

Multiple Extended Target Tracking in the Presence of Heavy-Tailed Noise Using Multi-Bernoulli Filtering Method
-
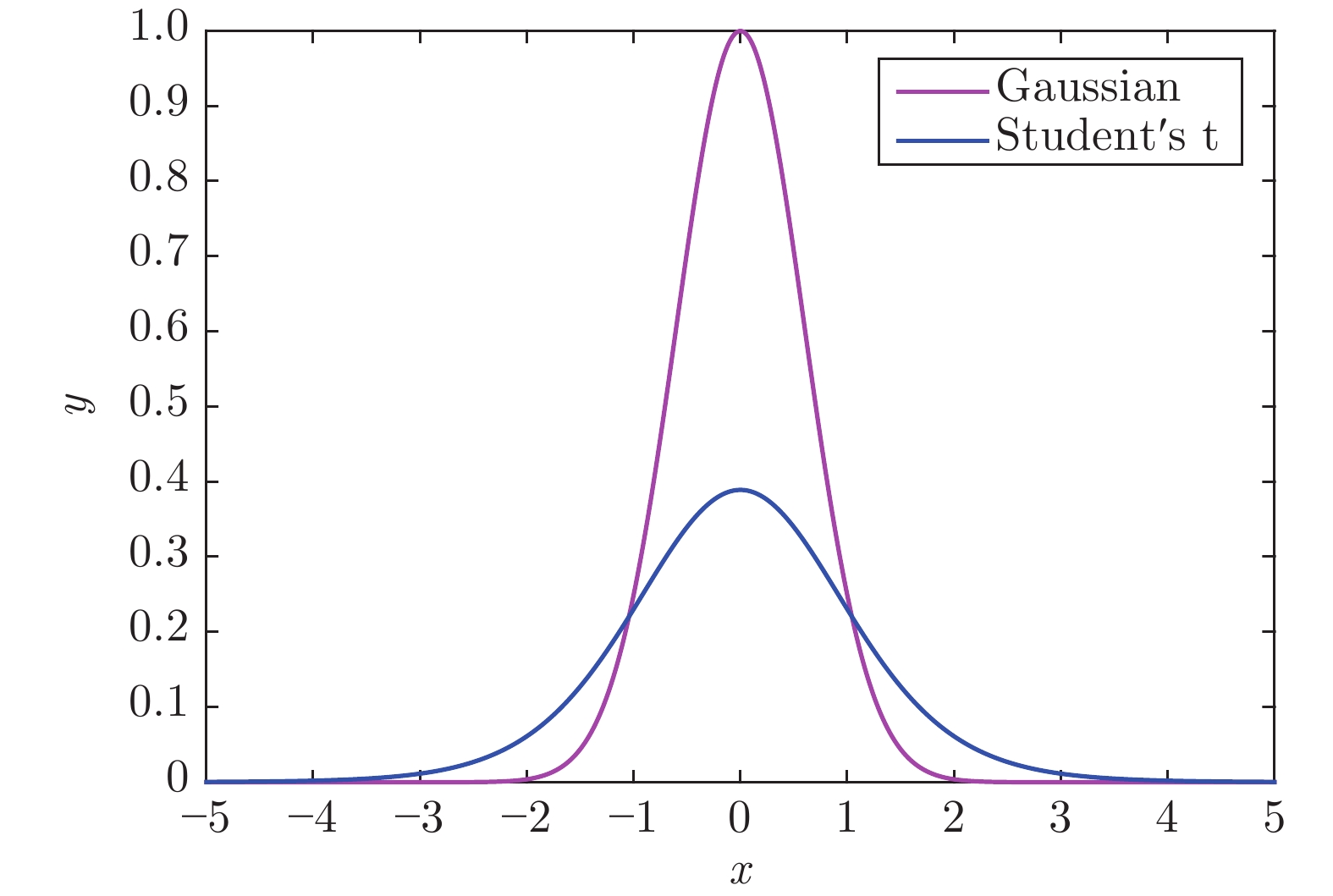
摘要: 针对厚尾噪声条件下不规则星凸形多扩展目标跟踪(Multiple extended target tracking, METT)问题, 提出一种基于多伯努利滤波的厚尾噪声条件下多扩展目标跟踪方法. 首先, 采用学生t分布对厚尾过程噪声和量测噪声进行建模, 并基于有限集统计(Finite set statistics, FISST)理论利用随机超曲面模型(Random hypersurface model, RHM)建立不规则星凸形多扩展目标的跟踪滤波模型. 然后, 利用学生t混合(Student's t mixture, STM)模型来表征多伯努利密度, 提出学生t混合多扩展目标多伯努利(Student's t mixture multiple extended target multi-Bernoulli filter, STM-MET-CBMeMBer)滤波算法, 并进一步基于鲁棒学生t容积滤波算法提出了非线性鲁棒学生t混合星凸形多扩展目标多伯努利滤波算法. 最后, 通过构造厚尾噪声条件下星凸形多扩展目标和多群目标的跟踪仿真实验验证了所提方法的有效性.Abstract: Aiming at the problem of the irregular star-convex multiple extended target tracking (METT) with heavy-tailed noise, a multiple extended target tracking in the presence of heavy-tailed noise using multi-Bernoulli filtering method is proposed in this article. First, the student's t distribution is used to model the heavy-tailed process noise and measurement noise. The irregular star-convex multiple extended target filtering problem is formulated based on the finite set statistics (FISST) theory and the random hypersurface model (RHM). Then, the multi-Bernoulli density is approximated by the student's t mixture (STM) and a student's t mixture multiple extended target multi-Bernoulli filter (STM-MET-CBMeMBer) is proposed correspondingly. Furthermore, this article proposes a nonlinear robust student's t mixture star-convex multiple extended target multi-Bernoulli filter based on the robust student's t based cubature filtering method. Finally, simulation experiments on star-convex multiple extended target tracking and multiple group target tracking with the heavy-tail noise verify effectiveness of the proposed method.
-
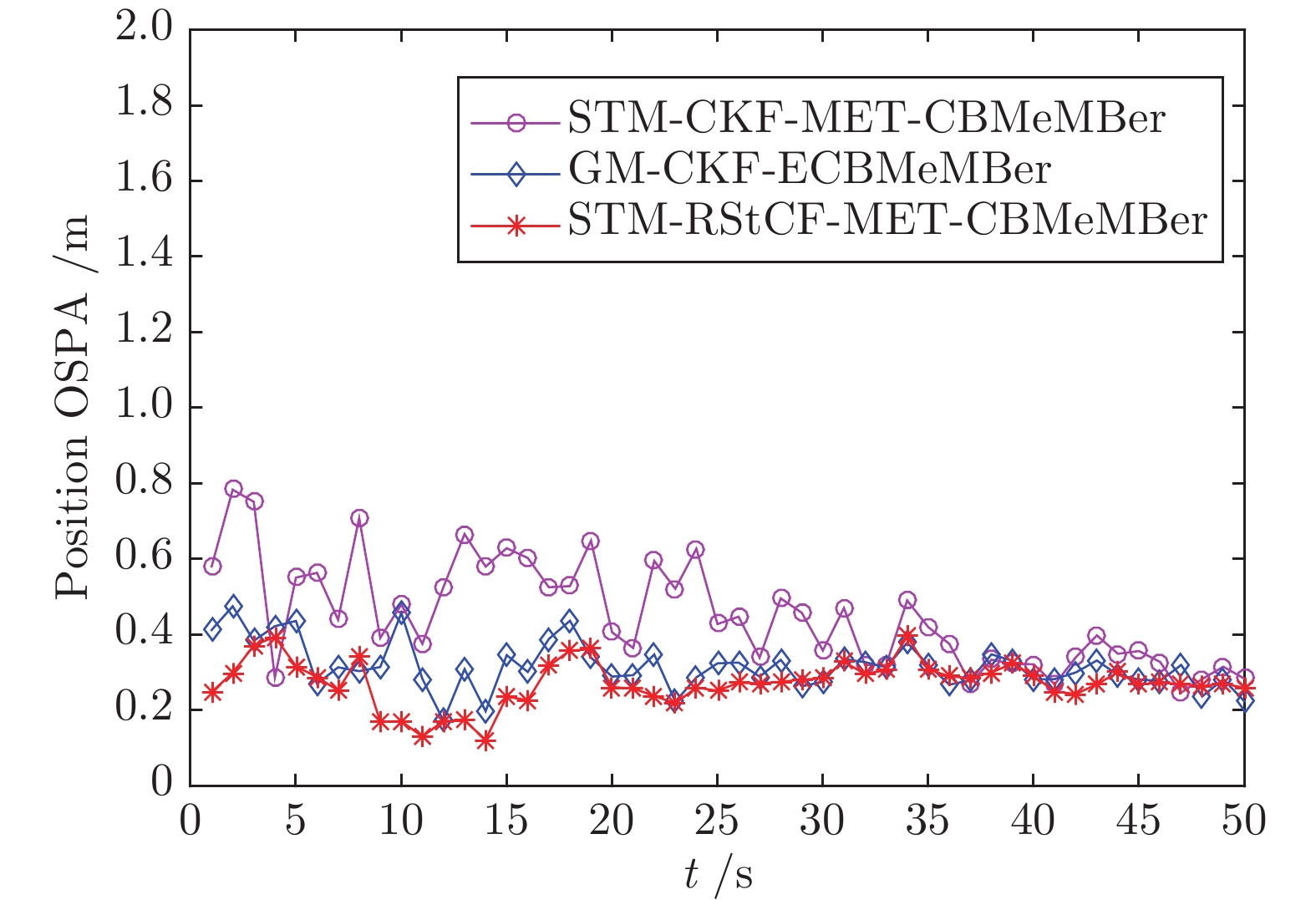
图 5 多扩展目标质心位置估计的OSPA
Fig. 5 OSPA statistics of the centroid position estimation of multiple extended target

图 6 多扩展目标形状估计的拟Jaccard距离
Fig. 6 Quasi-Jaccard distance of the shape estimation of multiple extended target
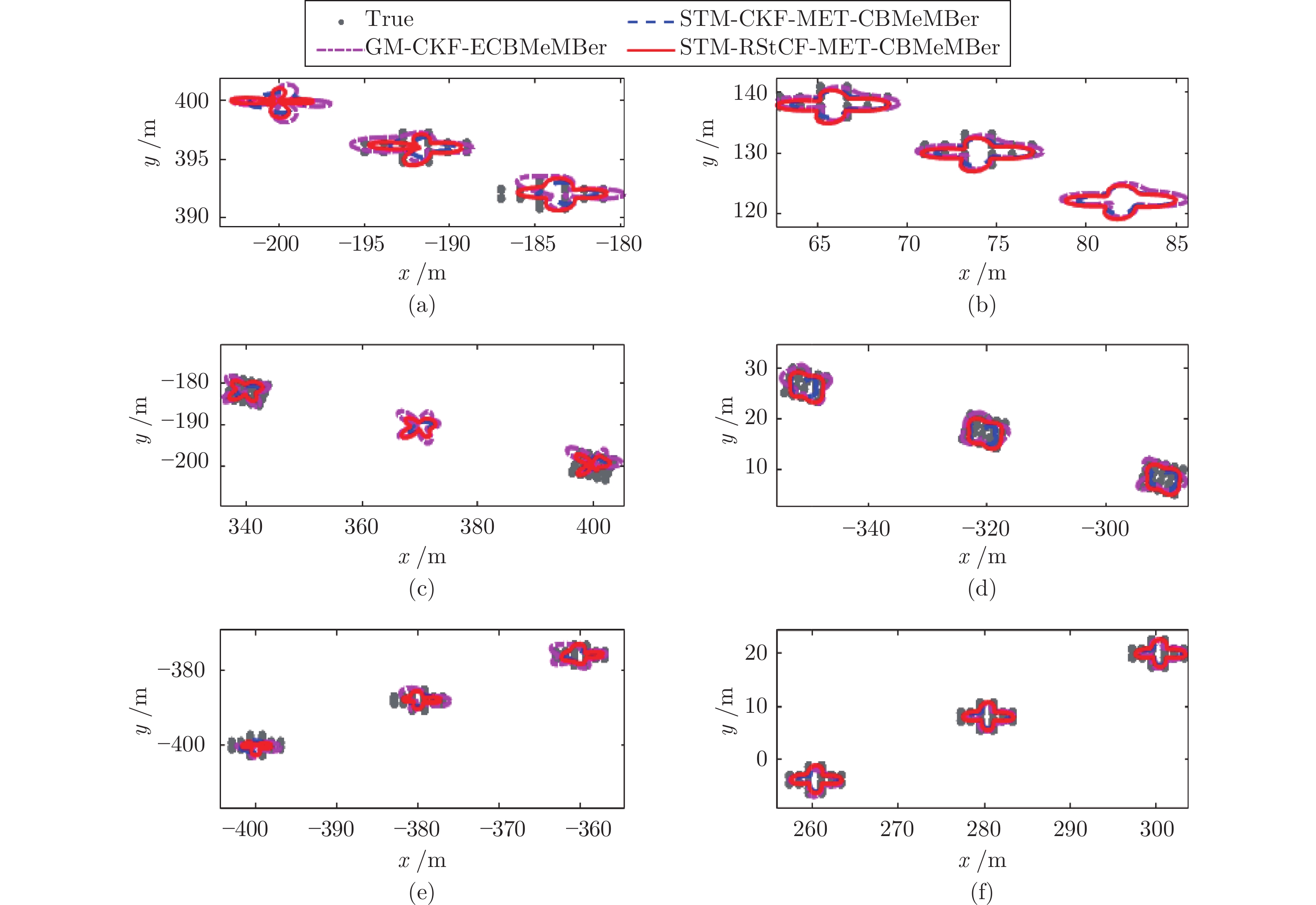
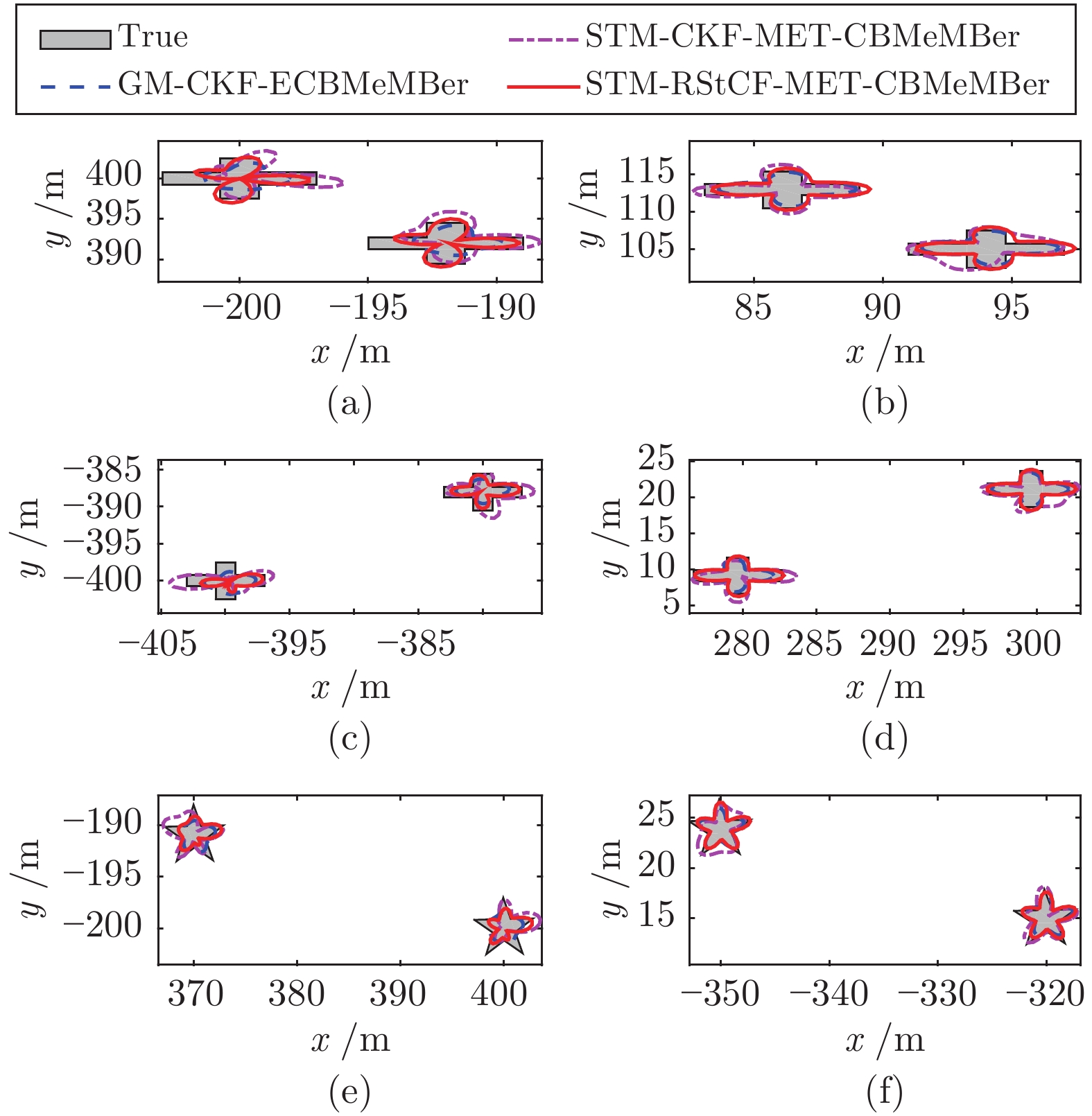
图 8 多群目标跟踪形状估计局部放大效果图
Fig. 8 The partial enlarged effect for shape estimation of multiple group target tracking
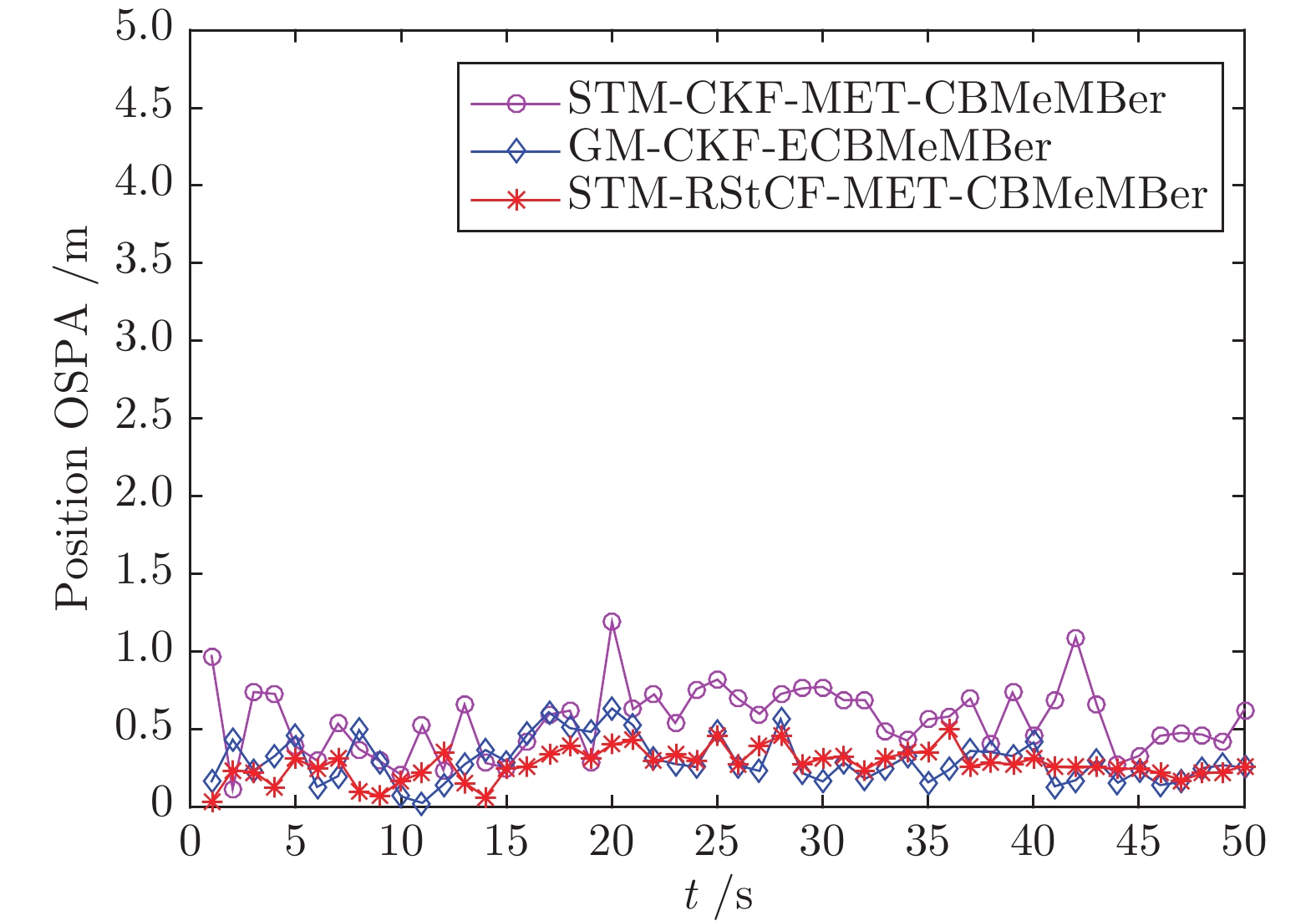
图 10 多群目标质心位置估计的OSPA
Fig. 10 OSPA statistics of the position estimation of multiple group target
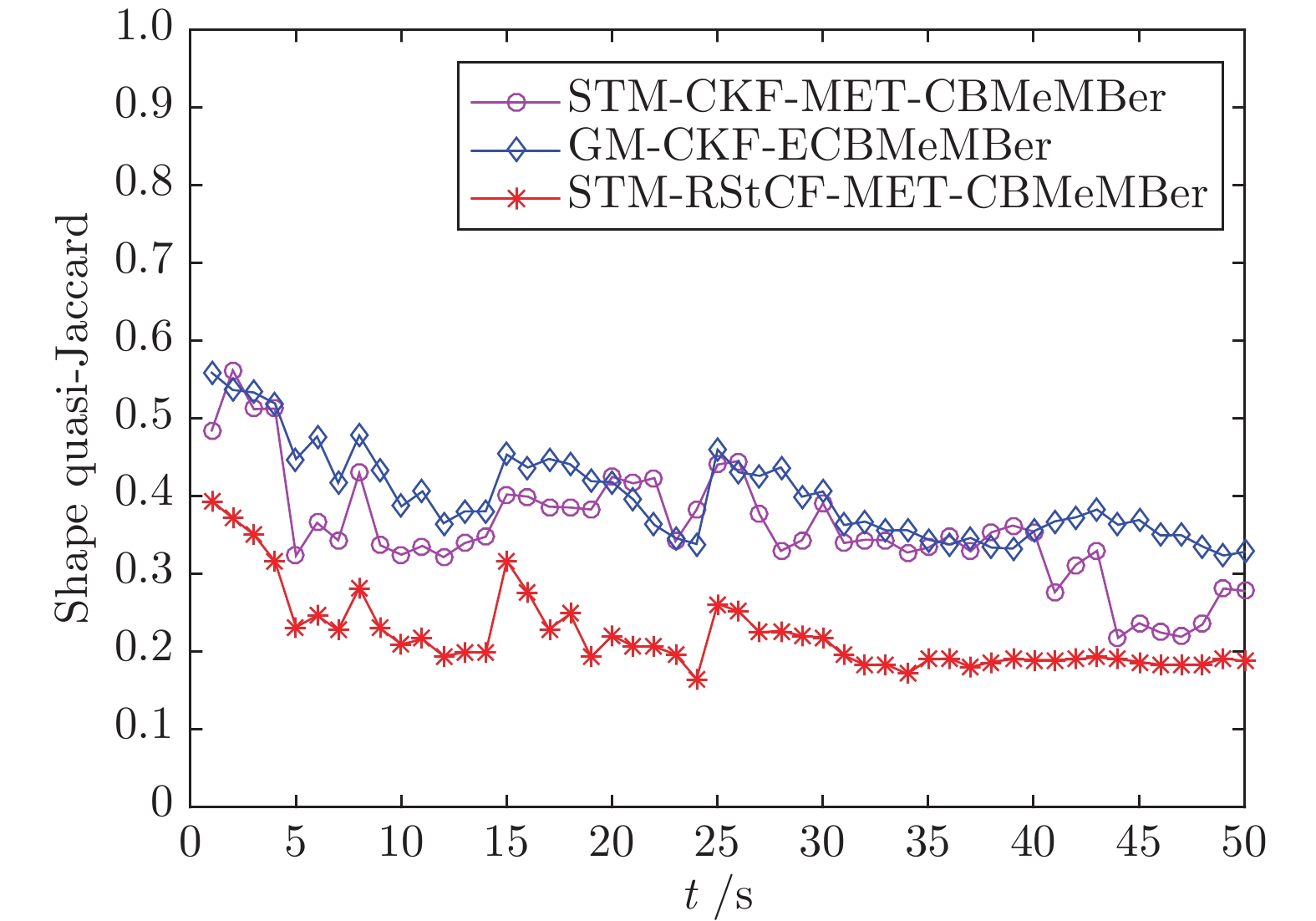
图 11 多群目标形状估计的拟Jaccard距离
Fig. 11 Quasi-Jaccard distance of the shape estimation of multiple group target
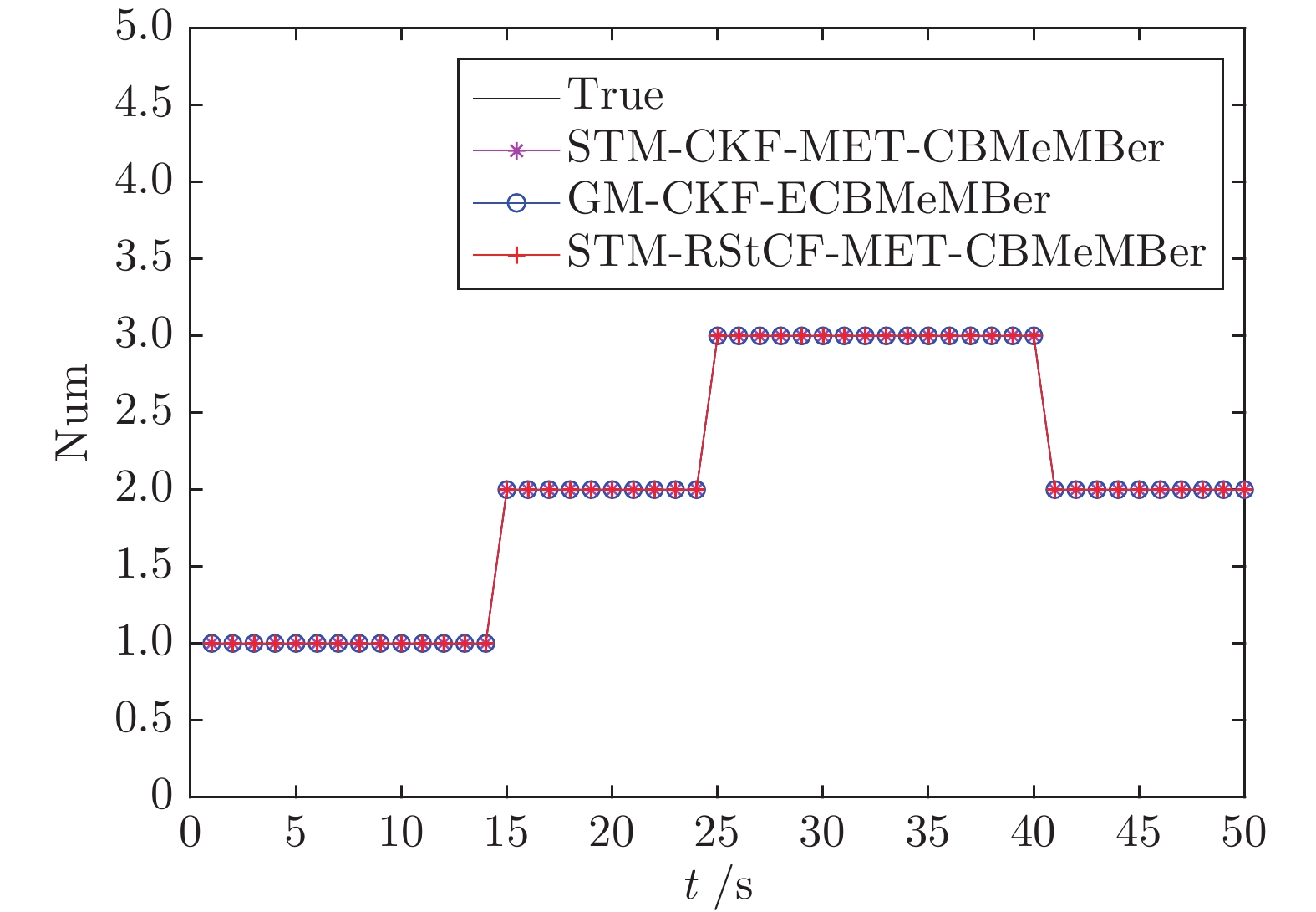
表 1 多扩展目标的初始参数
Table 1 Initial parameters of multiple extended target
目标 新生时刻(s) 消亡时刻(s) 初始位置(m) 真实形状 目标1 1 40 $[-200,400]^{\rm T}$ 十字形 目标2 15 50 $[-400,-400]^{\rm T}$ 十字形 目标3 25 50 $[400,-200]^{\rm T}$ 五角星形  下载: 导出CSV
下载: 导出CSV
-
[1] Granström K, Fatemi M, Svensson L. Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 208-225 doi: 10.1109/TAES.2019.2920220 [2] Yang S S, Teich F, Baum M. Network flow labeling for extended target tracking PHD filters. IEEE Transactions on Industrial Informatics, 2019, 15(7): 4164-4171. doi: 10.1109/TII.2019.2898992 [3] Liu B, Tharmarasa R, Jassemi R, Brown D, Kirubarajan T. Extended target tracking with multipath detections, terrain-constrained motion model and clutter. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7056-7072. doi: 10.1109/TITS.2020.3001174 [4] Granström K, Fatemi M, Svensson L. Gamma Gaussian inverse-Wishart Poisson multi-Bernoulli filter for extended target tracking. In: Proceedings of the 19th International Conference on Information Fusion (FUSION). Heidelberg, Germany: IEEE, 2016. 893−900 [5] Vo B N, Vo B T. A multi-scan labeled random finite set model for multi-object state estimation. IEEE Transactions on Signal Processing, 2019, 67(19): 4948-4963 doi: 10.1109/TSP.2019.2928953 [6] Mahler R P S. Advances in Statistical Multisource-Multitarget Information Fusion. Boston, USA: Artech House, 2014. [7] García-Fernández Á F, Svensson L. Trajectory PHD and CPHD filters. IEEE Transactions on Signal Processing, 2019, 67(22): 5702-5714 doi: 10.1109/TSP.2019.2943234 [8] Granström K, Lundquist C, Orguner O. Extended target tracking using a Gaussian-mixture PHD filter. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3268-3286 doi: 10.1109/TAES.2012.6324703 [9] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423 doi: 10.1109/TSP.2008.2007924 [10] Vo B N, Vo B T, Hoang H G. An efficient implementation of the generalized labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2017, 65(8): 1975-1987 doi: 10.1109/TSP.2016.2641392 [11] Dong P, Jing Z L, Leung H, Shen K, Wang J R. Student-t mixture labeled multi-Bernoulli filter for multi-target tracking with heavy-tailed noise. Signal Processing, 2018, 152: 331-339 doi: 10.1016/j.sigpro.2018.06.014 [12] Zhang G H, Lian F, Han C Z. CBMeMBer filters for nonstandard targets, I: Extended targets. In: Proceedings of the 17th International Conference on Information Fusion (FUSION). Salamanca, Spain: IEEE, 2014. 1−6 [13] 连峰, 马冬冬, 元向辉, 陈文, 韩崇昭. 扩展目标CBMeMBer滤波器及其高斯混合实现. 控制与决策, 2015, 30(4): 611-616 doi: 10.13195/j.kzyjc.2014.0286Lian Feng, Ma Dong-Dong, Yuan Xiang-Hui, Chen Wen, Han Chong-Zhao. CBMeMBer filter for extended targets and its Gaussian mixture implementations. Control and Decision, 2015, 30(4): 611-616 doi: 10.13195/j.kzyjc.2014.0286 [14] Ma D D, Lian F, Liu J. Sequential Monte Carlo implementation of cardinality balanced multi-target multi-Bernoulli filter for extended target tracking. IET Radar, Sonar & Navigation, 2016, 10(2): 272-277 [15] Hu Q, Ji H B, Zhang Y Q. Tracking multiple extended targets with multi-Bernoulli filter. IET Signal Processing, 2019, 13(4): 443-455 doi: 10.1049/iet-spr.2018.5125 [16] 李翠芸, 王荣, 姬红兵. 基于变分贝叶斯势均衡多目标多伯努利滤波的多扩展目标跟踪算法. 控制理论与应用, 2015, 32(2): 187-195 doi: 10.7641/CTA.2015.40454Li Cui-Yun, Wang Rong, Ji Hong-Bing. Multiple extended-target tracking based on variational Bayesian cardinality-balanced multi-target multi-Bernoulli. Control Theory & Applications, 2015, 32(2): 187-195 doi: 10.7641/CTA.2015.40454 [17] Beard M, Reuter S, Granström K, Vo B T, Vo B N, Scheel A. Multiple extended target tracking with labeled random finite sets. IEEE Transactions on Signal Processing, 2016, 64(7): 1638-1653 doi: 10.1109/TSP.2015.2505683 [18] Vo B T, Vo B N, Hoseinnezhad R, Mahler R P S. Robust multi-Bernoulli filtering. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 399-409 doi: 10.1109/JSTSP.2013.2252325 [19] Zhang G H, Lian F, Han C Z, Han S Y. An improved PHD filter based on variational Bayesian method for multi-target tracking. In: Proceedings of the 17th International Conference on Information Fusion (FUSION). Salamanca, Spain: IEEE, 2014. 1−6 [20] Pasha S A, Vo B N, Tuan H D, Ma W K. A Gaussian mixture PHD filter for jump Markov system models. IEEE Transactions on Aerospace and Electronic systems, 2009, 45(3): 919-936 doi: 10.1109/TAES.2009.5259174 [21] Zhou H, Huang H Q, Zhao H, Han S, Yin X. Adaptive unscented Kalman filter for target tracking in the presence of nonlinear systems involving model mismatches. Remote Sensing, 2017, 9(7): Article No. 657 [22] Wu H, Chen S X, Yang B F, Chen K. Robust derivative-free cubature Kalman filter for bearings-only tracking. Journal of Guidance, Control, and Dynamics, 2016, 39(8): 1865-1870 doi: 10.2514/1.G001686 [23] Roth M, Özkan E, Gustafsson F. A student's t filter for heavy tailed process and measurement noise. In: Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing. Vancouver, Canada: IEEE, 2013, 5770−5774 [24] Huang Y L, Zhang Y G, Li N, Chambers J. Robust student’s t based nonlinear filter and smoother. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(5): 2586-2596 doi: 10.1109/TAES.2016.150722 [25] Huang Y L, Zhang Y G, Li N, Naqvi S M, Chambers J. A robust student's t based cubature filter. In: Proceedings of the 19th International Conference on Information Fusion (FUSION). Heidelberg, Germany: IEEE, 2016. 9−16 [26] Straka O, Duník J. Stochastic integration student's-t filter. In: Proceedings of the 20th International Conference on Information Fusion (Fusion). Xi'an, China: IEEE, 2017. 1−8 [27] Huang Y L, Zhang Y G, Chambers J A. A novel Kullback–Leibler divergence minimization-based adaptive student's t-filter. IEEE Transactions on signal Processing, 2019, 67(20): 5417-5432 doi: 10.1109/TSP.2019.2939079 [28] Granström K, Baum M, Reuter S. Extended OBJECT TRACKING: Introduction, overview, and applications. Journal of Advances in Information Fusion, 2017, 12(2): 139-174 [29] Feldmann M, Fränken D, Koch W. Tracking of extended objects and group targets using random matrices. IEEE Transactions on Signal Processing, 2011, 59(4): 1409-1420 doi: 10.1109/TSP.2010.2101064 [30] Lan J, Li X R. Extended-object or group-target tracking using random matrix with nonlinear measurements. IEEE Transactions on Signal Processing, 2019, 67(19): 5130-5142 doi: 10.1109/TSP.2019.2935866 [31] Hu Q, Ji H B, Zhang Y Q. A standard PHD filter for joint tracking and classification of maneuvering extended targets using random matrix. Signal Processing, 2018, 144: 352-363 doi: 10.1016/j.sigpro.2017.10.026 [32] Baum M, Hanebeck U D. Extended object tracking with random hypersurface models. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 149-159 doi: 10.1109/TAES.2013.120107 [33] Yao G, Dani A. Image moment-based random hypersurface model for extended object tracking. In: Proceedings of the 20th International Conference on Information Fusion (Fusion). Xi'an, China: IEEE, 2017. 1−7 [34] Han Y L, Zhu H Y, Han C Z. A Gaussian-mixture PHD filter based on random hypersurface model for multiple extended targets. In: Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013. 1752−1759 [35] 陈辉, 杜金瑞, 韩崇昭. 基于星凸形随机超曲面模型多扩展目标多伯努利滤波器. 自动化学报, 2020, 46(5): 909-922 doi: 10.16383/j.aas.c180130Chen Hui, Du Jin-Rui, Han Chong-Zhao. A multiple extended target multi-bernouli filter based on star-convex random hypersurface model. Acta Automatica Sinica, 2020, 46(5): 909-922 doi: 10.16383/j.aas.c180130 [36] Gao L, Jing Z L, Li M Z, Pan H. Robust adaptive filtering for extended target tracking with heavy-tailed noise in clutter. IET Signal Processing, 2018, 12(7): 826-835 doi: 10.1049/iet-spr.2017.0249 [37] Granström K, Lundquist C, Orguner U. A Gaussian mixture PHD filter for extended target tracking. In: Proceedings of the 13th International Conference on Information Fusion. Edinburgh, UK: IEEE, 2010. 1−8 [38] Gilholm K, Godsill S, Maskell S, Salmond D. Poisson models for extended target and group tracking. In: Proceedings of SPIE 5913, Signal and Data Processing of Small Targets 2005. San Diego, California, USA: SPIE, 2005. Article No. 59130R -

 下载:
下载:

计量
- 文章访问数: 1501
- HTML全文浏览量: 780
- PDF下载量: 170
- 被引次数: 0
