2022年 第48卷 第6期
2022, 48(6): 1385-1401.
doi: 10.16383/j.aas.c210818
摘要:
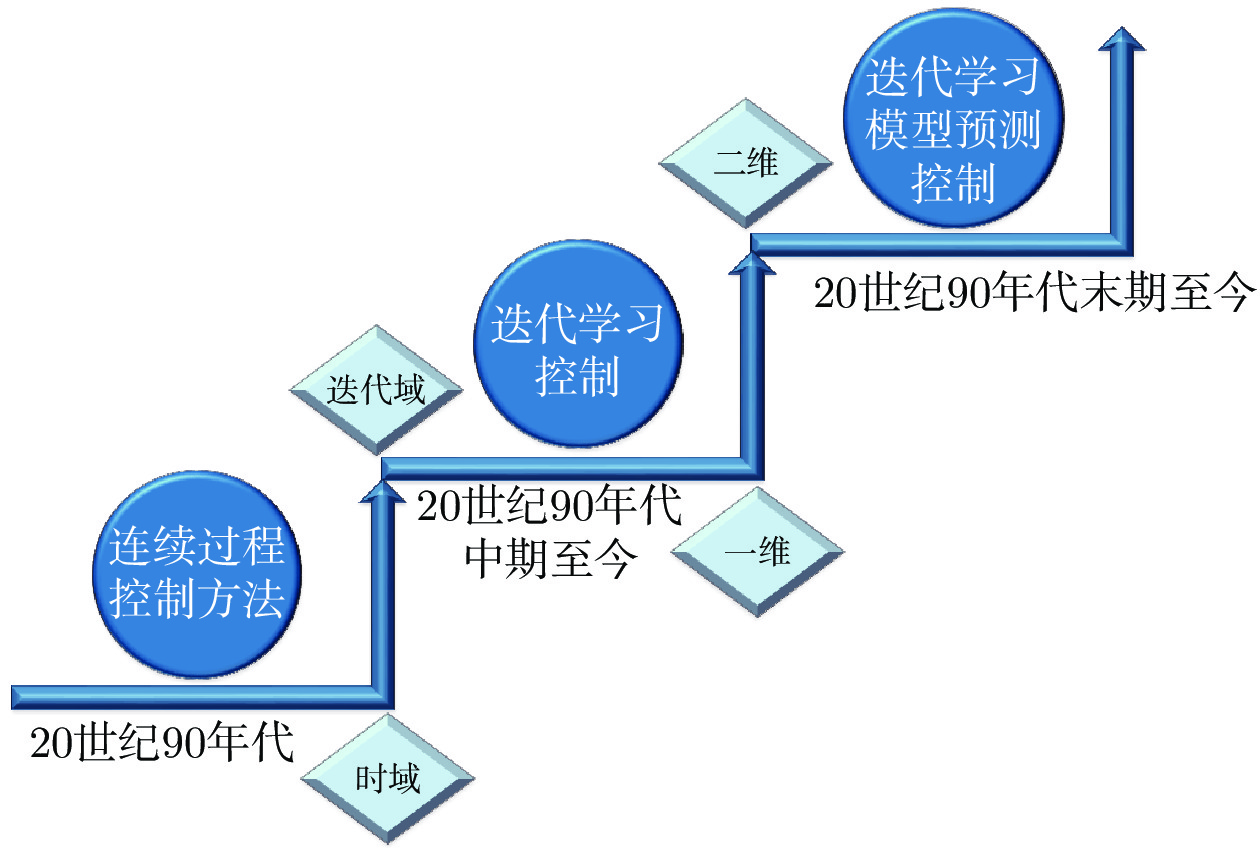
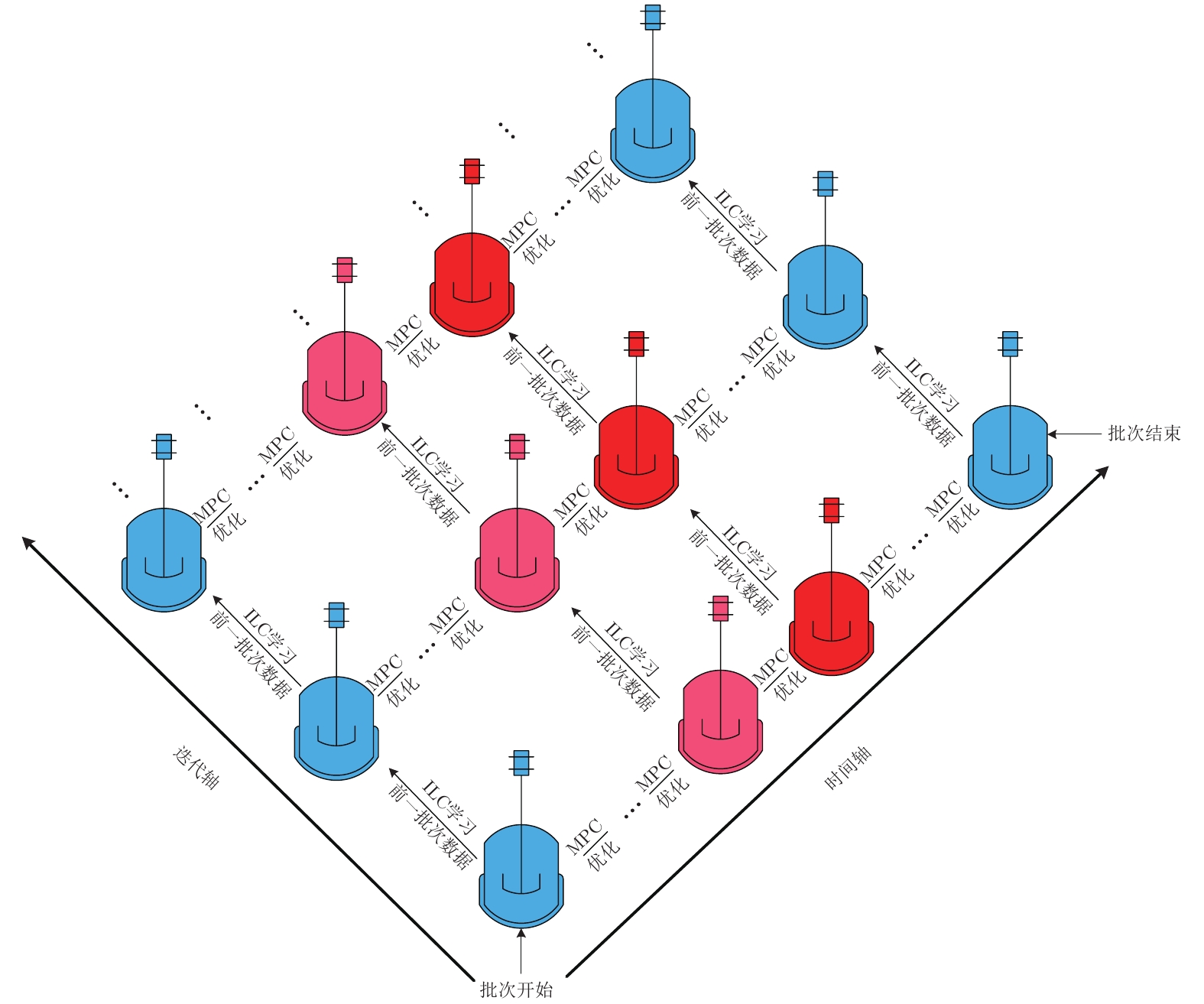
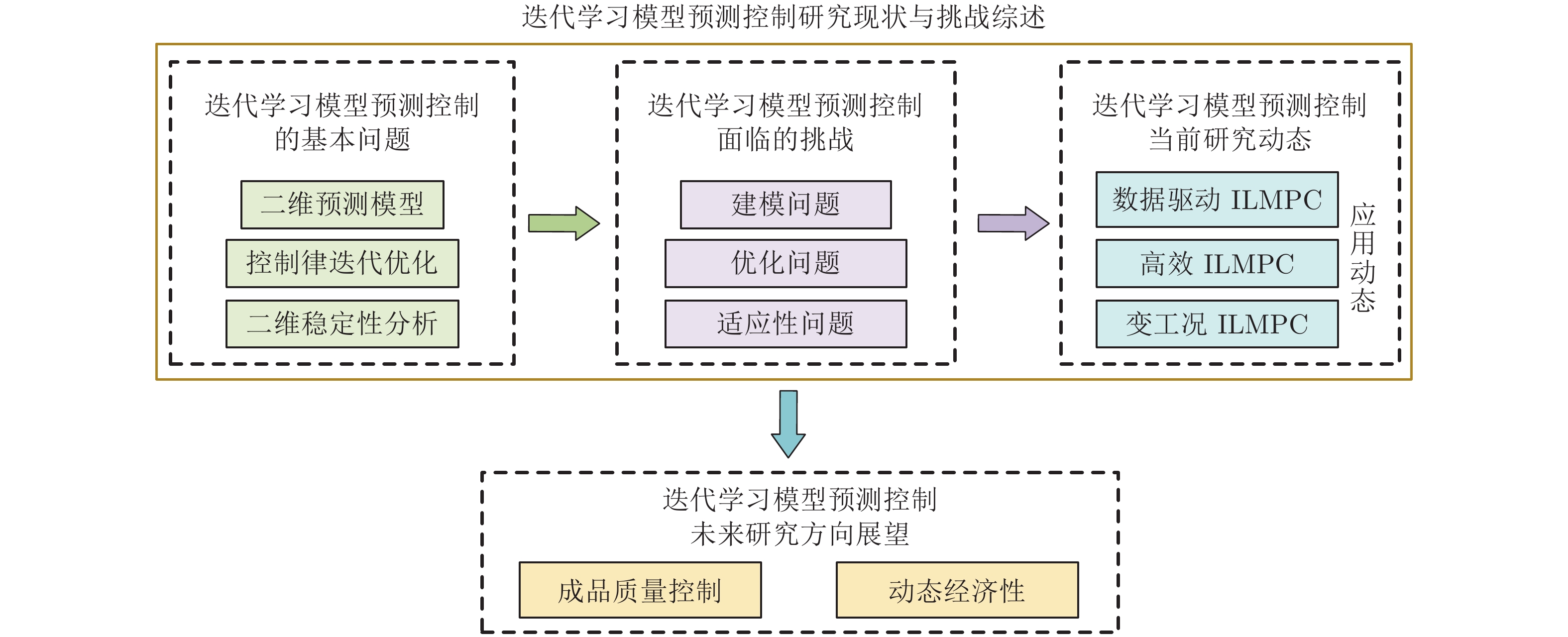
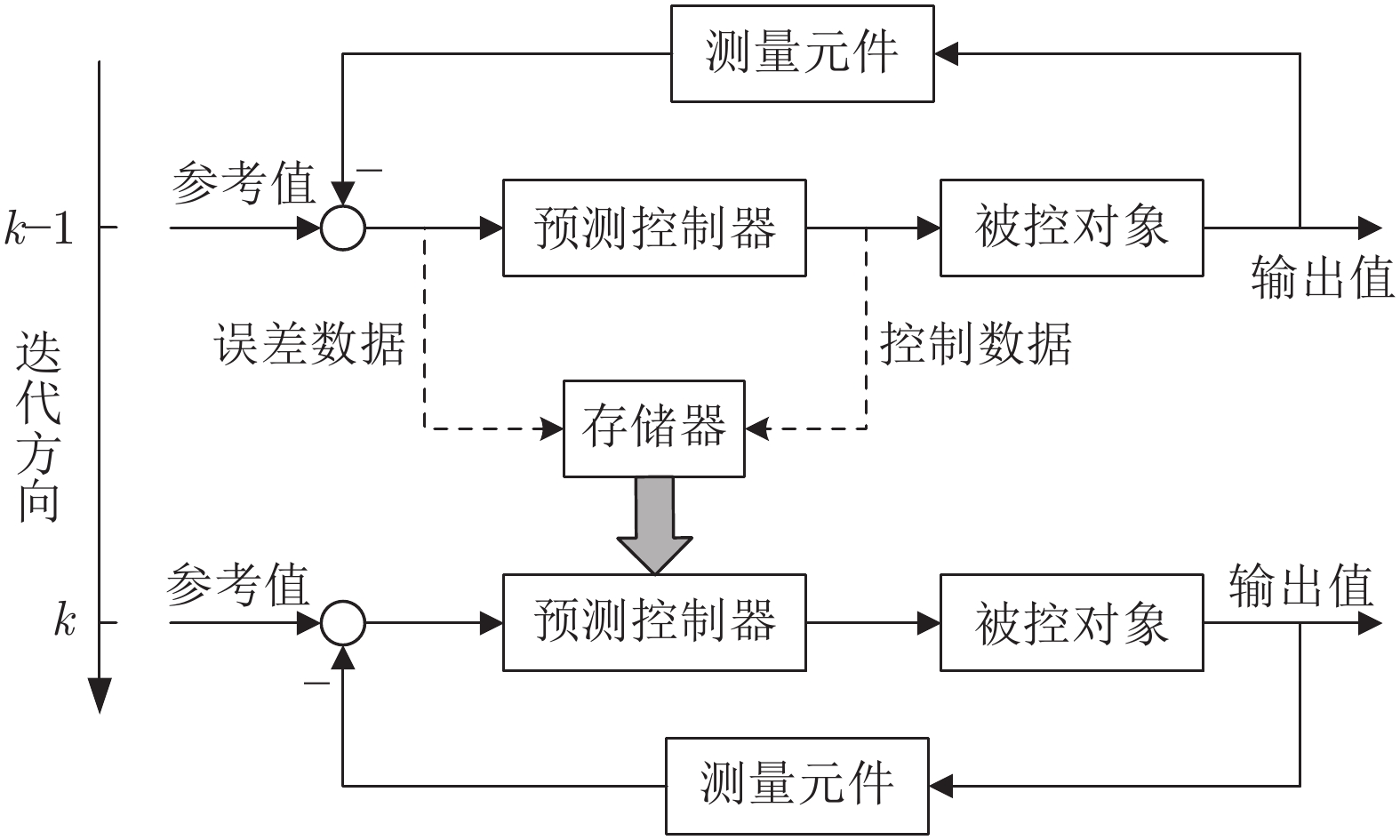
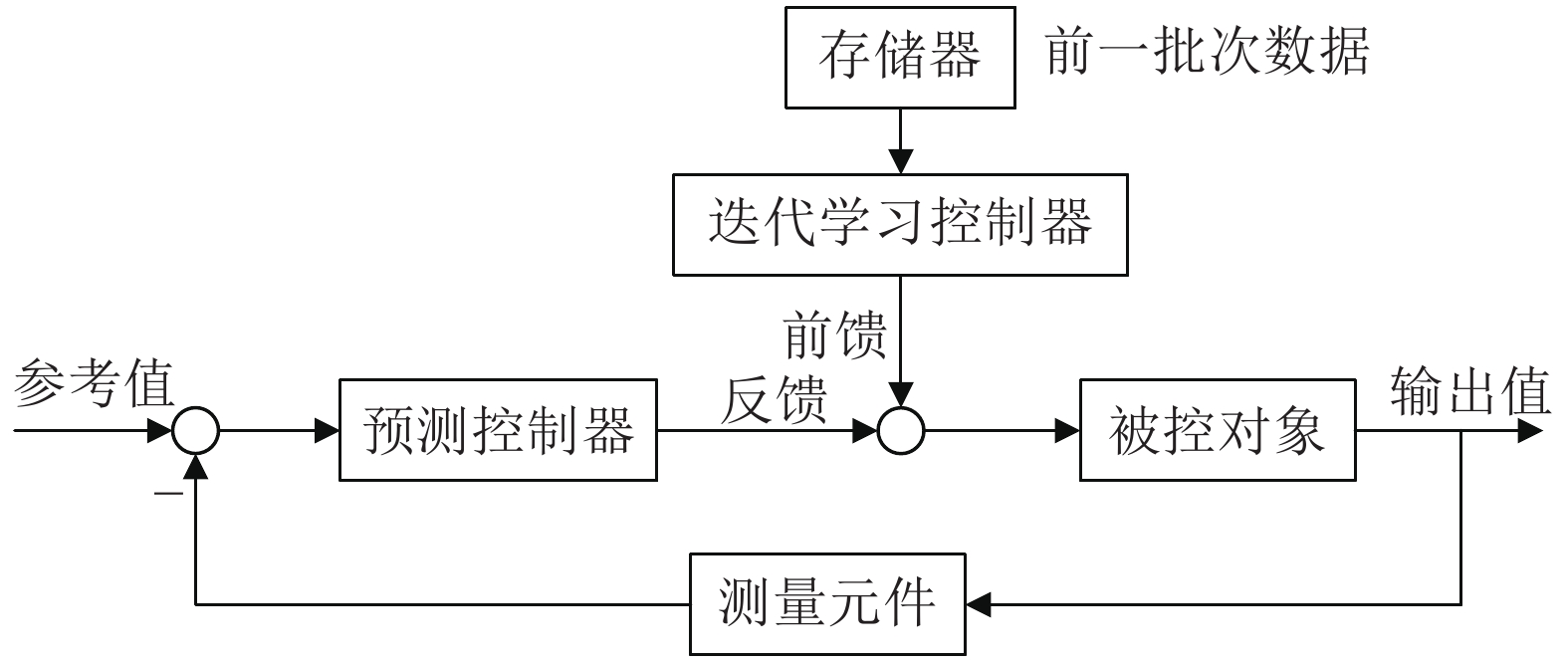
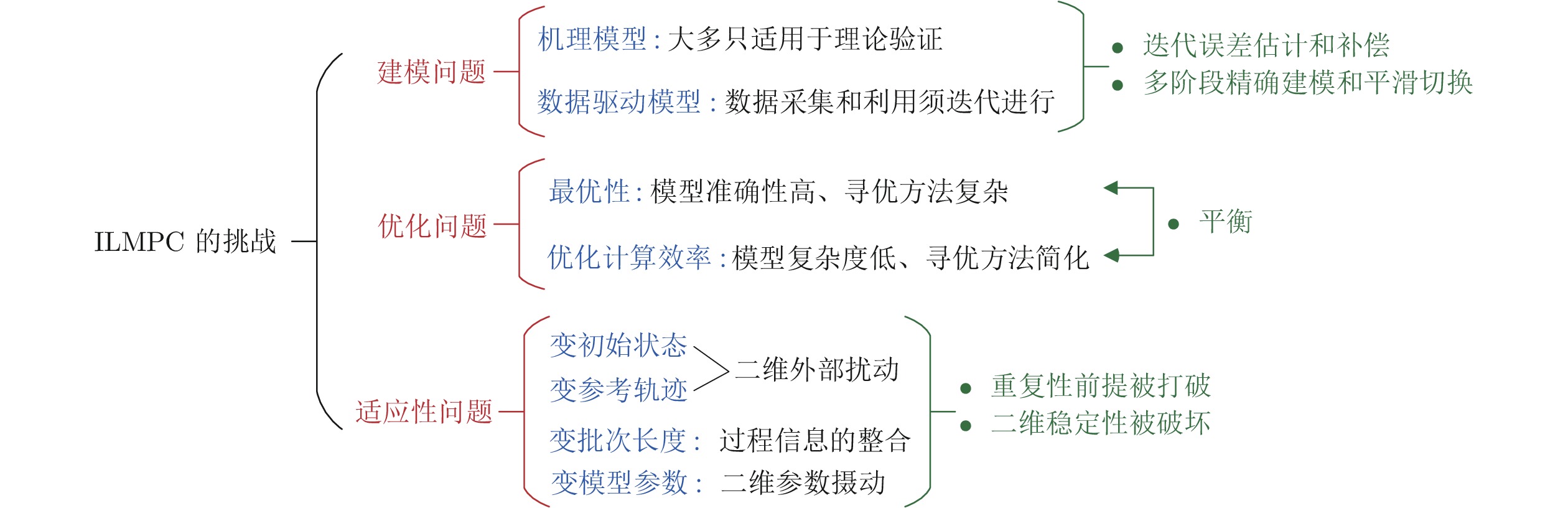
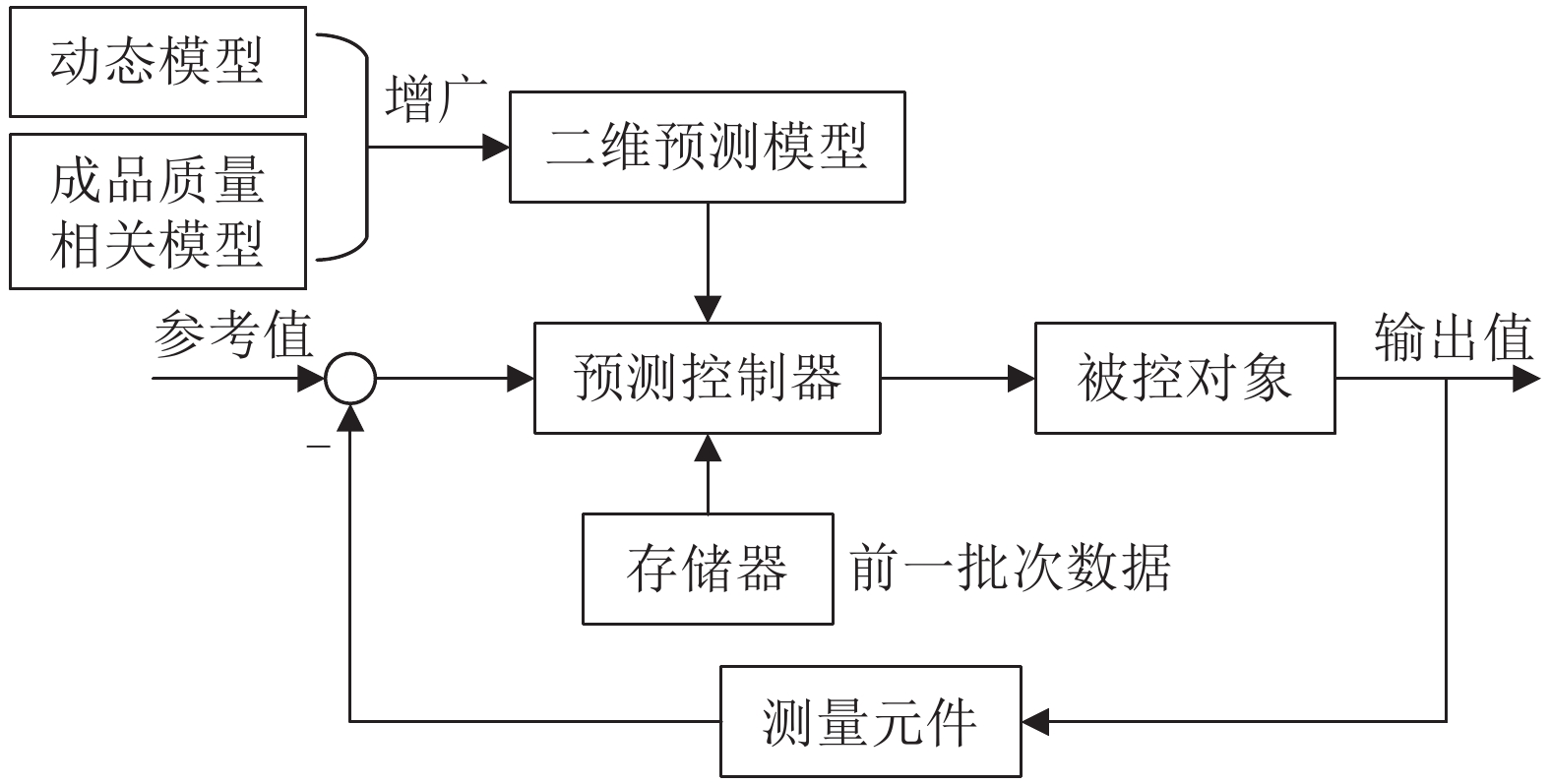
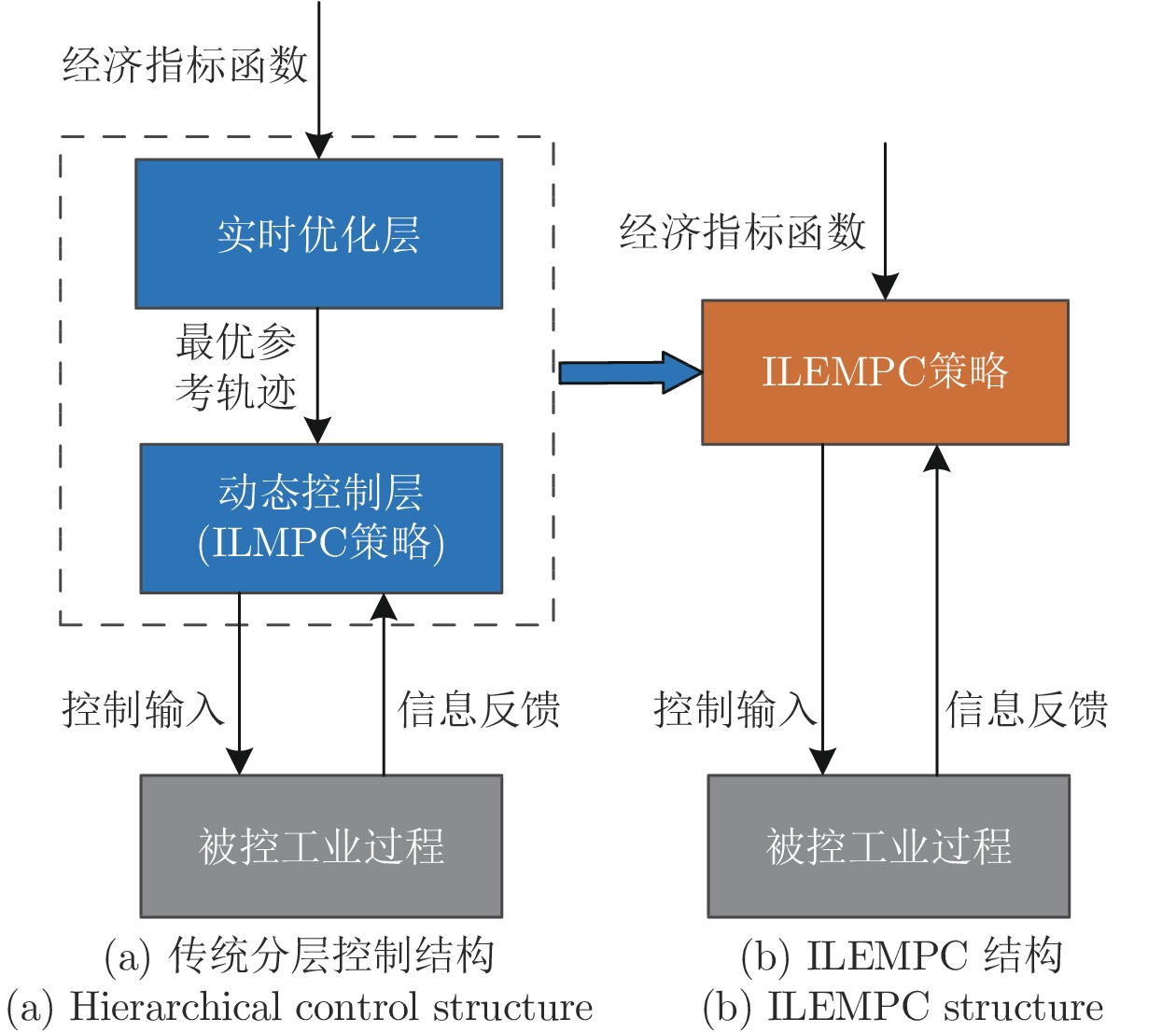
历经20多年的发展, 迭代学习模型预测控制在理论和应用方面都取得了长足的进步. 但由于批次工业过程复杂多样、结构各异、精细化程度较高, 现有的迭代学习模型预测控制理论仍面临着巨大挑战. 本文简要回顾了迭代学习模型预测控制理论的产生及发展, 阐述了二维预测模型、控制律迭代优化及二维稳定性等基本理论问题; 分析了现有方法在理论及应用方面的局限性, 说明了迭代学习模型预测控制在迭代建模、高效优化、变工况适应等方面面临的难点问题, 提出了可行的解决方案. 简要综述了近年来迭代学习模型预测控制理论和应用层面的发展动态, 指出了研究复杂非线性系统、快速系统、变工况系统对进一步完善其理论体系和拓宽其应用前景的意义, 展望了成品质量控制和动态经济控制等重要的未来研究方向.
历经20多年的发展, 迭代学习模型预测控制在理论和应用方面都取得了长足的进步. 但由于批次工业过程复杂多样、结构各异、精细化程度较高, 现有的迭代学习模型预测控制理论仍面临着巨大挑战. 本文简要回顾了迭代学习模型预测控制理论的产生及发展, 阐述了二维预测模型、控制律迭代优化及二维稳定性等基本理论问题; 分析了现有方法在理论及应用方面的局限性, 说明了迭代学习模型预测控制在迭代建模、高效优化、变工况适应等方面面临的难点问题, 提出了可行的解决方案. 简要综述了近年来迭代学习模型预测控制理论和应用层面的发展动态, 指出了研究复杂非线性系统、快速系统、变工况系统对进一步完善其理论体系和拓宽其应用前景的意义, 展望了成品质量控制和动态经济控制等重要的未来研究方向.
2022, 48(6): 1402-1428.
doi: 10.16383/j.aas.c200956
摘要:
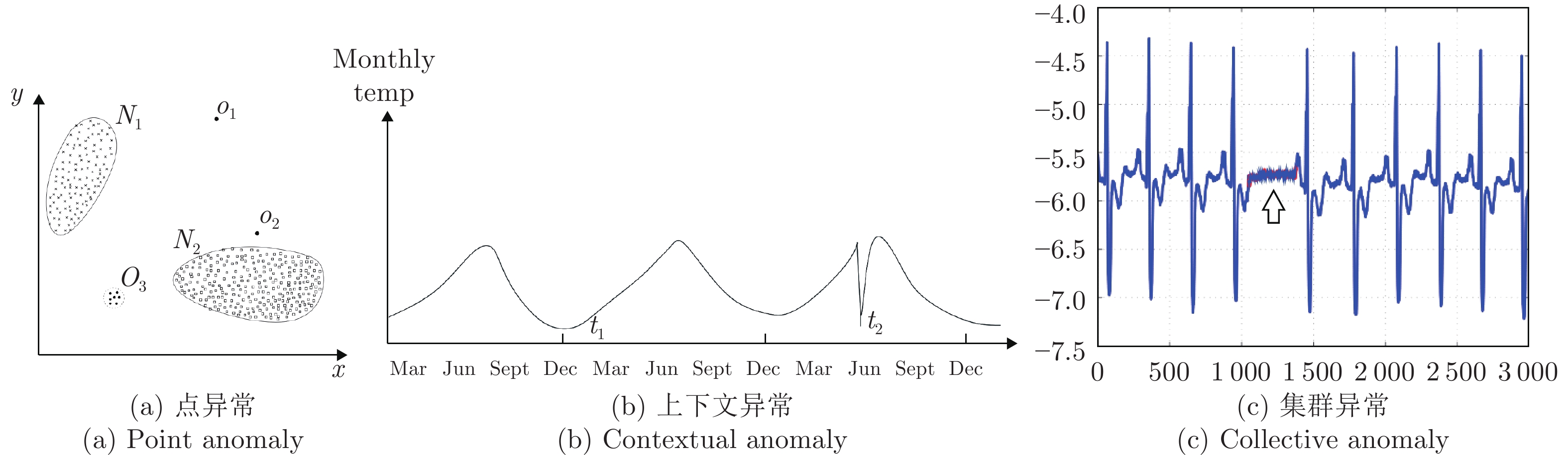
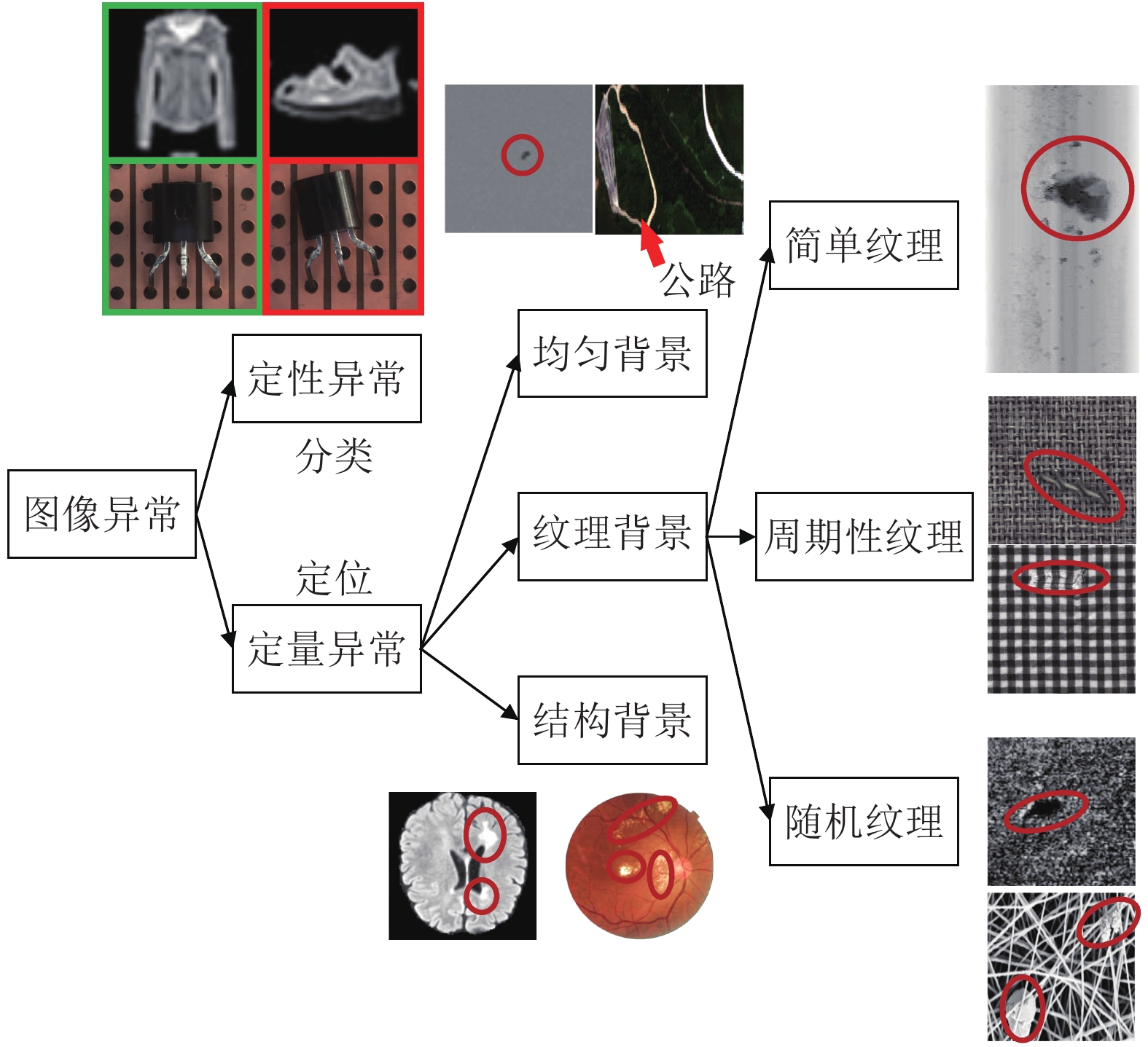
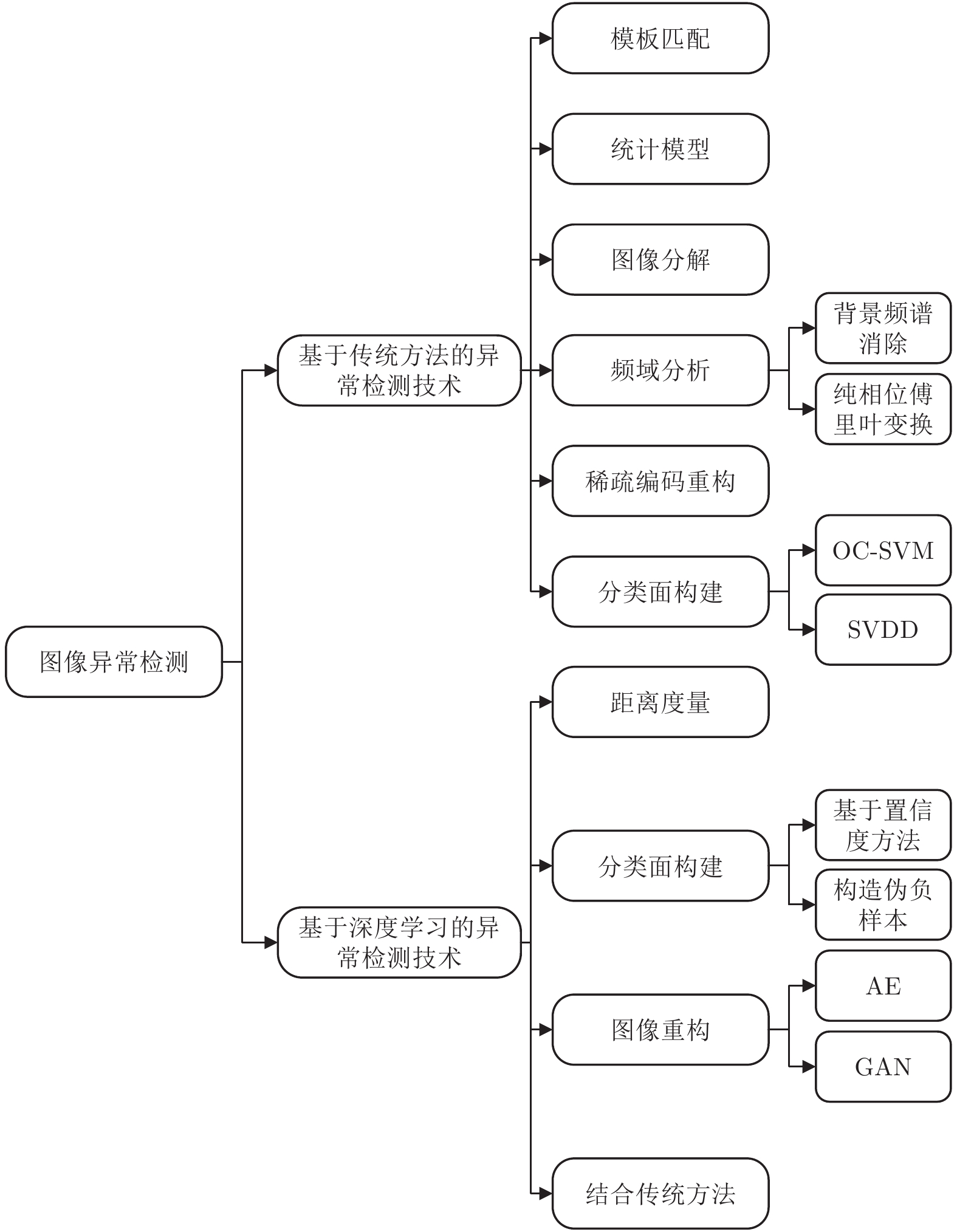
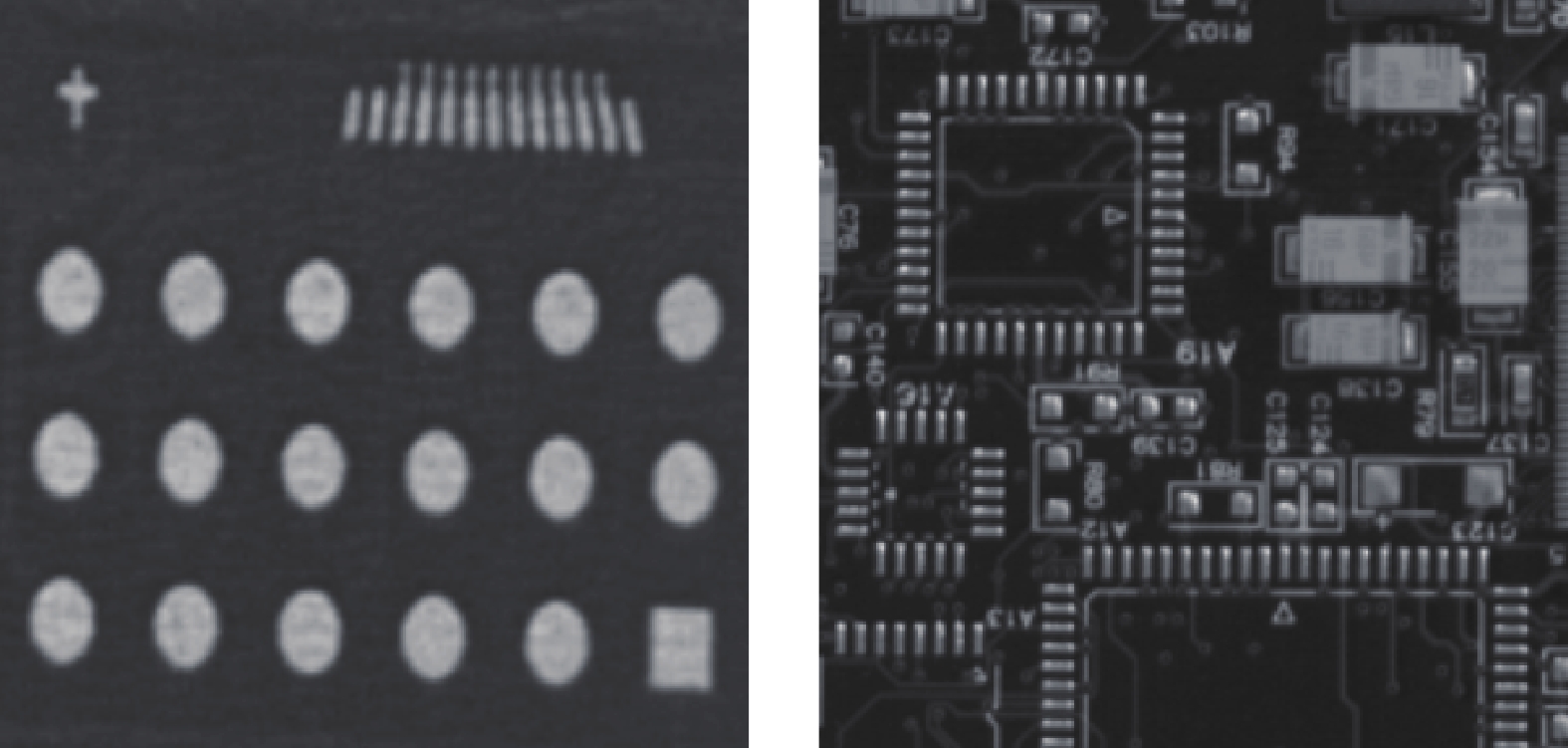
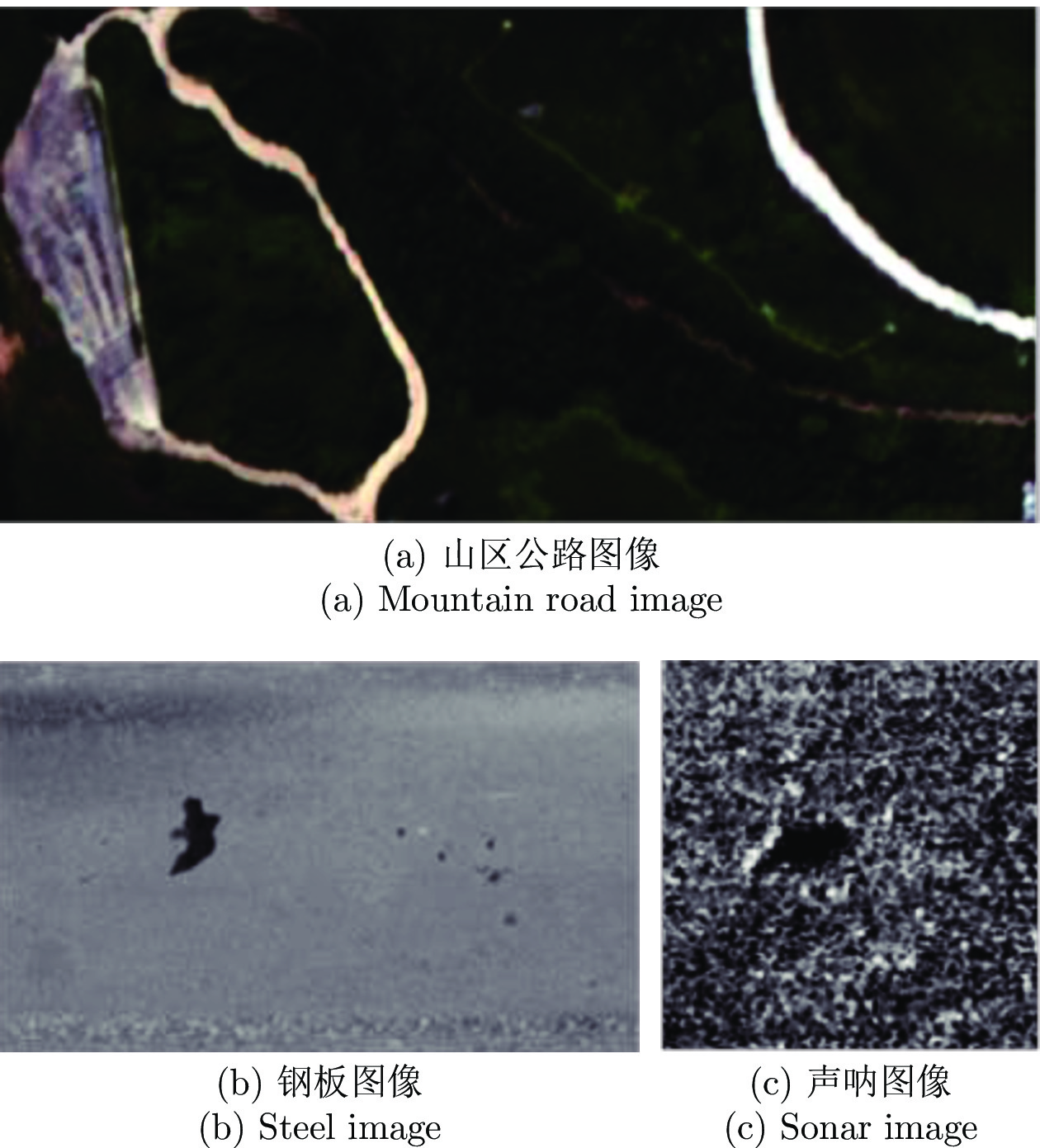
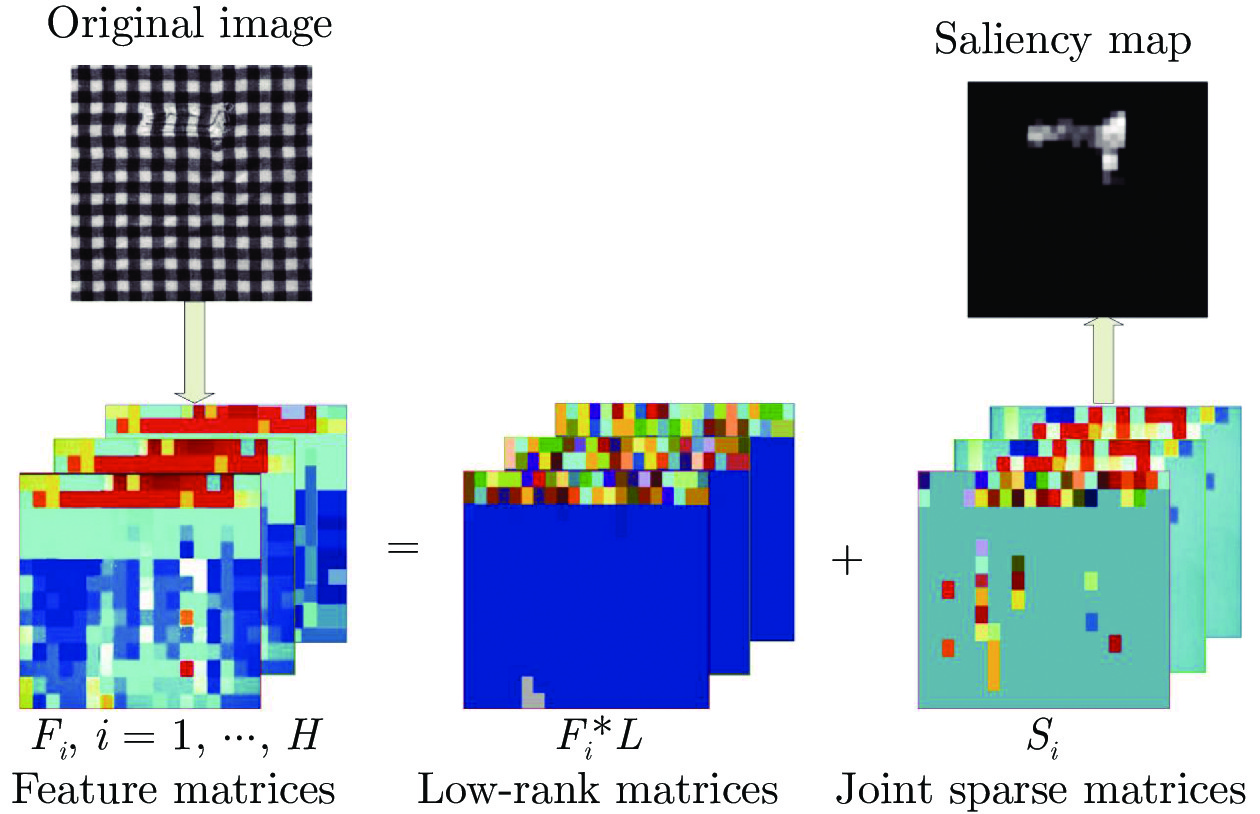
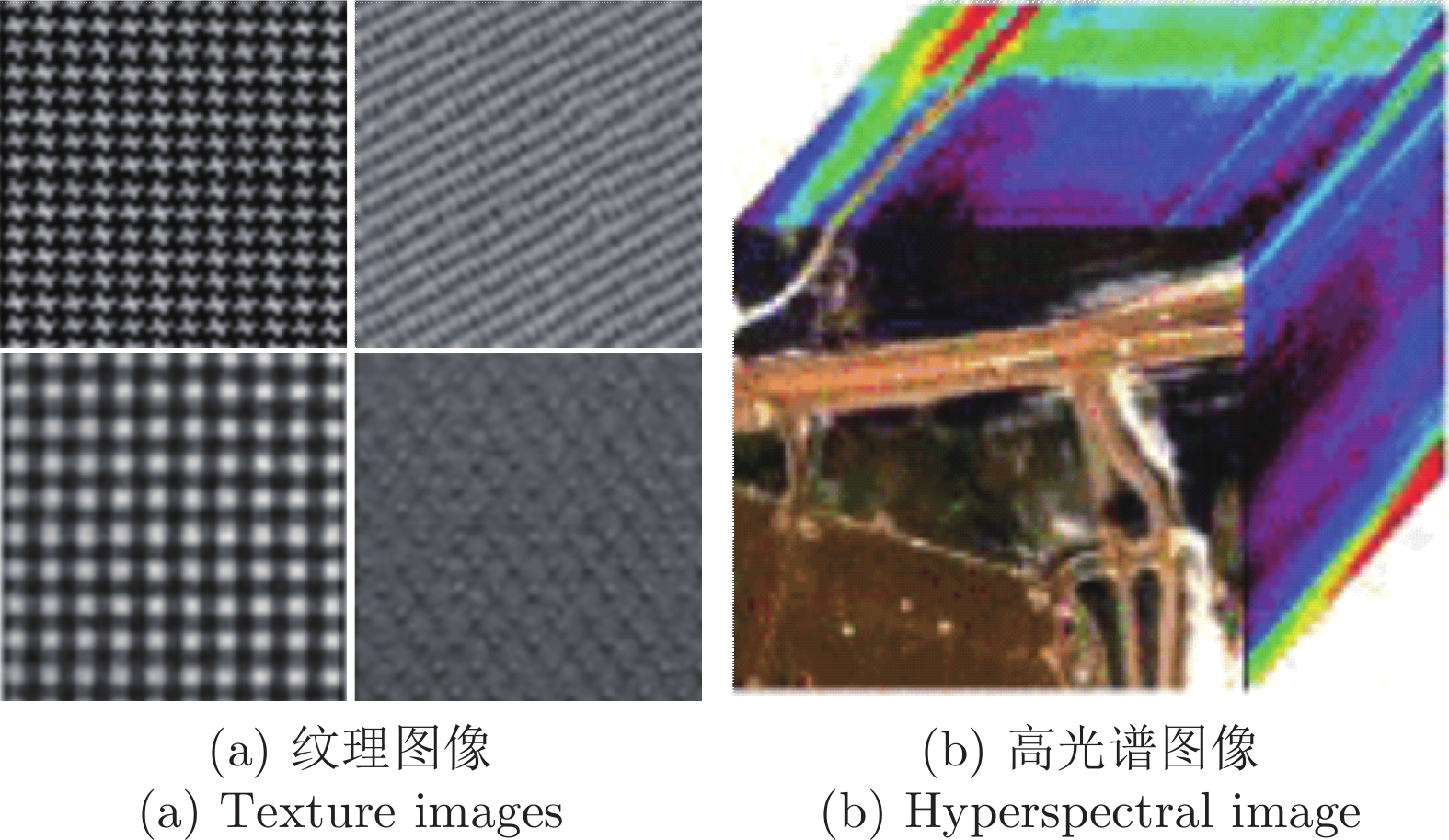
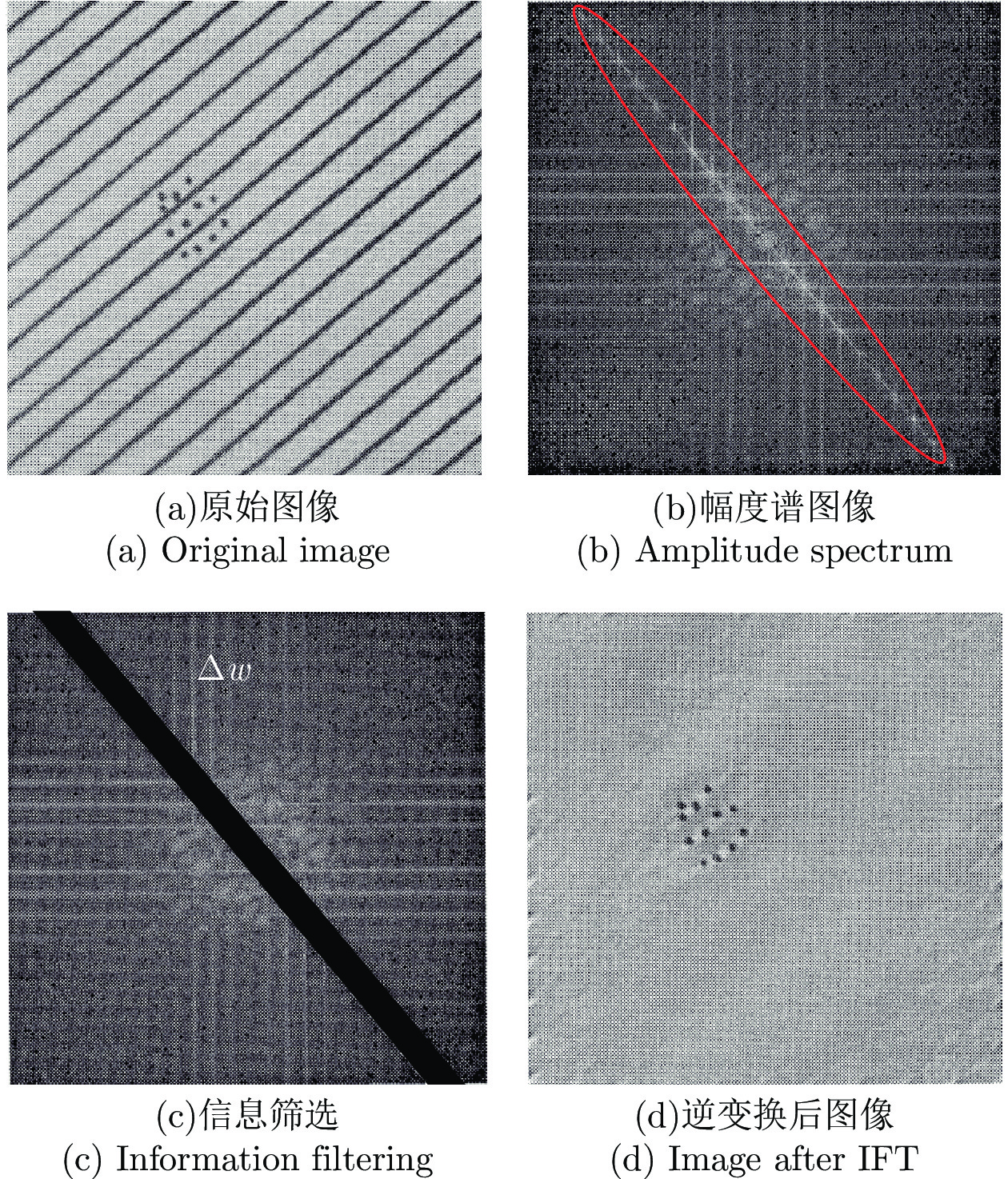
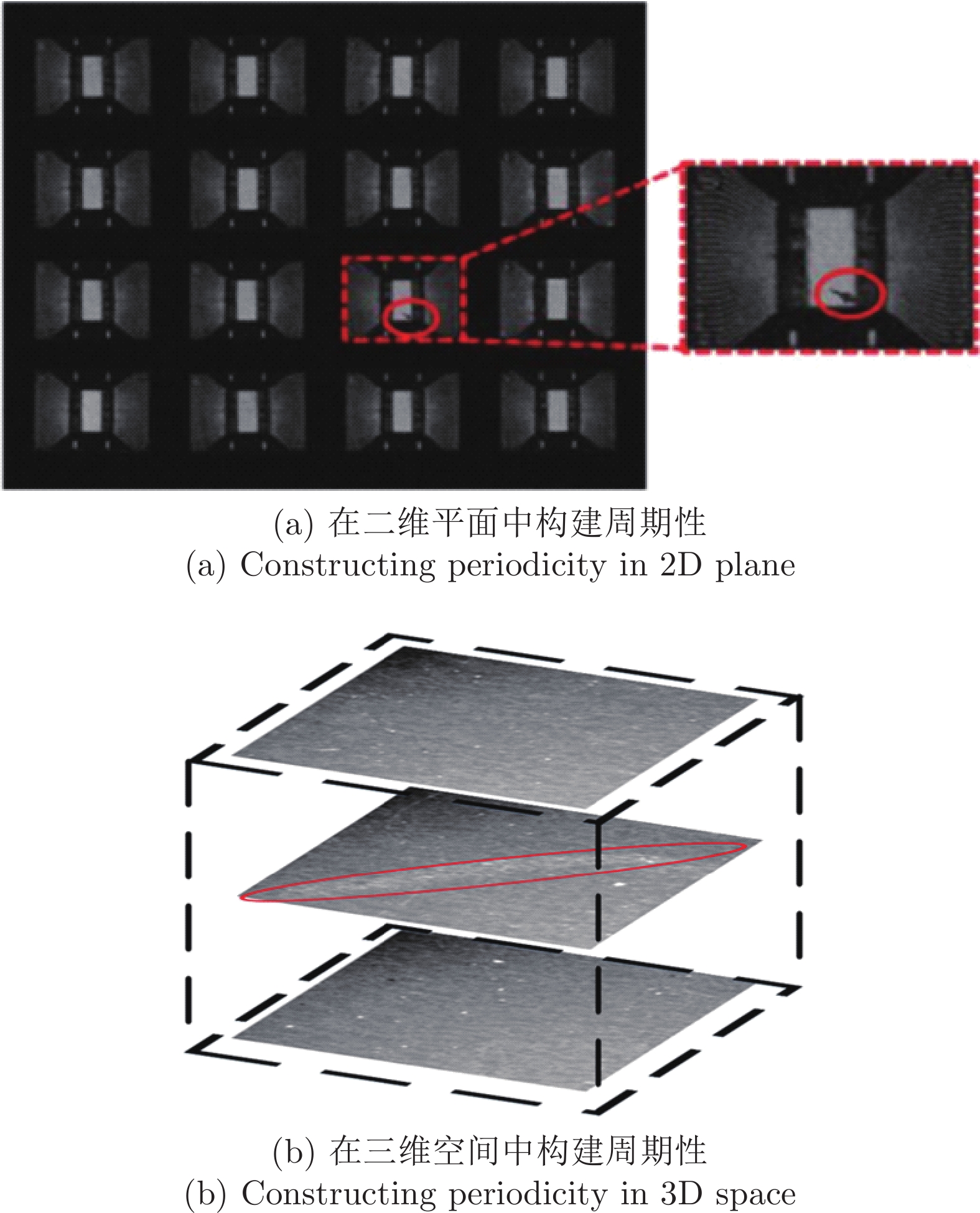
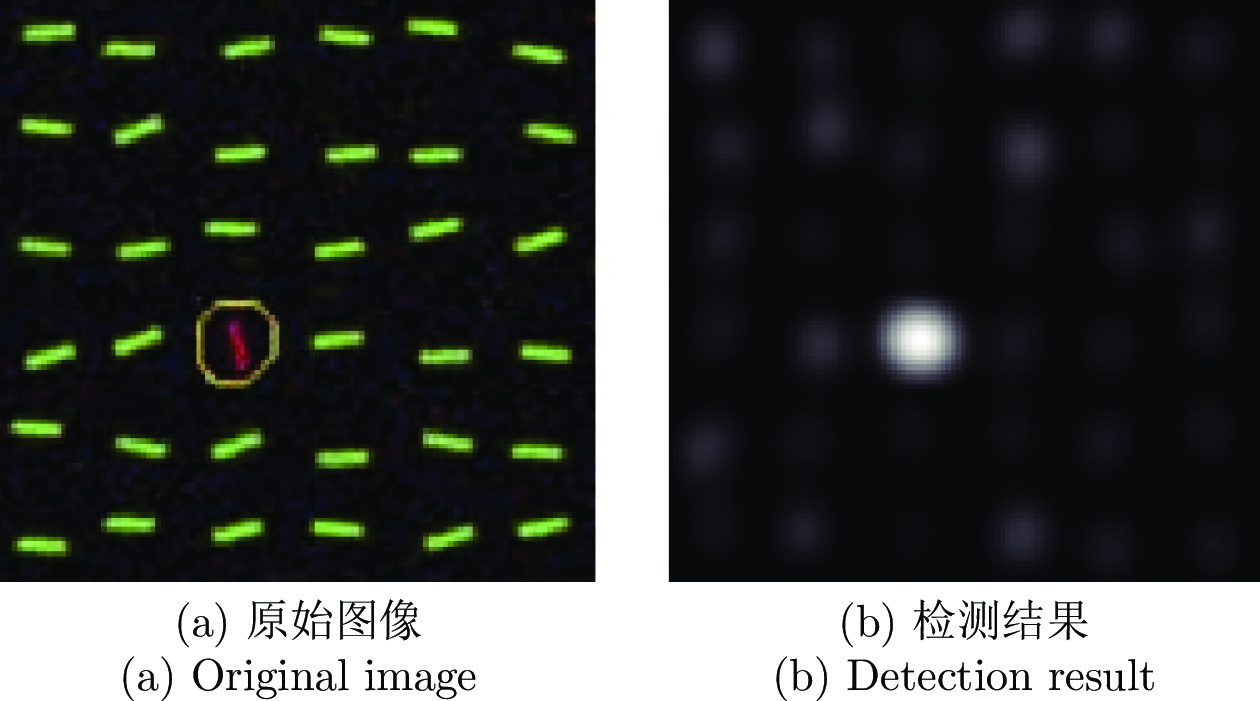
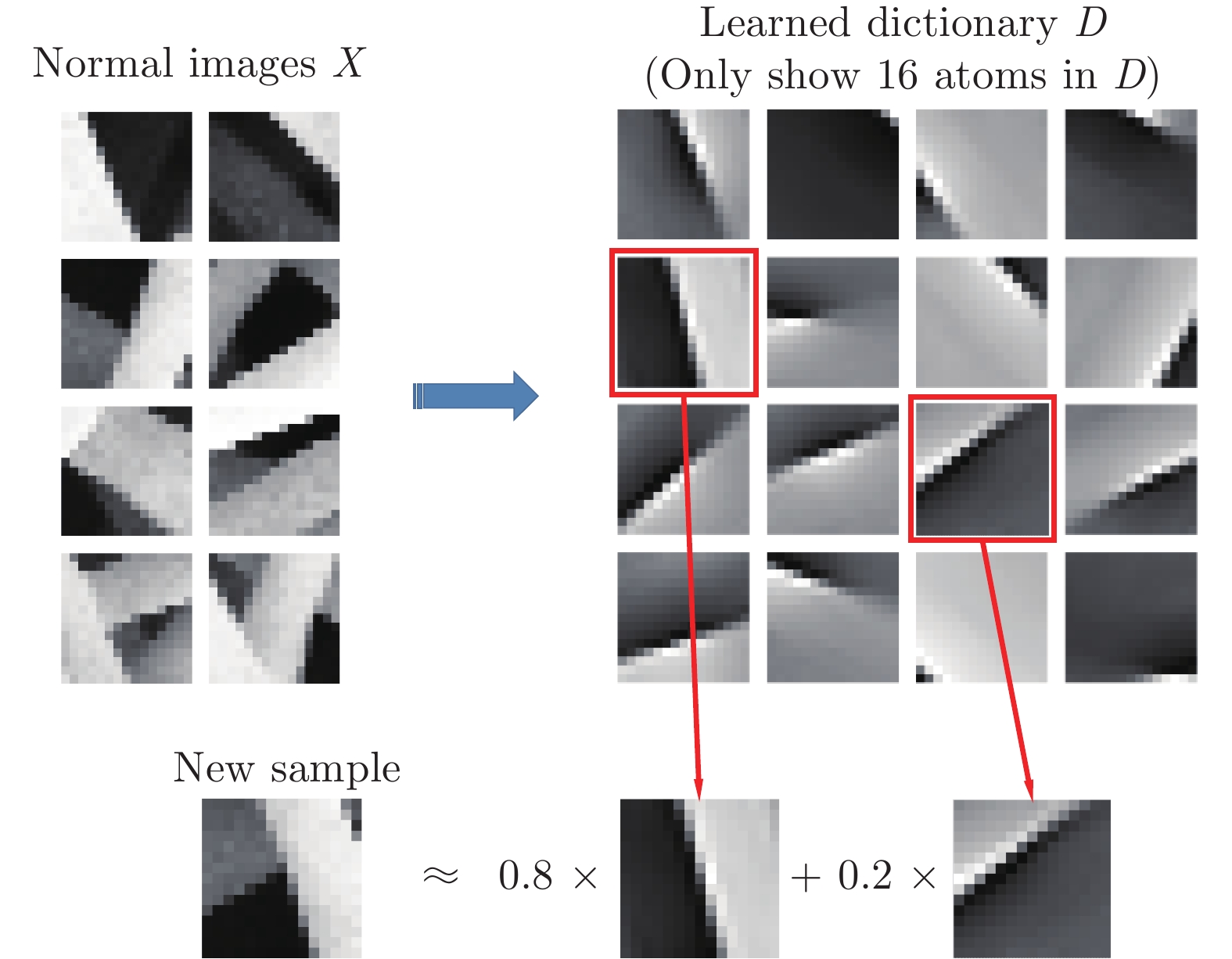
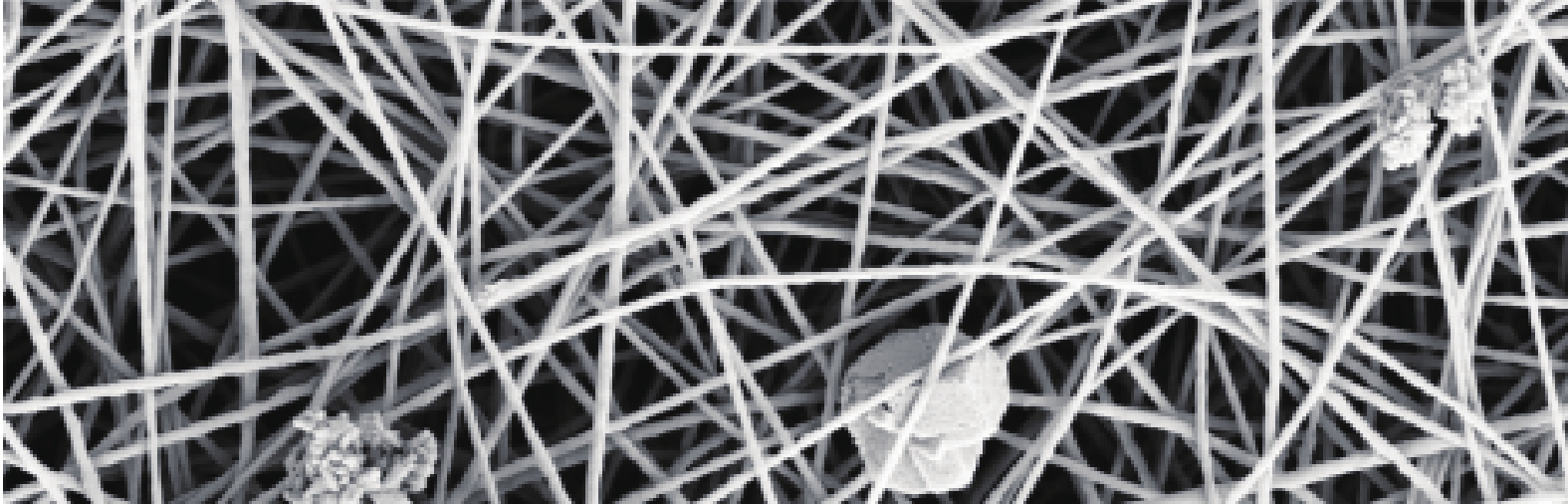
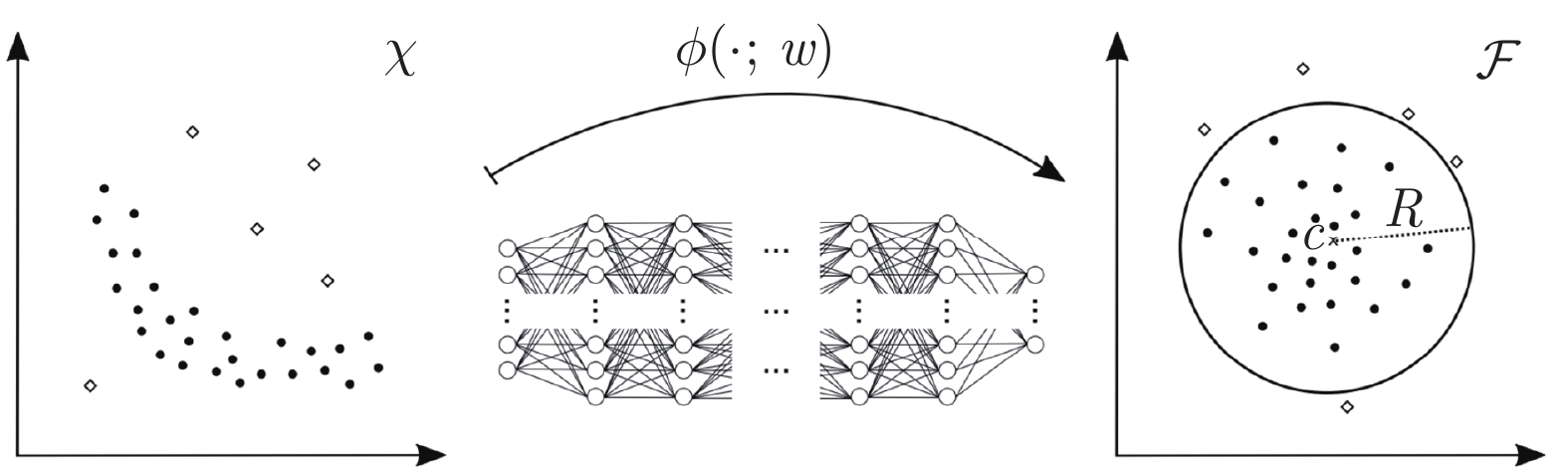
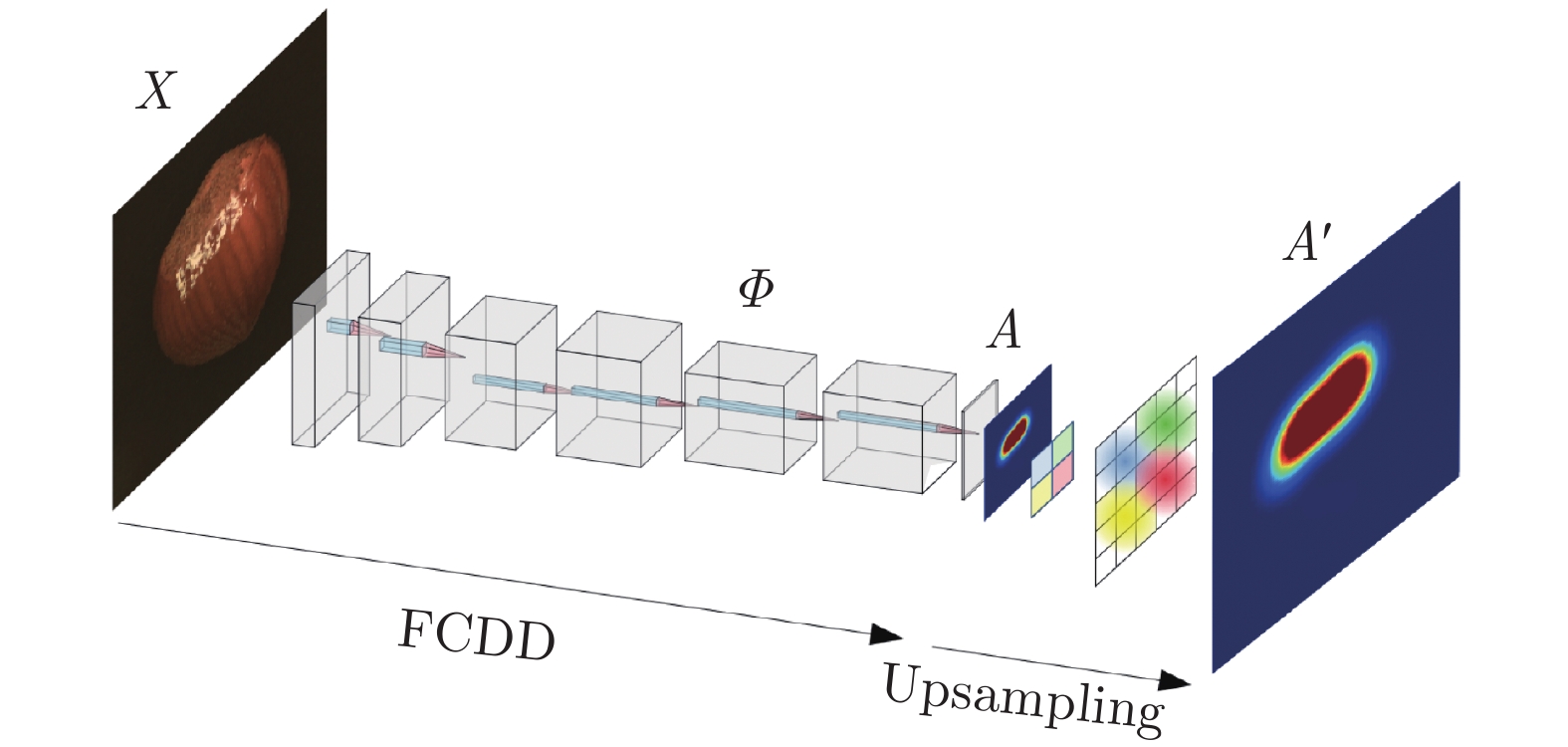
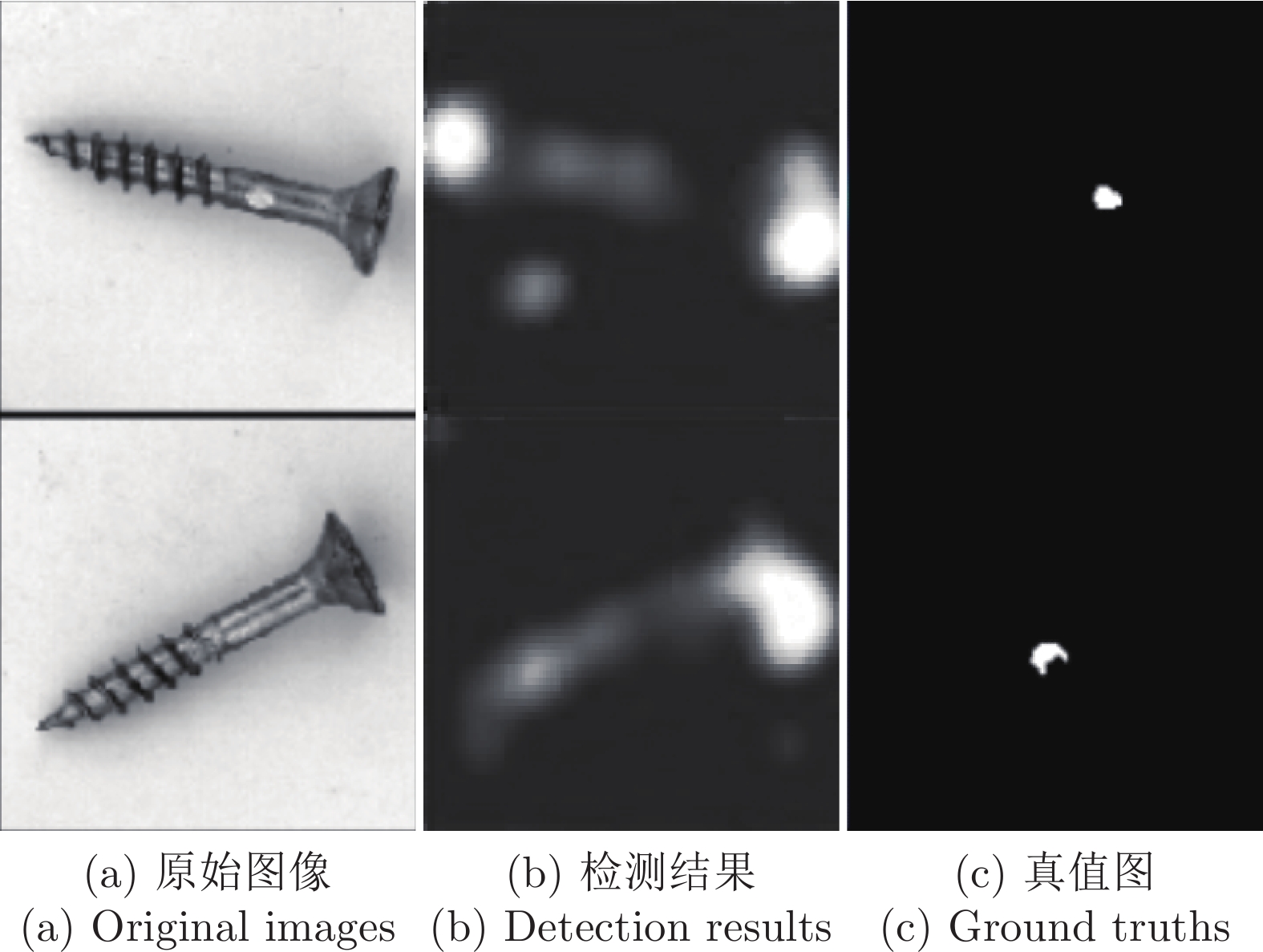
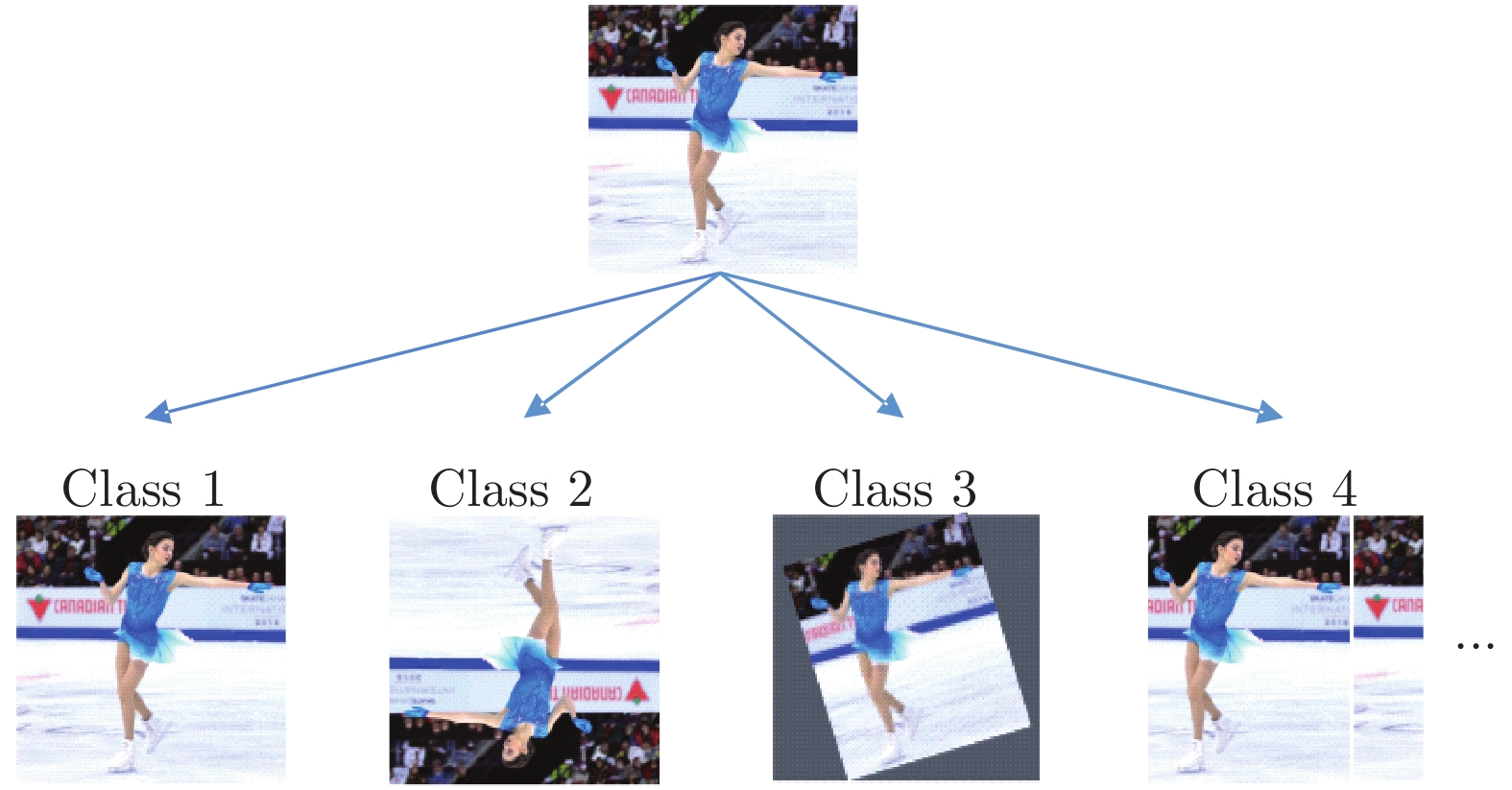
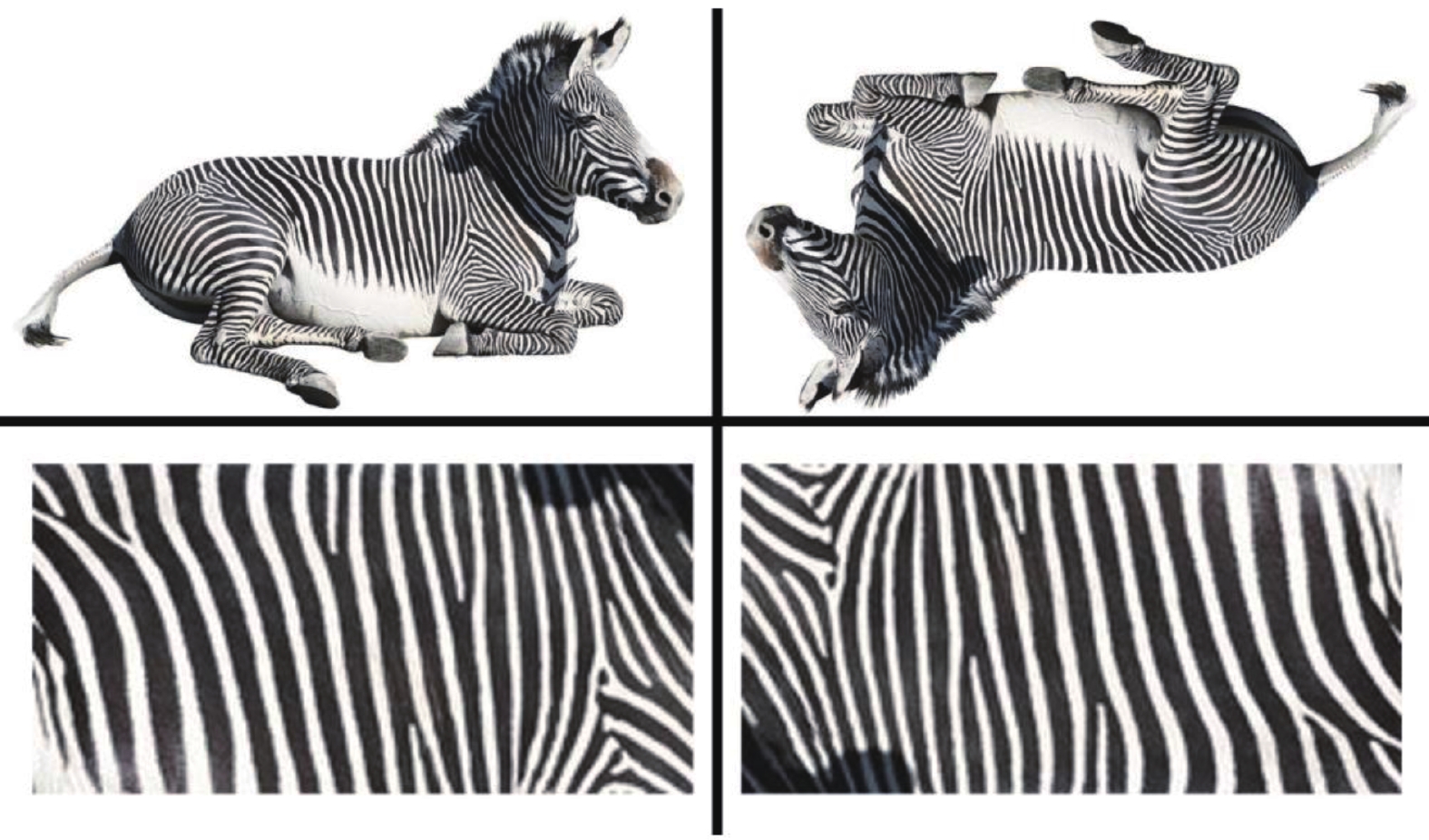
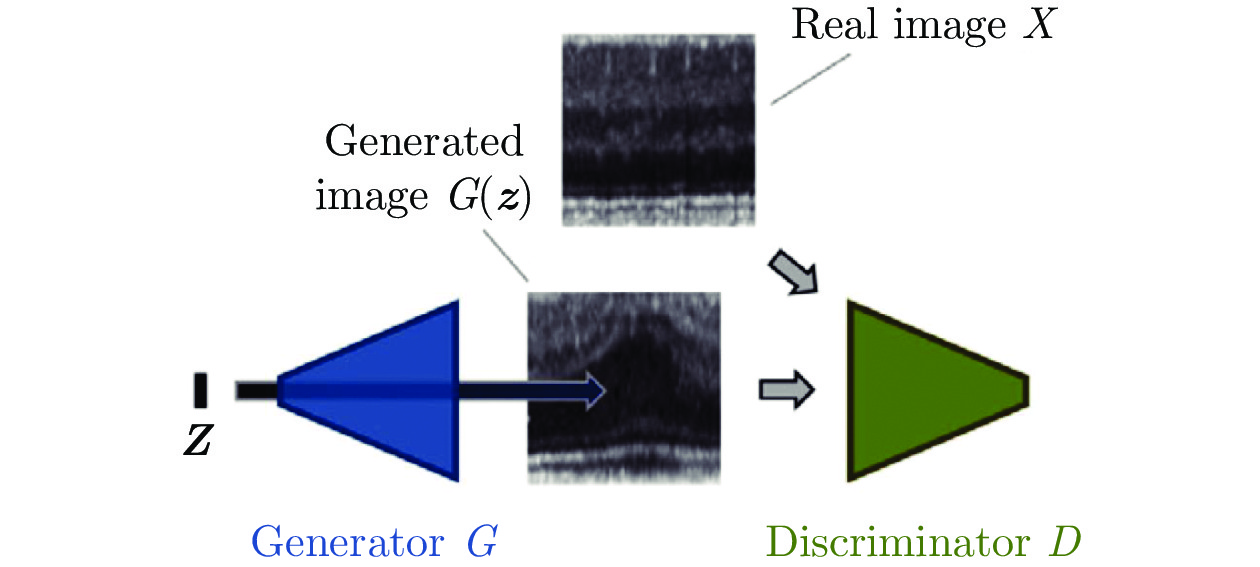
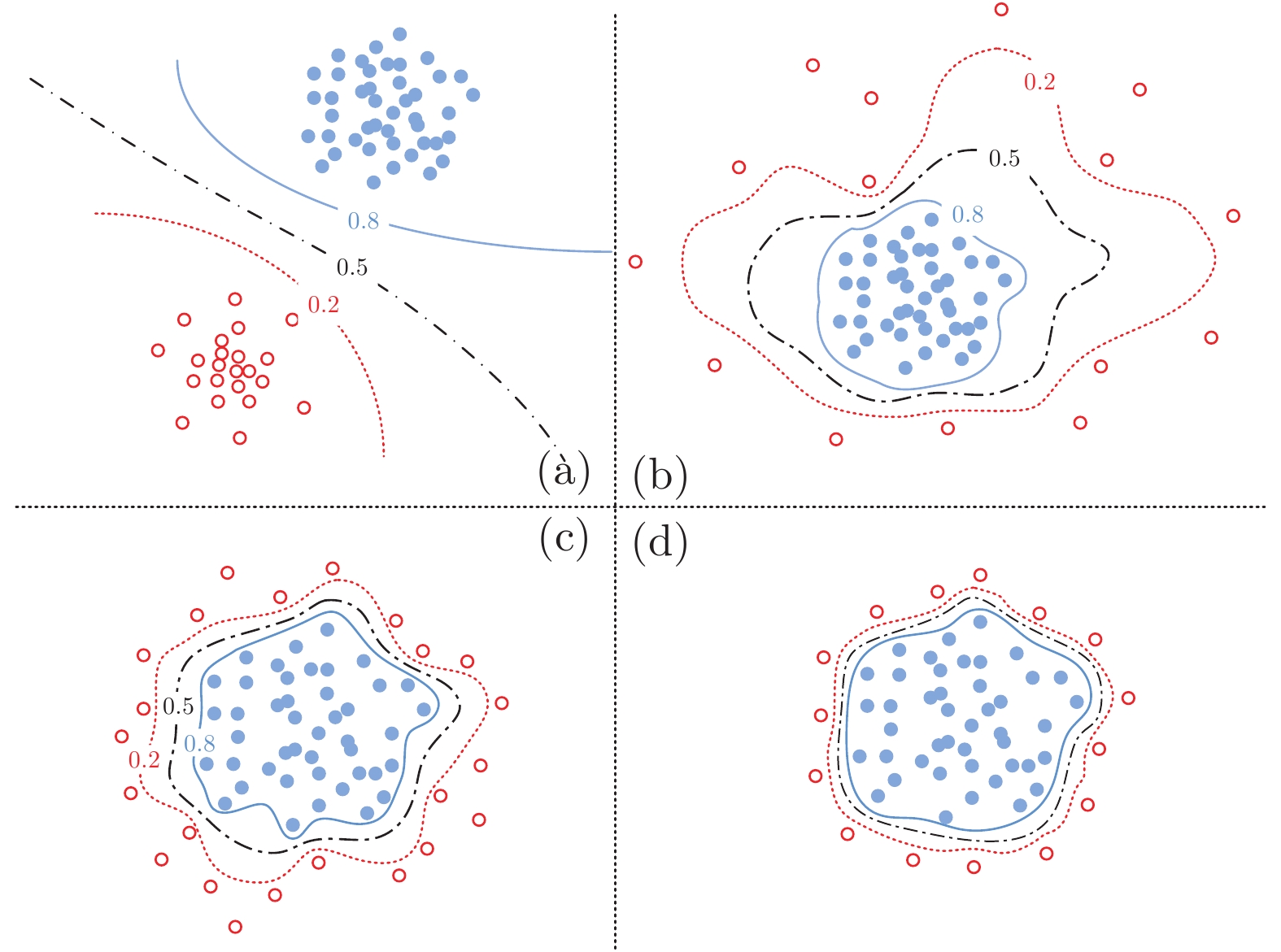
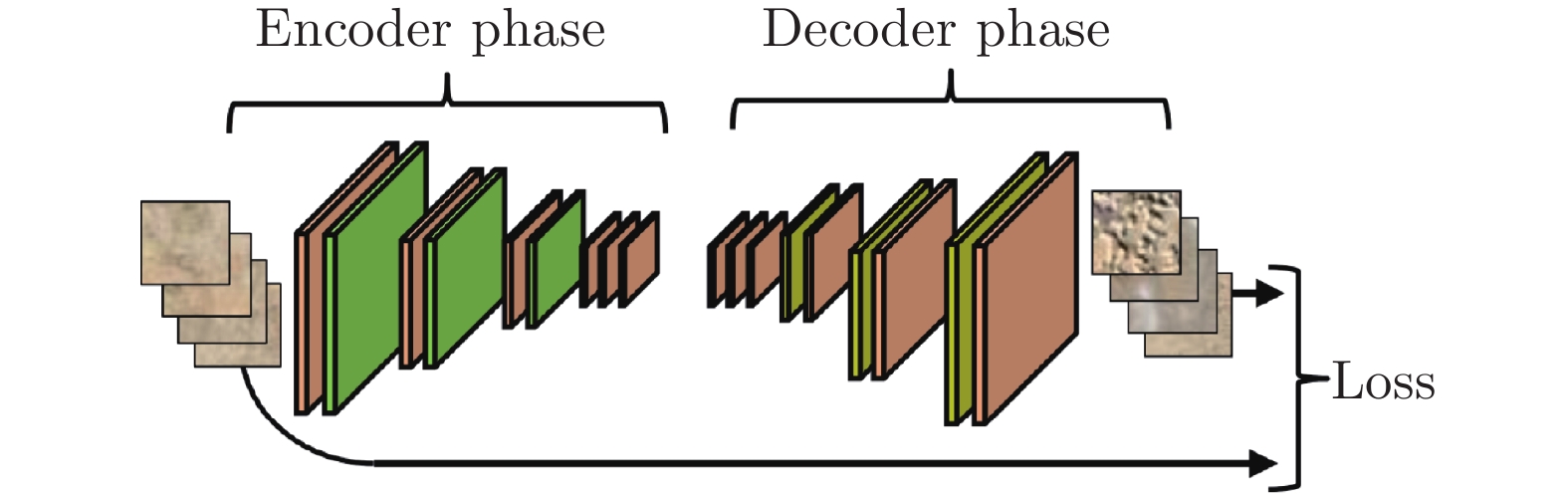
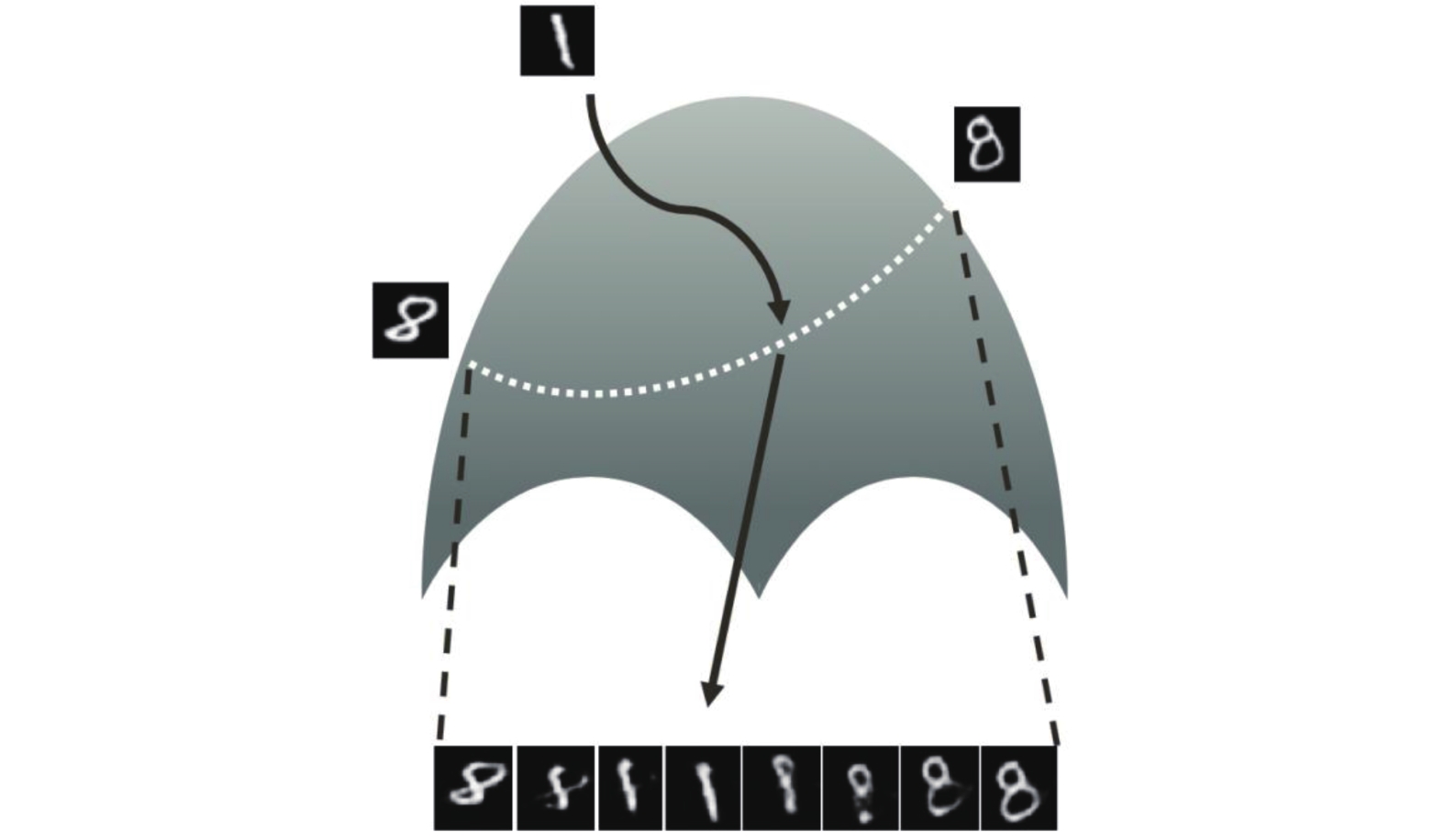
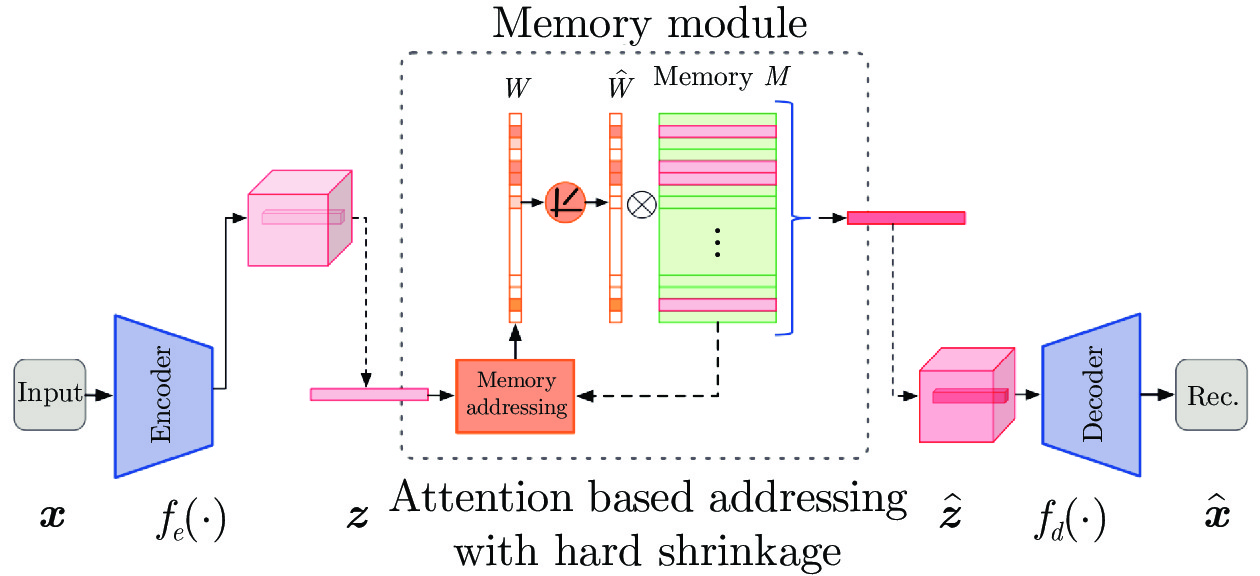
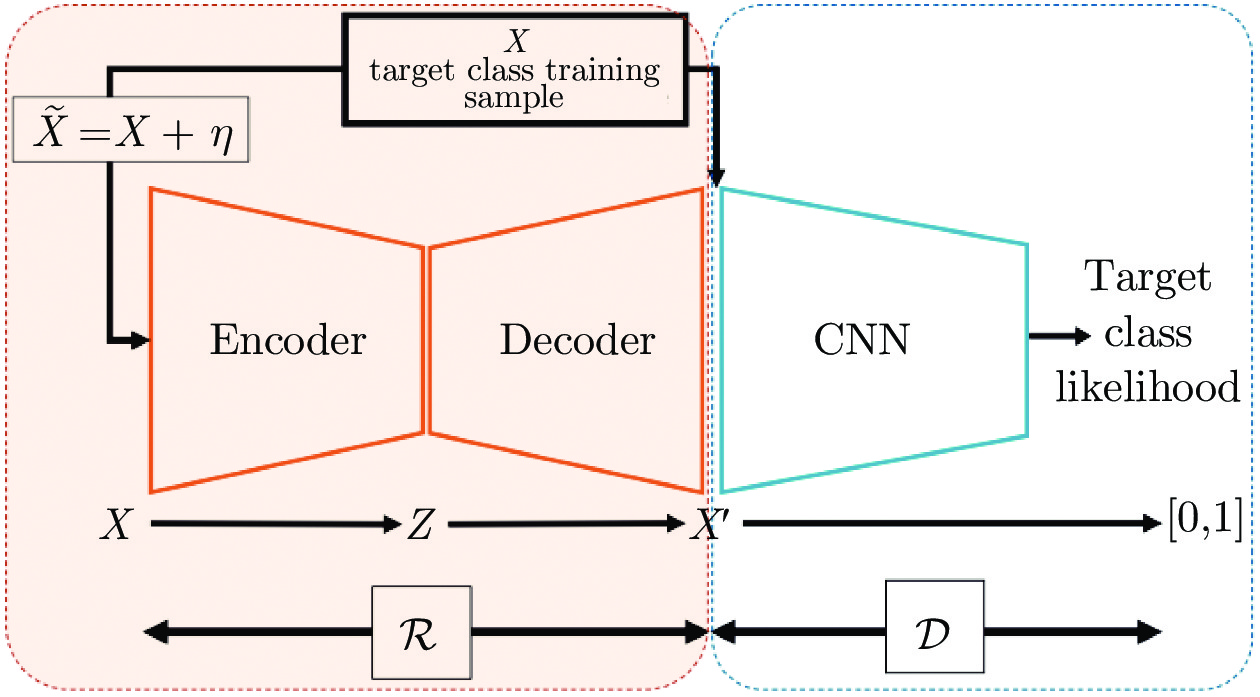
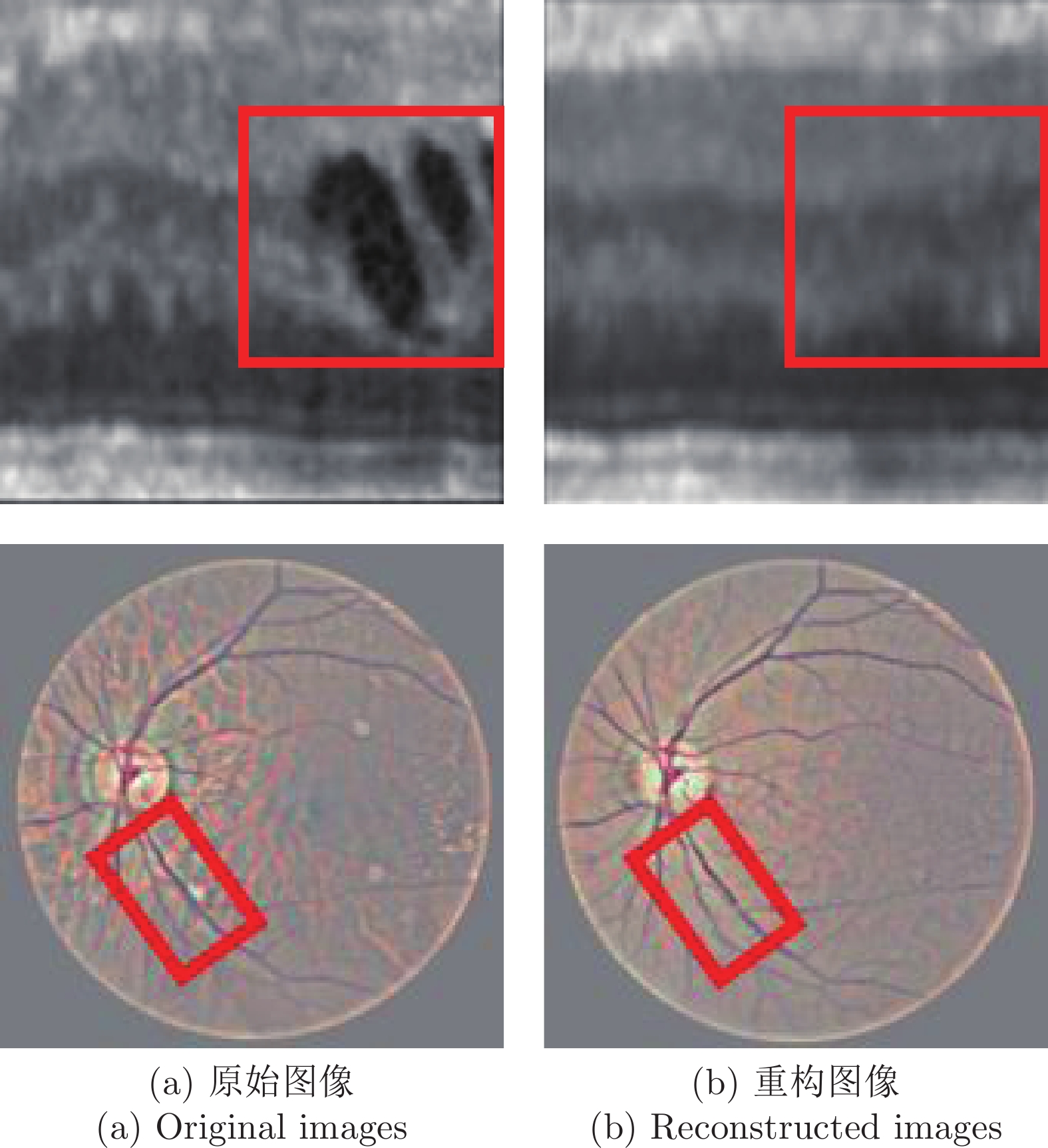
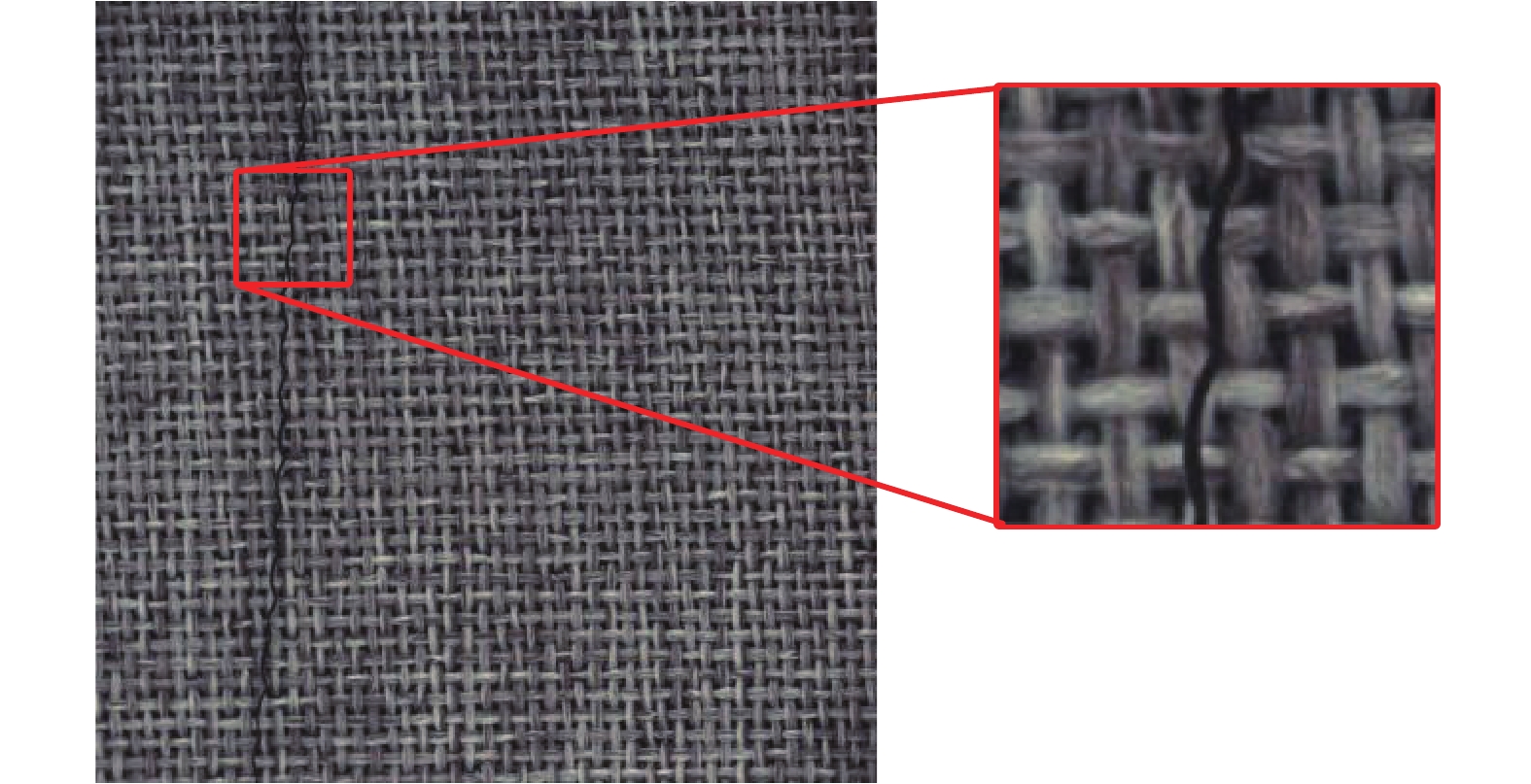
图像异常检测是计算机视觉领域的一个热门研究课题, 其目标是在不使用真实异常样本的情况下, 利用现有的正常样本构建模型以检测可能出现的各种异常图像, 在工业外观缺陷检测、医学图像分析、高光谱图像处理等领域有较高的研究意义和应用价值. 本文首先介绍了异常的定义以及常见的异常类型. 然后, 本文根据在模型构建过程中有无神经网络的参与, 将图像异常检测方法分为基于传统方法和基于深度学习两大类型, 并分别对相应的检测方法的设计思路、优点和局限性进行了综述与分析. 其次, 梳理了图像异常检测任务中面临的主要挑战. 最后, 对该领域未来可能的研究方向进行了展望.
图像异常检测是计算机视觉领域的一个热门研究课题, 其目标是在不使用真实异常样本的情况下, 利用现有的正常样本构建模型以检测可能出现的各种异常图像, 在工业外观缺陷检测、医学图像分析、高光谱图像处理等领域有较高的研究意义和应用价值. 本文首先介绍了异常的定义以及常见的异常类型. 然后, 本文根据在模型构建过程中有无神经网络的参与, 将图像异常检测方法分为基于传统方法和基于深度学习两大类型, 并分别对相应的检测方法的设计思路、优点和局限性进行了综述与分析. 其次, 梳理了图像异常检测任务中面临的主要挑战. 最后, 对该领域未来可能的研究方向进行了展望.

2022, 48(6): 1429-1447.
doi: 10.16383/j.aas.c200862
摘要:
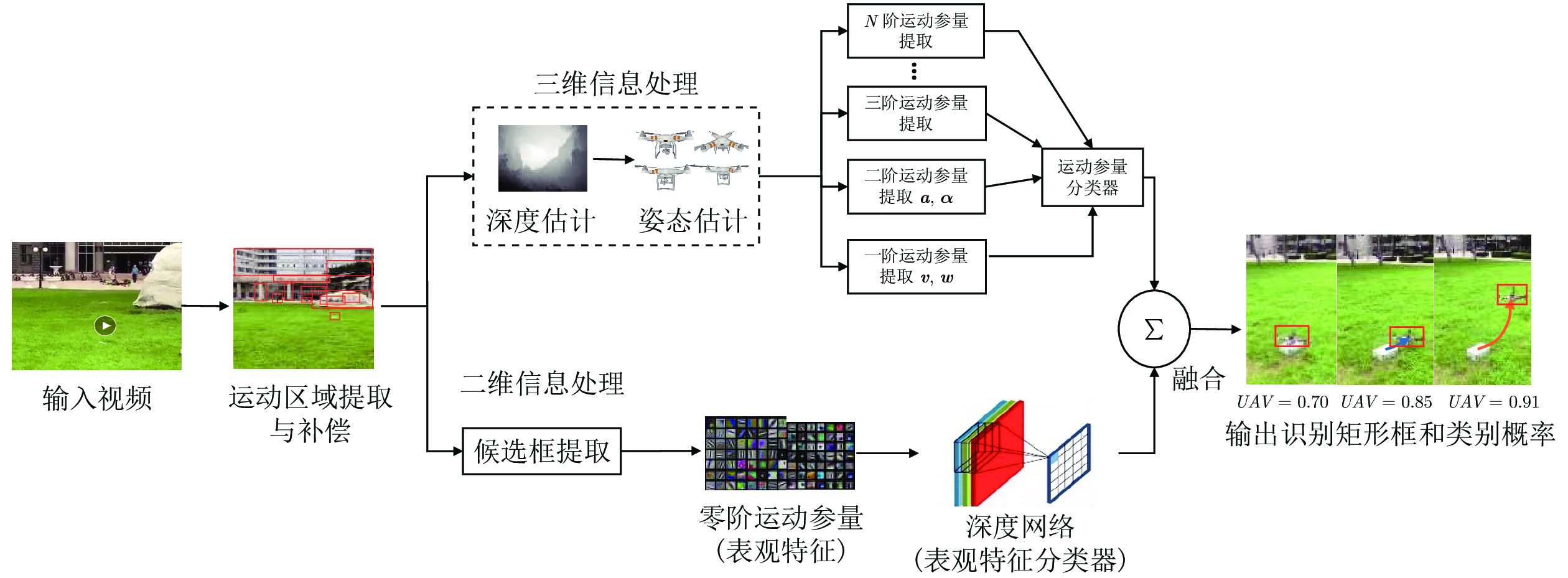
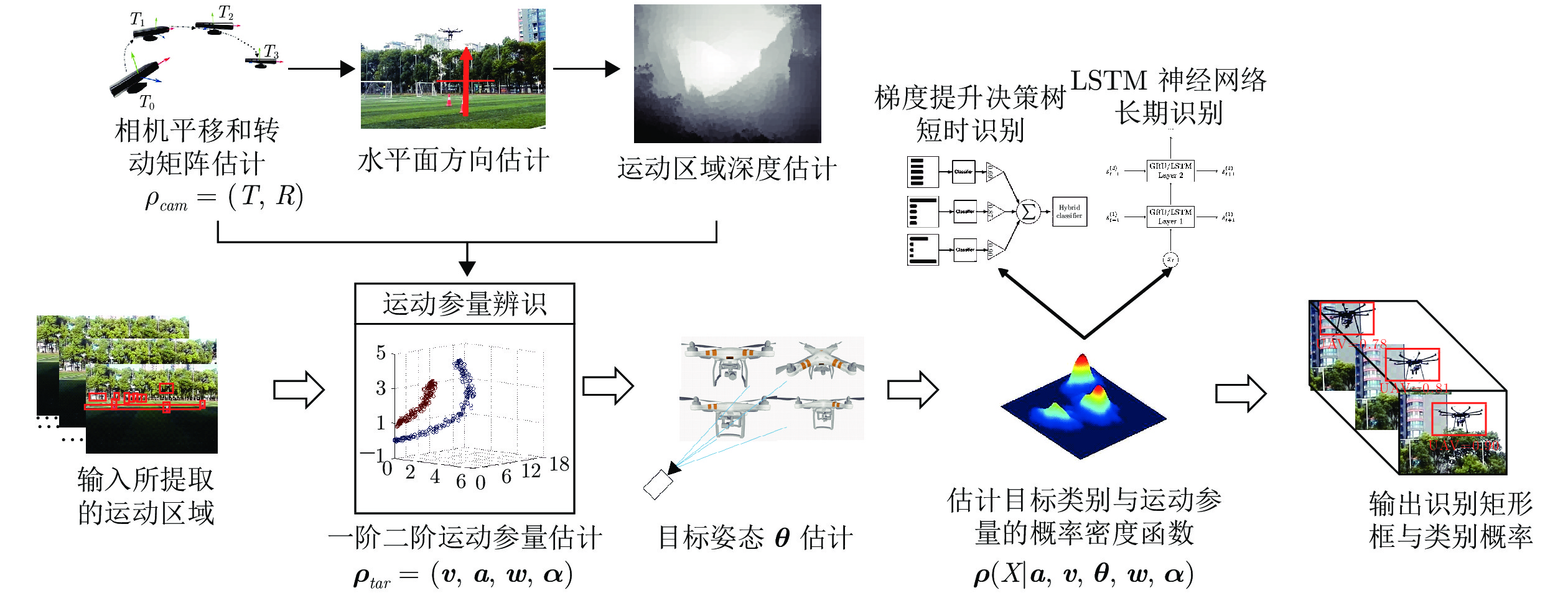
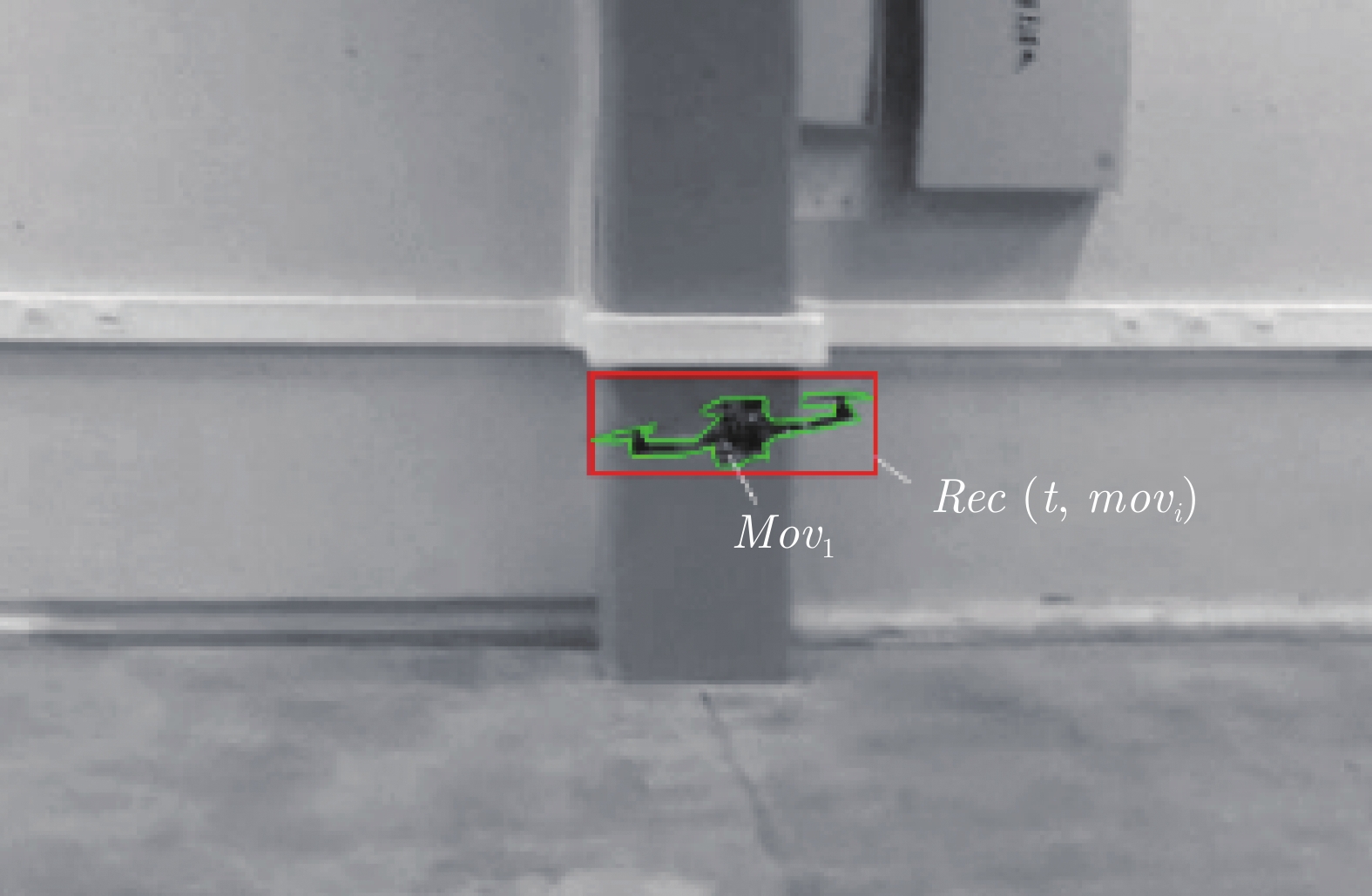
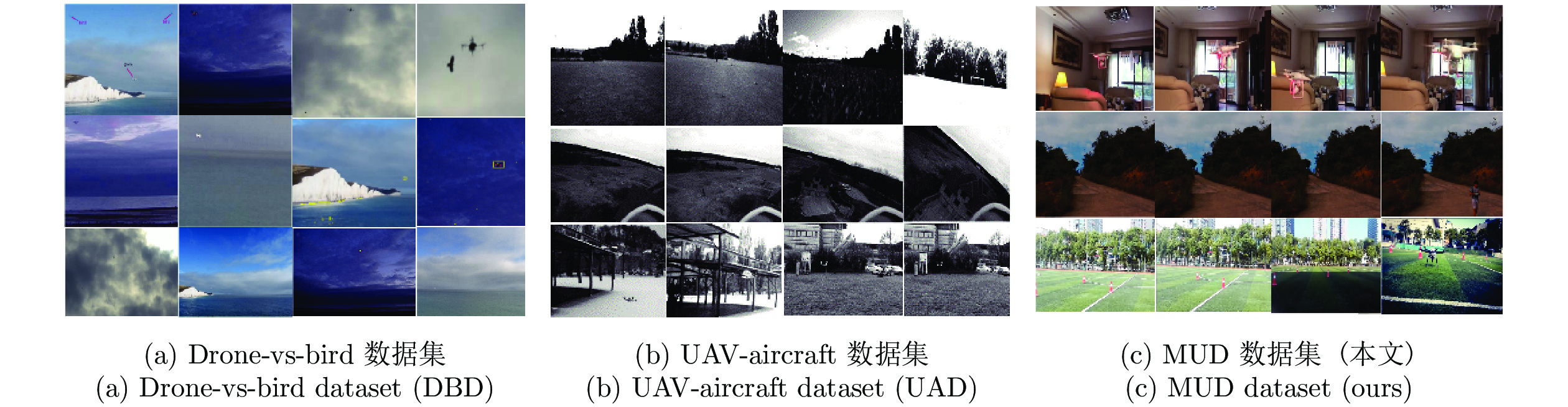
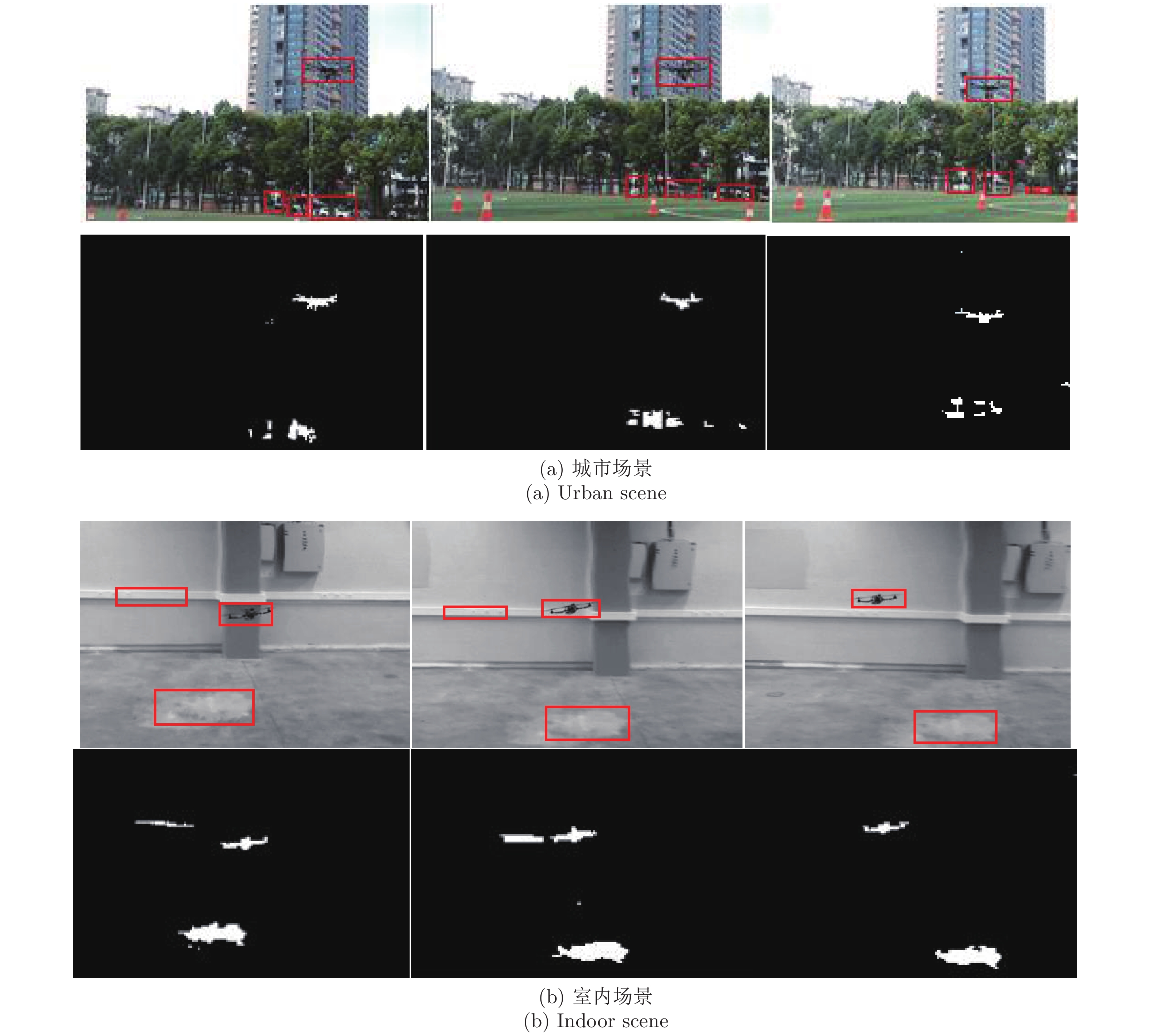
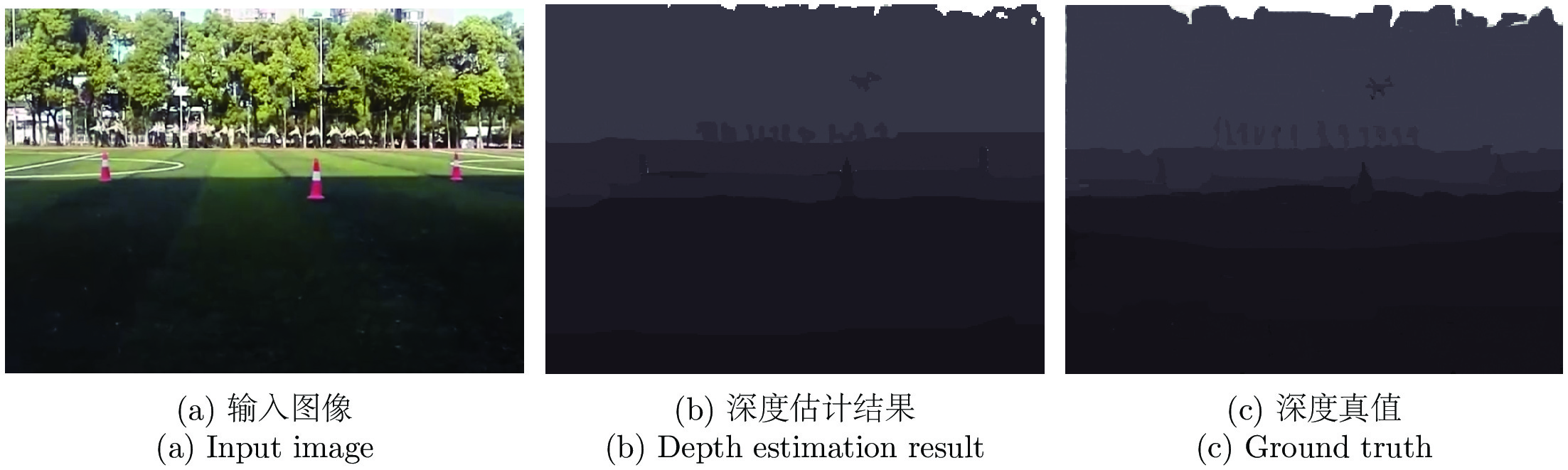
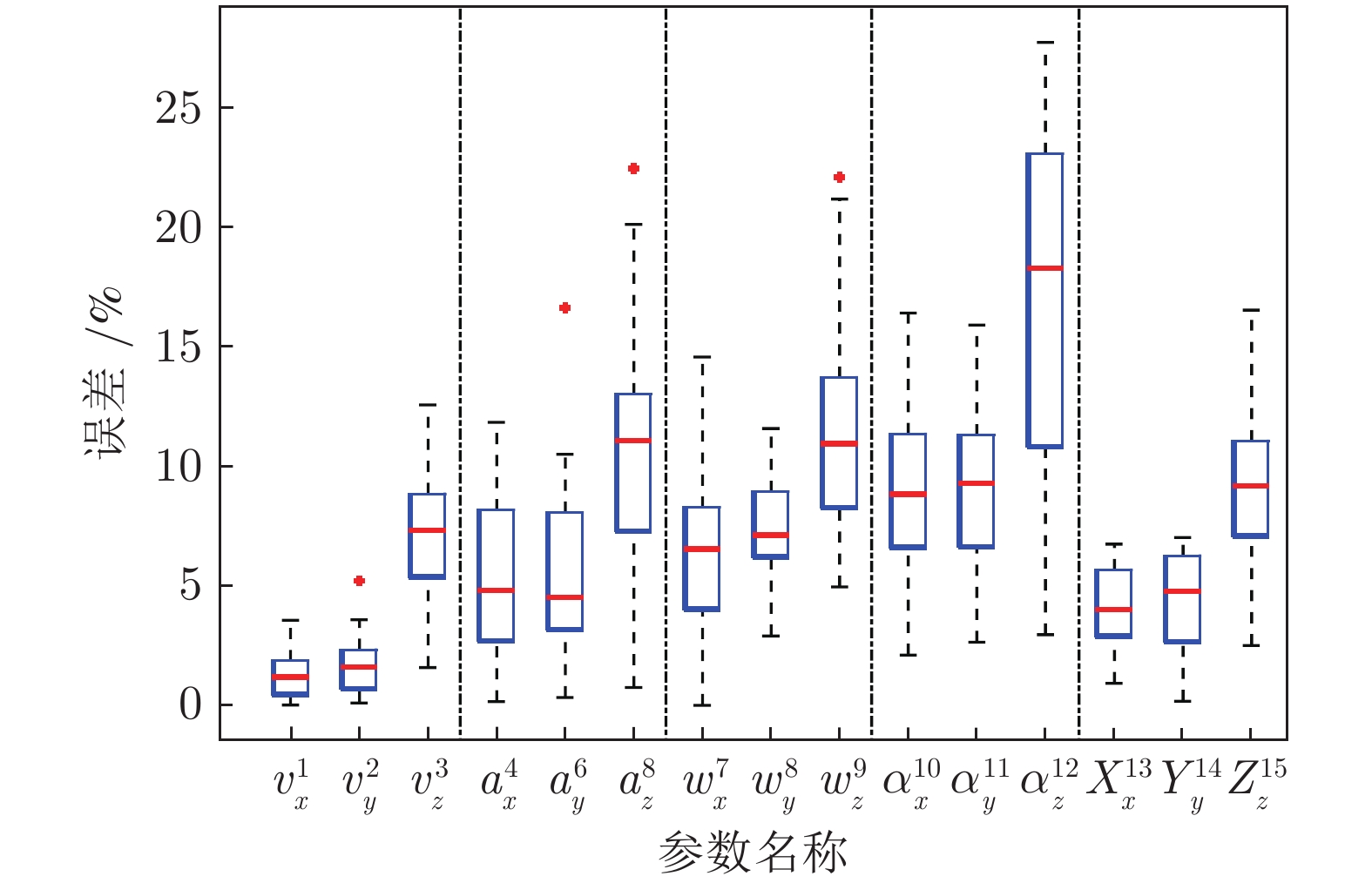
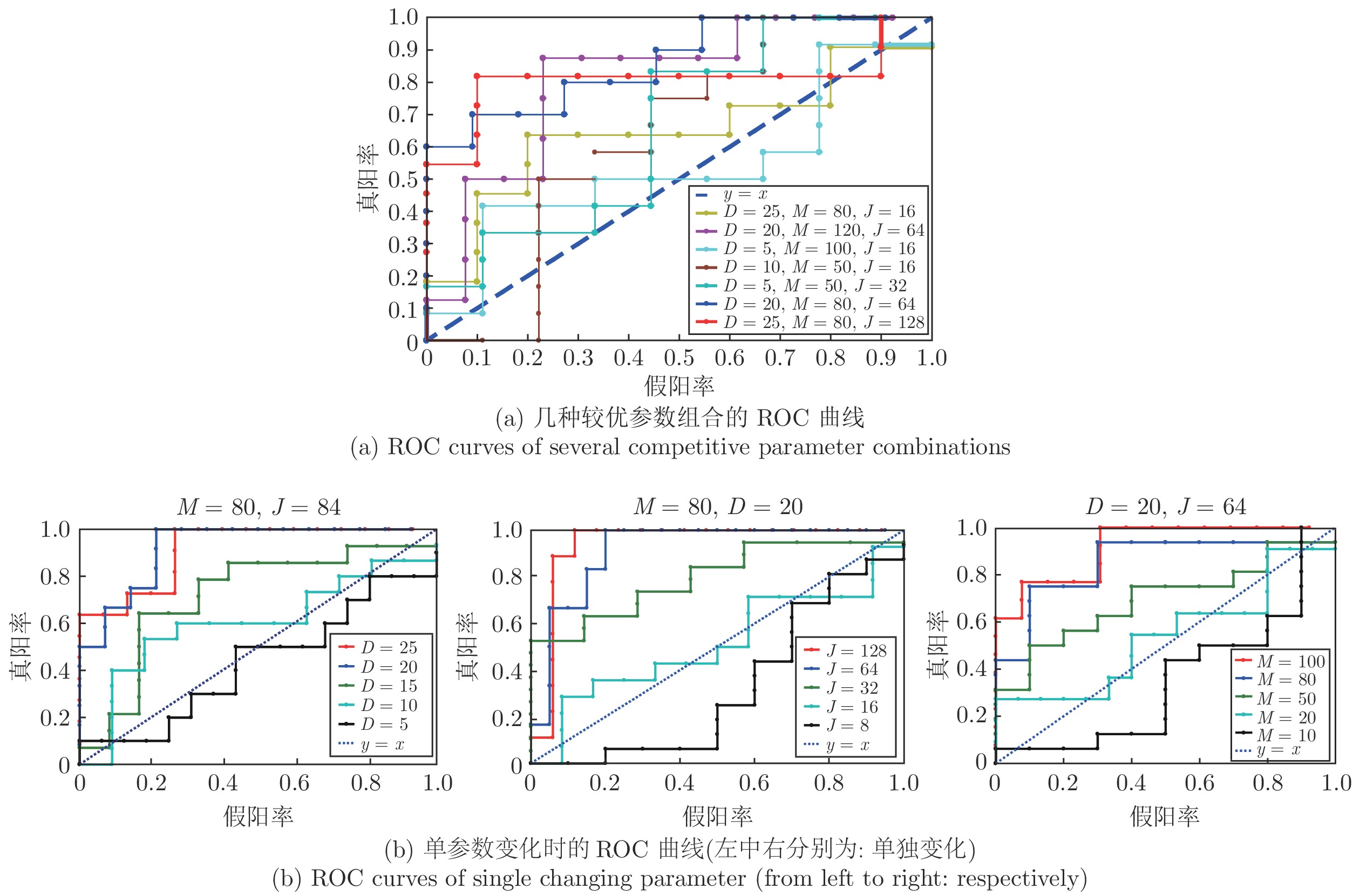
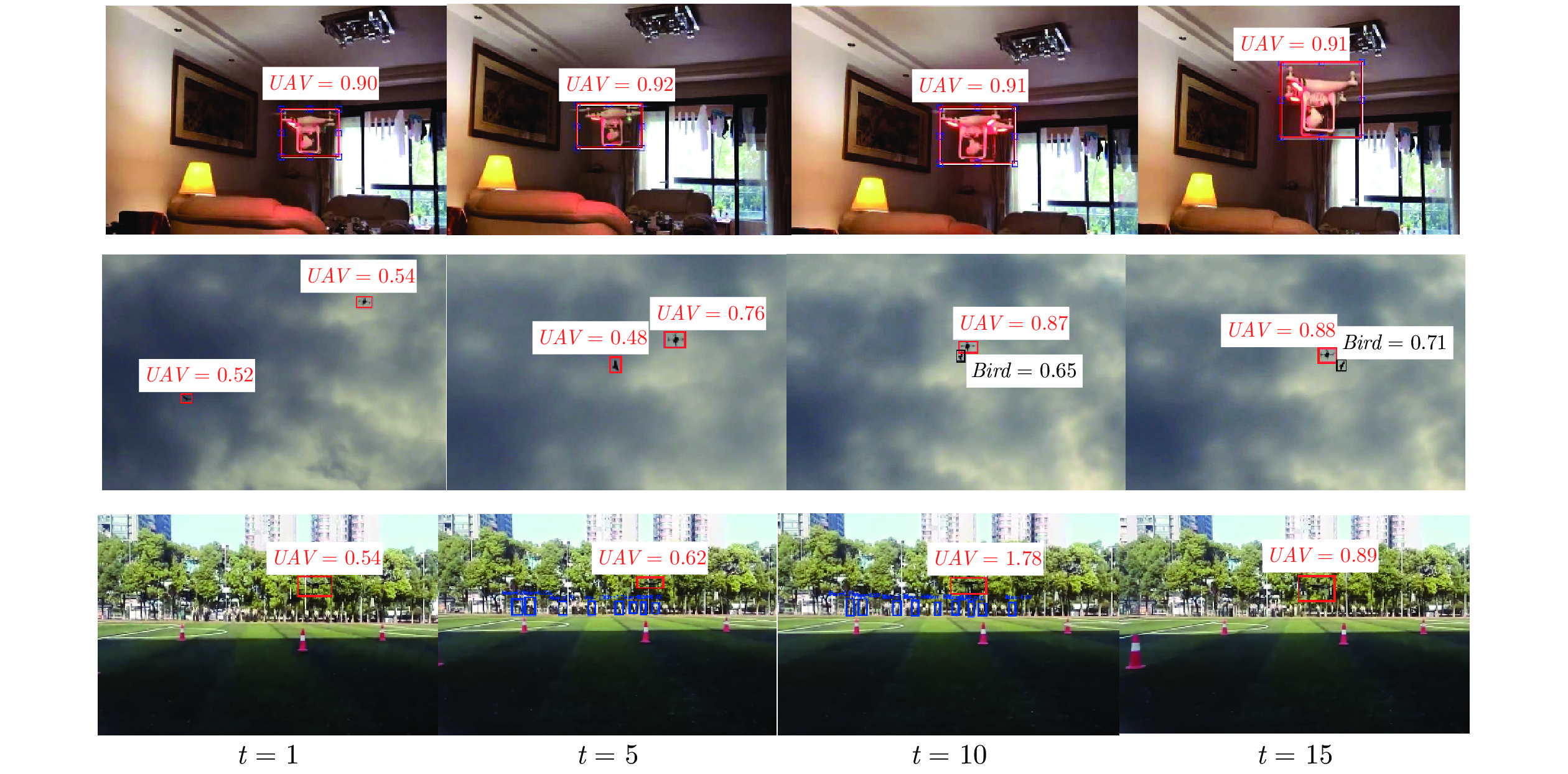
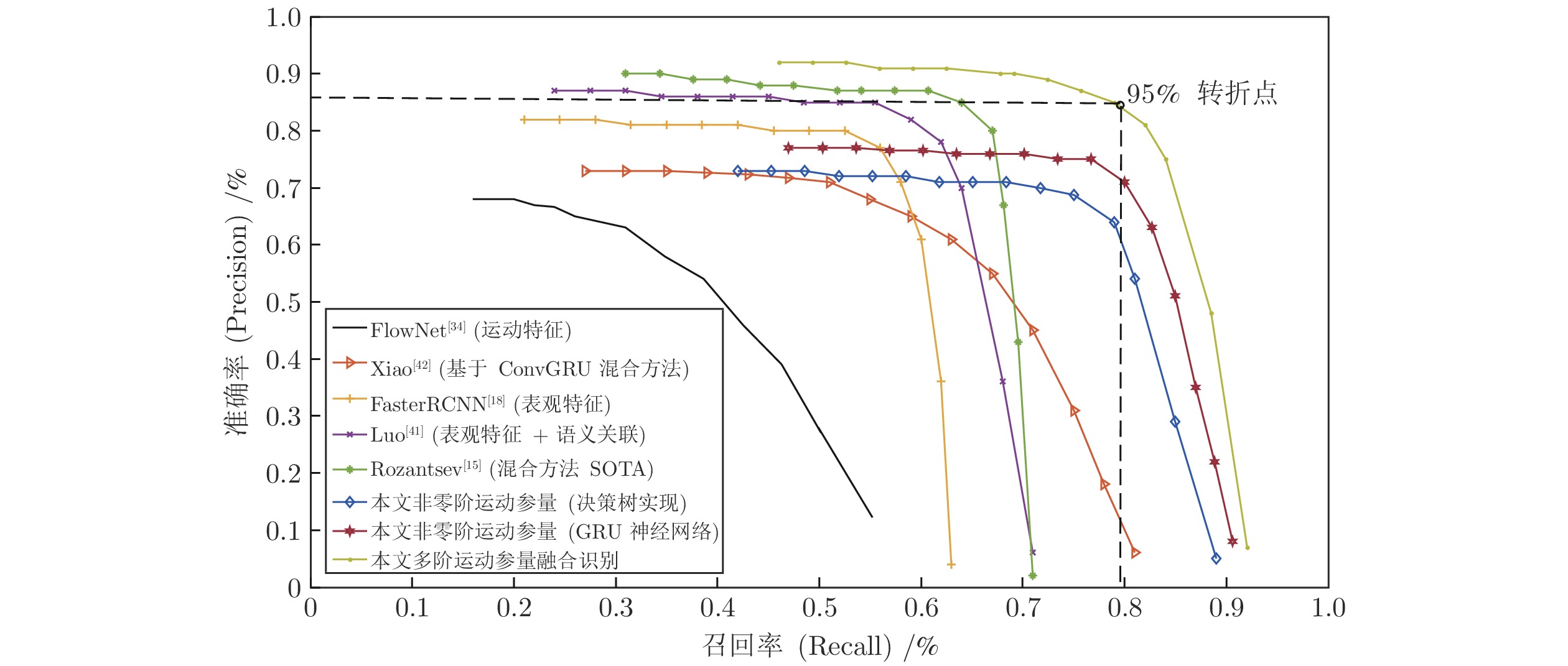
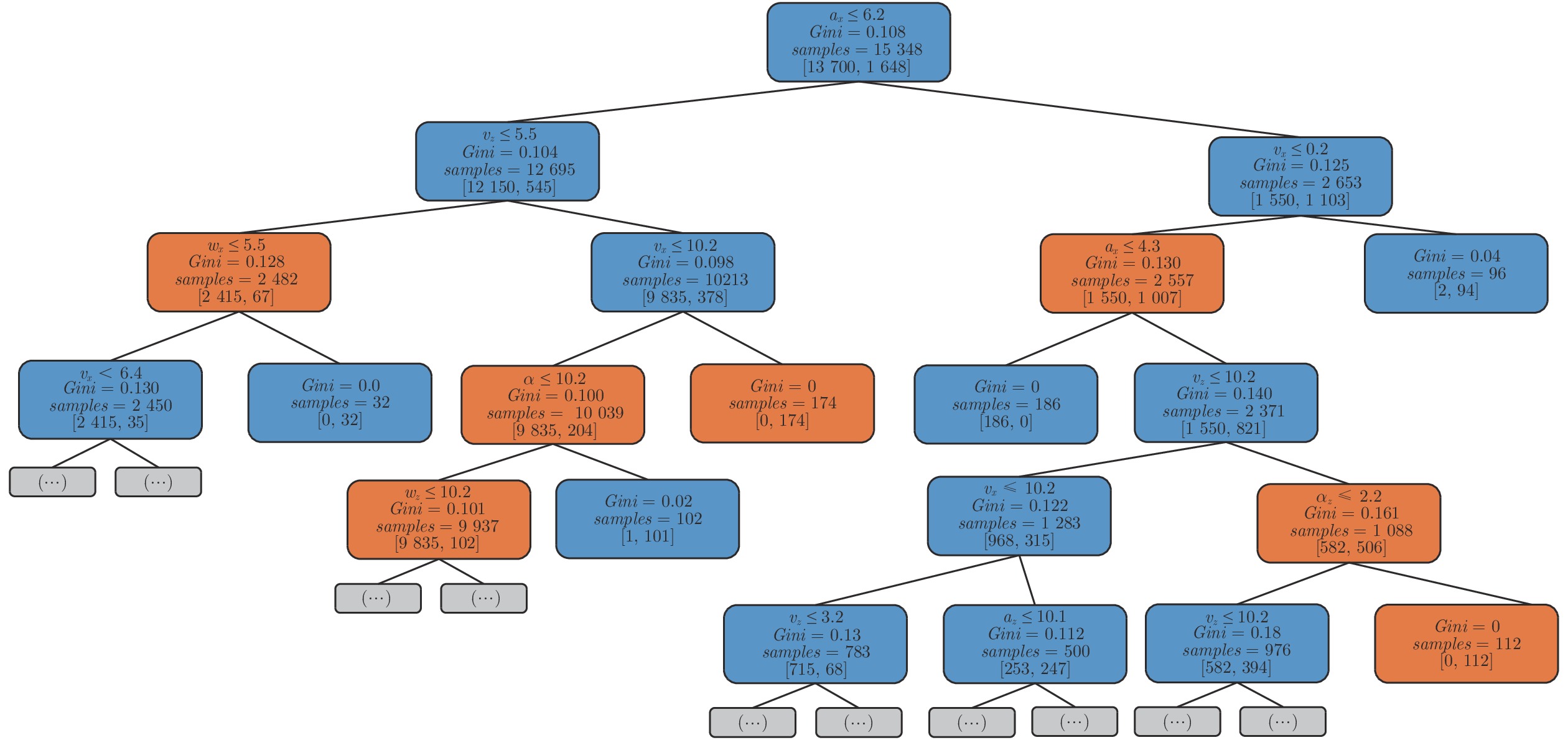
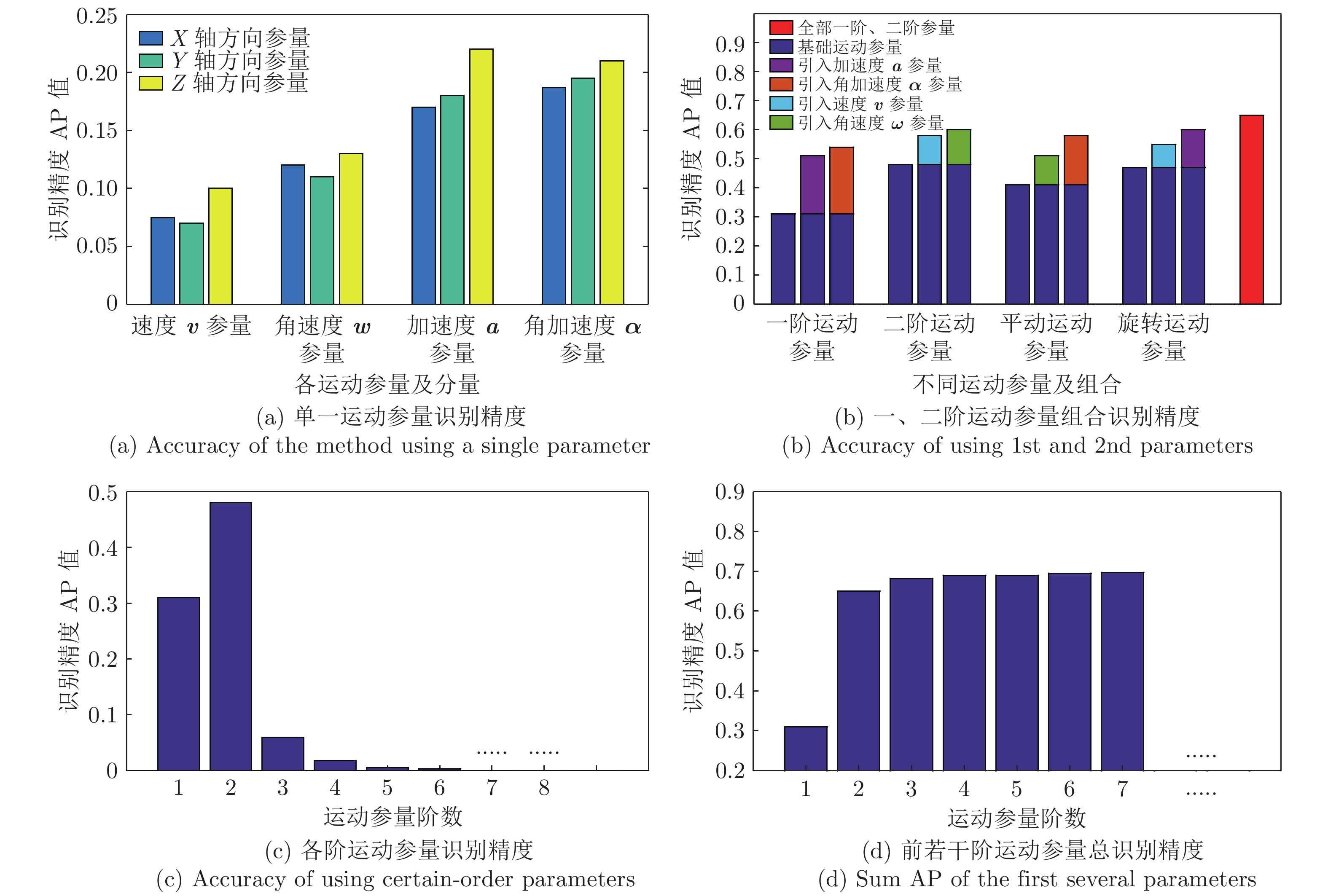
以小型多轴无人机为代表的“低慢小”目标, 通常难以被常规手段探测, 而此类目标又会严重威胁某些重要设施. 因此对该类目标的识别已经成为一个亟待解决的重要问题. 本文基于目标运动特征, 提出了一种无人机目标识别方法, 并揭示了二阶运动参量以及重力方向运动参量是无人机识别过程中的关键参数. 该方法首先提取候选目标的多阶运动参量, 建立梯度提升树(Gradient boosting decision tree, GBDT)和门控制循环单元(Gate recurrent unit, GRU)记忆神经网络分别完成短时和长期识别, 然后融合表观特征识别结果得到最终判别结果. 此外, 本文还建立了一个综合多尺度无人机数据集(Multi-scale UAV dataset, MUD), 本文所提出的方法在该数据集上相对于传统基于运动特征的方法, 其识别精度(Average precision, AP)提升103%, 融合方法提升26%.
以小型多轴无人机为代表的“低慢小”目标, 通常难以被常规手段探测, 而此类目标又会严重威胁某些重要设施. 因此对该类目标的识别已经成为一个亟待解决的重要问题. 本文基于目标运动特征, 提出了一种无人机目标识别方法, 并揭示了二阶运动参量以及重力方向运动参量是无人机识别过程中的关键参数. 该方法首先提取候选目标的多阶运动参量, 建立梯度提升树(Gradient boosting decision tree, GBDT)和门控制循环单元(Gate recurrent unit, GRU)记忆神经网络分别完成短时和长期识别, 然后融合表观特征识别结果得到最终判别结果. 此外, 本文还建立了一个综合多尺度无人机数据集(Multi-scale UAV dataset, MUD), 本文所提出的方法在该数据集上相对于传统基于运动特征的方法, 其识别精度(Average precision, AP)提升103%, 融合方法提升26%.
2022, 48(6): 1448-1456.
doi: 10.16383/j.aas.c200717
摘要:
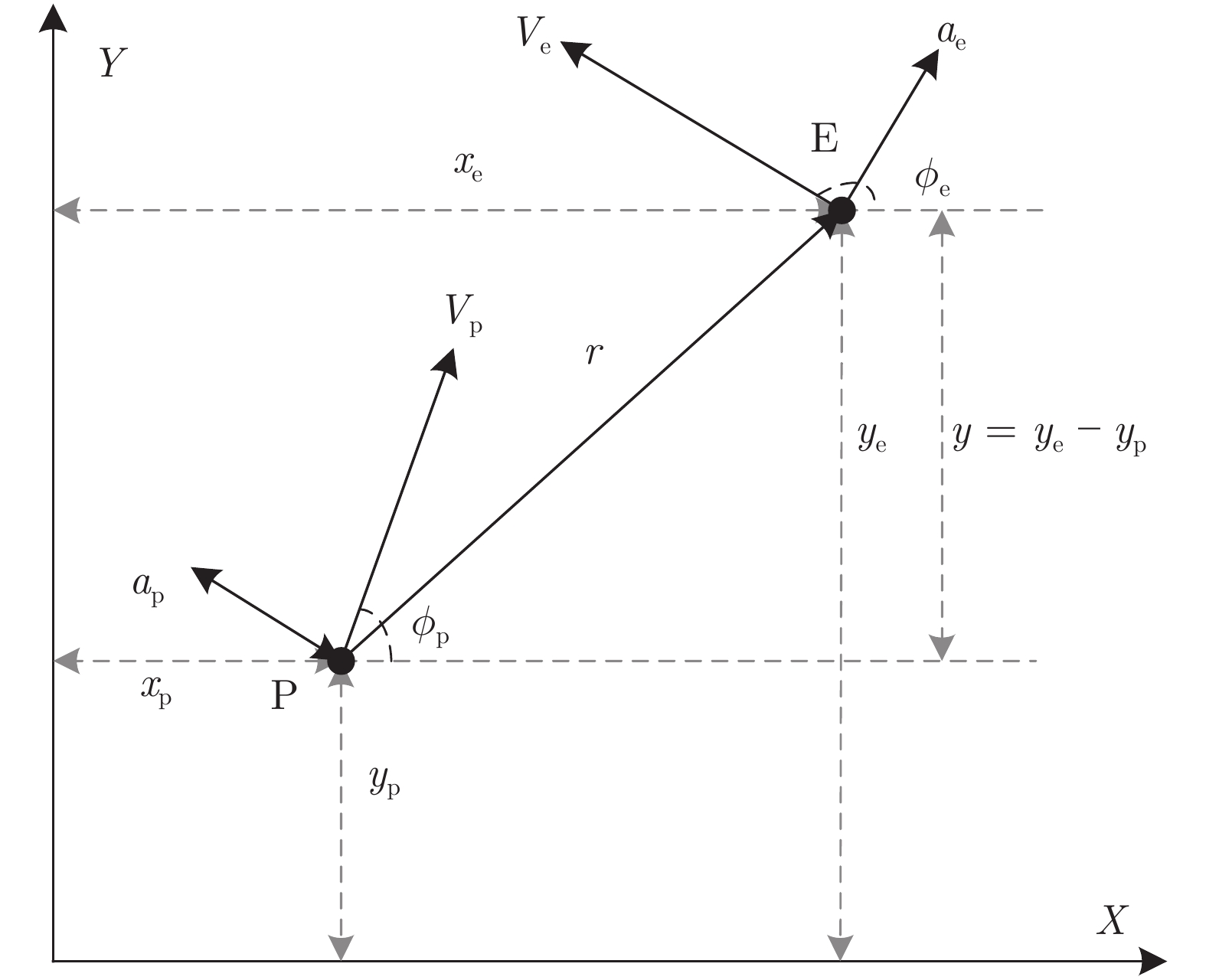
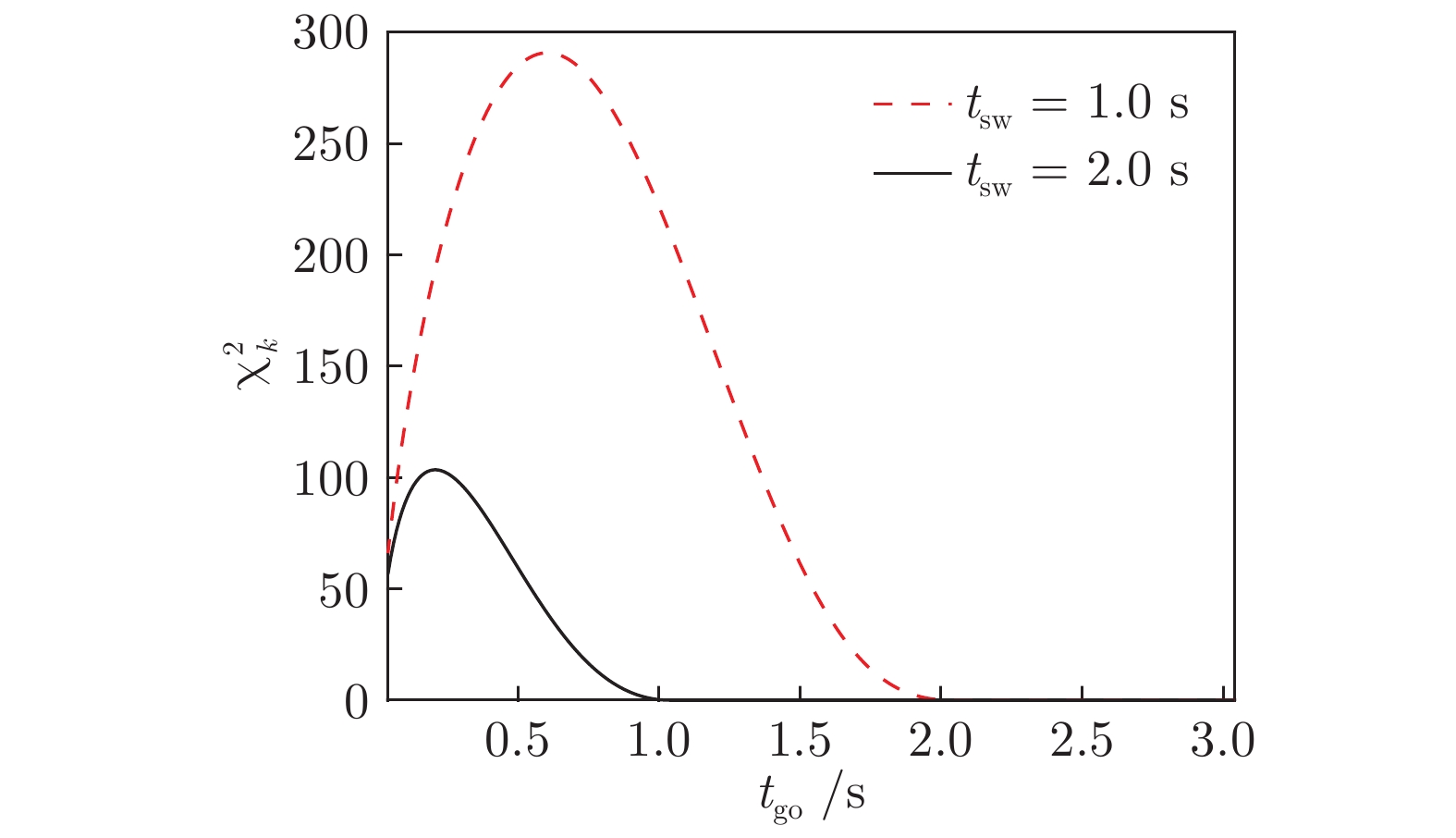
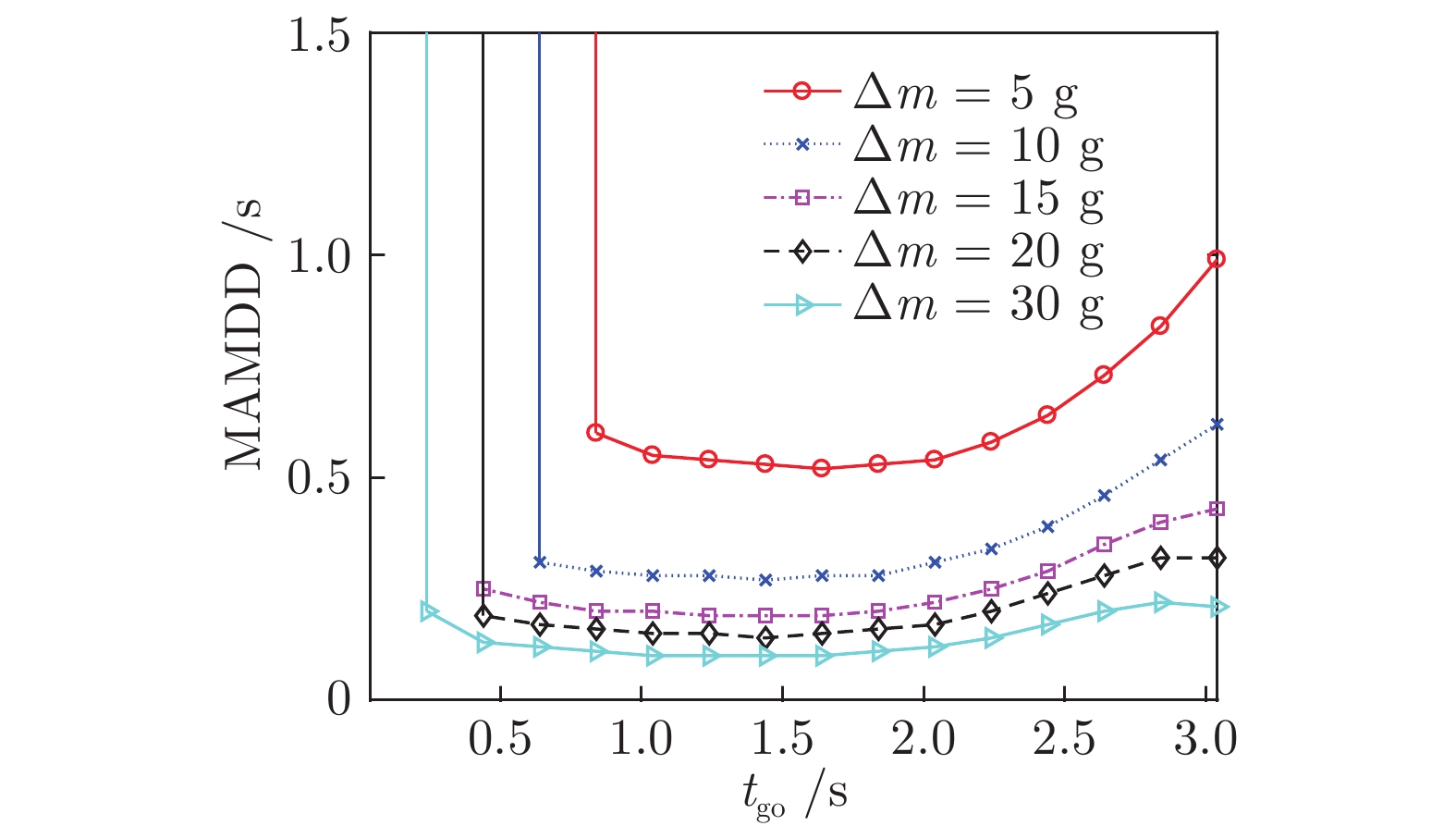
对于大机动目标拦截问题, 模式决策器是基于逻辑的集成估计导引系统(Integrated estimation and guidance, IEG)中的一个重要组件. 为了保证系统的估计精度和制导性能, 模式决策器的模式延迟应尽可能小. 本文针对末制导场景, 首先推导了离散时间系统零控脱靶量的估计误差模型, 然后在一致性约束条件下给出了系统最大可容许模式决策延迟的数值计算方法. 本文的研究结果可为IEG系统中模式决策器的设计提供指标参考.
对于大机动目标拦截问题, 模式决策器是基于逻辑的集成估计导引系统(Integrated estimation and guidance, IEG)中的一个重要组件. 为了保证系统的估计精度和制导性能, 模式决策器的模式延迟应尽可能小. 本文针对末制导场景, 首先推导了离散时间系统零控脱靶量的估计误差模型, 然后在一致性约束条件下给出了系统最大可容许模式决策延迟的数值计算方法. 本文的研究结果可为IEG系统中模式决策器的设计提供指标参考.
2022, 48(6): 1457-1468.
doi: 10.16383/j.aas.c190340
摘要:
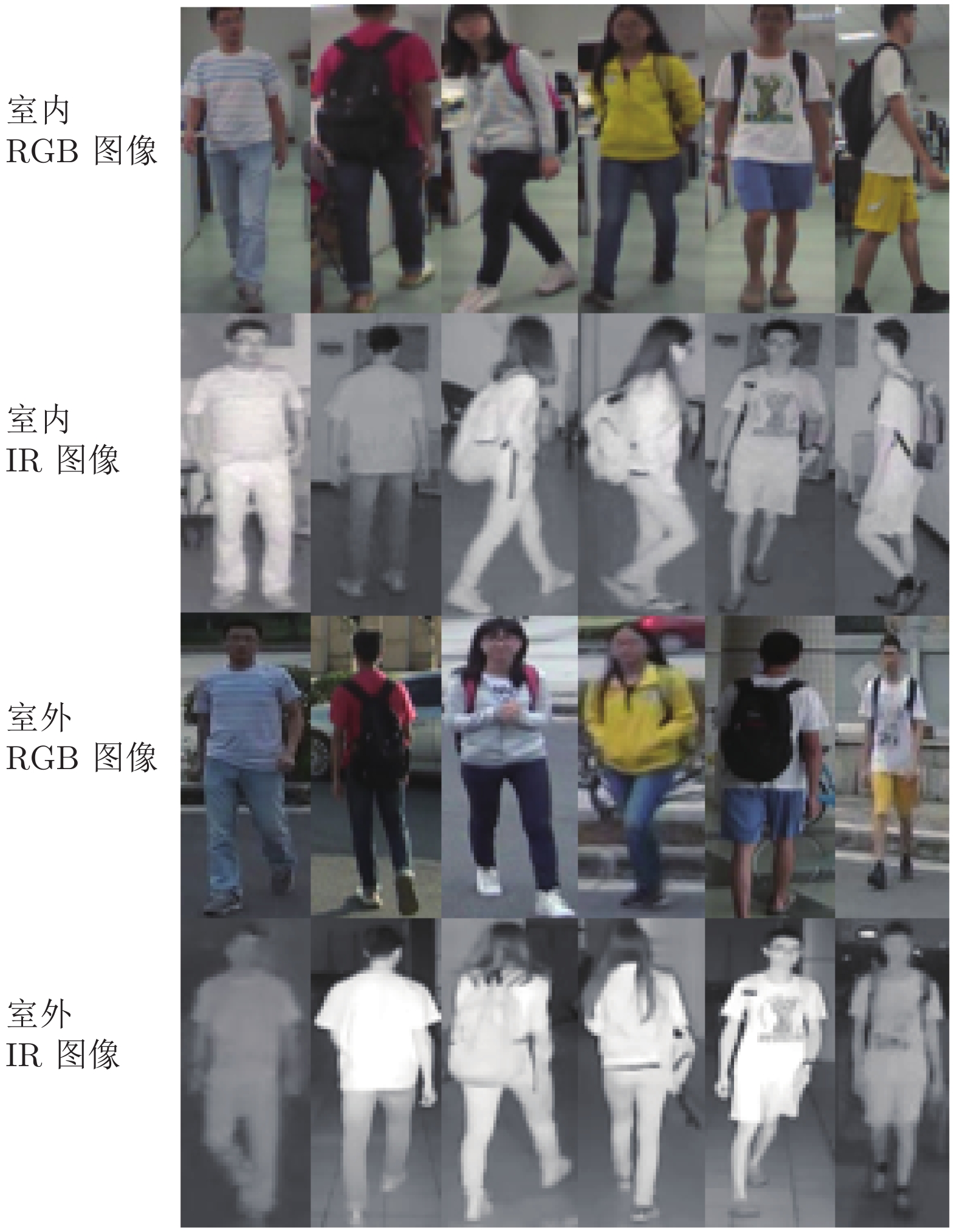
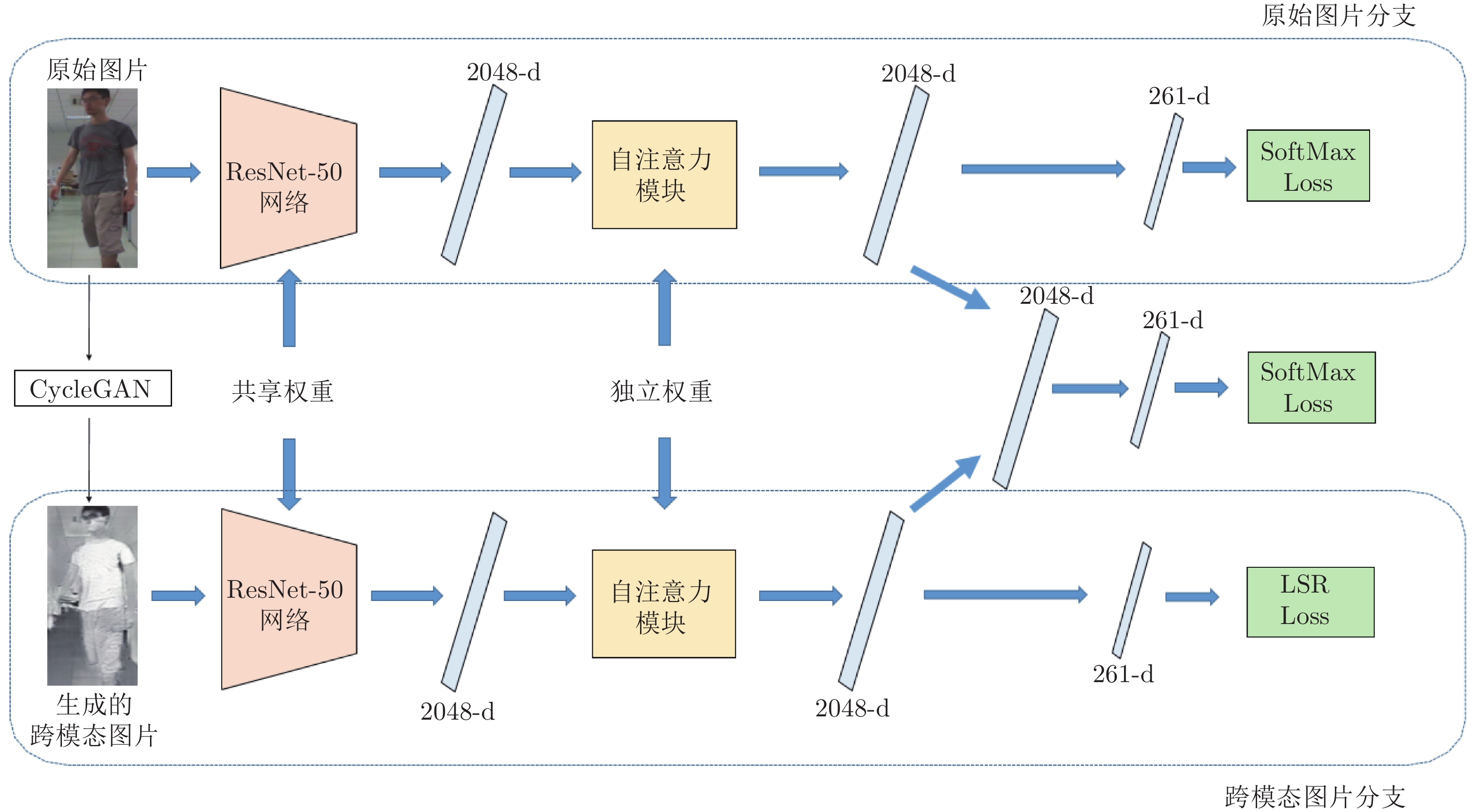
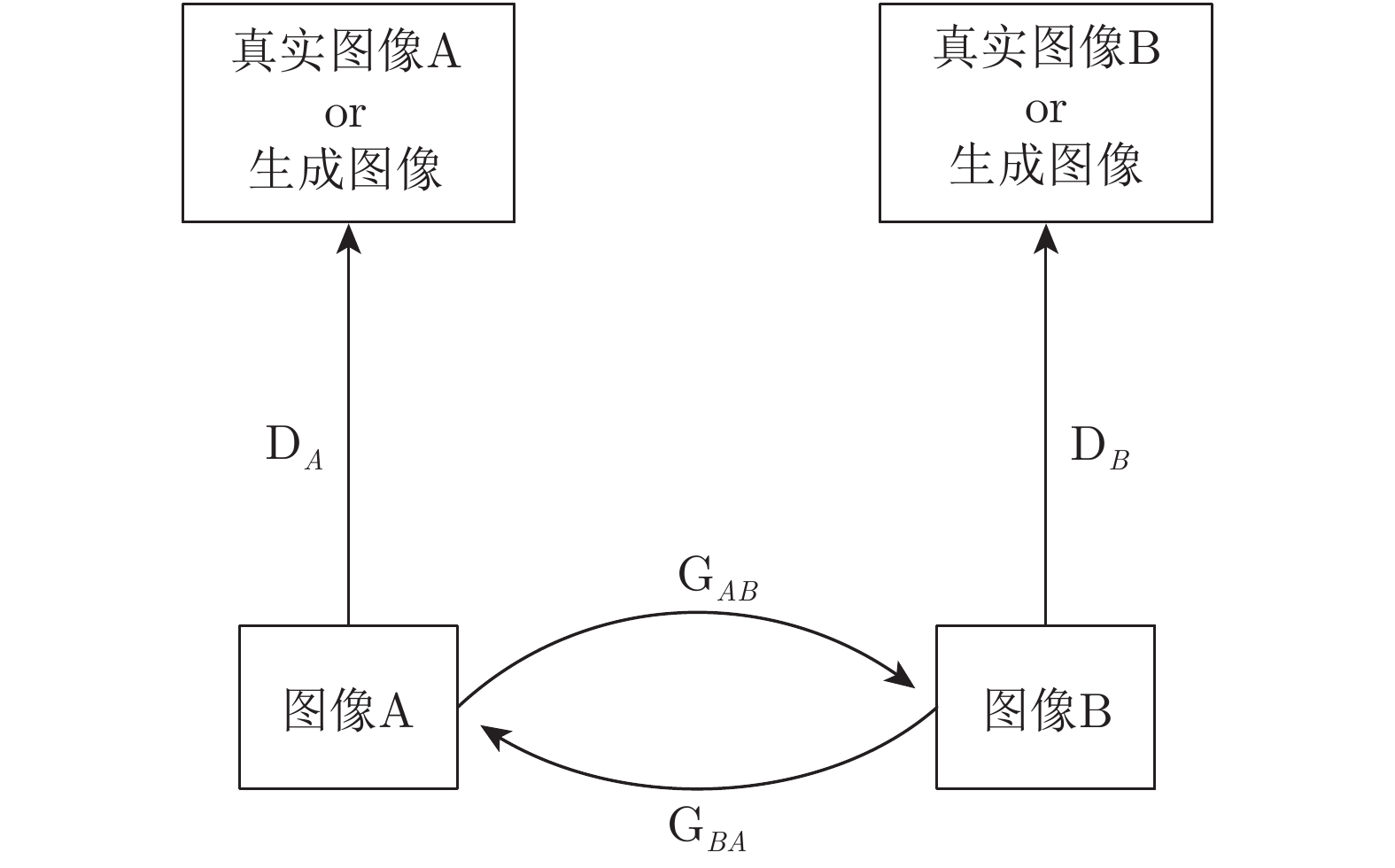
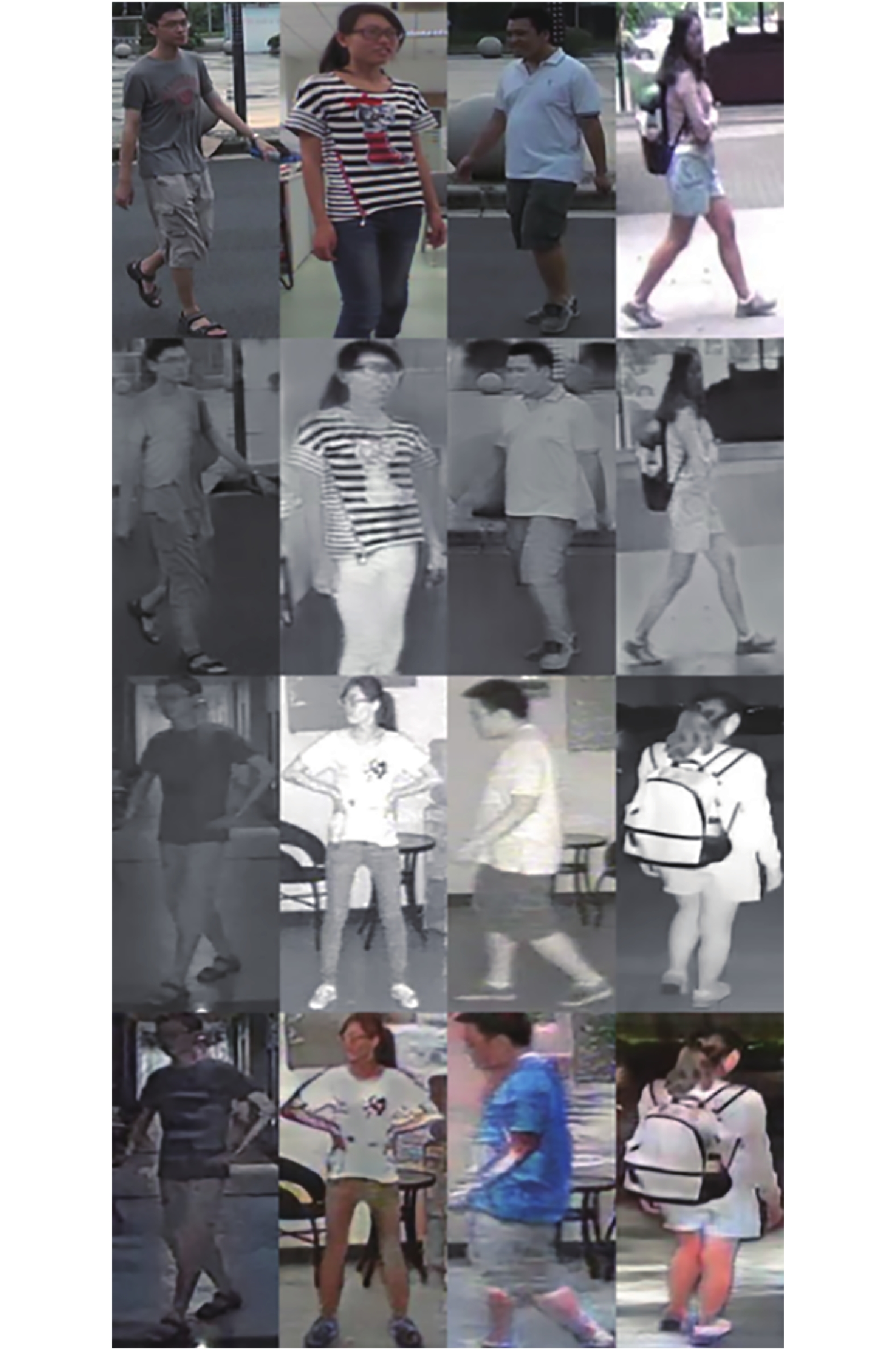
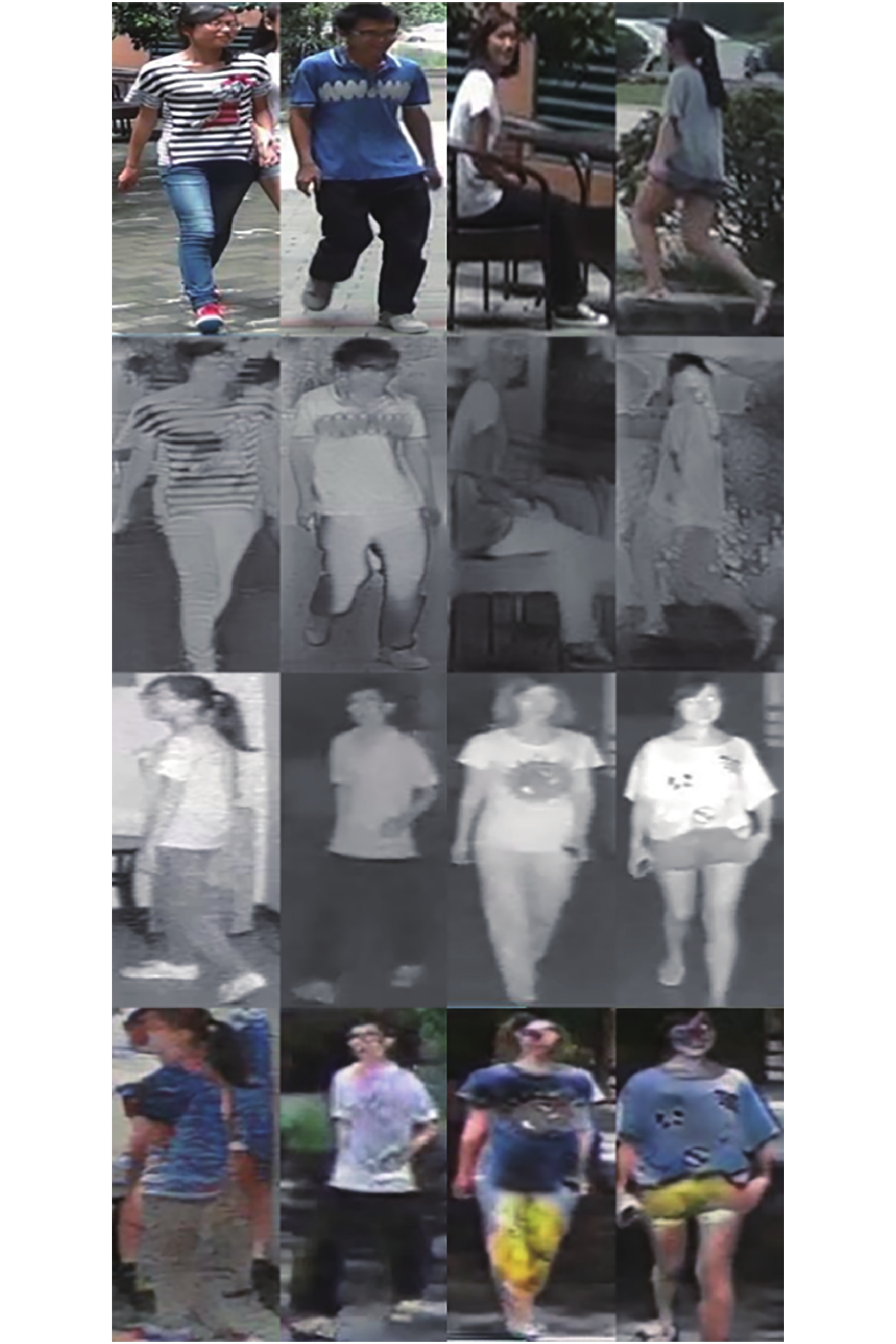
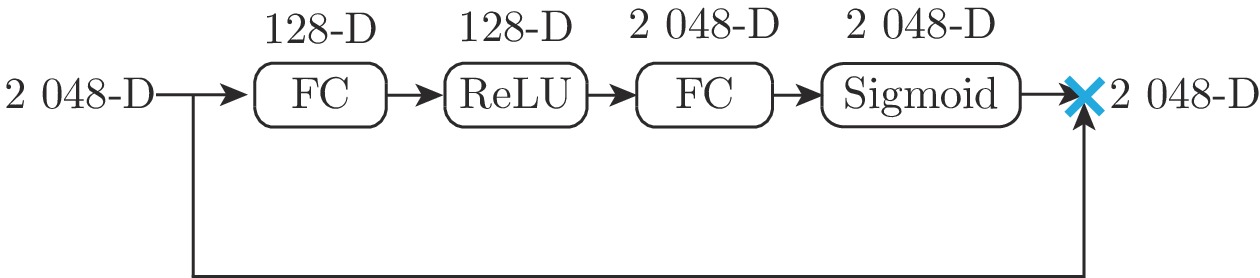
行人再识别是实现多目标跨摄像头跟踪的核心技术, 该技术能够广泛应用于安防、智能视频监控、刑事侦查等领域. 一般的行人再识别问题面临的挑战包括摄像机的低分辨率、行人姿态变化、光照变化、行人检测误差、遮挡等. 跨模态行人再识别相比于一般的行人再识别问题增加了相同行人不同模态的变化. 针对跨模态行人再识别中存在的模态变化问题, 本文提出了一种自注意力模态融合网络. 首先是利用CycleGAN生成跨模态图像. 在得到了跨模态图像后利用跨模态学习网络同时学习两种模态图像特征, 对于原始数据集中的图像利用SoftMax 损失进行有监督的训练, 对生成的跨模态图像利用LSR (Label smooth regularization) 损失进行有监督的训练. 之后, 使用自注意力模块将原始图像和CycleGAN生成的图像进行区分, 自动地对跨模态学习网络的特征在通道层面进行筛选. 最后利用模态融合模块将两种筛选后的特征进行融合. 通过在跨模态数据集SYSU-MM01上的实验证明了本文提出的方法和跨模态行人再识别其他方法相比有一定程度的性能提升.
行人再识别是实现多目标跨摄像头跟踪的核心技术, 该技术能够广泛应用于安防、智能视频监控、刑事侦查等领域. 一般的行人再识别问题面临的挑战包括摄像机的低分辨率、行人姿态变化、光照变化、行人检测误差、遮挡等. 跨模态行人再识别相比于一般的行人再识别问题增加了相同行人不同模态的变化. 针对跨模态行人再识别中存在的模态变化问题, 本文提出了一种自注意力模态融合网络. 首先是利用CycleGAN生成跨模态图像. 在得到了跨模态图像后利用跨模态学习网络同时学习两种模态图像特征, 对于原始数据集中的图像利用SoftMax 损失进行有监督的训练, 对生成的跨模态图像利用LSR (Label smooth regularization) 损失进行有监督的训练. 之后, 使用自注意力模块将原始图像和CycleGAN生成的图像进行区分, 自动地对跨模态学习网络的特征在通道层面进行筛选. 最后利用模态融合模块将两种筛选后的特征进行融合. 通过在跨模态数据集SYSU-MM01上的实验证明了本文提出的方法和跨模态行人再识别其他方法相比有一定程度的性能提升.

2022, 48(6): 1469-1481.
doi: 10.16383/j.aas.c200707
摘要:
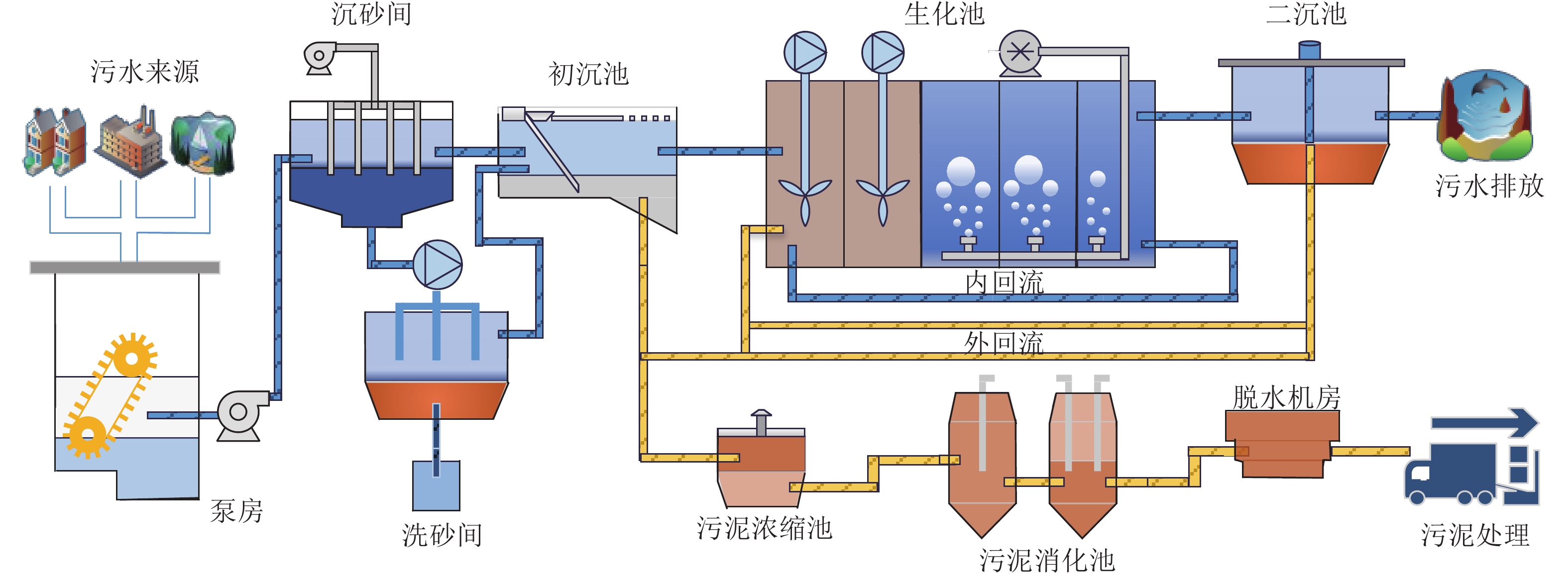
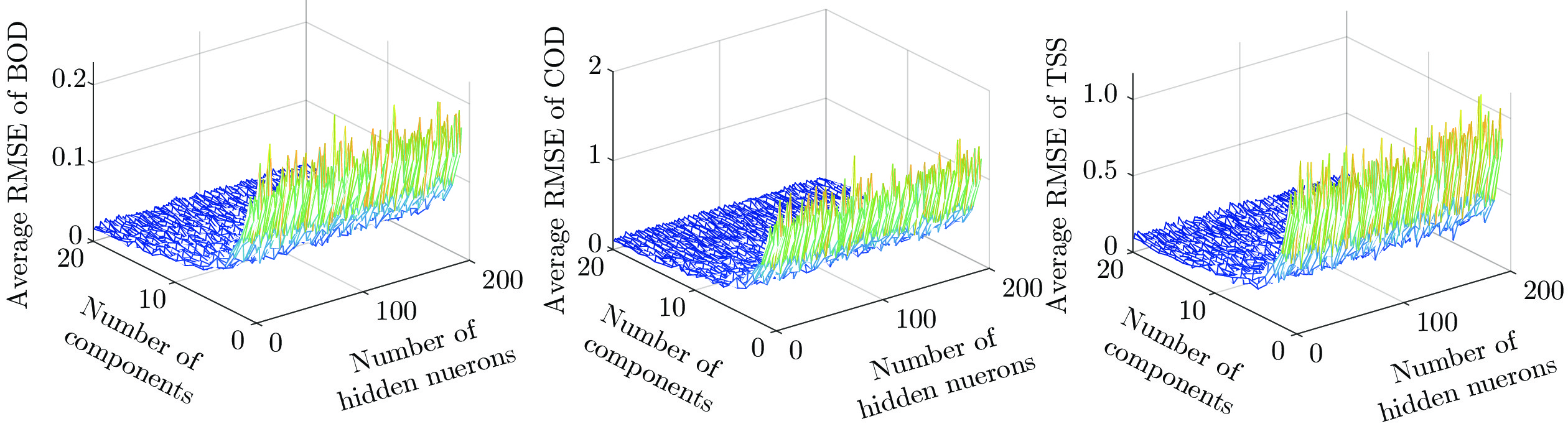
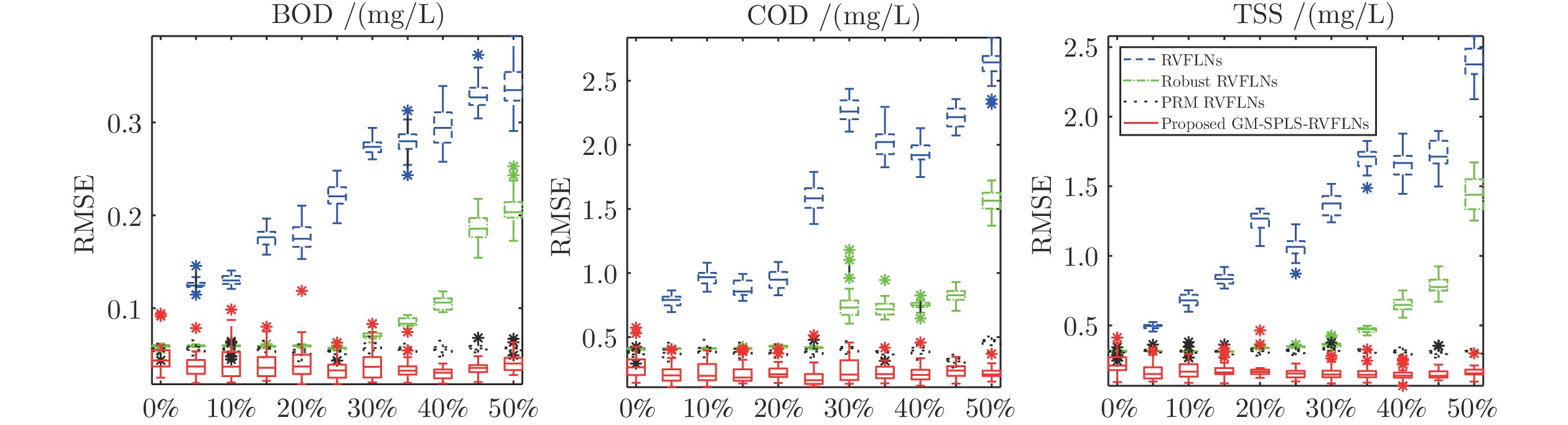
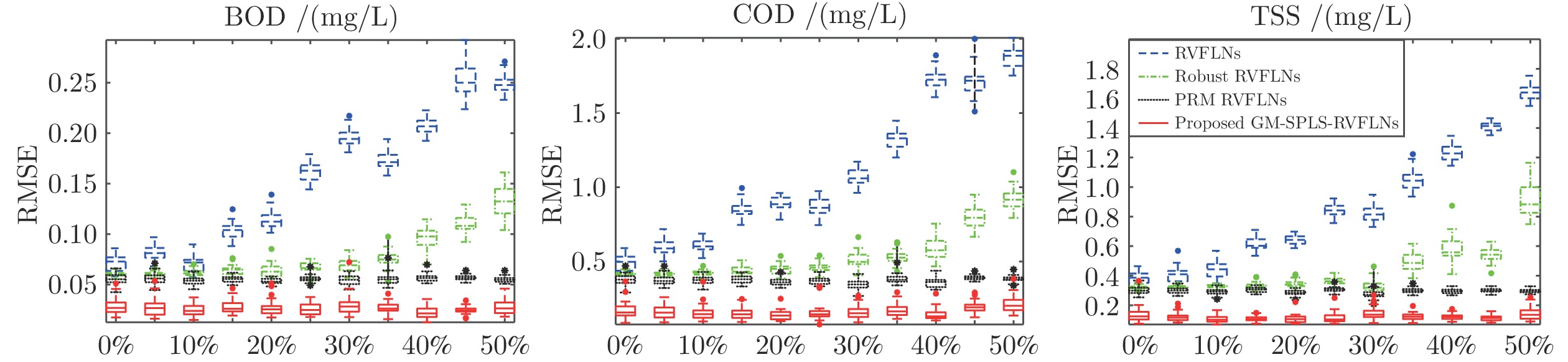
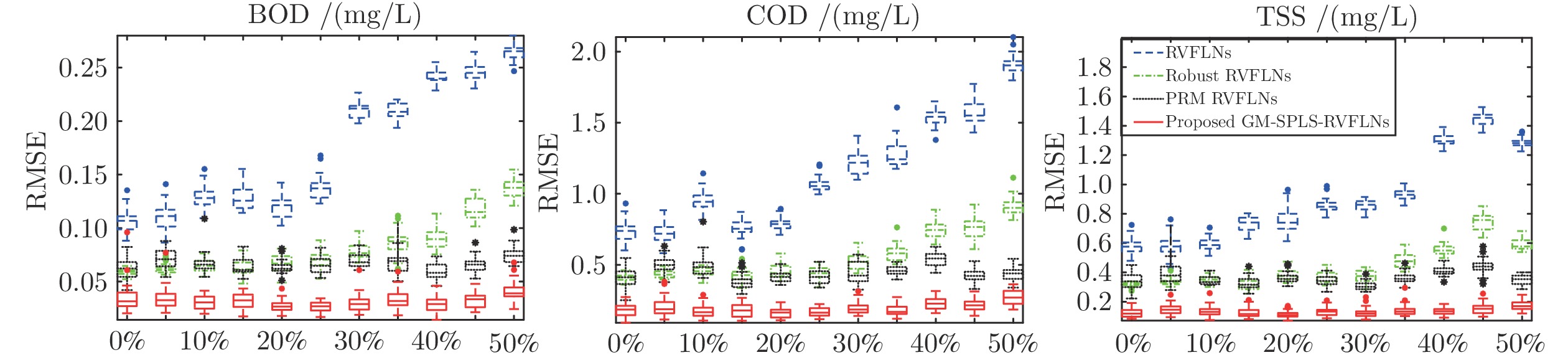
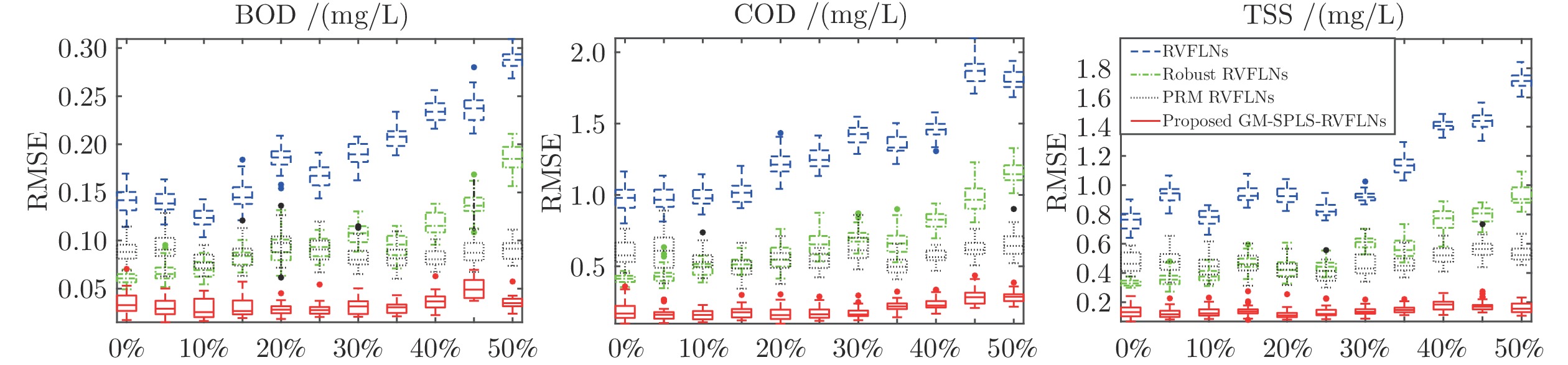
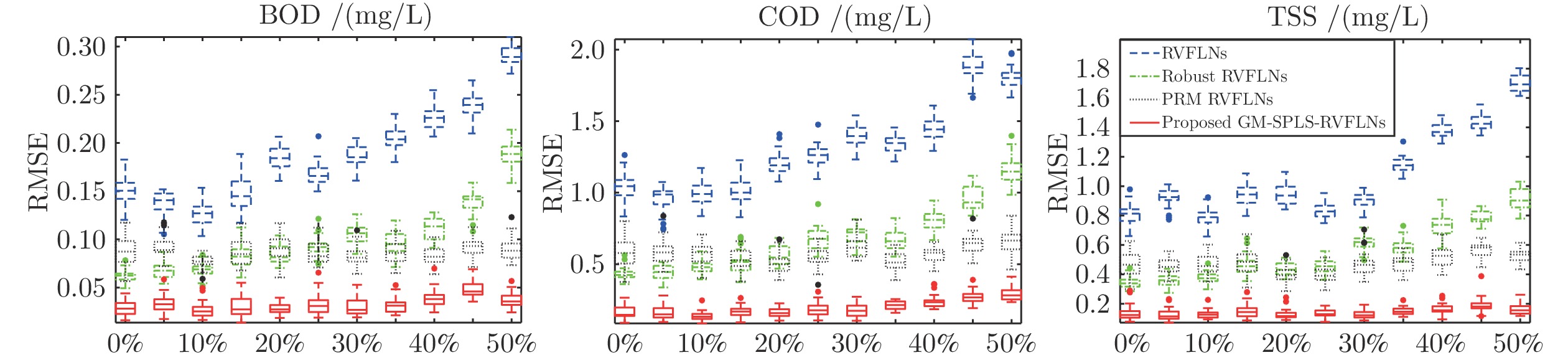
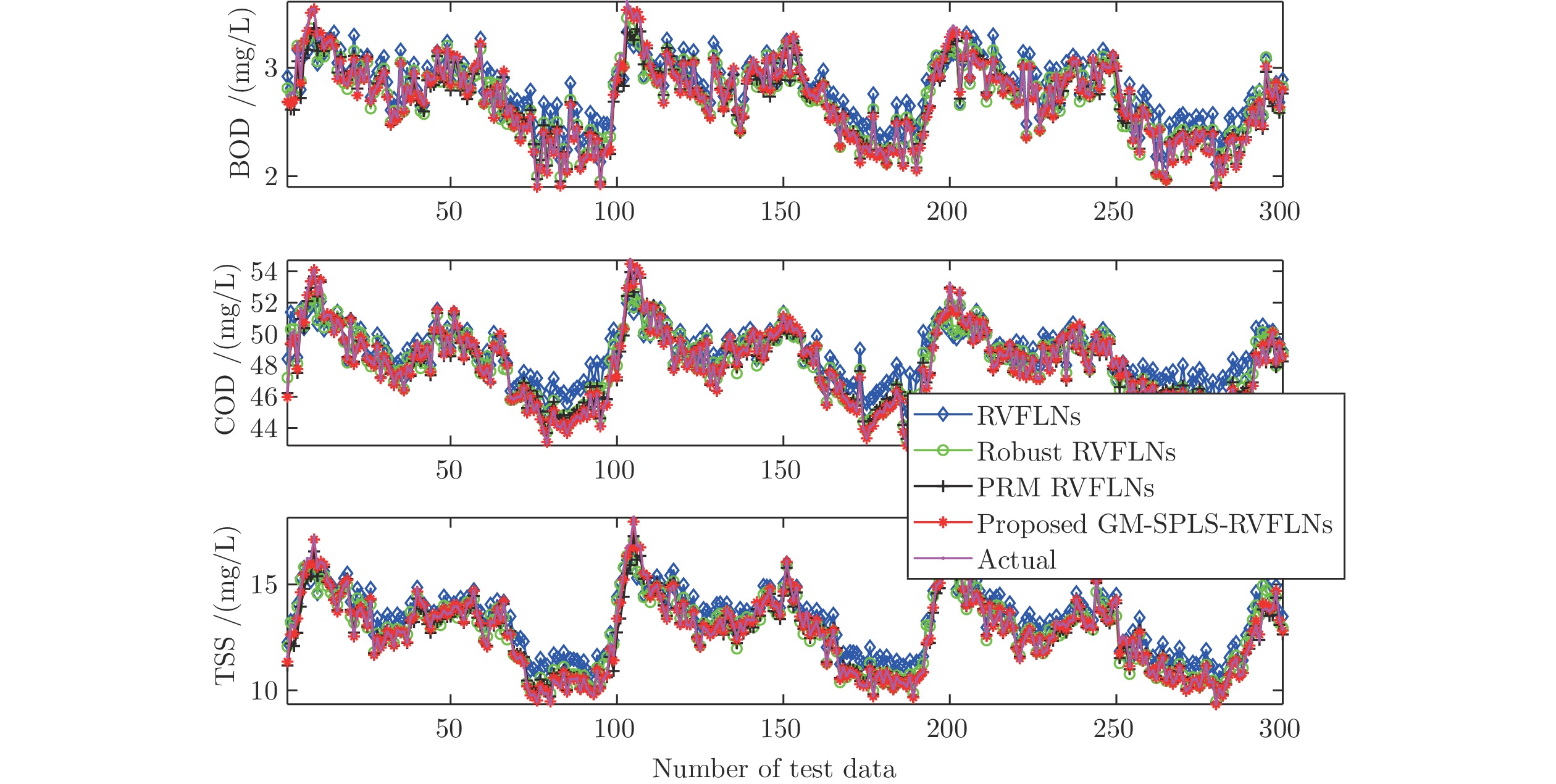
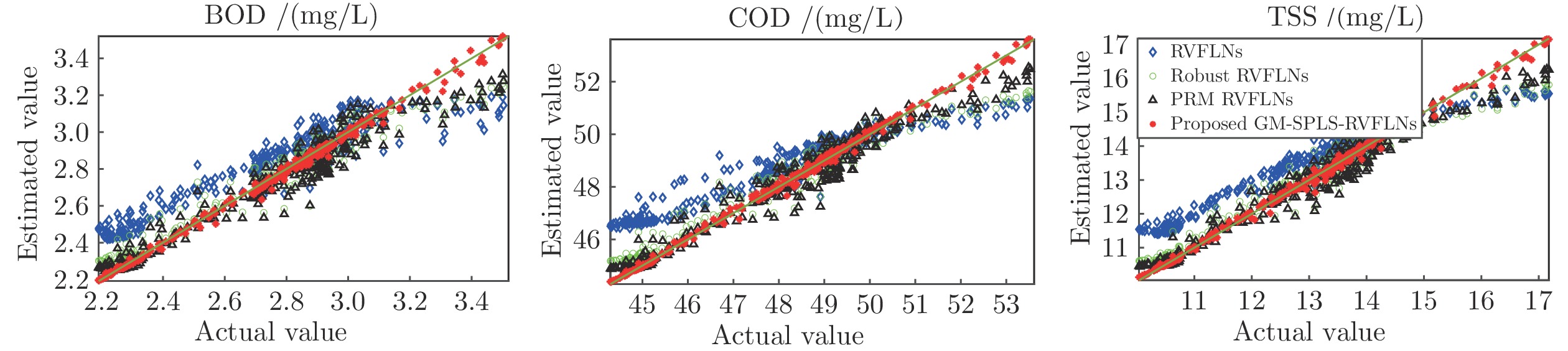
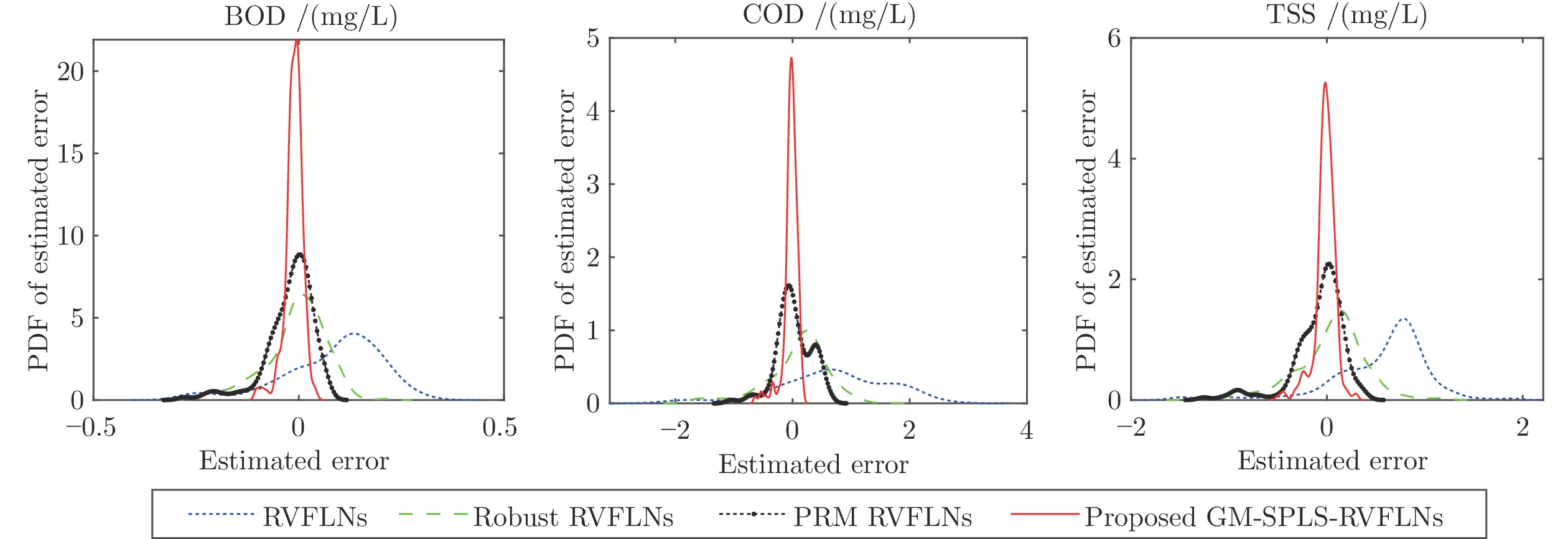
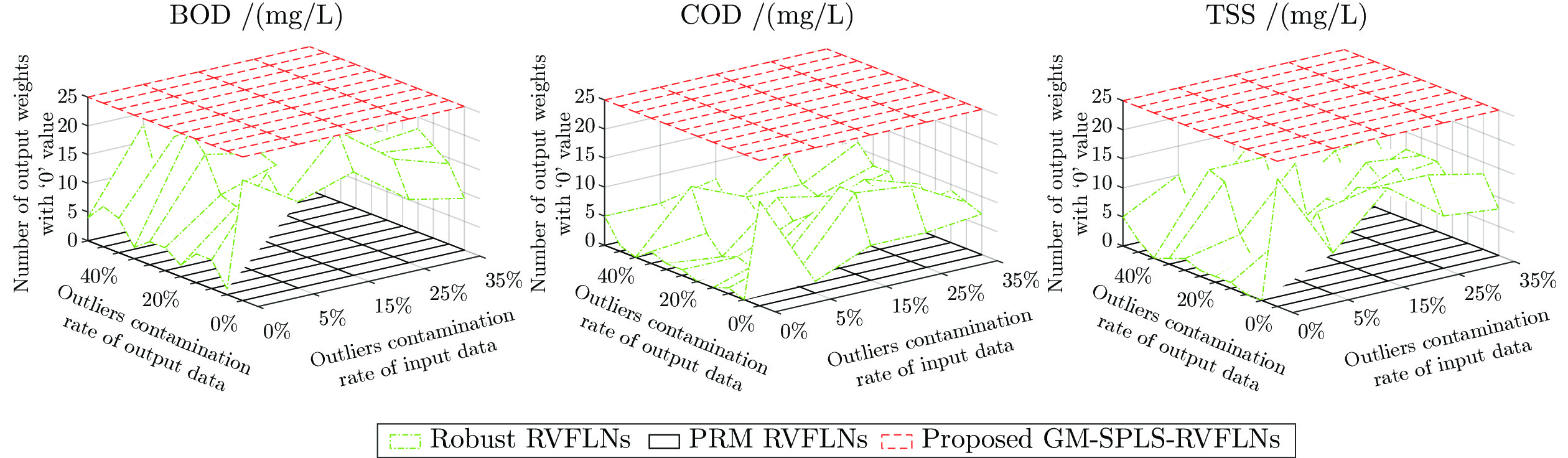
污水处理过程中, 出水水质参数是衡量污水处理性能的最重要指标, 需要进行严格监测, 但现有传感技术难以对其进行实时准确地在线测量. 因此, 提出一种新型的基于随机权神经网络(Random vector functional-link networks, RVFLNs)与Schweppe型广义M估计(Generalized M-estimation, GM-estimation)的稀疏鲁棒建模方法, 用于水质指标的在线鲁棒预测. 首先, 针对常规RVFLNs隐含层矩阵存在多重共线性而导致最小二乘估计失效的问题, 利用稀疏偏最小二乘(Sparse partial least squares, SPLS)代替RVFLNs输出权值求解的最小二乘估计, 从而提出SPLS-RVFLNs. 该算法不仅可有效解决传统RVFLNs的多重共线性问题, 还可以进行建模变量选择, 提高模型的可解释性和最终的预测精度. 同时, 考虑到SPLS-RVFLNs在求解输出权值时会同时受到隐含层矩阵和输出层矩阵两个方向离群点的影响, 进一步采用Schweppe型广义M估计对SPLS-RVFLNs进行鲁棒改进, 从而提出GM-SPLS-RVFLNs, 可显著提高模型的稀疏鲁棒性能. 最后, 将提出的GM-SPLS-RVFLNs用于污水处理过程出水水质指标预测建模, 数据实验结果表明所提方法不仅解决了常规RVFLNs多重共线性和鲁棒性差的问题, 而且具有很好的预测精度和泛化性能.
污水处理过程中, 出水水质参数是衡量污水处理性能的最重要指标, 需要进行严格监测, 但现有传感技术难以对其进行实时准确地在线测量. 因此, 提出一种新型的基于随机权神经网络(Random vector functional-link networks, RVFLNs)与Schweppe型广义M估计(Generalized M-estimation, GM-estimation)的稀疏鲁棒建模方法, 用于水质指标的在线鲁棒预测. 首先, 针对常规RVFLNs隐含层矩阵存在多重共线性而导致最小二乘估计失效的问题, 利用稀疏偏最小二乘(Sparse partial least squares, SPLS)代替RVFLNs输出权值求解的最小二乘估计, 从而提出SPLS-RVFLNs. 该算法不仅可有效解决传统RVFLNs的多重共线性问题, 还可以进行建模变量选择, 提高模型的可解释性和最终的预测精度. 同时, 考虑到SPLS-RVFLNs在求解输出权值时会同时受到隐含层矩阵和输出层矩阵两个方向离群点的影响, 进一步采用Schweppe型广义M估计对SPLS-RVFLNs进行鲁棒改进, 从而提出GM-SPLS-RVFLNs, 可显著提高模型的稀疏鲁棒性能. 最后, 将提出的GM-SPLS-RVFLNs用于污水处理过程出水水质指标预测建模, 数据实验结果表明所提方法不仅解决了常规RVFLNs多重共线性和鲁棒性差的问题, 而且具有很好的预测精度和泛化性能.
2022, 48(6): 1482-1492.
doi: 10.16383/j.aas.c190306
摘要:
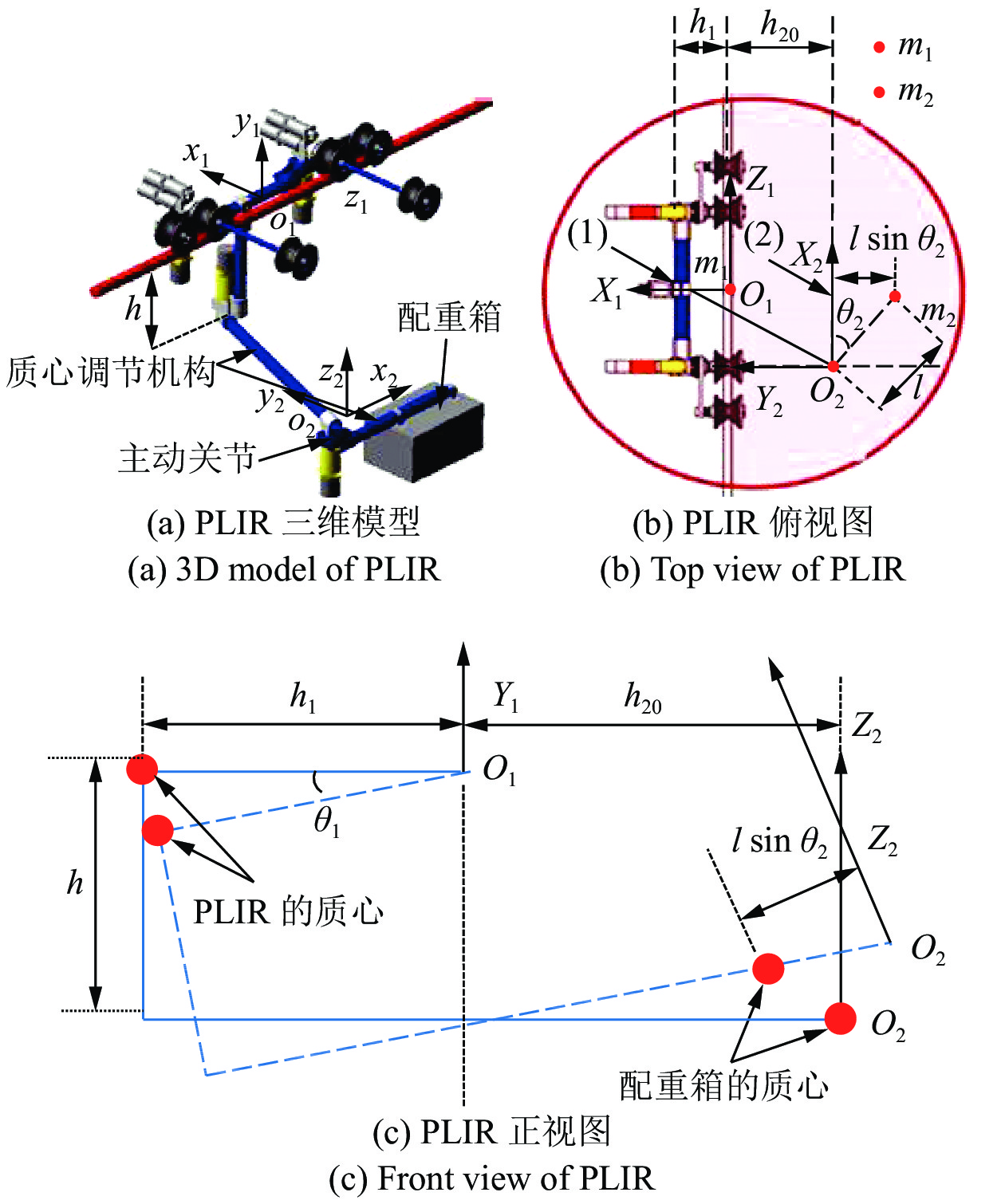
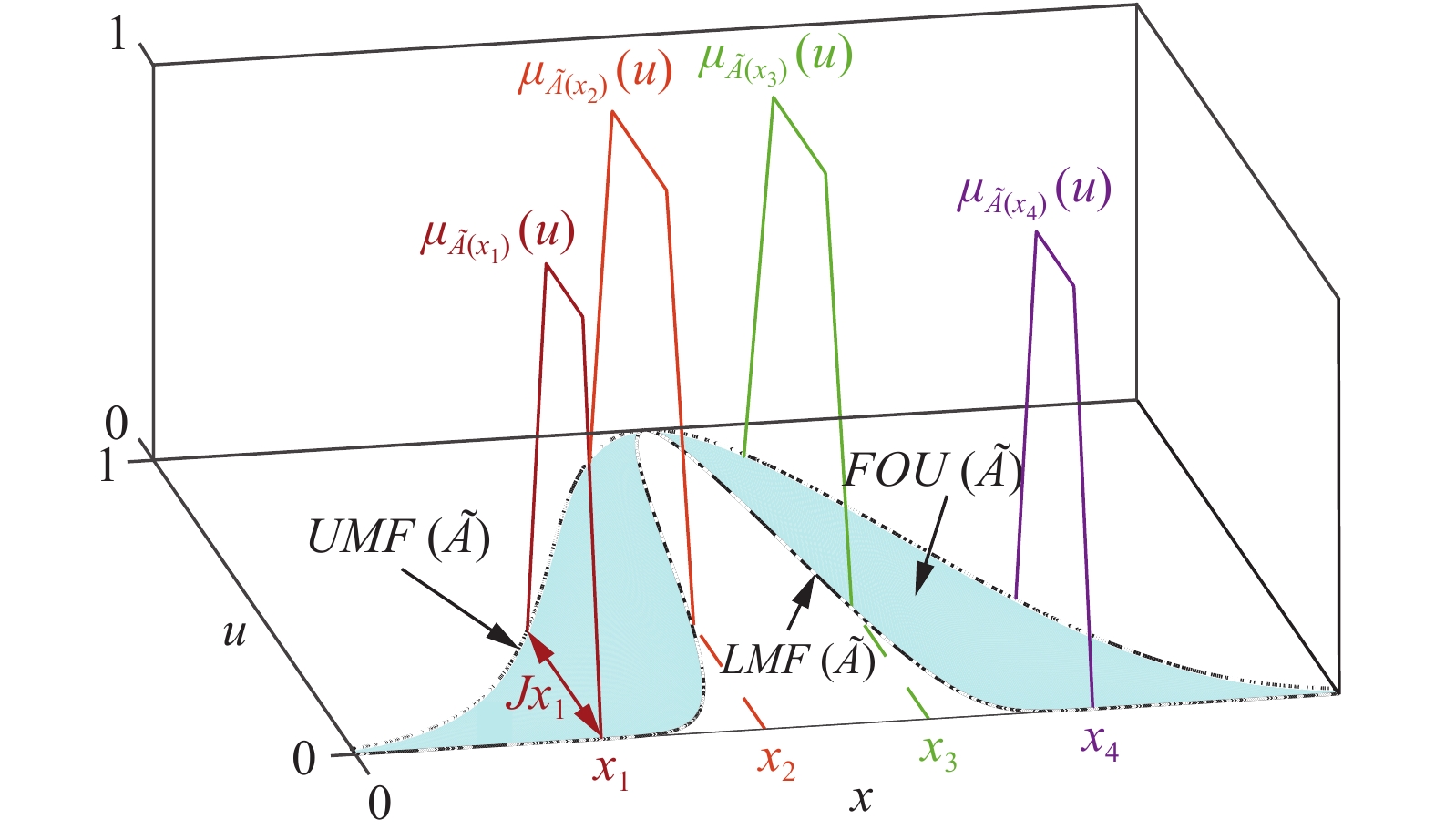
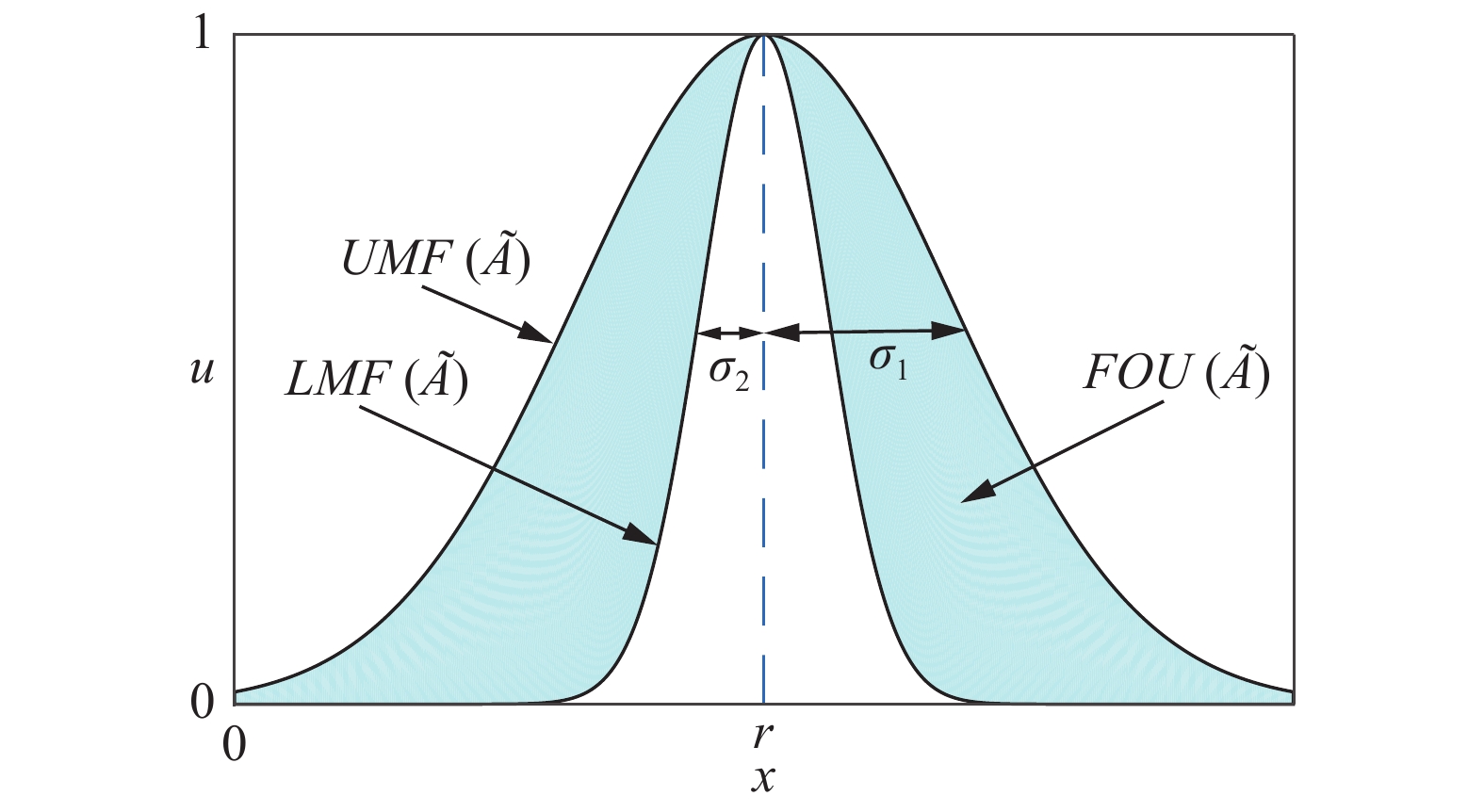
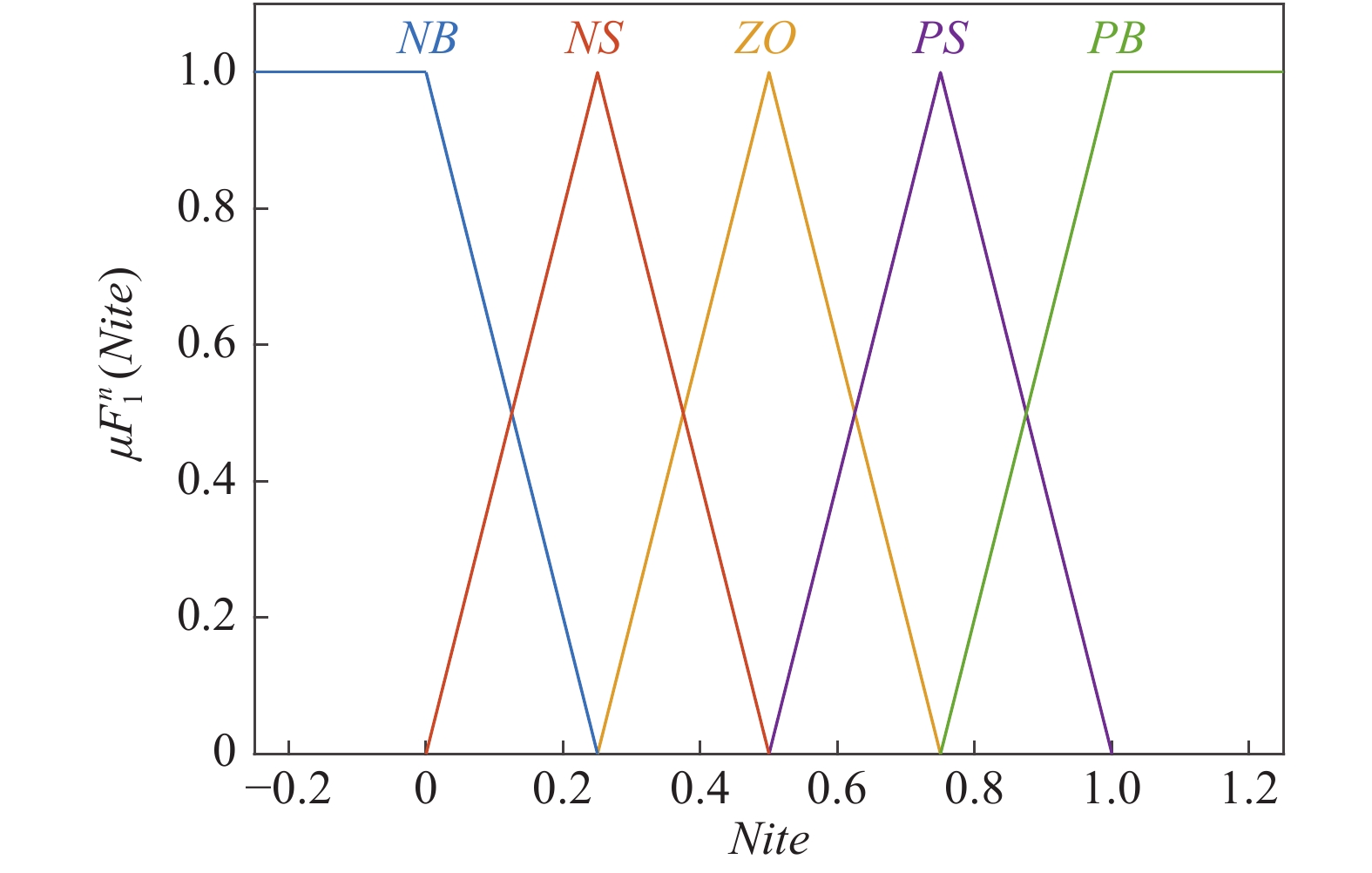
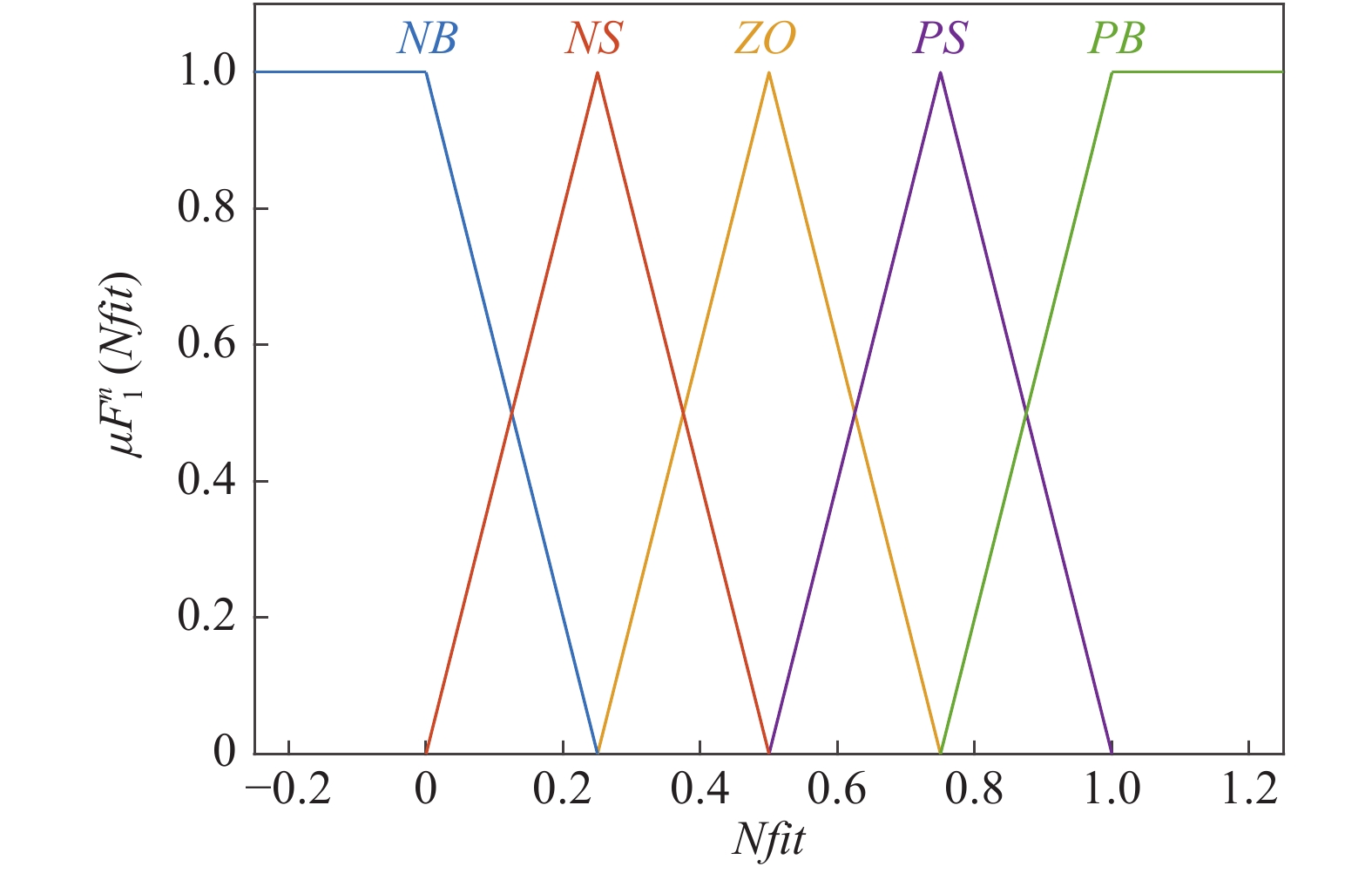
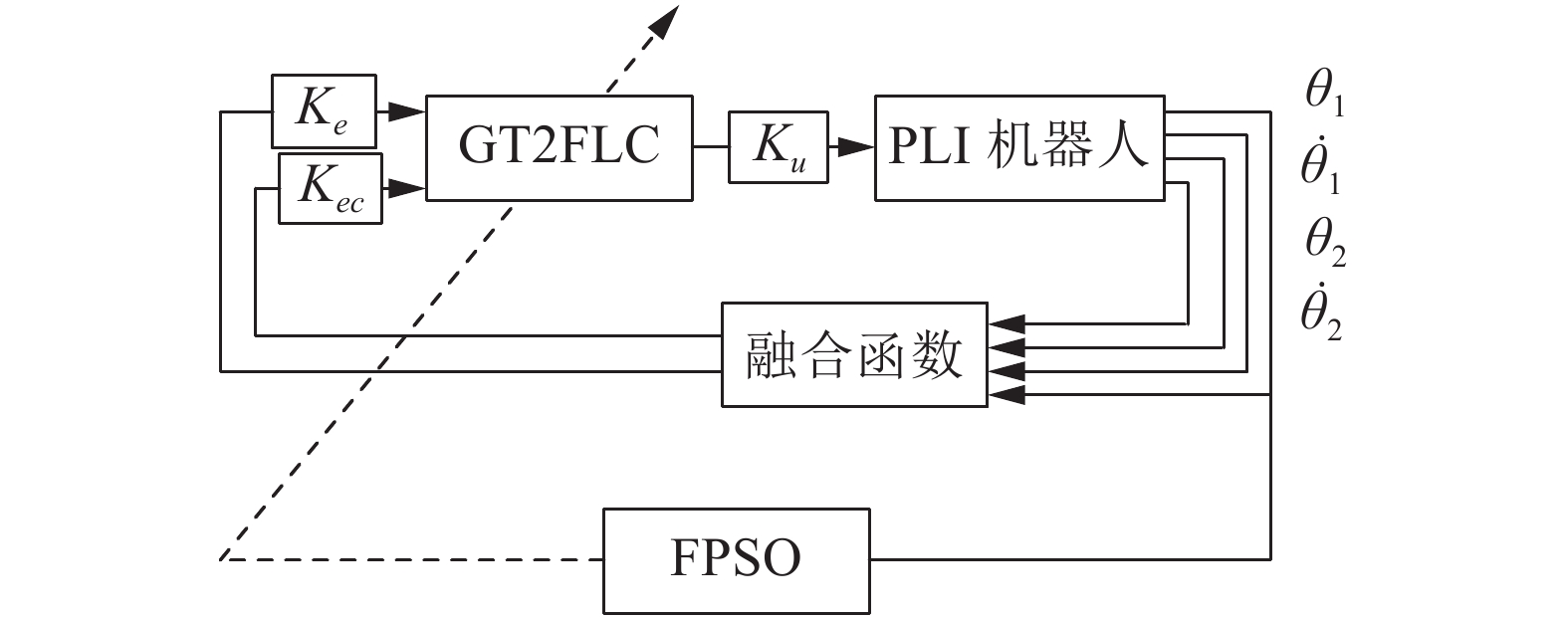
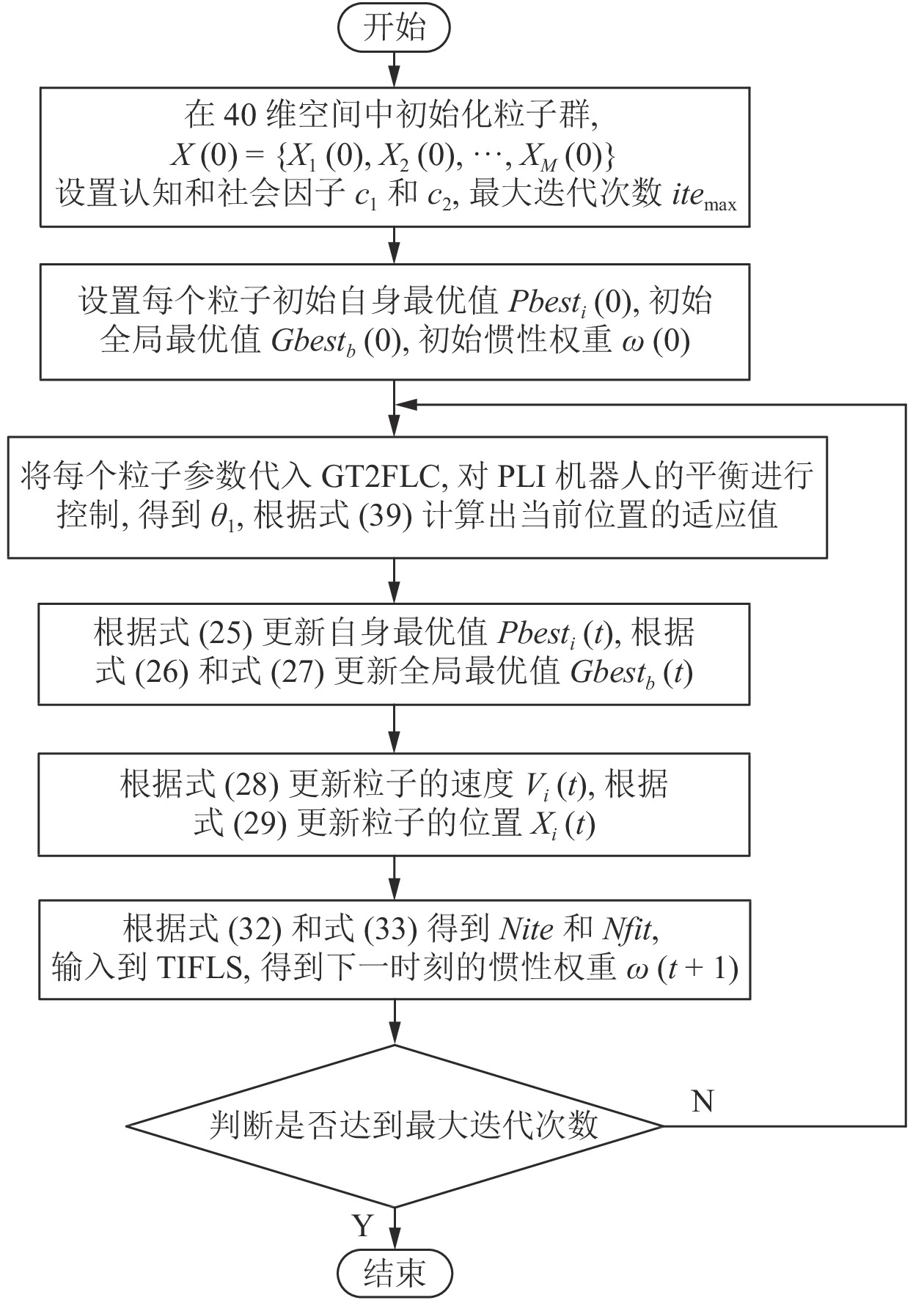
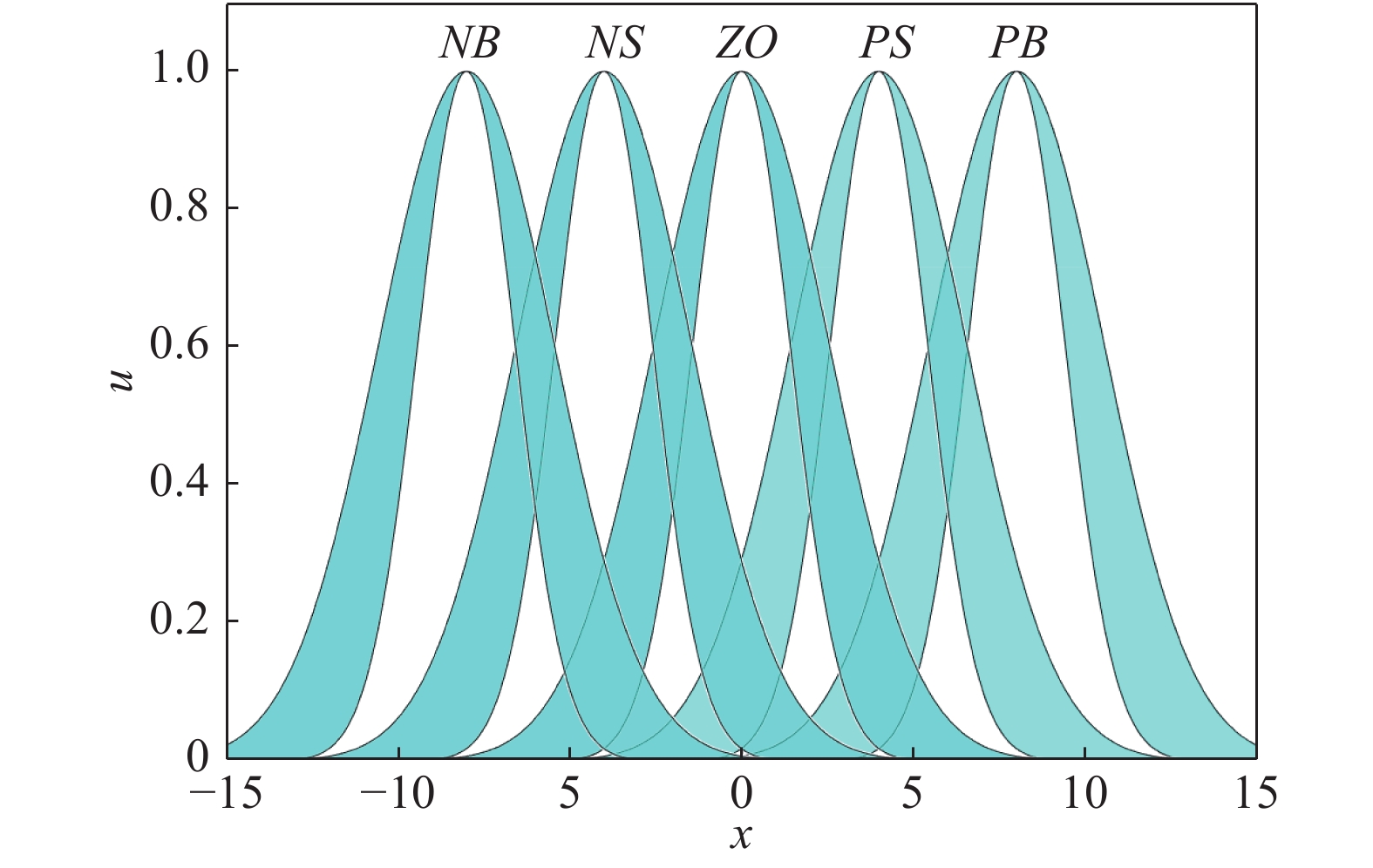
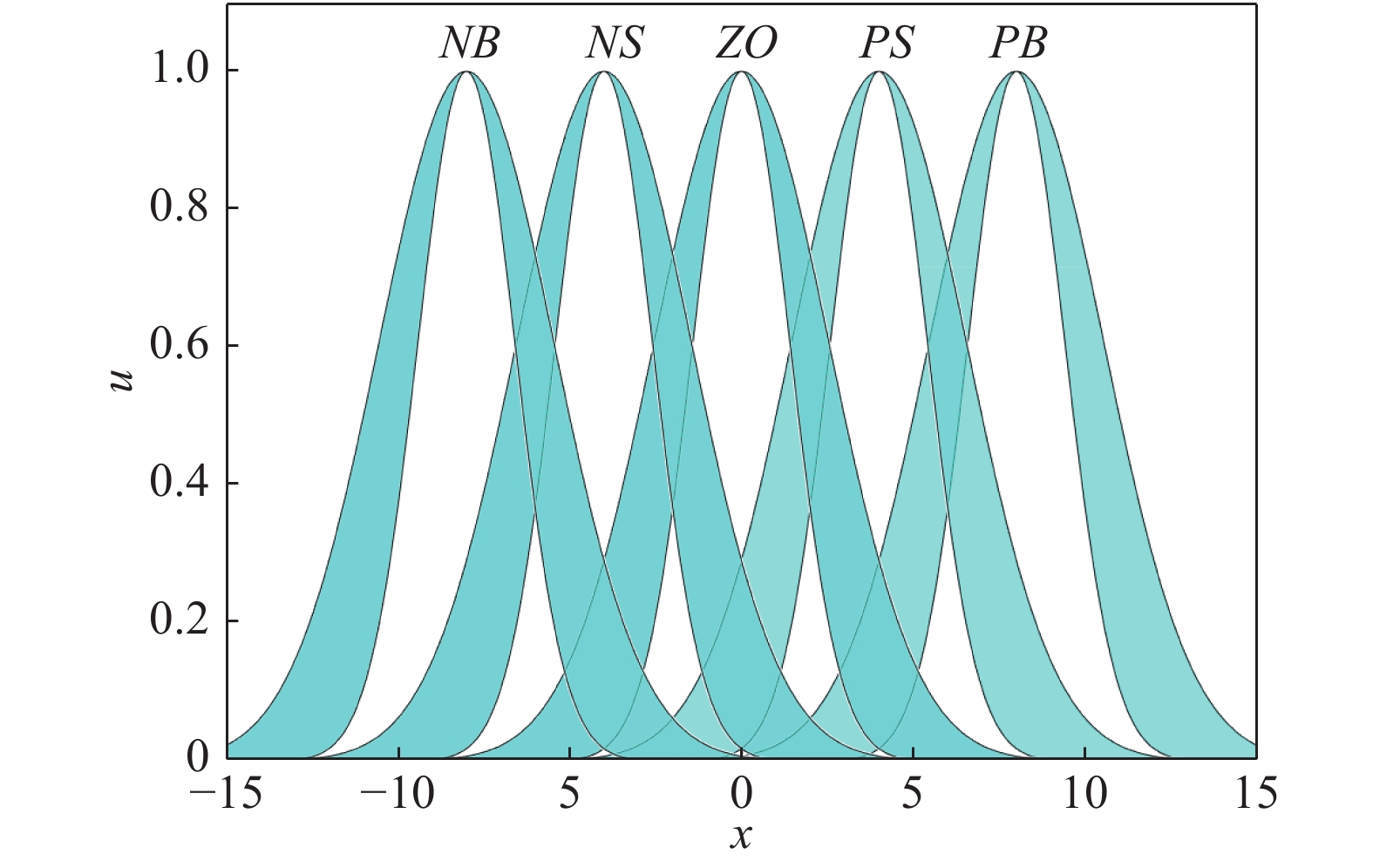
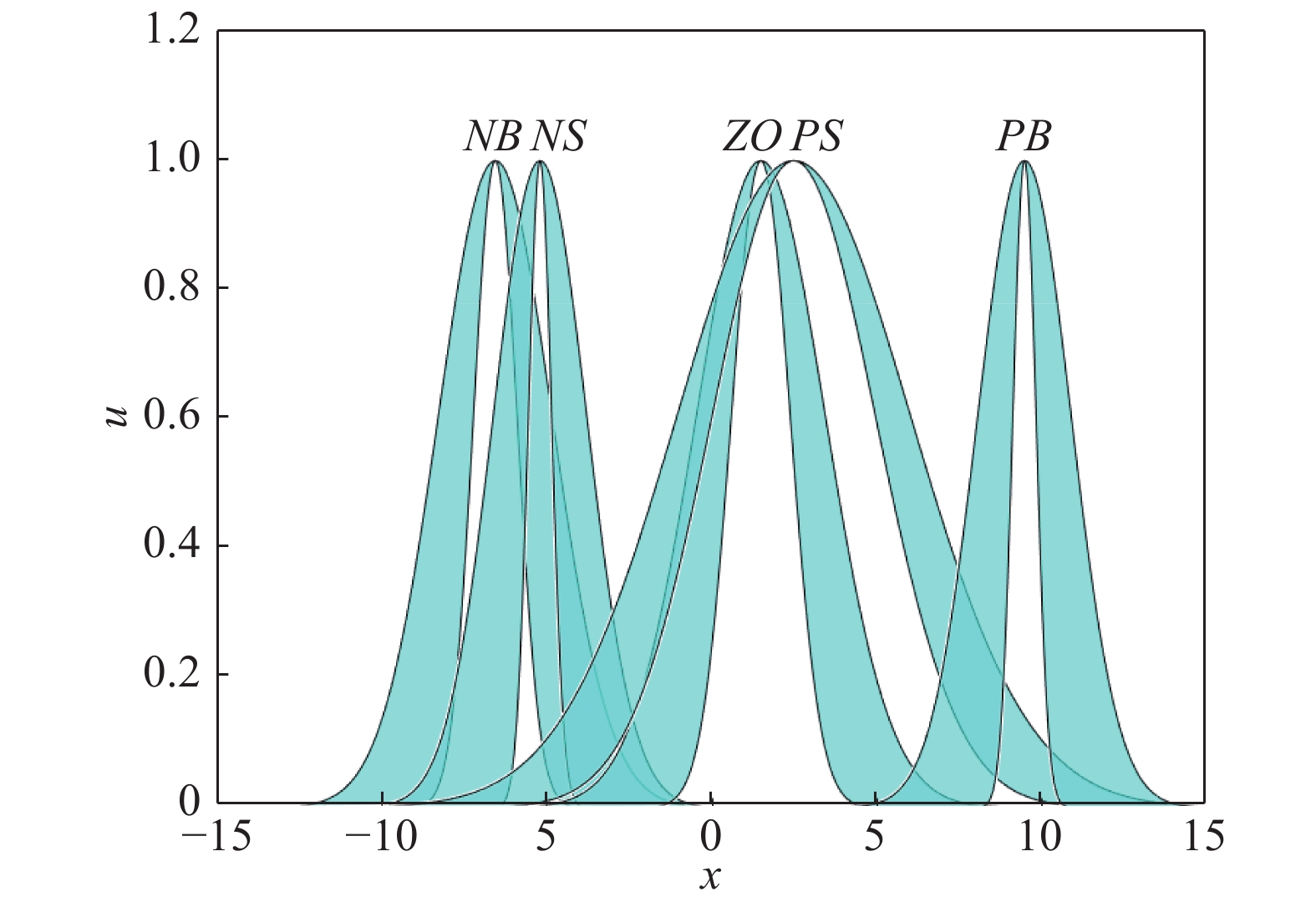
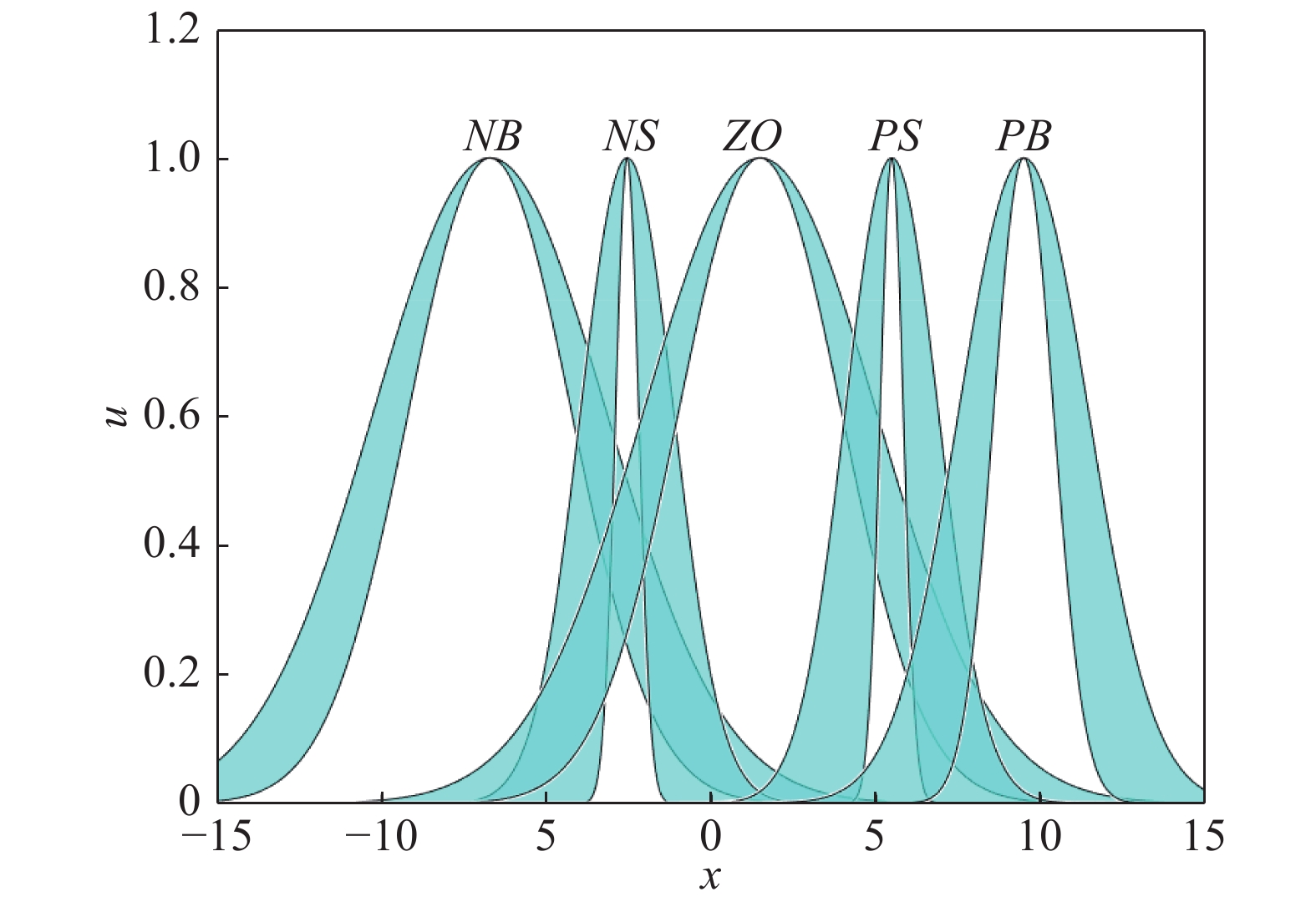
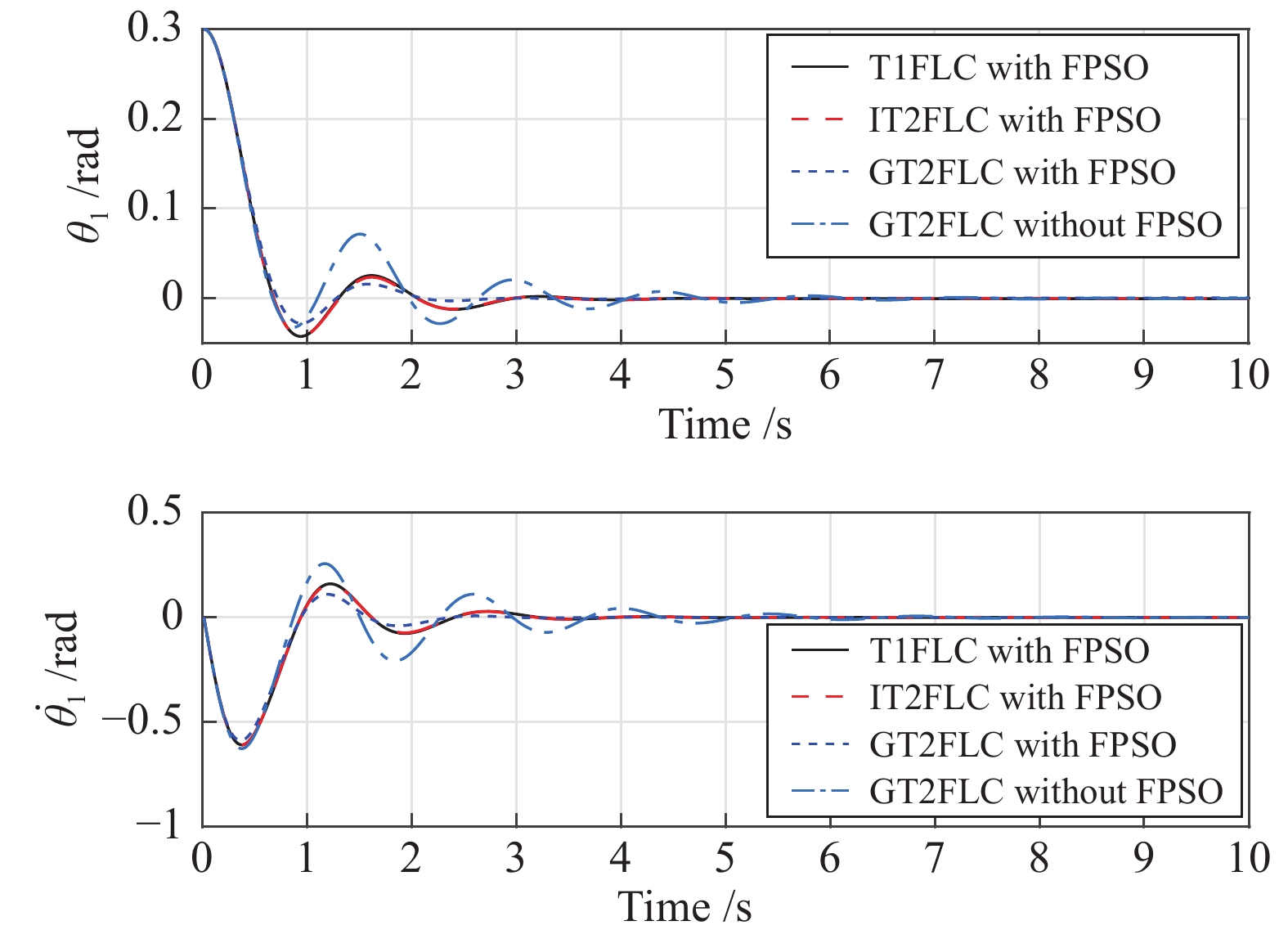
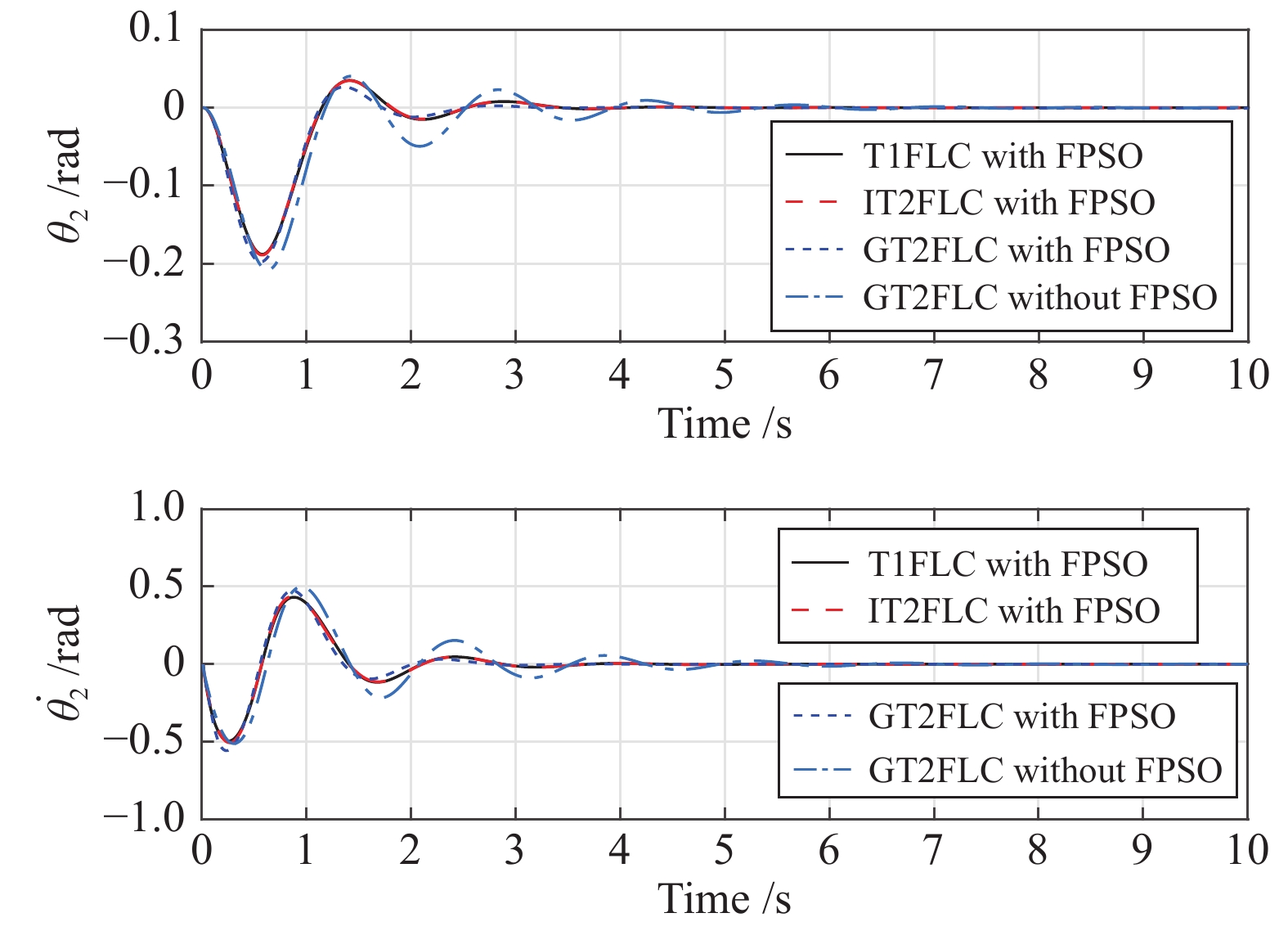
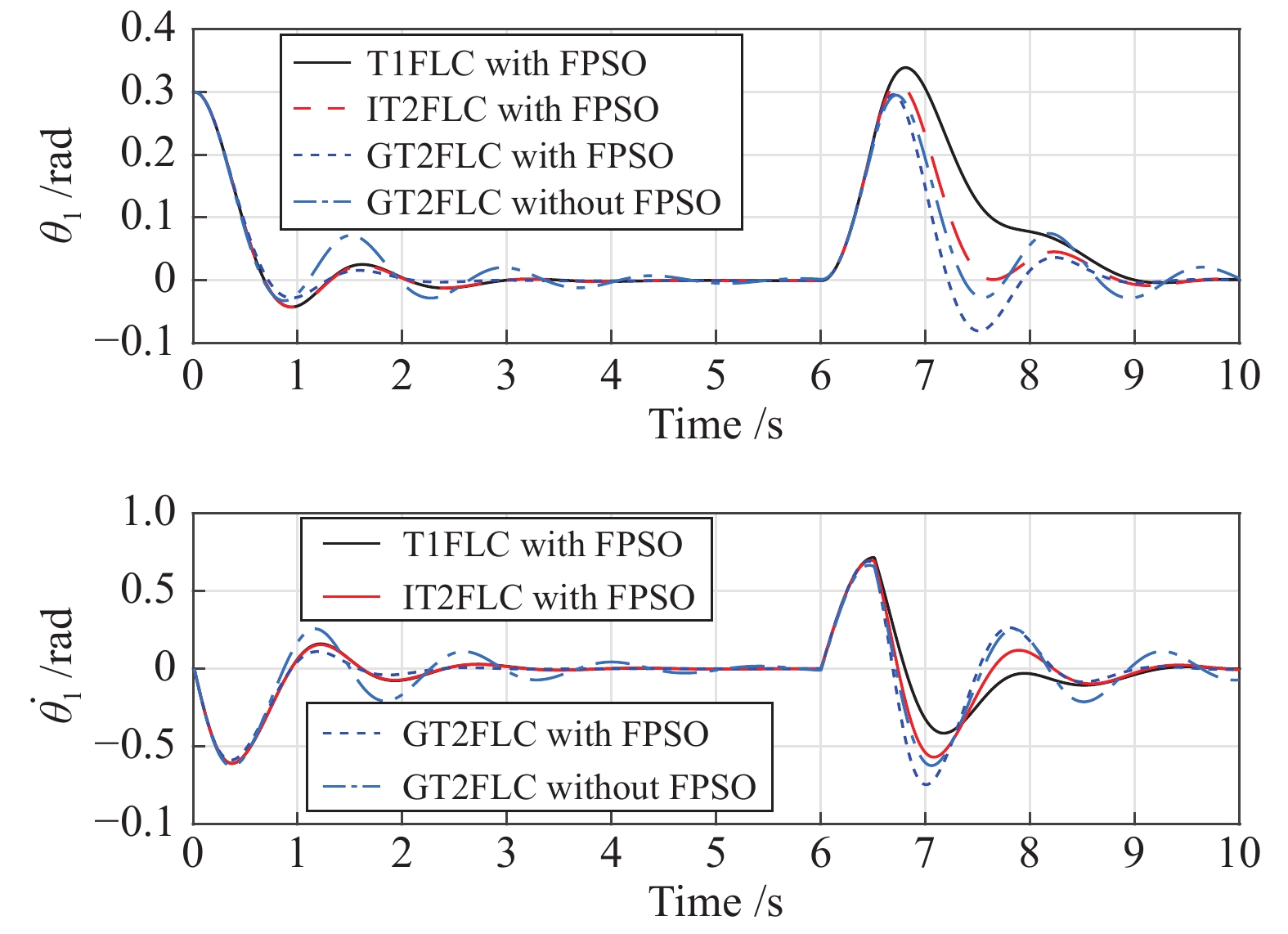
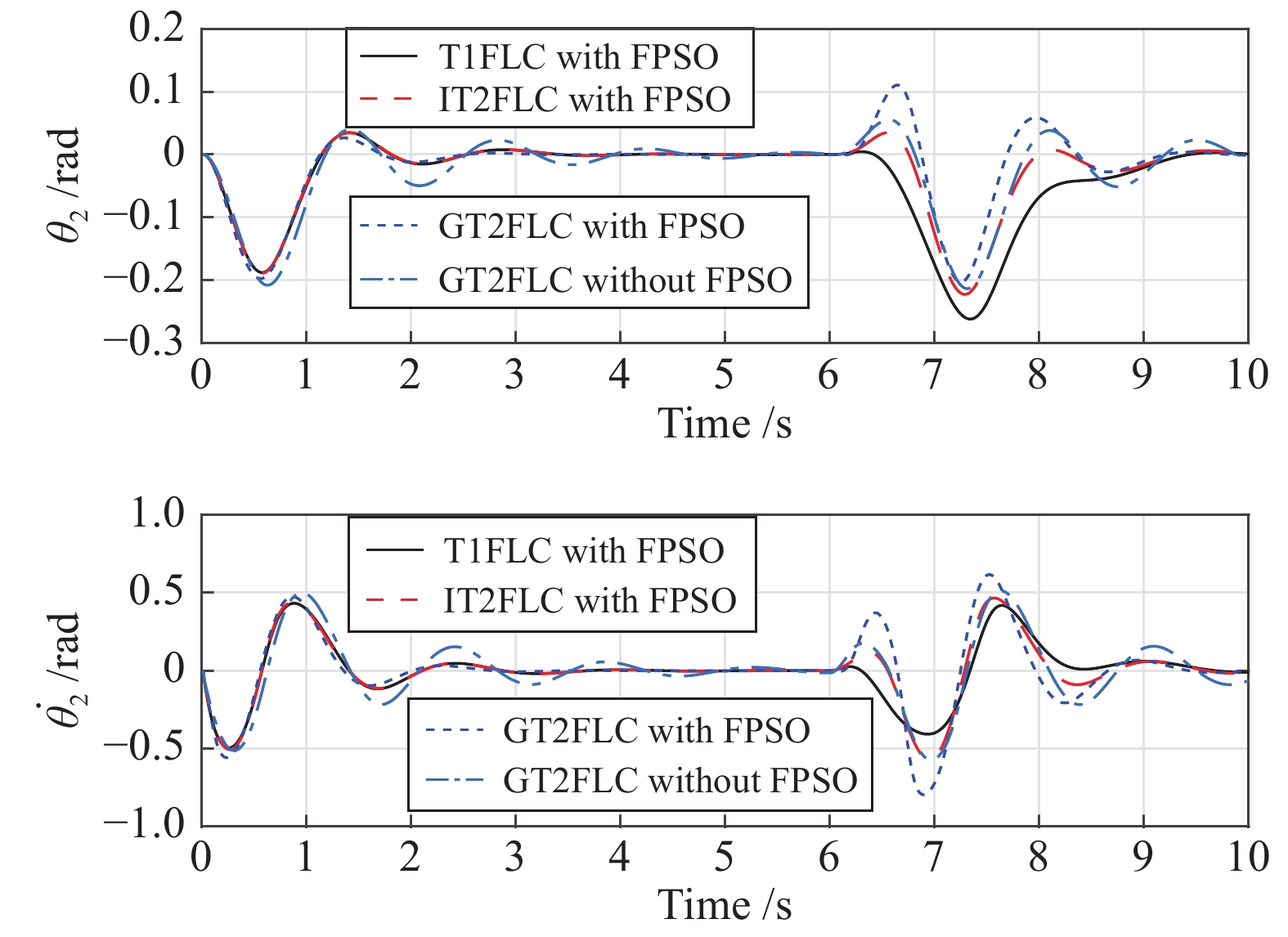
针对电力巡检机器人(Power-line inspection robot, PLIR)的平衡调节问题, 设计了广义二型模糊逻辑控制器(General type-2 fuzzy logic controller, GT2FLC); 针对GT2FLC中隶属函数参数难以确定的问题, 通过模糊粒子群(Fuzzy particle swarm optimization, FPSO)算法来优化隶属函数参数. 将GT2FLC的控制性能与区间二型模糊逻辑控制器(Interval type-2 fuzzy logic controller, IT2FLC)和一型模糊逻辑控制器(Type-1 fuzzy logic controller, T1FLC) 的控制性能进行对比. 除此之外, 还考虑了外部干扰对三种控制器控制效果的影响. 仿真结果表明, GT2FLC具有更好的性能和处理不确定性的能力.
针对电力巡检机器人(Power-line inspection robot, PLIR)的平衡调节问题, 设计了广义二型模糊逻辑控制器(General type-2 fuzzy logic controller, GT2FLC); 针对GT2FLC中隶属函数参数难以确定的问题, 通过模糊粒子群(Fuzzy particle swarm optimization, FPSO)算法来优化隶属函数参数. 将GT2FLC的控制性能与区间二型模糊逻辑控制器(Interval type-2 fuzzy logic controller, IT2FLC)和一型模糊逻辑控制器(Type-1 fuzzy logic controller, T1FLC) 的控制性能进行对比. 除此之外, 还考虑了外部干扰对三种控制器控制效果的影响. 仿真结果表明, GT2FLC具有更好的性能和处理不确定性的能力.
2022, 48(6): 1493-1503.
doi: 10.16383/j.aas.c190512
摘要:
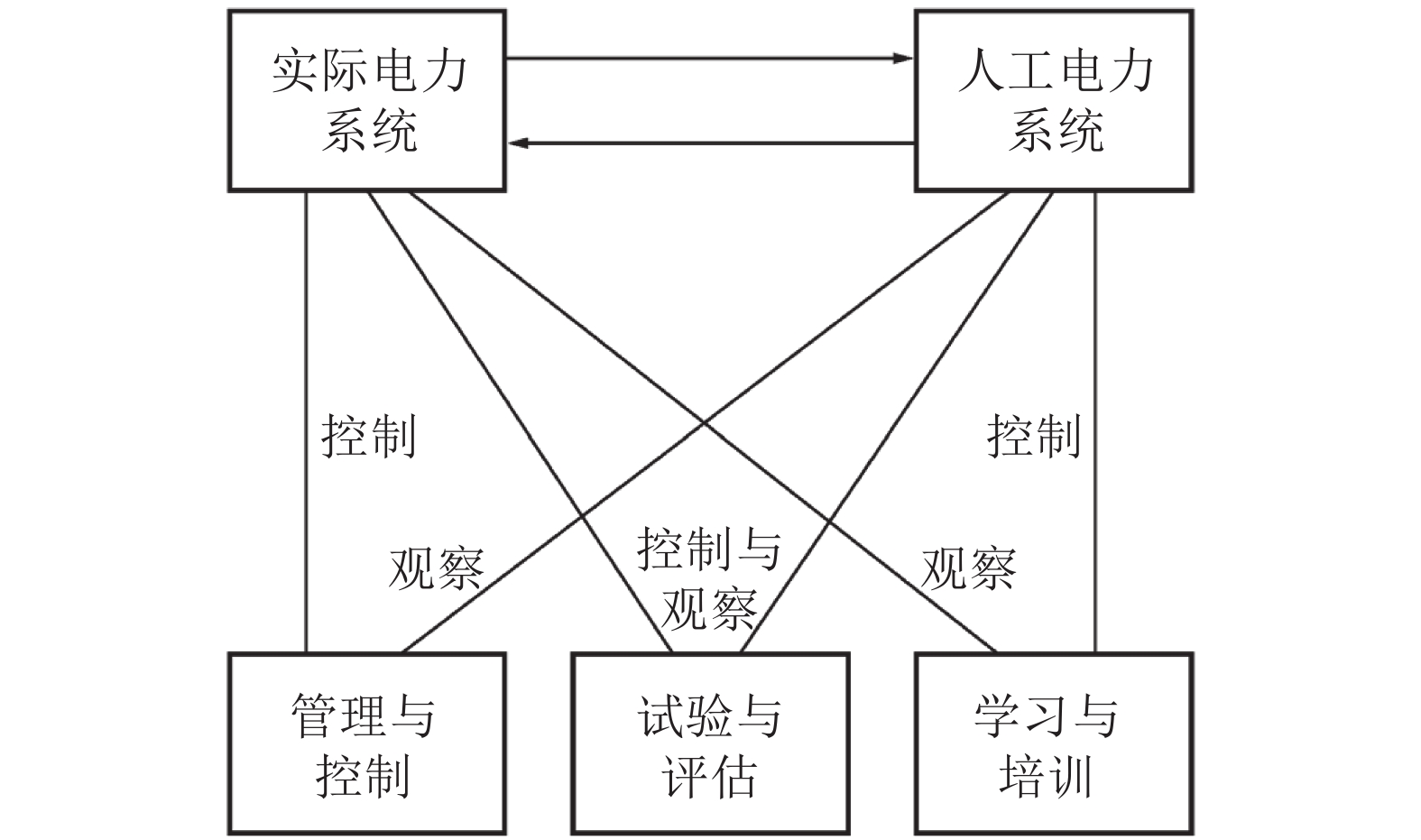
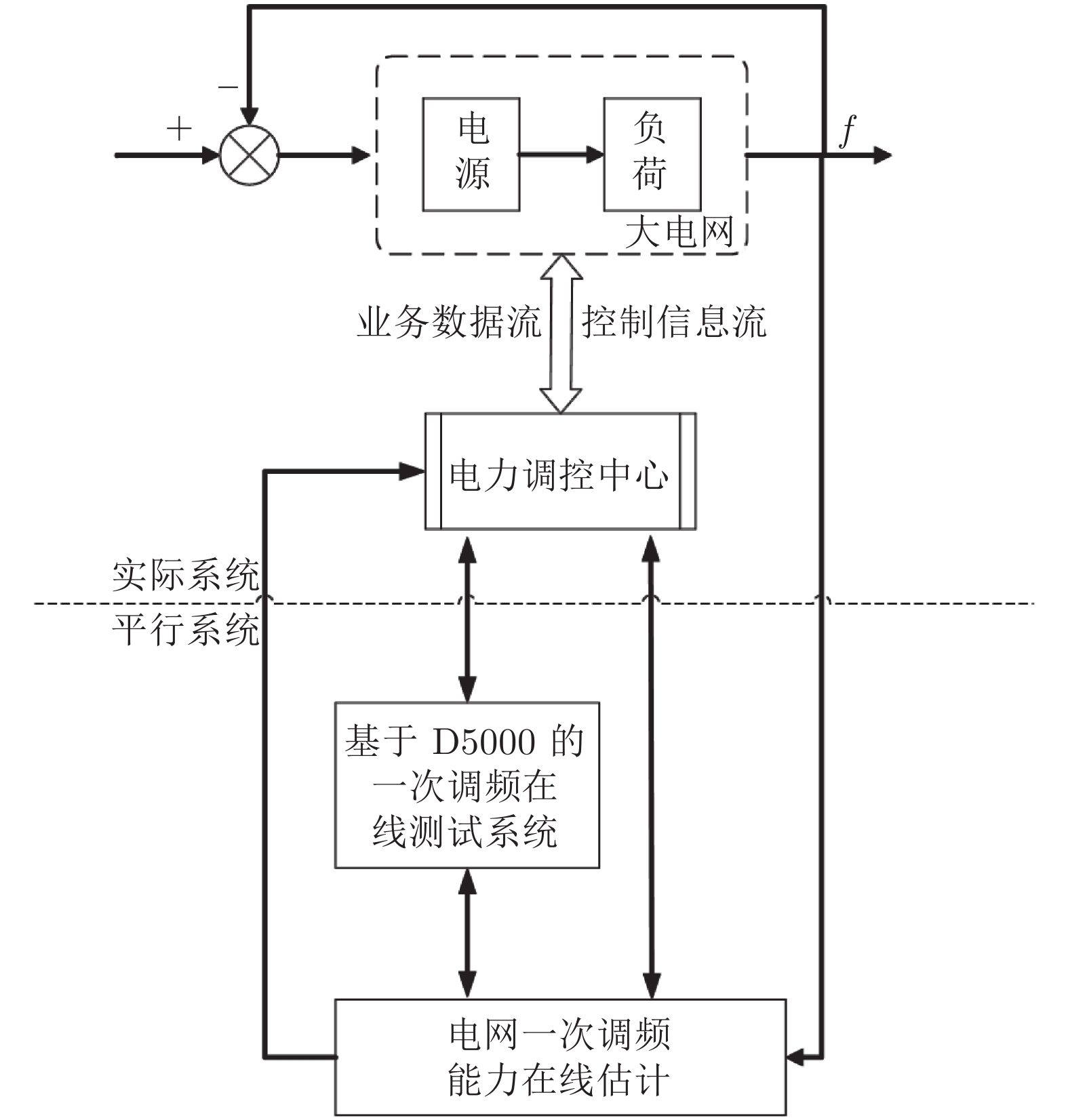
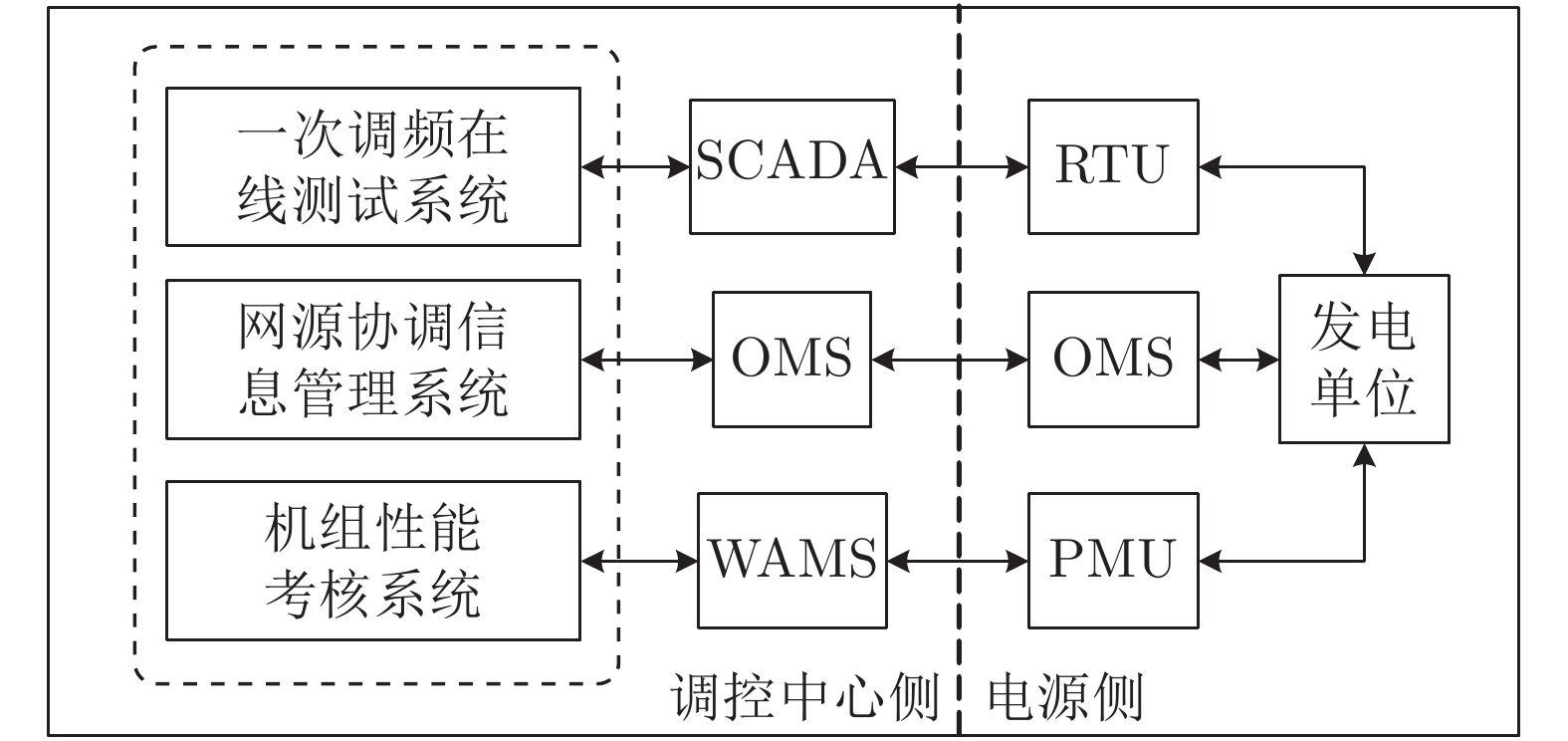
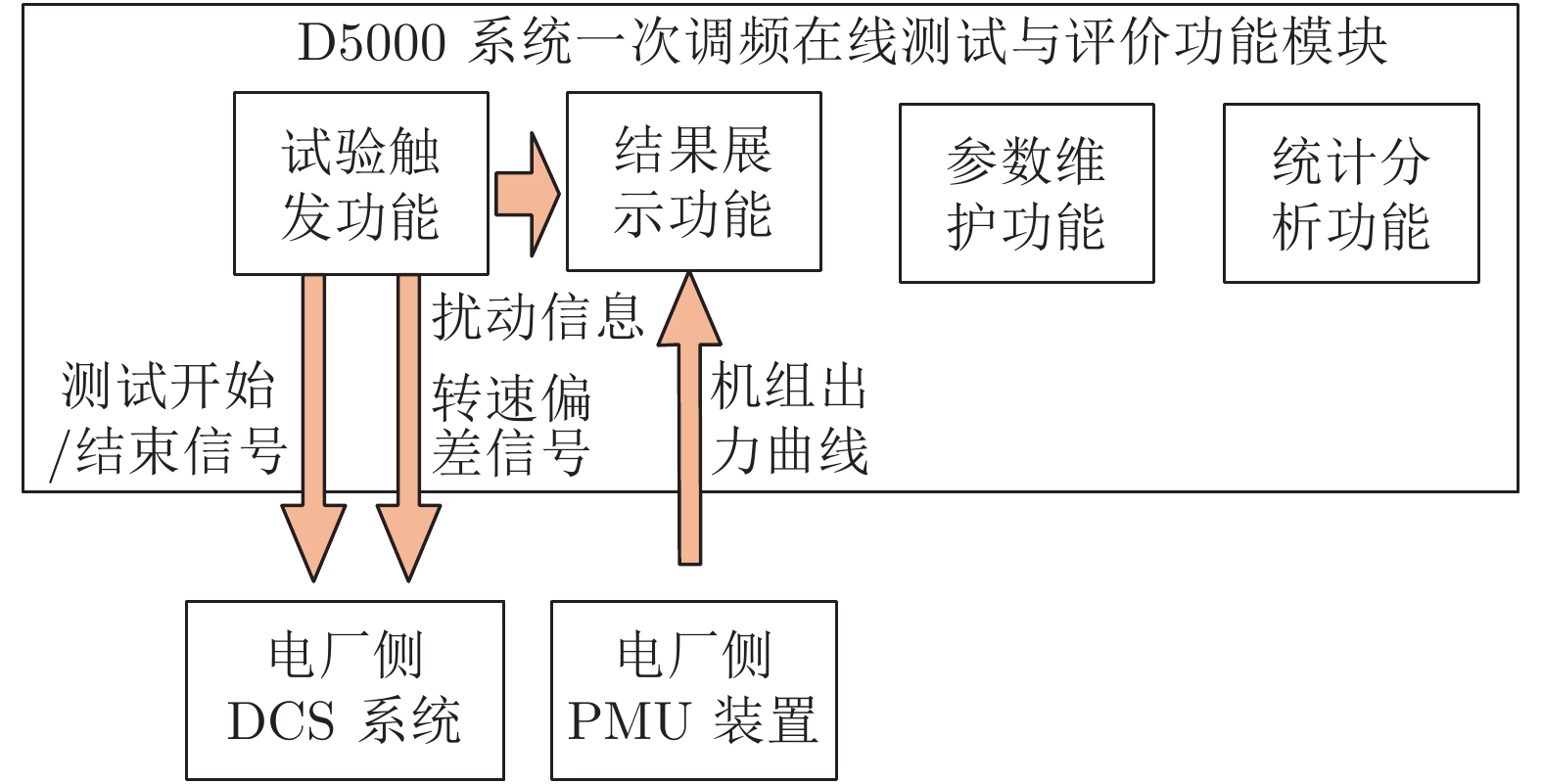
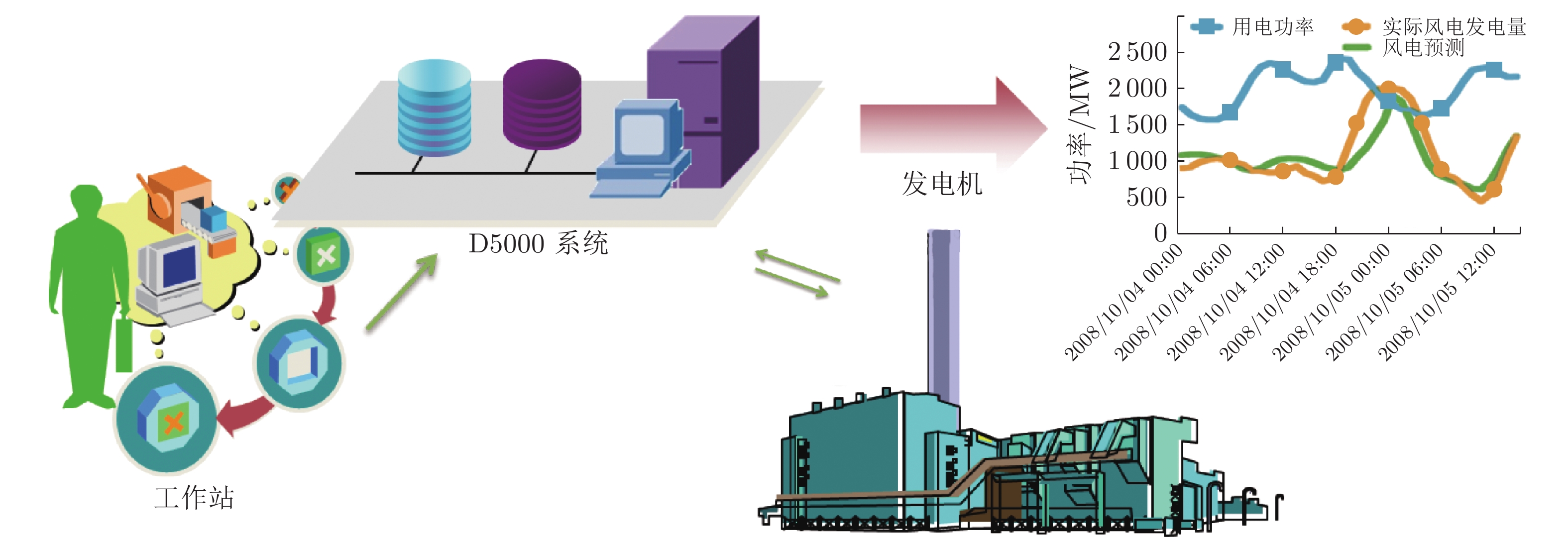
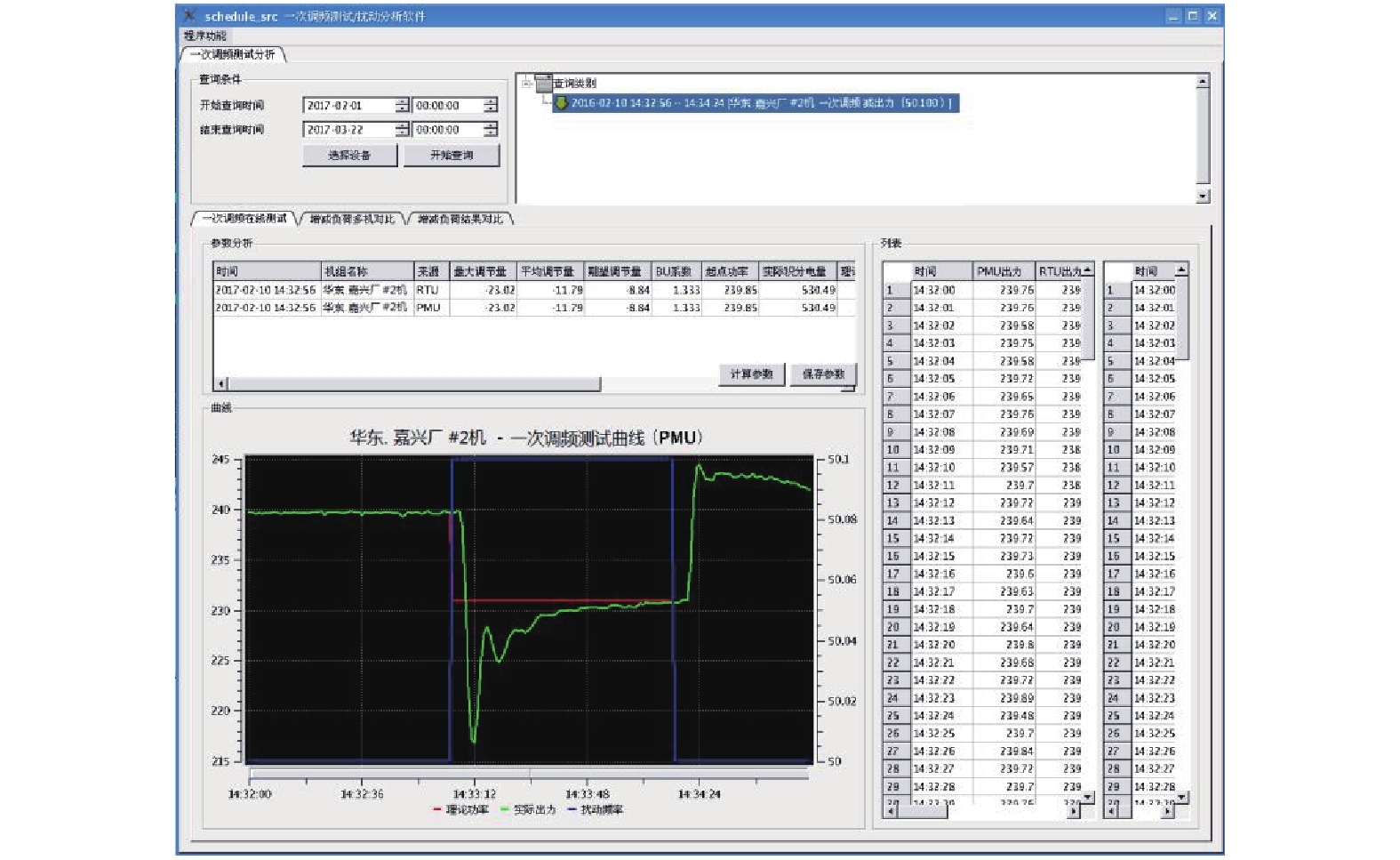
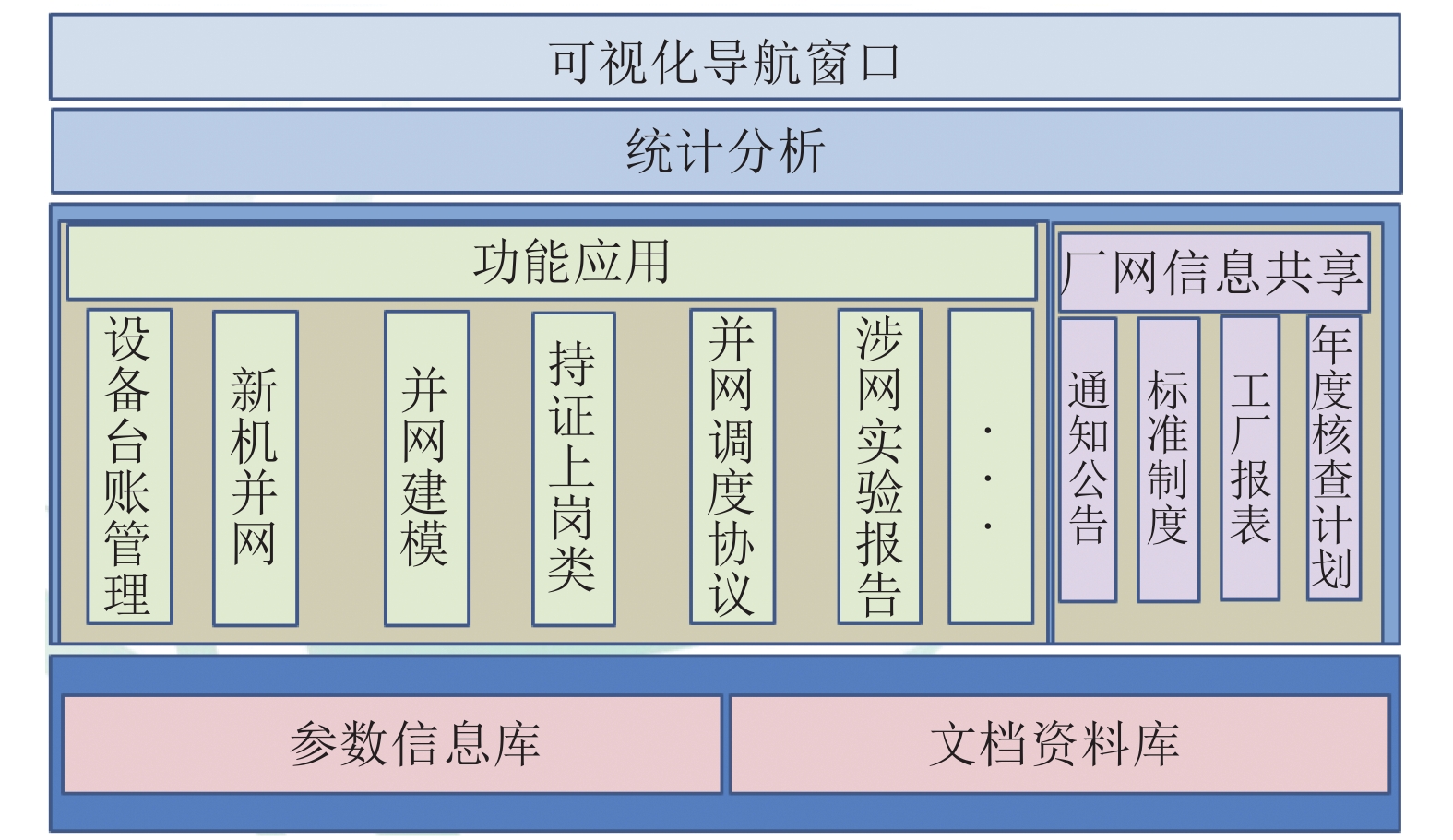
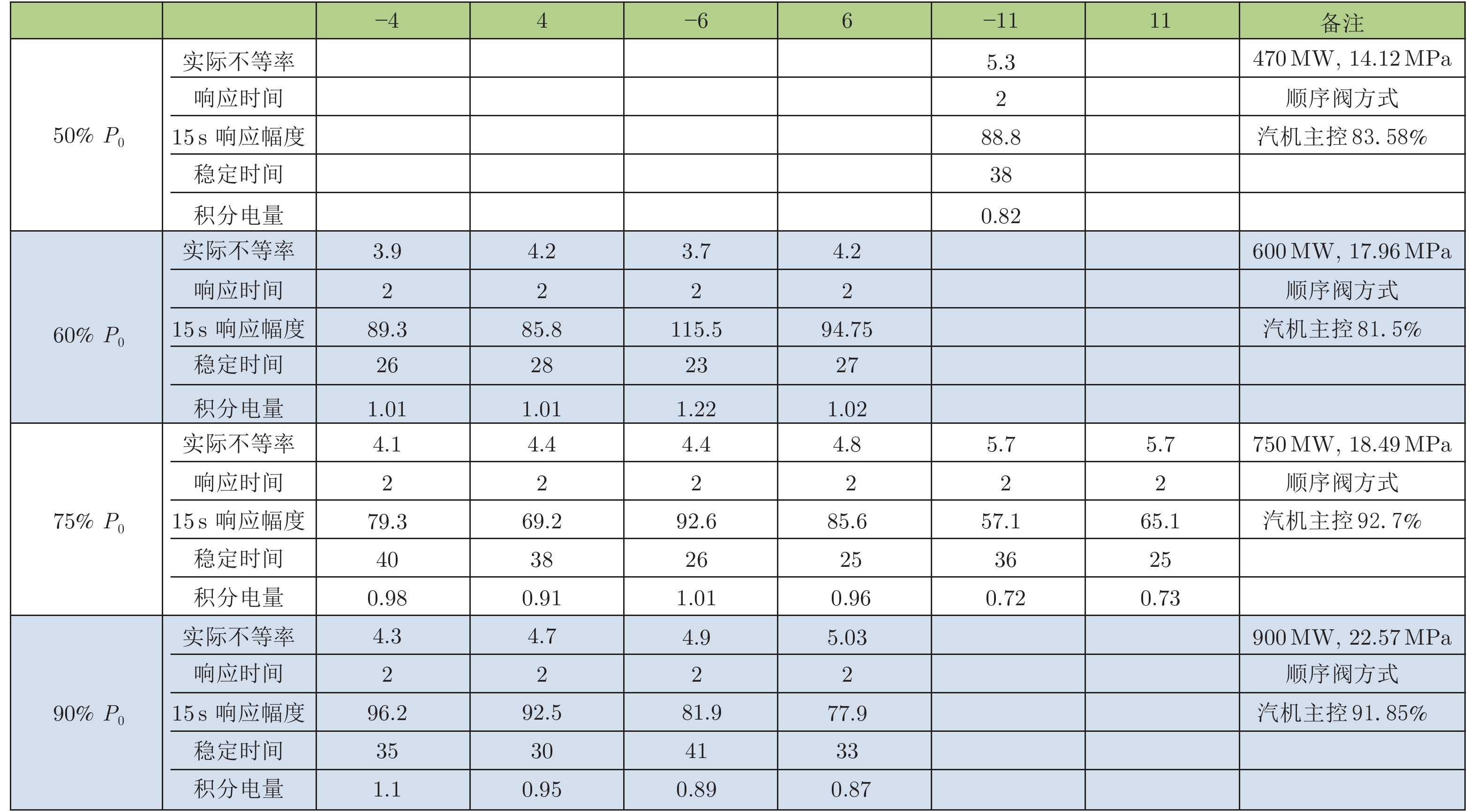
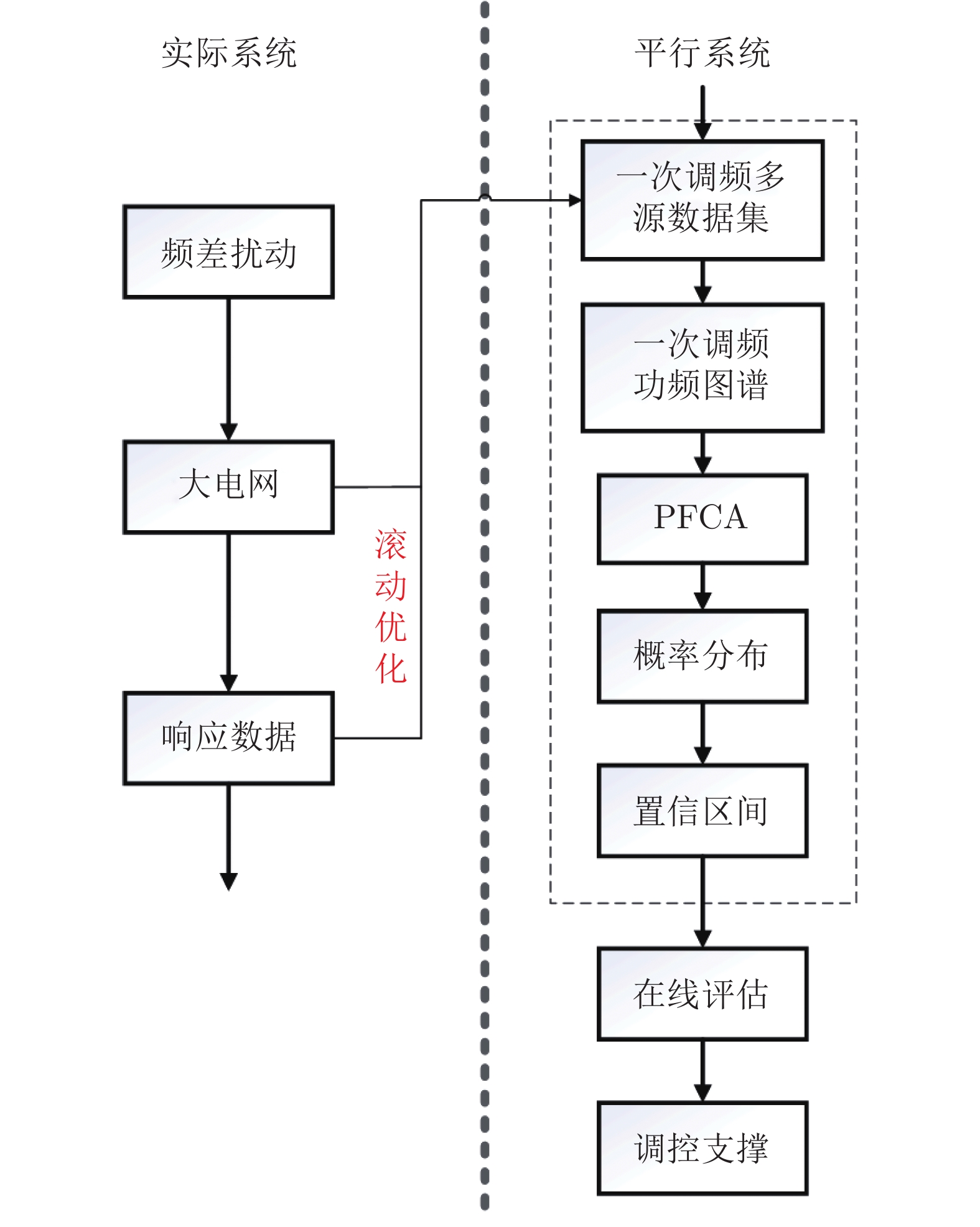
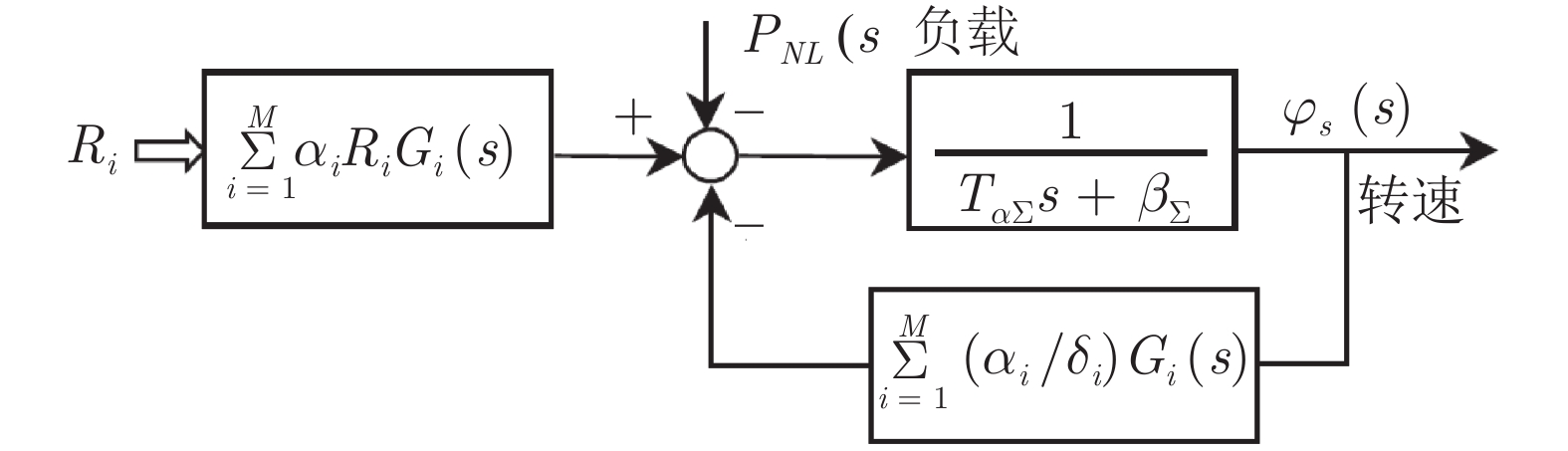
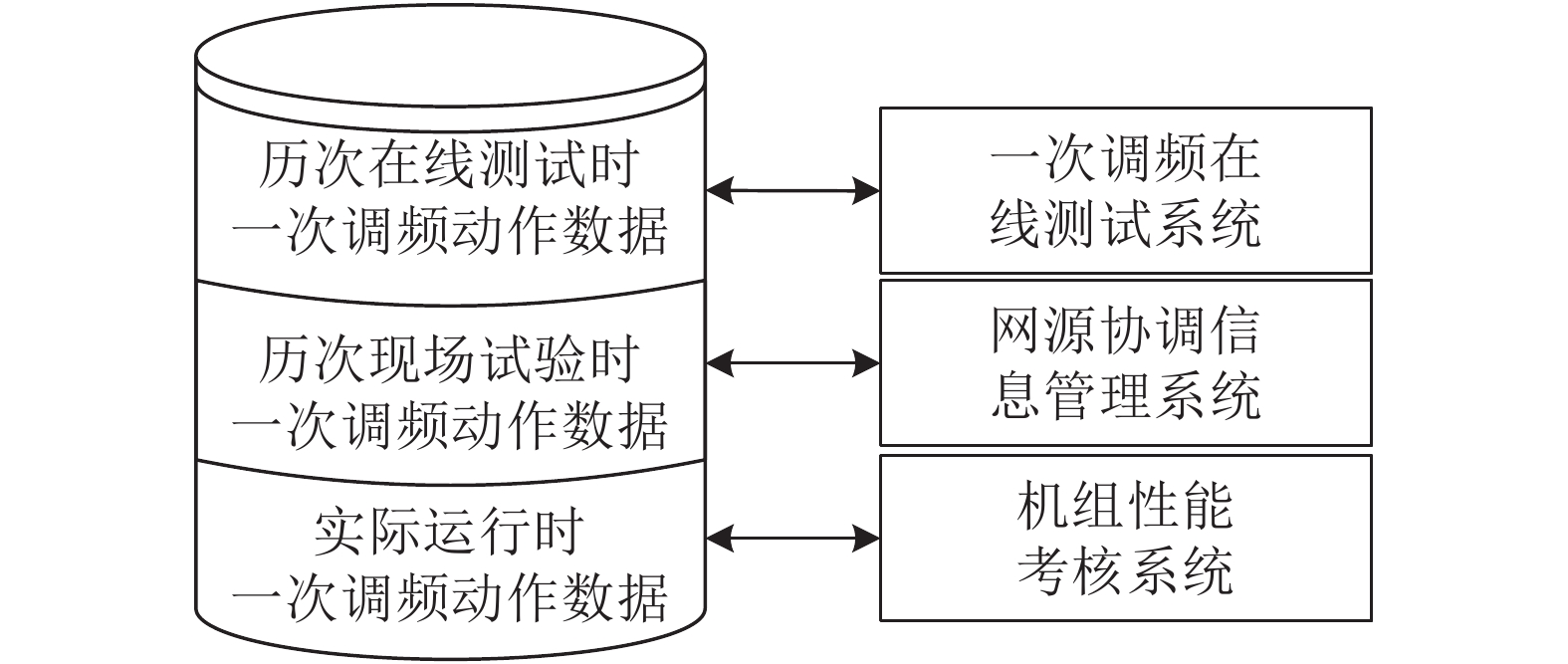
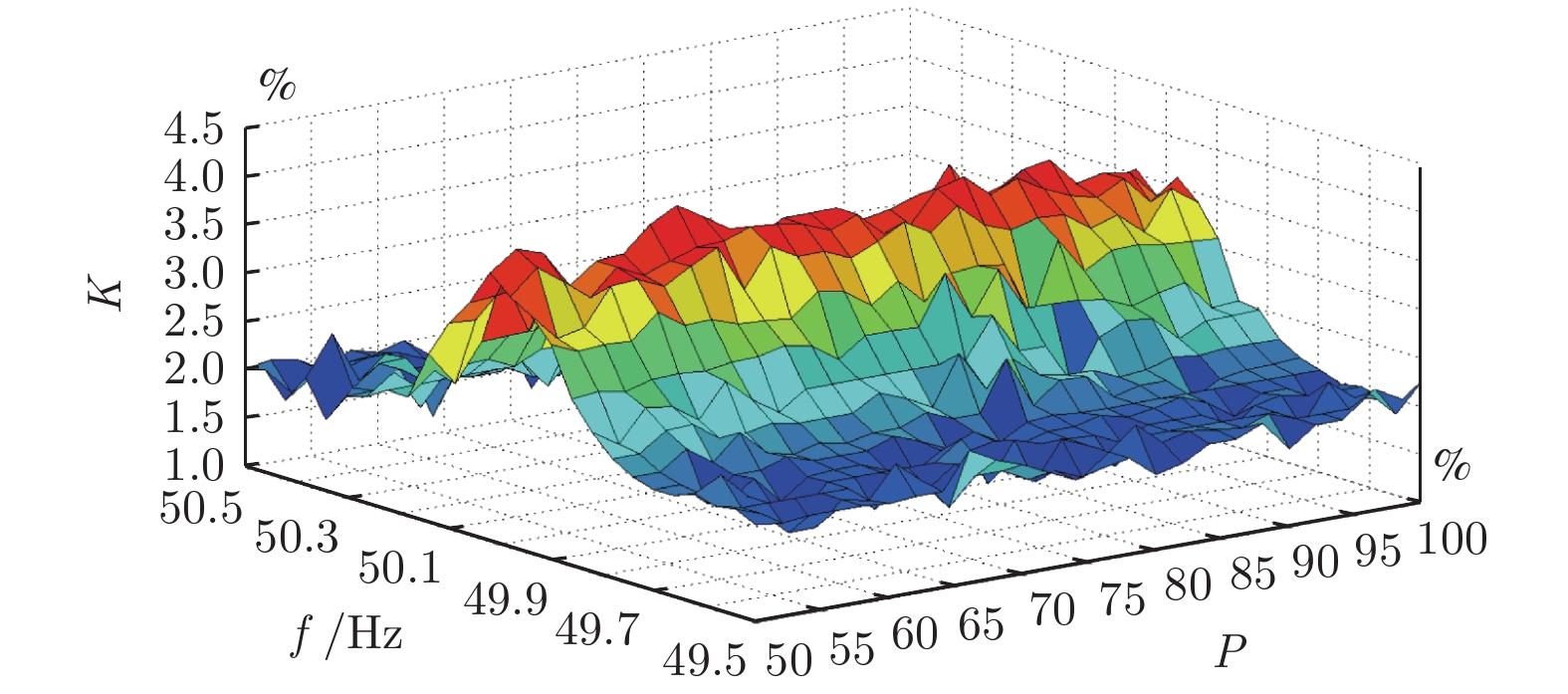
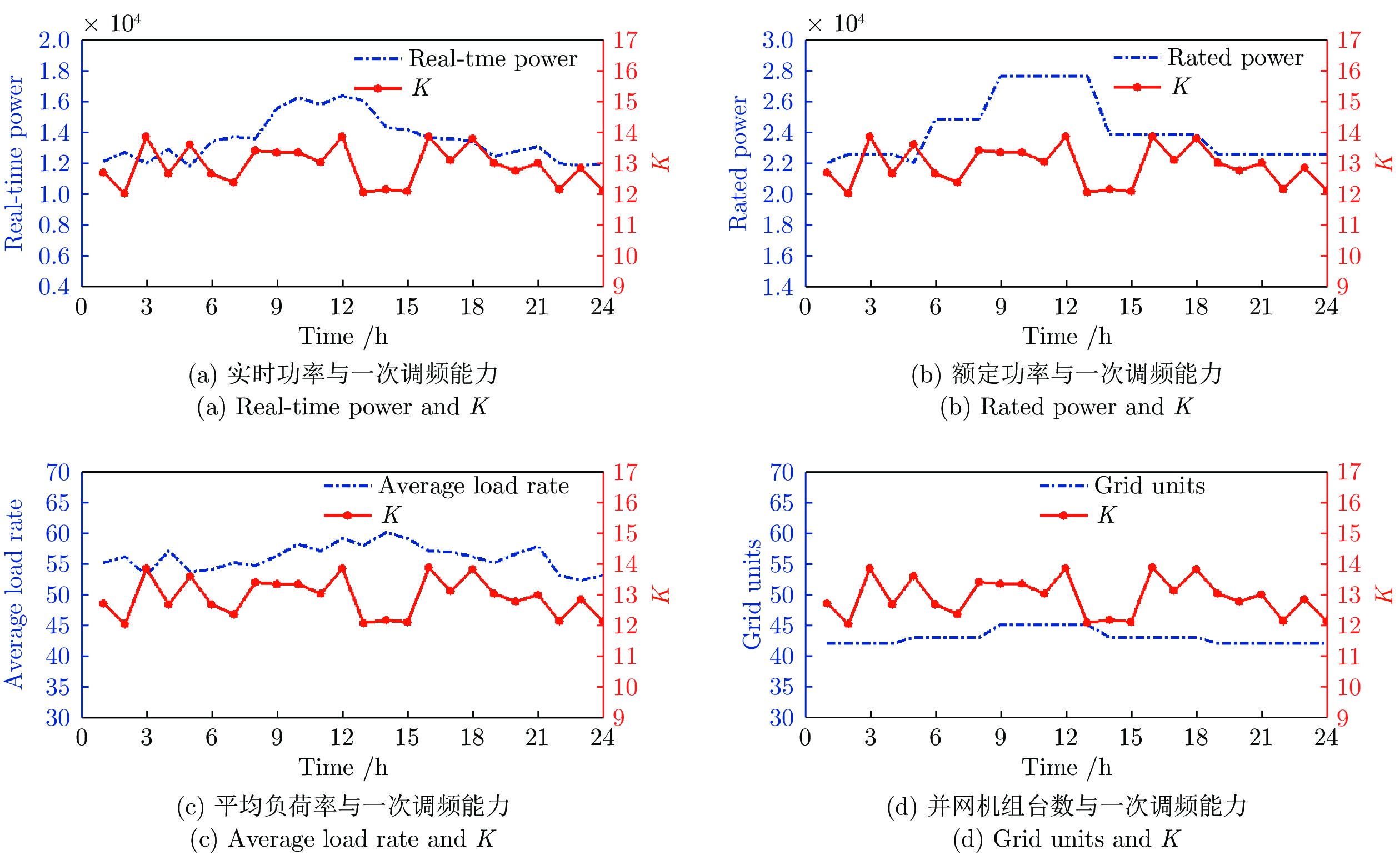
为解决电网一次调频性能难以估计的问题, 本文提出了基于多源数据的电网一次调频性能平行计算平台. 通过采集整合OMS (Operations management system)、WAMS (Wide area measurement system)、SCADA (Supervisory control and data acquisition)等系统的各类型一次调频数据, 以极大似然估计、数值拟合等方法构建机组一次调频性能功频图谱. 采用均方差分析建立电网一次调频性能数学模型, 基于并网运行机组的一次调频性能功频图谱, 估算出当前电网的实际一次调频性能. 算例计算表明, 本文所提出的计算方法能够有效兼顾机组类型的静态特性和运行工况的动态特性, 并以平行执行方式完成人工估算系统与实际电力系统的滚动优化, 实现了电网一次调频性能的在线全面估计, 为电网频率管理与控制提供数据决策支持.
为解决电网一次调频性能难以估计的问题, 本文提出了基于多源数据的电网一次调频性能平行计算平台. 通过采集整合OMS (Operations management system)、WAMS (Wide area measurement system)、SCADA (Supervisory control and data acquisition)等系统的各类型一次调频数据, 以极大似然估计、数值拟合等方法构建机组一次调频性能功频图谱. 采用均方差分析建立电网一次调频性能数学模型, 基于并网运行机组的一次调频性能功频图谱, 估算出当前电网的实际一次调频性能. 算例计算表明, 本文所提出的计算方法能够有效兼顾机组类型的静态特性和运行工况的动态特性, 并以平行执行方式完成人工估算系统与实际电力系统的滚动优化, 实现了电网一次调频性能的在线全面估计, 为电网频率管理与控制提供数据决策支持.

2022, 48(6): 1504-1519.
doi: 10.16383/j.aas.c210637
摘要:
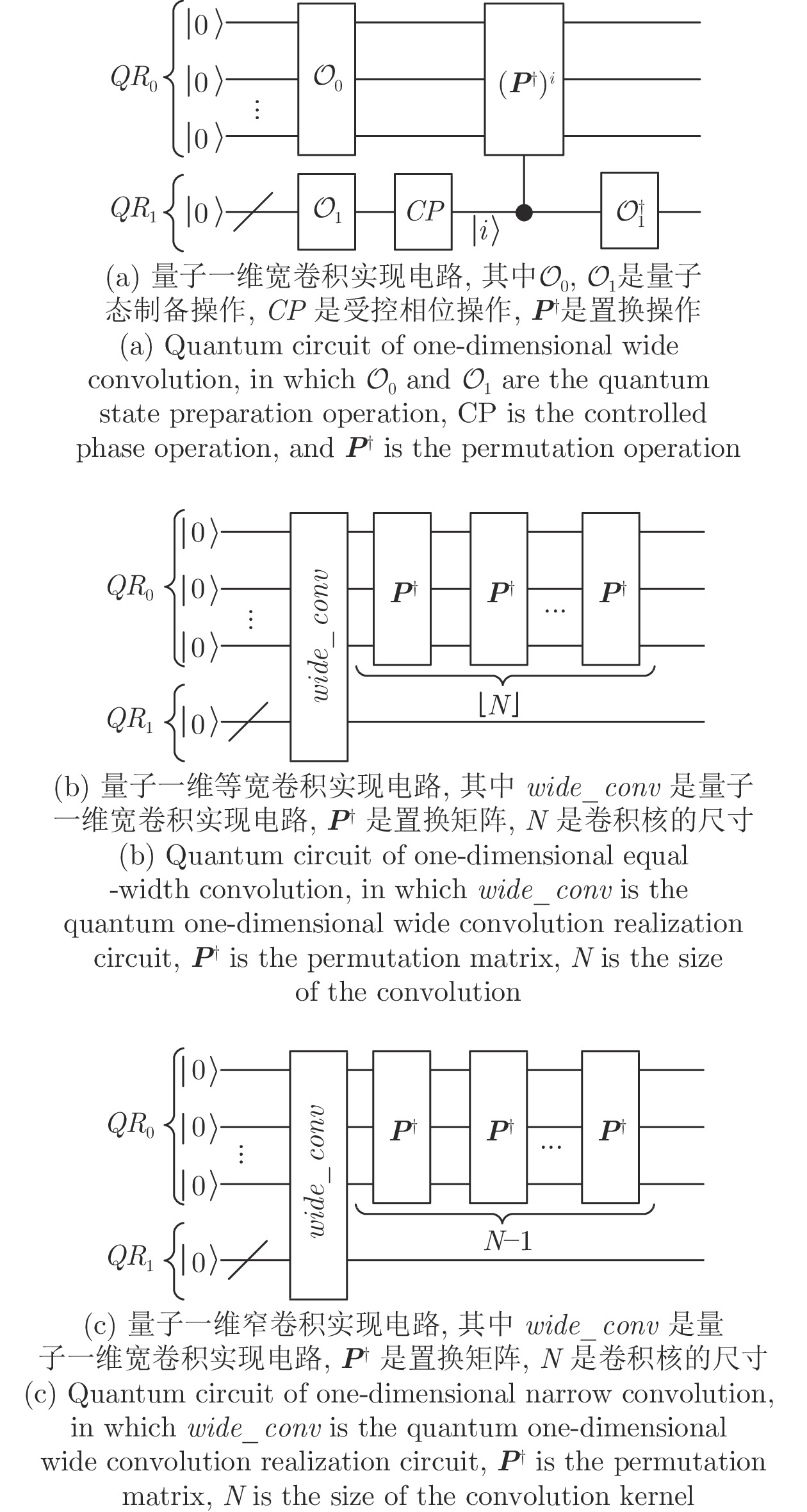
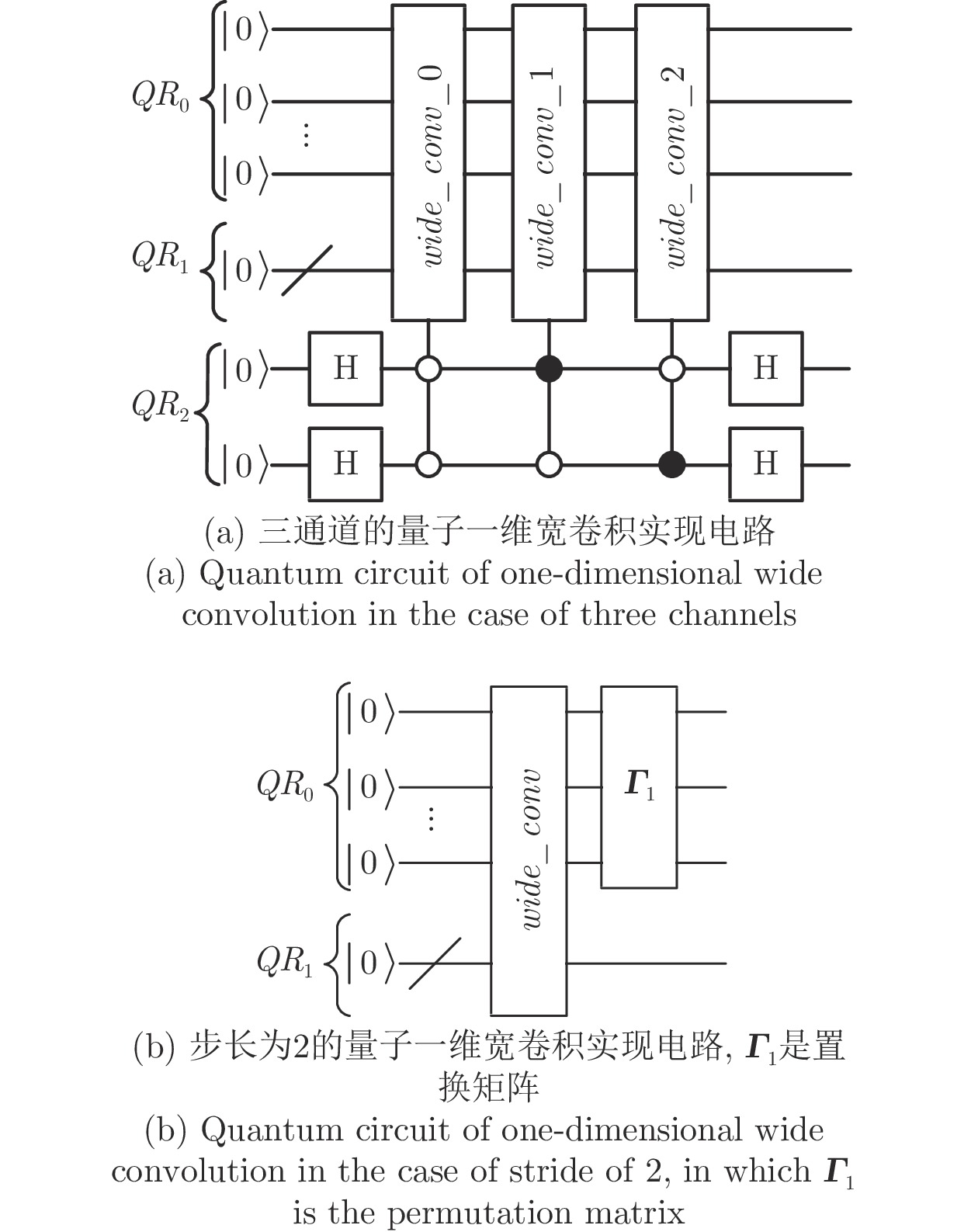
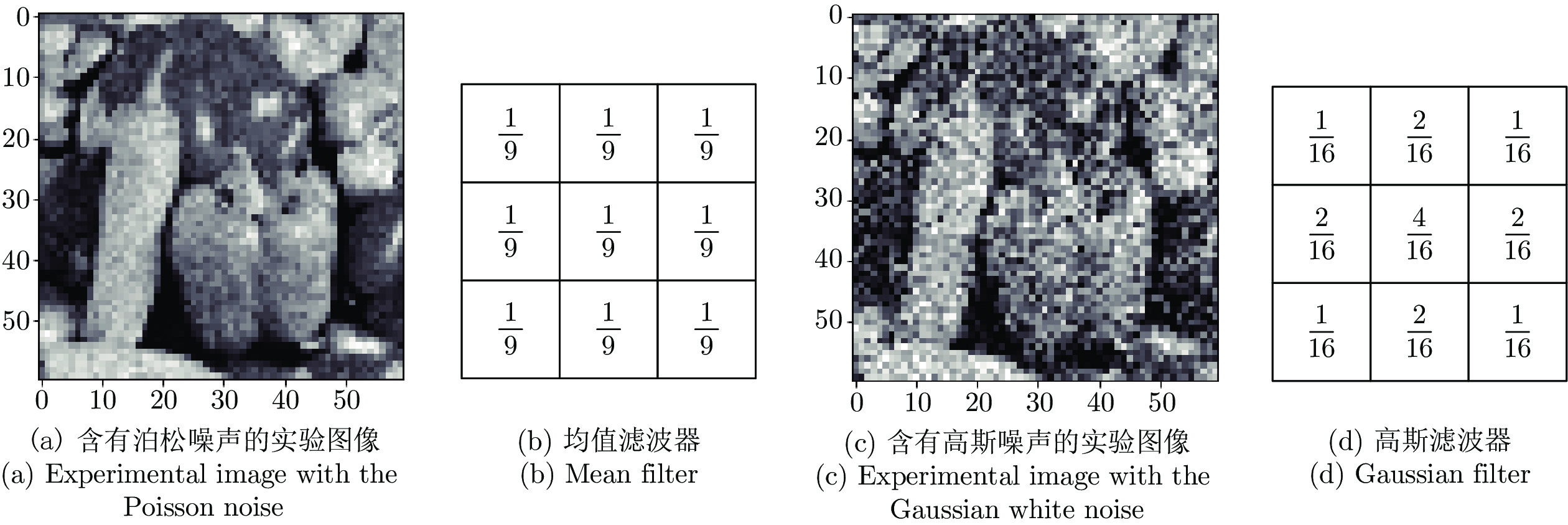
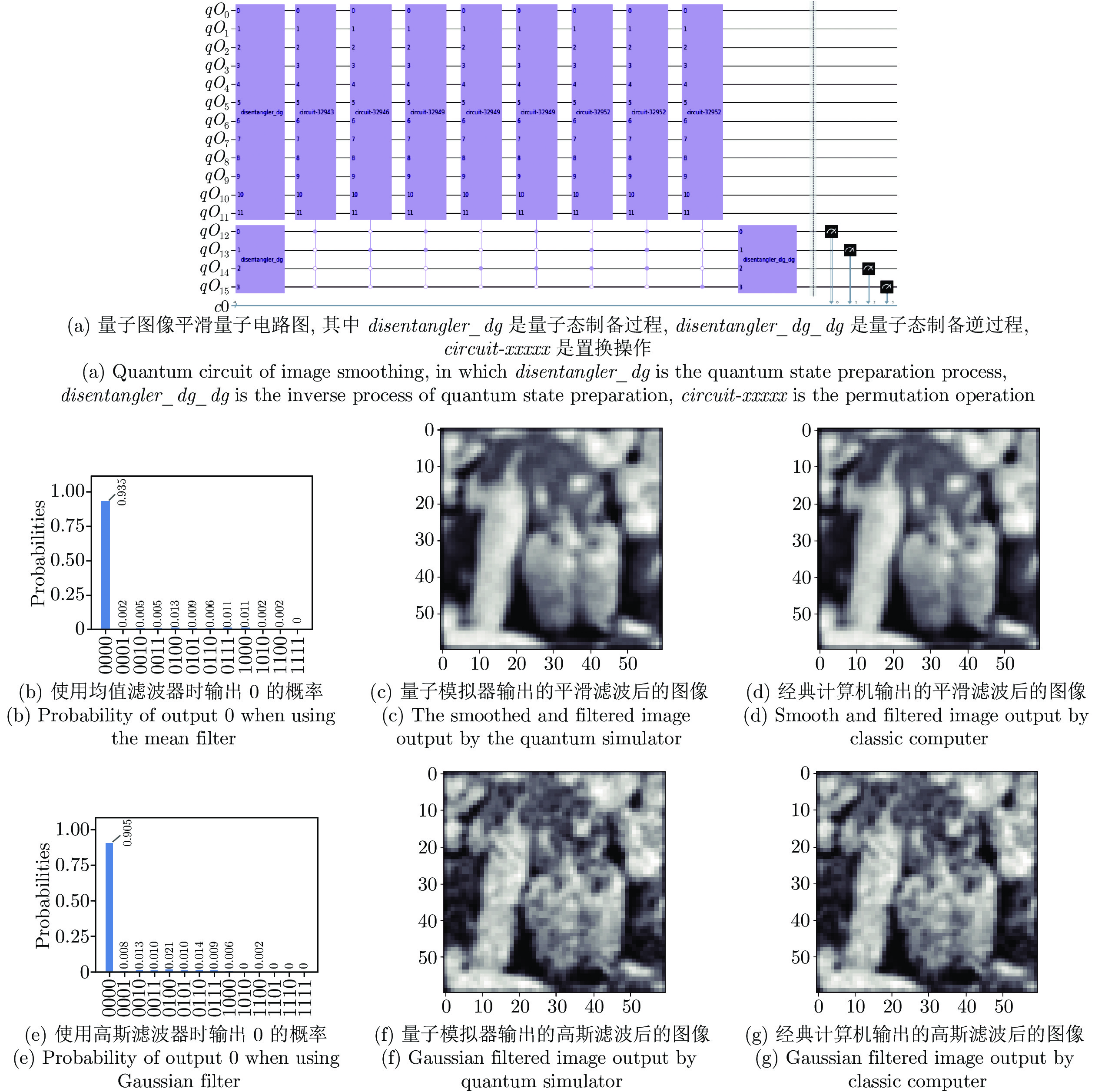
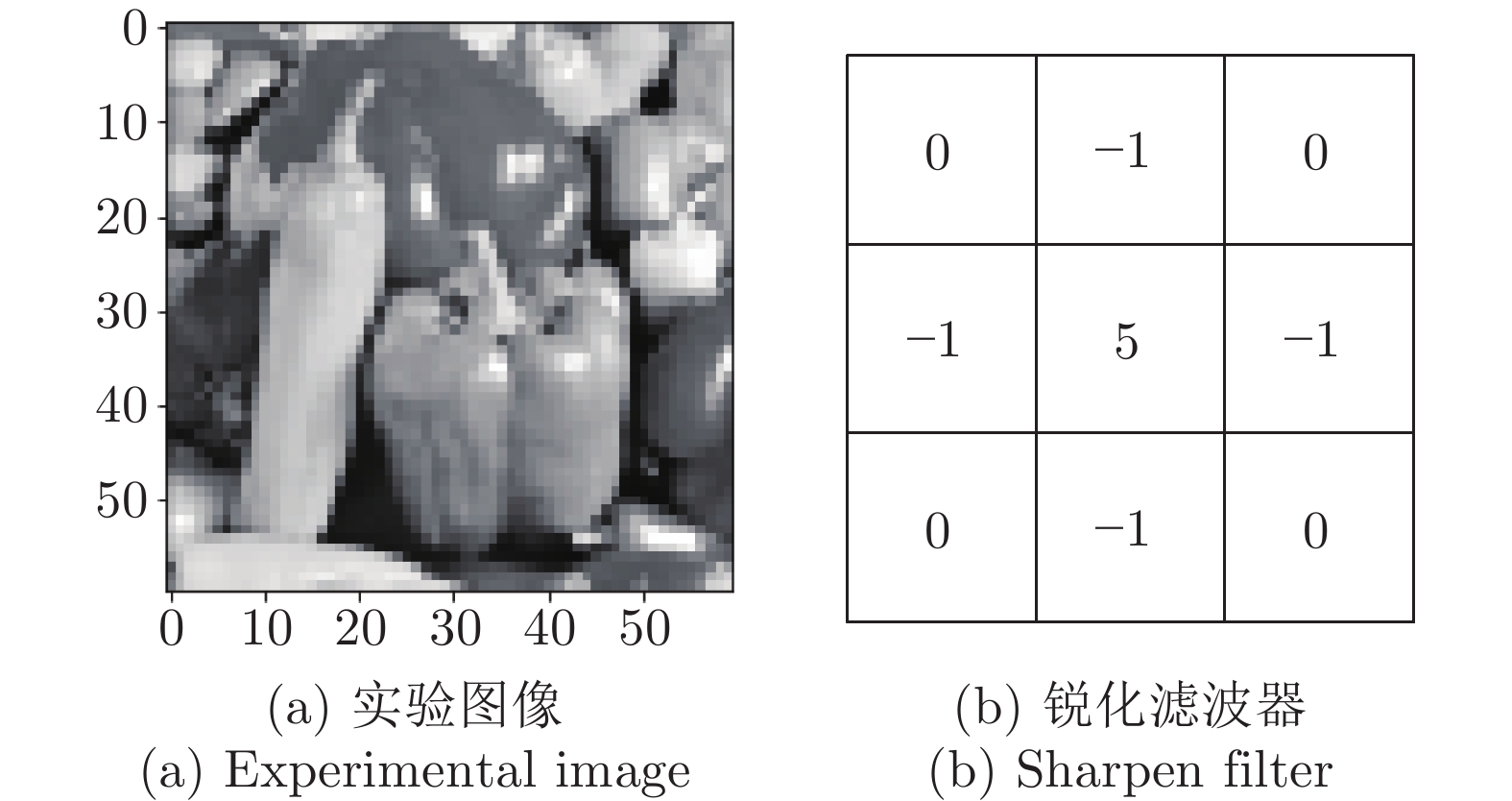
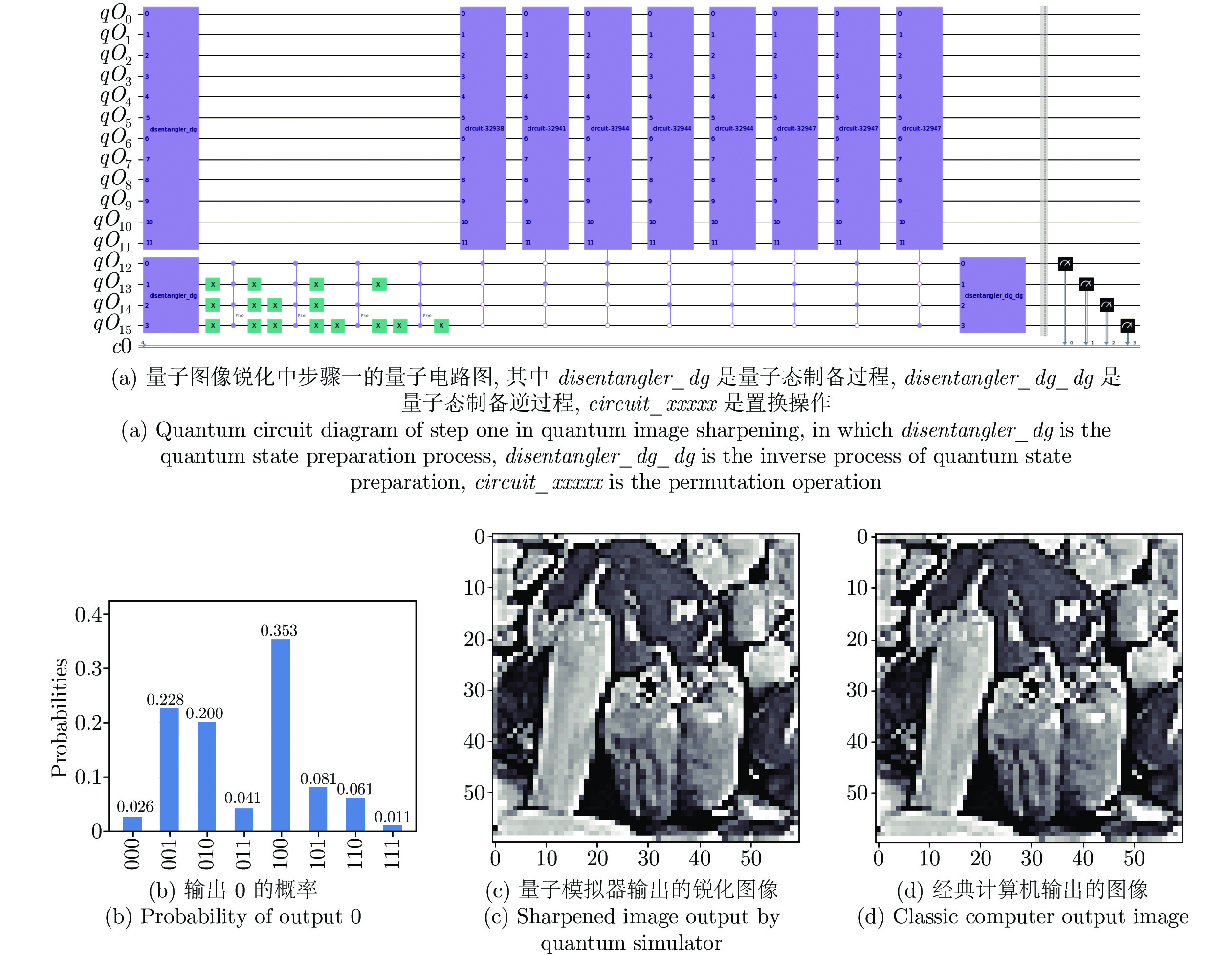
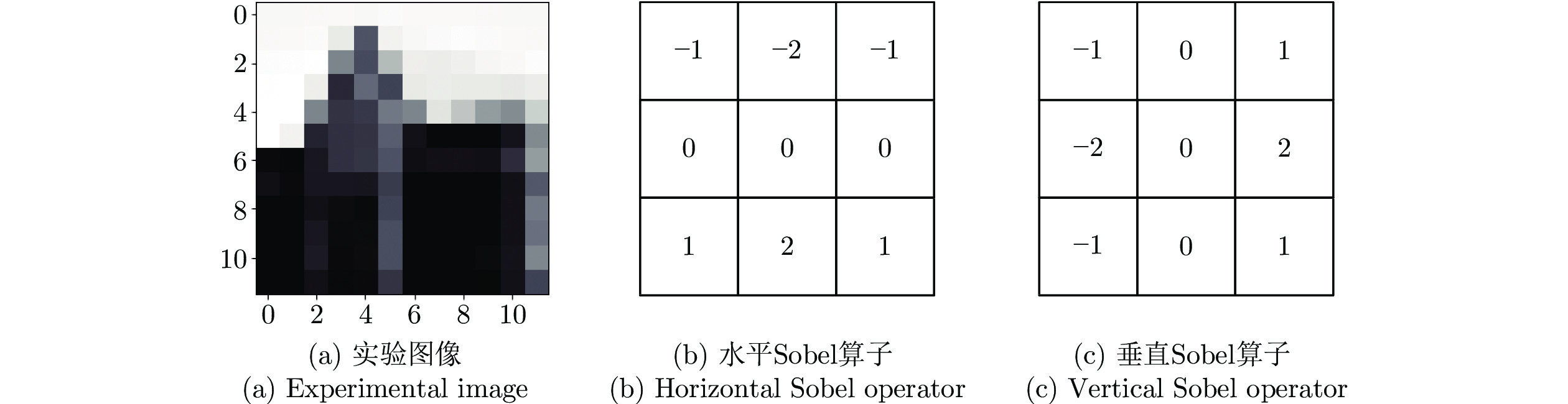
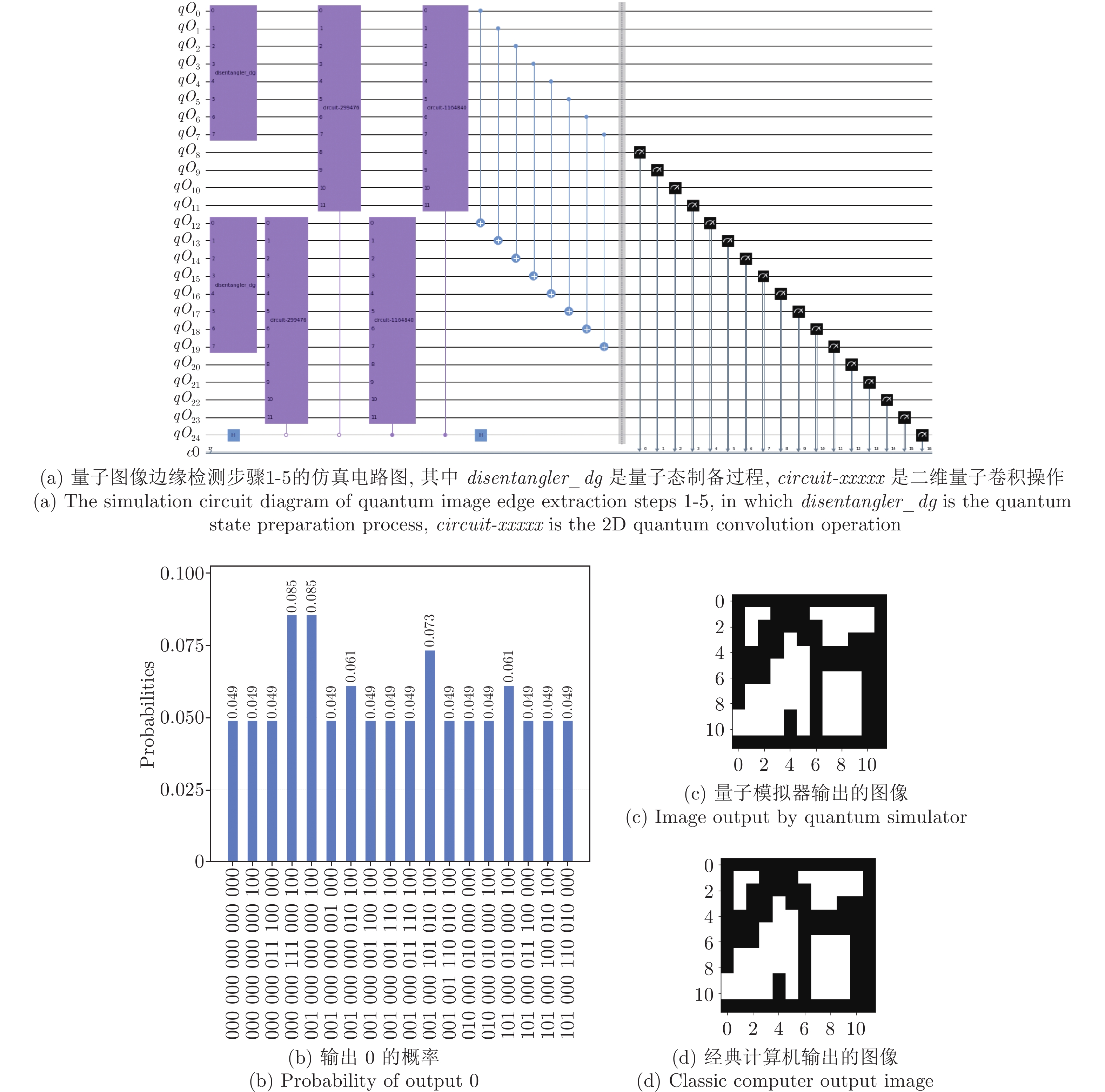
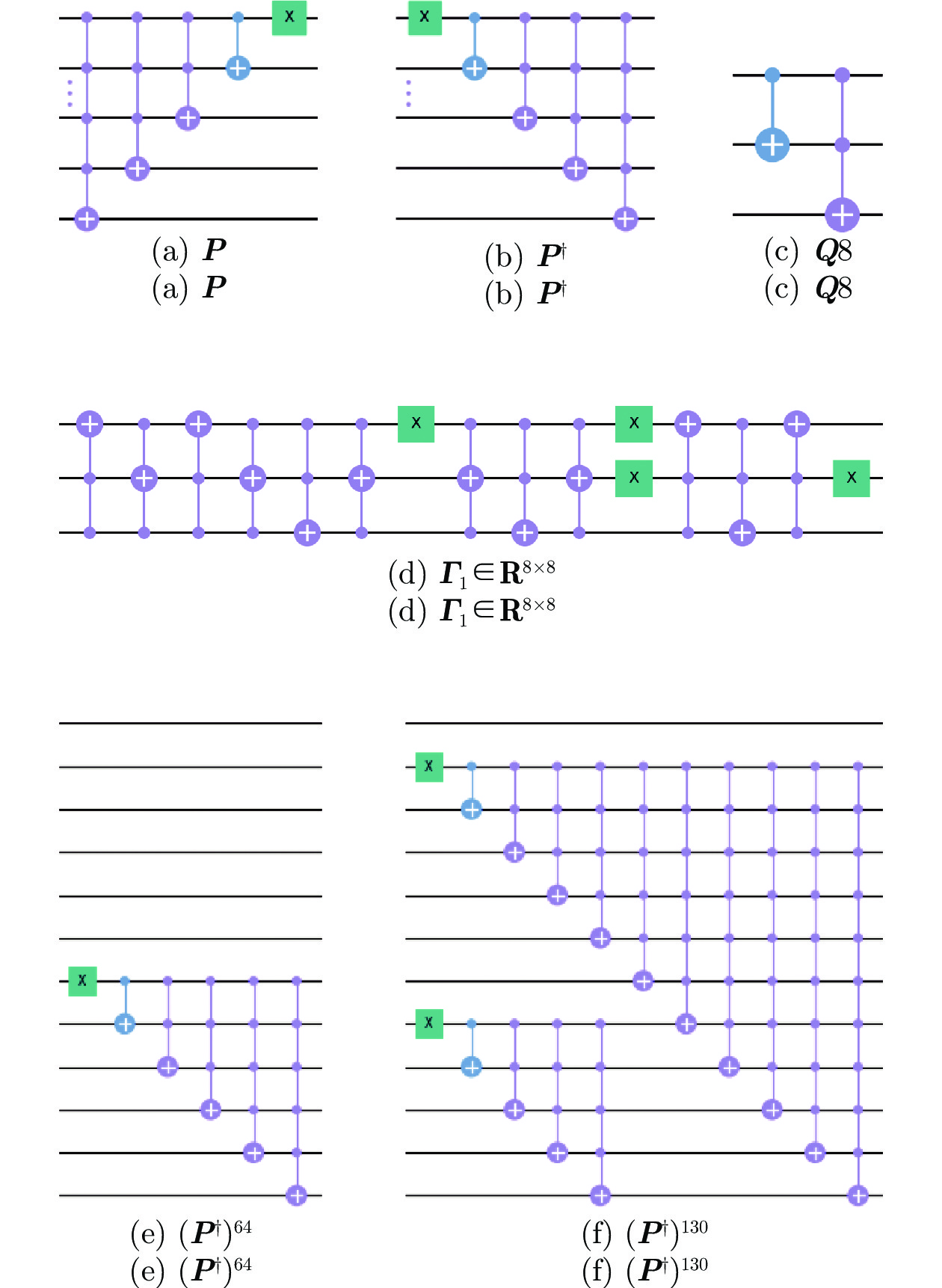
线性卷积在图像处理中发挥着重要作用, 但是在处理海量高分辨率图像时, 求解线性卷积会消耗许多计算资源. 为此, 本文就量子线性卷积及其在图像处理问题中的应用开展相关研究, 首先提出单通道, 单位步长, 零补充情况下的量子一维和二维线性卷积, 然后实现多通道, 非单位步长, 非零补充的情况, 最后将量子二维线性卷积应用于量子图像平滑, 量子图像锐化和量子图像边缘检测. 通过理论分析证明了量子线性卷积的空间复杂度\begin{document}${\rm{O}}(\mathrm{log}M)$\end{document} ![]()
![]()
\begin{document}${\rm{O}}({\mathrm{log}}^{2}M)$\end{document} ![]()
![]()
线性卷积在图像处理中发挥着重要作用, 但是在处理海量高分辨率图像时, 求解线性卷积会消耗许多计算资源. 为此, 本文就量子线性卷积及其在图像处理问题中的应用开展相关研究, 首先提出单通道, 单位步长, 零补充情况下的量子一维和二维线性卷积, 然后实现多通道, 非单位步长, 非零补充的情况, 最后将量子二维线性卷积应用于量子图像平滑, 量子图像锐化和量子图像边缘检测. 通过理论分析证明了量子线性卷积的空间复杂度
2022, 48(6): 1520-1529.
doi: 10.16383/j.aas.c200738
摘要:
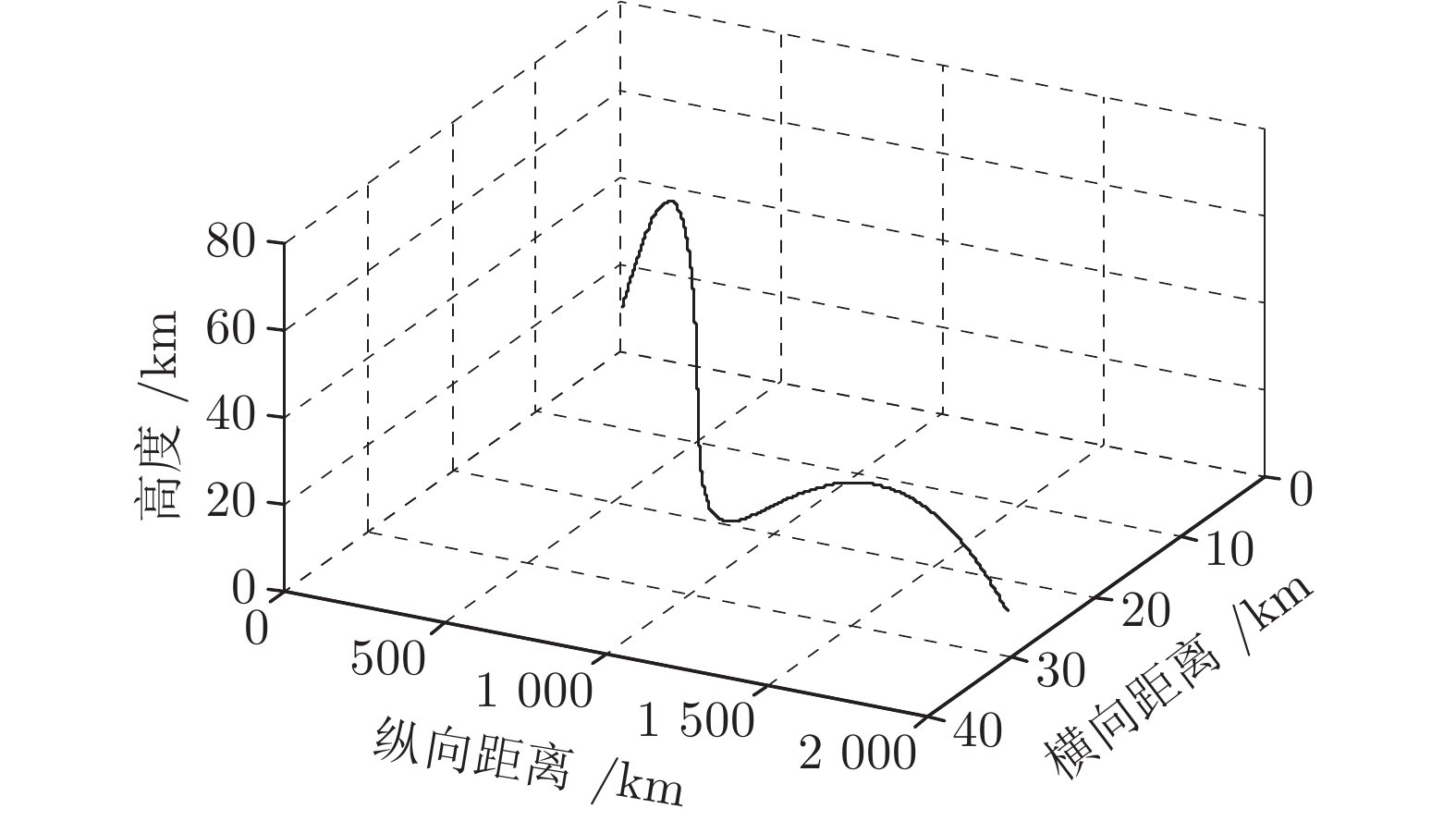
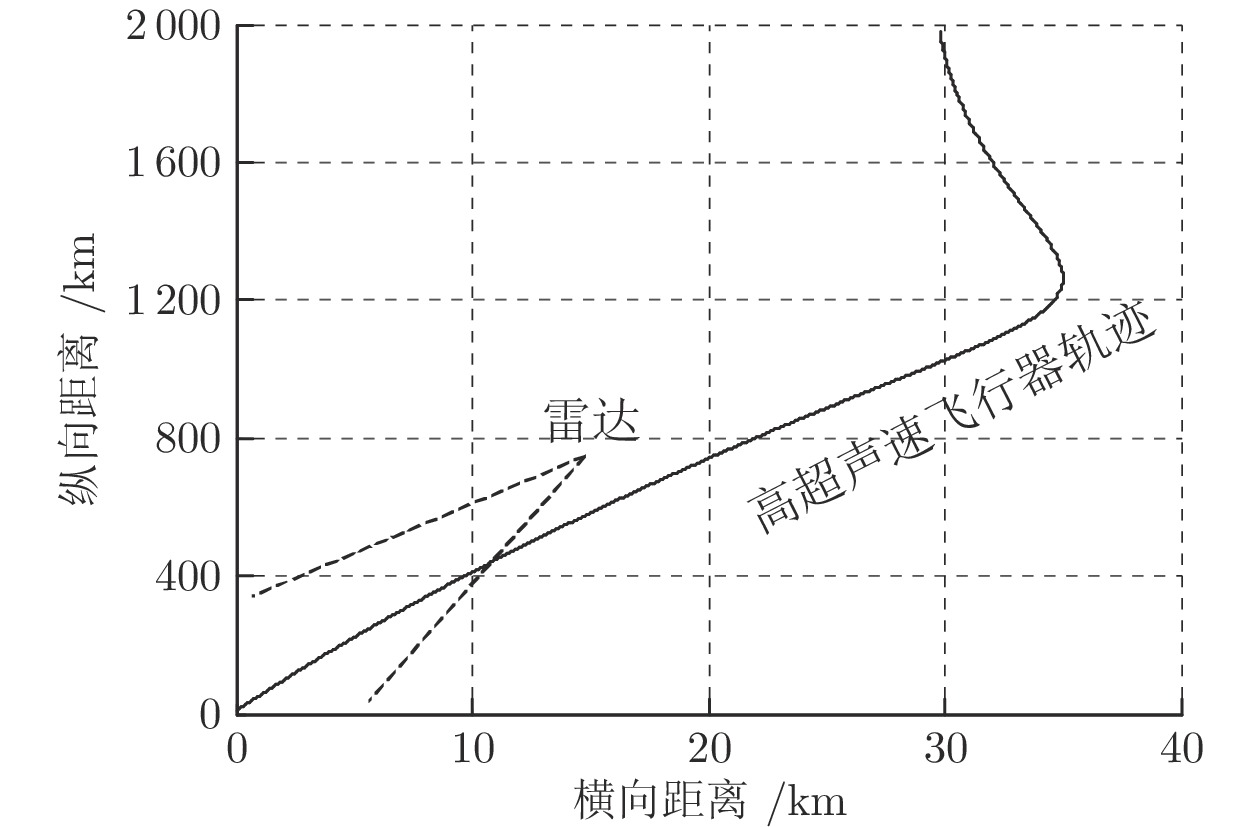
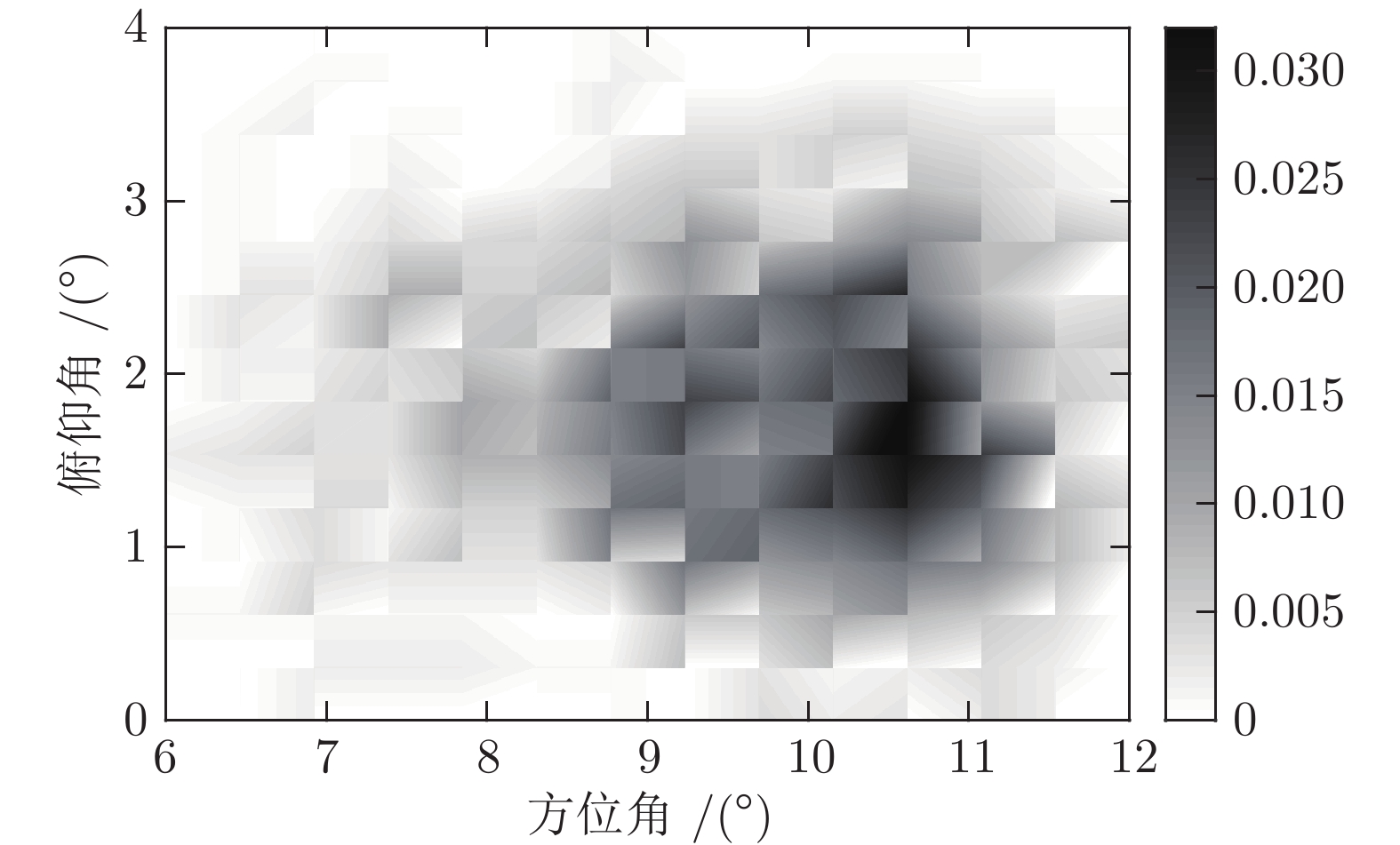
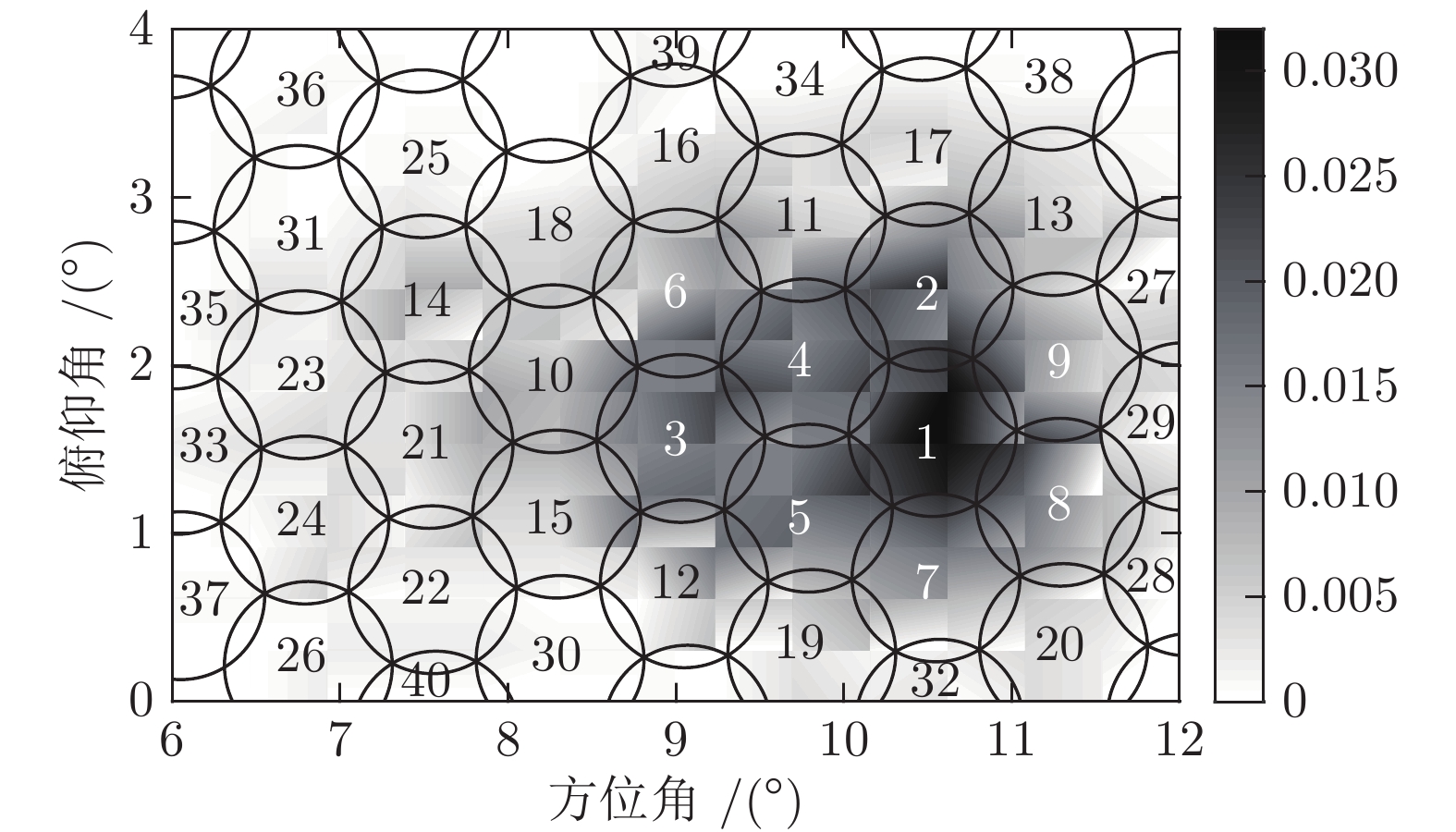
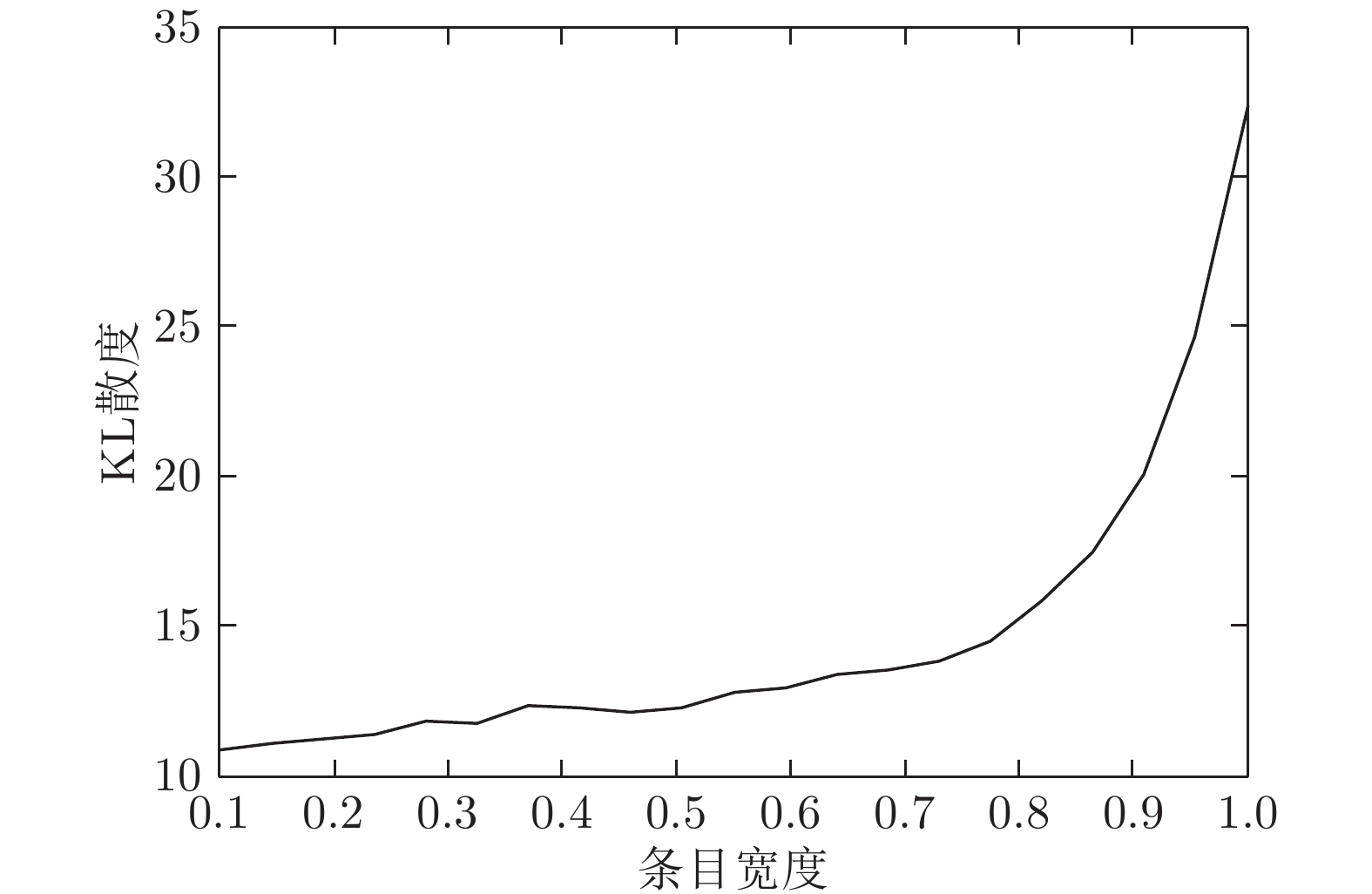
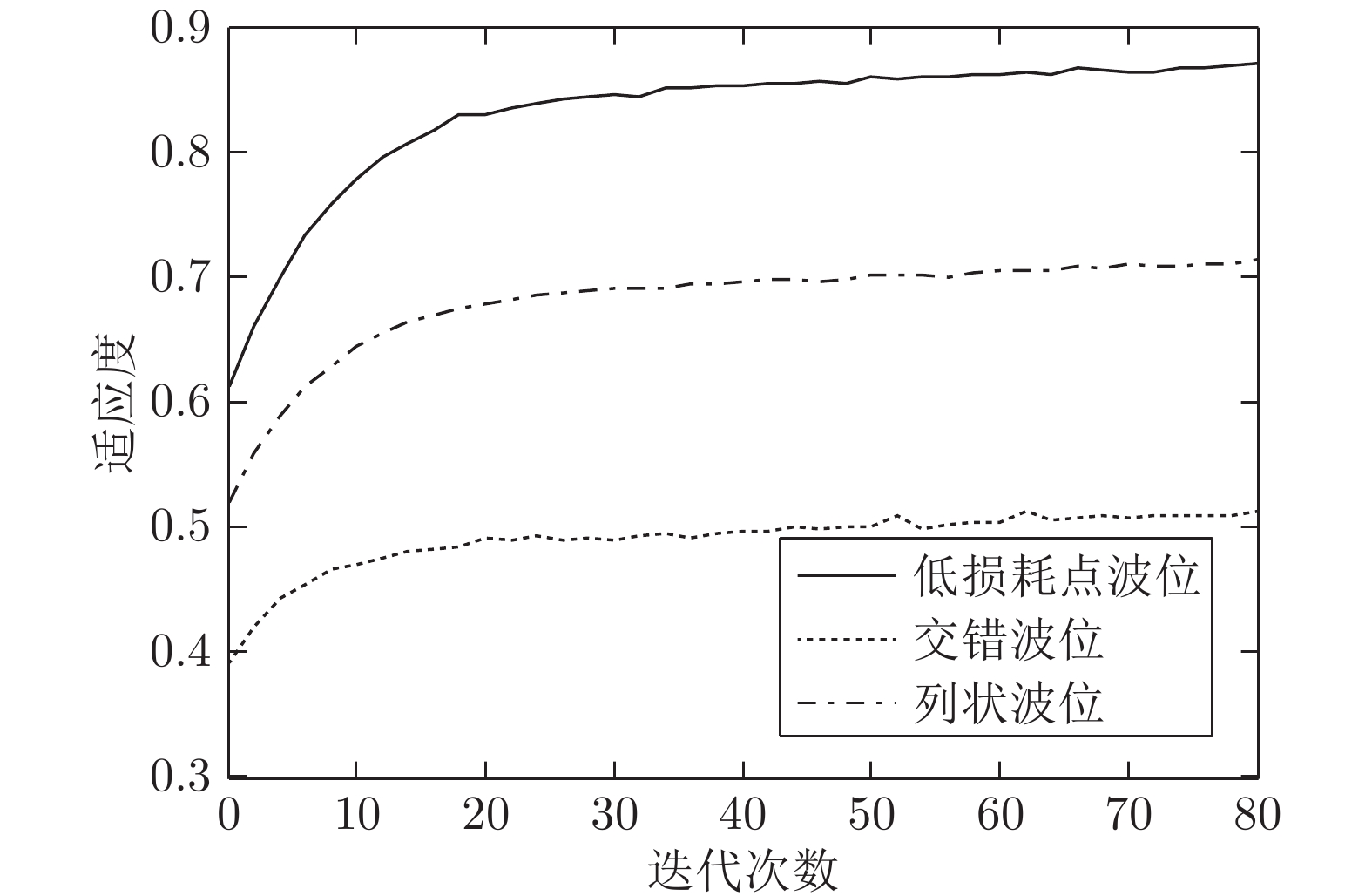
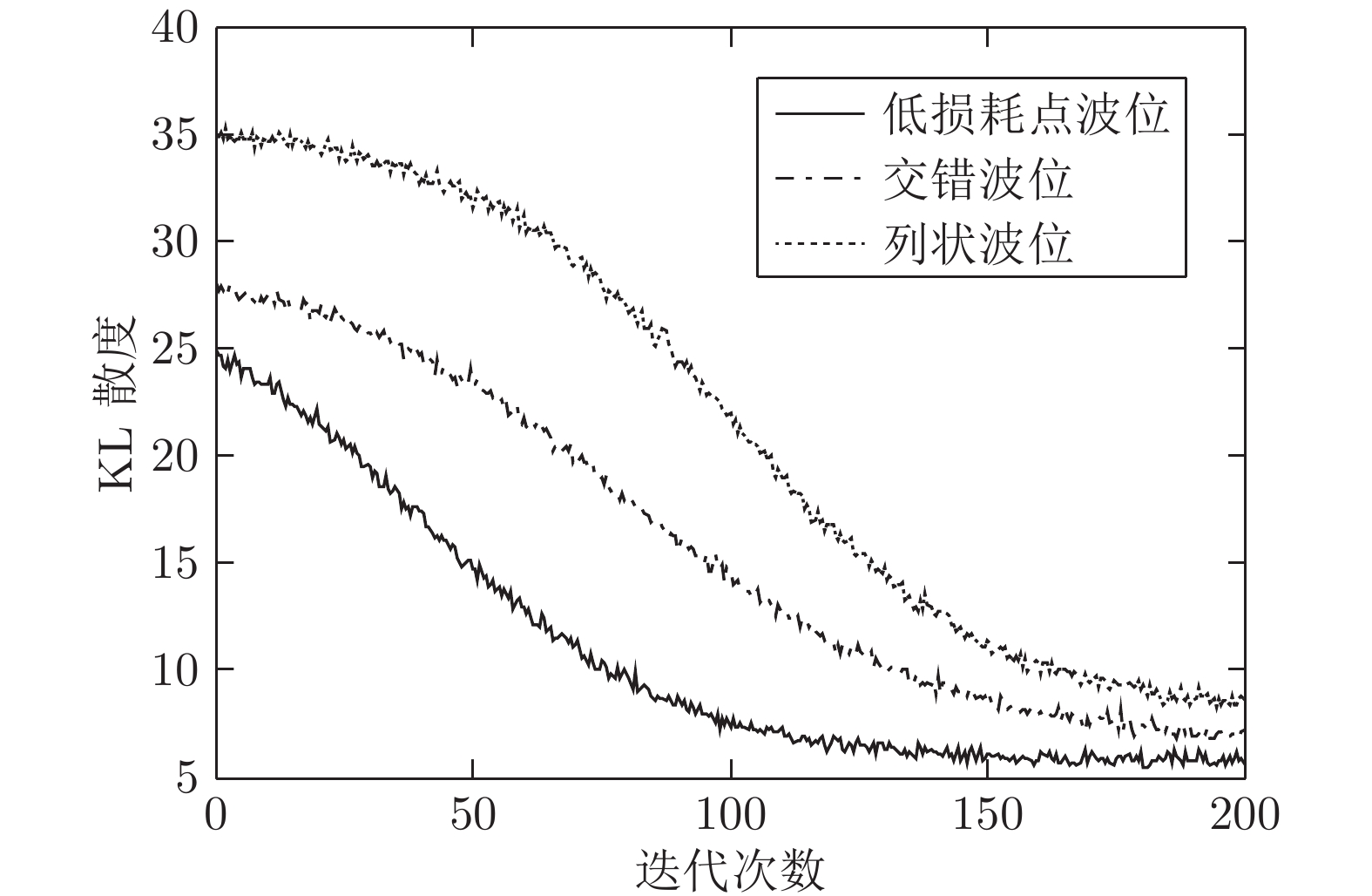
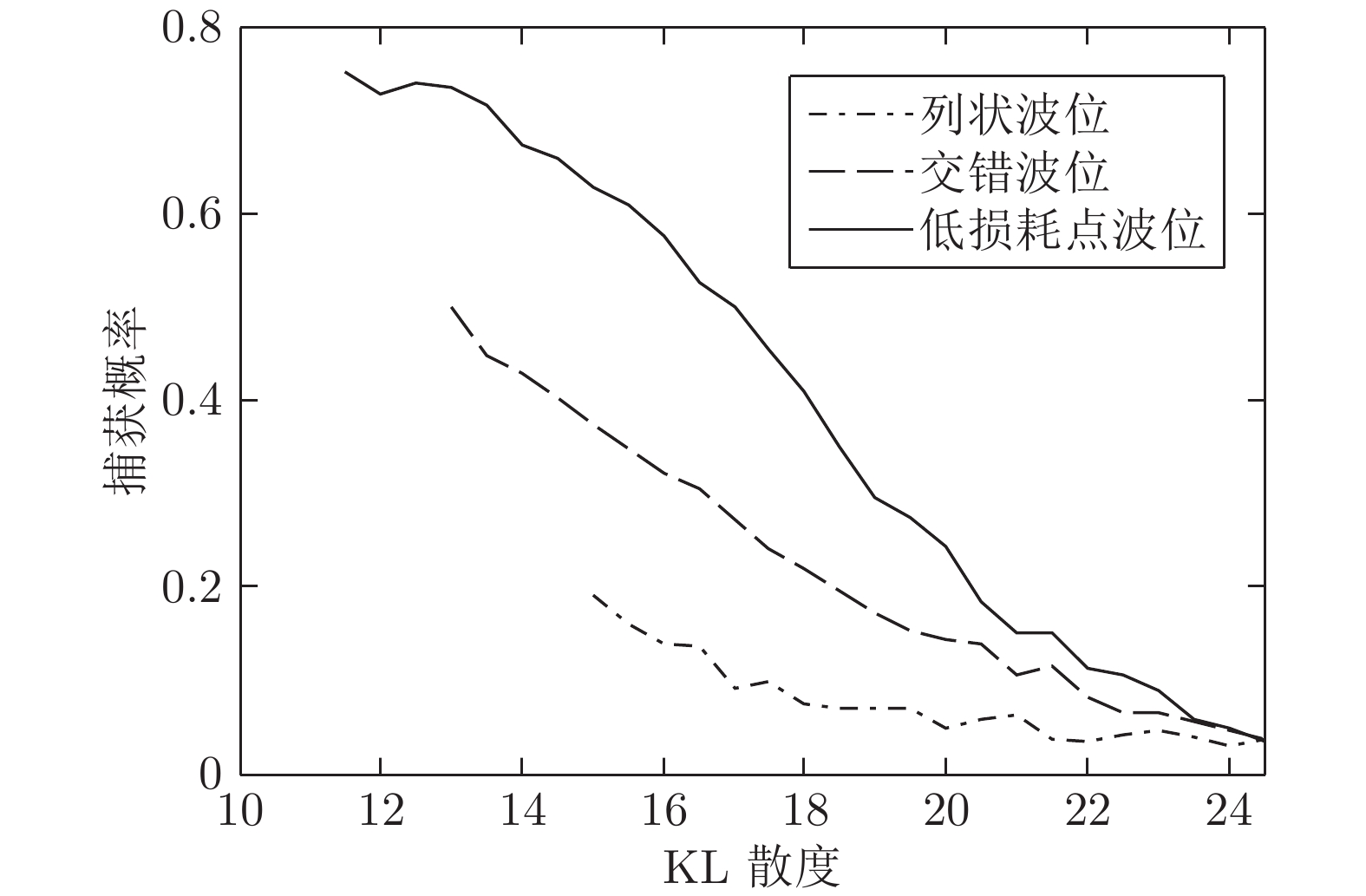
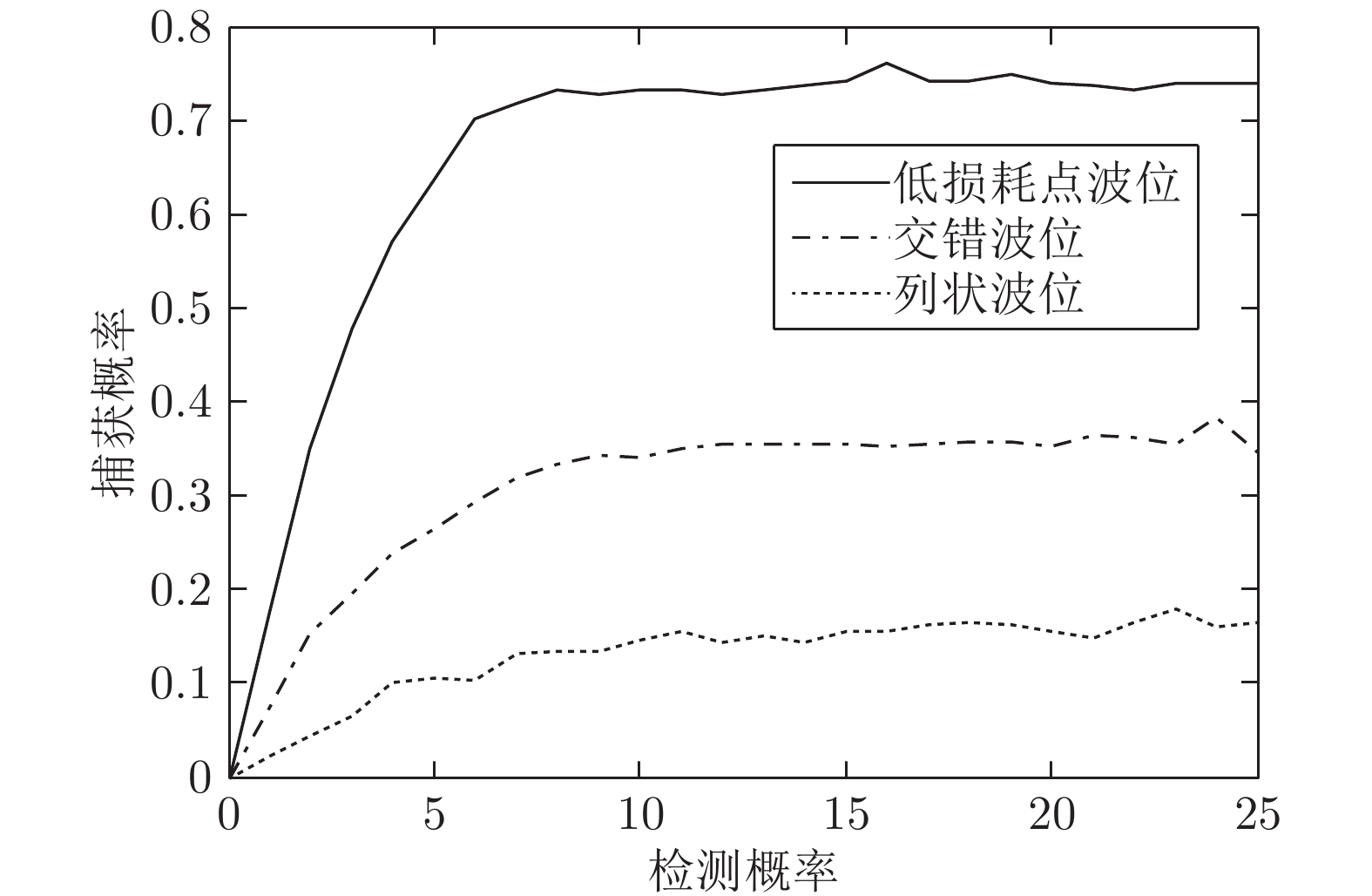
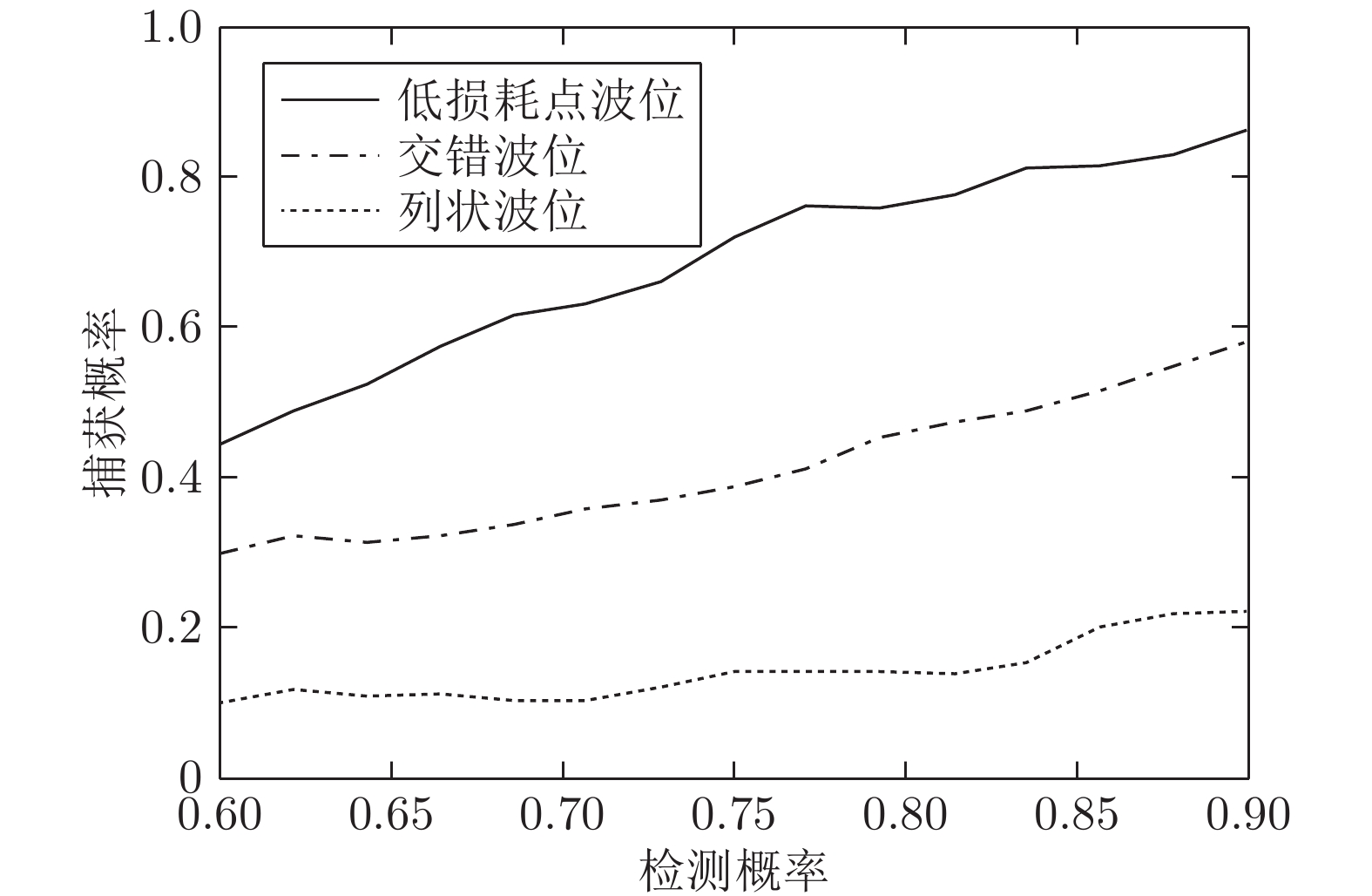
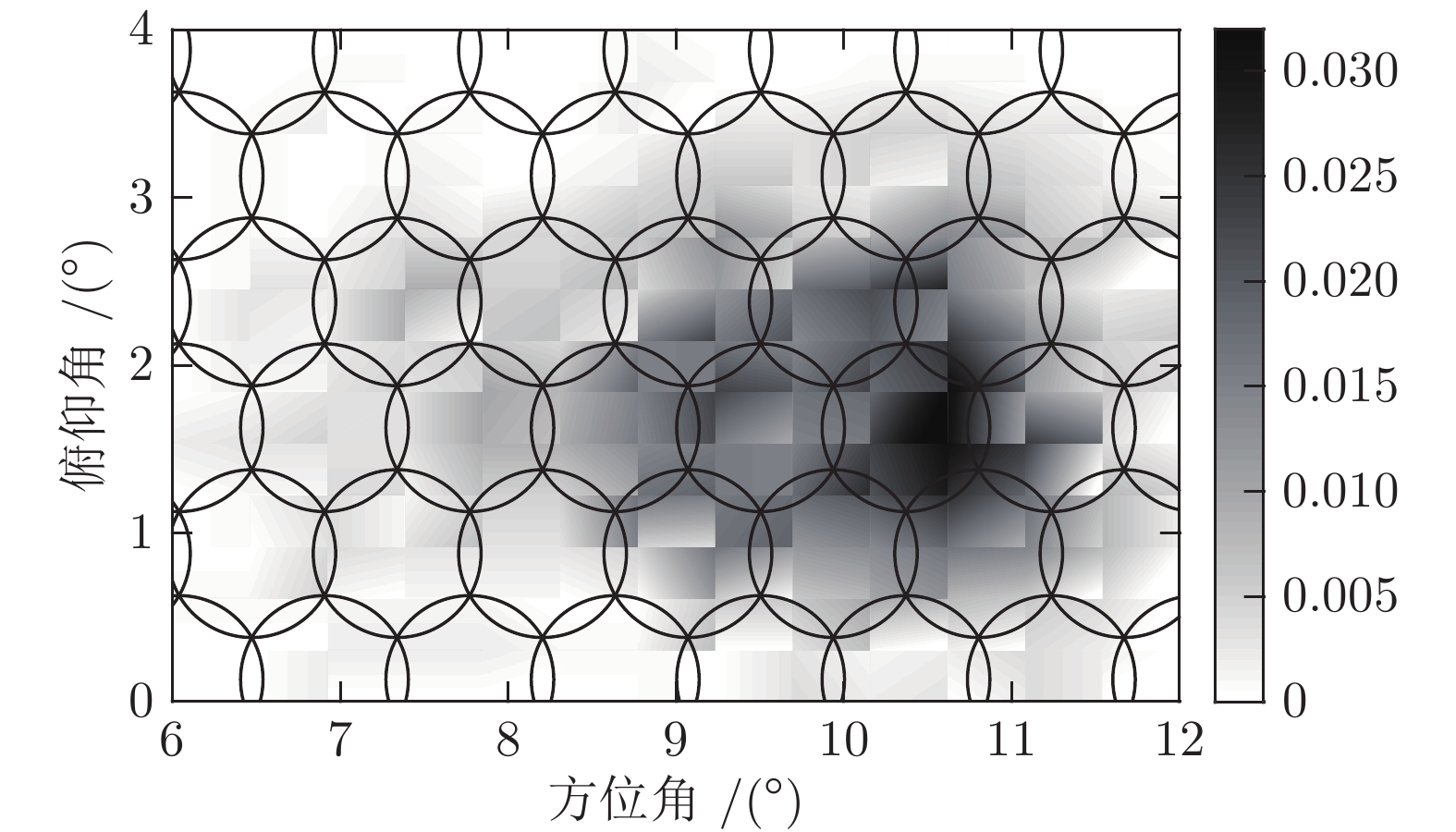
由于地面雷达受视距限制无法对高超声速飞行器进行连续观测, 针对高超声速飞行器飞出雷达视距盲区后难以搜索的问题, 提出了一种基于信息几何的雷达搜索方法. 本文利用非参数概率密度估计法对高超声速飞行器的出现位置的概率密度进行估计, 并将估计的位置概率密度作为雷达搜索的引导信息; 根据引导信息确定搜索区域, 以区域覆盖率最大化作为优化目标在搜索区域内进行波位编排; 基于信息几何理论, 将搜索策略建模为统计流形, 利用KL (Kullback-Leibler)散度来度量搜索策略与引导信息之间的差异, 通过最小化KL散度获得最优搜索策略. 通过仿真实验验证了本文所提方法的有效性和可行性, 并验证了相比其他搜索方法具有较明显的优势.
由于地面雷达受视距限制无法对高超声速飞行器进行连续观测, 针对高超声速飞行器飞出雷达视距盲区后难以搜索的问题, 提出了一种基于信息几何的雷达搜索方法. 本文利用非参数概率密度估计法对高超声速飞行器的出现位置的概率密度进行估计, 并将估计的位置概率密度作为雷达搜索的引导信息; 根据引导信息确定搜索区域, 以区域覆盖率最大化作为优化目标在搜索区域内进行波位编排; 基于信息几何理论, 将搜索策略建模为统计流形, 利用KL (Kullback-Leibler)散度来度量搜索策略与引导信息之间的差异, 通过最小化KL散度获得最优搜索策略. 通过仿真实验验证了本文所提方法的有效性和可行性, 并验证了相比其他搜索方法具有较明显的优势.
2022, 48(6): 1530-1542.
doi: 10.16383/j.aas.c210131
摘要:
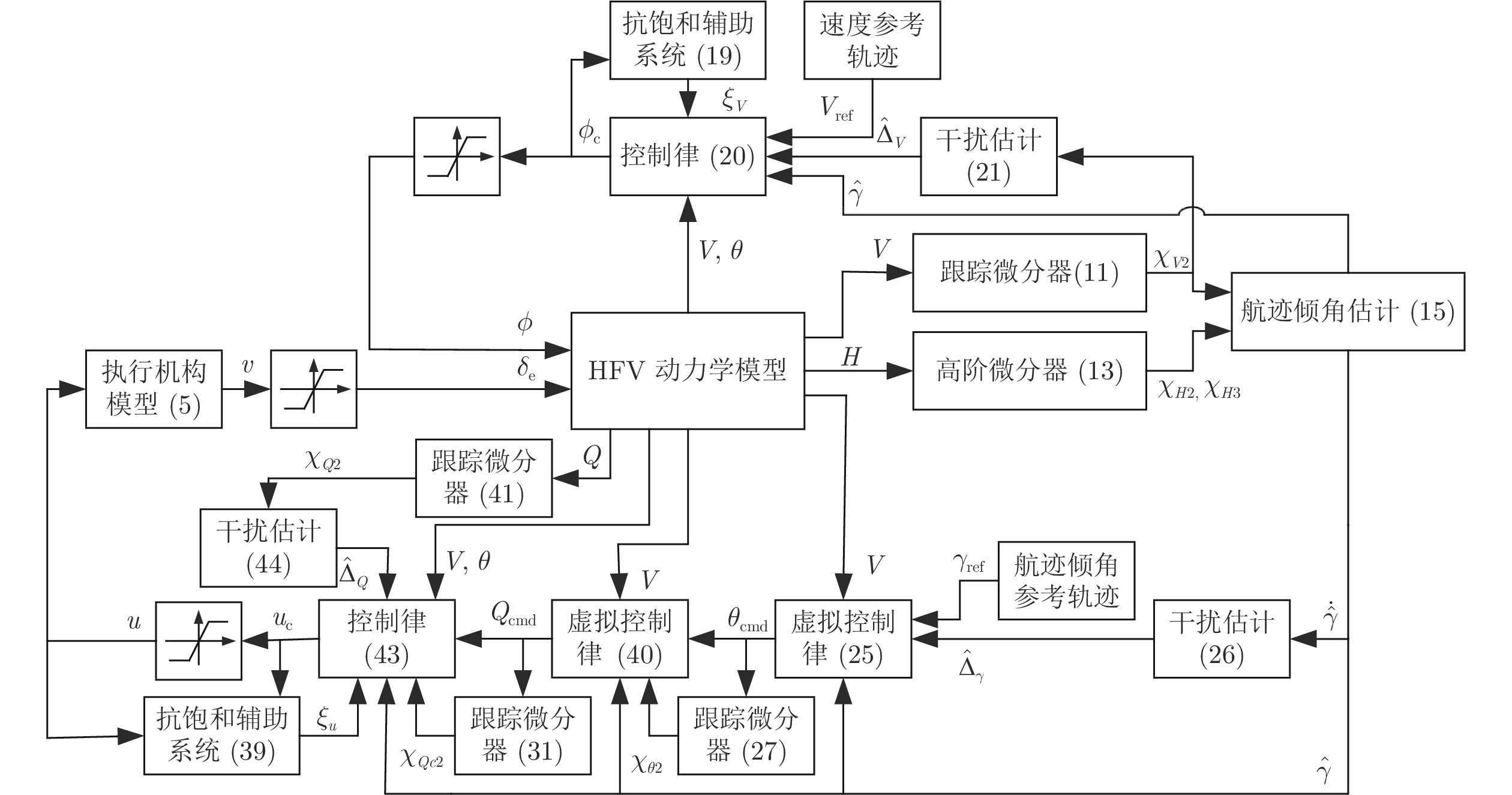
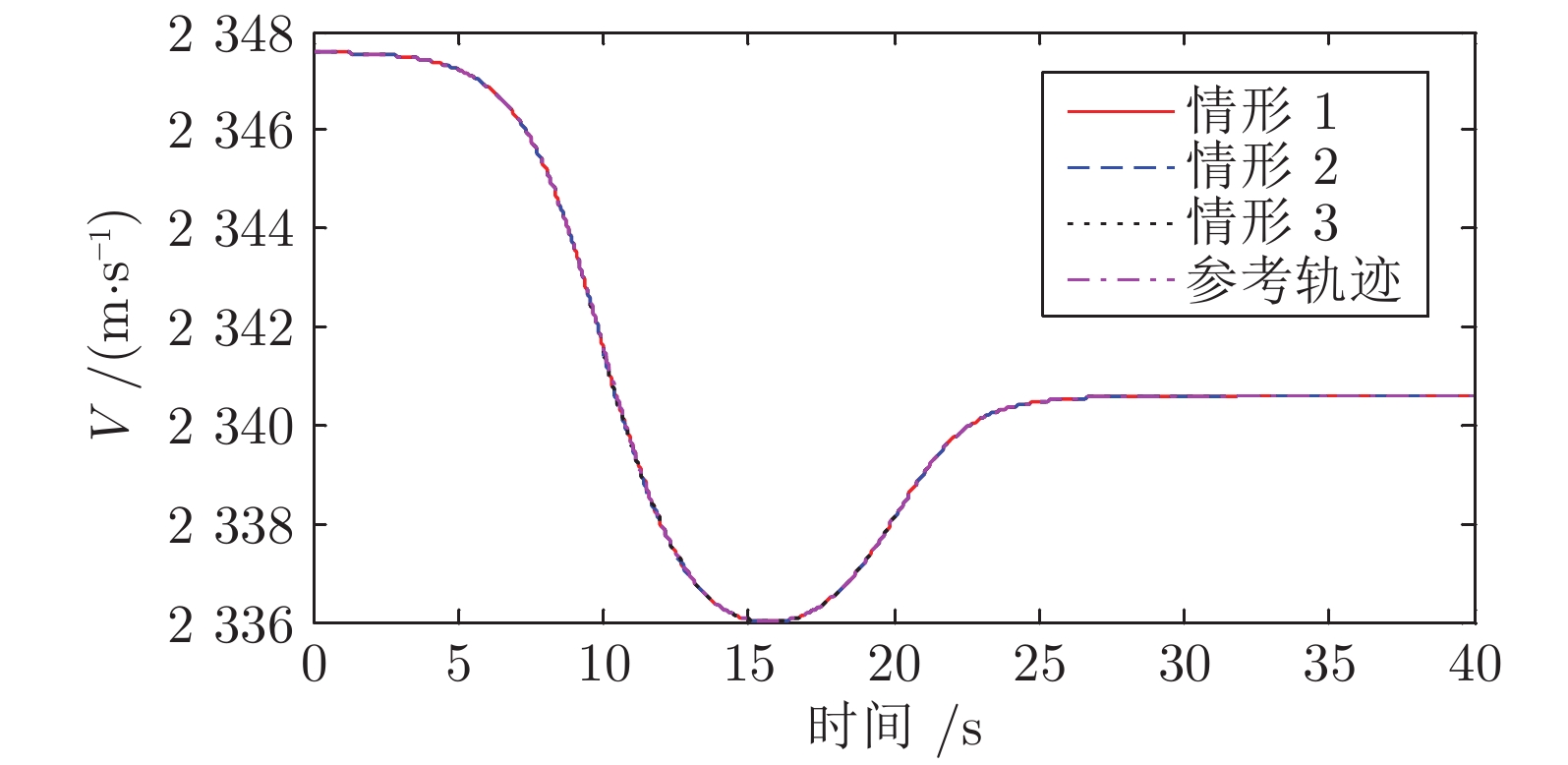
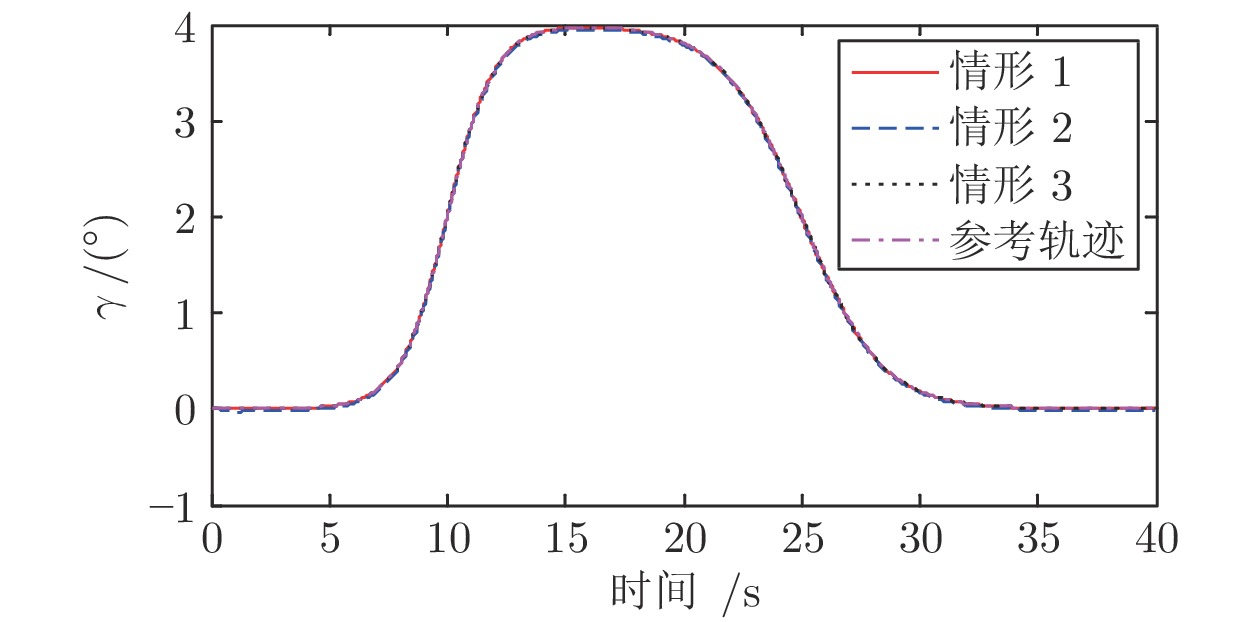
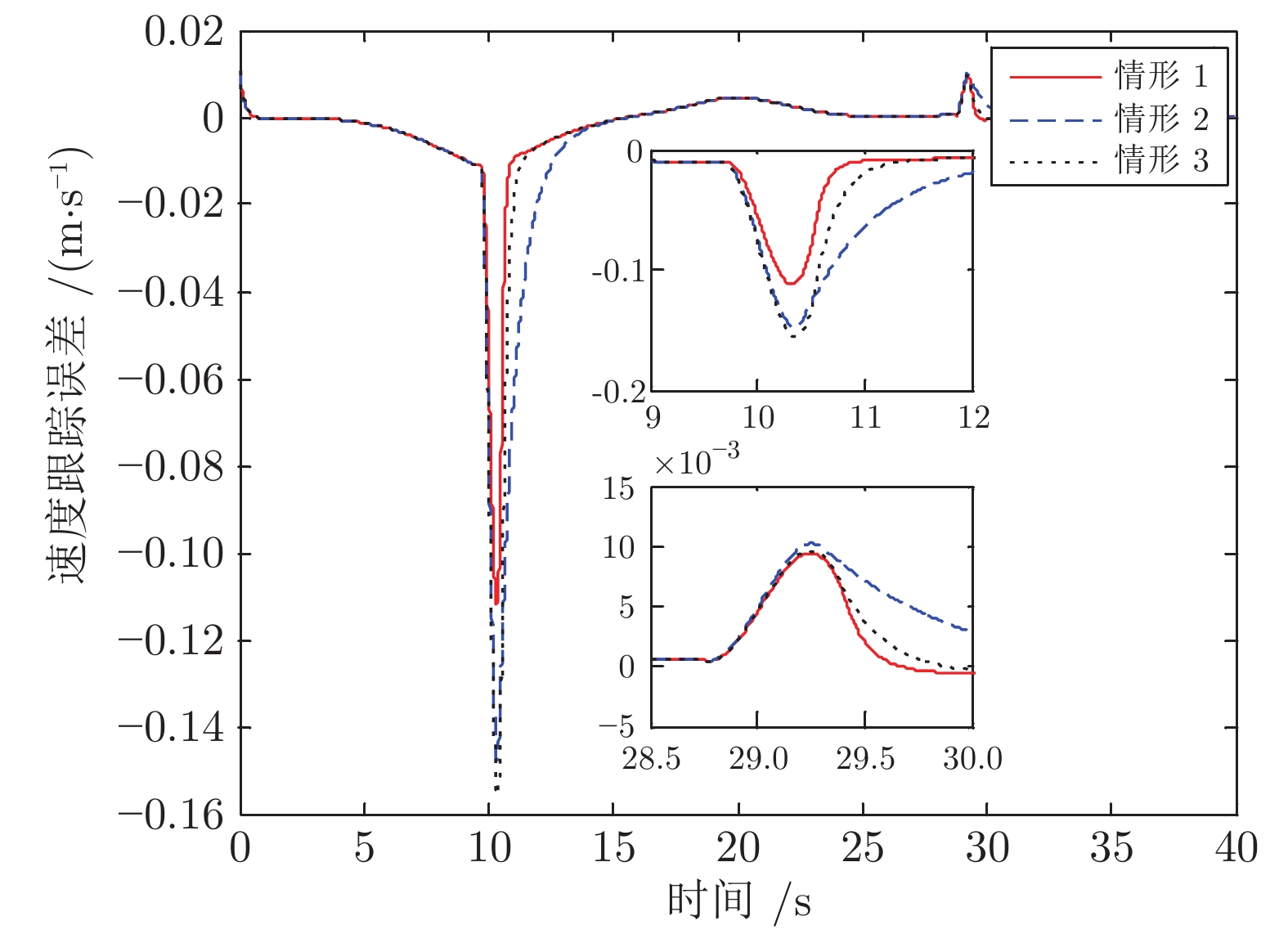
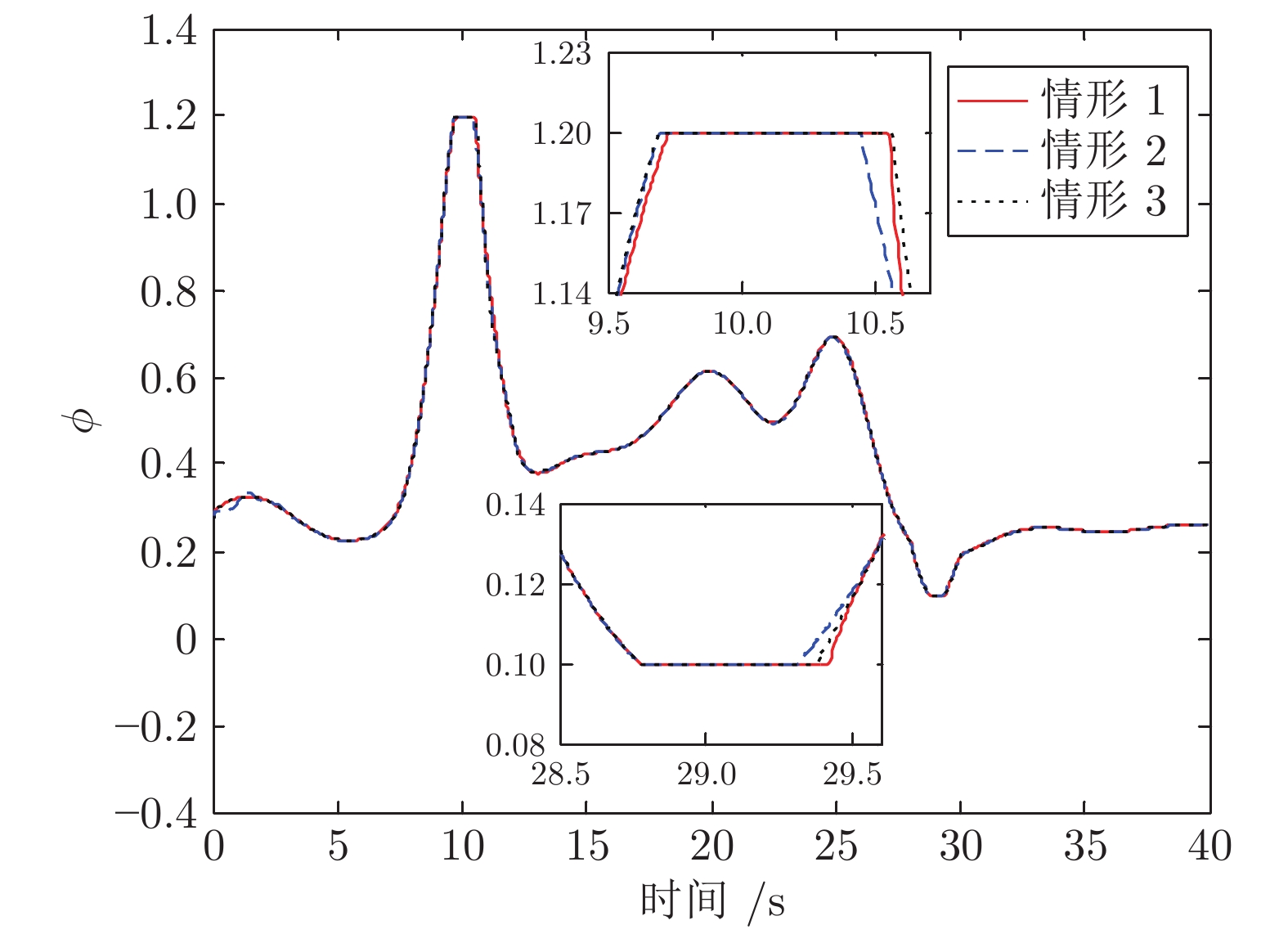
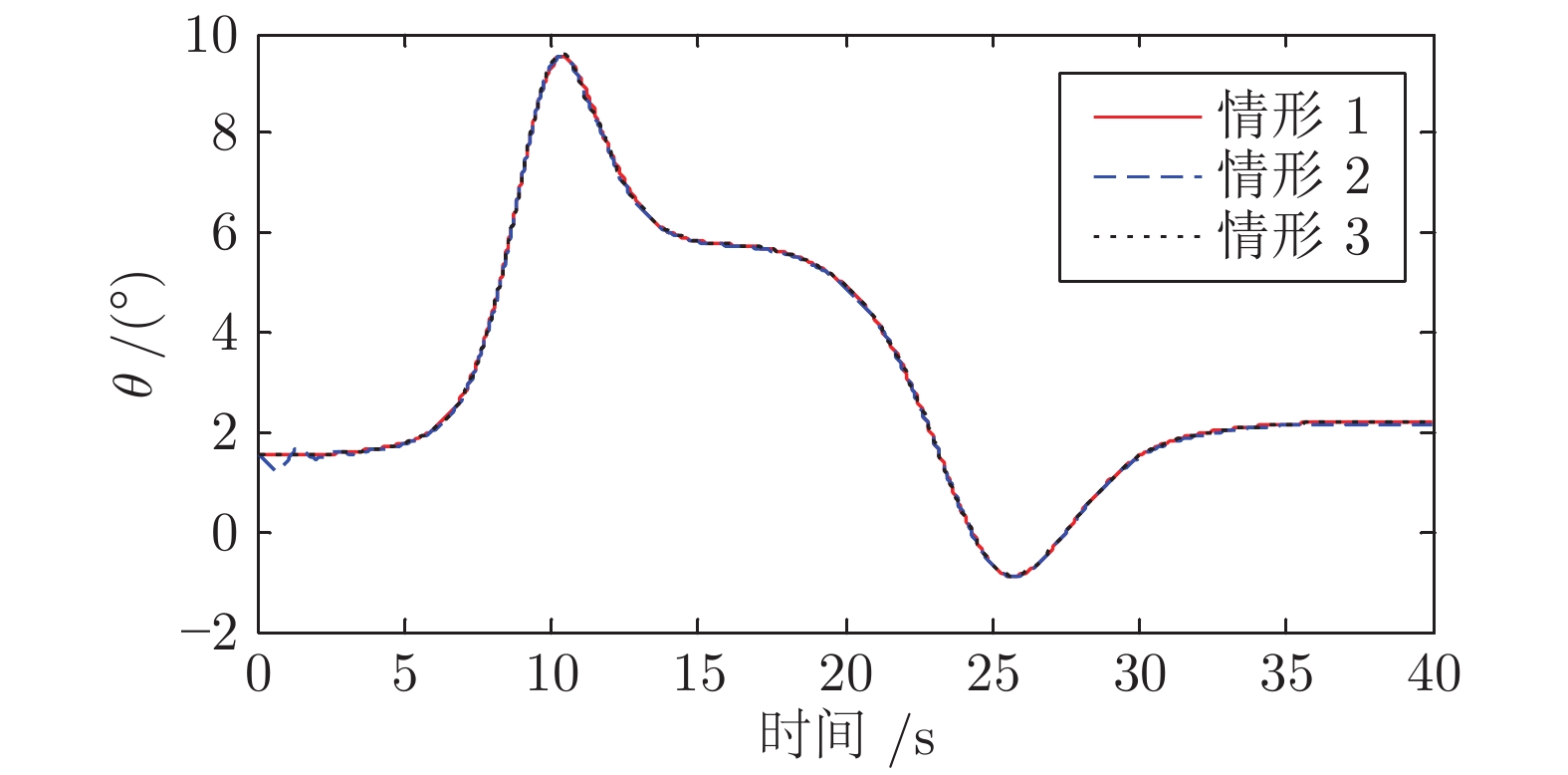
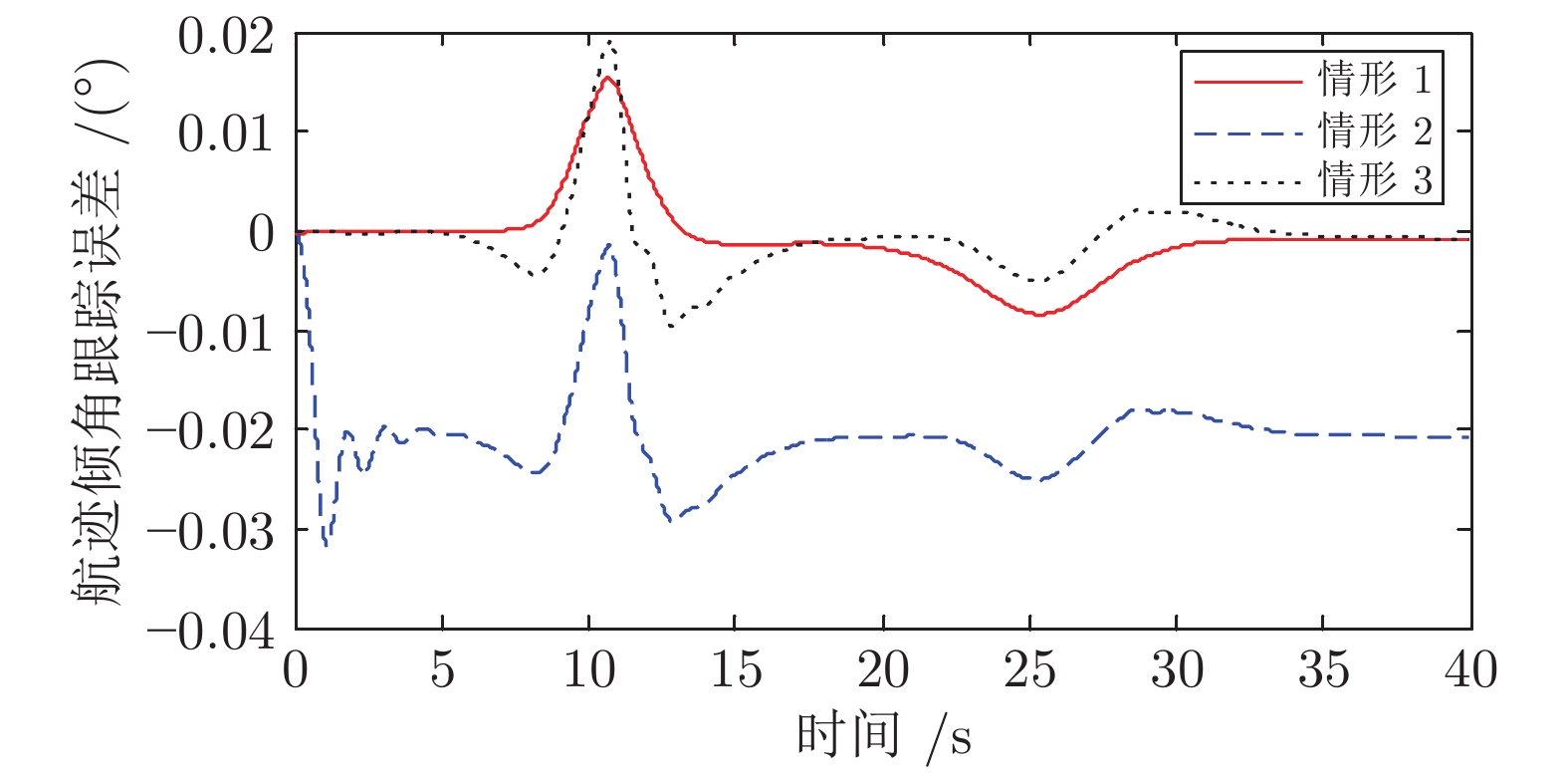
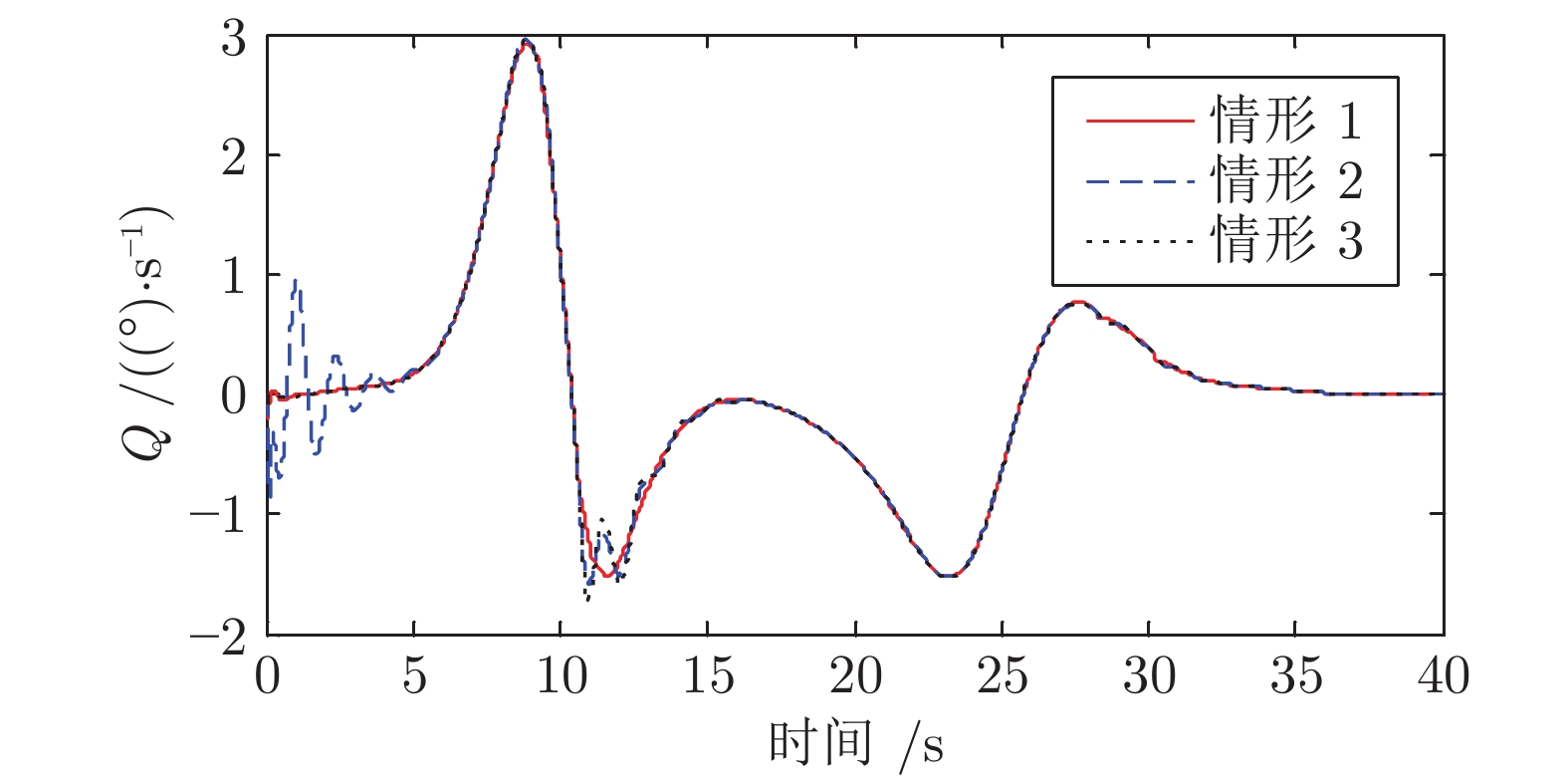
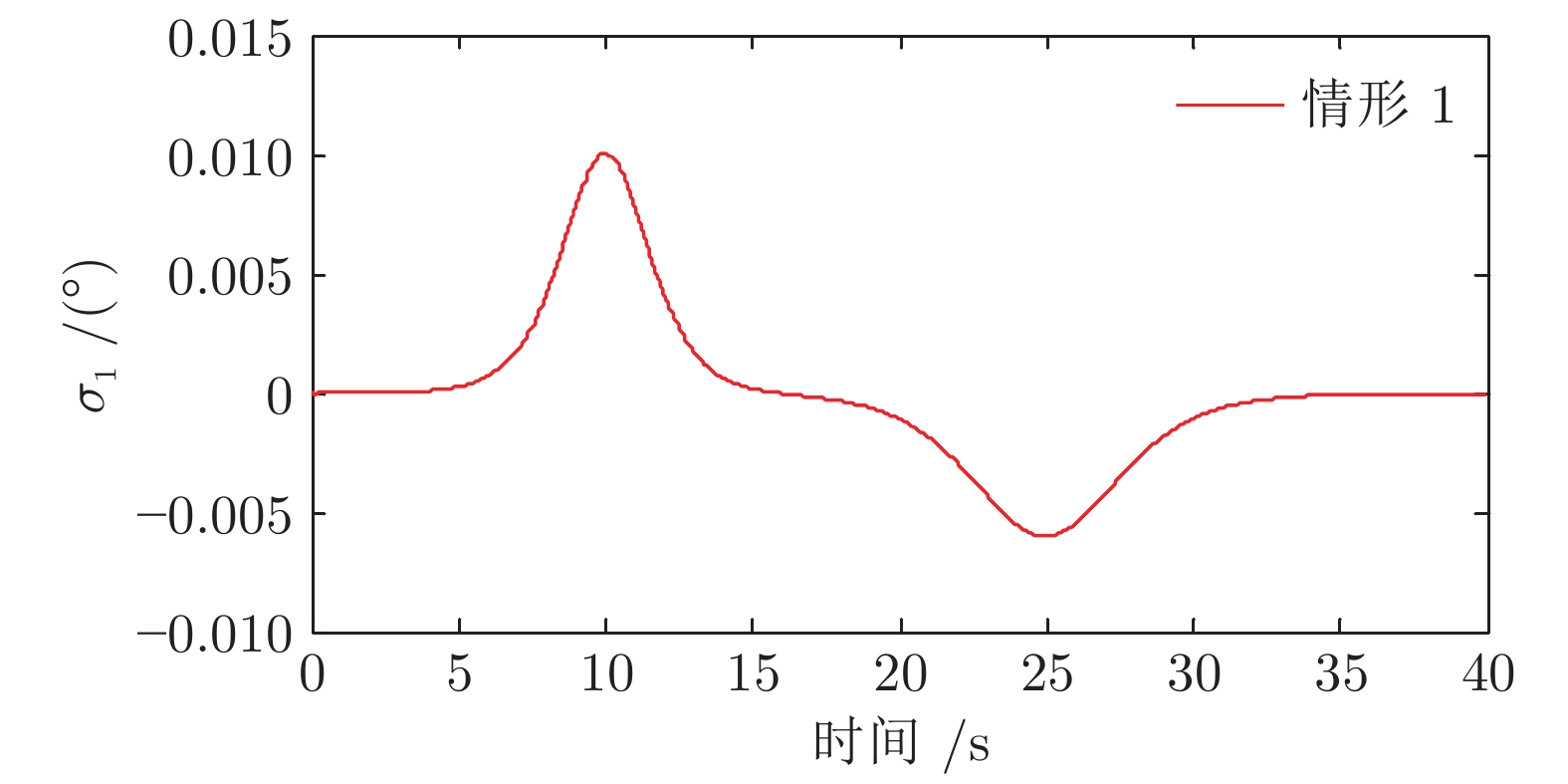
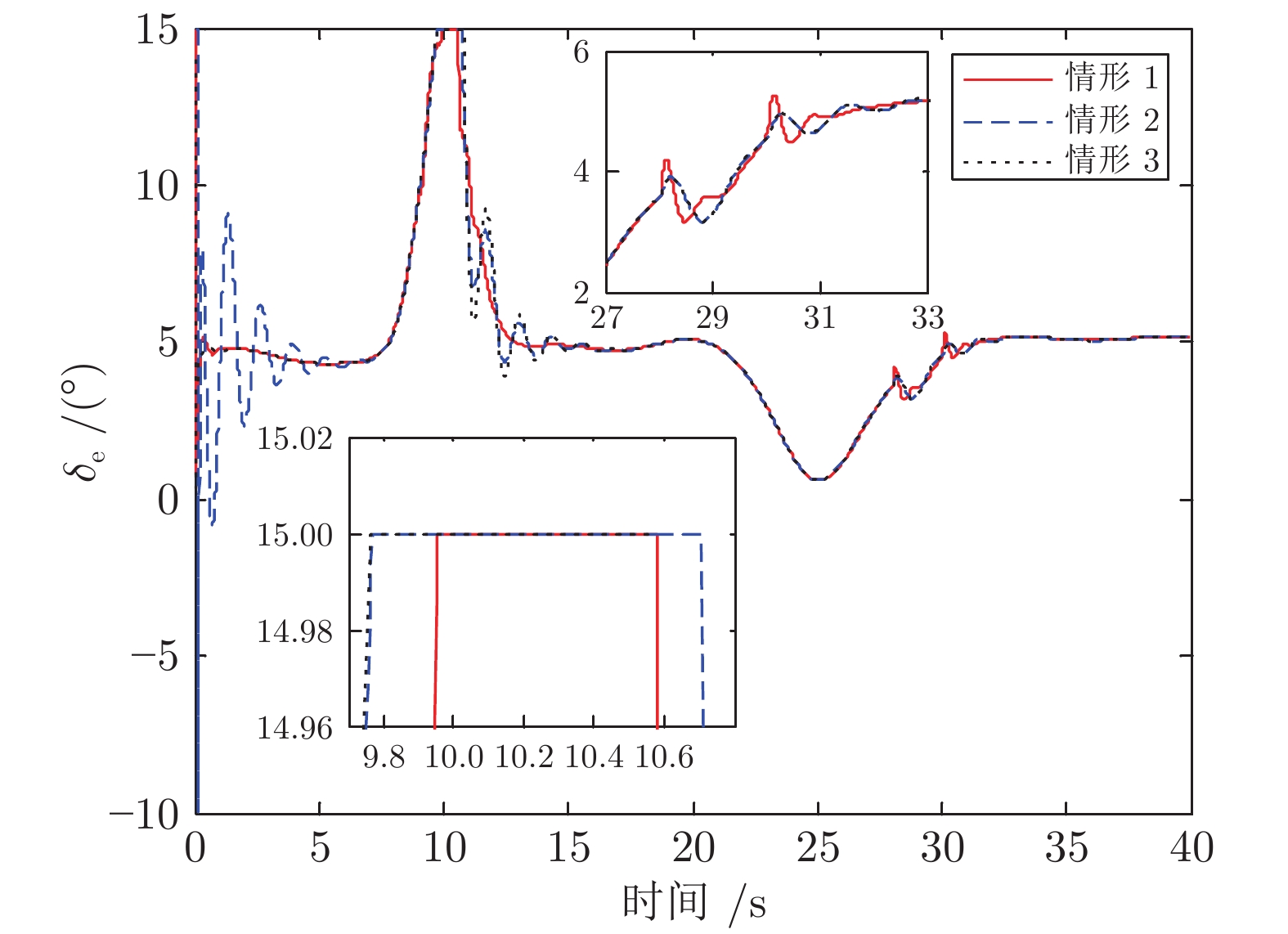
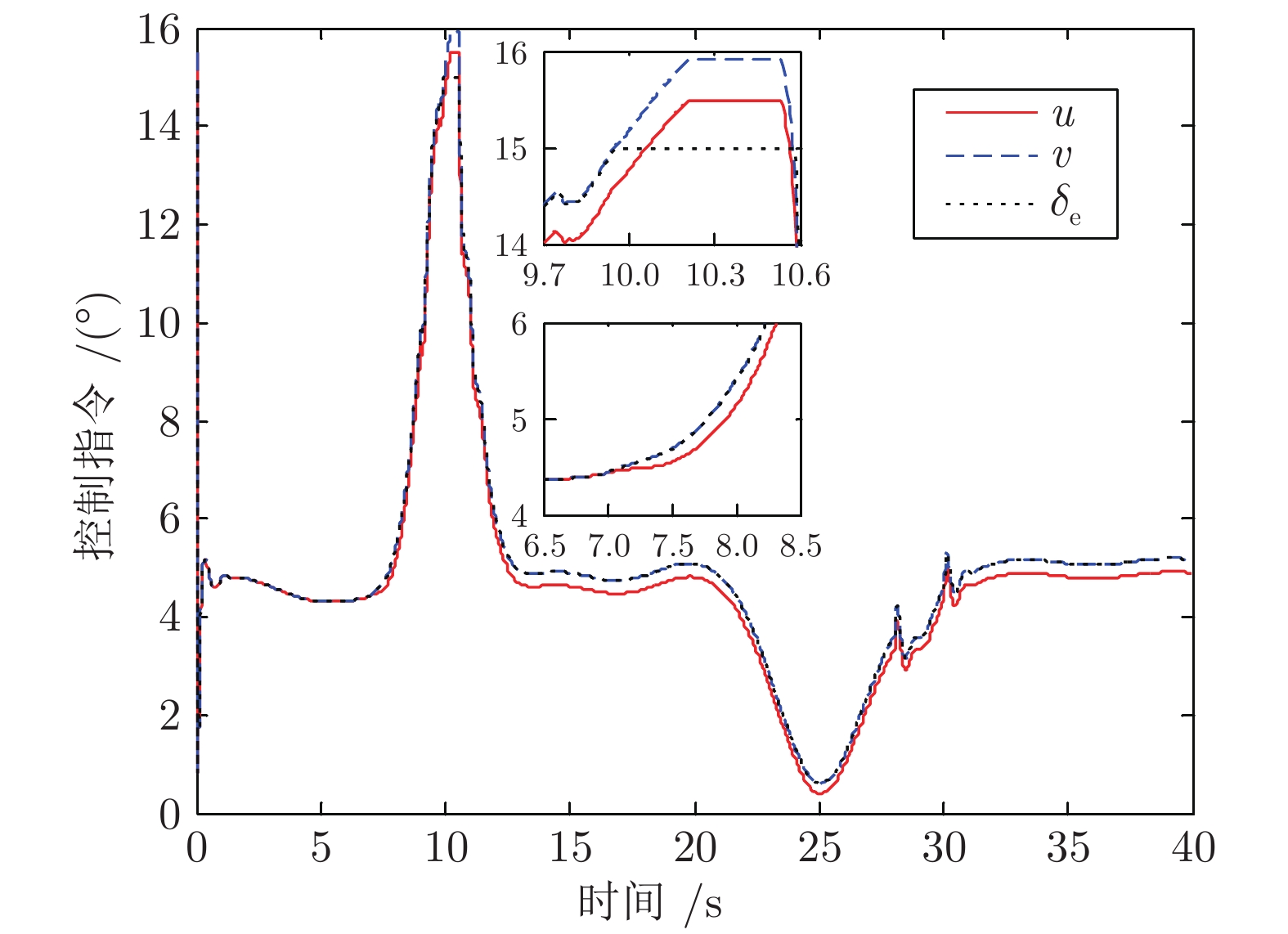
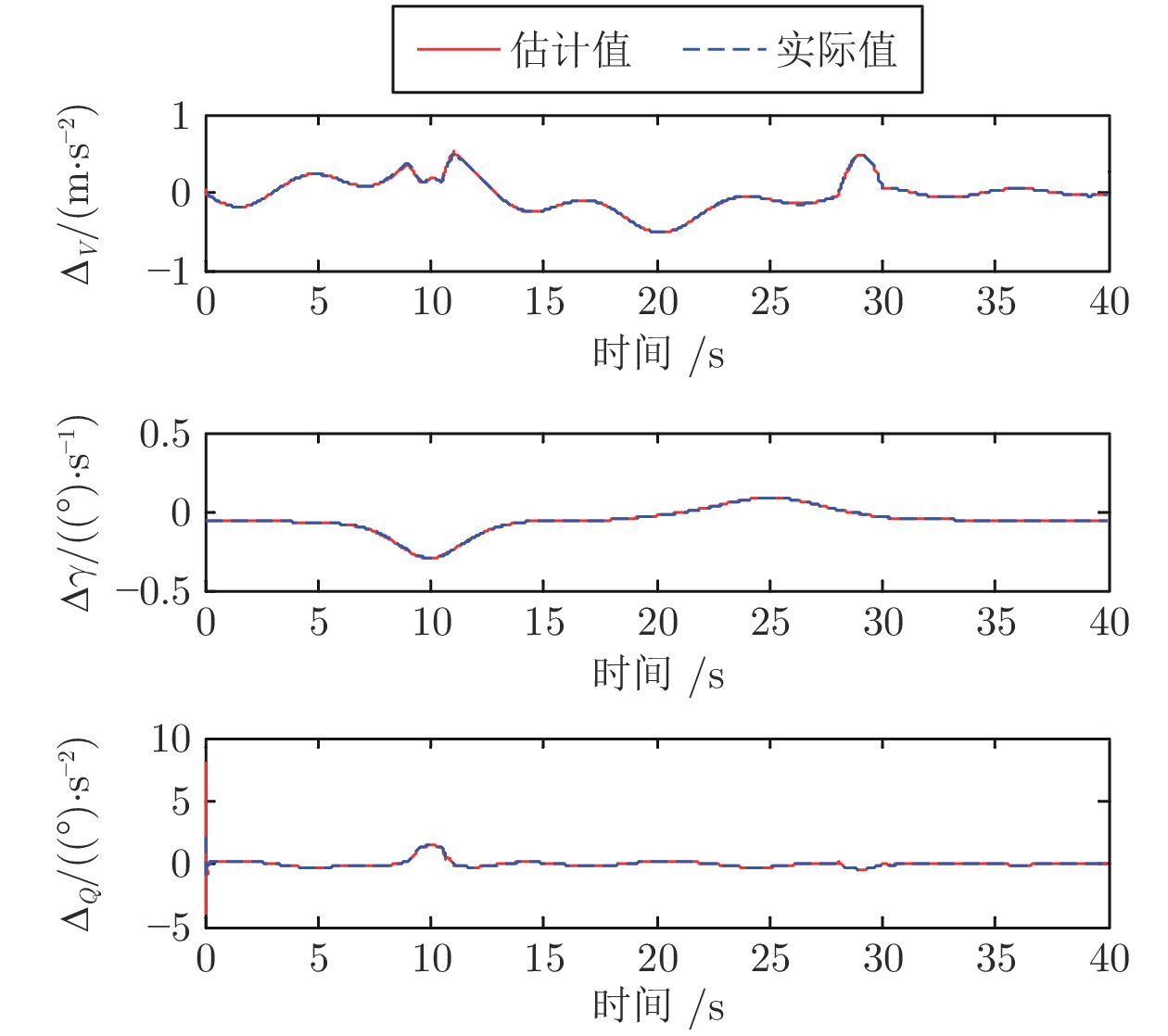
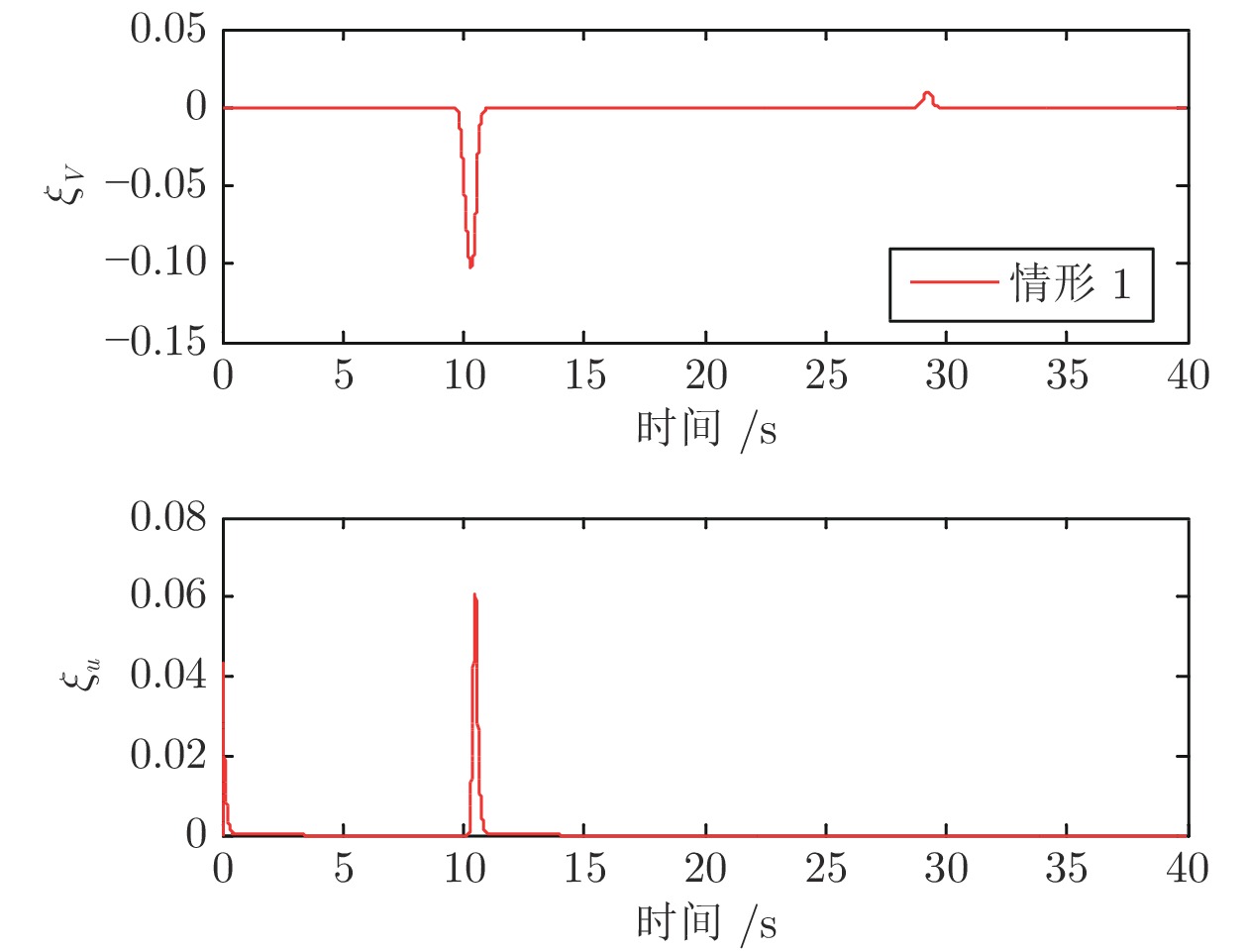
针对一类考虑模型非仿射特性和执行机构饱和特性的高超声速飞行器轨迹跟踪控制问题, 提出一种基于backstepping的输出反馈非线性控制方法. 考虑执行机构故障激发的未知非线性动态, 建立了非仿射形式飞行器模型. 为解决实际工程应用中存在的气流角测量值难以使用的问题, 利用高度和速度测量值以及高阶微分器设计了航迹倾角在线估计方法. 基于跟踪微分器设计了模型干扰项的估计方法, 并解决了backstepping方法应用中存在的“微分项爆炸”问题. 引入辅助系统降低控制量饱和带来的不利影响. 基于Lyapunov理论证明了闭环系统的稳定性. 最后, 通过对比仿真实验验证了所提方法的有效性.
针对一类考虑模型非仿射特性和执行机构饱和特性的高超声速飞行器轨迹跟踪控制问题, 提出一种基于backstepping的输出反馈非线性控制方法. 考虑执行机构故障激发的未知非线性动态, 建立了非仿射形式飞行器模型. 为解决实际工程应用中存在的气流角测量值难以使用的问题, 利用高度和速度测量值以及高阶微分器设计了航迹倾角在线估计方法. 基于跟踪微分器设计了模型干扰项的估计方法, 并解决了backstepping方法应用中存在的“微分项爆炸”问题. 引入辅助系统降低控制量饱和带来的不利影响. 基于Lyapunov理论证明了闭环系统的稳定性. 最后, 通过对比仿真实验验证了所提方法的有效性.
2022, 48(6): 1543-1559.
doi: 10.16383/j.aas.c210232
摘要:
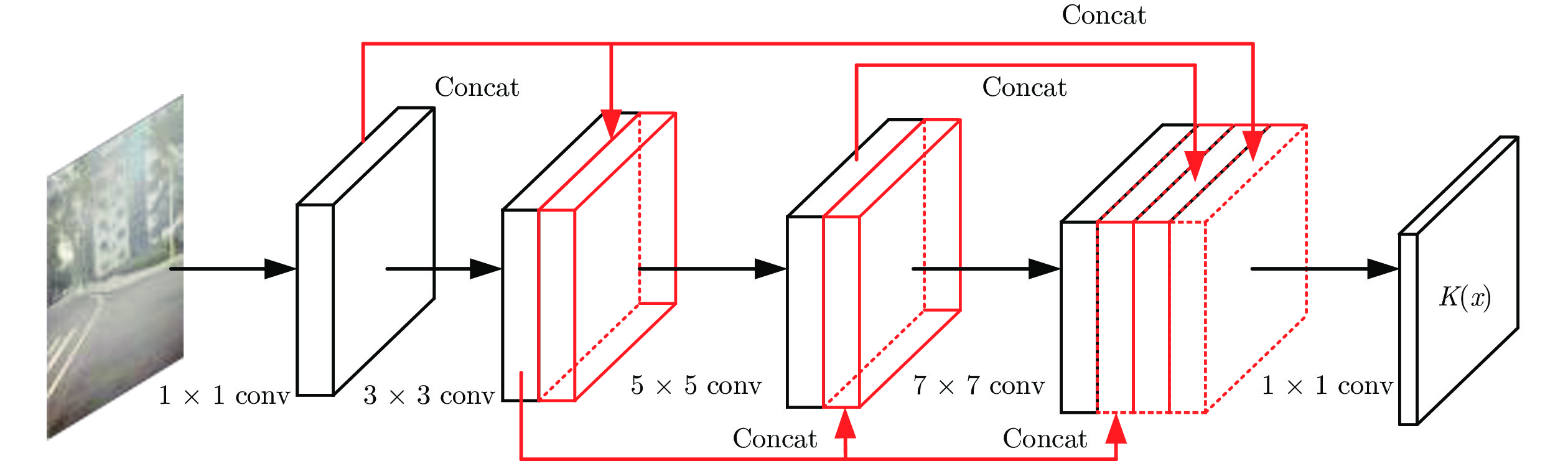
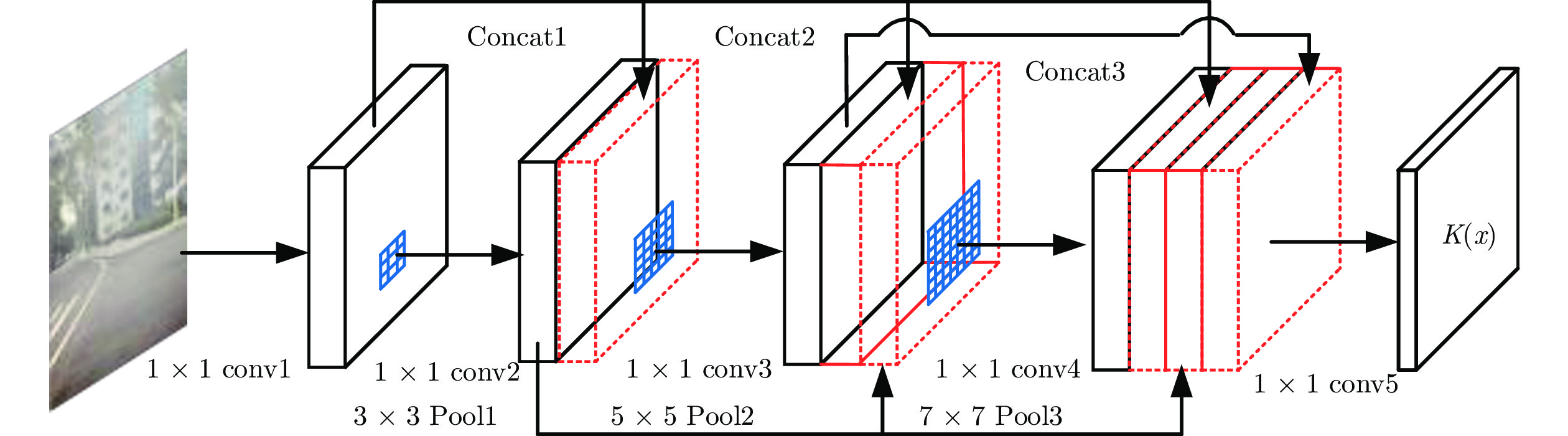
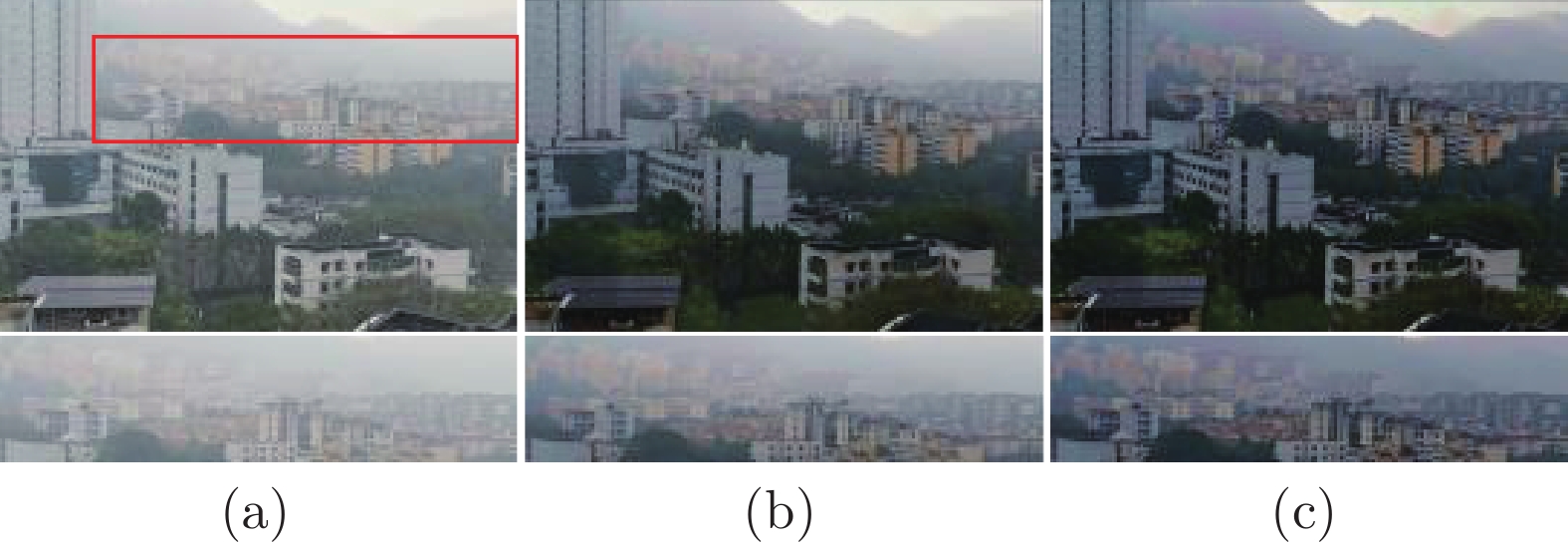
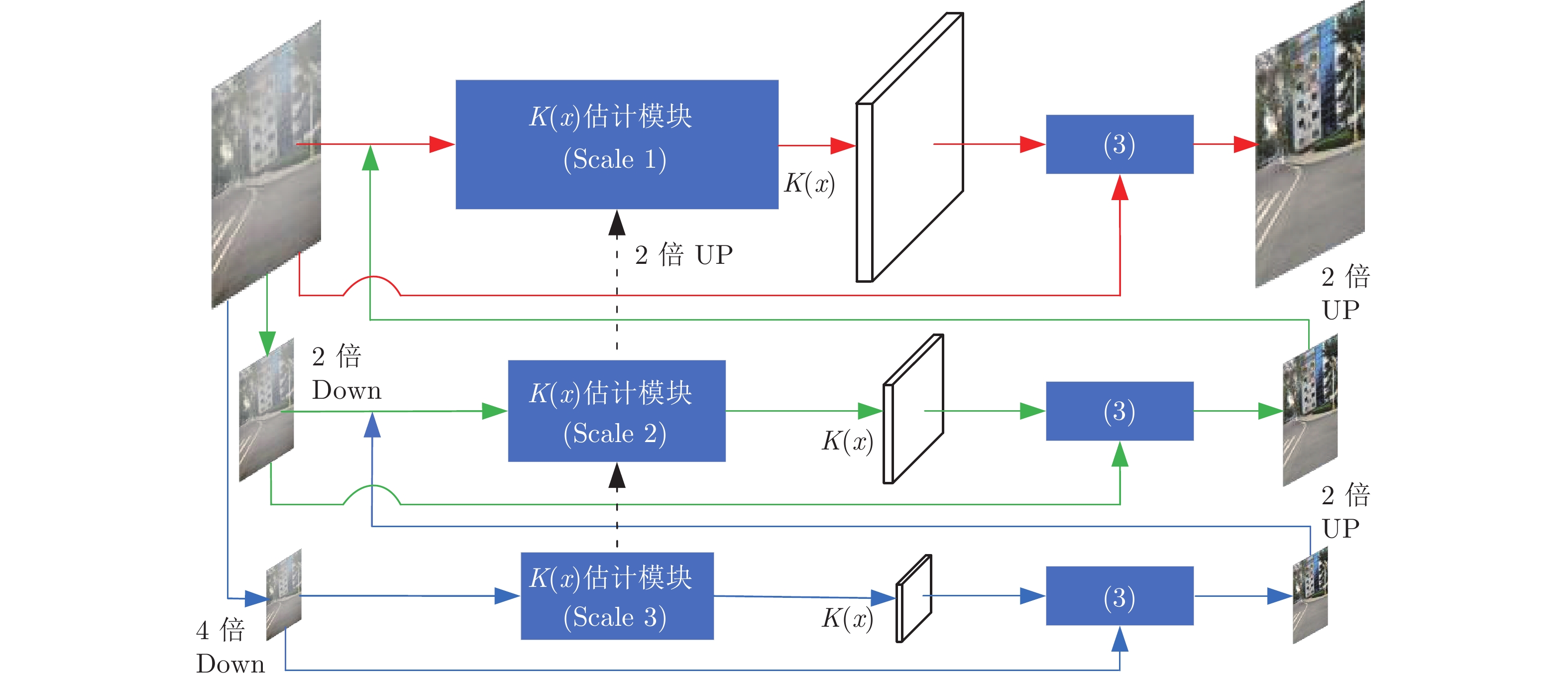
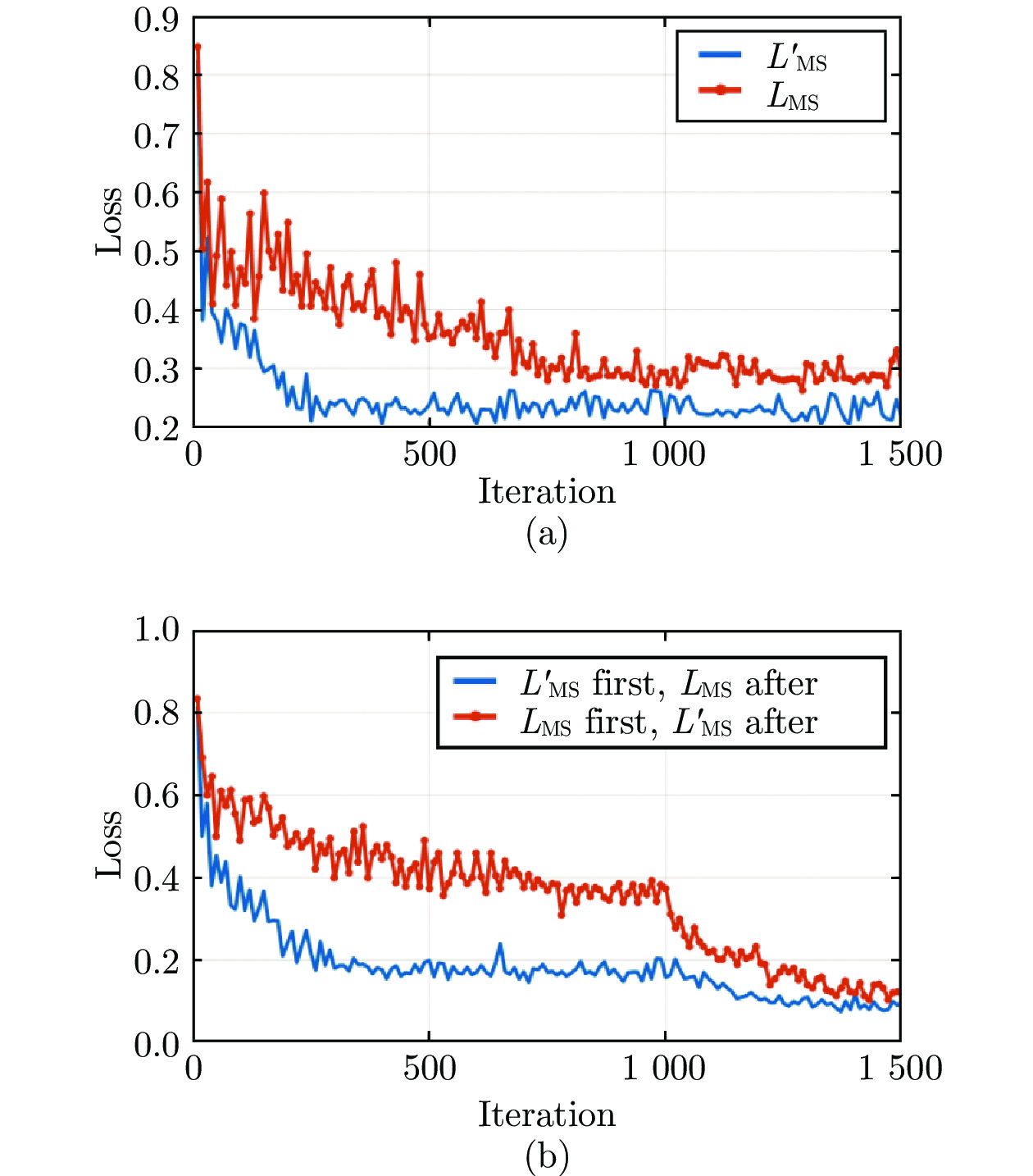
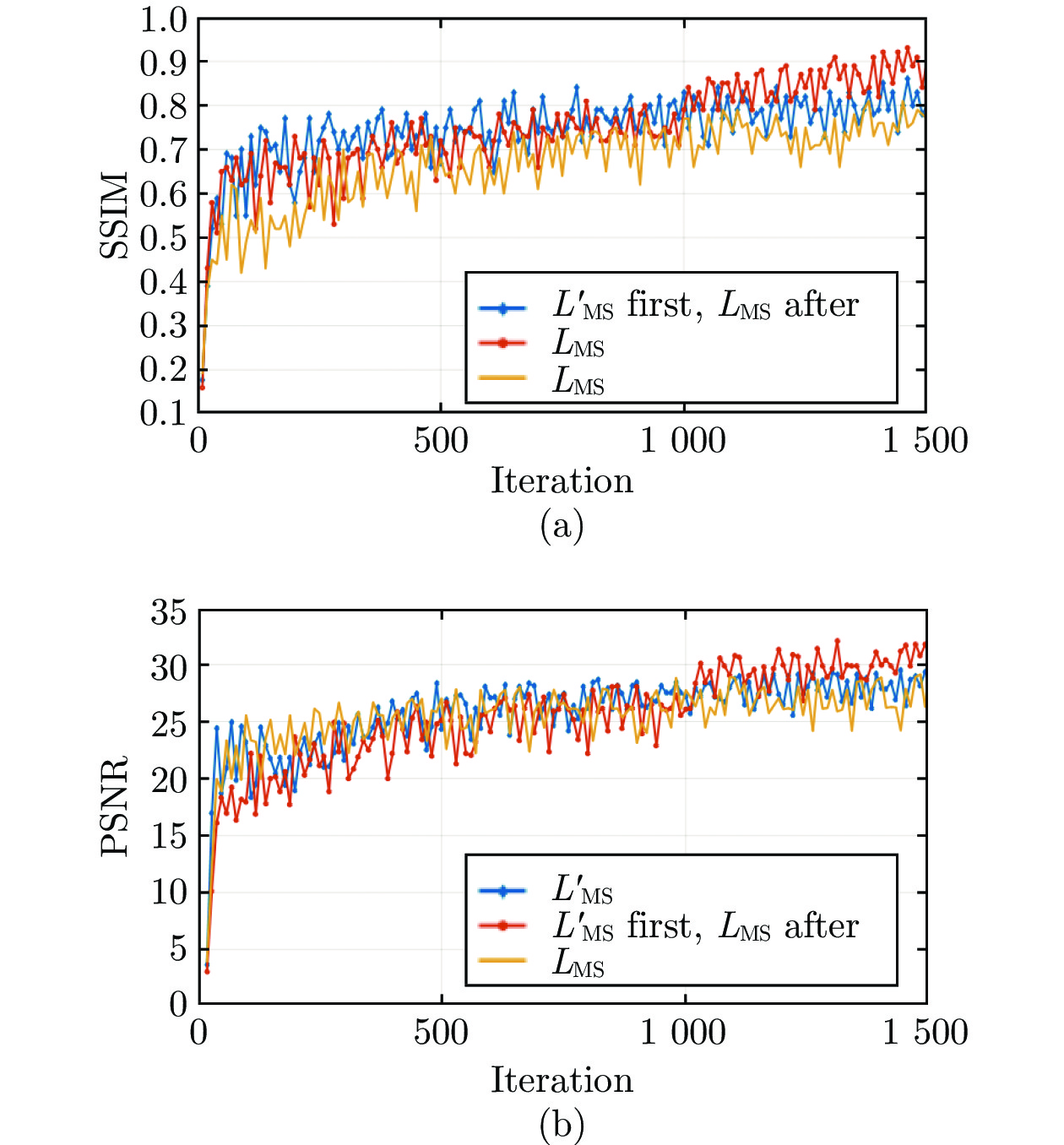
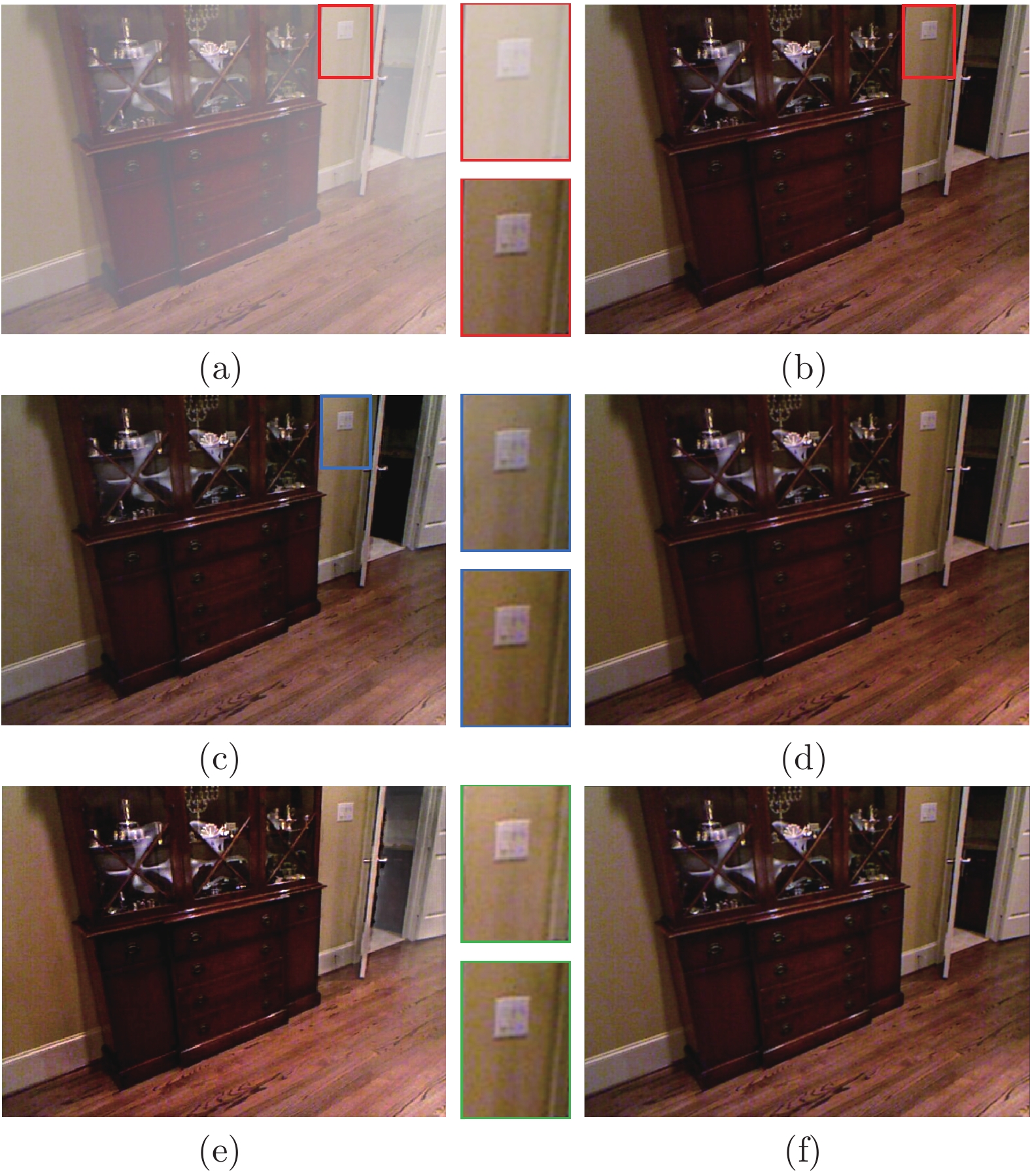
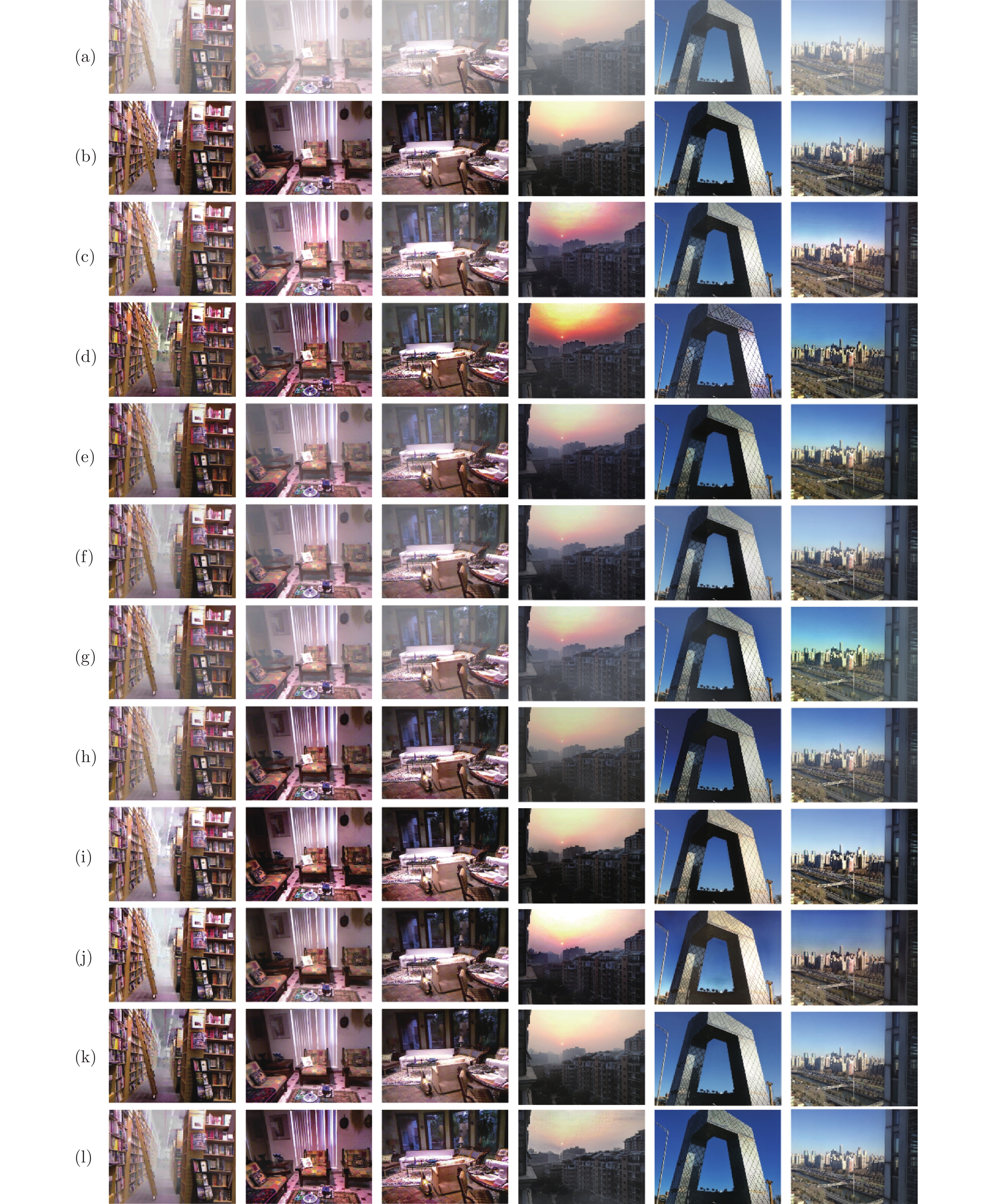
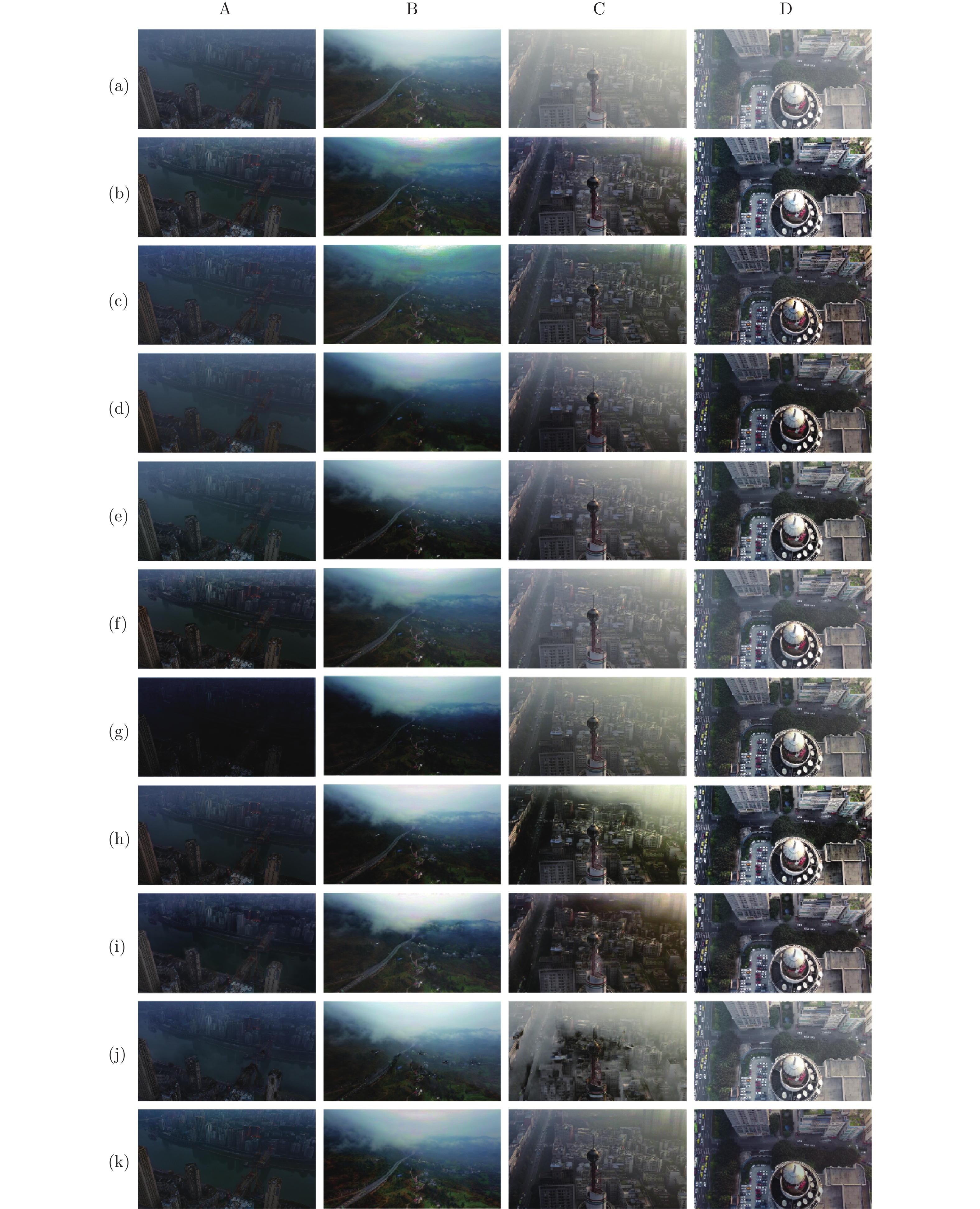
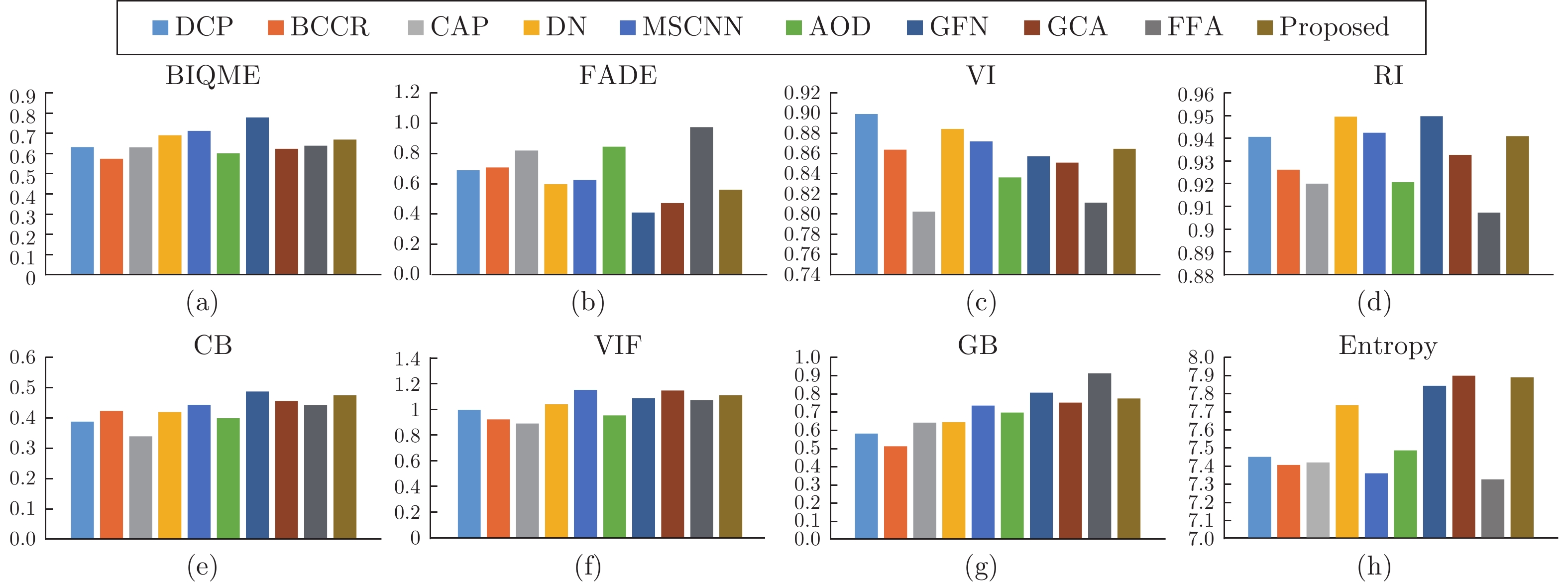
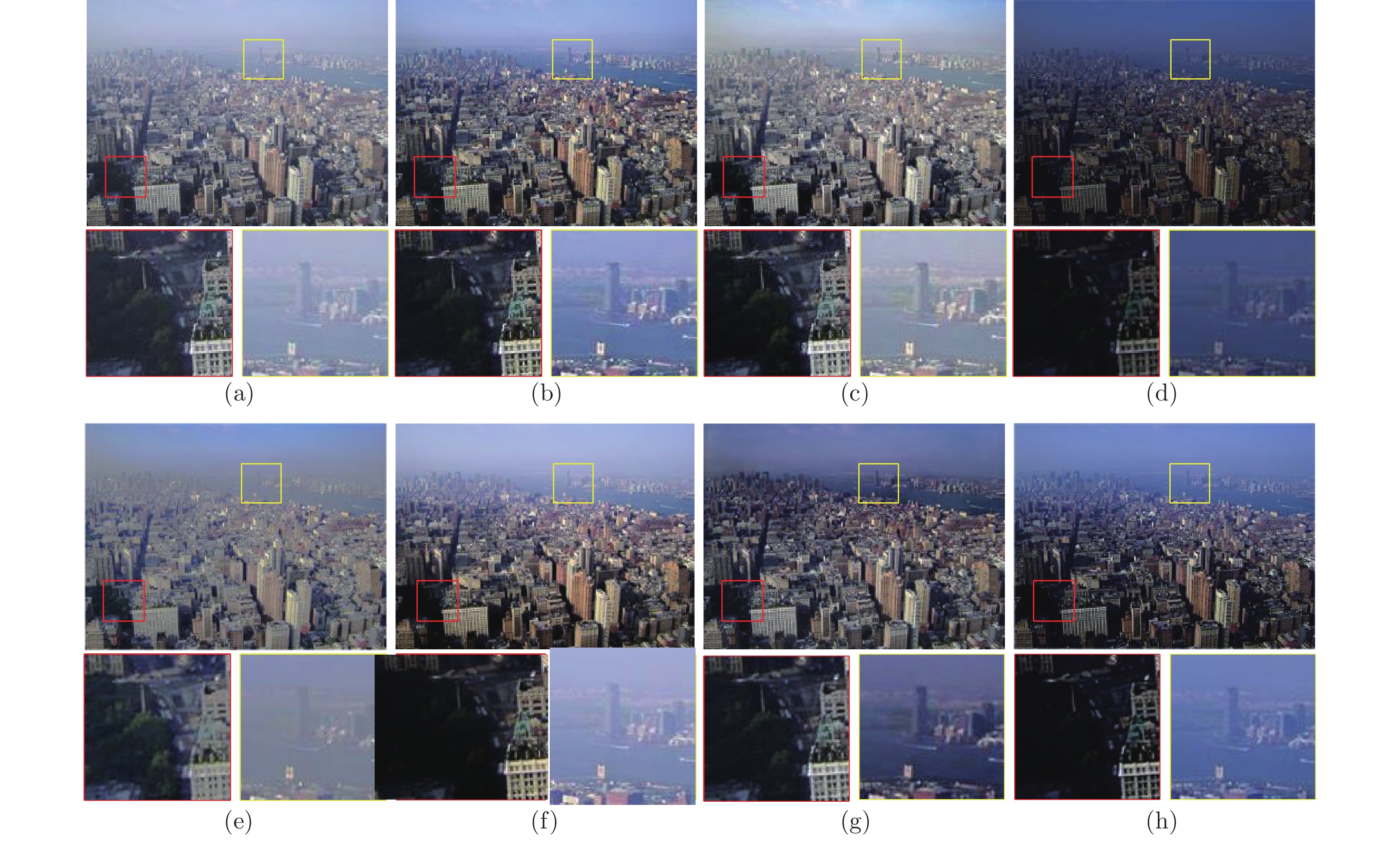
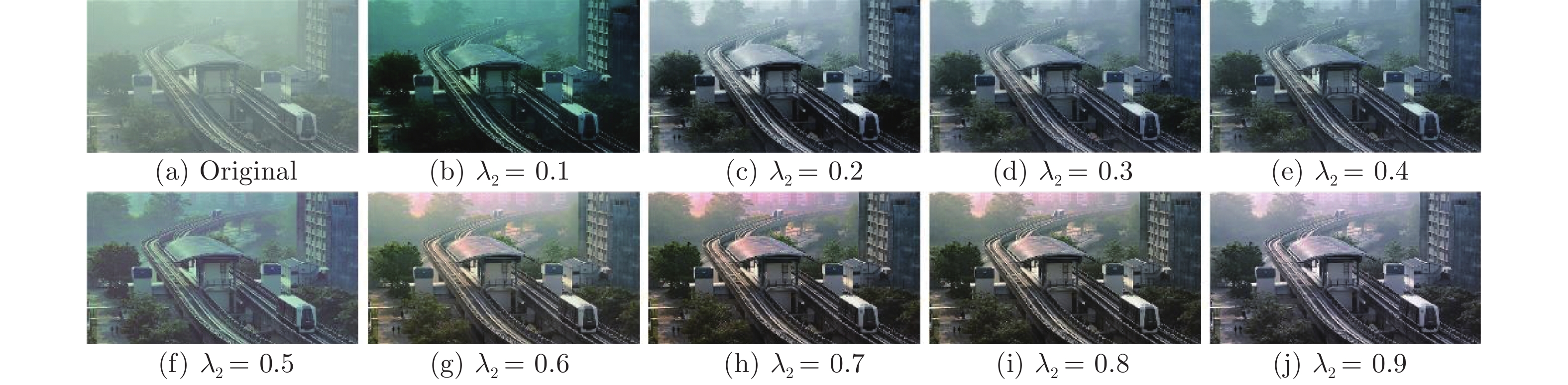
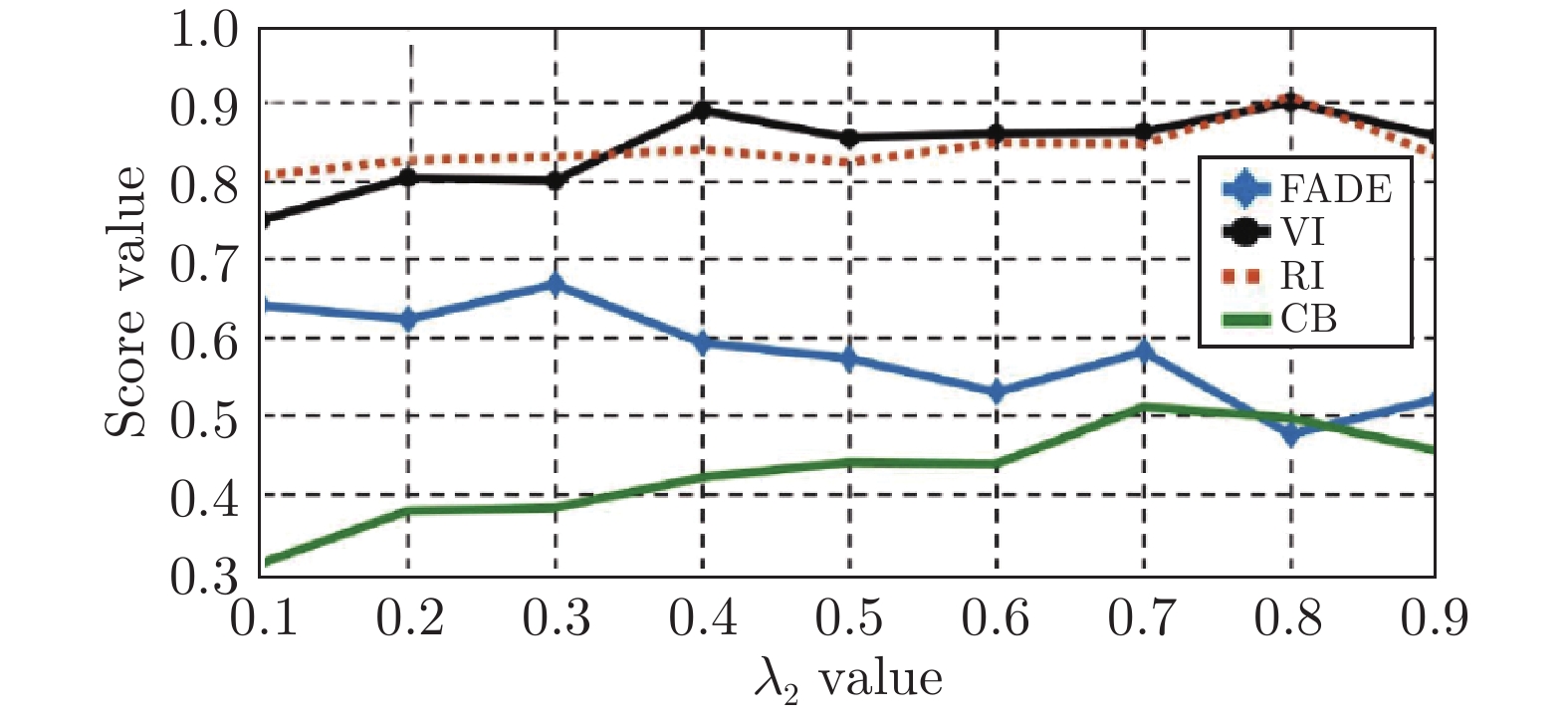
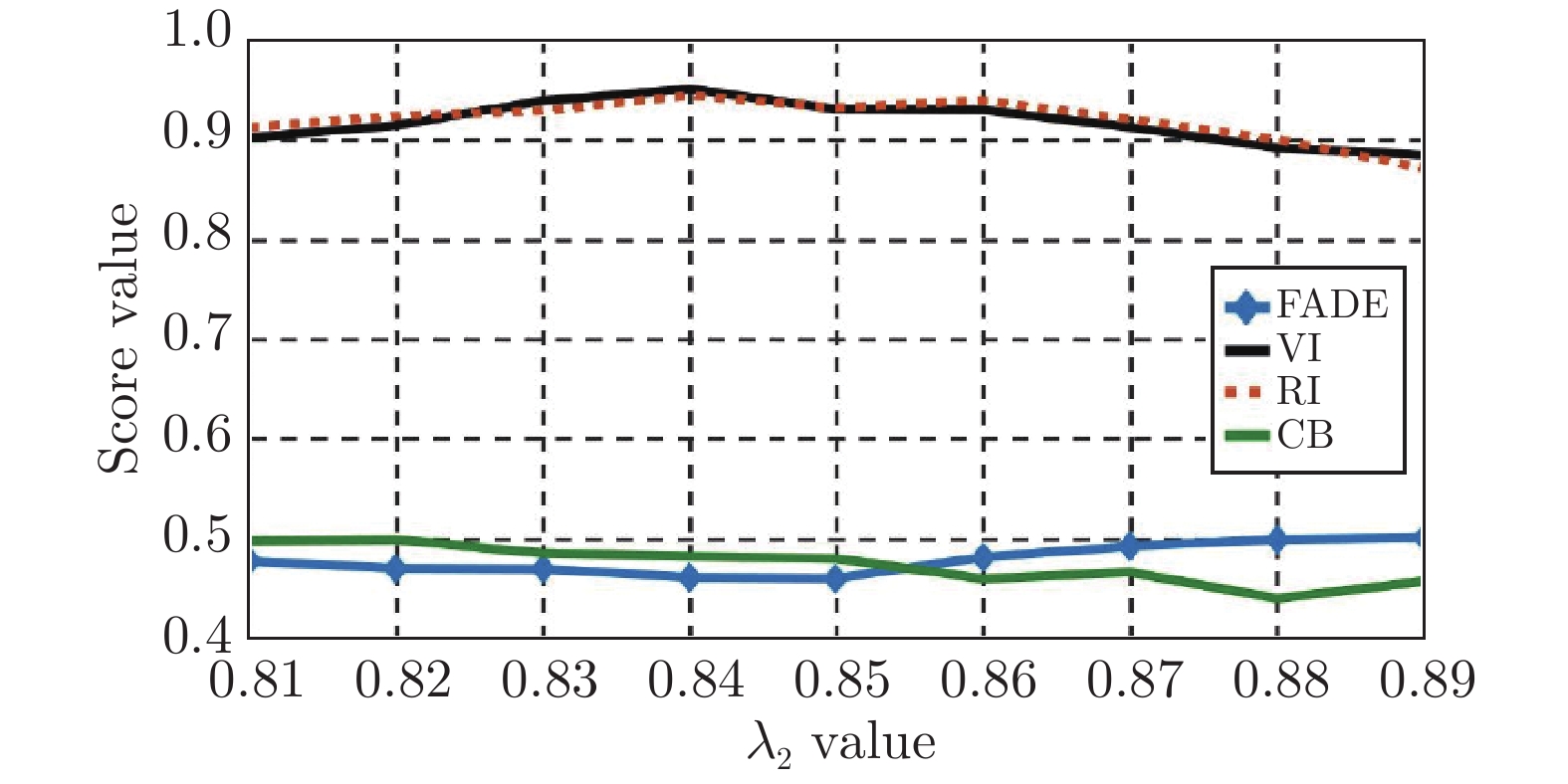
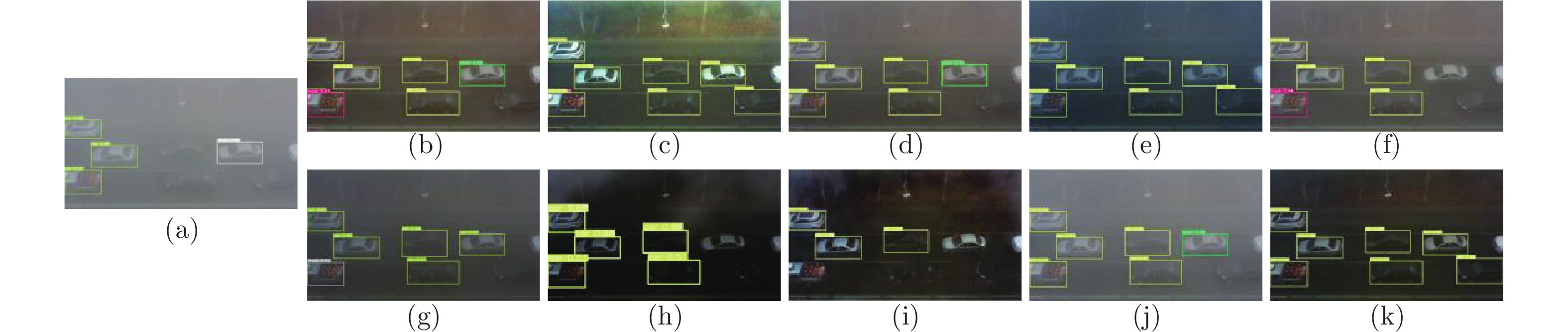
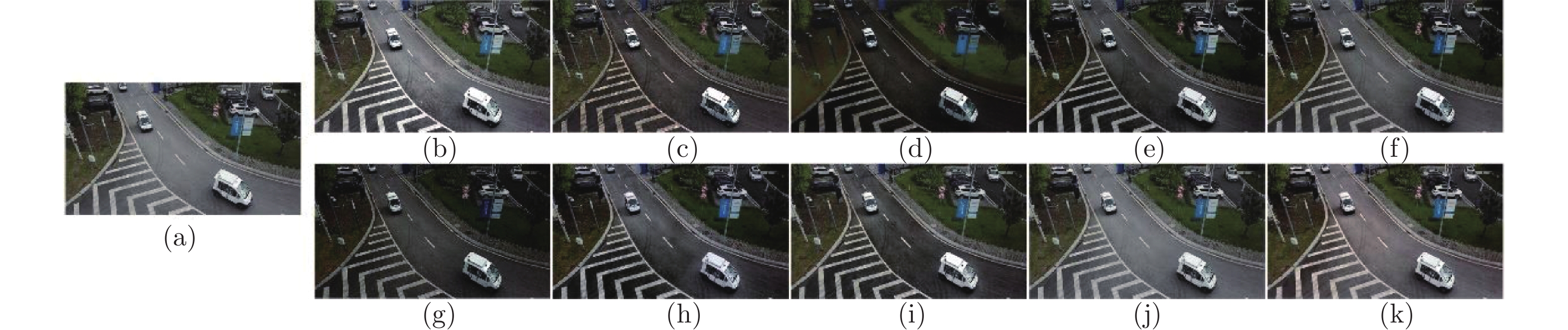
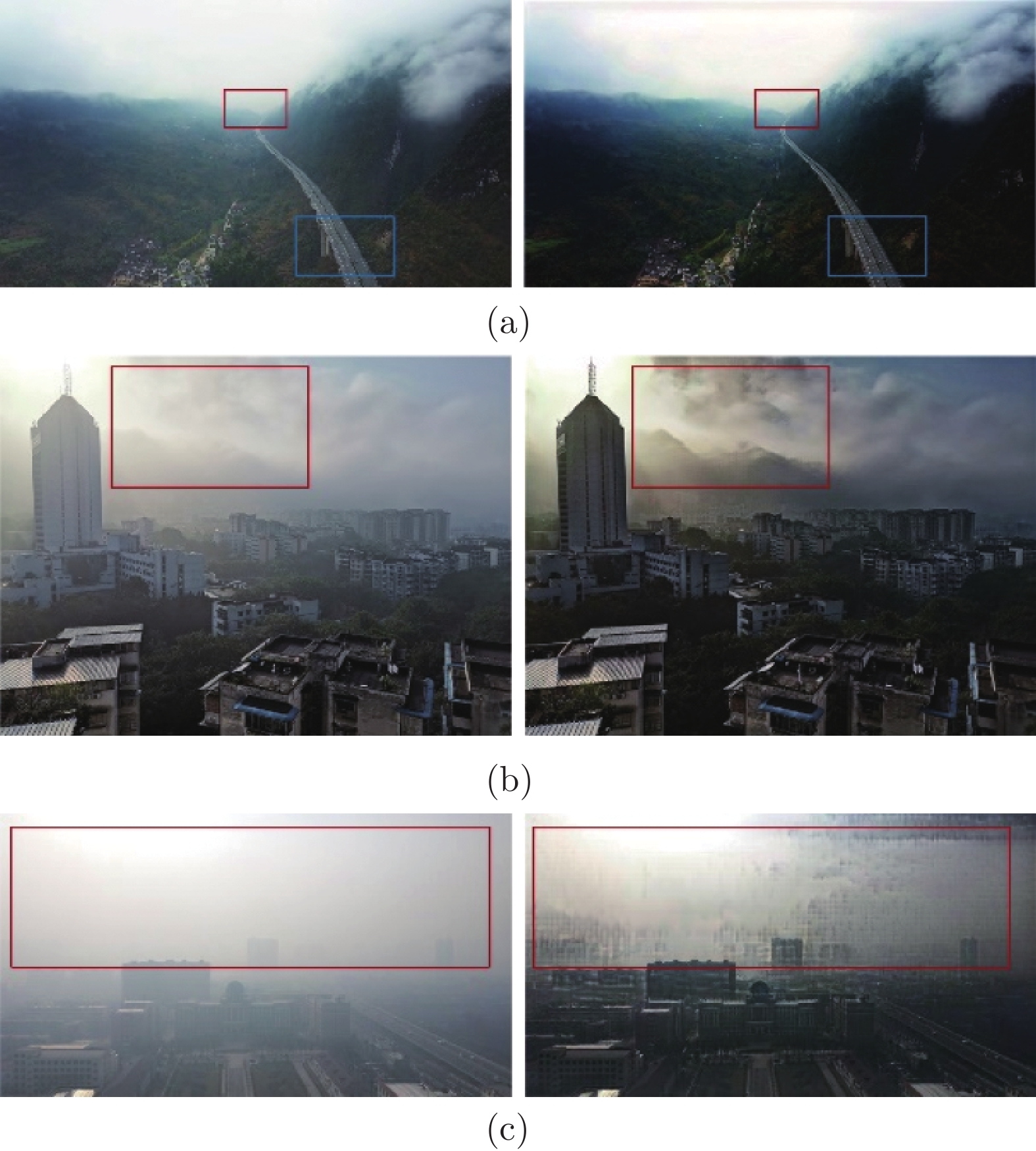
针对航拍图像易受雾气影响, AOD-Net (All in one dehazing network)算法对图像去雾后容易出现细节模糊、对比度过高和图像偏暗等问题, 本文提出了一种基于改进AOD-Net的航拍图像去雾算法. 本文主要从网络结构、损失函数、训练方式三个方面对AOD-Net进行改良. 首先在AOD-Net的第二个特征融合层上添加了第一层的特征图, 用全逐点卷积替换了传统卷积方式, 并用多尺度结构提升了网络对细节的处理能力. 然后用包含有图像重构损失函数、SSIM (Structural similarity)损失函数以及TV (Total variation)损失函数的复合损失函数优化去雾图的对比度、亮度以及色彩饱和度. 最后采用分段式的训练方式进一步提升了去雾图的质量. 实验结果表明, 经该算法去雾后的图像拥有令人满意的去雾结果, 图像的饱和度和对比度相较于AOD-Net更自然. 与其他对比算法相比, 该算法在合成图像实验、真实航拍图像实验以及算法耗时测试的综合表现上更好, 更适用于航拍图像实时去雾.
针对航拍图像易受雾气影响, AOD-Net (All in one dehazing network)算法对图像去雾后容易出现细节模糊、对比度过高和图像偏暗等问题, 本文提出了一种基于改进AOD-Net的航拍图像去雾算法. 本文主要从网络结构、损失函数、训练方式三个方面对AOD-Net进行改良. 首先在AOD-Net的第二个特征融合层上添加了第一层的特征图, 用全逐点卷积替换了传统卷积方式, 并用多尺度结构提升了网络对细节的处理能力. 然后用包含有图像重构损失函数、SSIM (Structural similarity)损失函数以及TV (Total variation)损失函数的复合损失函数优化去雾图的对比度、亮度以及色彩饱和度. 最后采用分段式的训练方式进一步提升了去雾图的质量. 实验结果表明, 经该算法去雾后的图像拥有令人满意的去雾结果, 图像的饱和度和对比度相较于AOD-Net更自然. 与其他对比算法相比, 该算法在合成图像实验、真实航拍图像实验以及算法耗时测试的综合表现上更好, 更适用于航拍图像实时去雾.
2022, 48(6): 1560-1568.
doi: 10.16383/j.aas.c190178
摘要:
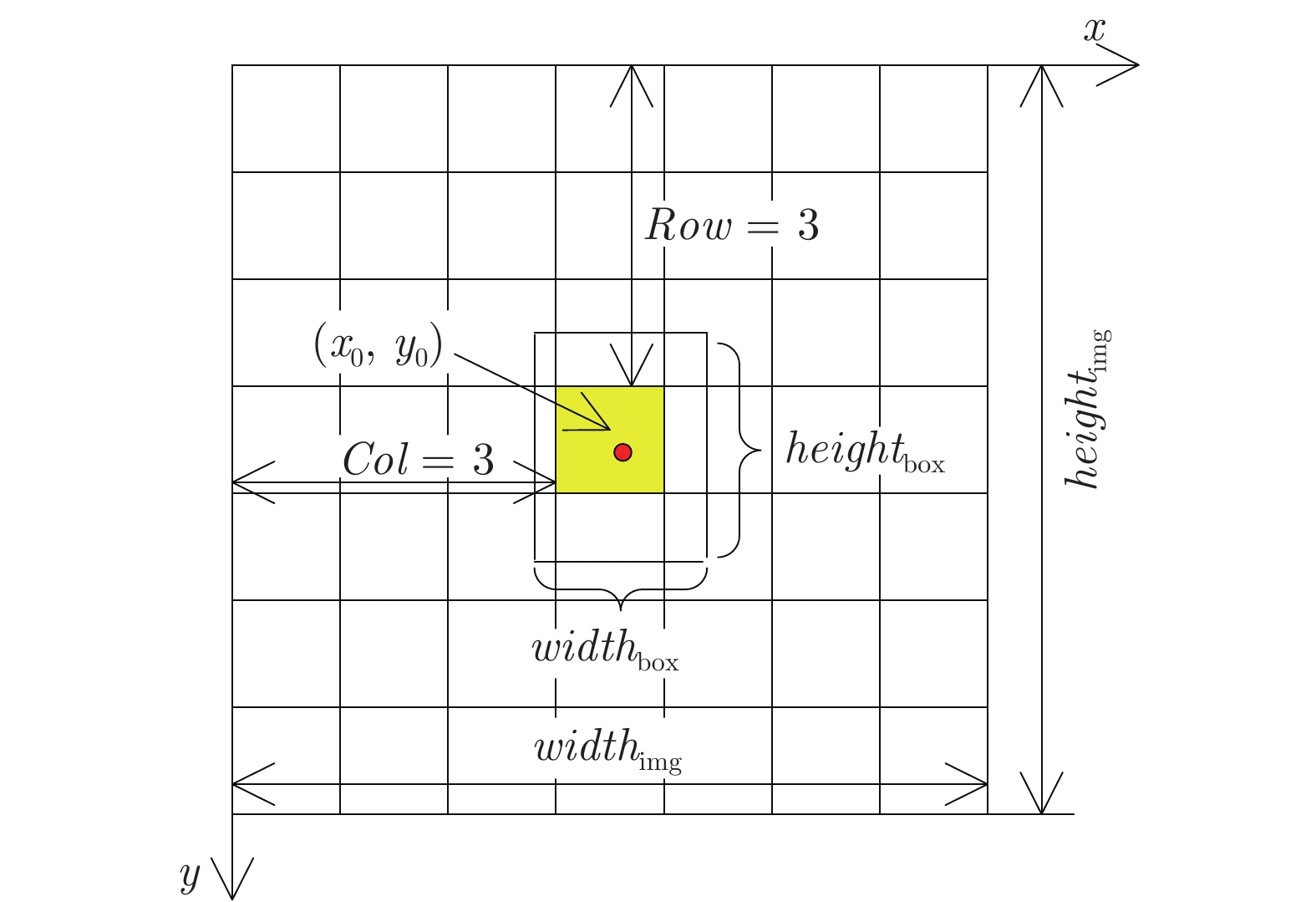
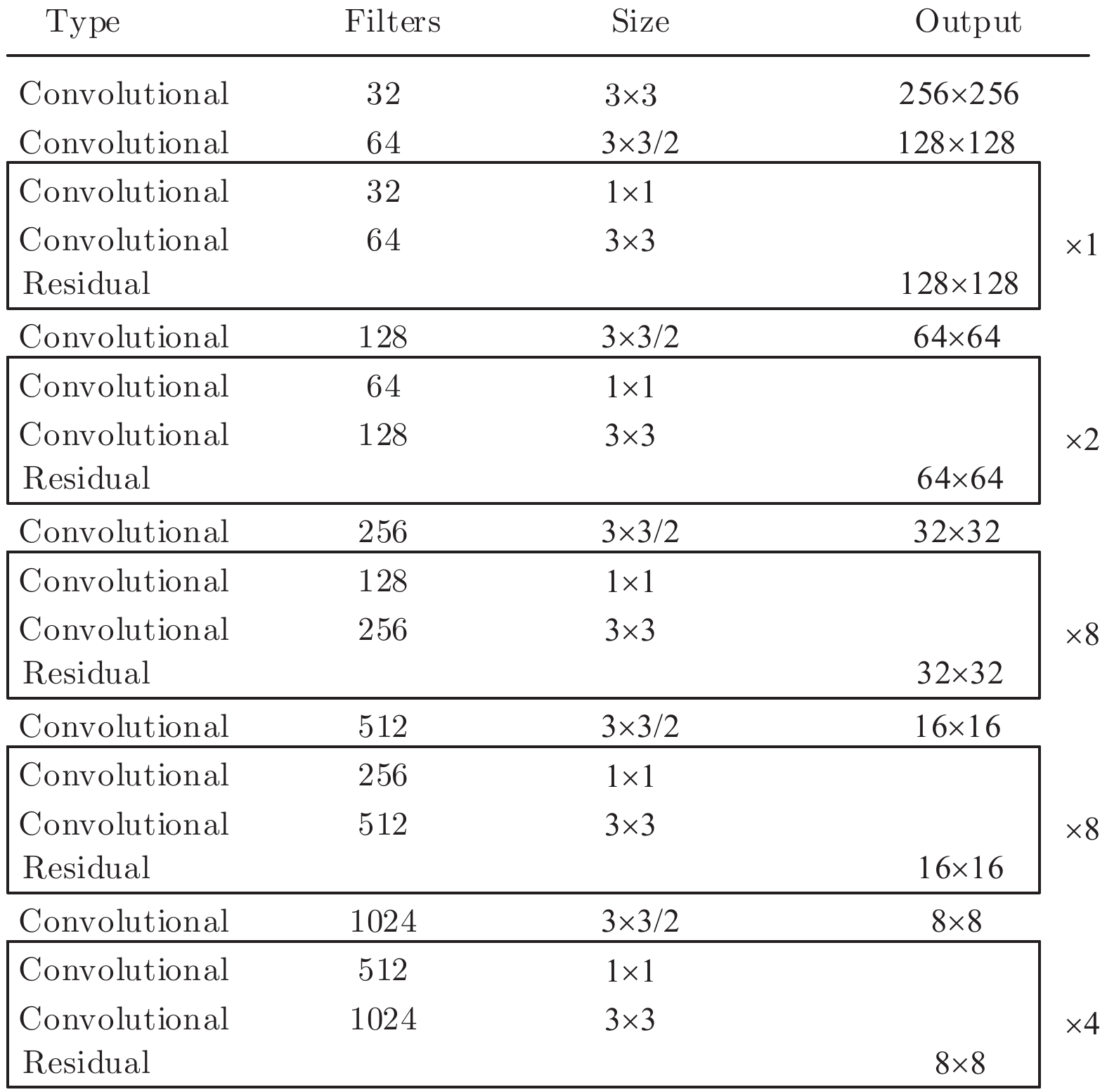
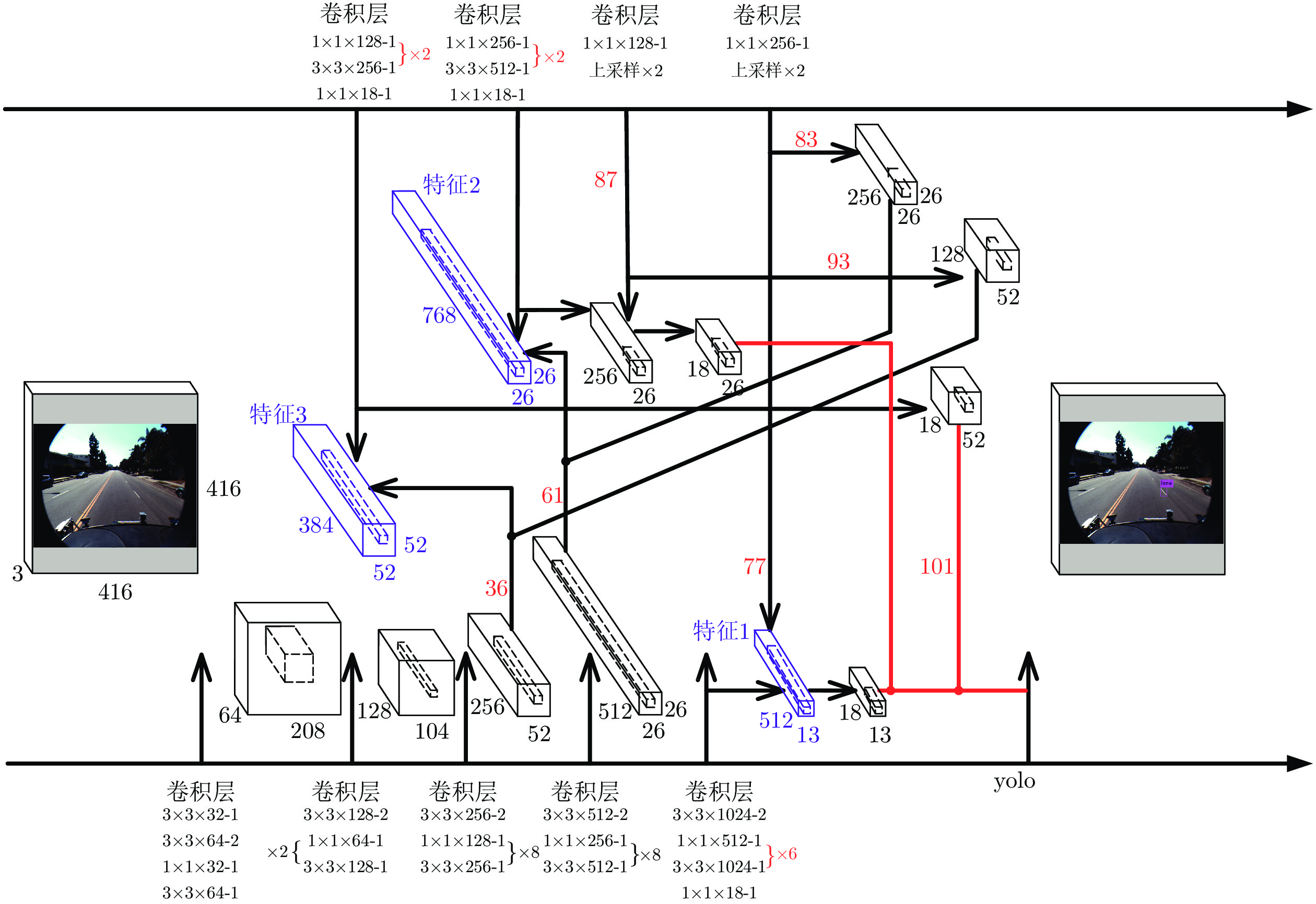
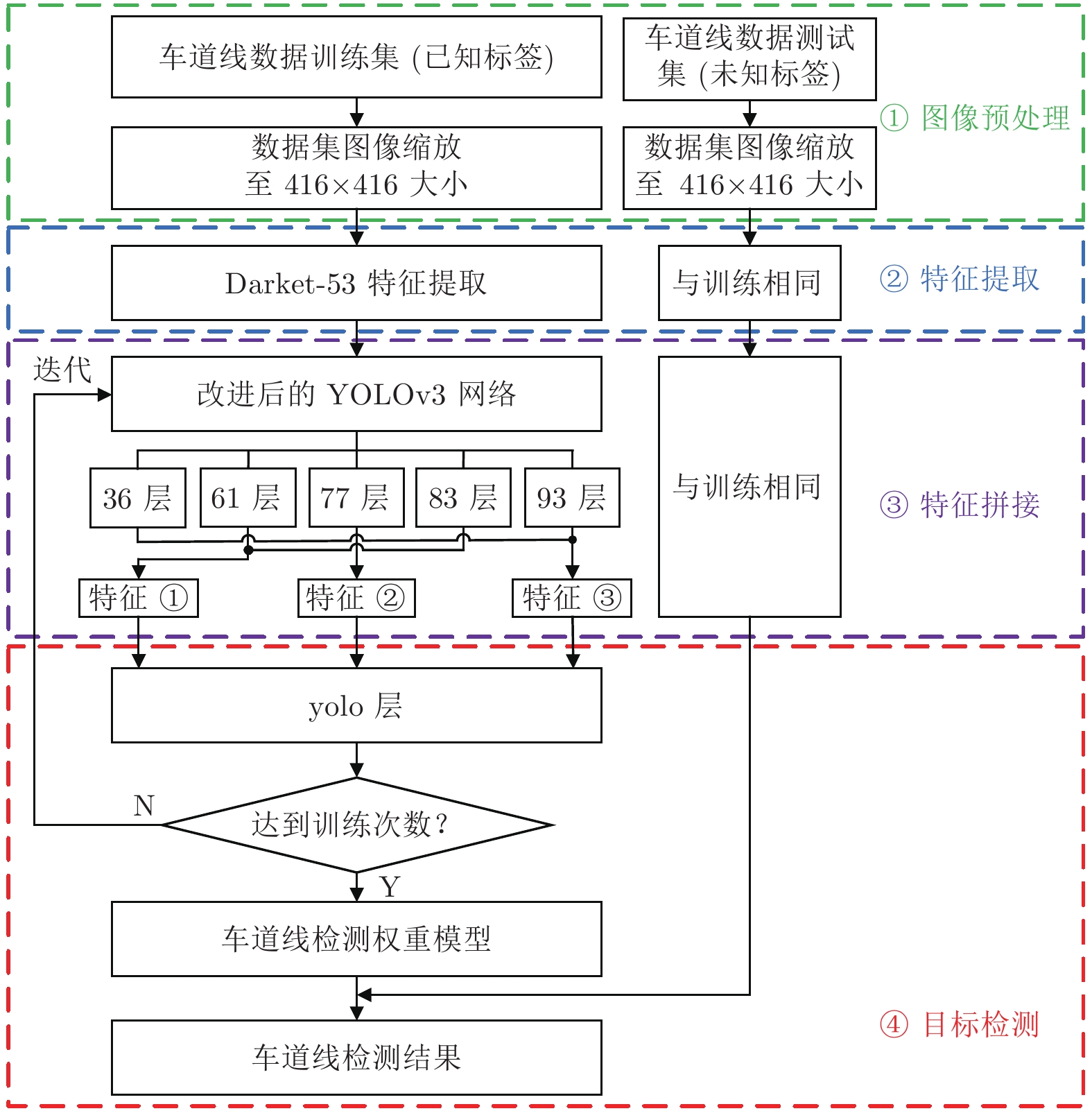
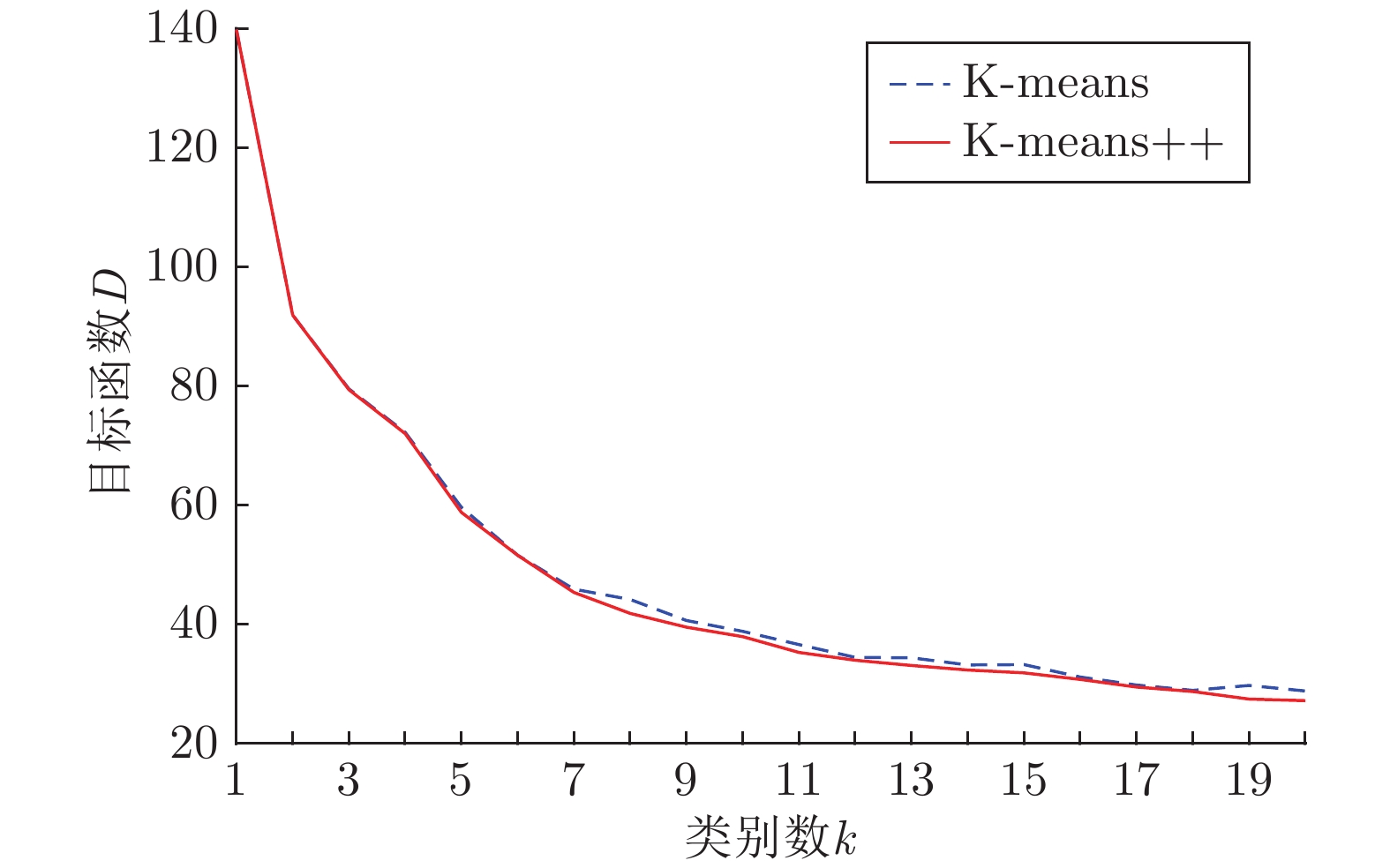
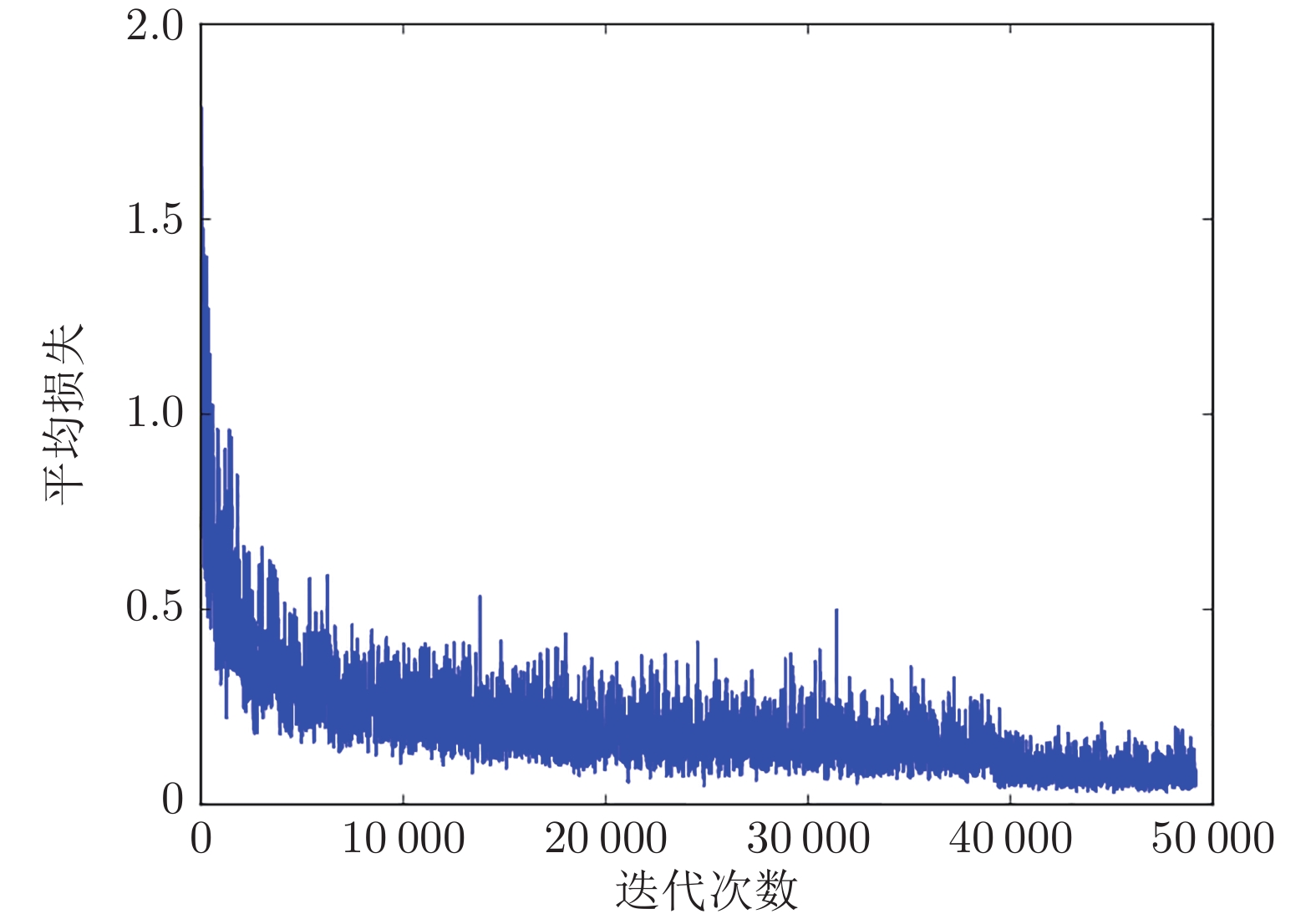
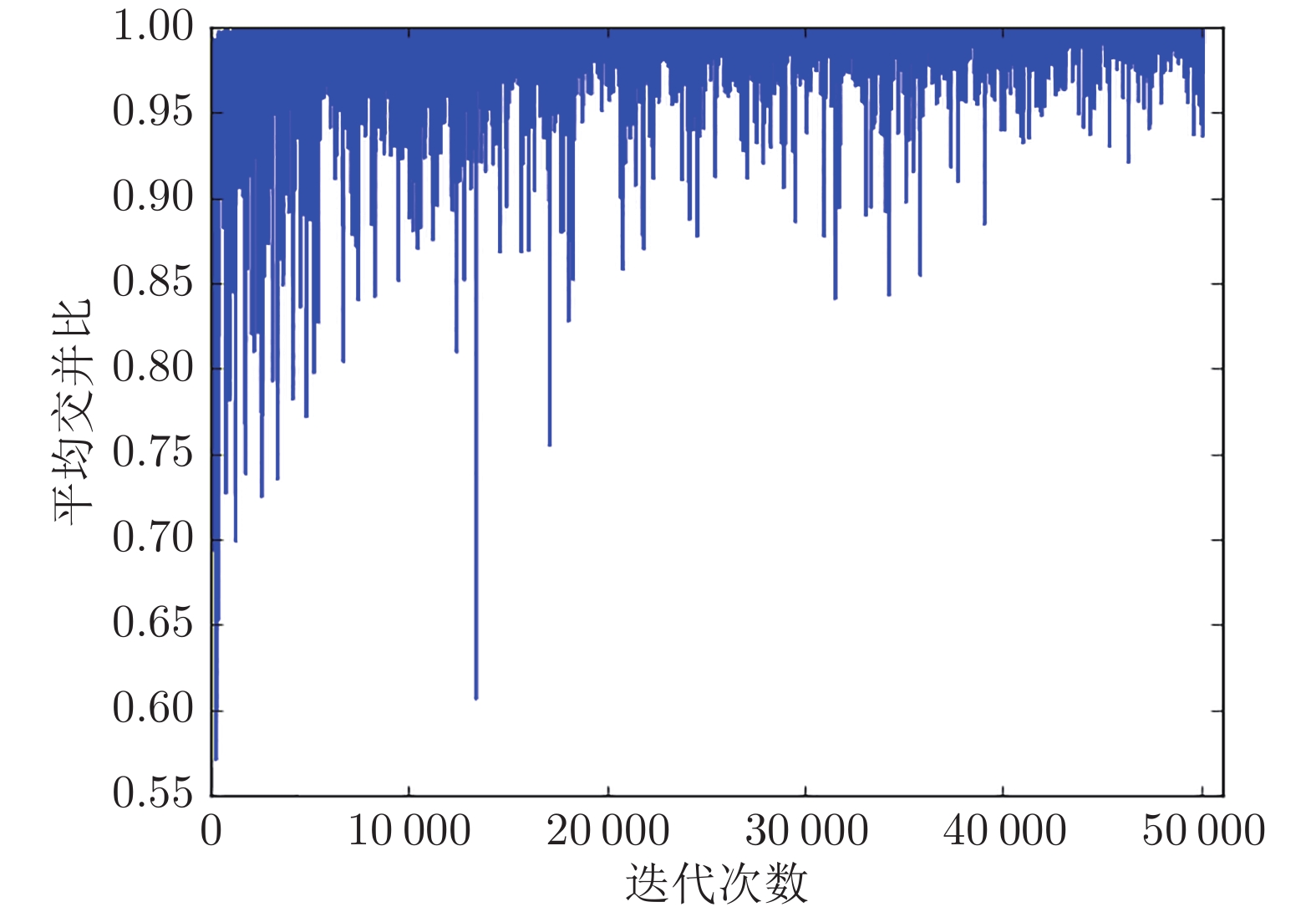
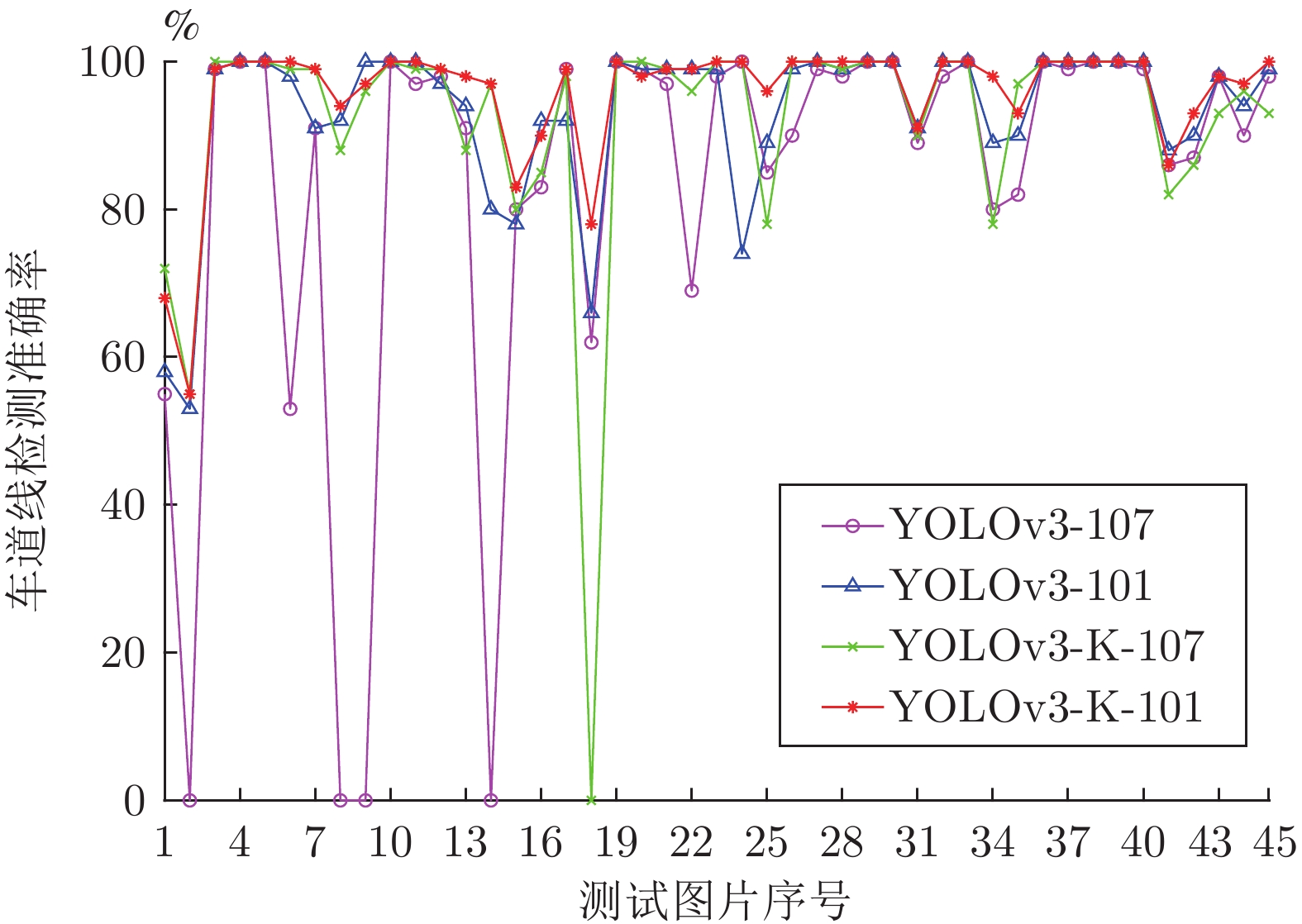
针对YOLOv3算法在检测公路车道线时存在准确率低和漏检概率高的问题, 提出一种改进YOLOv3网络结构的公路车道线检测方法.该方法首先将图像划分为多个网格, 利用K-means++聚类算法, 根据公路车道线宽高固有特点, 确定目标先验框数量和对应宽高值; 其次根据聚类结果优化网络Anchor参数, 使训练网络在车道线检测方面具有一定的针对性; 最后将经过Darknet-53网络提取的特征进行拼接, 改进YOLOv3算法卷积层结构, 使用GPU进行多尺度训练得到最优的权重模型, 从而对图像中的车道线目标进行检测,并选取置信度最高的边界框进行标记.使用Caltech Lanes数据库中的图像信息进行对比试验, 实验结果表明, 改进的YOLOv3算法在公路车道线检测中平均准确率(Mean average precision, mAP)为95%, 检测速度可达50帧/s, 较YOLOv3原始算法mAP值提升了11%, 且明显高于其他车道线检测方法.
针对YOLOv3算法在检测公路车道线时存在准确率低和漏检概率高的问题, 提出一种改进YOLOv3网络结构的公路车道线检测方法.该方法首先将图像划分为多个网格, 利用K-means++聚类算法, 根据公路车道线宽高固有特点, 确定目标先验框数量和对应宽高值; 其次根据聚类结果优化网络Anchor参数, 使训练网络在车道线检测方面具有一定的针对性; 最后将经过Darknet-53网络提取的特征进行拼接, 改进YOLOv3算法卷积层结构, 使用GPU进行多尺度训练得到最优的权重模型, 从而对图像中的车道线目标进行检测,并选取置信度最高的边界框进行标记.使用Caltech Lanes数据库中的图像信息进行对比试验, 实验结果表明, 改进的YOLOv3算法在公路车道线检测中平均准确率(Mean average precision, mAP)为95%, 检测速度可达50帧/s, 较YOLOv3原始算法mAP值提升了11%, 且明显高于其他车道线检测方法.

2022, 48(6): 1569-1589.
doi: 10.16383/j.aas.c200975
摘要:
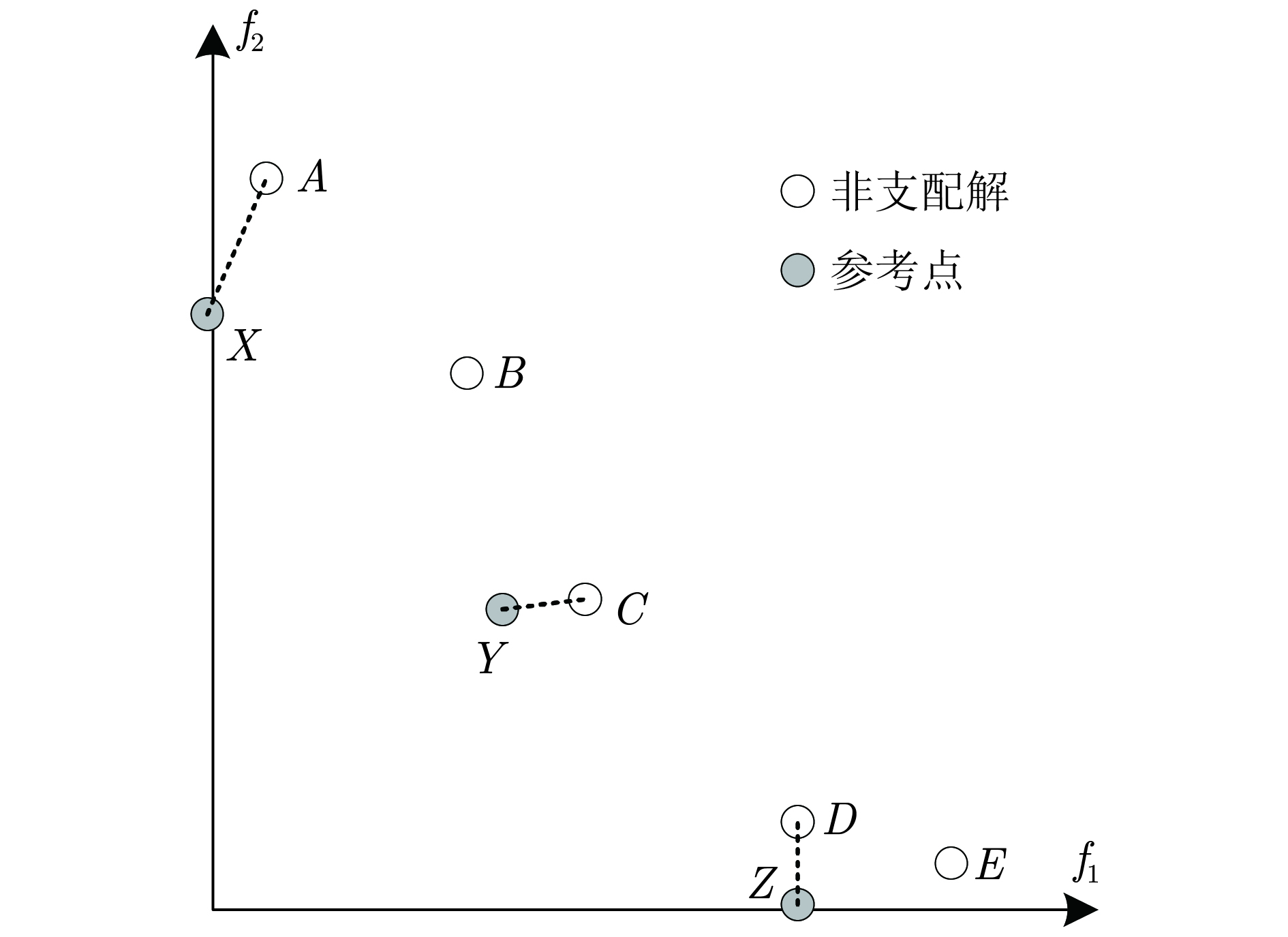
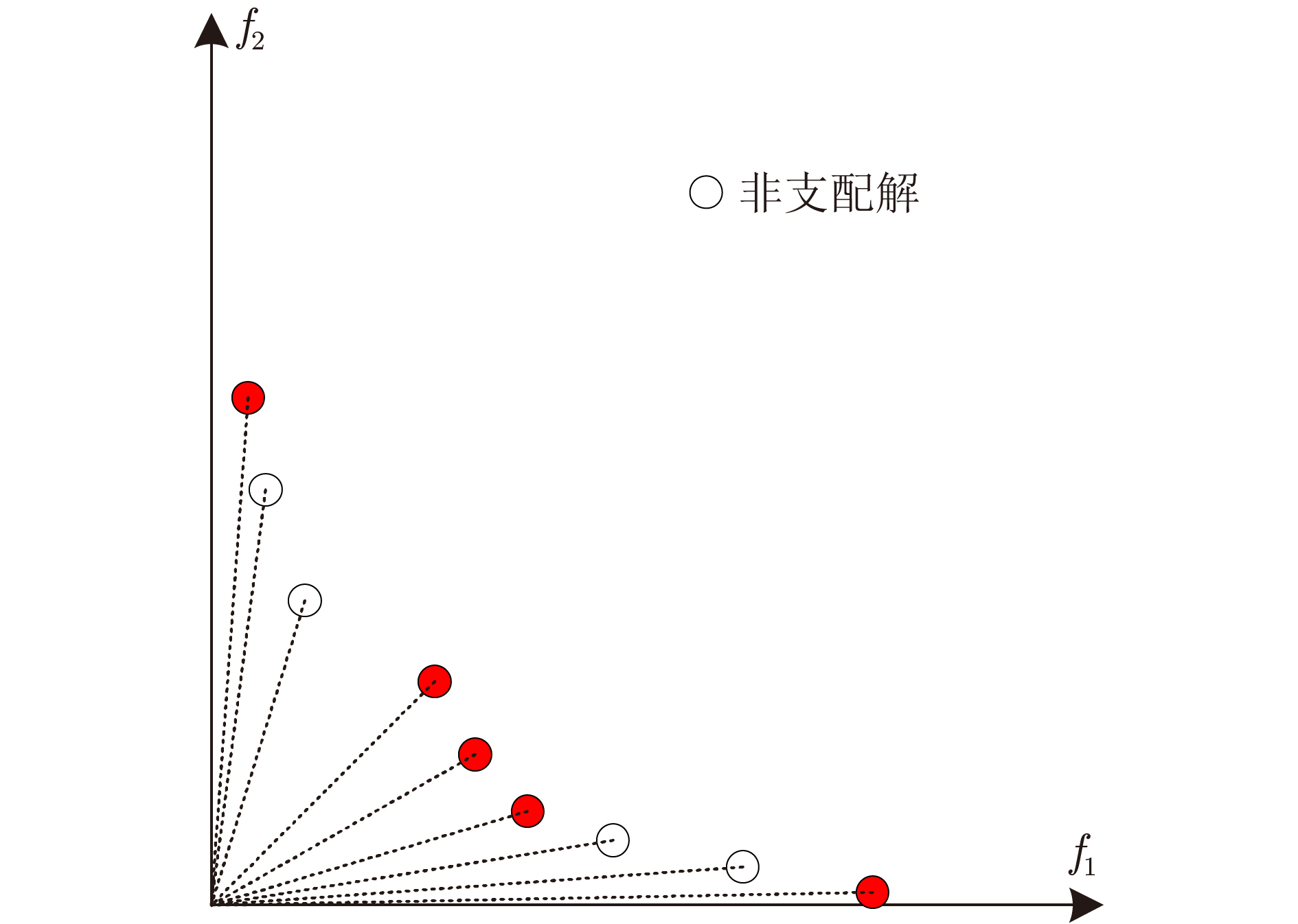
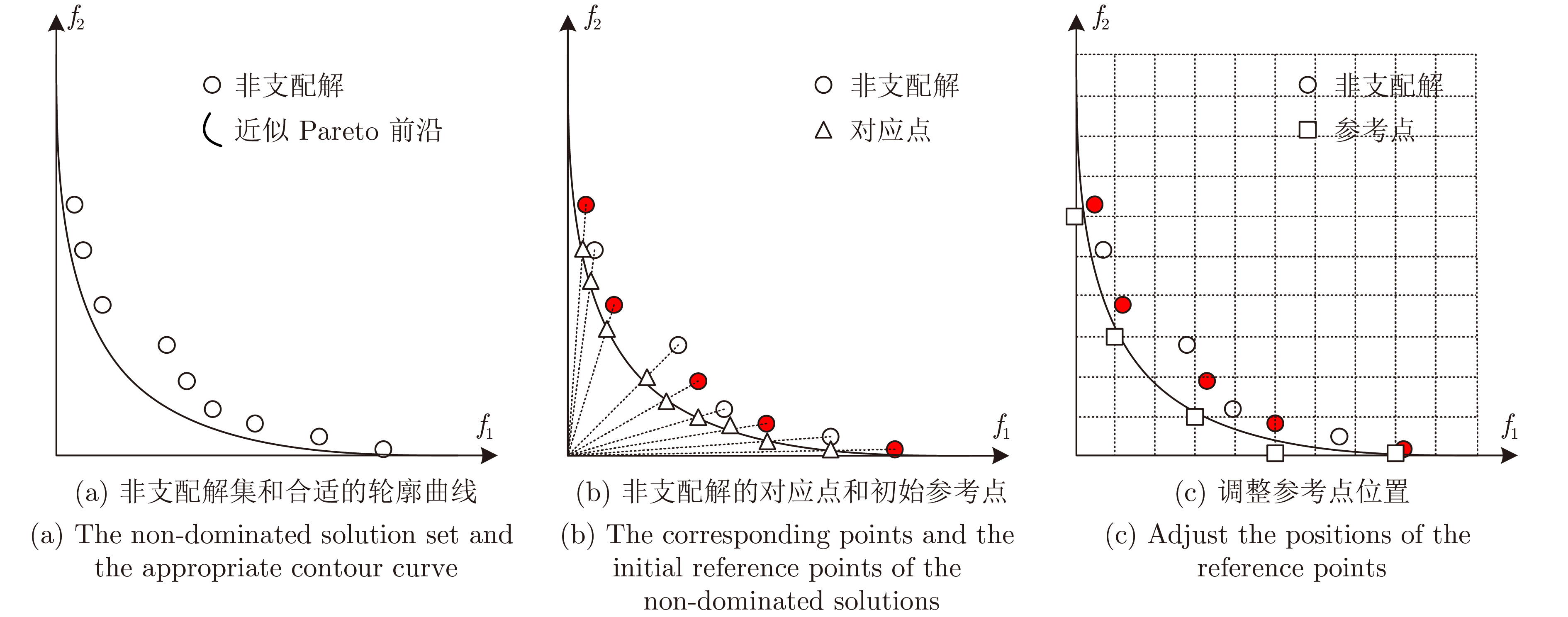
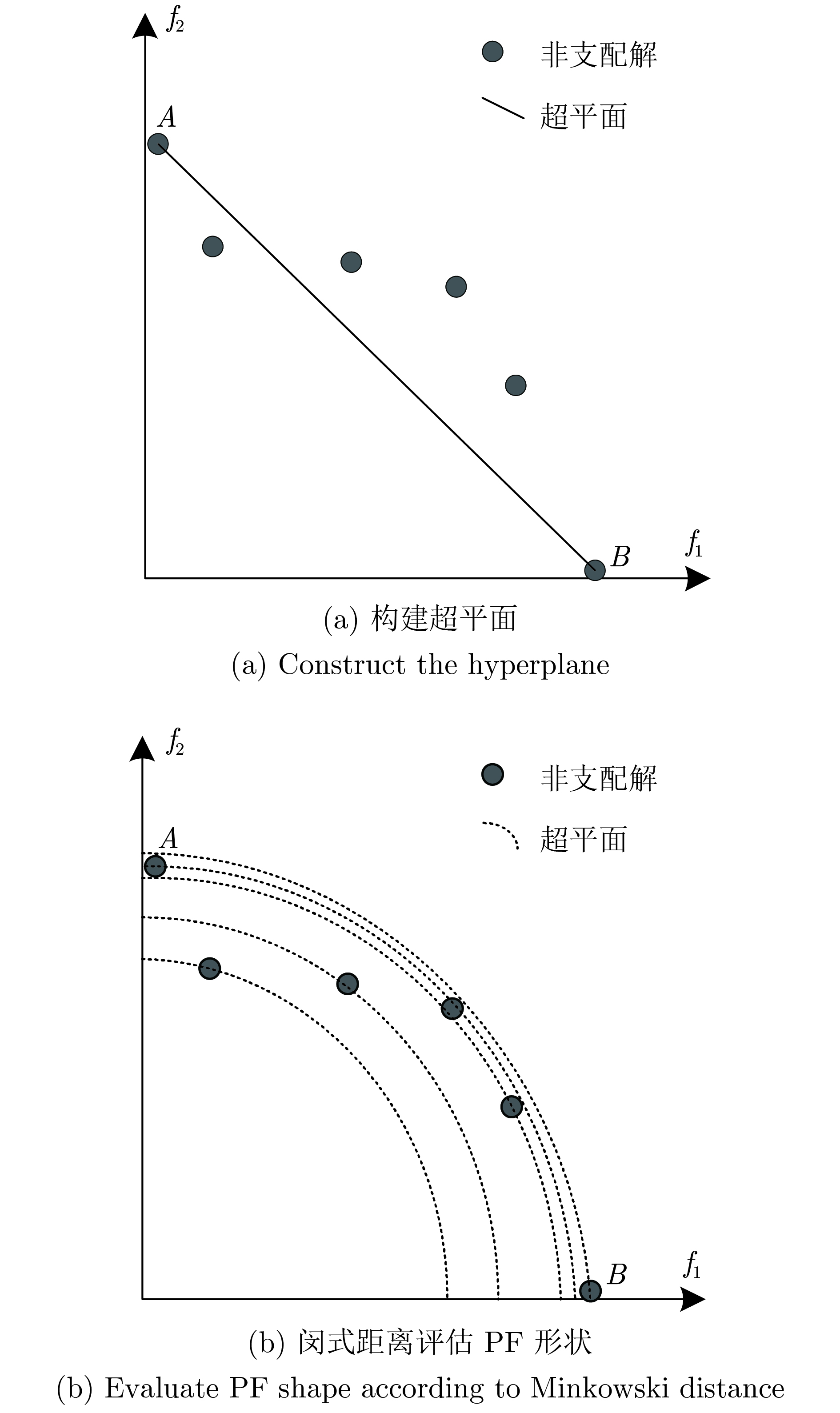
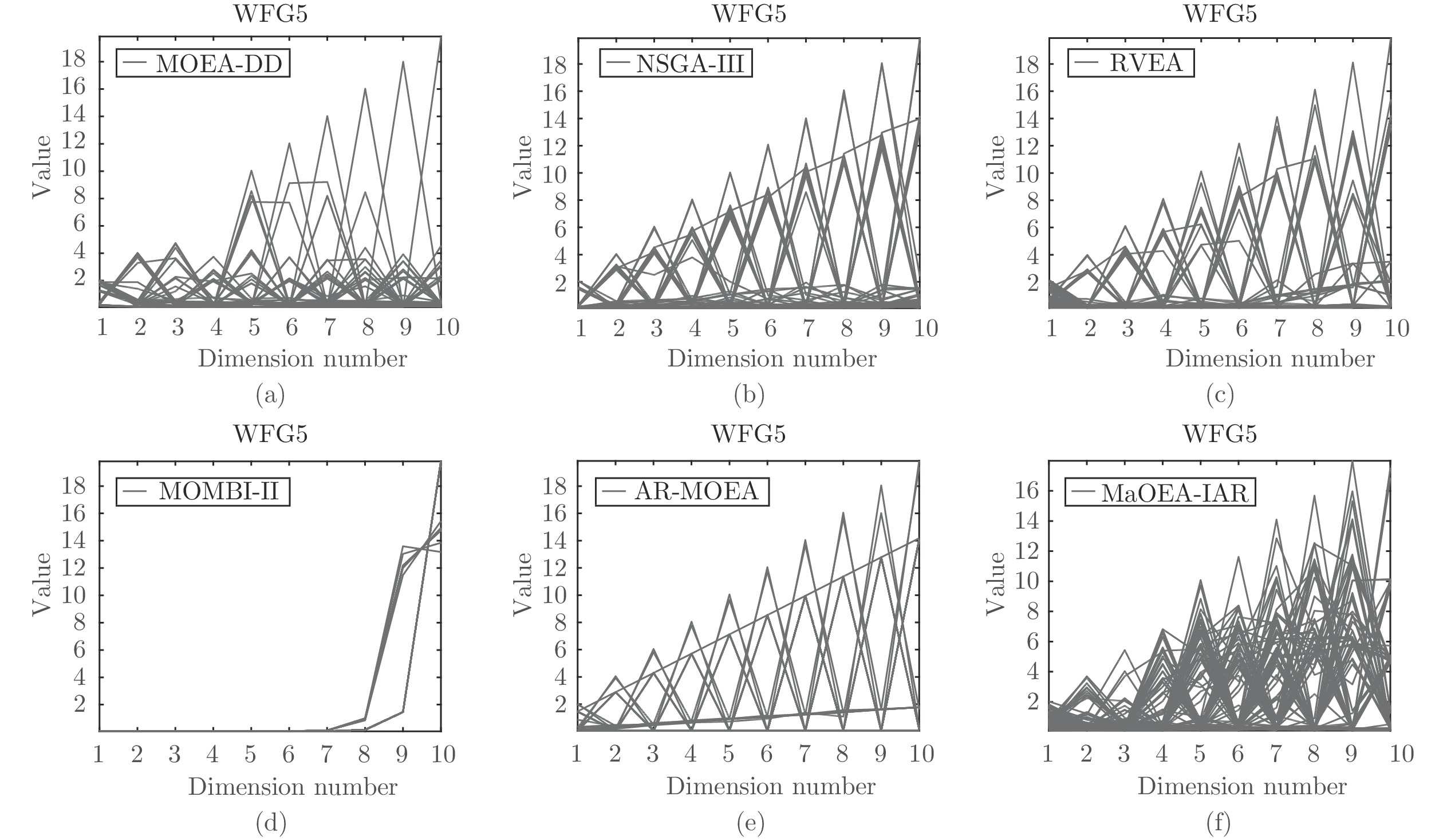
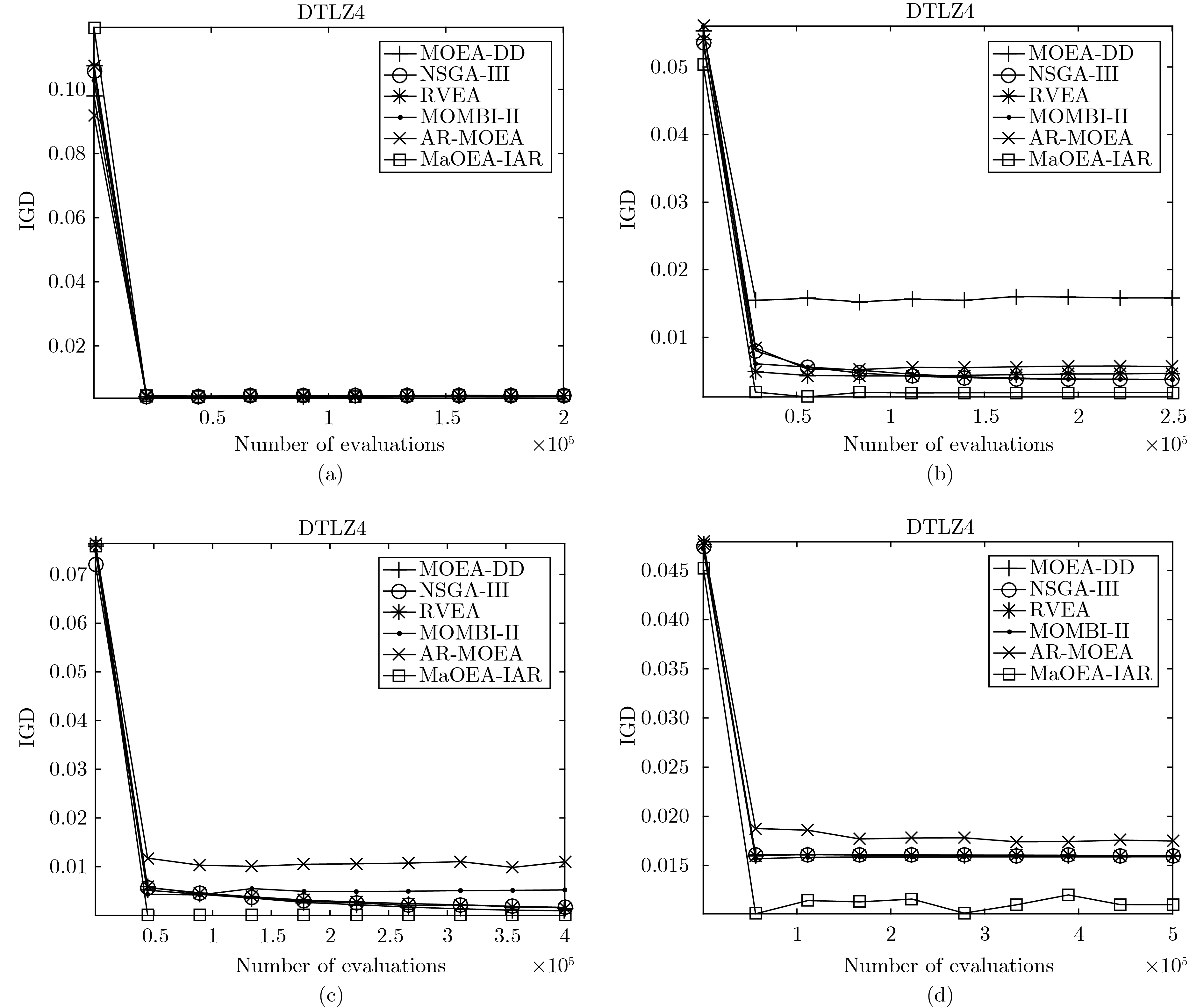
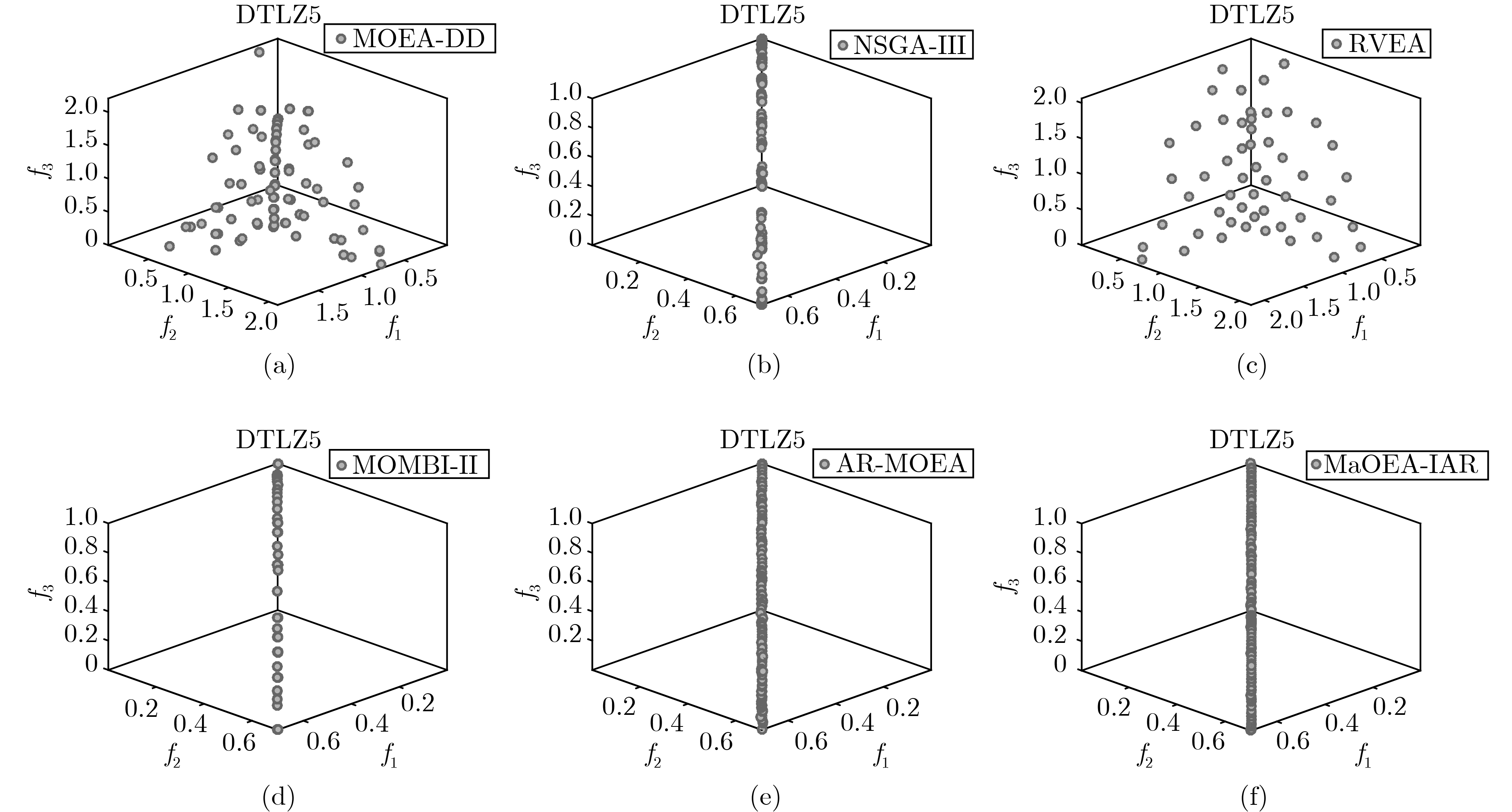
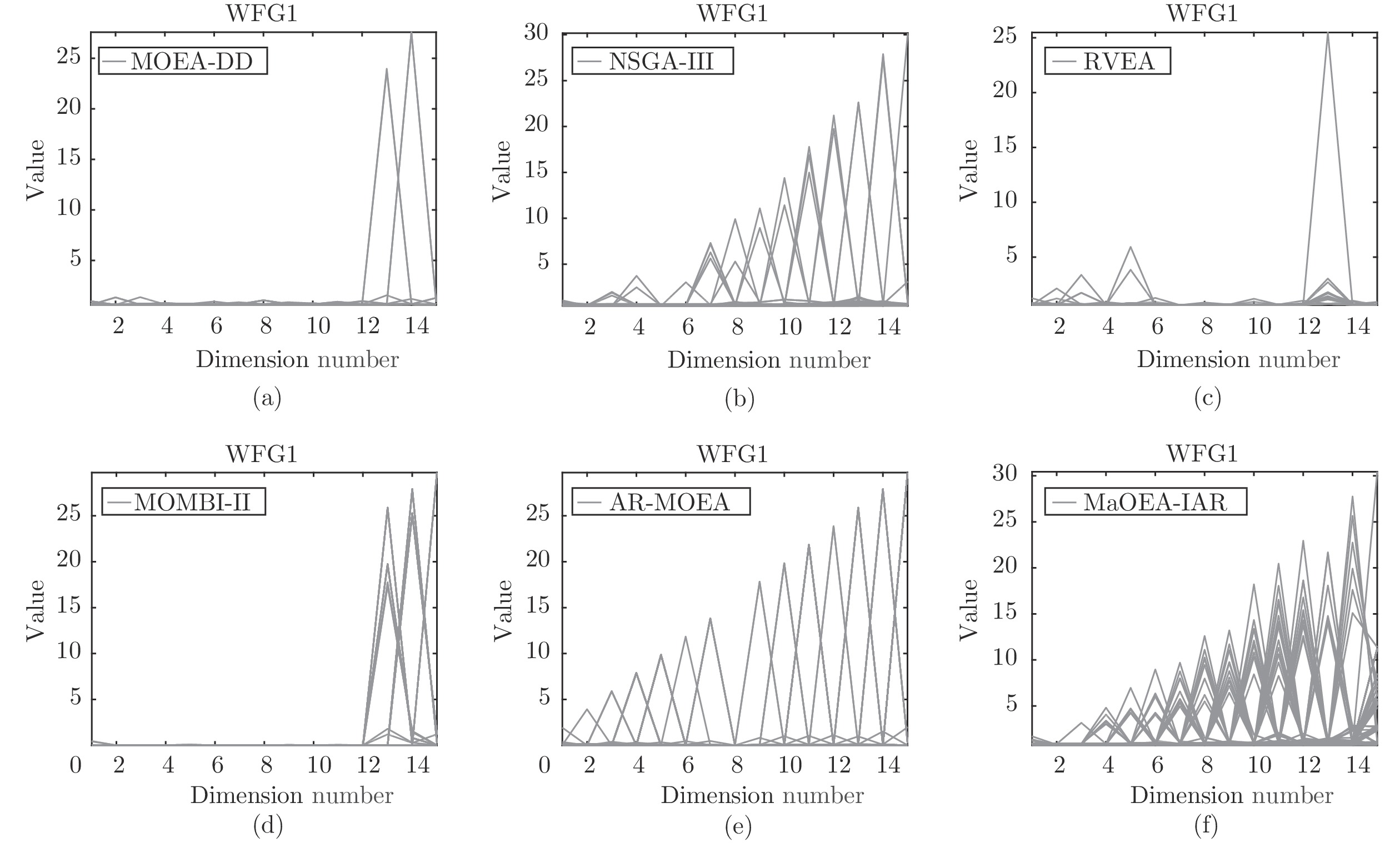
在具有不同Pareto前沿形状的优化问题上, 基于参考点的高维多目标进化算法表现出较差的通用性. 为了解决这个问题, 提出参考点自适应调整下评价指标驱动的高维多目标进化算法(Many-objective evolutionary algorithm driven by evaluation indicator under adaptive reference point adjustment, MaOEA-IAR). MaOEA-IAR提出Pareto前沿形状监测基础上的参考点自适应策略, 利用该策略选择一组候选解作为初始参考点; 然后通过曲线参数对参考点位置进行调整; 将最终得到的能够适应不同Pareto前沿的参考点用于计算增强的反世代距离指标, 基于指标值设计适应度函数作为选择标准. 实验证明提出的算法在处理各种Pareto前沿形状的优化问题时能获得较好的性能, 算法通用性高.
在具有不同Pareto前沿形状的优化问题上, 基于参考点的高维多目标进化算法表现出较差的通用性. 为了解决这个问题, 提出参考点自适应调整下评价指标驱动的高维多目标进化算法(Many-objective evolutionary algorithm driven by evaluation indicator under adaptive reference point adjustment, MaOEA-IAR). MaOEA-IAR提出Pareto前沿形状监测基础上的参考点自适应策略, 利用该策略选择一组候选解作为初始参考点; 然后通过曲线参数对参考点位置进行调整; 将最终得到的能够适应不同Pareto前沿的参考点用于计算增强的反世代距离指标, 基于指标值设计适应度函数作为选择标准. 实验证明提出的算法在处理各种Pareto前沿形状的优化问题时能获得较好的性能, 算法通用性高.
2022, 48(6): 1590-1600.
doi: 10.16383/j.aas.c190349
摘要:
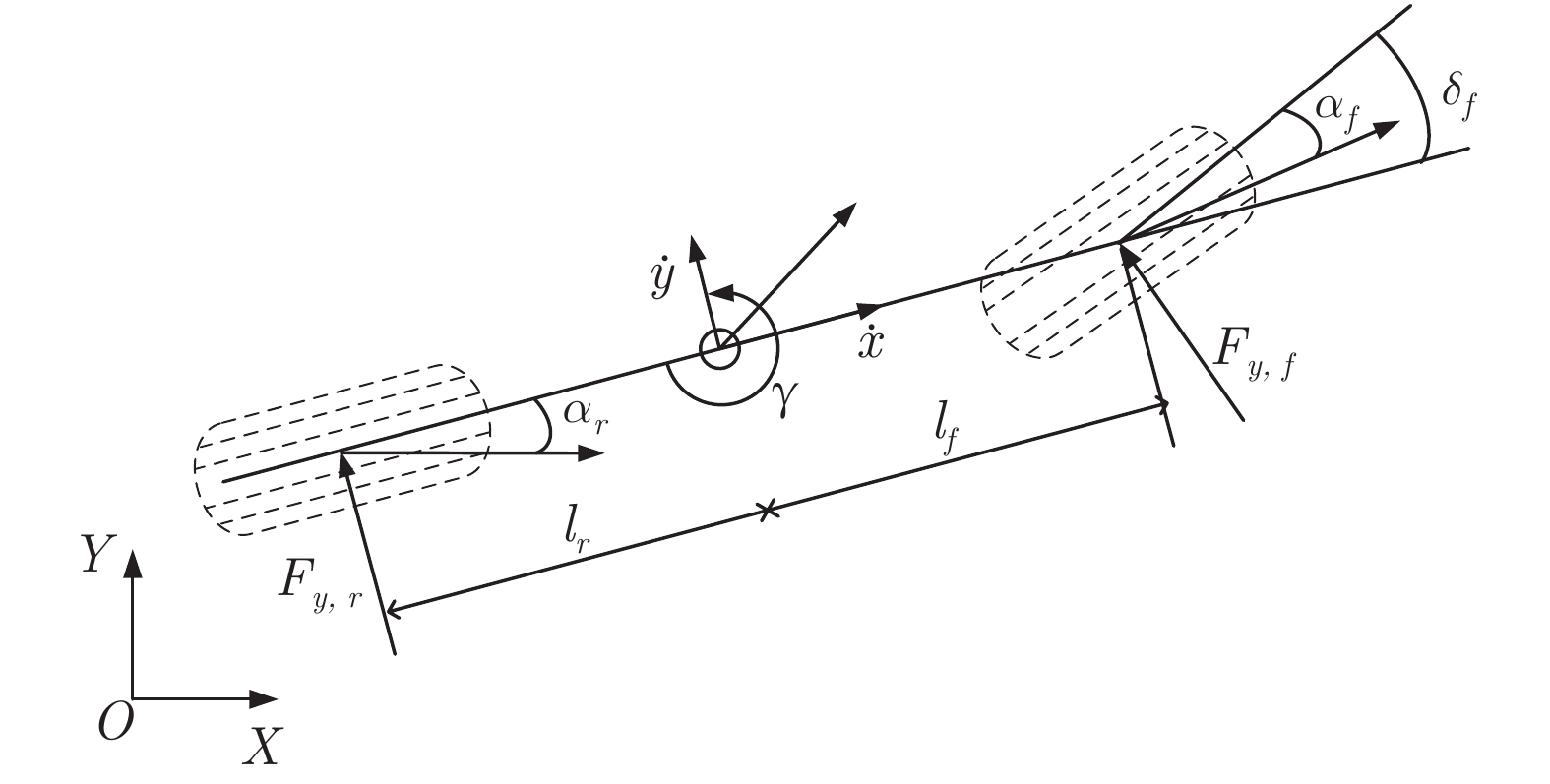
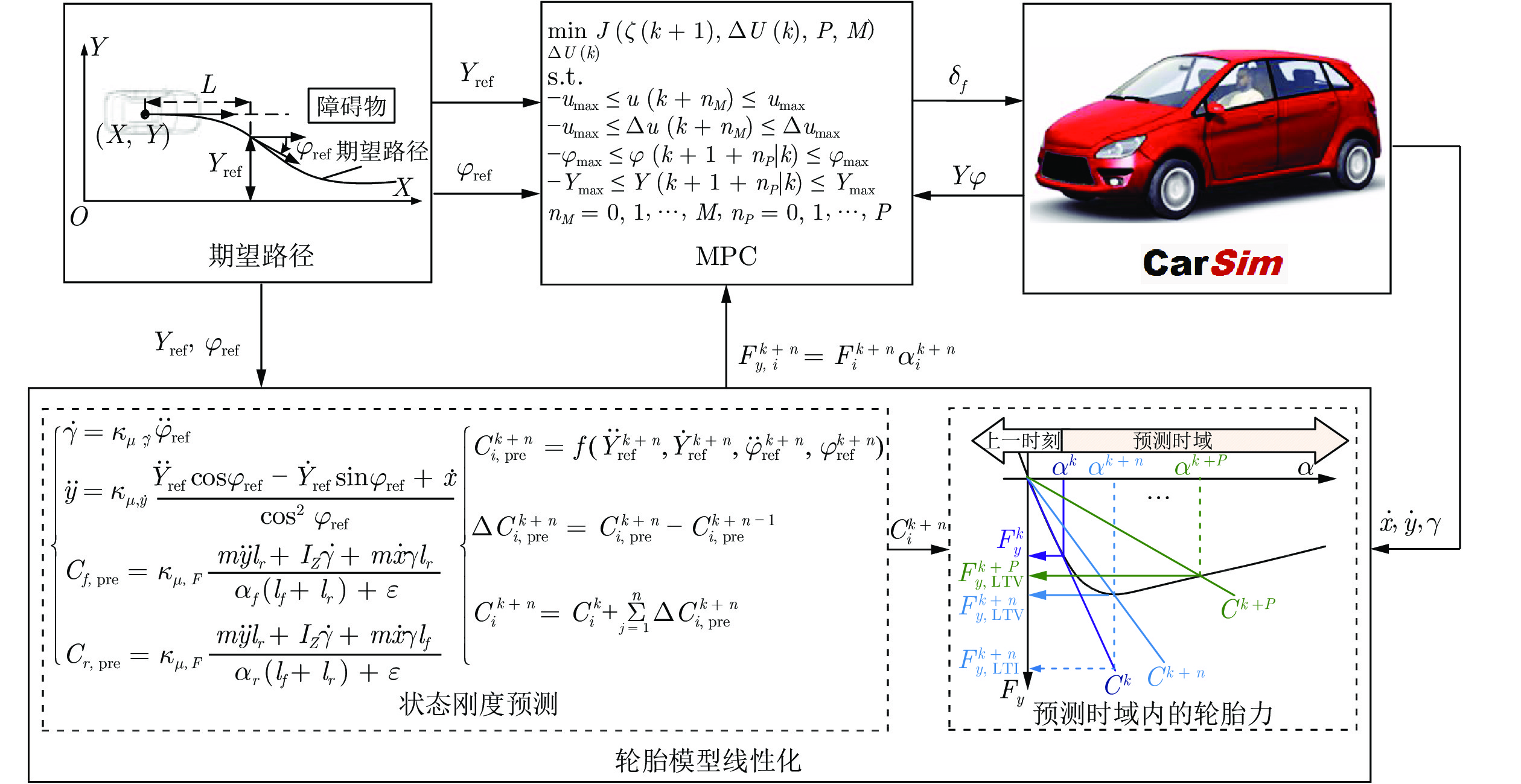
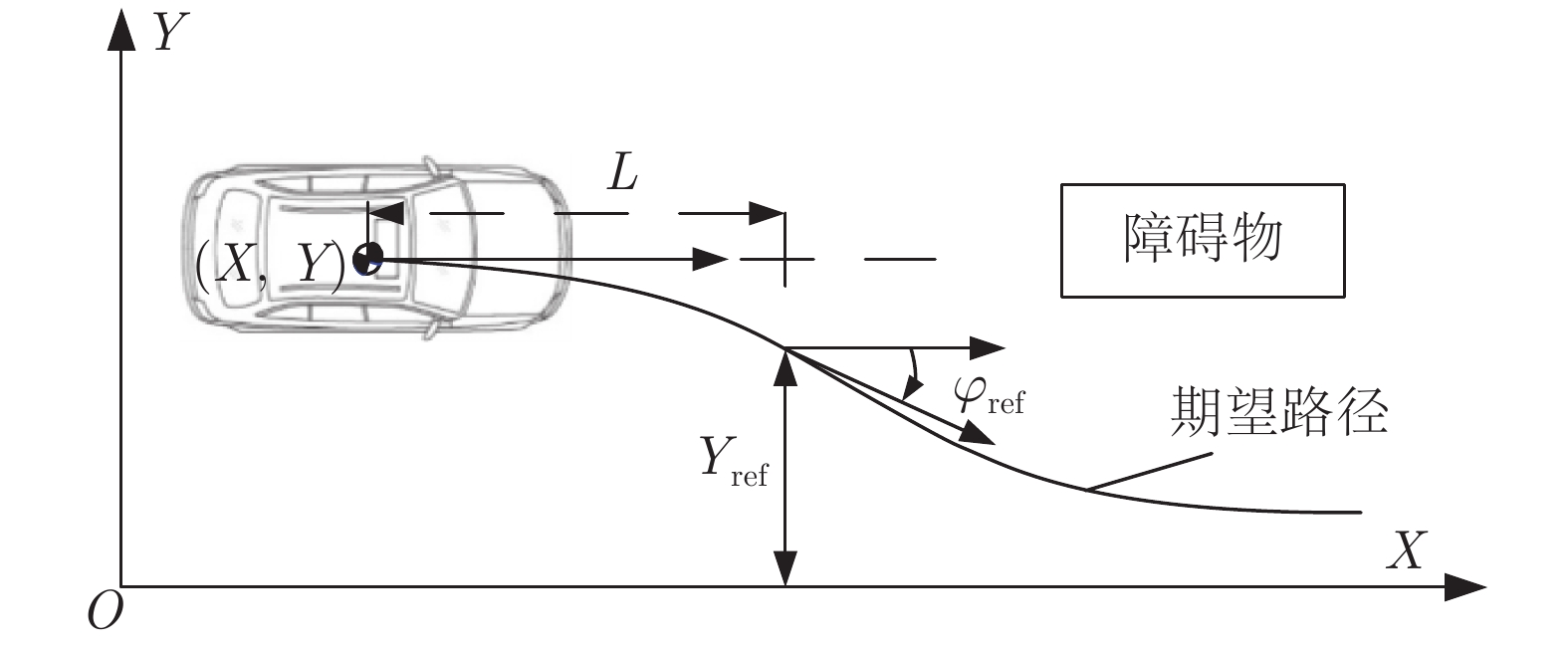
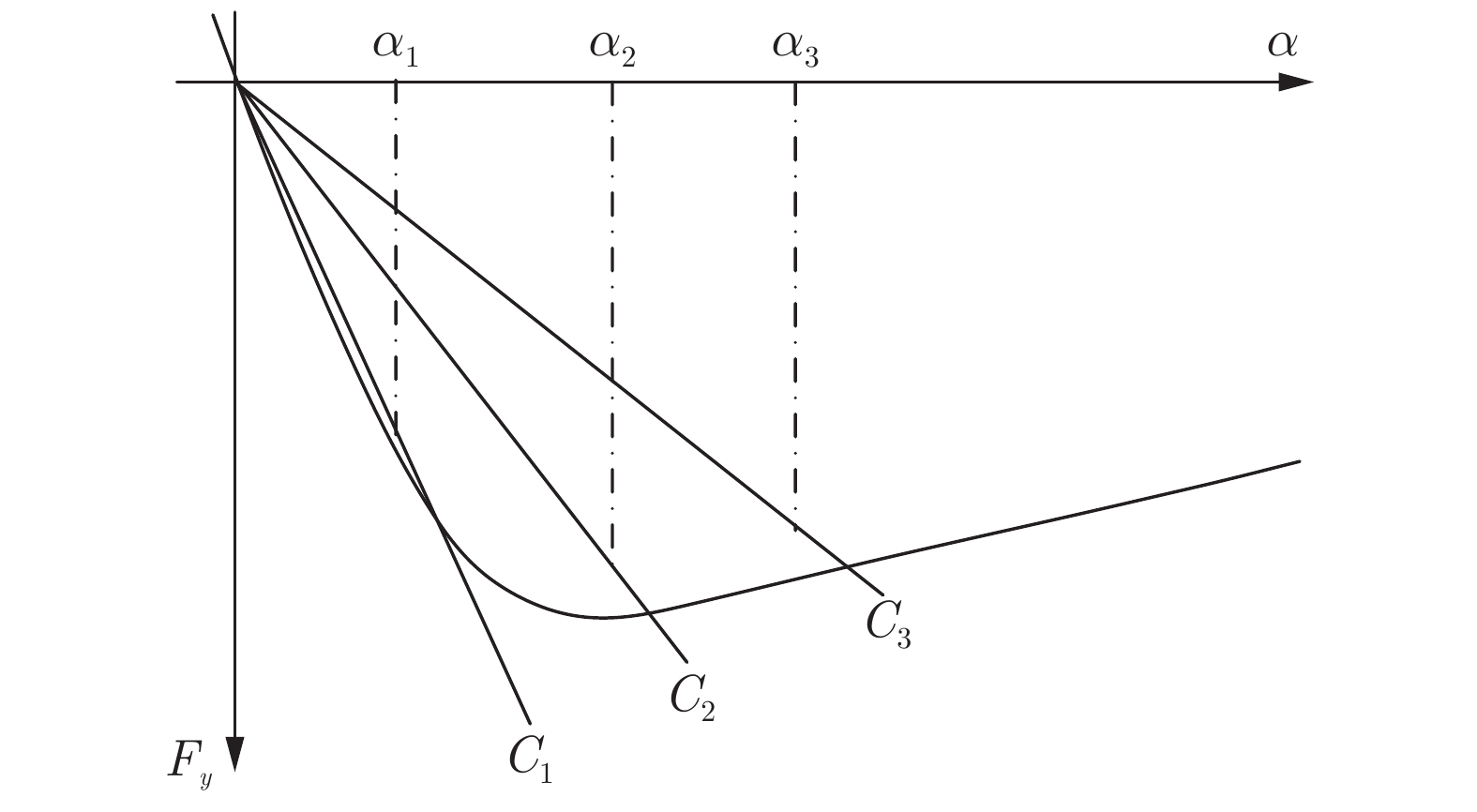
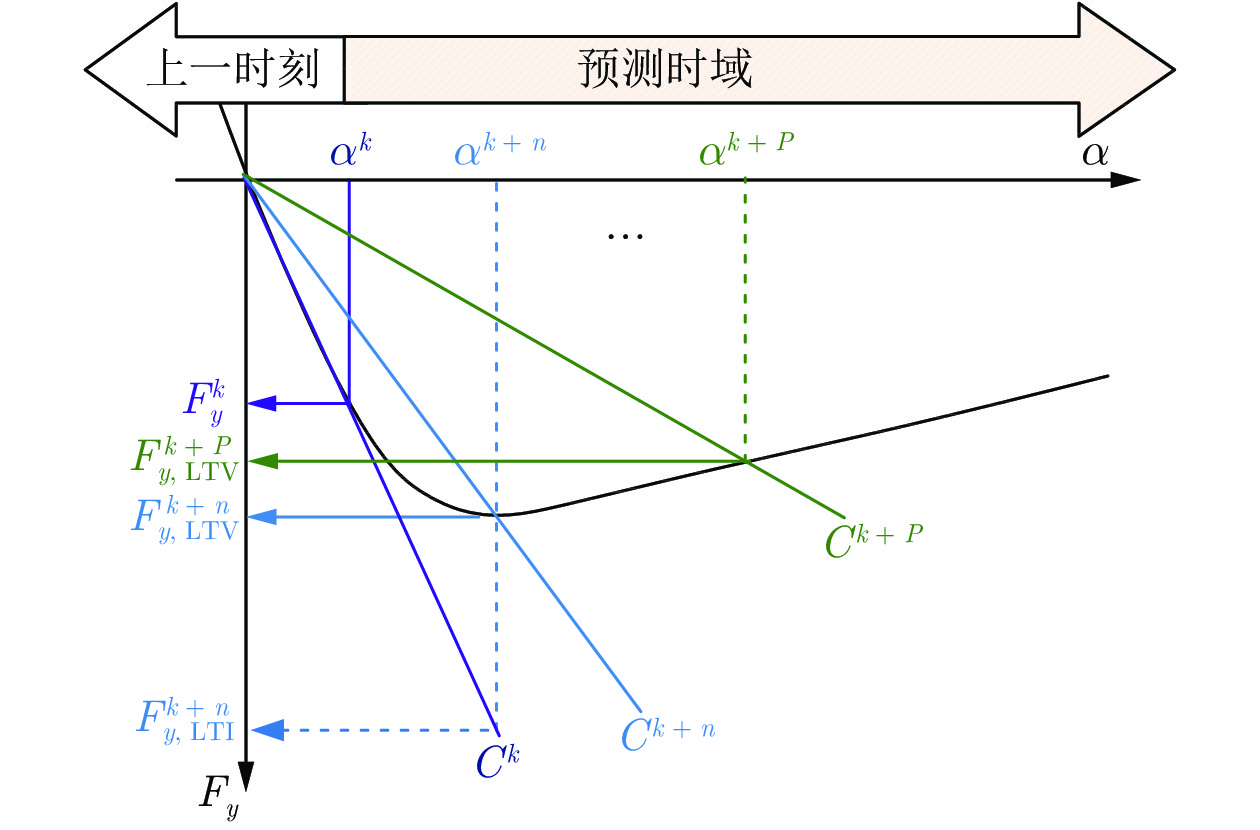
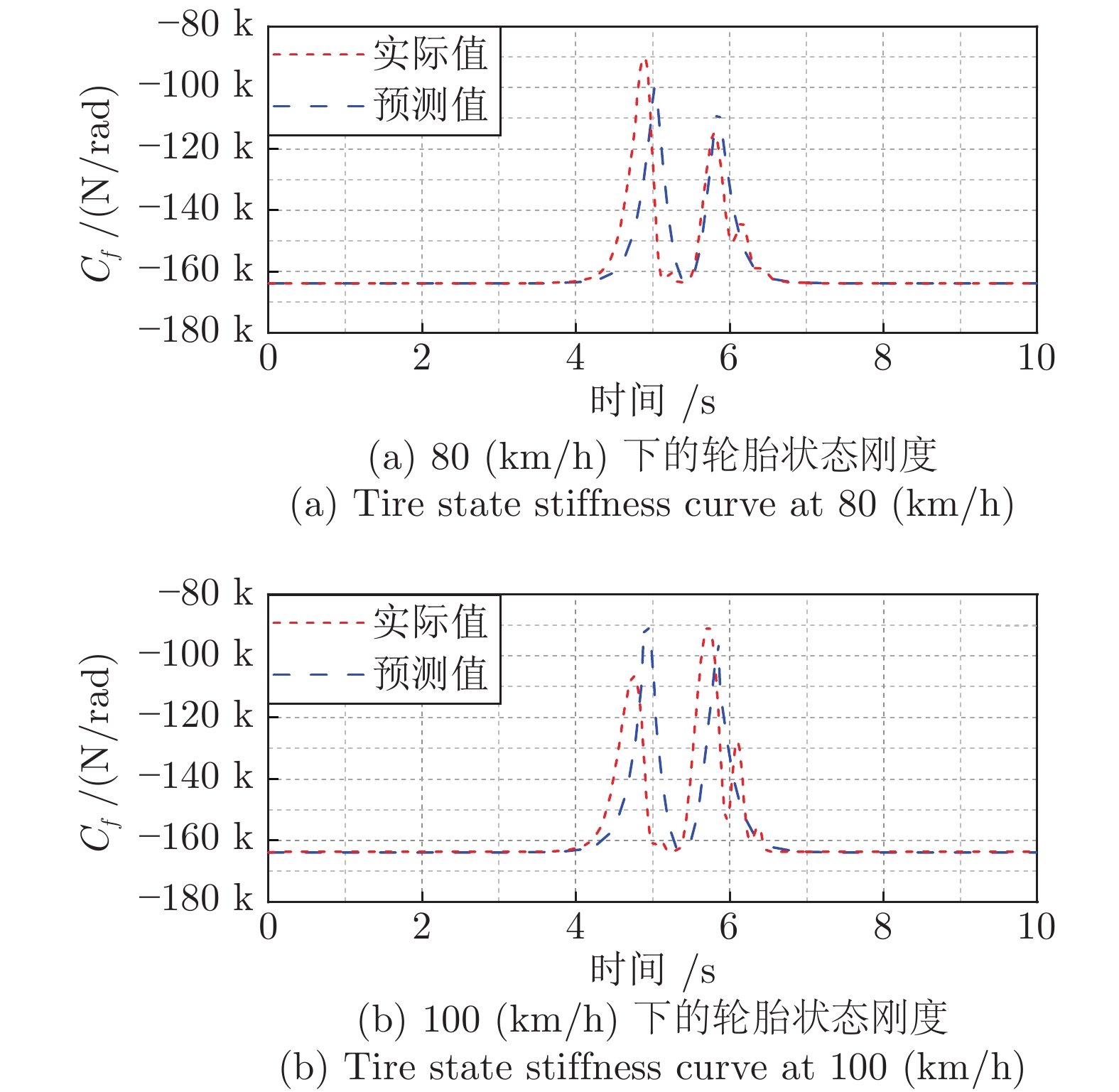
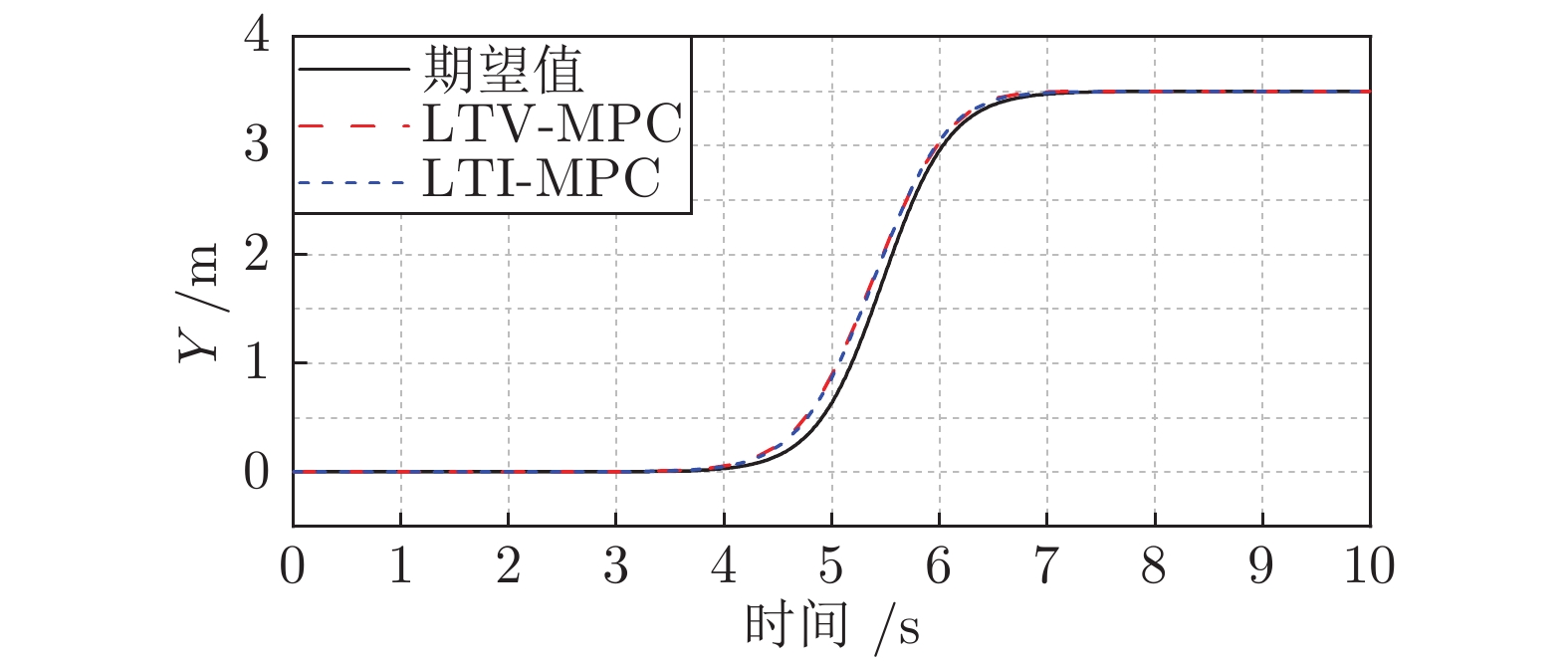
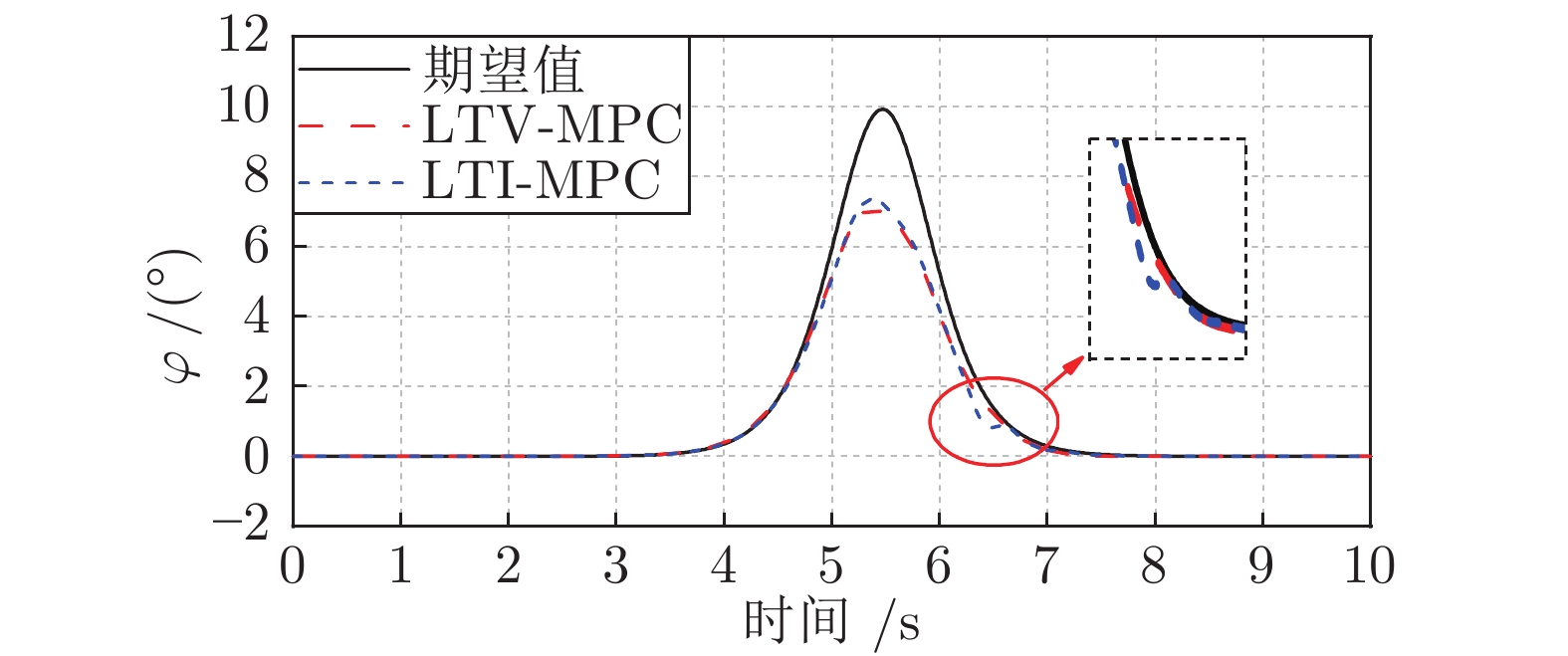
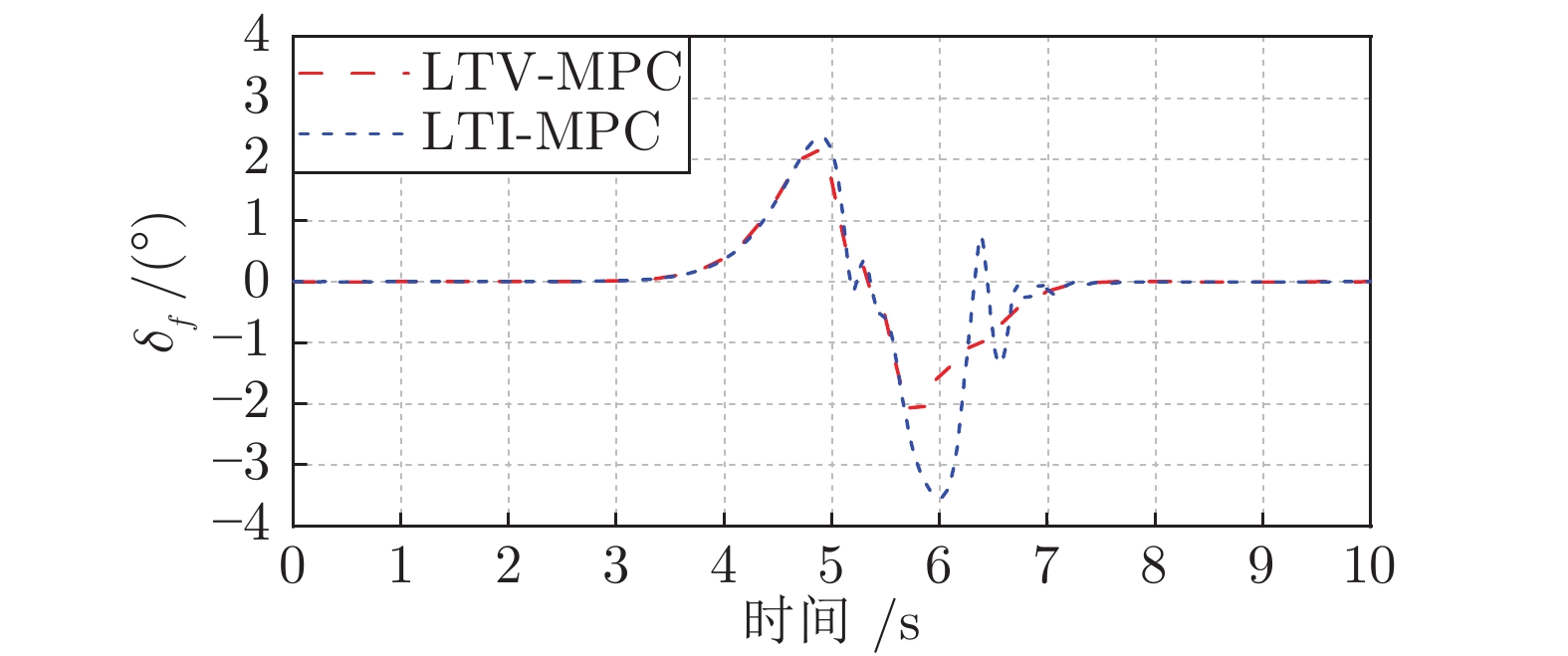
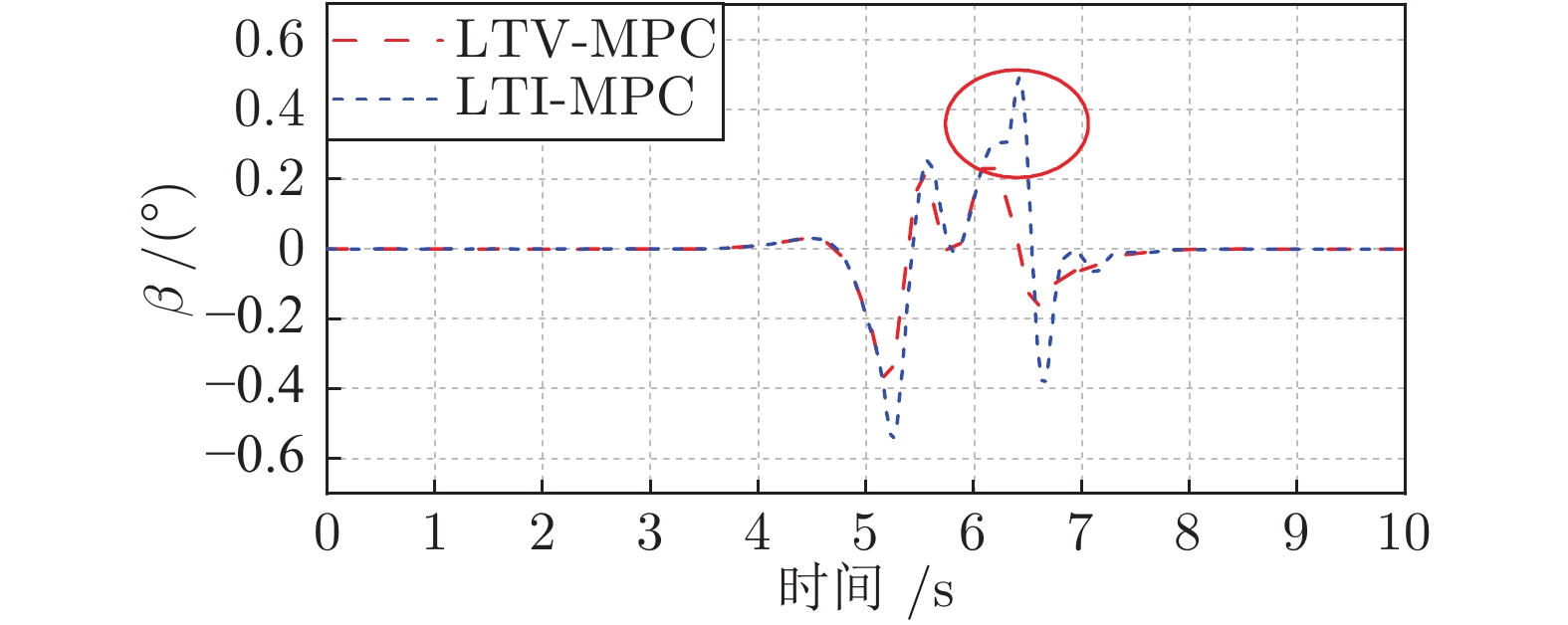
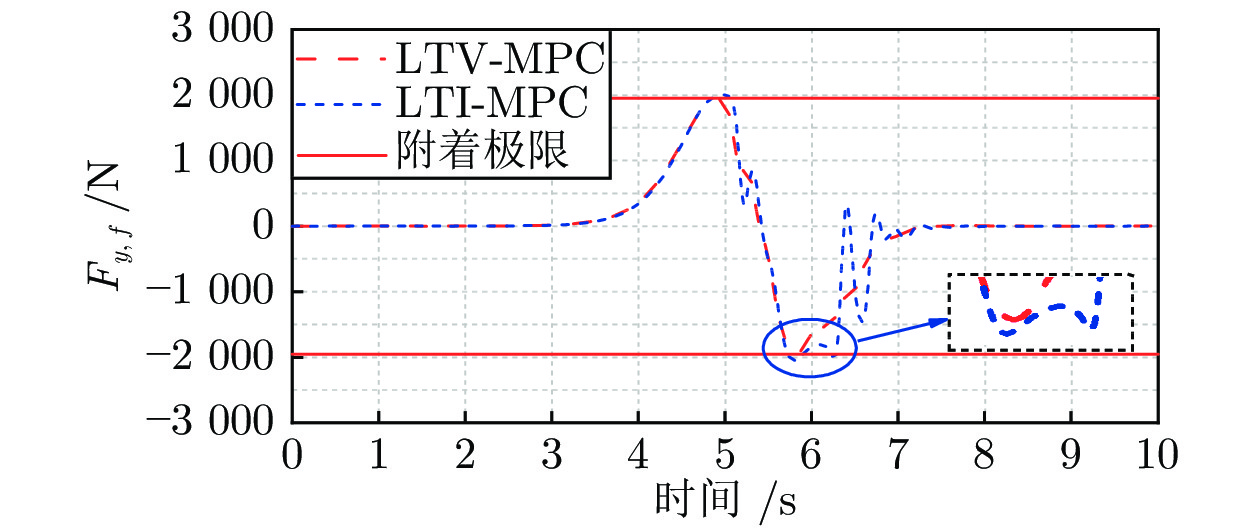
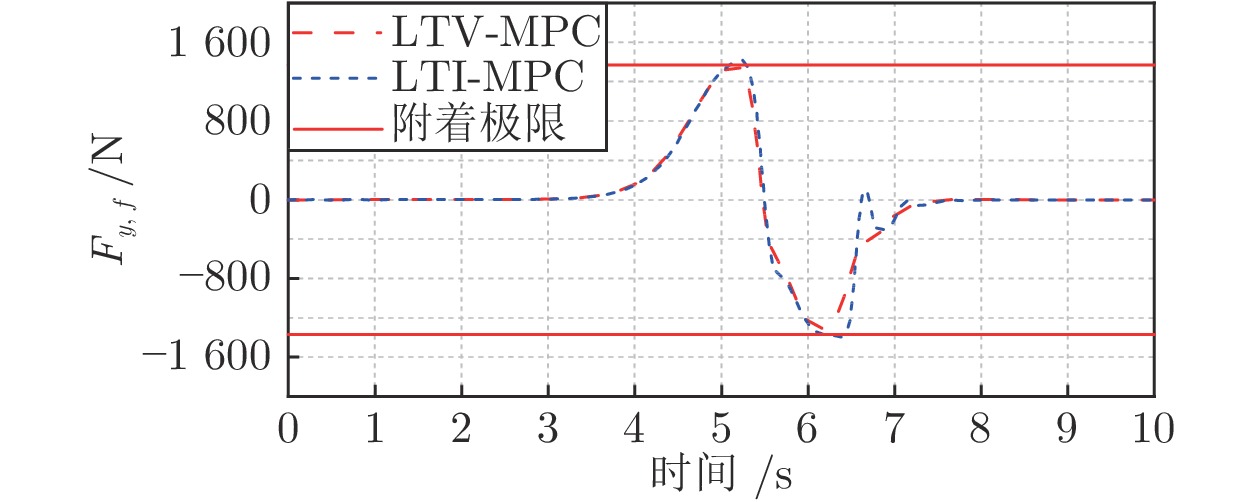
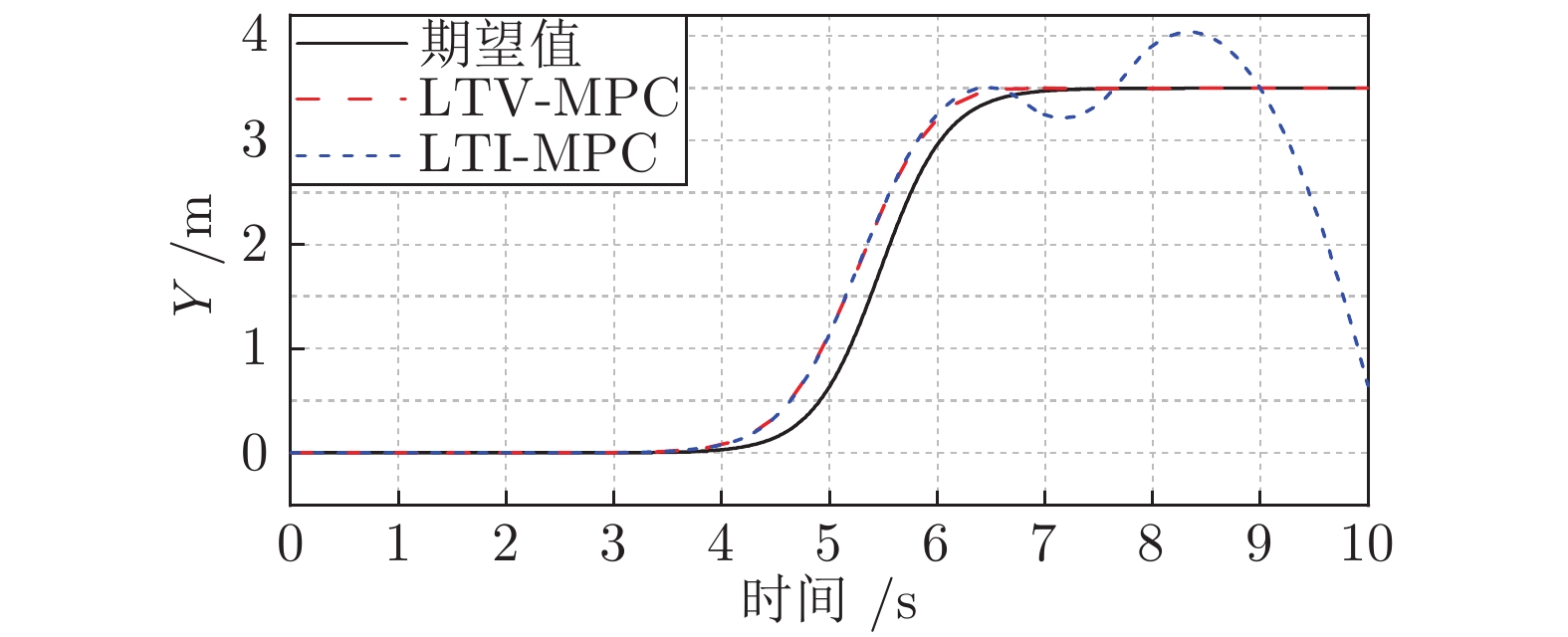
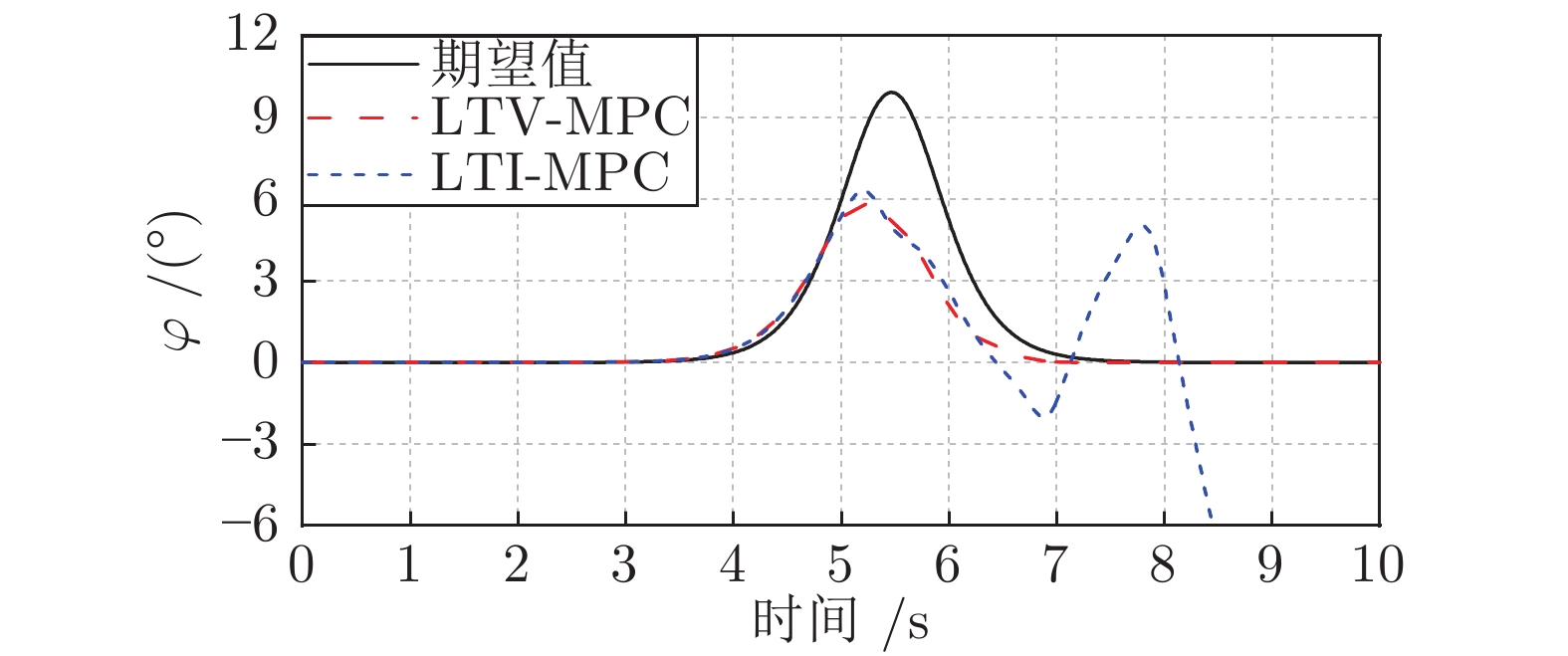
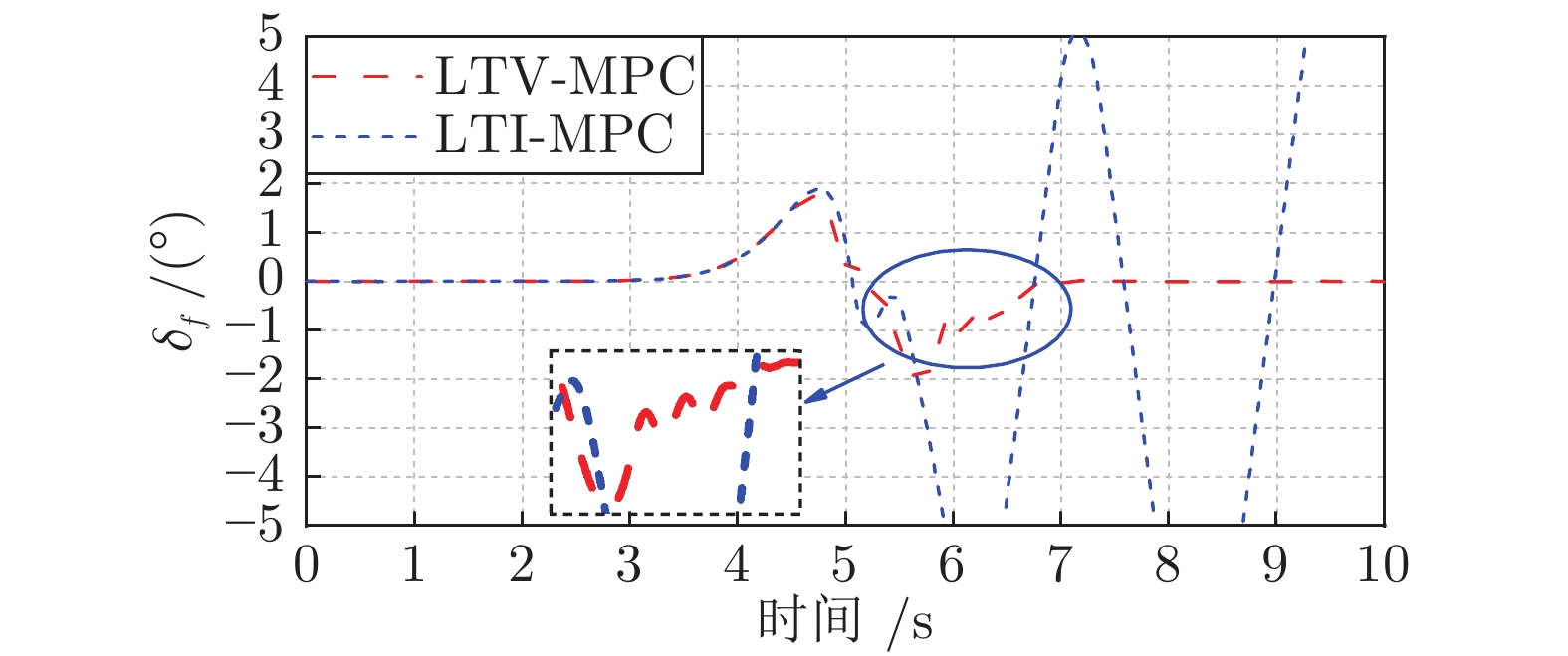
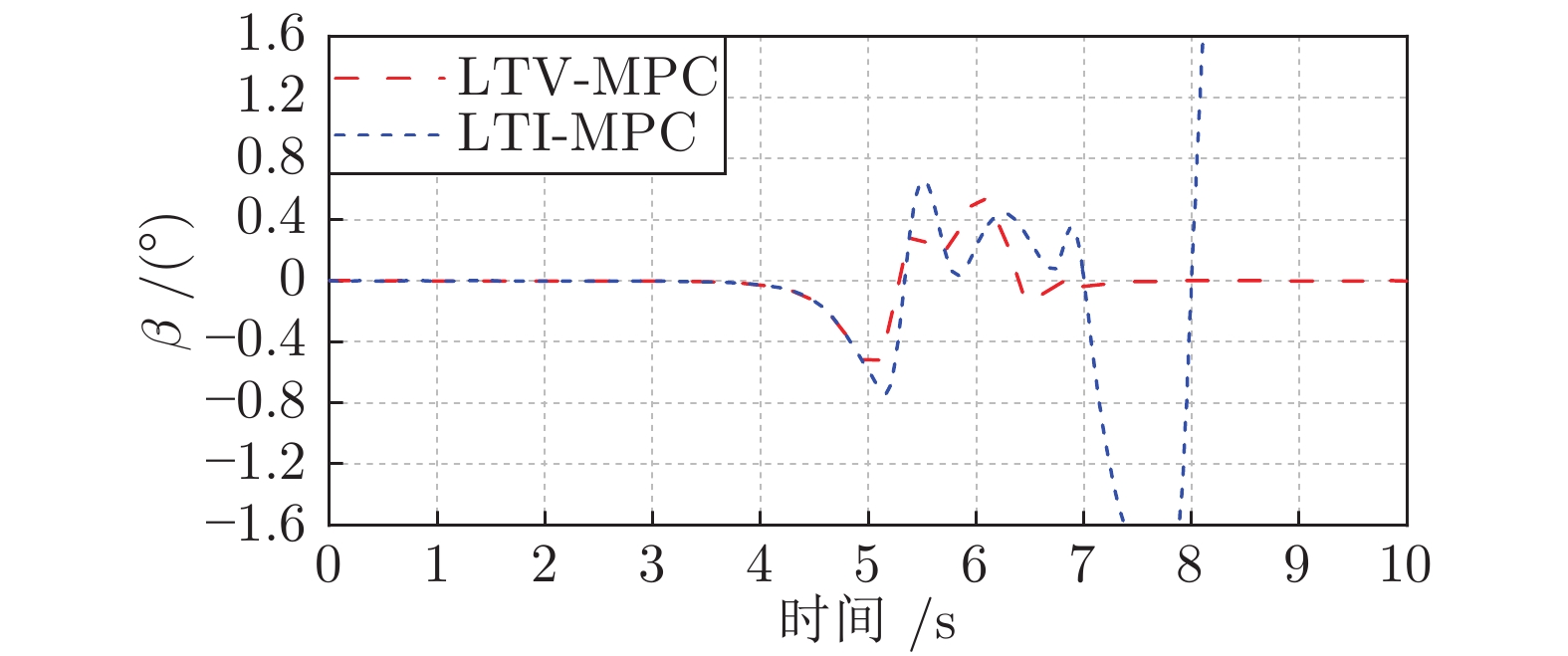
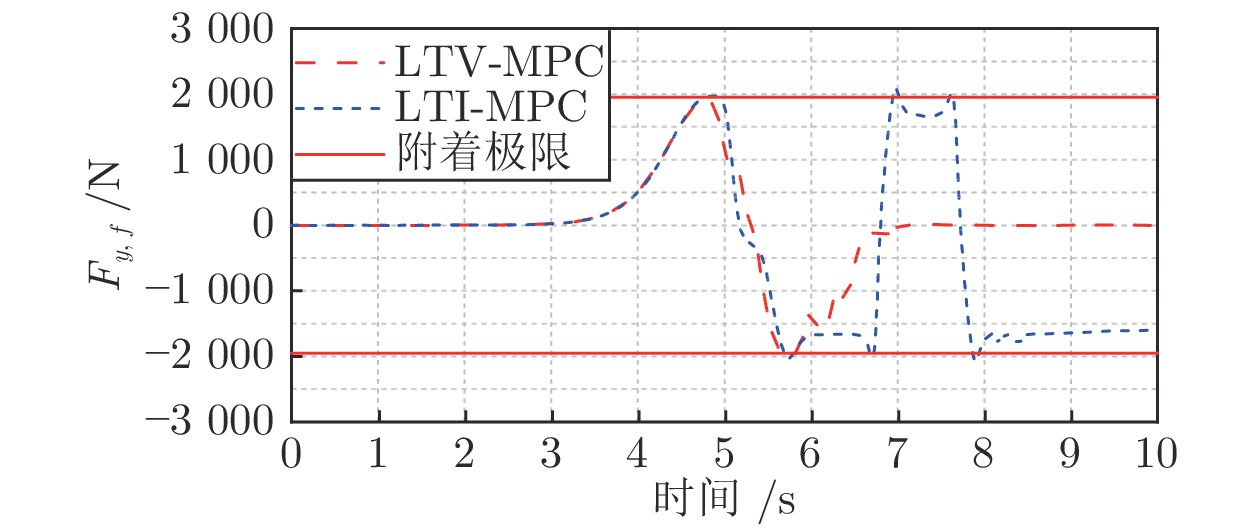
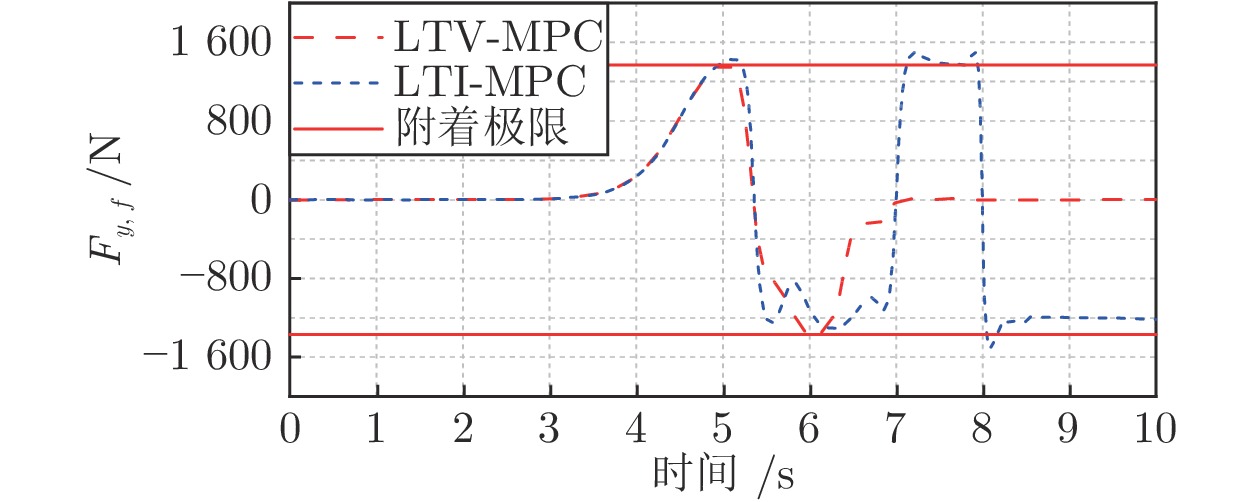
为解决高速极限工况下自动驾驶车辆紧急避撞时传统路径跟踪控制方法因轮胎力表达不精确导致的路径跟踪失败问题, 提出一种基于轮胎状态刚度预测的模型预测路径跟踪控制方法. 首先, 基于非线性UniTire轮胎模型求解的轮胎状态刚度对非线性轮胎力进行线性化处理. 其次, 基于期望路径信息提出状态刚度预测方法, 实现预测时域内轮胎力的预测和线性化. 最后, MATLAB和CarSim联合仿真实验表明: 所提出的方法能够明显改善高速极限工况下的避撞控制效果.
为解决高速极限工况下自动驾驶车辆紧急避撞时传统路径跟踪控制方法因轮胎力表达不精确导致的路径跟踪失败问题, 提出一种基于轮胎状态刚度预测的模型预测路径跟踪控制方法. 首先, 基于非线性UniTire轮胎模型求解的轮胎状态刚度对非线性轮胎力进行线性化处理. 其次, 基于期望路径信息提出状态刚度预测方法, 实现预测时域内轮胎力的预测和线性化. 最后, MATLAB和CarSim联合仿真实验表明: 所提出的方法能够明显改善高速极限工况下的避撞控制效果.
2022, 48(6): 1601-1615.
doi: 10.16383/j.aas.c200322
摘要:
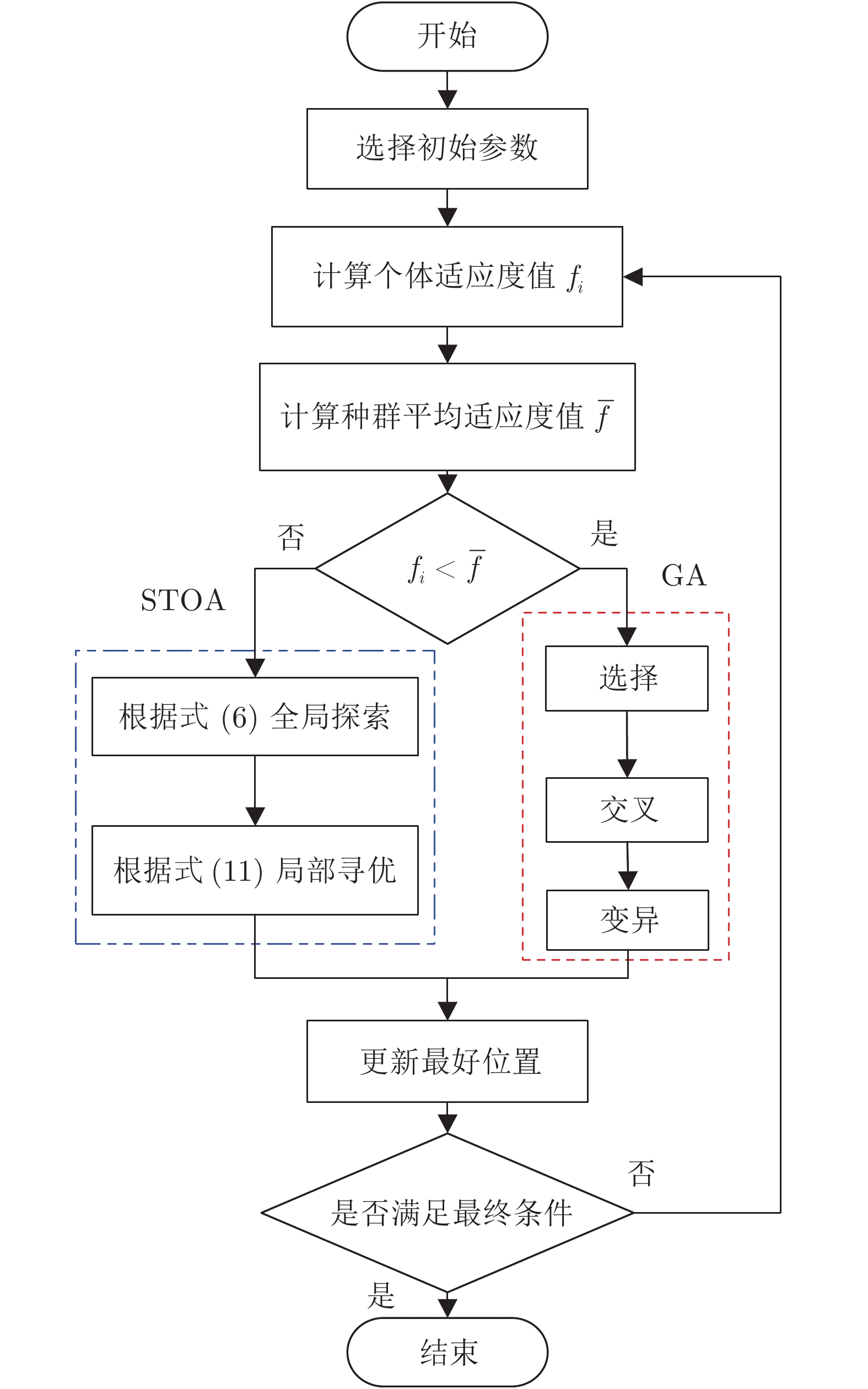
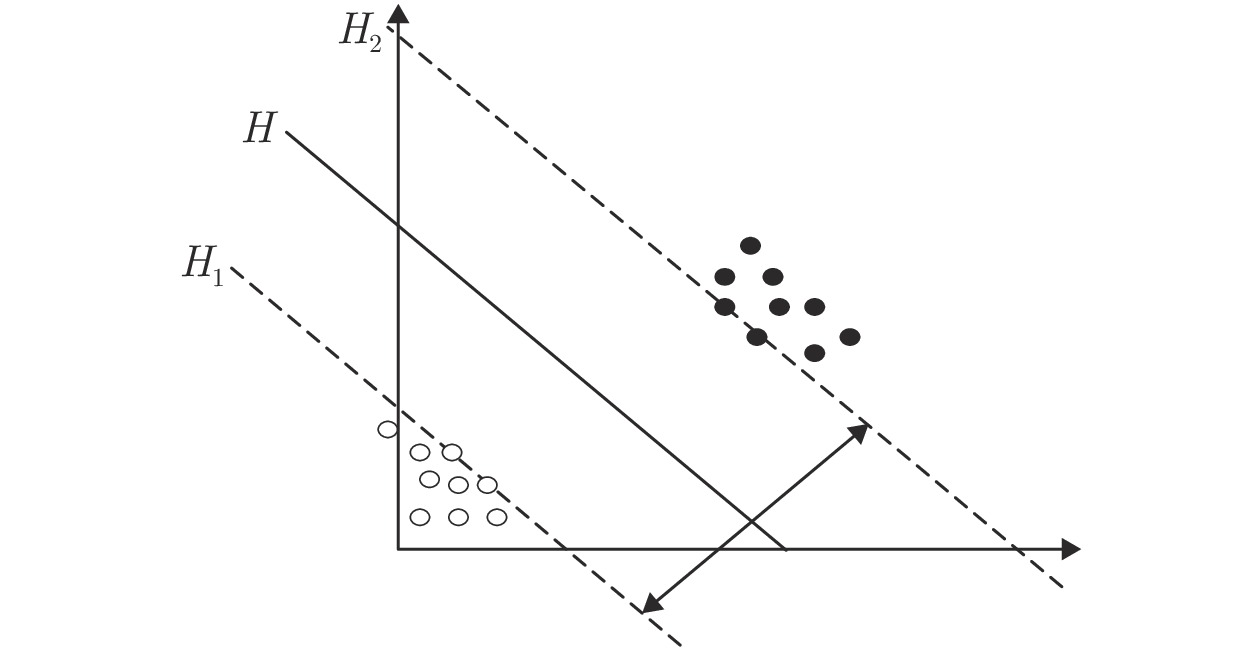
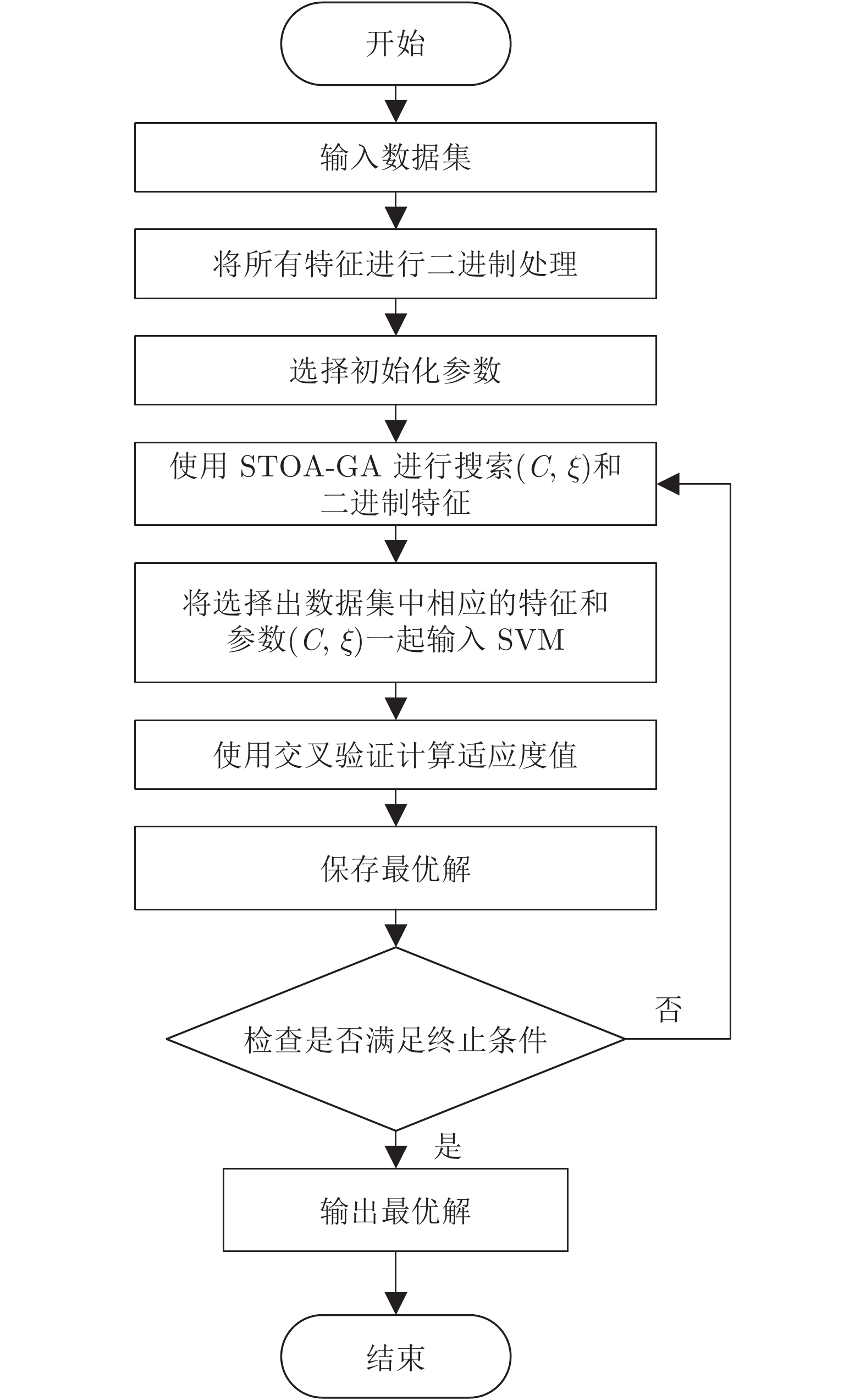
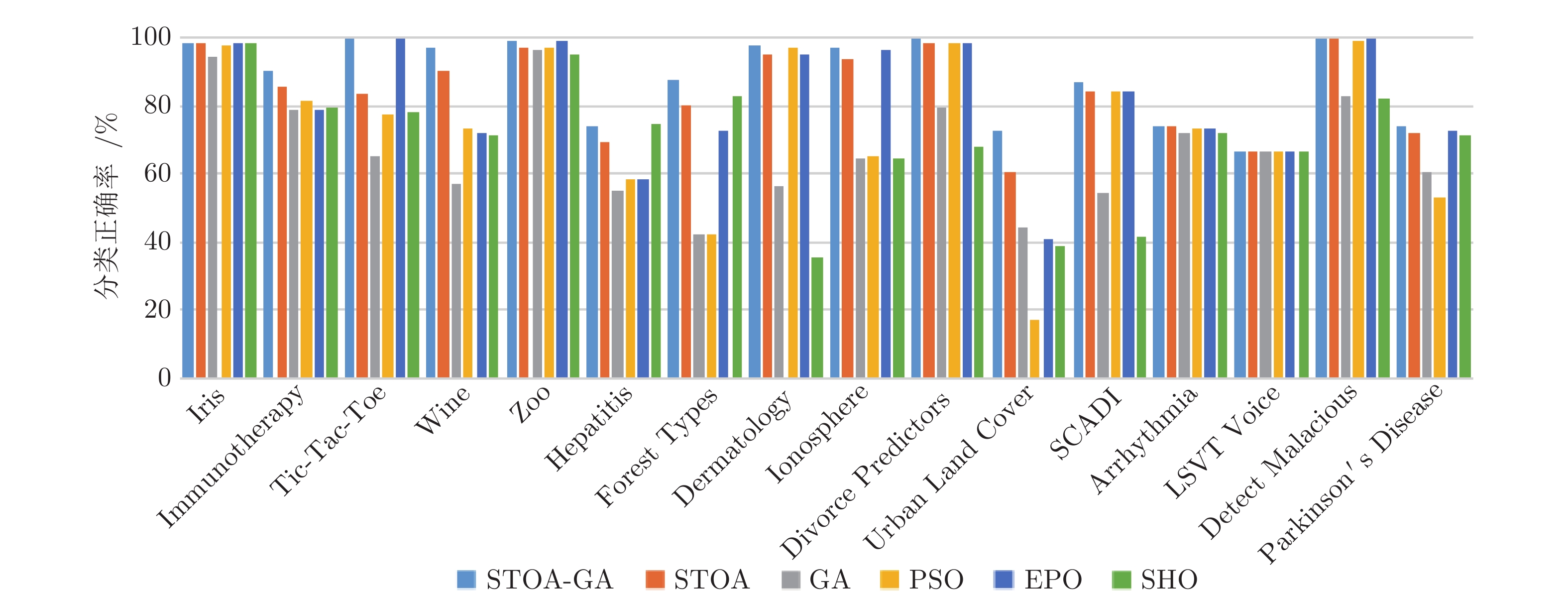
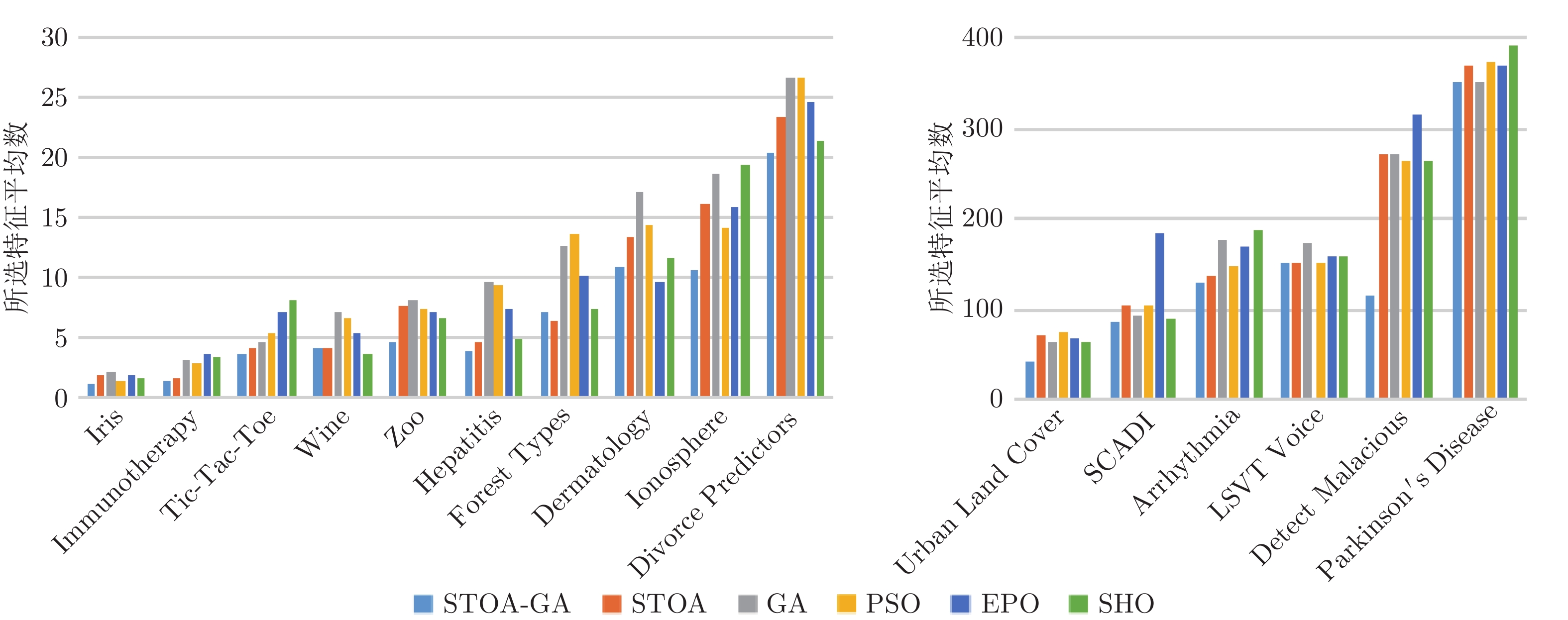
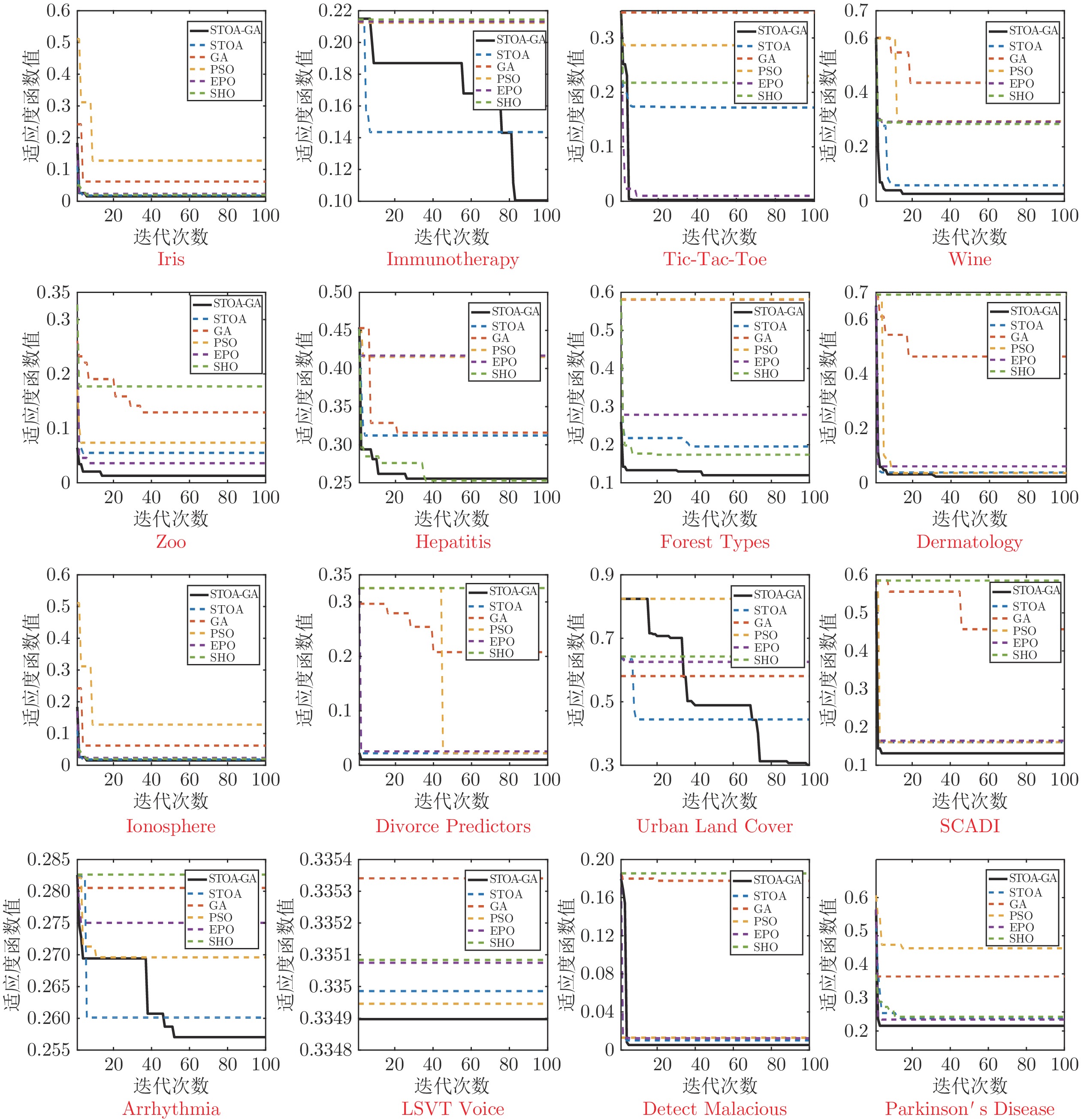
针对传统支持向量机方法用于数据分类存在分类精度低的不足问题, 将支持向量机分类方法与特征选择同步结合, 并利用智能优化算法对算法参数进行优化研究. 首先将遗传算法(Genetic algorithm, GA)和乌燕鸥优化算法(Sooty tern optimization algorithm, STOA)进行混合, 先通过对平均适应度值进行评估, 当个体的适应度函数值小于平均值时采用遗传算法对其进行局部搜索的加强, 否则进行乌燕鸥本体优化过程, 同时将支持向量机内核函数和特征选择目标共同作为优化对象, 利用改进后的STOA-GA寻找最适应解, 获得所选的特征分类结果. 其次, 通过16组经典UCI数据集和实际乳腺癌数据集进行数据分类研究, 在最佳适应度值、所选特征个数、特异性、敏感性和算法耗时方面进行对比研究, 实验结果表明, 该算法可以更加准确地处理数据, 避免冗余特征干扰, 在数据挖掘领域具有更广阔的工程应用前景.
针对传统支持向量机方法用于数据分类存在分类精度低的不足问题, 将支持向量机分类方法与特征选择同步结合, 并利用智能优化算法对算法参数进行优化研究. 首先将遗传算法(Genetic algorithm, GA)和乌燕鸥优化算法(Sooty tern optimization algorithm, STOA)进行混合, 先通过对平均适应度值进行评估, 当个体的适应度函数值小于平均值时采用遗传算法对其进行局部搜索的加强, 否则进行乌燕鸥本体优化过程, 同时将支持向量机内核函数和特征选择目标共同作为优化对象, 利用改进后的STOA-GA寻找最适应解, 获得所选的特征分类结果. 其次, 通过16组经典UCI数据集和实际乳腺癌数据集进行数据分类研究, 在最佳适应度值、所选特征个数、特异性、敏感性和算法耗时方面进行对比研究, 实验结果表明, 该算法可以更加准确地处理数据, 避免冗余特征干扰, 在数据挖掘领域具有更广阔的工程应用前景.

2022, 48(6): 1616-1624.
doi: 10.16383/j.aas.c200996
摘要:
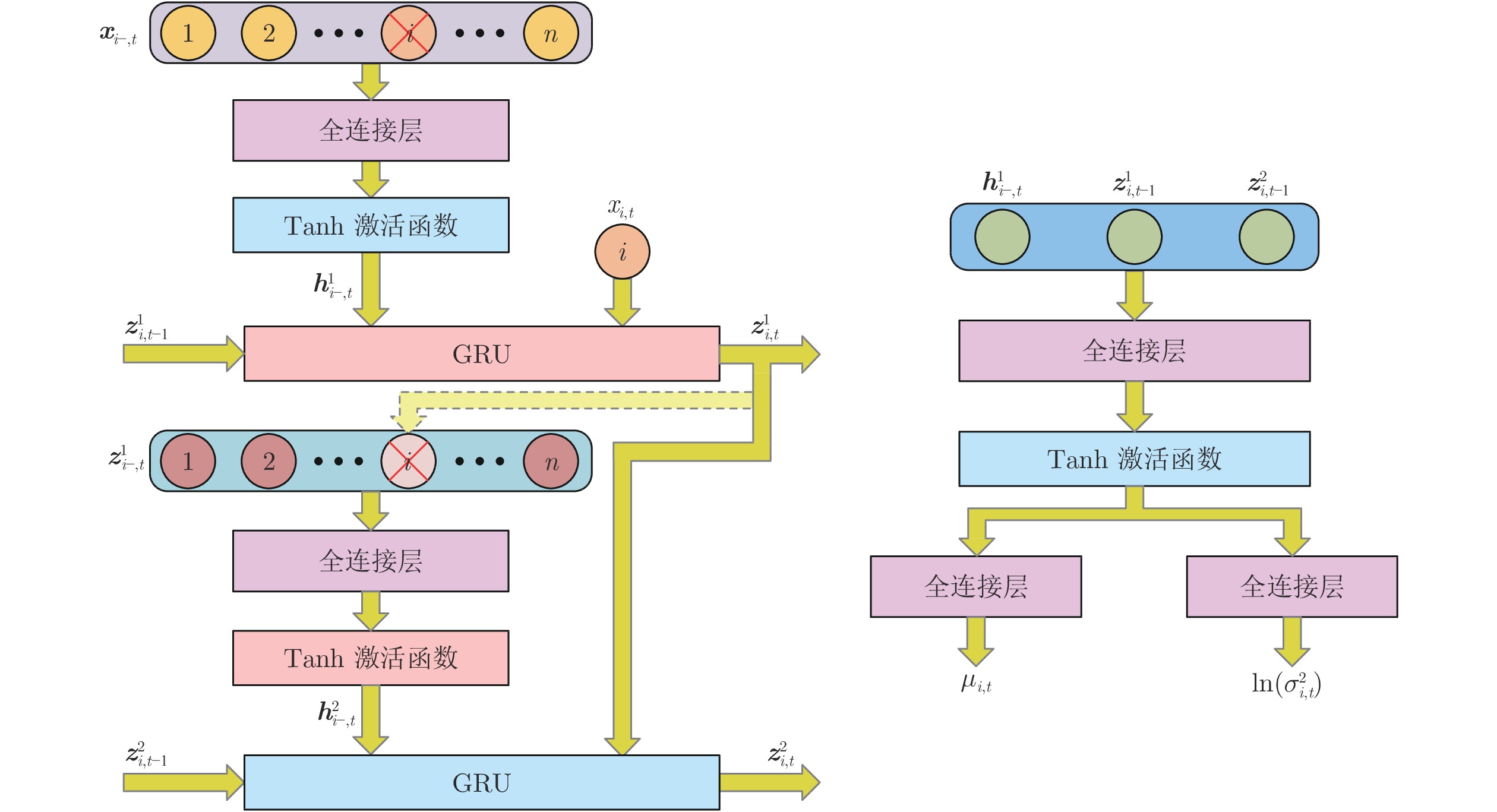
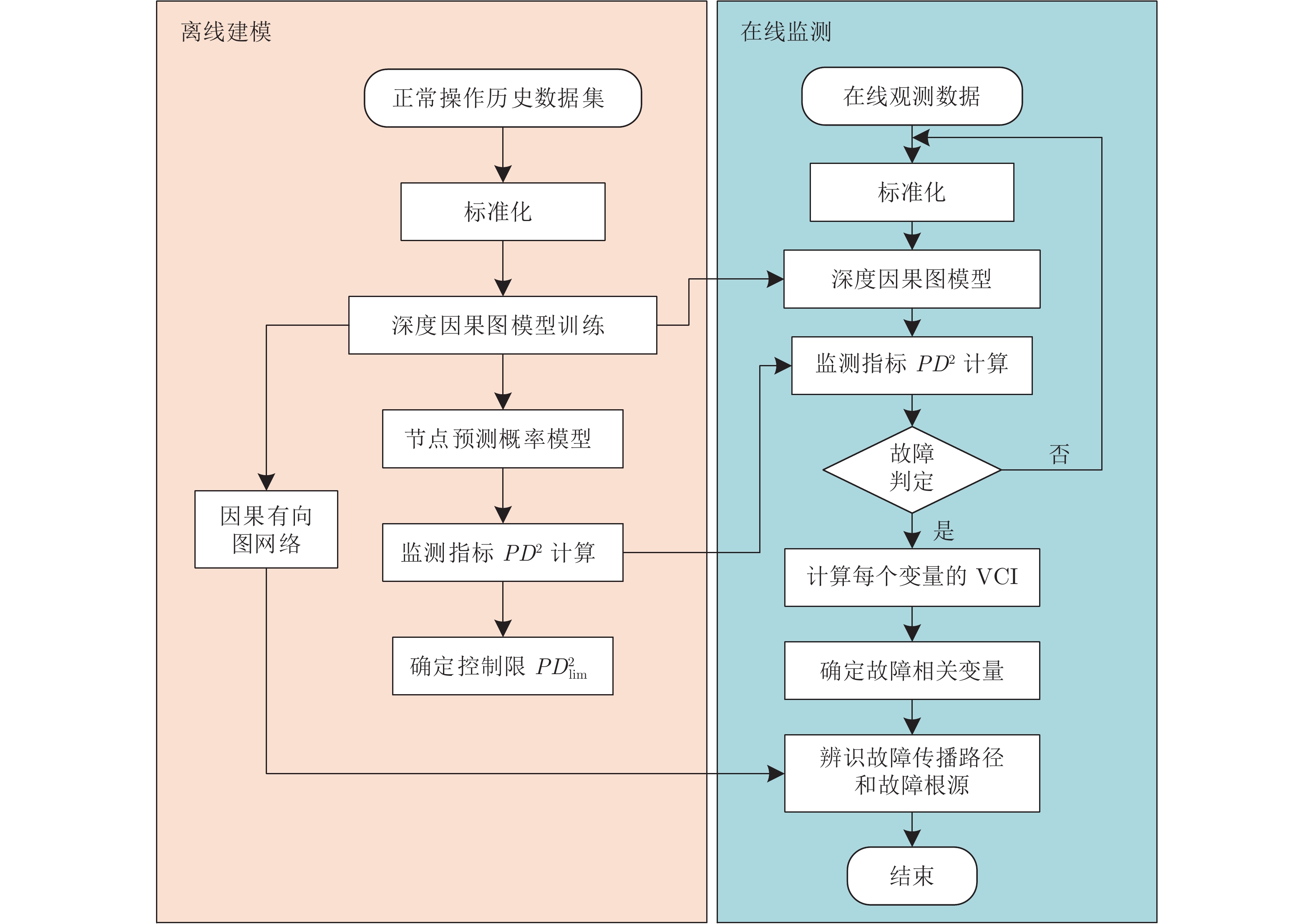
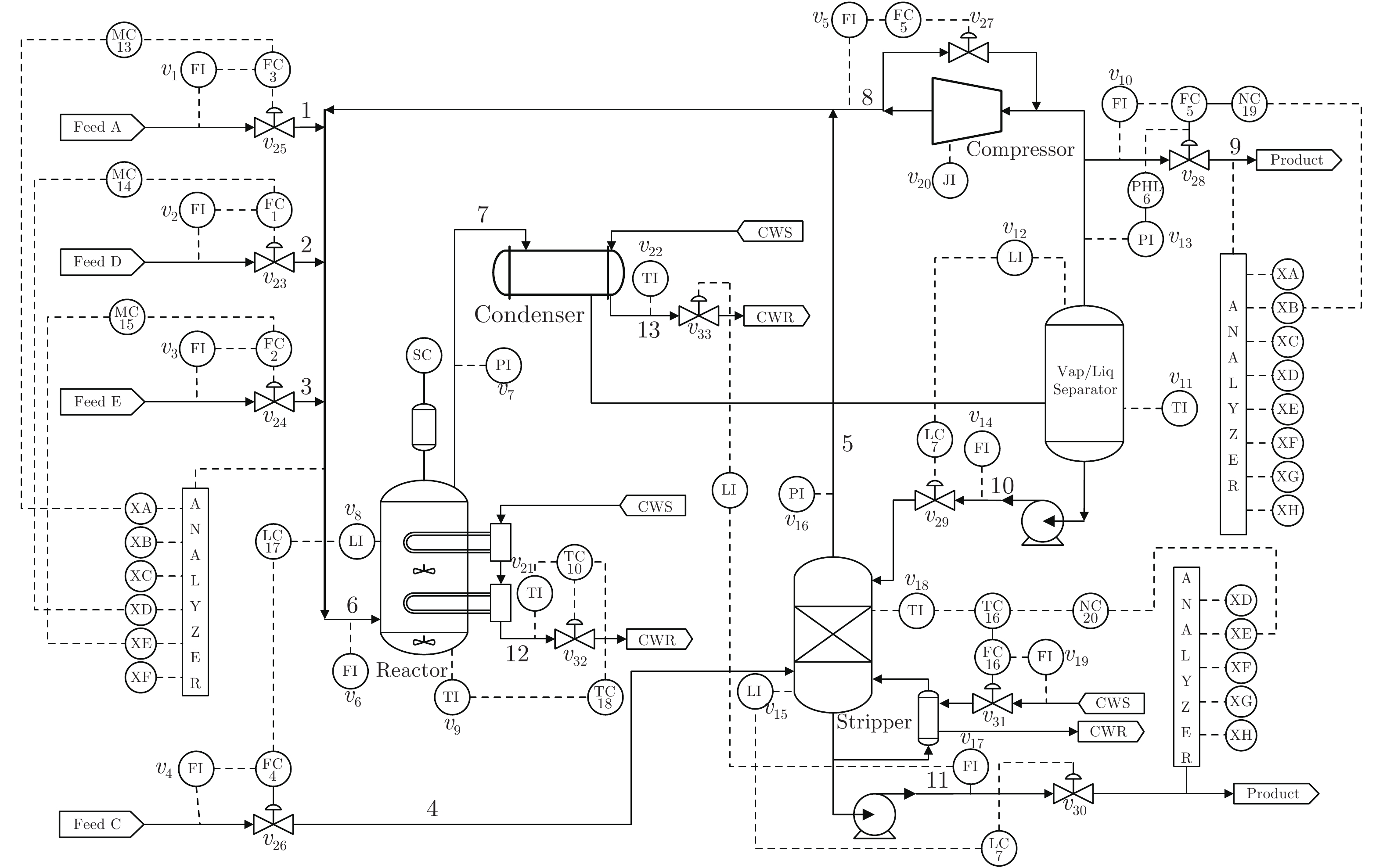
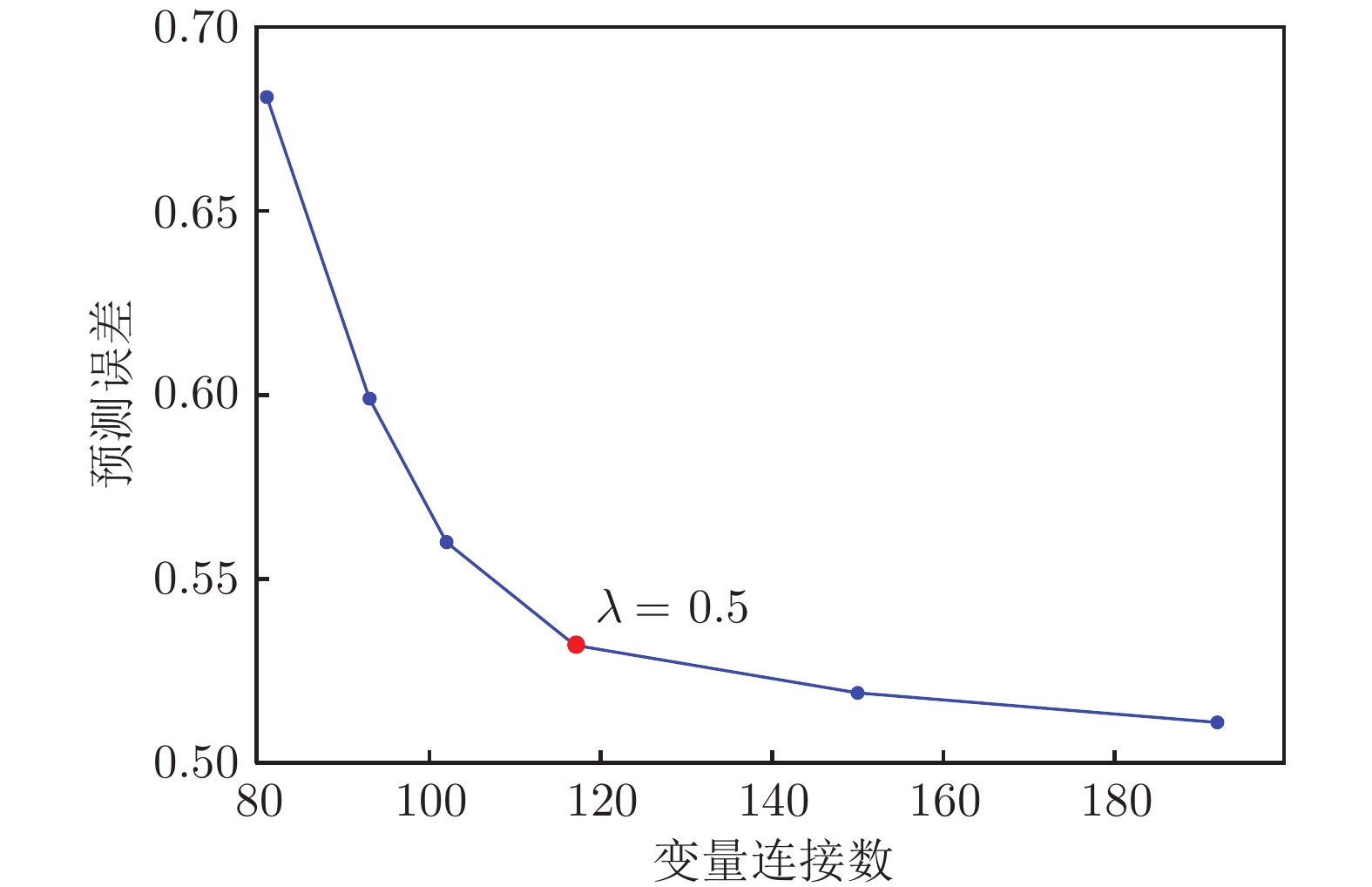
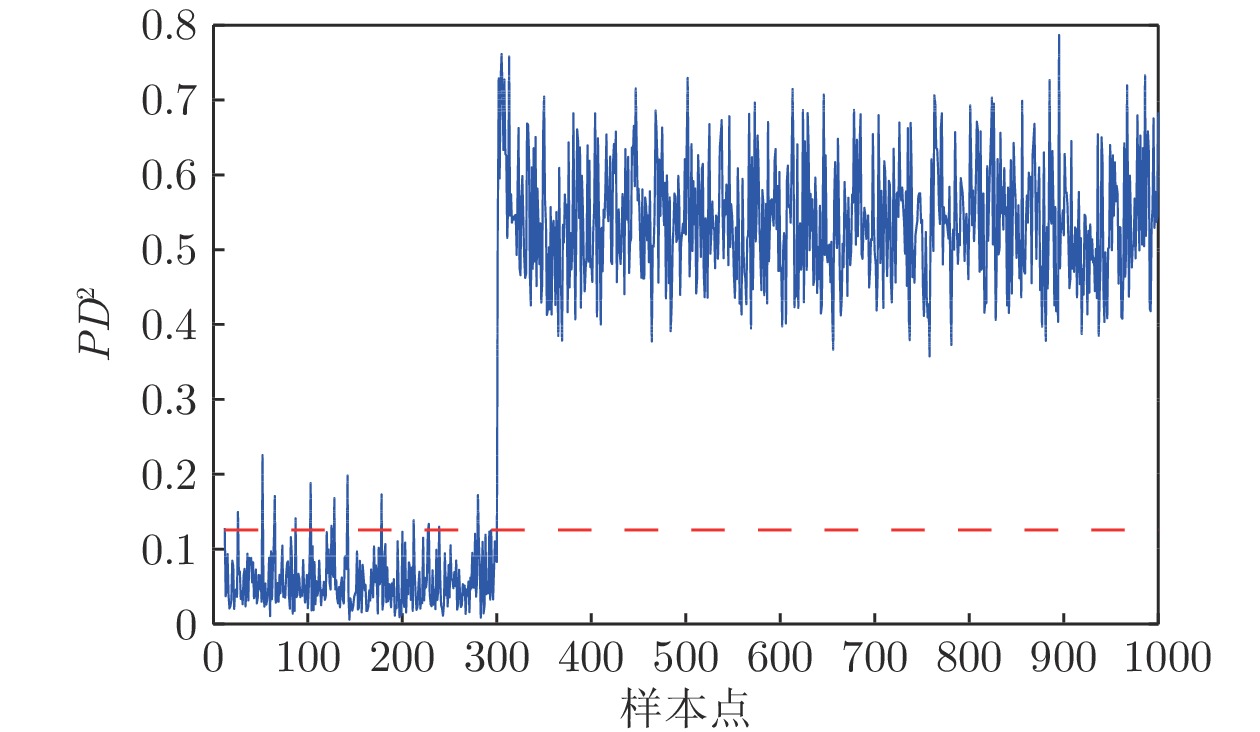
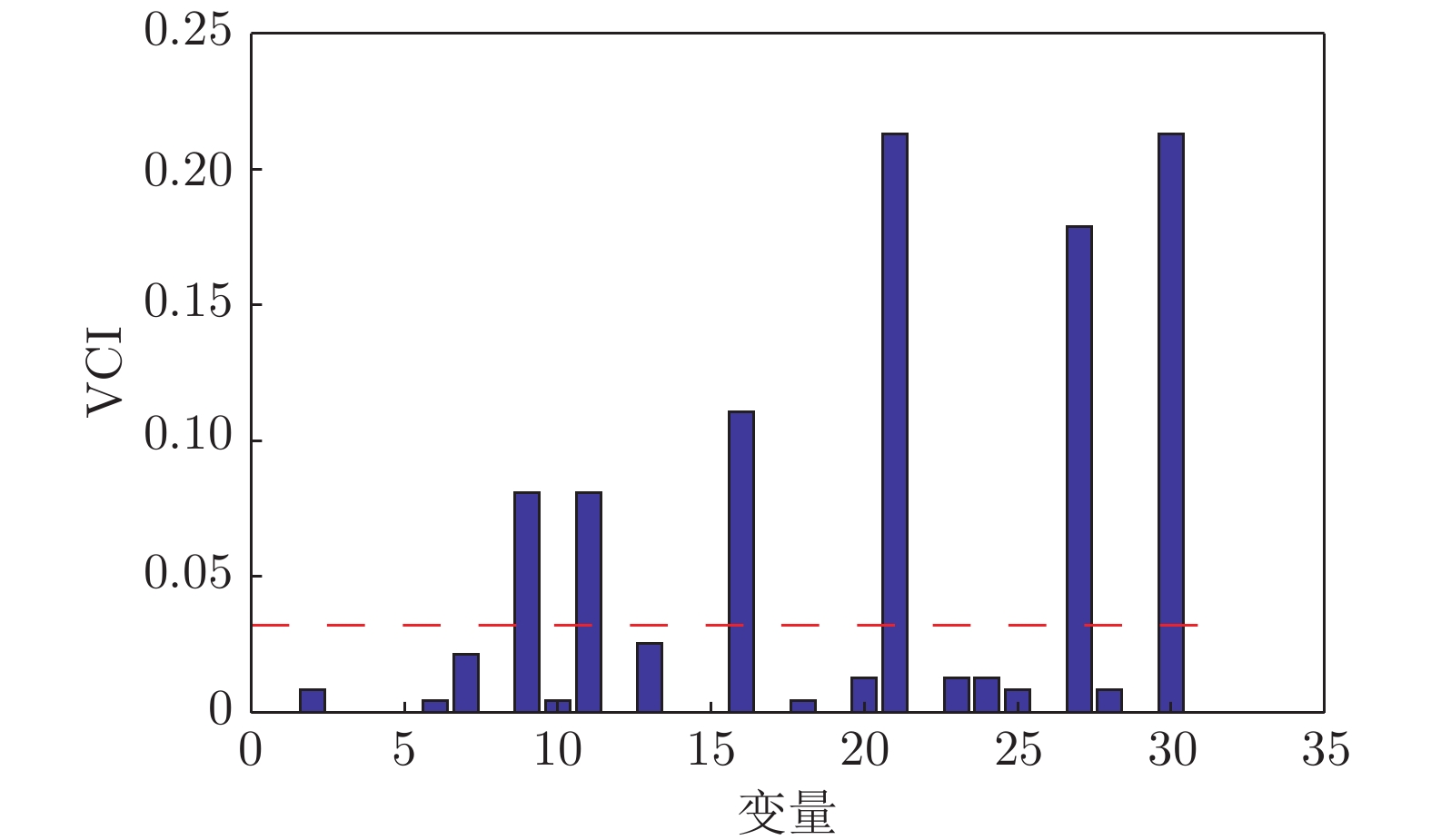
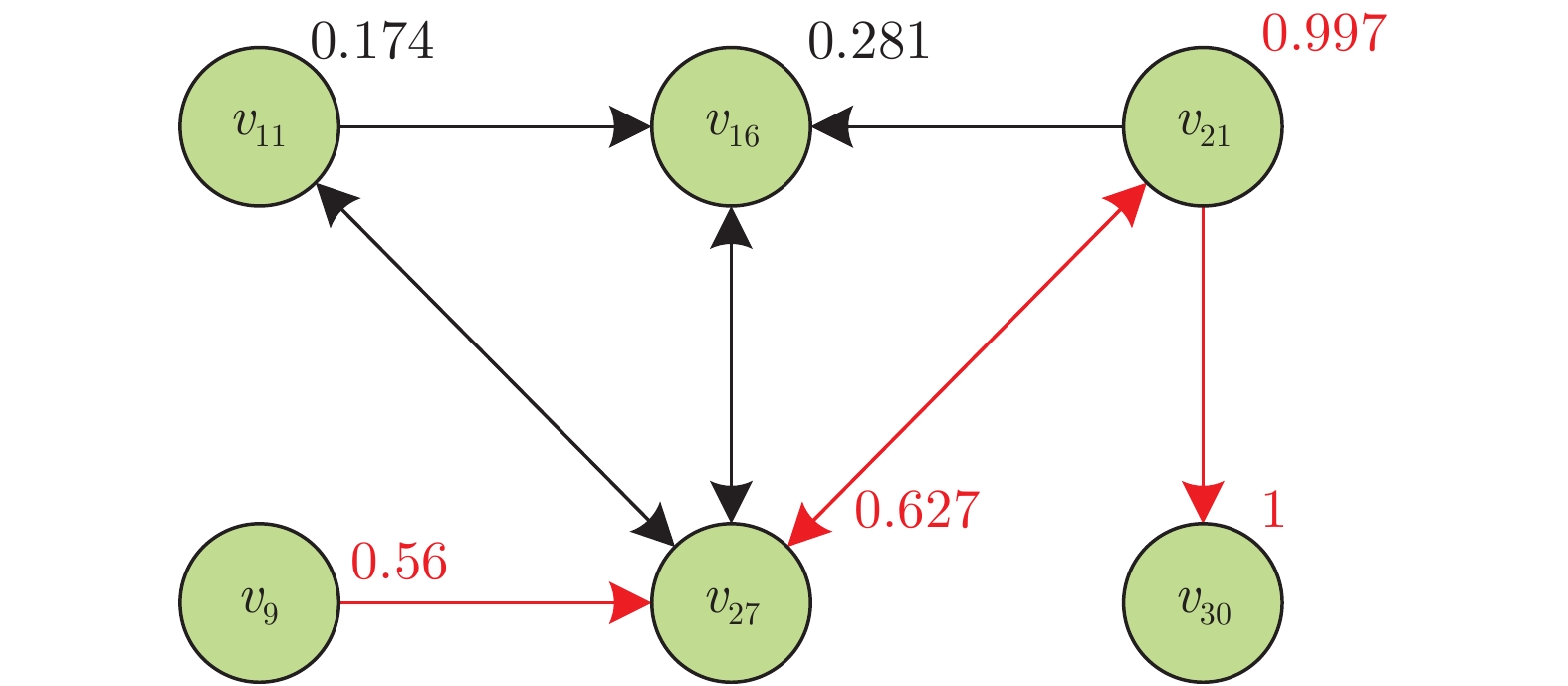
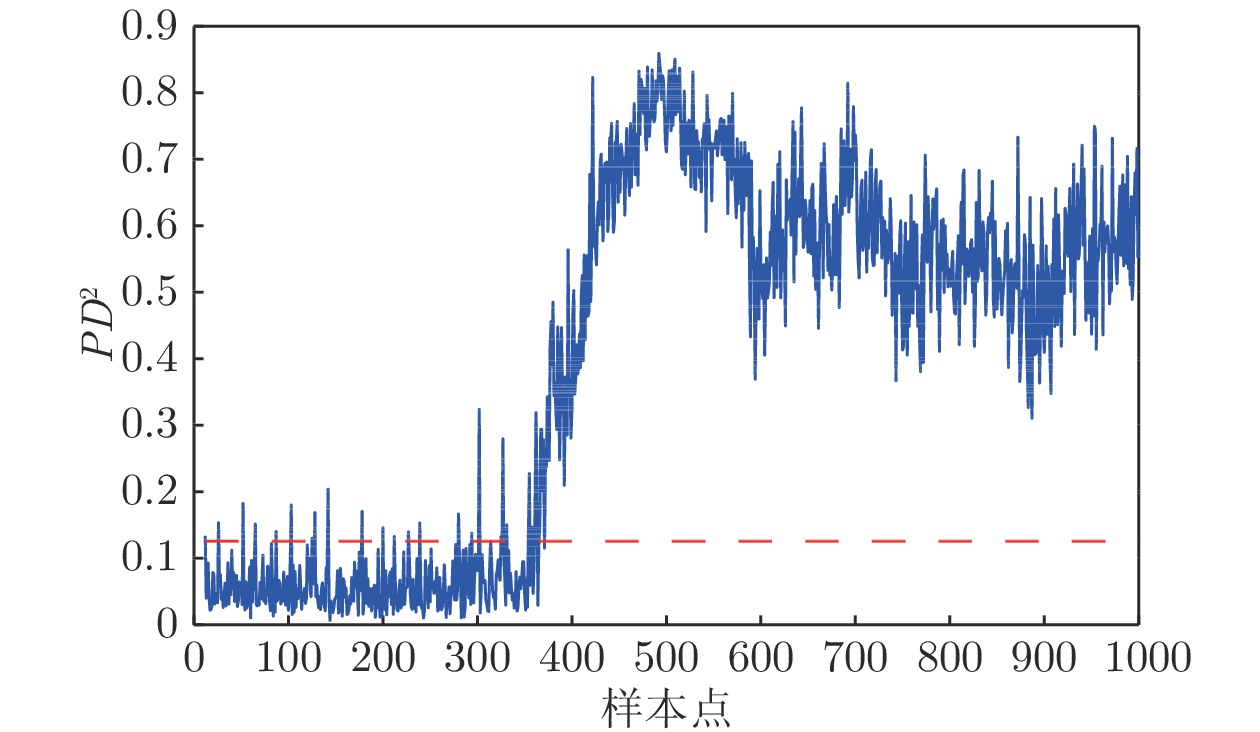
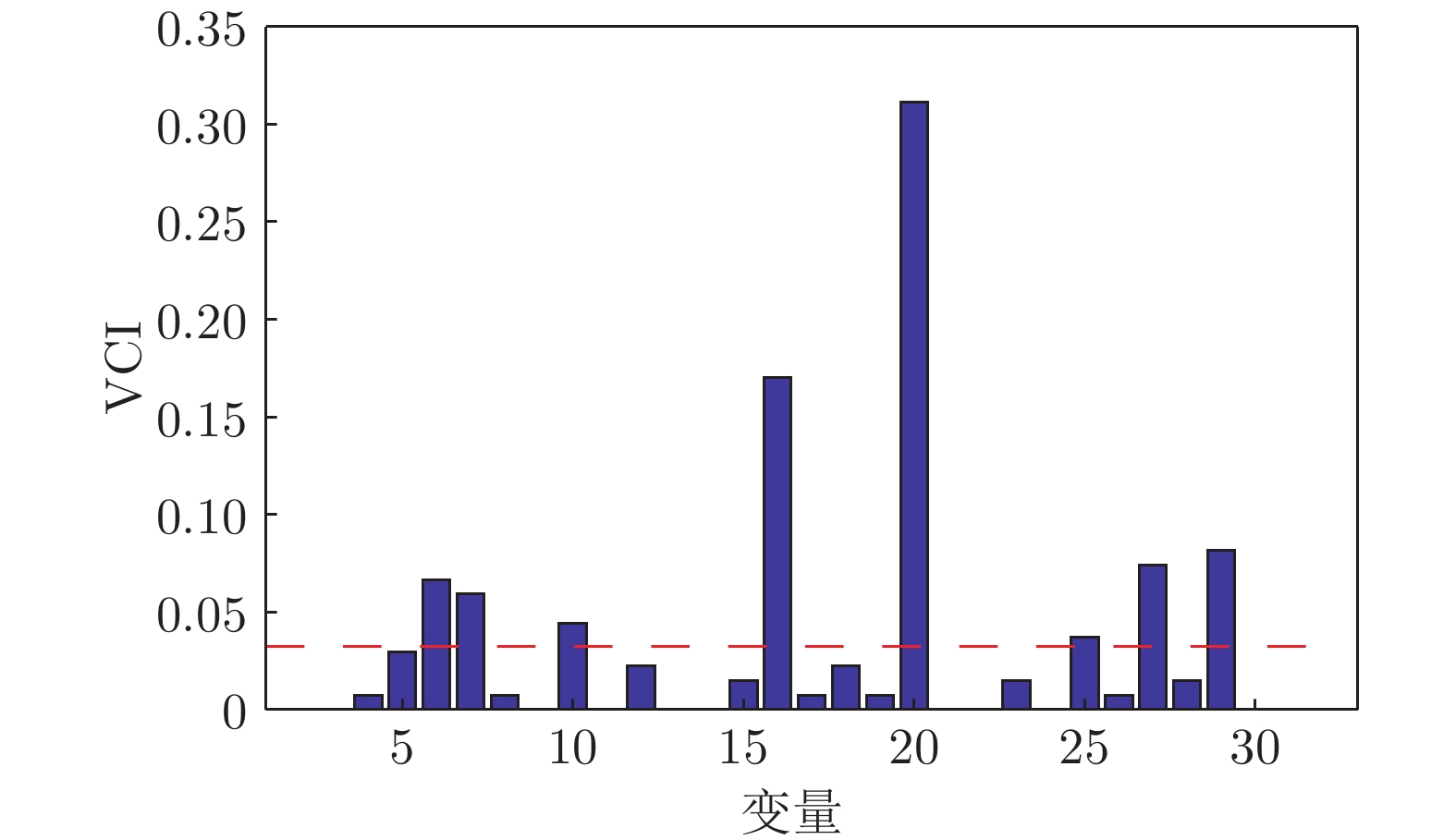
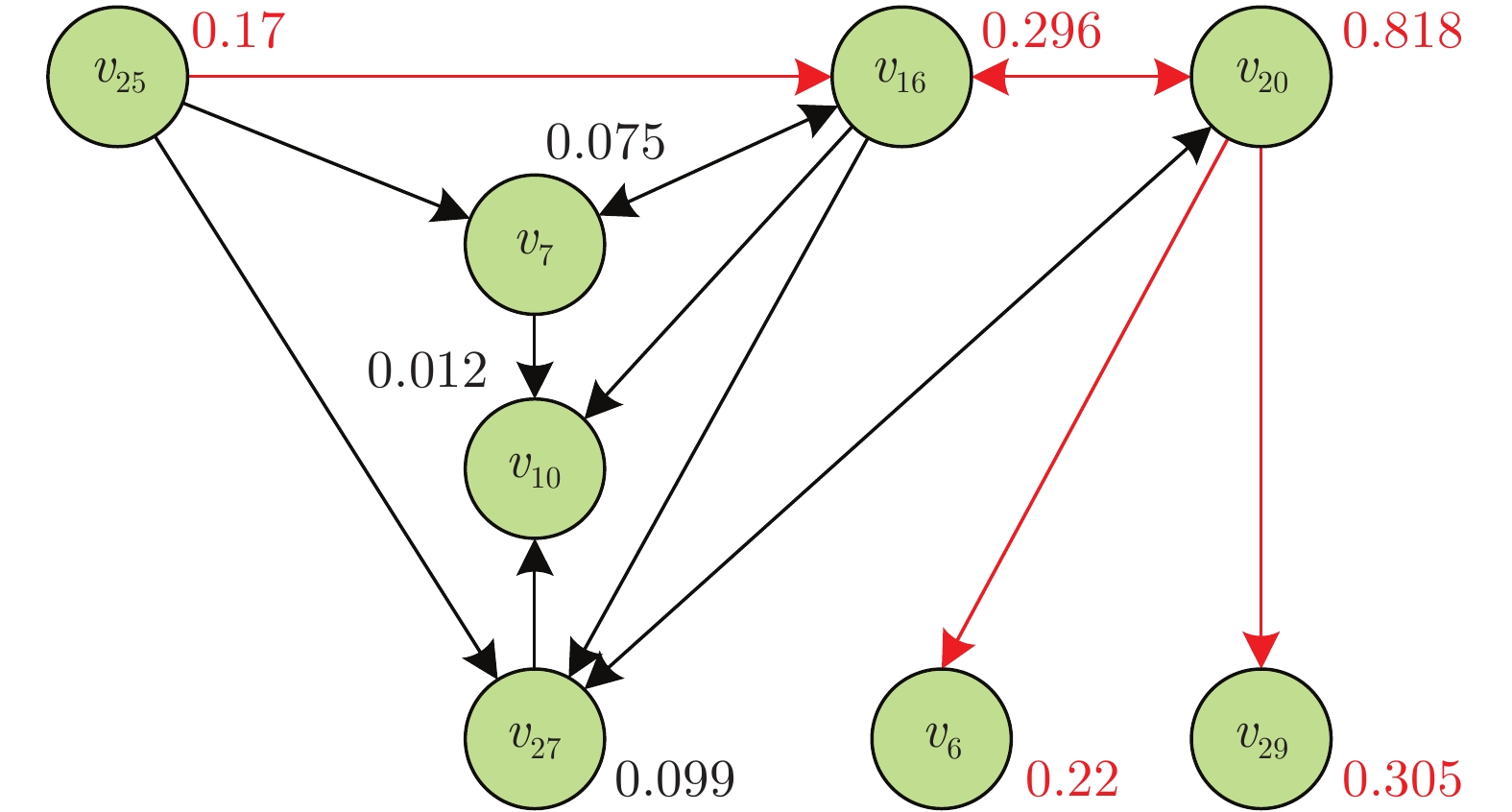
为了实现复杂工业过程故障检测和诊断一体化建模, 提出了一种新颖的深度因果图建模方法. 首先, 利用循环神经网络建立深度因果图模型, 将Group Lasso稀疏惩罚项引入到模型训练中, 自动地检测过程变量间的因果关系. 其次, 利用模型学习到的条件概率预测模型对每个变量建立监测指标, 并融合得到综合指标进行整体工业过程故障检测. 一旦检测到故障, 对故障样本构建变量贡献度指标, 隔离故障相关变量, 并通过深度因果图模型的局部因果有向图诊断故障根源, 辨识故障传播路径. 最后, 通过田纳西−伊斯曼过程进行仿真验证, 实验结果验证了所提方法的有效性.
为了实现复杂工业过程故障检测和诊断一体化建模, 提出了一种新颖的深度因果图建模方法. 首先, 利用循环神经网络建立深度因果图模型, 将Group Lasso稀疏惩罚项引入到模型训练中, 自动地检测过程变量间的因果关系. 其次, 利用模型学习到的条件概率预测模型对每个变量建立监测指标, 并融合得到综合指标进行整体工业过程故障检测. 一旦检测到故障, 对故障样本构建变量贡献度指标, 隔离故障相关变量, 并通过深度因果图模型的局部因果有向图诊断故障根源, 辨识故障传播路径. 最后, 通过田纳西−伊斯曼过程进行仿真验证, 实验结果验证了所提方法的有效性.