








2024, 50(4): 649-673.
doi: 10.16383/j.aas.c230153
摘要:
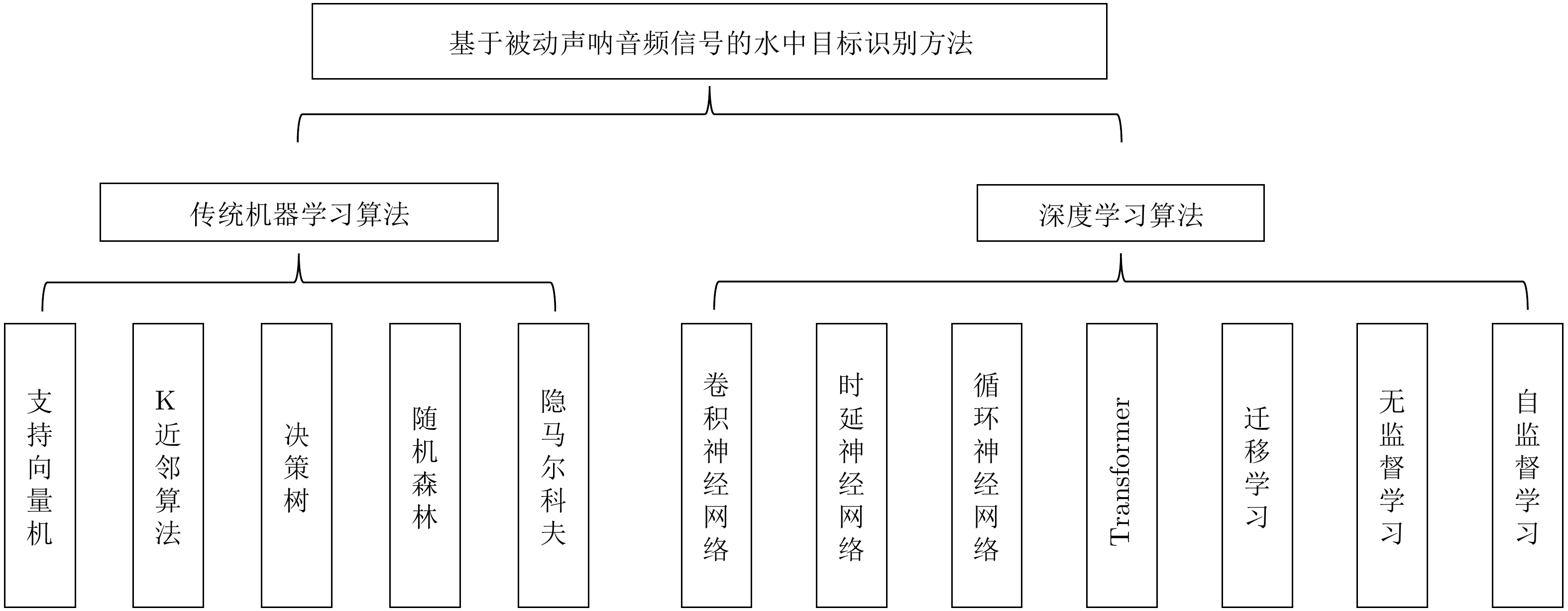
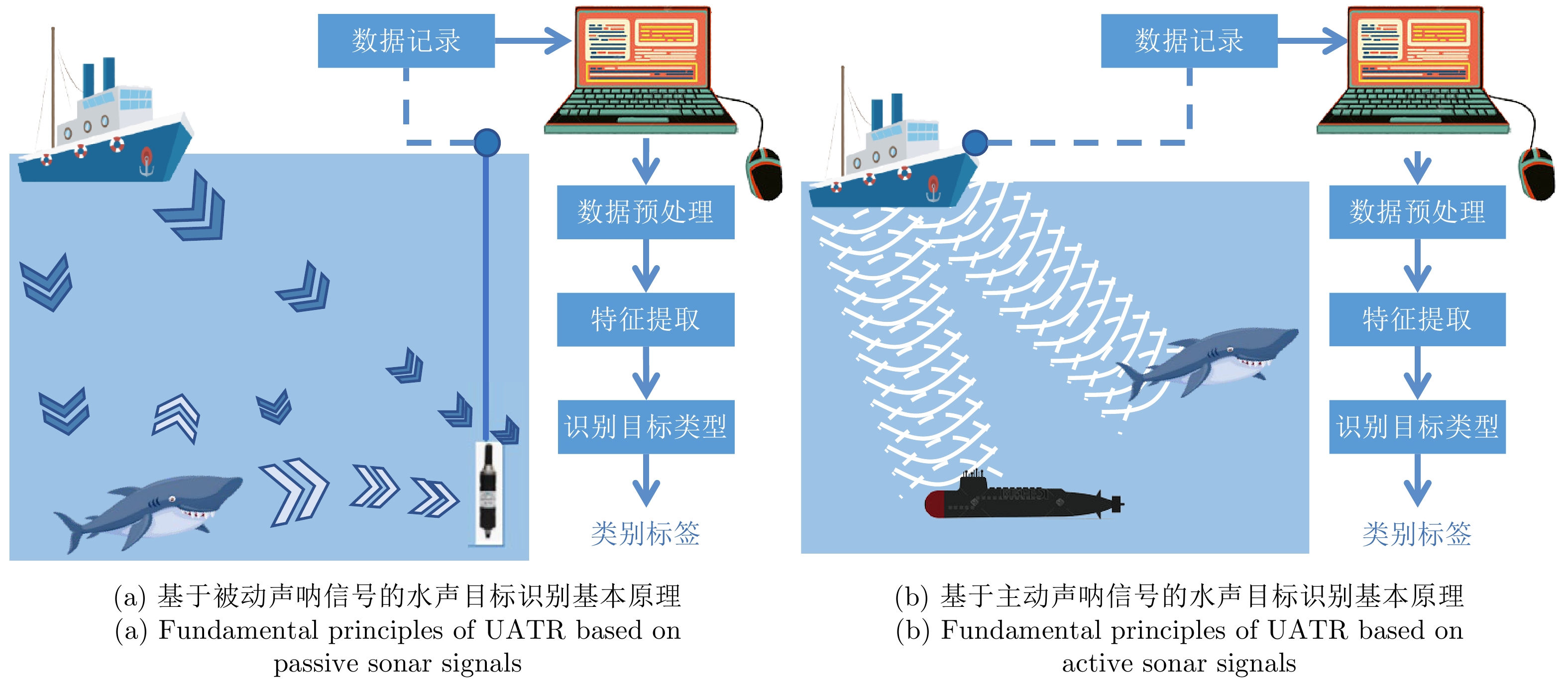
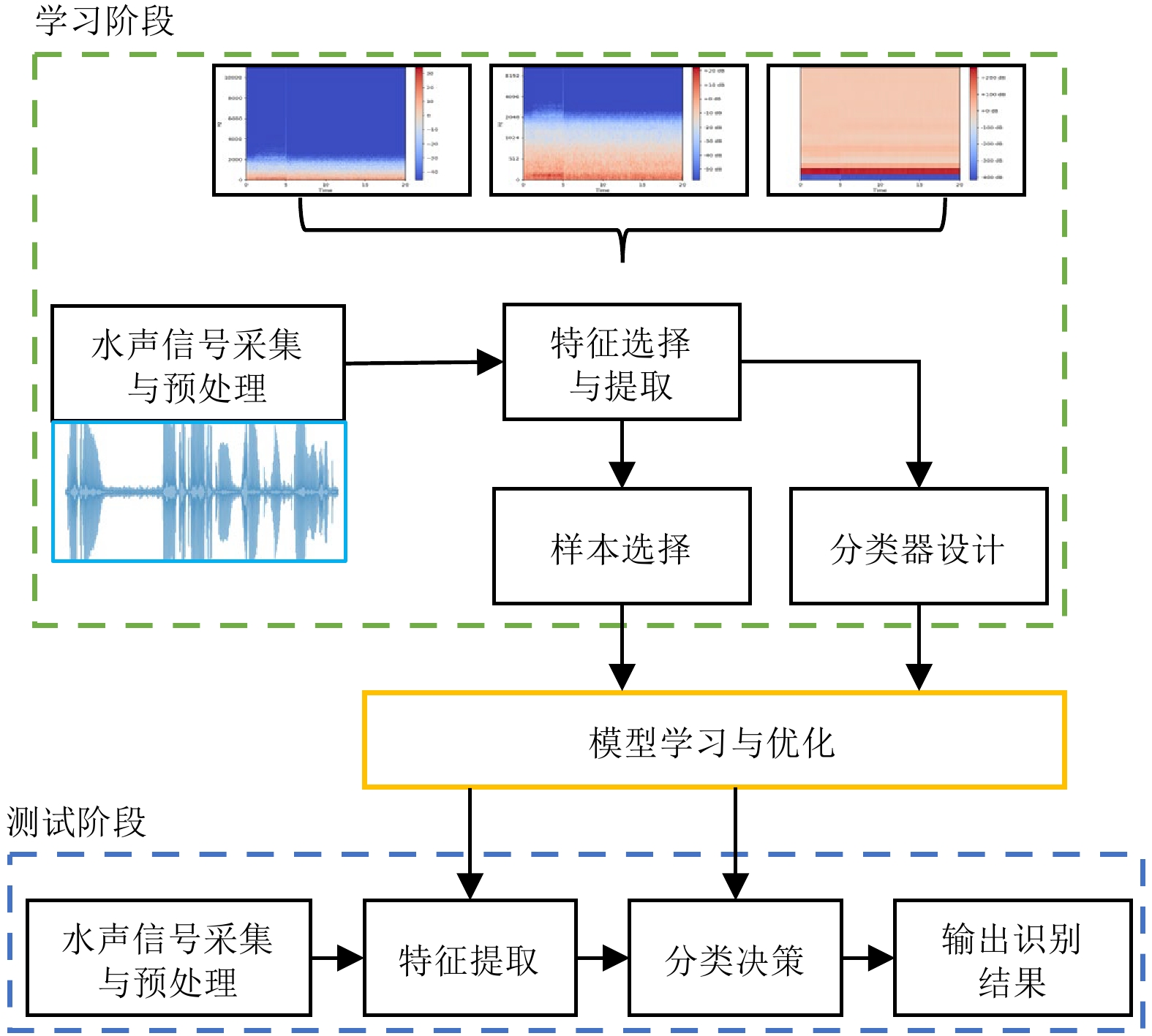
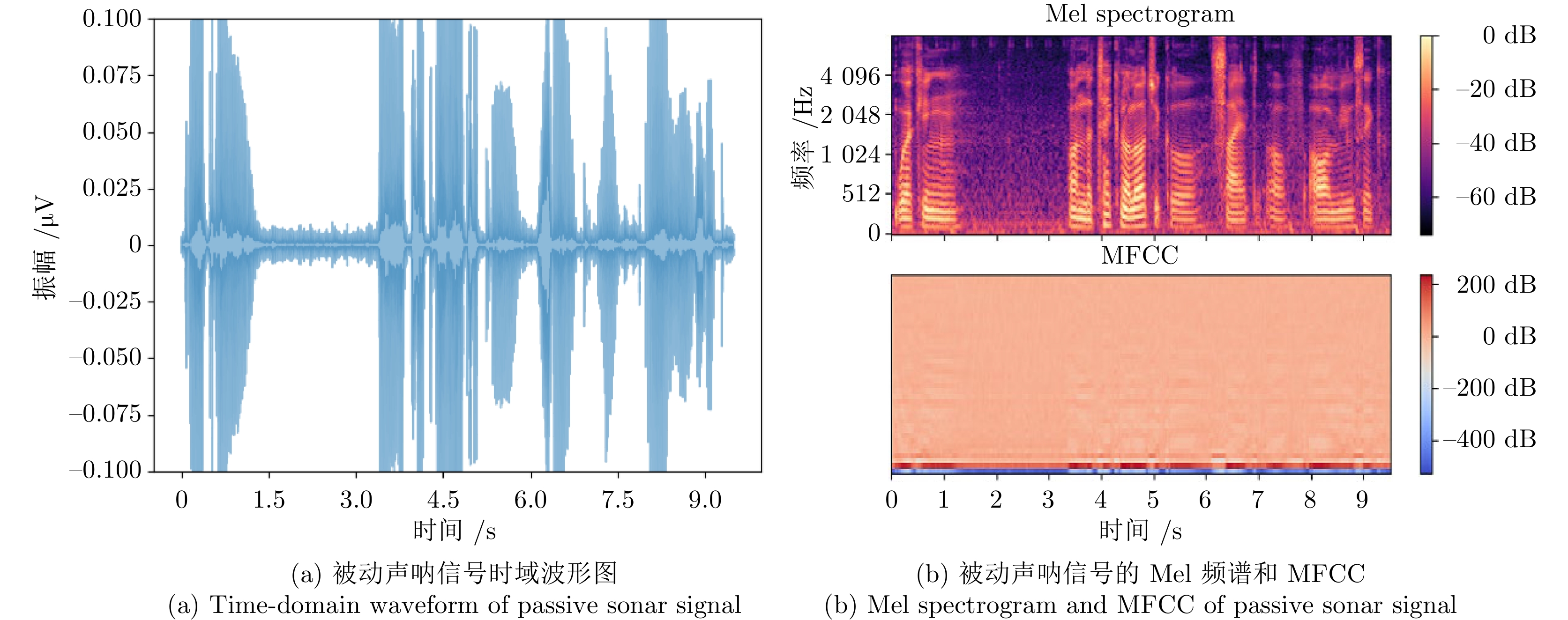
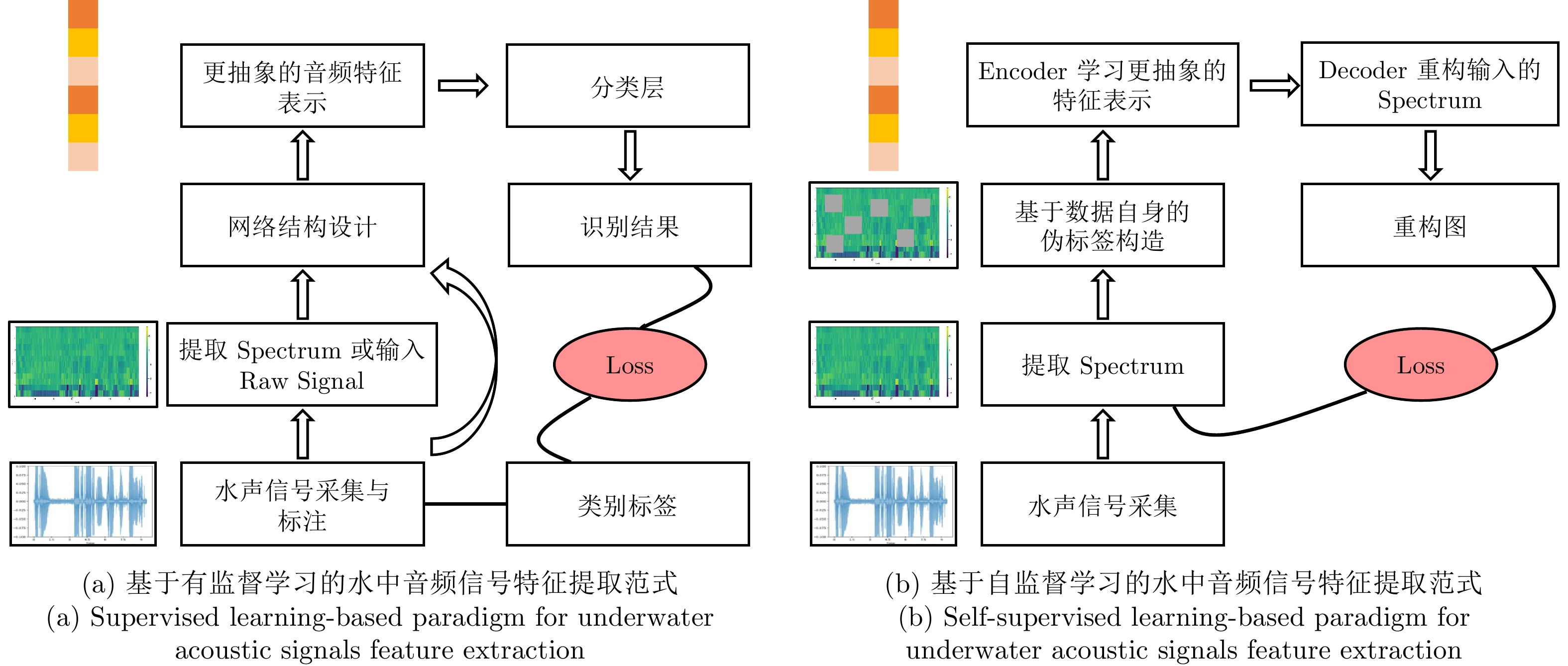
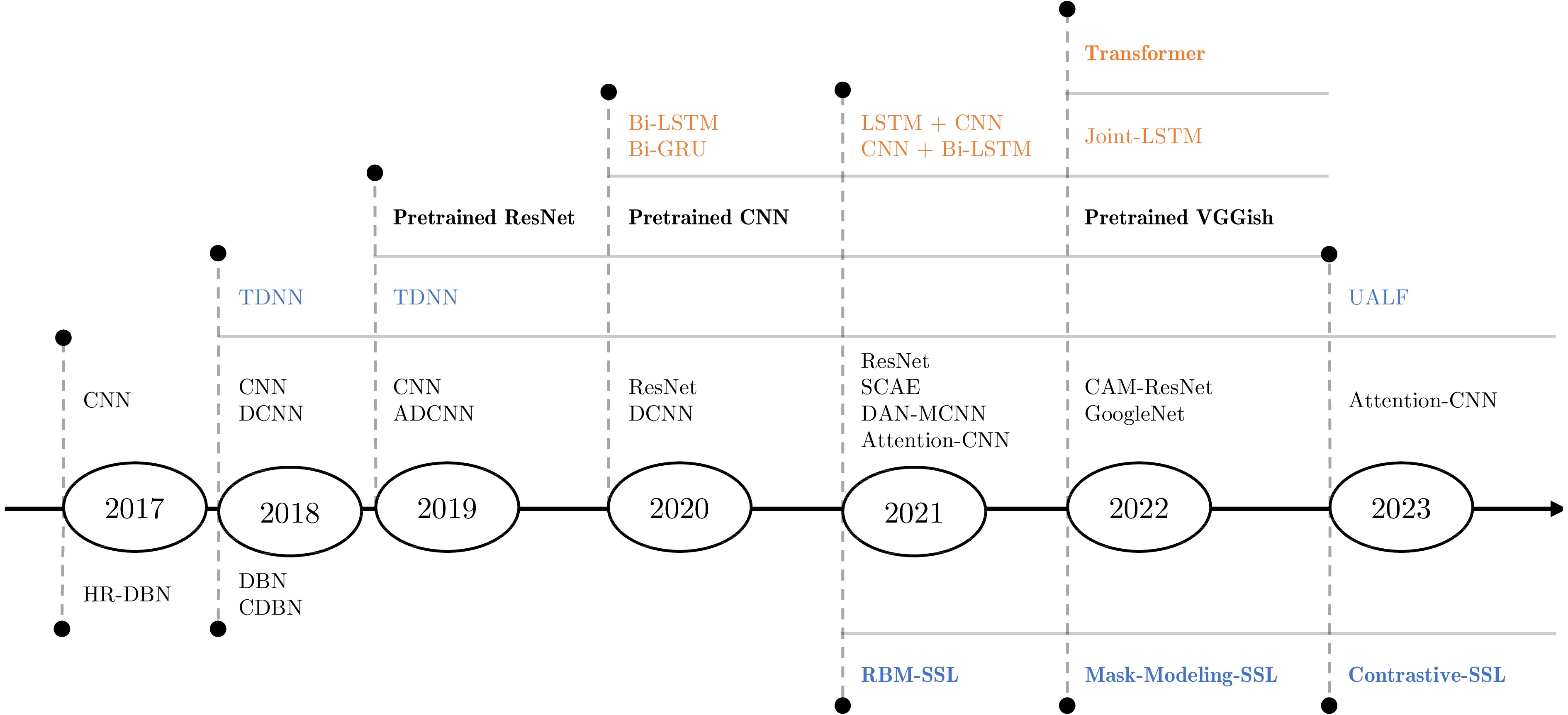
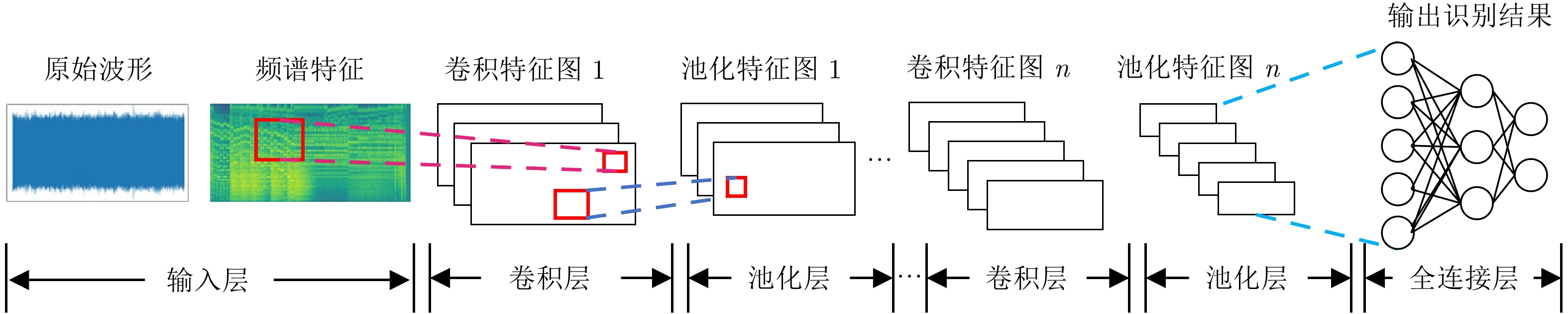
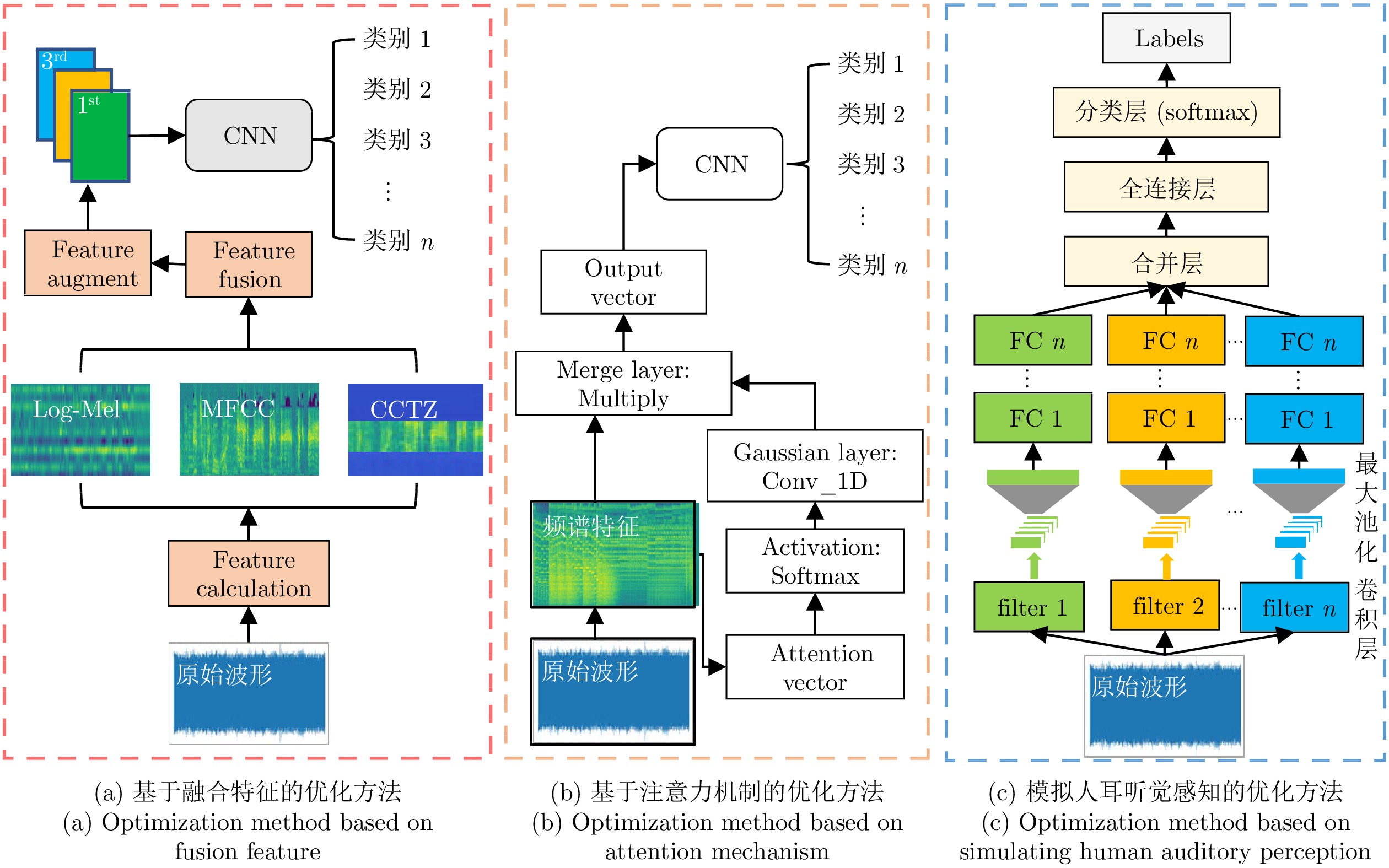
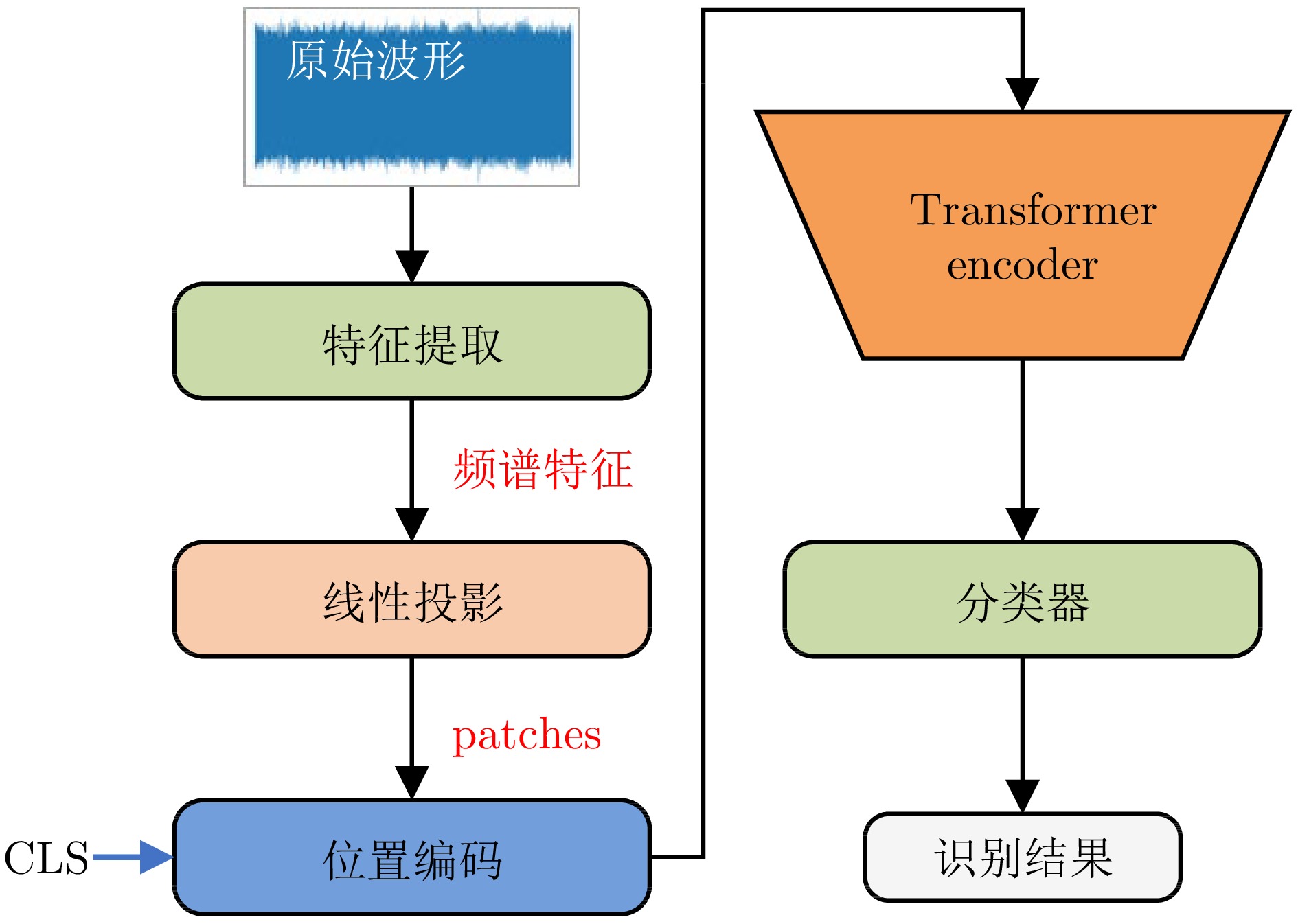
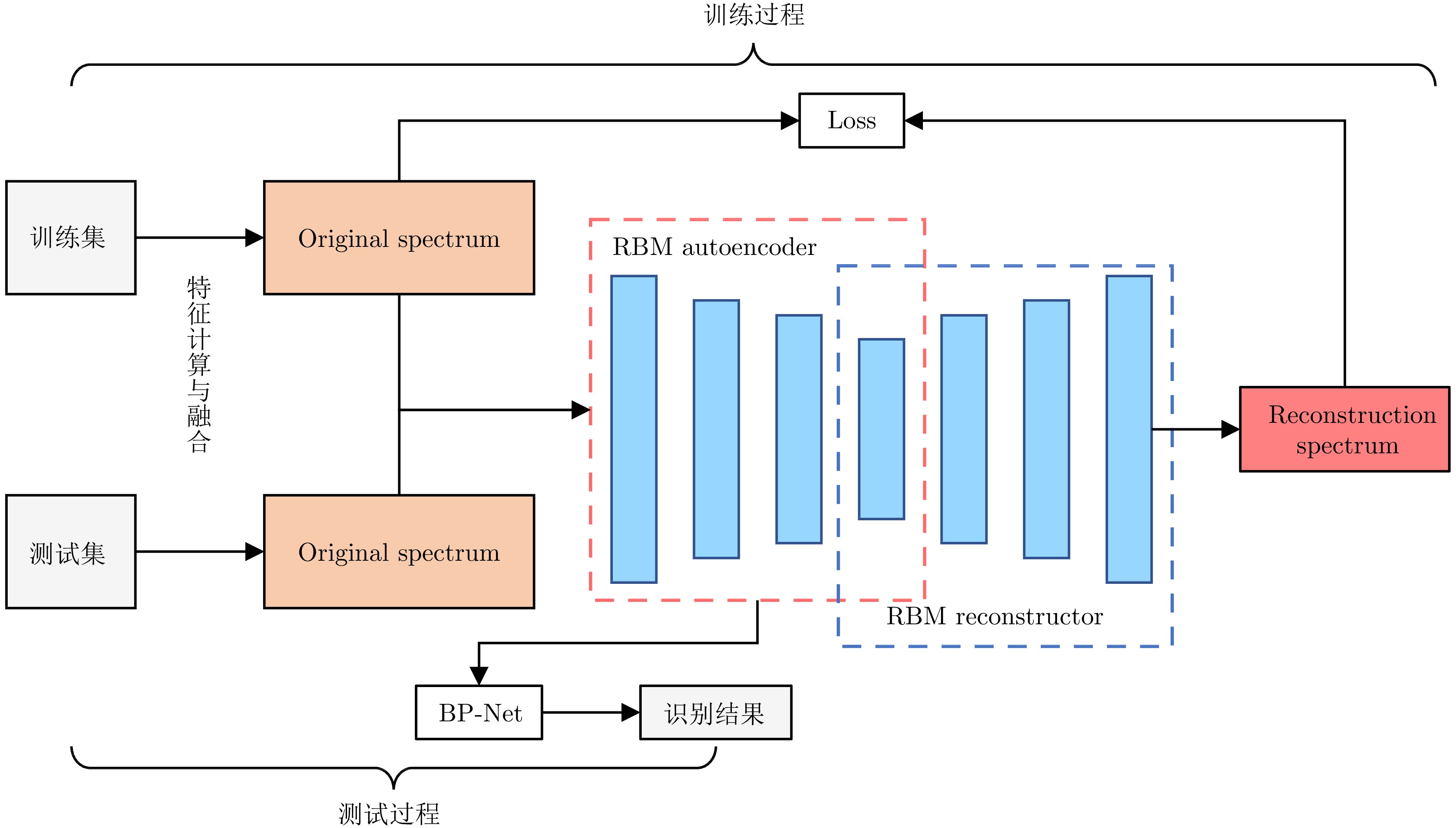
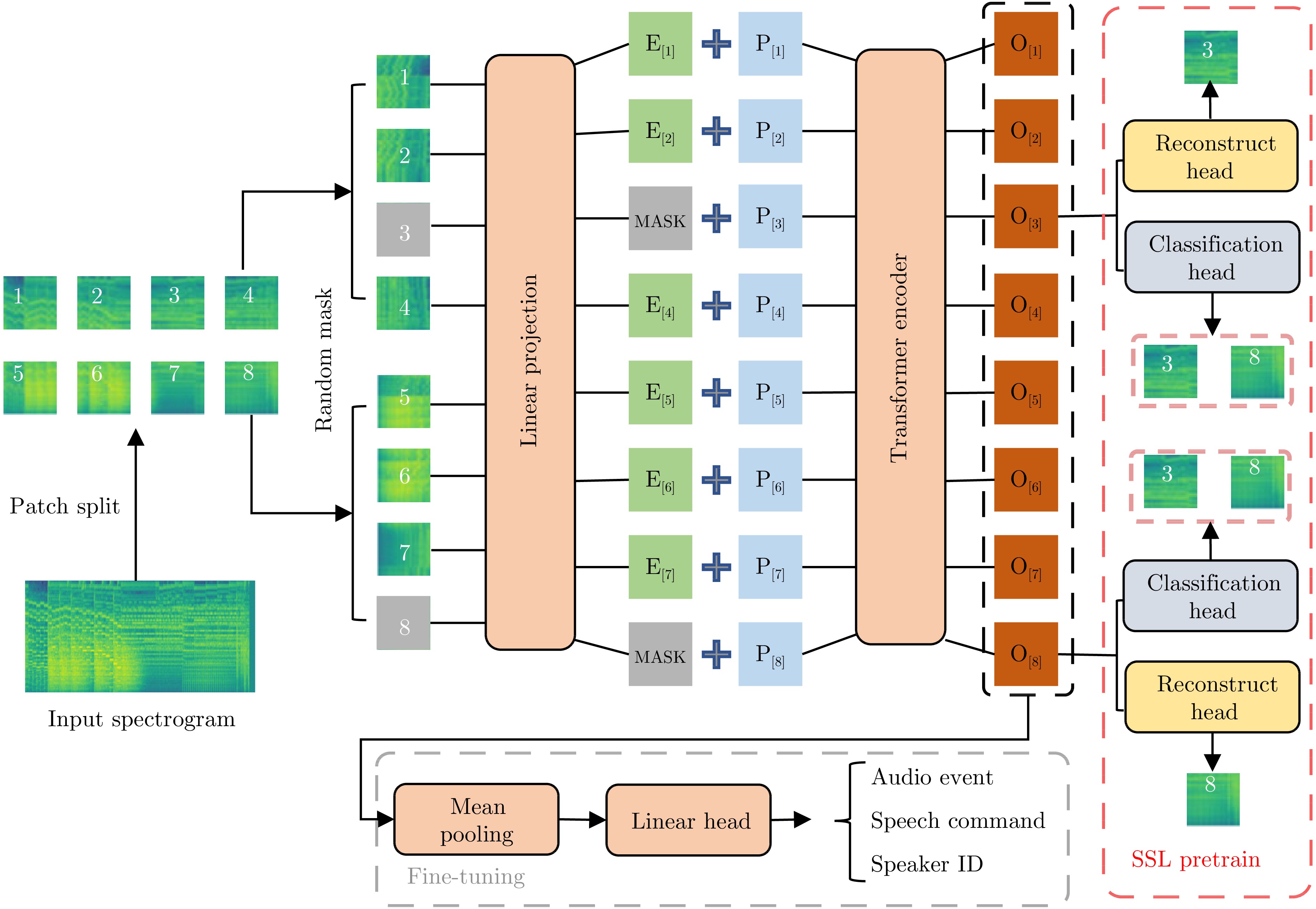
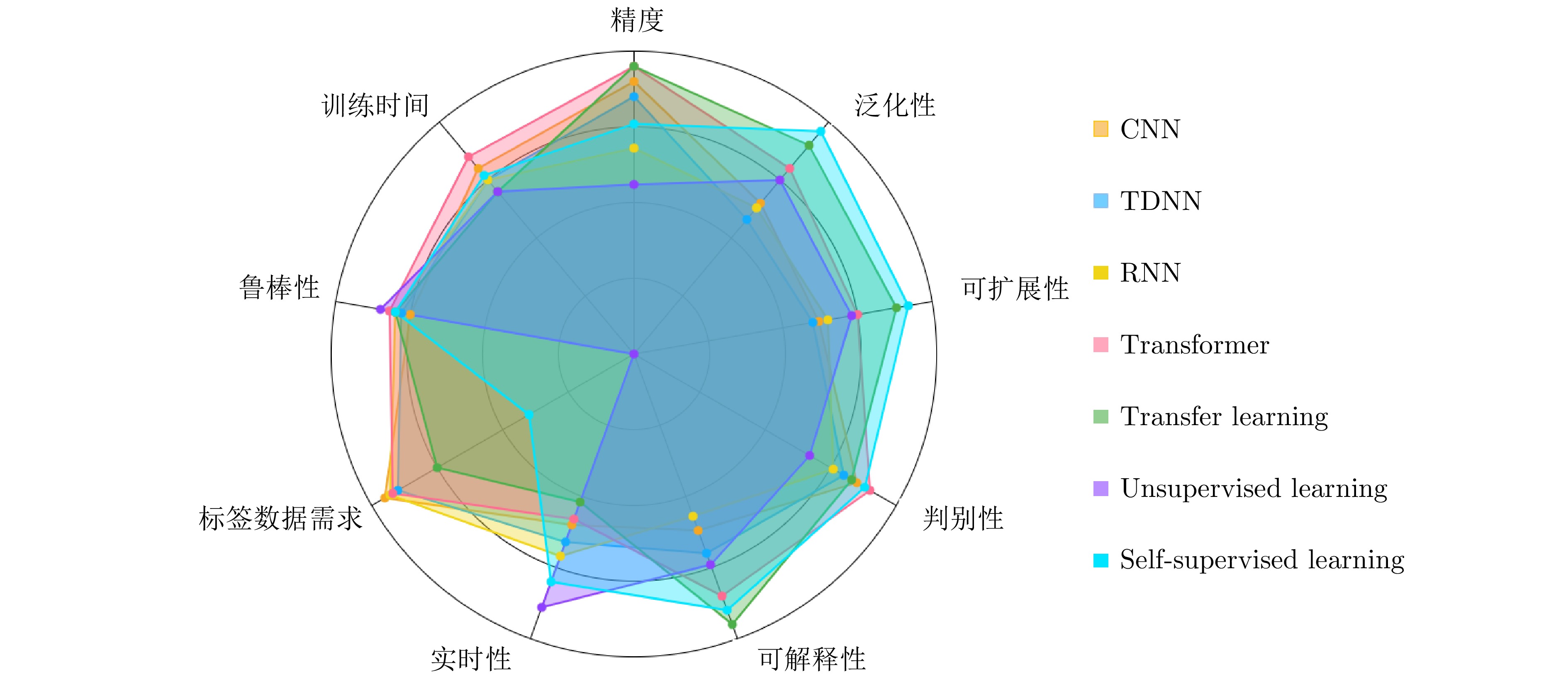
基于被动声呐音频信号的水中目标识别是当前水下无人探测领域的重要技术难题, 在军事和民用领域都应用广泛. 本文从数据处理和识别方法两个层面系统阐述基于被动声呐信号进行水中目标识别的方法和流程. 在数据处理方面, 从基于被动声呐信号的水中目标识别基本流程、被动声呐音频信号分析的数理基础及其特征提取三个方面概述被动声呐信号处理的基本原理. 在识别方法层面, 全面分析基于机器学习算法的水中目标识别方法, 并聚焦以深度学习算法为核心的水中目标识别研究. 本文从有监督学习、无监督学习、自监督学习等多种学习范式对当前研究进展进行系统性的总结分析, 并从算法的标签数据需求、鲁棒性、可扩展性与适应性等多个维度分析这些方法的优缺点. 同时, 还总结该领域中较为广泛使用的公开数据集, 并分析公开数据集应具备的基本要素. 最后, 通过对水中目标识别过程的论述, 总结目前基于被动声呐音频信号的水中目标自动识别算法存在的困难与挑战, 并对该领域未来的发展方向进行展望.
基于被动声呐音频信号的水中目标识别是当前水下无人探测领域的重要技术难题, 在军事和民用领域都应用广泛. 本文从数据处理和识别方法两个层面系统阐述基于被动声呐信号进行水中目标识别的方法和流程. 在数据处理方面, 从基于被动声呐信号的水中目标识别基本流程、被动声呐音频信号分析的数理基础及其特征提取三个方面概述被动声呐信号处理的基本原理. 在识别方法层面, 全面分析基于机器学习算法的水中目标识别方法, 并聚焦以深度学习算法为核心的水中目标识别研究. 本文从有监督学习、无监督学习、自监督学习等多种学习范式对当前研究进展进行系统性的总结分析, 并从算法的标签数据需求、鲁棒性、可扩展性与适应性等多个维度分析这些方法的优缺点. 同时, 还总结该领域中较为广泛使用的公开数据集, 并分析公开数据集应具备的基本要素. 最后, 通过对水中目标识别过程的论述, 总结目前基于被动声呐音频信号的水中目标自动识别算法存在的困难与挑战, 并对该领域未来的发展方向进行展望.

2024, 50(4): 674-687.
doi: 10.16383/j.aas.c240156
摘要:
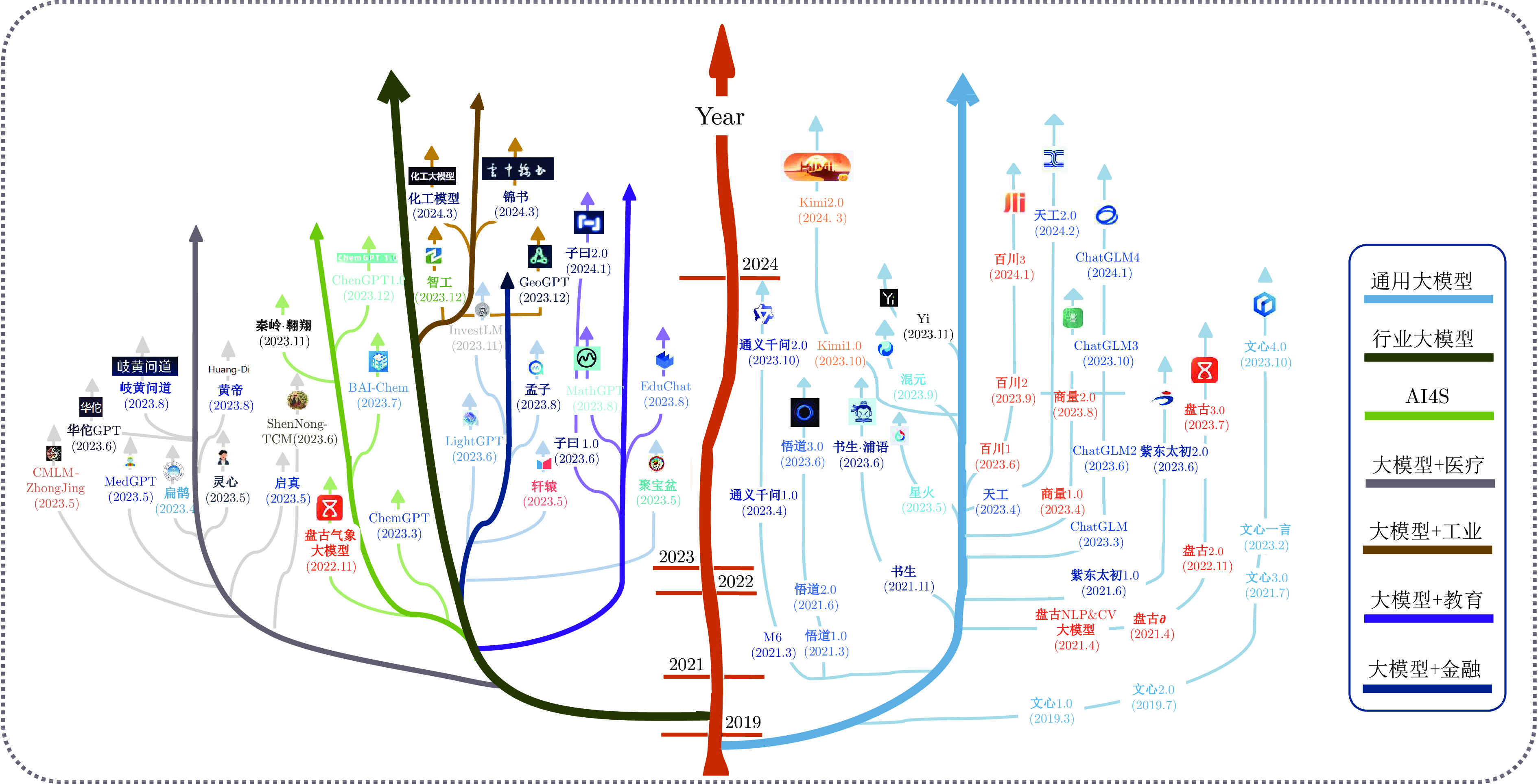
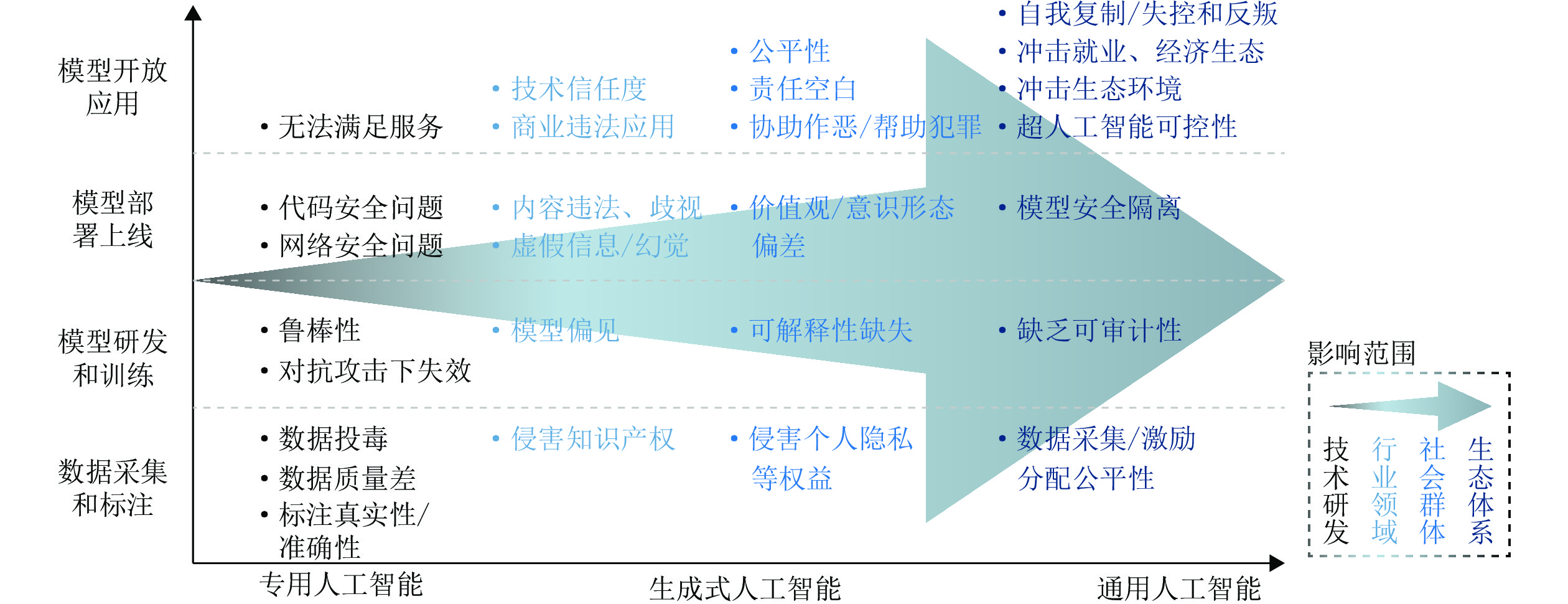
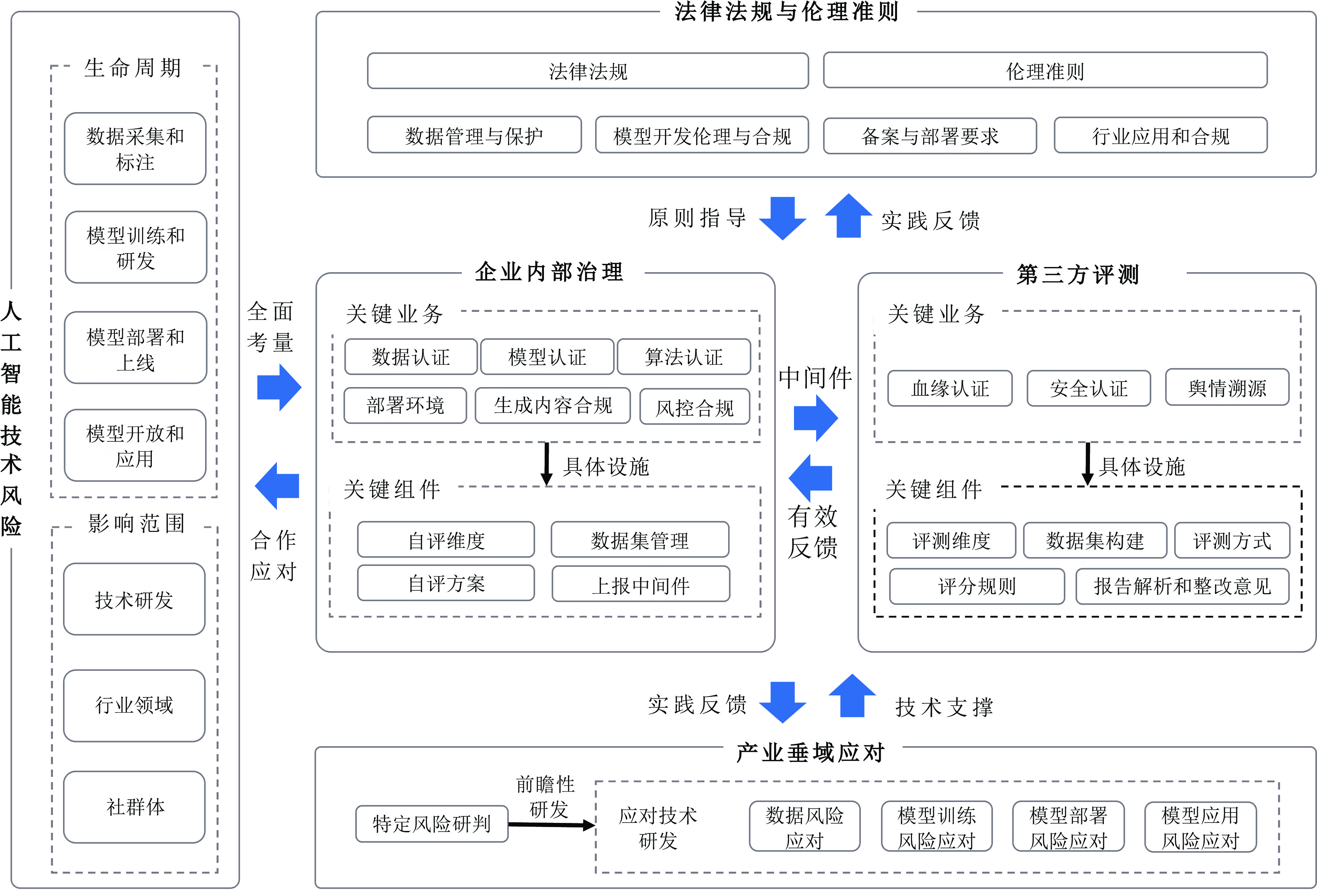
本文对生成式AI (Generative artificial intelligence, GenAI)的国内外发展现状进行了概述, 重点分析了中美之间在算力、数据、算法、生态等方面存在的差距. 为改变我国在生成式AI领域的落后现状, 提出高能效算力建设、联邦数据、专业领域模型、基于TAO的联邦生态等应对策略, 对大模型时代AI安全治理进行了论述, 对通用人工智能(Artificial general intelligence, AGI)的未来发展进行了展望.
本文对生成式AI (Generative artificial intelligence, GenAI)的国内外发展现状进行了概述, 重点分析了中美之间在算力、数据、算法、生态等方面存在的差距. 为改变我国在生成式AI领域的落后现状, 提出高能效算力建设、联邦数据、专业领域模型、基于TAO的联邦生态等应对策略, 对大模型时代AI安全治理进行了论述, 对通用人工智能(Artificial general intelligence, AGI)的未来发展进行了展望.
2024, 50(4): 688-718.
doi: 10.16383/j.aas.c221006
摘要:
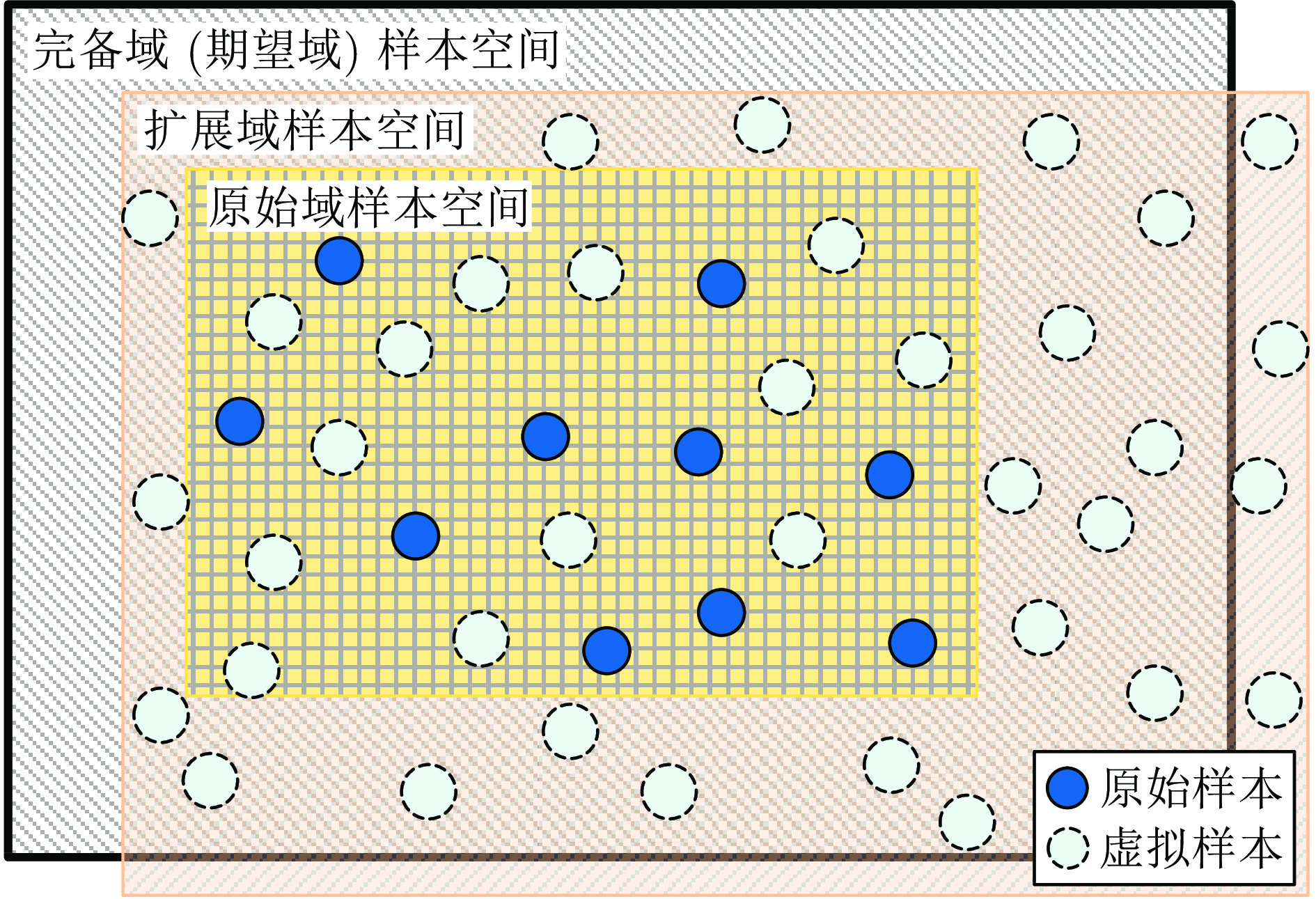
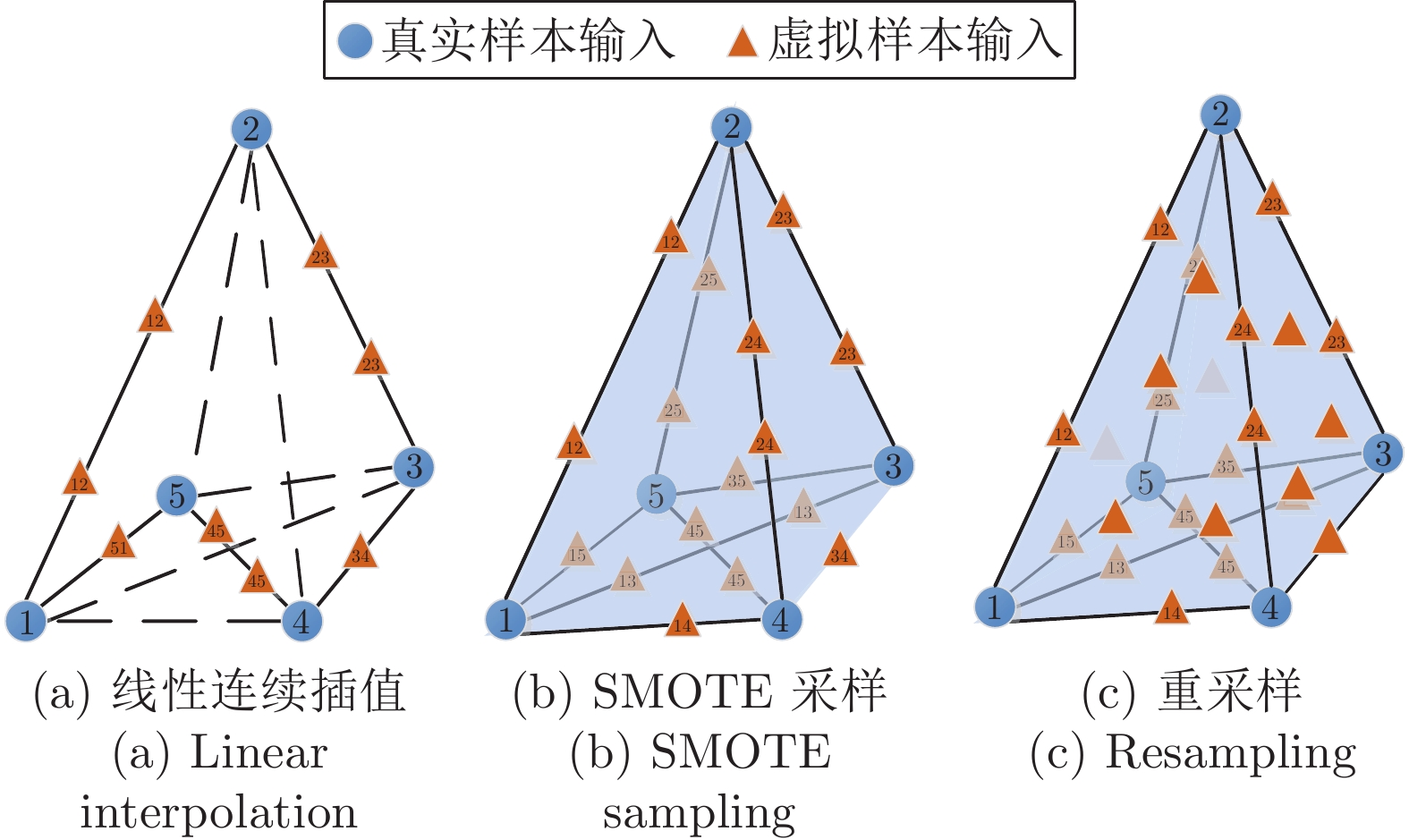
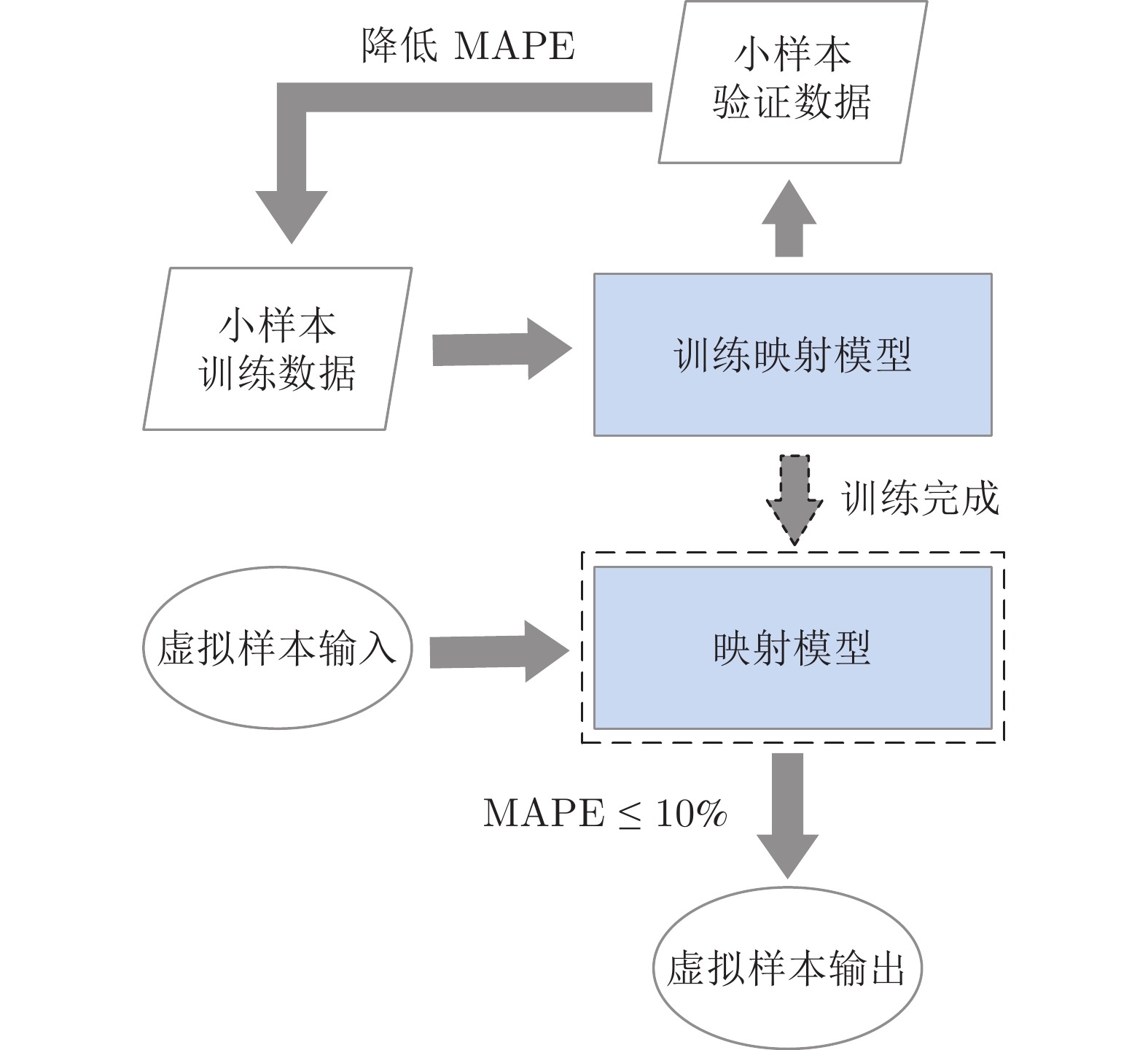
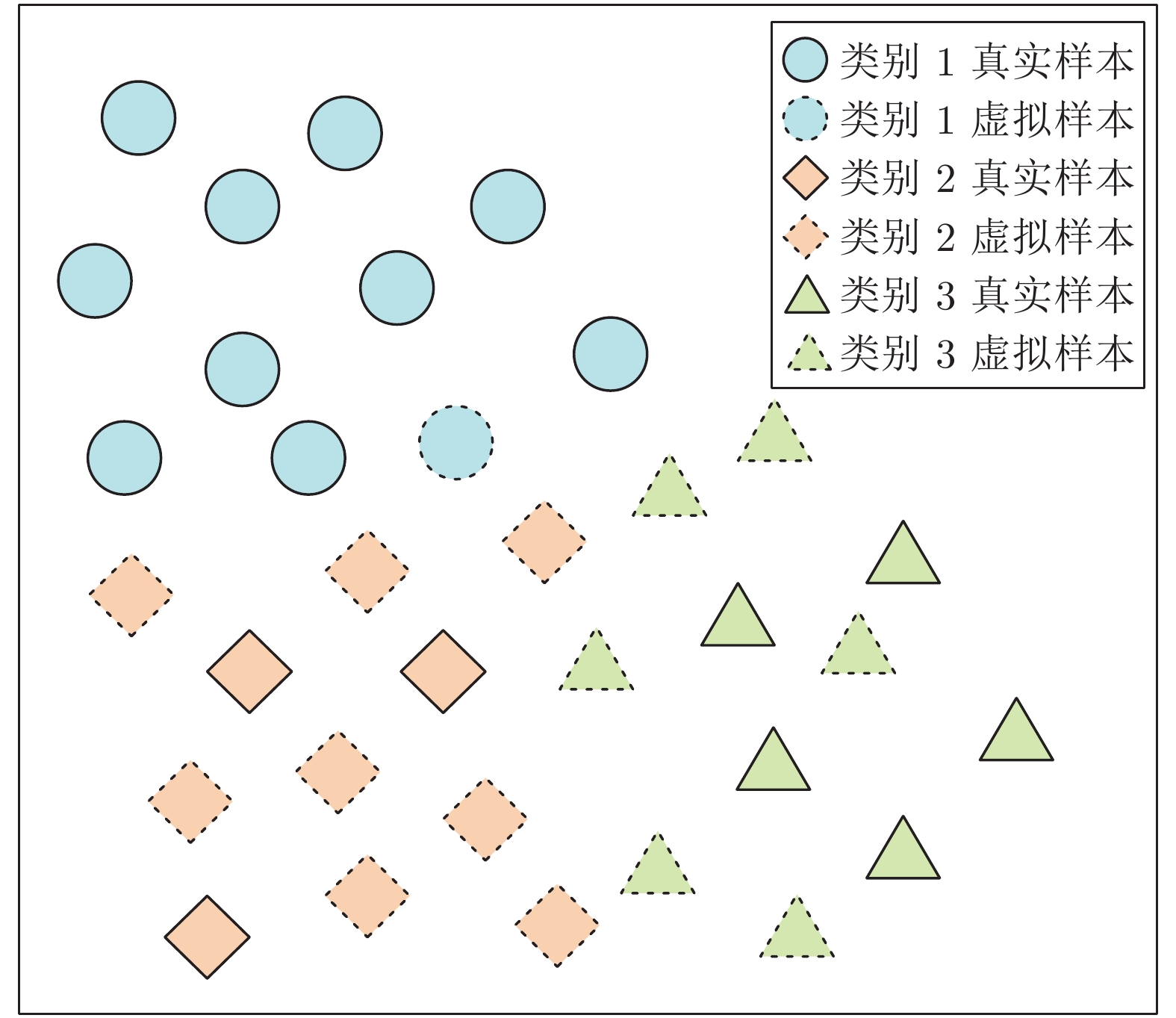
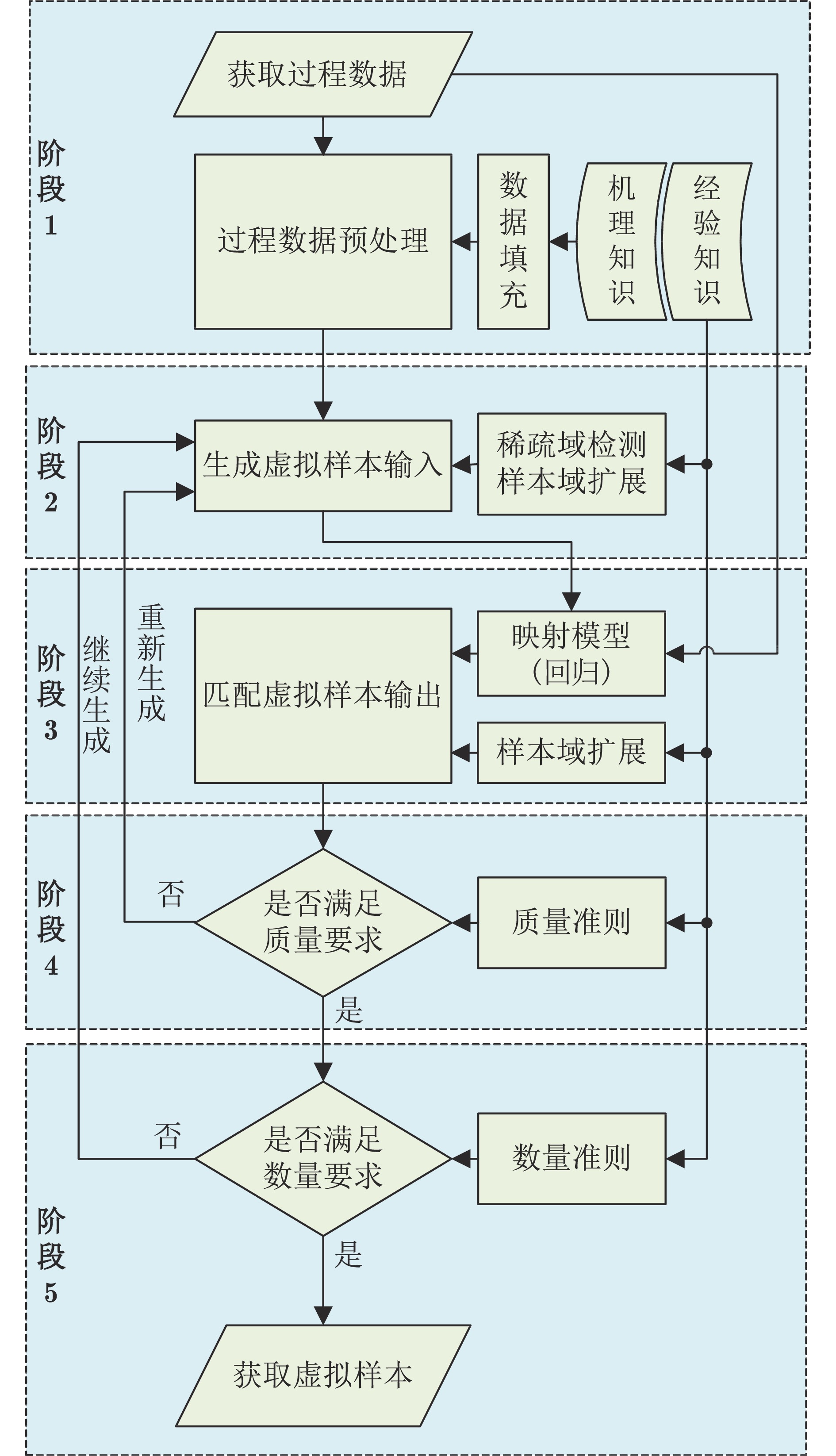
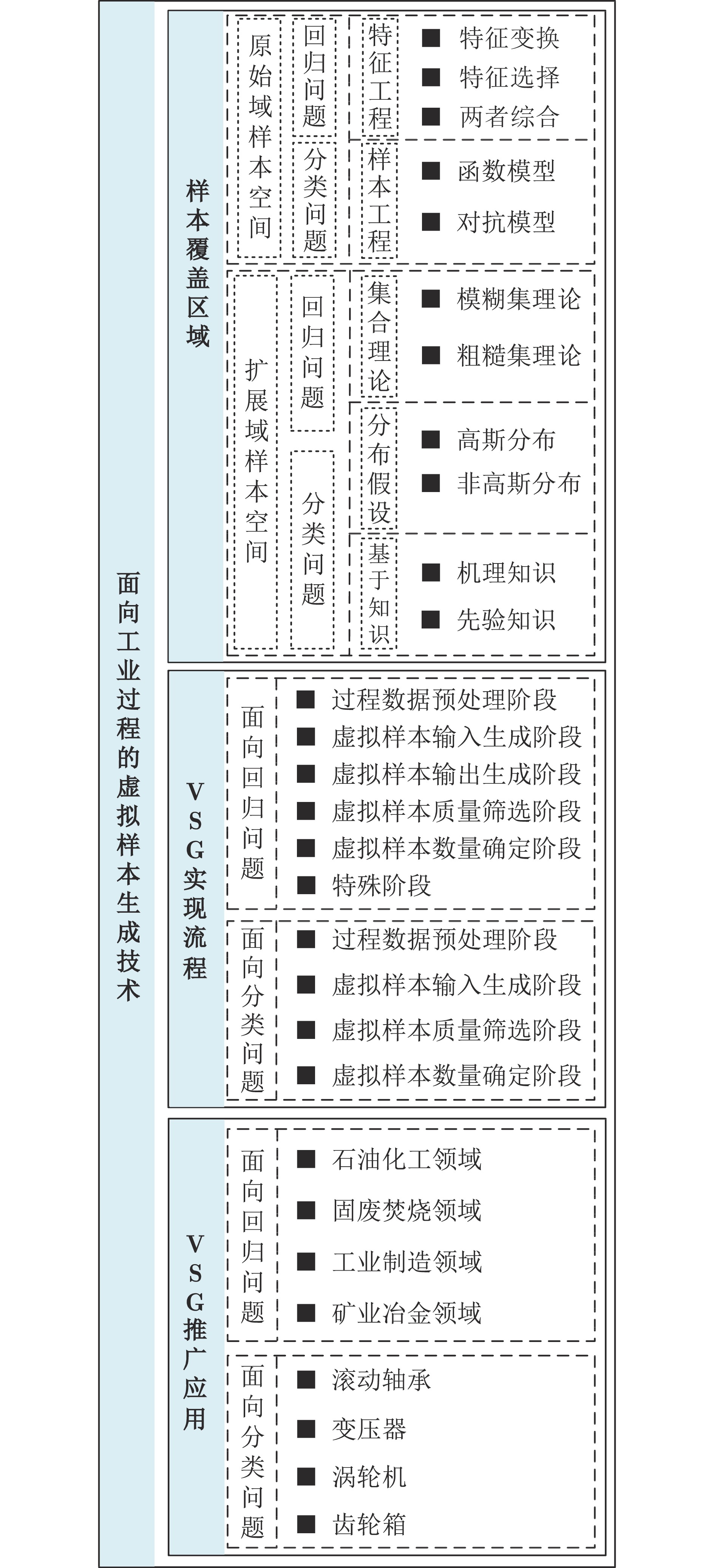
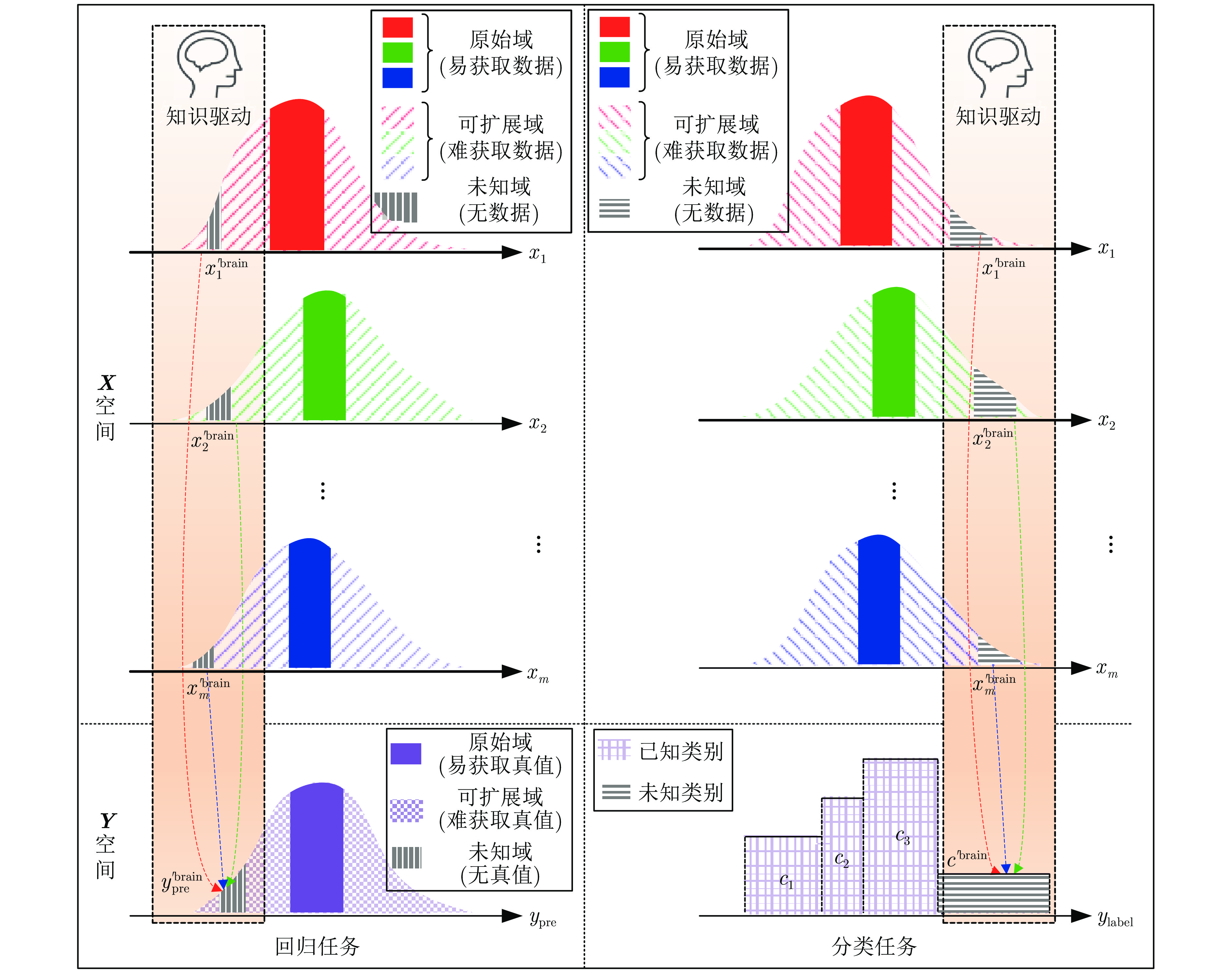
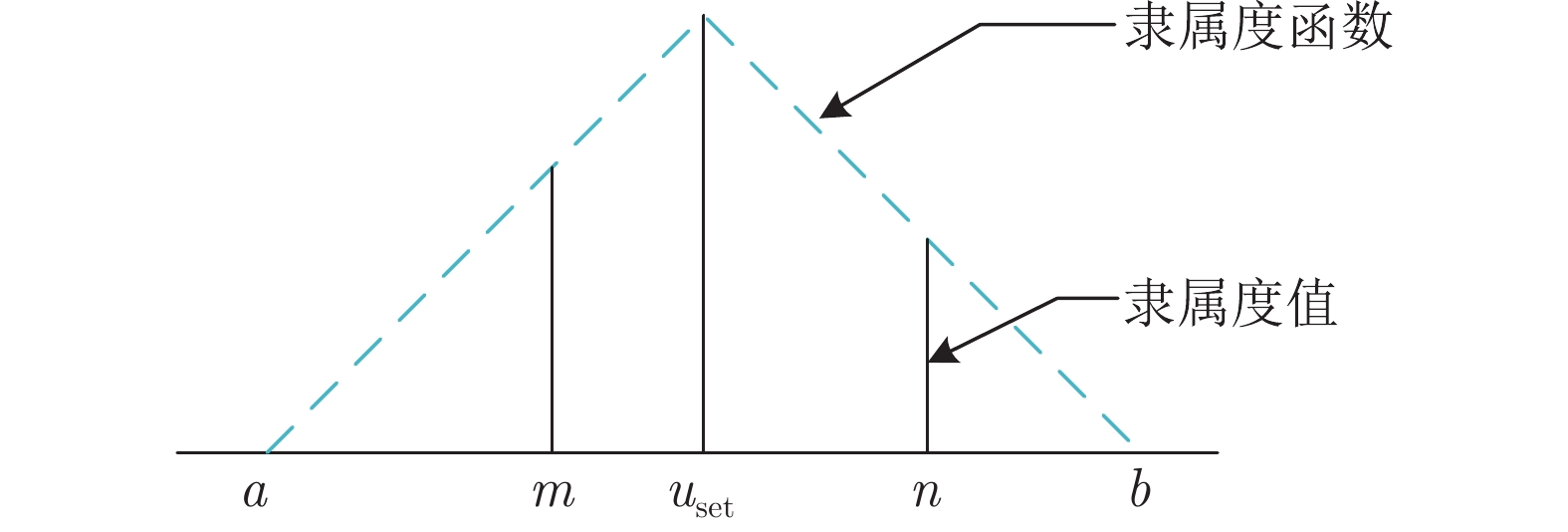
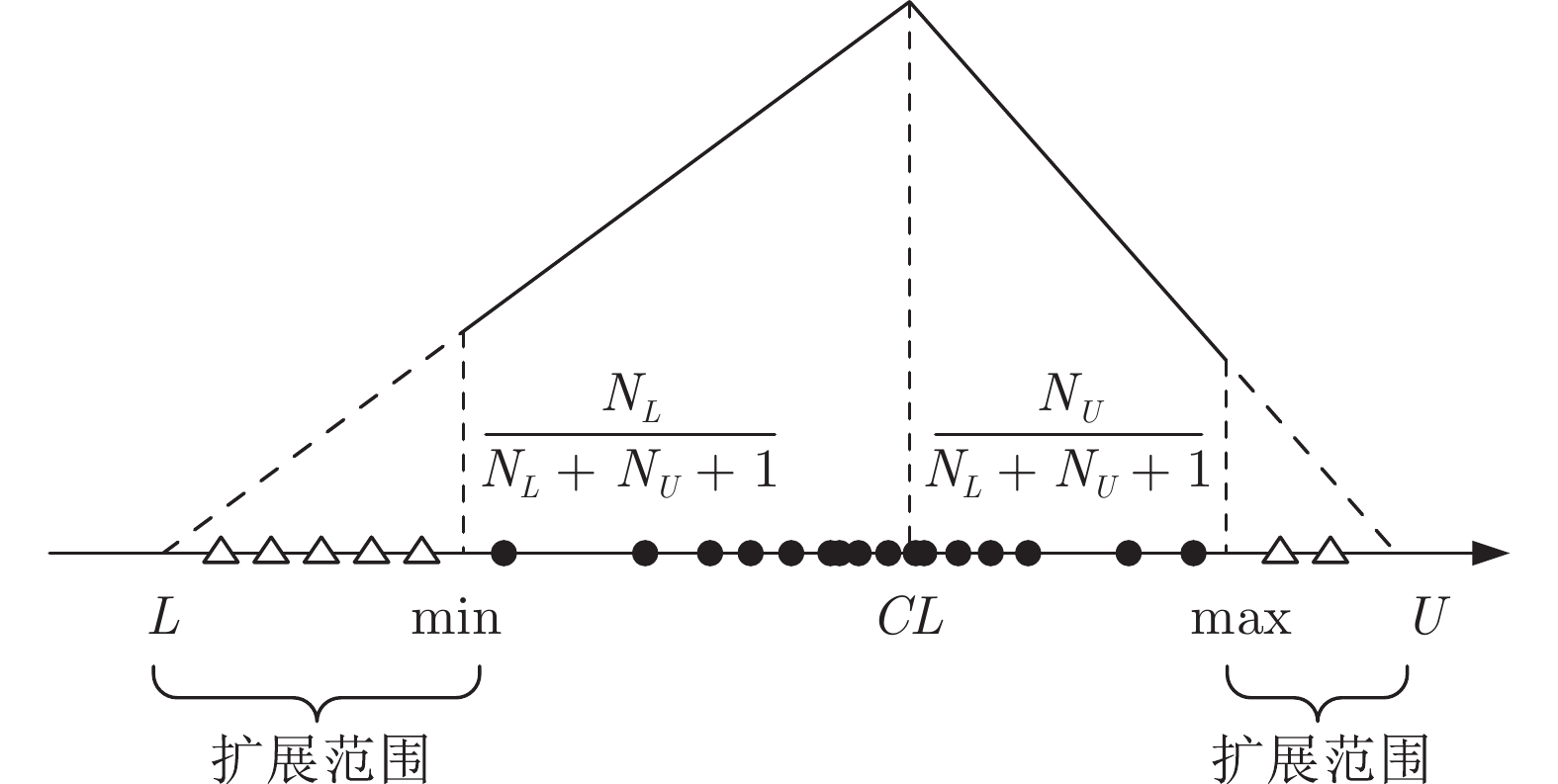
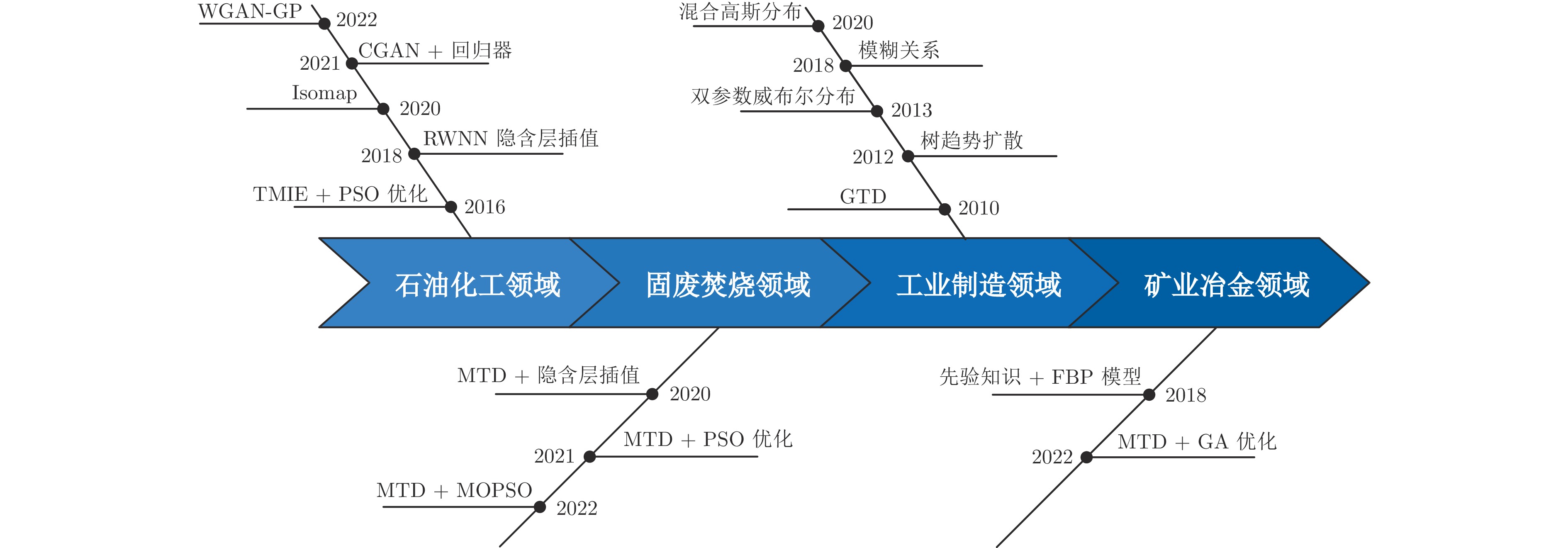
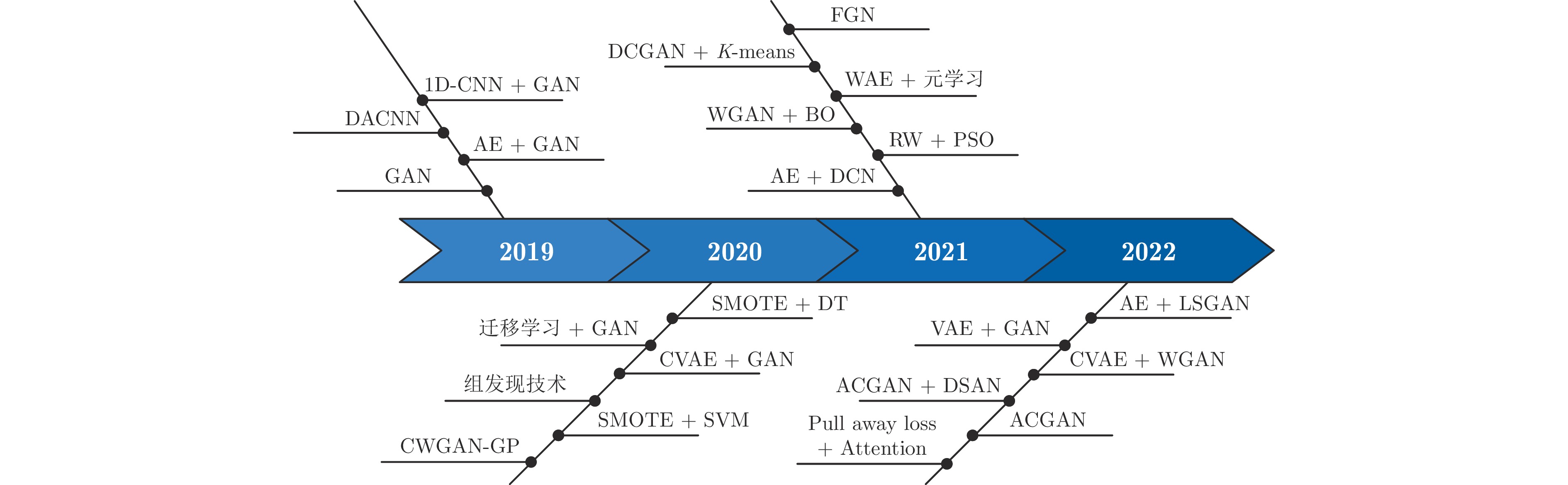
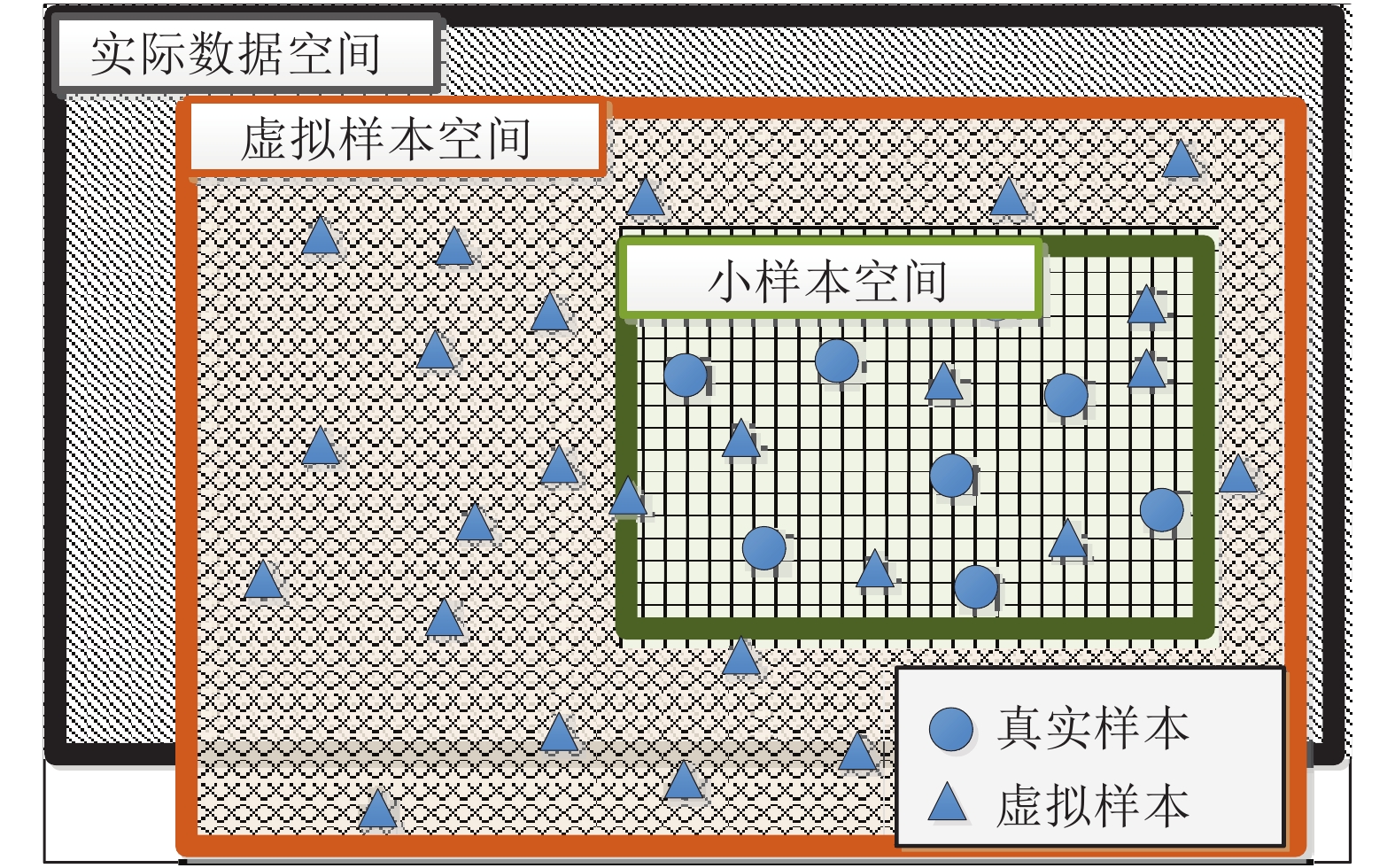
用于复杂工业过程难测运行指标和异常故障建模的样本具有量少稀缺、分布不平衡以及内涵机理知识匮乏等特性. 虚拟样本生成(Virtual sample generation, VSG)作为扩充建模样本数量及其涵盖空间的技术, 已成为解决上述问题的主要手段之一, 但已有研究还存在缺乏理论支撑、分类准则与应用边界模糊等问题. 本文在描述复杂工业过程难测运行指标和异常故障建模所存在问题的基础上, 梳理虚拟样本定义及其内涵, 给出面向工业过程回归与分类问题的VSG实现流程; 接着, 从样本覆盖区域、实现流程与推广应用等方向进行综述; 然后, 分析讨论VSG的下一步研究方向; 最后, 对全文进行总结并给出未来挑战.
用于复杂工业过程难测运行指标和异常故障建模的样本具有量少稀缺、分布不平衡以及内涵机理知识匮乏等特性. 虚拟样本生成(Virtual sample generation, VSG)作为扩充建模样本数量及其涵盖空间的技术, 已成为解决上述问题的主要手段之一, 但已有研究还存在缺乏理论支撑、分类准则与应用边界模糊等问题. 本文在描述复杂工业过程难测运行指标和异常故障建模所存在问题的基础上, 梳理虚拟样本定义及其内涵, 给出面向工业过程回归与分类问题的VSG实现流程; 接着, 从样本覆盖区域、实现流程与推广应用等方向进行综述; 然后, 分析讨论VSG的下一步研究方向; 最后, 对全文进行总结并给出未来挑战.
2024, 50(4): 719-730.
doi: 10.16383/j.aas.c230642
摘要:
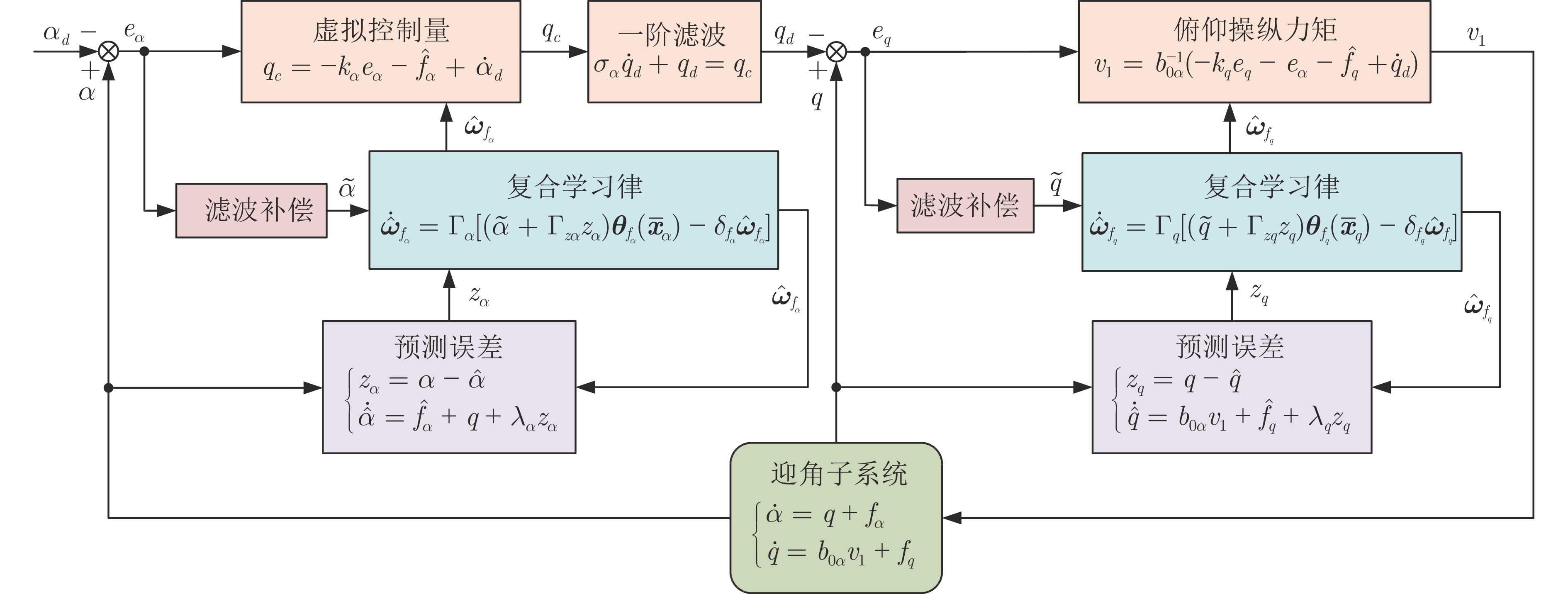
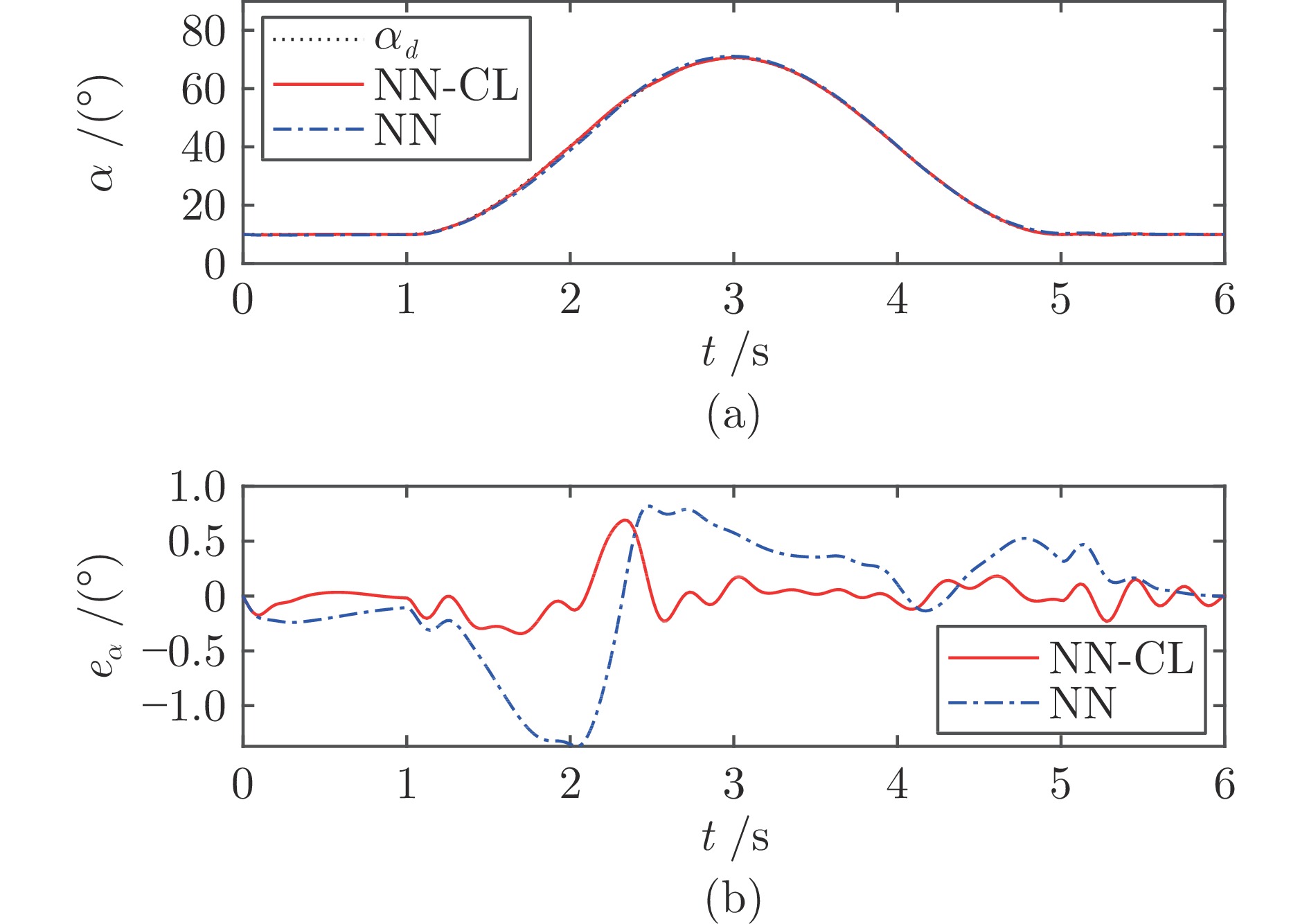
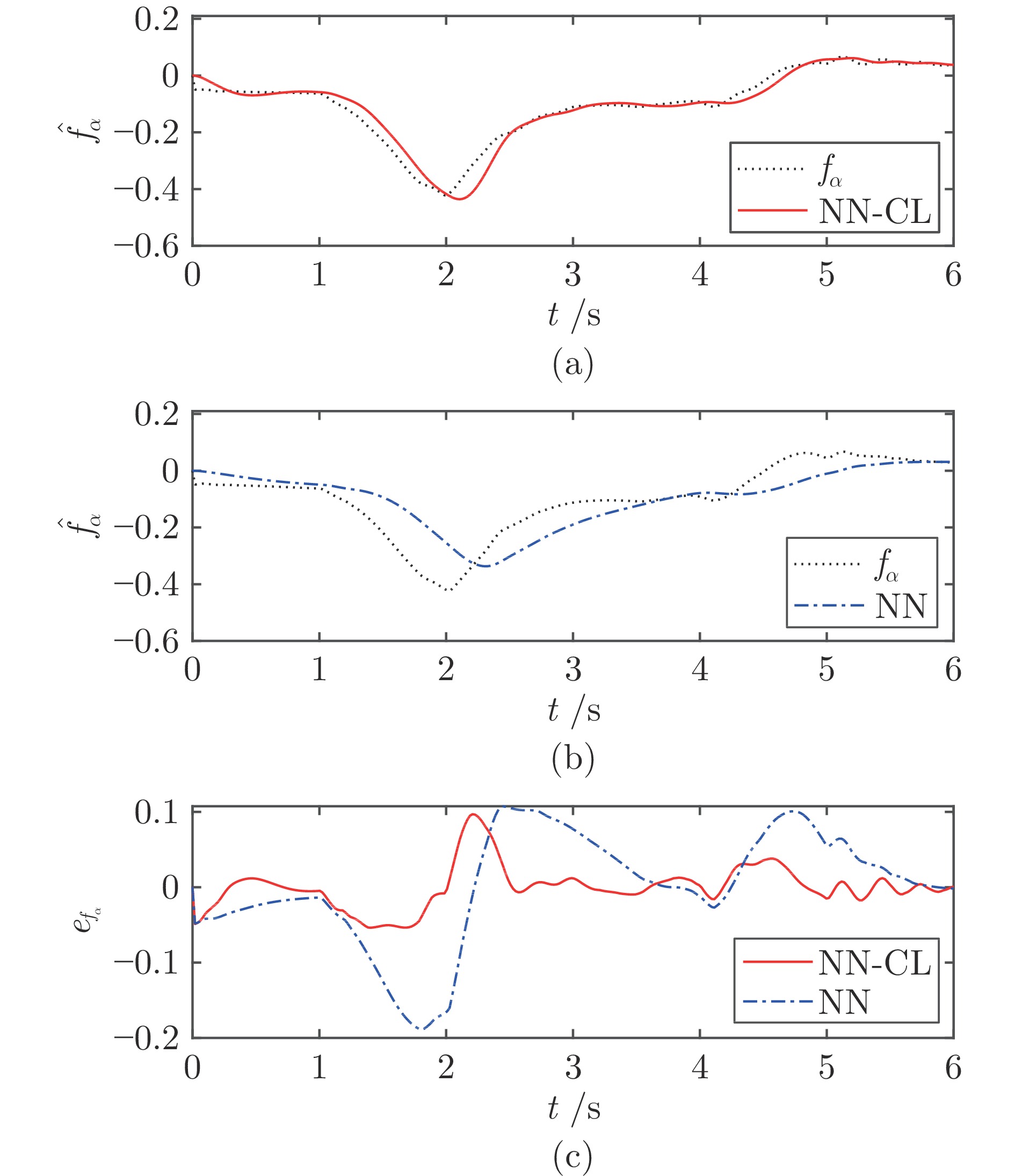
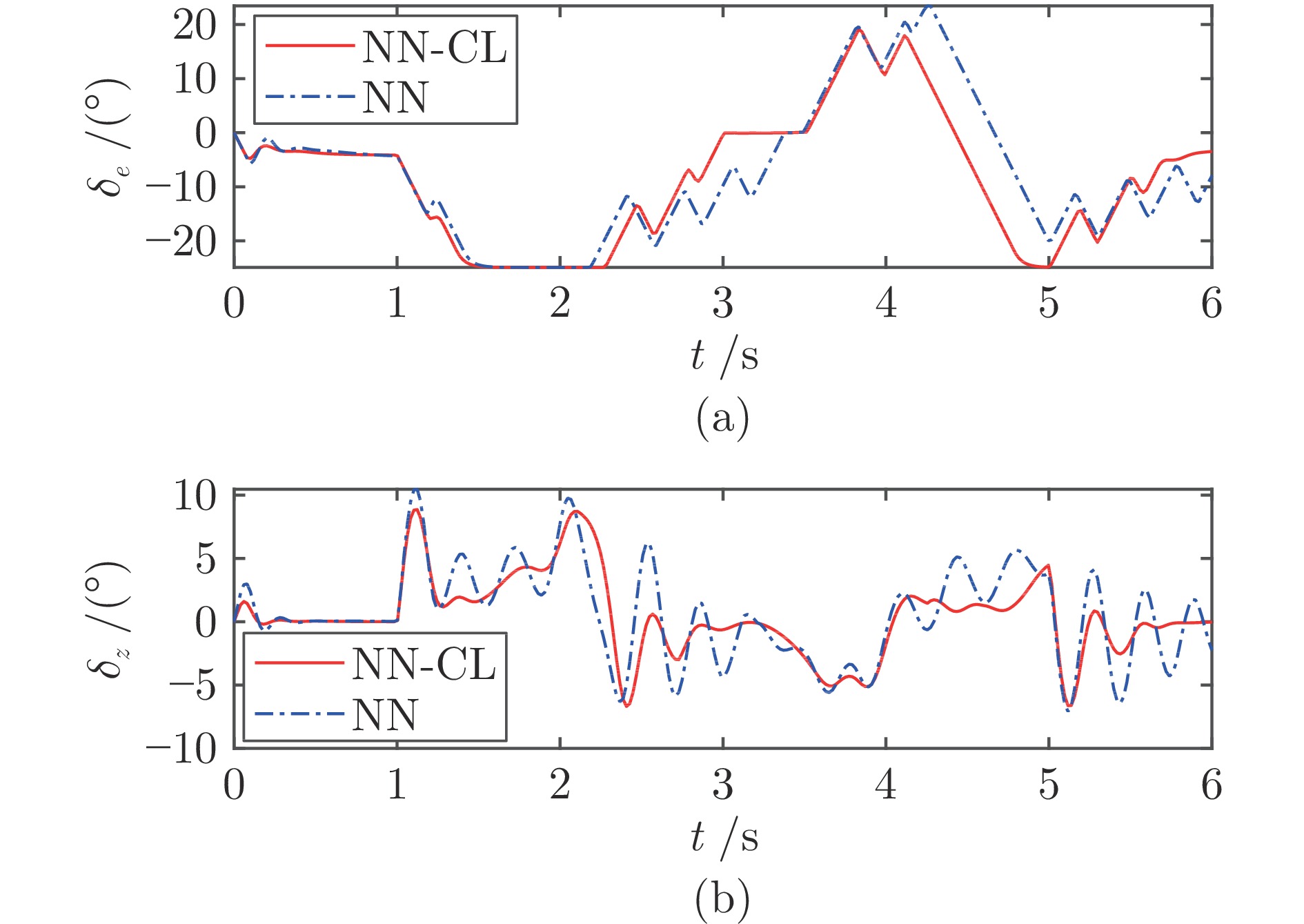
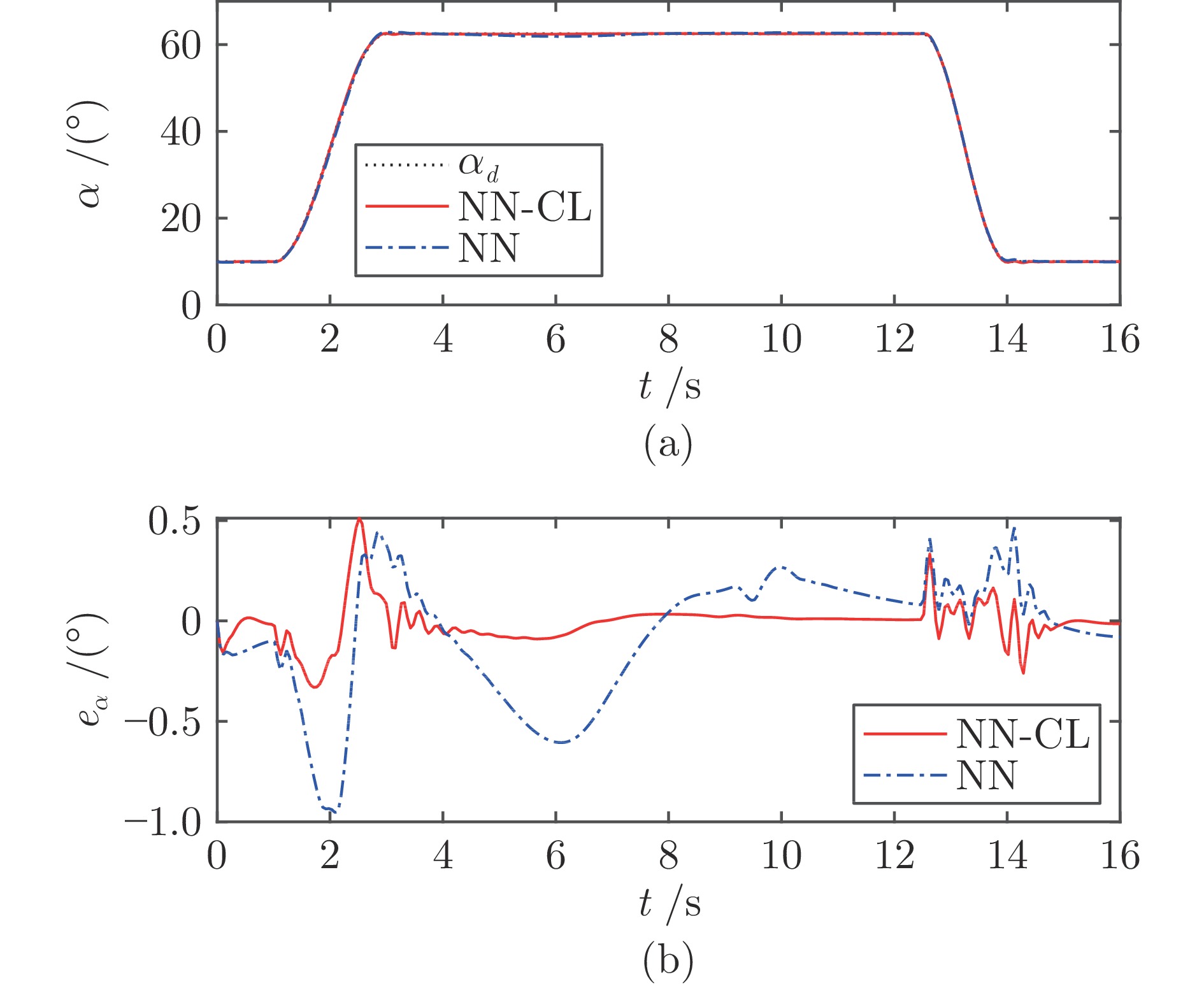
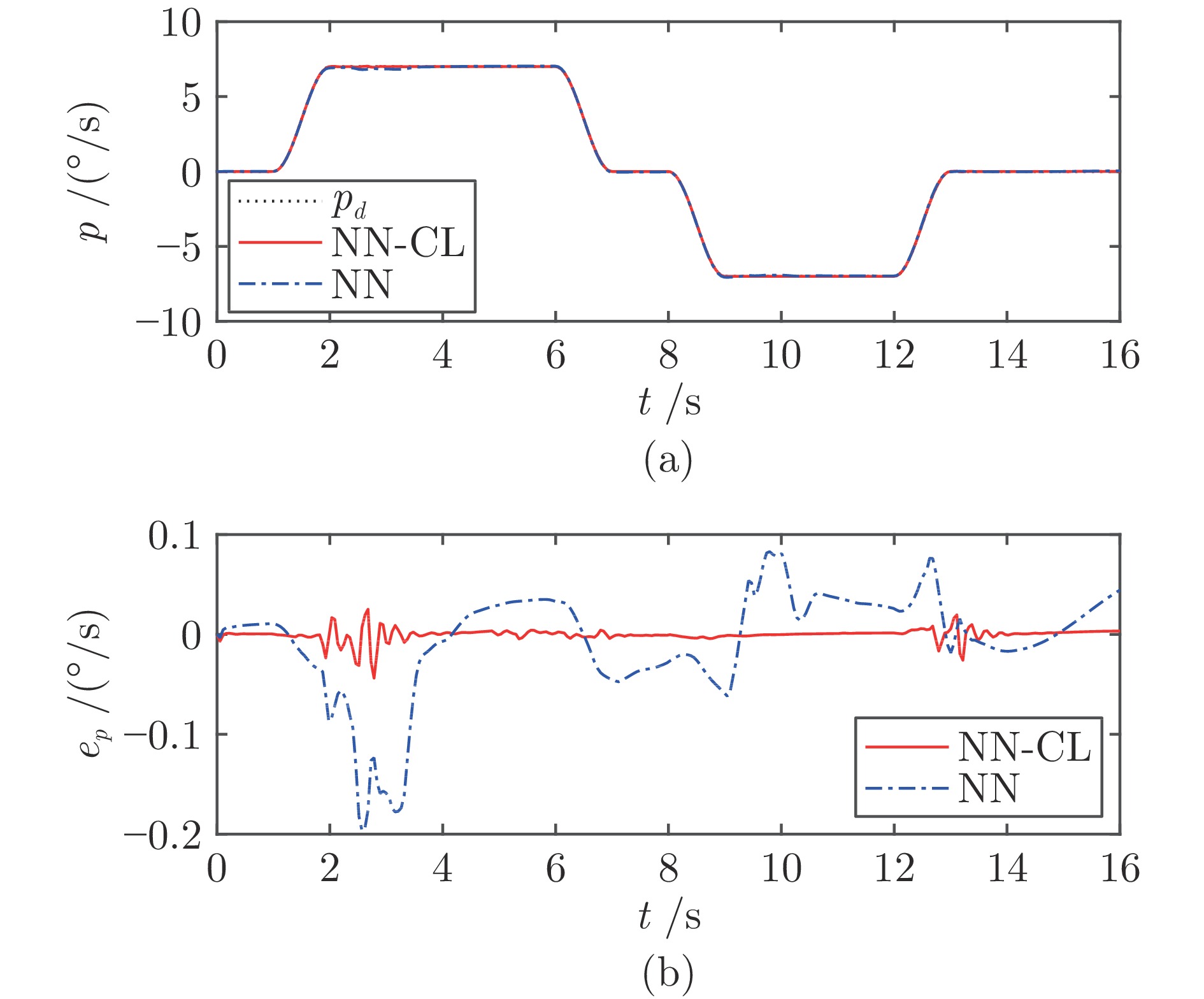
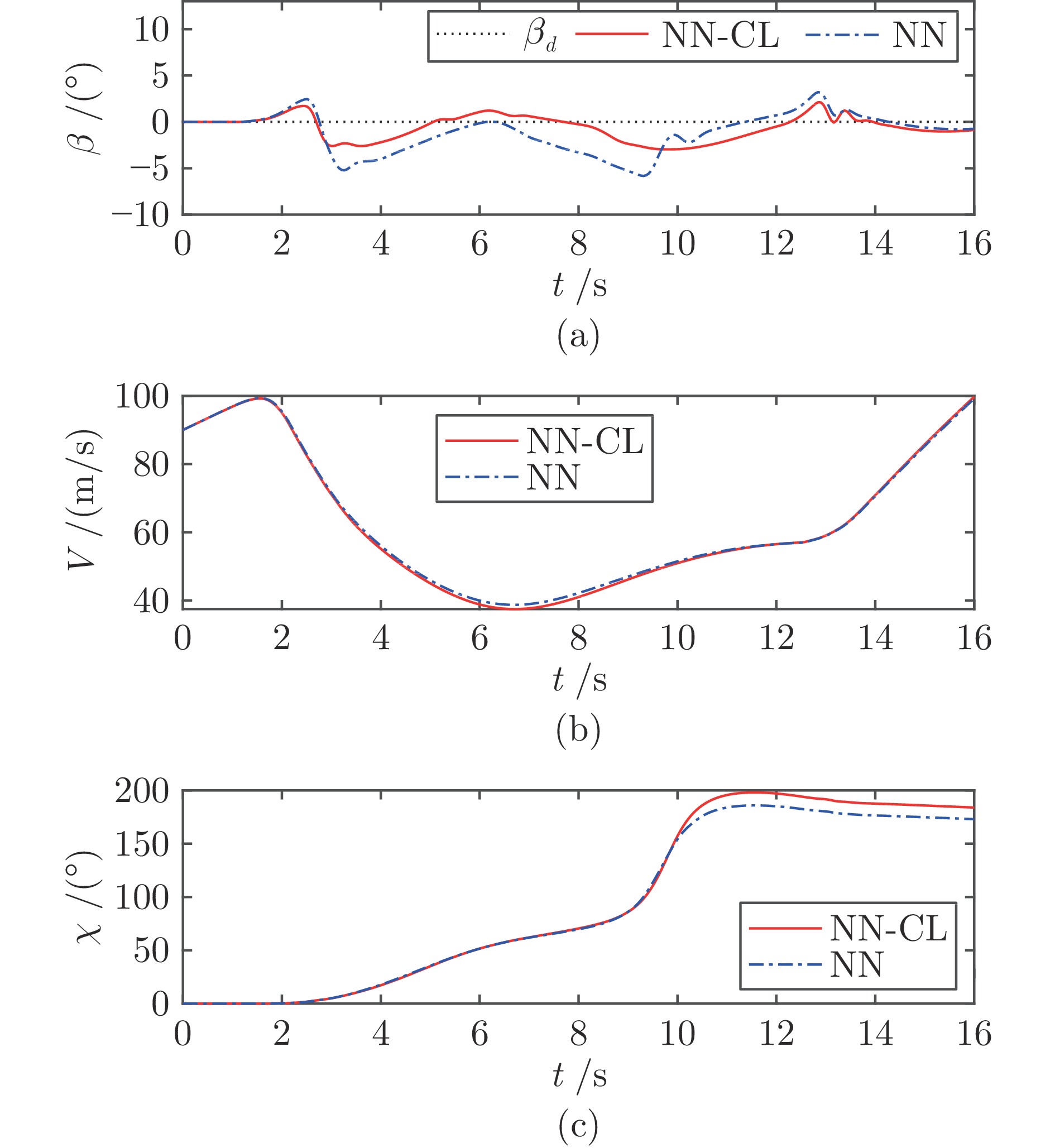
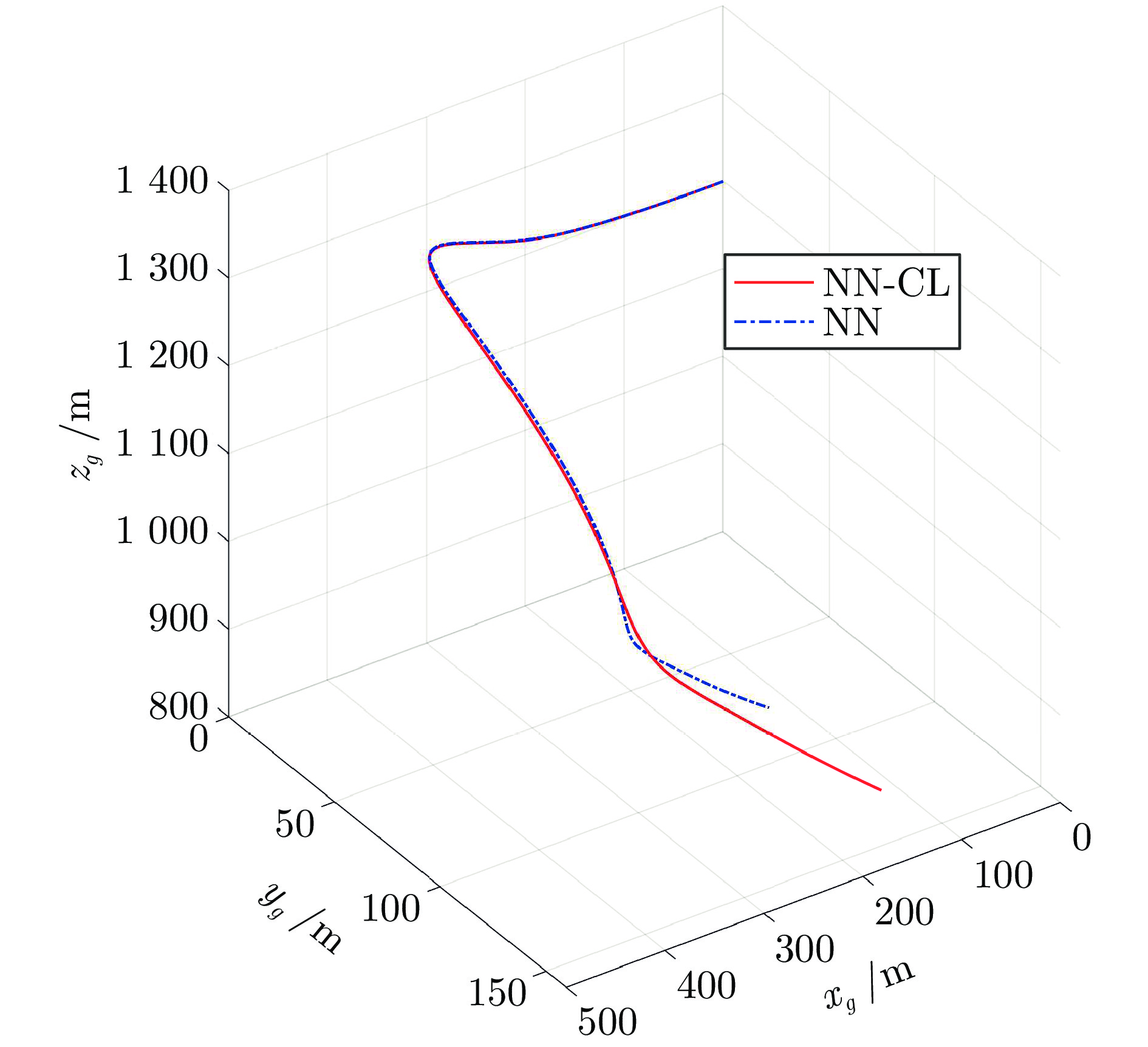
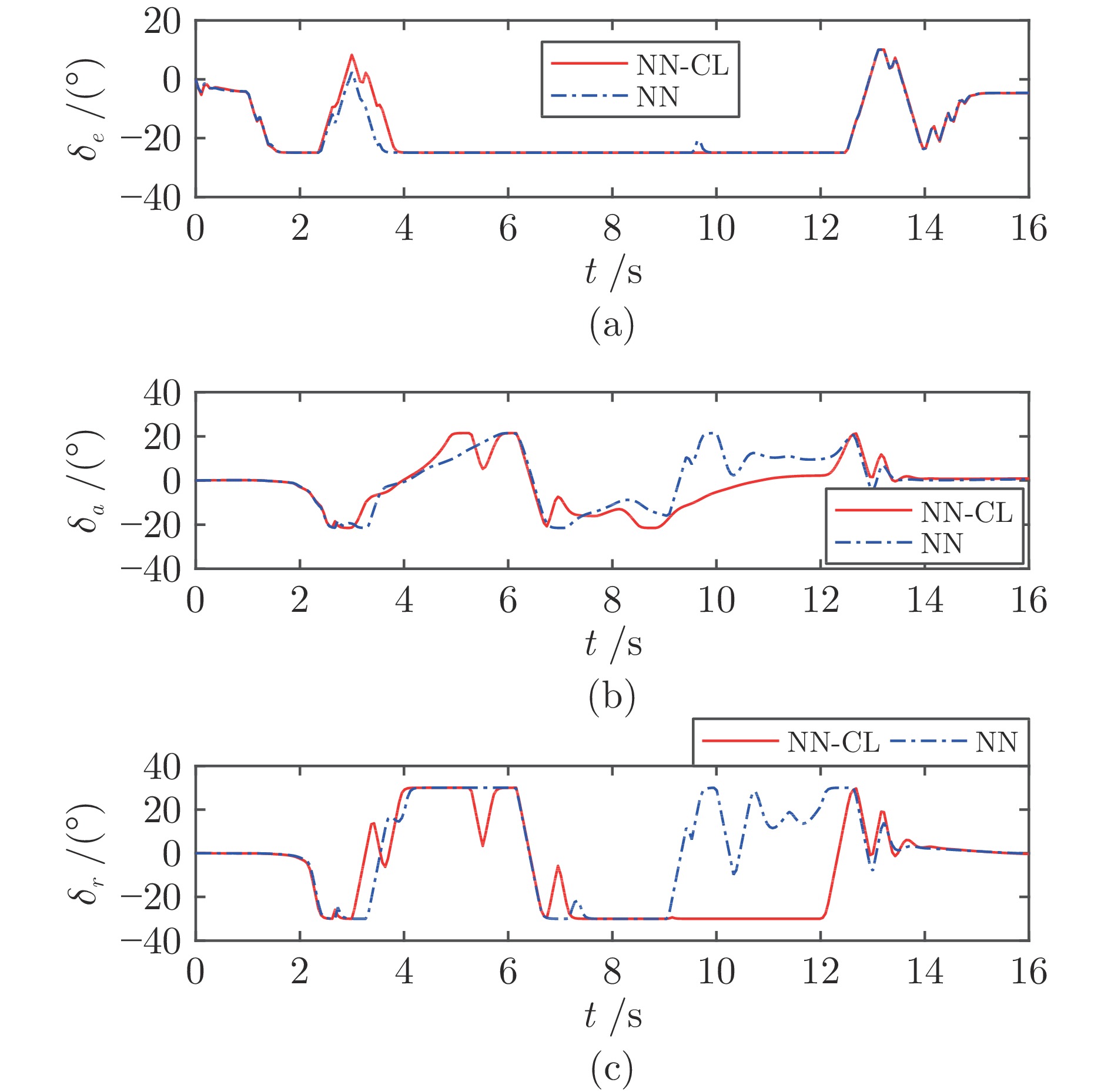
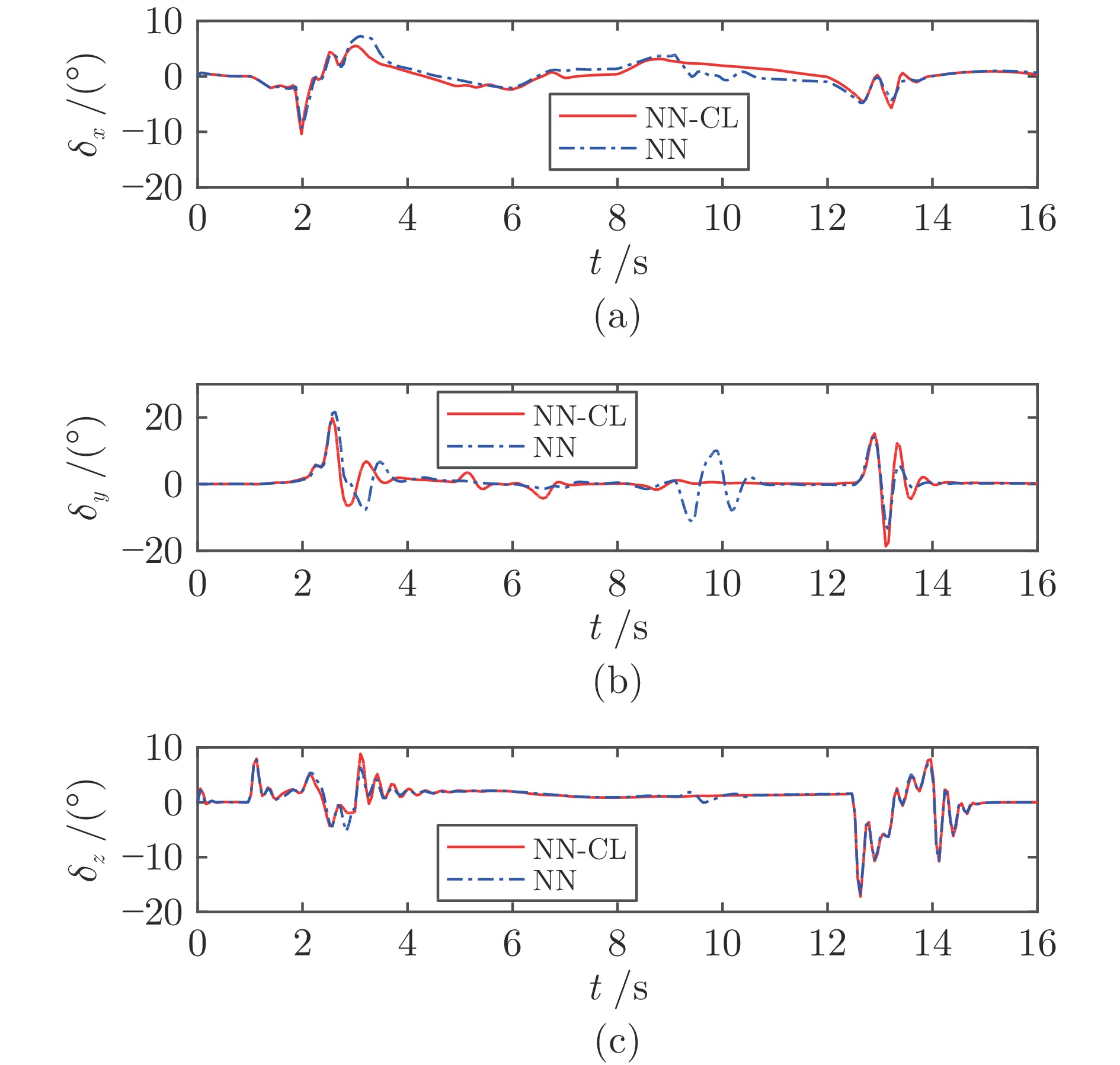
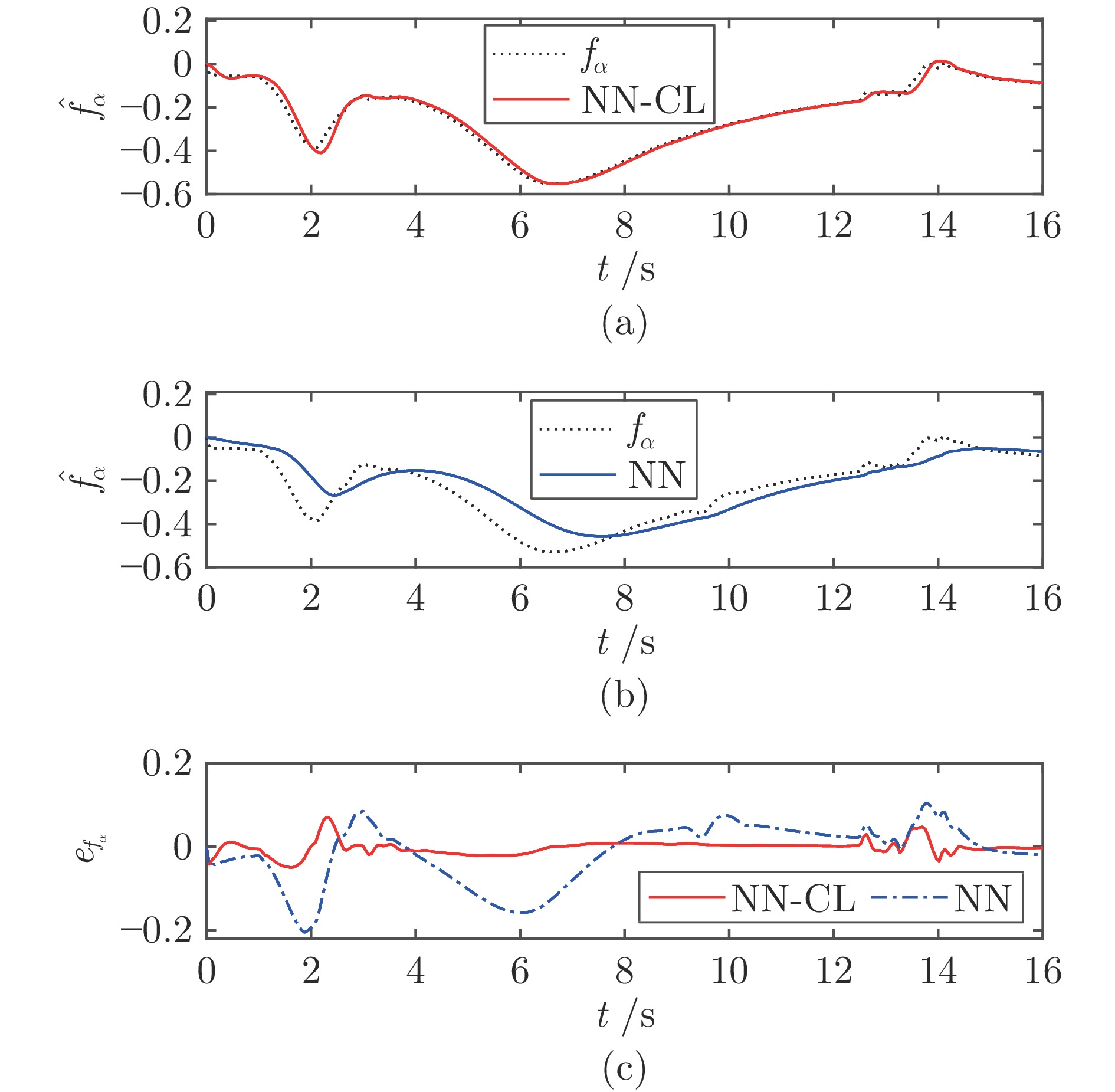
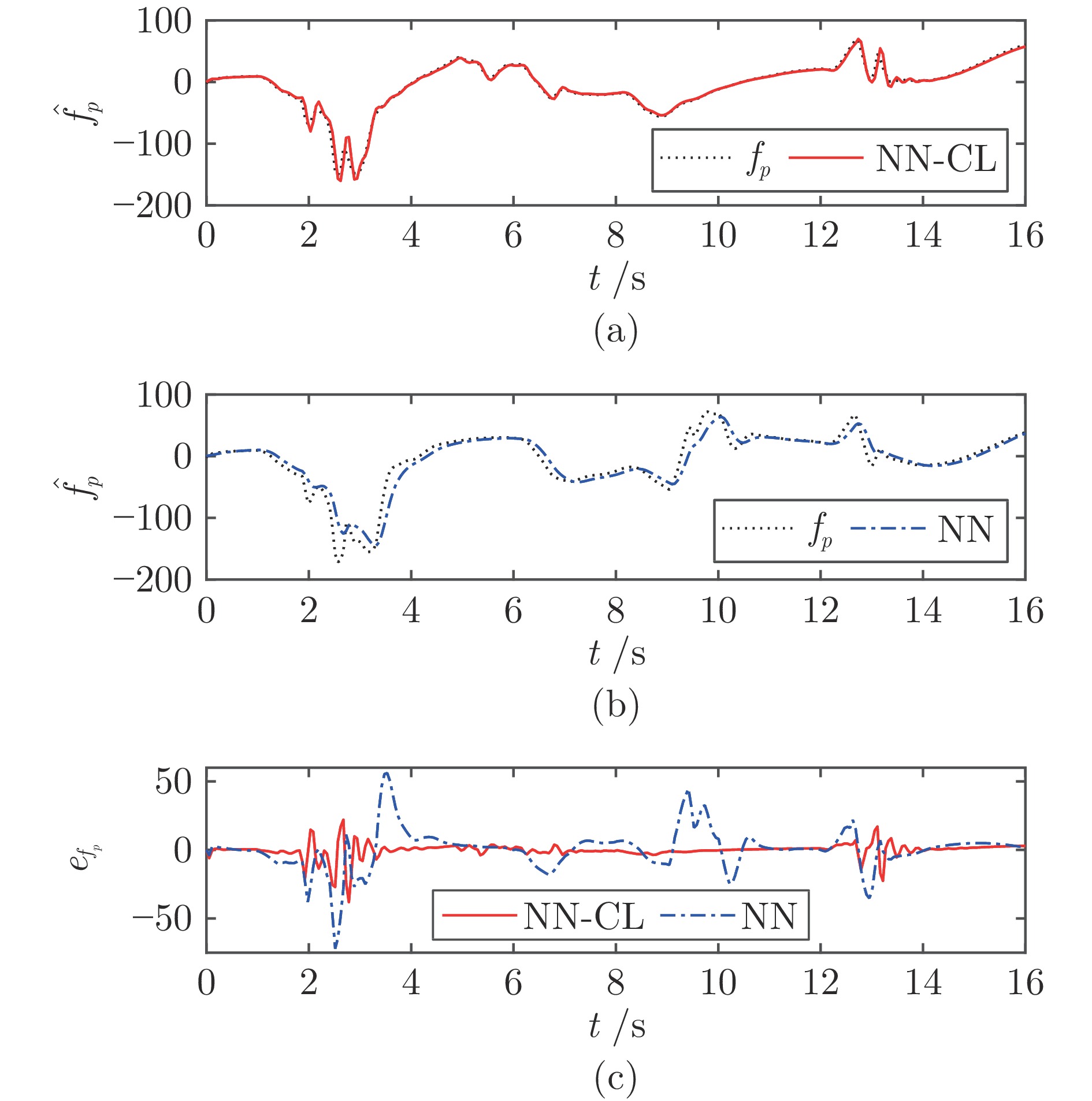
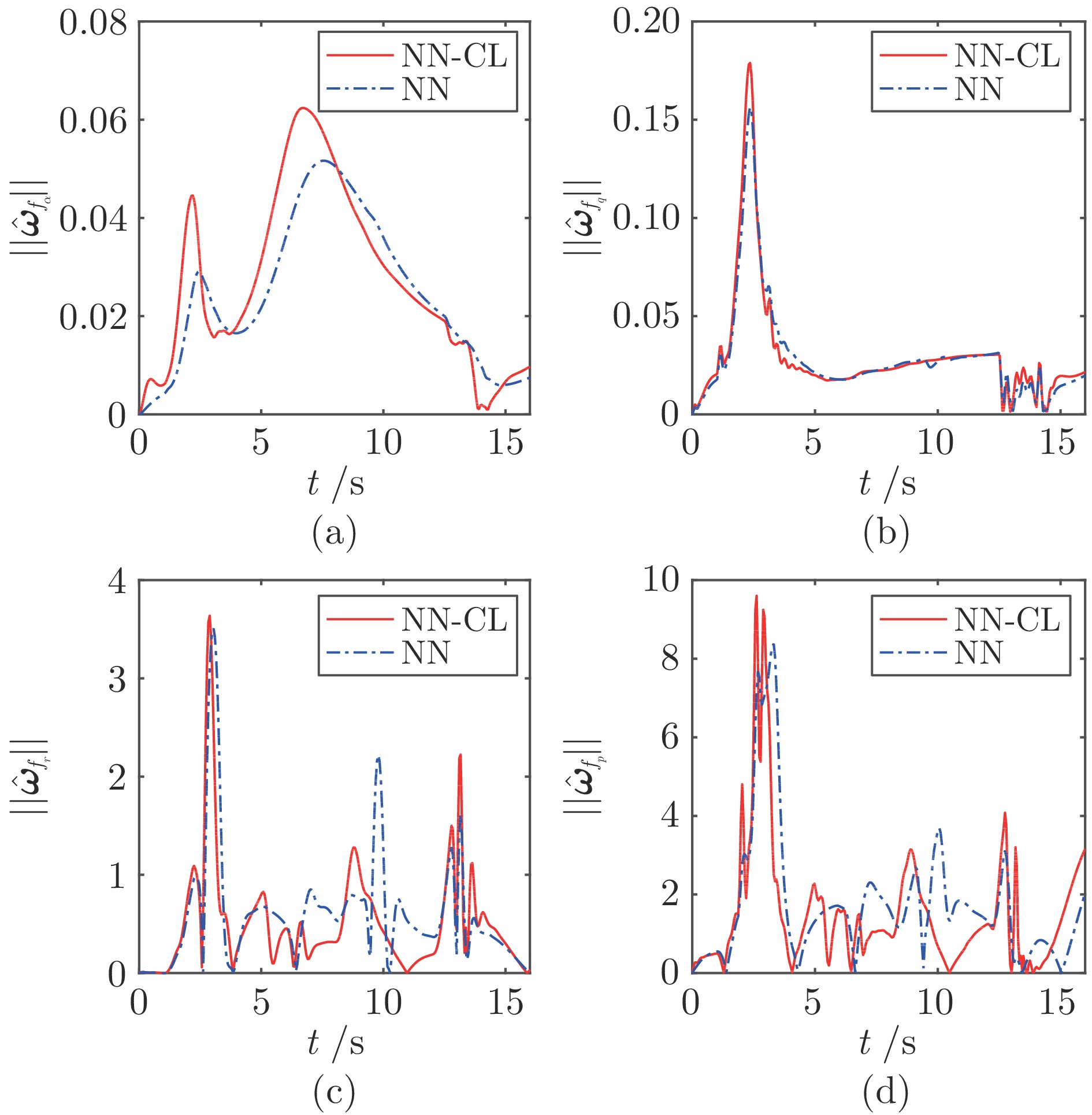
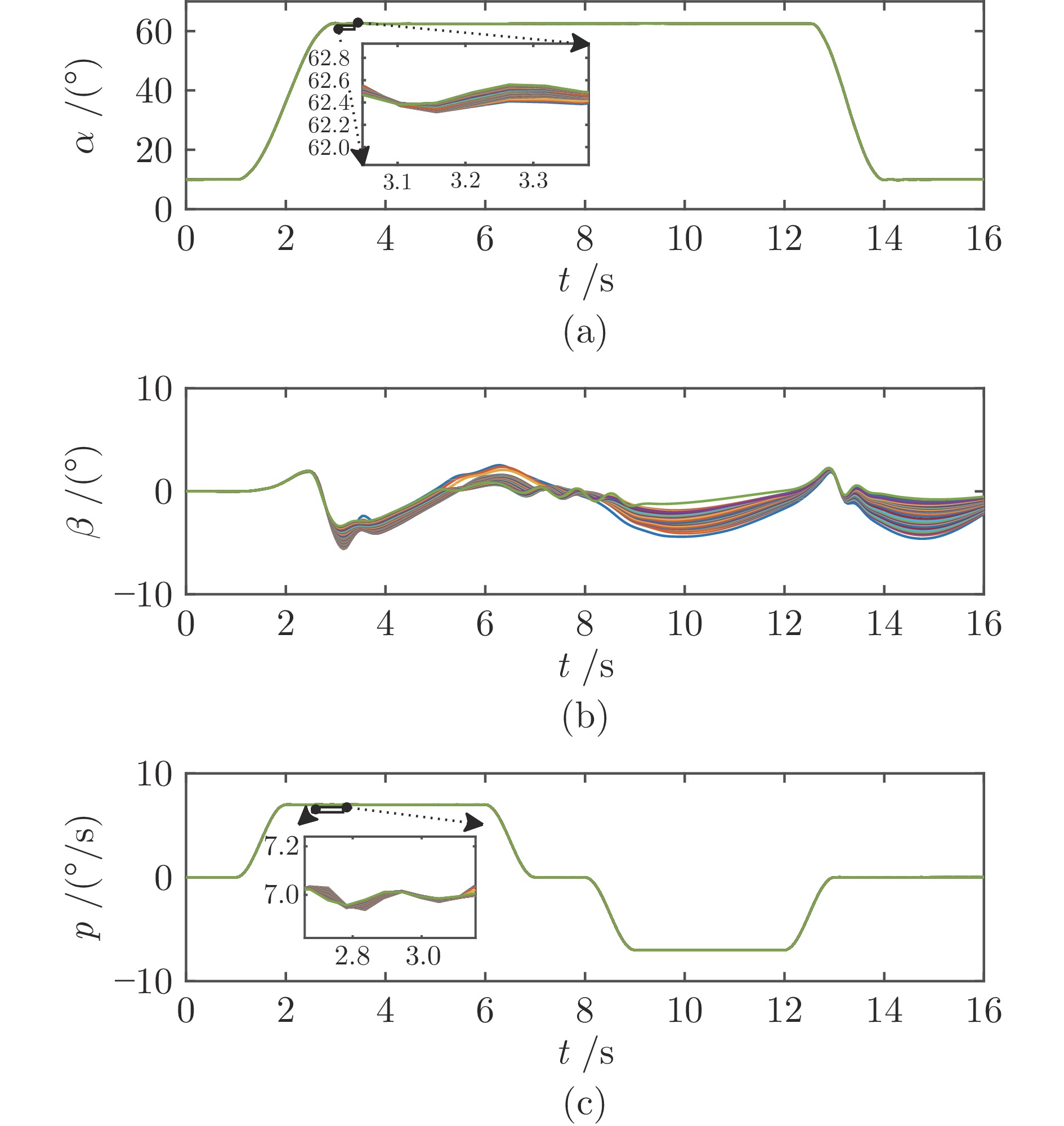
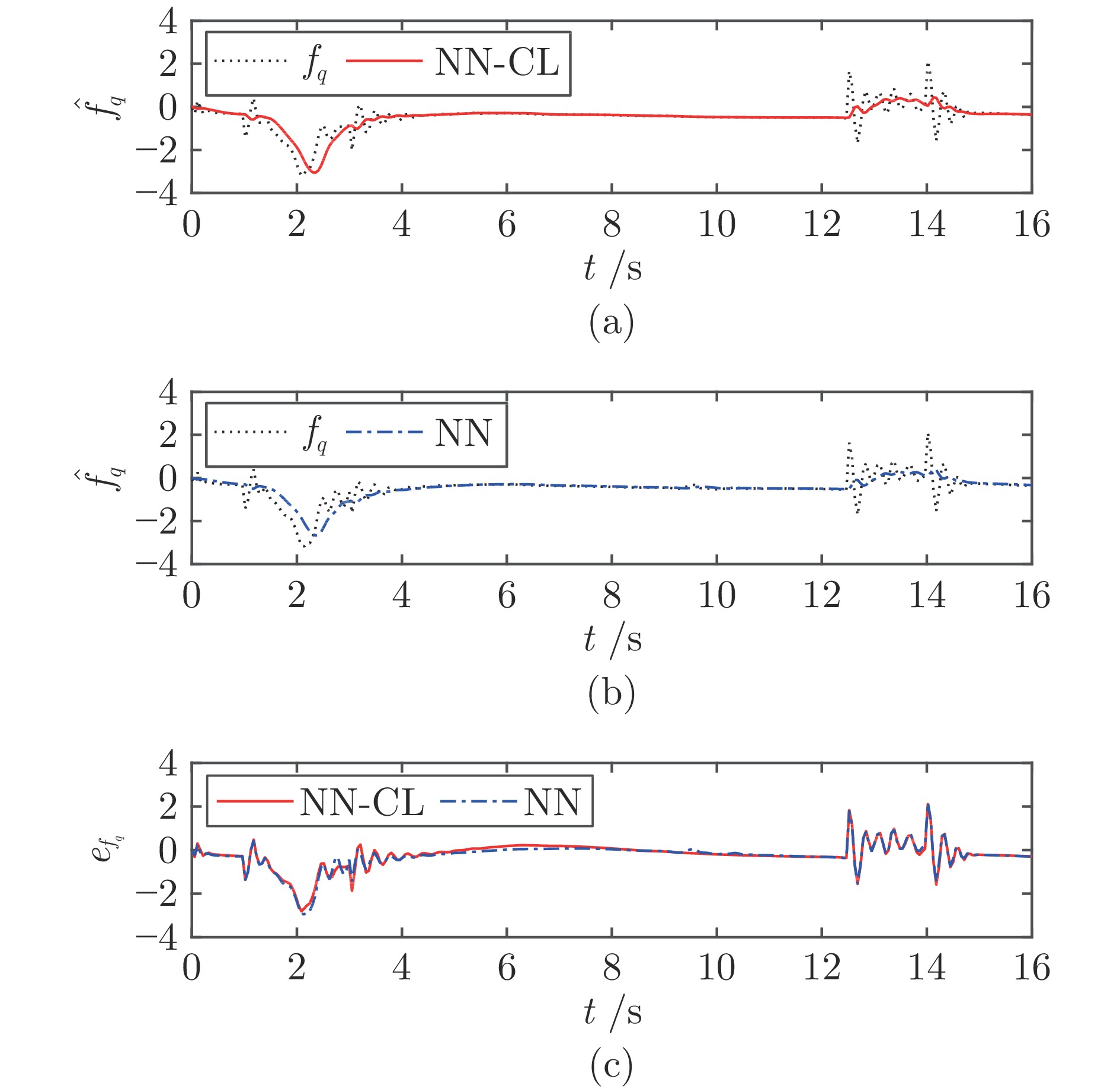
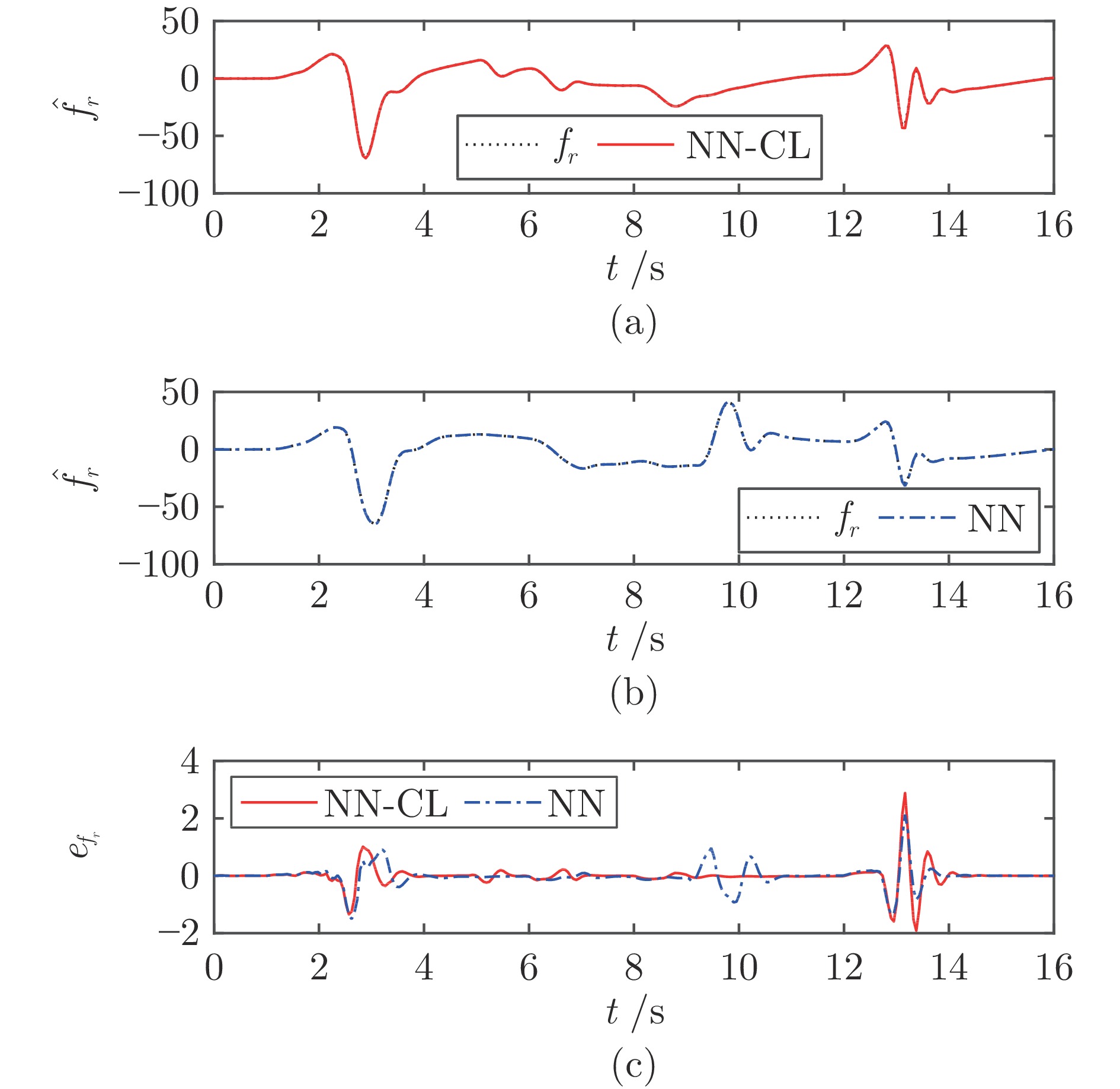
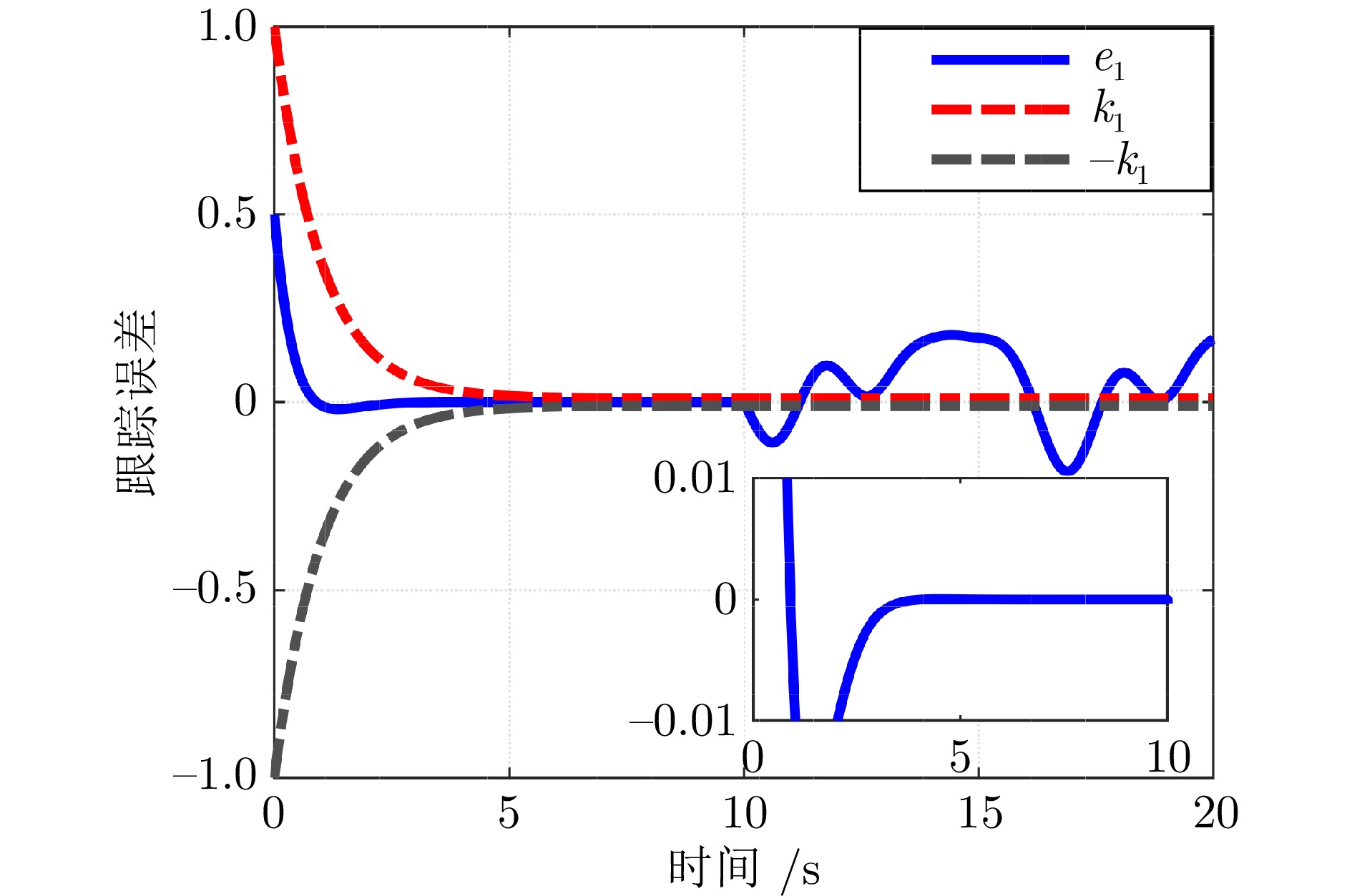
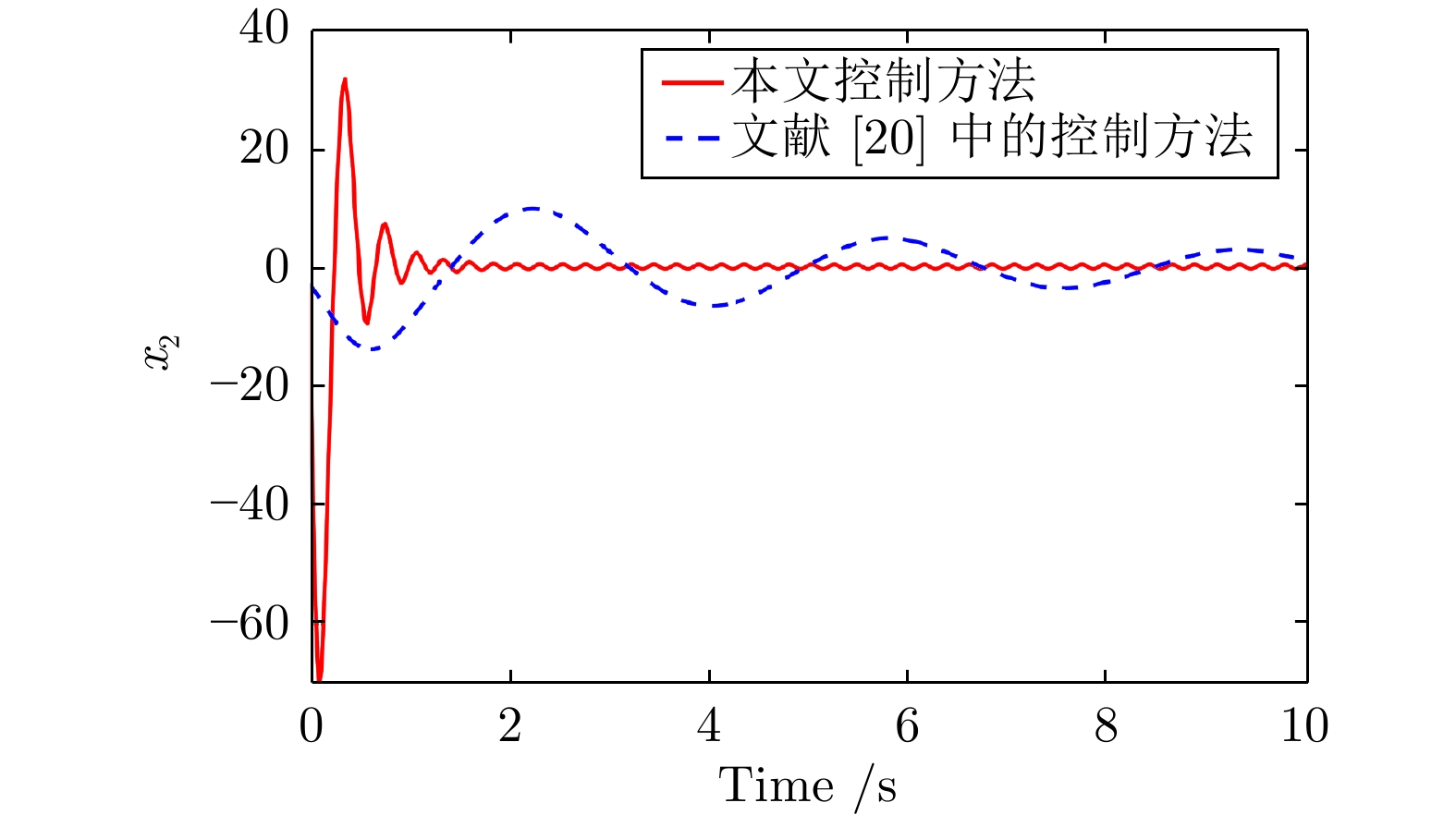
针对战机大迎角动力学呈现的强非线性、气动不确定和通道耦合特性, 提出了一种基于智能学习的自适应机动跟踪控制方法. 通过将通道耦合视为集总扰动的一部分, 把模型分解为迎角子系统、侧滑角子系统和滚转角速率子系统. 采用神经网络估计不确定, 设计跟踪误差反馈与集总干扰估计前馈相结合的控制器获取期望操纵力矩, 并基于串接链分配方法求解气动舵偏角和推力矢量偏角. 对于神经网络权重更新, 构建预测误差表征集总干扰的估计性能, 结合跟踪误差设计复合学习更新律. 基于李雅普诺夫方法证明了闭环系统的一致最终有界稳定性. 针对眼镜蛇机动和赫伯斯特机动指令进行了仿真验证和抗干扰参数拉偏测试, 结果表明所提方法具有较高的机动指令跟踪精度和鲁棒性能.
针对战机大迎角动力学呈现的强非线性、气动不确定和通道耦合特性, 提出了一种基于智能学习的自适应机动跟踪控制方法. 通过将通道耦合视为集总扰动的一部分, 把模型分解为迎角子系统、侧滑角子系统和滚转角速率子系统. 采用神经网络估计不确定, 设计跟踪误差反馈与集总干扰估计前馈相结合的控制器获取期望操纵力矩, 并基于串接链分配方法求解气动舵偏角和推力矢量偏角. 对于神经网络权重更新, 构建预测误差表征集总干扰的估计性能, 结合跟踪误差设计复合学习更新律. 基于李雅普诺夫方法证明了闭环系统的一致最终有界稳定性. 针对眼镜蛇机动和赫伯斯特机动指令进行了仿真验证和抗干扰参数拉偏测试, 结果表明所提方法具有较高的机动指令跟踪精度和鲁棒性能.
2024, 50(4): 731-744.
doi: 10.16383/j.aas.c230446
摘要:
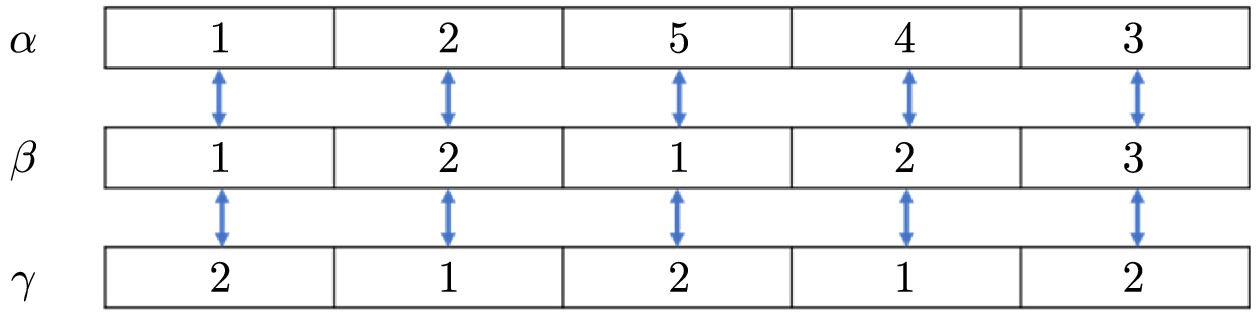
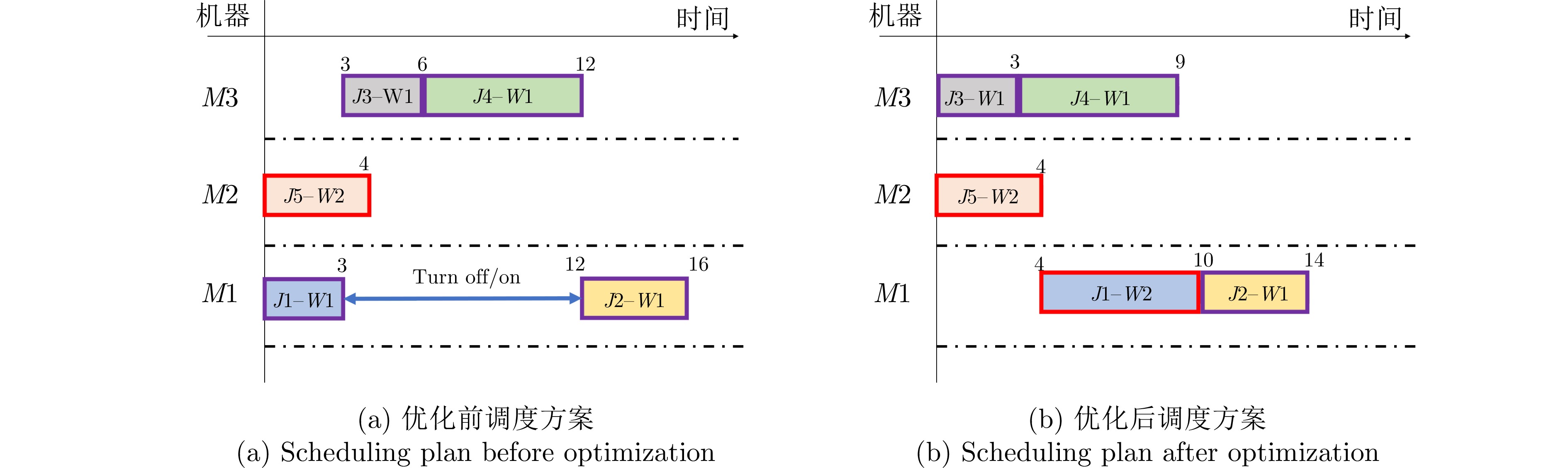
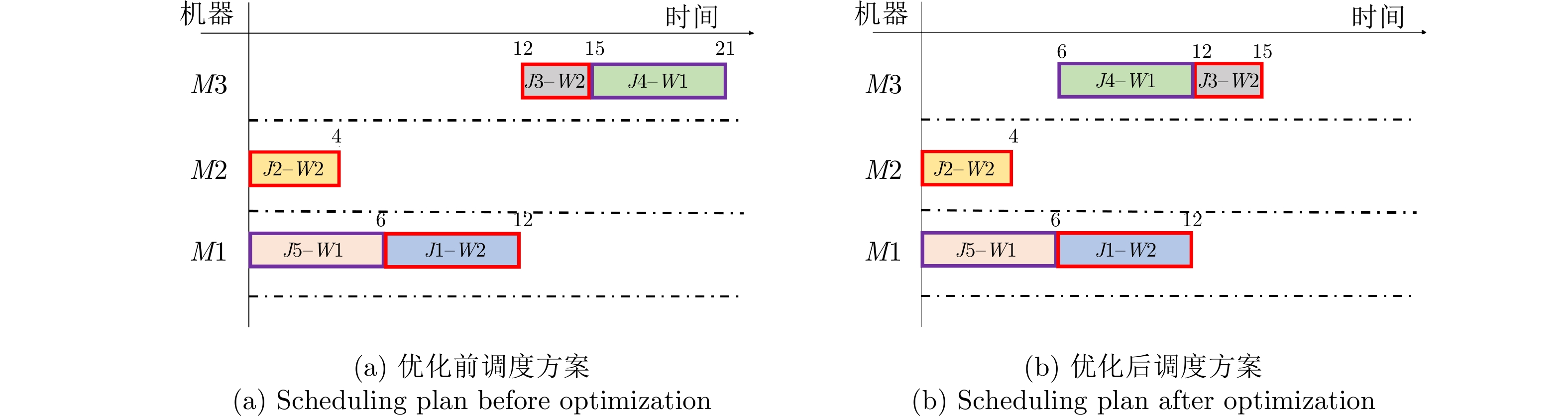
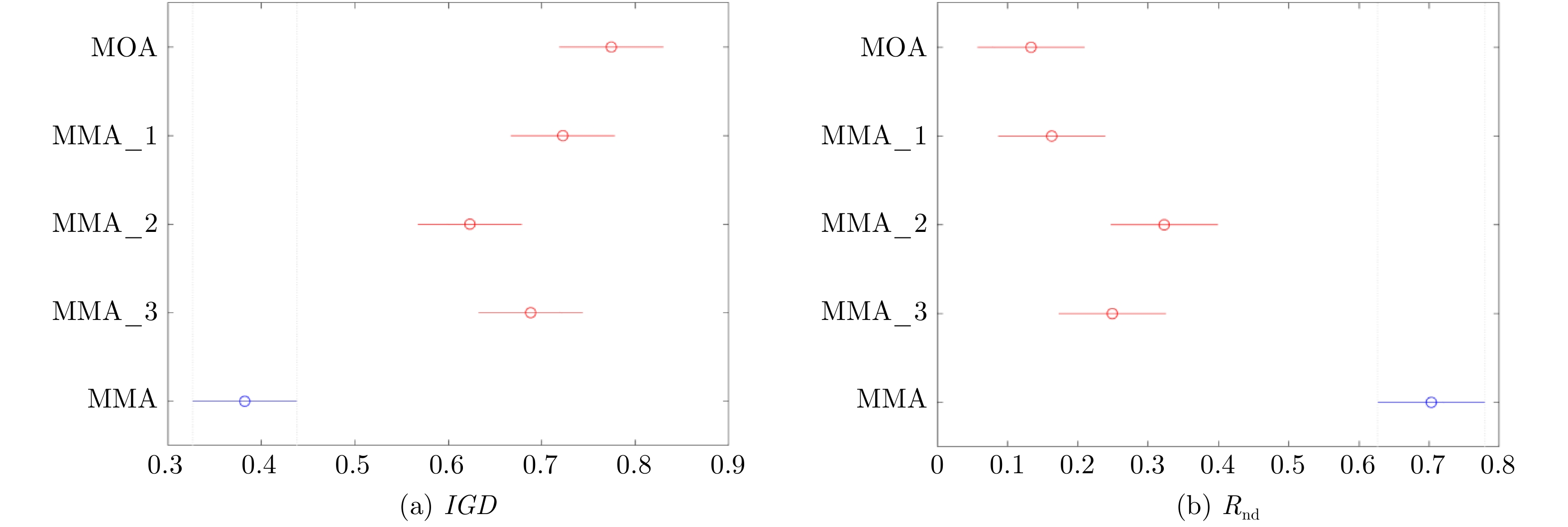
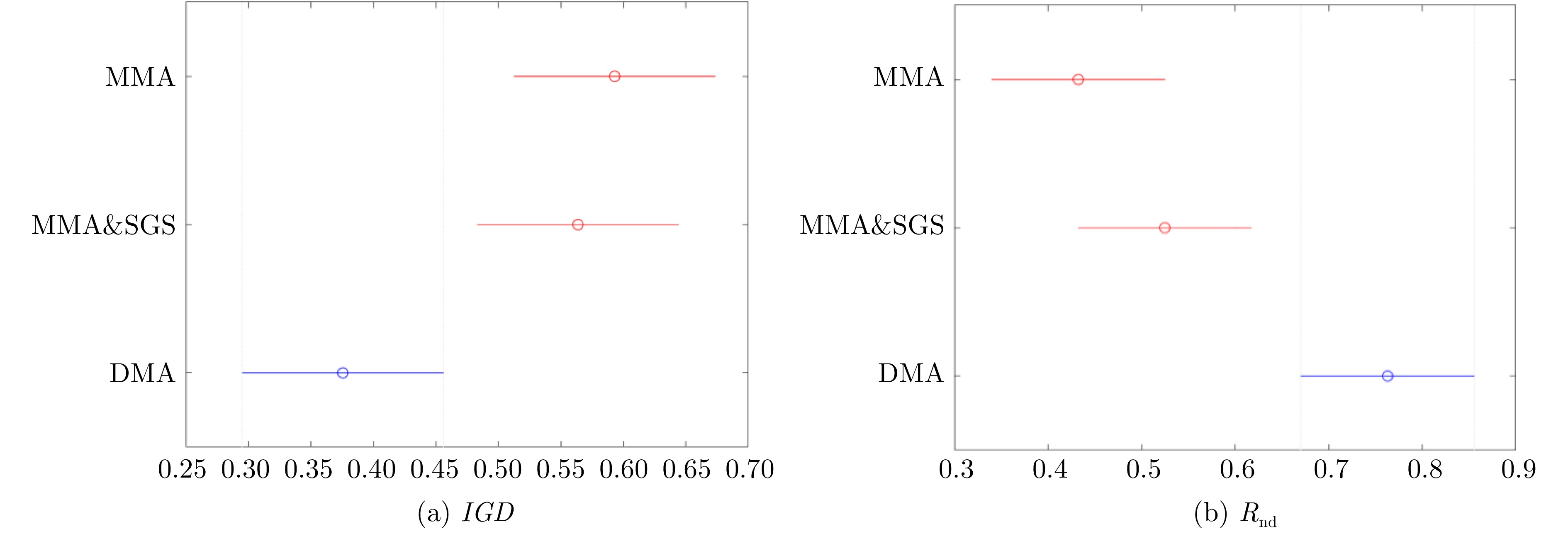
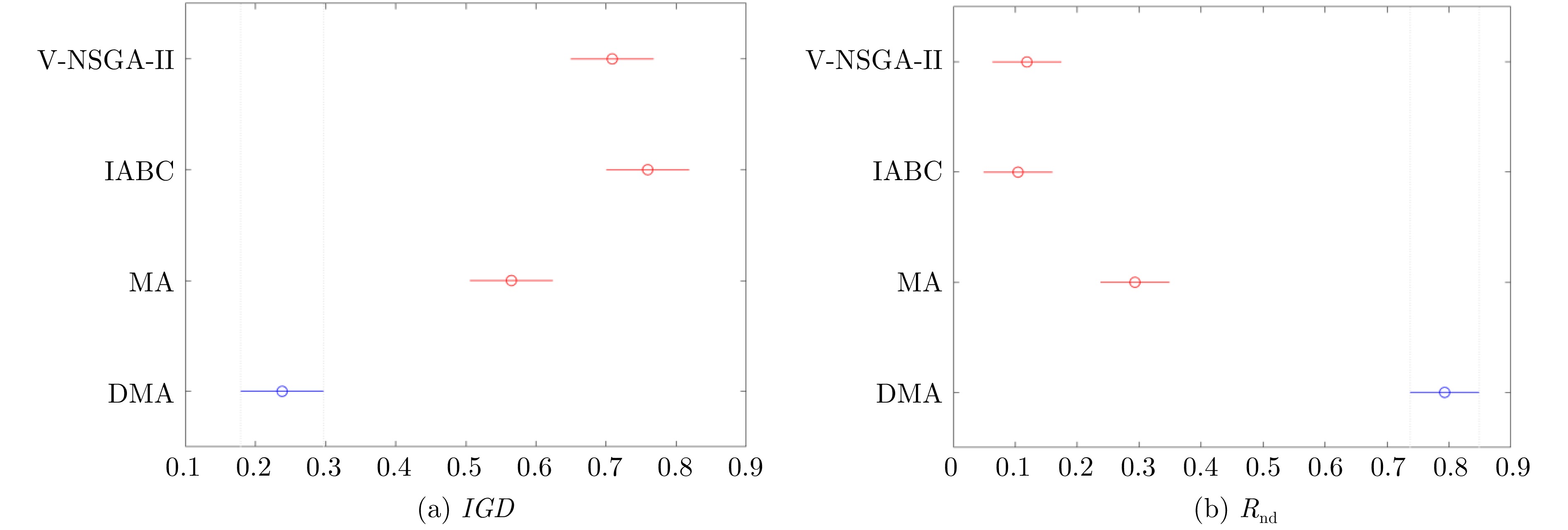
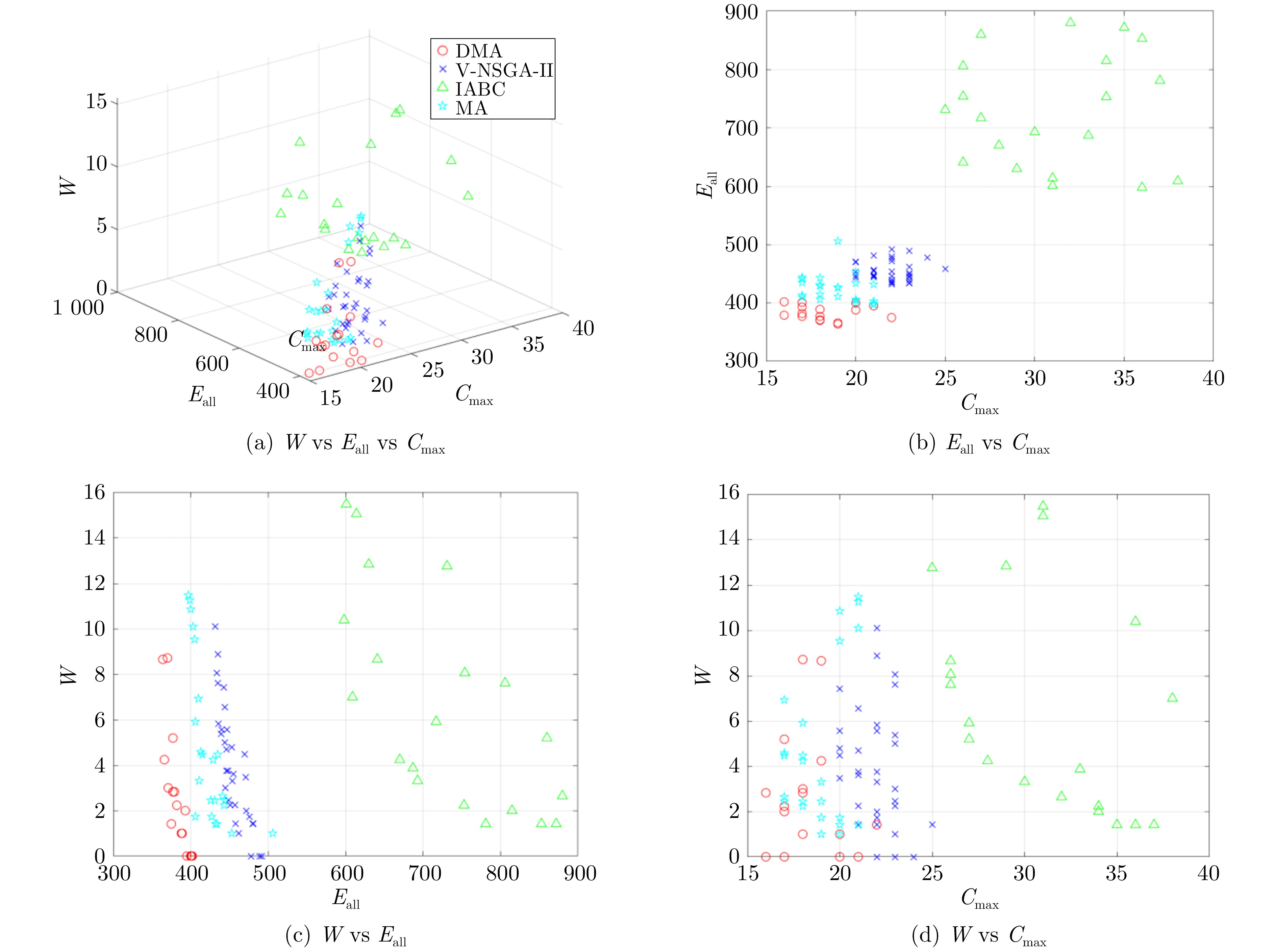
从经济、环境和社会3个维度, 全面提升生产调度方案的可持续性具有重要意义. 针对并行机生产场景, 建立考虑机器指派、加工顺序、人员安排以及开关机控制等4种决策任务的调度模型. 为实现对复杂决策空间的高效寻优, 提出一种融合两种局部优化策略的双重增强模因算法(Dual-enhanced memetic algorithm, DMA)求解模型. 从随机更新角度, 针对不同决策任务, 构造单步变邻域搜索(One-step variable neighborhood search, 1S-VNS)策略. 从定向优化角度, 分析目标和关键任务之间的匹配关系, 提出一种可持续目标导向策略(Sustainable goals-oriented strategy, SGS). 考虑到两种优化策略的不同特点, 单步变邻域搜索策略作用于整个种群, 目标导向策略强化种群中的精英个体, 实现对输出解集的双重优化. 仿真实验结果表明, 双重优化策略能有效地增强算法性能, 并且所提算法在非支配解的多样性和收敛性上具有优越性.
从经济、环境和社会3个维度, 全面提升生产调度方案的可持续性具有重要意义. 针对并行机生产场景, 建立考虑机器指派、加工顺序、人员安排以及开关机控制等4种决策任务的调度模型. 为实现对复杂决策空间的高效寻优, 提出一种融合两种局部优化策略的双重增强模因算法(Dual-enhanced memetic algorithm, DMA)求解模型. 从随机更新角度, 针对不同决策任务, 构造单步变邻域搜索(One-step variable neighborhood search, 1S-VNS)策略. 从定向优化角度, 分析目标和关键任务之间的匹配关系, 提出一种可持续目标导向策略(Sustainable goals-oriented strategy, SGS). 考虑到两种优化策略的不同特点, 单步变邻域搜索策略作用于整个种群, 目标导向策略强化种群中的精英个体, 实现对输出解集的双重优化. 仿真实验结果表明, 双重优化策略能有效地增强算法性能, 并且所提算法在非支配解的多样性和收敛性上具有优越性.
2024, 50(4): 745-757.
doi: 10.16383/j.aas.c230154
摘要:
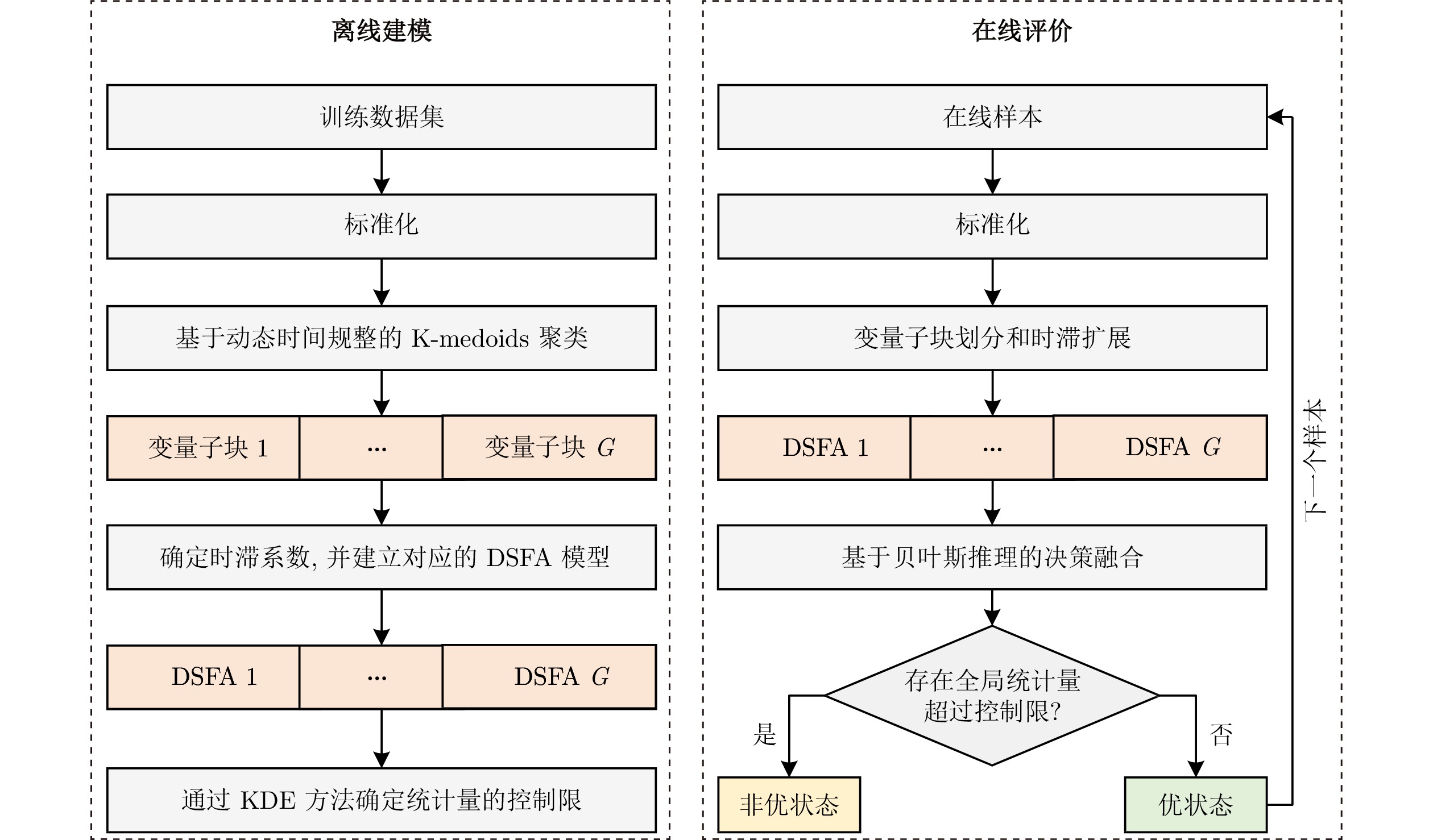
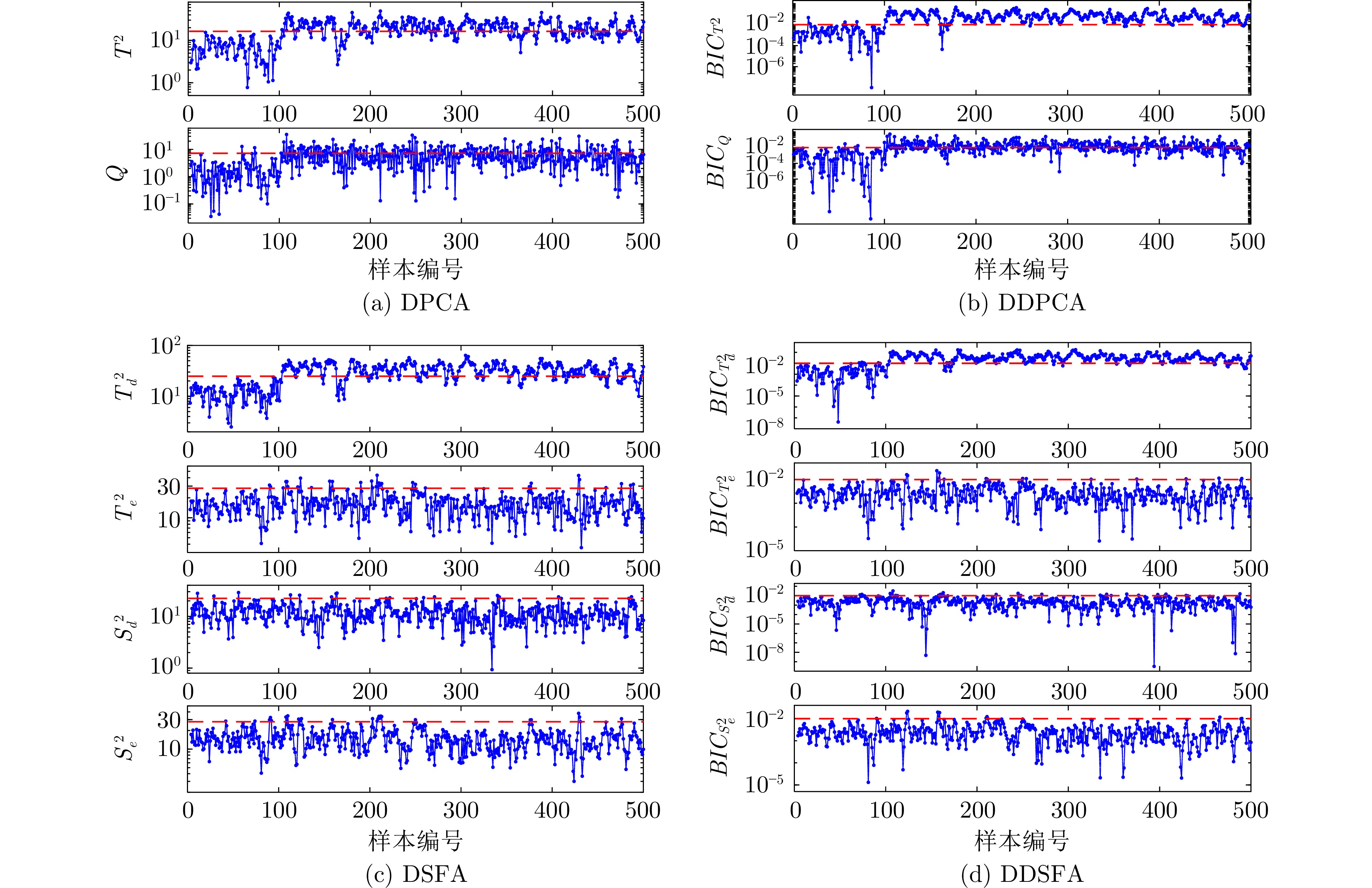
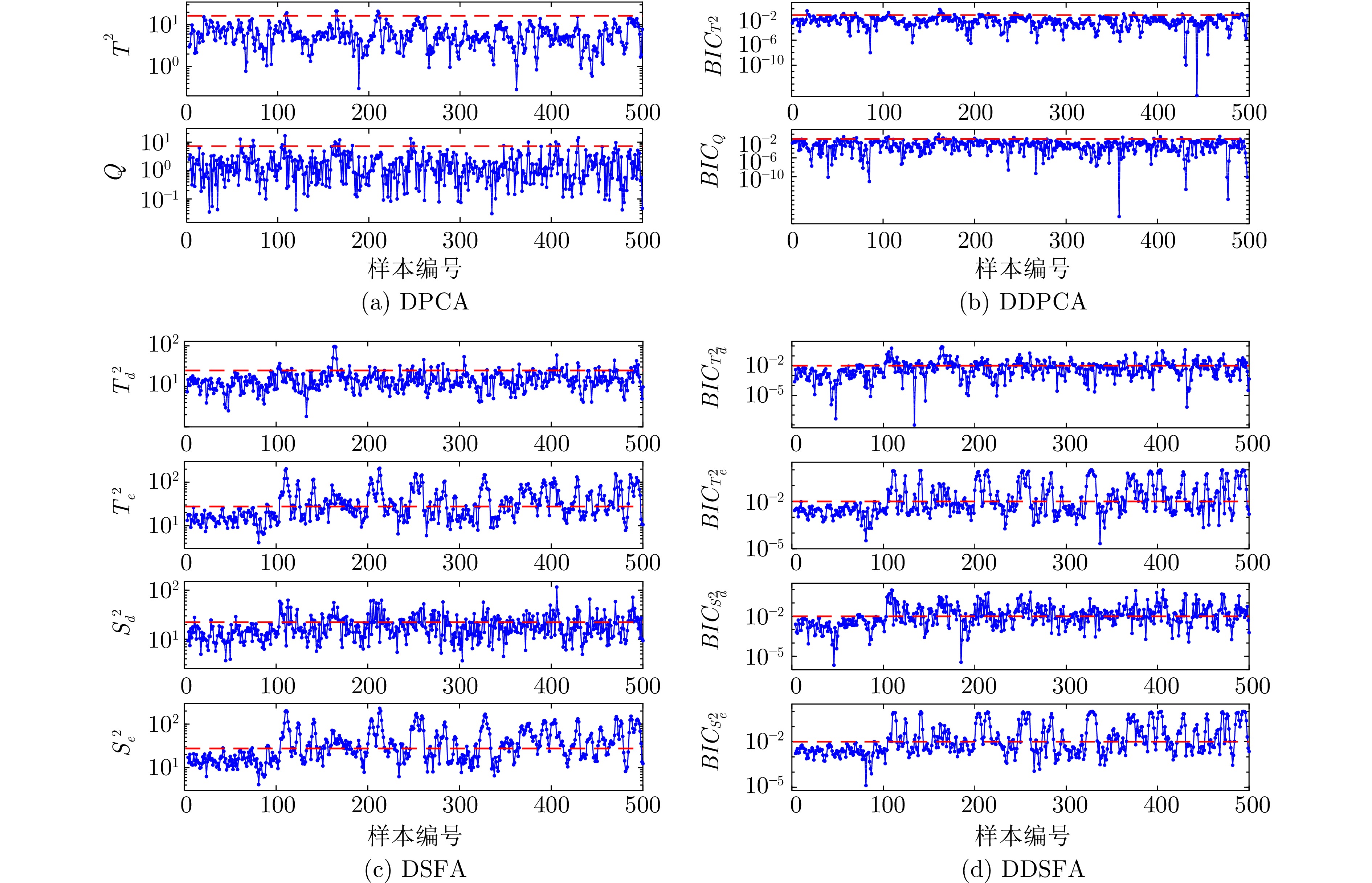
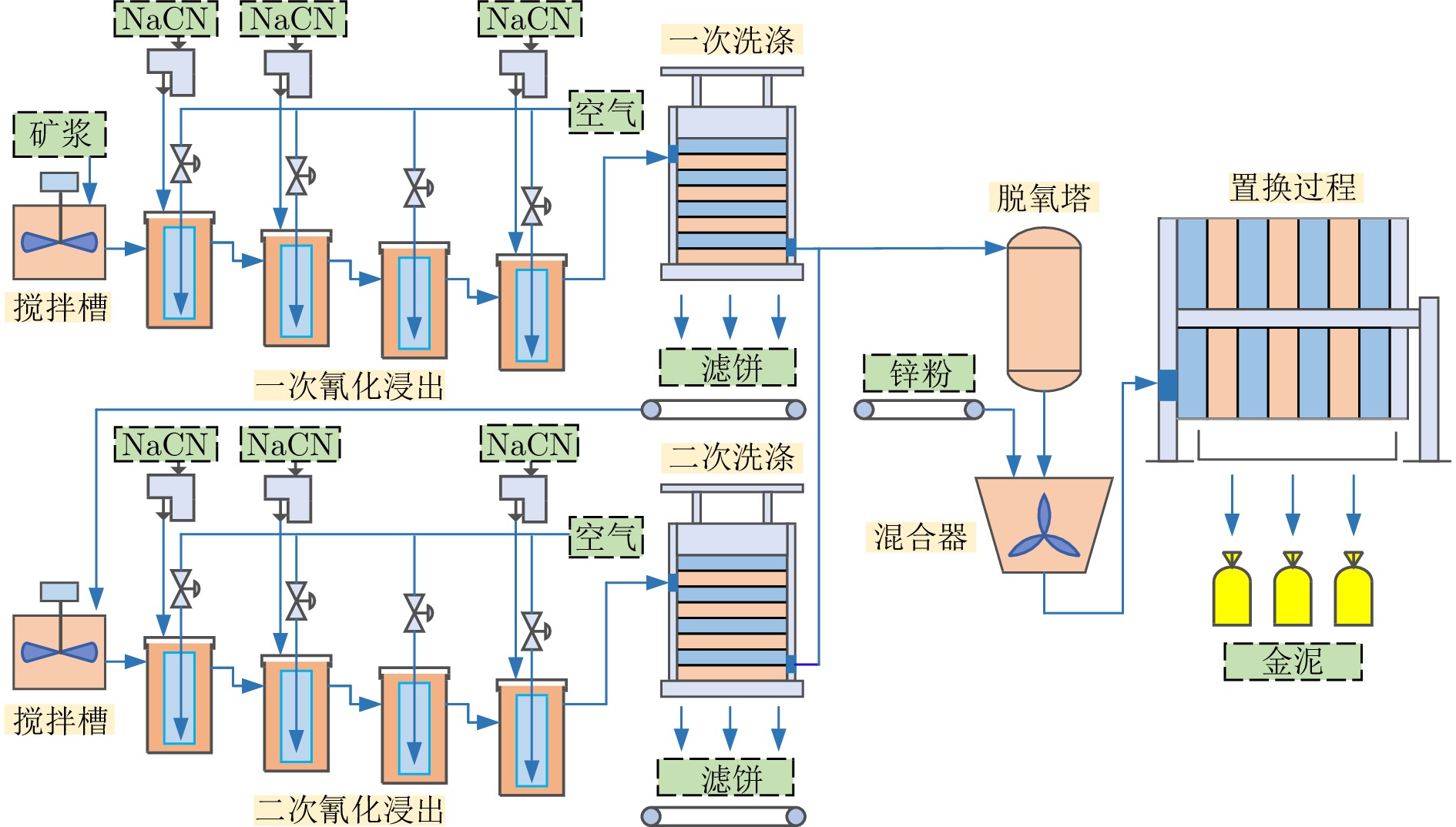
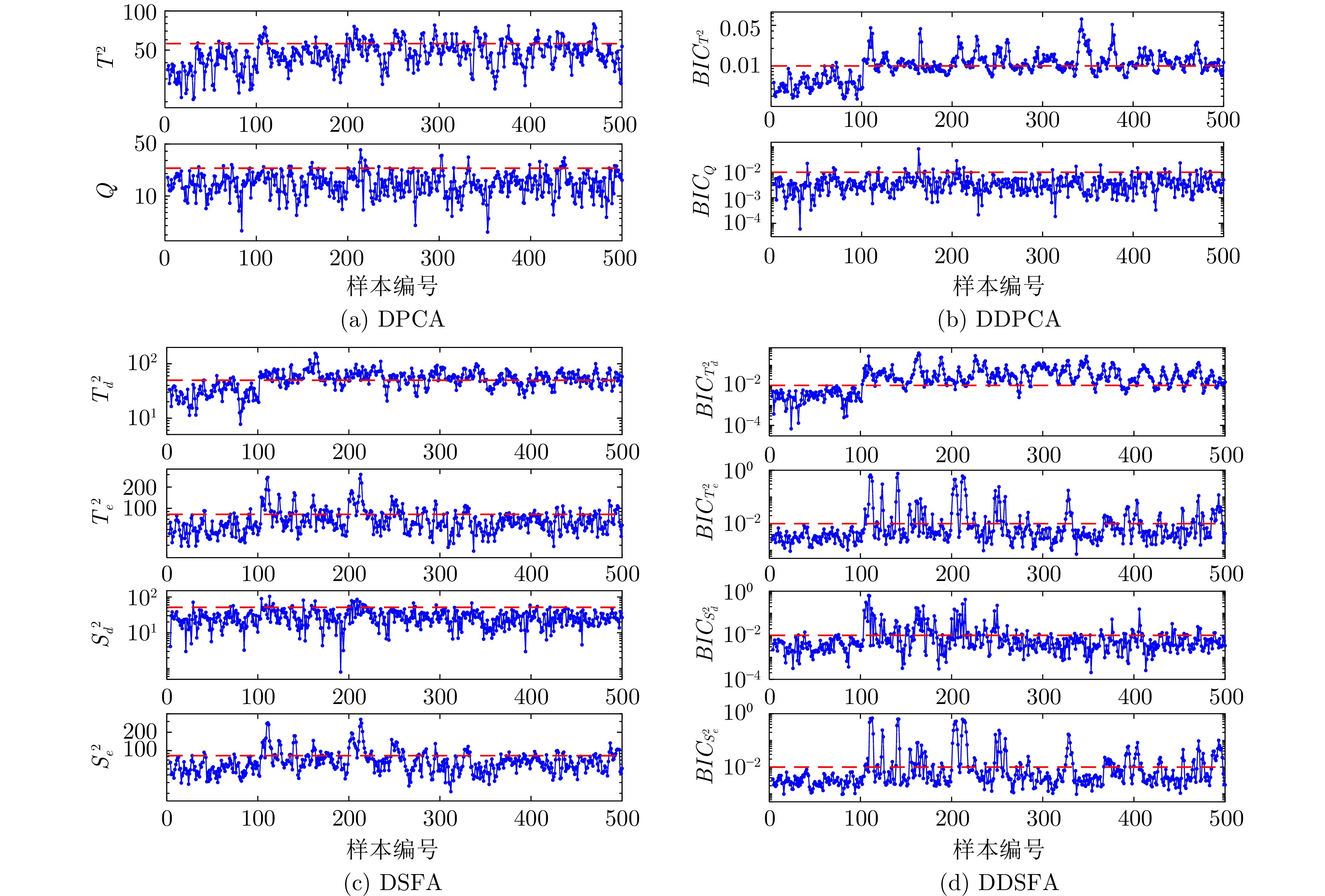
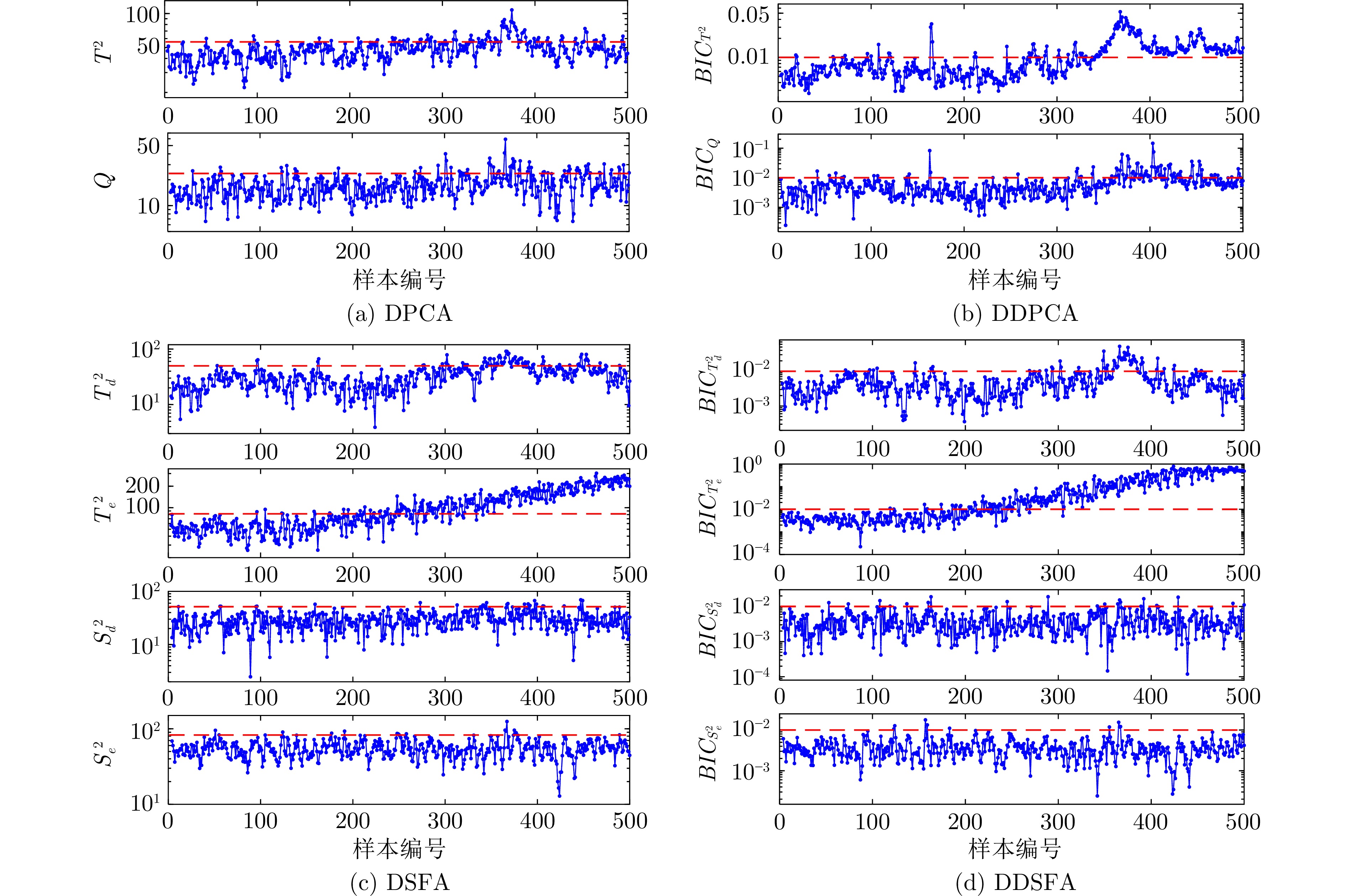
现代工业过程通常具有规模大、流程长和工序多的特点, 导致传统的集中式建模方法会淹没过程的局部变化信息, 从而无法及时识别早期的非优运行状态. 此外, 闭环控制的广泛应用使得过程变量普遍存在时序相关性. 针对以上问题, 提出一种基于慢特征分析(Slow feature analysis, SFA)的分布式动态工业过程运行状态评价方法. 首先, 结合动态时间规整(Dynamic time warping, DTW)和K-medoids聚类算法对过程进行分解; 然后, 对每一变量子块建立相应的动态慢特征分析(Dynamic slow feature analysis, DSFA)模型; 最后, 利用贝叶斯推理获得全局的综合评价指标. 通过在数值案例和金湿法冶金过程的仿真应用, 验证了该方法的有效性.
现代工业过程通常具有规模大、流程长和工序多的特点, 导致传统的集中式建模方法会淹没过程的局部变化信息, 从而无法及时识别早期的非优运行状态. 此外, 闭环控制的广泛应用使得过程变量普遍存在时序相关性. 针对以上问题, 提出一种基于慢特征分析(Slow feature analysis, SFA)的分布式动态工业过程运行状态评价方法. 首先, 结合动态时间规整(Dynamic time warping, DTW)和K-medoids聚类算法对过程进行分解; 然后, 对每一变量子块建立相应的动态慢特征分析(Dynamic slow feature analysis, DSFA)模型; 最后, 利用贝叶斯推理获得全局的综合评价指标. 通过在数值案例和金湿法冶金过程的仿真应用, 验证了该方法的有效性.
2024, 50(4): 758-770.
doi: 10.16383/j.aas.c210518
摘要:
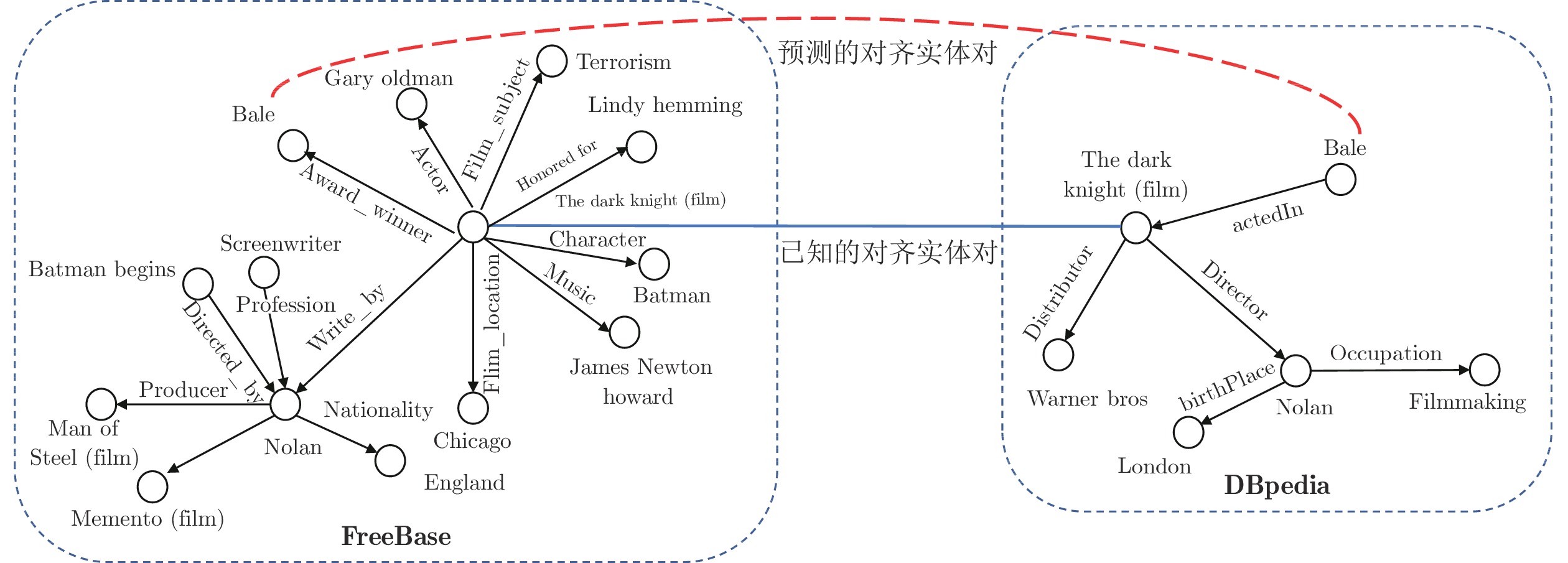
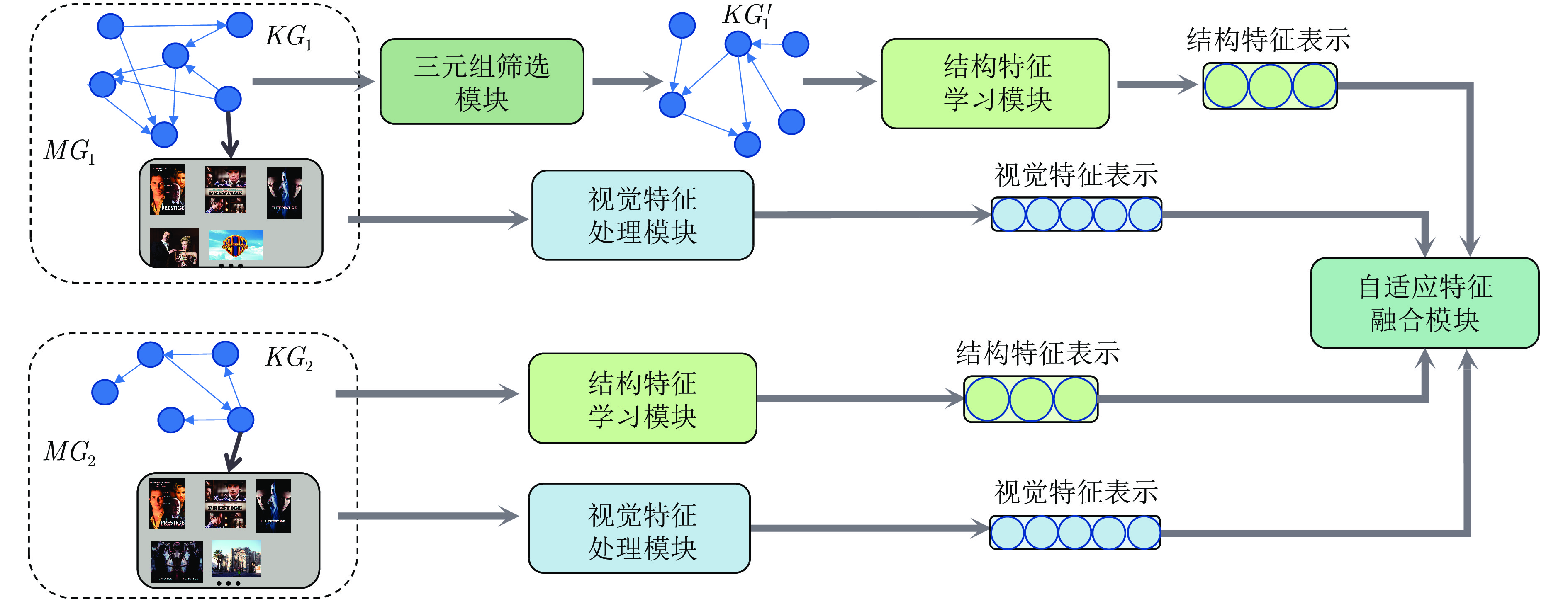
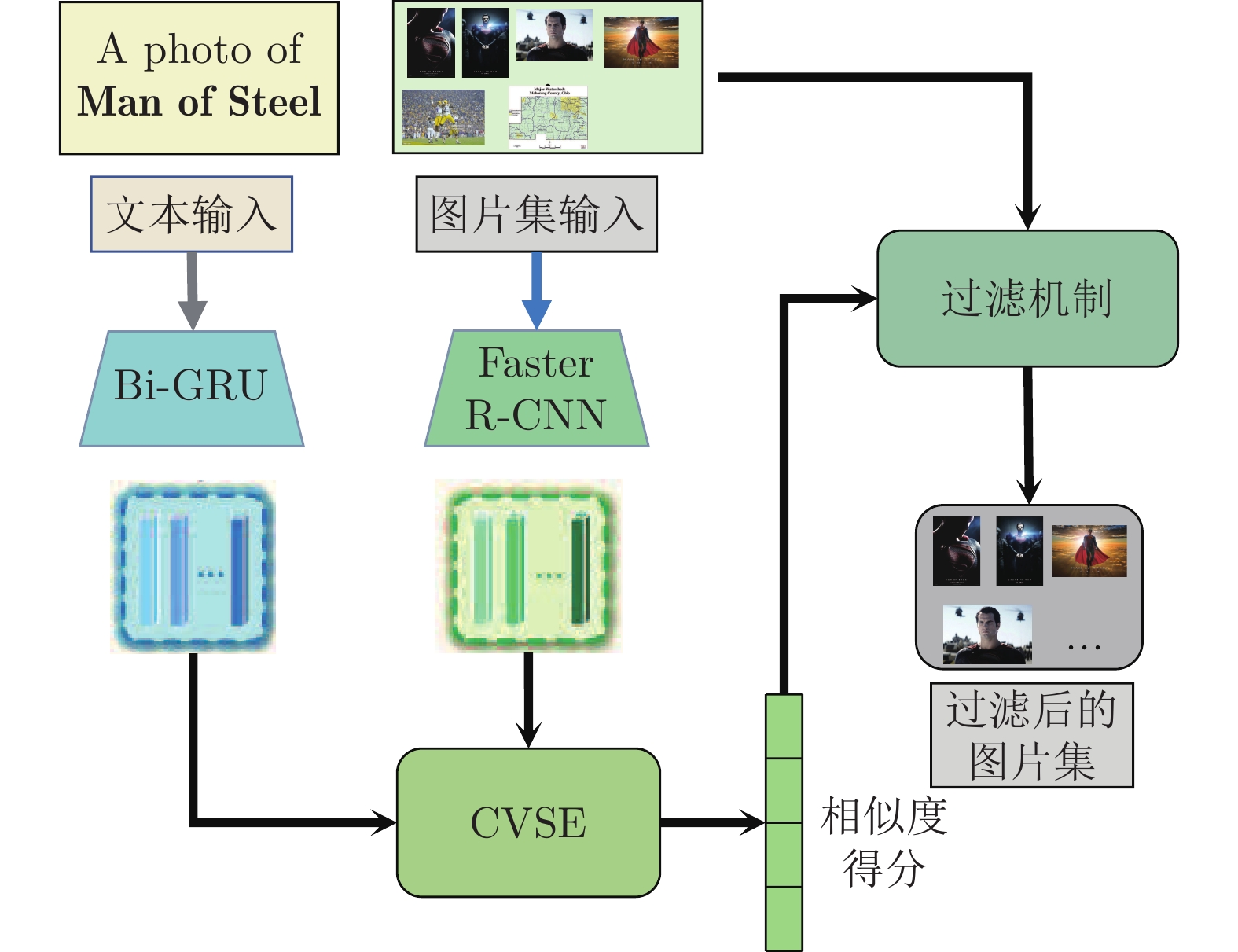
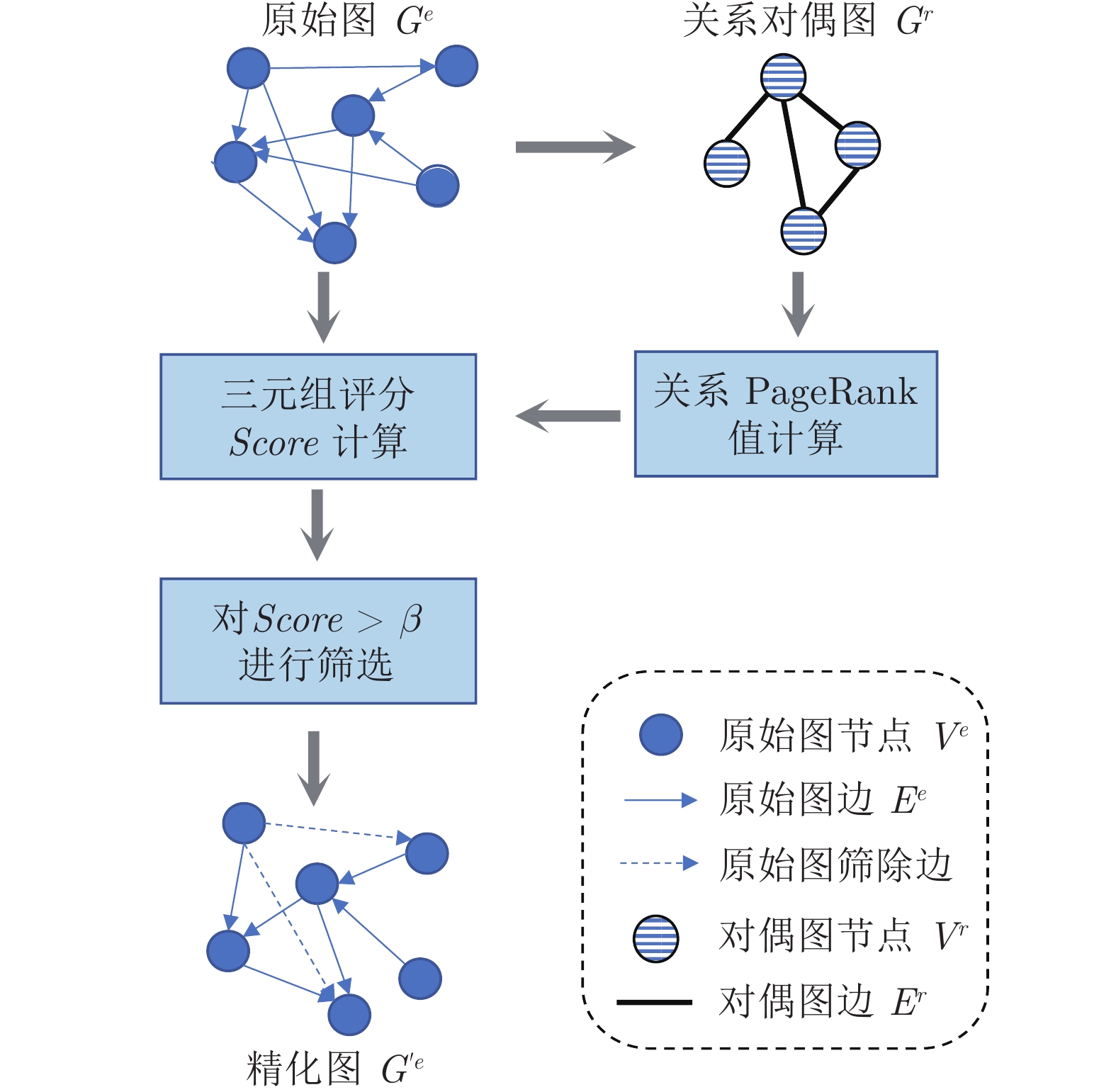
多模态数据间交互式任务的兴起对于综合利用不同模态的知识提出了更高的要求, 因此融合不同模态知识的多模态知识图谱应运而生. 然而, 现有多模态知识图谱存在图谱知识不完整的问题, 严重阻碍对信息的有效利用. 缓解此问题的有效方法是通过实体对齐进行知识图谱补全. 当前多模态实体对齐方法以固定权重融合多种模态信息, 在融合过程中忽略不同模态信息贡献的差异性. 为解决上述问题, 设计一套自适应特征融合机制, 根据不同模态数据质量动态融合实体结构信息和视觉信息. 此外, 考虑到视觉信息质量不高、知识图谱之间的结构差异也影响实体对齐的效果, 本文分别设计提升视觉信息有效利用率的视觉特征处理模块以及缓和结构差异性的三元组筛选模块. 在多模态实体对齐任务上的实验结果表明, 提出的多模态实体对齐方法的性能优于当前最好的方法.
多模态数据间交互式任务的兴起对于综合利用不同模态的知识提出了更高的要求, 因此融合不同模态知识的多模态知识图谱应运而生. 然而, 现有多模态知识图谱存在图谱知识不完整的问题, 严重阻碍对信息的有效利用. 缓解此问题的有效方法是通过实体对齐进行知识图谱补全. 当前多模态实体对齐方法以固定权重融合多种模态信息, 在融合过程中忽略不同模态信息贡献的差异性. 为解决上述问题, 设计一套自适应特征融合机制, 根据不同模态数据质量动态融合实体结构信息和视觉信息. 此外, 考虑到视觉信息质量不高、知识图谱之间的结构差异也影响实体对齐的效果, 本文分别设计提升视觉信息有效利用率的视觉特征处理模块以及缓和结构差异性的三元组筛选模块. 在多模态实体对齐任务上的实验结果表明, 提出的多模态实体对齐方法的性能优于当前最好的方法.
2024, 50(4): 771-789.
doi: 10.16383/j.aas.c220775
摘要:
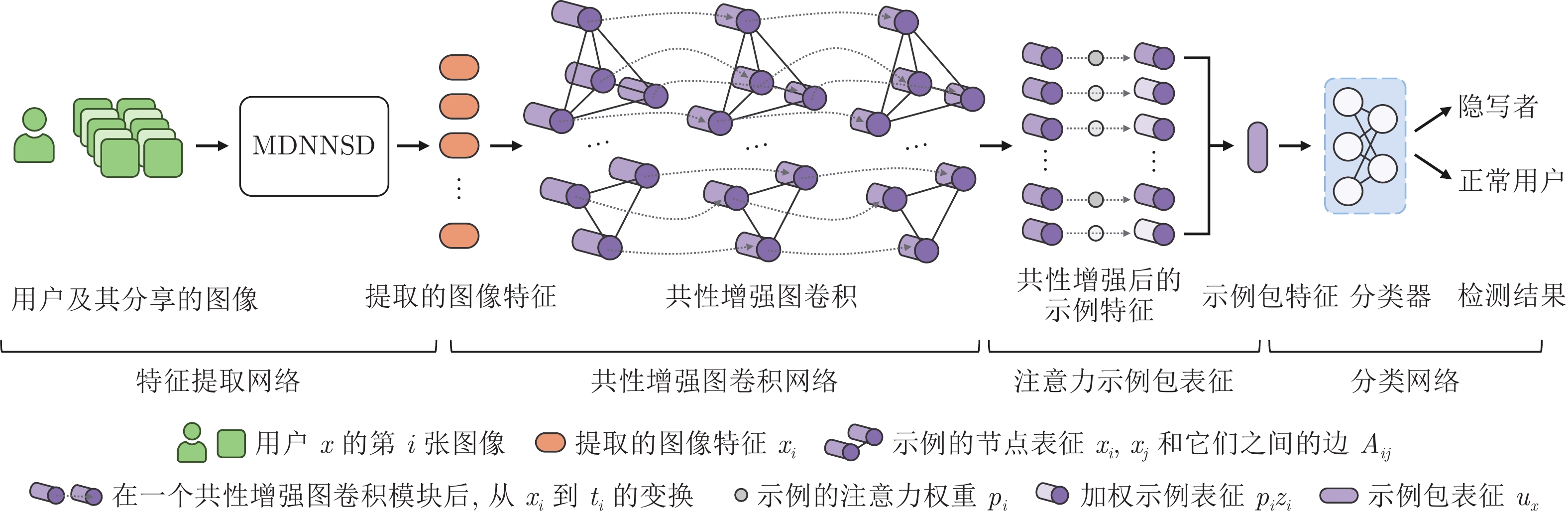
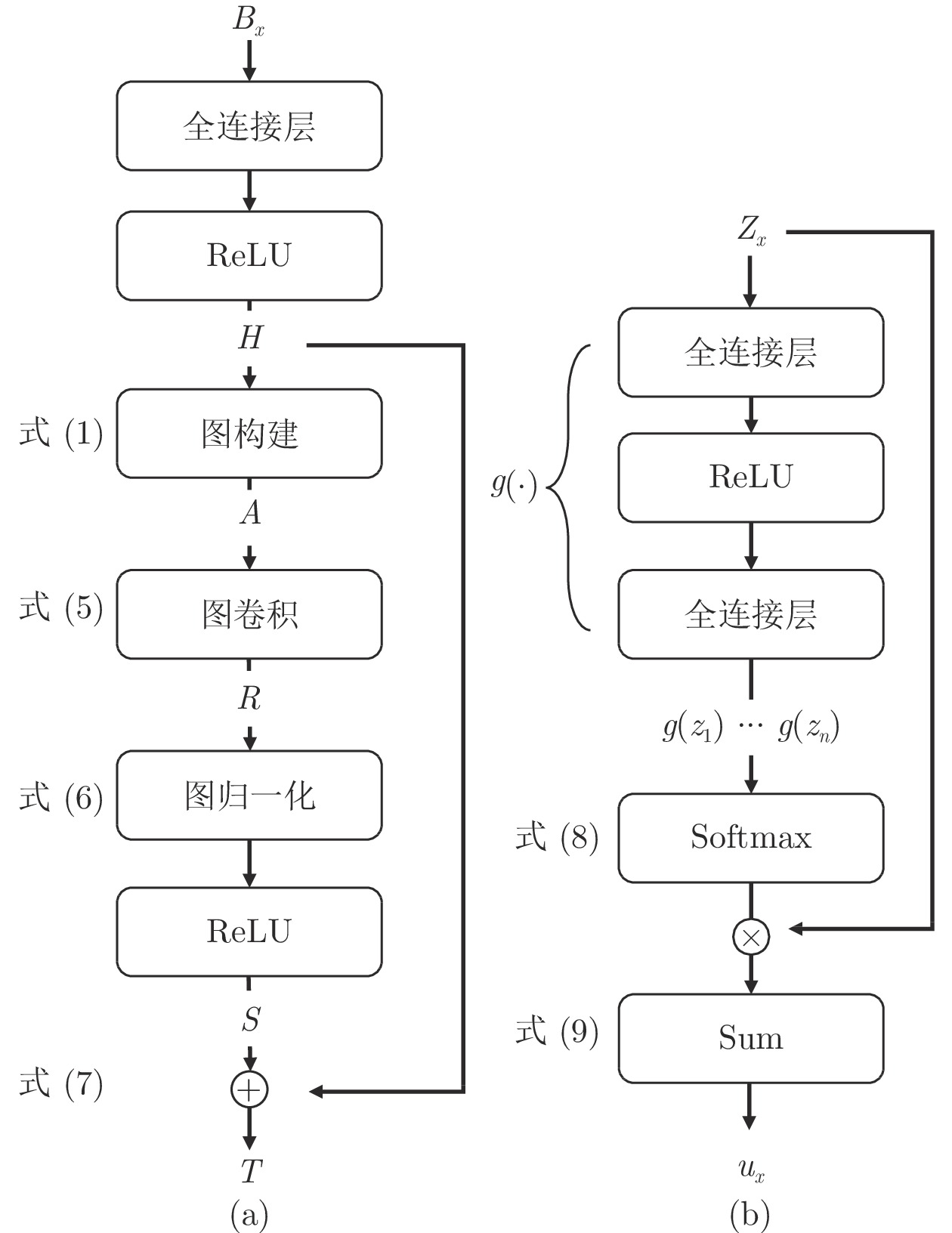
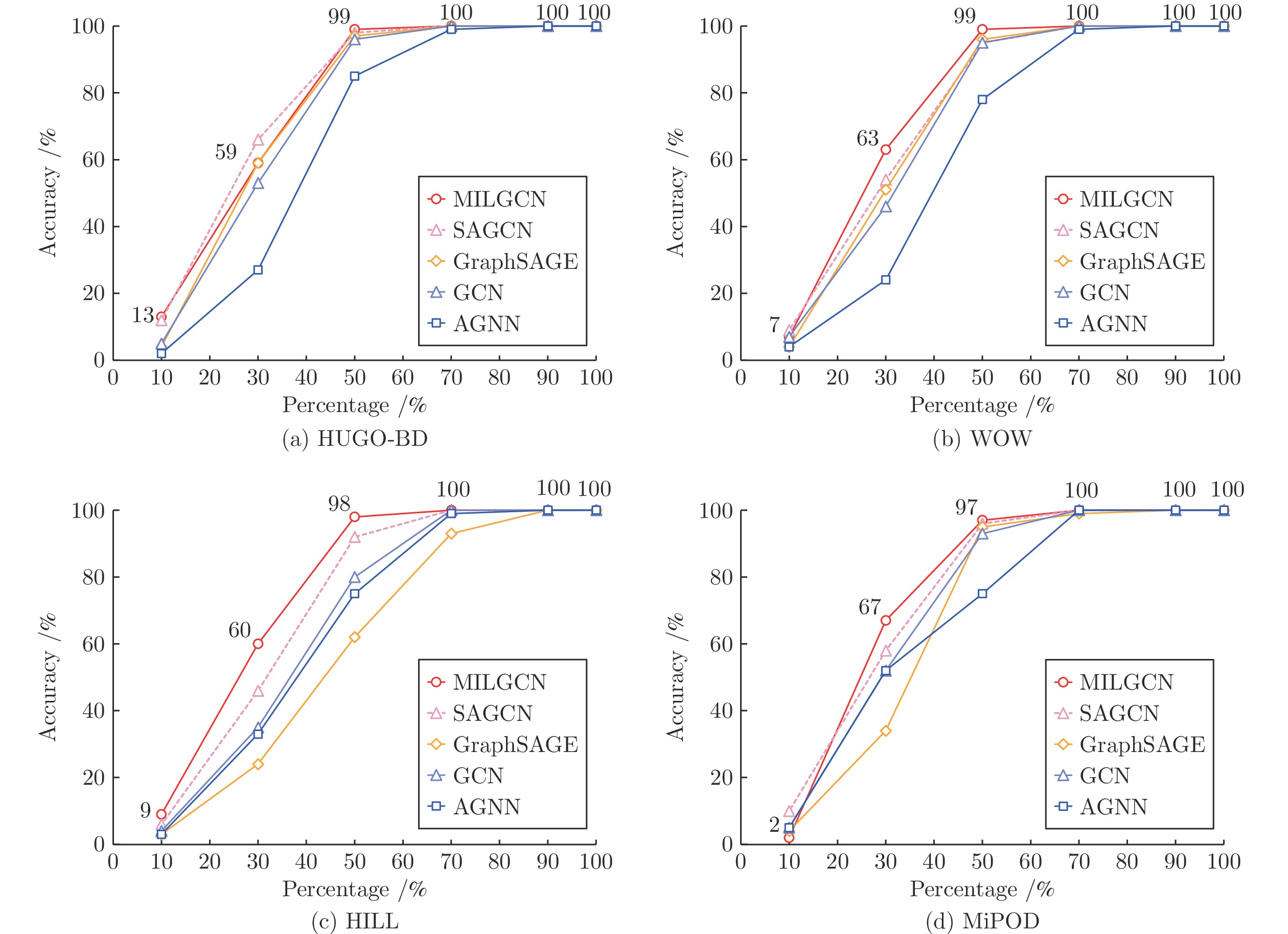
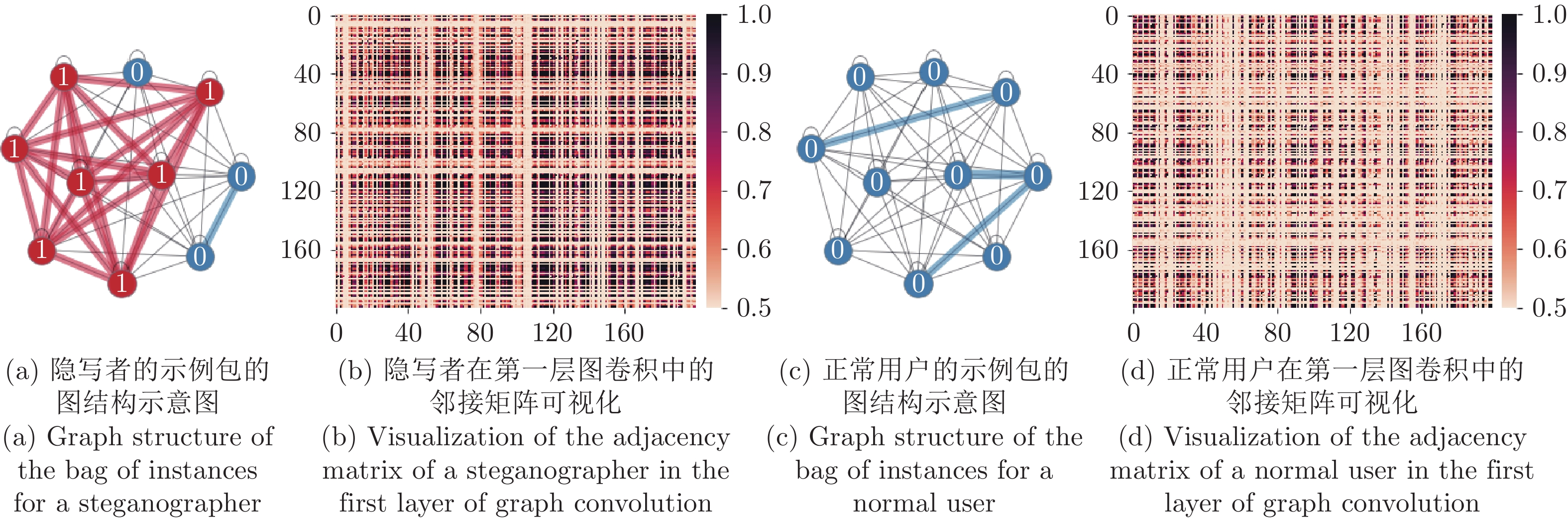
隐写者检测通过设计模型检测在批量图像中嵌入秘密信息进行隐蔽通信的隐写者, 对解决非法使用隐写术的问题具有重要意义. 本文提出一种基于多示例学习图卷积网络 (Multiple-instance learning graph convolutional network, MILGCN) 的隐写者检测算法, 将隐写者检测形式化为多示例学习(Multiple-instance learning, MIL) 任务. 本文中设计的共性增强图卷积网络(Graph convolutional network, GCN) 和注意力图读出模块能够自适应地突出示例包中正示例的模式特征, 构建有区分度的示例包表征并进行隐写者检测. 实验表明, 本文设计的模型能够对抗多种批量隐写术和与之对应的策略.
隐写者检测通过设计模型检测在批量图像中嵌入秘密信息进行隐蔽通信的隐写者, 对解决非法使用隐写术的问题具有重要意义. 本文提出一种基于多示例学习图卷积网络 (Multiple-instance learning graph convolutional network, MILGCN) 的隐写者检测算法, 将隐写者检测形式化为多示例学习(Multiple-instance learning, MIL) 任务. 本文中设计的共性增强图卷积网络(Graph convolutional network, GCN) 和注意力图读出模块能够自适应地突出示例包中正示例的模式特征, 构建有区分度的示例包表征并进行隐写者检测. 实验表明, 本文设计的模型能够对抗多种批量隐写术和与之对应的策略.
2024, 50(4): 790-811.
doi: 10.16383/j.aas.c211091
摘要:
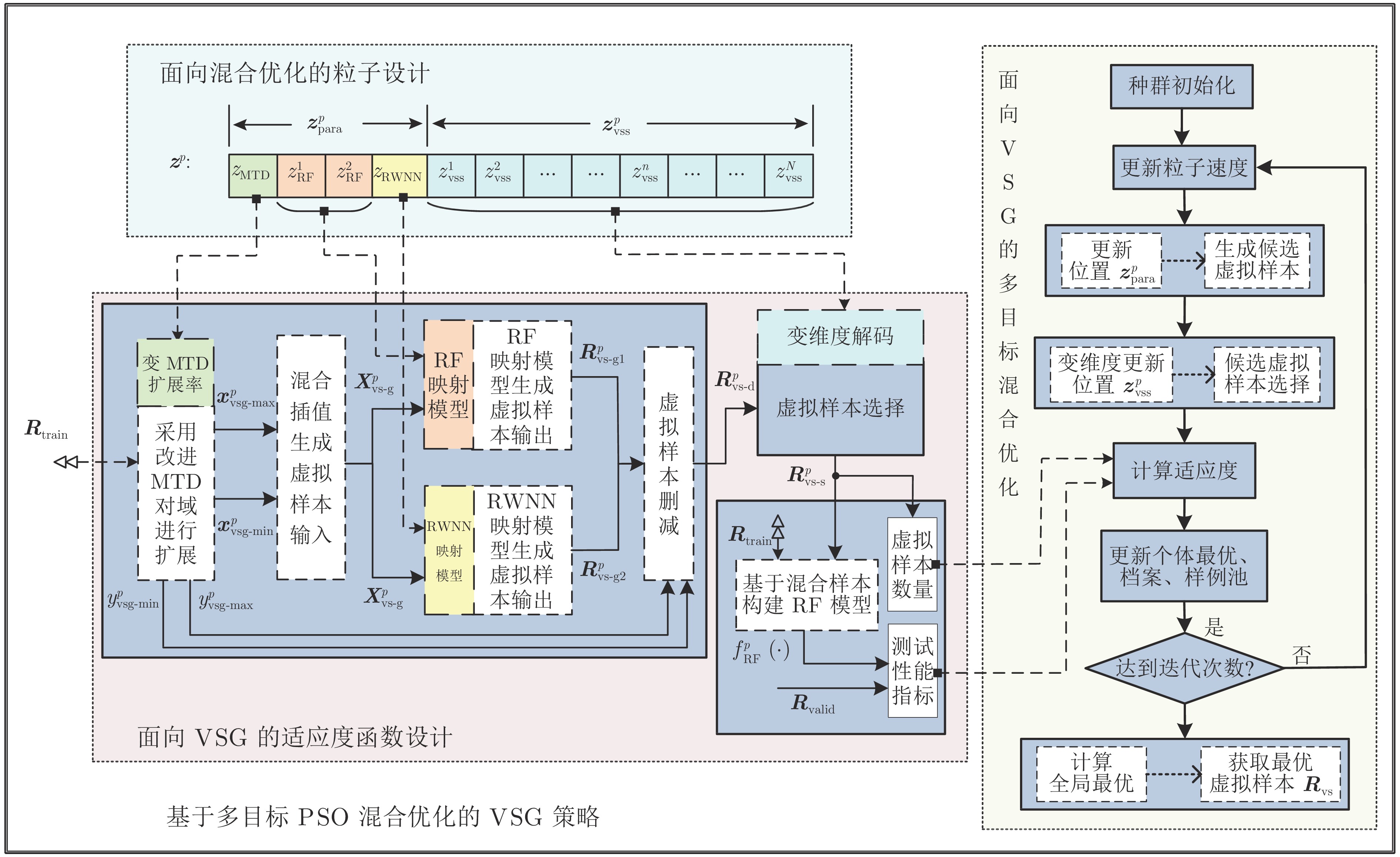
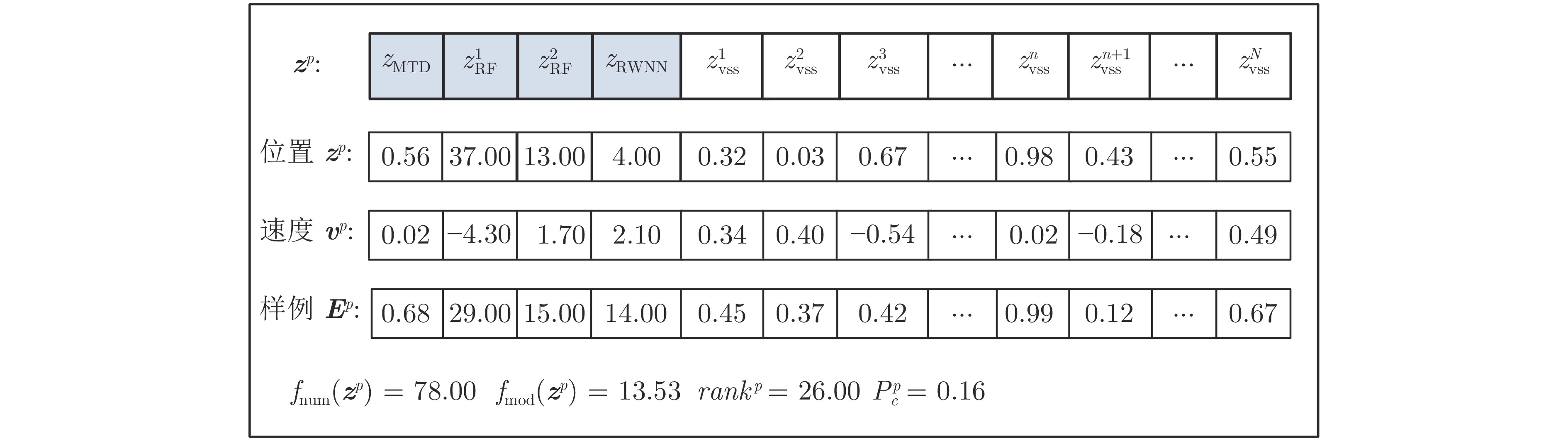
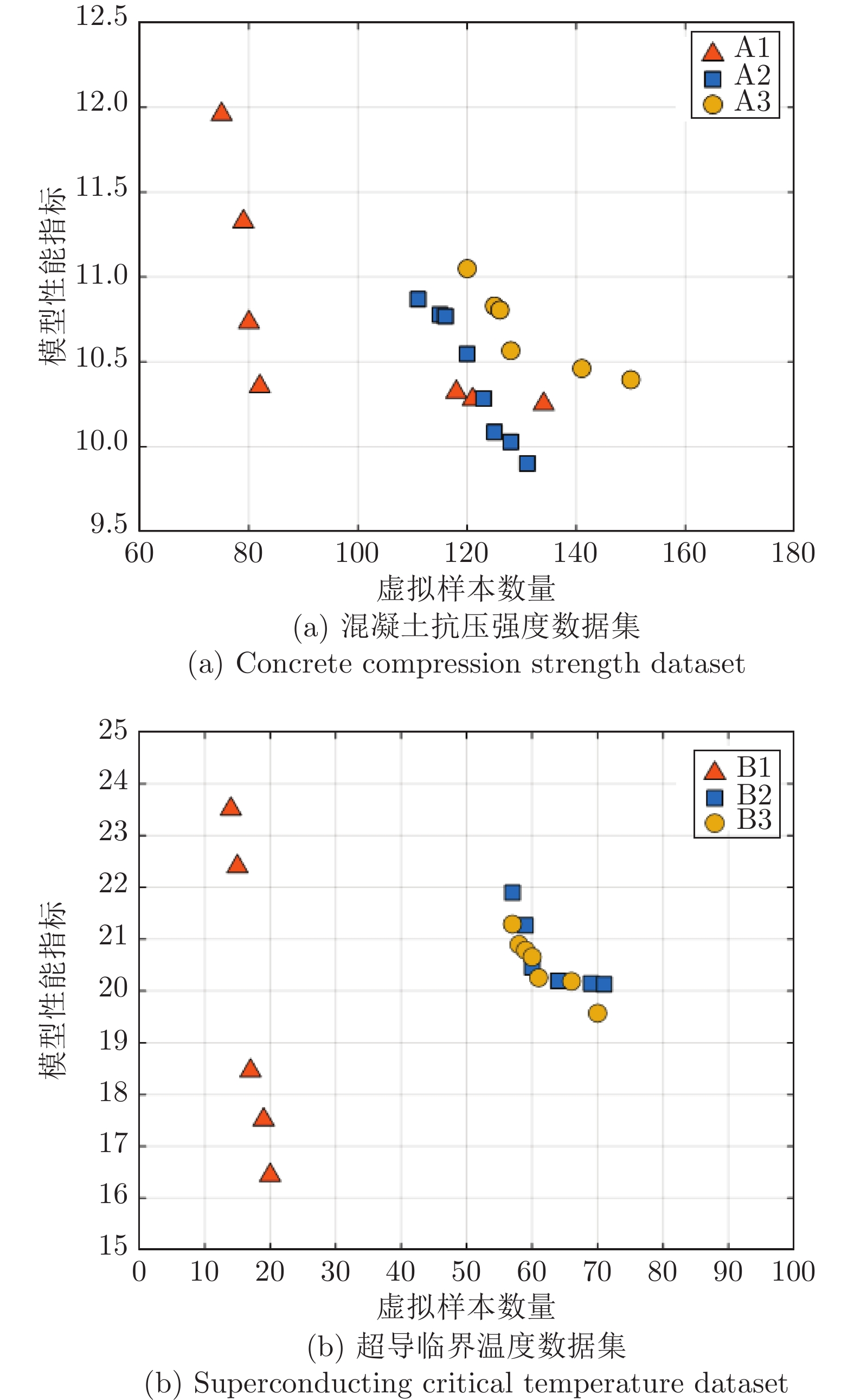
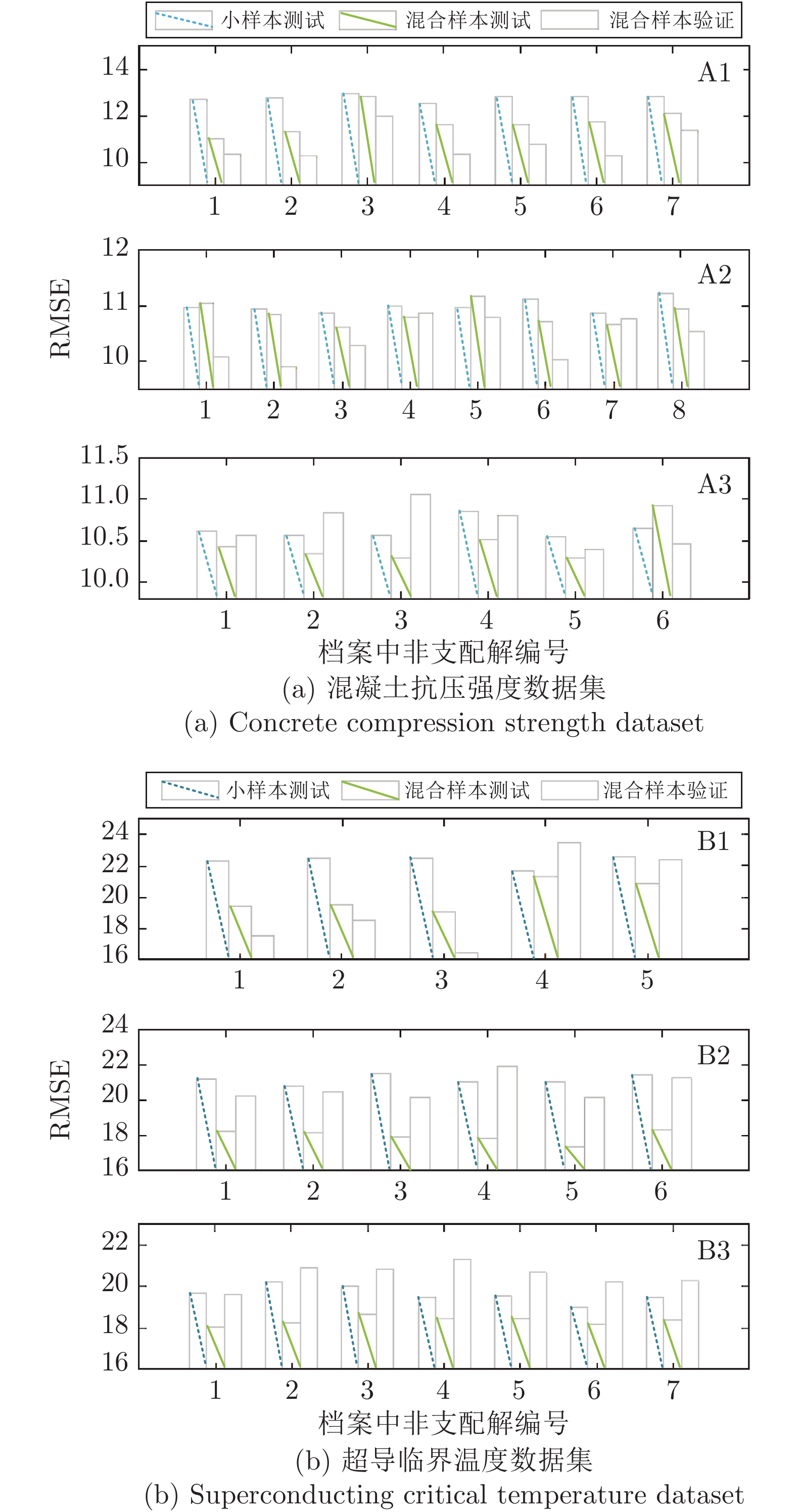
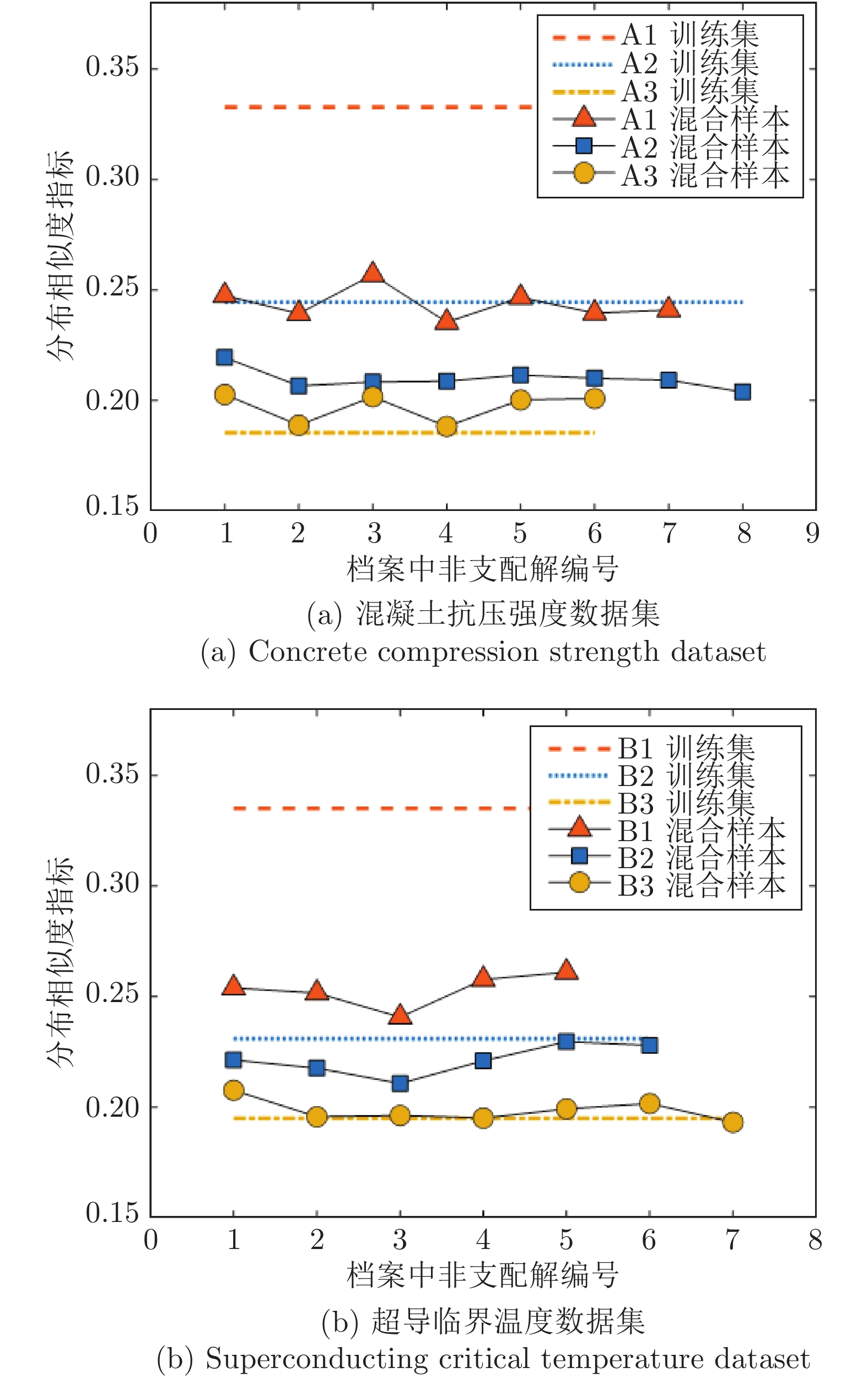
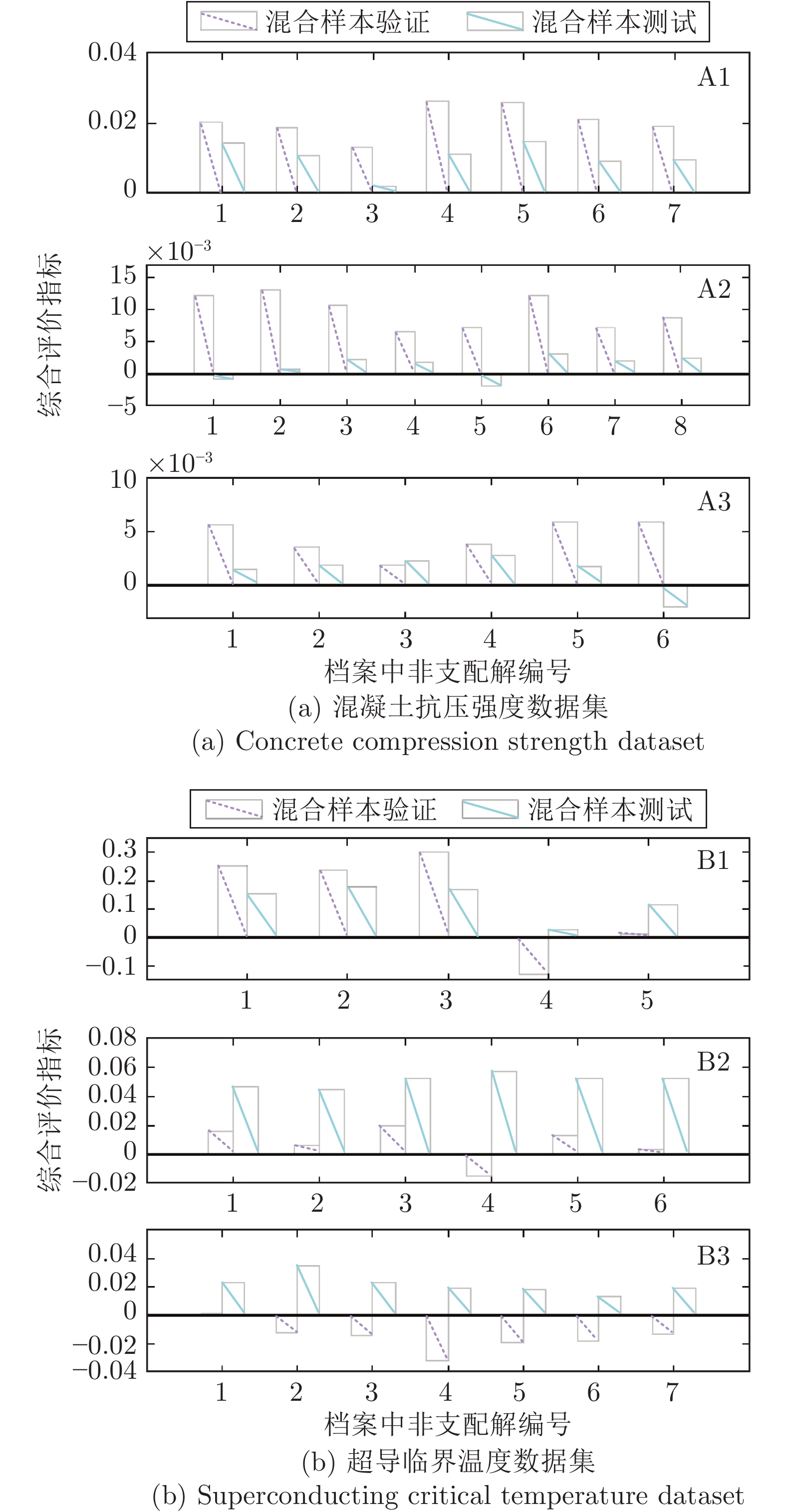
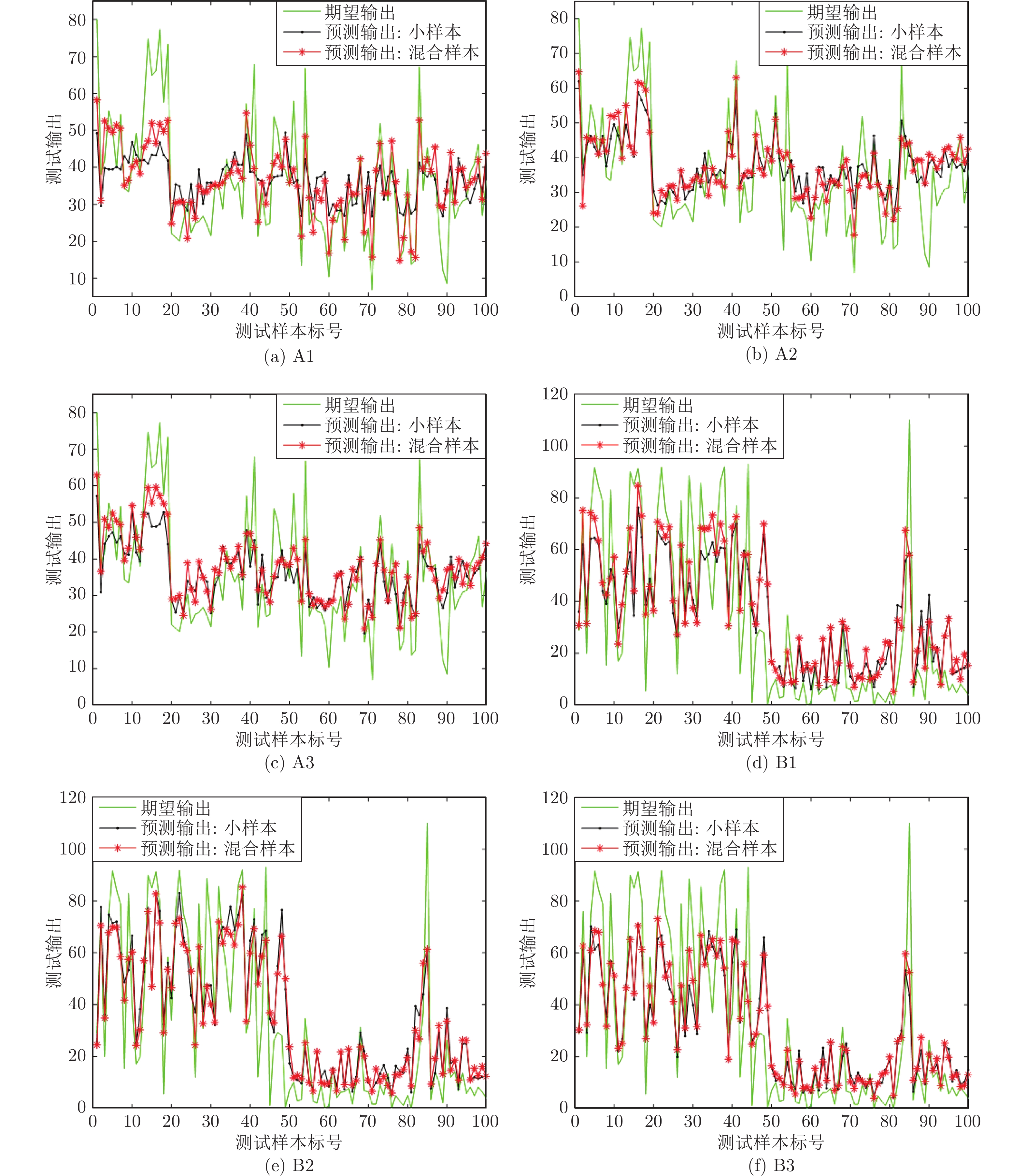
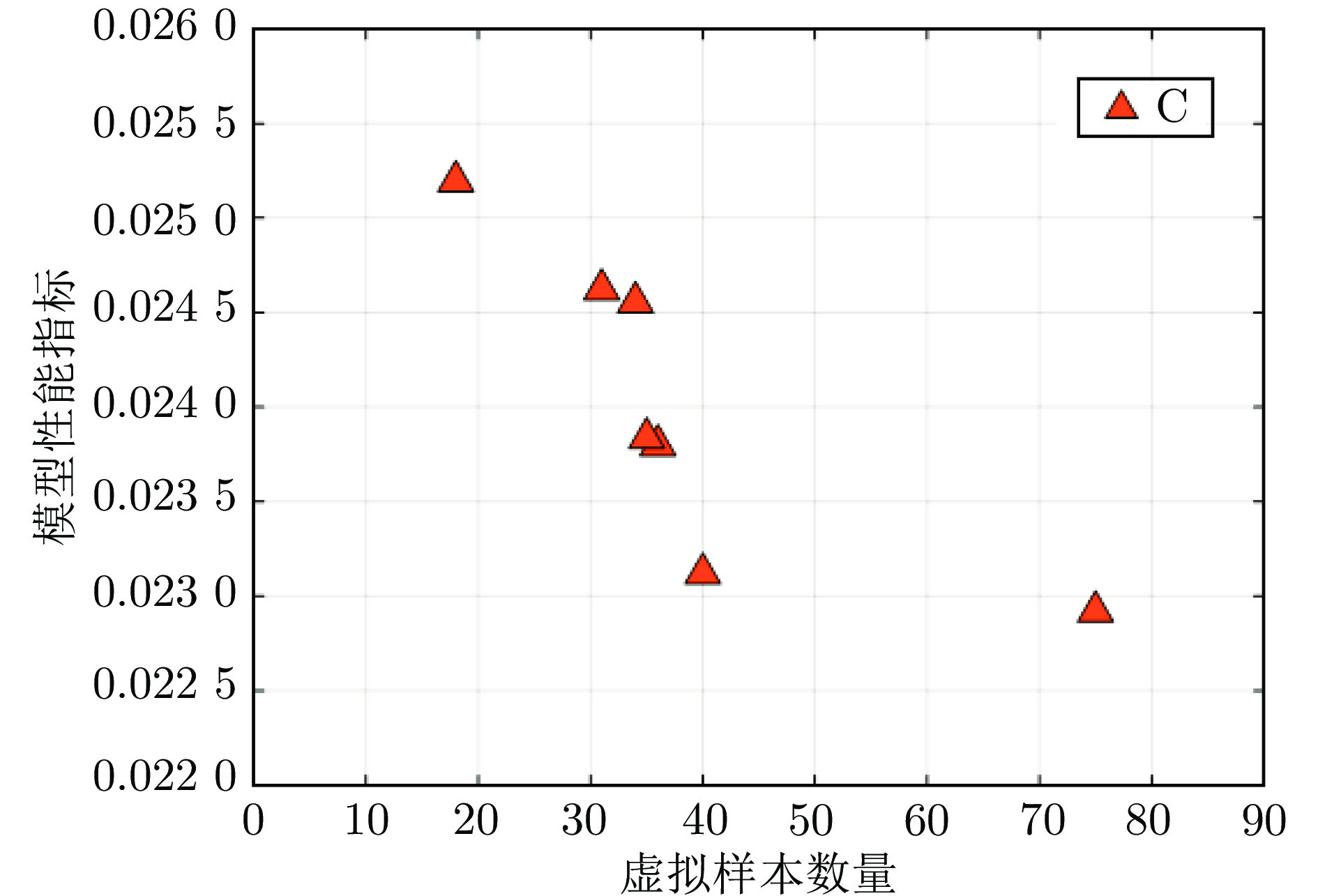
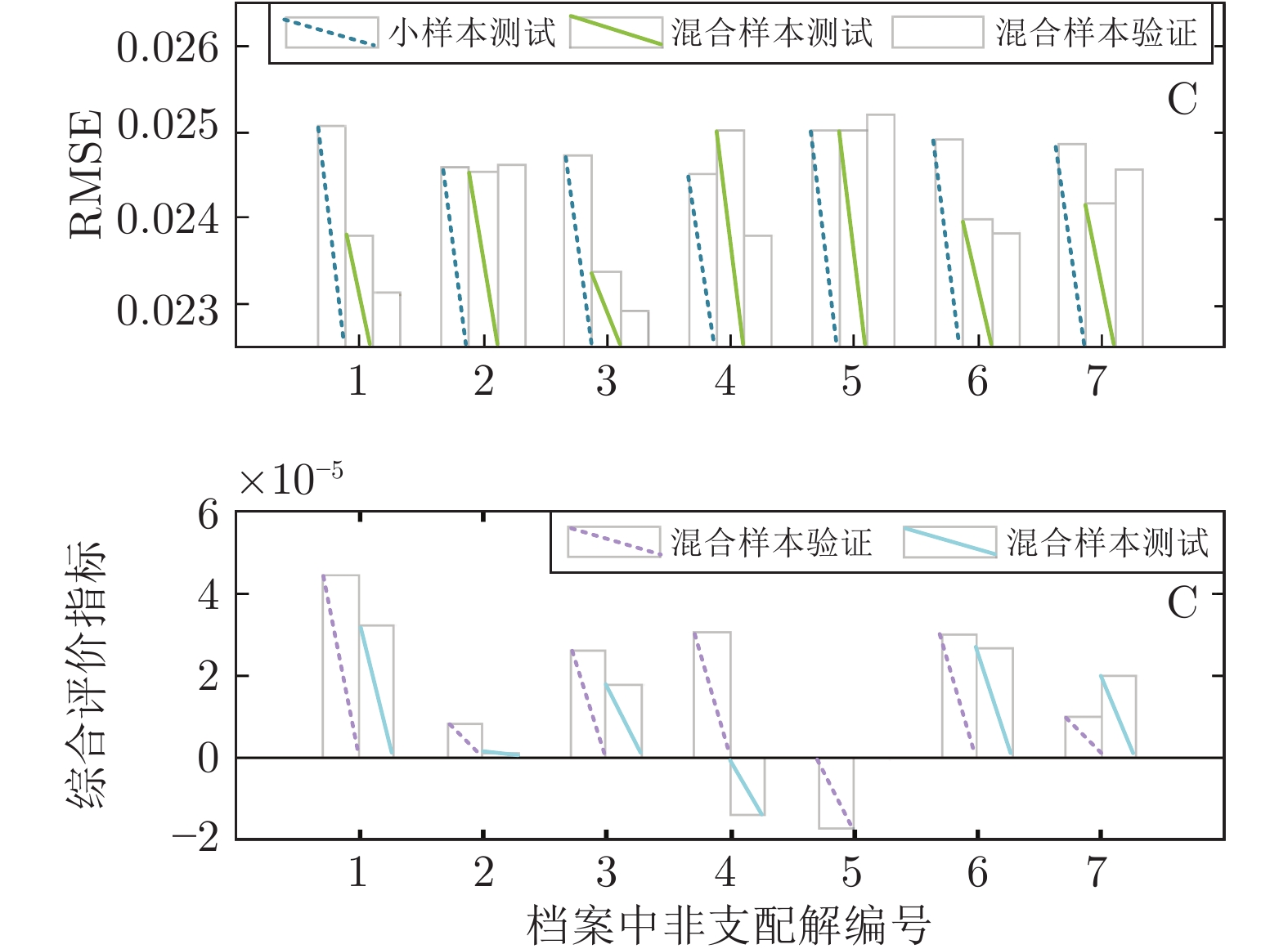
受限于检测技术难度、高时间与经济成本等原因, 难测参数的软测量模型建模样本存在数量少、分布稀疏与不平衡等问题, 严重制约了数据驱动模型的泛化性能. 针对以上问题, 提出一种基于多目标粒子群优化(Multi-objective particle swarm optimization, MOPSO)混合优化的虚拟样本生成(Virtual sample generation, VSG)方法. 首先, 设计综合学习粒子群优化算法的种群表征机制, 使其能够同时编码用于连续变量和离散变量; 然后, 定义具有多阶段多目标特性的综合学习粒子群优化算法适应度函数, 使其能够在确保模型泛化性能的同时最小化虚拟样本数量; 最后, 提出面向虚拟样本生成的多目标混合优化任务以改进综合学习粒子群优化算法, 使其能够适应虚拟样本优选过程的变维特性并提高收敛速度. 同时, 首次借鉴度量学习提出用于评价虚拟样本质量的综合评价指标和分布相似指标. 利用基准数据集和真实工业数据集验证了所提方法的有效性和优越性.
受限于检测技术难度、高时间与经济成本等原因, 难测参数的软测量模型建模样本存在数量少、分布稀疏与不平衡等问题, 严重制约了数据驱动模型的泛化性能. 针对以上问题, 提出一种基于多目标粒子群优化(Multi-objective particle swarm optimization, MOPSO)混合优化的虚拟样本生成(Virtual sample generation, VSG)方法. 首先, 设计综合学习粒子群优化算法的种群表征机制, 使其能够同时编码用于连续变量和离散变量; 然后, 定义具有多阶段多目标特性的综合学习粒子群优化算法适应度函数, 使其能够在确保模型泛化性能的同时最小化虚拟样本数量; 最后, 提出面向虚拟样本生成的多目标混合优化任务以改进综合学习粒子群优化算法, 使其能够适应虚拟样本优选过程的变维特性并提高收敛速度. 同时, 首次借鉴度量学习提出用于评价虚拟样本质量的综合评价指标和分布相似指标. 利用基准数据集和真实工业数据集验证了所提方法的有效性和优越性.
2024, 50(4): 812-827.
doi: 10.16383/j.aas.c220689
摘要:
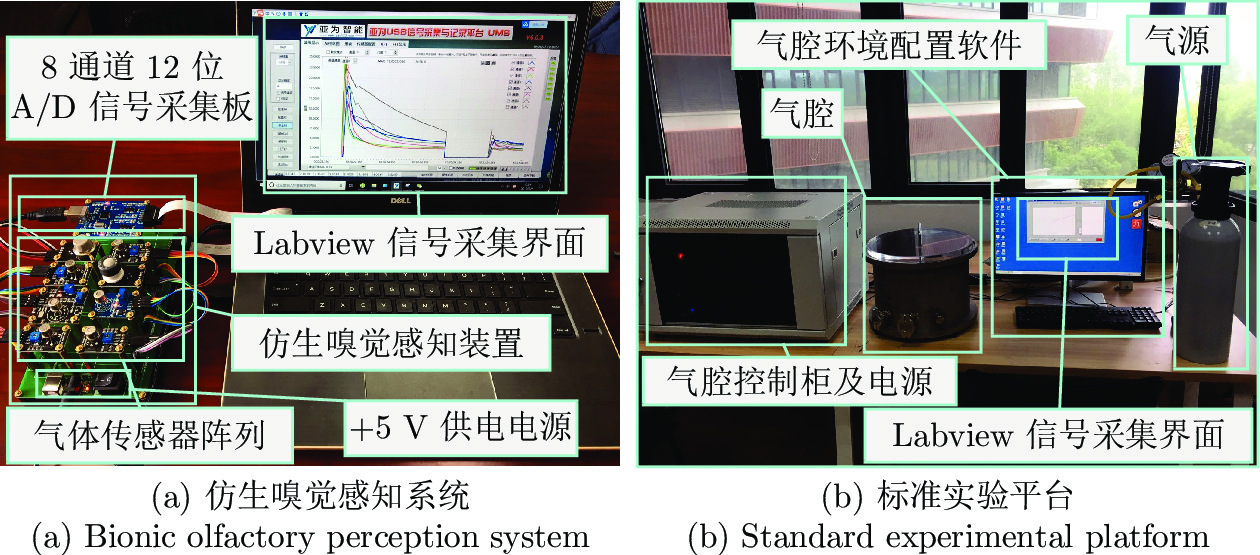
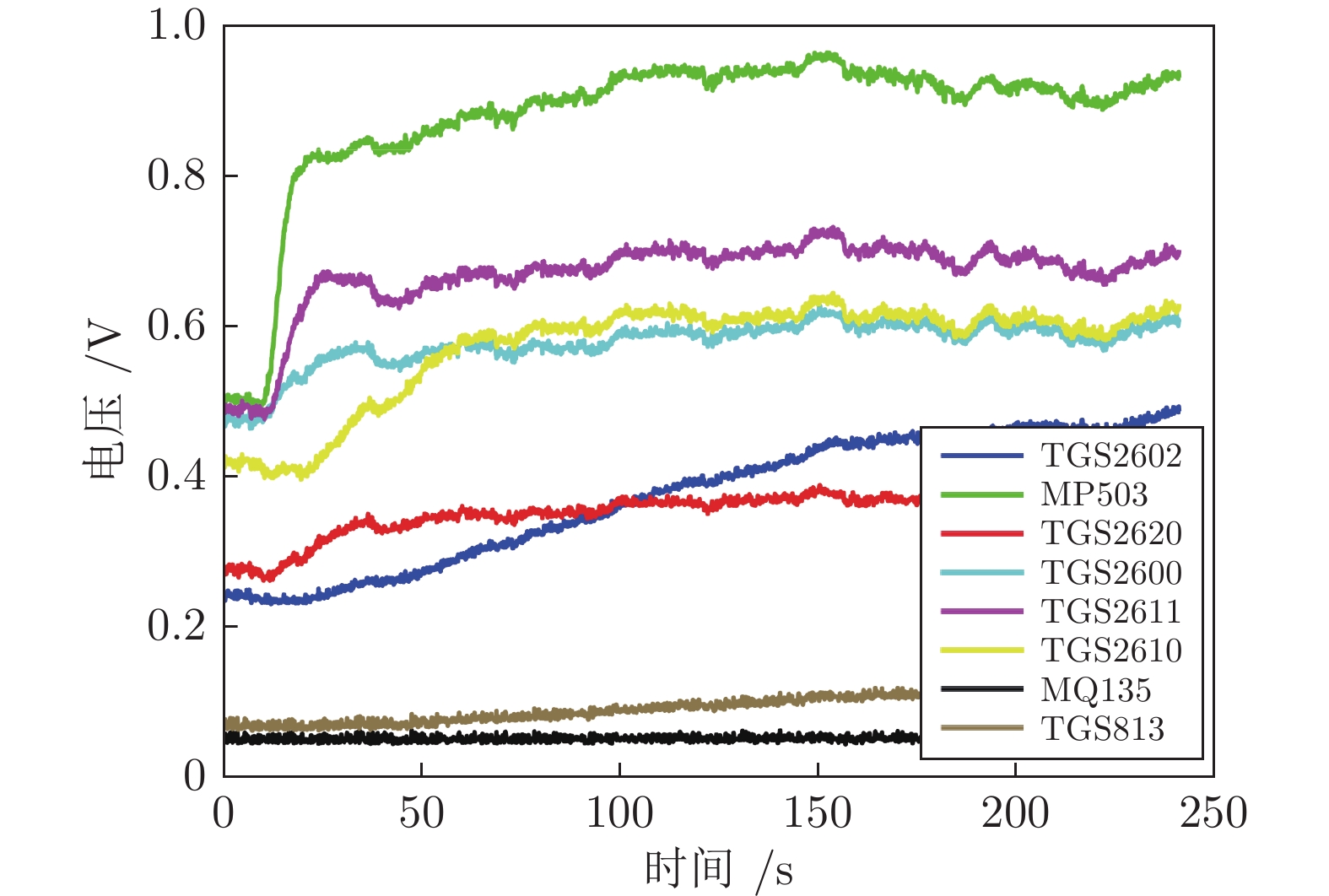
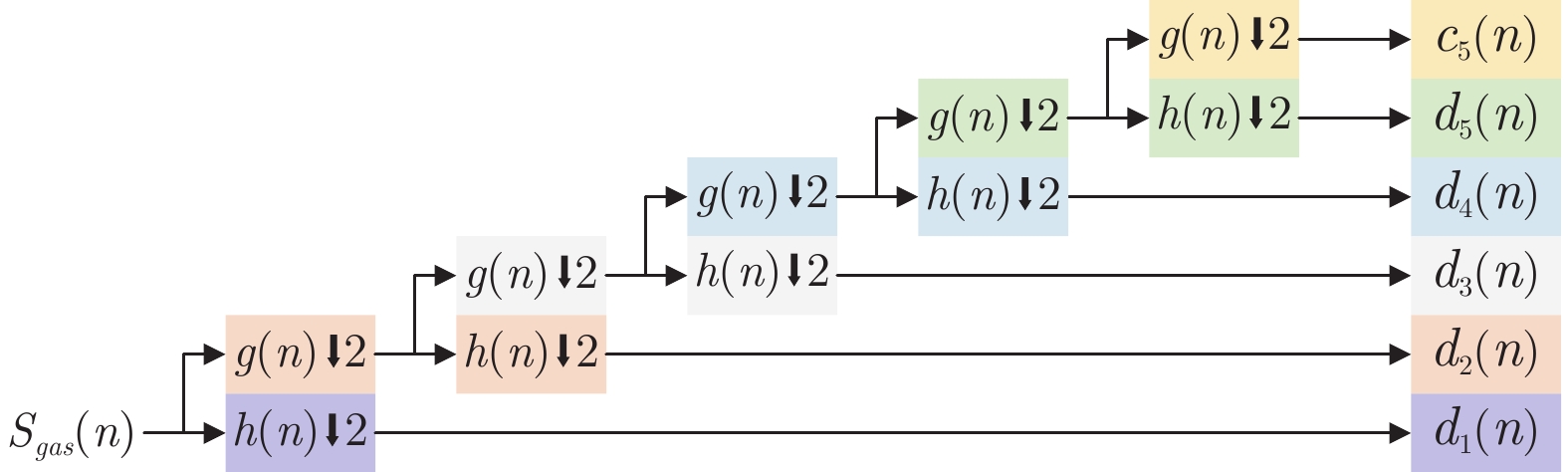
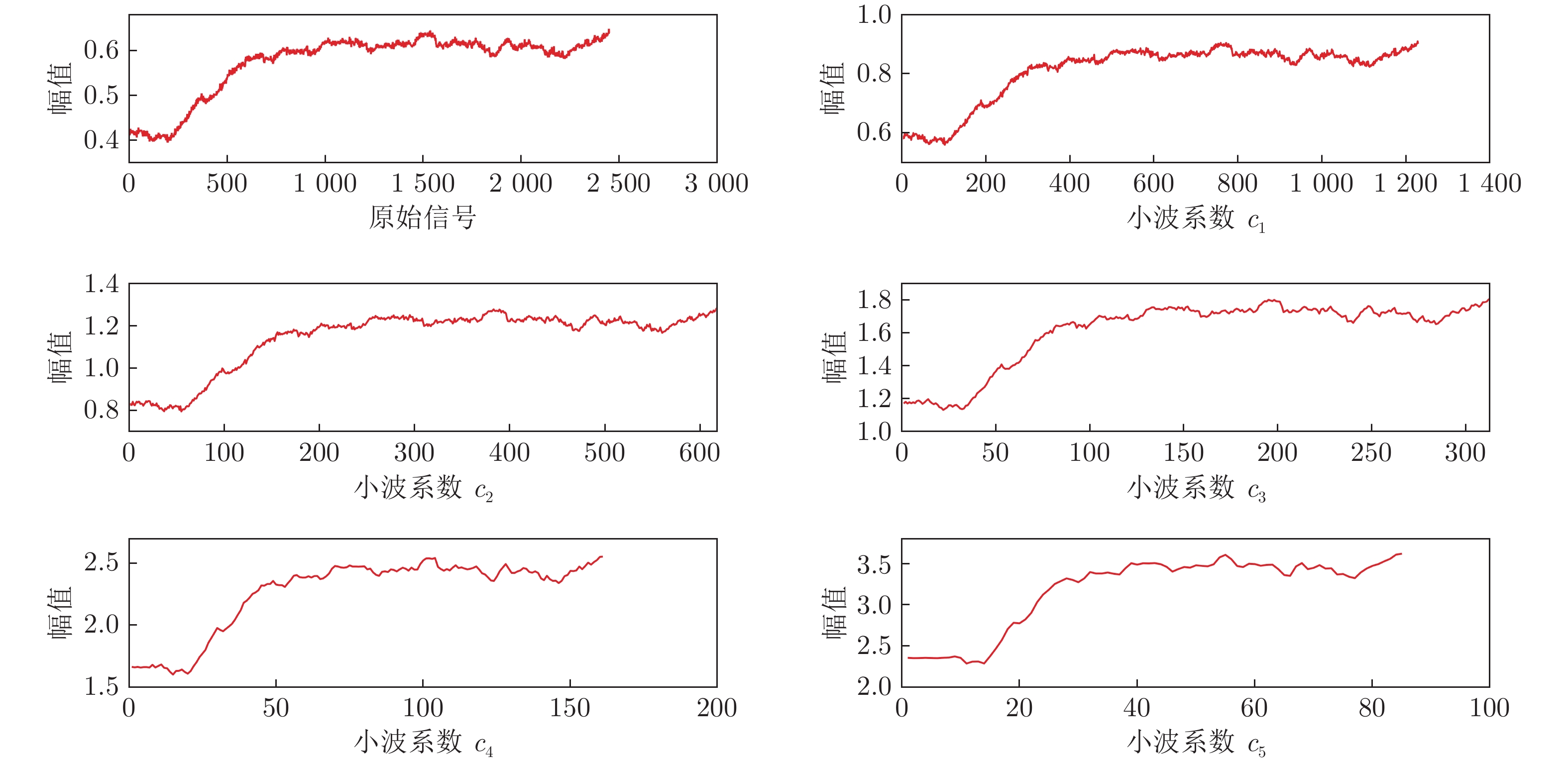
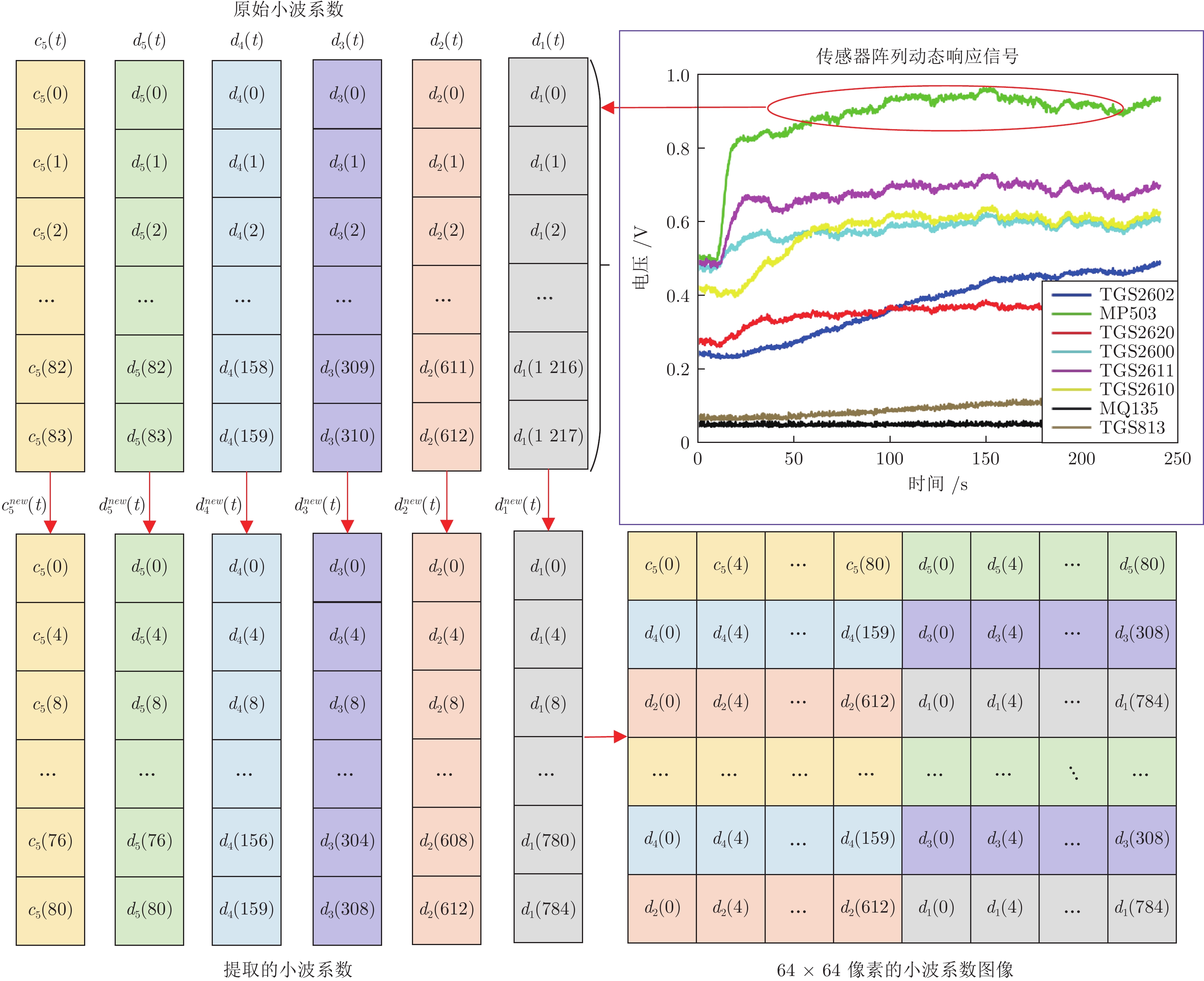
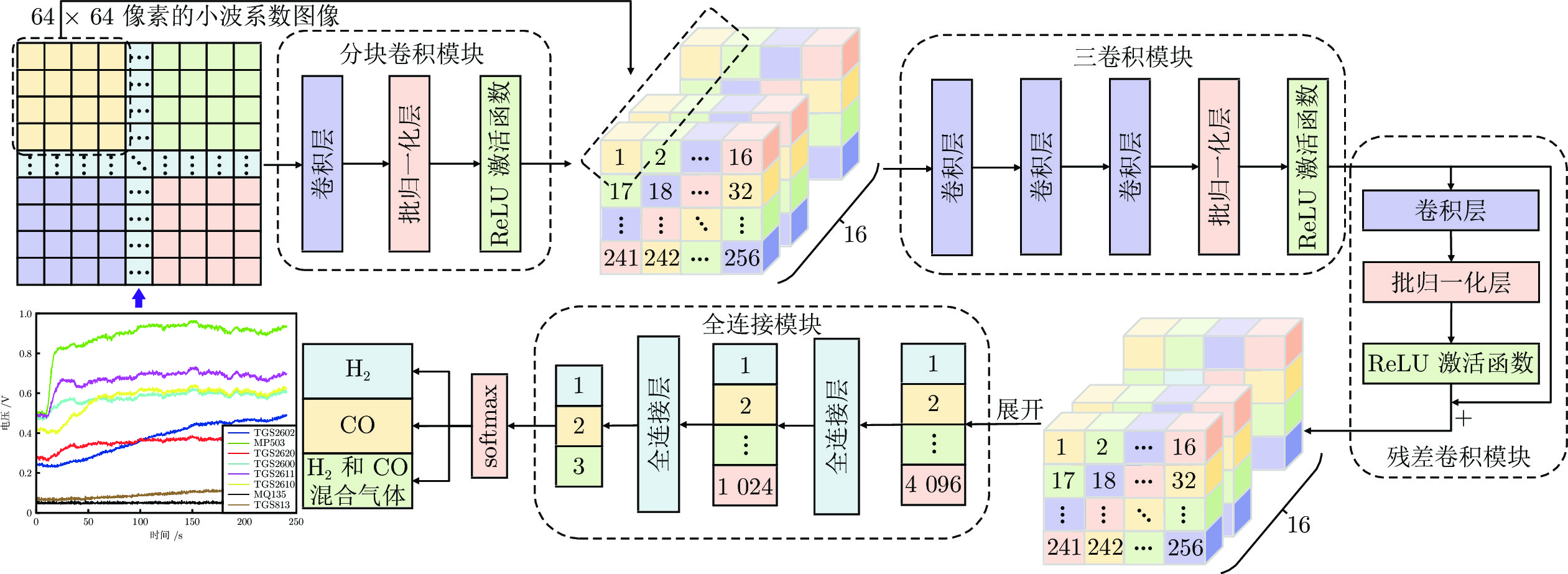
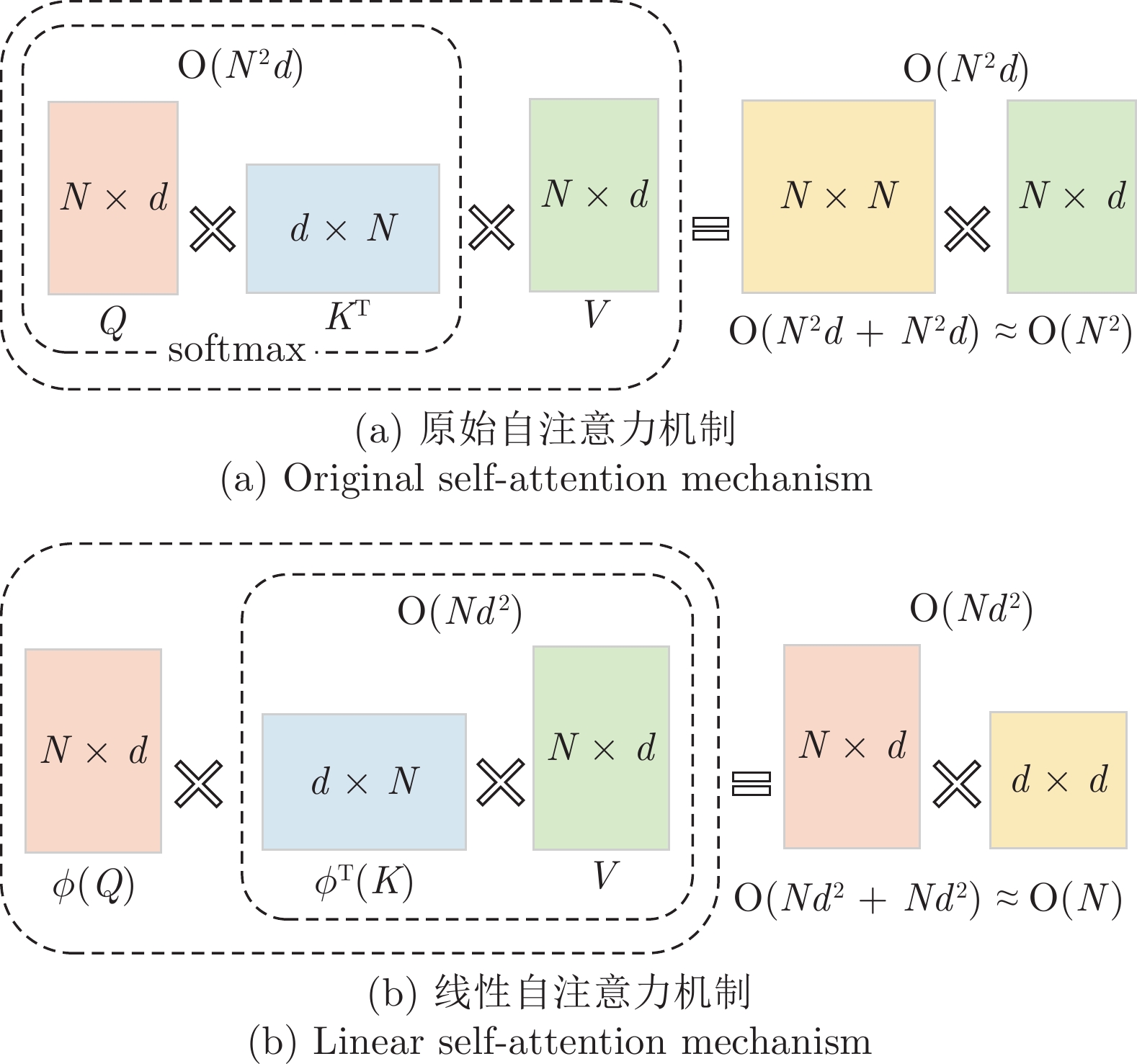
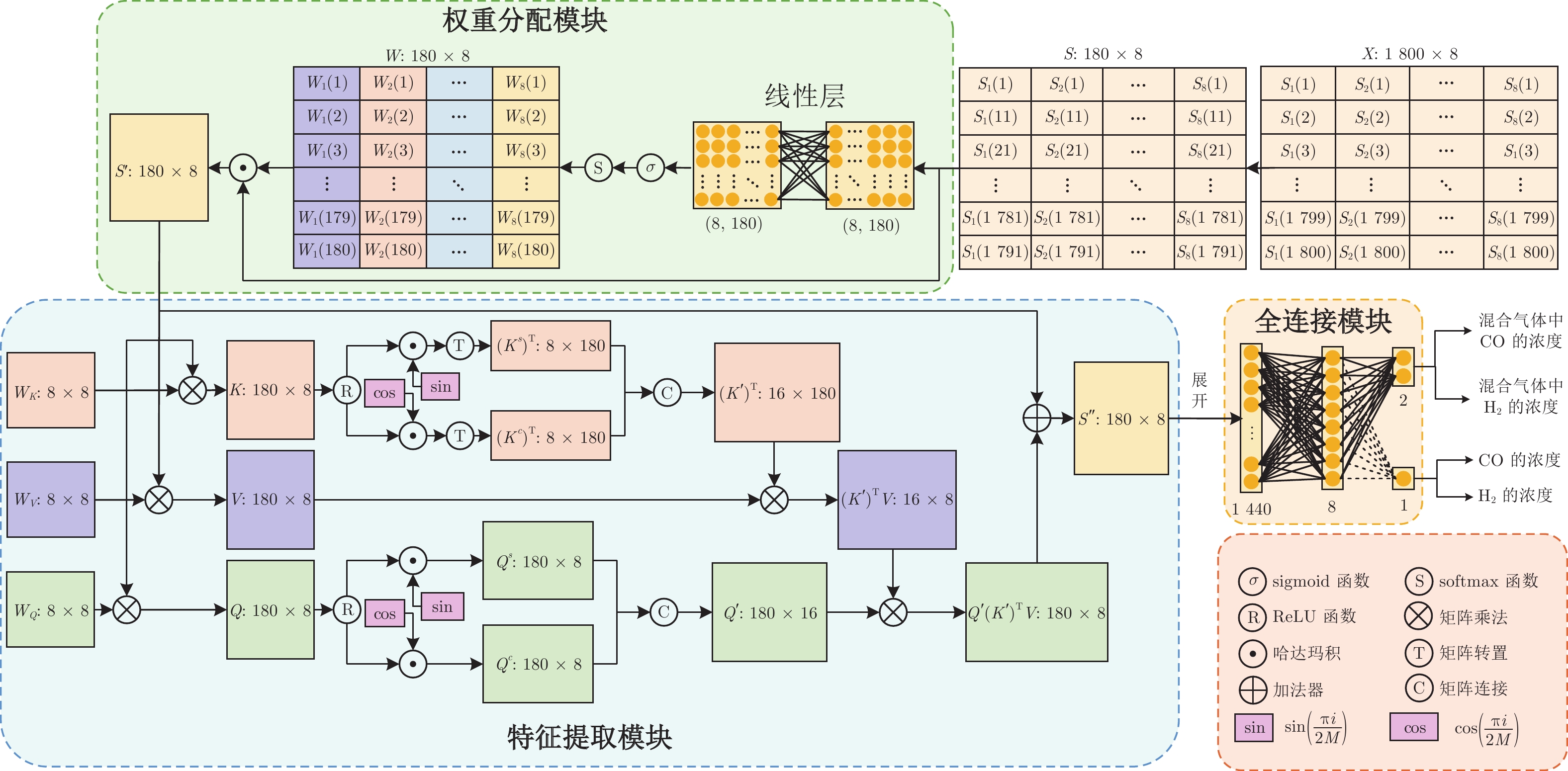
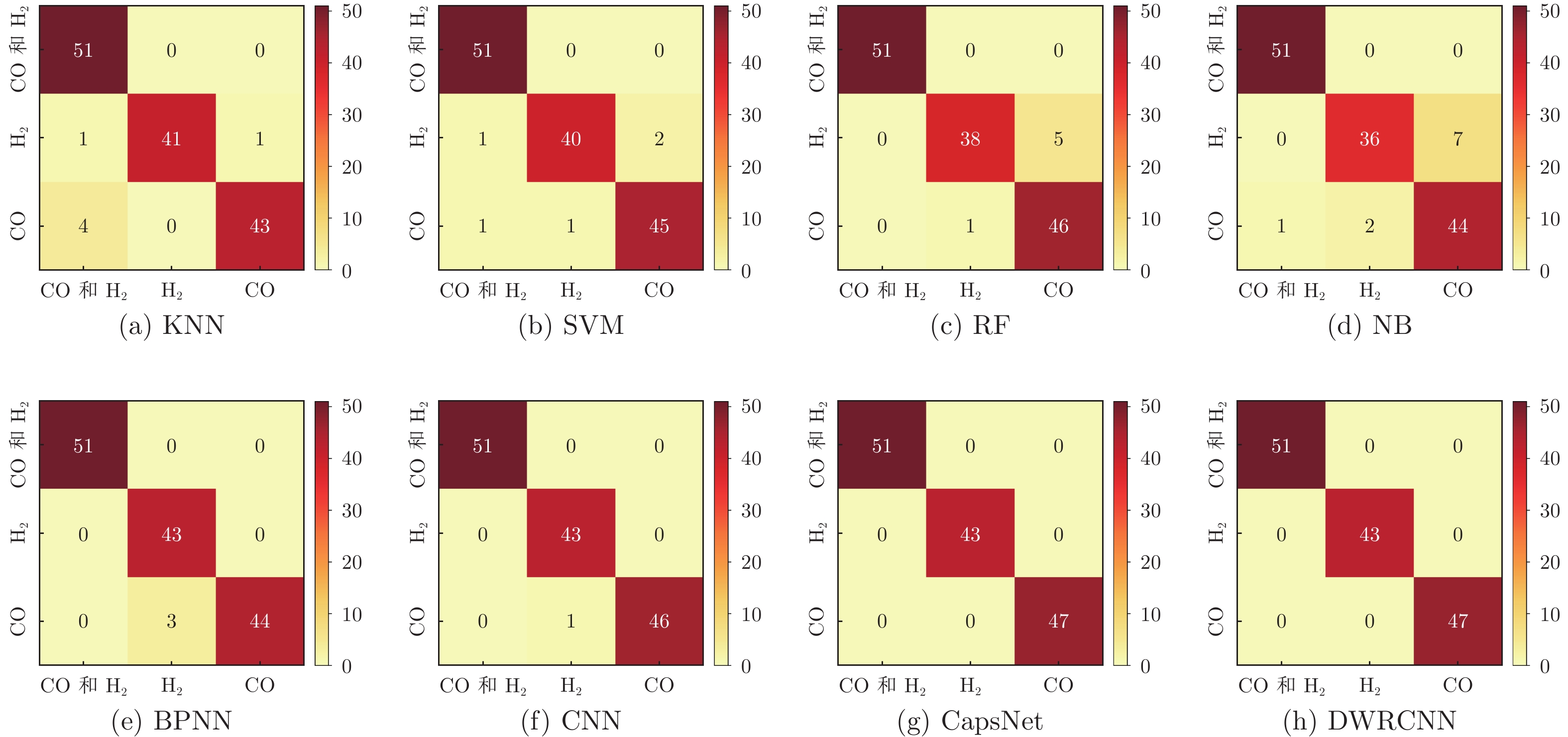
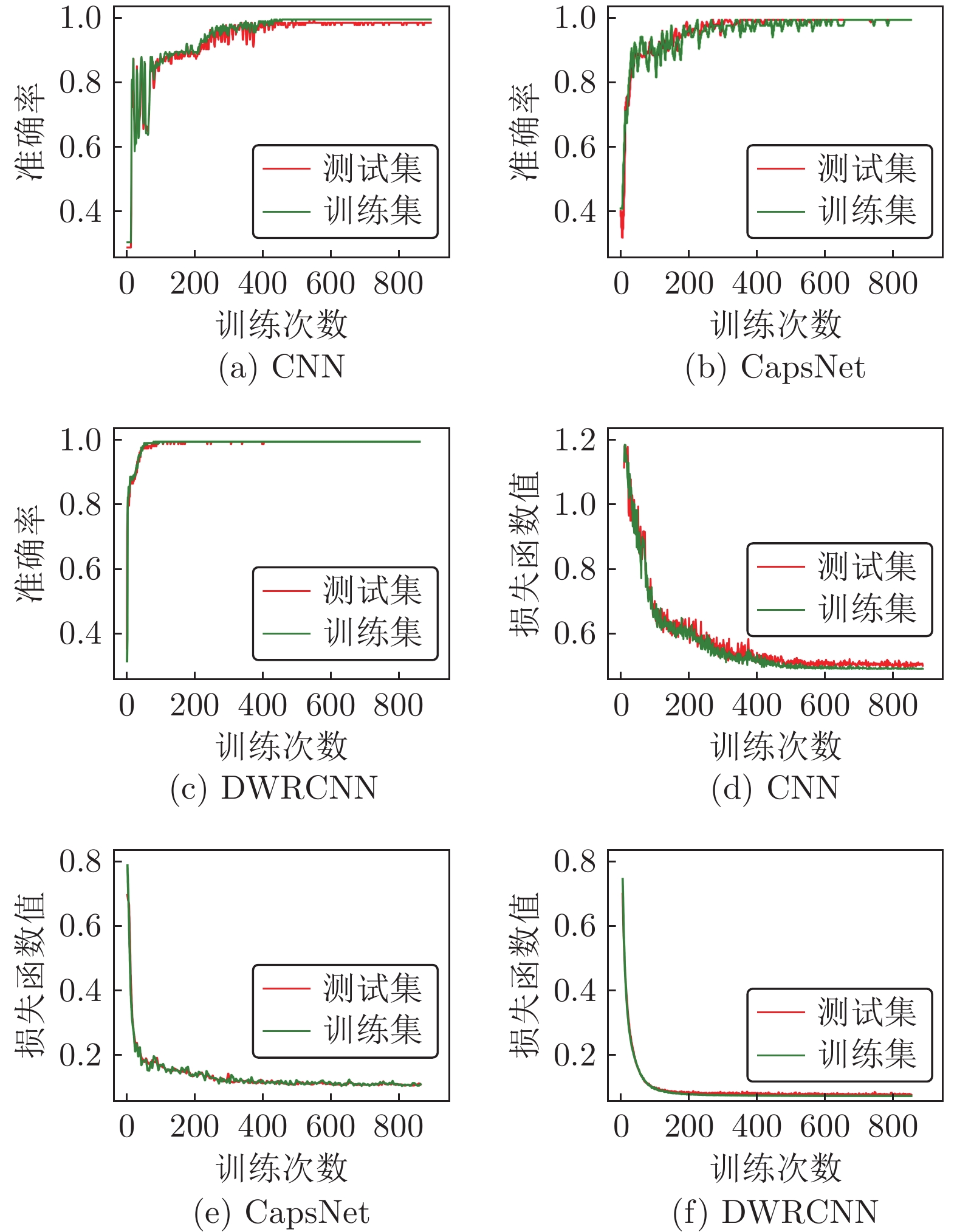
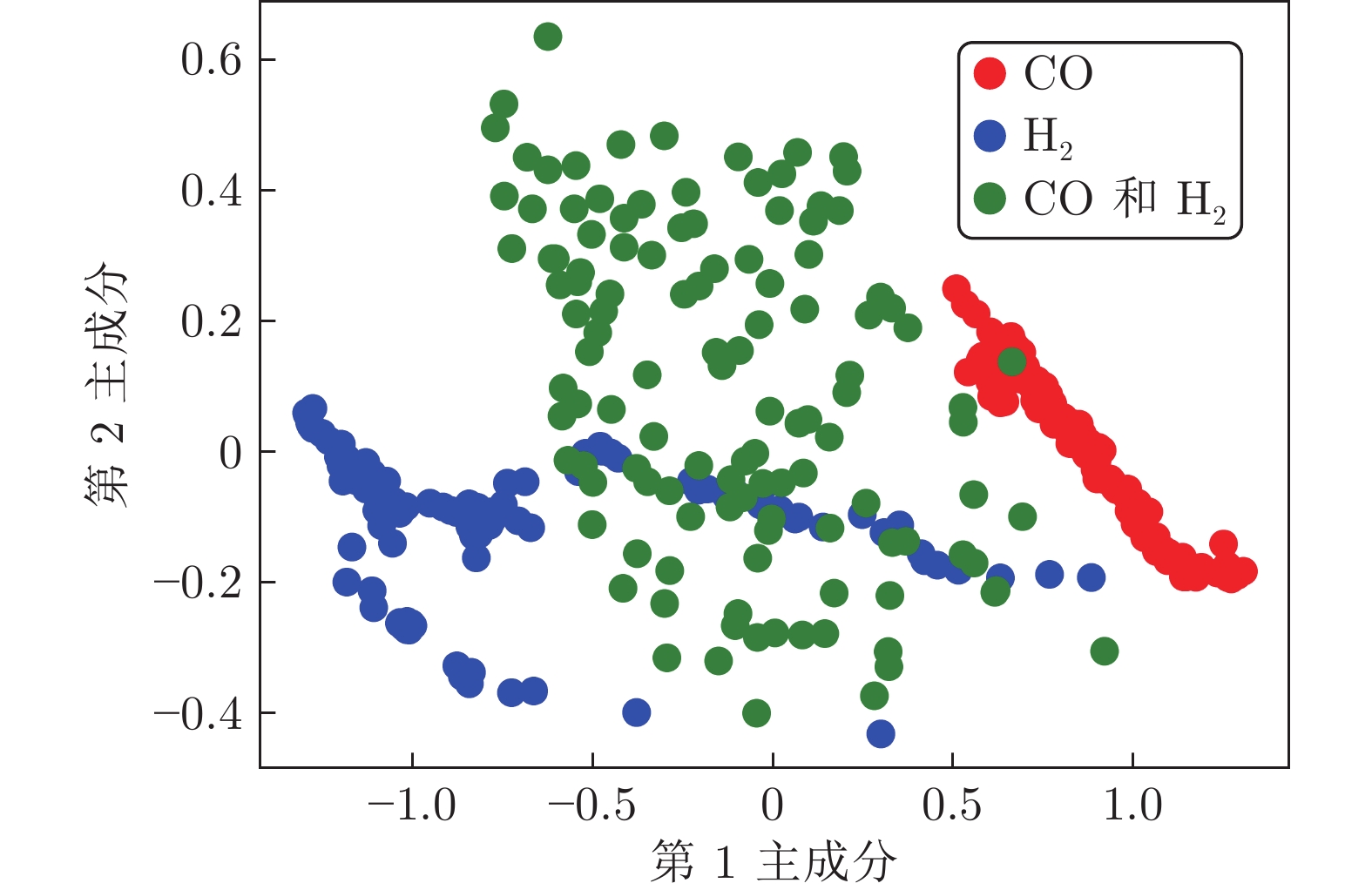
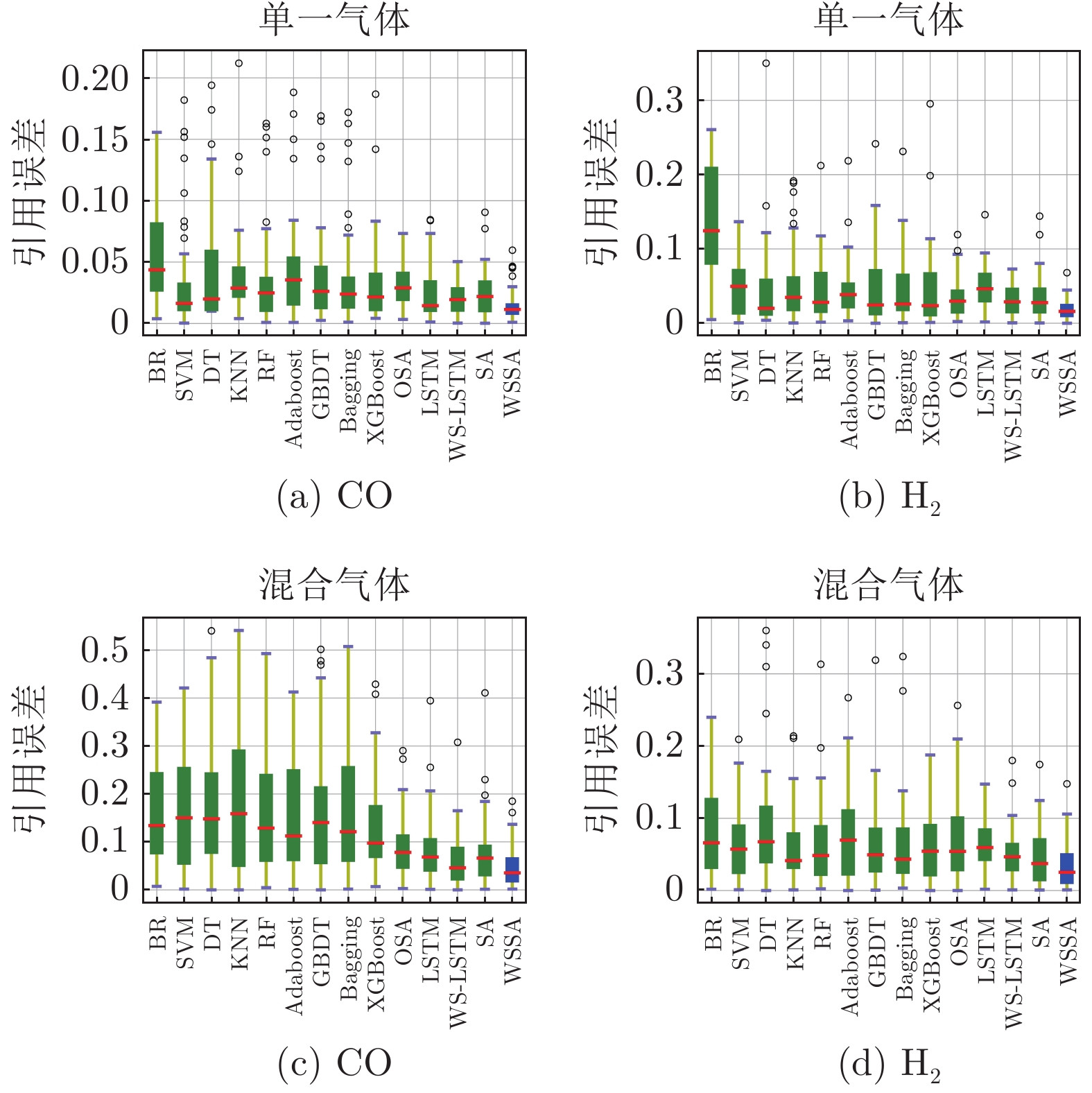
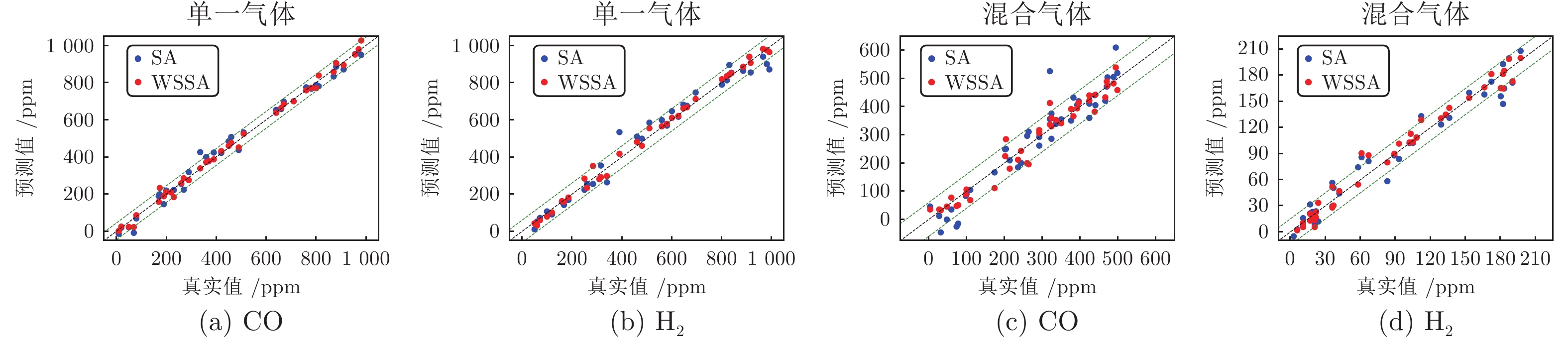
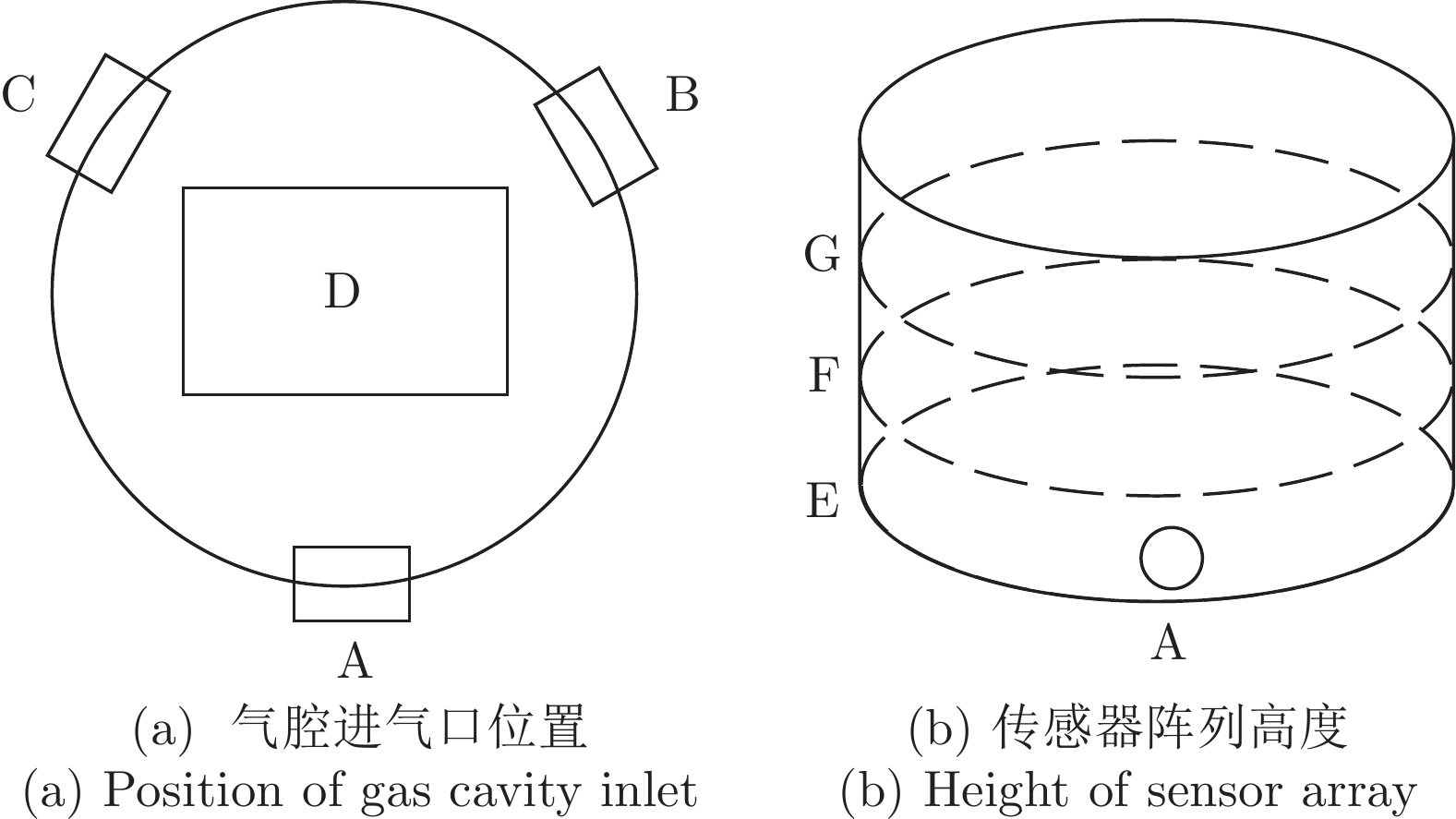
常用气体检测模型需要使用气体传感器阵列响应信号的稳态值对气体进行种类识别和浓度估计, 而在实际环境 中, 气体一般处于动态变化的状态, 气体传感器阵列响应信号难以达到稳态值或长时间维持稳定状态. 针对上述问题, 提出 一种由动态小波残差卷积神经网络(Dynamic wavelet residual convolutional neural network, DWRCNN)子模型和权重 信号自注意力(Weighted signal self-attention, WSSA)子模型组成的气体检测模型. 该模型可以直接使用气体传感器阵列 的原始动态响应信号对动态变化的气体进行成分识别, 并进一步对每种成分气体的浓度在线估计. 通过搭建的仿生嗅觉感 知系统对模型的性能进行评估, 实验结果表明, 与常用气体识别模型相比, DWRCNN能获得接近 100%气体识别准确率, 且在线训练时间短, 收敛速度快; 与常用气体浓度估计模型相比, WSSA浓度估计模型能够大幅提高气体浓度估计精度, 并 能同时对不同气体都保持较高气体浓度估计精度, 解决了动态环境中仿生嗅觉感知系统需要针对不同气体选择不同最优气 体浓度估计模型问题.
常用气体检测模型需要使用气体传感器阵列响应信号的稳态值对气体进行种类识别和浓度估计, 而在实际环境 中, 气体一般处于动态变化的状态, 气体传感器阵列响应信号难以达到稳态值或长时间维持稳定状态. 针对上述问题, 提出 一种由动态小波残差卷积神经网络(Dynamic wavelet residual convolutional neural network, DWRCNN)子模型和权重 信号自注意力(Weighted signal self-attention, WSSA)子模型组成的气体检测模型. 该模型可以直接使用气体传感器阵列 的原始动态响应信号对动态变化的气体进行成分识别, 并进一步对每种成分气体的浓度在线估计. 通过搭建的仿生嗅觉感 知系统对模型的性能进行评估, 实验结果表明, 与常用气体识别模型相比, DWRCNN能获得接近 100%气体识别准确率, 且在线训练时间短, 收敛速度快; 与常用气体浓度估计模型相比, WSSA浓度估计模型能够大幅提高气体浓度估计精度, 并 能同时对不同气体都保持较高气体浓度估计精度, 解决了动态环境中仿生嗅觉感知系统需要针对不同气体选择不同最优气 体浓度估计模型问题.

2024, 50(4): 828-840.
doi: 10.16383/j.aas.c230018
摘要:
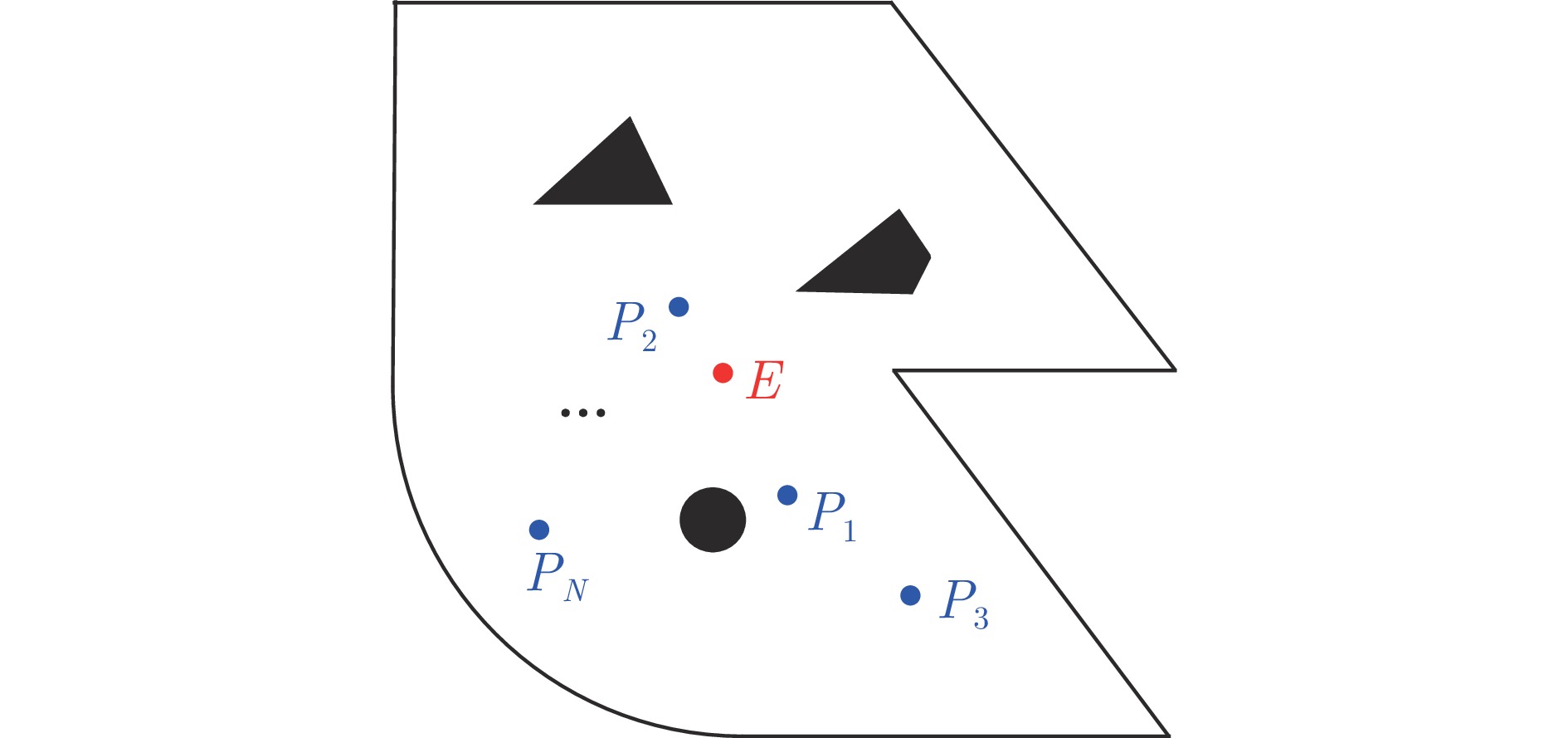
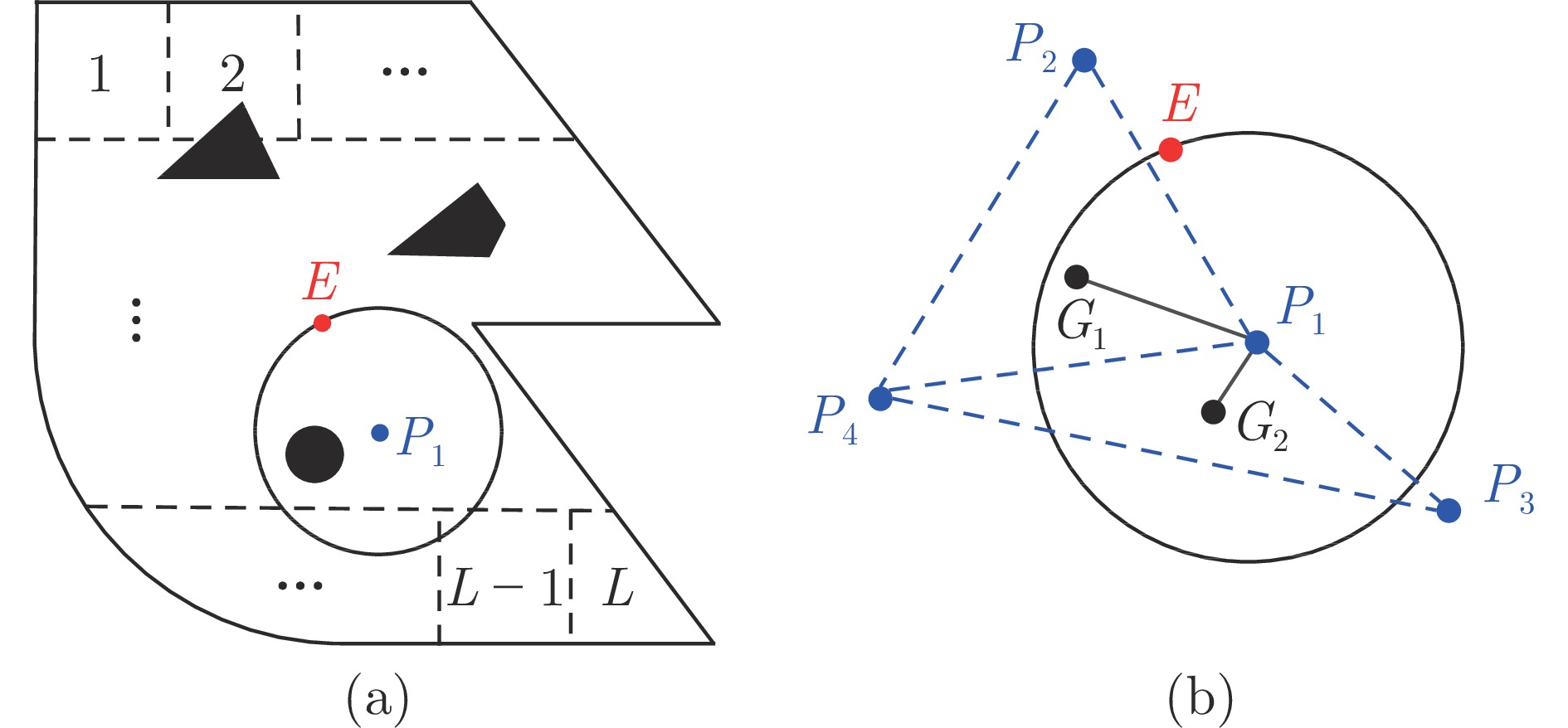
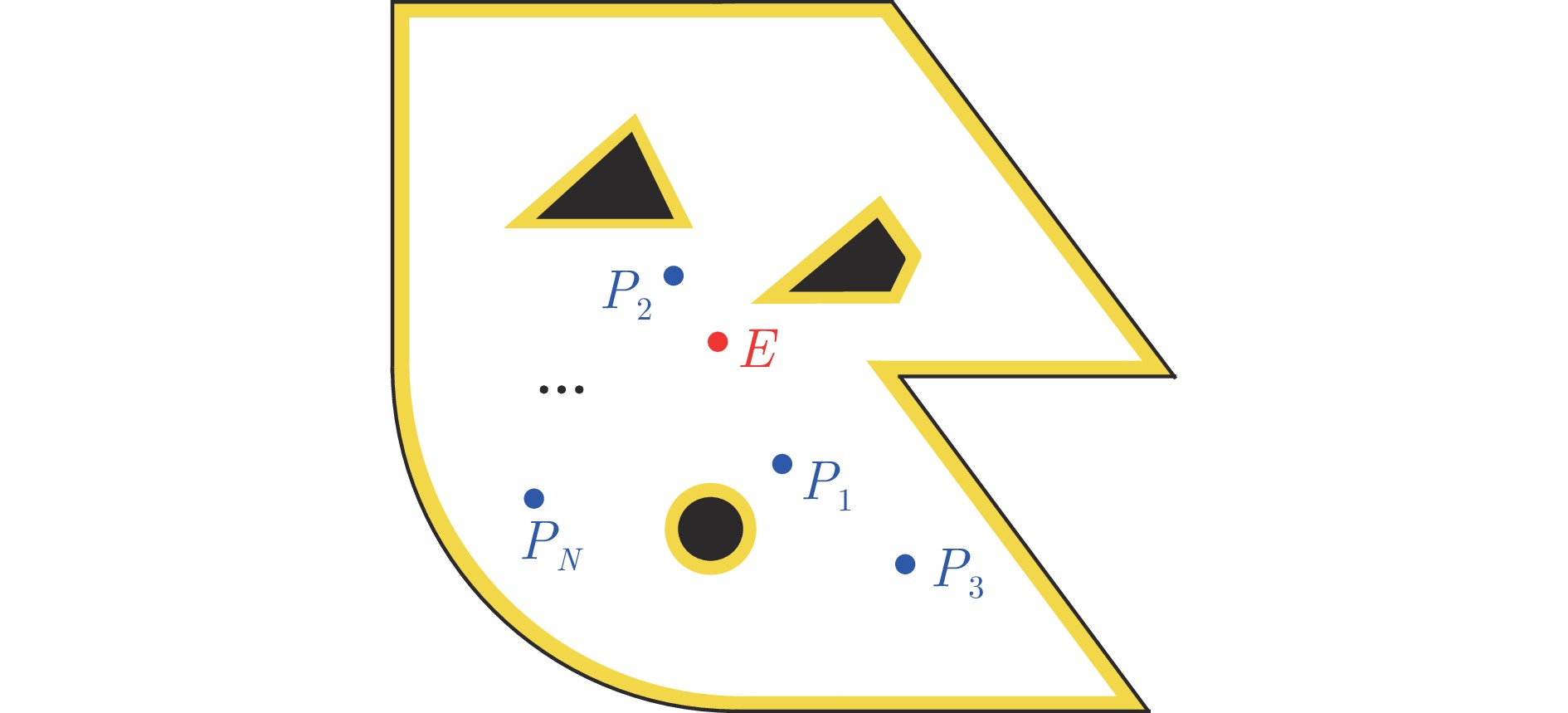
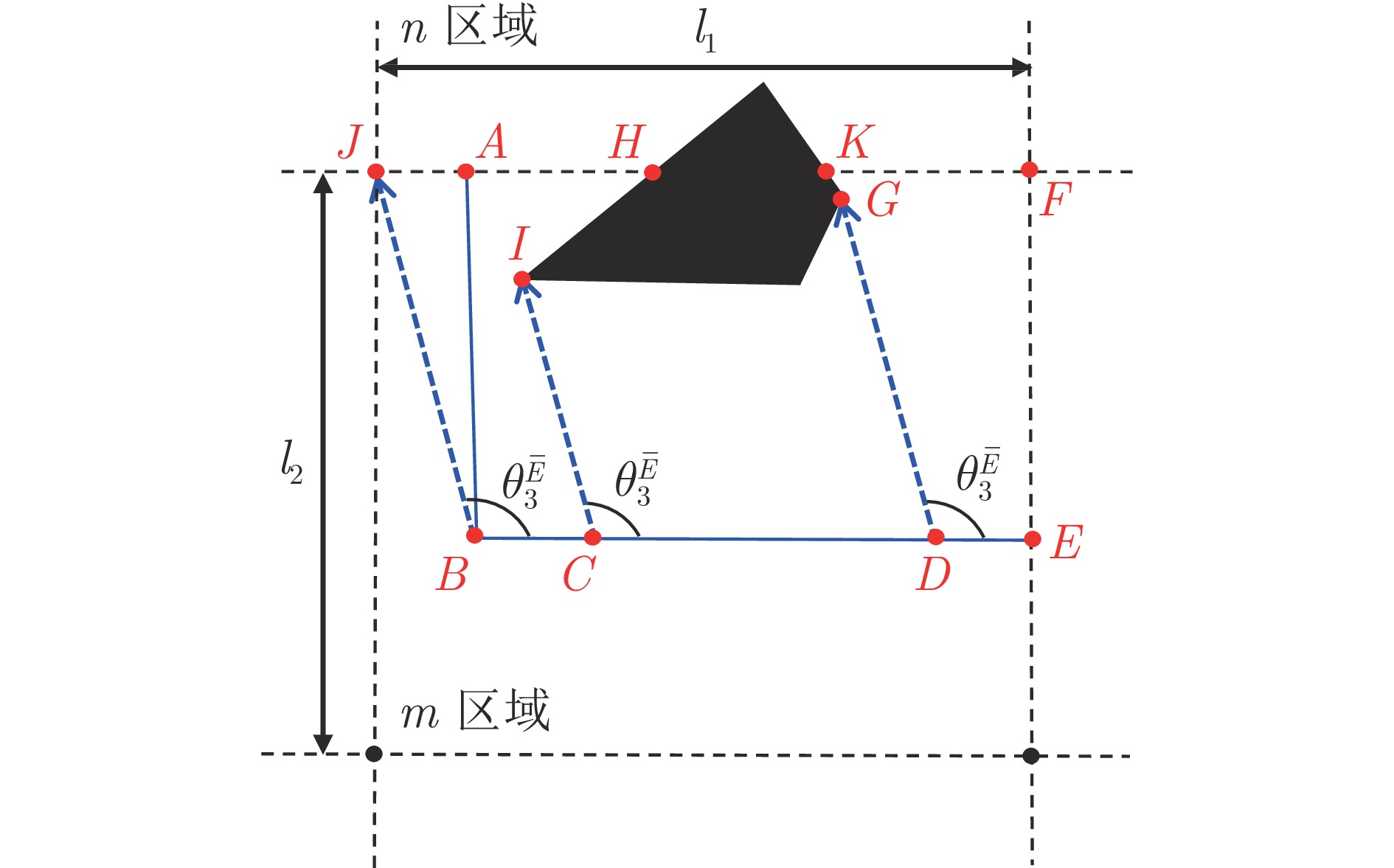
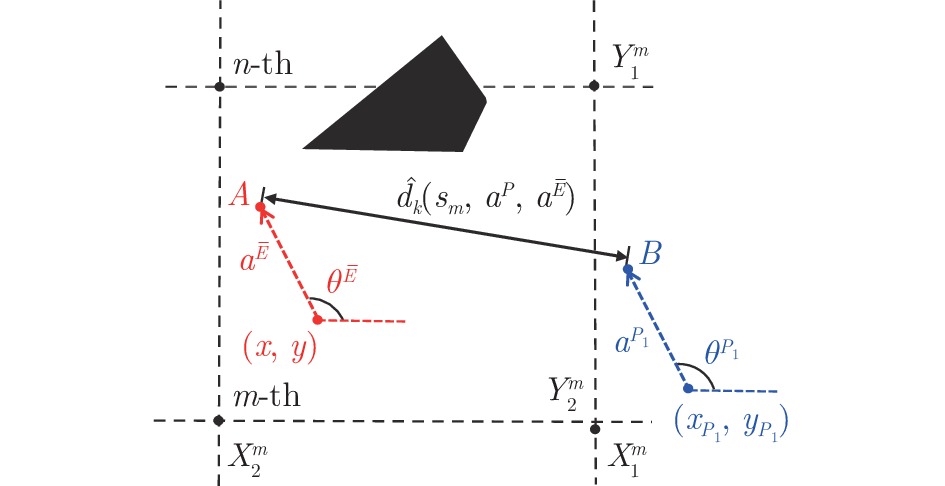
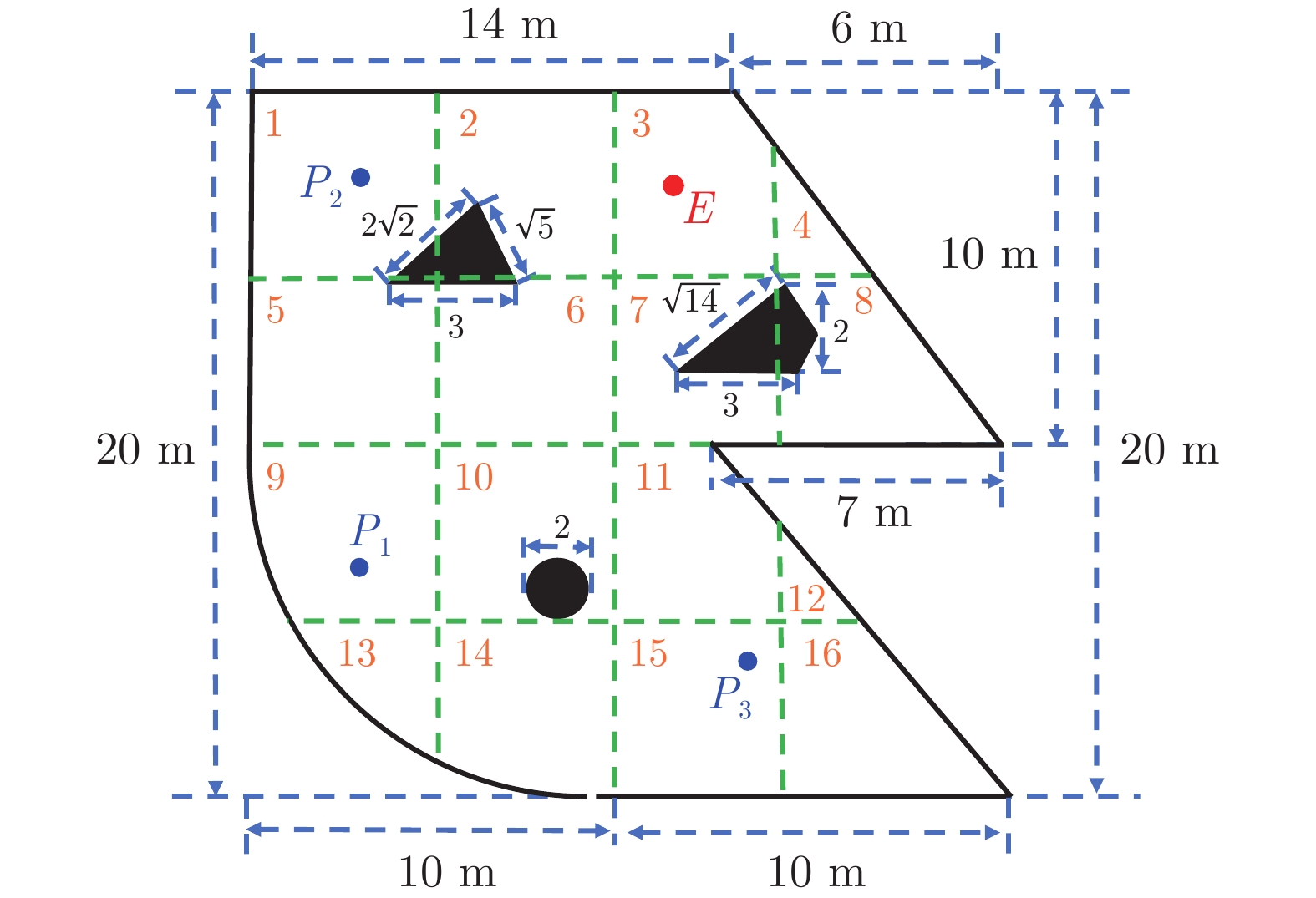
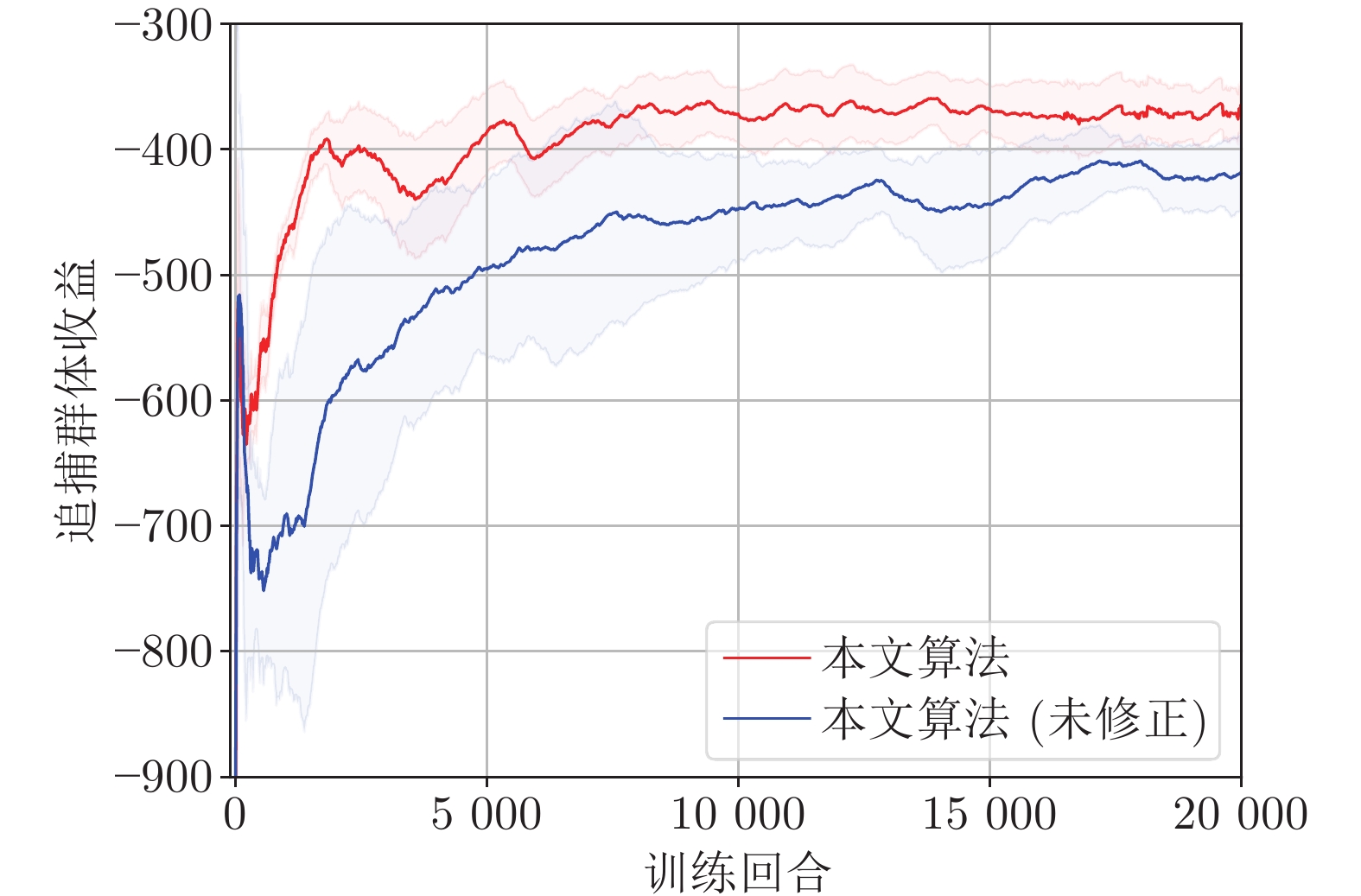
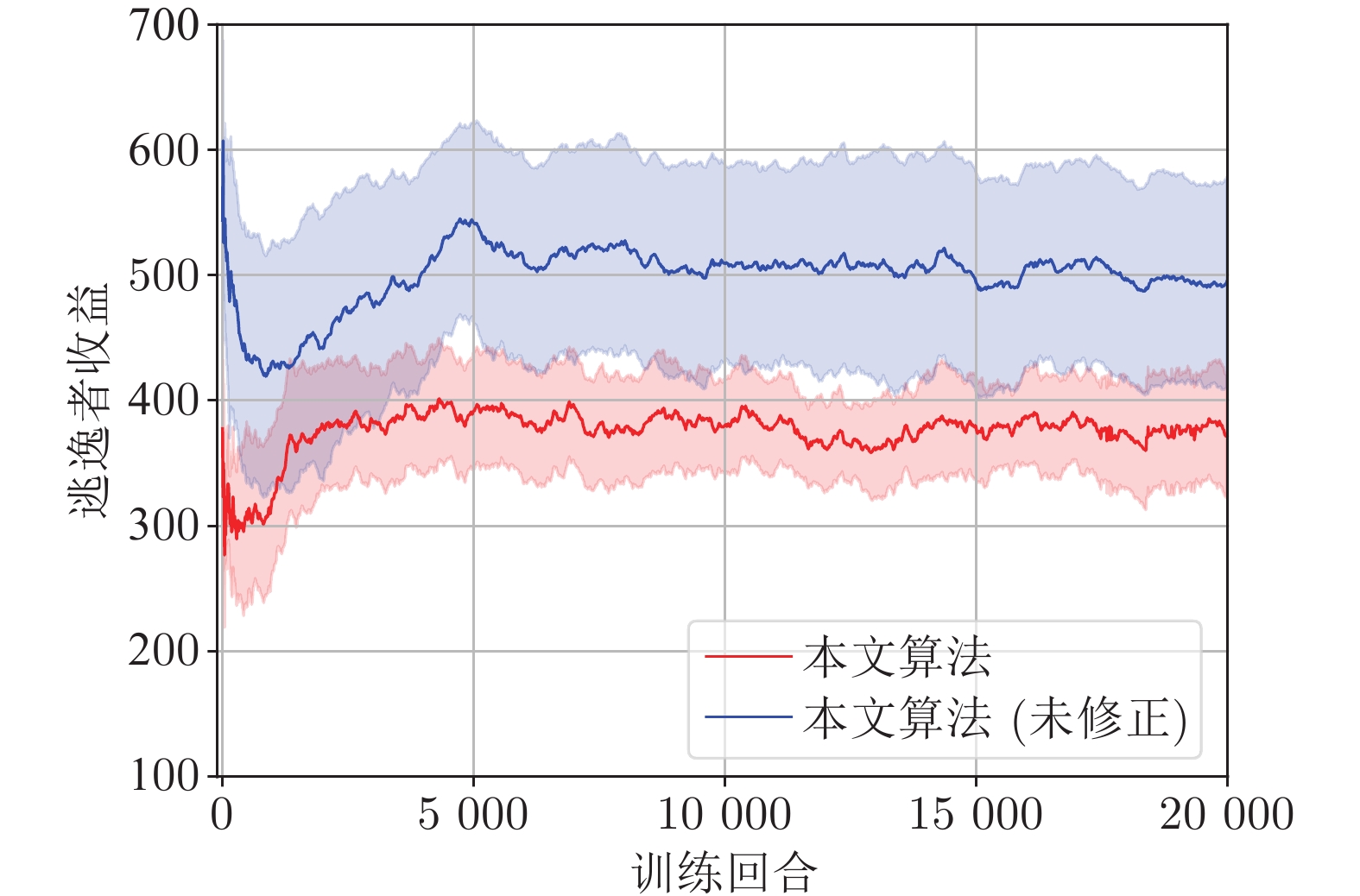
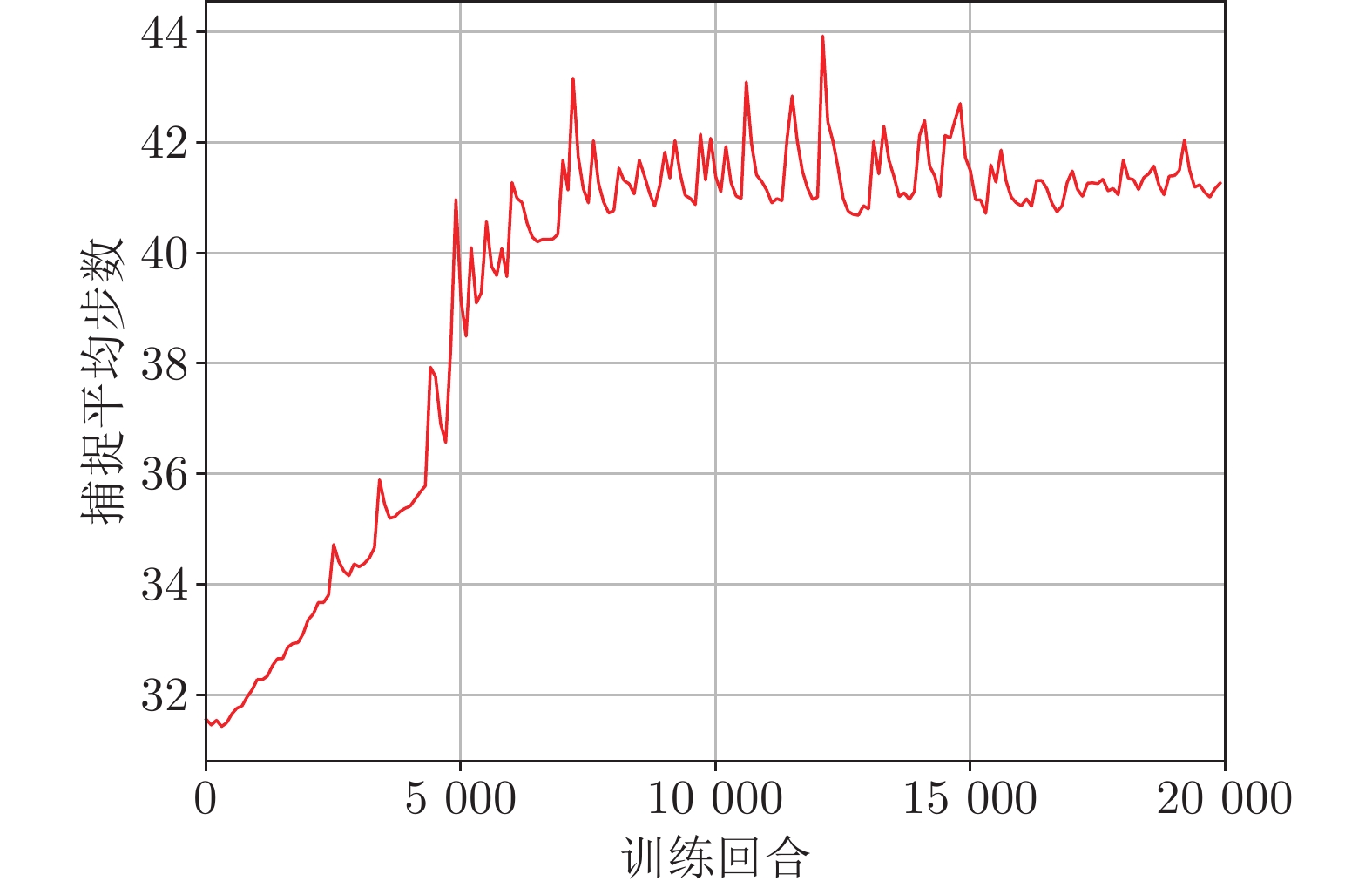
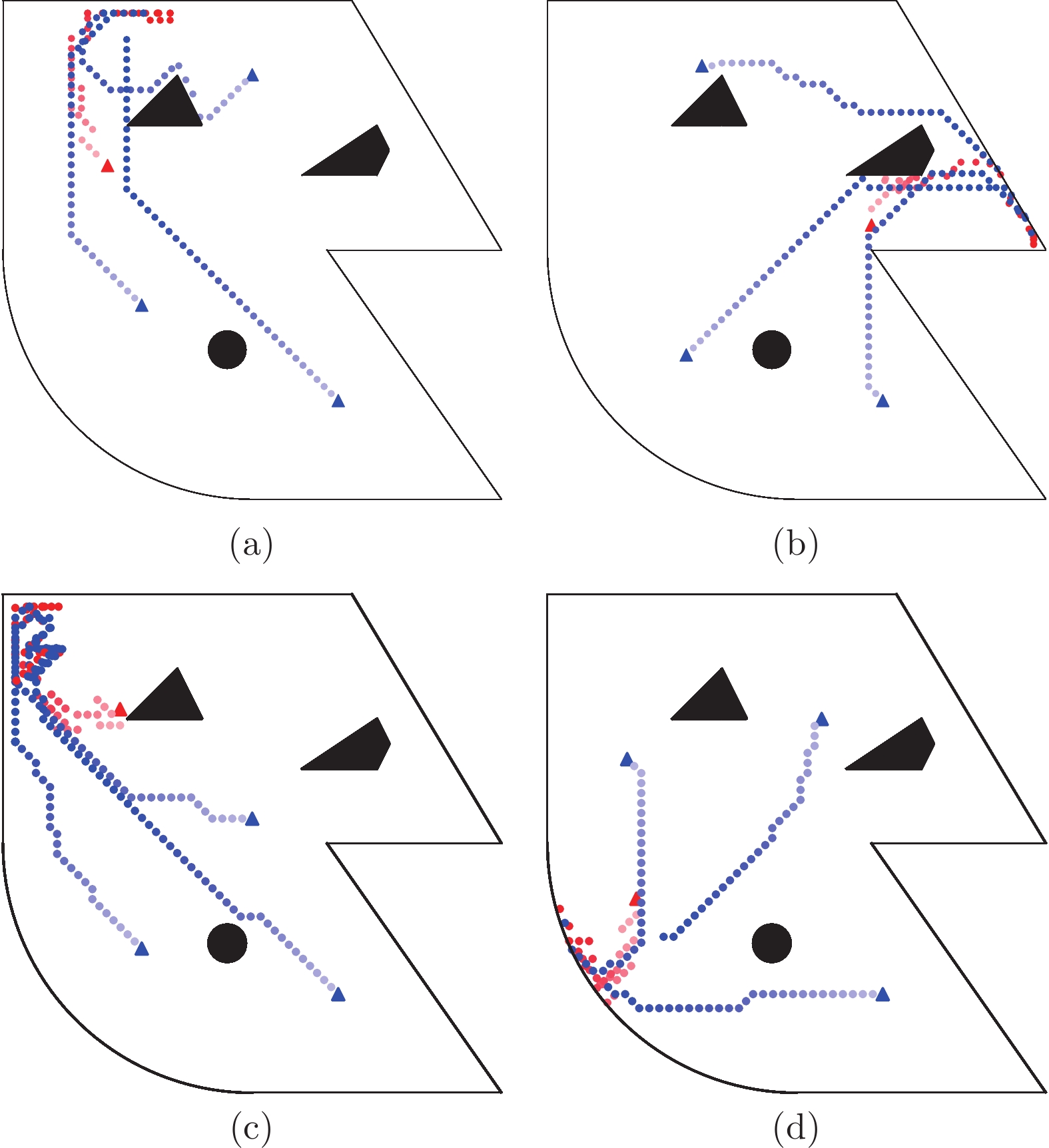
追逃问题的研究在对抗、追踪以及搜查等领域极具现实意义. 借助连续随机博弈与马尔科夫决策过程(Markov decision process, MDP), 研究使用测量距离求解多对一追逃问题的最优策略. 在此追逃问题中, 追捕群体仅领导者可测量与逃逸者间的相对距离, 而逃逸者具有全局视野. 追逃策略求解被分为追博弈与马尔科夫决策两个过程. 在求解追捕策略时, 通过分割环境引入信念区域状态以估计逃逸者位置, 同时使用测量距离对信念区域状态进行修正, 构建起基于信念区域状态的连续随机追博弈, 并借助不动点定理证明了博弈平稳纳什均衡策略的存在性. 在求解逃逸策略时, 逃逸者根据全局信息建立混合状态下的马尔科夫决策过程及相应的最优贝尔曼方程. 同时给出了基于强化学习的平稳追逃策略求解算法, 并通过案例验证了该算法的有效性.
追逃问题的研究在对抗、追踪以及搜查等领域极具现实意义. 借助连续随机博弈与马尔科夫决策过程(Markov decision process, MDP), 研究使用测量距离求解多对一追逃问题的最优策略. 在此追逃问题中, 追捕群体仅领导者可测量与逃逸者间的相对距离, 而逃逸者具有全局视野. 追逃策略求解被分为追博弈与马尔科夫决策两个过程. 在求解追捕策略时, 通过分割环境引入信念区域状态以估计逃逸者位置, 同时使用测量距离对信念区域状态进行修正, 构建起基于信念区域状态的连续随机追博弈, 并借助不动点定理证明了博弈平稳纳什均衡策略的存在性. 在求解逃逸策略时, 逃逸者根据全局信息建立混合状态下的马尔科夫决策过程及相应的最优贝尔曼方程. 同时给出了基于强化学习的平稳追逃策略求解算法, 并通过案例验证了该算法的有效性.
2024, 50(4): 841-850.
doi: 10.16383/j.aas.c210921
摘要:
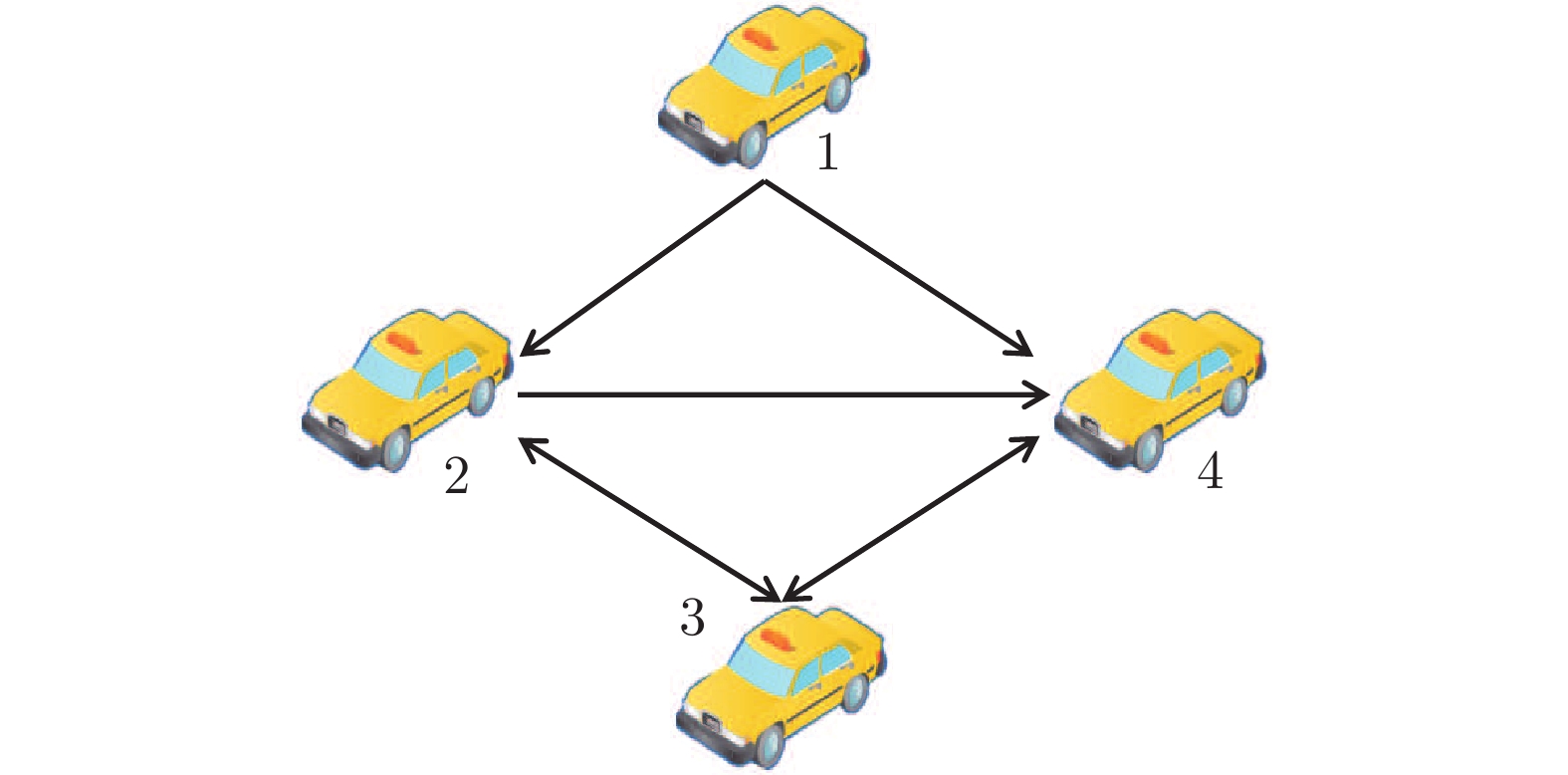
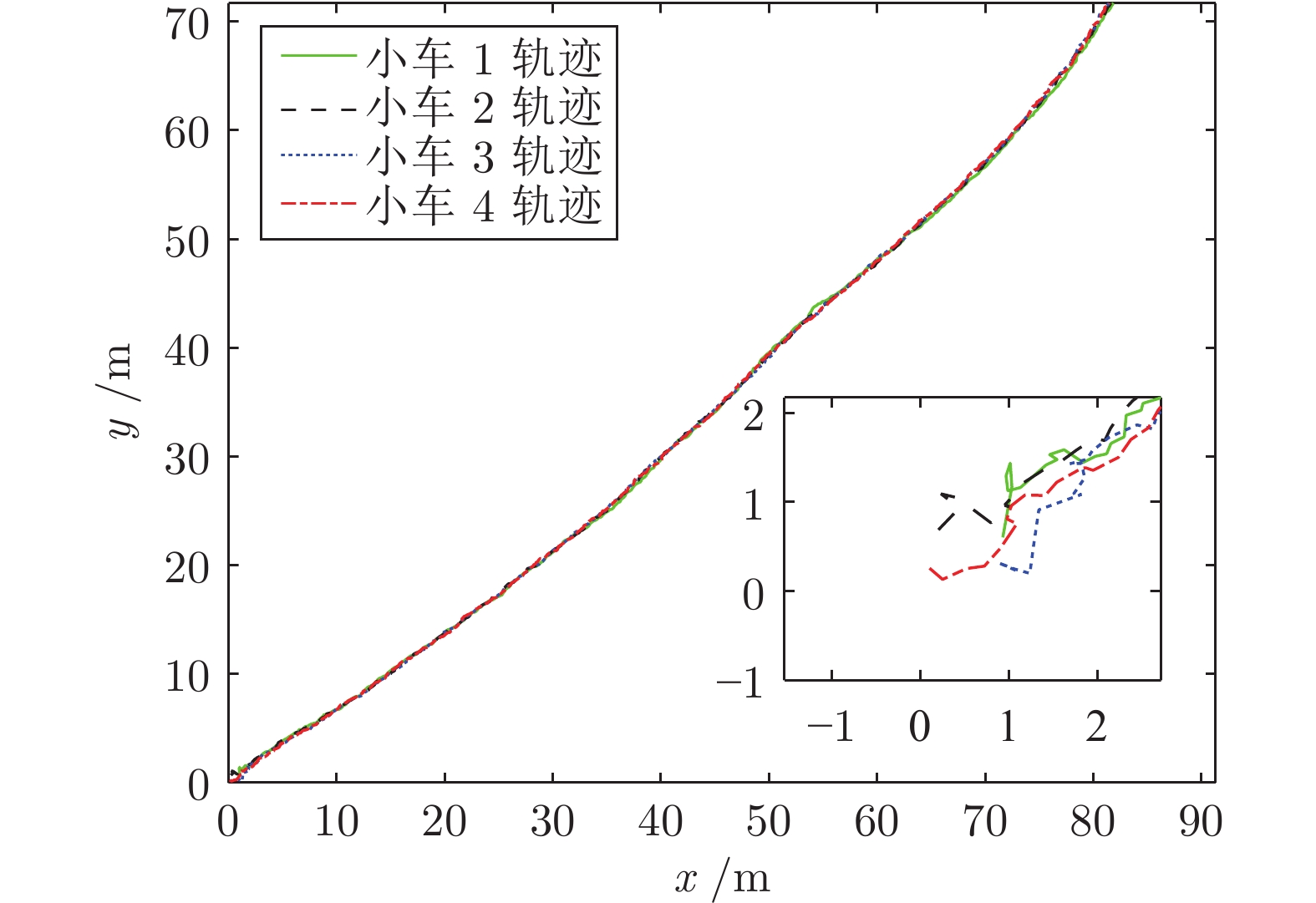
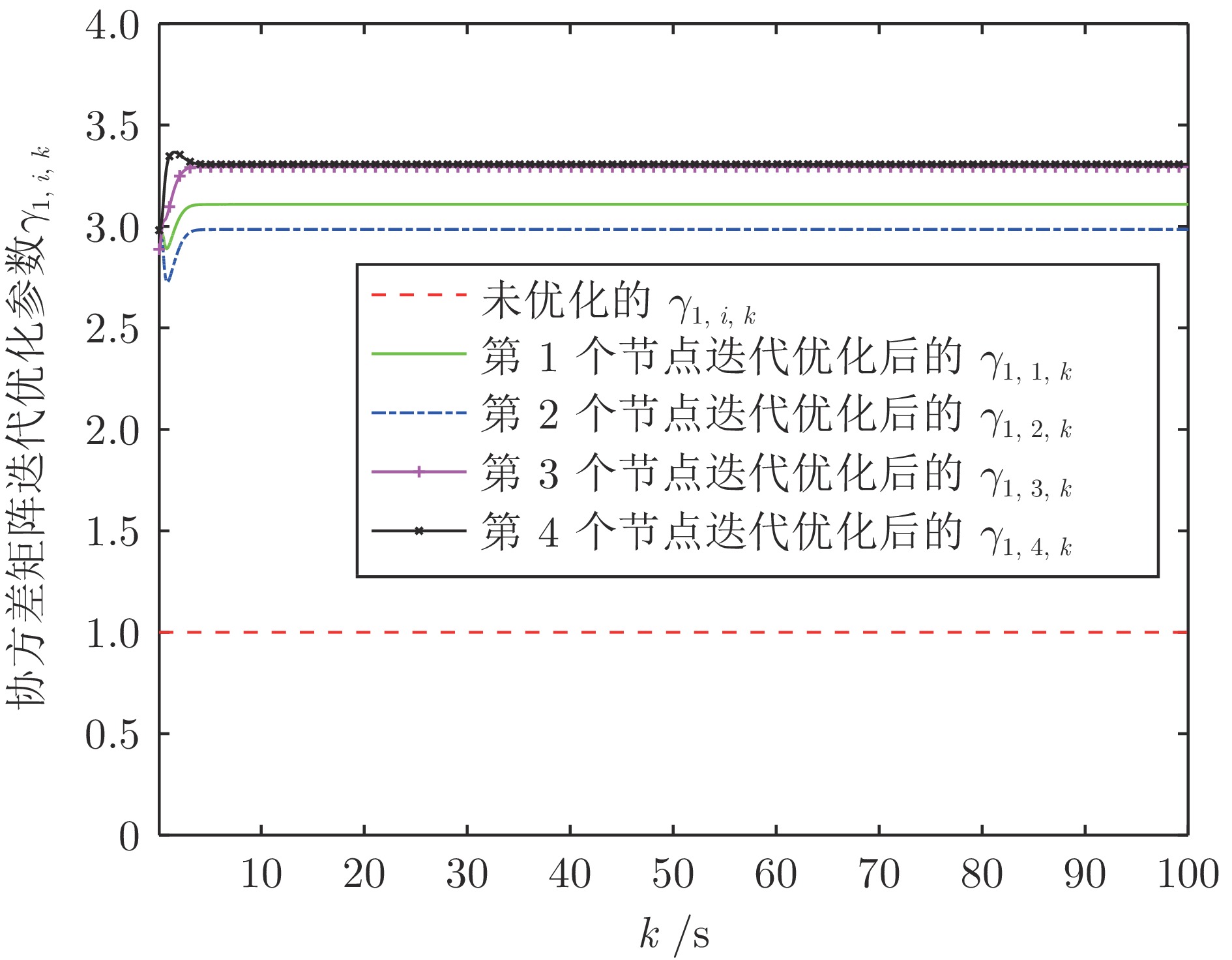
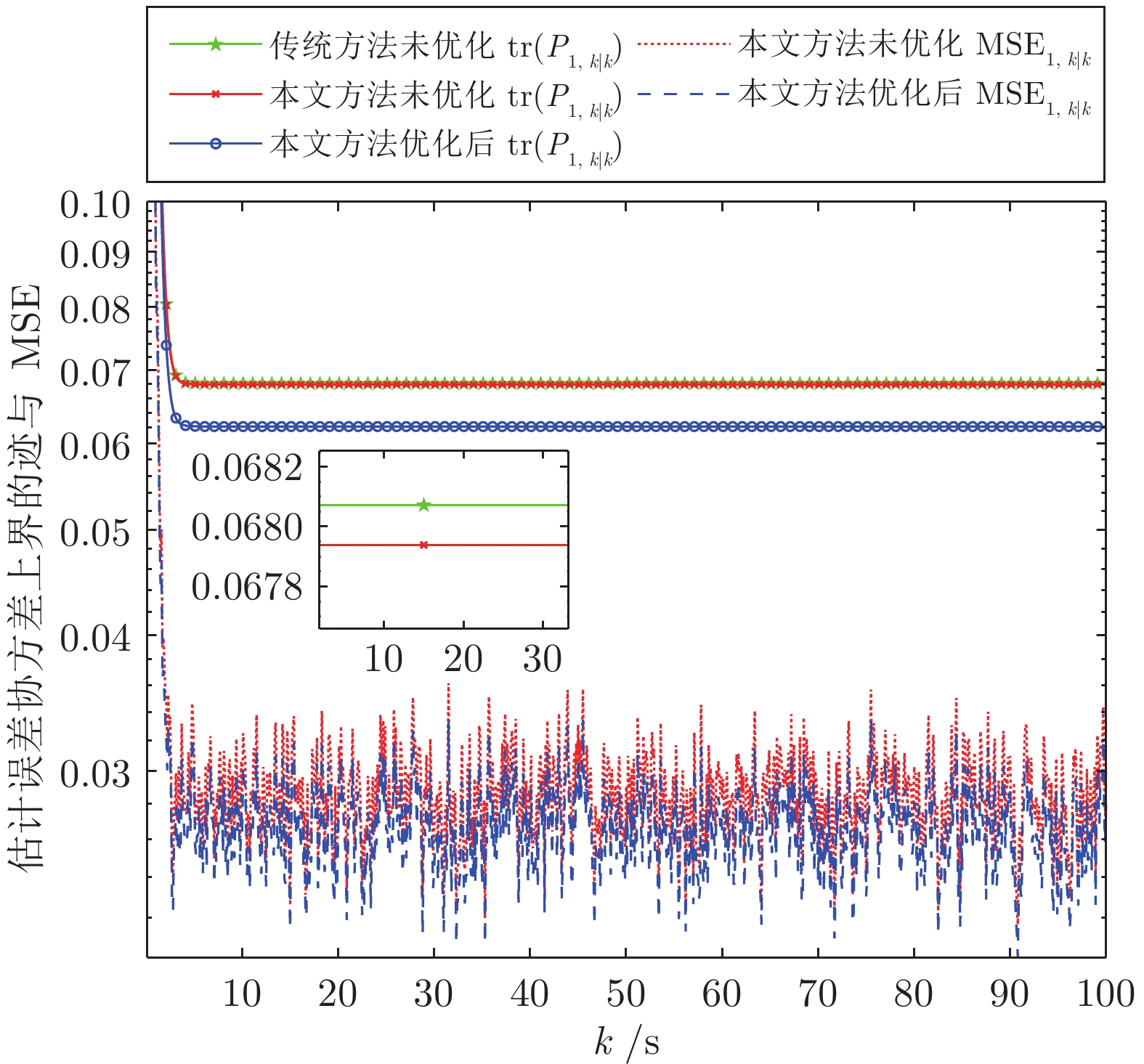
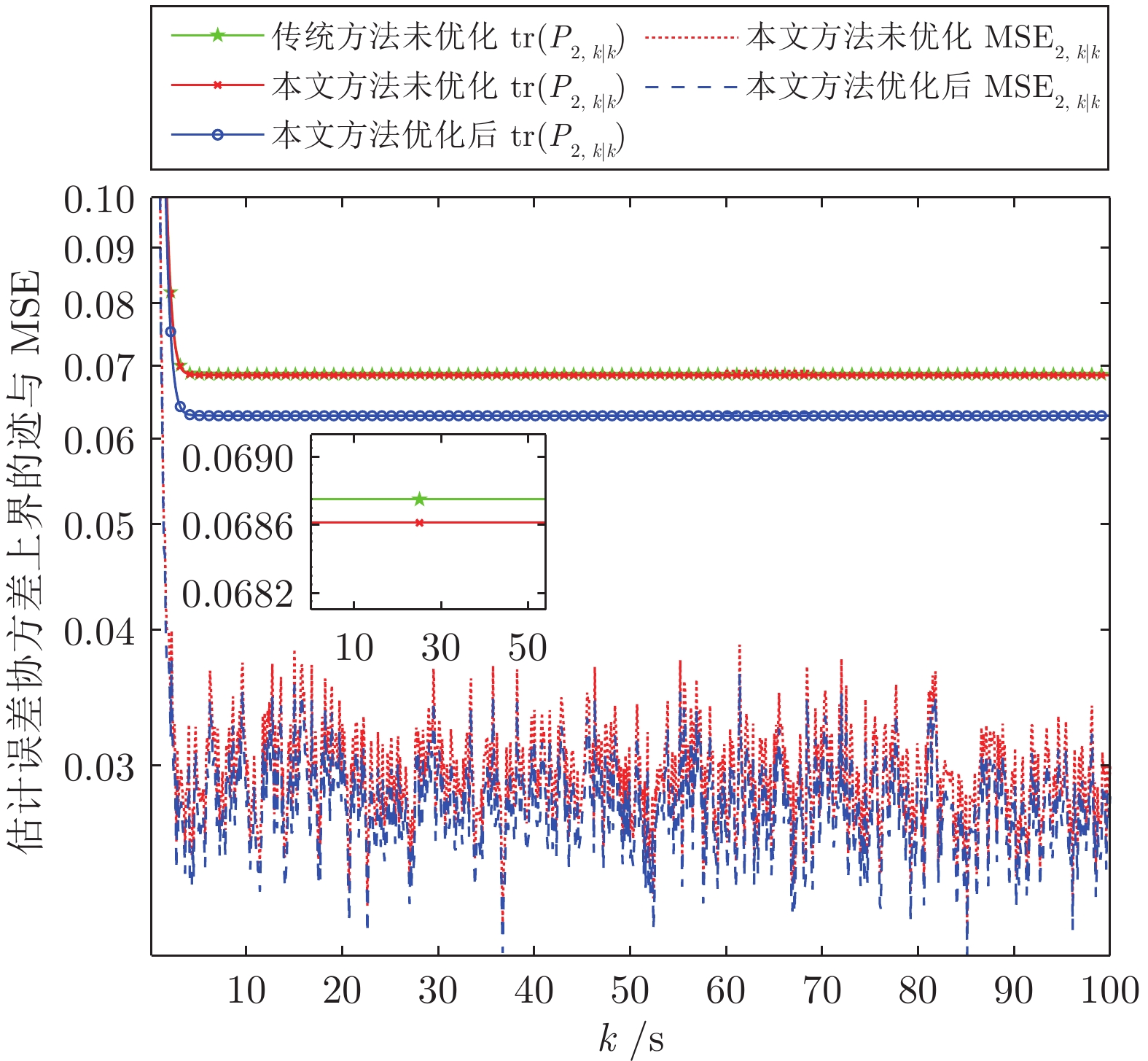
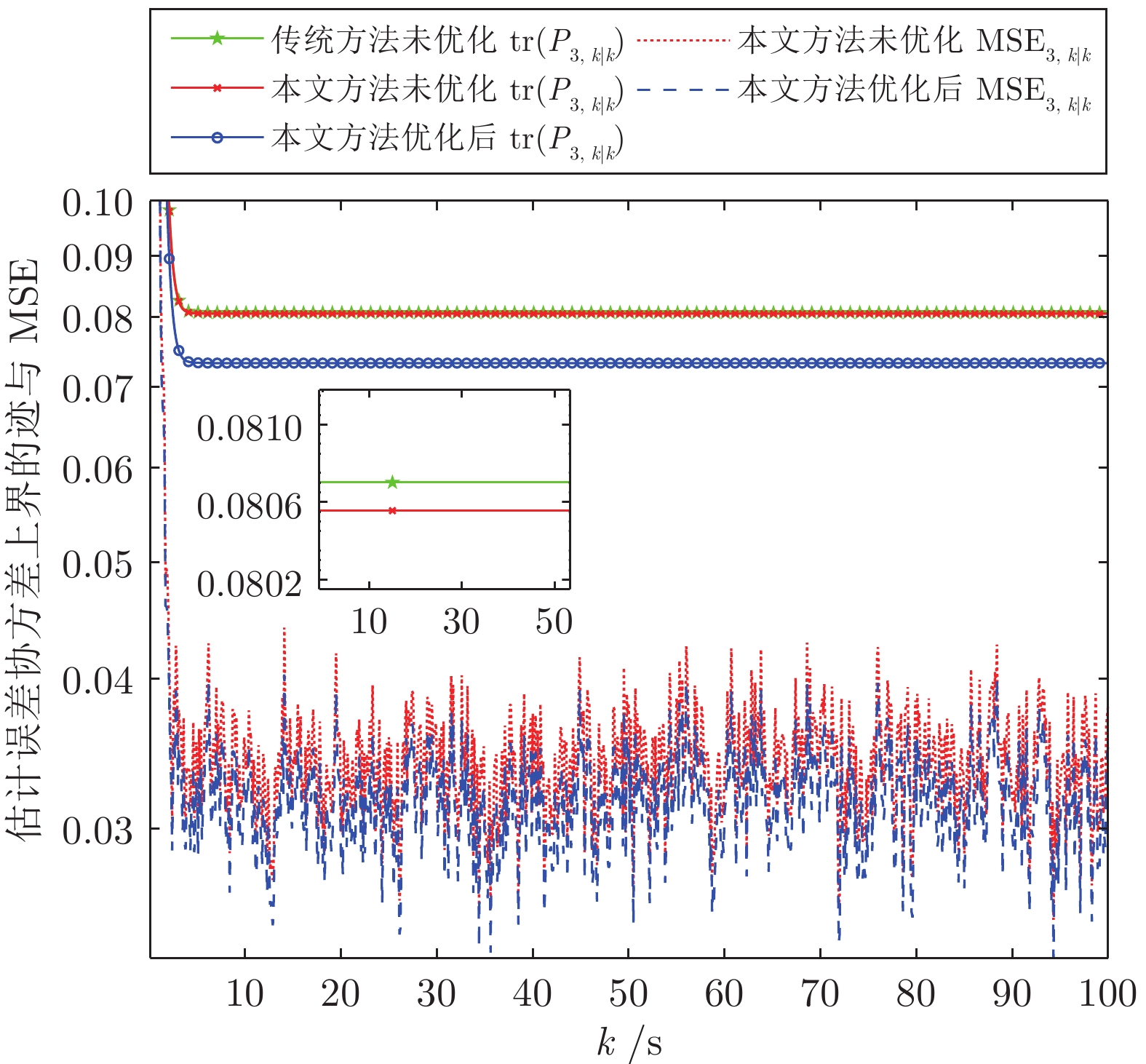
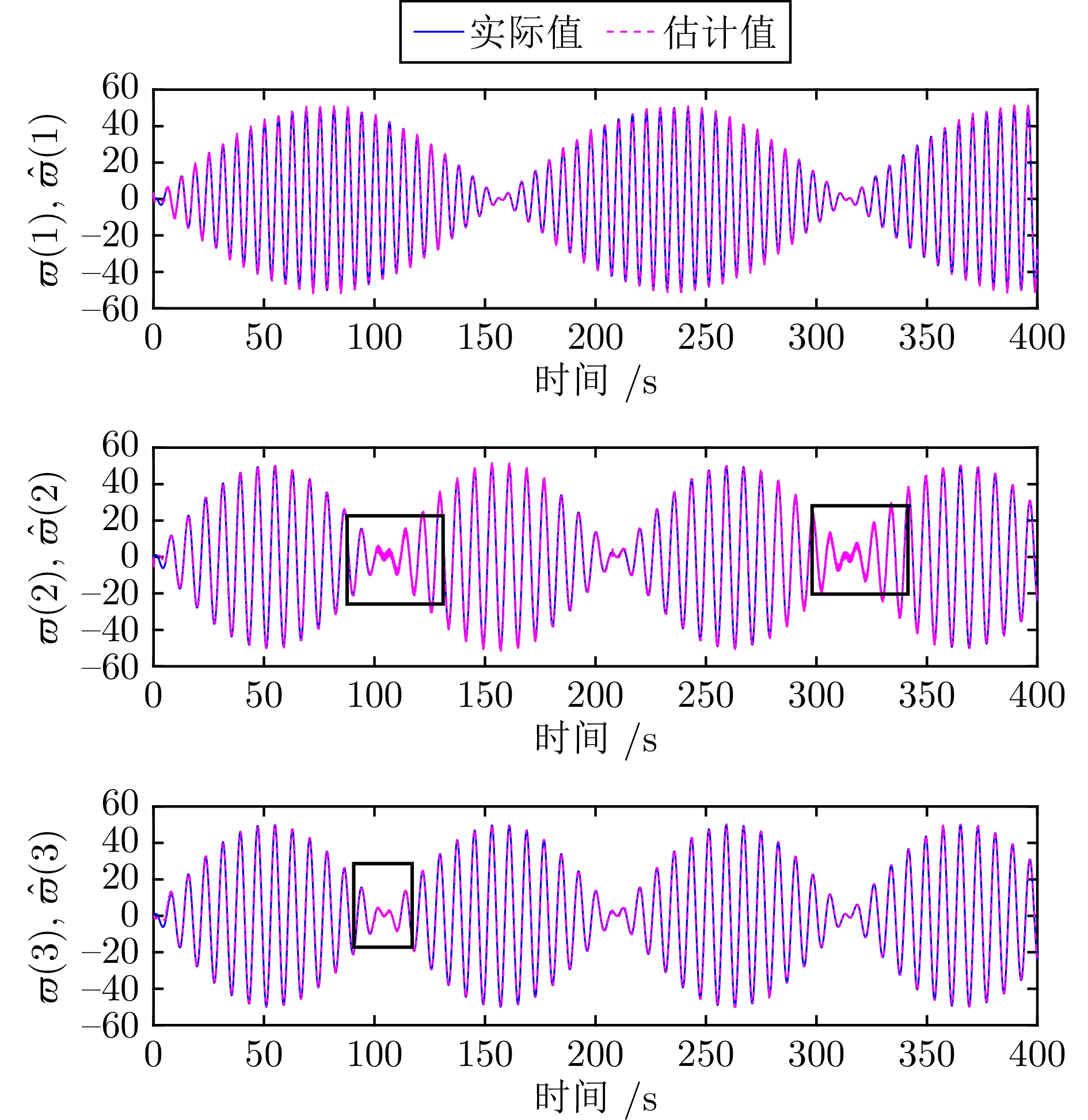
研究一类存在一步随机时滞的复杂网络分布式状态估计问题, 采用伯努利随机变量刻画测量值的随机时滞情况. 基于复杂网络模型和不可靠测量值, 分别设计复杂网络的状态预测器和分布式状态估计器, 基于杨氏不等式消除节点之间的耦合项, 通过优化杨氏不等式引进的参数, 优化状态预测协方差. 通过设计估计器增益, 获得状态估计误差协方差, 同时结合预测误差协方差, 获得状态估计误差协方差的迭代公式, 并给出估计误差协方差稳定的充分条件. 最后, 对由小车组成的耦合系统进行数值仿真, 验证所设计估计器的有效性.
研究一类存在一步随机时滞的复杂网络分布式状态估计问题, 采用伯努利随机变量刻画测量值的随机时滞情况. 基于复杂网络模型和不可靠测量值, 分别设计复杂网络的状态预测器和分布式状态估计器, 基于杨氏不等式消除节点之间的耦合项, 通过优化杨氏不等式引进的参数, 优化状态预测协方差. 通过设计估计器增益, 获得状态估计误差协方差, 同时结合预测误差协方差, 获得状态估计误差协方差的迭代公式, 并给出估计误差协方差稳定的充分条件. 最后, 对由小车组成的耦合系统进行数值仿真, 验证所设计估计器的有效性.
2024, 50(4): 851-861.
doi: 10.16383/j.aas.c220635
摘要:
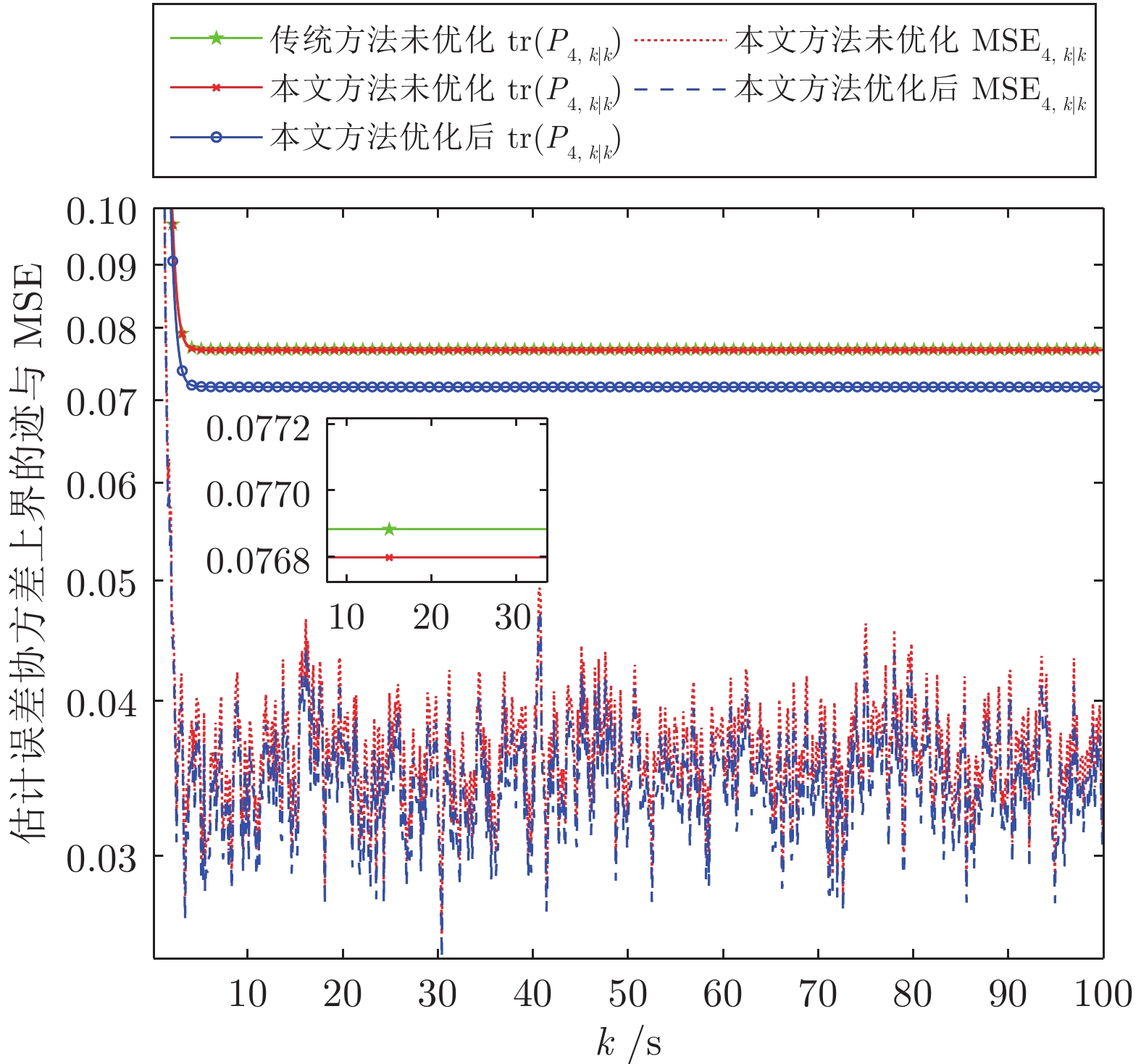
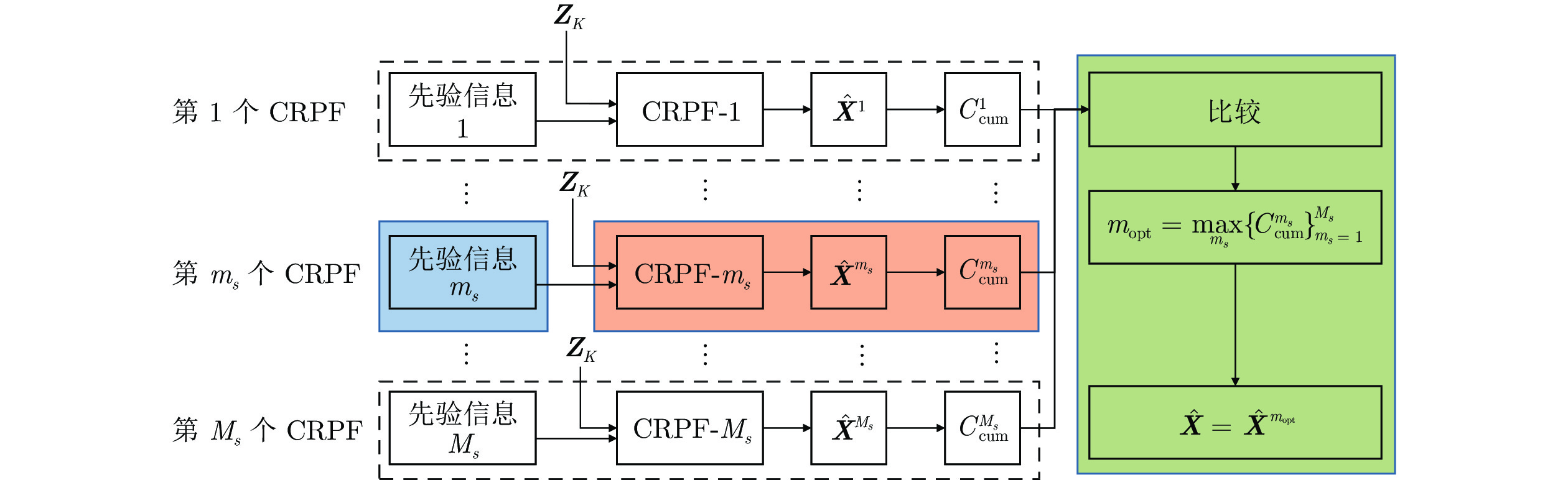
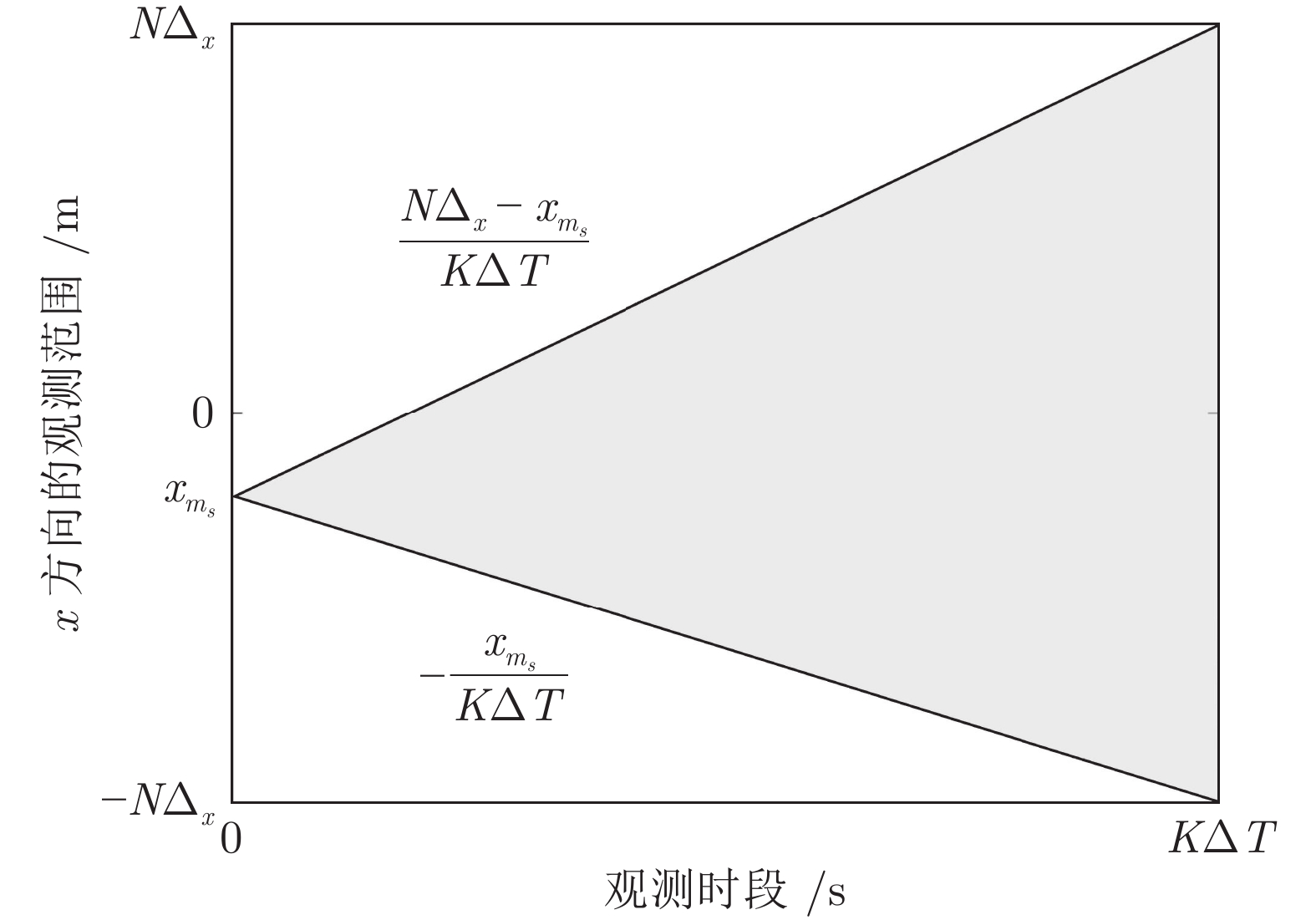
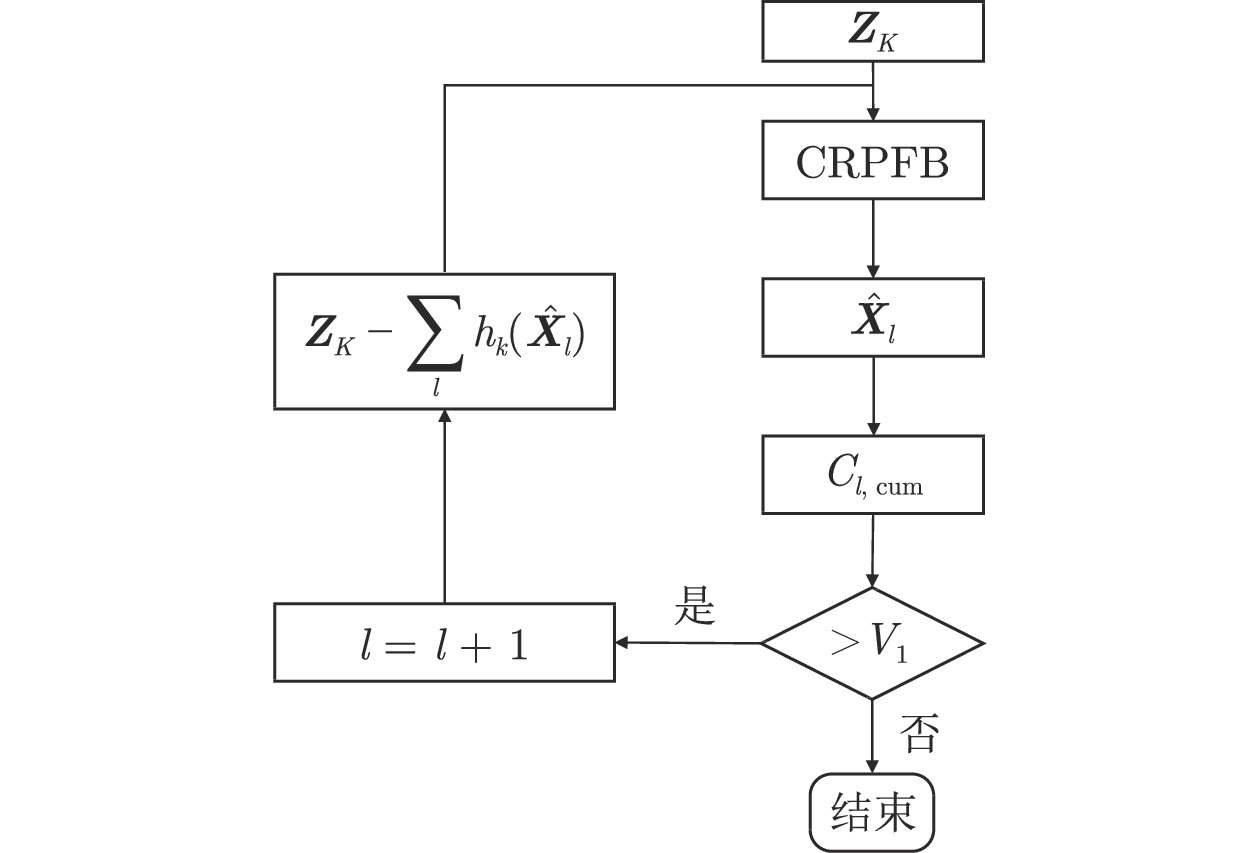
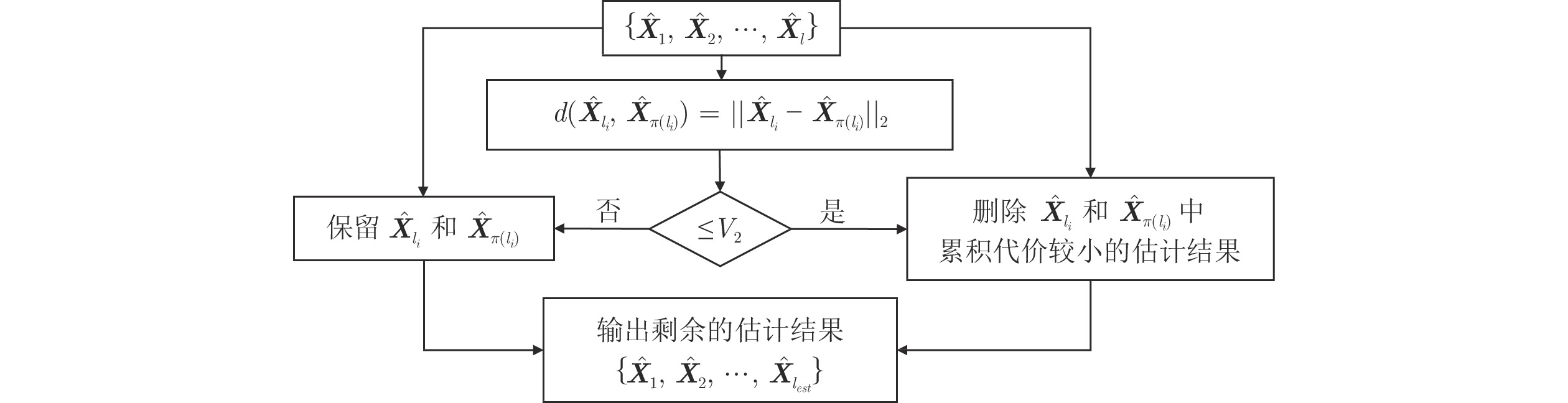
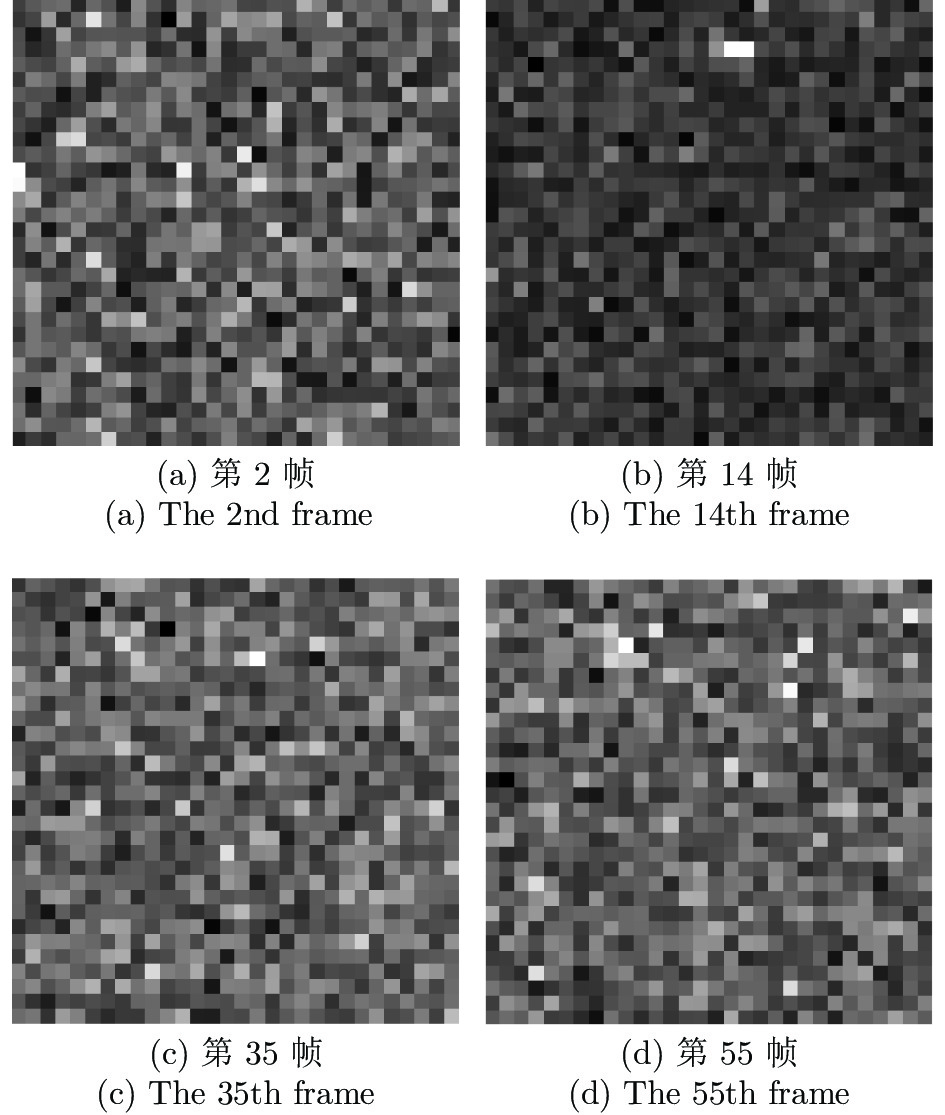
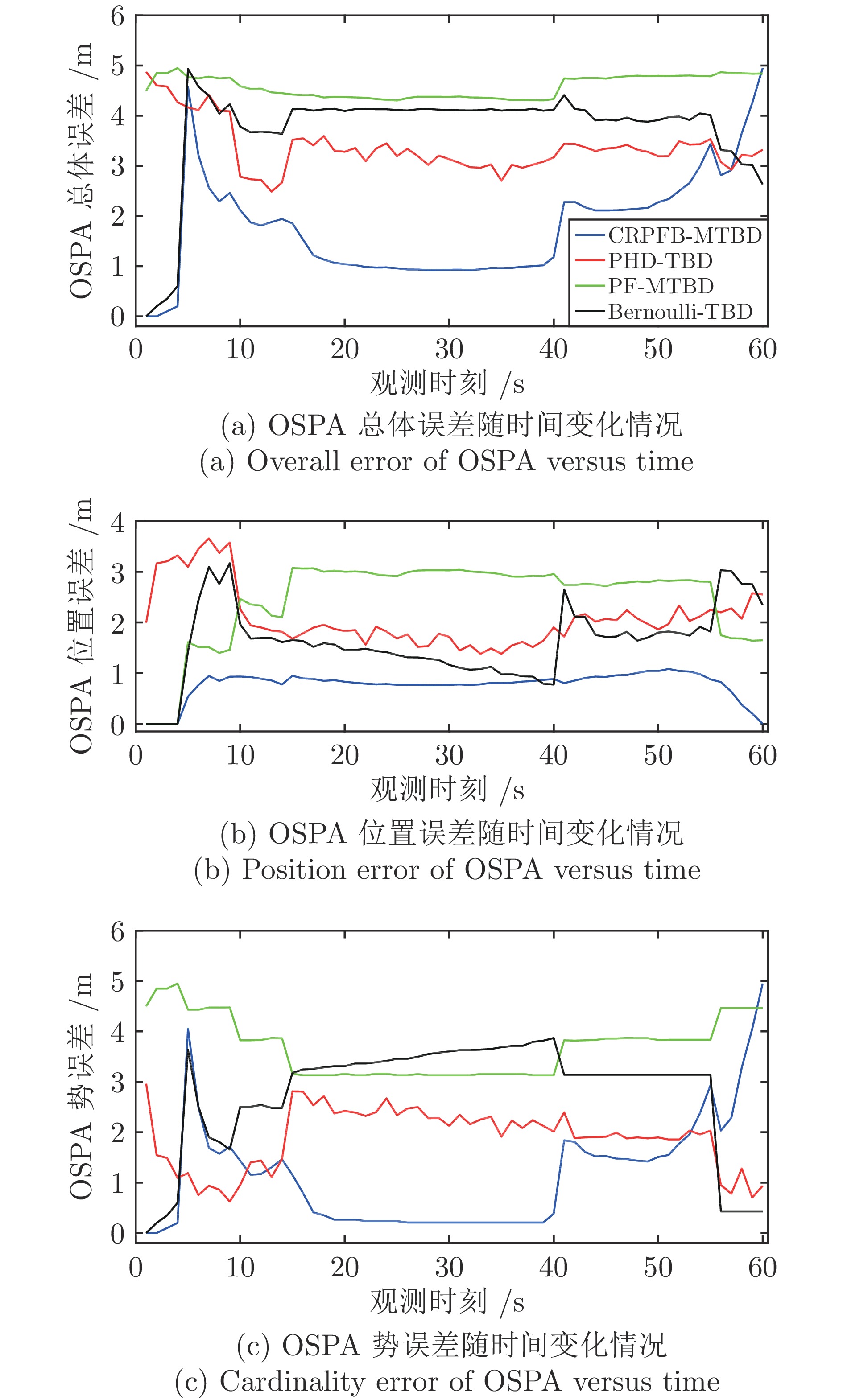
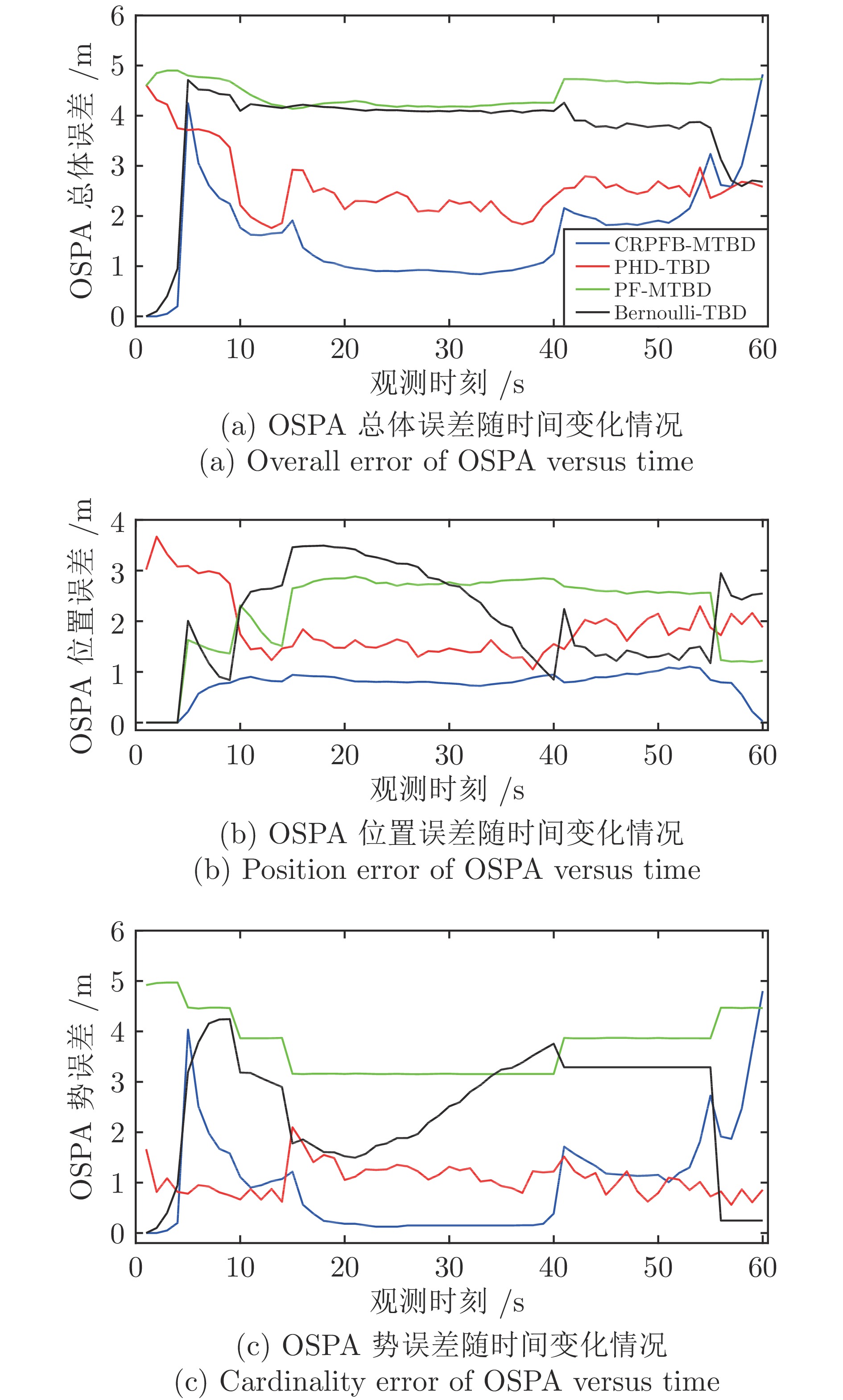
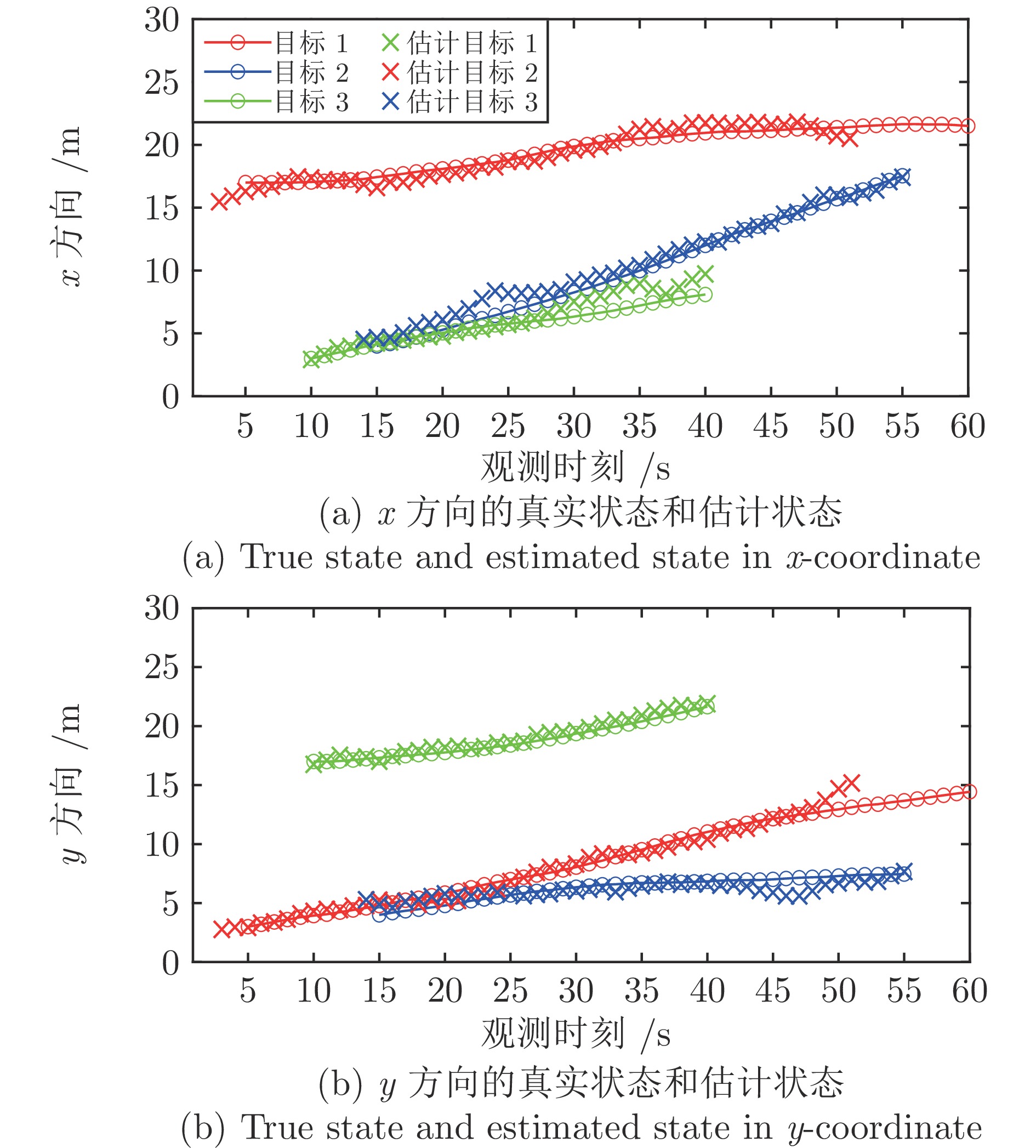
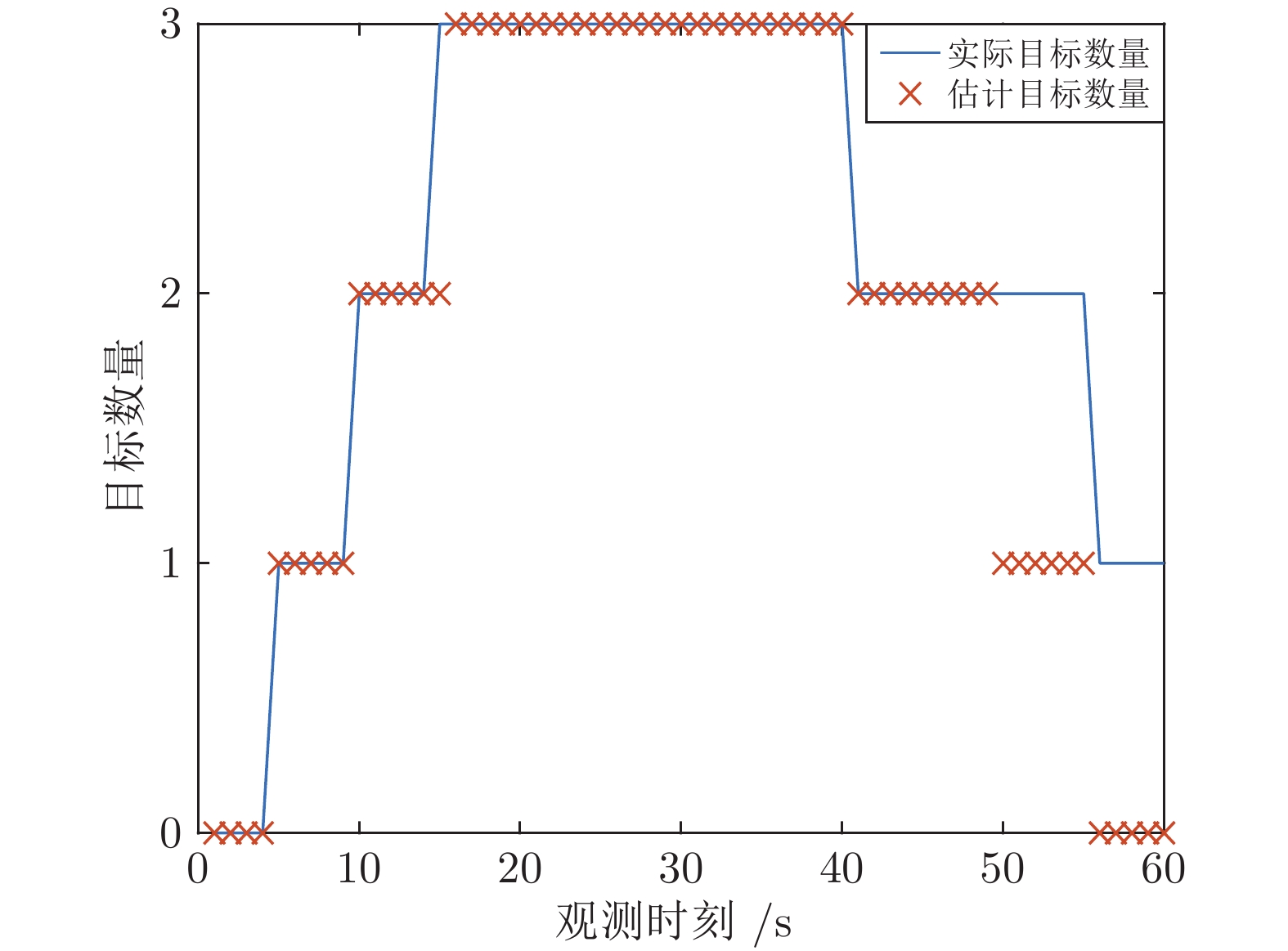
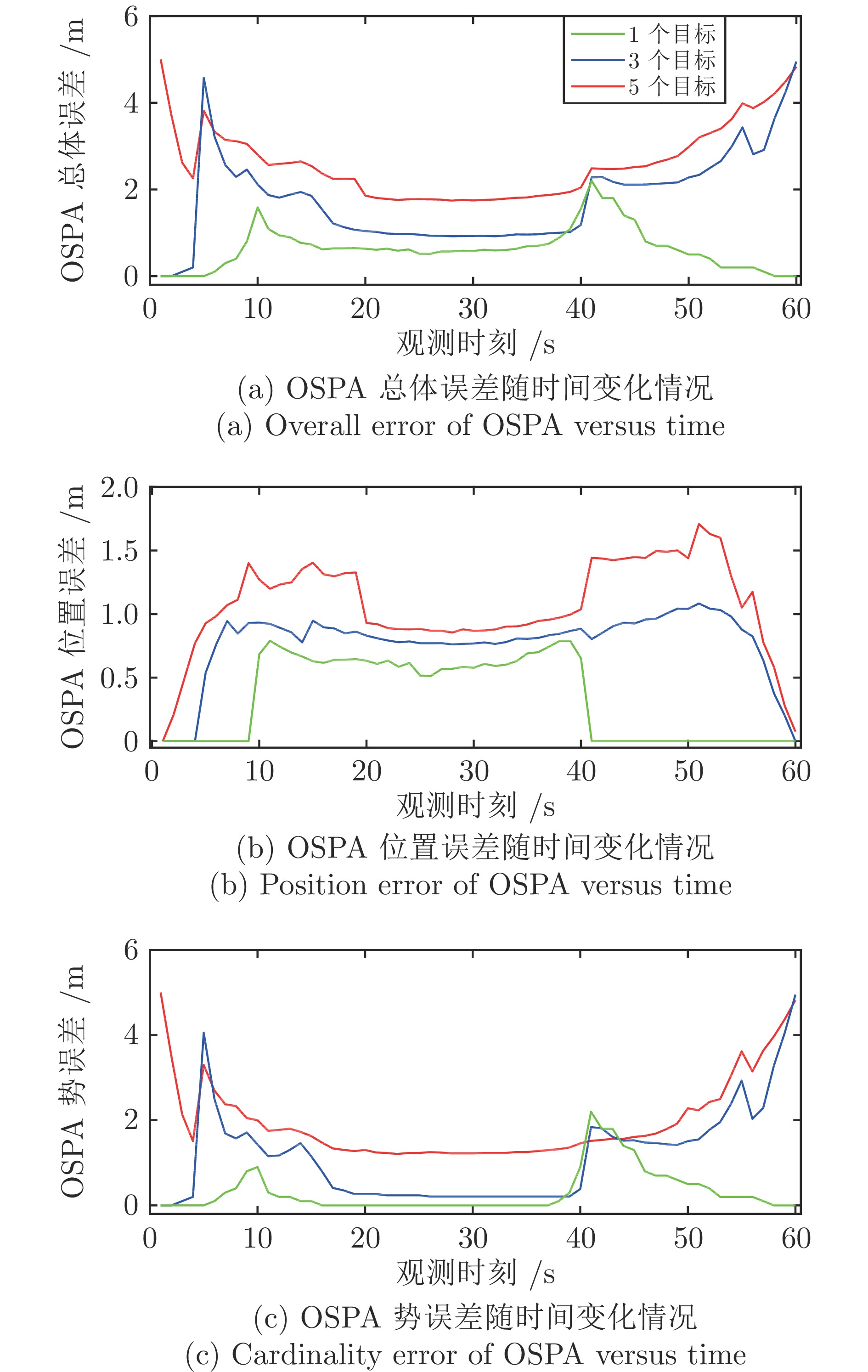
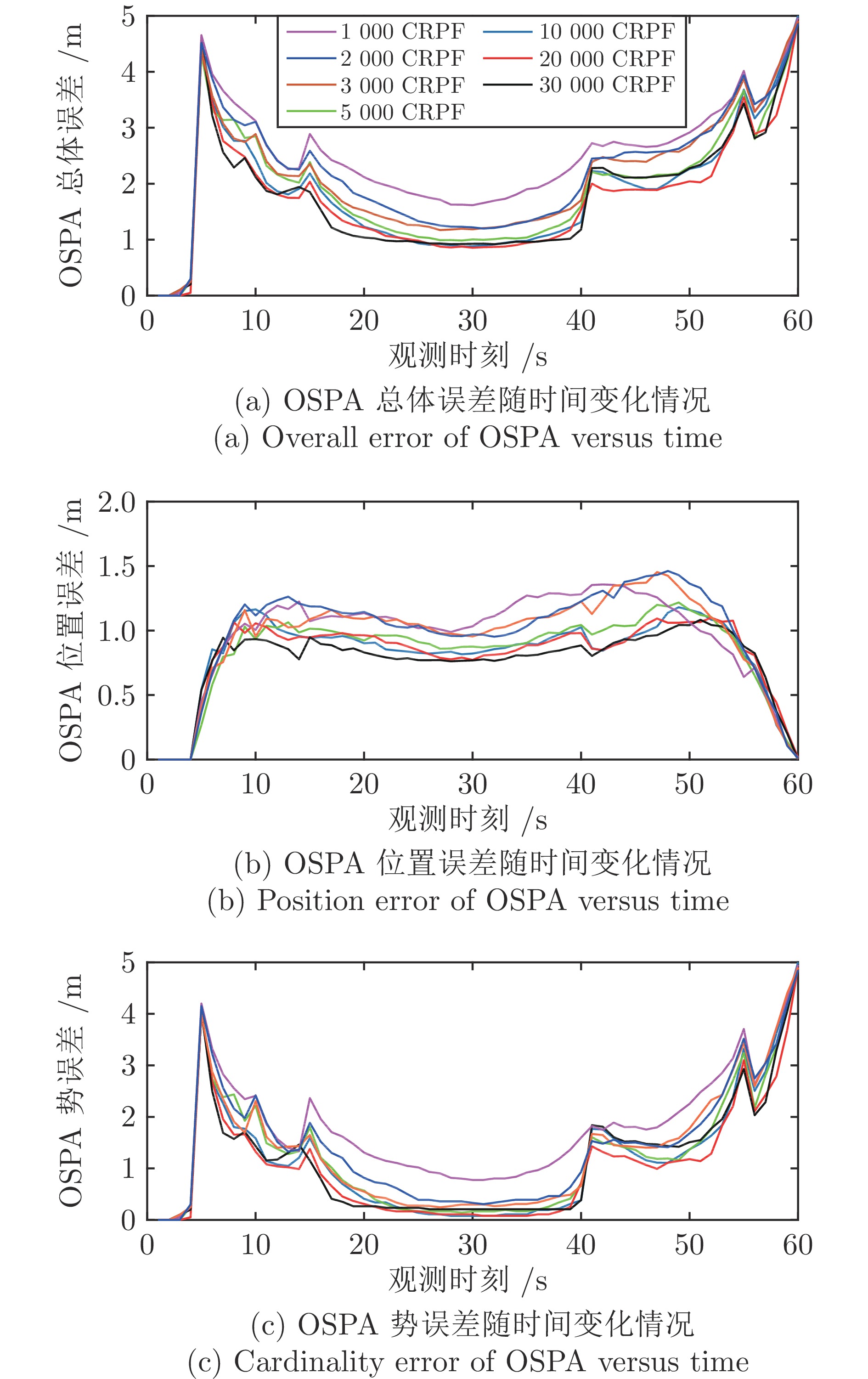
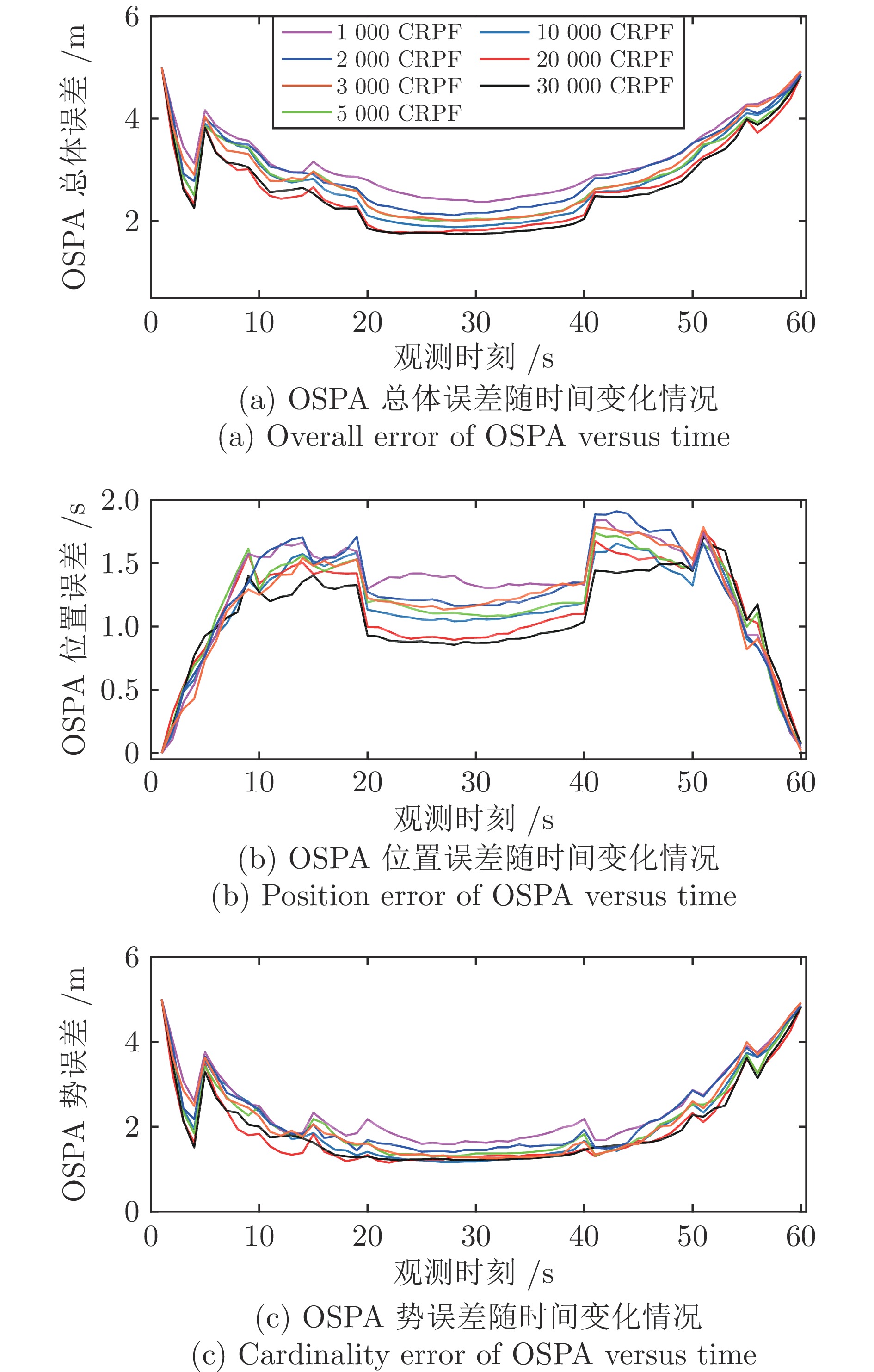
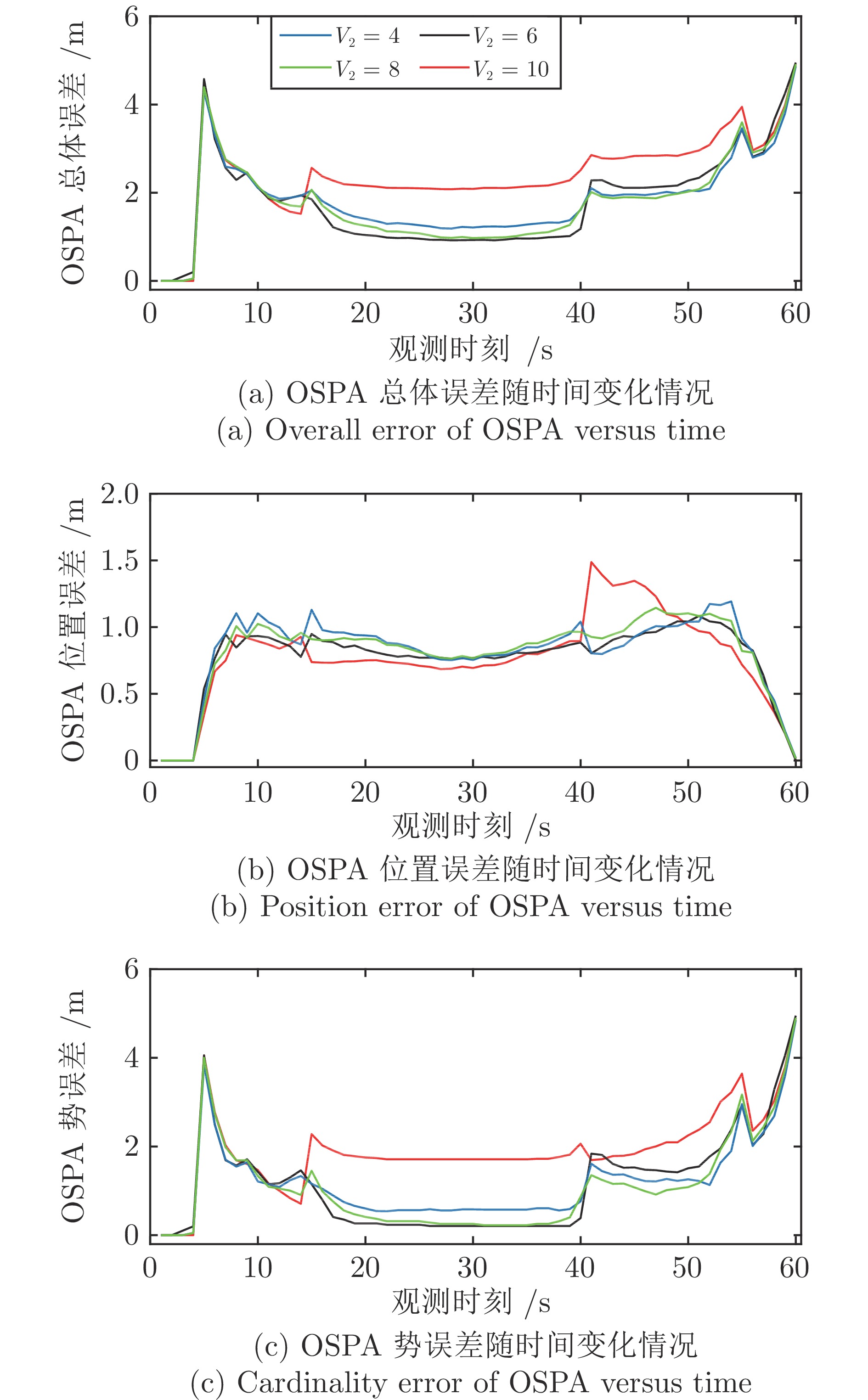
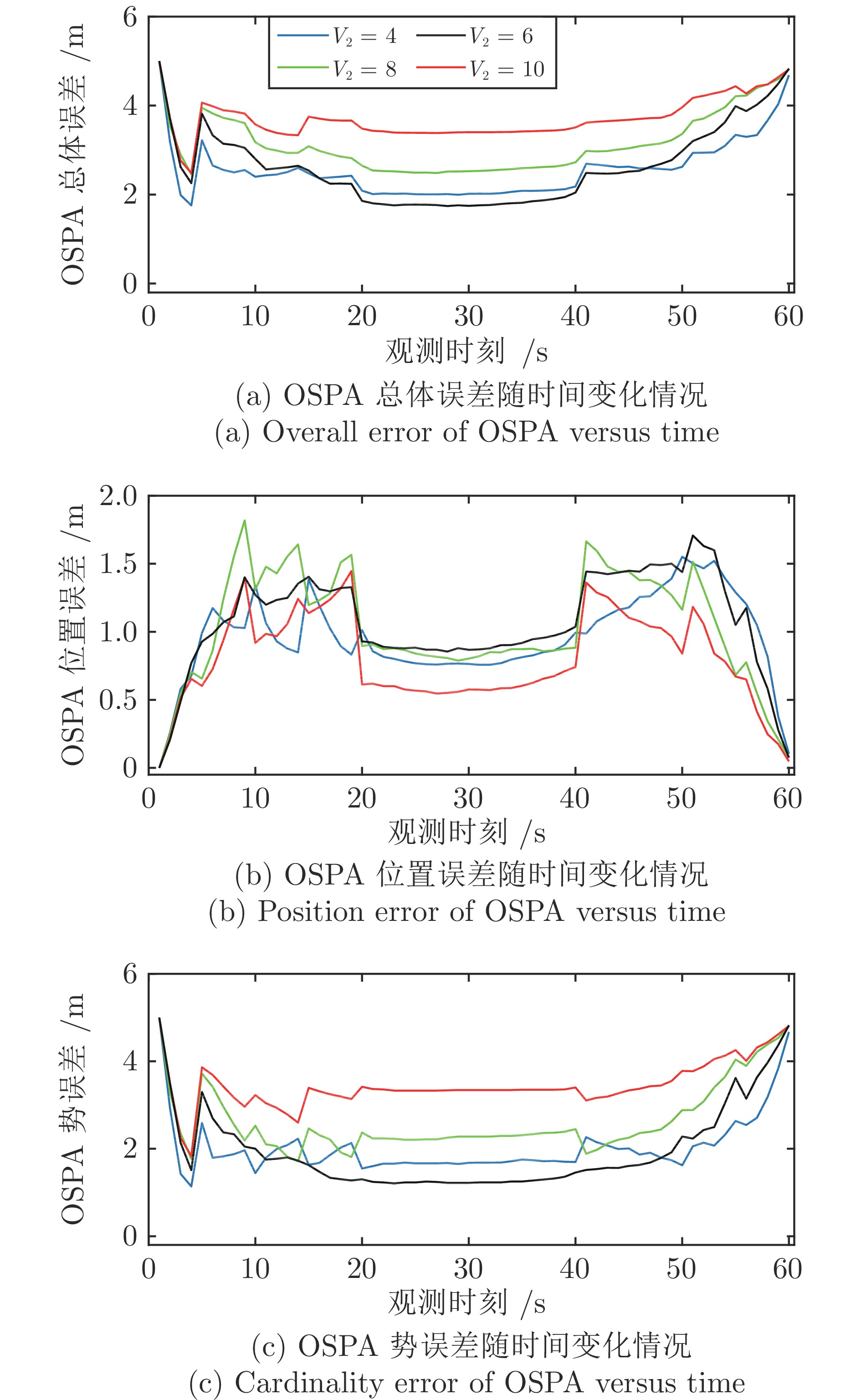
针对图像序列中多目标检测和跟踪算法结构复杂、计算量大、性能降低等问题, 提出一种基于代价参考粒子滤波器组的多目标检测前跟踪(Cost-reference particle filter bank based multi-target track-before-detect, CRPFB-MTBD)算法, 将多目标跟踪问题转换为序贯地检测和跟踪多个单目标的问题. 首先, 采用代价参考粒子滤波器组序贯地估计所有可能单目标状态序列; 其次, 基于所有可能单目标状态序列的欧氏距离和累积代价确定目标数量; 最后, 根据累积代价判断每个目标出现和消失的具体时刻. 仿真实验验证了CRPFB-MTBD的优良性能, 与基于传统粒子滤波的多目标检测前跟踪算法(Particle filter based multi-target track-before-detect, PF-MTBD)、基于概率假设密度的检测前跟踪算法(Probability hypothesis density based track-before-detect, PHD-TBD)和基于伯努利滤波的检测前跟踪算法(Bernoulli based track-before-detect, Bernoulli-TBD) 相比, CRPFB-MTBD的目标状态序列和数量估计结果最佳, 且平均单次运行时间极短.
针对图像序列中多目标检测和跟踪算法结构复杂、计算量大、性能降低等问题, 提出一种基于代价参考粒子滤波器组的多目标检测前跟踪(Cost-reference particle filter bank based multi-target track-before-detect, CRPFB-MTBD)算法, 将多目标跟踪问题转换为序贯地检测和跟踪多个单目标的问题. 首先, 采用代价参考粒子滤波器组序贯地估计所有可能单目标状态序列; 其次, 基于所有可能单目标状态序列的欧氏距离和累积代价确定目标数量; 最后, 根据累积代价判断每个目标出现和消失的具体时刻. 仿真实验验证了CRPFB-MTBD的优良性能, 与基于传统粒子滤波的多目标检测前跟踪算法(Particle filter based multi-target track-before-detect, PF-MTBD)、基于概率假设密度的检测前跟踪算法(Probability hypothesis density based track-before-detect, PHD-TBD)和基于伯努利滤波的检测前跟踪算法(Bernoulli based track-before-detect, Bernoulli-TBD) 相比, CRPFB-MTBD的目标状态序列和数量估计结果最佳, 且平均单次运行时间极短.


2024, 50(4): 862-872.
doi: 10.16383/j.aas.c240088
摘要:
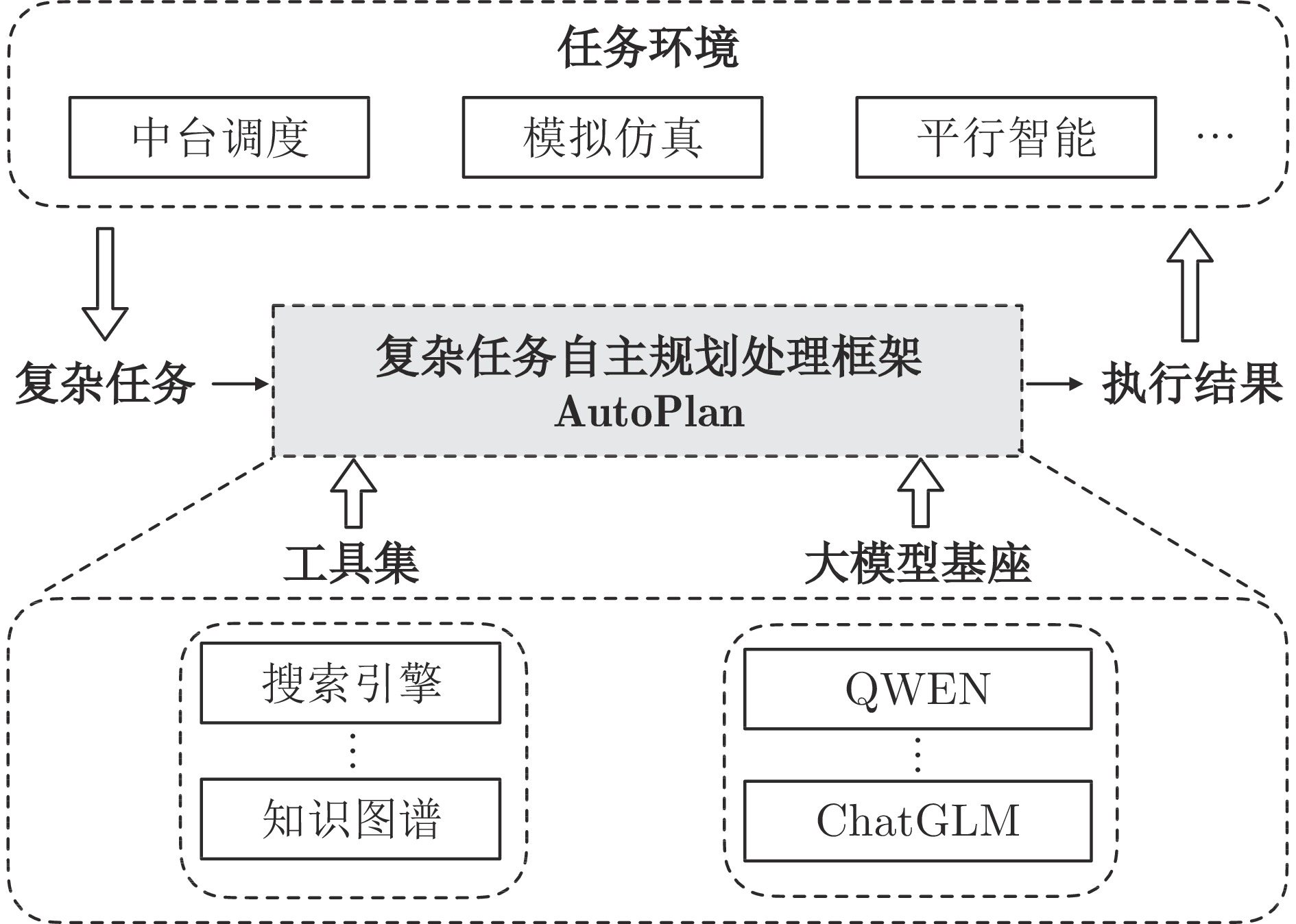
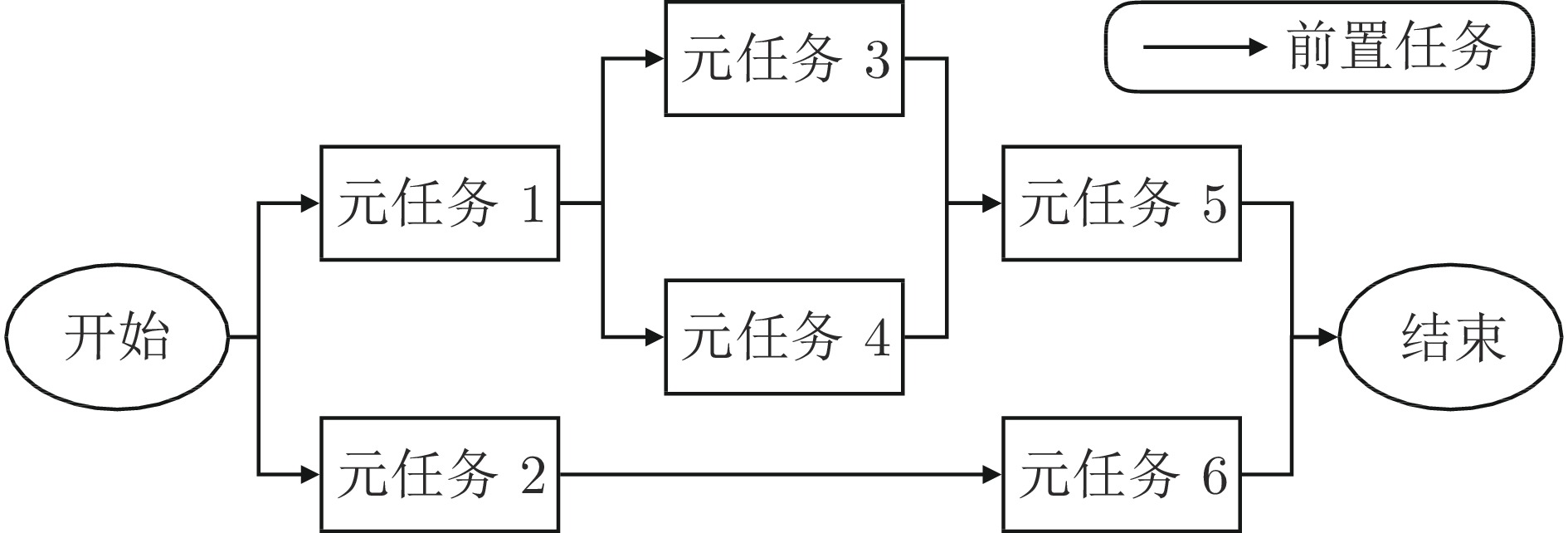
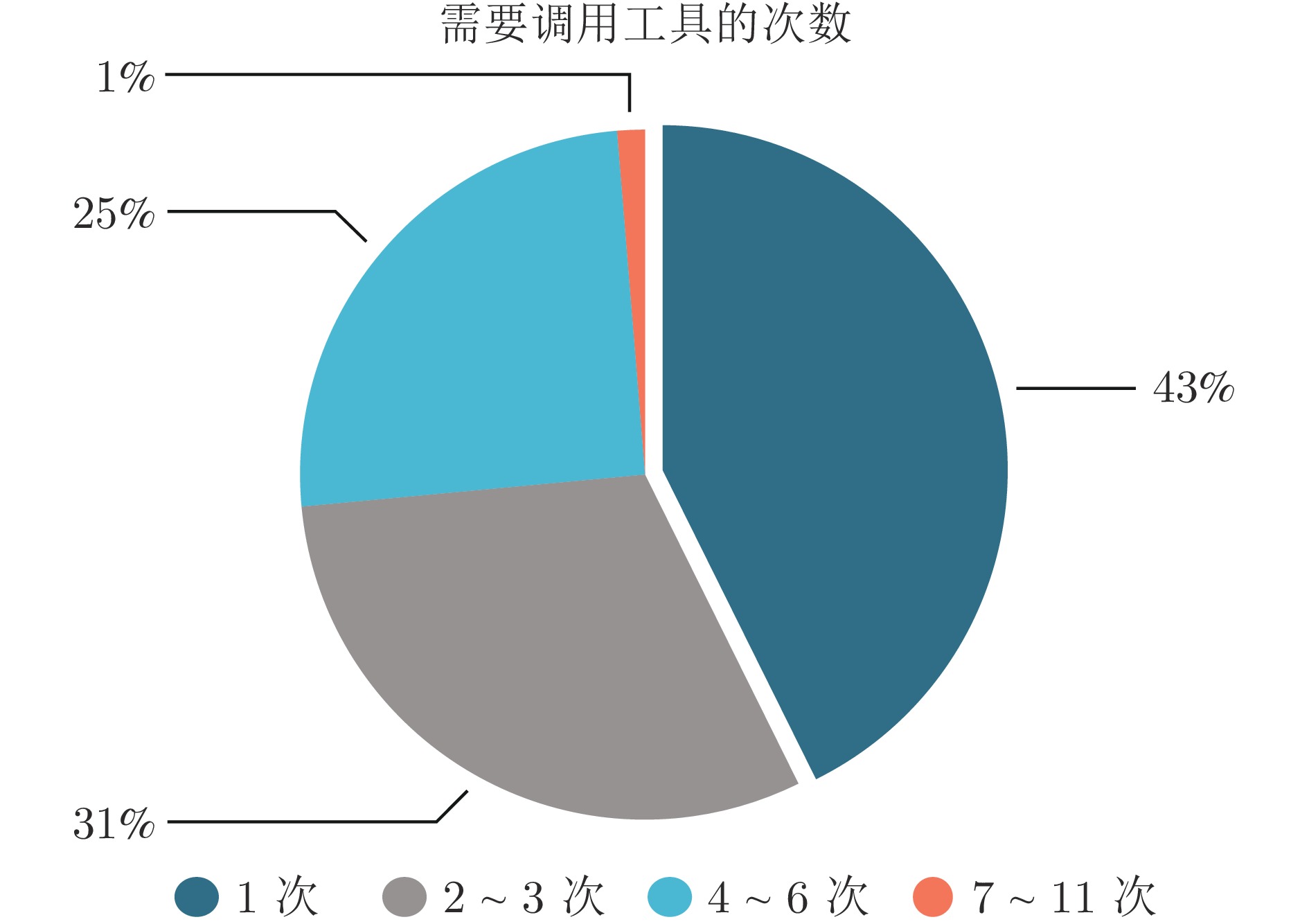
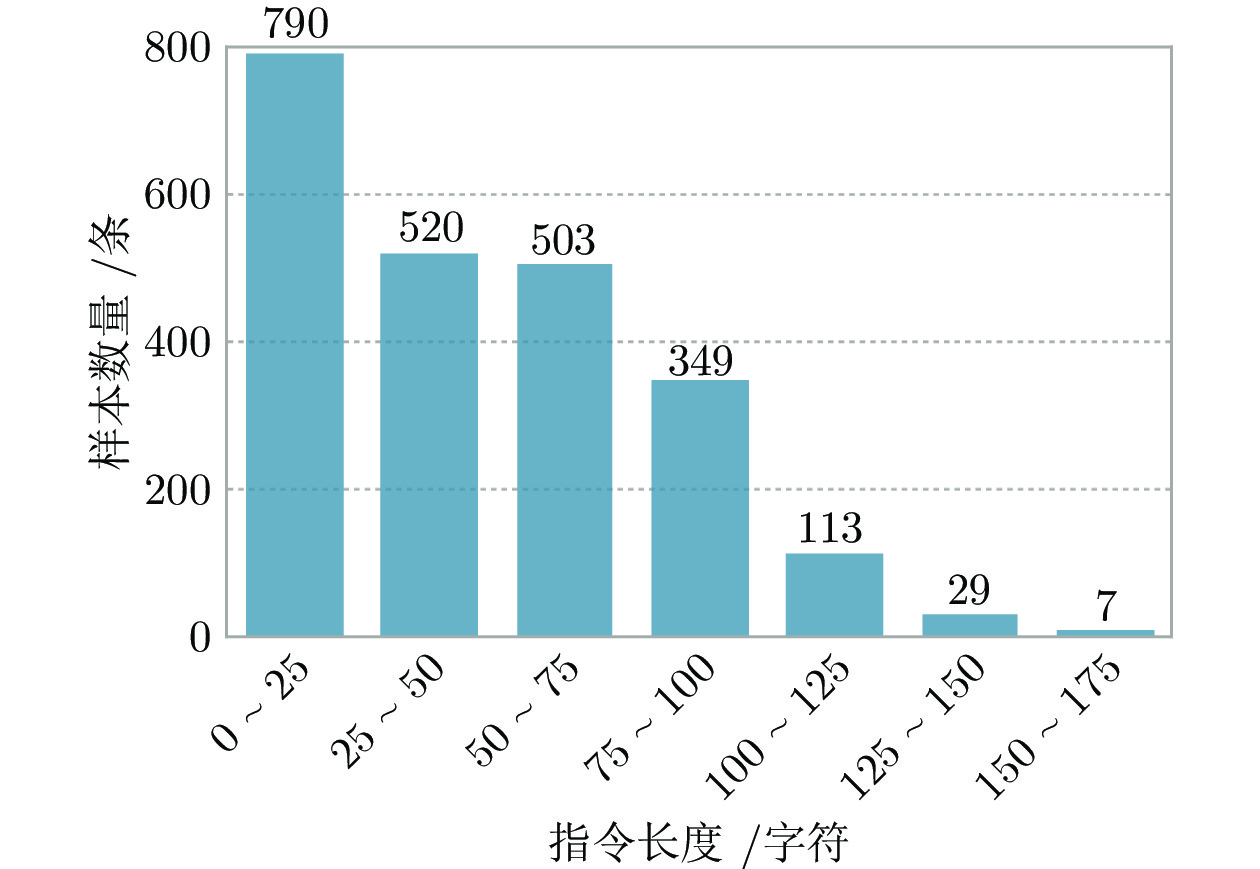
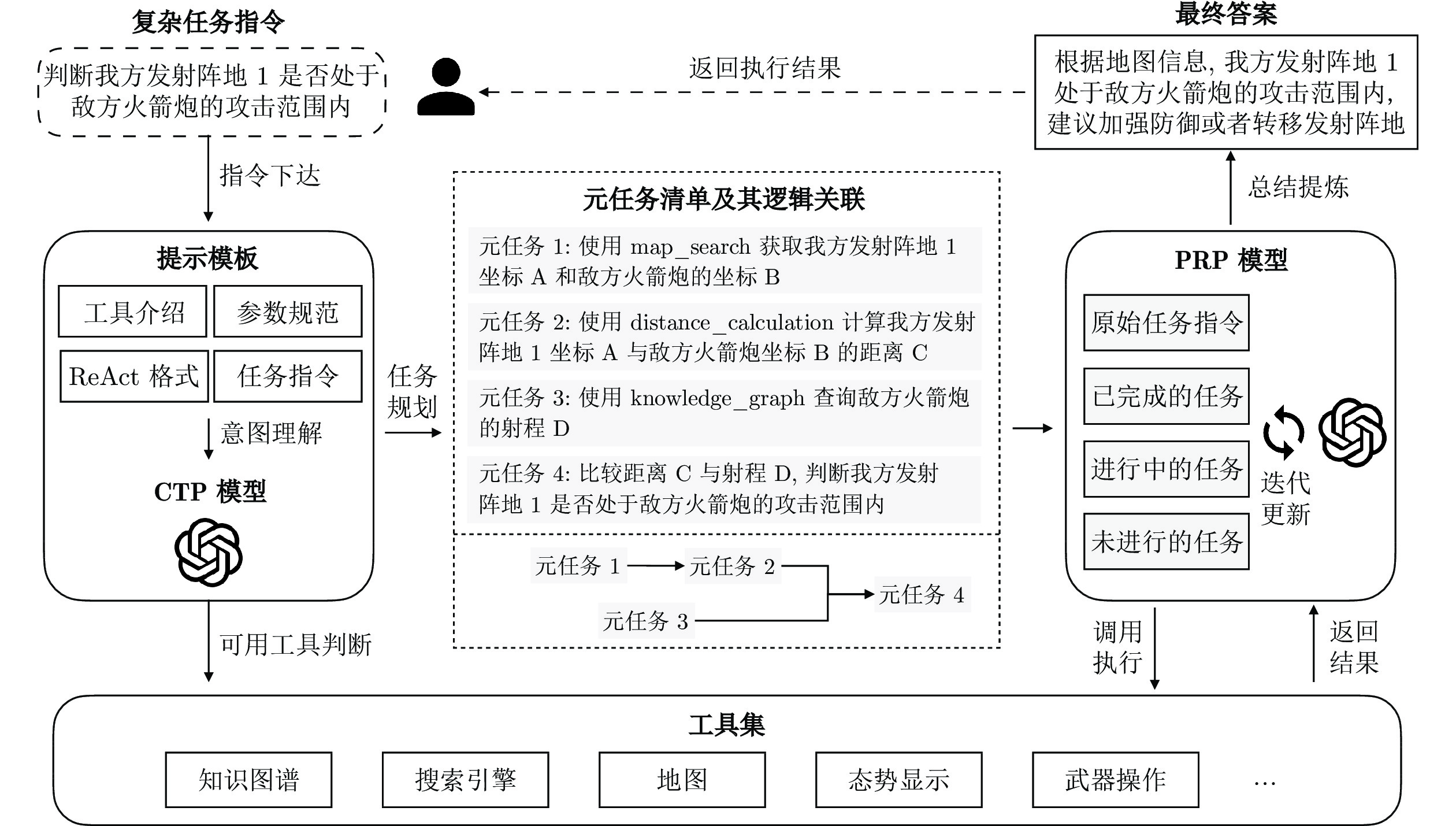
随着深度学习和自然语言处理技术的进步, 大语言模型(Large language models, LLMs)展现出巨大潜力. 尽管如此, 它们在处理复杂任务时仍存在局限性, 特别是在任务需要结合规划及外部工具调用的场合. 面向这一挑战, 提出国内首个以军事游戏为背景的中文的复杂任务规划与执行数据集(Complex task planning and execution dataset, CTPaE), 以及一个基于LLMs的自主复杂任务规划 (Complex task planning, CTP) 处理框架AutoPlan. 该框架可以对复杂任务进行自主规划得到元任务序列, 并使用递进式ReAct提示 (Progressive ReAct prompting,PRP) 方法对已规划的元任务逐步执行. 该框架的有效性通过在CTPaE上的实验及与其他经典算法的比较分析得到了验证. 项目地址:https://github.com/LDLINGLINGLING/AutoPlan .
随着深度学习和自然语言处理技术的进步, 大语言模型(Large language models, LLMs)展现出巨大潜力. 尽管如此, 它们在处理复杂任务时仍存在局限性, 特别是在任务需要结合规划及外部工具调用的场合. 面向这一挑战, 提出国内首个以军事游戏为背景的中文的复杂任务规划与执行数据集(Complex task planning and execution dataset, CTPaE), 以及一个基于LLMs的自主复杂任务规划 (Complex task planning, CTP) 处理框架AutoPlan. 该框架可以对复杂任务进行自主规划得到元任务序列, 并使用递进式ReAct提示 (Progressive ReAct prompting,PRP) 方法对已规划的元任务逐步执行. 该框架的有效性通过在CTPaE上的实验及与其他经典算法的比较分析得到了验证. 项目地址:
本刊经同行评议拟录用的文章,目前在编校阶段,尚未确定卷期及页码,已有DOI。
显示方式:
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230288
摘要:
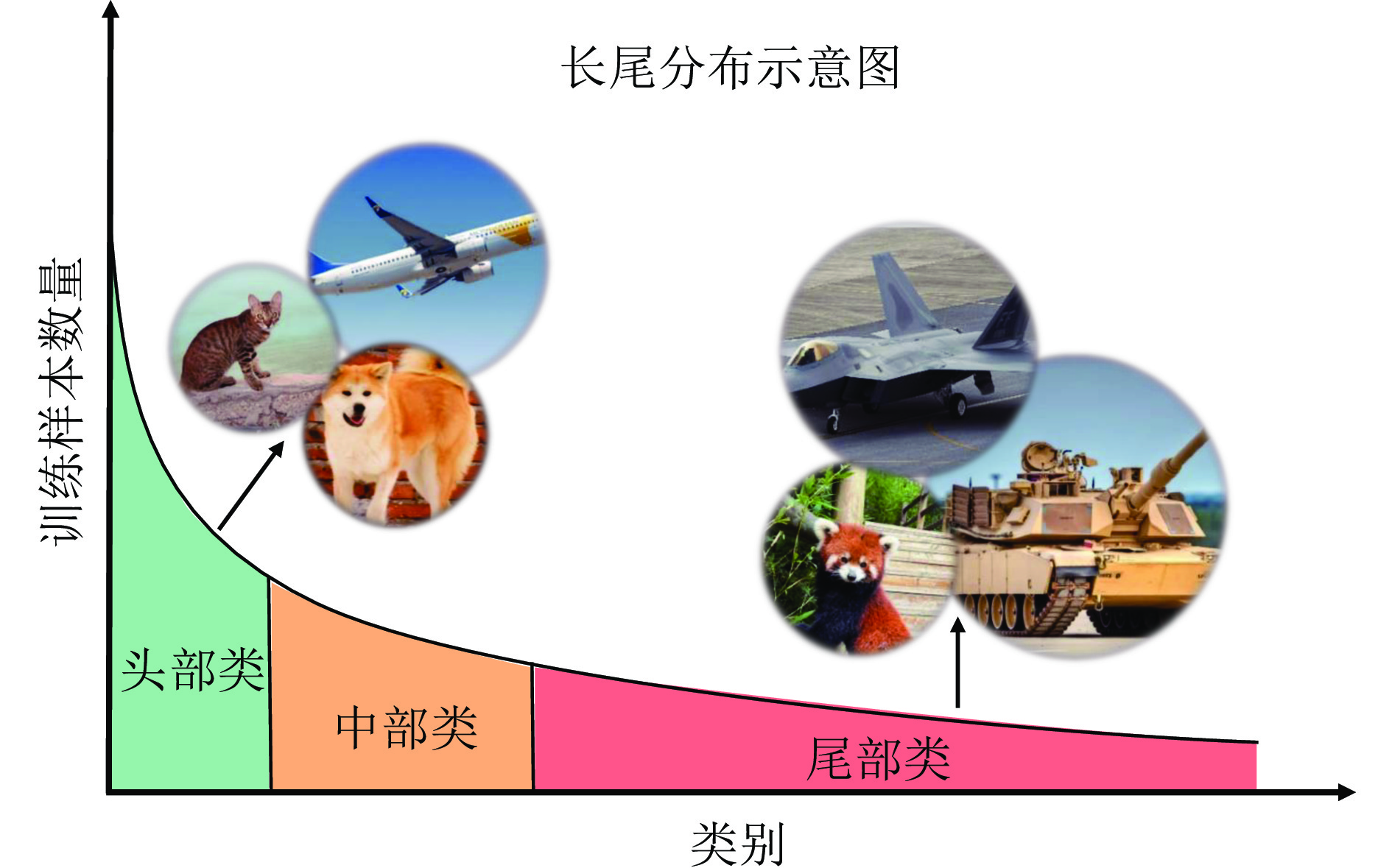
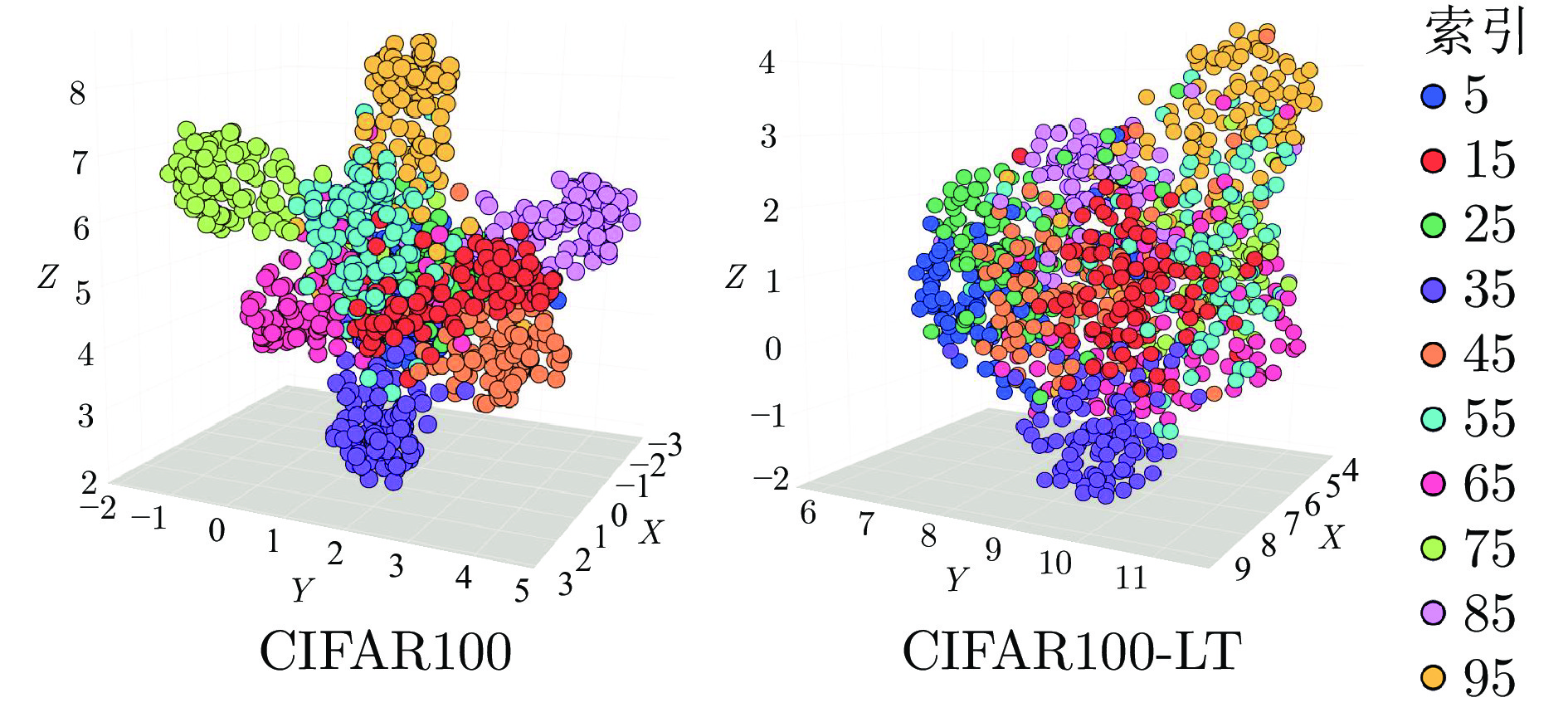
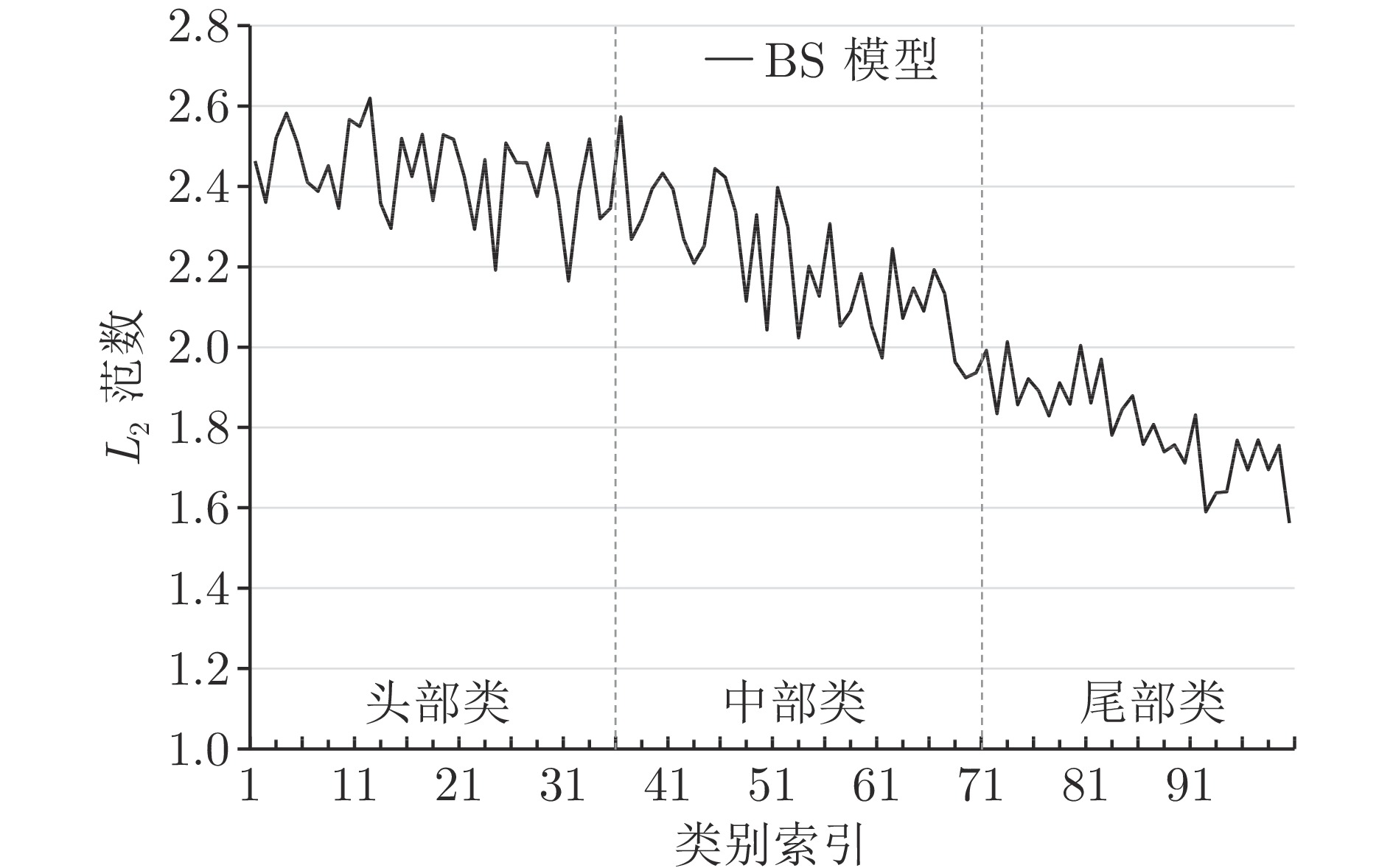
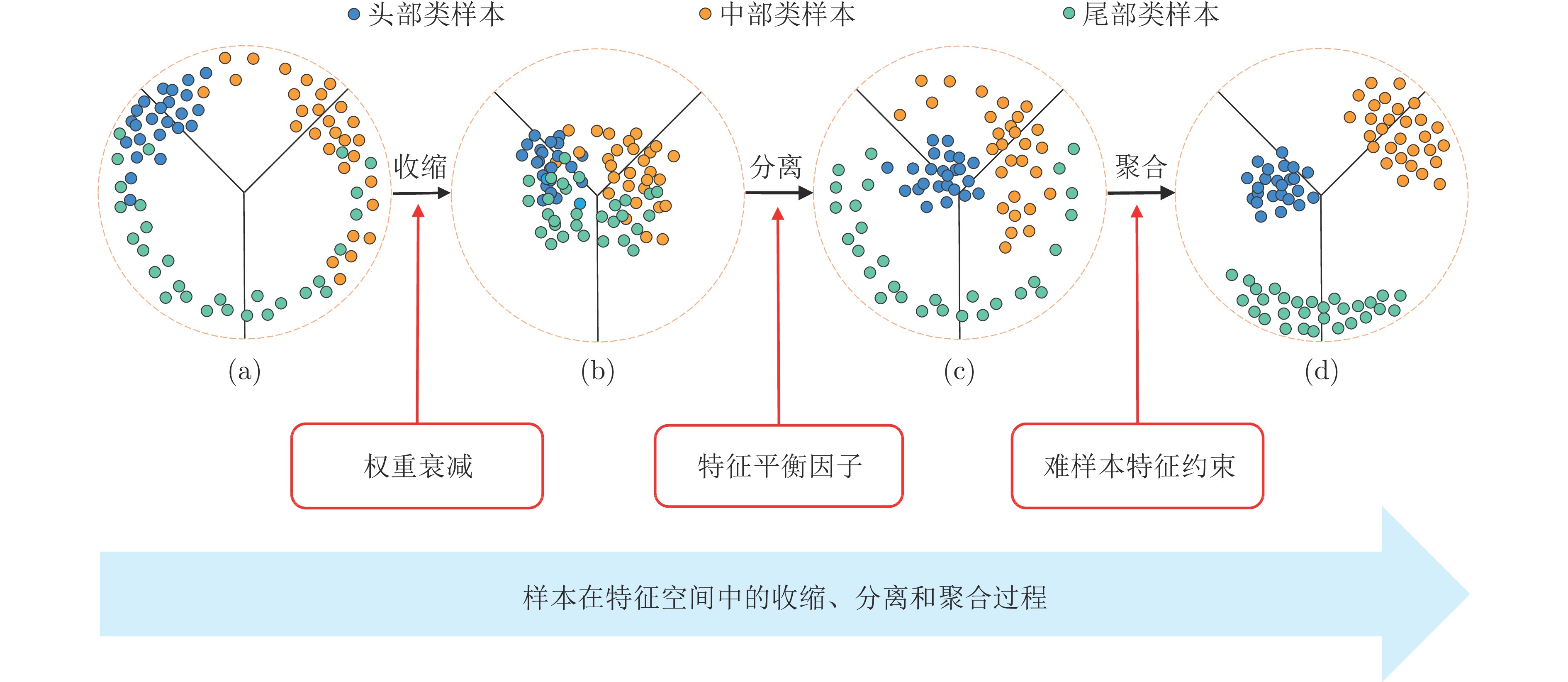
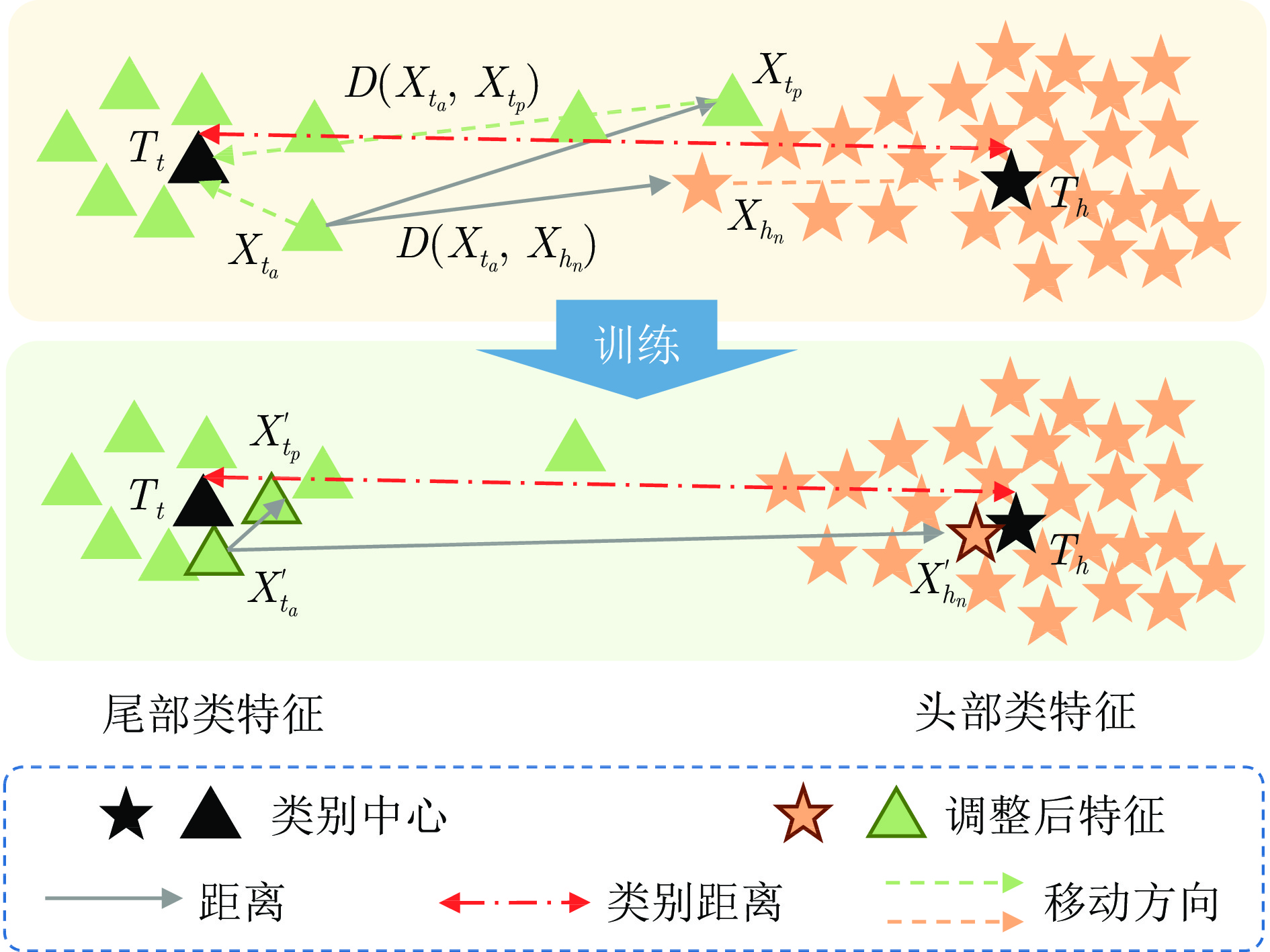
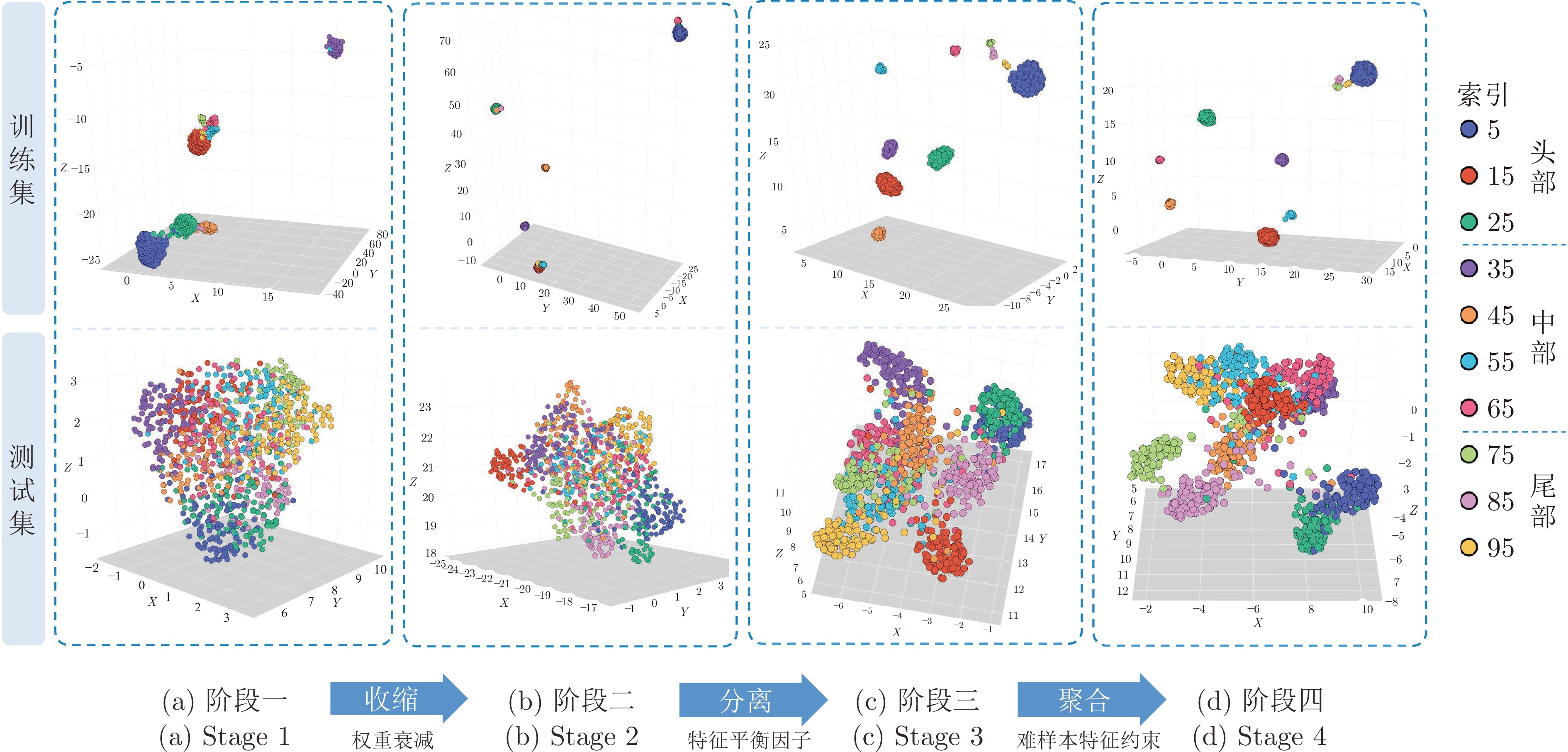
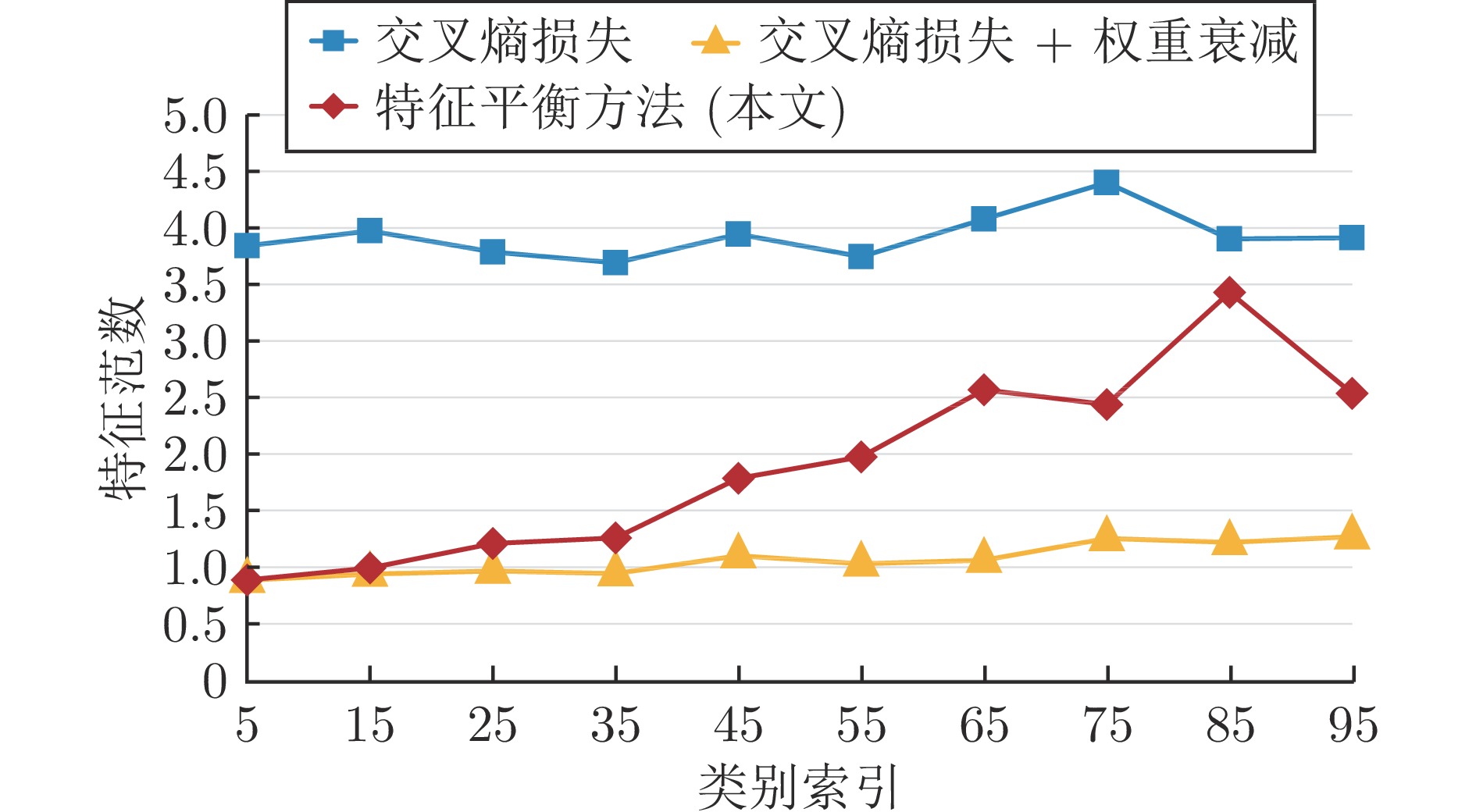
数据在现实世界中通常呈现长尾分布, 即, 少数类别拥有大量样本, 而多数类别仅有少量样本. 这种数据不均衡的情况会导致在该数据集上训练的模型对于样本数量较少的尾部类别产生过拟合. 面对长尾视觉识别这一任务, 提出一种面向长尾视觉识别的特征平衡方法, 通过对样本在特征空间中的收缩、分离和聚合操作, 增强模型对于难样本的识别能力. 该方法主要由特征平衡因子和难样本特征约束两个模块组成. 特征平衡因子利用类样本数量来调整模型的输出概率分布, 使得不同类别之间的特征距离更加均衡, 从而提高模型的分类准确率. 难样本特征约束通过对样本特征进行聚类分析, 增加不同类别之间的边界距离, 使得模型能够找到更合理的决策边界. 该方法在多个常用的长尾基准数据集上进行实验验证, 结果表明不但提高了模型在长尾数据上的整体分类精度, 而且显著提升了尾部类别的识别性能. 与基准方法BS相比较, 该方法在CIFAR100-LT、ImageNet-LT和iNaturalist 2018数据集上的性能分别提升了7.40%、6.60%和2.89%.
数据在现实世界中通常呈现长尾分布, 即, 少数类别拥有大量样本, 而多数类别仅有少量样本. 这种数据不均衡的情况会导致在该数据集上训练的模型对于样本数量较少的尾部类别产生过拟合. 面对长尾视觉识别这一任务, 提出一种面向长尾视觉识别的特征平衡方法, 通过对样本在特征空间中的收缩、分离和聚合操作, 增强模型对于难样本的识别能力. 该方法主要由特征平衡因子和难样本特征约束两个模块组成. 特征平衡因子利用类样本数量来调整模型的输出概率分布, 使得不同类别之间的特征距离更加均衡, 从而提高模型的分类准确率. 难样本特征约束通过对样本特征进行聚类分析, 增加不同类别之间的边界距离, 使得模型能够找到更合理的决策边界. 该方法在多个常用的长尾基准数据集上进行实验验证, 结果表明不但提高了模型在长尾数据上的整体分类精度, 而且显著提升了尾部类别的识别性能. 与基准方法BS相比较, 该方法在CIFAR100-LT、ImageNet-LT和iNaturalist 2018数据集上的性能分别提升了7.40%、6.60%和2.89%.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230585
摘要:
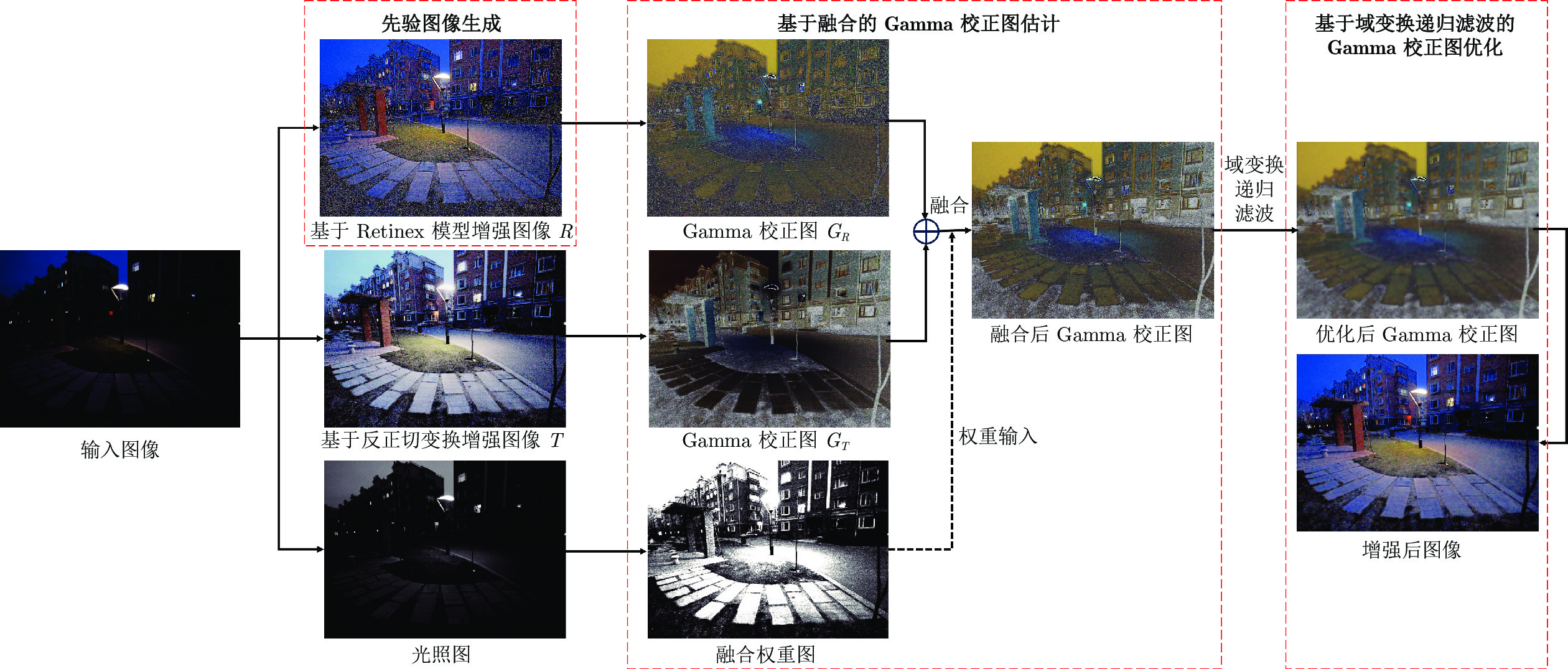
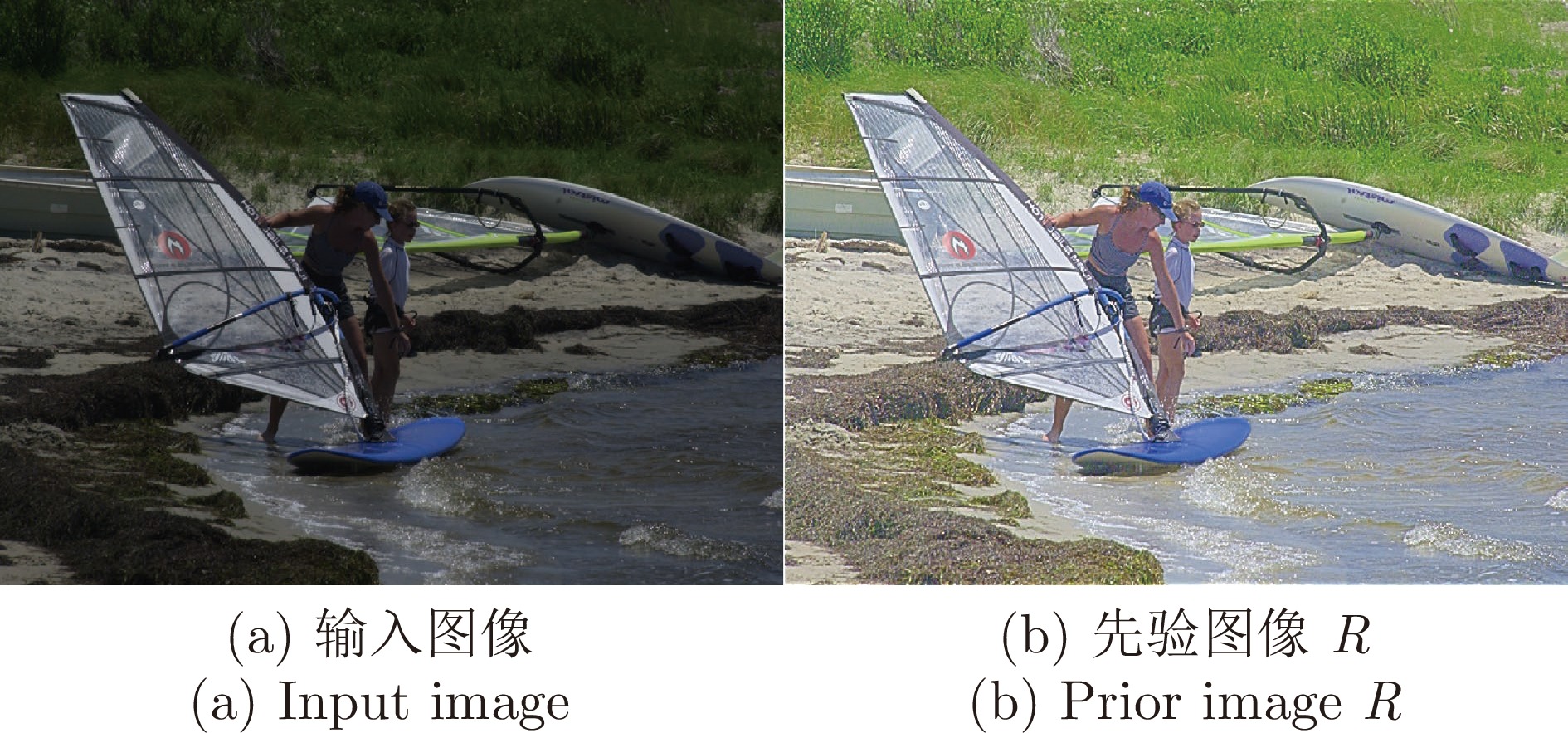
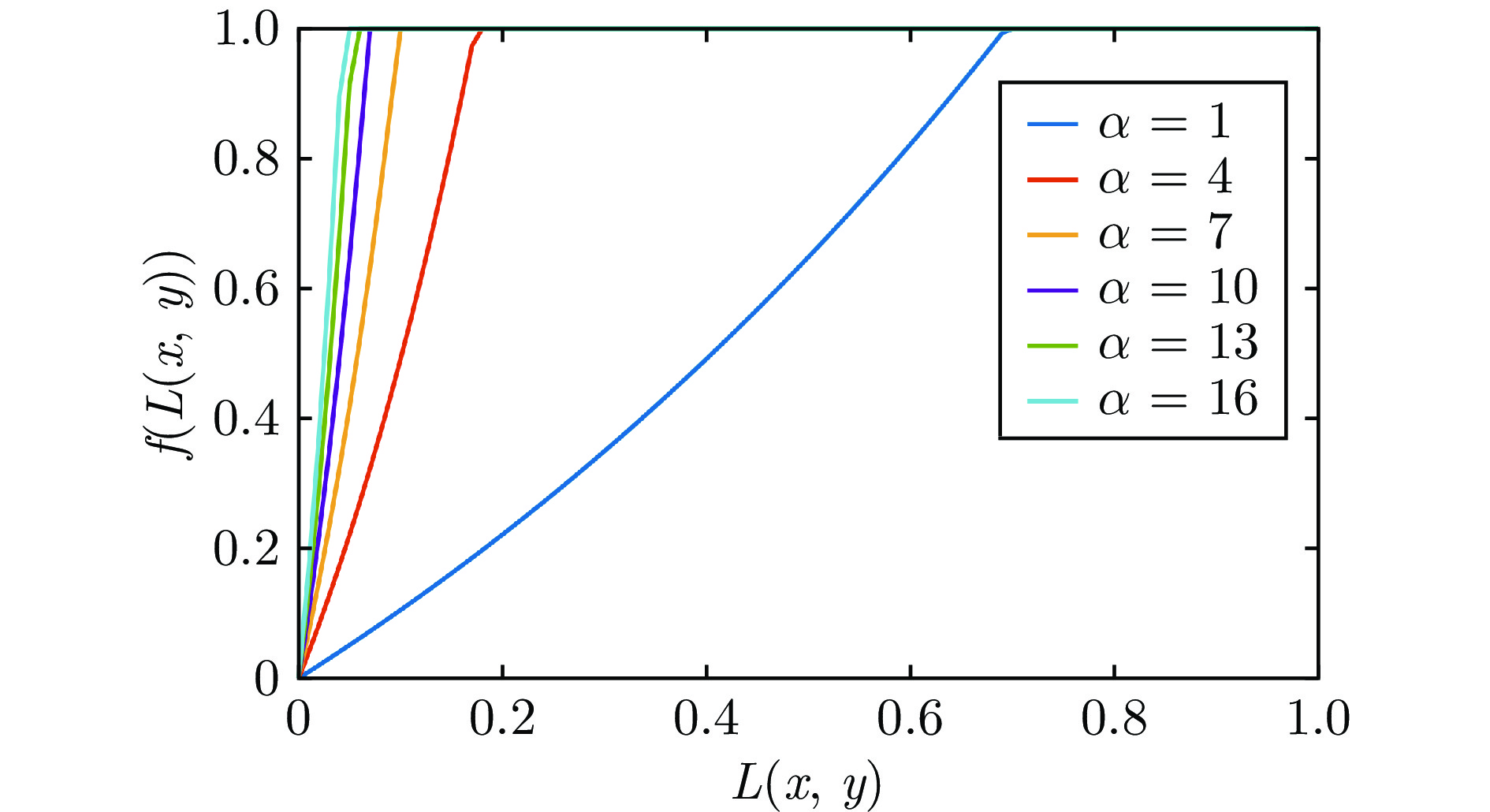
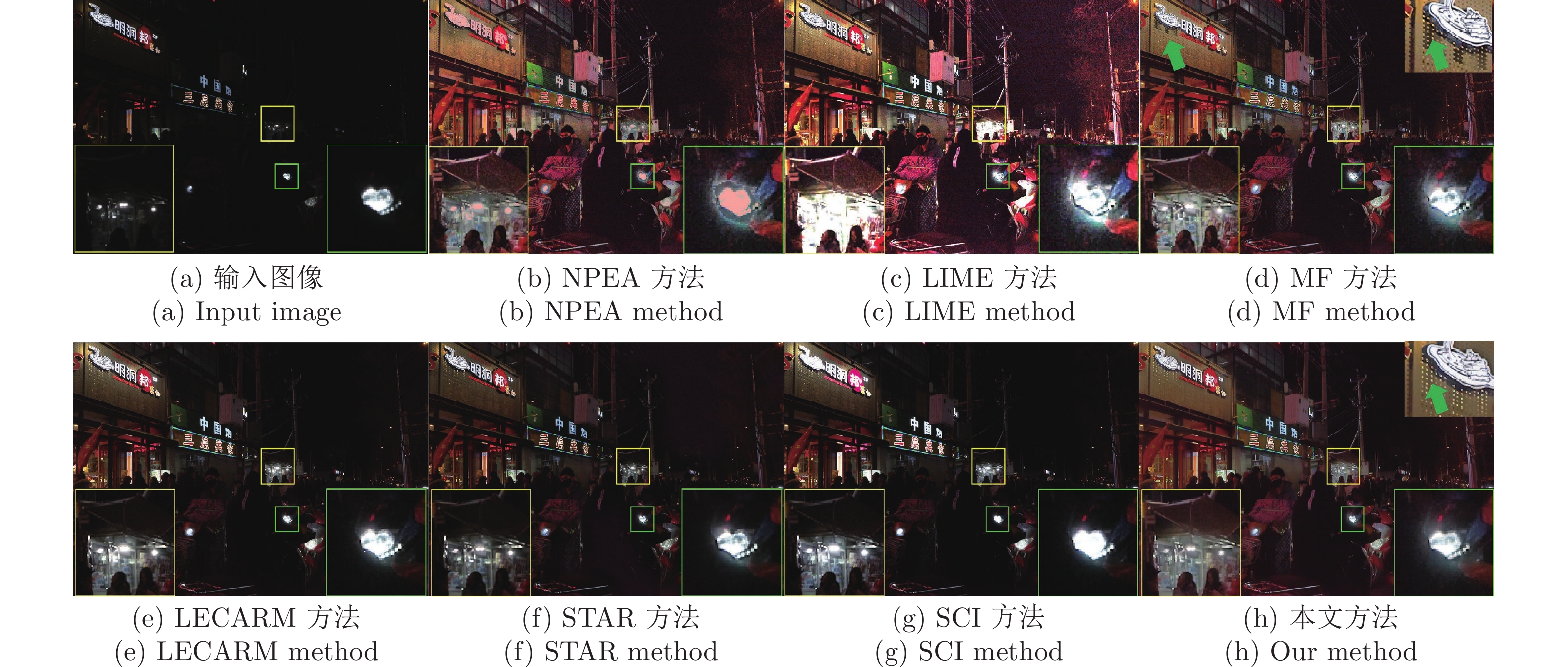
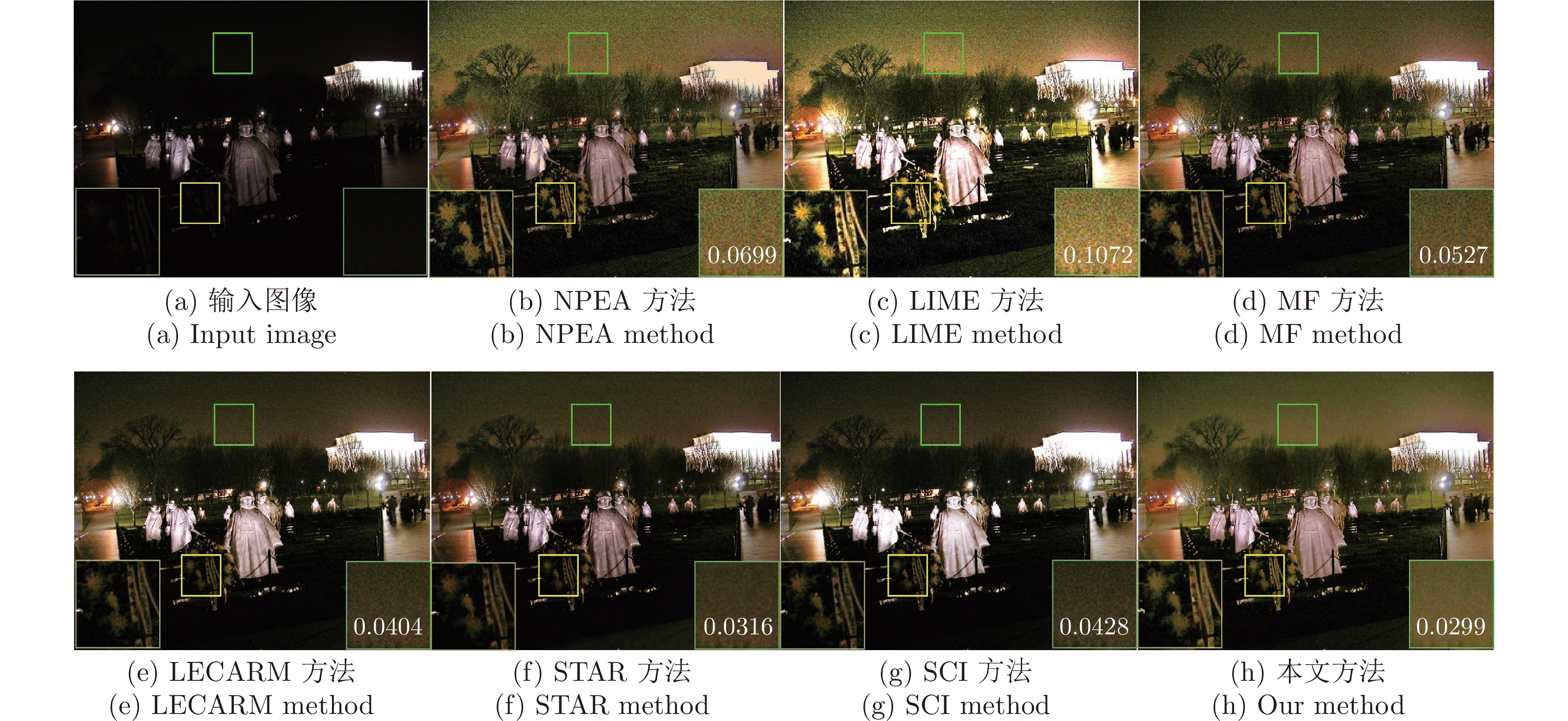
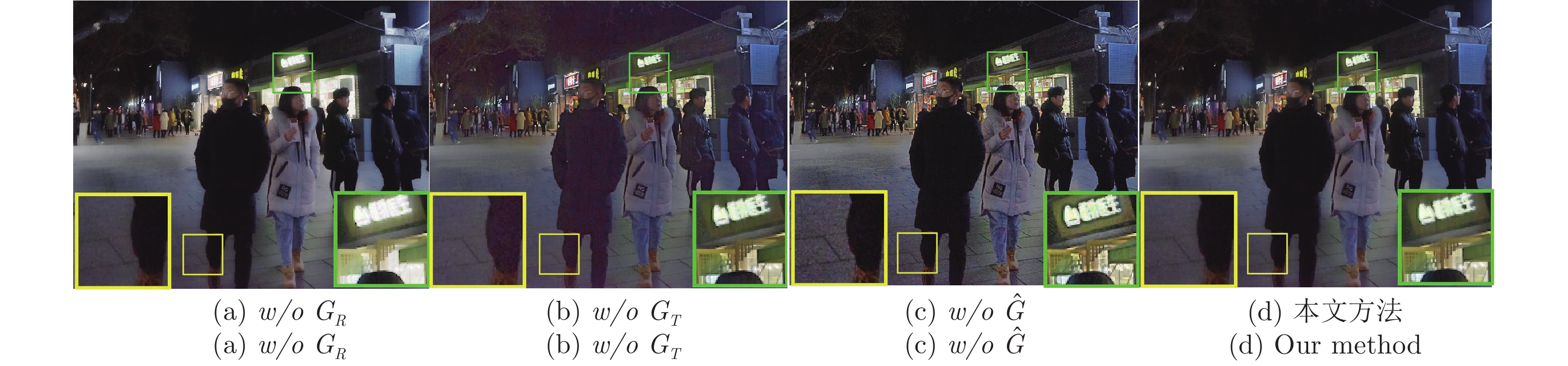
低光照图像增强旨在提高在低光照环境下所采集图像的视觉质量. 然而, 现有的低光照图像增强方法难以在计算效率与增强性能之间达到很好的平衡, 为此, 提出一种基于Retinex先验引导的低光照图像快速增强方法, 将Retinex模型与Gamma校正相结合, 快速输出具有对比度高、视觉效果好和低噪声的图像. 为获取具有良好光照的图像以引导确定与输入图像尺寸大小一致的Gamma校正图, 提出基于Retinex模型的先验图像生成方法. 针对所提先验图像生成方法在极低光照区域中存在颜色失真的问题, 提出一种基于融合的Gamma校正图估计方法, 采用反正切变换恢复极低光照区域的颜色和对比度, 以提升Gamma校正图在极低光照区域的增强性能. 为抑制输出图像的噪声, 考虑到完全平滑的Gamma校正图不会平滑细节纹理的特点, 提出基于域变换递归滤波的Gamma校正图优化方法, 降低输出图像噪声的同时保持颜色和对比度. 实验结果表明, 所提方法不仅在主客观图像质量评价上优于现有大多数主流算法, 而且在计算效率上具有十分显著的优势.
低光照图像增强旨在提高在低光照环境下所采集图像的视觉质量. 然而, 现有的低光照图像增强方法难以在计算效率与增强性能之间达到很好的平衡, 为此, 提出一种基于Retinex先验引导的低光照图像快速增强方法, 将Retinex模型与Gamma校正相结合, 快速输出具有对比度高、视觉效果好和低噪声的图像. 为获取具有良好光照的图像以引导确定与输入图像尺寸大小一致的Gamma校正图, 提出基于Retinex模型的先验图像生成方法. 针对所提先验图像生成方法在极低光照区域中存在颜色失真的问题, 提出一种基于融合的Gamma校正图估计方法, 采用反正切变换恢复极低光照区域的颜色和对比度, 以提升Gamma校正图在极低光照区域的增强性能. 为抑制输出图像的噪声, 考虑到完全平滑的Gamma校正图不会平滑细节纹理的特点, 提出基于域变换递归滤波的Gamma校正图优化方法, 降低输出图像噪声的同时保持颜色和对比度. 实验结果表明, 所提方法不仅在主客观图像质量评价上优于现有大多数主流算法, 而且在计算效率上具有十分显著的优势.




当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230460
摘要:
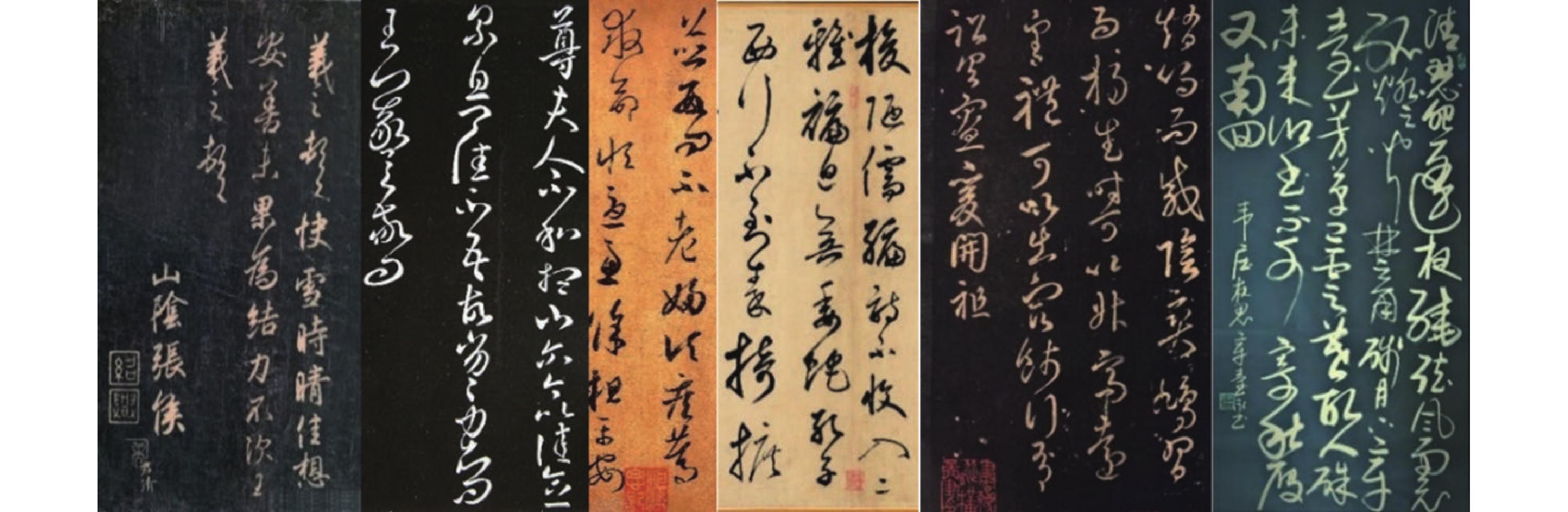
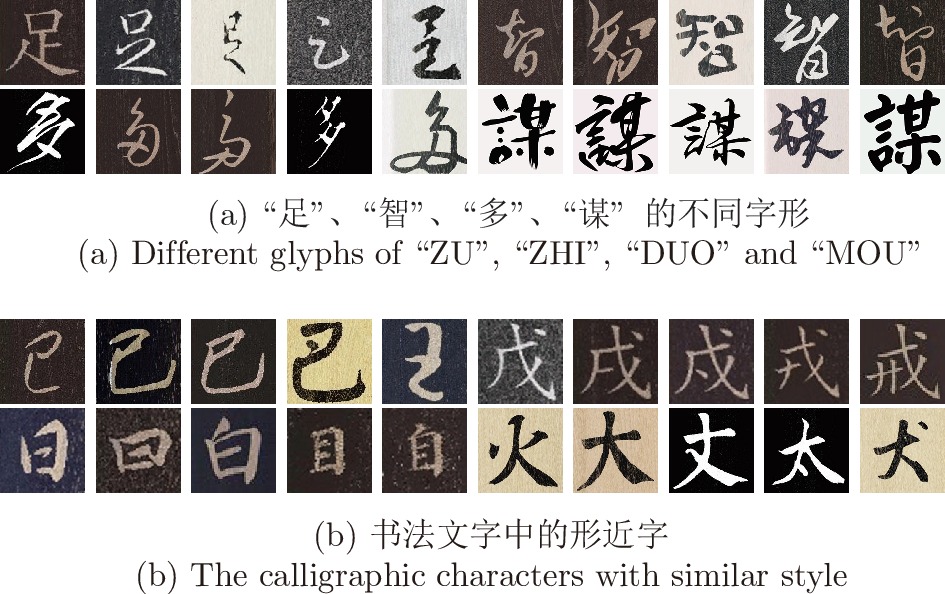
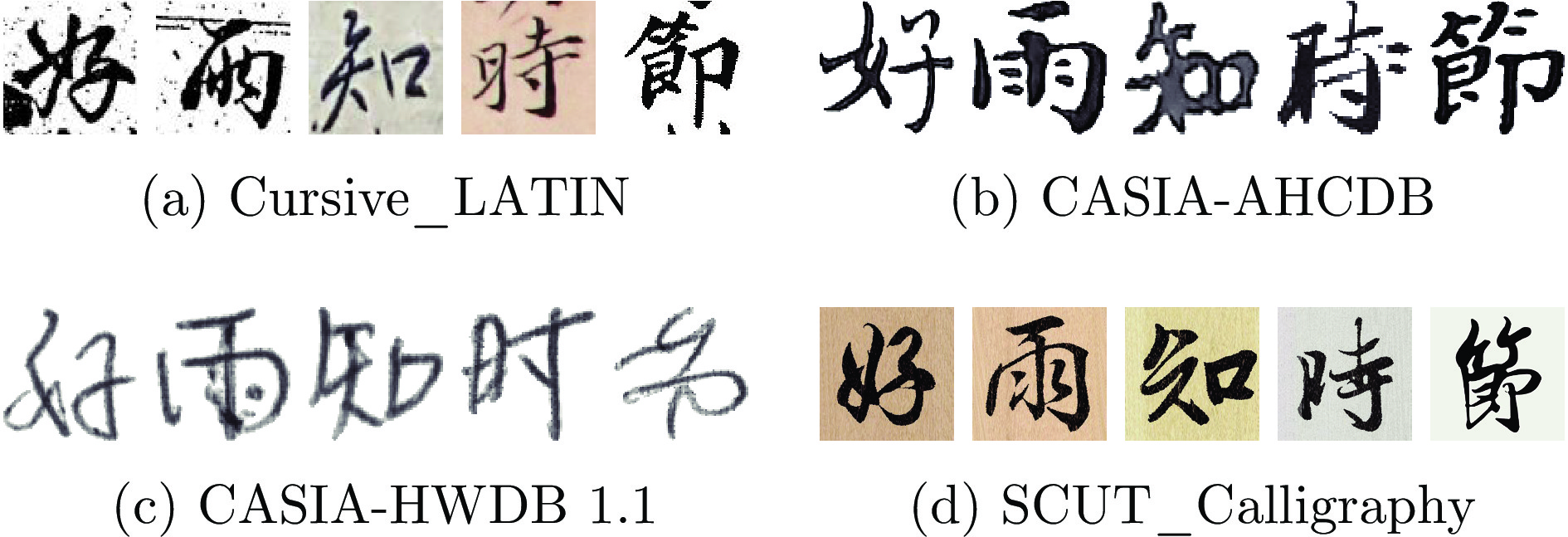
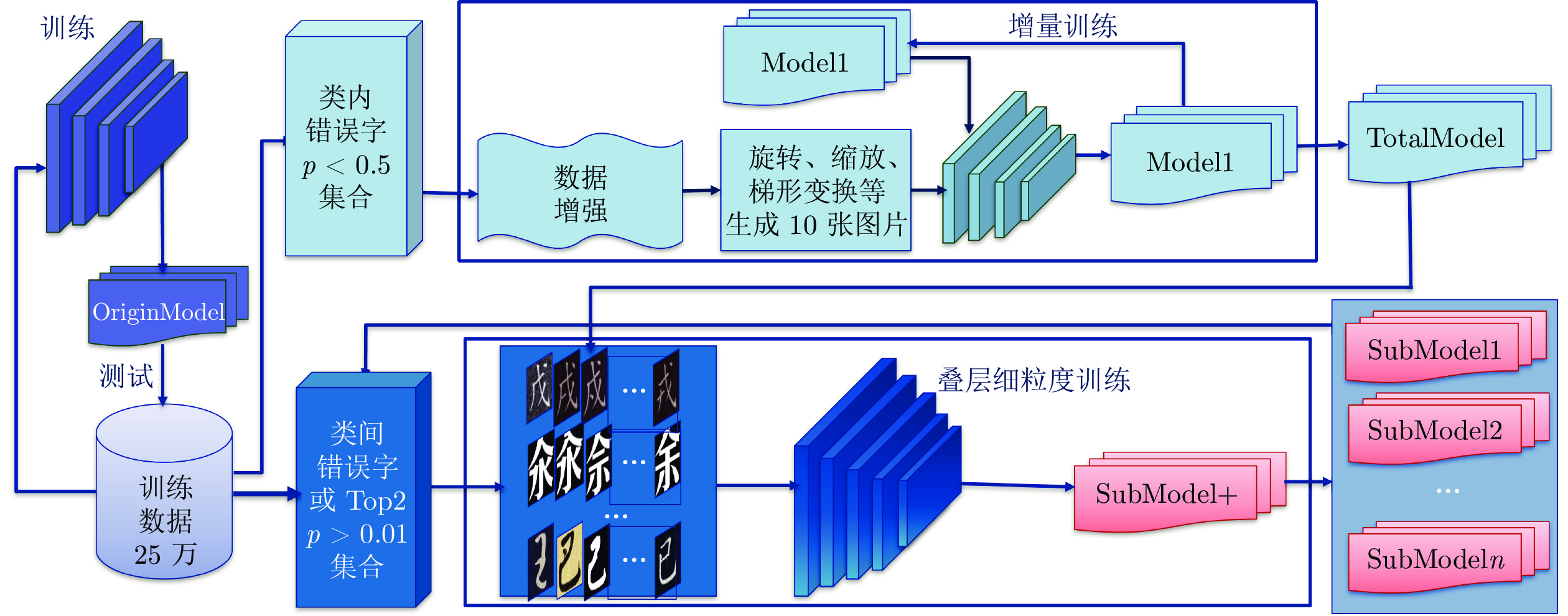
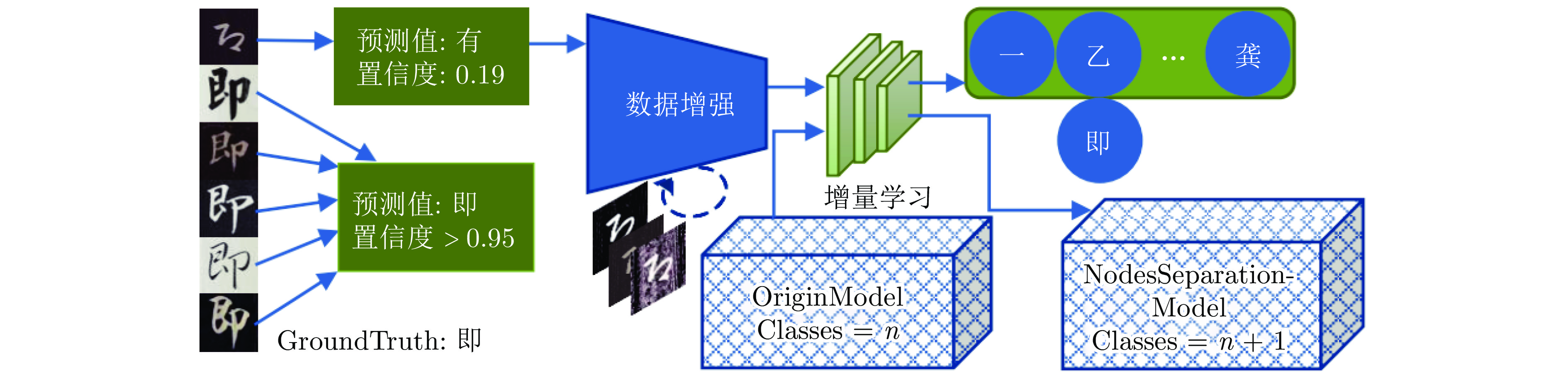
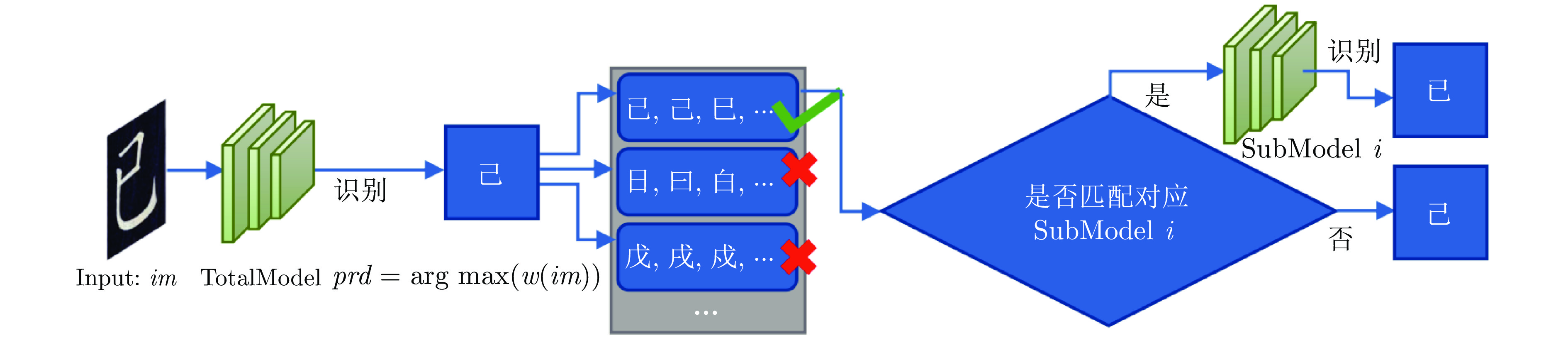
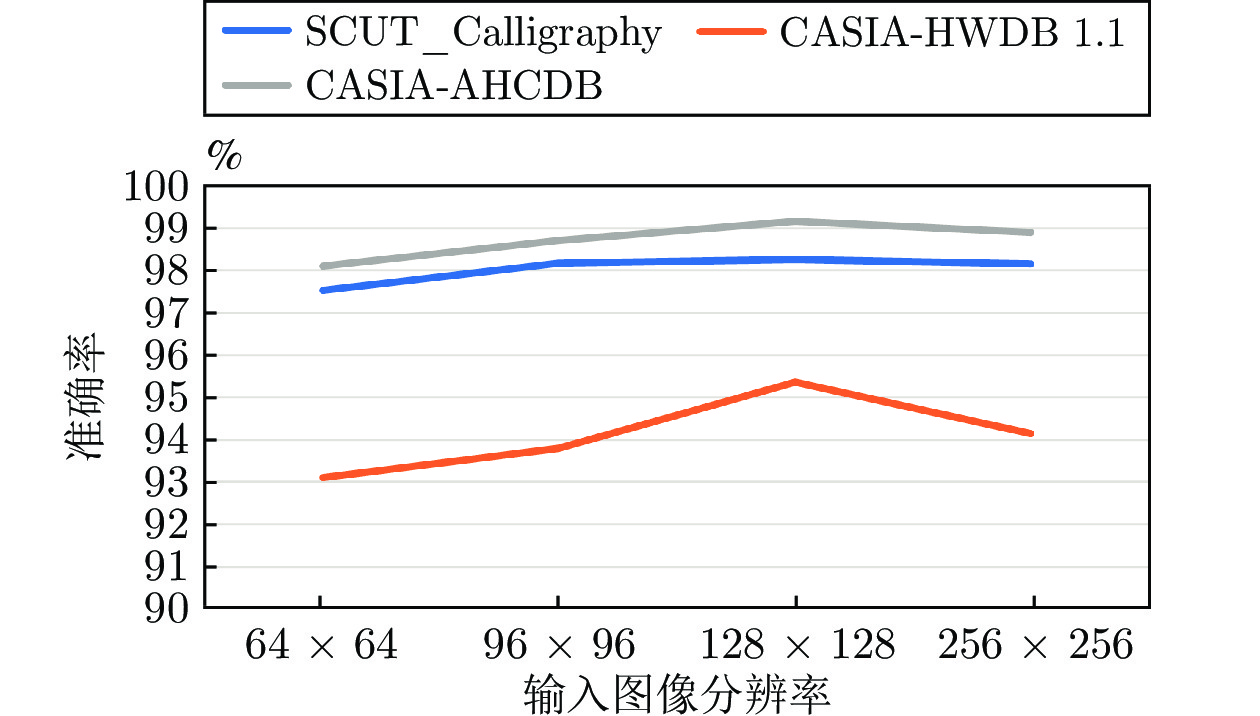
基于二维图像的书法文字识别是指利用计算机视觉技术对书法文字单字图像进行识别, 在古籍研究和文化传播中具有重要应用. 目前书法文字识别技术已经取得了相当不错的进展, 但依旧面临很多挑战, 比如复杂多变的字形可能导致的识别误差, 汉字本身又存在较多形近字, 且汉字字符类别数与其他语言文字相比更多, 书法文字图像普遍存在类内差距大、类间差距小的问题. 为解决这些问题, 提出叠层模型驱动的书法文字识别方法(Stacked-model driven character recognition, SDCR), 通过使用数据预处理、节点分离策略和叠层模型对现有单一分类模型进行改进, 按照字体类别对同一类别不同字体风格的文字进行二次划分; 针对类间差距小的问题, 根据书法文字训练集图像识别置信度对形近字进行子集划分, 针对子集进行嵌套模型增强训练, 在测试阶段利用叠层模型对形近字进行二次识别, 提升形近字的识别准确率. 为了验证该方法的鲁棒性, 在自主生成的SCUT_Calligraphy数据集和CASIA-HWDB 1.1, CASIA-AHCDB公开数据集上进行训练和测试, 实验结果表明该方法在上述数据集的识别准确率均有较大幅度提升, 在CASIA-HWDB 1.1、CASIA-AHCDB和自建数据集SCUT_Calligraphy上测试准确率分别达到96.33%、99.51%和99.90%, 证明了该方法的有效性.
基于二维图像的书法文字识别是指利用计算机视觉技术对书法文字单字图像进行识别, 在古籍研究和文化传播中具有重要应用. 目前书法文字识别技术已经取得了相当不错的进展, 但依旧面临很多挑战, 比如复杂多变的字形可能导致的识别误差, 汉字本身又存在较多形近字, 且汉字字符类别数与其他语言文字相比更多, 书法文字图像普遍存在类内差距大、类间差距小的问题. 为解决这些问题, 提出叠层模型驱动的书法文字识别方法(Stacked-model driven character recognition, SDCR), 通过使用数据预处理、节点分离策略和叠层模型对现有单一分类模型进行改进, 按照字体类别对同一类别不同字体风格的文字进行二次划分; 针对类间差距小的问题, 根据书法文字训练集图像识别置信度对形近字进行子集划分, 针对子集进行嵌套模型增强训练, 在测试阶段利用叠层模型对形近字进行二次识别, 提升形近字的识别准确率. 为了验证该方法的鲁棒性, 在自主生成的SCUT_Calligraphy数据集和CASIA-HWDB 1.1, CASIA-AHCDB公开数据集上进行训练和测试, 实验结果表明该方法在上述数据集的识别准确率均有较大幅度提升, 在CASIA-HWDB 1.1、CASIA-AHCDB和自建数据集SCUT_Calligraphy上测试准确率分别达到96.33%、99.51%和99.90%, 证明了该方法的有效性.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220988
摘要:
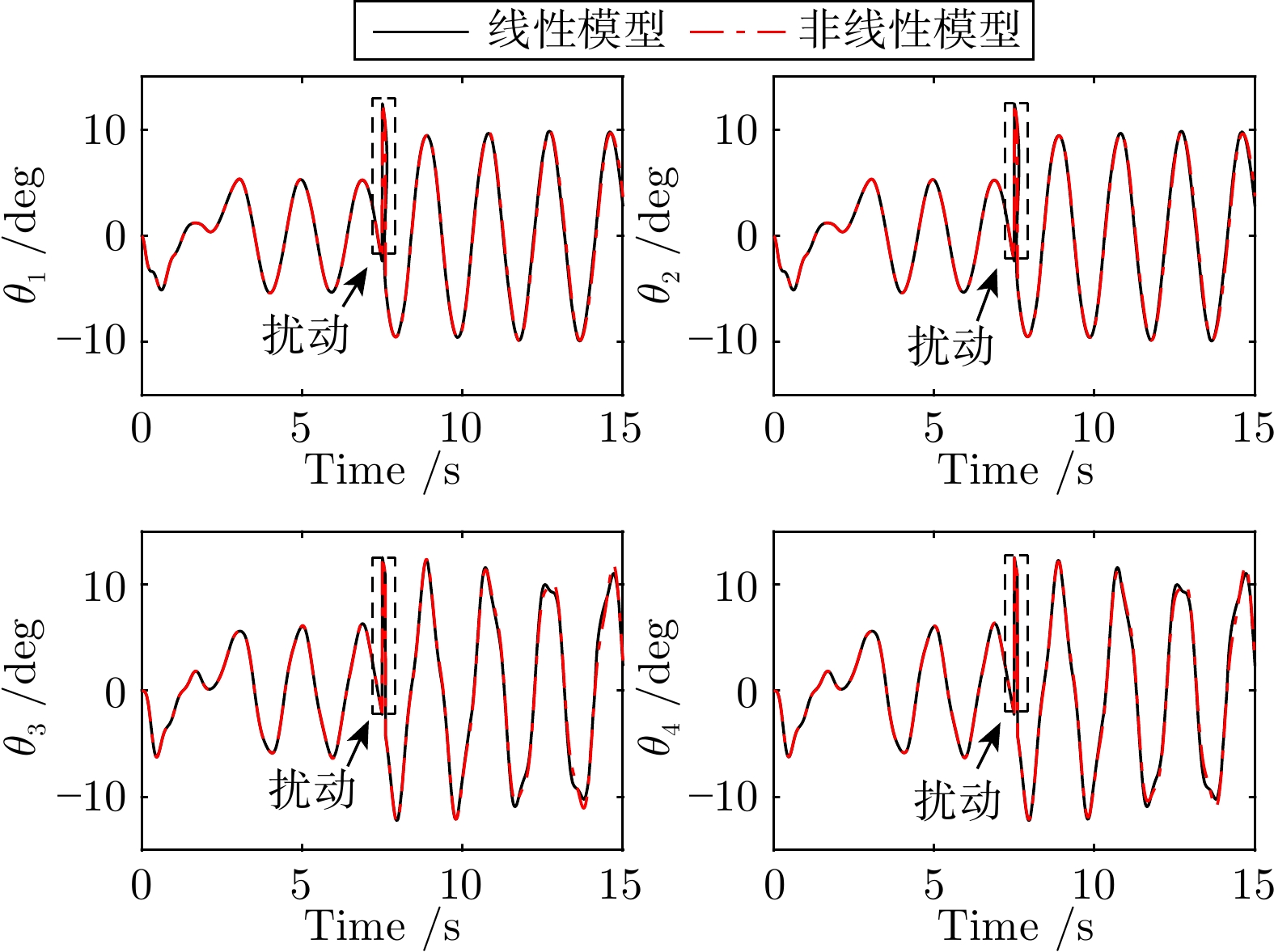
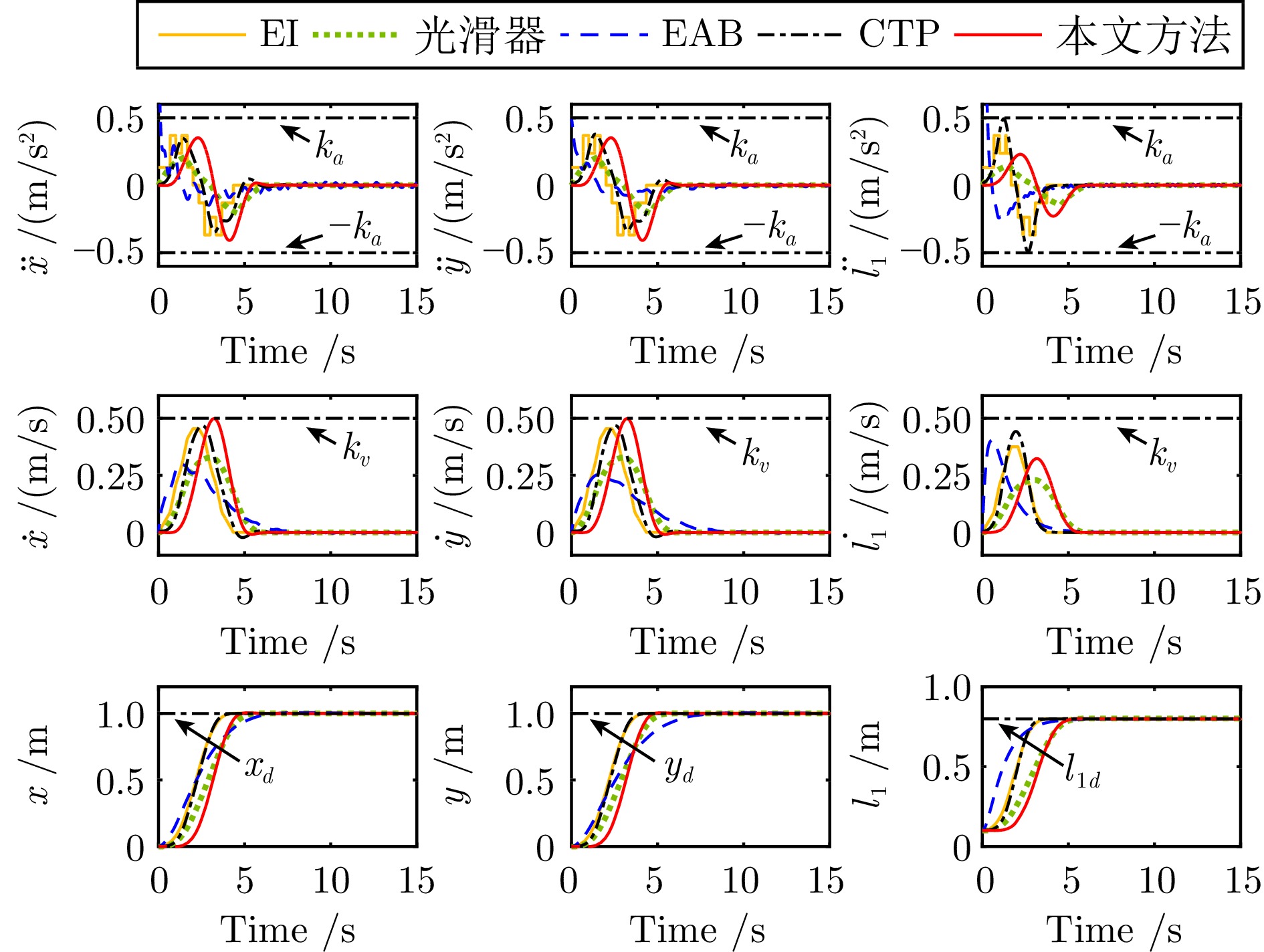
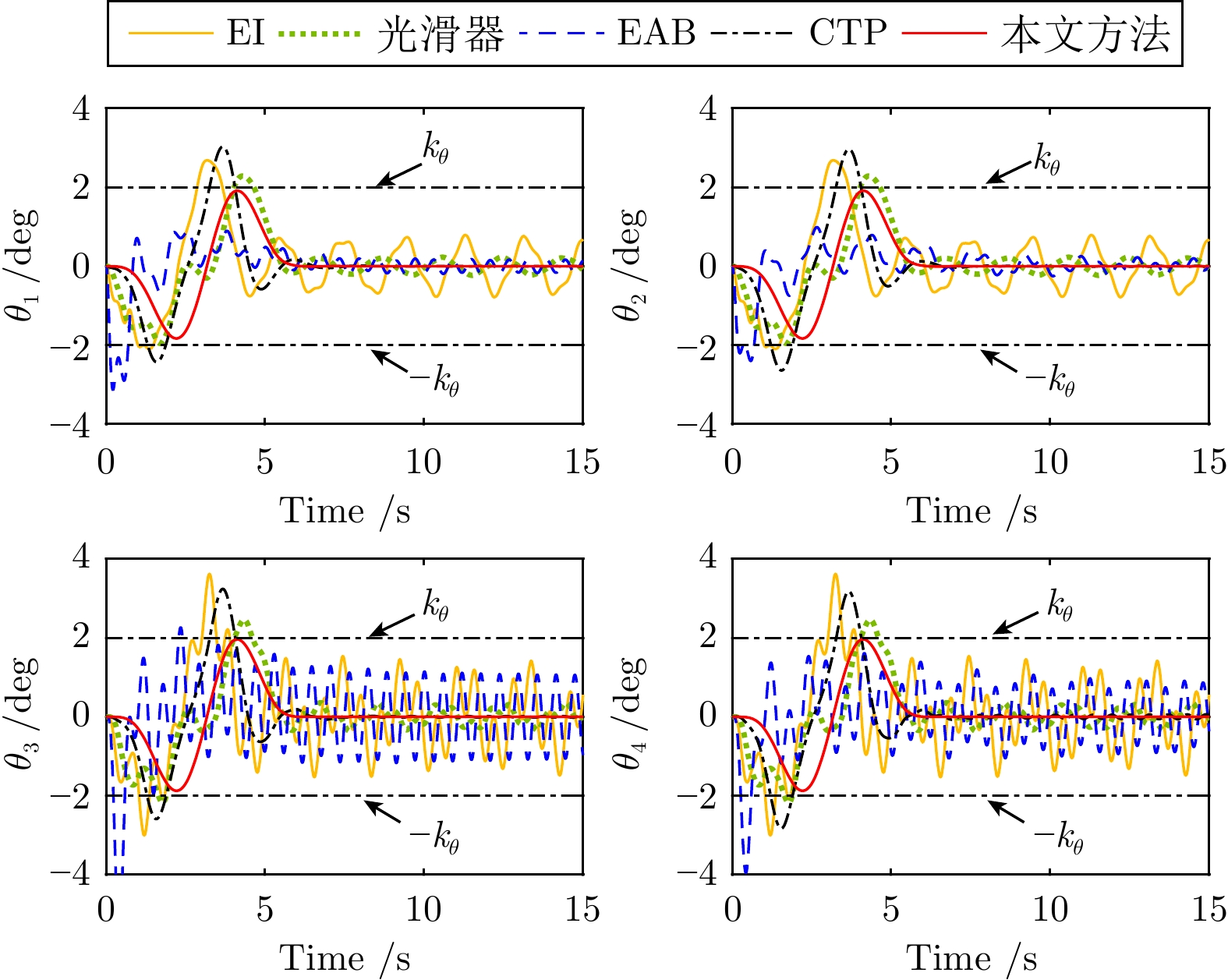
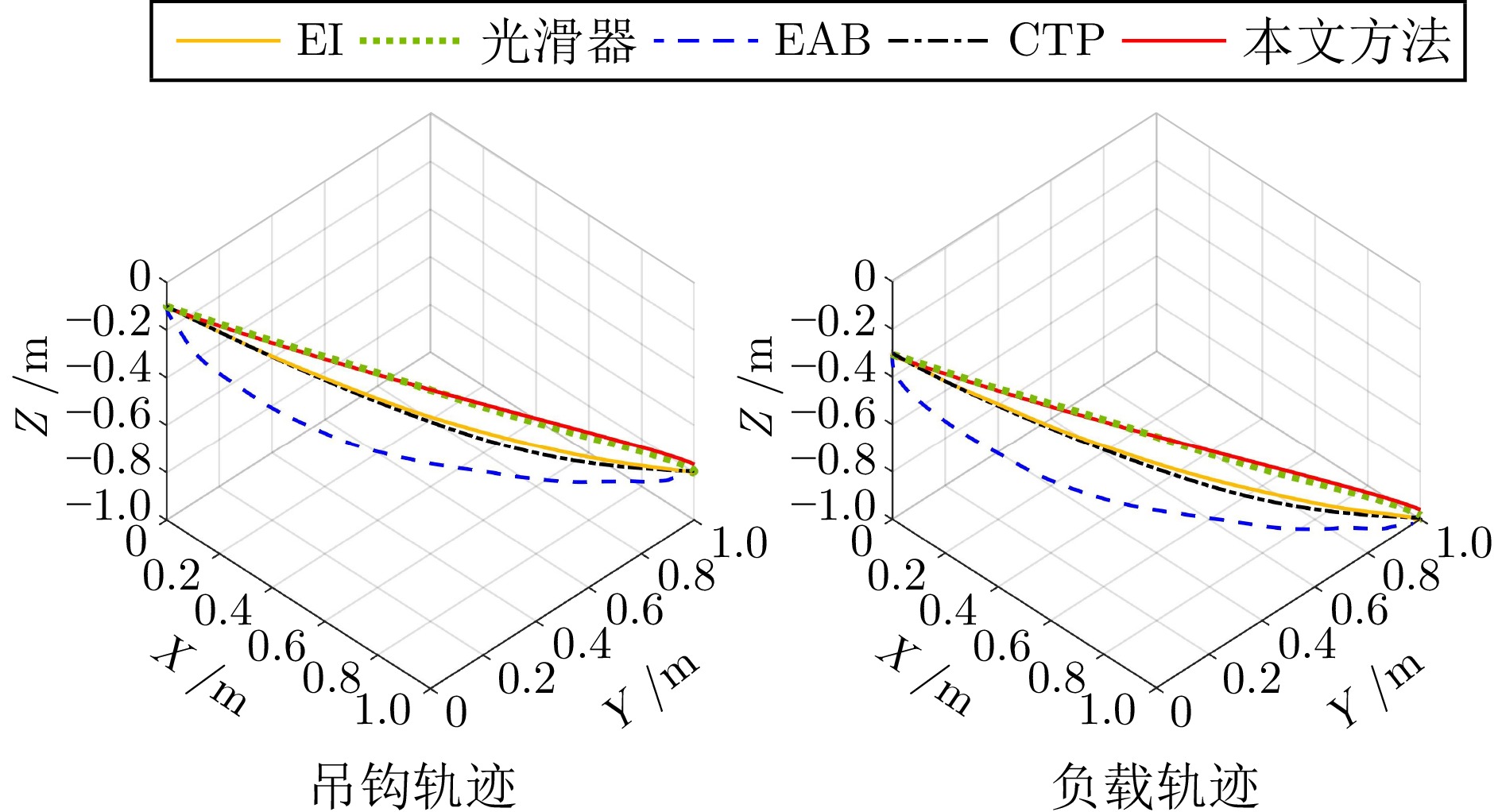
带有双球面摆和变绳长效应的桥式起重机具有多输入多输出以及欠驱动的动力学特性, 目前仍缺乏有效的控制策略. 在台车移动、桥架移动、负载升降同步作业过程中, 吊钩和负载两级球面摆动特性更为复杂, 各状态量之间的非线性耦合关系更强, 桥式起重机的防摆控制更具挑战性. 不仅如此, 现有方法无法保证桥式起重机系统全状态量的暂态控制性能. 为解决上述问题, 提出一种基于多项式的优化轨迹规划方法. 首先, 在未进行近似简化的前提下, 使用拉格朗日方法建立带有双球面摆和变绳长效应的7自由度 (Seven degree-of-freedom, 7-DOF) 桥式起重机的精确动力学模型. 在此基础上, 构造一组包含各状态量的辅助信号, 将施加在台车、桥架、绳长以及吊钩、负载摆动上的约束转化为对辅助信号的约束, 从而将桥式起重机的轨迹规划问题转化为与辅助信号相关的时间优化问题, 并使用二分法求解. 该轨迹规划方法不仅缩短了吊运时间, 而且确保了全状态量满足约束条件. 最后, 仿真结果证明了动力学模型的准确性和轨迹规划方法的有效性.
带有双球面摆和变绳长效应的桥式起重机具有多输入多输出以及欠驱动的动力学特性, 目前仍缺乏有效的控制策略. 在台车移动、桥架移动、负载升降同步作业过程中, 吊钩和负载两级球面摆动特性更为复杂, 各状态量之间的非线性耦合关系更强, 桥式起重机的防摆控制更具挑战性. 不仅如此, 现有方法无法保证桥式起重机系统全状态量的暂态控制性能. 为解决上述问题, 提出一种基于多项式的优化轨迹规划方法. 首先, 在未进行近似简化的前提下, 使用拉格朗日方法建立带有双球面摆和变绳长效应的7自由度 (Seven degree-of-freedom, 7-DOF) 桥式起重机的精确动力学模型. 在此基础上, 构造一组包含各状态量的辅助信号, 将施加在台车、桥架、绳长以及吊钩、负载摆动上的约束转化为对辅助信号的约束, 从而将桥式起重机的轨迹规划问题转化为与辅助信号相关的时间优化问题, 并使用二分法求解. 该轨迹规划方法不仅缩短了吊运时间, 而且确保了全状态量满足约束条件. 最后, 仿真结果证明了动力学模型的准确性和轨迹规划方法的有效性.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230701
摘要:
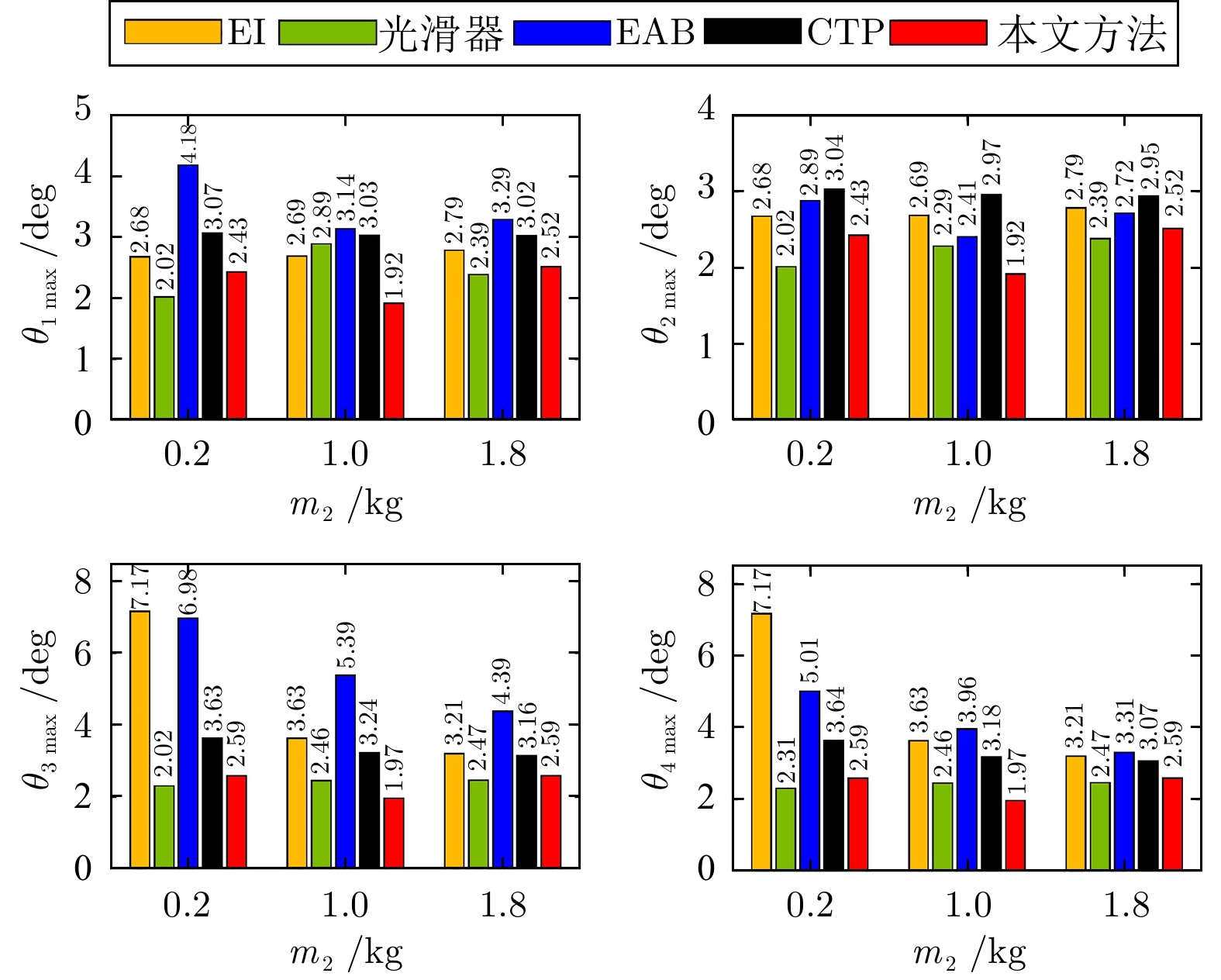
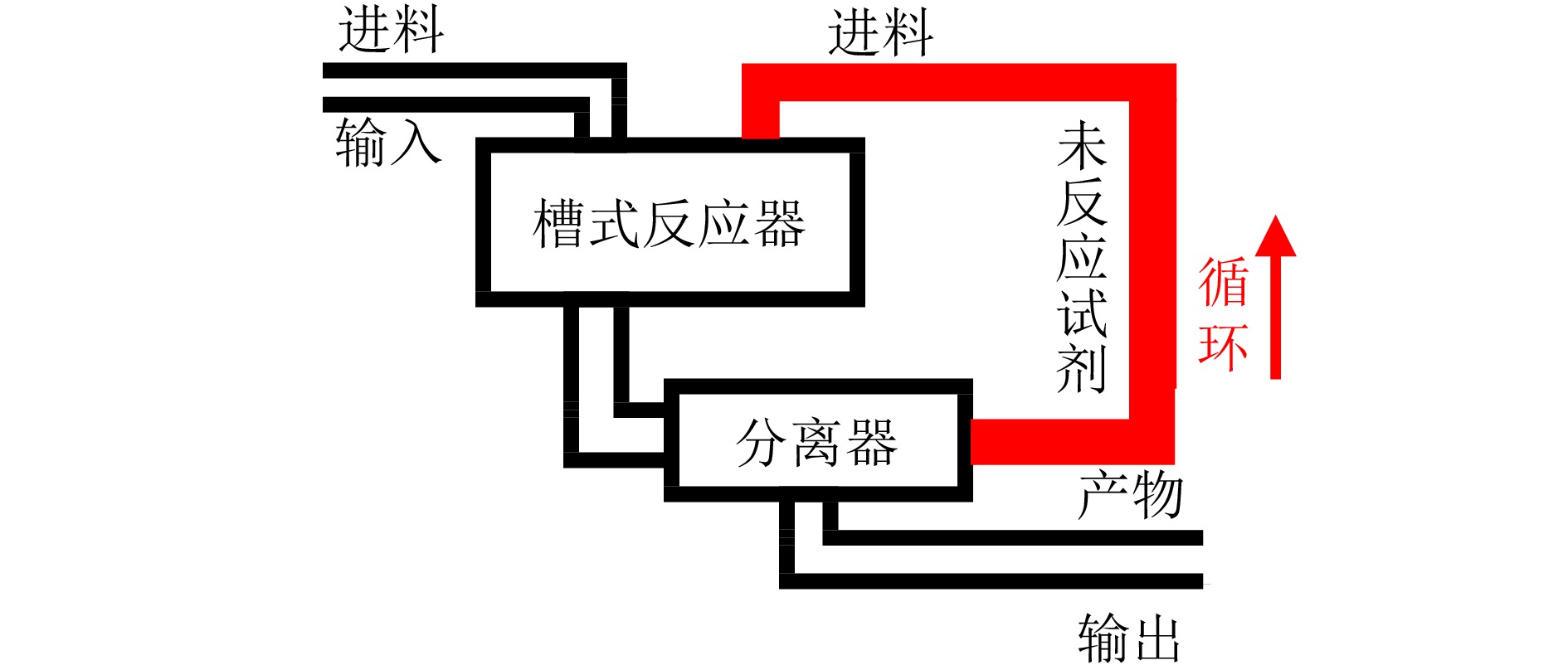
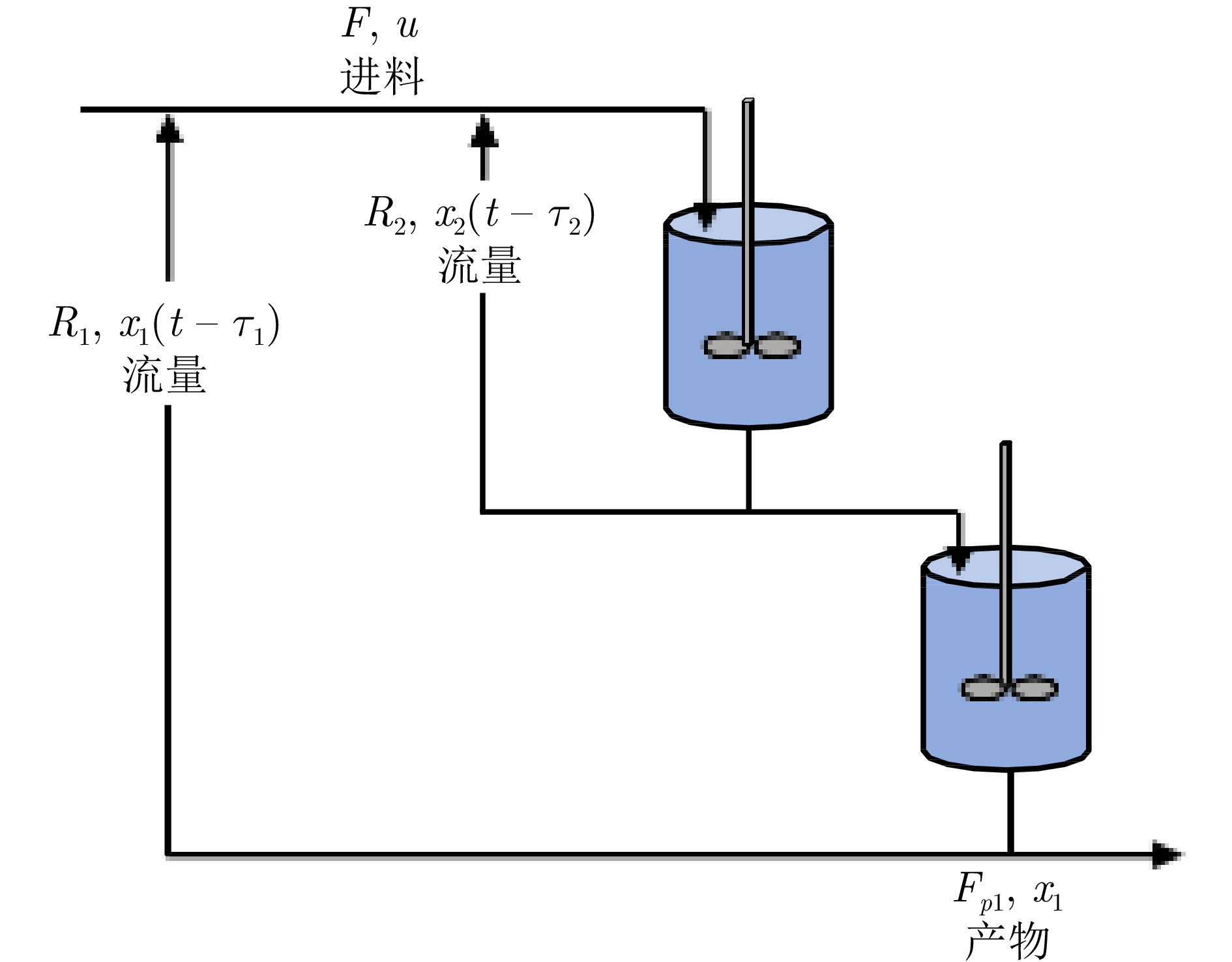
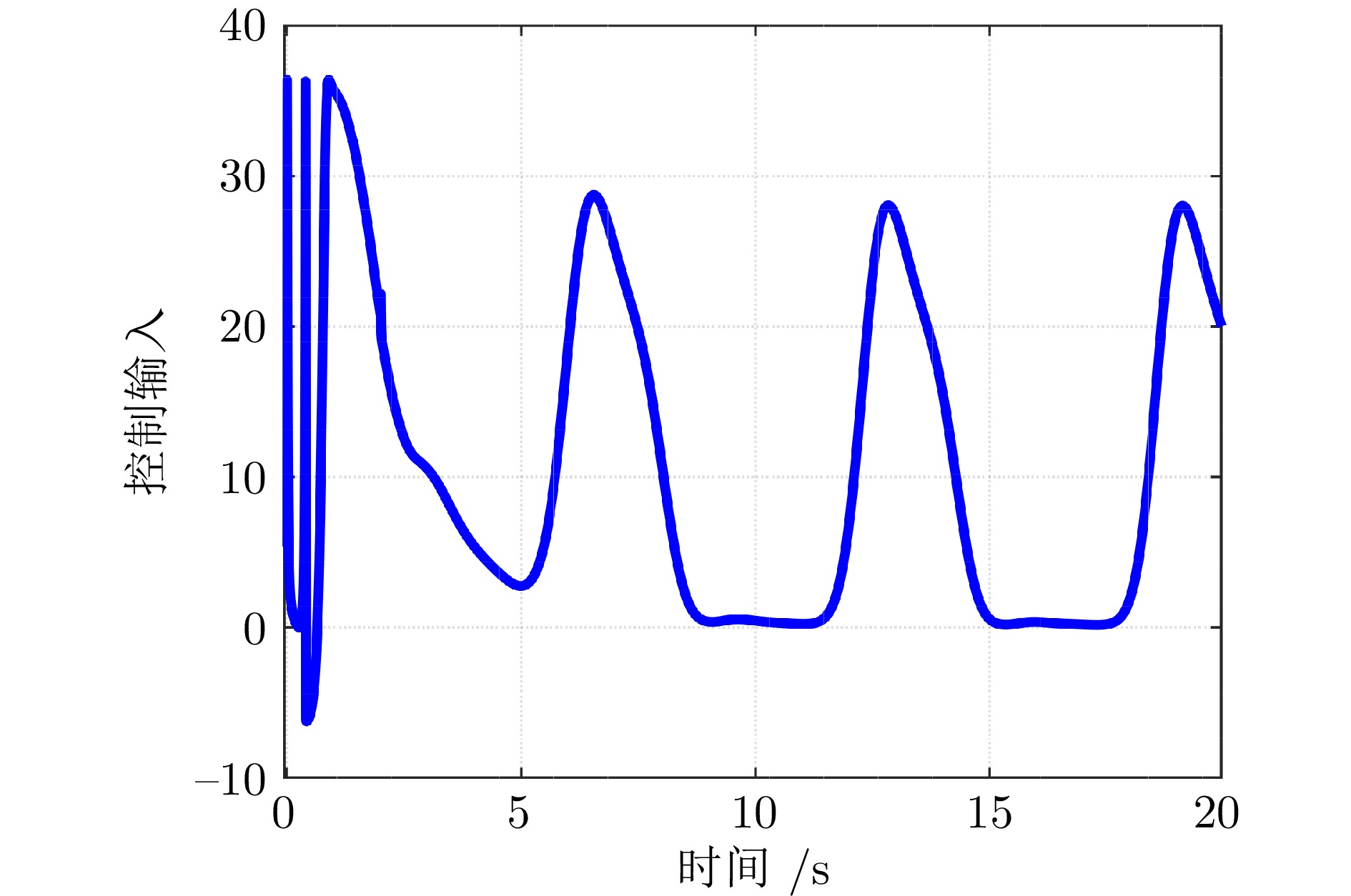
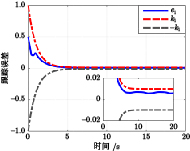
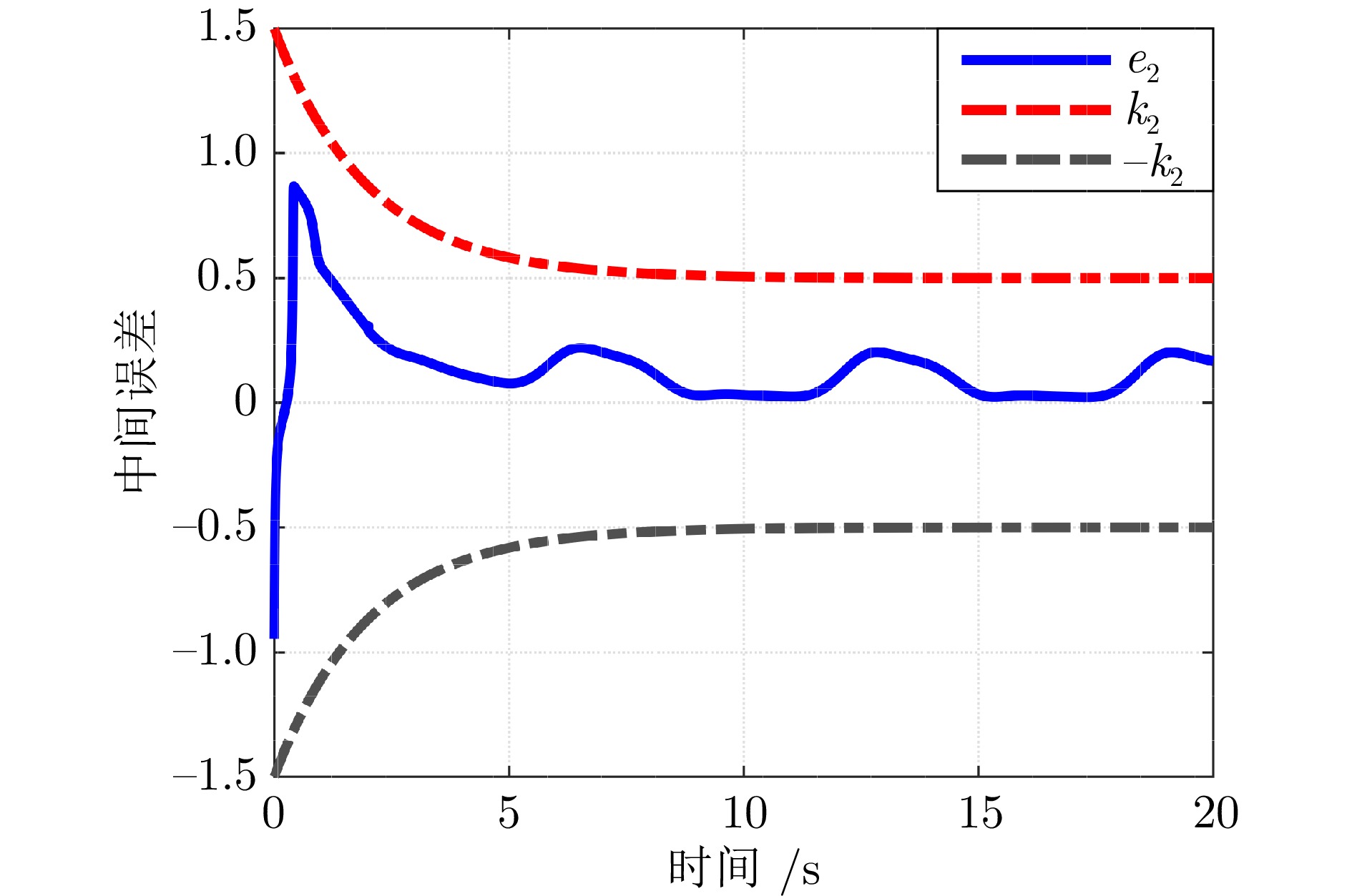
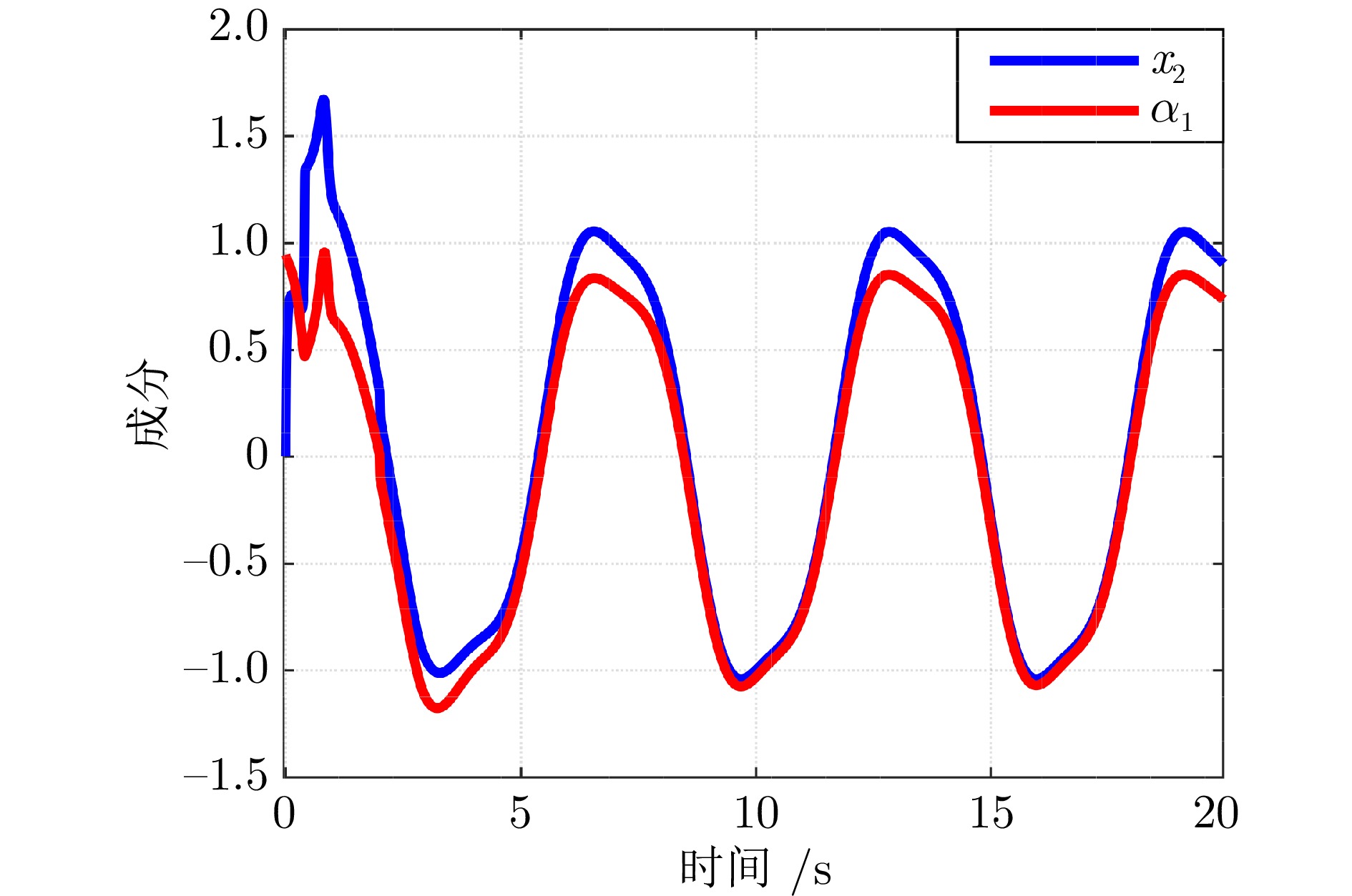
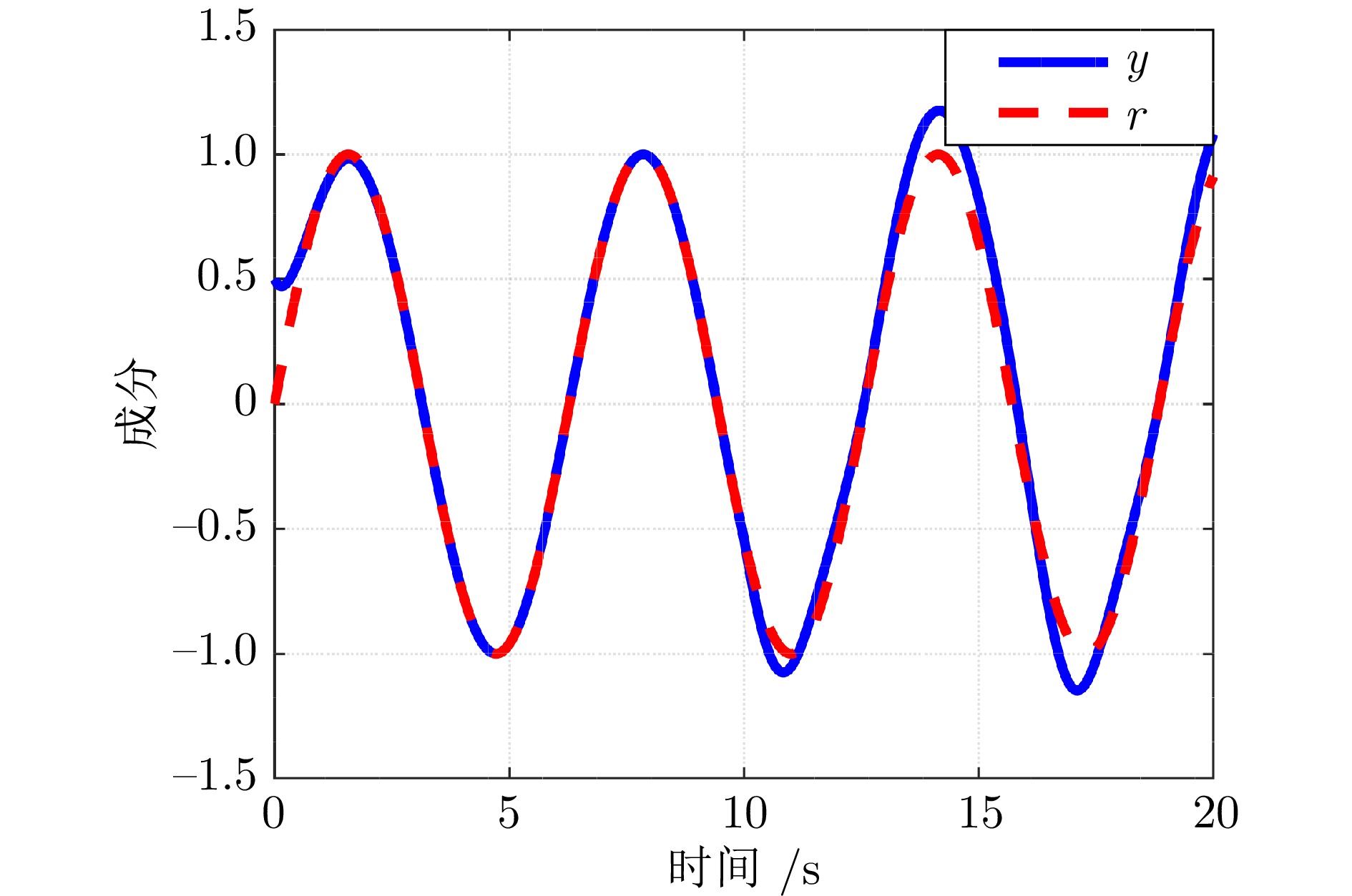
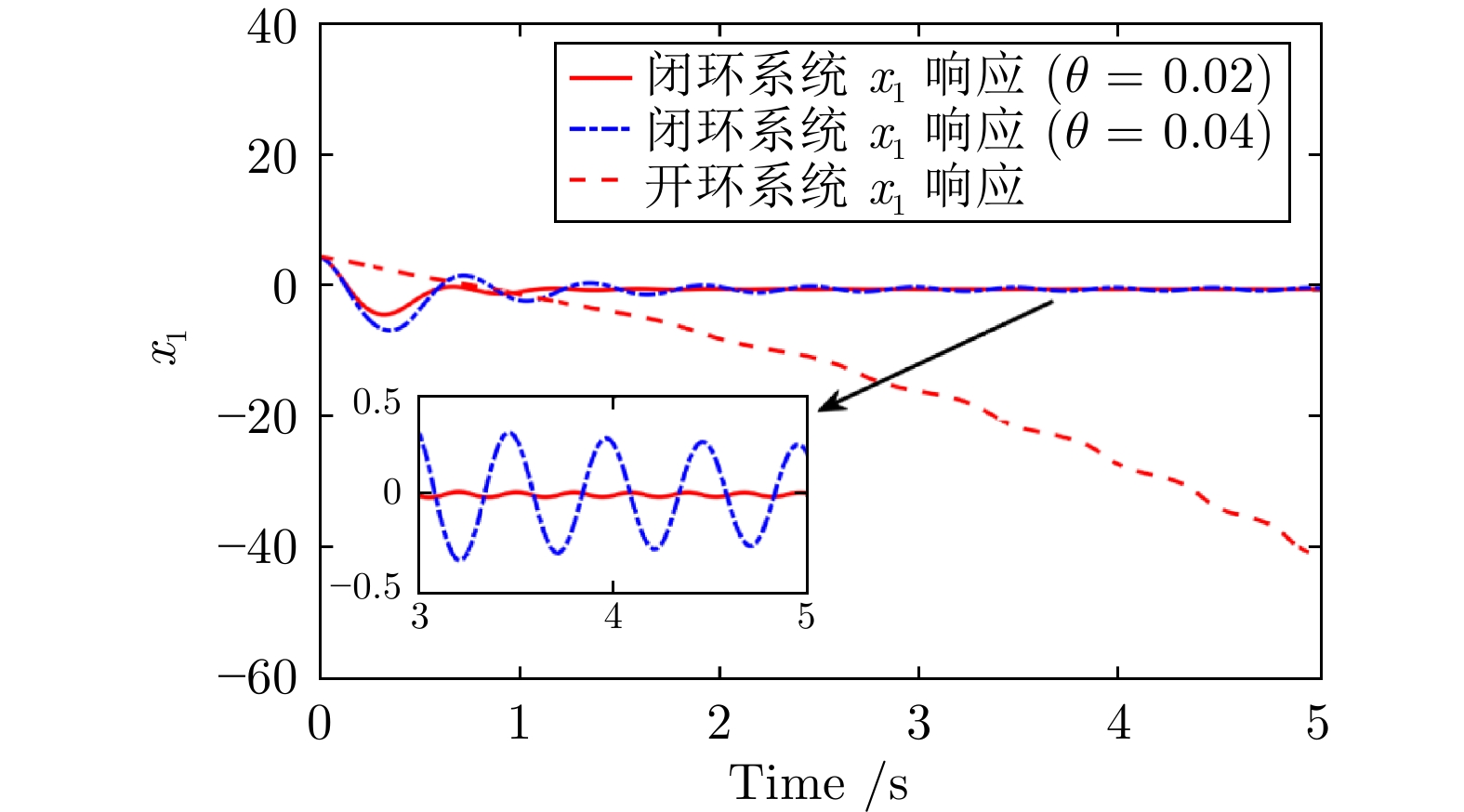
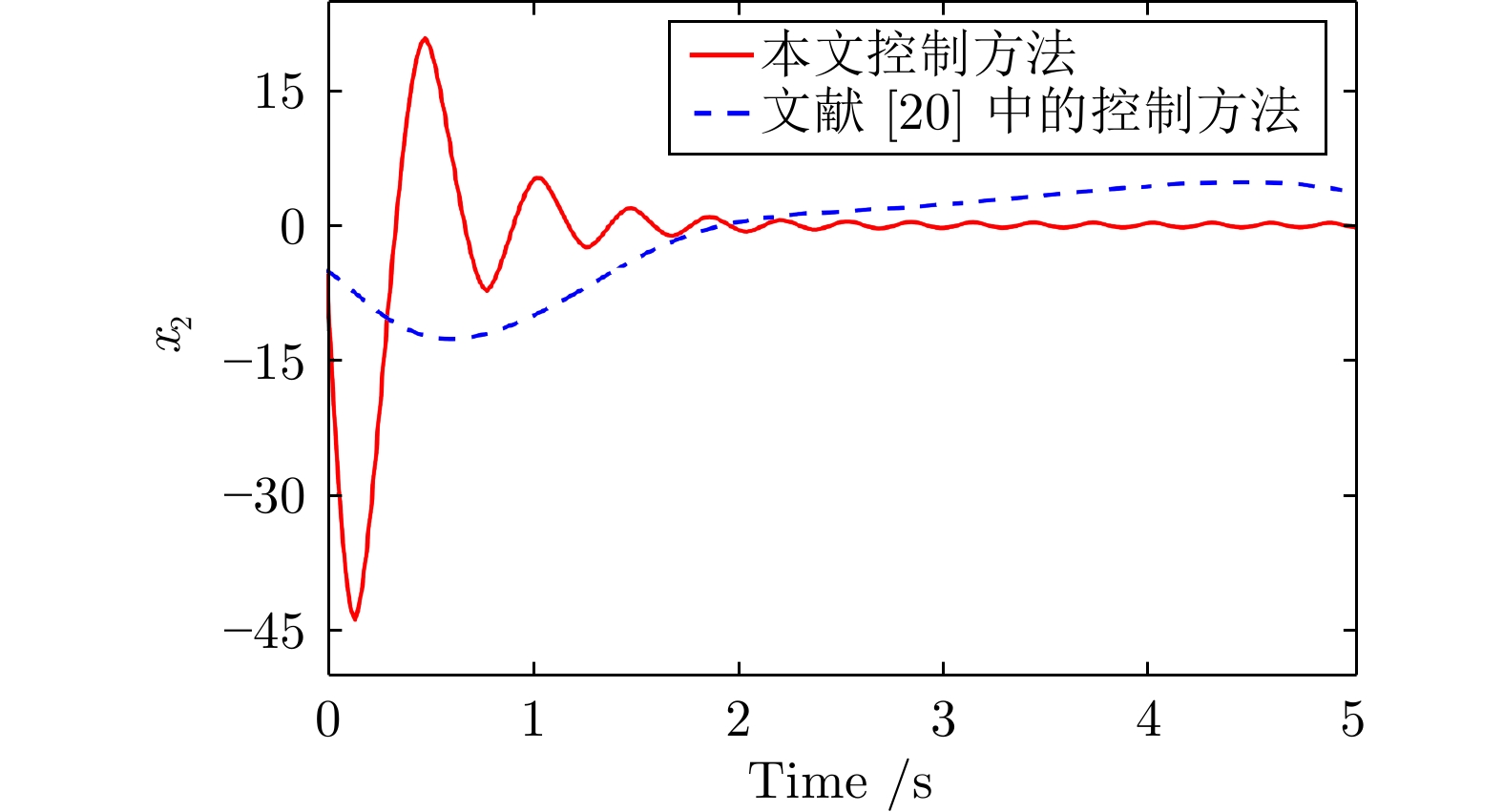
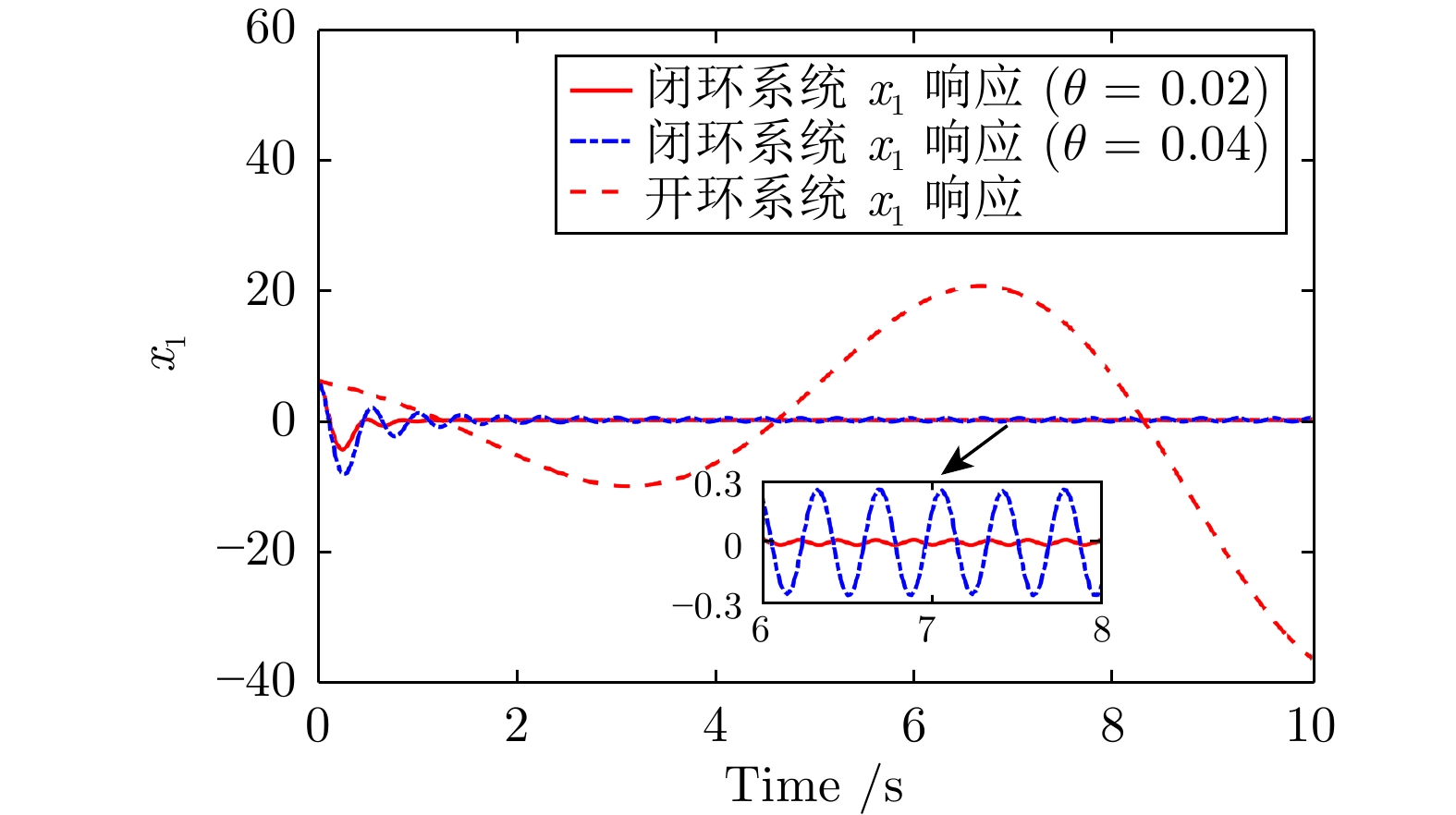
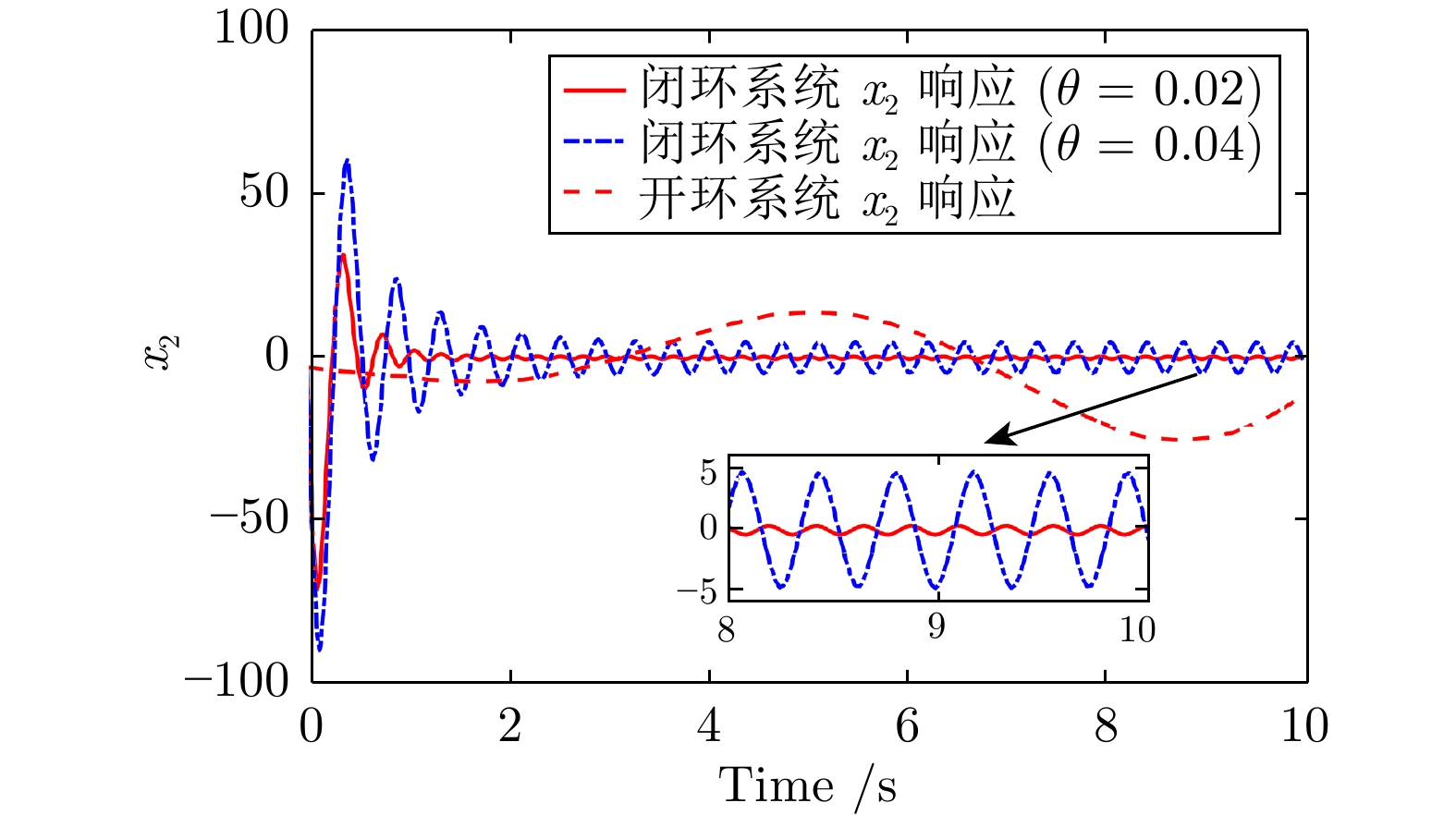
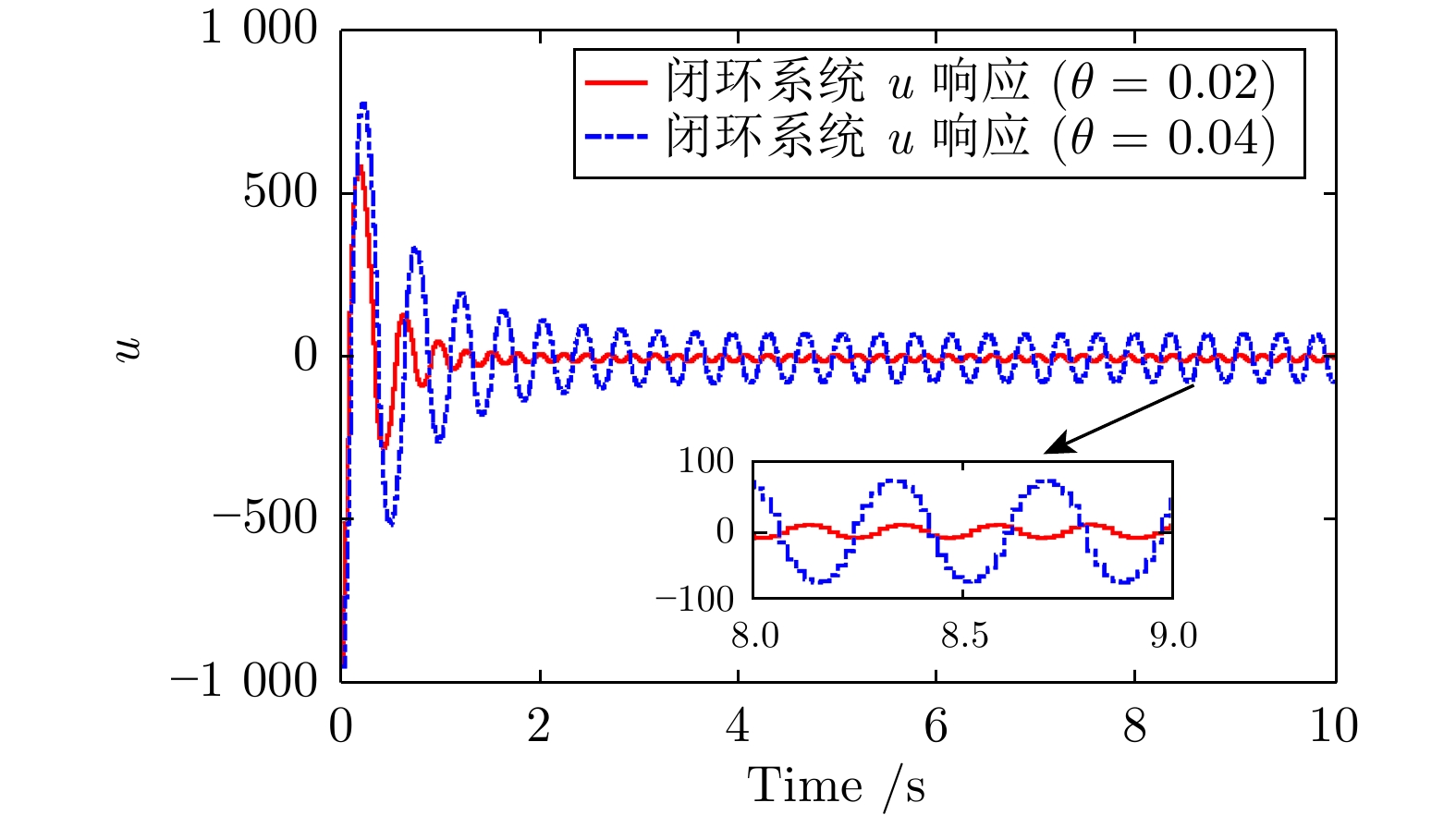
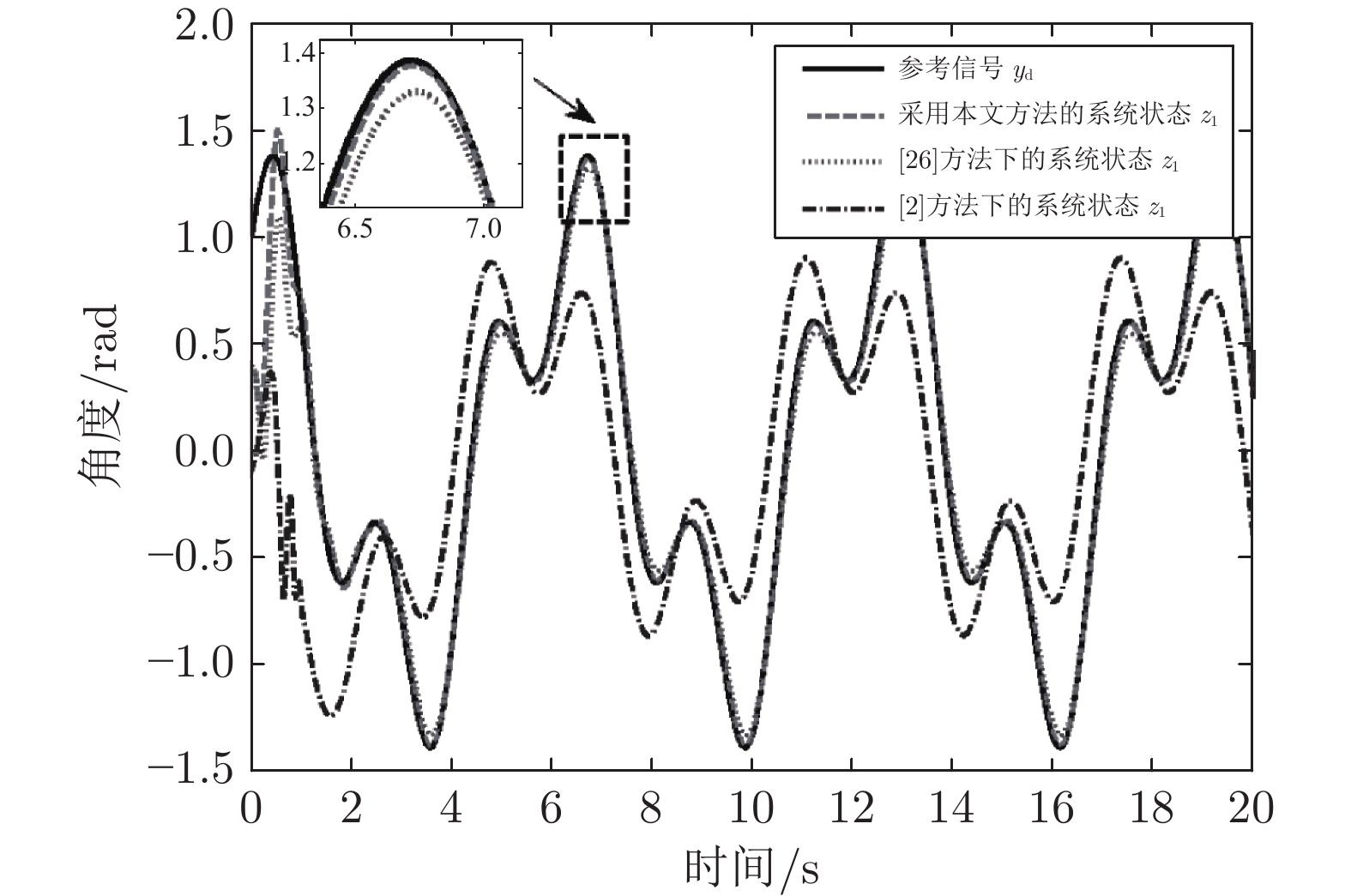
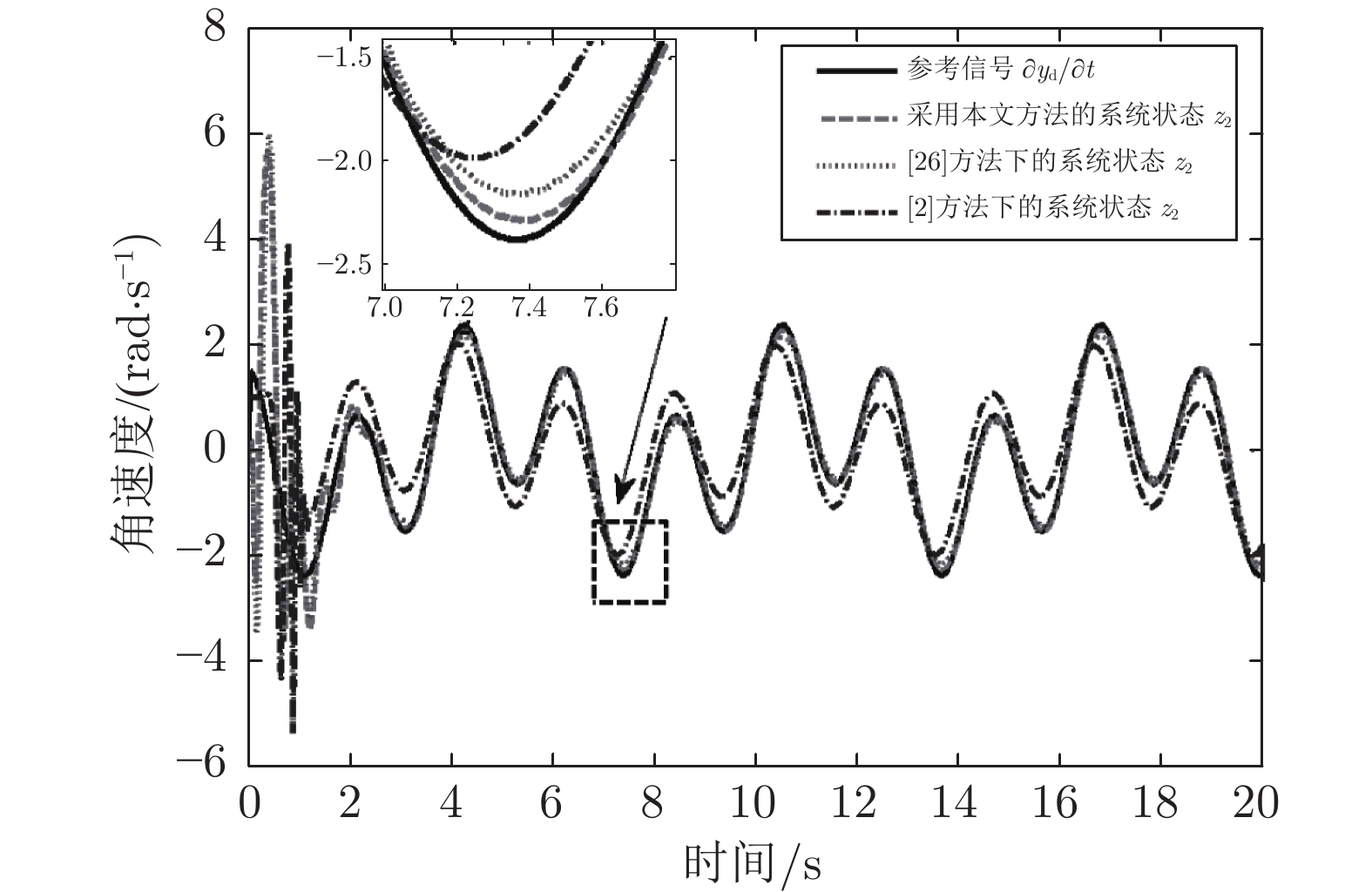
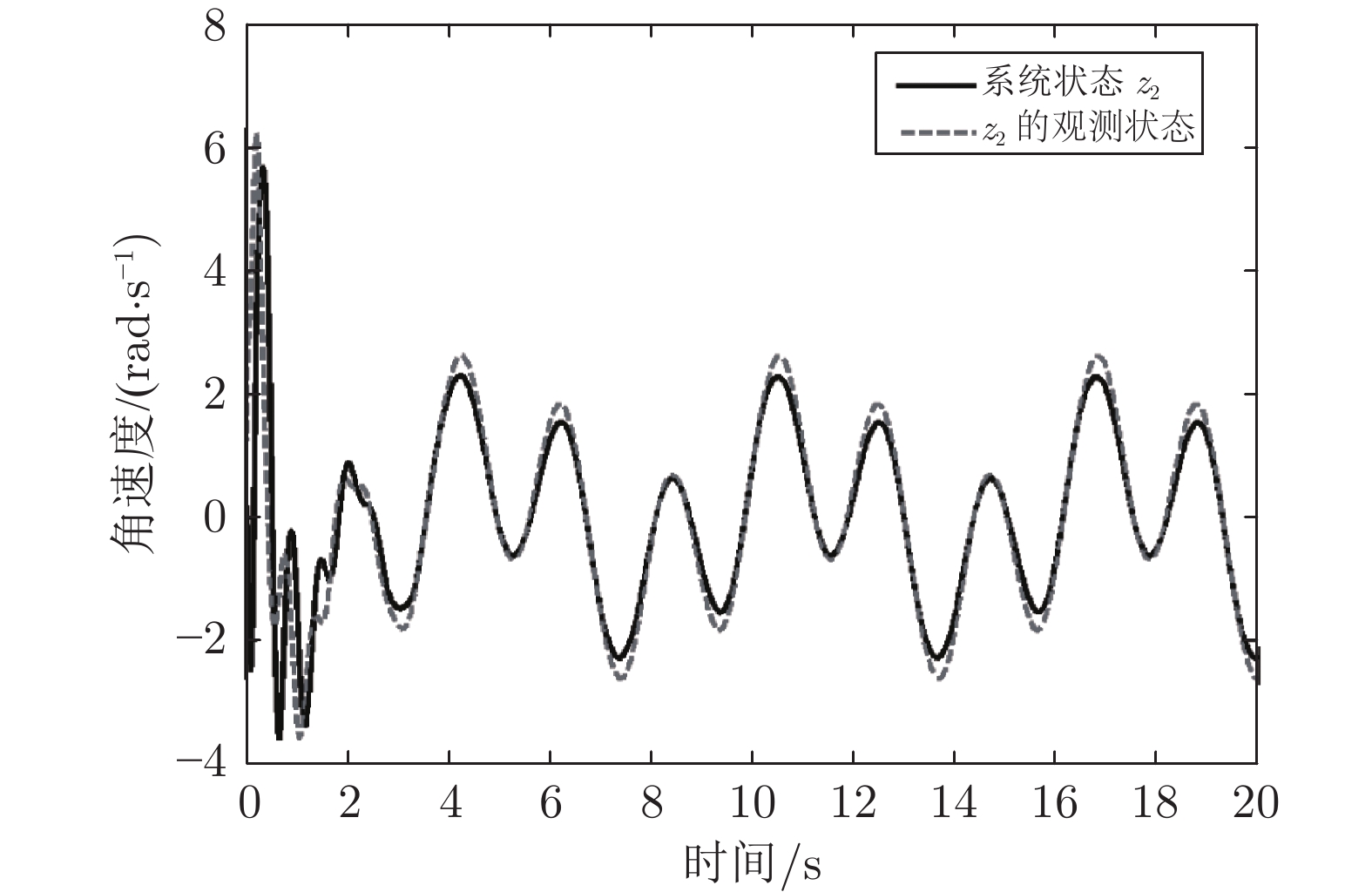
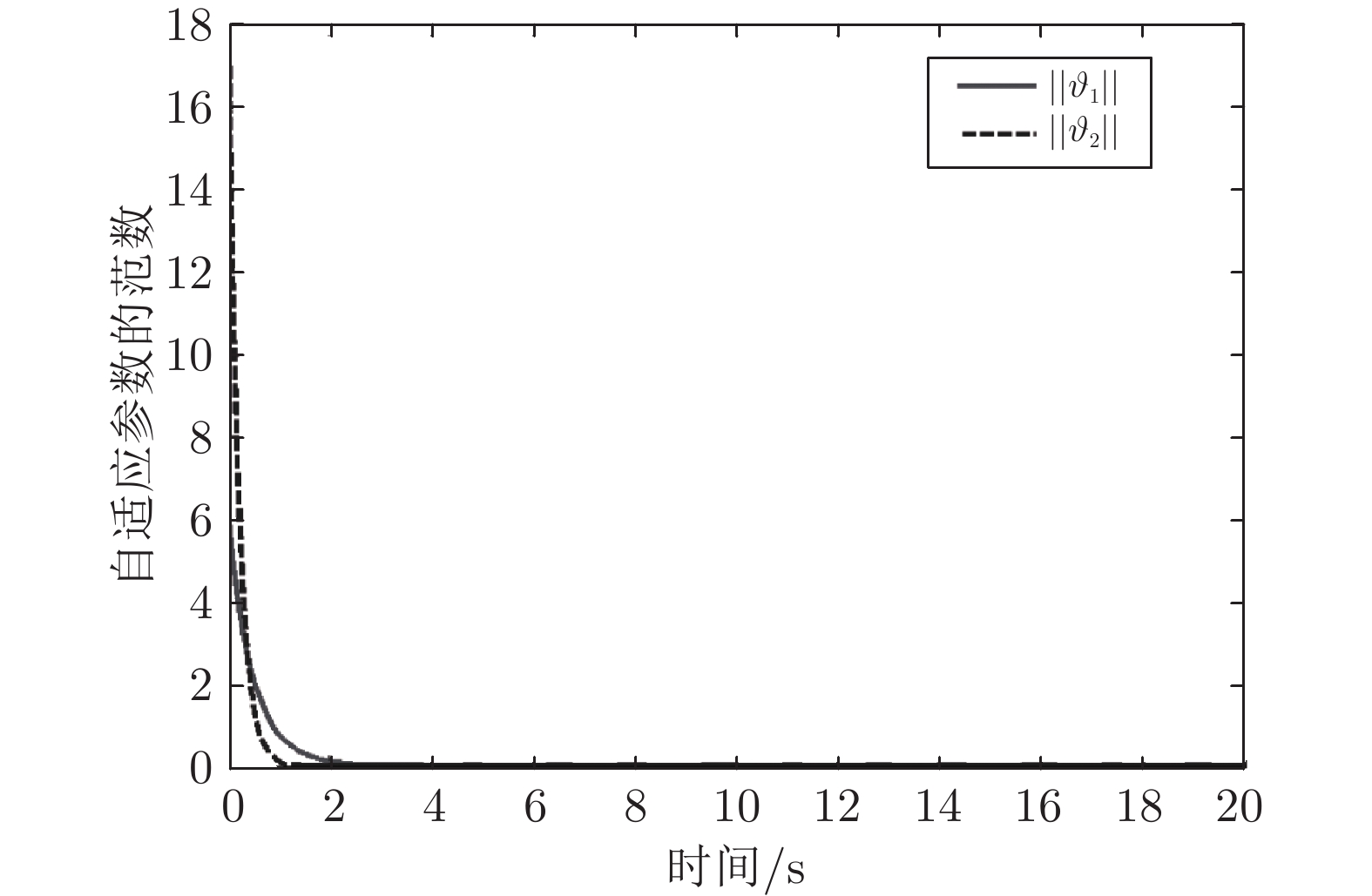
研究含有状态时延的严反馈非线性系统的跟踪控制问题, 充分考虑时延的时变性和任意性以及系统的未知动力学特性. 为解决该问题, 取代参数辨识、函数逼近、增益调节、指令滤波等常规技术, 提出了基于导向函数的预设性能控制方法, 移除了控制器设计对于系统非线性、控制方向和虚拟控制信号导数等信息的依赖. 并且, 摆脱基于李雅普诺夫-克拉索夫斯基泛函或拉祖米欣函数的稳定性分析框架, 采用基于反证法的受限分析理论, 移除了性能分析对于已知的时延上界、部分已知的时延非线性函数和时延导数小于1等常见约束. 因此, 形成了无模型、低复杂度、高性能控制方法, 将跟踪误差限制于设计者预先选取的性能包络线内, 确保系统输出以预先设定的速度和精度跟踪上时变的设定值. 最后, 以具有延迟回收流的两级化学反应器为对象开展对比仿真, 实验结果验证了所提方法的有效性和优越性.
研究含有状态时延的严反馈非线性系统的跟踪控制问题, 充分考虑时延的时变性和任意性以及系统的未知动力学特性. 为解决该问题, 取代参数辨识、函数逼近、增益调节、指令滤波等常规技术, 提出了基于导向函数的预设性能控制方法, 移除了控制器设计对于系统非线性、控制方向和虚拟控制信号导数等信息的依赖. 并且, 摆脱基于李雅普诺夫-克拉索夫斯基泛函或拉祖米欣函数的稳定性分析框架, 采用基于反证法的受限分析理论, 移除了性能分析对于已知的时延上界、部分已知的时延非线性函数和时延导数小于1等常见约束. 因此, 形成了无模型、低复杂度、高性能控制方法, 将跟踪误差限制于设计者预先选取的性能包络线内, 确保系统输出以预先设定的速度和精度跟踪上时变的设定值. 最后, 以具有延迟回收流的两级化学反应器为对象开展对比仿真, 实验结果验证了所提方法的有效性和优越性.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210895
摘要:
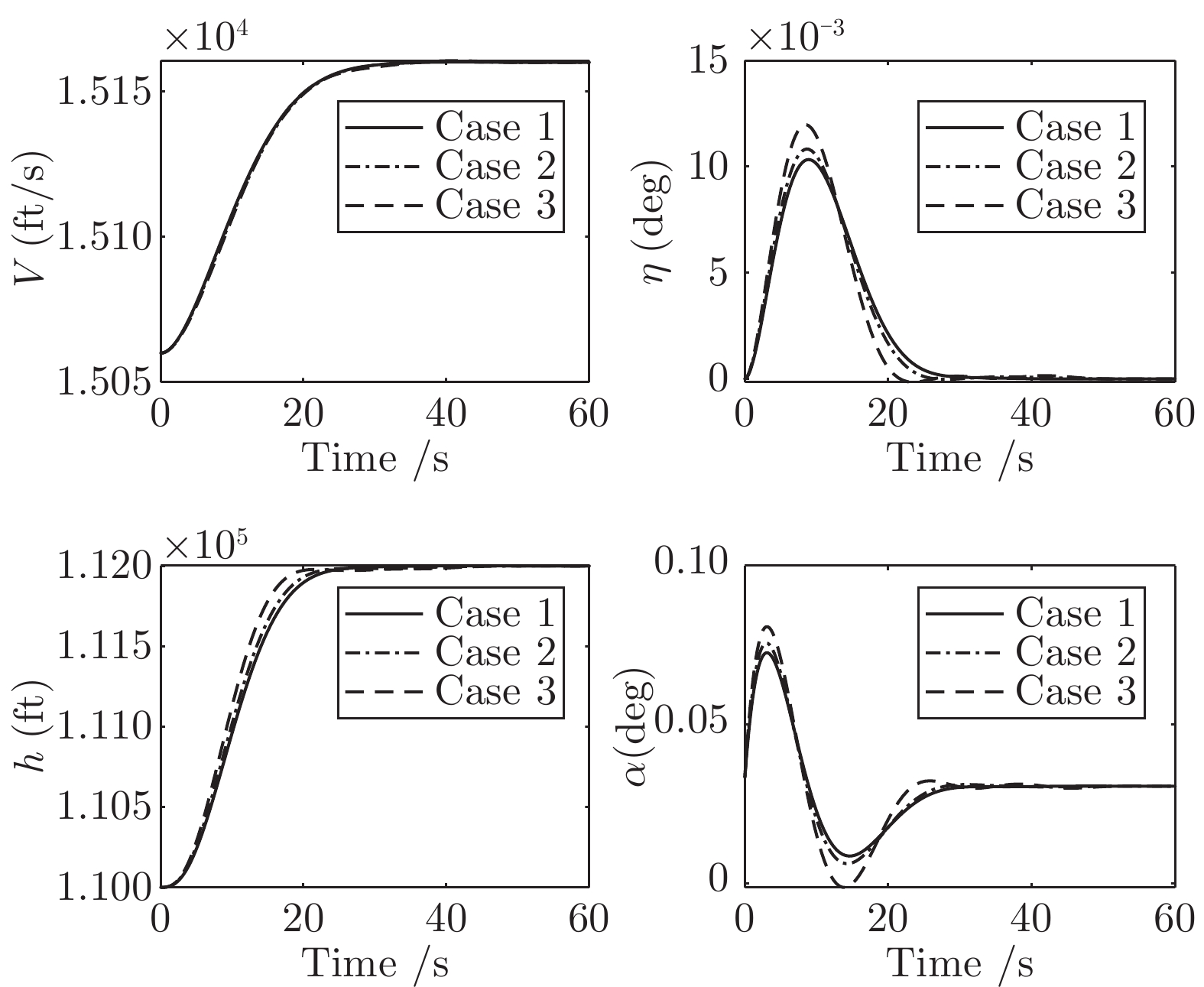
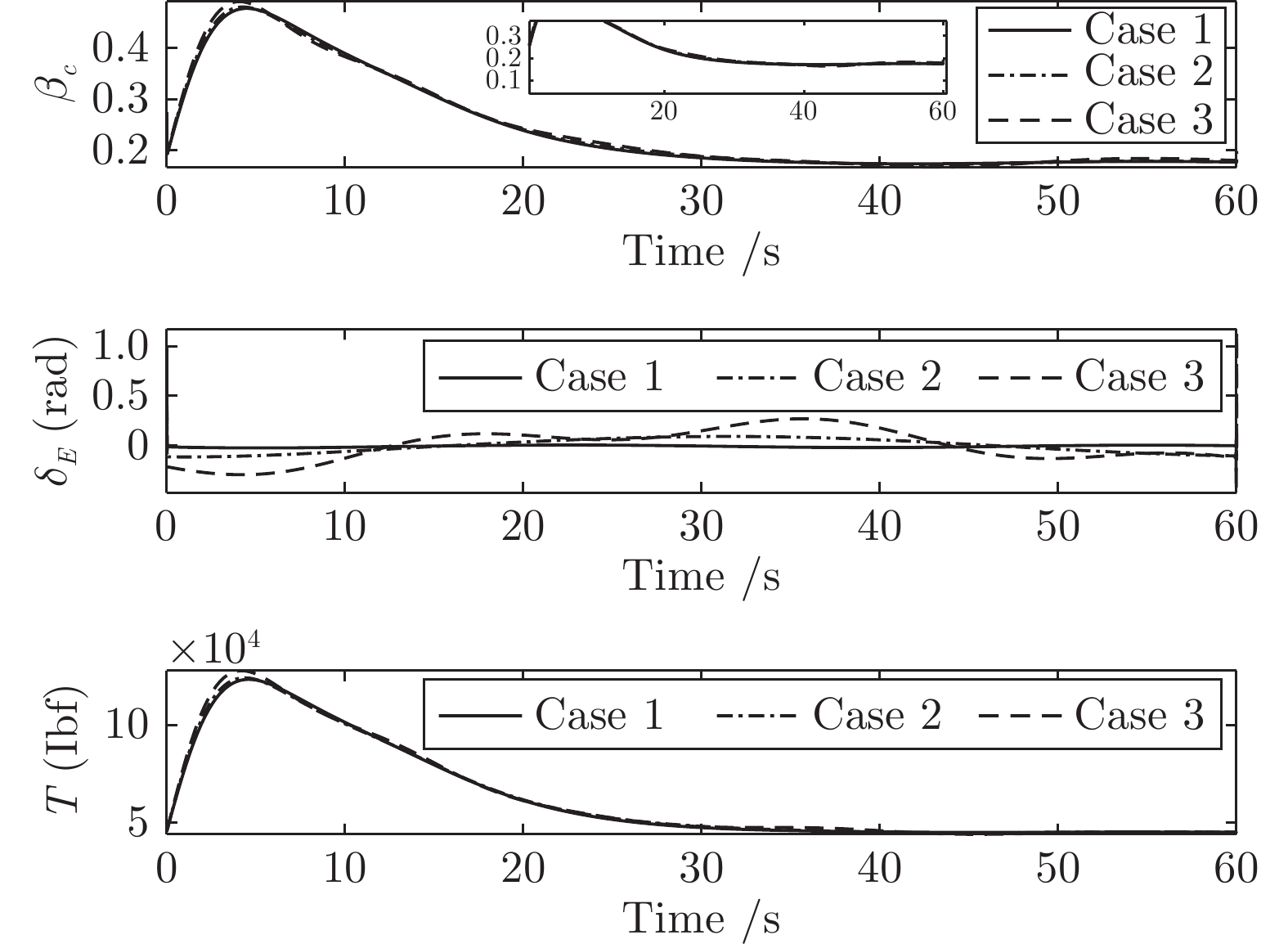
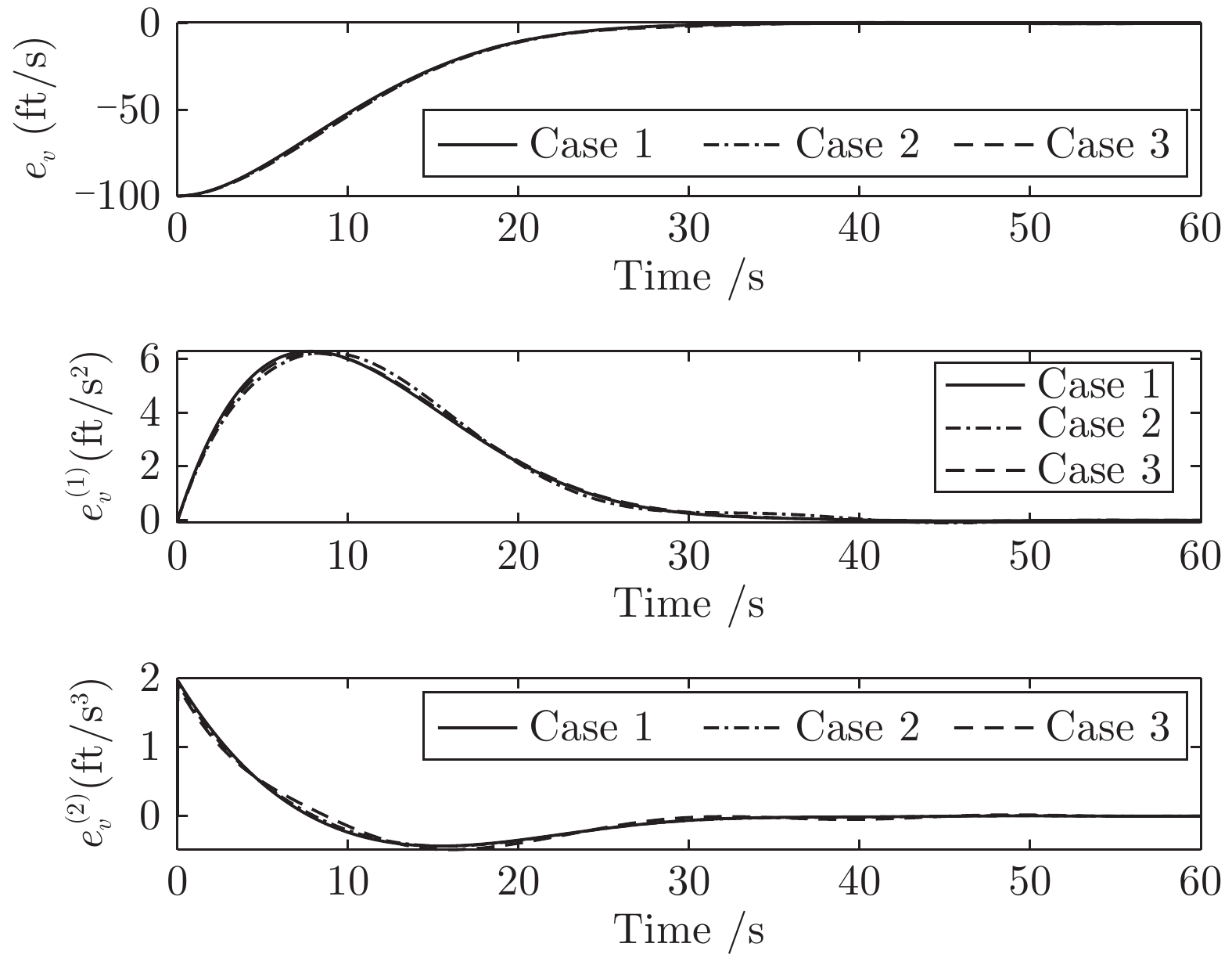
研究了高超声速飞行器控制通道存在未知环境干扰时的指定时间跟踪控制问题. 基于高超声速飞行器的输入输出线性化模型, 借助参量 Lyapunov方程的一些性质, 设计一种光滑、有界的时变高增益控制律. 相比于现有的高超声速飞行器有限/固定时间控制方法, 该算法不会出现抖振现象, 同时收敛时间不依赖于初始状态且可以事先设定. 当高超声速飞行器存在未知的有界环境匹配干扰时, 该控制器能使高度和速度在指定时间跟踪上参考信号. 仿真结果验证了方法的有效性.
研究了高超声速飞行器控制通道存在未知环境干扰时的指定时间跟踪控制问题. 基于高超声速飞行器的输入输出线性化模型, 借助参量 Lyapunov方程的一些性质, 设计一种光滑、有界的时变高增益控制律. 相比于现有的高超声速飞行器有限/固定时间控制方法, 该算法不会出现抖振现象, 同时收敛时间不依赖于初始状态且可以事先设定. 当高超声速飞行器存在未知的有界环境匹配干扰时, 该控制器能使高度和速度在指定时间跟踪上参考信号. 仿真结果验证了方法的有效性.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230149
摘要:
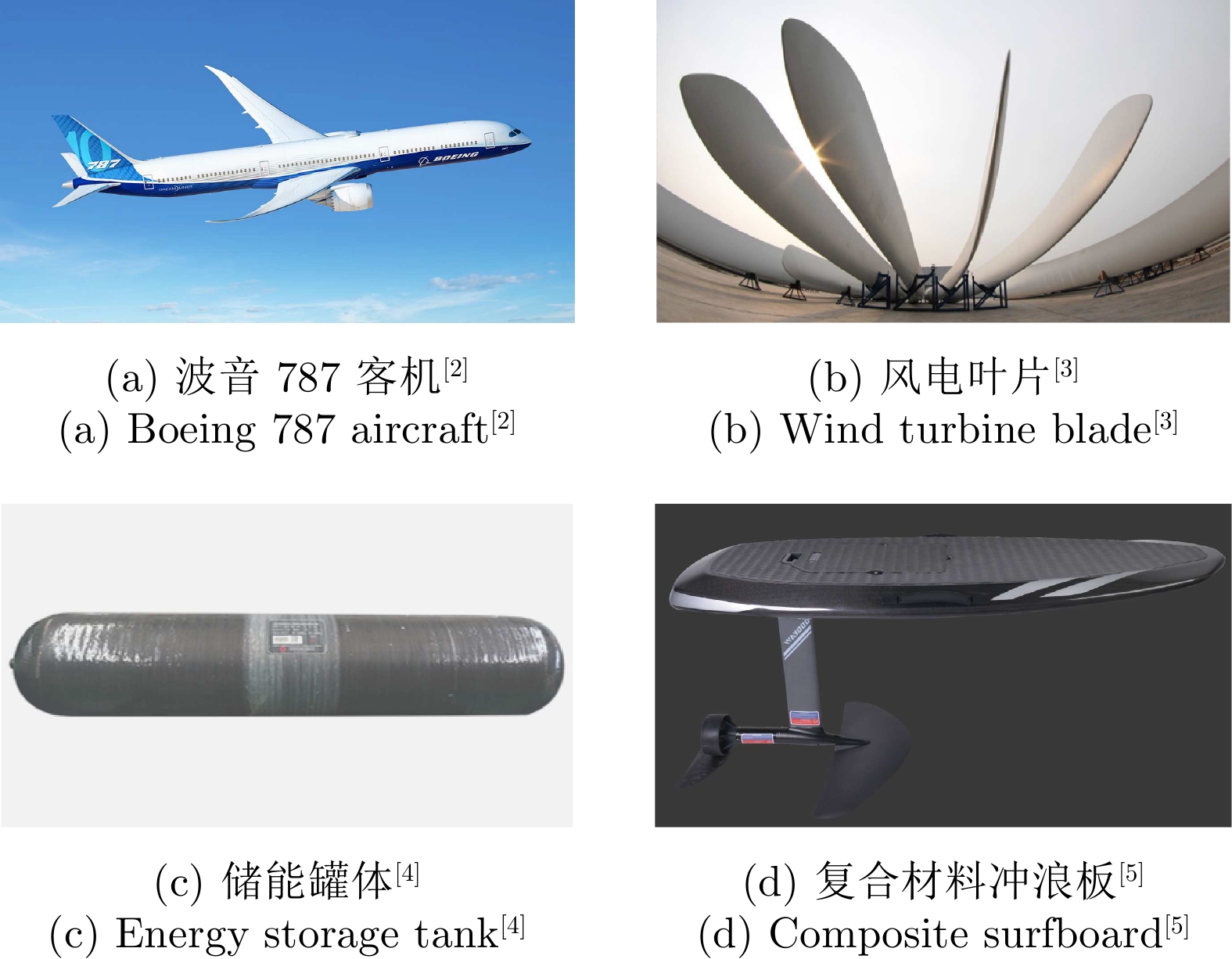
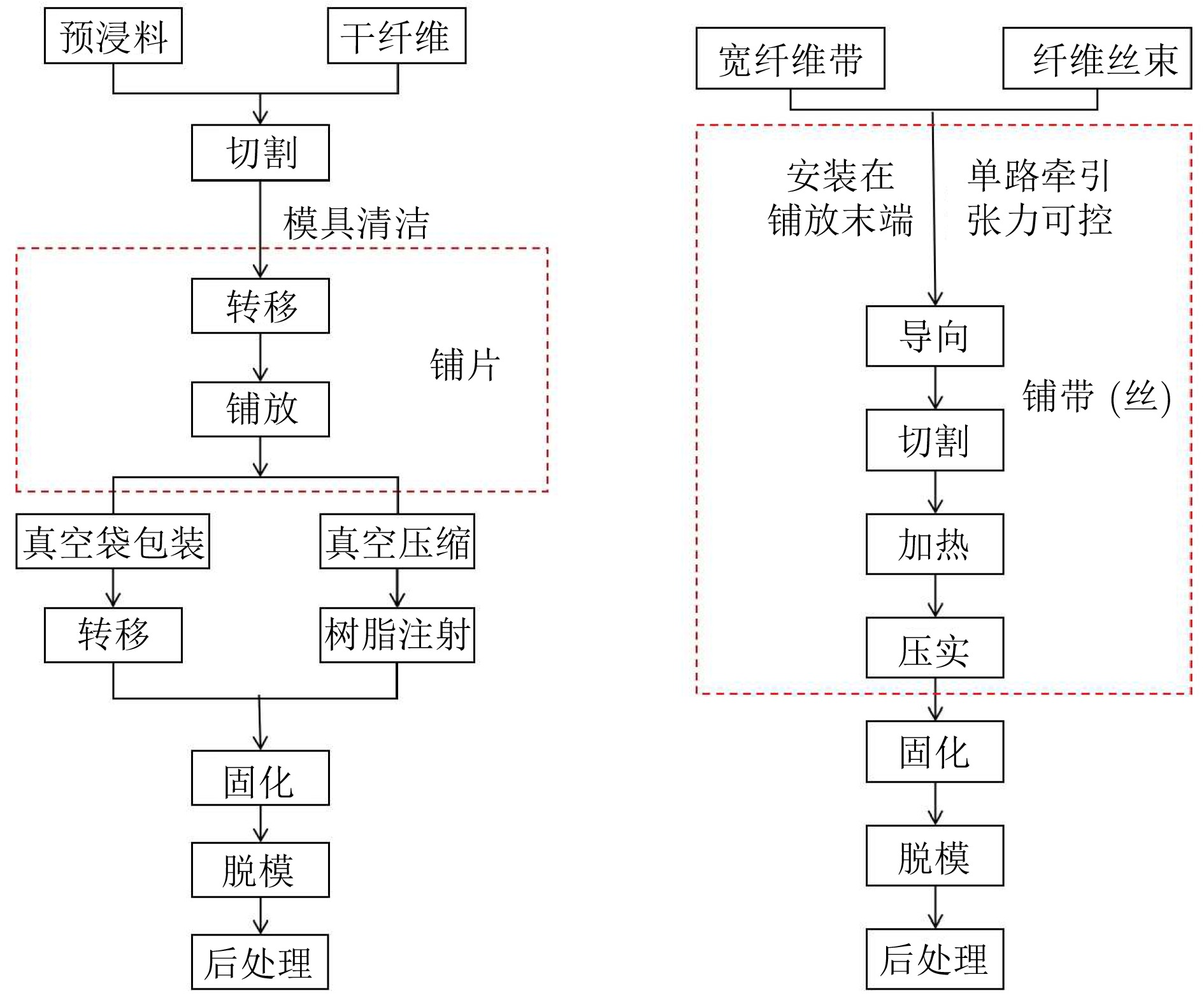
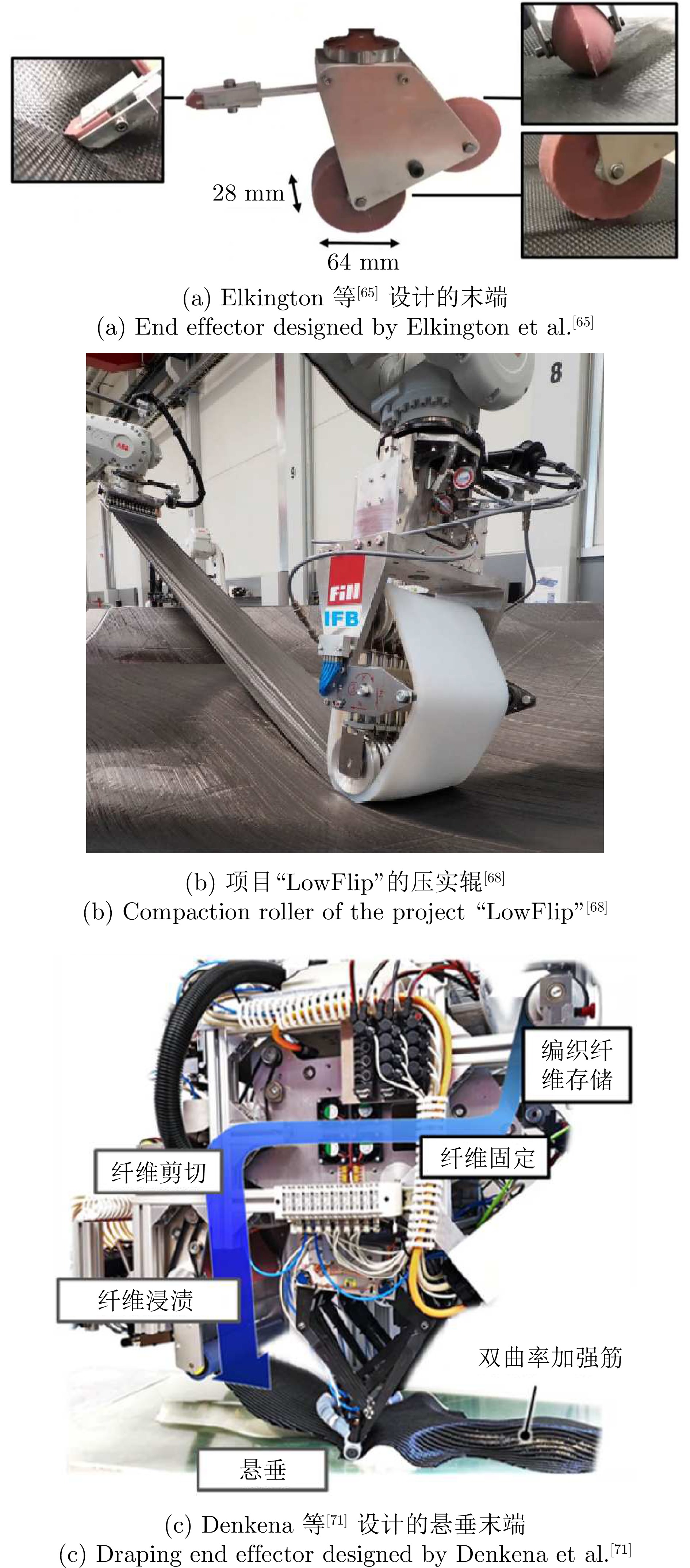
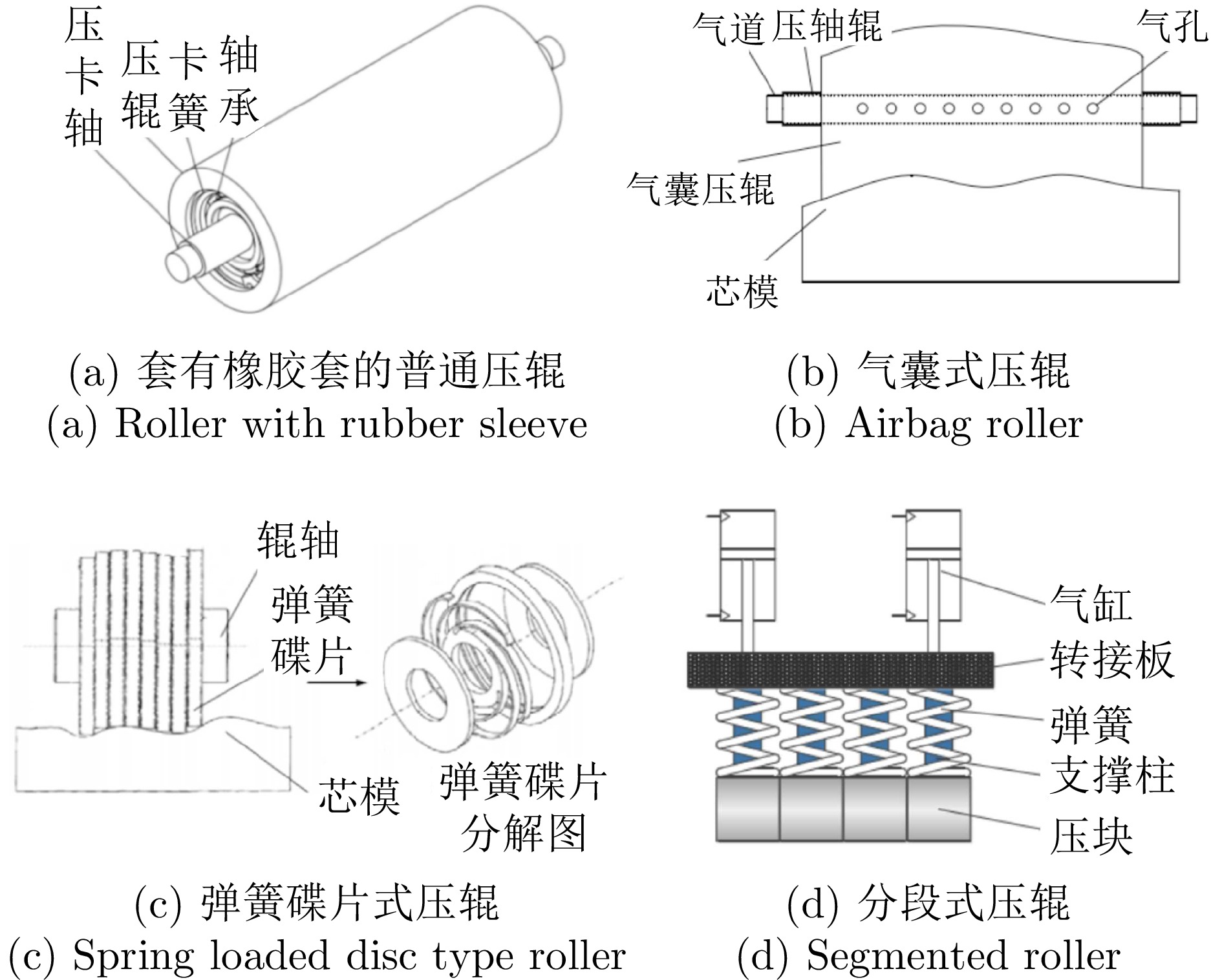
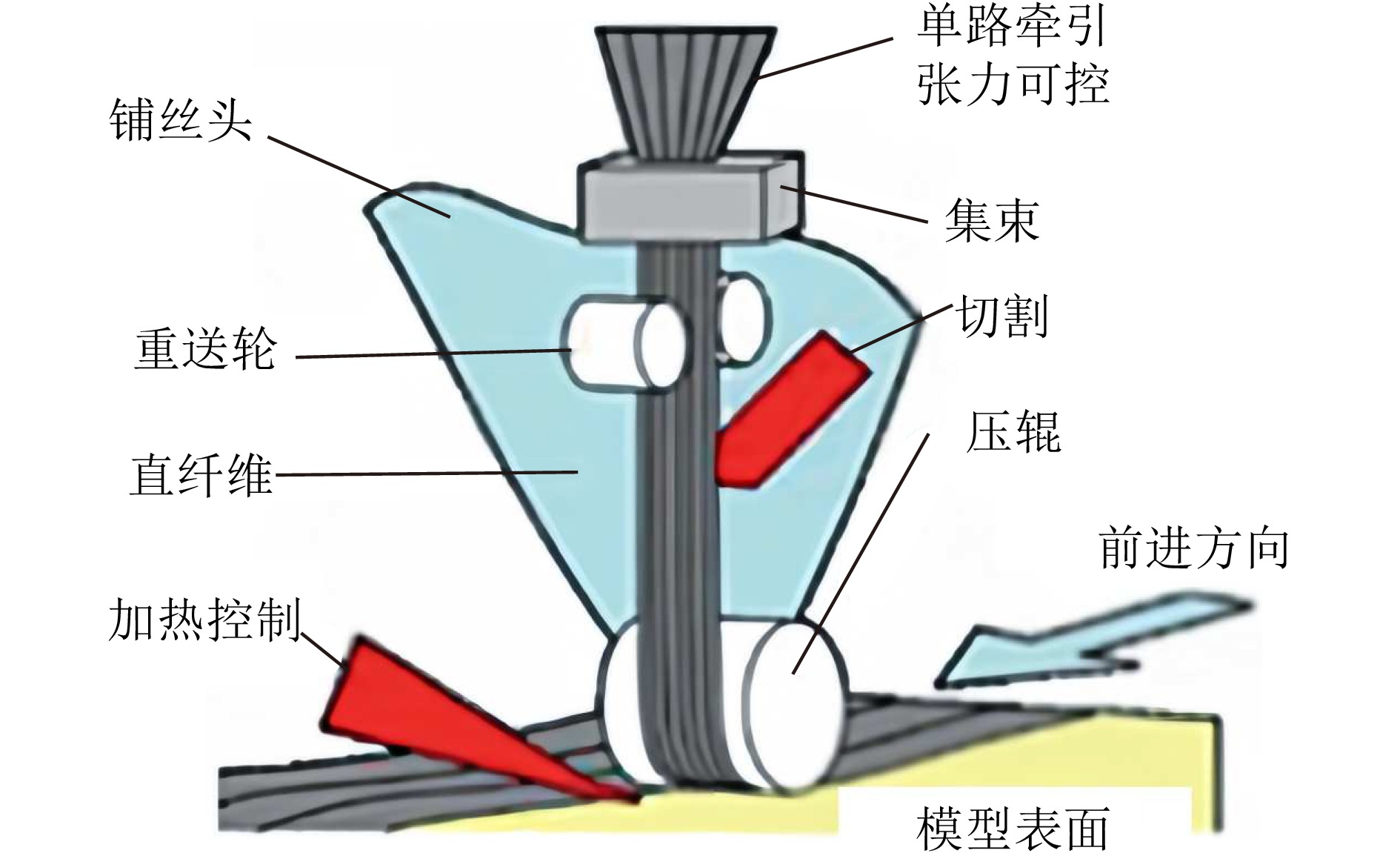
碳纤维增强复合材料(Carbon fiber-reinforced composite, CFRC)因具有轻质高强、耐腐蚀、耐冲击等优越性能, 在生产生活中的应用已越来越广泛, 然而复材产品的生产制造仍是劳动密集性产业, 主要依靠人工. 机械臂自上世纪50年代进入工业生产中以来, 极大提高了生产效率和质量, 然而目前机械臂在复材产品制造中的应用是少见的, 主要集中在机械臂形式的自动铺丝(Automated fiber placement, AFP)中. 复材产品制造工艺繁琐, 将复合材料铺放在模具上是复材产品制造过程中的一个重要环节, 本文称之为“铺层”, 使用机械臂完成复合材料自动铺层将是未来复材产品制造自动化、智能化发展的一个关键方向. 本文将机械臂进行复合材料自动铺层操作分为两种主要形式: 铺片和铺带(丝), 通过案例调研和分析, 归纳总结现有的设计理念和技术方法, 提出未来发展趋势, 以期对机械臂的应用和研究、复材产品的智能化制造和工业4.0的发展形成参考.
碳纤维增强复合材料(Carbon fiber-reinforced composite, CFRC)因具有轻质高强、耐腐蚀、耐冲击等优越性能, 在生产生活中的应用已越来越广泛, 然而复材产品的生产制造仍是劳动密集性产业, 主要依靠人工. 机械臂自上世纪50年代进入工业生产中以来, 极大提高了生产效率和质量, 然而目前机械臂在复材产品制造中的应用是少见的, 主要集中在机械臂形式的自动铺丝(Automated fiber placement, AFP)中. 复材产品制造工艺繁琐, 将复合材料铺放在模具上是复材产品制造过程中的一个重要环节, 本文称之为“铺层”, 使用机械臂完成复合材料自动铺层将是未来复材产品制造自动化、智能化发展的一个关键方向. 本文将机械臂进行复合材料自动铺层操作分为两种主要形式: 铺片和铺带(丝), 通过案例调研和分析, 归纳总结现有的设计理念和技术方法, 提出未来发展趋势, 以期对机械臂的应用和研究、复材产品的智能化制造和工业4.0的发展形成参考.






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230766
摘要:
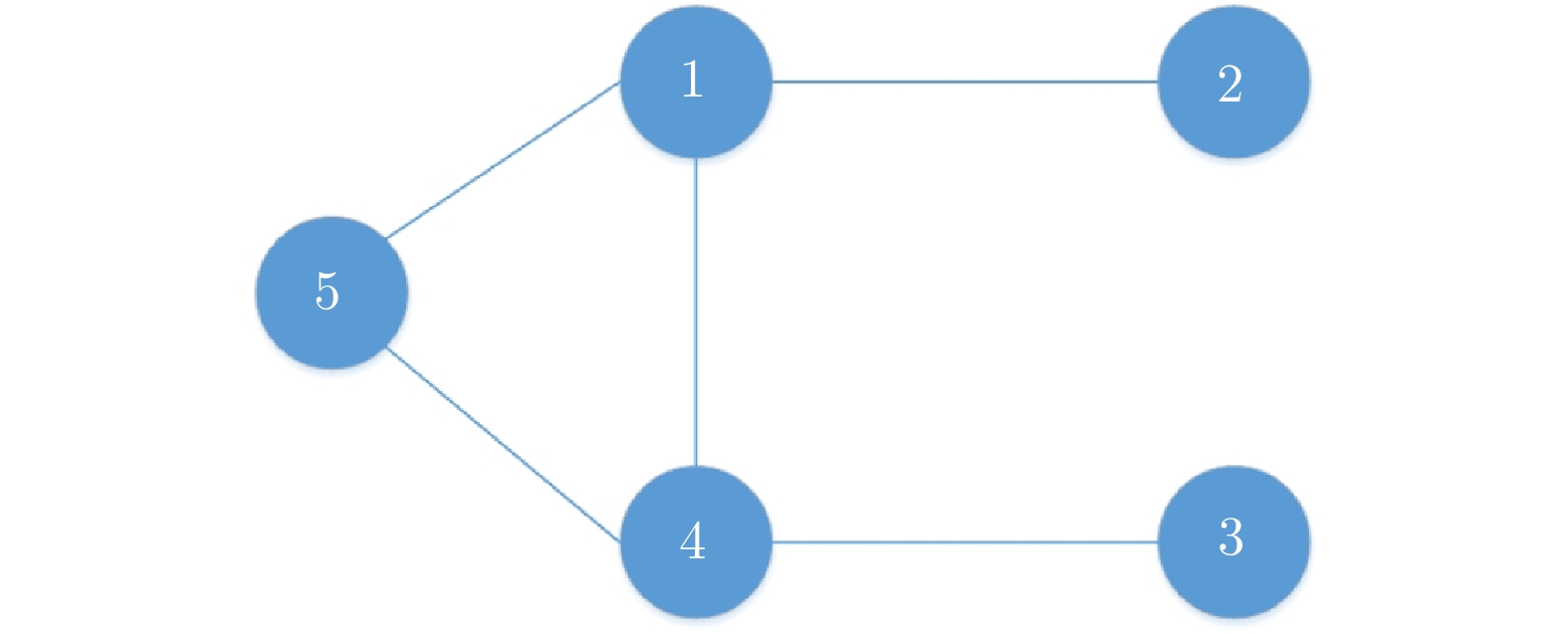
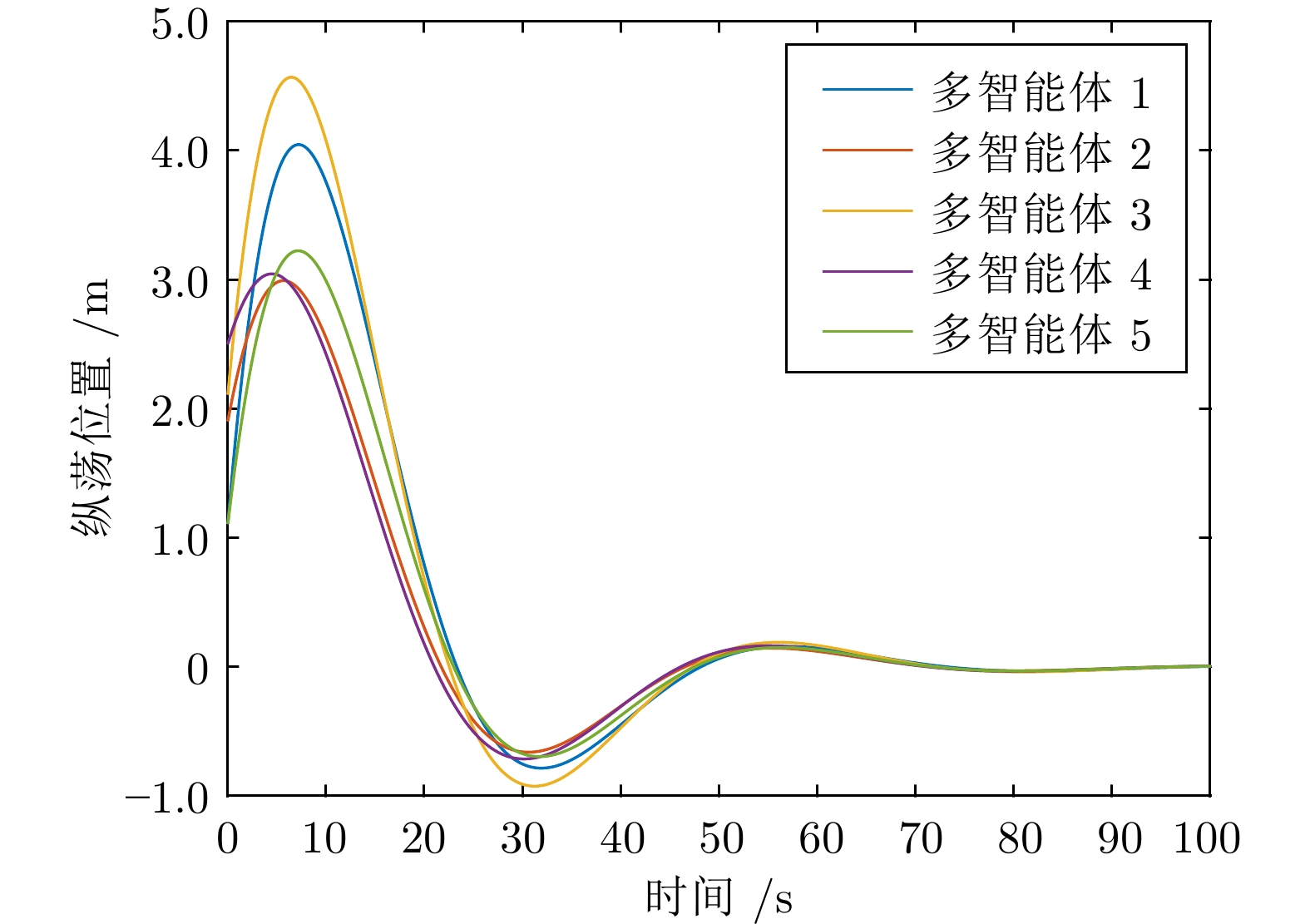
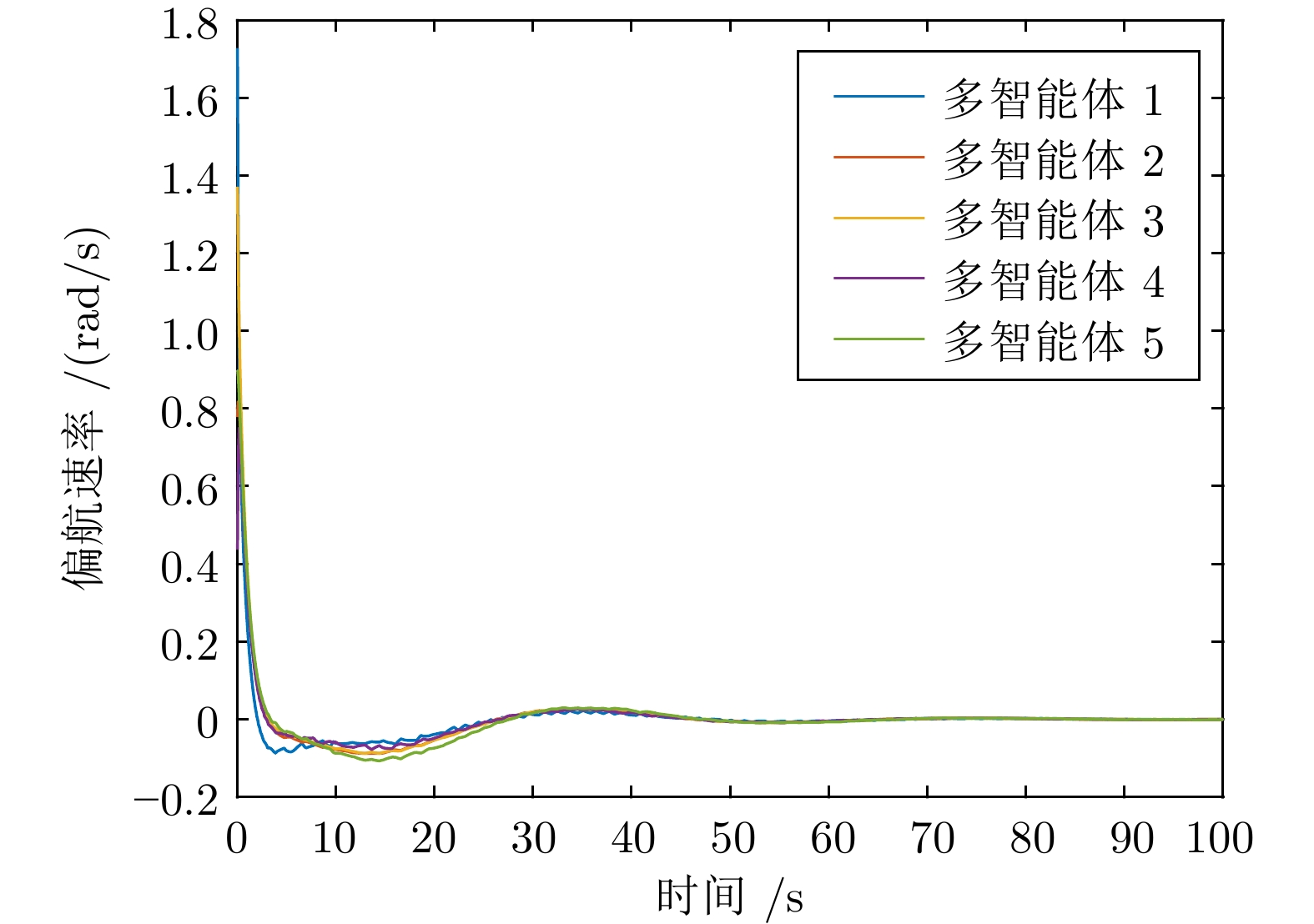
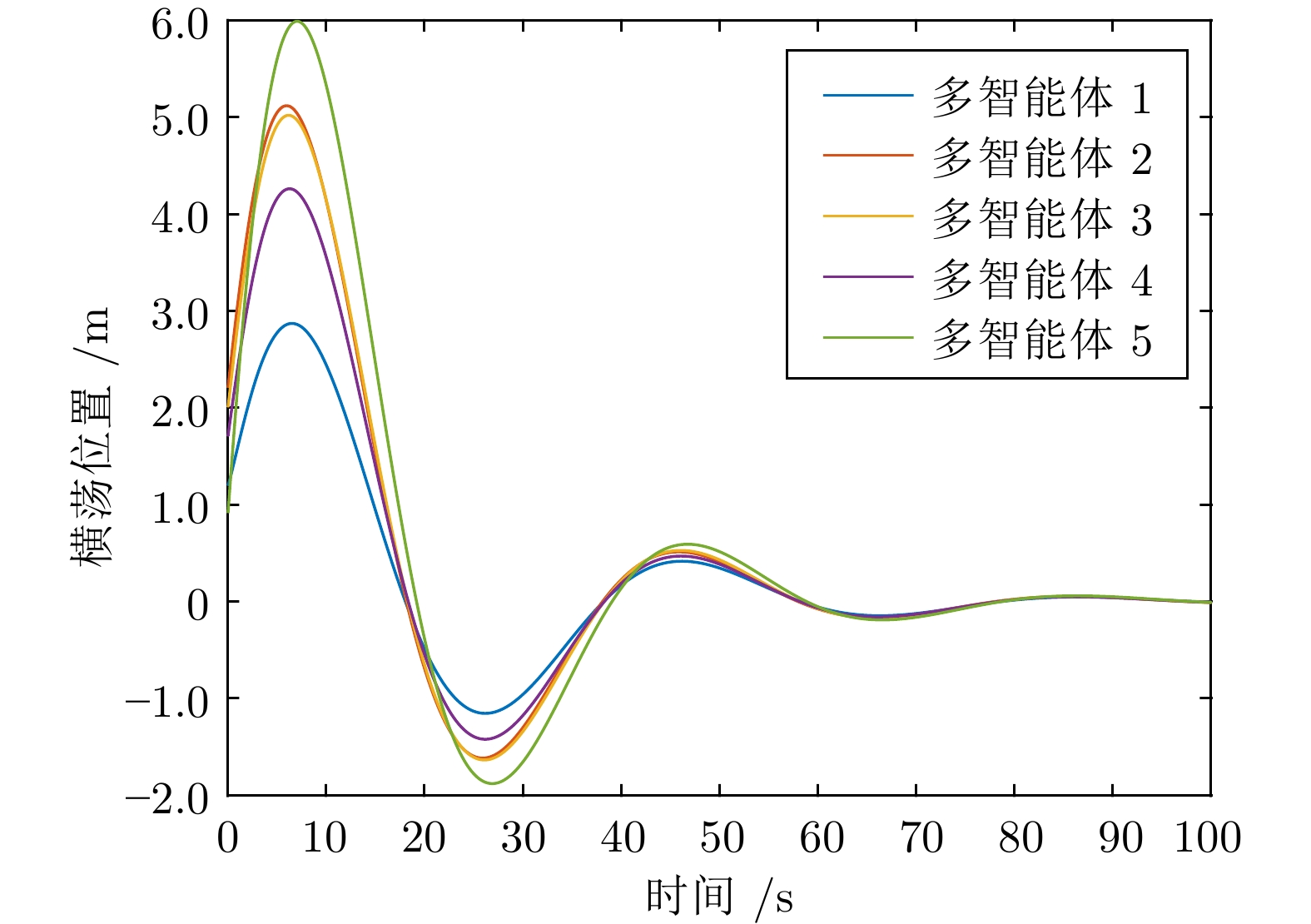
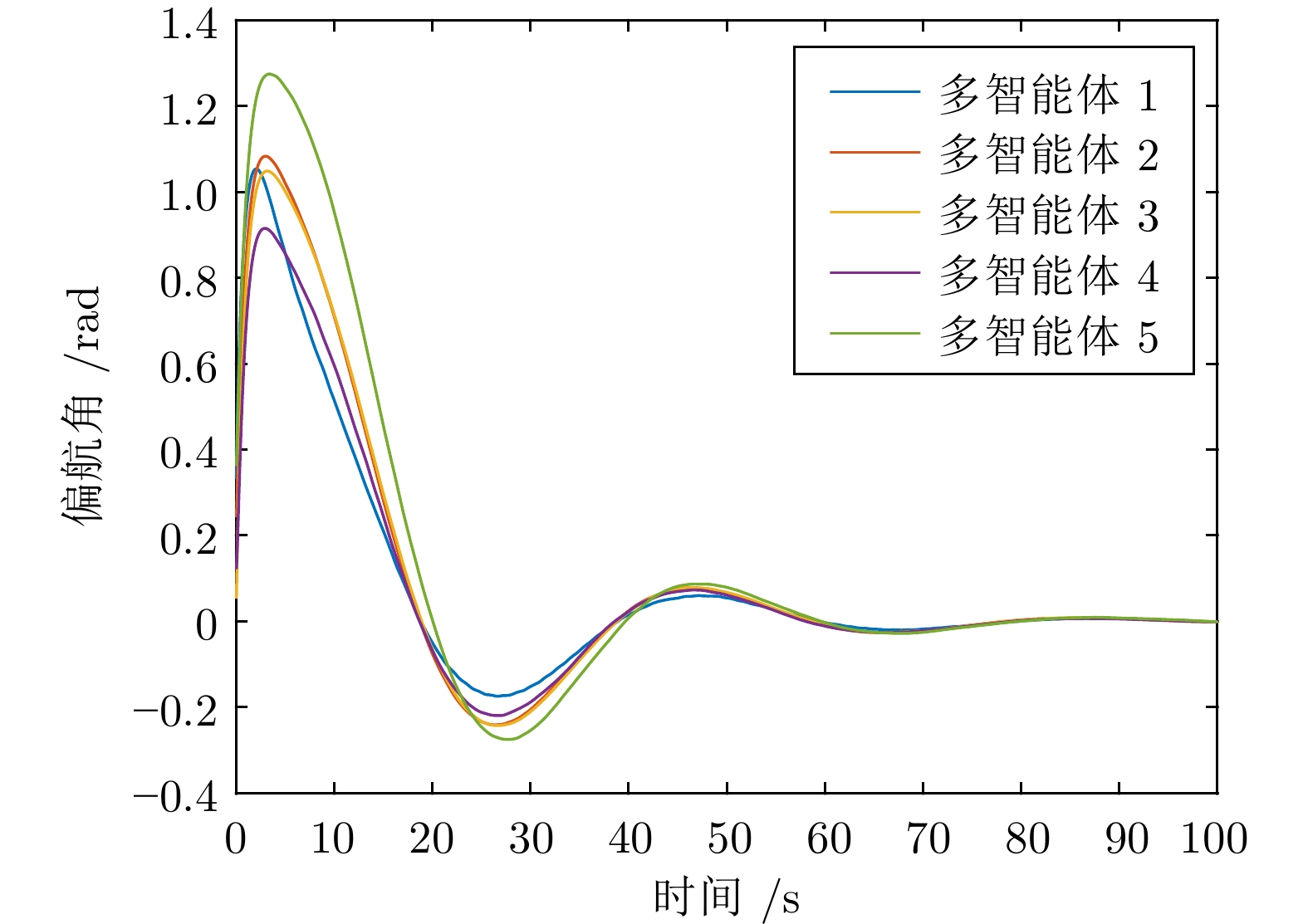
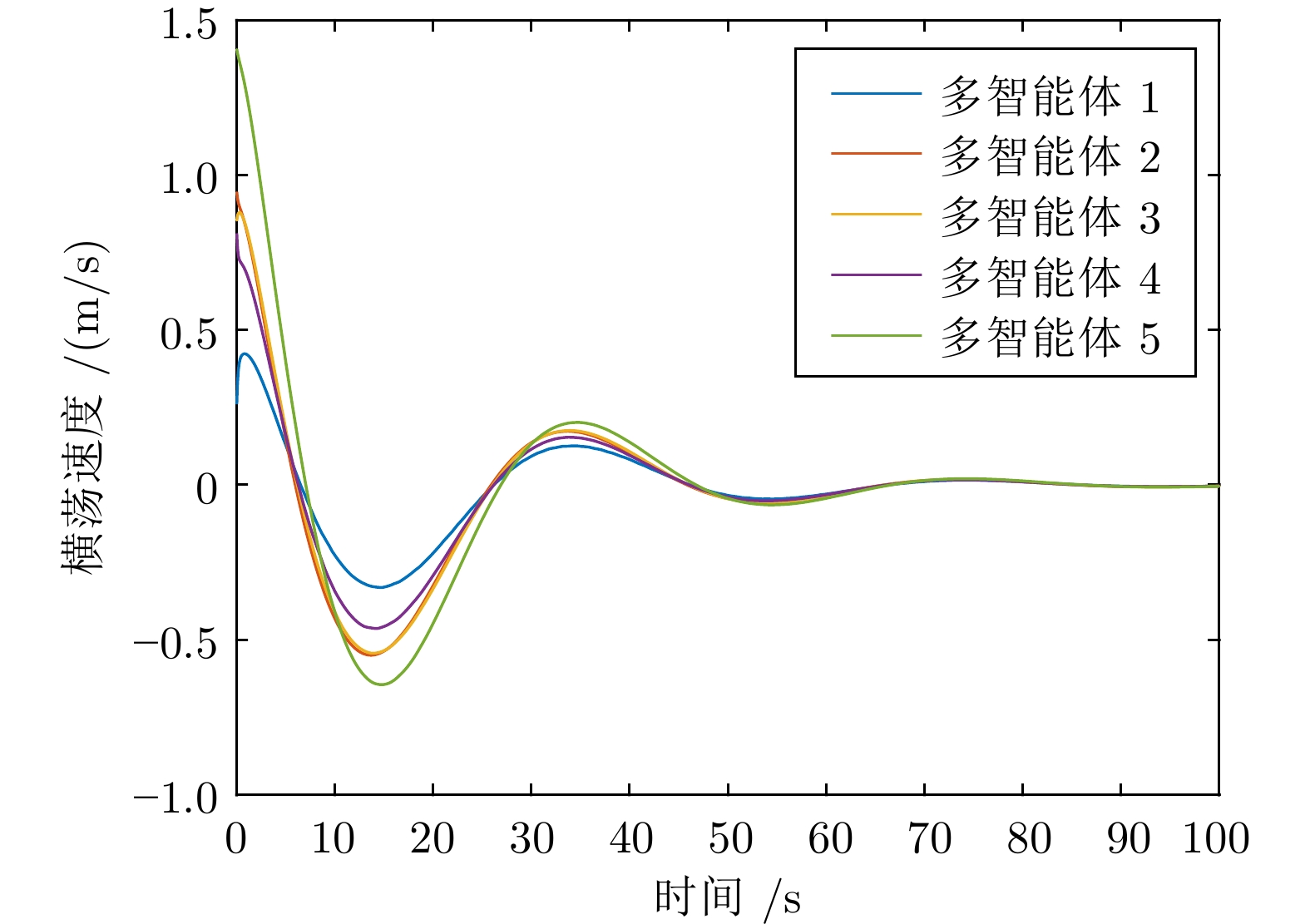
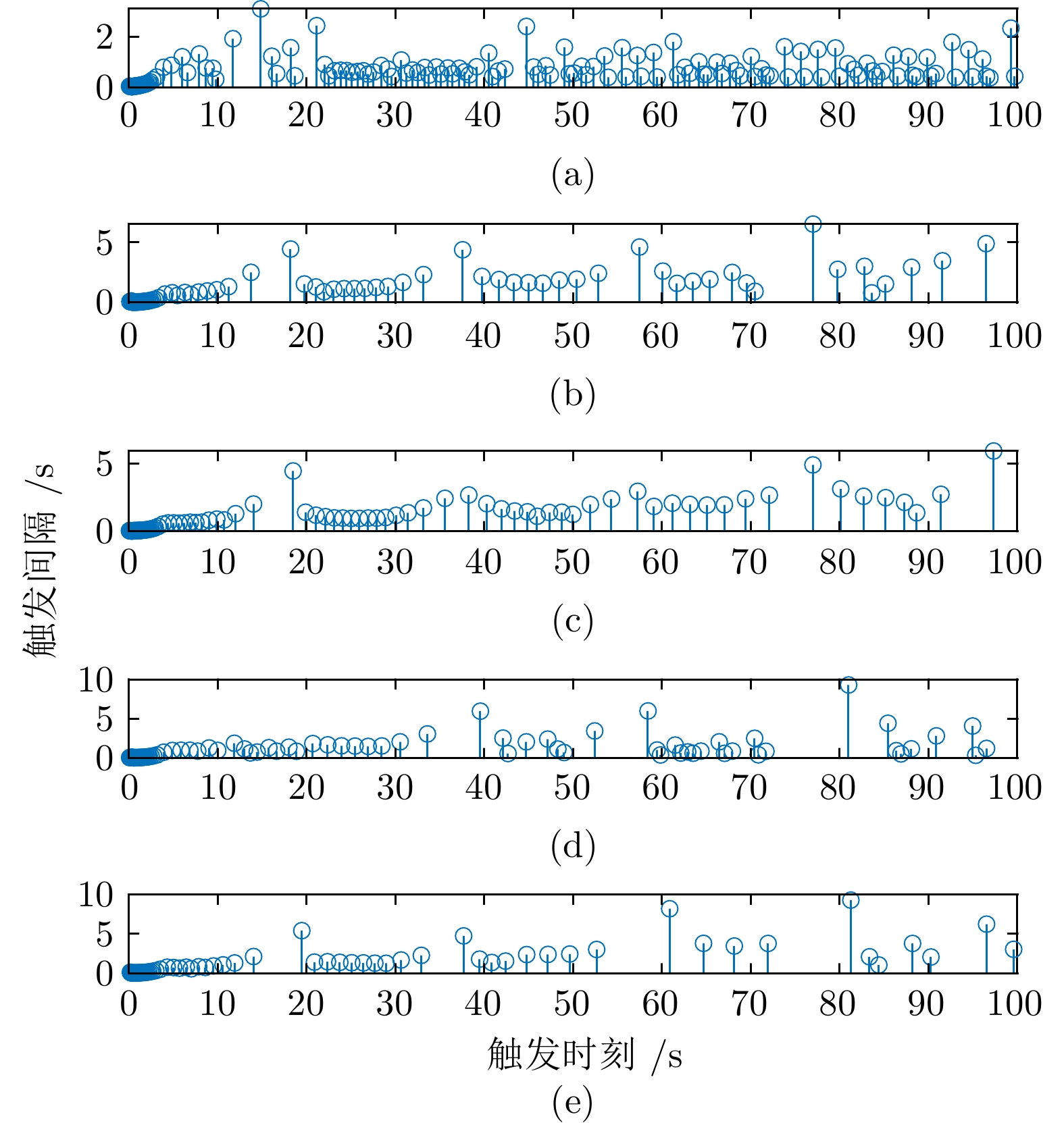
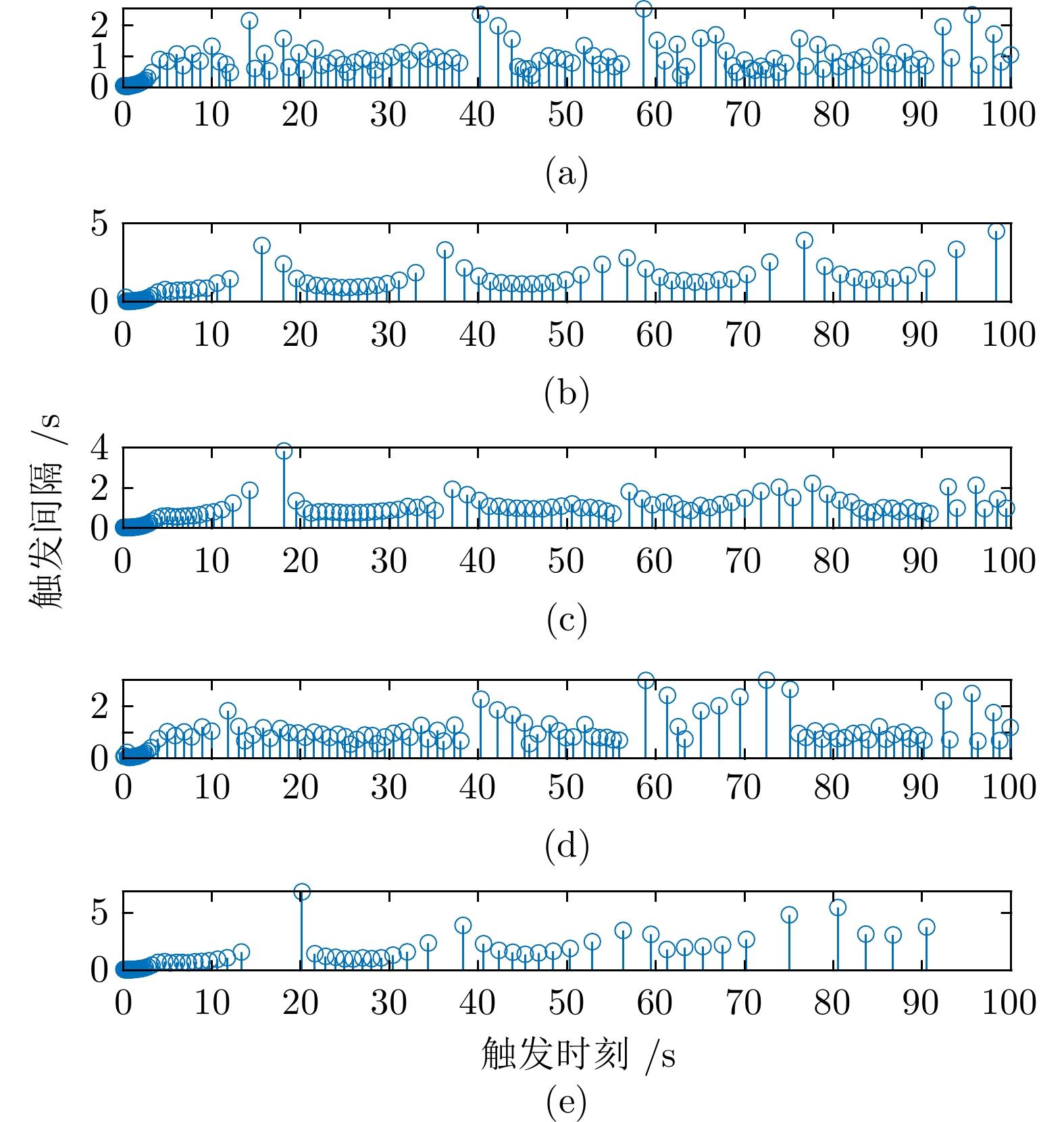
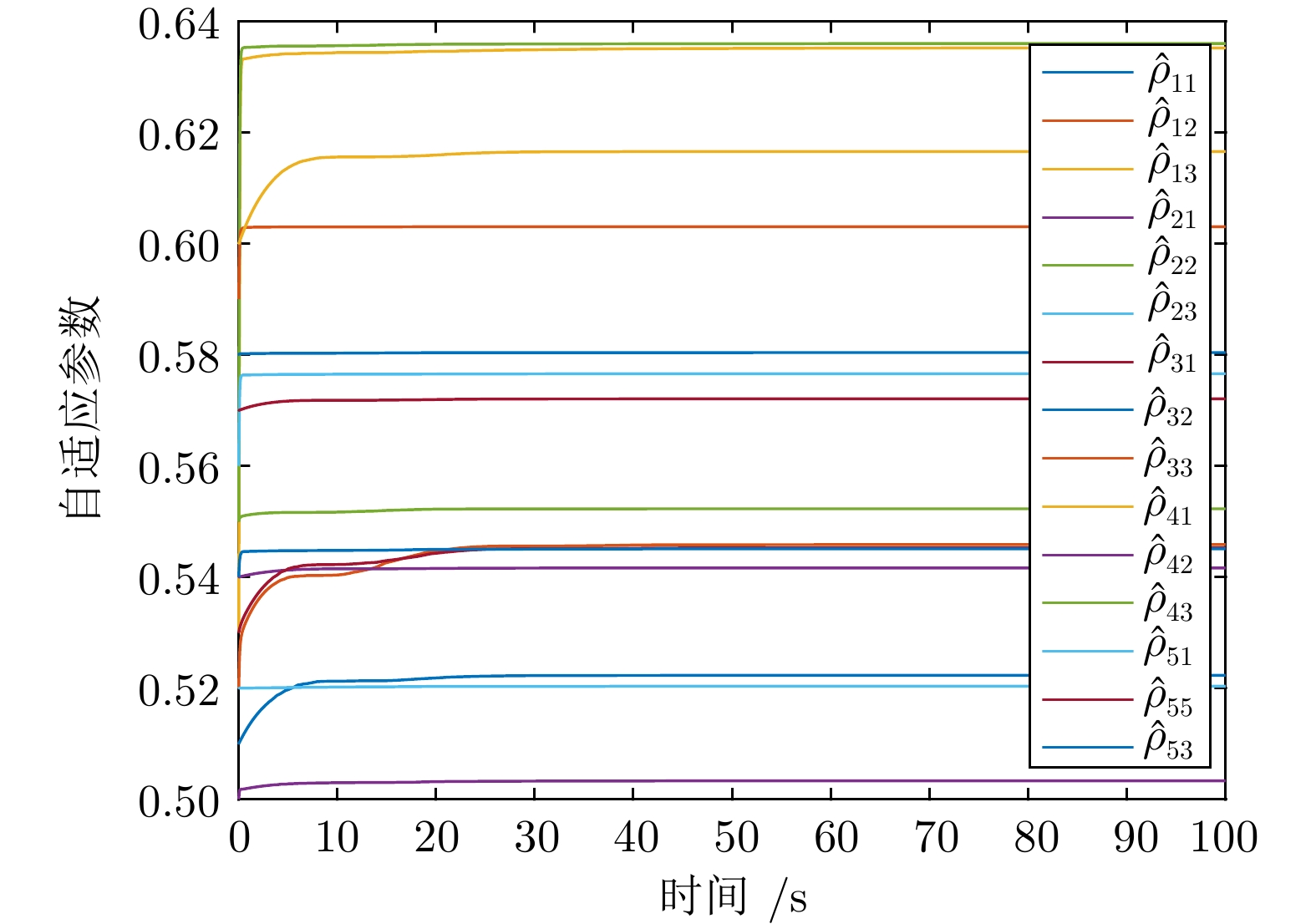
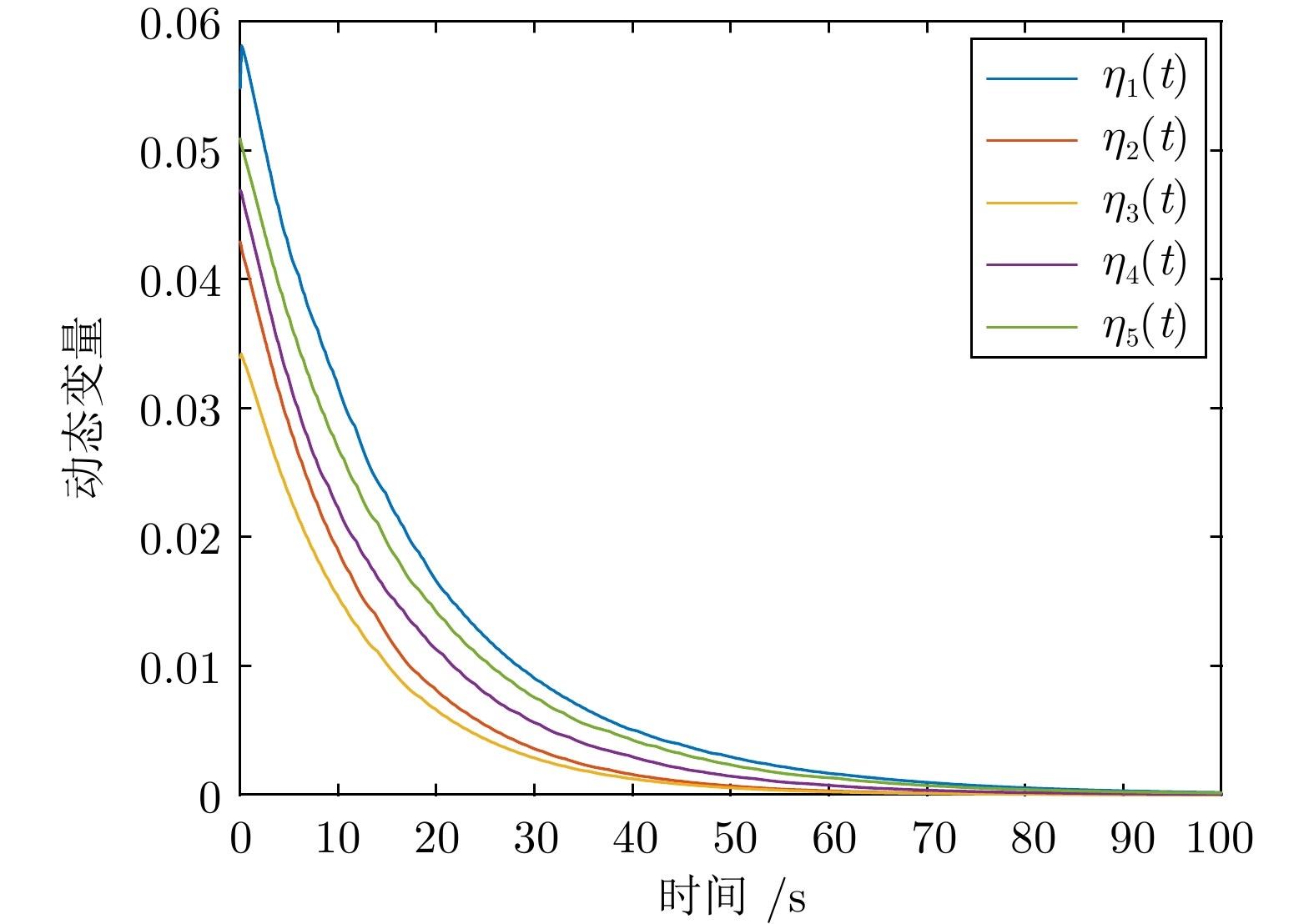
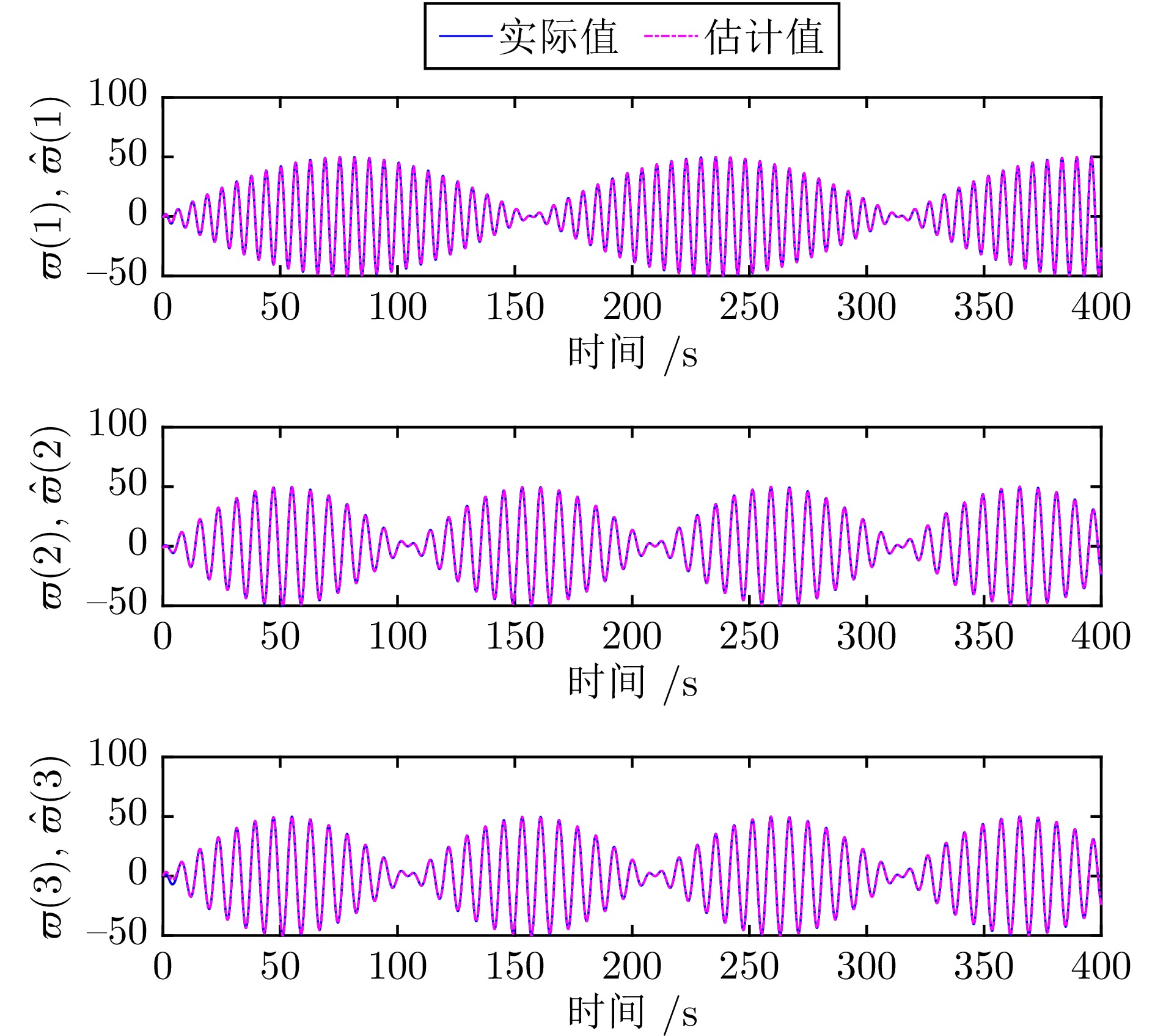
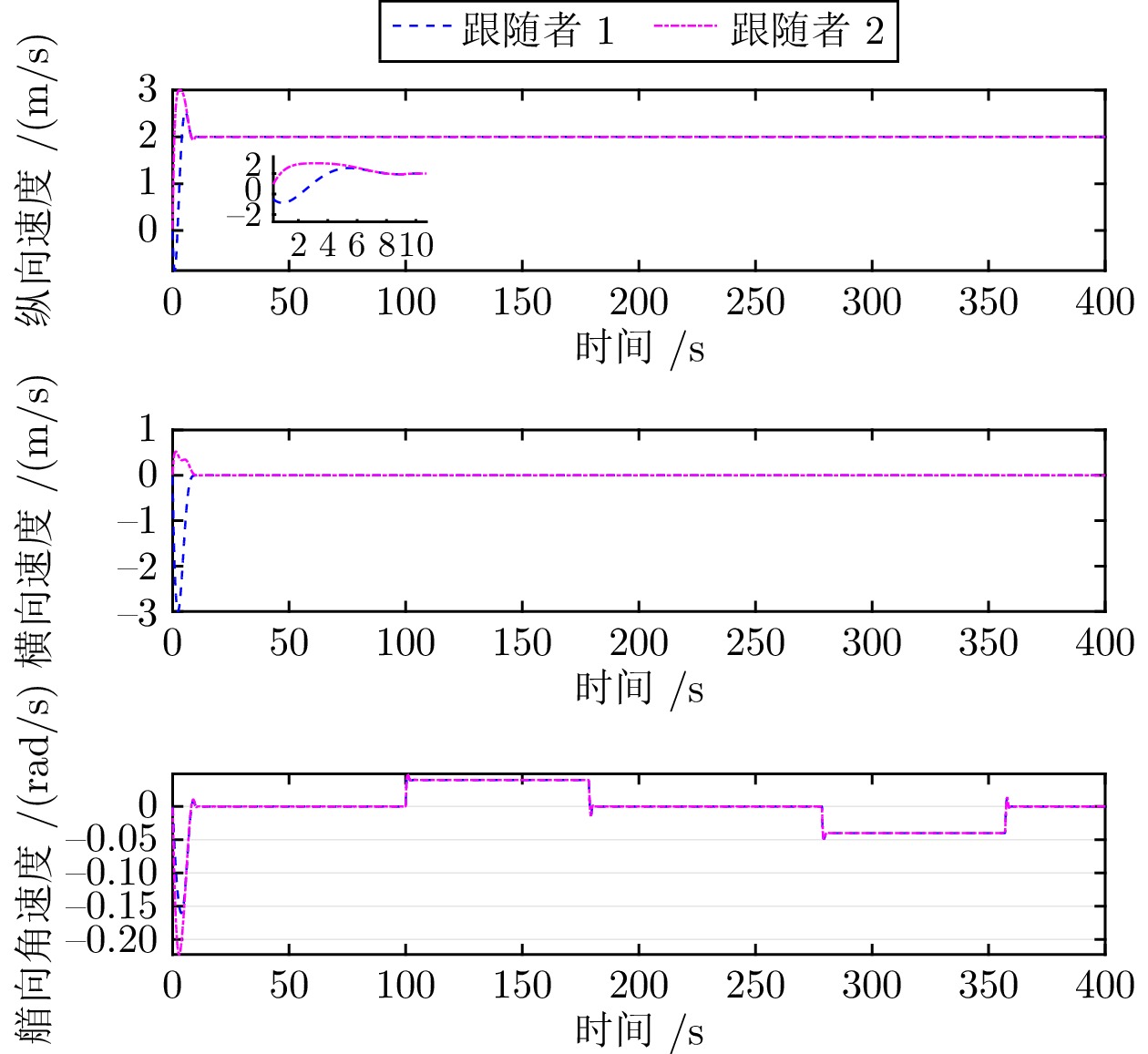
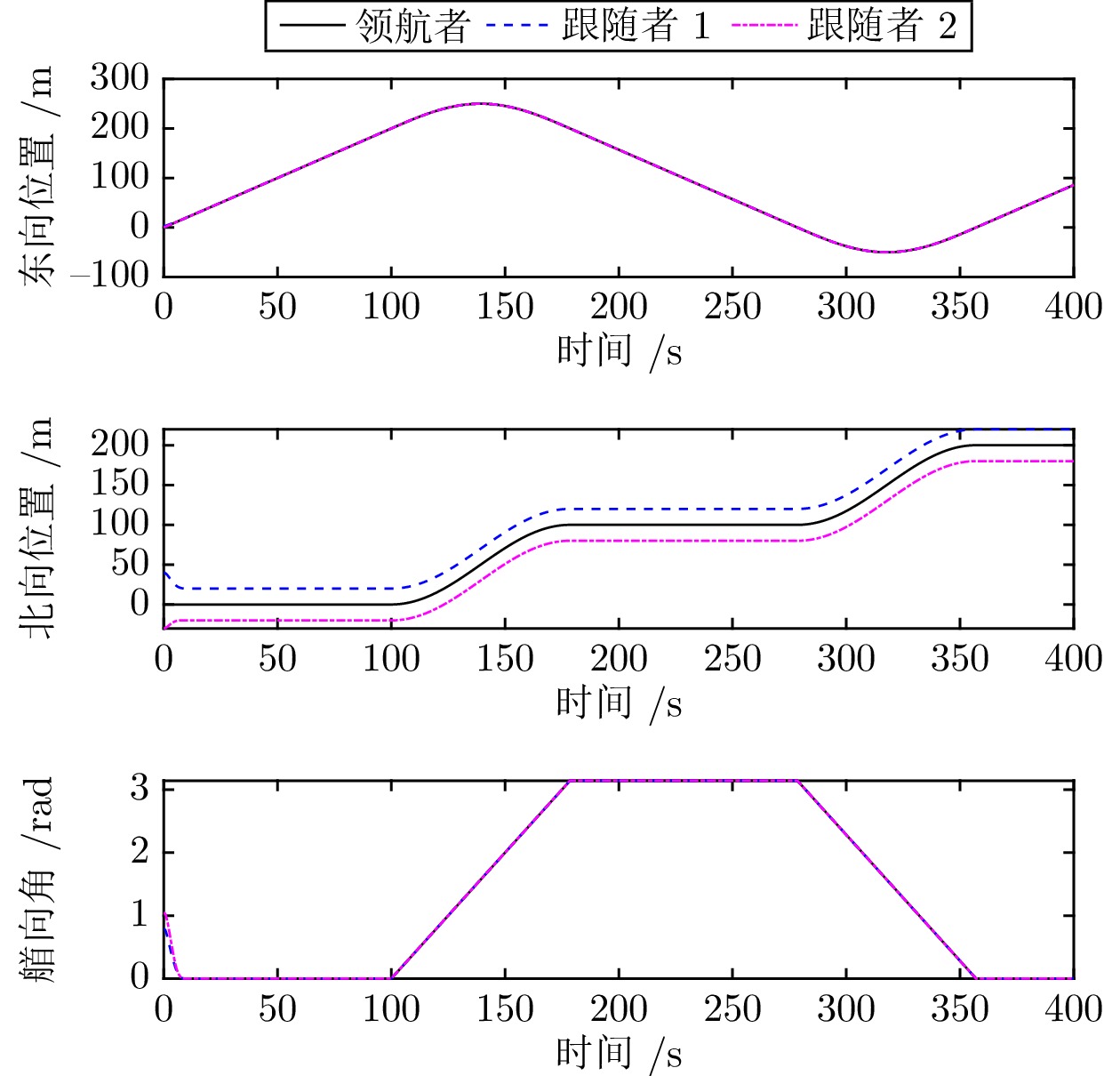
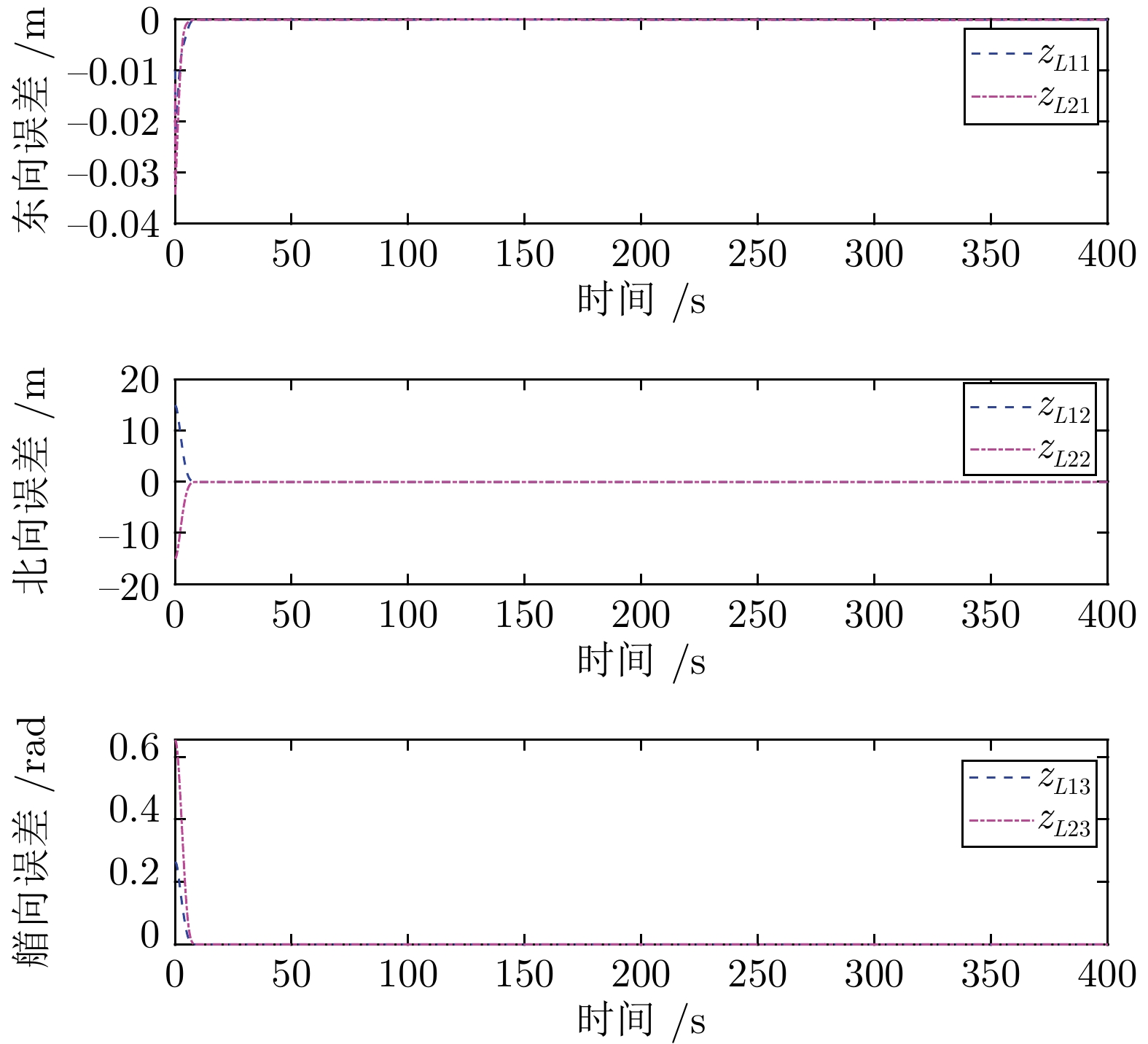
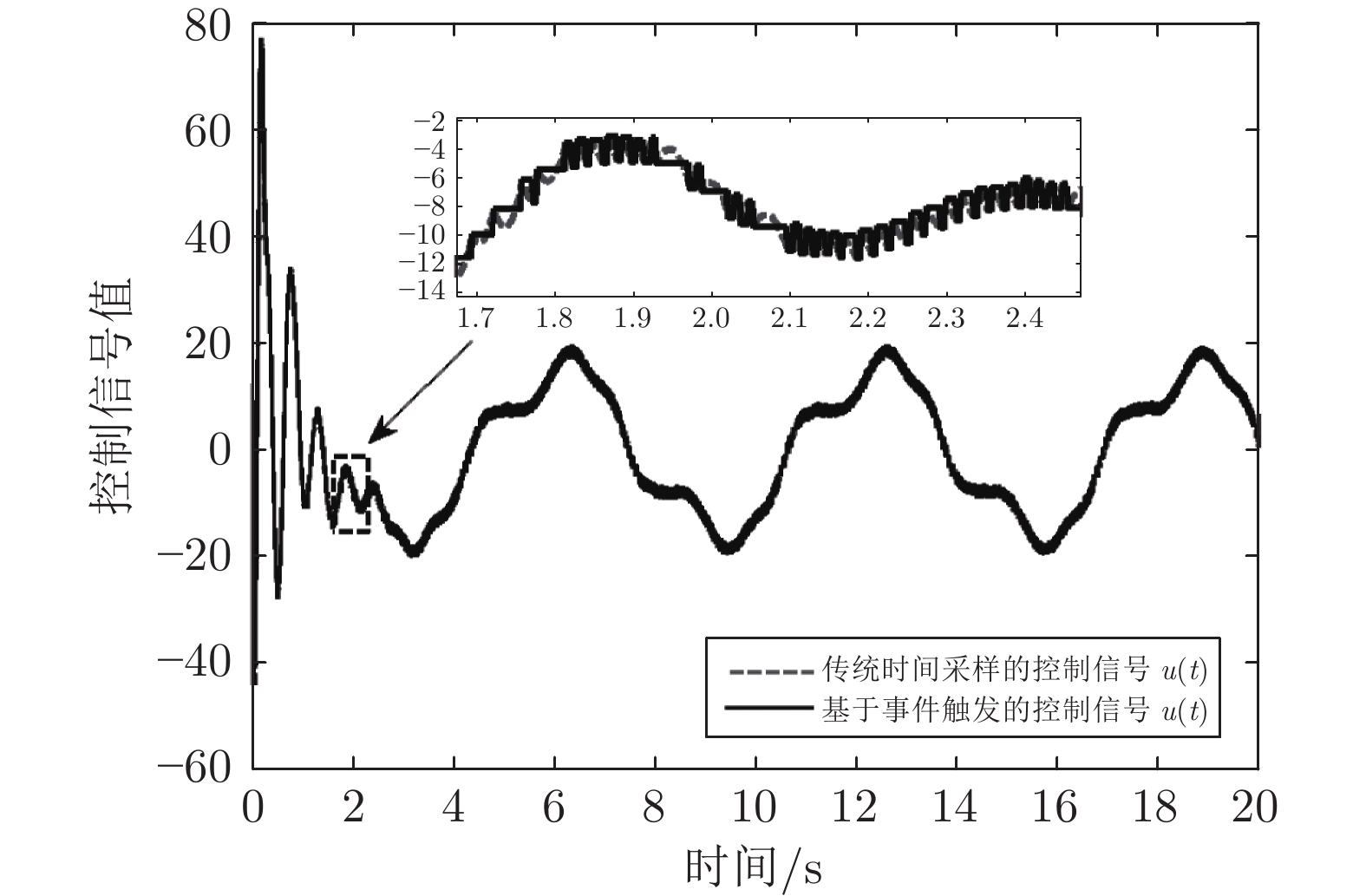
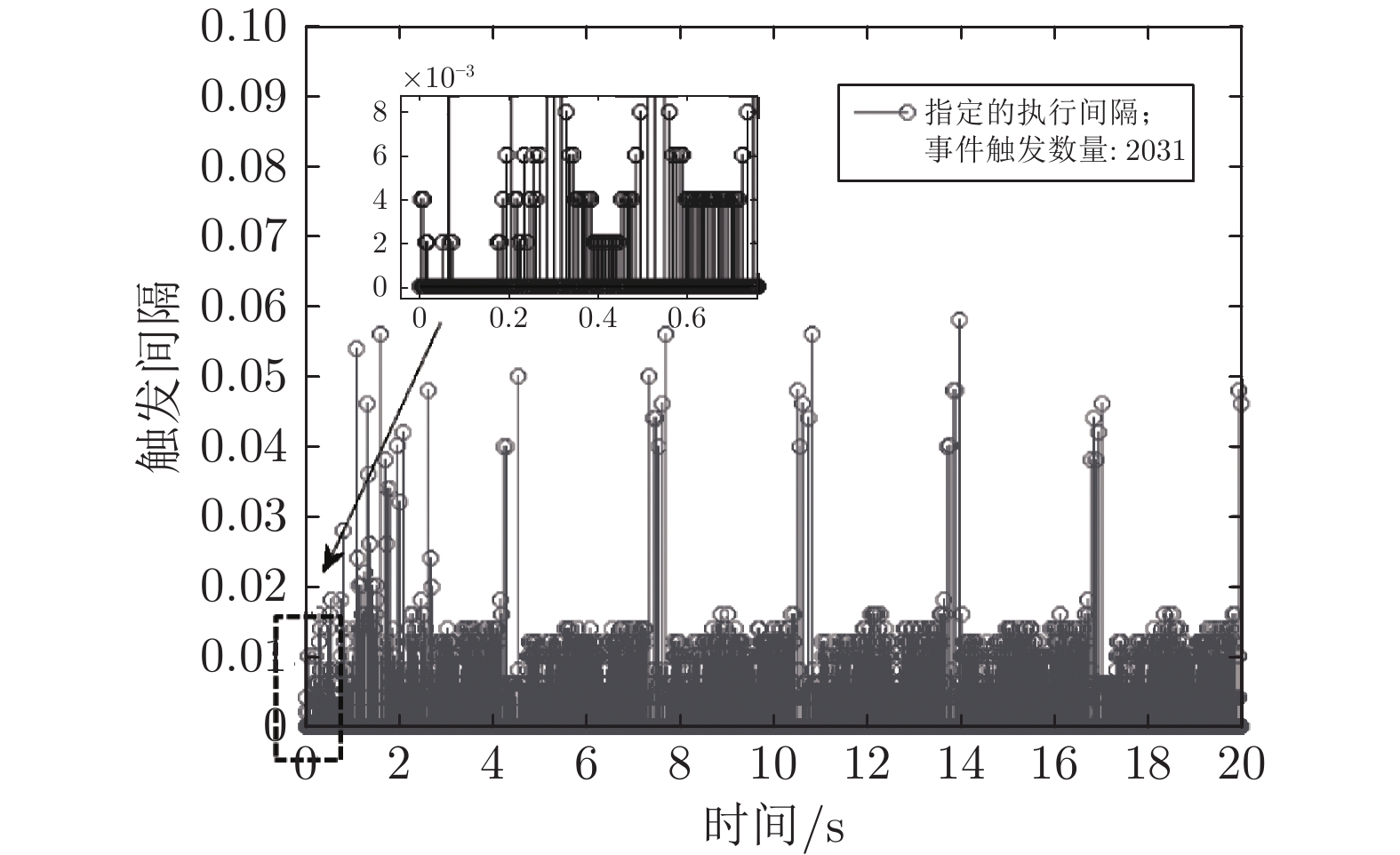
针对多智能体系统中邻居节点间通信资源受限的情况, 本文研究了基于动态事件触发通信协议的多智能体系统自适应可靠一致性控制问题. 首先, 设计了一种基于自适应参数估计技术的容错控制策略来应对未知执行器故障. 其次, 提出一种新型动态事件触发函数, 通过增加具有自适应调节能力的动态变量来延长事件触发间隔. 在此基础上, 证明了在智能体之间非连续通信的情况下, 所提方法仅依靠智能体与邻居在触发时刻的交互信息就可以确保一致性误差的收敛. 此外, 本文从理论上说明了智能体间的事件触发通信不存在芝诺现象. 最后, 针对无人船编队系统开展仿真, 结果能够说明本文所提自适应事件触发可靠控制方法的有效性.
针对多智能体系统中邻居节点间通信资源受限的情况, 本文研究了基于动态事件触发通信协议的多智能体系统自适应可靠一致性控制问题. 首先, 设计了一种基于自适应参数估计技术的容错控制策略来应对未知执行器故障. 其次, 提出一种新型动态事件触发函数, 通过增加具有自适应调节能力的动态变量来延长事件触发间隔. 在此基础上, 证明了在智能体之间非连续通信的情况下, 所提方法仅依靠智能体与邻居在触发时刻的交互信息就可以确保一致性误差的收敛. 此外, 本文从理论上说明了智能体间的事件触发通信不存在芝诺现象. 最后, 针对无人船编队系统开展仿真, 结果能够说明本文所提自适应事件触发可靠控制方法的有效性.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220983
摘要:
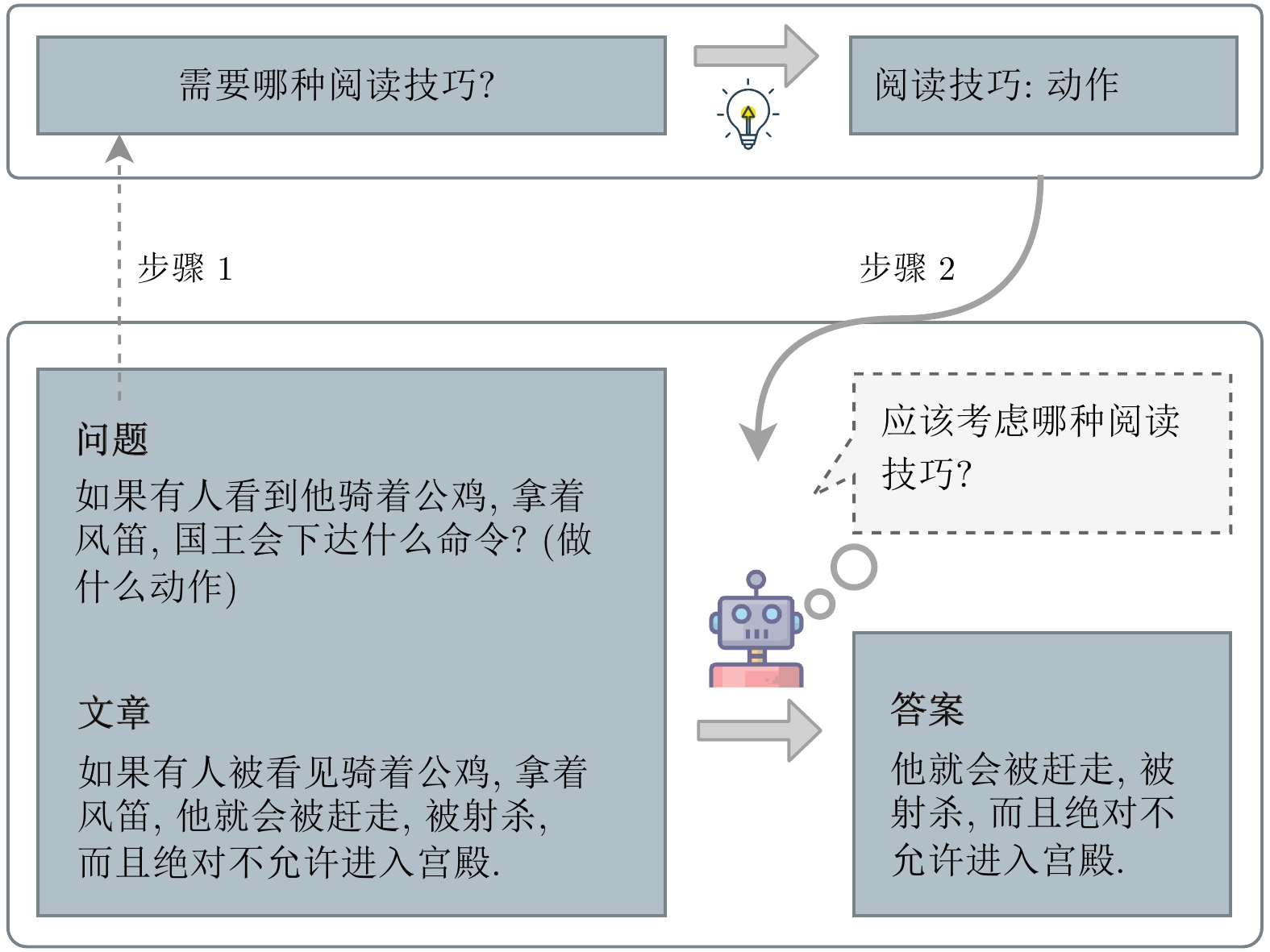
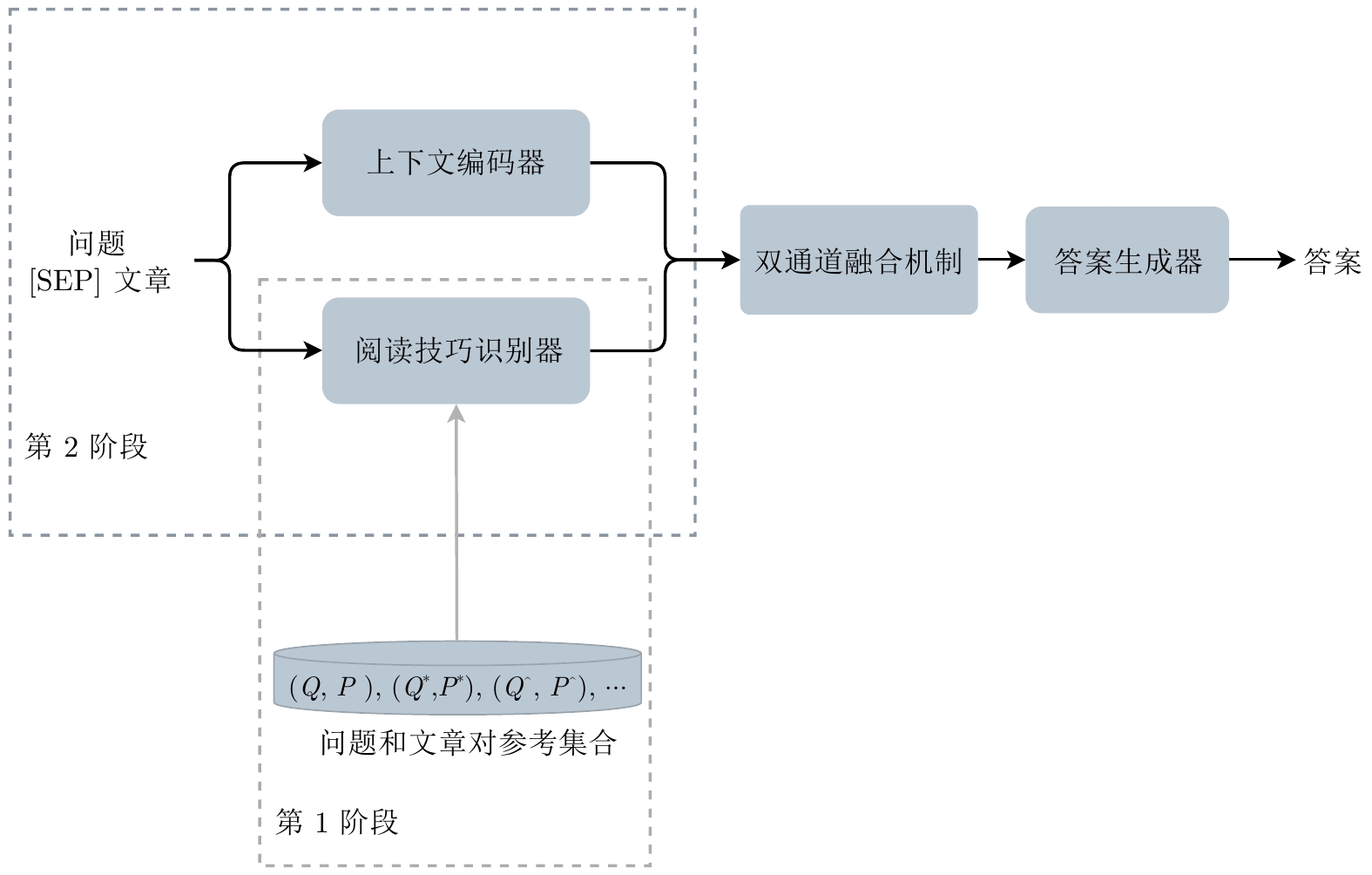
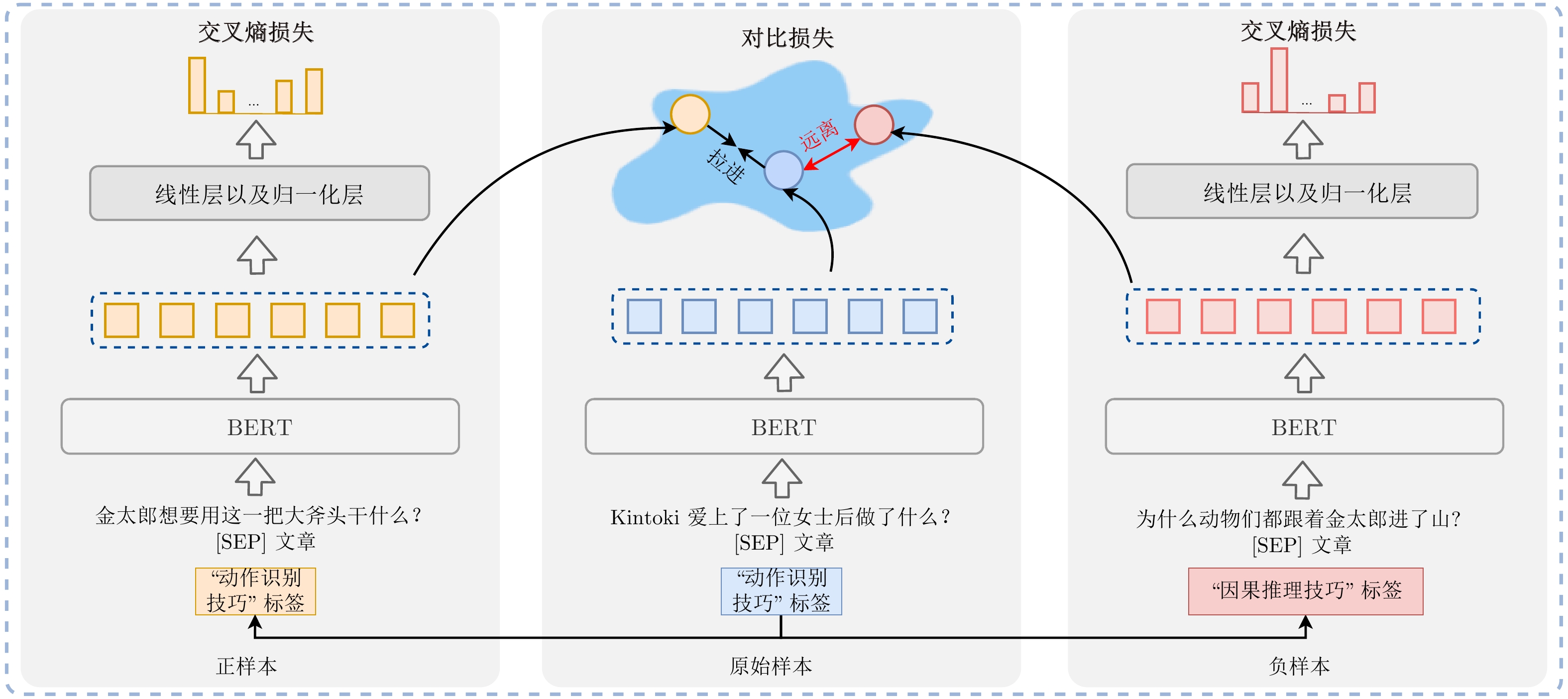
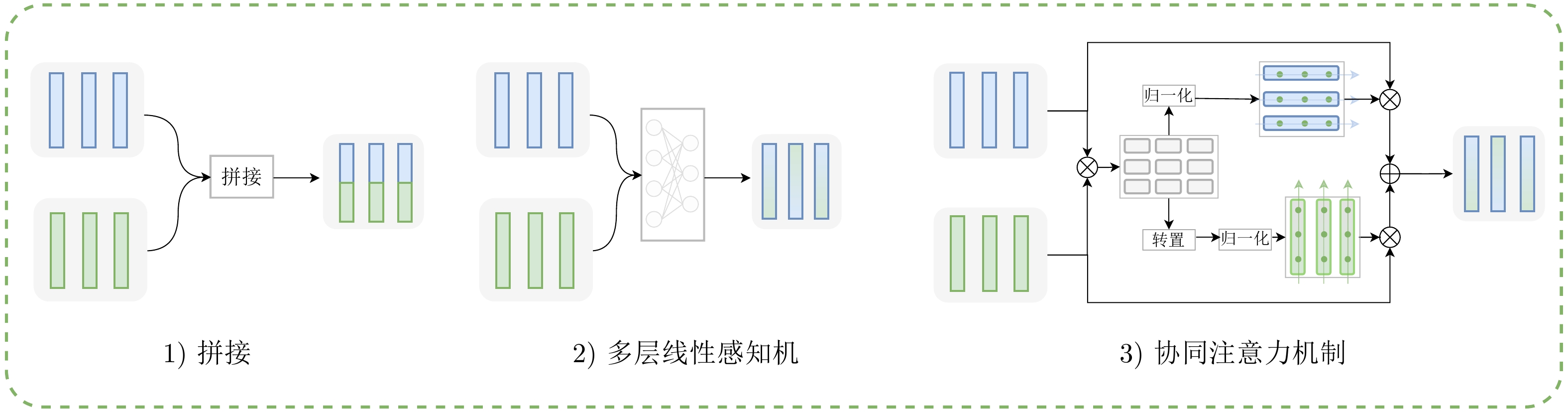
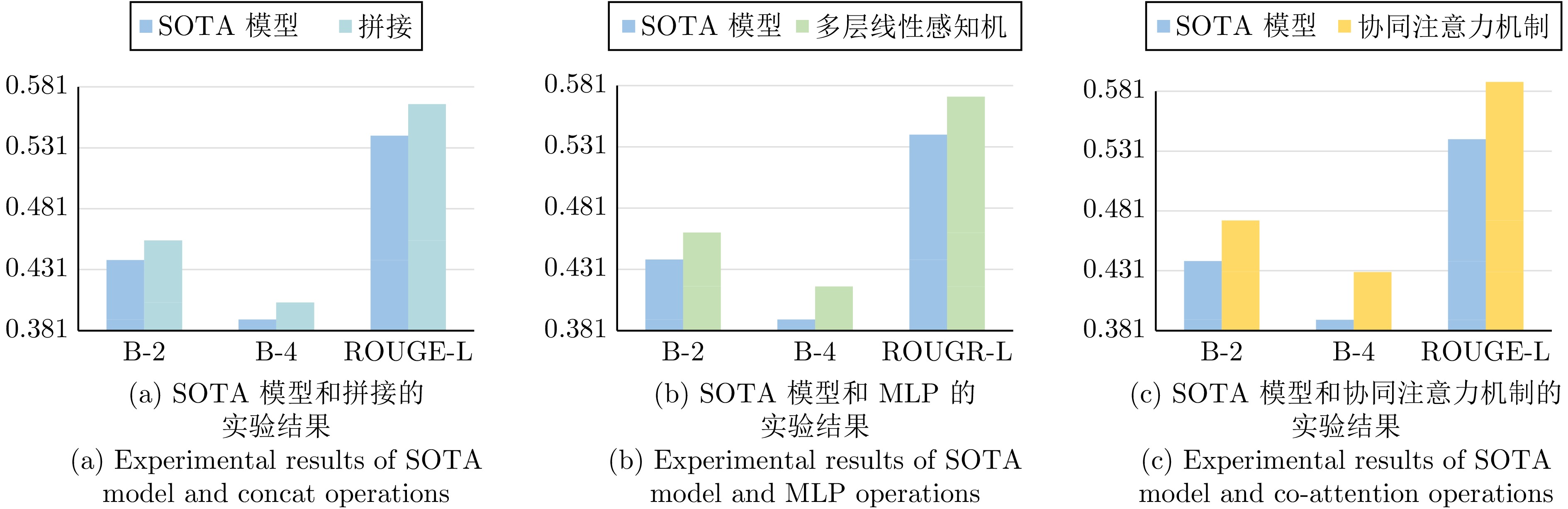
机器阅读理解任务旨在要求系统对给定文章进行理解, 然后对给定问题进行回答. 先前的工作重点聚焦在问题和文章间的交互信息, 忽略了对问题进行更加细粒度的分析(如问题所考察的阅读技巧是什么?). 受到先前研究的启发, 人类对于问题的理解是一个多维度的过程, 首先人类需要理解问题的上/下文语义信息, 然后针对不同类型问题, 识别其需要使用的阅读技巧, 最后通过与文章交互回答出问题答案. 针对这些问题, 提出一种基于阅读技巧识别和双通道融合的机器阅读理解方法, 对问题进行更加细致的分析, 从而提高模型回答问题的准确性. 阅读技巧识别器通过对比学习的方法, 能够显式地捕获阅读技巧的语义信息. 双通道融合机制将问题与文章的交互信息和阅读技巧的语义信息进行深层次的融合, 从而达到辅助系统理解问题和文章的目的. 为了验证该模型的效果, 在FairytaleQA数据集上进行实验, 实验结果表明, 该方法实现了在机器阅读理解任务和阅读技巧识别任务上的最好效果.
机器阅读理解任务旨在要求系统对给定文章进行理解, 然后对给定问题进行回答. 先前的工作重点聚焦在问题和文章间的交互信息, 忽略了对问题进行更加细粒度的分析(如问题所考察的阅读技巧是什么?). 受到先前研究的启发, 人类对于问题的理解是一个多维度的过程, 首先人类需要理解问题的上/下文语义信息, 然后针对不同类型问题, 识别其需要使用的阅读技巧, 最后通过与文章交互回答出问题答案. 针对这些问题, 提出一种基于阅读技巧识别和双通道融合的机器阅读理解方法, 对问题进行更加细致的分析, 从而提高模型回答问题的准确性. 阅读技巧识别器通过对比学习的方法, 能够显式地捕获阅读技巧的语义信息. 双通道融合机制将问题与文章的交互信息和阅读技巧的语义信息进行深层次的融合, 从而达到辅助系统理解问题和文章的目的. 为了验证该模型的效果, 在FairytaleQA数据集上进行实验, 实验结果表明, 该方法实现了在机器阅读理解任务和阅读技巧识别任务上的最好效果.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230550
摘要:
针对有限时间控制中各状态分量收敛时间不同问题, 提出一种无人艇编队有限时间同步控制框架, 在此框架下设计的有限时间同步编队控制方法可巧妙地达到无人艇所有自由度误差在同一时刻收敛到平衡点. 首先, 针对现有干扰观测器与时间同步稳定框架不兼容问题, 设计有限时间同步干扰观测器; 然后, 利用比例保持特性设计有限时间同步稳定编队控制器, 并验证了所提控制算法的稳定性; 最后, 通过3艘无人艇编队进行仿真实验, 实验结果验证了所提控制算法的有效性和优越性. 所提控制方法对有时间同步控制需求的航海、航空航天和工业领域具有现实意义.
针对有限时间控制中各状态分量收敛时间不同问题, 提出一种无人艇编队有限时间同步控制框架, 在此框架下设计的有限时间同步编队控制方法可巧妙地达到无人艇所有自由度误差在同一时刻收敛到平衡点. 首先, 针对现有干扰观测器与时间同步稳定框架不兼容问题, 设计有限时间同步干扰观测器; 然后, 利用比例保持特性设计有限时间同步稳定编队控制器, 并验证了所提控制算法的稳定性; 最后, 通过3艘无人艇编队进行仿真实验, 实验结果验证了所提控制算法的有效性和优越性. 所提控制方法对有时间同步控制需求的航海、航空航天和工业领域具有现实意义.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230699
摘要:
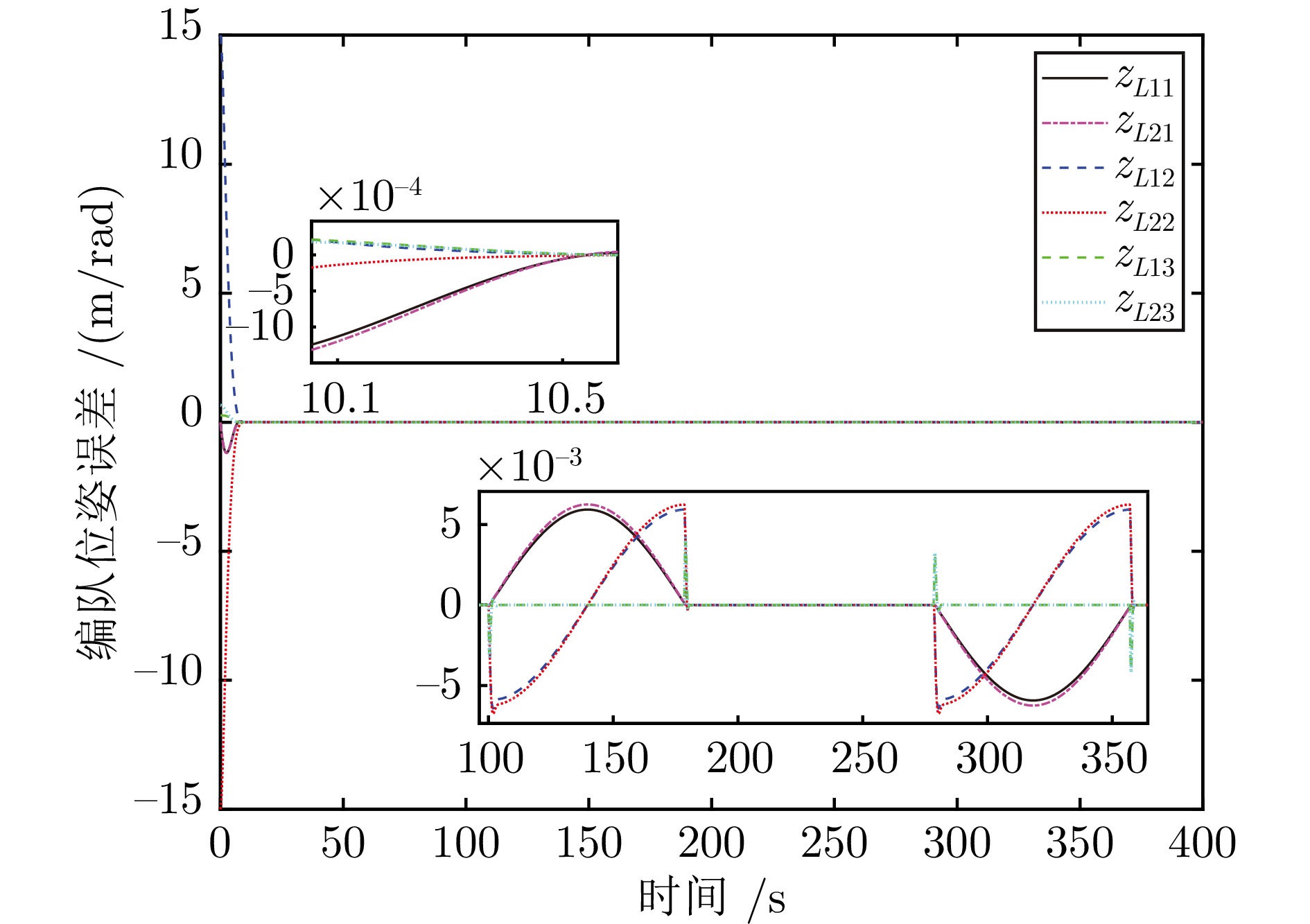
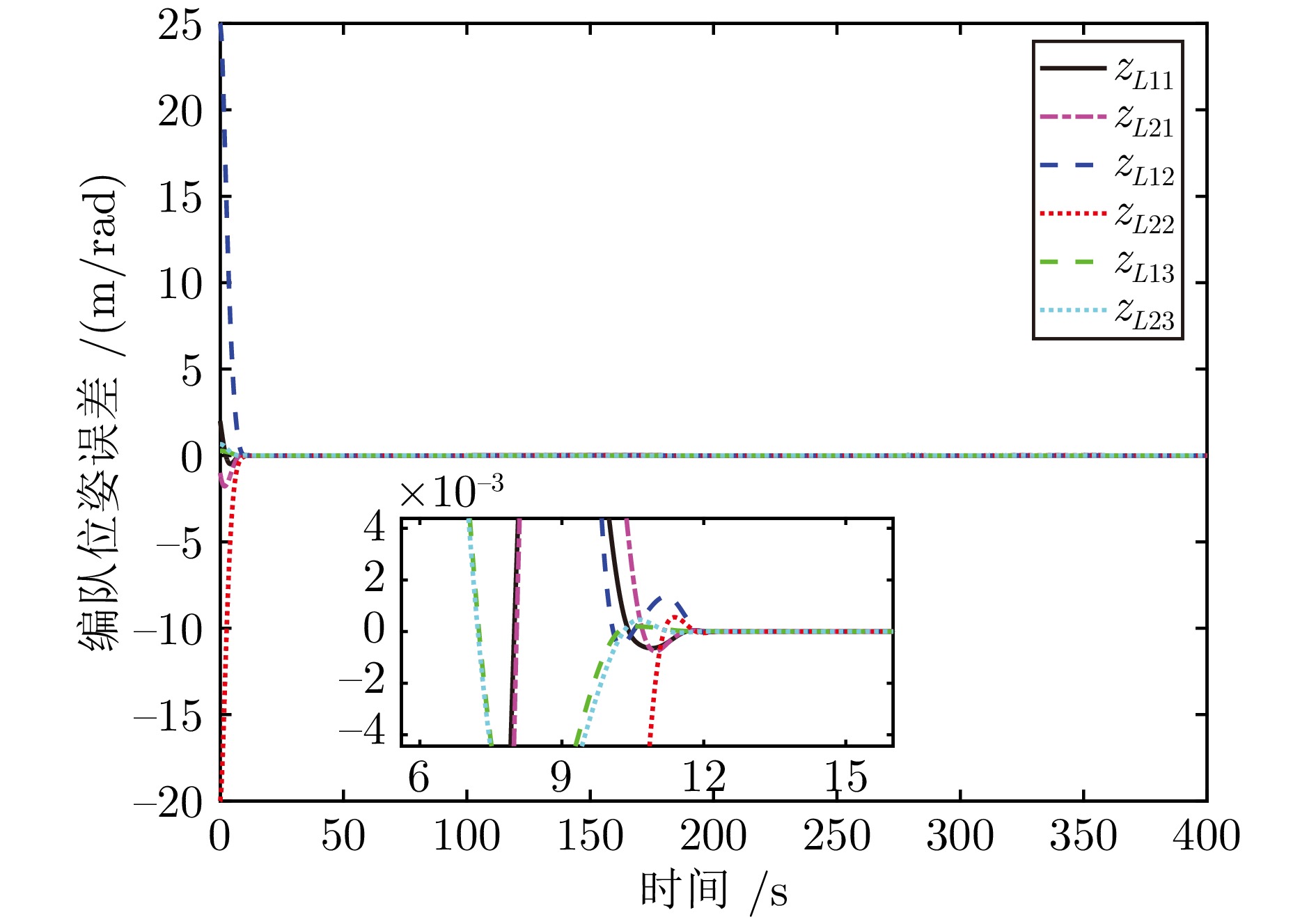
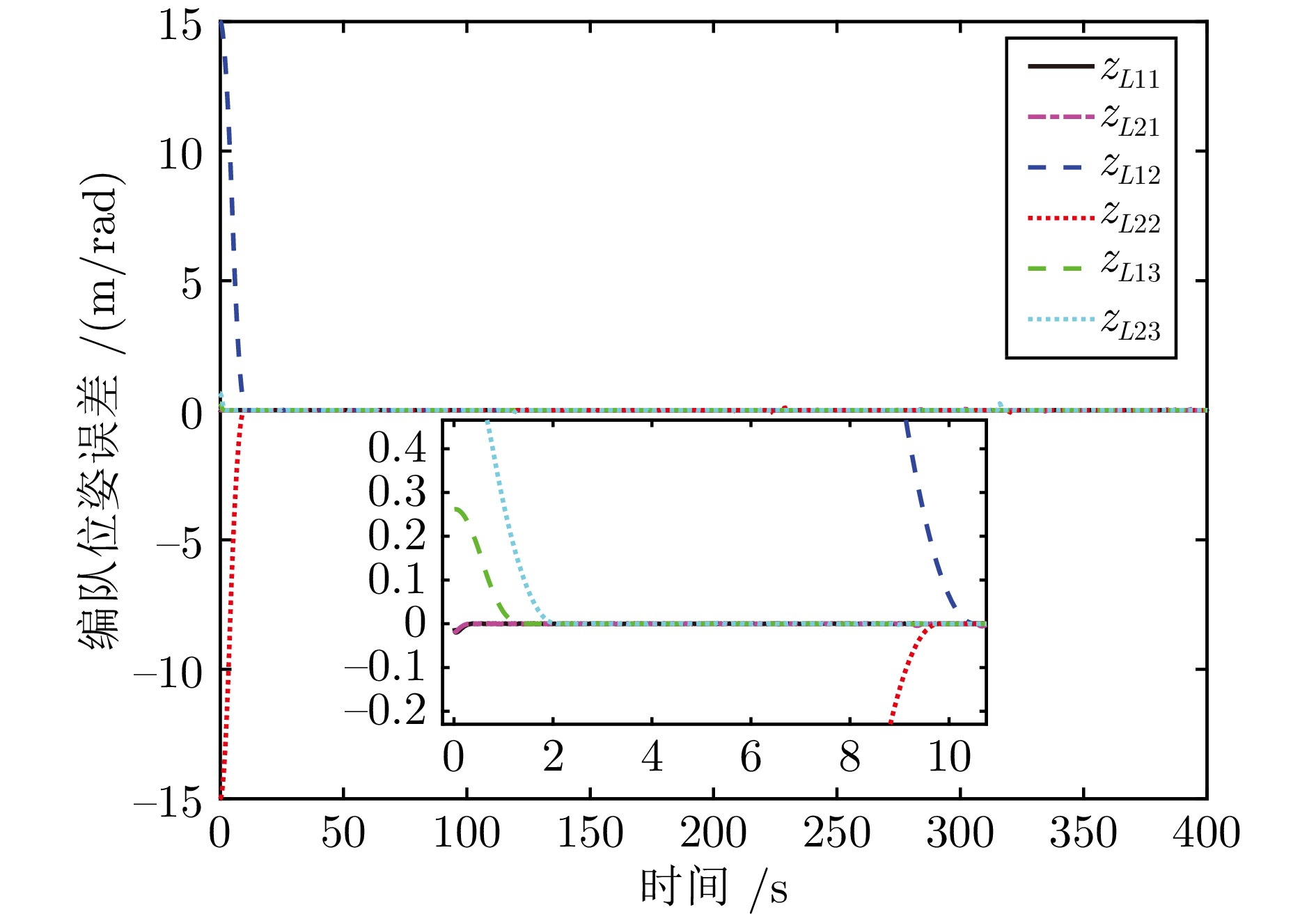
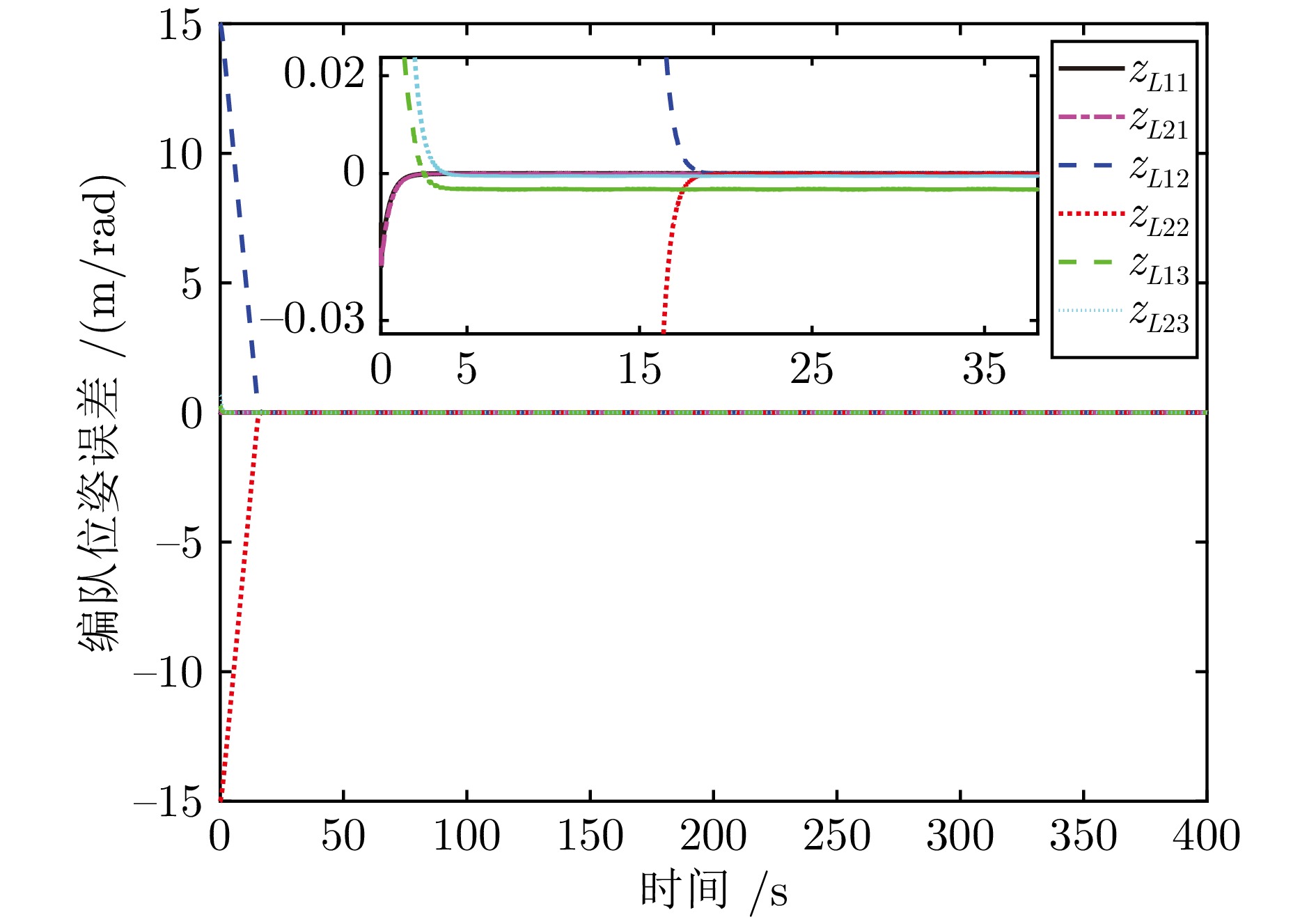
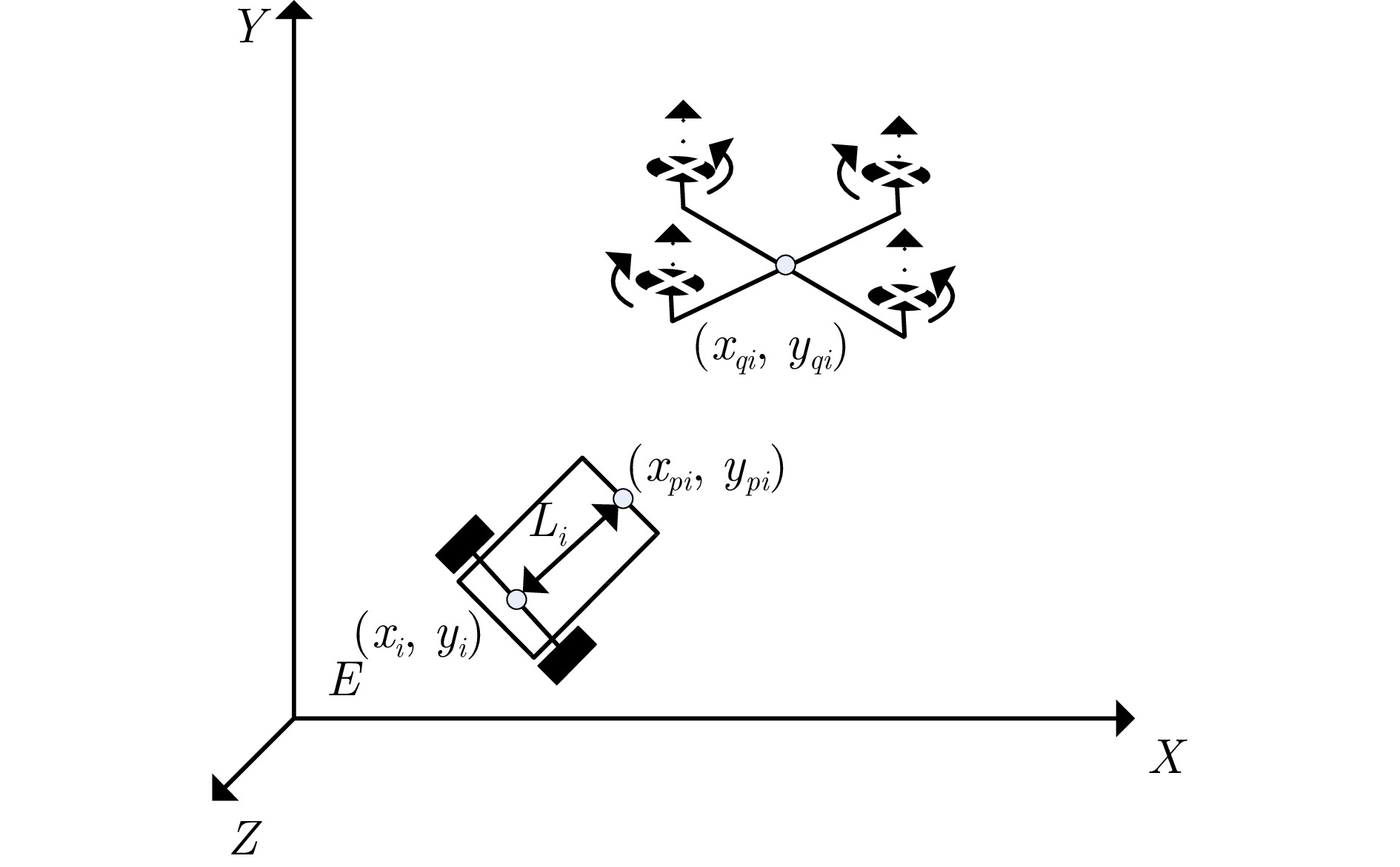
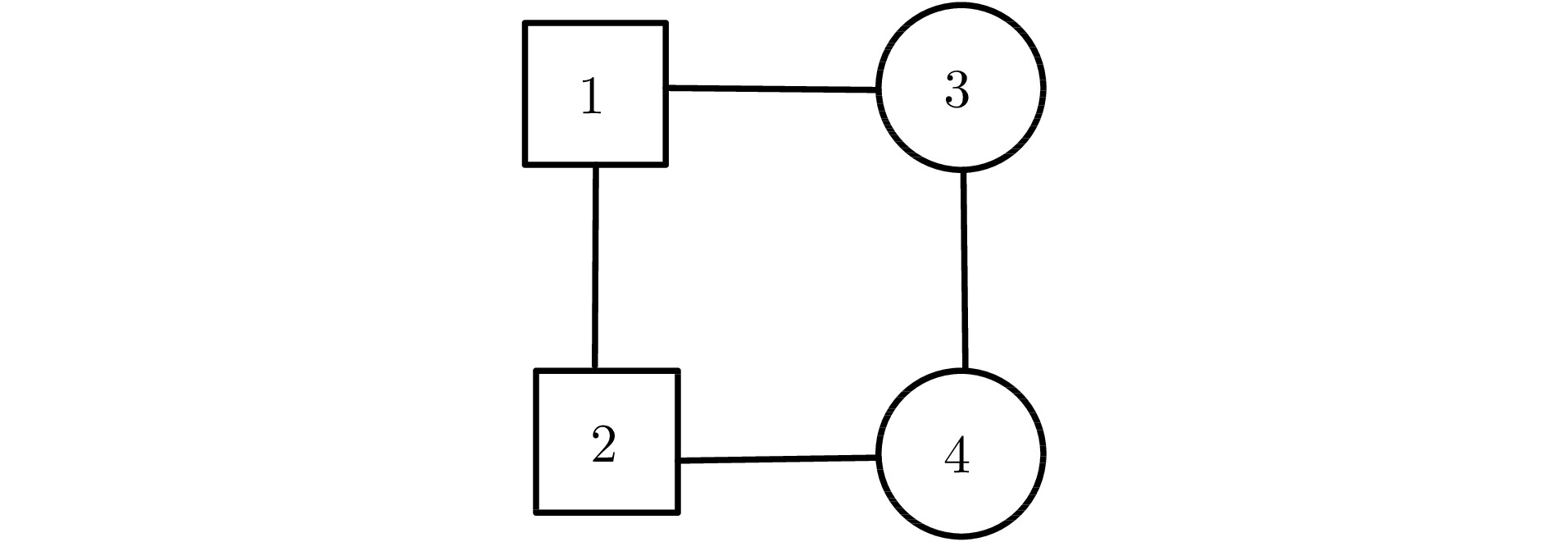
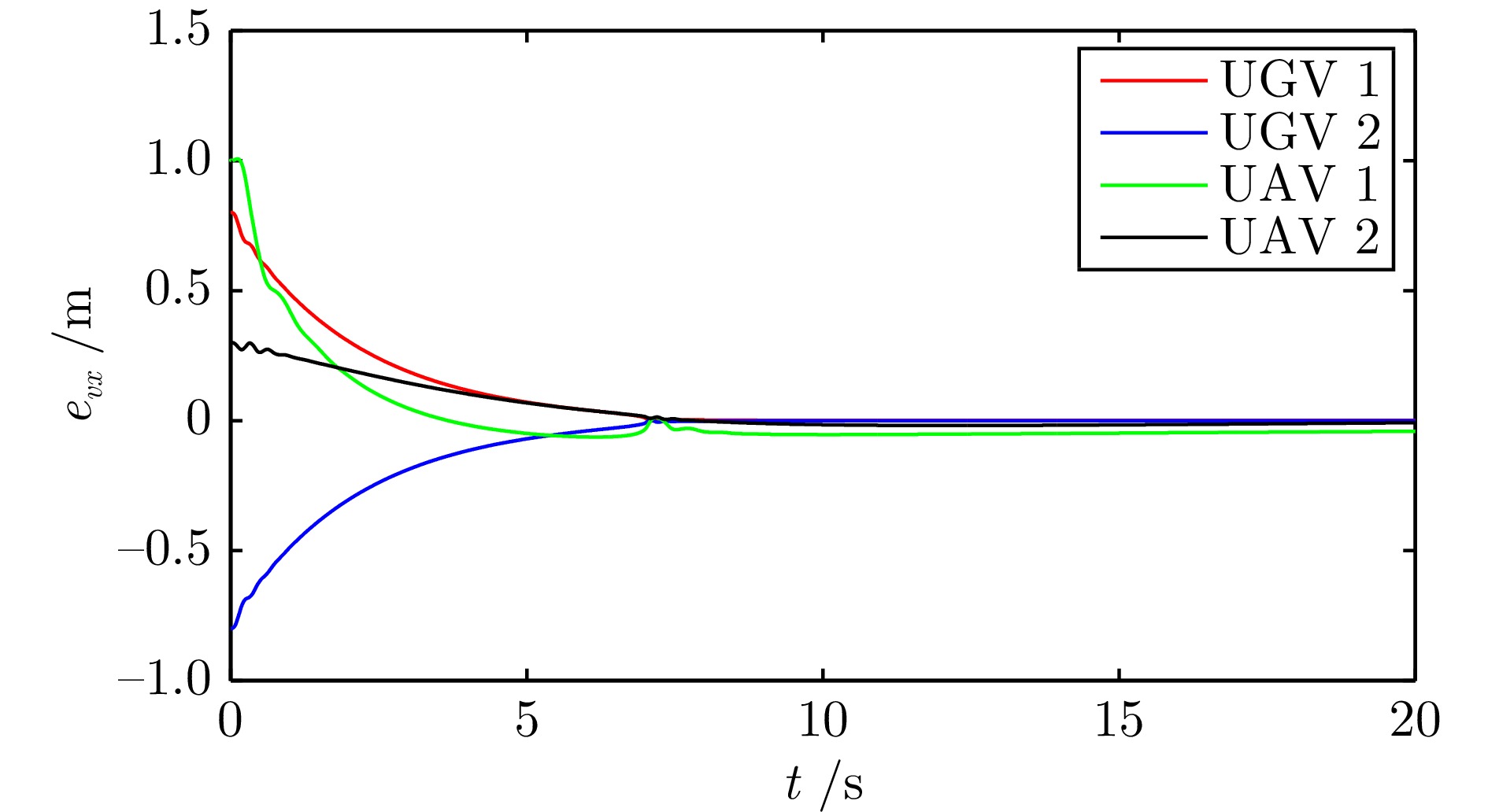
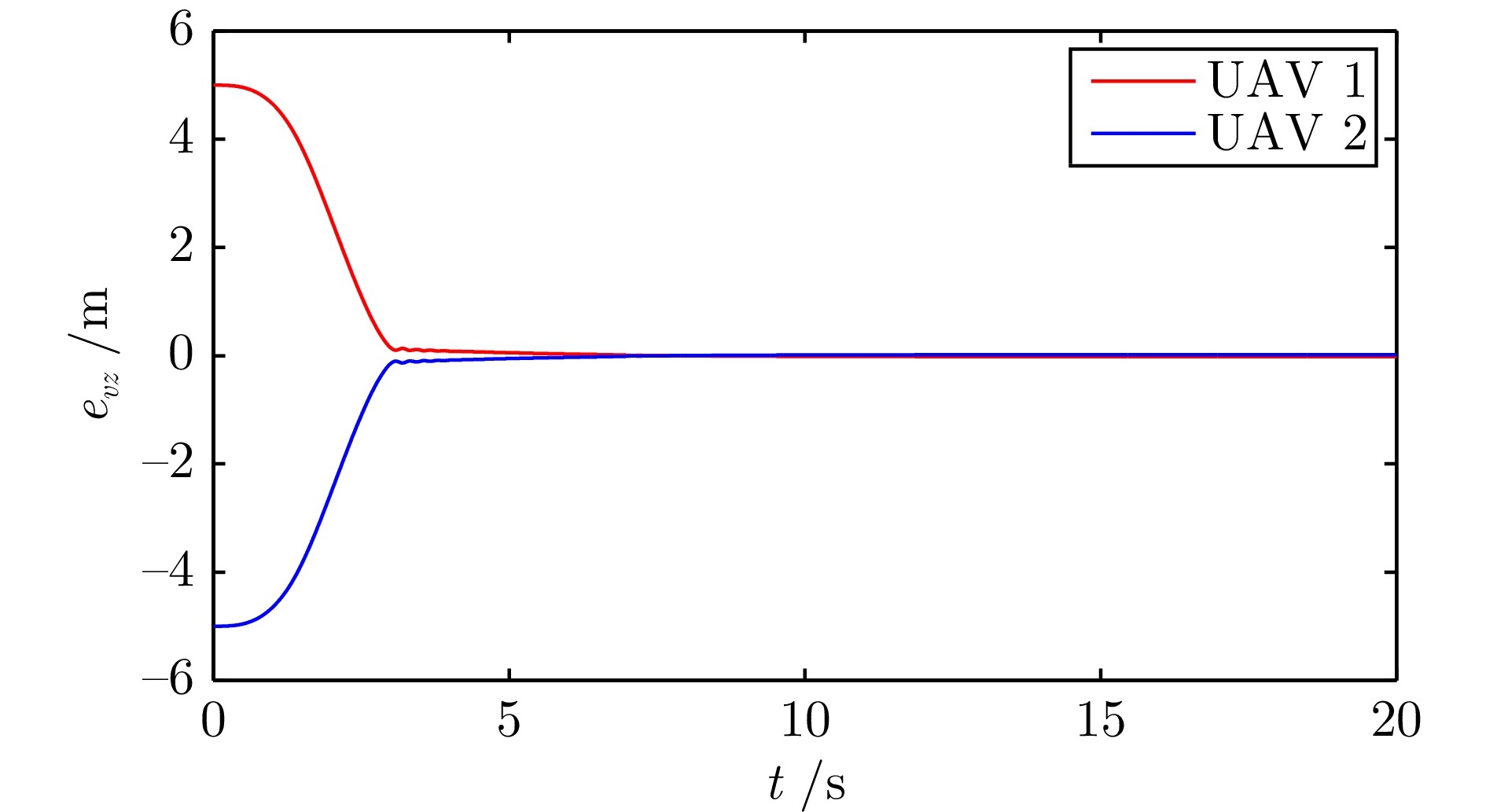
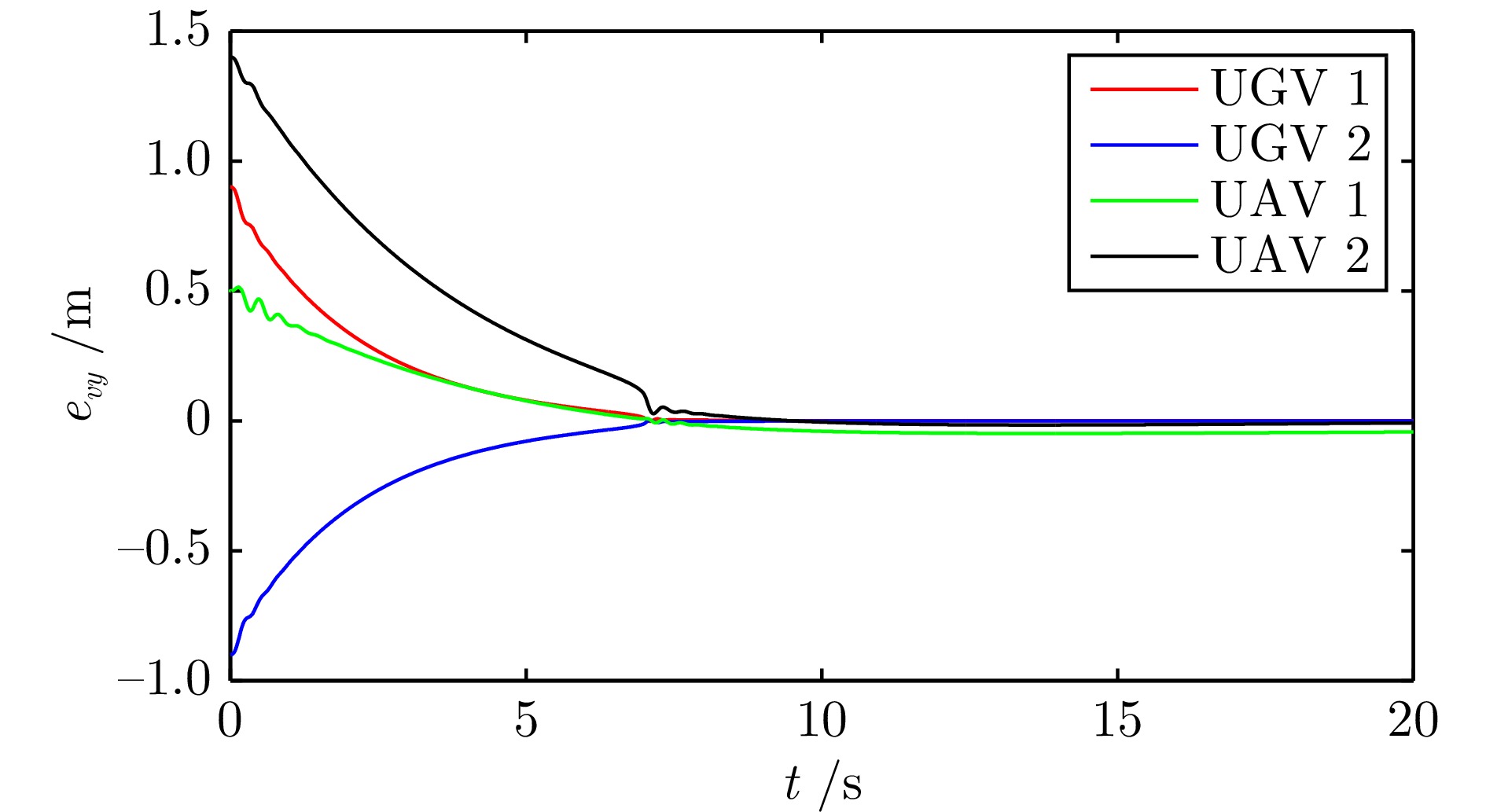
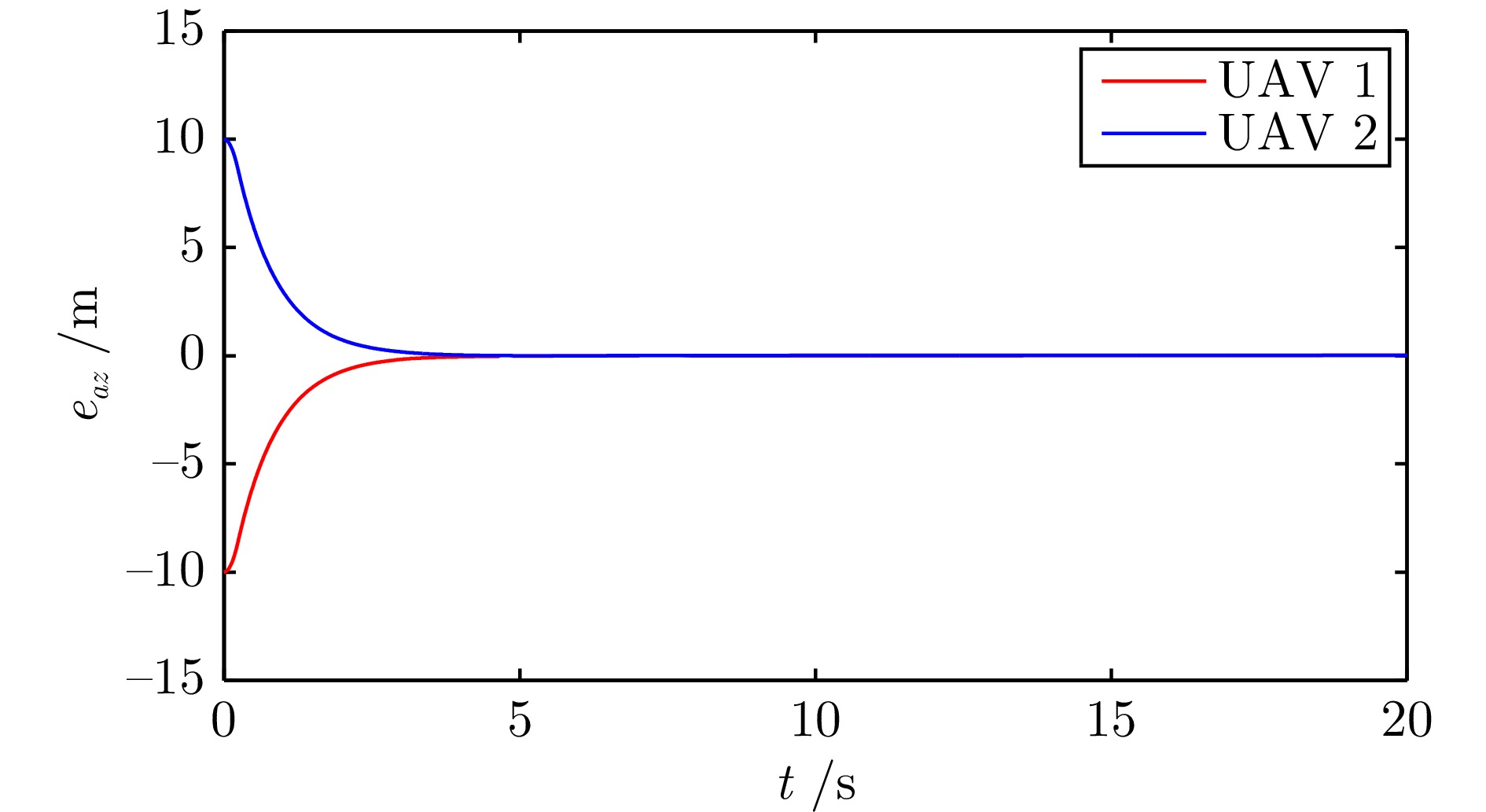
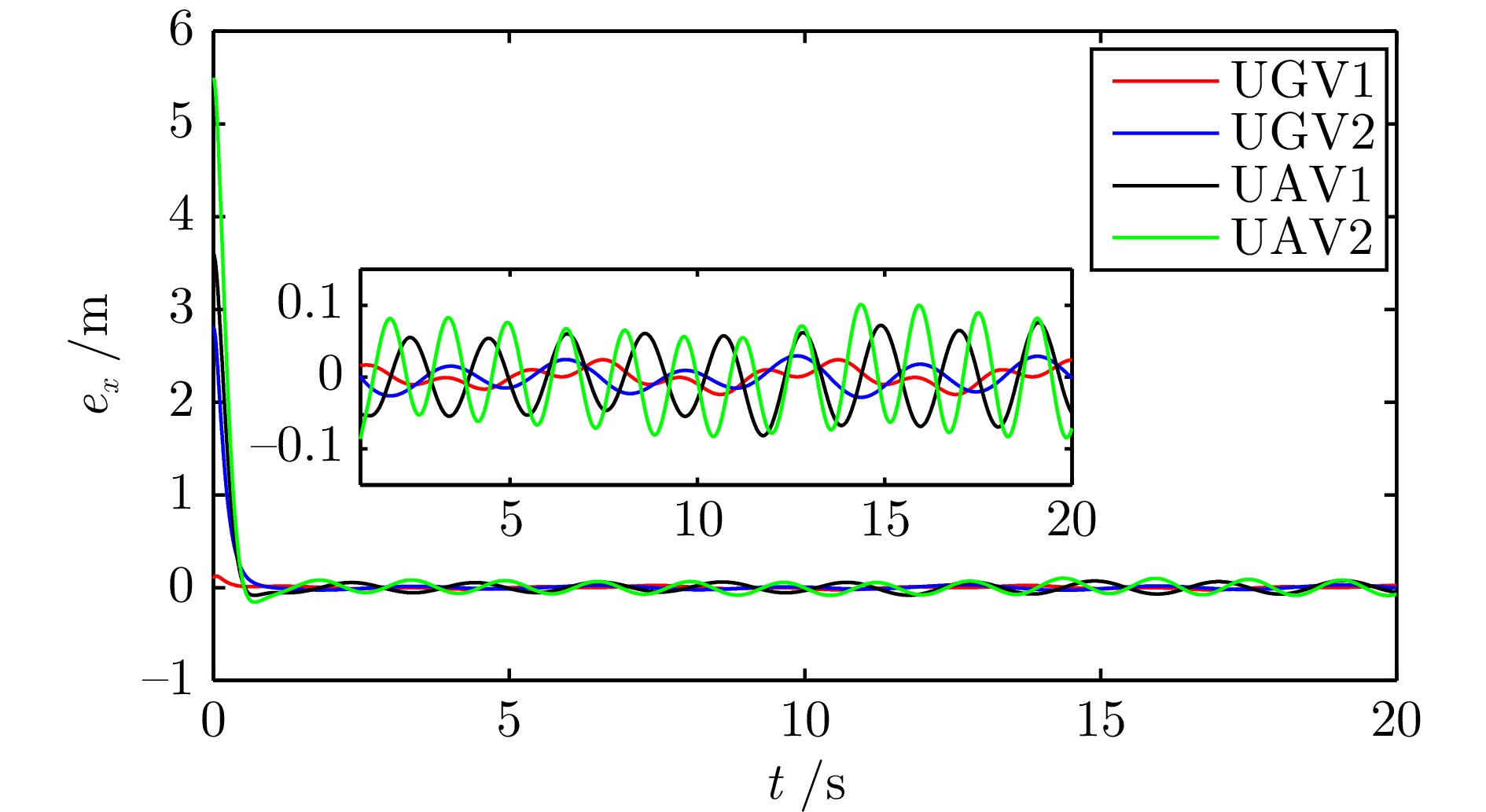
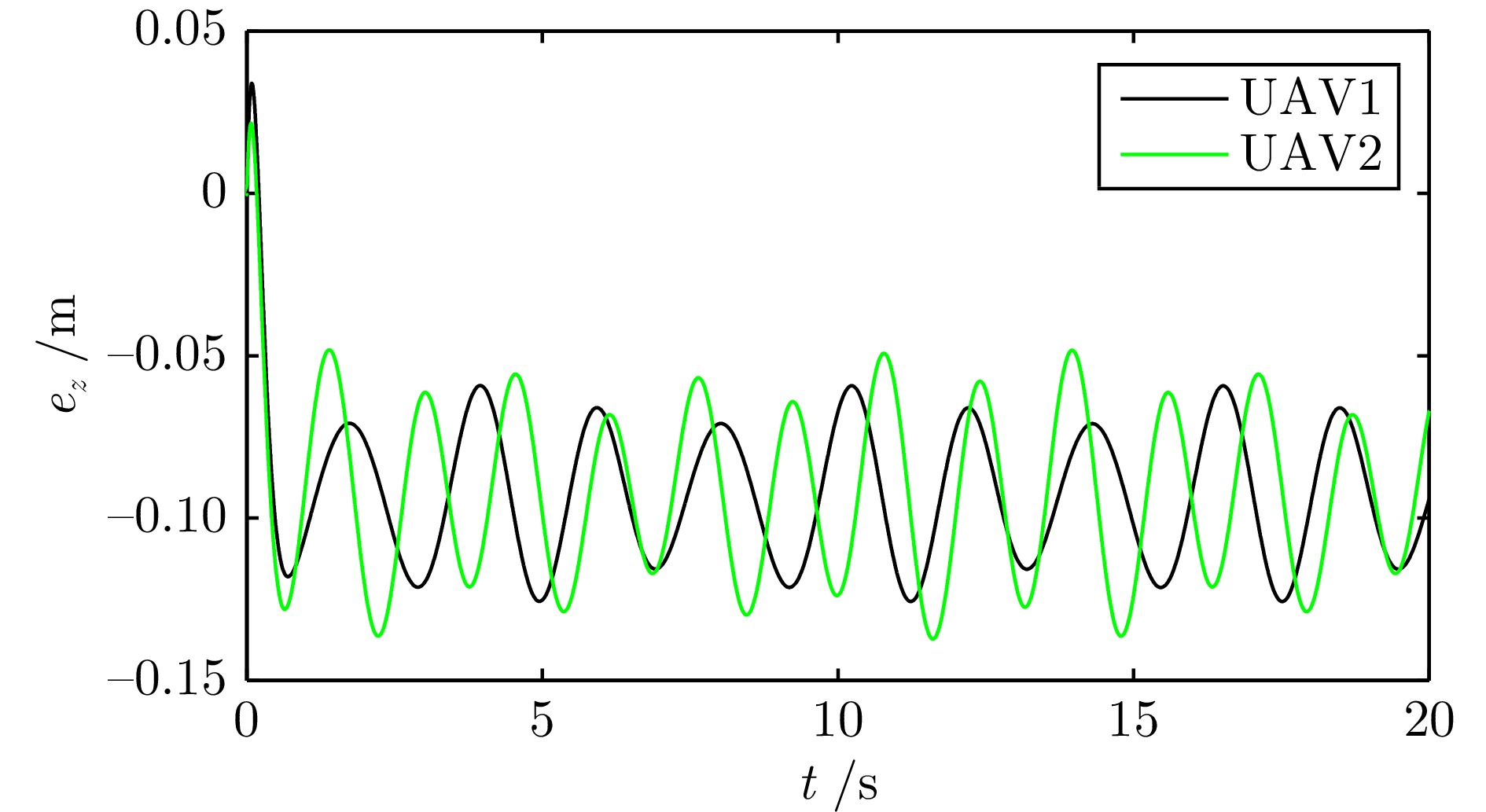
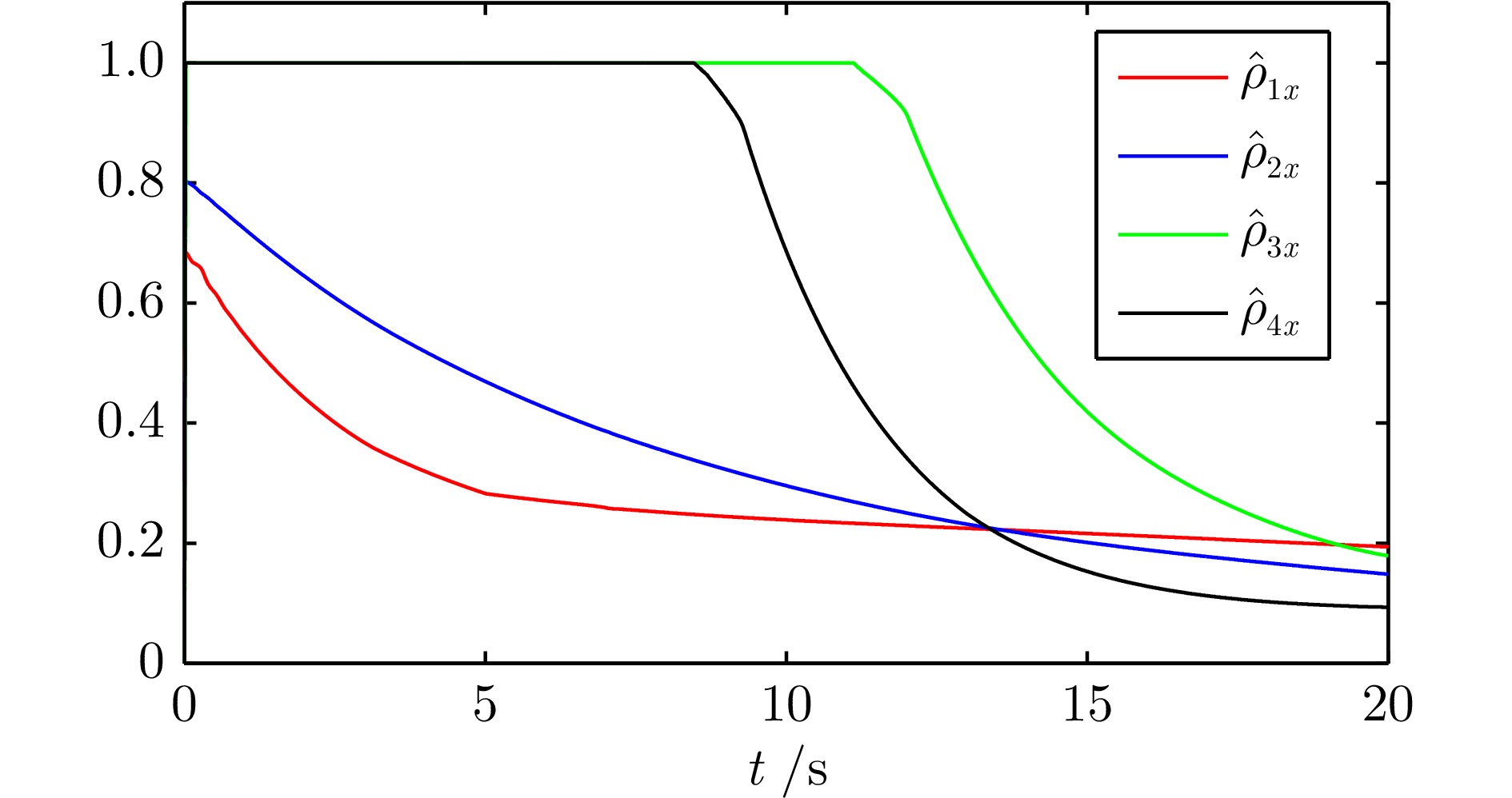
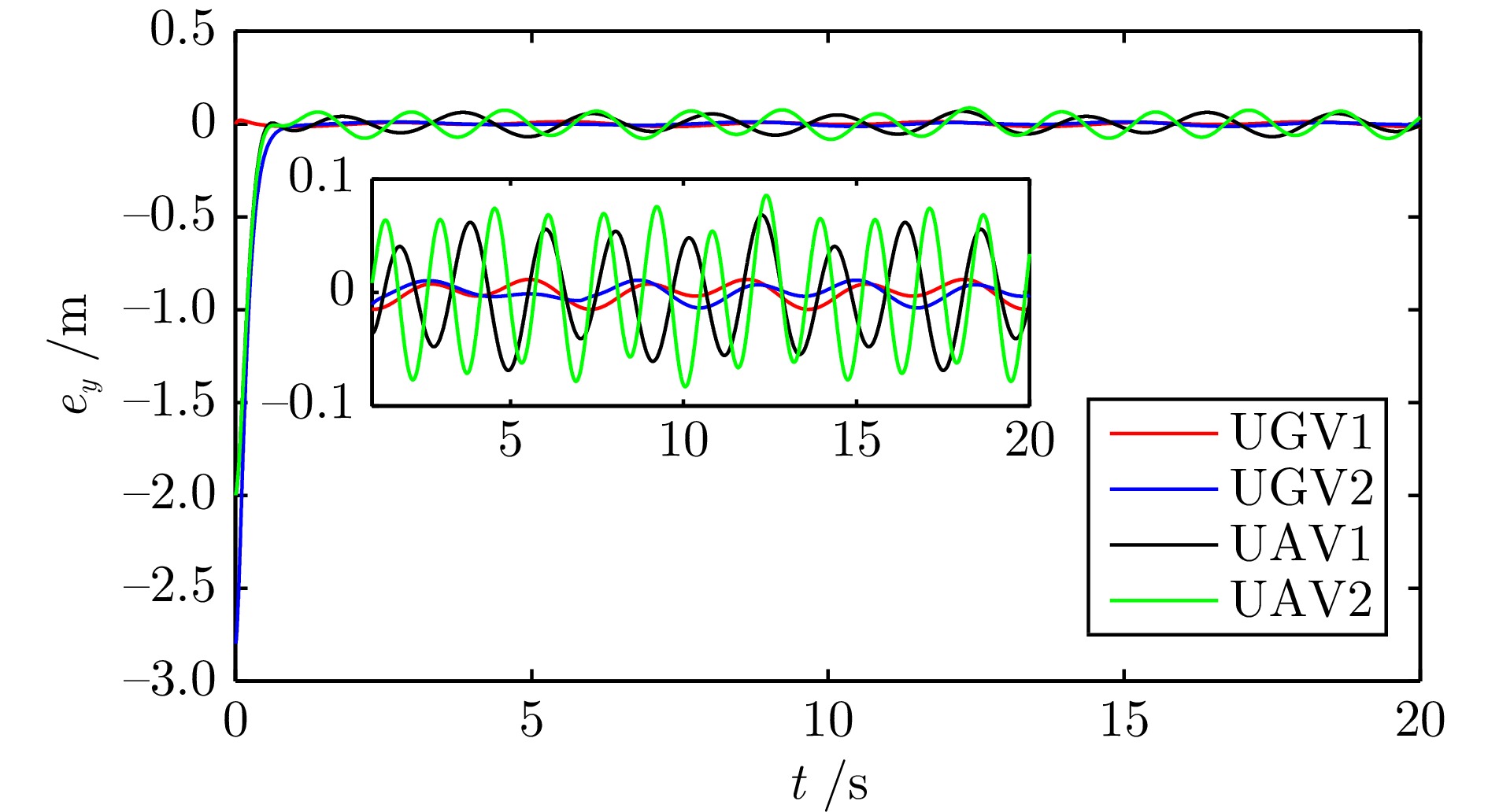
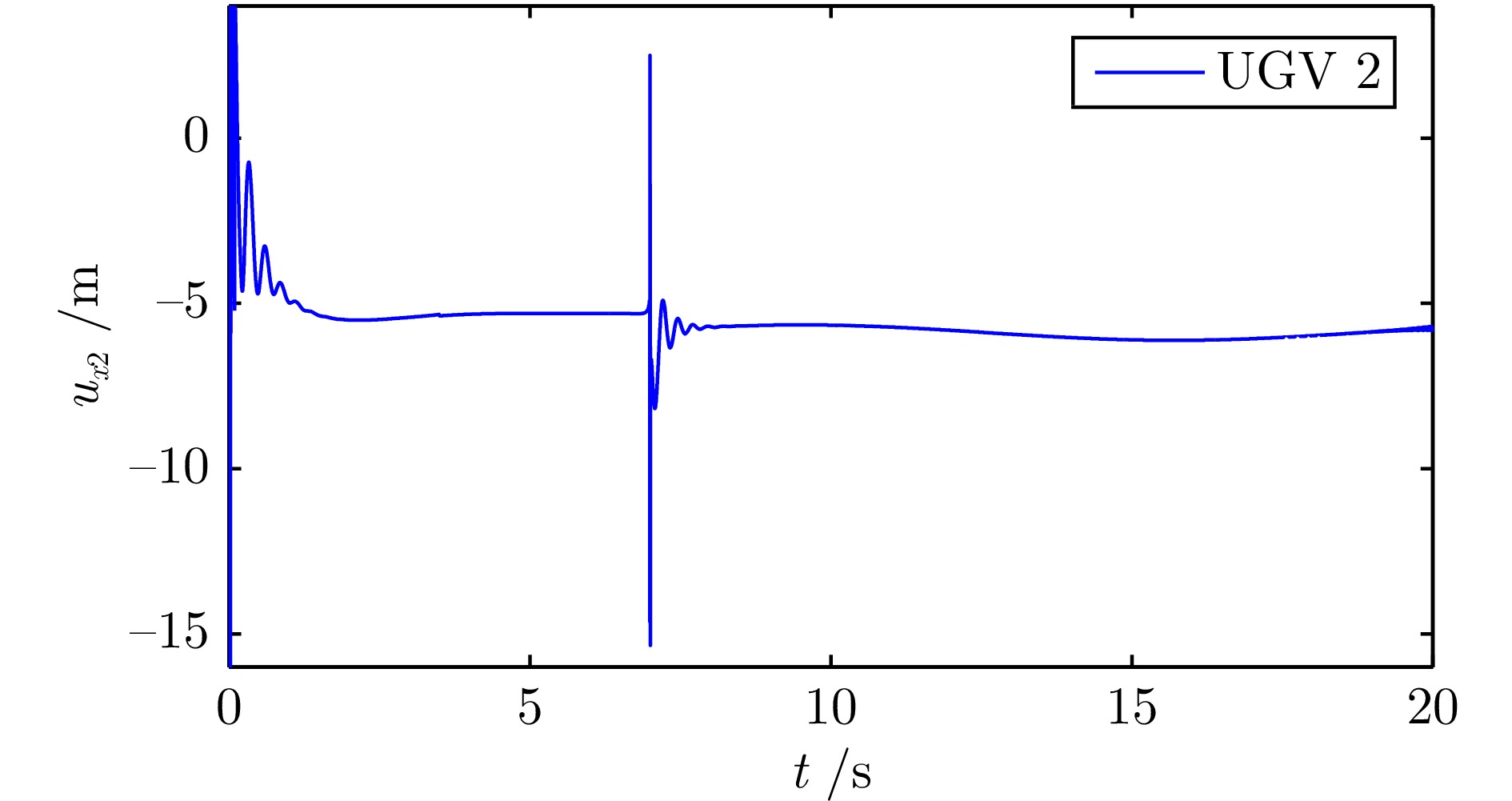
本文研究了发生执行器故障的无人机-无人车异构编队系统的层级预设时间最优编队控制问题. 以保容错性能和收敛速度的优化控制为研究主线, 以层级控制、图博弈理论和预设时间控制为技术基础, 构建了一种预设时间最优容错控制算法. 虚拟层设计了基于一致性跟踪误差和能量消耗的二次型性能指标函数, 借助耦合哈密顿-雅克比-贝尔曼(Hanmilton-Jacobi-Bellman, HJB)方程和强化学习求解近似最优控制策略, 实现多智能体的同步最优控制和交互纳什均衡. 实际控制层基于最优信号并利用滑模控制和自适应技术, 设计了预设时间容错跟踪控制器, 实现对最优编队轨迹的有限时间跟踪. 在保证全局收敛时间完全不依赖于系统的初始状态和控制器参数的同时, 也有效实现对执行器故障参数的逼近. 最后, 通过仿真实验验证了所提控制策略的有效性.
本文研究了发生执行器故障的无人机-无人车异构编队系统的层级预设时间最优编队控制问题. 以保容错性能和收敛速度的优化控制为研究主线, 以层级控制、图博弈理论和预设时间控制为技术基础, 构建了一种预设时间最优容错控制算法. 虚拟层设计了基于一致性跟踪误差和能量消耗的二次型性能指标函数, 借助耦合哈密顿-雅克比-贝尔曼(Hanmilton-Jacobi-Bellman, HJB)方程和强化学习求解近似最优控制策略, 实现多智能体的同步最优控制和交互纳什均衡. 实际控制层基于最优信号并利用滑模控制和自适应技术, 设计了预设时间容错跟踪控制器, 实现对最优编队轨迹的有限时间跟踪. 在保证全局收敛时间完全不依赖于系统的初始状态和控制器参数的同时, 也有效实现对执行器故障参数的逼近. 最后, 通过仿真实验验证了所提控制策略的有效性.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230457
摘要:
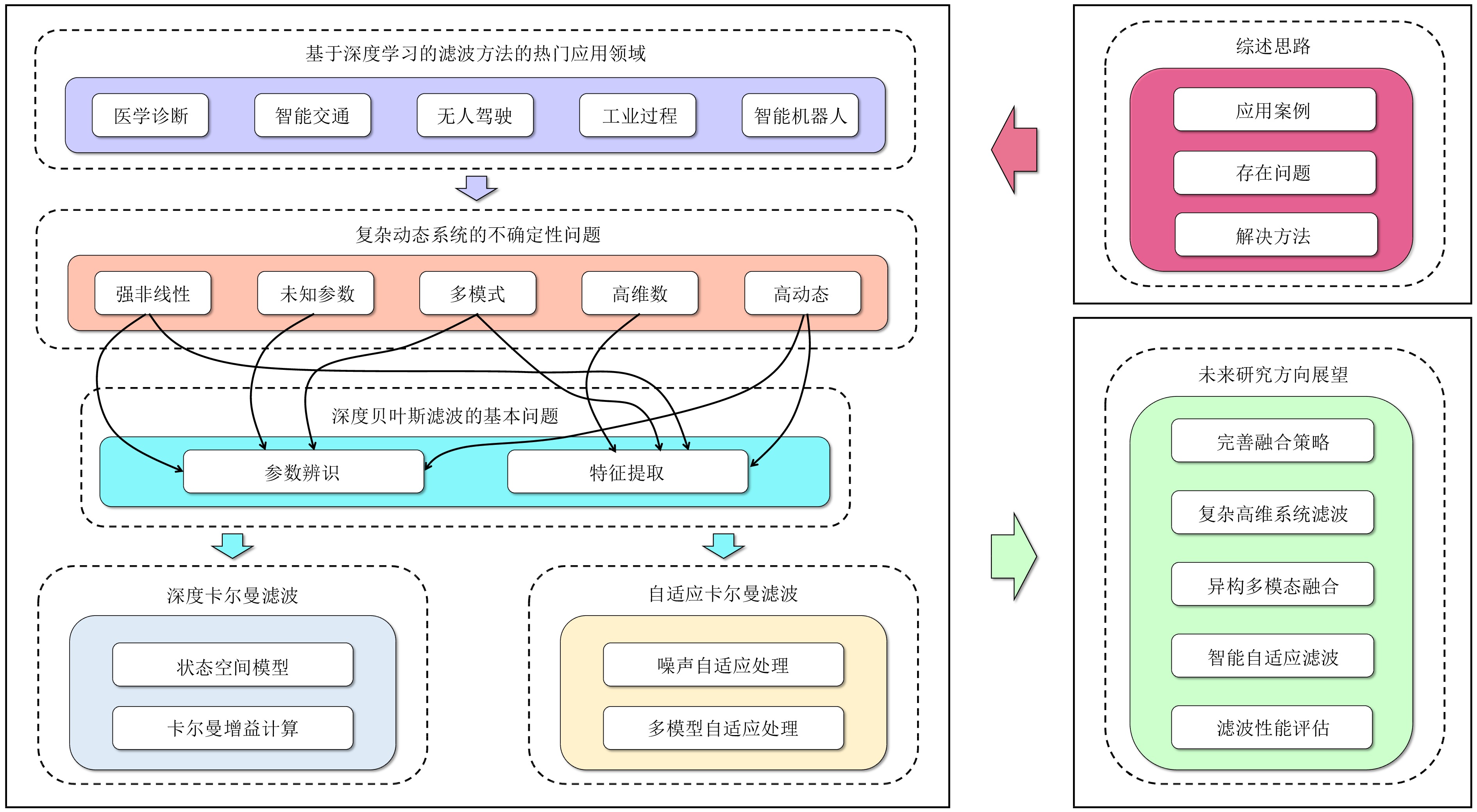
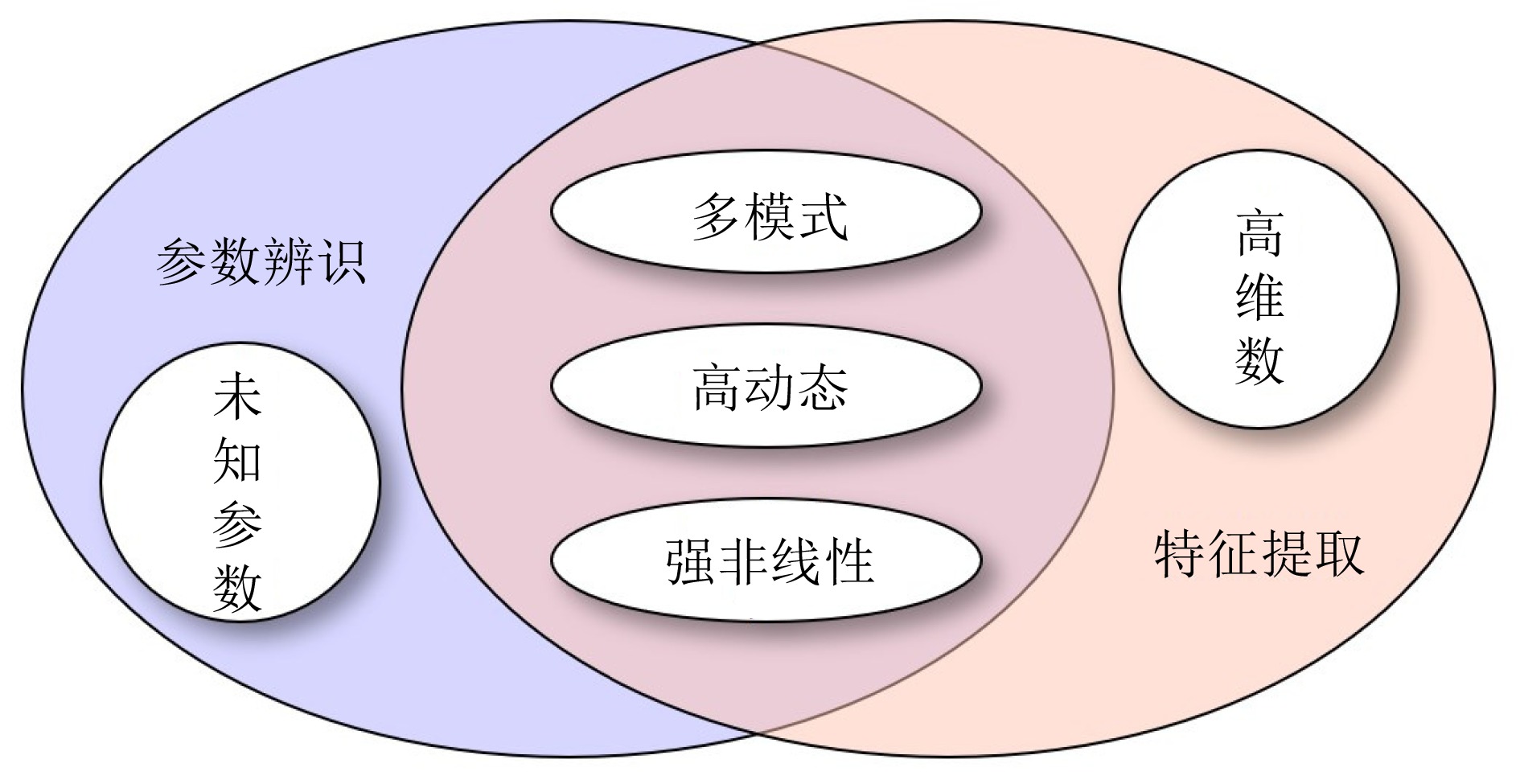
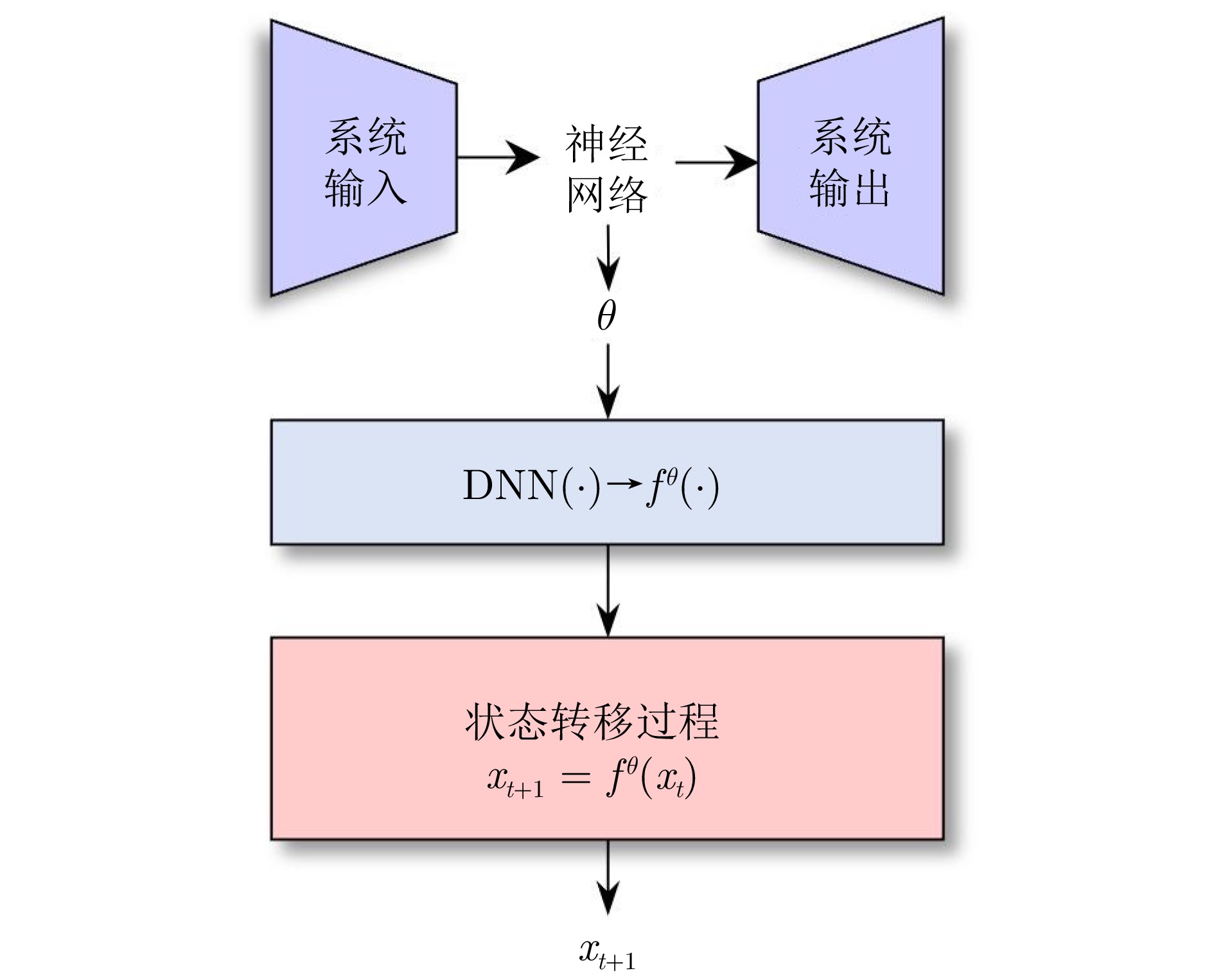
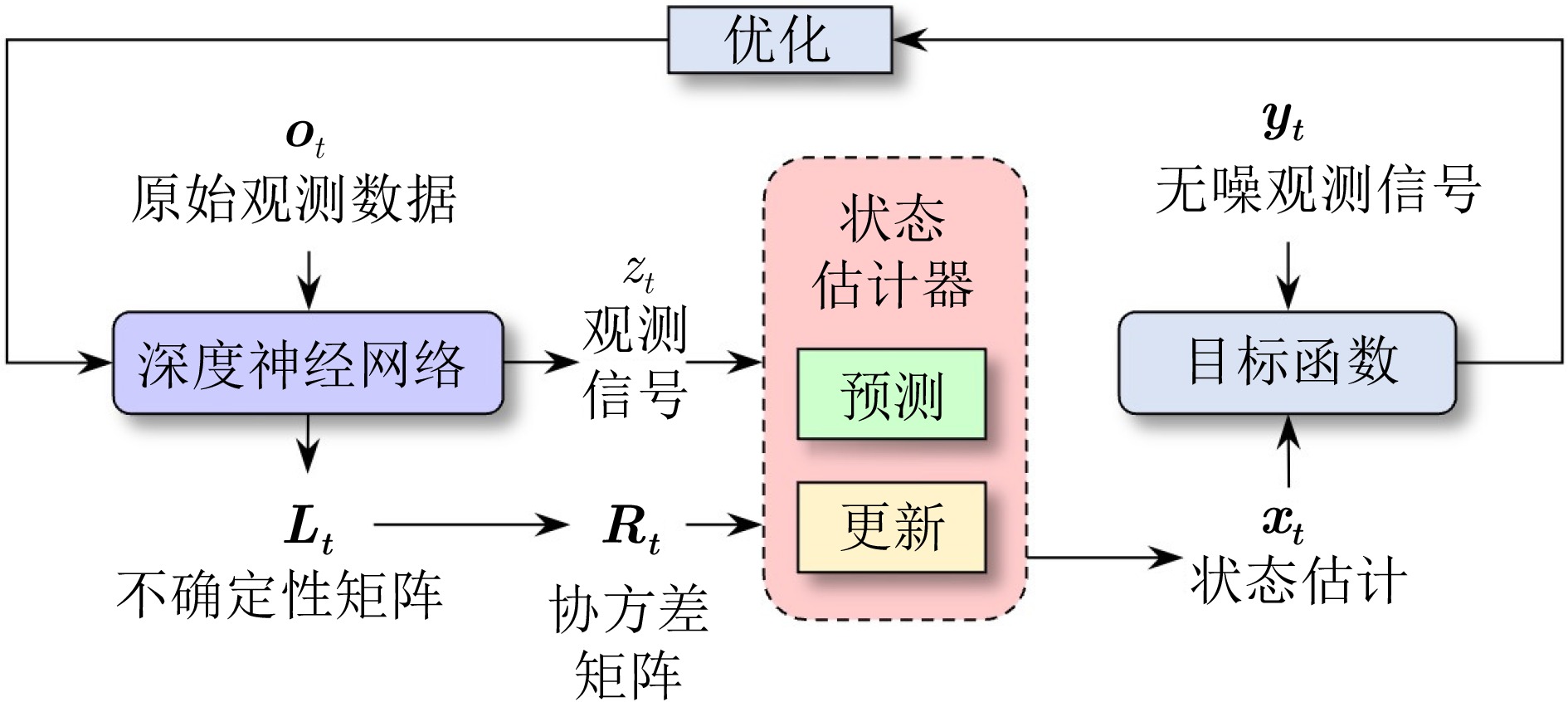
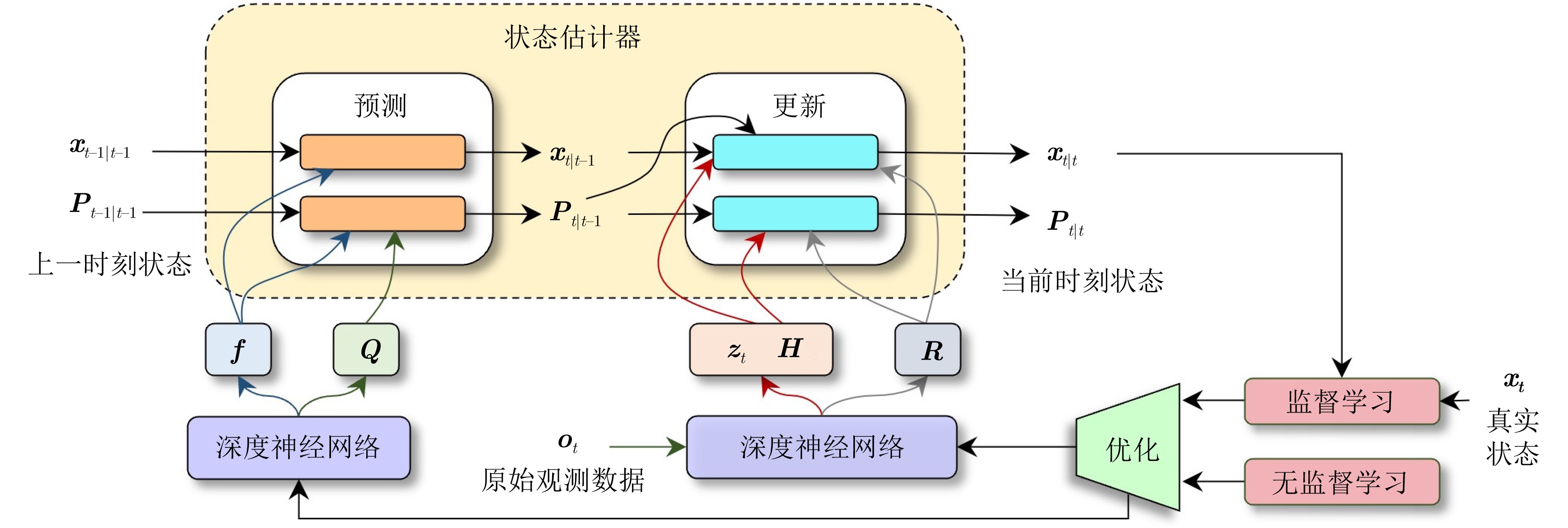
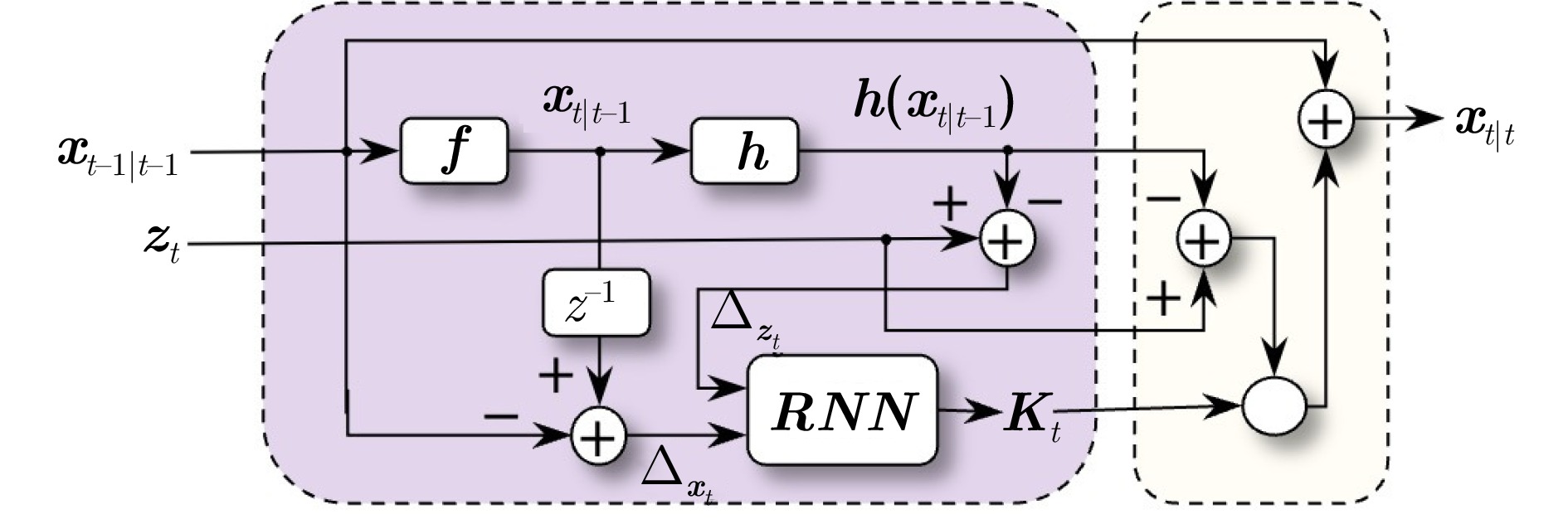
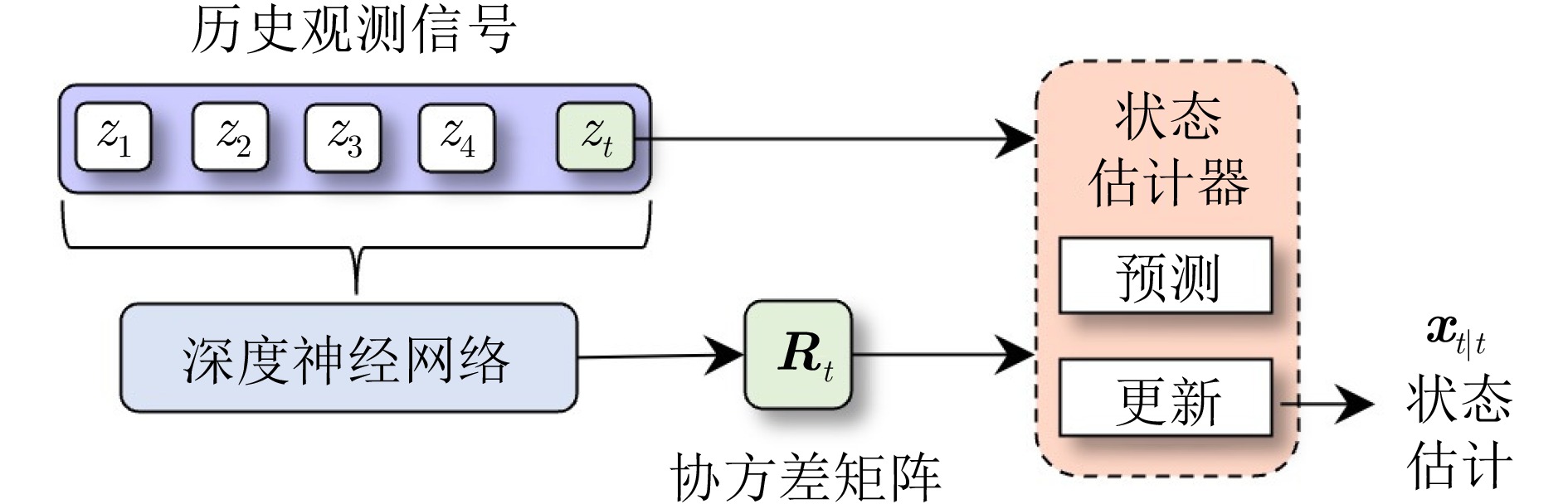
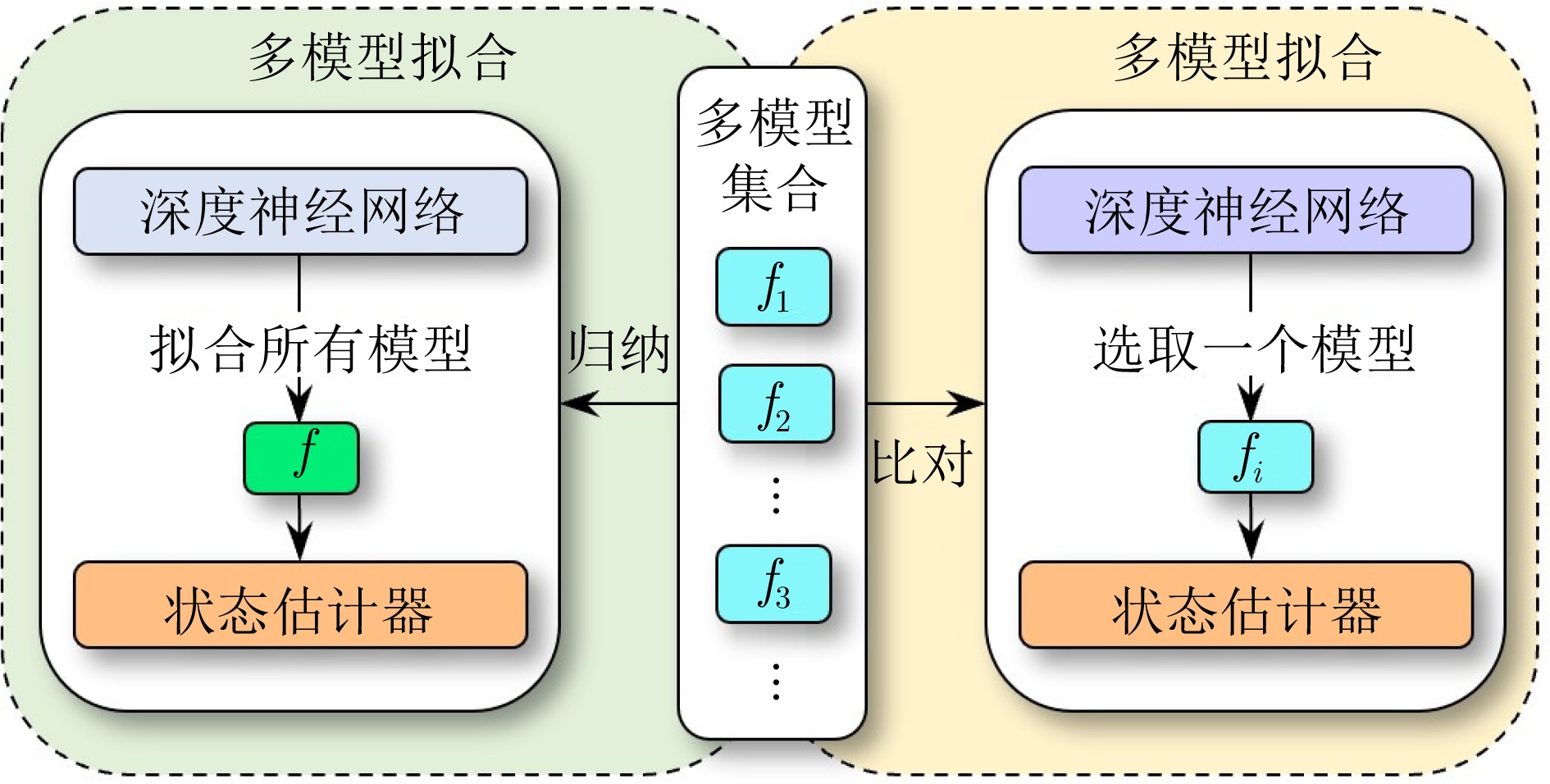
当前动态系统呈现大型化、复杂化的趋势, 基于贝叶斯滤波的动态系统状态估计遇到了一系列新的挑战. 随着深度学习在特征提取与模式识别等方面的优势与潜力不断显现, 深度学习与传统贝叶斯滤波相结合的研究也随之兴起. 为此, 本文梳理了不同领域融合深度学习的贝叶斯滤波方法的应用案例, 从中剖析不同类型动态系统下贝叶斯滤波存在的局限性和共性难题. 在此基础上, 总结了当前贝叶斯滤波存在的几类不确定性问题, 以深度学习的视角将这些问题归纳为特征提取和参数辨识两大基本问题, 进而介绍深度学习为贝叶斯滤波所提供的解决方案. 其次, 归纳整理了两类深度学习与贝叶斯滤波结合的具体方法, 着重介绍了深度卡尔曼滤波和融合深度学习的自适应卡尔曼滤波. 最后, 综合考虑深度学习方法和贝叶斯滤波方法的优势, 讨论了融合深度学习的贝叶斯滤波方法的开放问题和未来研究方向.
当前动态系统呈现大型化、复杂化的趋势, 基于贝叶斯滤波的动态系统状态估计遇到了一系列新的挑战. 随着深度学习在特征提取与模式识别等方面的优势与潜力不断显现, 深度学习与传统贝叶斯滤波相结合的研究也随之兴起. 为此, 本文梳理了不同领域融合深度学习的贝叶斯滤波方法的应用案例, 从中剖析不同类型动态系统下贝叶斯滤波存在的局限性和共性难题. 在此基础上, 总结了当前贝叶斯滤波存在的几类不确定性问题, 以深度学习的视角将这些问题归纳为特征提取和参数辨识两大基本问题, 进而介绍深度学习为贝叶斯滤波所提供的解决方案. 其次, 归纳整理了两类深度学习与贝叶斯滤波结合的具体方法, 着重介绍了深度卡尔曼滤波和融合深度学习的自适应卡尔曼滤波. 最后, 综合考虑深度学习方法和贝叶斯滤波方法的优势, 讨论了融合深度学习的贝叶斯滤波方法的开放问题和未来研究方向.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210298
摘要:
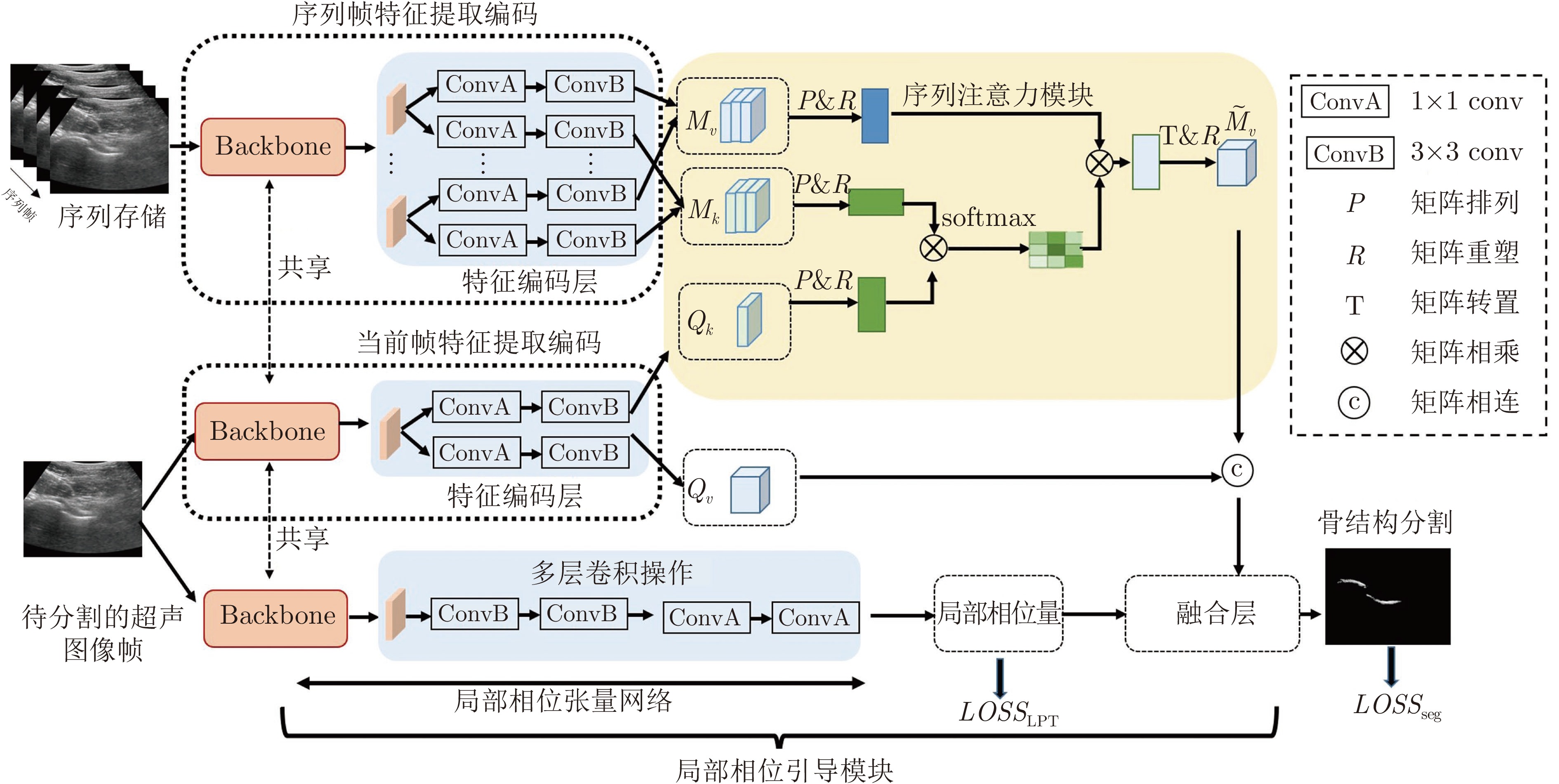
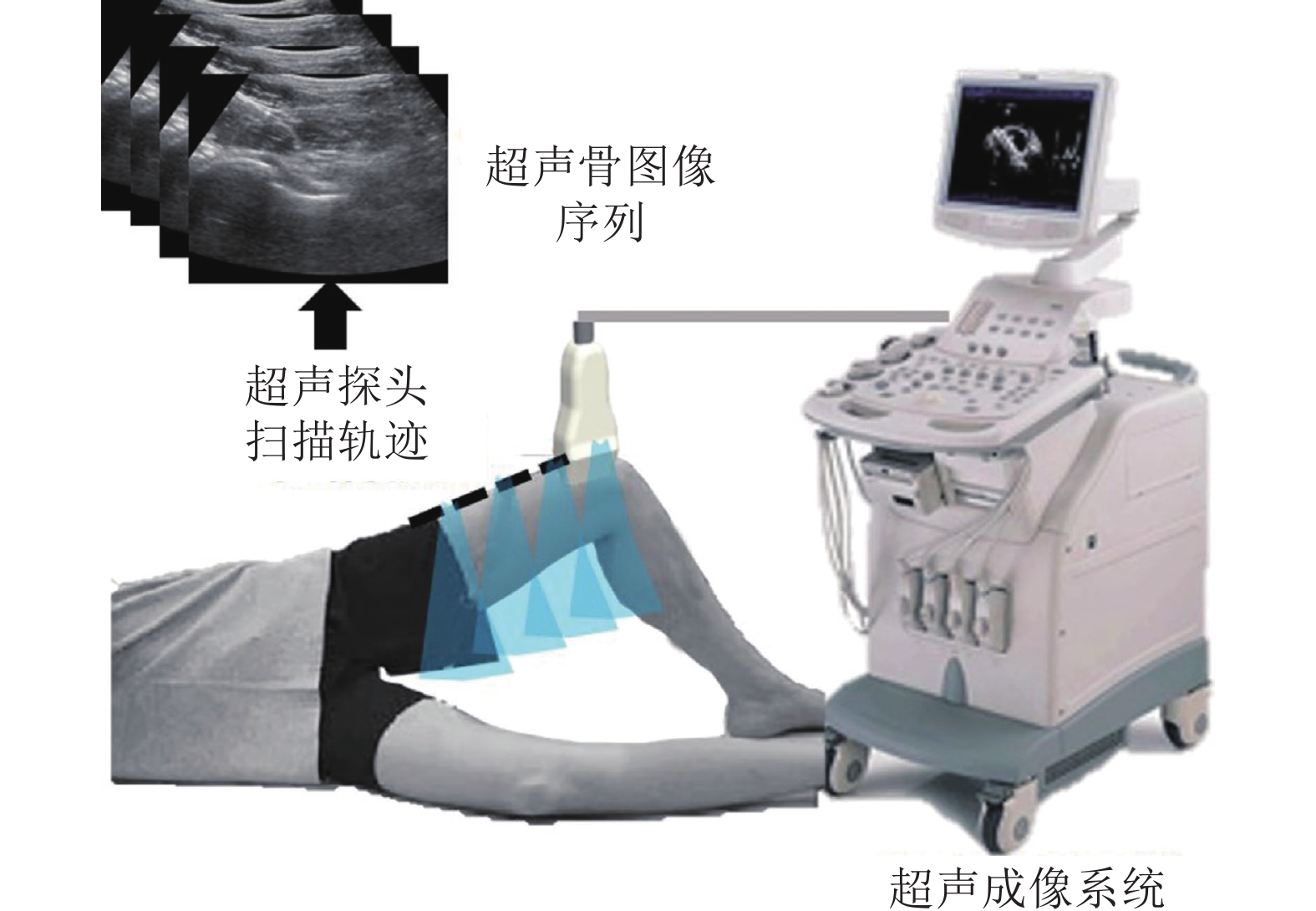
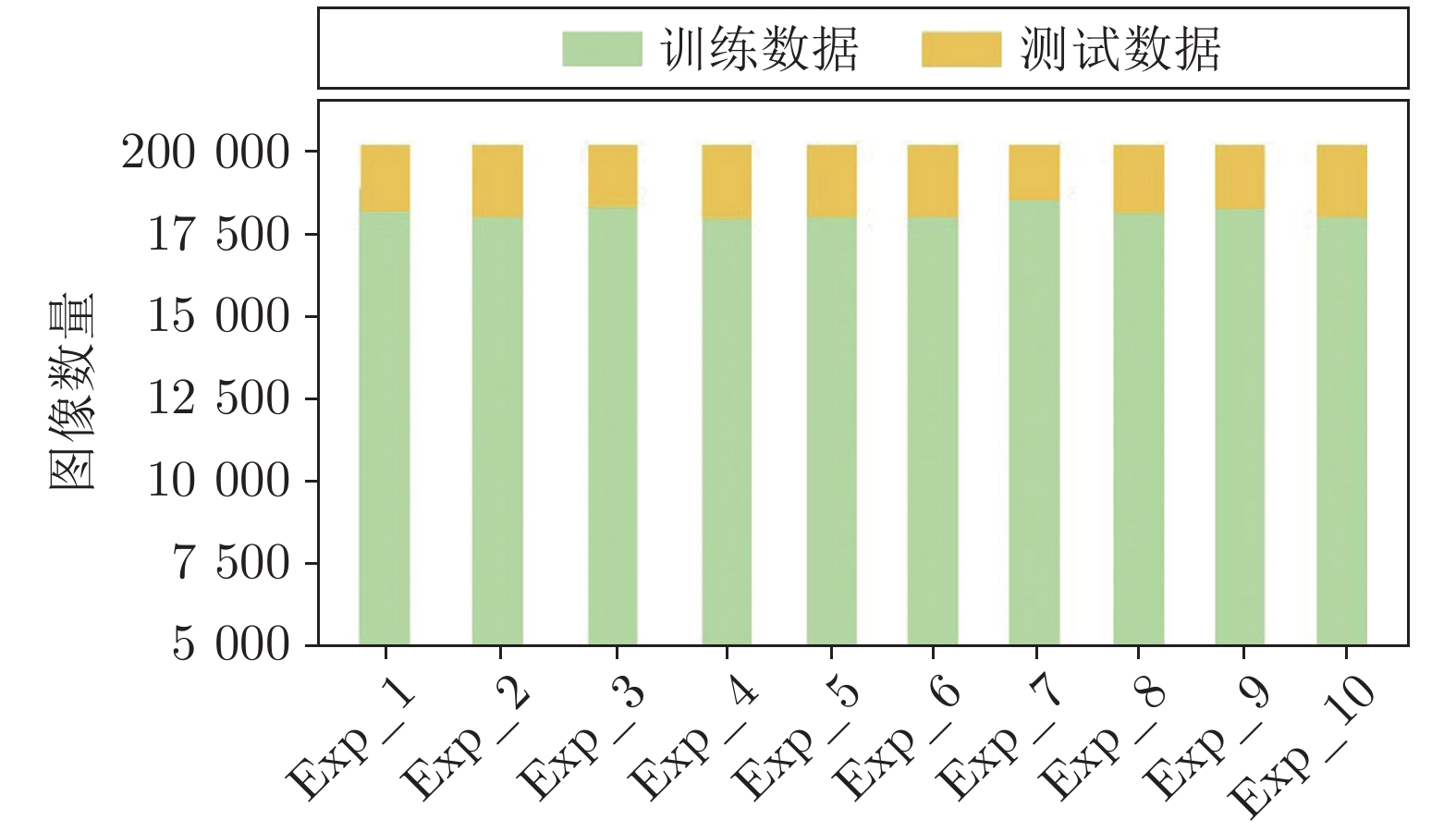
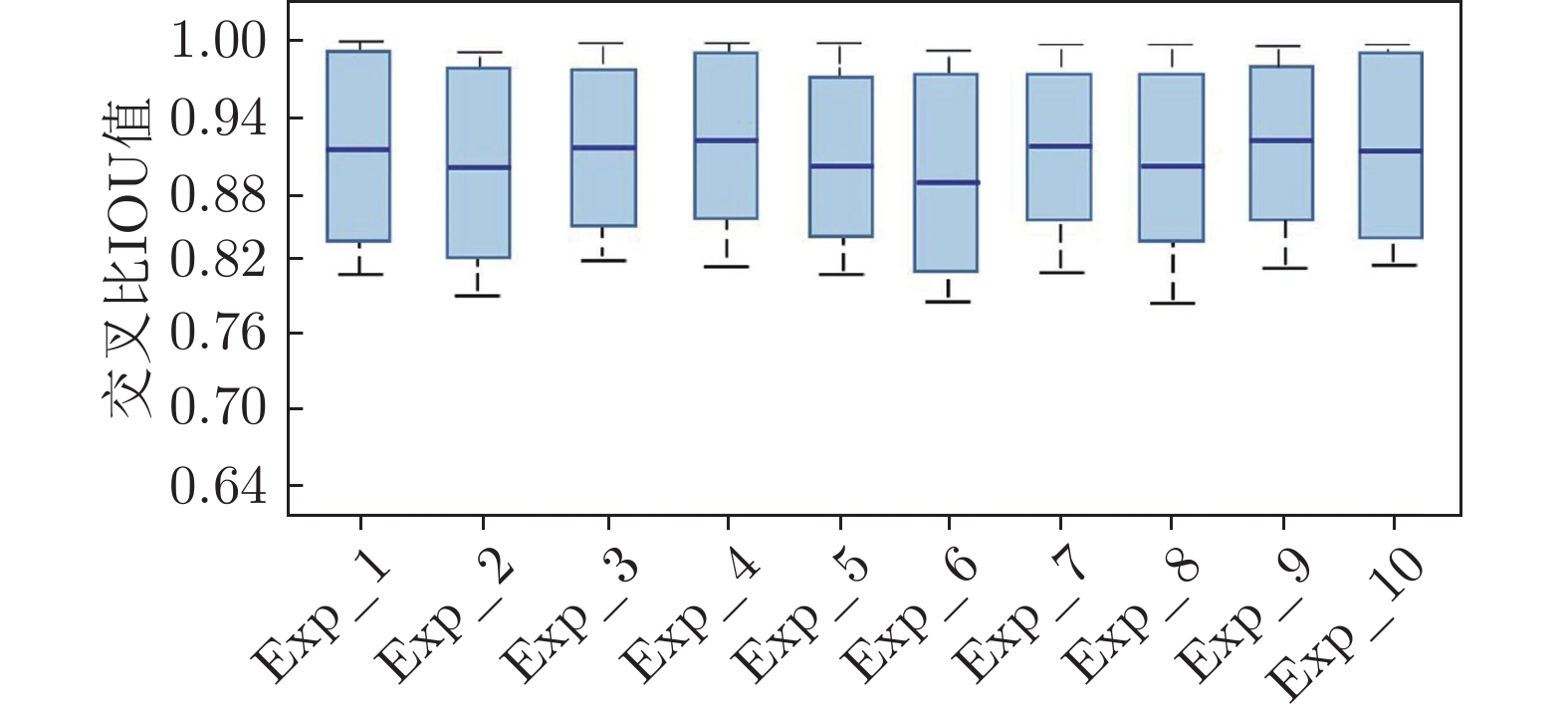
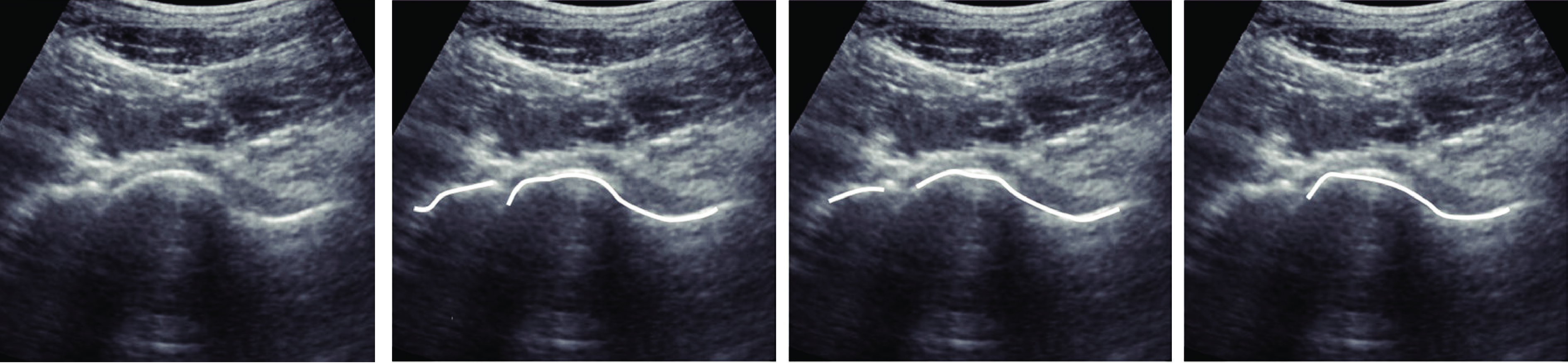
在超声辅助的骨科手术导航中, 需要从采集的超声图像序列中精确分割出骨结构, 并展示给医生, 来辅助医生进行术中决策. 但是, 图像噪声、成像伪影以及模糊的骨边界导致从超声图像序列中精确分割提取骨结构十分困难. 为解决该问题, 提出一种新的基于序列注意力与局部相位引导的骨超声图像分割网络. 该网络一方面自适应地利用超声序列帧之间的关系即序列注意力来辅助骨结构的语义分割. 另一方面, 该网络通过引入局部相位引导模块, 突出骨边缘信息, 进一步提高分割精度. 利用包含19 050幅图像的骨超声数据集, 进行交叉实验、消融实验并与最新的超声骨分割方法进行比较. 实验结果表明本文方法对骨结构分割精度高, 优于现有的超声骨分割方法.
在超声辅助的骨科手术导航中, 需要从采集的超声图像序列中精确分割出骨结构, 并展示给医生, 来辅助医生进行术中决策. 但是, 图像噪声、成像伪影以及模糊的骨边界导致从超声图像序列中精确分割提取骨结构十分困难. 为解决该问题, 提出一种新的基于序列注意力与局部相位引导的骨超声图像分割网络. 该网络一方面自适应地利用超声序列帧之间的关系即序列注意力来辅助骨结构的语义分割. 另一方面, 该网络通过引入局部相位引导模块, 突出骨边缘信息, 进一步提高分割精度. 利用包含19 050幅图像的骨超声数据集, 进行交叉实验、消融实验并与最新的超声骨分割方法进行比较. 实验结果表明本文方法对骨结构分割精度高, 优于现有的超声骨分割方法.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210553
摘要:
针对一类具有不确定控制增益的严格反馈系统, 提出一种基于命令滤波反推技术的自适应神经网络控制方法. 该方法采用神经网络对系统中的未知非线性函数进行逼近, 并引入命令滤波反推技术克服“计算膨胀”的问题. 与现有的命令滤波反推控制文献相比, 本文通过构造自适应误差补偿系统, 同时消除滤波器产生的边界层误差和不确定控制增益对系统性能造成的影响. 仿真结果验证了所提控制方法的有效性.
针对一类具有不确定控制增益的严格反馈系统, 提出一种基于命令滤波反推技术的自适应神经网络控制方法. 该方法采用神经网络对系统中的未知非线性函数进行逼近, 并引入命令滤波反推技术克服“计算膨胀”的问题. 与现有的命令滤波反推控制文献相比, 本文通过构造自适应误差补偿系统, 同时消除滤波器产生的边界层误差和不确定控制增益对系统性能造成的影响. 仿真结果验证了所提控制方法的有效性.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230637
摘要:
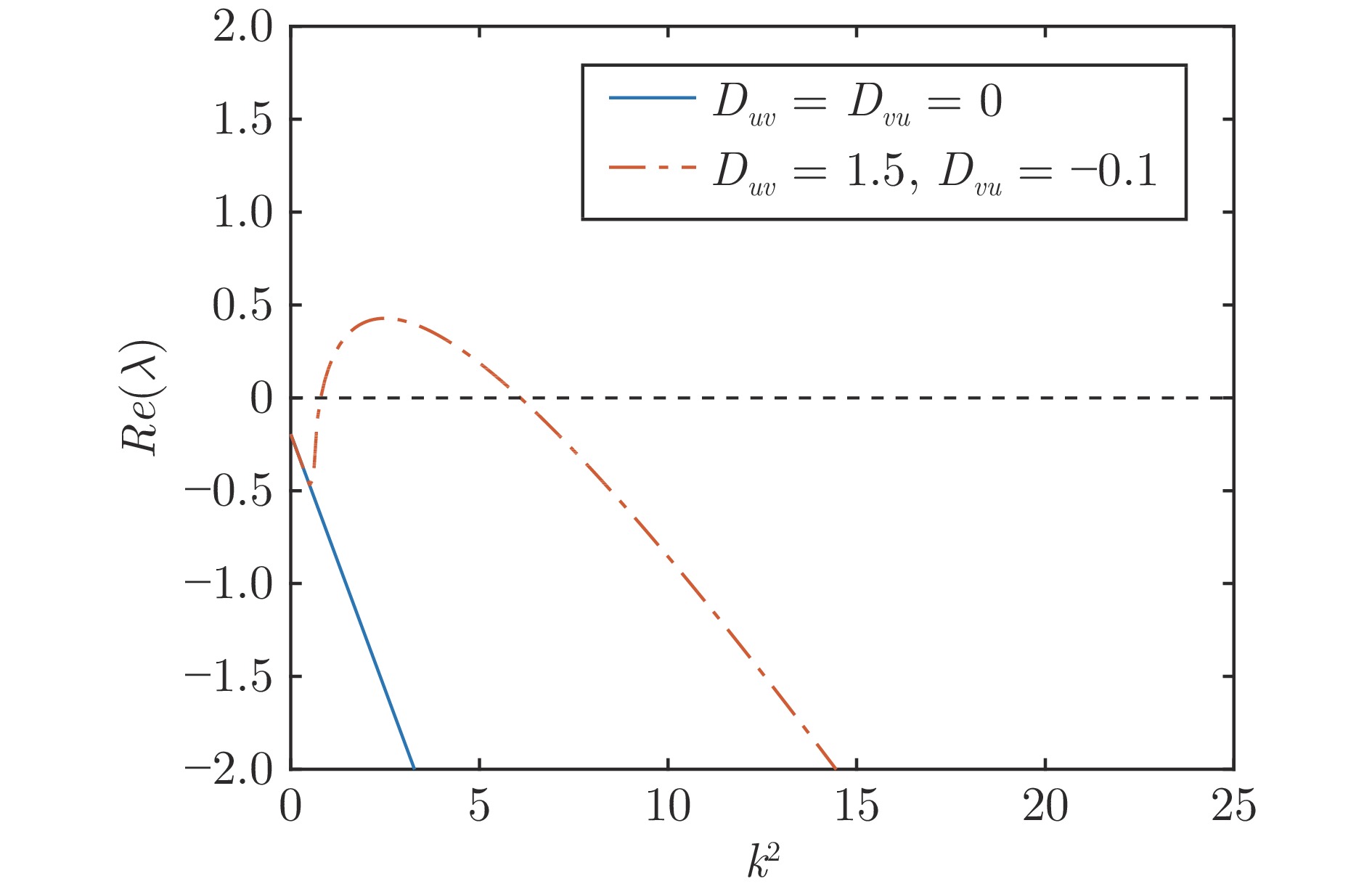
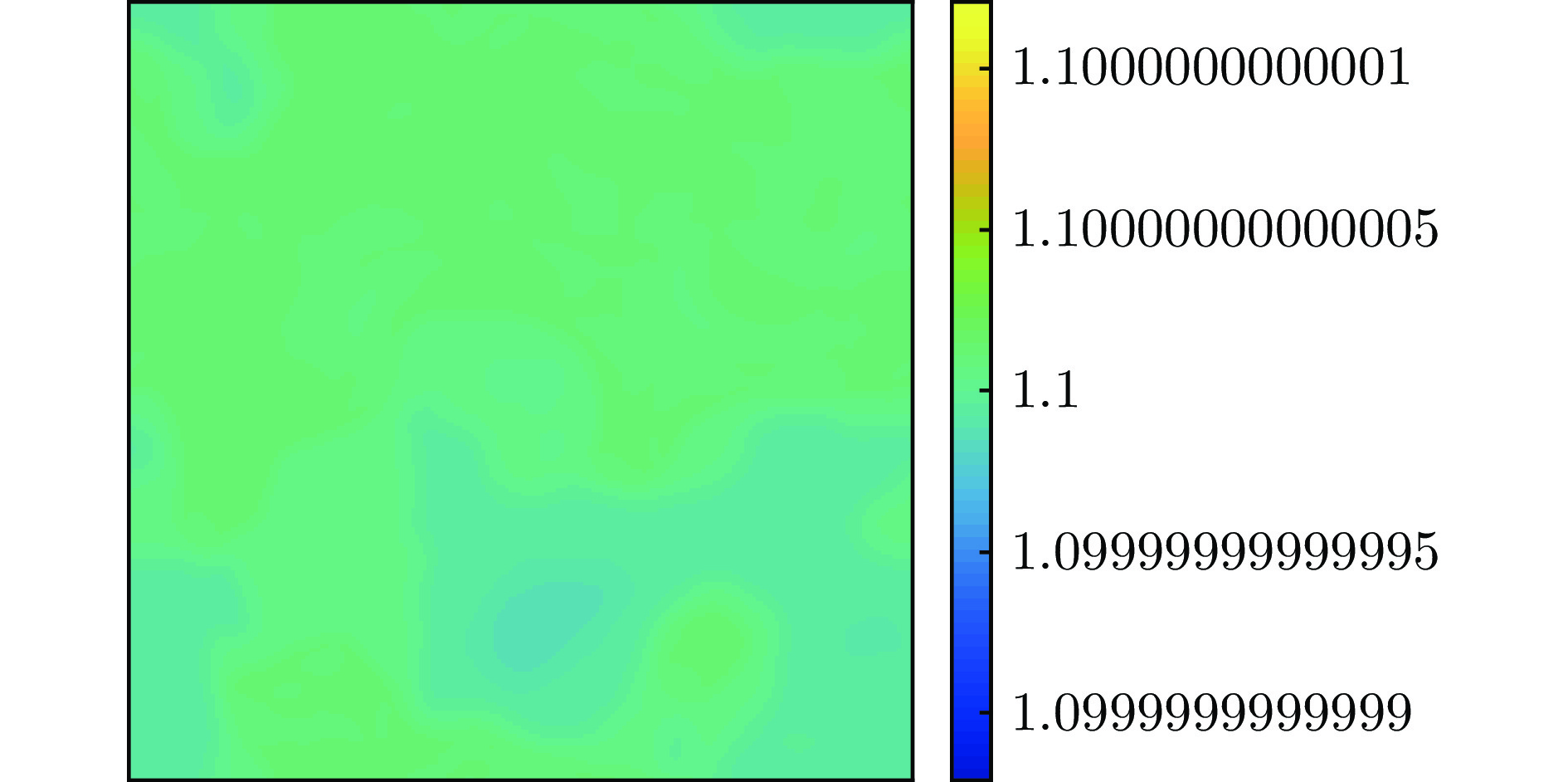
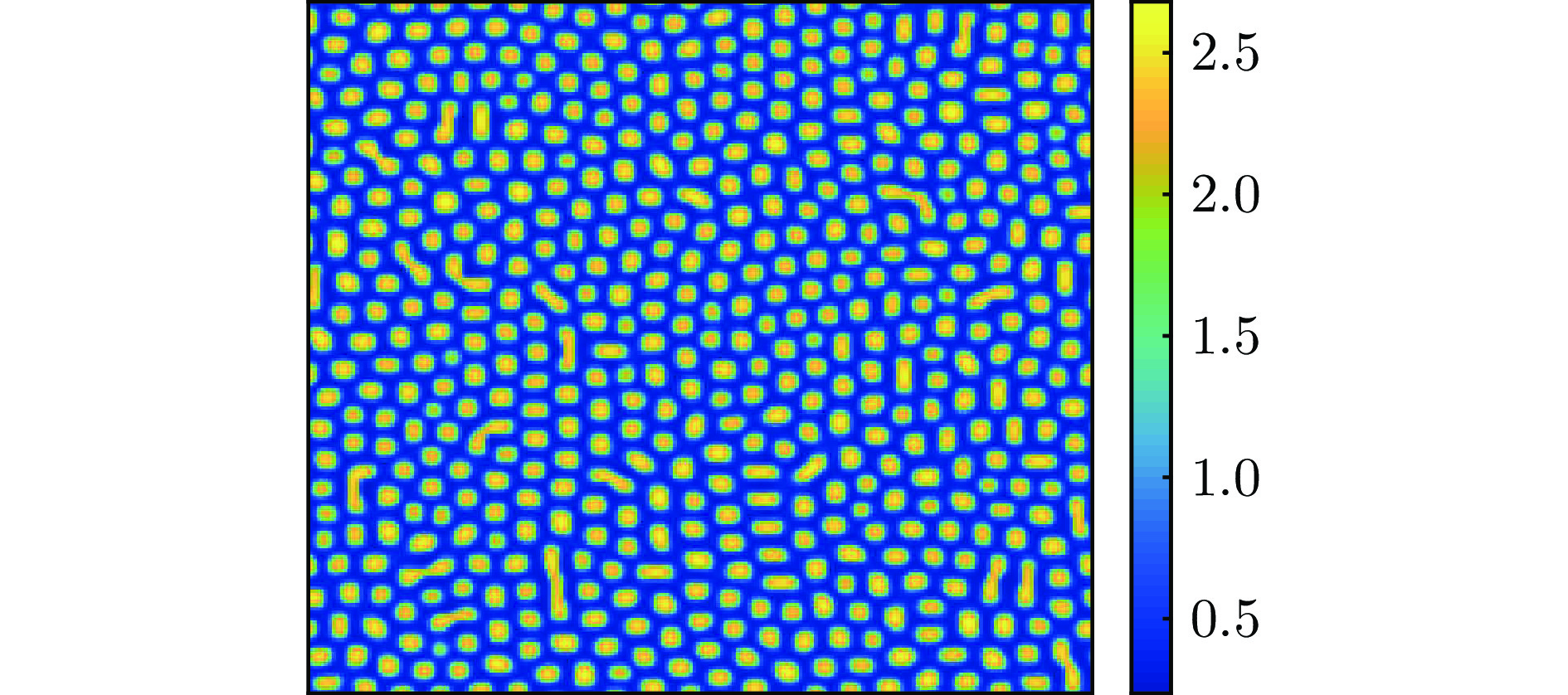
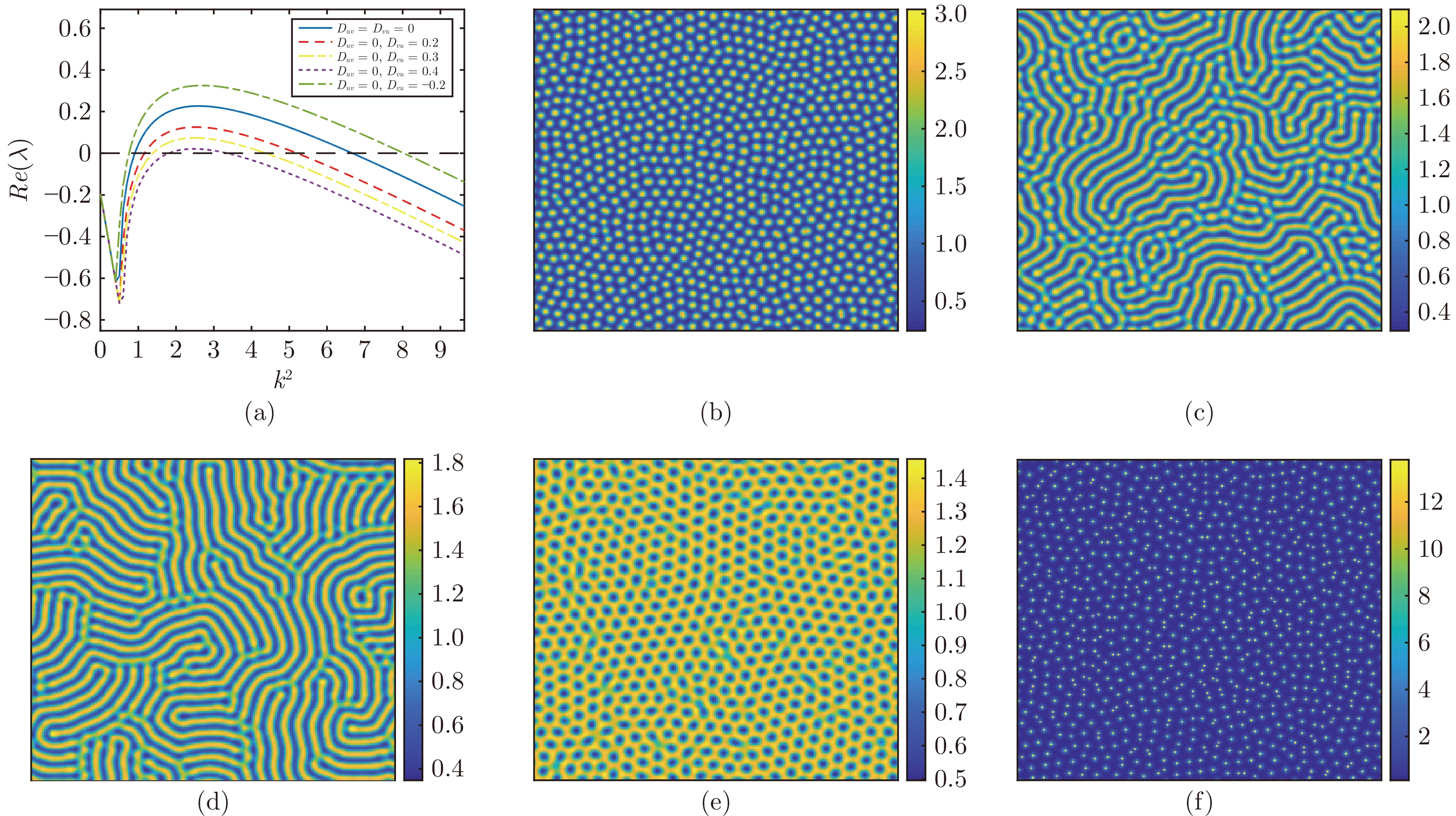
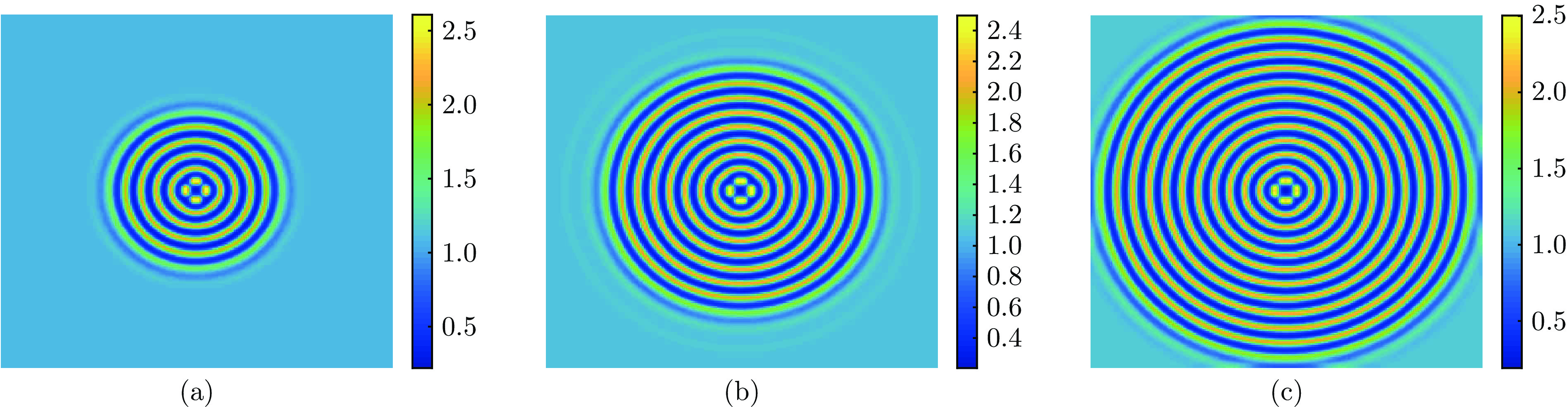
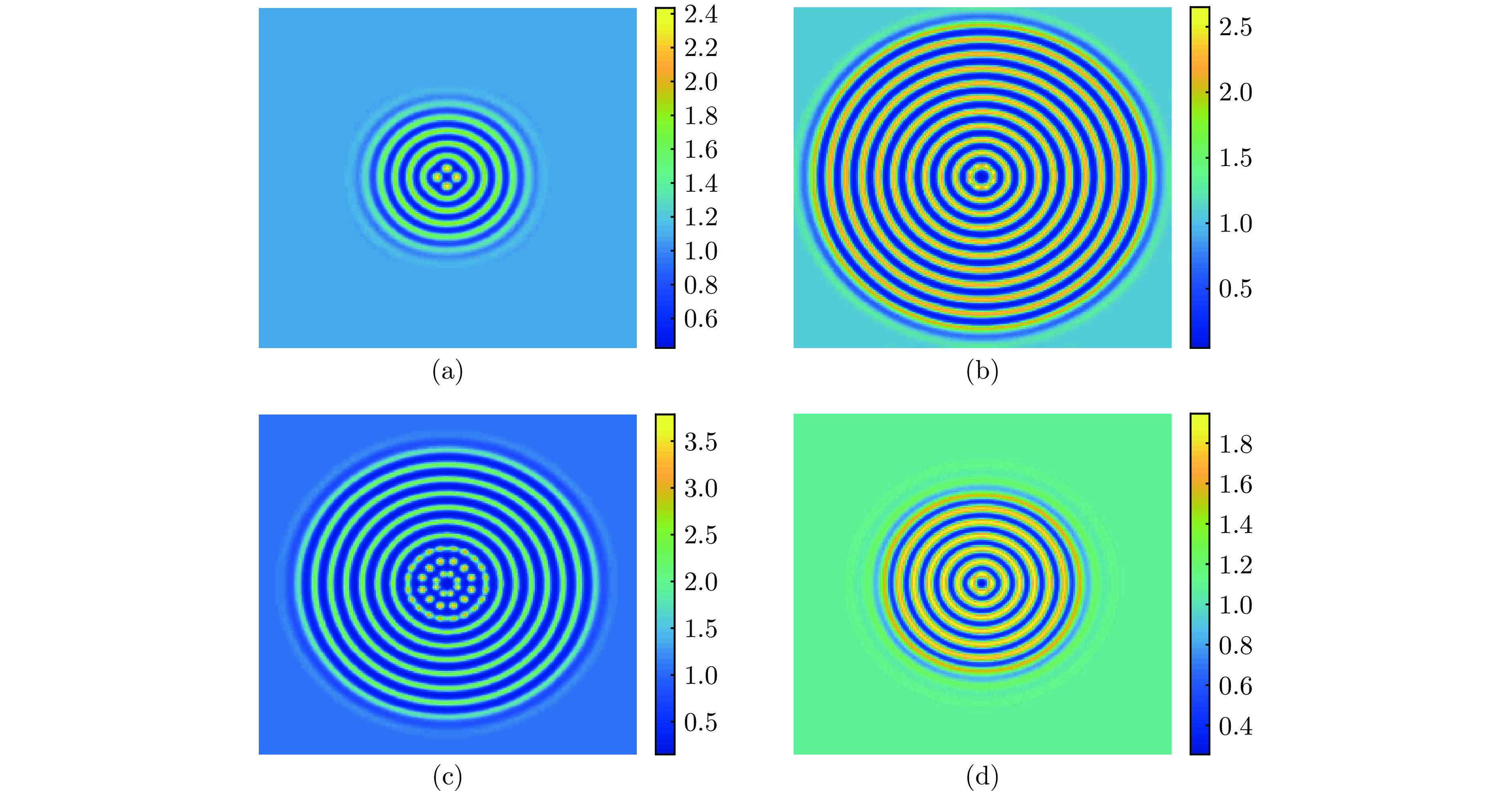
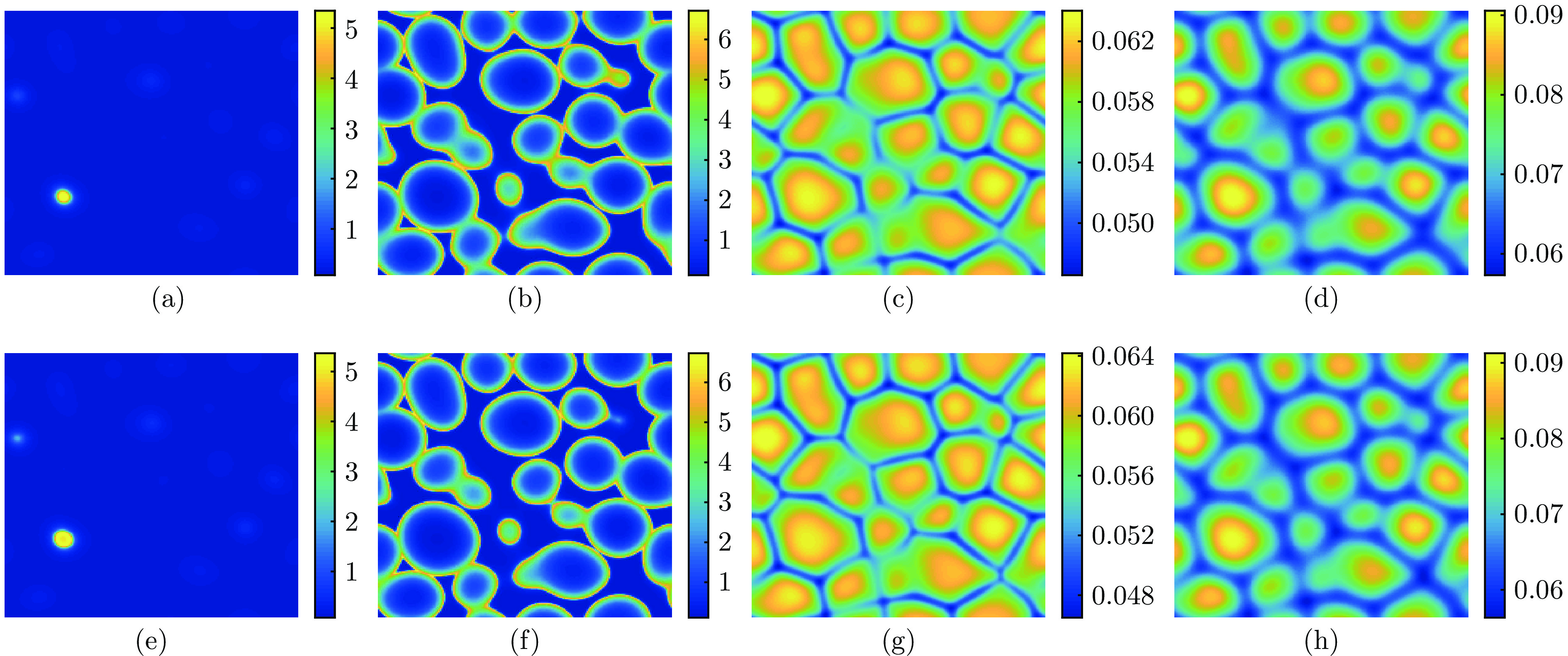
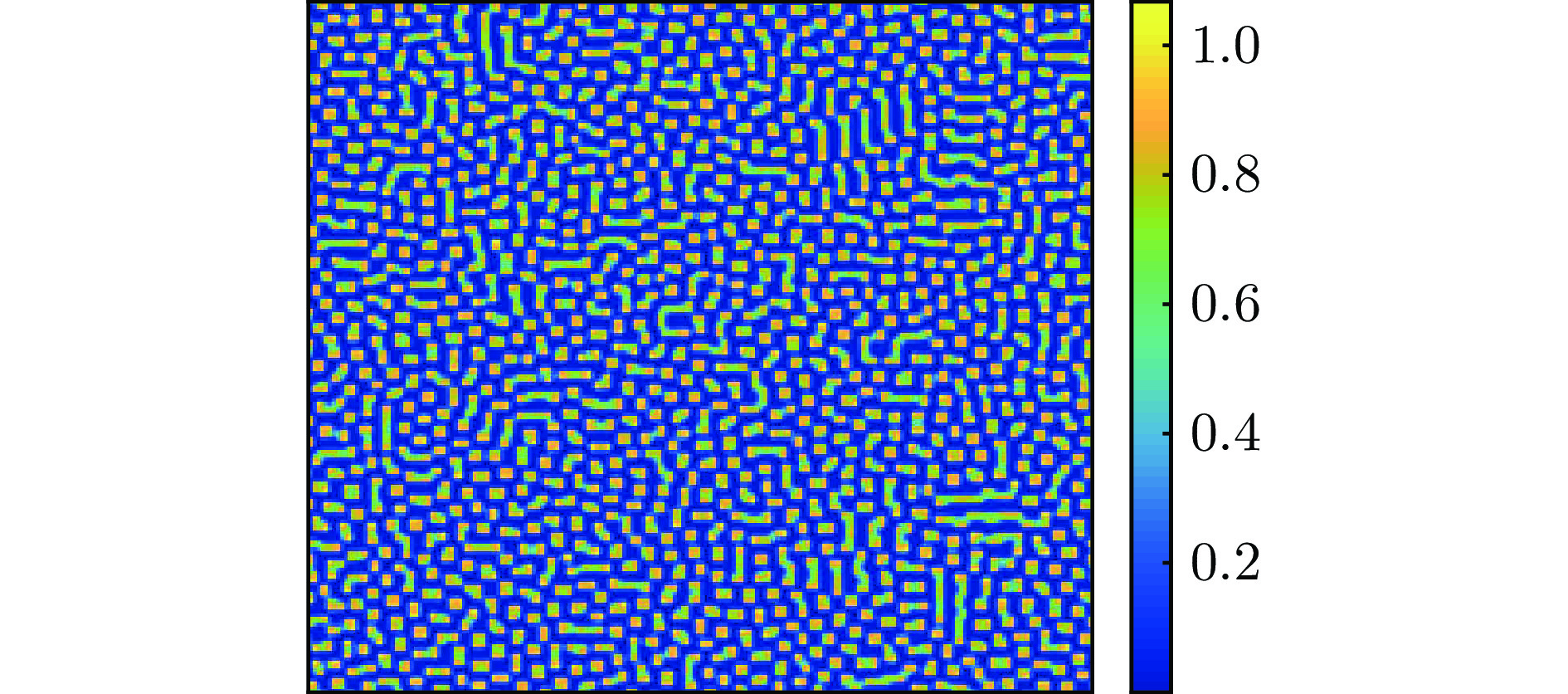
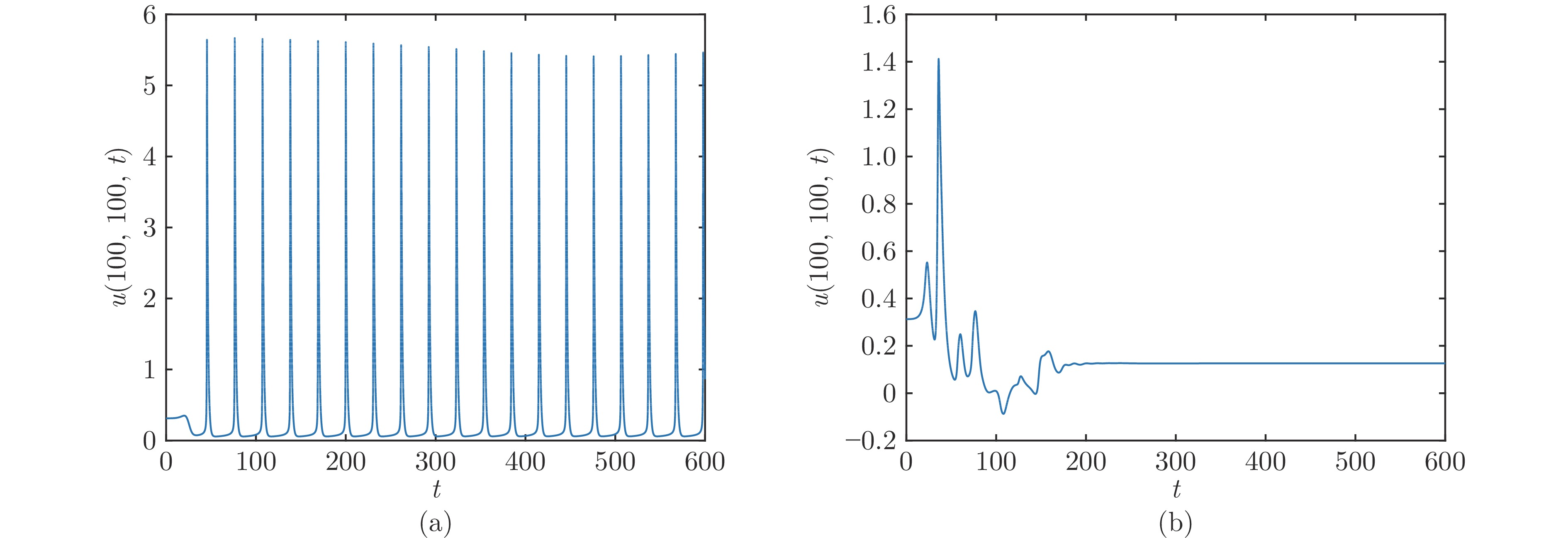
Schnakenberg系统是一类典型的化学反应扩散控制系统. 目前国内外研究仅局限于Schnakenberg系统的Turing不稳定与分岔, 而关于其化学斑图演化机理的报道较少. 斑图机理分析可以准确揭示化学反应中自组织现象的产生和空间模式的演化规律. 本文研究交叉扩散驱动下Schnakenberg系统斑图的结构蜕变、演化速度及时间依赖性, 重点探讨交叉扩散对其动力学与斑图演化的响应机制. 研究发现, 当自扩散诱导的系统稳定时, 交叉扩散可以激发斑图的产生; 当自扩散诱导的系统不稳定时, 交叉扩散可以实现斑图结构的蜕变; 对于环波结构, 不同组分的交叉扩散可以影响其演化速度; 对于时间依赖性, 交叉扩散可以激发随时间周期变化的斑图产生, 并可将此类斑图转换为随时间相对稳定的斑图. 因此, 交叉扩散对于Schnakenberg系统的斑图产生、蜕变、演化速度及时间依赖性都起着至关重要的作用.
Schnakenberg系统是一类典型的化学反应扩散控制系统. 目前国内外研究仅局限于Schnakenberg系统的Turing不稳定与分岔, 而关于其化学斑图演化机理的报道较少. 斑图机理分析可以准确揭示化学反应中自组织现象的产生和空间模式的演化规律. 本文研究交叉扩散驱动下Schnakenberg系统斑图的结构蜕变、演化速度及时间依赖性, 重点探讨交叉扩散对其动力学与斑图演化的响应机制. 研究发现, 当自扩散诱导的系统稳定时, 交叉扩散可以激发斑图的产生; 当自扩散诱导的系统不稳定时, 交叉扩散可以实现斑图结构的蜕变; 对于环波结构, 不同组分的交叉扩散可以影响其演化速度; 对于时间依赖性, 交叉扩散可以激发随时间周期变化的斑图产生, 并可将此类斑图转换为随时间相对稳定的斑图. 因此, 交叉扩散对于Schnakenberg系统的斑图产生、蜕变、演化速度及时间依赖性都起着至关重要的作用.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230573
摘要:
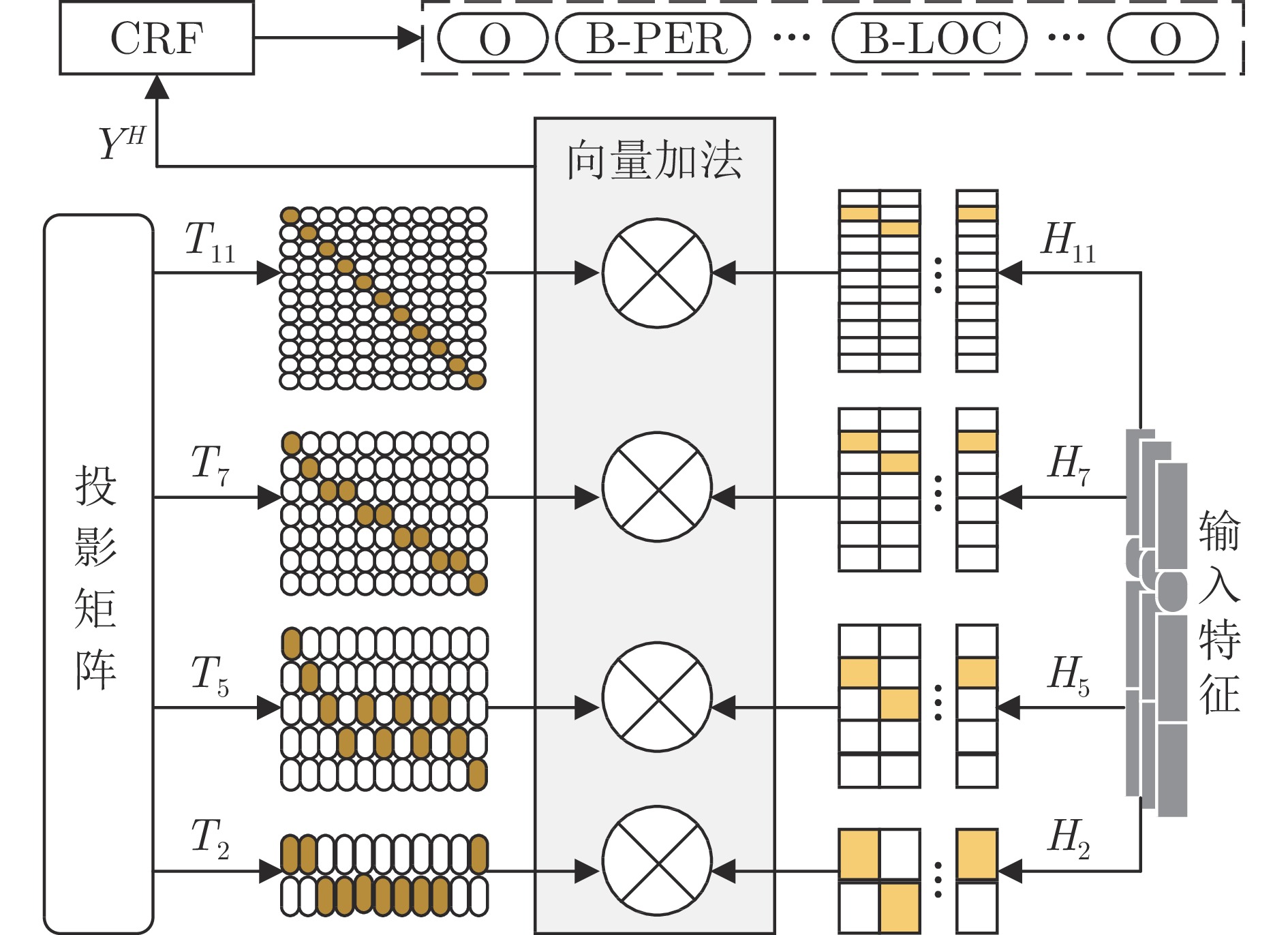
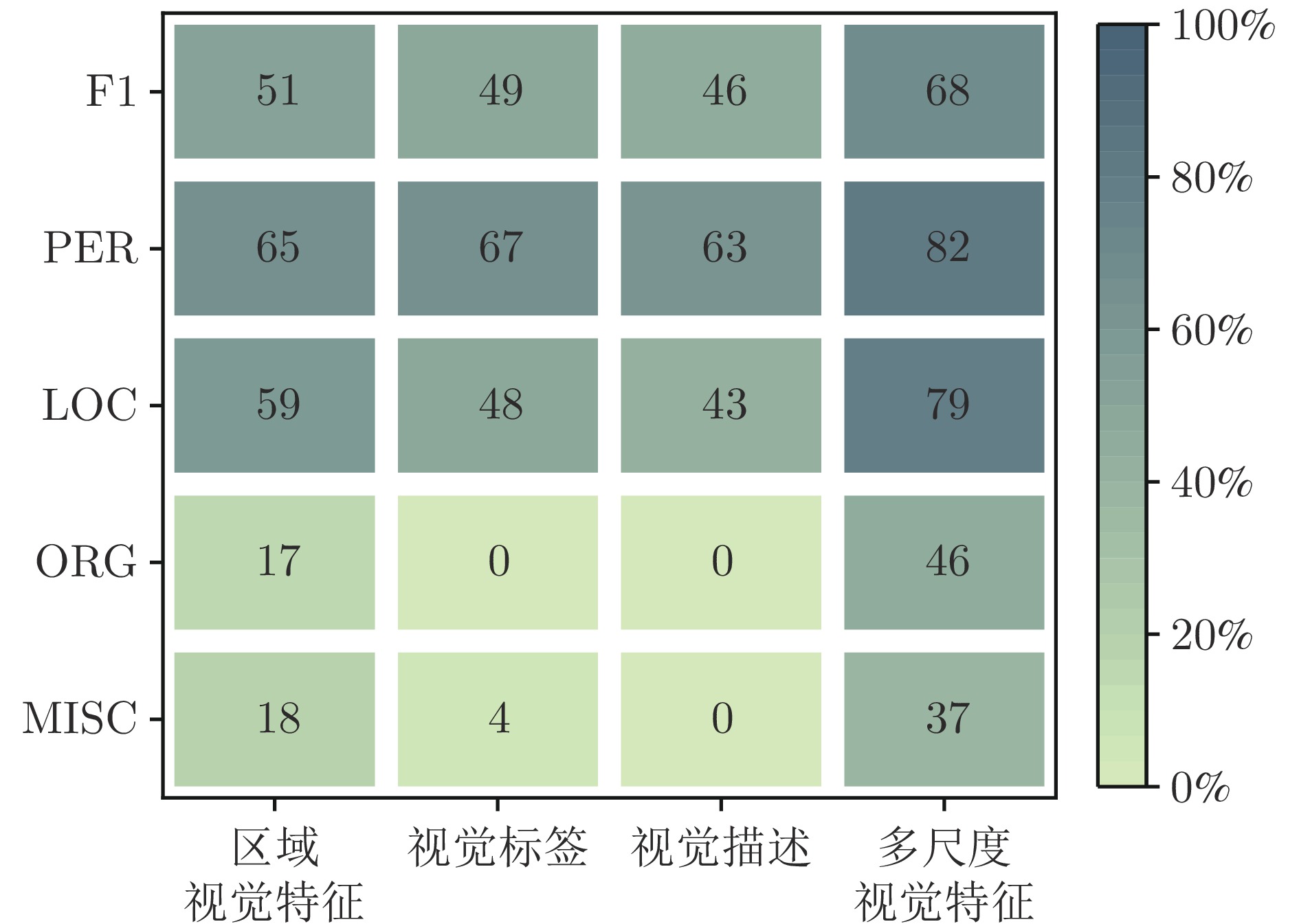
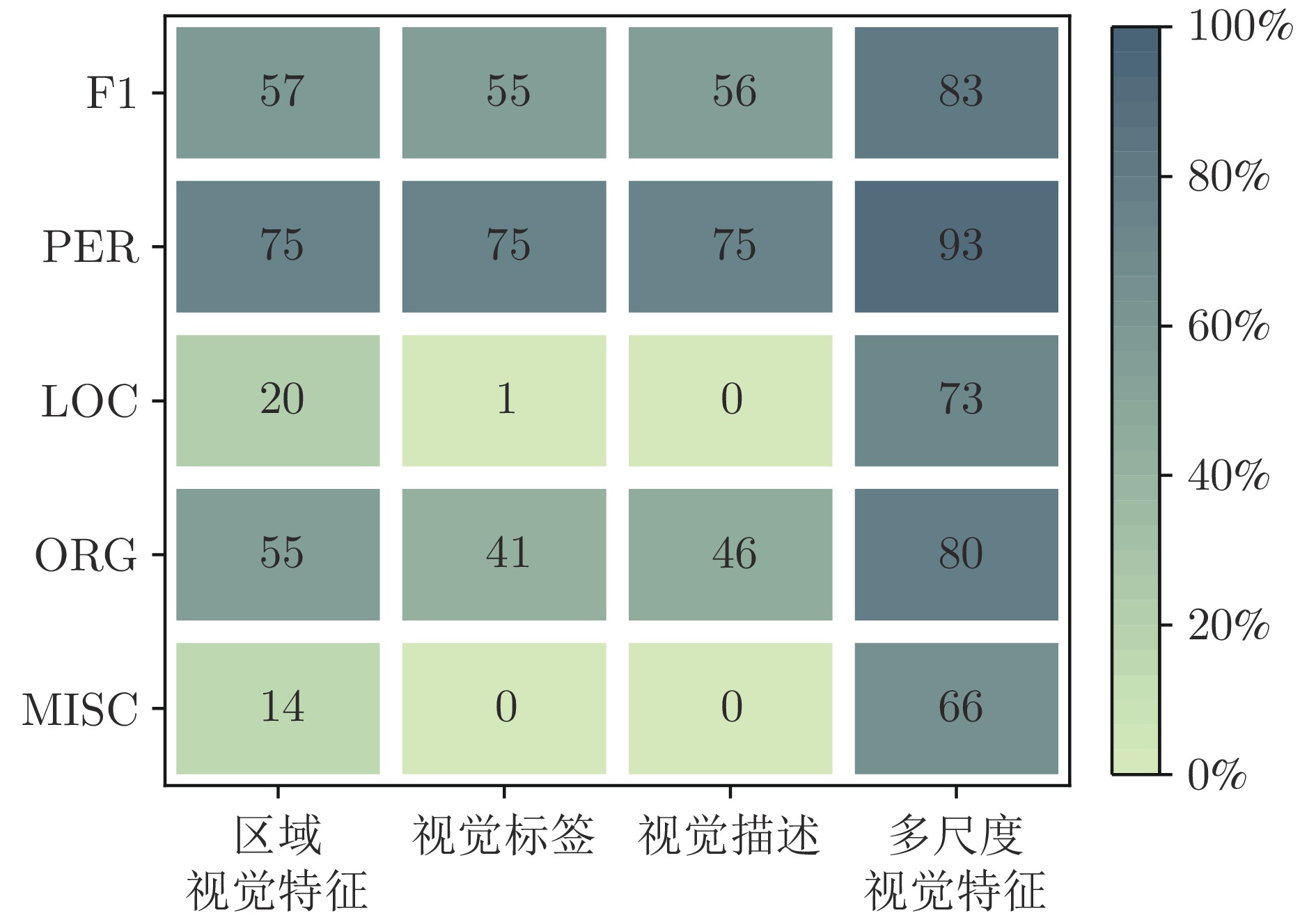
为了解决多模态命名实体识别(Multi-modal named entity recognition, MNER) 方法研究中存在的图像特征语义缺失以及多模态表示语义约束较弱等问题, 提出了多尺度视觉语义增强的多模态命名实体识别方法. 该方法提取多种视觉特征用于补全图像语义; 挖掘文本特征与多种视觉特征间的语义交互关系, 生成多尺度视觉语义特征并进行融合, 得到多尺度视觉语义增强的多模态文本表示; 使用视觉实体分类器对多尺度视觉语义特征解码, 实现视觉特征的语义一致性约束; 调用多任务标签解码器挖掘多模态文本表示和文本特征的细粒度语义, 通过联合解码来解决语义偏差问题, 从而进一步提高命名实体识别准确度. 为验证该方法的有效性, 在Twitter-2015和Twitter-2017数据集上进行实验, 并与HvpNet、MNER-QG和RGCN等10种方法进行对比, 该方法的平均F1值分别提升了0.85%和1.45%.
为了解决多模态命名实体识别(Multi-modal named entity recognition, MNER) 方法研究中存在的图像特征语义缺失以及多模态表示语义约束较弱等问题, 提出了多尺度视觉语义增强的多模态命名实体识别方法. 该方法提取多种视觉特征用于补全图像语义; 挖掘文本特征与多种视觉特征间的语义交互关系, 生成多尺度视觉语义特征并进行融合, 得到多尺度视觉语义增强的多模态文本表示; 使用视觉实体分类器对多尺度视觉语义特征解码, 实现视觉特征的语义一致性约束; 调用多任务标签解码器挖掘多模态文本表示和文本特征的细粒度语义, 通过联合解码来解决语义偏差问题, 从而进一步提高命名实体识别准确度. 为验证该方法的有效性, 在Twitter-2015和Twitter-2017数据集上进行实验, 并与HvpNet、MNER-QG和RGCN等10种方法进行对比, 该方法的平均F1值分别提升了0.85%和1.45%.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220679
摘要:
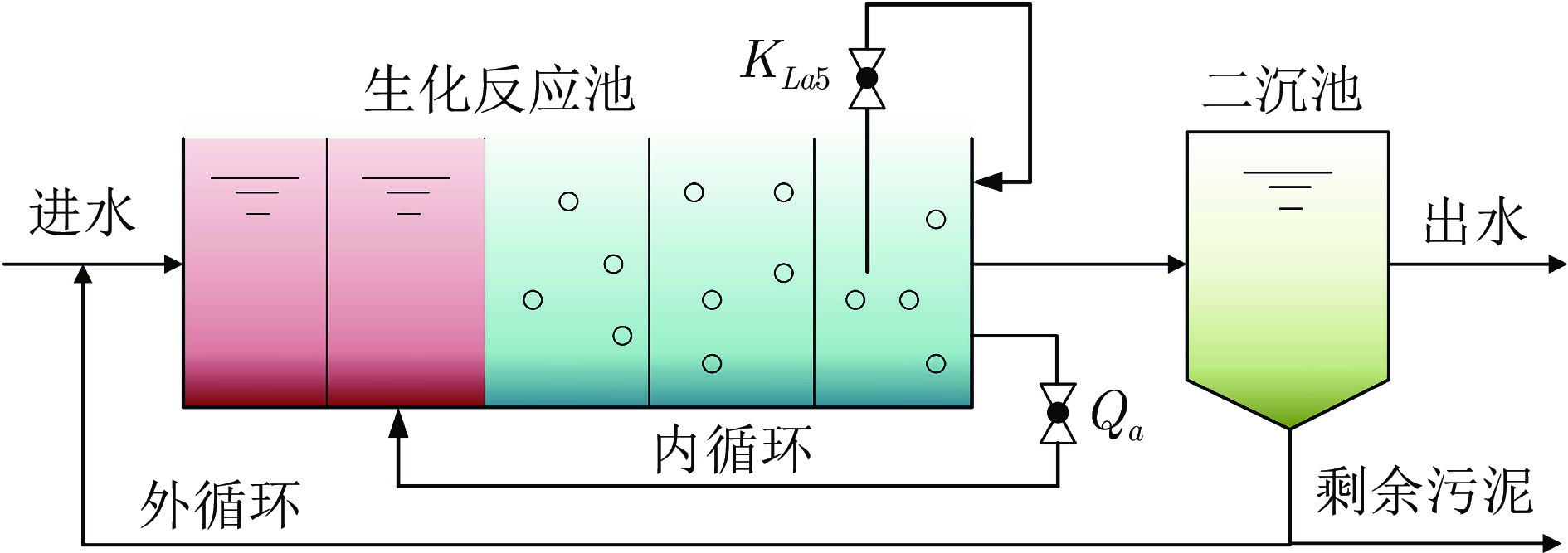
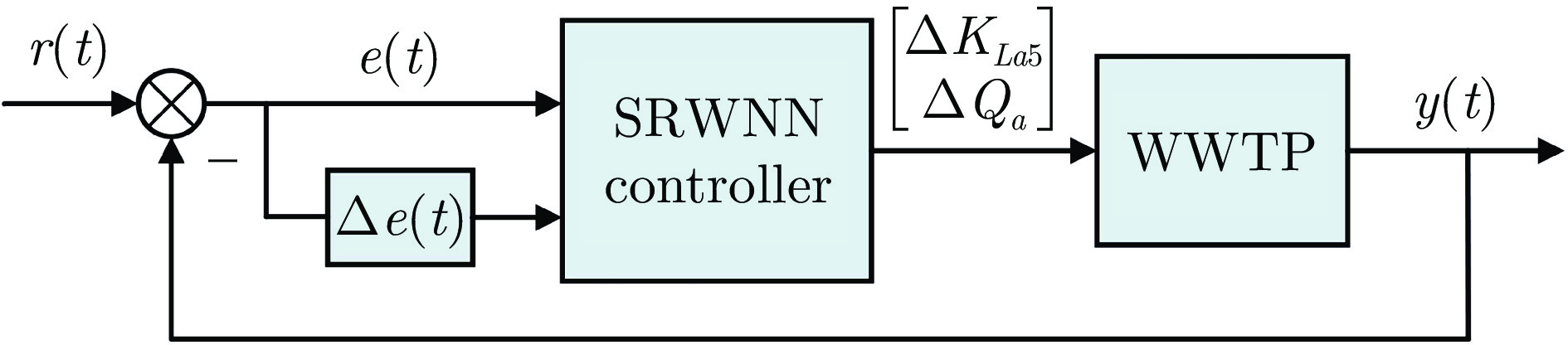
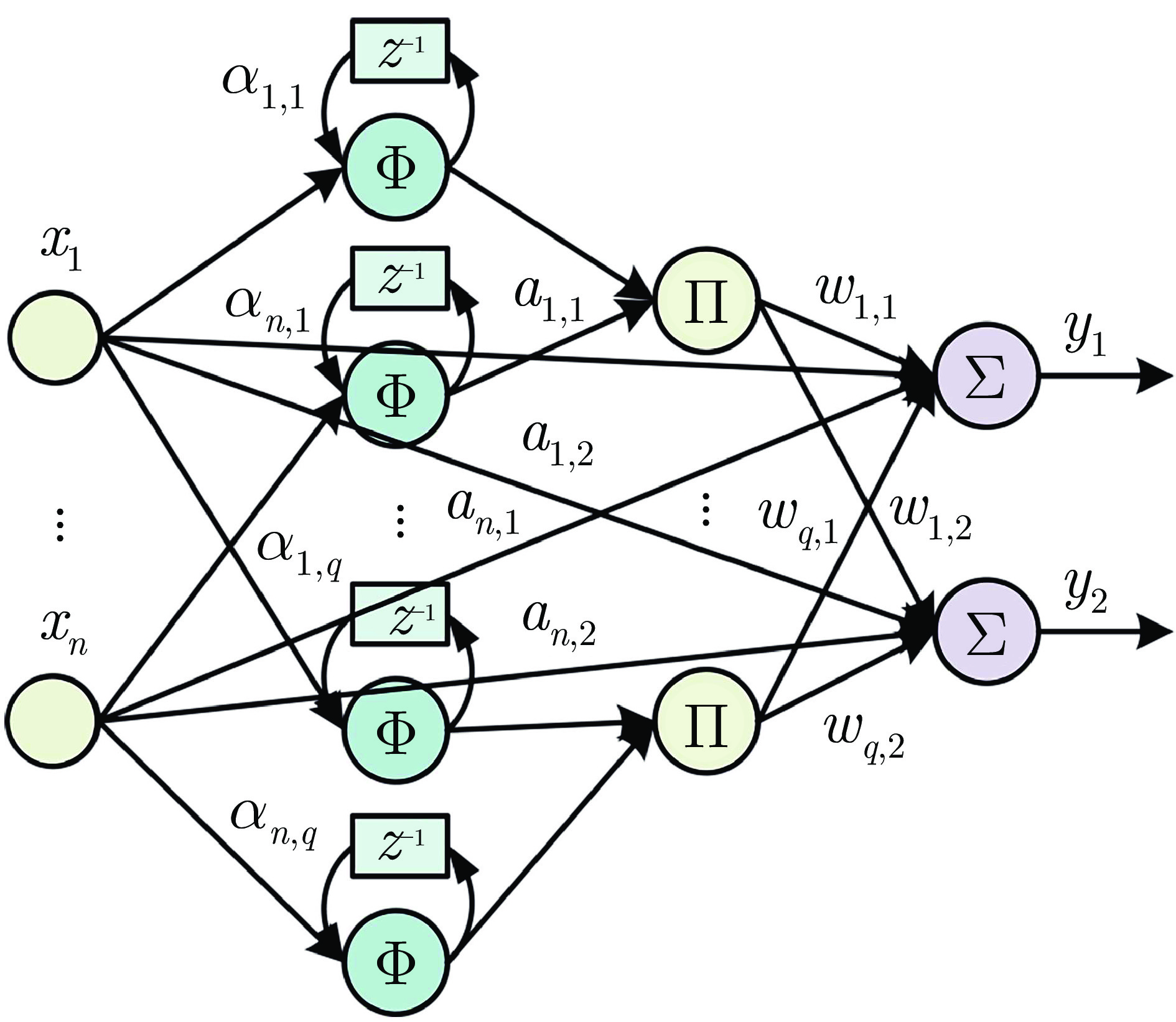
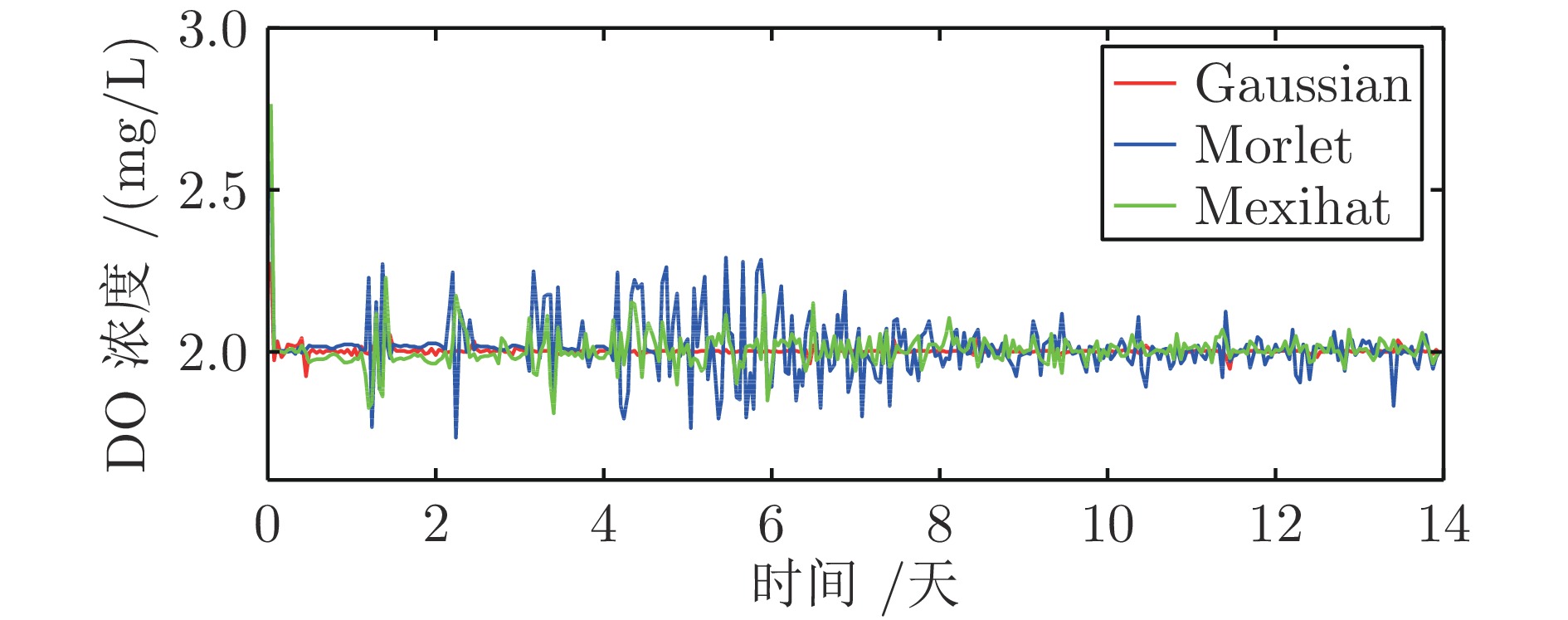
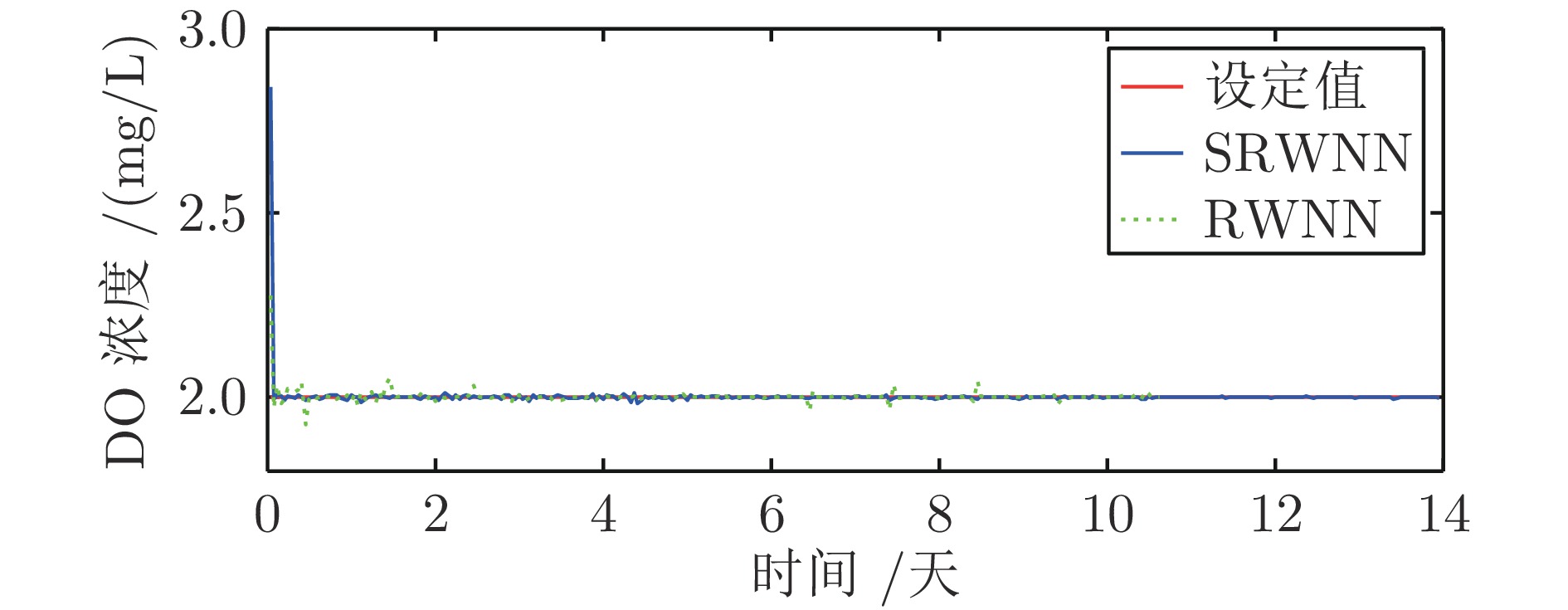
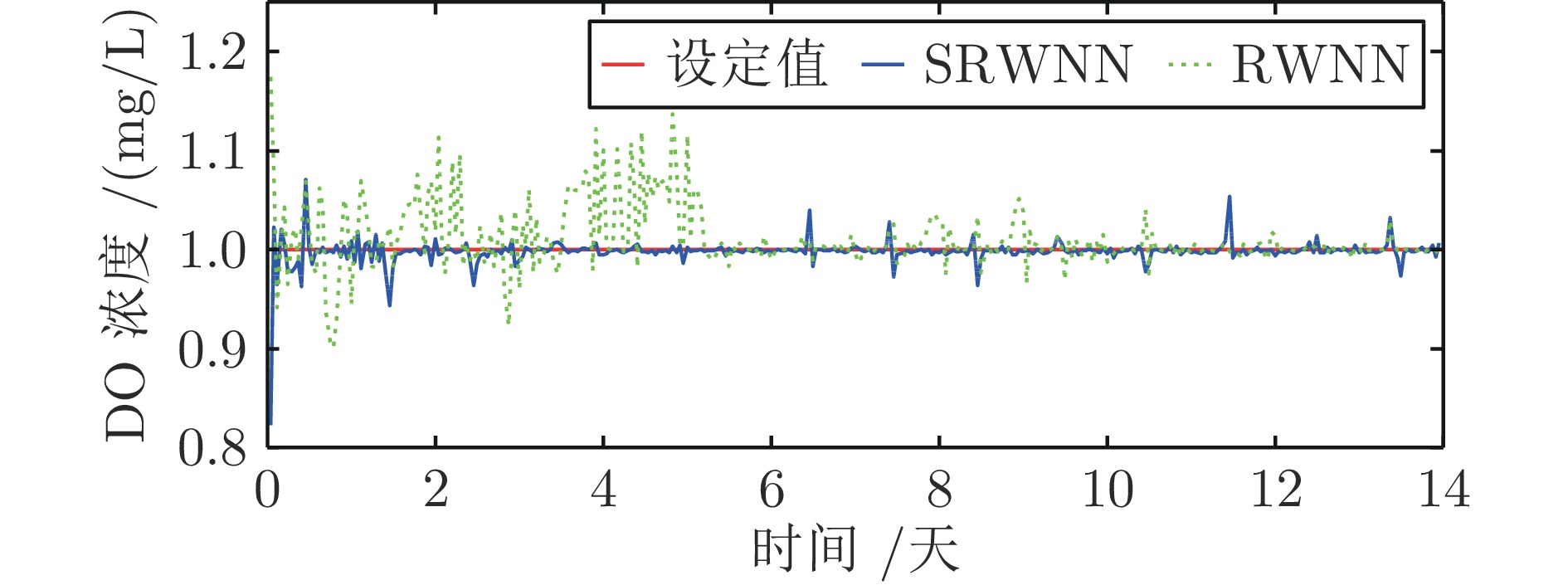
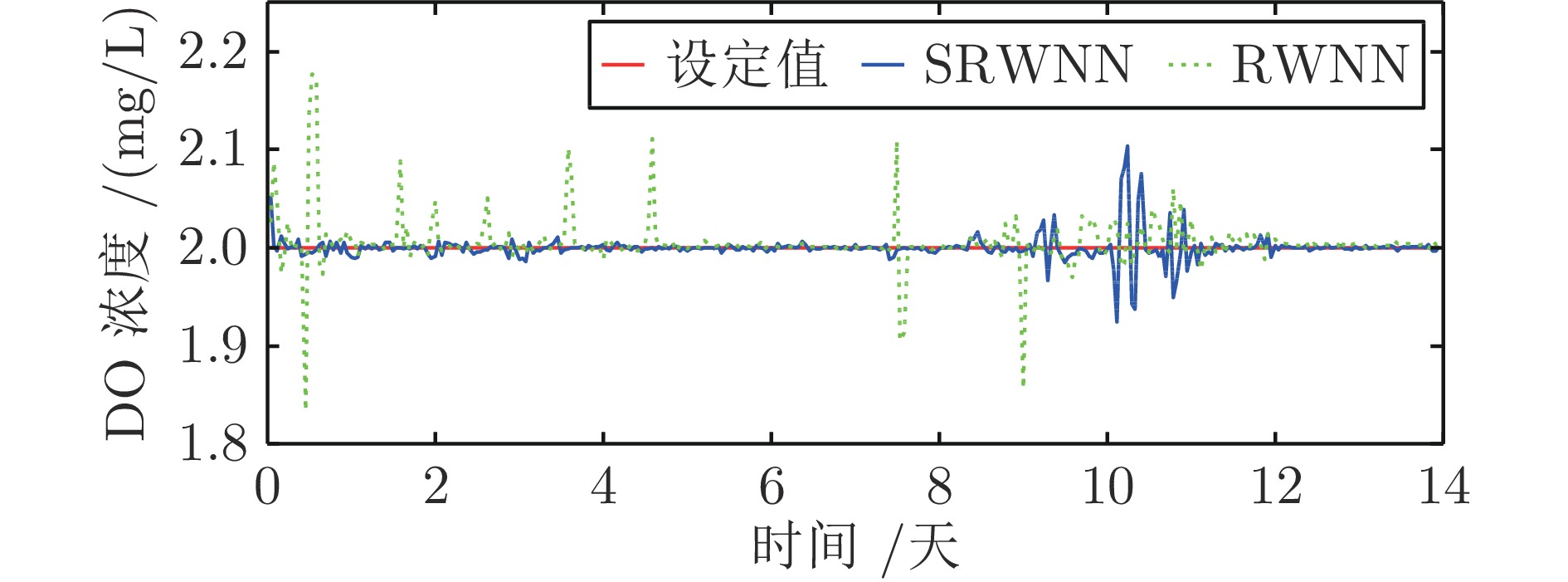
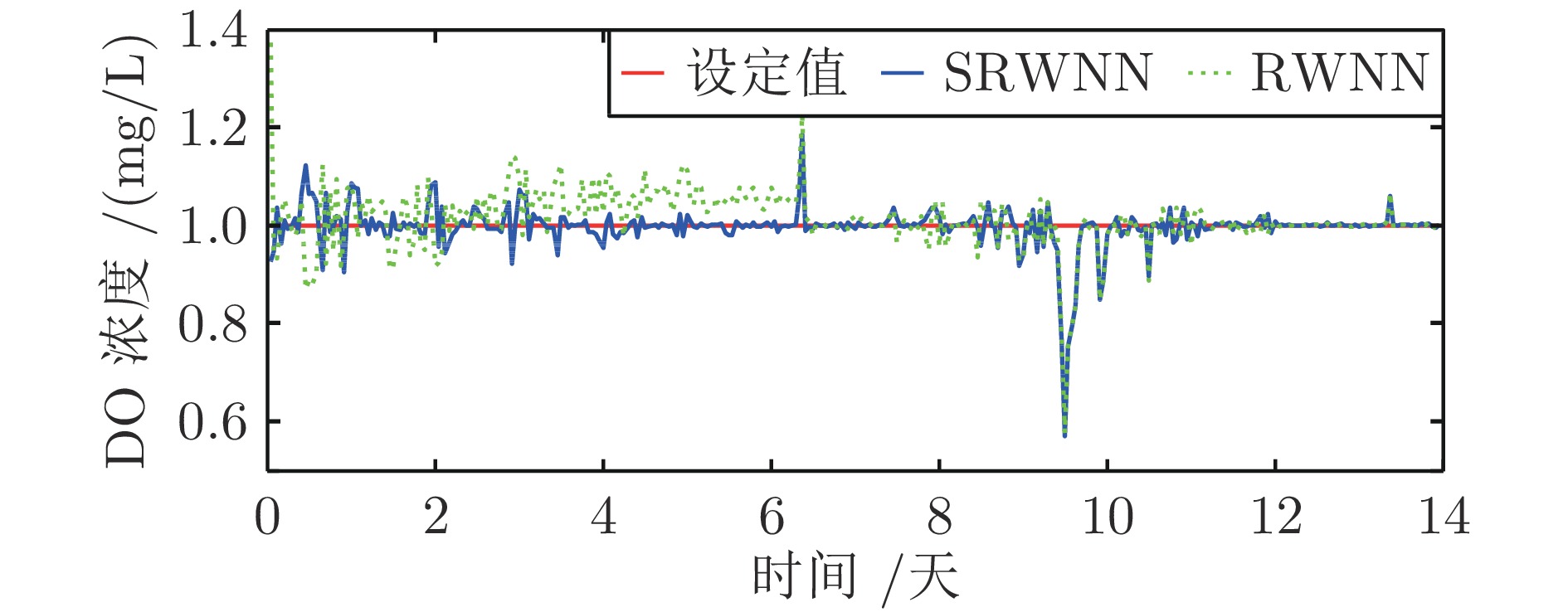
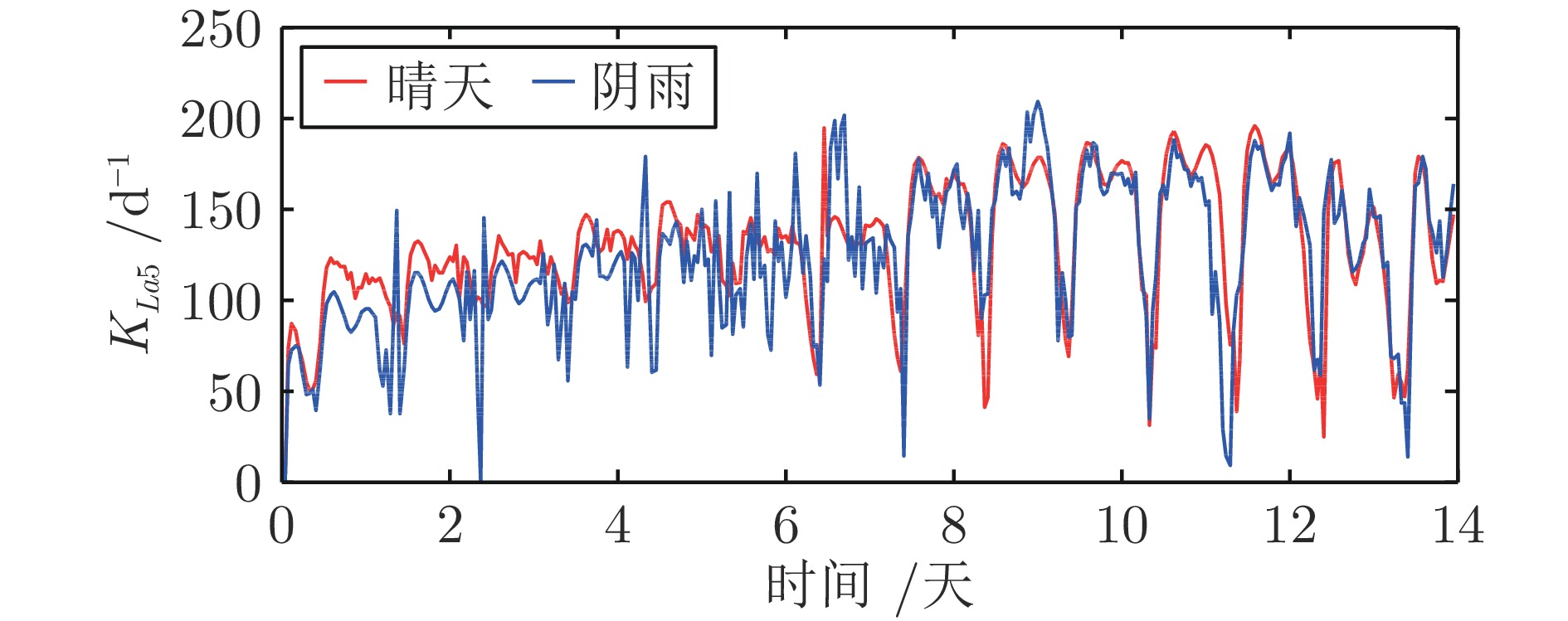
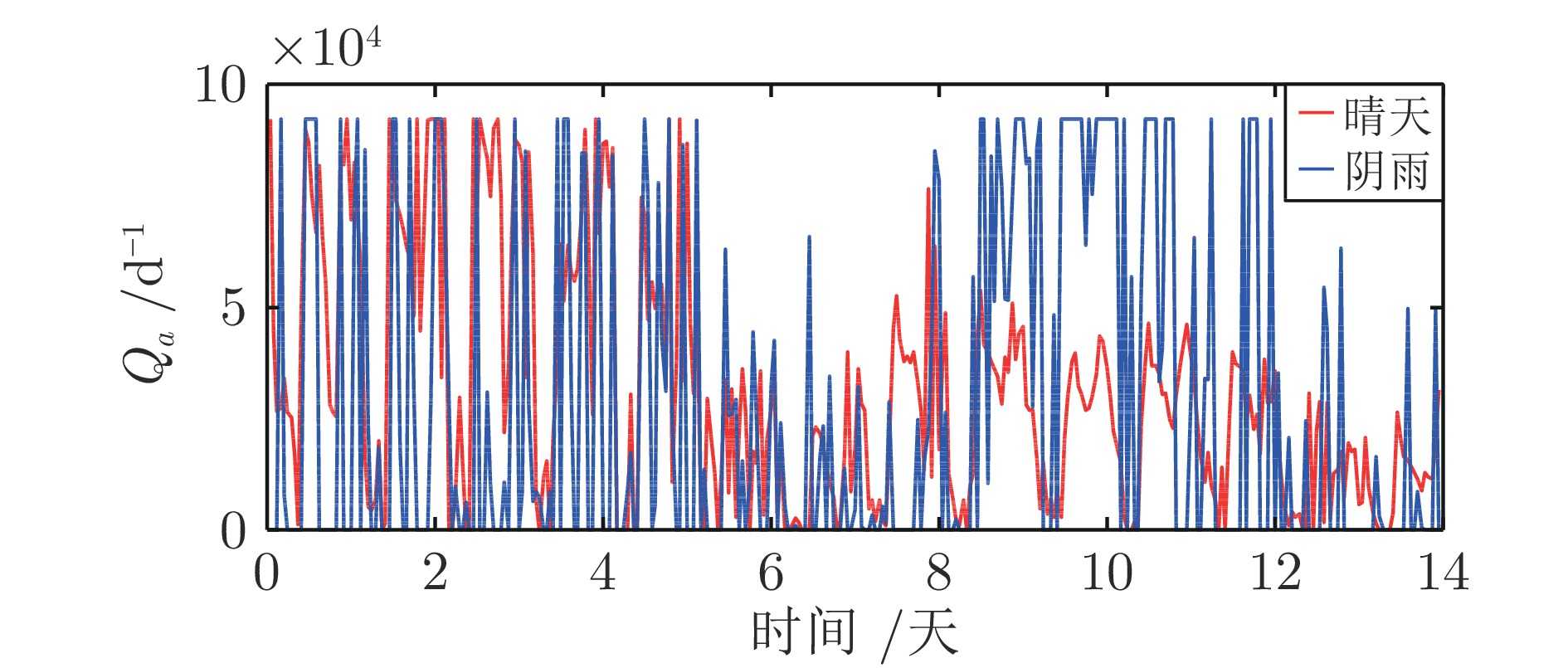
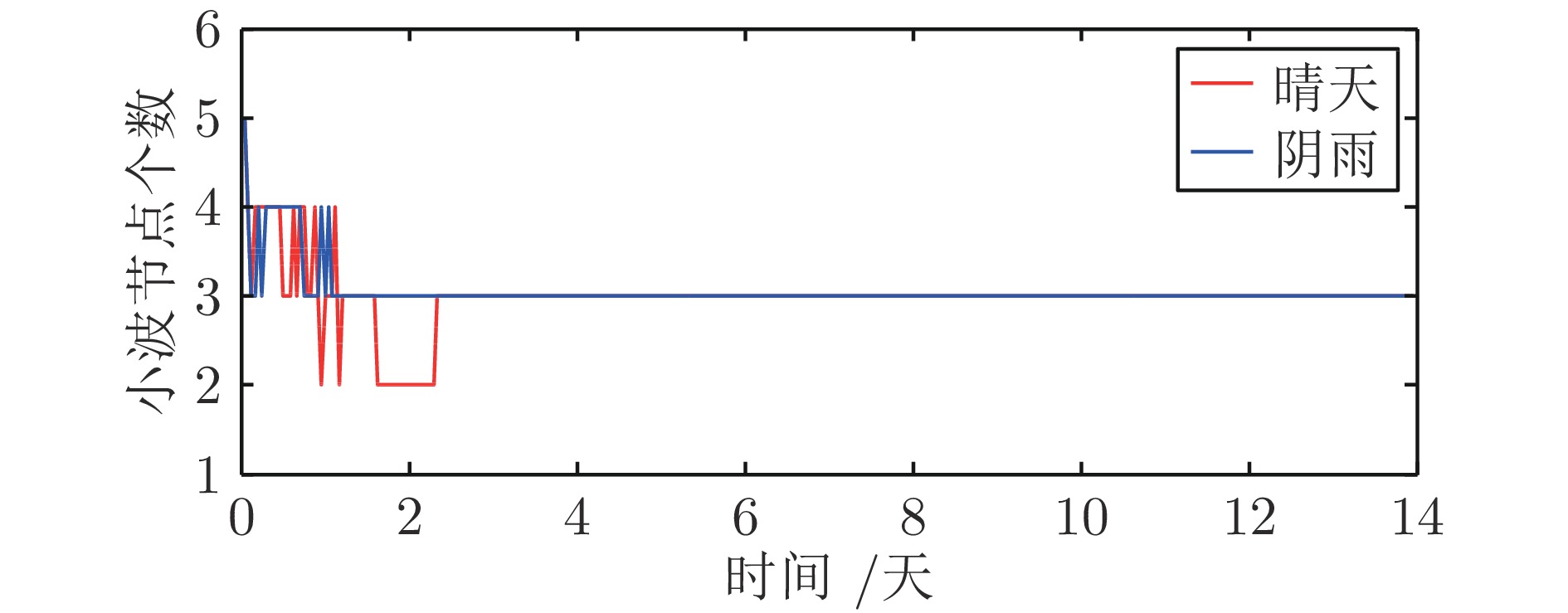
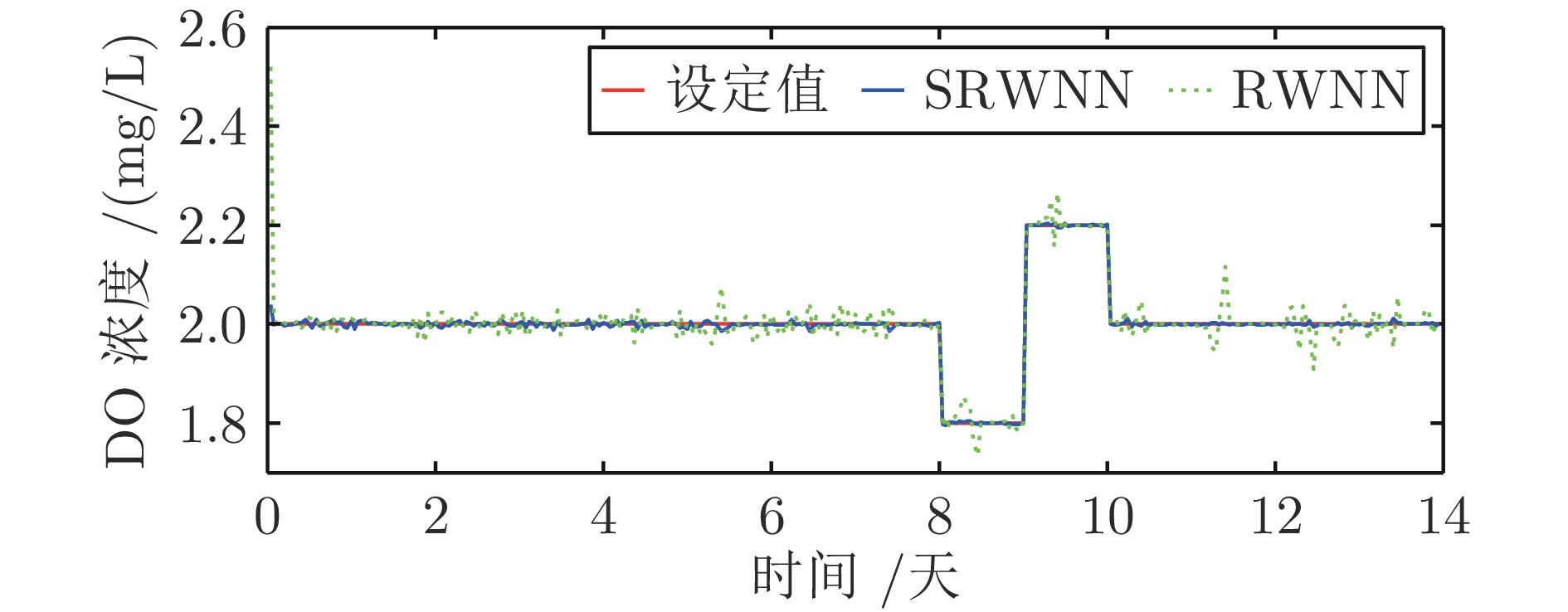
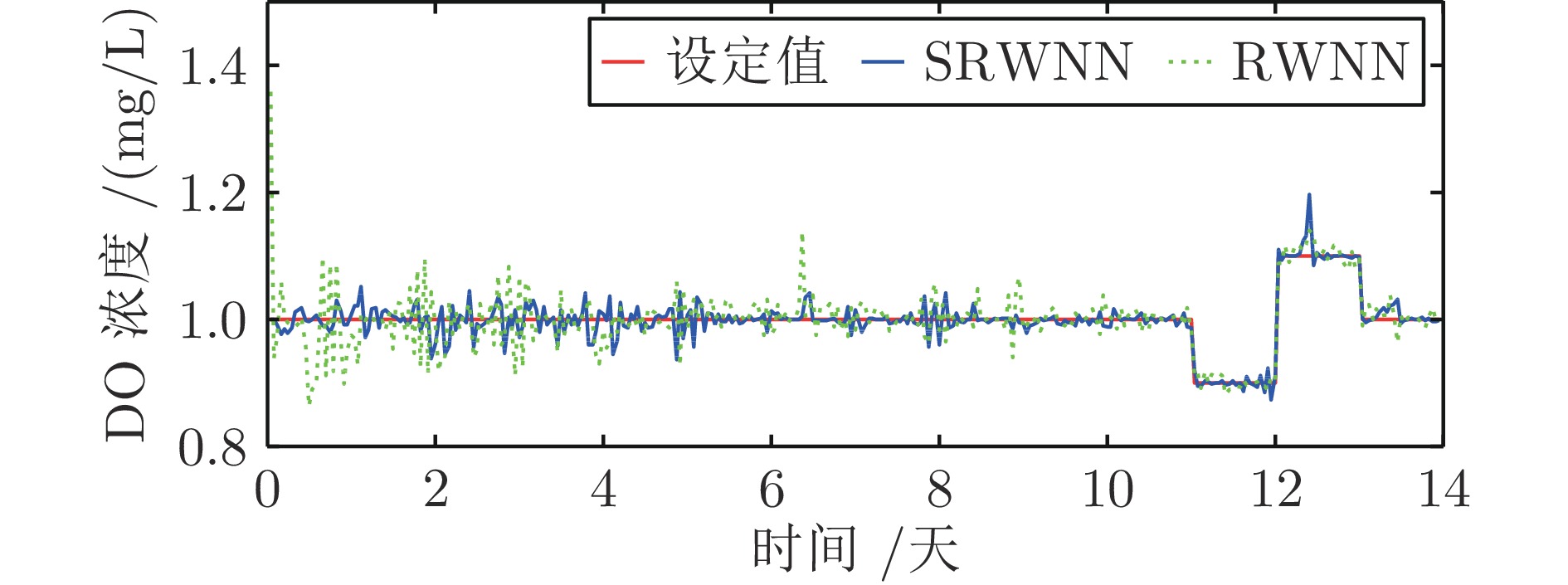
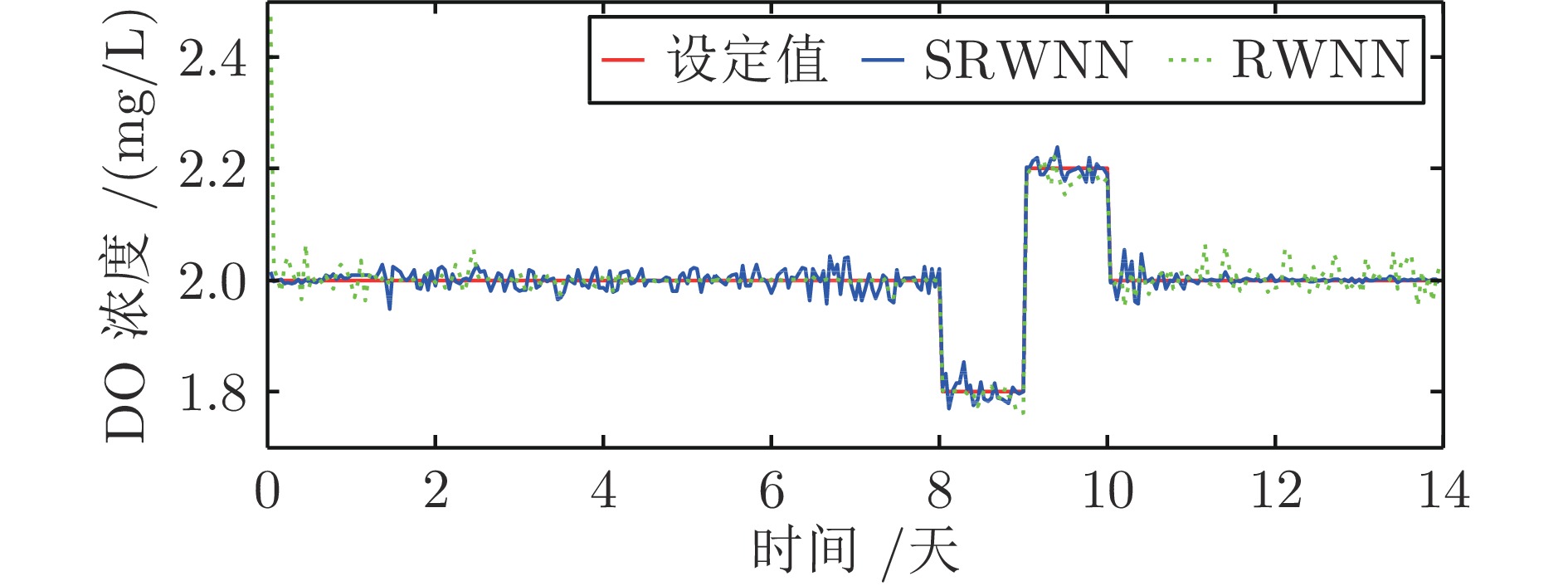
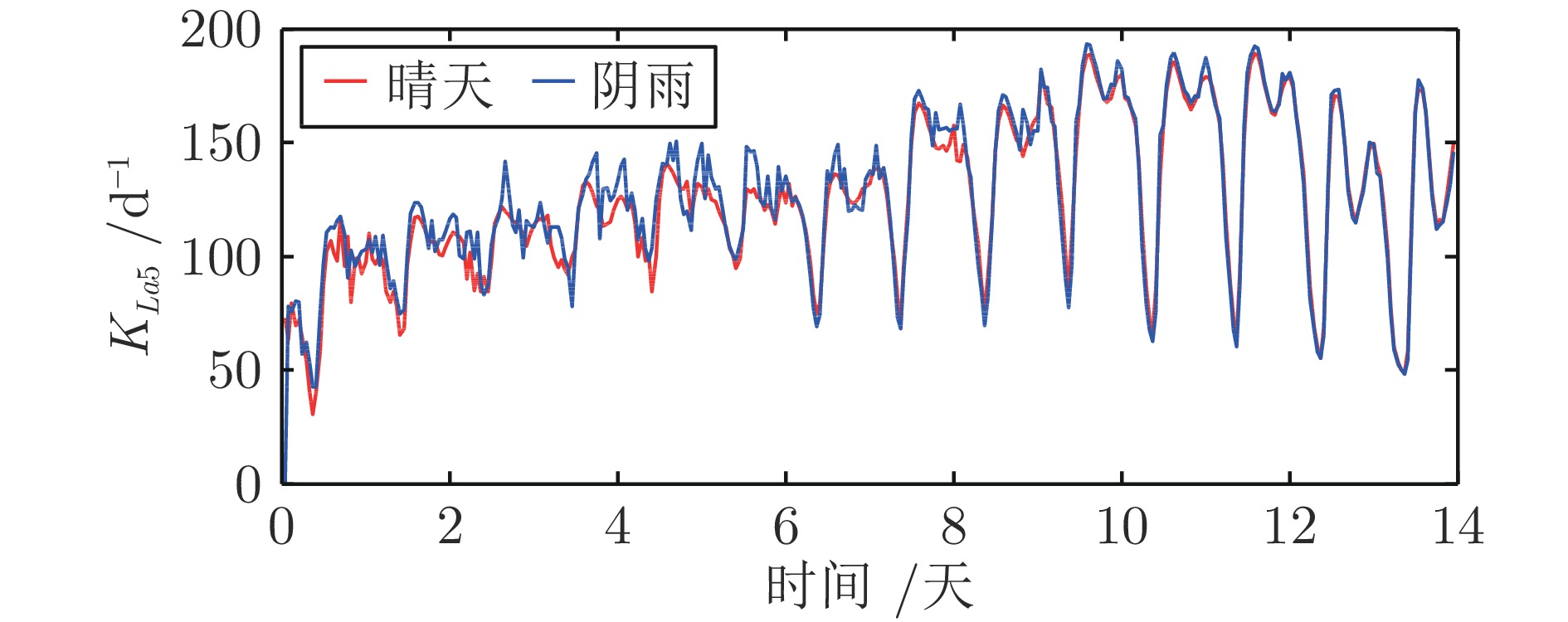
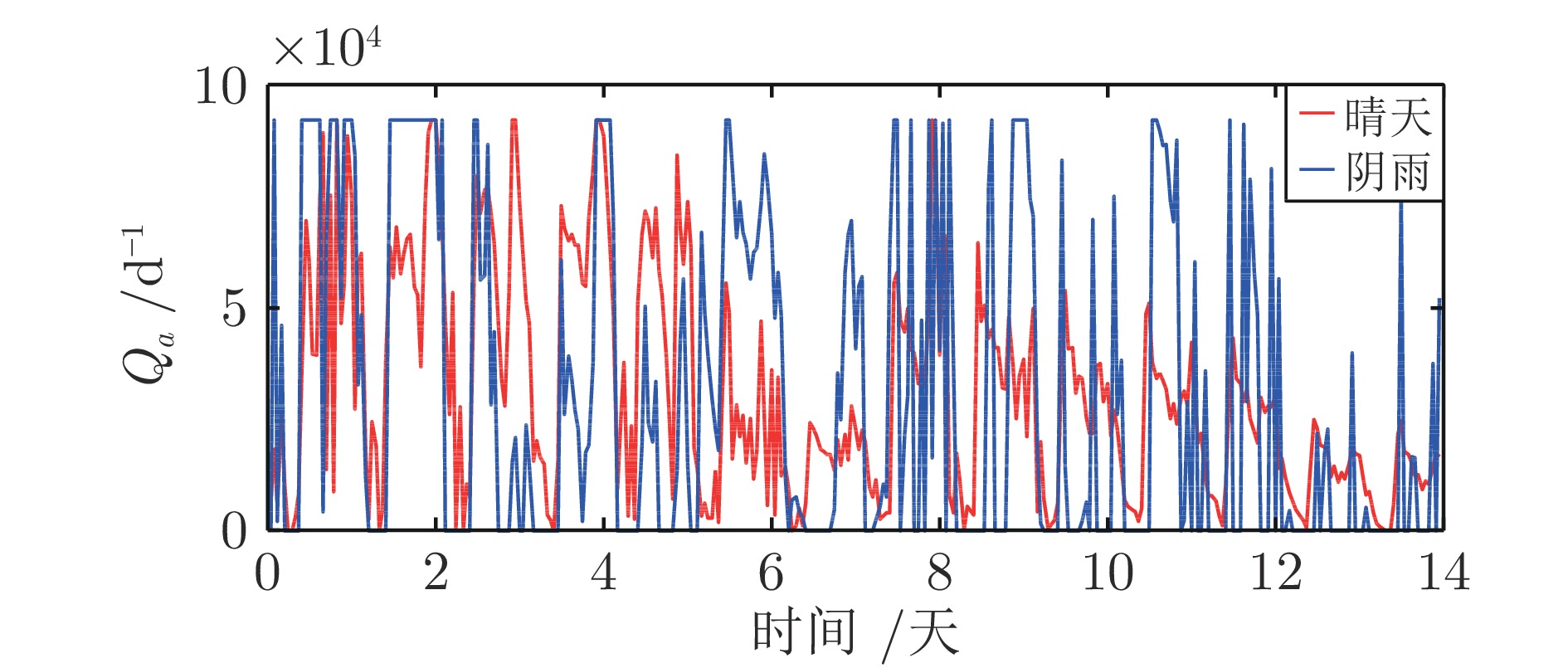
污水处理过程是一个包含多个生化反应的复杂过程, 具有非线性和动态特性. 因此, 实现污水处理过程的精准控制是一项挑战. 为了解决这个问题, 提出一种基于自组织递归小波神经网络的污水处理过程多变量控制. 首先, 针对污水处理过程的动态特性, 根据小波基的激活强度设计了一种自组织机制来动态调整递归小波神经网络控制器的结构, 提高控制的性能. 然后, 采用结合自适应学习率的在线学习算法, 实现控制器的参数学习. 此外, 通过李雅普诺夫稳定性定理证明了此控制器的稳定性. 最后, 采用基准仿真平台进行仿真验证, 实验结果表明, 此控制方法可以有效提高污水处理过程的控制绝对积分误差和平方误差积分的精度.
污水处理过程是一个包含多个生化反应的复杂过程, 具有非线性和动态特性. 因此, 实现污水处理过程的精准控制是一项挑战. 为了解决这个问题, 提出一种基于自组织递归小波神经网络的污水处理过程多变量控制. 首先, 针对污水处理过程的动态特性, 根据小波基的激活强度设计了一种自组织机制来动态调整递归小波神经网络控制器的结构, 提高控制的性能. 然后, 采用结合自适应学习率的在线学习算法, 实现控制器的参数学习. 此外, 通过李雅普诺夫稳定性定理证明了此控制器的稳定性. 最后, 采用基准仿真平台进行仿真验证, 实验结果表明, 此控制方法可以有效提高污水处理过程的控制绝对积分误差和平方误差积分的精度.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230581
摘要:
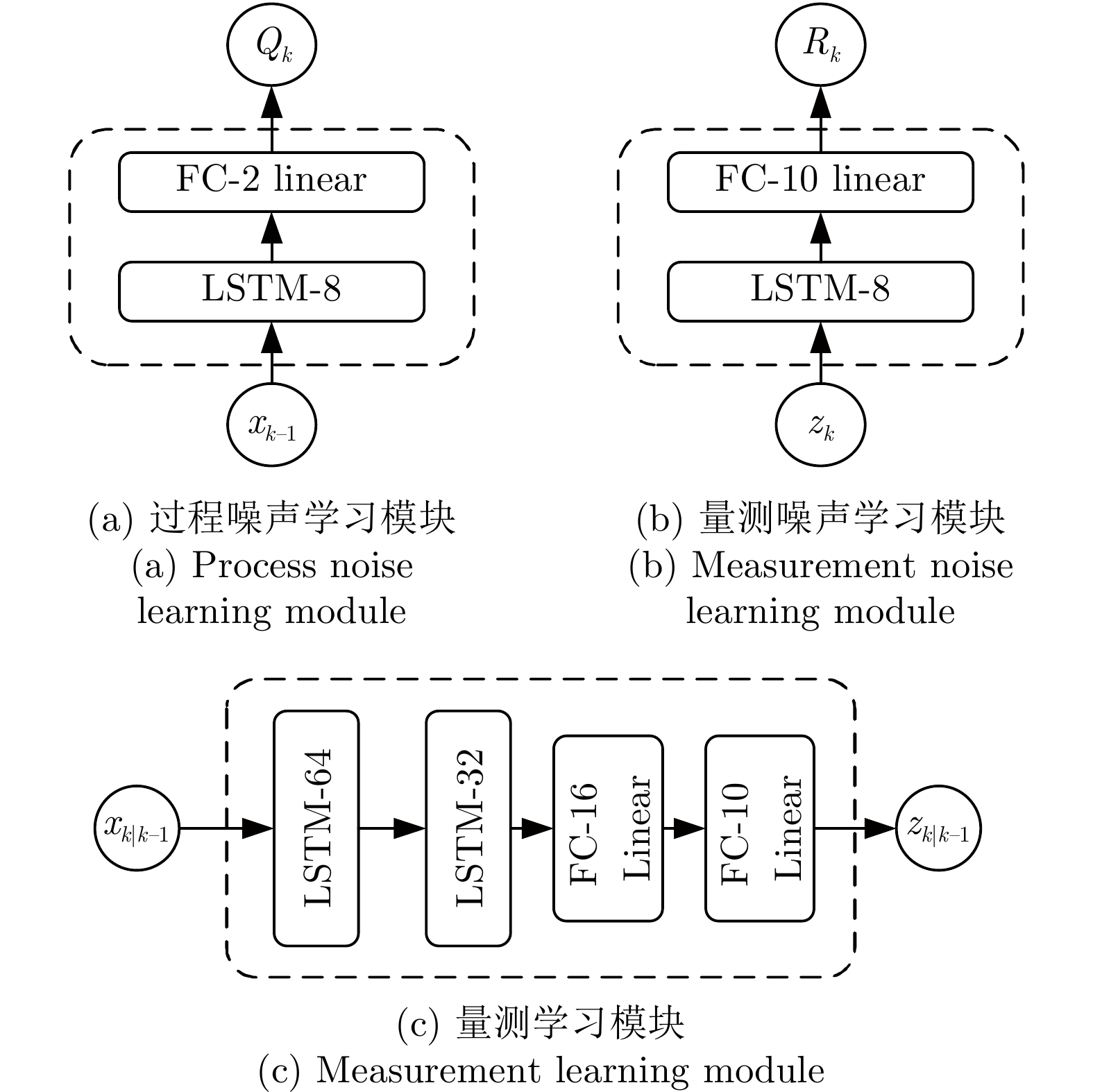
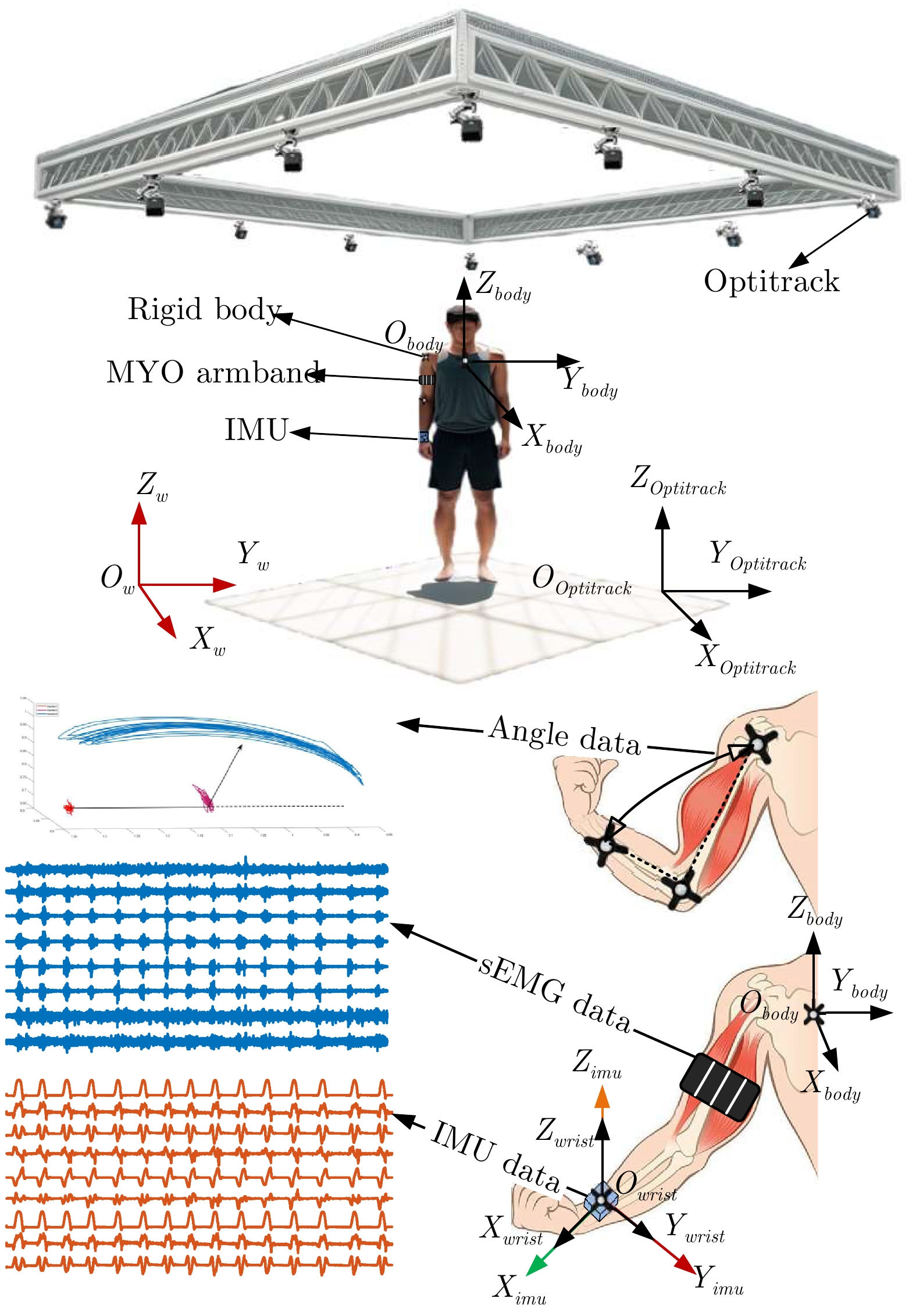
本文研究了基于肌电(Electromyography, EMG)−惯性融合的人体运动估计问题, 提出了一种序贯渐进高斯滤波网络(Sequential progressive Gaussian filtering network, SPGF-net)估计方法来形成肌电和惯性的互补性优势, 以提高人体运动估计精度和稳定性. 首先, 利用卷积神经网络对观测数据进行特征提取, 以及利用长短期记忆(Long short-term memory, LSTM)网络模型来学习噪声统计特性和量测模型. 其次, 采用序贯融合的方式融合异构传感器量测特征, 以建立高斯滤波与深度学习相结合的网络模型来实现人体运动估计. 特别地, 引入渐进量测更新对网络量测特征的不确定性进行补偿. 最后, 通过实验结果表明, 相比于现有的卡尔曼滤波网络, 该融合方法在上肢关节角度估计中的均方根误差(Root mean square error, RMSE)下降了13.8%, 相关系数(R2)提高了4.36%.
本文研究了基于肌电(Electromyography, EMG)−惯性融合的人体运动估计问题, 提出了一种序贯渐进高斯滤波网络(Sequential progressive Gaussian filtering network, SPGF-net)估计方法来形成肌电和惯性的互补性优势, 以提高人体运动估计精度和稳定性. 首先, 利用卷积神经网络对观测数据进行特征提取, 以及利用长短期记忆(Long short-term memory, LSTM)网络模型来学习噪声统计特性和量测模型. 其次, 采用序贯融合的方式融合异构传感器量测特征, 以建立高斯滤波与深度学习相结合的网络模型来实现人体运动估计. 特别地, 引入渐进量测更新对网络量测特征的不确定性进行补偿. 最后, 通过实验结果表明, 相比于现有的卡尔曼滤波网络, 该融合方法在上肢关节角度估计中的均方根误差(Root mean square error, RMSE)下降了13.8%, 相关系数(R2)提高了4.36%.




当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230777
摘要:
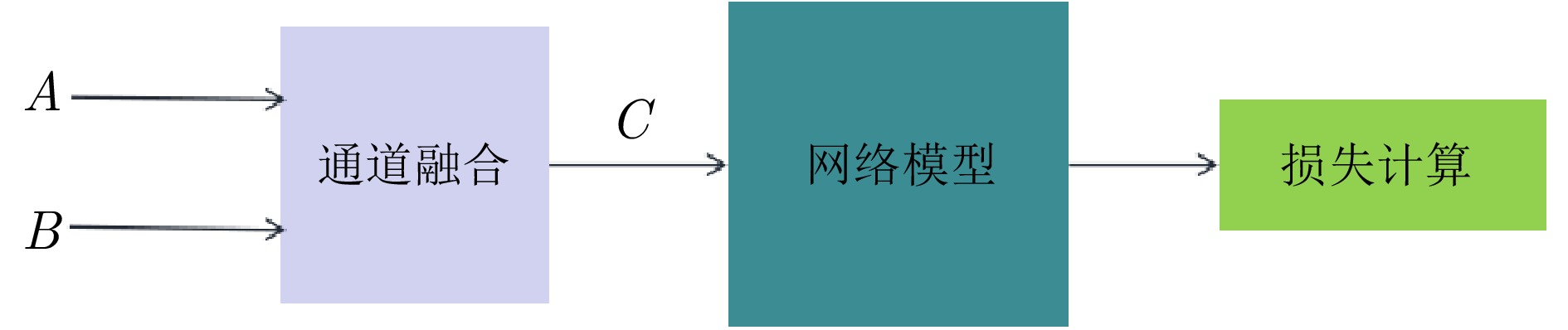
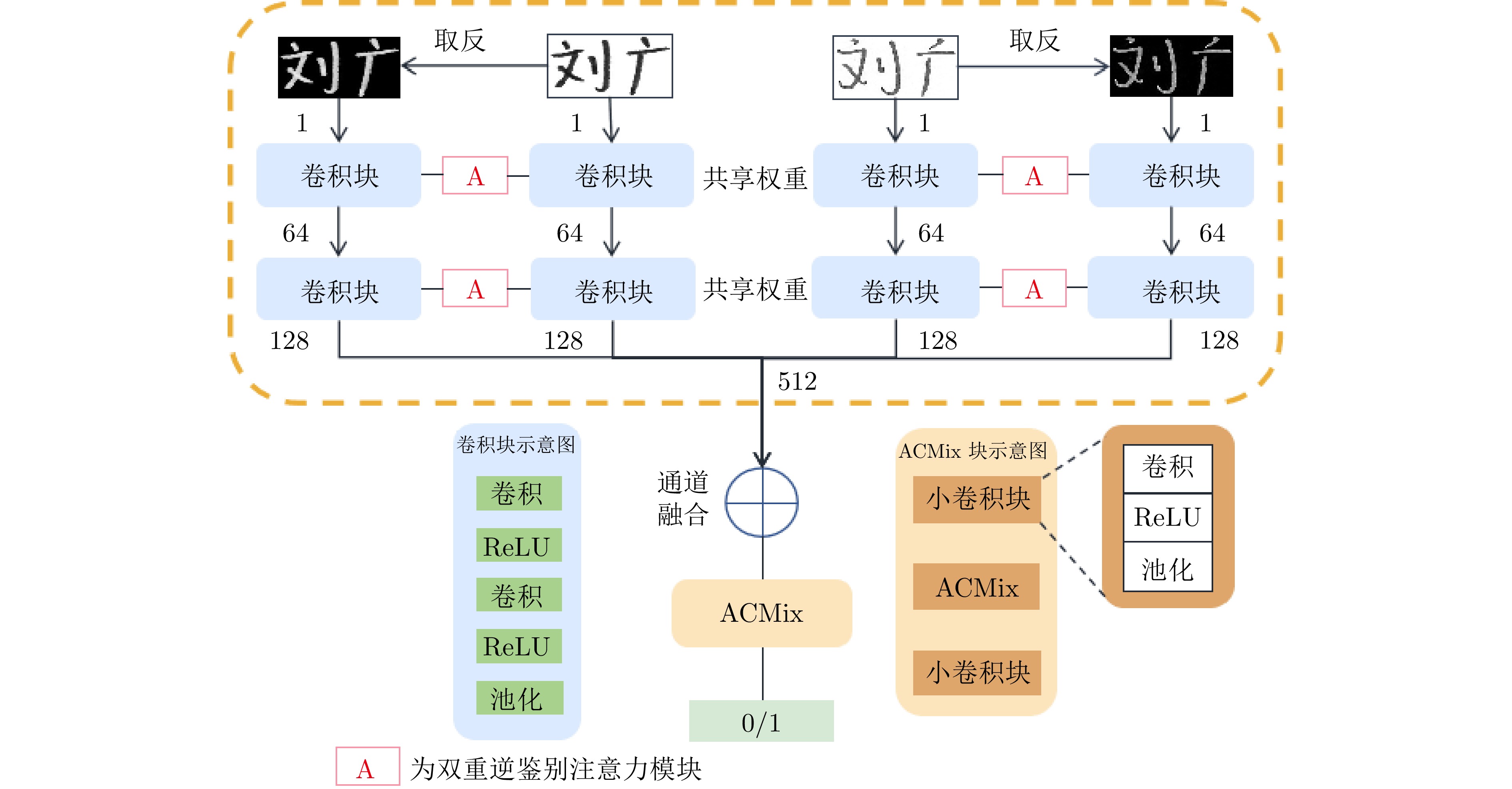
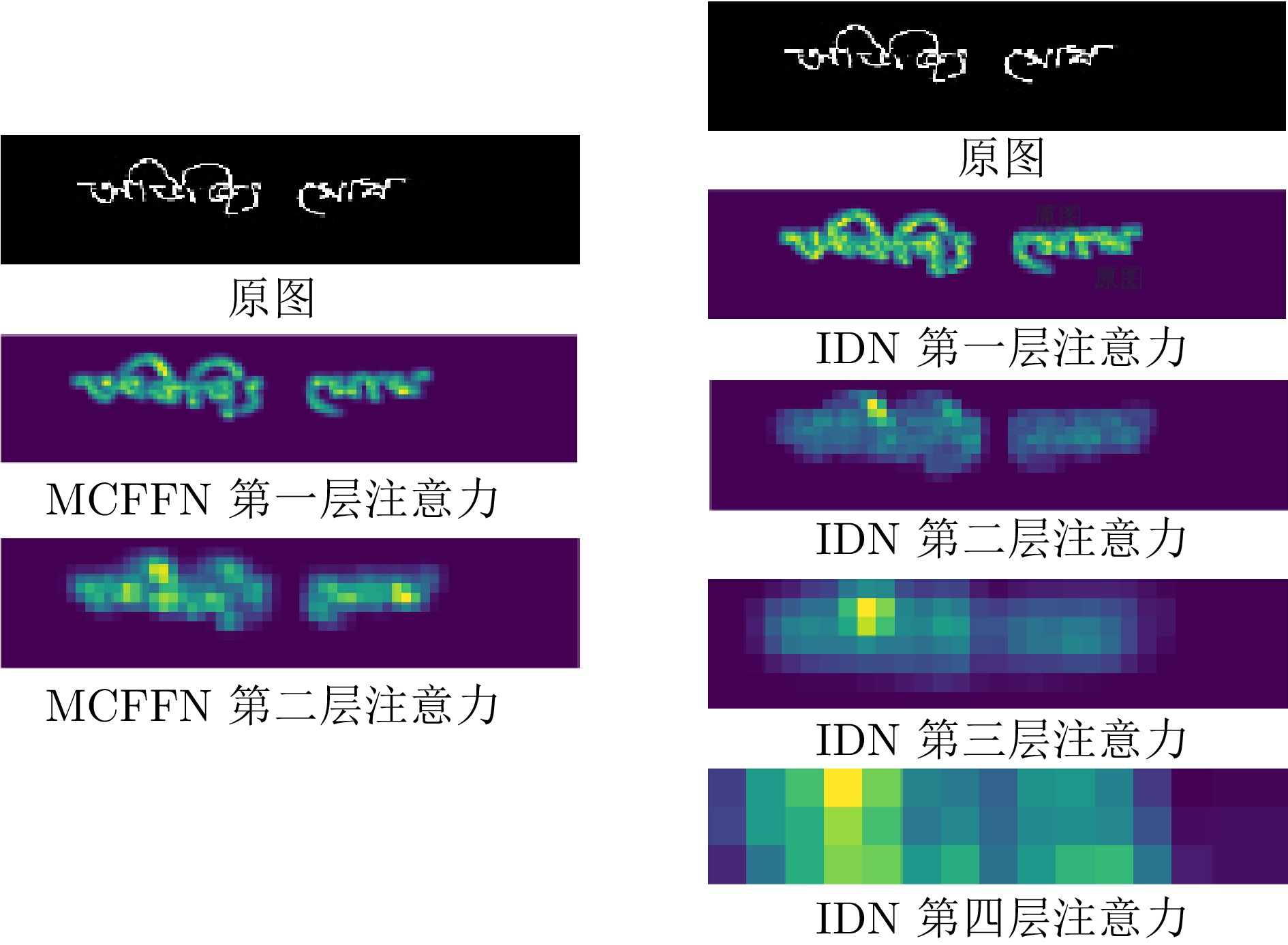
脱机签名验证模型因其判断签名是否伪造的能力而备受关注. 当今大多数脱机签名验证模型可分为深度度量学习方法和双通道判别方法. 大部分深度度量学习方法利用孪生网络生成每张图片的细节特征向量, 采用欧氏距离法判断相似度, 但是欧氏距离仅考虑两个点之间的绝对距离, 而容易忽视点的方向、缩放的信息, 不会考虑数据之间的相关性, 因此无法捕获特征向量内部之间的关系; 而双通道判别方法在网络前就进行特征的判别, 更能判断不同图像的相似性, 但此时图像的细节特征不够清晰, 大量特征丢失. 针对双通道判别方法中特征消失过多的问题, 提出了一种面向独立于书写者场景的手写签名离线验证模型(Multi-channel feature fusion network, MCFFN). MCFFN 模型首先通过多重网络和双重逆鉴别注意力模块进行特征提取, 然后通过多通道机制进行特征融合, 最后使用 ACMix 判别模块获得预测结果. 在 CEDAR、BHSig-B、BHSig-H 和 ChiSig 四个不同语言的签名数据集上测试了所提出的方法, 实验证明了所提方法的优势和潜力.
脱机签名验证模型因其判断签名是否伪造的能力而备受关注. 当今大多数脱机签名验证模型可分为深度度量学习方法和双通道判别方法. 大部分深度度量学习方法利用孪生网络生成每张图片的细节特征向量, 采用欧氏距离法判断相似度, 但是欧氏距离仅考虑两个点之间的绝对距离, 而容易忽视点的方向、缩放的信息, 不会考虑数据之间的相关性, 因此无法捕获特征向量内部之间的关系; 而双通道判别方法在网络前就进行特征的判别, 更能判断不同图像的相似性, 但此时图像的细节特征不够清晰, 大量特征丢失. 针对双通道判别方法中特征消失过多的问题, 提出了一种面向独立于书写者场景的手写签名离线验证模型(Multi-channel feature fusion network, MCFFN). MCFFN 模型首先通过多重网络和双重逆鉴别注意力模块进行特征提取, 然后通过多通道机制进行特征融合, 最后使用 ACMix 判别模块获得预测结果. 在 CEDAR、BHSig-B、BHSig-H 和 ChiSig 四个不同语言的签名数据集上测试了所提出的方法, 实验证明了所提方法的优势和潜力.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230695
摘要:
为了有效提升城市污水处理过程的脱氮效果, 提出了一种知识和数据驱动的反硝化脱氮过程协同优化控制(Knowledge-data-driven cooperative optimal control, KDDCOC). 本文工作主要有以下两点: 首先, 建立了一种基于自适应知识核函数的协同优化控制目标模型, 动态描述出水水质以及泵送能耗、关键变量的协同关系; 其次, 提出了一种知识引导的协同优化算法(Knowledge guide-based cooperative optimization algorithm, KGCO), 快速准确求解硝态氮优化设定值, 提高KDDCOC的响应速度. KDDCOC利用了比例积分微分控制器对硝态氮优化设定值进行跟踪. 将提出的KDDCOC应用于城市污水处理过程基准仿真模型1, 实验结果表明该方法能够提高出水水质, 降低运行能耗, 有效改善脱氮效果.
为了有效提升城市污水处理过程的脱氮效果, 提出了一种知识和数据驱动的反硝化脱氮过程协同优化控制(Knowledge-data-driven cooperative optimal control, KDDCOC). 本文工作主要有以下两点: 首先, 建立了一种基于自适应知识核函数的协同优化控制目标模型, 动态描述出水水质以及泵送能耗、关键变量的协同关系; 其次, 提出了一种知识引导的协同优化算法(Knowledge guide-based cooperative optimization algorithm, KGCO), 快速准确求解硝态氮优化设定值, 提高KDDCOC的响应速度. KDDCOC利用了比例积分微分控制器对硝态氮优化设定值进行跟踪. 将提出的KDDCOC应用于城市污水处理过程基准仿真模型1, 实验结果表明该方法能够提高出水水质, 降低运行能耗, 有效改善脱氮效果.
















当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230430
摘要:
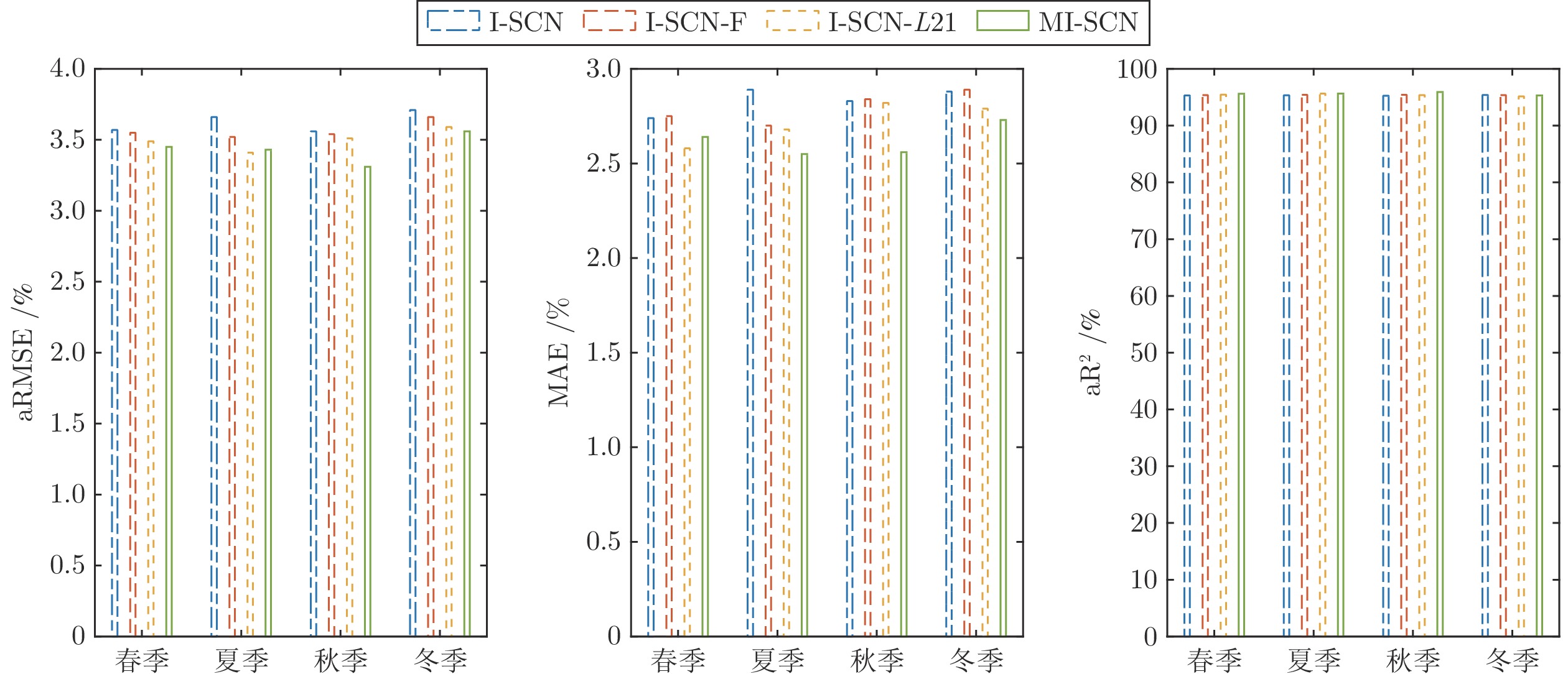
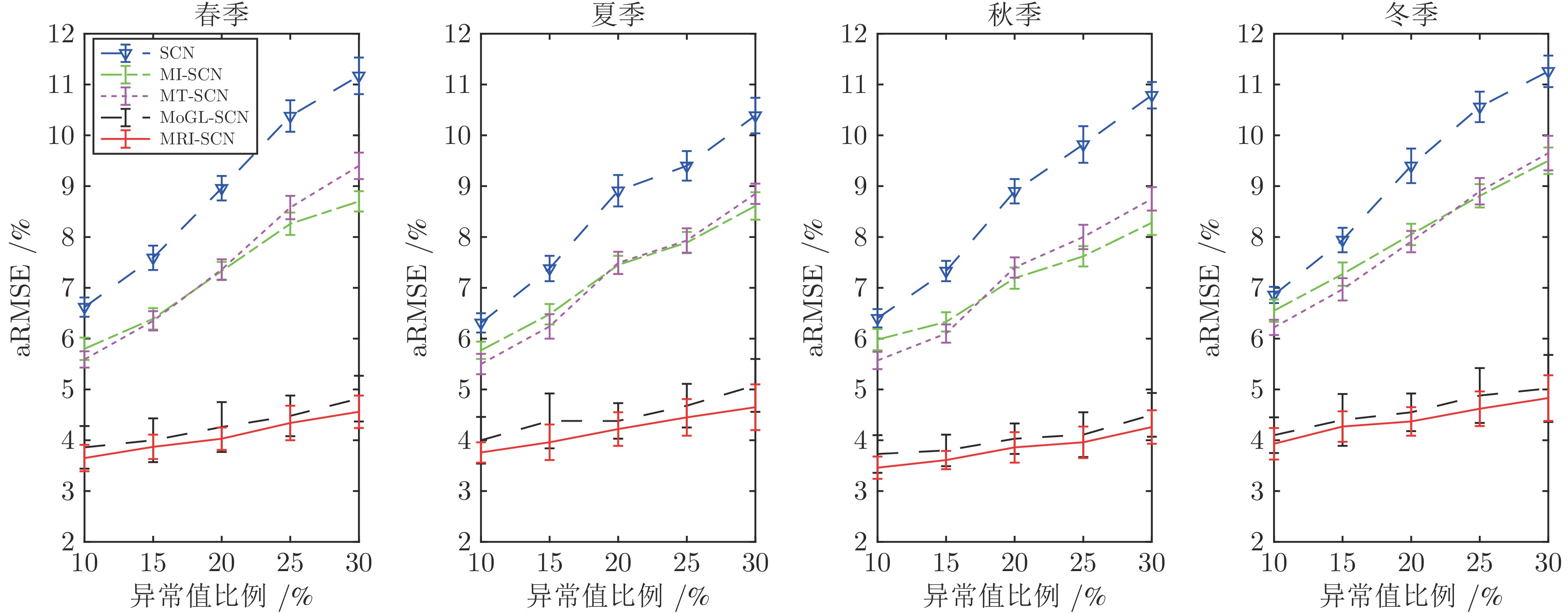
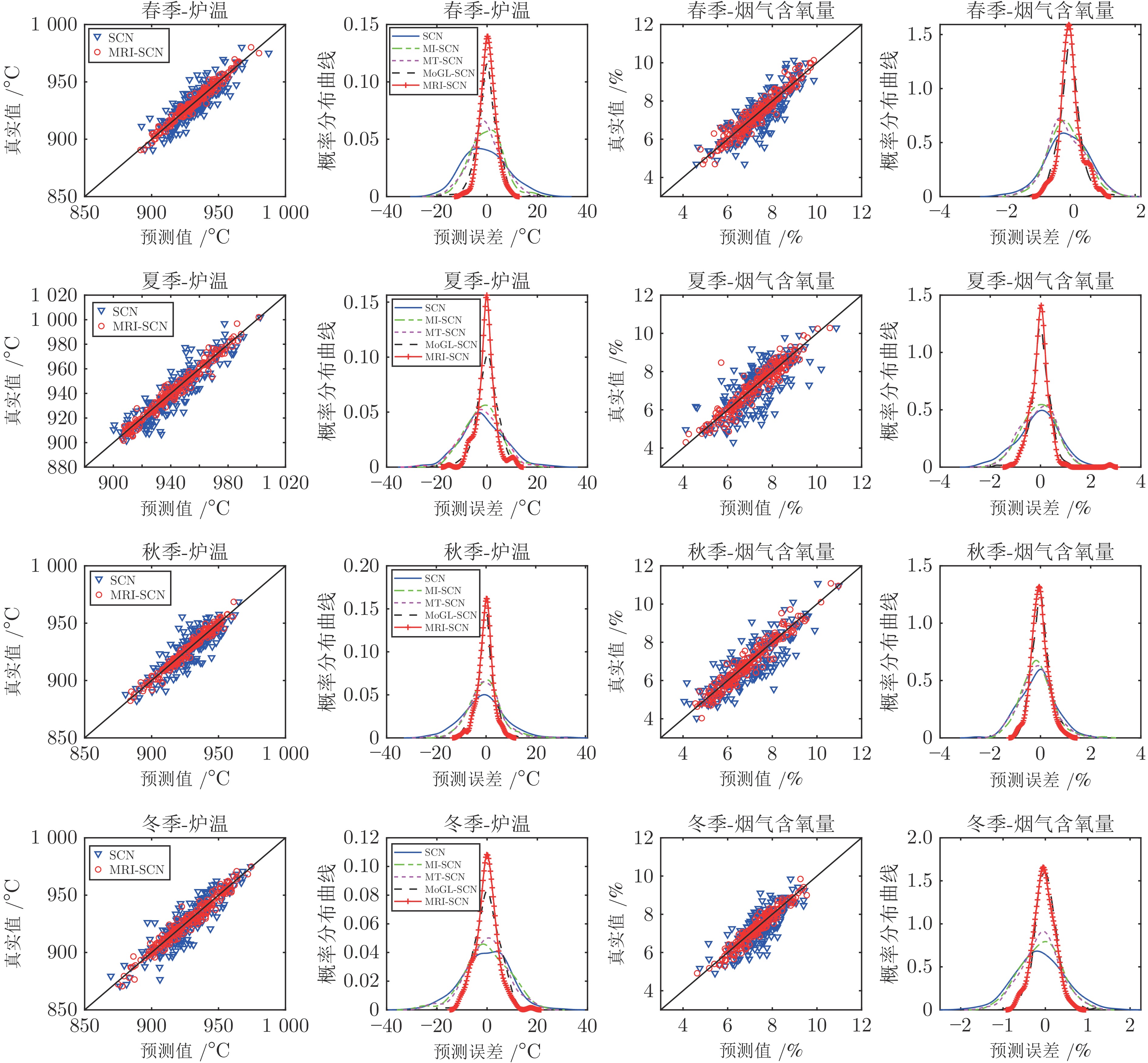
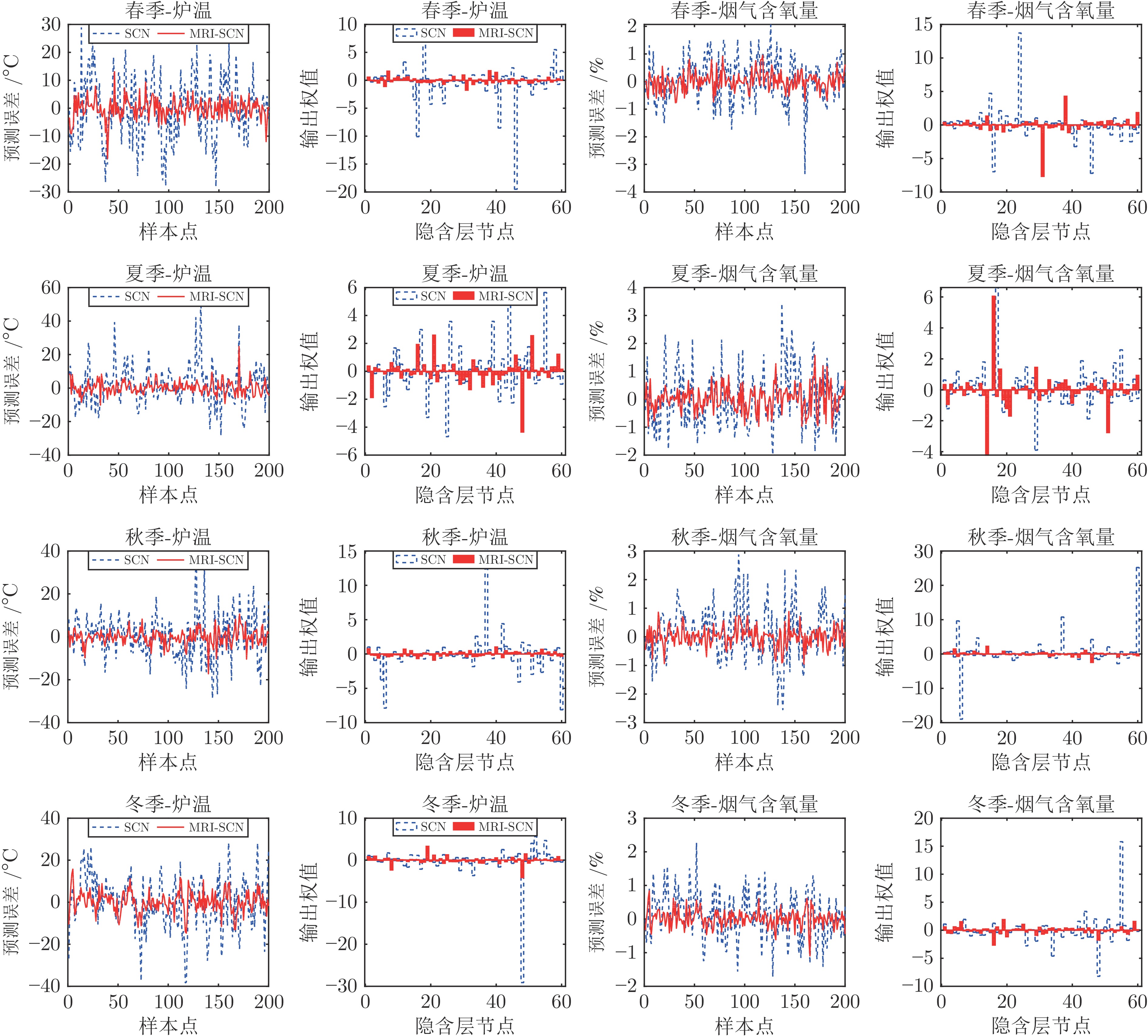
为实现城市固废焚烧过程炉温与烟气含氧量的准确预测, 提出一种基于改进随机配置网络(\begin{document}$ \text{SCN} $\end{document} \begin{document}$ \text{F} $\end{document} \begin{document}$ L_{2,1} $\end{document}
为实现城市固废焚烧过程炉温与烟气含氧量的准确预测, 提出一种基于改进随机配置网络(

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230584
摘要:
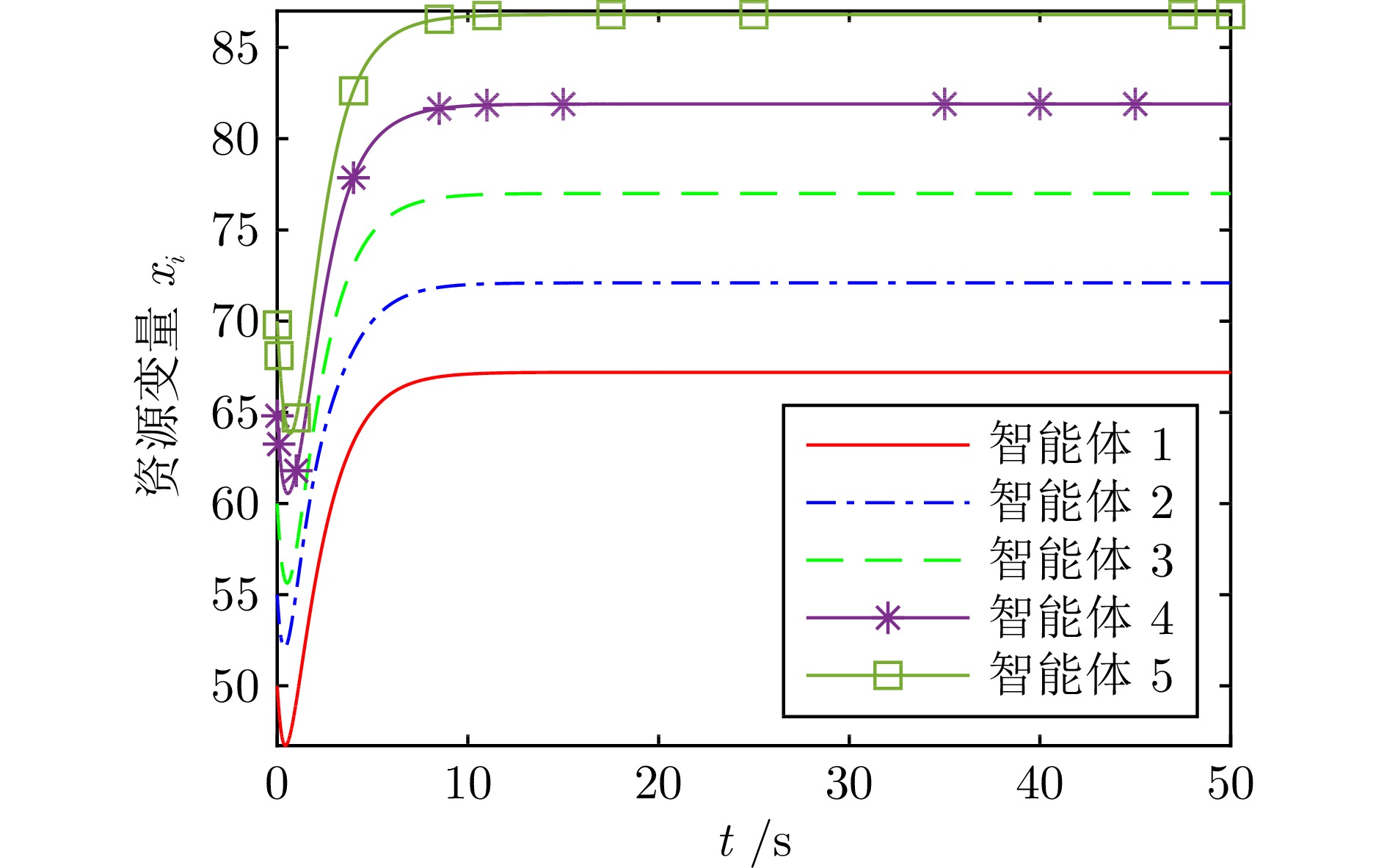
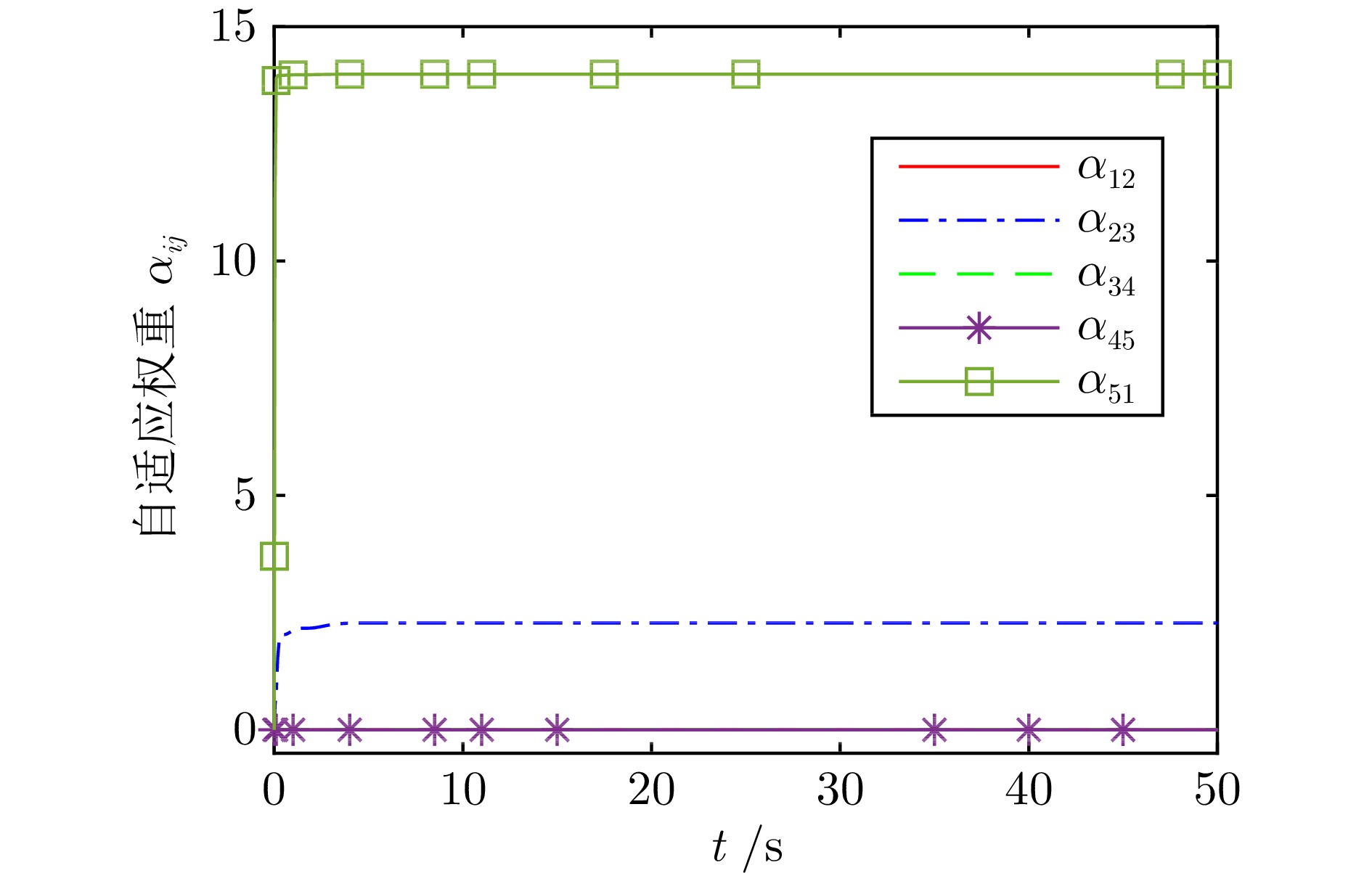
随着信息物理系统技术的发展, 面向多智能体系统的分布式协同优化问题受到广泛研究. 主要研究面向多智能体系统的受约束分布式聚合博弈问题, 其中局部智能体成本函数受到全局聚合项约束和全局等式耦合约束. 首先, 面向一阶积分型多智能体系统设计一种基于估计梯度下降的纳什均衡求解算法. 其中, 利用多智能体系统平均一致性方法设计一种自适应估计策略, 以实现全局聚合项约束分布式估计. 并据此计算出梯度函数估计值. 其次, 利用状态反馈策略和输出反馈策略将上述算法推广至状态信息可测和状态信息不可测一般异构线性多智能体系统. 最后, 利用拉萨尔不变性原理证实上述算法收敛性, 并提供多组案例仿真用以验证算法有效性.
随着信息物理系统技术的发展, 面向多智能体系统的分布式协同优化问题受到广泛研究. 主要研究面向多智能体系统的受约束分布式聚合博弈问题, 其中局部智能体成本函数受到全局聚合项约束和全局等式耦合约束. 首先, 面向一阶积分型多智能体系统设计一种基于估计梯度下降的纳什均衡求解算法. 其中, 利用多智能体系统平均一致性方法设计一种自适应估计策略, 以实现全局聚合项约束分布式估计. 并据此计算出梯度函数估计值. 其次, 利用状态反馈策略和输出反馈策略将上述算法推广至状态信息可测和状态信息不可测一般异构线性多智能体系统. 最后, 利用拉萨尔不变性原理证实上述算法收敛性, 并提供多组案例仿真用以验证算法有效性.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230678
摘要:
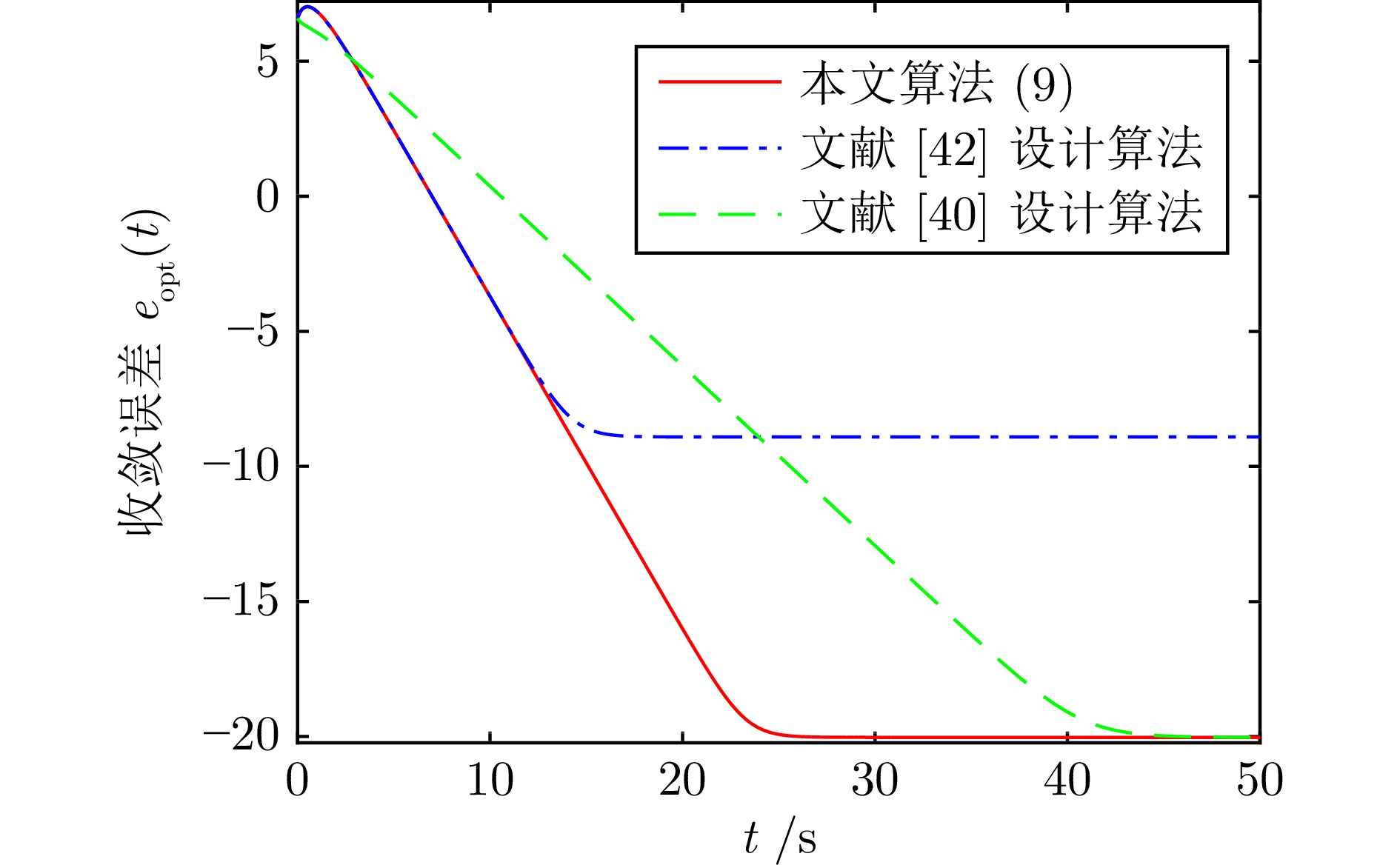
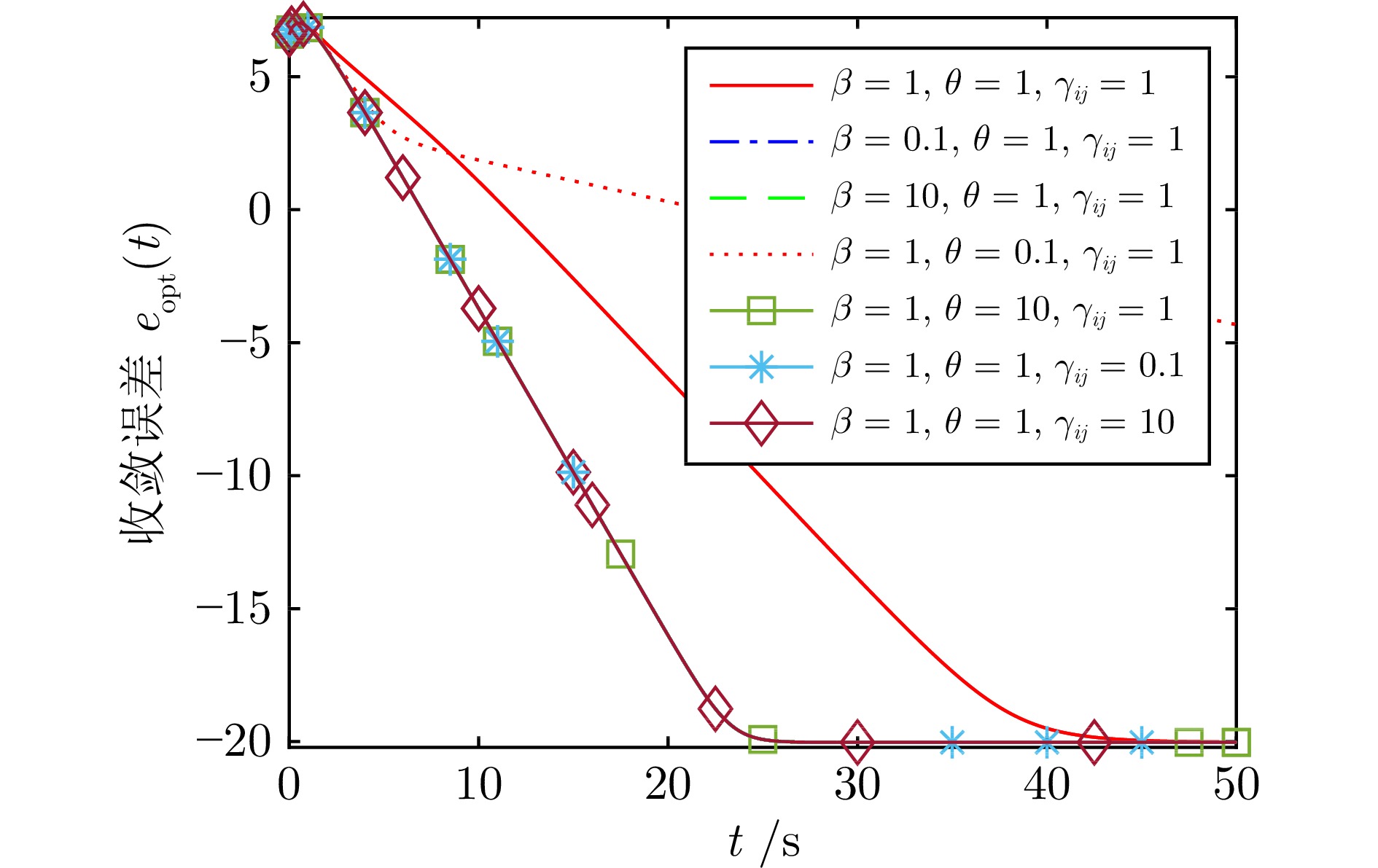
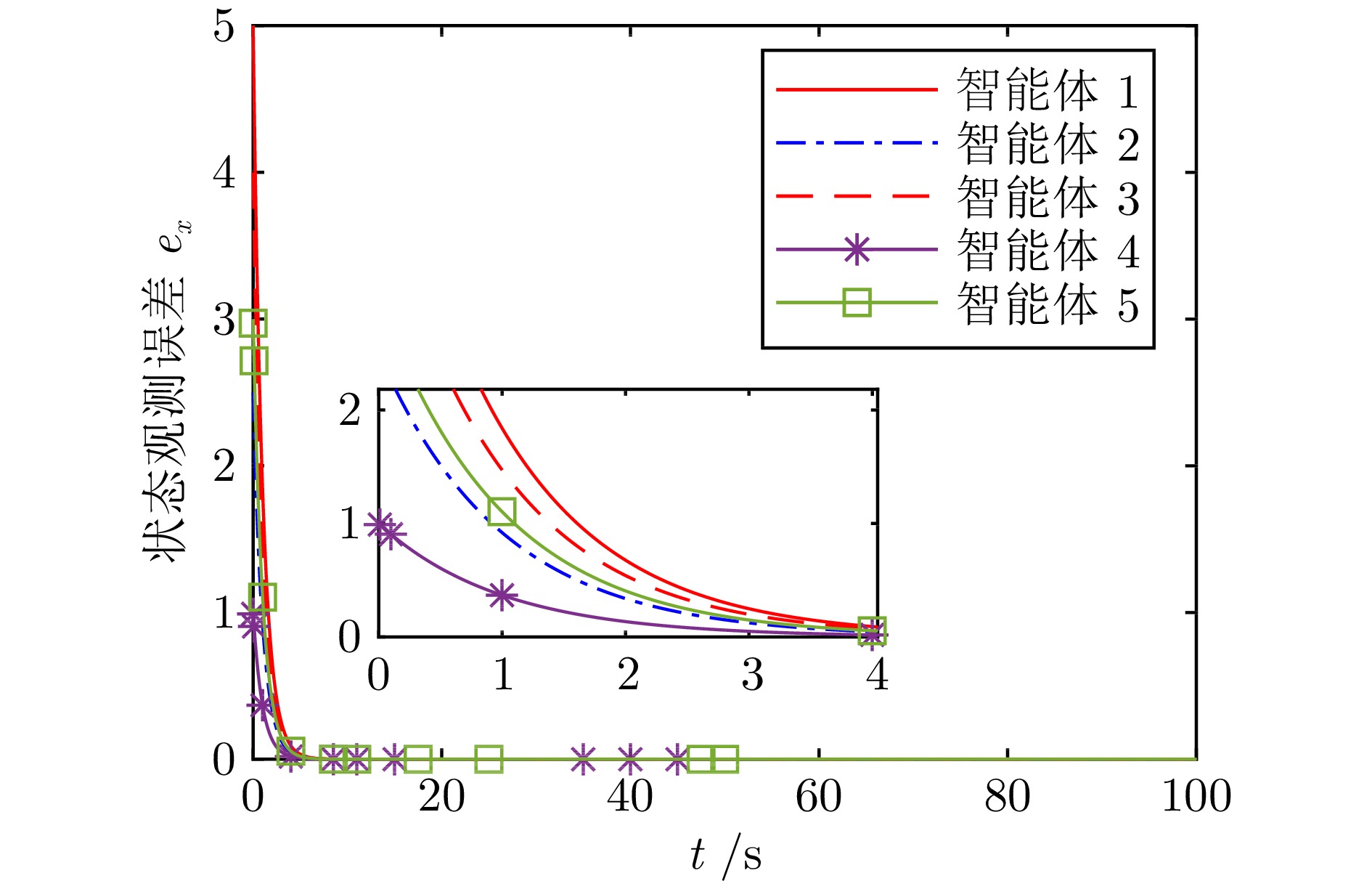
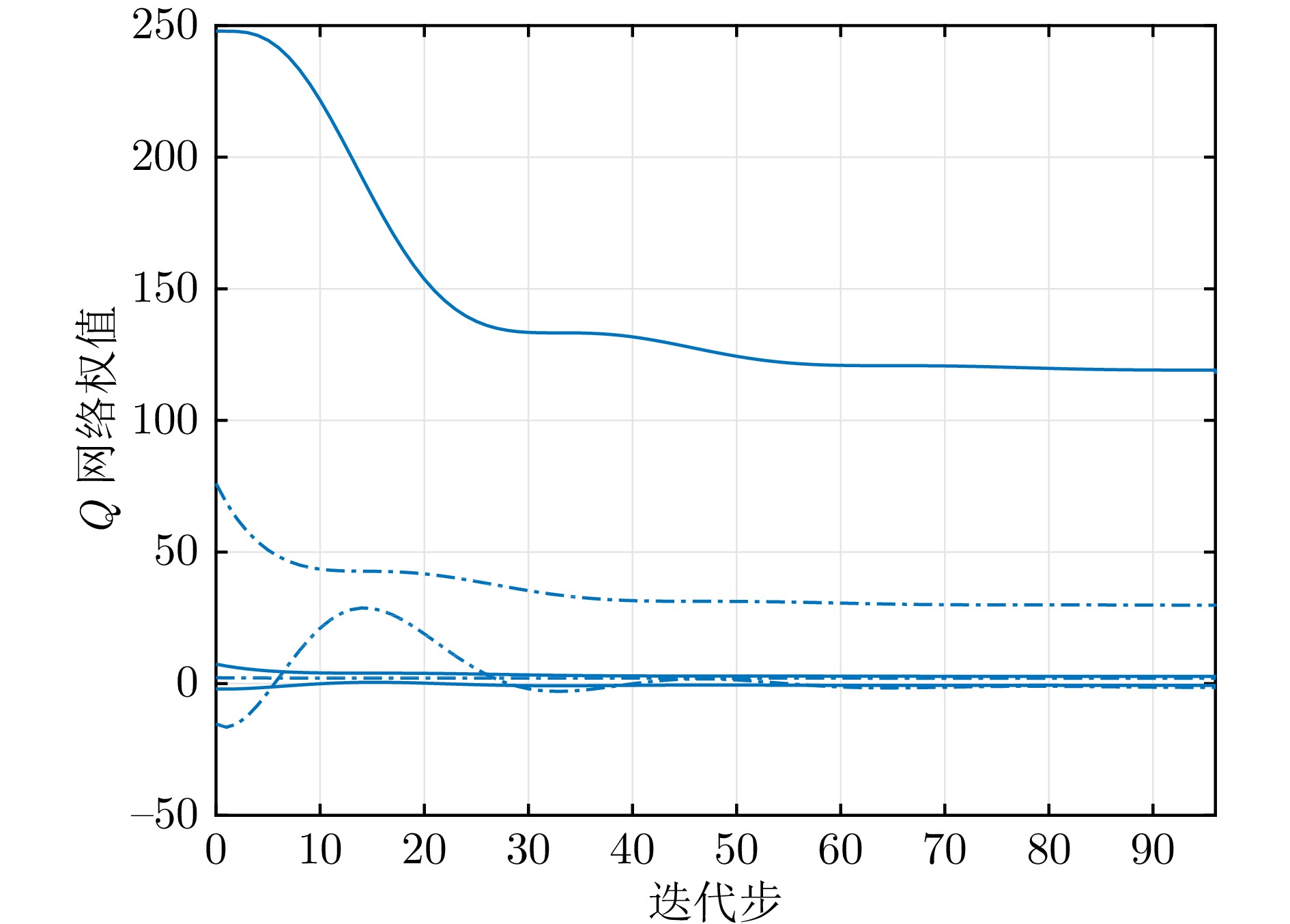
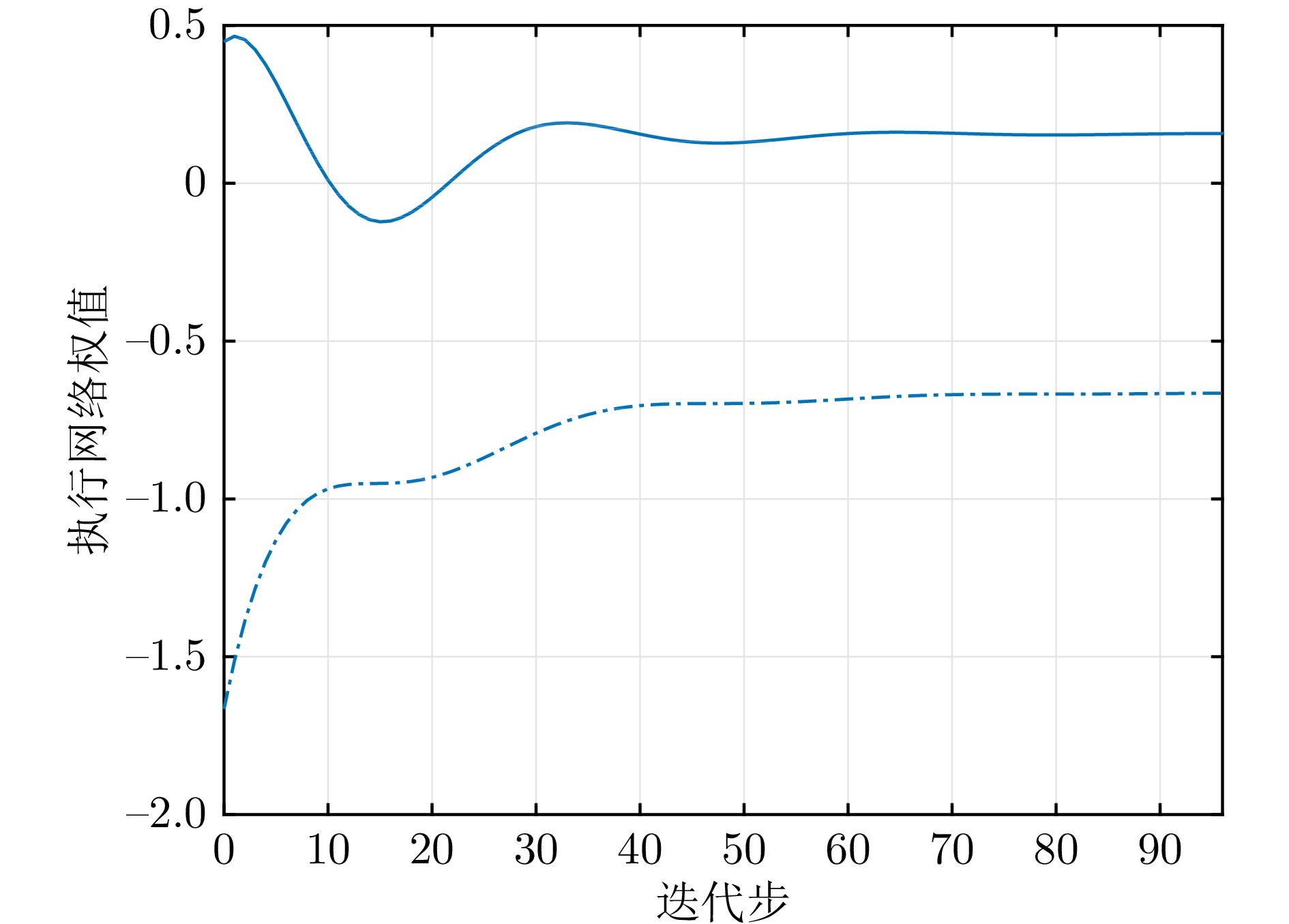
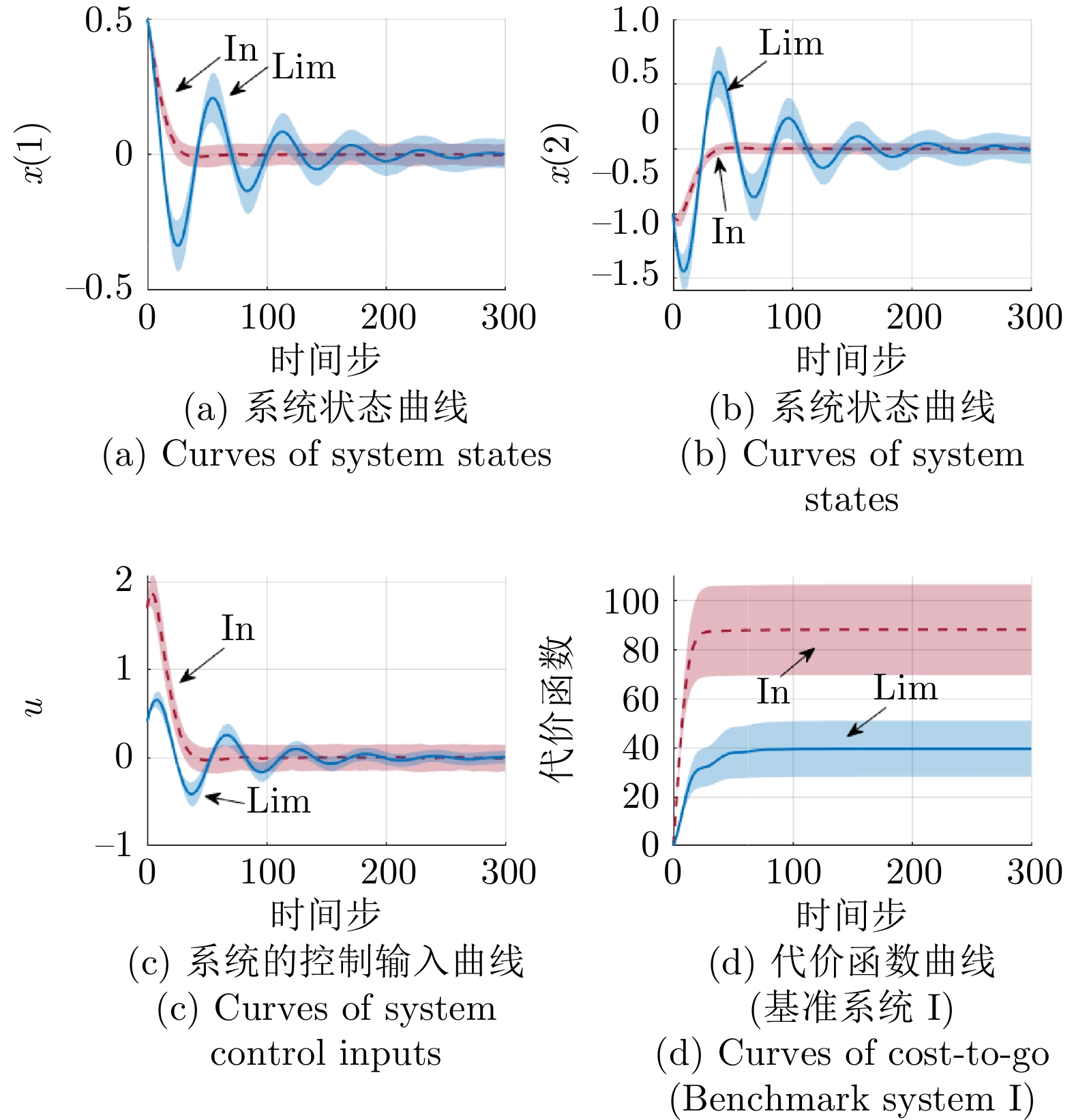
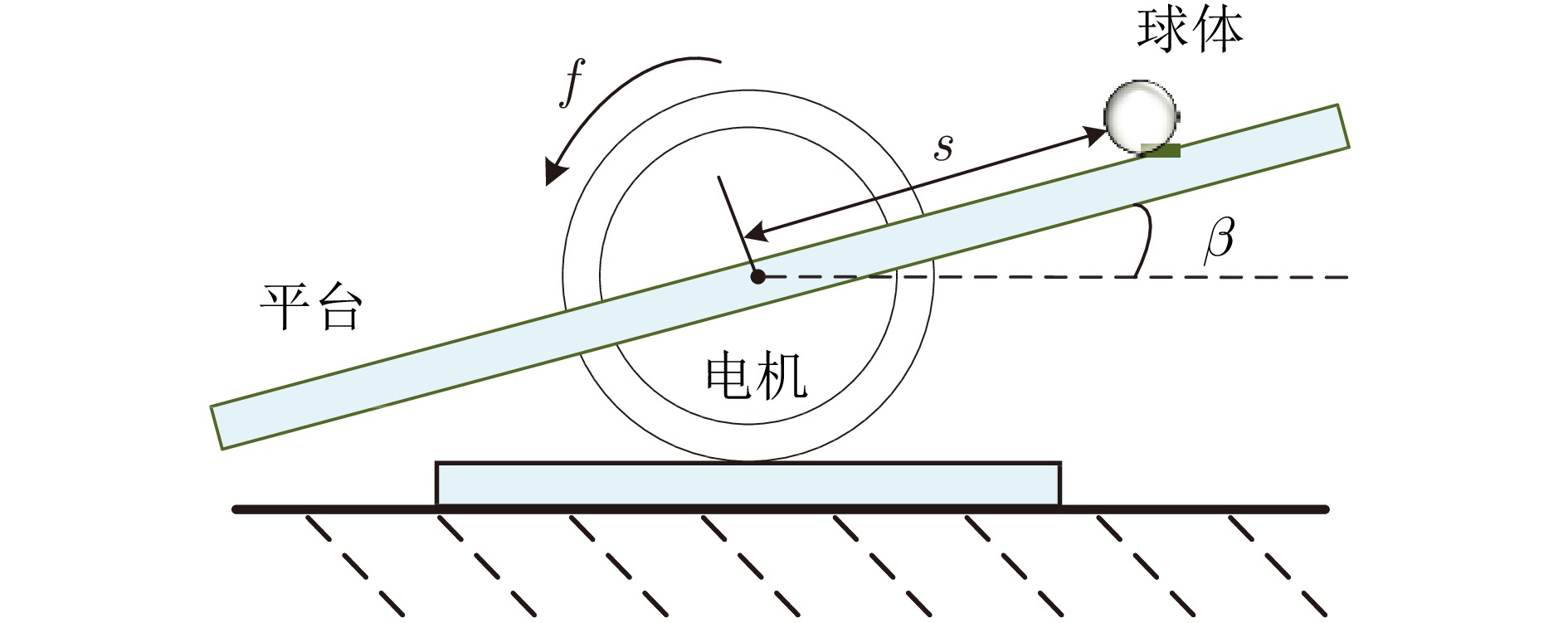
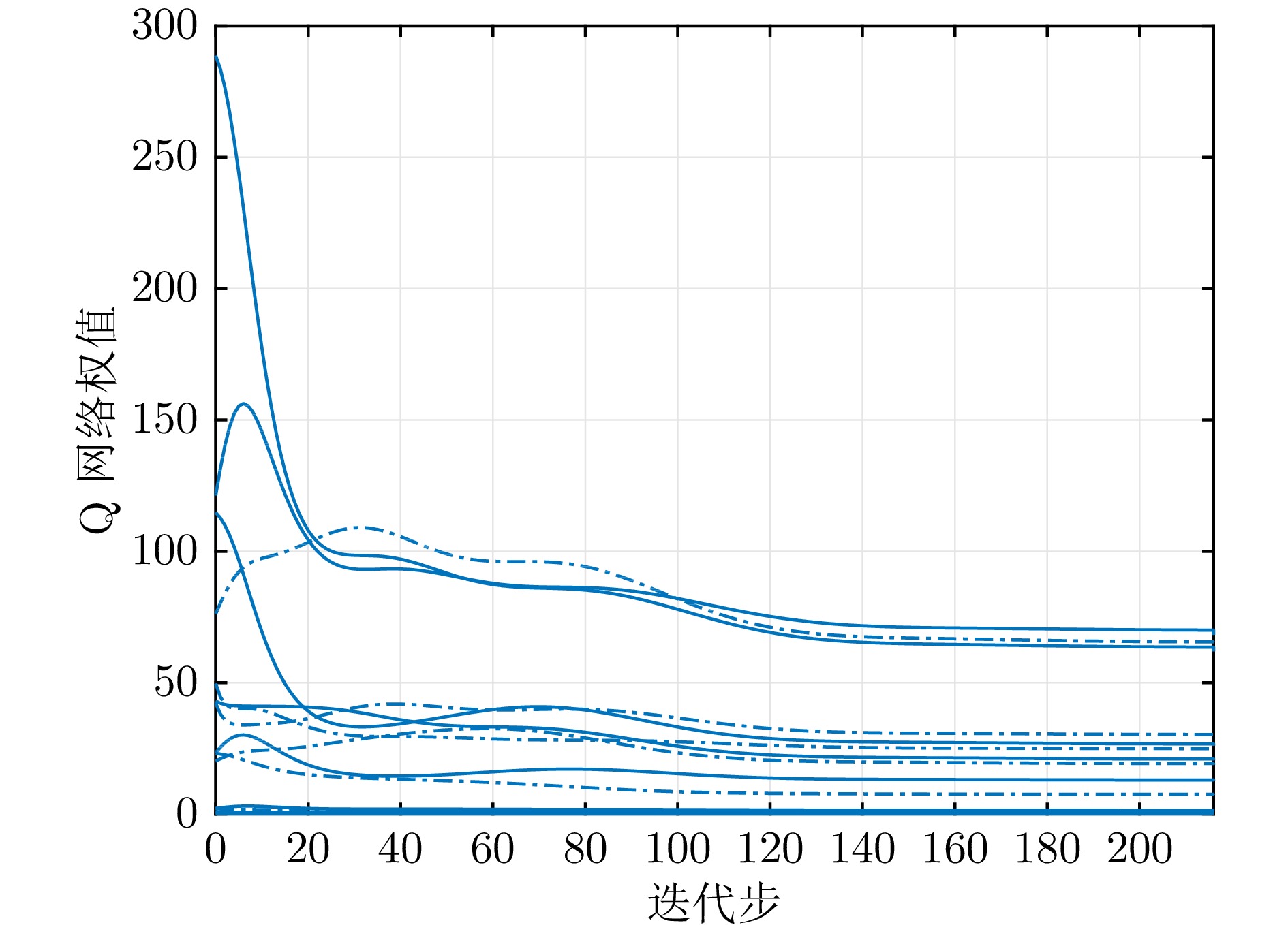
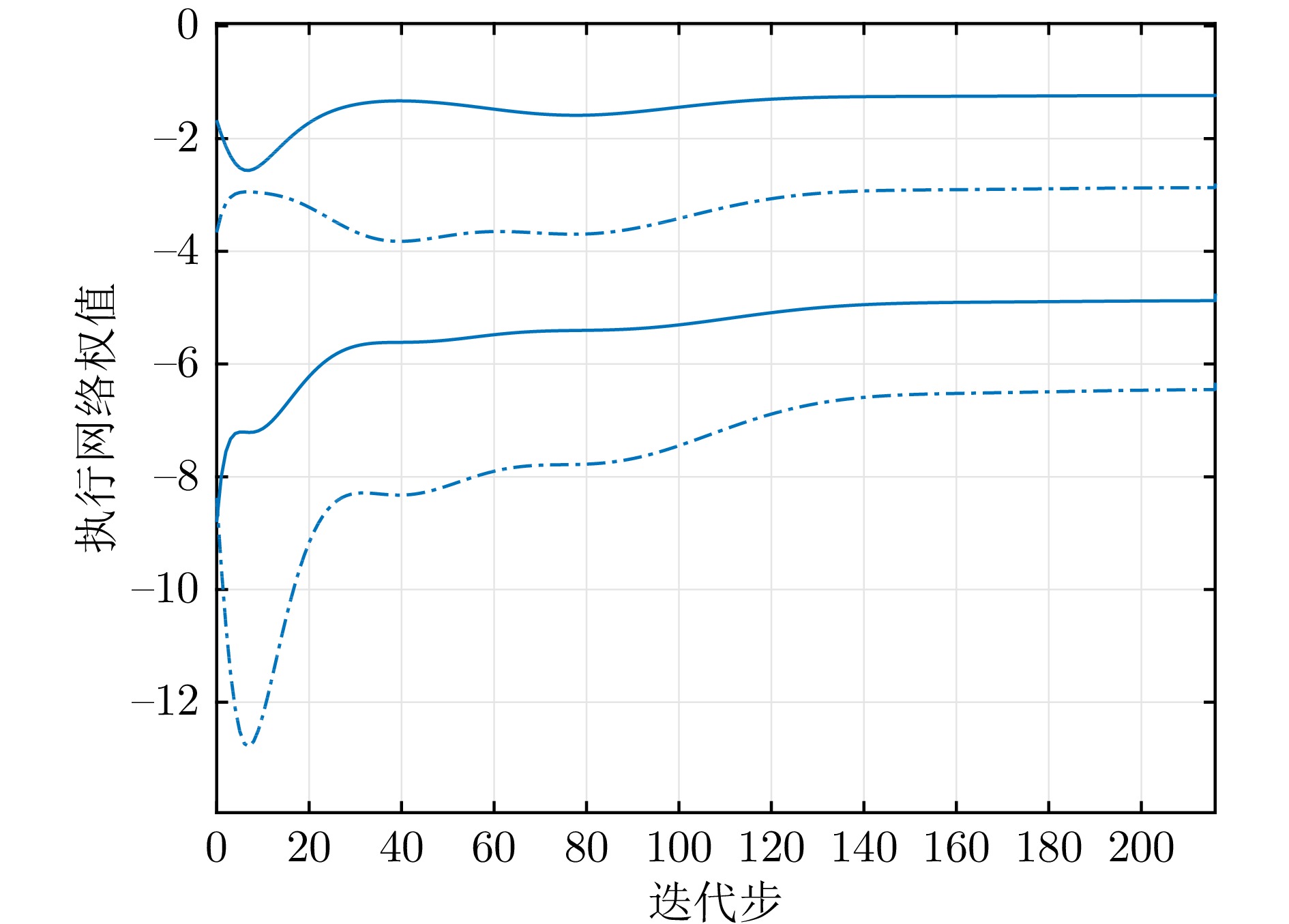
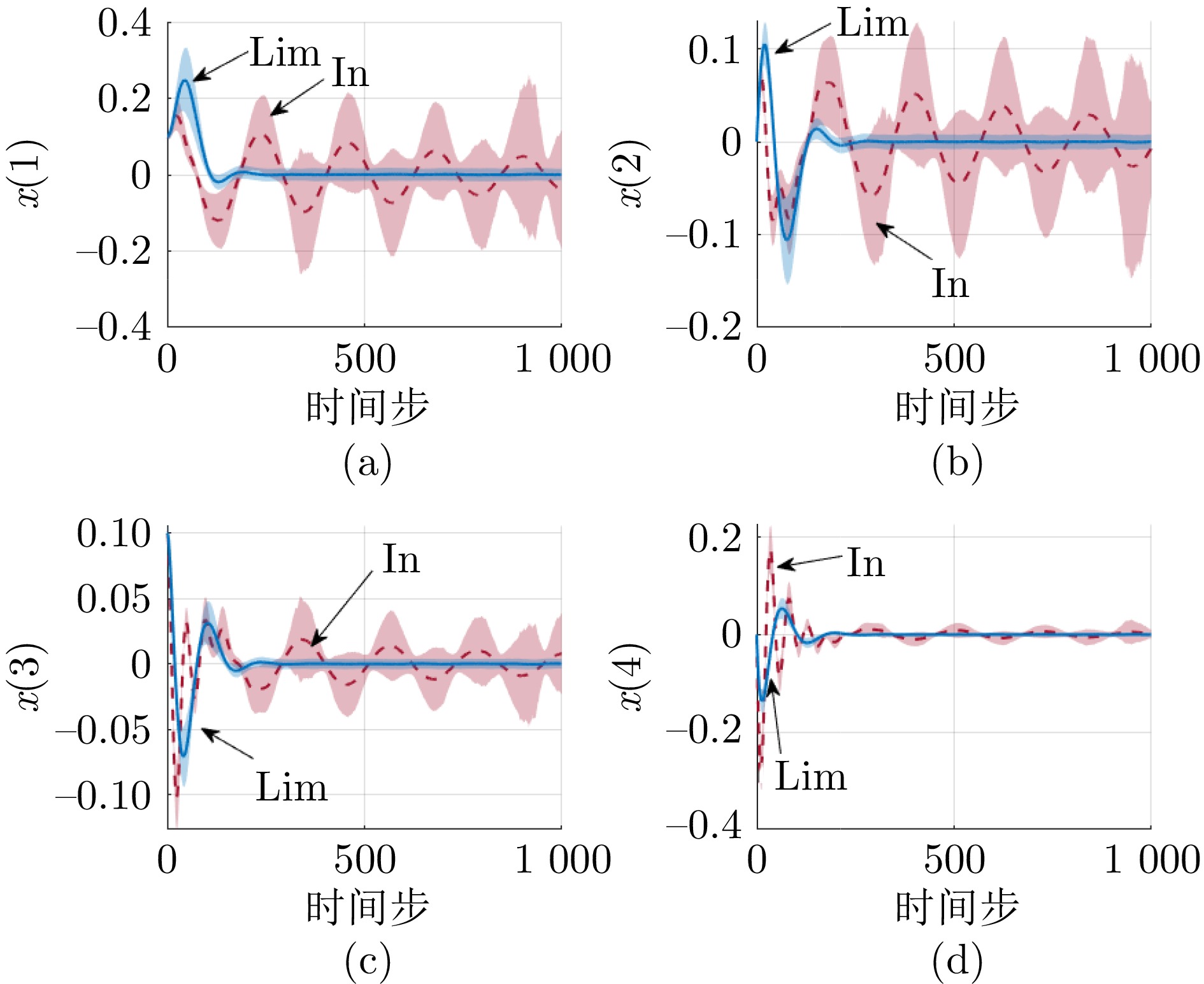
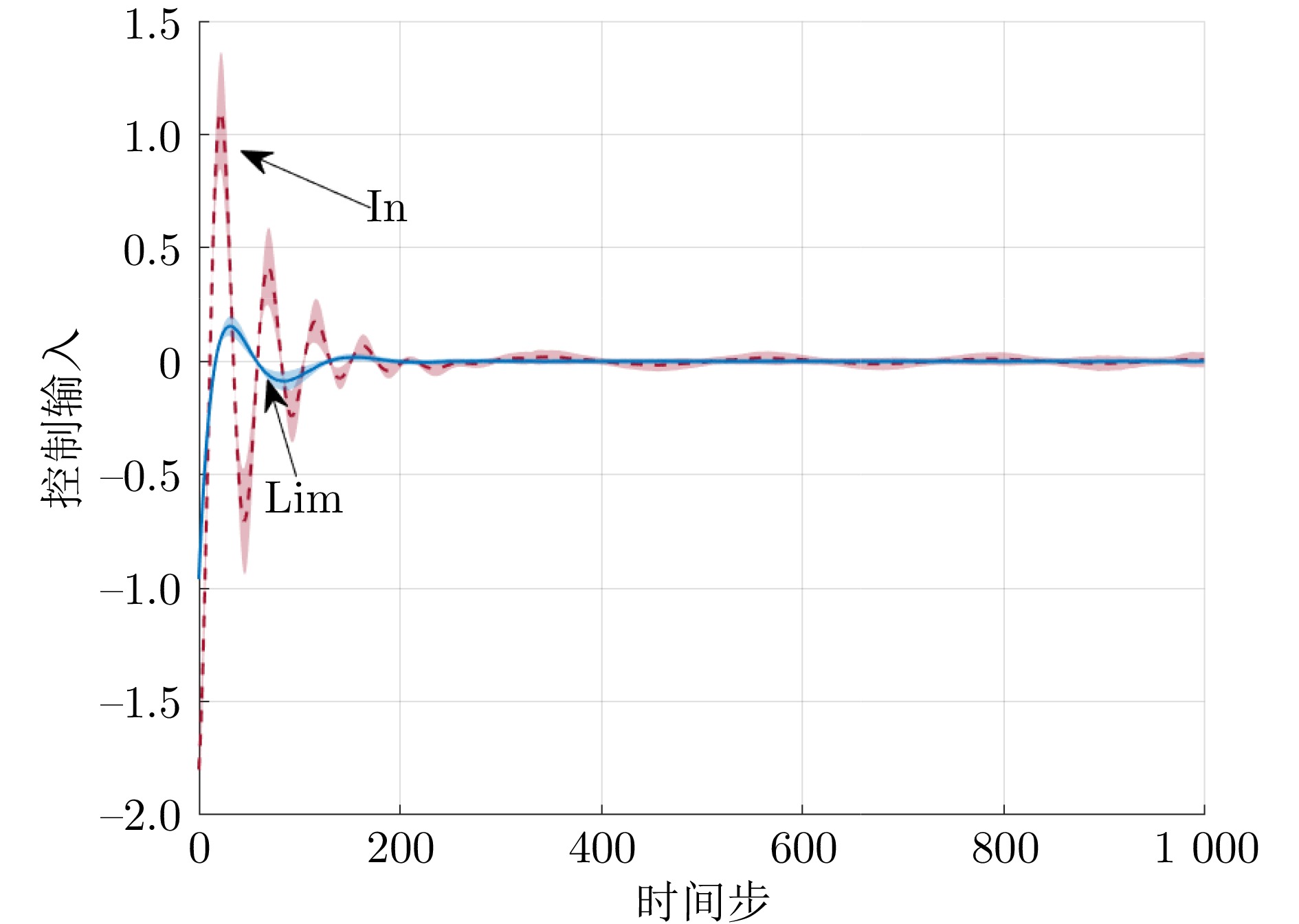
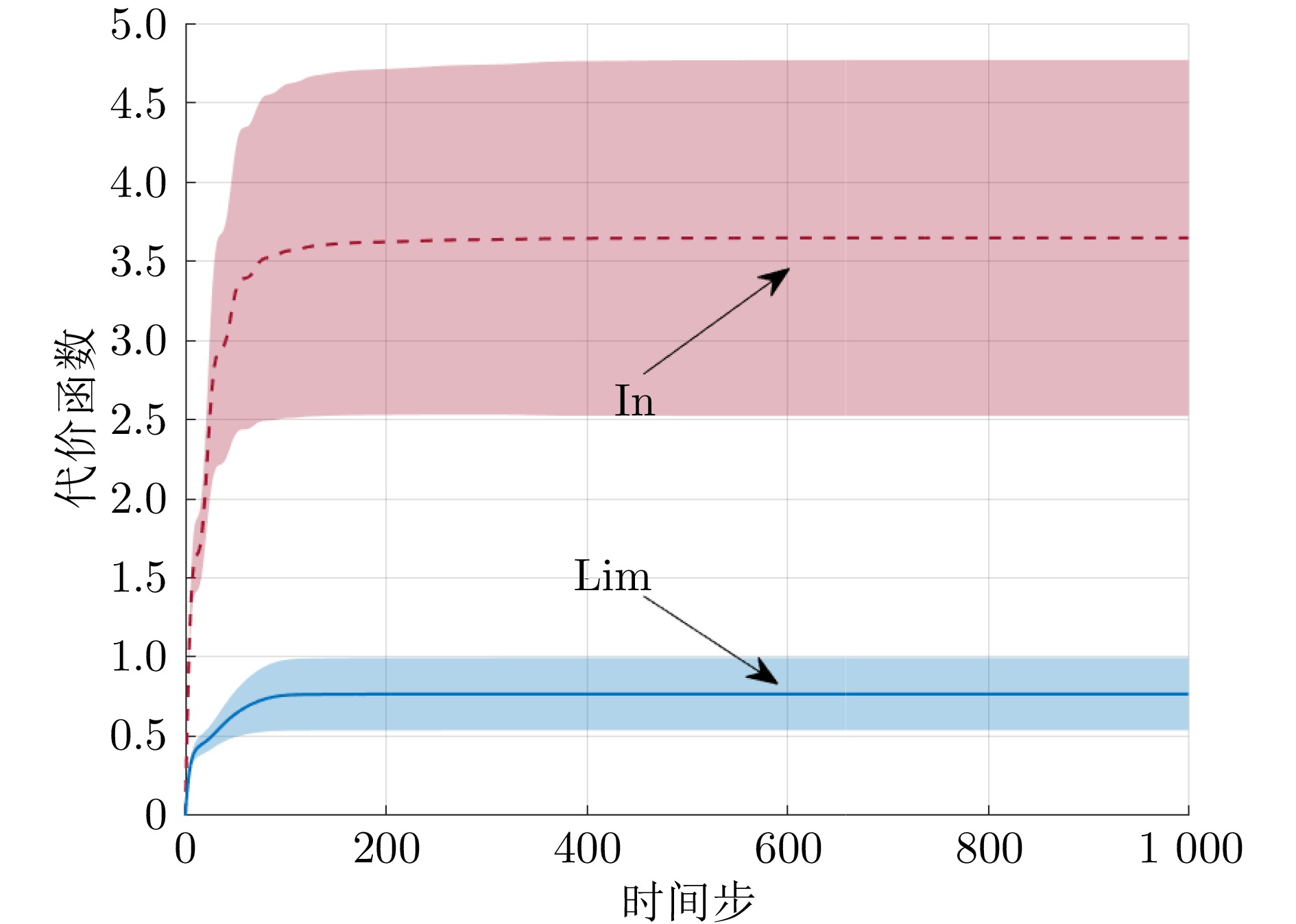
自适应评判技术已经广泛应用于求解复杂非线性系统的最优控制问题, 但利用其求解离散时间非线性随机系统的无限时域最优控制问题还存在一定局限性. 本文融合自适应评判技术, 建立一种数据驱动的离散随机系统折扣最优调节方法. 首先, 针对宽松假设下的非线性随机系统, 研究带有折扣因子的无限时域最优控制问题. 本文所提的随机系统 Q-learning 算法能够将初始的容许策略单调不增地优化至最优策略. 基于数据驱动思想, 随机系统 Q-learning 算法在不建立模型的情况下直接利用数据进行策略优化. 其次, 利用执行−评判神经网络方案, 实现了随机系统 Q-learning 算法. 最后, 通过两个基准系统, 验证本文提出的随机系统 Q-learning 算法的有效性.
自适应评判技术已经广泛应用于求解复杂非线性系统的最优控制问题, 但利用其求解离散时间非线性随机系统的无限时域最优控制问题还存在一定局限性. 本文融合自适应评判技术, 建立一种数据驱动的离散随机系统折扣最优调节方法. 首先, 针对宽松假设下的非线性随机系统, 研究带有折扣因子的无限时域最优控制问题. 本文所提的随机系统 Q-learning 算法能够将初始的容许策略单调不增地优化至最优策略. 基于数据驱动思想, 随机系统 Q-learning 算法在不建立模型的情况下直接利用数据进行策略优化. 其次, 利用执行−评判神经网络方案, 实现了随机系统 Q-learning 算法. 最后, 通过两个基准系统, 验证本文提出的随机系统 Q-learning 算法的有效性.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230359
摘要:
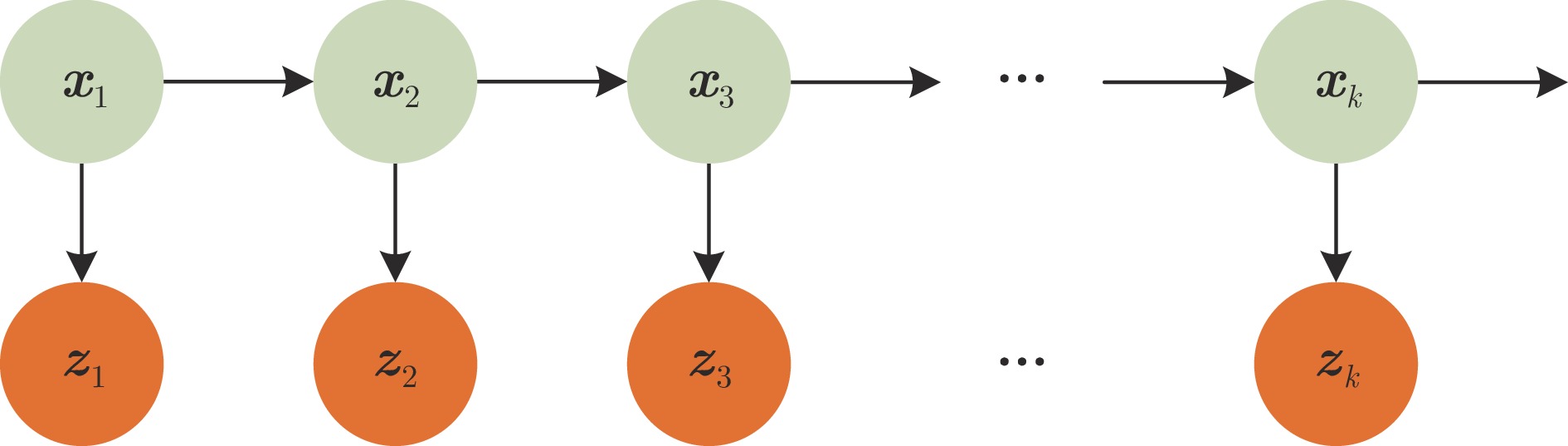
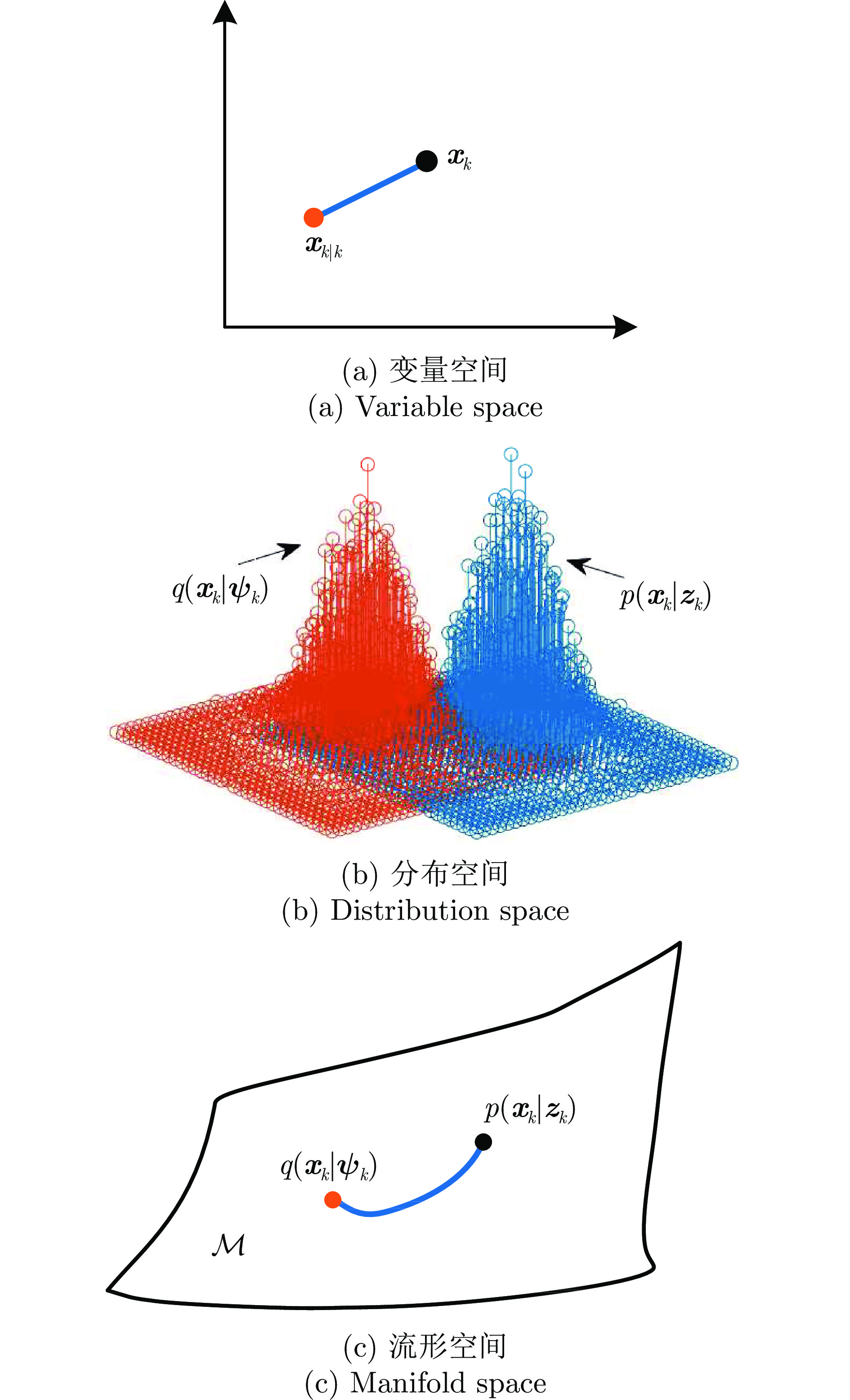
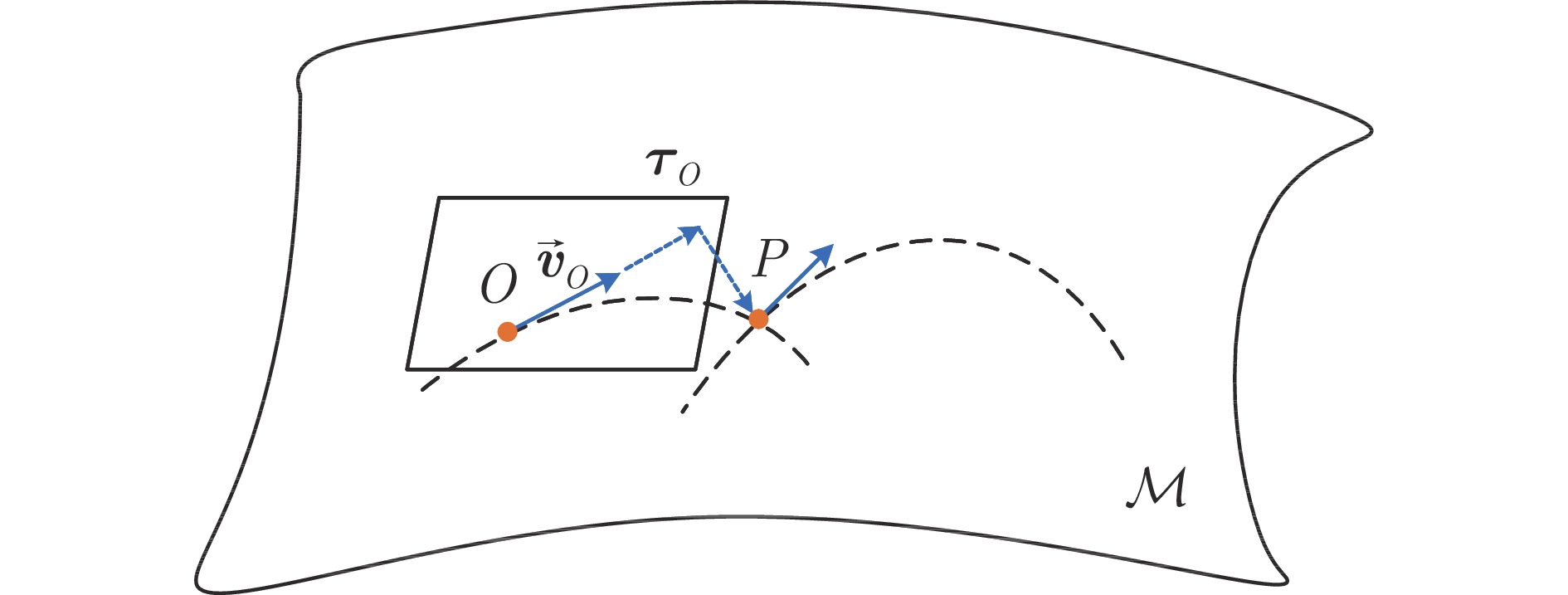
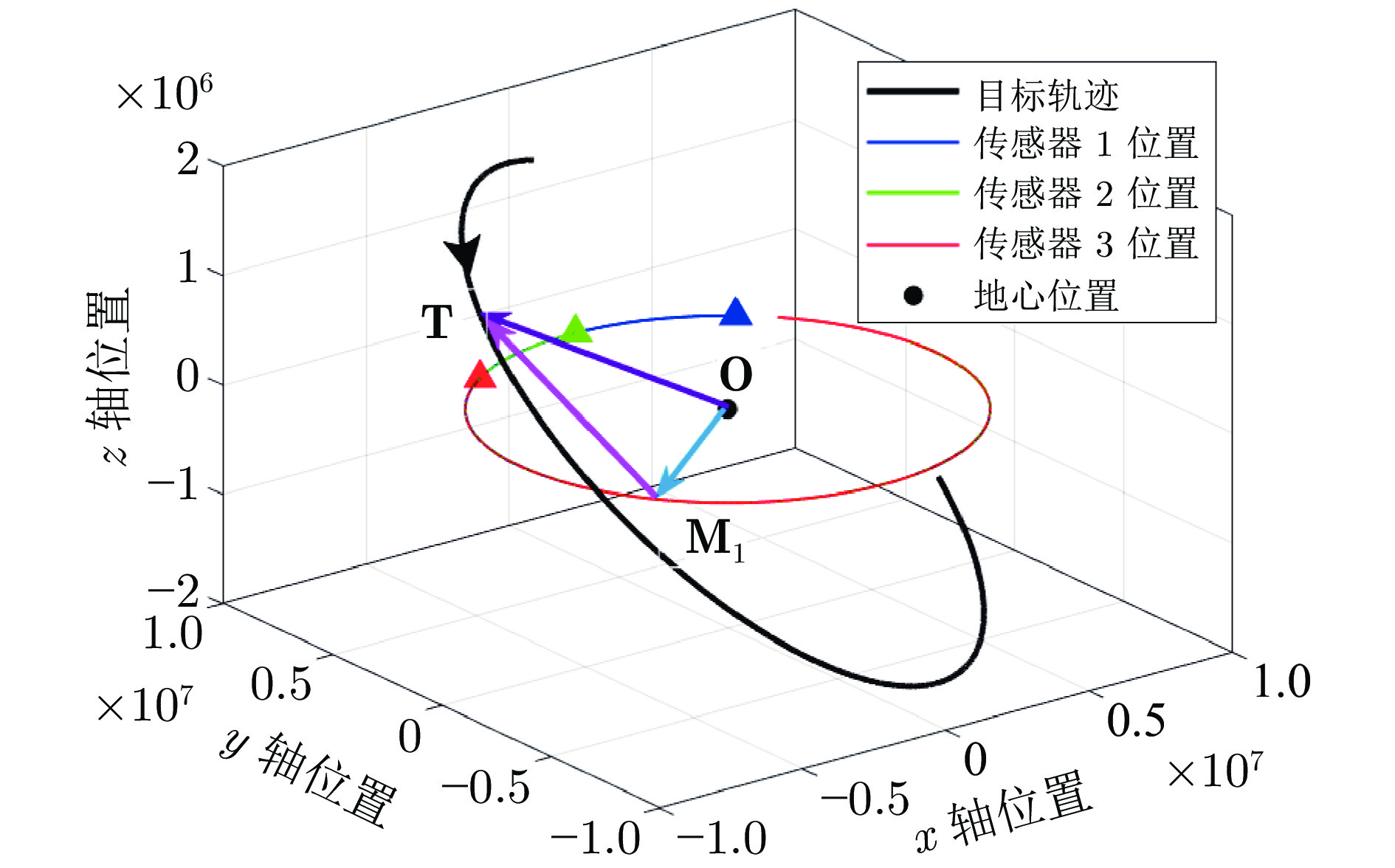
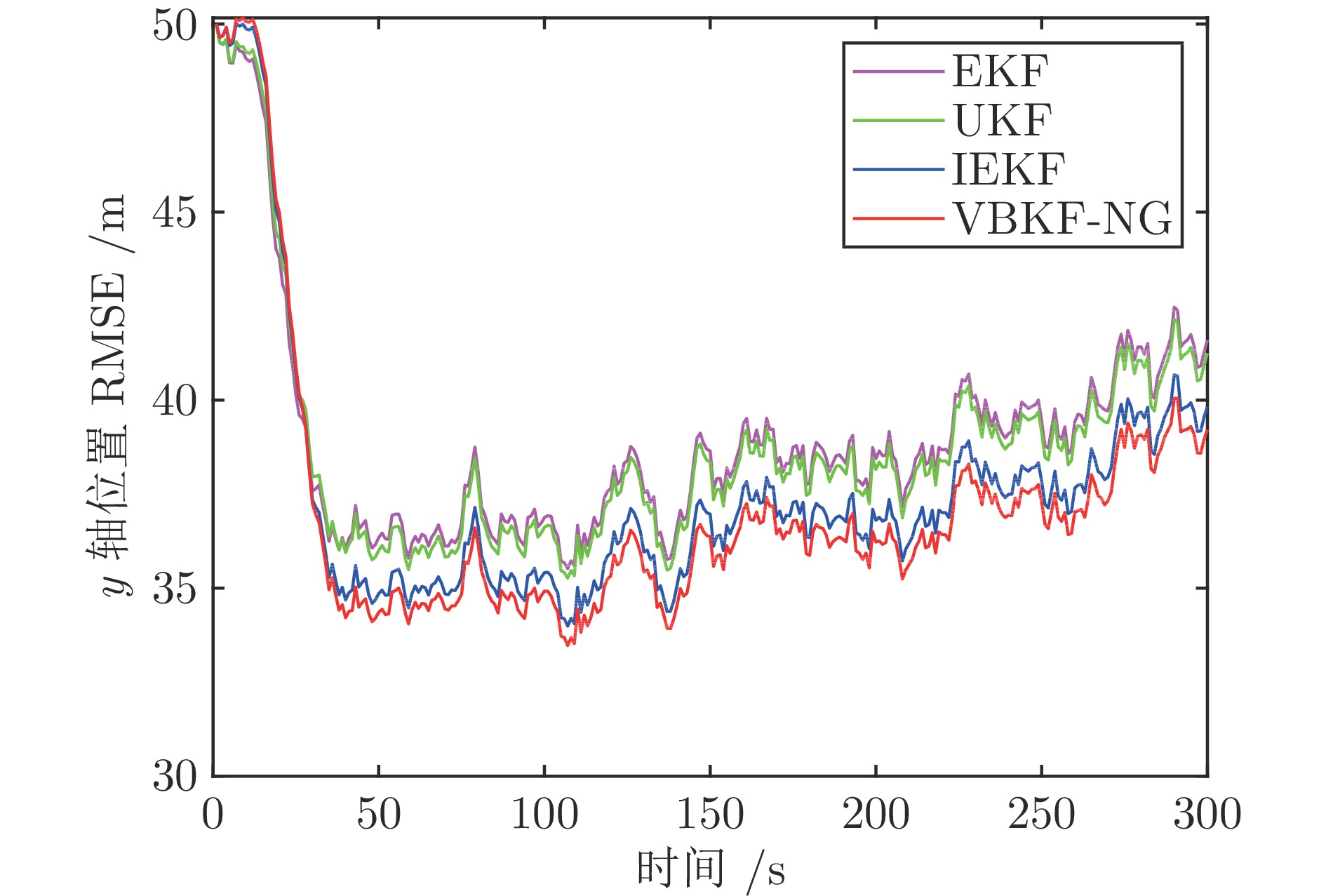
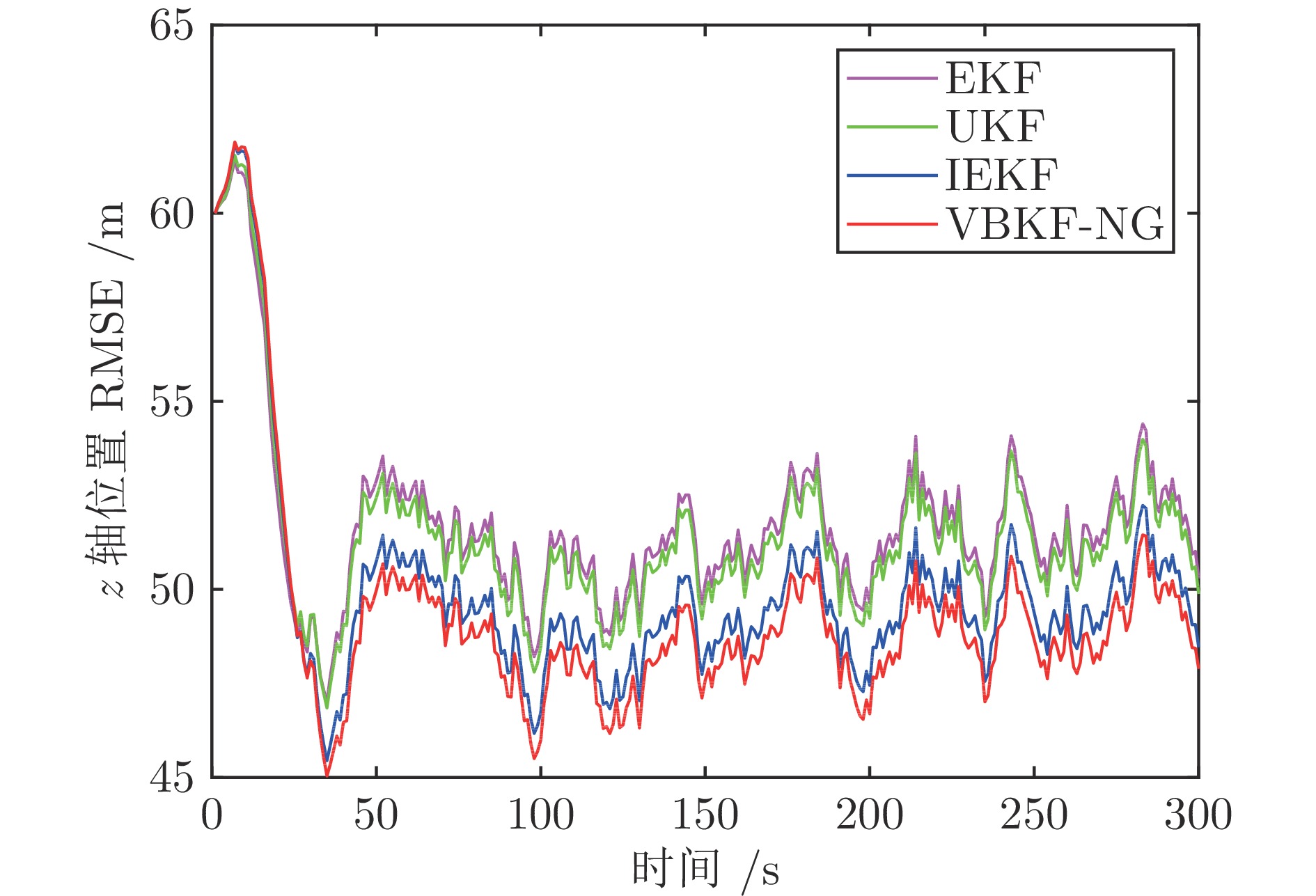
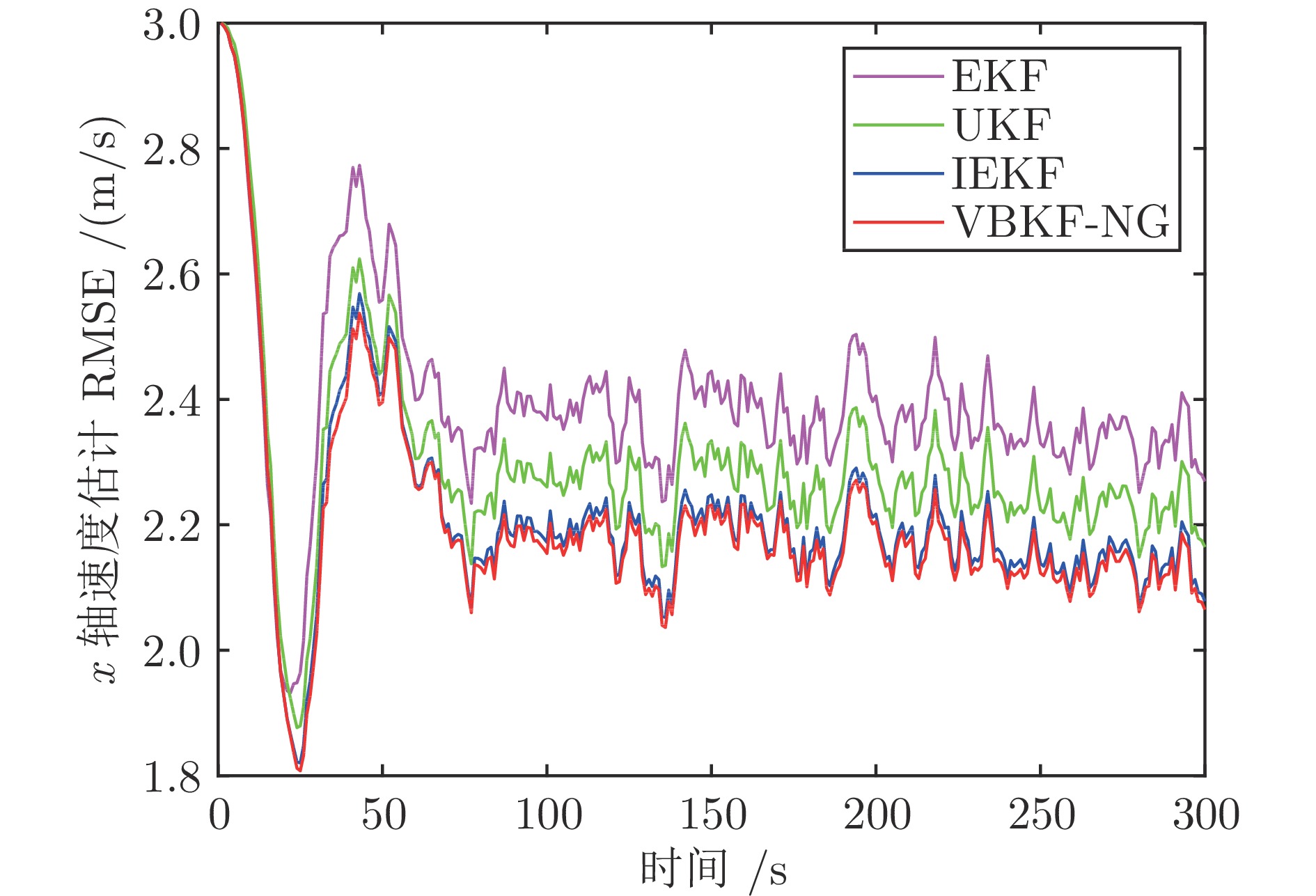
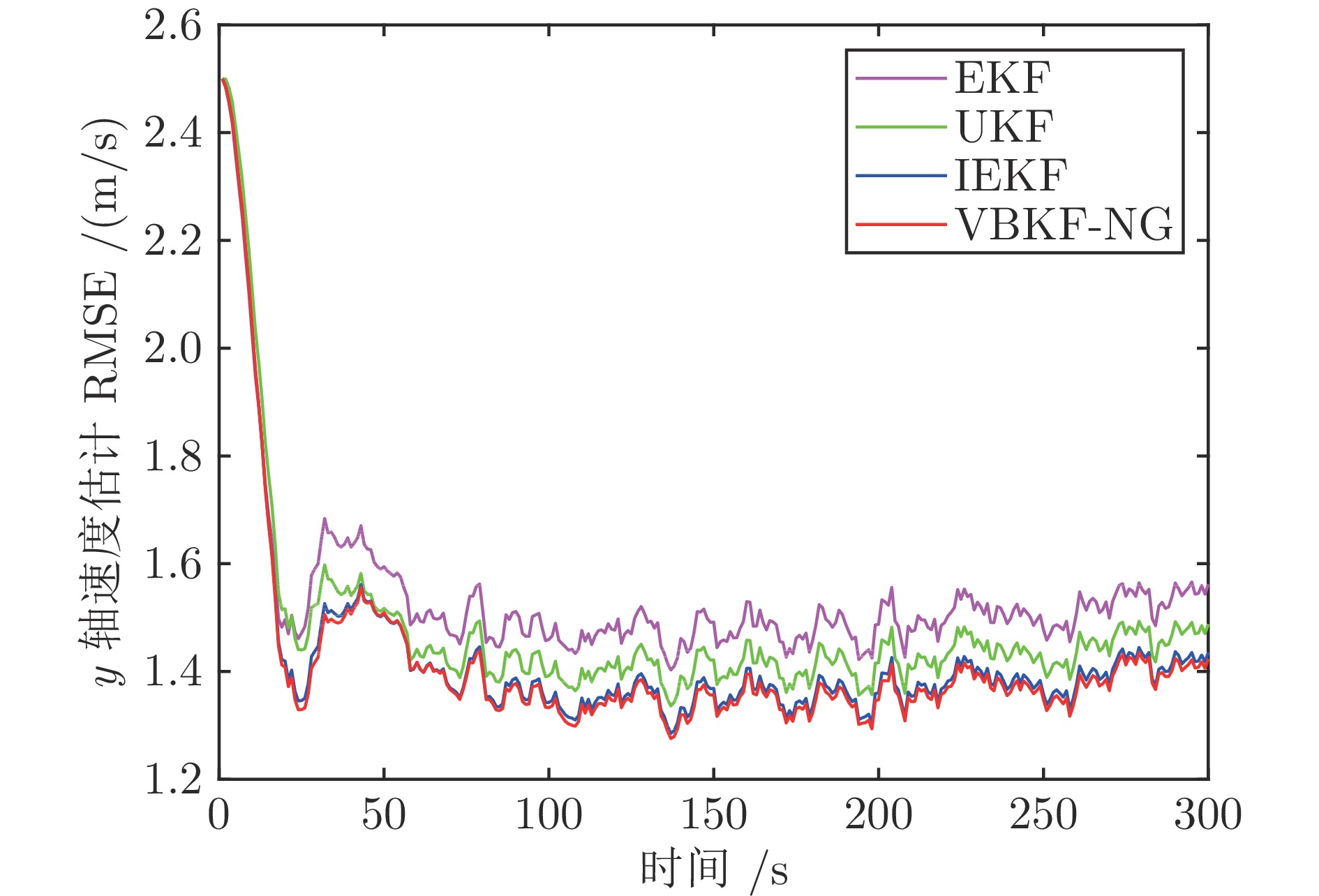
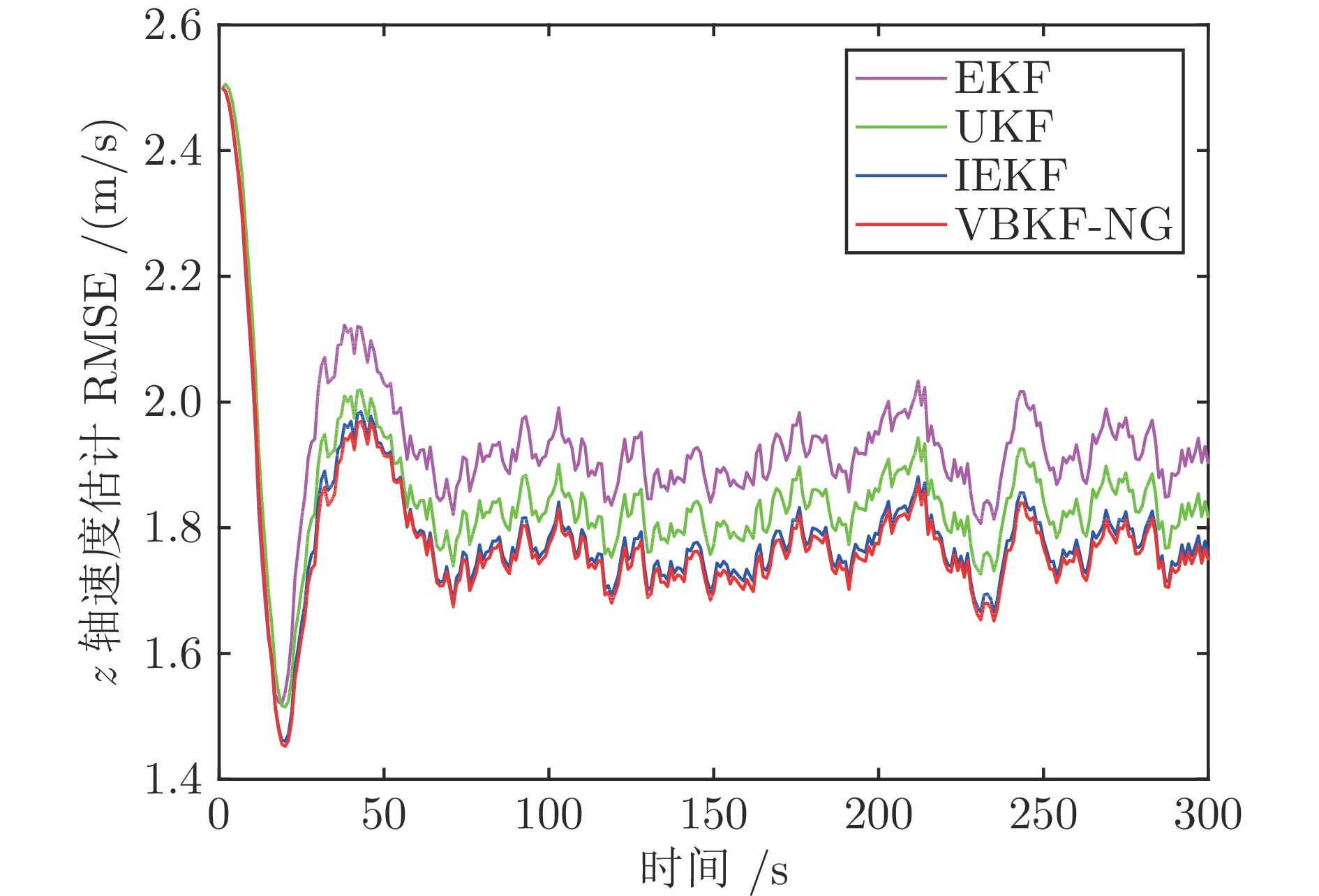
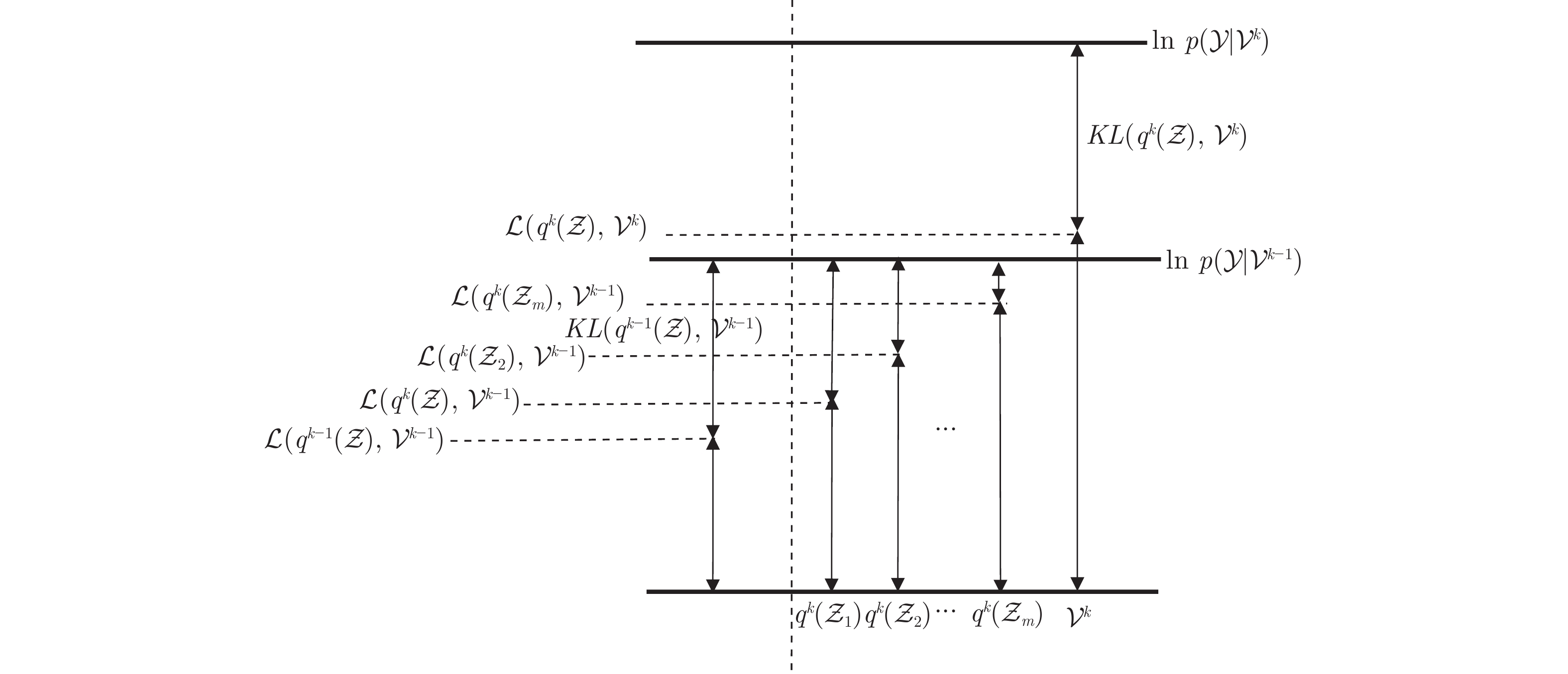
在统计流形空间中, 从信息几何角度考虑非线性状态后验分布近似的实质是后验分布与相应参数化变分分布之间的Kullback-Leibler散度最小化问题, 同时也可以转化为变分置信下界的最大化问题. 为了提升非线性系统状态估计的精度, 在高斯系统假设条件下结合变分贝叶斯推断和Fisher信息矩阵推导出置信下界的自然梯度, 并通过分析其信息几何意义, 阐述在统计流形空间中置信下界沿其方向不断迭代增大, 实现变分分布与后验分布的 “紧密” 近似; 在此基础上, 以状态估计及其误差协方差作为变分超参数, 结合最优估计理论给出一种基于自然梯度的非线性变分贝叶斯滤波算法; 最后, 通过天基光学传感器量测条件下近地轨道卫星跟踪定轨仿真实验验证: 与对比算法相比, 所提算法具有更高的精度.
在统计流形空间中, 从信息几何角度考虑非线性状态后验分布近似的实质是后验分布与相应参数化变分分布之间的Kullback-Leibler散度最小化问题, 同时也可以转化为变分置信下界的最大化问题. 为了提升非线性系统状态估计的精度, 在高斯系统假设条件下结合变分贝叶斯推断和Fisher信息矩阵推导出置信下界的自然梯度, 并通过分析其信息几何意义, 阐述在统计流形空间中置信下界沿其方向不断迭代增大, 实现变分分布与后验分布的 “紧密” 近似; 在此基础上, 以状态估计及其误差协方差作为变分超参数, 结合最优估计理论给出一种基于自然梯度的非线性变分贝叶斯滤波算法; 最后, 通过天基光学传感器量测条件下近地轨道卫星跟踪定轨仿真实验验证: 与对比算法相比, 所提算法具有更高的精度.





当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c211089
摘要:
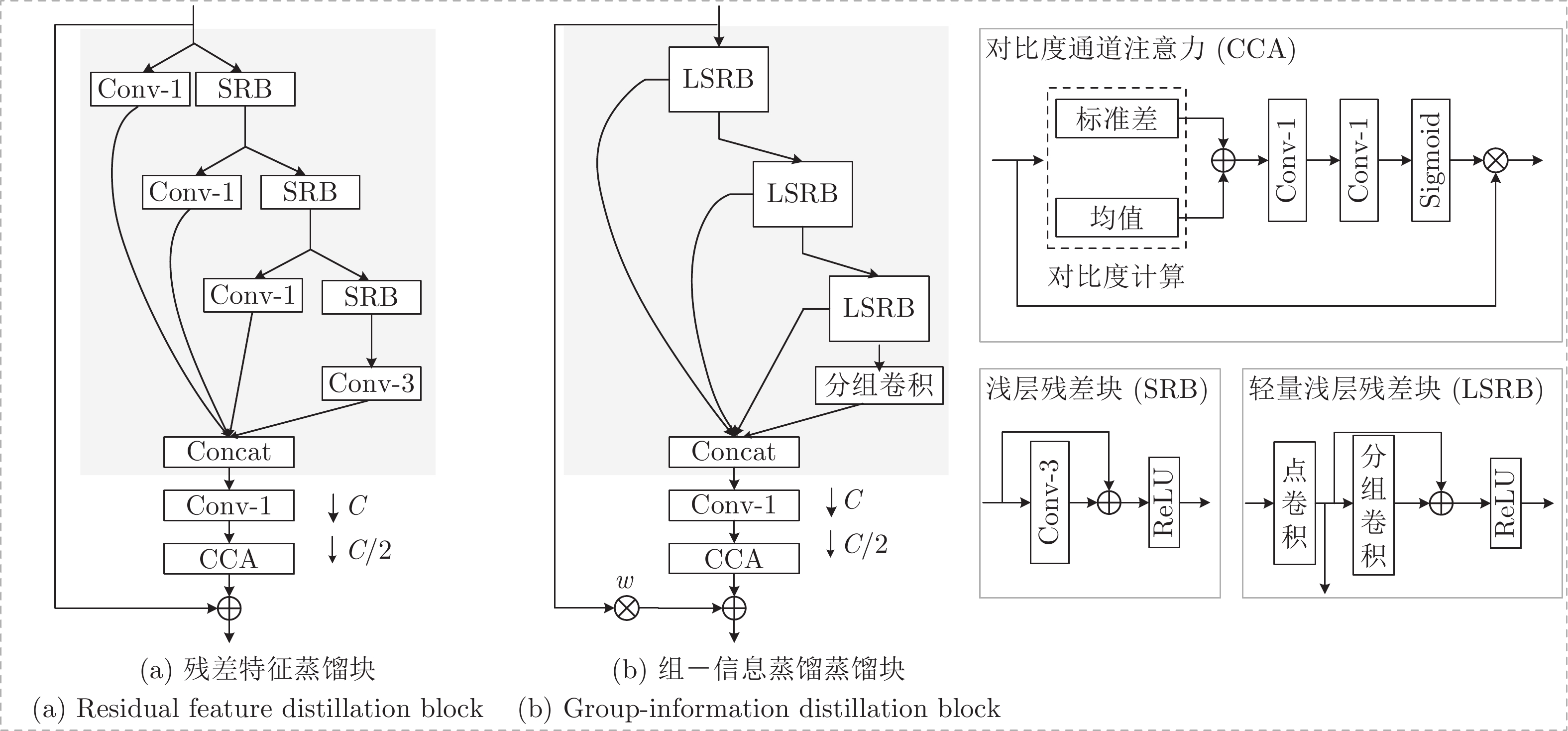
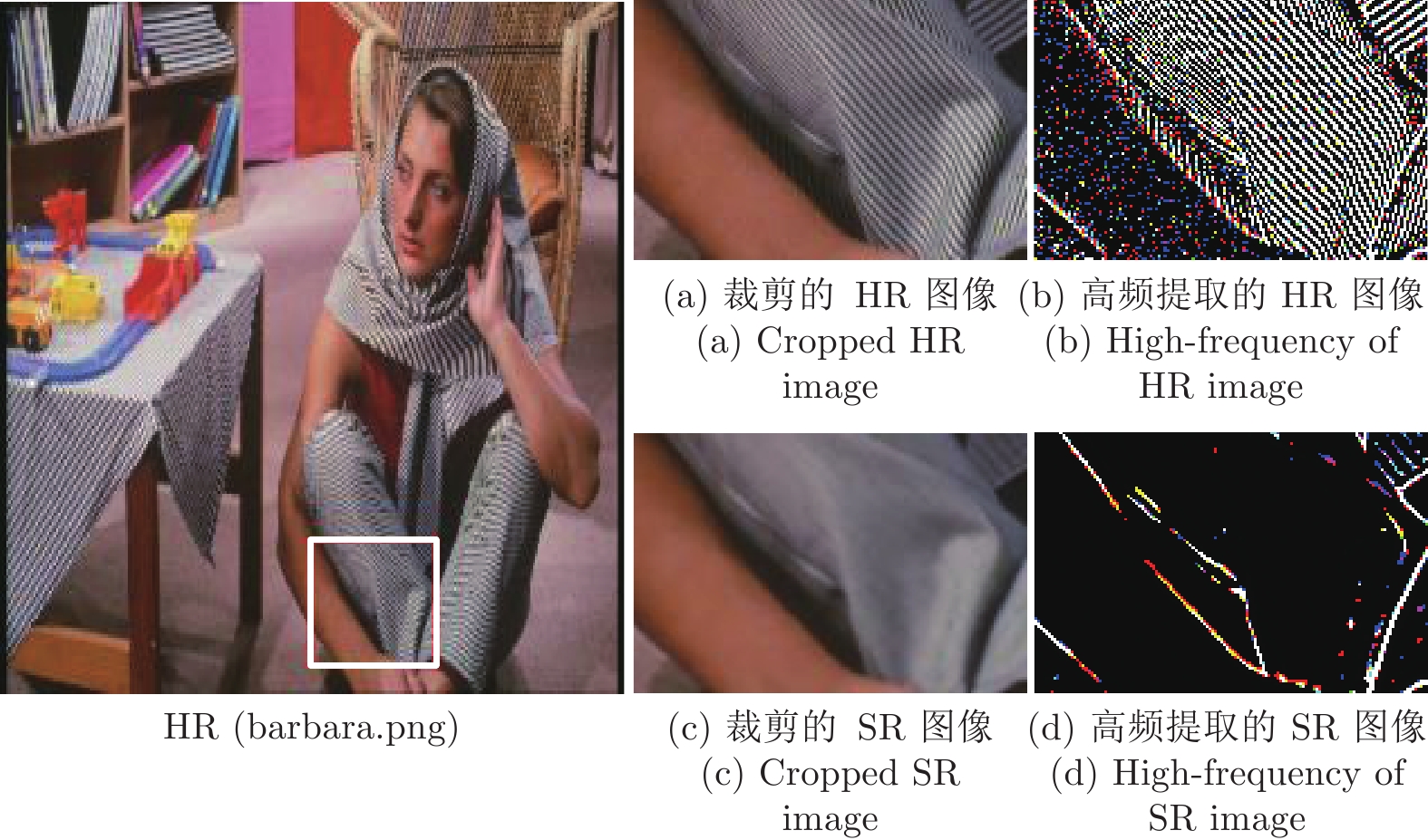
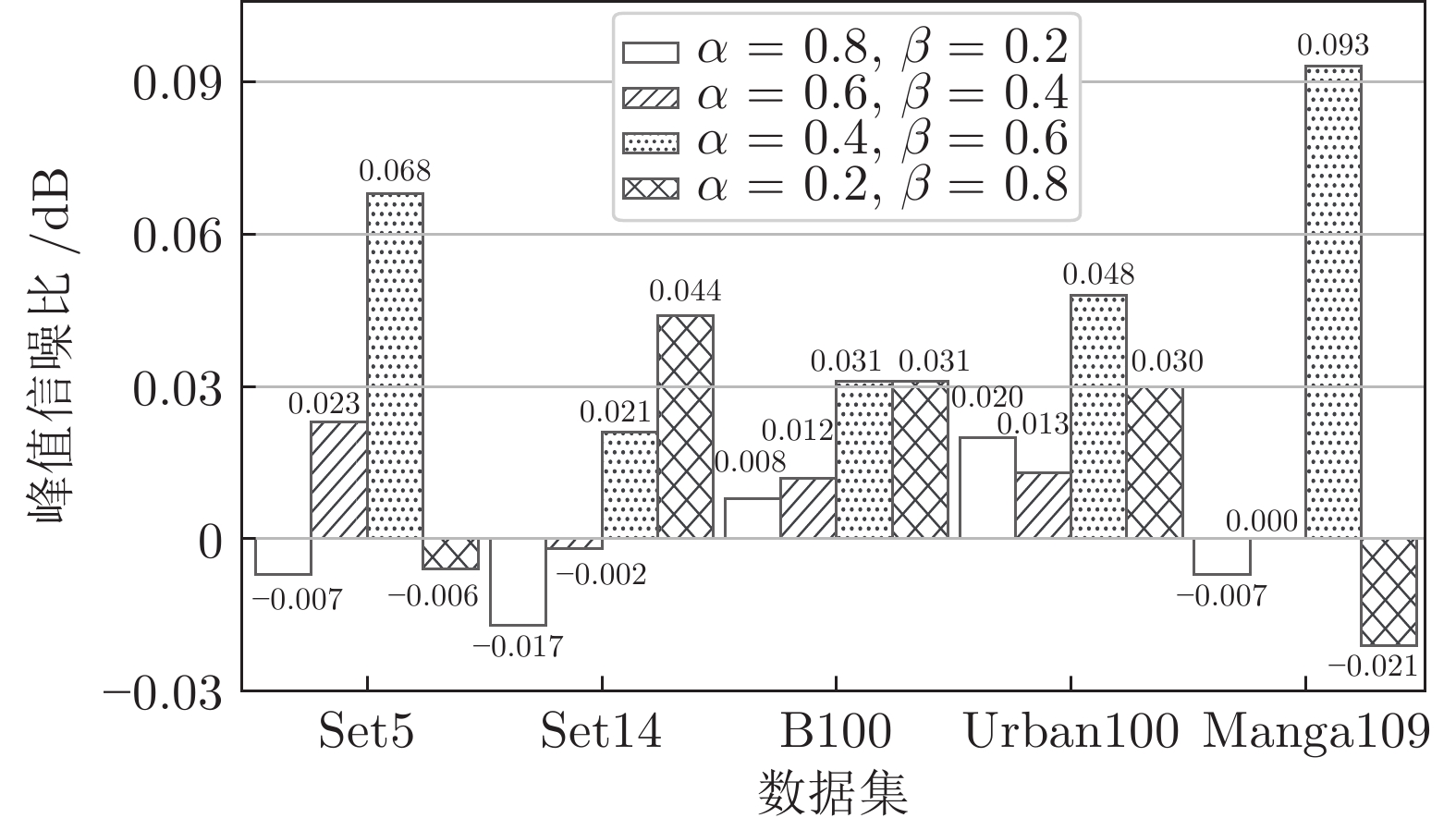
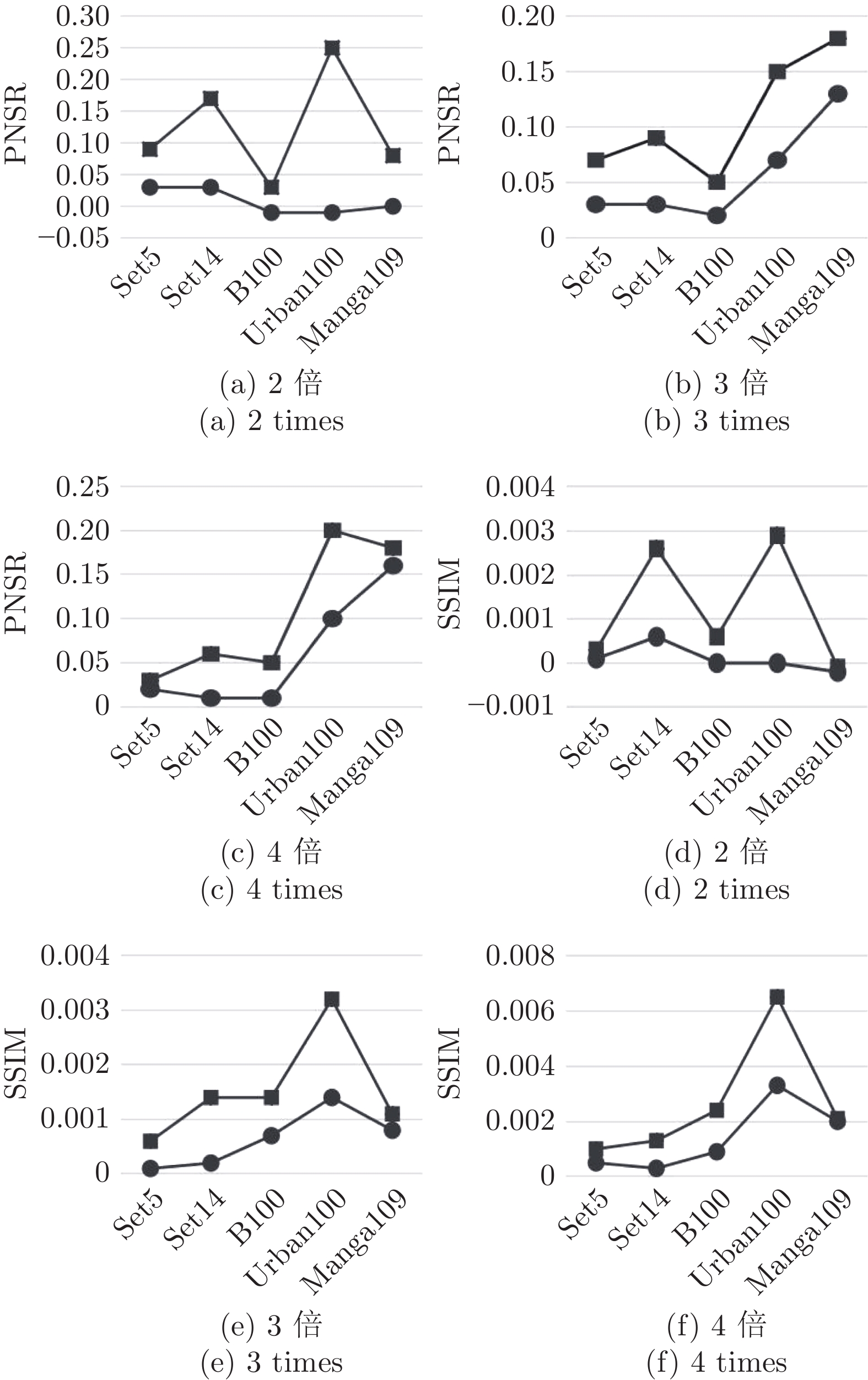
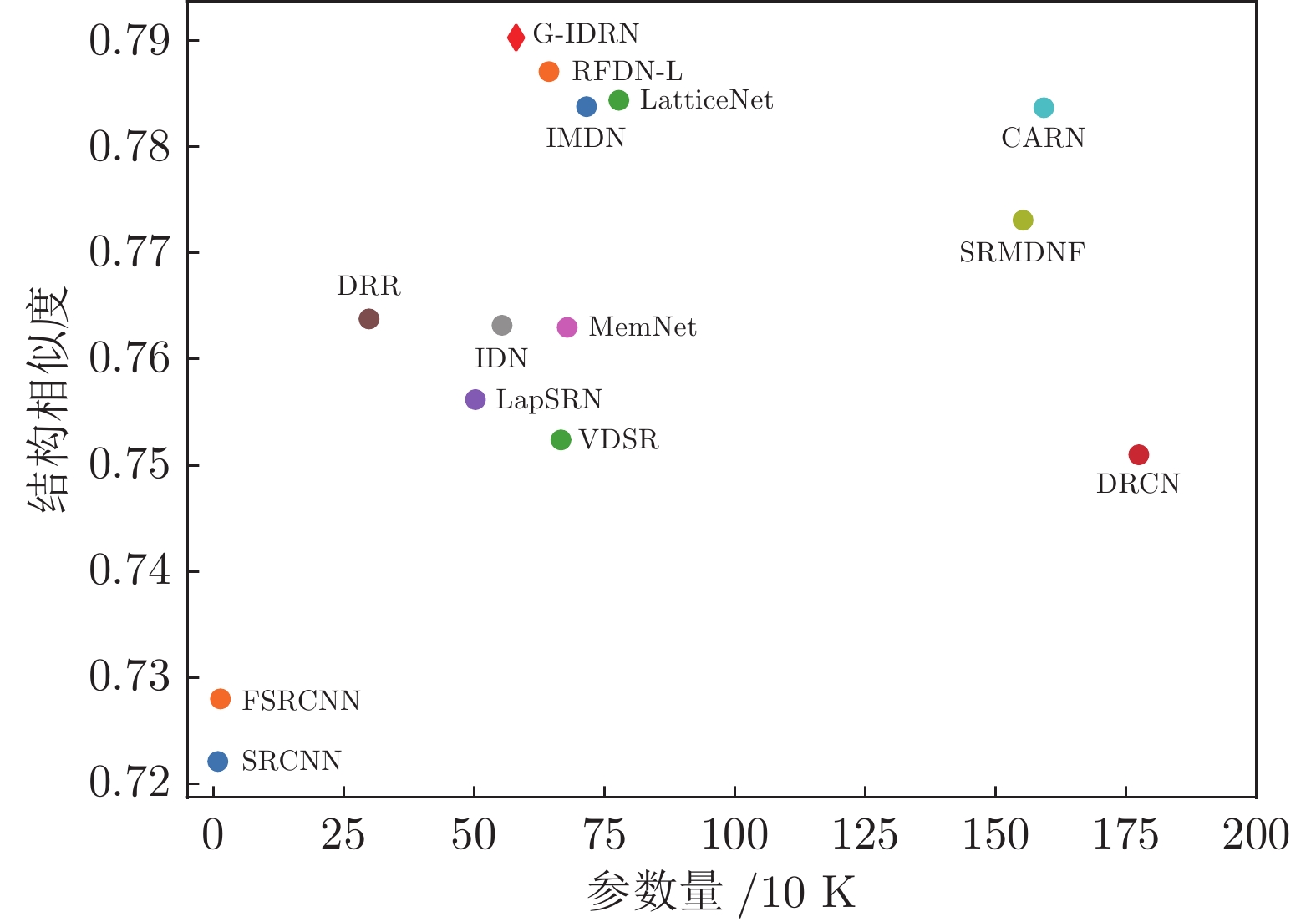
目前, 基于深度学习的超分辨算法已经取得了很好性能, 但这些方法通常具有较大的内存消耗和较高的计算复杂度, 很难应用到低算力或便携式设备上. 为了解决这个问题, 设计一种轻量级的组−信息蒸馏残差网络(Group-information distillation residual network, G-IDRN)用于快速且精确的单图像超分辨率. 具体来说, 提出一个更加有效的组−信息蒸馏模块(Group-information distillation block, G-IDB)作为网络特征提取基本块. 同时, 引入密集快捷连接对多个基本块进行组合, 构建组−信息蒸馏残差组(Group-information distillation residual group, G-IDRG), 捕获多层级信息和有效重利用特征. 另外, 还提出一个轻量的非对称残差Non-local模块, 对长距离依赖关系进行建模, 进一步提升超分的性能. 最后, 设计一个高频损失函数, 去解决像素损失带来图像细节平滑的问题. 大量的实验表明, 该算法相较于其他先进方法可以在图像超分辨率性能和模型复杂度之间取得更好平衡, 其在公开测试数据集B100上, 4倍超分速率达到56 FPS, 比残差注意力网络快15倍.
目前, 基于深度学习的超分辨算法已经取得了很好性能, 但这些方法通常具有较大的内存消耗和较高的计算复杂度, 很难应用到低算力或便携式设备上. 为了解决这个问题, 设计一种轻量级的组−信息蒸馏残差网络(Group-information distillation residual network, G-IDRN)用于快速且精确的单图像超分辨率. 具体来说, 提出一个更加有效的组−信息蒸馏模块(Group-information distillation block, G-IDB)作为网络特征提取基本块. 同时, 引入密集快捷连接对多个基本块进行组合, 构建组−信息蒸馏残差组(Group-information distillation residual group, G-IDRG), 捕获多层级信息和有效重利用特征. 另外, 还提出一个轻量的非对称残差Non-local模块, 对长距离依赖关系进行建模, 进一步提升超分的性能. 最后, 设计一个高频损失函数, 去解决像素损失带来图像细节平滑的问题. 大量的实验表明, 该算法相较于其他先进方法可以在图像超分辨率性能和模型复杂度之间取得更好平衡, 其在公开测试数据集B100上, 4倍超分速率达到56 FPS, 比残差注意力网络快15倍.







当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230081
摘要:
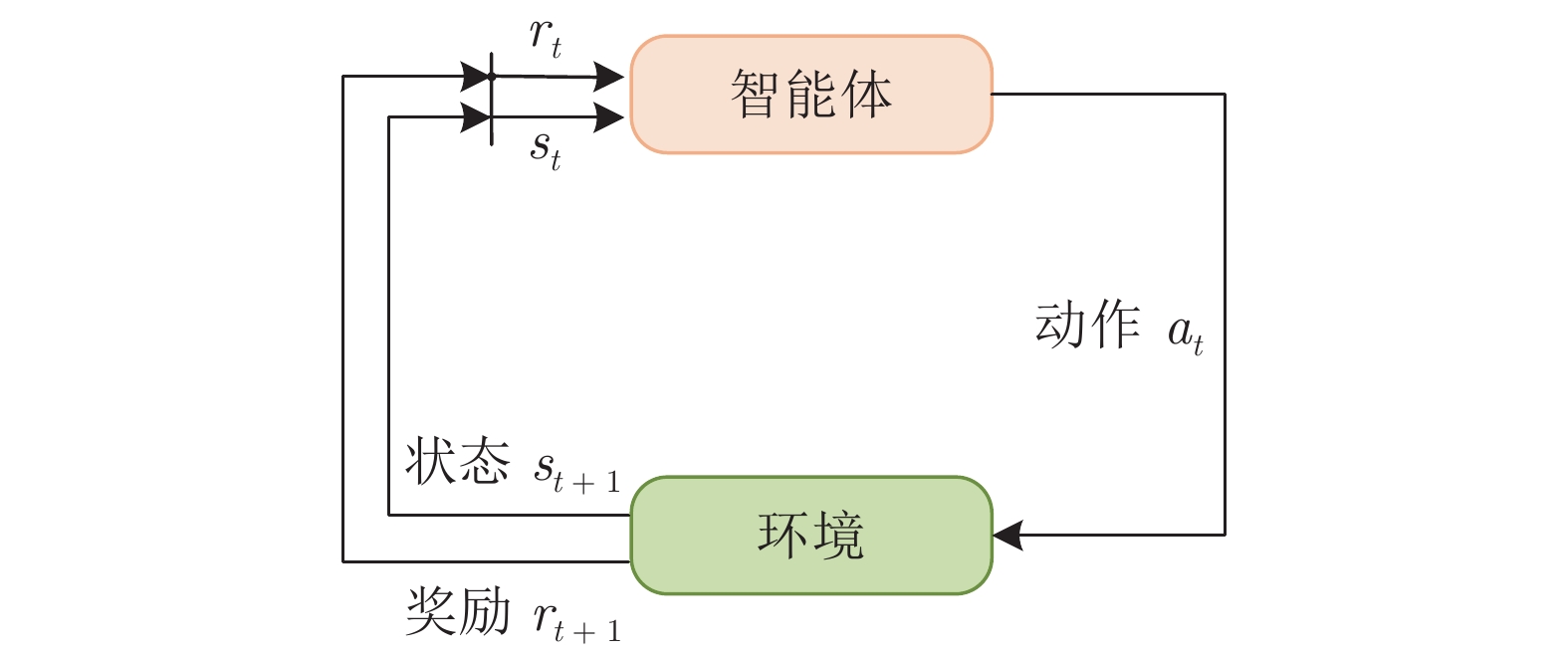
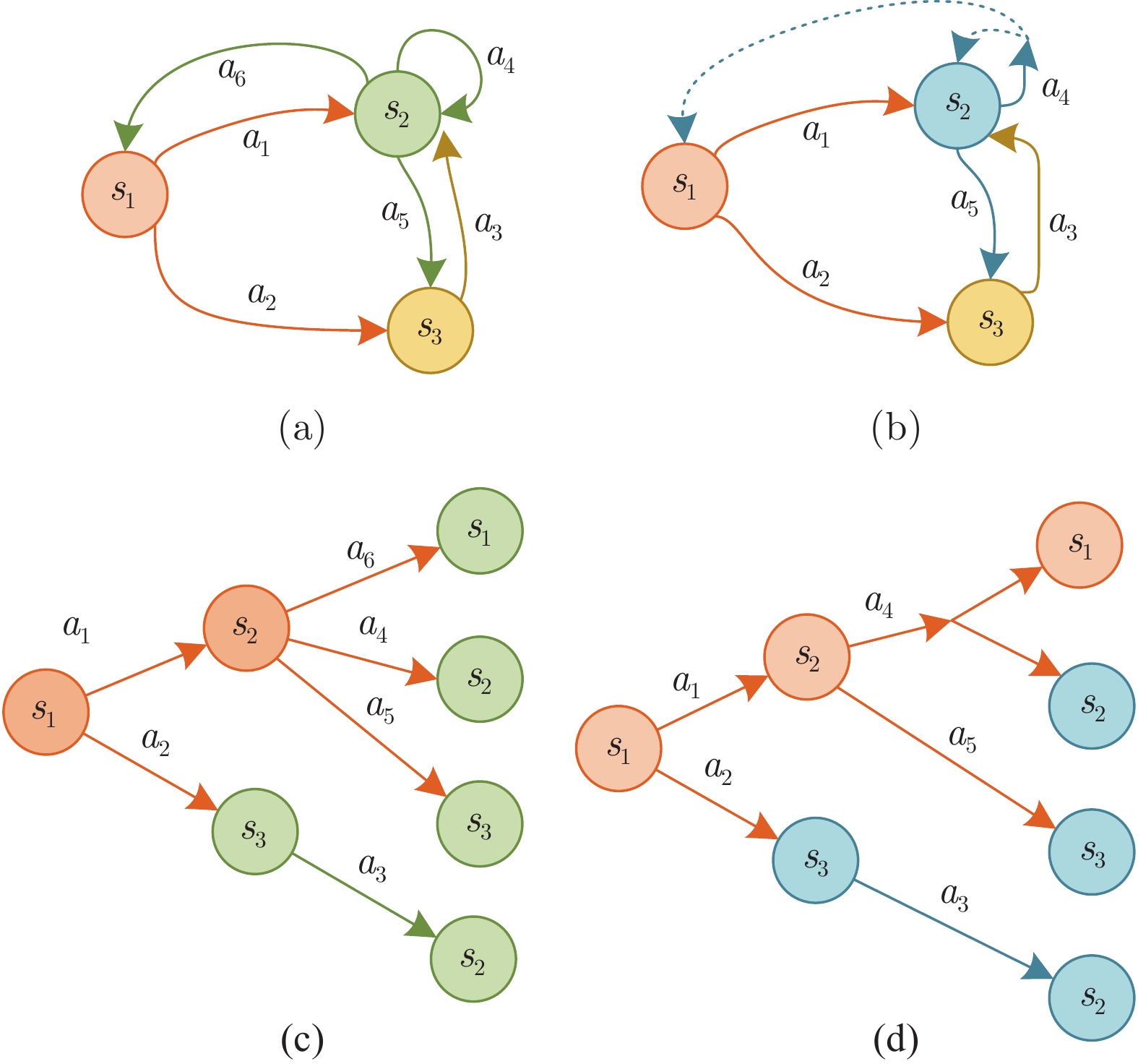
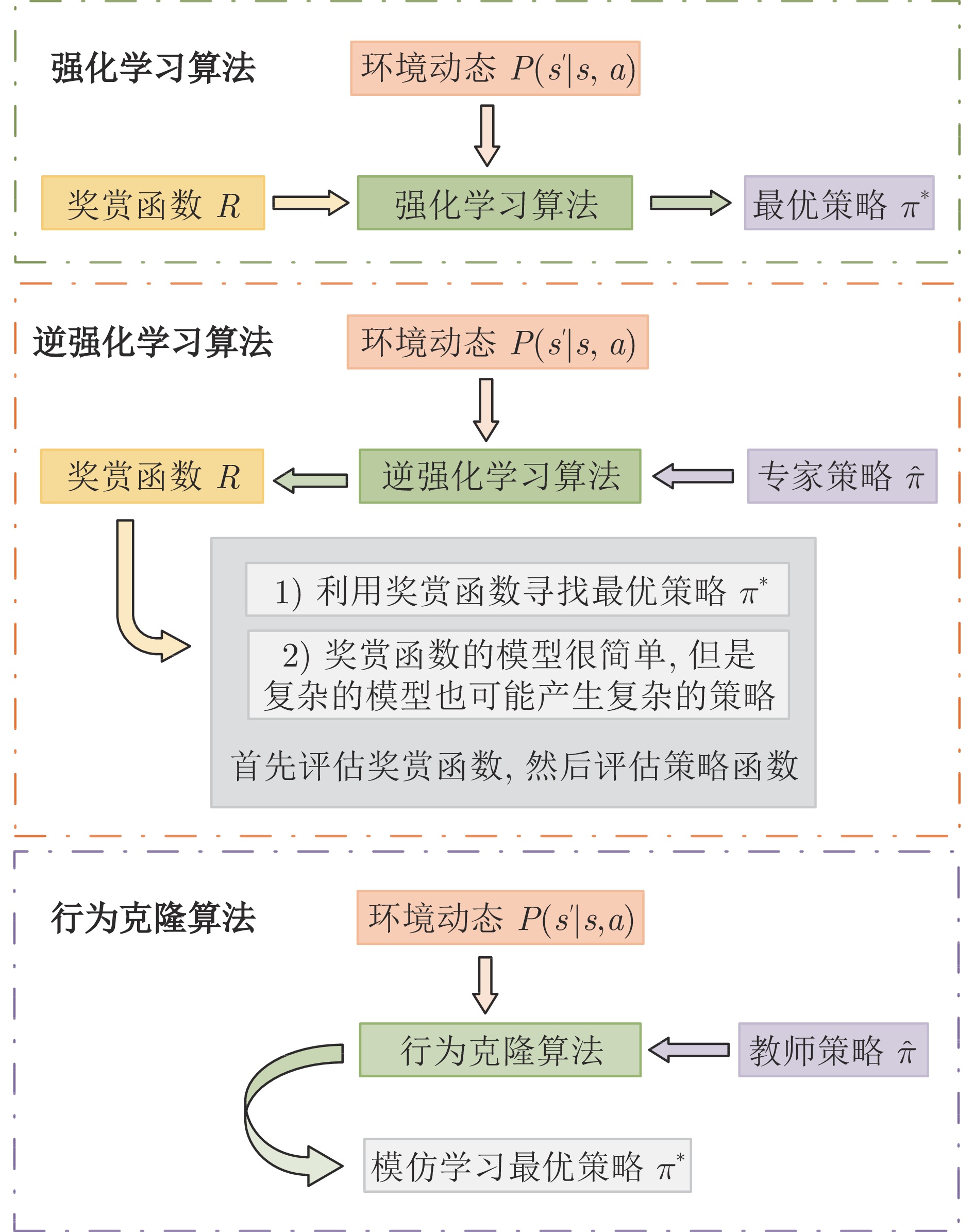
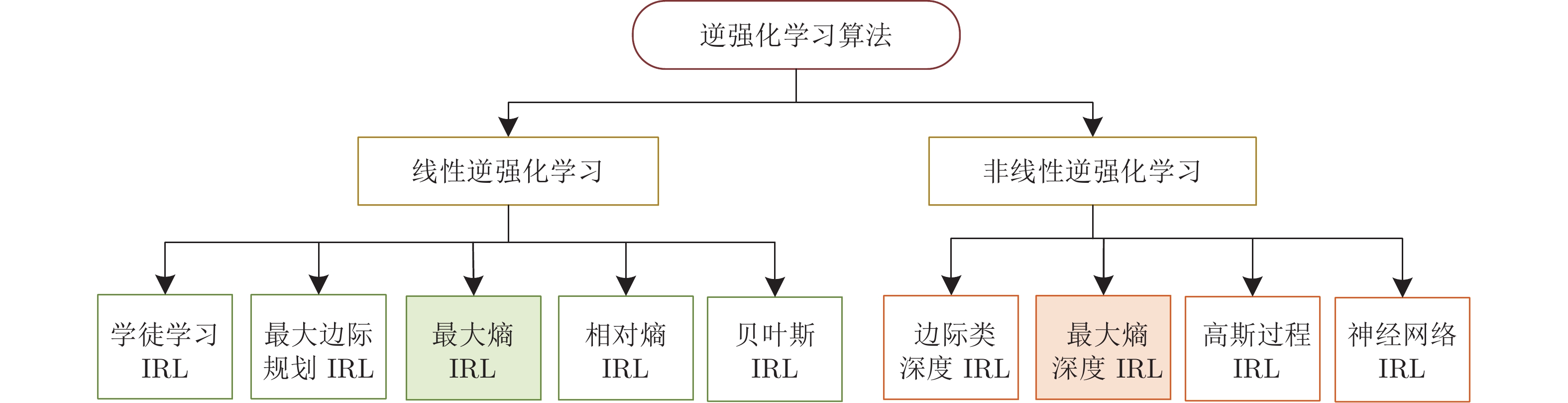
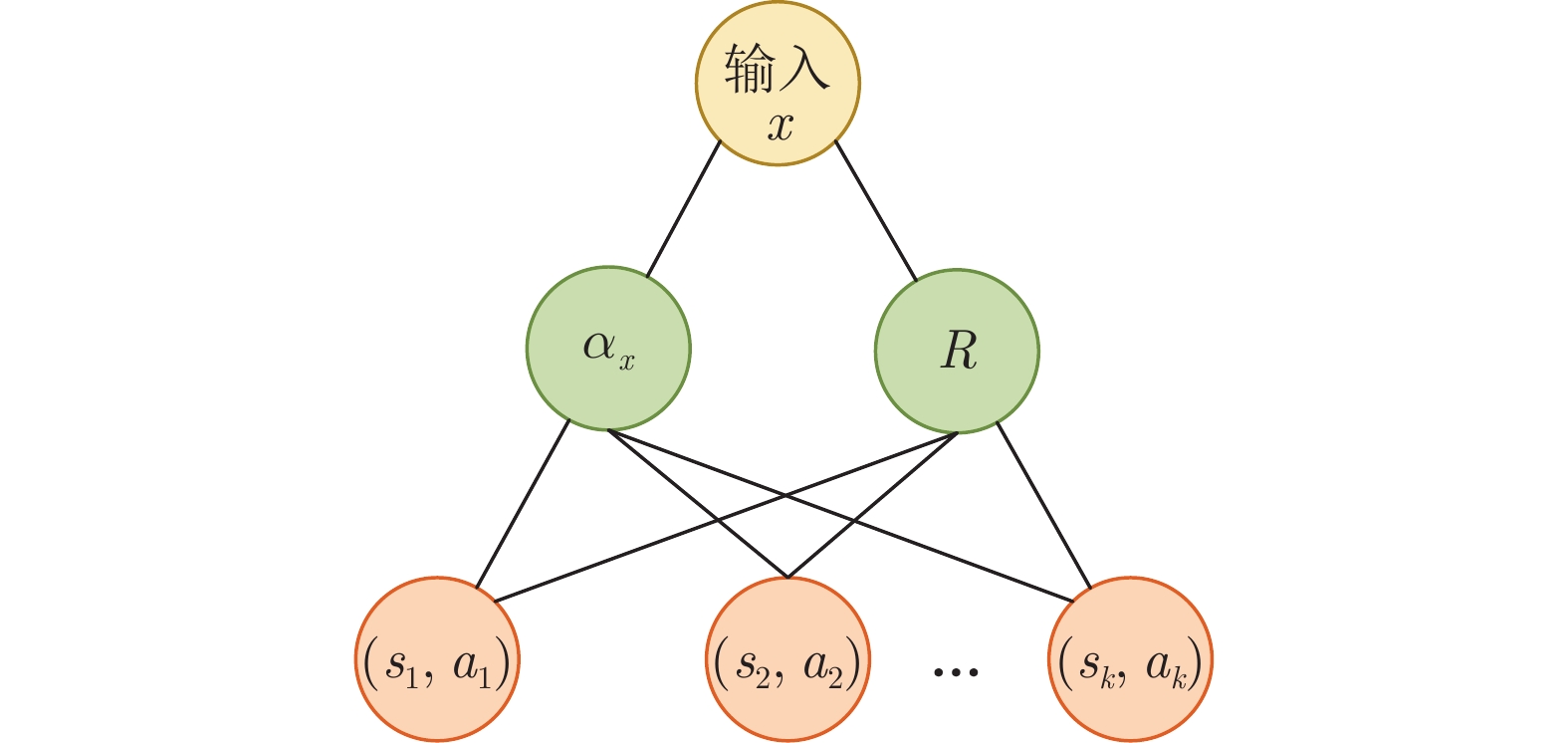
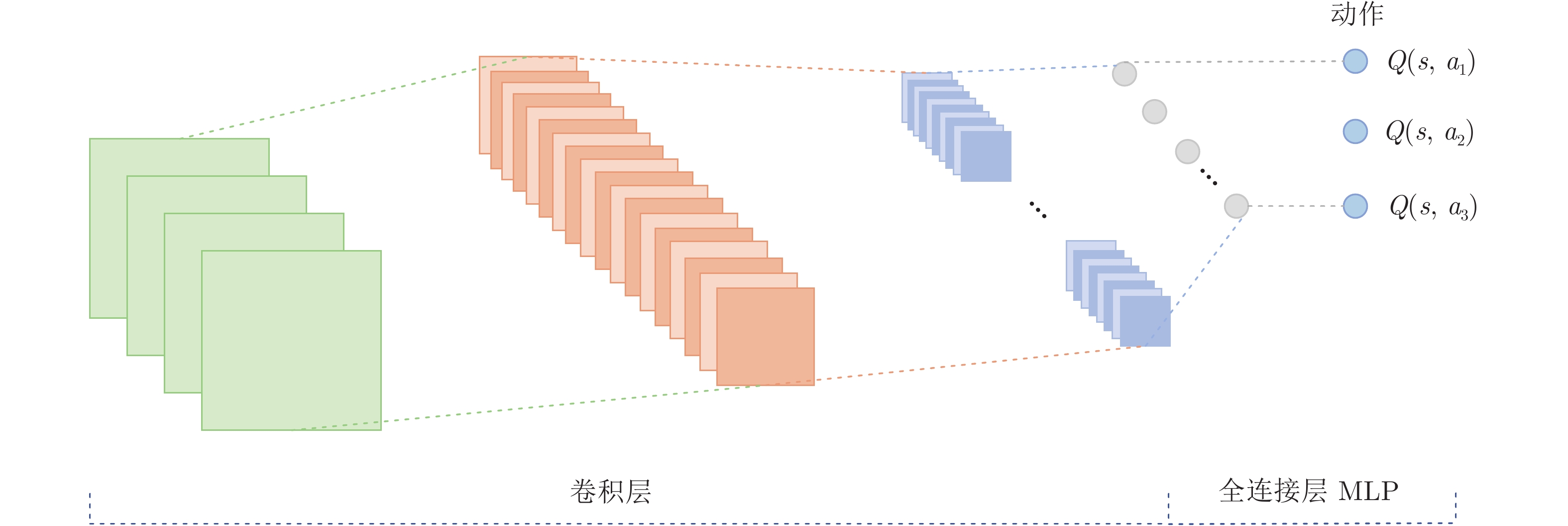
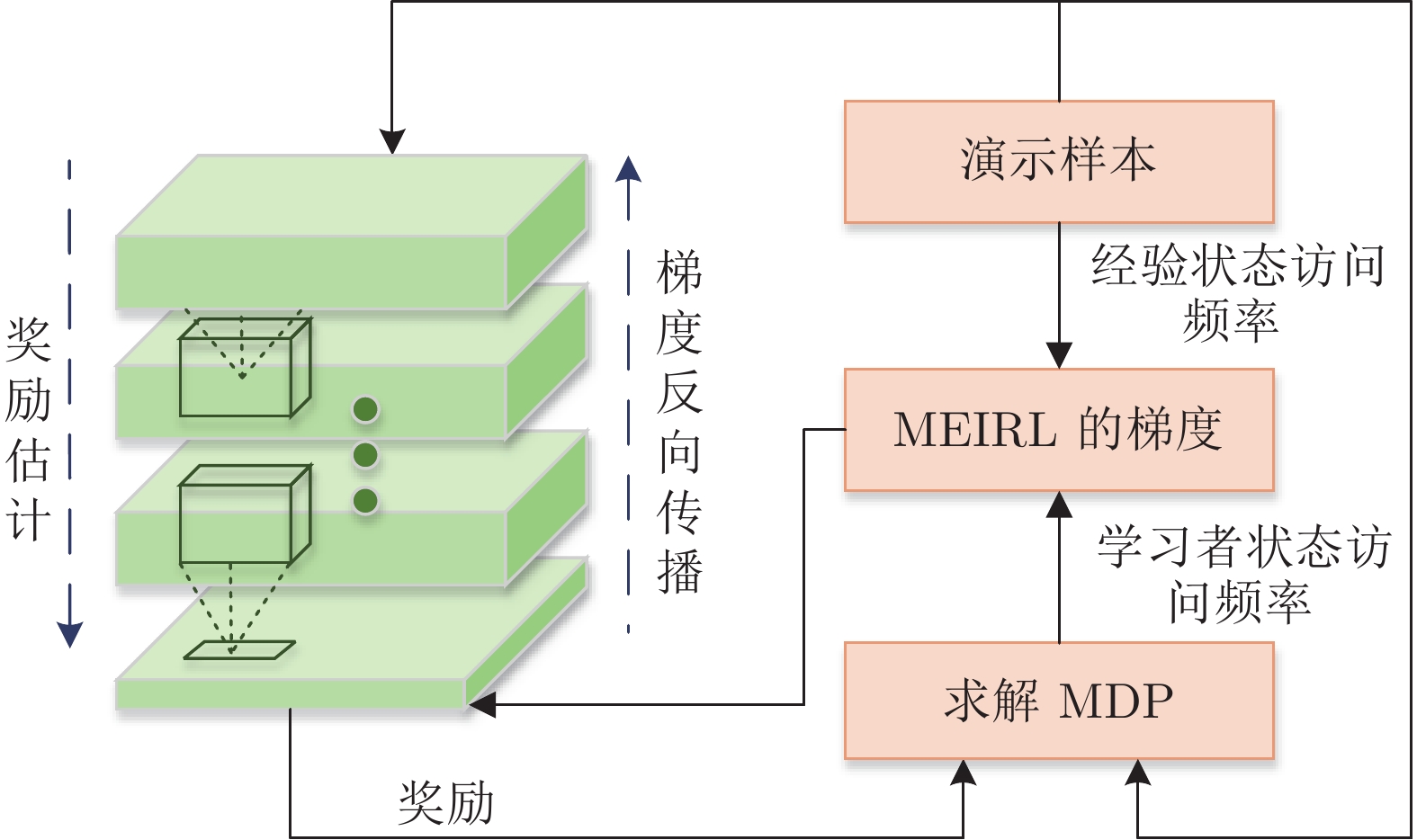
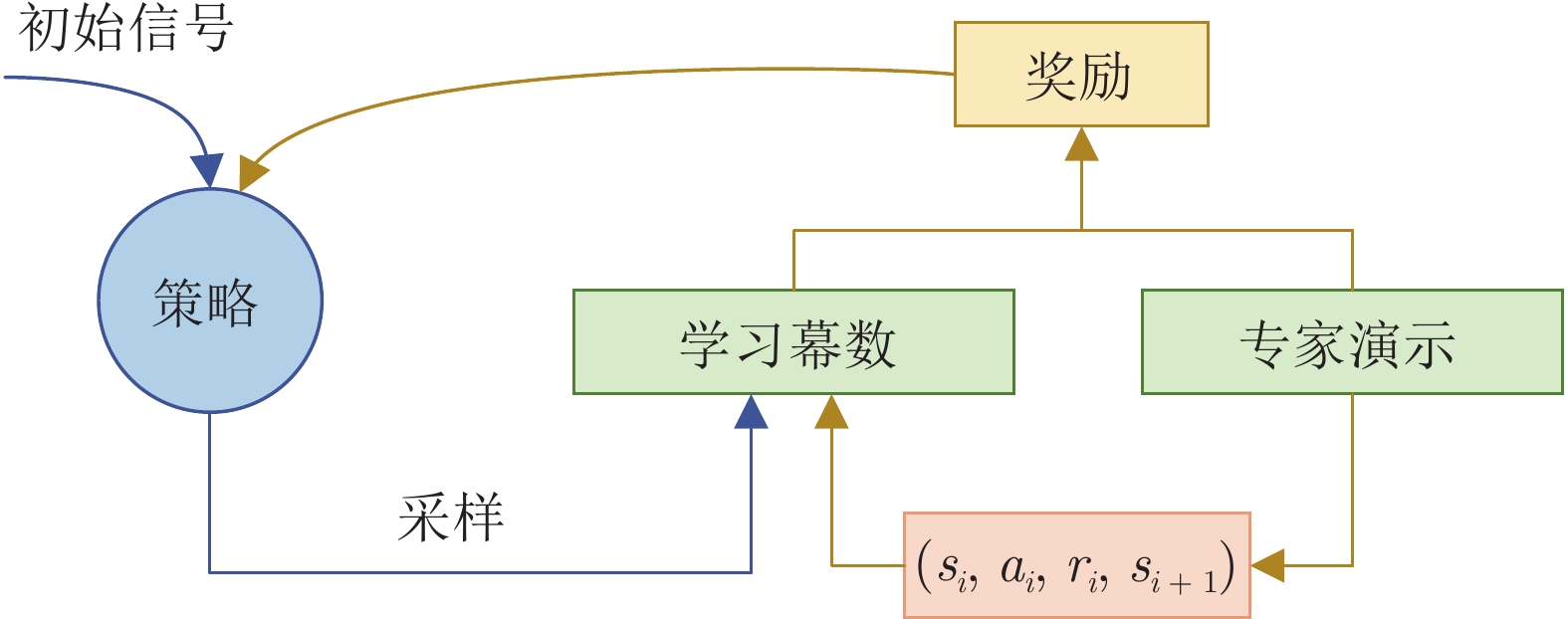
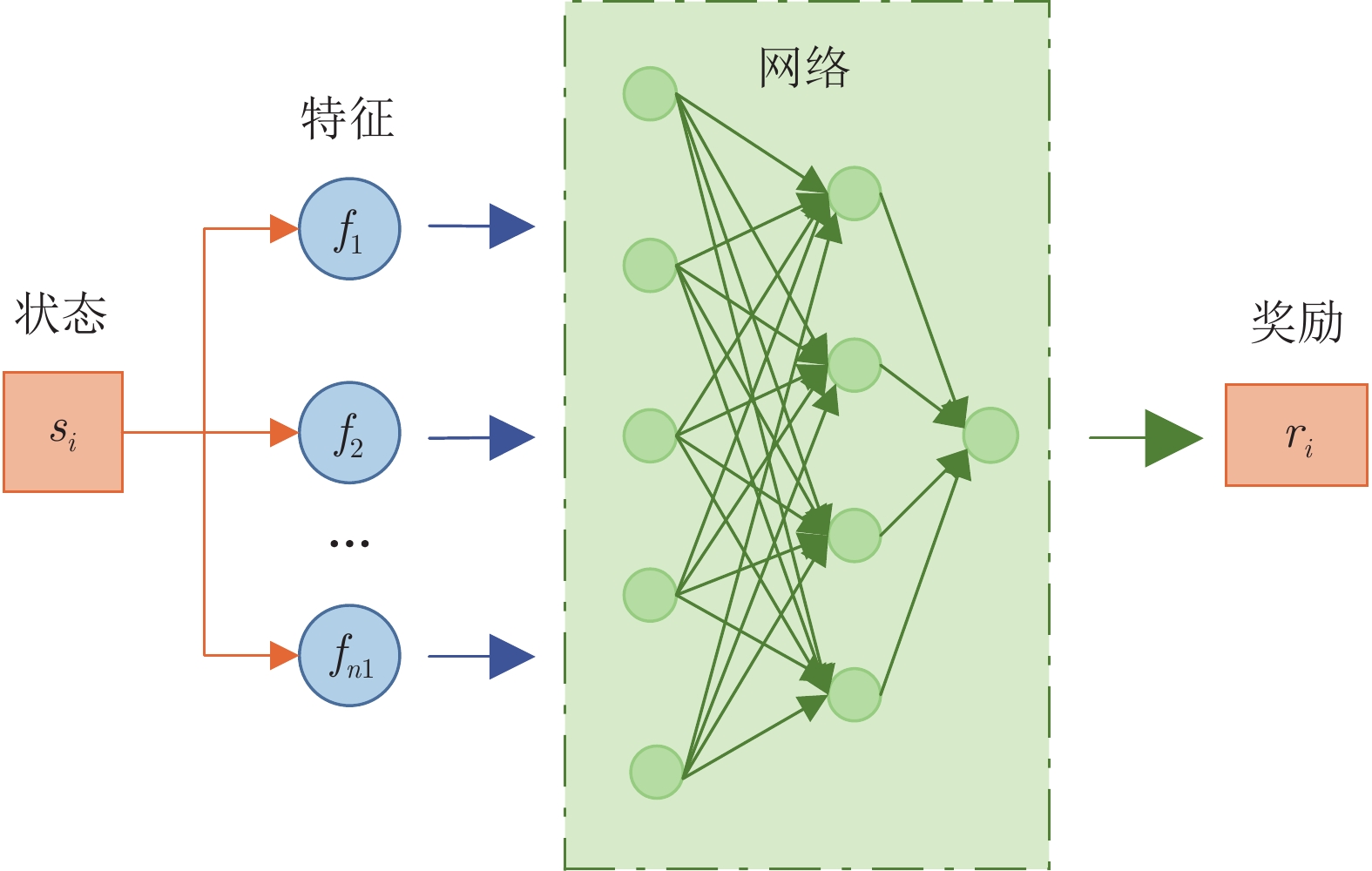
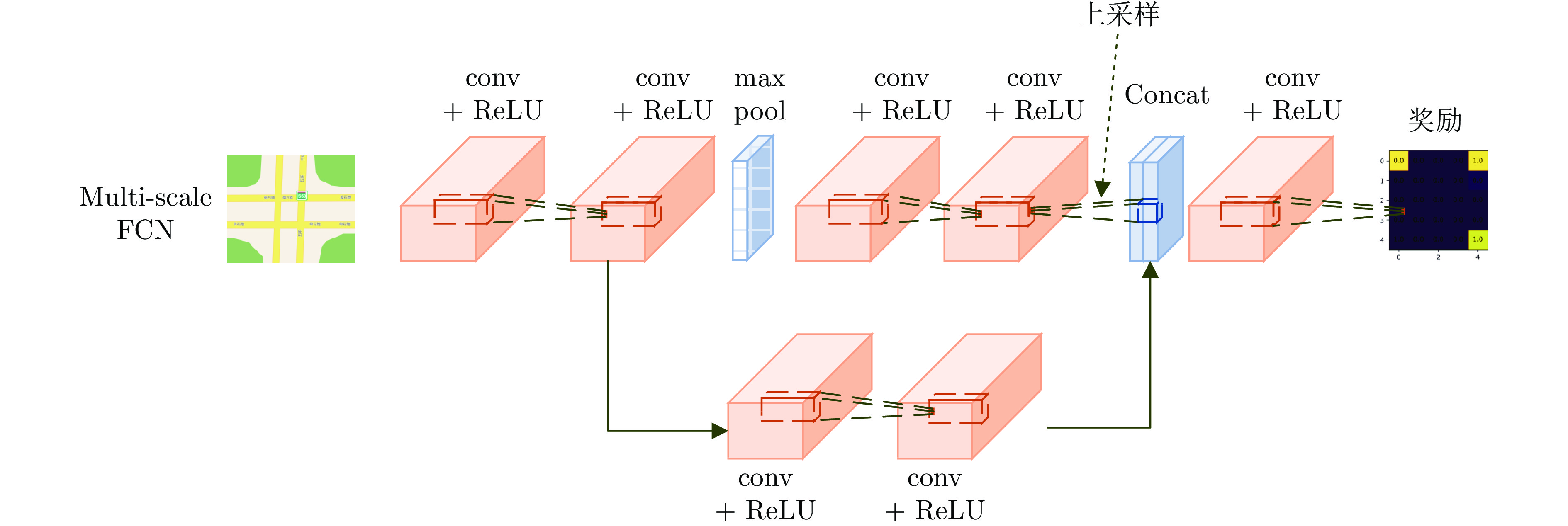
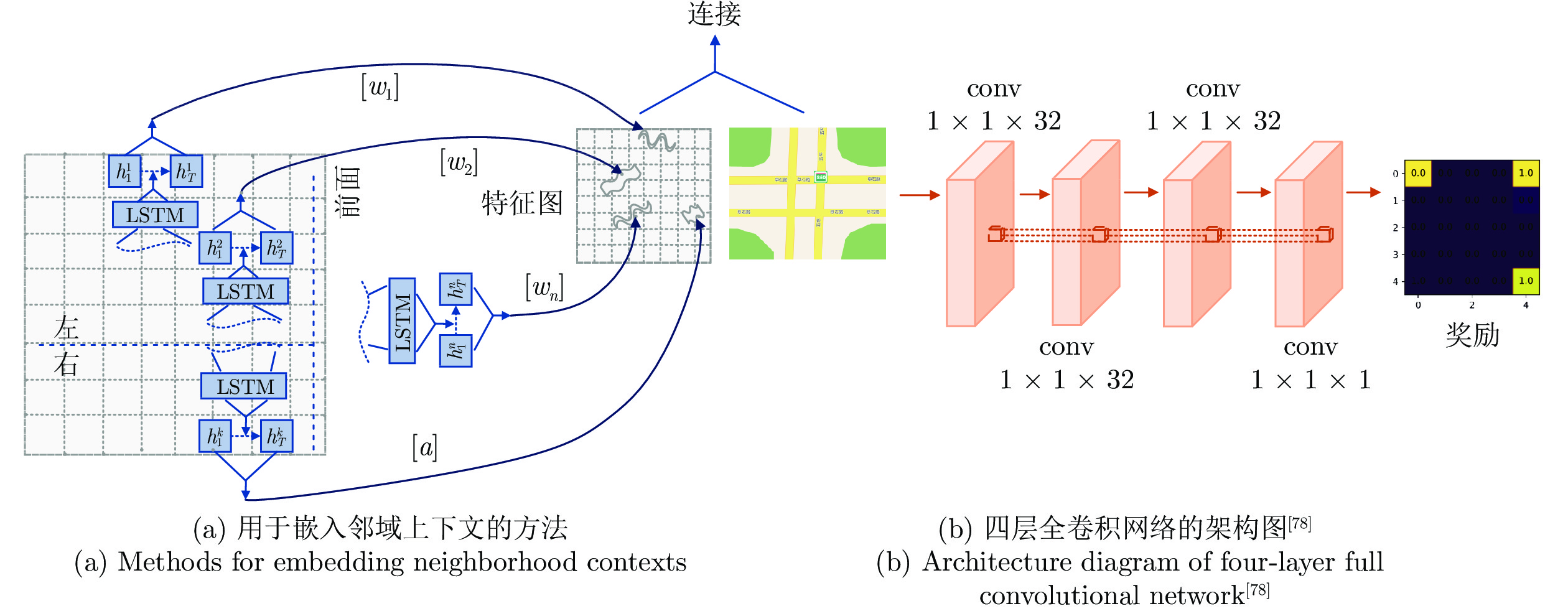
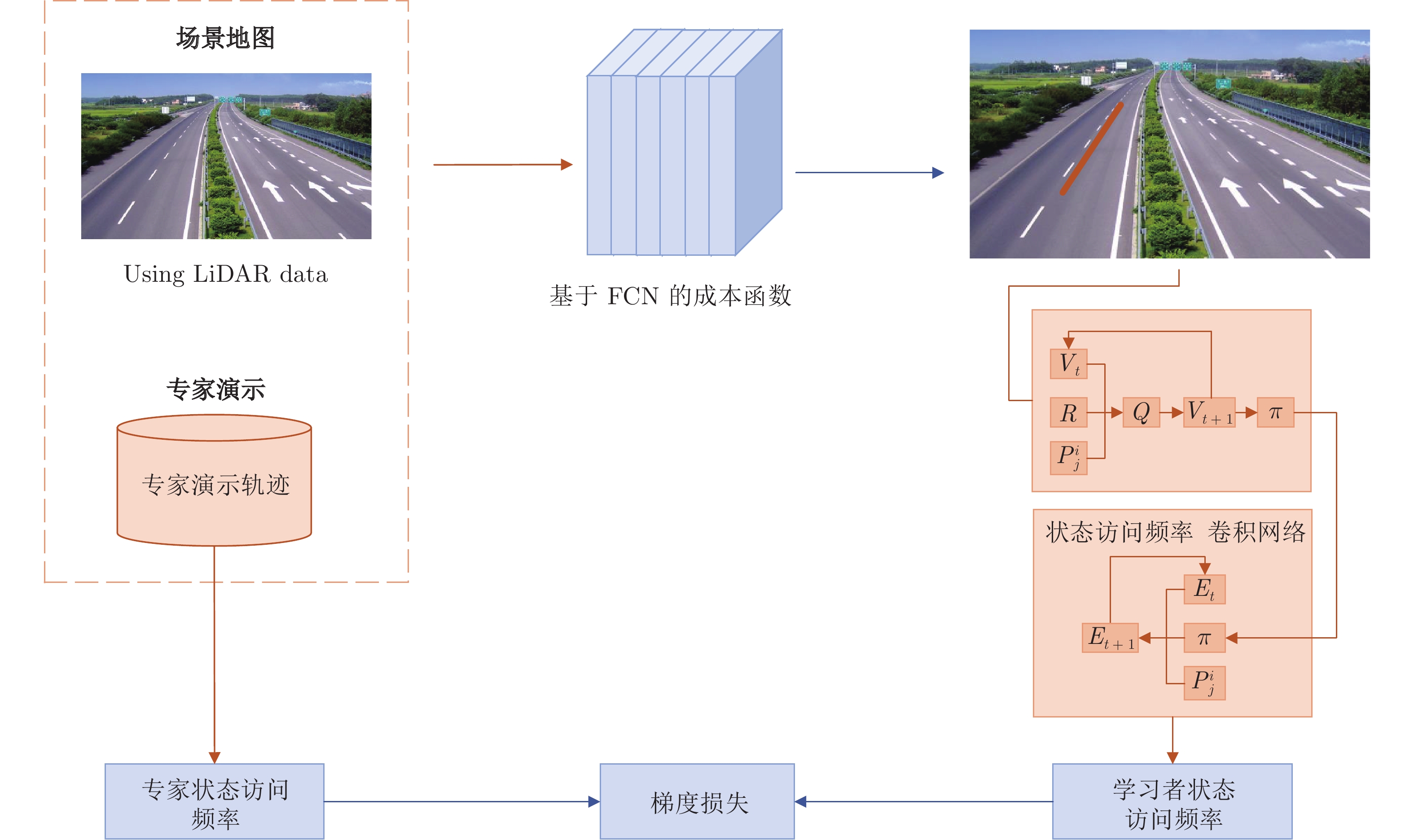
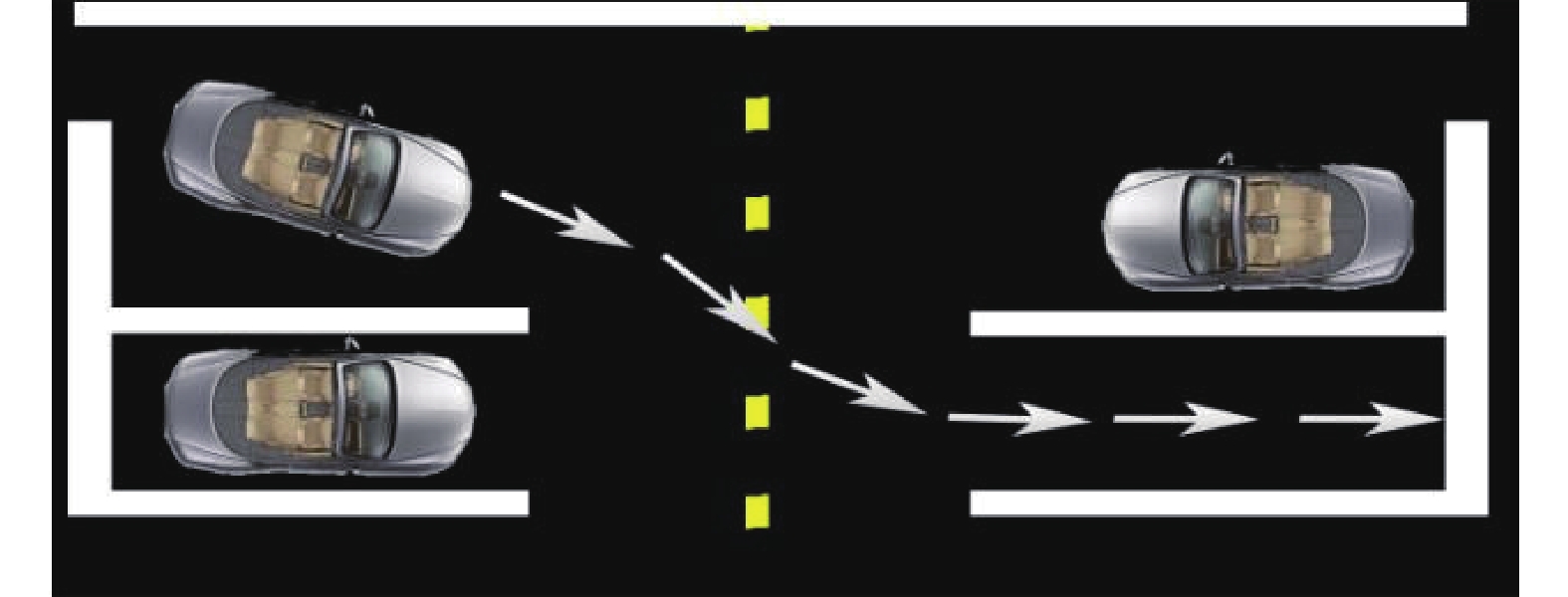
随着深度强化学习的研究与发展, 强化学习在博弈与优化决策、智能驾驶等现实问题中的应用也取得显著进展. 然而强化学习在智能体与环境的交互中存在人工设计奖励函数难的问题, 因此研究者提出了逆强化学习这一研究方向. 如何从专家演示中学习奖励函数和进行策略优化是一个新颖且重要的研究课题, 在人工智能领域具有十分重要的研究意义. 本文综合介绍了逆强化学习算法的最新进展, 首先介绍了逆强化学习在理论方面的新进展, 然后分析了逆强化学习面临的挑战以及未来的发展趋势, 最后讨论了逆强化学习的应用进展和应用前景.
随着深度强化学习的研究与发展, 强化学习在博弈与优化决策、智能驾驶等现实问题中的应用也取得显著进展. 然而强化学习在智能体与环境的交互中存在人工设计奖励函数难的问题, 因此研究者提出了逆强化学习这一研究方向. 如何从专家演示中学习奖励函数和进行策略优化是一个新颖且重要的研究课题, 在人工智能领域具有十分重要的研究意义. 本文综合介绍了逆强化学习算法的最新进展, 首先介绍了逆强化学习在理论方面的新进展, 然后分析了逆强化学习面临的挑战以及未来的发展趋势, 最后讨论了逆强化学习的应用进展和应用前景.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230210
摘要:
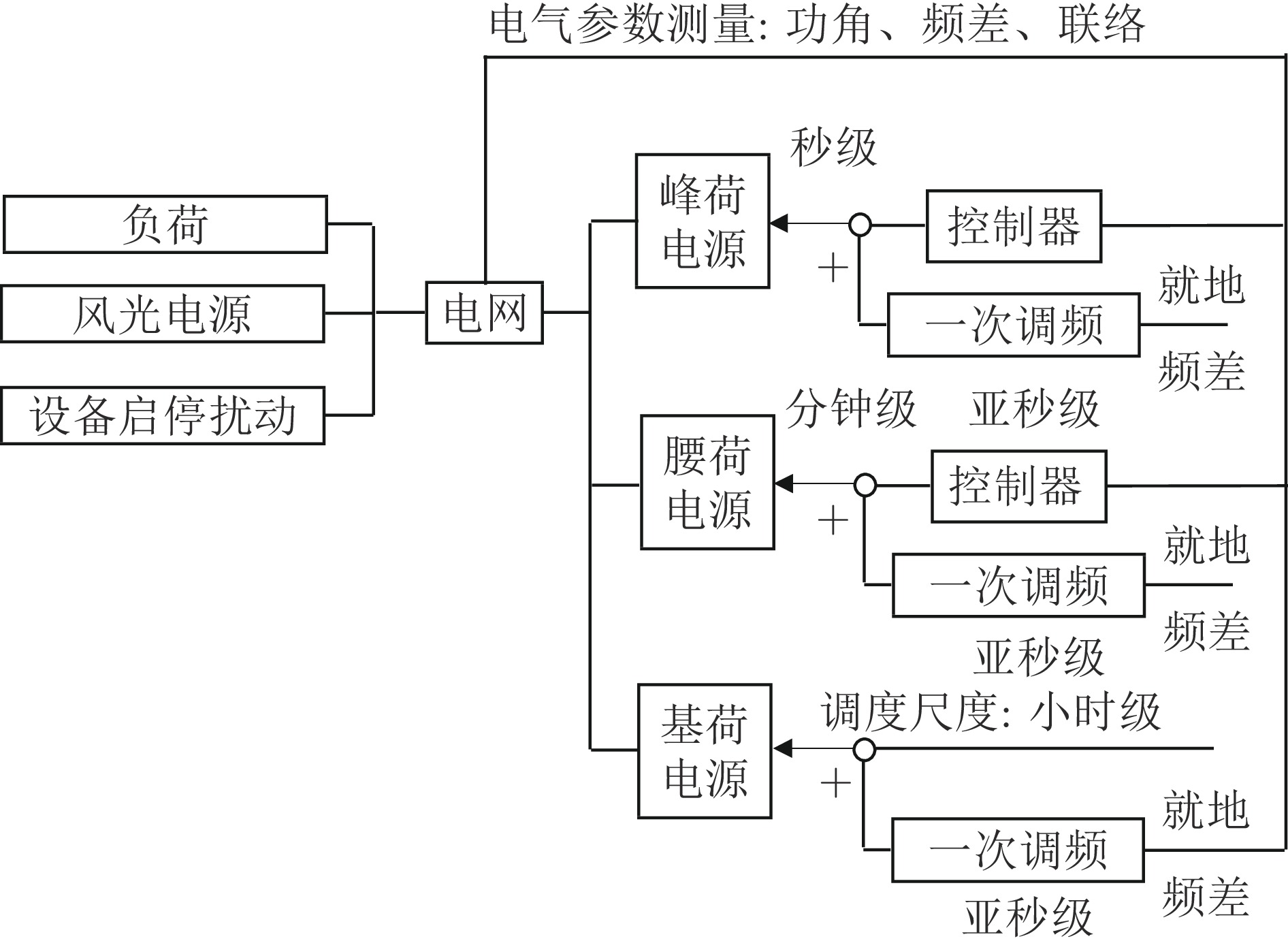
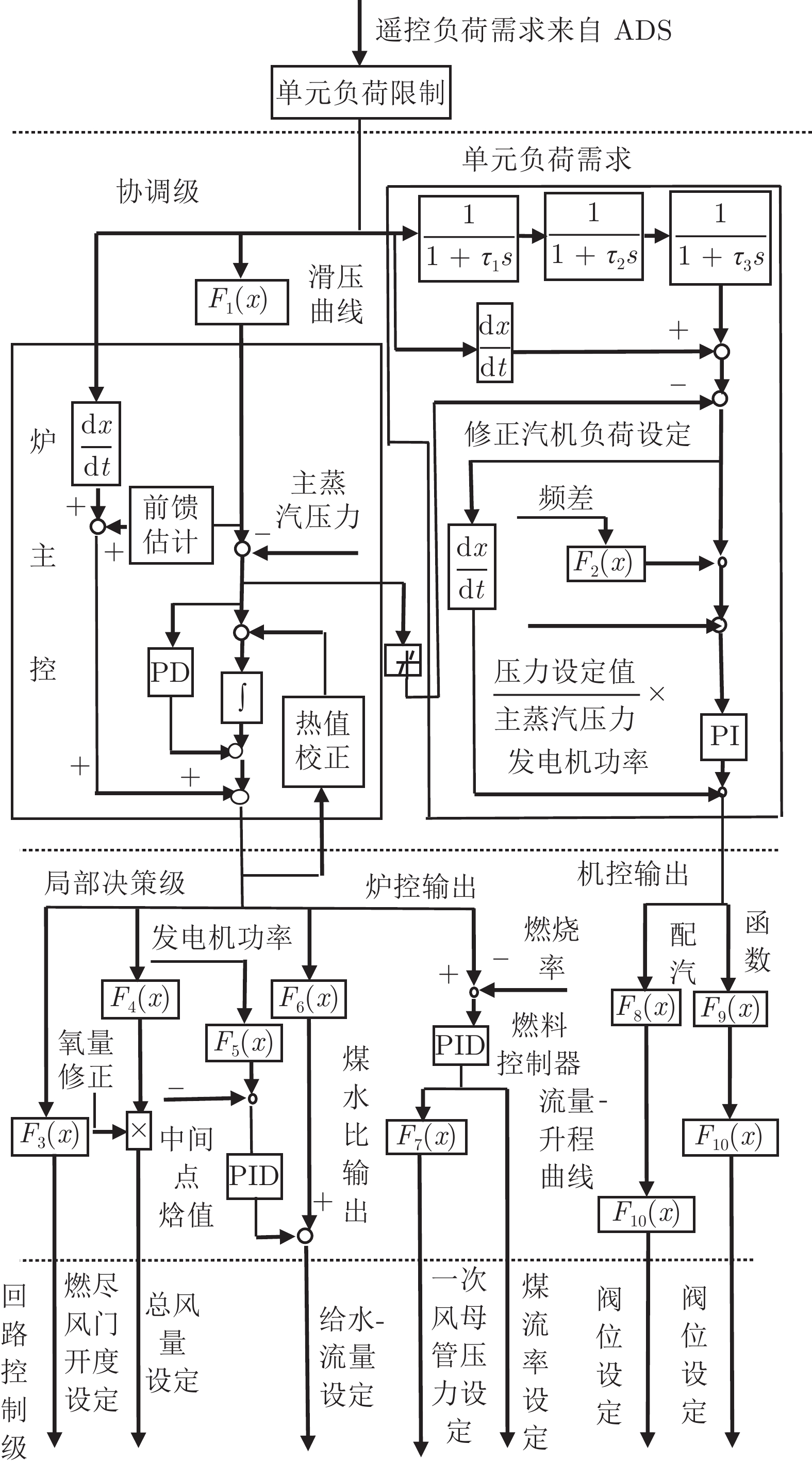
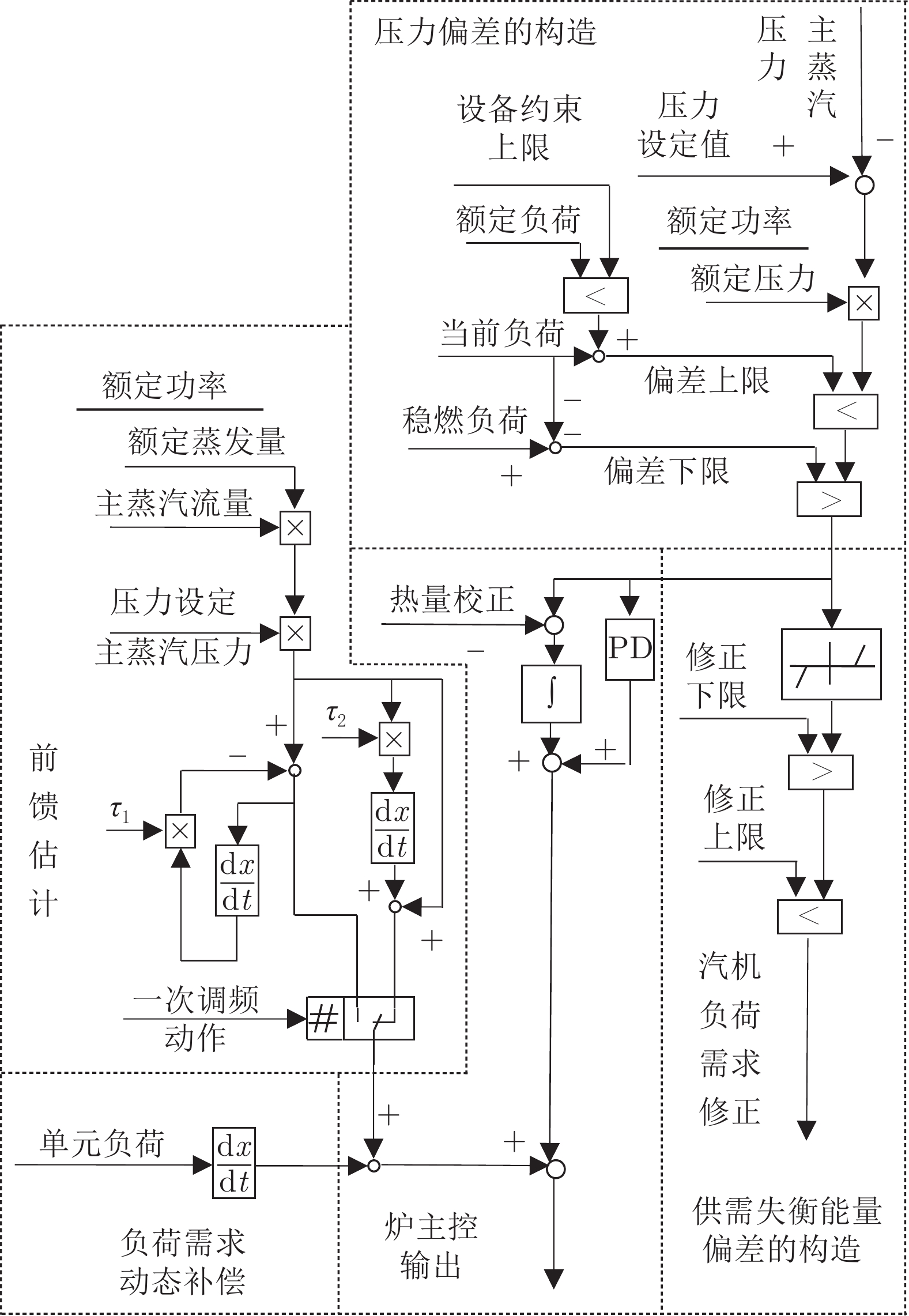
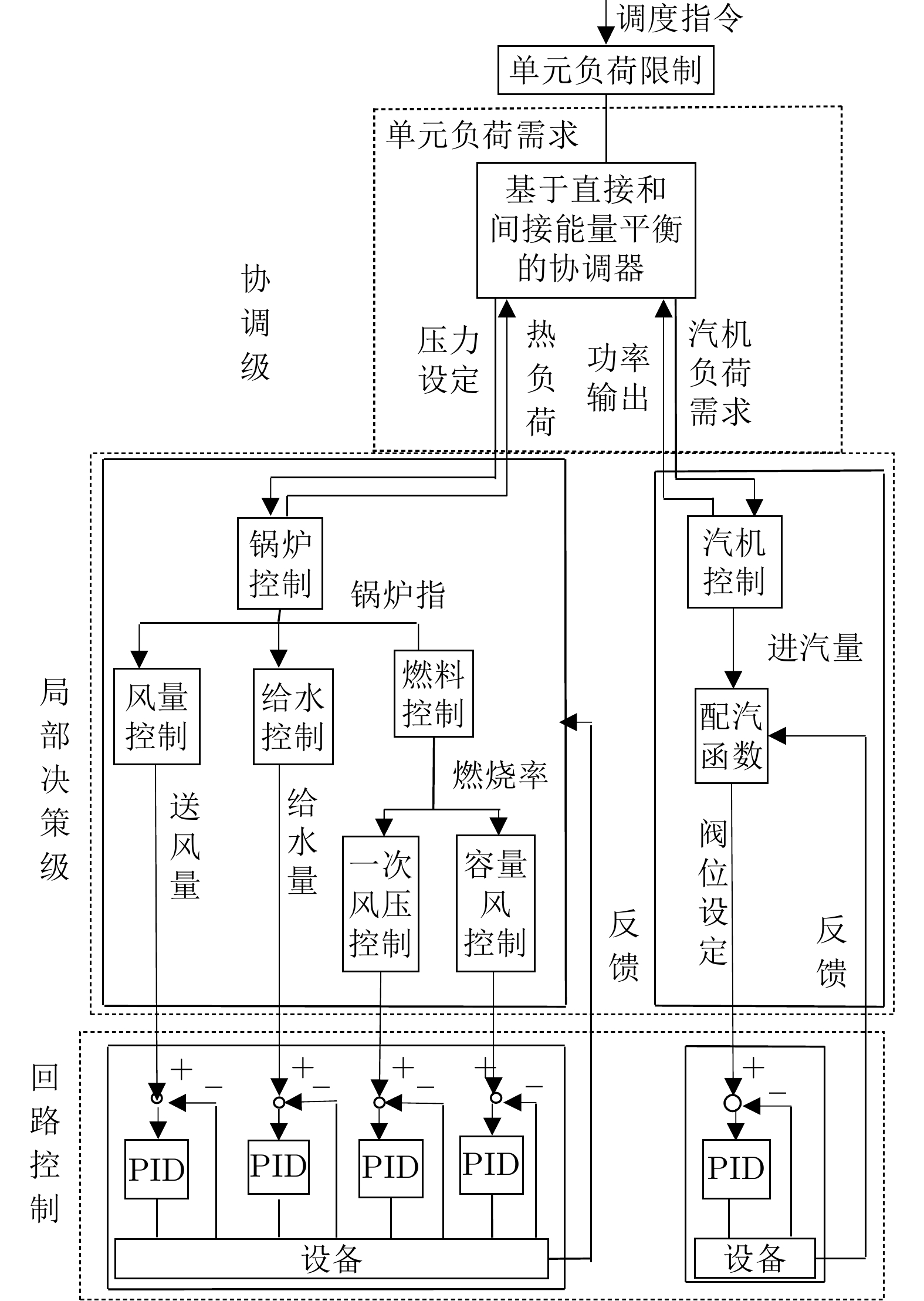
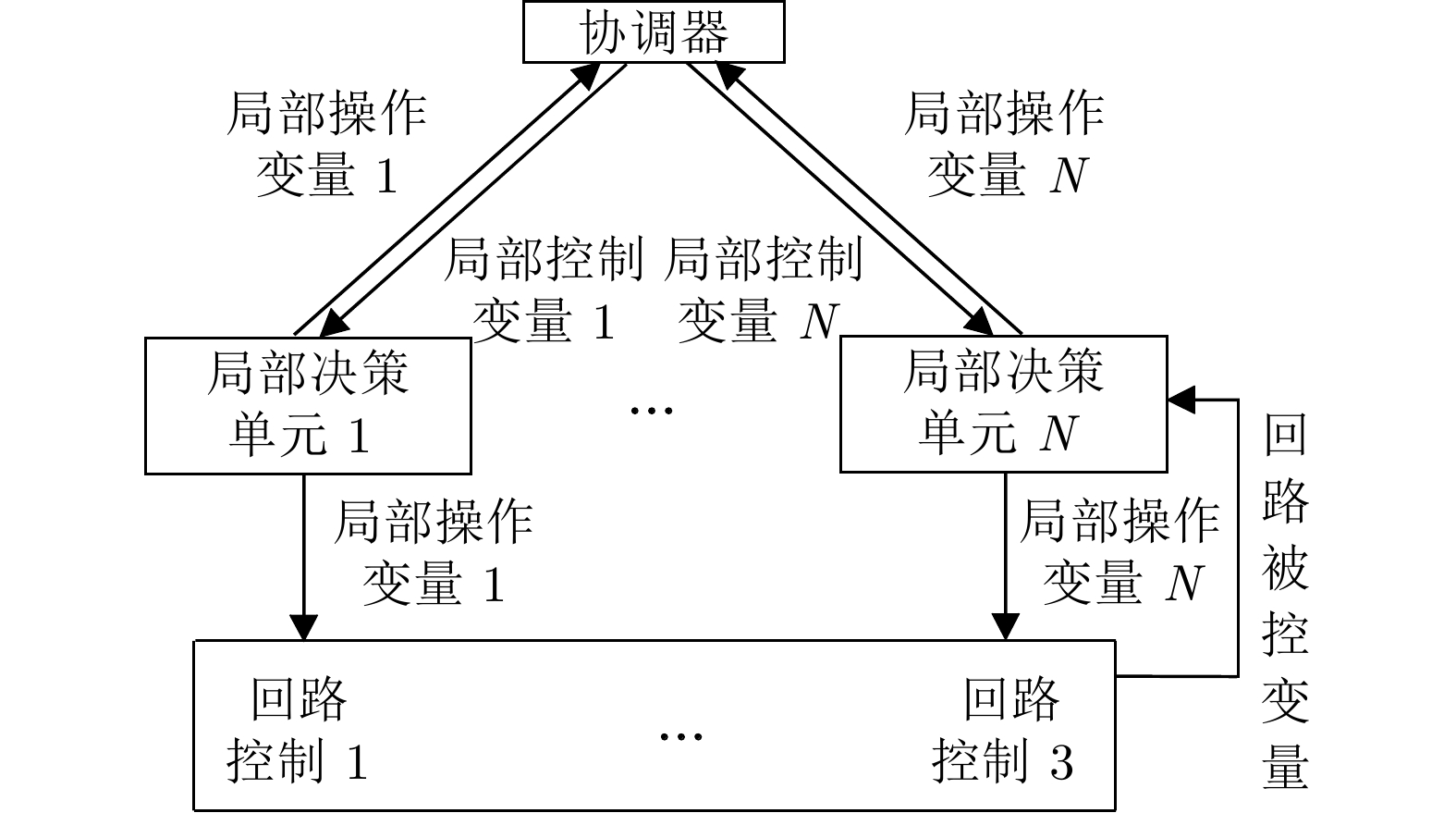
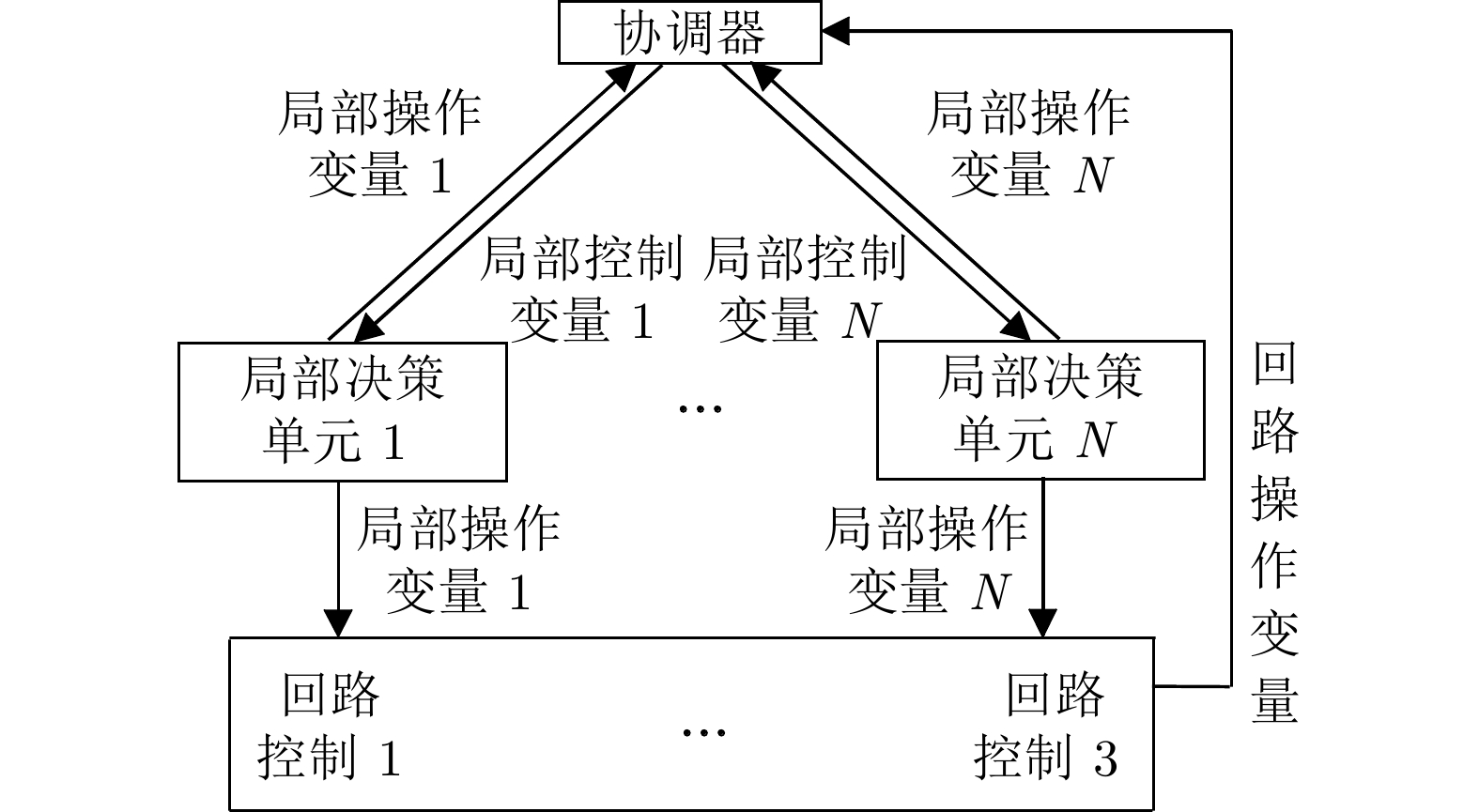
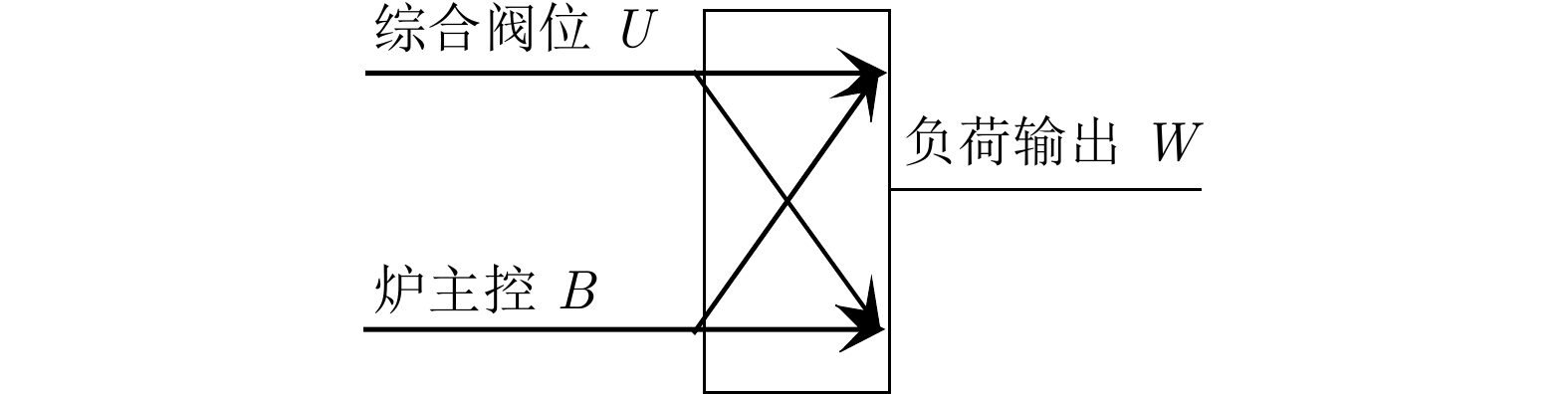
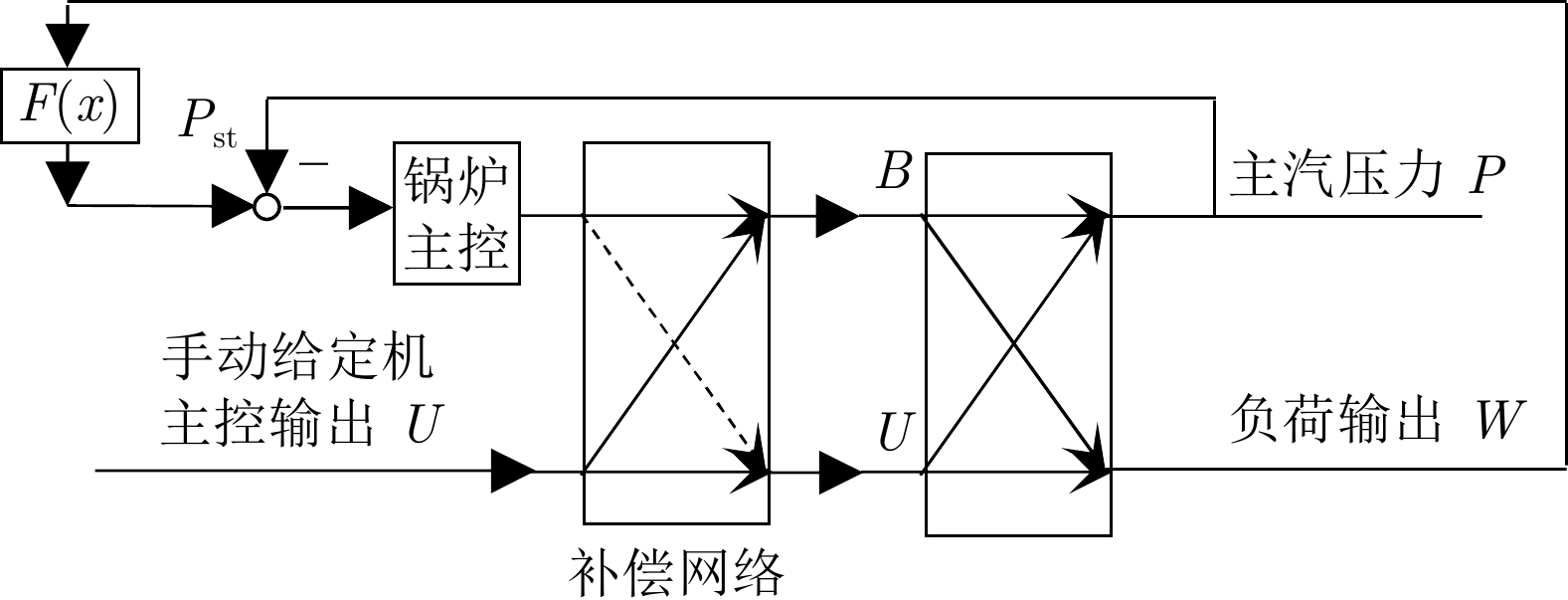
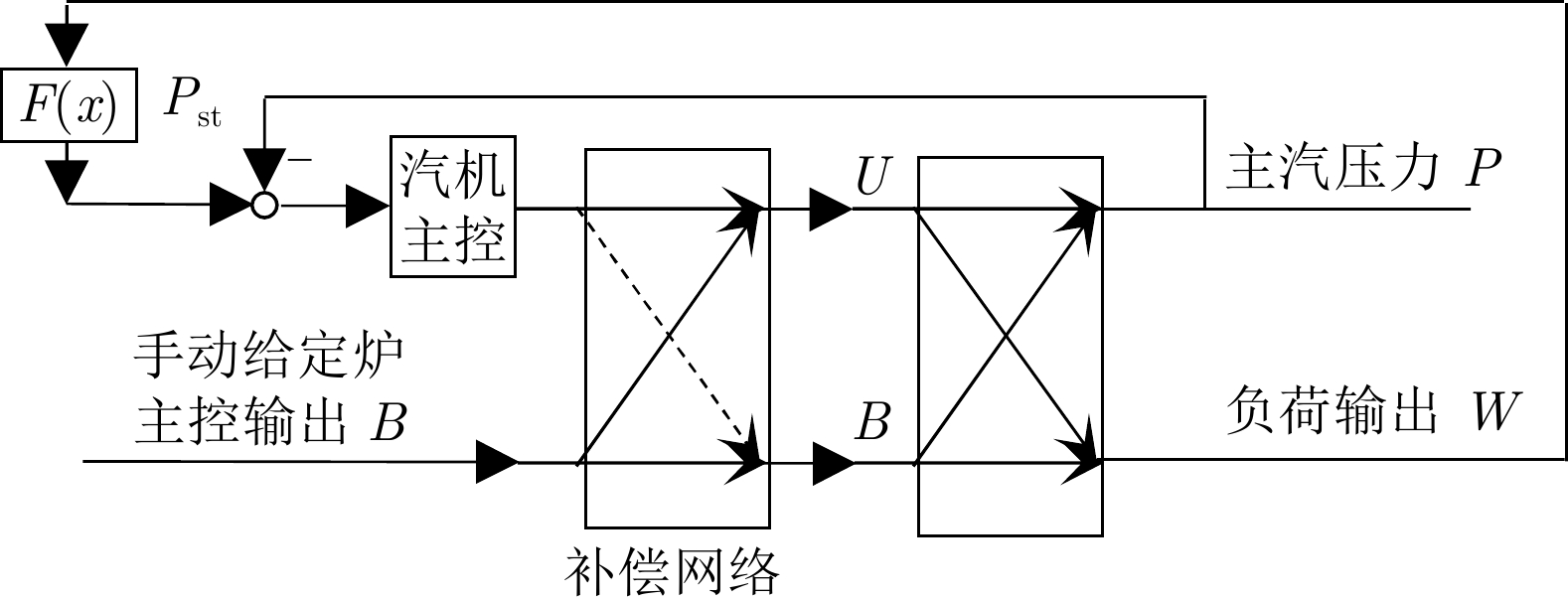
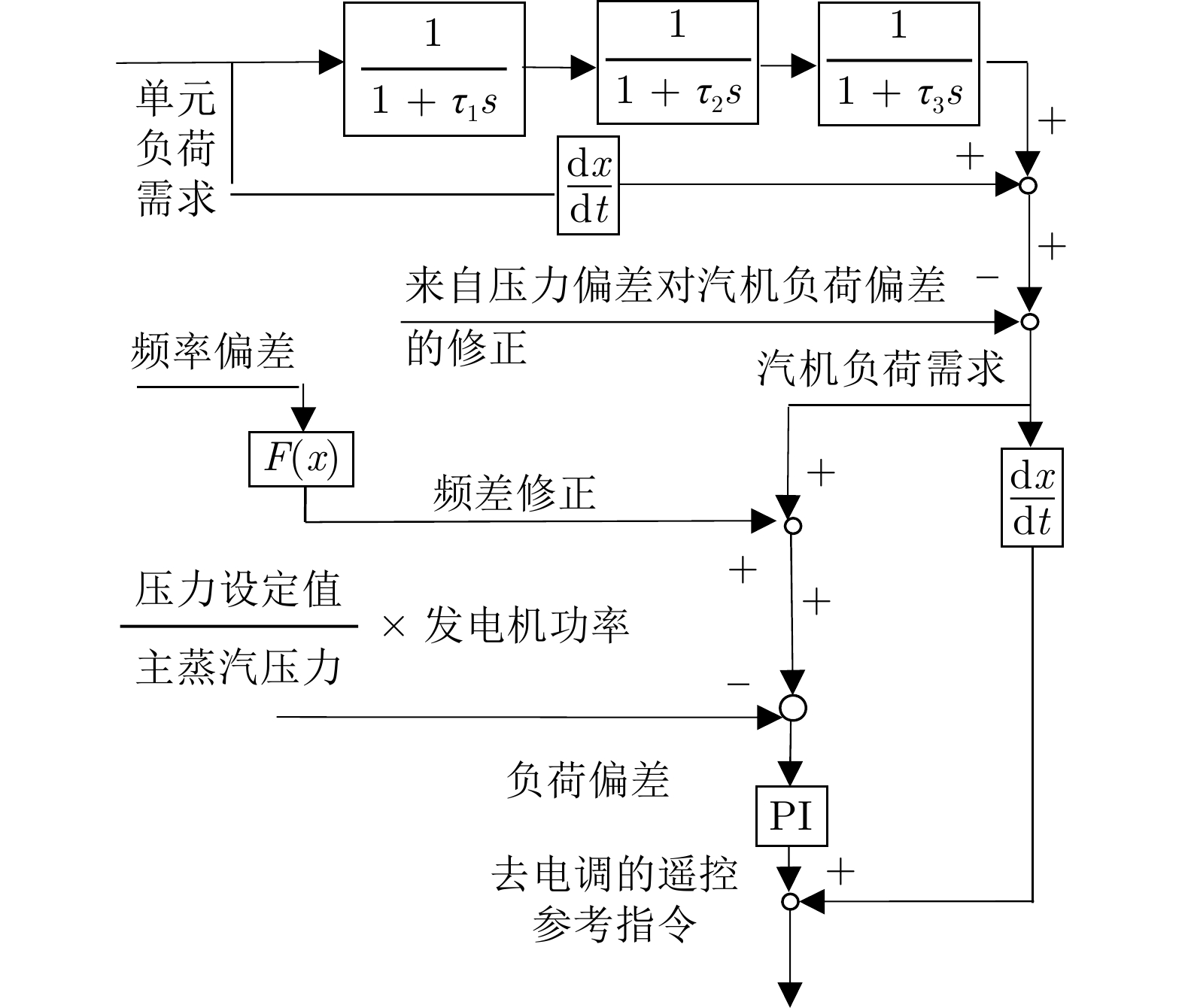
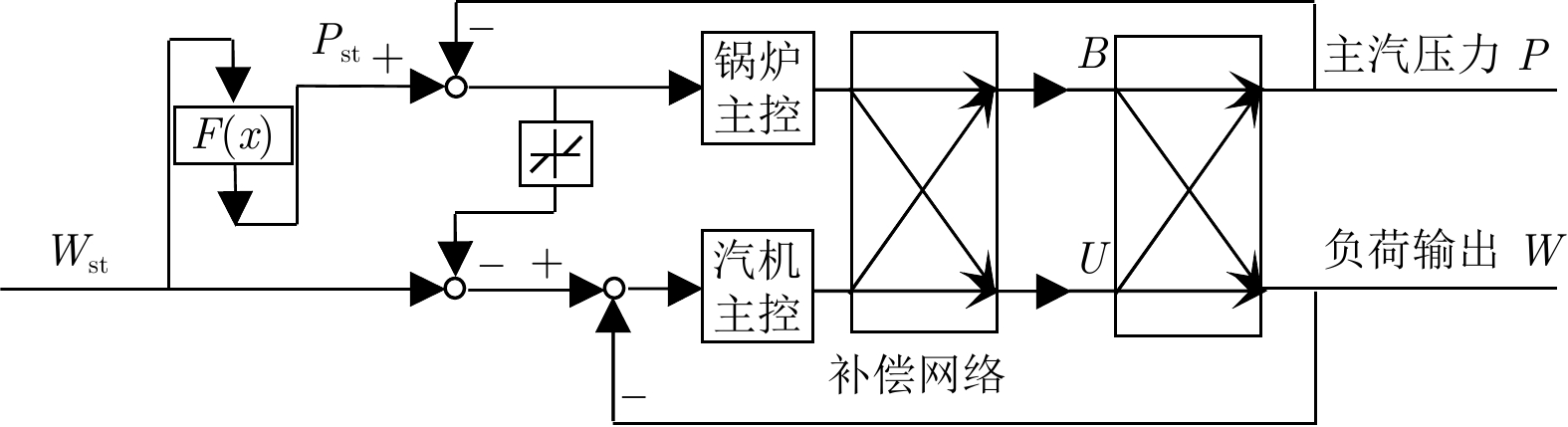
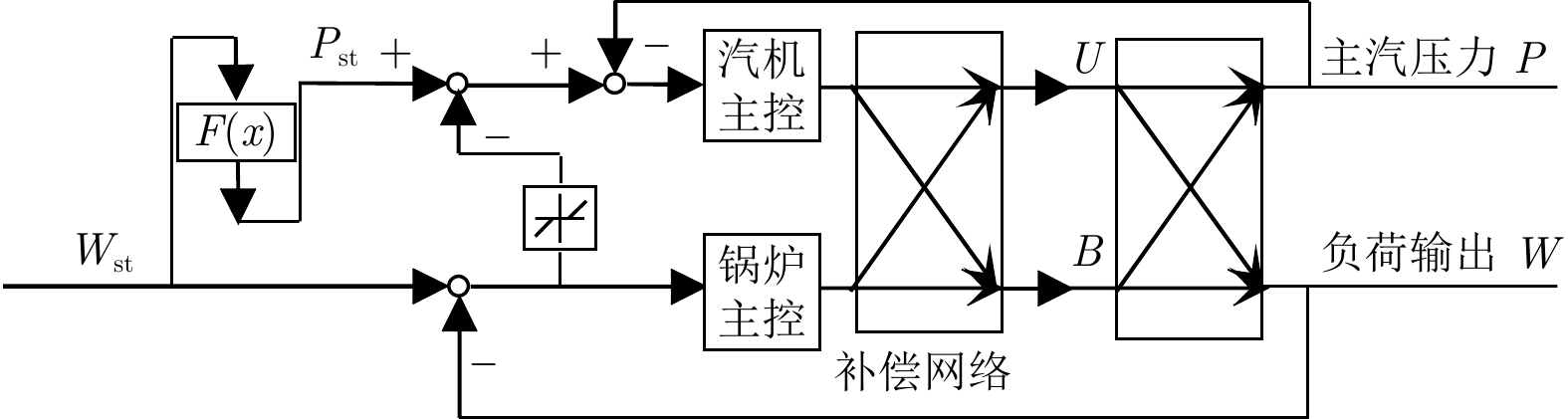
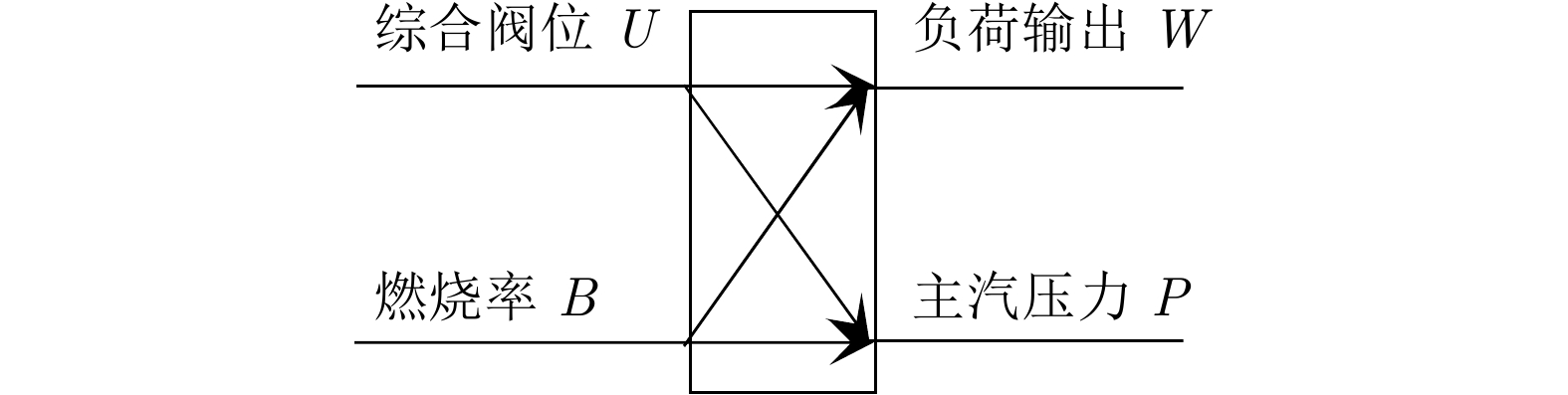
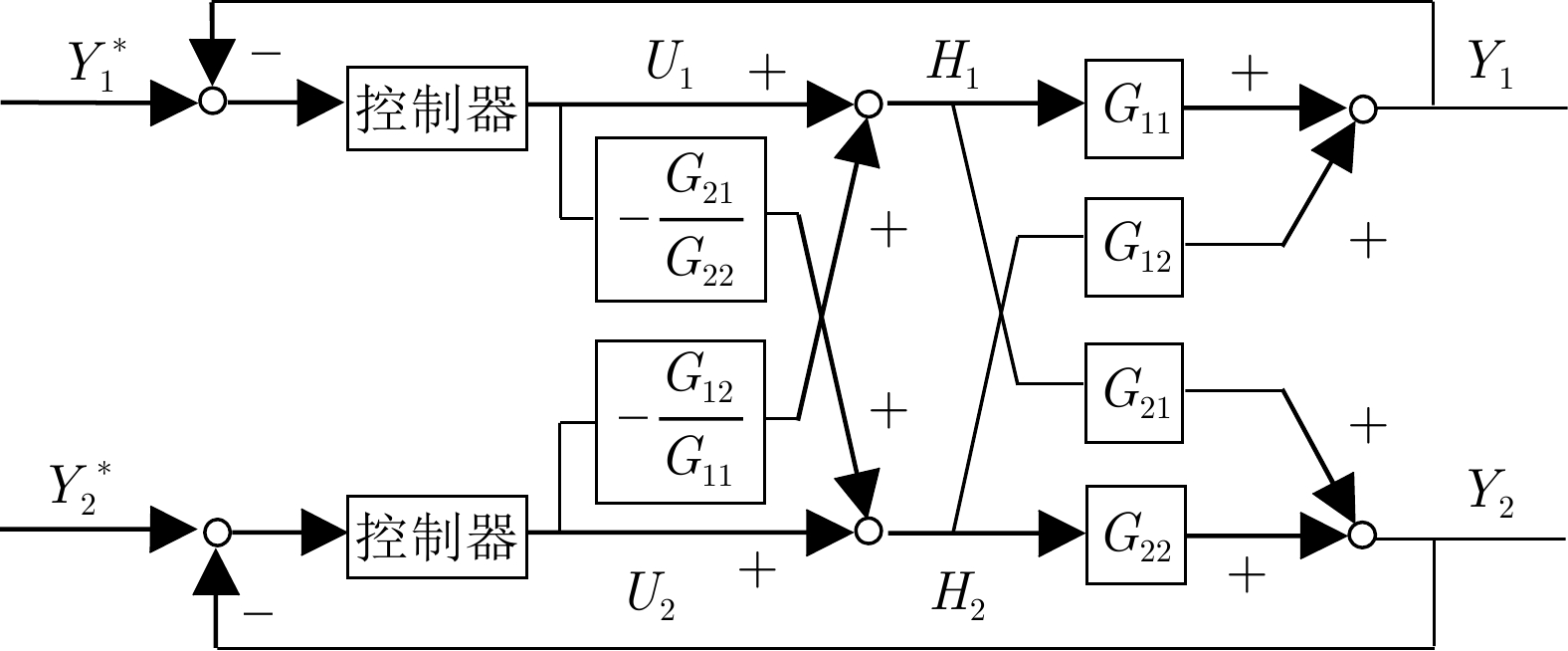
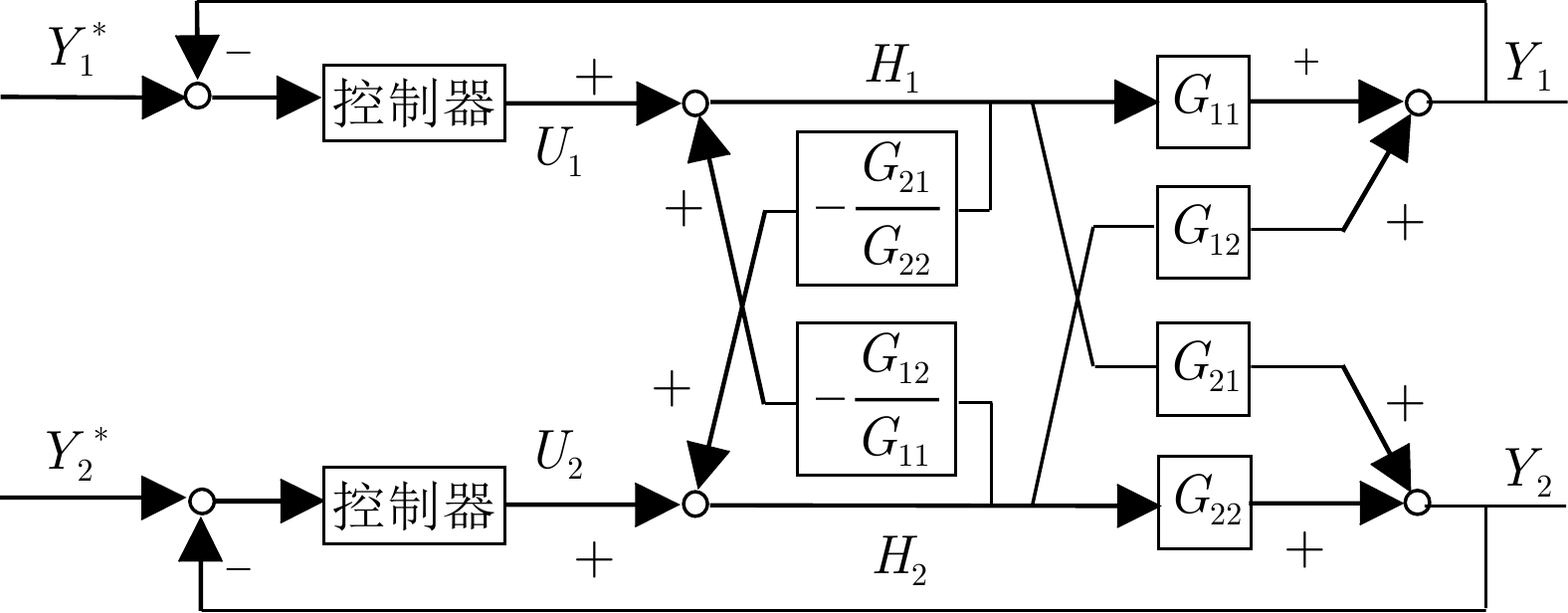
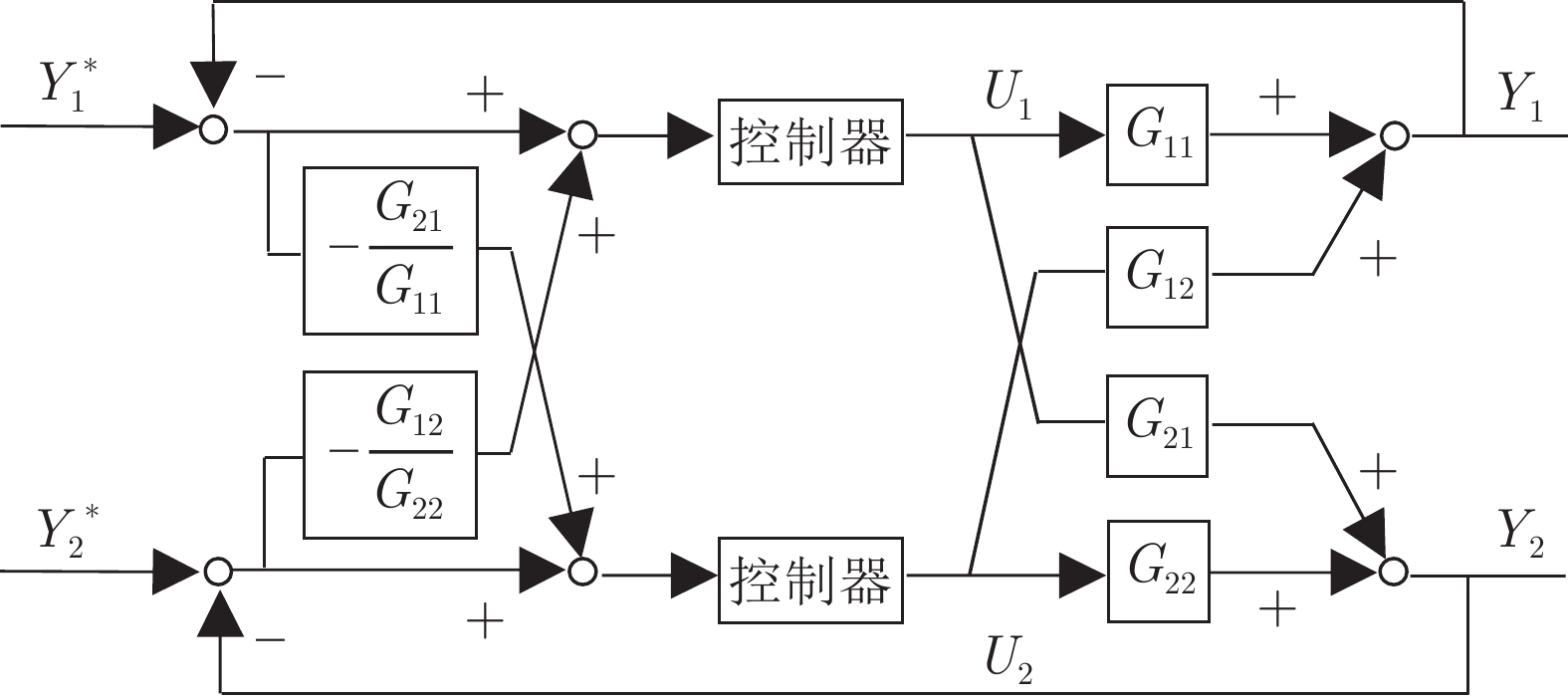
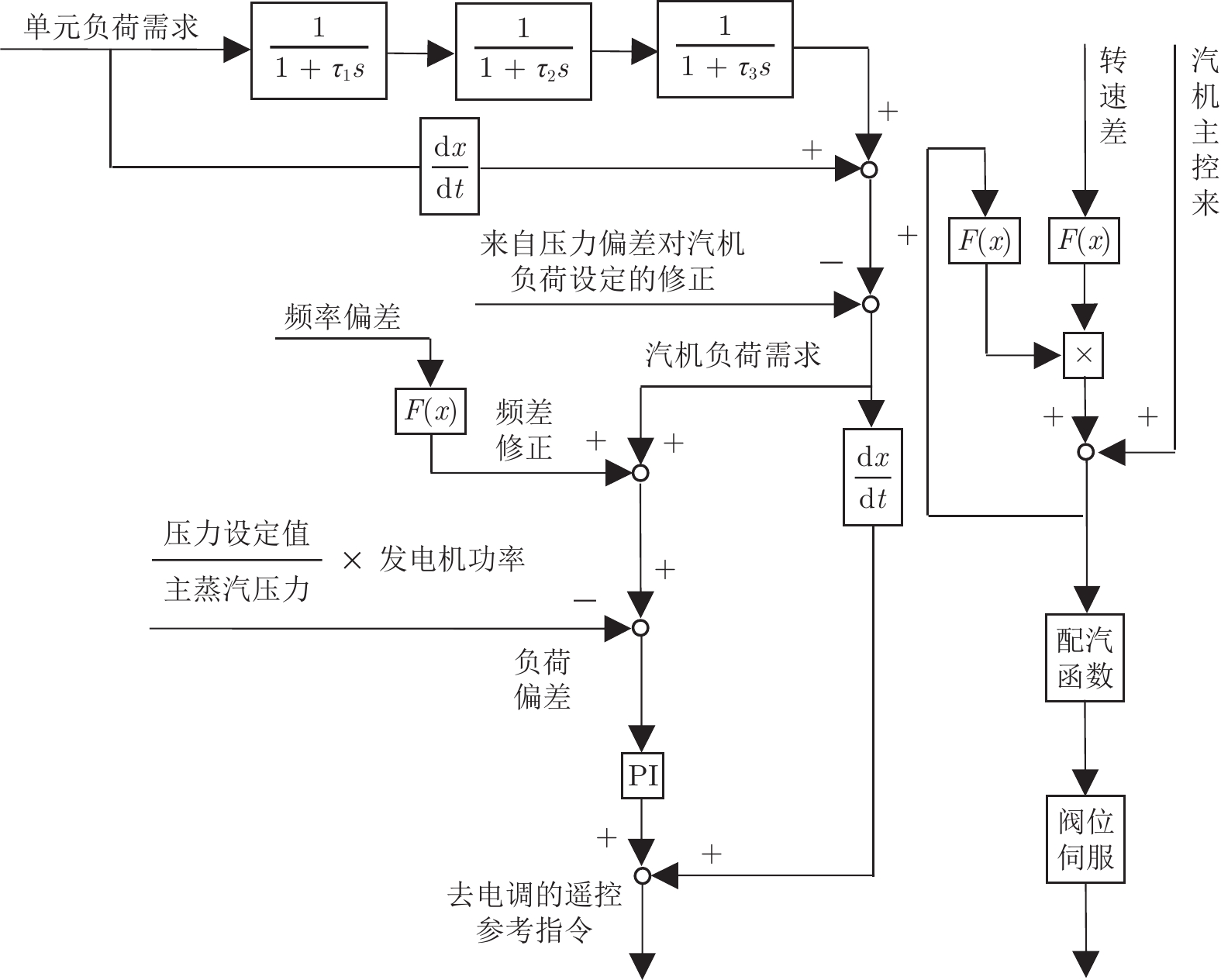
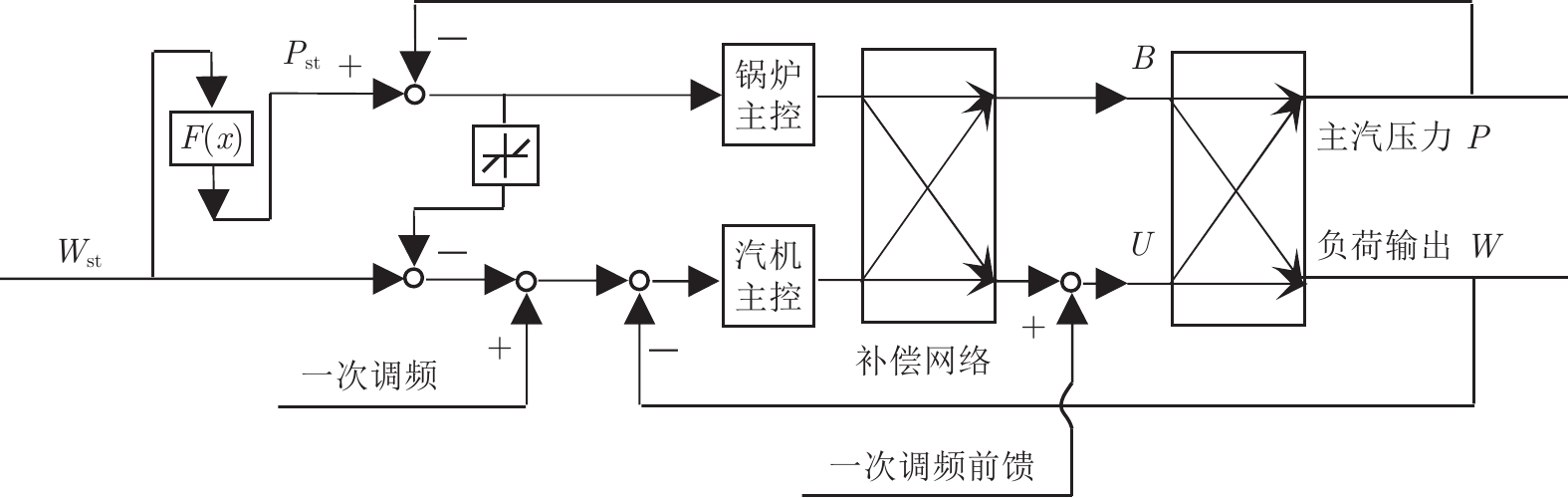
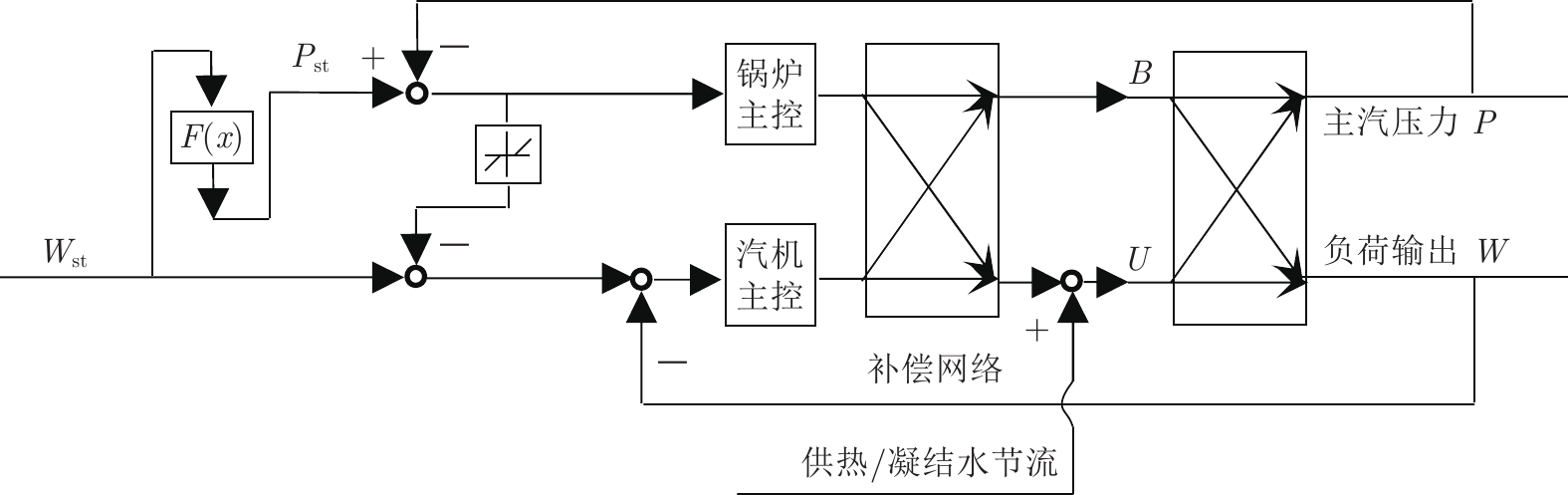
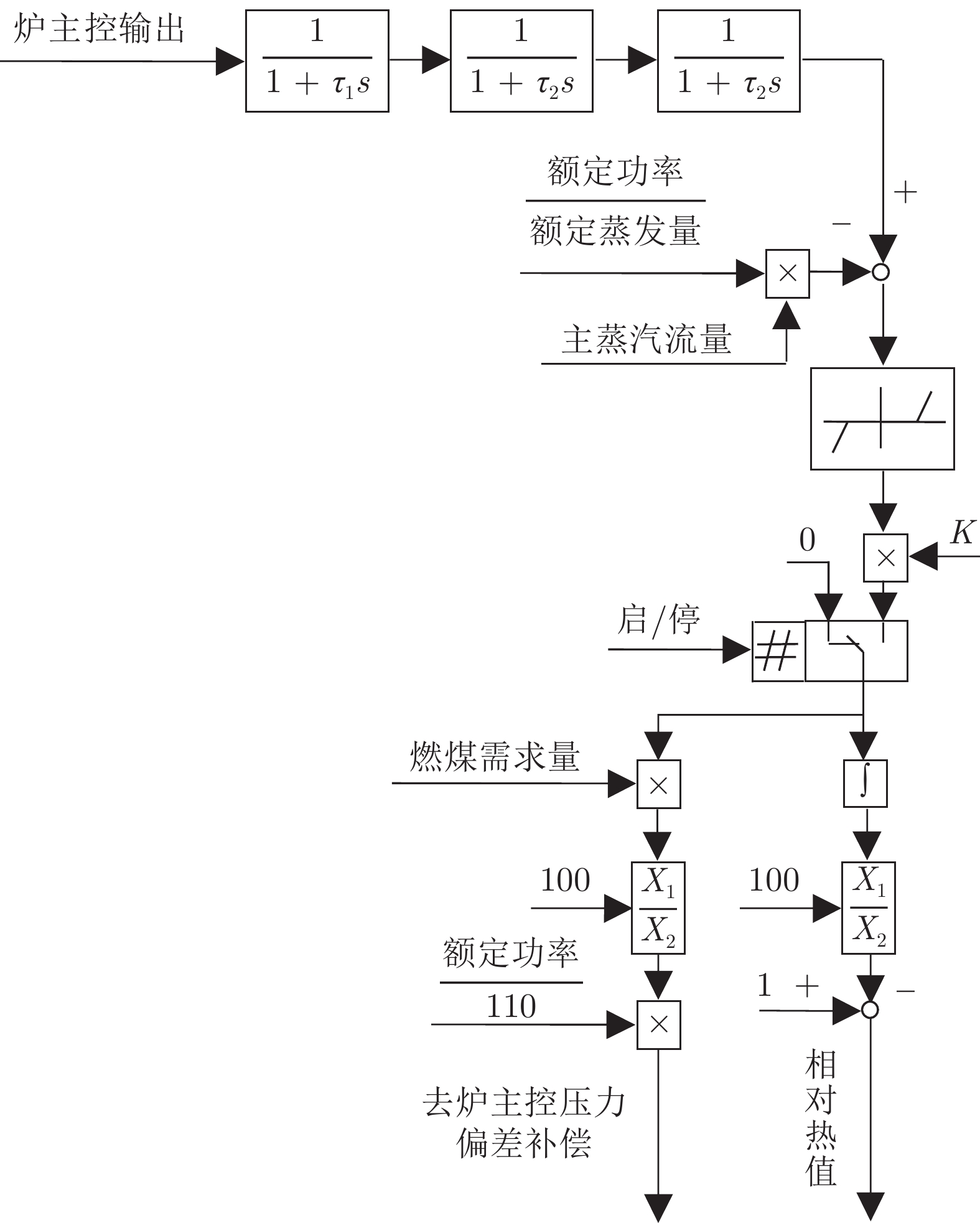
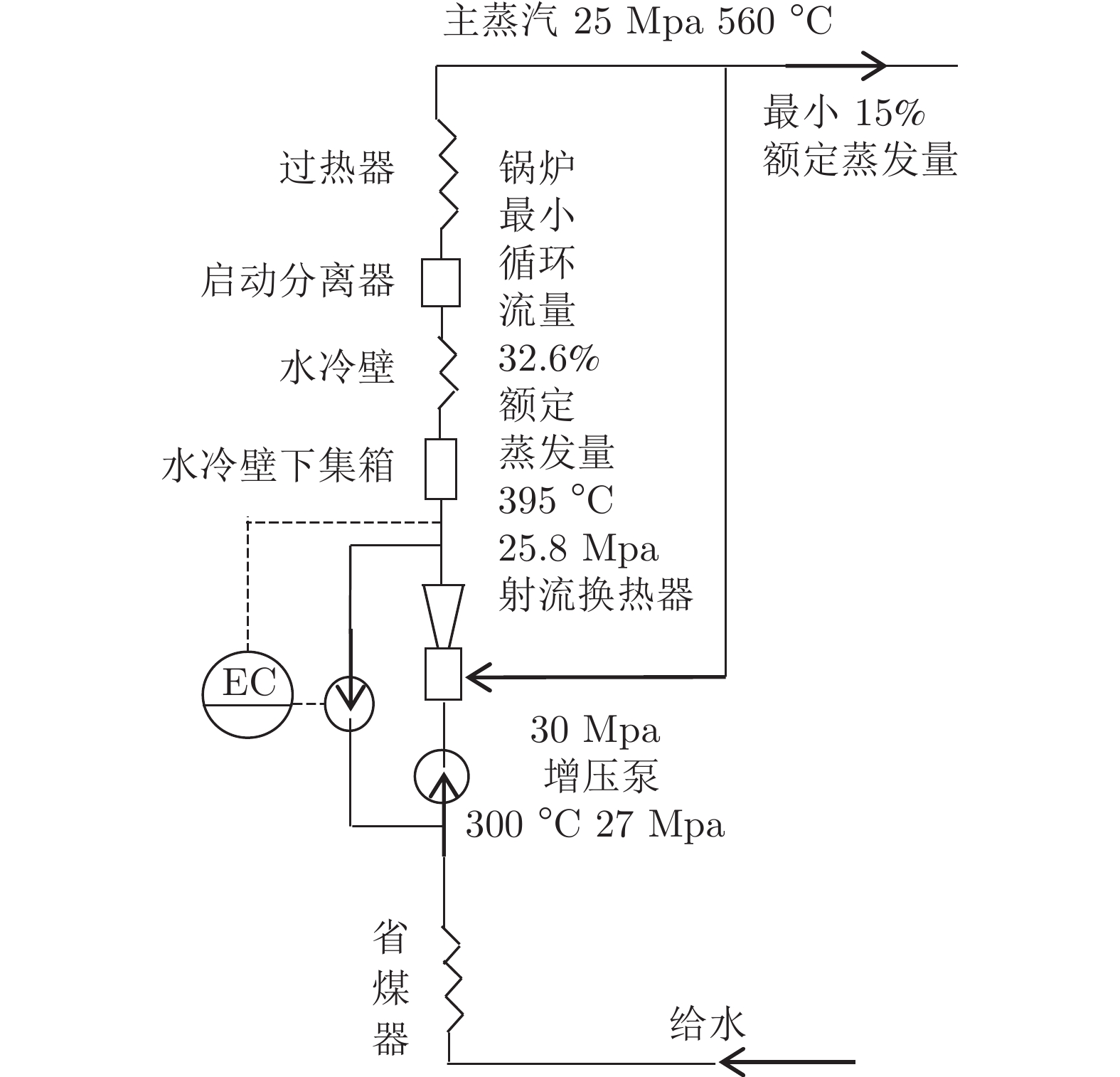
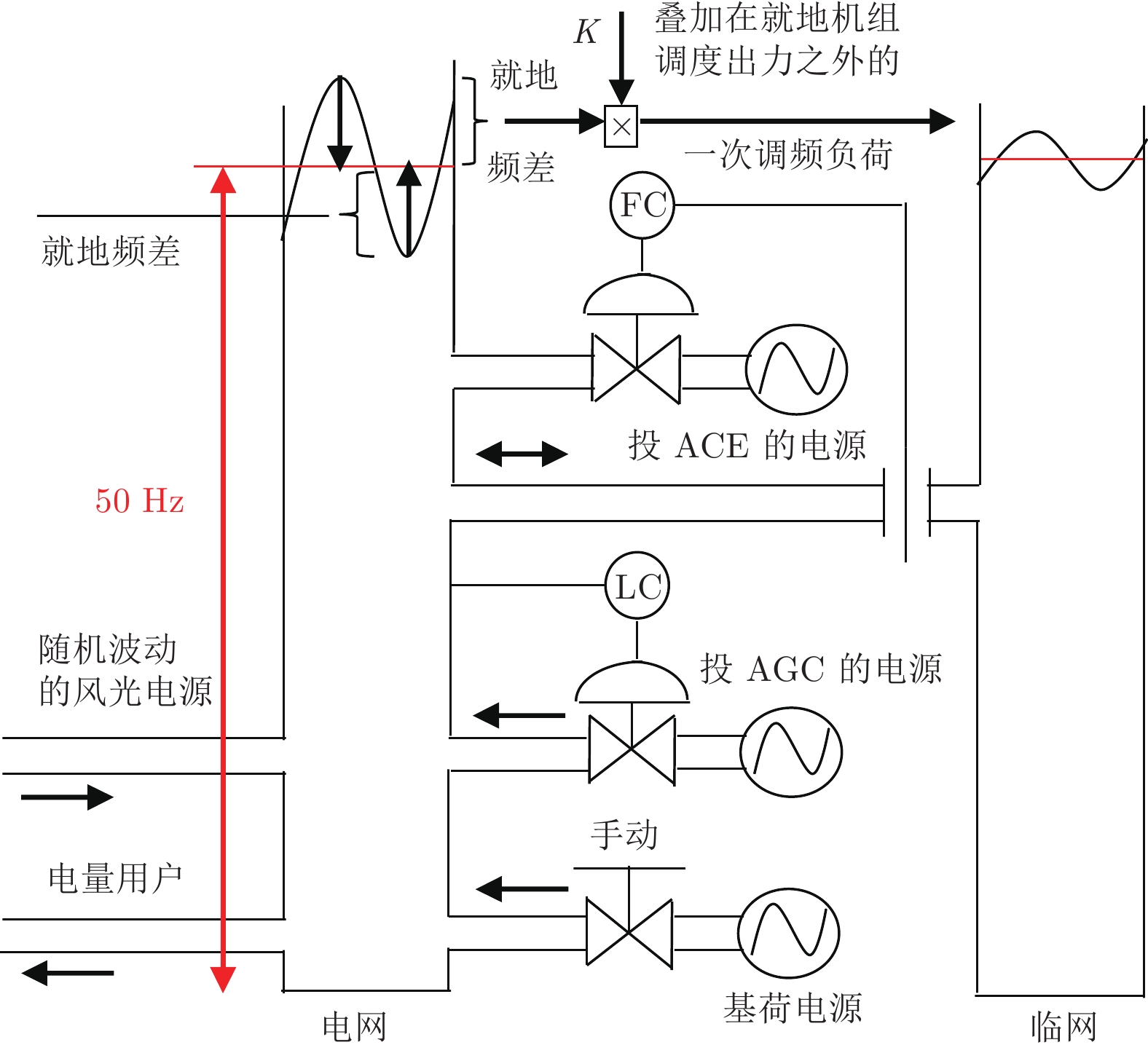
增加可再生能源在电网中的占比, 使能源结构更合理, 是加快能源转型实现低碳可持续发展的有效途径. 电网中占主导地位的火电, 辅助消纳可再生能源的能力, 对提高可再生能源在电网中的占比起到重要作用. 为了提高火电机组辅助可再生能源的消纳能力, 本文根据当前系统控制方案, 分析了影响机组灵活性与调峰深度的因素, 包括机炉协调、局部反馈策略下的锅炉控制、系统稳态工作点的规划等. 基于补偿方案的协调策略限制了机组对具有随机性和间歇性的可再生能源的补偿能力; 局部反馈策略下的锅炉控制只是实现了等效热效应的反馈; 非额定工况下的稳态工作点关系到辅助可再生能源消纳的能耗和排放指标. 根据以上分析分别给出了进一步的研究内容.
增加可再生能源在电网中的占比, 使能源结构更合理, 是加快能源转型实现低碳可持续发展的有效途径. 电网中占主导地位的火电, 辅助消纳可再生能源的能力, 对提高可再生能源在电网中的占比起到重要作用. 为了提高火电机组辅助可再生能源的消纳能力, 本文根据当前系统控制方案, 分析了影响机组灵活性与调峰深度的因素, 包括机炉协调、局部反馈策略下的锅炉控制、系统稳态工作点的规划等. 基于补偿方案的协调策略限制了机组对具有随机性和间歇性的可再生能源的补偿能力; 局部反馈策略下的锅炉控制只是实现了等效热效应的反馈; 非额定工况下的稳态工作点关系到辅助可再生能源消纳的能耗和排放指标. 根据以上分析分别给出了进一步的研究内容.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210979
摘要:
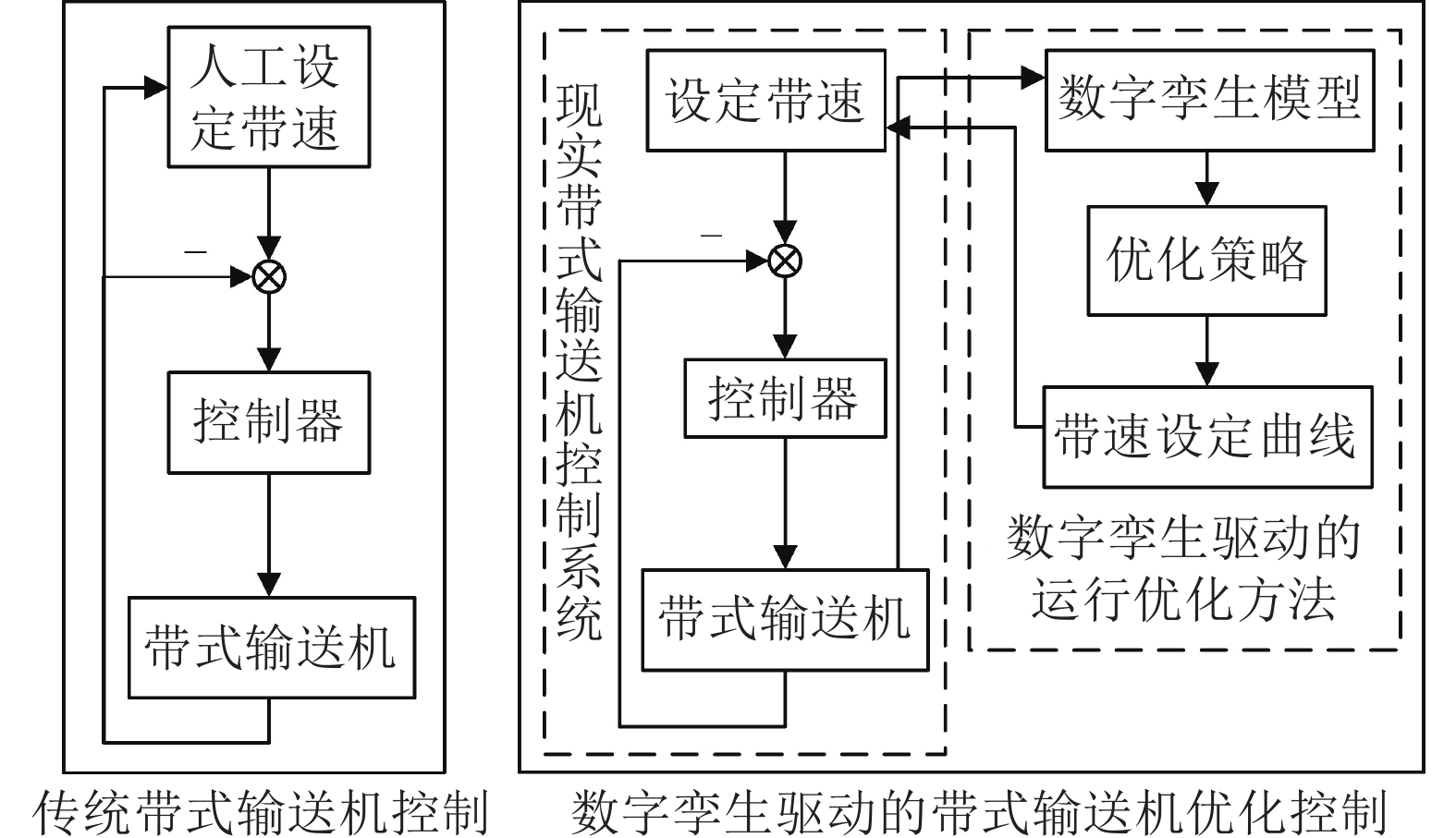
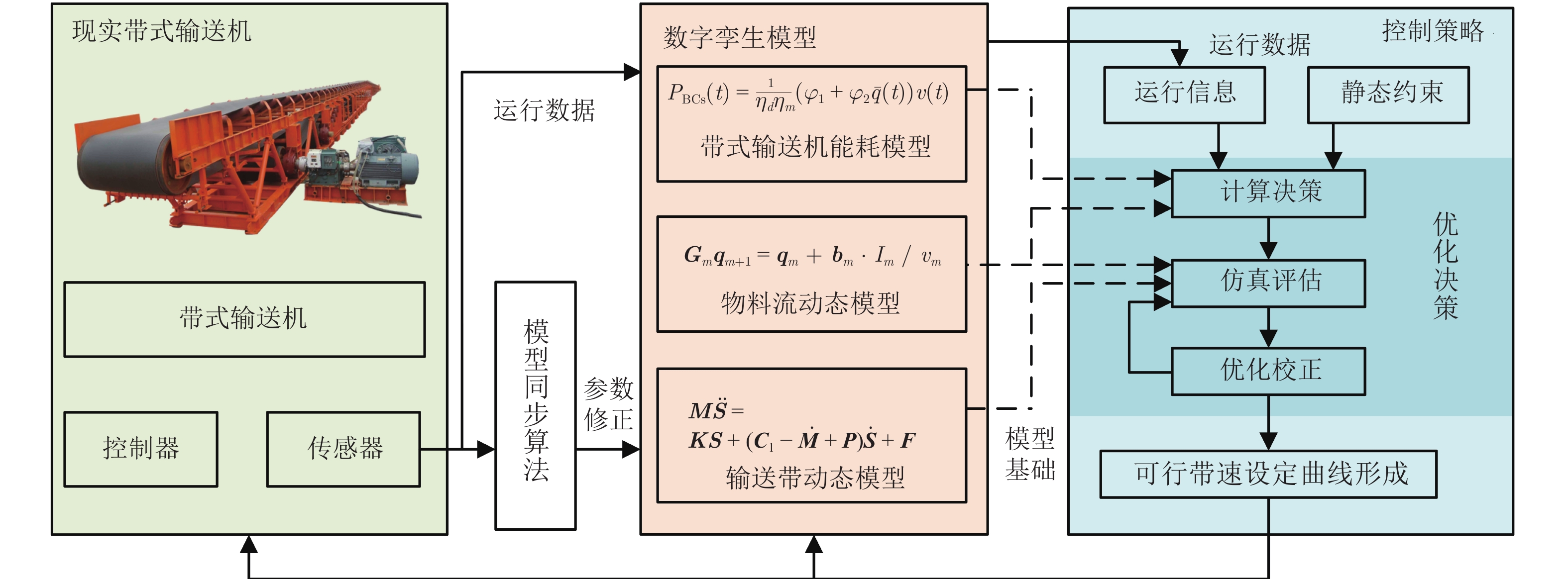
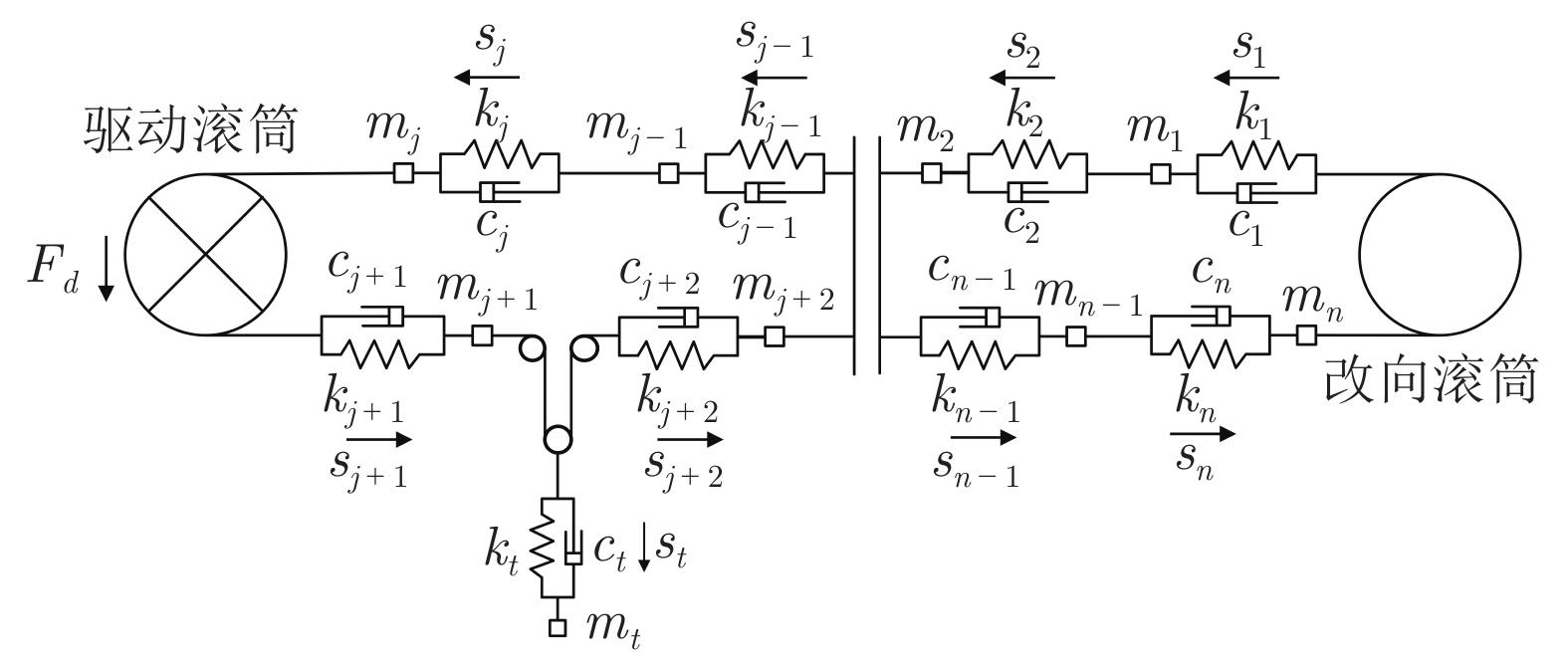
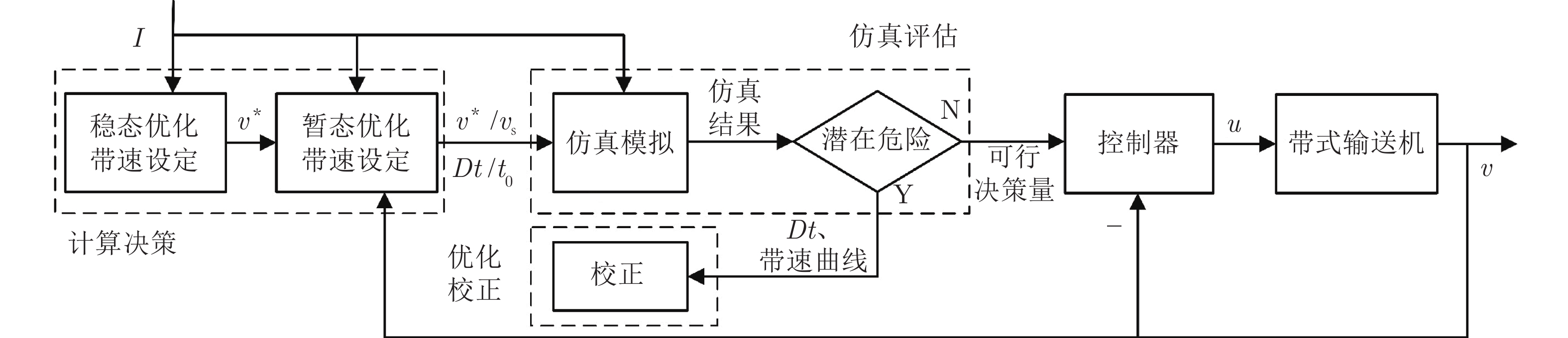
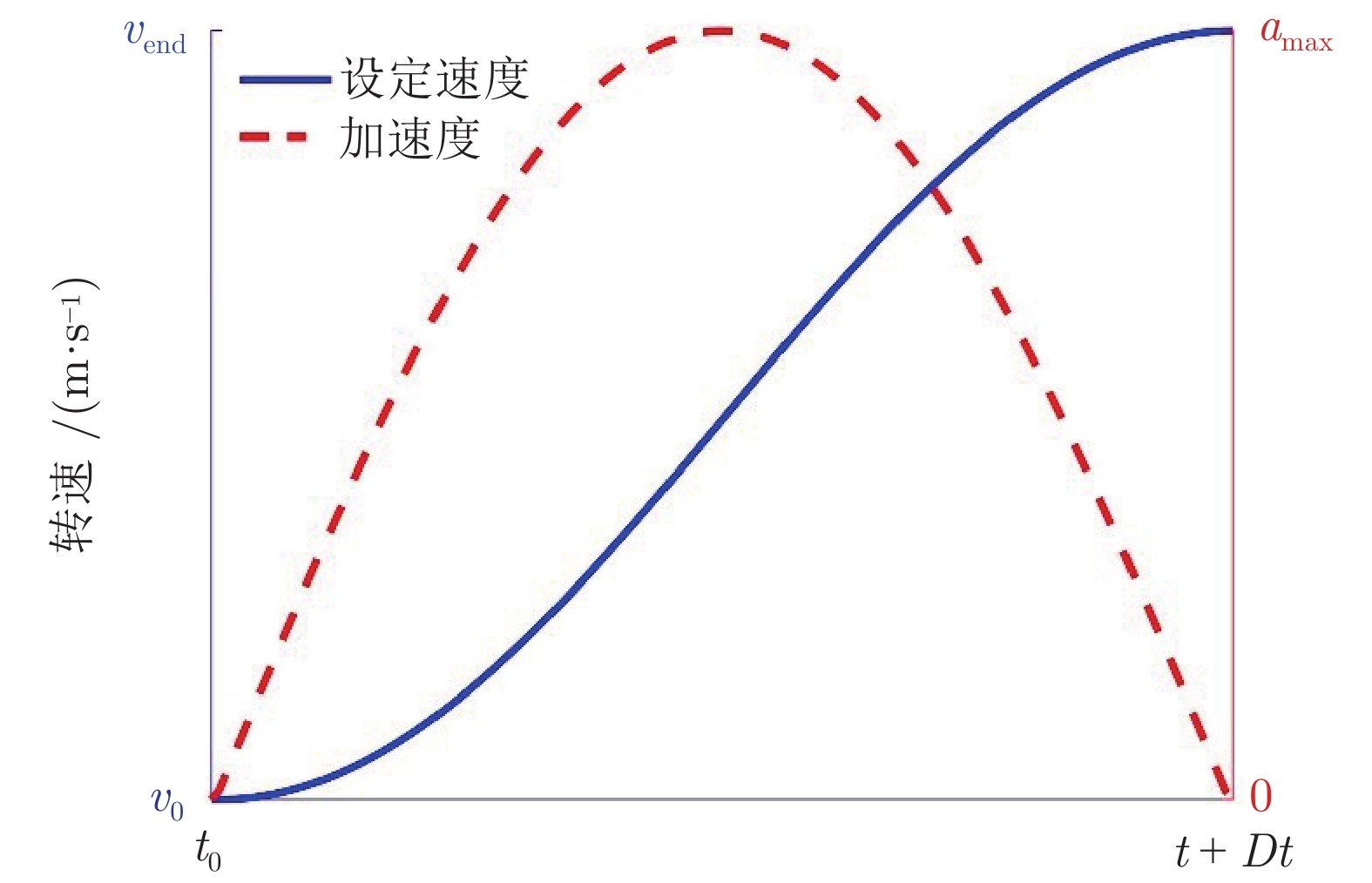
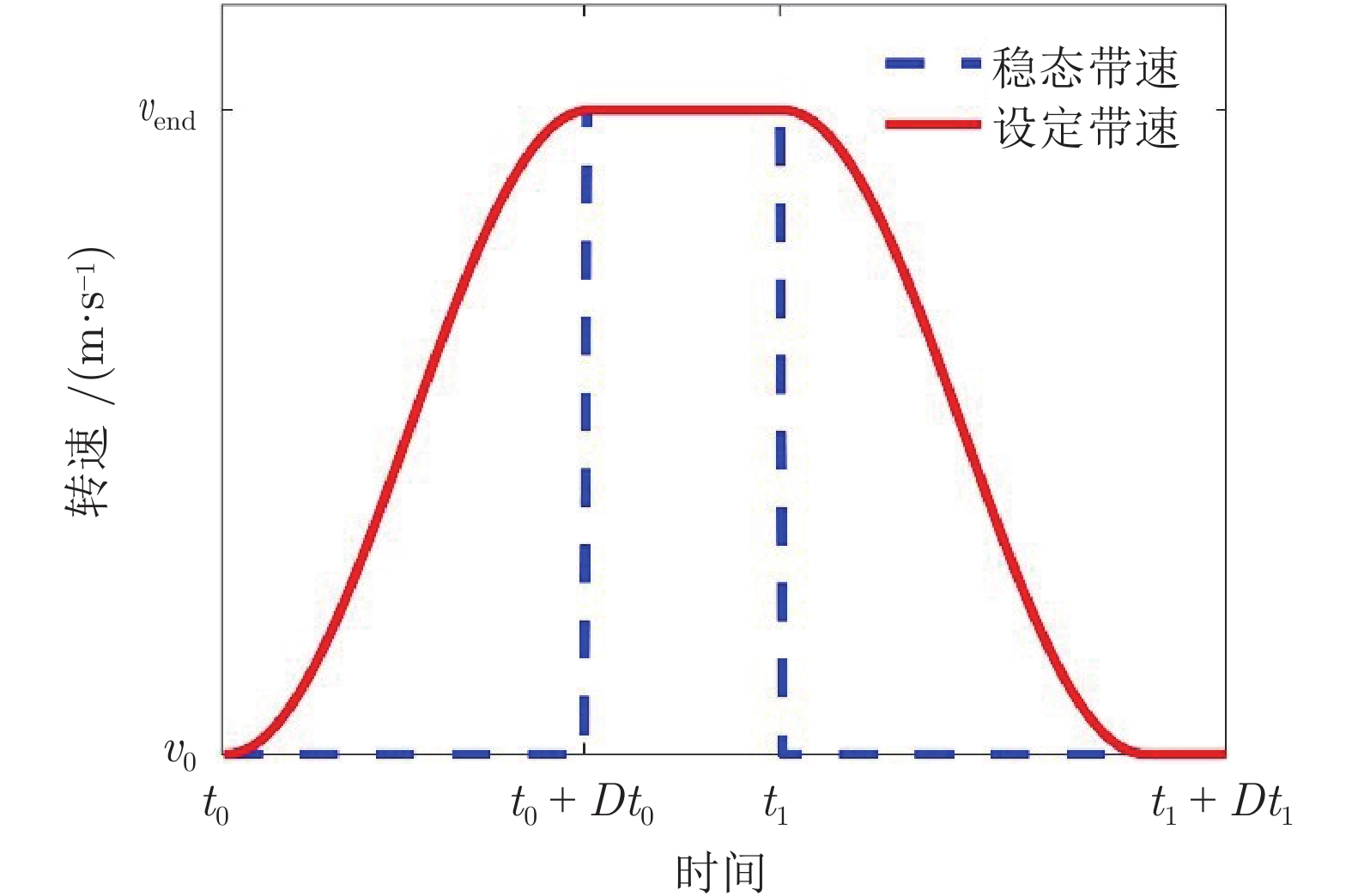
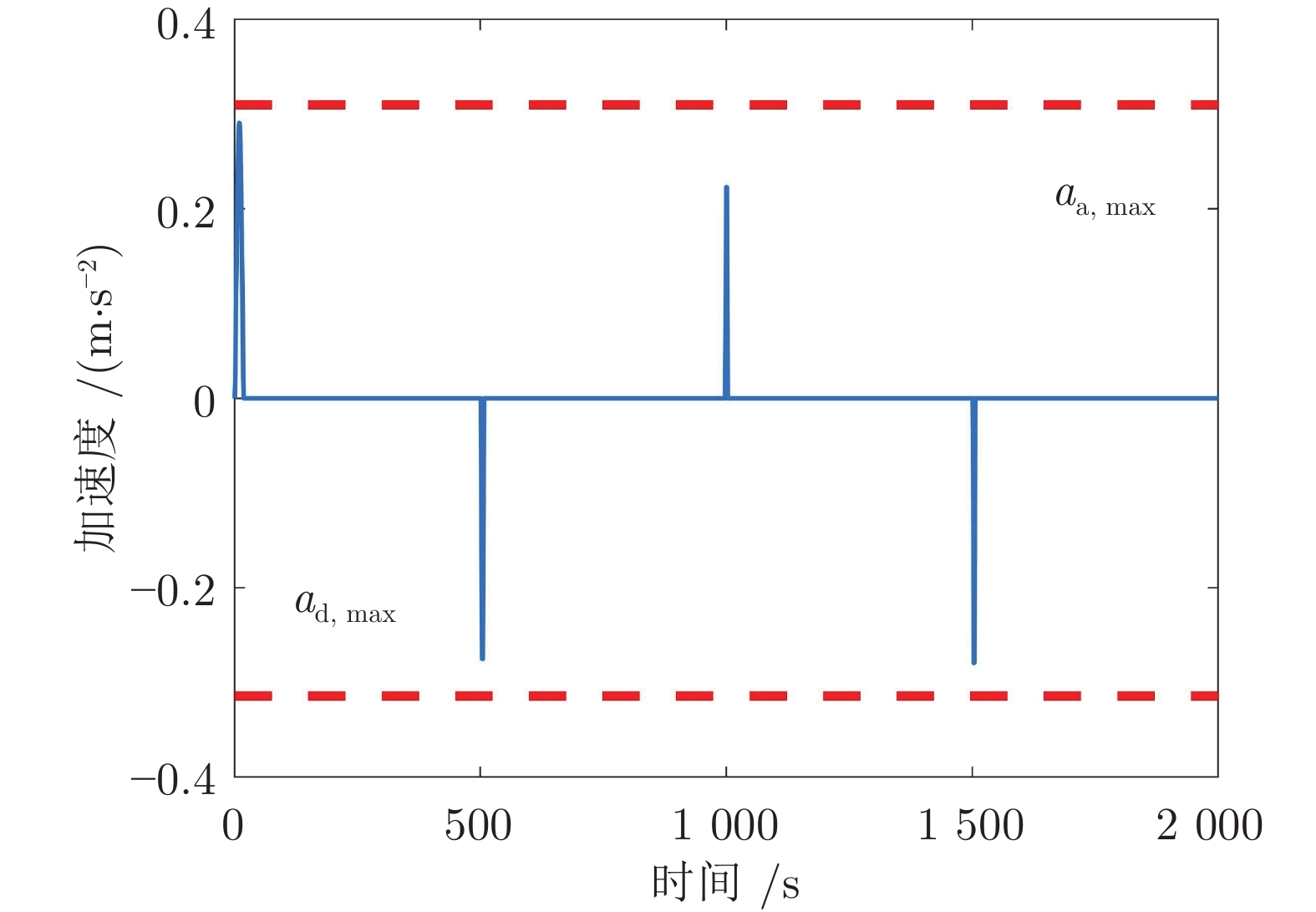
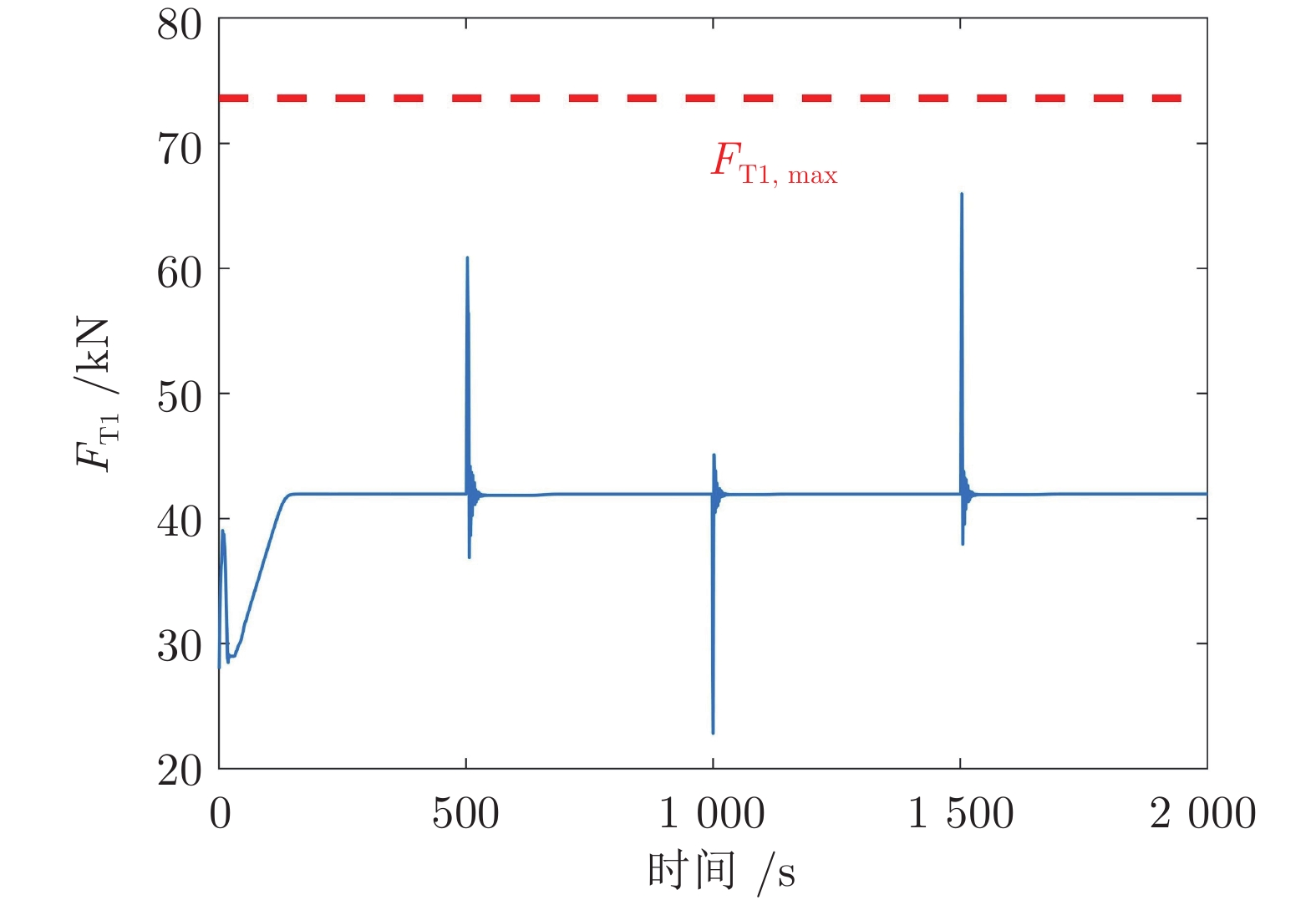
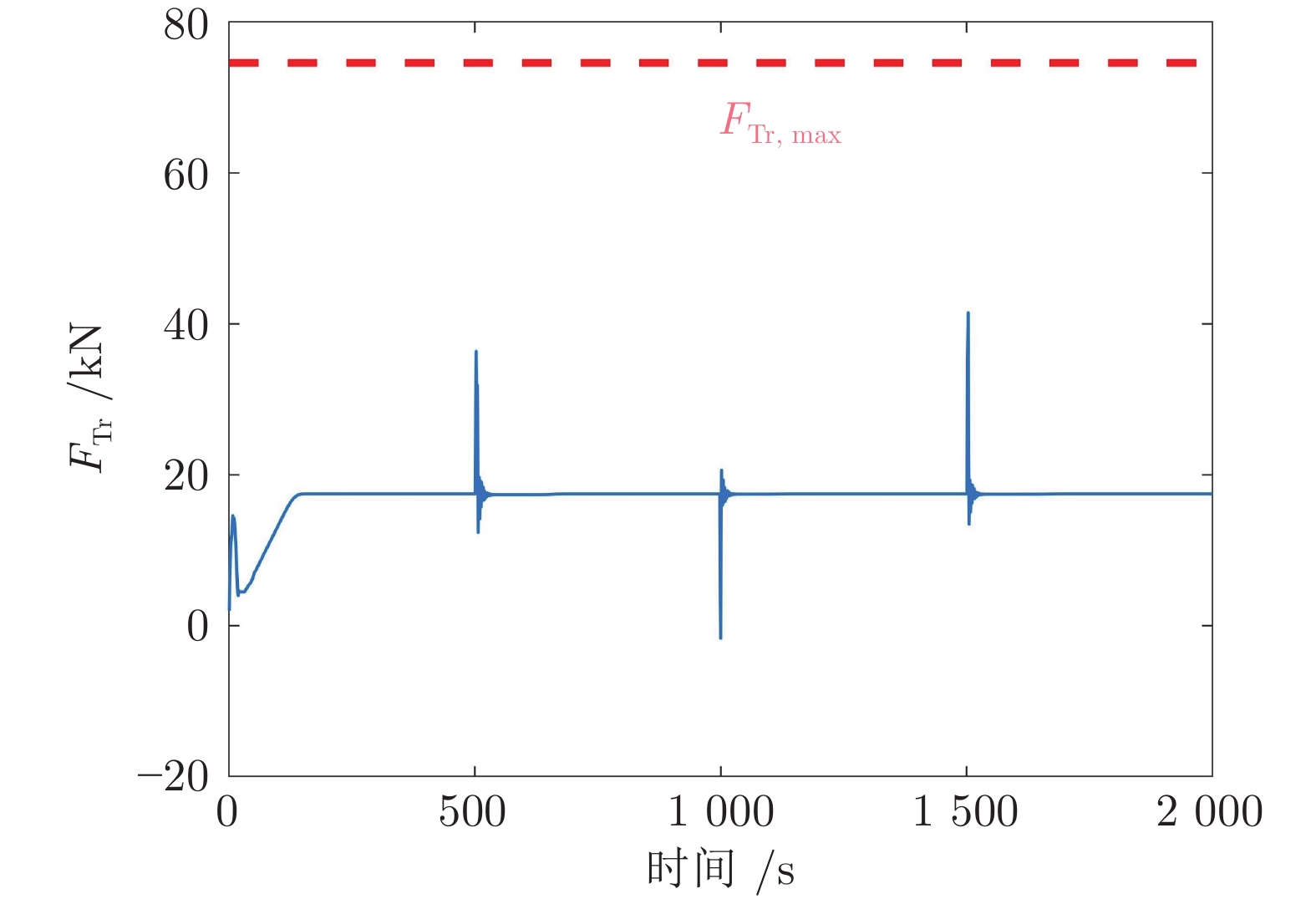
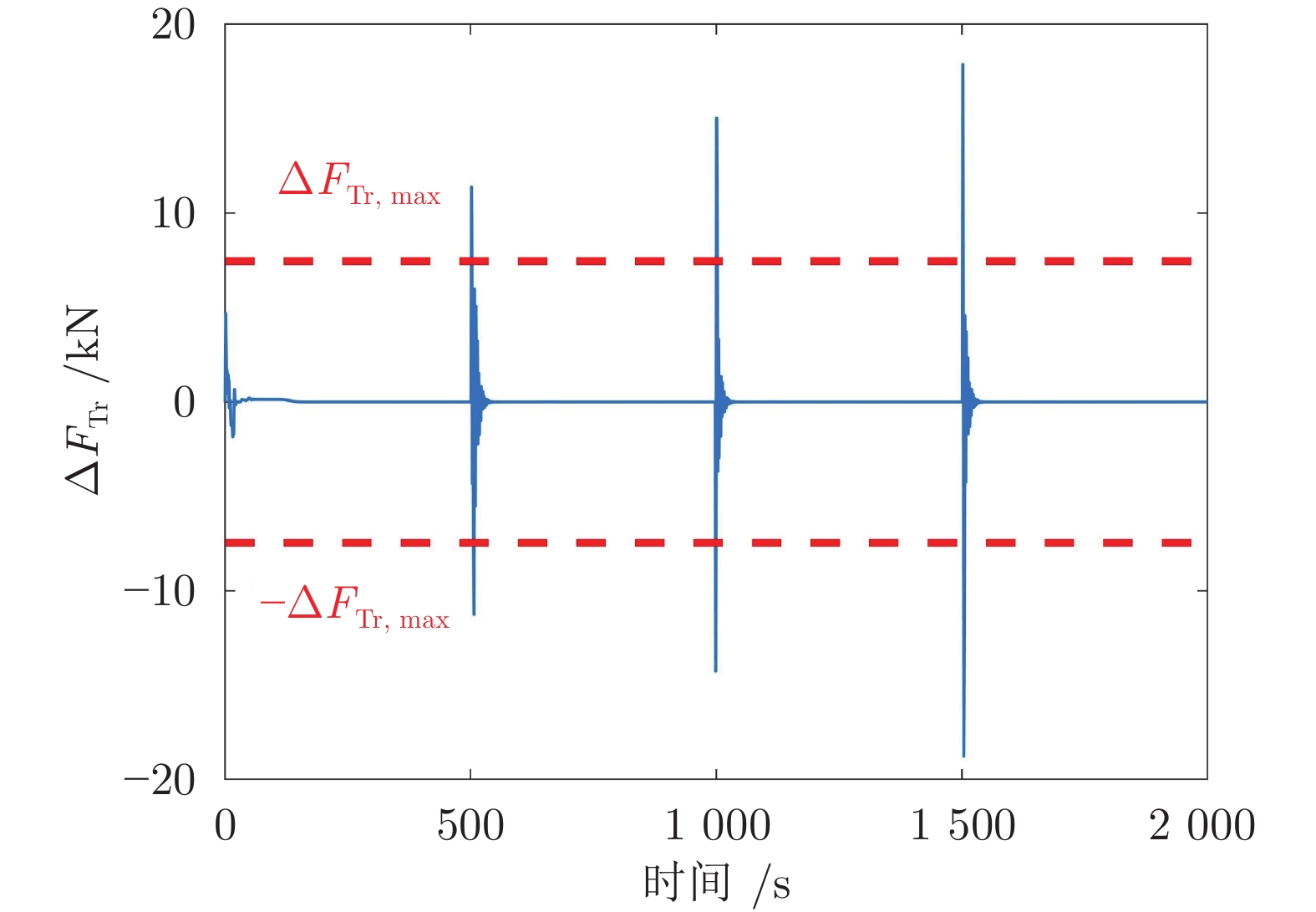
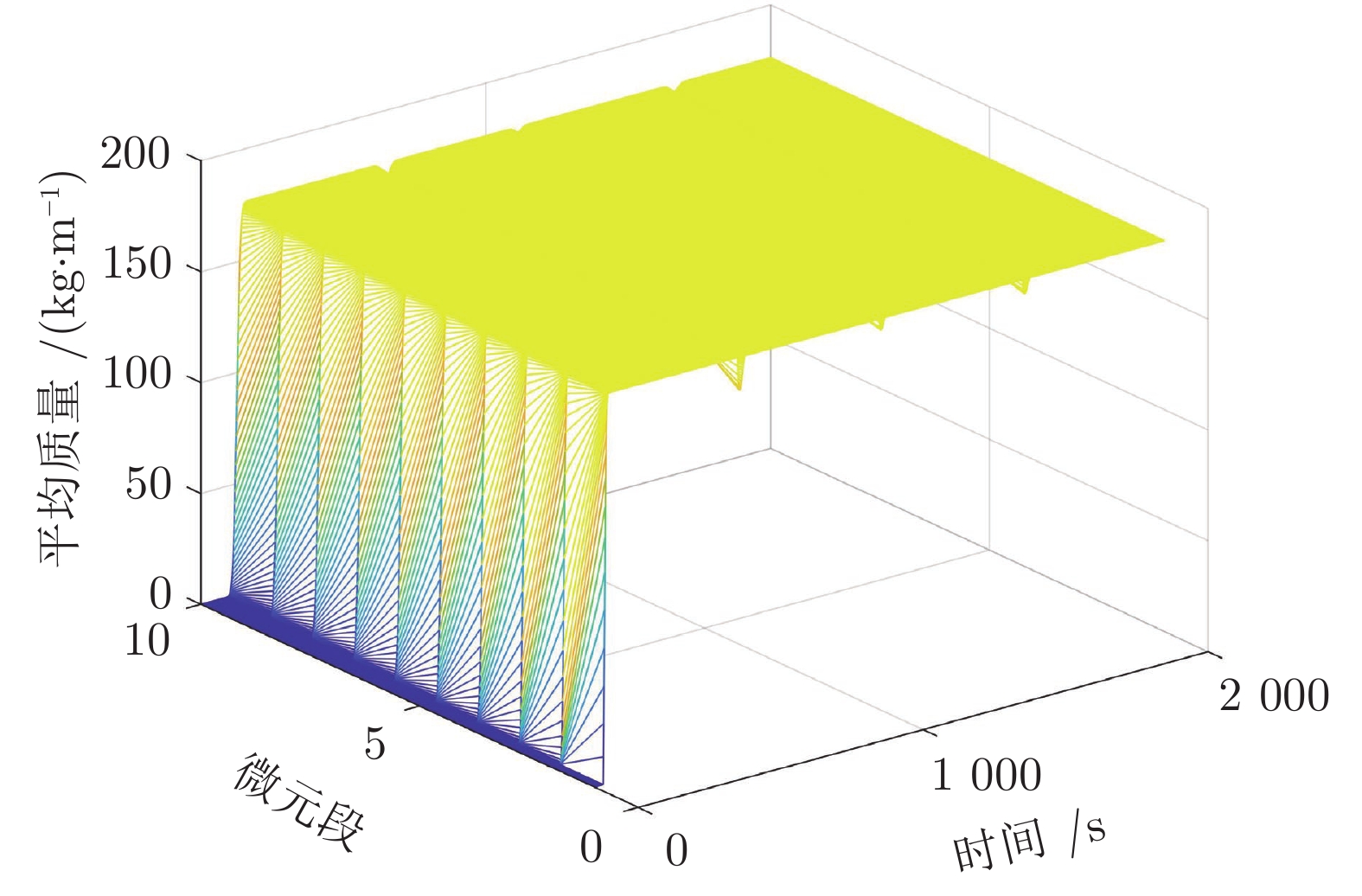
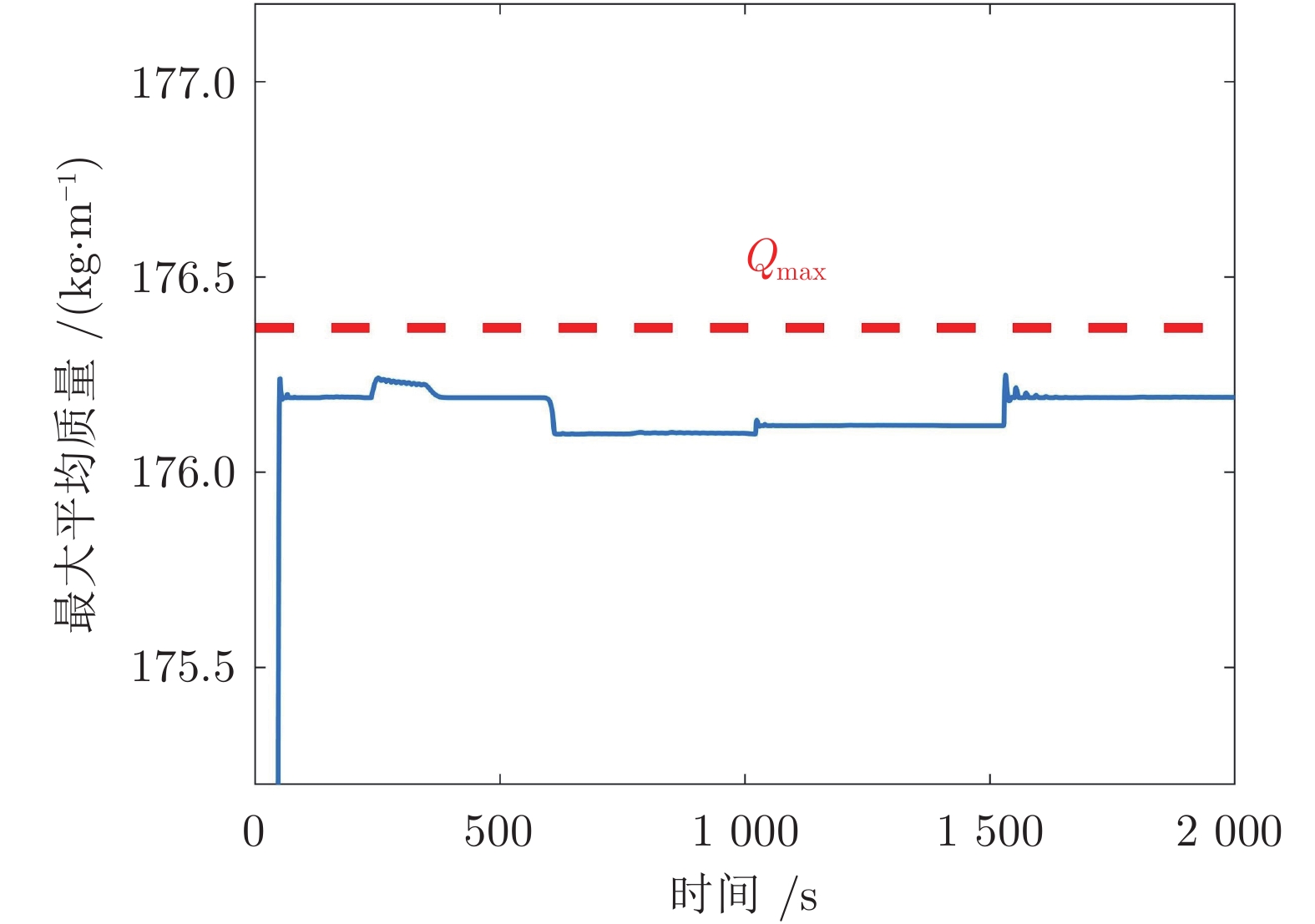
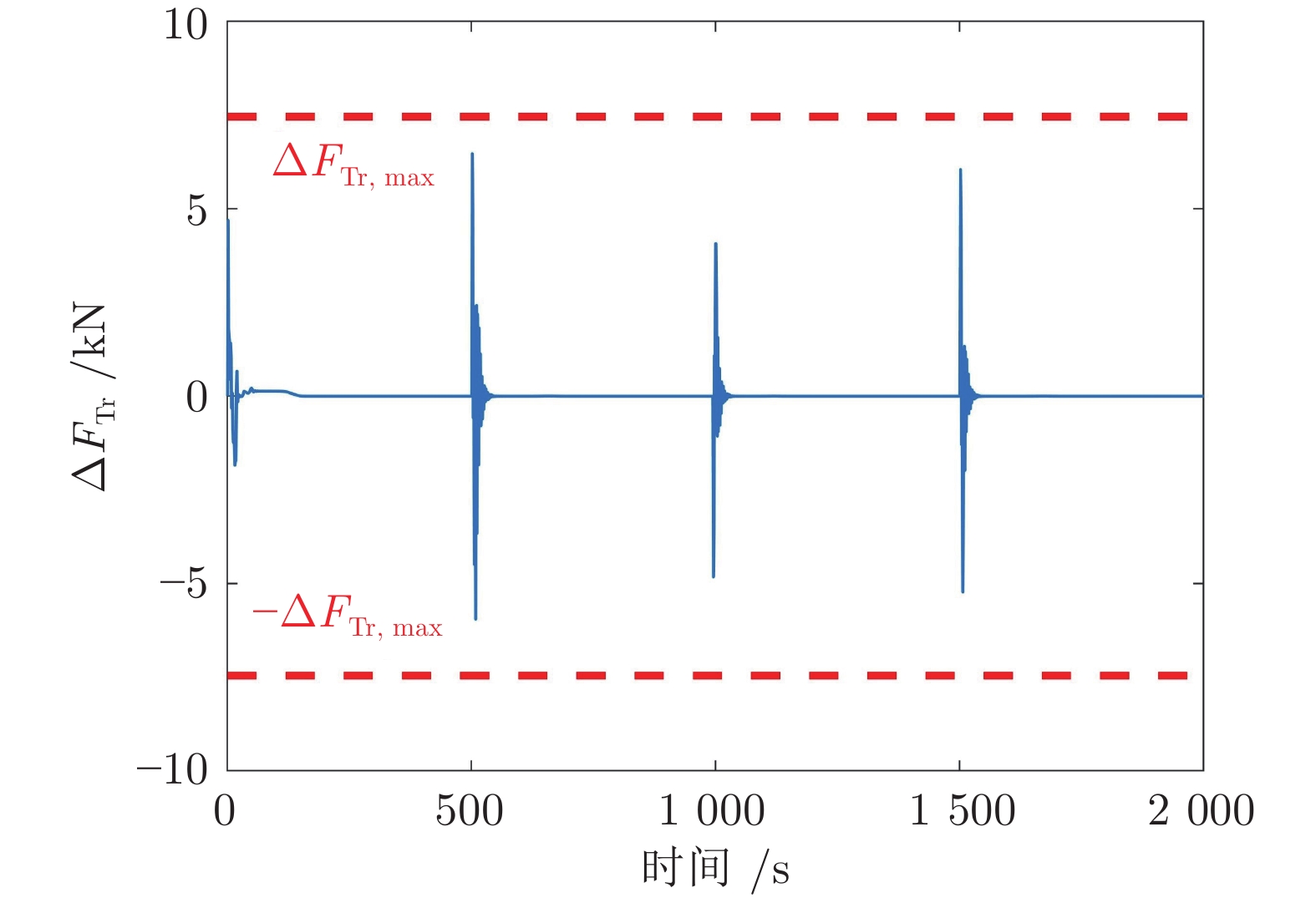
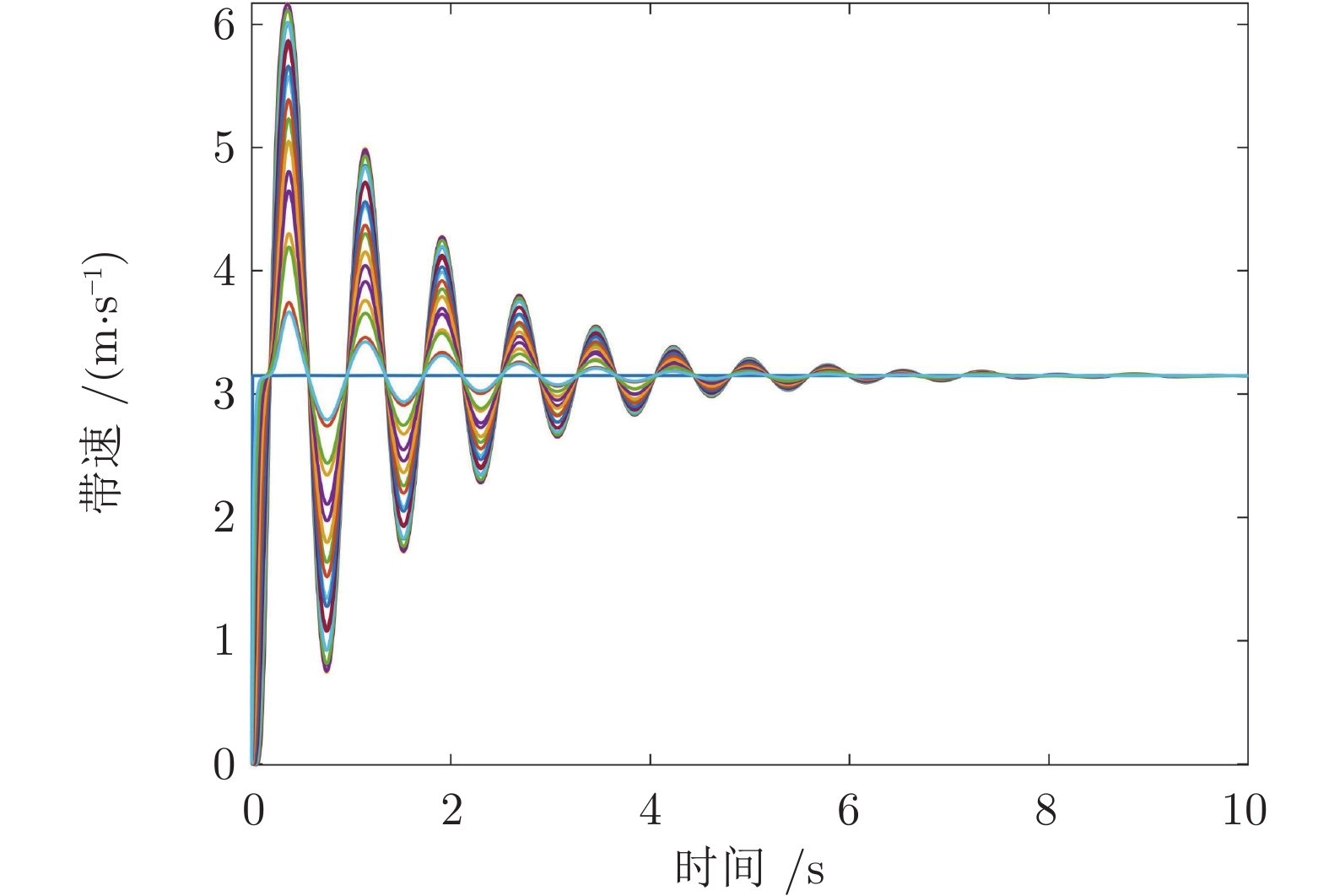
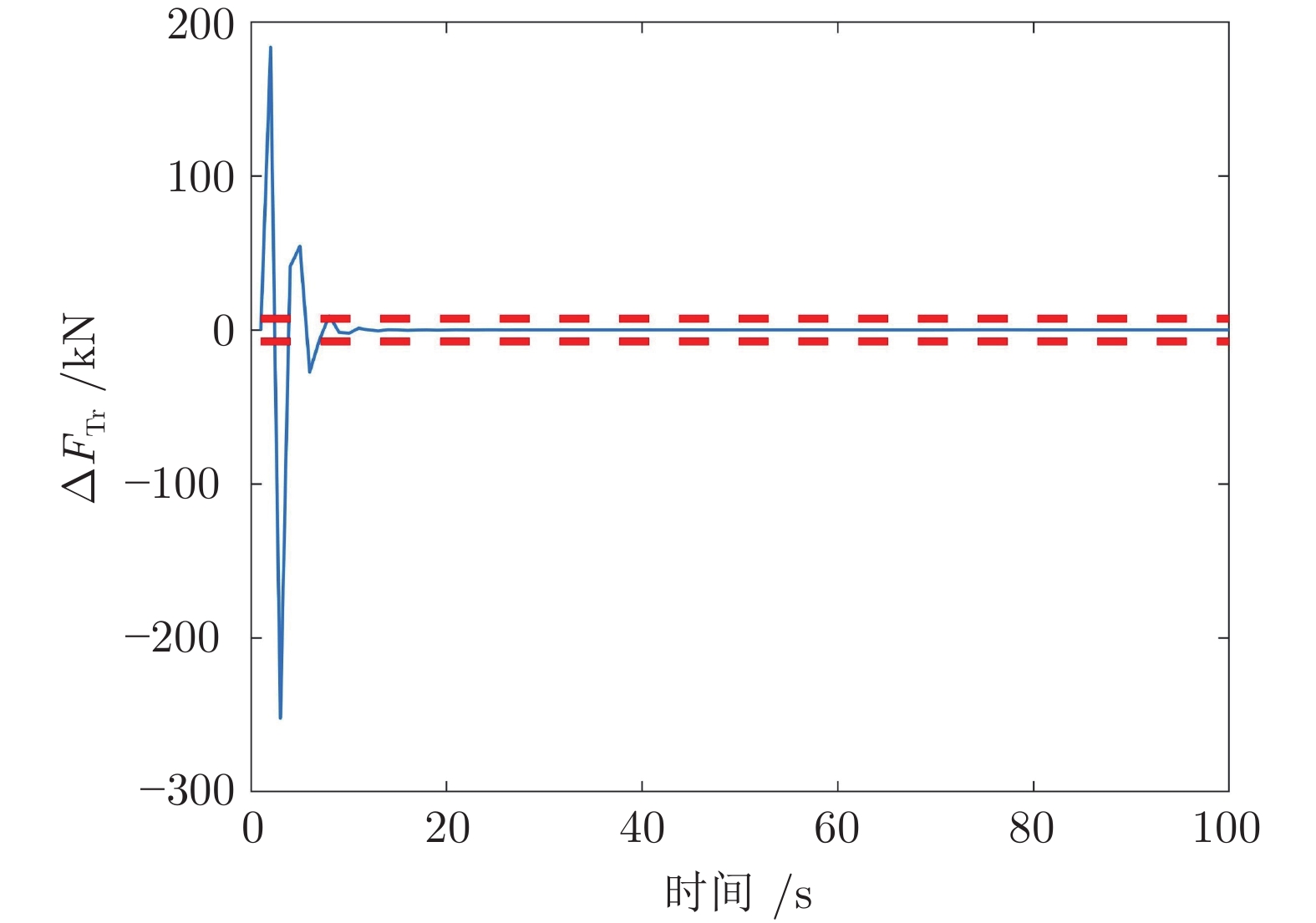
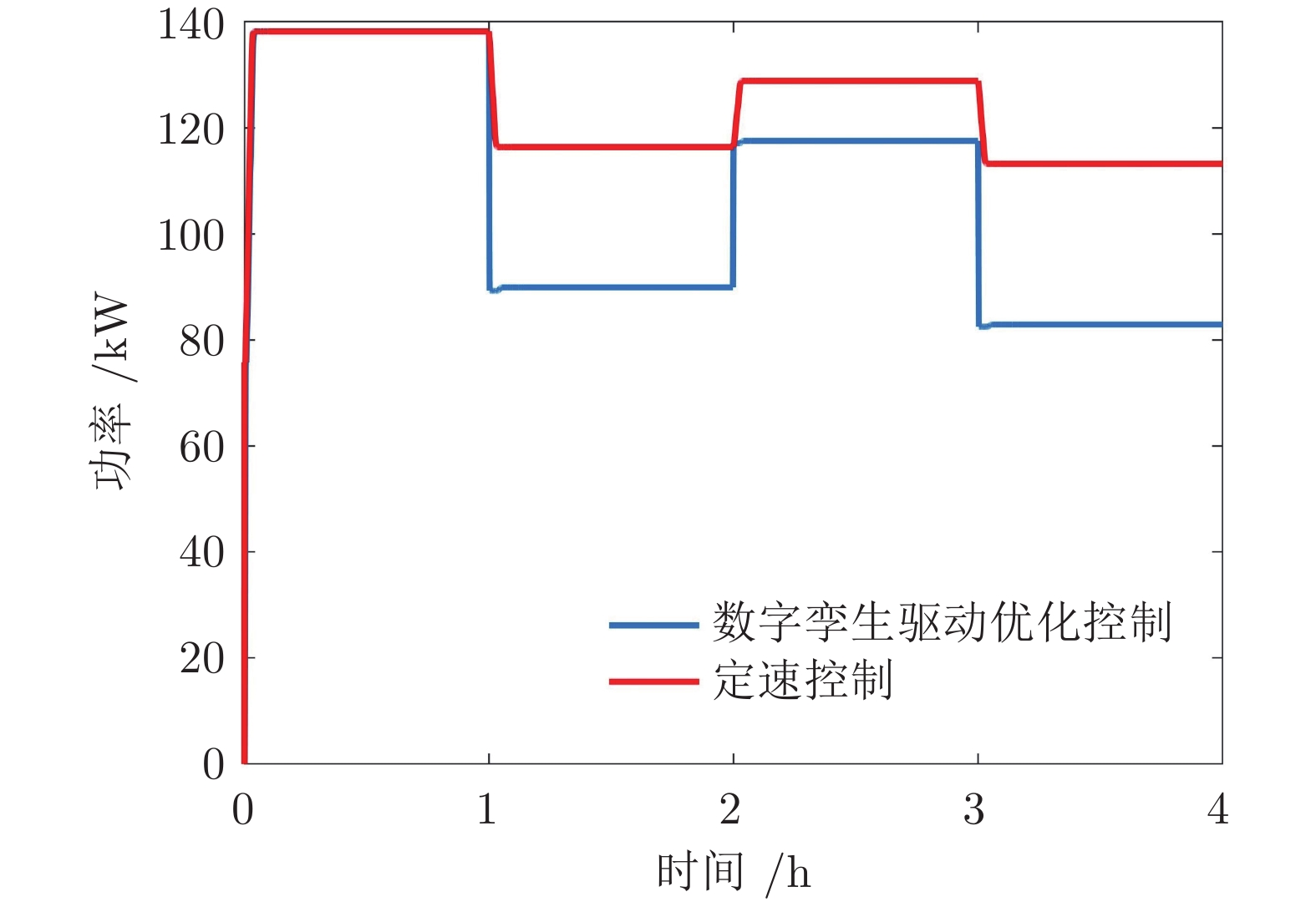
长距离带式输送机是矿山、港口等领域运输散装物料的主要工具. 针对长距离带式输送机的安全节能运行问题, 研究数字孪生驱动的运行优化方法. 首先, 构建由数字孪生模型、模型同步算法、控制策略和现实带式输送机组成的数字孪生驱动运行优化框架; 然后, 建立数字孪生模型, 包括基于变质量牛顿第二定律和有限元分析法的输送带动力学模型、物料流动态模型和动态能耗模型; 最后, 提出数字孪生驱动的计算决策−仿真评估−优化校正(Decision-simulation-correction, DSC)优化决策方法, 优化带式输送机的稳态和暂态运行带速, 形成可行带速设定曲线. 实验结果表明, 数字孪生驱动的带式输送机运行优化方法可以实现带式输送机安全节能运行. 与传统控制方法相比, 能够根据运行工况实时调速, 提高输送带填充率, 节能13.87%.
长距离带式输送机是矿山、港口等领域运输散装物料的主要工具. 针对长距离带式输送机的安全节能运行问题, 研究数字孪生驱动的运行优化方法. 首先, 构建由数字孪生模型、模型同步算法、控制策略和现实带式输送机组成的数字孪生驱动运行优化框架; 然后, 建立数字孪生模型, 包括基于变质量牛顿第二定律和有限元分析法的输送带动力学模型、物料流动态模型和动态能耗模型; 最后, 提出数字孪生驱动的计算决策−仿真评估−优化校正(Decision-simulation-correction, DSC)优化决策方法, 优化带式输送机的稳态和暂态运行带速, 形成可行带速设定曲线. 实验结果表明, 数字孪生驱动的带式输送机运行优化方法可以实现带式输送机安全节能运行. 与传统控制方法相比, 能够根据运行工况实时调速, 提高输送带填充率, 节能13.87%.






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220984
摘要:
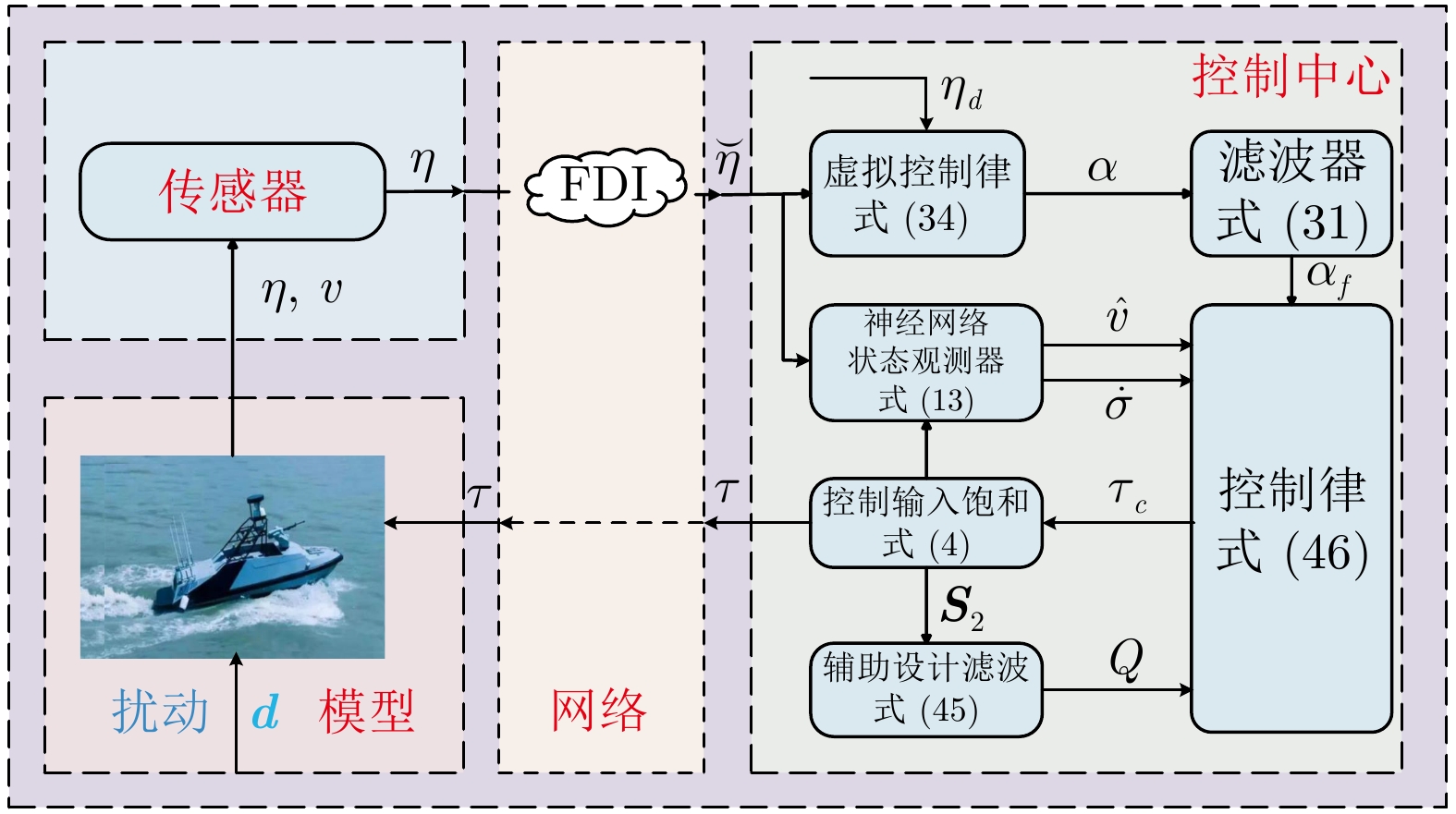
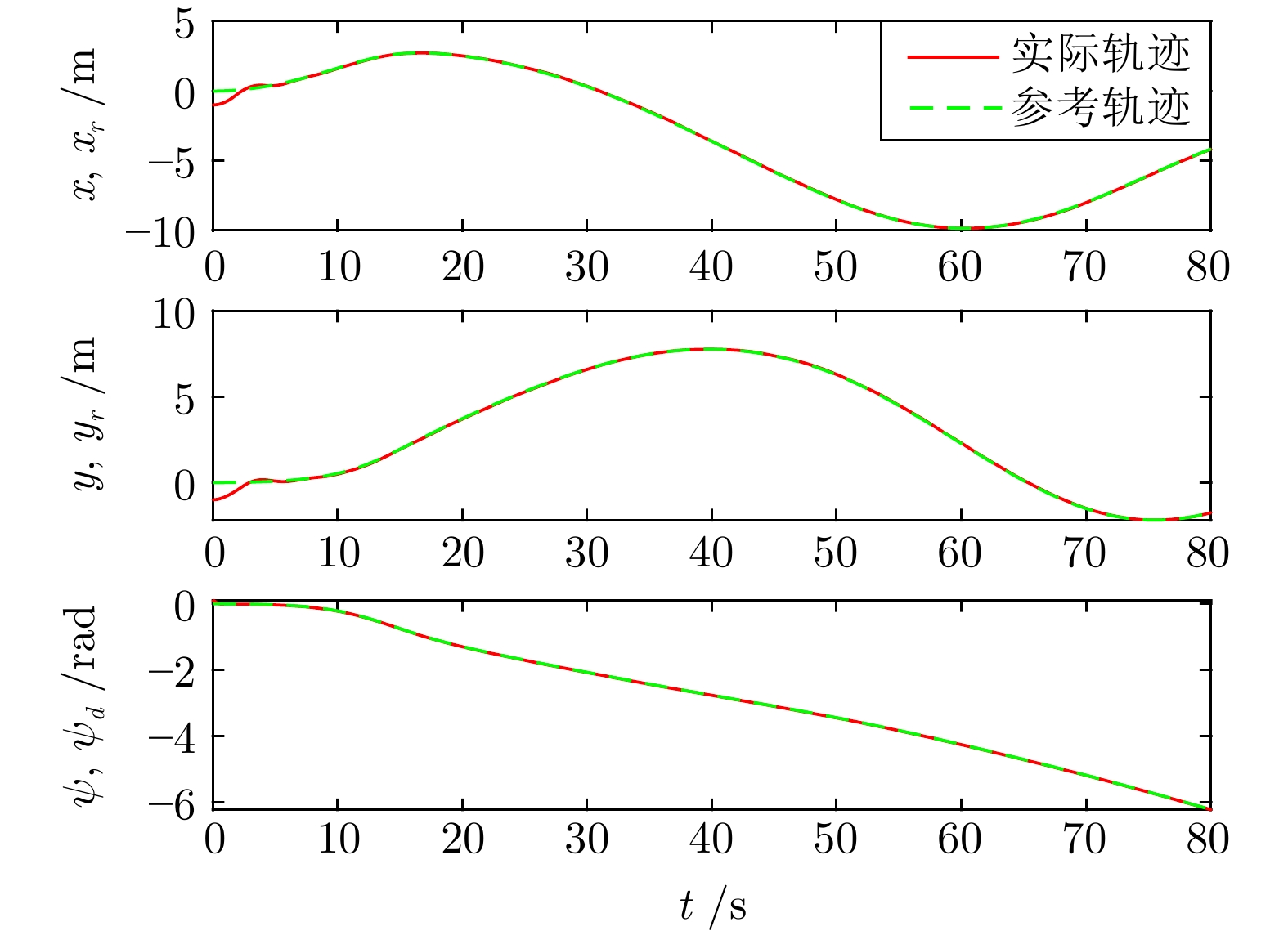
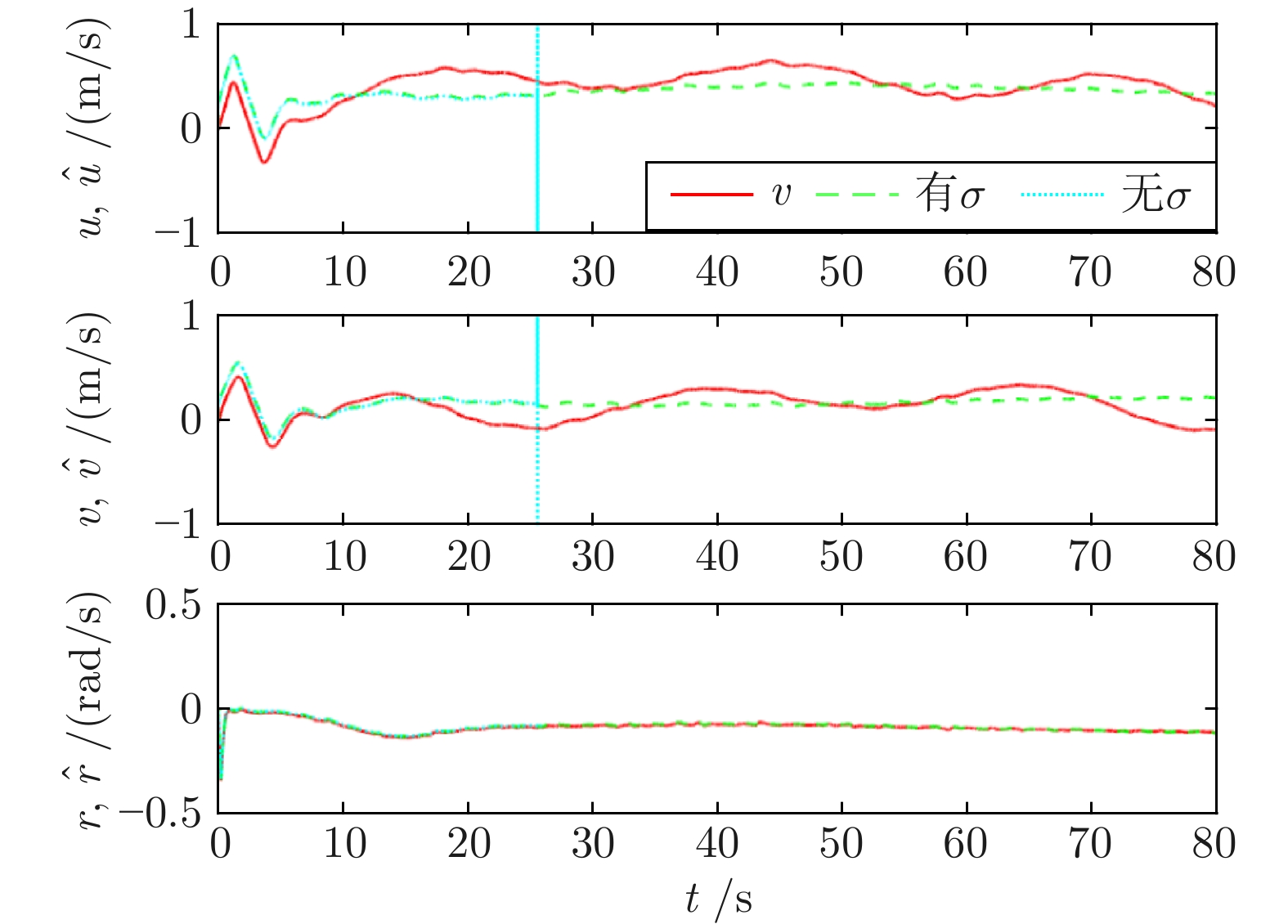
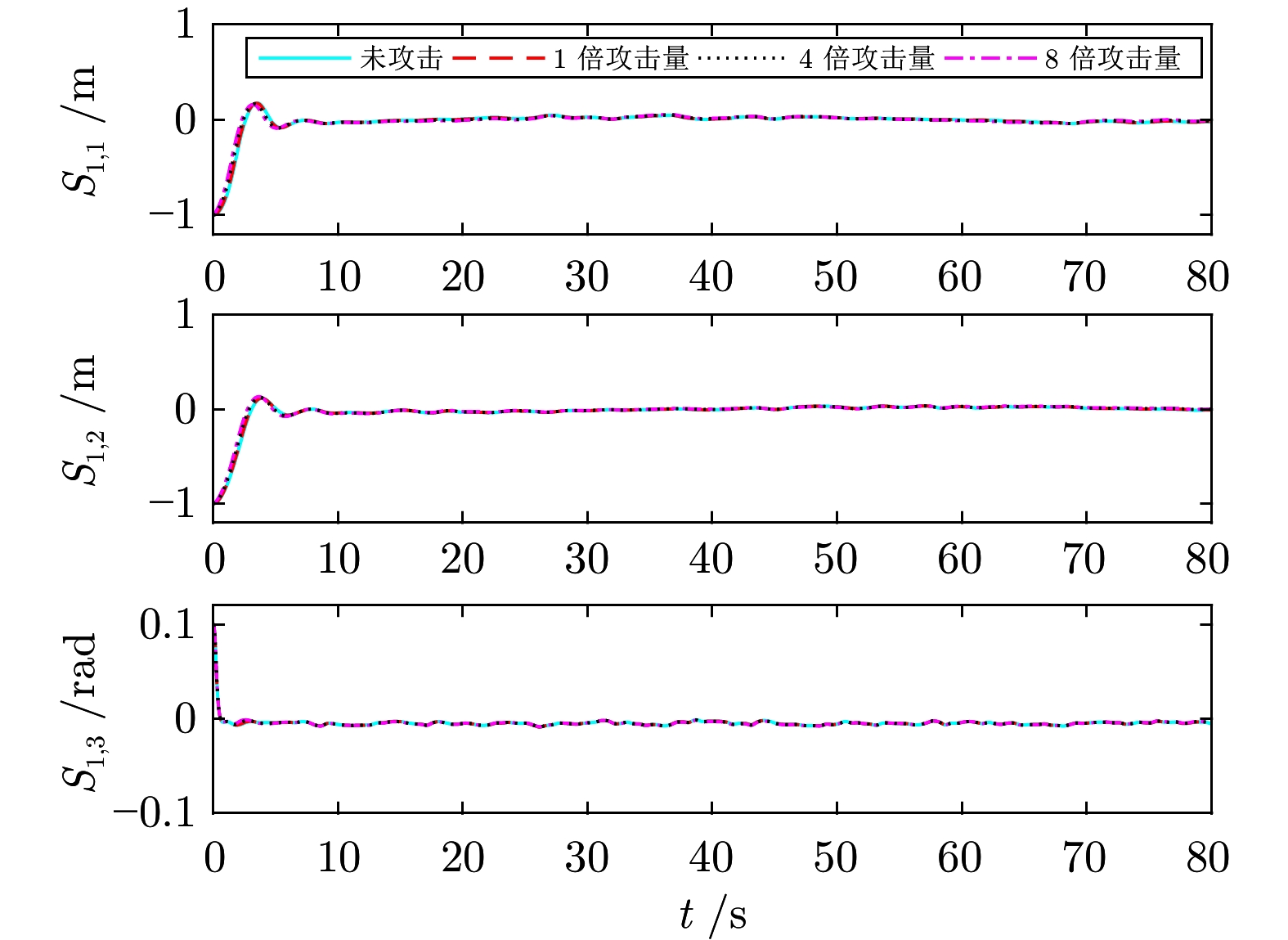
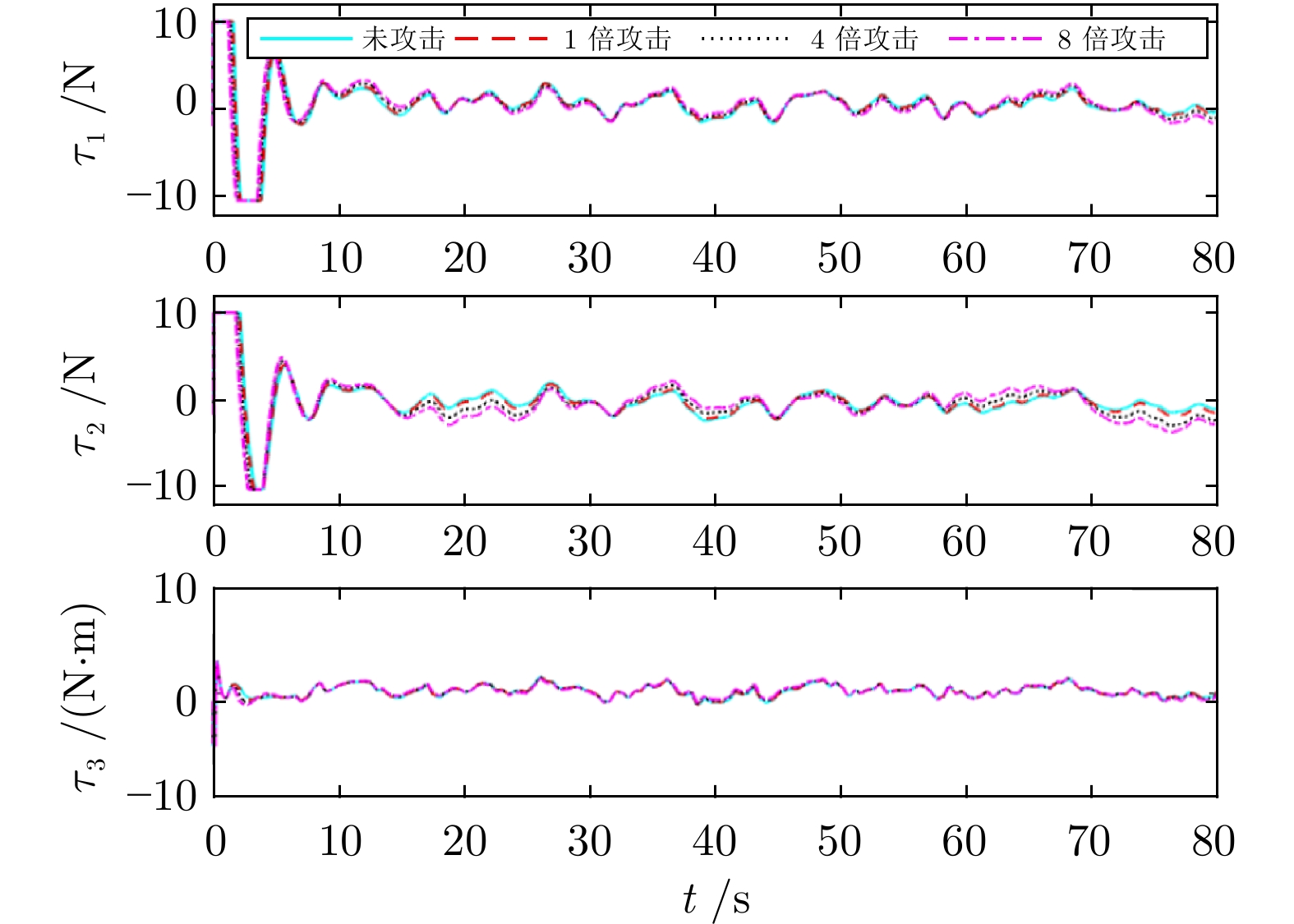
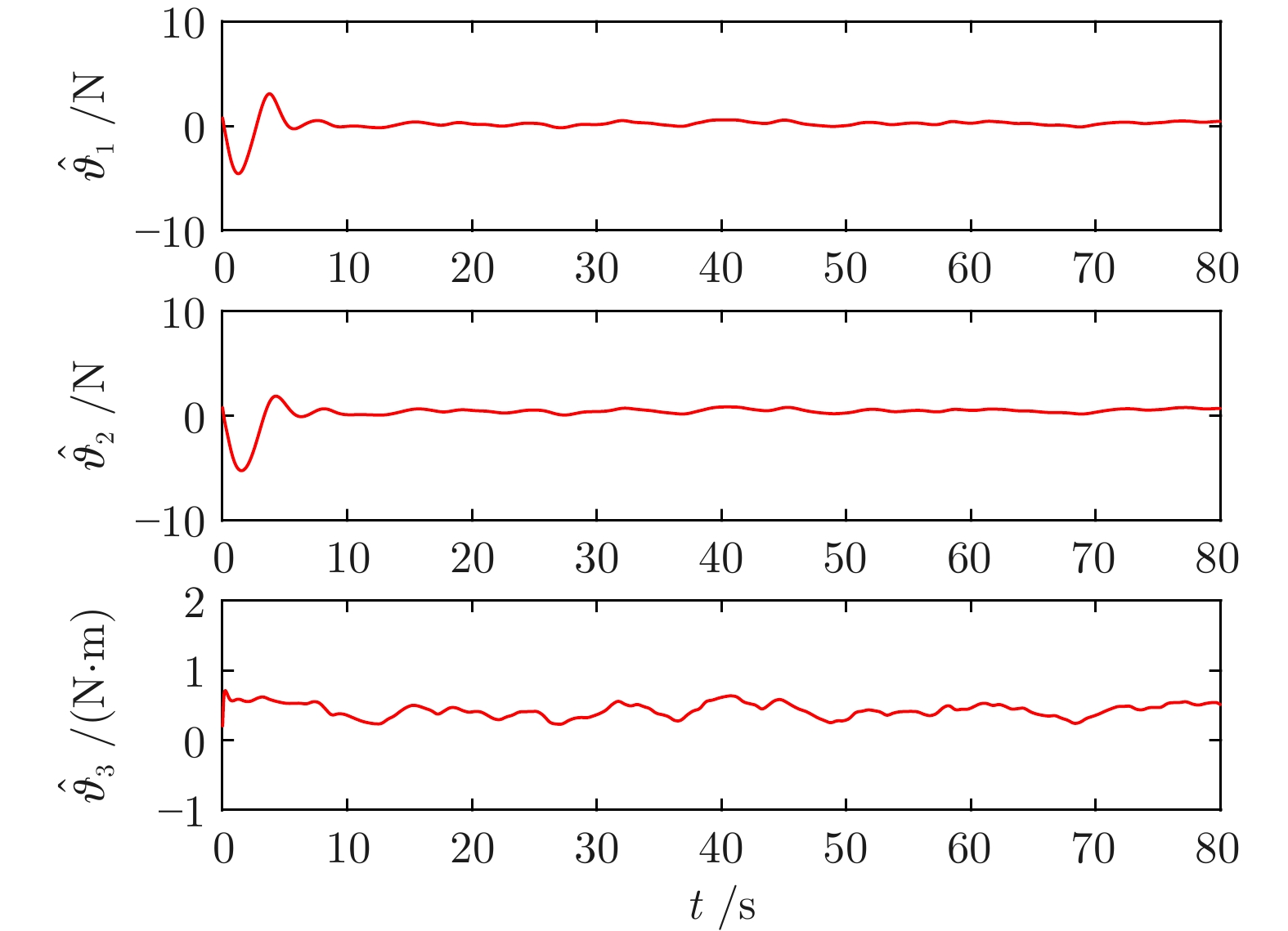
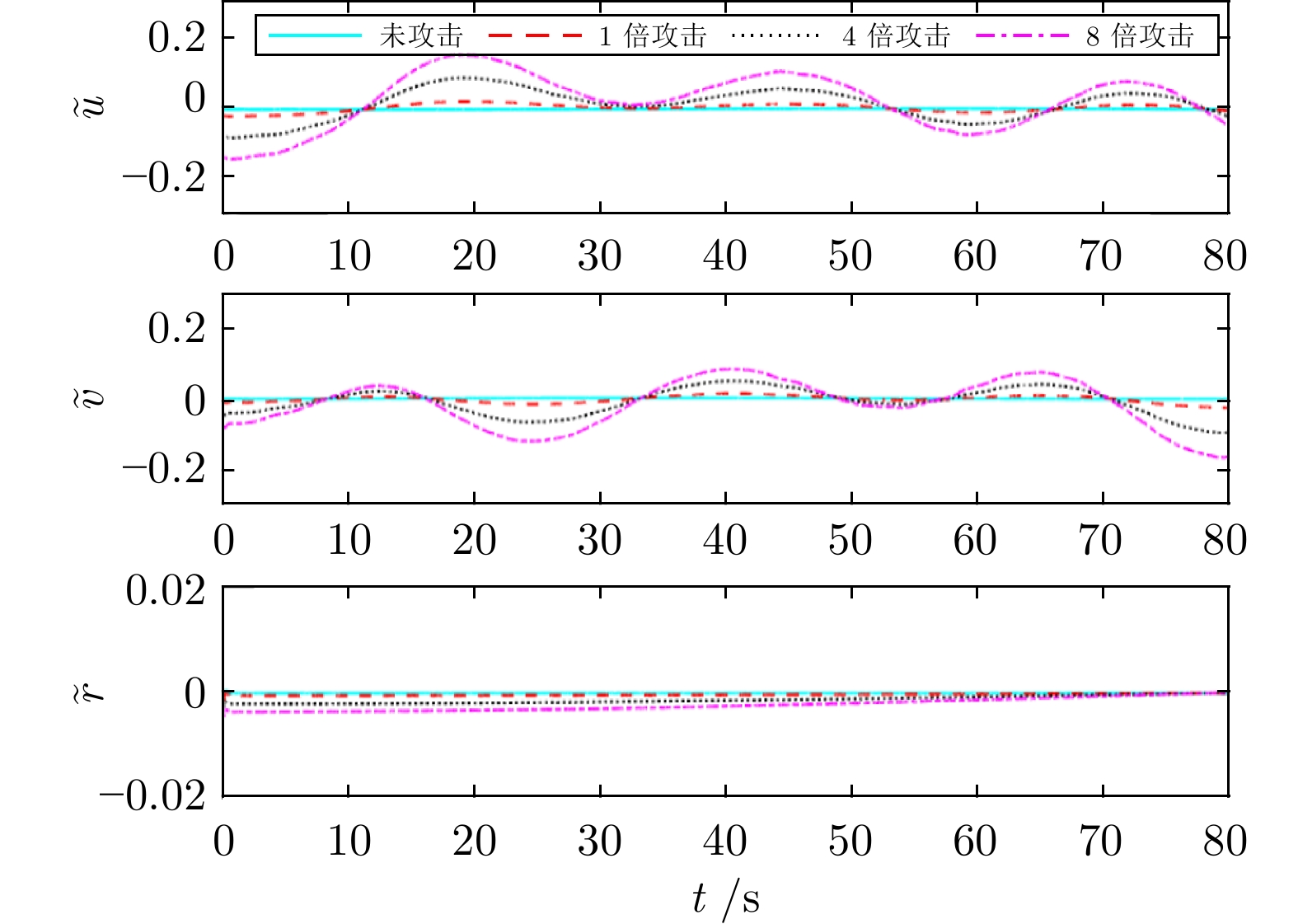
本文主要研究网络环境下无人水面船舶 (Unmanned surface vessels, USVs) 遭受虚假数据注入式 (False-data-injection, FDI) 攻击的跟踪控制问题. 其中, USVs 遭受内部和外部不确定以及输入饱和约束等实际因素均考虑在设计中. 在控制设计过程中, 为避免将船舶速度的攻击信号引入闭环系统, 采用分类重构思想, 构造一种新的神经网络 (Neural network, NN) 状态观测器, 同时在线重构船舶速度和攻击信号. 进一步, 在~Backstepping 设计框架下, 利用重构的攻击信号补偿~USVs 运动学通道因虚假数据注入式攻击引起的非匹配不确定项. 在动力学设计通道中, 利用自适应神经技术和单参数学习法, 在线重构了由内部和外部不确定组成的复合不确定部分, 进而提出自适应神经输出反馈控制方案. 理论分析表明, 即便存在~FDI 攻击、内外不确定以及执行器饱和约束的情况下, 所提控制方案能迫使~USVs 跟踪给定的参考轨迹. 同时, 仿真和比较结果阐明了所提控制方案的有效性和优越性.
本文主要研究网络环境下无人水面船舶 (Unmanned surface vessels, USVs) 遭受虚假数据注入式 (False-data-injection, FDI) 攻击的跟踪控制问题. 其中, USVs 遭受内部和外部不确定以及输入饱和约束等实际因素均考虑在设计中. 在控制设计过程中, 为避免将船舶速度的攻击信号引入闭环系统, 采用分类重构思想, 构造一种新的神经网络 (Neural network, NN) 状态观测器, 同时在线重构船舶速度和攻击信号. 进一步, 在~Backstepping 设计框架下, 利用重构的攻击信号补偿~USVs 运动学通道因虚假数据注入式攻击引起的非匹配不确定项. 在动力学设计通道中, 利用自适应神经技术和单参数学习法, 在线重构了由内部和外部不确定组成的复合不确定部分, 进而提出自适应神经输出反馈控制方案. 理论分析表明, 即便存在~FDI 攻击、内外不确定以及执行器饱和约束的情况下, 所提控制方案能迫使~USVs 跟踪给定的参考轨迹. 同时, 仿真和比较结果阐明了所提控制方案的有效性和优越性.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230381
摘要:
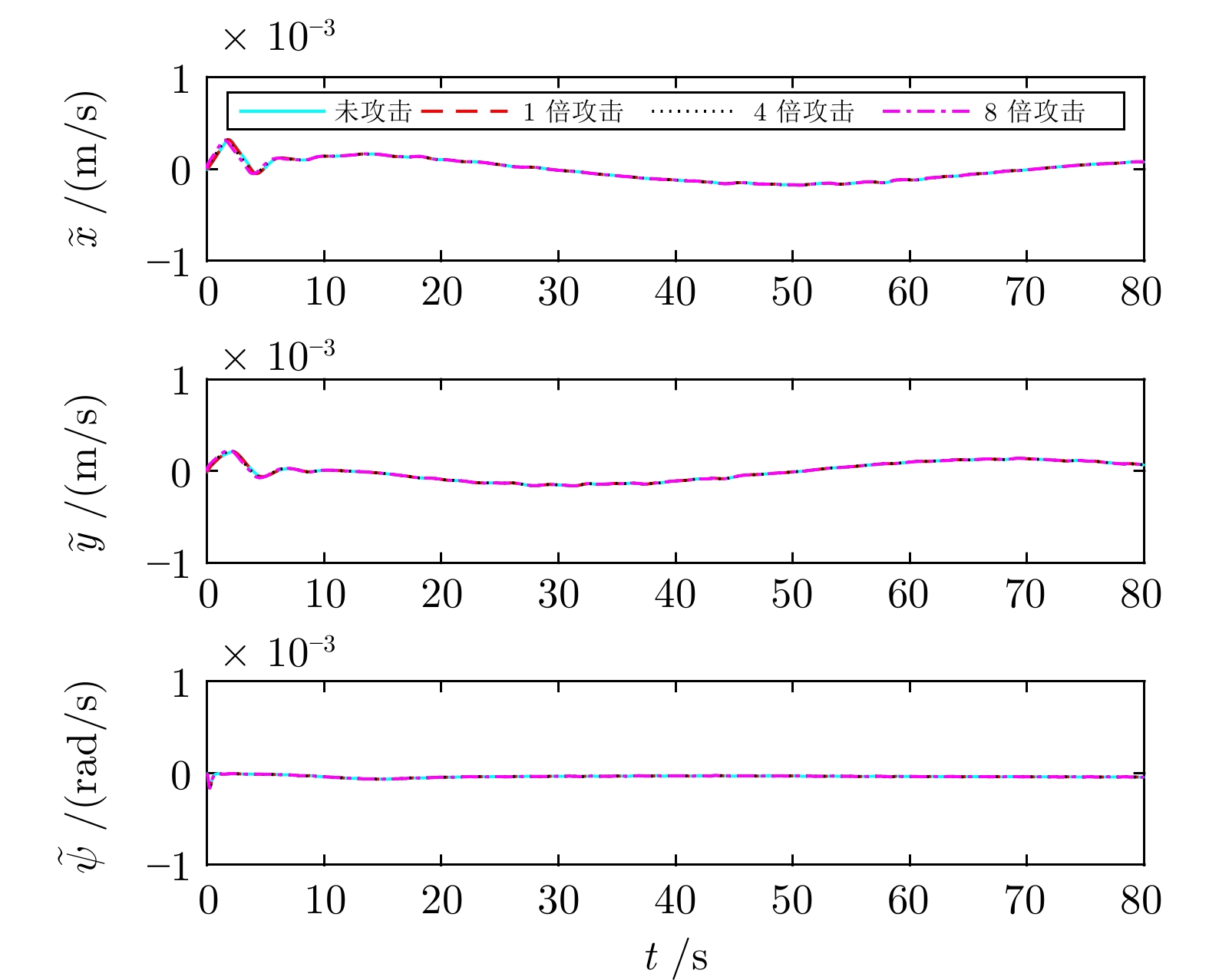
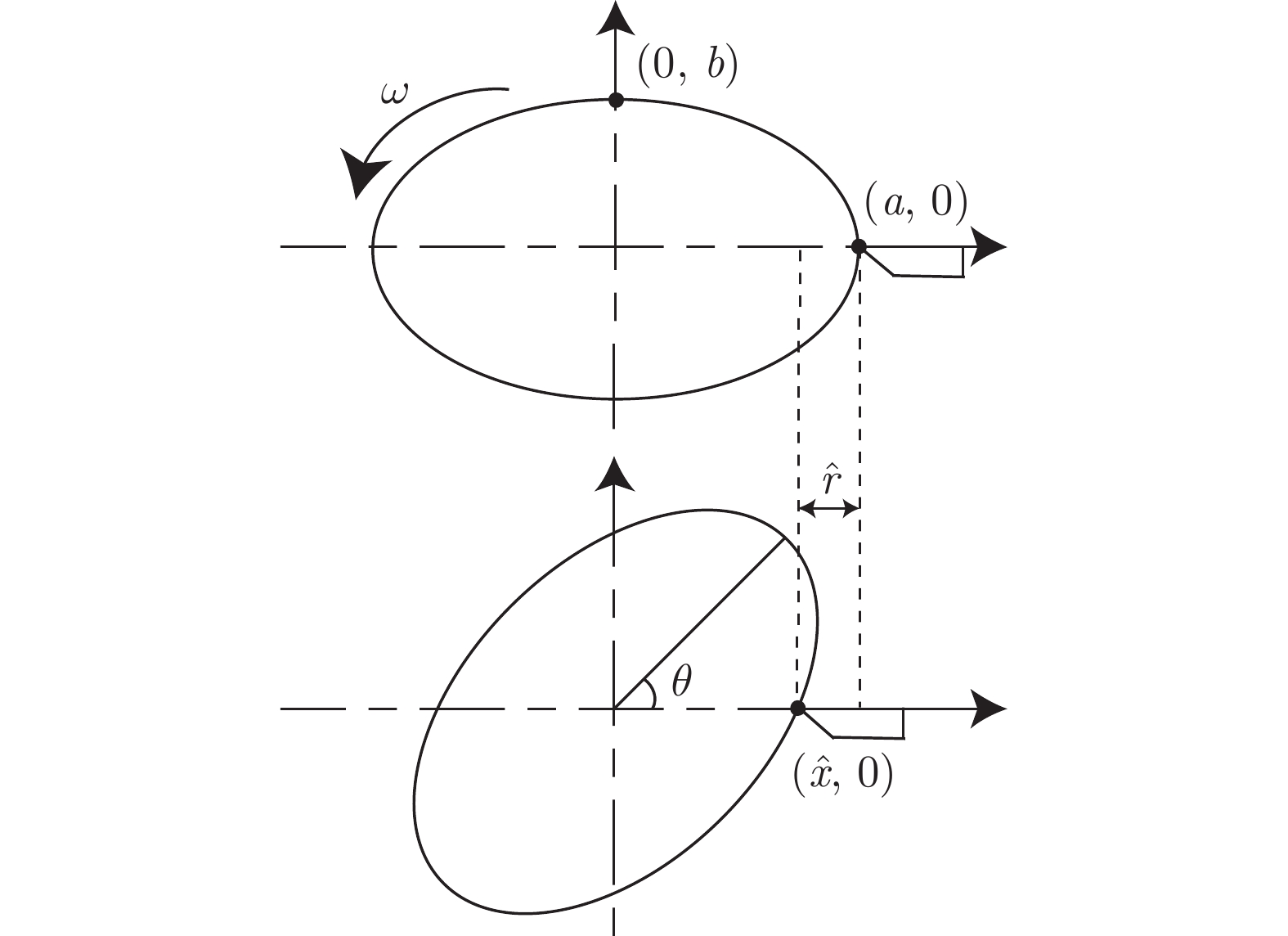
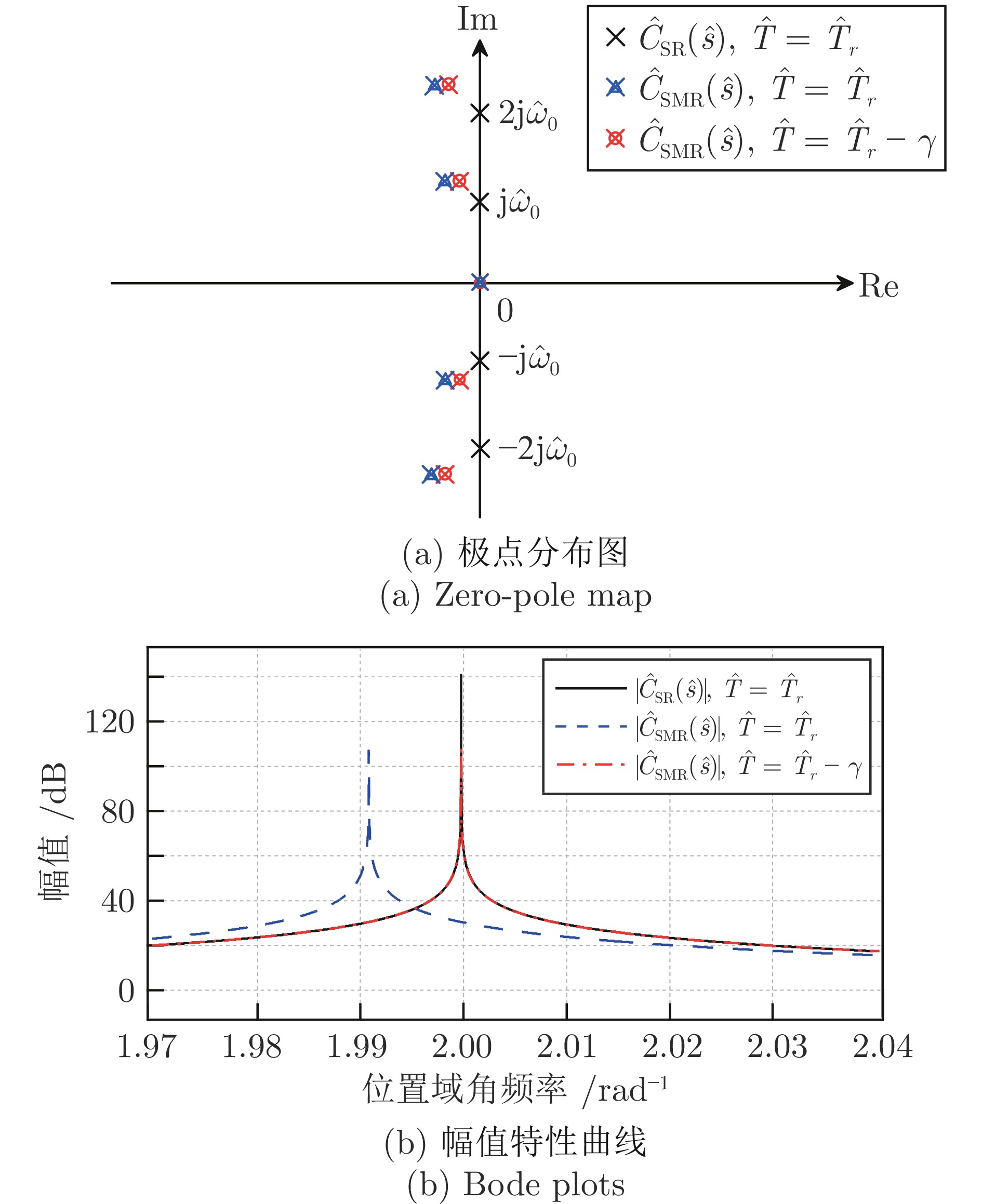
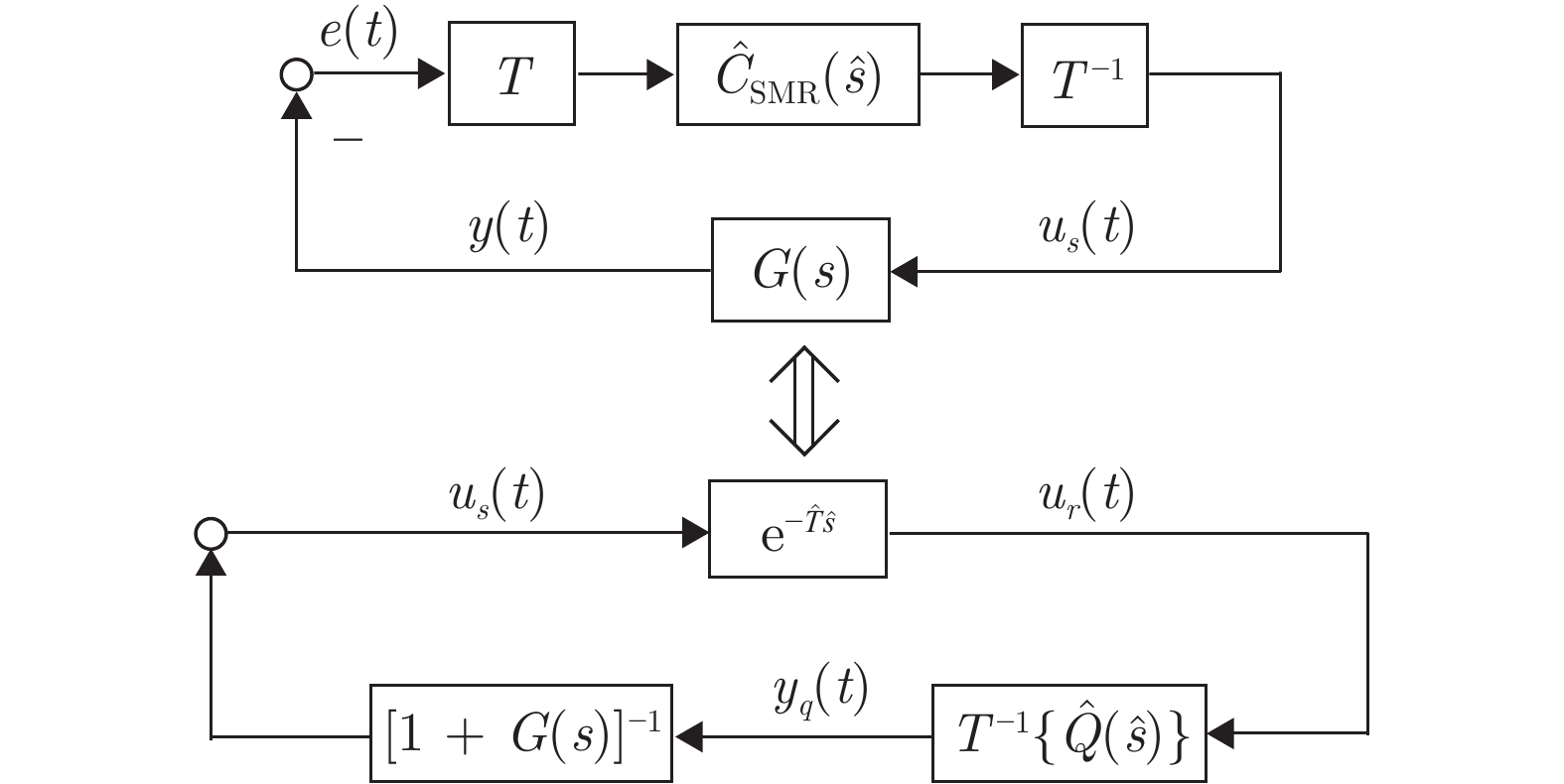
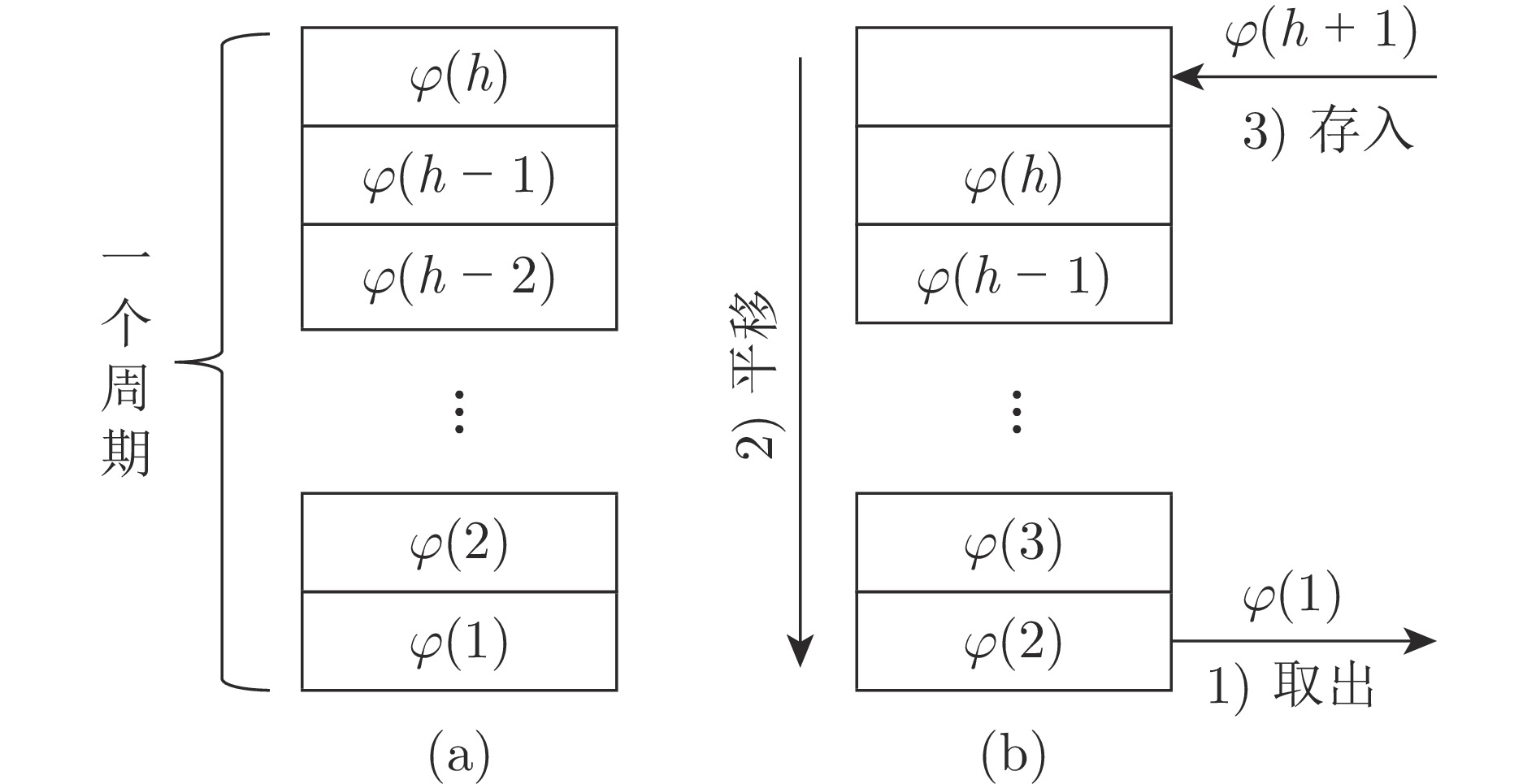
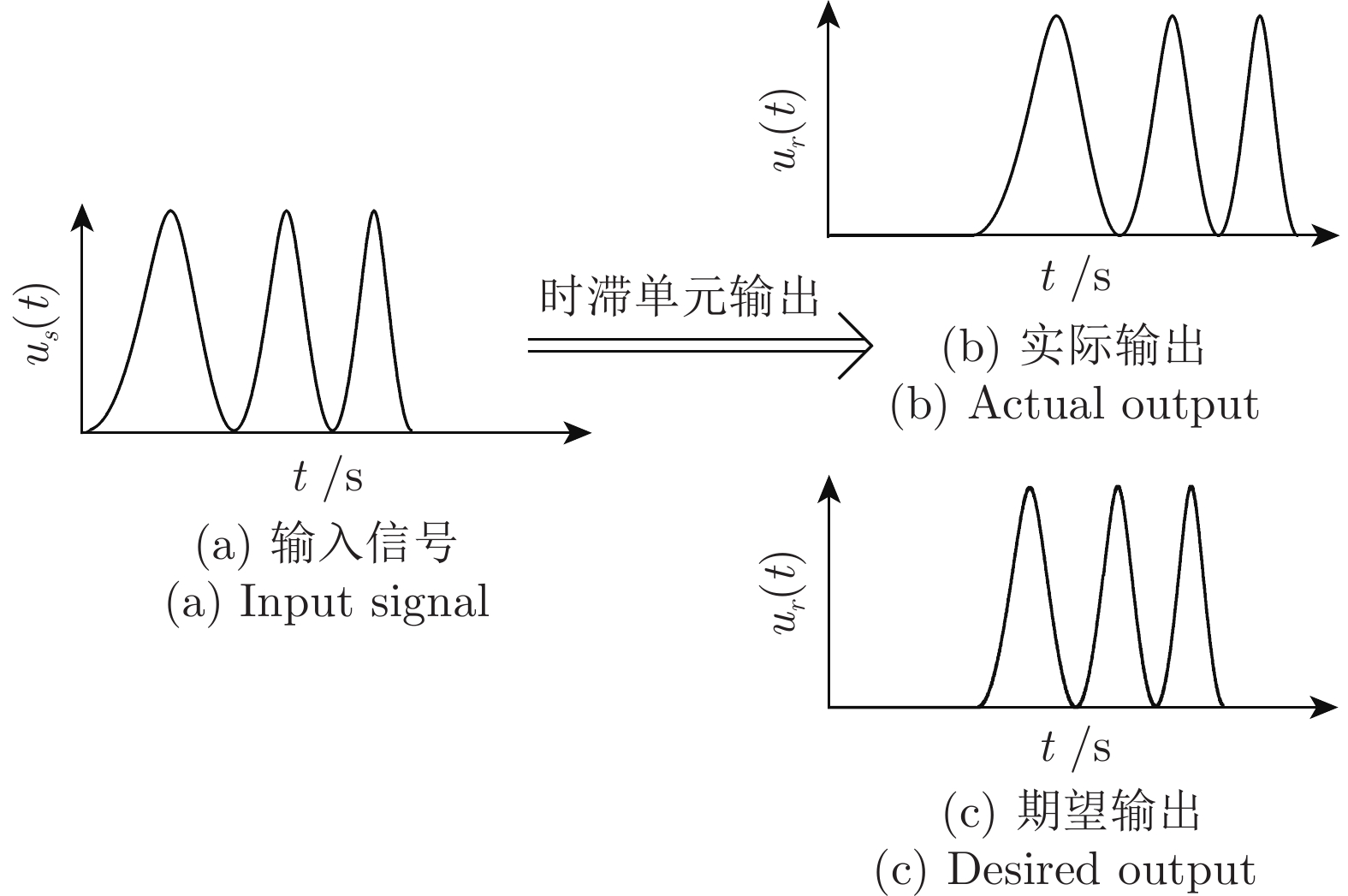
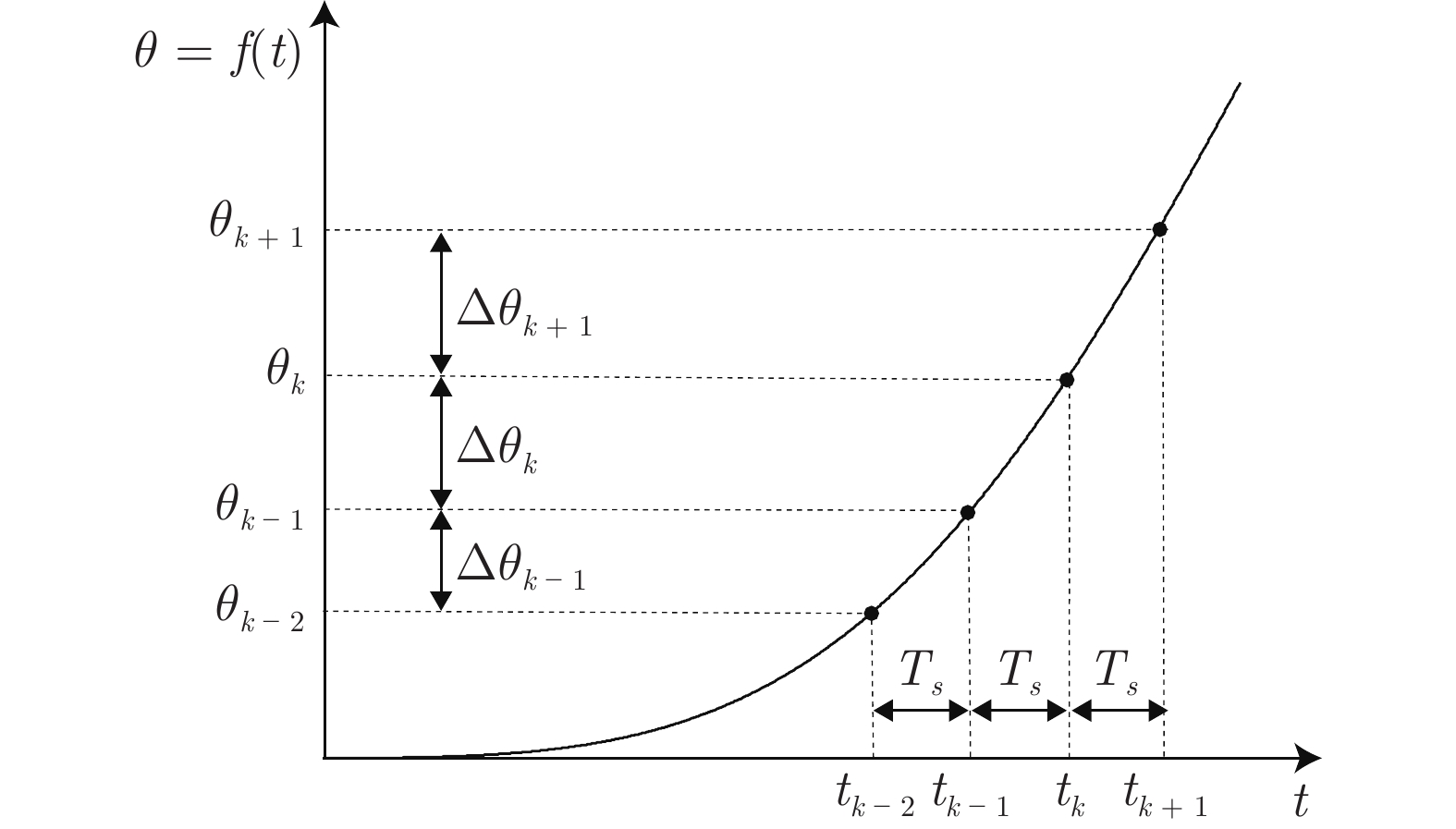
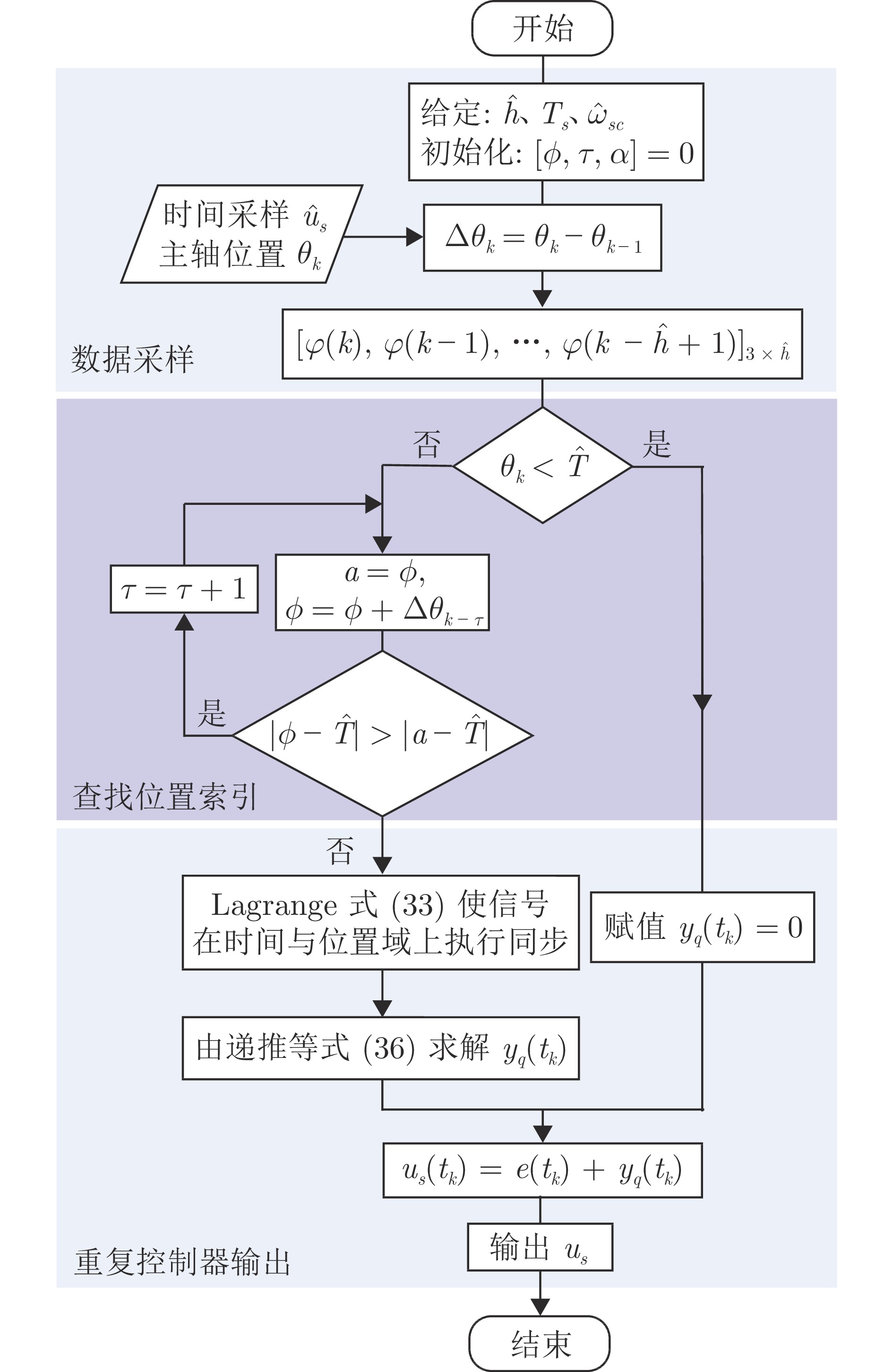
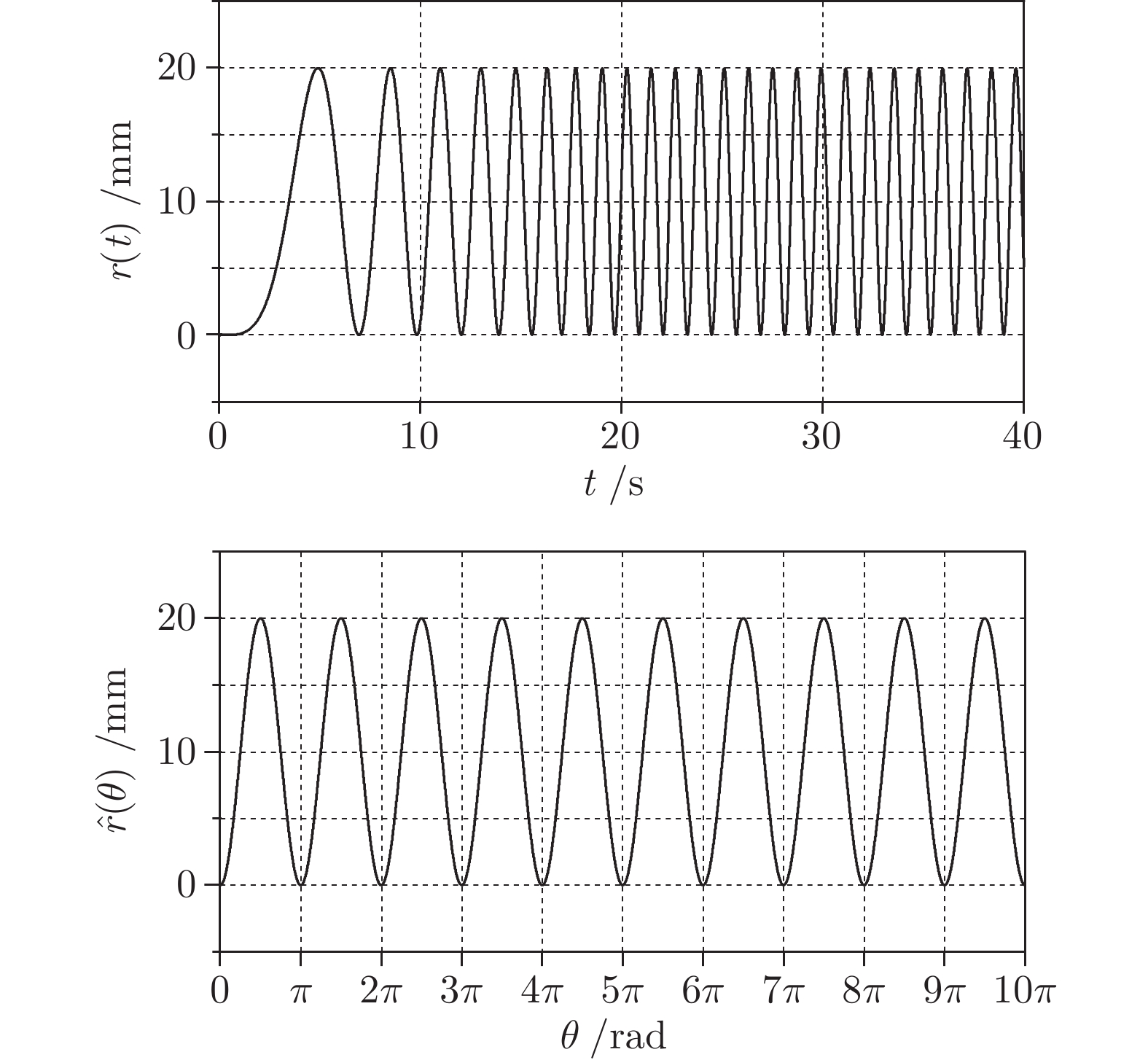
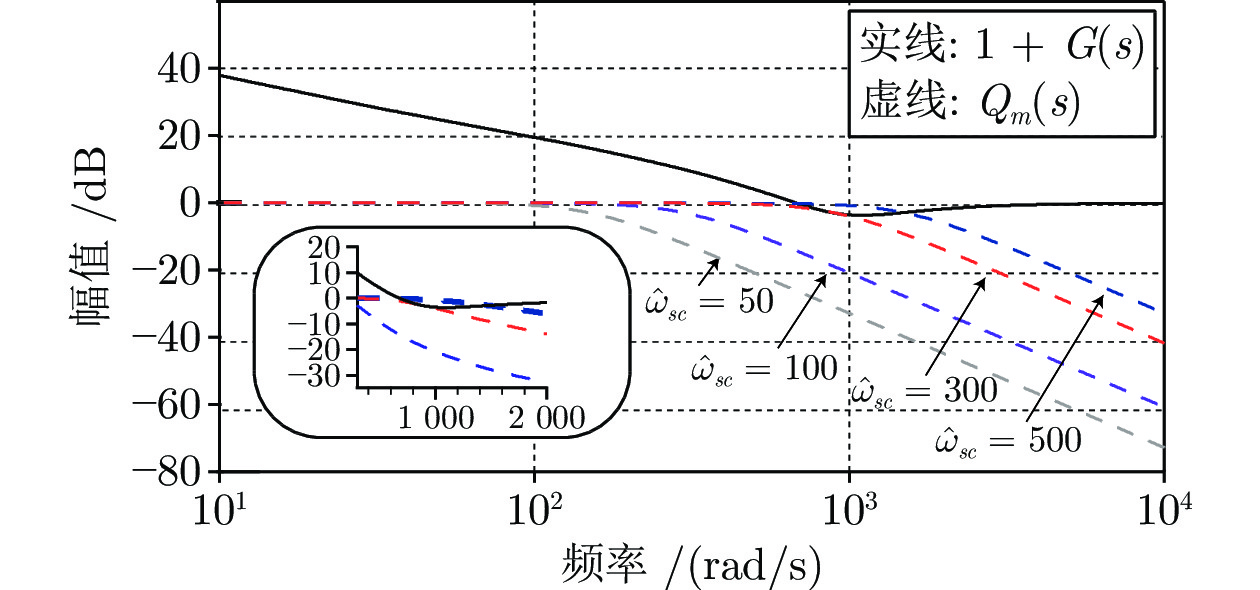
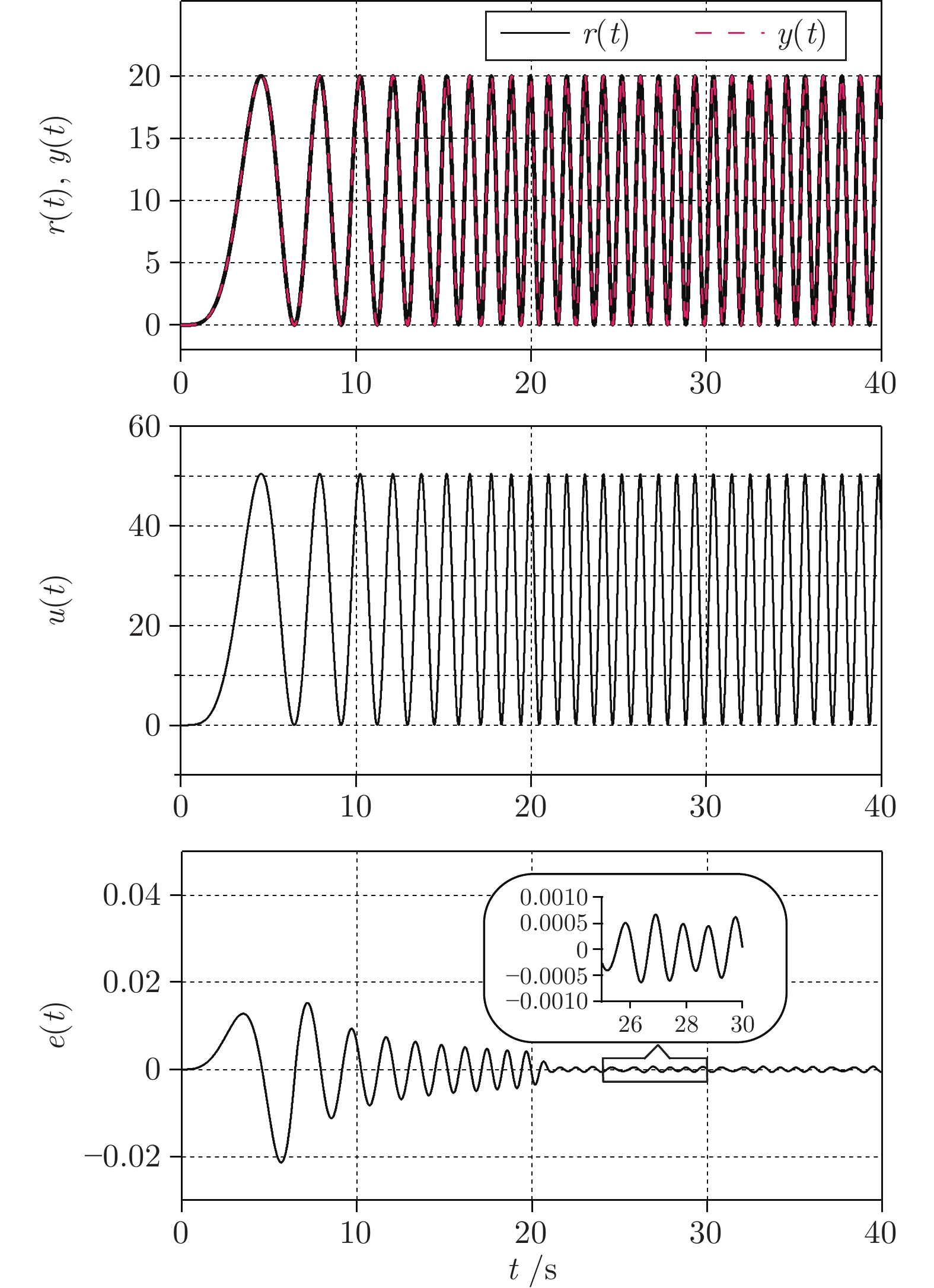
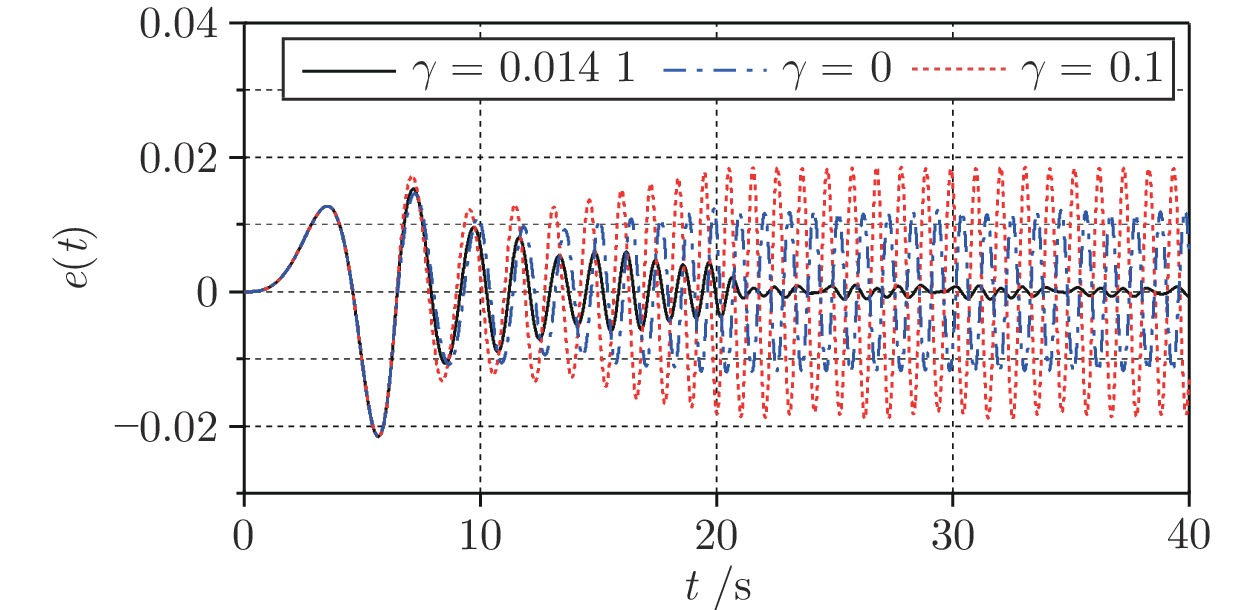
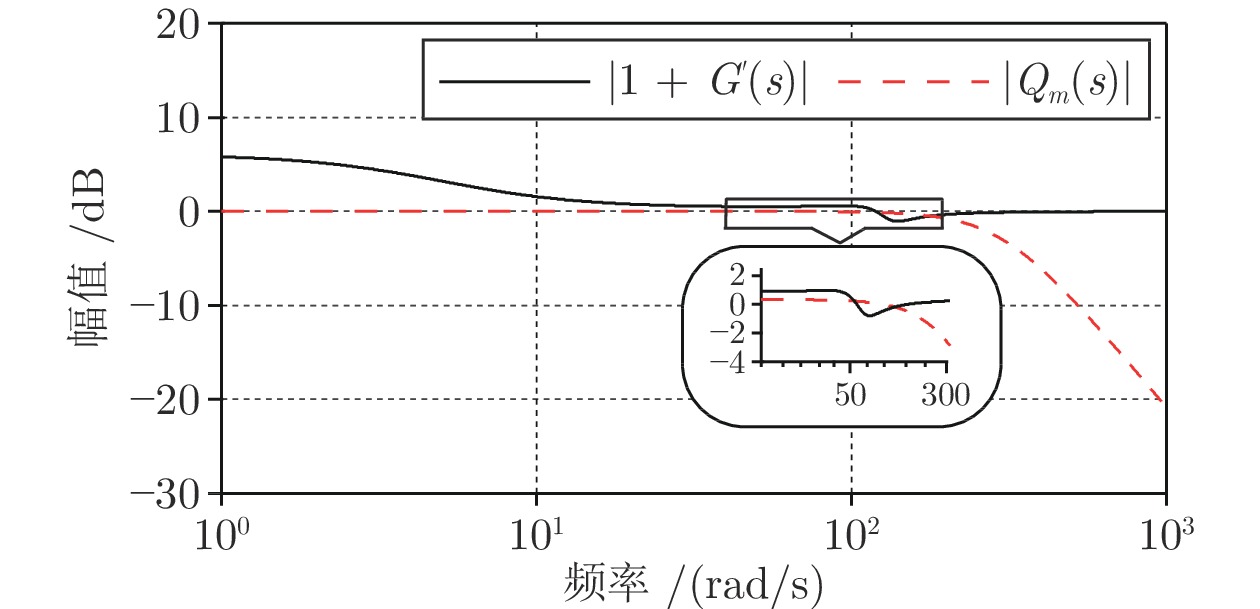
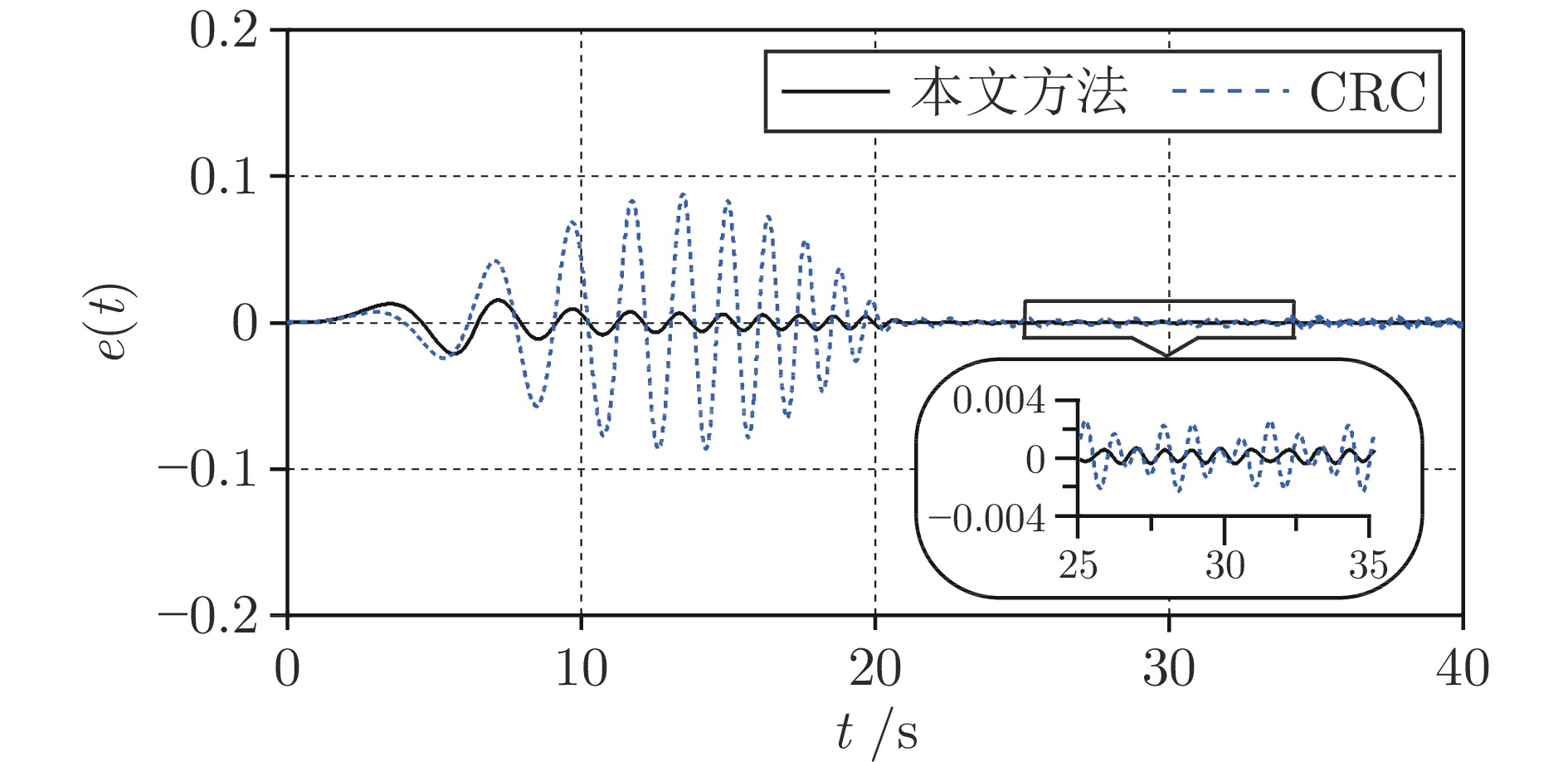
在非圆零件车削过程中, 快速刀具伺服(Fast tool servo, FTS)的运动精度直接影响零件的加工质量. 主轴变速加工使得FTS的参考目标信号周期时变而不确定, 这对实现其渐近跟踪提出了极大的挑战. 本文利用FTS的位置域周期特性, 提出一种基于位置域重复控制和时域速度反馈镇定的FTS系统复合控制设计方法, 并给出位置域改进型重复控制器(Spatial modified repetitive controller, SMRC)的数字实现算法, 实现对时变周期参考目标信号的高精度跟踪. 首先, 建立包含位置相关时变周期参考目标信号内模的SMRC, 并引入位置域相位超前装置对镇定补偿器引起的相位滞后进行补偿, 在此基础上构建复合控制律. 然后应用小增益定理和算子理论, 推导出闭环系统的稳定性条件, 在保持系统采样频率不变的条件下, 应用插值法建立SMRC的数字实现算法, 确保位置域重复控制和时域镇定控制器的同步执行. 最后, 通过仿真验证所设计的FTS控制系统具有满意的时变周期跟踪性能和鲁棒性. 并通过与其他位置域重复控制方法的比较, 说明所提方法同时具有更好的暂态和稳态性能.
在非圆零件车削过程中, 快速刀具伺服(Fast tool servo, FTS)的运动精度直接影响零件的加工质量. 主轴变速加工使得FTS的参考目标信号周期时变而不确定, 这对实现其渐近跟踪提出了极大的挑战. 本文利用FTS的位置域周期特性, 提出一种基于位置域重复控制和时域速度反馈镇定的FTS系统复合控制设计方法, 并给出位置域改进型重复控制器(Spatial modified repetitive controller, SMRC)的数字实现算法, 实现对时变周期参考目标信号的高精度跟踪. 首先, 建立包含位置相关时变周期参考目标信号内模的SMRC, 并引入位置域相位超前装置对镇定补偿器引起的相位滞后进行补偿, 在此基础上构建复合控制律. 然后应用小增益定理和算子理论, 推导出闭环系统的稳定性条件, 在保持系统采样频率不变的条件下, 应用插值法建立SMRC的数字实现算法, 确保位置域重复控制和时域镇定控制器的同步执行. 最后, 通过仿真验证所设计的FTS控制系统具有满意的时变周期跟踪性能和鲁棒性. 并通过与其他位置域重复控制方法的比较, 说明所提方法同时具有更好的暂态和稳态性能.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220889
摘要:
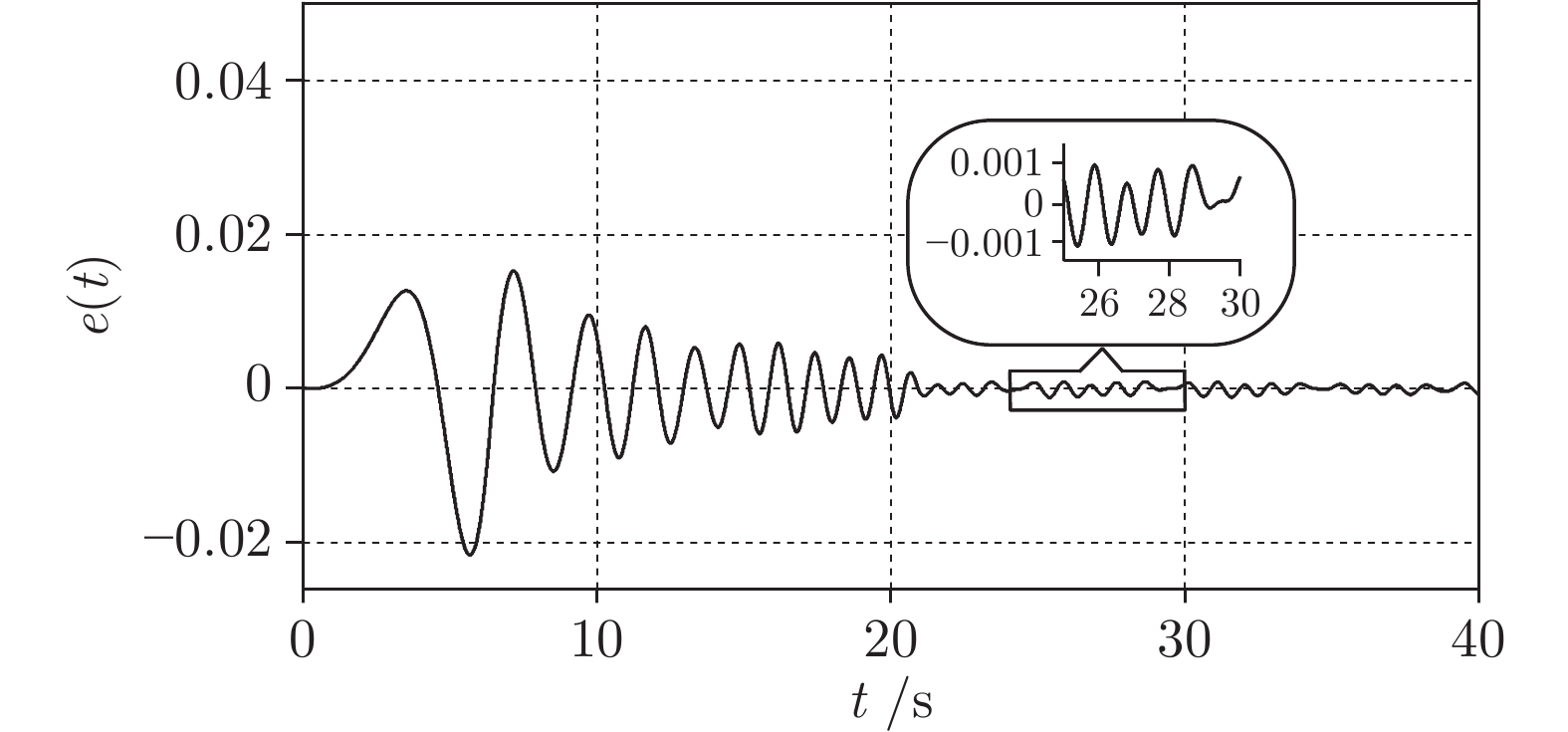
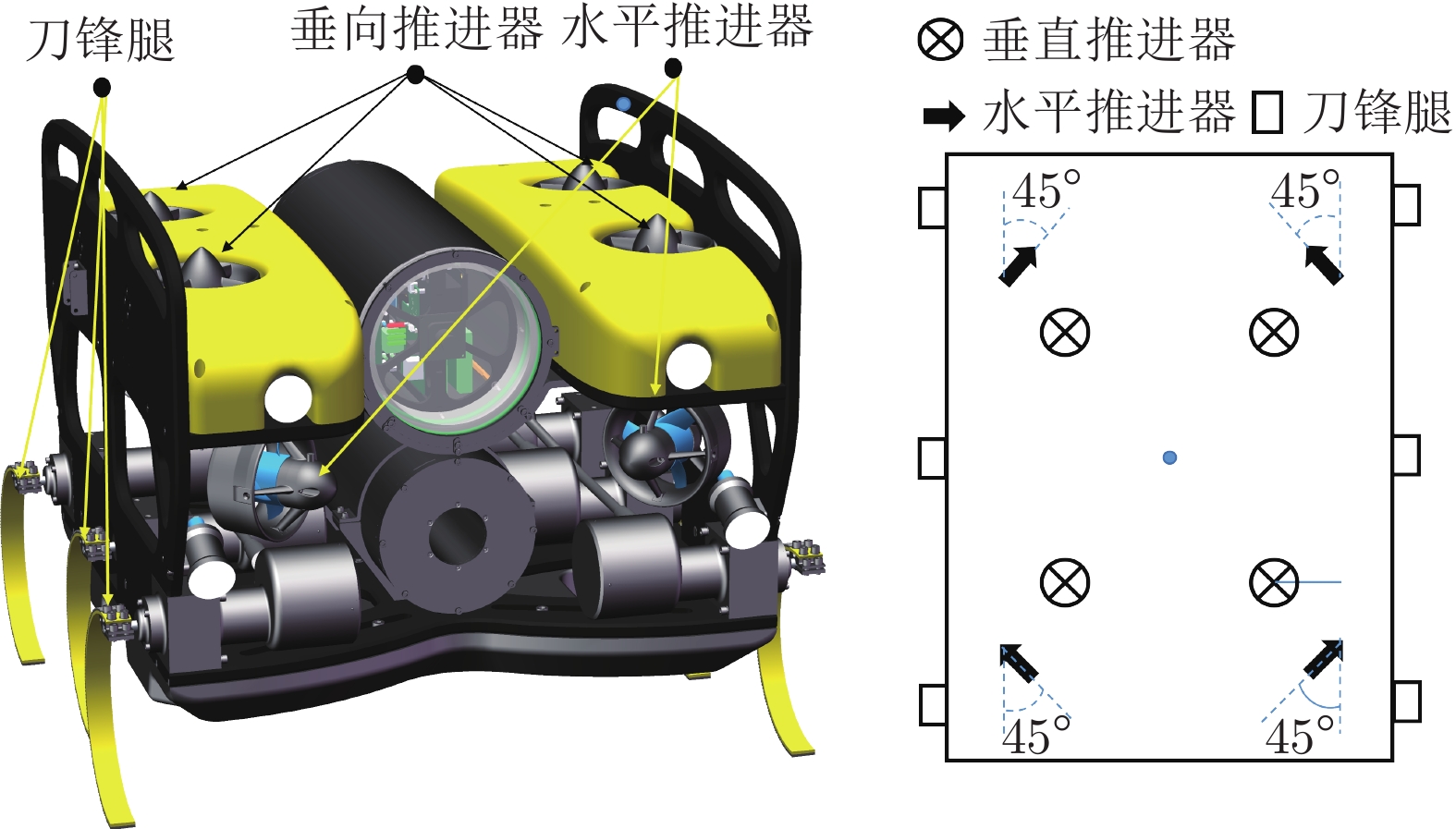
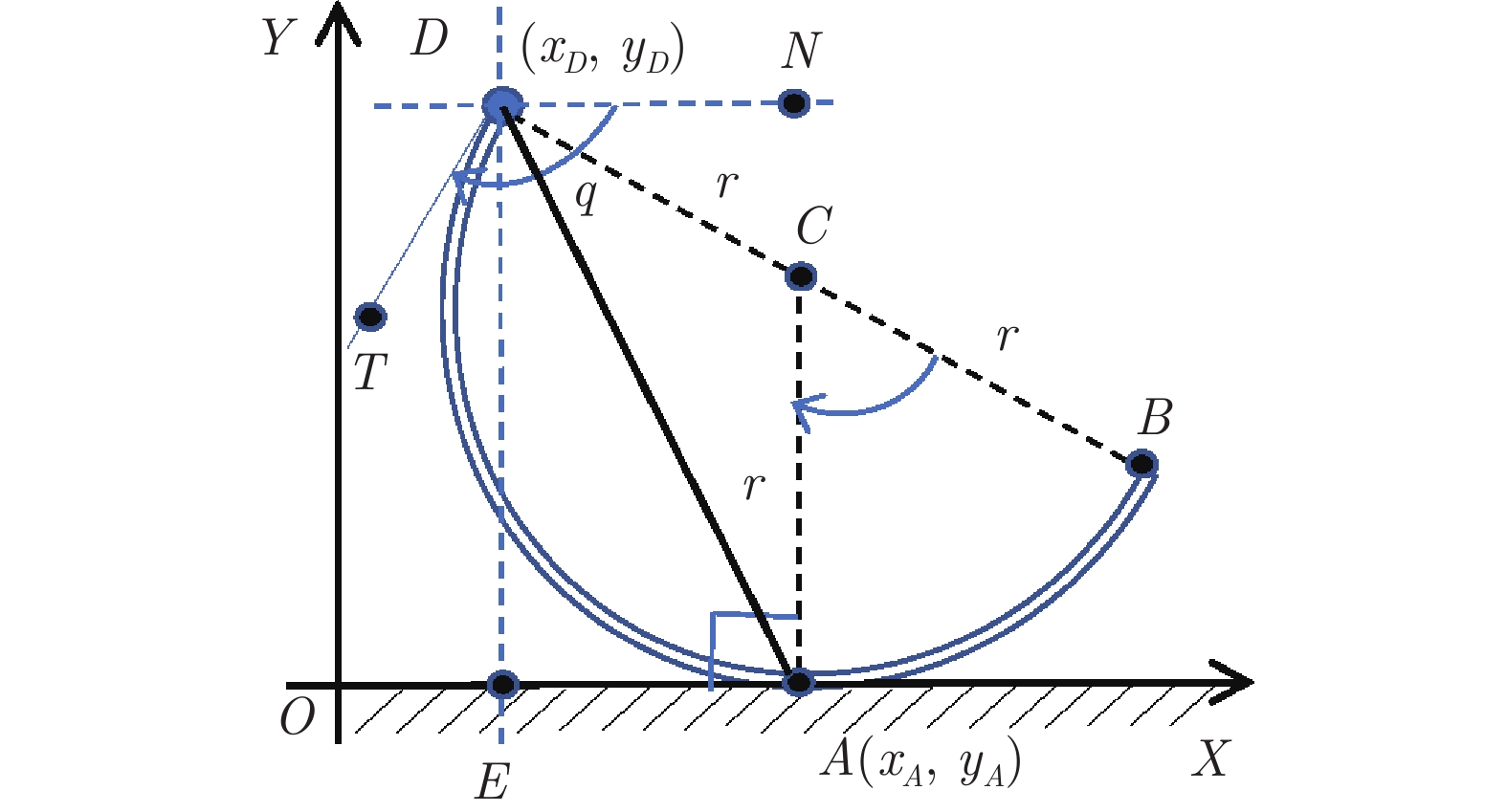
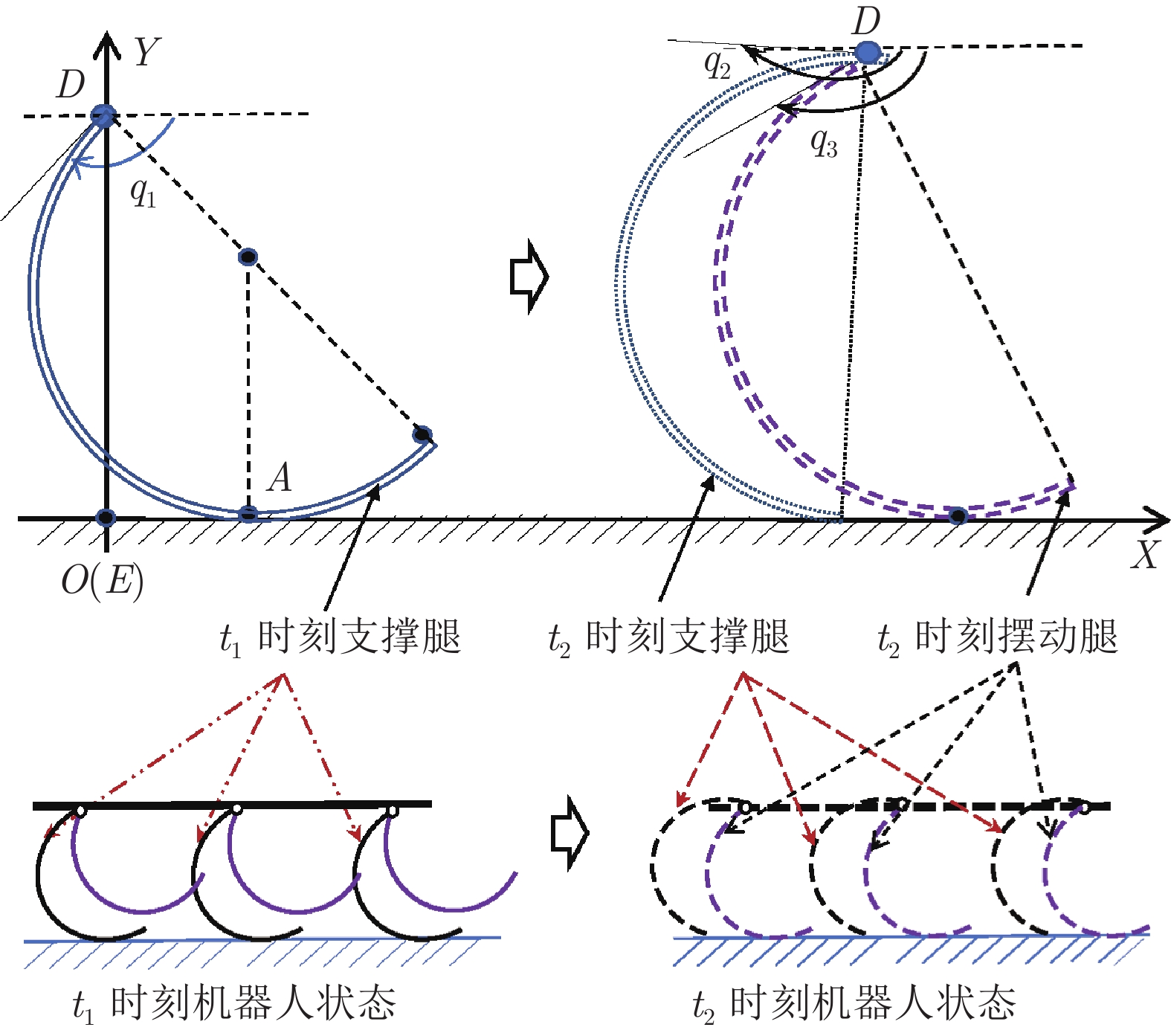
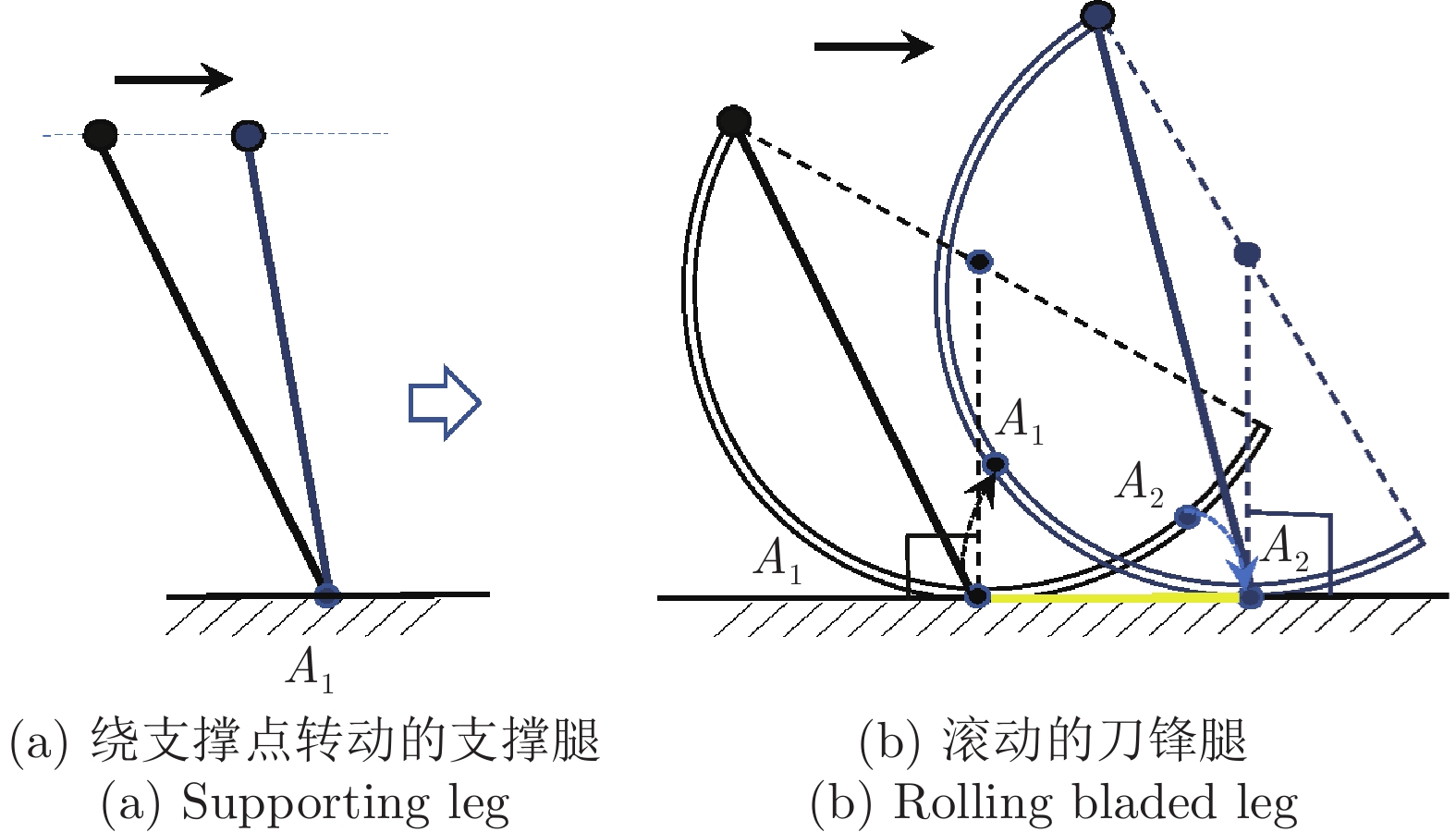
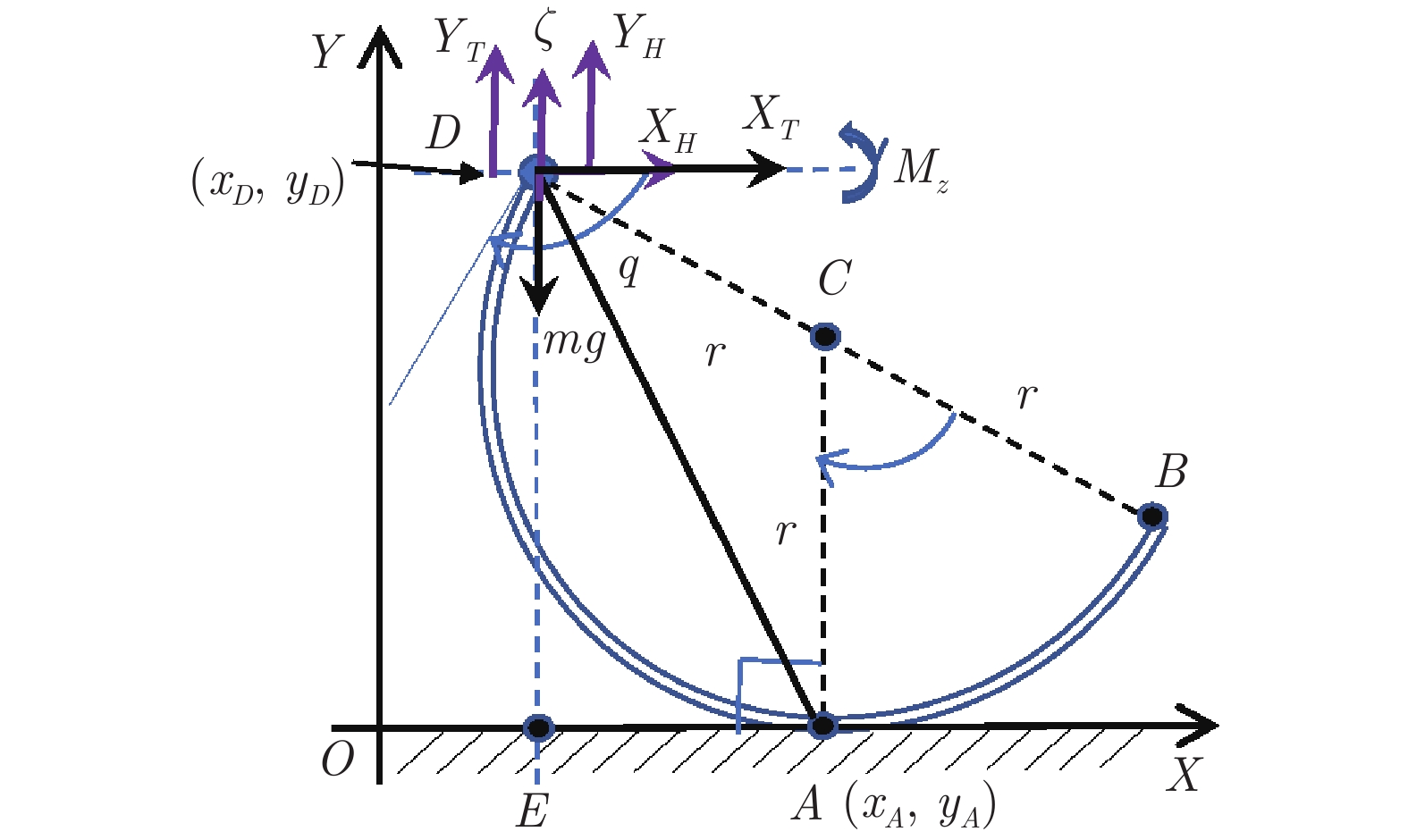
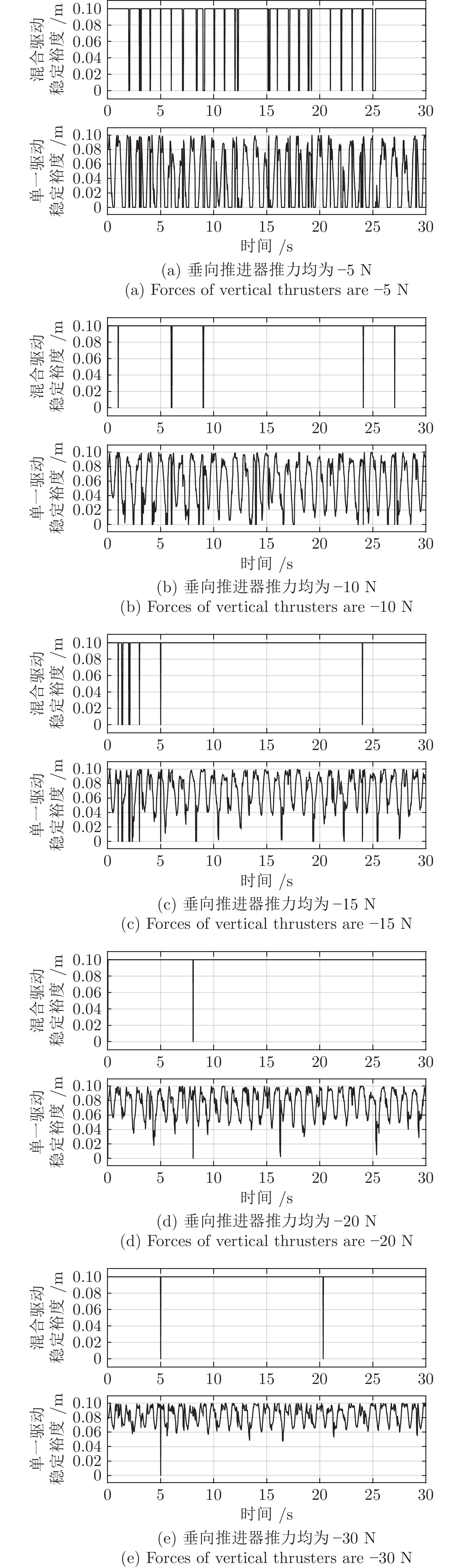
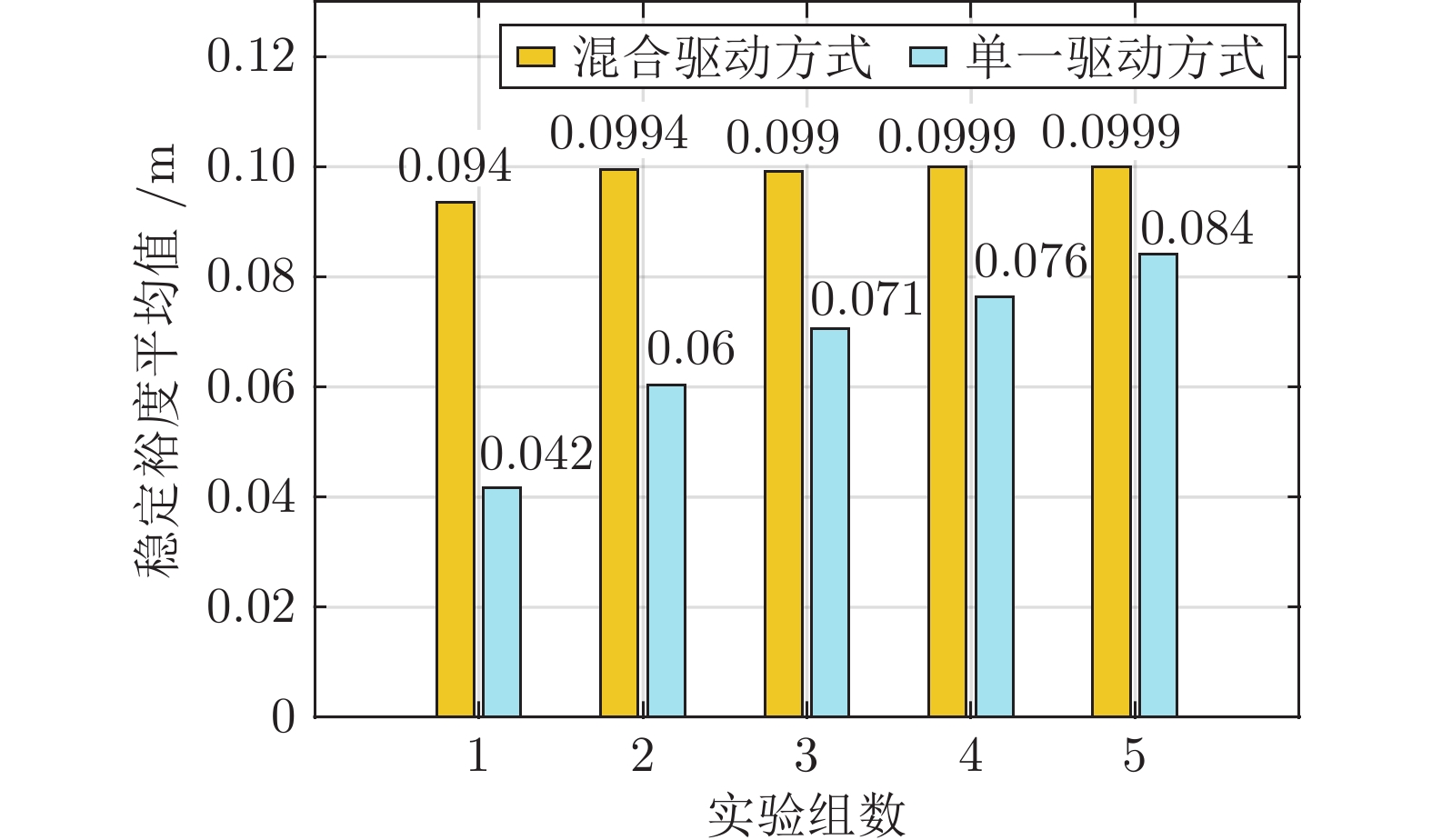
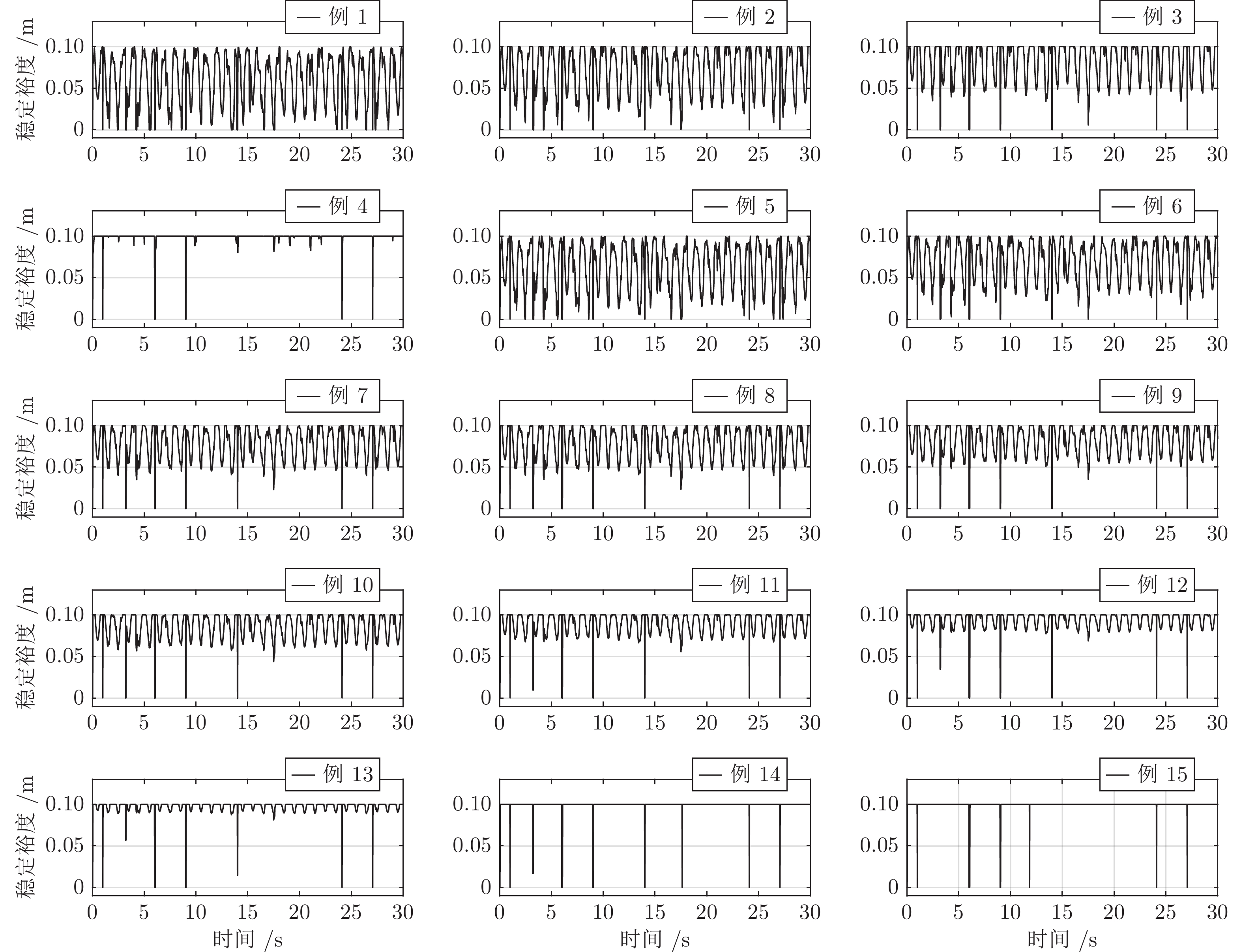
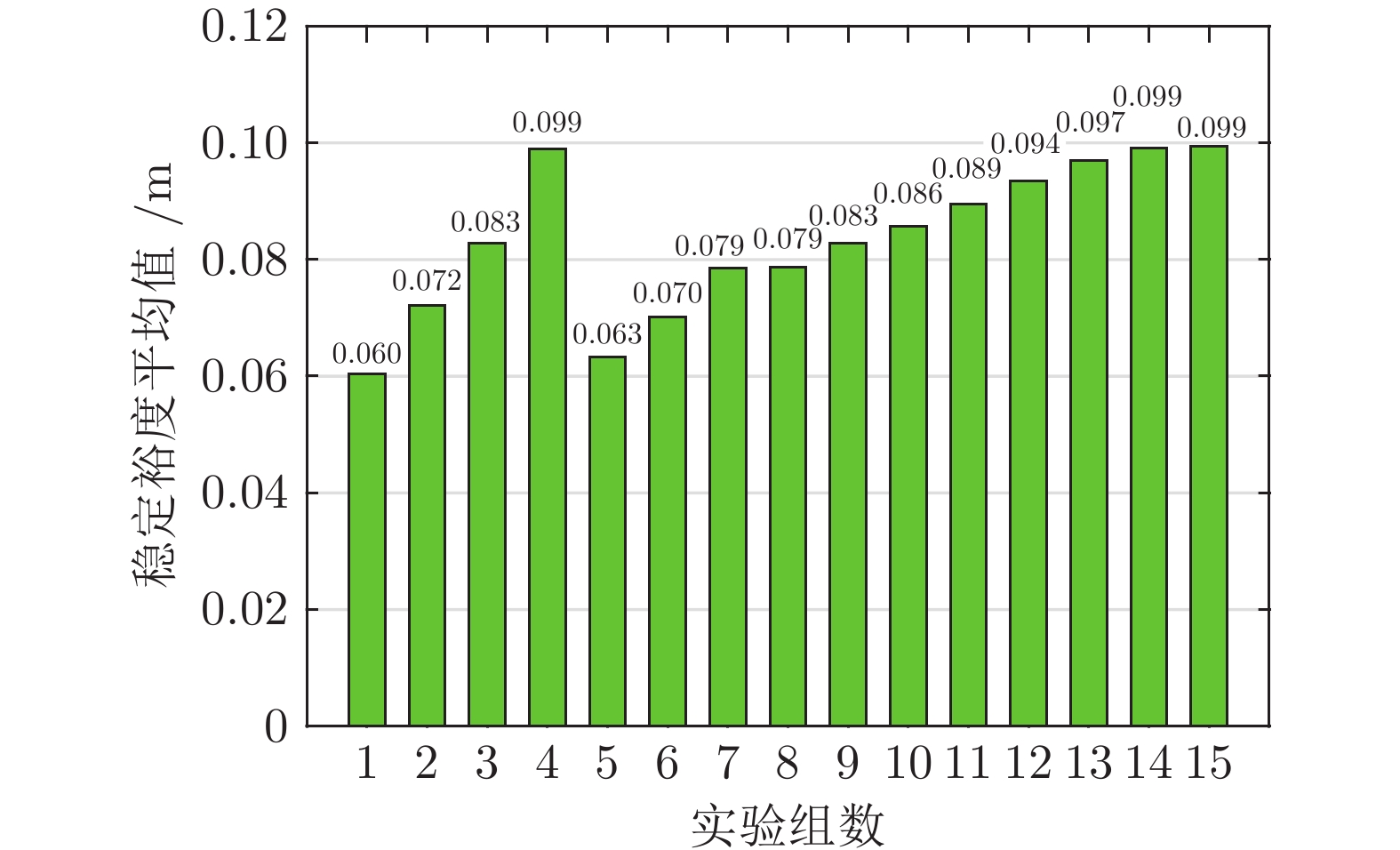
由8个推进器和6条刀锋腿混合驱动的水下机器人可在水底或壁面上行走. 本文旨在研究这类机器人运动稳定性的评判准则, 即稳定性判据. 现有的稳定性判据多集中于同一机构(腿)驱动的陆地机器人, 未涉及混合驱动的水下刀锋腿机器人. 针对该问题, 提出了基于捕获点理论的混合驱动水下刀锋腿机器人稳定性判据. 首先, 在建立混合驱动水下滚动倒立摆模型的基础上, 利用机器人运动状态预测摆动腿和支撑腿切换瞬间机器人的动能. 然后, 根据推进器所能提供的推力范围, 计算迫使机器人静止的捕获点变化范围, 即获取捕获域. 最后, 根据捕获域与支撑域的空间关系, 判断机器人是否稳定, 并计算稳定裕度. 水下实验表明, 所提出的稳定性判据具有较好的充要性和普适性.
由8个推进器和6条刀锋腿混合驱动的水下机器人可在水底或壁面上行走. 本文旨在研究这类机器人运动稳定性的评判准则, 即稳定性判据. 现有的稳定性判据多集中于同一机构(腿)驱动的陆地机器人, 未涉及混合驱动的水下刀锋腿机器人. 针对该问题, 提出了基于捕获点理论的混合驱动水下刀锋腿机器人稳定性判据. 首先, 在建立混合驱动水下滚动倒立摆模型的基础上, 利用机器人运动状态预测摆动腿和支撑腿切换瞬间机器人的动能. 然后, 根据推进器所能提供的推力范围, 计算迫使机器人静止的捕获点变化范围, 即获取捕获域. 最后, 根据捕获域与支撑域的空间关系, 判断机器人是否稳定, 并计算稳定裕度. 水下实验表明, 所提出的稳定性判据具有较好的充要性和普适性.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220690
摘要:
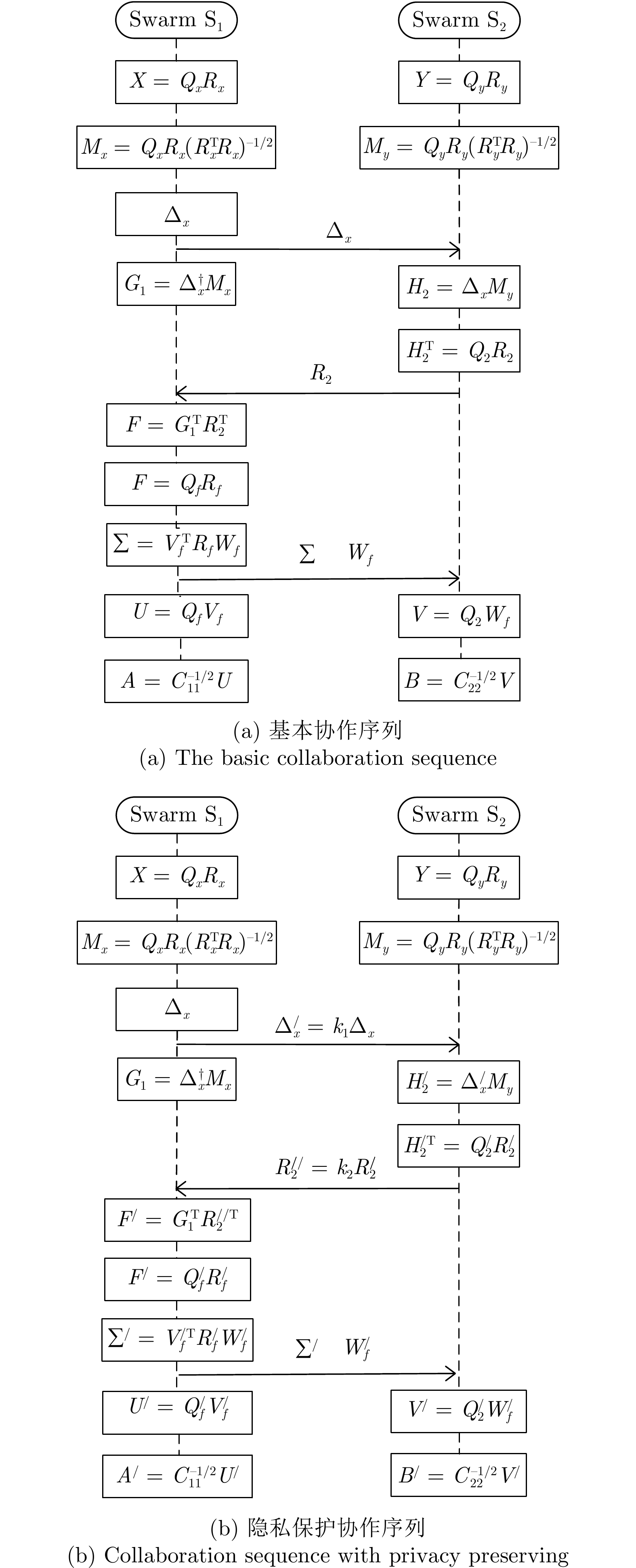
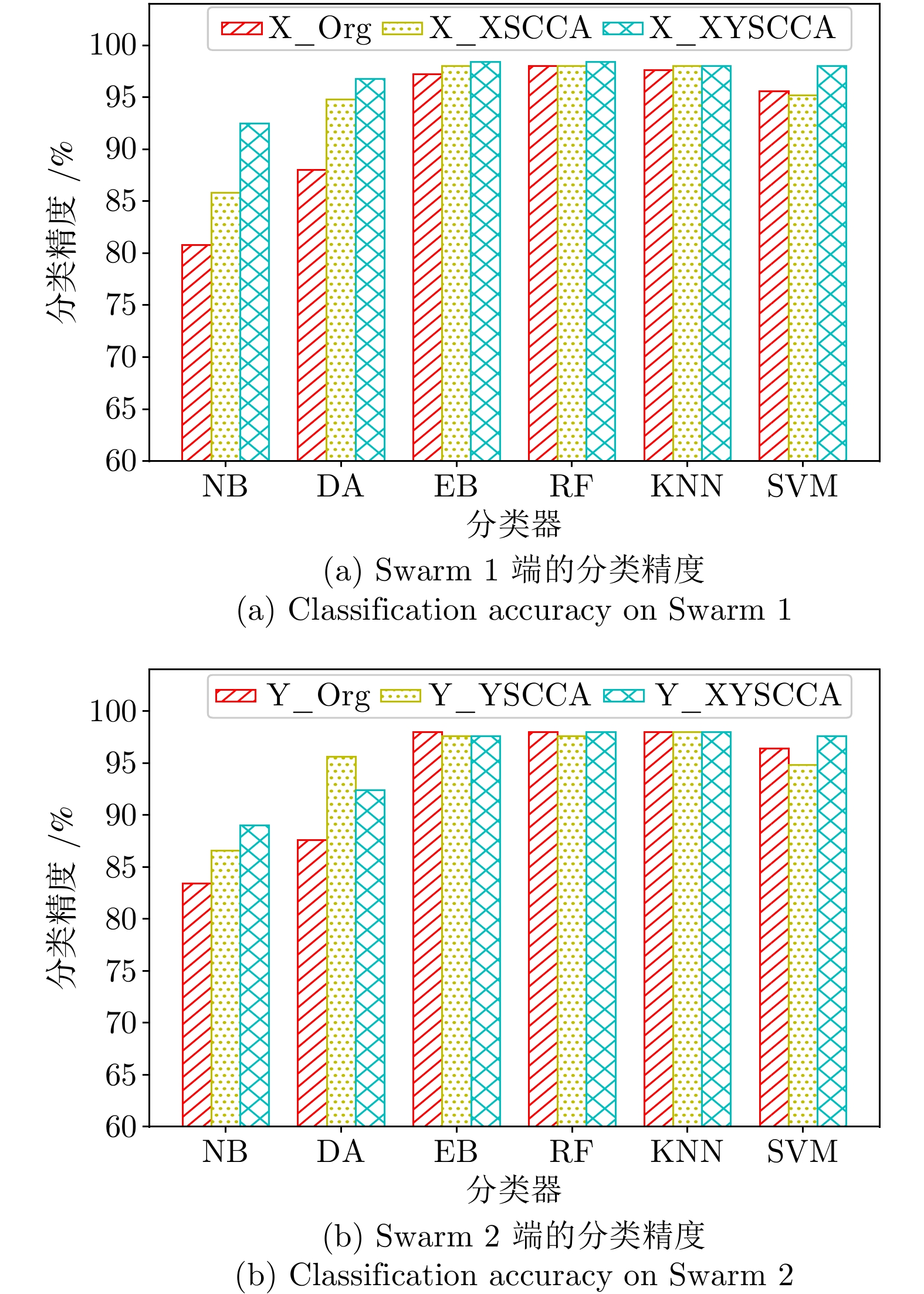
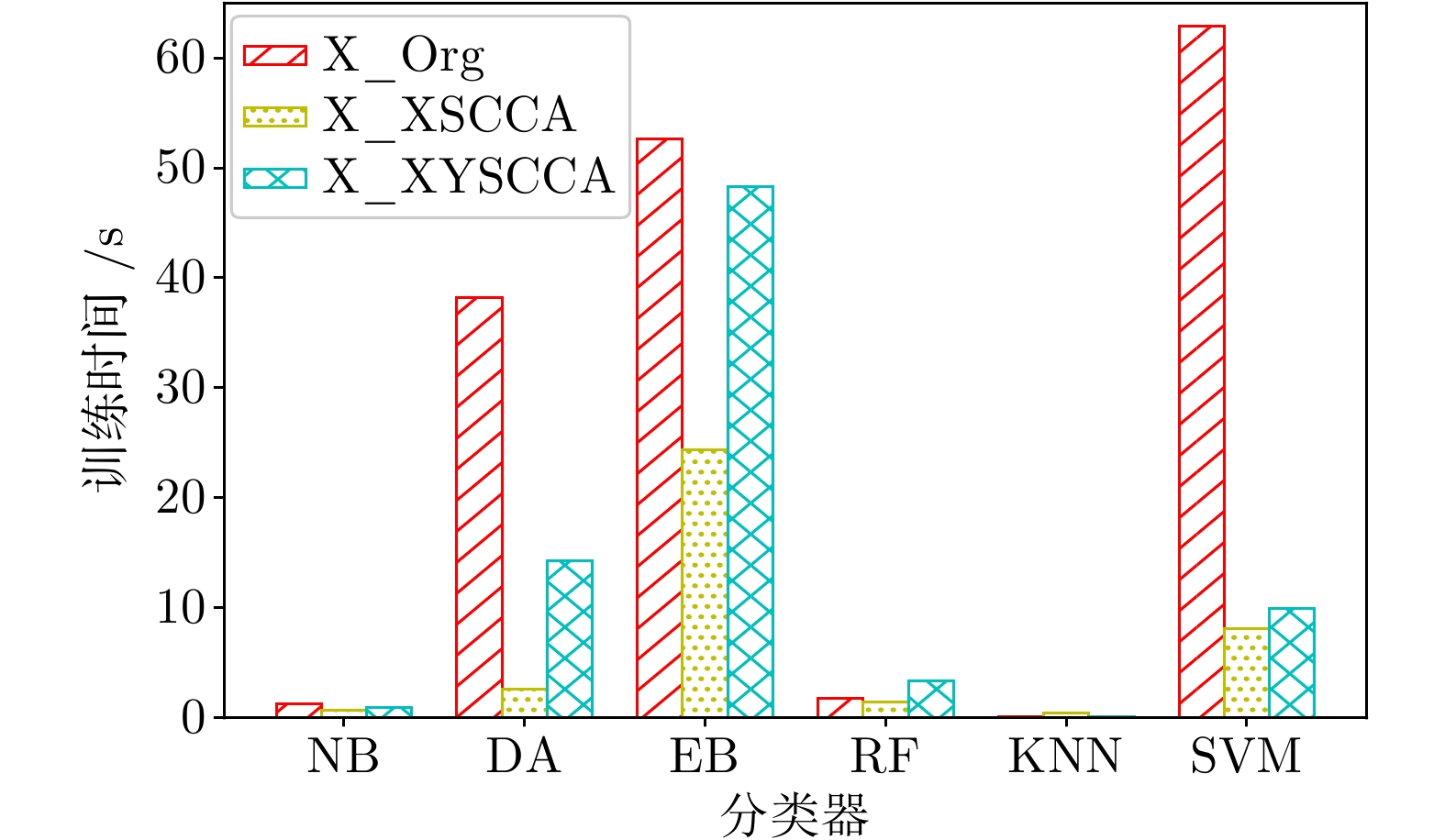
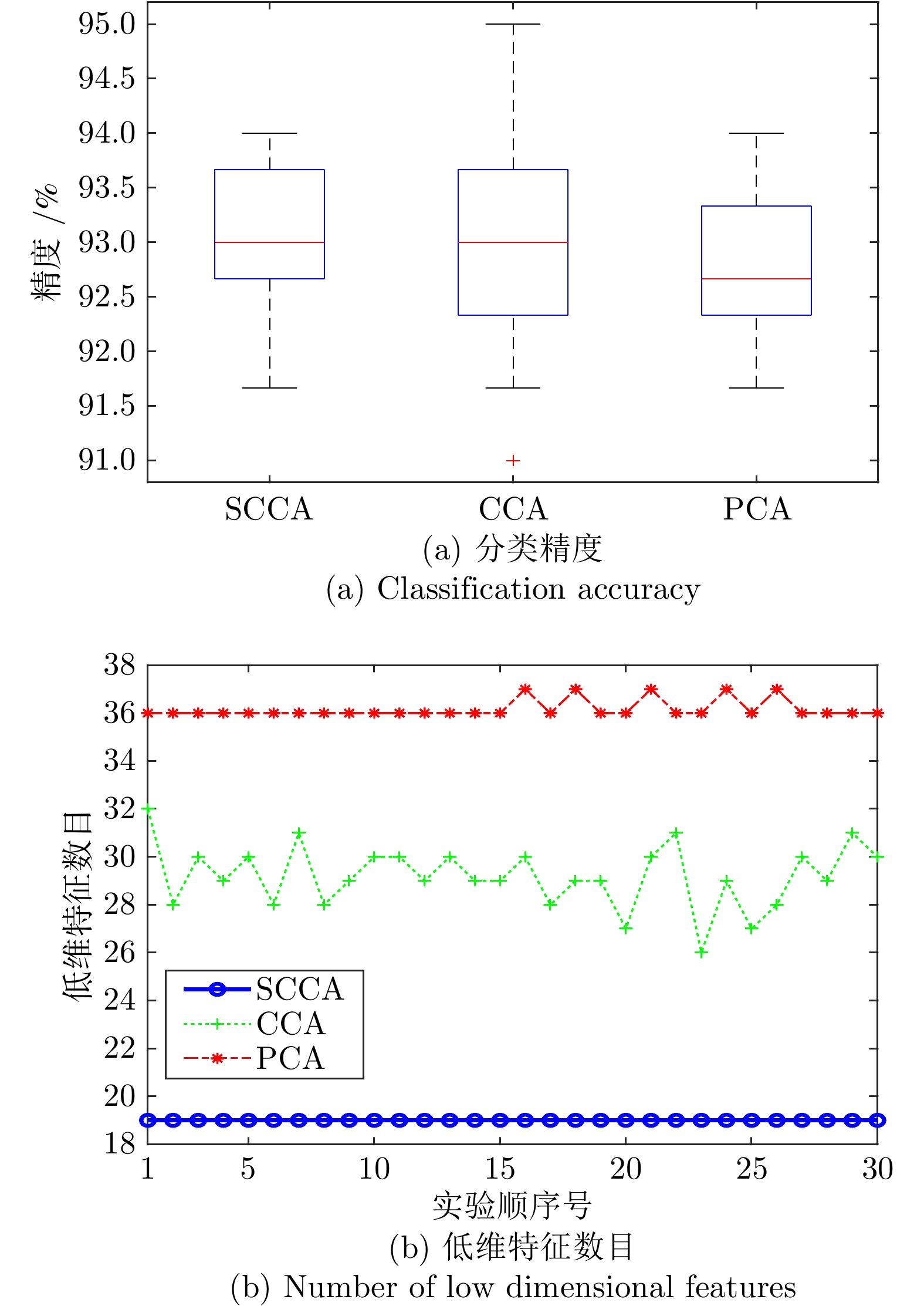
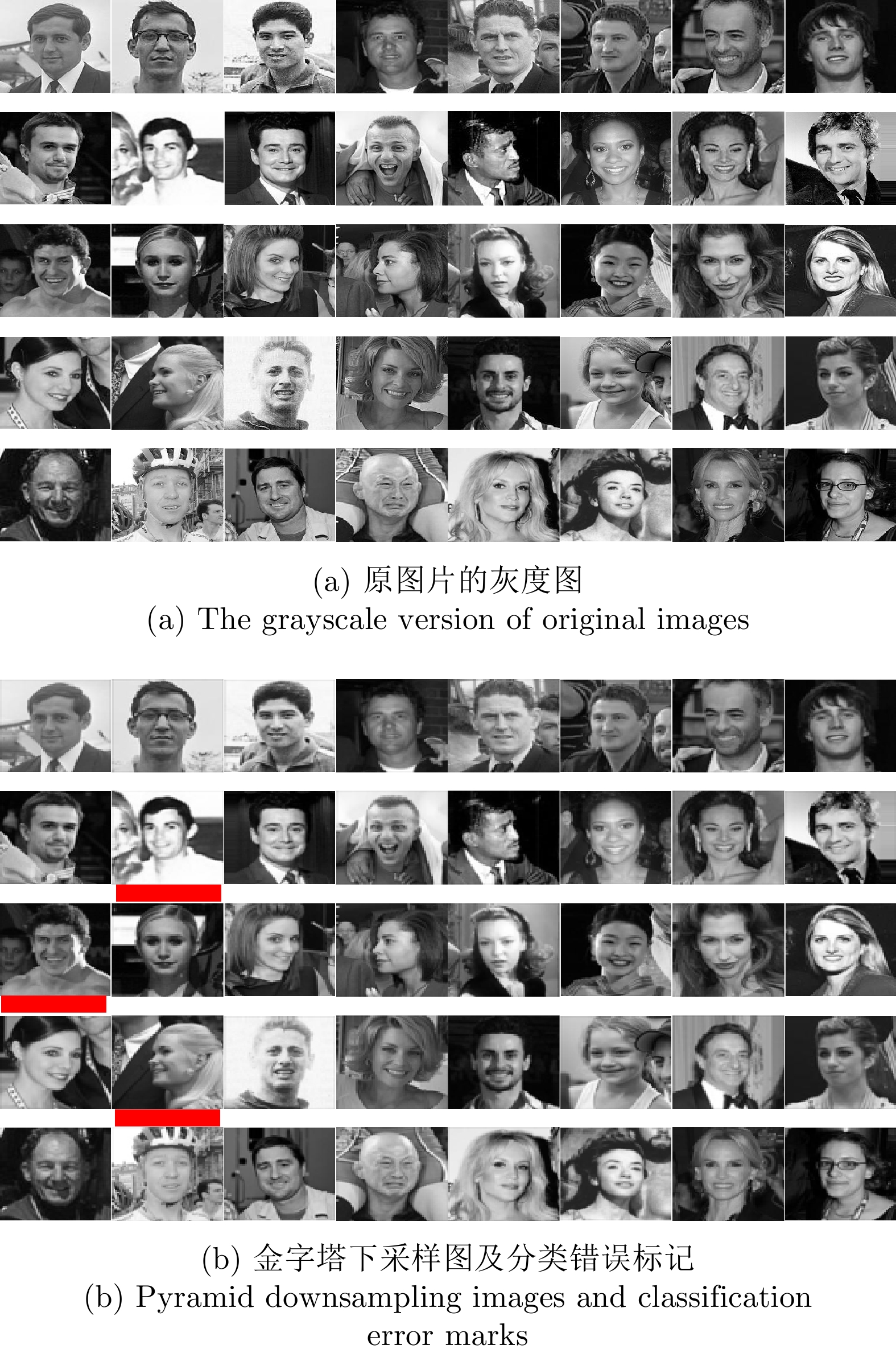
联邦学习(Federated learning, FL)在解决人工智能(Artificial intelligence, AI)面临的隐私泄露和数据孤岛问题方面具有显著优势. 针对联邦学习的已有研究未考虑联邦数据之间的关联性和高维性问题, 提出一种基于联邦数据相关性的去中心化联邦降维方法. 该方法基于Swarm学习(Swarm learning, SL)思想, 通过分离耦合特征, 构建典型相关分析(Canonical correlation analysis, CCA)的Swarm联邦框架, 以提取Swarm节点的低维关联特征. 为保护协作参数的隐私安全, 还构建了一种随机扰乱策略来隐藏Swarm特征隐私. 在真实数据集上的实验验证了所提方法的有效性.
联邦学习(Federated learning, FL)在解决人工智能(Artificial intelligence, AI)面临的隐私泄露和数据孤岛问题方面具有显著优势. 针对联邦学习的已有研究未考虑联邦数据之间的关联性和高维性问题, 提出一种基于联邦数据相关性的去中心化联邦降维方法. 该方法基于Swarm学习(Swarm learning, SL)思想, 通过分离耦合特征, 构建典型相关分析(Canonical correlation analysis, CCA)的Swarm联邦框架, 以提取Swarm节点的低维关联特征. 为保护协作参数的隐私安全, 还构建了一种随机扰乱策略来隐藏Swarm特征隐私. 在真实数据集上的实验验证了所提方法的有效性.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220994
摘要:
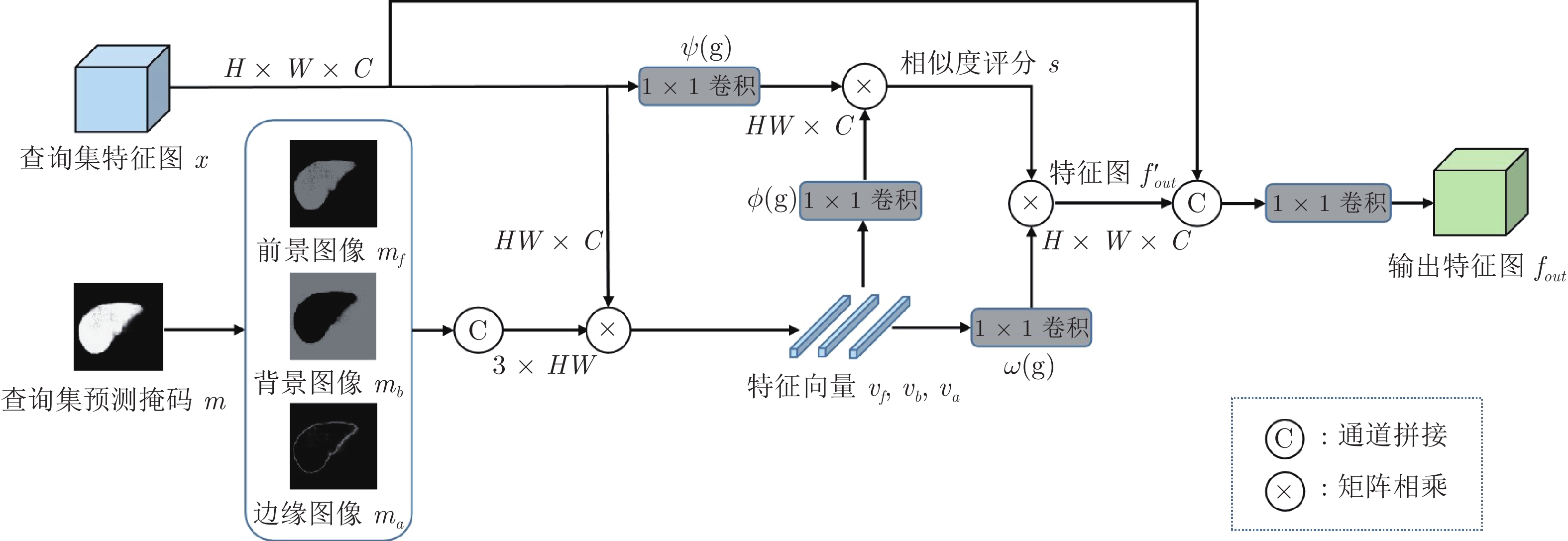
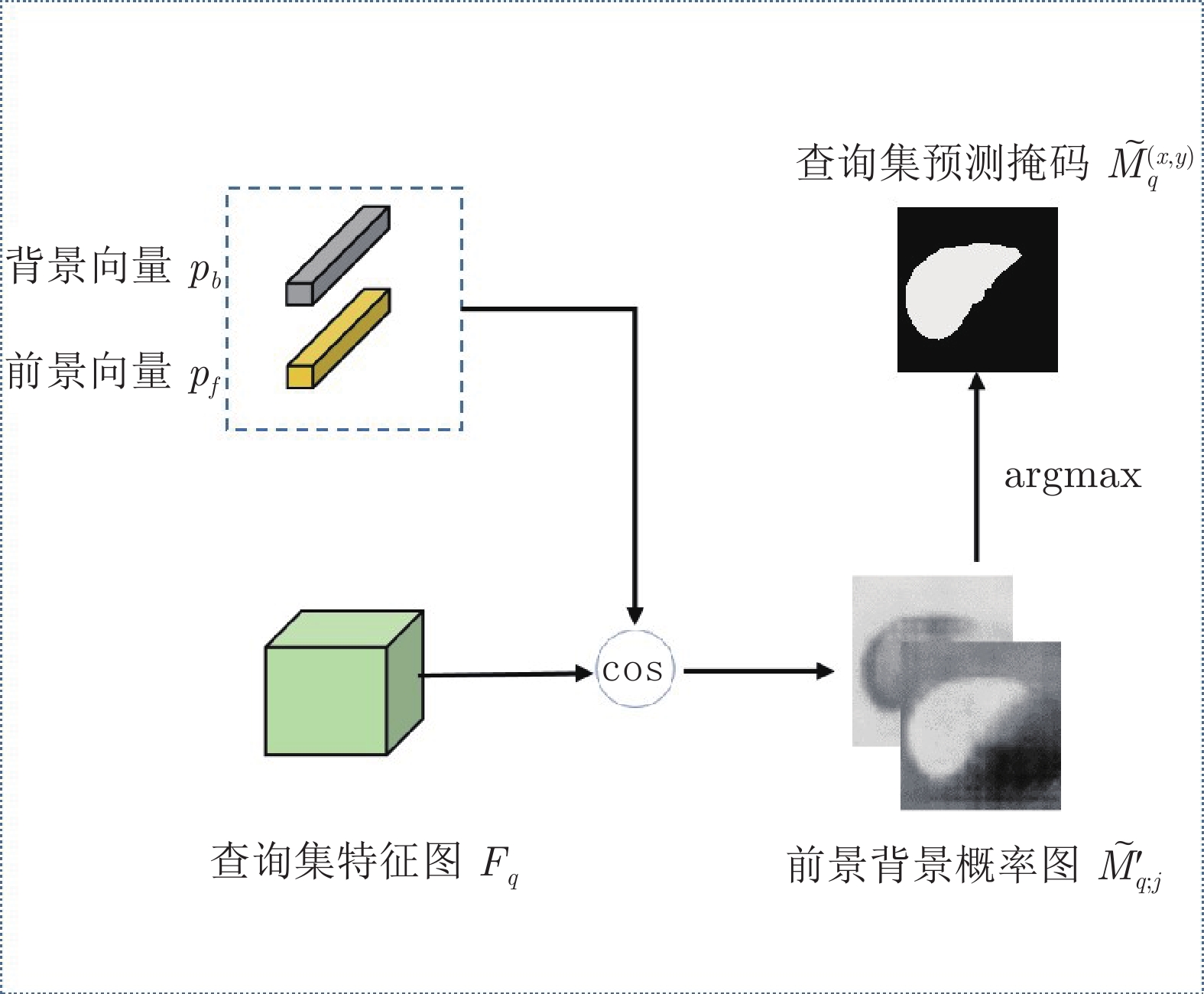
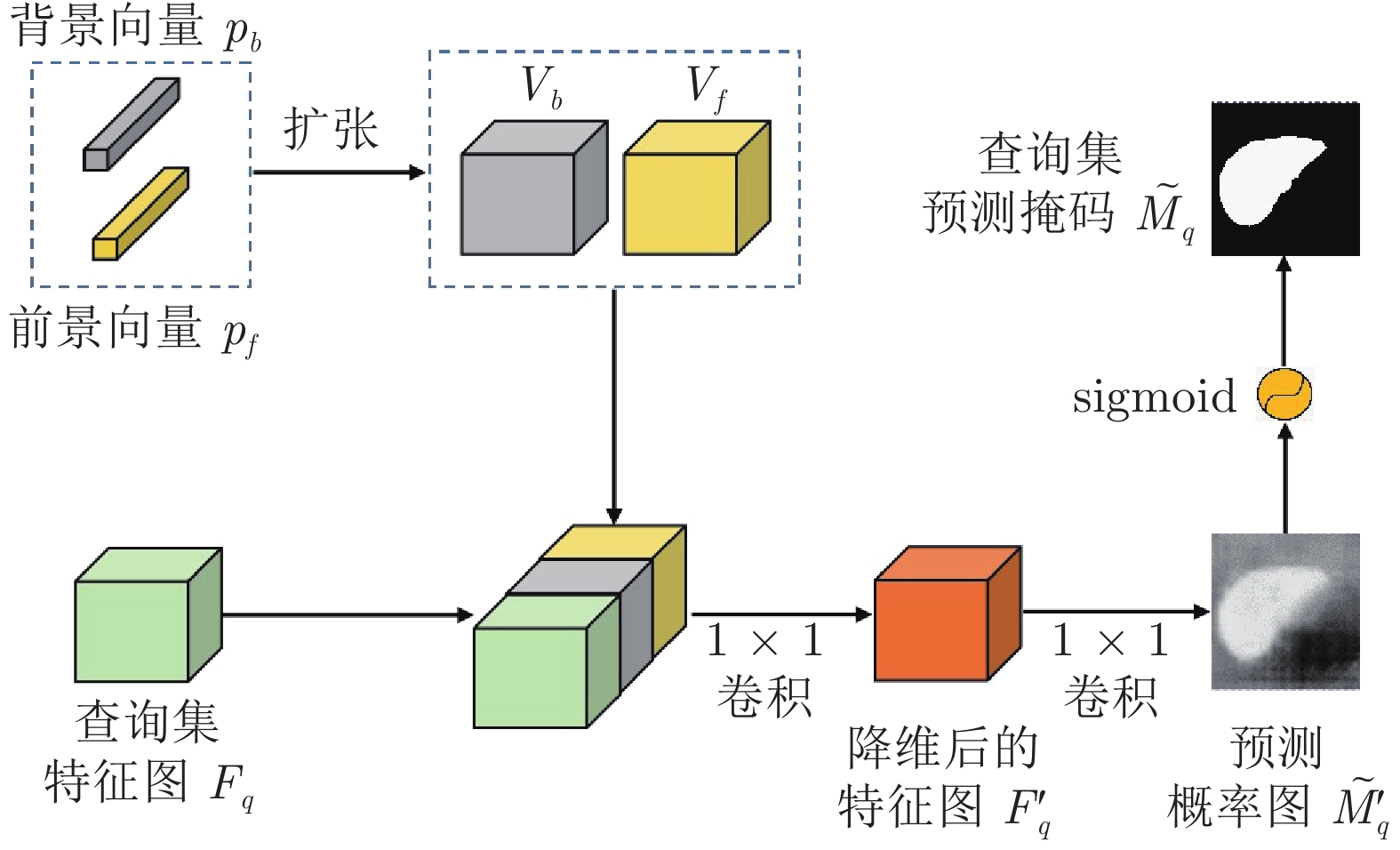
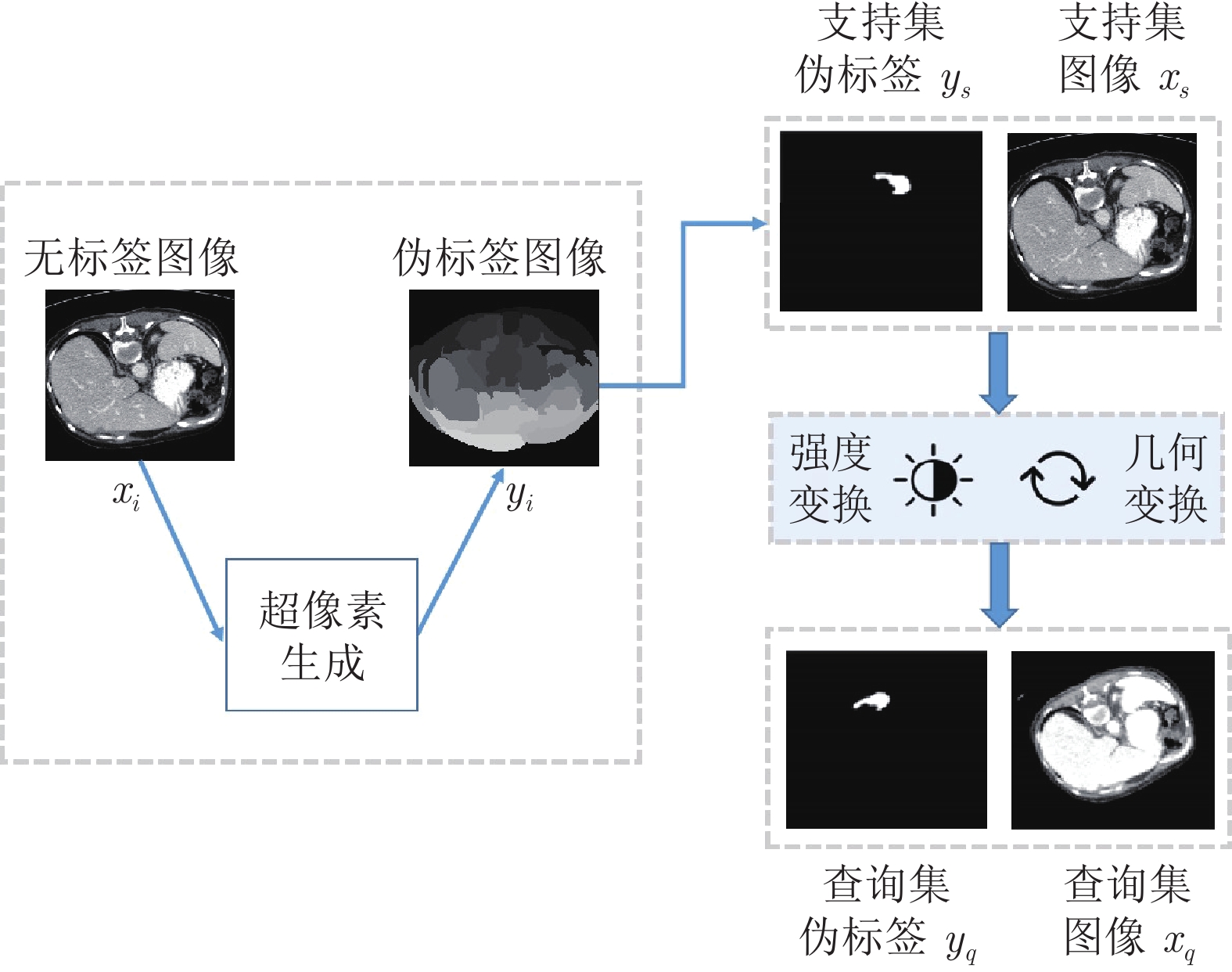
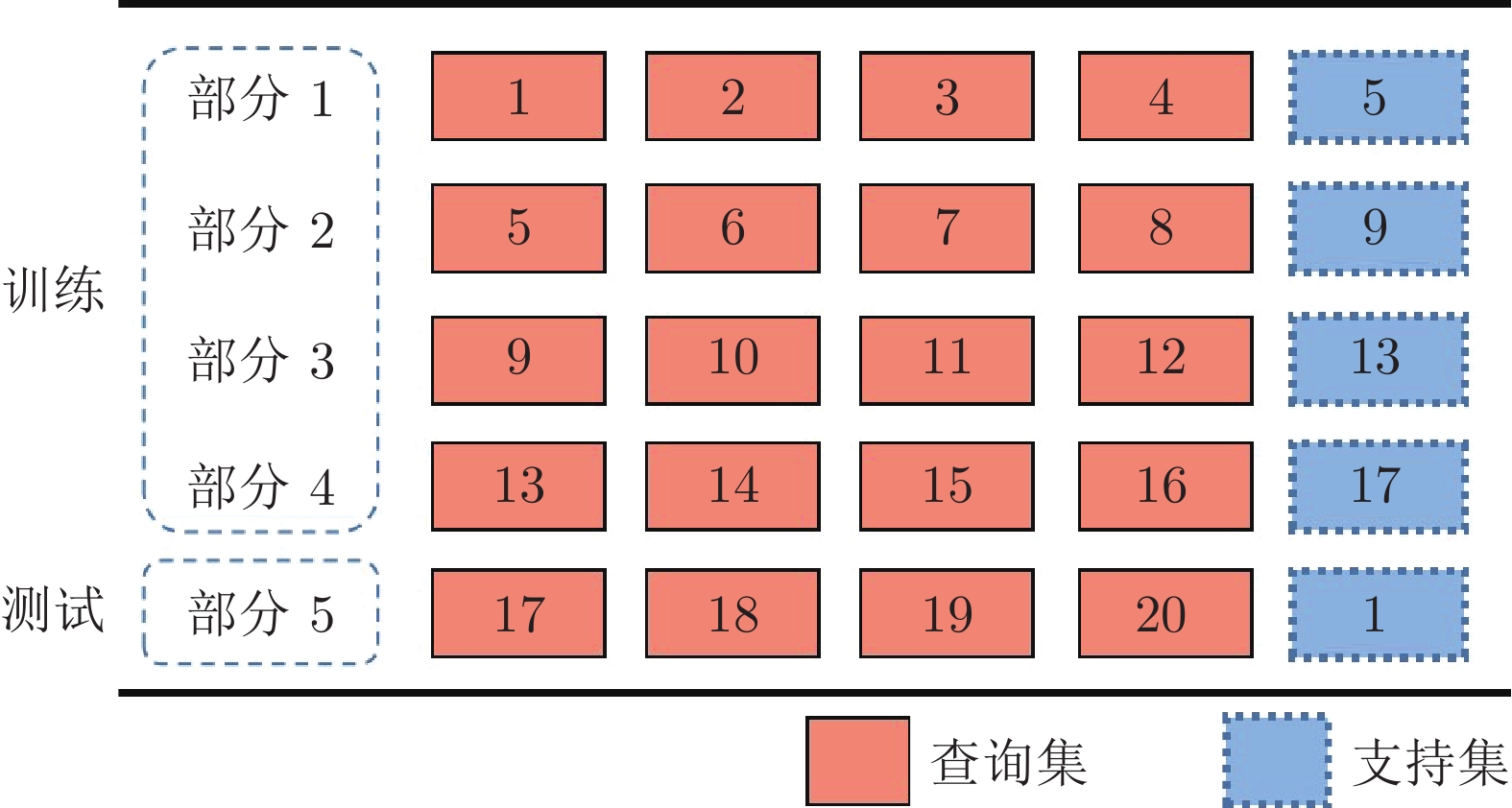
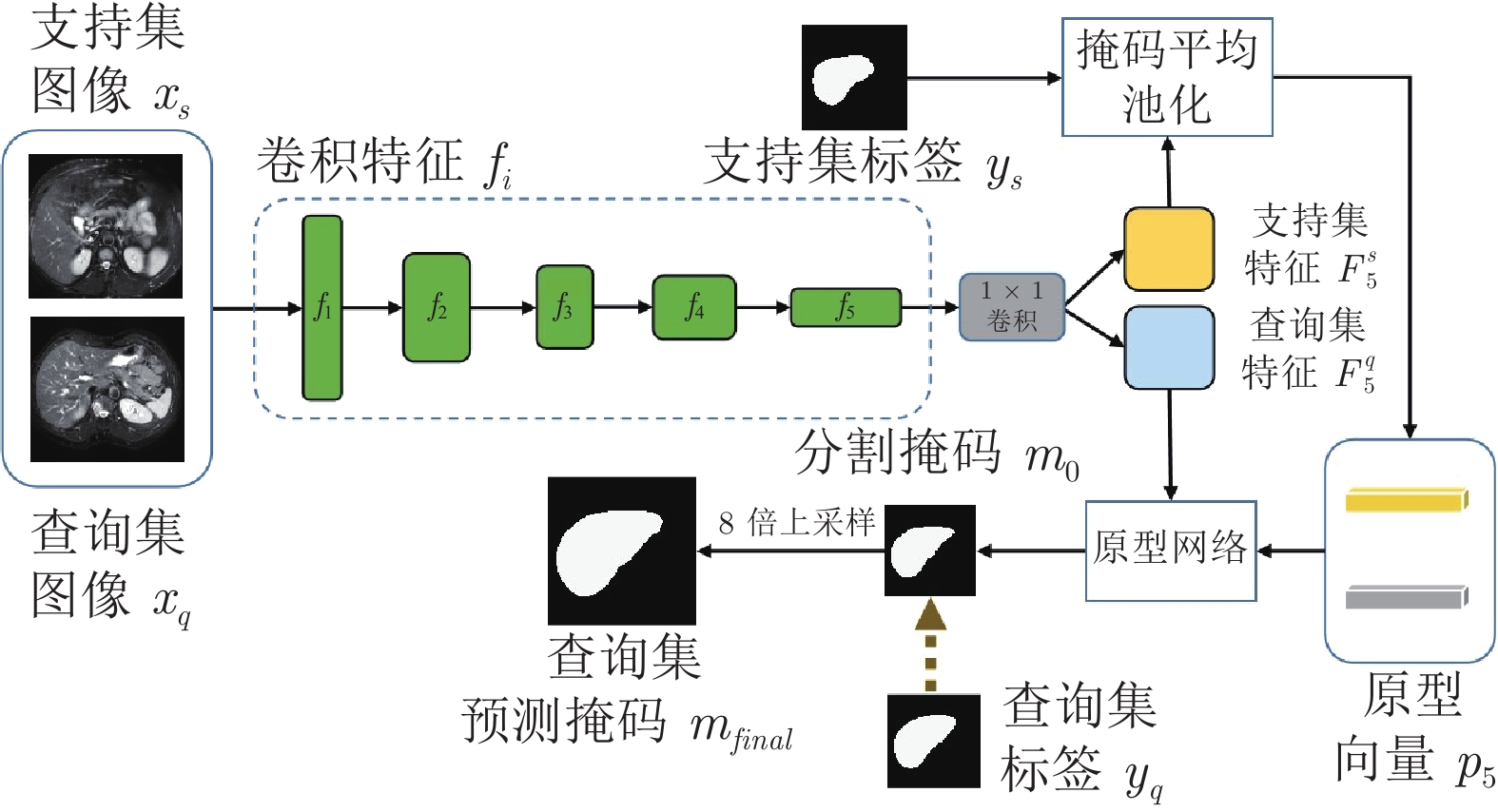
精准的医学图像自动分割是临床影像学诊断和影像三维重建的重要基础.但医学图像数据的目标对象间对比度差异小、受器官运动影响大, 加之标注样本规模小, 因此在小样本下建立高性能的医学分割模型仍是目前的难点问题. 针对主流原型学习小样本分割网络对医学图像边界分割性能差的问题, 提出一种迭代边界优化的小样本分割网络(Iterative boundary refinement based few-shot-segmentation network, IBR-FSS-Net). 以双分支原型学习的小样本分割框架为基础引入类别注意力机制和密集比较模块, 对粗分割掩码进行迭代优化, 引导分割模型在多次迭代学习过程中关注边界, 从而提升边界分割精度. 为进一步克服医学图像训练样本少且多样性不足的问题, 使用超像素方法生成伪标签, 扩充训练数据以提升模型泛化性. 在主流的ABD-MR和ABD-CT医学图像分割公共数据集上进行实验, 与现有多种先进的医学图像小样本分割方法进行了广泛的对比分析和消融实验. 结果表明, 该方法有效提升了未见医学类别的分割性能.
精准的医学图像自动分割是临床影像学诊断和影像三维重建的重要基础.但医学图像数据的目标对象间对比度差异小、受器官运动影响大, 加之标注样本规模小, 因此在小样本下建立高性能的医学分割模型仍是目前的难点问题. 针对主流原型学习小样本分割网络对医学图像边界分割性能差的问题, 提出一种迭代边界优化的小样本分割网络(Iterative boundary refinement based few-shot-segmentation network, IBR-FSS-Net). 以双分支原型学习的小样本分割框架为基础引入类别注意力机制和密集比较模块, 对粗分割掩码进行迭代优化, 引导分割模型在多次迭代学习过程中关注边界, 从而提升边界分割精度. 为进一步克服医学图像训练样本少且多样性不足的问题, 使用超像素方法生成伪标签, 扩充训练数据以提升模型泛化性. 在主流的ABD-MR和ABD-CT医学图像分割公共数据集上进行实验, 与现有多种先进的医学图像小样本分割方法进行了广泛的对比分析和消融实验. 结果表明, 该方法有效提升了未见医学类别的分割性能.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210598
摘要:
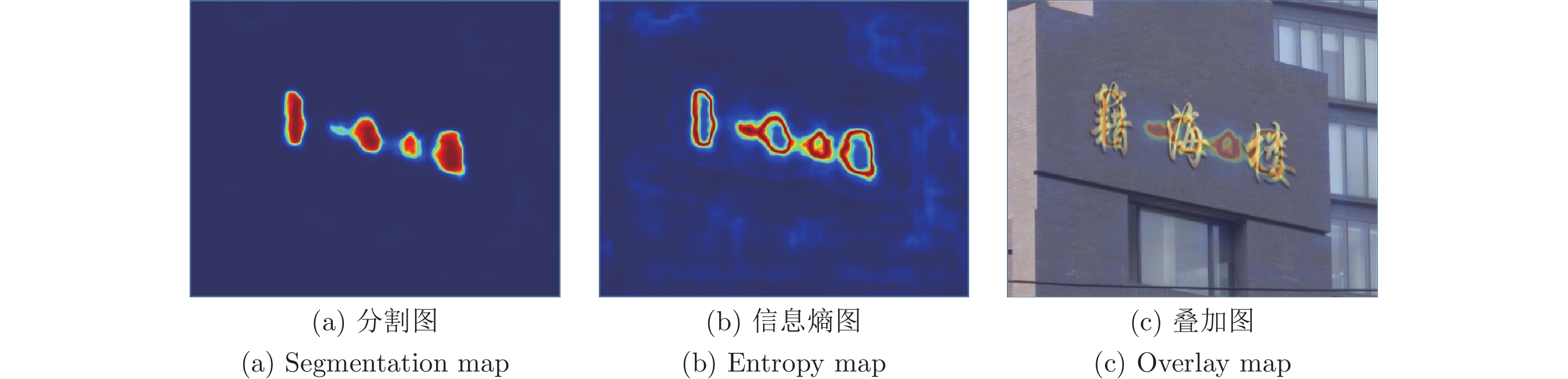
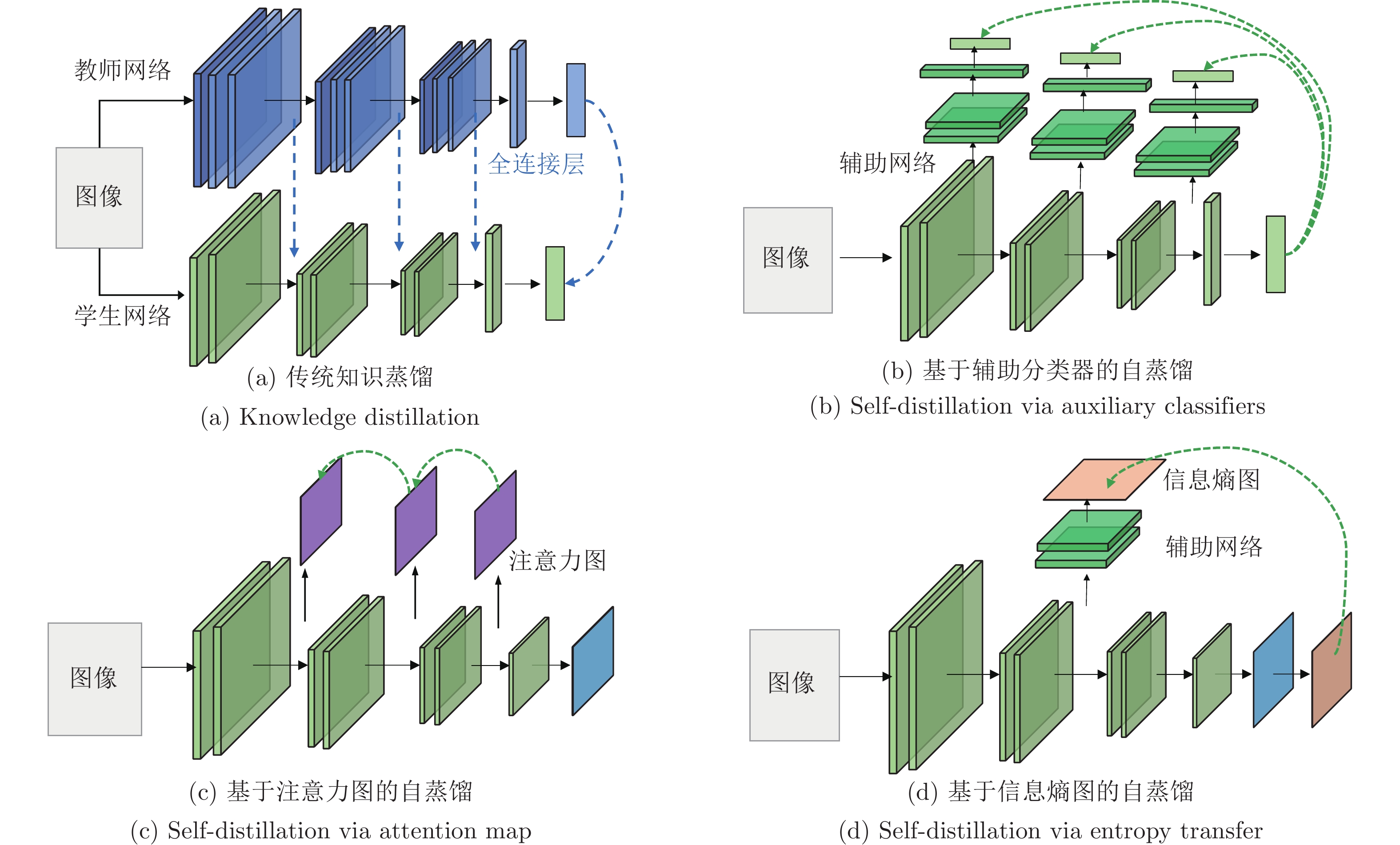
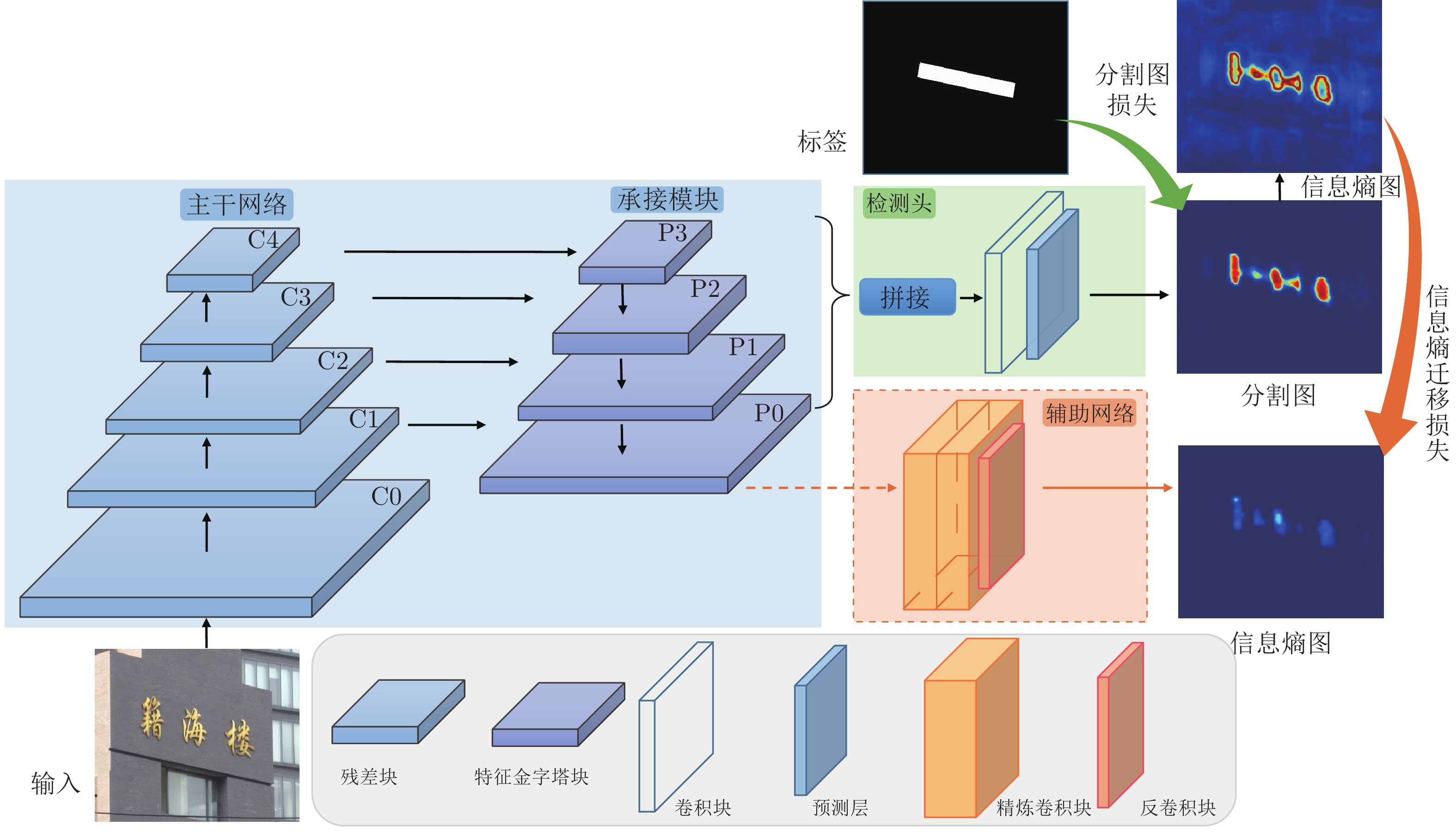
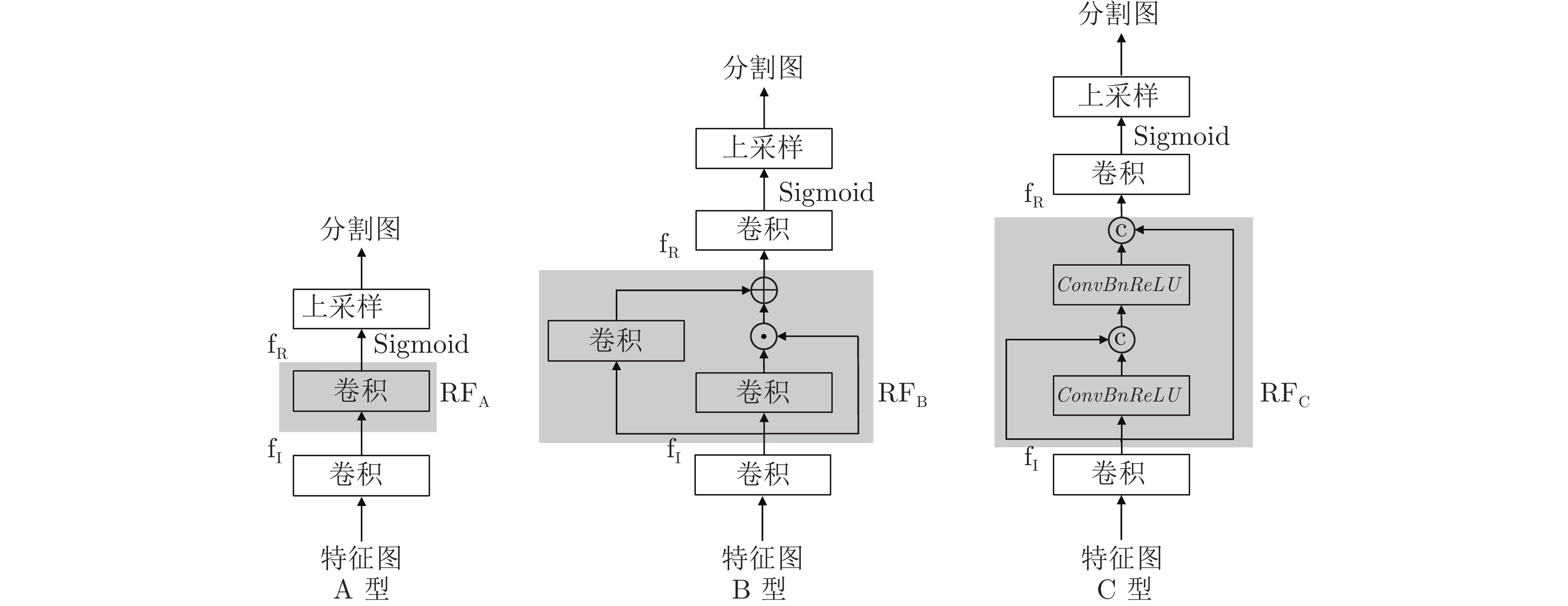
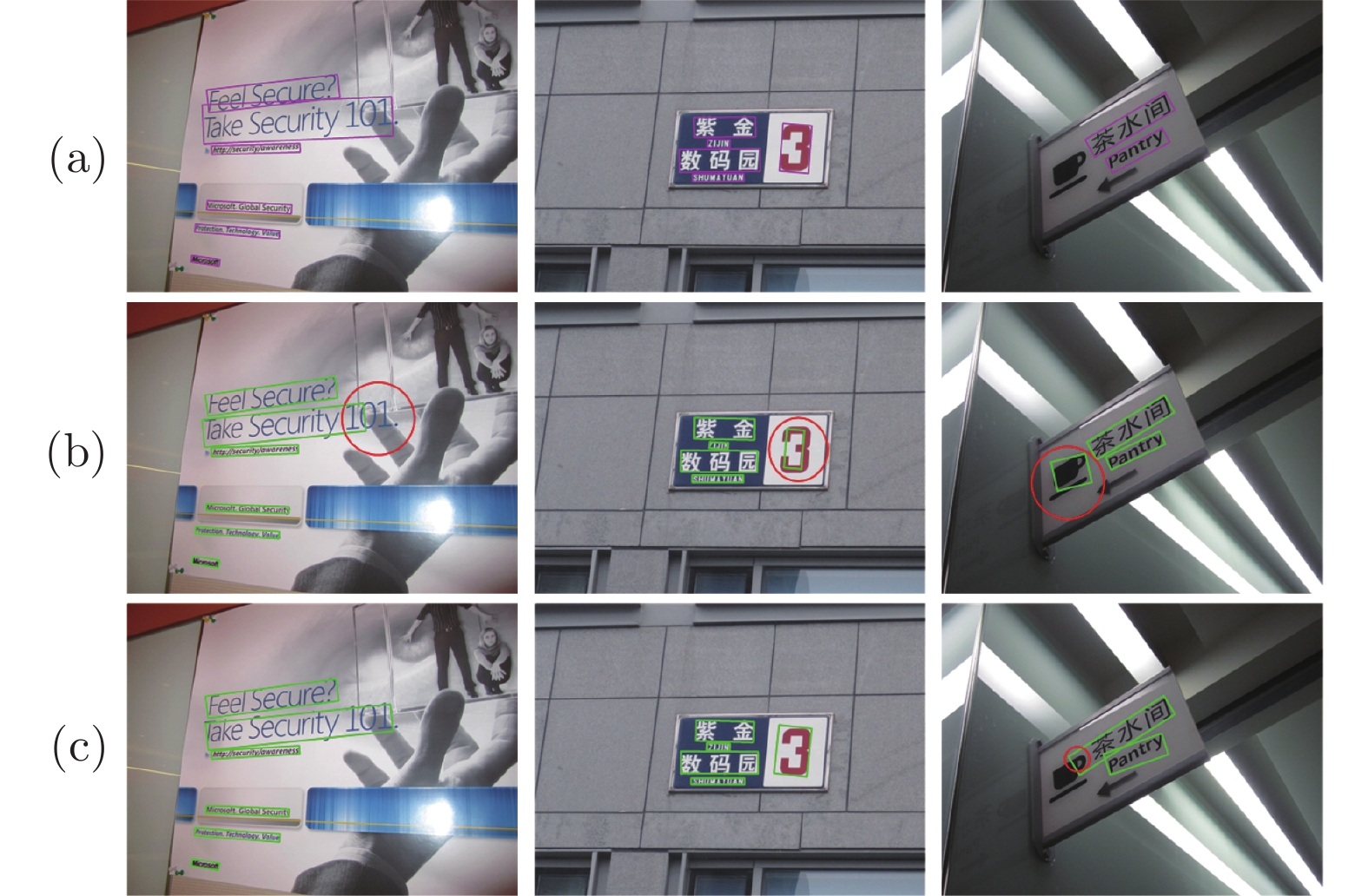
前沿的自然场景文本检测方法大多基于全卷积语义分割网络, 利用像素级分类结果有效检测任意形状的文本, 其缺点是模型大、推理时间长、内存占用高, 这在实际应用中限制了其部署. 提出一种基于信息熵迁移的自蒸馏训练方法(Self-distillation via entropy transfer, SDET), 利用文本检测网络深层网络输出的分割图(Segmentation map, SM)信息熵作为待迁移知识, 通过辅助网络将信息熵反馈给浅层网络. 与依赖教师网络的知识蒸馏 (Knowledge distillation, KD)不同, 自蒸馏训练方法仅在训练阶段增加一个辅助网络, 以微小的额外训练代价实现无需教师网络的自蒸馏(Self-distillation, SD). 在多个自然场景文本检测的标准数据集上的实验结果表明, SDET在基线文本检测网络的召回率和F1得分上, 能显著优于其他蒸馏方法.
前沿的自然场景文本检测方法大多基于全卷积语义分割网络, 利用像素级分类结果有效检测任意形状的文本, 其缺点是模型大、推理时间长、内存占用高, 这在实际应用中限制了其部署. 提出一种基于信息熵迁移的自蒸馏训练方法(Self-distillation via entropy transfer, SDET), 利用文本检测网络深层网络输出的分割图(Segmentation map, SM)信息熵作为待迁移知识, 通过辅助网络将信息熵反馈给浅层网络. 与依赖教师网络的知识蒸馏 (Knowledge distillation, KD)不同, 自蒸馏训练方法仅在训练阶段增加一个辅助网络, 以微小的额外训练代价实现无需教师网络的自蒸馏(Self-distillation, SD). 在多个自然场景文本检测的标准数据集上的实验结果表明, SDET在基线文本检测网络的召回率和F1得分上, 能显著优于其他蒸馏方法.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220705
摘要:
决策蕴涵分析是形式概念分析研究的重要方面, 基于形式背景获取决策蕴涵、概念规则等知识是数据分析、机器学习的重要研究内容之一. 首先, 利用属性逻辑语义对决策蕴涵的特性进行刻画. 其次, 在经典二值逻辑框架下分析决策蕴涵、概念规则的基于全蕴涵三I推理思想及分离规则 (Modus Ponens, MP) 和逆分离规则 (Modus Tonens, MT) 的近似推理模式的特征, 证明决策蕴涵的MP、MT近似推理结论是决策蕴涵, 概念规则的MP、MT近似推理结论是概念规则等结论. 引进属性逻辑公式的伪距离, 在属性逻辑伪距离空间中分析推理对象范围参数变化对决策蕴涵MP、MT近似推理结论的影响. 最后, 提出若干通过MP、MT近似推理生成决策蕴涵、概念规则及拟决策蕴涵的模式和方法, 数值实验说明所提出的方法是有效的.
决策蕴涵分析是形式概念分析研究的重要方面, 基于形式背景获取决策蕴涵、概念规则等知识是数据分析、机器学习的重要研究内容之一. 首先, 利用属性逻辑语义对决策蕴涵的特性进行刻画. 其次, 在经典二值逻辑框架下分析决策蕴涵、概念规则的基于全蕴涵三I推理思想及分离规则 (Modus Ponens, MP) 和逆分离规则 (Modus Tonens, MT) 的近似推理模式的特征, 证明决策蕴涵的MP、MT近似推理结论是决策蕴涵, 概念规则的MP、MT近似推理结论是概念规则等结论. 引进属性逻辑公式的伪距离, 在属性逻辑伪距离空间中分析推理对象范围参数变化对决策蕴涵MP、MT近似推理结论的影响. 最后, 提出若干通过MP、MT近似推理生成决策蕴涵、概念规则及拟决策蕴涵的模式和方法, 数值实验说明所提出的方法是有效的.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230184
摘要:
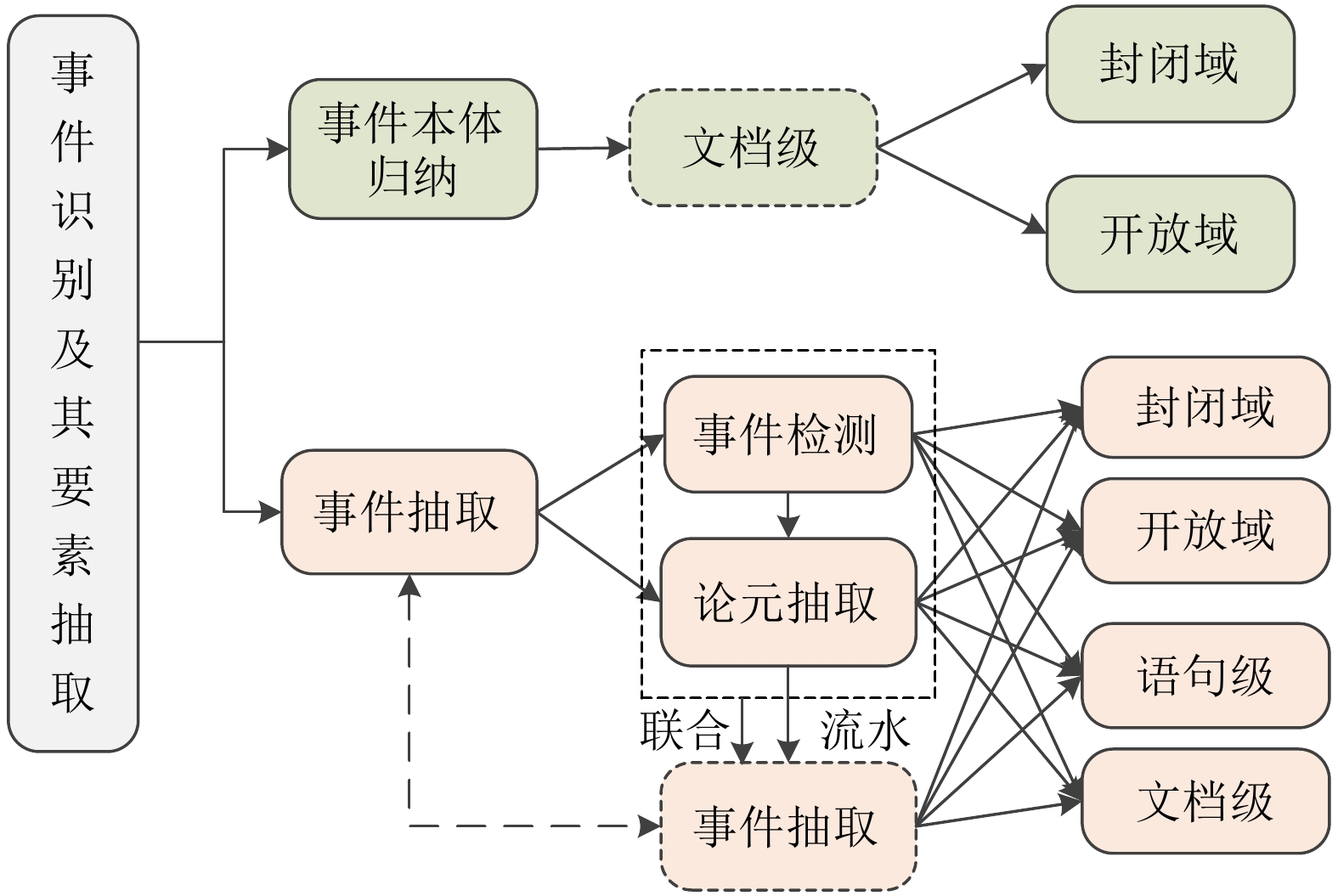
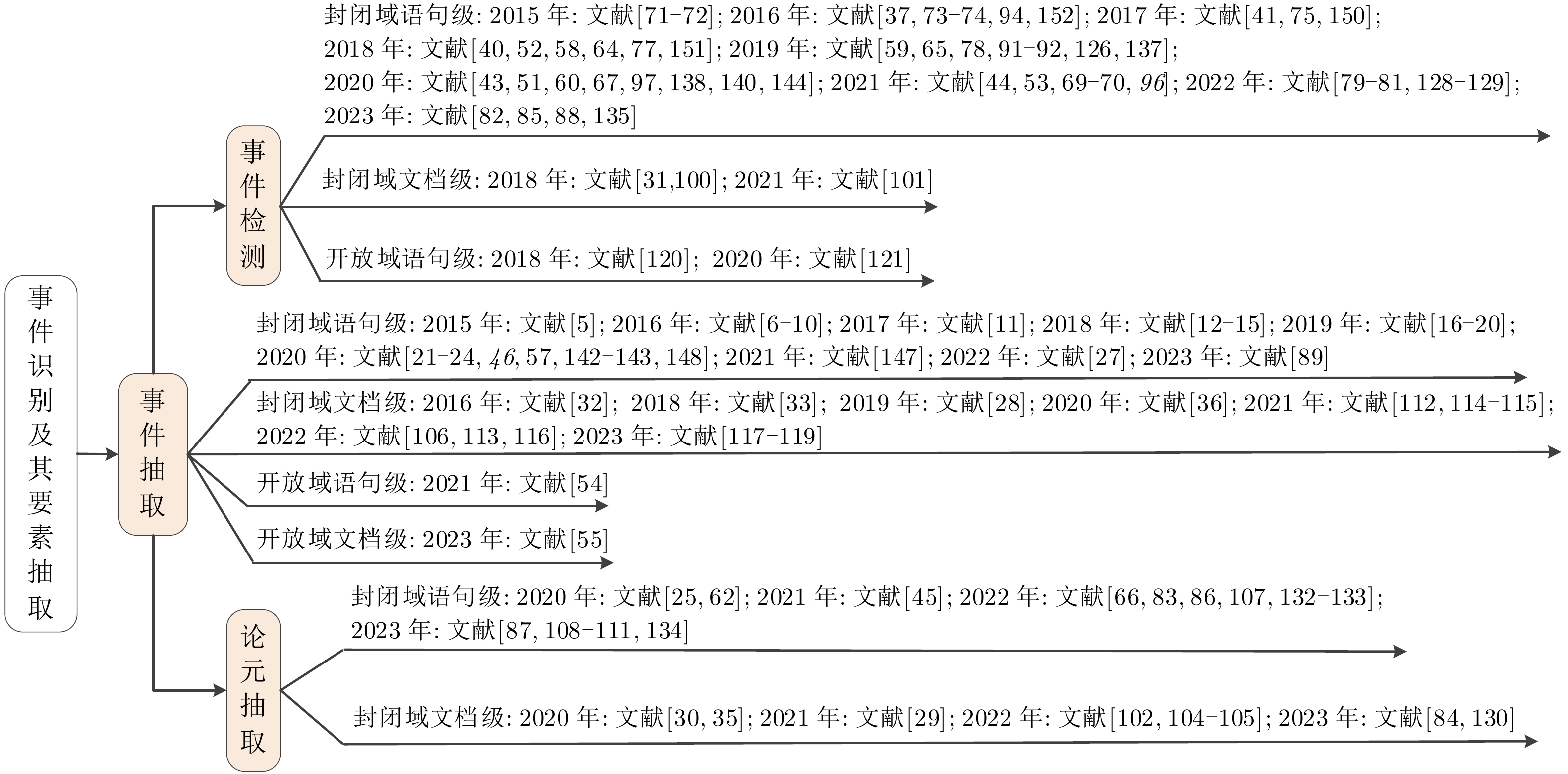
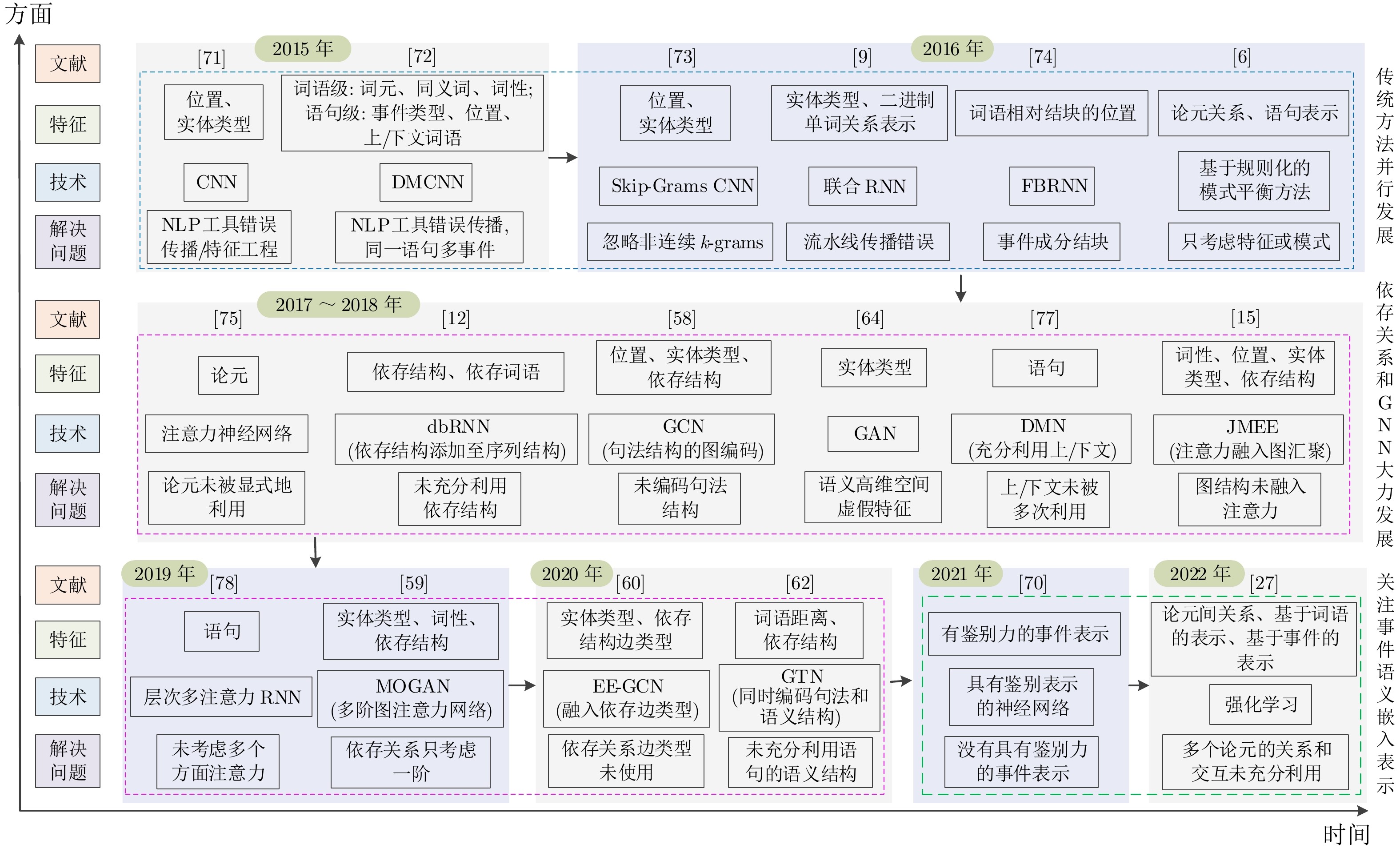
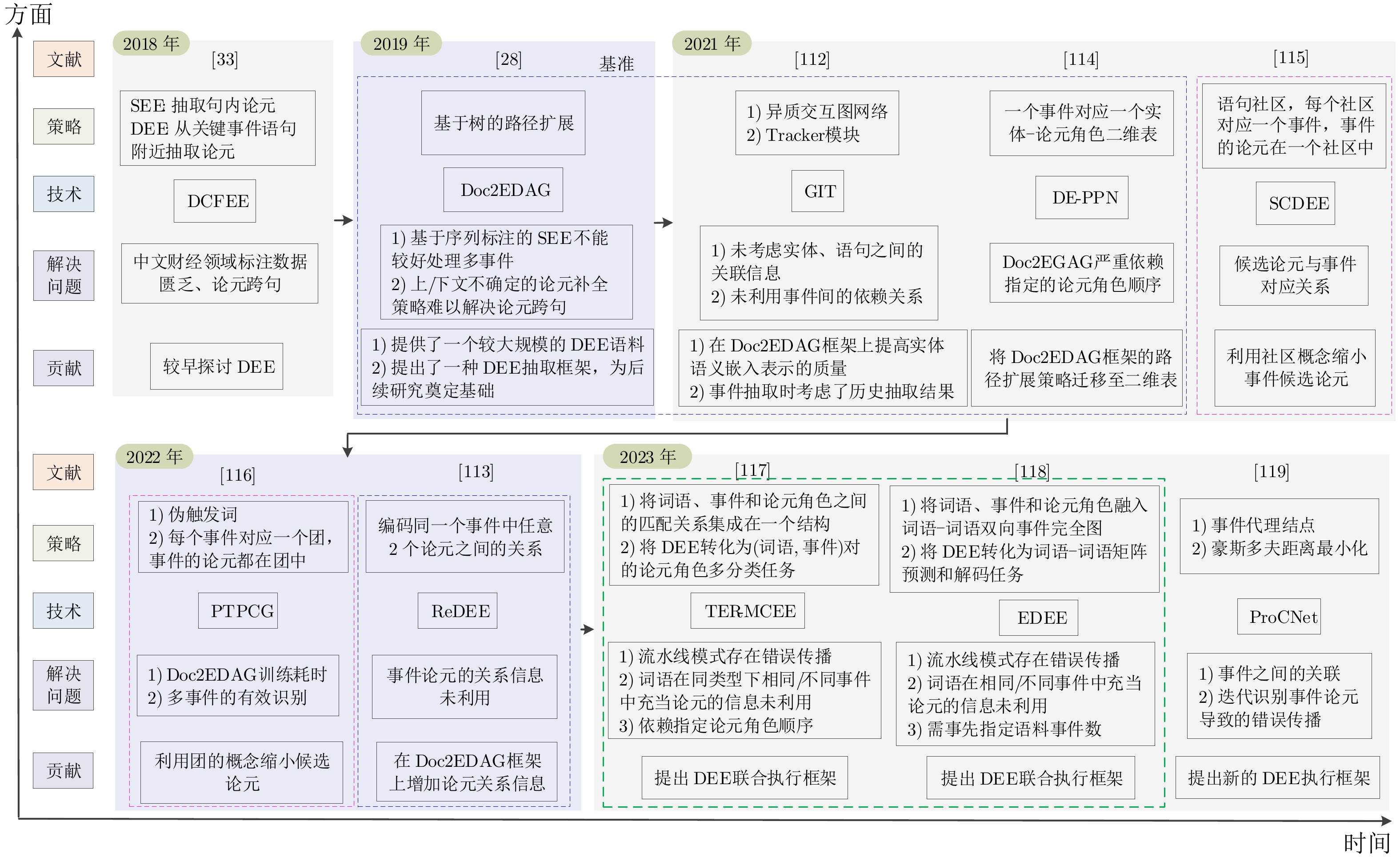
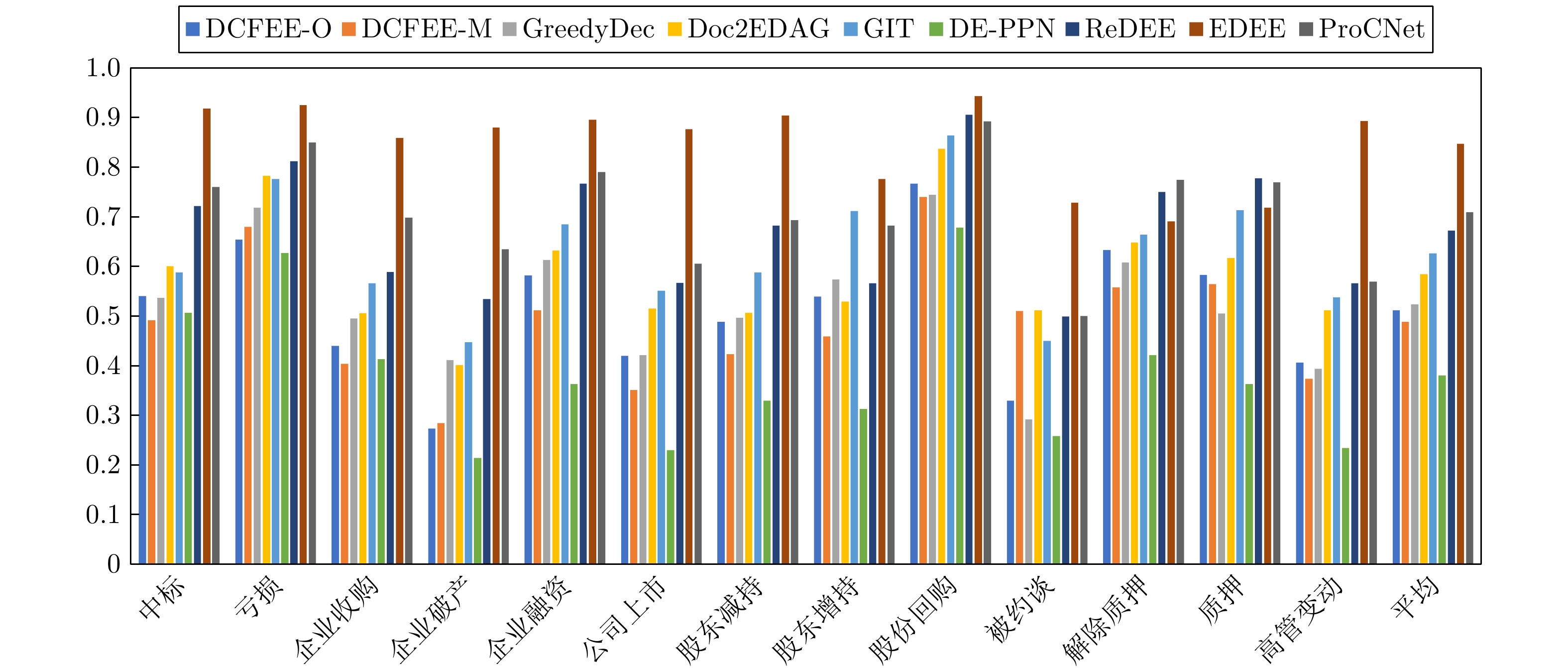
事件抽取是一个历史悠久且极具挑战的研究任务, 取得了大量优异的成果. 由于事件抽取涉及的研究内容较多, 它们的目标和重心各不相同, 使得读者难以全面地了解事件抽取包含的研究任务、研究问题以及未来的热点趋势. 尽管现有的少量事件抽取综述梳理了相关成果, 但存在以下局限: 1)研究任务及其研究进展的梳理不清晰; 2)仅从技术路线的角度进行梳理. 由于不同研究任务下的不同研究问题的解决技术不宜一起对比, 因此这样的梳理方式不利于清晰地展示事件抽取在不同方面的研究进展情况. 为此, 面向研究问题对基于深度学习的事件抽取研究成果重新回顾整理. 首先, 界定事件的相关概念, 论述事件抽取的研究任务, 明确各研究任务的目标, 再梳理各任务上的代表性研究成果; 然后, 总结现有事件抽取成果主要致力于解决哪些方面的研究问题, 分析为什么会存在这些问题、为什么需要解决这些问题的原因; 紧接着对每个方面的研究问题进行技术路线梳理, 分析各自的大体研究方案以及研究推进的过程. 最后, 讨论事件抽取可能的发展趋势.
事件抽取是一个历史悠久且极具挑战的研究任务, 取得了大量优异的成果. 由于事件抽取涉及的研究内容较多, 它们的目标和重心各不相同, 使得读者难以全面地了解事件抽取包含的研究任务、研究问题以及未来的热点趋势. 尽管现有的少量事件抽取综述梳理了相关成果, 但存在以下局限: 1)研究任务及其研究进展的梳理不清晰; 2)仅从技术路线的角度进行梳理. 由于不同研究任务下的不同研究问题的解决技术不宜一起对比, 因此这样的梳理方式不利于清晰地展示事件抽取在不同方面的研究进展情况. 为此, 面向研究问题对基于深度学习的事件抽取研究成果重新回顾整理. 首先, 界定事件的相关概念, 论述事件抽取的研究任务, 明确各研究任务的目标, 再梳理各任务上的代表性研究成果; 然后, 总结现有事件抽取成果主要致力于解决哪些方面的研究问题, 分析为什么会存在这些问题、为什么需要解决这些问题的原因; 紧接着对每个方面的研究问题进行技术路线梳理, 分析各自的大体研究方案以及研究推进的过程. 最后, 讨论事件抽取可能的发展趋势.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230049
摘要:
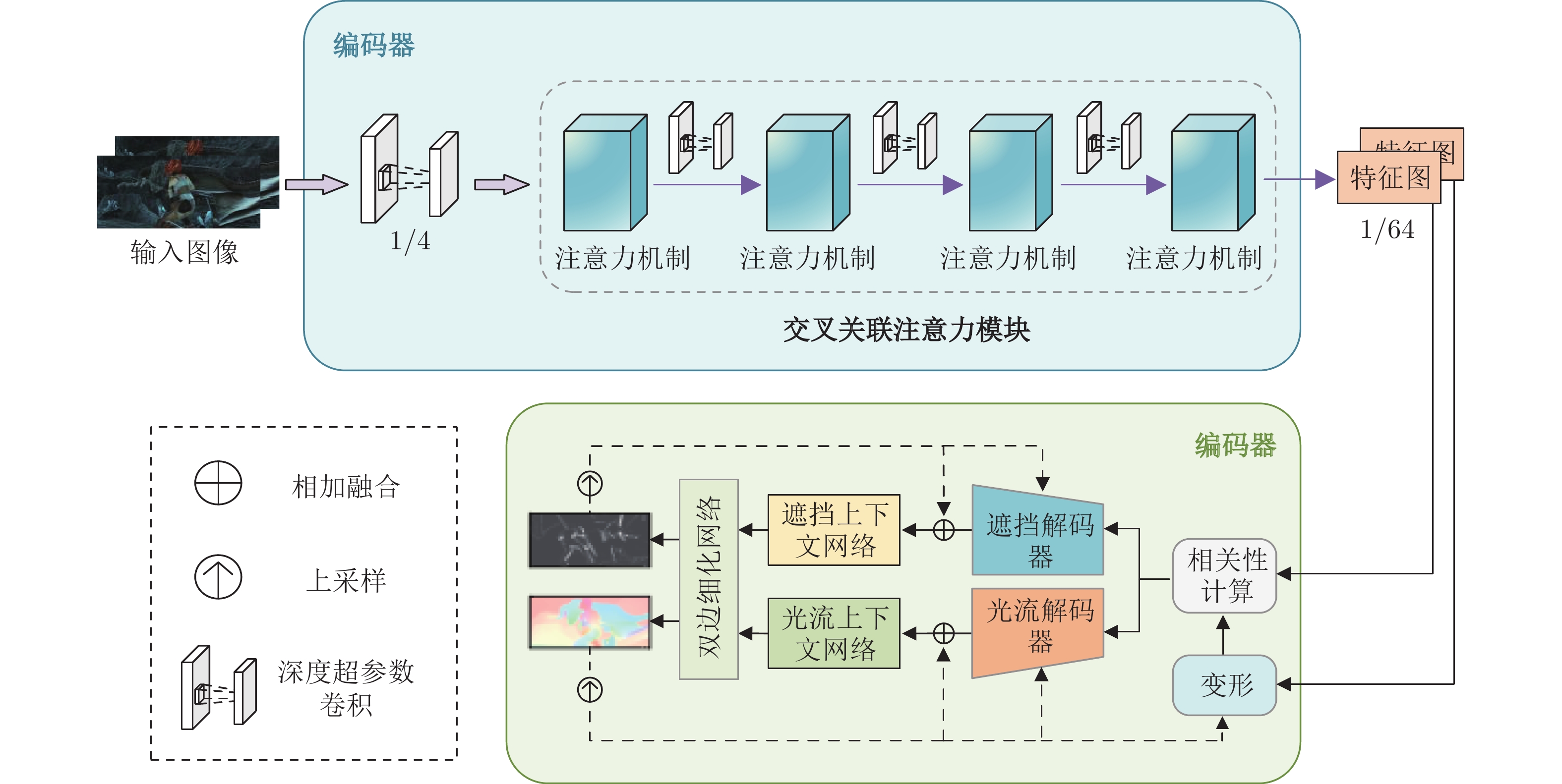
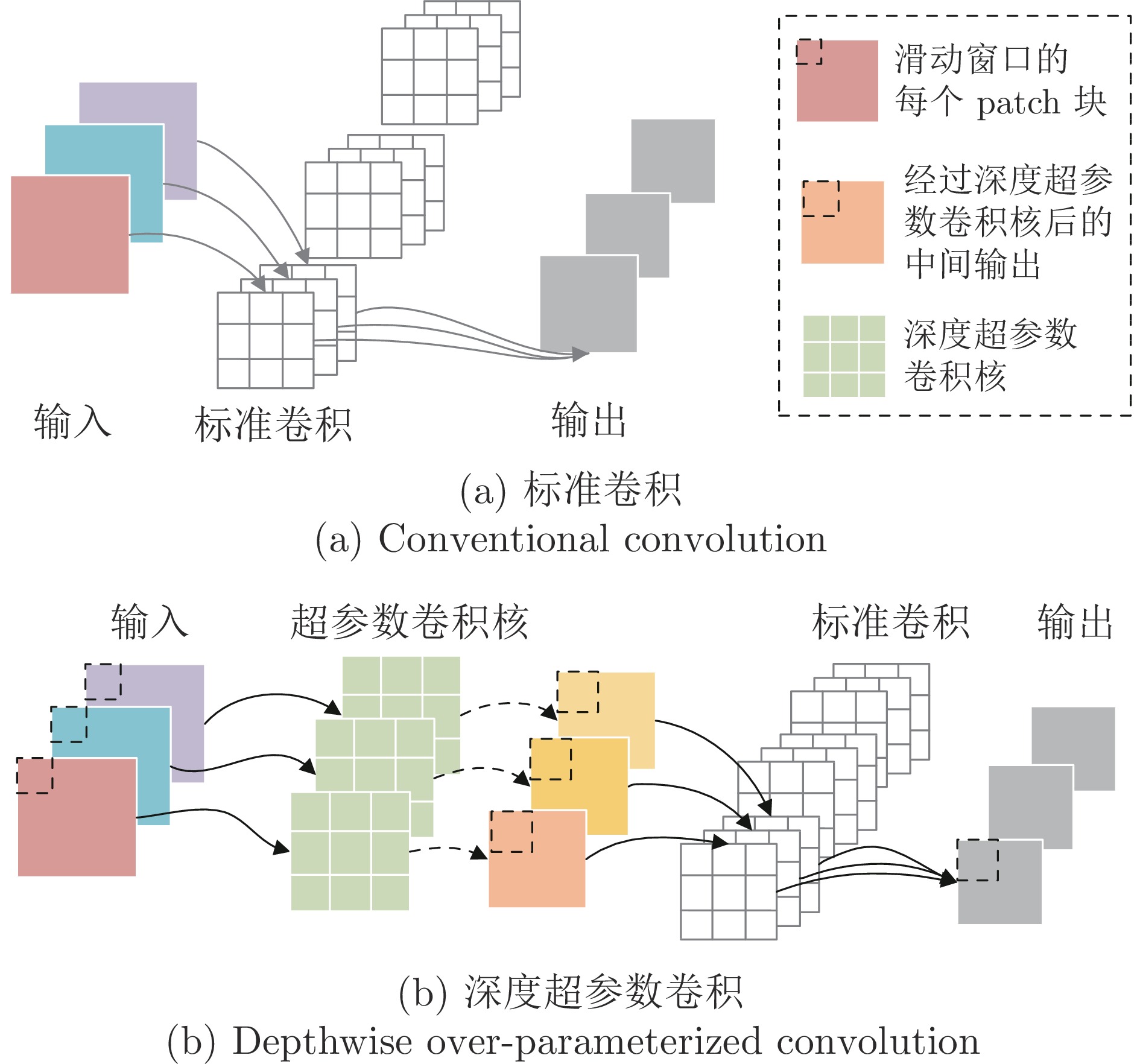
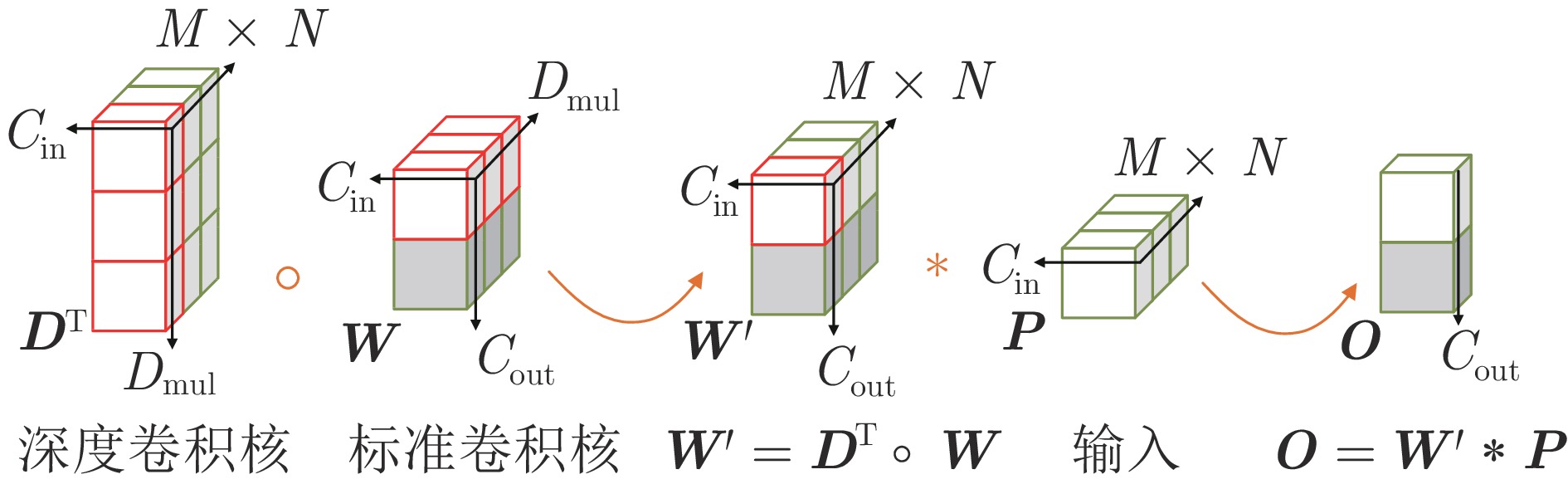
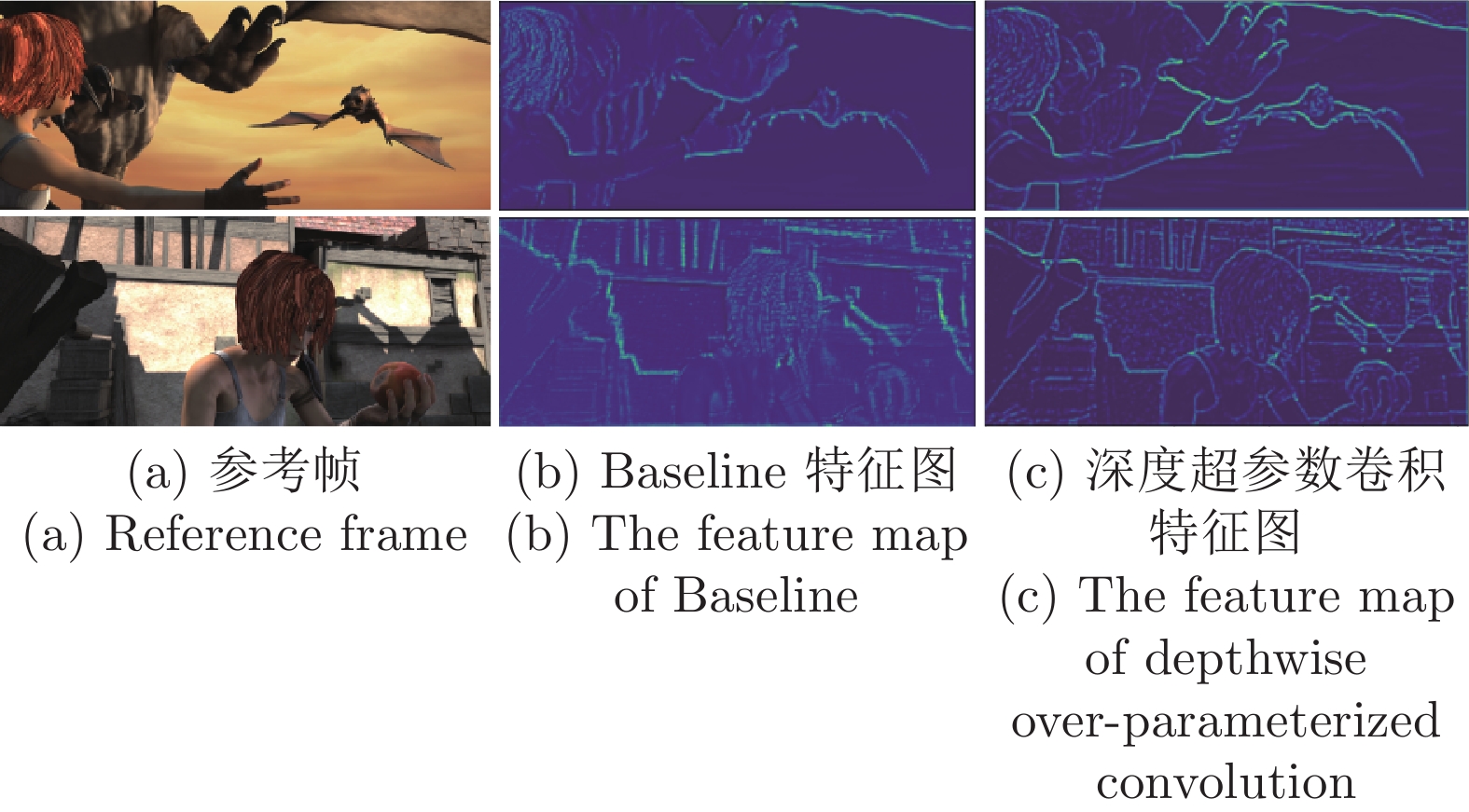
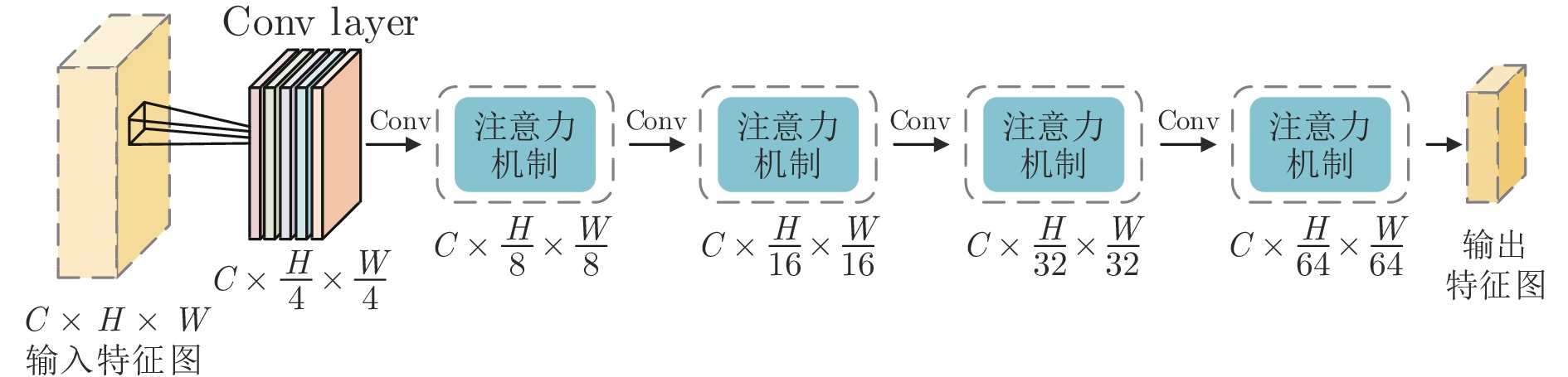
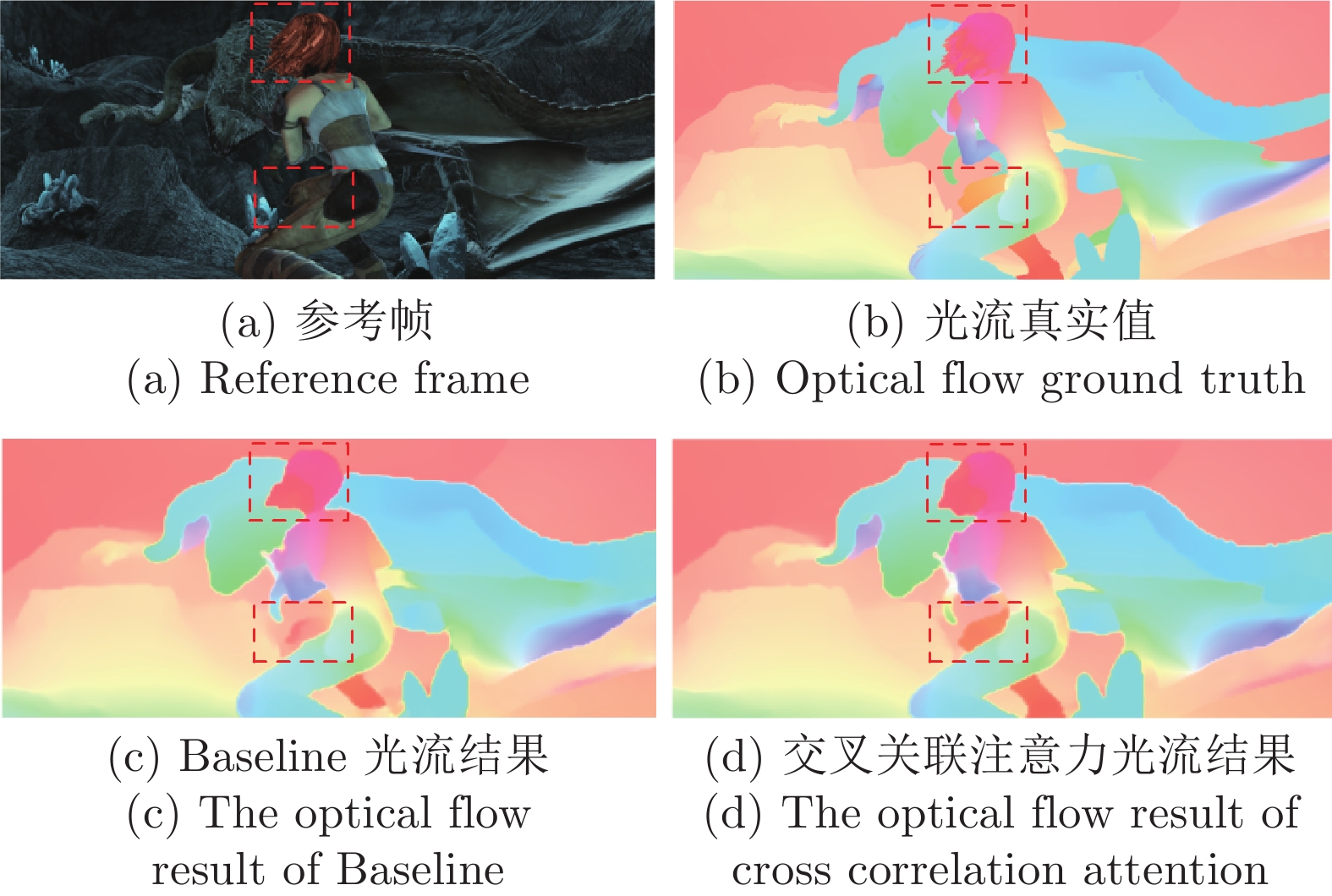
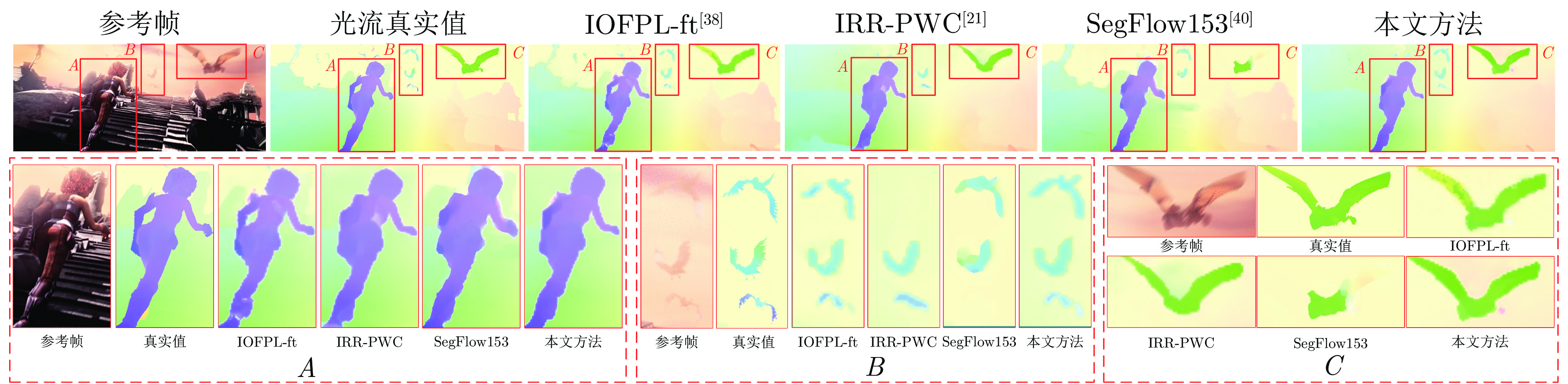
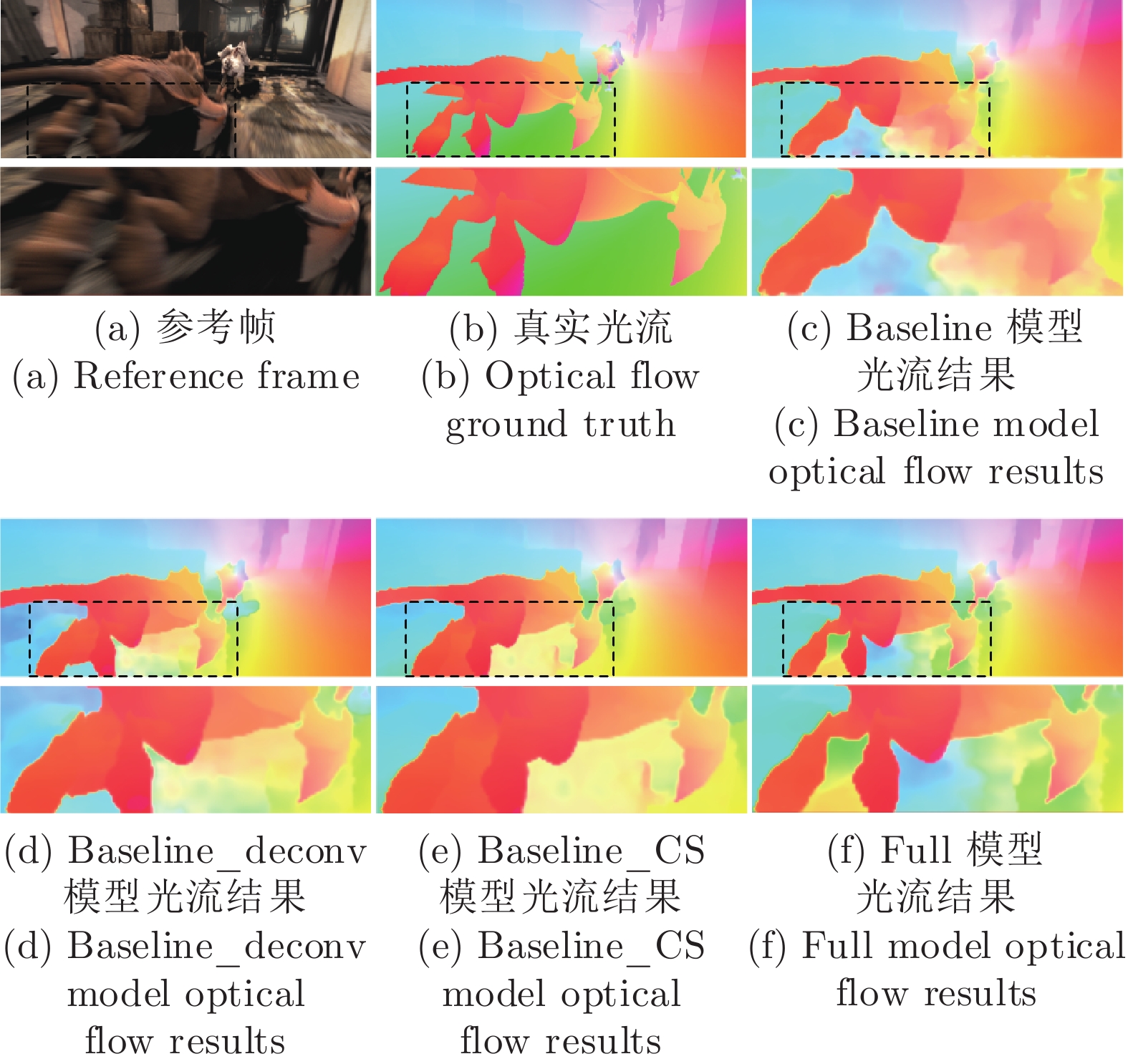
针对现有深度学习光流估计模型在大位移场景下的准确性和鲁棒性问题, 本文提出了一种联合深度超参数卷积和交叉关联注意力的图像序列光流估计方法. 首先, 通过联合深层卷积和标准卷积构建深度超参数卷积以替代普通卷积, 提取更多特征并加快光流估计网络训练的收敛速度, 在不增加网络推理估计量的前提下提高光流估计的准确性; 然后, 设计基于交叉关联注意力的特征提取编码网络, 通过叠加注意力层数获得更大的感受野, 以提取多尺度长距离上下文特征信息, 增强大位移场景下光流估计的鲁棒性; 最后, 采用金字塔残差迭代模型构建联合深度超参数卷积和交叉关联注意力的光流估计网络, 提升光流估计的整体性能. 分别采用MPI-Sintel和KITTI测试图像集对本文方法和现有代表性光流估计方法进行综合对比分析, 实验结果表明本文方法取得了较好的光流估计性能, 尤其在大位移场景下具有更好的估计准确性与鲁棒性.
针对现有深度学习光流估计模型在大位移场景下的准确性和鲁棒性问题, 本文提出了一种联合深度超参数卷积和交叉关联注意力的图像序列光流估计方法. 首先, 通过联合深层卷积和标准卷积构建深度超参数卷积以替代普通卷积, 提取更多特征并加快光流估计网络训练的收敛速度, 在不增加网络推理估计量的前提下提高光流估计的准确性; 然后, 设计基于交叉关联注意力的特征提取编码网络, 通过叠加注意力层数获得更大的感受野, 以提取多尺度长距离上下文特征信息, 增强大位移场景下光流估计的鲁棒性; 最后, 采用金字塔残差迭代模型构建联合深度超参数卷积和交叉关联注意力的光流估计网络, 提升光流估计的整体性能. 分别采用MPI-Sintel和KITTI测试图像集对本文方法和现有代表性光流估计方法进行综合对比分析, 实验结果表明本文方法取得了较好的光流估计性能, 尤其在大位移场景下具有更好的估计准确性与鲁棒性.






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210903
摘要:
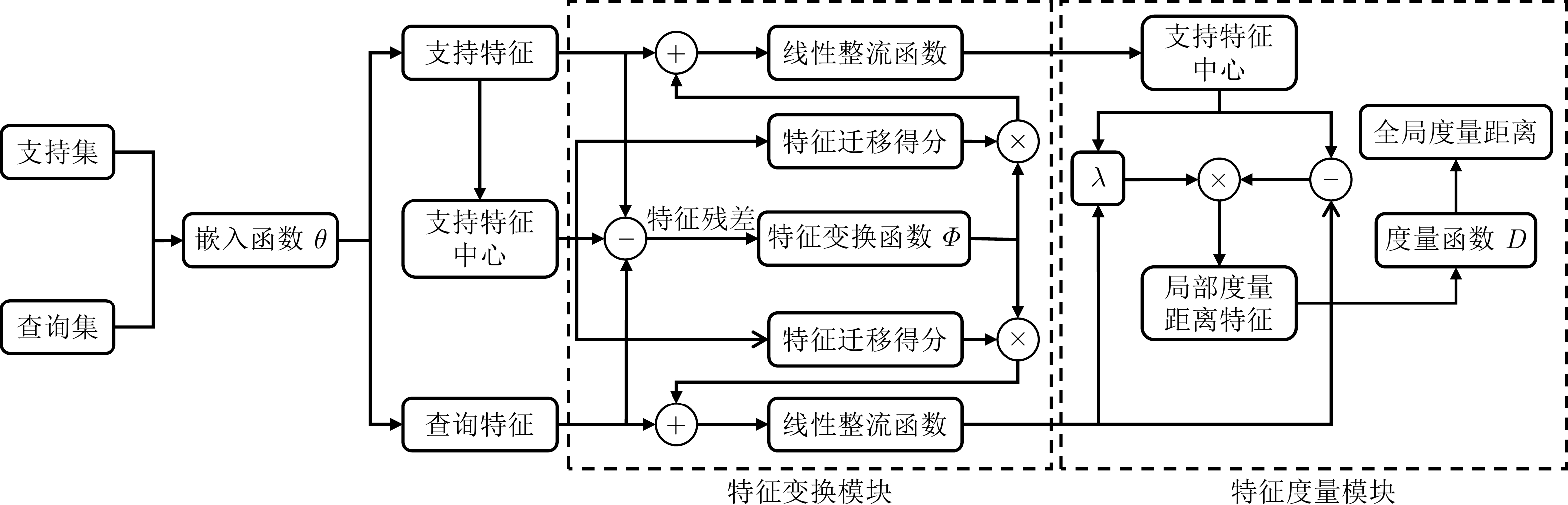
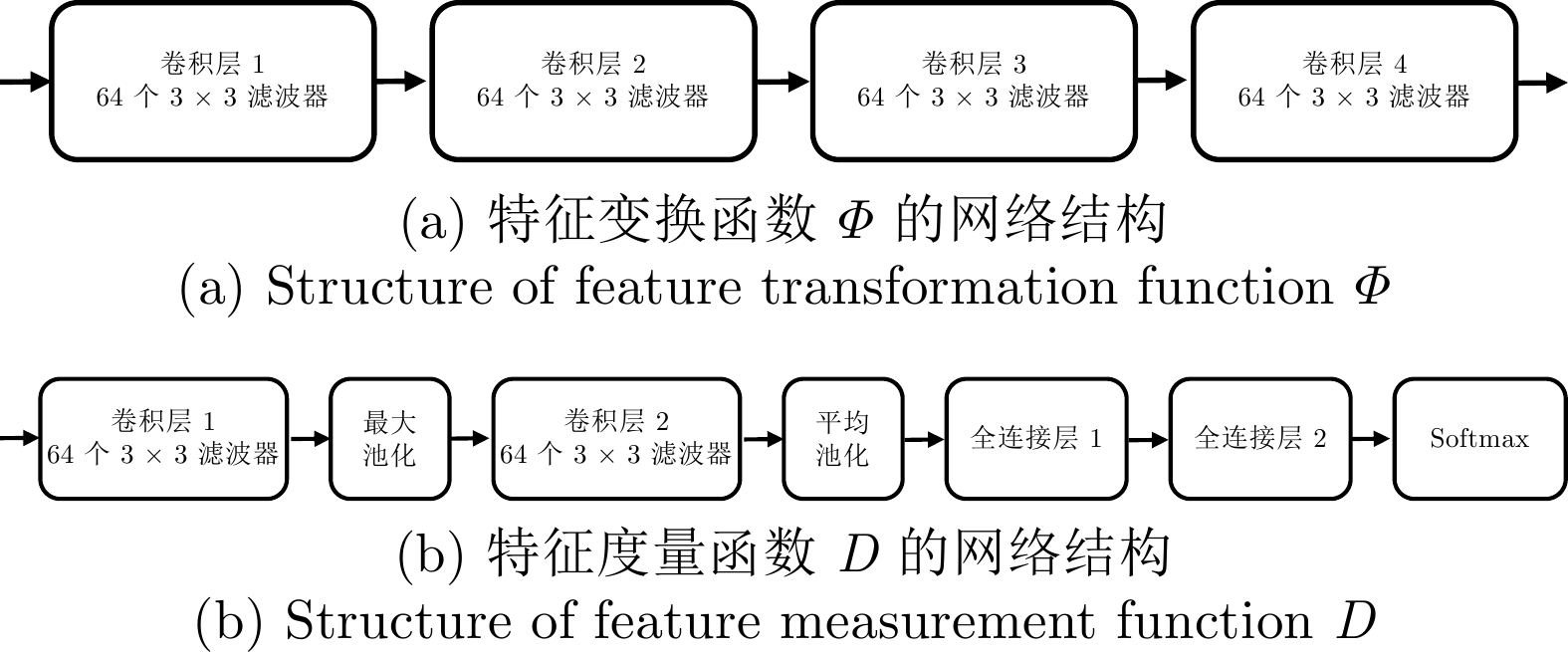
在小样本分类任务中, 每类可供训练的样本非常有限, 同类样本在特征空间中分布稀疏, 异类样本间的边界模糊. 文章提出一种新的基于特征变换的网络, 并使用度量的方法来处理小样本分类任务. 算法通过嵌入函数将样本映射到特征空间并计算输入样本与样本中心的特征残差, 利用特征变换函数学习样本中心与同类样本间的残差, 使样本在特征空间中向同类样本中心靠拢, 更新样本中心在特征空间中的位置使它们之间的距离增大. 融合余弦相似度和欧氏距离构造一个新的度量方法, 设计一个度量函数对特征图中每个局部特征的度量距离进行联合地表达, 该函数在网络优化时可同时对样本特征间的夹角和欧氏距离进行优化. 网络模型在小样本分类任务常用数据集上的表现证明, 该模型性能优秀且具有泛化性.
在小样本分类任务中, 每类可供训练的样本非常有限, 同类样本在特征空间中分布稀疏, 异类样本间的边界模糊. 文章提出一种新的基于特征变换的网络, 并使用度量的方法来处理小样本分类任务. 算法通过嵌入函数将样本映射到特征空间并计算输入样本与样本中心的特征残差, 利用特征变换函数学习样本中心与同类样本间的残差, 使样本在特征空间中向同类样本中心靠拢, 更新样本中心在特征空间中的位置使它们之间的距离增大. 融合余弦相似度和欧氏距离构造一个新的度量方法, 设计一个度量函数对特征图中每个局部特征的度量距离进行联合地表达, 该函数在网络优化时可同时对样本特征间的夹角和欧氏距离进行优化. 网络模型在小样本分类任务常用数据集上的表现证明, 该模型性能优秀且具有泛化性.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220966
摘要:
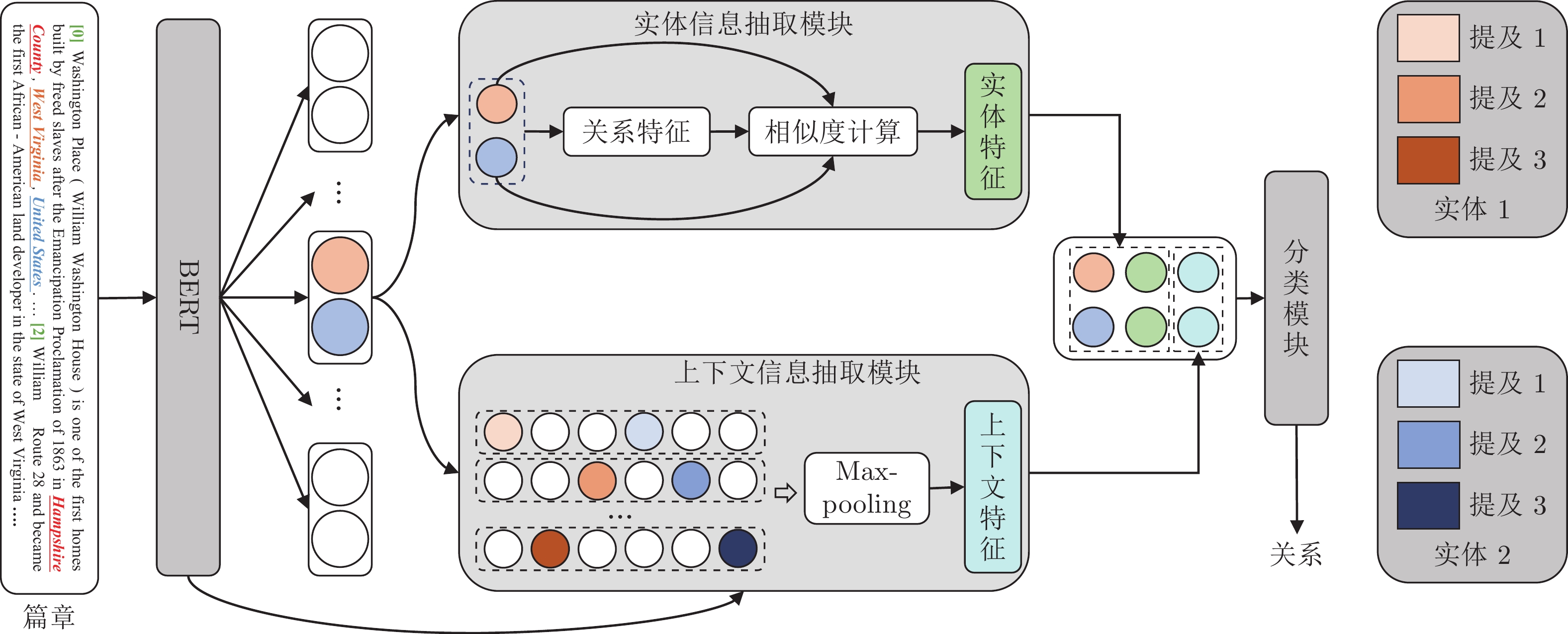
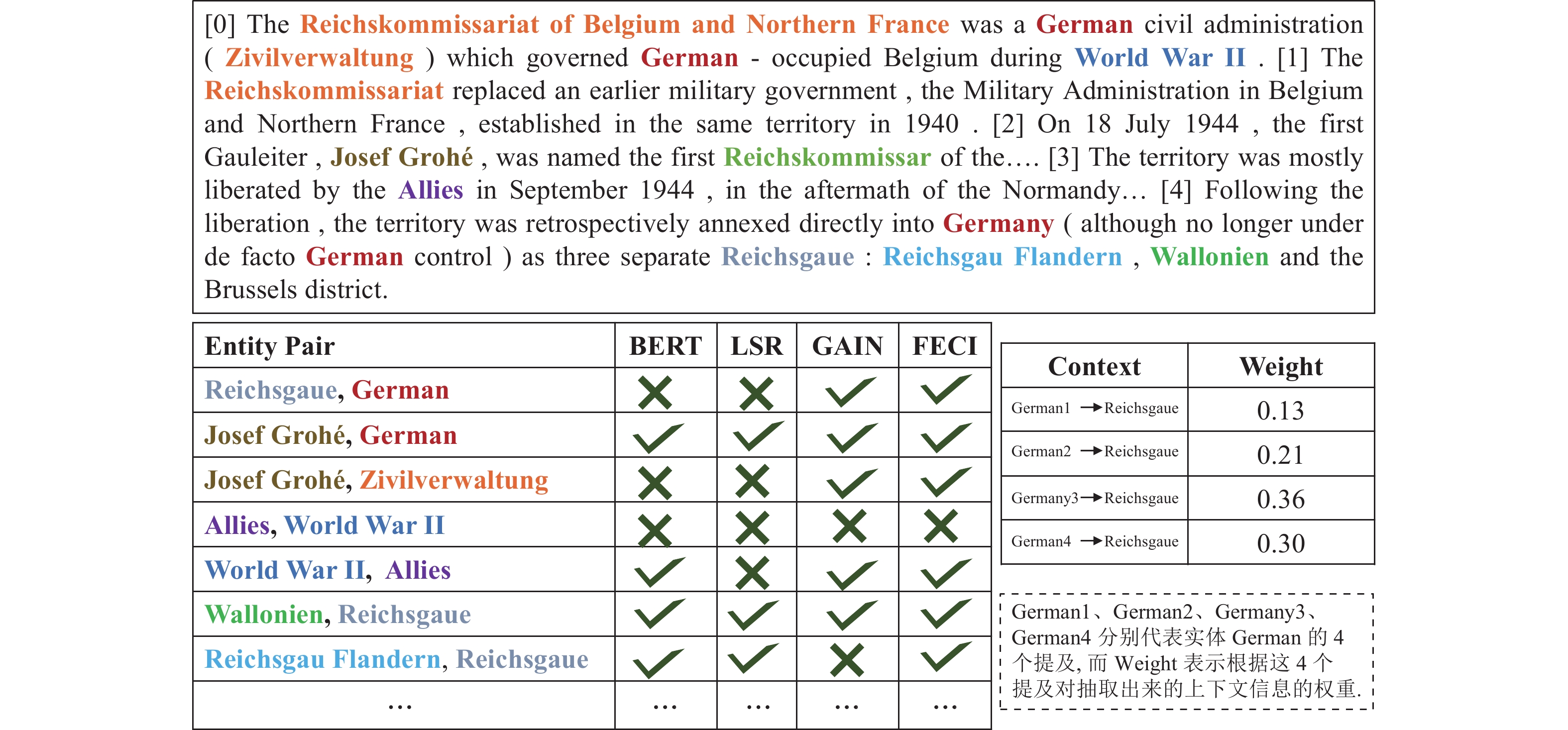
篇章关系抽取是识别篇章中实体对之间的关系. 相较于传统的句子级别关系抽取, 篇章级别关系抽取任务更加贴近实际应用, 但是它对实体对的跨句子推理和上下文信息感知等问题提出了新的挑战. 本文提出融合实体和上下文信息(Fuse entity and context information, FECI)的篇章关系抽取方法, 它包含两个模块, 分别是实体信息抽取模块和上下文信息抽取模块. 实体信息抽取模块从两个实体中自动地抽取出能够表示实体对关系的特征. 上下文信息抽取模块根据实体对的提及位置信息, 从篇章中抽取不同的上下文关系特征. 本文在三个篇章级别的关系抽取数据集上进行实验, 效果得到显著地提升.
篇章关系抽取是识别篇章中实体对之间的关系. 相较于传统的句子级别关系抽取, 篇章级别关系抽取任务更加贴近实际应用, 但是它对实体对的跨句子推理和上下文信息感知等问题提出了新的挑战. 本文提出融合实体和上下文信息(Fuse entity and context information, FECI)的篇章关系抽取方法, 它包含两个模块, 分别是实体信息抽取模块和上下文信息抽取模块. 实体信息抽取模块从两个实体中自动地抽取出能够表示实体对关系的特征. 上下文信息抽取模块根据实体对的提及位置信息, 从篇章中抽取不同的上下文关系特征. 本文在三个篇章级别的关系抽取数据集上进行实验, 效果得到显著地提升.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220774
摘要:
针对含有输入时滞和低阶非线性项的非线性系统, 提出了一种基于采样机制的无记忆输出反馈控制方法. 该方法移除了传统预测控制方法预测映射难以确定的限制, 同时避免了时滞依赖方法对过去时刻状态信息的依赖性, 在实际中更易实现. 首先, 根据系统输出在采样时刻的信息, 利用加幂积分技术和齐次占优思想设计了无记忆输出反馈控制器. 然后, 利用齐次系统理论提出了闭环系统的稳定性条件. 最后, 仿真结果验证了所提方法的正确性和优越性.
针对含有输入时滞和低阶非线性项的非线性系统, 提出了一种基于采样机制的无记忆输出反馈控制方法. 该方法移除了传统预测控制方法预测映射难以确定的限制, 同时避免了时滞依赖方法对过去时刻状态信息的依赖性, 在实际中更易实现. 首先, 根据系统输出在采样时刻的信息, 利用加幂积分技术和齐次占优思想设计了无记忆输出反馈控制器. 然后, 利用齐次系统理论提出了闭环系统的稳定性条件. 最后, 仿真结果验证了所提方法的正确性和优越性.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220938
摘要:
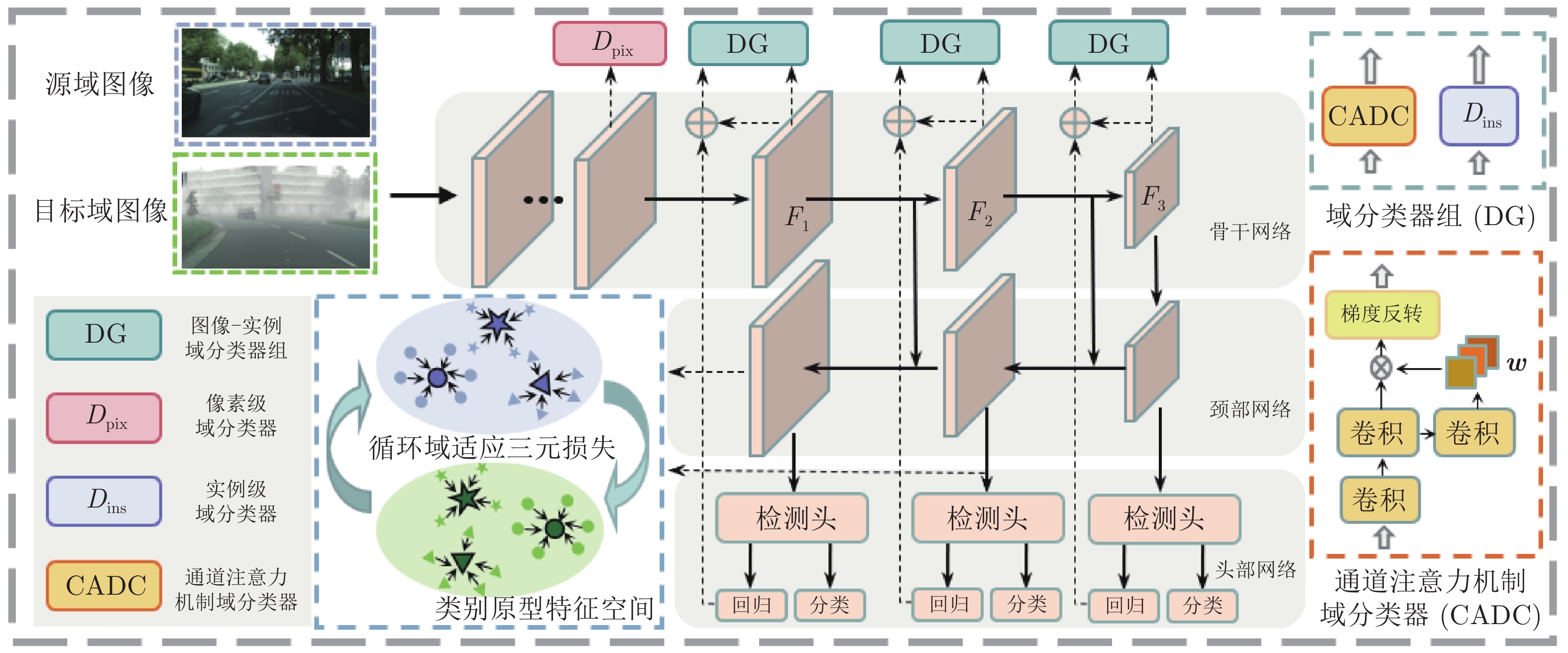
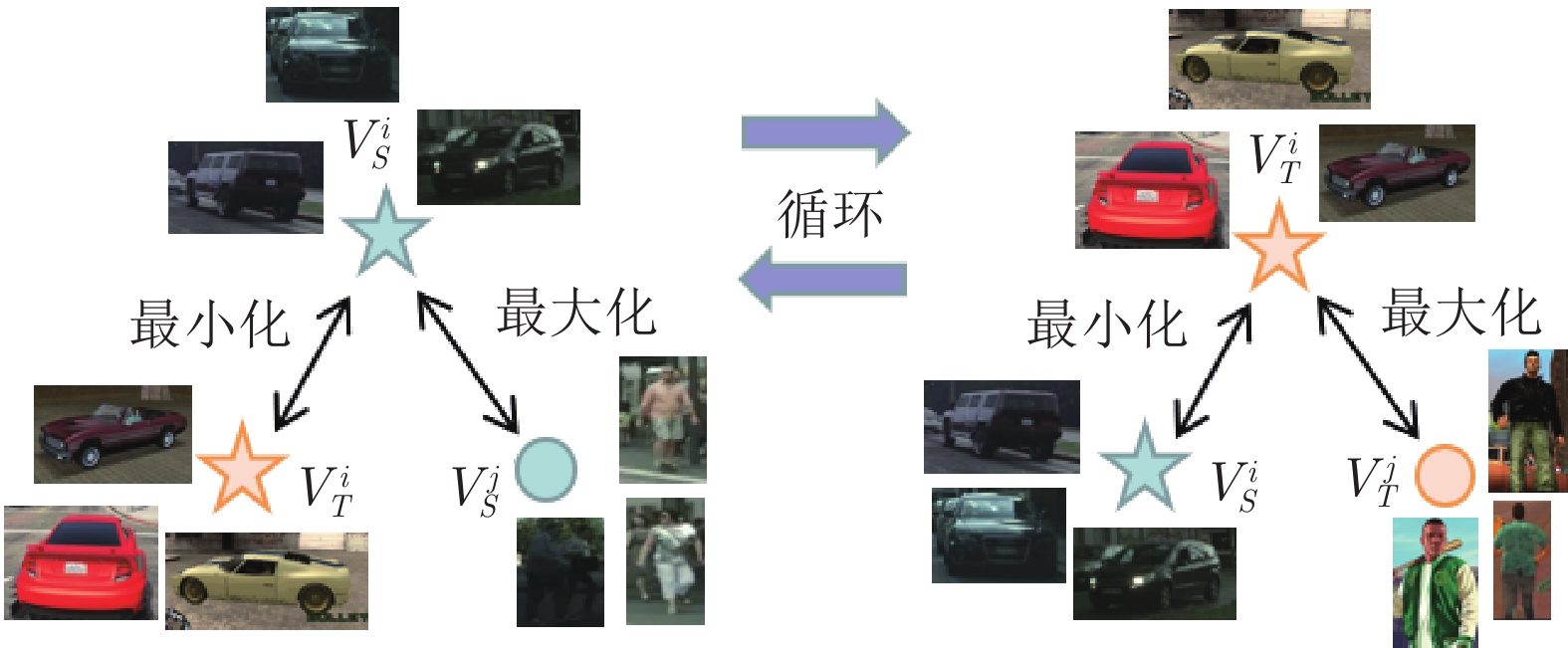
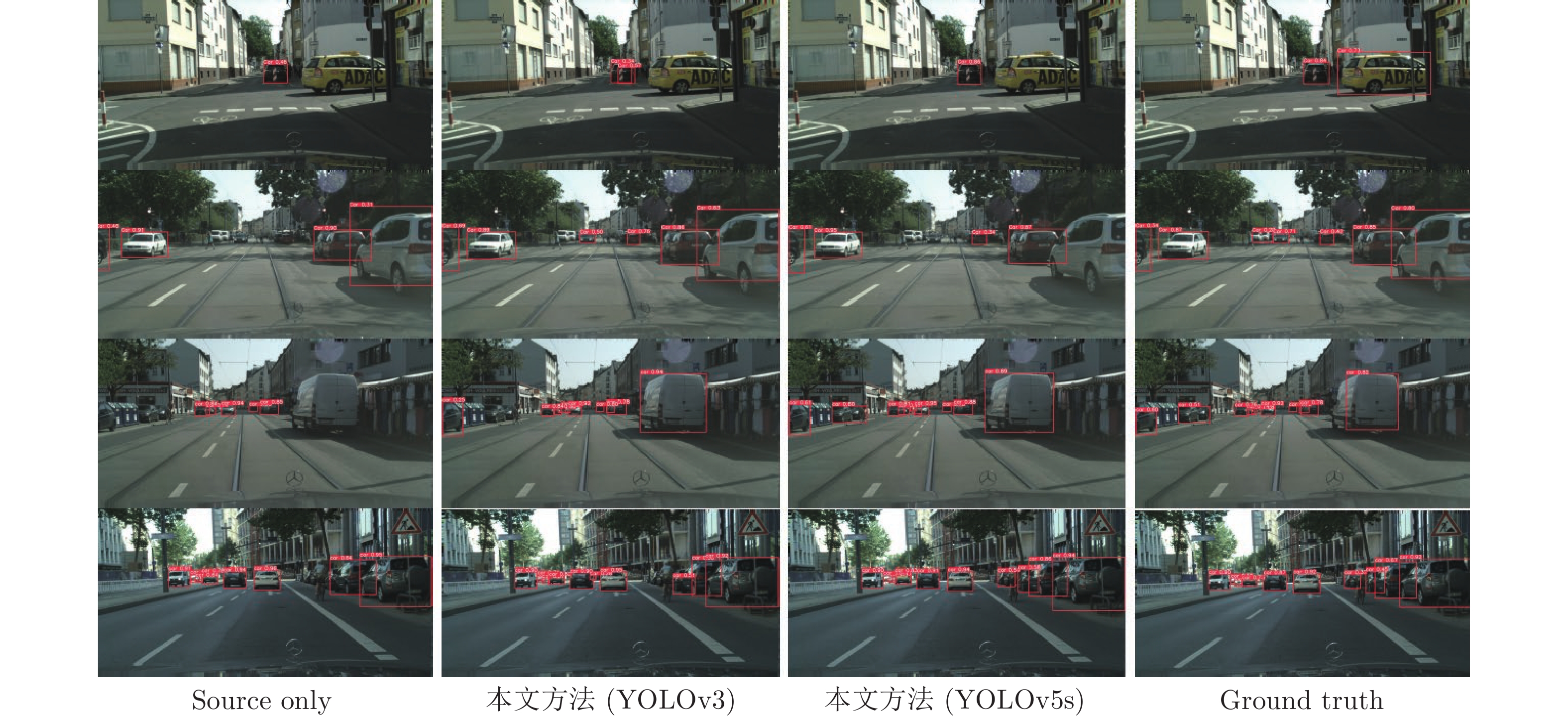
目前大多数深度学习算法都依赖于大量的标注数据并欠缺一定的泛化能力. 无监督域适应算法能提取到已标注数据和未标注数据间隐式共同特征, 从而提高算法在未标注数据上的性能. 目前域适应目标检测算法主要为两阶段目标检测器设计. 针对单阶段检测器中无法直接进行实例级特征对齐导致一定数量域不变特征的缺失, 提出结合通道注意力机制的图像级域分类器加强域不变特征提取. 此外对于域适应目标检测中存在类别特征的错误对齐引起的精度下降问题, 通过原型学习构建类别中心, 设计了一种基于原型的循环域三元损失函数, 从而实现原型引导的精细类别特征对齐. 以单阶段目标检测算法作为检测器, 在多种域适应目标检测公共数据集上进行实验. 实验结果证明该方法能有效提升原检测器在目标域的泛化能力达到更高的检测精度, 并且对于单阶段目标检测网络具有一定的通用性.
目前大多数深度学习算法都依赖于大量的标注数据并欠缺一定的泛化能力. 无监督域适应算法能提取到已标注数据和未标注数据间隐式共同特征, 从而提高算法在未标注数据上的性能. 目前域适应目标检测算法主要为两阶段目标检测器设计. 针对单阶段检测器中无法直接进行实例级特征对齐导致一定数量域不变特征的缺失, 提出结合通道注意力机制的图像级域分类器加强域不变特征提取. 此外对于域适应目标检测中存在类别特征的错误对齐引起的精度下降问题, 通过原型学习构建类别中心, 设计了一种基于原型的循环域三元损失函数, 从而实现原型引导的精细类别特征对齐. 以单阶段目标检测算法作为检测器, 在多种域适应目标检测公共数据集上进行实验. 实验结果证明该方法能有效提升原检测器在目标域的泛化能力达到更高的检测精度, 并且对于单阶段目标检测网络具有一定的通用性.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c230039
摘要:
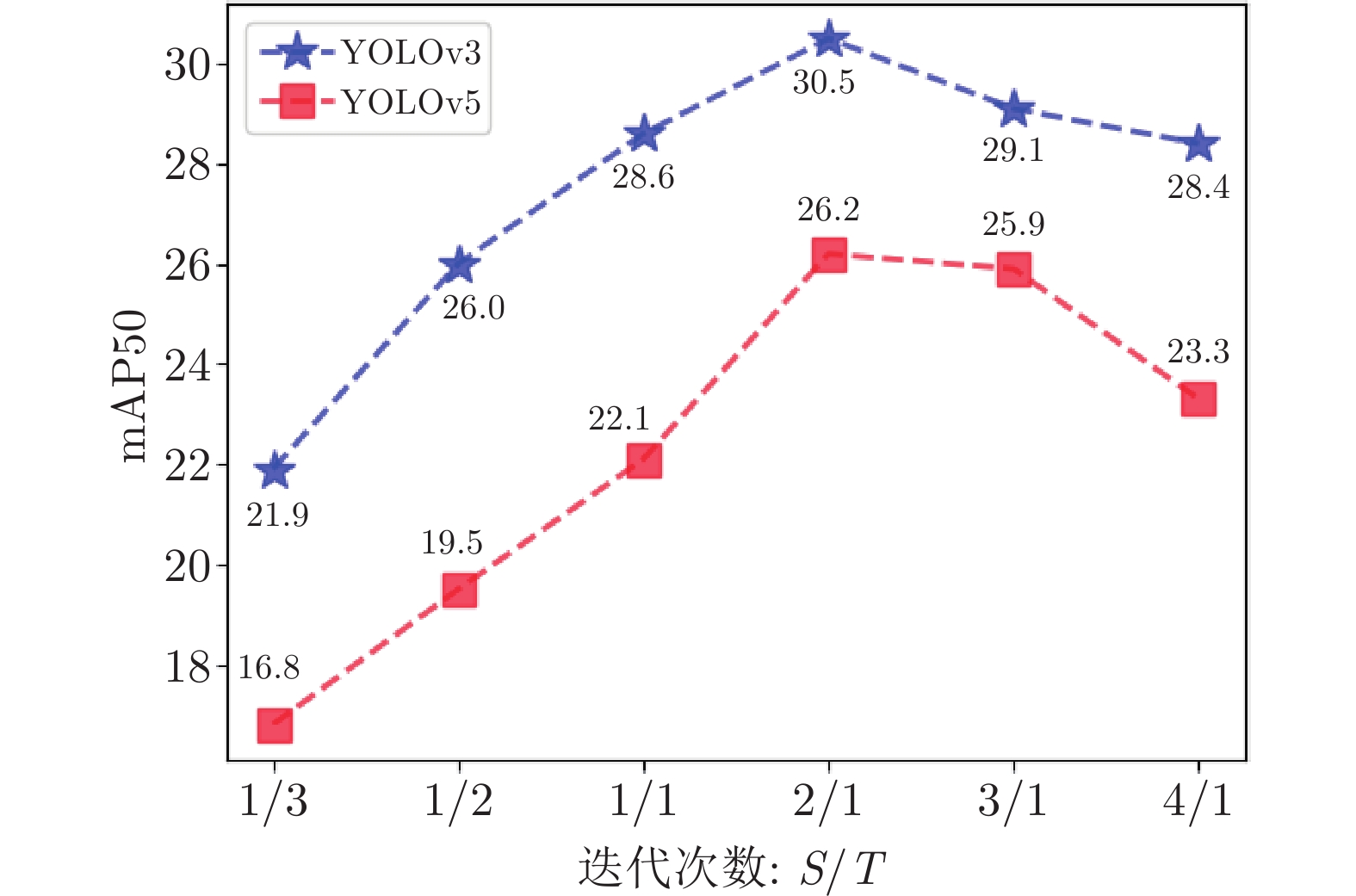
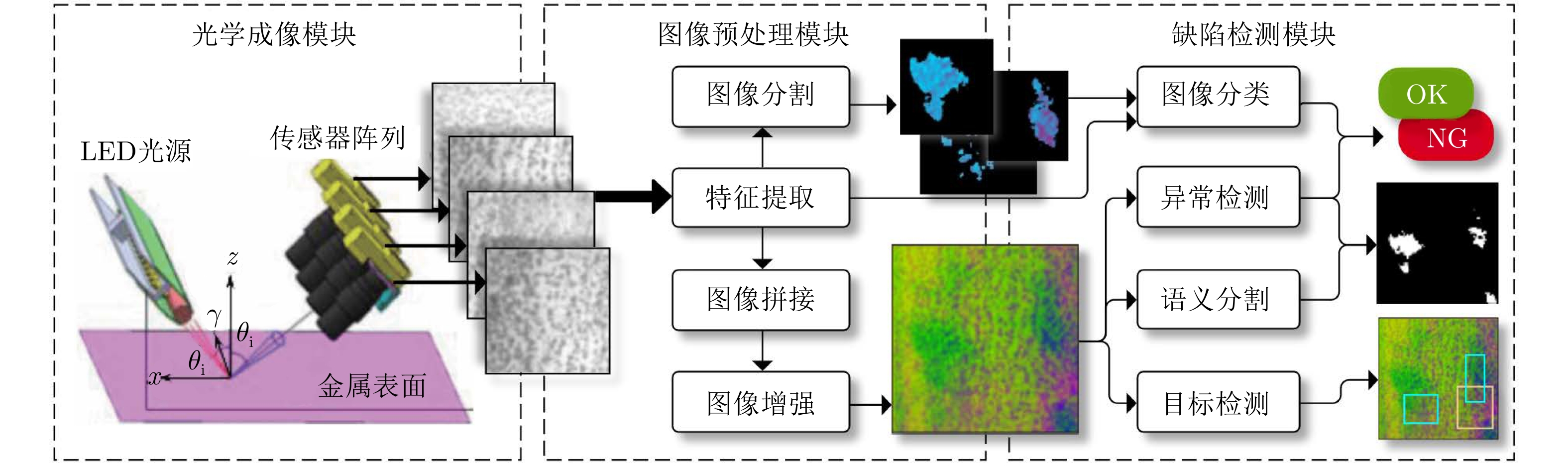
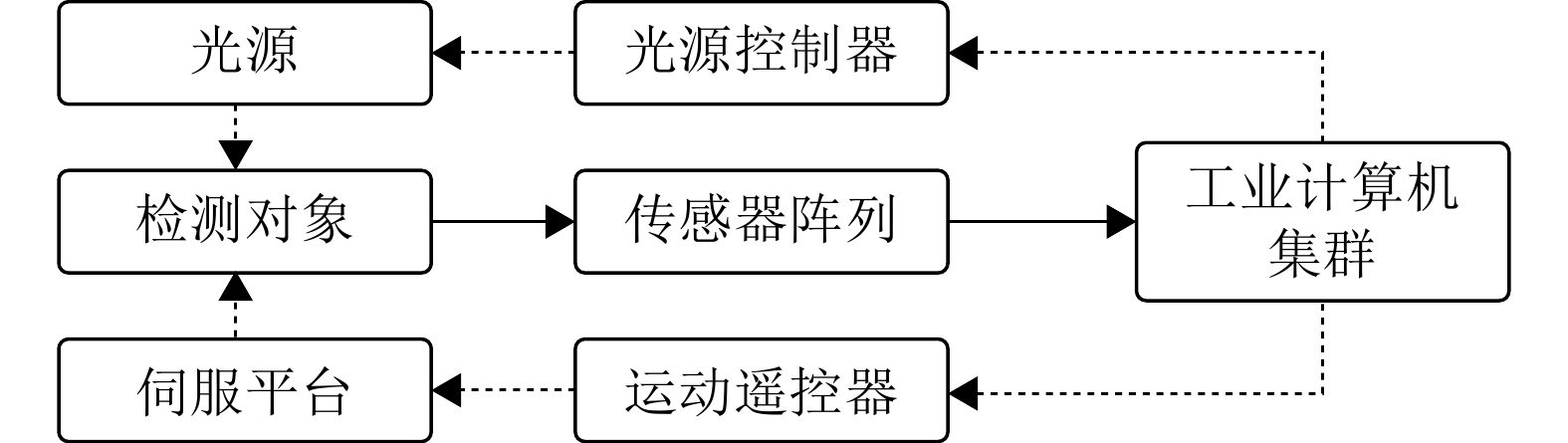
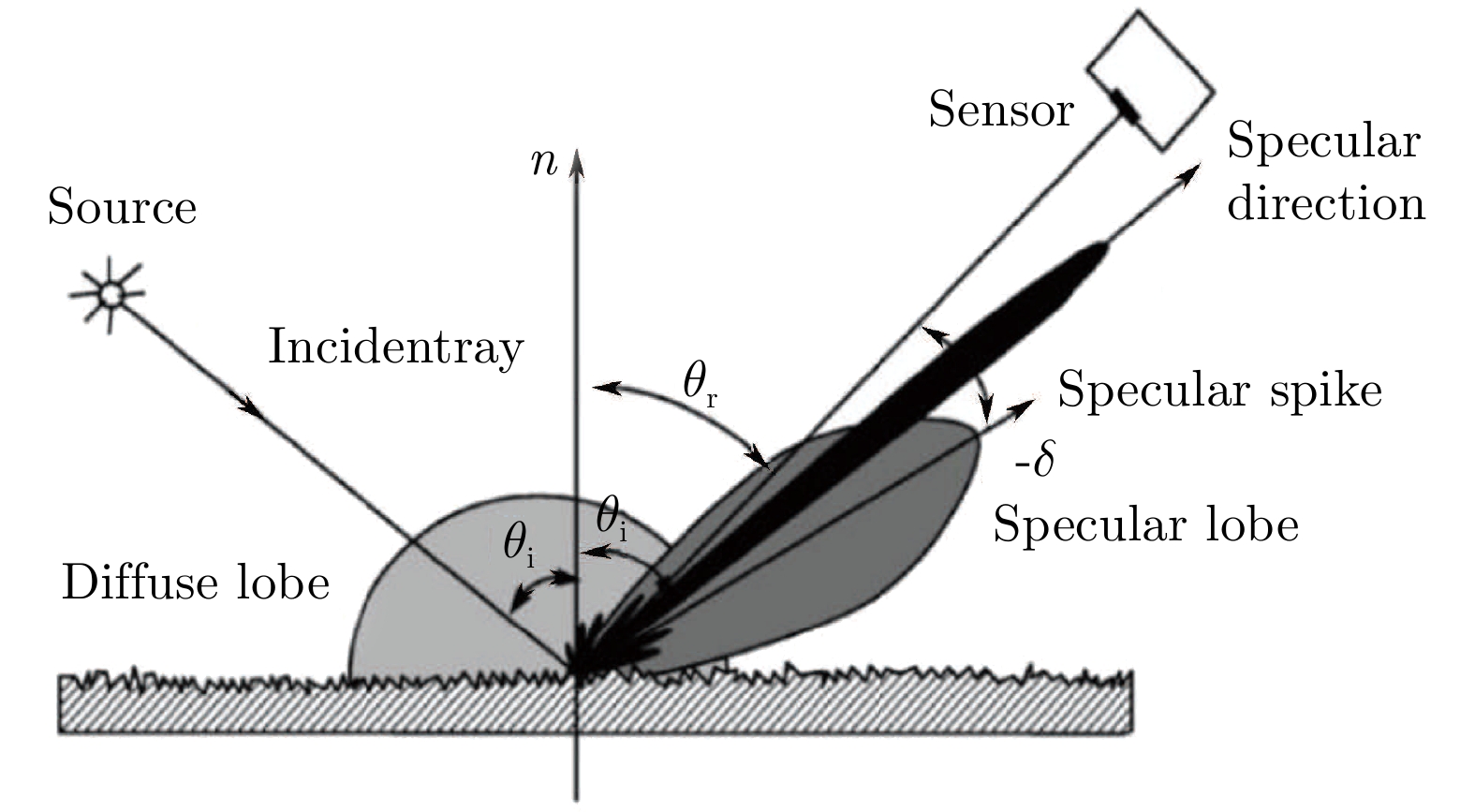
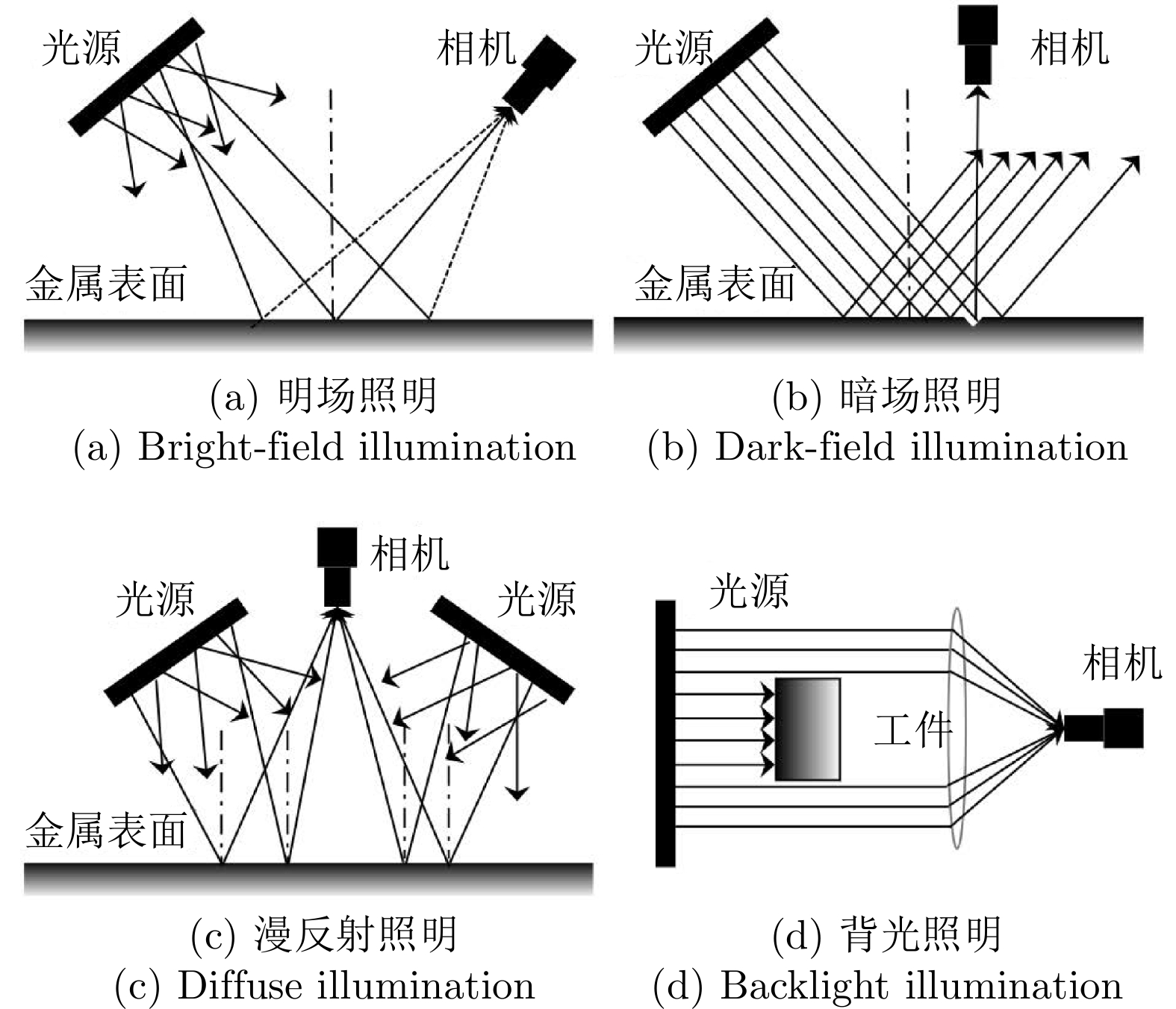
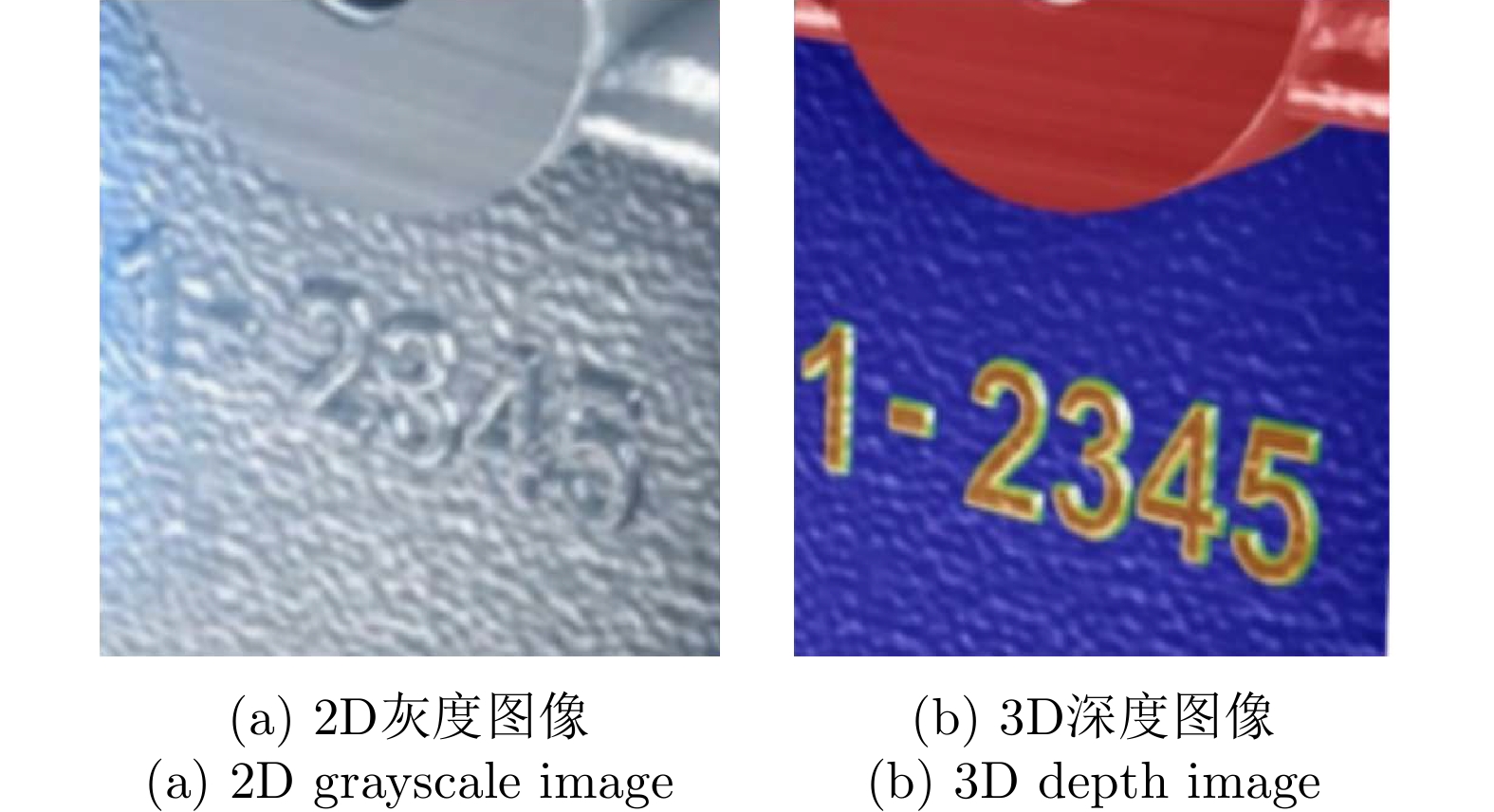
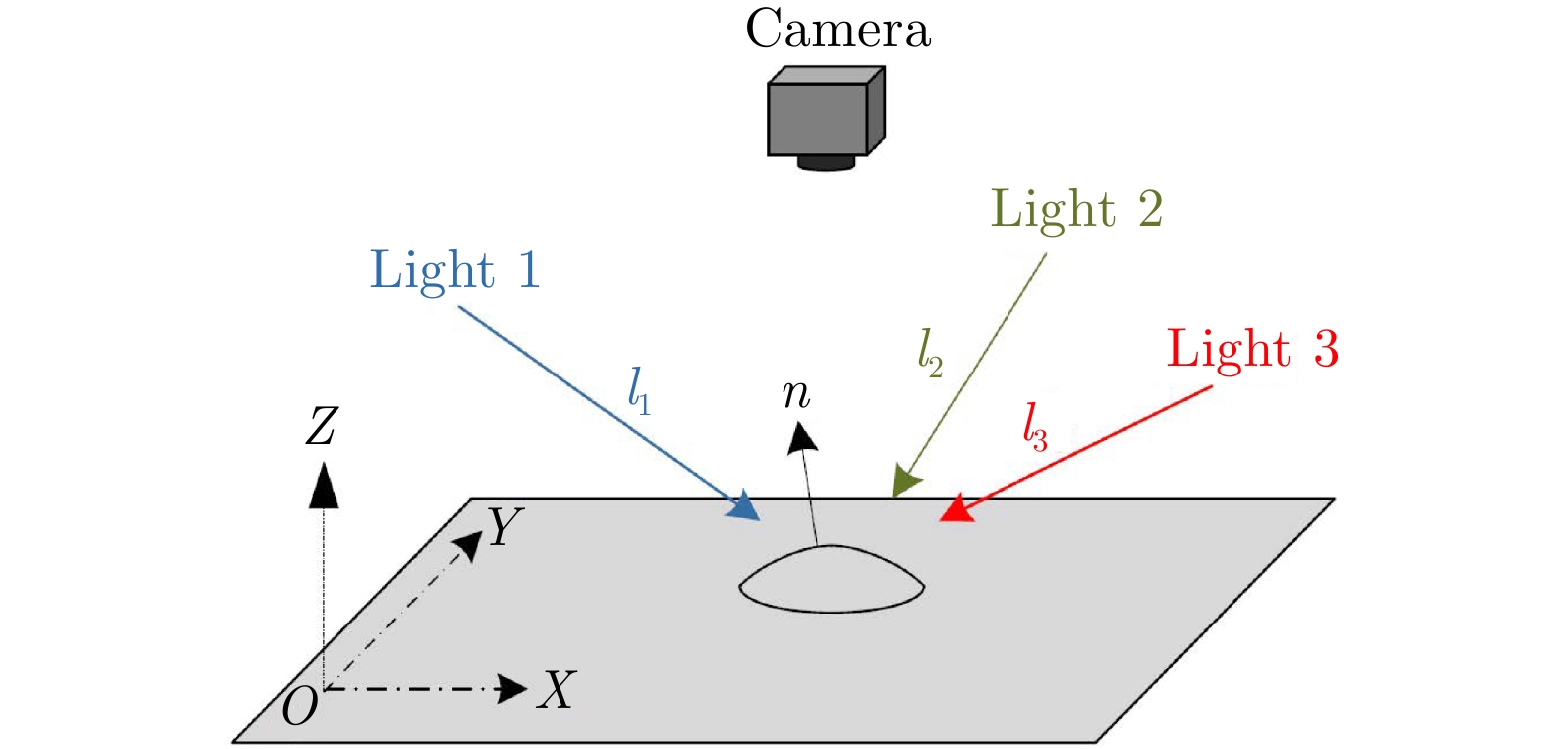
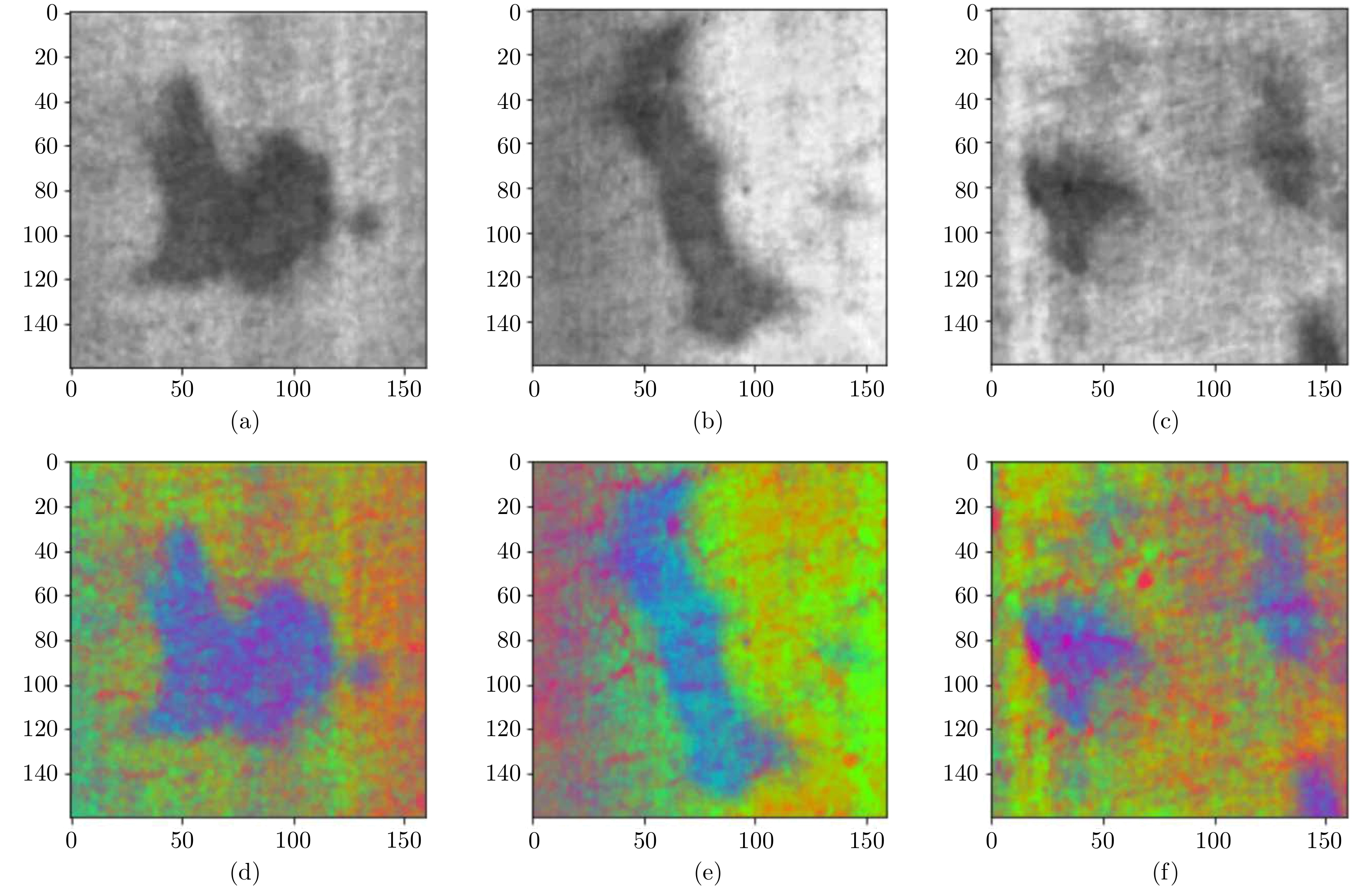
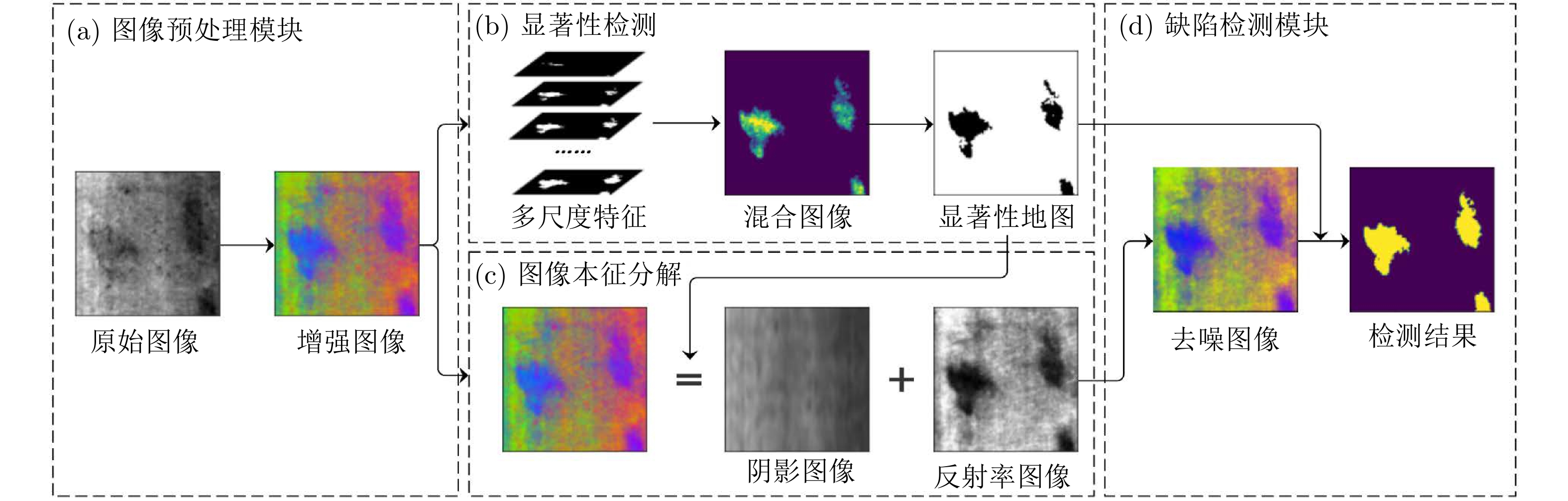
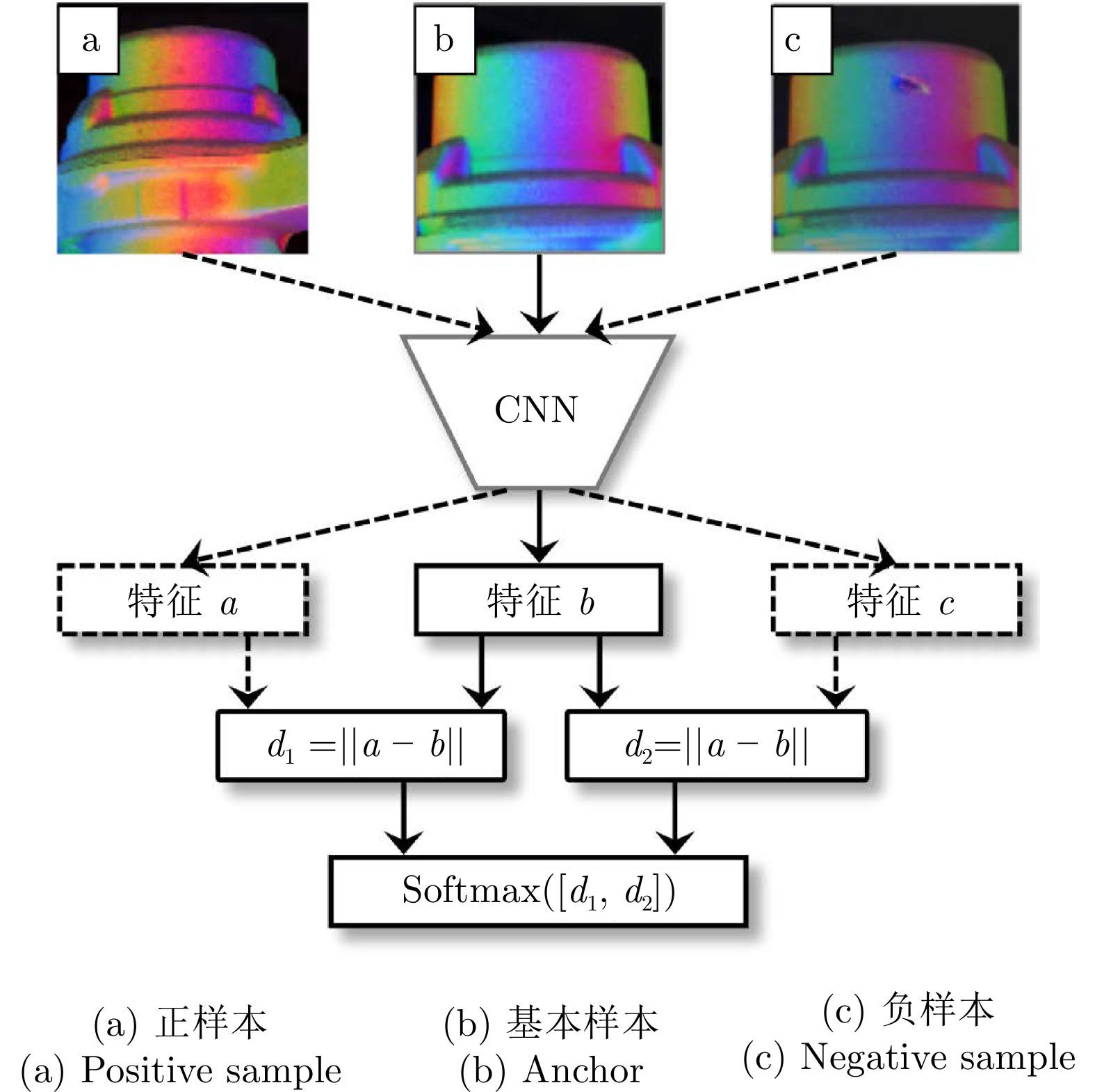
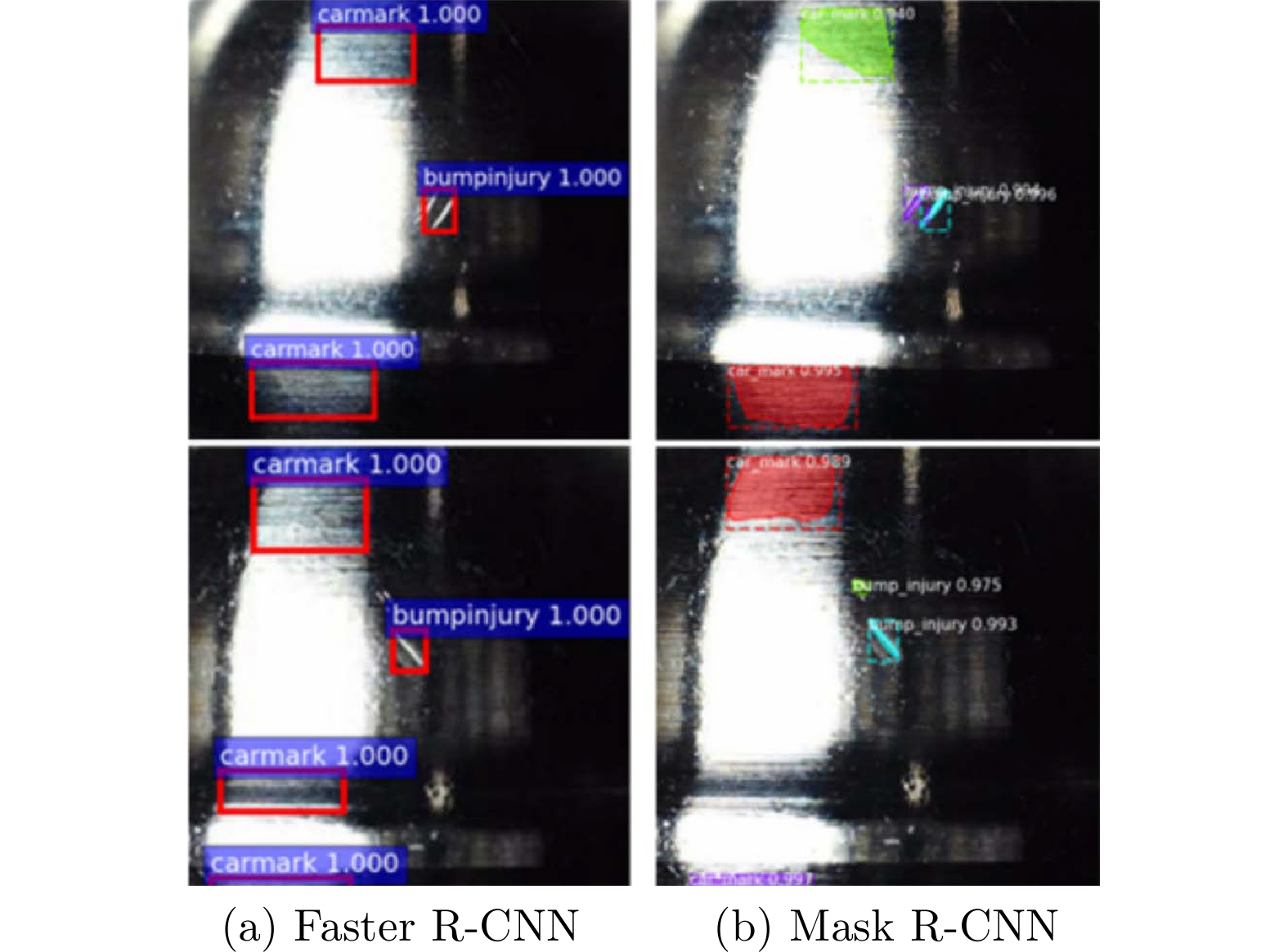
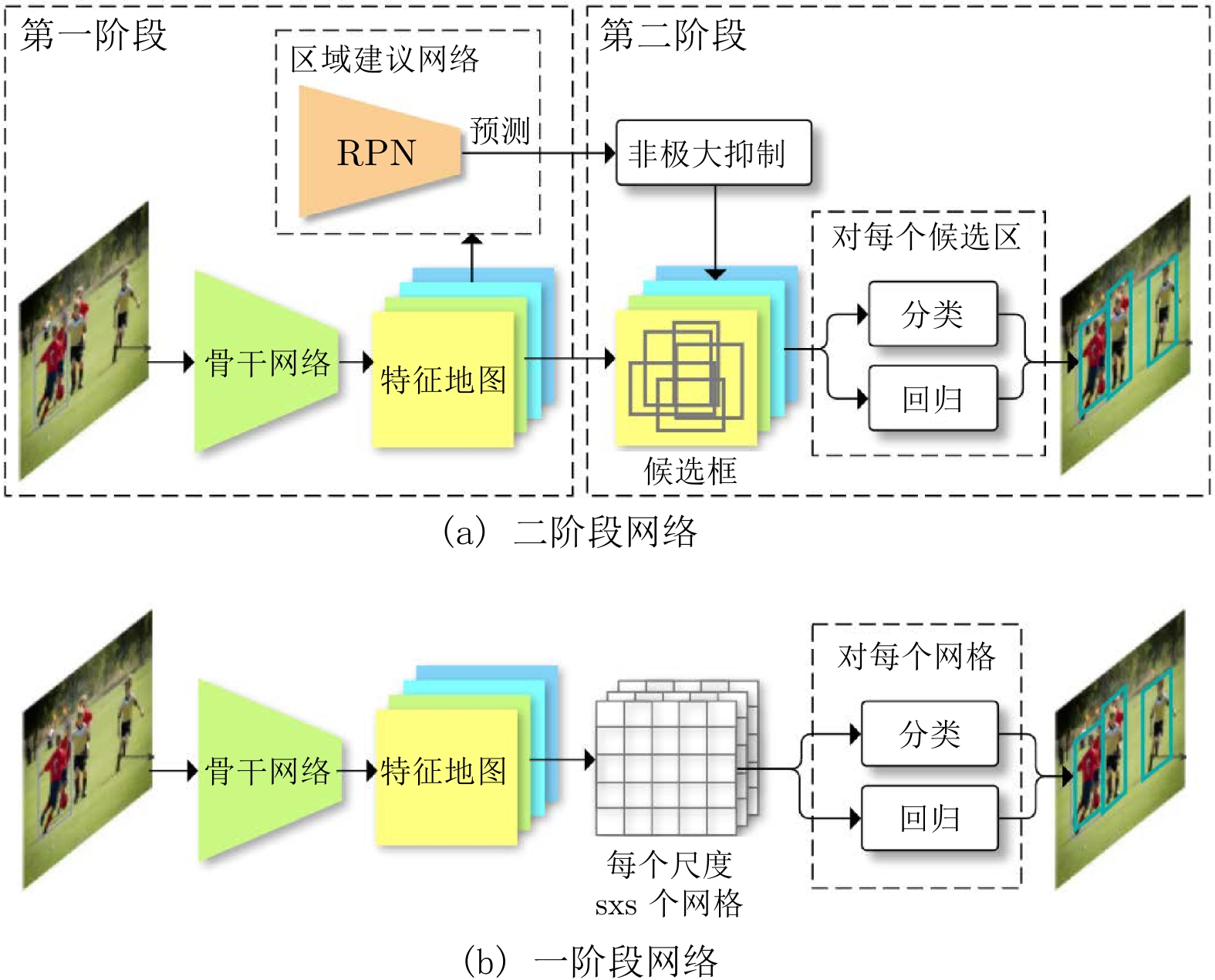
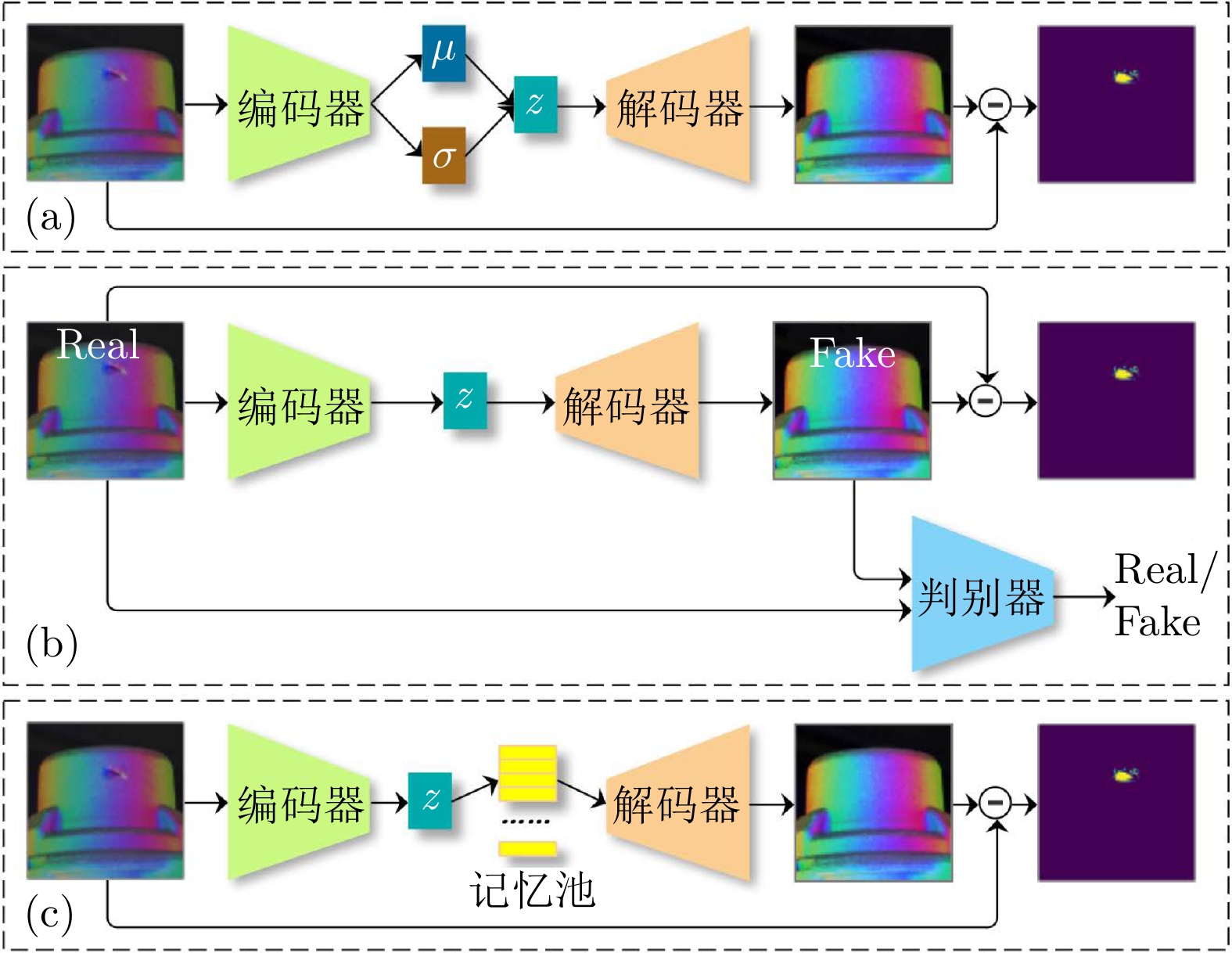
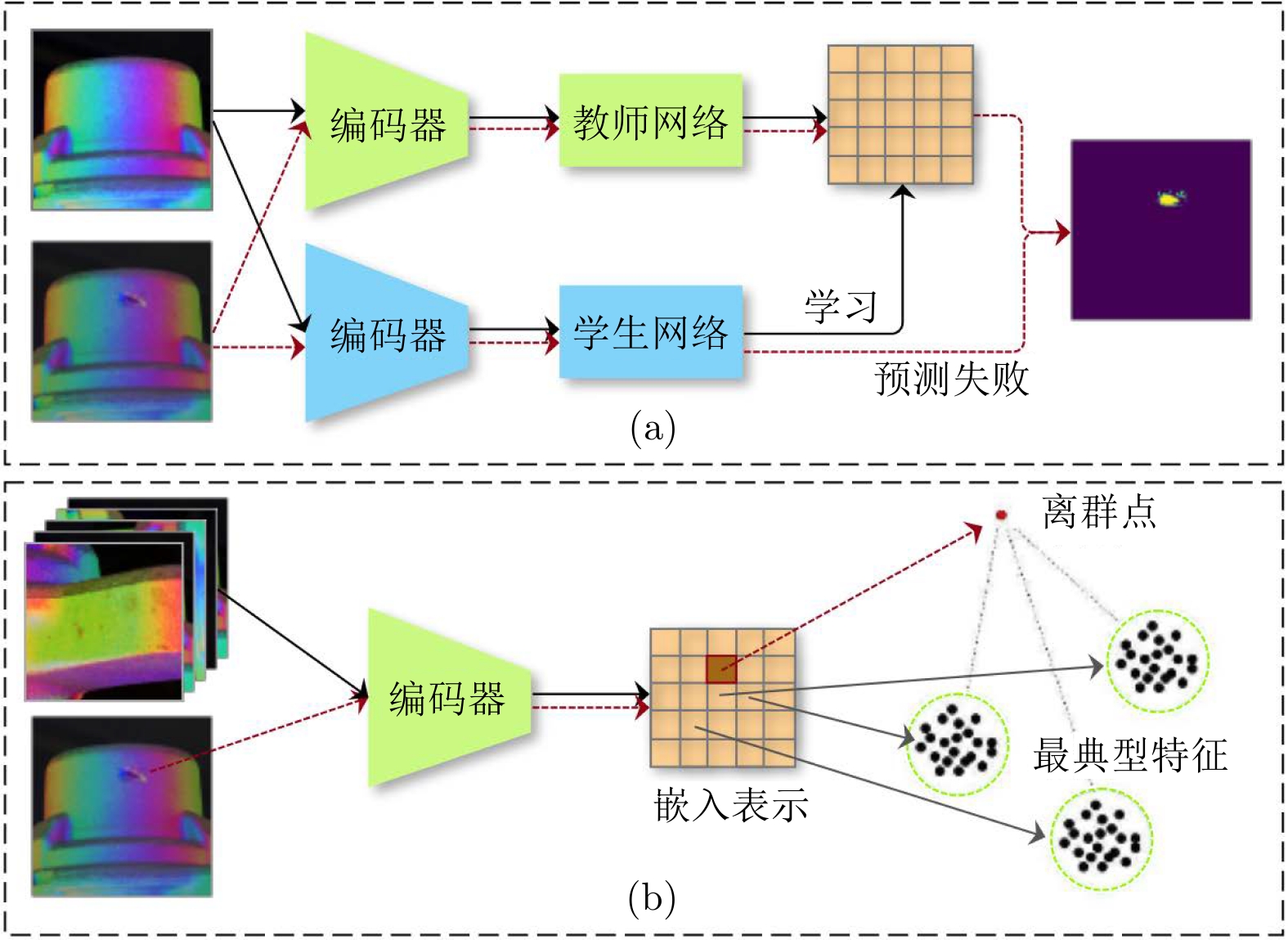
针对金属平面及三维结构材料的工业表面缺陷检测, 本文概述了视觉检测技术的基本原理和研究现状, 并总结出视觉自动检测系统的关键技术包括光学成像技术、图像预处理技术与缺陷检测器. 本文首先介绍了如何根据检测对象的光学特性选择合适的二维、三维光学成像技术; 其次介绍了图像降噪、特征提取、图像分割和拼接等预处理技术的重要作用; 然后根据缺陷检测器的实现原理将其分为模板匹配、图像分类、图像语义分割、目标检测和图像异常检测五类, 并对其中的经典算法进行了归纳分析. 最后, 本文探讨了工业场景下视觉检测技术实施中的关键问题, 并对该技术的发展趋势进行了展望.
针对金属平面及三维结构材料的工业表面缺陷检测, 本文概述了视觉检测技术的基本原理和研究现状, 并总结出视觉自动检测系统的关键技术包括光学成像技术、图像预处理技术与缺陷检测器. 本文首先介绍了如何根据检测对象的光学特性选择合适的二维、三维光学成像技术; 其次介绍了图像降噪、特征提取、图像分割和拼接等预处理技术的重要作用; 然后根据缺陷检测器的实现原理将其分为模板匹配、图像分类、图像语义分割、目标检测和图像异常检测五类, 并对其中的经典算法进行了归纳分析. 最后, 本文探讨了工业场景下视觉检测技术实施中的关键问题, 并对该技术的发展趋势进行了展望.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220939
摘要:
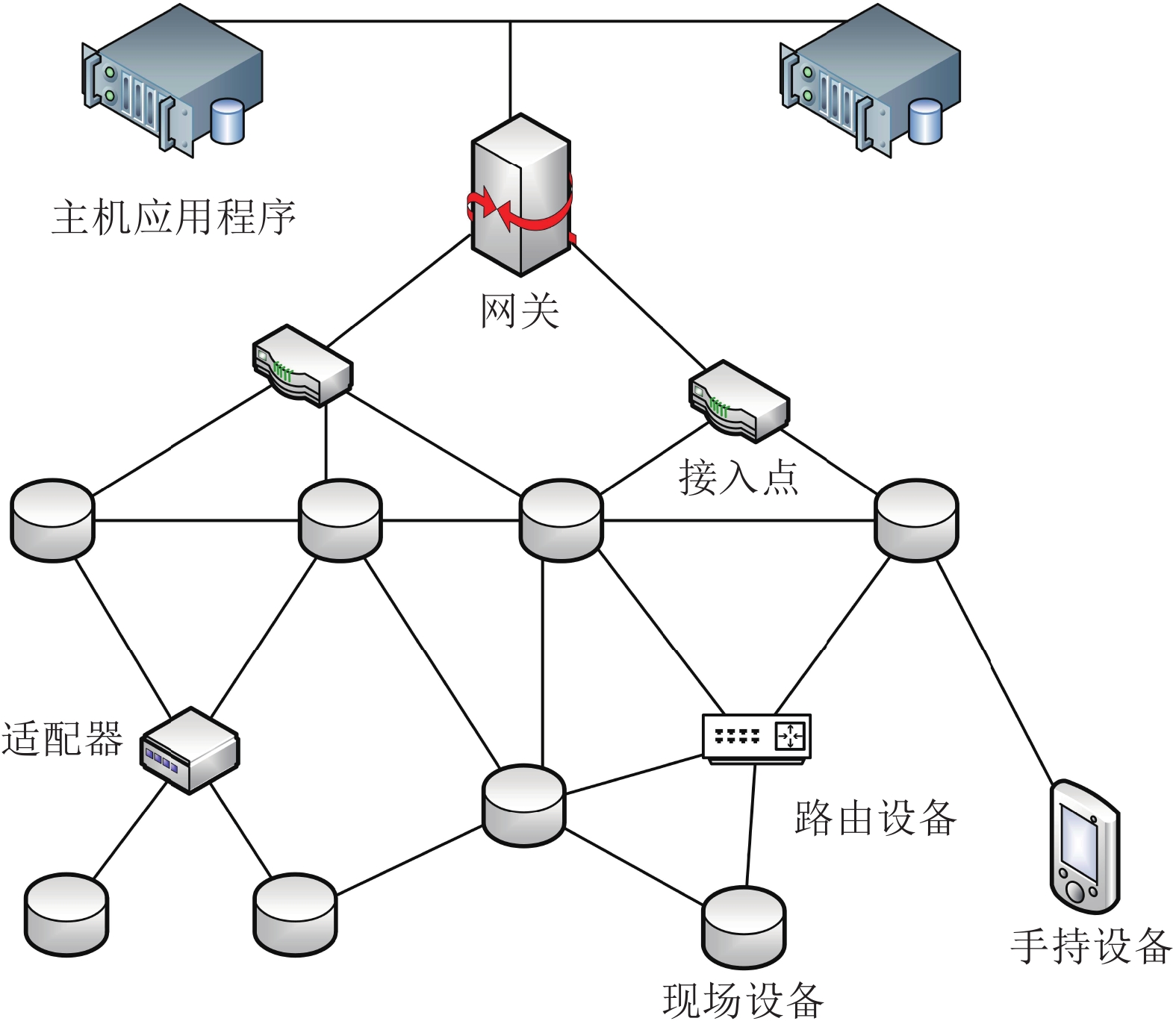
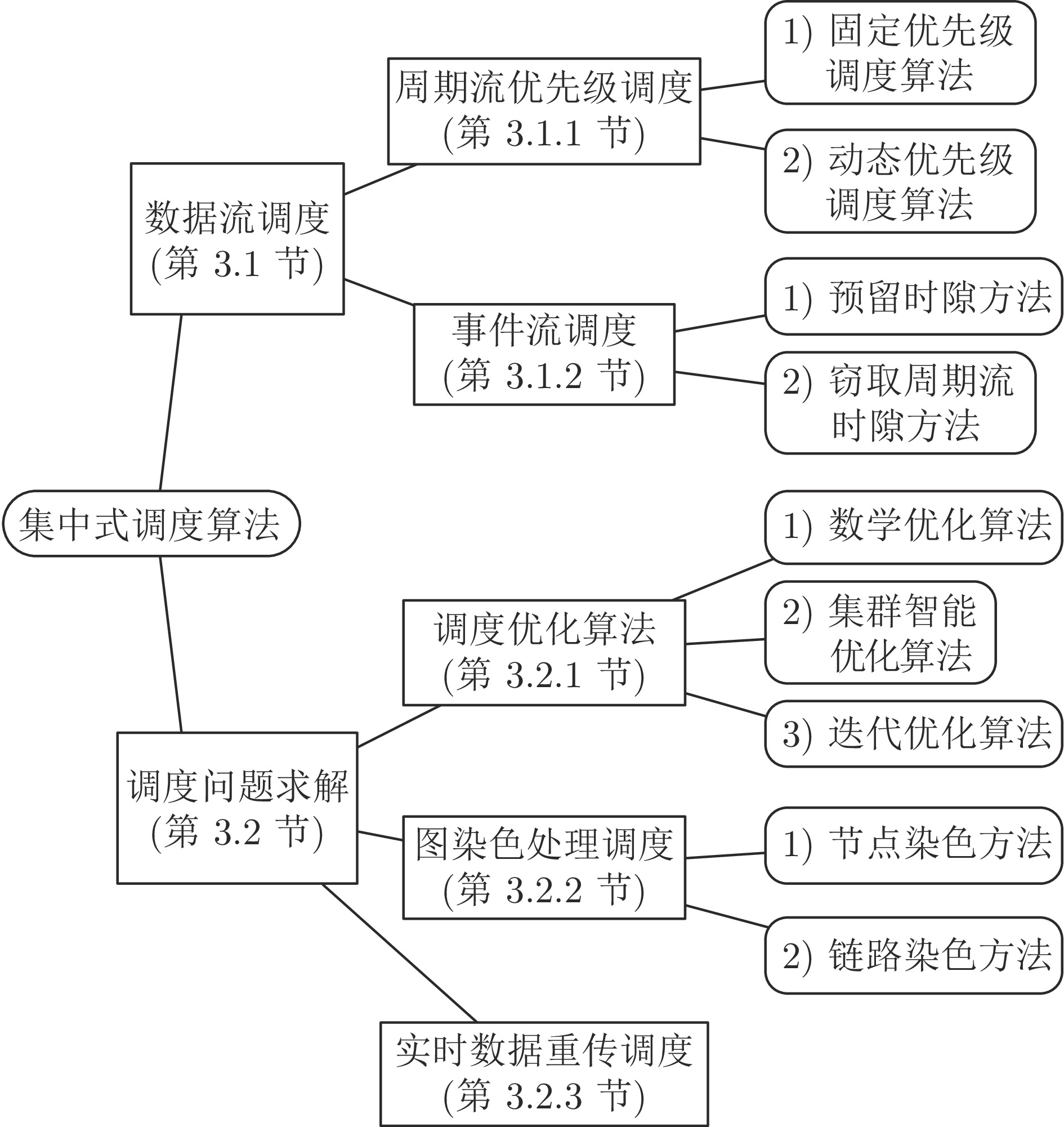
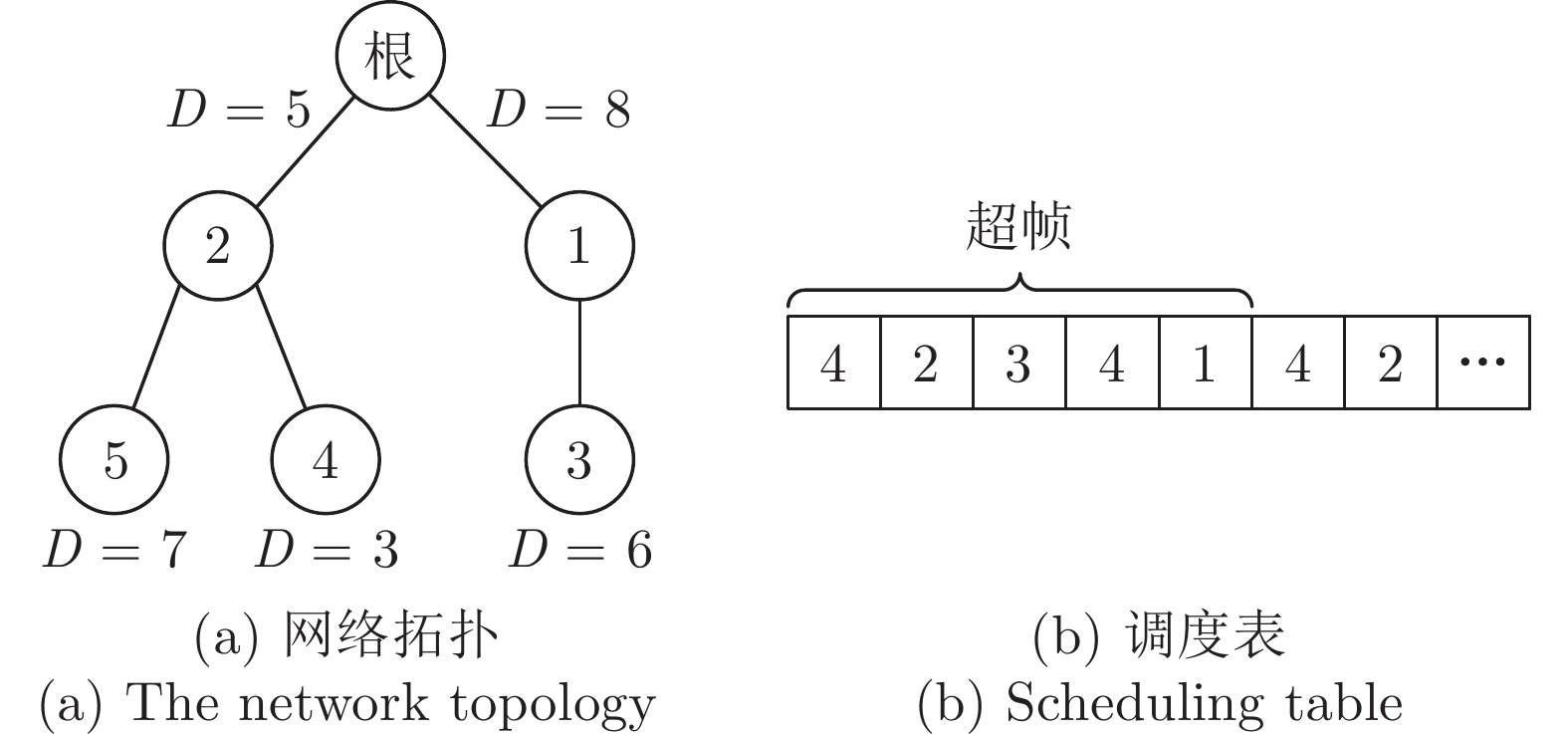
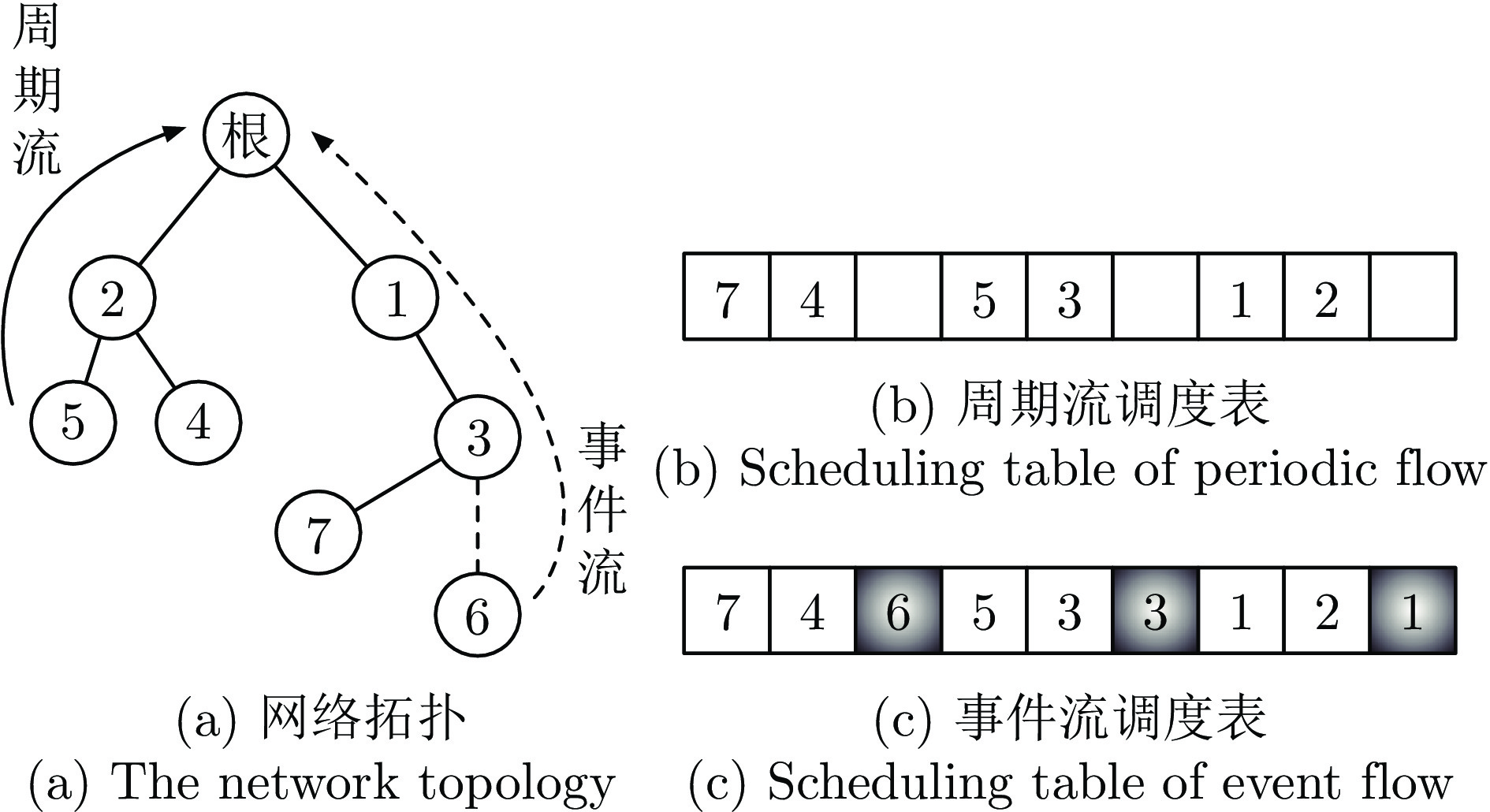
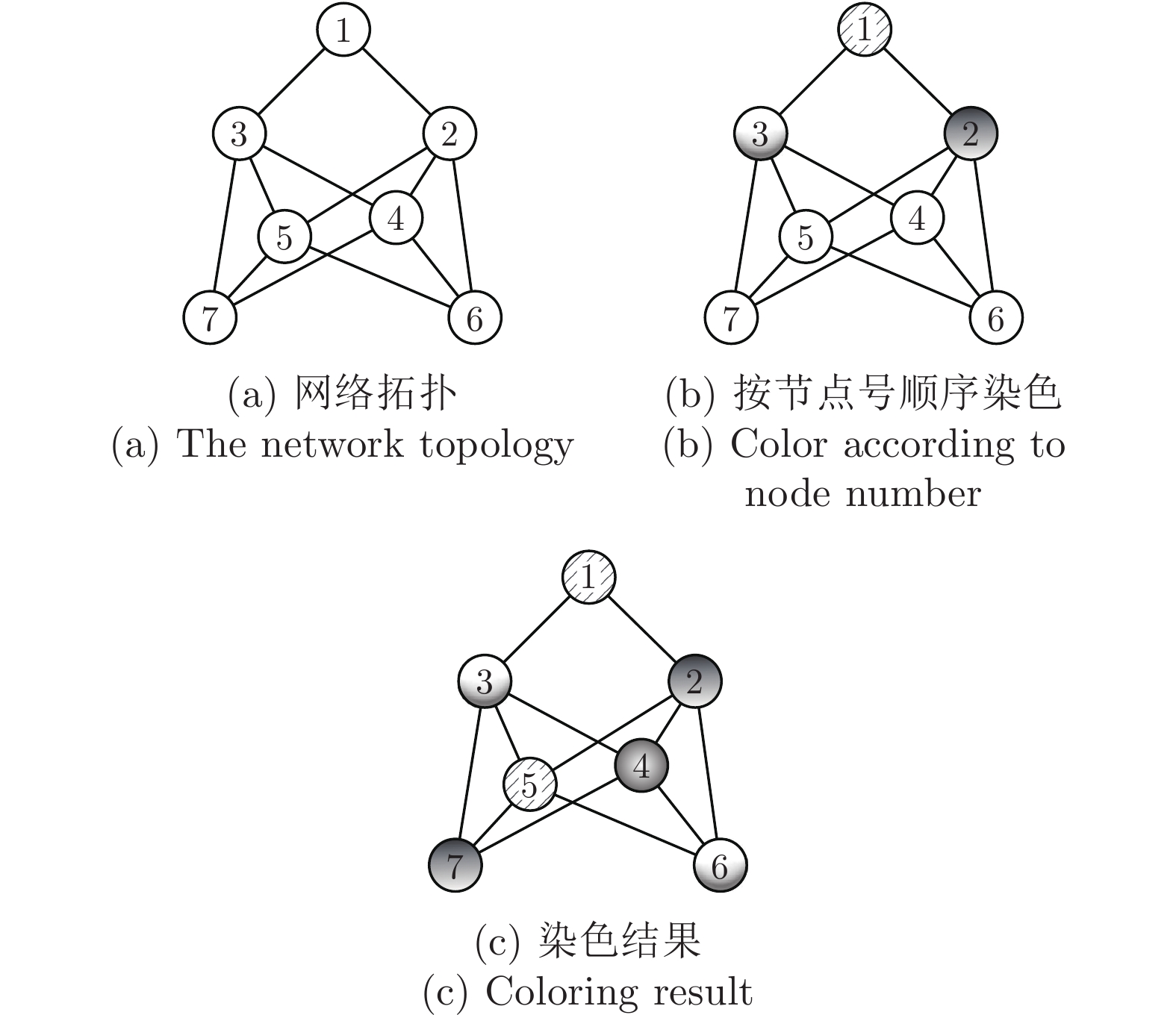
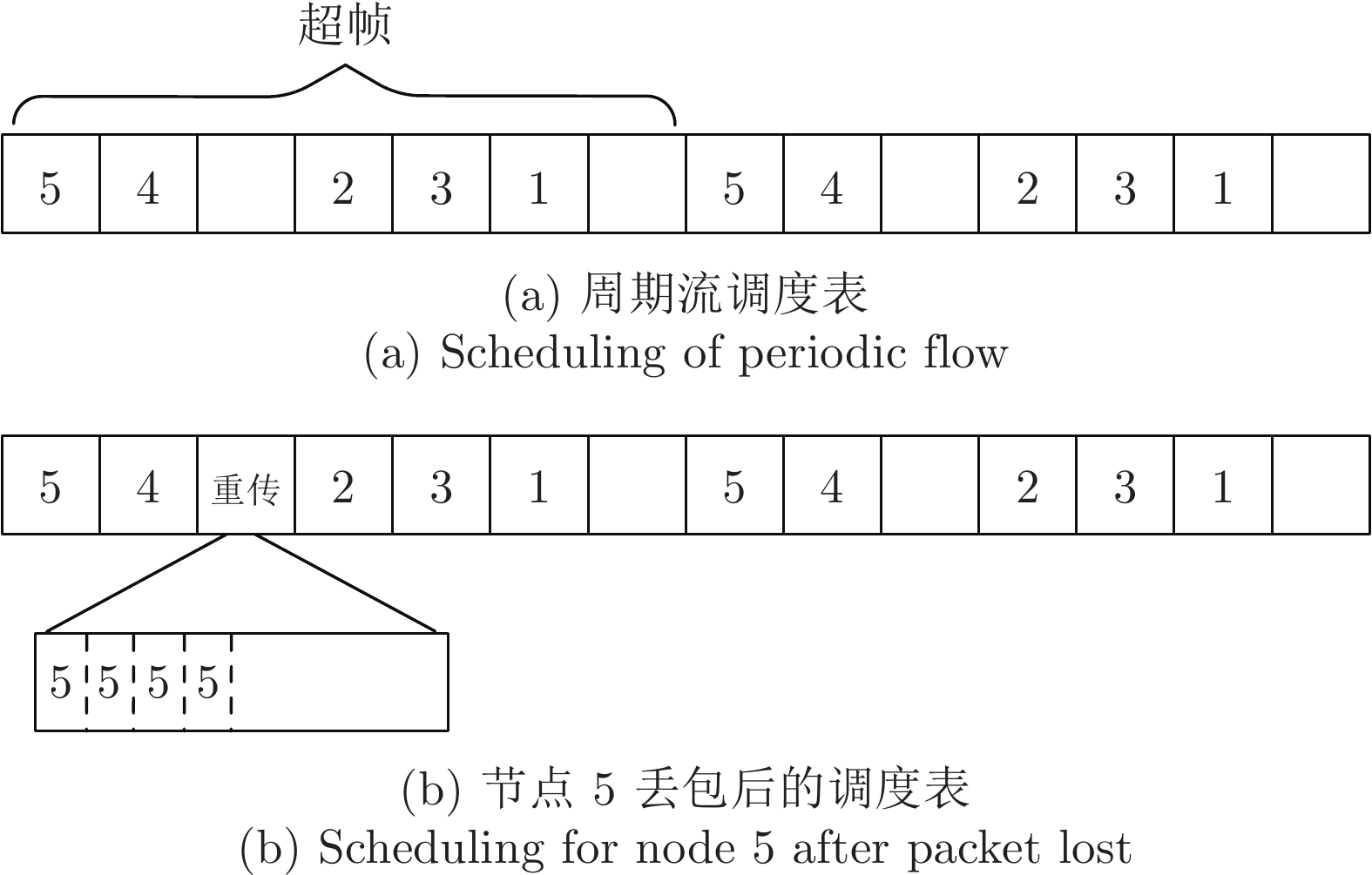
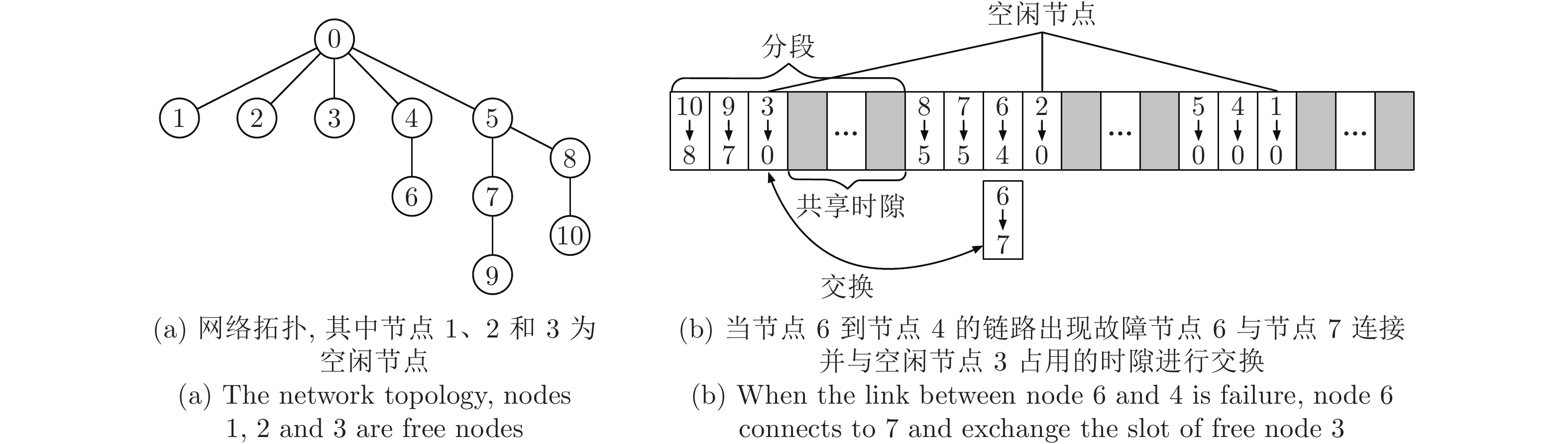
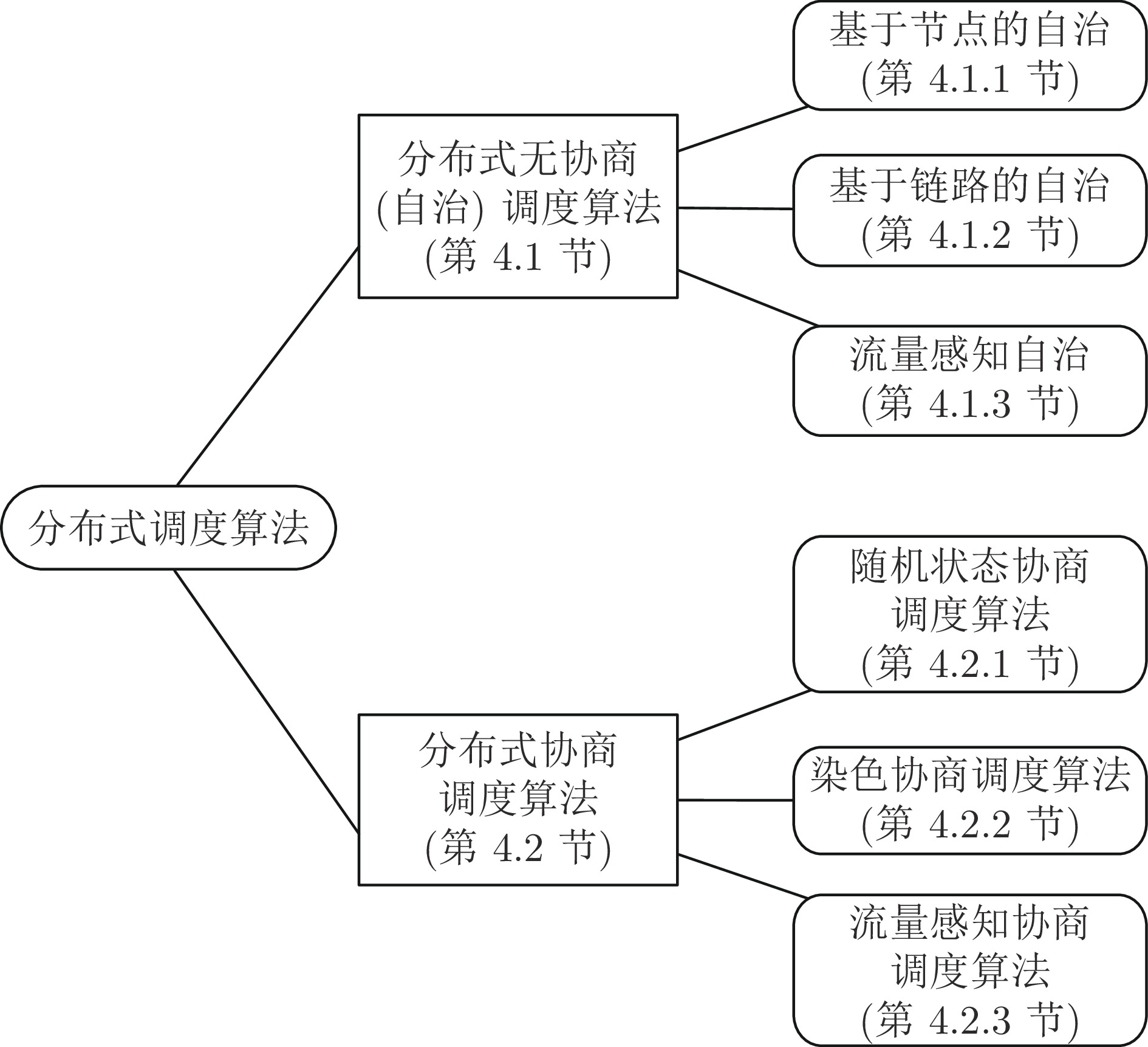
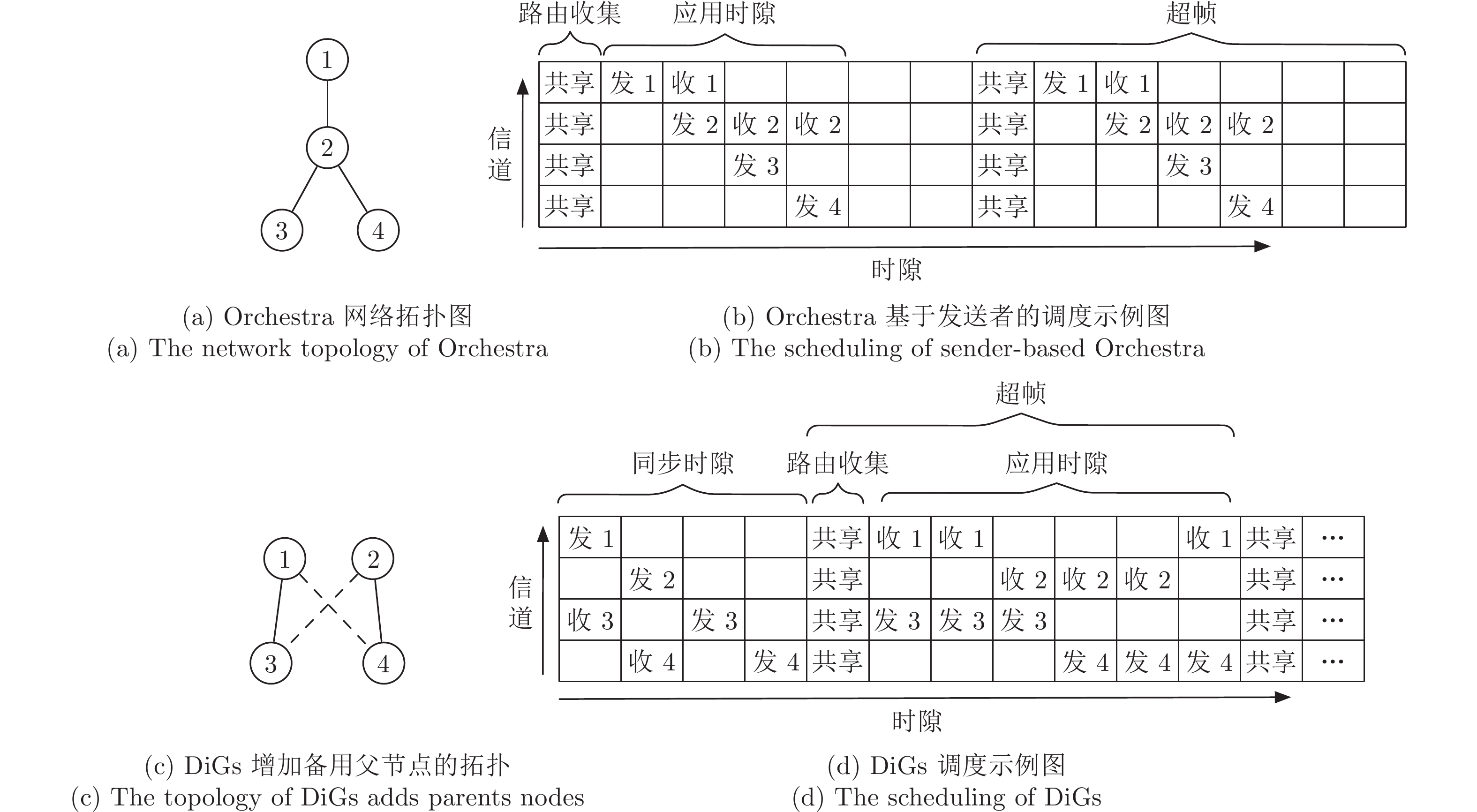
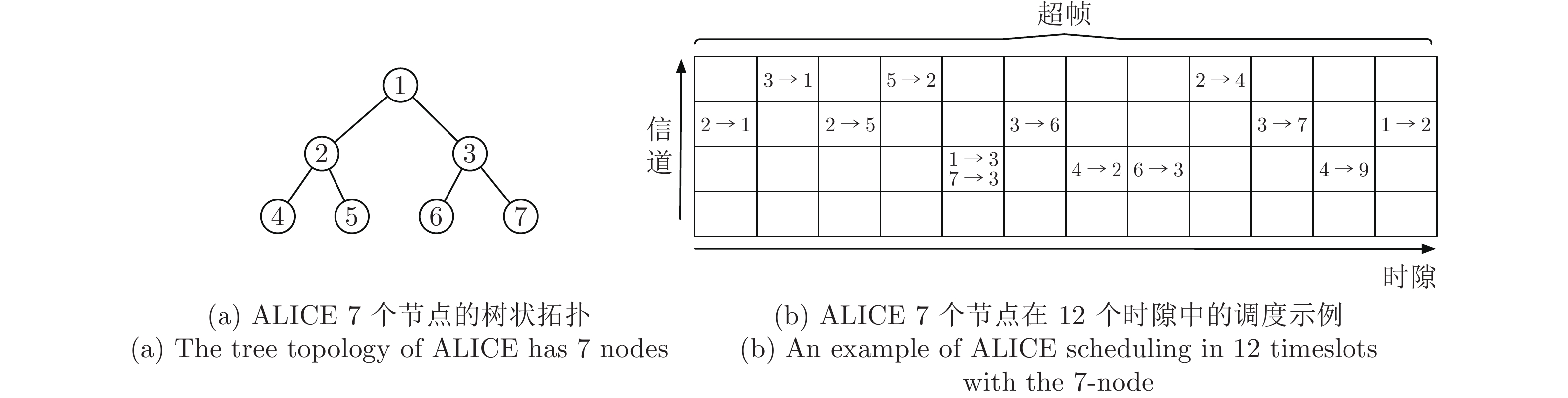
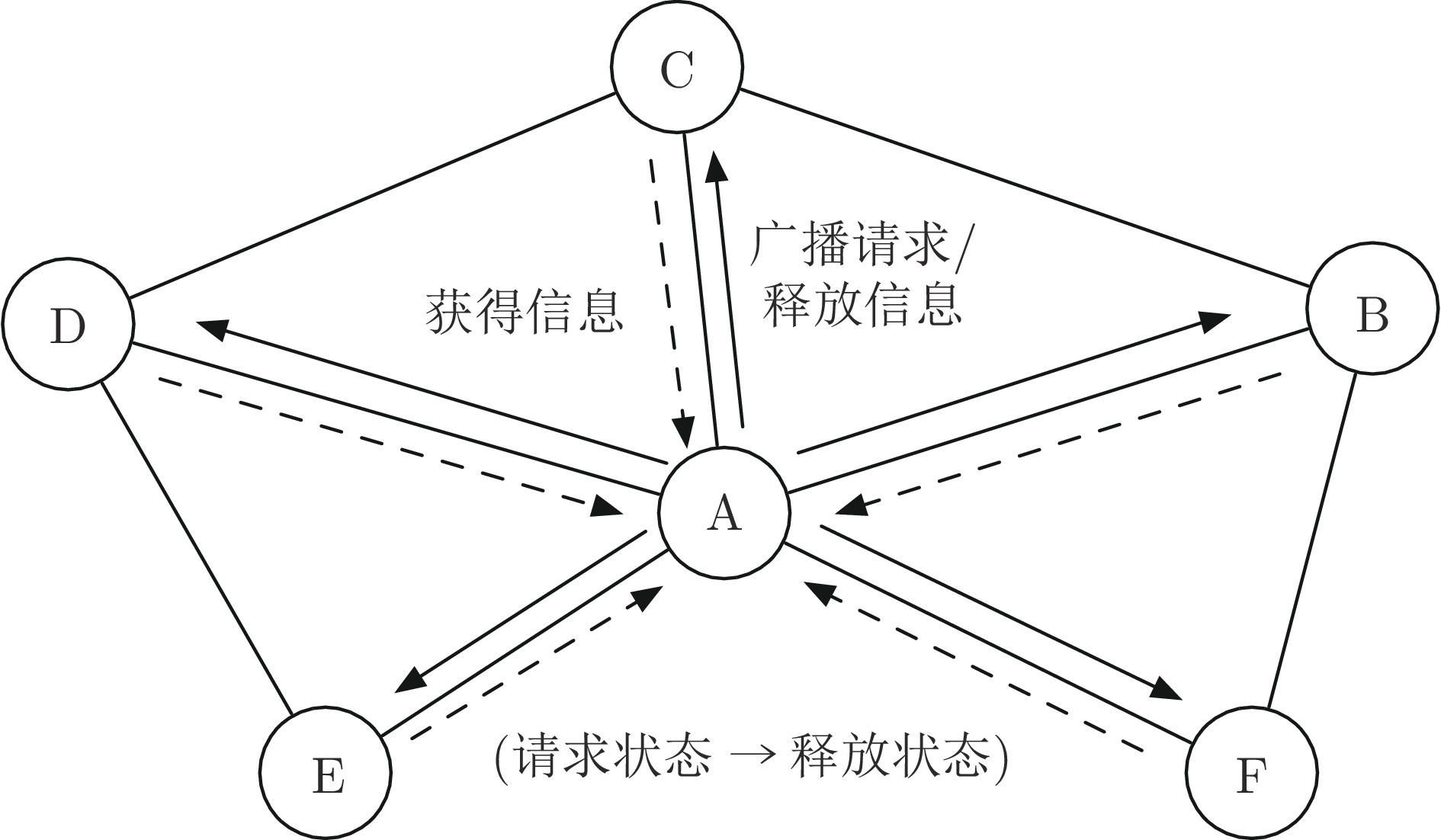
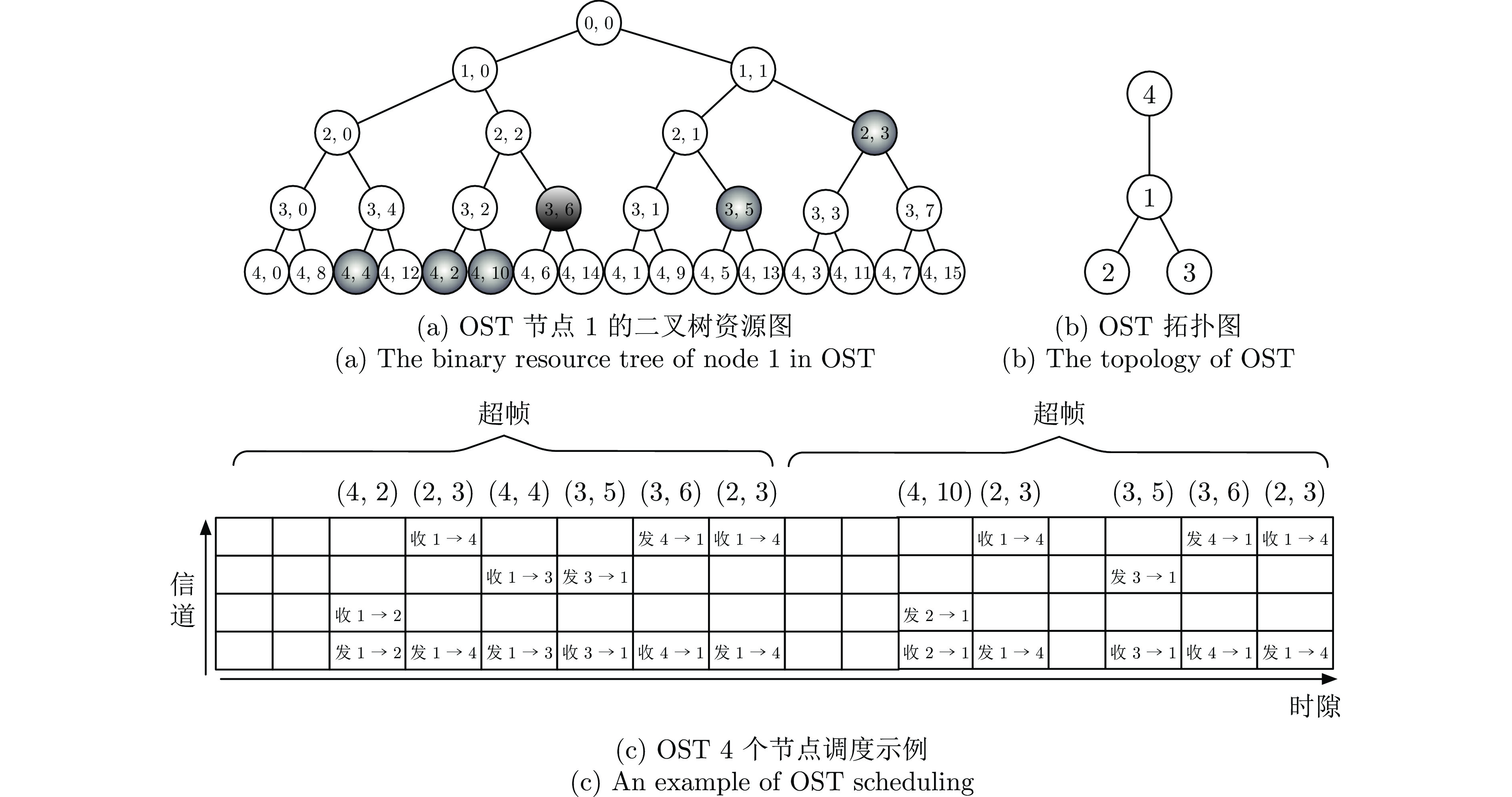
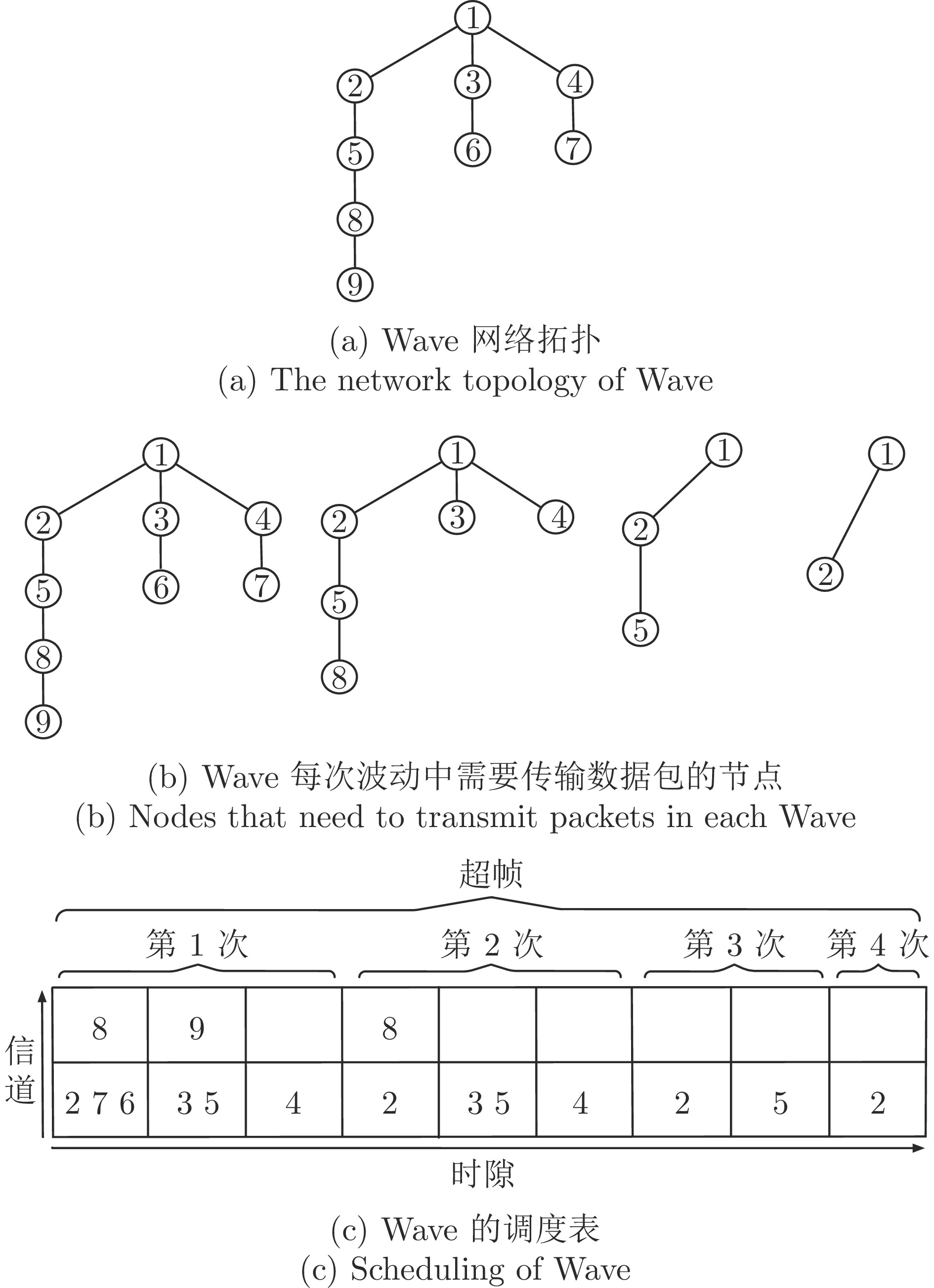
无线网络是工业物联网中的一种具有良好前景的网络互联技术. 它的应用为工业现场设备的部署提供了极大的便利, 使设备摆脱了线缆的束缚从而在空间上的选点更为灵活, 同时能够节省线材和人力等方面的成本. 然而, 无线通信易受环境噪声的影响, 尤其是在复杂电磁干扰的工业环境中, 易导致无线传输的时延增大和数据丢失. 这些问题对于传输实时性要求较高的工业控制系统而言是非常不利的因素. 为了提高无线网络在工业环境中数据传输的实时性, 业界设计了多种传输调度算法以提高无线通信的实时性和可靠性从而满足工业应用的需求. 综述了工业无线网络传输调度算法的研究现状, 对其发展历程、问题定义、评价指标、分类方法和现有标准等方面进行了全面的总结, 详细阐述了具有代表性的调度算法的工作原理, 并指出了未来的研究方向.
无线网络是工业物联网中的一种具有良好前景的网络互联技术. 它的应用为工业现场设备的部署提供了极大的便利, 使设备摆脱了线缆的束缚从而在空间上的选点更为灵活, 同时能够节省线材和人力等方面的成本. 然而, 无线通信易受环境噪声的影响, 尤其是在复杂电磁干扰的工业环境中, 易导致无线传输的时延增大和数据丢失. 这些问题对于传输实时性要求较高的工业控制系统而言是非常不利的因素. 为了提高无线网络在工业环境中数据传输的实时性, 业界设计了多种传输调度算法以提高无线通信的实时性和可靠性从而满足工业应用的需求. 综述了工业无线网络传输调度算法的研究现状, 对其发展历程、问题定义、评价指标、分类方法和现有标准等方面进行了全面的总结, 详细阐述了具有代表性的调度算法的工作原理, 并指出了未来的研究方向.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c211112
摘要:
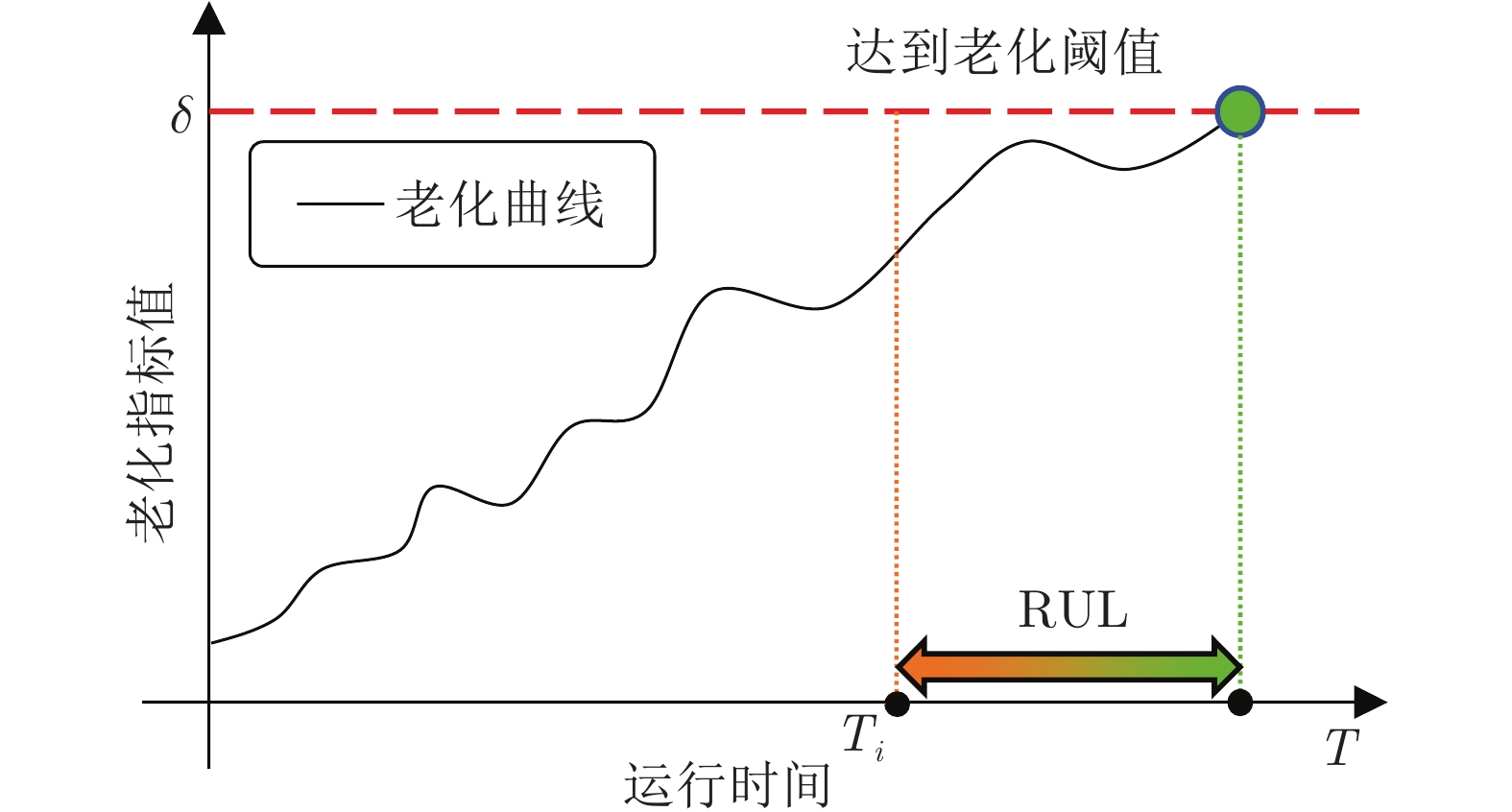
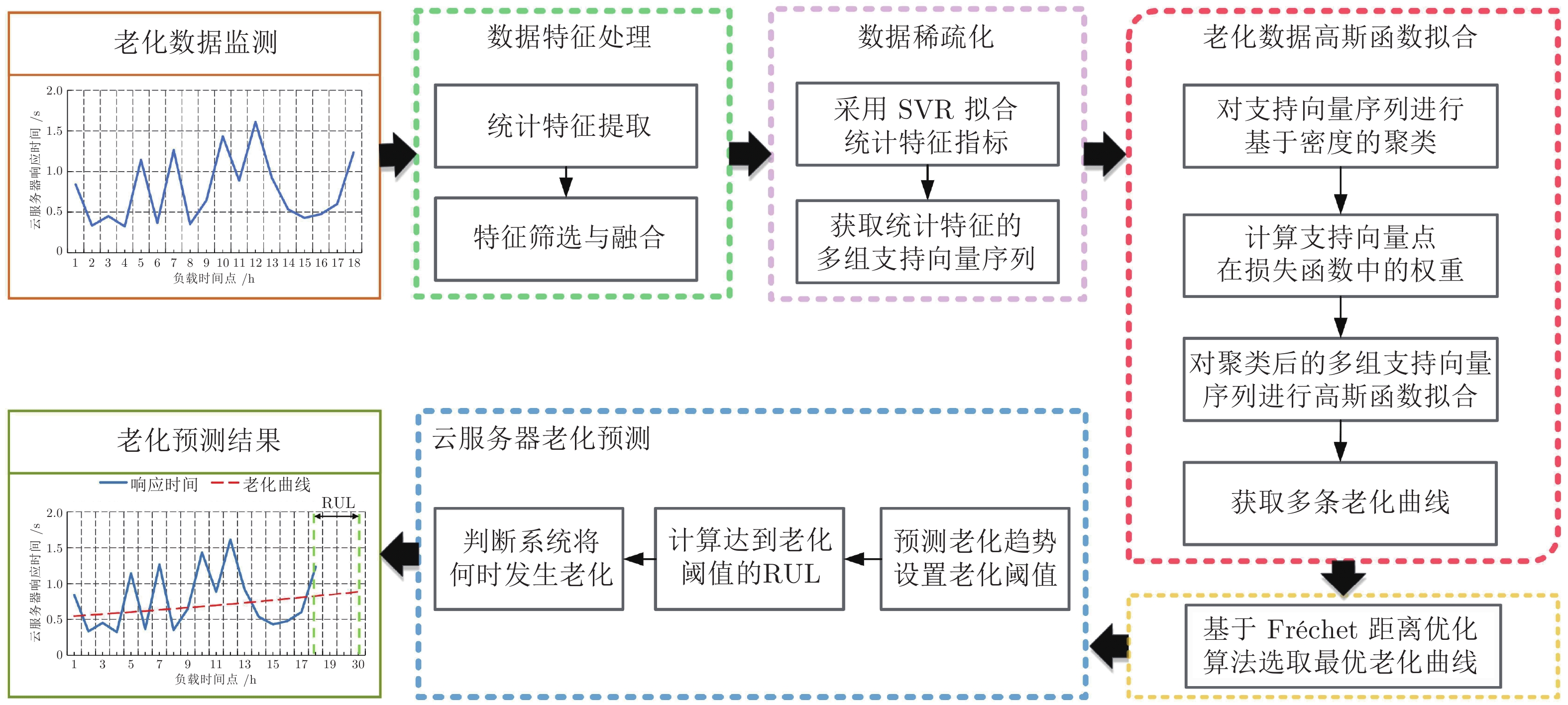
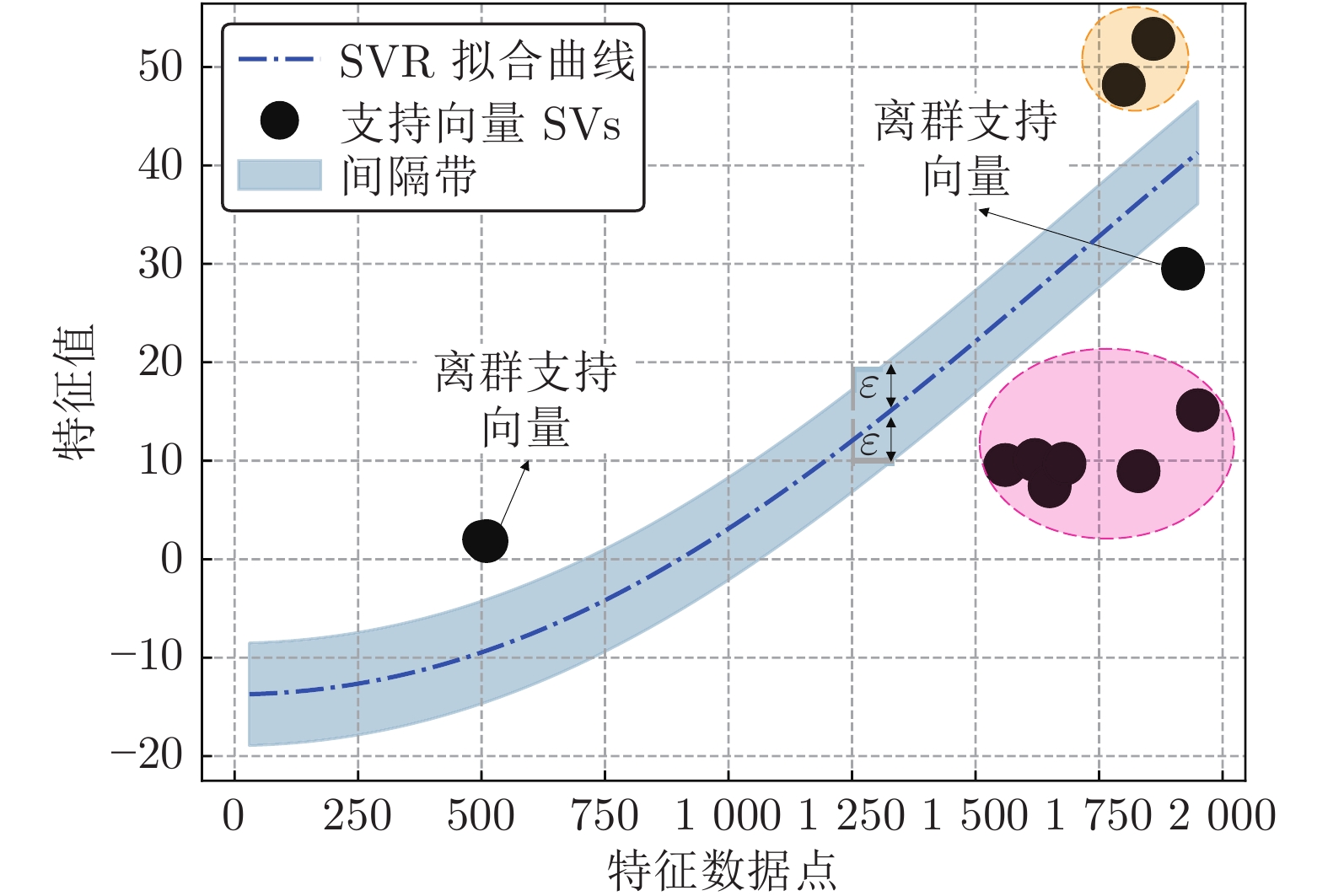
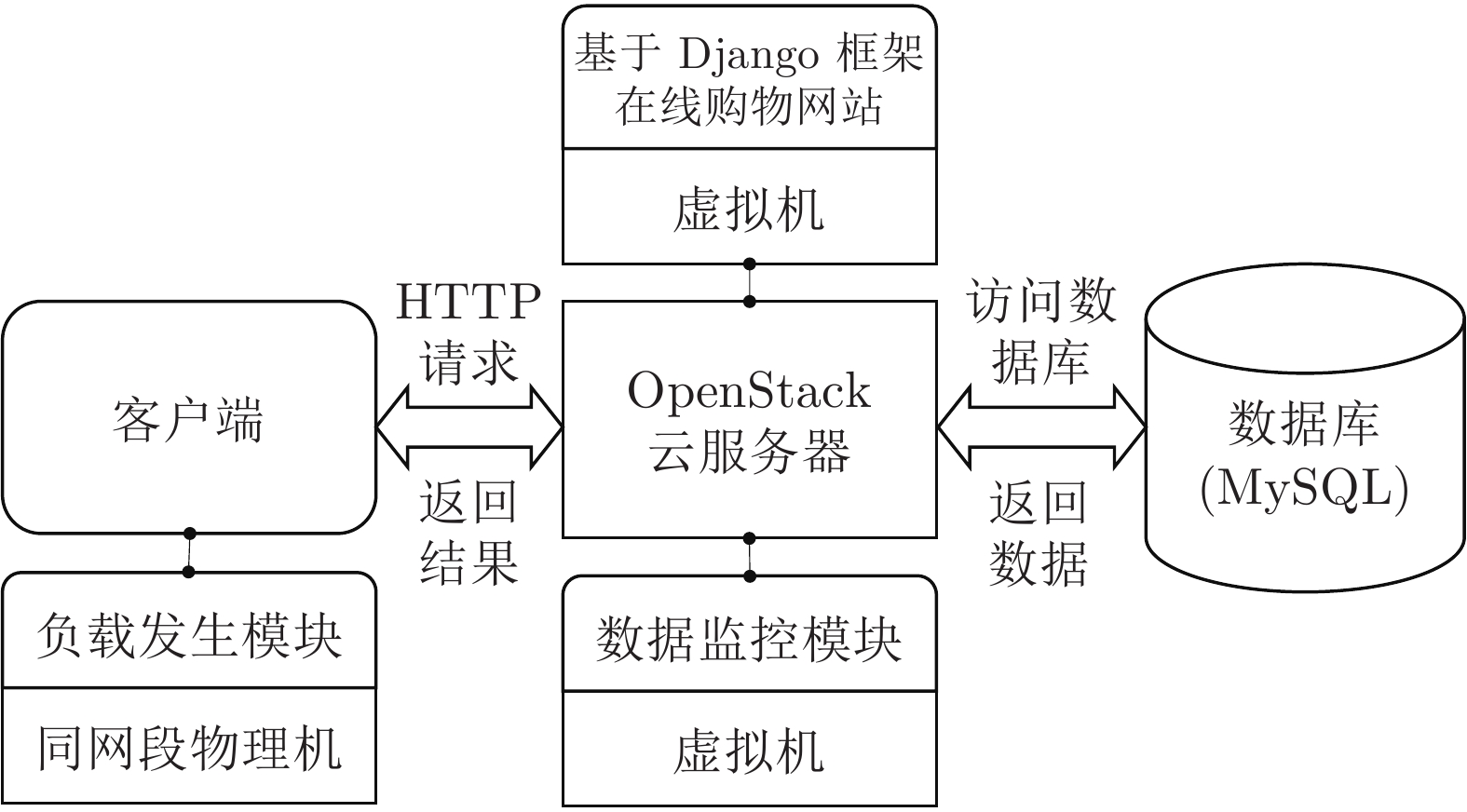
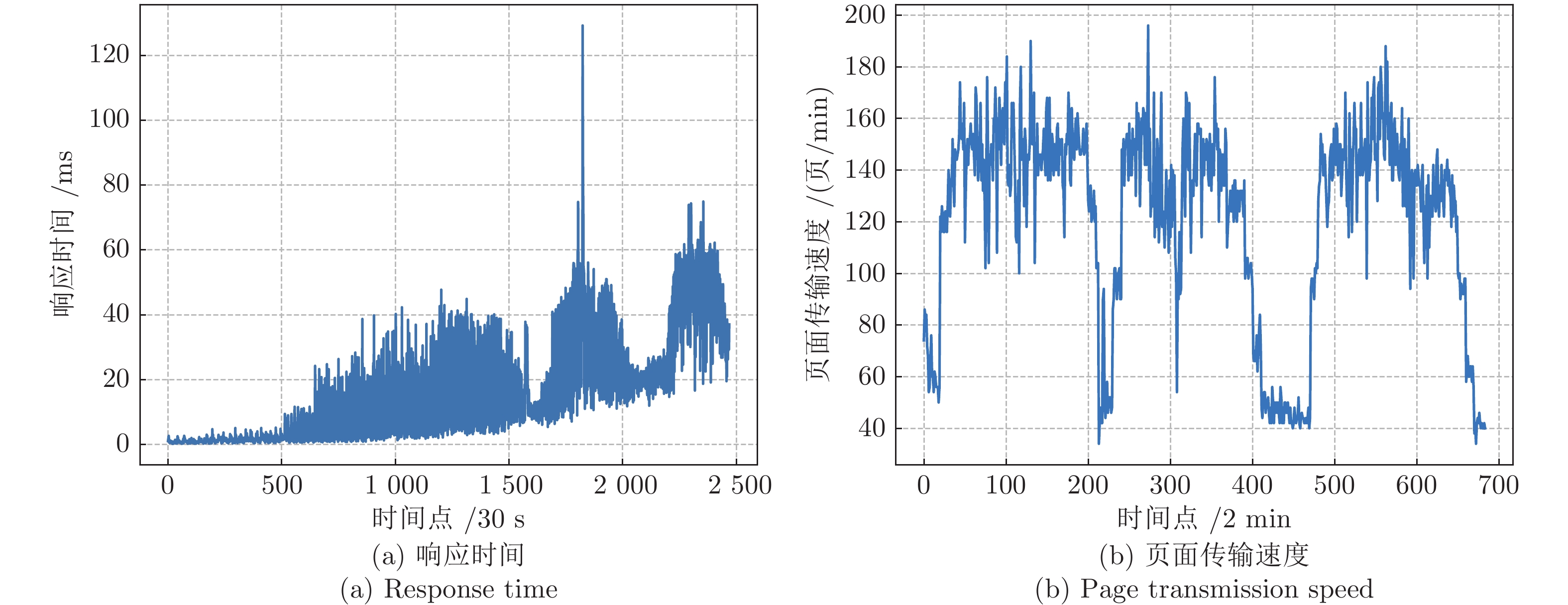
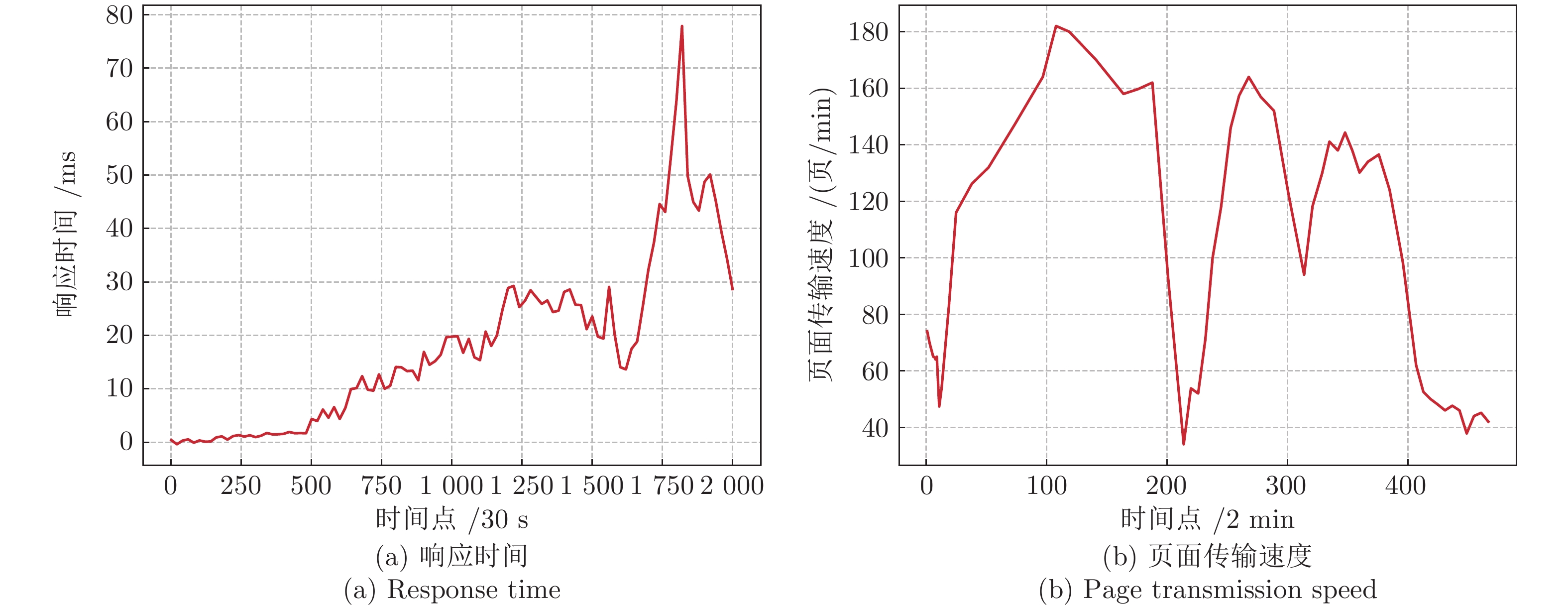
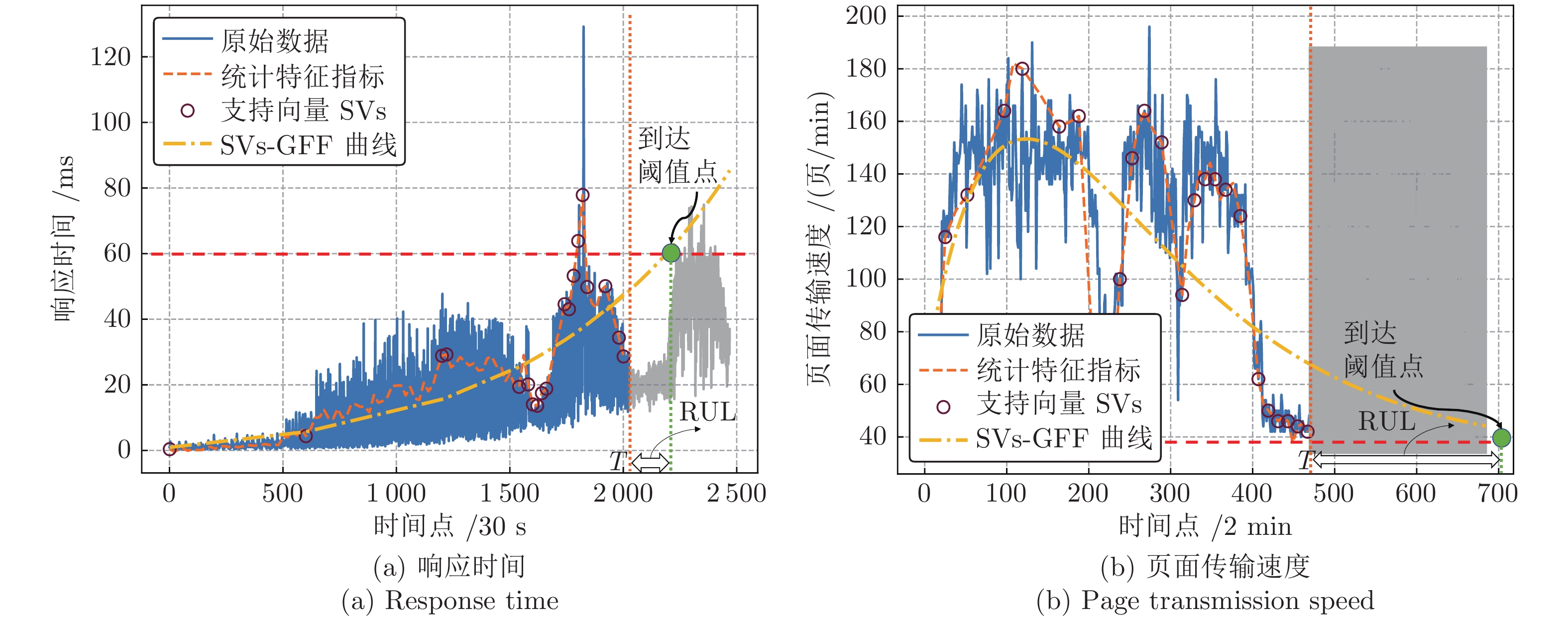
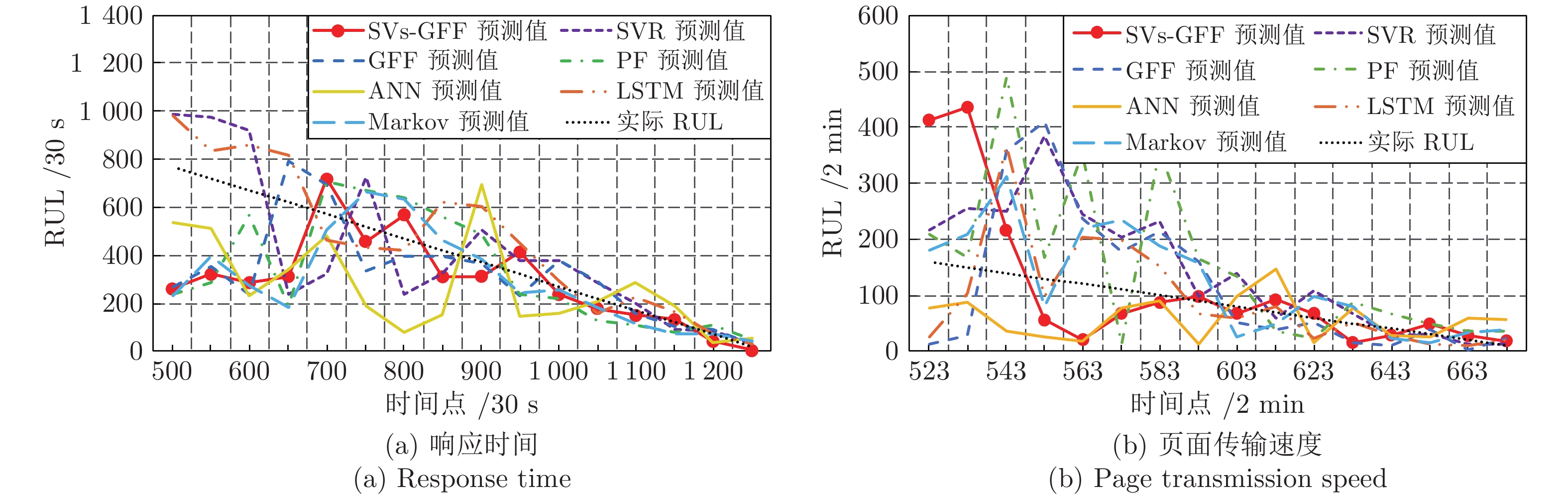
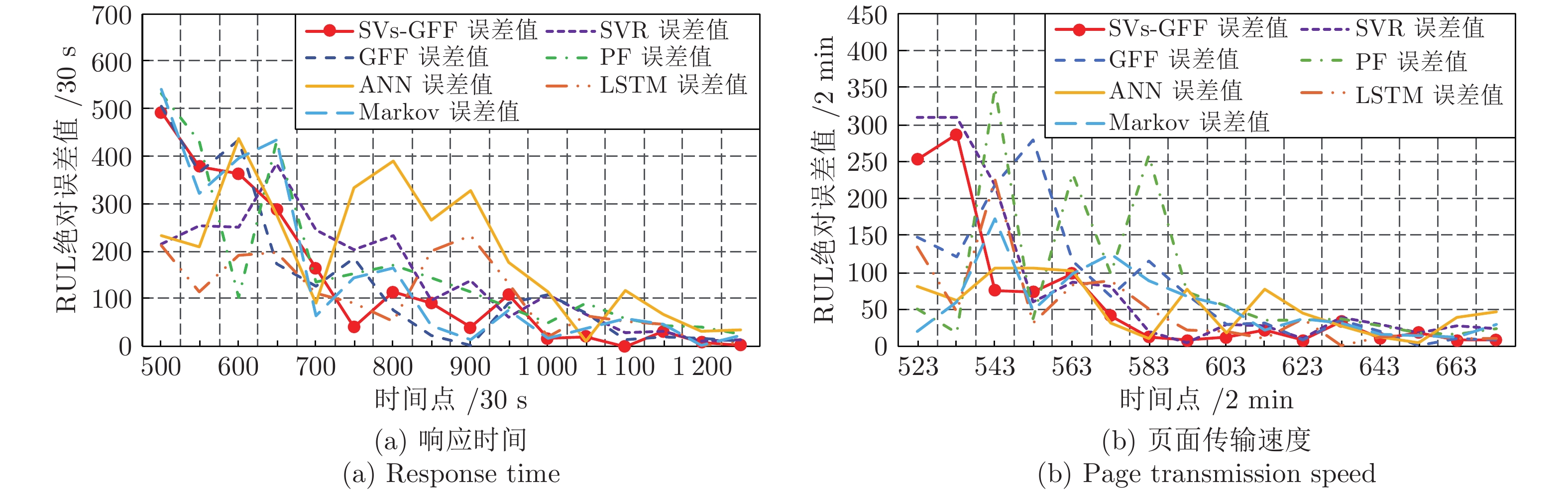
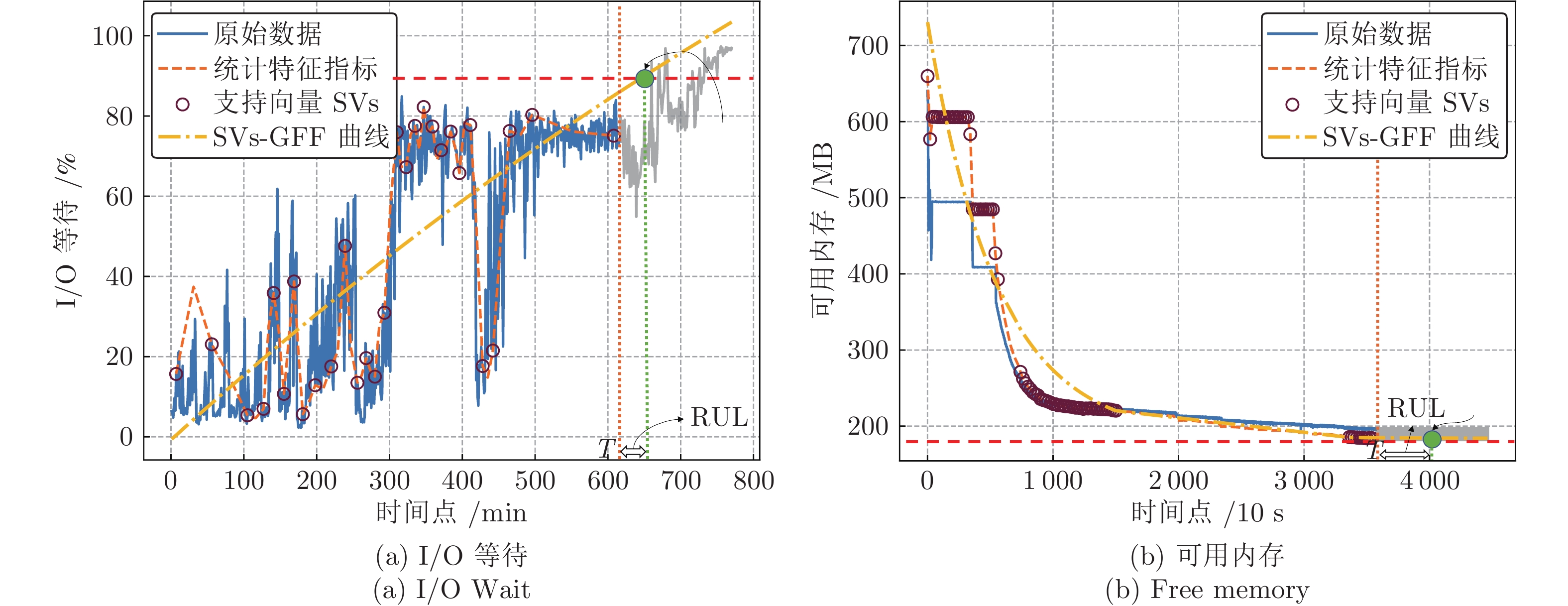
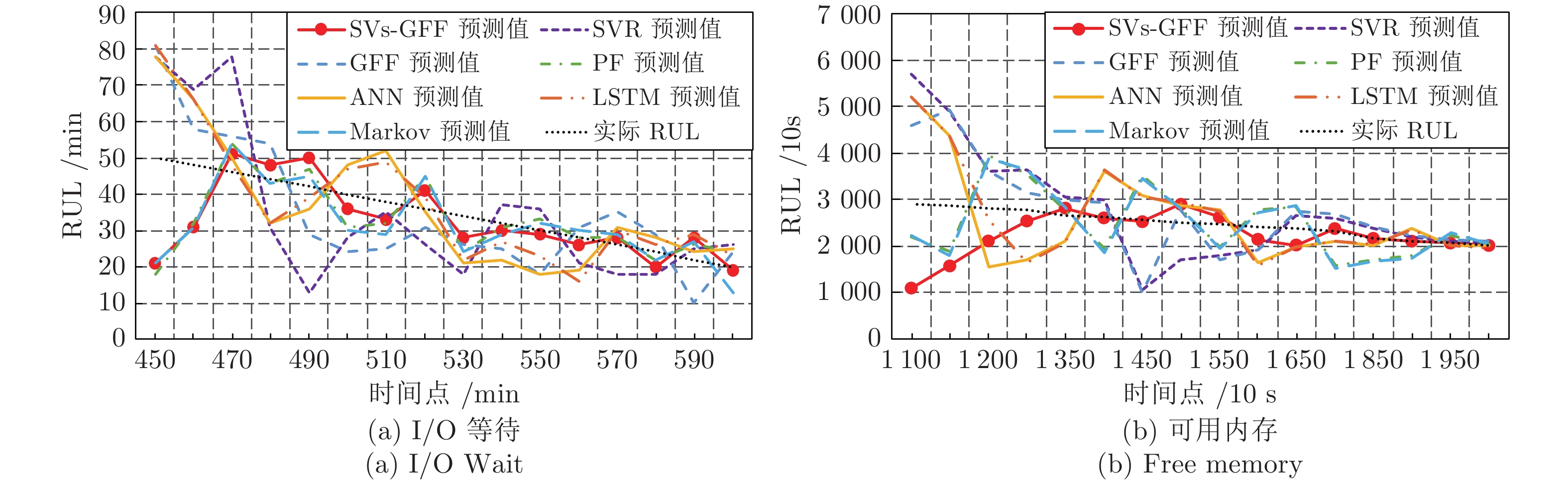
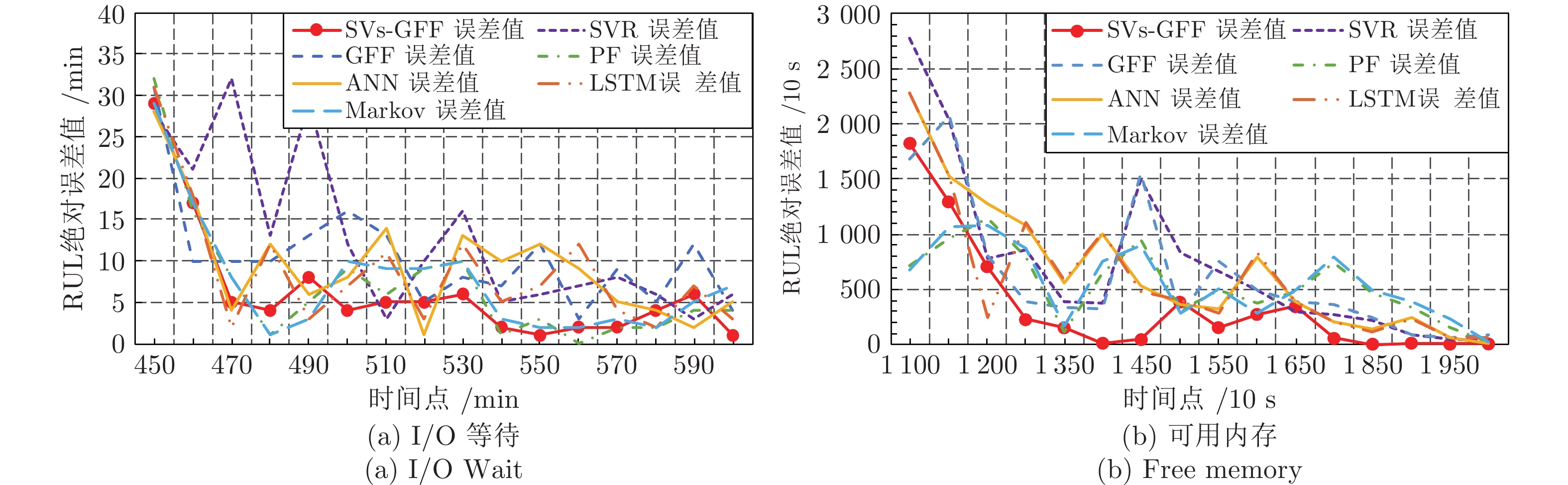
针对云服务器中存在软件老化现象, 将造成系统性能衰退与可靠性下降的问题, 借鉴剩余使用寿命(Remaining useful life, RUL)概念, 提出基于支持向量(Support vectors, SVs)和高斯函数拟合(Gaussian function fitting, GFF)的老化预测方法(SVs-GFF). 首先, 提取云服务器老化数据的统计特征指标, 并采用支持向量回归(Support vector regression, SVR) 对统计特征指标进行数据稀疏化处理, 得到支持向量序列数据; 然后, 建立基于密度聚类的高斯函数拟合模型, 对不同核函数下的支持向量序列数据进行老化曲线拟合, 并采用Fréchet距离优化算法选取最优老化曲线; 最后, 基于最优老化曲线, 评估系统到达老化阈值前的RUL, 以预测系统何时发生老化. 在OpenStack云服务器4个老化数据集上的实验结果表明, 基于RUL和SVs-GFF的云服务器老化预测方法与传统预测方法相比, 具有更高的预测精度和更快的收敛速度.
针对云服务器中存在软件老化现象, 将造成系统性能衰退与可靠性下降的问题, 借鉴剩余使用寿命(Remaining useful life, RUL)概念, 提出基于支持向量(Support vectors, SVs)和高斯函数拟合(Gaussian function fitting, GFF)的老化预测方法(SVs-GFF). 首先, 提取云服务器老化数据的统计特征指标, 并采用支持向量回归(Support vector regression, SVR) 对统计特征指标进行数据稀疏化处理, 得到支持向量序列数据; 然后, 建立基于密度聚类的高斯函数拟合模型, 对不同核函数下的支持向量序列数据进行老化曲线拟合, 并采用Fréchet距离优化算法选取最优老化曲线; 最后, 基于最优老化曲线, 评估系统到达老化阈值前的RUL, 以预测系统何时发生老化. 在OpenStack云服务器4个老化数据集上的实验结果表明, 基于RUL和SVs-GFF的云服务器老化预测方法与传统预测方法相比, 具有更高的预测精度和更快的收敛速度.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220914
摘要:
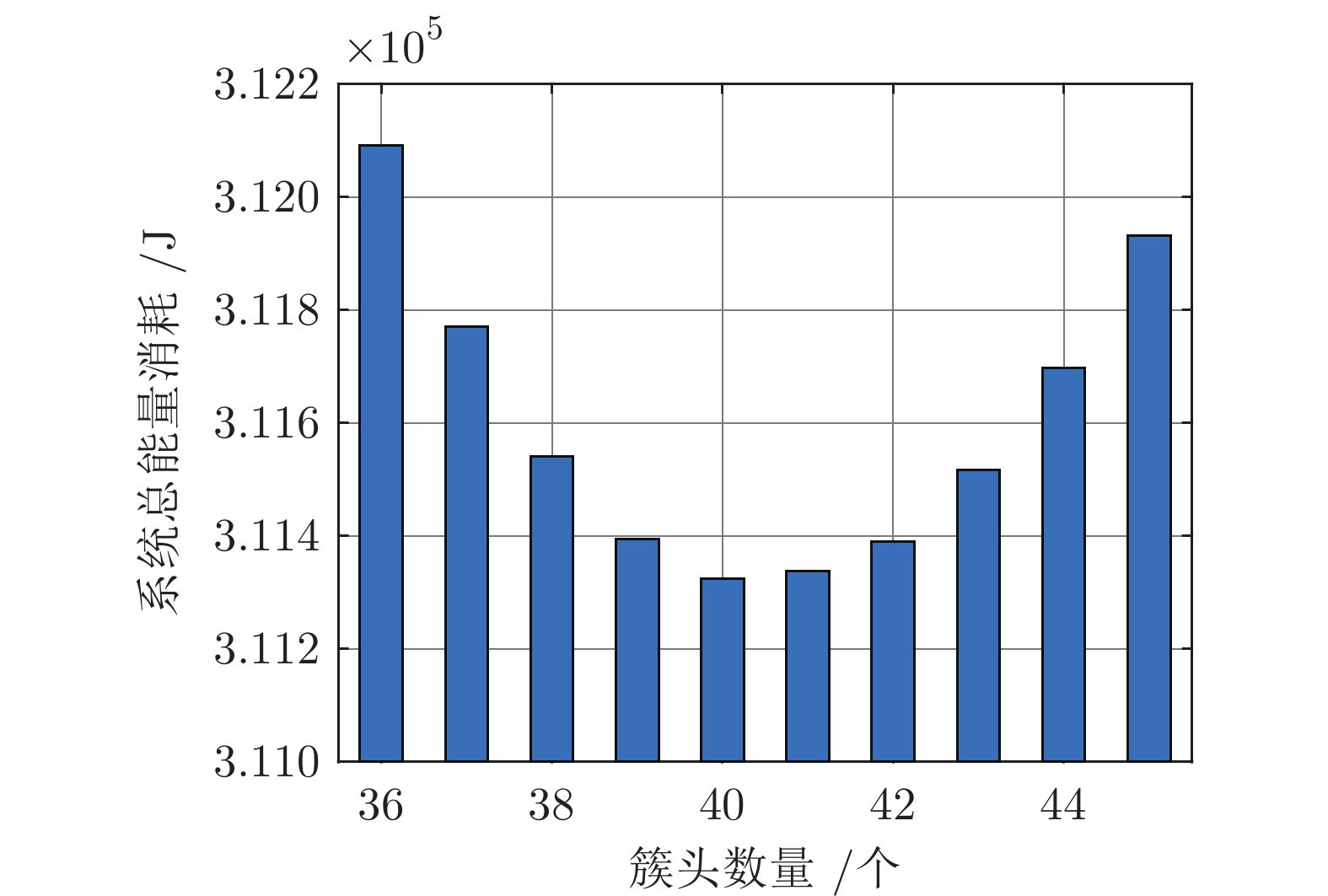
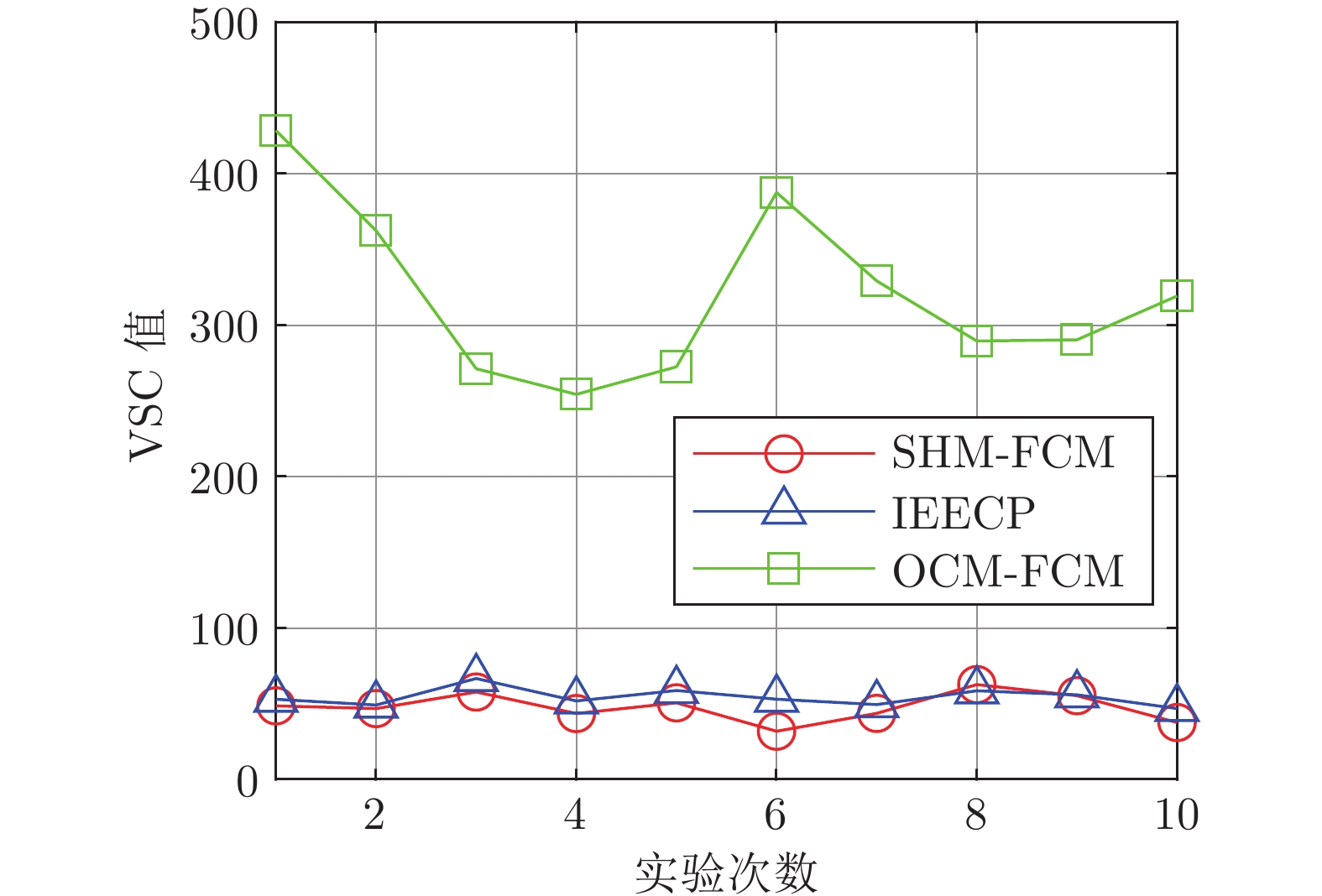
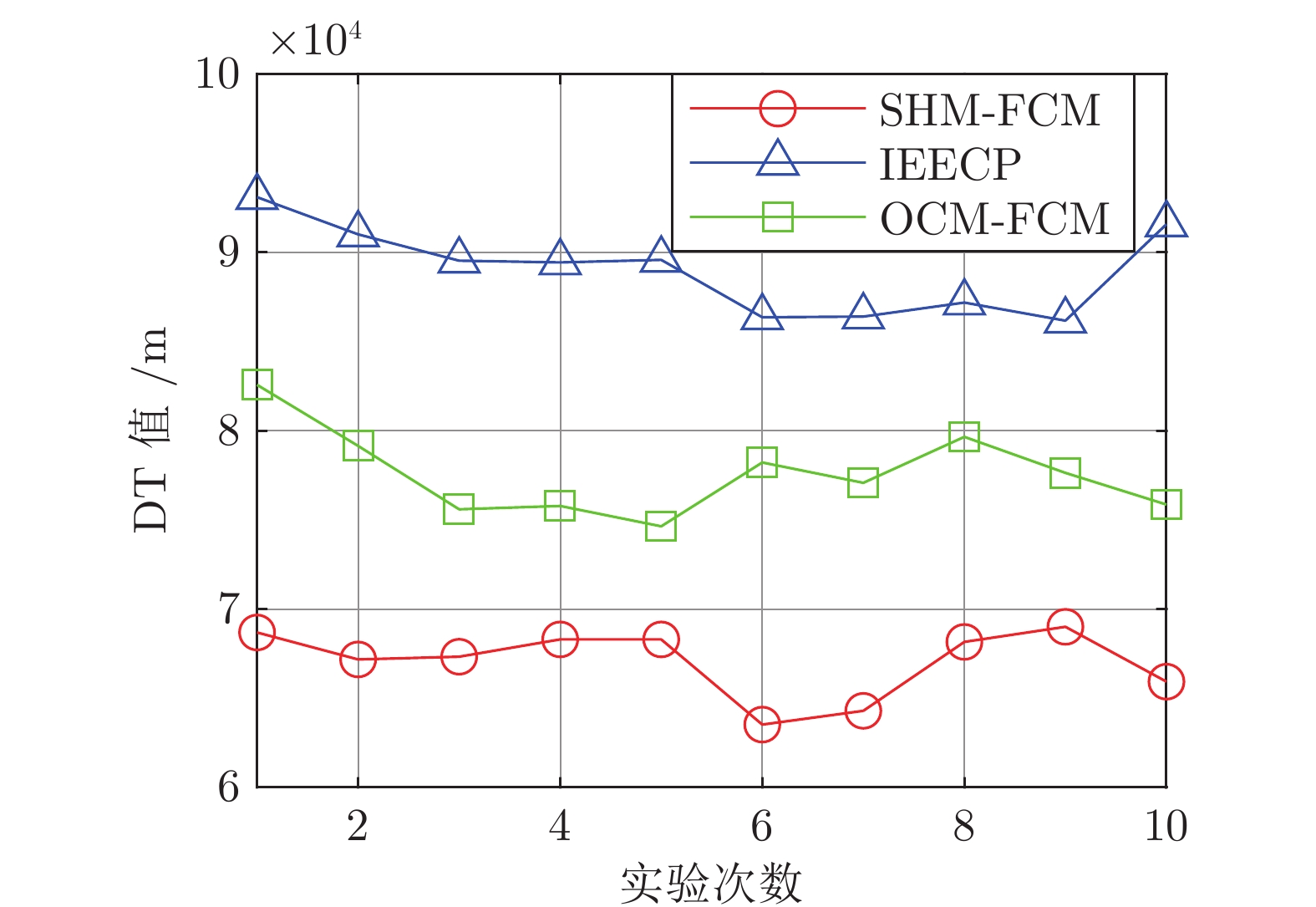
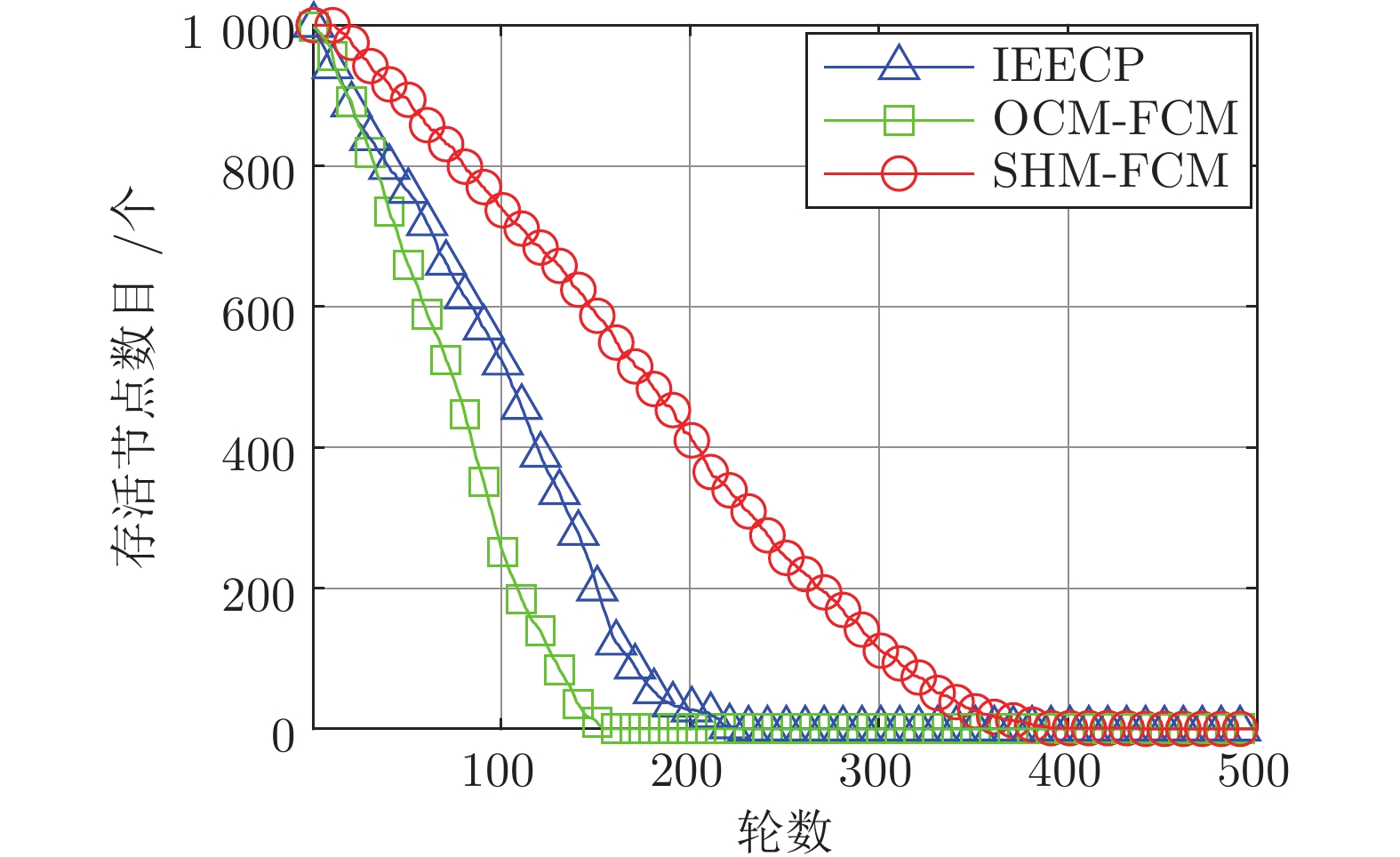
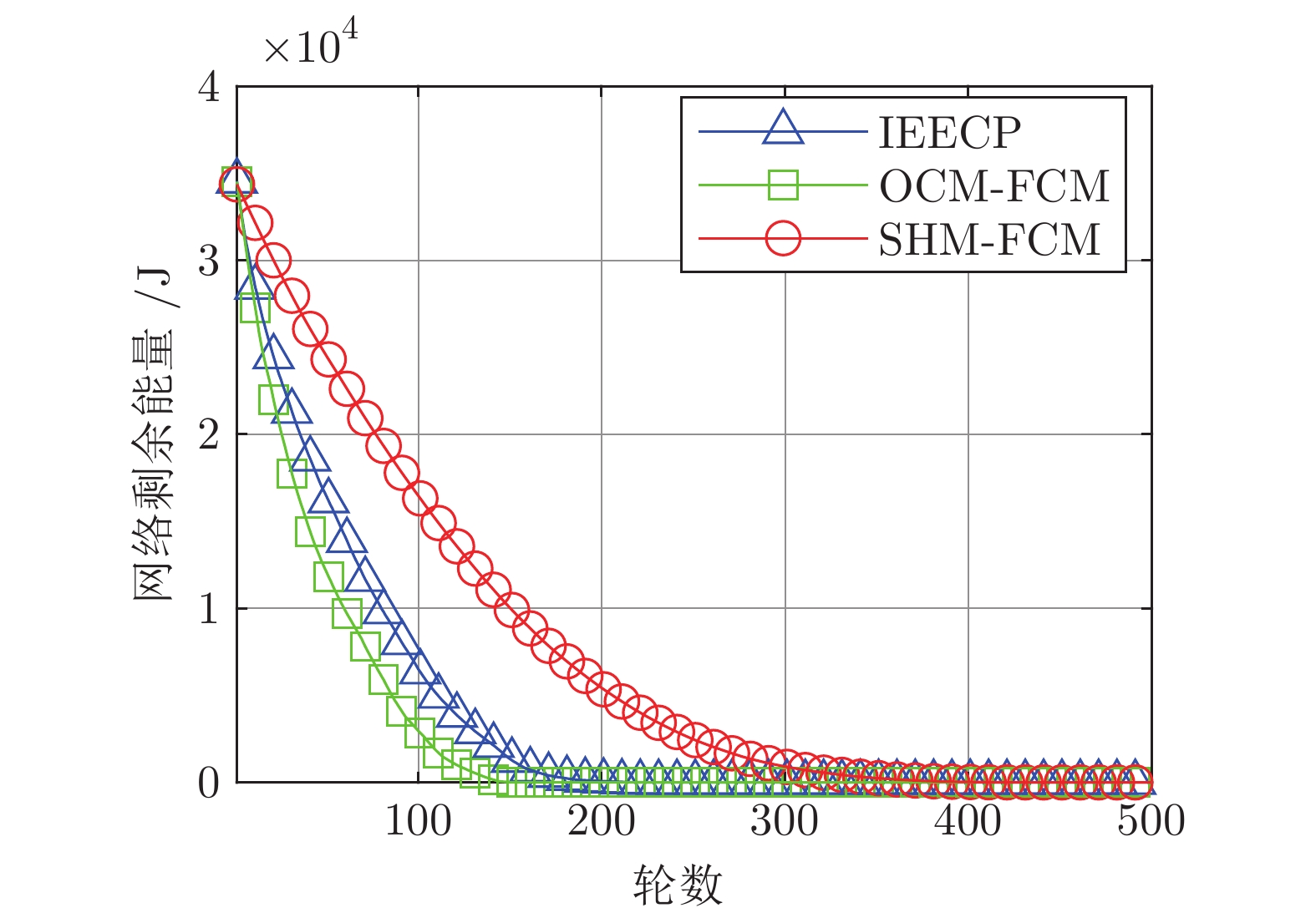
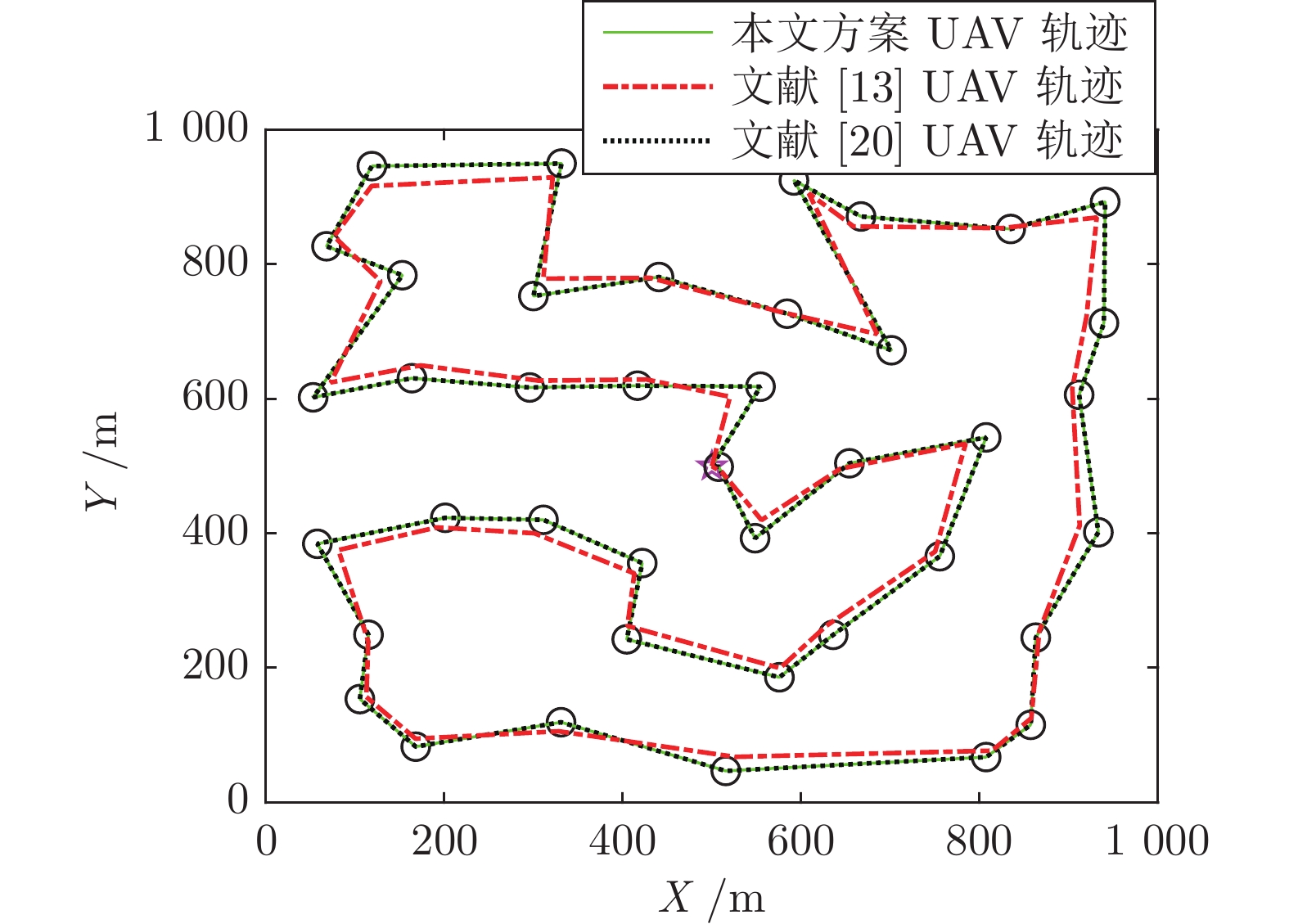
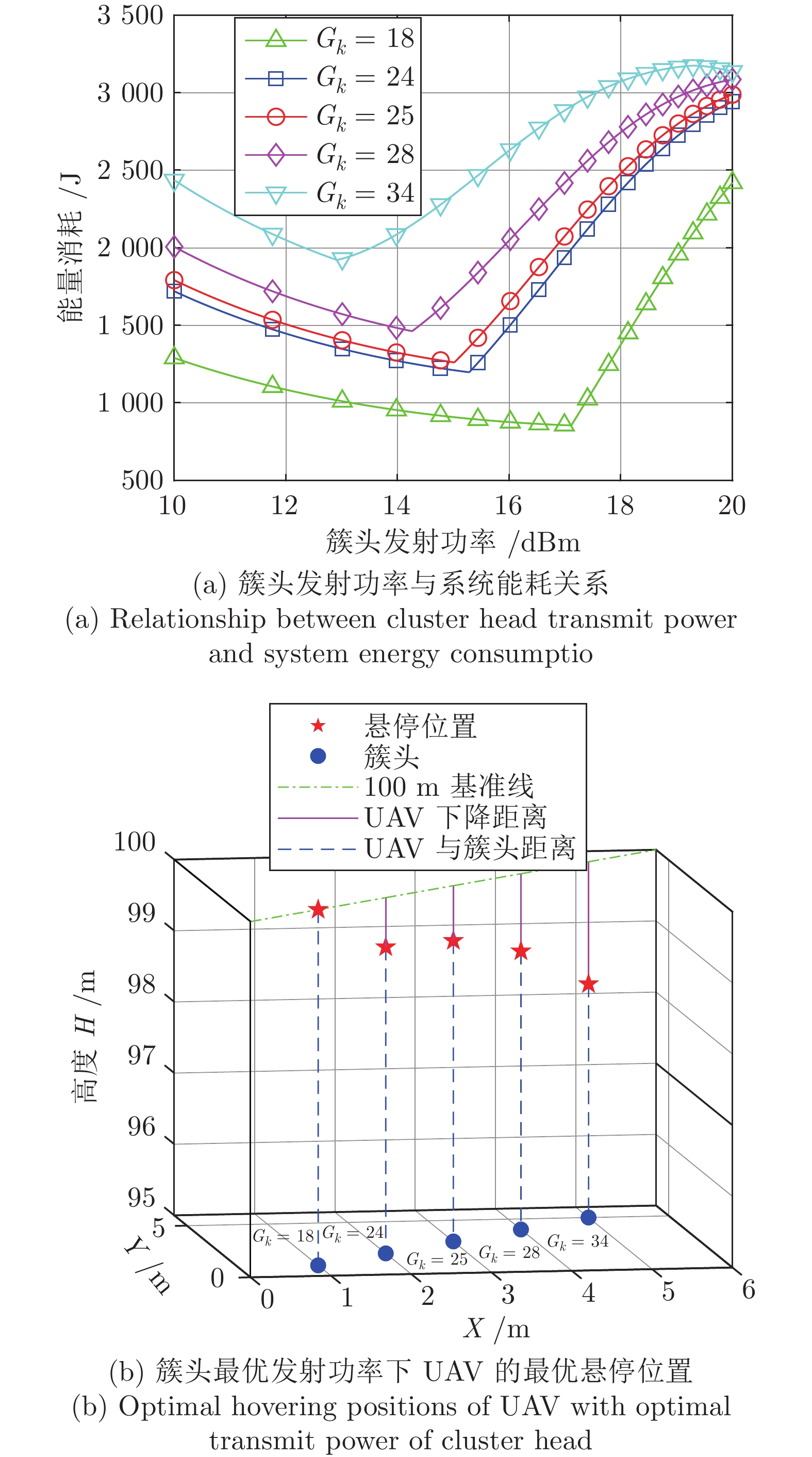
为降低无人机(Unmanned aerial vehicle, UAV)使能的无线传感网的能量消耗, 延长网络生命周期, 该文提出一种在地面节点能量预算下系统总能耗优化方法. 首先, 提出地面节点聚类方法, 利用目标函数确定最优簇数, 改进模糊C均值算法构建能量均衡的集群, 采用退避定时器机制根据隶属度和能量值选择各集群的最优簇头, 减少地面节点的能耗. 其次, 根据已选簇头位置, 利用遗传算法规划UAV的飞行轨迹, 减小UAV能耗. 最后, 通过单纯形搜索算法和连续凸逼近算法联合优化簇头发射功率和UAV悬停位置, 减小数据采集时系统的总能耗. 仿真结果表明, 所提方法优于所比较的方案.
为降低无人机(Unmanned aerial vehicle, UAV)使能的无线传感网的能量消耗, 延长网络生命周期, 该文提出一种在地面节点能量预算下系统总能耗优化方法. 首先, 提出地面节点聚类方法, 利用目标函数确定最优簇数, 改进模糊C均值算法构建能量均衡的集群, 采用退避定时器机制根据隶属度和能量值选择各集群的最优簇头, 减少地面节点的能耗. 其次, 根据已选簇头位置, 利用遗传算法规划UAV的飞行轨迹, 减小UAV能耗. 最后, 通过单纯形搜索算法和连续凸逼近算法联合优化簇头发射功率和UAV悬停位置, 减小数据采集时系统的总能耗. 仿真结果表明, 所提方法优于所比较的方案.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220754
摘要:
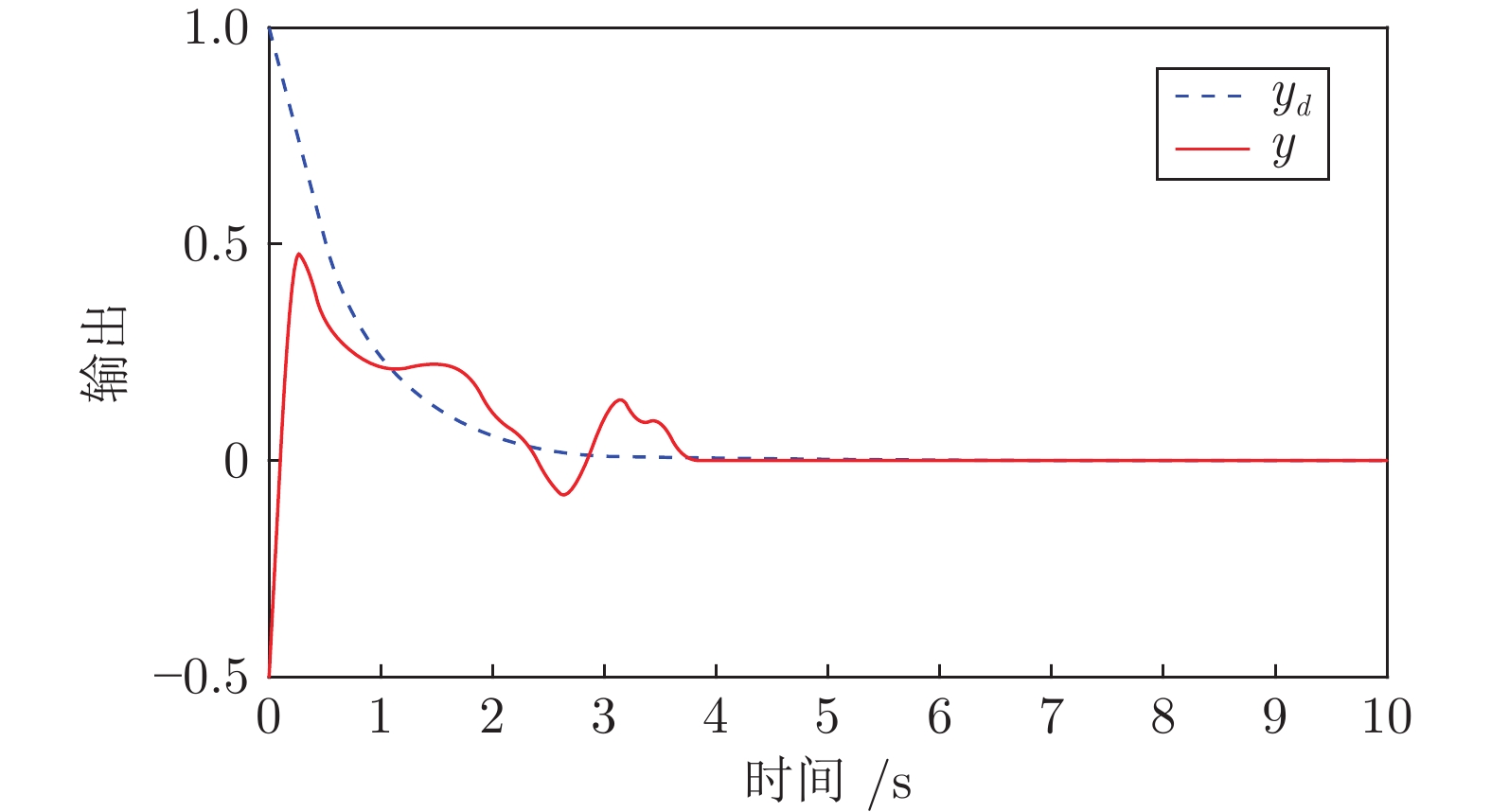
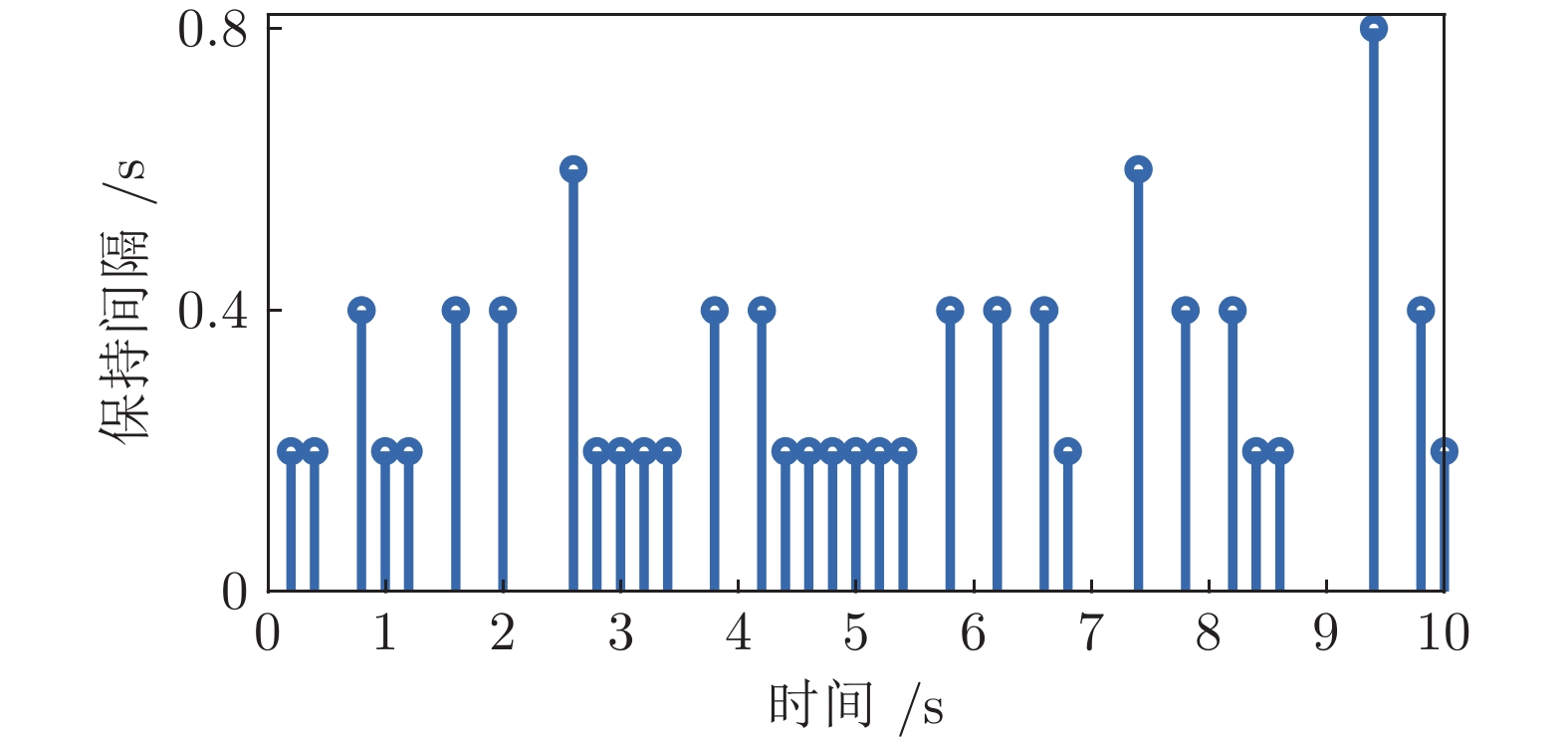
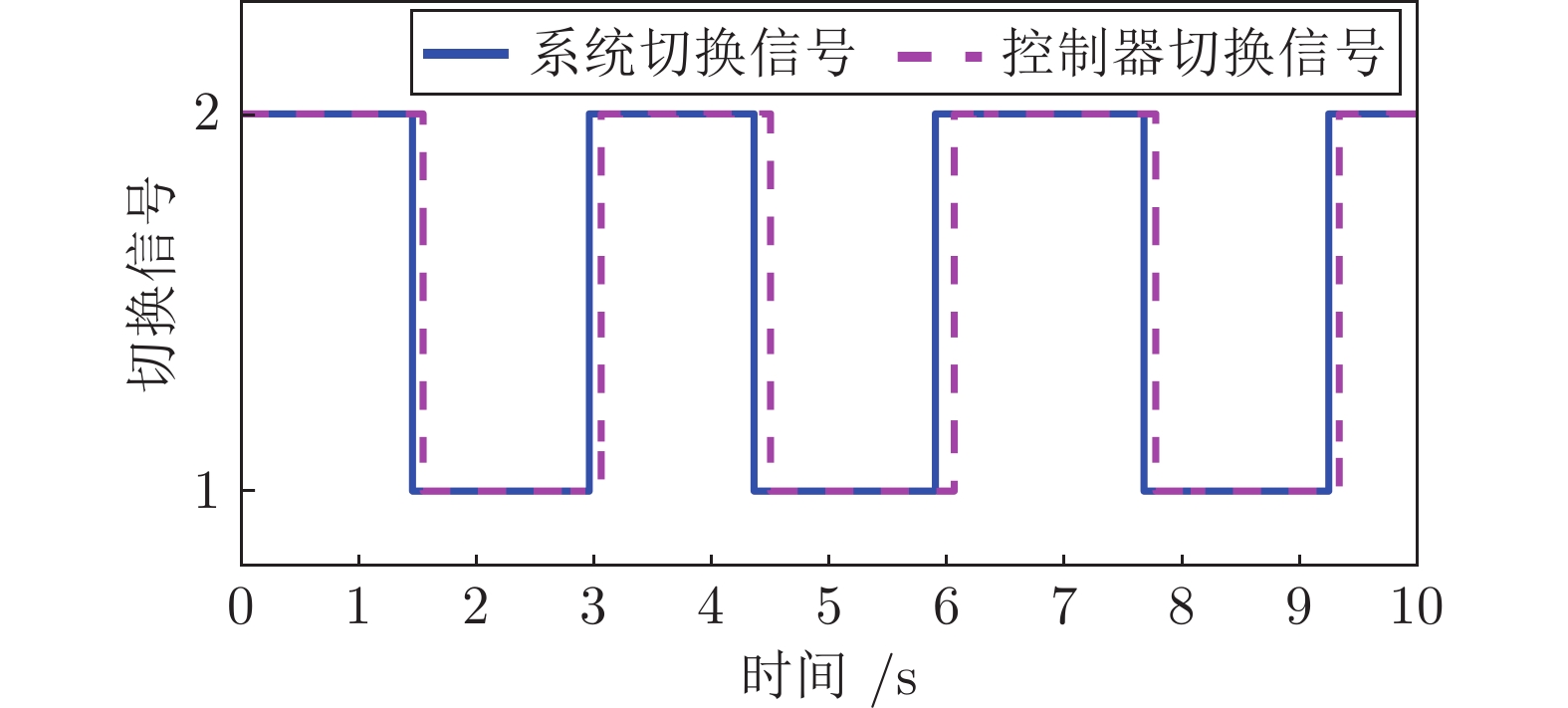
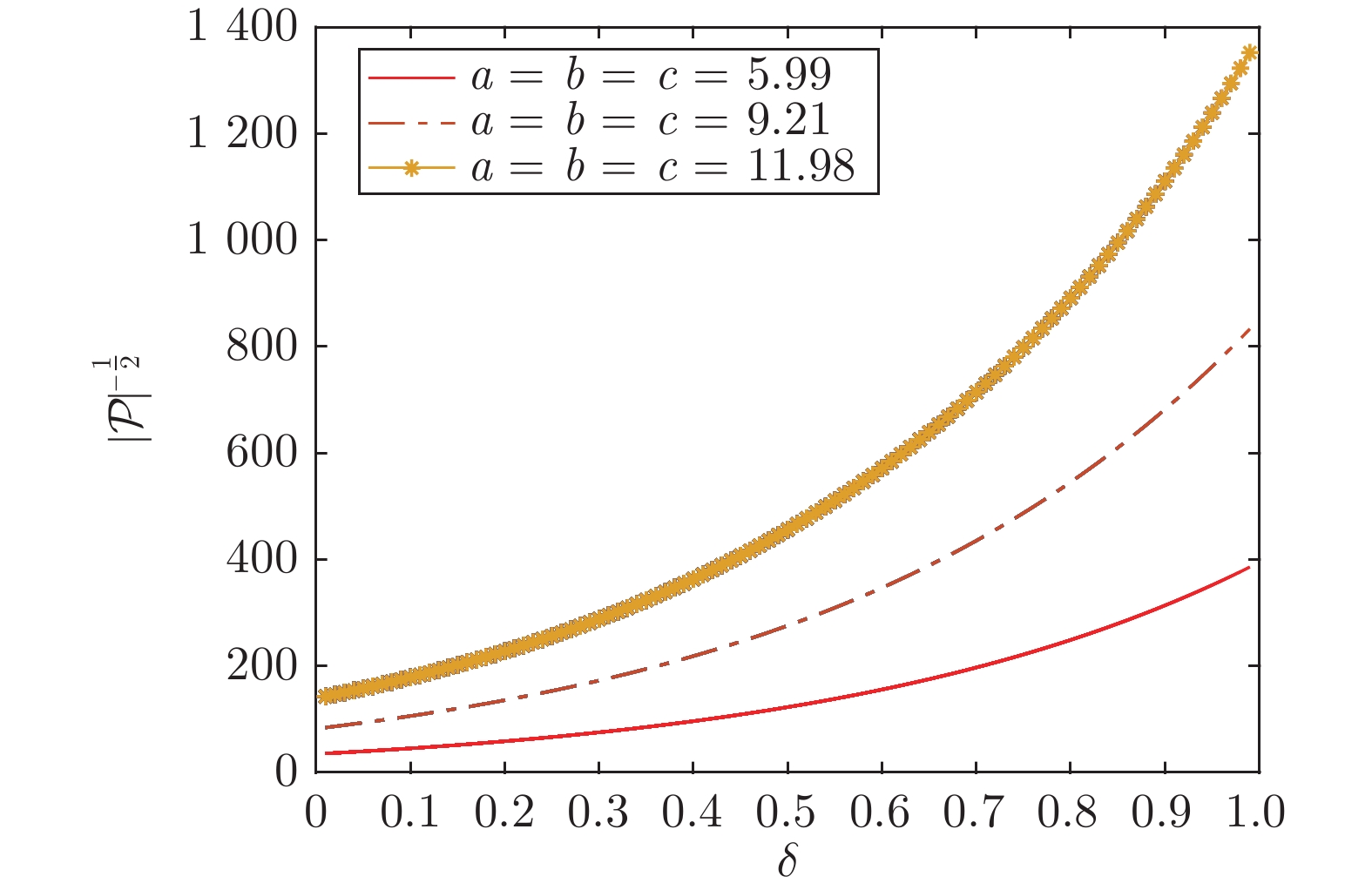
针对级联非线性切换系统, 提出了基于周期事件驱动机制的H∞输出跟踪控制策略. 首先, 基于提出的周期事件驱动方案, 设计了积分型控制器, 并将闭环系统转化为时滞切换系统. 其次, 考虑子系统与控制器异步切换的情况, 并给出驻留时间与平均驻留时间满足的关系, 从而得到H∞输出跟踪控制问题可解的充分条件. 最后, 给出数值仿真验证主要方法的有效性.
针对级联非线性切换系统, 提出了基于周期事件驱动机制的H∞输出跟踪控制策略. 首先, 基于提出的周期事件驱动方案, 设计了积分型控制器, 并将闭环系统转化为时滞切换系统. 其次, 考虑子系统与控制器异步切换的情况, 并给出驻留时间与平均驻留时间满足的关系, 从而得到H∞输出跟踪控制问题可解的充分条件. 最后, 给出数值仿真验证主要方法的有效性.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220893
摘要:
研究了受到隐蔽攻击的信息物理系统的安全控制问题. 采用Kullback-Leibler(KL)散度描述攻击的隐蔽性, 并设计动态输出反馈控制器使得系统可达集始终保持在安全区域内, 其中可达集定义为系统状态以一定概率属于的集合. 首先, 给出了隐蔽攻击下检测器残差所在范围的一个外椭球近似集. 其次, 根据该近似集和噪声的范围给出了控制器参数与系统椭球形不变可达集的关系. 然后, 通过设计可逆线性变换并构造凸优化问题, 求解安全动态输出控制器参数和相应的不变可达集. 最后, 使用弹簧-质量-阻尼系统进行仿真, 验证了所提控制方法的有效性.
研究了受到隐蔽攻击的信息物理系统的安全控制问题. 采用Kullback-Leibler(KL)散度描述攻击的隐蔽性, 并设计动态输出反馈控制器使得系统可达集始终保持在安全区域内, 其中可达集定义为系统状态以一定概率属于的集合. 首先, 给出了隐蔽攻击下检测器残差所在范围的一个外椭球近似集. 其次, 根据该近似集和噪声的范围给出了控制器参数与系统椭球形不变可达集的关系. 然后, 通过设计可逆线性变换并构造凸优化问题, 求解安全动态输出控制器参数和相应的不变可达集. 最后, 使用弹簧-质量-阻尼系统进行仿真, 验证了所提控制方法的有效性.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210467
摘要:
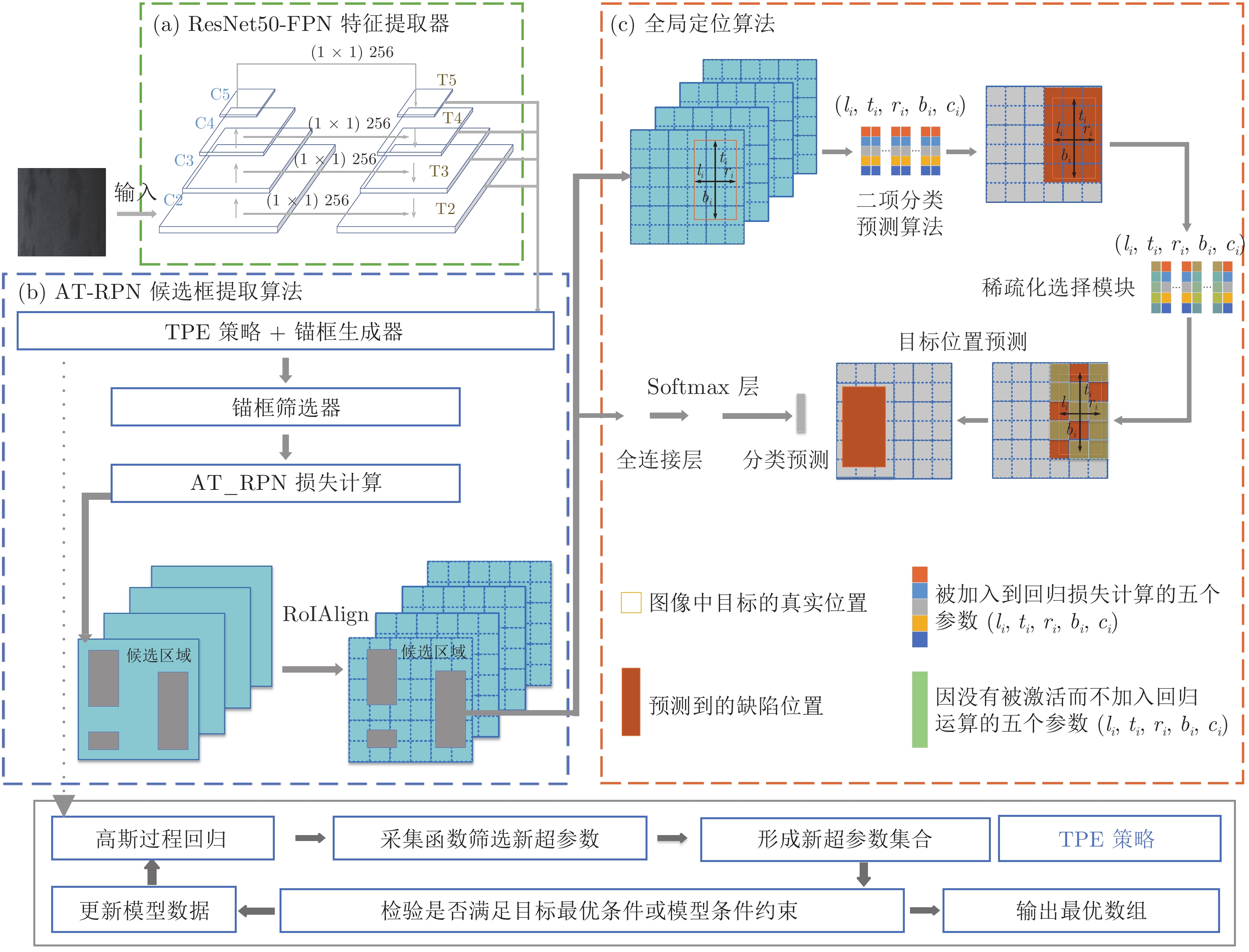
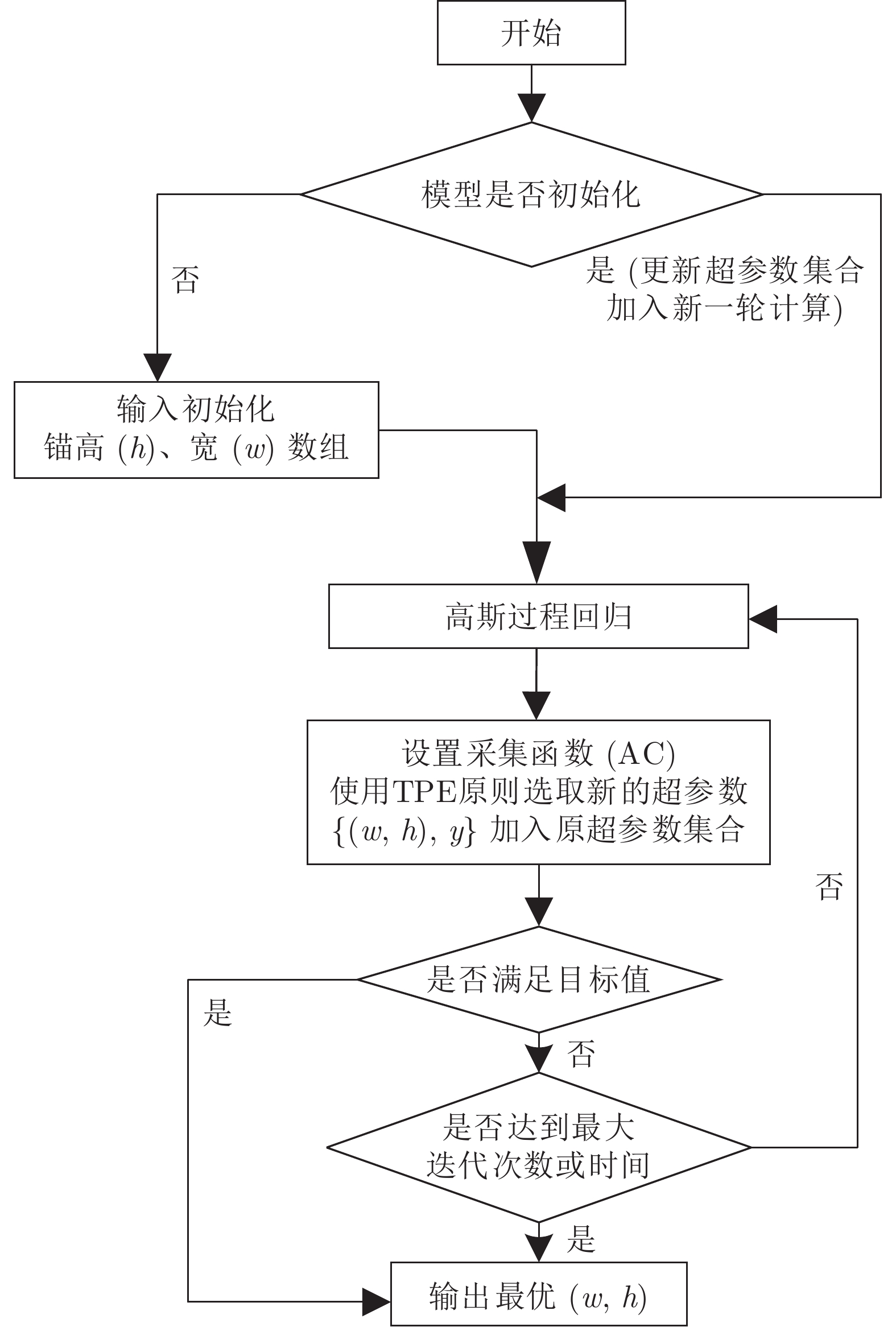
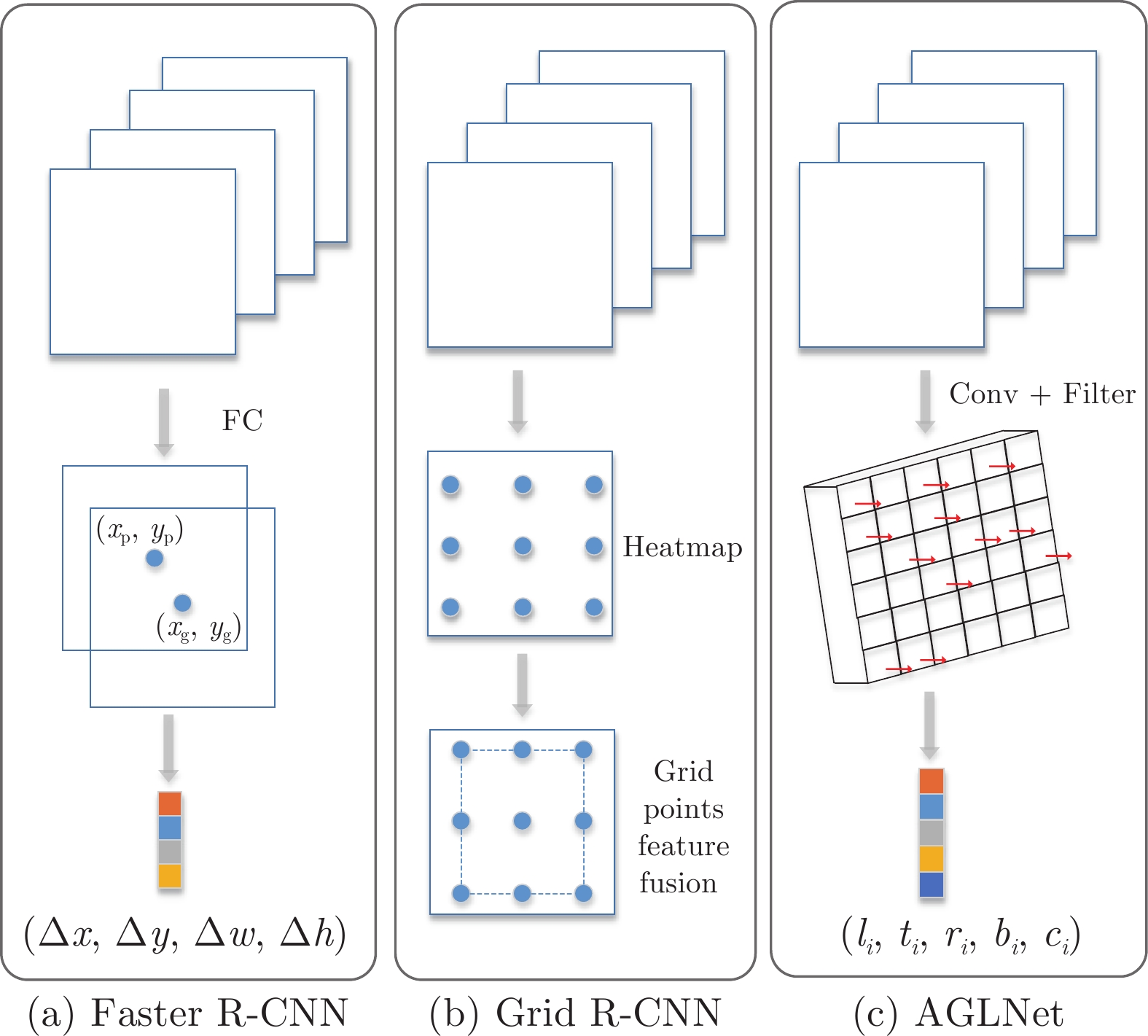
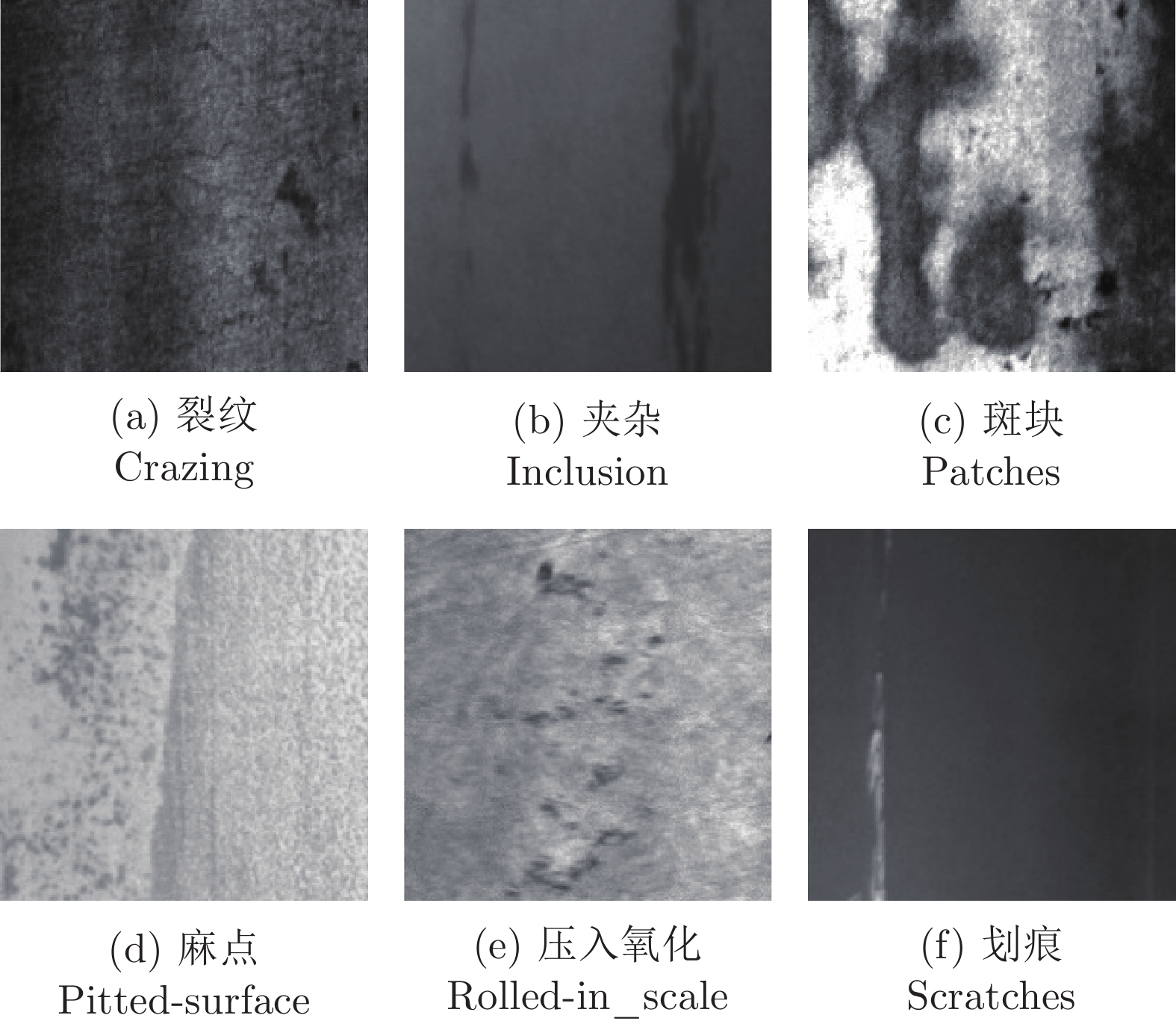
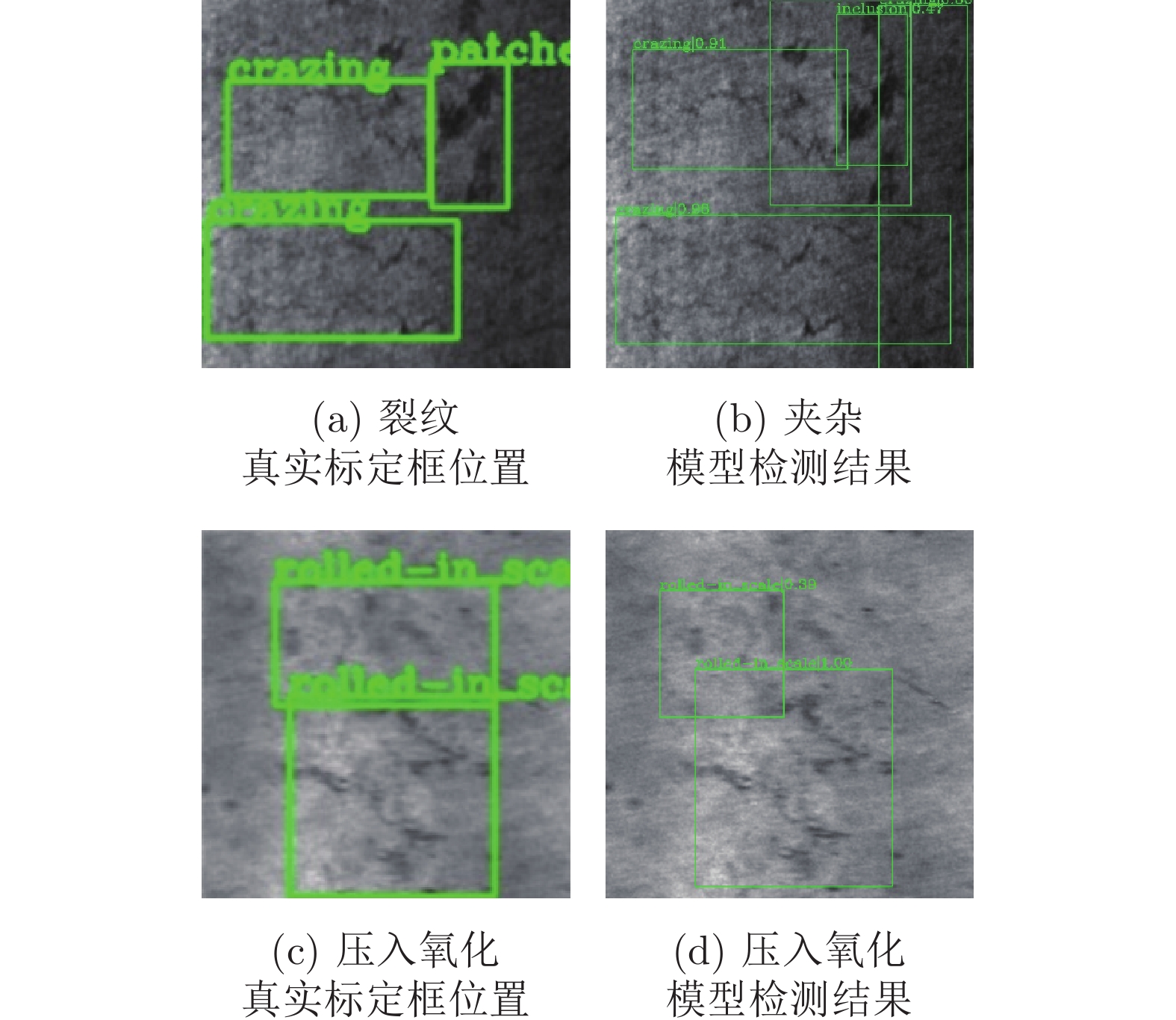
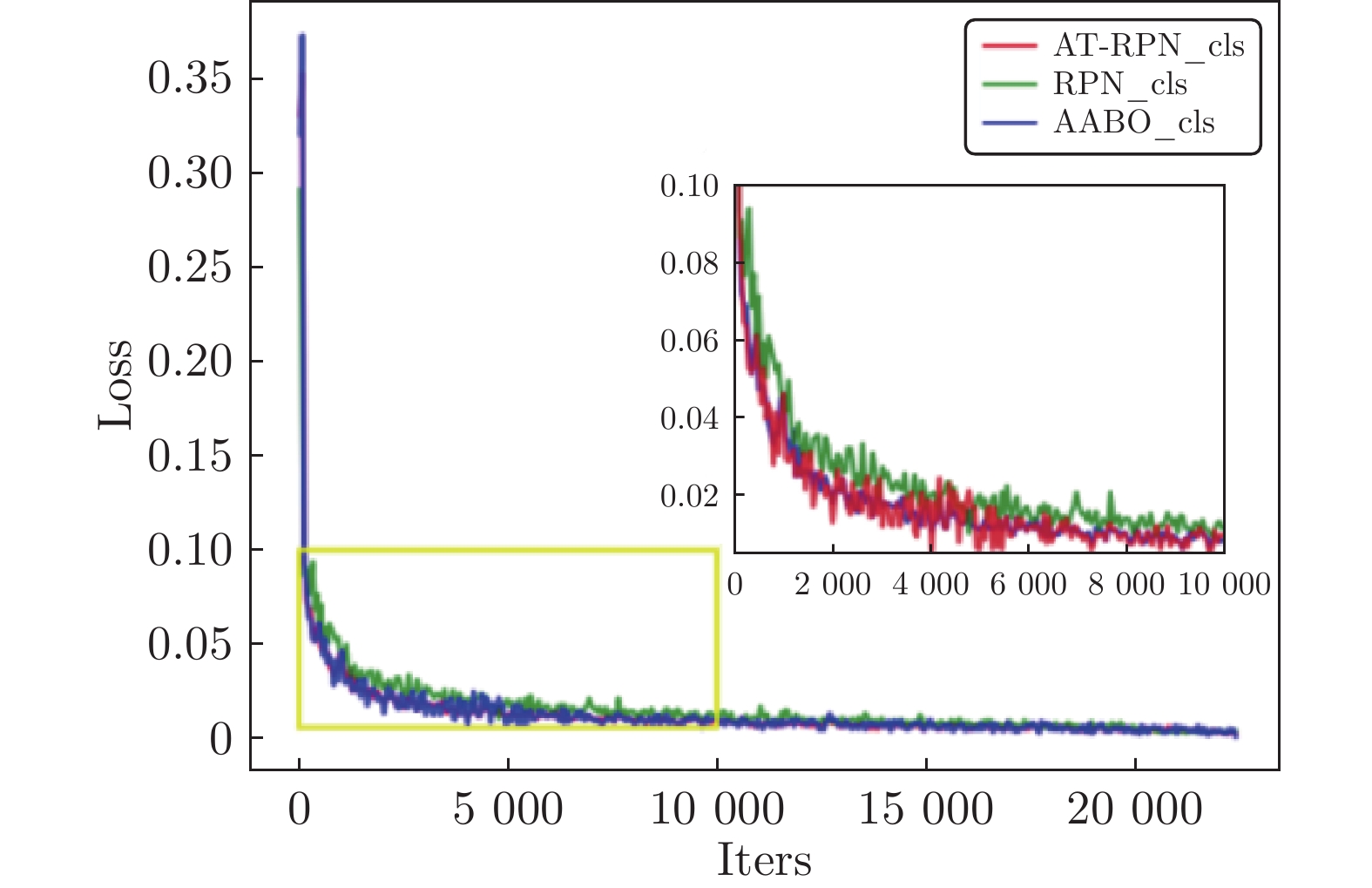
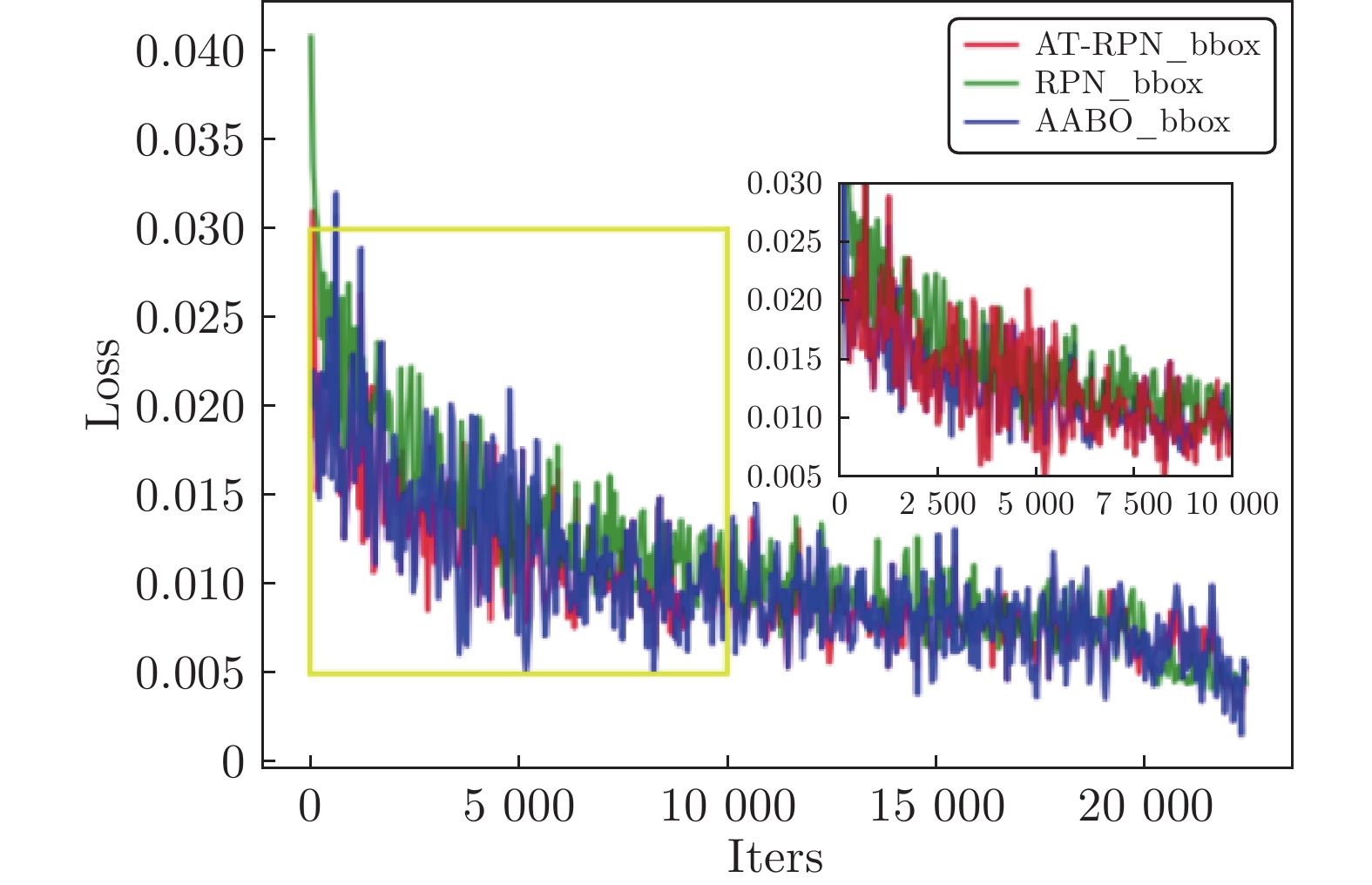
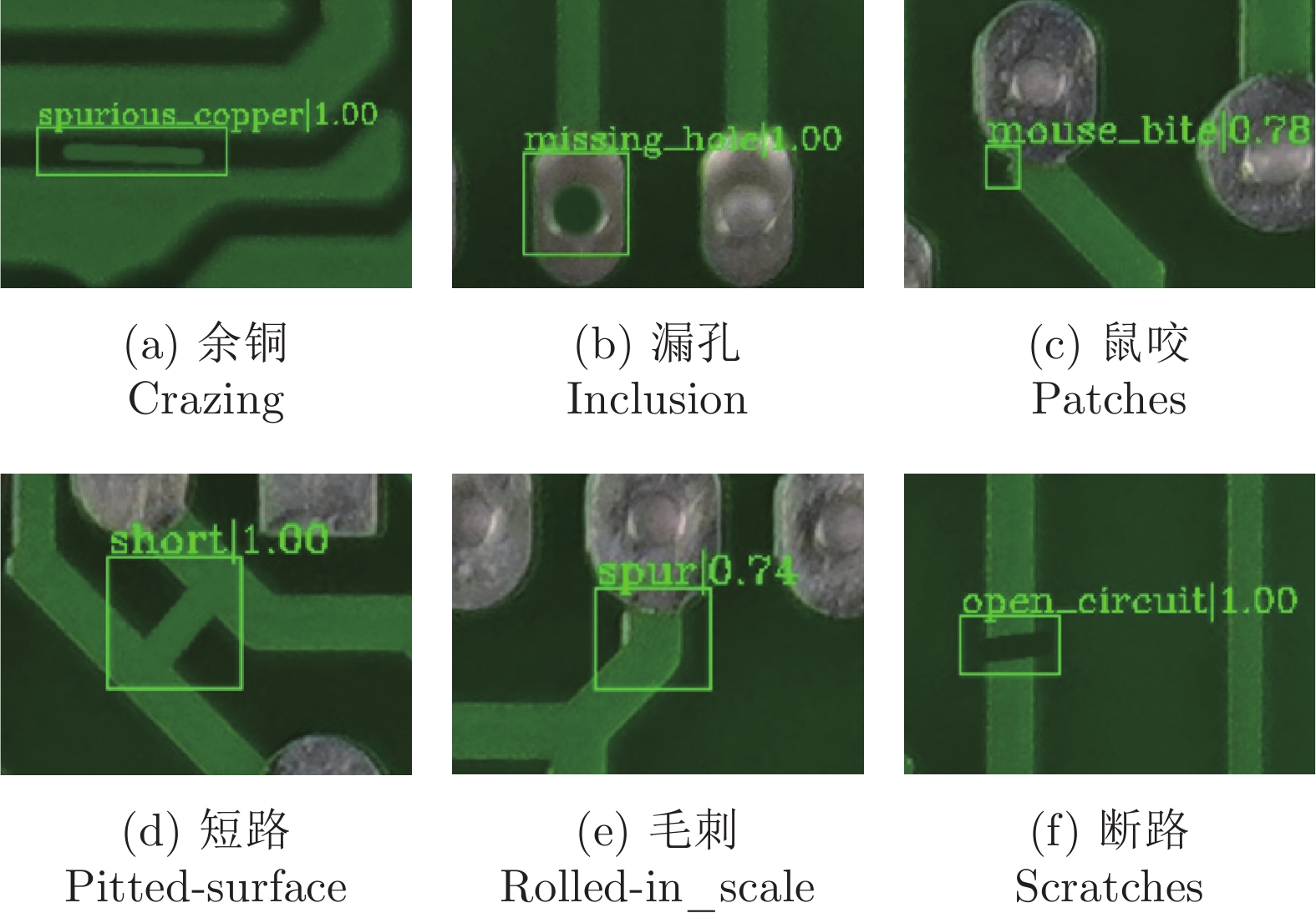
针对热轧带钢表面缺陷检测存在的智能化水平低、检测精度低和检测速度慢等问题, 本文提出了一种基于自适应全局定位网络(Adaptive global localization network, AGLNet)的深度学习缺陷检测算法. 首先, 引入了一种残差网络(Residual network, ResNet)与特征金字塔网络(Feature pyramid network, FPN)集成的特征提取结构, 减少缺陷语义信息在层级传递间的消失; 其次, 提出基于Tree-structure parzen estimation的自适应树型候选框提取网络(Adaptive tree-structure region proposal network, AT-RPN), 无需先验知识的测试积累, 避免了人为调参的训练模; 最后, 引入了全局定位算法(Global localization regression)算法以全局定位的模式在复杂的缺陷检测中实现缺陷更精确定位.本文实现一种快速、准确、更智能化、更适用于实际工业应用的热轧带钢表面缺陷的算法.实验结果表明, AGLNet在NEU-DET热轧带钢表面缺陷数据集上的检测速度保持在11.8fps, 平均精度达到了79.90 %, 优于目前其他深度学习带钢表面缺陷检测算法; 另外该算法还具备较强的泛化能力.
针对热轧带钢表面缺陷检测存在的智能化水平低、检测精度低和检测速度慢等问题, 本文提出了一种基于自适应全局定位网络(Adaptive global localization network, AGLNet)的深度学习缺陷检测算法. 首先, 引入了一种残差网络(Residual network, ResNet)与特征金字塔网络(Feature pyramid network, FPN)集成的特征提取结构, 减少缺陷语义信息在层级传递间的消失; 其次, 提出基于Tree-structure parzen estimation的自适应树型候选框提取网络(Adaptive tree-structure region proposal network, AT-RPN), 无需先验知识的测试积累, 避免了人为调参的训练模; 最后, 引入了全局定位算法(Global localization regression)算法以全局定位的模式在复杂的缺陷检测中实现缺陷更精确定位.本文实现一种快速、准确、更智能化、更适用于实际工业应用的热轧带钢表面缺陷的算法.实验结果表明, AGLNet在NEU-DET热轧带钢表面缺陷数据集上的检测速度保持在11.8fps, 平均精度达到了79.90 %, 优于目前其他深度学习带钢表面缺陷检测算法; 另外该算法还具备较强的泛化能力.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210664
摘要:
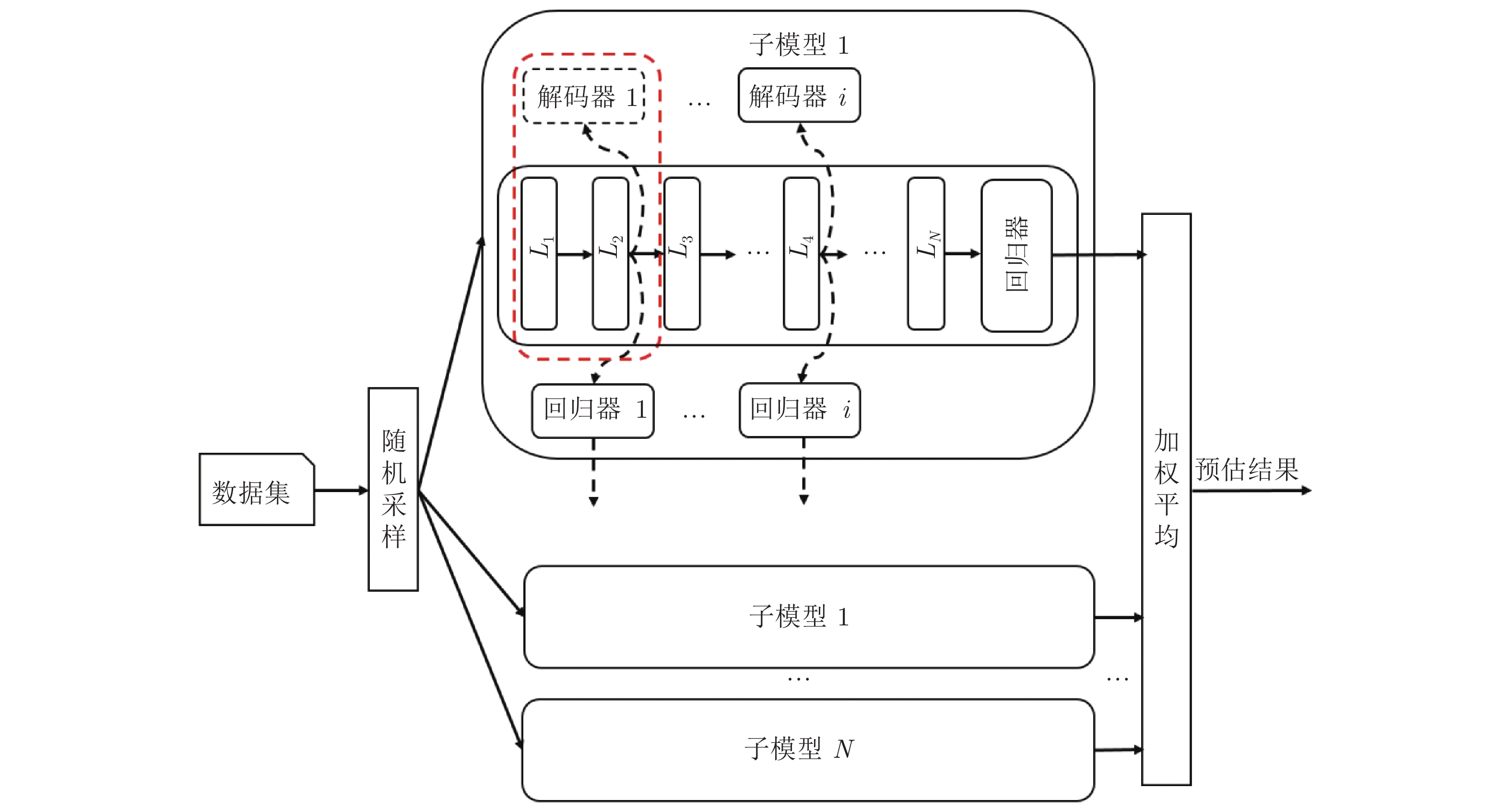
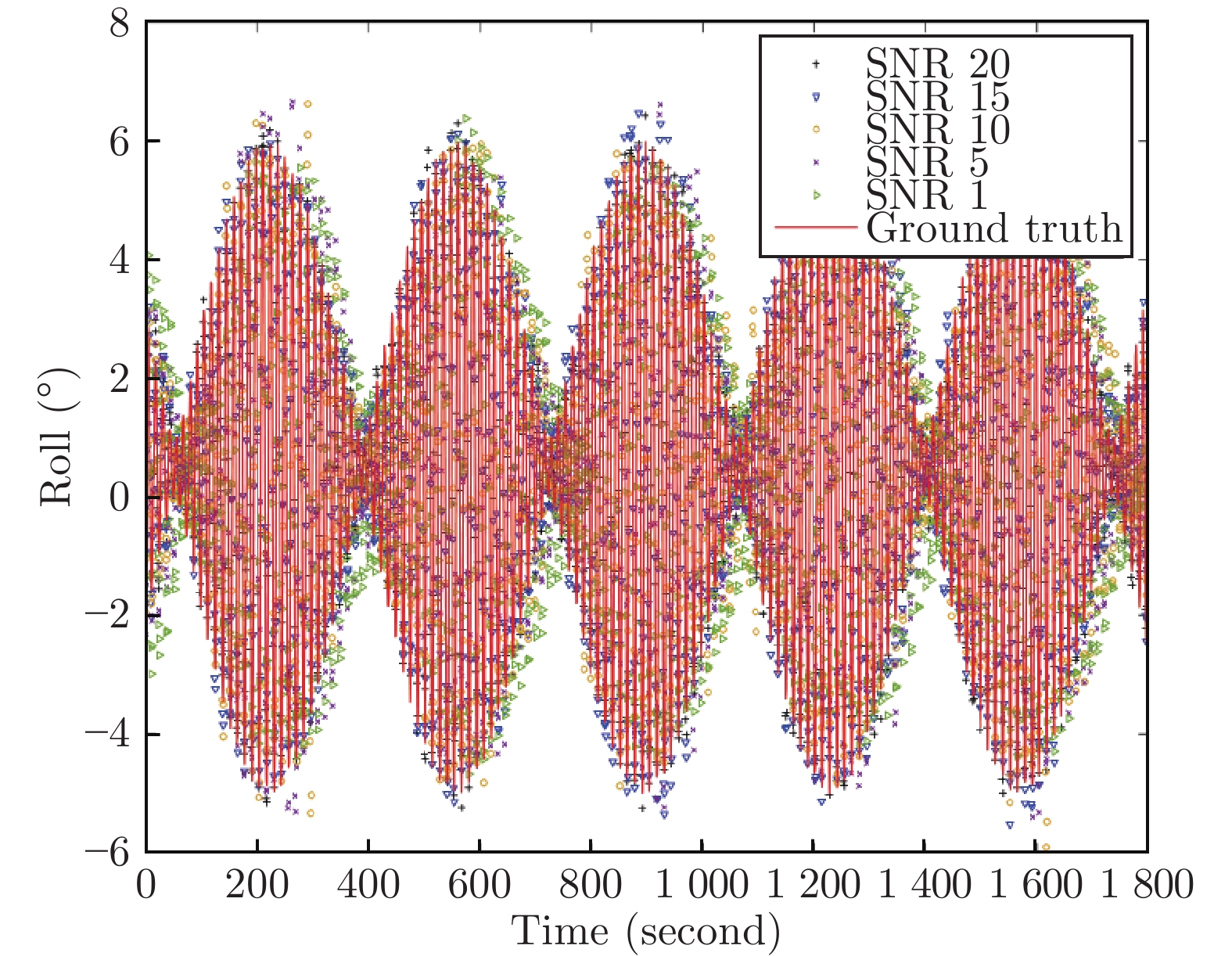
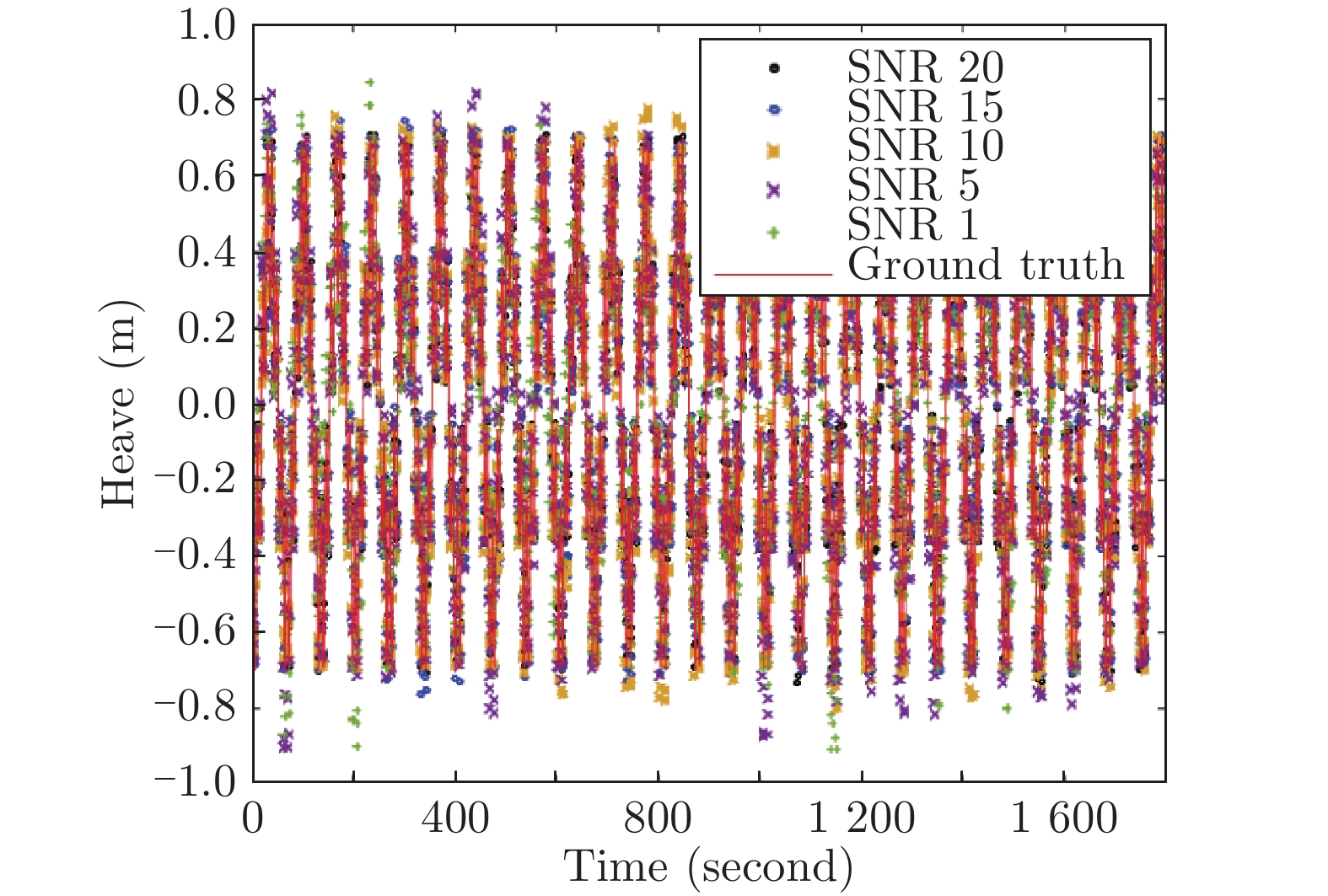
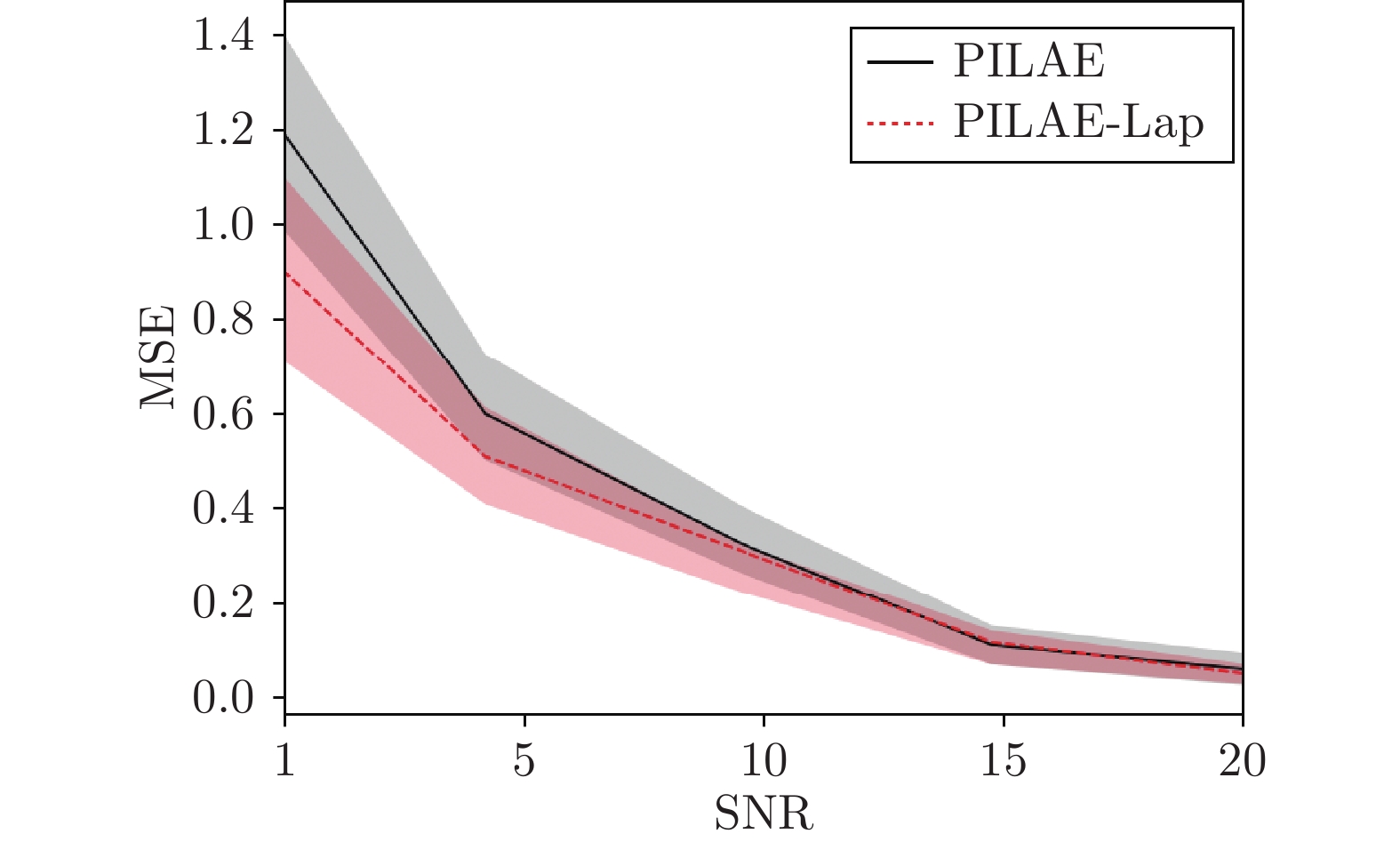
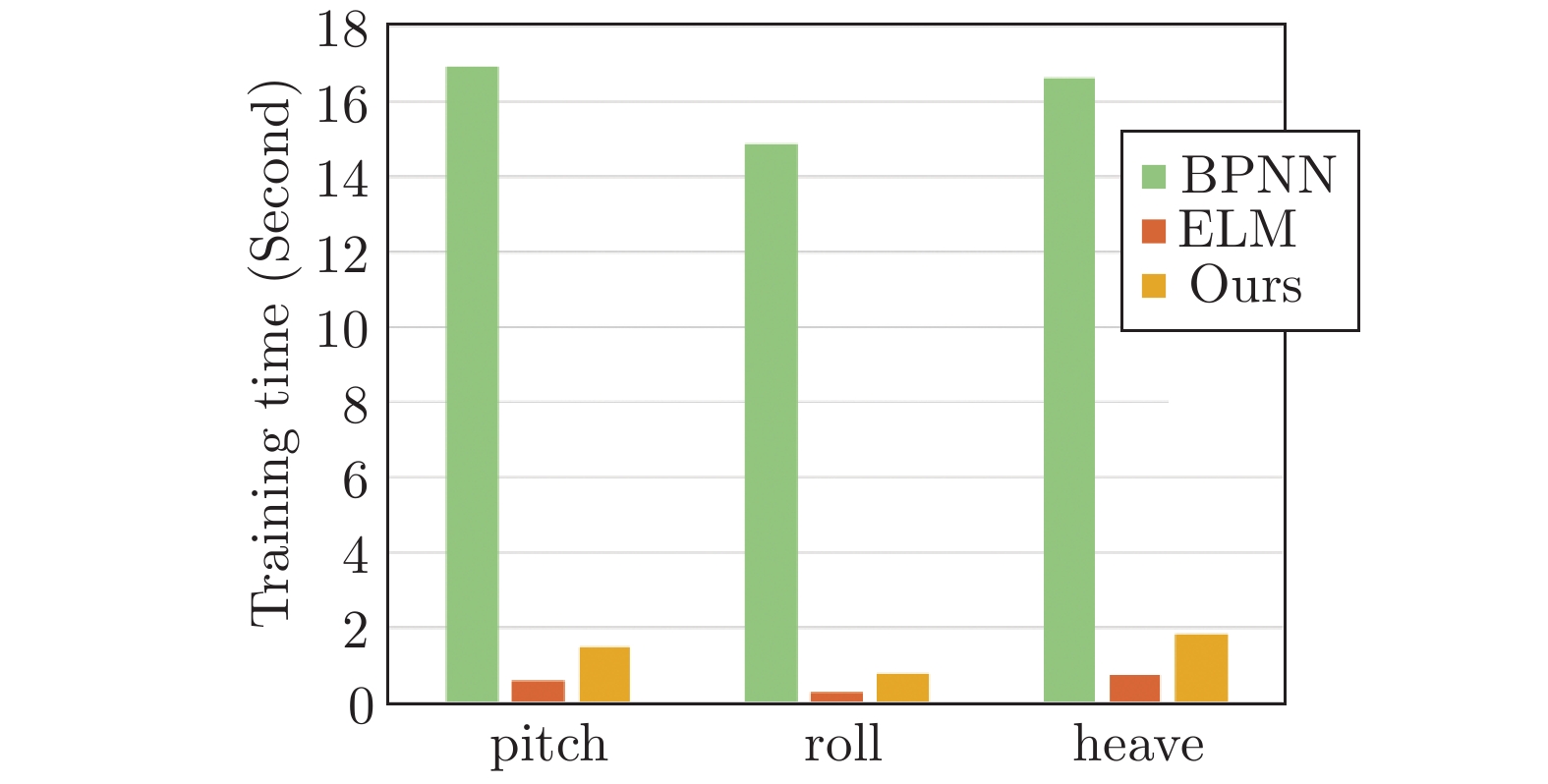
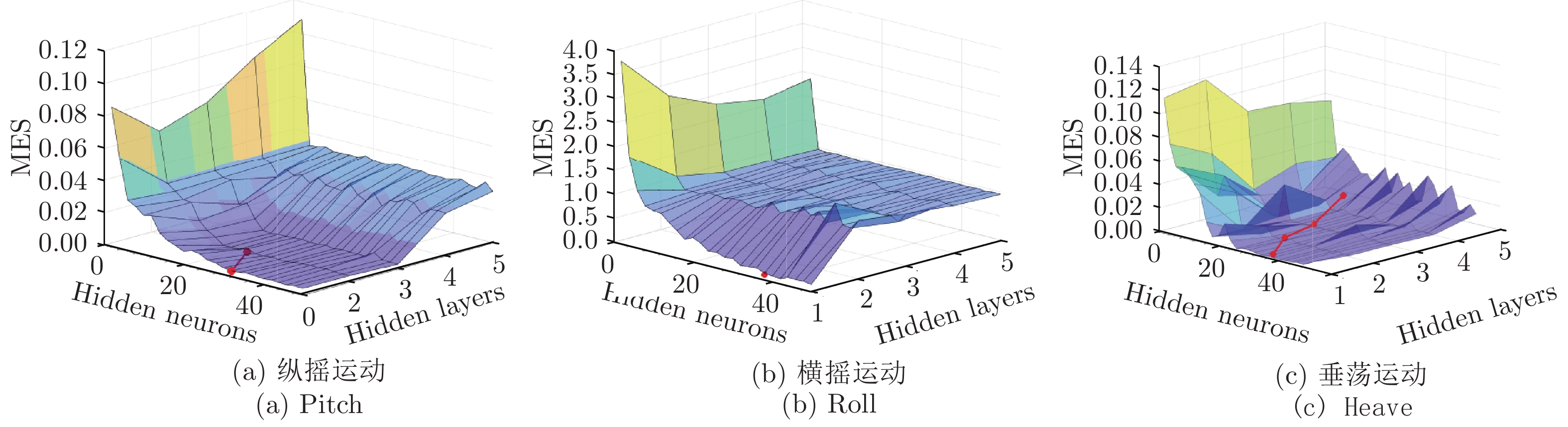
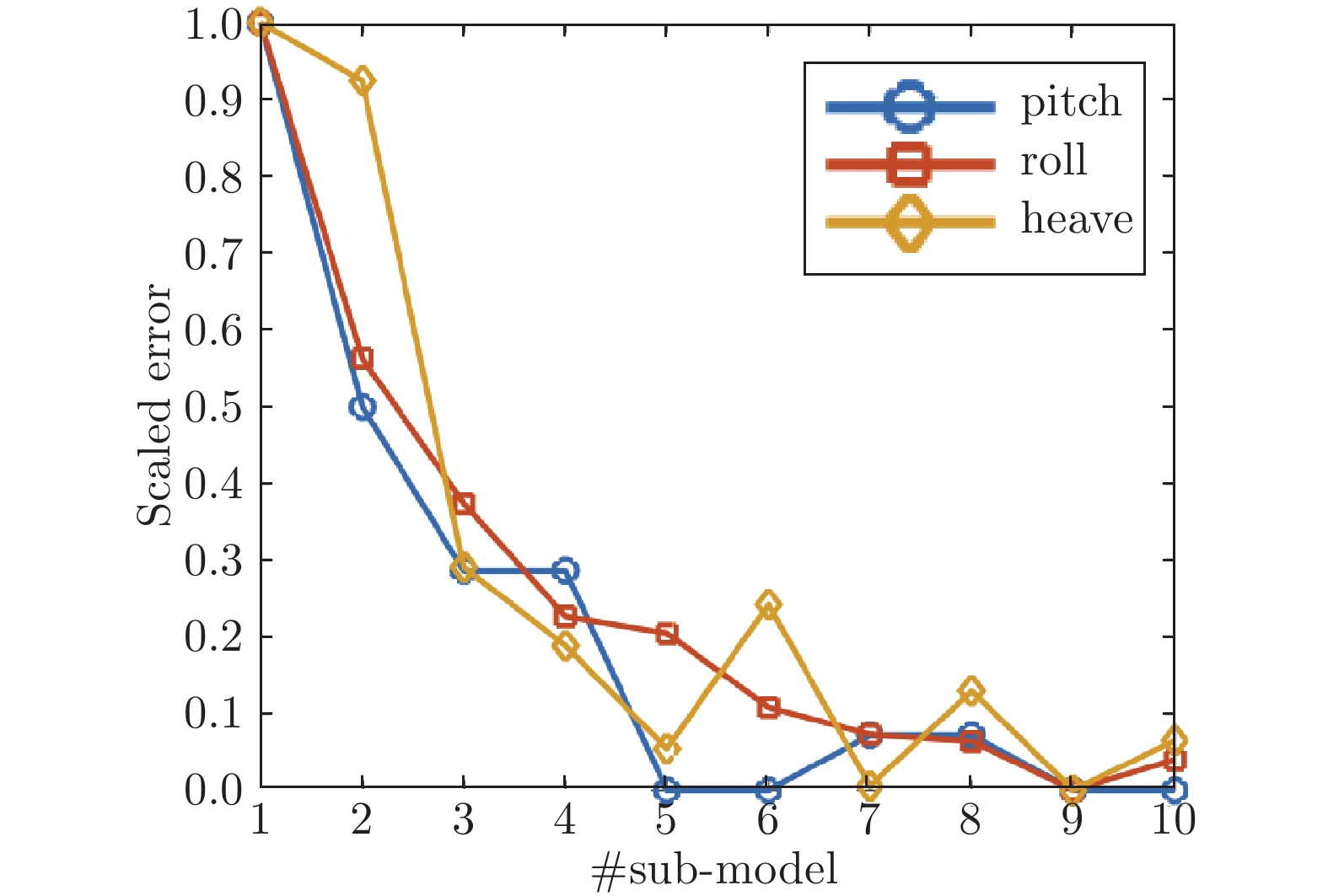
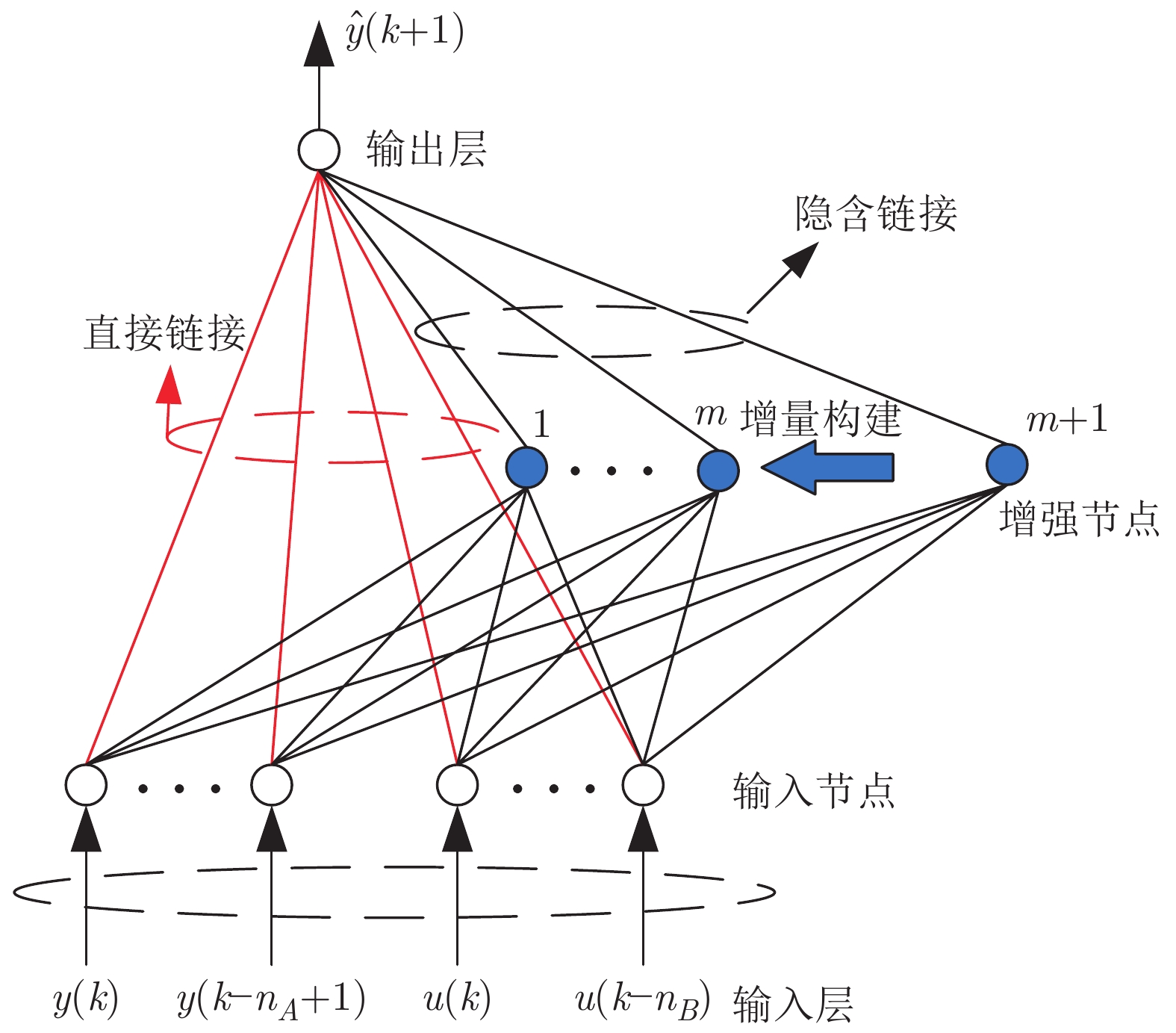
航母甲板在风、浪、流等因素影响下做六自由度不规则运动, 影响舰载机着舰精度. 航母甲板运动预估与补偿是自动着舰系统的重要功能之一, 也是提高舰载机着舰安全性与成功率的关键技术之一. 本文提出一种面向甲板运动预估的鲁棒学习模型, 通过基本构建单元自适应演化出复杂学习系统. 构建单元的训练采用非梯度的伪逆学习策略, 提高了训练效率, 简化了学习控制超参数调优;构建单元的架构设计采用数据驱动的策略, 简化了架构超参数调优;采用图拉普拉斯正则化方法提高了模型的鲁棒性. 通过某型航母在中等海况条件下以典型航速巡航时的仿真实验, 验证了所提方法在甲板纵摇、横摇以及垂荡运动预估问题中的有效性及鲁棒性.
航母甲板在风、浪、流等因素影响下做六自由度不规则运动, 影响舰载机着舰精度. 航母甲板运动预估与补偿是自动着舰系统的重要功能之一, 也是提高舰载机着舰安全性与成功率的关键技术之一. 本文提出一种面向甲板运动预估的鲁棒学习模型, 通过基本构建单元自适应演化出复杂学习系统. 构建单元的训练采用非梯度的伪逆学习策略, 提高了训练效率, 简化了学习控制超参数调优;构建单元的架构设计采用数据驱动的策略, 简化了架构超参数调优;采用图拉普拉斯正则化方法提高了模型的鲁棒性. 通过某型航母在中等海况条件下以典型航速巡航时的仿真实验, 验证了所提方法在甲板纵摇、横摇以及垂荡运动预估问题中的有效性及鲁棒性.




当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220531
摘要:
大规模多视图聚类旨在解决传统多视图聚类算法中计算速度慢、空间复杂度高以致无法扩展到大规模数据的问题.其中, 基于锚点的多视图聚类方法通过使用整体数据集合的锚点集构建后者对于前者的重构矩阵, 利用重构矩阵进行聚类, 有效地降低了算法的时间和空间复杂度.然而, 现有的方法忽视了锚点之间的差异, 均等地看待所有锚点, 导致聚类结果受到低质量锚点的限制.为了定位更具有判别性的锚点, 加强高质量锚点对聚类的影响, 提出了一种基于加权锚点的大规模多视图聚类算法(Multi-view Clustering With Weighted Anchors, MVC-WA).通过引入自适应锚点加权机制, 所提方法在统一框架下确定锚点的权重, 进行锚图的构建.同时, 为了增加锚点的多样性, 根据锚点之间的相似度进一步调整锚点的权重.在9个基准数据集上与现有最先进的大规模多视图聚类算法的对比实验结果验证了所提方法的高效性与有效性.
大规模多视图聚类旨在解决传统多视图聚类算法中计算速度慢、空间复杂度高以致无法扩展到大规模数据的问题.其中, 基于锚点的多视图聚类方法通过使用整体数据集合的锚点集构建后者对于前者的重构矩阵, 利用重构矩阵进行聚类, 有效地降低了算法的时间和空间复杂度.然而, 现有的方法忽视了锚点之间的差异, 均等地看待所有锚点, 导致聚类结果受到低质量锚点的限制.为了定位更具有判别性的锚点, 加强高质量锚点对聚类的影响, 提出了一种基于加权锚点的大规模多视图聚类算法(Multi-view Clustering With Weighted Anchors, MVC-WA).通过引入自适应锚点加权机制, 所提方法在统一框架下确定锚点的权重, 进行锚图的构建.同时, 为了增加锚点的多样性, 根据锚点之间的相似度进一步调整锚点的权重.在9个基准数据集上与现有最先进的大规模多视图聚类算法的对比实验结果验证了所提方法的高效性与有效性.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210174
摘要:
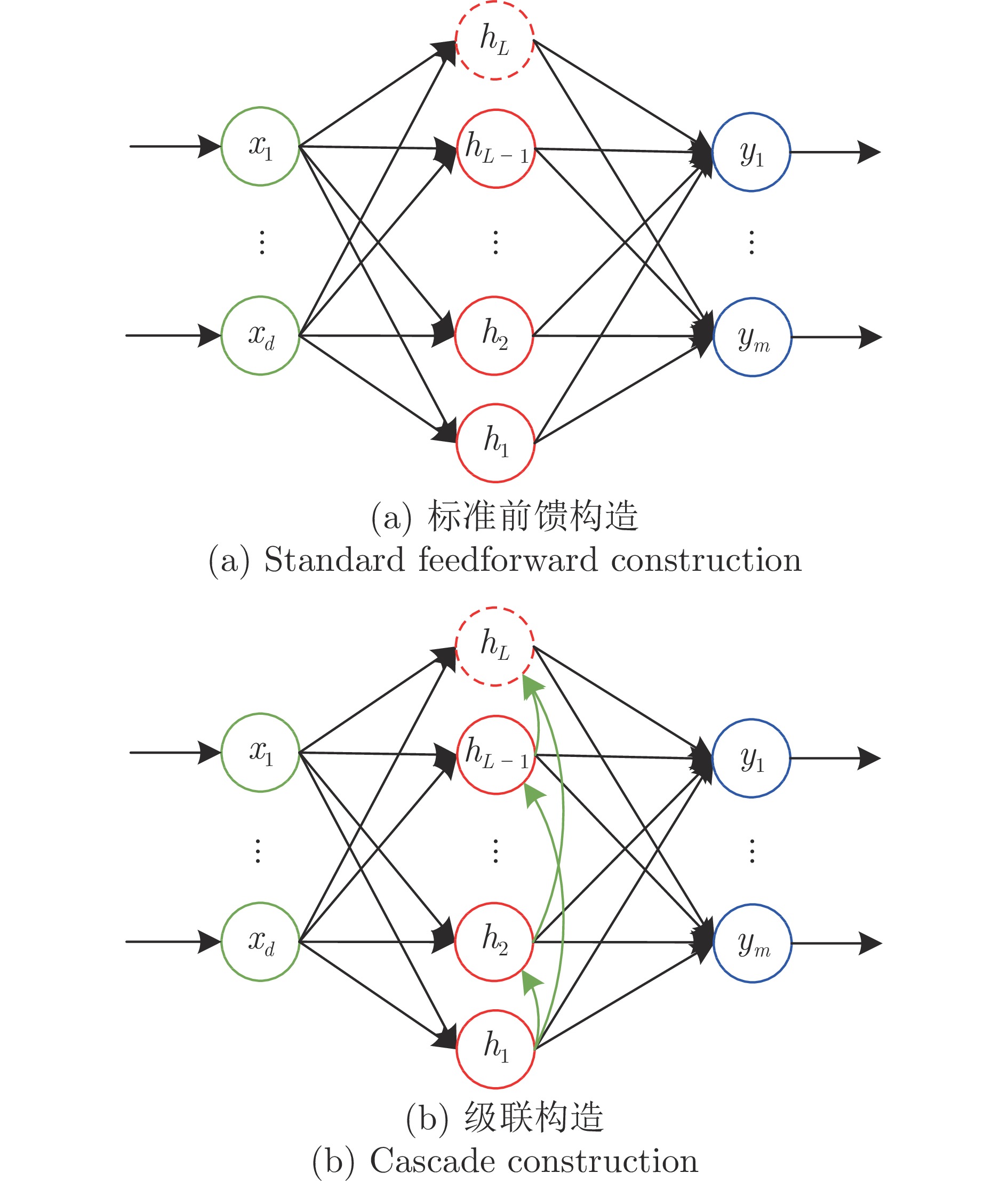
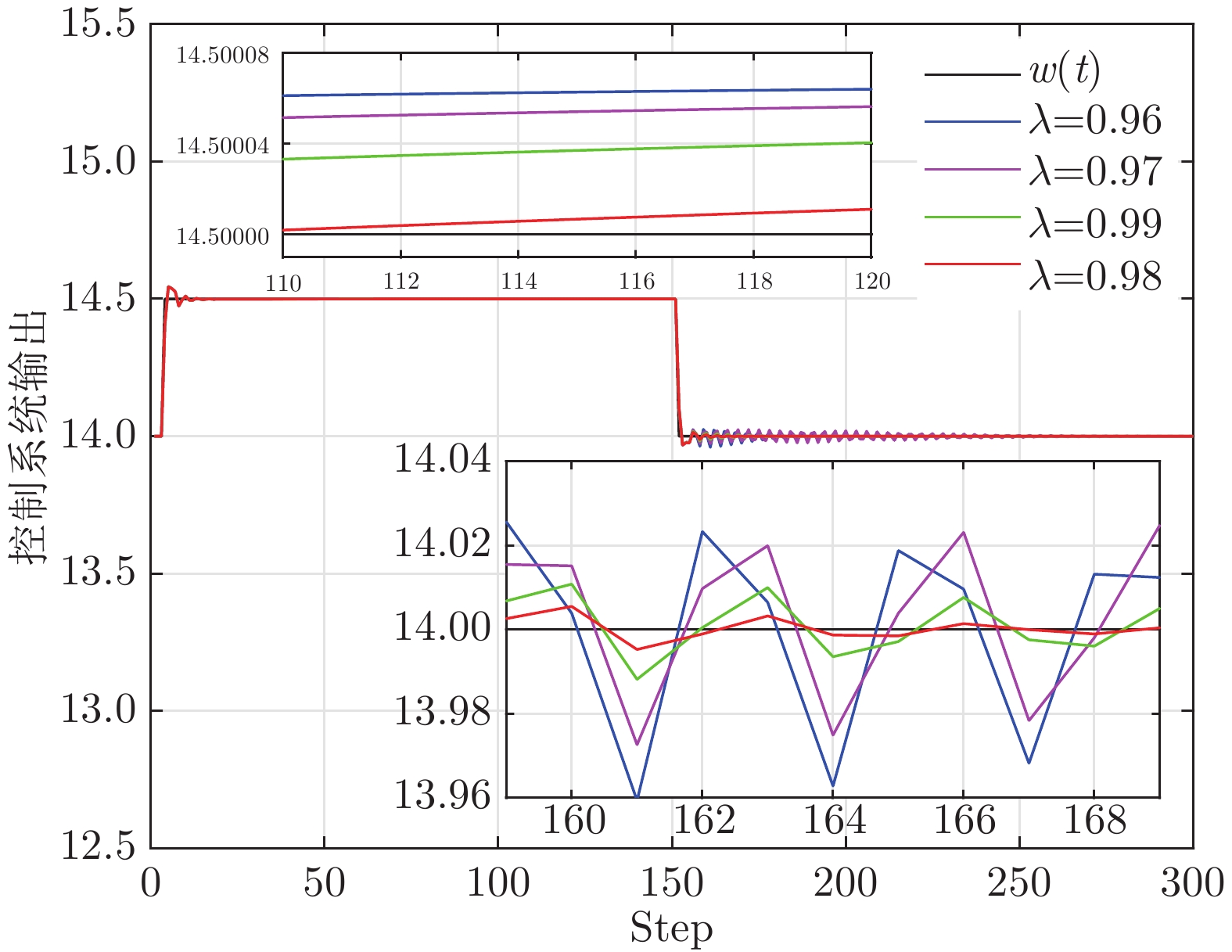
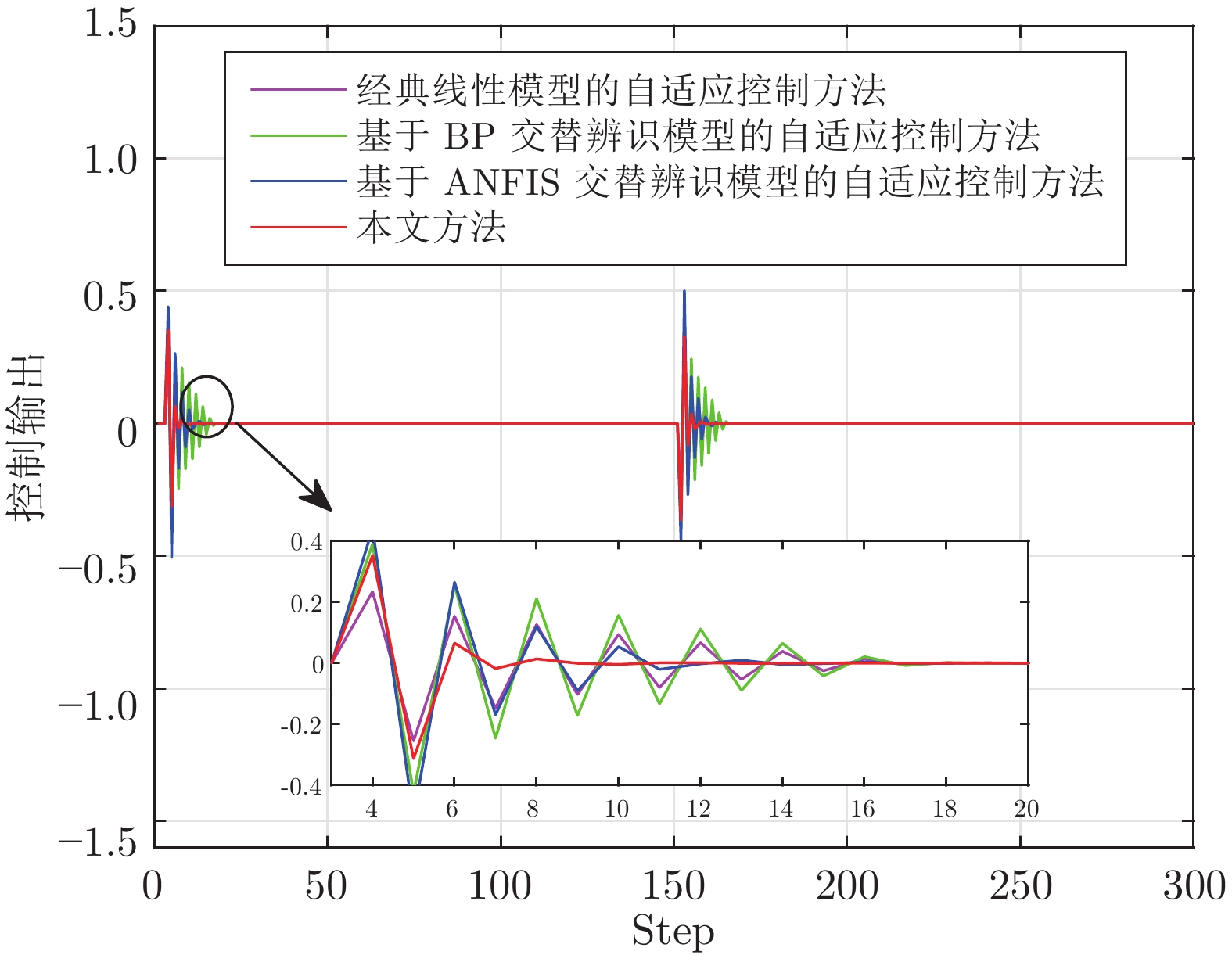
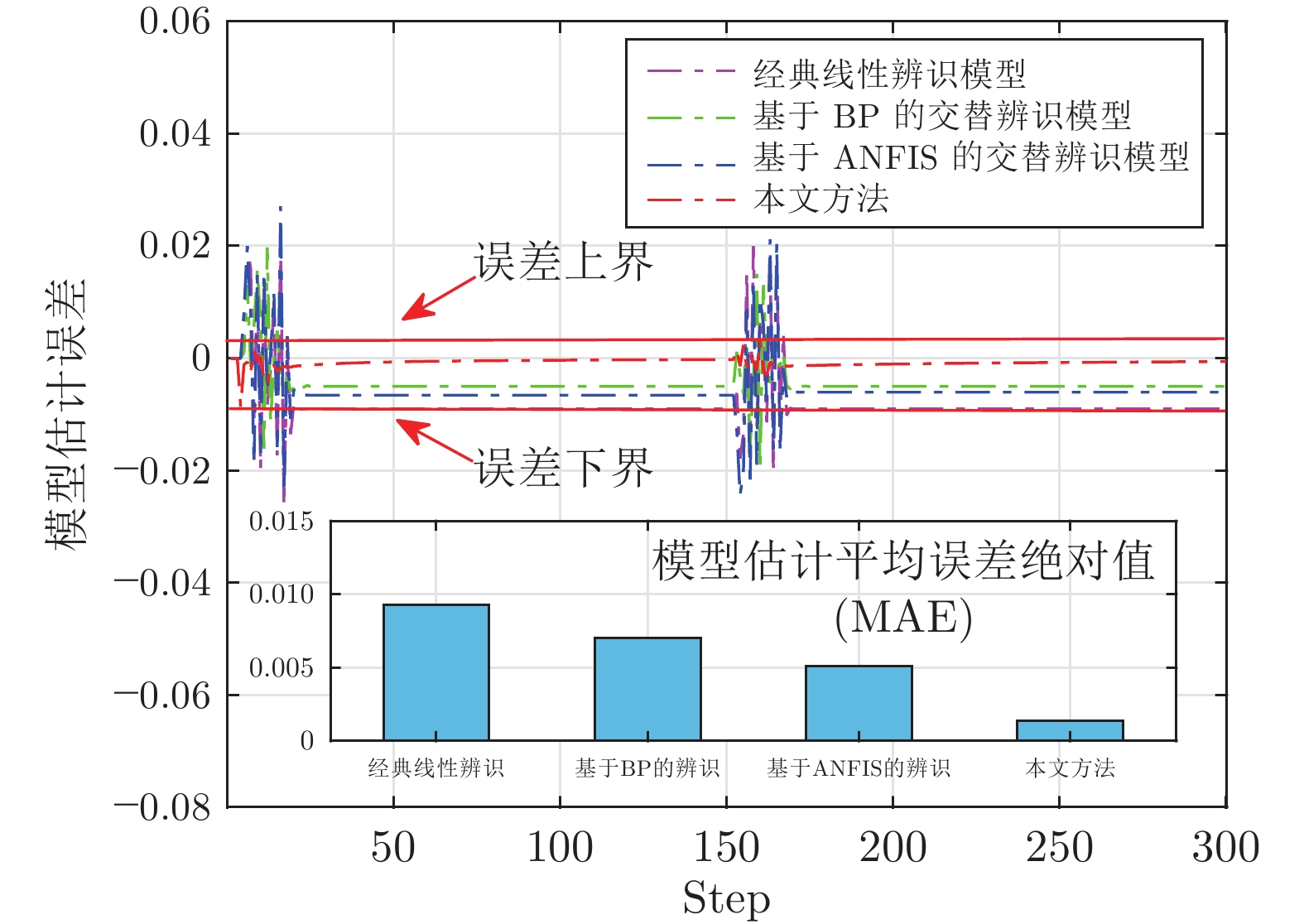
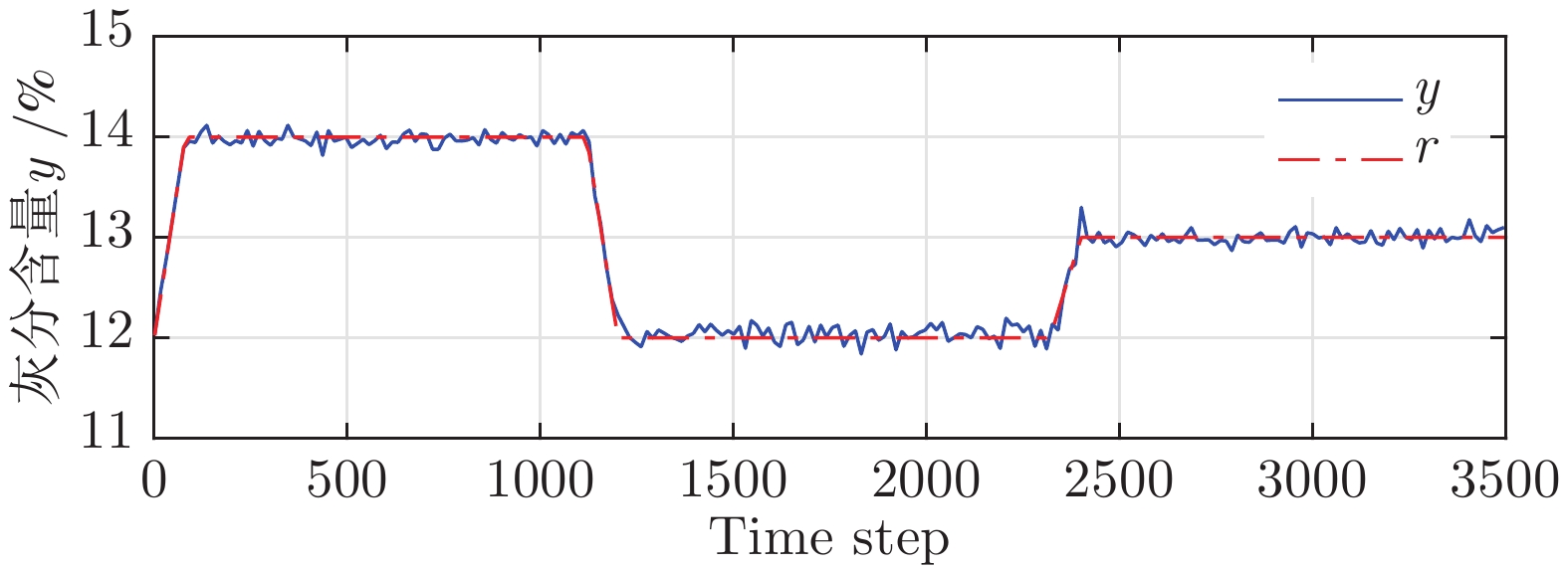
针对一类难以建立精确模型的单输入单输出(Single-input single-output, SISO) 非线性离散动态系统, 提出了一种数据驱动模型的自适应控制方法. 所提方法首先设计具有直链与增强结构的随机配置网络(Stochastic configuration network, SCN), 建立了一种可同时表征非线性系统低阶线性部分与高阶非线性项(未建模动态)的数据驱动模型, 并采用增量学习方法与监督机制, 对模型结构与模型参数进行同步更新优化, 保证了数据驱动模型的无限逼近能力, 解决了传统自适应控制采用交替辨识算法存在的建模精度低、模型收敛性无法保证的问题. 进而利用直链部分与增强部分, 分别设计了线性控制器及虚拟未建模动态补偿器, 建立了基于SCN 数据驱动模型的自适应控制新方法, 分析了其稳定性与收敛性, 通过数值仿真实验和采用交替辨识算法的传统自适应控制方法进行对比, 实验结果表明所提方法的有效性.
针对一类难以建立精确模型的单输入单输出(Single-input single-output, SISO) 非线性离散动态系统, 提出了一种数据驱动模型的自适应控制方法. 所提方法首先设计具有直链与增强结构的随机配置网络(Stochastic configuration network, SCN), 建立了一种可同时表征非线性系统低阶线性部分与高阶非线性项(未建模动态)的数据驱动模型, 并采用增量学习方法与监督机制, 对模型结构与模型参数进行同步更新优化, 保证了数据驱动模型的无限逼近能力, 解决了传统自适应控制采用交替辨识算法存在的建模精度低、模型收敛性无法保证的问题. 进而利用直链部分与增强部分, 分别设计了线性控制器及虚拟未建模动态补偿器, 建立了基于SCN 数据驱动模型的自适应控制新方法, 分析了其稳定性与收敛性, 通过数值仿真实验和采用交替辨识算法的传统自适应控制方法进行对比, 实验结果表明所提方法的有效性.




当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c211233
摘要:
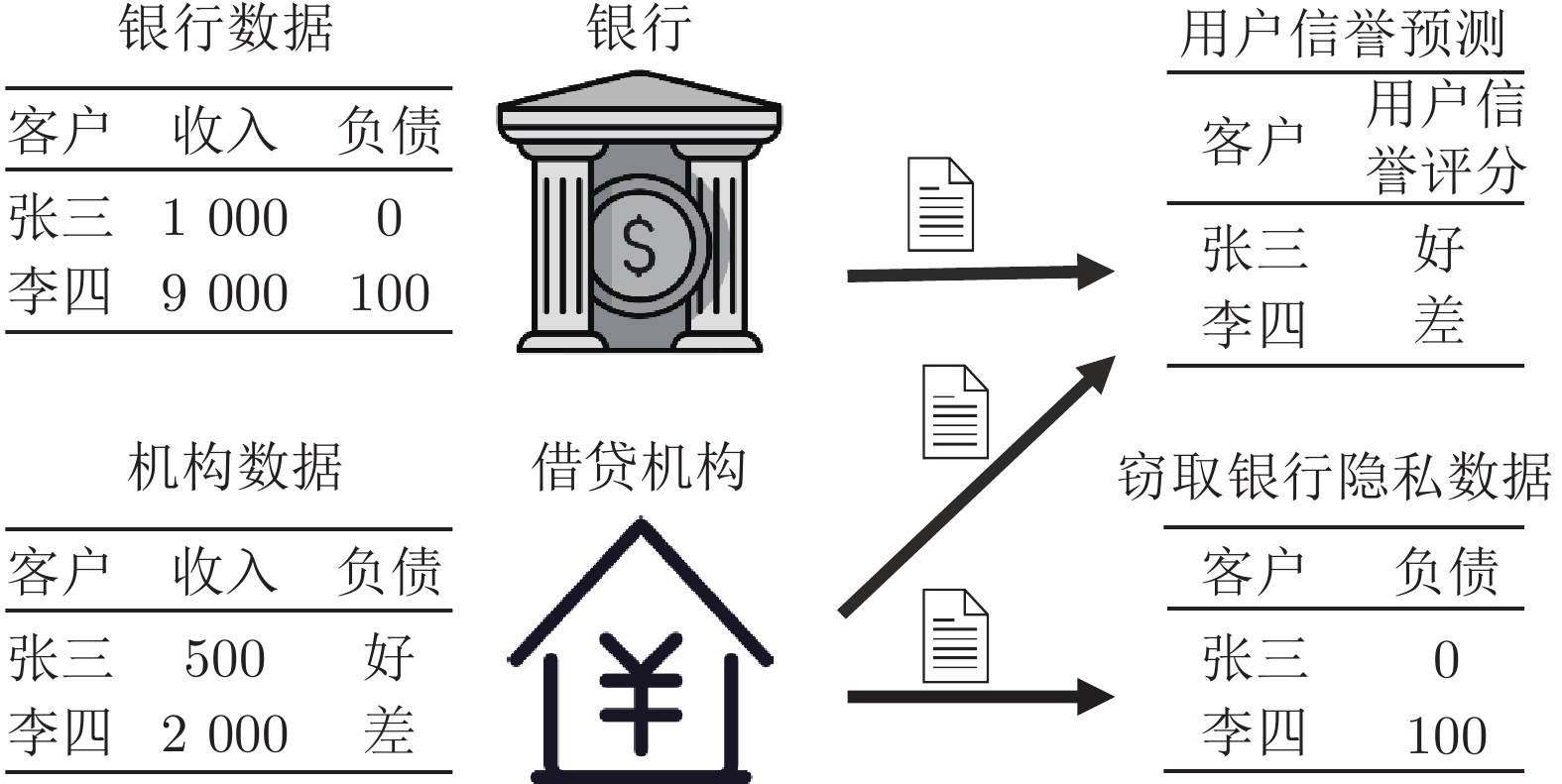
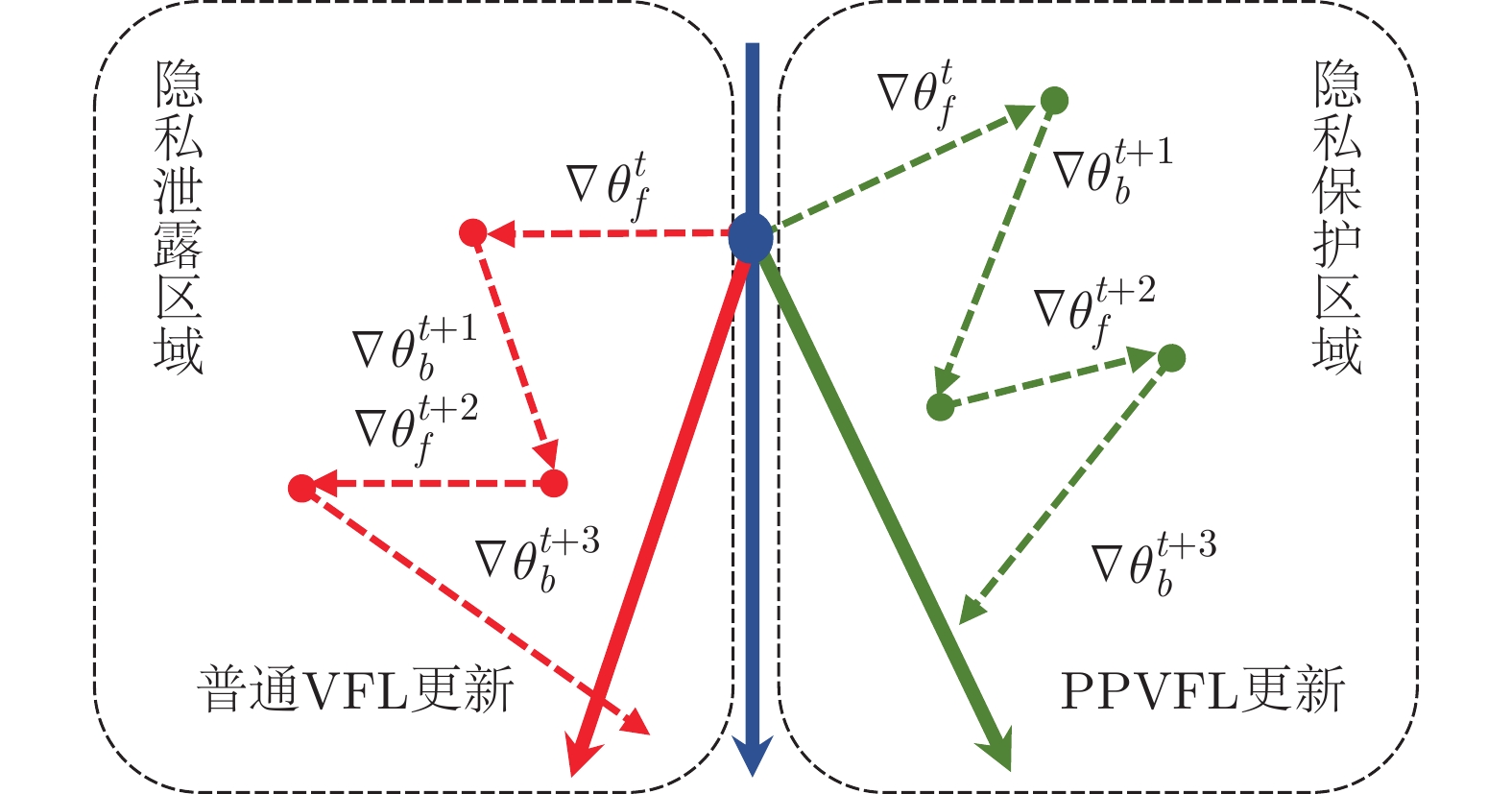
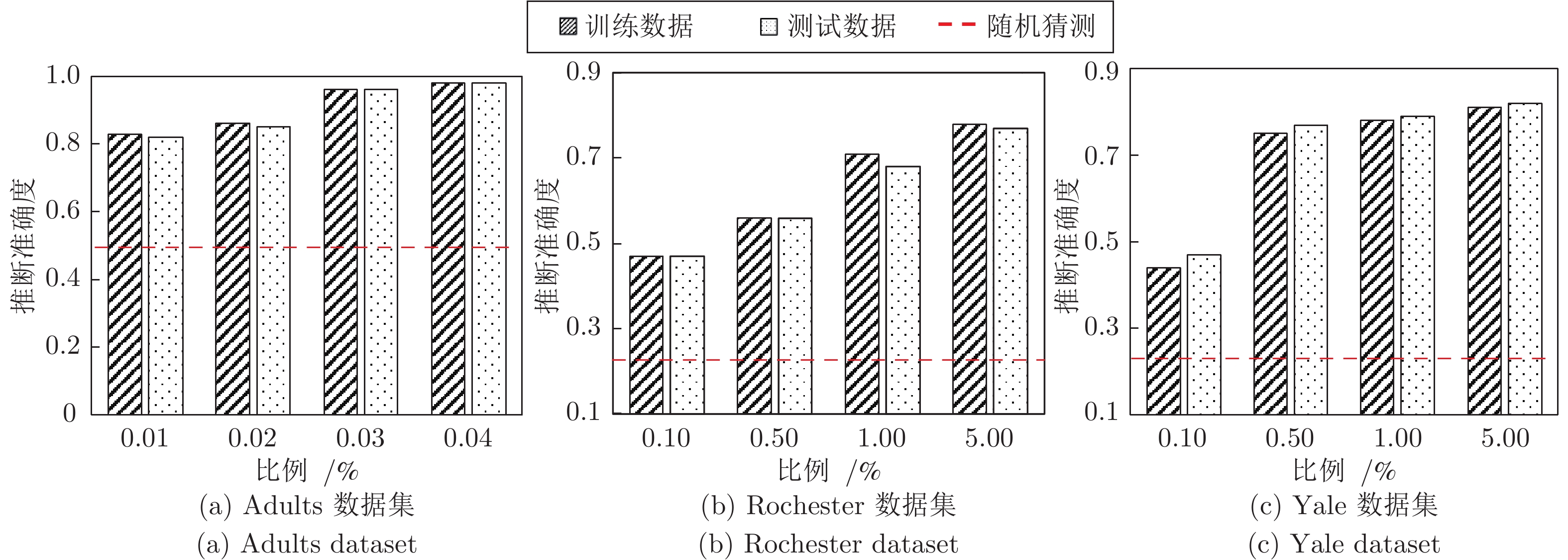
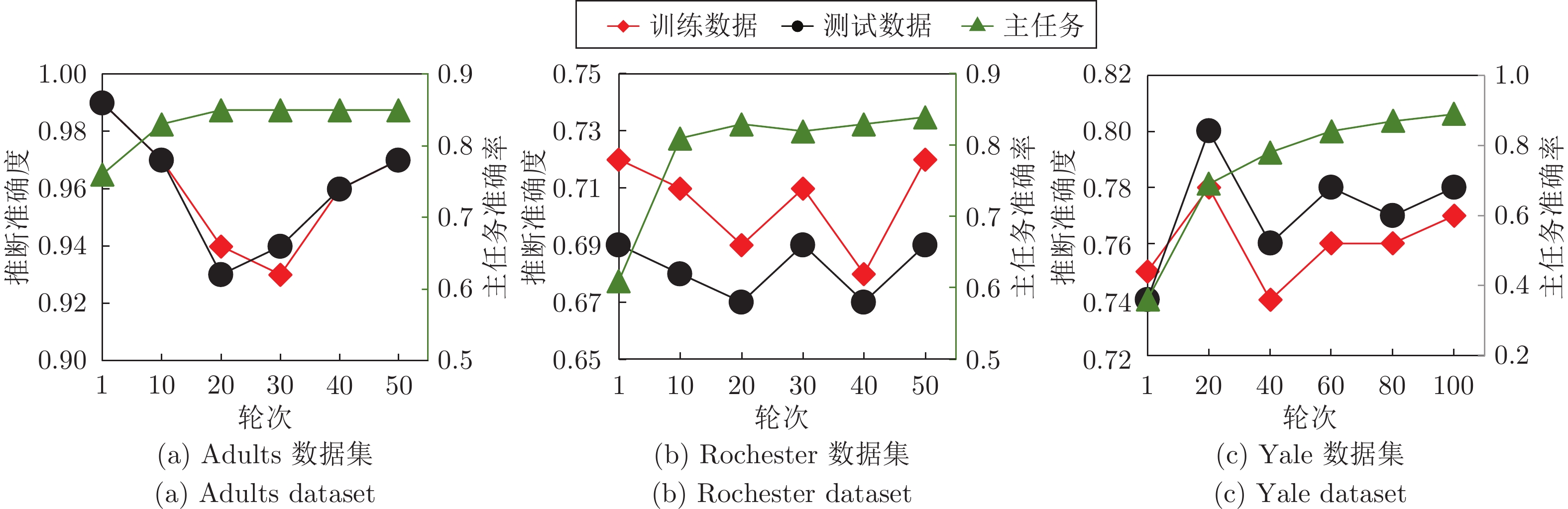
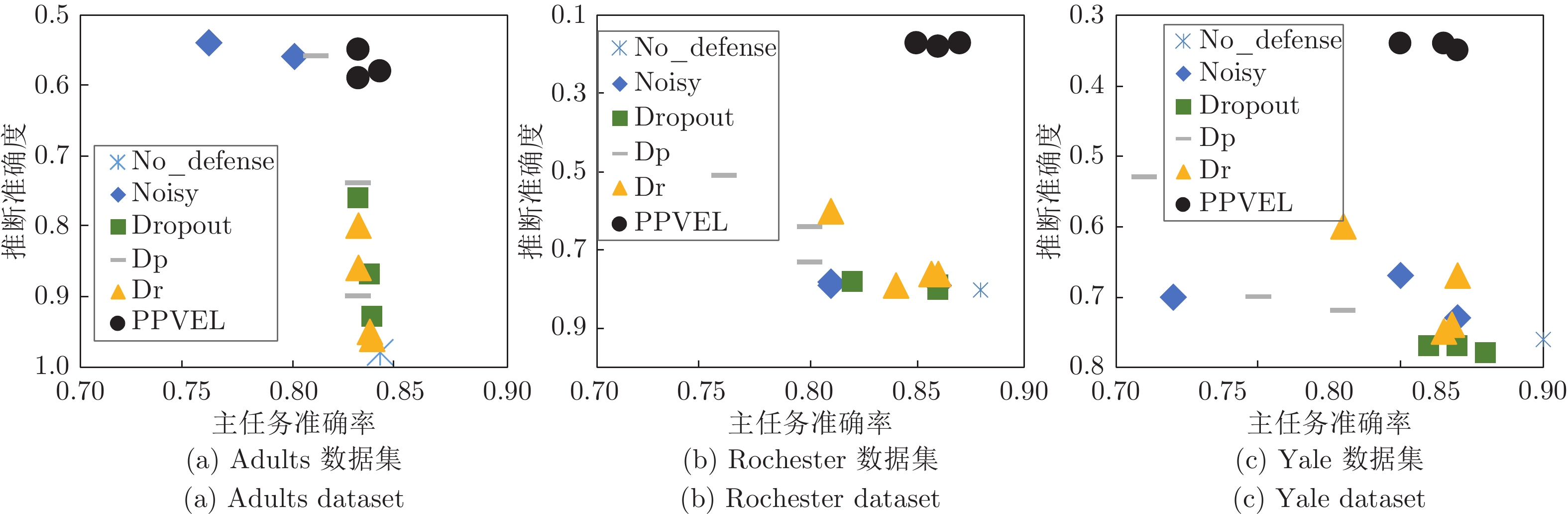
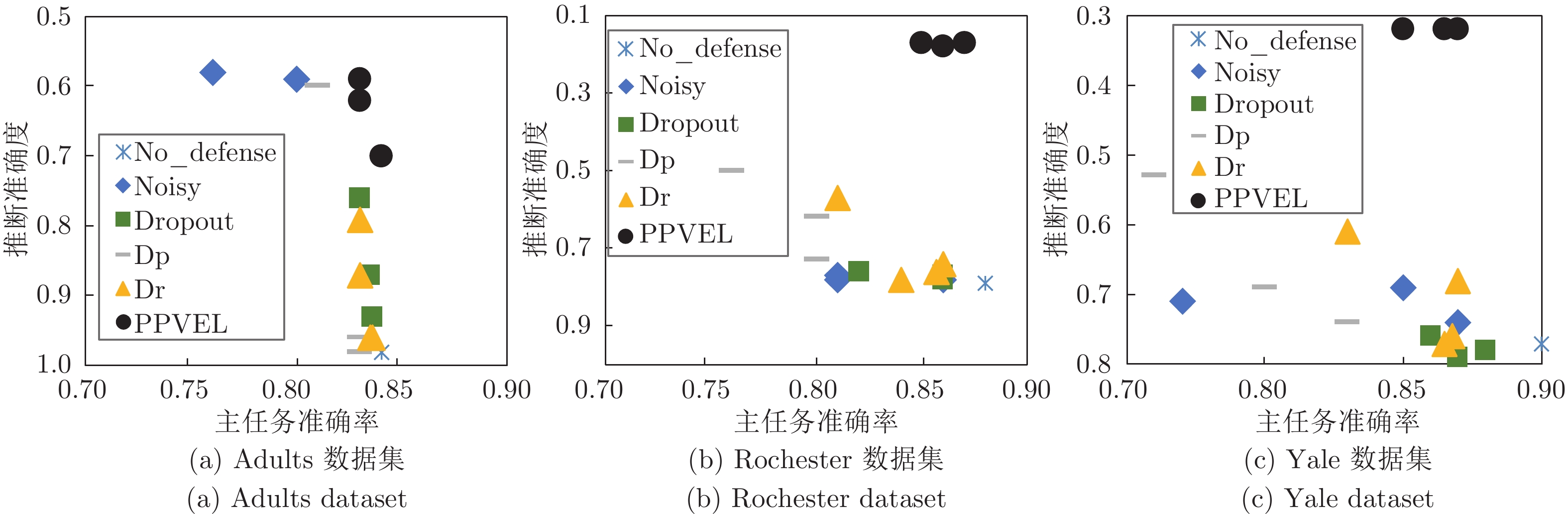
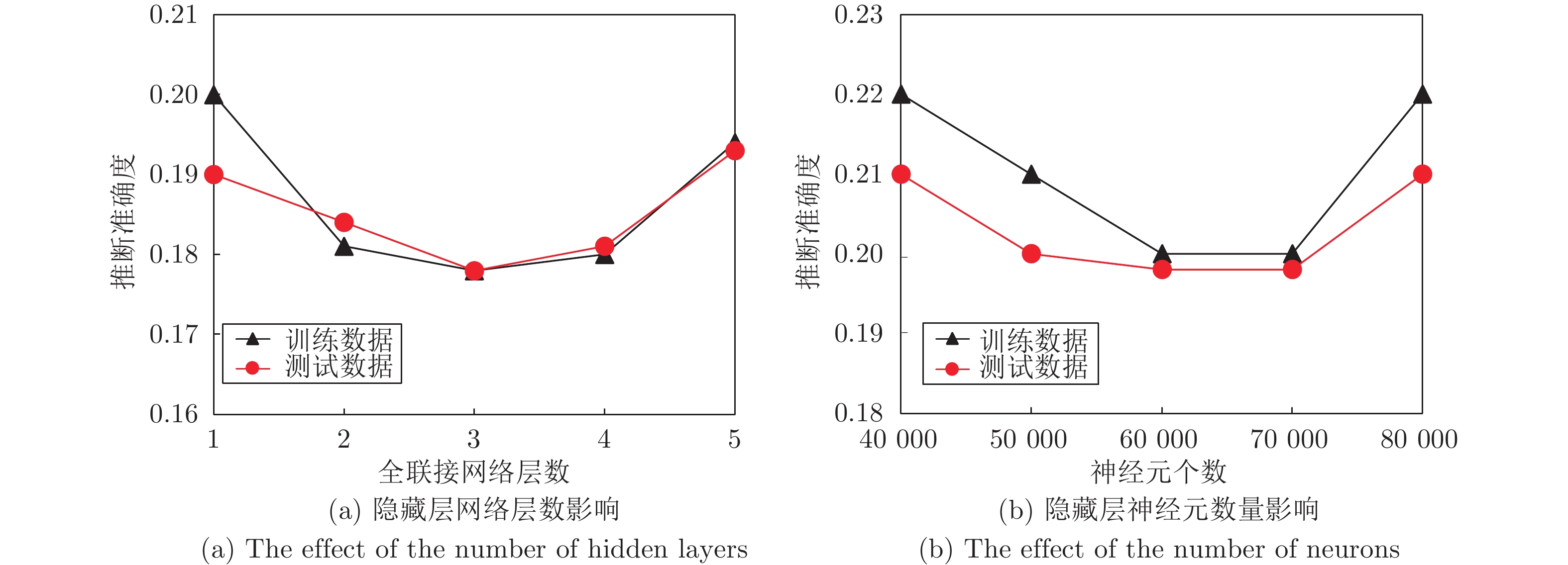
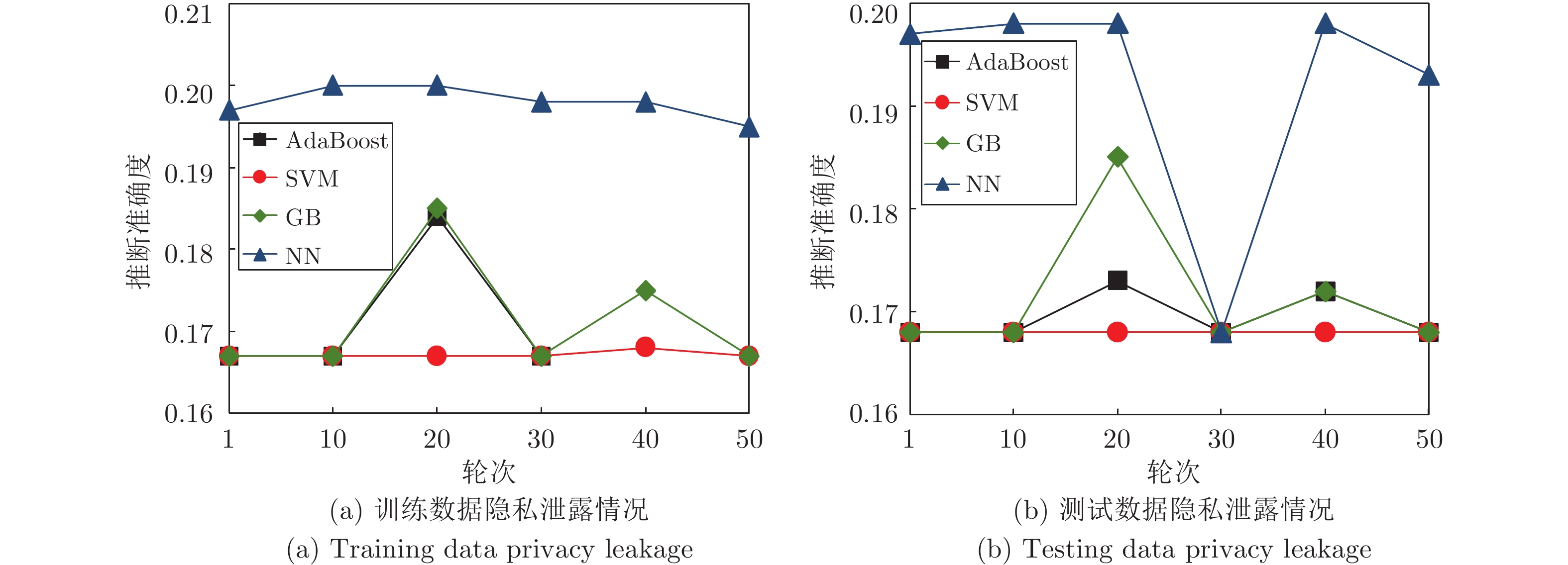
纵向联邦学习是一种新兴的分布式机器学习技术, 在保障隐私性的前提下利用分散在各个机构的数据实现机器学习模型的联合训练. 纵向联邦学习被广泛应用于工业互联网金融借贷和医疗诊断等众多领域中, 因此保证其隐私安全性具有重要意义. 本文首先针对纵向联邦学习协议中由于参与方交换的嵌入表示造成的隐私泄露风险, 研究由协作者发起的通用的属性推断攻击. 攻击者利用辅助数据和嵌入表示训练一个攻击模型, 然后利用训练完成的攻击模型窃取参与方的隐私属性. 实验结果表明: 纵向联邦学习在训练、推理阶段产生的嵌入表示容易泄露数据隐私. 为了应对上述隐私泄露风险, 进一步提出一种基于最大最小策略的纵向联邦学习隐私保护方法, 其引入梯度正则组件保证训练过程主任务的预测性能, 同时引入重构组件掩藏参与方嵌入表示中包含的隐私属性信息. 最后, 在钢板缺陷诊断工业场景的实验结果表明: 相比于没有任何防御方法的VFL, 隐私保护方法将攻击推断准确度从95%降到55%以下, 接近于随机猜测的水平, 同时主任务预测准确率仅下降2%.
纵向联邦学习是一种新兴的分布式机器学习技术, 在保障隐私性的前提下利用分散在各个机构的数据实现机器学习模型的联合训练. 纵向联邦学习被广泛应用于工业互联网金融借贷和医疗诊断等众多领域中, 因此保证其隐私安全性具有重要意义. 本文首先针对纵向联邦学习协议中由于参与方交换的嵌入表示造成的隐私泄露风险, 研究由协作者发起的通用的属性推断攻击. 攻击者利用辅助数据和嵌入表示训练一个攻击模型, 然后利用训练完成的攻击模型窃取参与方的隐私属性. 实验结果表明: 纵向联邦学习在训练、推理阶段产生的嵌入表示容易泄露数据隐私. 为了应对上述隐私泄露风险, 进一步提出一种基于最大最小策略的纵向联邦学习隐私保护方法, 其引入梯度正则组件保证训练过程主任务的预测性能, 同时引入重构组件掩藏参与方嵌入表示中包含的隐私属性信息. 最后, 在钢板缺陷诊断工业场景的实验结果表明: 相比于没有任何防御方法的VFL, 隐私保护方法将攻击推断准确度从95%降到55%以下, 接近于随机猜测的水平, 同时主任务预测准确率仅下降2%.






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c220090
摘要:
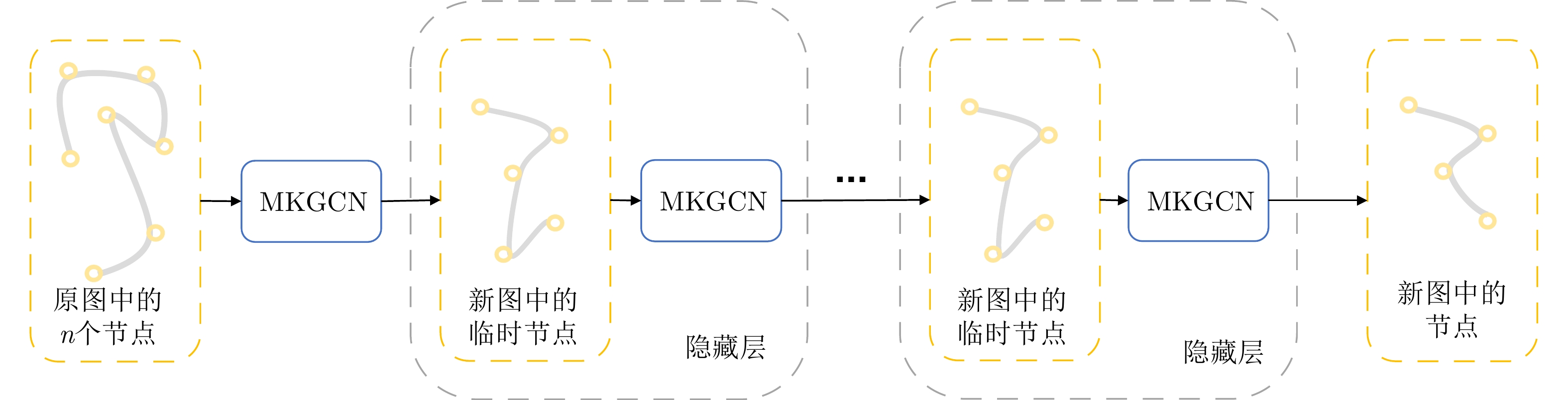
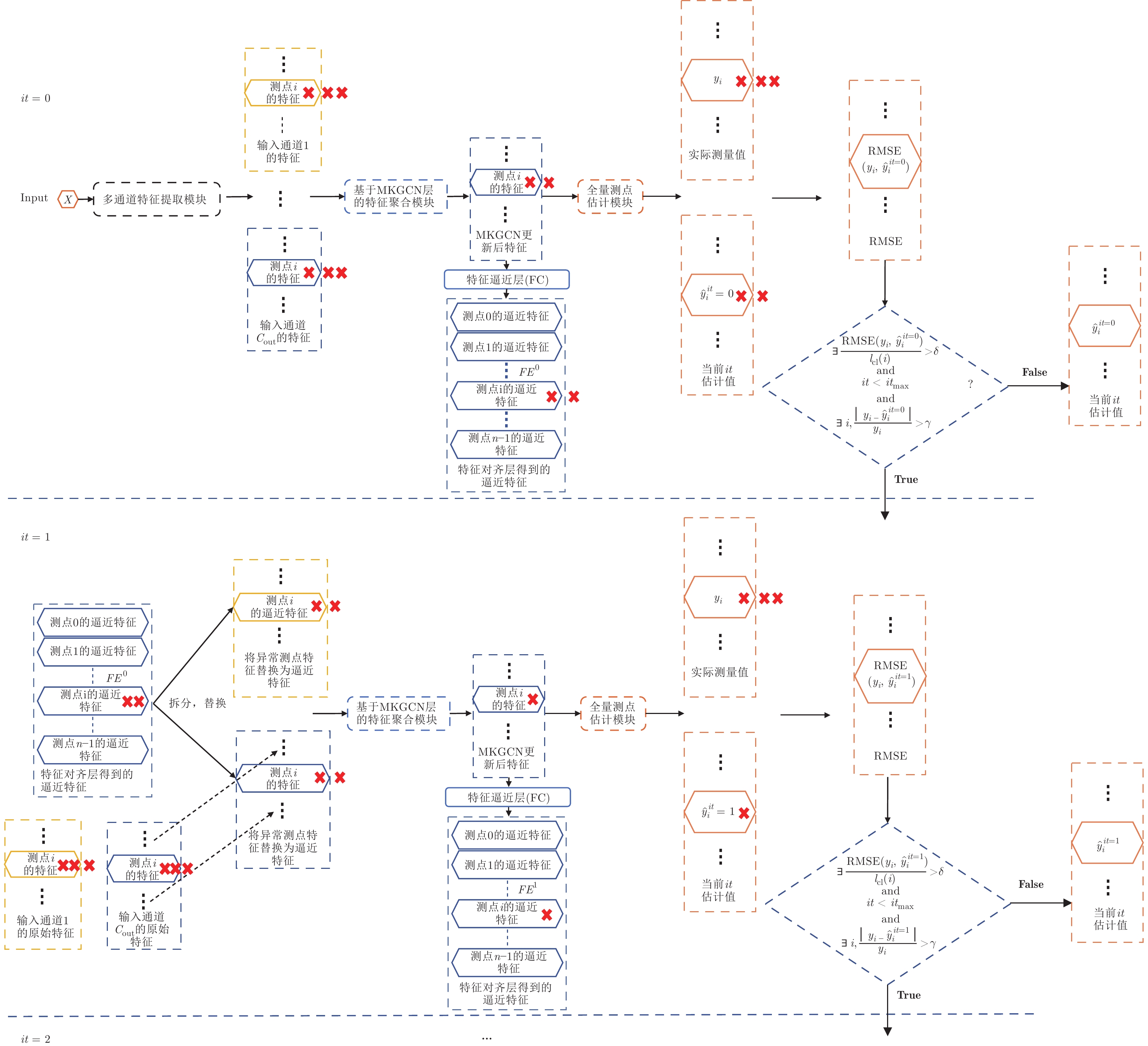
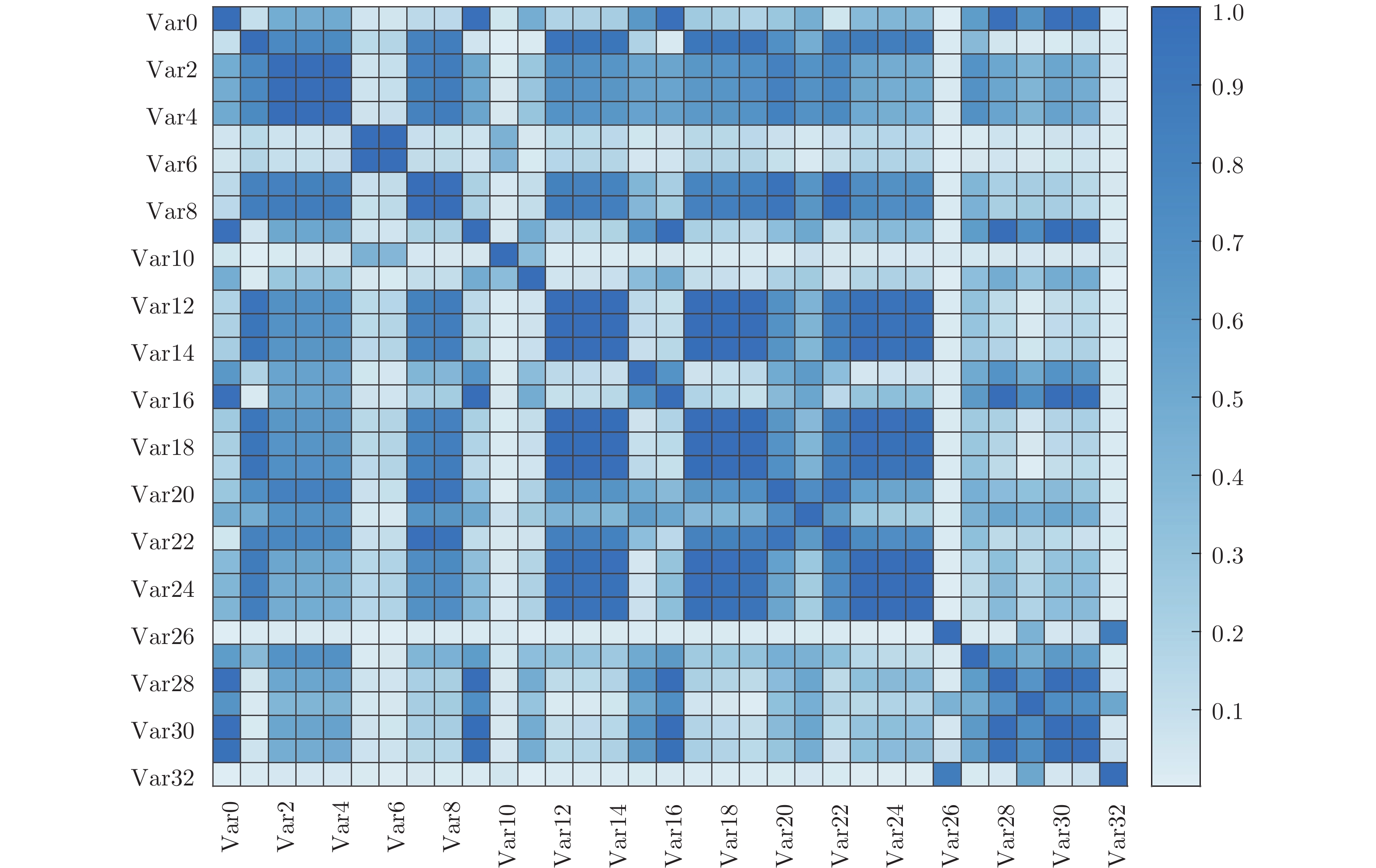
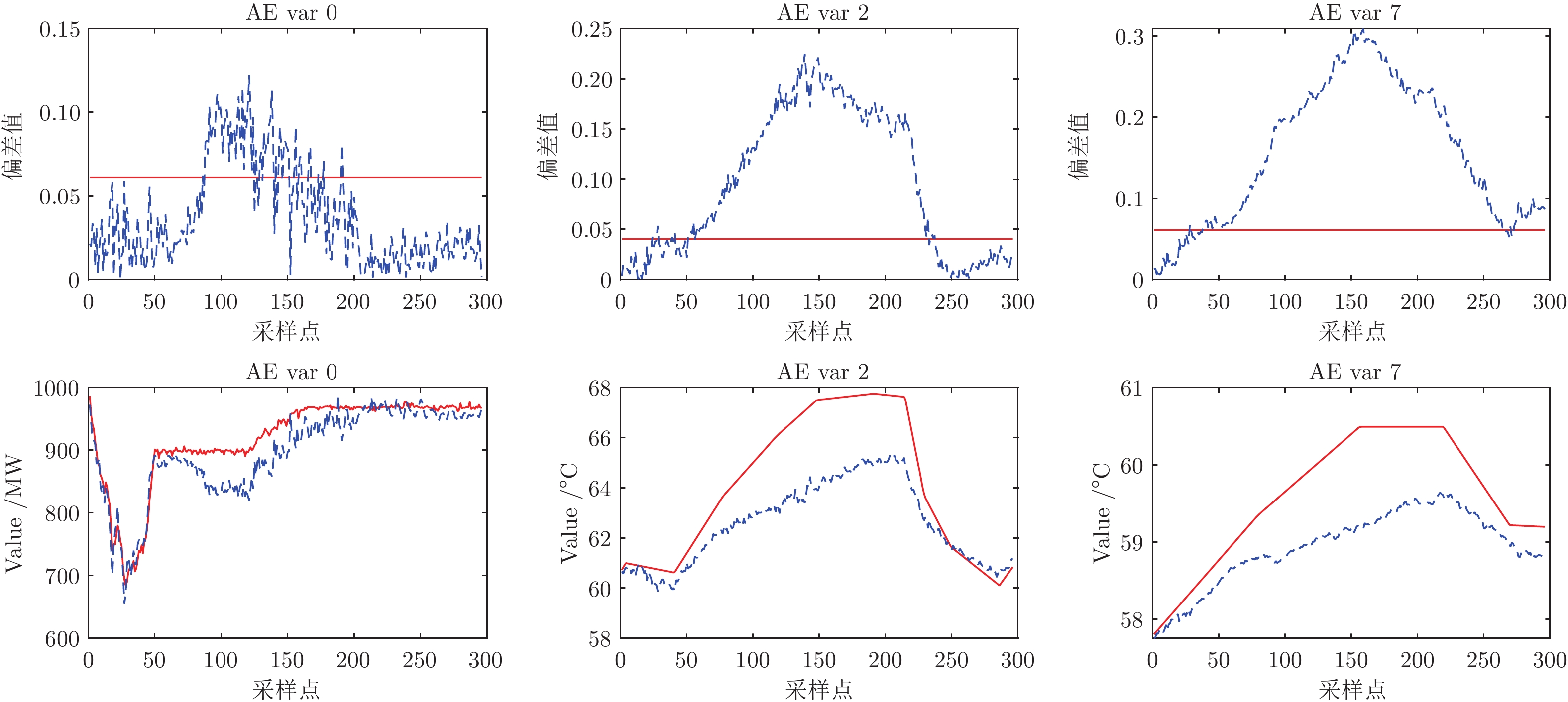
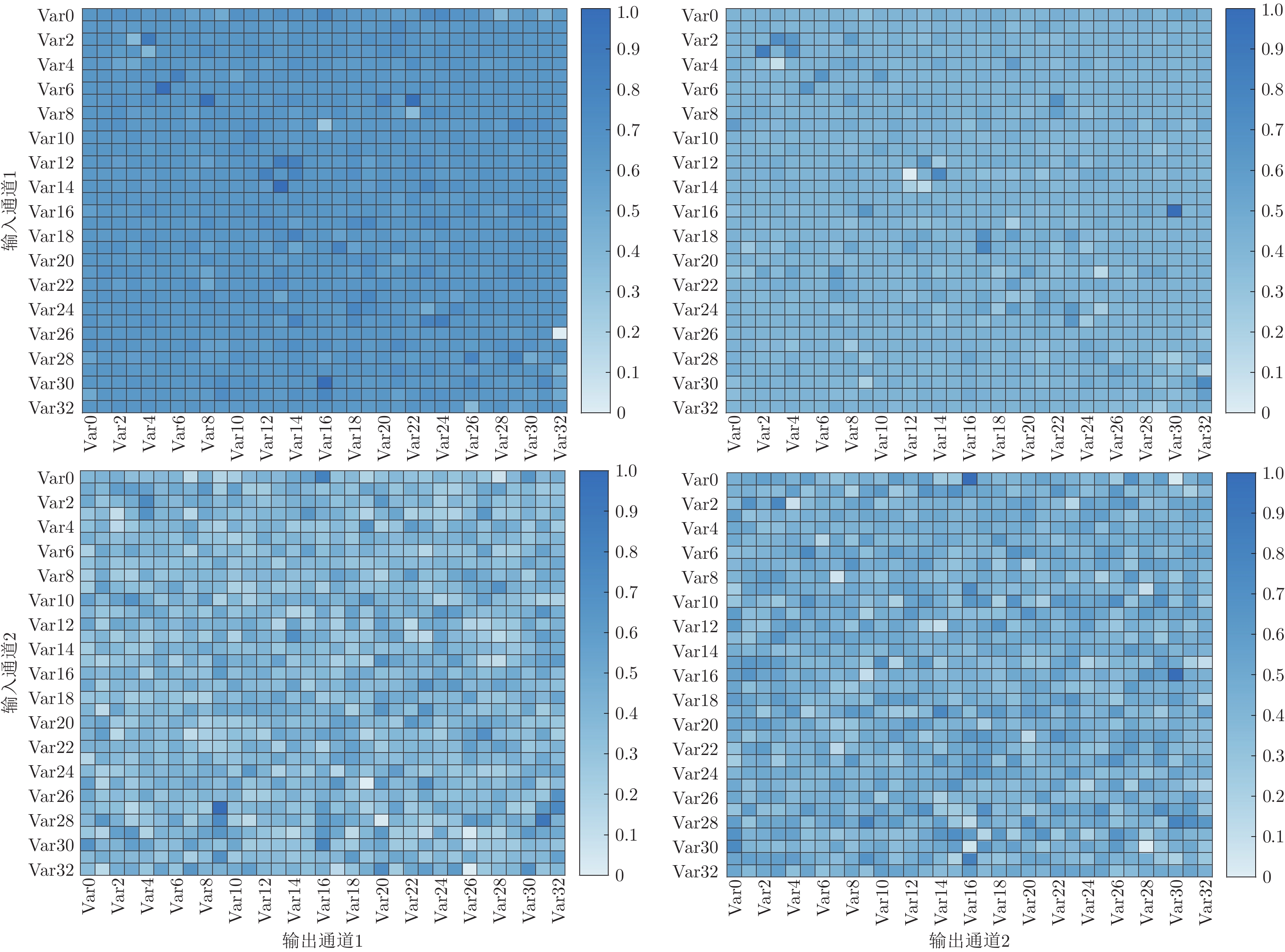
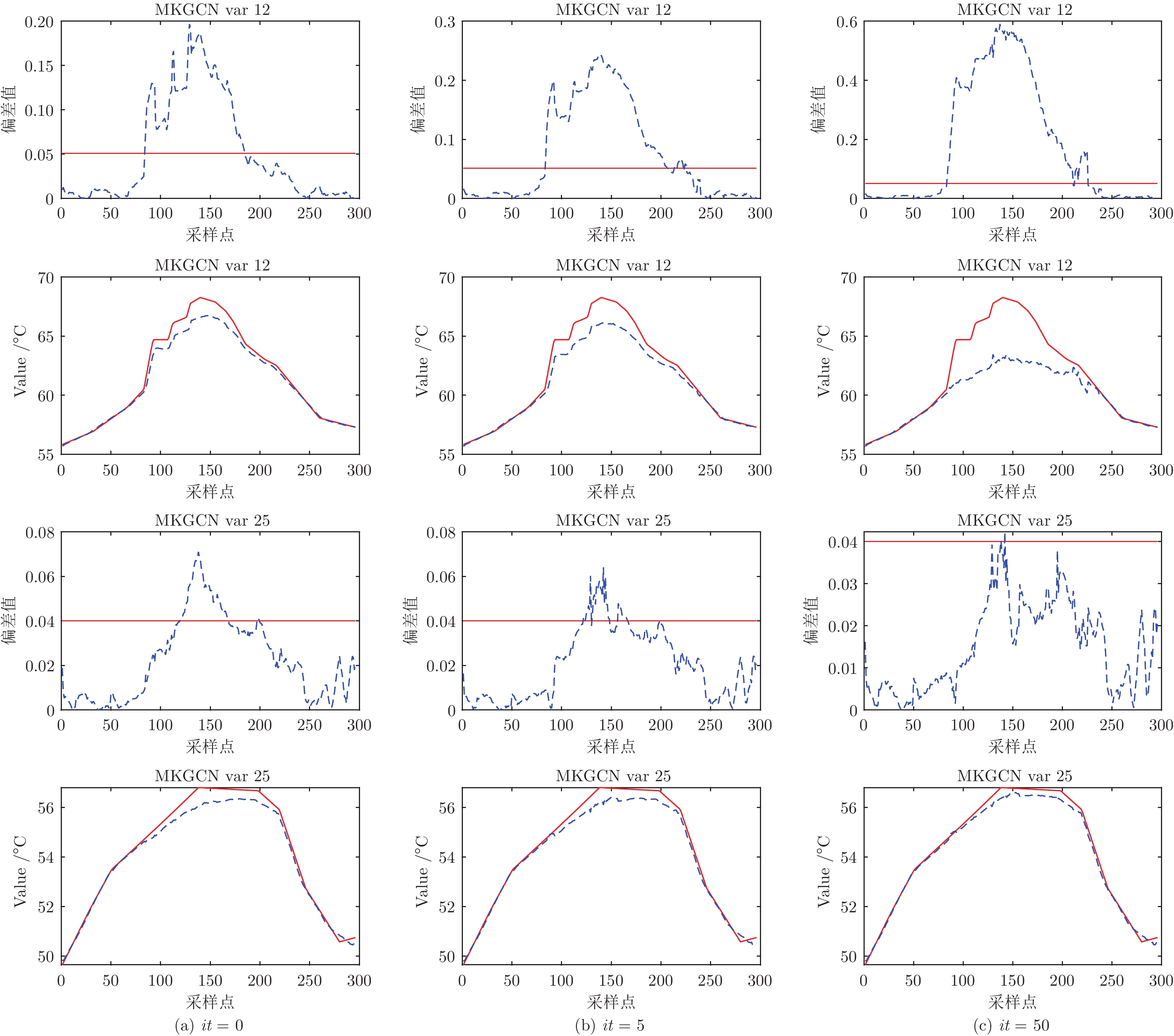
实际工业场景中, 需要在生产过程中收集大量测点的数据, 从而掌握生产过程运行状态. 传统的过程监测方法通常仅评估运行状态整体的异常与否, 或对运行状态进行分级评估, 这种方式并不会直接定位故障部位, 不利于故障的高效检修. 为此, 提出了一种基于全量测点估计的监测模型, 根据全量测点估计值与实际值的偏差定义监测指标, 从而实现全量测点的分别精准监测. 为了克服原有的基于工况估计的监测方法监测不全面且对测点间耦合关系建模不充分的问题, 提出了多核图卷积网络(Multi-kernel graph convolution network, MKGCN), 通过将全量传感器测点视为一张全量测点图, 显式地对测点间耦合关系进行建模, 从而实现了全量传感器测点的同步工况估计. 此外, 面向在线监测场景, 设计了基于特征逼近的自迭代方法, 从而克服了在异常情况下由于测点间强耦合导致的部分测点估计值异常的问题. 所提出的方法在电厂百万千瓦超超临界机组中引风机的实际数据上进行了验证, 结果显示, 提出的监测方法与其他典型方法相比能够更精准地检测出发生故障的测点.
实际工业场景中, 需要在生产过程中收集大量测点的数据, 从而掌握生产过程运行状态. 传统的过程监测方法通常仅评估运行状态整体的异常与否, 或对运行状态进行分级评估, 这种方式并不会直接定位故障部位, 不利于故障的高效检修. 为此, 提出了一种基于全量测点估计的监测模型, 根据全量测点估计值与实际值的偏差定义监测指标, 从而实现全量测点的分别精准监测. 为了克服原有的基于工况估计的监测方法监测不全面且对测点间耦合关系建模不充分的问题, 提出了多核图卷积网络(Multi-kernel graph convolution network, MKGCN), 通过将全量传感器测点视为一张全量测点图, 显式地对测点间耦合关系进行建模, 从而实现了全量传感器测点的同步工况估计. 此外, 面向在线监测场景, 设计了基于特征逼近的自迭代方法, 从而克服了在异常情况下由于测点间强耦合导致的部分测点估计值异常的问题. 所提出的方法在电厂百万千瓦超超临界机组中引风机的实际数据上进行了验证, 结果显示, 提出的监测方法与其他典型方法相比能够更精准地检测出发生故障的测点.




当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c211163
摘要:
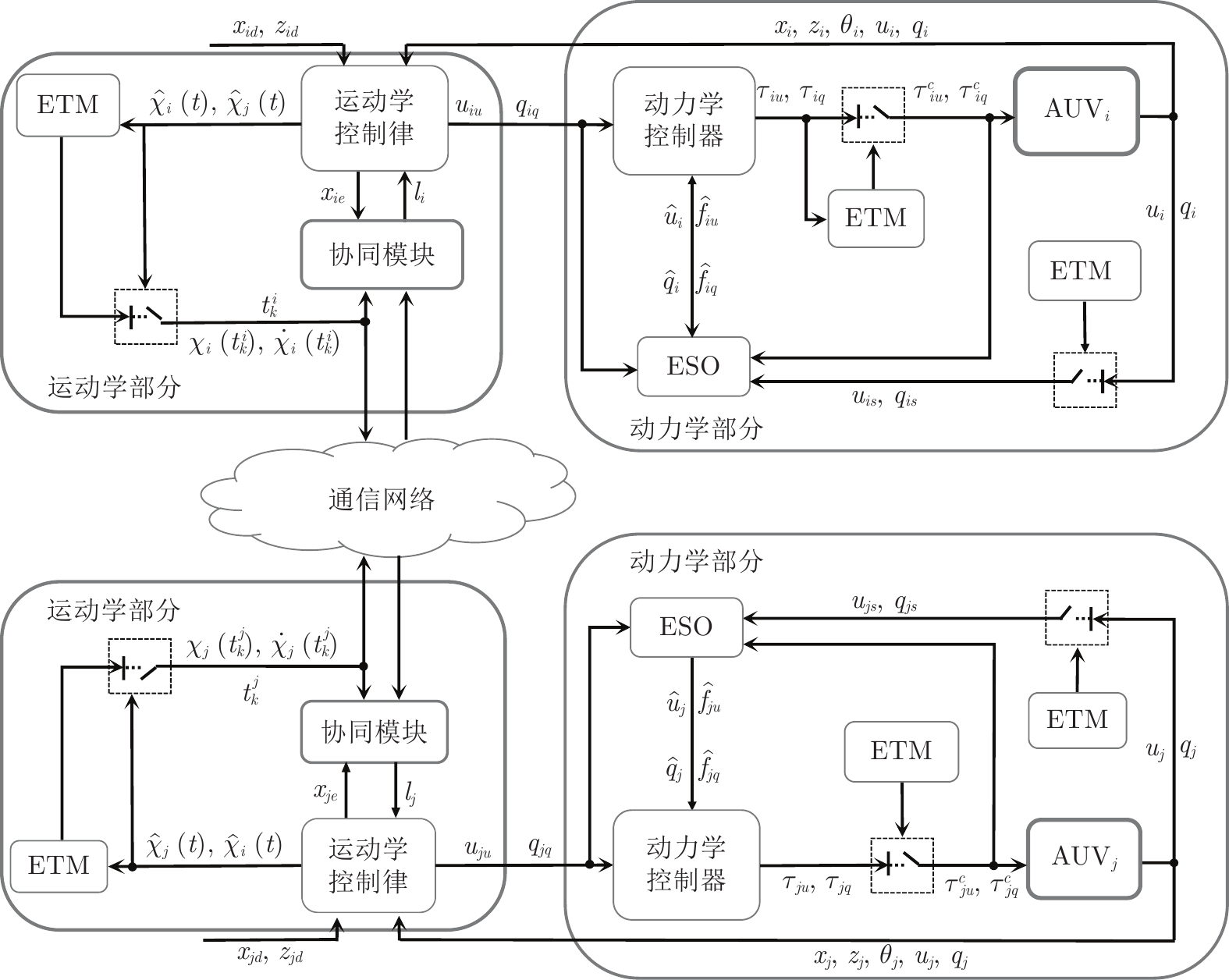
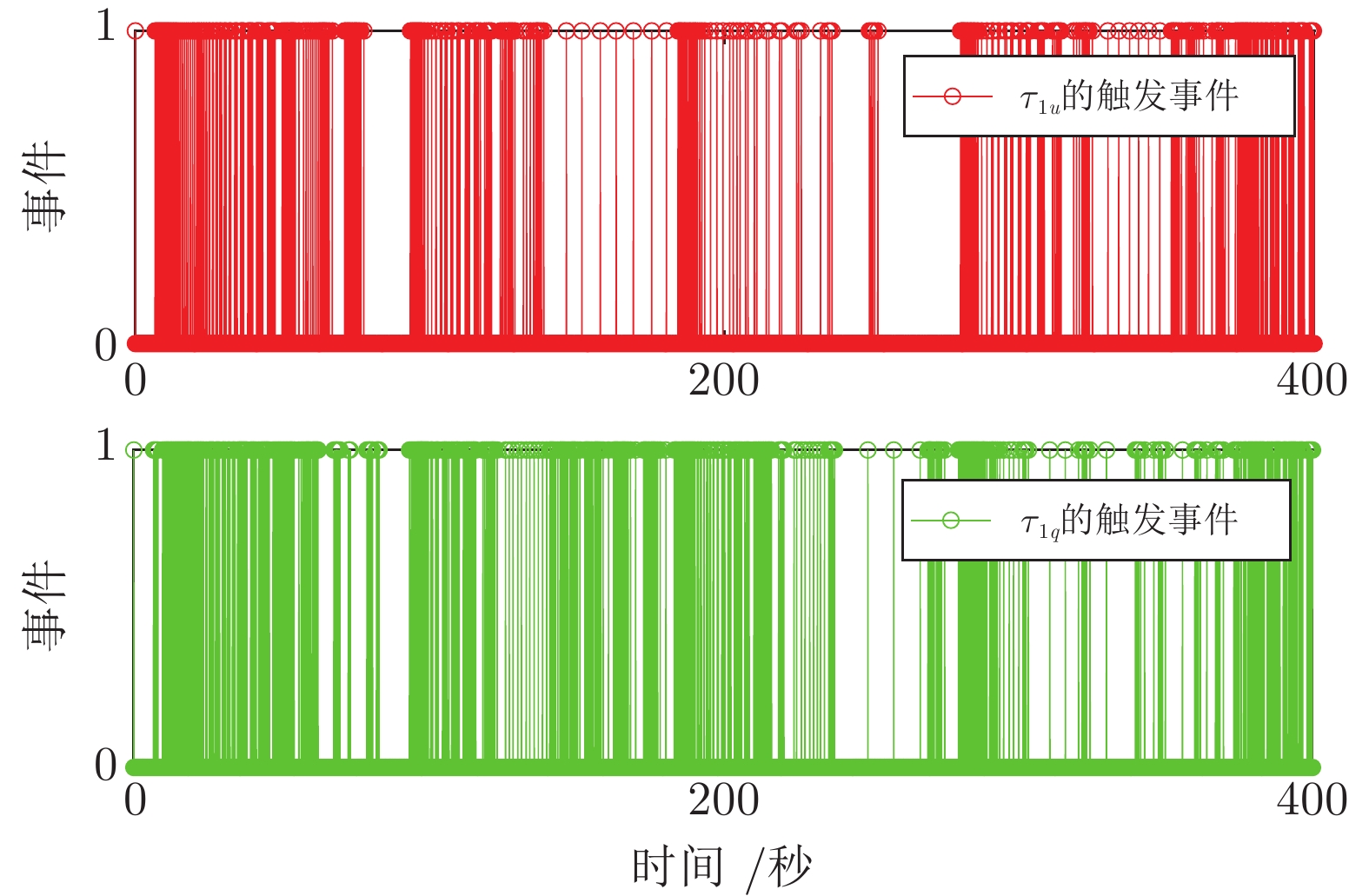
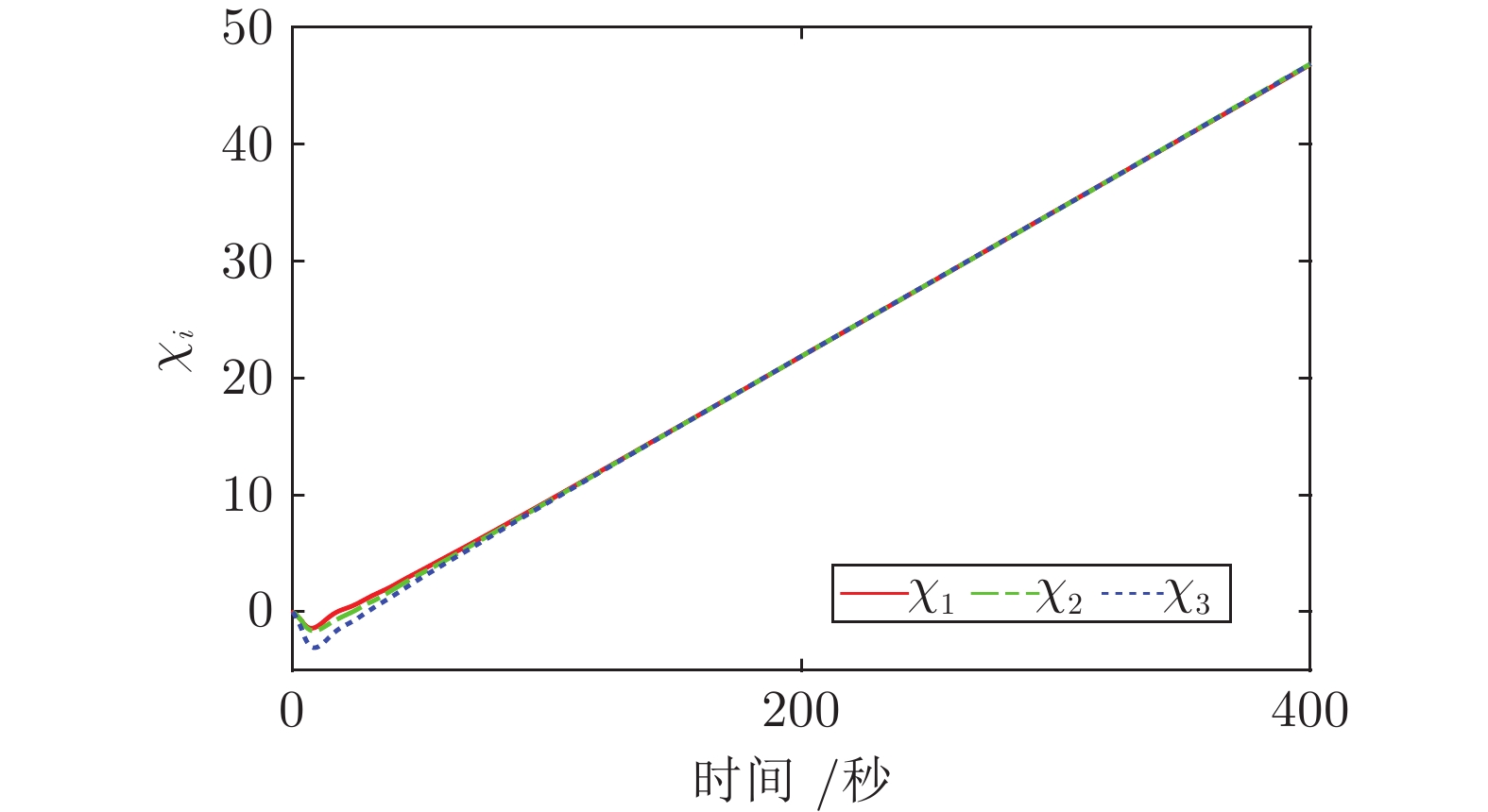
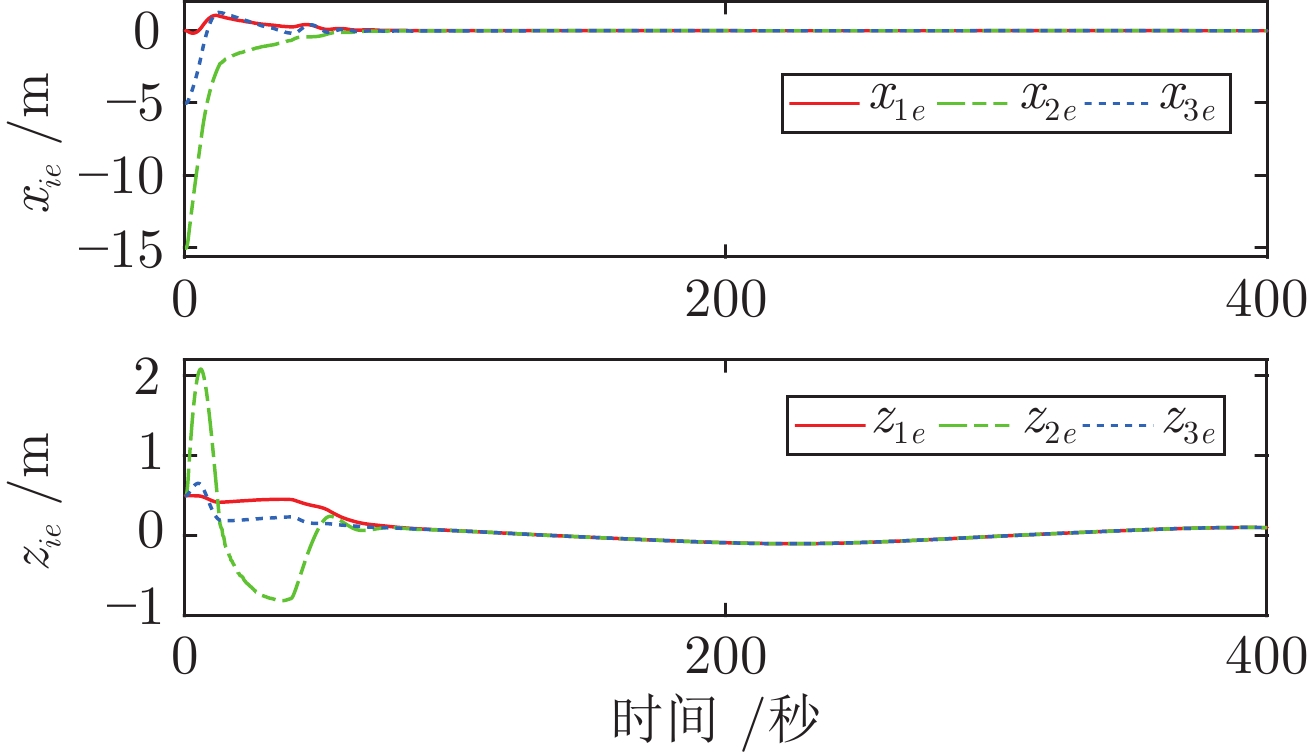
针对考虑外部海洋环境扰动和内部模型不确定性的多个欠驱动自主水下航行器, 研究了其在通信资源受限和机载能量受限下的协同路径跟踪控制问题. 首先, 针对水声通信信道窄造成的通信资源受限问题, 设计了一种基于事件触发机制的协同通信策略; 其次, 针对模型不确定性和海洋环境扰动问题, 设计了一种基于事件触发机制的线性扩张状态观测器来逼近水下航行器的未知动力学, 并降低了系统采样次数; 最后, 针对机载能量受限问题, 设计了一种基于事件触发机制的动力学控制律, 在保证控制精度的前提下降低了执行机构的动作频次, 从而节省了能量消耗. 应用级联系统稳定性分析方法, 分别证明了闭环系统是输入状态稳定的, 且系统不存在Zeno行为. 仿真结果验证了所提基于事件触发机制的多自主水下航行器协同路径跟踪控制方法的有效性.
针对考虑外部海洋环境扰动和内部模型不确定性的多个欠驱动自主水下航行器, 研究了其在通信资源受限和机载能量受限下的协同路径跟踪控制问题. 首先, 针对水声通信信道窄造成的通信资源受限问题, 设计了一种基于事件触发机制的协同通信策略; 其次, 针对模型不确定性和海洋环境扰动问题, 设计了一种基于事件触发机制的线性扩张状态观测器来逼近水下航行器的未知动力学, 并降低了系统采样次数; 最后, 针对机载能量受限问题, 设计了一种基于事件触发机制的动力学控制律, 在保证控制精度的前提下降低了执行机构的动作频次, 从而节省了能量消耗. 应用级联系统稳定性分析方法, 分别证明了闭环系统是输入状态稳定的, 且系统不存在Zeno行为. 仿真结果验证了所提基于事件触发机制的多自主水下航行器协同路径跟踪控制方法的有效性.




当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210966
摘要:
目前, 在带有视差场景的图像对齐中, 主要难点在某些无法找到足够匹配特征的区域, 这些区域称为匹配特征缺失区域. 现有算法往往忽略匹配特征缺失区域的对齐建模, 而只将有足够匹配特征区域中的部分单应变换系数(如相似性变换系数)传递给匹配特征缺失区域, 或者采用将匹配特征缺失区域转化为有足够匹配特征区域的间接方式, 因此对齐效果仍不理想. 在客观事实上, 位于相同平面的区域应该拥有相同的完整单应变换而非部分变换参数. 由此出发, 利用单应变换系数扩散的思想设计了一个二步网格优化的图像对齐算法. 该方法在第一步网格优化时获得有足够匹配特征区域的单应变换, 再基于提出的单应性扩散约束将这些单应变换系数扩散到邻域网格, 进行第二步网格优化, 在保证优化任务简洁高效的前提下实现单应变换系数的传播与图像对齐. 相较于现有的针对视差场景图像对齐算法, 所提方法在各项指标上都获得了更好的效果.
目前, 在带有视差场景的图像对齐中, 主要难点在某些无法找到足够匹配特征的区域, 这些区域称为匹配特征缺失区域. 现有算法往往忽略匹配特征缺失区域的对齐建模, 而只将有足够匹配特征区域中的部分单应变换系数(如相似性变换系数)传递给匹配特征缺失区域, 或者采用将匹配特征缺失区域转化为有足够匹配特征区域的间接方式, 因此对齐效果仍不理想. 在客观事实上, 位于相同平面的区域应该拥有相同的完整单应变换而非部分变换参数. 由此出发, 利用单应变换系数扩散的思想设计了一个二步网格优化的图像对齐算法. 该方法在第一步网格优化时获得有足够匹配特征区域的单应变换, 再基于提出的单应性扩散约束将这些单应变换系数扩散到邻域网格, 进行第二步网格优化, 在保证优化任务简洁高效的前提下实现单应变换系数的传播与图像对齐. 相较于现有的针对视差场景图像对齐算法, 所提方法在各项指标上都获得了更好的效果.








当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c211244
摘要:
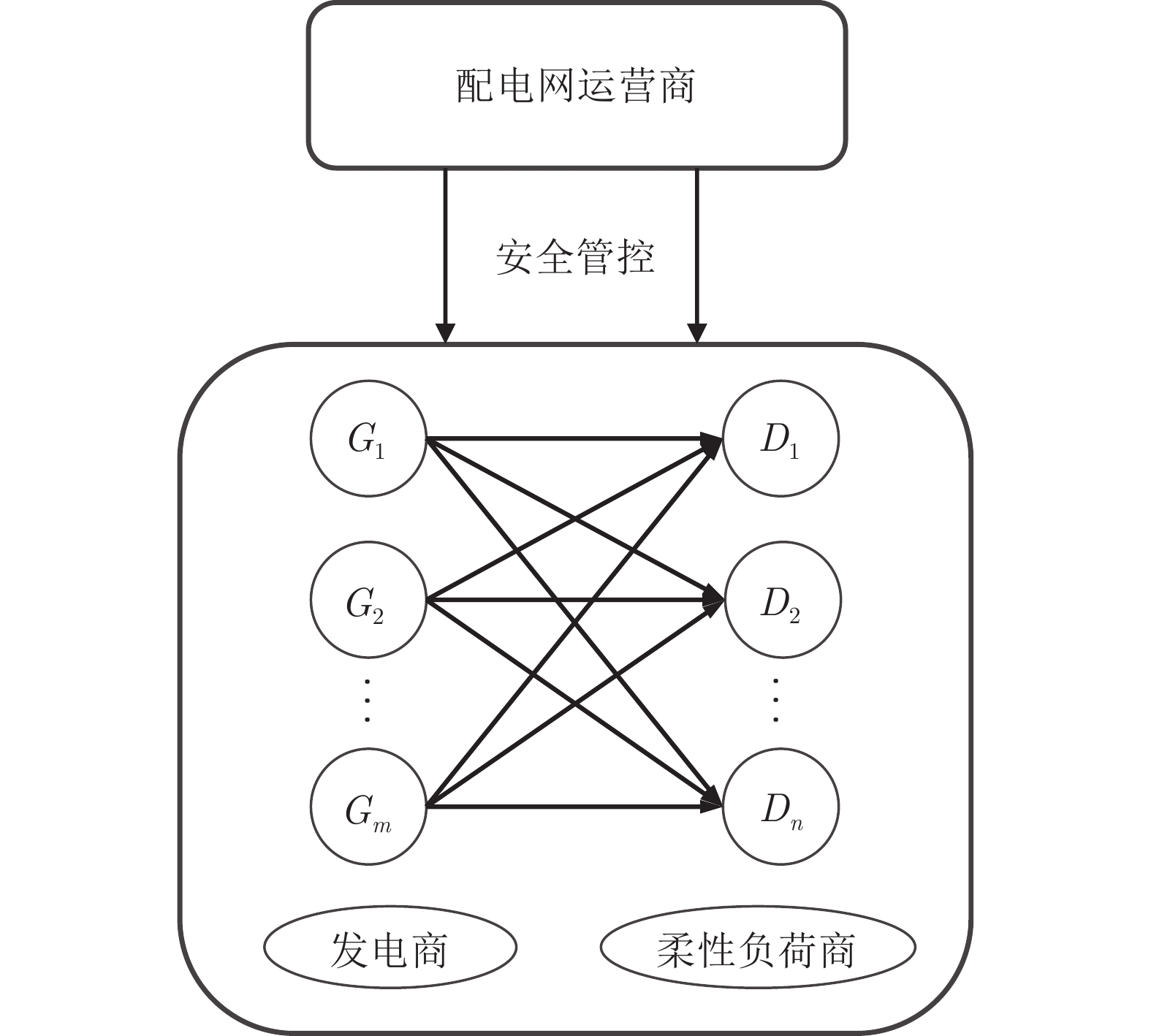
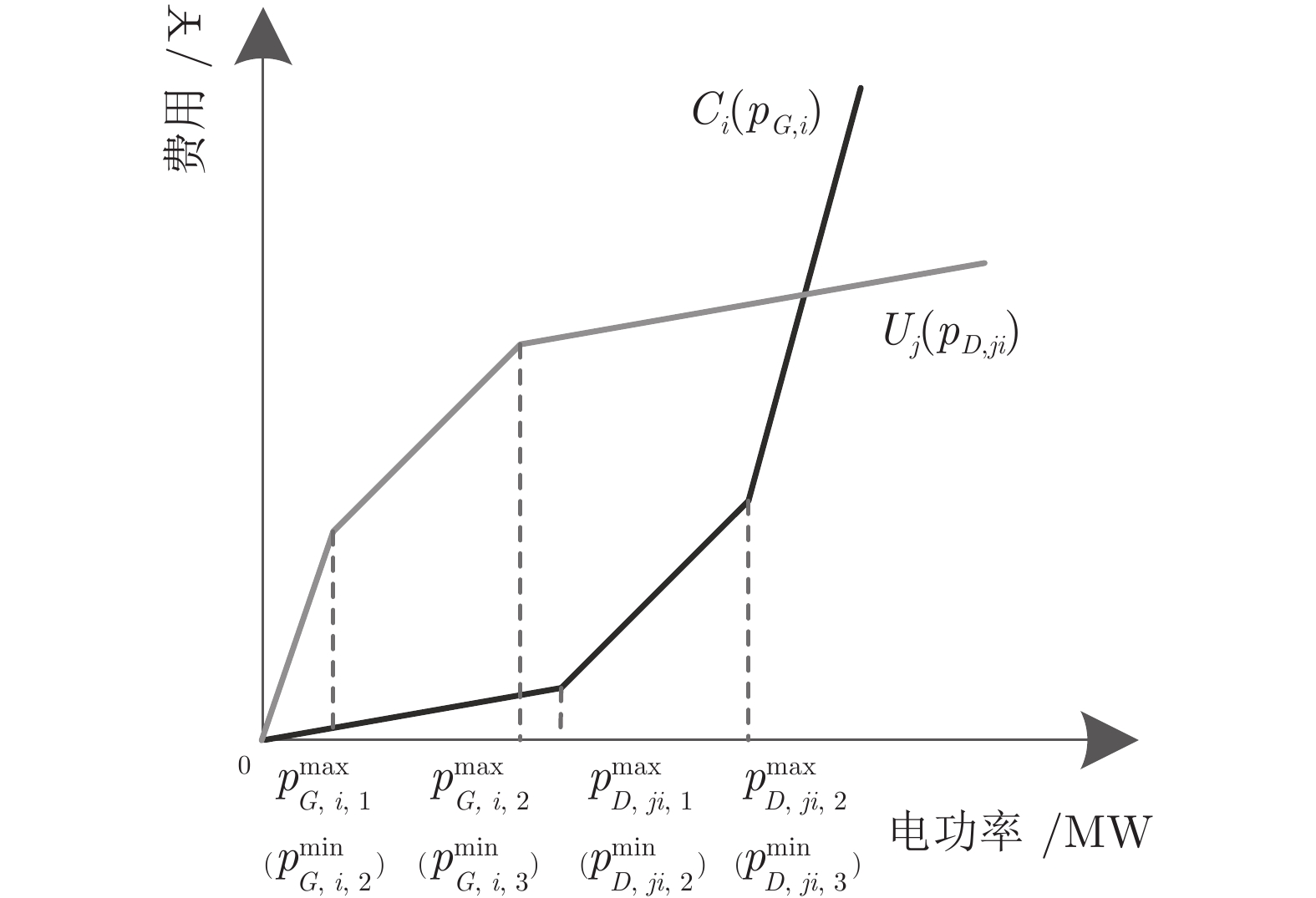
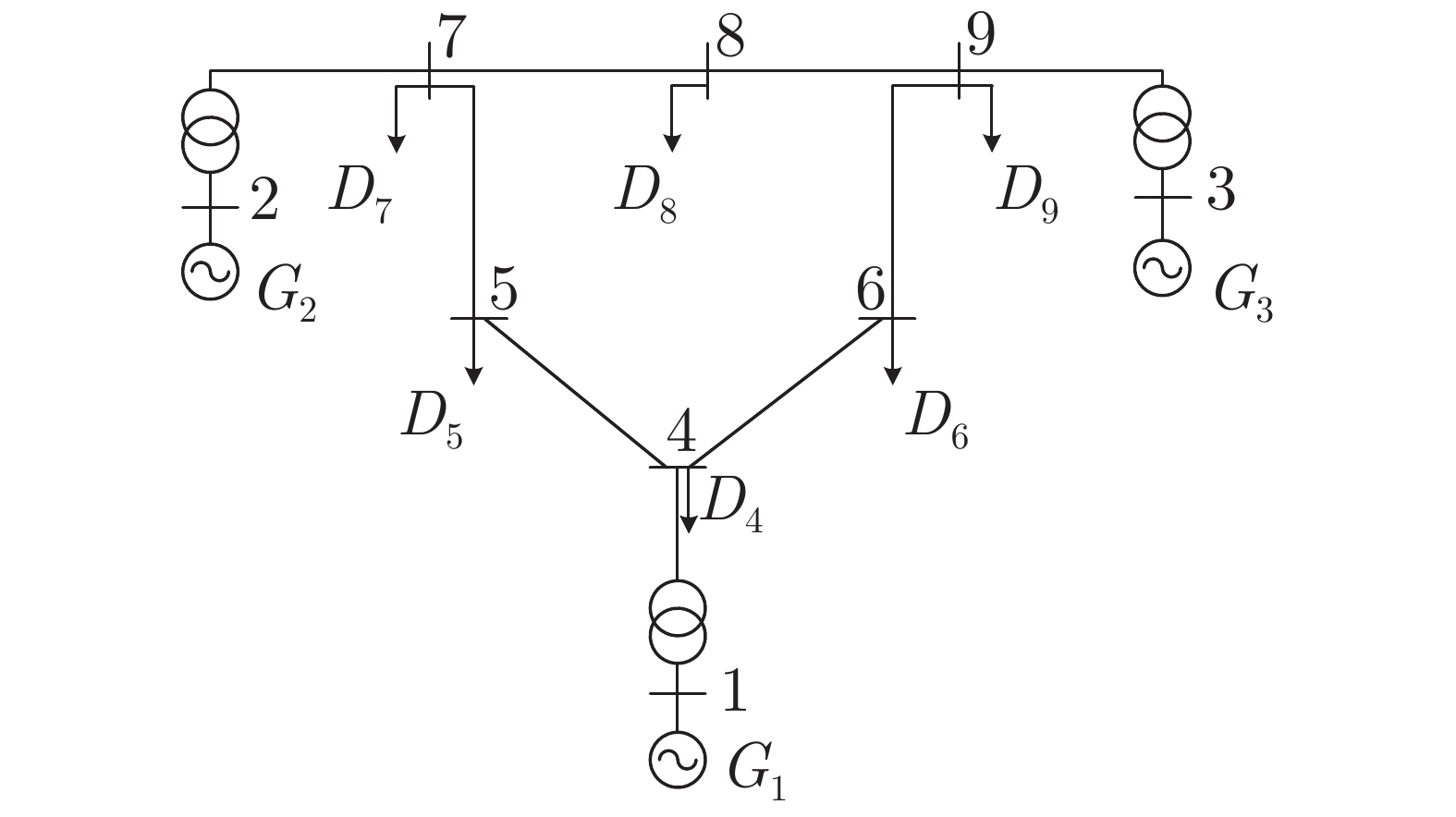
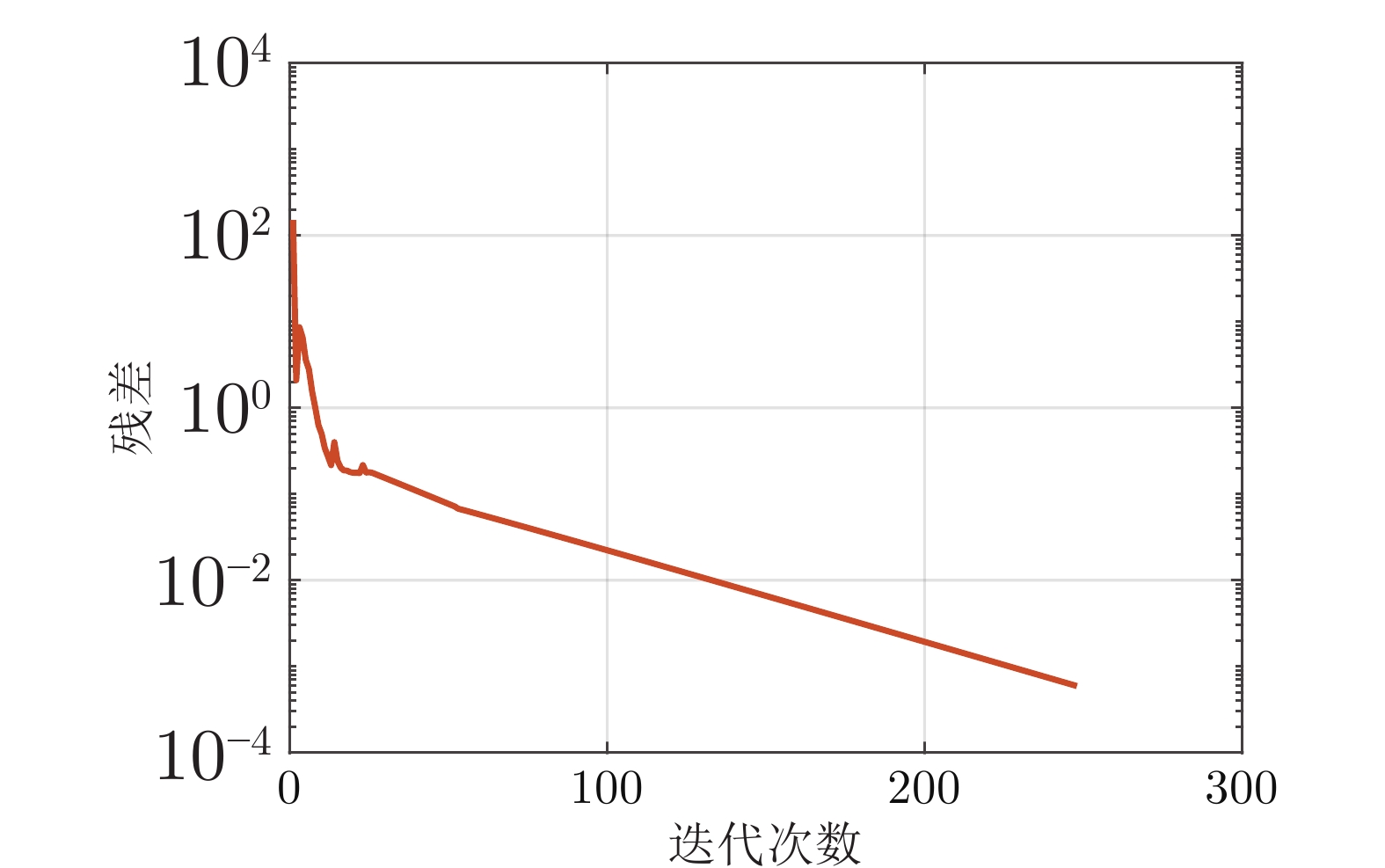
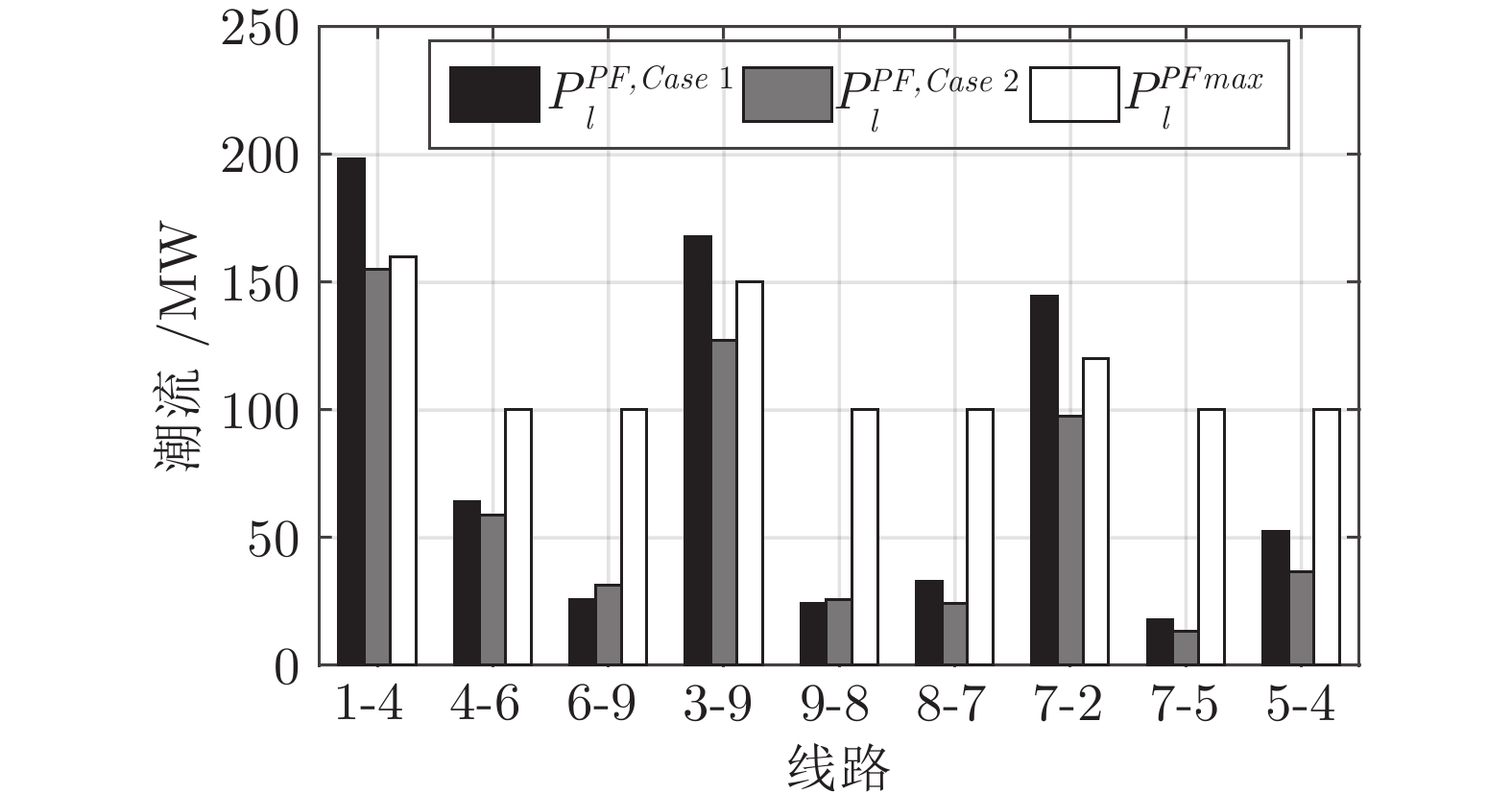
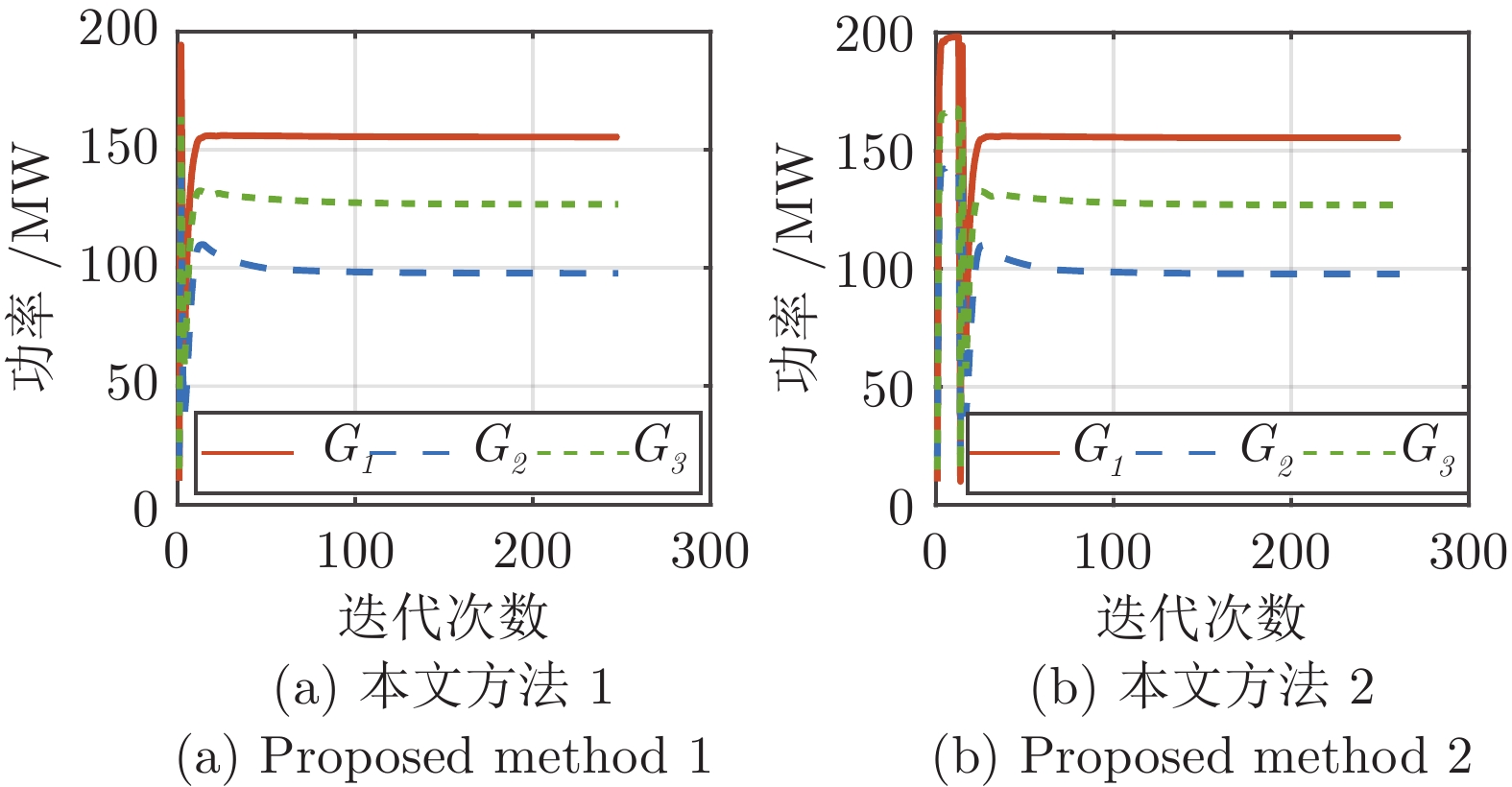
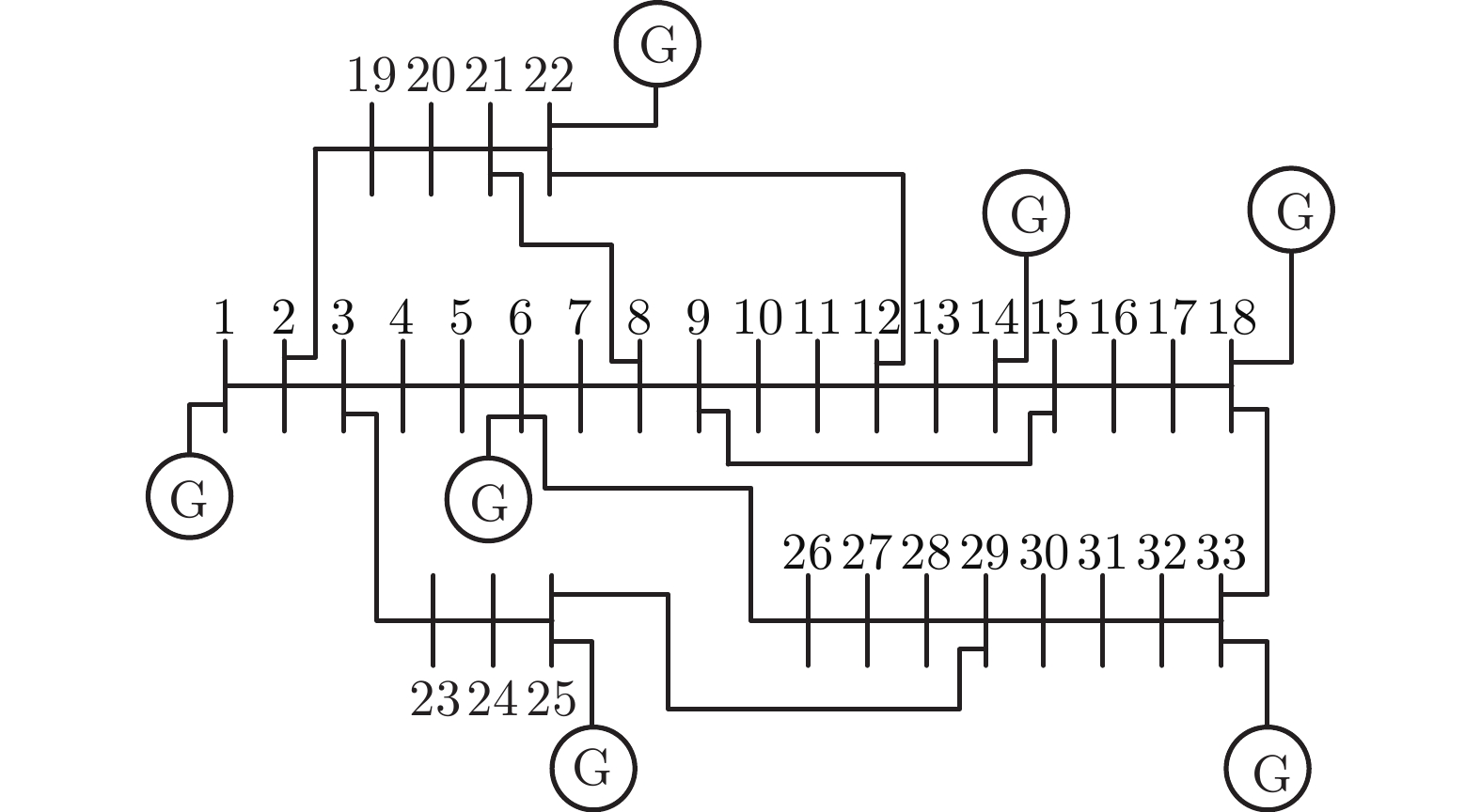
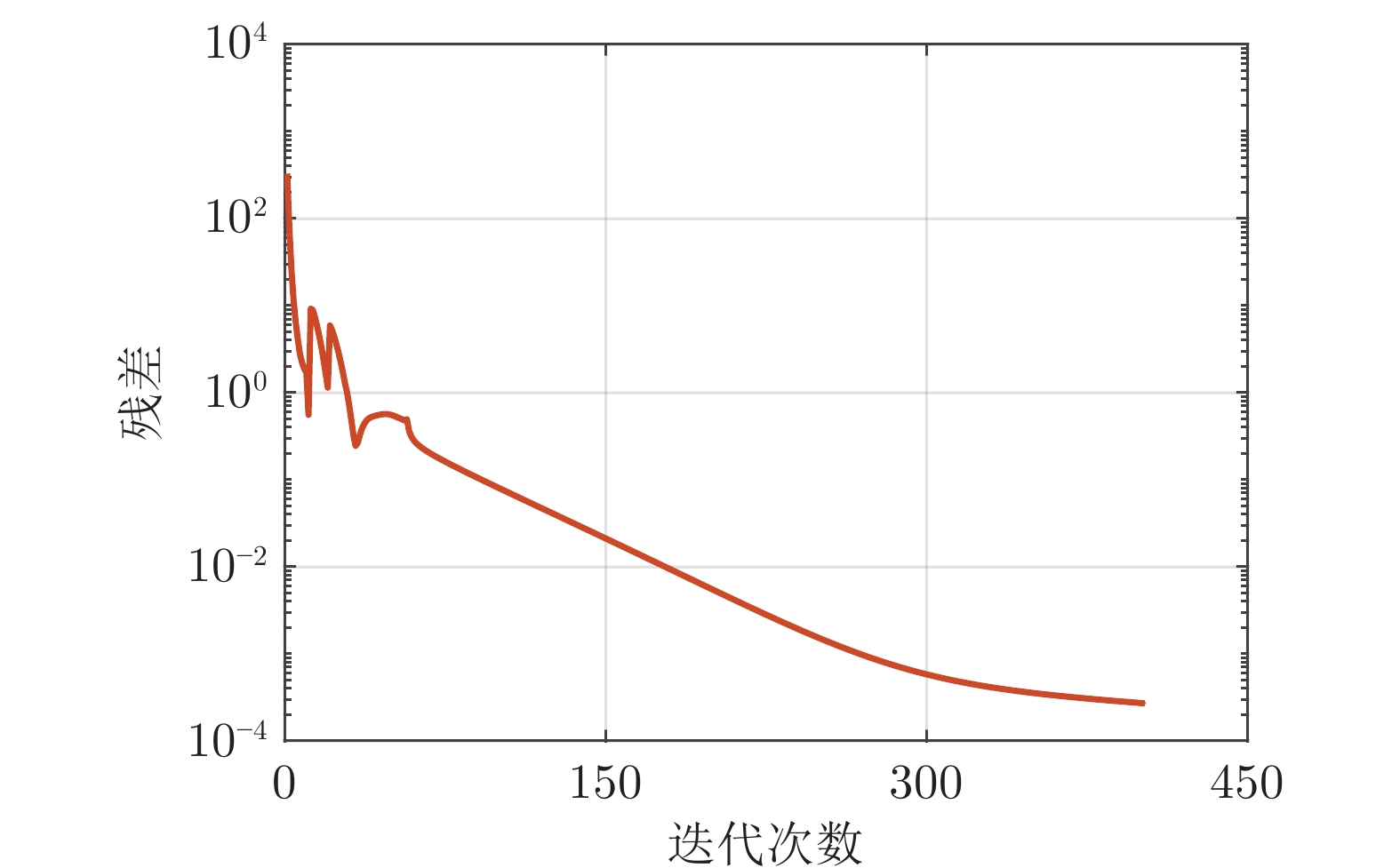
分布式电力市场交易模式可以有效缓解传统集中模式下市场主体的隐私安全等问题, 但难以在保障市场主体收益和电力系统安全稳定运行的同时实现社会福利最大化. 因此, 考虑电网线路传输约束, 首先以社会福利最大化为目标构建了集中式交易模型, 并采用拉格朗日乘子法和对偶理论将其等价分解为各市场主体自身利益最大化的分布式交易模型. 在此基础上, 设计了两种适用于不同场景的分布式交易方法, 并构造电网安全成本影响市场主体的决策, 从而保证电网线路传输安全. 最后, 基于算例分析验证了两种方法的有效性.
分布式电力市场交易模式可以有效缓解传统集中模式下市场主体的隐私安全等问题, 但难以在保障市场主体收益和电力系统安全稳定运行的同时实现社会福利最大化. 因此, 考虑电网线路传输约束, 首先以社会福利最大化为目标构建了集中式交易模型, 并采用拉格朗日乘子法和对偶理论将其等价分解为各市场主体自身利益最大化的分布式交易模型. 在此基础上, 设计了两种适用于不同场景的分布式交易方法, 并构造电网安全成本影响市场主体的决策, 从而保证电网线路传输安全. 最后, 基于算例分析验证了两种方法的有效性.





当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210577
摘要:
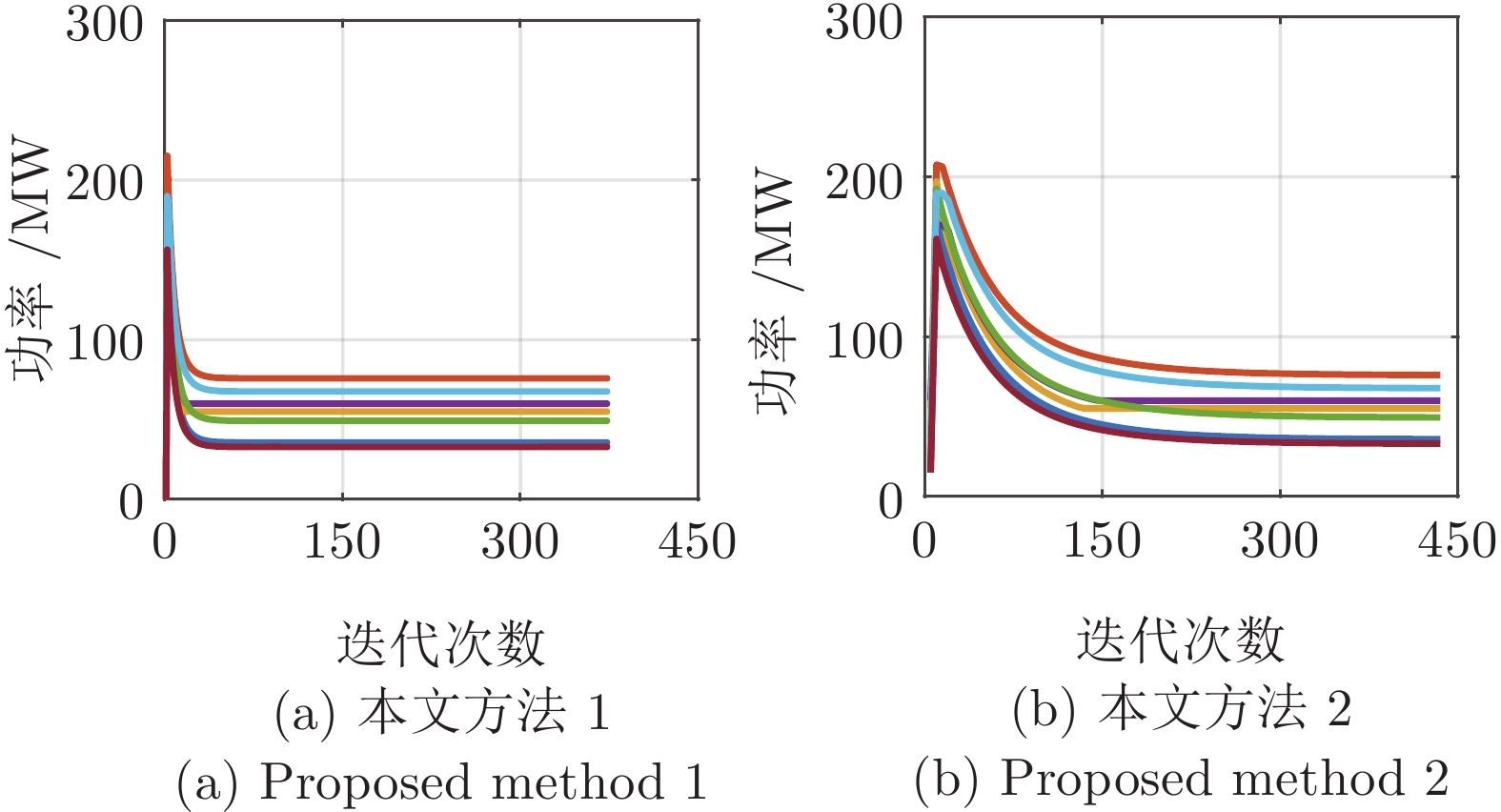
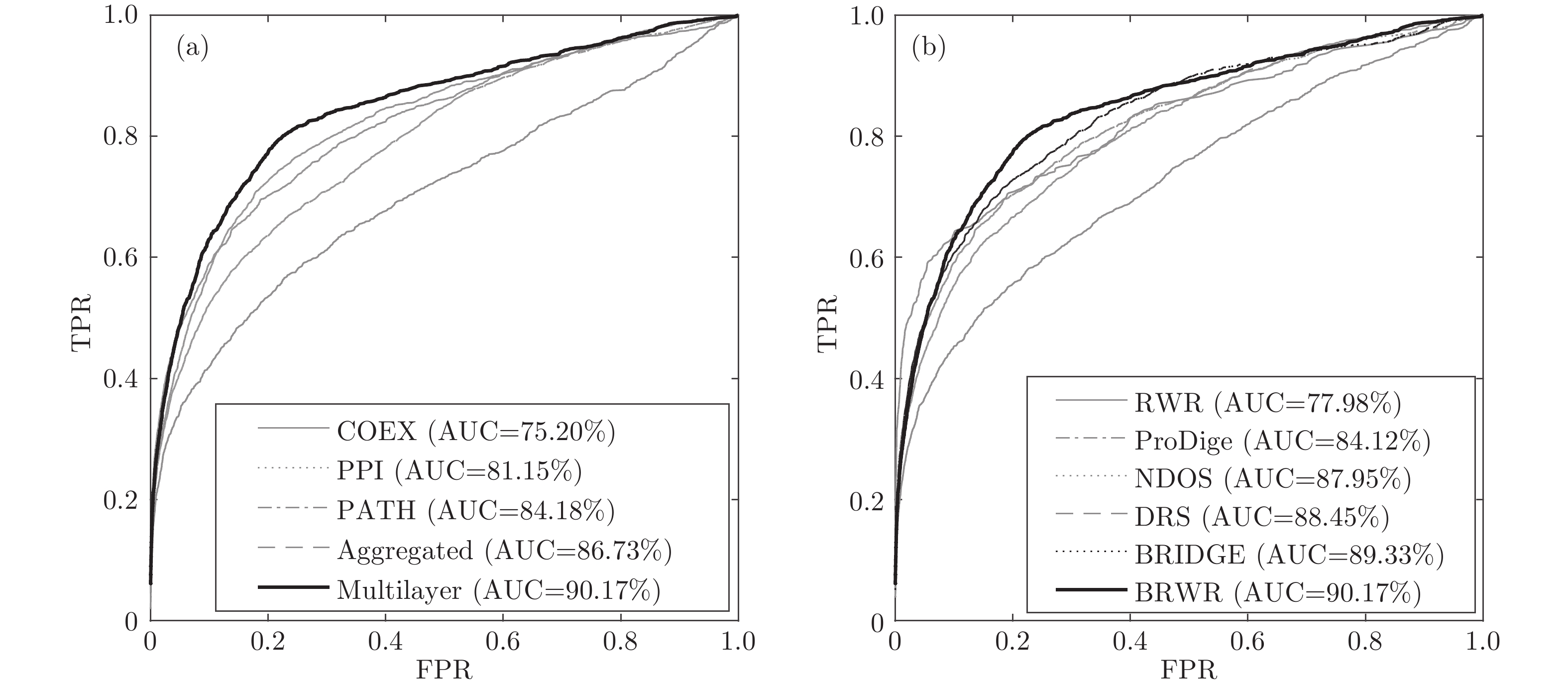
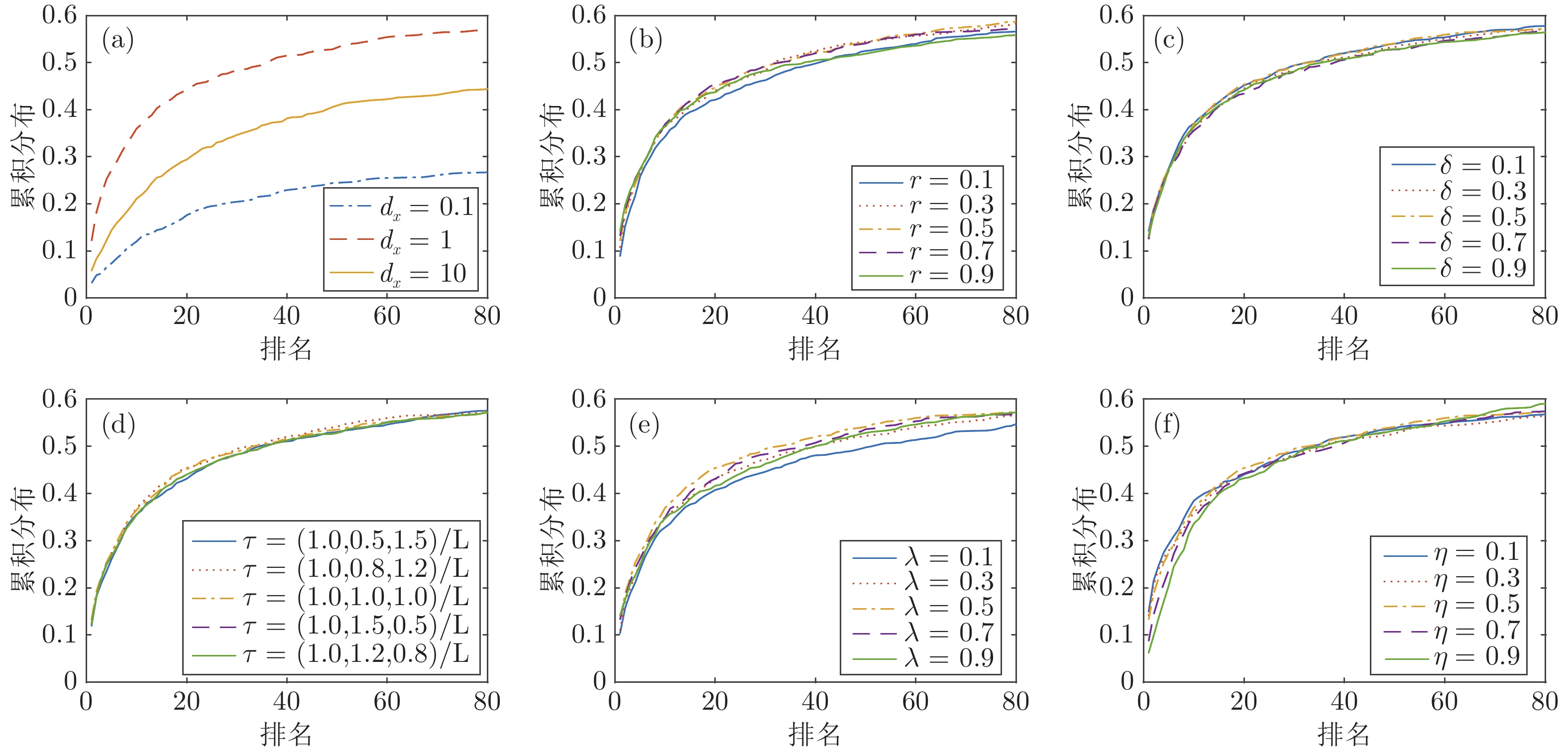
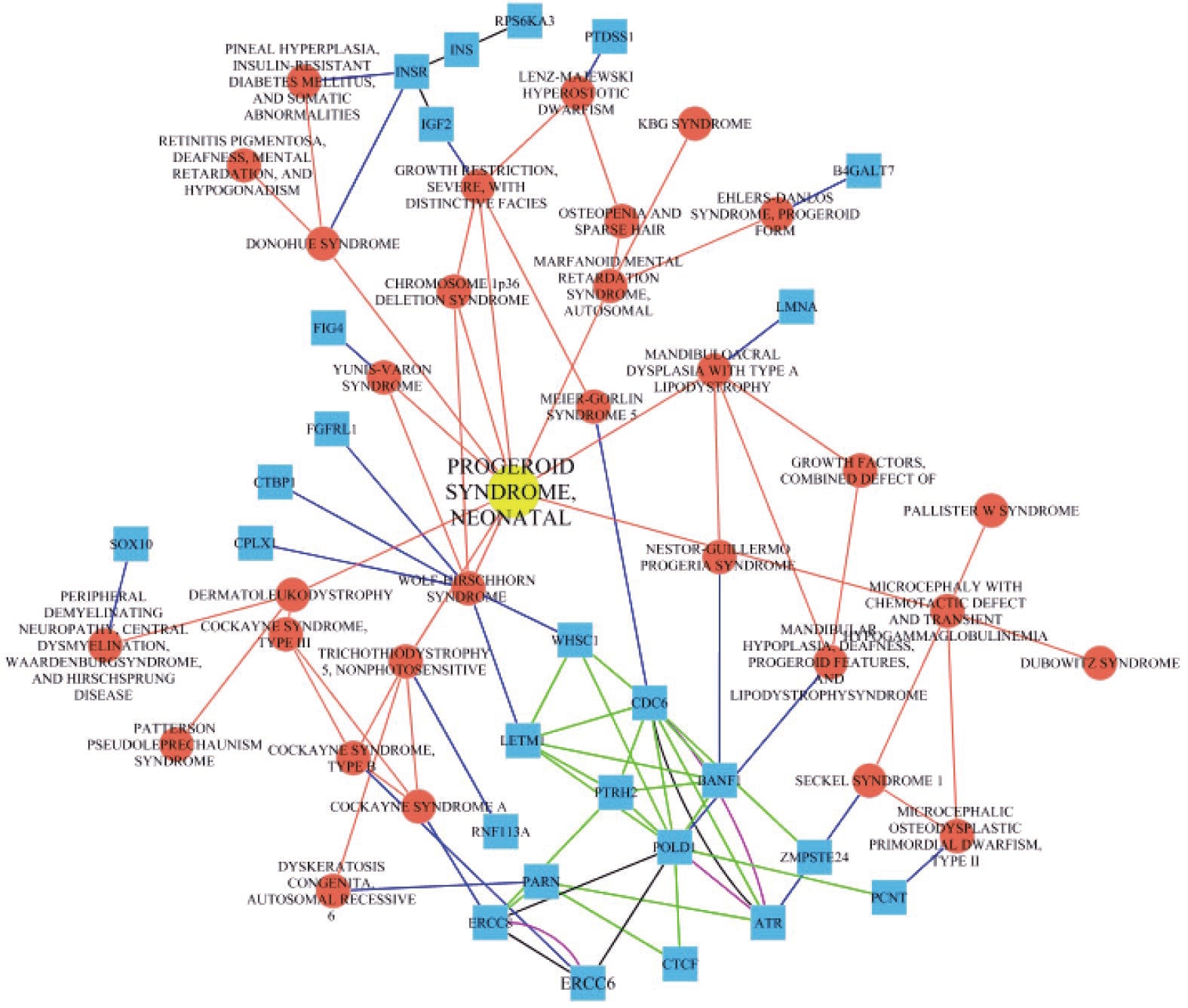
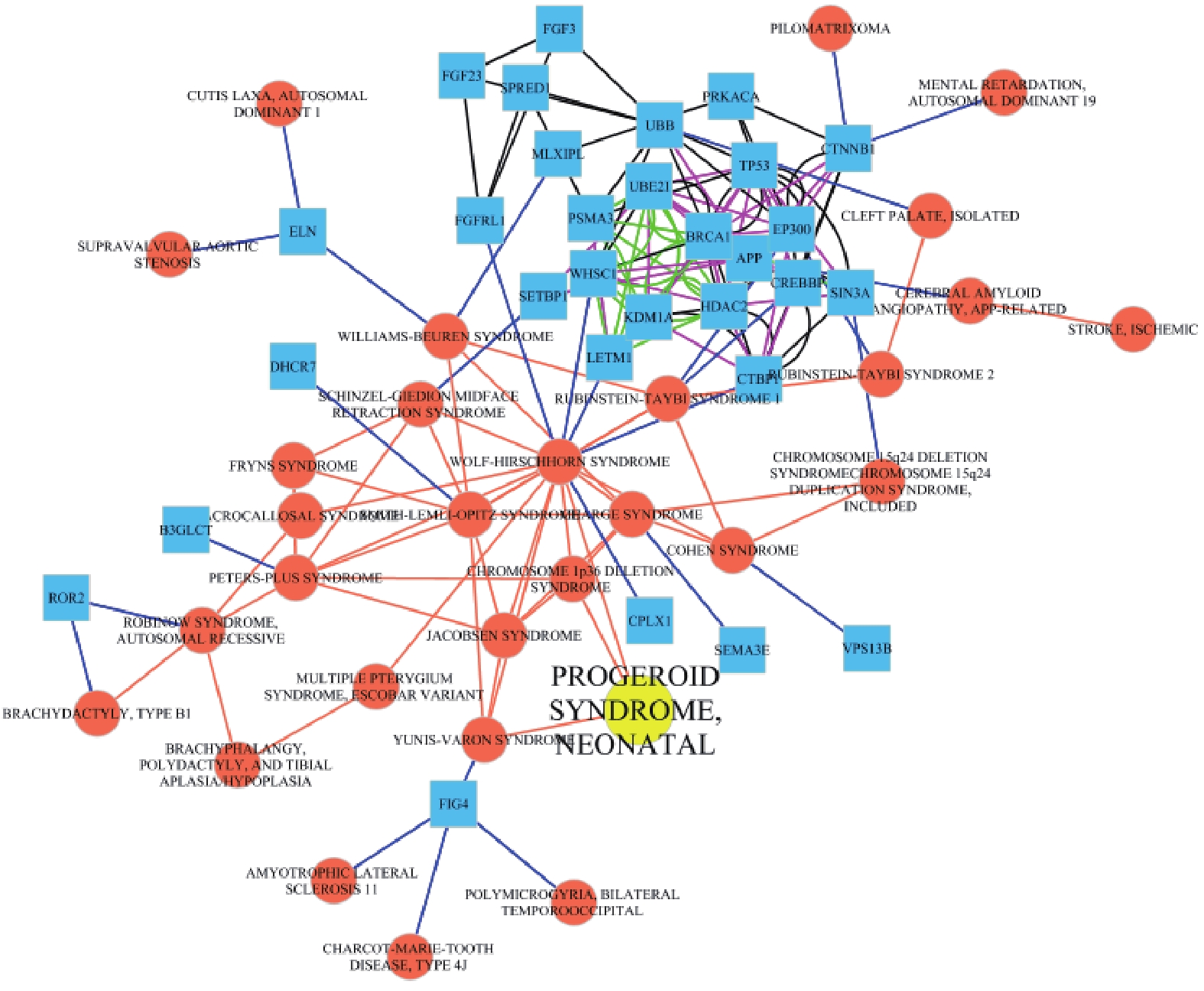
现有大多数用于识别候选疾病基因的随机游走方法通常优先访问高度连接的基因, 而可能与已知疾病有关的不知名或连接性差的基因易被忽略或难以识别. 此外, 这些方法仅访问单个基因网络或各种基因数据的聚合网络, 导致偏差和不完整性. 因此, 设计一种能控制随机游走运动方向和整合多种数据源的候选疾病基因识别方法将是一个迫切需要解决的问题. 为此, 本文首先构建多层网络和多层异构基因网络. 然后, 提出了一种游走于多层和多层异构网络的拓扑偏置随机游走(Biased random walk with restart, BRWR)算法来识别疾病基因. 实验结果表明, 游走于不同类型网络上的识别候选疾病基因的BRWR算法优于现有的算法. 最后, 应用于多层异构网络上的BRWR算法能预测未诊断的新生儿类早衰综合征中涉及的疾病基因.
现有大多数用于识别候选疾病基因的随机游走方法通常优先访问高度连接的基因, 而可能与已知疾病有关的不知名或连接性差的基因易被忽略或难以识别. 此外, 这些方法仅访问单个基因网络或各种基因数据的聚合网络, 导致偏差和不完整性. 因此, 设计一种能控制随机游走运动方向和整合多种数据源的候选疾病基因识别方法将是一个迫切需要解决的问题. 为此, 本文首先构建多层网络和多层异构基因网络. 然后, 提出了一种游走于多层和多层异构网络的拓扑偏置随机游走(Biased random walk with restart, BRWR)算法来识别疾病基因. 实验结果表明, 游走于不同类型网络上的识别候选疾病基因的BRWR算法优于现有的算法. 最后, 应用于多层异构网络上的BRWR算法能预测未诊断的新生儿类早衰综合征中涉及的疾病基因.






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210925
摘要:
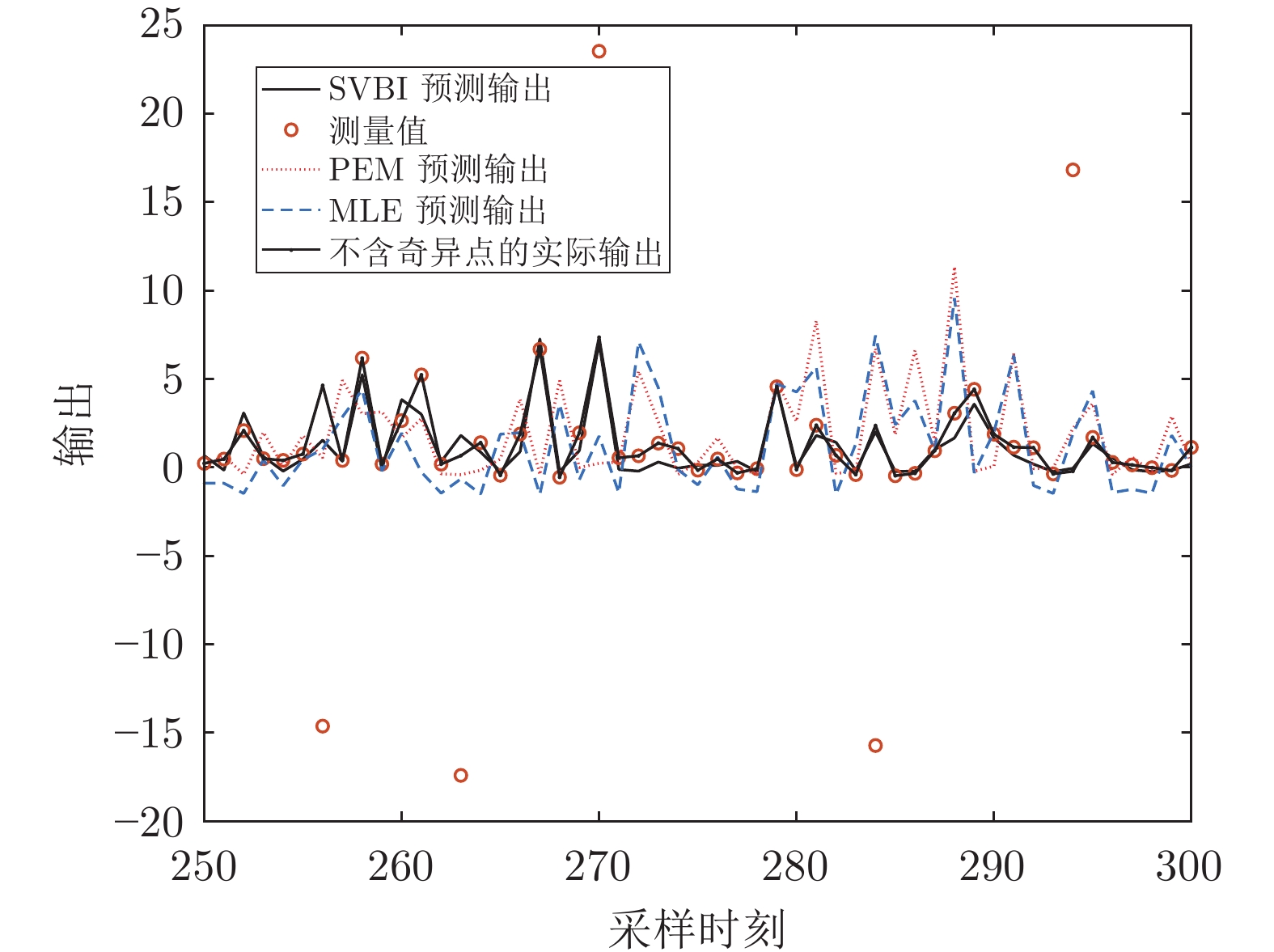
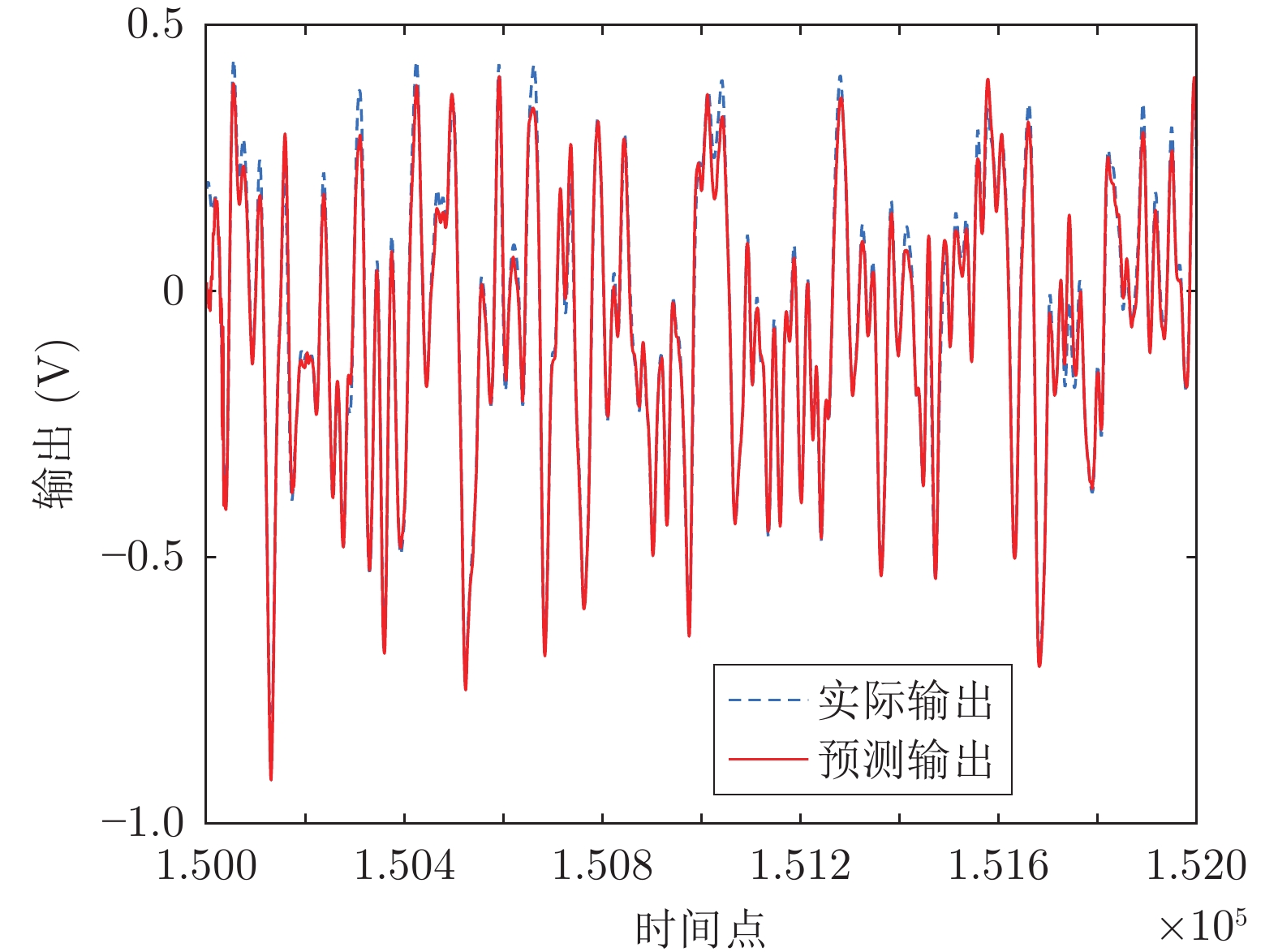
多重不确定性环境下的非线性系统辨识是一个开放问题.贝叶斯学习在描述、处理不确定性方面具有显著优势, 已在线性系统辨识方面得到广泛应用, 但在非线性系统辨识的应用较少, 面临概率估计复杂、计算量大等困难.本文针对上述问题, 以典型维纳非线性过程为对象, 提出基于随机变分贝叶斯的非线性系统辨识方法.首先对过程噪声、测量噪声以及参数不确定性进行概率描述;然后利用随机变分贝叶斯方法对模型参数进行后验估计.在估计过程中, 利用随机优化思想, 仅利用部分中间变量概率信息估计模型参数分布的自然梯度期望, 与利用所有中间变量概率信息估计模型参数比较, 显著降低了计算复杂性.该方法是首次在系统辨识领域中的应用.本文利用一个仿真实例和一个维纳模型的Benchmark问题, 证明了该方法在对大规模数据系统辨识时的有效性.
多重不确定性环境下的非线性系统辨识是一个开放问题.贝叶斯学习在描述、处理不确定性方面具有显著优势, 已在线性系统辨识方面得到广泛应用, 但在非线性系统辨识的应用较少, 面临概率估计复杂、计算量大等困难.本文针对上述问题, 以典型维纳非线性过程为对象, 提出基于随机变分贝叶斯的非线性系统辨识方法.首先对过程噪声、测量噪声以及参数不确定性进行概率描述;然后利用随机变分贝叶斯方法对模型参数进行后验估计.在估计过程中, 利用随机优化思想, 仅利用部分中间变量概率信息估计模型参数分布的自然梯度期望, 与利用所有中间变量概率信息估计模型参数比较, 显著降低了计算复杂性.该方法是首次在系统辨识领域中的应用.本文利用一个仿真实例和一个维纳模型的Benchmark问题, 证明了该方法在对大规模数据系统辨识时的有效性.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210223
摘要:
现实生活中的很多黑盒优化问题可归为高计算代价的多模态优化问题, 即昂贵多模态优化问题. 在处理该类问题时, 决策者希望以尽量少的计算代价(即尽量少的真实函数评价次数)找到多个高质量的最优解. 然而, 已有代理辅助的进化优化算法很少考虑问题的多模态属性, 运行一次仅可获得问题的一个最优解. 鉴于此, 研究一种异构集成代理辅助的区间多模态粒子群优化算法. 首先, 借助异构集成的思想构建一个由多个基础代理模型组成的模型池; 随后, 依据待评价粒子与已发现模态之间的匹配关系, 从模型池中自主选择部分基础代理模型进行集成, 并使用集成后的代理模型预测该粒子的适应值. 进一步, 为节约代理模型管理的代价, 设计一种增量式的代理模型管理策略; 为减少代理模型预测误差对算法性能的影响, 首次将区间排序关系引入到进化过程中. 将所提算法与当前流行的5种代理辅助进化优化算法和7 种经典的多模态优化算法进行对比, 在20个测试函数和1个建筑节能实际问题上的结果表明, 所提算法可以在较少计算代价下获得问题的多个高竞争最优解.
现实生活中的很多黑盒优化问题可归为高计算代价的多模态优化问题, 即昂贵多模态优化问题. 在处理该类问题时, 决策者希望以尽量少的计算代价(即尽量少的真实函数评价次数)找到多个高质量的最优解. 然而, 已有代理辅助的进化优化算法很少考虑问题的多模态属性, 运行一次仅可获得问题的一个最优解. 鉴于此, 研究一种异构集成代理辅助的区间多模态粒子群优化算法. 首先, 借助异构集成的思想构建一个由多个基础代理模型组成的模型池; 随后, 依据待评价粒子与已发现模态之间的匹配关系, 从模型池中自主选择部分基础代理模型进行集成, 并使用集成后的代理模型预测该粒子的适应值. 进一步, 为节约代理模型管理的代价, 设计一种增量式的代理模型管理策略; 为减少代理模型预测误差对算法性能的影响, 首次将区间排序关系引入到进化过程中. 将所提算法与当前流行的5种代理辅助进化优化算法和7 种经典的多模态优化算法进行对比, 在20个测试函数和1个建筑节能实际问题上的结果表明, 所提算法可以在较少计算代价下获得问题的多个高竞争最优解.



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210303
摘要:
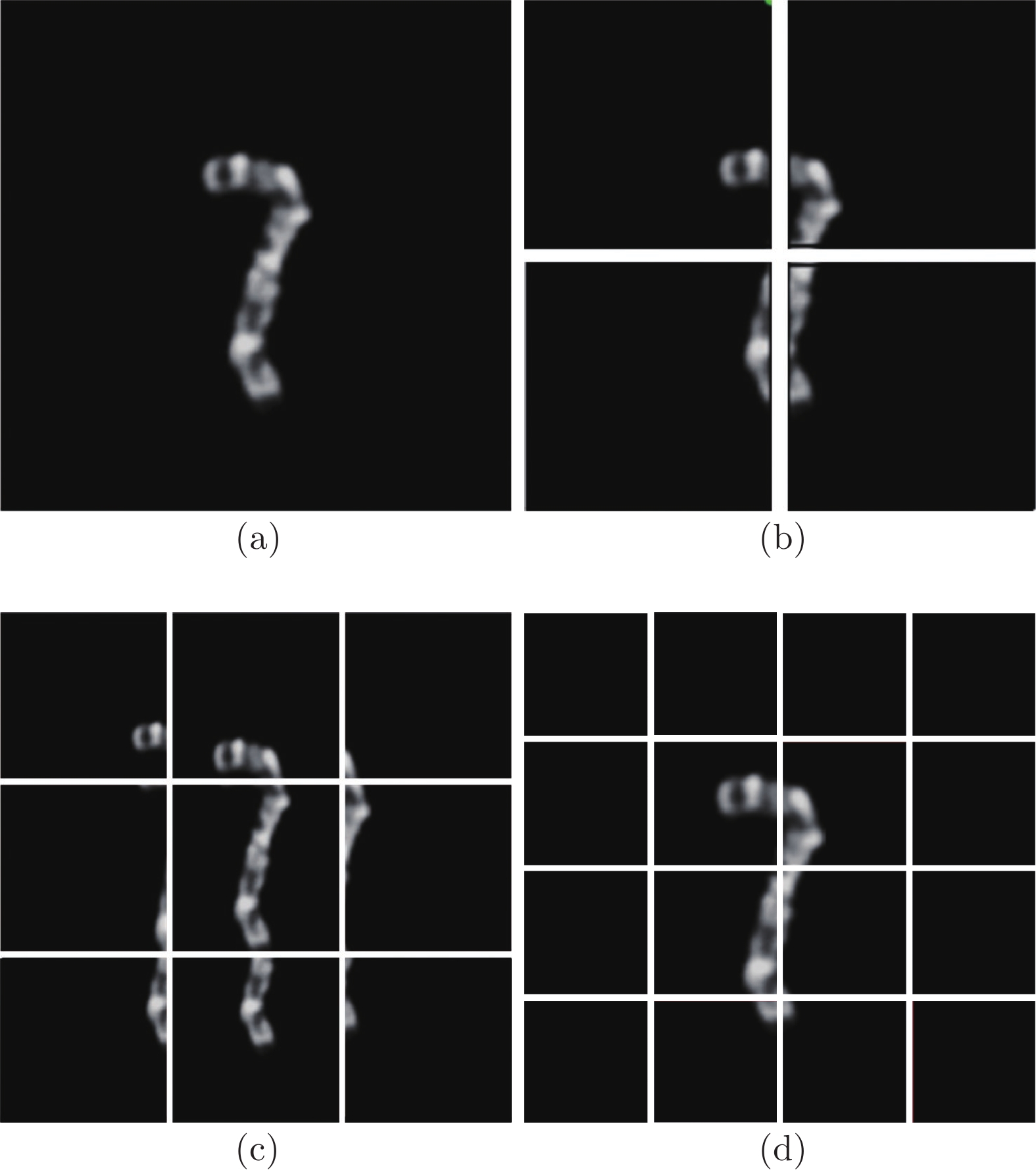
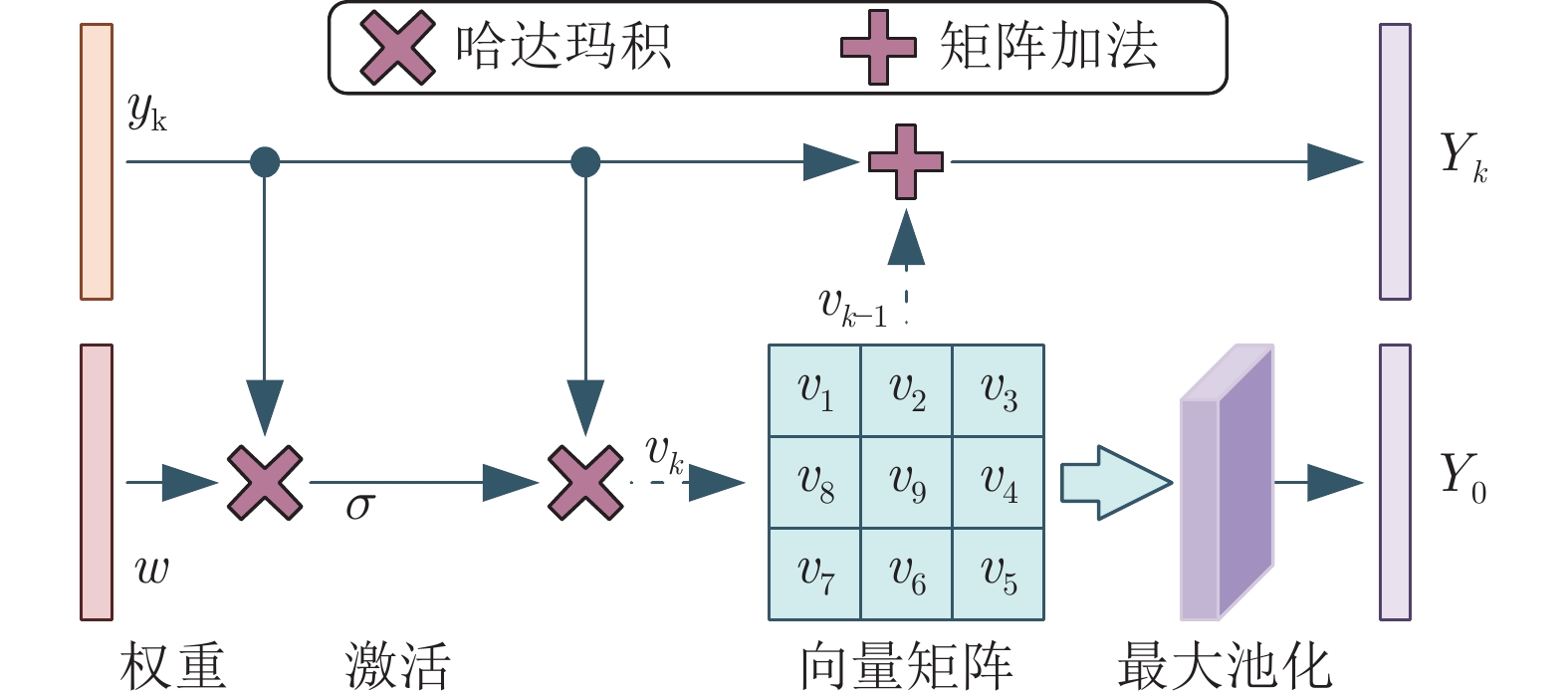
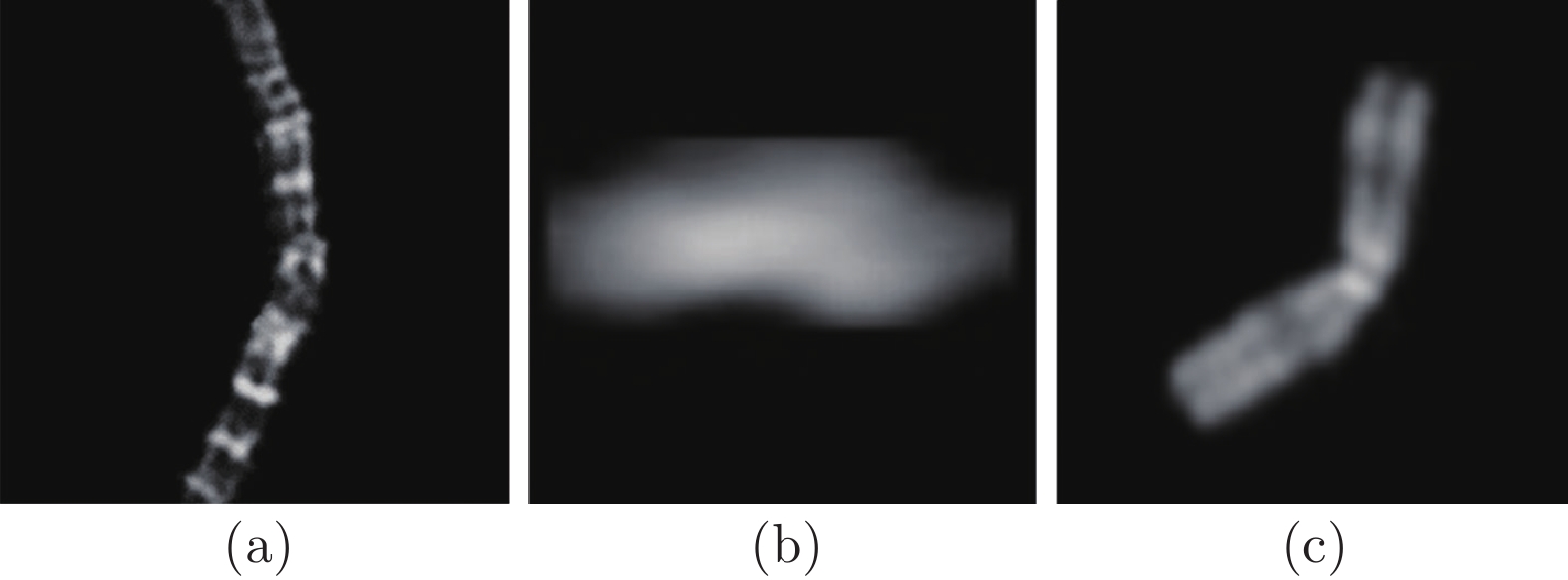
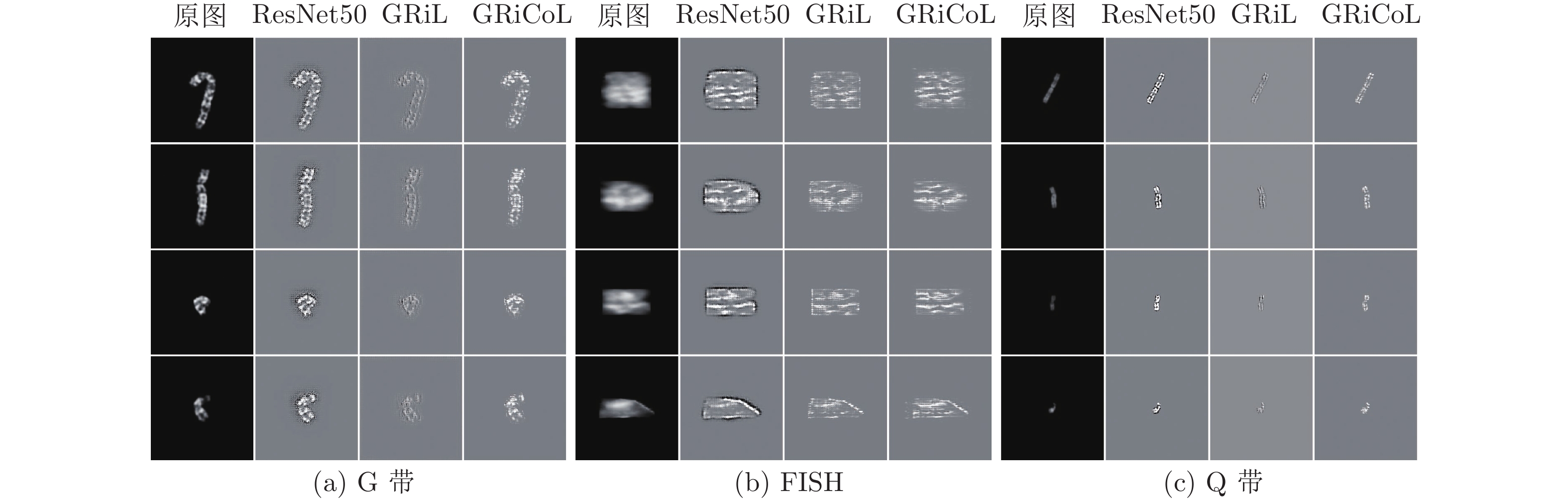
染色体的分类识别是核型分析的重要任务之一. 因其柔软易弯曲, 且类间差异小、类内差异大等特点, 其精准分类已成为挑战性难题. 本文提出基于网格重构学习(GRid reConstruction learning, GRiCoL)的染色体分类模型. 该模型首先将染色体图像网格化, 提取局部分类特征; 再通过重构网络对全局特征进行二次提取, 最后完成分类. 相比于现有几种方法, GRiCoL同时兼顾局部和全局特征提取更有效的分类特征, 有效改善染色体弯曲导致的分类性能下降, 参数规模合理. 通过基于G带、荧光原位杂交、Q带染色体公开数据集的实验表明: GRiCoL能够更好地弱化染色体弯曲带来的影响, 在不同数据集上的分类准确度均优于现有分类方法.
染色体的分类识别是核型分析的重要任务之一. 因其柔软易弯曲, 且类间差异小、类内差异大等特点, 其精准分类已成为挑战性难题. 本文提出基于网格重构学习(GRid reConstruction learning, GRiCoL)的染色体分类模型. 该模型首先将染色体图像网格化, 提取局部分类特征; 再通过重构网络对全局特征进行二次提取, 最后完成分类. 相比于现有几种方法, GRiCoL同时兼顾局部和全局特征提取更有效的分类特征, 有效改善染色体弯曲导致的分类性能下降, 参数规模合理. 通过基于G带、荧光原位杂交、Q带染色体公开数据集的实验表明: GRiCoL能够更好地弱化染色体弯曲带来的影响, 在不同数据集上的分类准确度均优于现有分类方法.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210654
摘要:
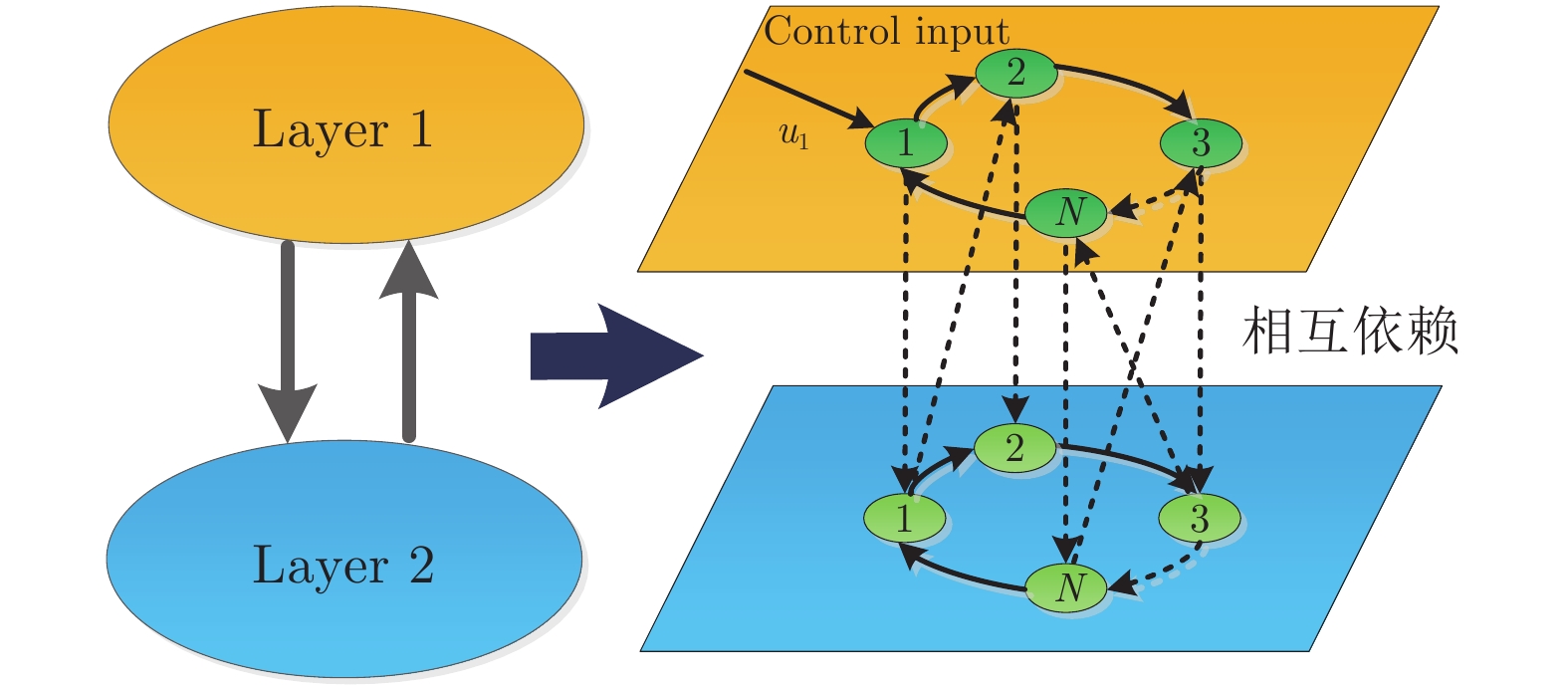
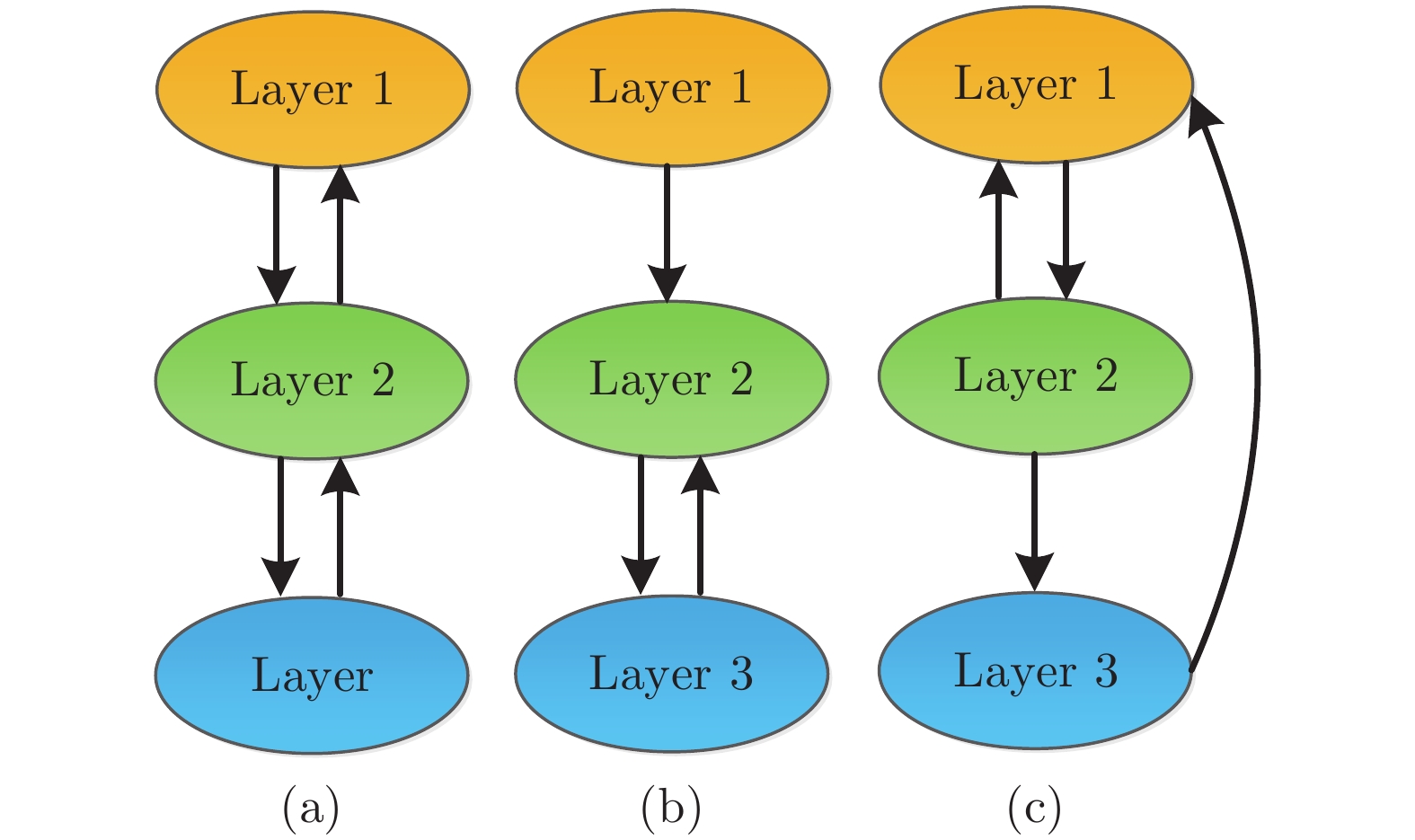
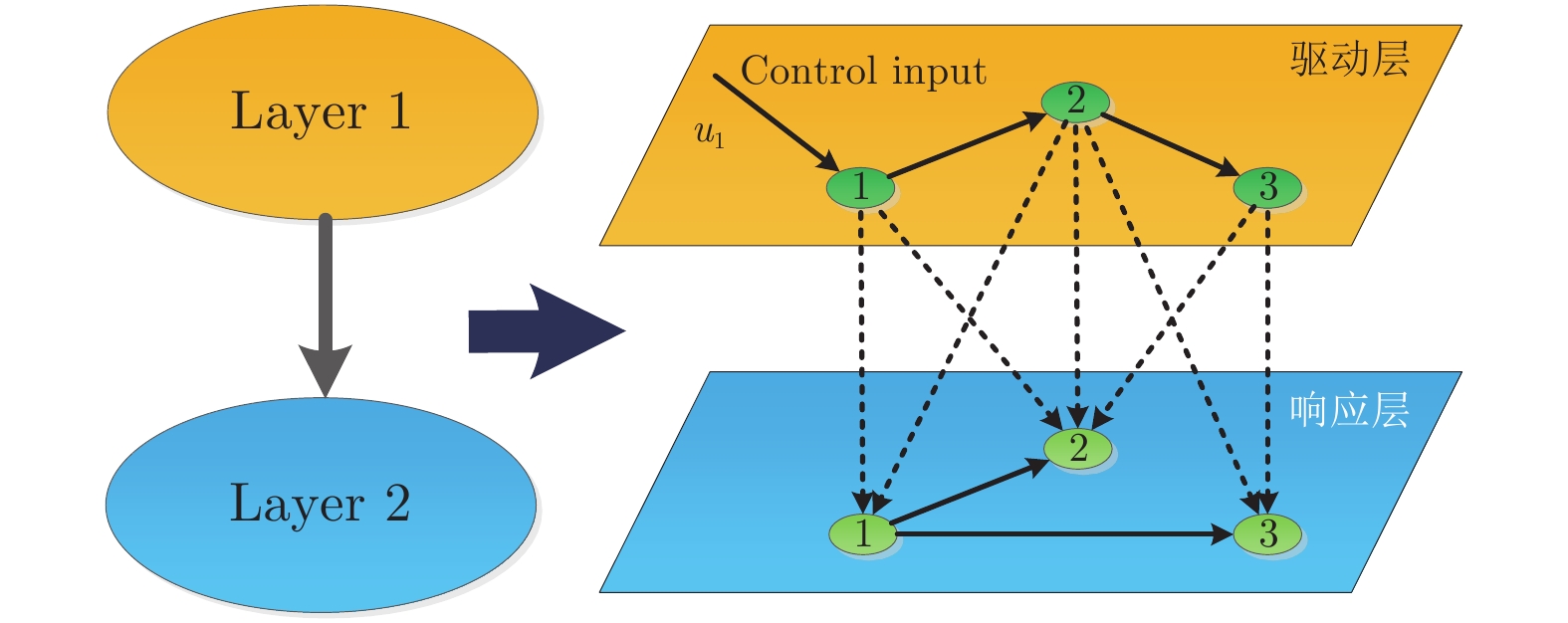
本文研究了节点状态为高维的多层复杂网络系统的能控性问题. 讨论了节点的异质性、层间耦合、层内耦合对网络能控性的影响. 发现当节点状态由同质变为异质, 内耦合矩阵由相同变为不同, 对网络能控性均有影响(网络既可由能控变为不能控, 又可由不能控变为能控); 对层间耦合模式为驱动响应模式和相互依赖模式, 分别给出了网络系统能控的充分条件或必要条件. 相比于直接应用经典的能控性判据, 这些条件更易于验证, 且驱动响应模式比相互依赖模式实现系统完全能控所需的条件更弱.
本文研究了节点状态为高维的多层复杂网络系统的能控性问题. 讨论了节点的异质性、层间耦合、层内耦合对网络能控性的影响. 发现当节点状态由同质变为异质, 内耦合矩阵由相同变为不同, 对网络能控性均有影响(网络既可由能控变为不能控, 又可由不能控变为能控); 对层间耦合模式为驱动响应模式和相互依赖模式, 分别给出了网络系统能控的充分条件或必要条件. 相比于直接应用经典的能控性判据, 这些条件更易于验证, 且驱动响应模式比相互依赖模式实现系统完全能控所需的条件更弱.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210457
摘要:
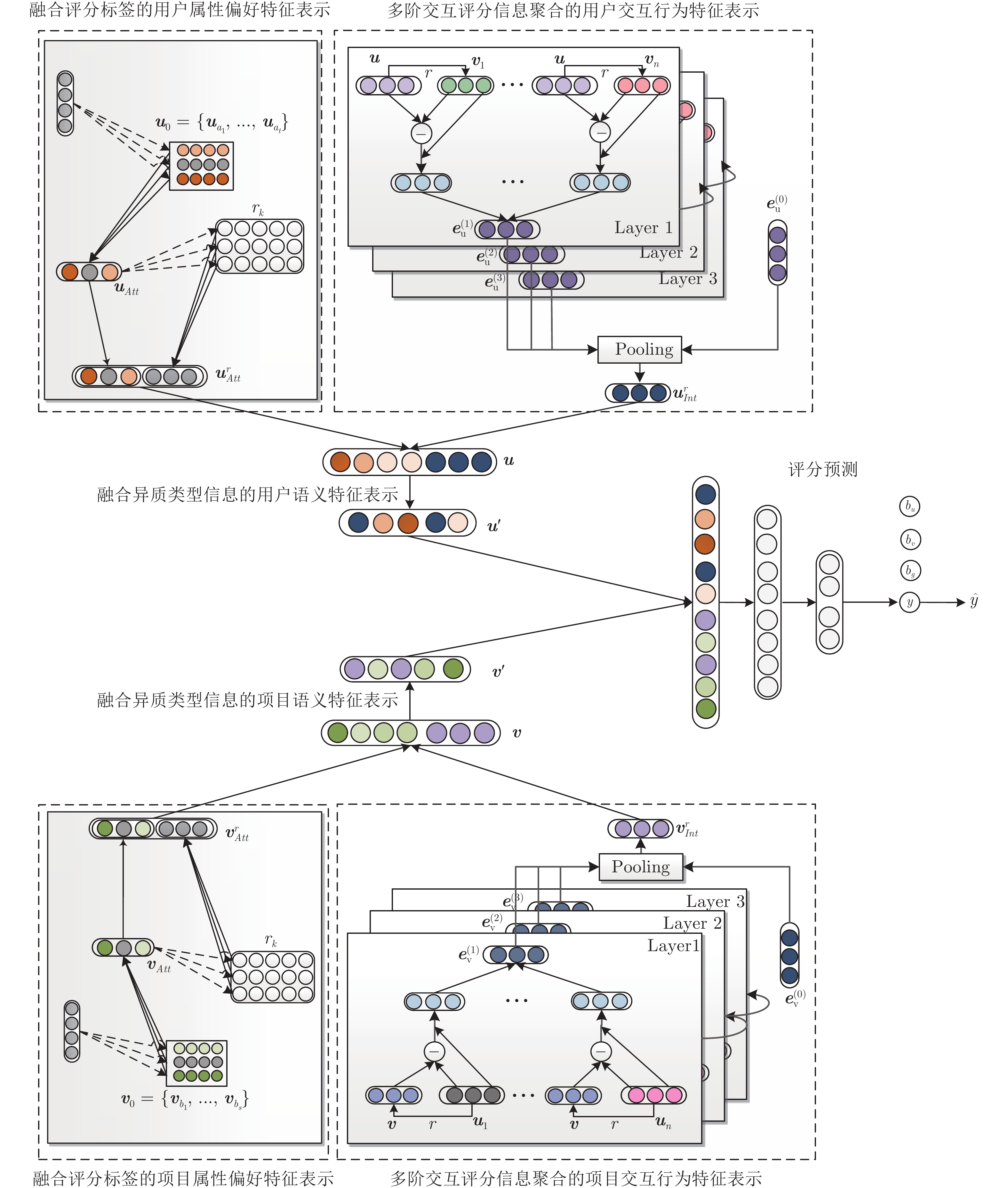
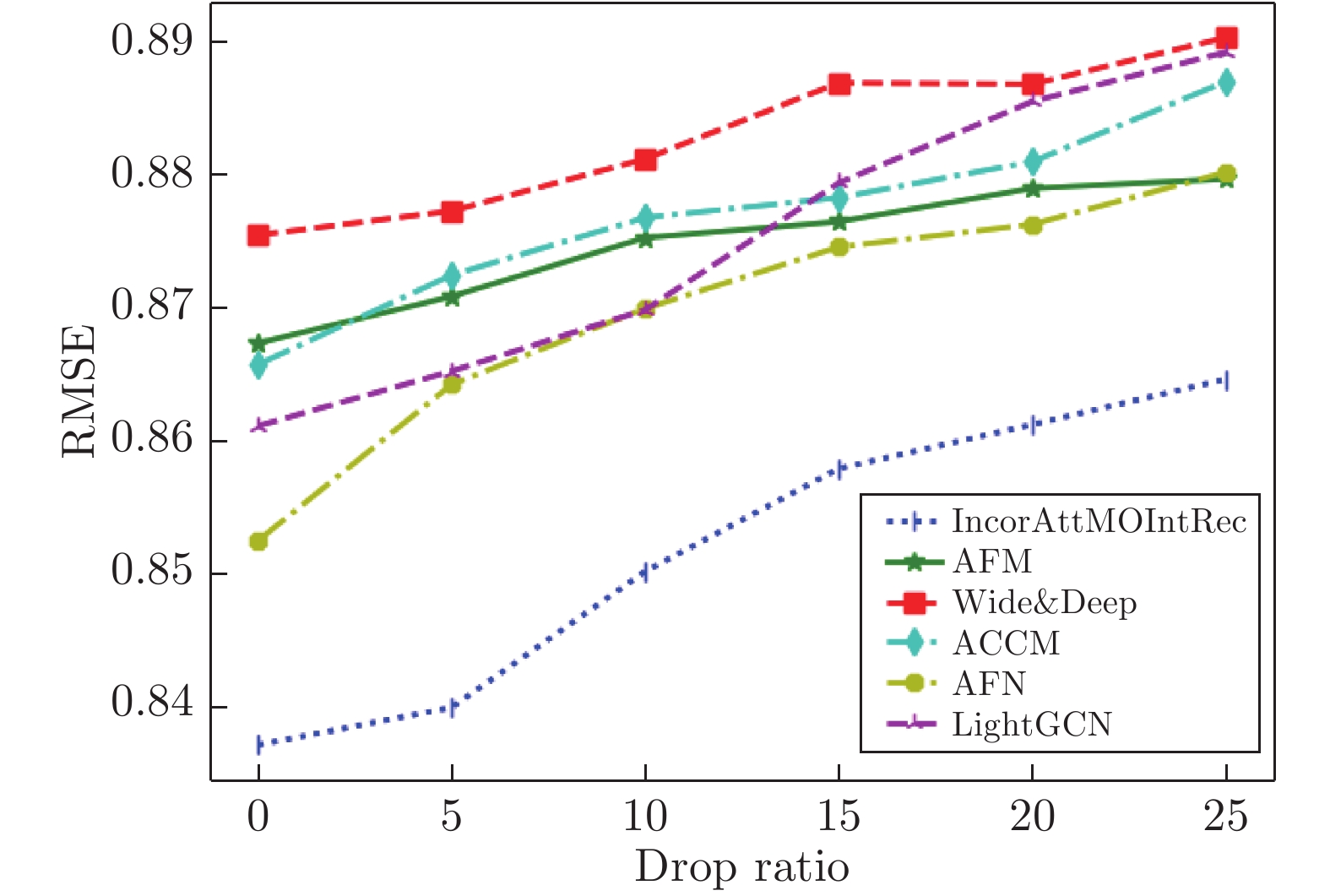
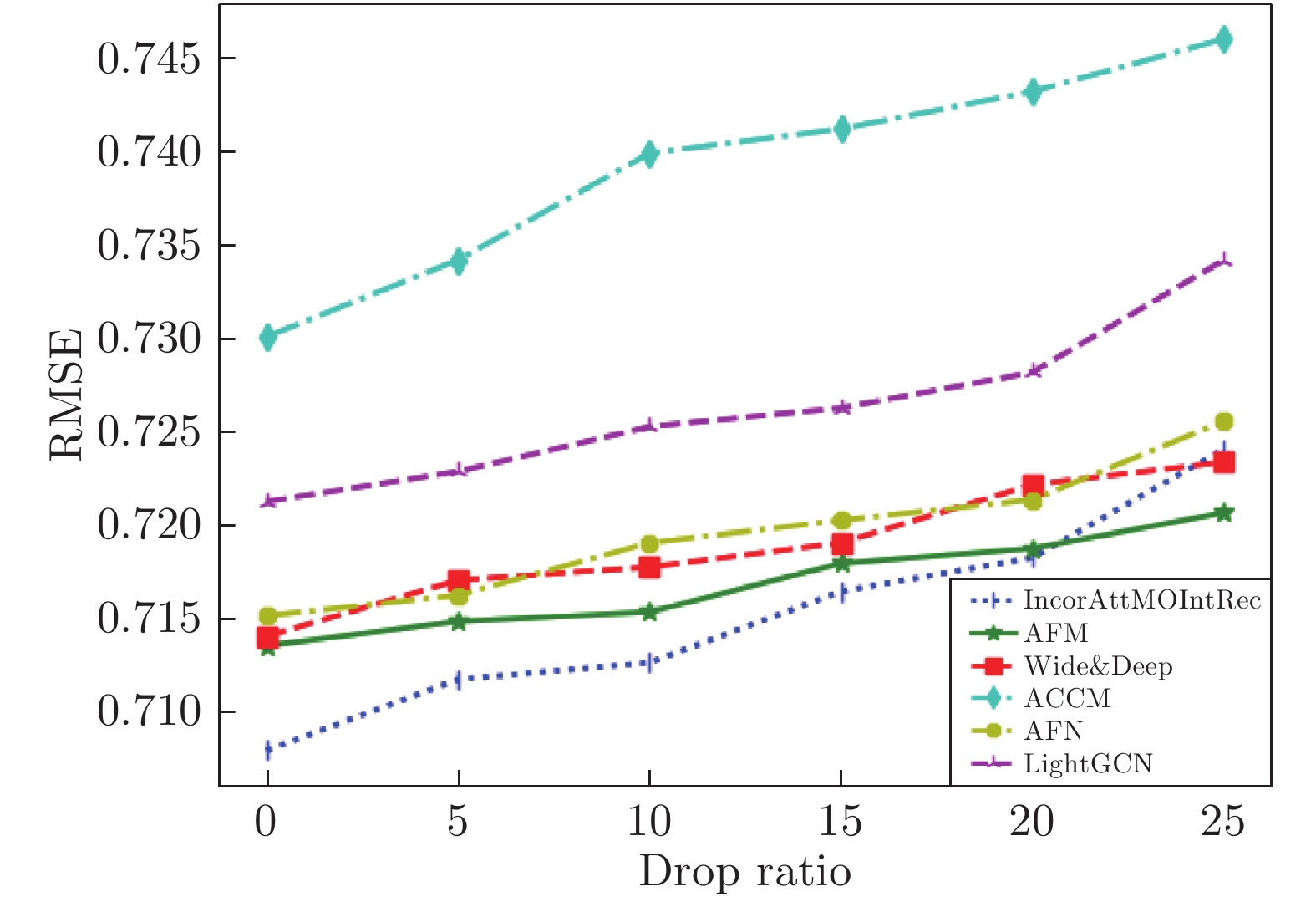
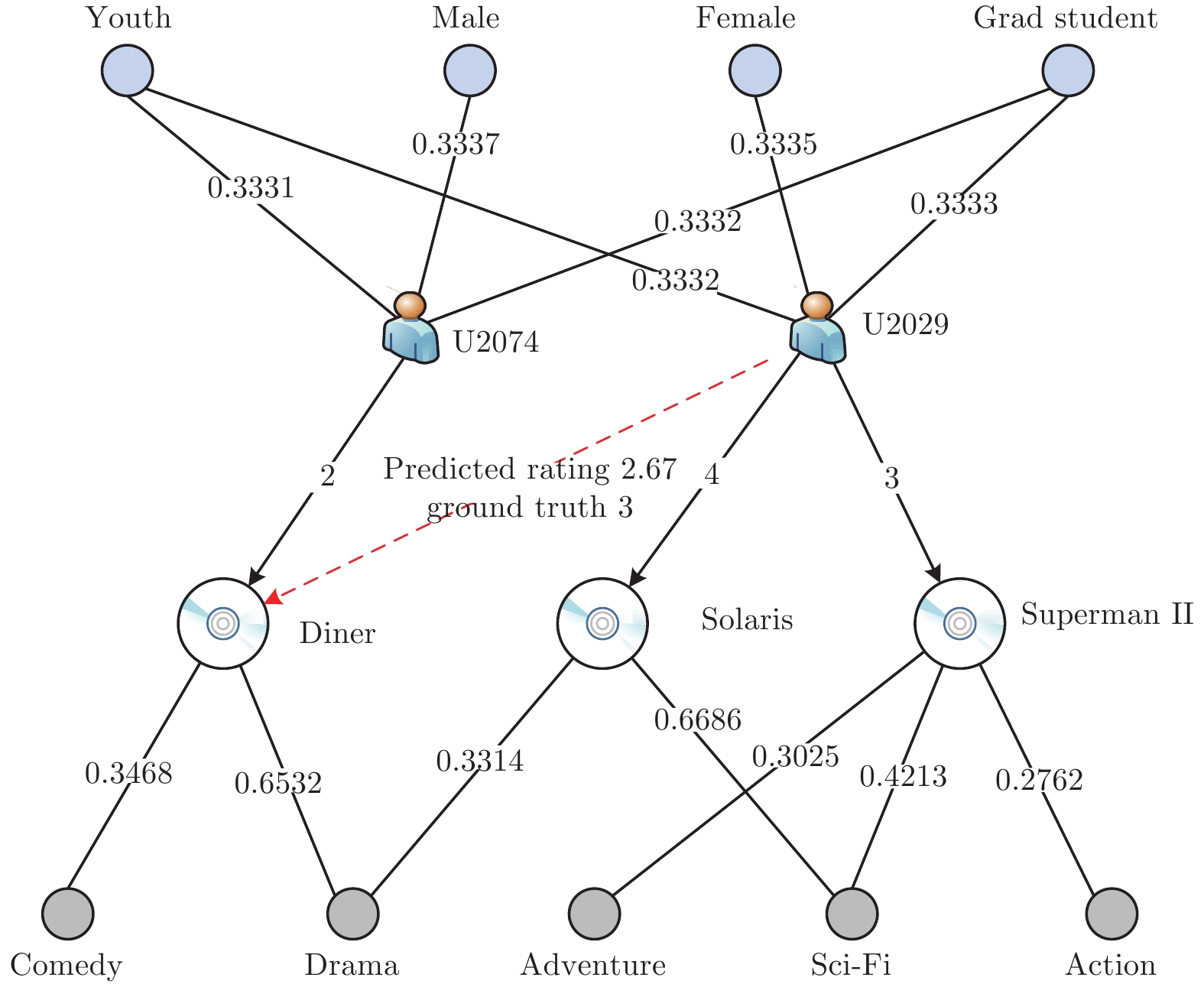
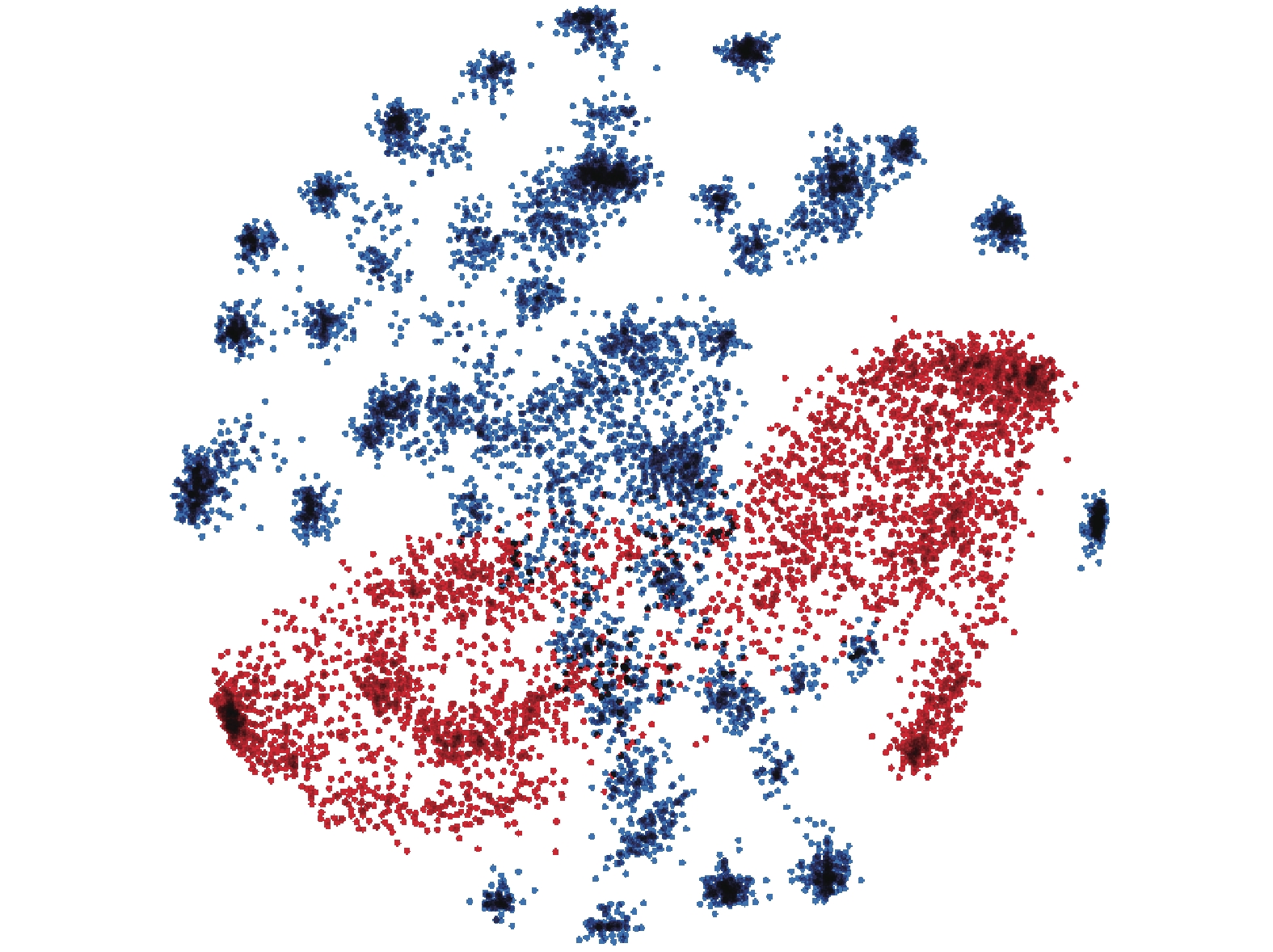
已有推荐系统主要基于用户-项目交互矩阵来学习用户和项目的向量表示, 而当交互矩阵稀疏时, 推荐系统的精度较低, 推荐的结果缺乏可解释性. 本文考虑了用户-项目交互行为中的评分标签信息, 提出了一种融合属性偏好和多阶交互信息的可解释评分预测方法, 并根据属性偏好对推荐结果进行了解释. 首先, 基于注意力机制分析了用户和项目属性信息与评分标签的关系, 建模了节点的属性偏好特征表示; 然后, 聚合了用户-项目交互矩阵中节点自身、交互邻居和评分标签信息, 通过图神经网络学习了节点的多阶交互行为特征表示; 最后, 融合了节点的属性偏好特征和交互行为特征, 在异质类型信息空间下学习了用户和项目的语义特征表示, 利用多层感知机实现了评分预测, 并在MovieLens和Douban数据集上验证了方法的有效性. 实验结果表明, 本文方法在MAE和RMSE指标上有效提高了推荐系统的精度, 缓解了数据稀疏场景下推荐模型性能较低的问题, 提升了推荐结果的可解释性.
已有推荐系统主要基于用户-项目交互矩阵来学习用户和项目的向量表示, 而当交互矩阵稀疏时, 推荐系统的精度较低, 推荐的结果缺乏可解释性. 本文考虑了用户-项目交互行为中的评分标签信息, 提出了一种融合属性偏好和多阶交互信息的可解释评分预测方法, 并根据属性偏好对推荐结果进行了解释. 首先, 基于注意力机制分析了用户和项目属性信息与评分标签的关系, 建模了节点的属性偏好特征表示; 然后, 聚合了用户-项目交互矩阵中节点自身、交互邻居和评分标签信息, 通过图神经网络学习了节点的多阶交互行为特征表示; 最后, 融合了节点的属性偏好特征和交互行为特征, 在异质类型信息空间下学习了用户和项目的语义特征表示, 利用多层感知机实现了评分预测, 并在MovieLens和Douban数据集上验证了方法的有效性. 实验结果表明, 本文方法在MAE和RMSE指标上有效提高了推荐系统的精度, 缓解了数据稀疏场景下推荐模型性能较低的问题, 提升了推荐结果的可解释性.






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210673
摘要:
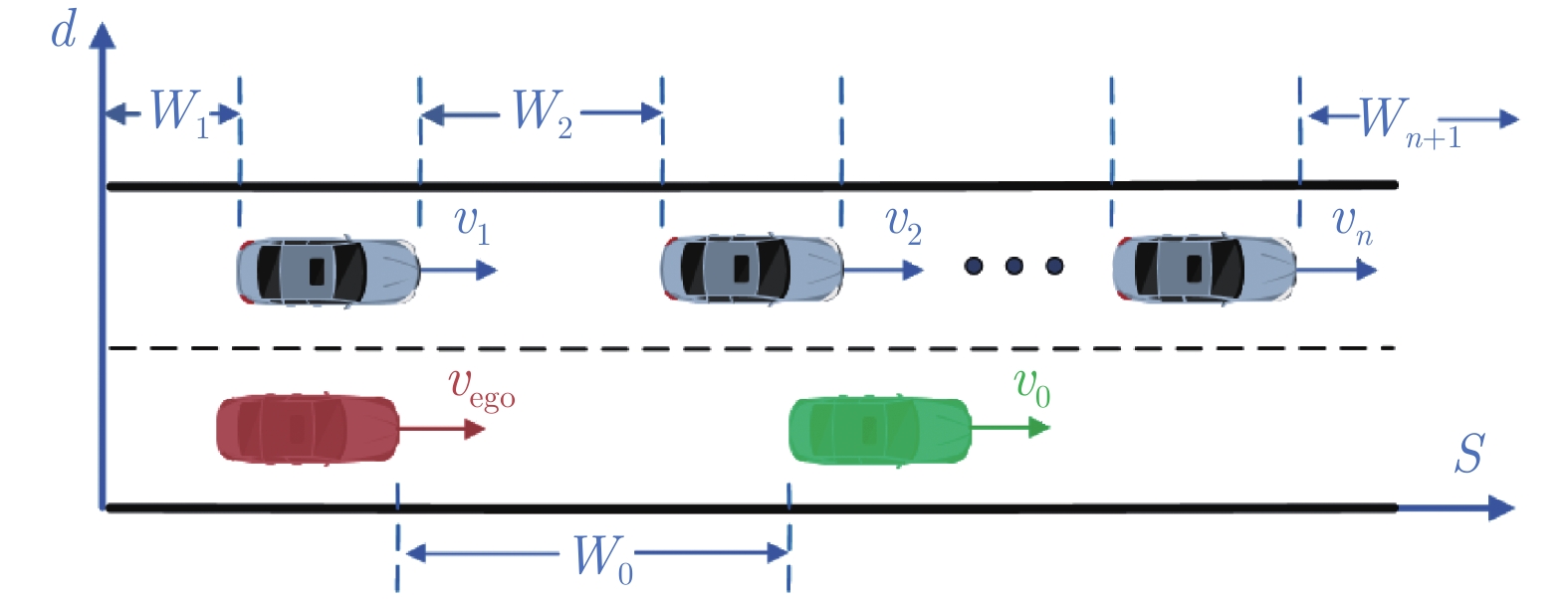
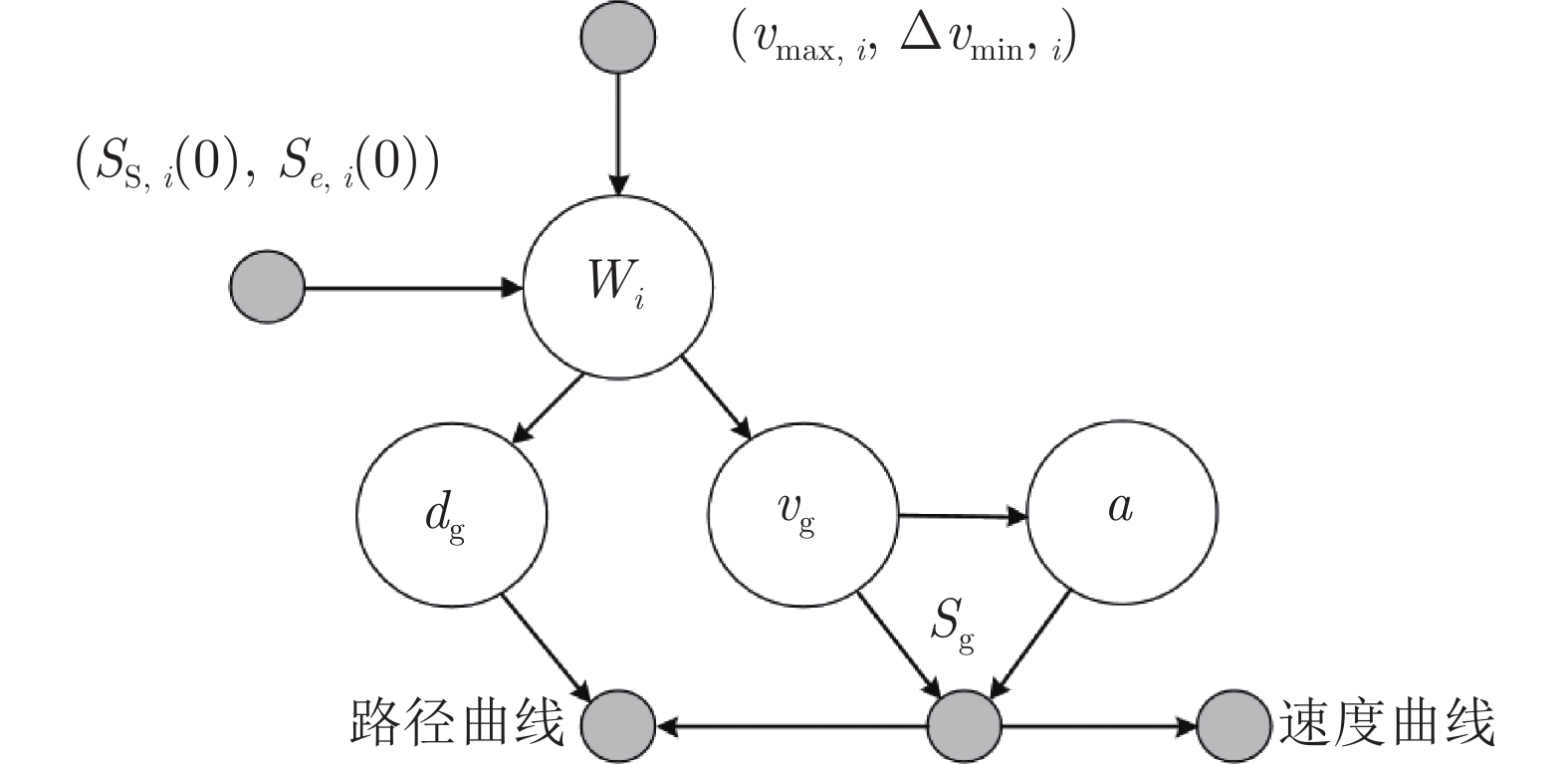
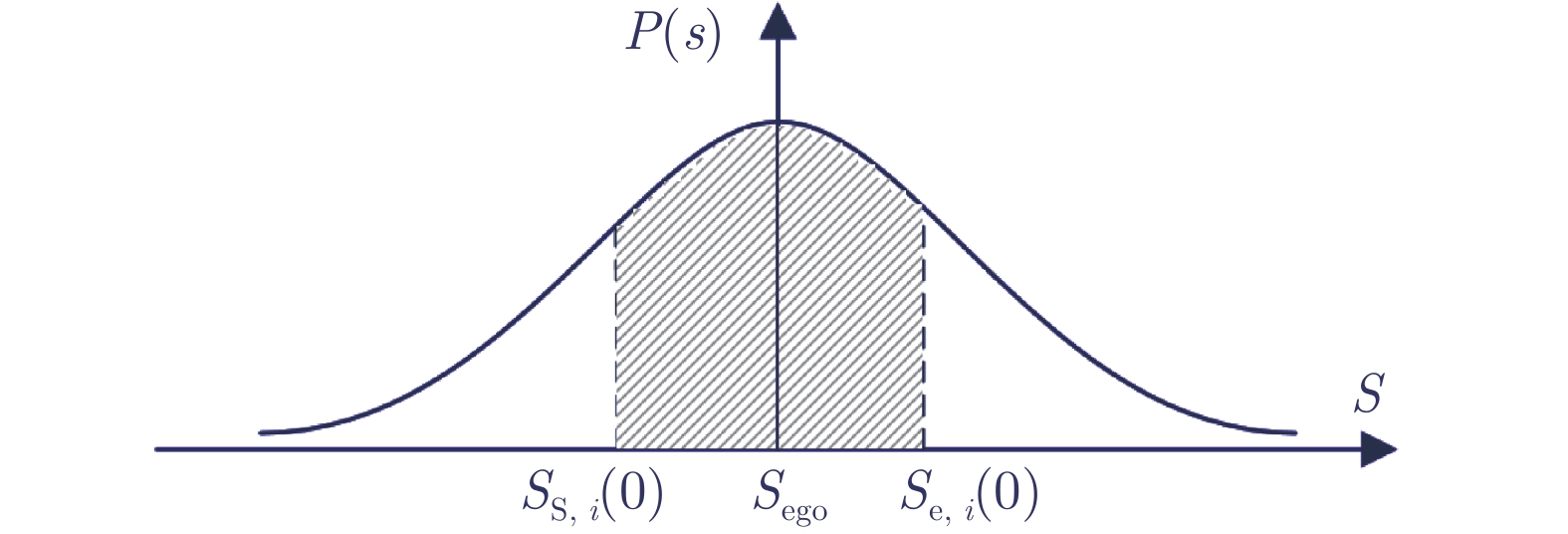
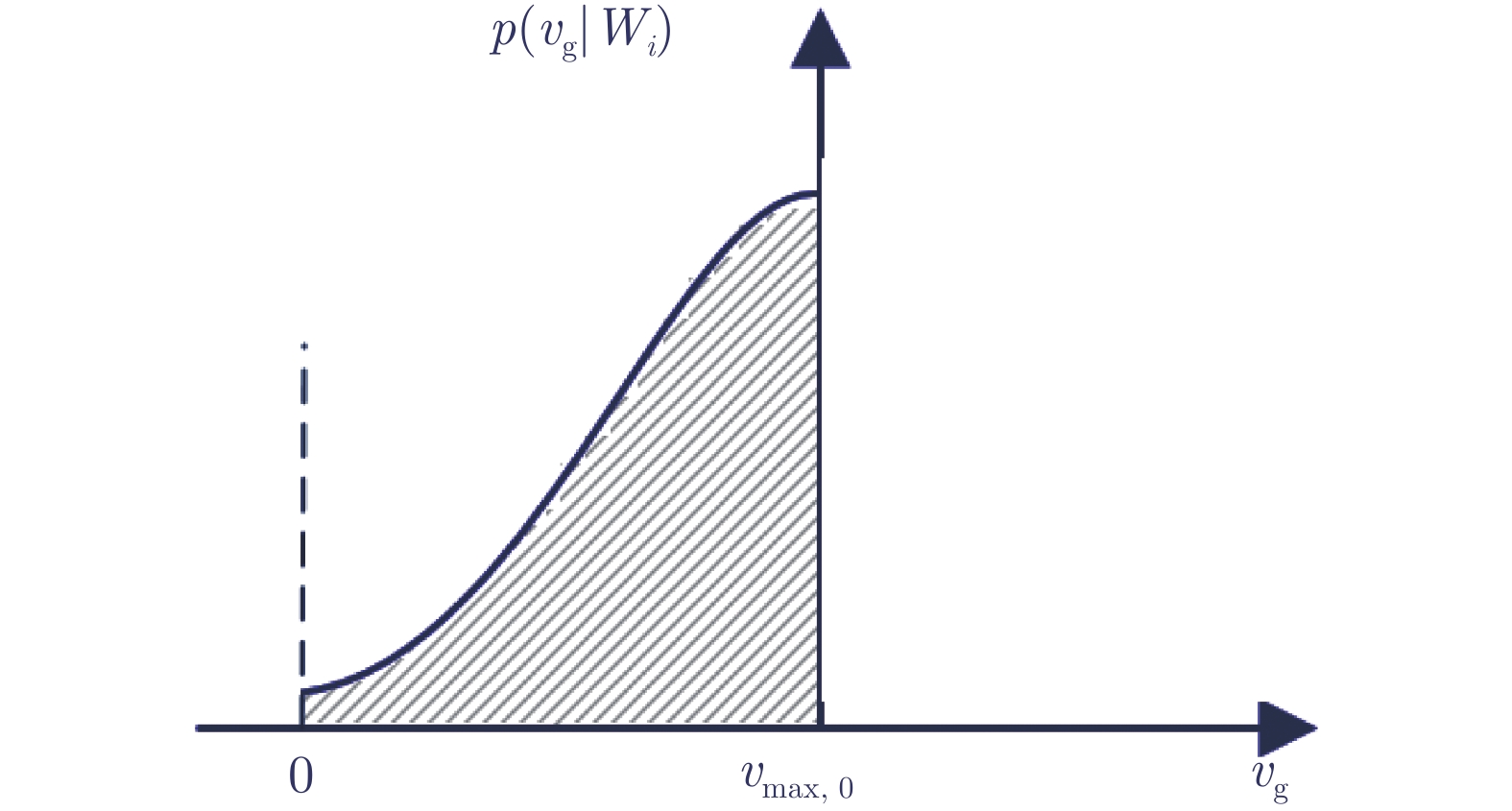
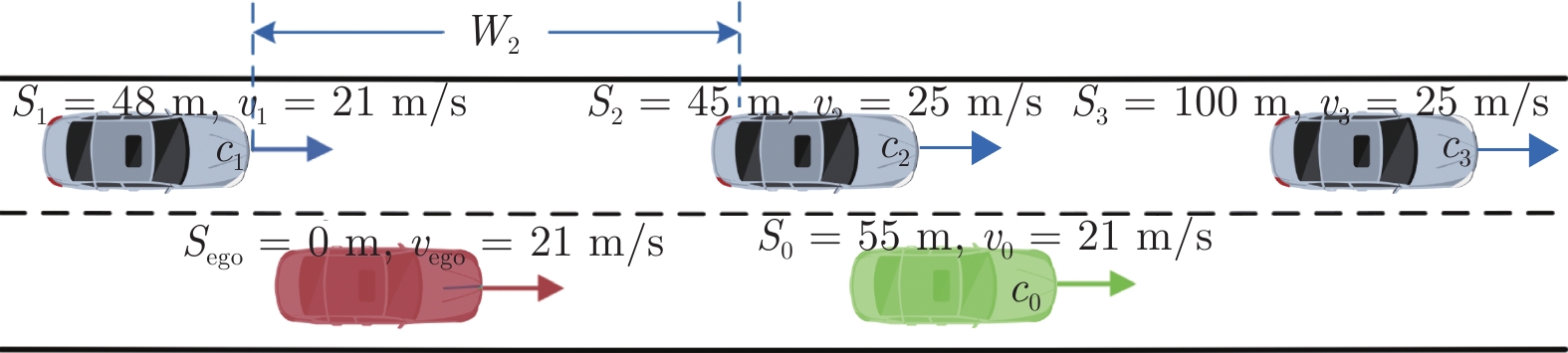
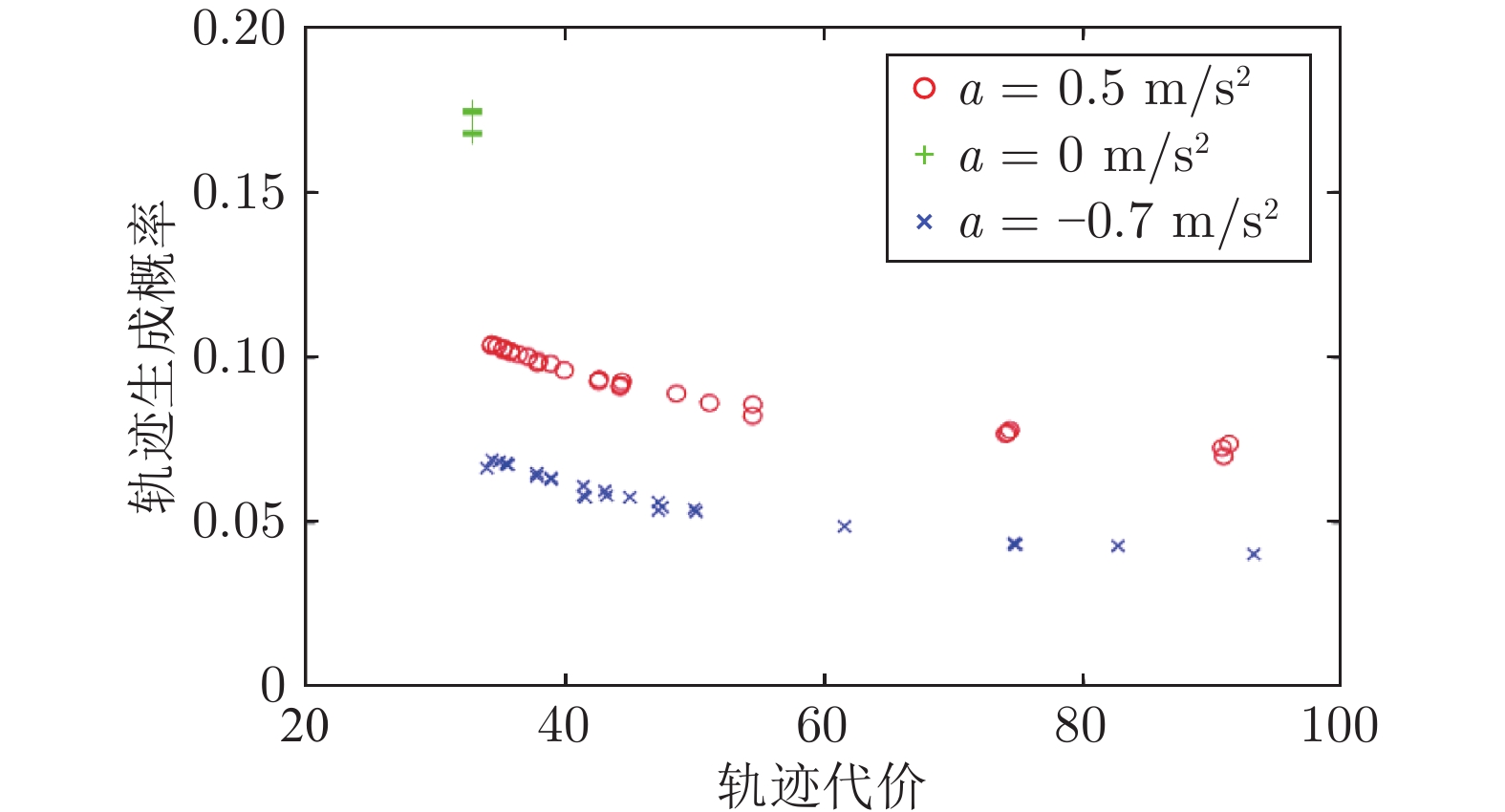
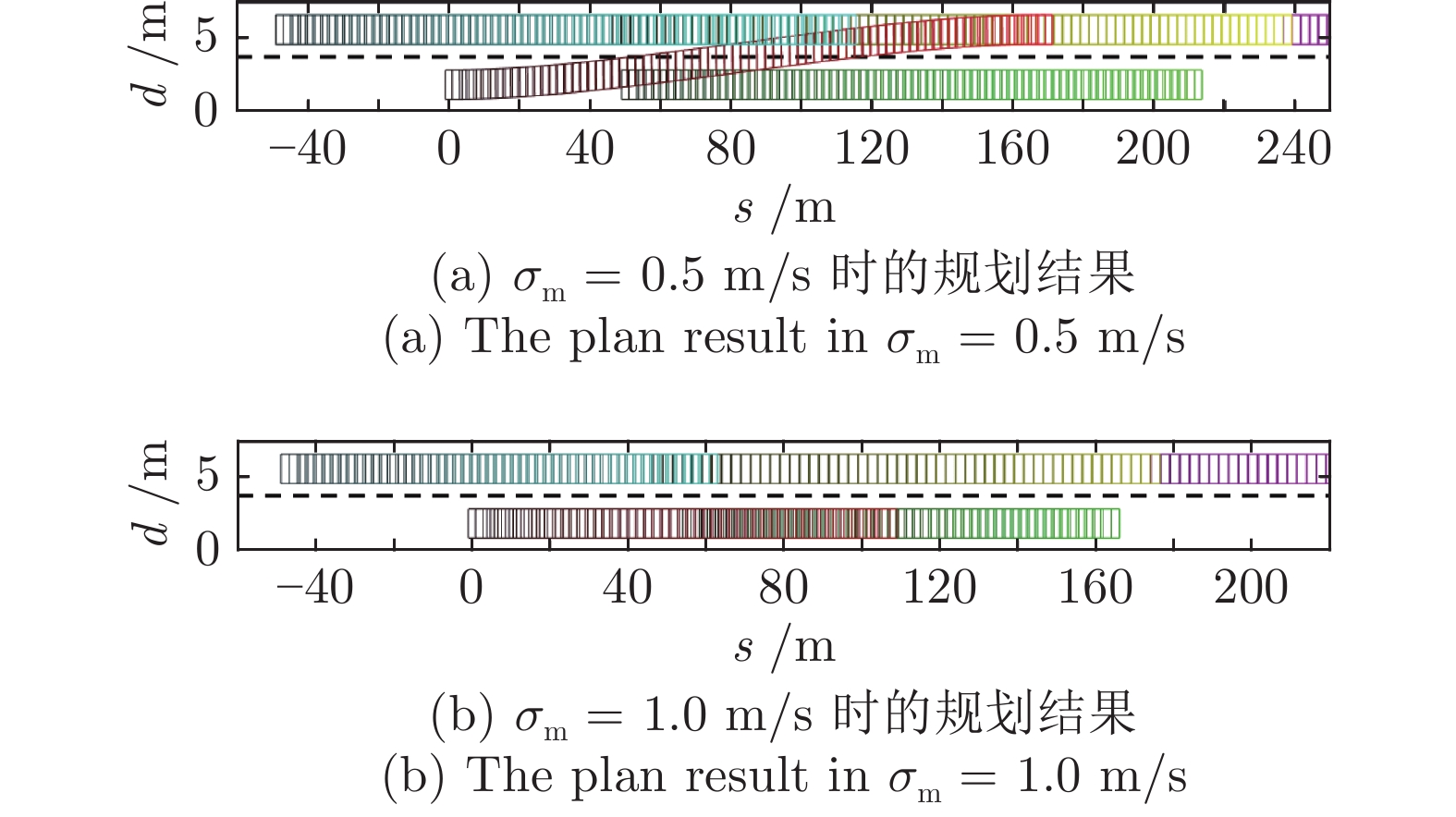
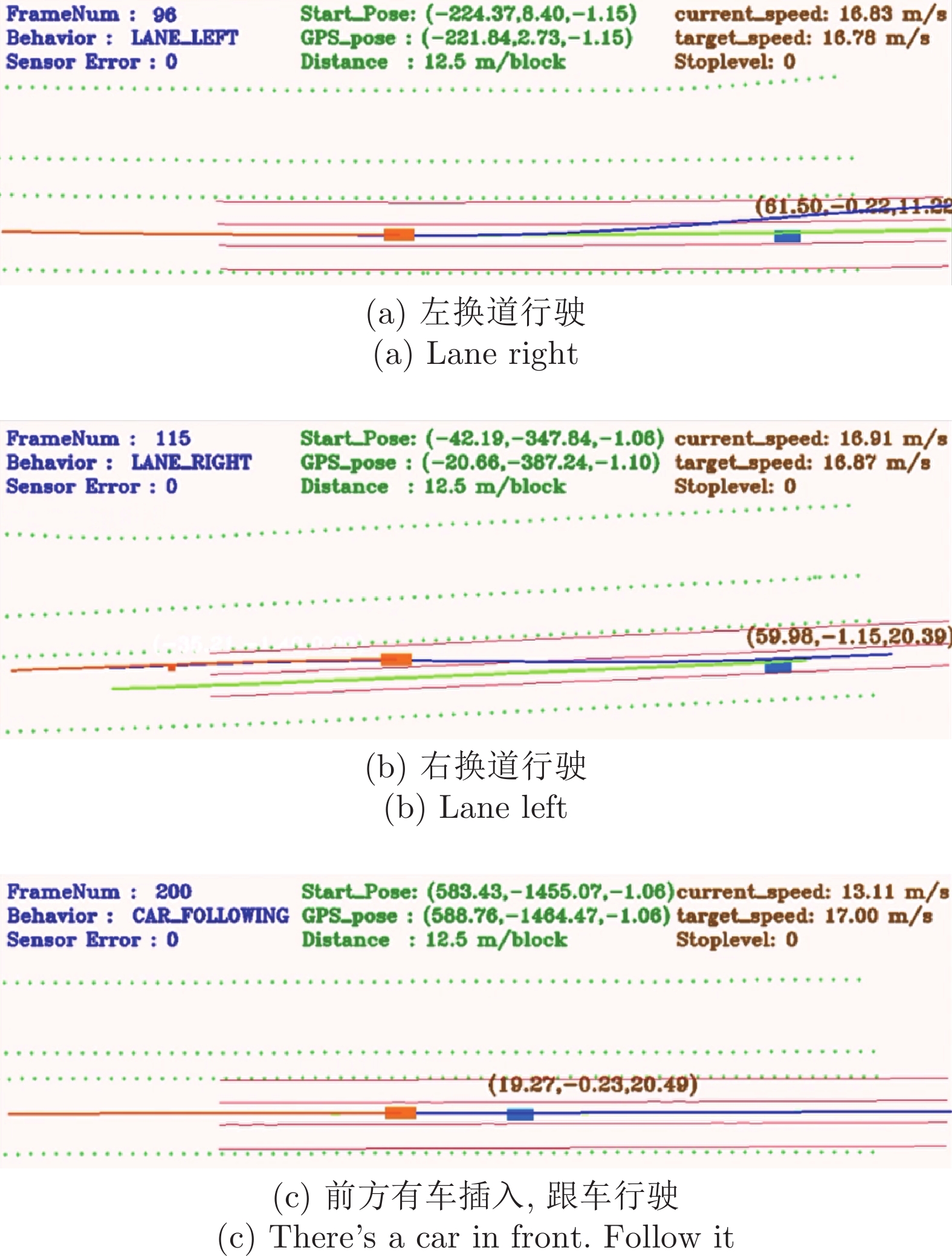
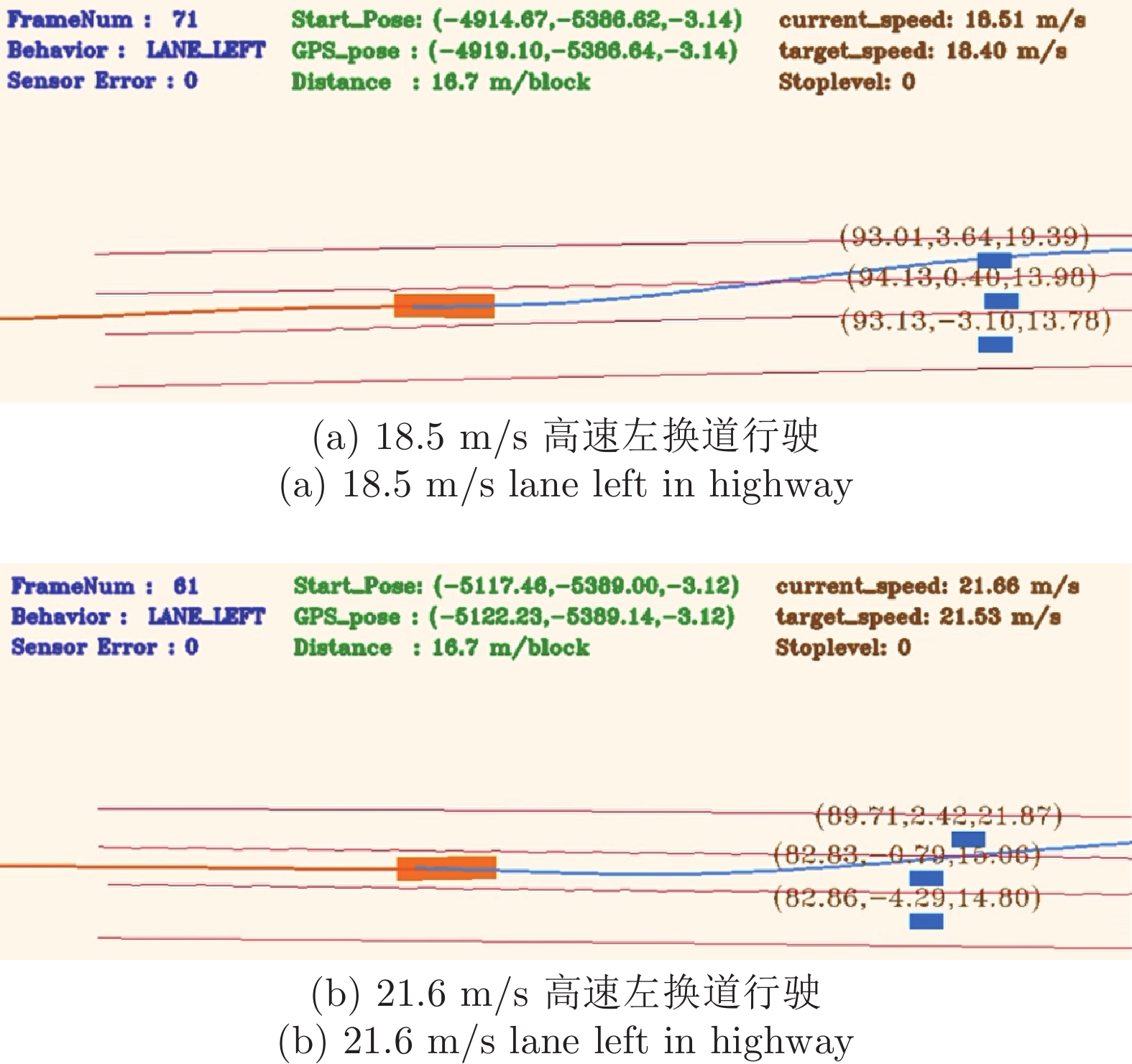
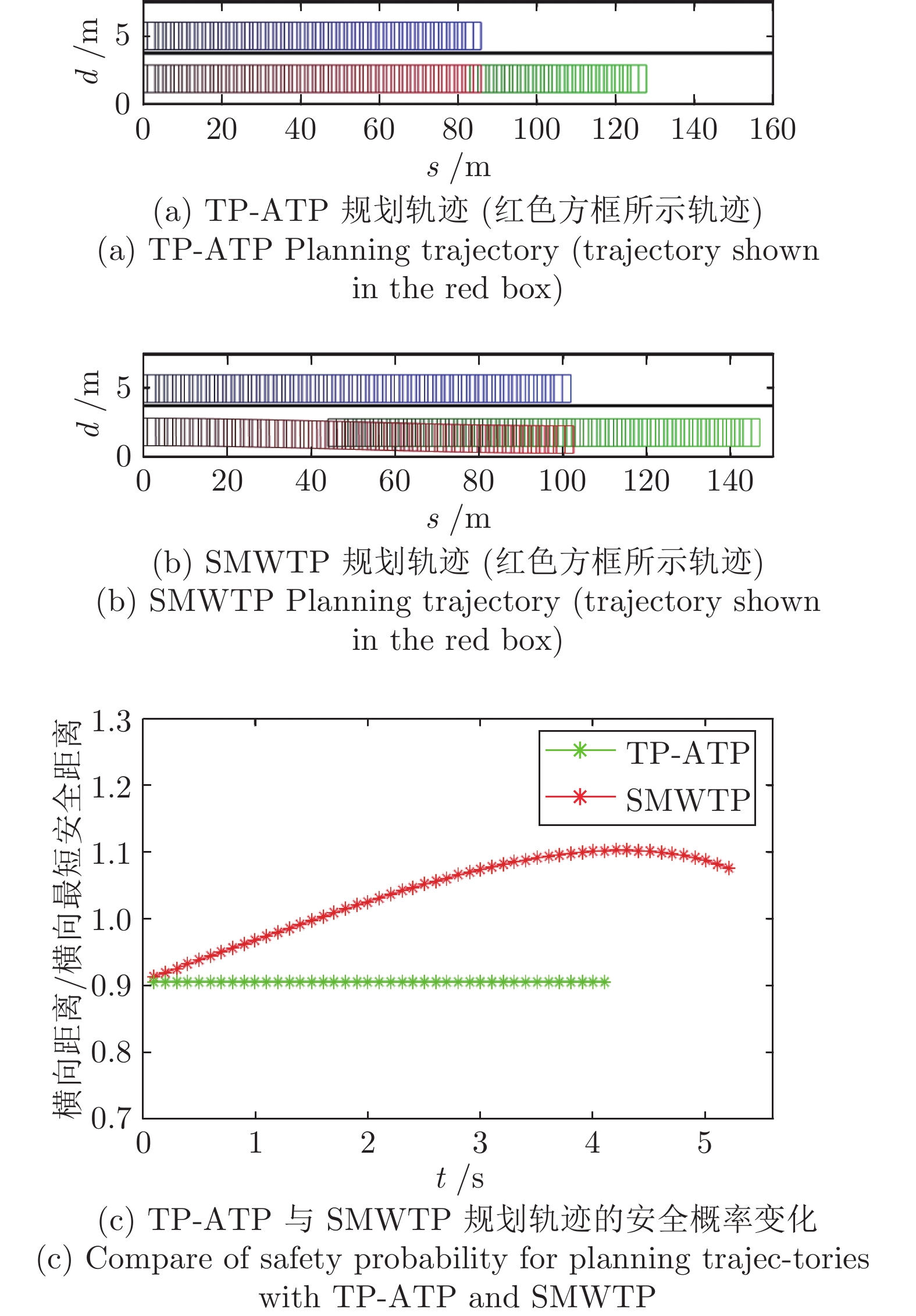
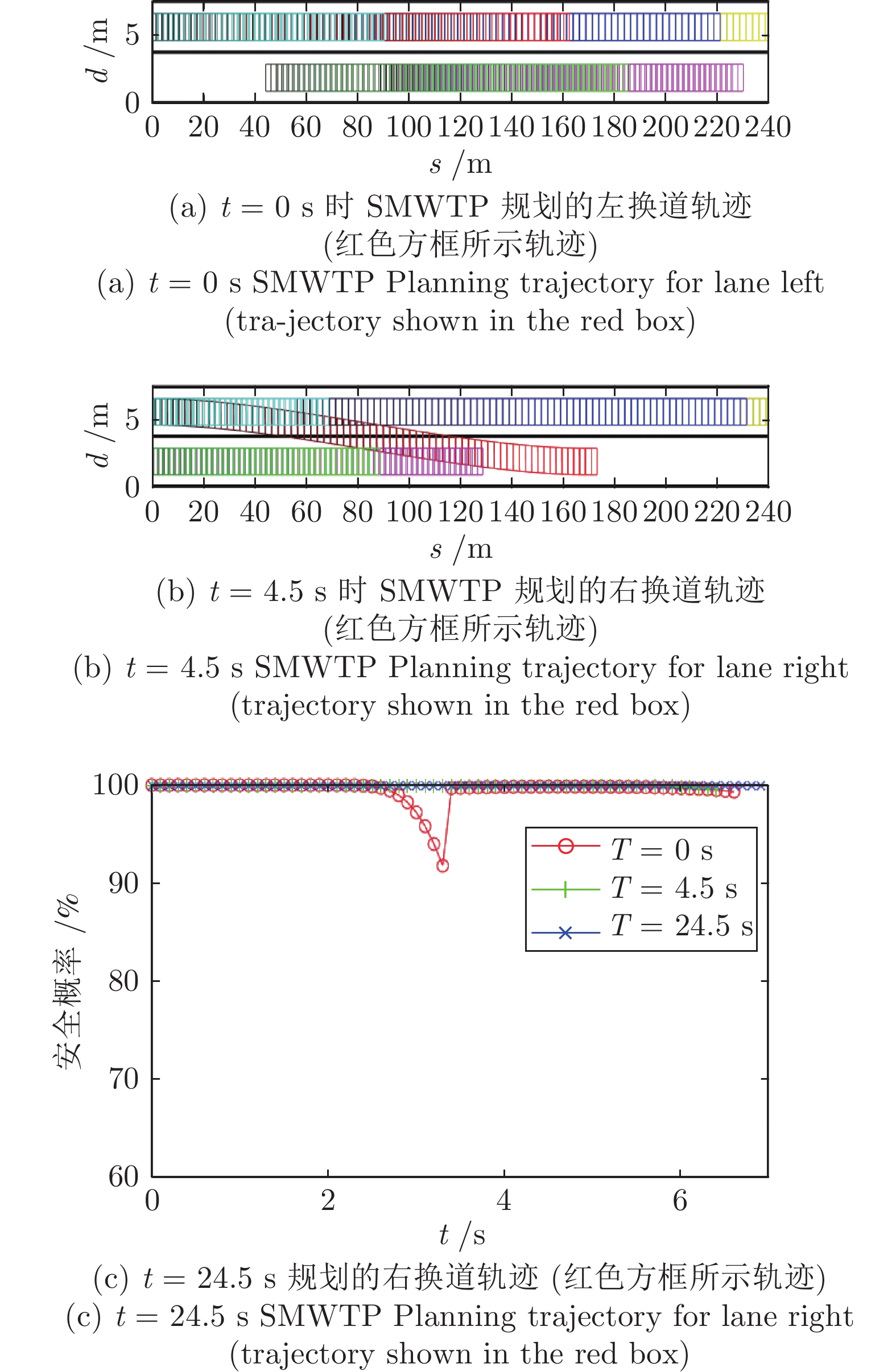
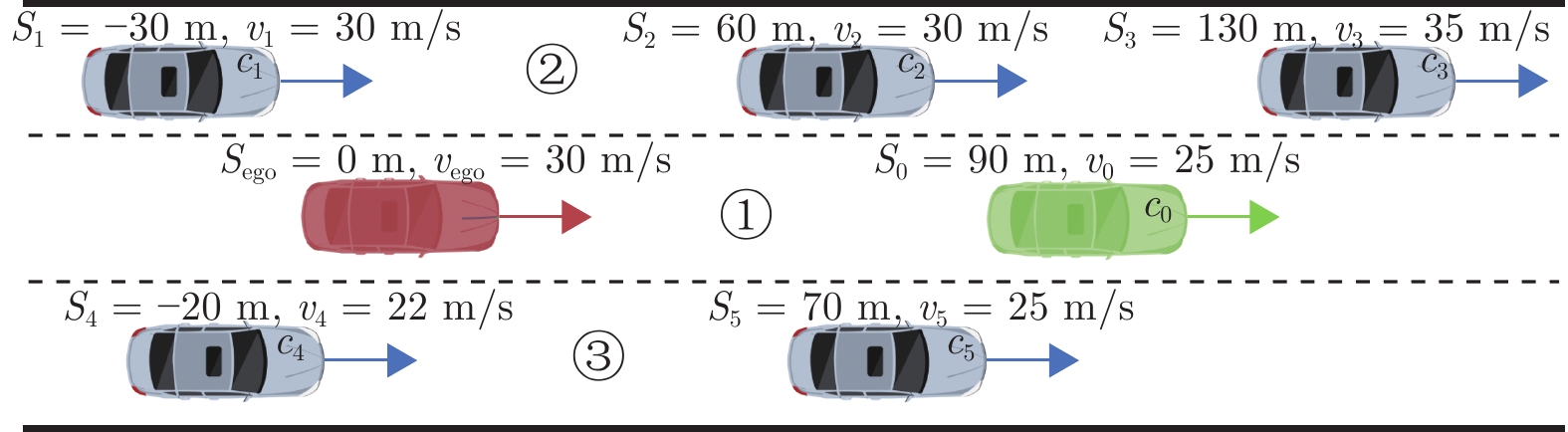
高速公路无人驾驶轨迹规划面临着实时性强、安全性高的挑战. 本文提出了一种分层抽样多动态窗口的轨迹规划算法(Stratied sampling based multi-dynamic window trajectory planner, SMWTP). 首先, 用多动态窗口表征可行轨迹的搜索空间, 并基于贝叶斯网络构建了车辆轨迹分布模型. 其次, 采用先速度后路径的分层抽样策略生成符合动态场景约束的候选轨迹集合. 最后, 利用引入障碍车辆速度估计不确定性的责任敏感安全模型(Responsibility sensitive safety, RSS)从中选择最优轨迹. 大量仿真实验和实际交通场景测试验证了算法的有效性, 对比实验结果表明所提算法性能显著优于人工势场最优轨迹规划算法和多动态窗口模拟退火轨迹规划算法.
高速公路无人驾驶轨迹规划面临着实时性强、安全性高的挑战. 本文提出了一种分层抽样多动态窗口的轨迹规划算法(Stratied sampling based multi-dynamic window trajectory planner, SMWTP). 首先, 用多动态窗口表征可行轨迹的搜索空间, 并基于贝叶斯网络构建了车辆轨迹分布模型. 其次, 采用先速度后路径的分层抽样策略生成符合动态场景约束的候选轨迹集合. 最后, 利用引入障碍车辆速度估计不确定性的责任敏感安全模型(Responsibility sensitive safety, RSS)从中选择最优轨迹. 大量仿真实验和实际交通场景测试验证了算法的有效性, 对比实验结果表明所提算法性能显著优于人工势场最优轨迹规划算法和多动态窗口模拟退火轨迹规划算法.













当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210356
摘要:
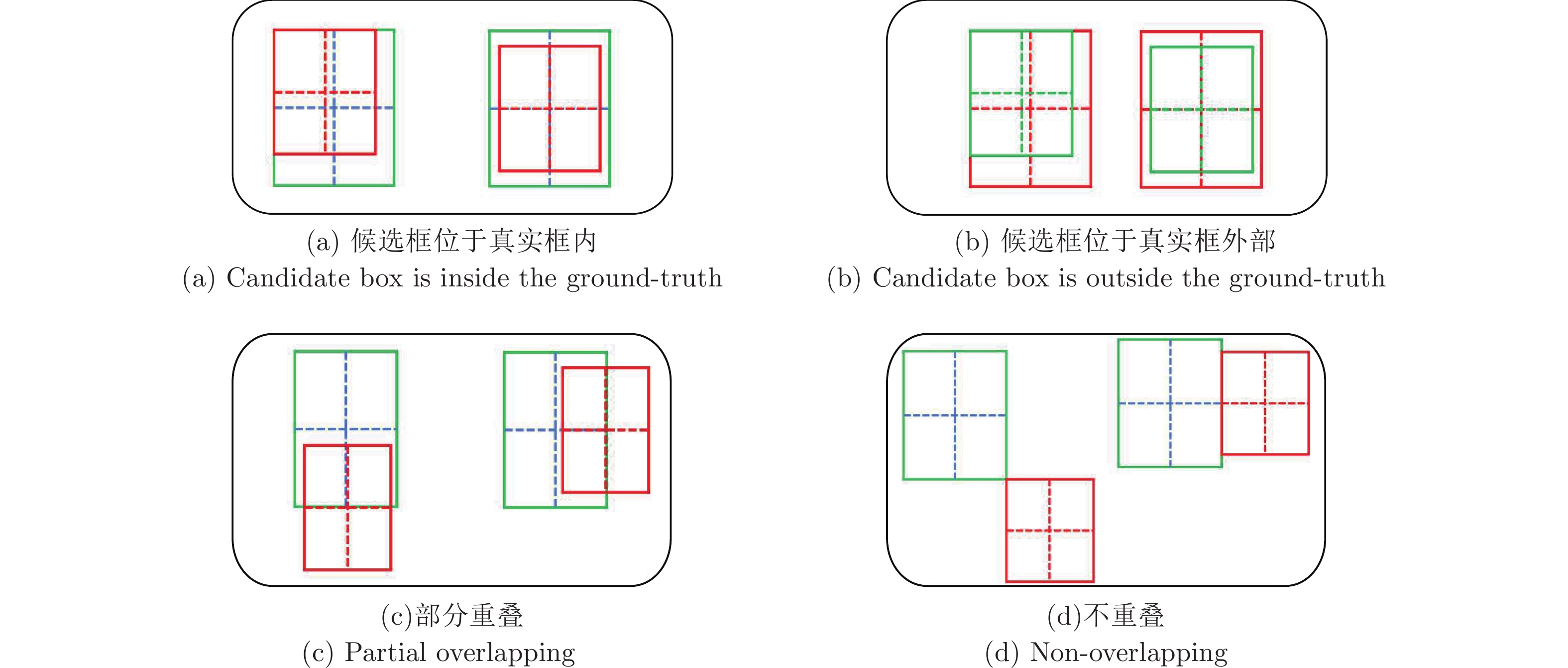
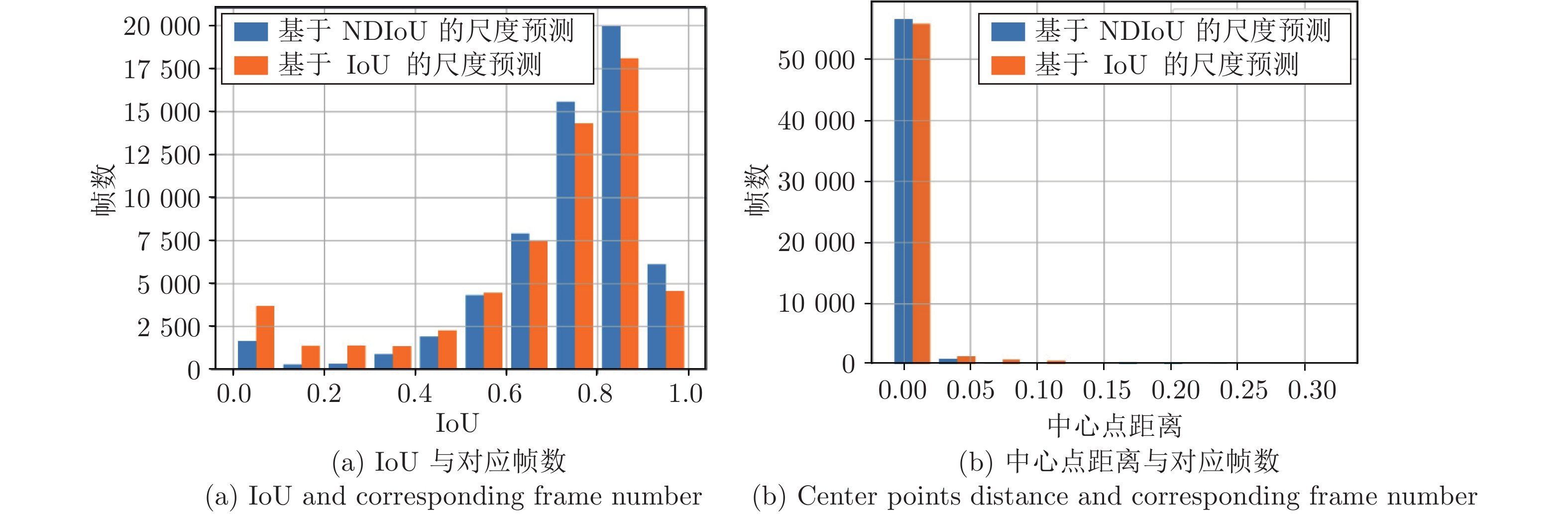
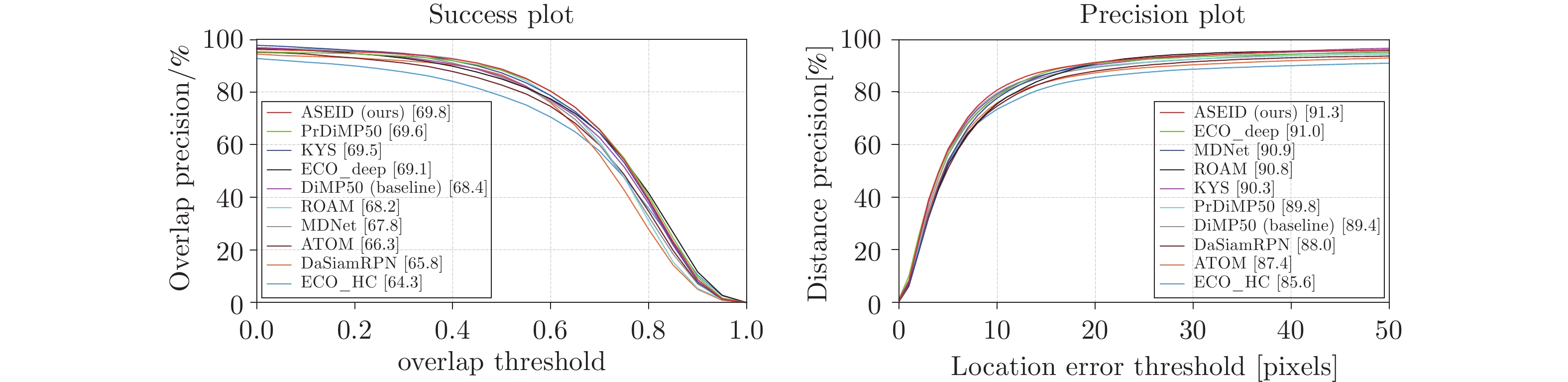
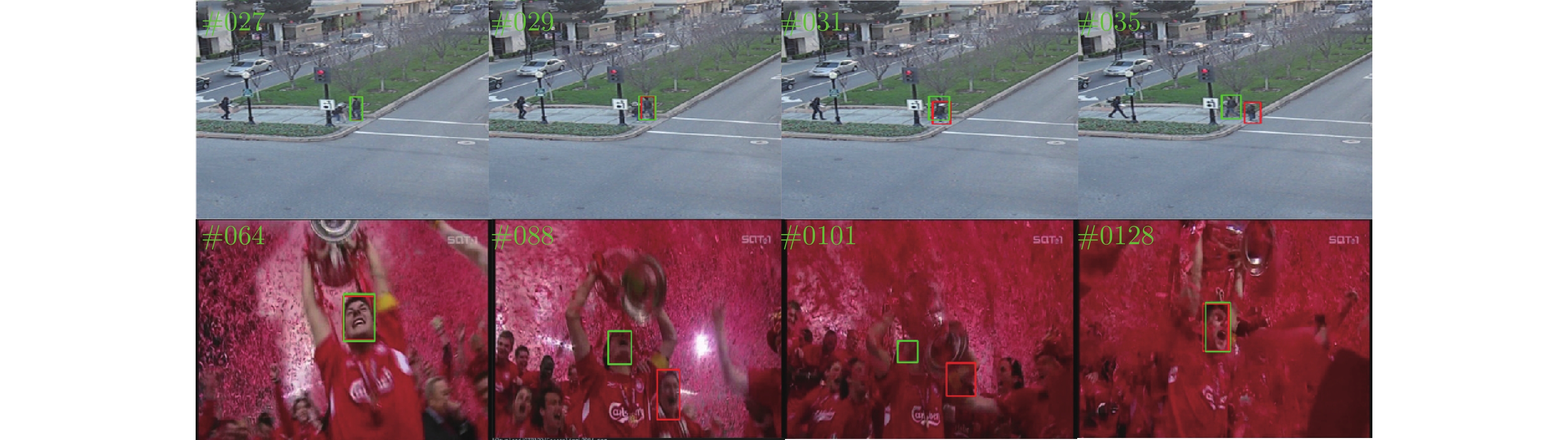
目标跟踪中基于IoU (Intersection over union, IoU)预测的尺度估计方法, 通过估计视频帧中候选框与真实目标框的重叠度训练尺度回归模型, 推理阶段通过最大化IoU对初始化边界框进行微调, 取得目标的尺度. 本文详细分析了基于IoU预测的尺度估计模型的梯度更新过程, 发现其在训练和推理过程仅将IoU作为度量, 缺乏对预测框和真实目标框中心点距离的约束, 导致外观模型更新过程中模板受到污染, 前景和背景分类时定位出现偏差. 基于此发现, 本文构建了一种结合IoU和中心点距离的新度量NDIoU (Normalization distance IoU), 在此基础上提出一种新的尺度估计方法, 并将其嵌入判别式跟踪框架. 即在训练阶段以NDIoU为标签, 设计了具有中心点距离约束的损失函数监督网络的学习, 在线推理期间通过最大化NDIoU微调目标尺度, 以帮助外观模型更新时获得更加准确的样本. 在七个数据上与相关主流方法进行对比, 本文方法在七个数据集上的综合性能优于所有对比算法. 特别是在GOT-10k数据集上, 本文方法的AO、\begin{document}$ S{R}_{0.5} $\end{document} ![]()
![]()
\begin{document}$ S{R}_{0.75} $\end{document} ![]()
![]()
目标跟踪中基于IoU (Intersection over union, IoU)预测的尺度估计方法, 通过估计视频帧中候选框与真实目标框的重叠度训练尺度回归模型, 推理阶段通过最大化IoU对初始化边界框进行微调, 取得目标的尺度. 本文详细分析了基于IoU预测的尺度估计模型的梯度更新过程, 发现其在训练和推理过程仅将IoU作为度量, 缺乏对预测框和真实目标框中心点距离的约束, 导致外观模型更新过程中模板受到污染, 前景和背景分类时定位出现偏差. 基于此发现, 本文构建了一种结合IoU和中心点距离的新度量NDIoU (Normalization distance IoU), 在此基础上提出一种新的尺度估计方法, 并将其嵌入判别式跟踪框架. 即在训练阶段以NDIoU为标签, 设计了具有中心点距离约束的损失函数监督网络的学习, 在线推理期间通过最大化NDIoU微调目标尺度, 以帮助外观模型更新时获得更加准确的样本. 在七个数据上与相关主流方法进行对比, 本文方法在七个数据集上的综合性能优于所有对比算法. 特别是在GOT-10k数据集上, 本文方法的AO、






当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210387
摘要:
This paper investigates an adaptive fuzzy tracking control method for a class of nonlinear systems with external disturbances. Firstly, fuzzy logic systems and the fuzzy state observer are implemented to approximate unknown nonlinear functions and estimate the unmeasured states of systems, respectively. Then, the tracking error can be constrained within the specified range by means of the performance function. Furthermore, an event-triggered adaptive fuzzy controller is designed by employing the backstepping method and Lyapunov functional with logarithm function. The proposed control strategy can ensure that all the signals of the closed-loop system are semiglobally uniformly ultimately bounded based on the Lyapunov stability theory and the properties of\begin{document}$\tanh$\end{document} ![]()
![]()
This paper investigates an adaptive fuzzy tracking control method for a class of nonlinear systems with external disturbances. Firstly, fuzzy logic systems and the fuzzy state observer are implemented to approximate unknown nonlinear functions and estimate the unmeasured states of systems, respectively. Then, the tracking error can be constrained within the specified range by means of the performance function. Furthermore, an event-triggered adaptive fuzzy controller is designed by employing the backstepping method and Lyapunov functional with logarithm function. The proposed control strategy can ensure that all the signals of the closed-loop system are semiglobally uniformly ultimately bounded based on the Lyapunov stability theory and the properties of



当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c190277
摘要:
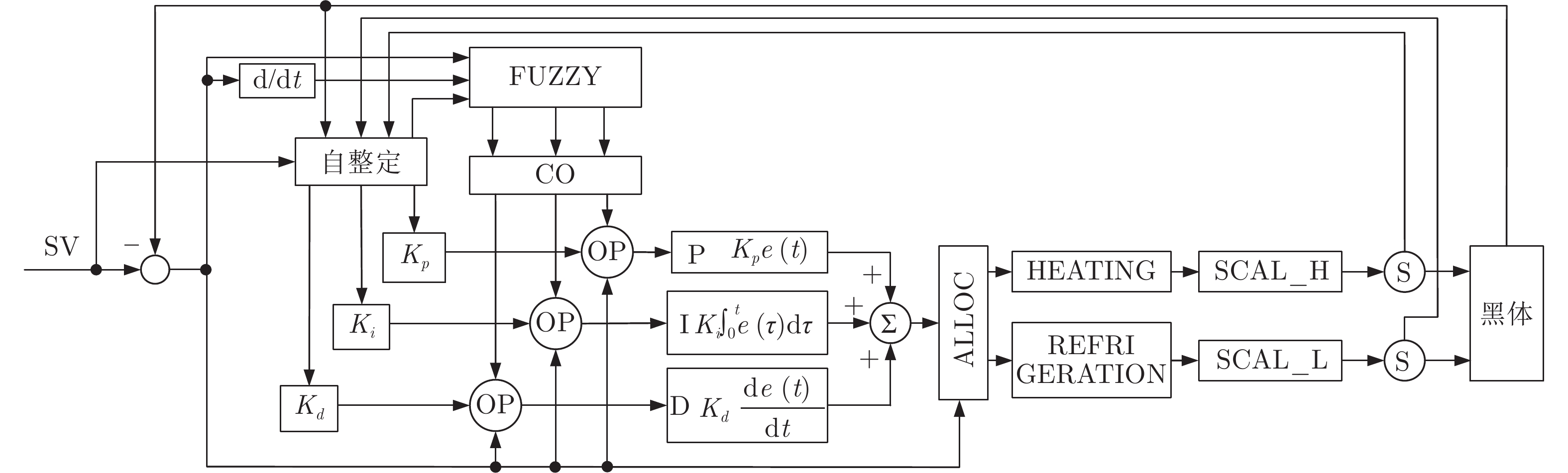
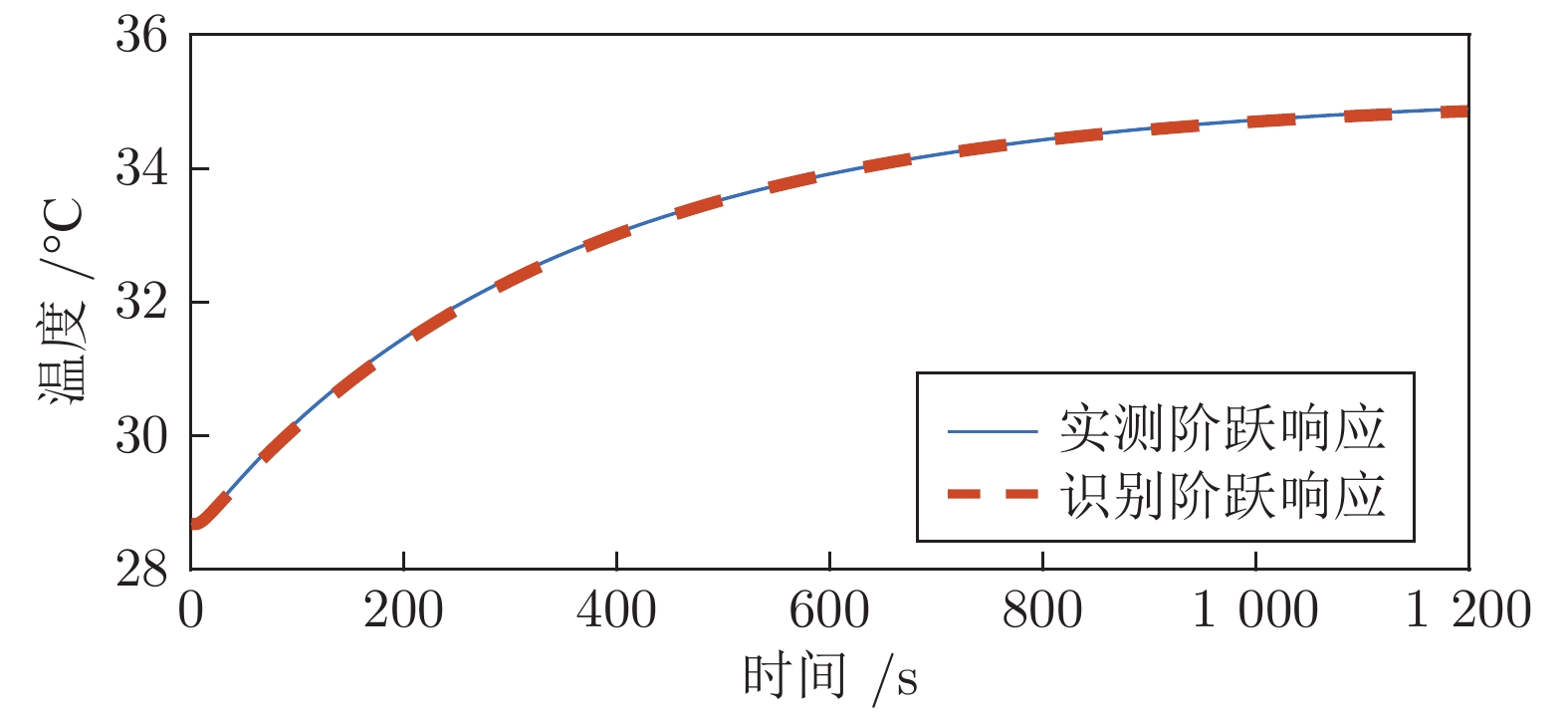
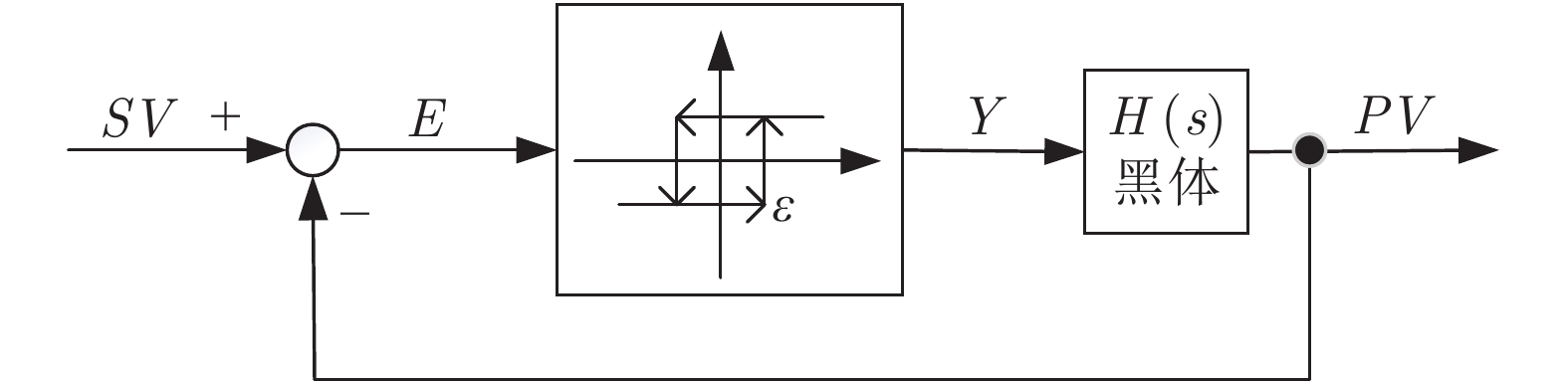
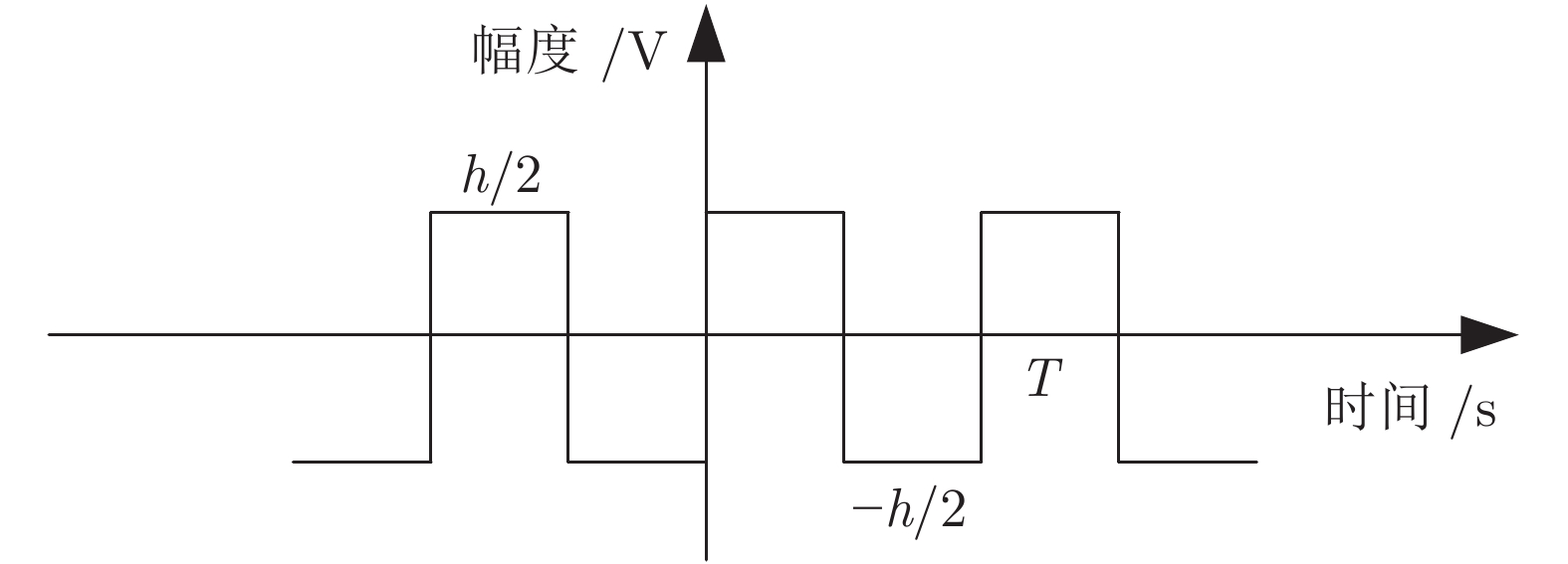
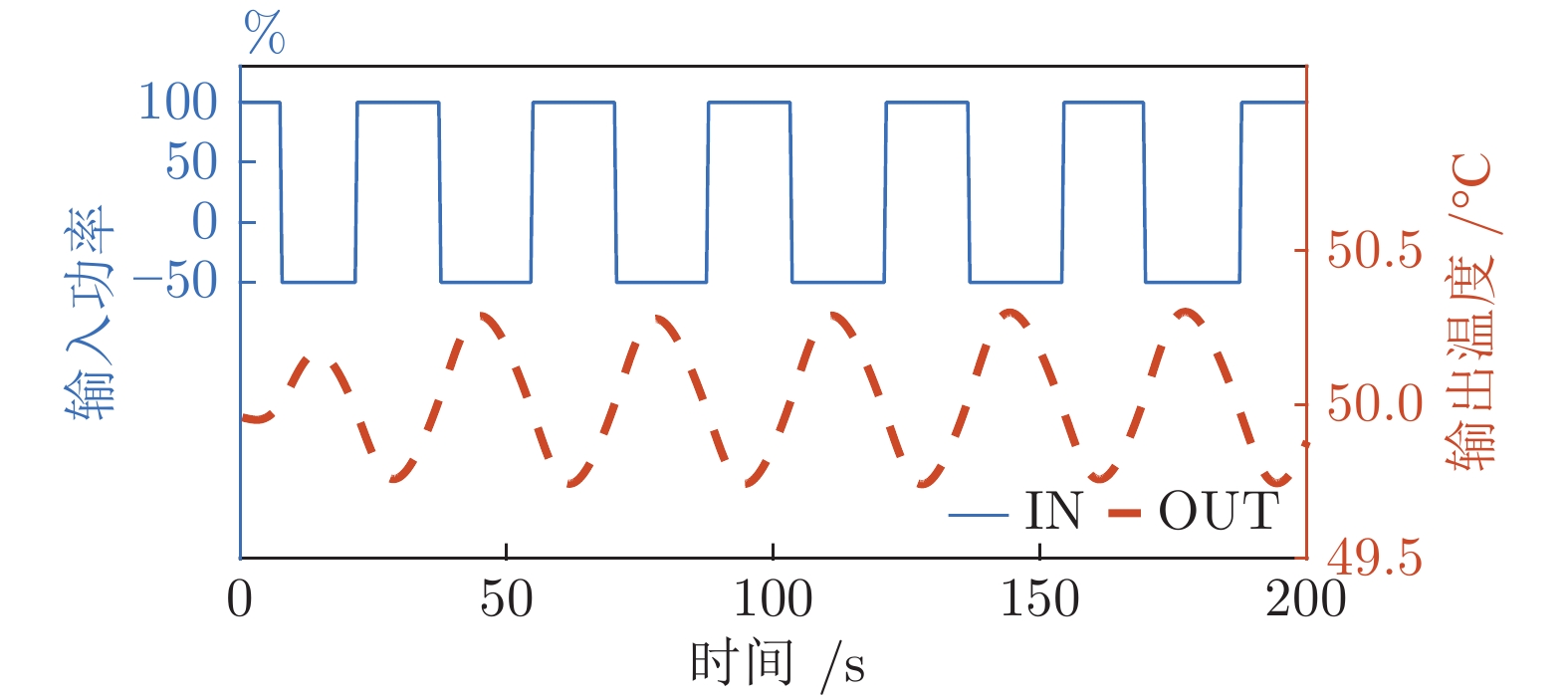
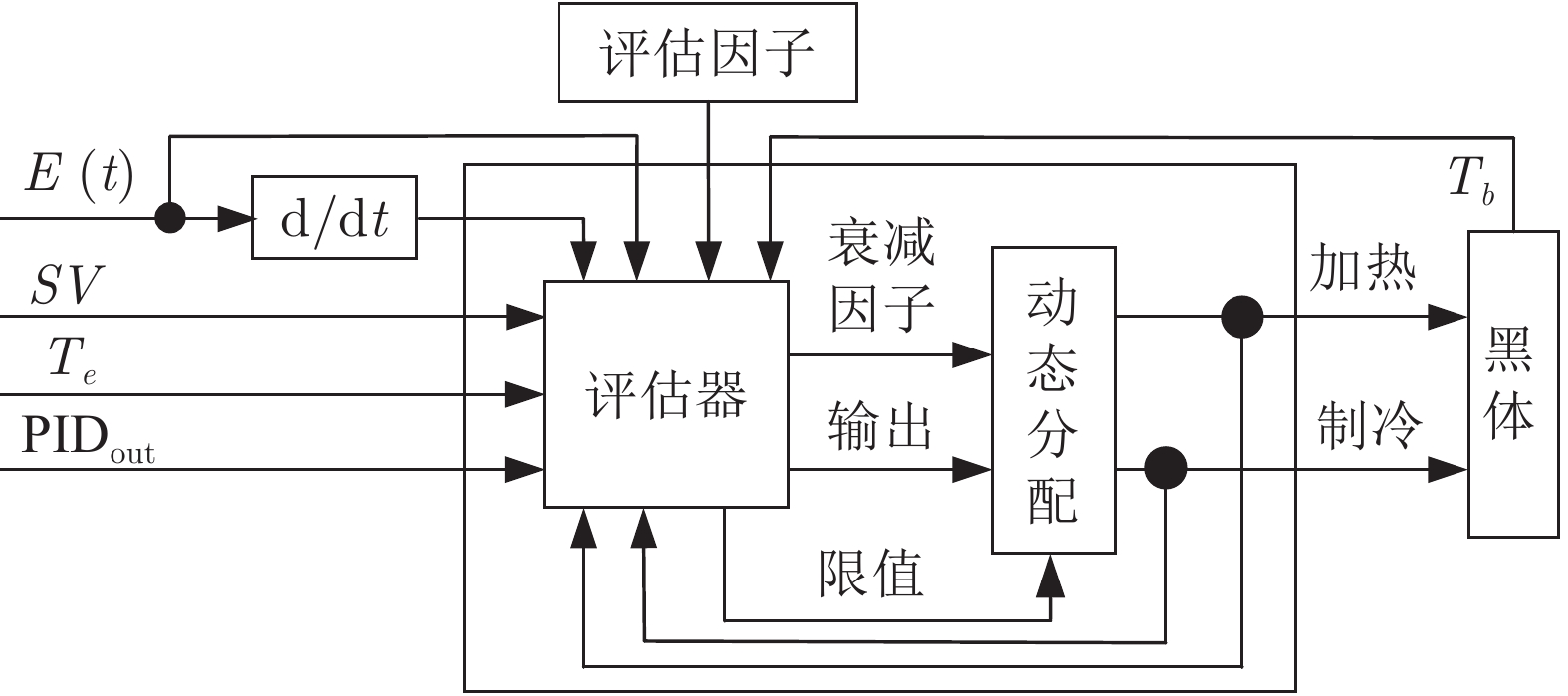
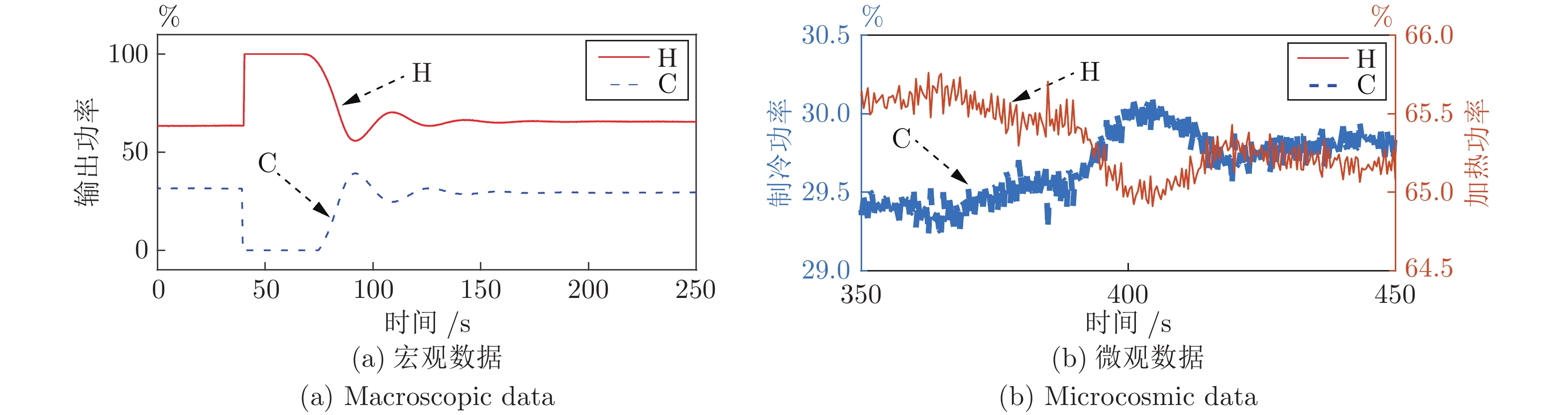
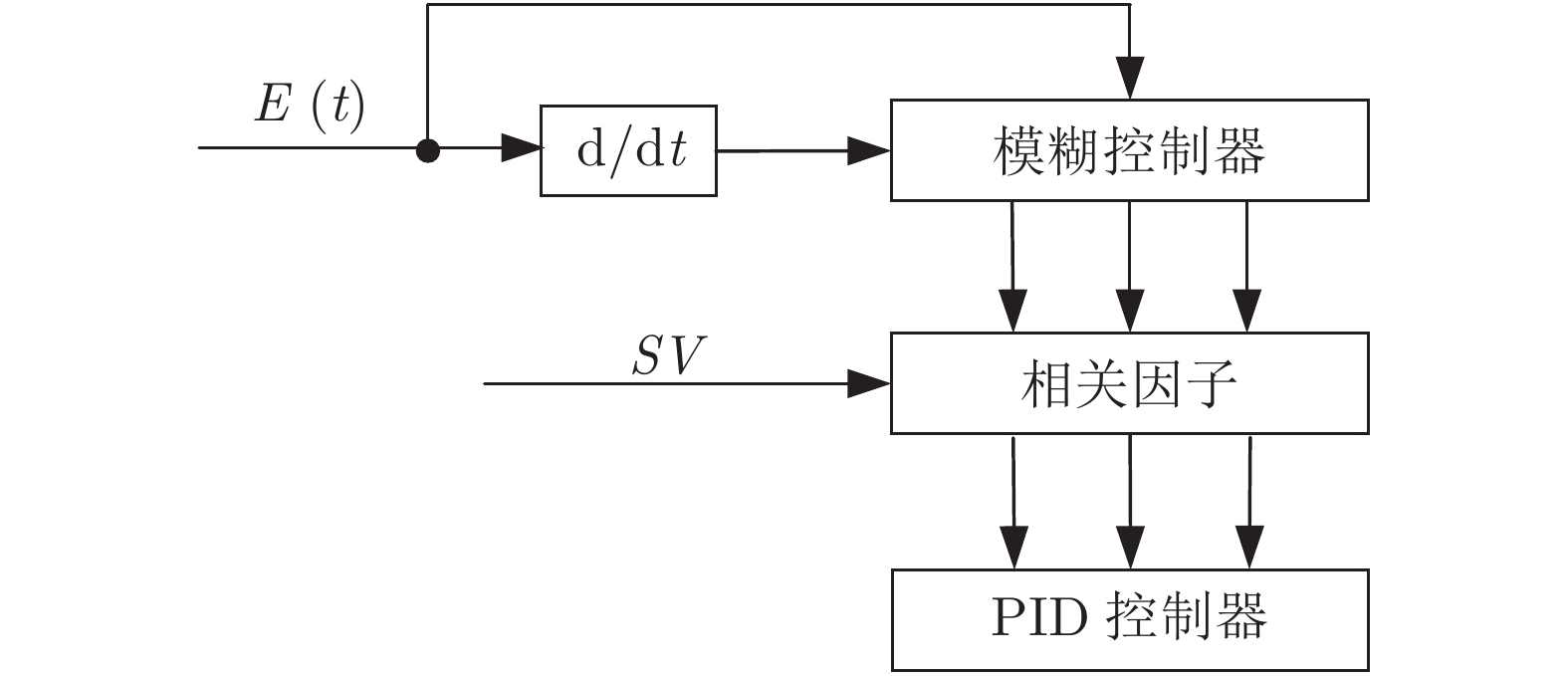
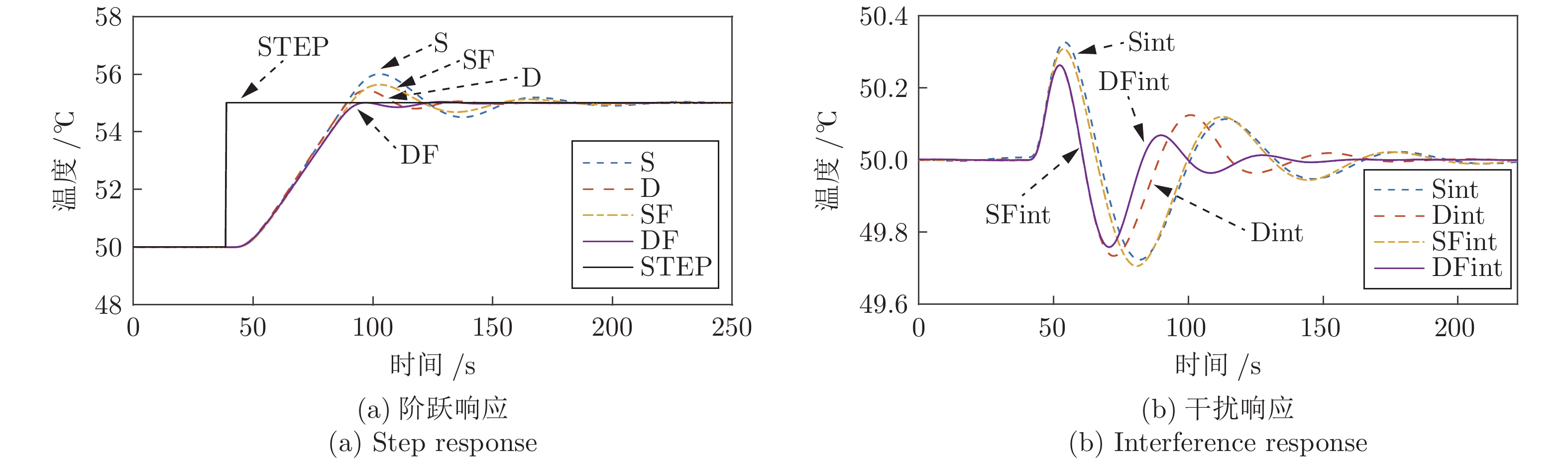
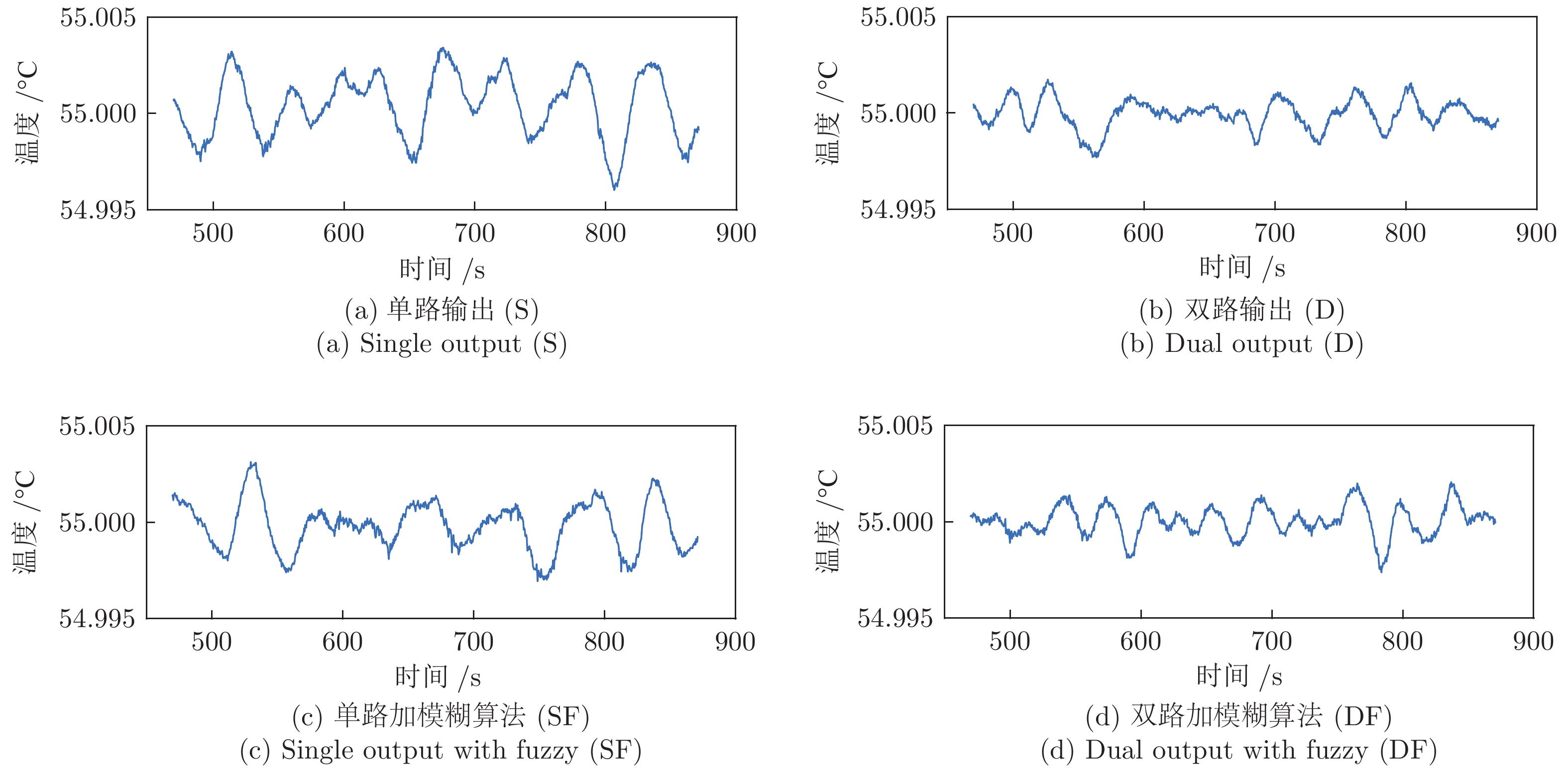
首先, 通过分析黑体温度控制系统的物理模型, 推演出黑体传递函数的表达式.推演过程中得知黑体易受环境温度和空气散热的影响, 所以黑体温度控制系统是个非线性时变系统.结合实验黑体的阶跃响应数据, 采用阶跃响应法对传递函数进行近似计算, 得出黑体温控系统的传递函数是极点在左半轴的二阶系统, 该系统等效于二阶低通滤波器.经过低通滤波器的信号, 会滤除高频部分, 当用继电器法进行参数自整定时, 仅需计算能量较大的基波信号.通过对基波信号进行比较, 得出继电器法的整定公式, 并参照Ziegler-Nichols整定法则计算出PID参数.同时, 本文针对黑体加热器具有双路输出的特点, 提出了一种双路动态输出法, 通过理论分析了该方法可以消除环境对黑体温度的影响.对于环境温度变化较大的, 采用继电器法PID参数自整定的方式来消除; 对于黑体运行过程中环境温度变化较小的, 采用双路动态输出法来减少影响.最后, 结合实验数据, 引入性能指标, 验证了本文所述方法对黑体的温度控制性能有一定的提升.
首先, 通过分析黑体温度控制系统的物理模型, 推演出黑体传递函数的表达式.推演过程中得知黑体易受环境温度和空气散热的影响, 所以黑体温度控制系统是个非线性时变系统.结合实验黑体的阶跃响应数据, 采用阶跃响应法对传递函数进行近似计算, 得出黑体温控系统的传递函数是极点在左半轴的二阶系统, 该系统等效于二阶低通滤波器.经过低通滤波器的信号, 会滤除高频部分, 当用继电器法进行参数自整定时, 仅需计算能量较大的基波信号.通过对基波信号进行比较, 得出继电器法的整定公式, 并参照Ziegler-Nichols整定法则计算出PID参数.同时, 本文针对黑体加热器具有双路输出的特点, 提出了一种双路动态输出法, 通过理论分析了该方法可以消除环境对黑体温度的影响.对于环境温度变化较大的, 采用继电器法PID参数自整定的方式来消除; 对于黑体运行过程中环境温度变化较小的, 采用双路动态输出法来减少影响.最后, 结合实验数据, 引入性能指标, 验证了本文所述方法对黑体的温度控制性能有一定的提升.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210324
摘要:
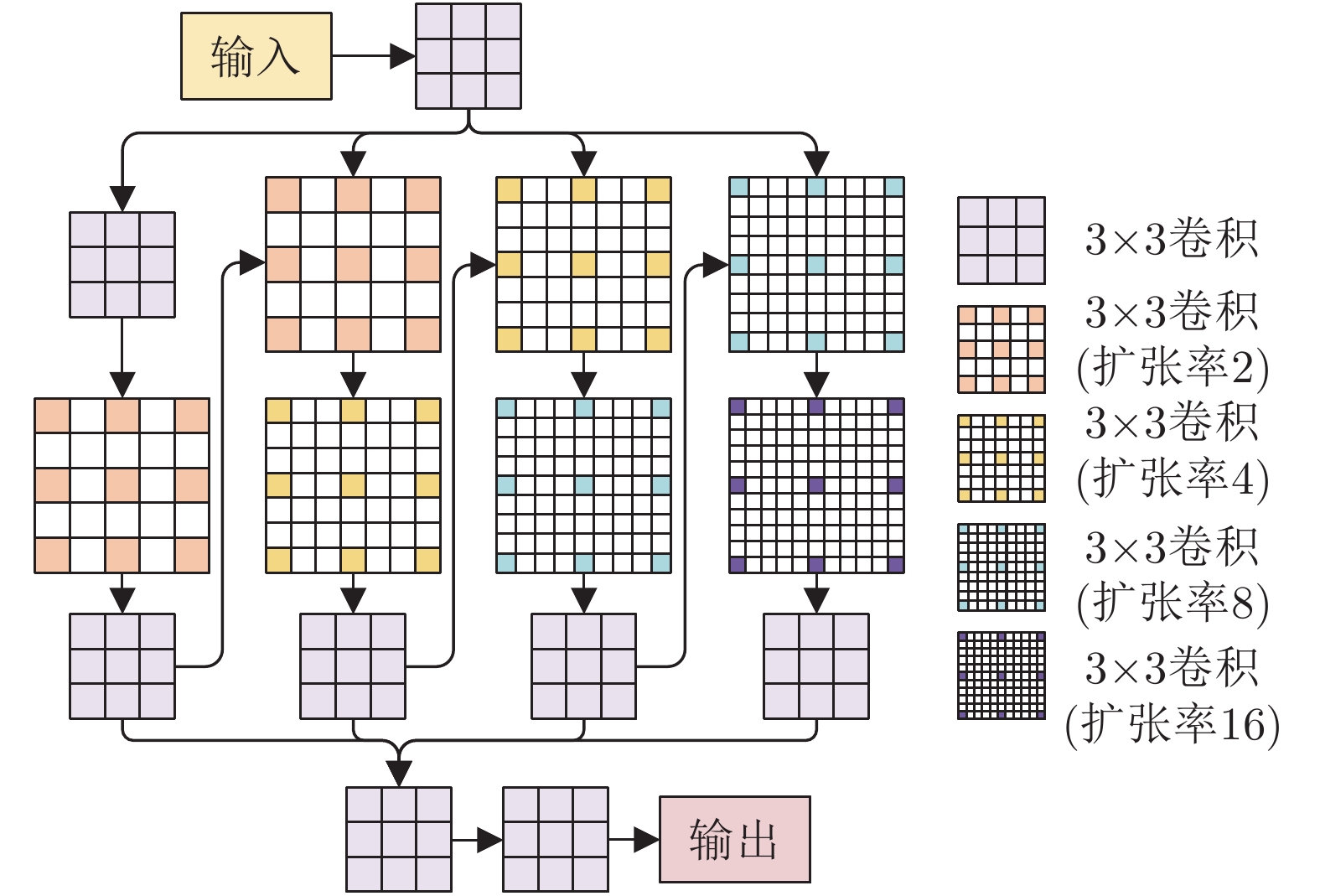
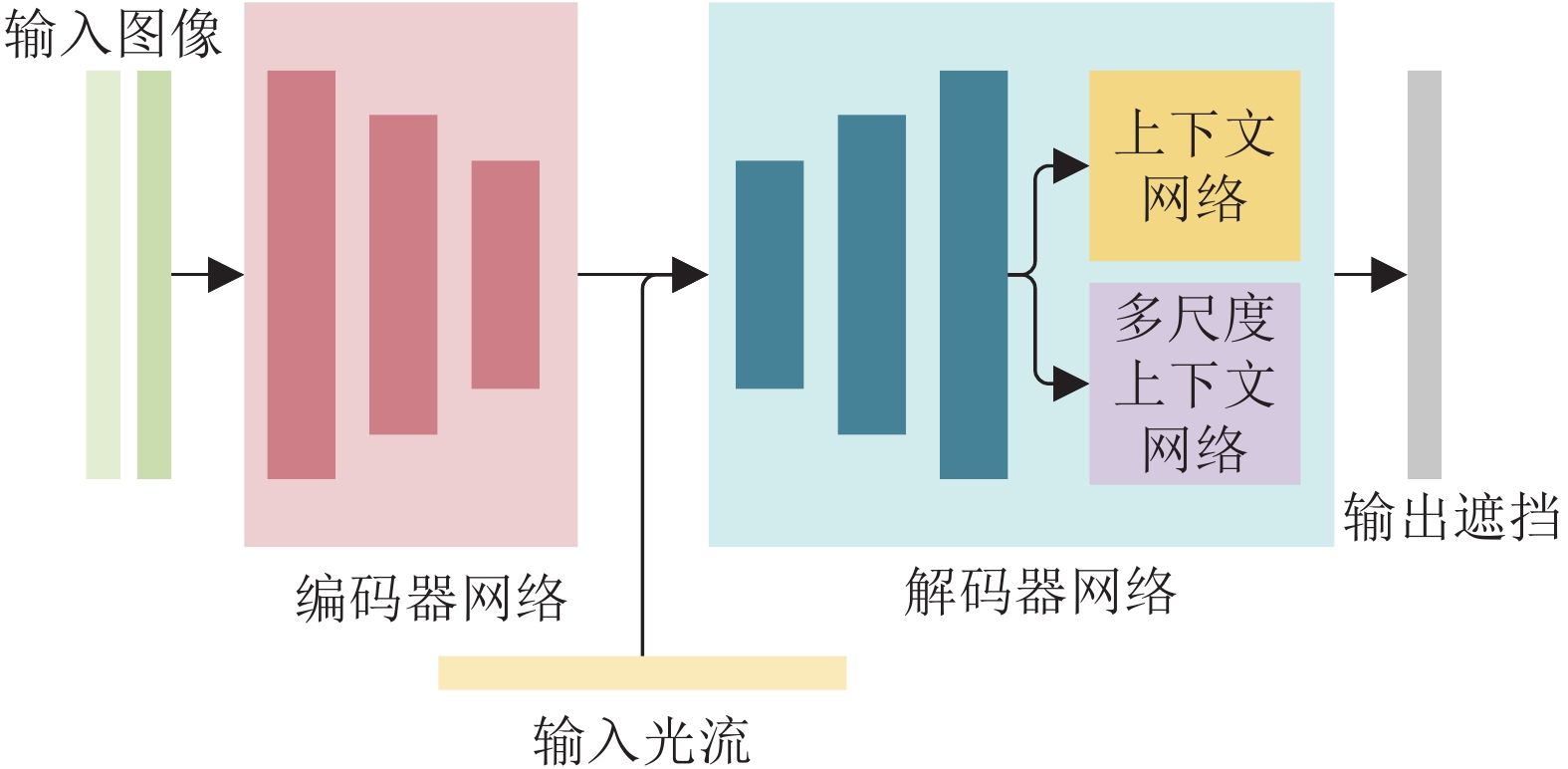
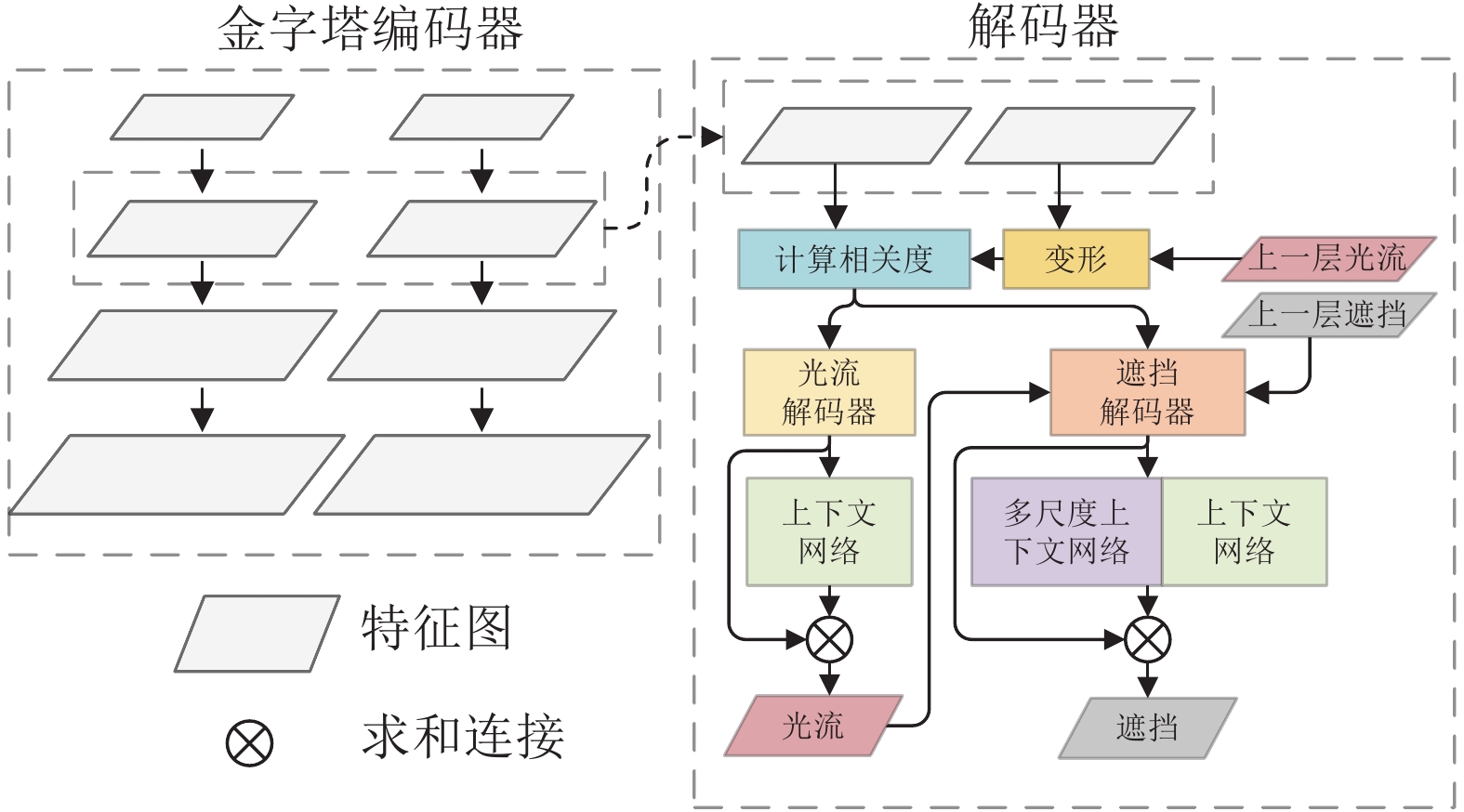
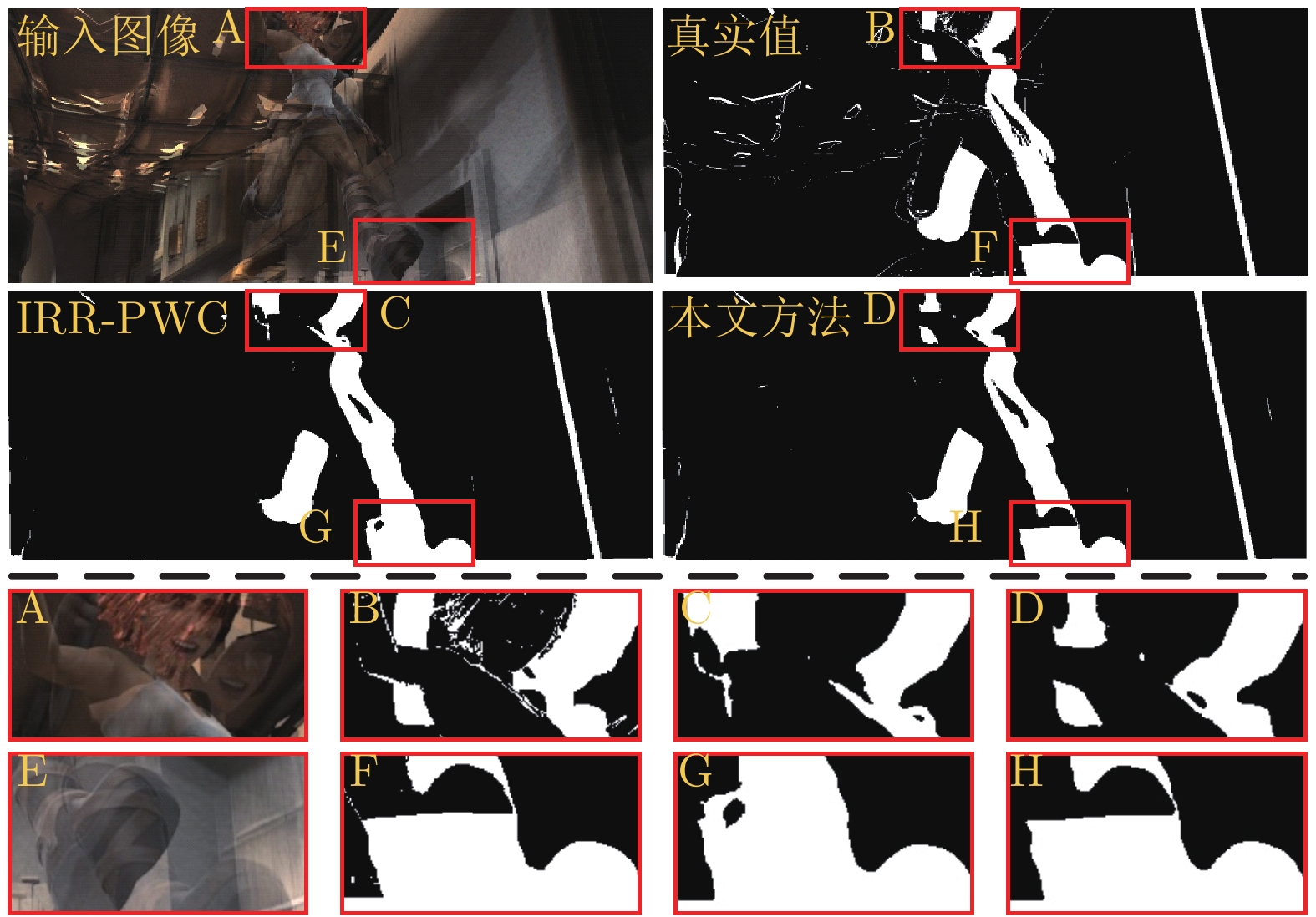
针对非刚性运动和大位移场景下运动遮挡检测的准确性与鲁棒性问题, 本文提出一种基于光流与多尺度上下文的图像序列运动遮挡检测方法. 首先, 设计基于扩张卷积的多尺度上下文信息聚合网络, 通过图像序列多尺度上下文信息获取更大范围的图像特征; 然后, 采用特征金字塔构建基于多尺度上下文与光流的端到端运动遮挡检测网络模型, 利用光流优化非刚性运动和大位移区域的运动遮挡信息; 最后, 构造基于运动边缘的网络模型训练损失函数, 获取准确的运动遮挡边界. 分别采用MPI-Sintel和KITTI测试数据集对本文方法与现有的代表性遮挡检测模型进行实验对比与分析. 实验结果表明, 本文方法能够有效提高运动遮挡检测的准确性, 尤其在非刚性运动和大位移等困难场景下具有更好的遮挡检测鲁棒性.
针对非刚性运动和大位移场景下运动遮挡检测的准确性与鲁棒性问题, 本文提出一种基于光流与多尺度上下文的图像序列运动遮挡检测方法. 首先, 设计基于扩张卷积的多尺度上下文信息聚合网络, 通过图像序列多尺度上下文信息获取更大范围的图像特征; 然后, 采用特征金字塔构建基于多尺度上下文与光流的端到端运动遮挡检测网络模型, 利用光流优化非刚性运动和大位移区域的运动遮挡信息; 最后, 构造基于运动边缘的网络模型训练损失函数, 获取准确的运动遮挡边界. 分别采用MPI-Sintel和KITTI测试数据集对本文方法与现有的代表性遮挡检测模型进行实验对比与分析. 实验结果表明, 本文方法能够有效提高运动遮挡检测的准确性, 尤其在非刚性运动和大位移等困难场景下具有更好的遮挡检测鲁棒性.





当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210095
摘要:
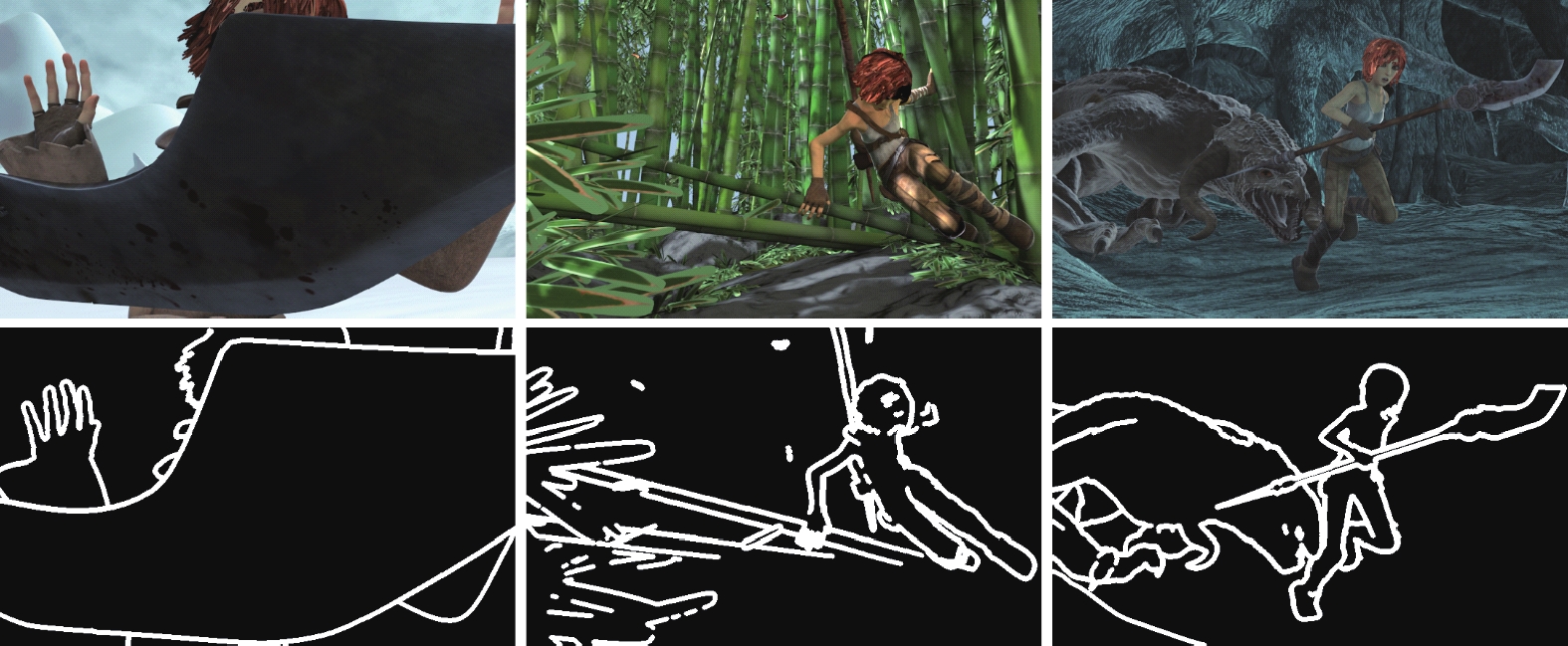
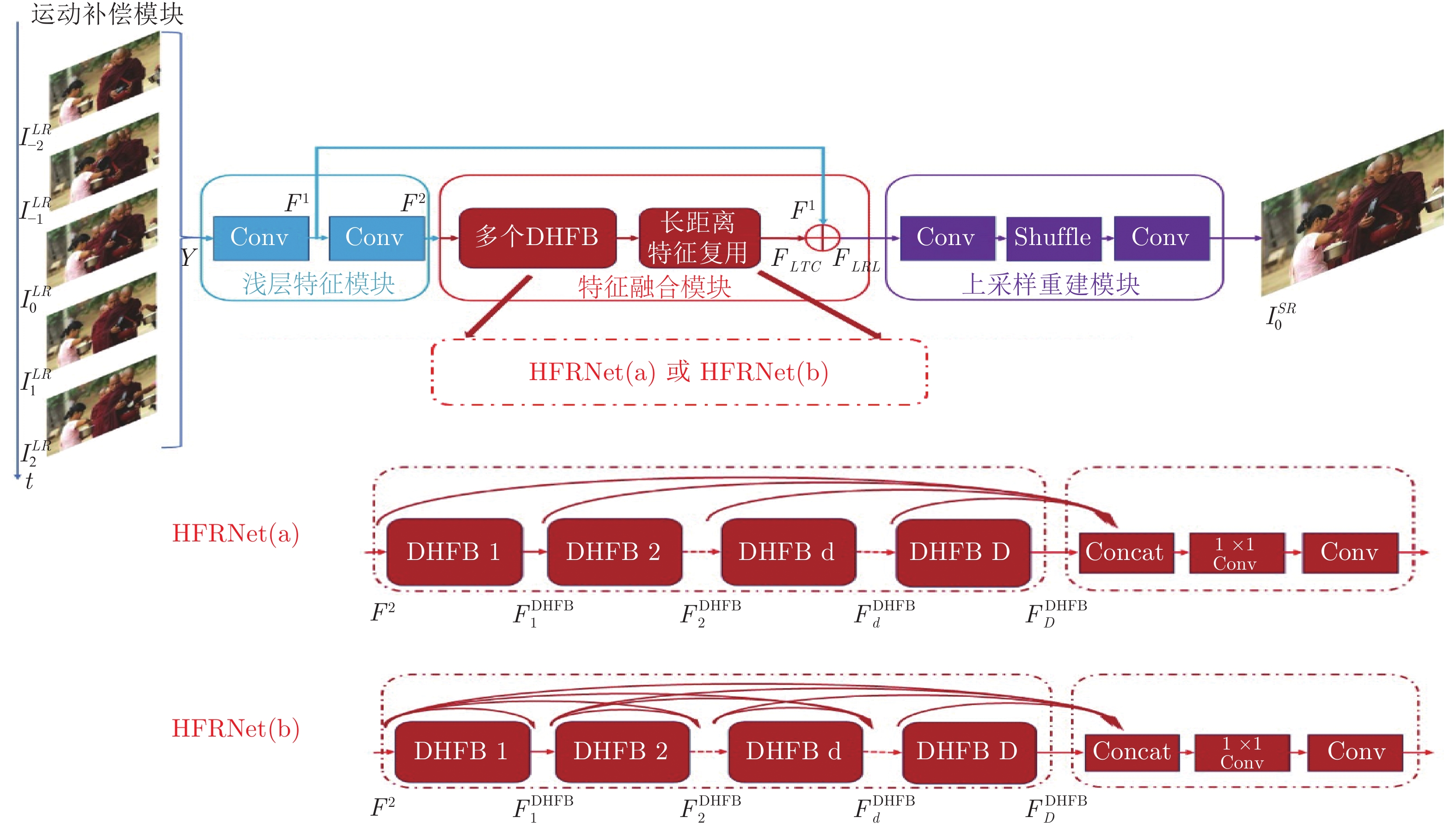
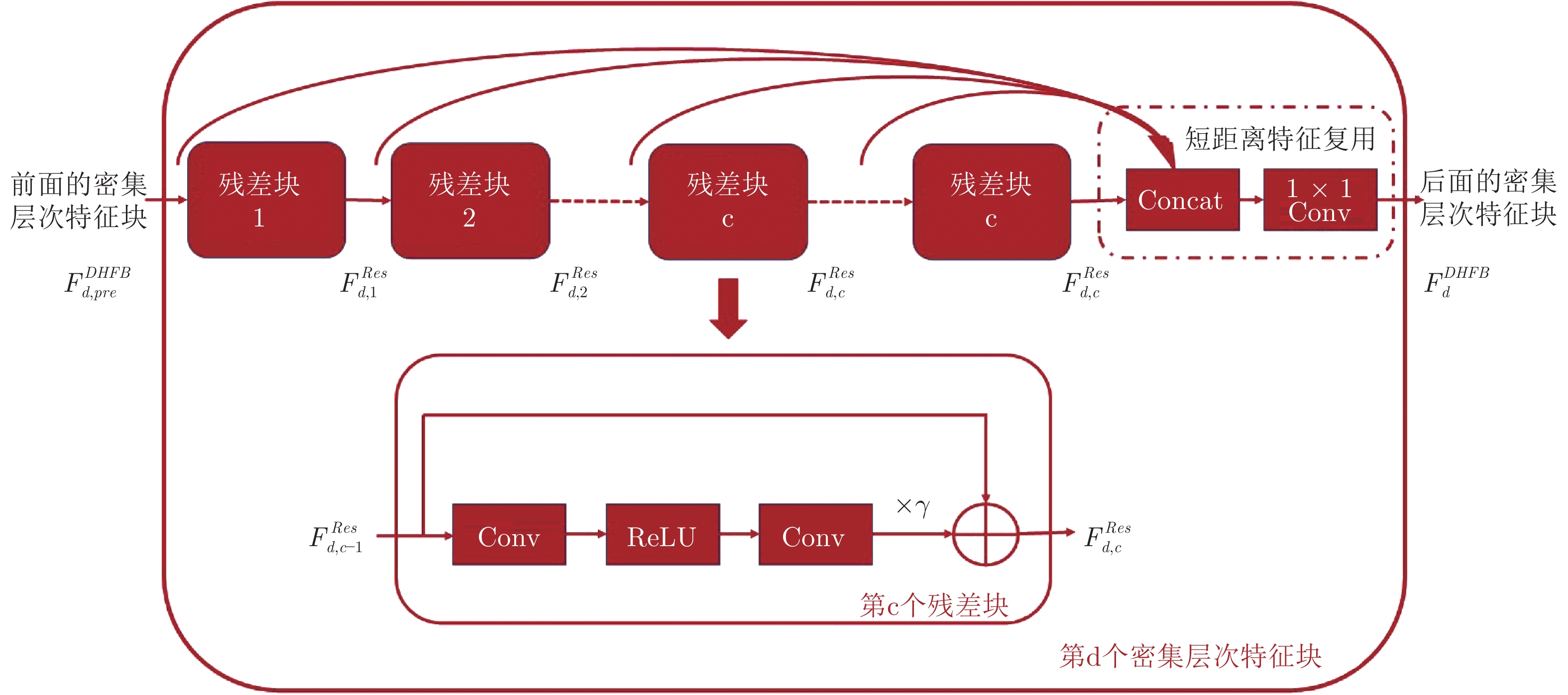
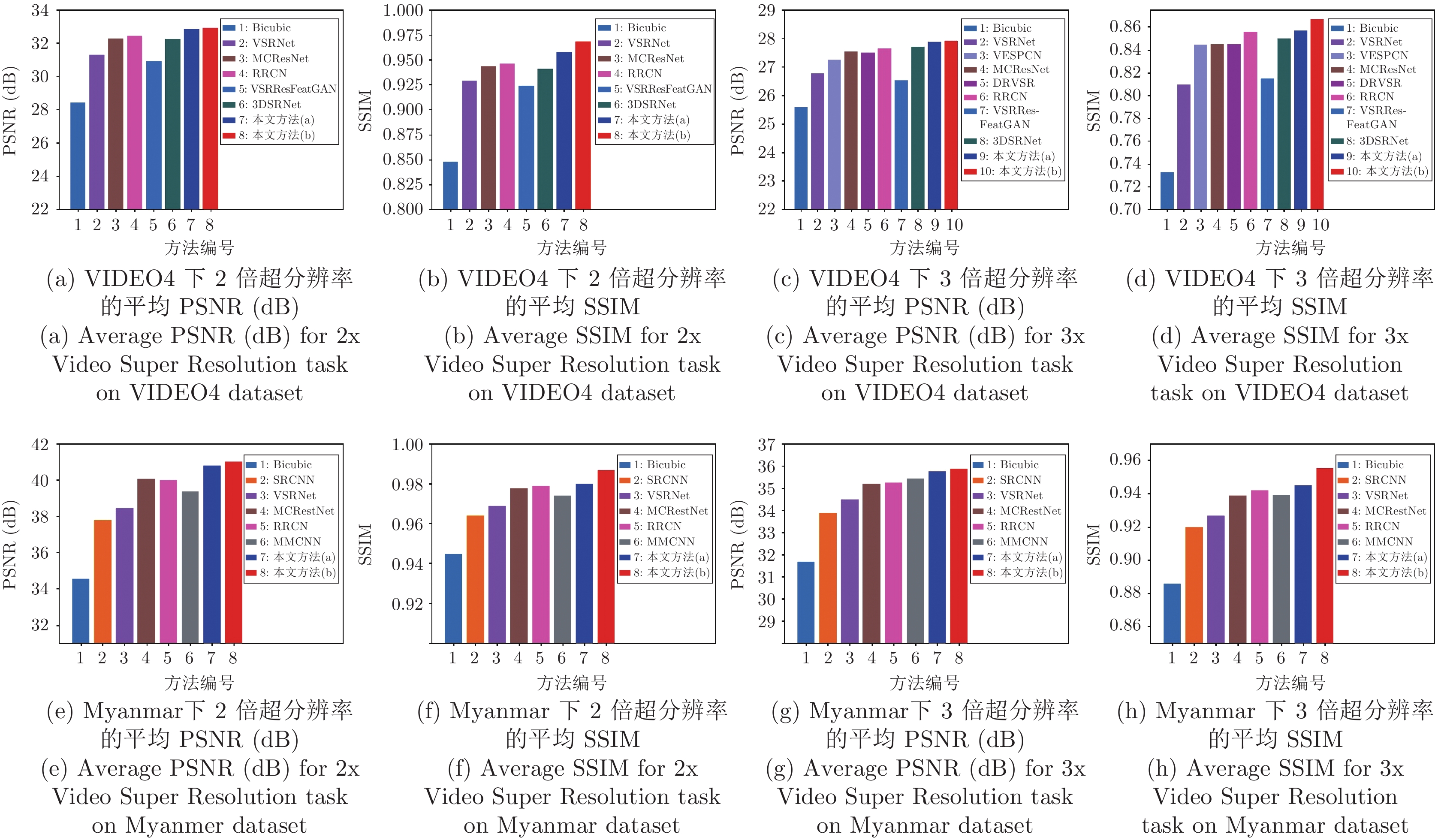
当前的深度卷积神经网络方法, 在视频超分辨率任务上实现的性能提升相对于图像超分辨率任务略低一些, 部分原因是它们对层次结构特征中的某些关键帧间信息的利用不够充分. 为此, 本文提出了一个称作层次特征复用网络(Hierarchical feature reuse network, HFRNet)的结构, 用以解决上述问题. 该网络保留运动补偿帧的低频内容, 并采用密集层次特征块(Dense hierarchical feature block, DHFB)自适应地融合其内部每个残差块的特征, 之后用长距离特征复用融合多个DHFB间的特征, 从而促进高频细节信息的恢复. 实验结果表明, 本文提出的方法在定量和定性指标上均优于当前的方法.
当前的深度卷积神经网络方法, 在视频超分辨率任务上实现的性能提升相对于图像超分辨率任务略低一些, 部分原因是它们对层次结构特征中的某些关键帧间信息的利用不够充分. 为此, 本文提出了一个称作层次特征复用网络(Hierarchical feature reuse network, HFRNet)的结构, 用以解决上述问题. 该网络保留运动补偿帧的低频内容, 并采用密集层次特征块(Dense hierarchical feature block, DHFB)自适应地融合其内部每个残差块的特征, 之后用长距离特征复用融合多个DHFB间的特征, 从而促进高频细节信息的恢复. 实验结果表明, 本文提出的方法在定量和定性指标上均优于当前的方法.


当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210009
摘要:
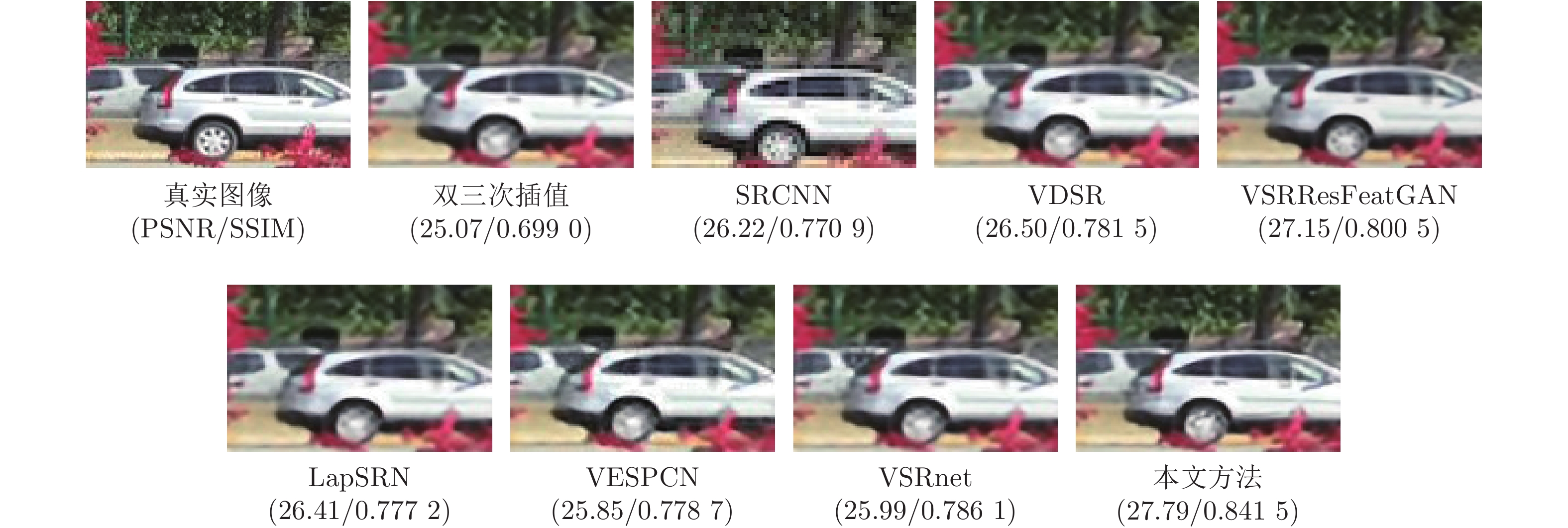
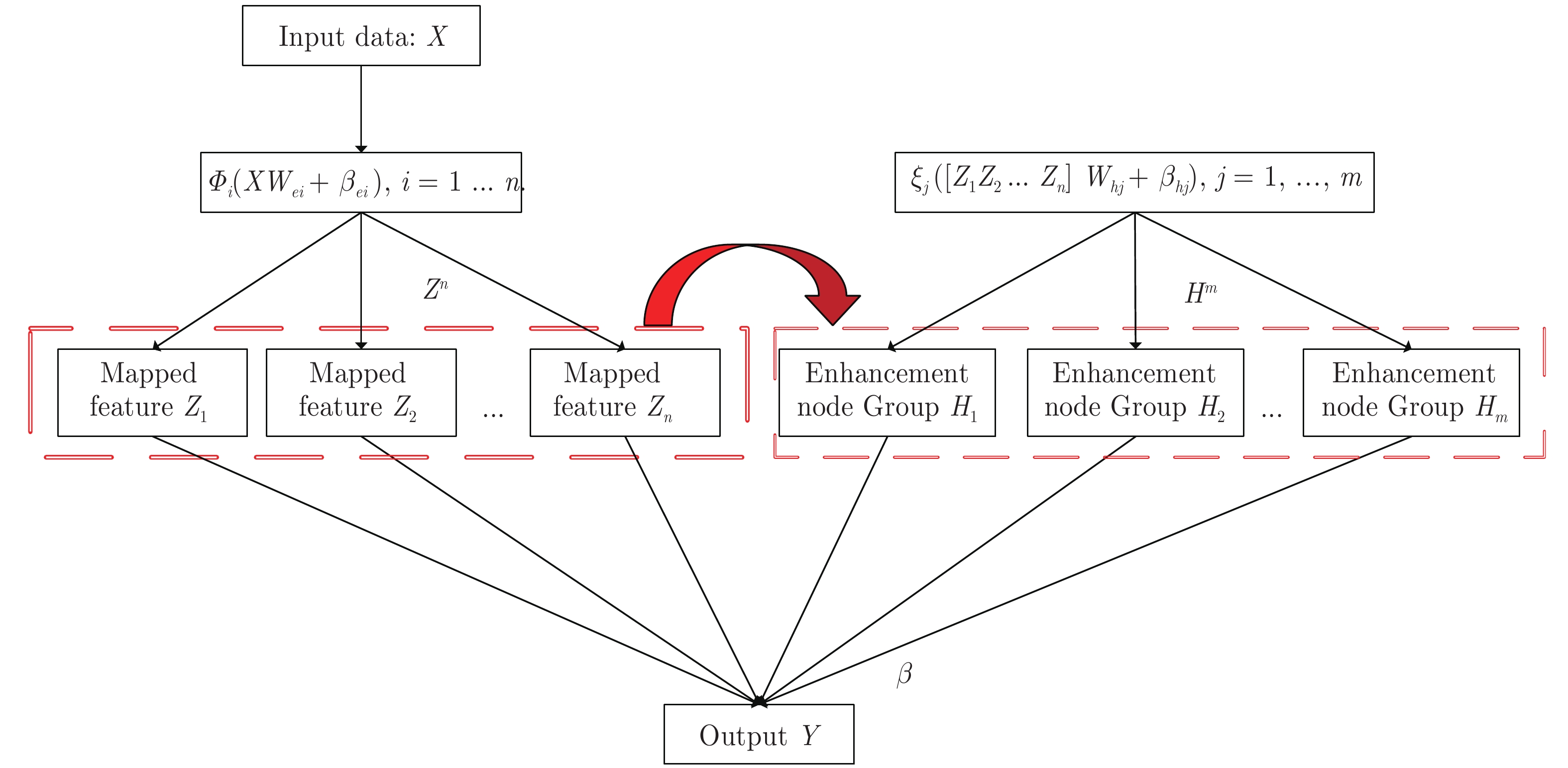
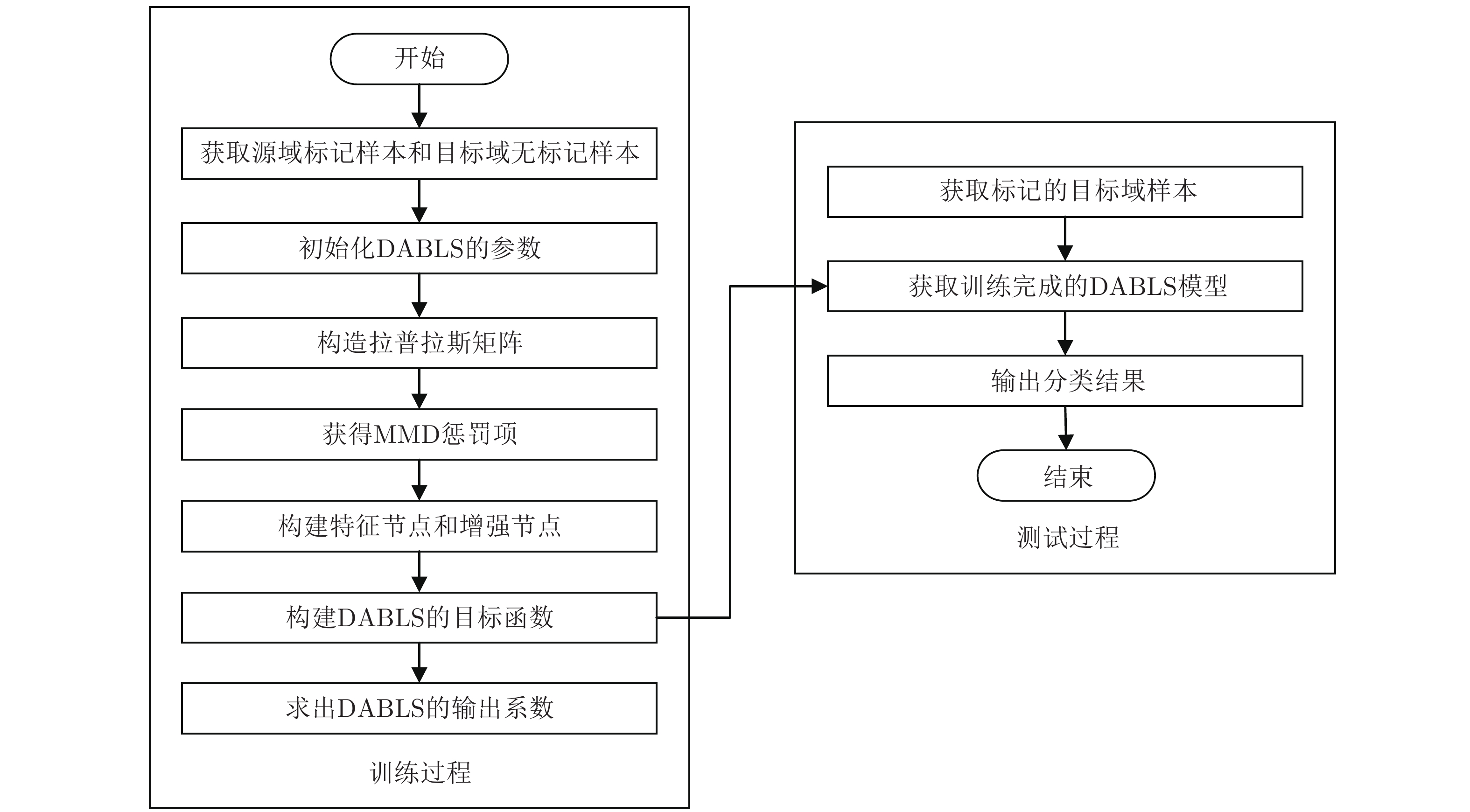
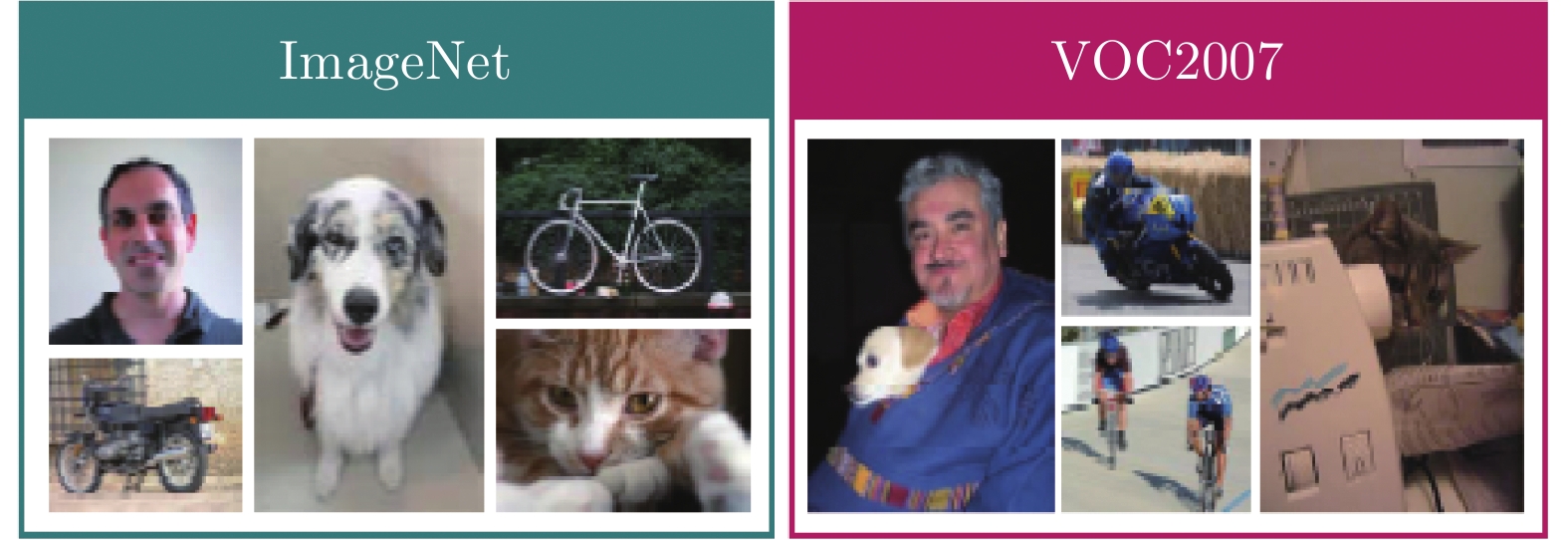
宽度学习系统(Broad learning system, BLS)作为一种基于随机向量函数型网络(Random vector functional link network, RVFLN)的高效增量学习系统, 具有快速自适应模型结构选择能力和高精度的特点. 但针对目标分类任务中有标签数据匮乏问题, 传统的BLS难以借助相关领域知识来提升目标域的分类效果, 为此本文提出一种基于流形正则化框架和最大均值差异(Maximum mean discrepancy, MMD)的域适应BLS(DABLS)模型, 实现目标域无标签条件下的跨域图像分类. DABLS模型首先构造BLS的特征节点和增强节点, 从源域和目标域数据中有效提取特征; 再利用流形正则化框架构造拉普拉斯矩阵, 以探索目标域数据中的流形特性, 挖掘目标域数据的潜在信息. 接着基于迁移学习方法构建源域数据与目标域数据之间的MMD惩罚项, 以匹配源域和目标域之间的投影均值; 将特征节点、增强节点、MMD惩罚项和目标域拉普拉斯矩阵相结合, 构造目标函数, 并采用岭回归分析法对其求解, 获得输出系数, 从而提高模型的跨域分类性能. 最后在不同图像数据集上进行大量的验证与对比实验, 结果表明DABLS在不同图像数据集上均能获得较好的跨域分类性能, 具有较强的泛化能力和较好的稳定性.
宽度学习系统(Broad learning system, BLS)作为一种基于随机向量函数型网络(Random vector functional link network, RVFLN)的高效增量学习系统, 具有快速自适应模型结构选择能力和高精度的特点. 但针对目标分类任务中有标签数据匮乏问题, 传统的BLS难以借助相关领域知识来提升目标域的分类效果, 为此本文提出一种基于流形正则化框架和最大均值差异(Maximum mean discrepancy, MMD)的域适应BLS(DABLS)模型, 实现目标域无标签条件下的跨域图像分类. DABLS模型首先构造BLS的特征节点和增强节点, 从源域和目标域数据中有效提取特征; 再利用流形正则化框架构造拉普拉斯矩阵, 以探索目标域数据中的流形特性, 挖掘目标域数据的潜在信息. 接着基于迁移学习方法构建源域数据与目标域数据之间的MMD惩罚项, 以匹配源域和目标域之间的投影均值; 将特征节点、增强节点、MMD惩罚项和目标域拉普拉斯矩阵相结合, 构造目标函数, 并采用岭回归分析法对其求解, 获得输出系数, 从而提高模型的跨域分类性能. 最后在不同图像数据集上进行大量的验证与对比实验, 结果表明DABLS在不同图像数据集上均能获得较好的跨域分类性能, 具有较强的泛化能力和较好的稳定性.

当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c210012
摘要:
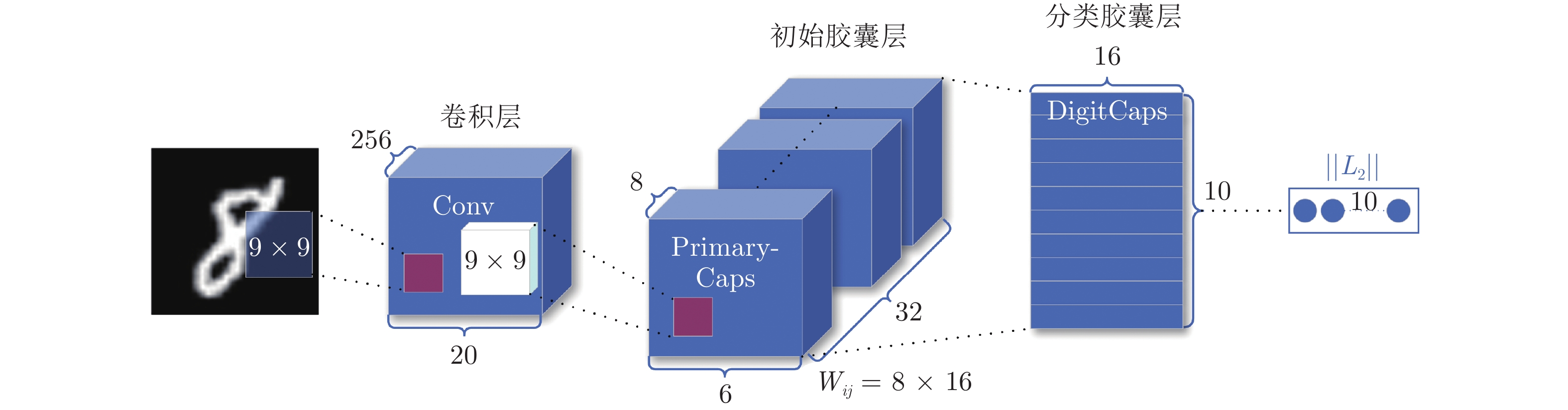
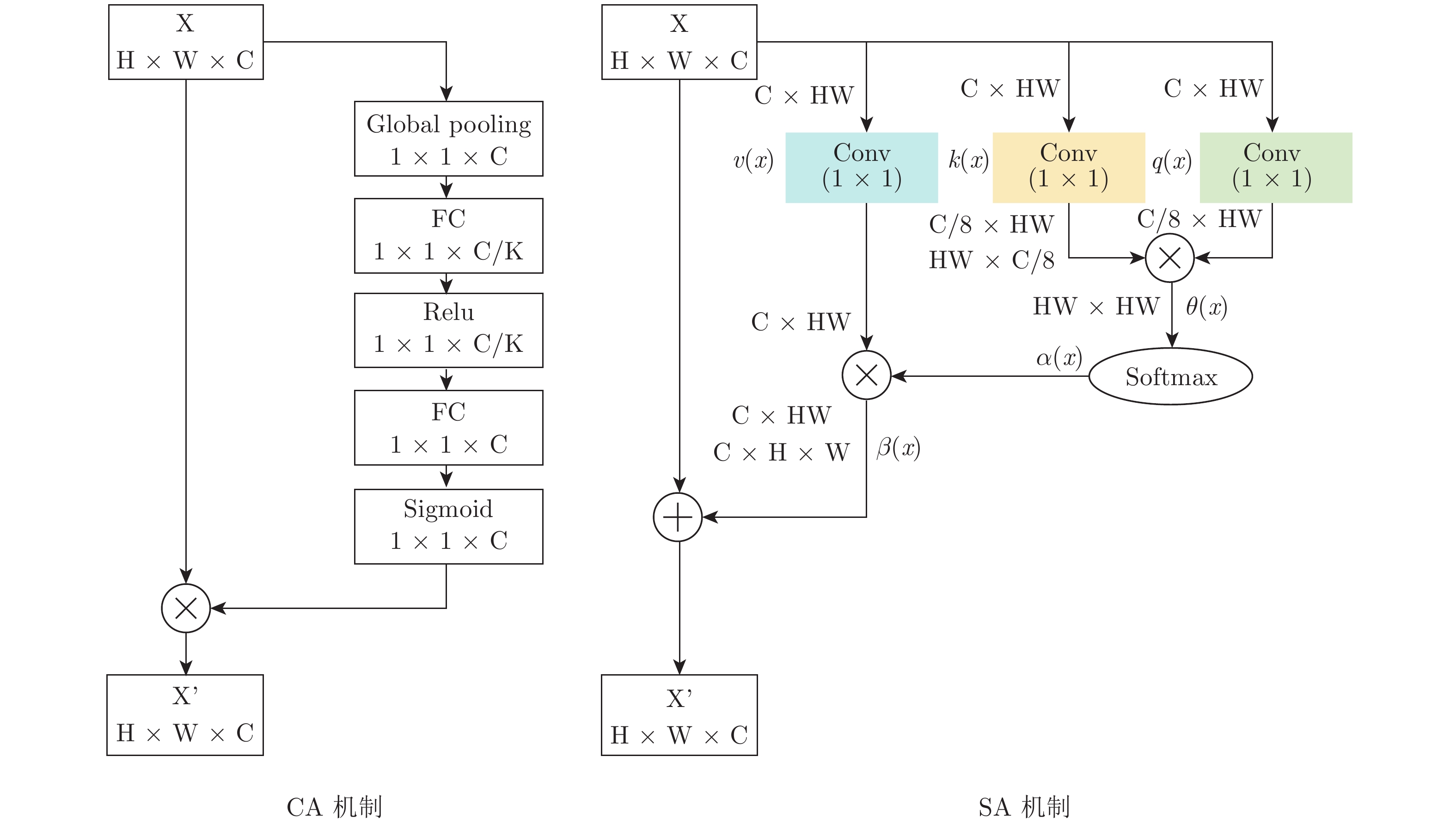
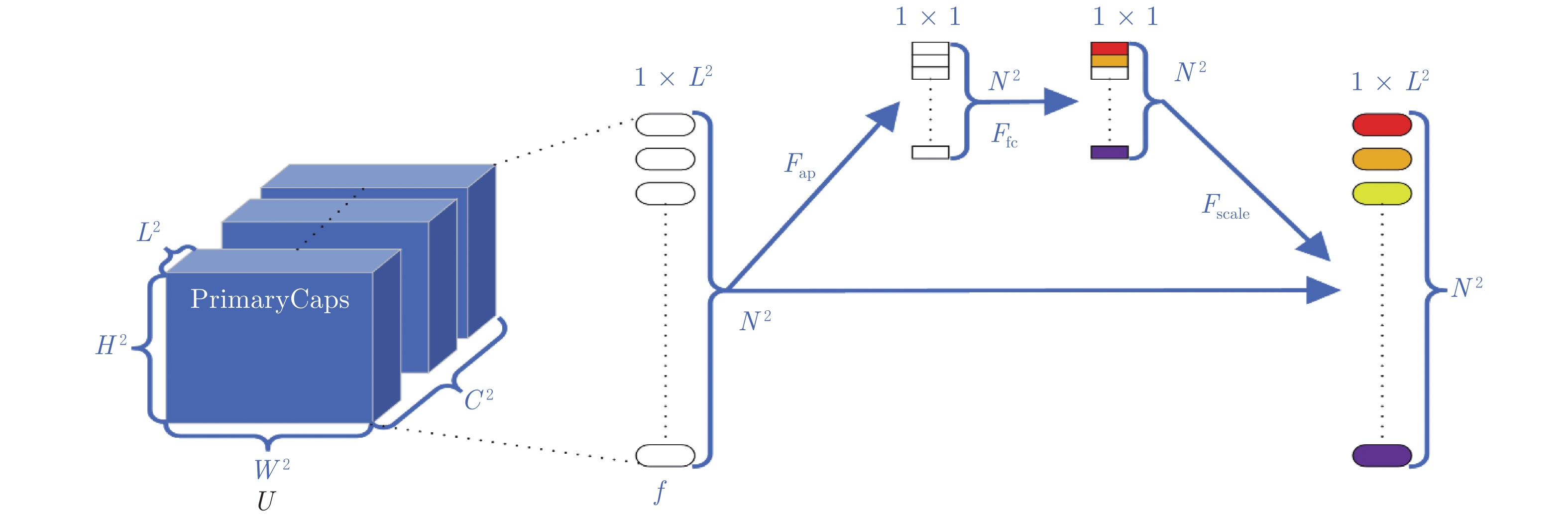
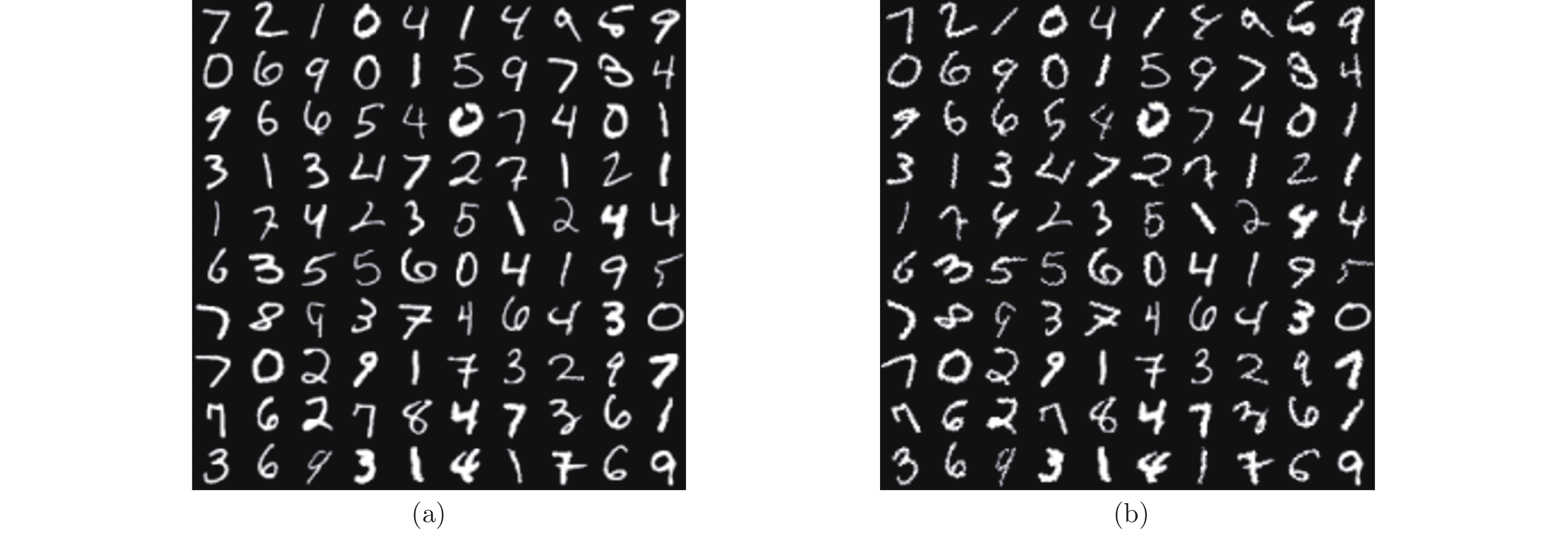
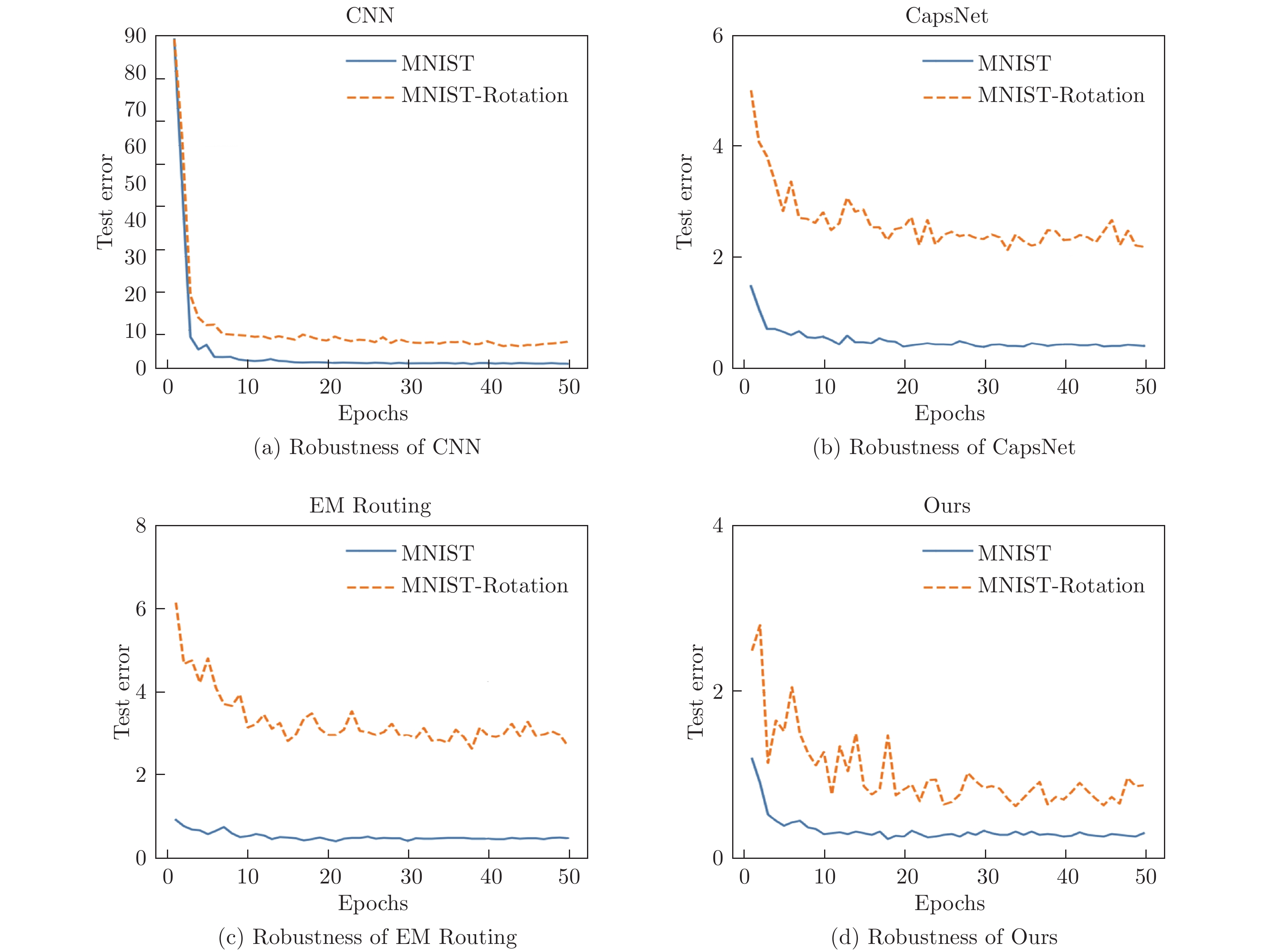
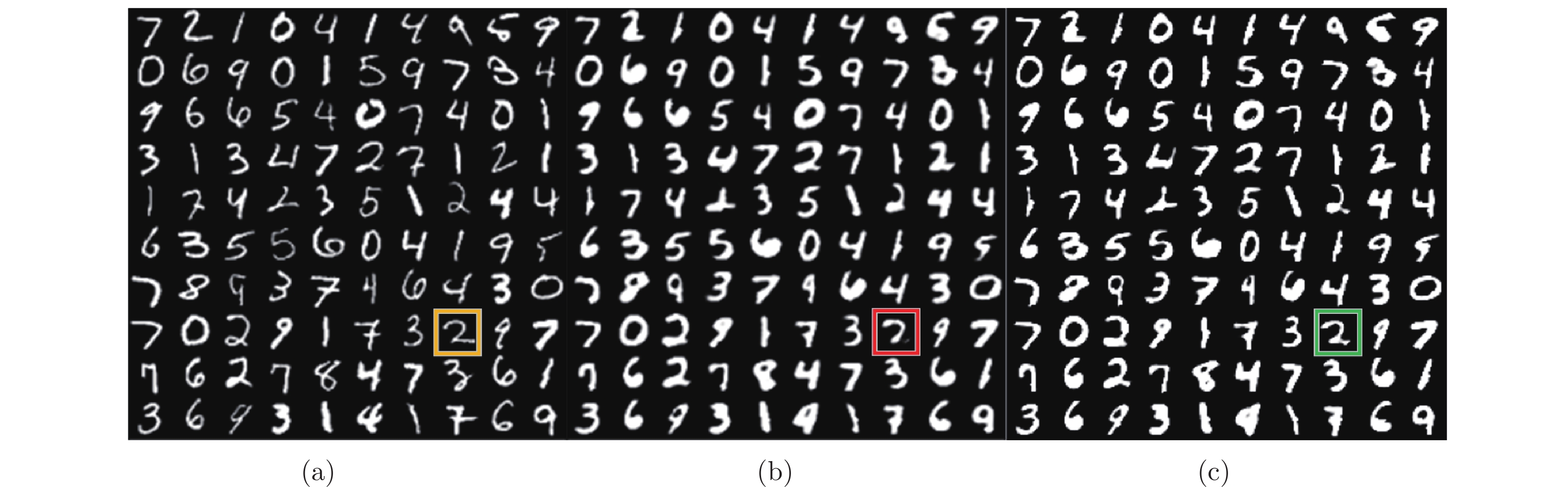
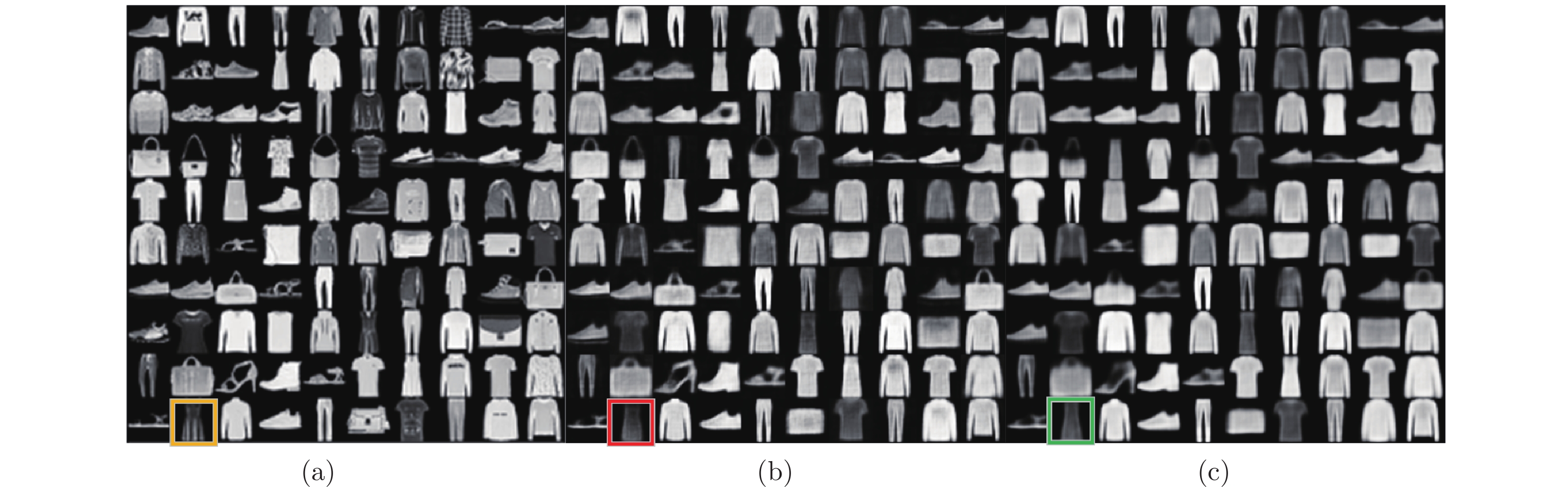
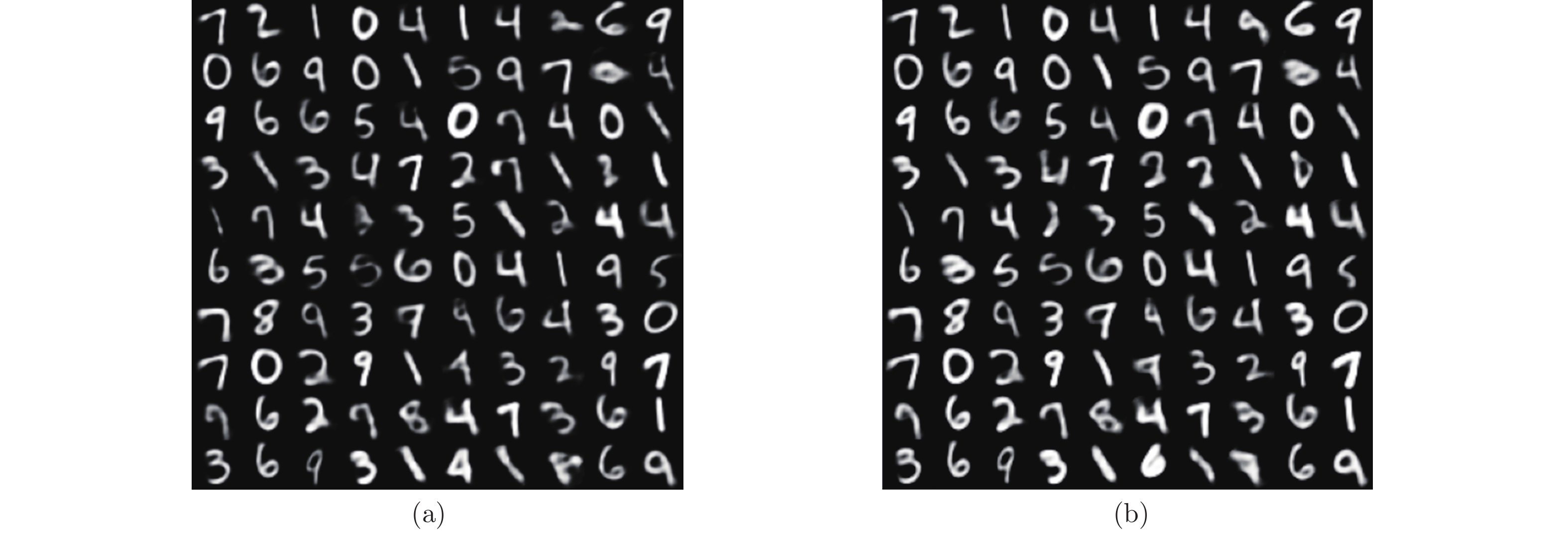
本文针对胶囊网络特征提取不充分的问题, 提出了一种图像分类的多阶段注意力胶囊网络模型. 首先在卷积层对低层特征和高层特征分别采用空间和通道注意力来提取有效特征; 然后提出基于向量方向的注意力机制作用于动态路由层, 增加对重要胶囊的关注, 进而提高低层胶囊对高层胶囊预测的准确性; 最后, 在五个公共数据集上进行对比实验, 结果表明本文提出的模型在分类精度和鲁棒性上优于其他胶囊网络模型, 在仿射变换图像重构上也表现良好.
本文针对胶囊网络特征提取不充分的问题, 提出了一种图像分类的多阶段注意力胶囊网络模型. 首先在卷积层对低层特征和高层特征分别采用空间和通道注意力来提取有效特征; 然后提出基于向量方向的注意力机制作用于动态路由层, 增加对重要胶囊的关注, 进而提高低层胶囊对高层胶囊预测的准确性; 最后, 在五个公共数据集上进行对比实验, 结果表明本文提出的模型在分类精度和鲁棒性上优于其他胶囊网络模型, 在仿射变换图像重构上也表现良好.







当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.c200007
摘要:
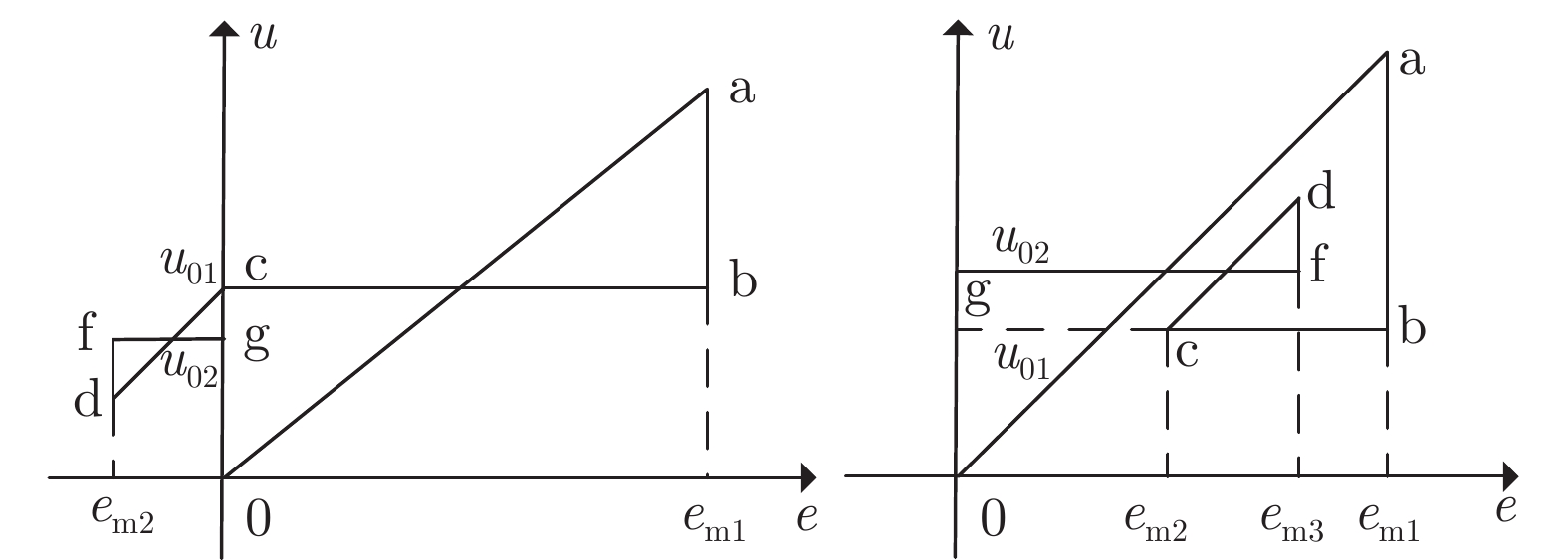
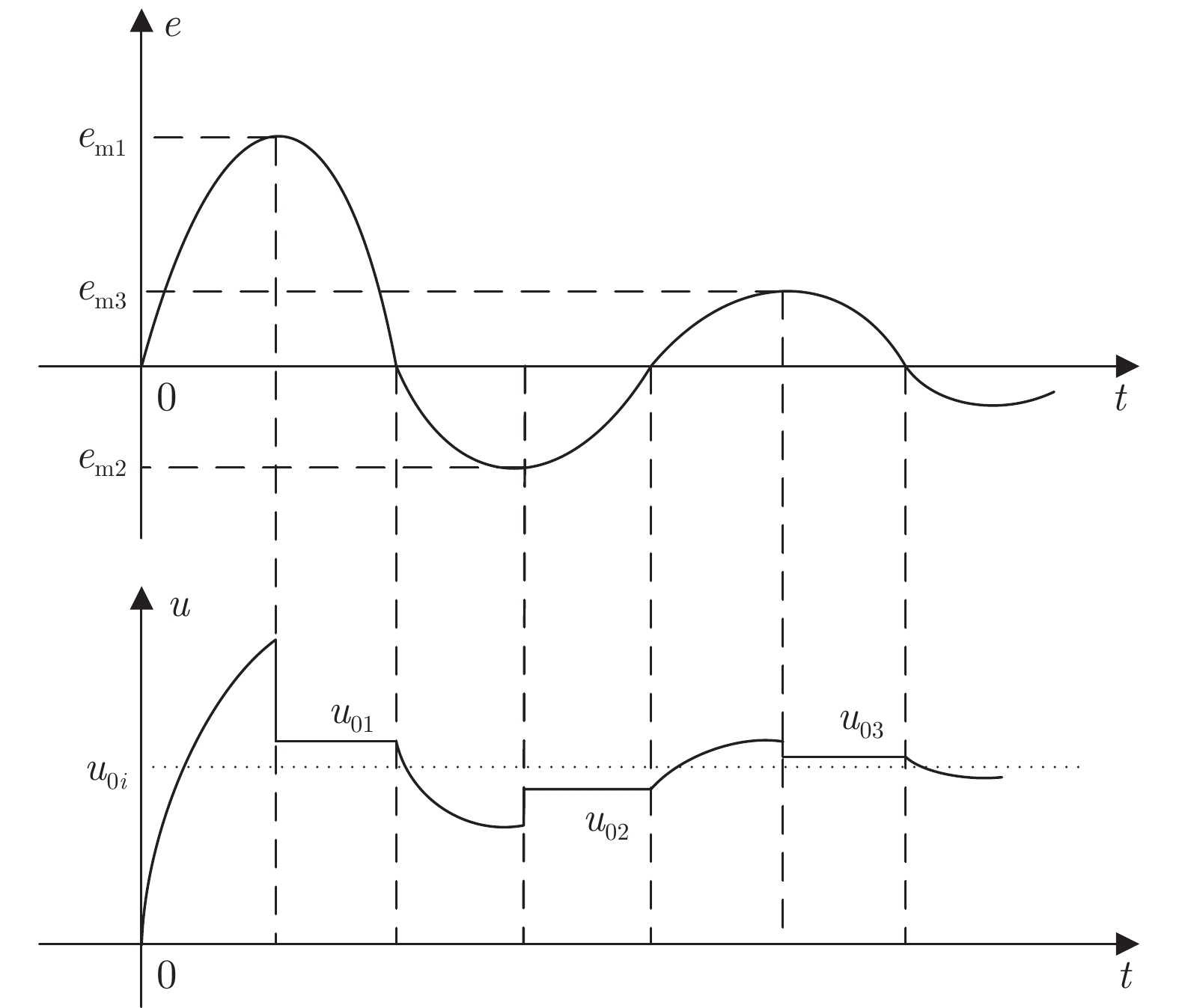
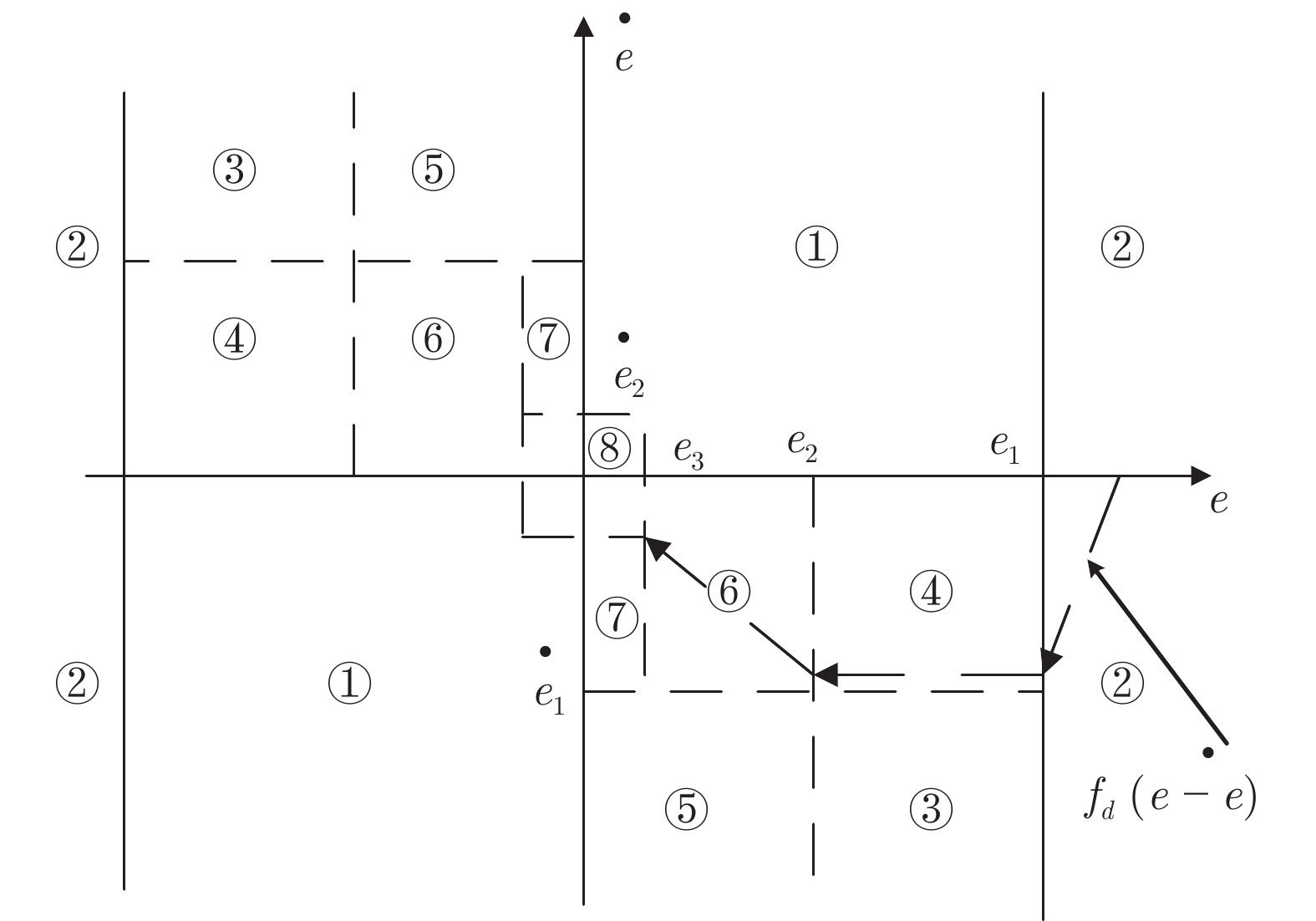
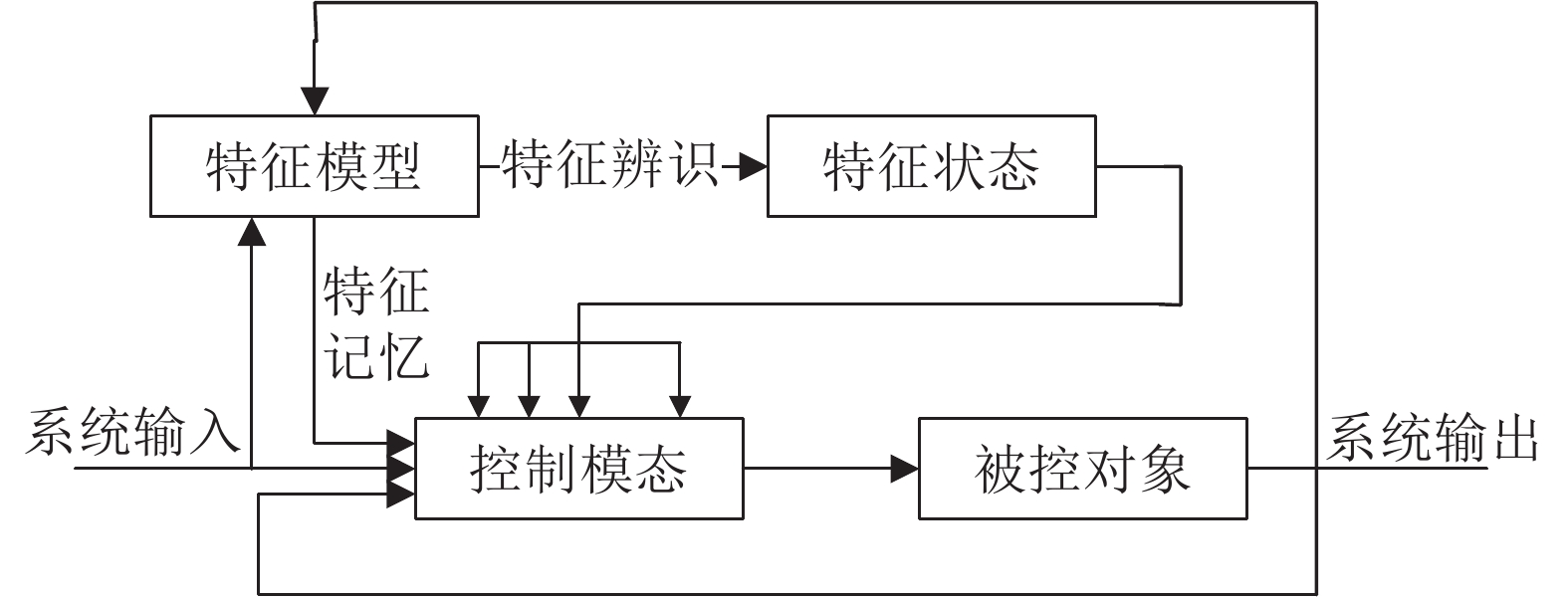
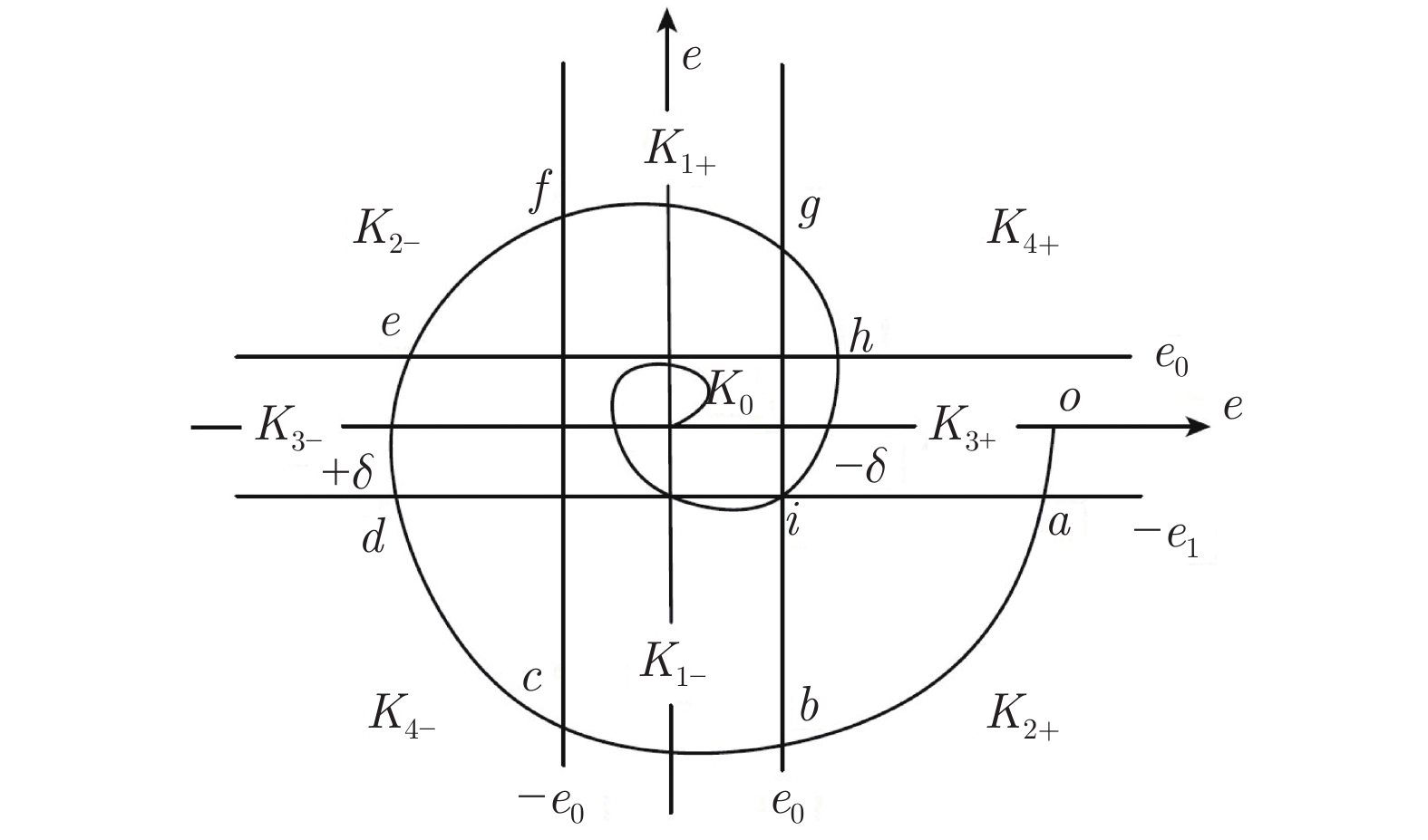
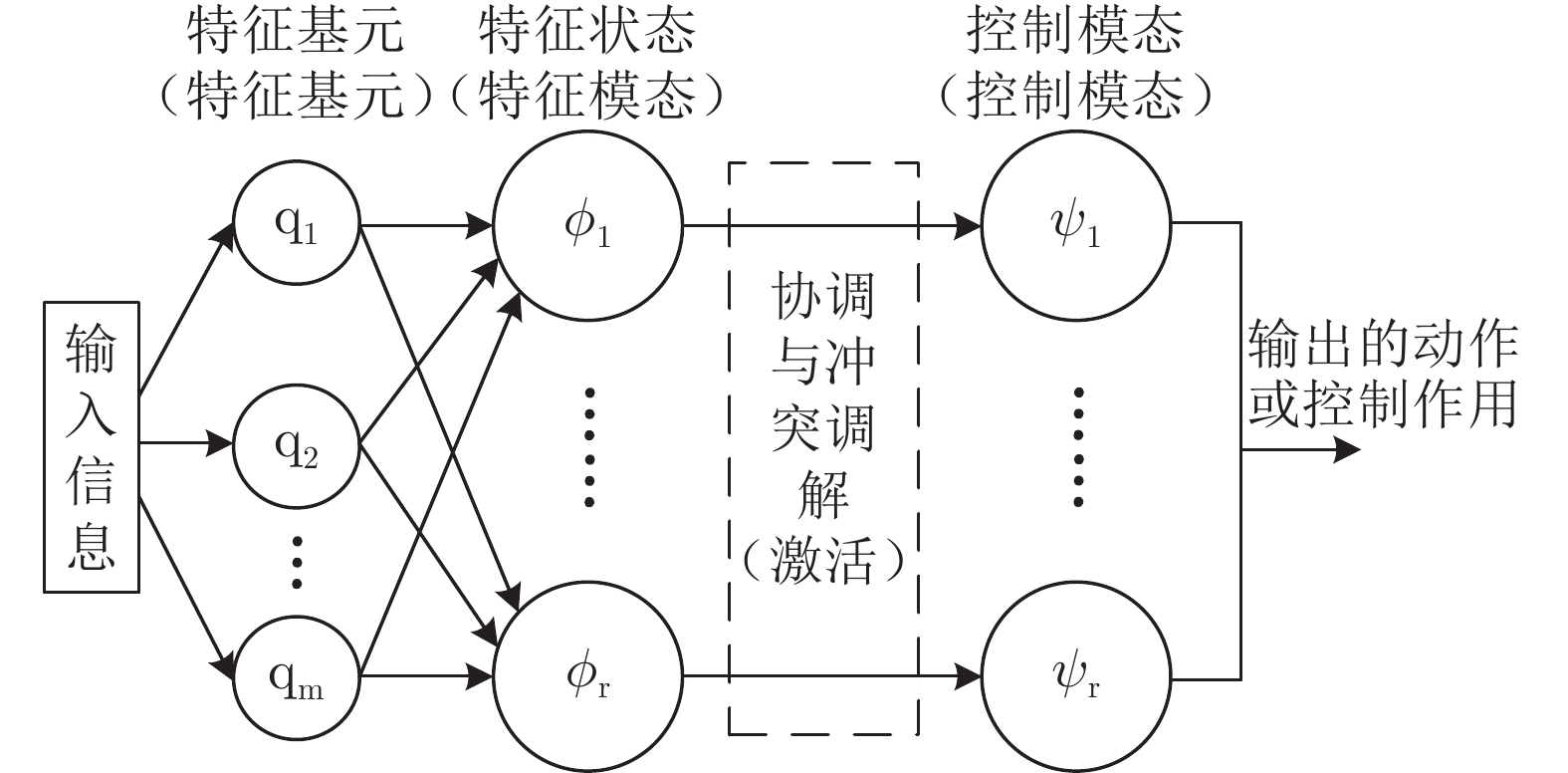
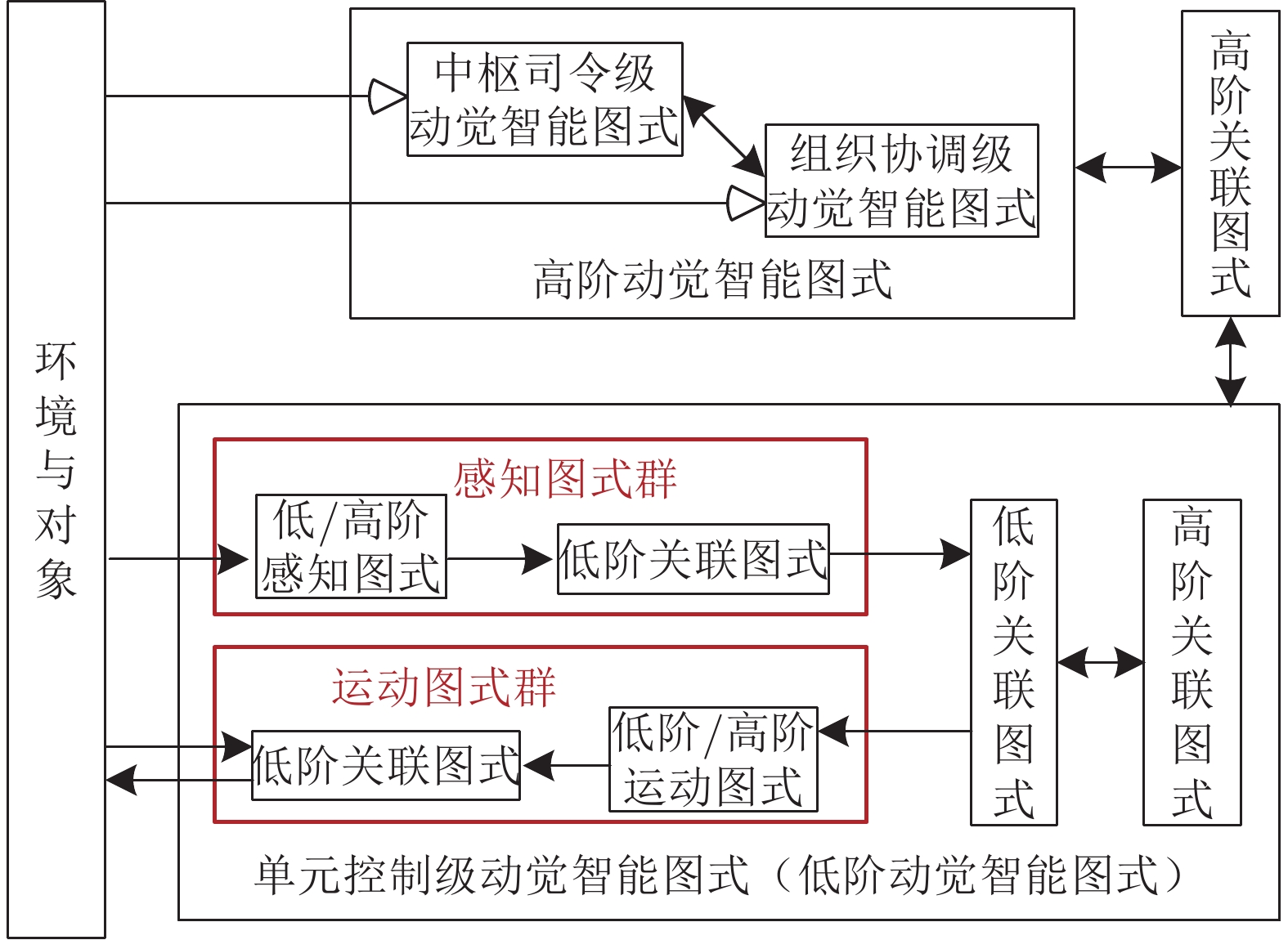
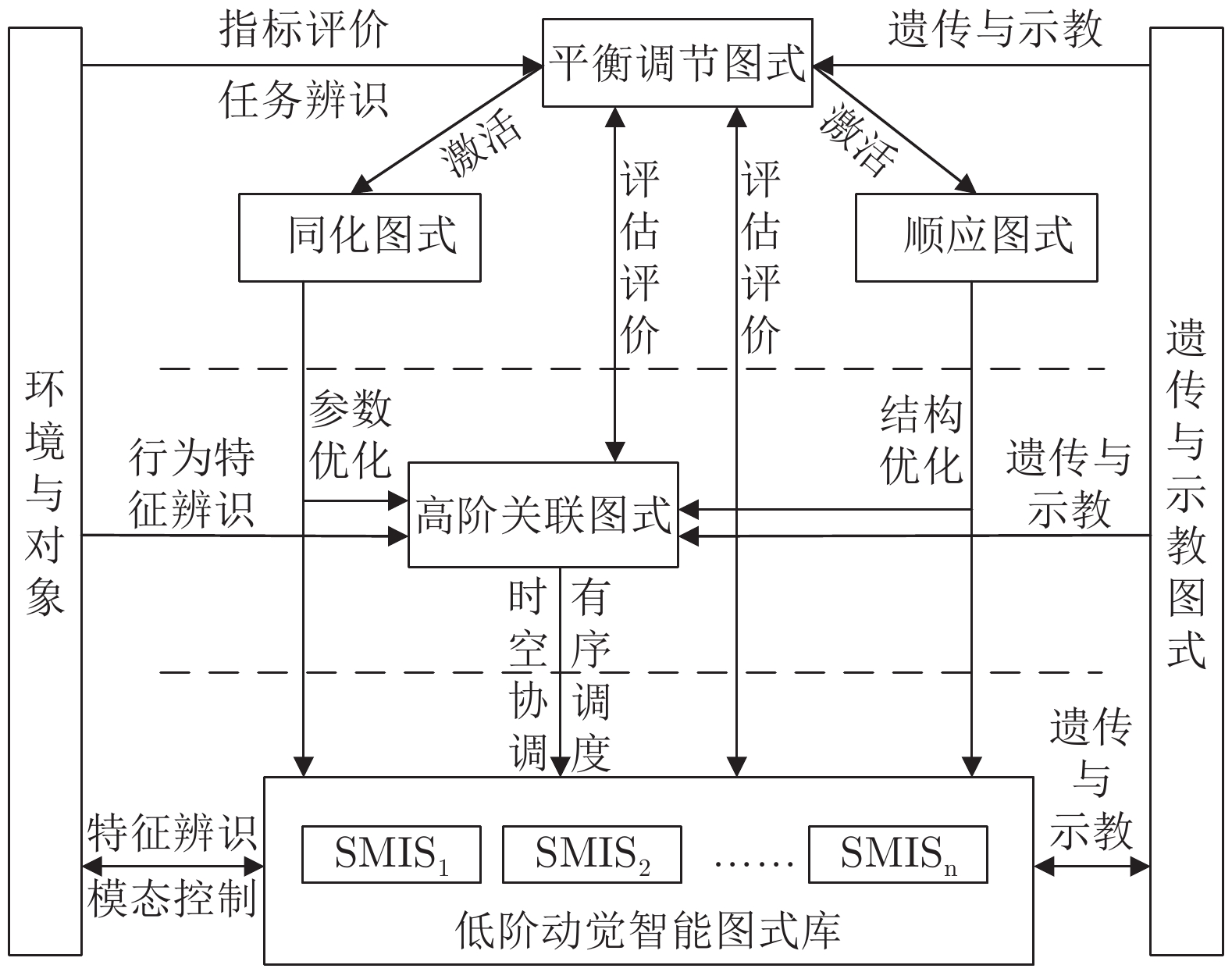
仿人智能控制是现代智能控制理论之一, 利用分层递阶的控制结构与多控制模态为强非线性、大迟滞、难建模问题提供了切实可行的解决方案, 近些年来发展迅速并且得到学术界的持续关注, 但缺乏对该理论研究进展系统性的总结. 本文通过系统的梳理仿人智能控制的理论基础和发展脉络, 将其划分为三代控制模型, 分别从每一代控制模型的算法描述、研究进展与应用进展三个角度进行综述, 同时, 结合当前的研究进展讨论仿人智能控制在控制模型、结构功能、参数校正方面进一步研究的方向.
仿人智能控制是现代智能控制理论之一, 利用分层递阶的控制结构与多控制模态为强非线性、大迟滞、难建模问题提供了切实可行的解决方案, 近些年来发展迅速并且得到学术界的持续关注, 但缺乏对该理论研究进展系统性的总结. 本文通过系统的梳理仿人智能控制的理论基础和发展脉络, 将其划分为三代控制模型, 分别从每一代控制模型的算法描述、研究进展与应用进展三个角度进行综述, 同时, 结合当前的研究进展讨论仿人智能控制在控制模型、结构功能、参数校正方面进一步研究的方向.
当前状态:
, 最新更新时间: ,
doi: 10.16383/j.aas.2020.c200033
摘要:
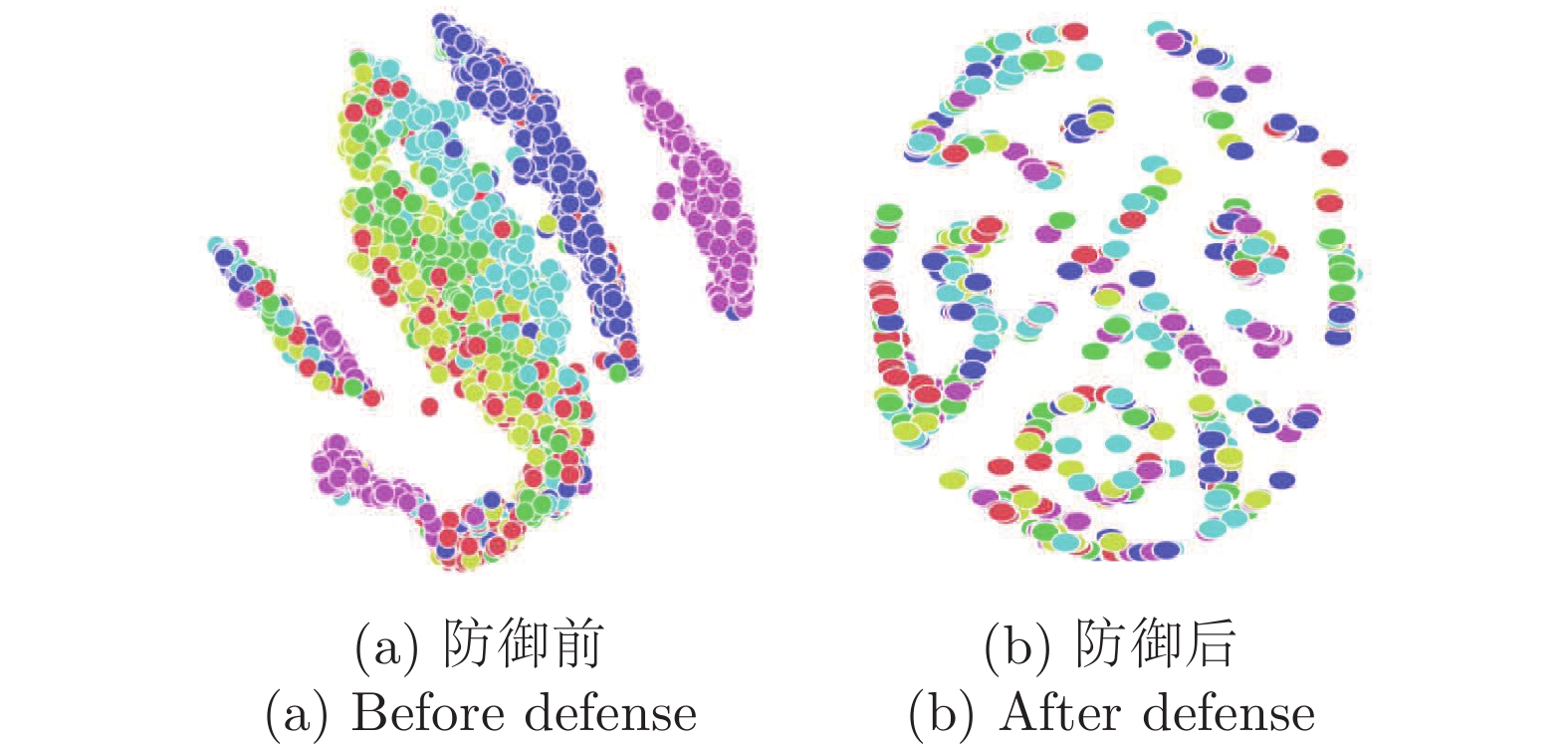
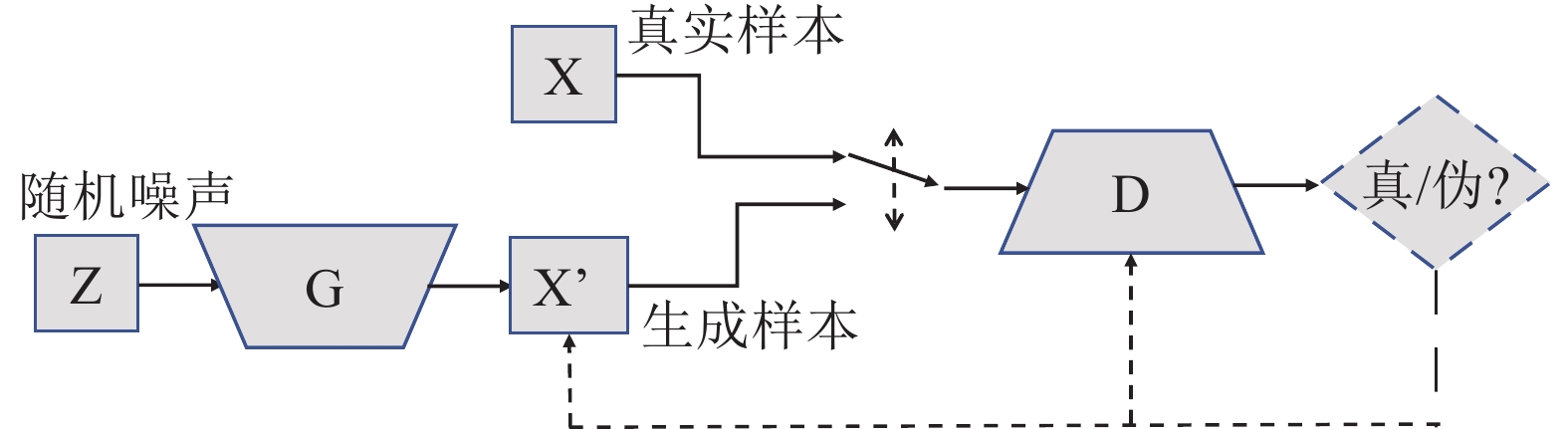
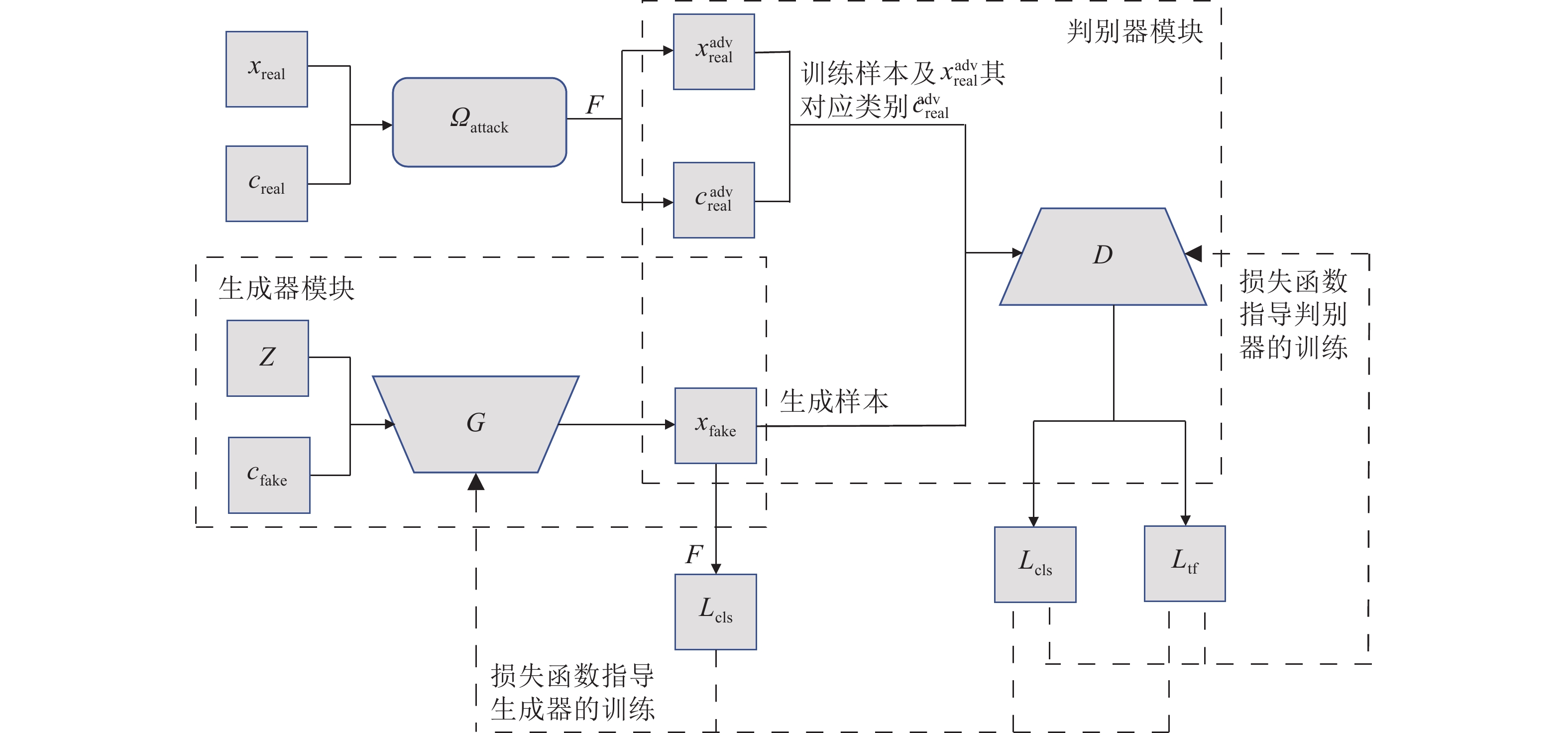
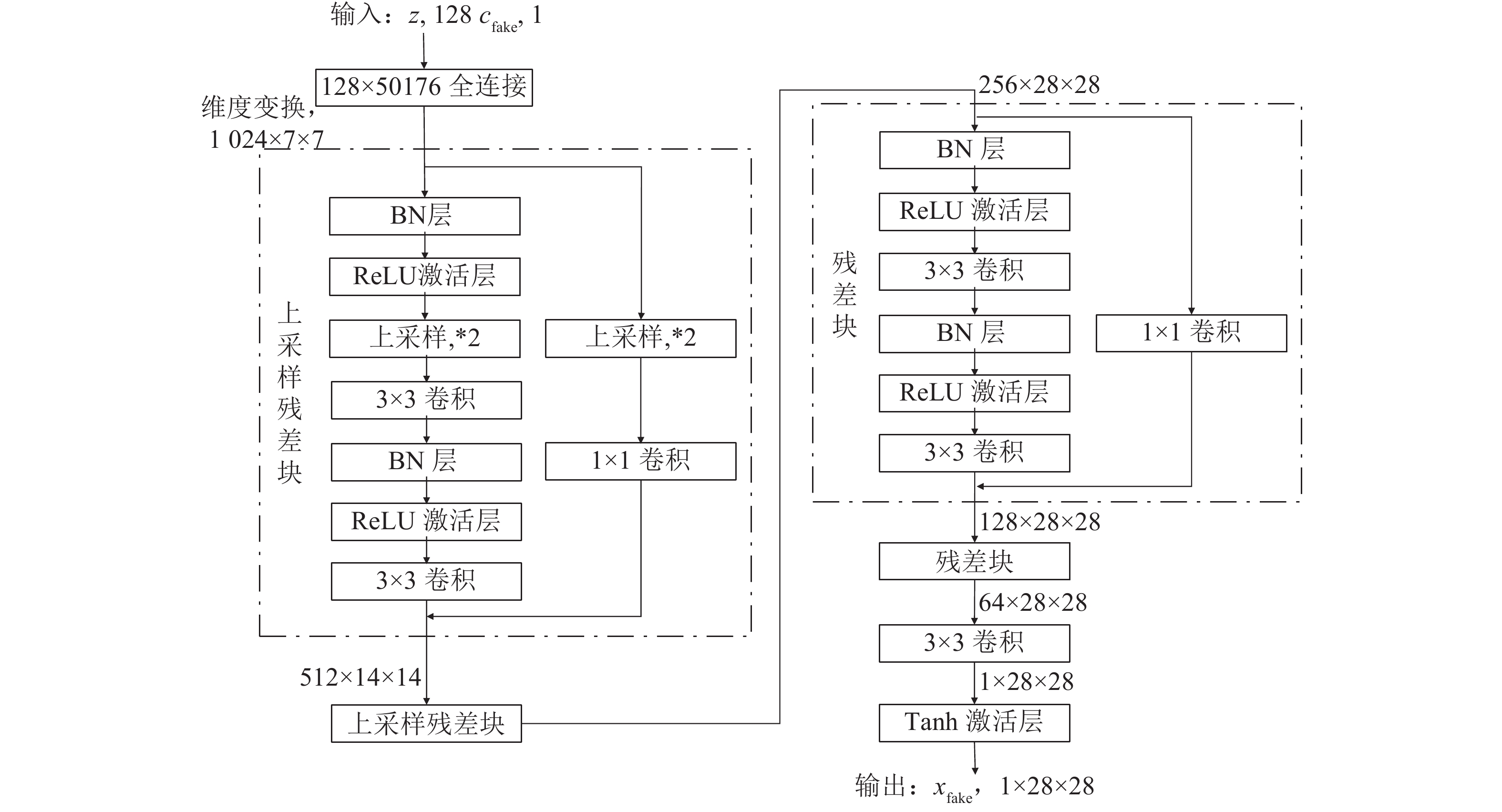
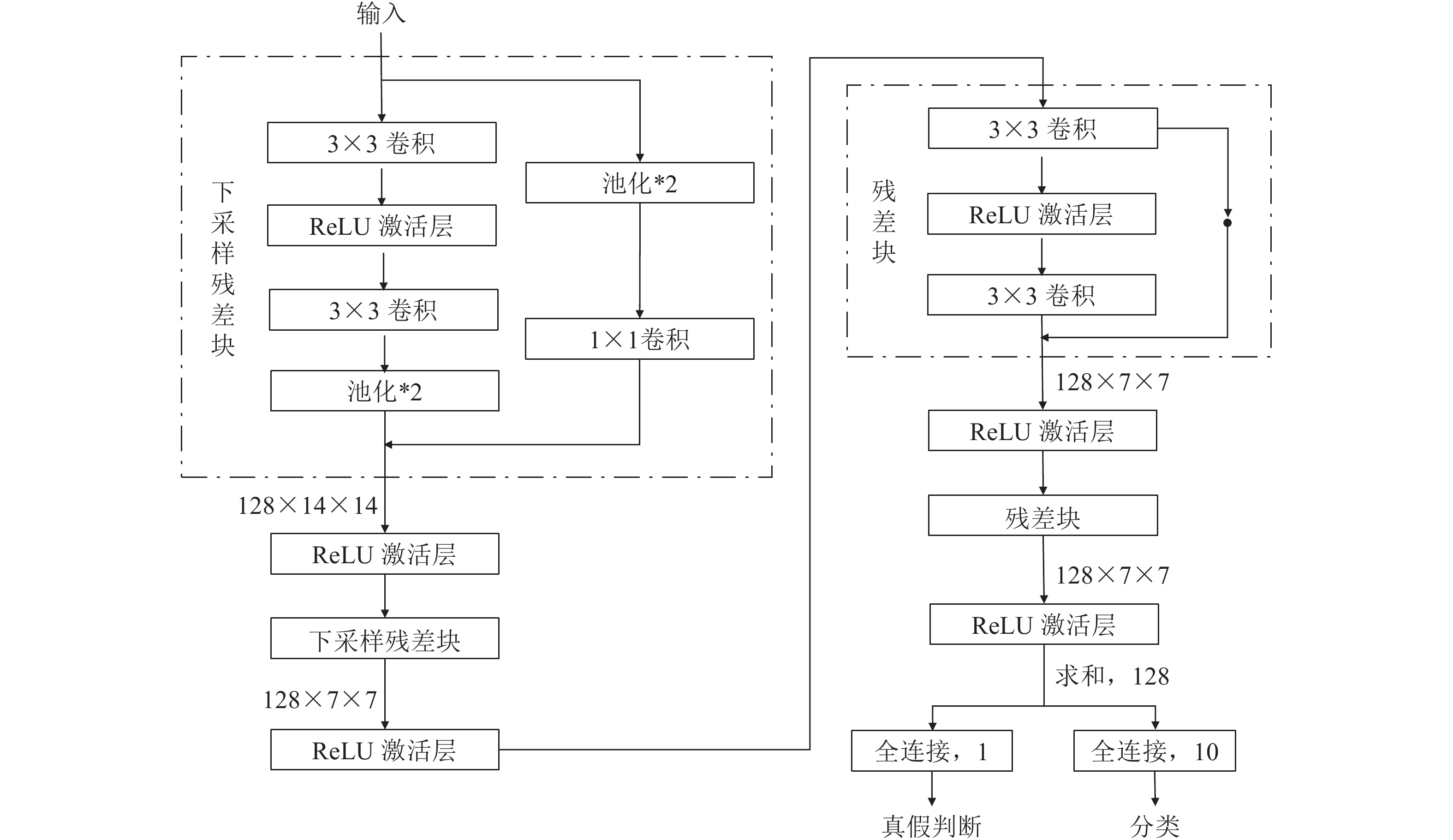
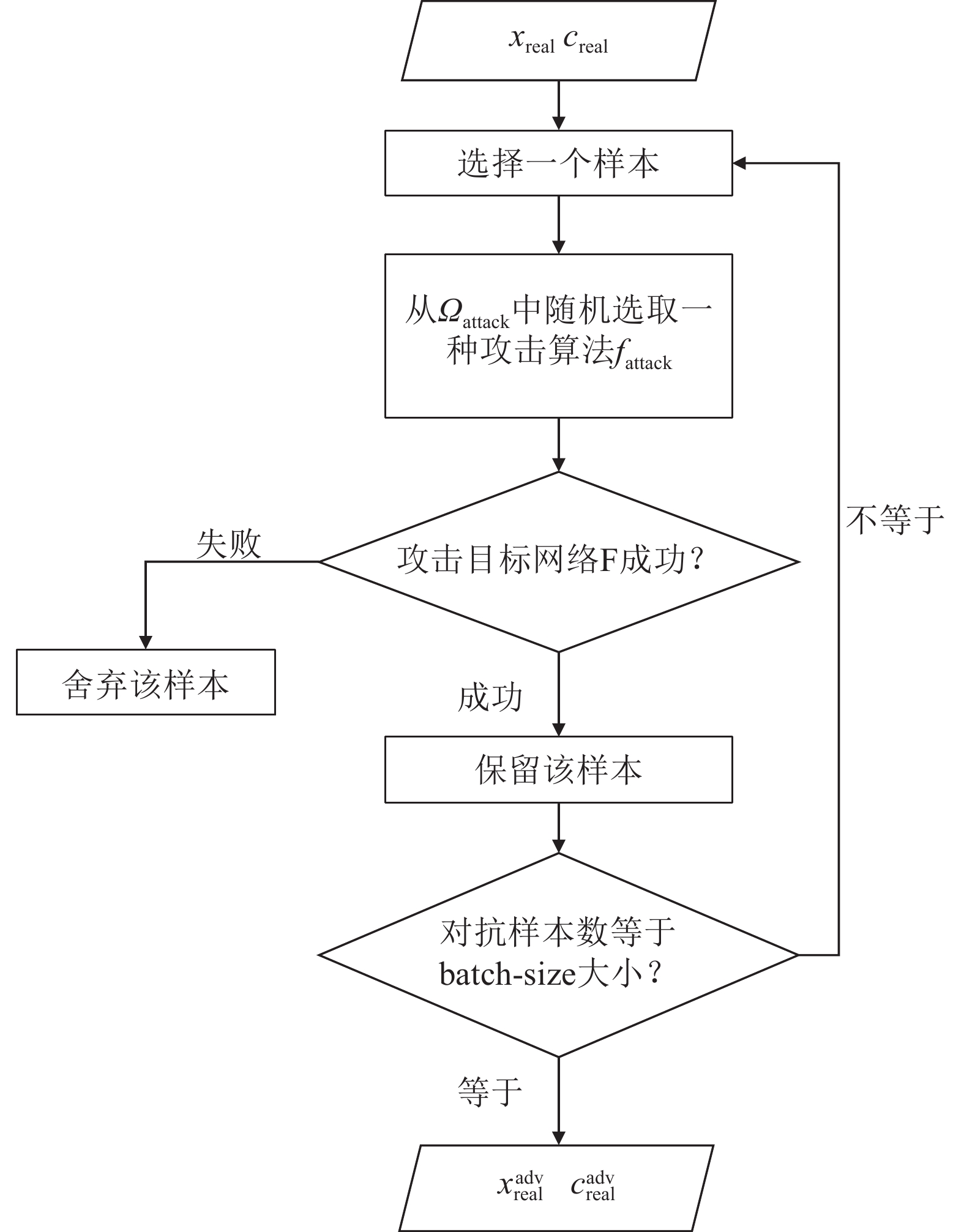
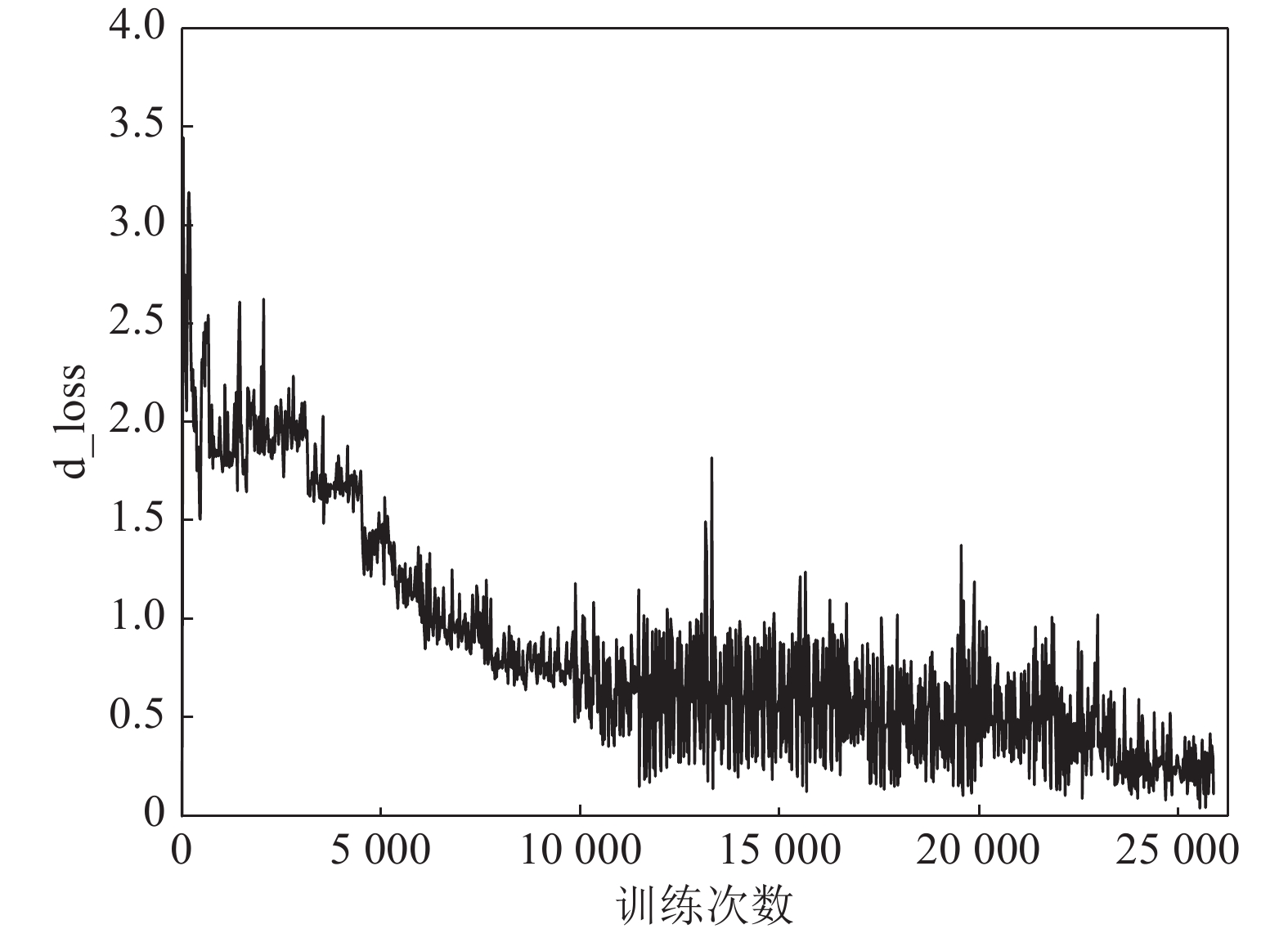
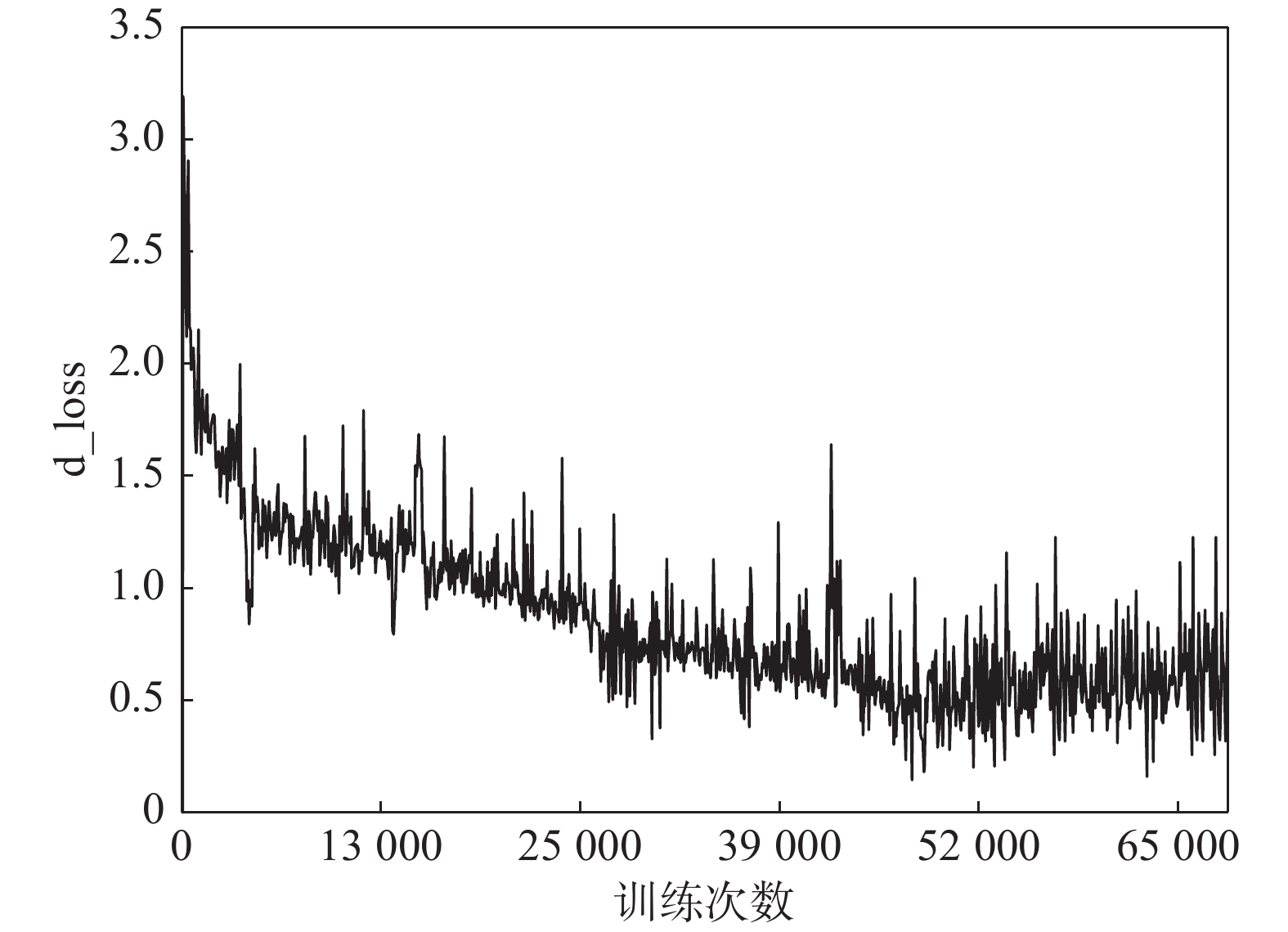
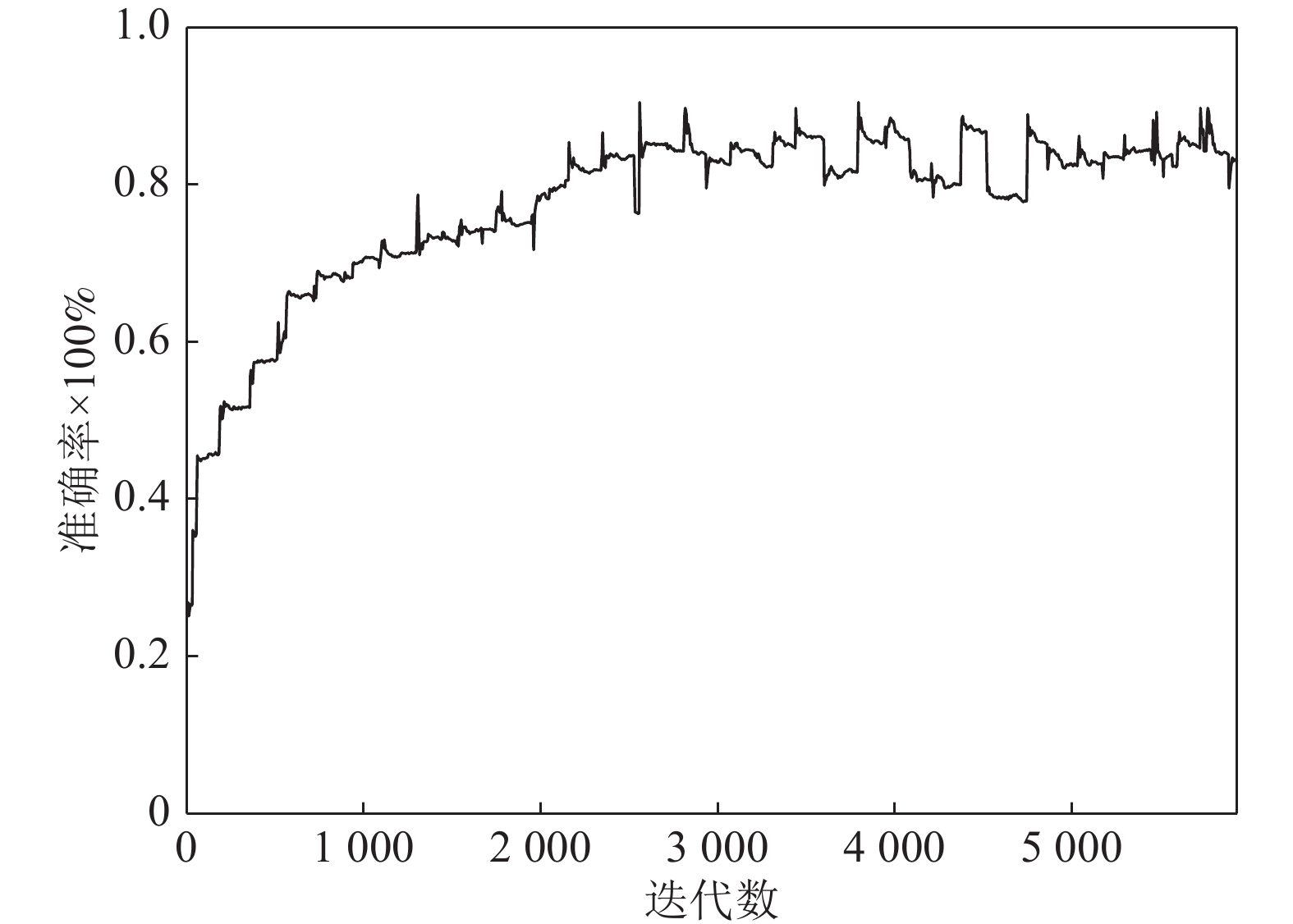
深度神经网络在解决复杂问题方面取得了惊人的成功, 广泛应用于生活中各个领域, 但是最近的研究表明, 深度神经网络容易受到精心设计的对抗样本的攻击, 导致网络模型输出错误的预测结果, 这对于深度学习网络的安全性是一种极大的挑战. 对抗攻击是深度神经网络发展过程中必须克服的一大障碍, 设计一种高效且能够防御多种对抗攻击算法, 且具有强鲁棒性的防御模型是有效推动对抗攻击防御的方向之一, 探究能否利用对抗性攻击来训练网络分类器从而提高其鲁棒性具有重要意义. 本文将生成对抗网络(Generative adversarial networks, GAN)和现有的攻击算法结合, 提出一种基于生成对抗网络的对抗攻击防御模型(AC-DefGAN), 利用对抗攻击算法生成攻击样本作为GAN的训练样本, 同时在网络中加入条件约束来稳定模型的训练过程, 利用分类器对生成器所生成样本的分类来指导GAN的训练过程, 通过自定义分类器需要防御的攻击算法来生成对抗样本以完成判别器的训练, 从而得到能够防御多种对抗攻击的分类器. 通过在MNIST、CIFAR-10和ImageNet数据集上进行实验, 证明训练完成后, AC-DefGAN可以直接对原始样本和对抗样本进行正确分类, 对各类对抗攻击算法达到很好的防御效果, 且比已有方法防御效果好、鲁棒性强.
深度神经网络在解决复杂问题方面取得了惊人的成功, 广泛应用于生活中各个领域, 但是最近的研究表明, 深度神经网络容易受到精心设计的对抗样本的攻击, 导致网络模型输出错误的预测结果, 这对于深度学习网络的安全性是一种极大的挑战. 对抗攻击是深度神经网络发展过程中必须克服的一大障碍, 设计一种高效且能够防御多种对抗攻击算法, 且具有强鲁棒性的防御模型是有效推动对抗攻击防御的方向之一, 探究能否利用对抗性攻击来训练网络分类器从而提高其鲁棒性具有重要意义. 本文将生成对抗网络(Generative adversarial networks, GAN)和现有的攻击算法结合, 提出一种基于生成对抗网络的对抗攻击防御模型(AC-DefGAN), 利用对抗攻击算法生成攻击样本作为GAN的训练样本, 同时在网络中加入条件约束来稳定模型的训练过程, 利用分类器对生成器所生成样本的分类来指导GAN的训练过程, 通过自定义分类器需要防御的攻击算法来生成对抗样本以完成判别器的训练, 从而得到能够防御多种对抗攻击的分类器. 通过在MNIST、CIFAR-10和ImageNet数据集上进行实验, 证明训练完成后, AC-DefGAN可以直接对原始样本和对抗样本进行正确分类, 对各类对抗攻击算法达到很好的防御效果, 且比已有方法防御效果好、鲁棒性强.
主管: 中国科学院
主办: 中国科学院自动化研究所中国自动化学会
主编: 柴天佑
刊期: 月刊
ISSN 0254-4156
CN 11-2109/TP






访问统计
总访问量
今日访问
在线人数
-

自动化学报服务号
-

JAS微信服务号
