

Event-triggered Tracking Control for a Class of Nonlinear Systems With Observer and Prescribed Performance
-
摘要: 针对一类具有外部扰动的非线性系统, 提出了一种自适应模糊跟踪控制方法. 首先, 利用模糊逻辑系统逼近系统未知的非线性函数, 并设计了一个模糊状态观测器来估计系统的不可测状态. 其次, 通过指定性能函数, 使系统的跟踪误差能够约束在指定范围内. 然后, 利用Backsteping方法结合包含对数函数的Lyapunov泛函, 设计了一个基于事件触发条件的自适应模糊控制器. 基于Lyapunov稳定性理论和$\tanh$函数的性质证明了所提出的控制策略能够保证闭环系统中所有信号是半全局一致最终有界的. 最后, 通过一个数值仿真例子验证了所提出方法的有效性.Abstract: This paper investigates an adaptive fuzzy tracking control method for a class of nonlinear systems with external disturbances. Firstly, fuzzy logic systems and the fuzzy state observer are implemented to approximate unknown nonlinear functions and estimate the unmeasured states of systems, respectively. Then, the tracking error can be constrained within the specified range by means of the performance function. Furthermore, an event-triggered adaptive fuzzy controller is designed by employing the Backstepping method and Lyapunov functional with logarithm function. The proposed control strategy can ensure that all the signals of the closed-loop system are semiglobally uniformly ultimately bounded based on the Lyapunov stability theory and the properties of $\tanh$function. Finally, a numerical simulation example is provided to verify the effectiveness of proposed method.
-
Key words:
- Adaptive control /
- prescribed performance /
- event-triggered /
- fuzzy logic system /
- fuzzy observer
-
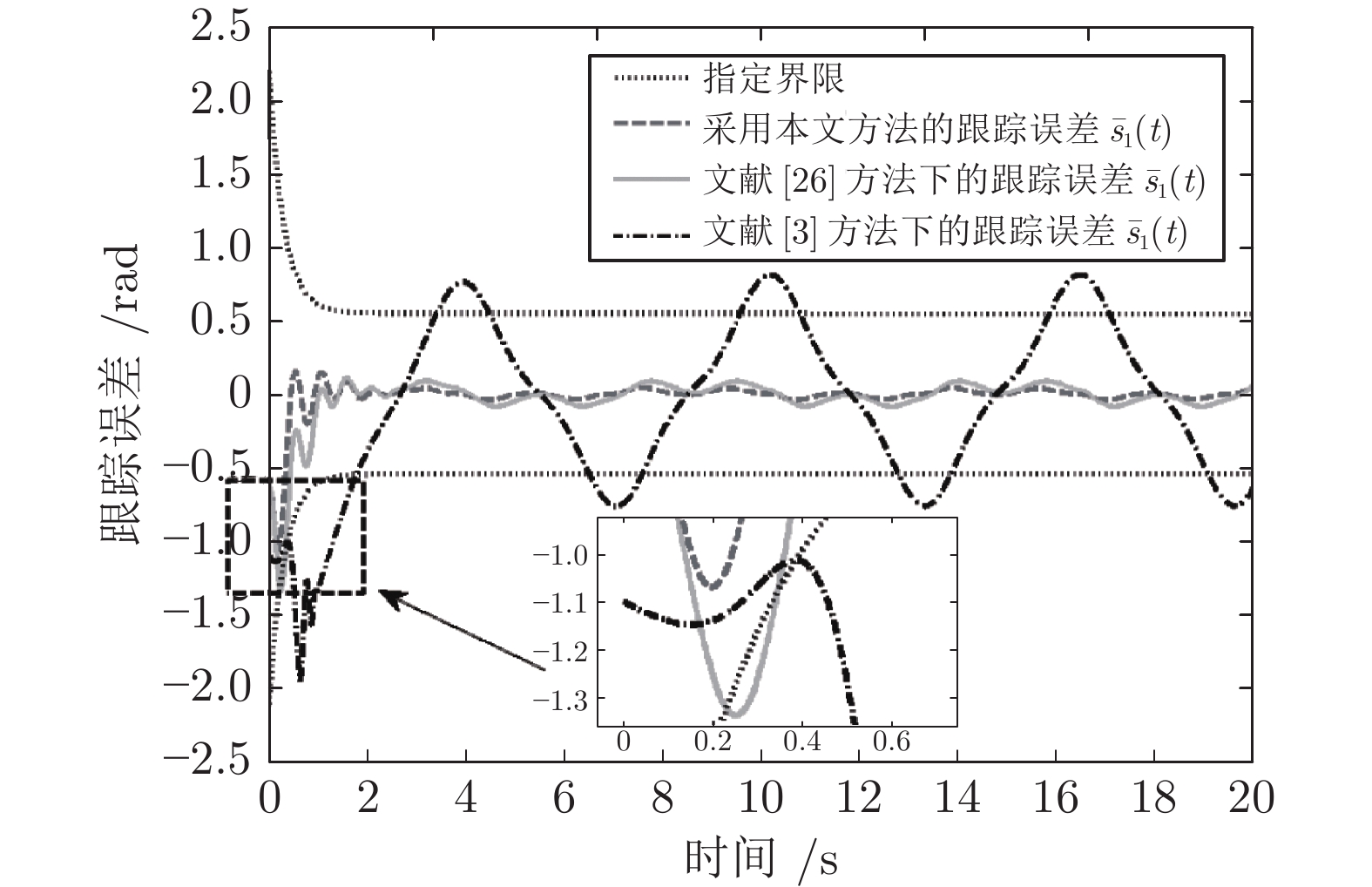
图 2 不同方法下的系统跟踪误差$\bar{s}_{1}$
Fig. 2 System tracking errors$\bar{s}_{1}$under different methods
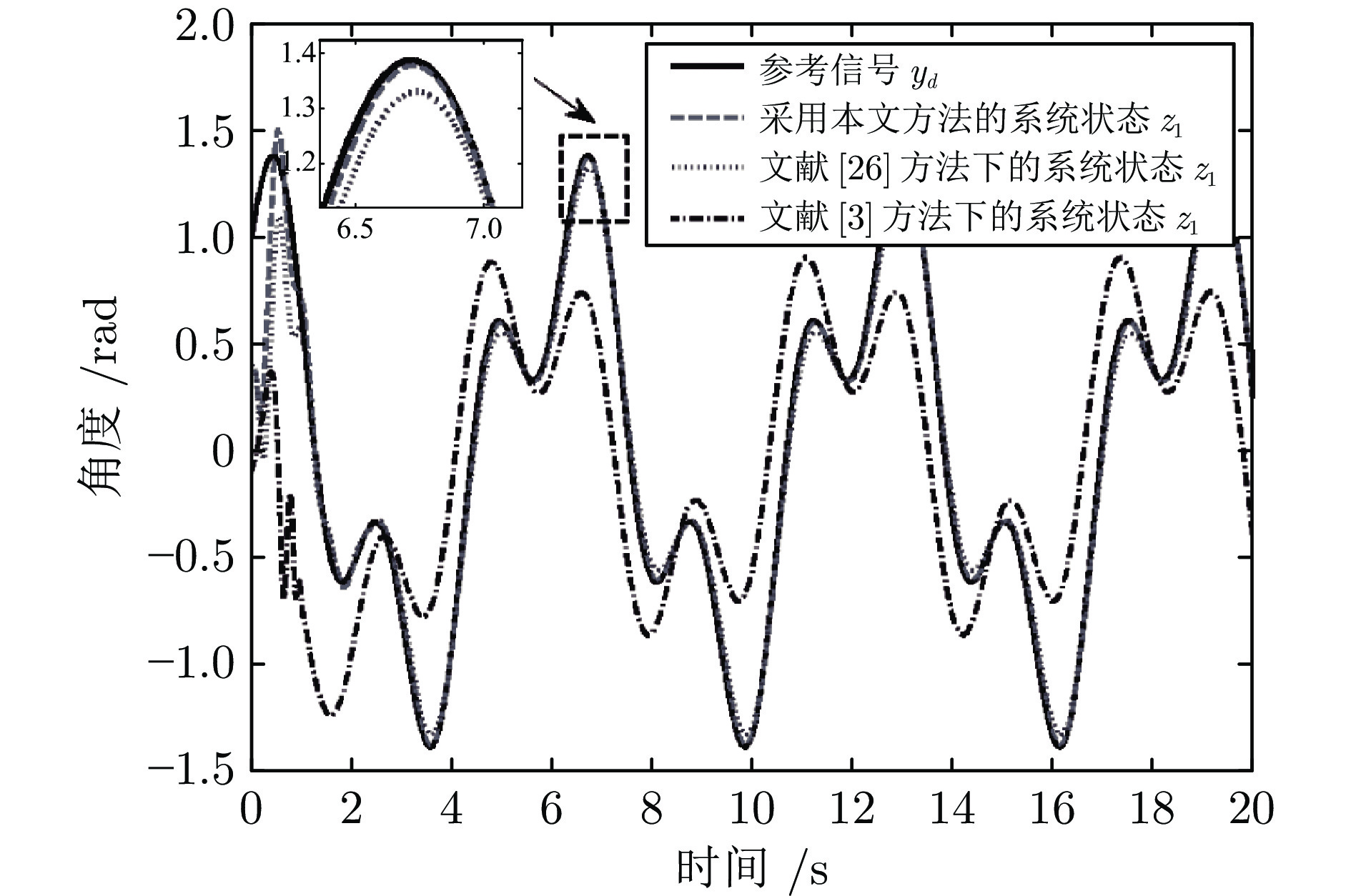
图 3 参考信号${y}_{d}$和不同方法下的系统状态$z_{1}$
Fig. 3 Reference signal${y}_{d}$and system states$z_{1}$ under different methods
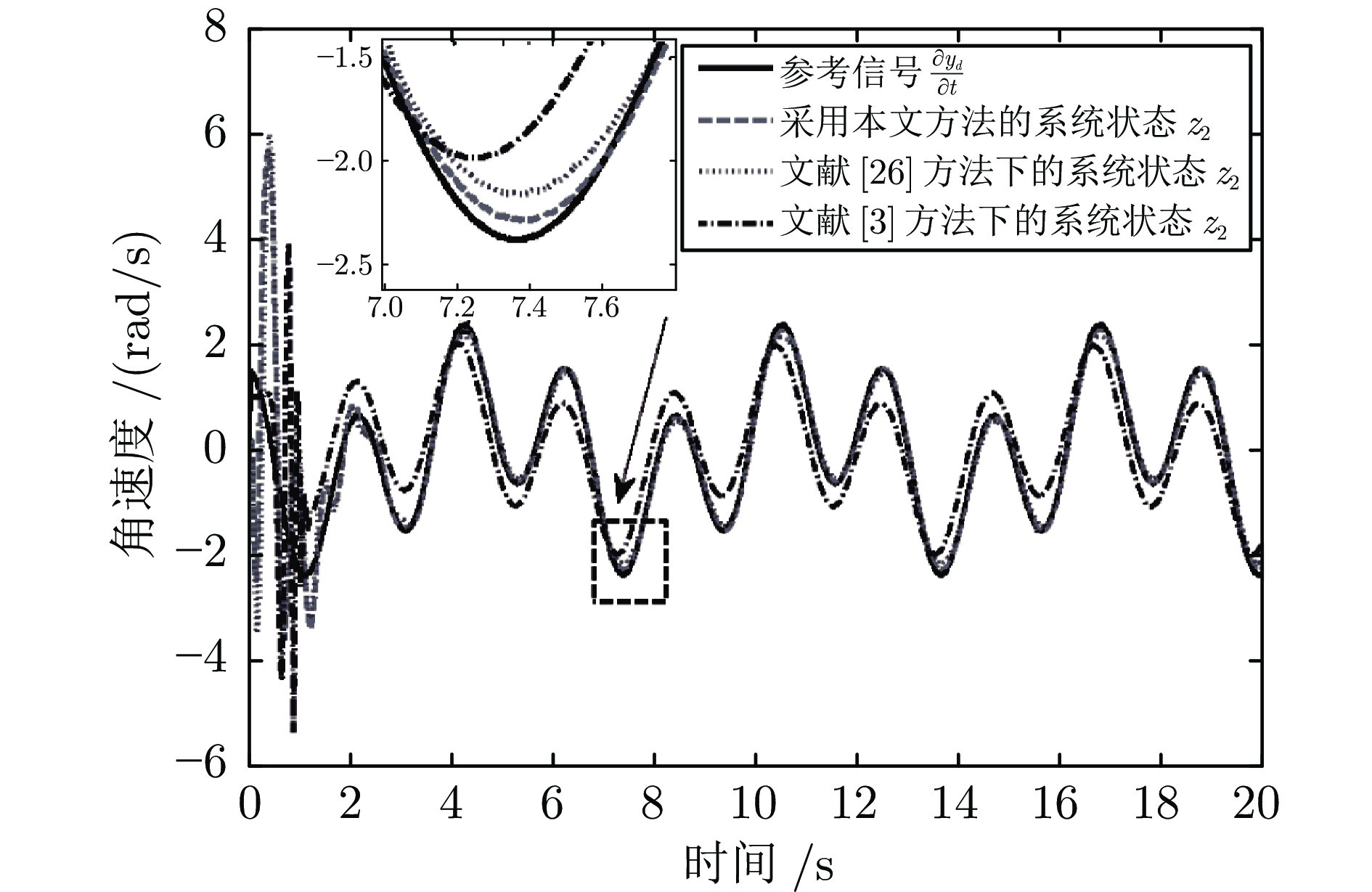
图 4 参考信号${\dot{y}}_{d}$和不同方法下的系统状态$z_{2}$
Fig. 4 Reference signal${\dot{y}}_{d}$and system states$z_{2}$underdifferent methods
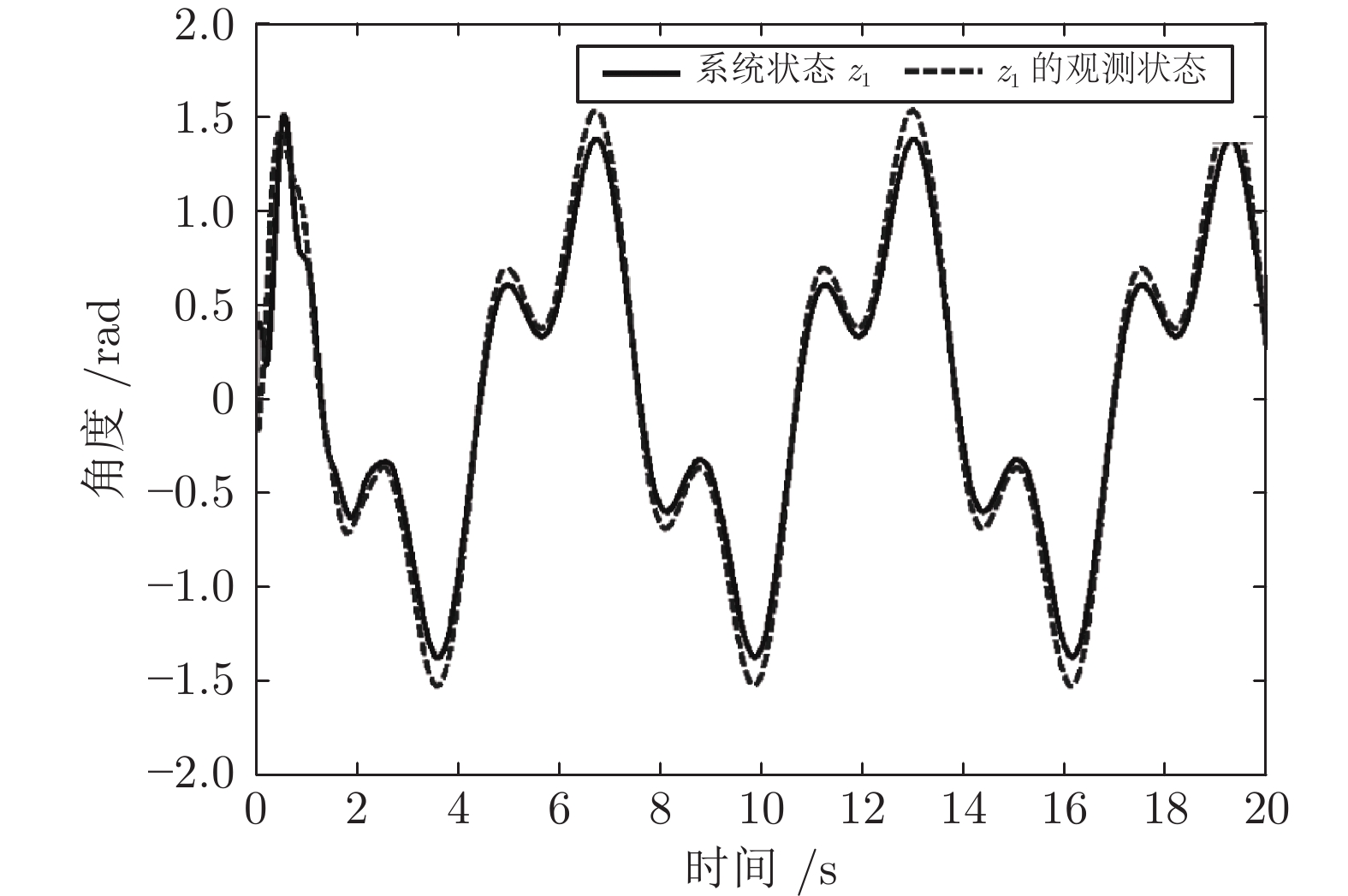
图 5 系统输出$y = z_{1}$和观测状态$\hat{z}_{1}$
Fig. 5 System output$y = z_{1}$and observed state$\hat{z}_{1}$
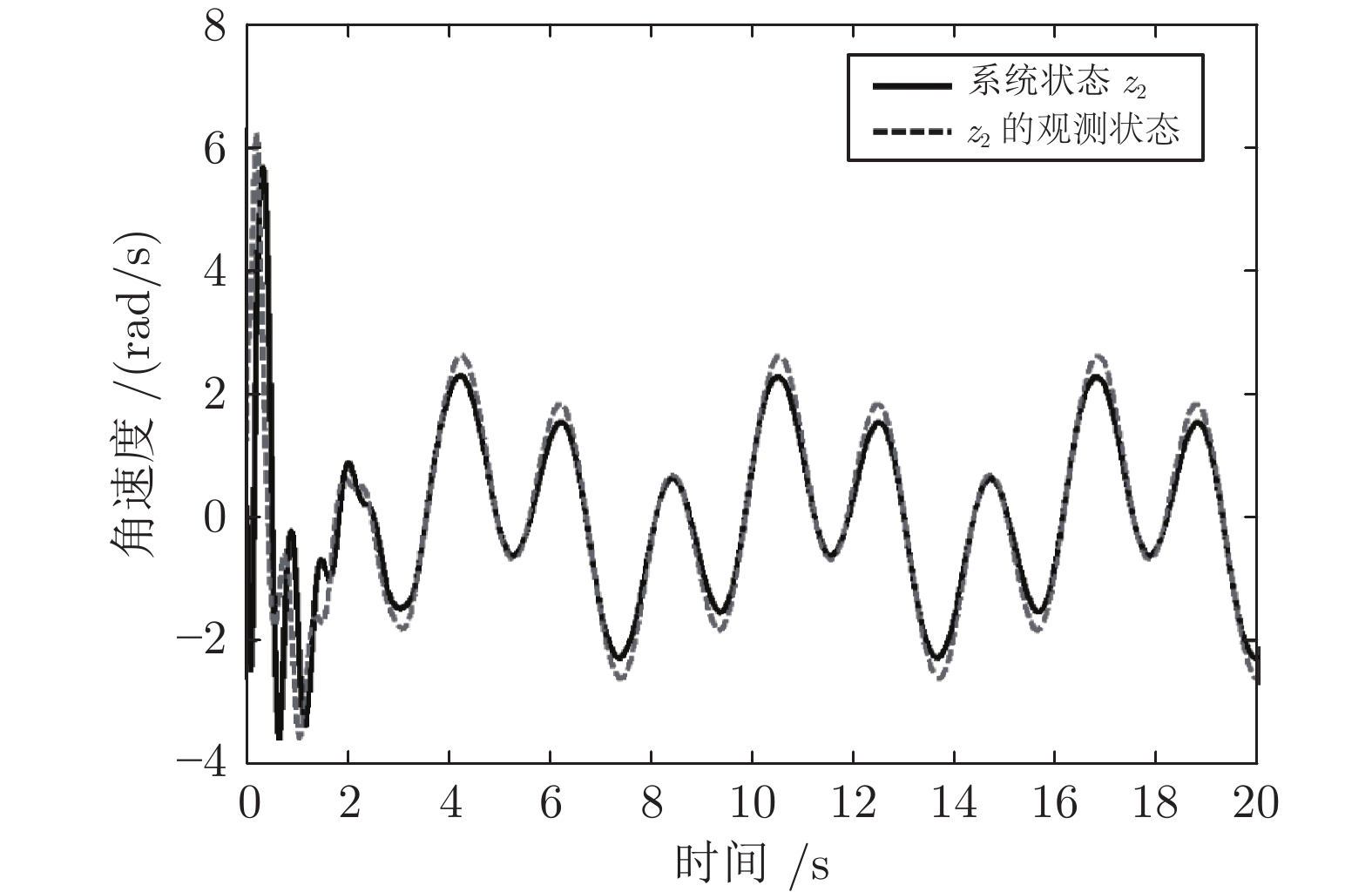
图 6 系统状态$z_{2}$和观测状态$\hat{z}_{2}$
Fig. 6 System state$z_{2}$and observed state$\hat{z}_{2}$
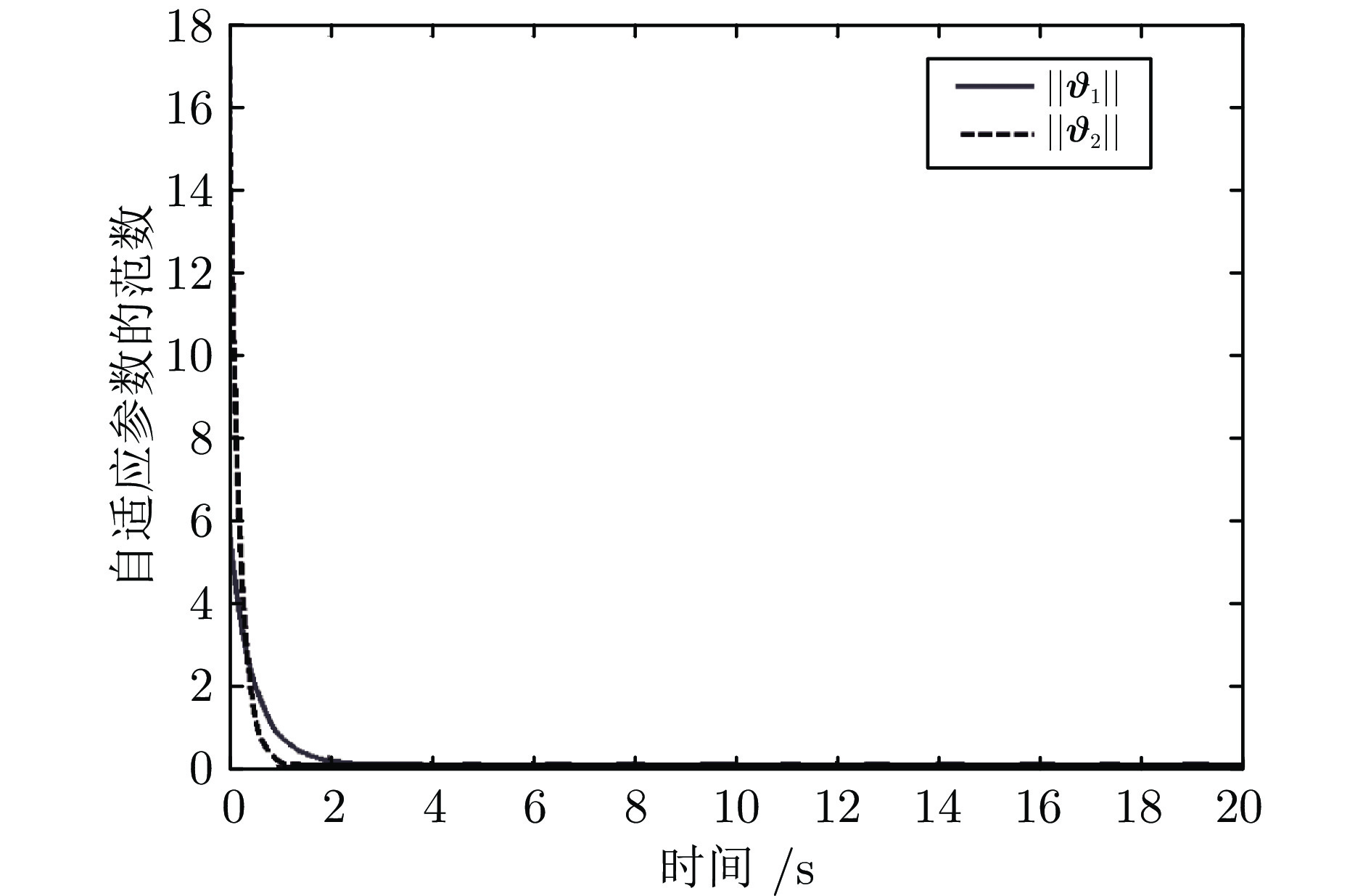
图 7 自适应律$\|{{\boldsymbol{ \vartheta}}}_{1}\|$和$\|{{\boldsymbol{ \vartheta}}}_{2}\|$
Fig. 7 Adaptive laws$\|{{\boldsymbol{ \vartheta}}}_{1}\|$and$\|{{\boldsymbol{ \vartheta}}}_{2}\|$
-
[1] Martin J, Corless G L. Continuous state feedback guaranteeing uniform ultimate boundedness for uncertain dynamic systems. IEEE Transactions on Automatic Control, 1981, 26(5): 1139−1144 doi: 10.1109/TAC.1981.1102785 [2] 王新华, 陈增强, 袁著祉. 基于扩张观测器的非线性不确定系统输出跟踪. 控制与决策, 2004, 19(10): 1113−1116 doi: 10.3321/j.issn:1001-0920.2004.10.008Wang Xin-Hua, Chen Zeng-Qiang, Yuan Zhu-Zhi. Output tracking based on extended observer for nonlinear uncertain systems. Control and Decision, 2004, 19(10): 1113−1116 doi: 10.3321/j.issn:1001-0920.2004.10.008 [3] Cai Z, Dequeiroz M S, Dawson D M. Robust adaptive asymptotic tracking of nonlinear systems with additive disturbance. IEEE Transactions on Automatic Control, 2006, 51(3): 524−529 doi: 10.1109/TAC.2005.864204 [4] Pan H H, Chang X P, Zhang D. Event-triggered adaptive control for uncertain constrained nonlinear systems with its application. IEEE Transactions on Industrial Informatics, 2020, 16(6): 3818−3827 doi: 10.1109/TII.2019.2929748 [5] Xing L T, Wen C Y, Liu Z T, Su H Y, Cai J P. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Transactions on Automatic Control, 2017, 62(4): 2071−2076 doi: 10.1109/TAC.2016.2594204 [6] Wang W, Tong S. Distributed adaptive fuzzy event-triggered containment control of nonlinear strict-feedback systems. IEEE Transactions on Cybernetics, 2020, 50(9): 3973−3983 doi: 10.1109/TCYB.2019.2917078 [7] Su X H, Liu Z, Lai G Y, Zhang Y, Chen C L P. Event-triggered adaptive fuzzy control for uncertain strict-feedback nonlinear systems with guaranteed transient performance. IEEE Transactions on Fuzzy Systems, 2019, 27(12): 2327−2337 doi: 10.1109/TFUZZ.2019.2898156 [8] Wang J H, Liu Z, Chen C L P, Zhang Y. Event-triggered fuzzy adaptive compensation control for uncertain stochastic nonlinear systems with given transient specification and actuator failures. Fuzzy Sets and Systems, 2019, 365: 1−21 doi: 10.1016/j.fss.2018.04.013 [9] 王敏, 黄龙旺, 杨辰光. 基于事件触发的离散MIMO系统自适应评判容错控制. 自动化学报, 2022, 48(5): 1234−1245 doi: 10.16383/j.aas.c200721Wang Min, Huang Long-Wang, Yang Chen-Guang. Event-triggered adaptive critic fault-tolerant control for a class of discrete-time MIMO systems. Acta Automatica Sinica, 2022, 48(5): 1234−1245 doi: 10.16383/j.aas.c200721 [10] Bechlioulis C P, Rovithakis G A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica, 2014, 50(4): 1217−1226 doi: 10.1016/j.automatica.2014.02.020 [11] 司文杰, 王聪, 曾玮. 状态观测的未知死区非线性系统的自适应神经网络跟踪控制. 控制与决策, 2017, 32(5): 780−788Si Wen-Jie, Wang Cong, Zeng Wei. Observed-based adaptive neural tracking control for nonlinear systems with unknown dead-zone. Control and Decision, 2017, 32(5): 780−788 [12] 杨彬, 周琪, 曹亮, 鲁仁全. 具有指定性能和全状态约束的多智能体系统事件触发控制. 自动化学报, 2019, 45(8): 1527−1535Yang Bin, Zhou Qi, Cao Liang, Lu Ren-Quan. Event-triggered control for multi-agent systems with prescribed performance and full state constraints. Acta Automatica Sinica, 2019, 45(8): 1527−1535 [13] Qiu J B, Sun K K, Wang T, Gao H J. Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Transactions on Fuzzy Systems, 2019, 27(11): 2152−2162 doi: 10.1109/TFUZZ.2019.2895560 [14] Qiu J B, Wang T, Sun K K, Rudas I J, Gao H J. Disturbance observer-based adaptive fuzzy control for strict-feedback nonlinear systems with finite-time prescribed performance. IEEE Transactions on Fuzzy Systems, 2022, 30(4): 1175−1184 doi: 10.1109/TFUZZ.2021.3053327 [15] Fischer N, Dani A, Sharma N, Dixon W E. Saturated control of an uncertain nonlinear system with input delay. Automatica, 2013, 49(6): 1741−1747 doi: 10.1016/j.automatica.2013.02.013 [16] 张化光, 张欣, 罗艳红, 杨珺. 自适应动态规划综述. 自动化学报, 2013, 39(4): 303−311 doi: 10.1016/S1874-1029(13)60031-2Zhang Hua-Guang, Zhang Xin, Luo Yan-Hong, Yang Jun. An overview of research on adaptive dynamic programming. Acta Automatica Sinica, 2013, 39(4): 303−311 doi: 10.1016/S1874-1029(13)60031-2 [17] Sun Z Y, Zhang C H, Wang Z. Adaptive disturbance attenuation for generalized high-order uncertain nonlinear systems. Automatica, 2017, 80: 102−109 doi: 10.1016/j.automatica.2017.02.036 [18] Li D F, Pan Z H, Deng H B, Hu L Y. Adaptive path following controller of a multi-joint snake robot based on the improved serpenoid curve. IEEE Transactions on Industrial Electronics, 2022, 69(4): 3831−3842 doi: 10.1109/TIE.2021.3075851 [19] Deng H, Krstić M. Stochastic nonlinear stabilization-I: A backstepping design. Systems and Control Letters, 1997, 32(3): 143−150 [20] Li Y X, Yang G H. Adaptive neural control of pure-feedback nonlinear systems with event-triggered communications. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(12): 6242−6251 doi: 10.1109/TNNLS.2018.2828140 [21] 王桐, 邱剑彬, 高会军. 随机非线性系统基于事件触发机制的自适应神经网络控制. 自动化学报, 2019, 45(1): 226−233Wang Tong, Qiu Jian-Bin, Gao Hui-Jun. Event-triggered adaptive neural network control for a class of stochastic nonlinear systems. Acta Automatica Sinica, 2019, 45(1): 226−233 [22] Zhang C H, Yang G H. Event-triggered adaptive output feedback control for a class of uncertain nonlinear systems with actuator failures. IEEE Transactions on Cybernetics, 2020, 50(1): 201−210 doi: 10.1109/TCYB.2018.2868169 [23] Zhou Q, Shi P, Xu S. Adaptive output-feedback fuzzy tracking control for a class of nonlinear systems. IEEE Transactions on Fuzzy Systems, 2011, 19(5): 972−982 doi: 10.1109/TFUZZ.2011.2158652 [24] Huang L T, Li Y M, Tong S C. Fuzzy adaptive output feedback control for MIMO switched nontriangular structure nonlinear systems with unknown control directions. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(2): 550−564 doi: 10.1109/TSMC.2017.2778099 [25] Cao L, Li H Y, Wang N, Zhou Q. Observer-based event-triggered adaptive decentralized fuzzy control for nonlinear large-scale systems. IEEE Transactions on Fuzzy Systems, 2019, 27(6): 1201−1214 doi: 10.1109/TFUZZ.2018.2873971 [26] Tong S C, Min X, Li Y. Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Transactions on Cybernetics, 2020, 50(9): 3903−3913 doi: 10.1109/TCYB.2020.2977175 [27] Tong S C, Li Y M, Feng G, Li T S. Observer-based adaptive fuzzy backstepping dynamic surface control for a class of MIMO nonlinear systems. IEEE Transactions on Systems, Man and Cybernetics, Part B, Cybernetics, 2011, 41(4): 1124−1135 doi: 10.1109/TSMCB.2011.2108283 [28] Wang W, Tong S. Adaptive fuzzy bounded control for consensus of multiple strict-feedback nonlinear systems. IEEE Transactions on Cybernetics, 2018, 48(2): 522−531 doi: 10.1109/TCYB.2016.2645763 [29] Zhang L L, Yang G H. Adaptive fuzzy prescribed performance control of nonlinear systems with hysteretic actuator nonlinearity and faults. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(12): 2349−2358 doi: 10.1109/TSMC.2017.2707241 [30] Wang L, Basin M V, Li H, Lu R Q. Observer-based composite adaptive fuzzy control for nonstrict-feedback systems with actuator failures. IEEE Transactions on Fuzzy Systems, 2018, 26(4): 2336−2347 doi: 10.1109/TFUZZ.2017.2774185 -

 下载:
下载:

计量
- 文章访问数: 2109
- HTML全文浏览量: 1028
- PDF下载量: 381
- 被引次数: 0
