2023年 第49卷 第7期
2023, 49(7): 1369-1392.
doi: 10.16383/j.aas.c220115
摘要:
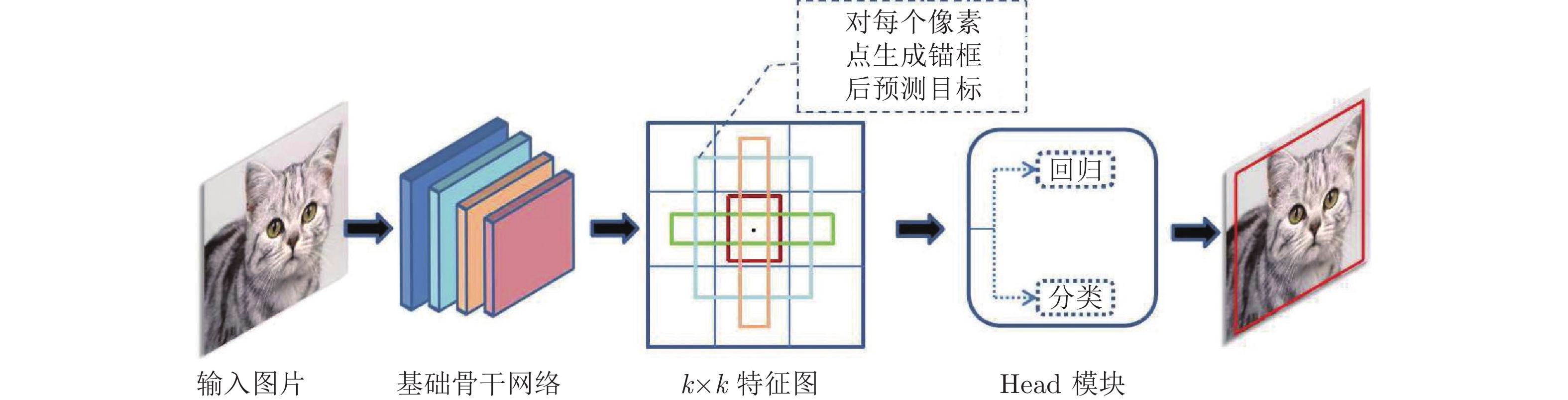
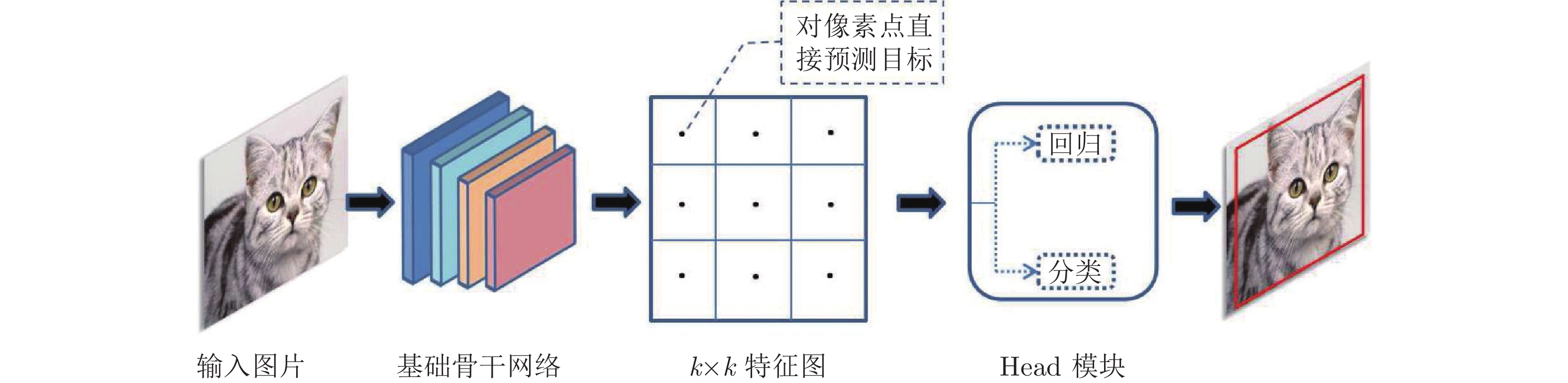
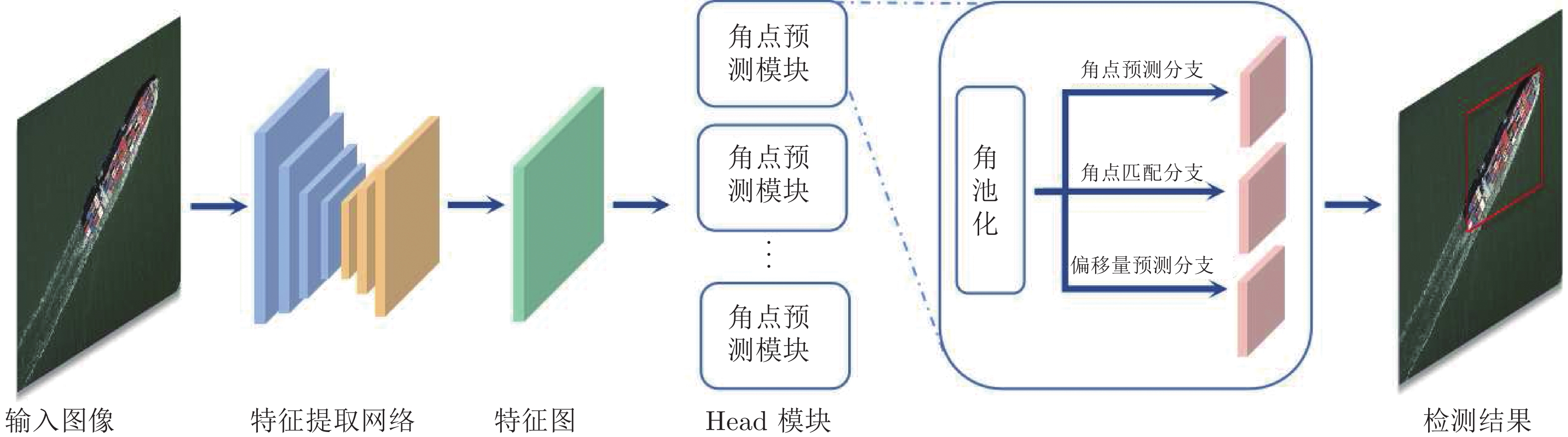
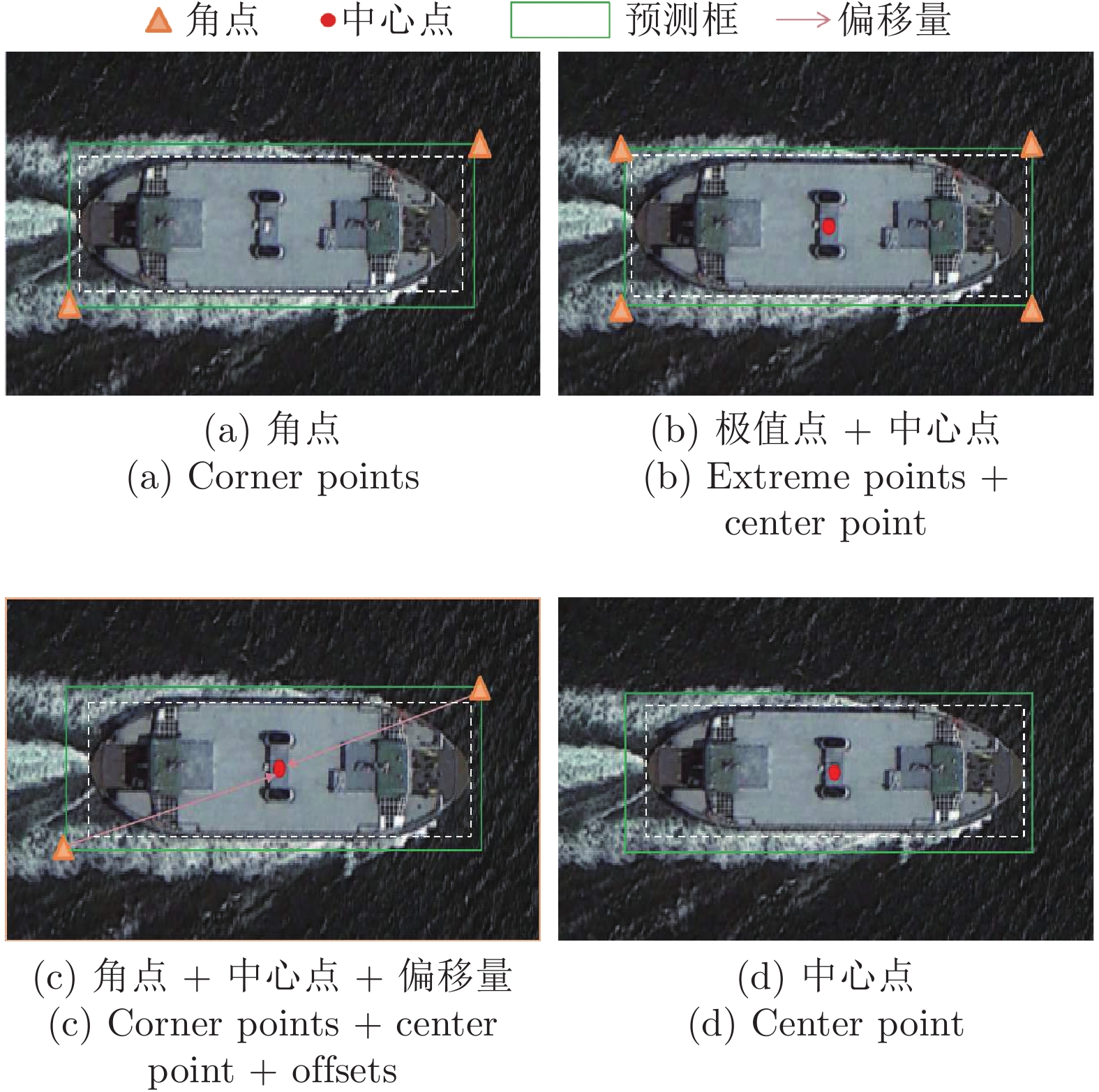
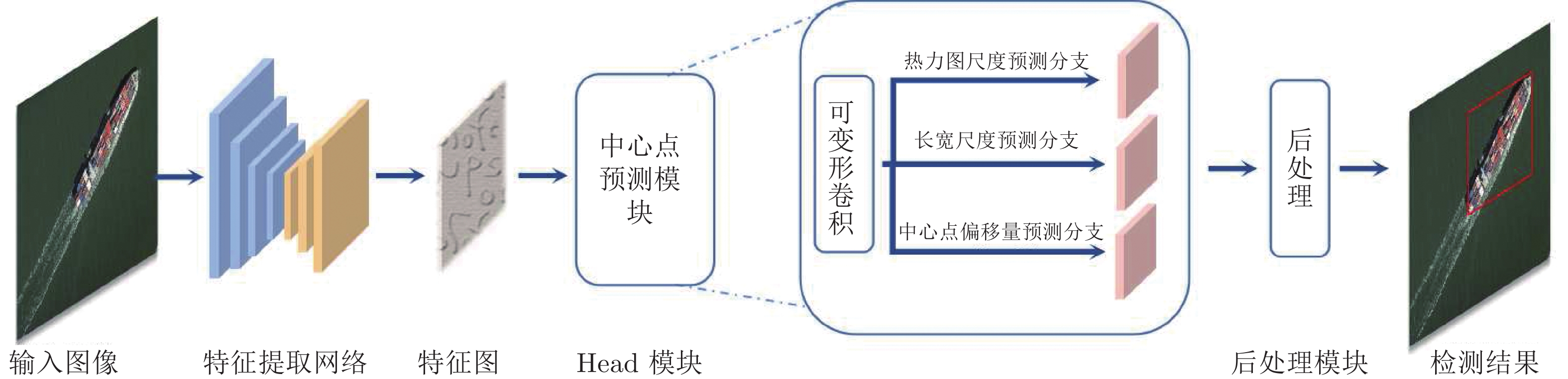
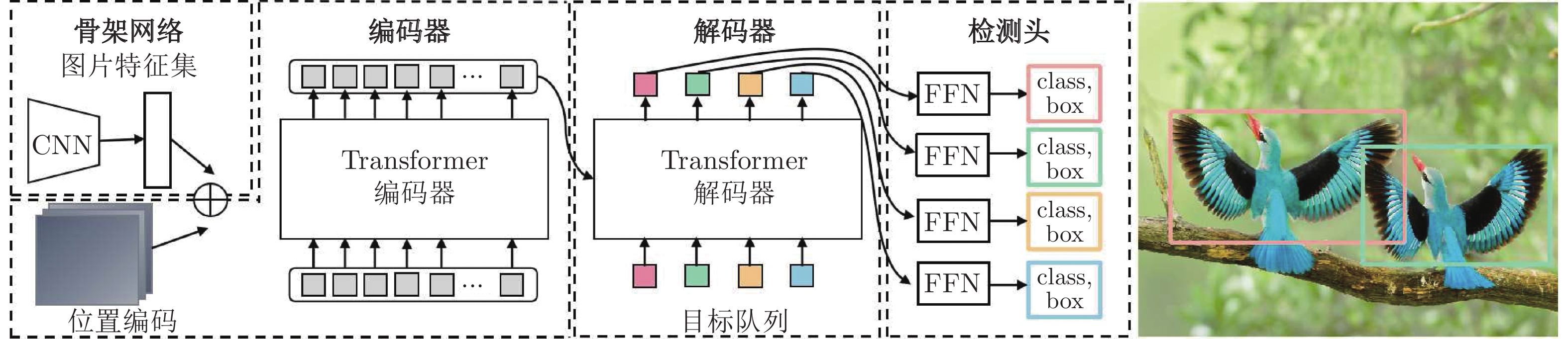
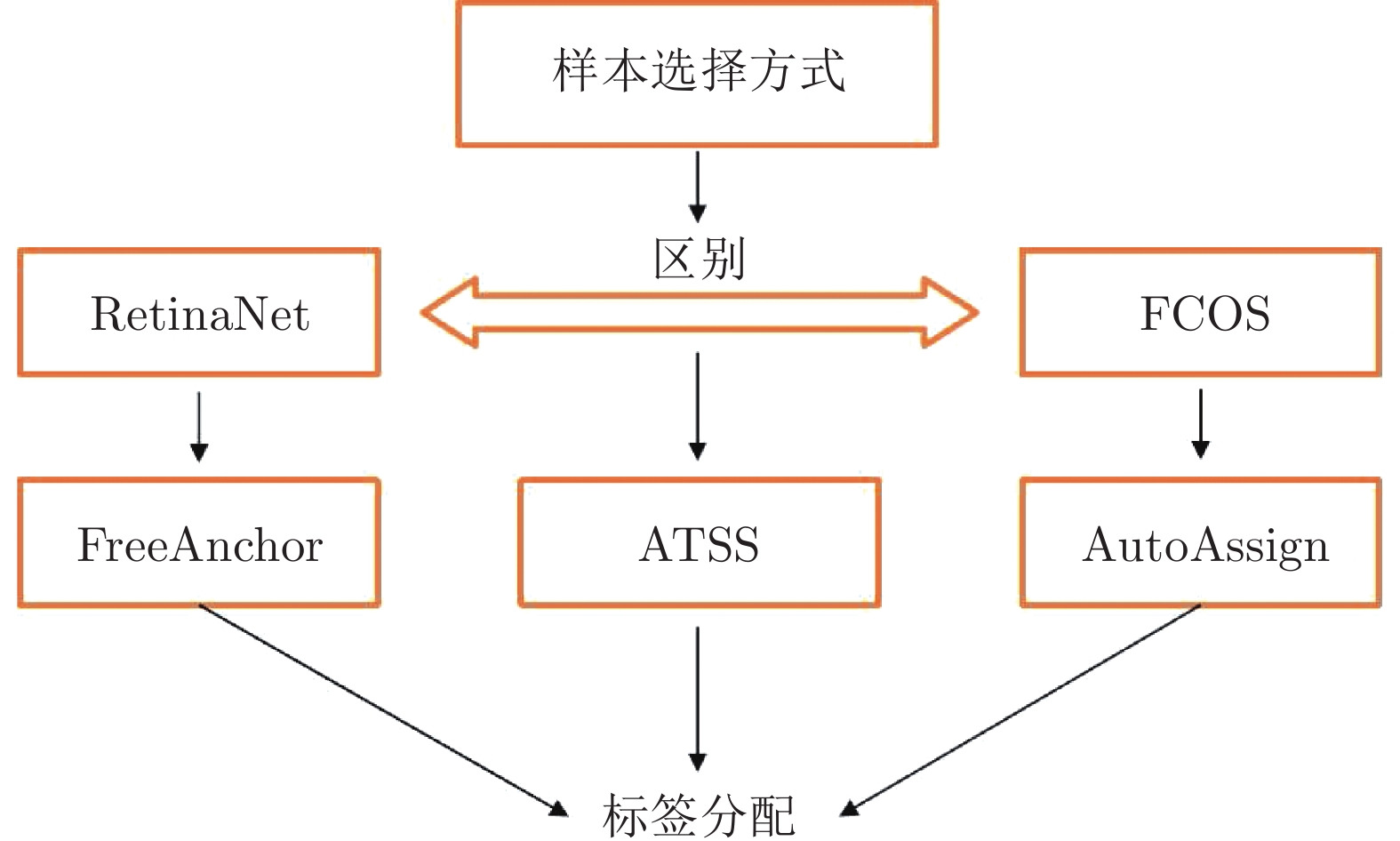
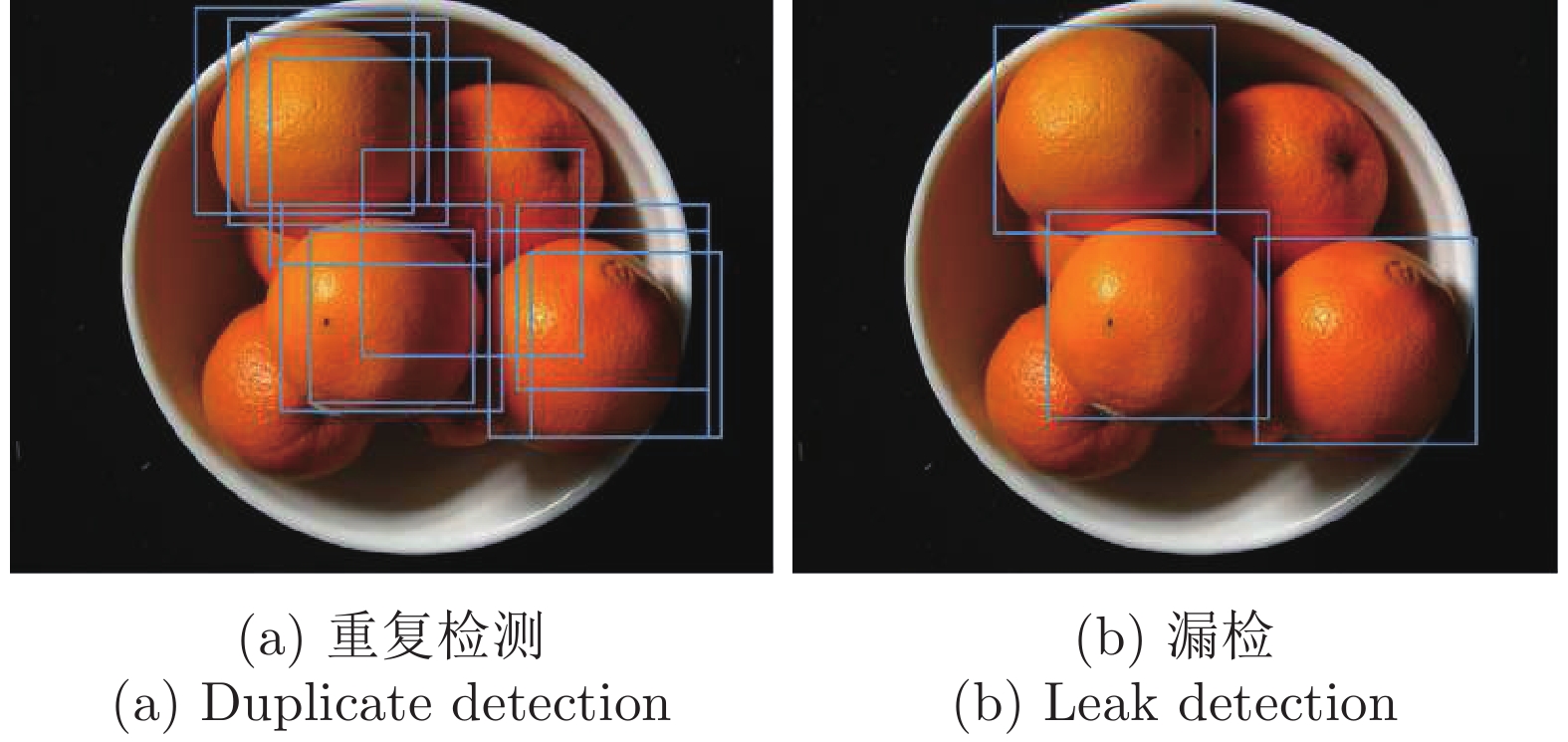
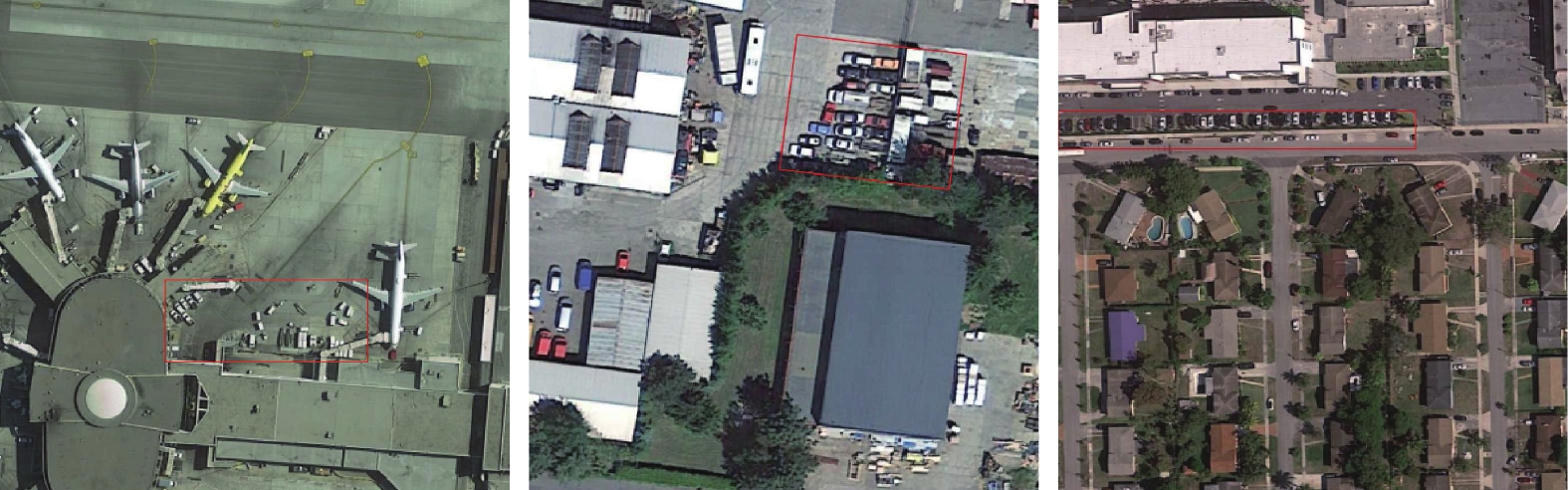
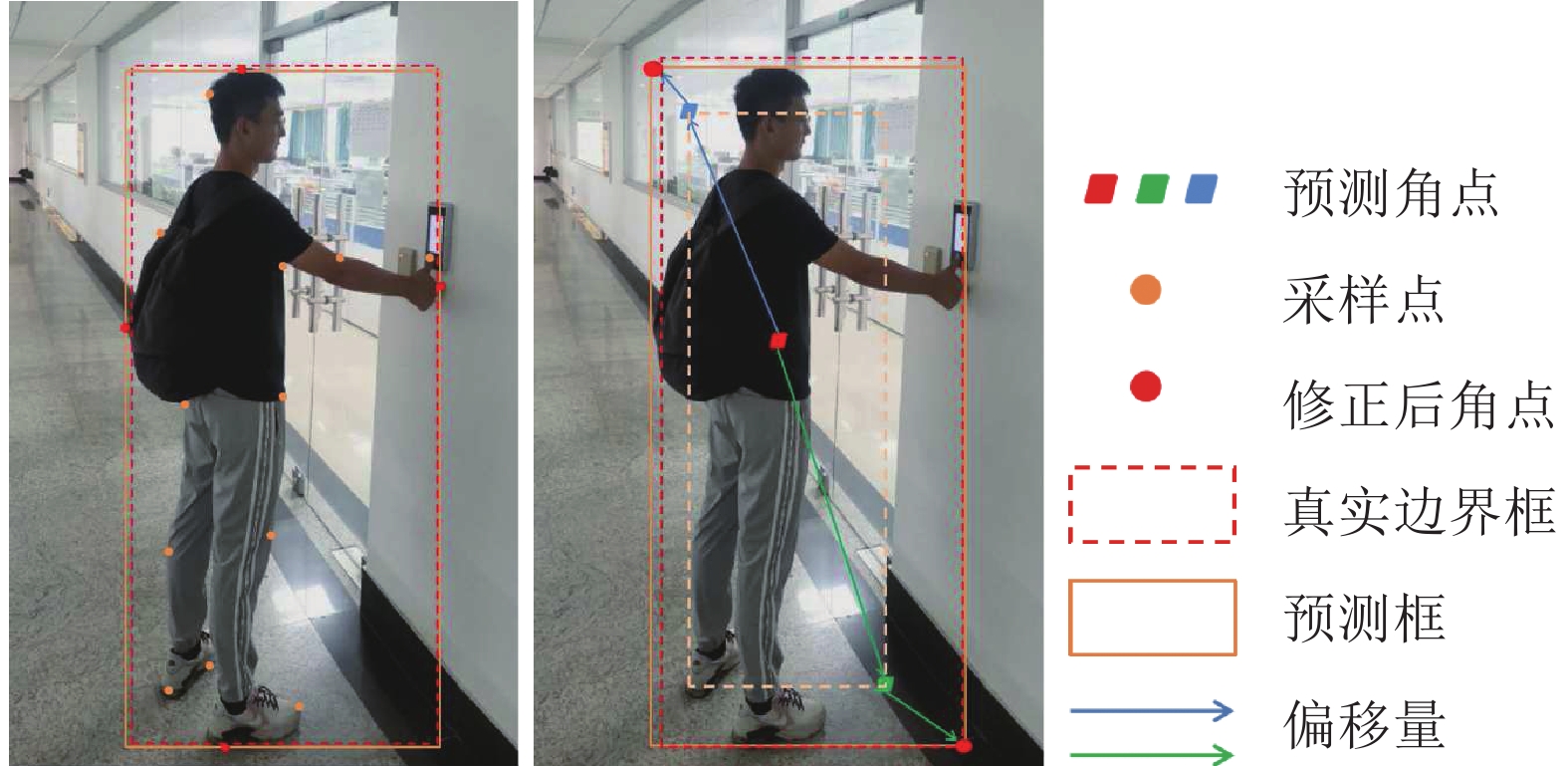
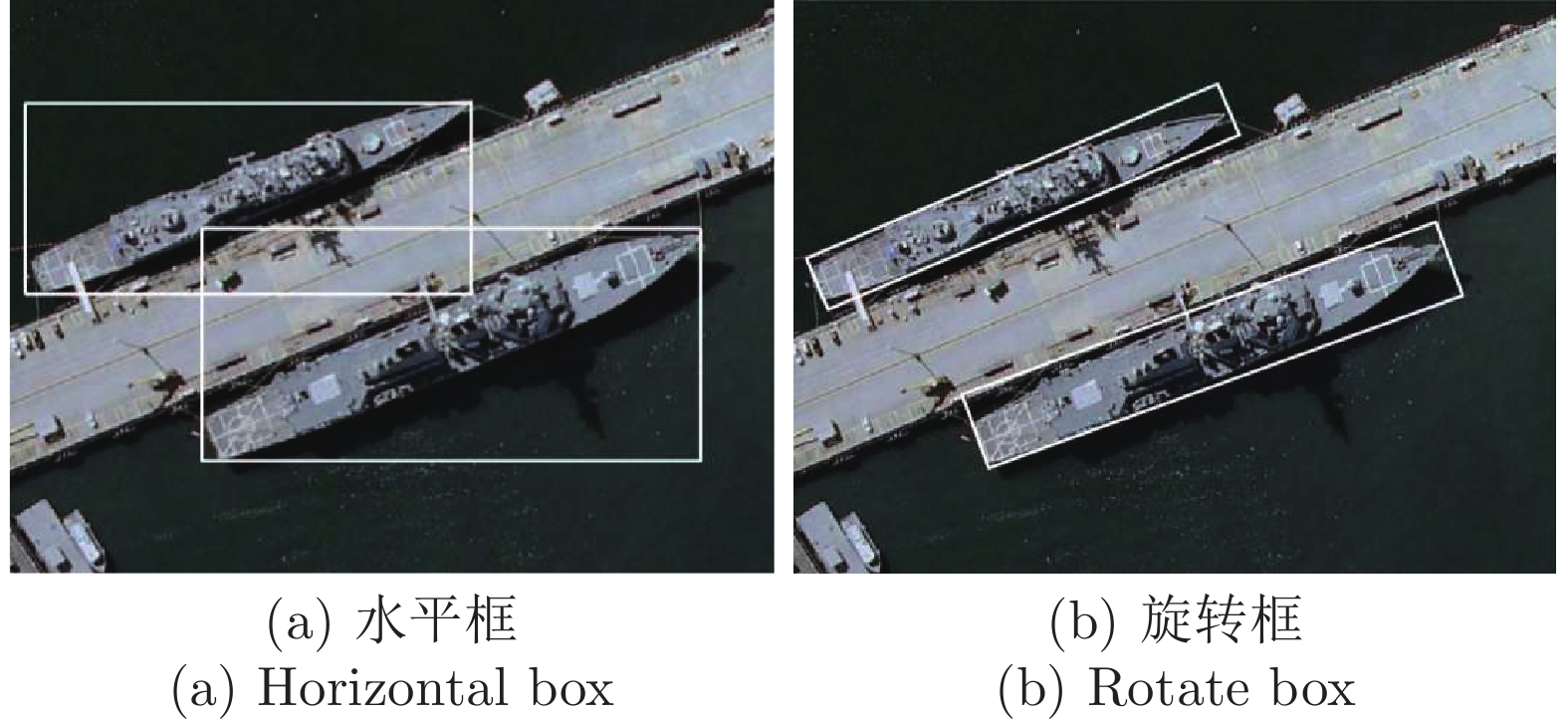
基于深度学习的目标检测方法是目前计算机视觉领域的热点, 在目标识别、跟踪等领域发挥了重要的作用. 随着研究的深入开展, 基于深度学习的目标检测方法主要分为有锚框的目标检测方法和无锚框的目标检测方法, 其中无锚框的目标检测方法无需预定义大量锚框, 具有更低的模型复杂度和更稳定的检测性能, 是目前目标检测领域中较前沿的方法. 在调研国内外相关文献的基础上, 梳理基于无锚框的目标检测方法及各场景下的常用数据集, 根据样本分配方式不同, 分别从基于关键点组合、中心点回归、Transformer、锚框和无锚框融合等4个方面进行整体结构分析和总结, 并结合COCO (Common objects in context)数据集上的性能指标进一步对比. 在此基础上, 介绍了无锚框目标检测方法在重叠目标、小目标和旋转目标等复杂场景情况下的应用, 聚焦目标遮挡、尺寸过小和角度多等关键问题, 综述现有方法的优缺点及难点. 最后对无锚框目标检测方法中仍存在的问题进行总结并对未来发展的应用趋势进行展望.
基于深度学习的目标检测方法是目前计算机视觉领域的热点, 在目标识别、跟踪等领域发挥了重要的作用. 随着研究的深入开展, 基于深度学习的目标检测方法主要分为有锚框的目标检测方法和无锚框的目标检测方法, 其中无锚框的目标检测方法无需预定义大量锚框, 具有更低的模型复杂度和更稳定的检测性能, 是目前目标检测领域中较前沿的方法. 在调研国内外相关文献的基础上, 梳理基于无锚框的目标检测方法及各场景下的常用数据集, 根据样本分配方式不同, 分别从基于关键点组合、中心点回归、Transformer、锚框和无锚框融合等4个方面进行整体结构分析和总结, 并结合COCO (Common objects in context)数据集上的性能指标进一步对比. 在此基础上, 介绍了无锚框目标检测方法在重叠目标、小目标和旋转目标等复杂场景情况下的应用, 聚焦目标遮挡、尺寸过小和角度多等关键问题, 综述现有方法的优缺点及难点. 最后对无锚框目标检测方法中仍存在的问题进行总结并对未来发展的应用趋势进行展望.
2023, 49(7): 1393-1406.
doi: 10.16383/j.aas.c200388
摘要:
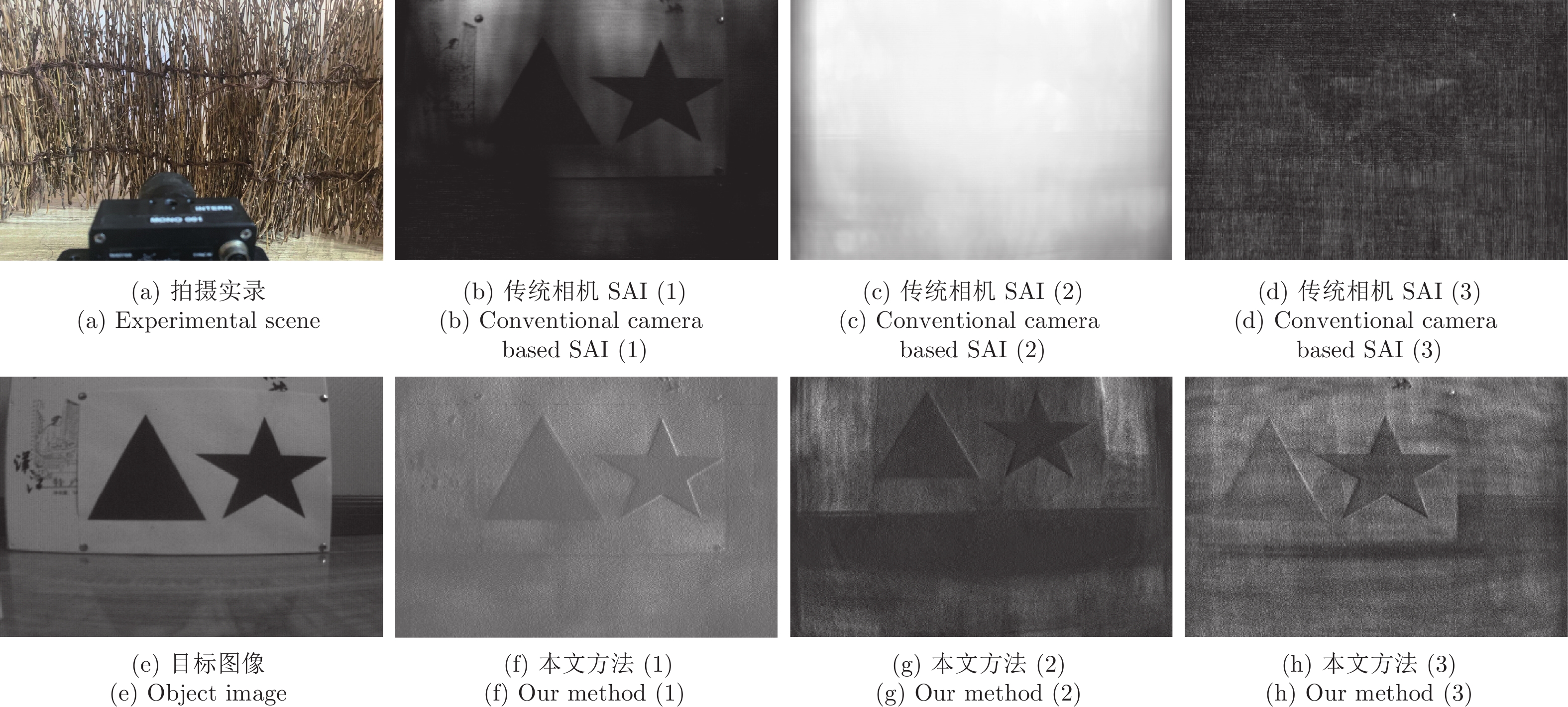
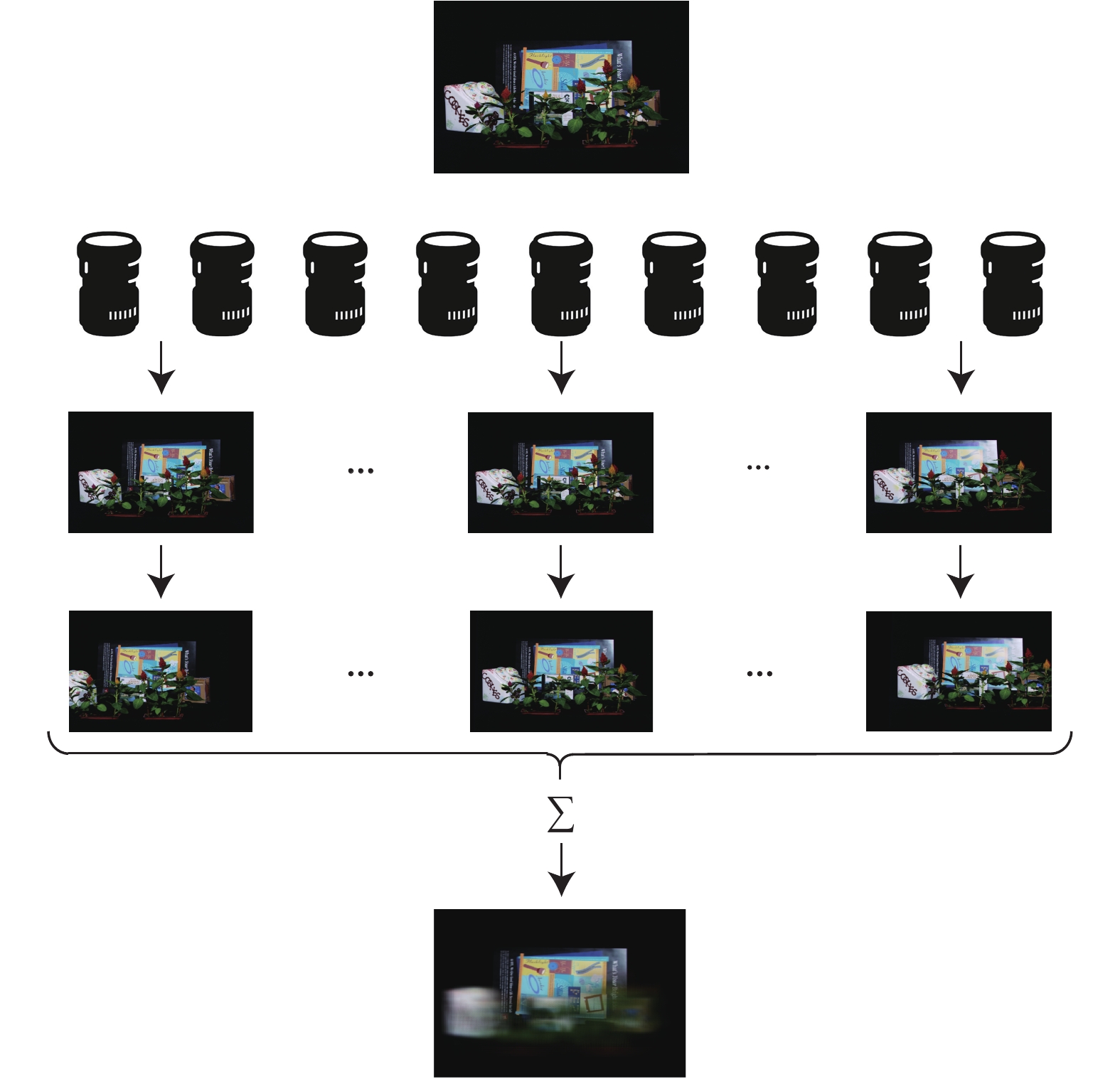
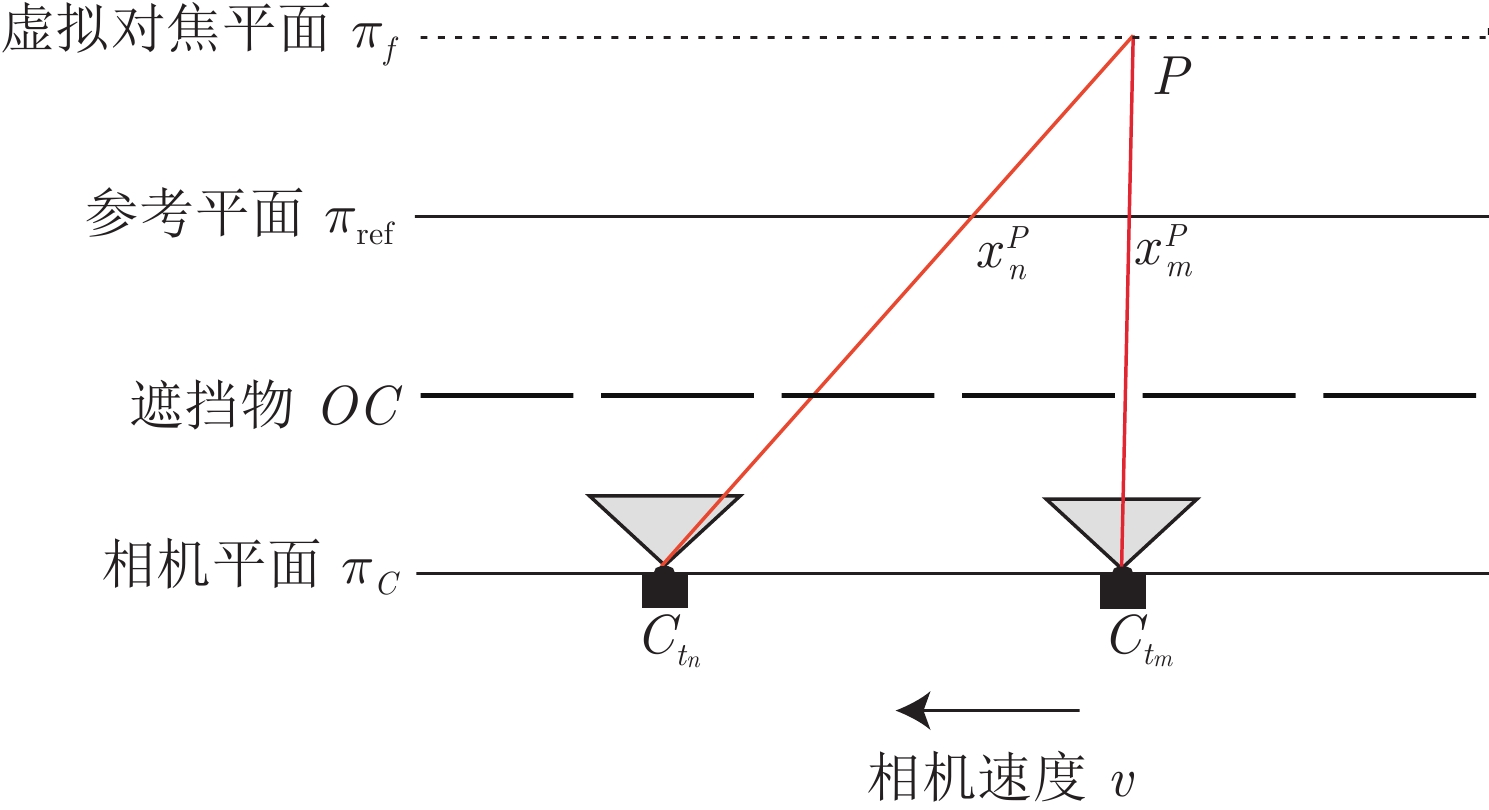
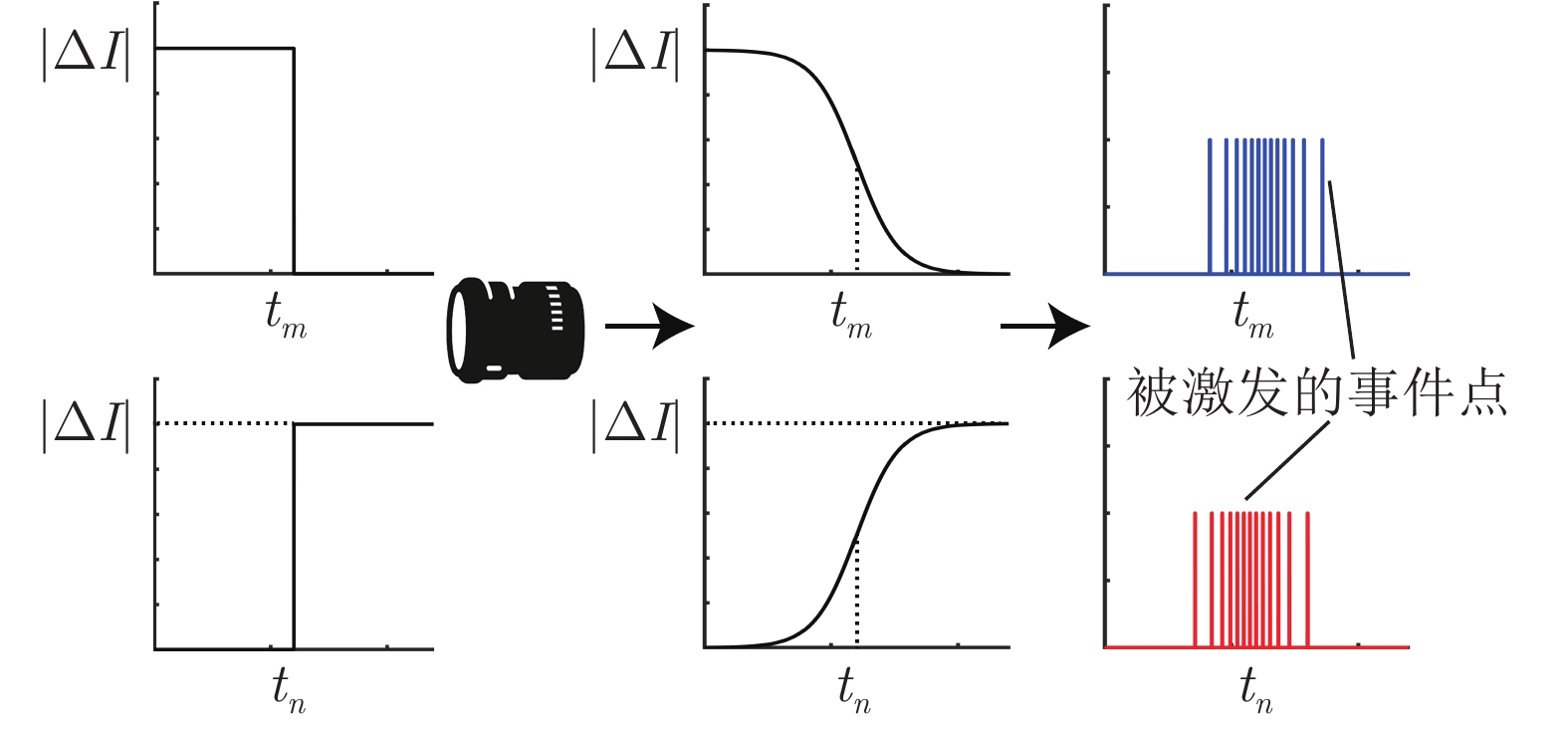
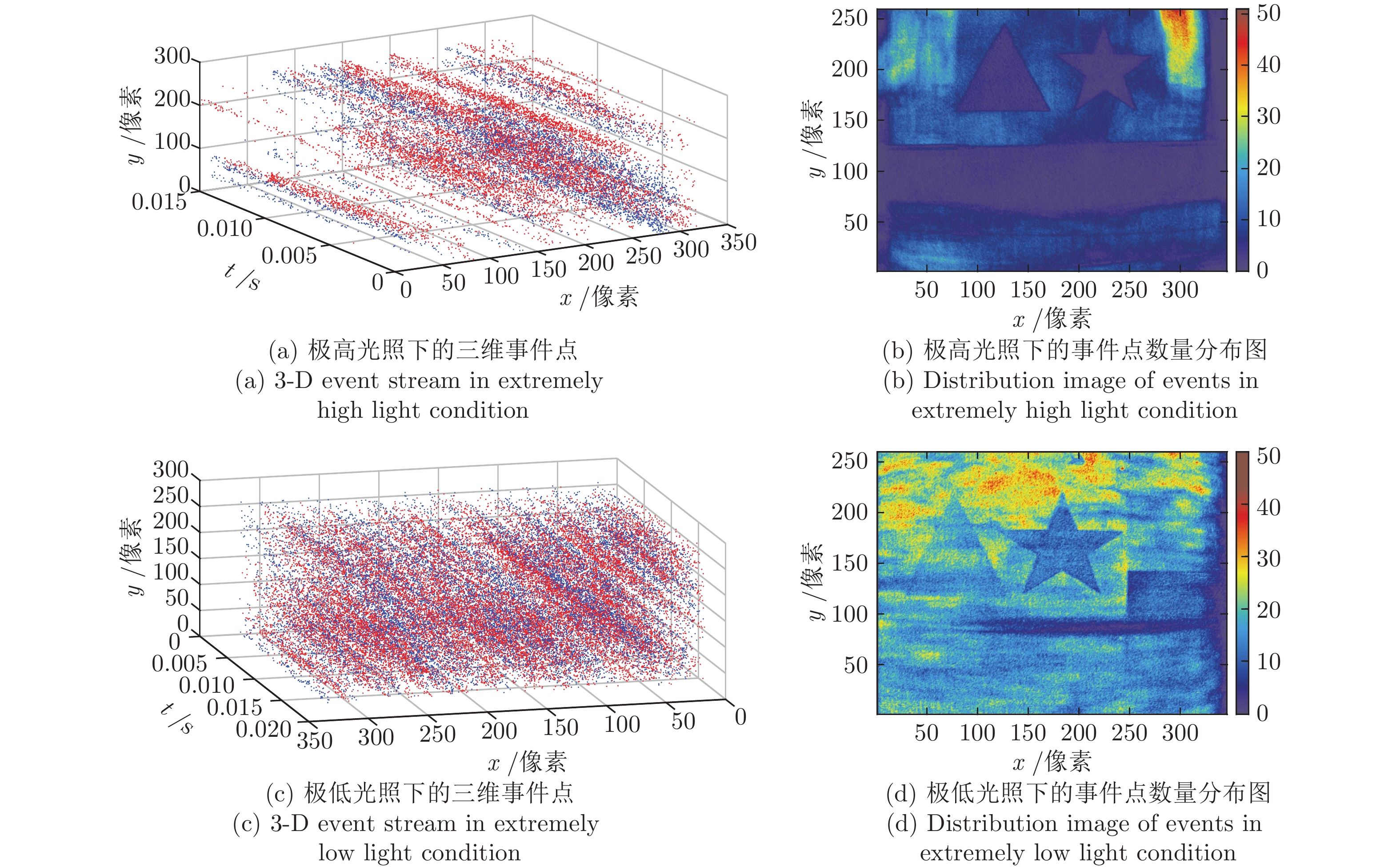
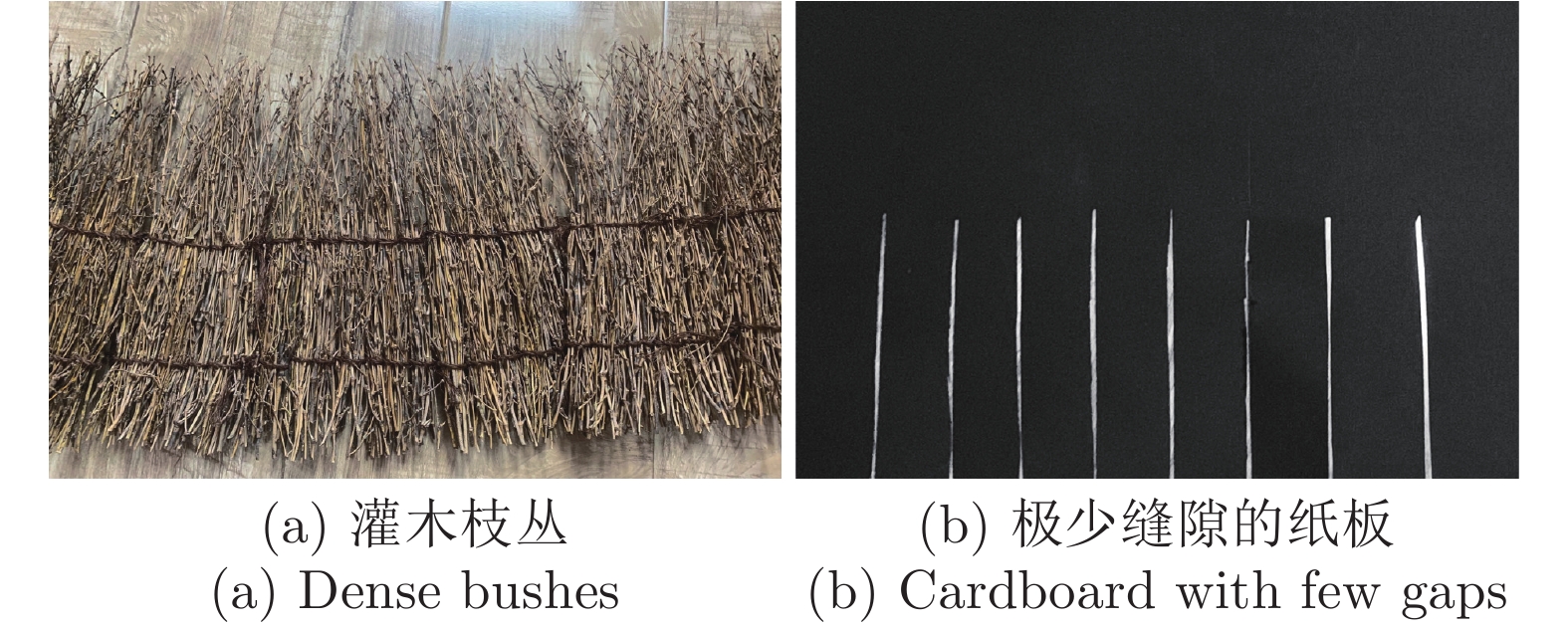
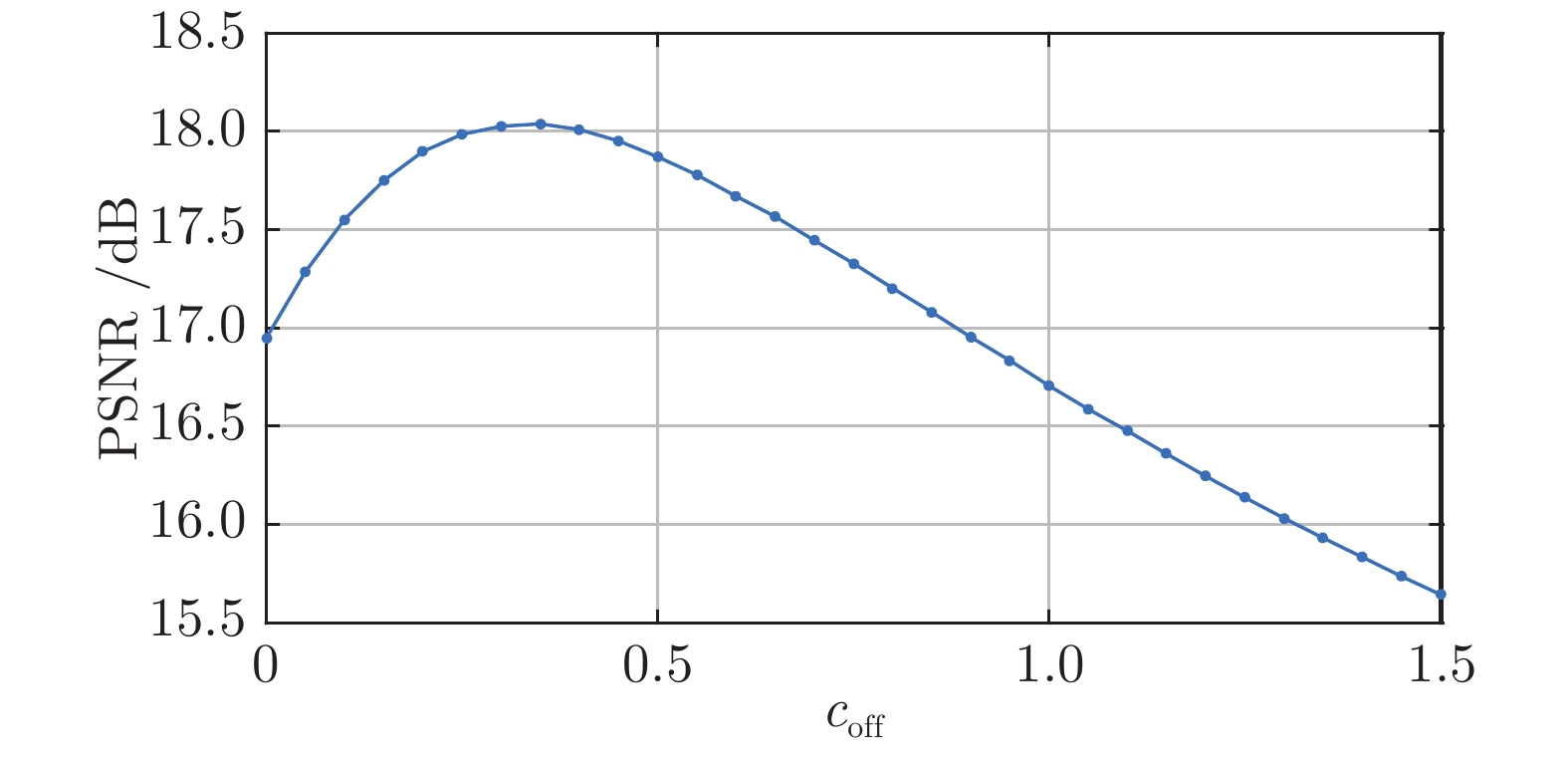
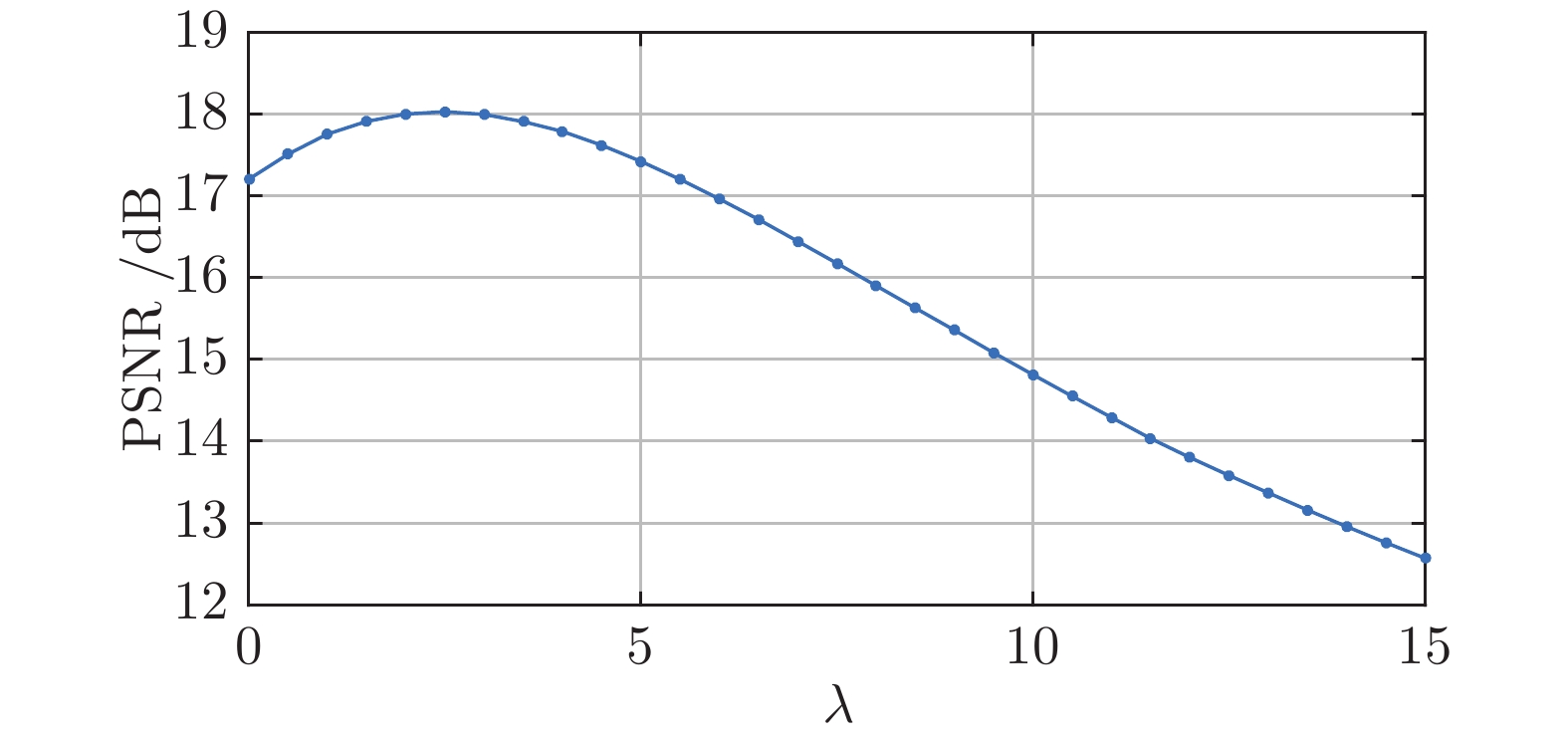
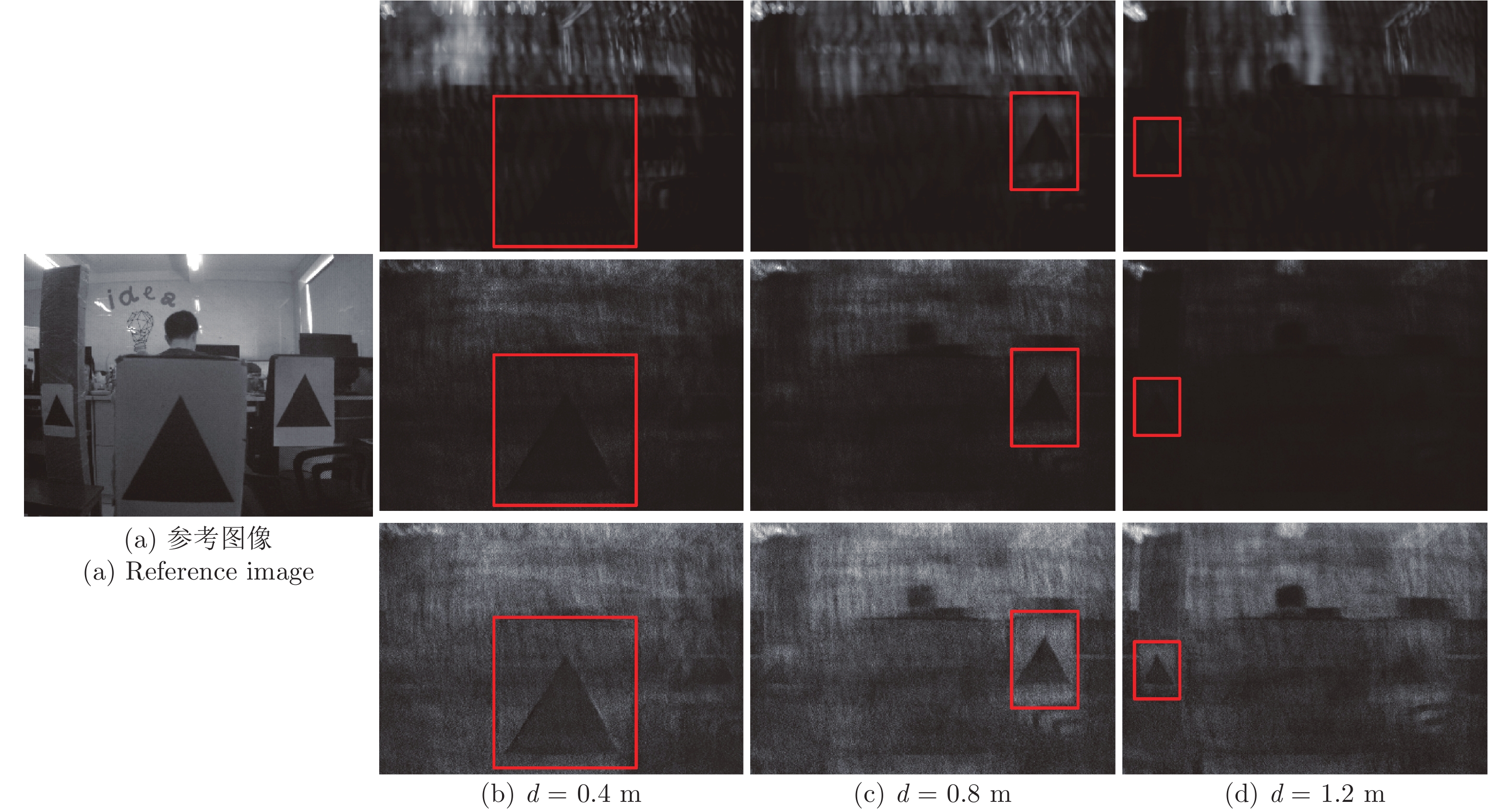
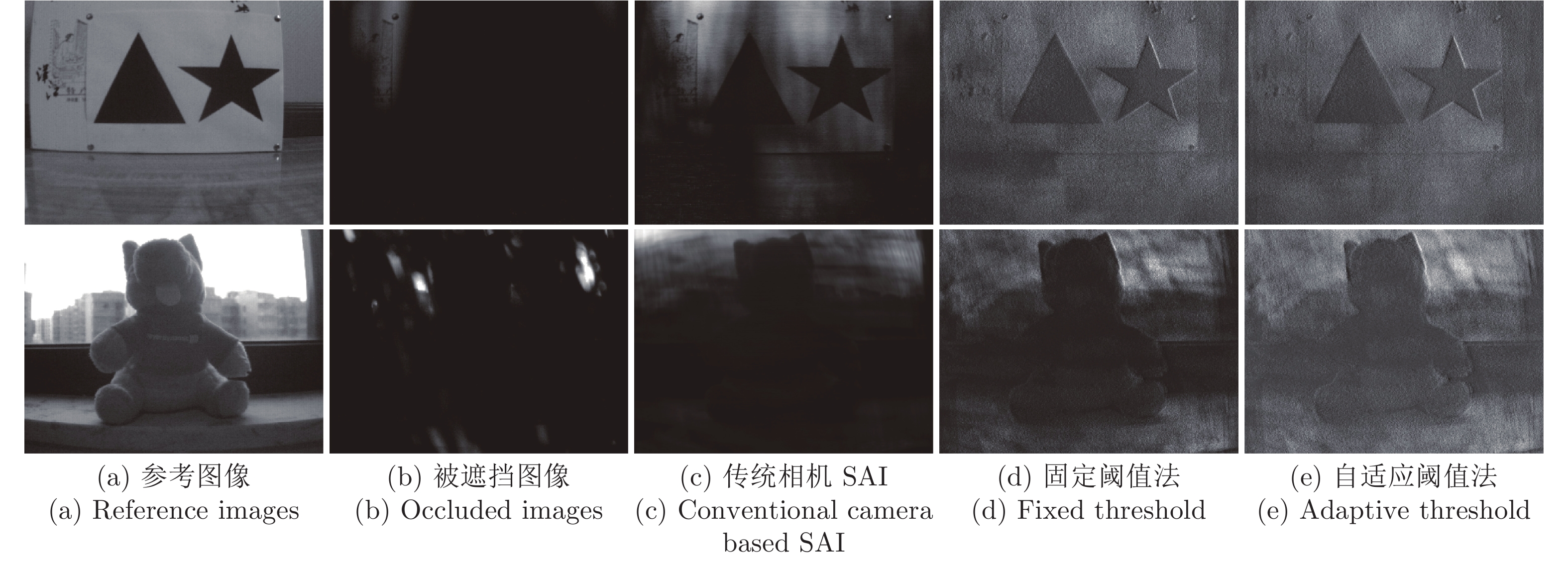
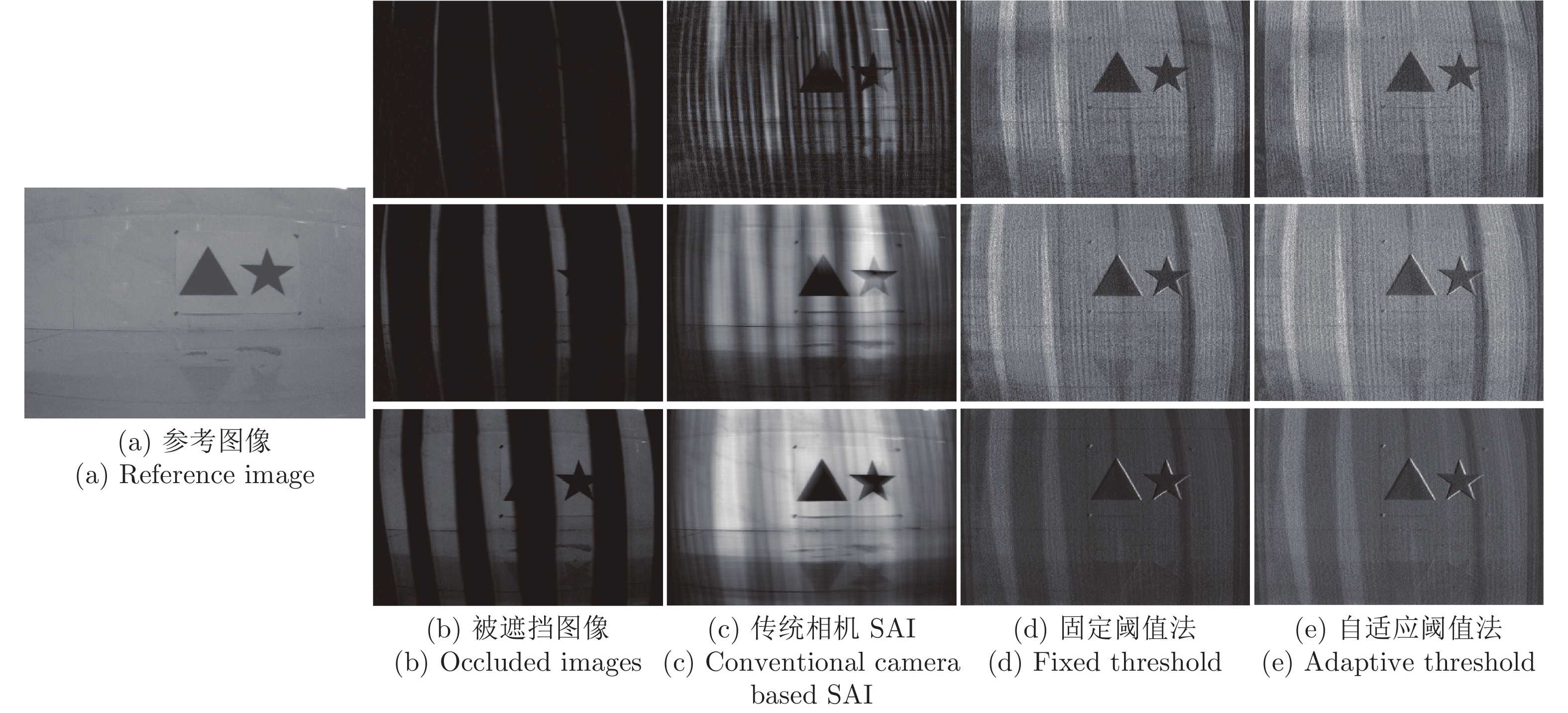
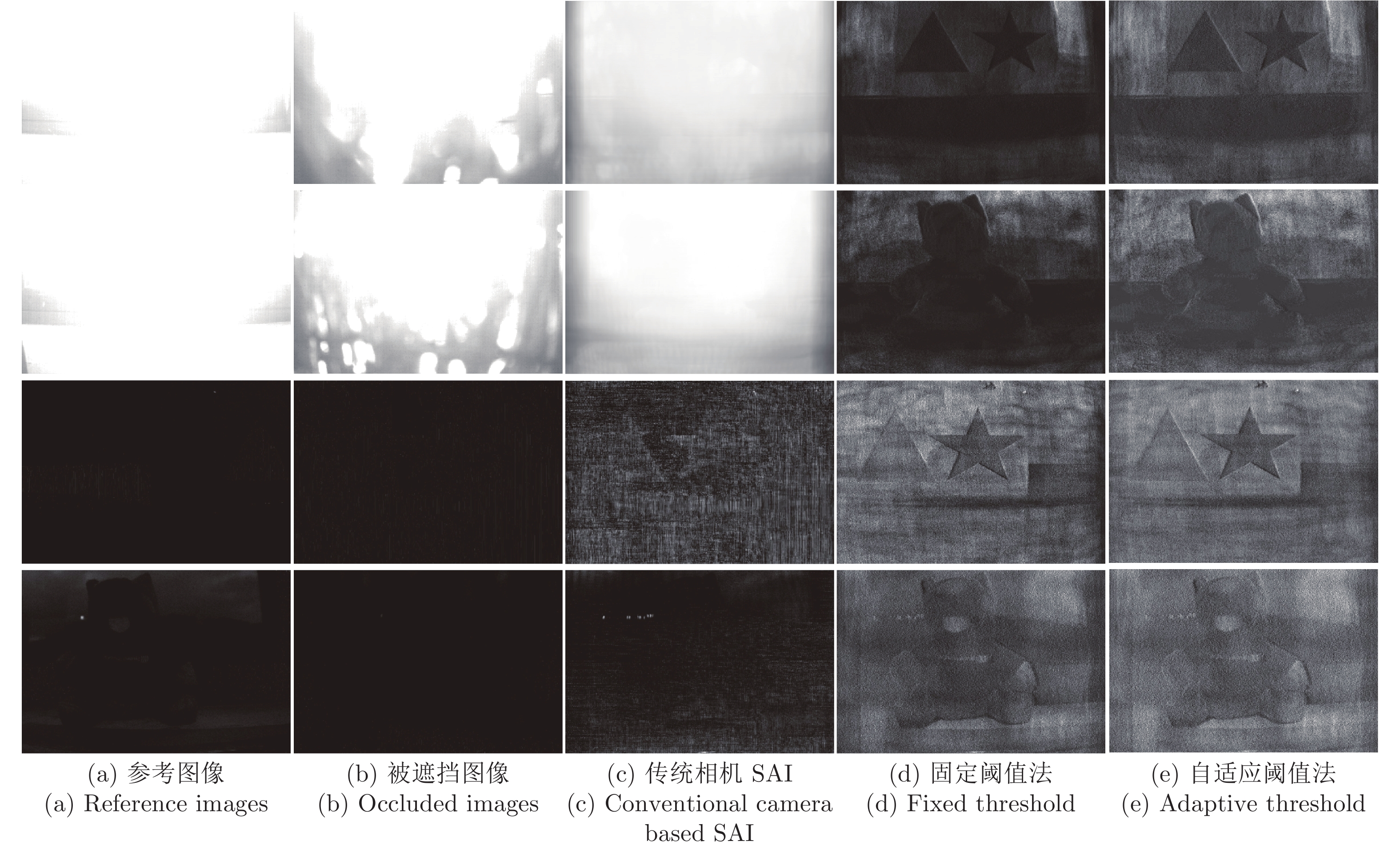
合成孔径成像(Synthetic aperture imaging, SAI)通过多角度获取目标信息来等效大孔径和小景深相机成像. 因此, 该技术可以虚化遮挡物, 实现对被遮挡目标的成像. 然而, 在密集遮挡和极端光照条件下, 由于遮挡物的密集干扰和相机本身较低的动态范围, 基于传统相机的合成孔径成像(SAI with conventional cameras, SAI-C)无法有效地对被遮挡目标进行成像. 利用事件相机低延时、高动态的特性, 本文提出基于事件相机的合成孔径成像方法. 事件相机产生异步事件数据, 具有极低的延时, 能够以连续视角观测场景, 从而消除密集干扰的影响. 而事件相机的高动态范围使其能够有效处理极端光照条件下的成像问题. 通过分析场景亮度变化与事件相机输出的事件点之间的关系, 从对焦后事件点重建出被遮挡目标, 实现基于事件相机的合成孔径成像. 实验结果表明, 所提出方法与传统方法相比, 在密集遮挡条件下重建图像的对比度、清晰度、峰值信噪比(Peak signal-to-noise ratio, PSNR)和结构相似性(Structural similarity index measure, SSIM)指数均有较大提升. 同时, 在极端光照条件下, 所提出方法能有效解决过曝/欠曝问题, 重建出清晰的被遮挡目标图像.
合成孔径成像(Synthetic aperture imaging, SAI)通过多角度获取目标信息来等效大孔径和小景深相机成像. 因此, 该技术可以虚化遮挡物, 实现对被遮挡目标的成像. 然而, 在密集遮挡和极端光照条件下, 由于遮挡物的密集干扰和相机本身较低的动态范围, 基于传统相机的合成孔径成像(SAI with conventional cameras, SAI-C)无法有效地对被遮挡目标进行成像. 利用事件相机低延时、高动态的特性, 本文提出基于事件相机的合成孔径成像方法. 事件相机产生异步事件数据, 具有极低的延时, 能够以连续视角观测场景, 从而消除密集干扰的影响. 而事件相机的高动态范围使其能够有效处理极端光照条件下的成像问题. 通过分析场景亮度变化与事件相机输出的事件点之间的关系, 从对焦后事件点重建出被遮挡目标, 实现基于事件相机的合成孔径成像. 实验结果表明, 所提出方法与传统方法相比, 在密集遮挡条件下重建图像的对比度、清晰度、峰值信噪比(Peak signal-to-noise ratio, PSNR)和结构相似性(Structural similarity index measure, SSIM)指数均有较大提升. 同时, 在极端光照条件下, 所提出方法能有效解决过曝/欠曝问题, 重建出清晰的被遮挡目标图像.
2023, 49(7): 1407-1420.
doi: 10.16383/j.aas.c200189
摘要:
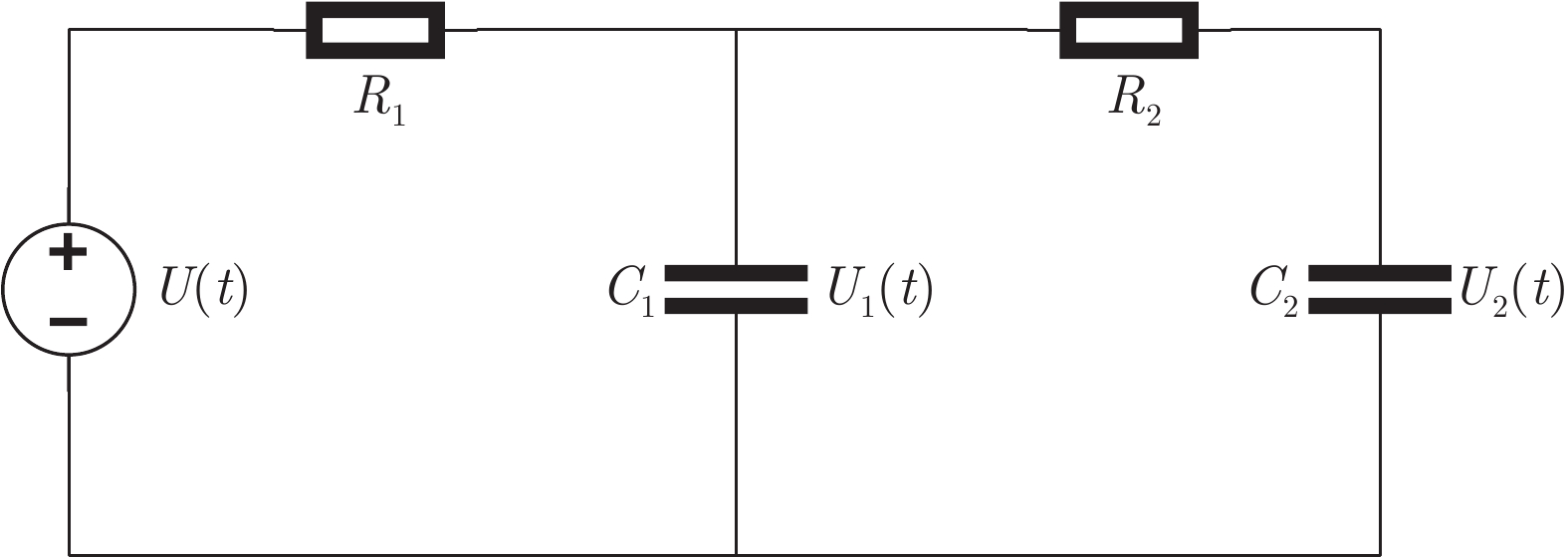
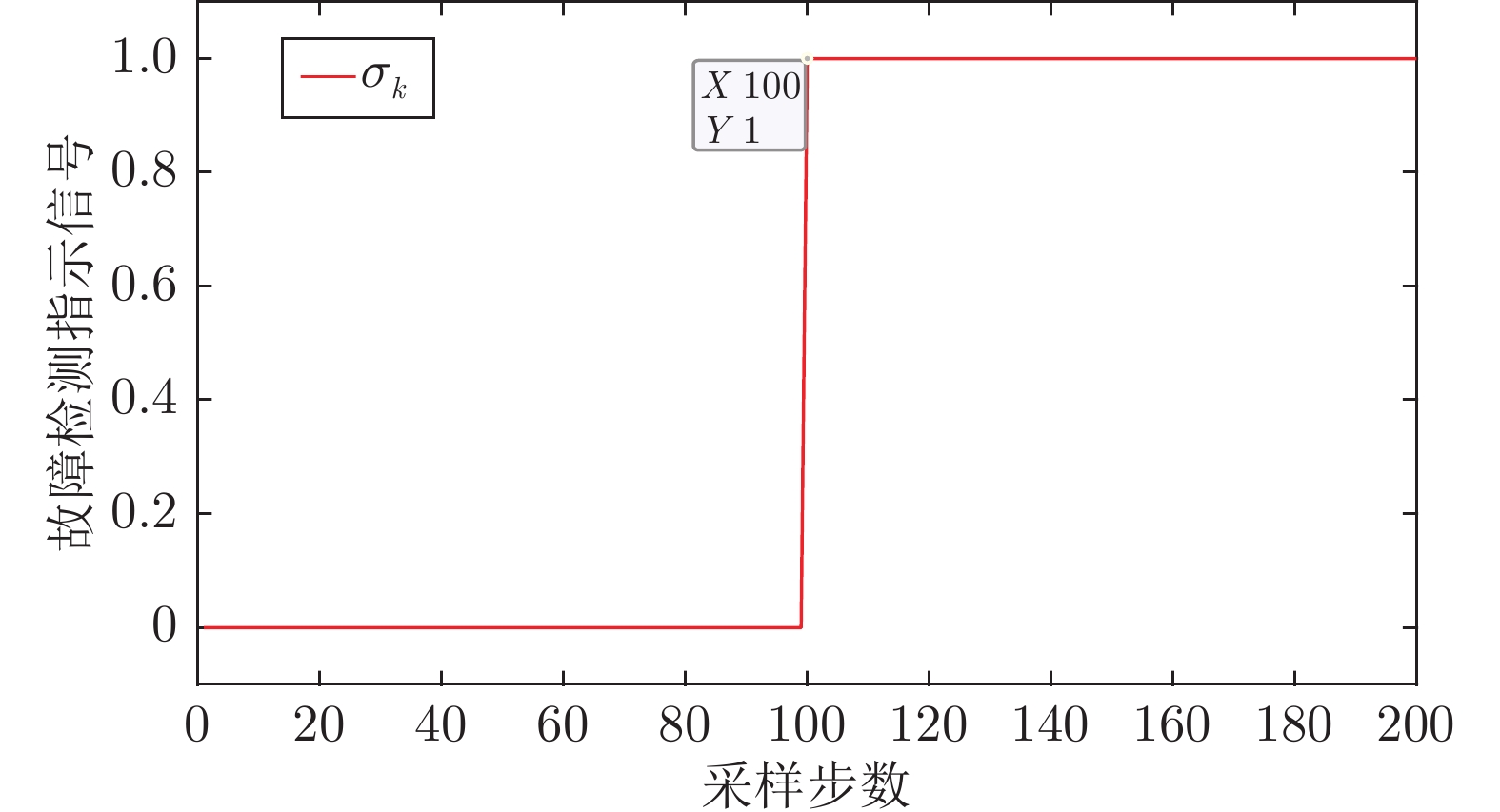
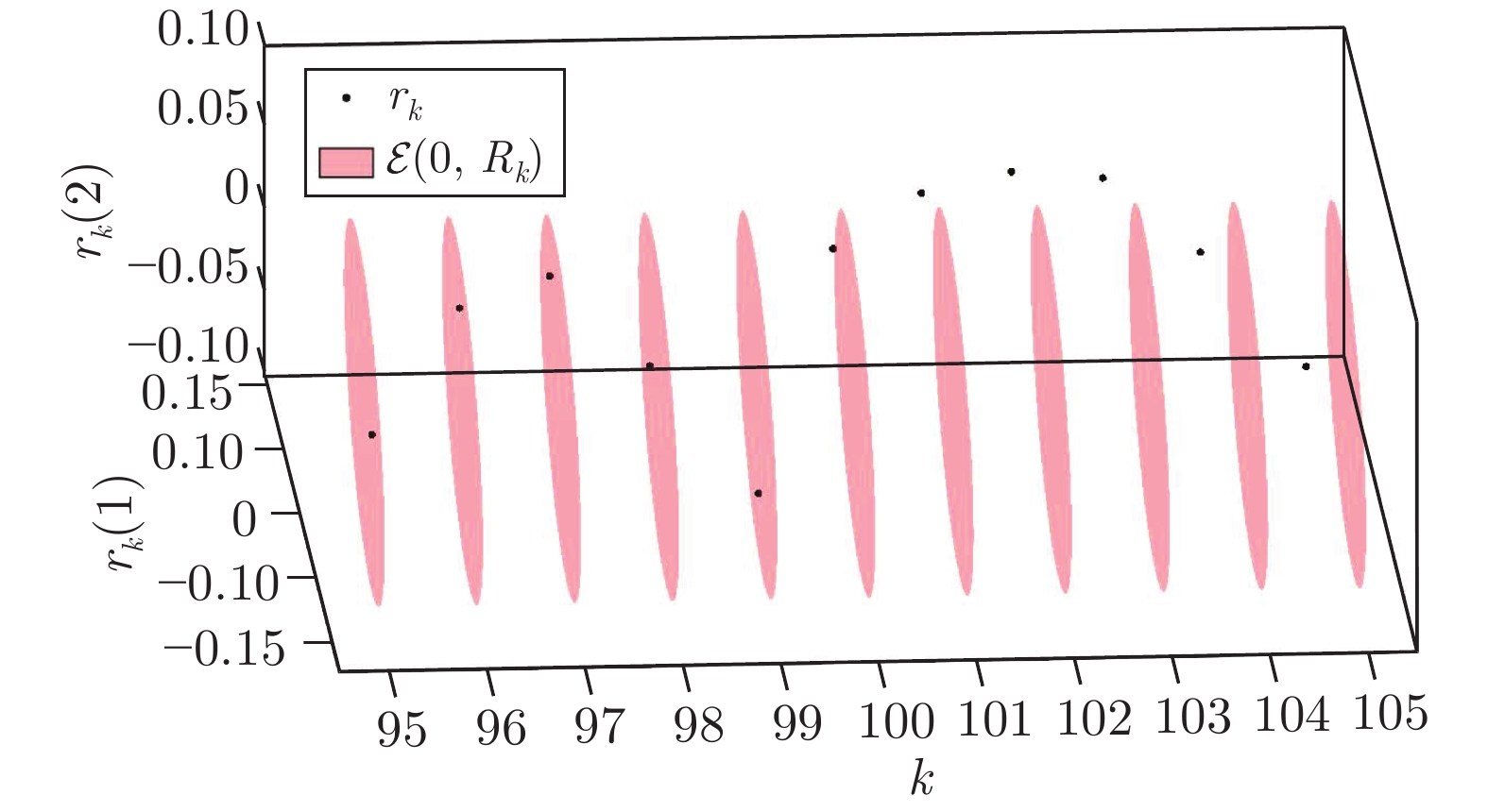
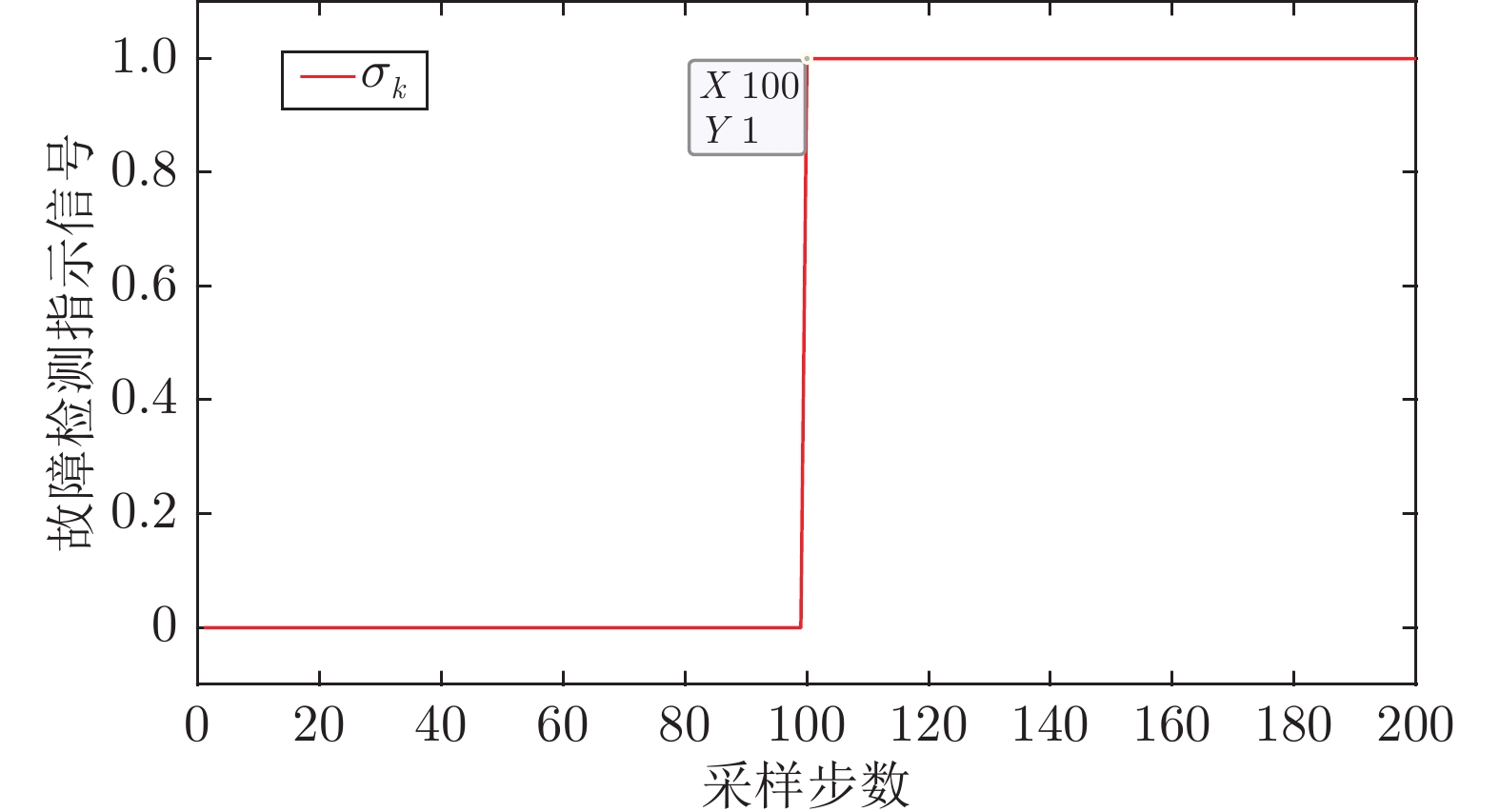
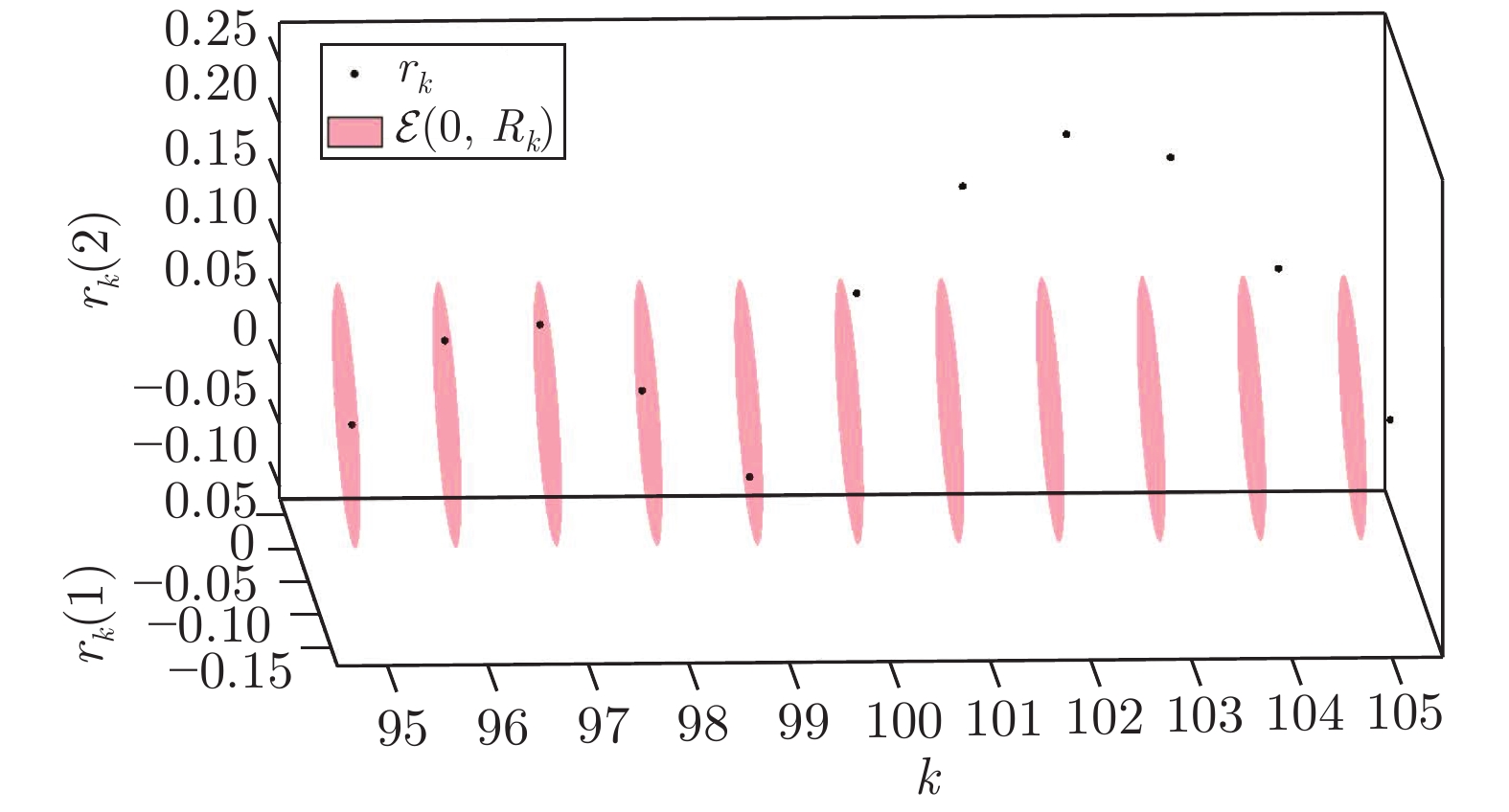
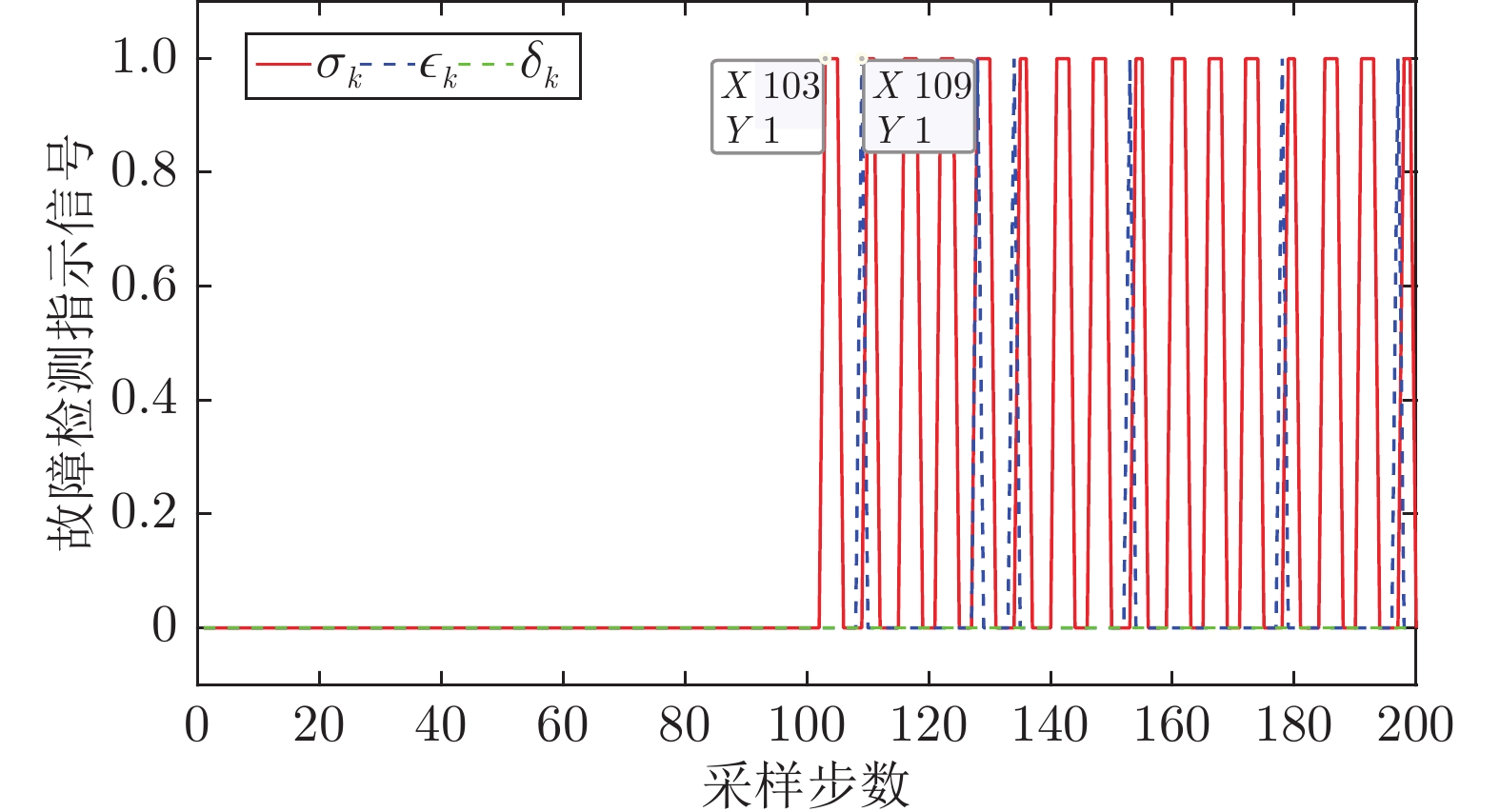
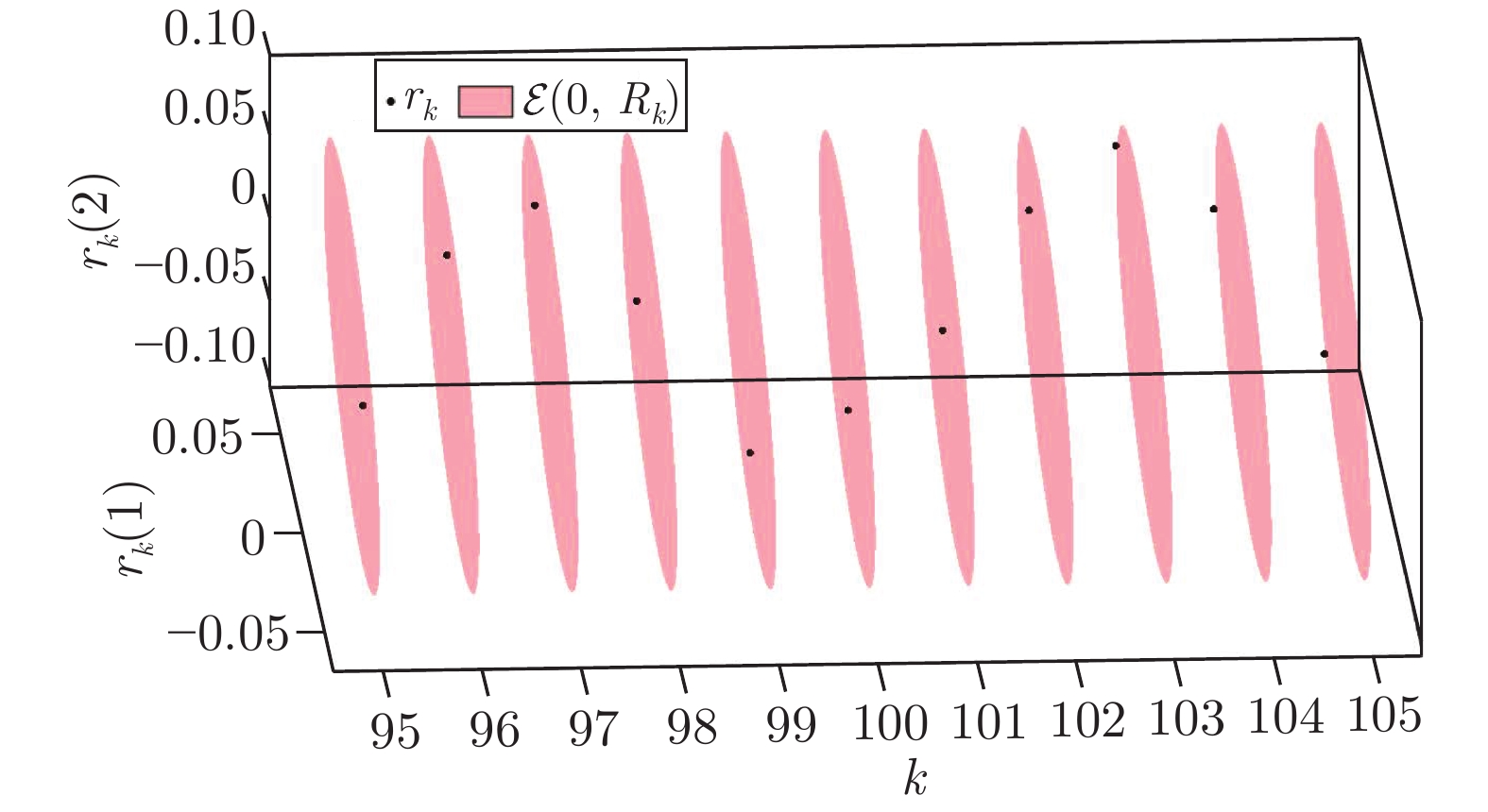
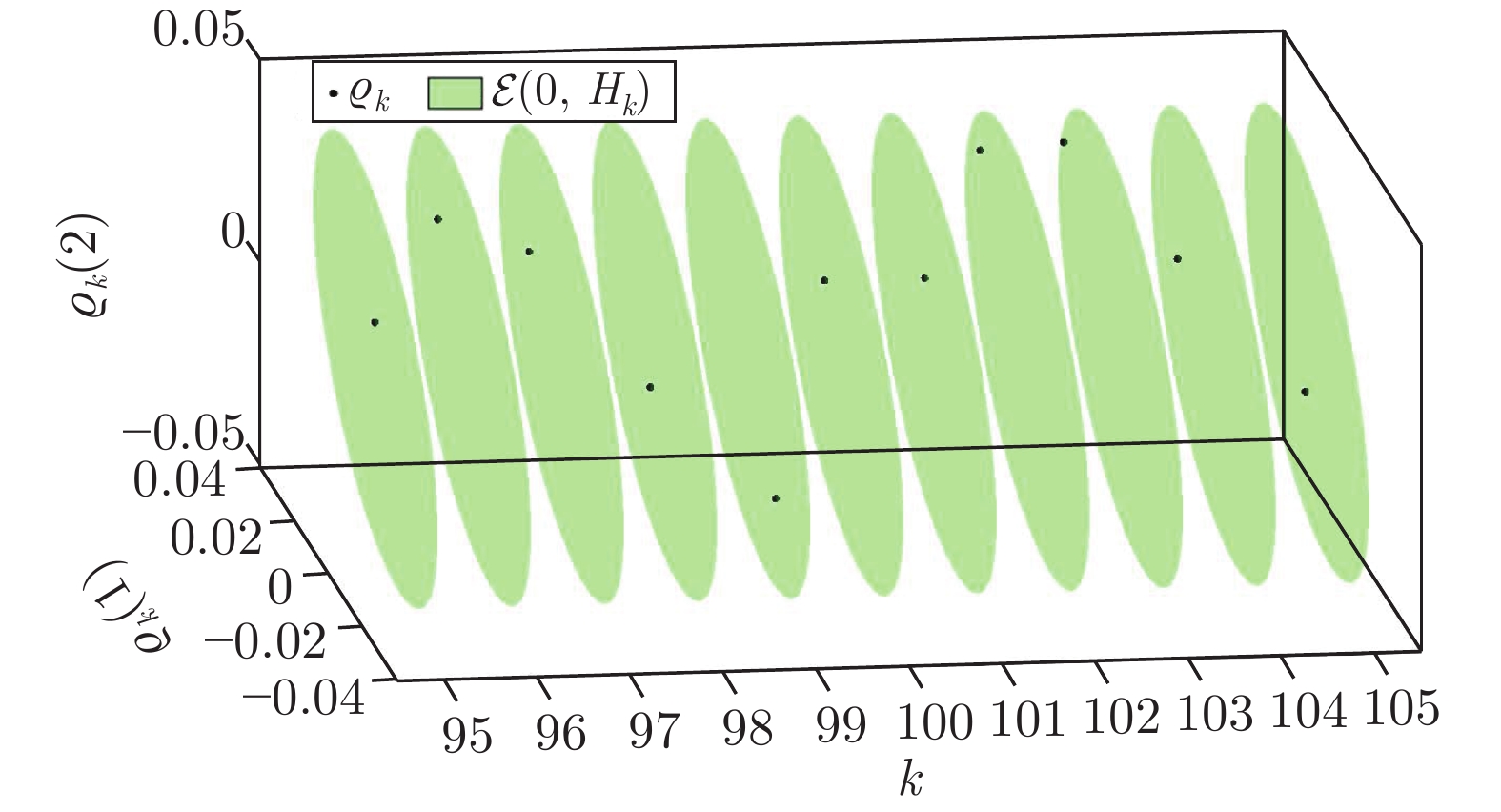
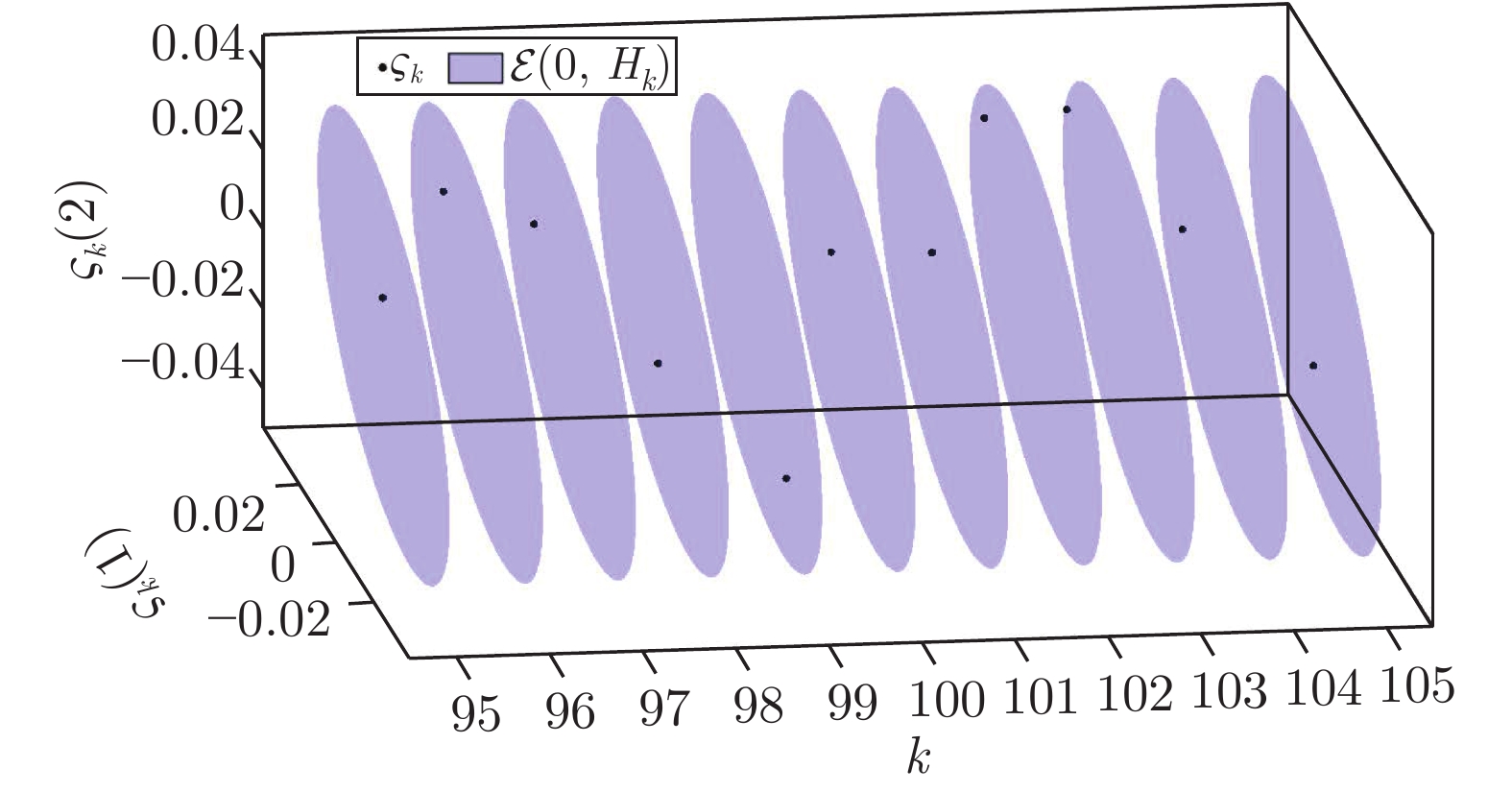
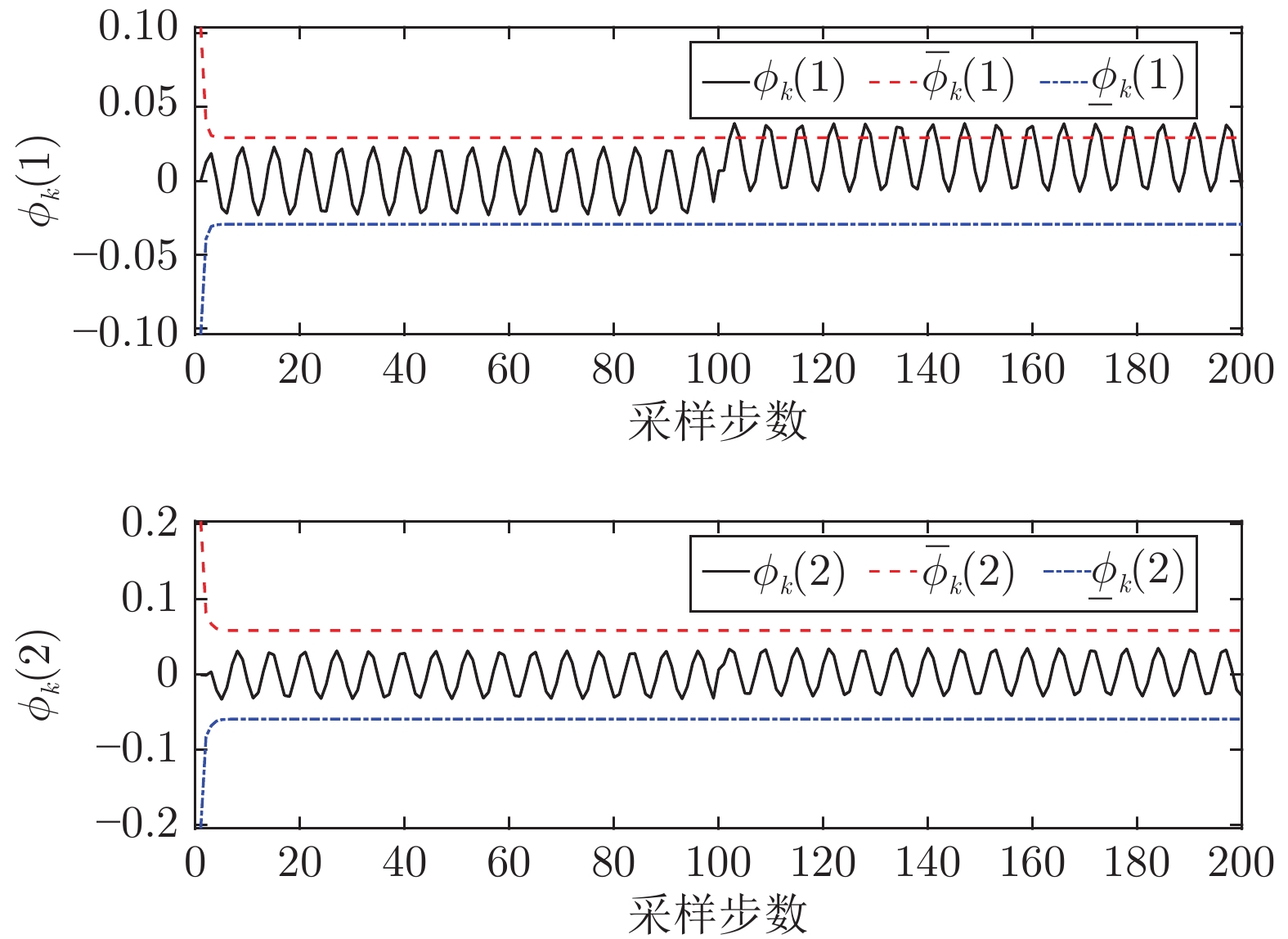
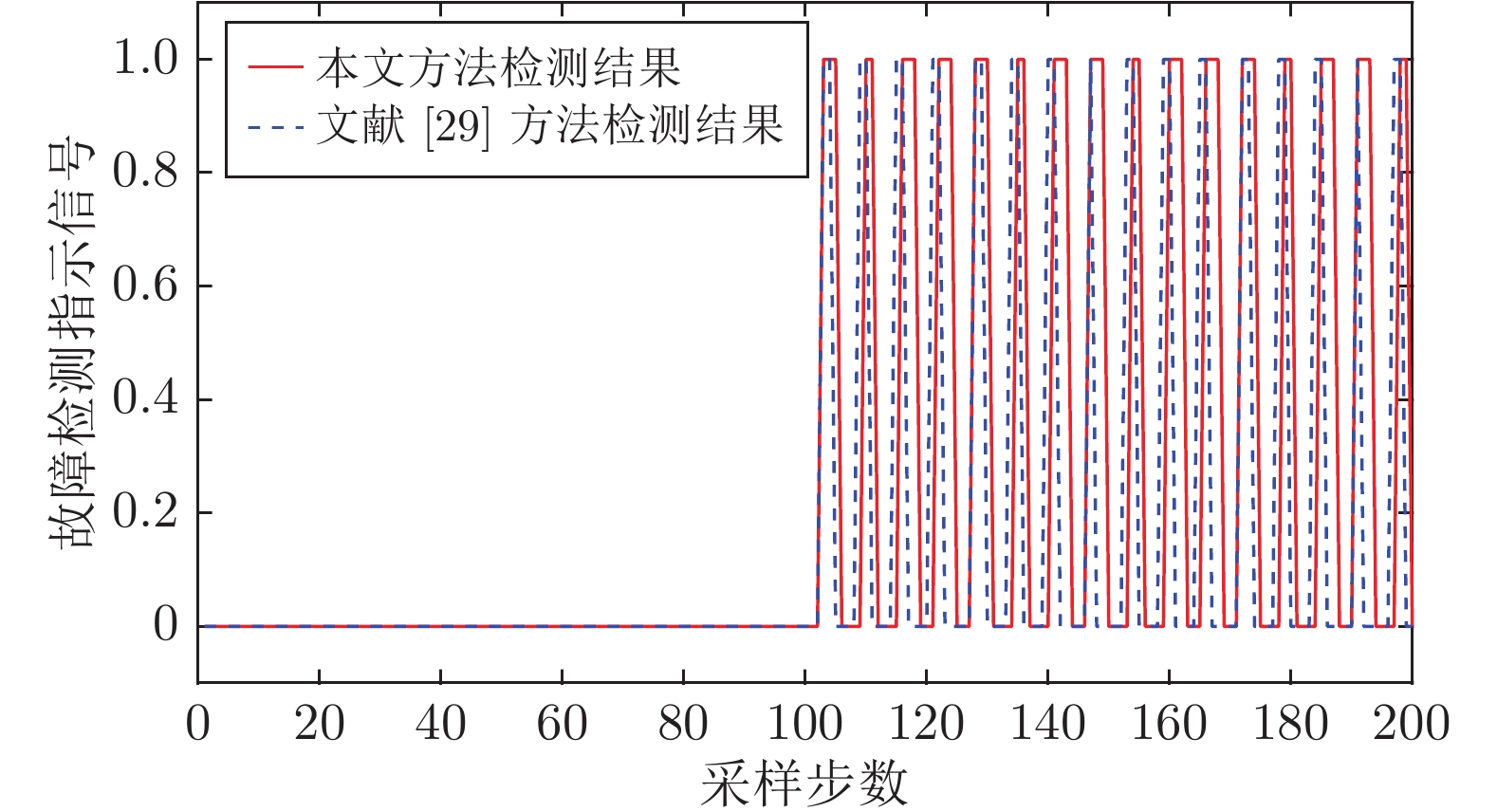
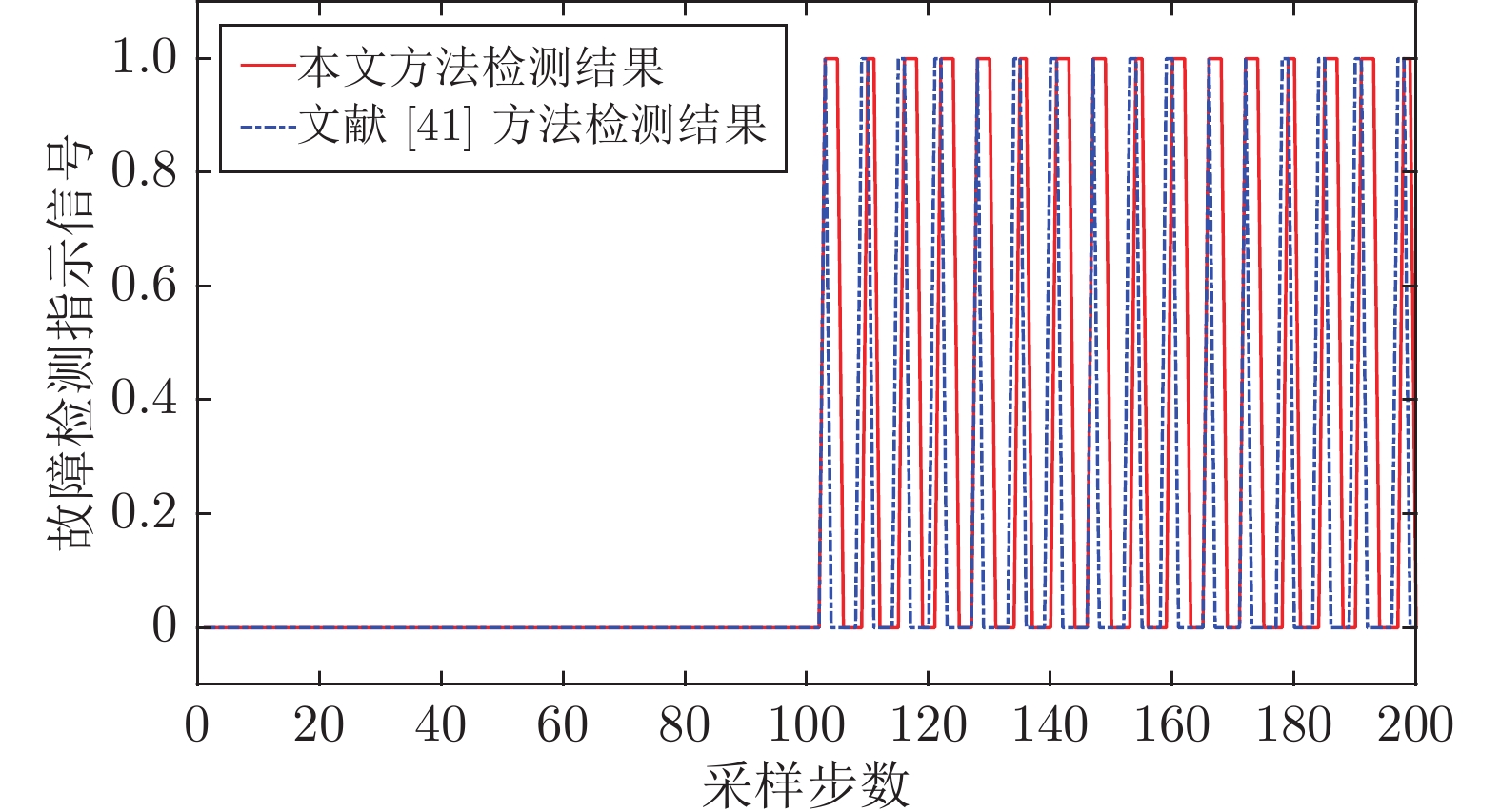
针对具有未知扰动与测量噪声的线性离散时间系统, 提出了一种传感器故障检测方法. 首先, 将传感器故障视为增广状态, 将原始系统转化为一个等效的新线性动态系统. 然后, 基于鲁棒观测器设计和极点配置方法构造了一个故障检测观测器, 使得生成的残差能够同时满足对扰动与噪声的鲁棒性和对故障的敏感性. 此外, 设计了一种基于椭球分析的残差评价方法, 该方法可通过判断残差是否被无故障残差椭球包含来检测故障. 最后, 通过一个二阶RC电路模型的仿真算例验证了所提出方法的有效性与优越性.
针对具有未知扰动与测量噪声的线性离散时间系统, 提出了一种传感器故障检测方法. 首先, 将传感器故障视为增广状态, 将原始系统转化为一个等效的新线性动态系统. 然后, 基于鲁棒观测器设计和极点配置方法构造了一个故障检测观测器, 使得生成的残差能够同时满足对扰动与噪声的鲁棒性和对故障的敏感性. 此外, 设计了一种基于椭球分析的残差评价方法, 该方法可通过判断残差是否被无故障残差椭球包含来检测故障. 最后, 通过一个二阶RC电路模型的仿真算例验证了所提出方法的有效性与优越性.
2023, 49(7): 1421-1432.
doi: 10.16383/j.aas.c220326
摘要:
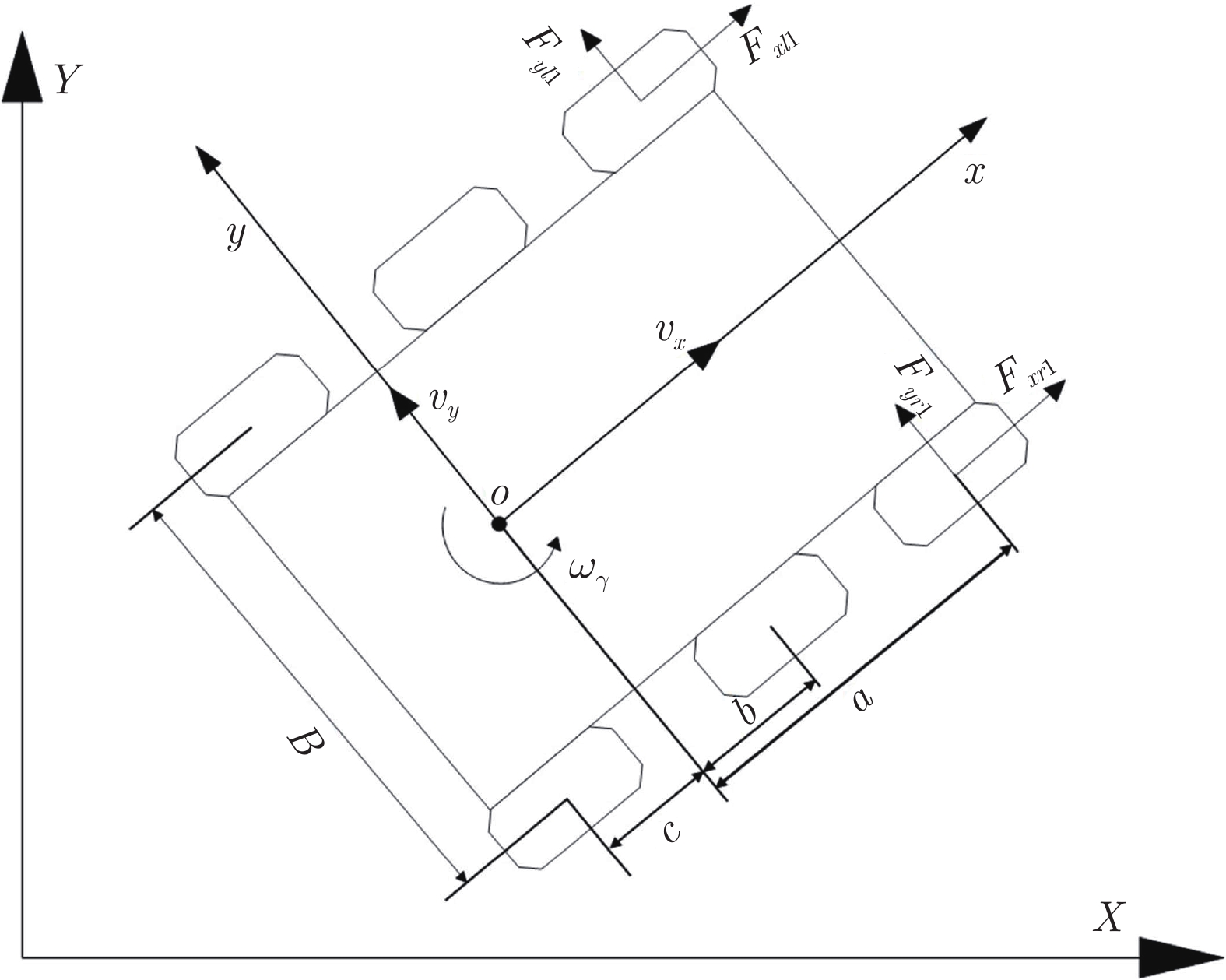
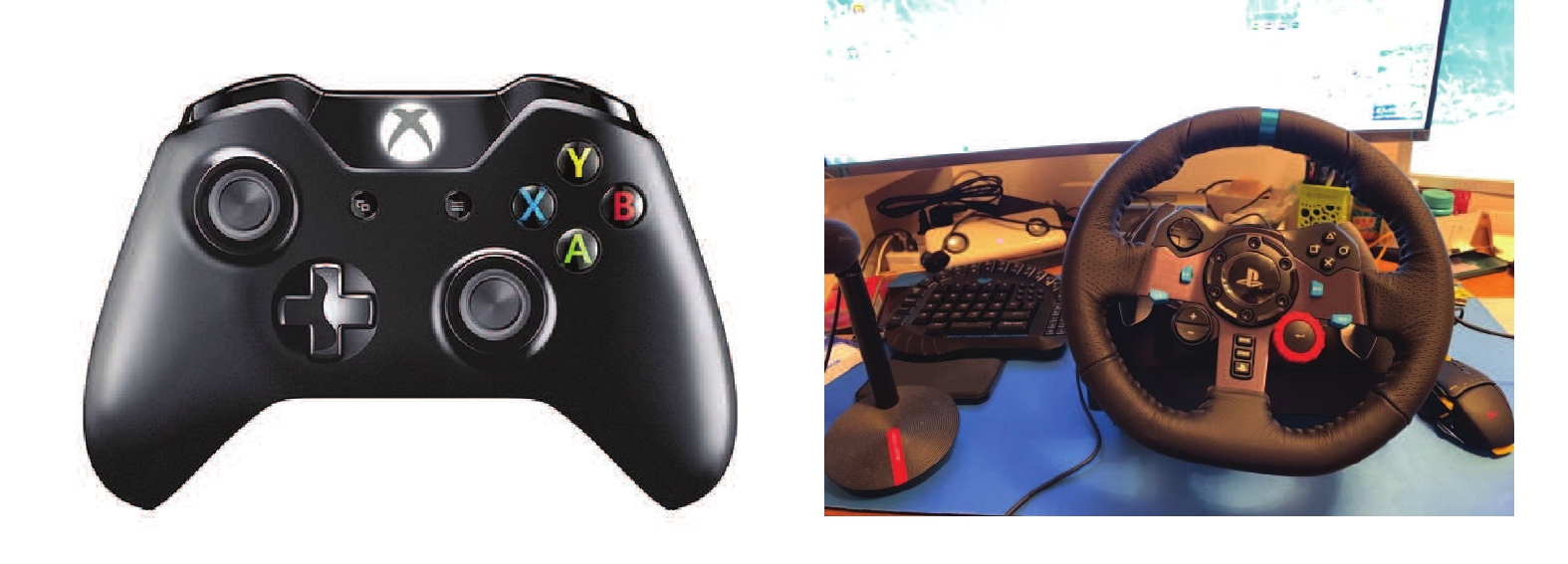
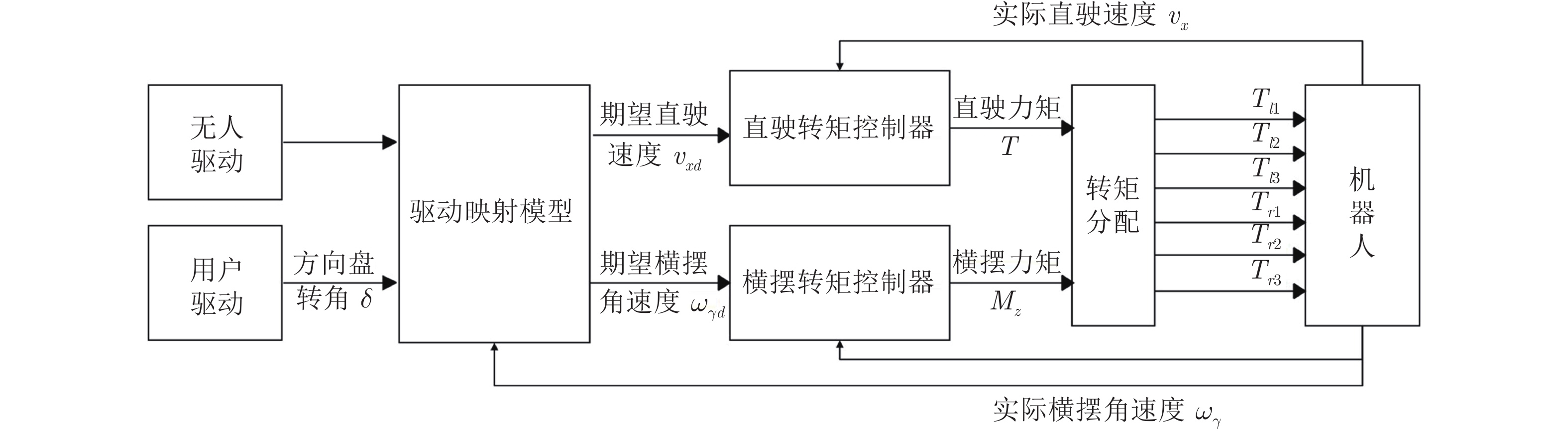
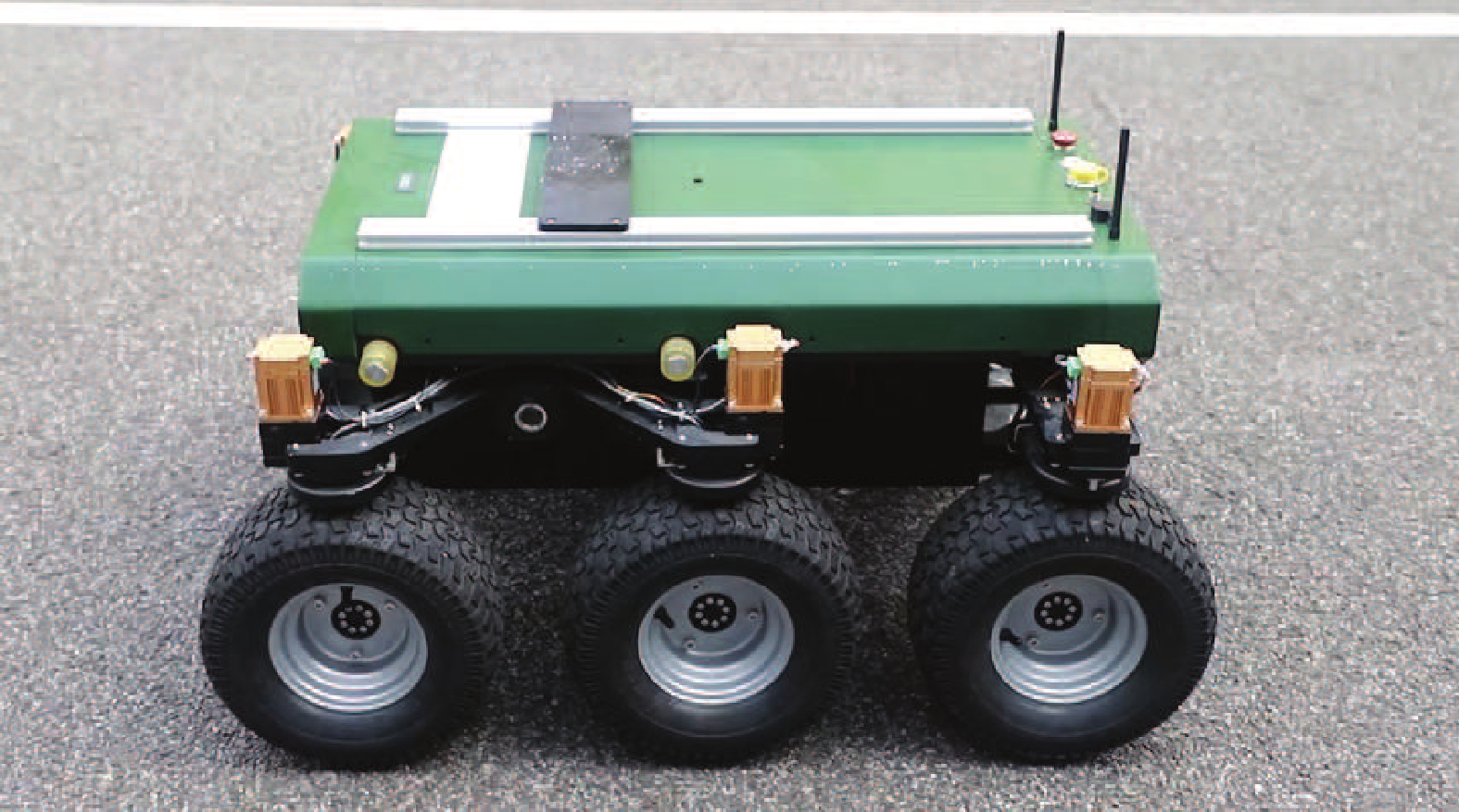
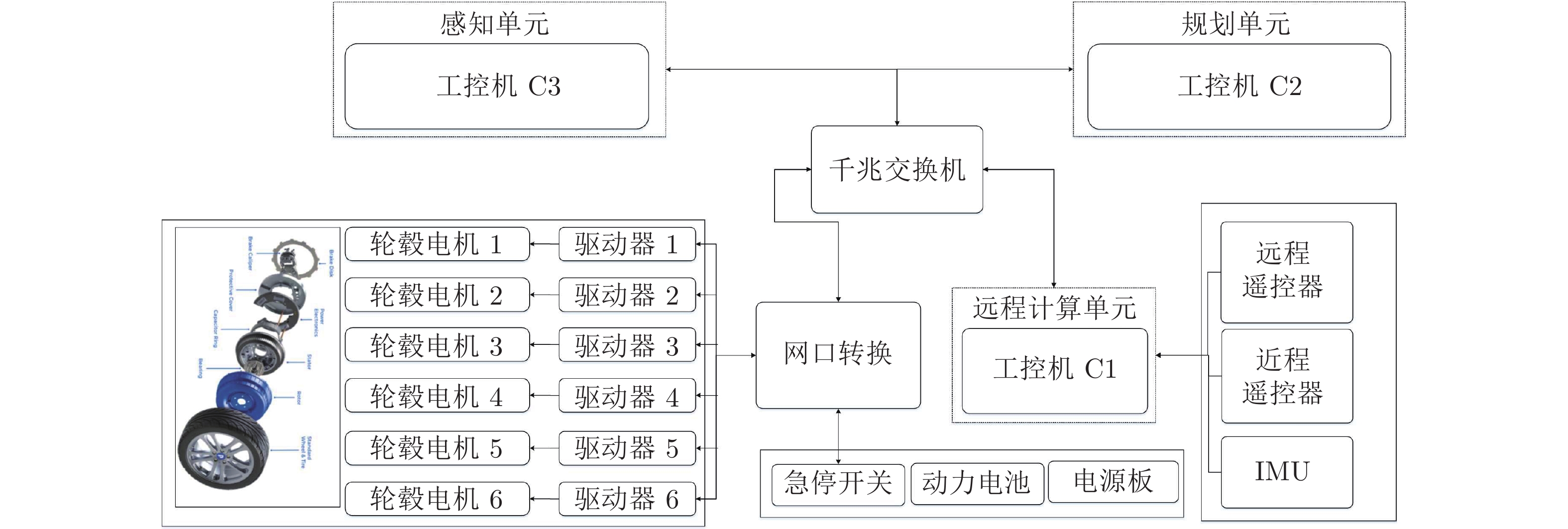
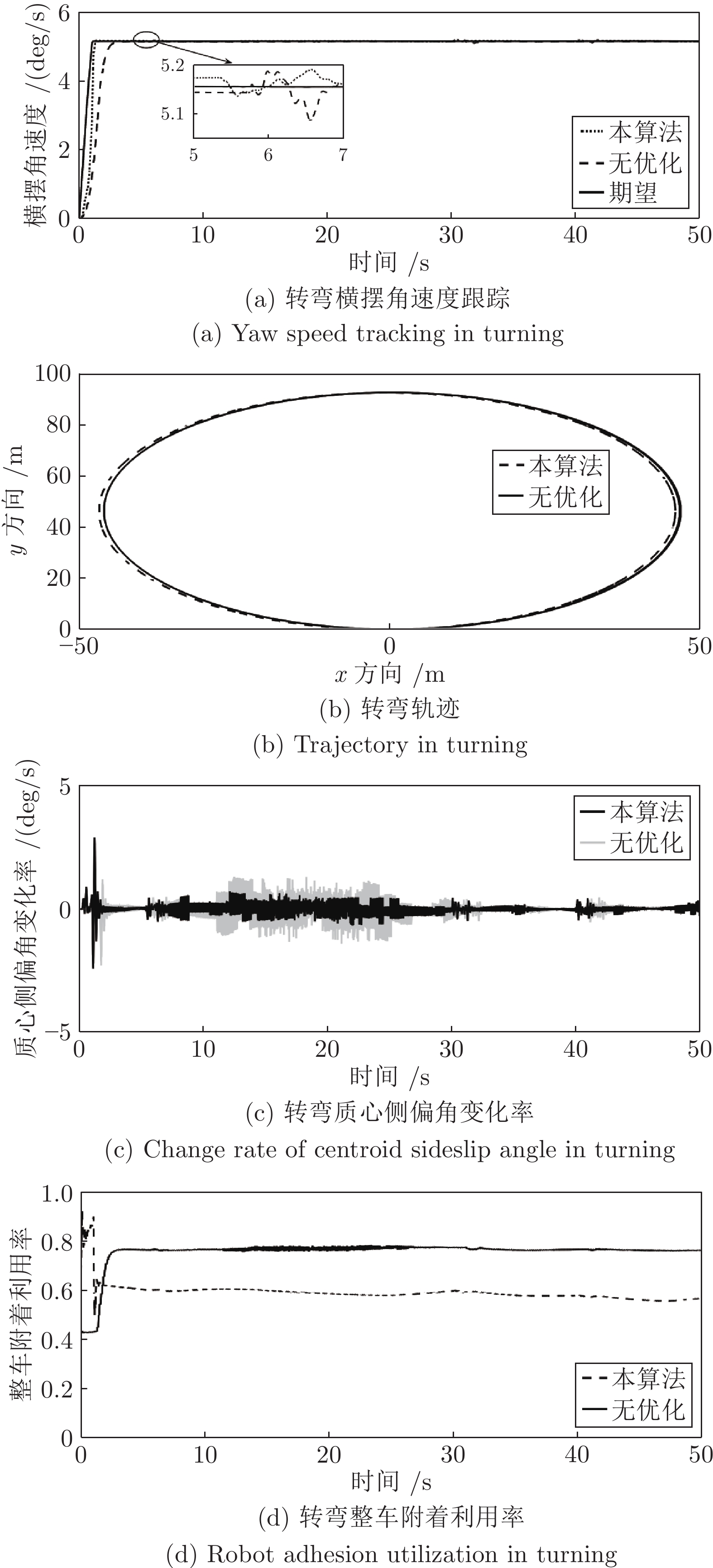
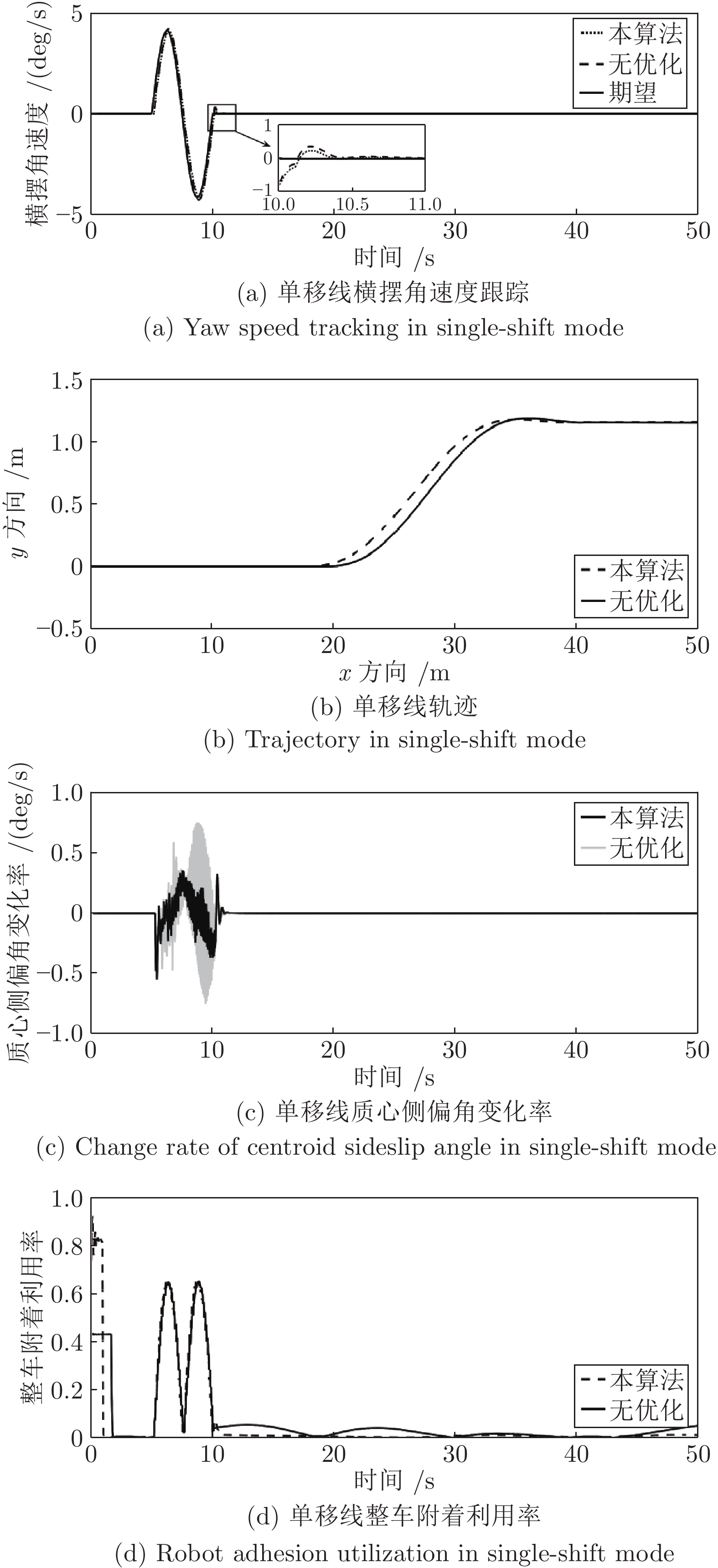
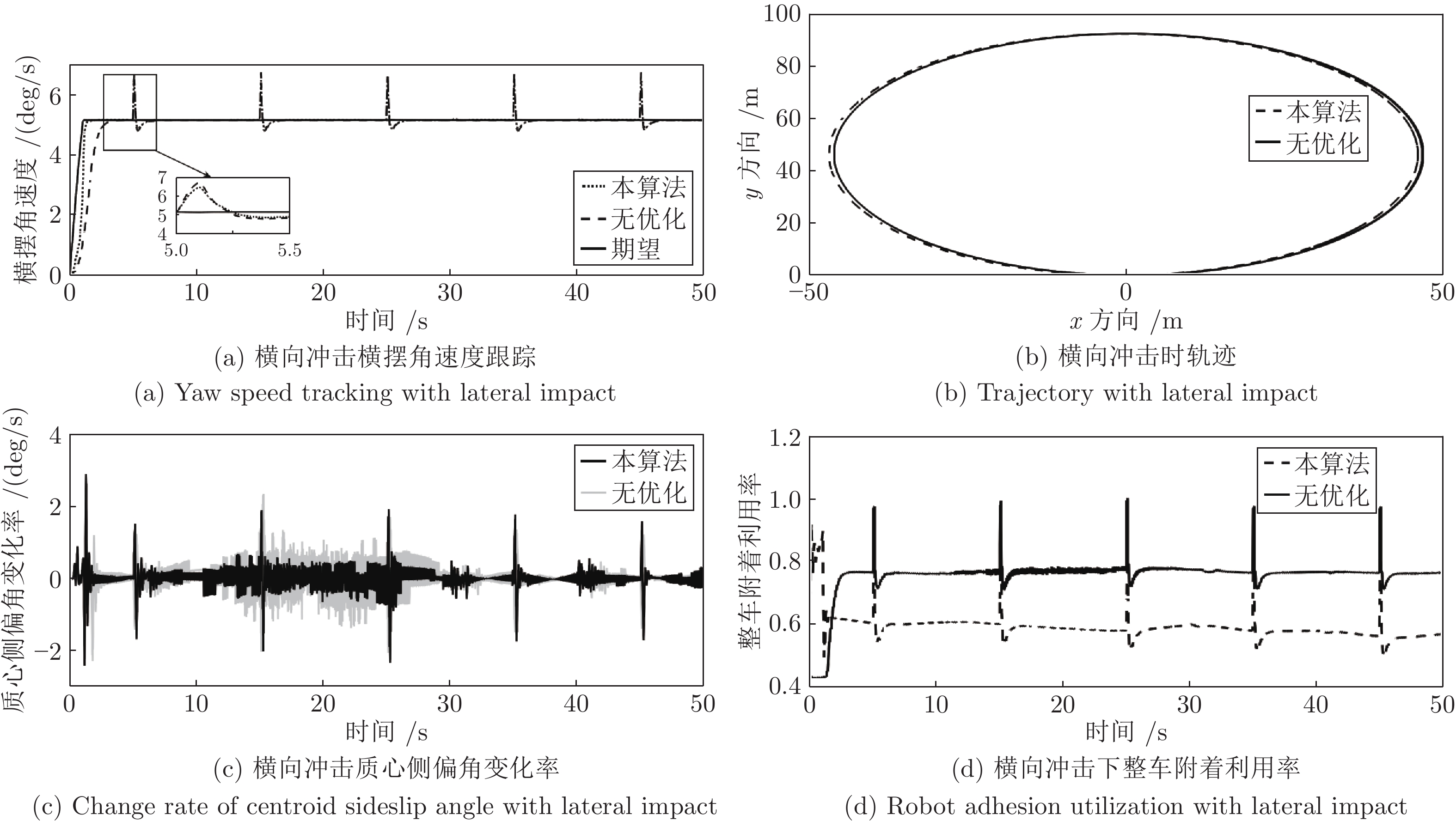
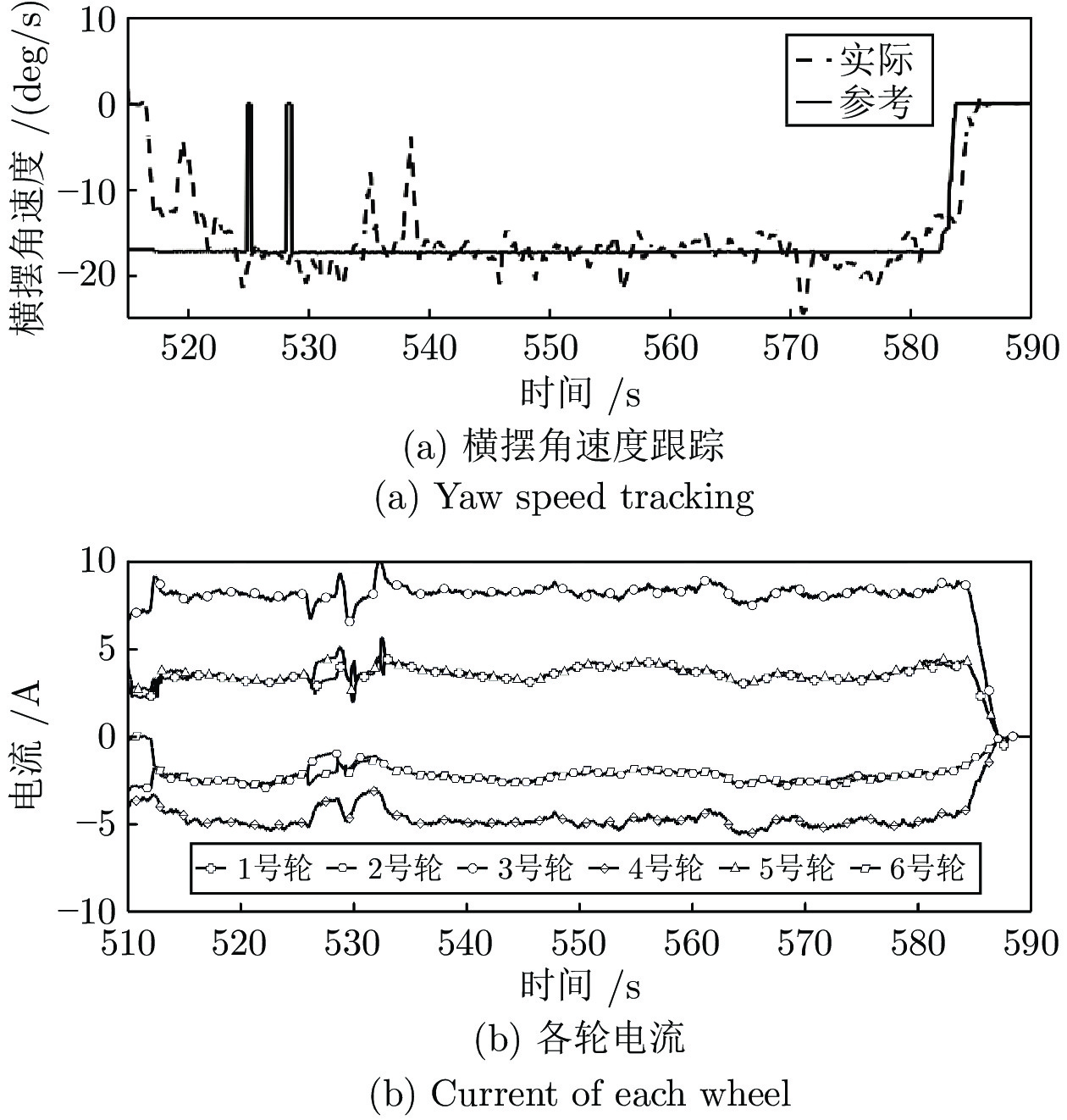
六轮野外机器人通常体积庞大, 难以建立其动力学模型. 采用传统的速度控制方法很难保证机器人的横向稳定性. 为解决这一问题, 开展基于分层控制策略的六轮滑移机器人横向稳定性控制研究. 首先分析整车受力情况, 建立六轮滑移机器人的动力学模型. 其次, 设计基于分层控制策略的动力学控制器, 其中上层为基于改进趋近律的滑模控制器, 实现对期望横摆角速度的跟踪; 下层为基于附着率最优的转矩分配控制器, 该控制器可以保证机器人行驶的横向稳定性. 最后, 在不同工况下进行仿真实验, 并搭建实验平台进行实物测试. 结果表明设计的控制器可以有效提高机器人的横向稳定性.
六轮野外机器人通常体积庞大, 难以建立其动力学模型. 采用传统的速度控制方法很难保证机器人的横向稳定性. 为解决这一问题, 开展基于分层控制策略的六轮滑移机器人横向稳定性控制研究. 首先分析整车受力情况, 建立六轮滑移机器人的动力学模型. 其次, 设计基于分层控制策略的动力学控制器, 其中上层为基于改进趋近律的滑模控制器, 实现对期望横摆角速度的跟踪; 下层为基于附着率最优的转矩分配控制器, 该控制器可以保证机器人行驶的横向稳定性. 最后, 在不同工况下进行仿真实验, 并搭建实验平台进行实物测试. 结果表明设计的控制器可以有效提高机器人的横向稳定性.
2023, 49(7): 1433-1445.
doi: 10.16383/j.aas.c200519
摘要:
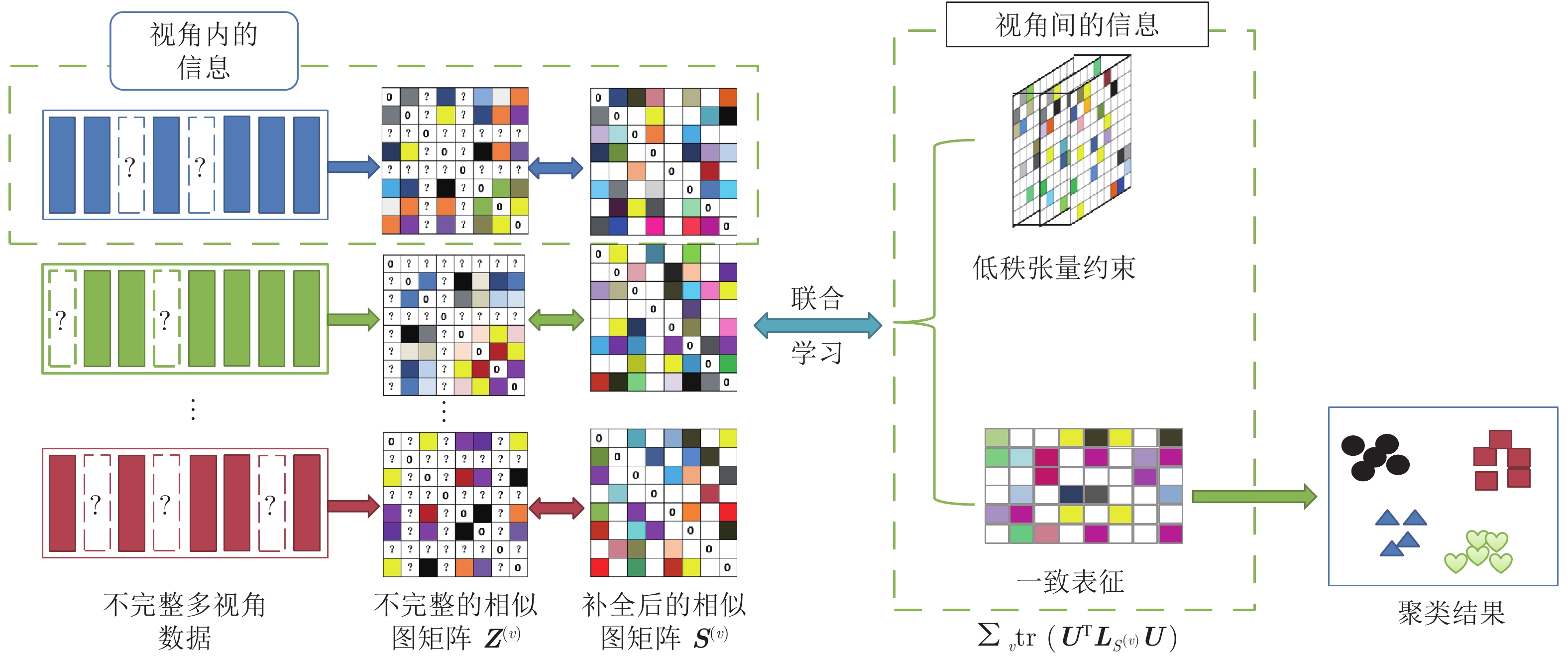
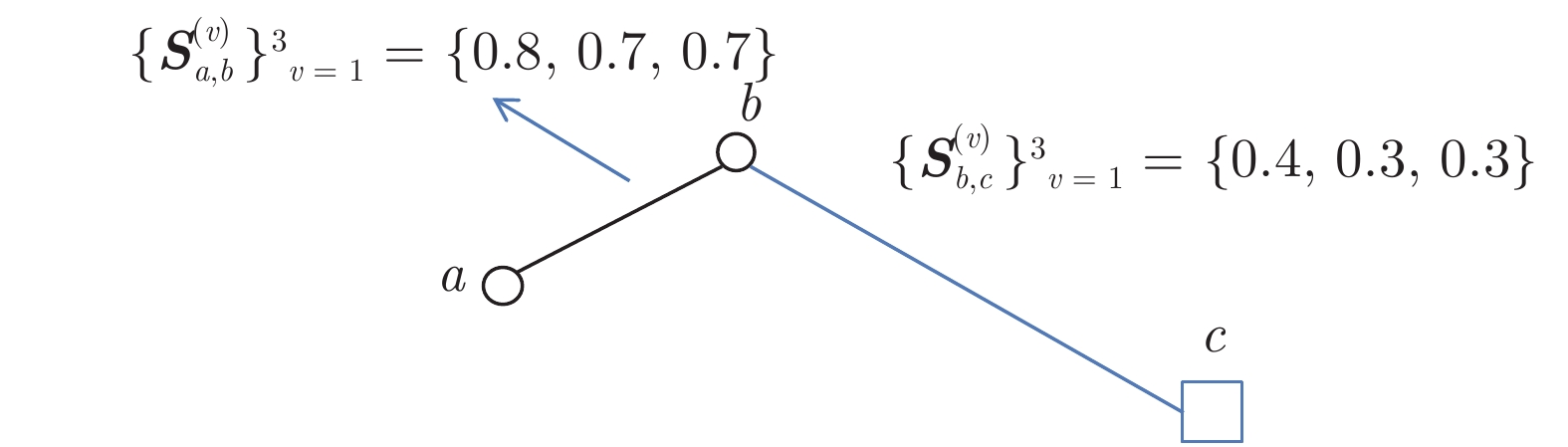
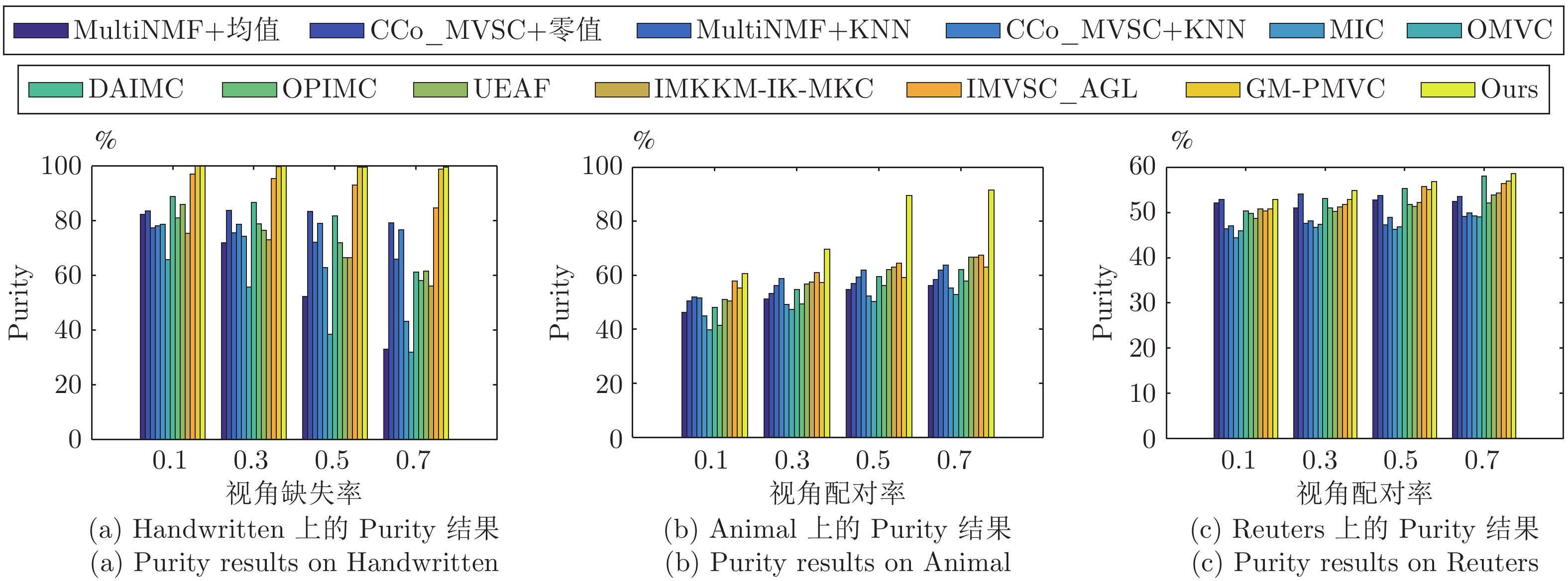
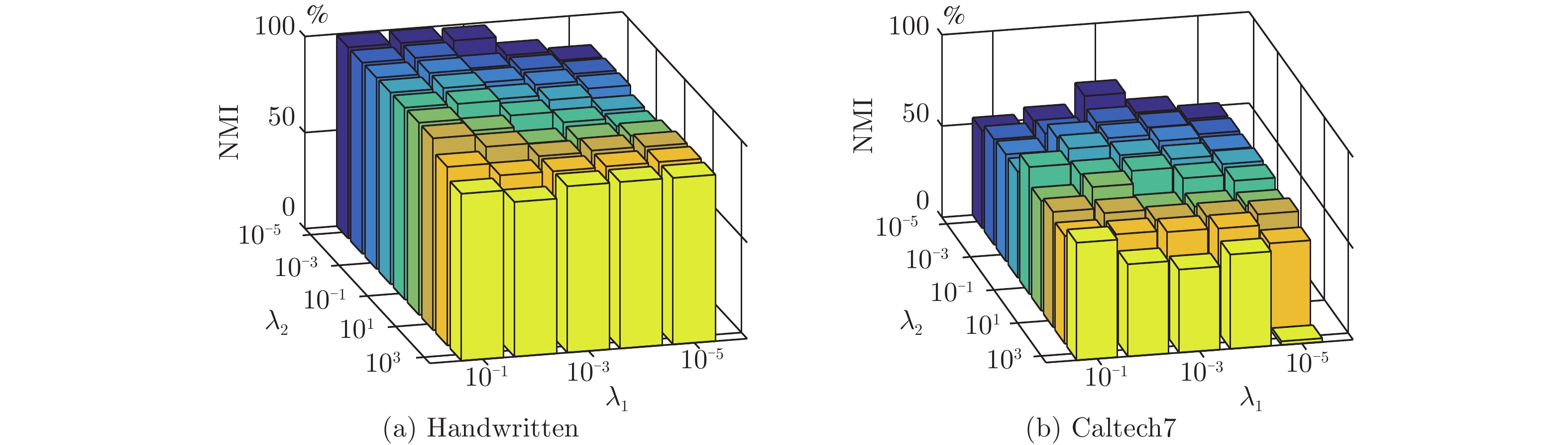
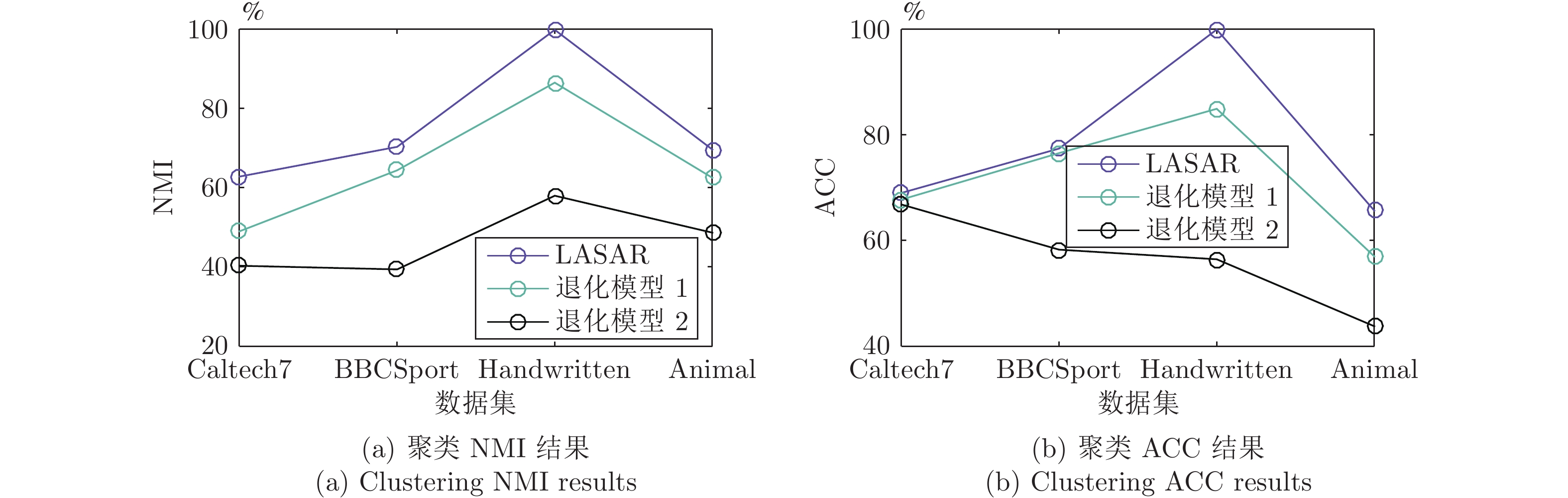
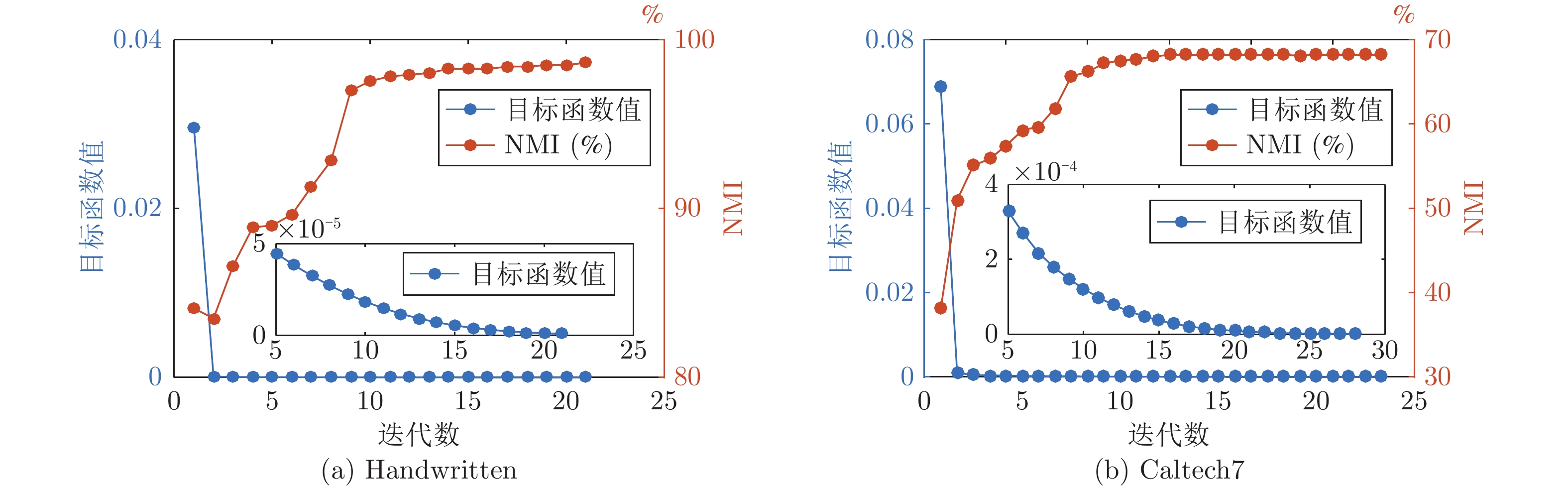
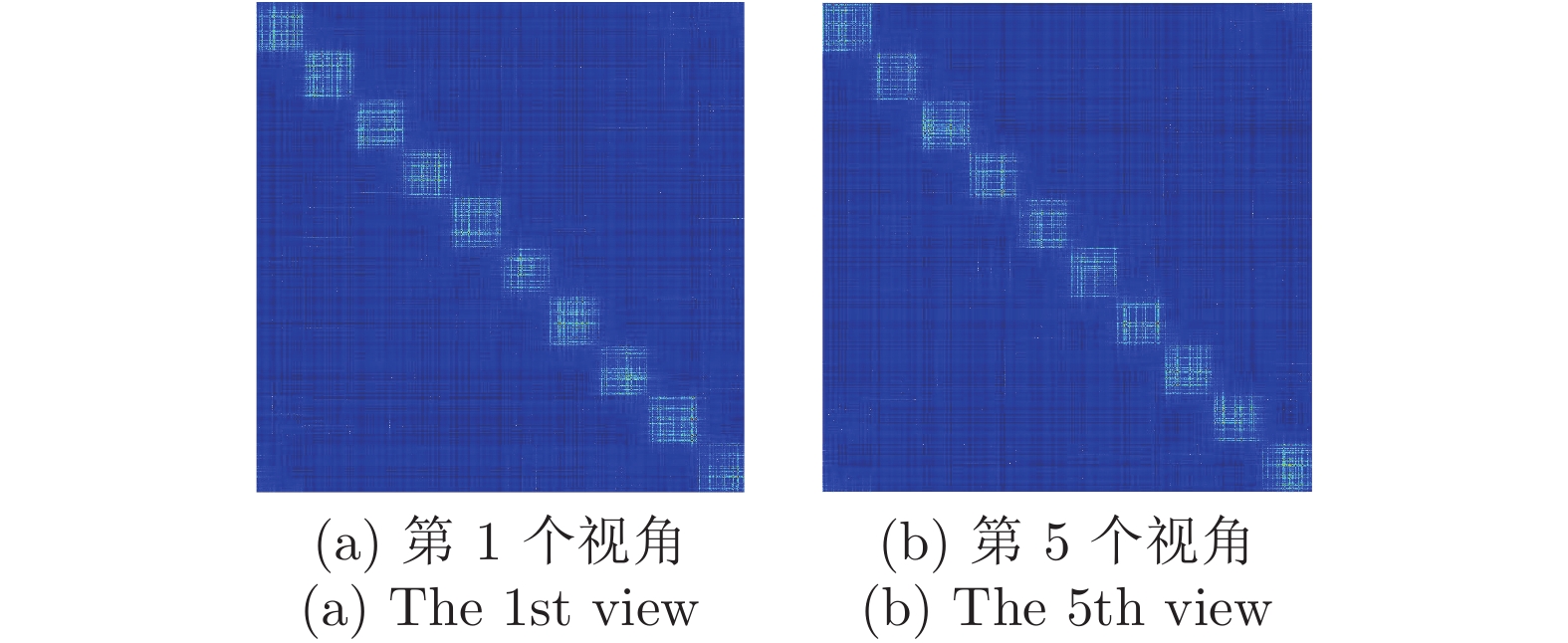
传统多视角聚类都基于视角完备假设, 要求所有样本的视角信息完整, 不能处理存在部分视角缺失情形下的不完整多视角聚类任务. 为解决该问题, 提出一种基于低秩张量图学习的不完整多视角聚类方法. 为了恢复相似图中缺失视角所对应的样本关联信息, 该方法将低秩张量图约束和视角内在图保持约束融入到多视角谱聚类模型. 通过在一个统一模型中同时挖掘视角间的互补信息和视角内未缺失样例的关联信息, 所提出的方法能够得到表征样例邻接关系的完整相似图和视角间一致的最优聚类指示矩阵. 与12种不完整多视角聚类方法进行实验对比, 实验结果表明所提出的方法在多种视角缺失率下的5个数据集上获得了最好的聚类性能.
传统多视角聚类都基于视角完备假设, 要求所有样本的视角信息完整, 不能处理存在部分视角缺失情形下的不完整多视角聚类任务. 为解决该问题, 提出一种基于低秩张量图学习的不完整多视角聚类方法. 为了恢复相似图中缺失视角所对应的样本关联信息, 该方法将低秩张量图约束和视角内在图保持约束融入到多视角谱聚类模型. 通过在一个统一模型中同时挖掘视角间的互补信息和视角内未缺失样例的关联信息, 所提出的方法能够得到表征样例邻接关系的完整相似图和视角间一致的最优聚类指示矩阵. 与12种不完整多视角聚类方法进行实验对比, 实验结果表明所提出的方法在多种视角缺失率下的5个数据集上获得了最好的聚类性能.
2023, 49(7): 1446-1455.
doi: 10.16383/j.aas.c200286
摘要:
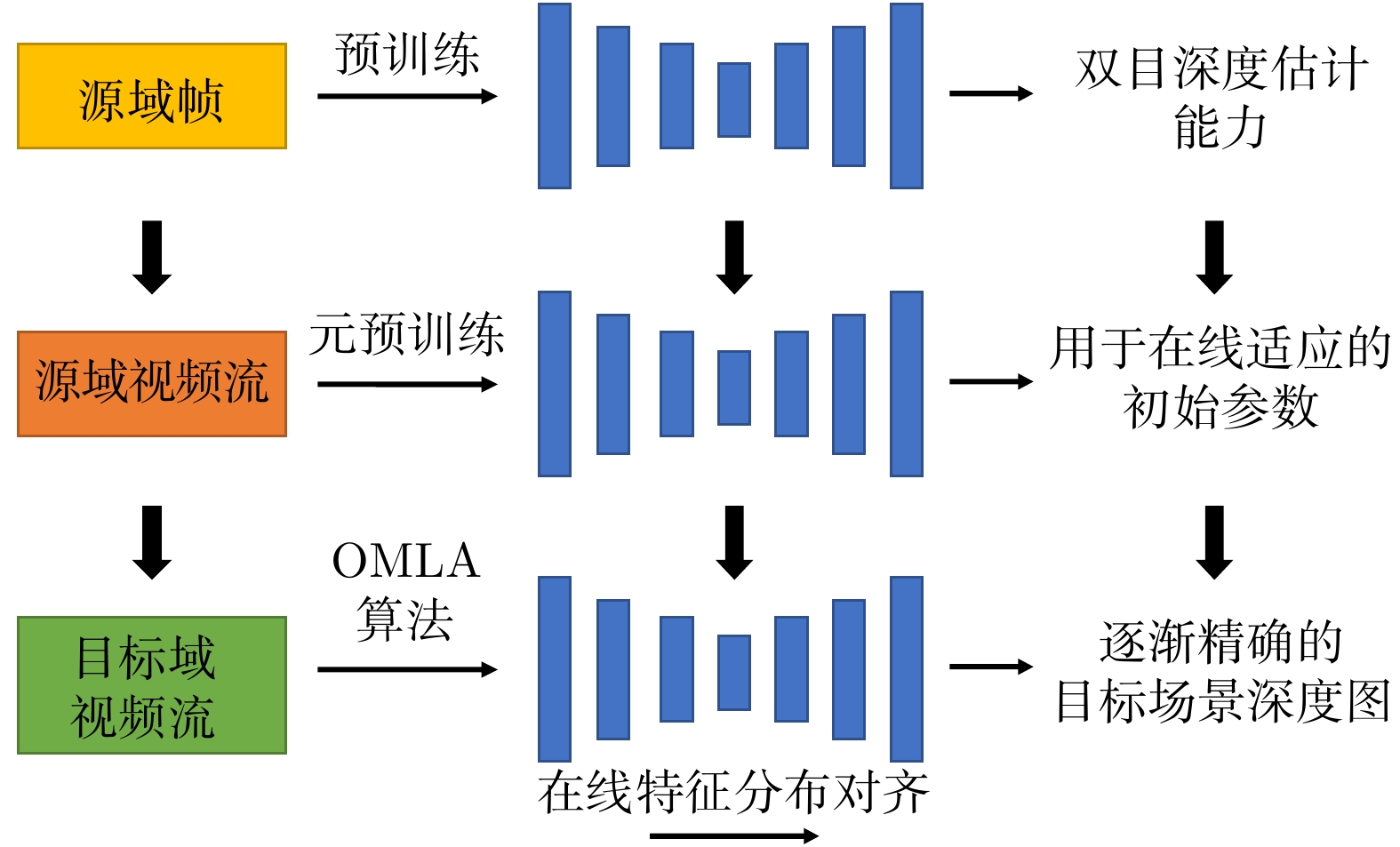
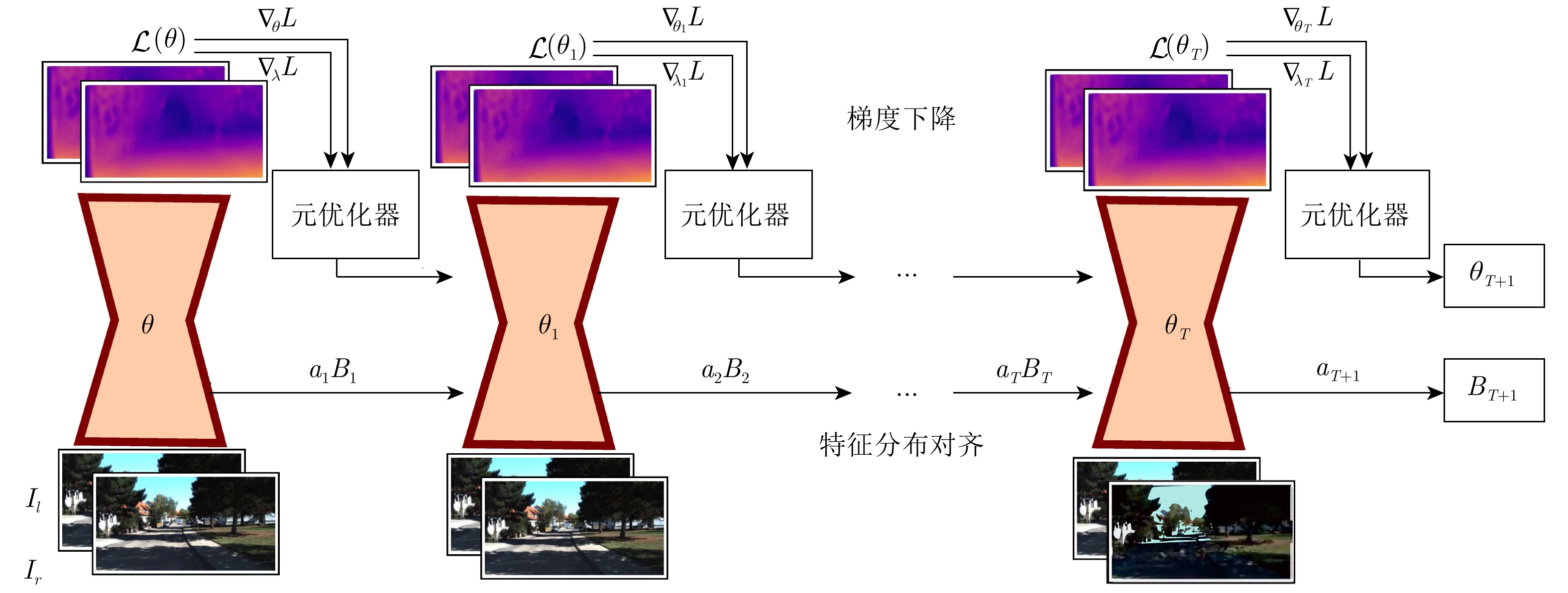
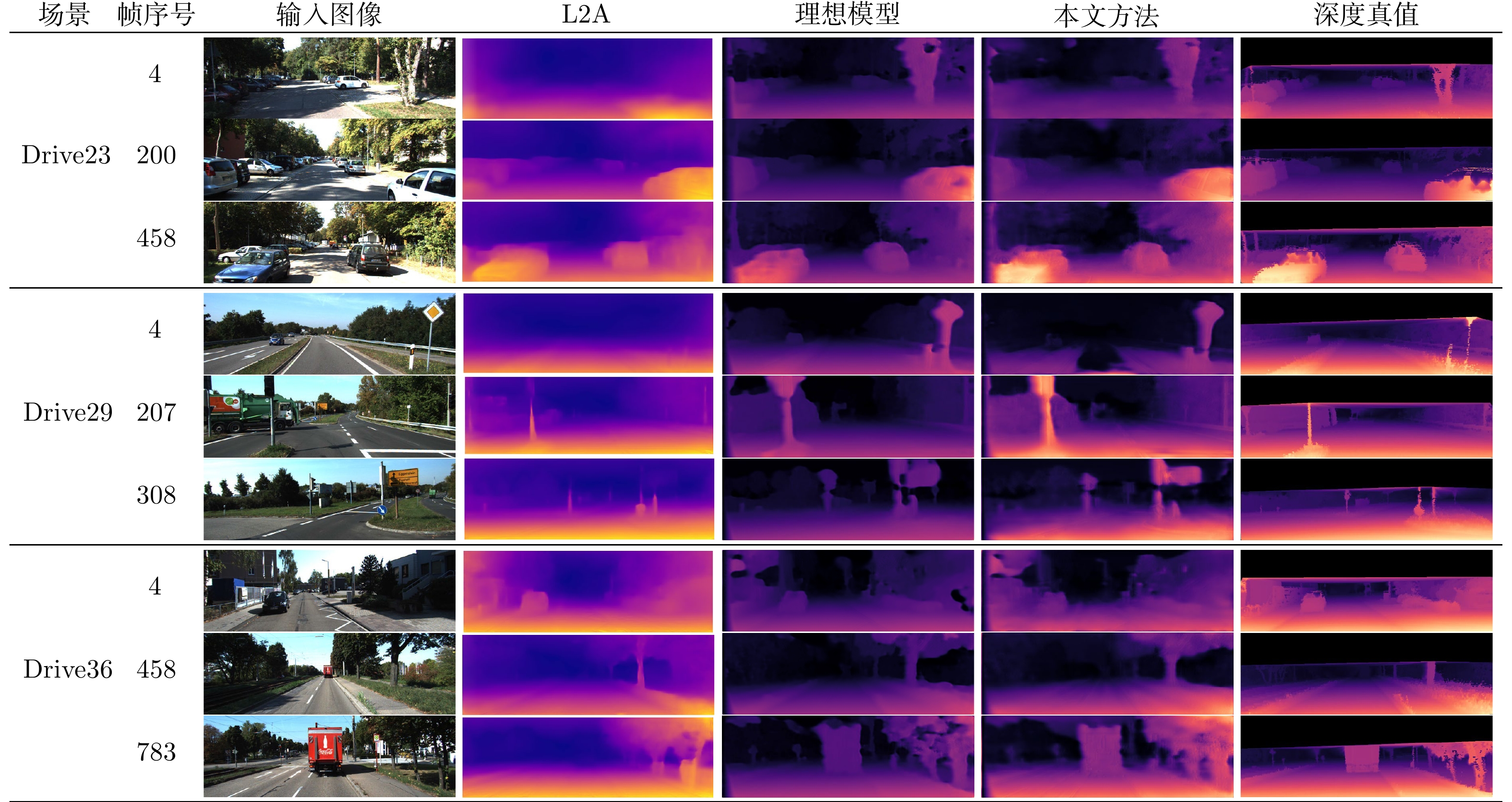
双目深度估计的在线适应是一个有挑战性的问题, 其要求模型能够在不断变化的目标场景中在线连续地自我调整并适应于当前环境. 为处理该问题, 提出一种新的在线元学习适应算法(Online meta-learning model with adaptation, OMLA), 其贡献主要体现在两方面: 首先引入在线特征对齐方法处理目标域和源域特征的分布偏差, 以减少数据域转移的影响; 然后利用在线元学习方法调整特征对齐过程和网络权重, 使模型实现快速收敛. 此外, 提出一种新的基于元学习的预训练方法, 以获得适用于在线学习场景的深度网络参数. 相关实验分析表明, OMLA和元学习预训练算法均能帮助模型快速适应于新场景, 在KITTI数据集上的实验对比表明, 本文方法的效果超越了当前最佳的在线适应算法, 接近甚至优于在目标域离线训练的理想模型.
双目深度估计的在线适应是一个有挑战性的问题, 其要求模型能够在不断变化的目标场景中在线连续地自我调整并适应于当前环境. 为处理该问题, 提出一种新的在线元学习适应算法(Online meta-learning model with adaptation, OMLA), 其贡献主要体现在两方面: 首先引入在线特征对齐方法处理目标域和源域特征的分布偏差, 以减少数据域转移的影响; 然后利用在线元学习方法调整特征对齐过程和网络权重, 使模型实现快速收敛. 此外, 提出一种新的基于元学习的预训练方法, 以获得适用于在线学习场景的深度网络参数. 相关实验分析表明, OMLA和元学习预训练算法均能帮助模型快速适应于新场景, 在KITTI数据集上的实验对比表明, 本文方法的效果超越了当前最佳的在线适应算法, 接近甚至优于在目标域离线训练的理想模型.
2023, 49(7): 1456-1470.
doi: 10.16383/j.aas.c220347
摘要:
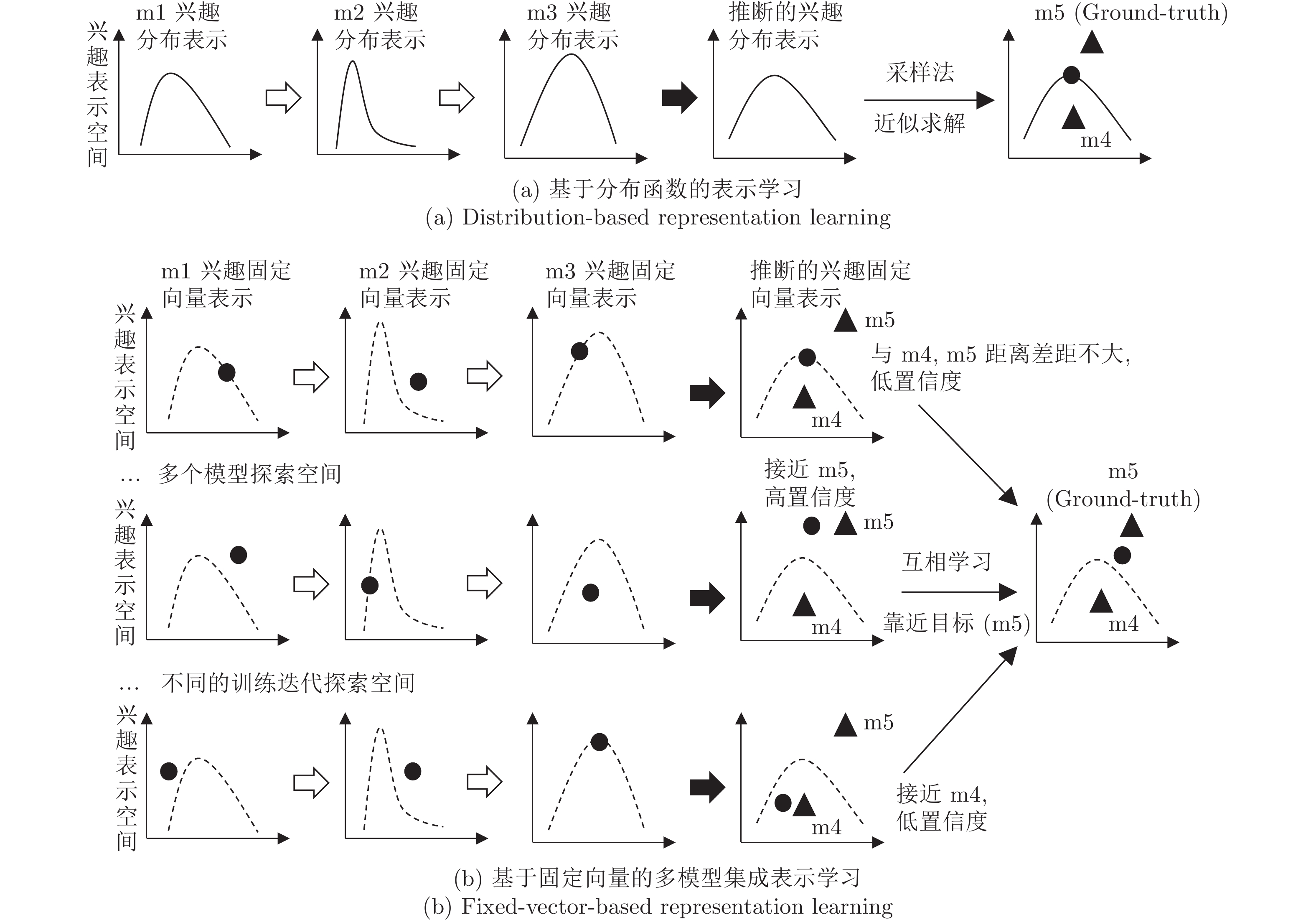
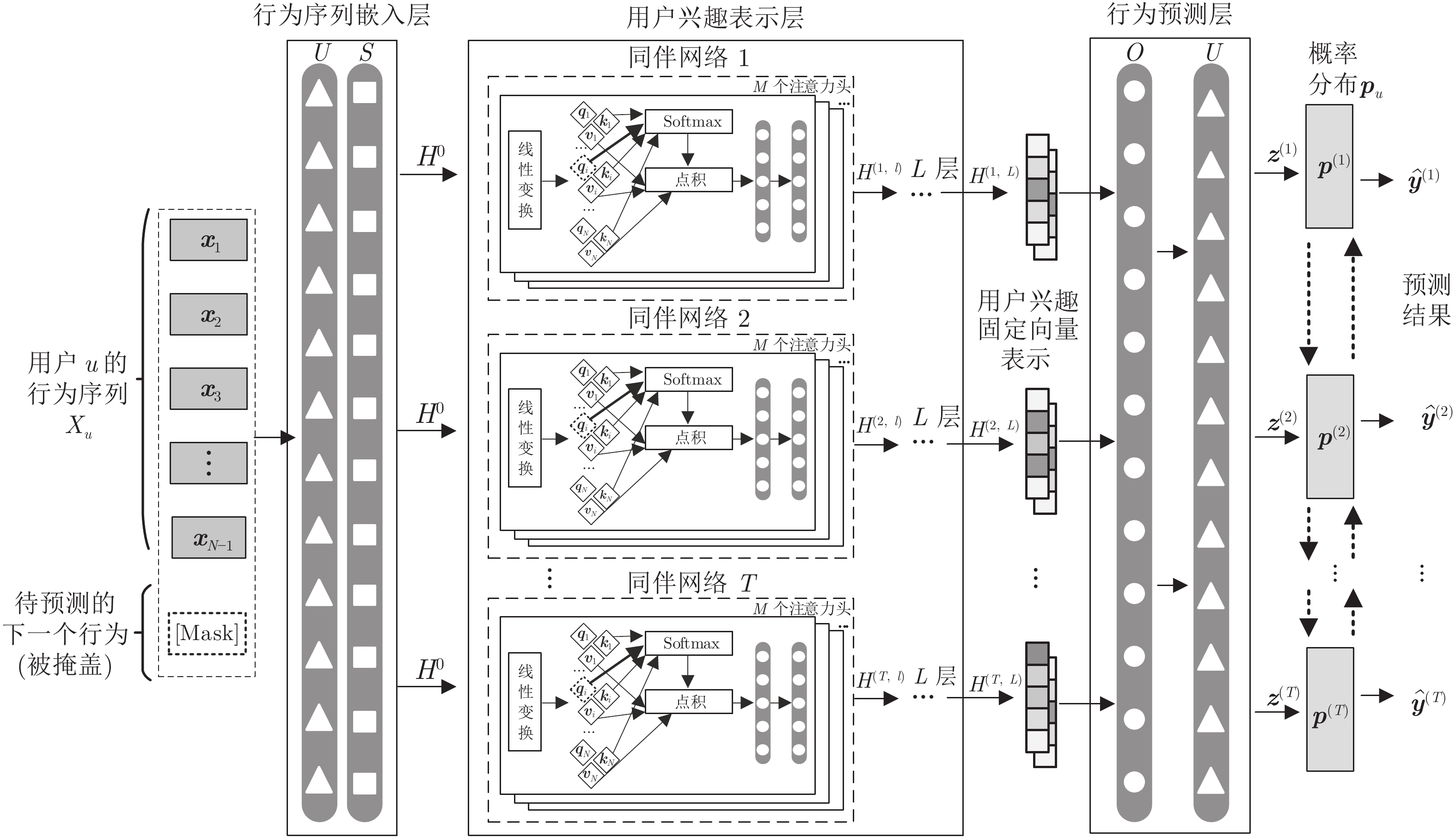
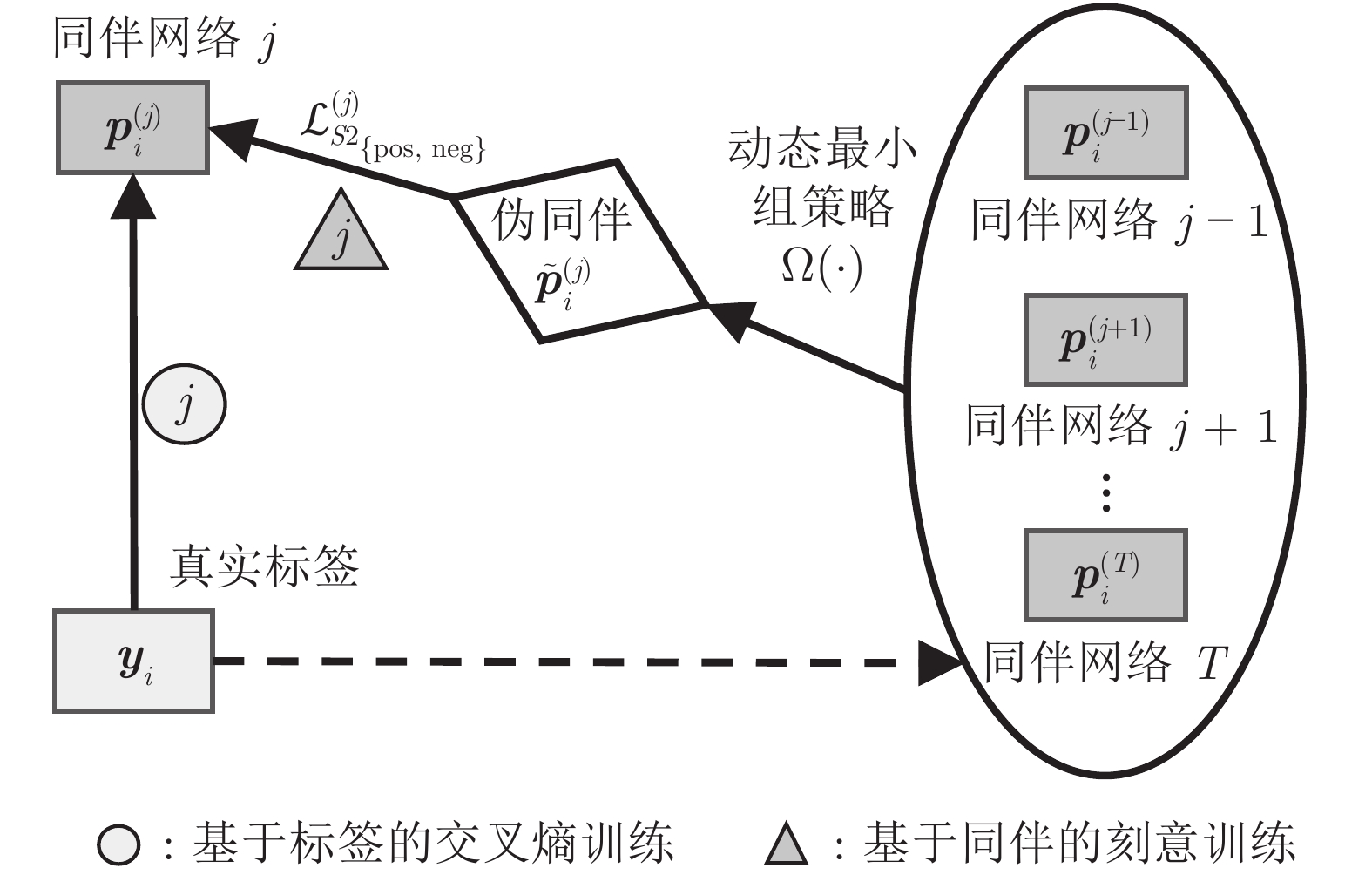
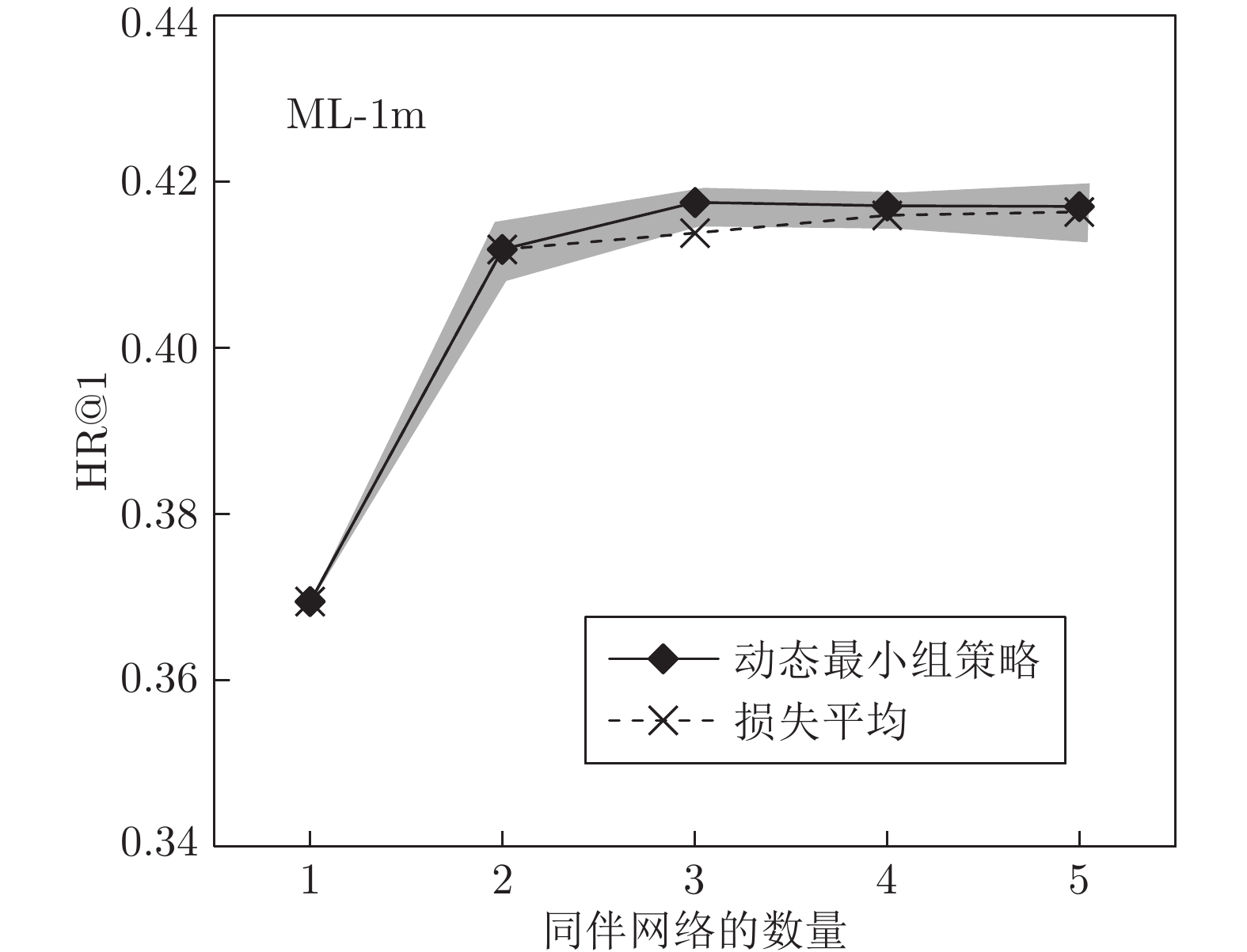
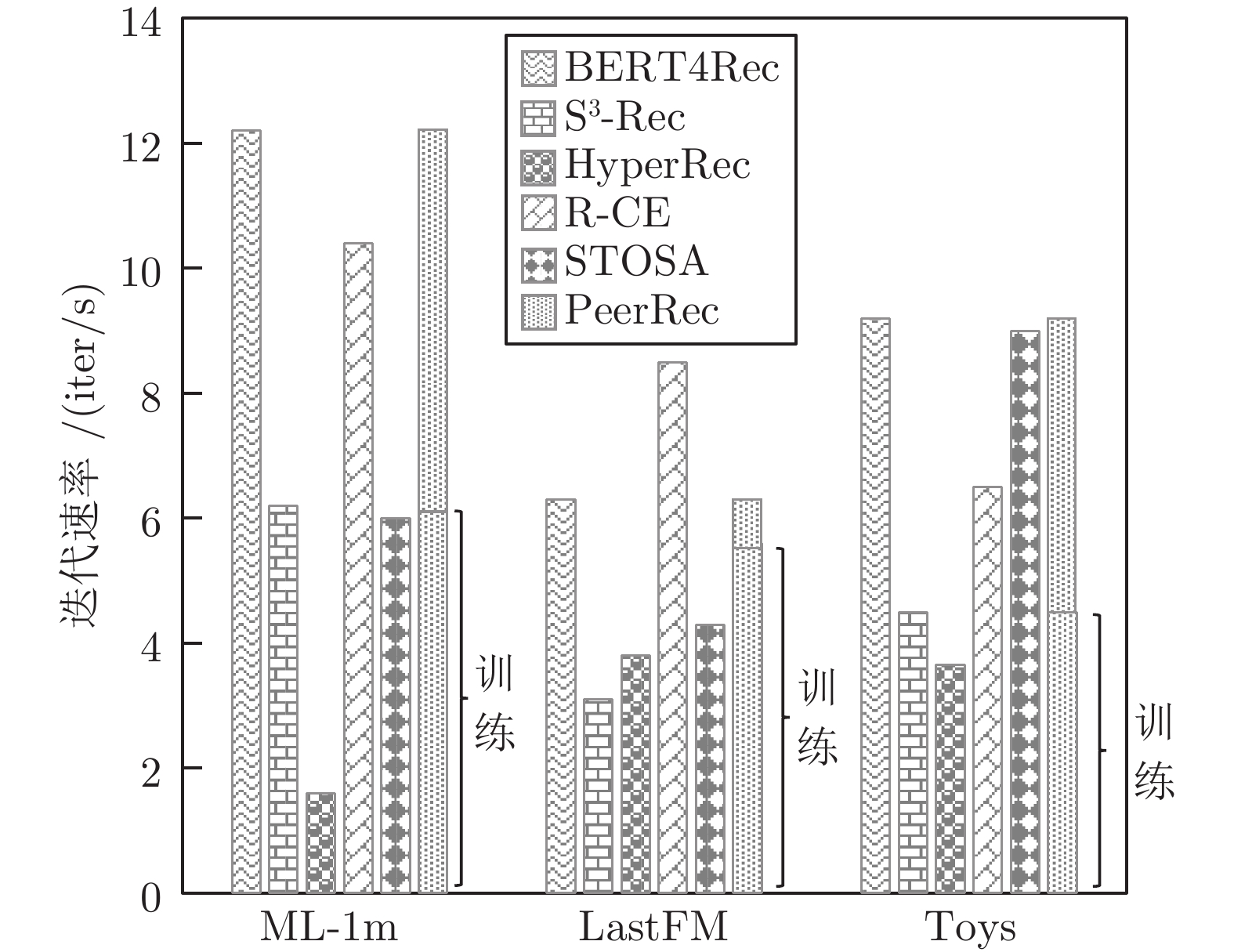
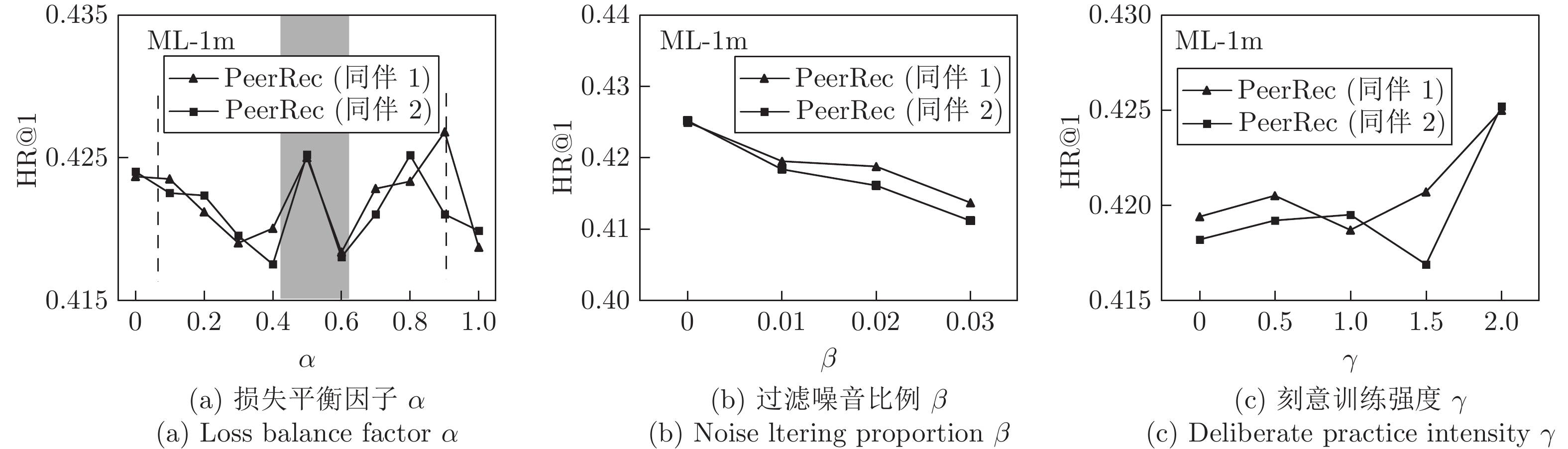
序列推荐(Sequential recommendation, SR)旨在建模用户序列中的动态兴趣, 预测下一个行为. 现有基于知识蒸馏(Knowledge distillation, KD)的多模型集成方法通常将教师模型预测的概率分布作为学生模型样本学习的软标签, 不利于关注低置信度序列样本中的动态兴趣. 为此, 提出一种同伴知识互增强下的序列推荐方法(Sequential recommendation enhanced by peer knowledge, PeerRec), 使多个具有差异的同伴网络按照人类由易到难的认知过程进行两阶段的互相学习. 在第1阶段知识蒸馏的基础上, 第2阶段的刻意训练通过动态最小组策略协调多个同伴从低置信度样本中挖掘出可被加强训练的潜在样本. 然后, 受训的网络利用同伴对潜在样本预测的概率分布调节自身对该样本学习的权重, 从解空间中探索更优的兴趣表示. 3个公开数据集上的实验结果表明, 提出的PeerRec方法相比于最新的基线方法在基于Top-k的指标上不仅获得了更佳的推荐精度, 且具有良好的在线推荐效率.
序列推荐(Sequential recommendation, SR)旨在建模用户序列中的动态兴趣, 预测下一个行为. 现有基于知识蒸馏(Knowledge distillation, KD)的多模型集成方法通常将教师模型预测的概率分布作为学生模型样本学习的软标签, 不利于关注低置信度序列样本中的动态兴趣. 为此, 提出一种同伴知识互增强下的序列推荐方法(Sequential recommendation enhanced by peer knowledge, PeerRec), 使多个具有差异的同伴网络按照人类由易到难的认知过程进行两阶段的互相学习. 在第1阶段知识蒸馏的基础上, 第2阶段的刻意训练通过动态最小组策略协调多个同伴从低置信度样本中挖掘出可被加强训练的潜在样本. 然后, 受训的网络利用同伴对潜在样本预测的概率分布调节自身对该样本学习的权重, 从解空间中探索更优的兴趣表示. 3个公开数据集上的实验结果表明, 提出的PeerRec方法相比于最新的基线方法在基于Top-k的指标上不仅获得了更佳的推荐精度, 且具有良好的在线推荐效率.

2023, 49(7): 1471-1482.
doi: 10.16383/j.aas.c200694
摘要:
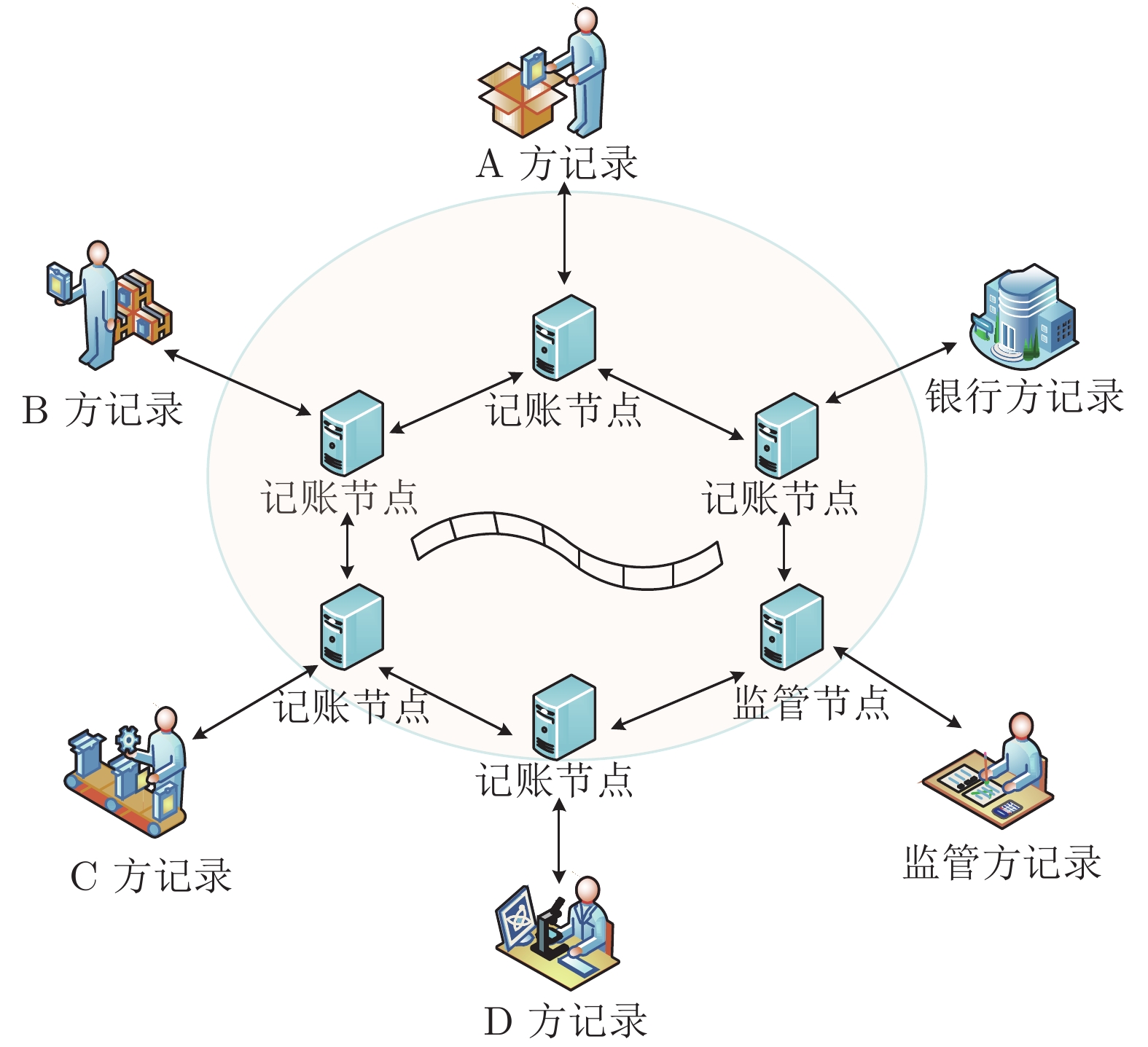
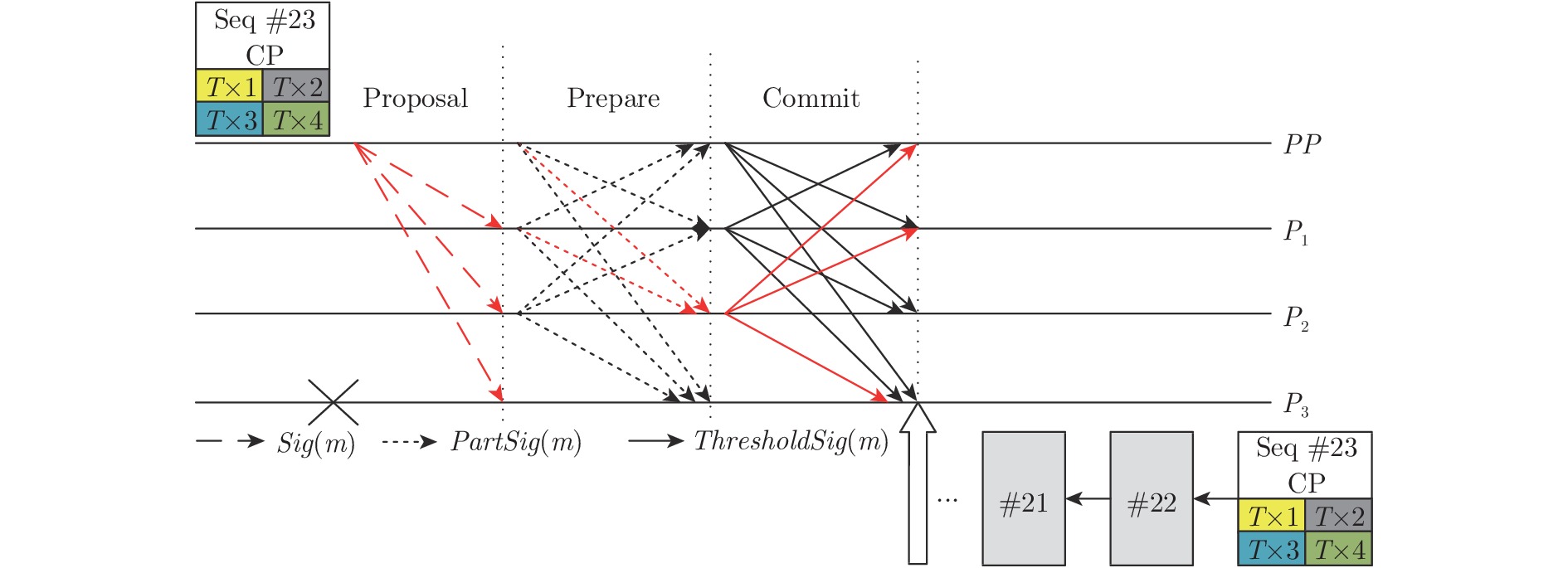
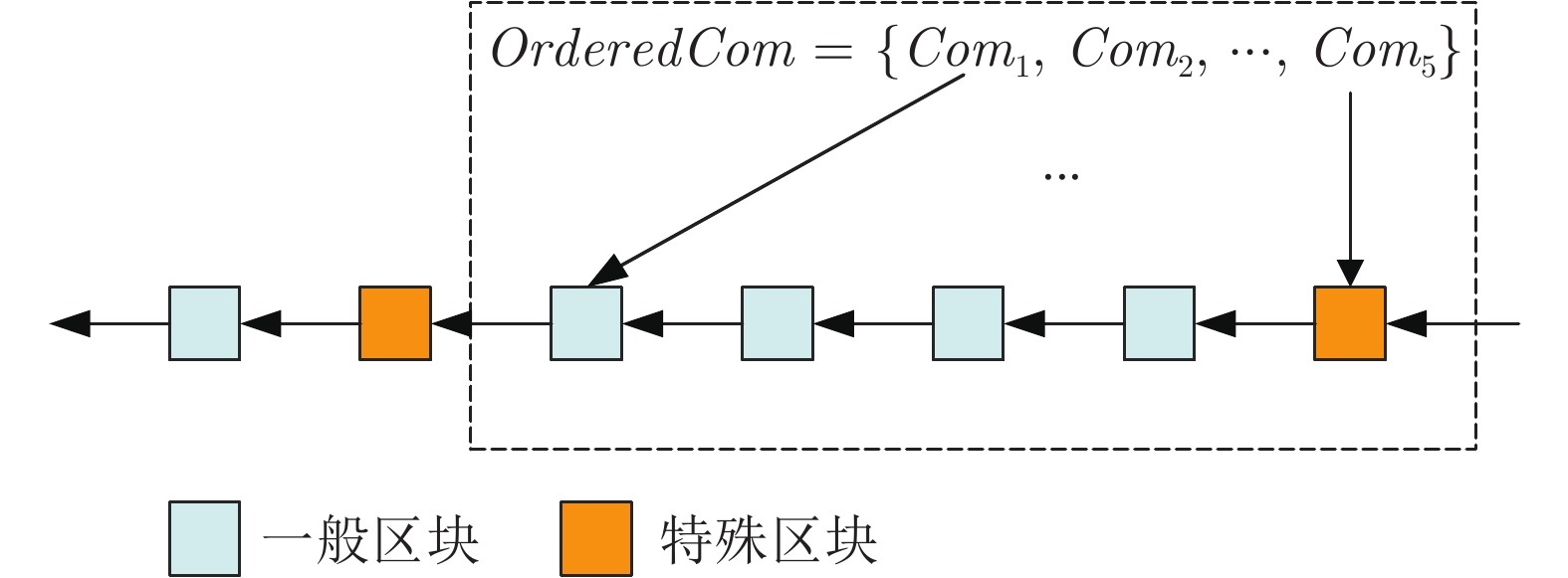
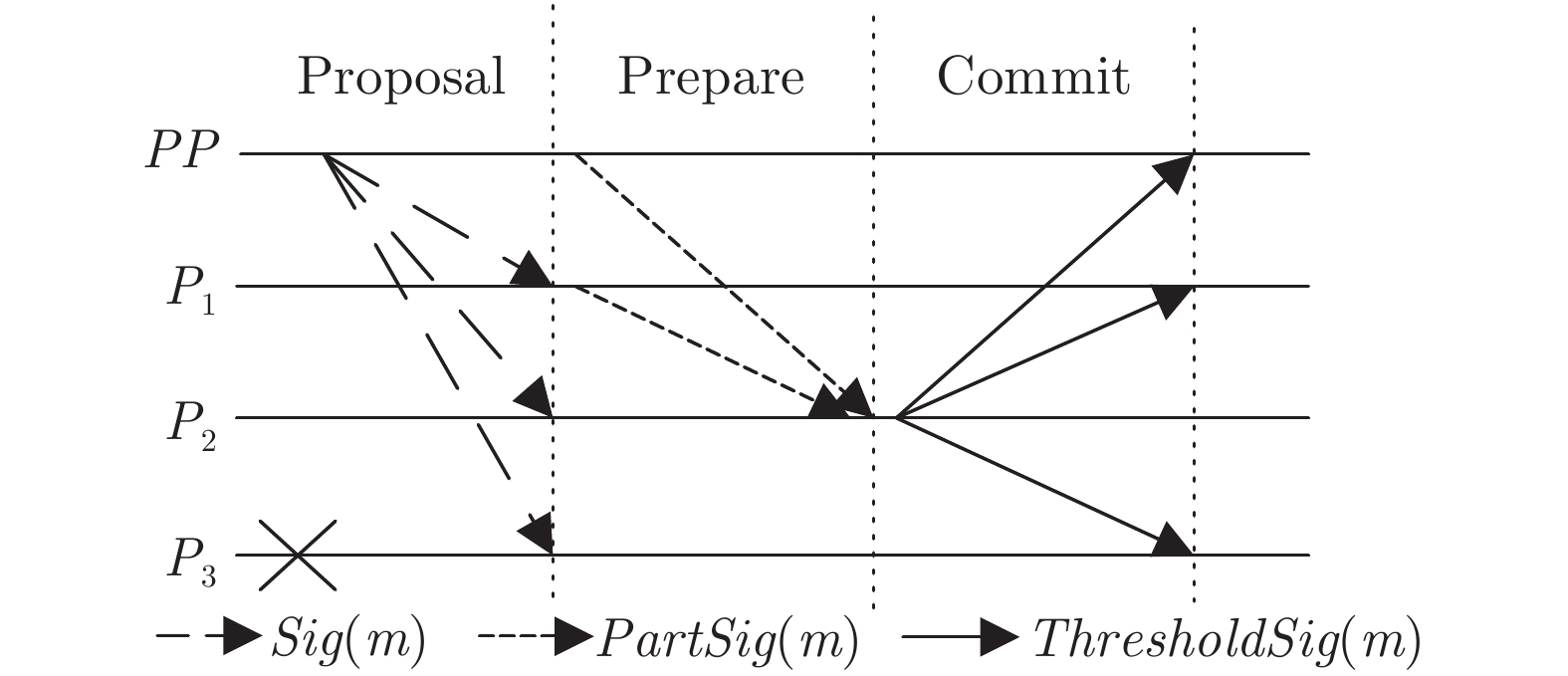
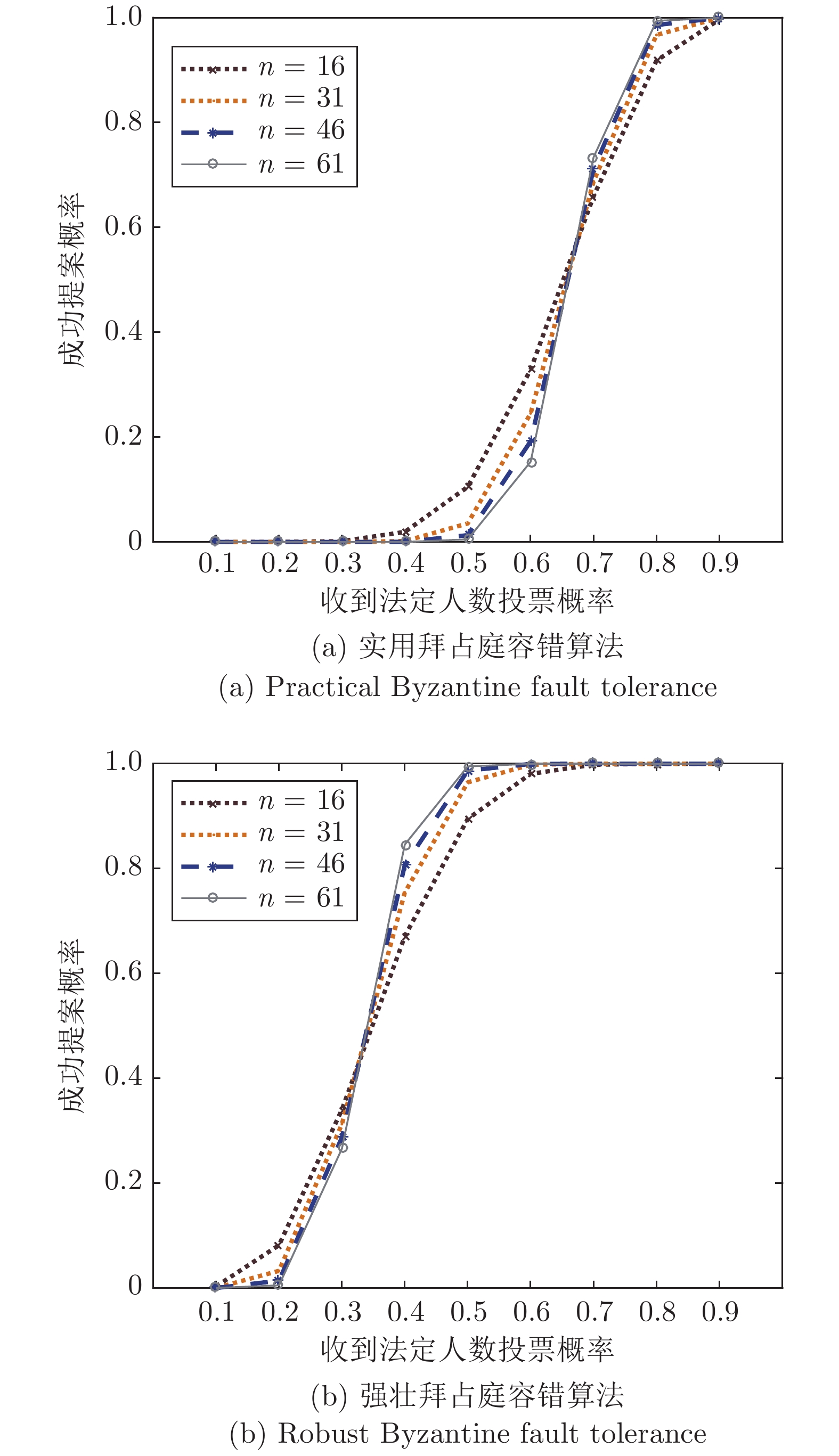
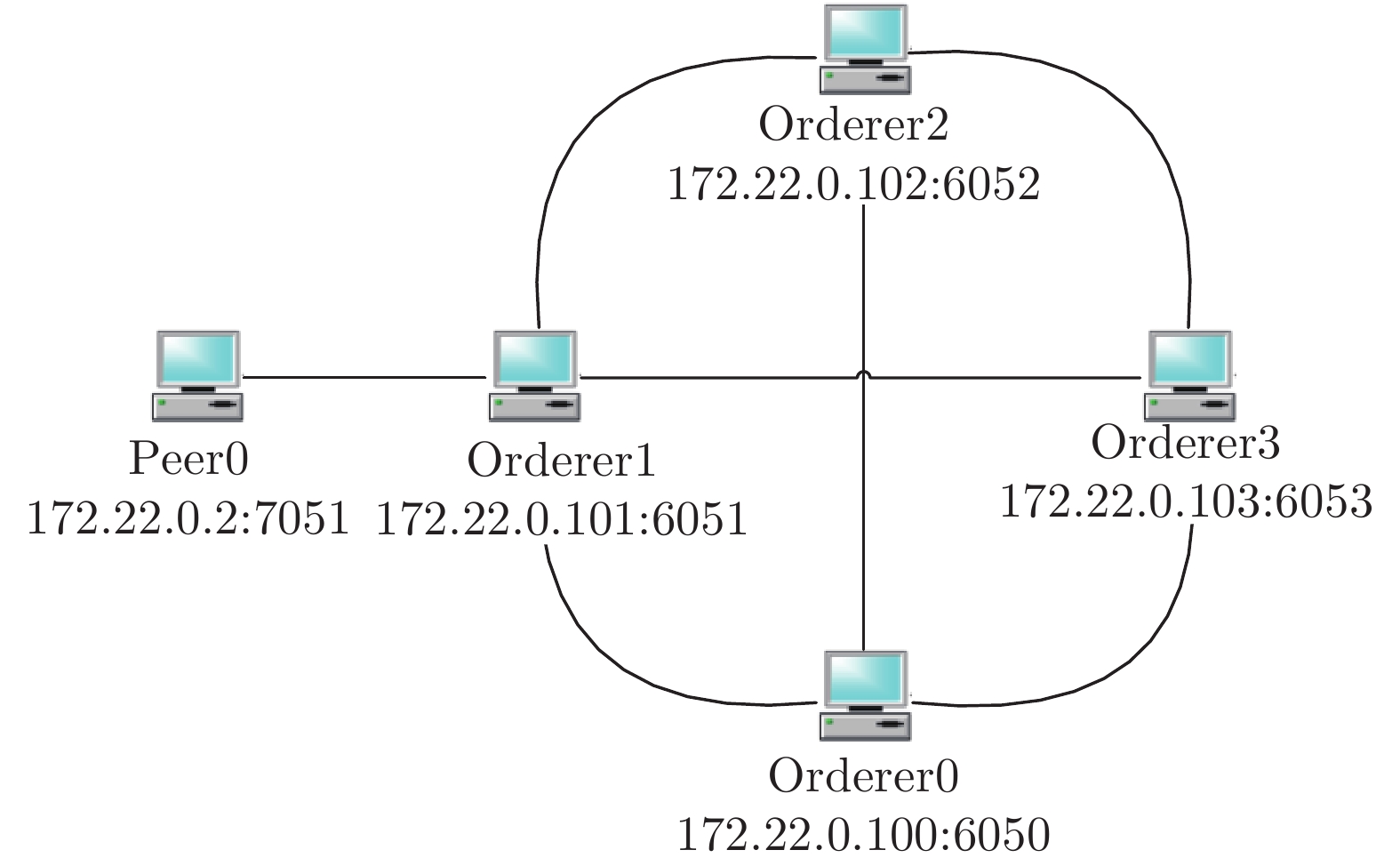
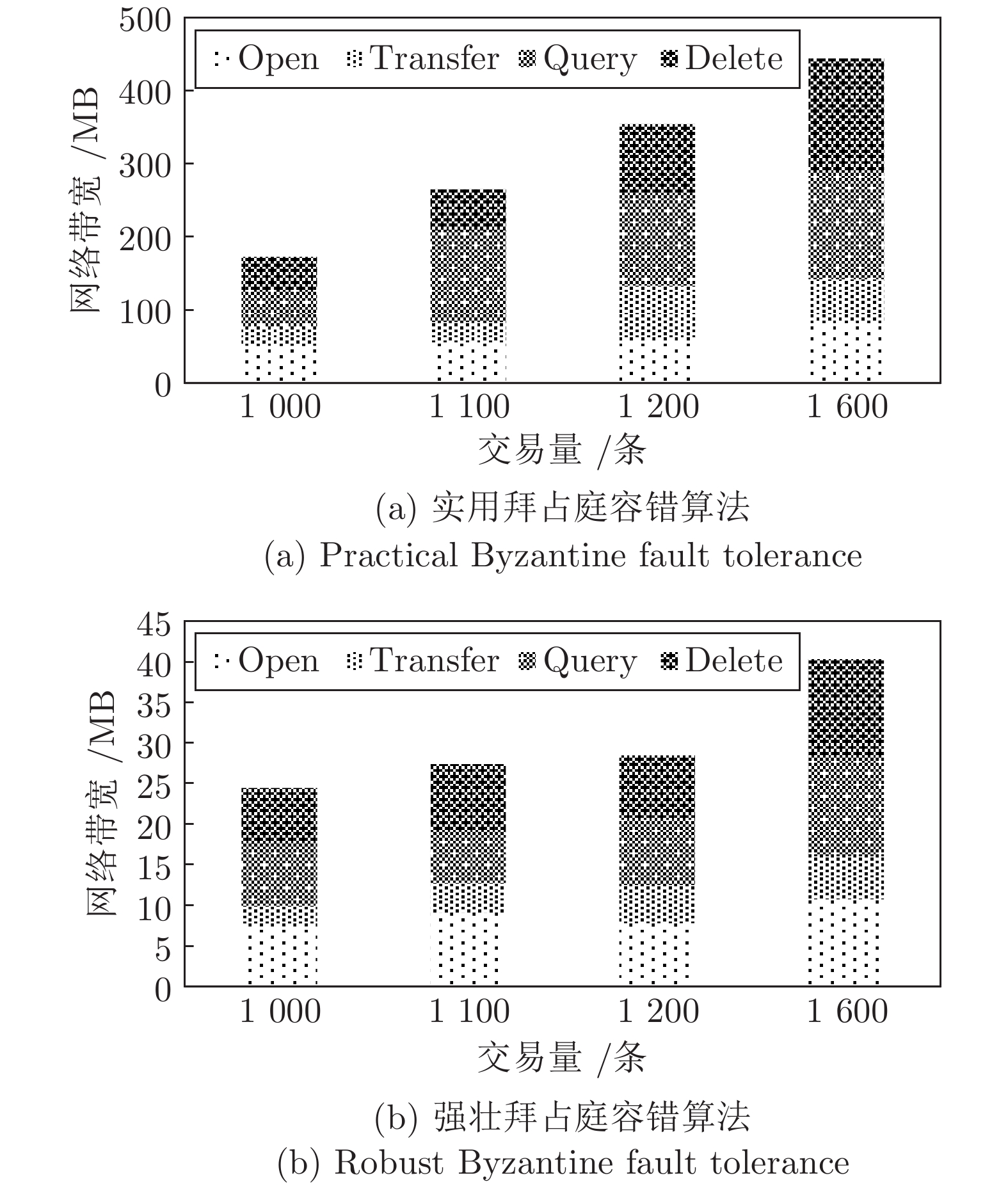
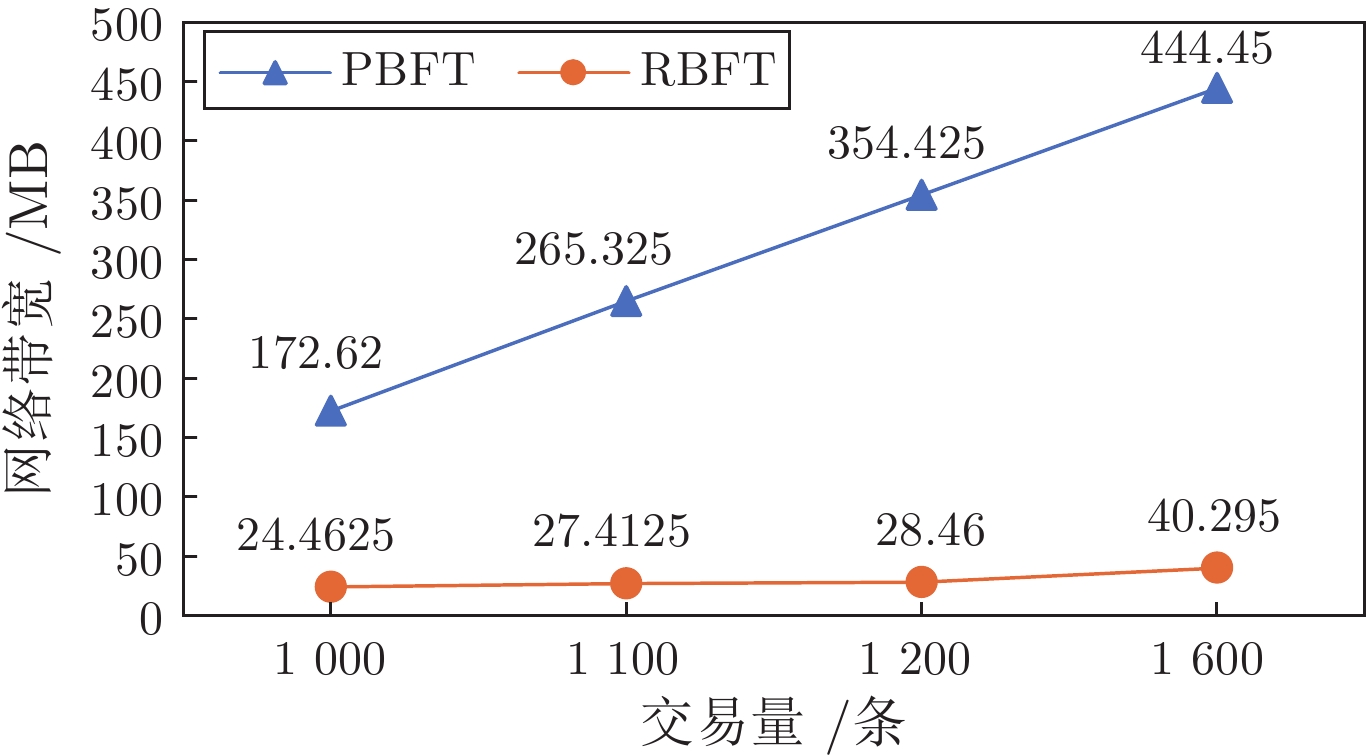
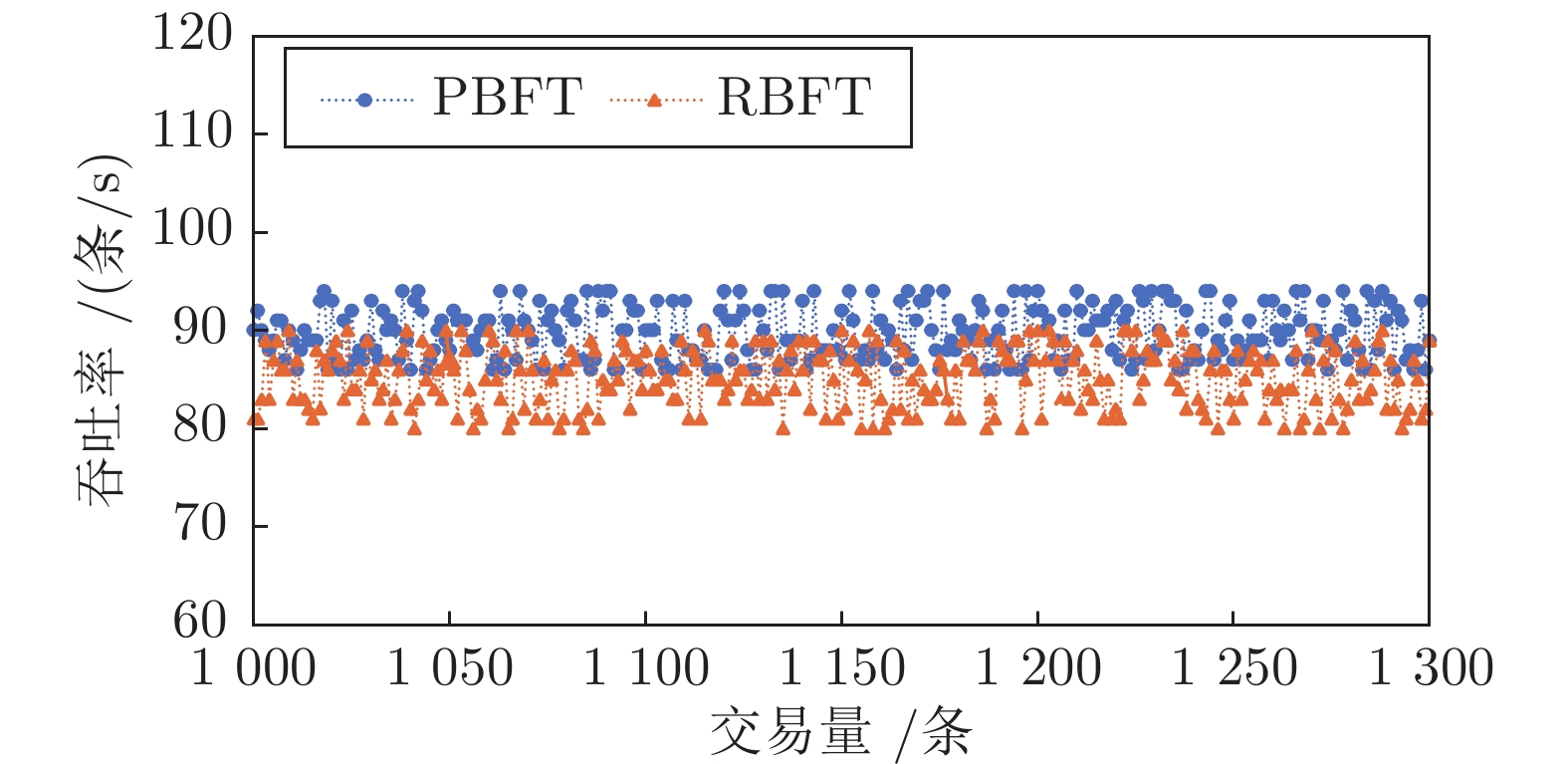
共识算法作为区块链底层关键技术, 可解决决策权分散的分布式系统中的一致性难题. 良好的共识算法可提升系统健壮性, 但大多数方案在网络故障或主动攻击下存在鲁棒性不可控、活性表现差、可扩展性不足等问题. 针对上述问题, 提出一种抗自适应攻击的健壮拜占庭容错共识算法(Robust Byzantine fault tolerance, RBFT). 该算法利用环签名的无条件强匿名性构造排序选主算法, 隐匿选举每一轮共识中的提案者, 进而达到模糊敌手攻击对象、有效抵抗自适应攻击的目的. 同时, 通过在多轮投票中合成代表法定人数投票意愿的门限签名, 将网络划分为众多最小连通性网络, 以保证在最小连通性网络环境中实现低延迟、高鲁棒性的拜占庭容错共识算法. 分析表明, 系统在提升可扩展性、减少视图更换、降低签名验证开销的同时, 能够有效保证系统活性.
共识算法作为区块链底层关键技术, 可解决决策权分散的分布式系统中的一致性难题. 良好的共识算法可提升系统健壮性, 但大多数方案在网络故障或主动攻击下存在鲁棒性不可控、活性表现差、可扩展性不足等问题. 针对上述问题, 提出一种抗自适应攻击的健壮拜占庭容错共识算法(Robust Byzantine fault tolerance, RBFT). 该算法利用环签名的无条件强匿名性构造排序选主算法, 隐匿选举每一轮共识中的提案者, 进而达到模糊敌手攻击对象、有效抵抗自适应攻击的目的. 同时, 通过在多轮投票中合成代表法定人数投票意愿的门限签名, 将网络划分为众多最小连通性网络, 以保证在最小连通性网络环境中实现低延迟、高鲁棒性的拜占庭容错共识算法. 分析表明, 系统在提升可扩展性、减少视图更换、降低签名验证开销的同时, 能够有效保证系统活性.
2023, 49(7): 1483-1497.
doi: 10.16383/j.aas.c220065
摘要:
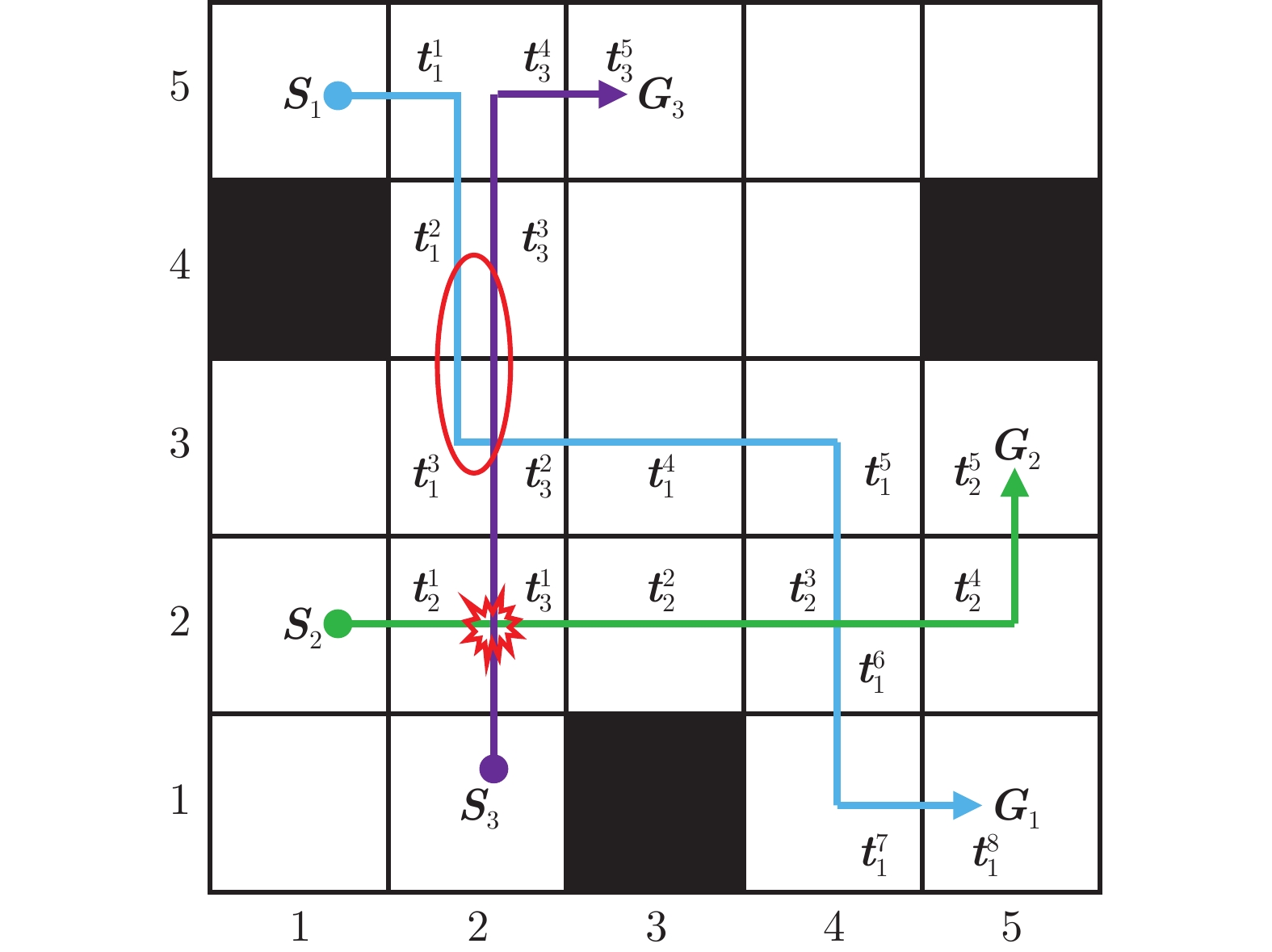
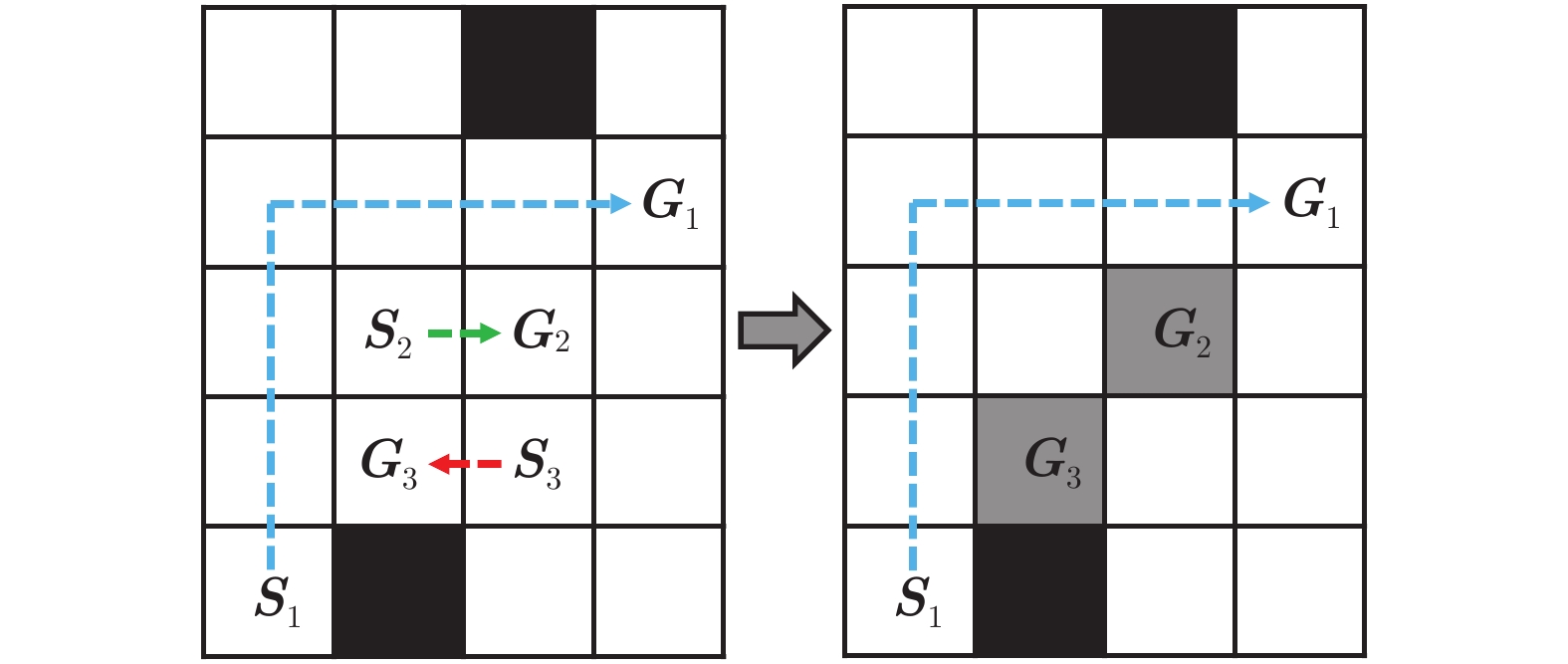
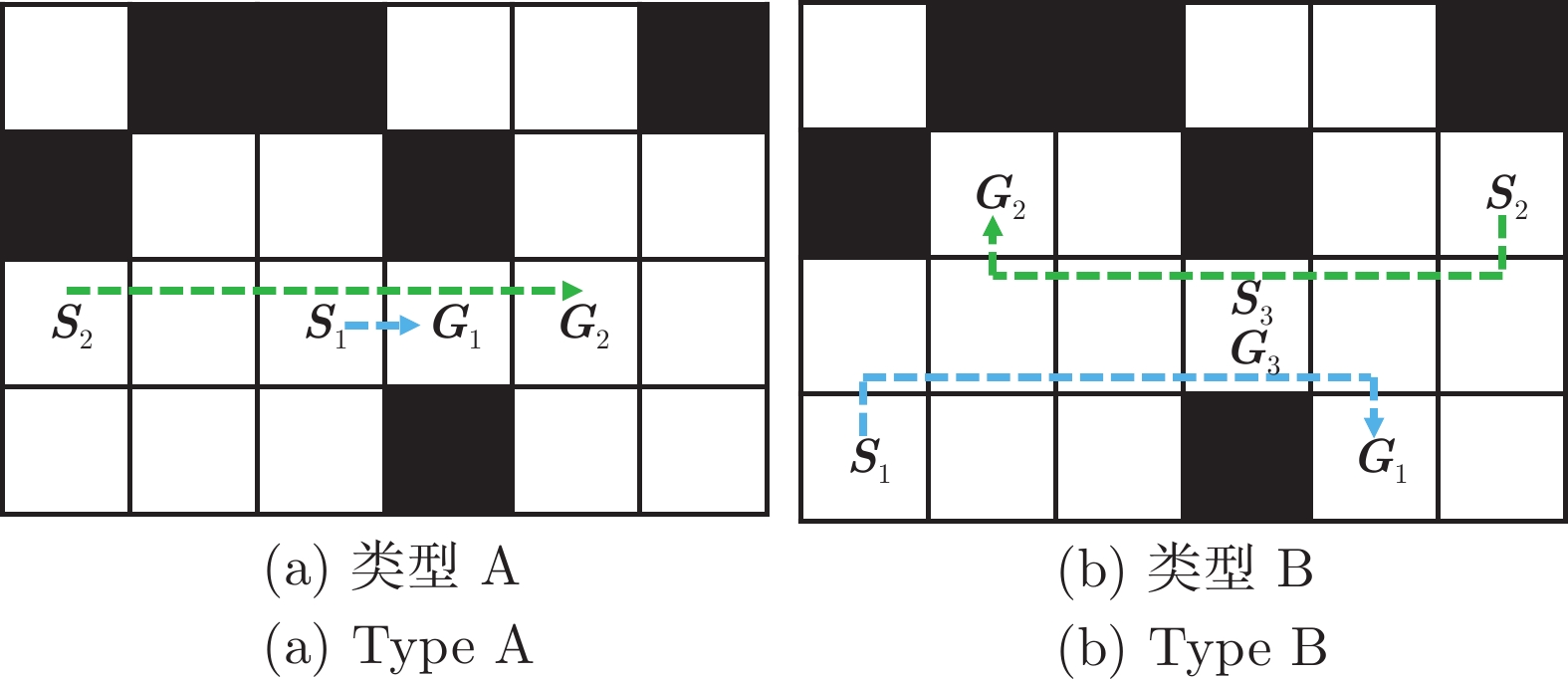
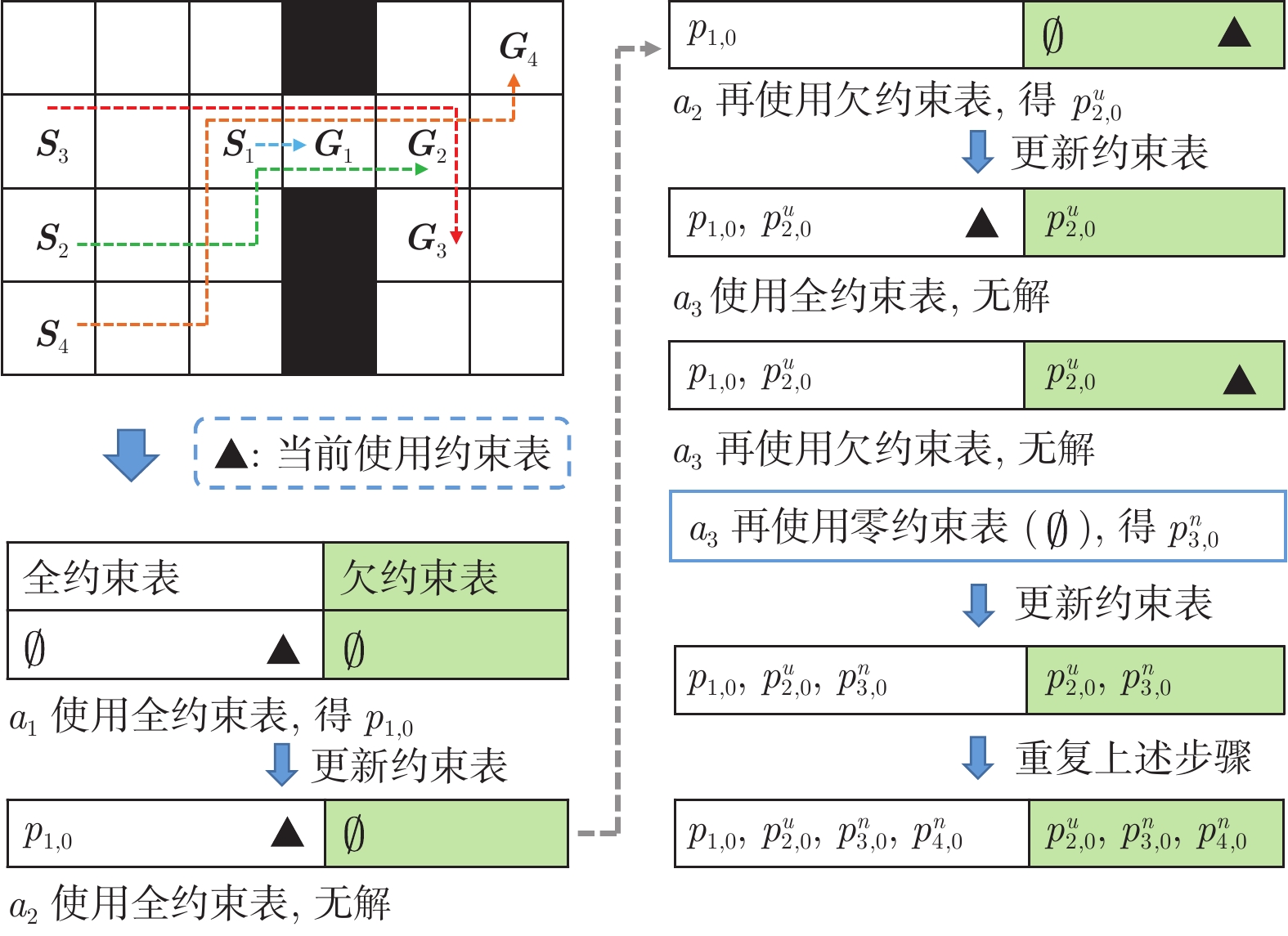
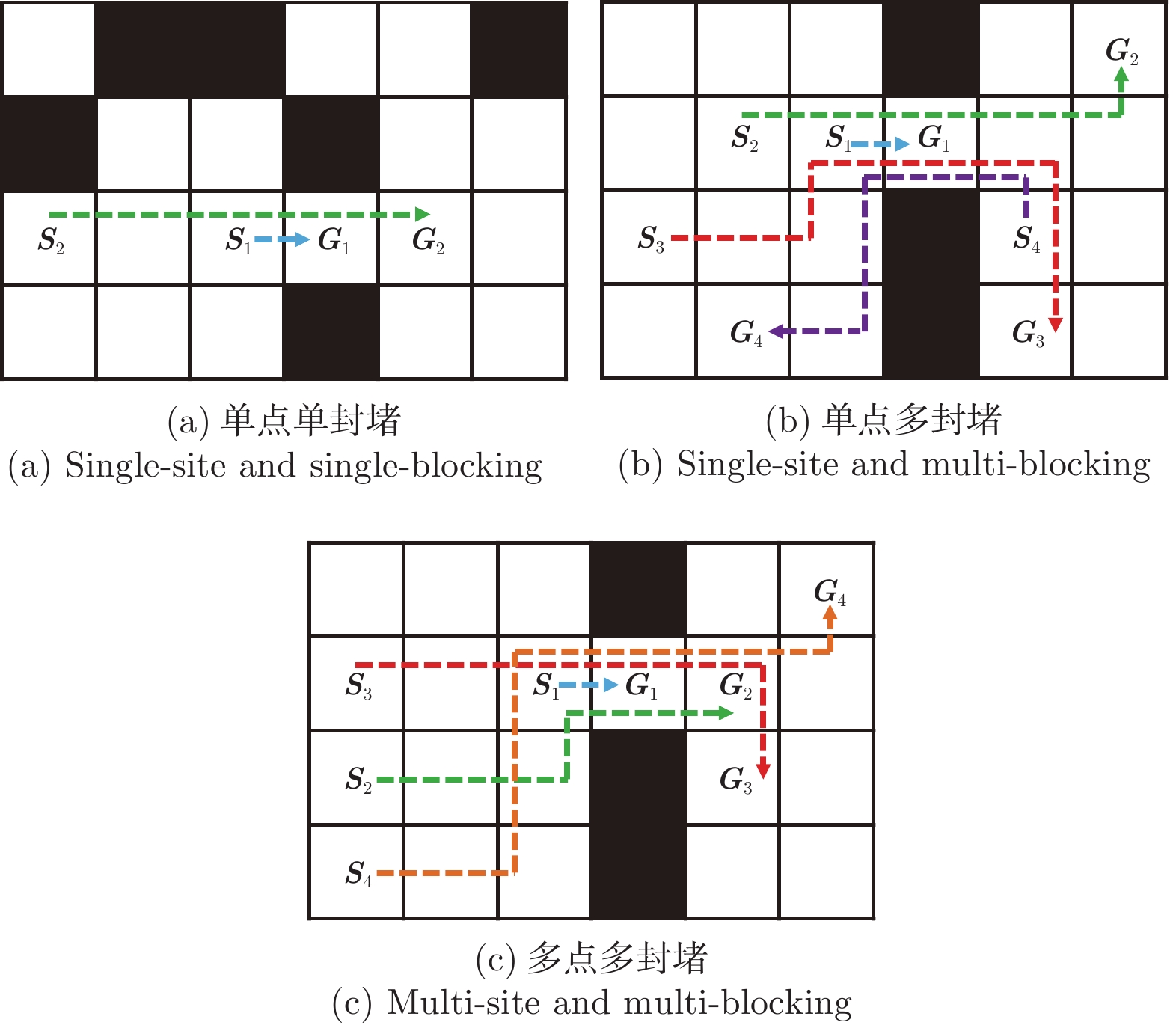
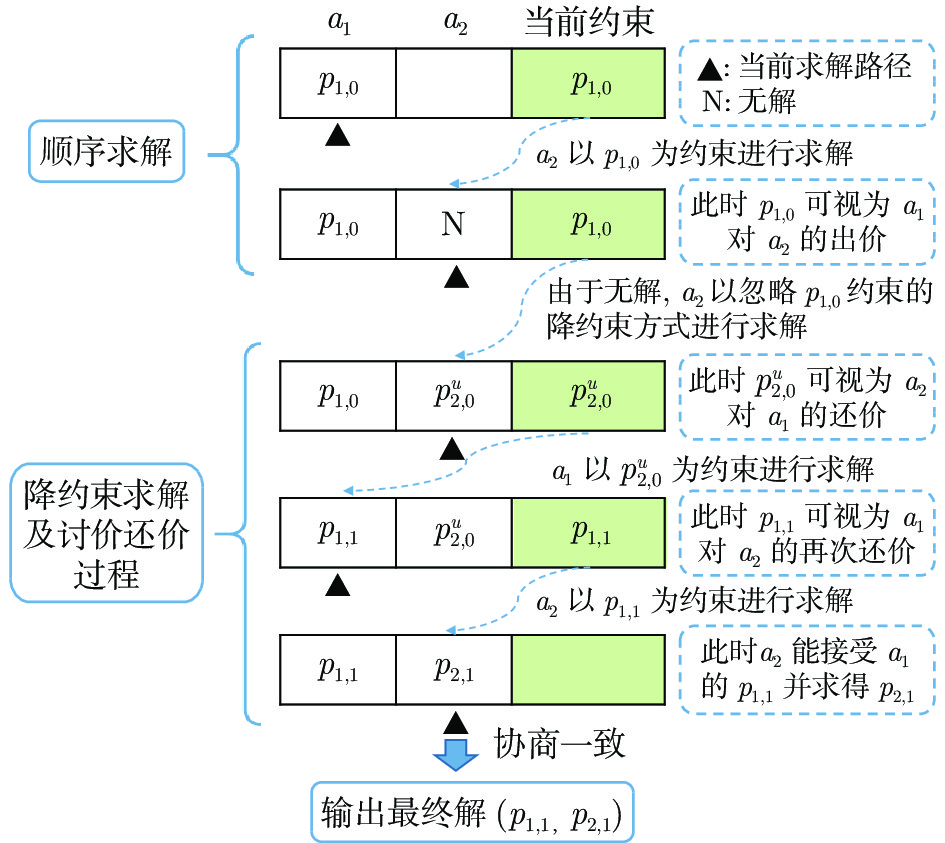
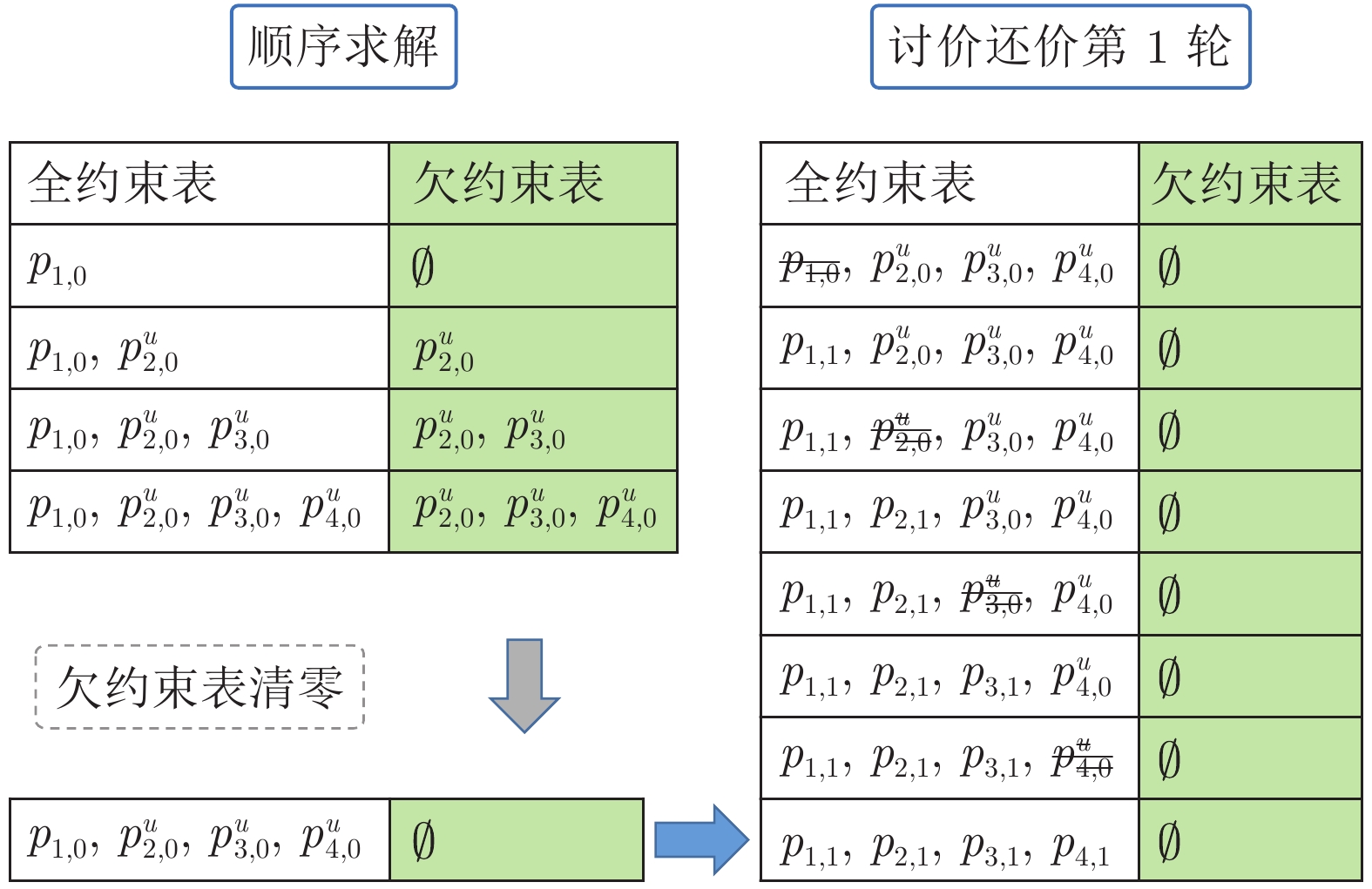
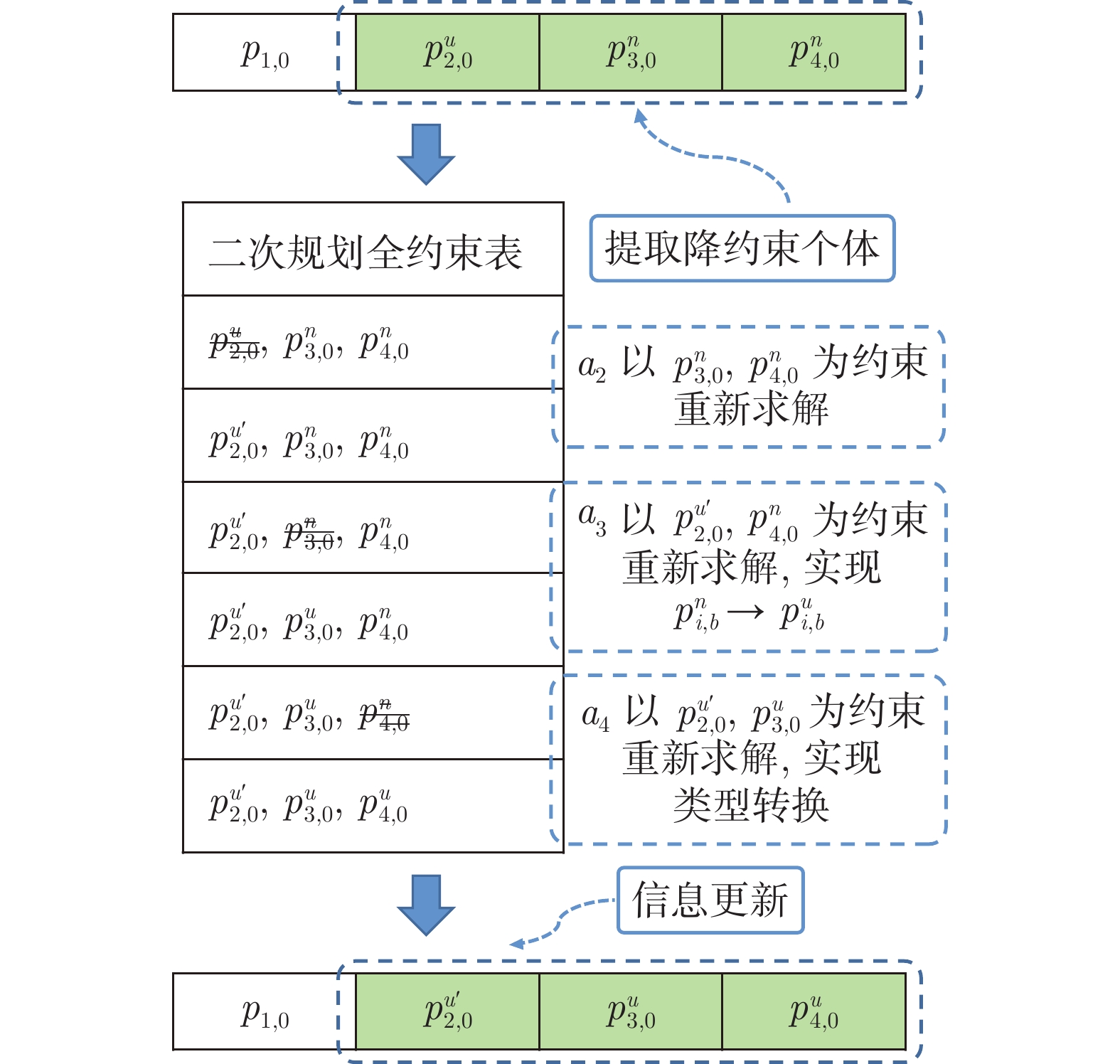
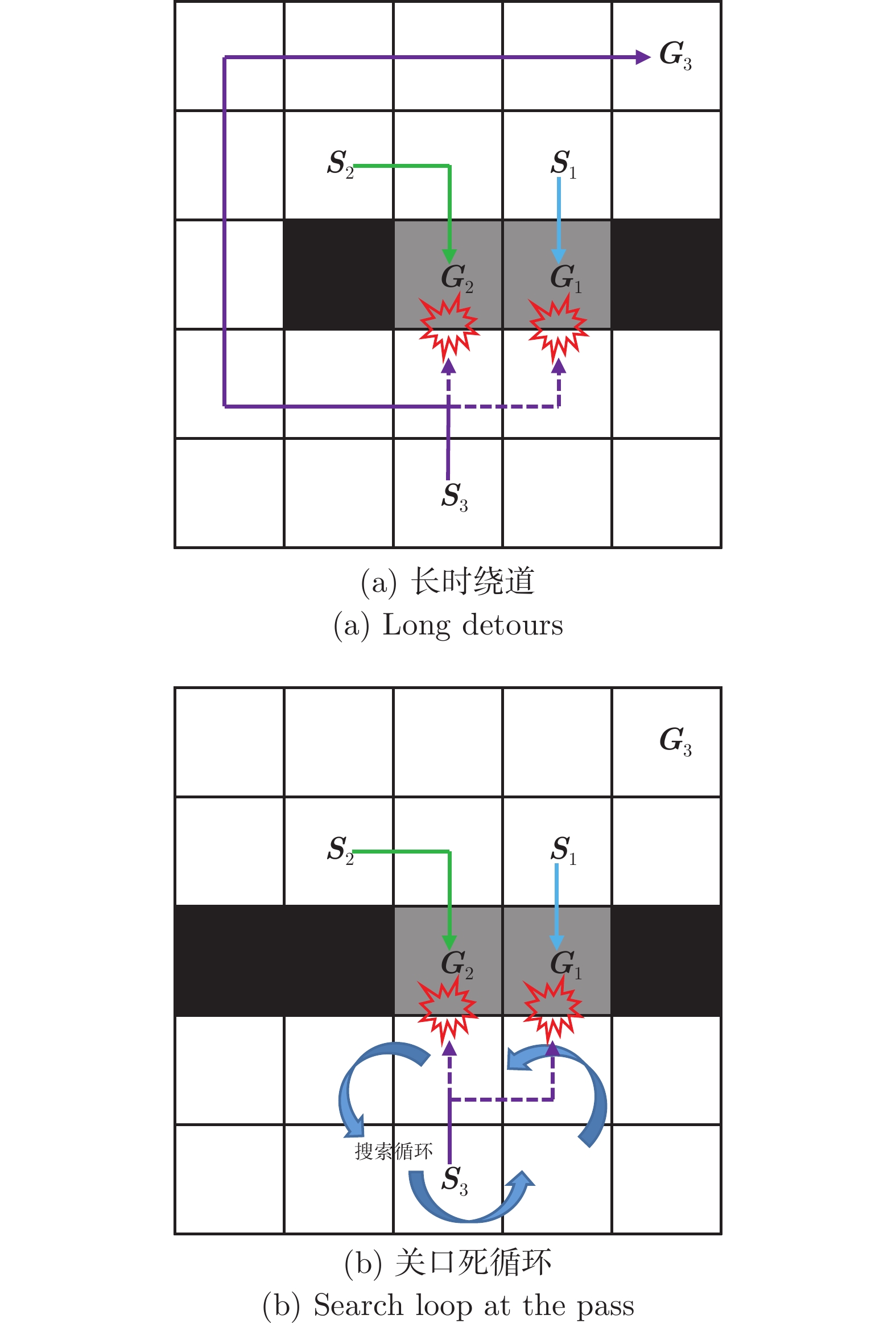
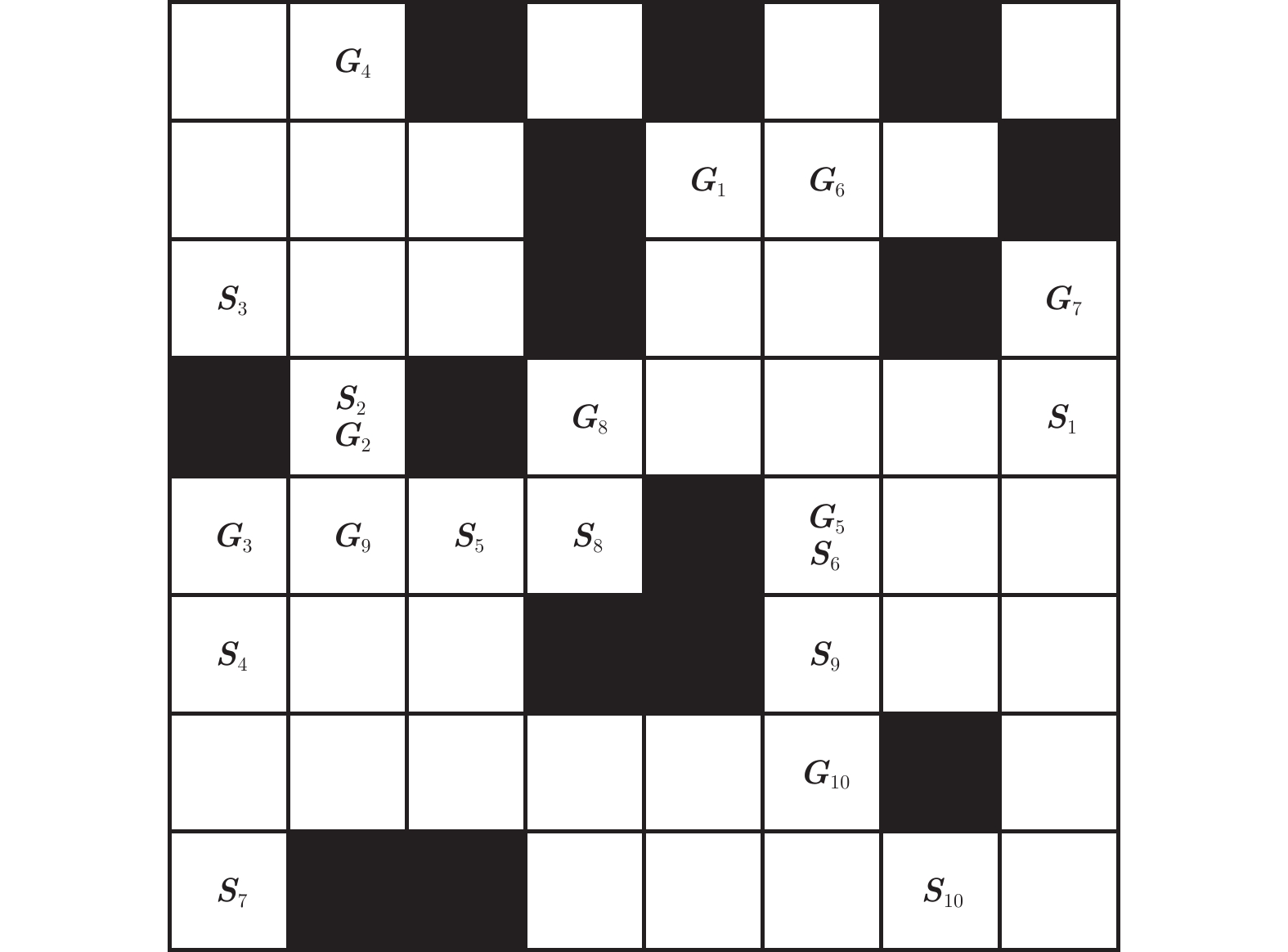
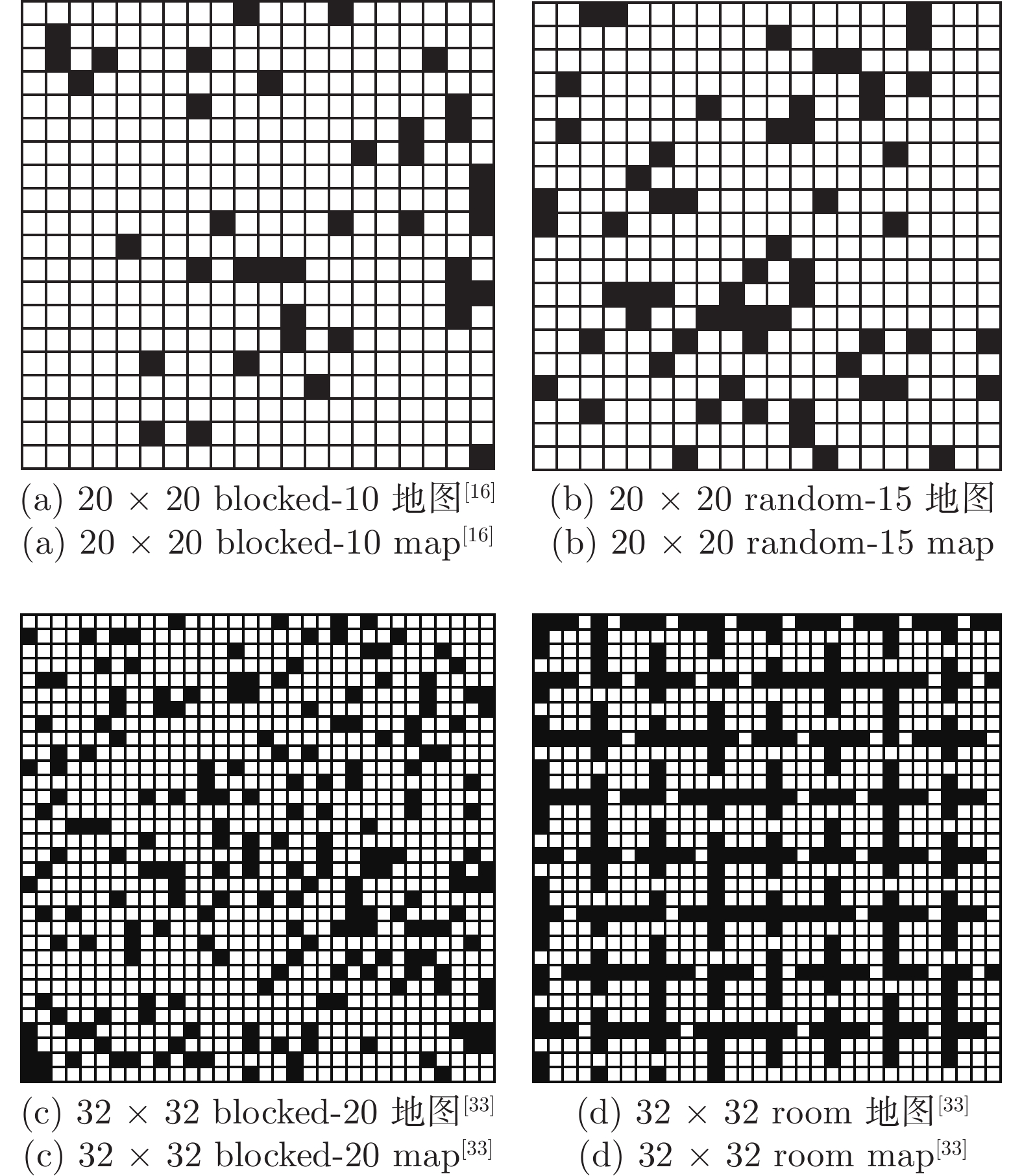
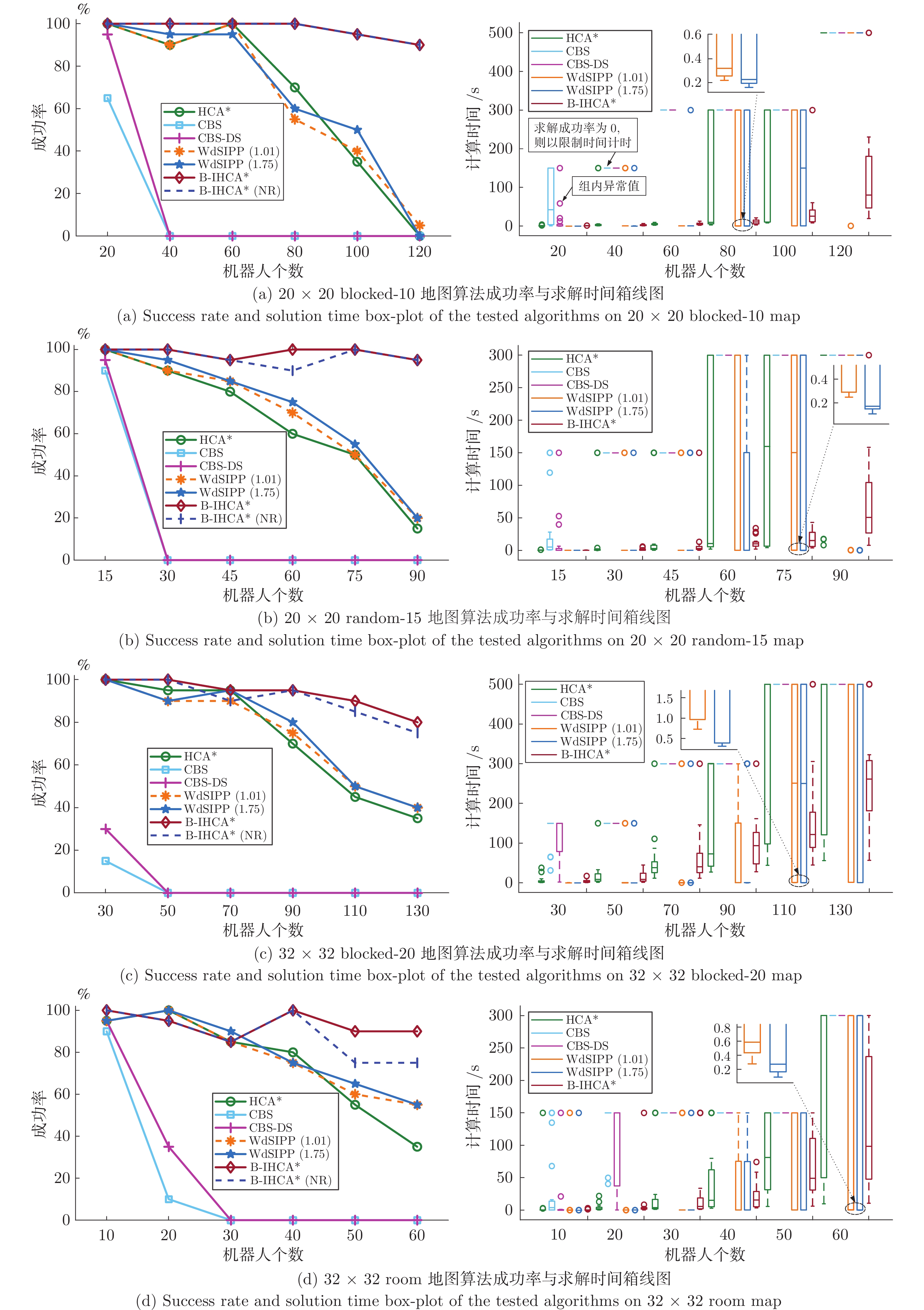
针对密集场景中大规模冲突导致多机器人路径规划(Multi-agent path finding, MAPF) 成功率低的问题, 引入讨价还价博弈机制并以层级协作A* (Hierarchical cooperative A*, HCA*) 算法为内核, 提出一种基于讨价还价博弈机制的改进层级协作A* (Bargaining game based improving HCA*, B-IHCA*) 算法. 首先, 在HCA* 算法基础上, 对导致路径无解的冲突双方或多方进行讨价还价博弈. 由高优先级机器人先出价, 当低优先级机器人在该条件下无法求解时, 则其将不接受该出价, 并通过降约束求解方式进行还价. 再由其他冲突方对此做进一步还价, 直至各冲突方都能协调得到可接受的路径方案. 其次, 为避免原始HCA* 算法由于高优先级的阻碍陷于过长或反复无效搜索状态, 在底层A* 搜索环节加入了熔断机制. 通过熔断机制与讨价还价博弈相配合可在提升路径求解成功率的同时兼顾路径代价. 研究结果表明, 所提算法在密集场景大规模机器人路径规划问题上较现有算法求解成功率更高、求解时间更短, 路径代价得到改善, 验证了算法的有效性.
针对密集场景中大规模冲突导致多机器人路径规划(Multi-agent path finding, MAPF) 成功率低的问题, 引入讨价还价博弈机制并以层级协作A* (Hierarchical cooperative A*, HCA*) 算法为内核, 提出一种基于讨价还价博弈机制的改进层级协作A* (Bargaining game based improving HCA*, B-IHCA*) 算法. 首先, 在HCA* 算法基础上, 对导致路径无解的冲突双方或多方进行讨价还价博弈. 由高优先级机器人先出价, 当低优先级机器人在该条件下无法求解时, 则其将不接受该出价, 并通过降约束求解方式进行还价. 再由其他冲突方对此做进一步还价, 直至各冲突方都能协调得到可接受的路径方案. 其次, 为避免原始HCA* 算法由于高优先级的阻碍陷于过长或反复无效搜索状态, 在底层A* 搜索环节加入了熔断机制. 通过熔断机制与讨价还价博弈相配合可在提升路径求解成功率的同时兼顾路径代价. 研究结果表明, 所提算法在密集场景大规模机器人路径规划问题上较现有算法求解成功率更高、求解时间更短, 路径代价得到改善, 验证了算法的有效性.

2023, 49(7): 1498-1507.
doi: 10.16383/j.aas.c200642
摘要:
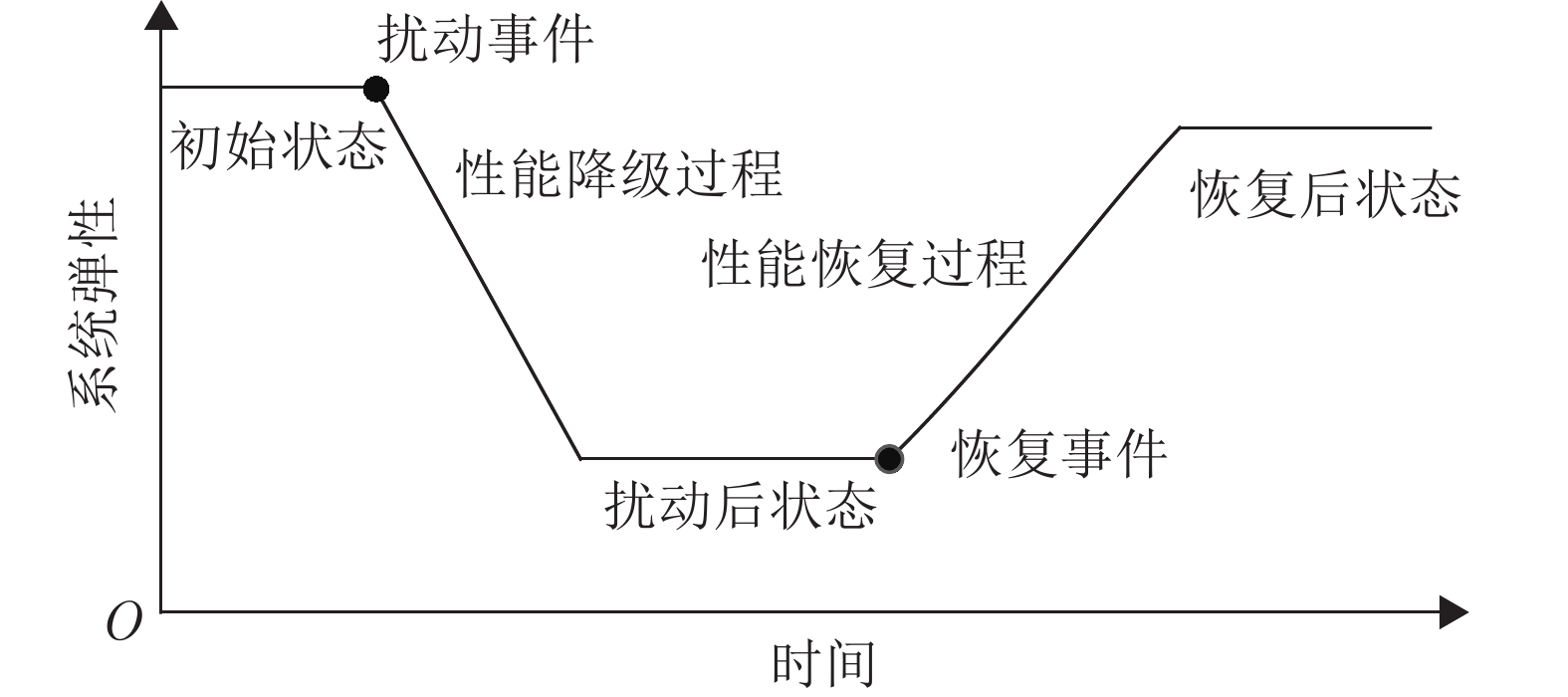
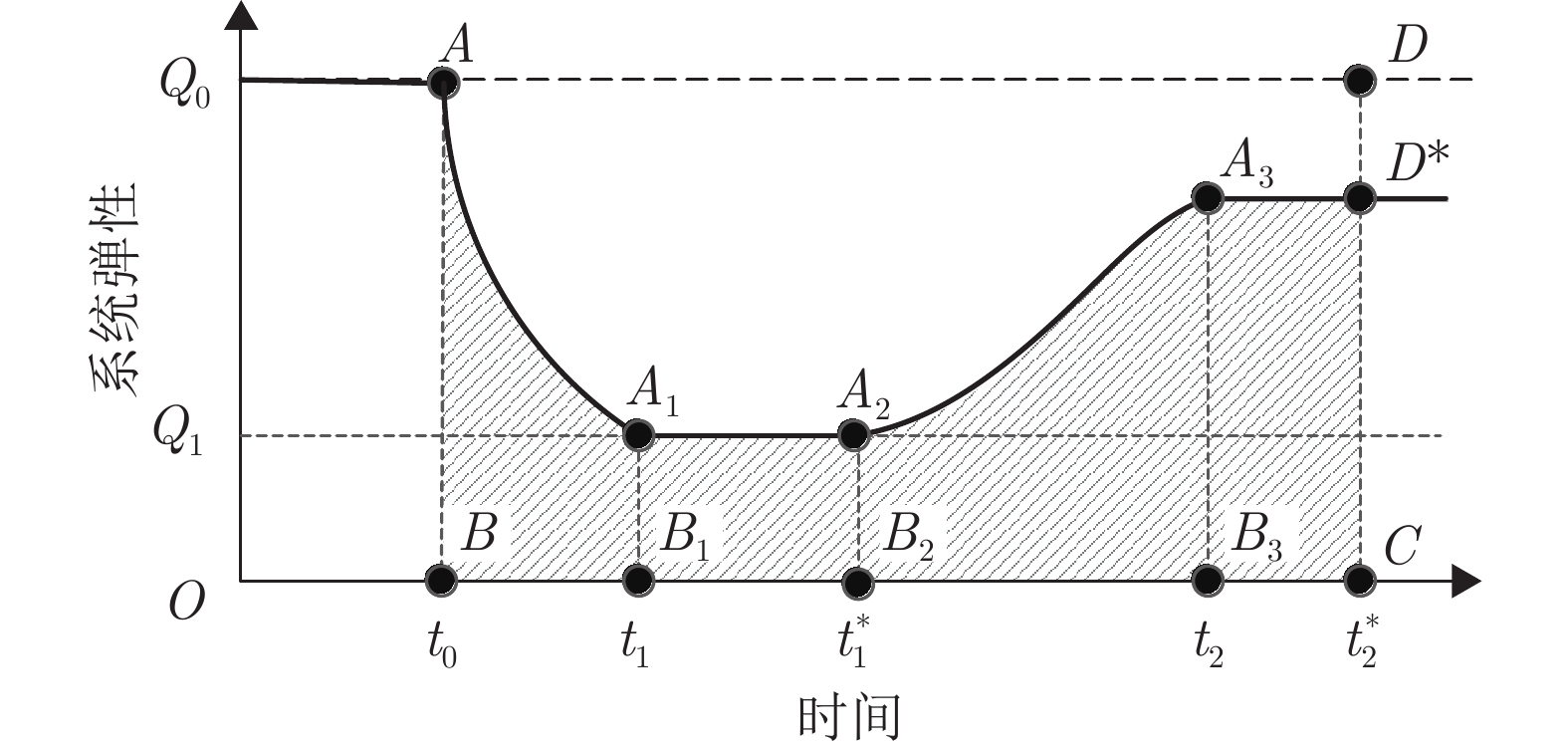
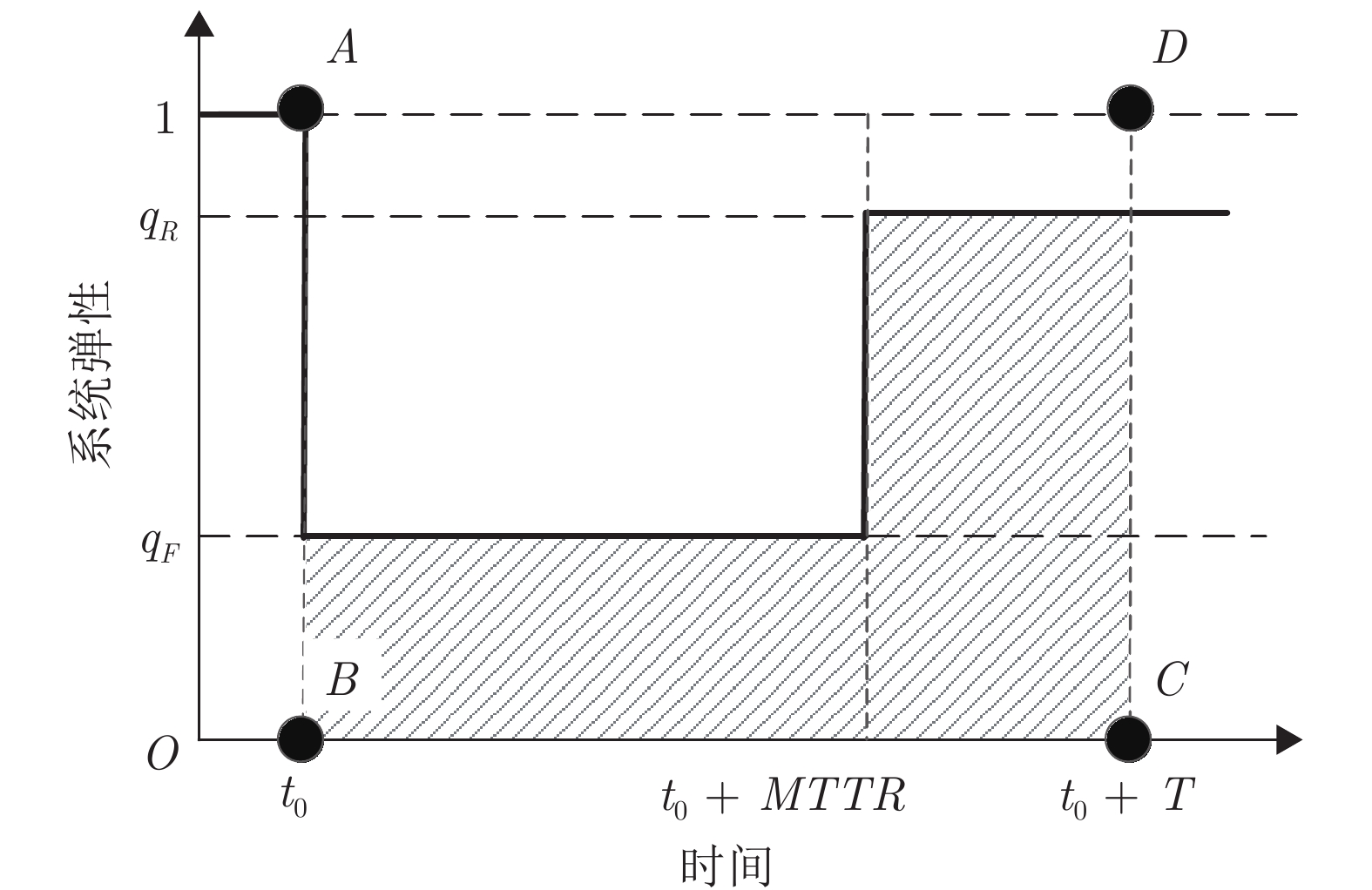
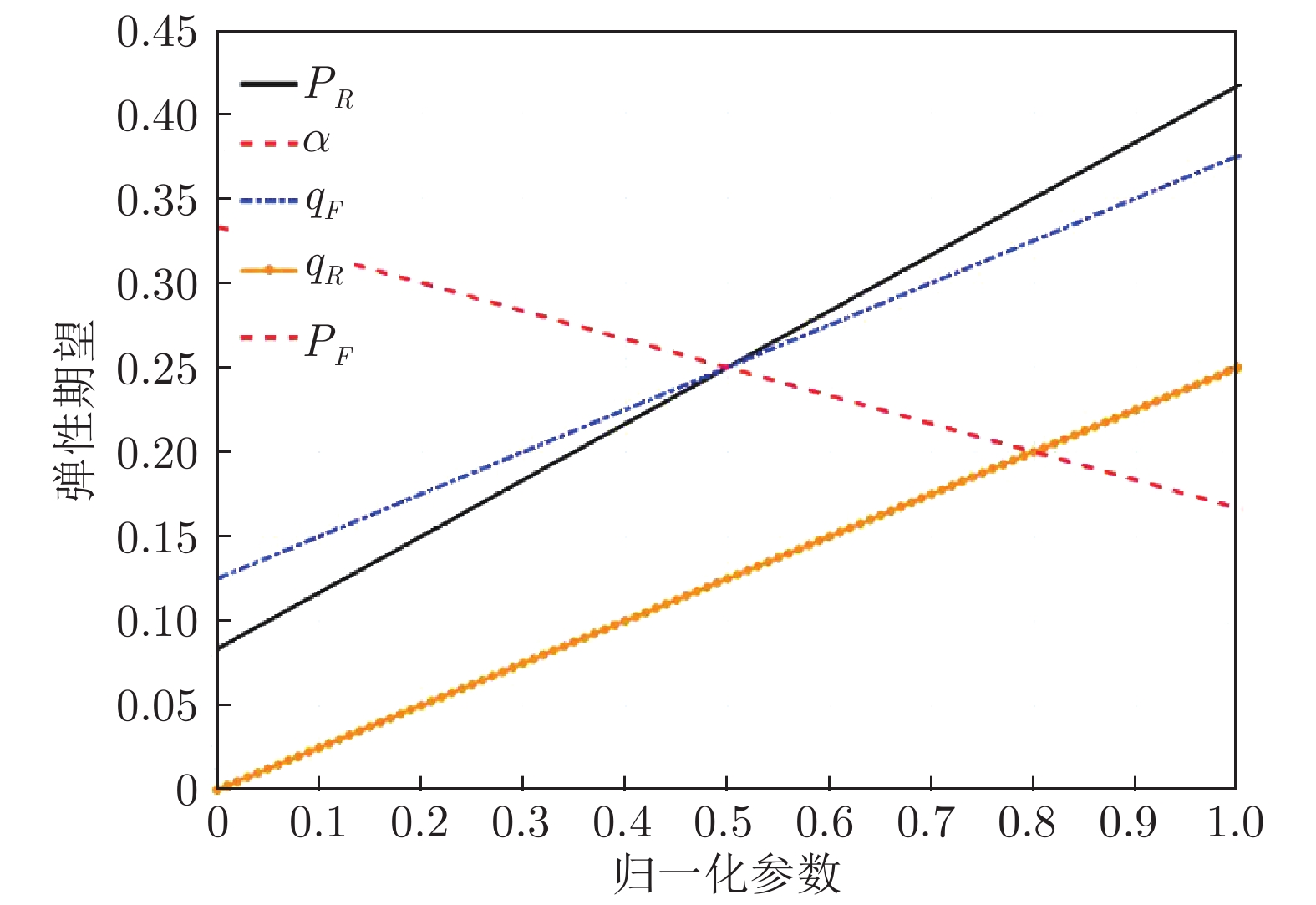
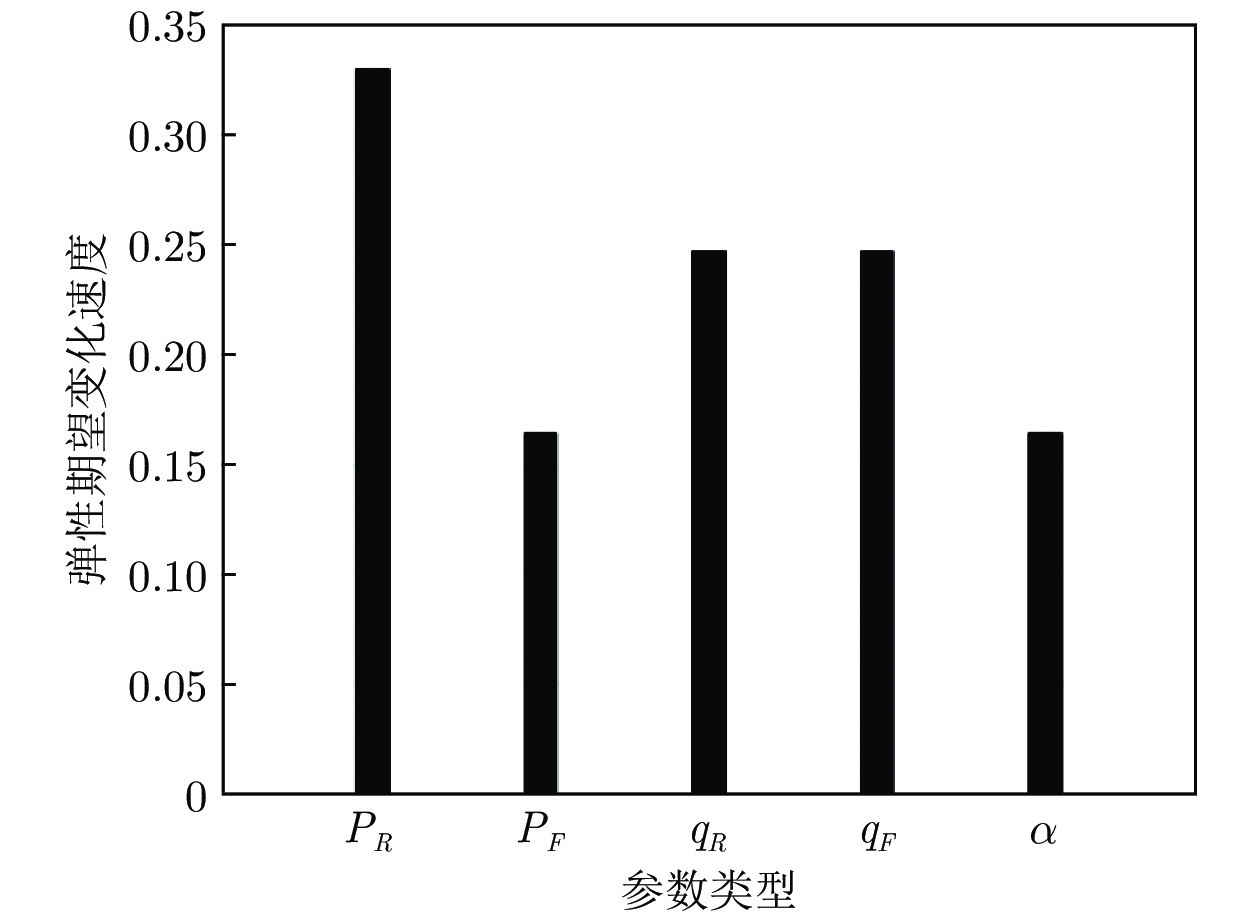
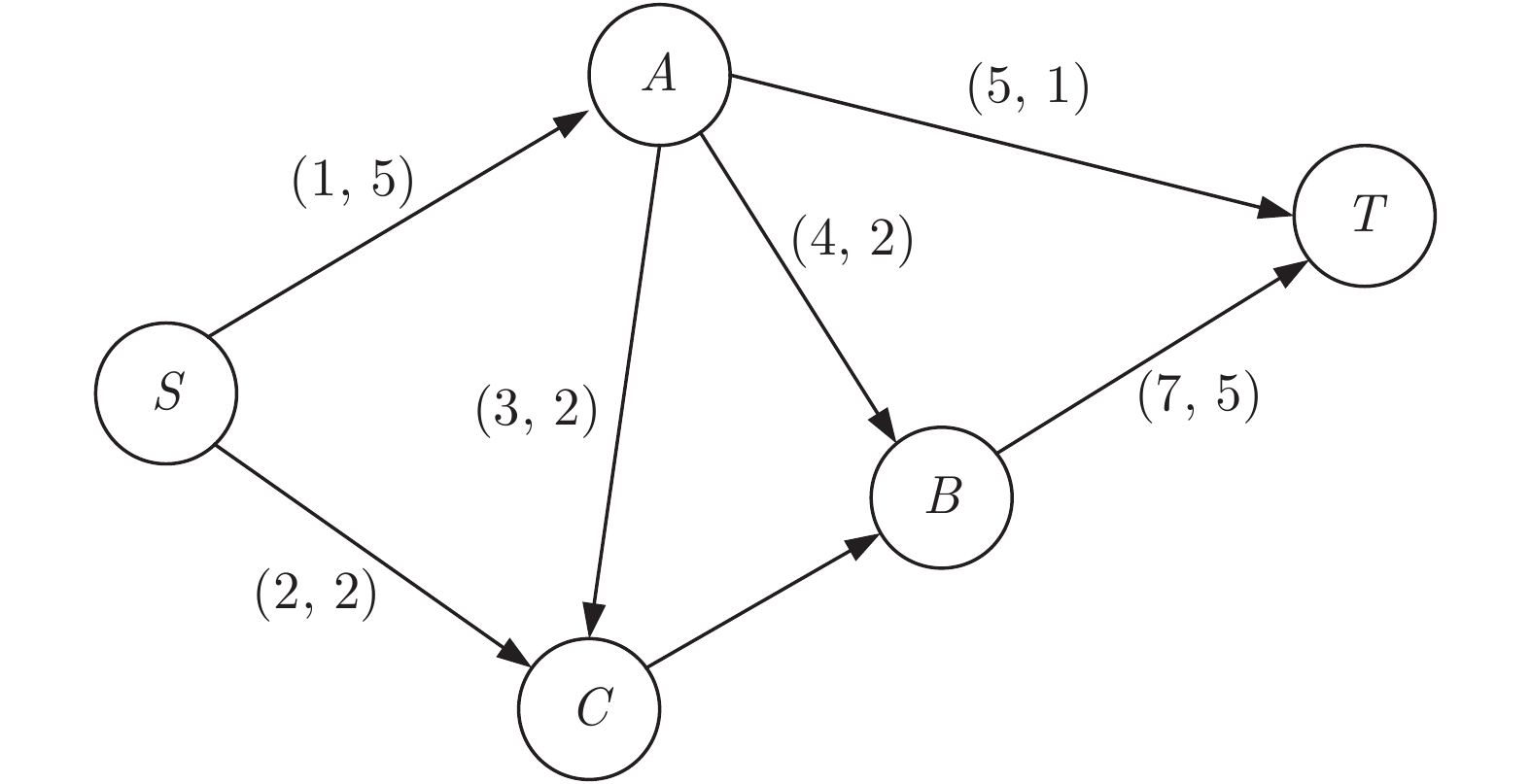
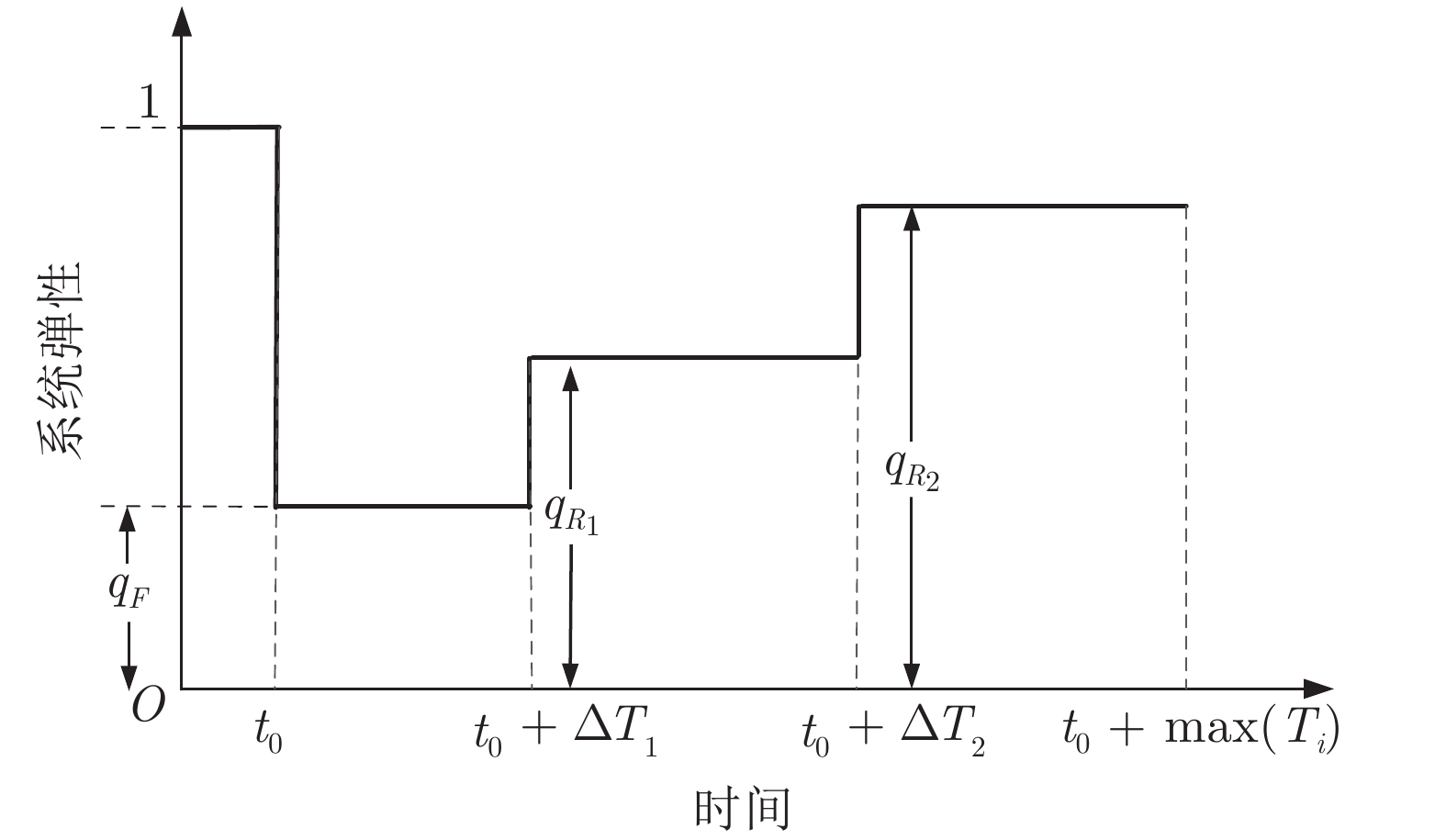
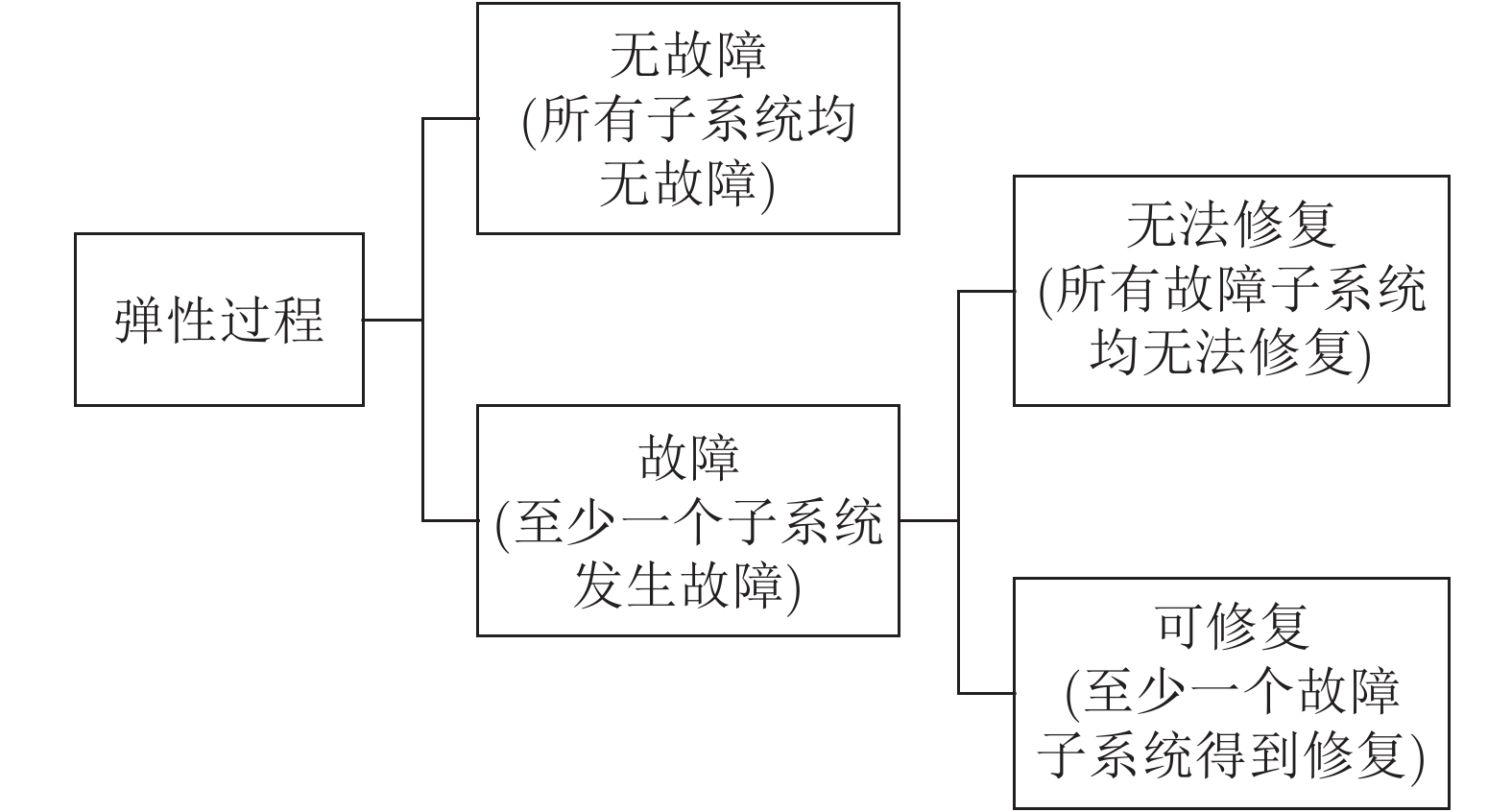
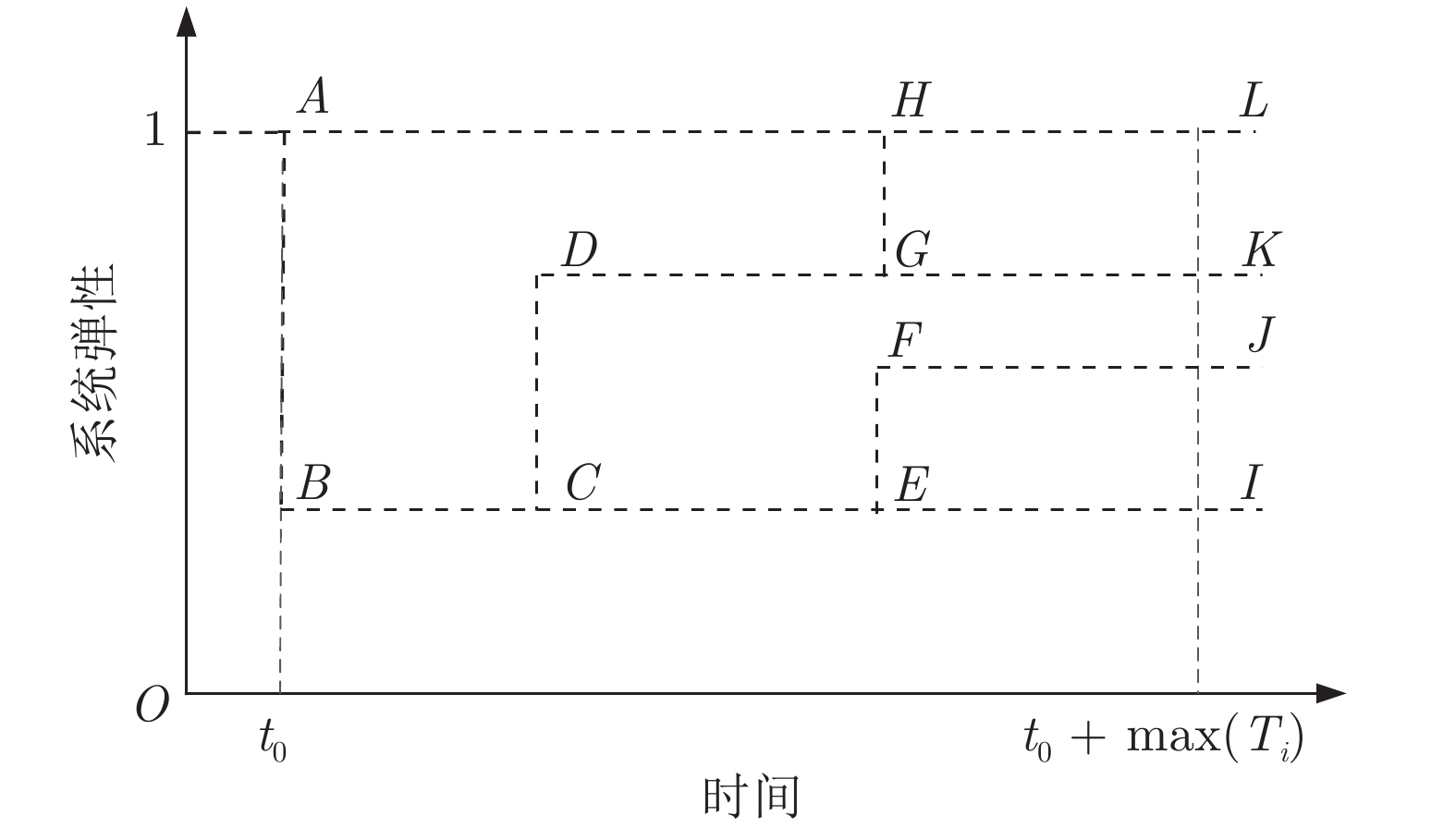
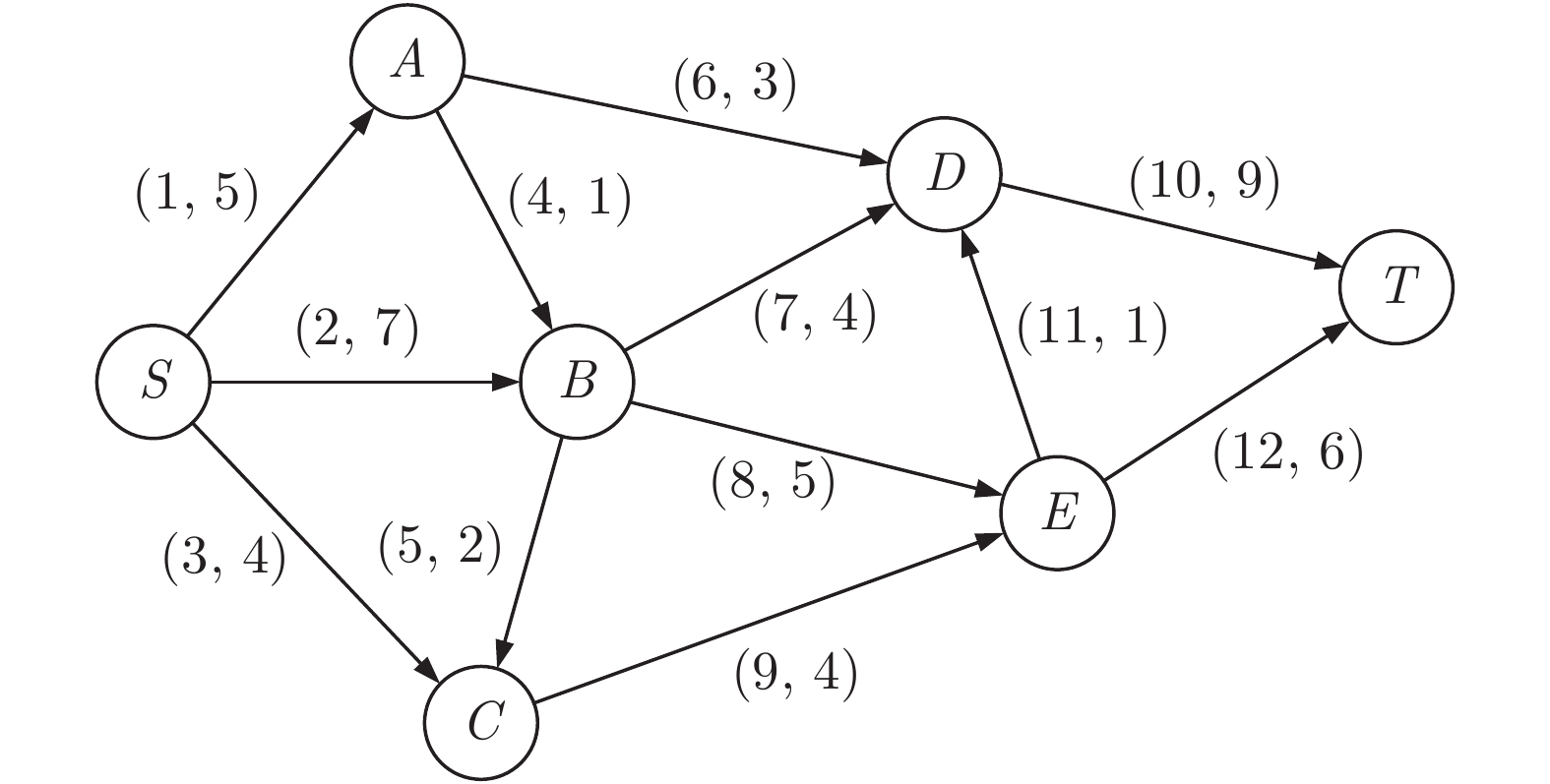
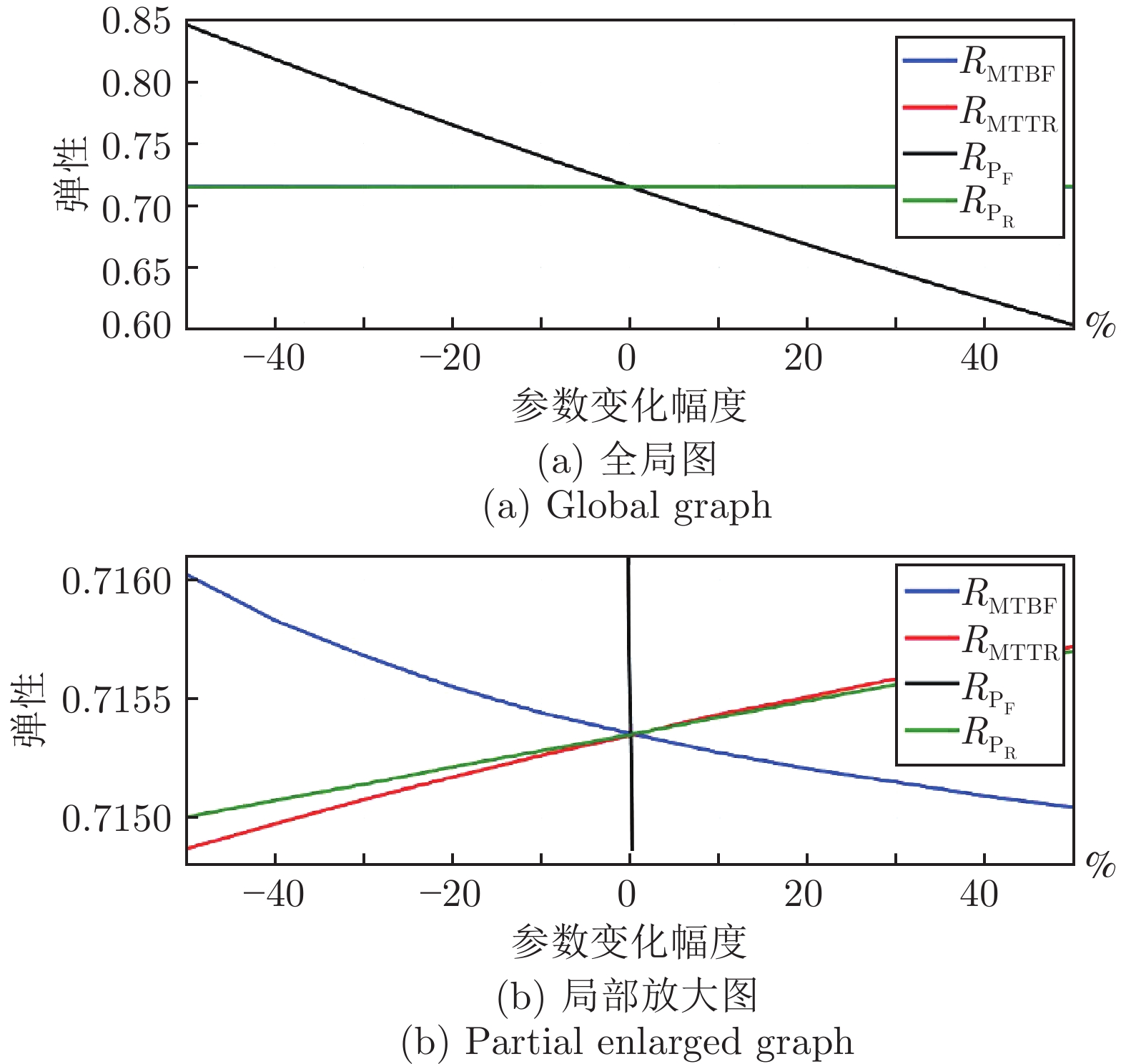
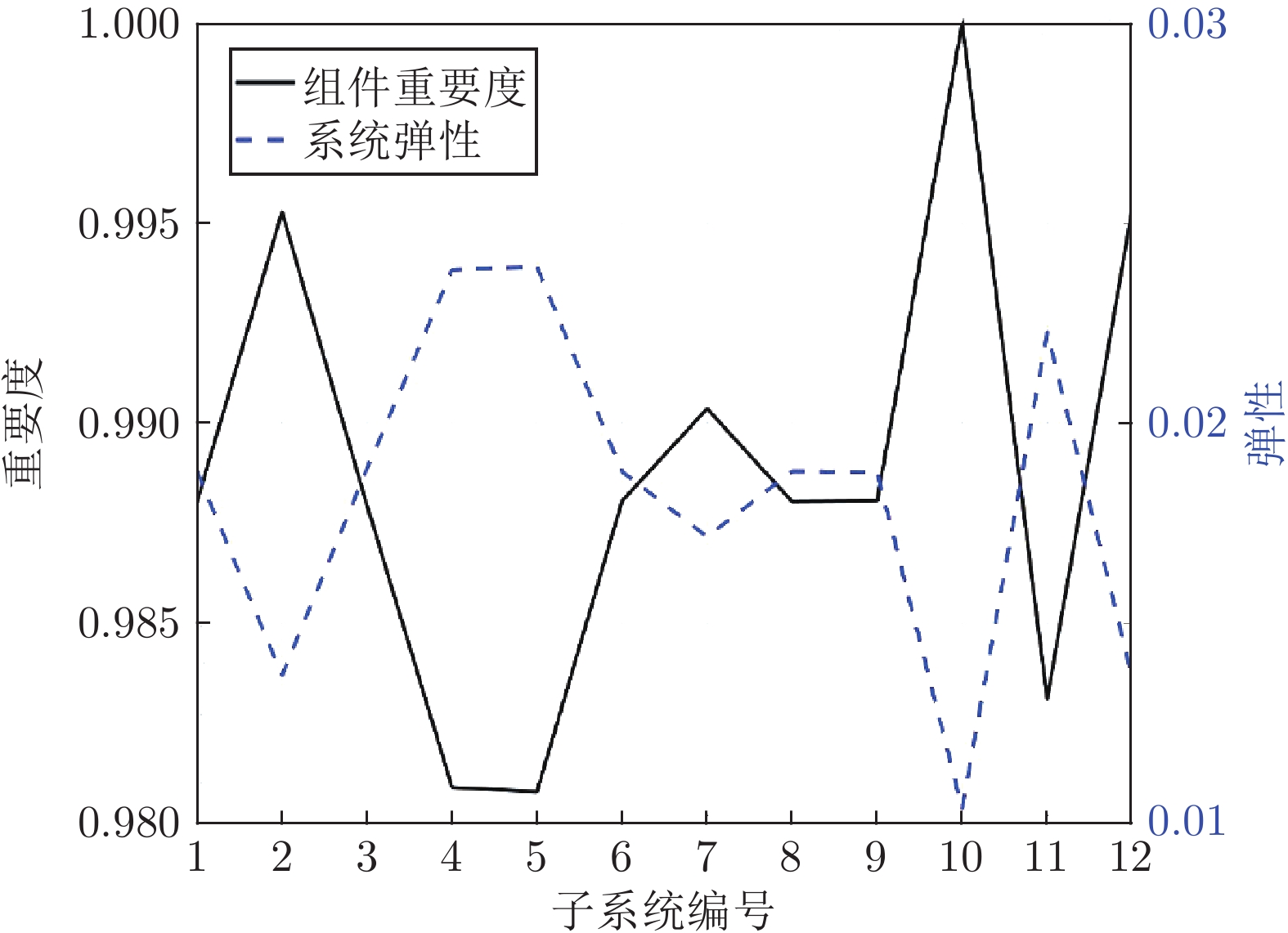
由于复杂装备系统缺少可工程应用的弹性度量方法, 且传统可靠性工程难以描述装备从故障到修复全过程的性质, 因此考虑装备系统在工作过程中性能变化的连续性以及扰动、故障和修复的不确定性, 利用可靠性工程相关参数, 针对无子系统的简单装备提出一种混合型弹性度量方法. 在此基础上, 考虑子系统对复杂系统的影响, 以及复杂系统故障和修复概率, 提出一种针对复杂装备系统的弹性度量方法. 最后, 通过基于弹性理论的组件重要度计算案例, 评估复杂装备系统各个子系统性能变化对整个装备的影响重要程度, 验证了方法的可行性和有效性.
由于复杂装备系统缺少可工程应用的弹性度量方法, 且传统可靠性工程难以描述装备从故障到修复全过程的性质, 因此考虑装备系统在工作过程中性能变化的连续性以及扰动、故障和修复的不确定性, 利用可靠性工程相关参数, 针对无子系统的简单装备提出一种混合型弹性度量方法. 在此基础上, 考虑子系统对复杂系统的影响, 以及复杂系统故障和修复概率, 提出一种针对复杂装备系统的弹性度量方法. 最后, 通过基于弹性理论的组件重要度计算案例, 评估复杂装备系统各个子系统性能变化对整个装备的影响重要程度, 验证了方法的可行性和有效性.
2023, 49(7): 1508-1518.
doi: 10.16383/j.aas.c210092
摘要:
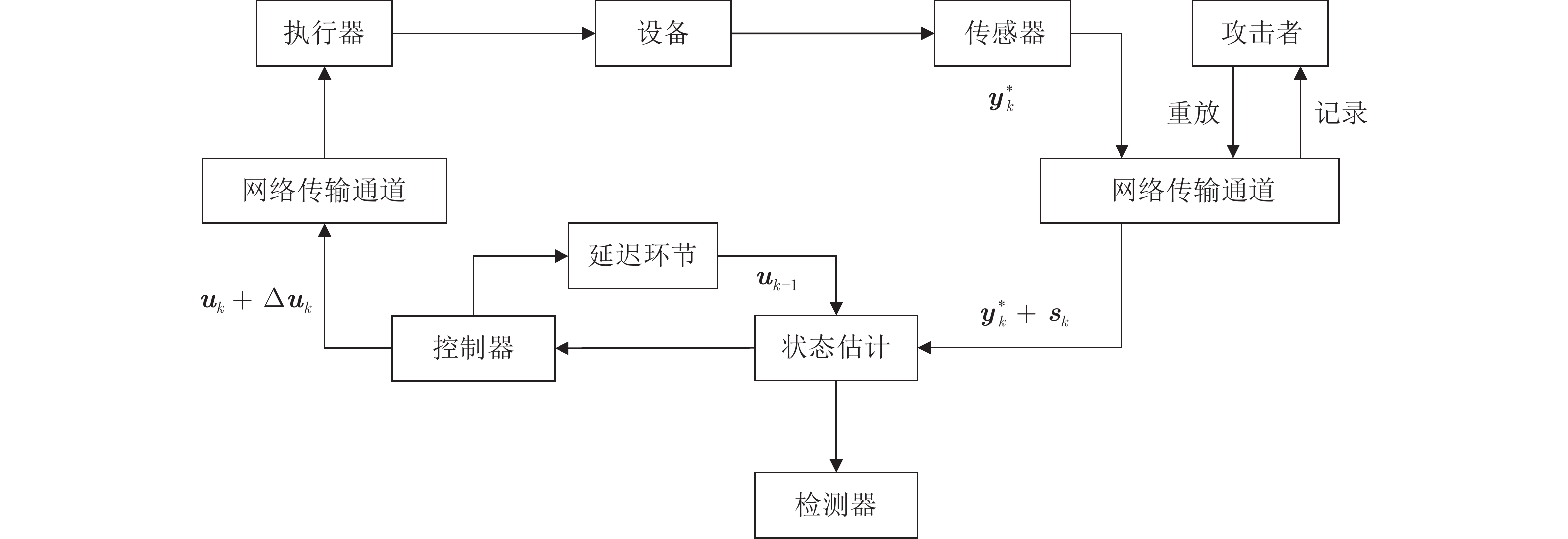
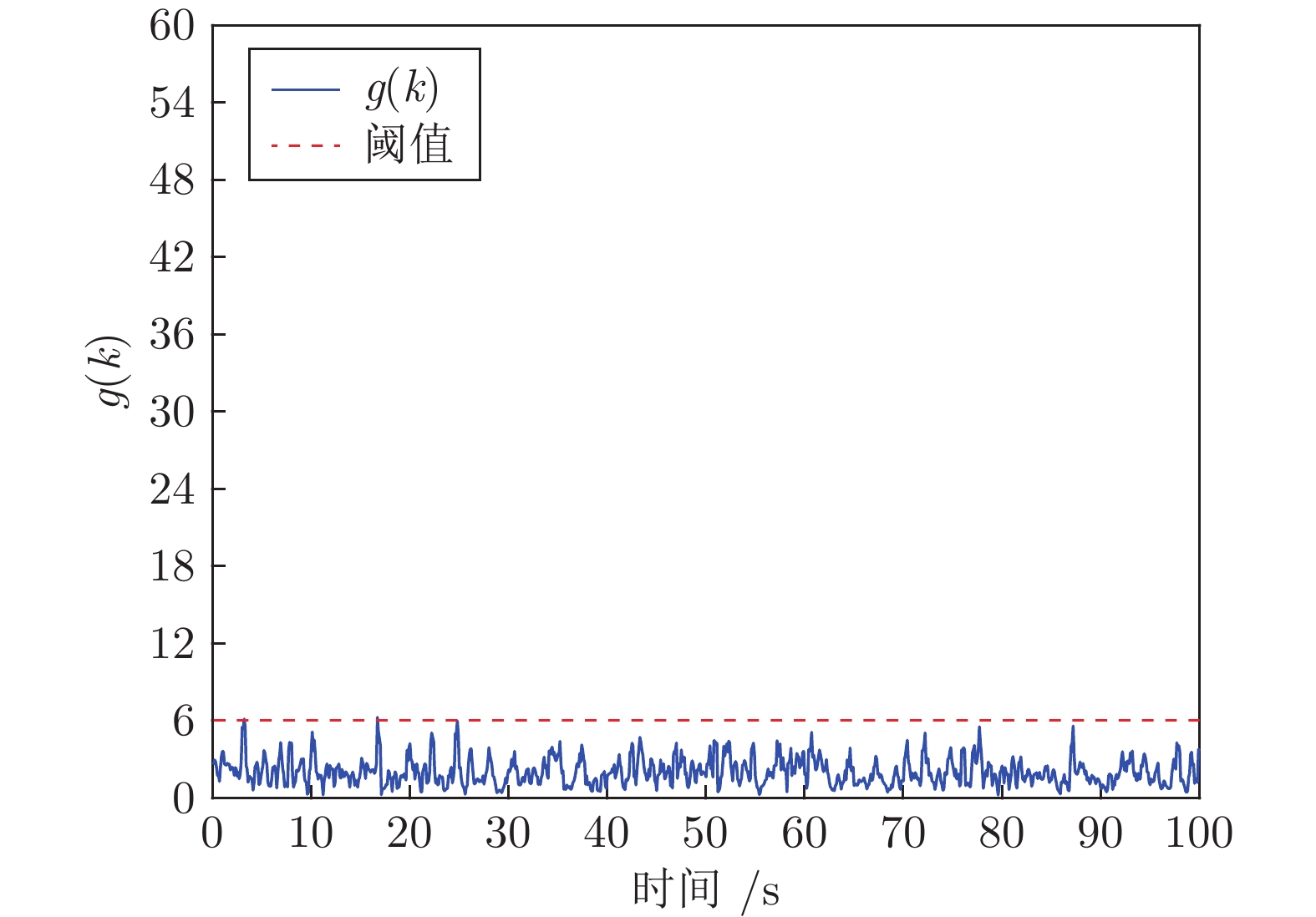
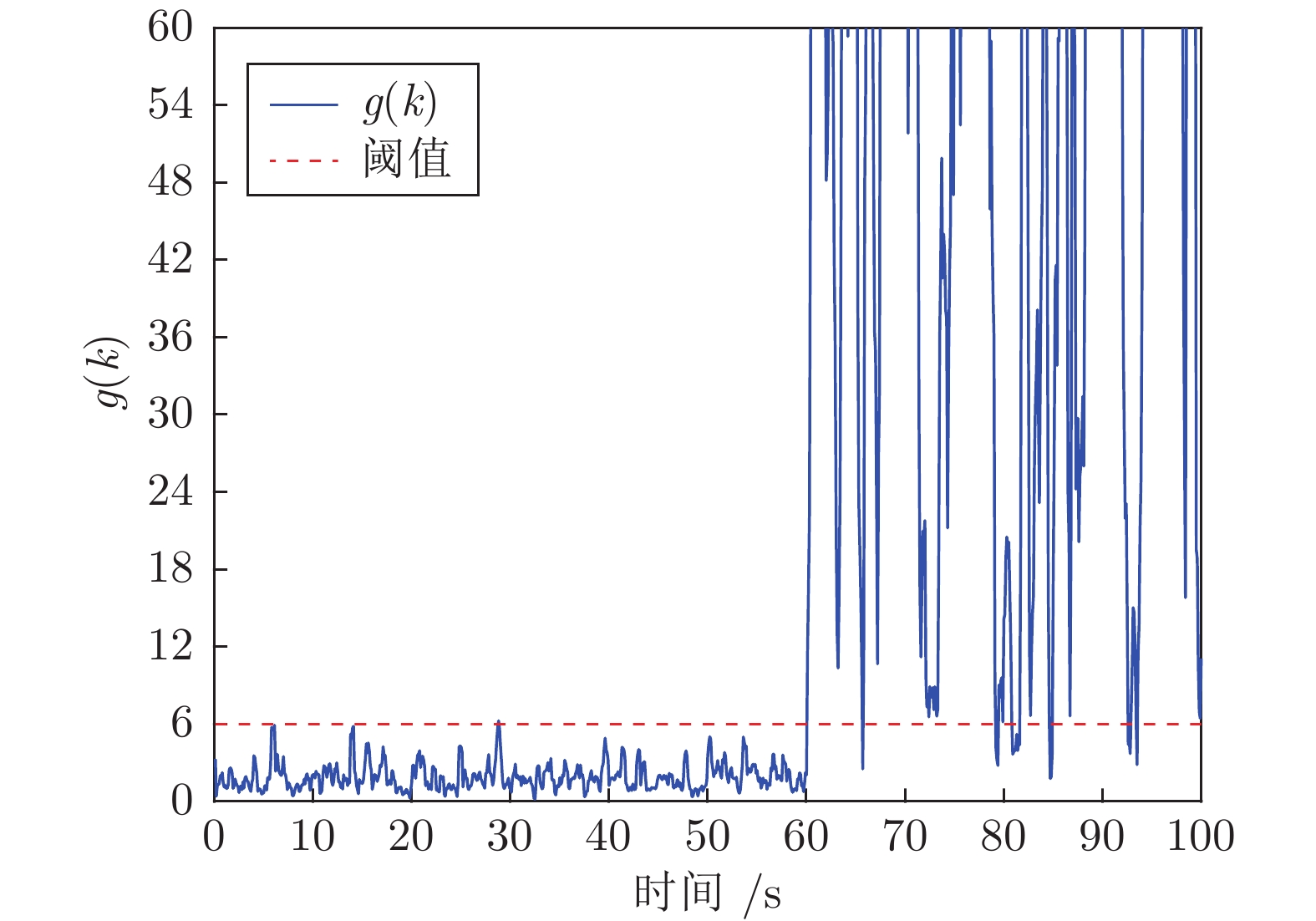
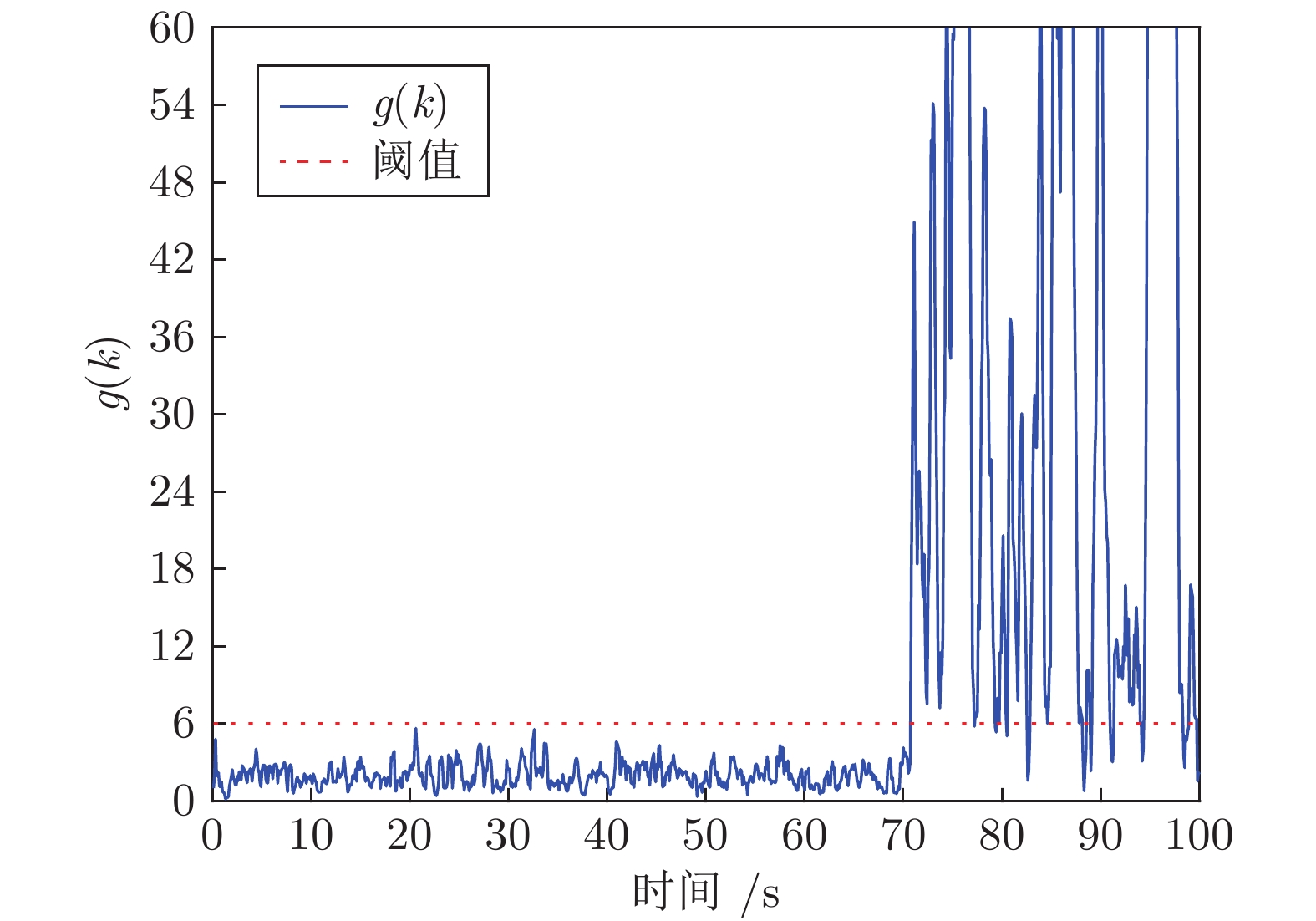
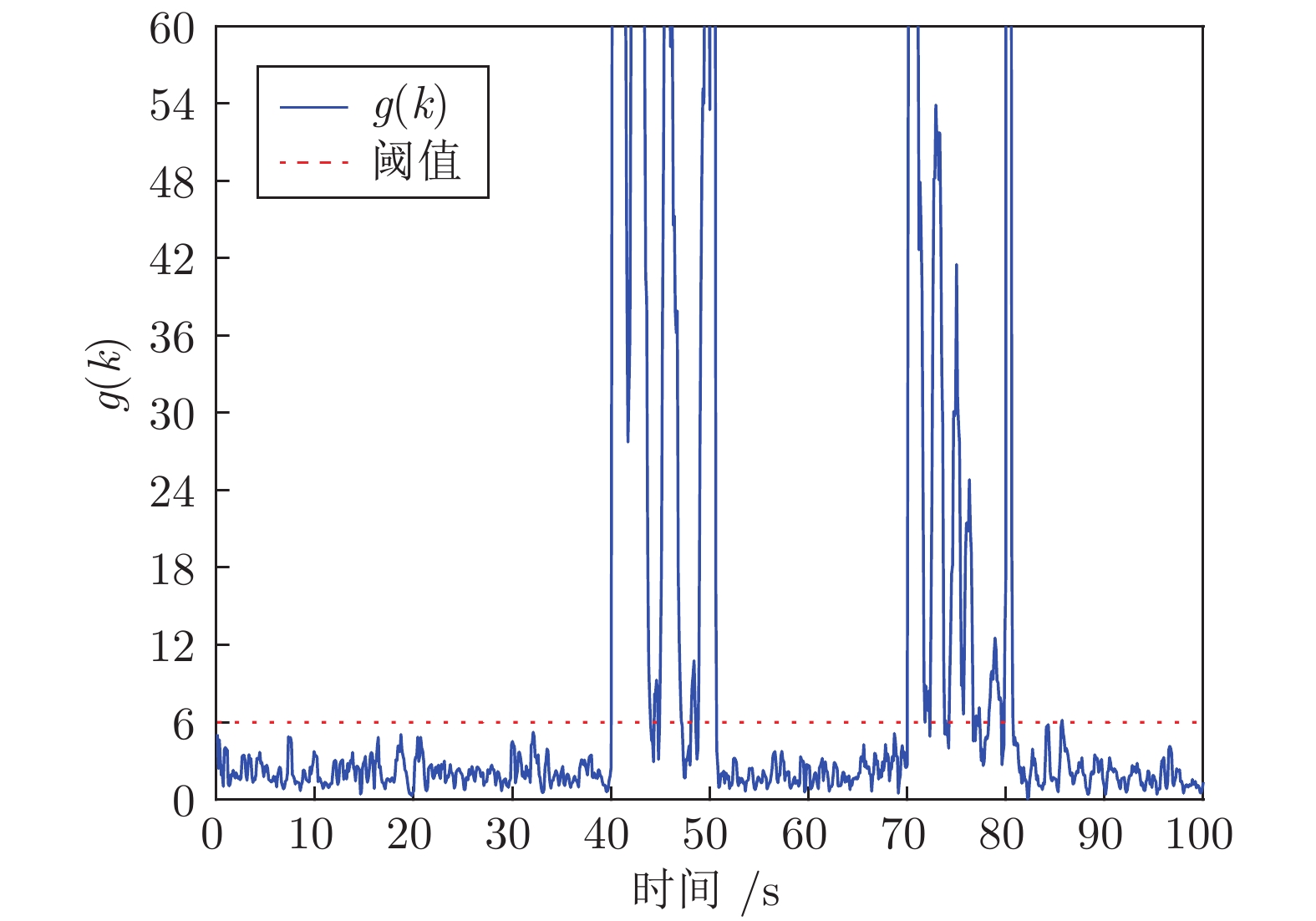
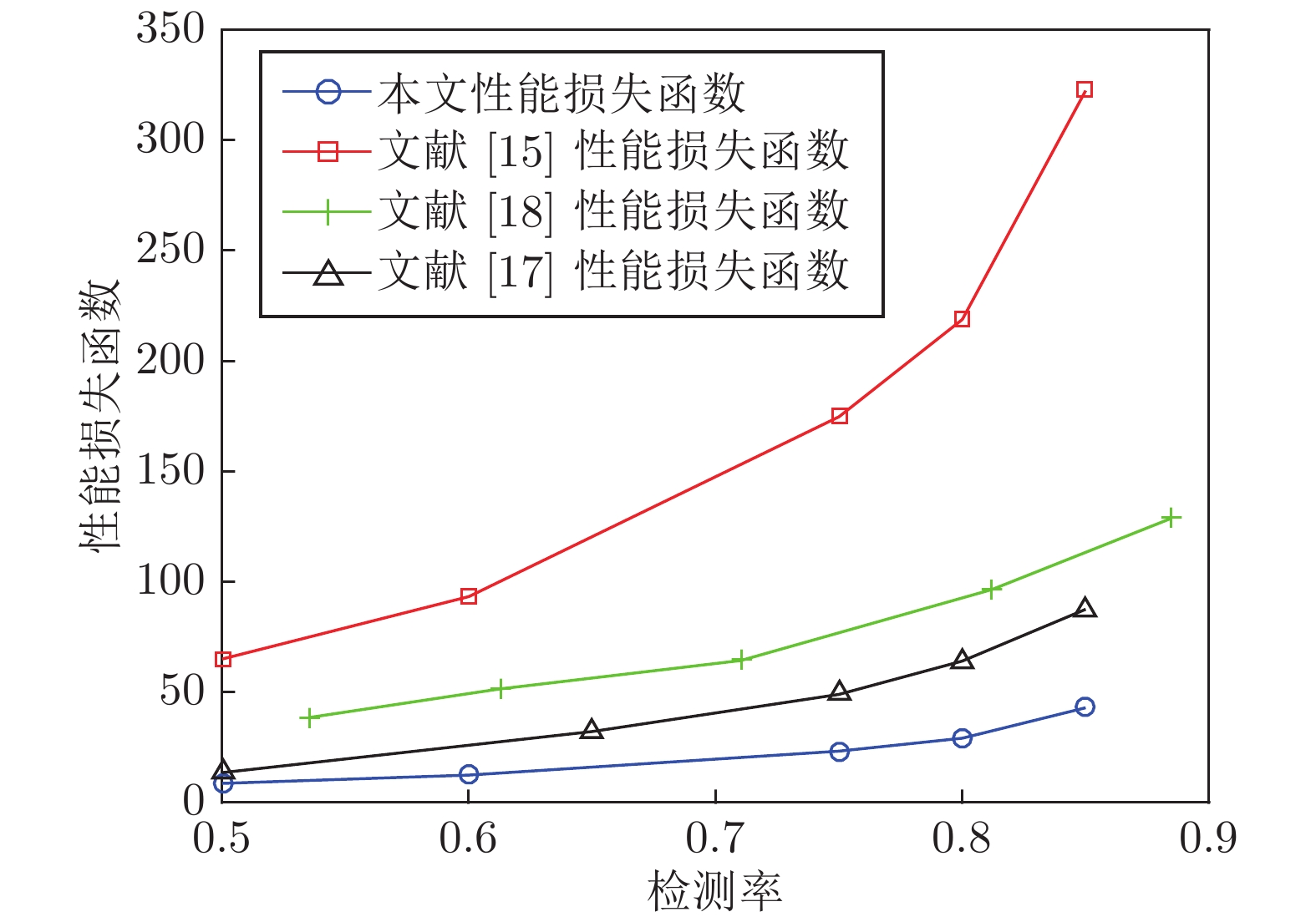
向最优控制信号中加入编码信号是实现信息物理系统(Cyber physical system, CPS)重放攻击检测的有效方法, 但会造成系统控制性能的损失. 如何在保证重放攻击检测率条件下降低系统的控制性能损失是一个值得研究的问题. 为此, 提出一种基于辅助信息补偿的控制信号编码检测方法, 通过向测量值添加辅助信号补偿控制编码信号对最优状态估计的影响. 首先, 证明了此方案下重放攻击的可检测性, 导出检测率的上界与检测函数阈值间的定量关系. 其次, 证明了加入辅助信号后系统控制信号与未添加编码信息时相同, 之前时刻的控制编码信号不会造成累积效应. 因此, 系统当前时刻的控制性能损失仅与当前时刻编码信号的大小有关. 最后, 将编码信号的协方差矩阵、检测率和检测阈值之间的关系表示成一个最优化问题, 给出了编码信号方差的计算方法. 仿真结果表明, 本文方法能有效地检测重放攻击的发生, 且系统控制性能的损失较小.
向最优控制信号中加入编码信号是实现信息物理系统(Cyber physical system, CPS)重放攻击检测的有效方法, 但会造成系统控制性能的损失. 如何在保证重放攻击检测率条件下降低系统的控制性能损失是一个值得研究的问题. 为此, 提出一种基于辅助信息补偿的控制信号编码检测方法, 通过向测量值添加辅助信号补偿控制编码信号对最优状态估计的影响. 首先, 证明了此方案下重放攻击的可检测性, 导出检测率的上界与检测函数阈值间的定量关系. 其次, 证明了加入辅助信号后系统控制信号与未添加编码信息时相同, 之前时刻的控制编码信号不会造成累积效应. 因此, 系统当前时刻的控制性能损失仅与当前时刻编码信号的大小有关. 最后, 将编码信号的协方差矩阵、检测率和检测阈值之间的关系表示成一个最优化问题, 给出了编码信号方差的计算方法. 仿真结果表明, 本文方法能有效地检测重放攻击的发生, 且系统控制性能的损失较小.
2023, 49(7): 1519-1529.
doi: 10.16383/j.aas.c200416
摘要:
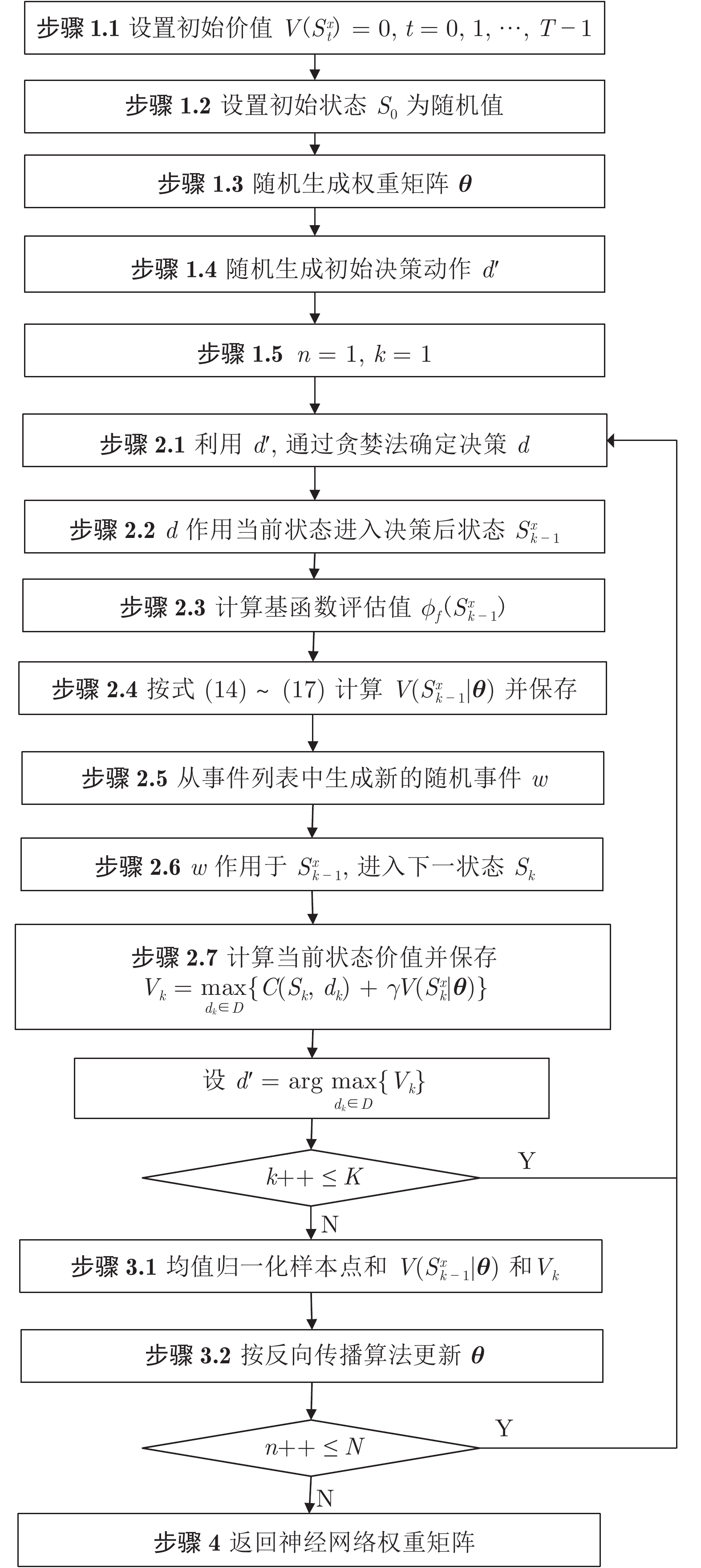
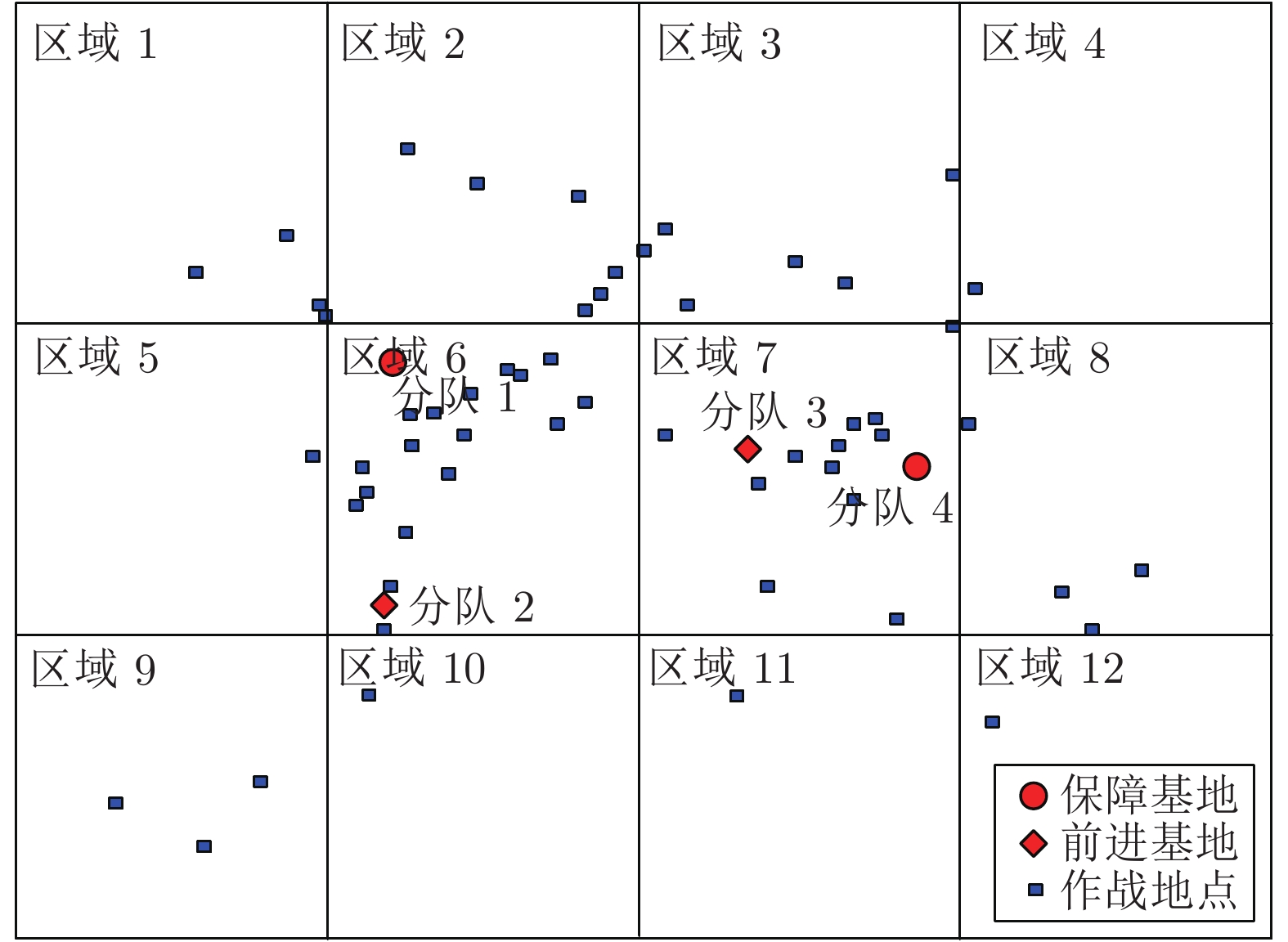
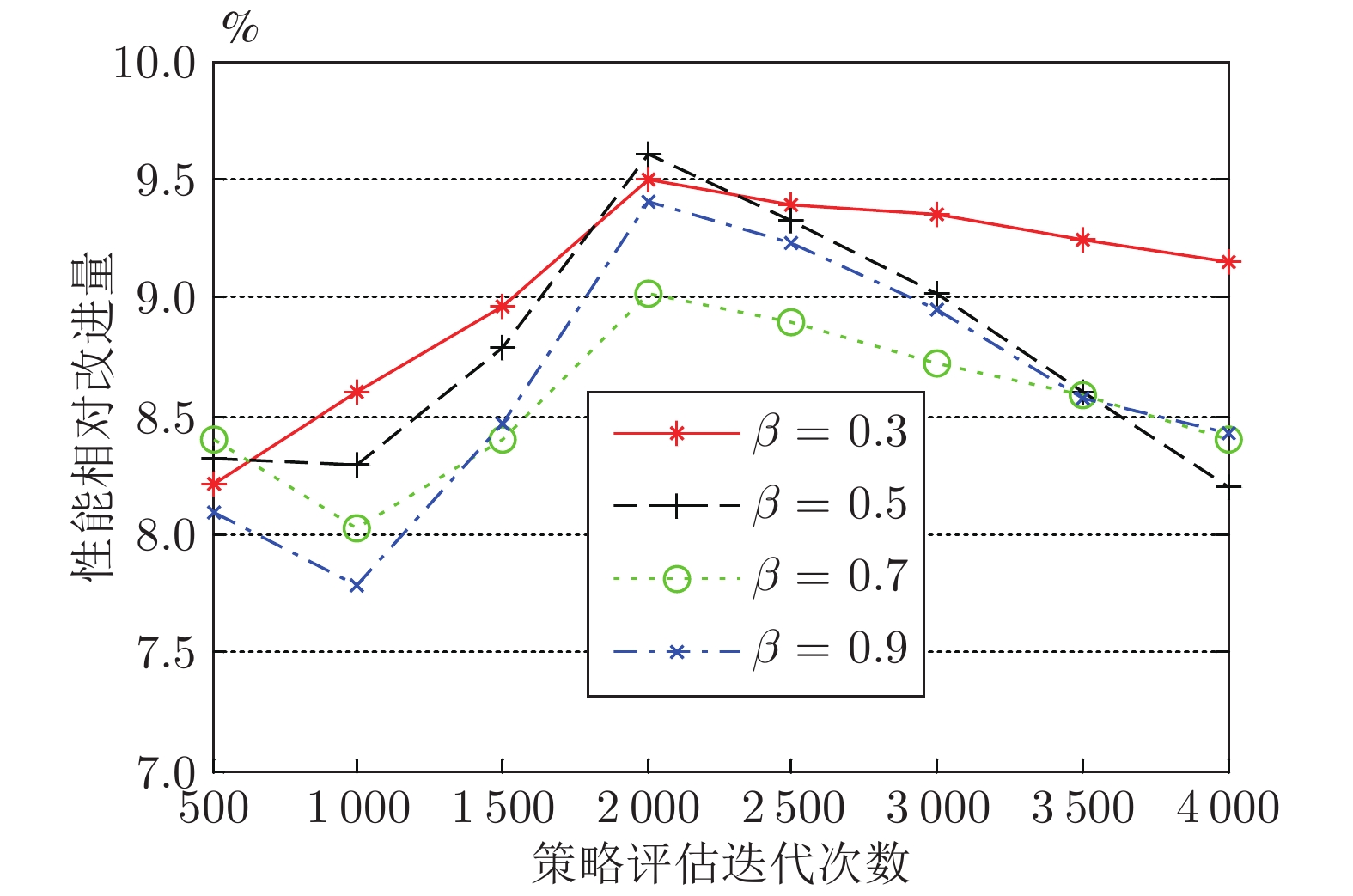
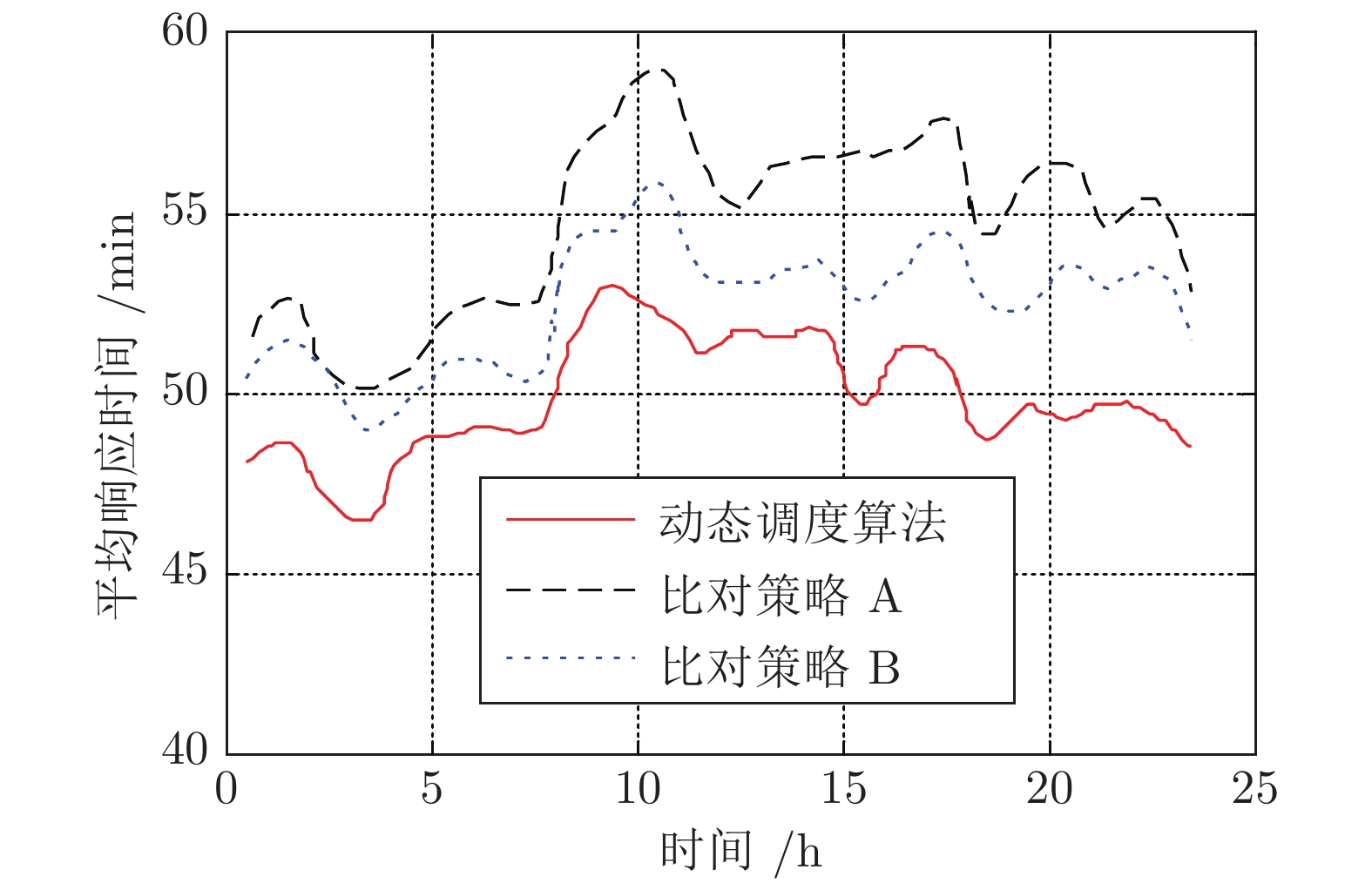
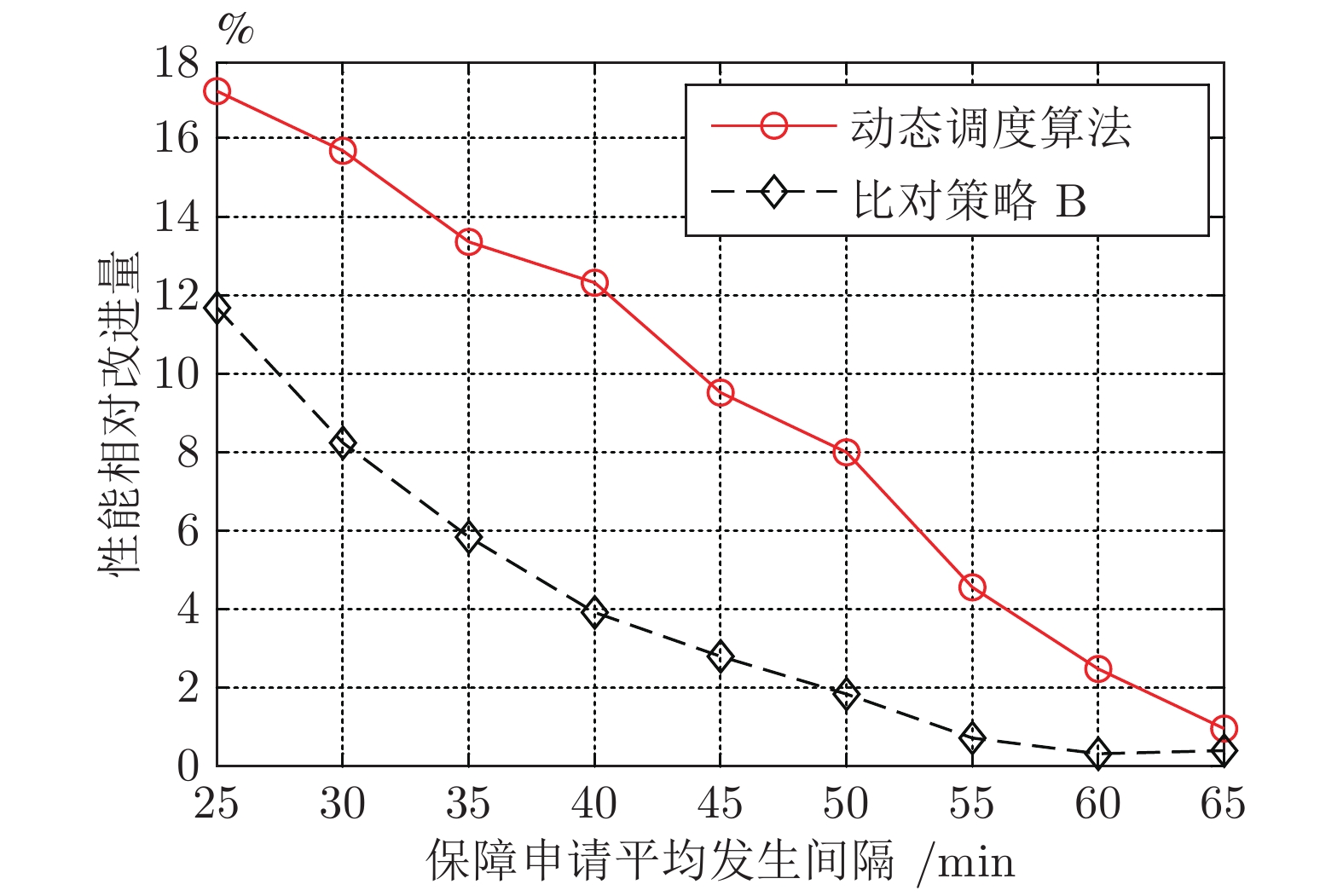
复杂多变的战场环境要求后装保障能够根据战场环境变化, 预见性地做出决策. 为此, 提出基于强化学习的动态调度方法. 为准确描述保障调度问题, 提出支持抢占调度、重分配及重部署决策的马尔科夫决策过程(Markov decision process, MDP)模型, 模型中综合考量了任务排队、保障优先级以及油料约束等诸多问题的影响; 随后设计改进策略迭代算法, 训练基于神经网络的保障调度模型; 训练后的神经网络模型能够近似计算状态价值函数, 从而求解出产生最大期望价值的优化调度策略. 最后设计一个分布式战场保障仿真实验, 通过与常规调度策略的对比, 验证了动态调度算法具有良好的自适应性和自主学习能力, 能够根据历史数据和当前态势预判后续变化, 并重新规划和配置保障资源的调度方案.
复杂多变的战场环境要求后装保障能够根据战场环境变化, 预见性地做出决策. 为此, 提出基于强化学习的动态调度方法. 为准确描述保障调度问题, 提出支持抢占调度、重分配及重部署决策的马尔科夫决策过程(Markov decision process, MDP)模型, 模型中综合考量了任务排队、保障优先级以及油料约束等诸多问题的影响; 随后设计改进策略迭代算法, 训练基于神经网络的保障调度模型; 训练后的神经网络模型能够近似计算状态价值函数, 从而求解出产生最大期望价值的优化调度策略. 最后设计一个分布式战场保障仿真实验, 通过与常规调度策略的对比, 验证了动态调度算法具有良好的自适应性和自主学习能力, 能够根据历史数据和当前态势预判后续变化, 并重新规划和配置保障资源的调度方案.
2023, 49(7): 1530-1548.
doi: 10.16383/j.aas.c200819
摘要:
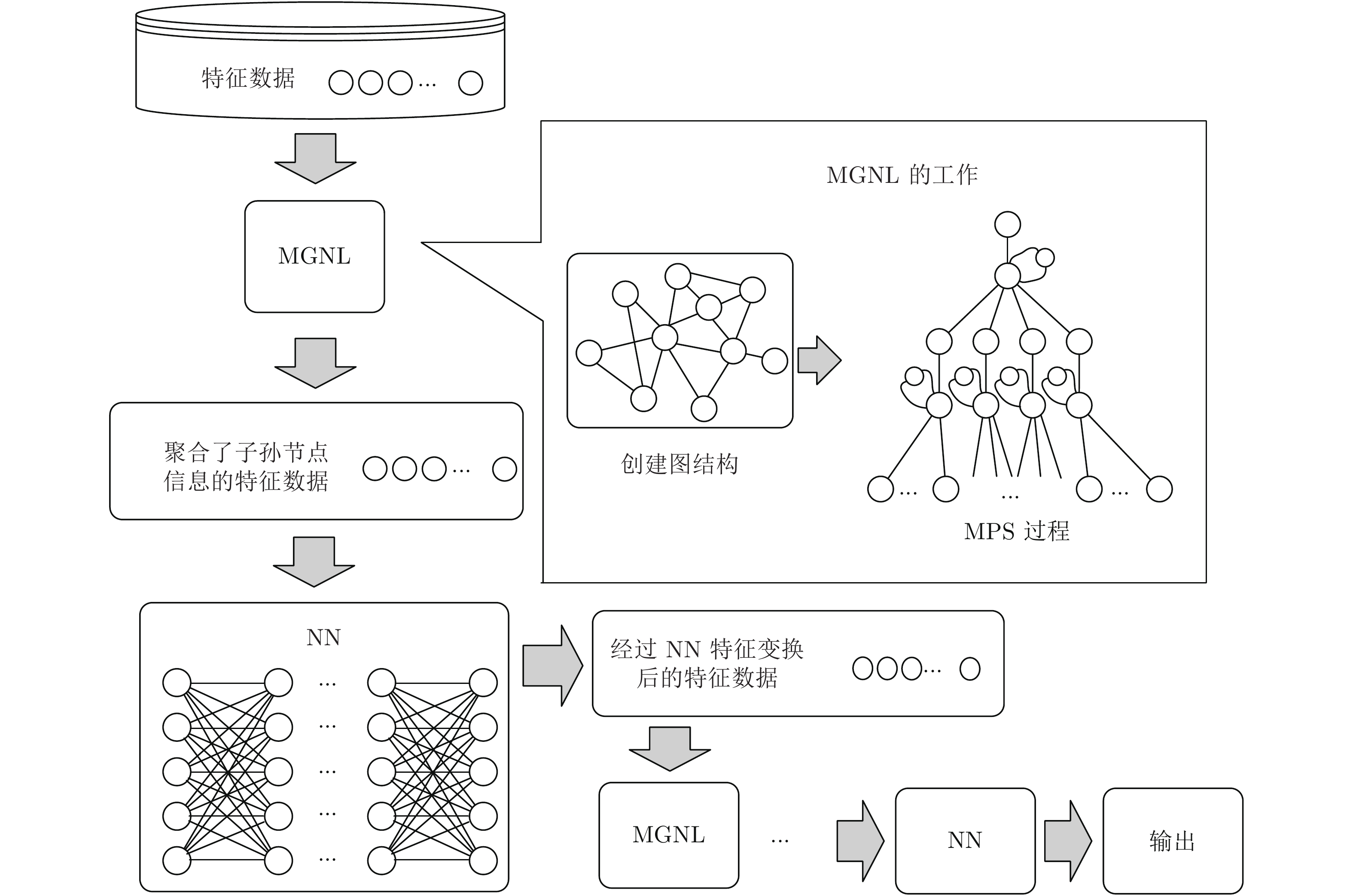
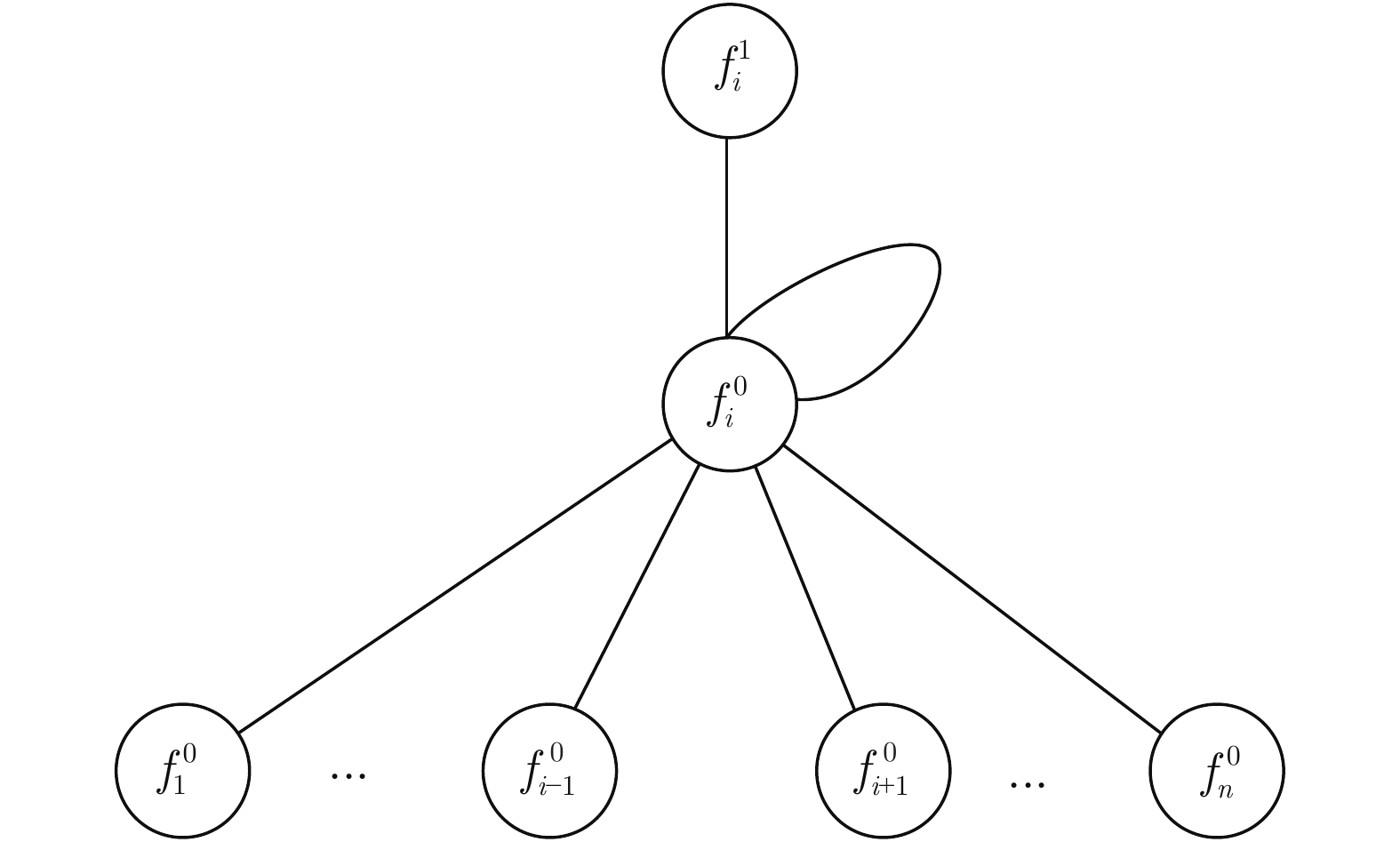
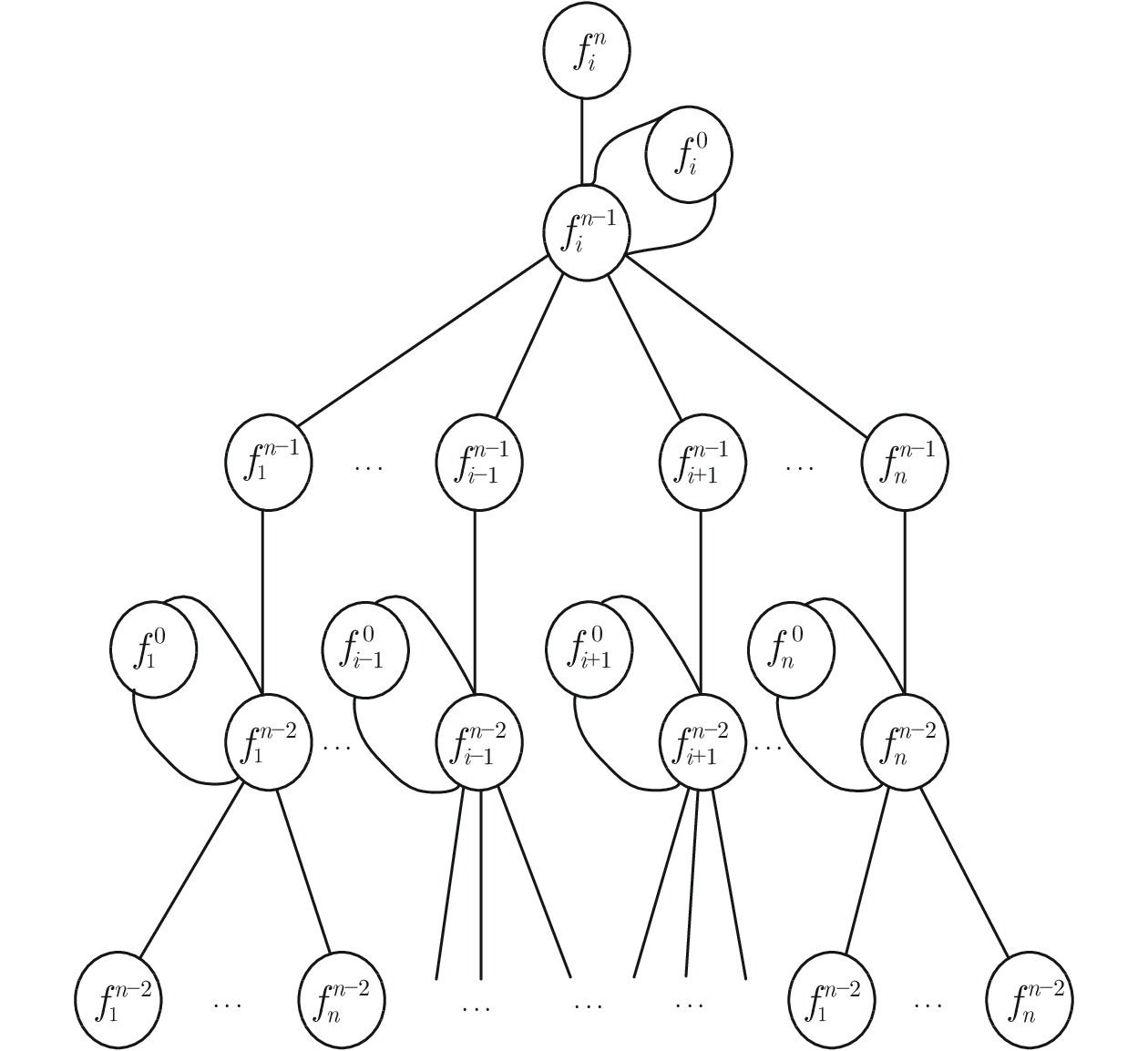
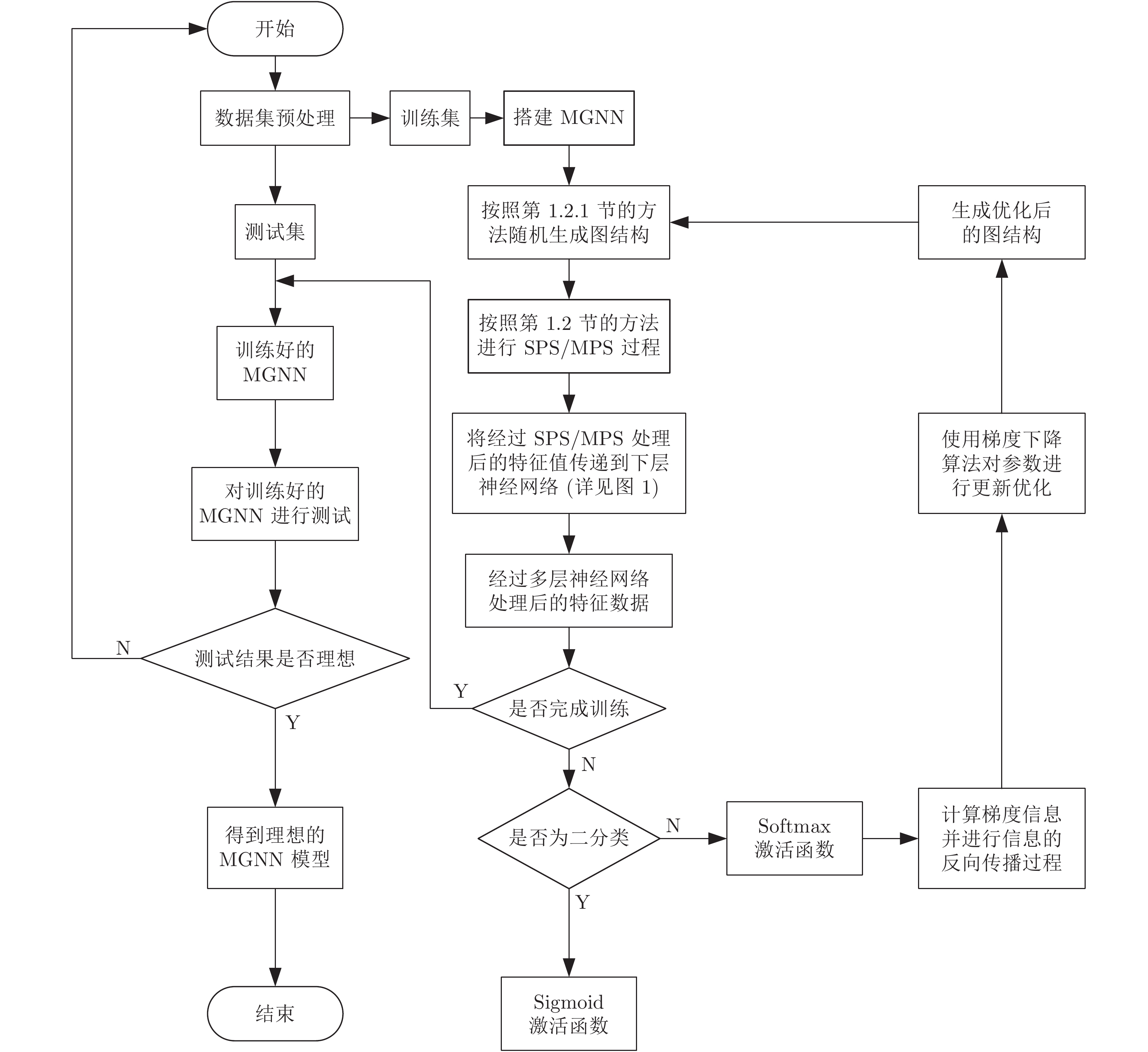
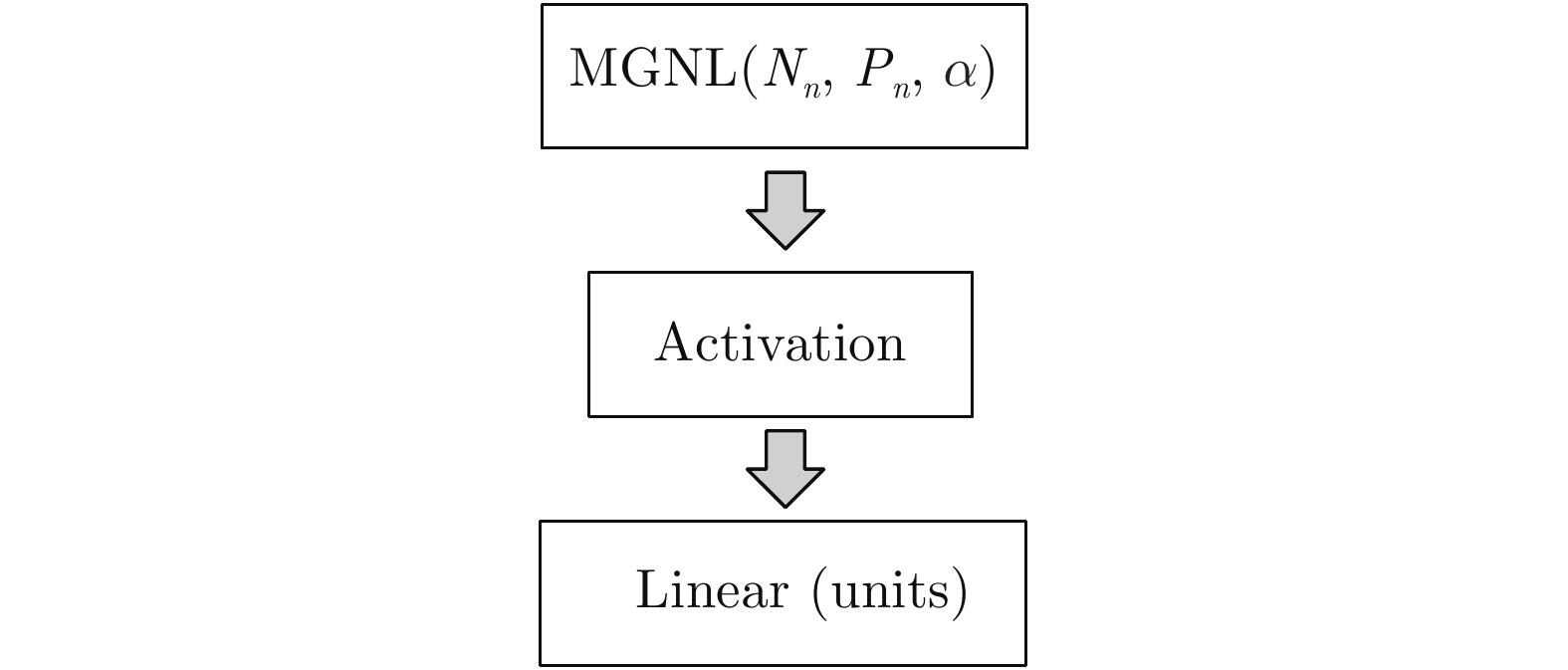
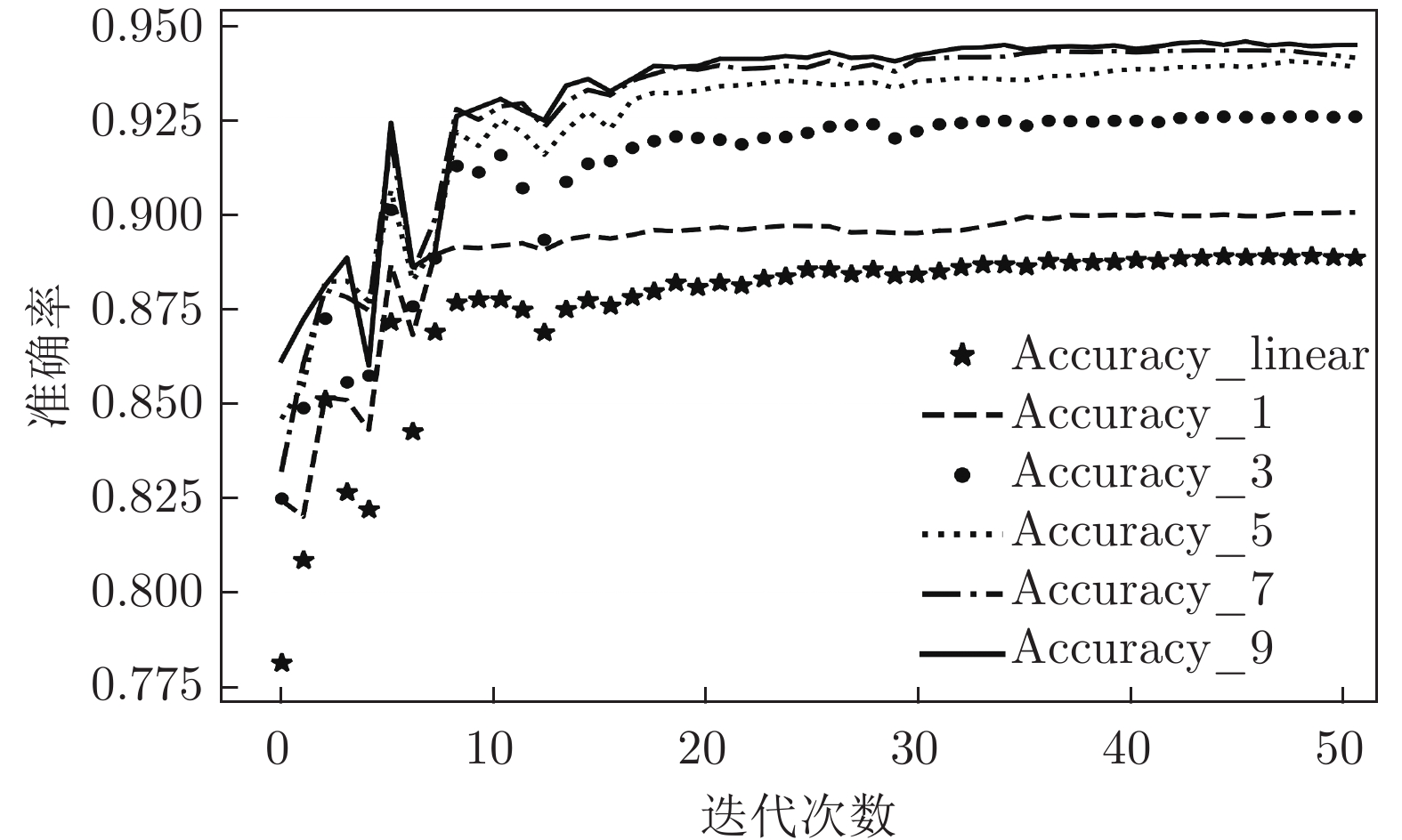
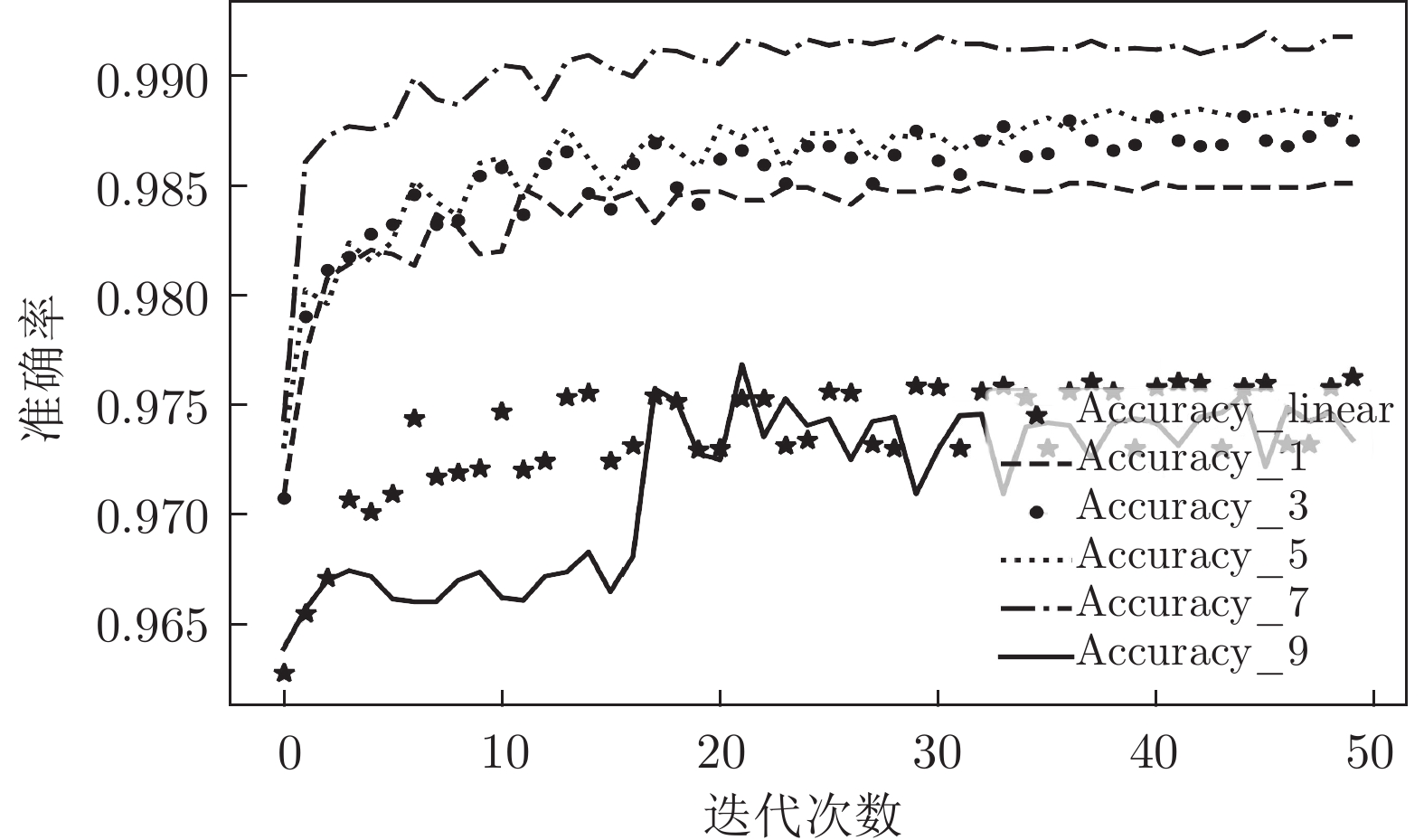
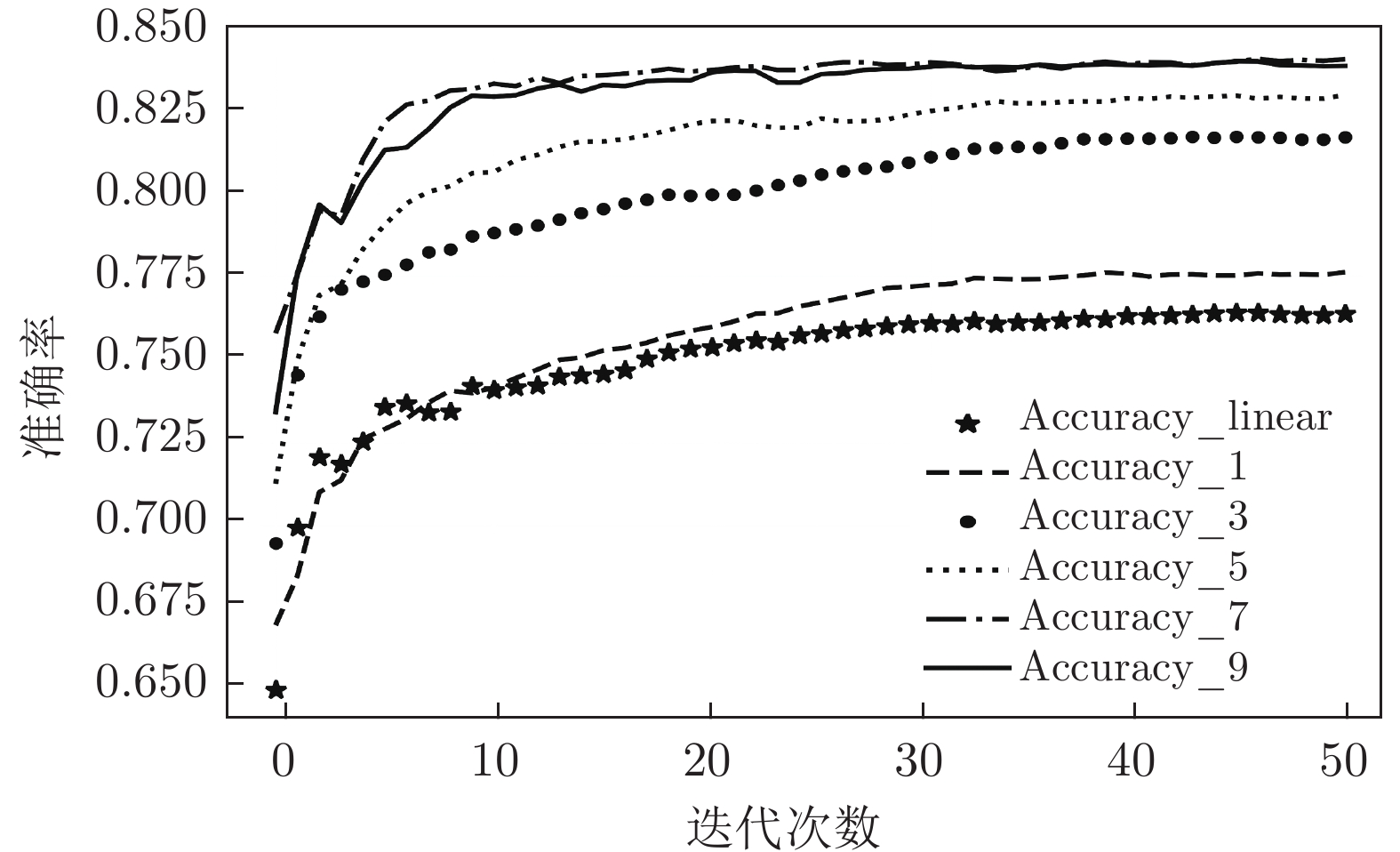
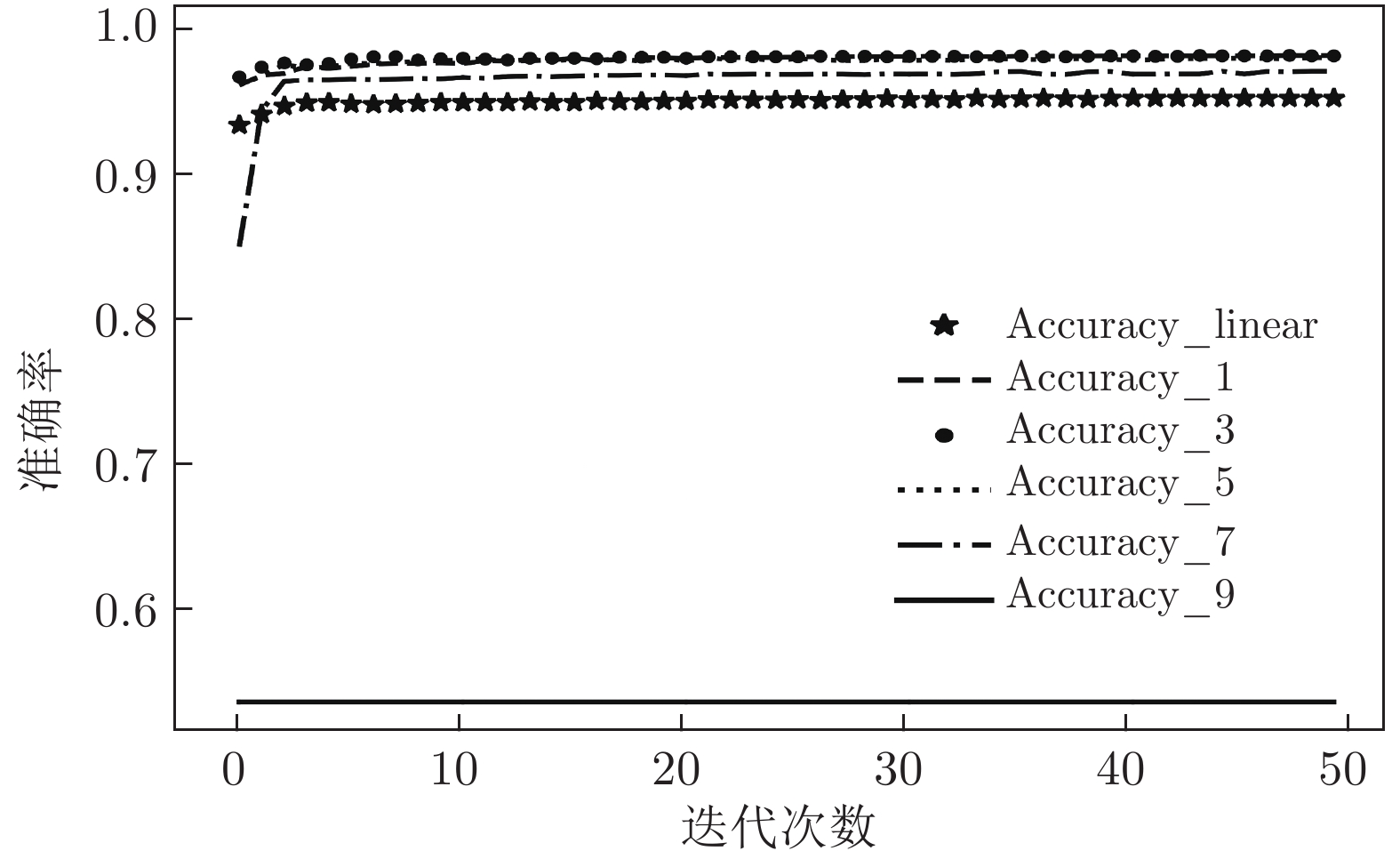
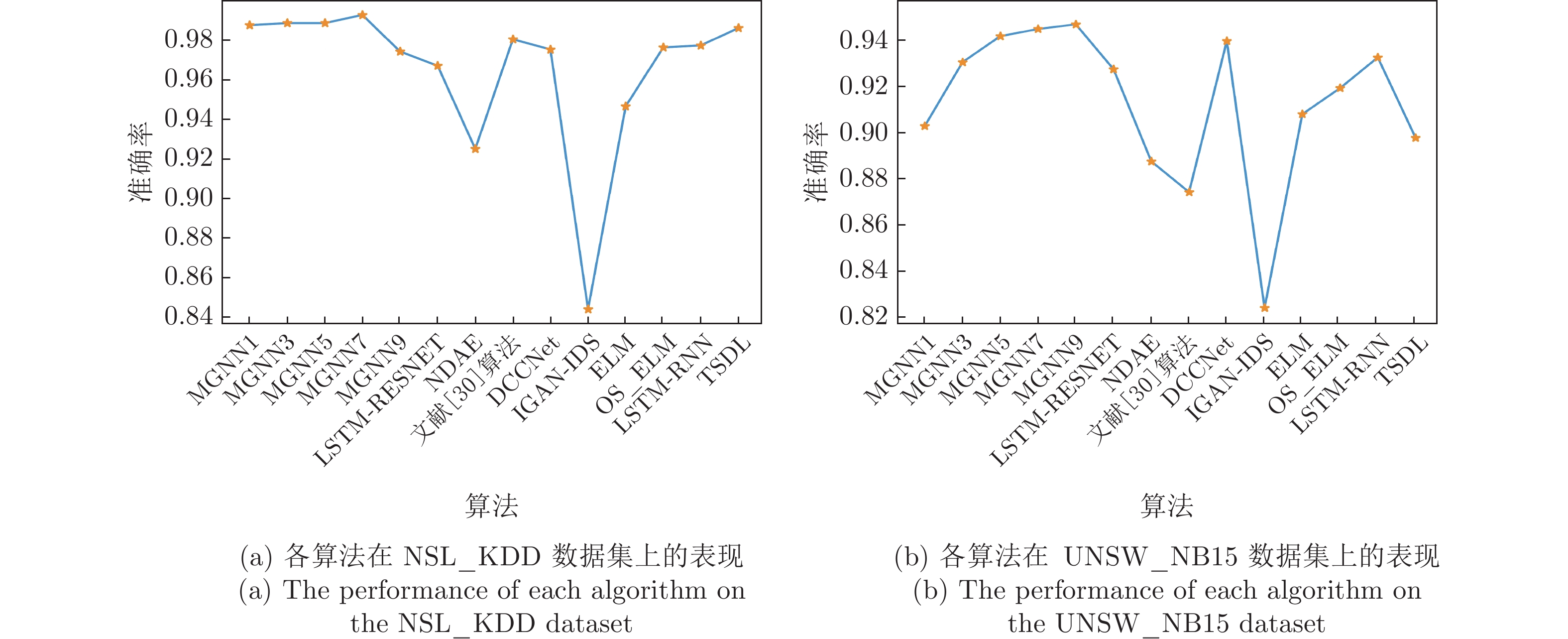
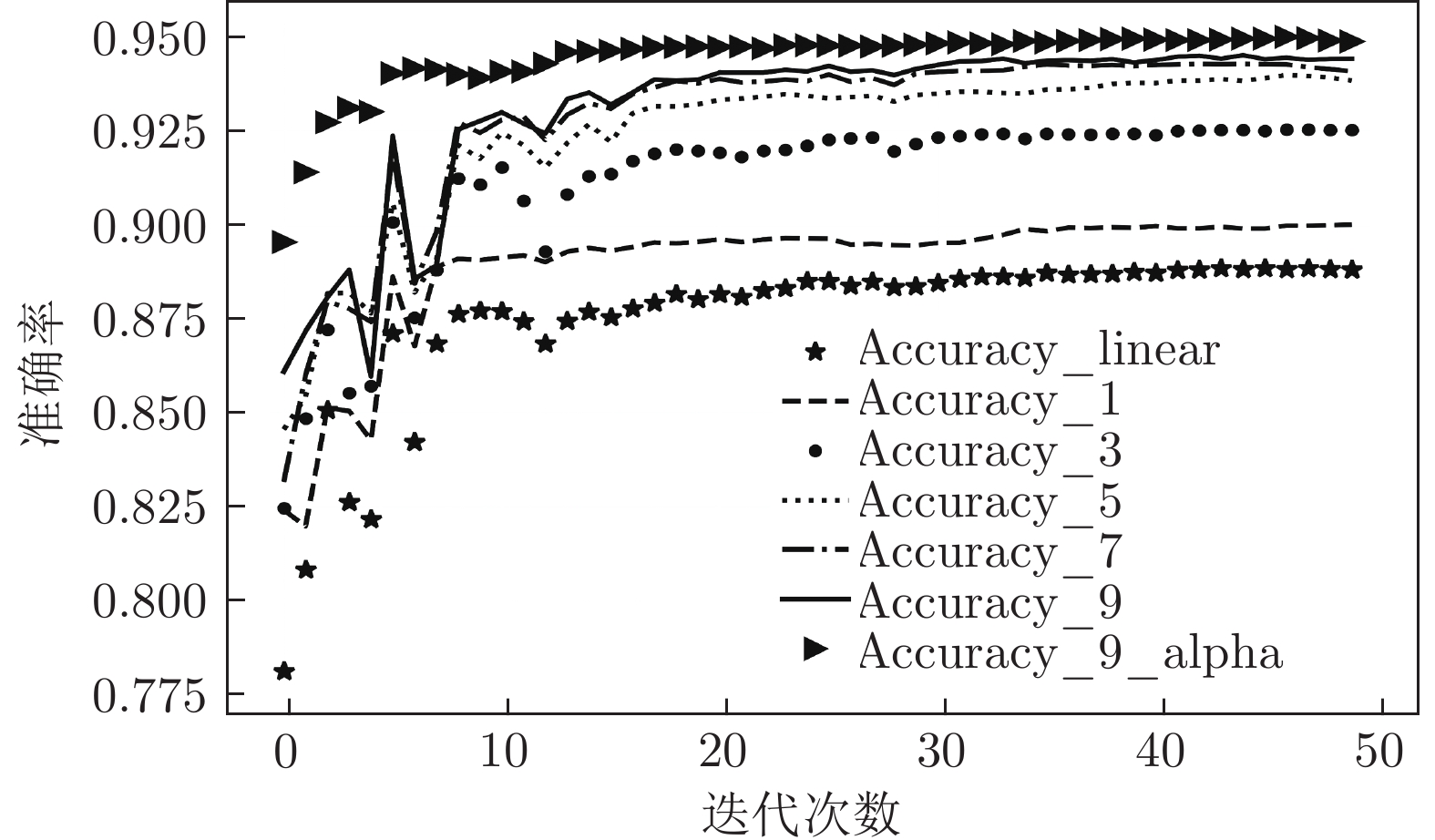
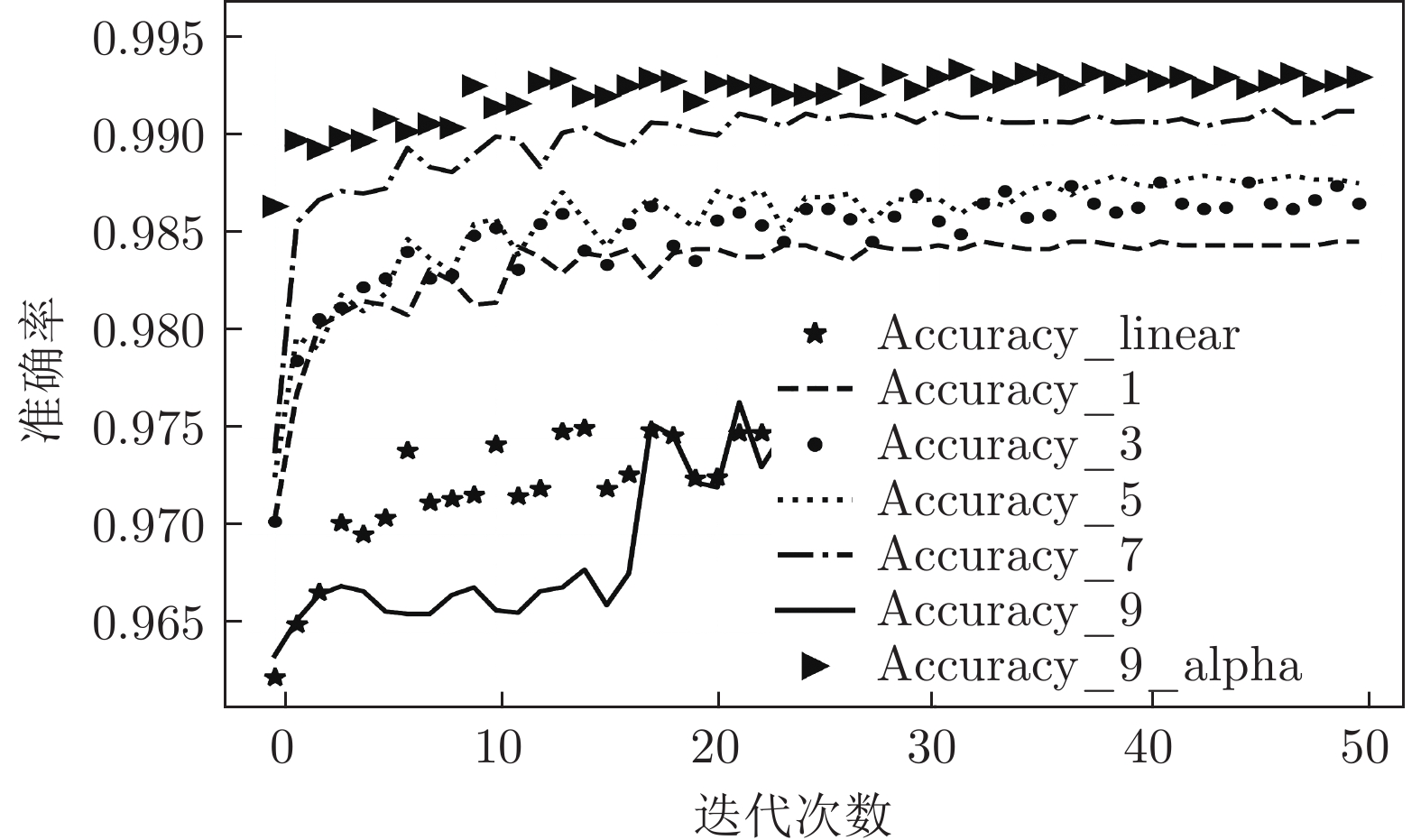
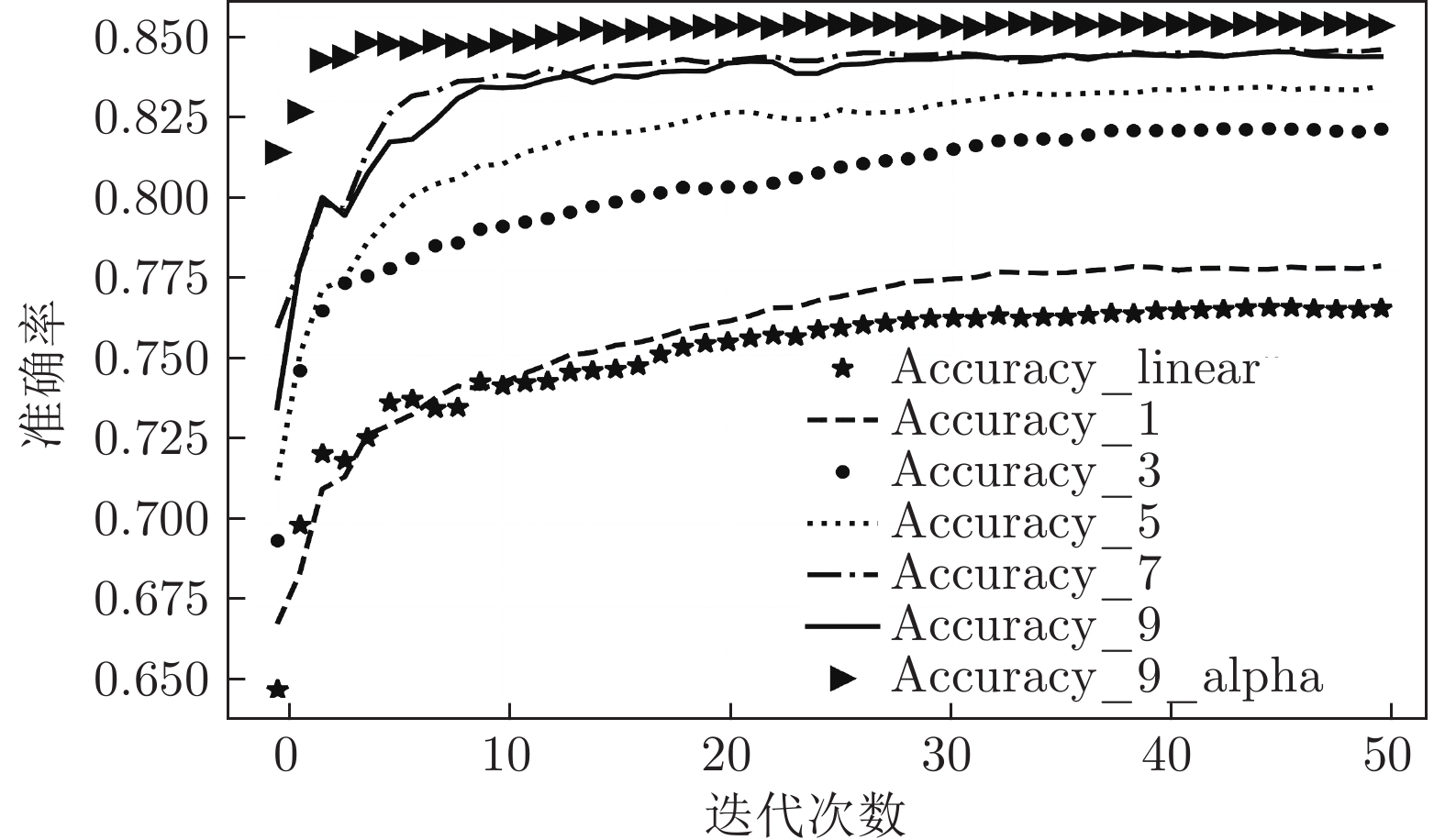
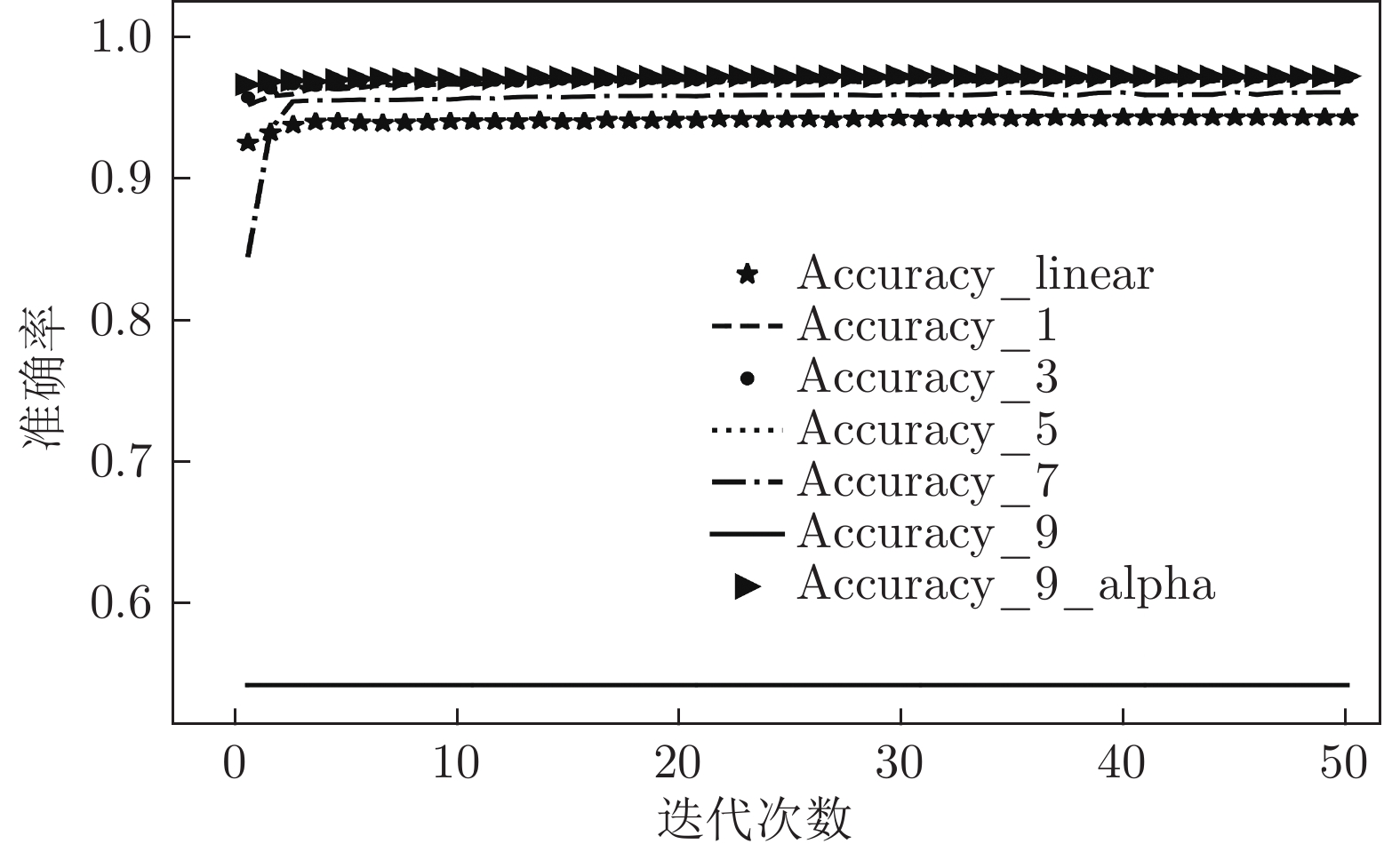
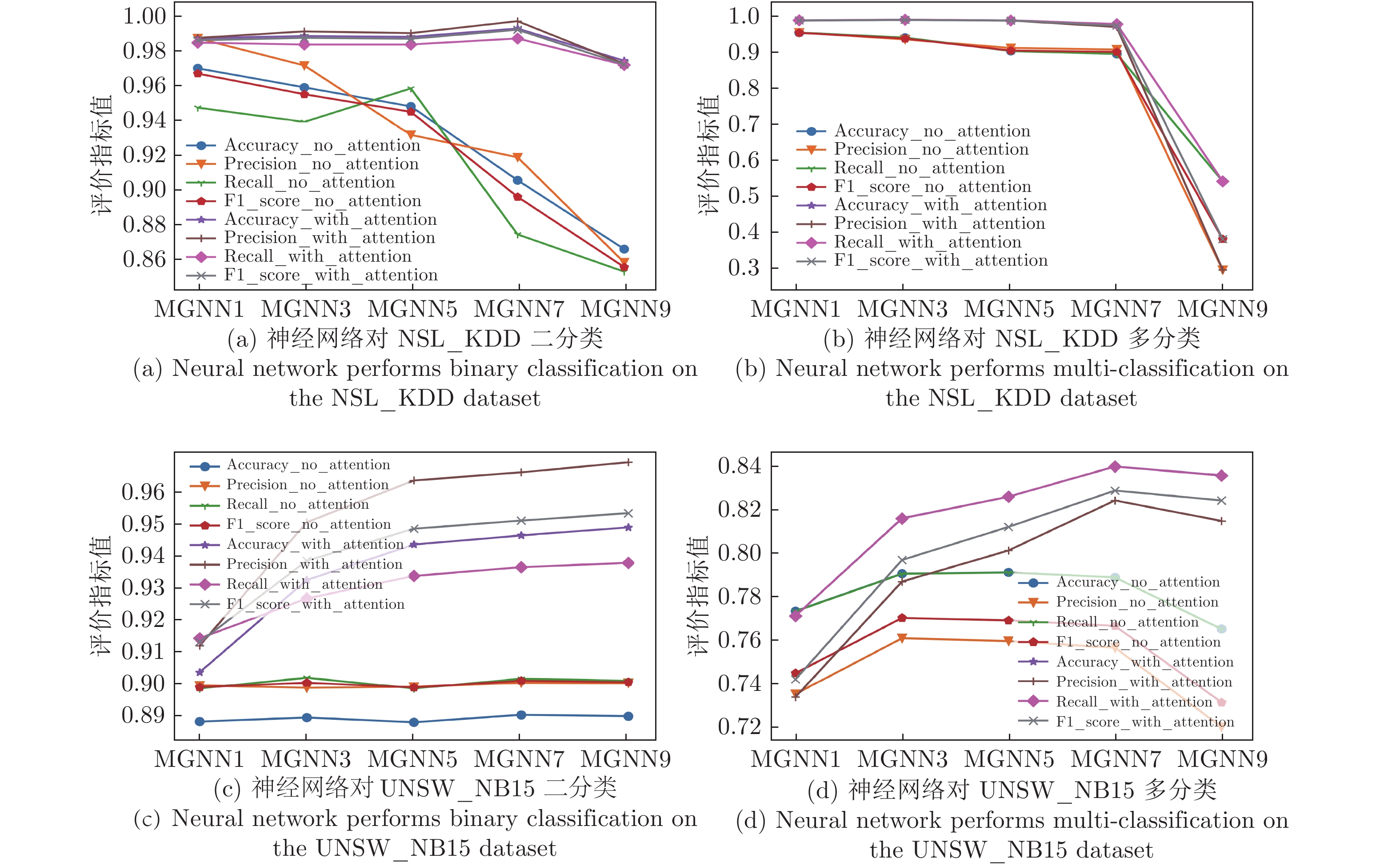
网络入侵样本数据特征间存在未知的非欧氏空间图结构关系, 深入挖掘并利用该关系可有效提升网络入侵检测方法的检测效能. 对此, 设计一种元图神经网络(Meta graph neural network, MGNN), MGNN能够对样本数据特征内部隐藏的图结构关系进行挖掘与利用, 在应对入侵检测问题时优势明显. 首先, 设计元图网络层(Meta graph network layer, MGNL), 挖掘出样本数据特征内部隐藏的图结构关系, 并利用该关系对样本数据的原始特征进行更新; 然后, 针对MGNN存在的图信息传播过程中父代信息湮灭现象提出反信息湮灭策略, 并设计了注意力损失函数, 简化MGNN中实现注意力机制的运算过程. KDD-NSL、UNSW-NB15、CICDoS2019数据集上的实验表明, 与经典深度学习算法深度神经网络 (Deep neural network, DNN)、卷积神经网络(Convolutional neural network, CNN)、循环神经网络(Recurrent neural network, RNN)、长短期记忆(Long short-term memory, LSTM)和传统机器学习算法支持向量机(Support vector machine, SVM)、决策树(Decision tree, DT)、随机森林(Random forest, RF)、K-最近邻(K-nearest neighbor, KNN)、逻辑回归(Logistic regression, LR)相比, MGNN在准确率、F1值、精确率、召回率评价指标上均具有良好效果.
网络入侵样本数据特征间存在未知的非欧氏空间图结构关系, 深入挖掘并利用该关系可有效提升网络入侵检测方法的检测效能. 对此, 设计一种元图神经网络(Meta graph neural network, MGNN), MGNN能够对样本数据特征内部隐藏的图结构关系进行挖掘与利用, 在应对入侵检测问题时优势明显. 首先, 设计元图网络层(Meta graph network layer, MGNL), 挖掘出样本数据特征内部隐藏的图结构关系, 并利用该关系对样本数据的原始特征进行更新; 然后, 针对MGNN存在的图信息传播过程中父代信息湮灭现象提出反信息湮灭策略, 并设计了注意力损失函数, 简化MGNN中实现注意力机制的运算过程. KDD-NSL、UNSW-NB15、CICDoS2019数据集上的实验表明, 与经典深度学习算法深度神经网络 (Deep neural network, DNN)、卷积神经网络(Convolutional neural network, CNN)、循环神经网络(Recurrent neural network, RNN)、长短期记忆(Long short-term memory, LSTM)和传统机器学习算法支持向量机(Support vector machine, SVM)、决策树(Decision tree, DT)、随机森林(Random forest, RF)、K-最近邻(K-nearest neighbor, KNN)、逻辑回归(Logistic regression, LR)相比, MGNN在准确率、F1值、精确率、召回率评价指标上均具有良好效果.
2023, 49(7): 1549-1557.
doi: 10.16383/j.aas.c211195
摘要:
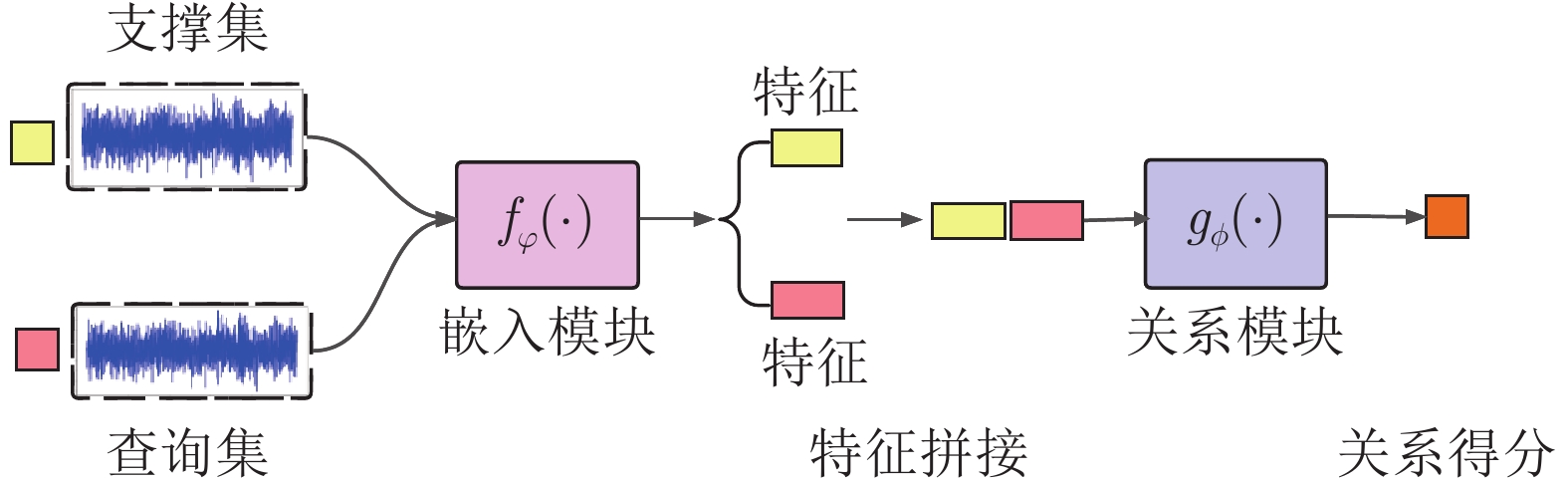
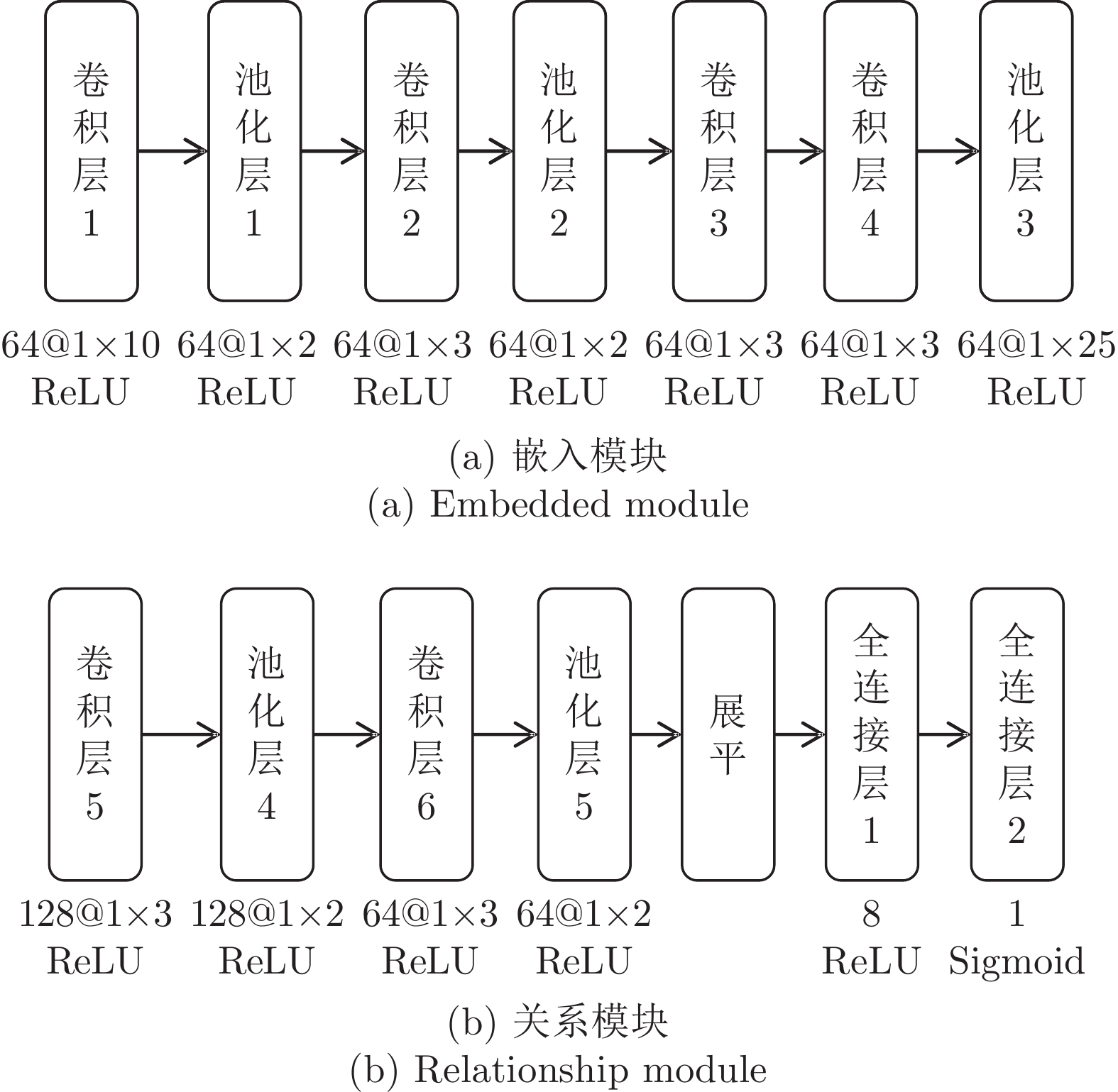
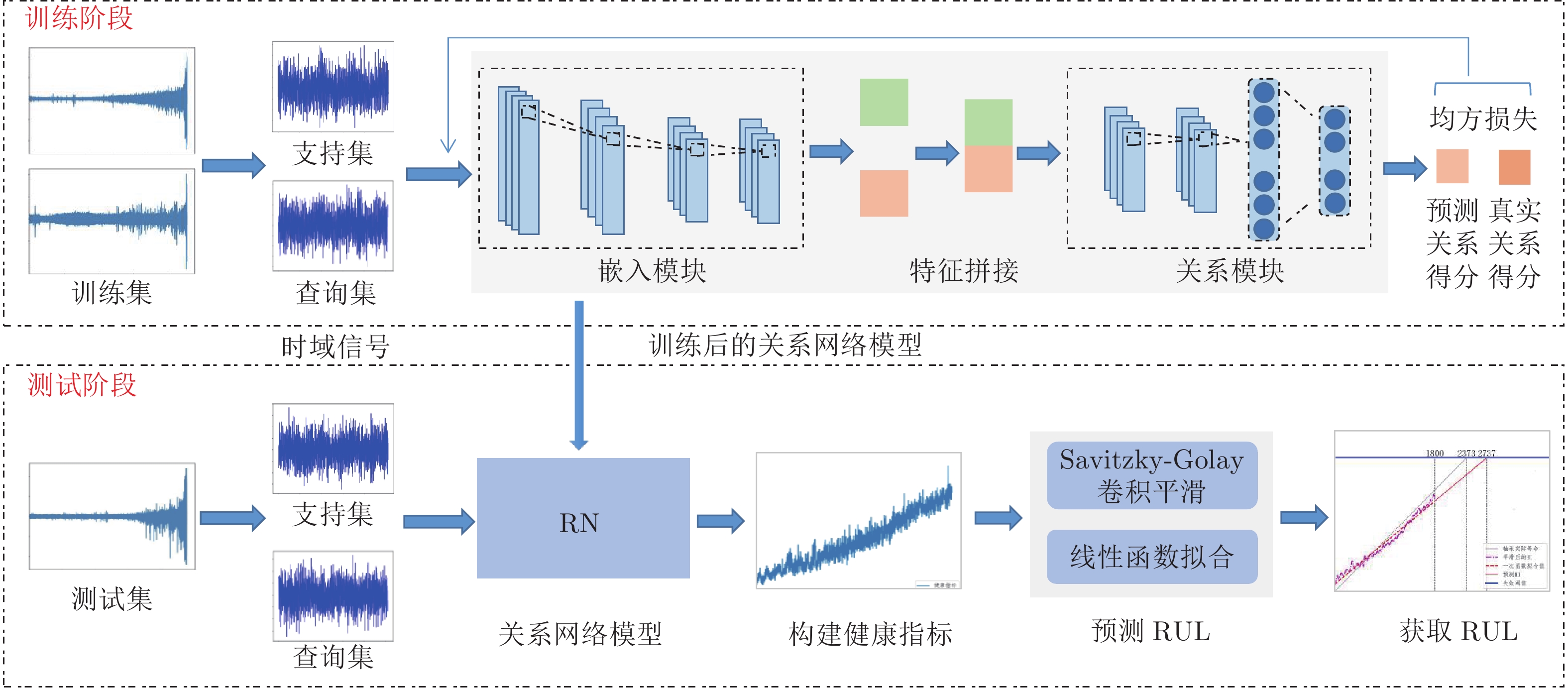
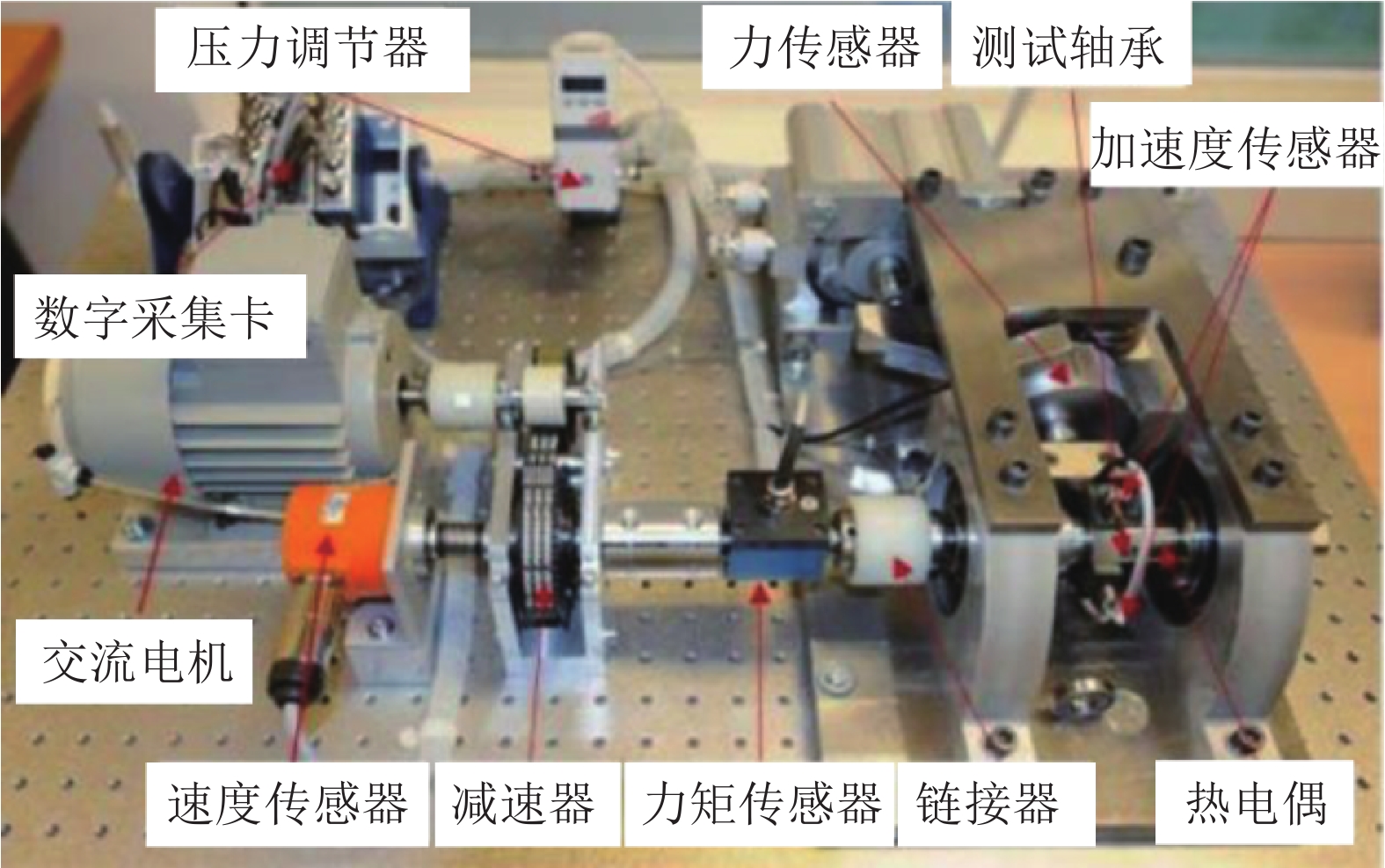
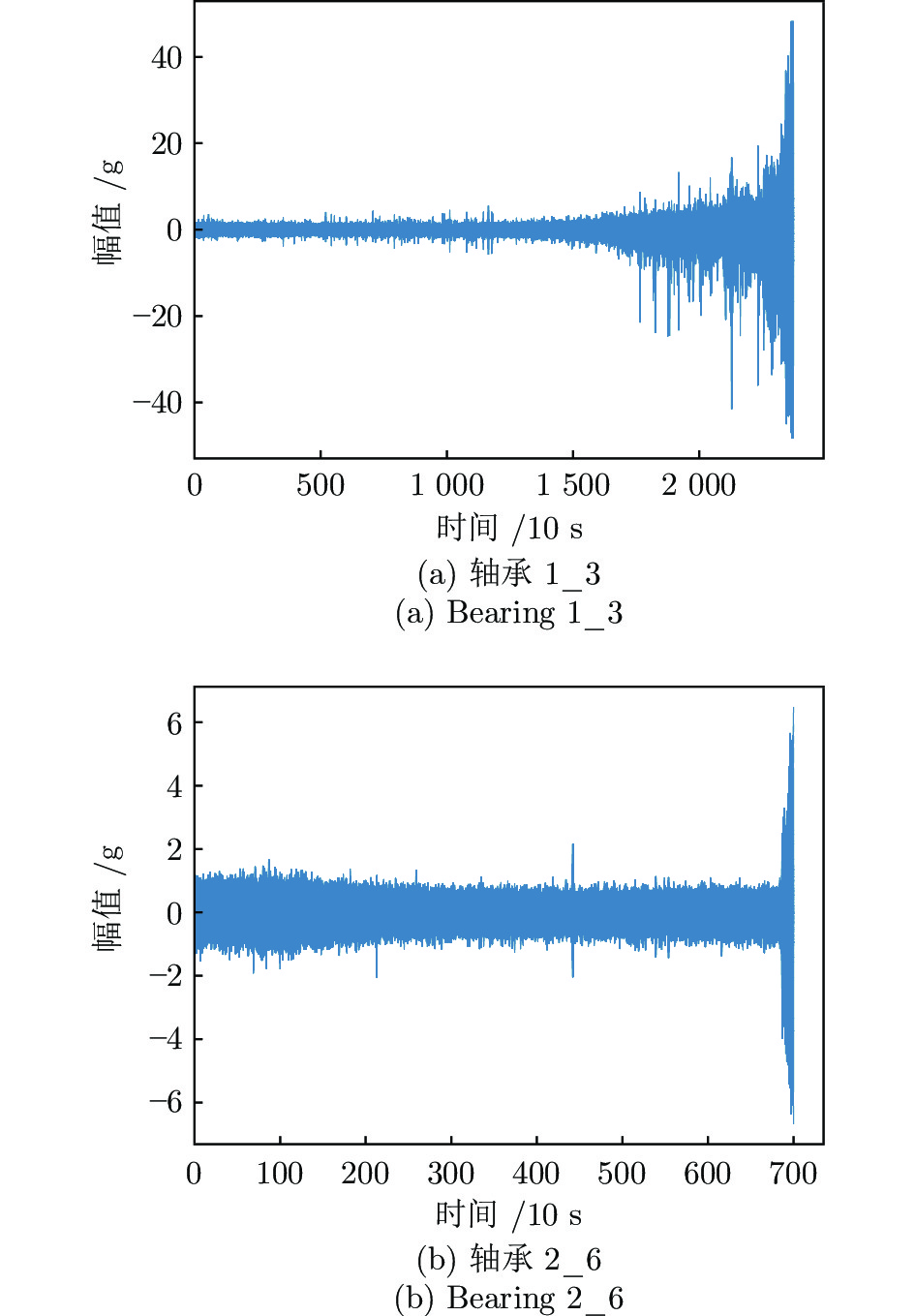
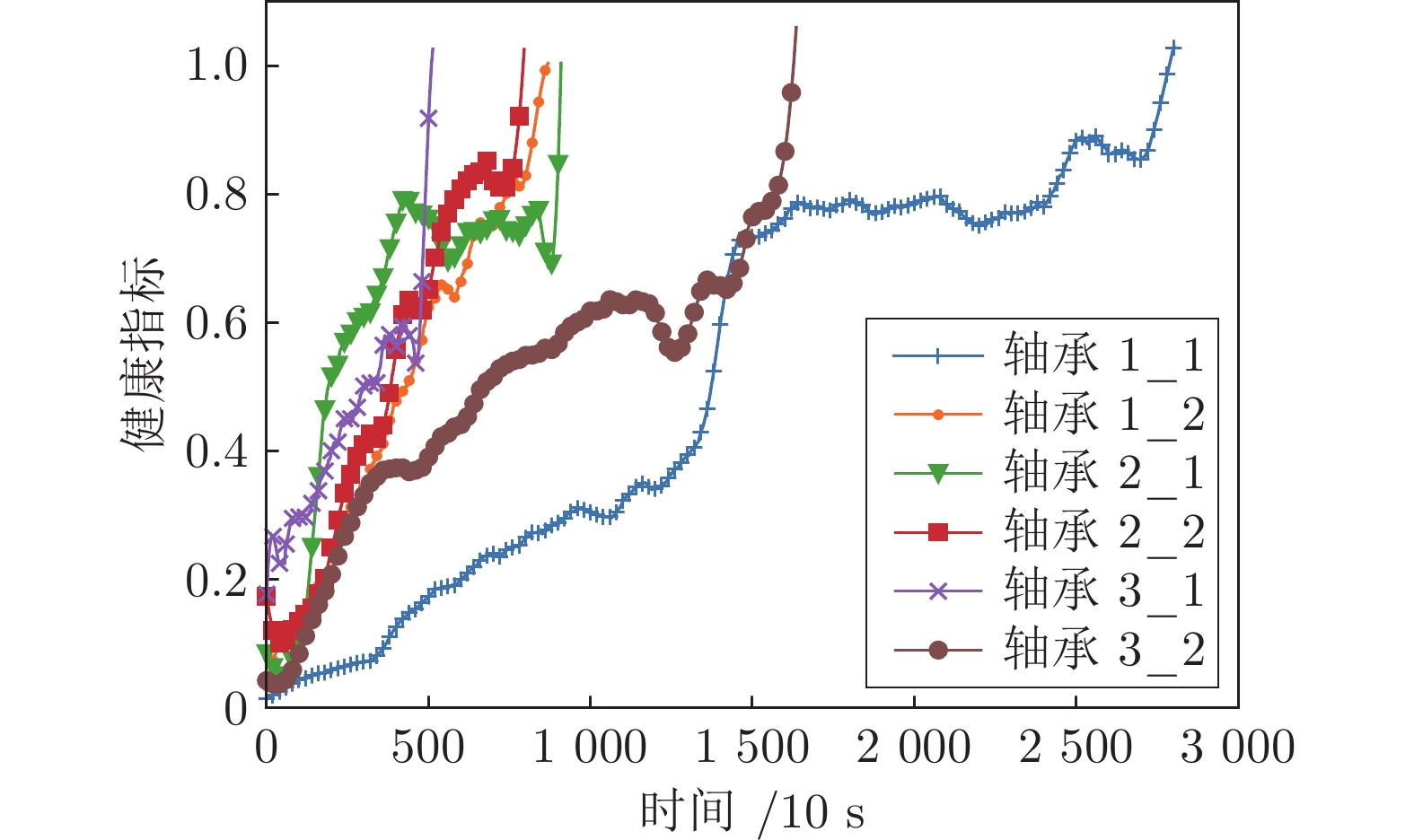
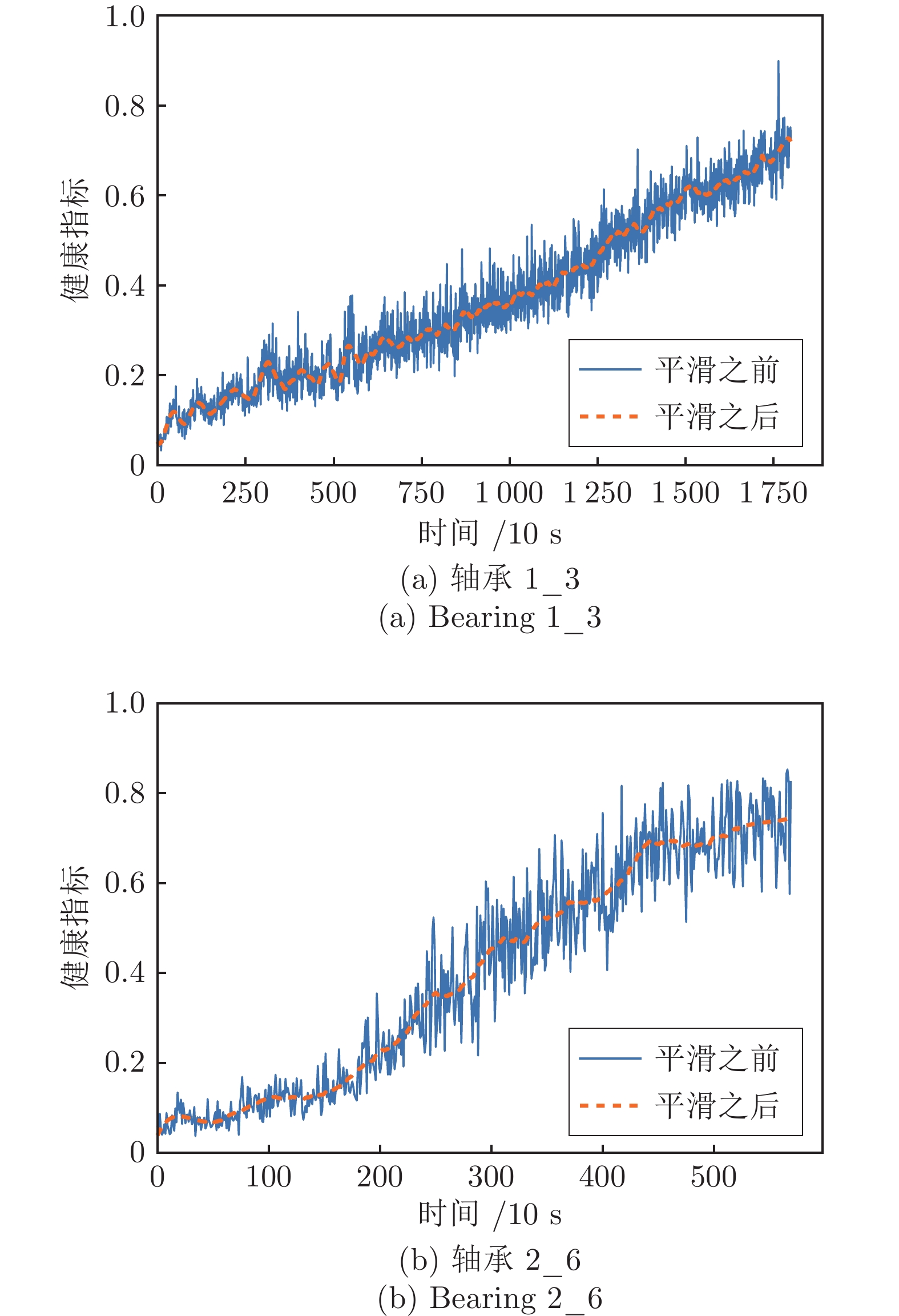
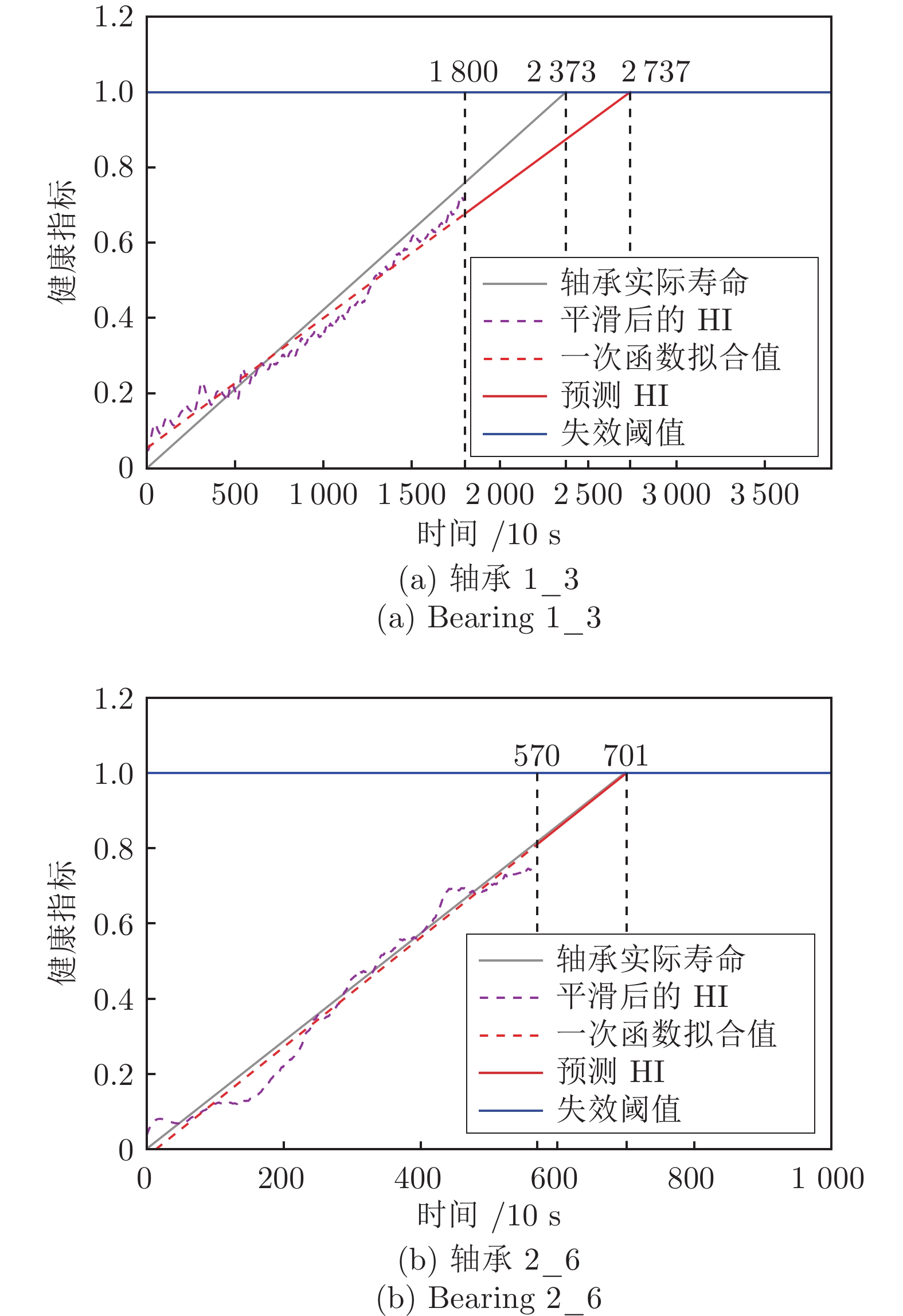
针对轴承全寿命周期数据获取困难、训练样本少的问题, 提出一种基于关系网络的轴承剩余使用寿命(Remaining useful life, RUL)预测方法. 关系网络是一种基于度量的元学习方法, 在少量训练样本下, 具有快速学习新任务的优点. 设计了一种基于关系网络的轴承健康评估模型, 利用关系网络的嵌入模块提取轴承状态特征, 利用关系模块度量轴承状态特征之间的相似性, 基于相似性构建轴承健康指标(Health indicator, HI); 对健康指标进行Savitzky-Golay滤波平滑处理, 降低振荡对预测结果的影响; 最后利用线性函数对健康指标进行拟合, 得到轴承RUL预测值. 为验证所提方法的有效性, 在PHM2012轴承实测数据集上进行实验. 结果表明, 所得健康指标能够反映轴承的退化趋势, 所得RUL预测结果与空间卷积长短期记忆神经网络 (Convolutional long short-term memory neural network, ConvLSTM)、Transformer、循环神经网络(Recurrent neural network, RNN)、卷积神经网络(Convolutional neural network, CNN) + 长短期记忆网络 (long short-term memory network, LSTM )、编码器−解码器(Encoder-decoder) + 注意力机制 (Attention mechanism)方法相比, 误差百分比分别减少了1.67%, 3.40%, 9.02%, 13.71%, 30.48%. 该方法在少量训练样本的基础上可以取得较好的预测结果, 具有一定的应用价值.
针对轴承全寿命周期数据获取困难、训练样本少的问题, 提出一种基于关系网络的轴承剩余使用寿命(Remaining useful life, RUL)预测方法. 关系网络是一种基于度量的元学习方法, 在少量训练样本下, 具有快速学习新任务的优点. 设计了一种基于关系网络的轴承健康评估模型, 利用关系网络的嵌入模块提取轴承状态特征, 利用关系模块度量轴承状态特征之间的相似性, 基于相似性构建轴承健康指标(Health indicator, HI); 对健康指标进行Savitzky-Golay滤波平滑处理, 降低振荡对预测结果的影响; 最后利用线性函数对健康指标进行拟合, 得到轴承RUL预测值. 为验证所提方法的有效性, 在PHM2012轴承实测数据集上进行实验. 结果表明, 所得健康指标能够反映轴承的退化趋势, 所得RUL预测结果与空间卷积长短期记忆神经网络 (Convolutional long short-term memory neural network, ConvLSTM)、Transformer、循环神经网络(Recurrent neural network, RNN)、卷积神经网络(Convolutional neural network, CNN) + 长短期记忆网络 (long short-term memory network, LSTM )、编码器−解码器(Encoder-decoder) + 注意力机制 (Attention mechanism)方法相比, 误差百分比分别减少了1.67%, 3.40%, 9.02%, 13.71%, 30.48%. 该方法在少量训练样本的基础上可以取得较好的预测结果, 具有一定的应用价值.
2023, 49(7): 1558-1572.
doi: 10.16383/j.aas.c220344
摘要:
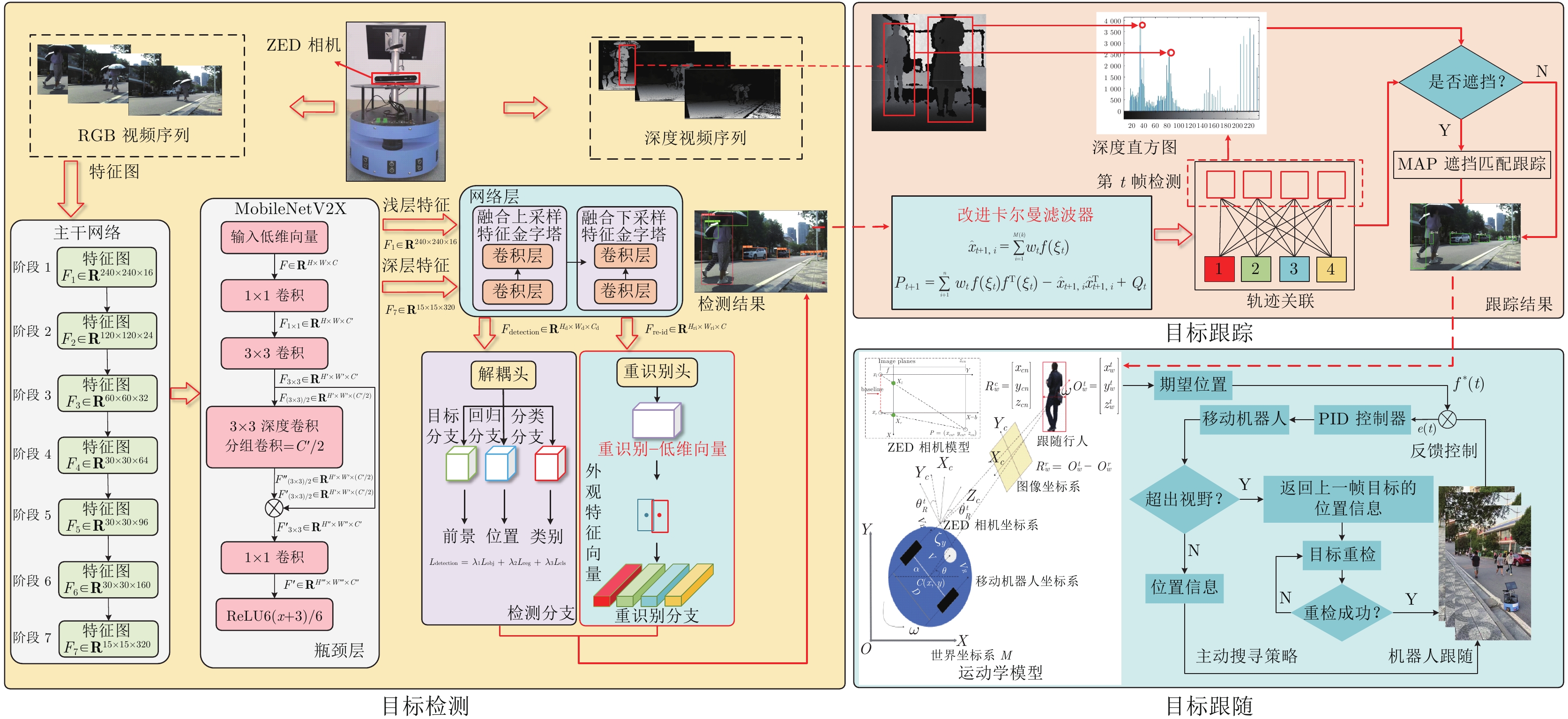
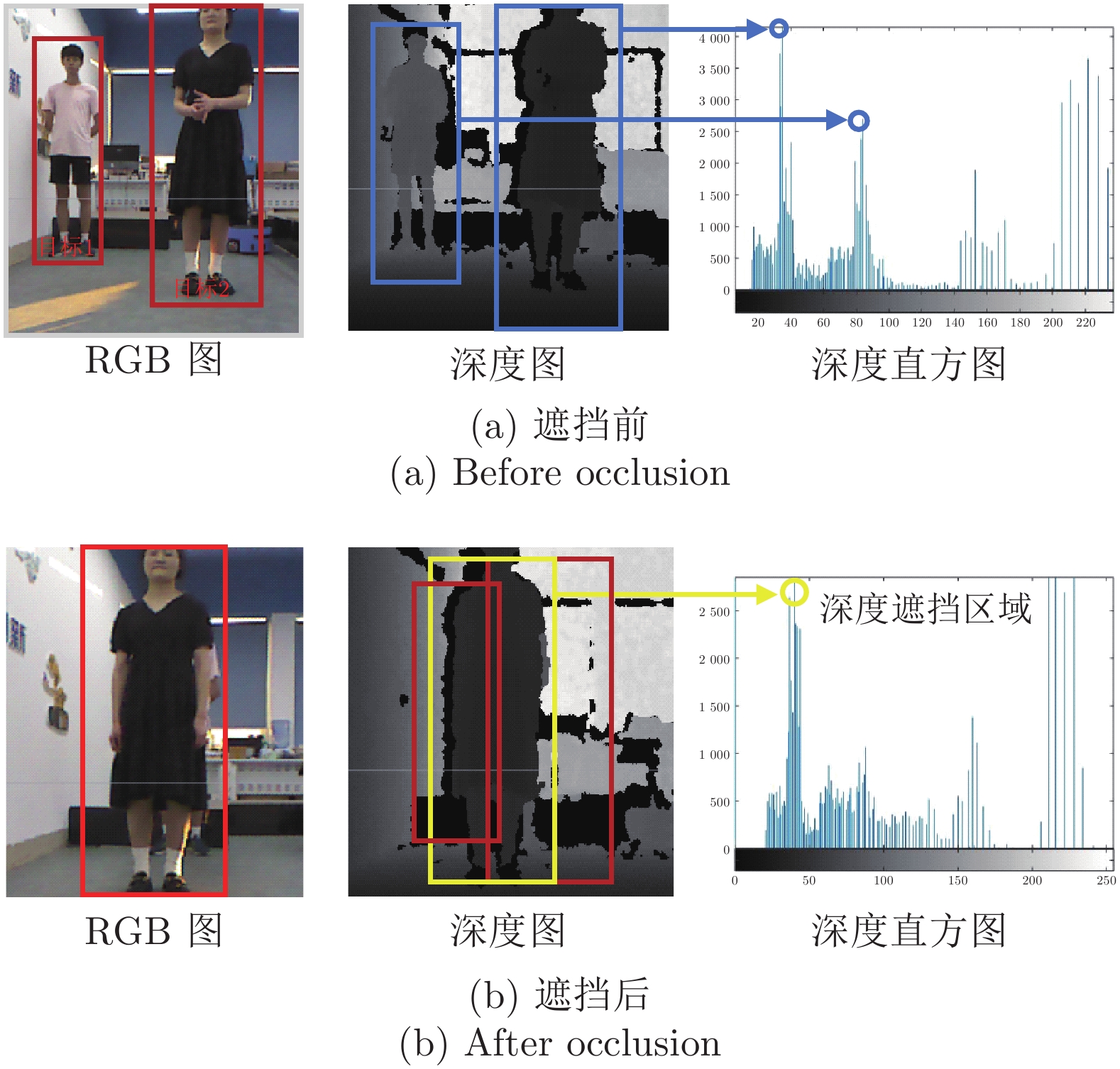
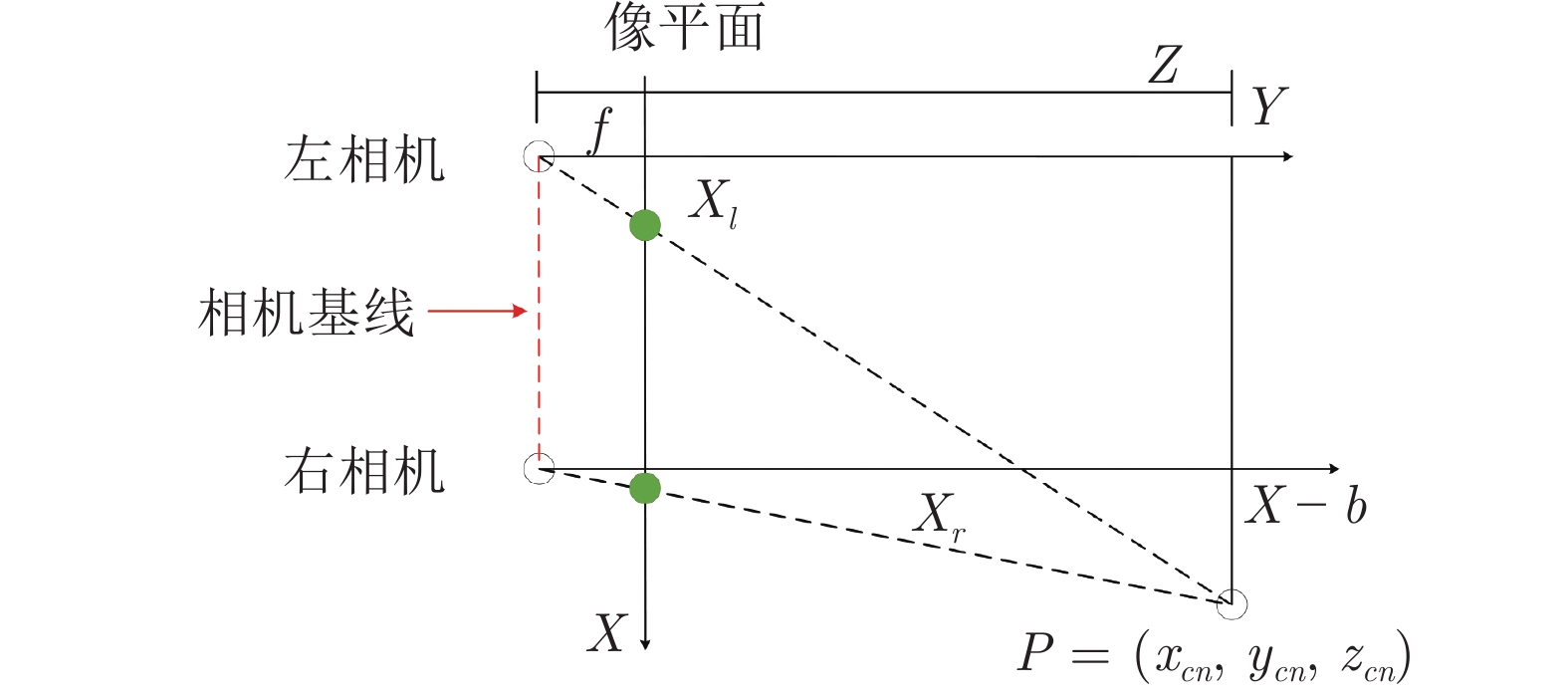
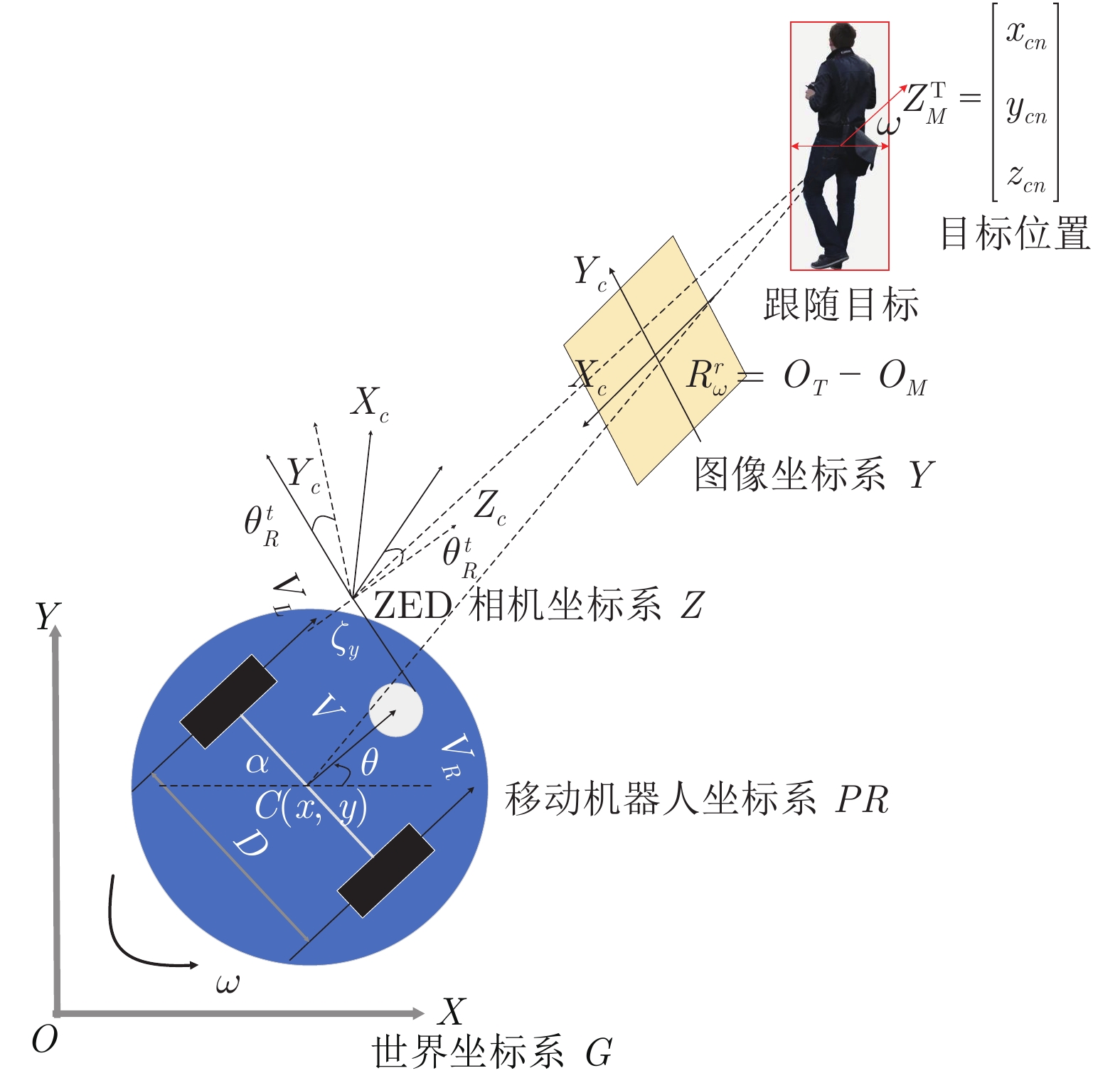
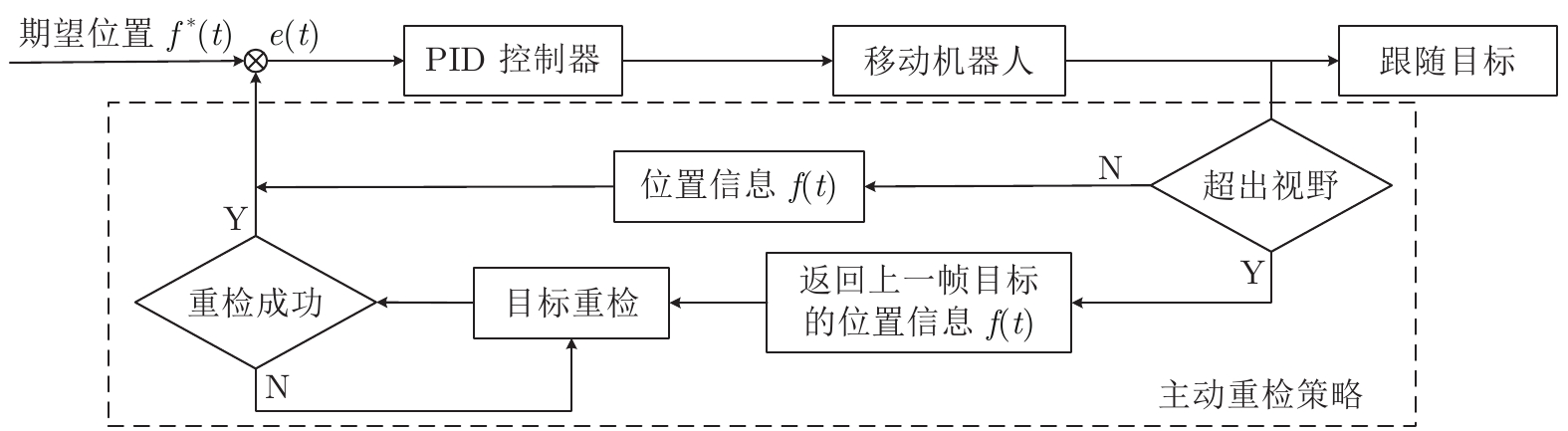
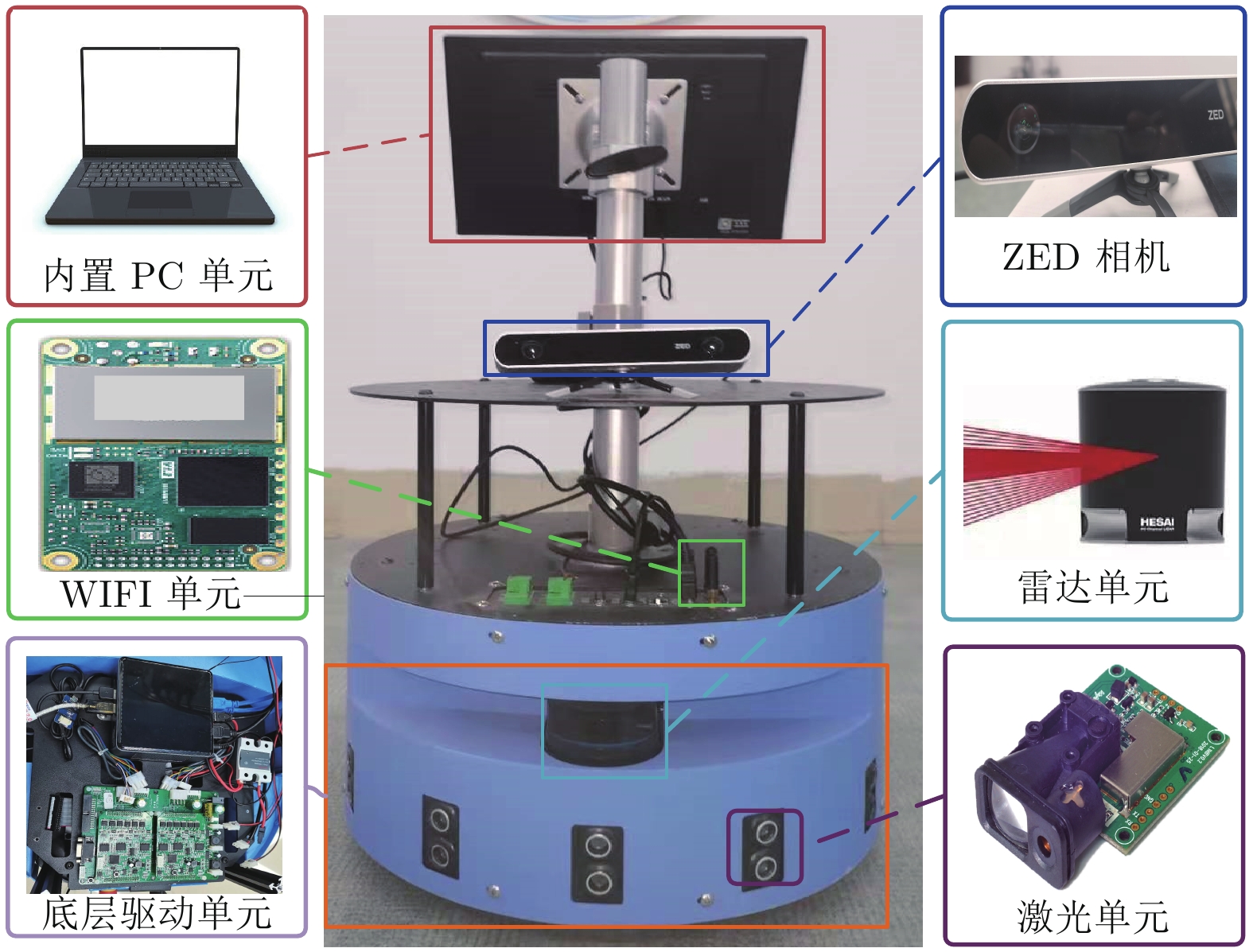
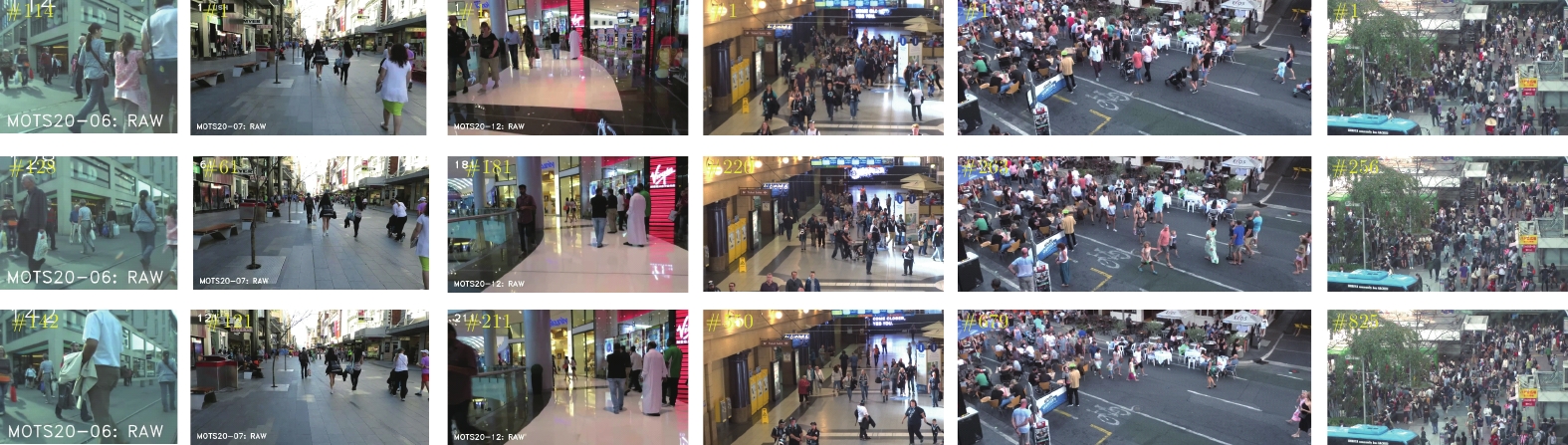
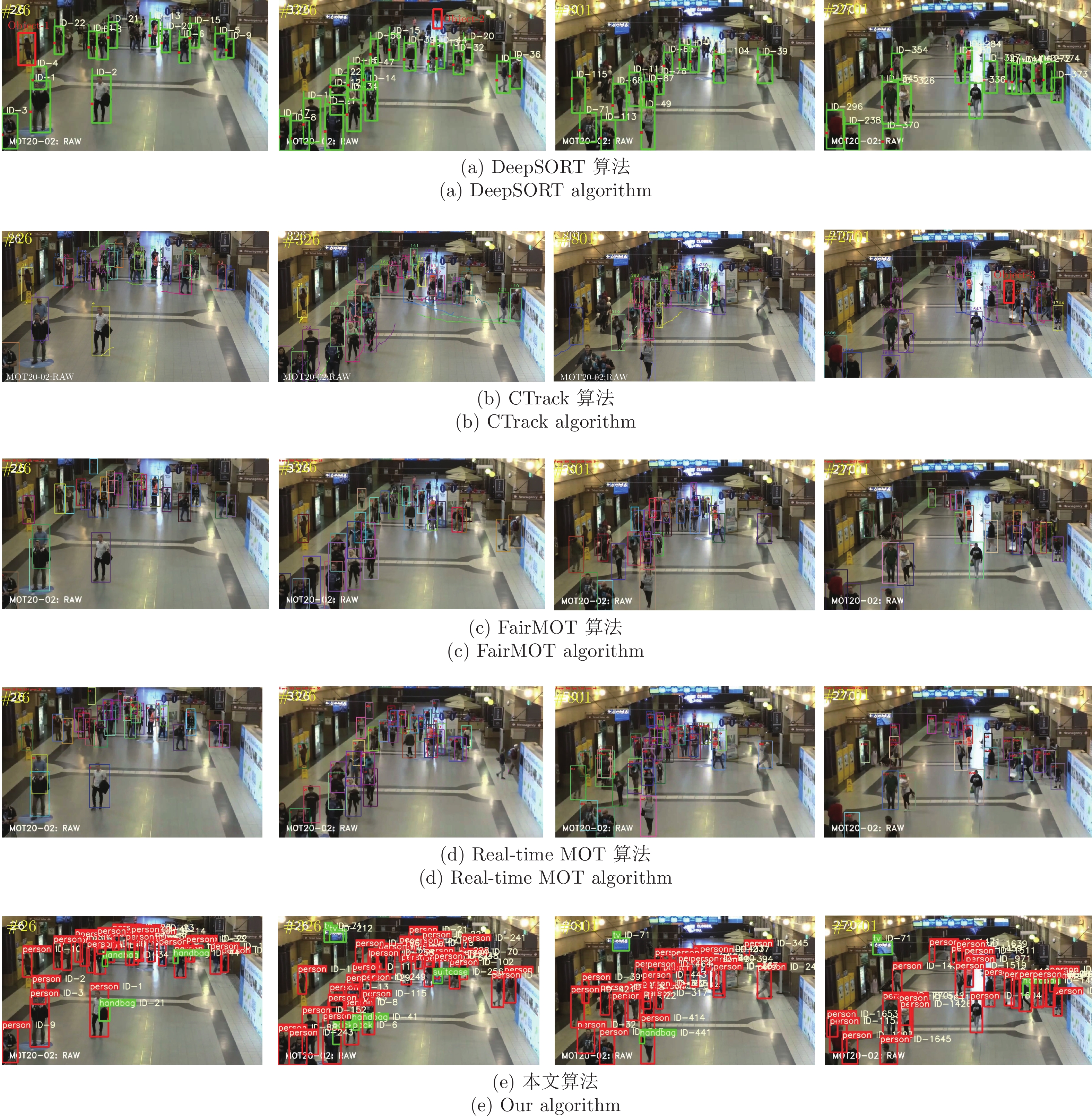
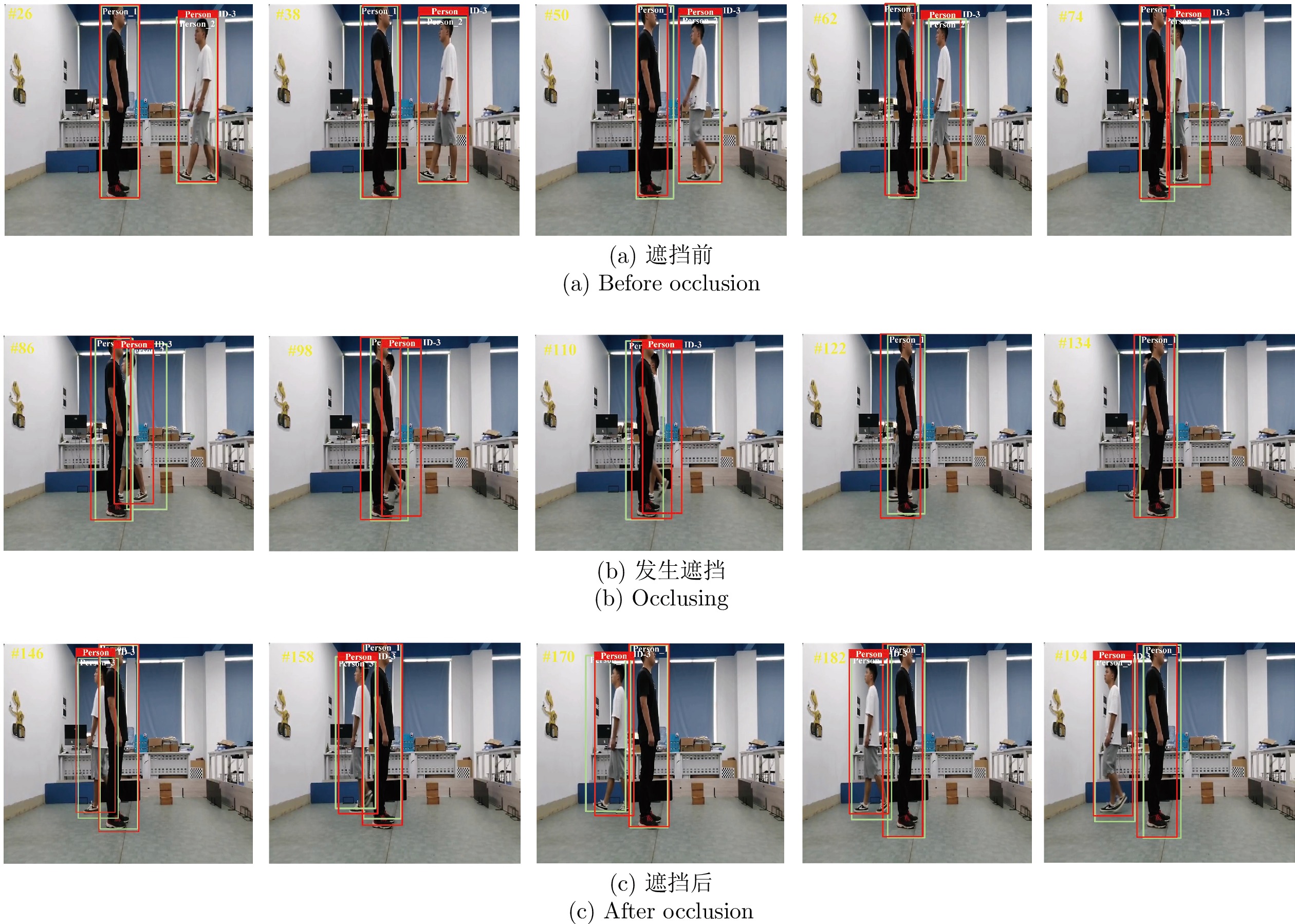
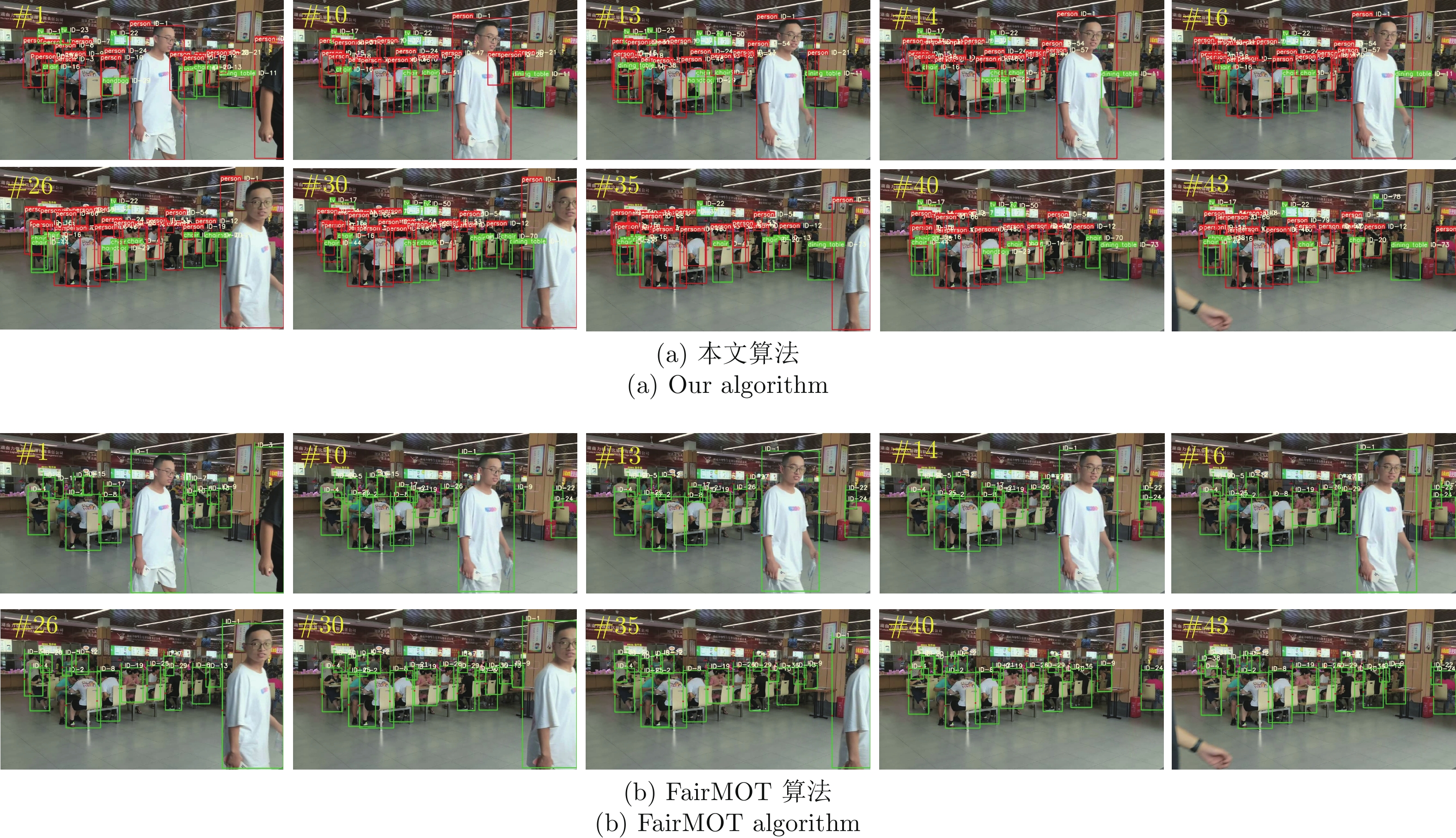
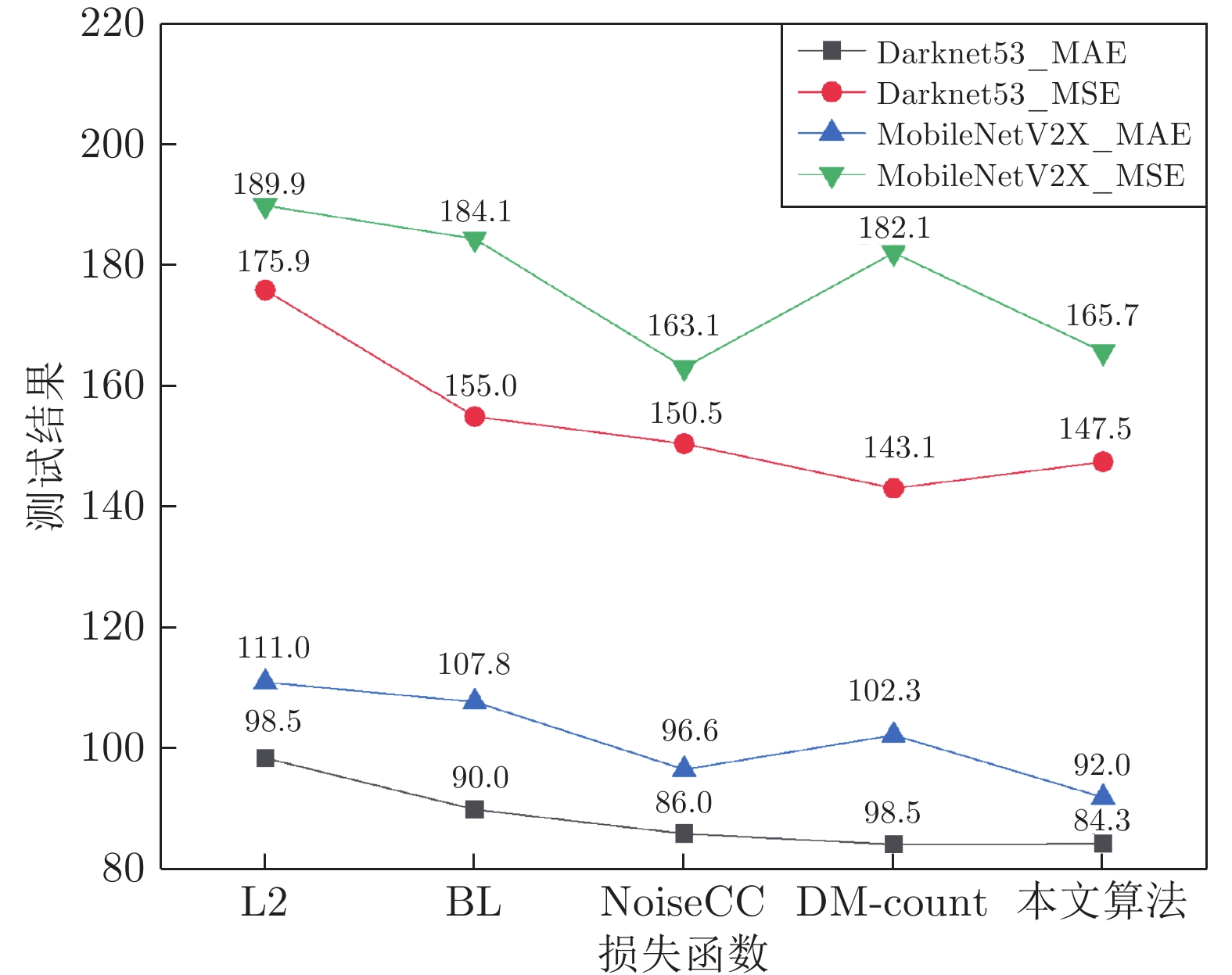
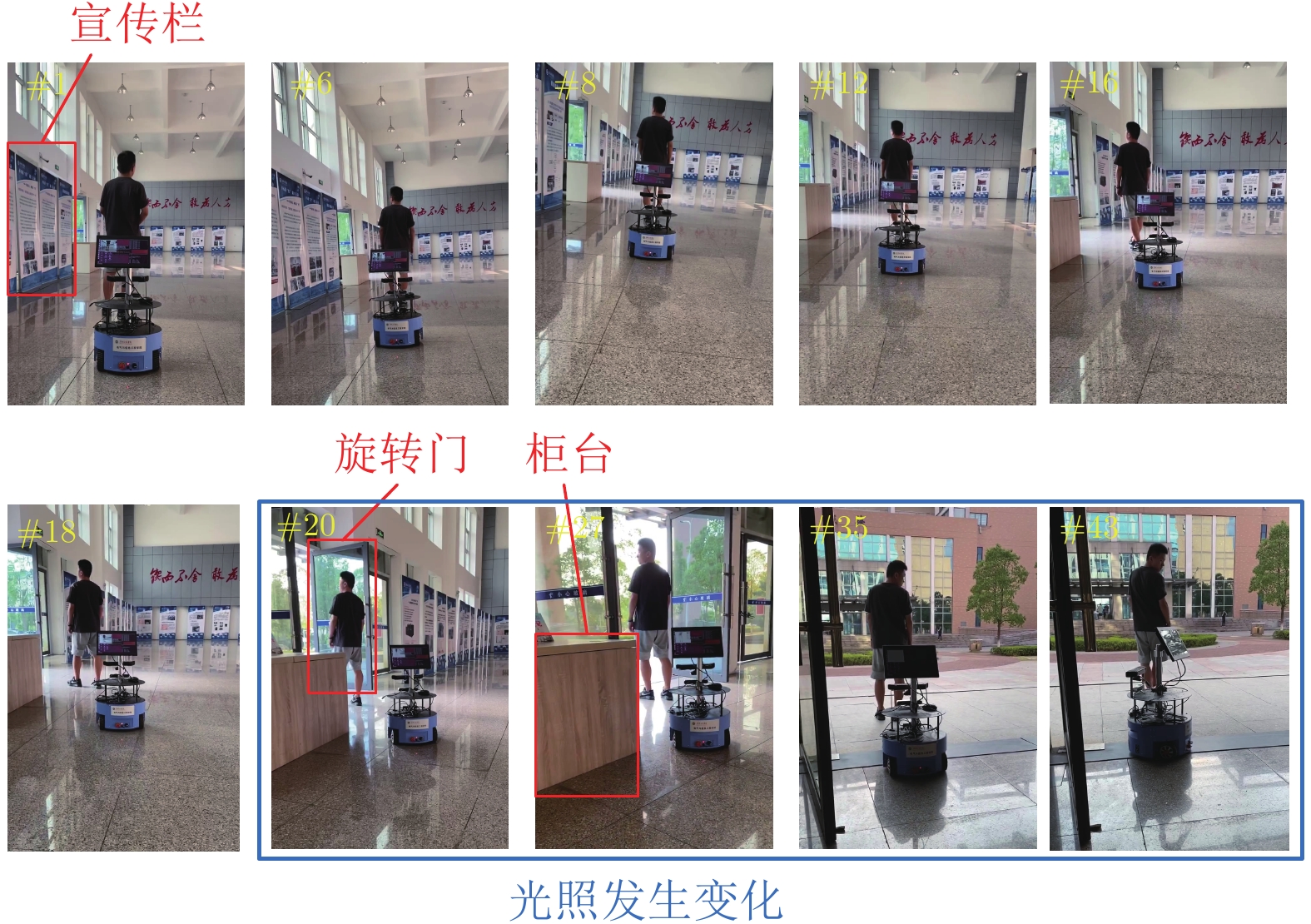
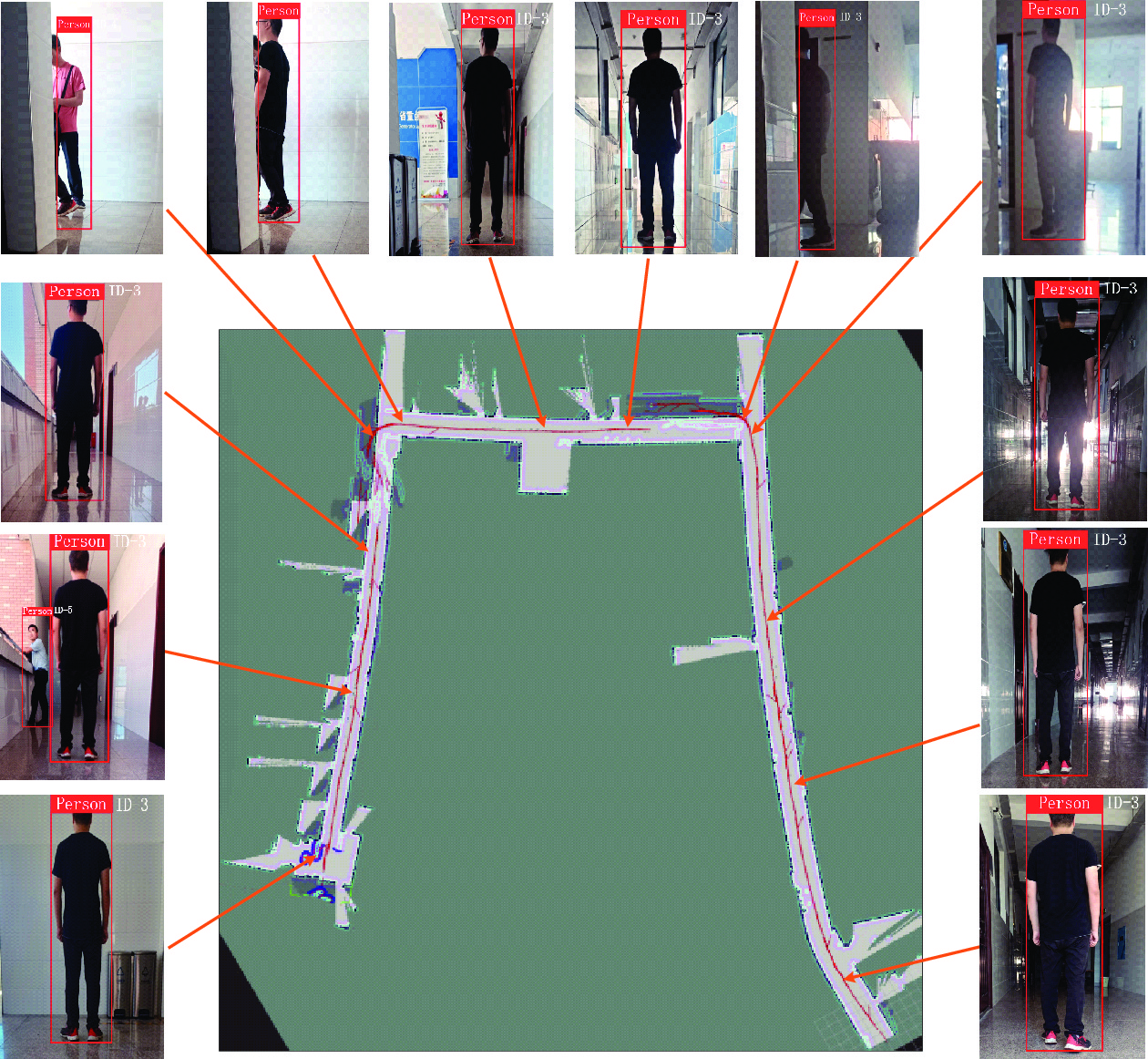
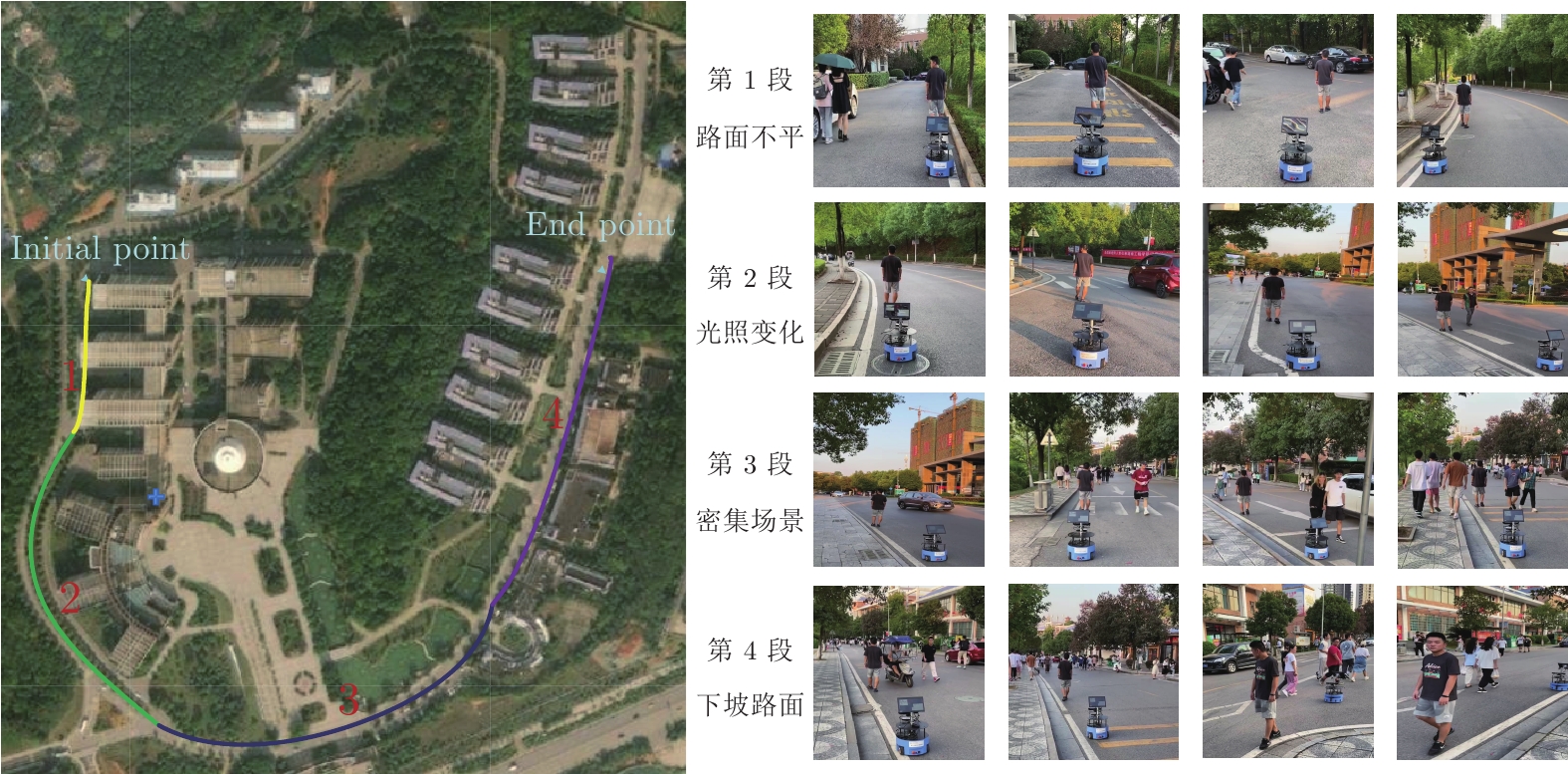
针对移动机器人在复杂场景中难以稳定跟随目标的问题, 提出基于改进YOLOX的移动机器人目标跟随方法, 主要包括目标检测、目标跟踪以及目标跟随三个部分. 首先, 以 YOLOX 网络为基础, 在其框架下将主干网络采用轻量化网络 MobileNetV2X, 提高复杂场景中目标检测的实时性. 然后, 通过改进的卡尔曼滤波器获取目标跟踪状态并采用数据关联进行目标匹配, 同时通过深度直方图判定目标发生遮挡后, 采用深度概率信息约束及最大后验概率(Maximum a posteriori, MAP)进行匹配跟踪, 确保机器人在遮挡情况下稳定跟踪目标. 再采用基于视觉伺服控制的目标跟随算法, 当跟踪目标丢失时, 引入重识别特征主动搜寻目标实现目标跟随. 最后, 在公开数据集上与具有代表性的目标跟随方法进行了定性和定量实验, 同时在真实场景中完成了移动机器人目标跟随实验, 实验结果均验证了所提方法具有较好的鲁棒性和实时性.
针对移动机器人在复杂场景中难以稳定跟随目标的问题, 提出基于改进YOLOX的移动机器人目标跟随方法, 主要包括目标检测、目标跟踪以及目标跟随三个部分. 首先, 以 YOLOX 网络为基础, 在其框架下将主干网络采用轻量化网络 MobileNetV2X, 提高复杂场景中目标检测的实时性. 然后, 通过改进的卡尔曼滤波器获取目标跟踪状态并采用数据关联进行目标匹配, 同时通过深度直方图判定目标发生遮挡后, 采用深度概率信息约束及最大后验概率(Maximum a posteriori, MAP)进行匹配跟踪, 确保机器人在遮挡情况下稳定跟踪目标. 再采用基于视觉伺服控制的目标跟随算法, 当跟踪目标丢失时, 引入重识别特征主动搜寻目标实现目标跟随. 最后, 在公开数据集上与具有代表性的目标跟随方法进行了定性和定量实验, 同时在真实场景中完成了移动机器人目标跟随实验, 实验结果均验证了所提方法具有较好的鲁棒性和实时性.
2023, 49(7): 1573-1586.
doi: 10.16383/j.aas.c201061
摘要:
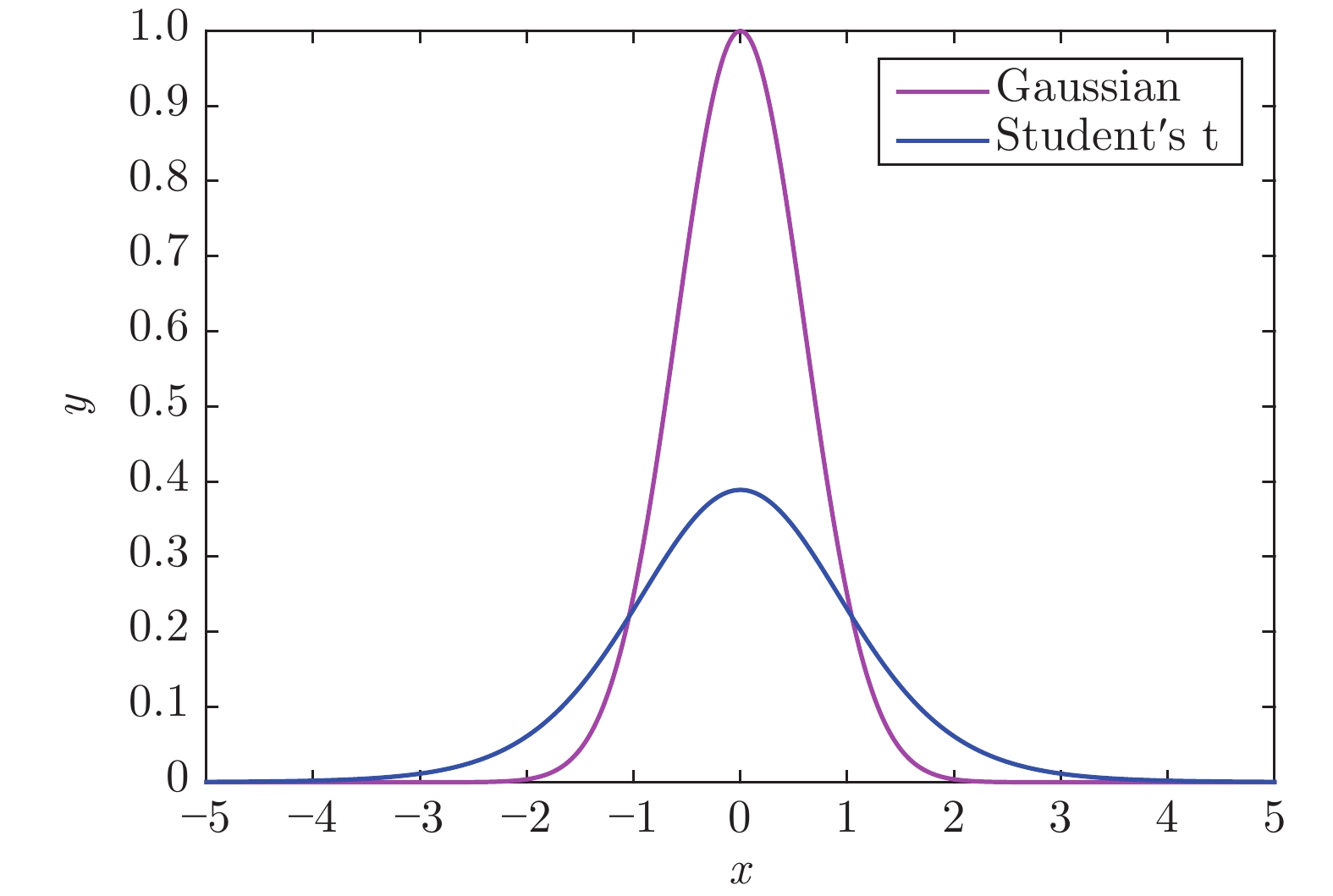
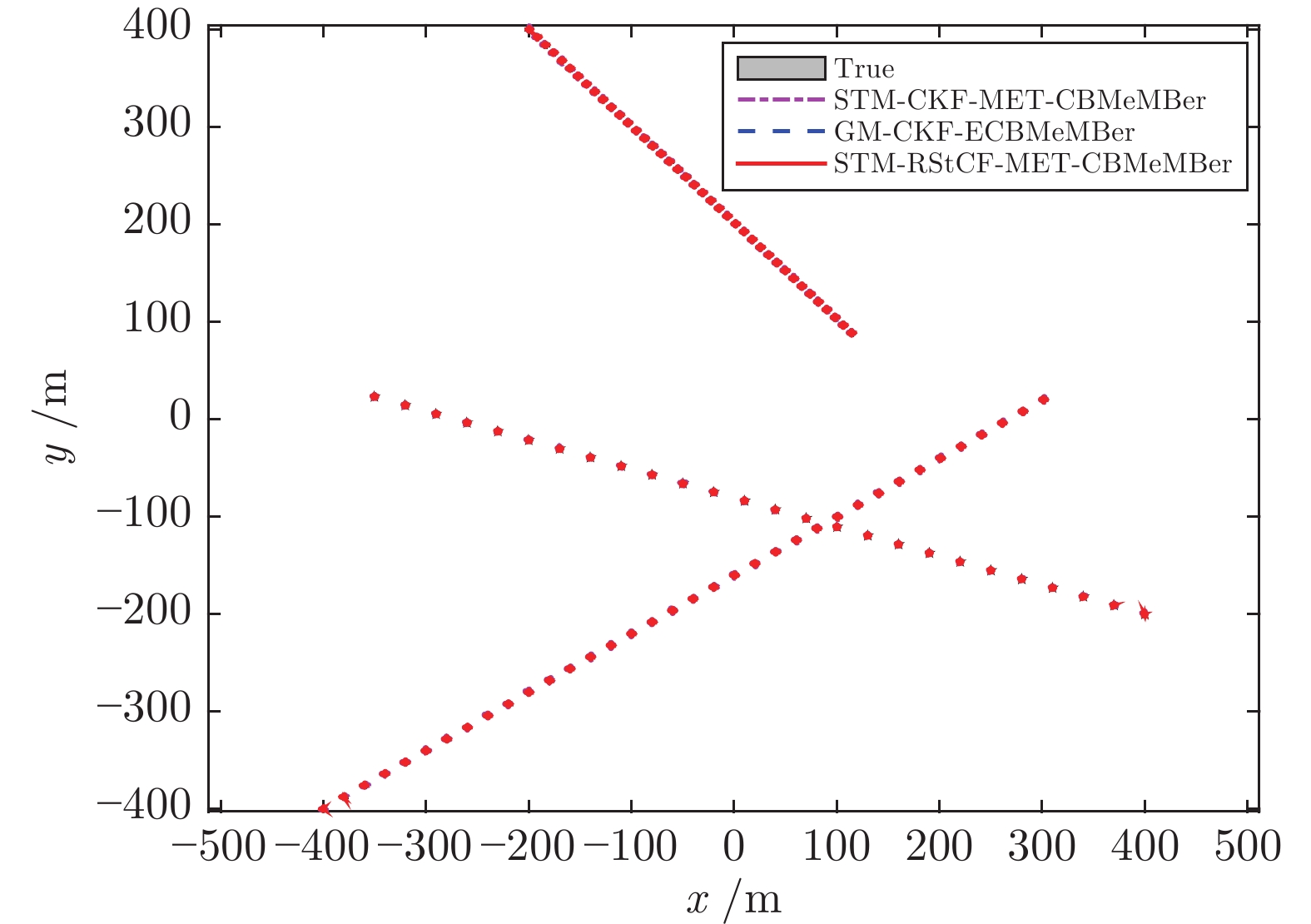
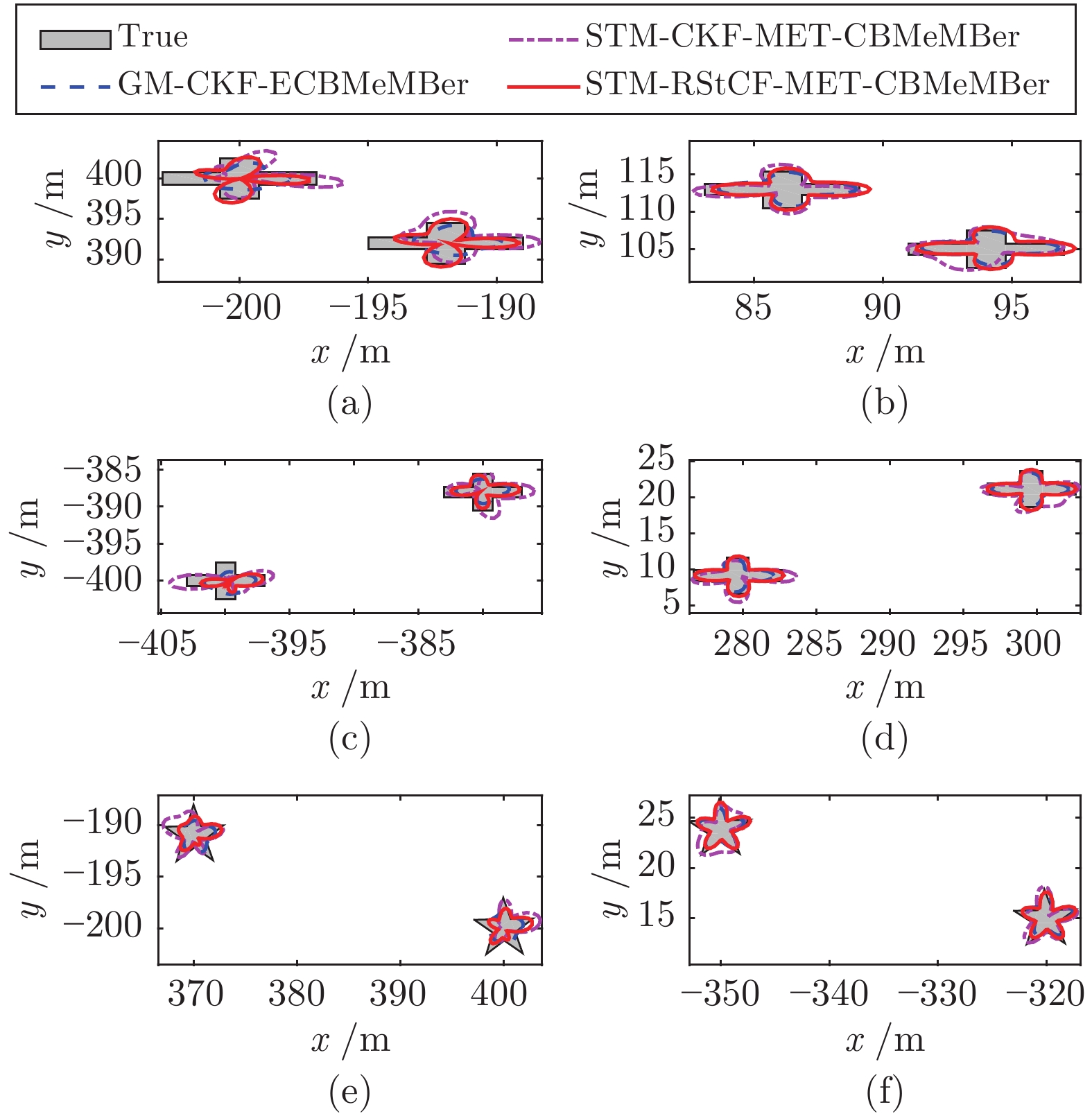
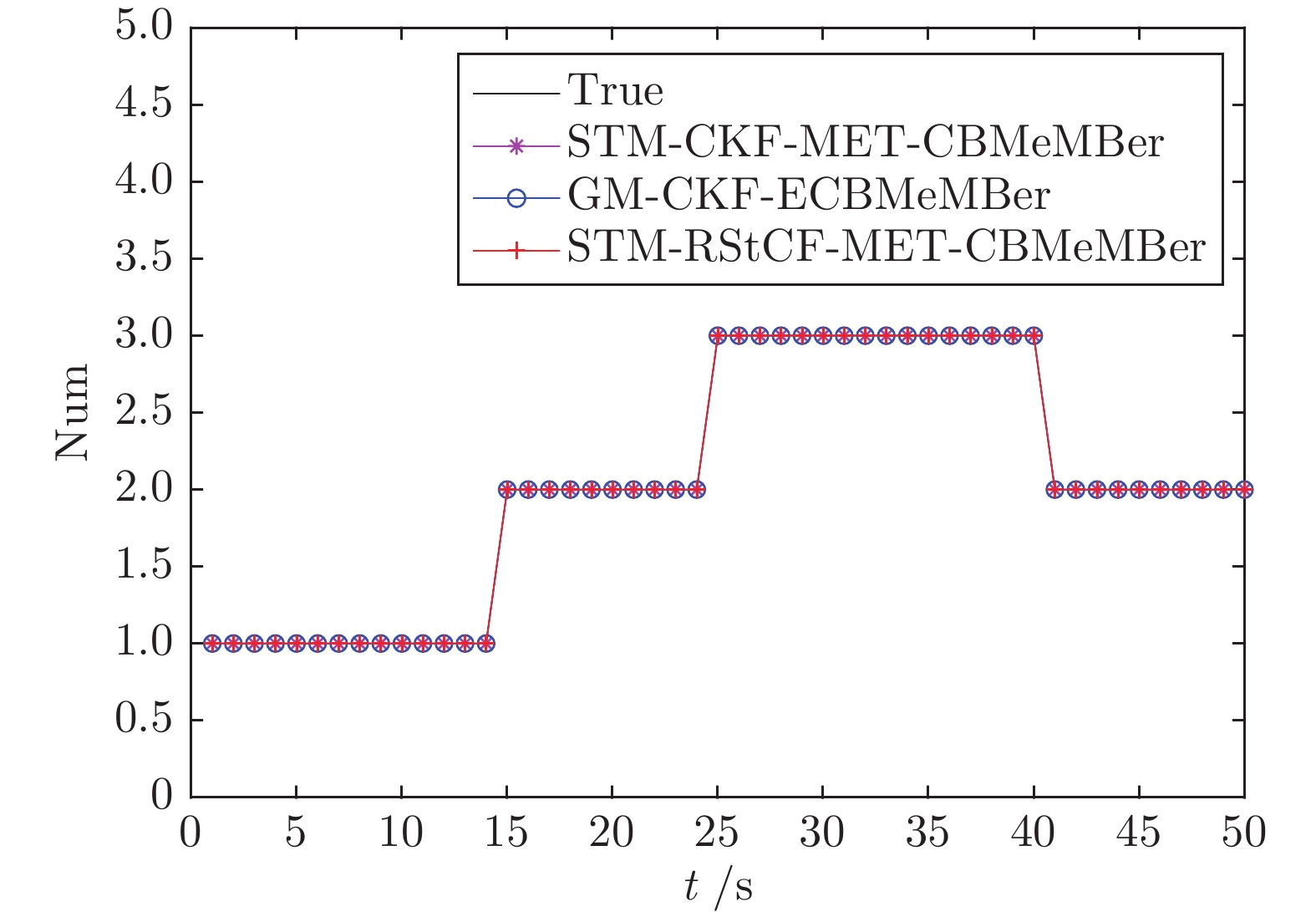
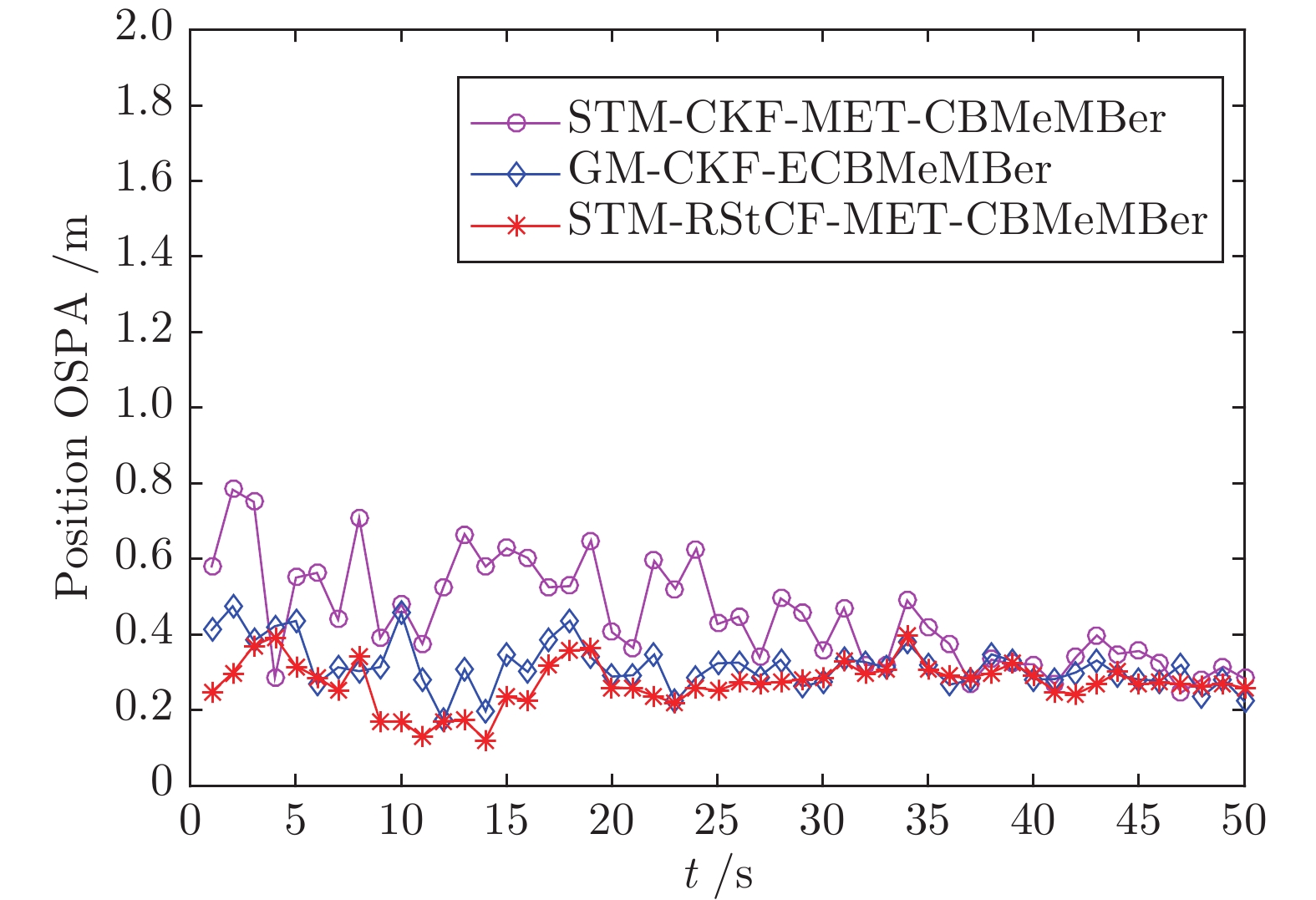
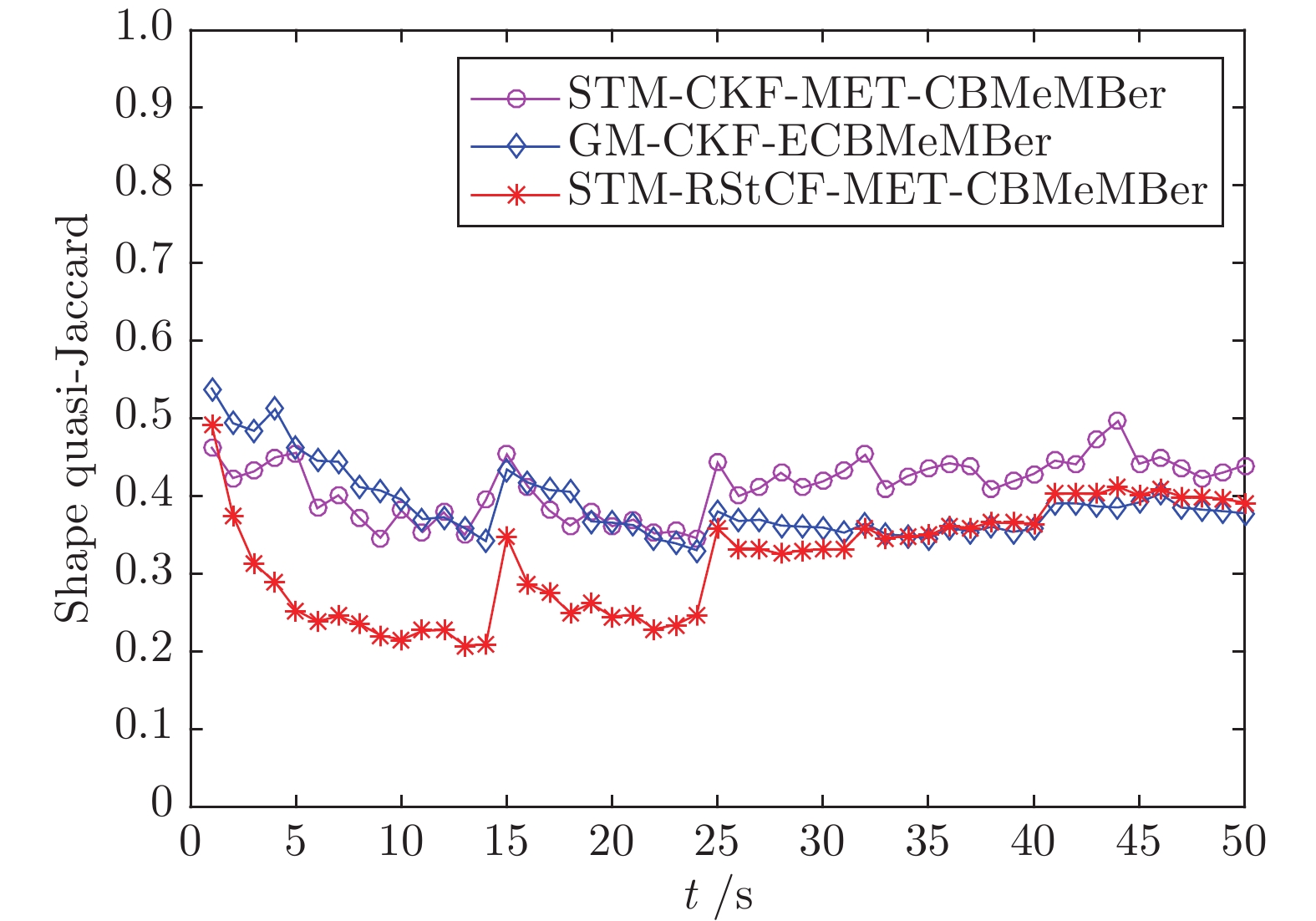
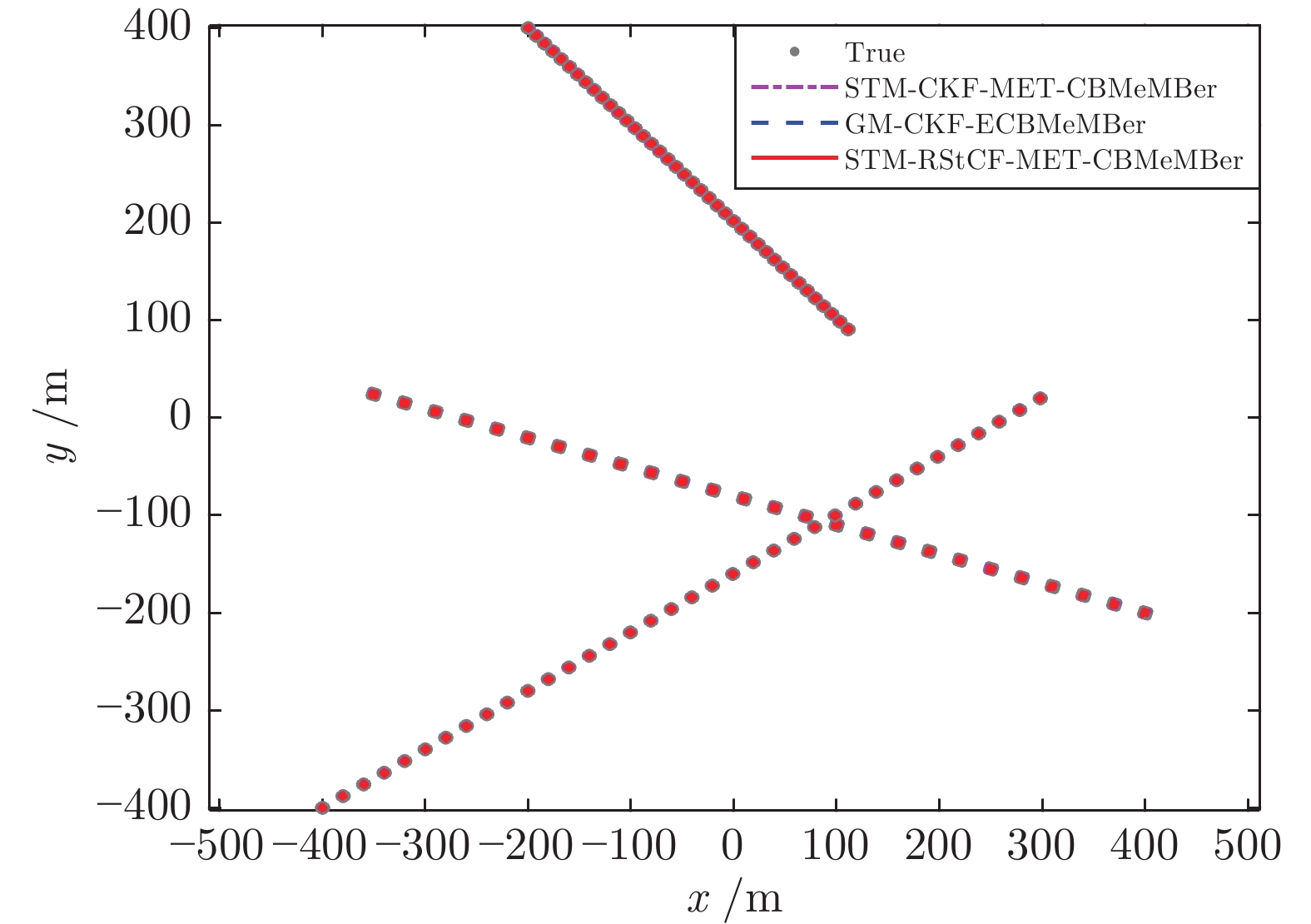
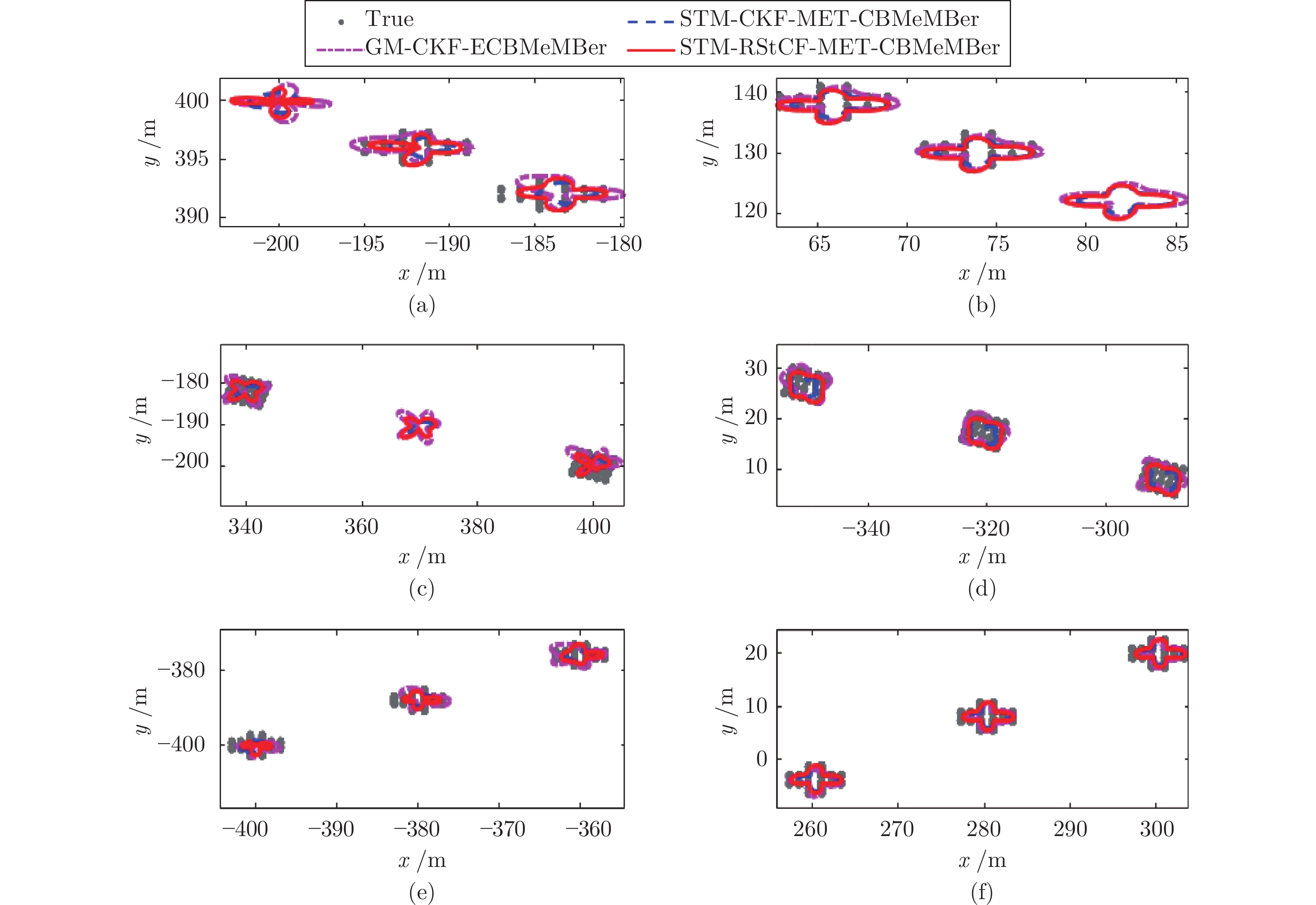
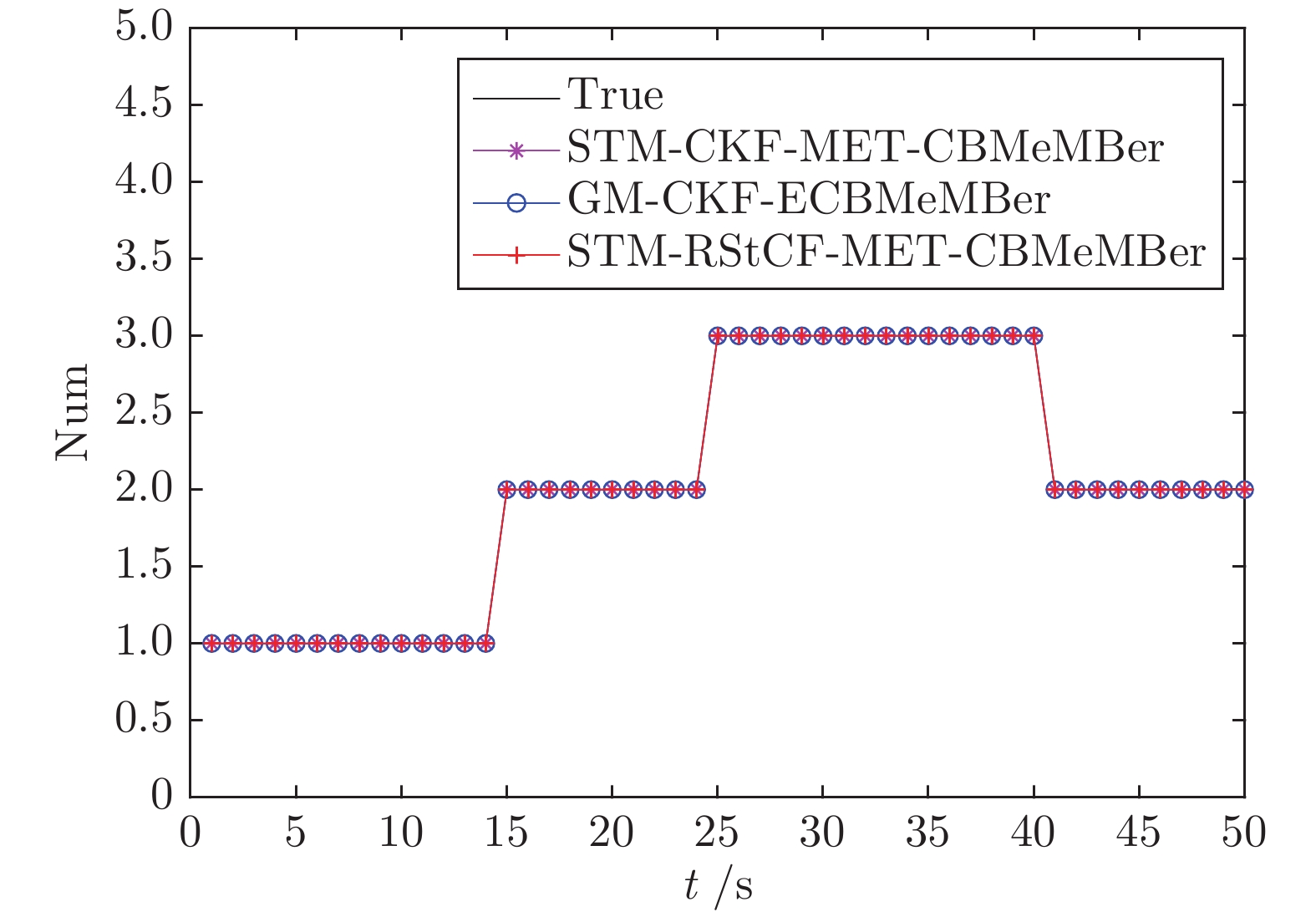
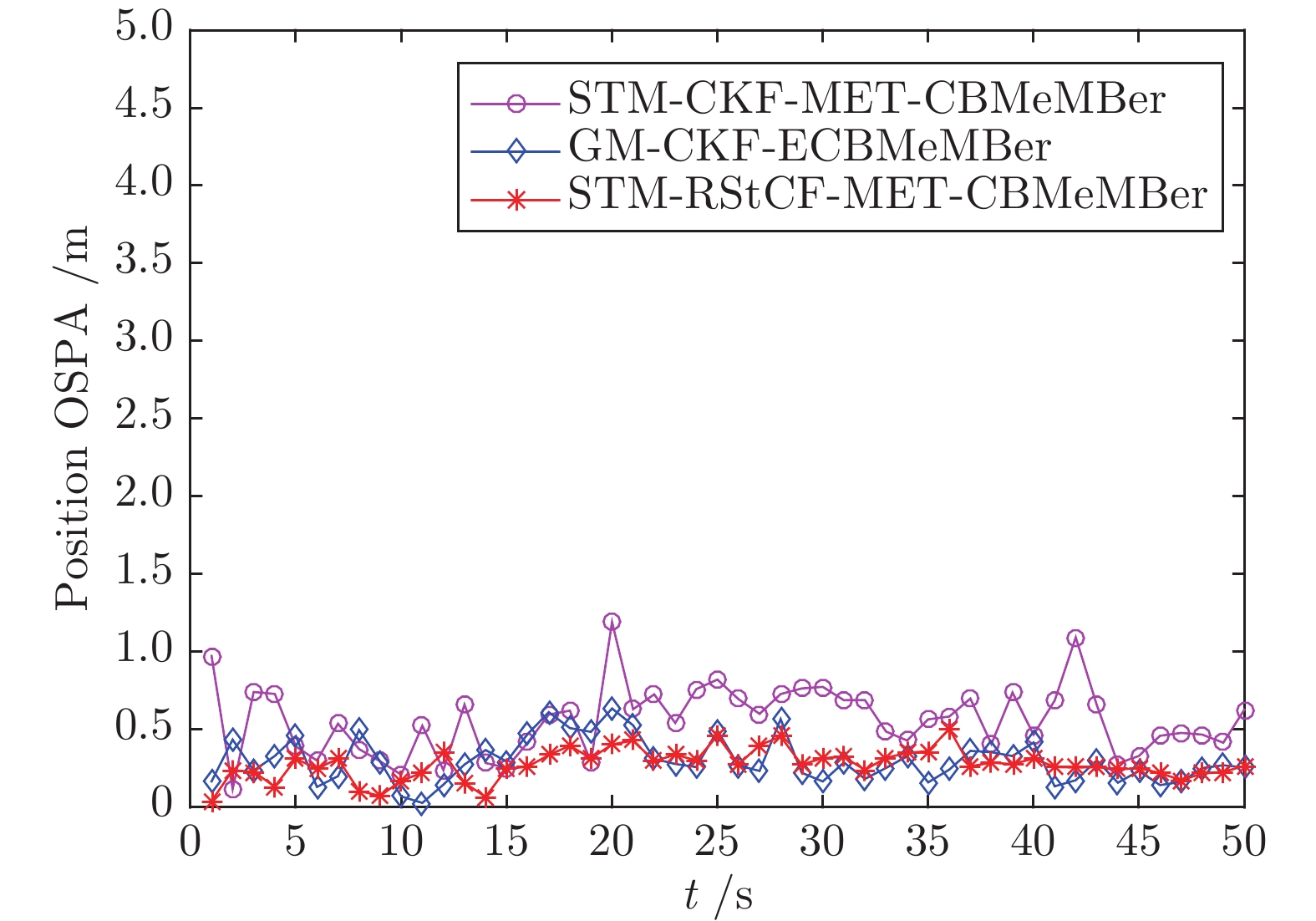
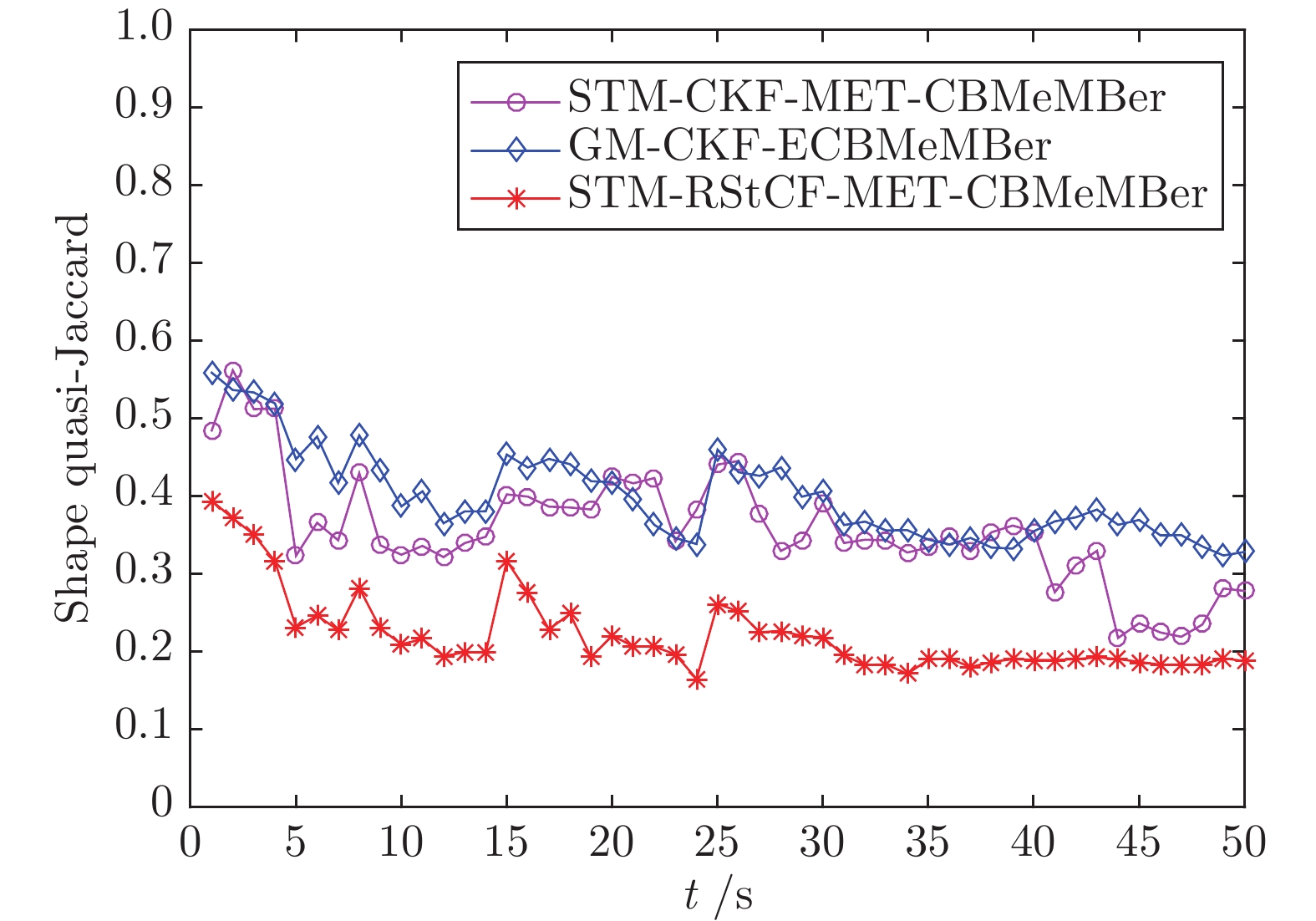
针对厚尾噪声条件下不规则星凸形多扩展目标跟踪(Multiple extended target tracking, METT)问题, 提出一种基于多伯努利滤波的厚尾噪声条件下多扩展目标跟踪方法. 首先, 采用学生t分布对厚尾过程噪声和量测噪声进行建模, 并基于有限集统计(Finite set statistics, FISST)理论利用随机超曲面模型(Random hypersurface model, RHM)建立不规则星凸形多扩展目标的跟踪滤波模型. 然后, 利用学生t混合(Student's t mixture, STM)模型来表征多伯努利密度, 提出学生t混合多扩展目标多伯努利(Student's t mixture multiple extended target multi-Bernoulli filter, STM-MET-CBMeMBer)滤波算法, 并进一步基于鲁棒学生t容积滤波算法提出了非线性鲁棒学生t混合星凸形多扩展目标多伯努利滤波算法. 最后, 通过构造厚尾噪声条件下星凸形多扩展目标和多群目标的跟踪仿真实验验证了所提方法的有效性.
针对厚尾噪声条件下不规则星凸形多扩展目标跟踪(Multiple extended target tracking, METT)问题, 提出一种基于多伯努利滤波的厚尾噪声条件下多扩展目标跟踪方法. 首先, 采用学生t分布对厚尾过程噪声和量测噪声进行建模, 并基于有限集统计(Finite set statistics, FISST)理论利用随机超曲面模型(Random hypersurface model, RHM)建立不规则星凸形多扩展目标的跟踪滤波模型. 然后, 利用学生t混合(Student's t mixture, STM)模型来表征多伯努利密度, 提出学生t混合多扩展目标多伯努利(Student's t mixture multiple extended target multi-Bernoulli filter, STM-MET-CBMeMBer)滤波算法, 并进一步基于鲁棒学生t容积滤波算法提出了非线性鲁棒学生t混合星凸形多扩展目标多伯努利滤波算法. 最后, 通过构造厚尾噪声条件下星凸形多扩展目标和多群目标的跟踪仿真实验验证了所提方法的有效性.
2023, 49(7): 1587-1600.
doi: 10.16383/j.aas.c200247
摘要:
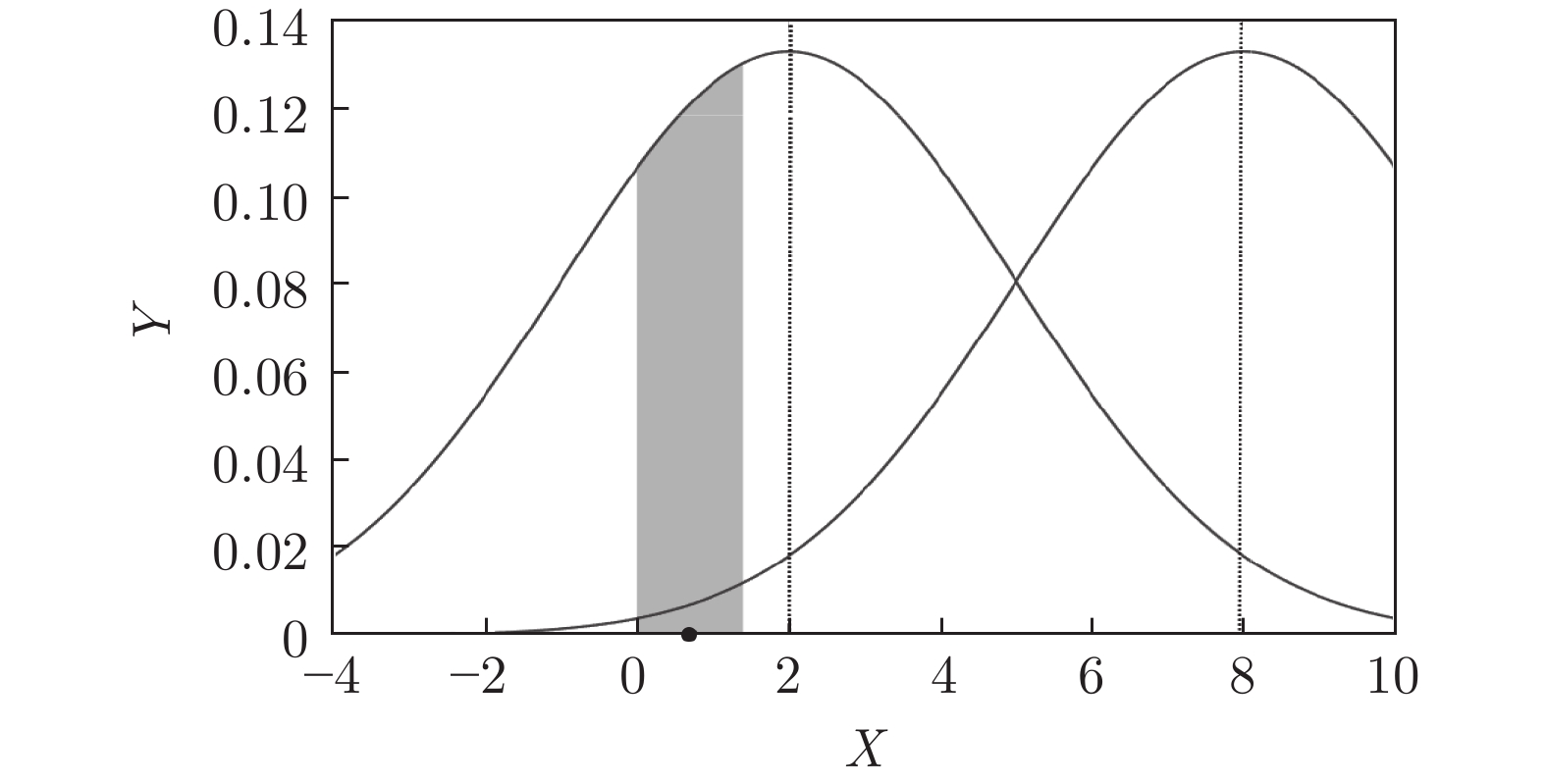
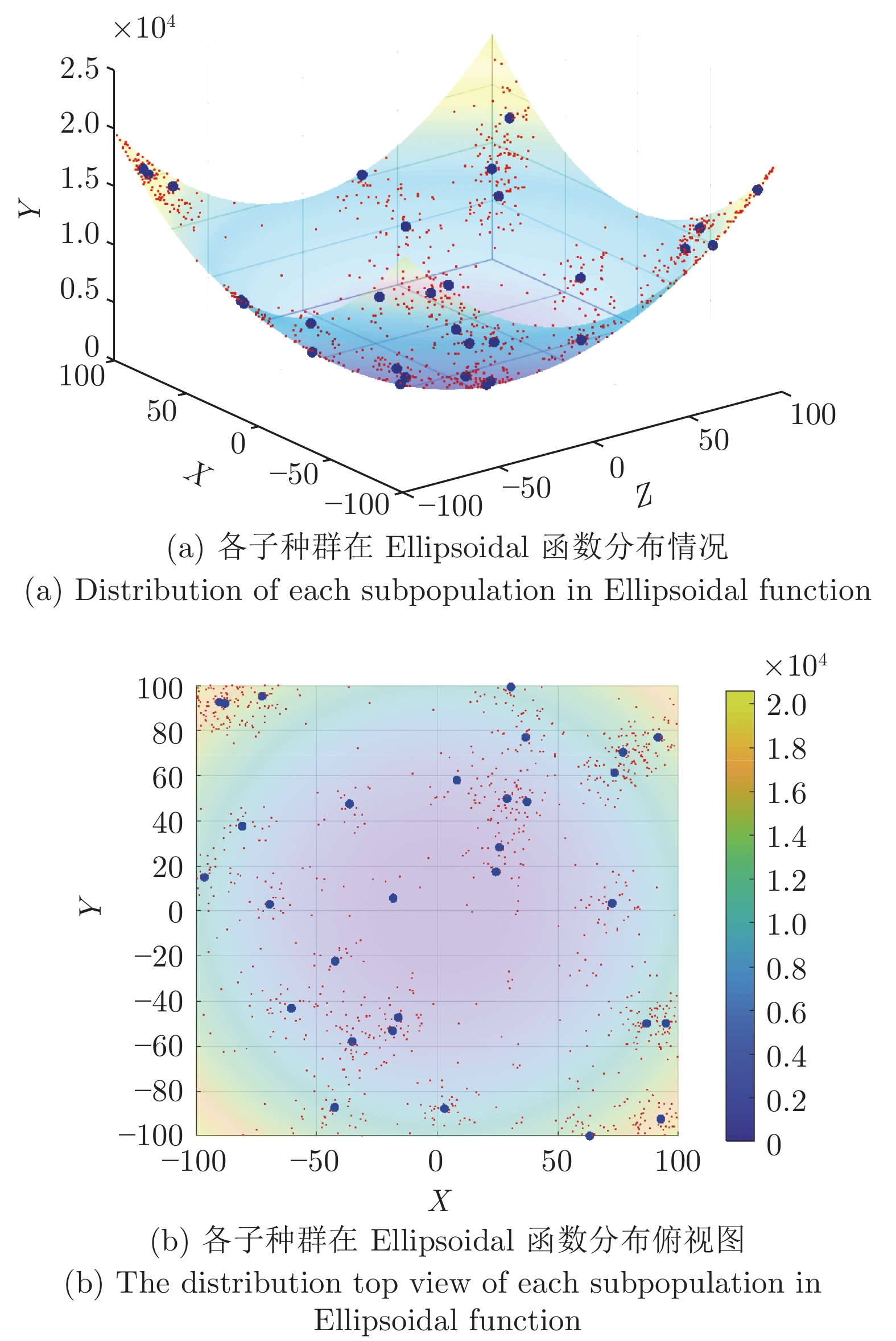
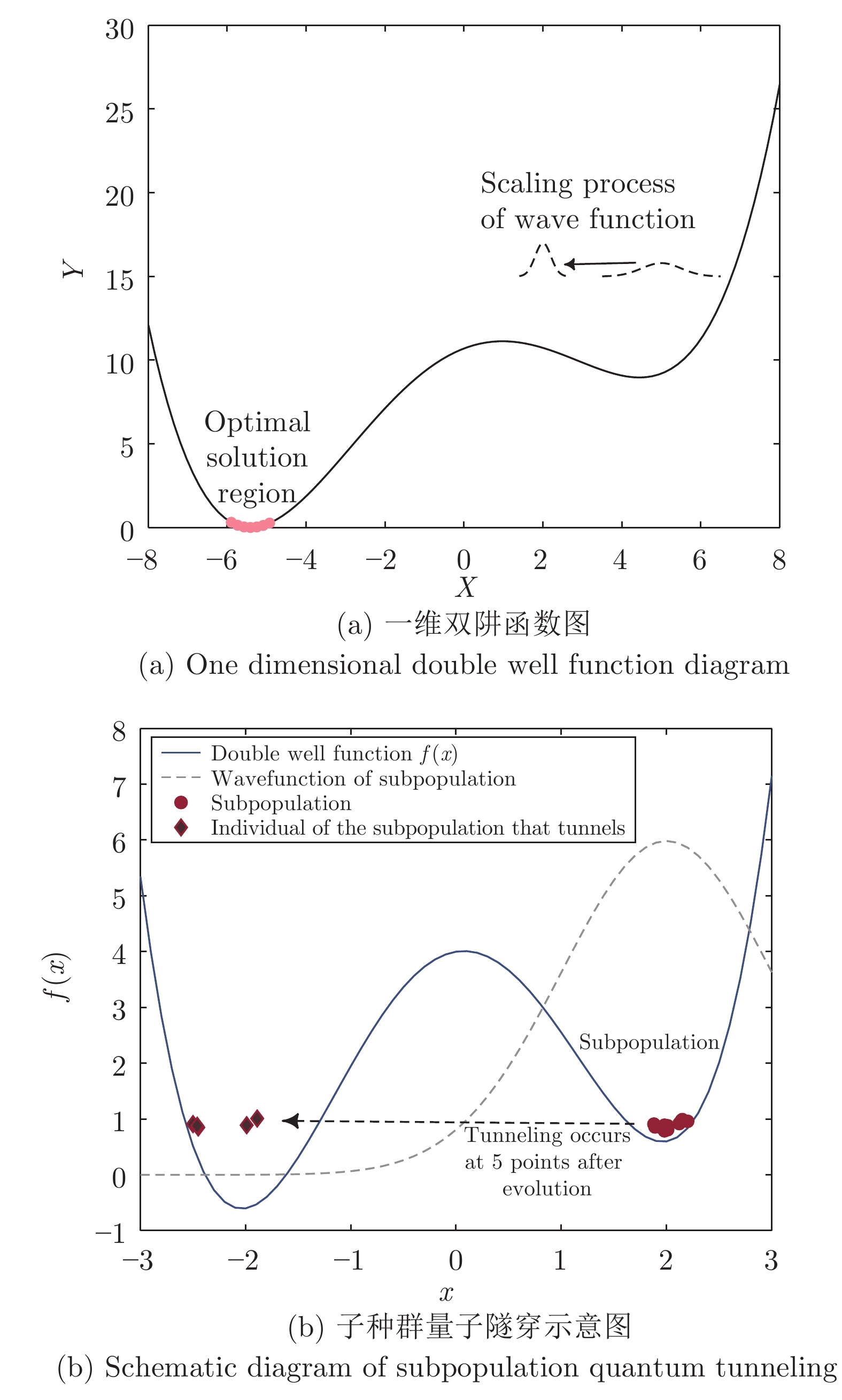
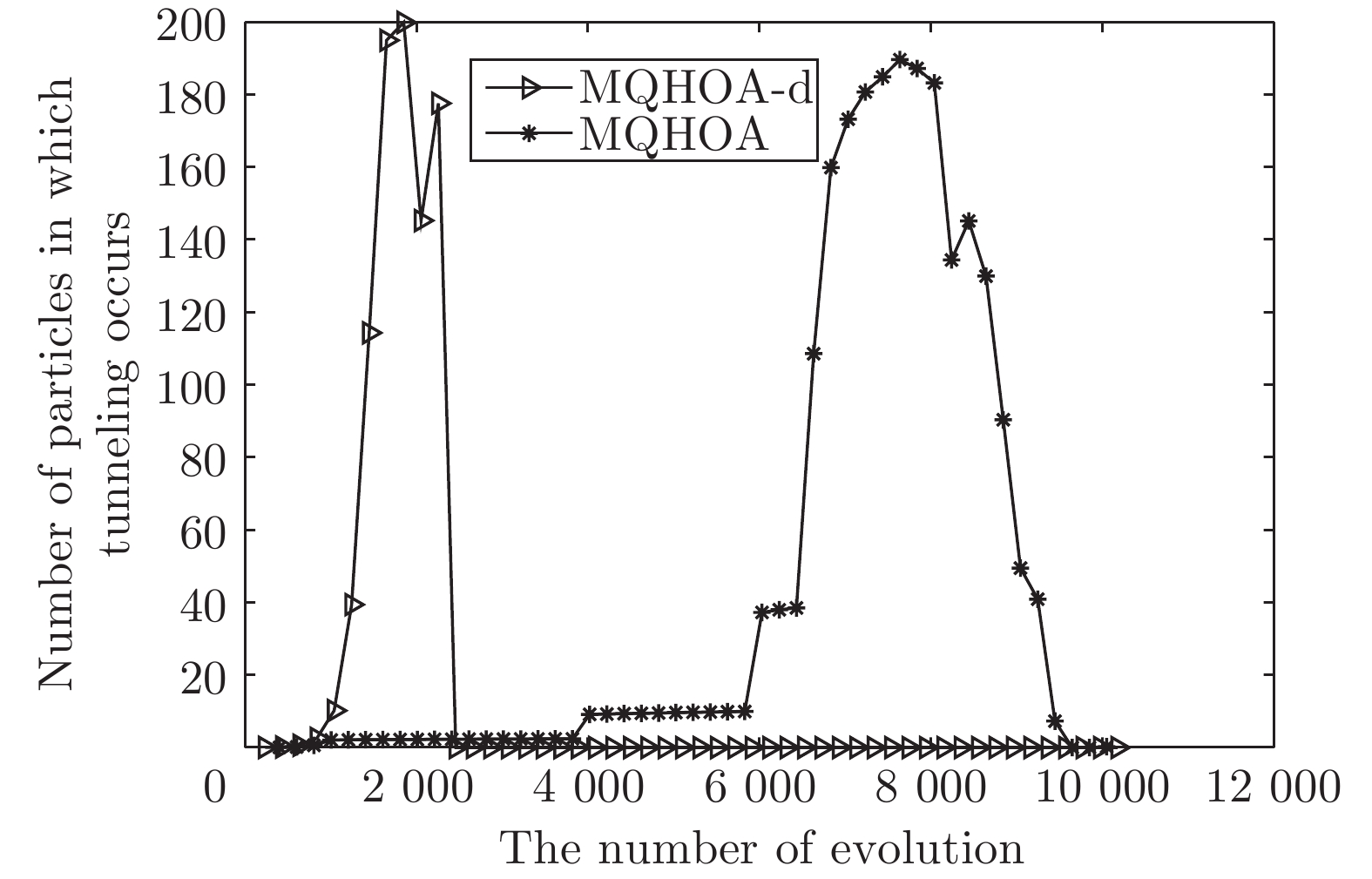
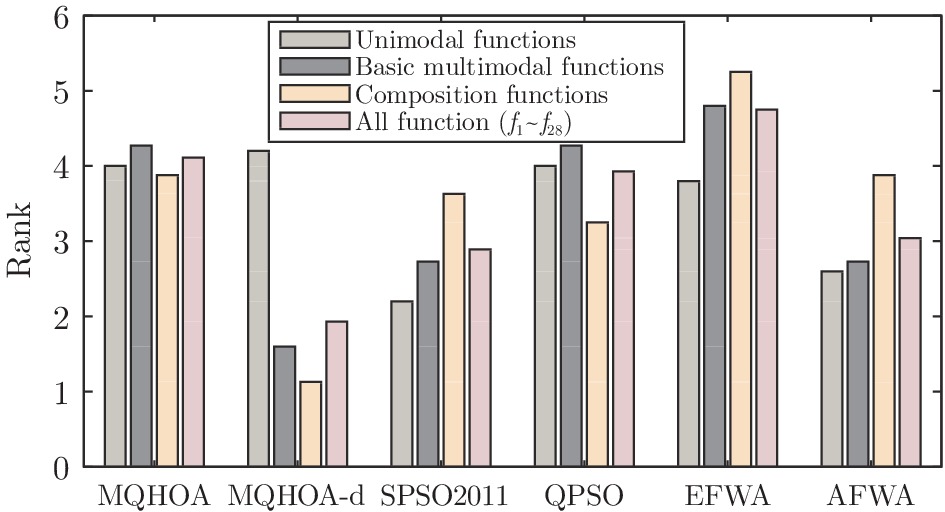
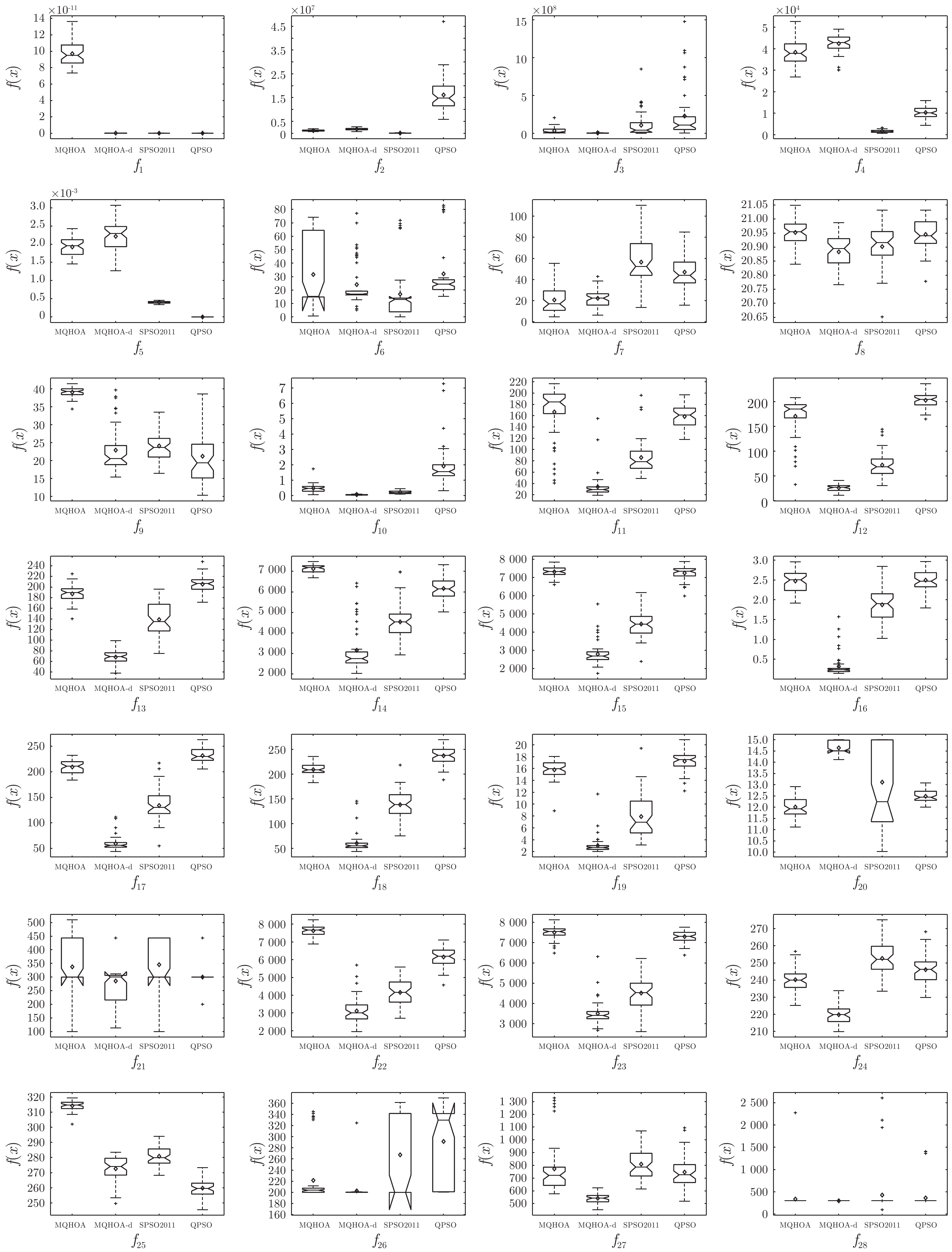
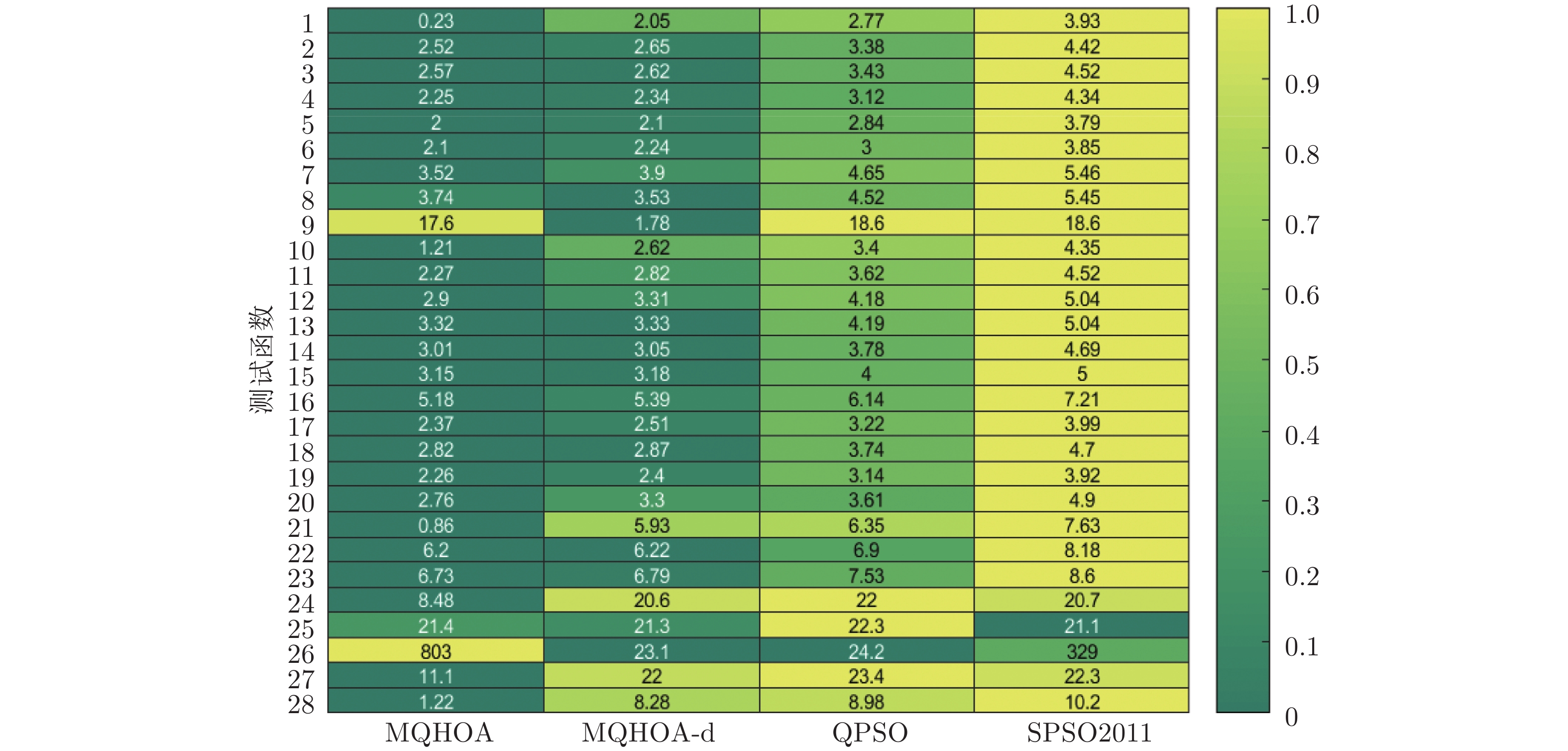
优化算法中多种群采样方式可转化为蒙特卡洛对当前函数积分的评估, 针对不同子种群对整体评估的差异性, 提出子种群规模 (个体数) 自适应的改进策略, 并用于多尺度量子谐振子优化算法(Multi-scale quantum harmonic oscillator algorithm, MQHOA) 的改进, 同时阐述多种群策略所具有的量子特性以及量子隧道效应与寻优性能的相关性. 已有的优化算法忽视了动态调节子种群规模对寻优能力的影响, 该策略通过动态调节子种群规模, 提高适应度差的子种群发生量子隧道效应的概率, 增强了算法的寻优能力. 将改进后的算法MQHOA-d (Multi-scale quantum harmonic oscillator algorithm based on dynamic subpopulation) 与 MQHOA 及其他优化算法在 CEC2013 测试集上进行测试, 结果表明原算法 MQHOA“早熟”问题在 MQHOA-d 中得到解决, 且 MQHOA-d 对多峰函数和复合函数优化具有显著优势, 求解误差和计算时间均小于几种经典优化算法.
优化算法中多种群采样方式可转化为蒙特卡洛对当前函数积分的评估, 针对不同子种群对整体评估的差异性, 提出子种群规模 (个体数) 自适应的改进策略, 并用于多尺度量子谐振子优化算法(Multi-scale quantum harmonic oscillator algorithm, MQHOA) 的改进, 同时阐述多种群策略所具有的量子特性以及量子隧道效应与寻优性能的相关性. 已有的优化算法忽视了动态调节子种群规模对寻优能力的影响, 该策略通过动态调节子种群规模, 提高适应度差的子种群发生量子隧道效应的概率, 增强了算法的寻优能力. 将改进后的算法MQHOA-d (Multi-scale quantum harmonic oscillator algorithm based on dynamic subpopulation) 与 MQHOA 及其他优化算法在 CEC2013 测试集上进行测试, 结果表明原算法 MQHOA“早熟”问题在 MQHOA-d 中得到解决, 且 MQHOA-d 对多峰函数和复合函数优化具有显著优势, 求解误差和计算时间均小于几种经典优化算法.