2022年 第48卷 第5期
2022, 48(5): 1153-1172.
doi: 10.16383/j.aas.c200964
摘要:
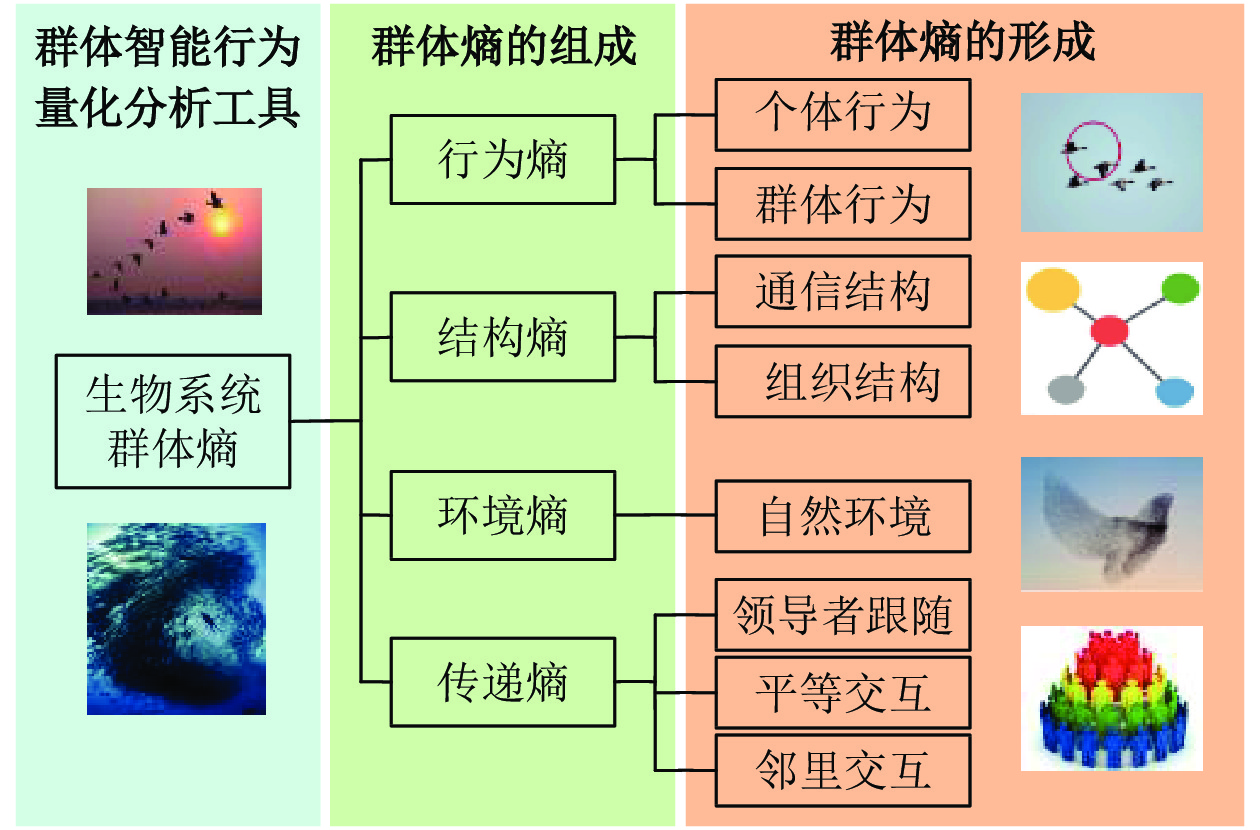
集群机器人系统是群体智能的一个重要应用研究领域, 也是机器人系统未来发展的重要方向之一. 集群机器人系统特性评价是一个极具挑战性的关键技术与理论问题, 对于集群机器人系统的研究与发展具有重要意义. 首先, 给出了对集群机器人系统基本概念的理解, 并且从多种不同角度作出了分类. 其次, 梳理了多个关键的集群机器人系统期望特性; 在此基础上, 分别从评价标准、评价指标体系和评价方法三方面对已有集群机器人系统特性评价研究成果进行了比较全面的评述. 最后, 分析总结了当前集群机器人系统特性评价研究工作的不足, 并对未来发展方向进行了展望.
集群机器人系统是群体智能的一个重要应用研究领域, 也是机器人系统未来发展的重要方向之一. 集群机器人系统特性评价是一个极具挑战性的关键技术与理论问题, 对于集群机器人系统的研究与发展具有重要意义. 首先, 给出了对集群机器人系统基本概念的理解, 并且从多种不同角度作出了分类. 其次, 梳理了多个关键的集群机器人系统期望特性; 在此基础上, 分别从评价标准、评价指标体系和评价方法三方面对已有集群机器人系统特性评价研究成果进行了比较全面的评述. 最后, 分析总结了当前集群机器人系统特性评价研究工作的不足, 并对未来发展方向进行了展望.
2022, 48(5): 1173-1192.
doi: 10.16383/j.aas.c210514
摘要:
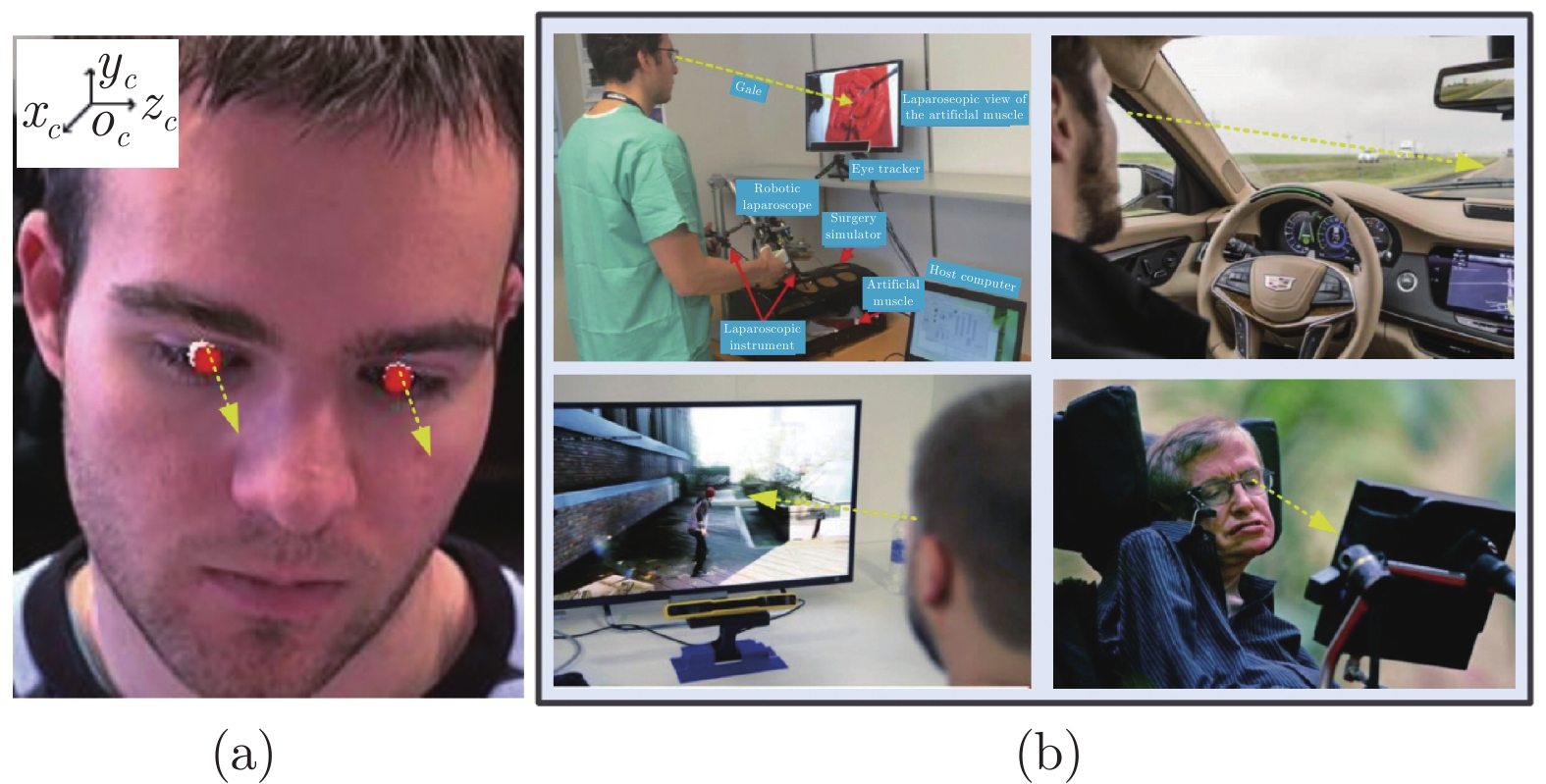
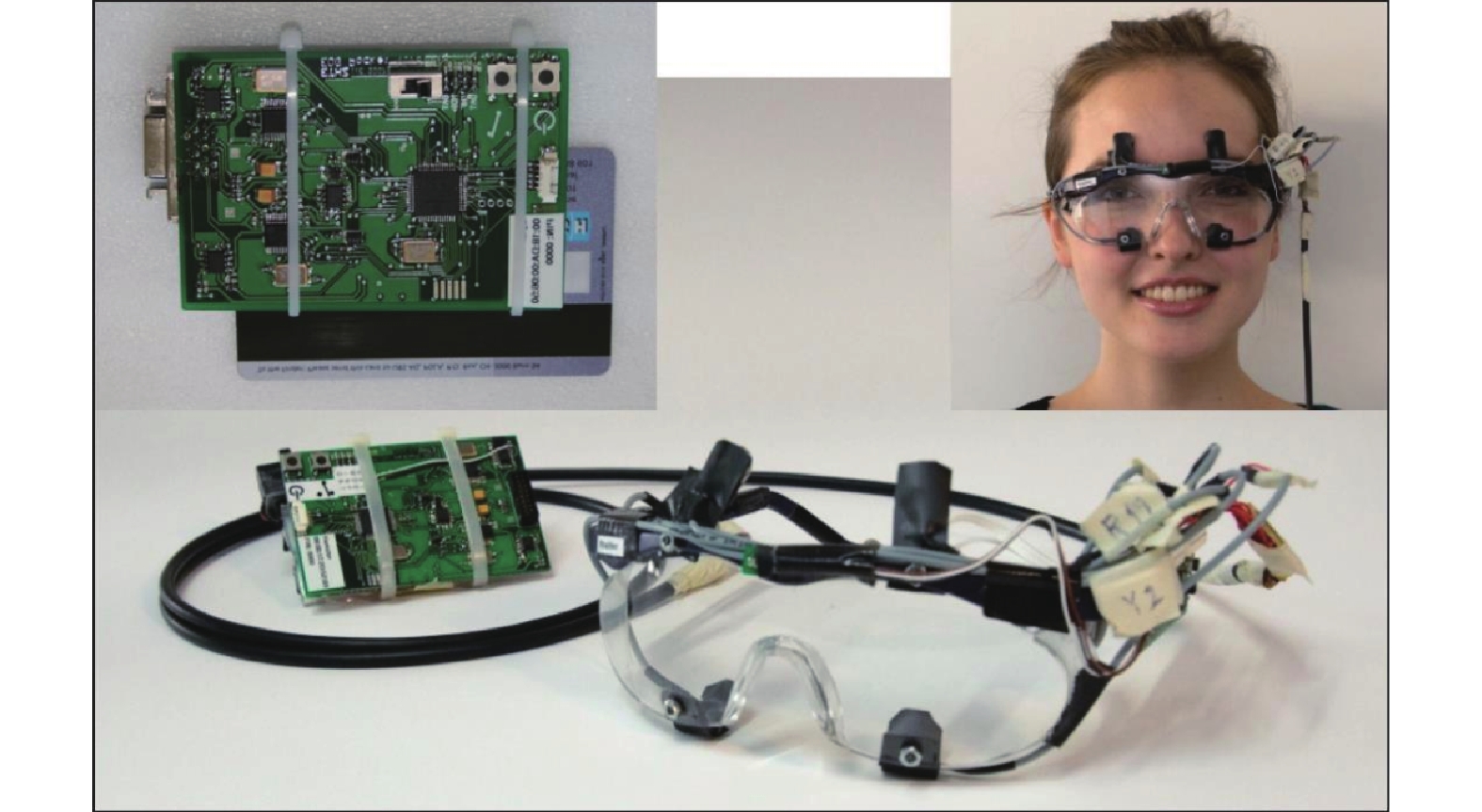
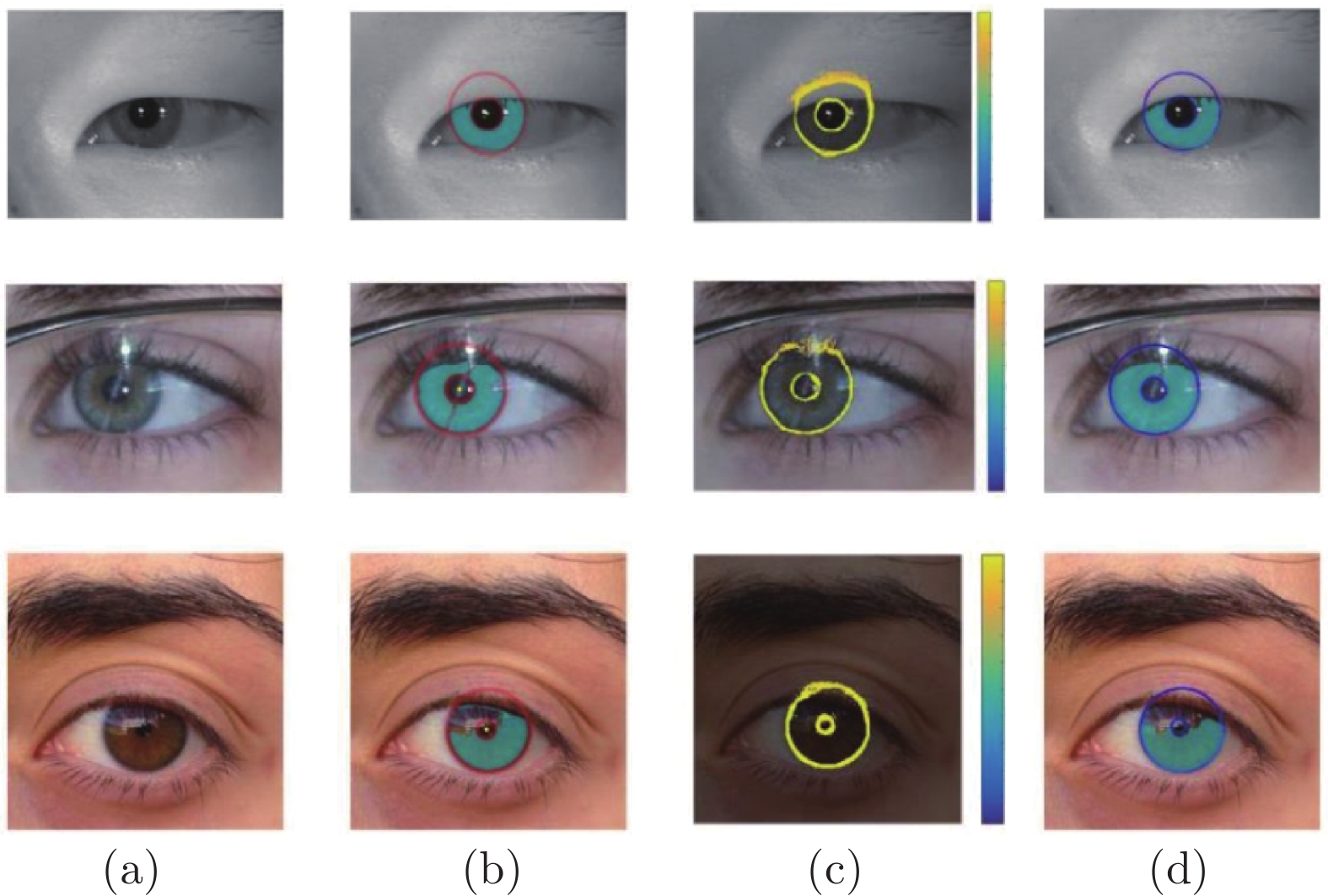
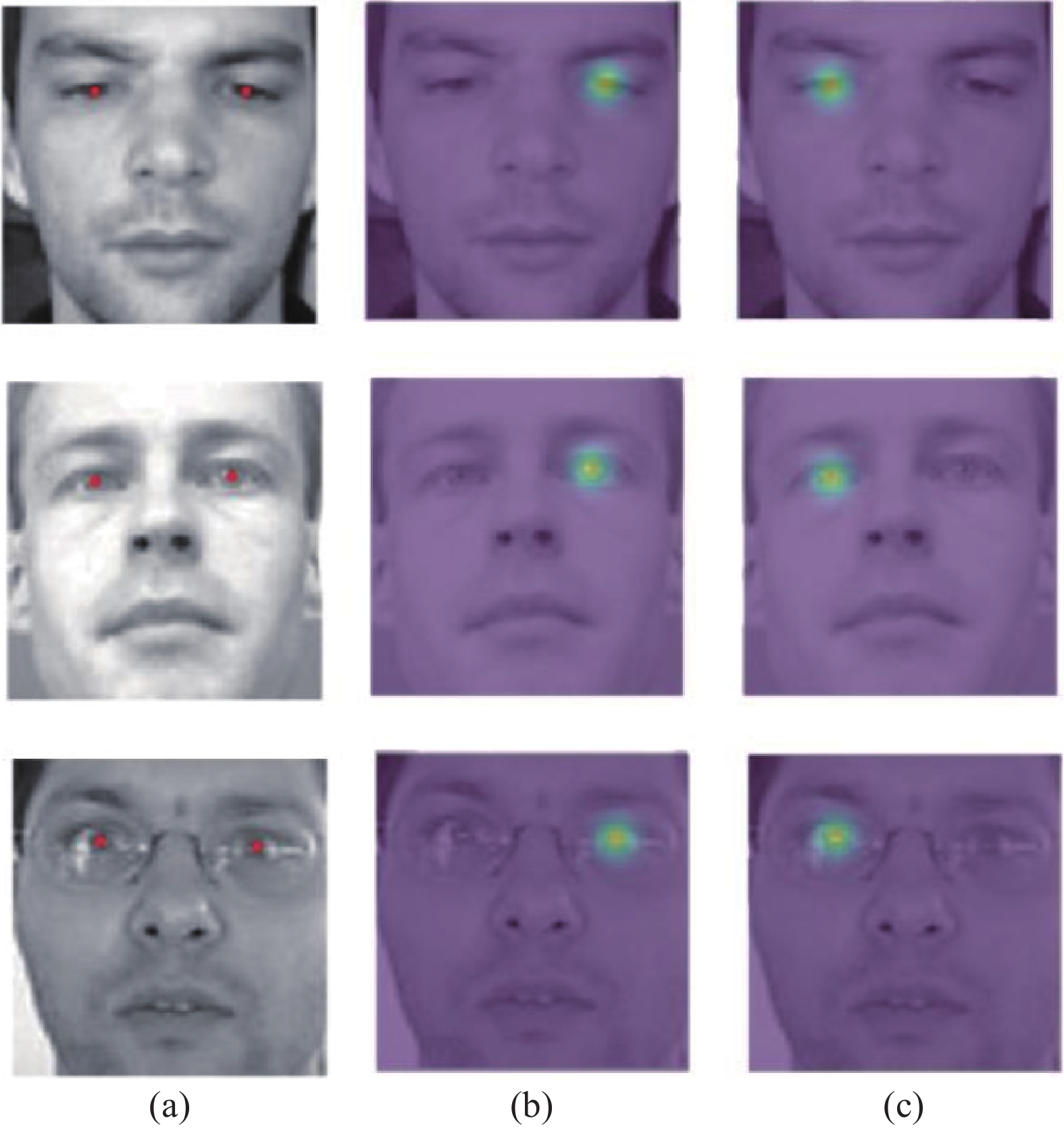
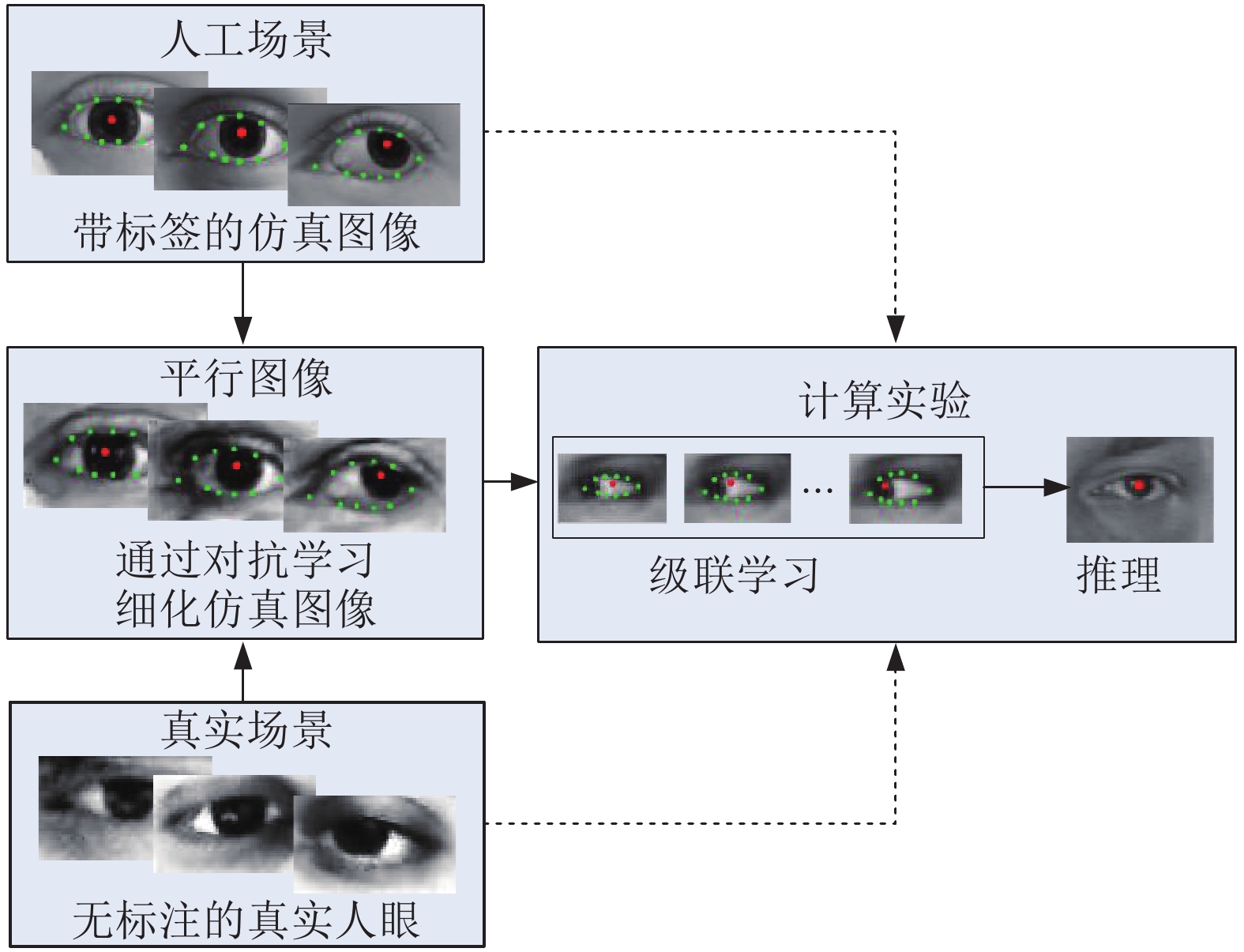
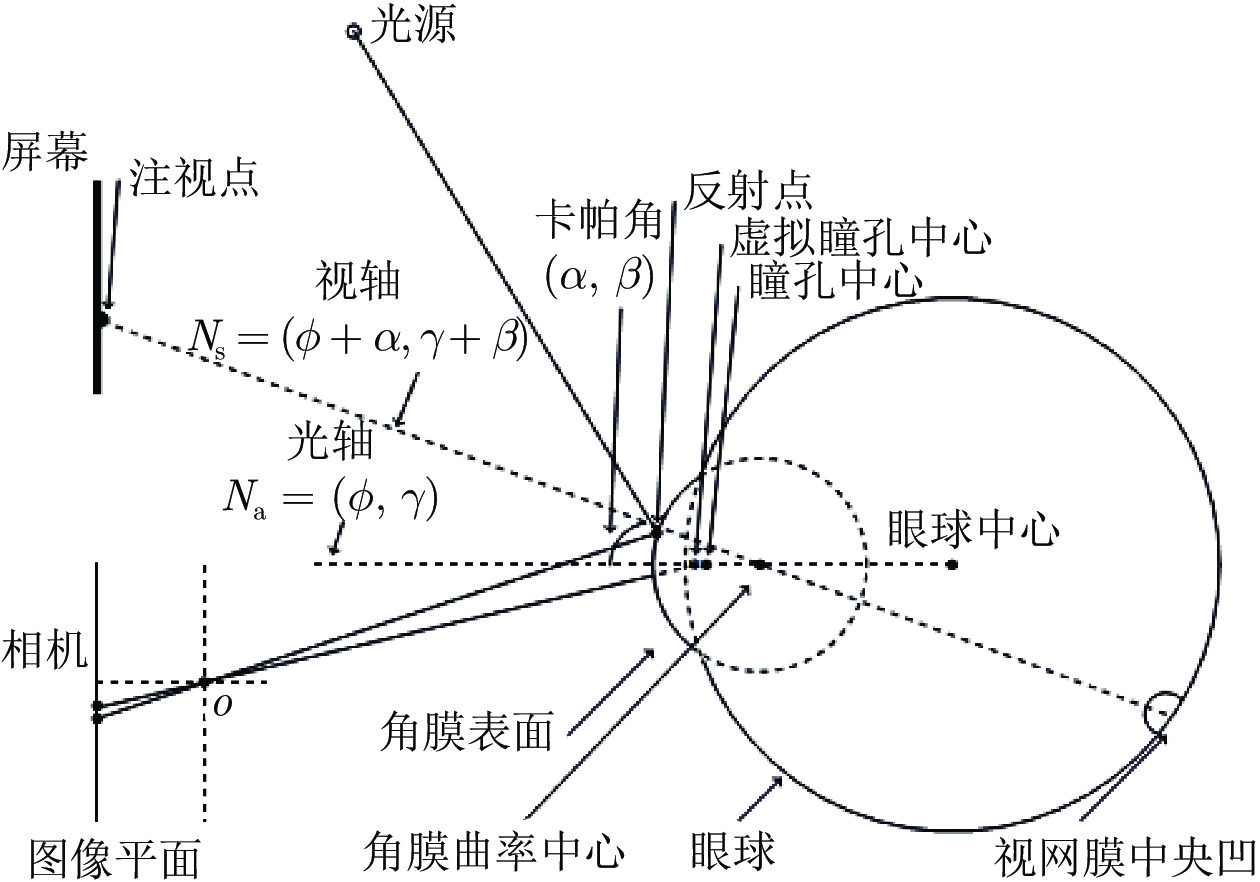
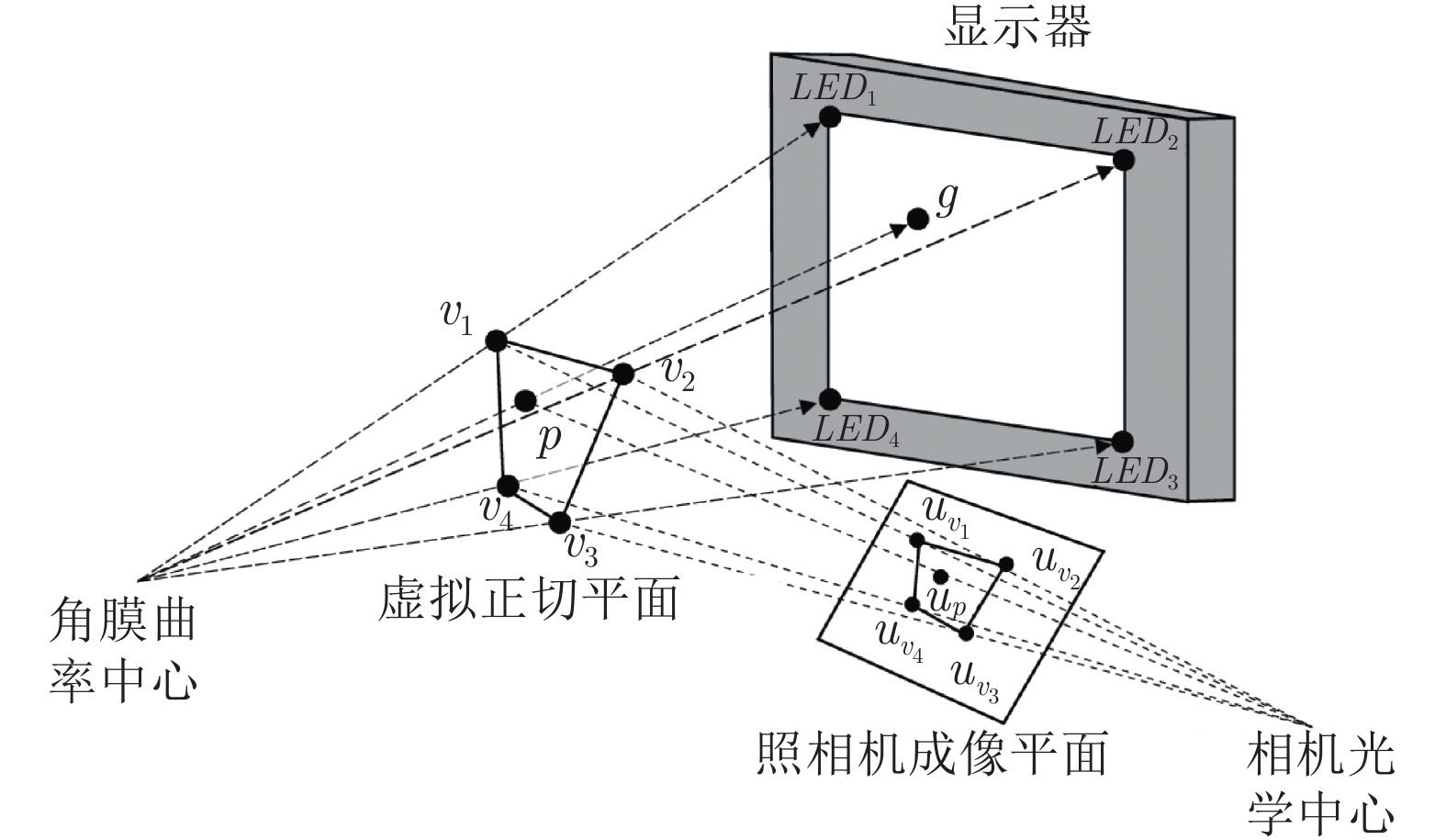
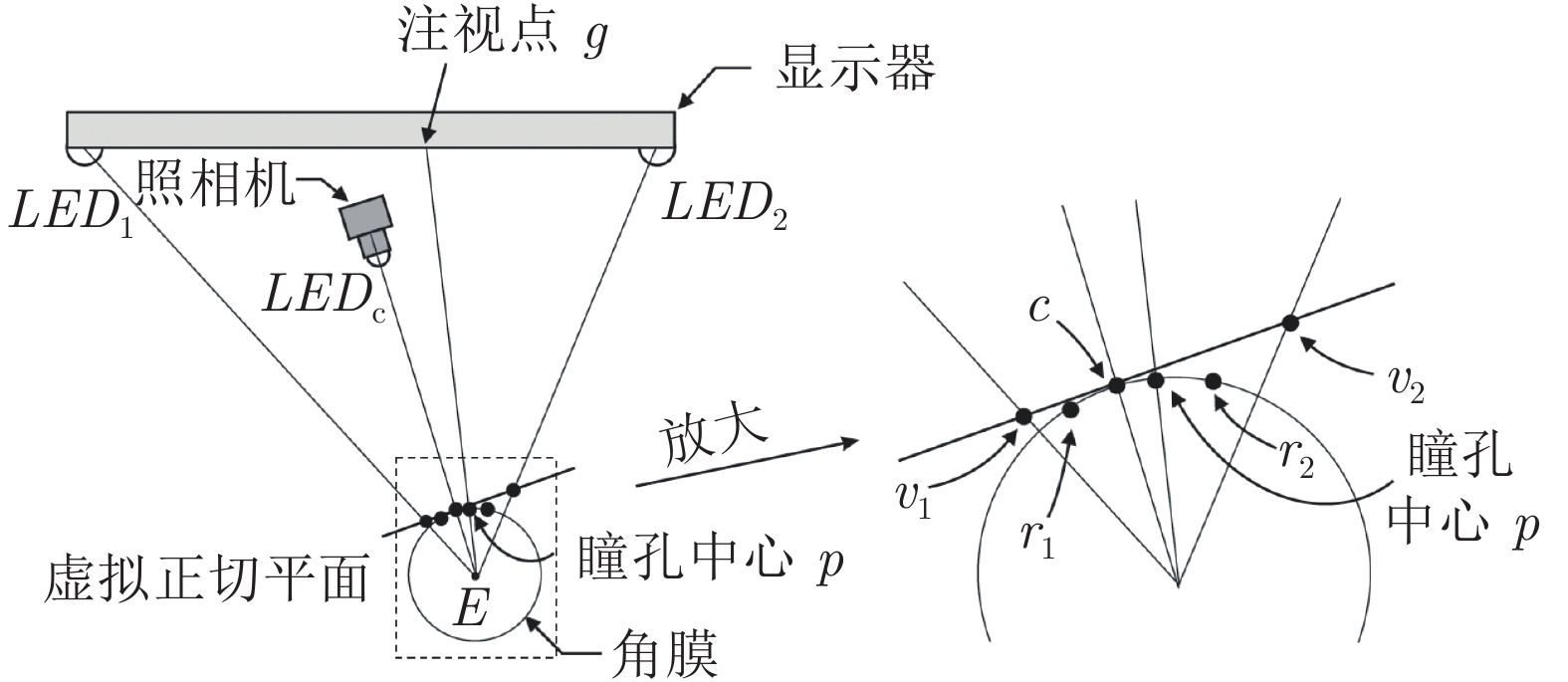
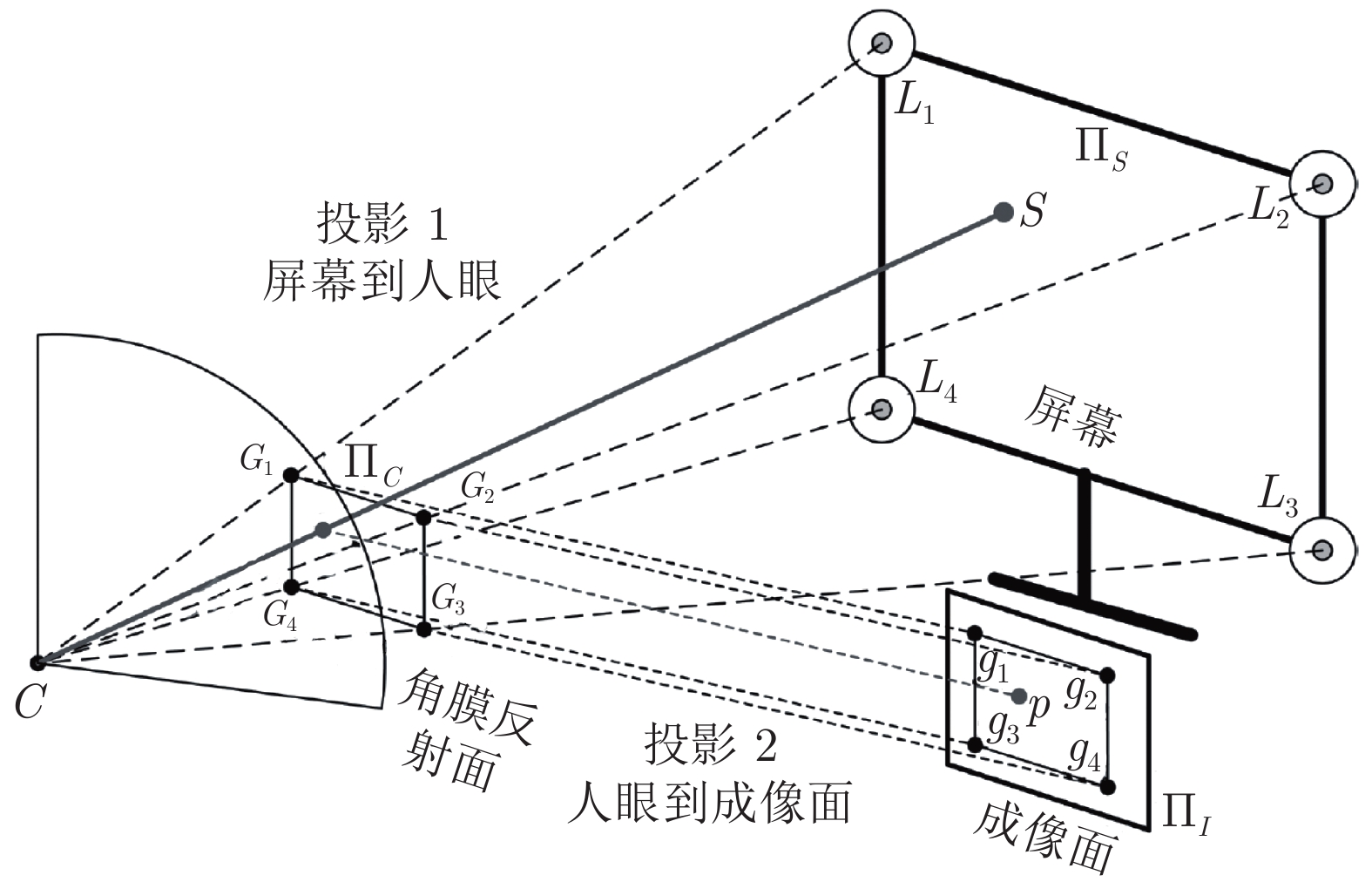
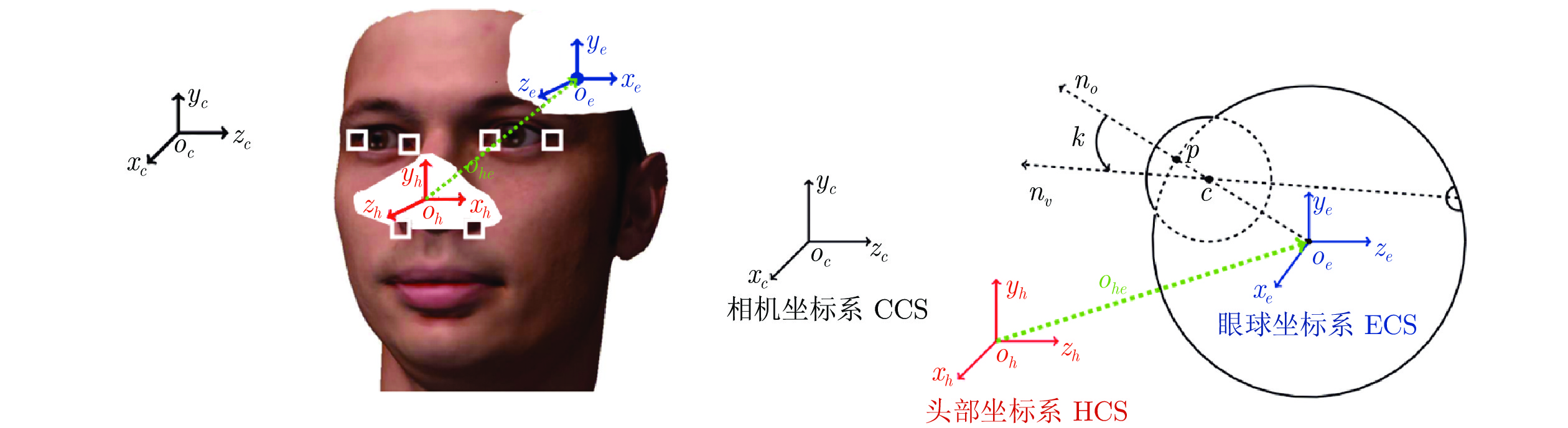
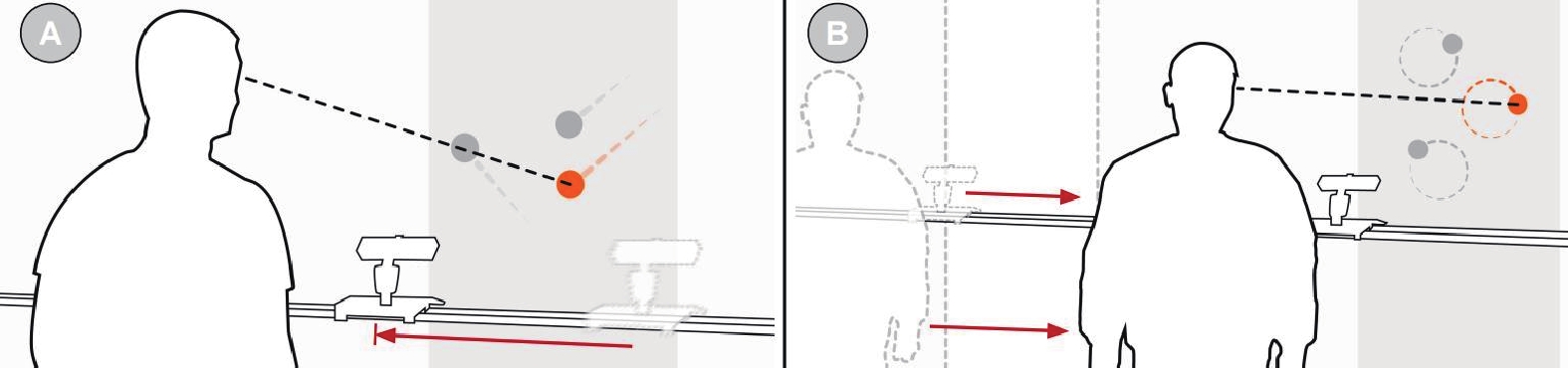
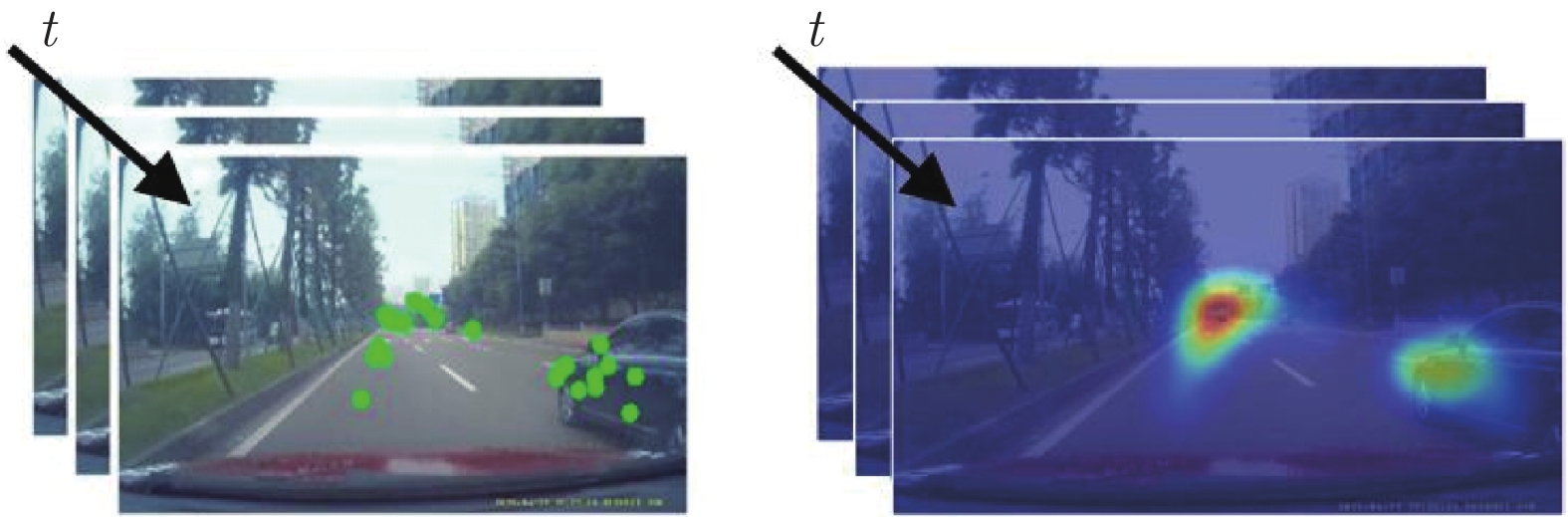
眼动跟踪是指自动检测瞳孔中心位置或者识别三维视线方向及注视点的过程, 被广泛应用于人机交互、智能驾驶、人因工程等. 由于不同场景下的光照变化、个体眼球生理构造差异、遮挡、头部姿态多样等原因, 眼动跟踪的研究目前仍然是一个具有挑战性的热点问题. 针对眼动跟踪领域,首先概述眼动跟踪研究内容, 然后分别论述近年来瞳孔中心检测及视线估计领域的国内外研究进展, 综述目前眼动跟踪主要数据集、评价指标及研究成果, 接着介绍眼动跟踪在人机交互、智能驾驶等领域的应用, 最后对眼动跟踪领域的未来发展趋势进行展望.
眼动跟踪是指自动检测瞳孔中心位置或者识别三维视线方向及注视点的过程, 被广泛应用于人机交互、智能驾驶、人因工程等. 由于不同场景下的光照变化、个体眼球生理构造差异、遮挡、头部姿态多样等原因, 眼动跟踪的研究目前仍然是一个具有挑战性的热点问题. 针对眼动跟踪领域,首先概述眼动跟踪研究内容, 然后分别论述近年来瞳孔中心检测及视线估计领域的国内外研究进展, 综述目前眼动跟踪主要数据集、评价指标及研究成果, 接着介绍眼动跟踪在人机交互、智能驾驶等领域的应用, 最后对眼动跟踪领域的未来发展趋势进行展望.

2022, 48(5): 1193-1208.
doi: 10.16383/j.aas.c210022
摘要:
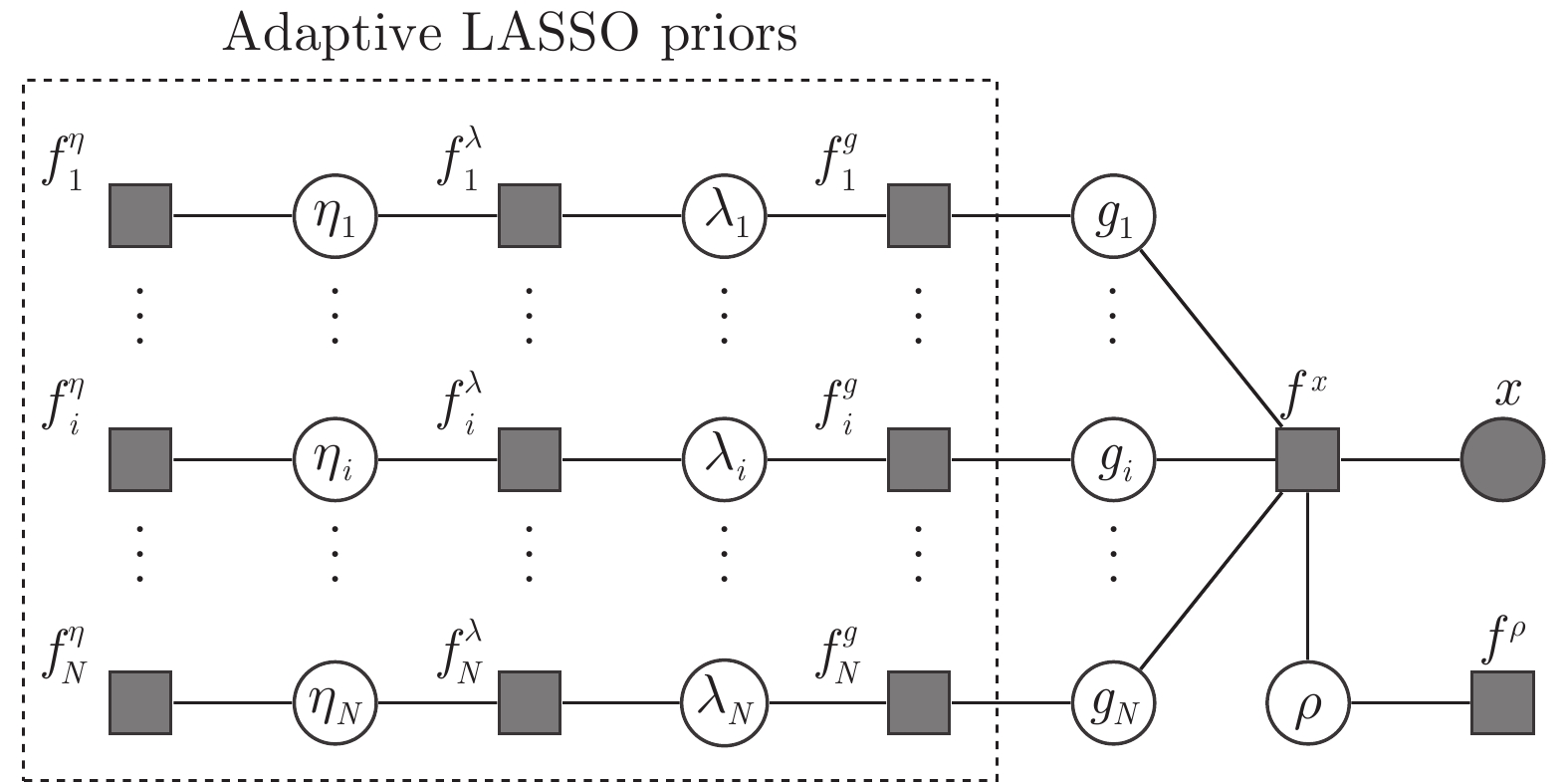
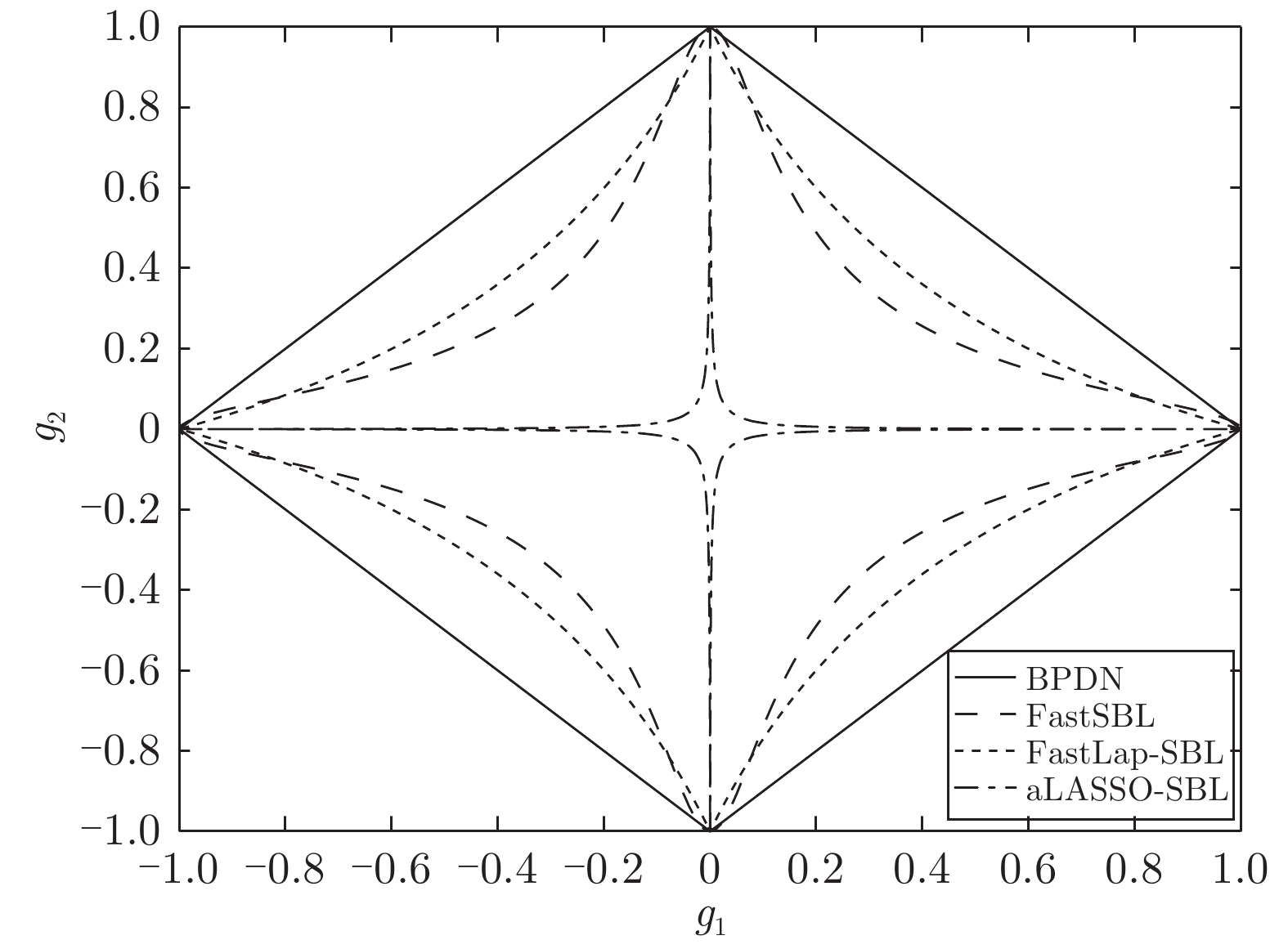
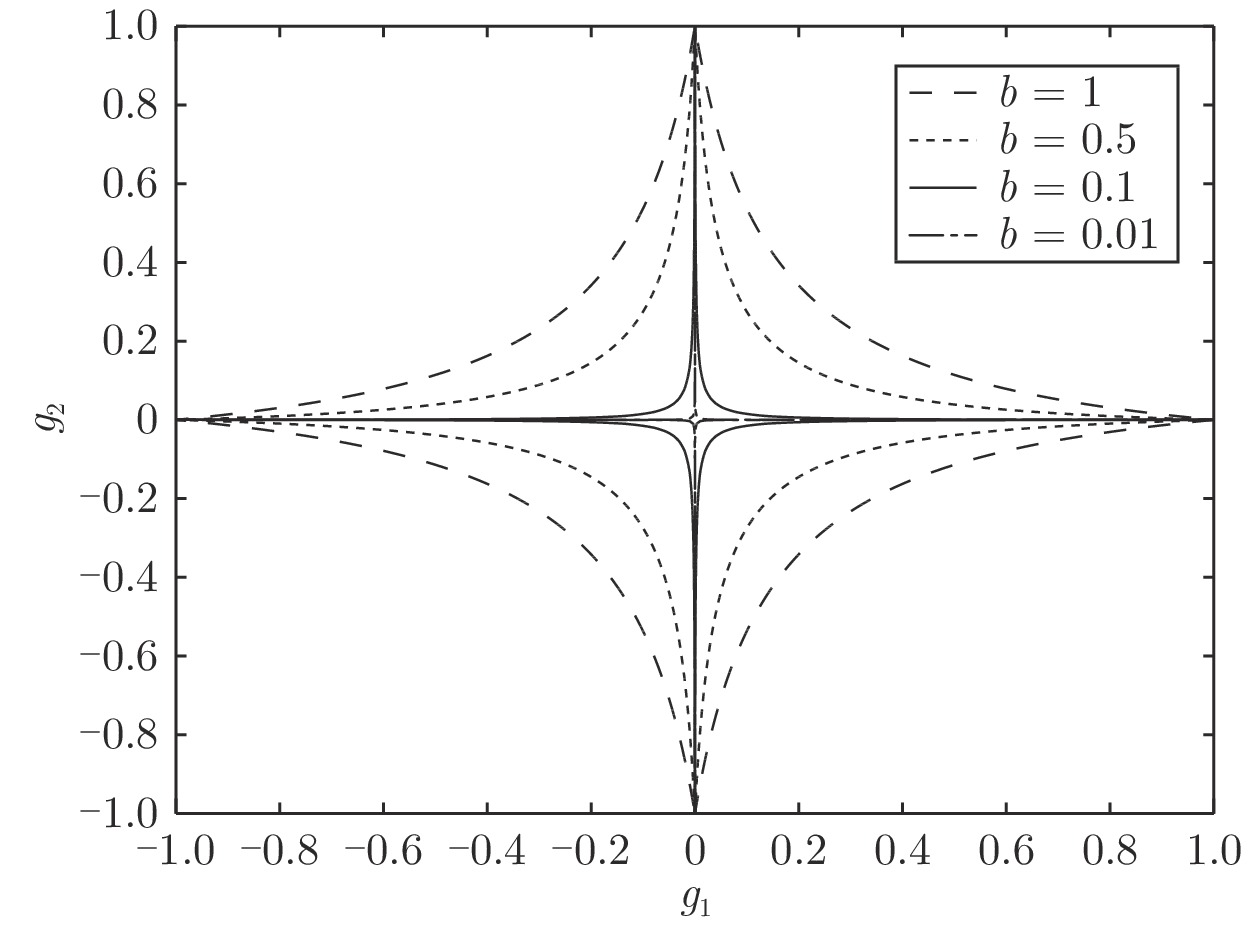
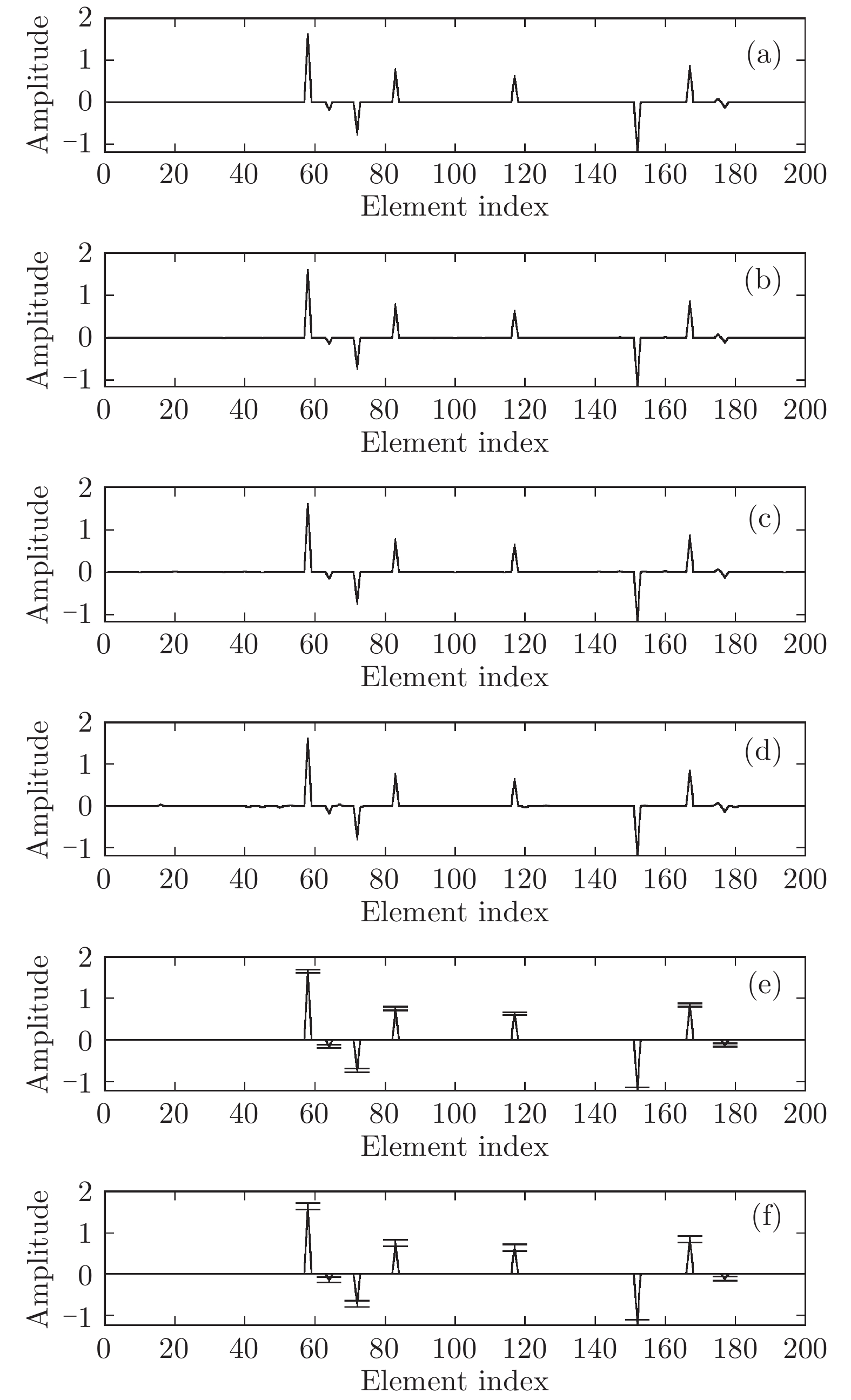
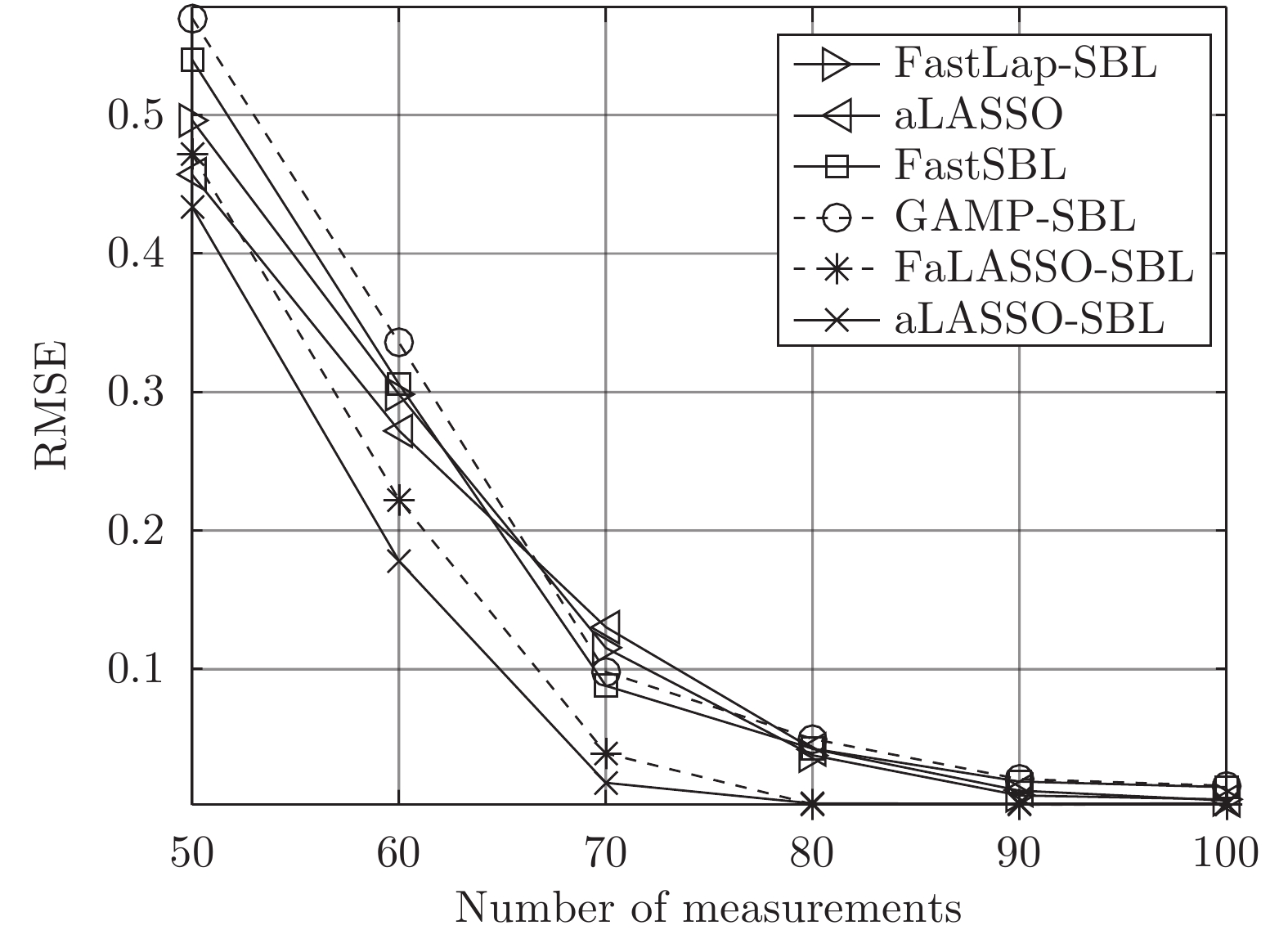
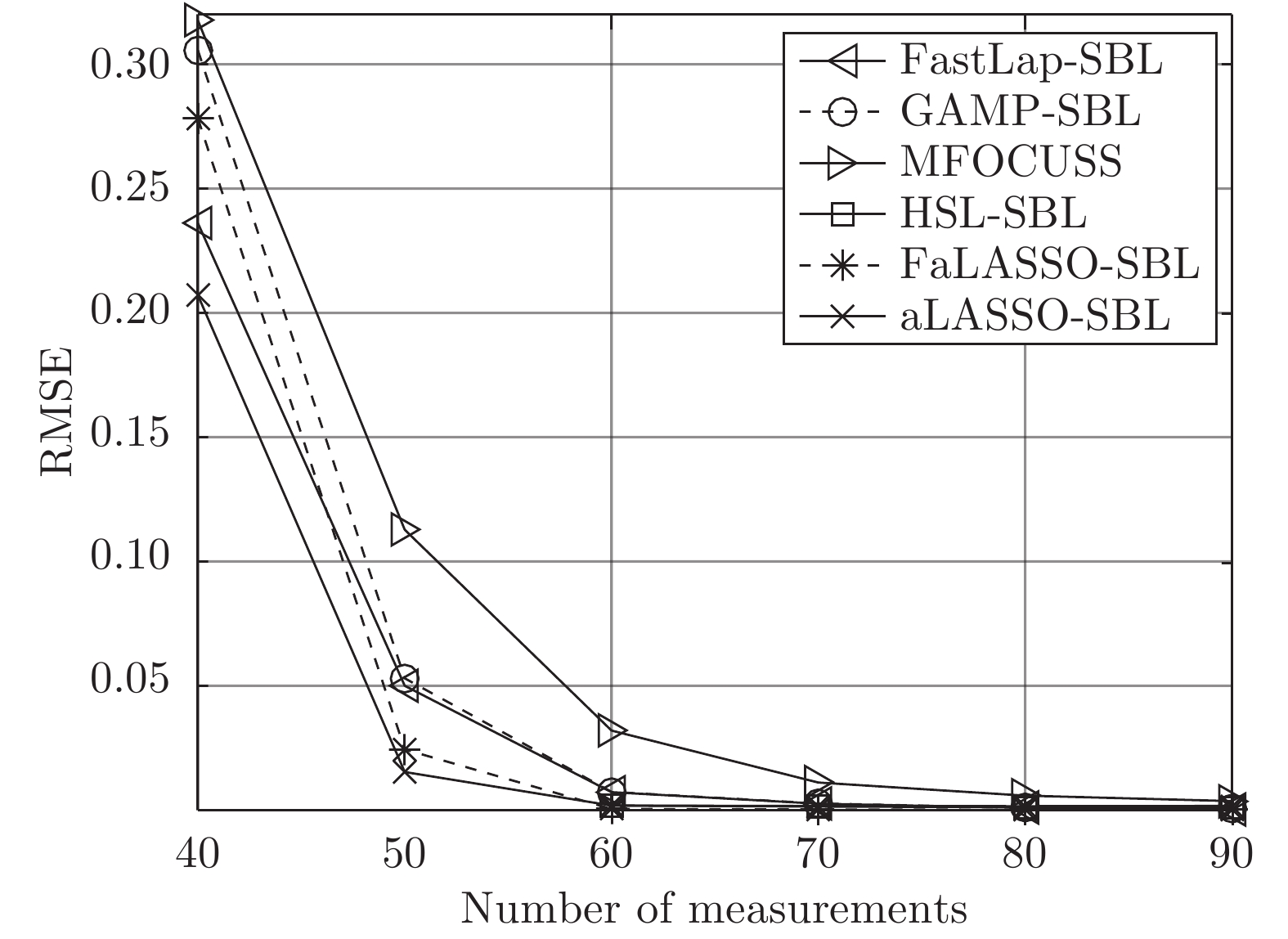
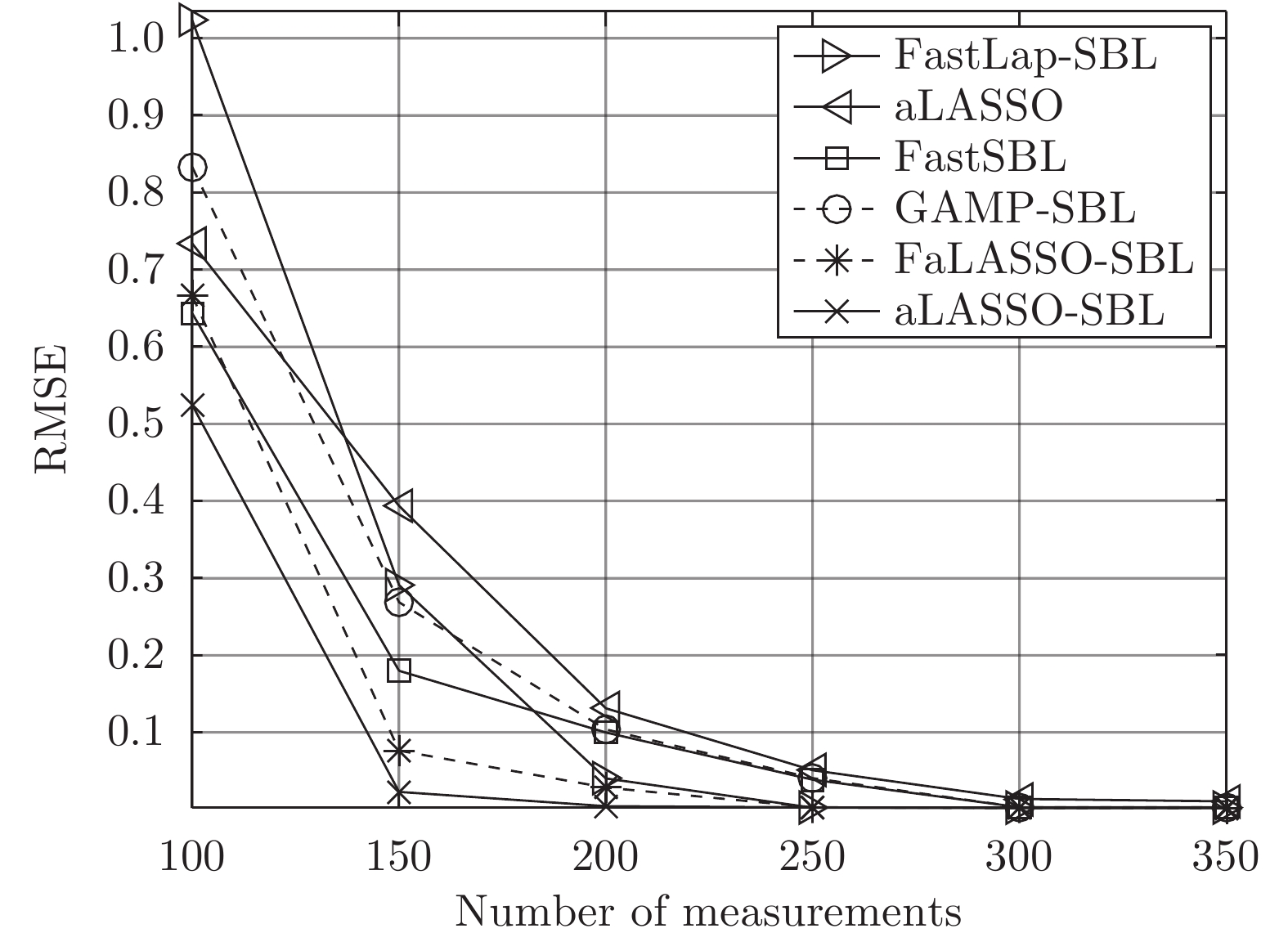
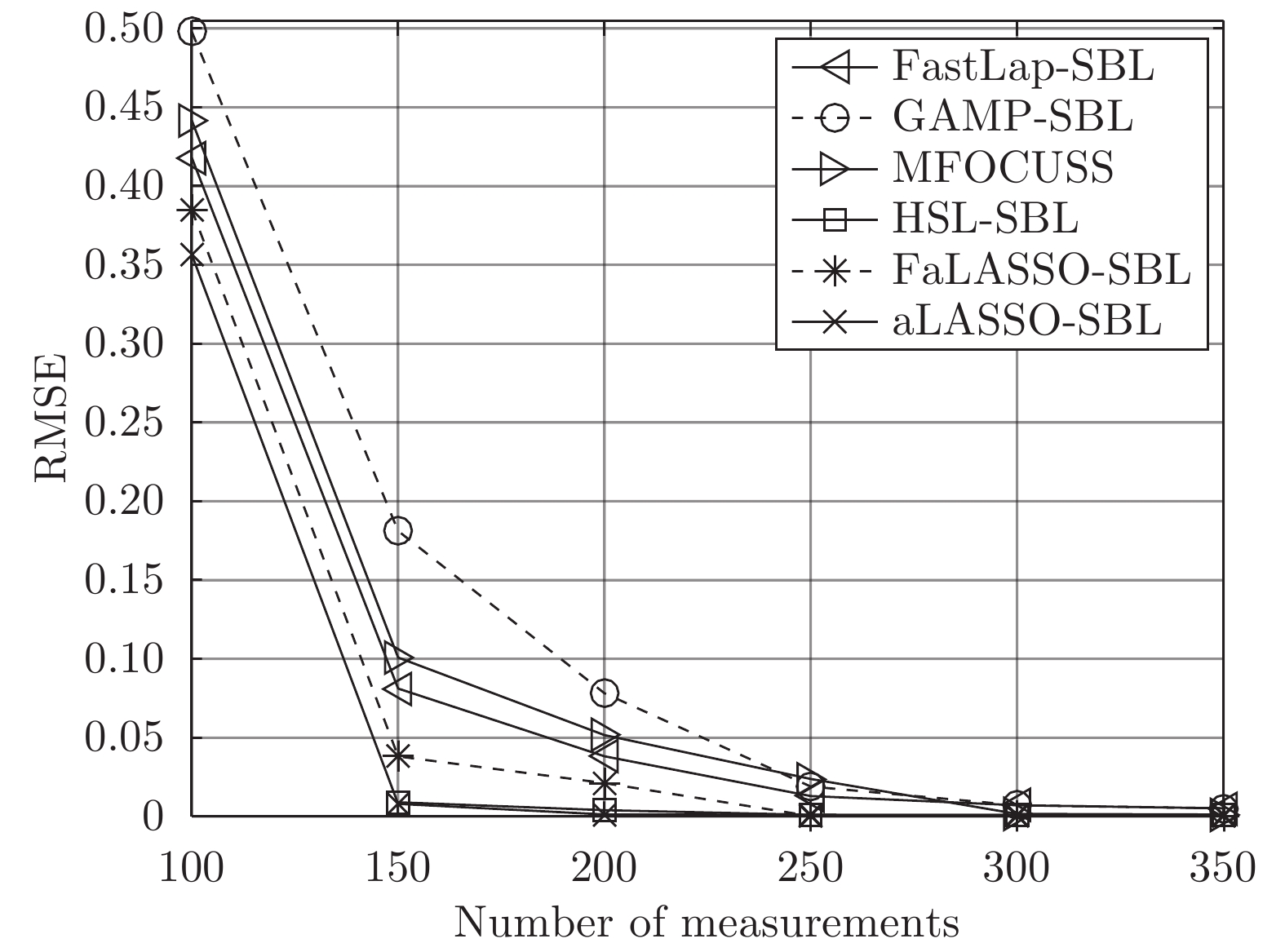
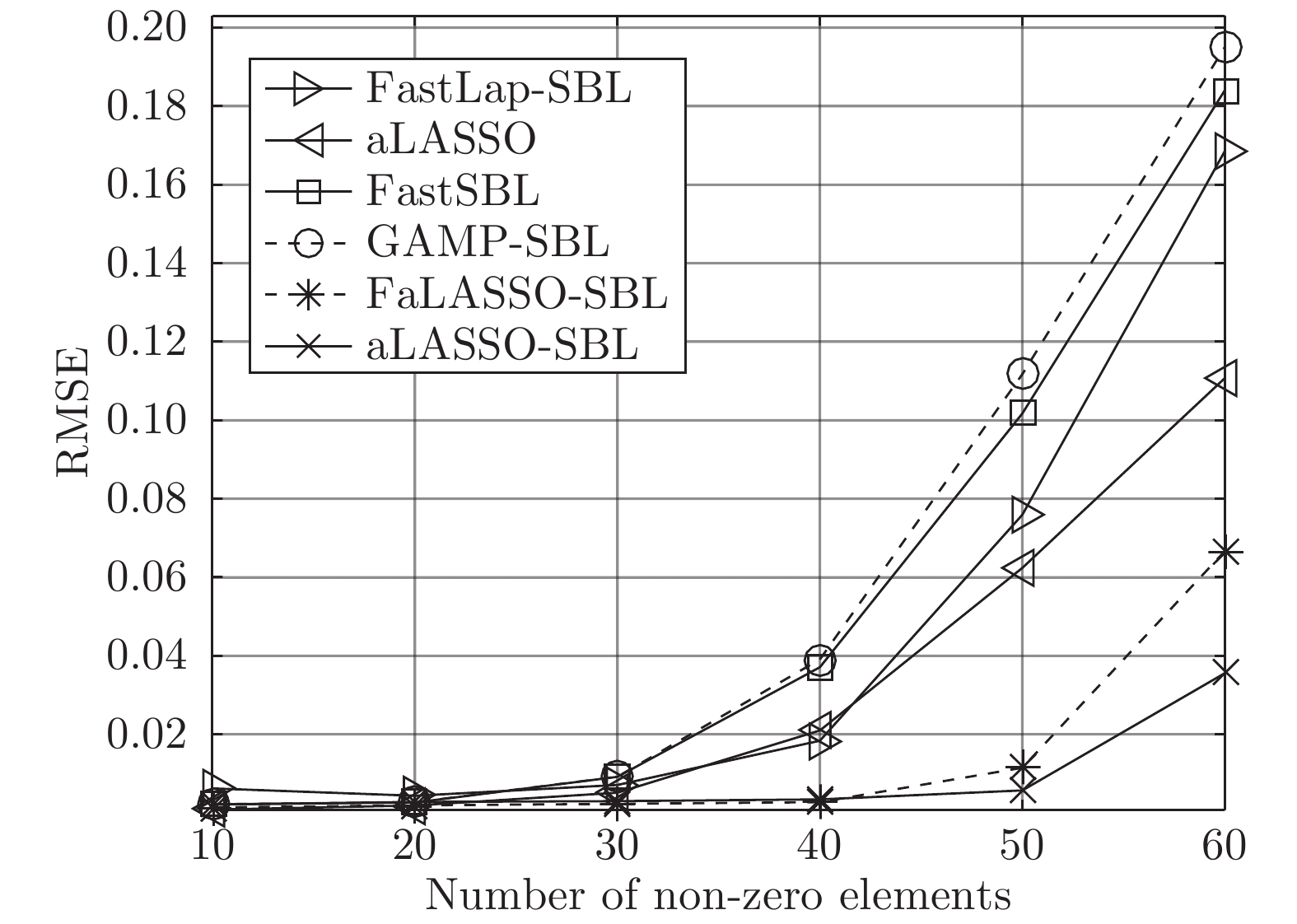
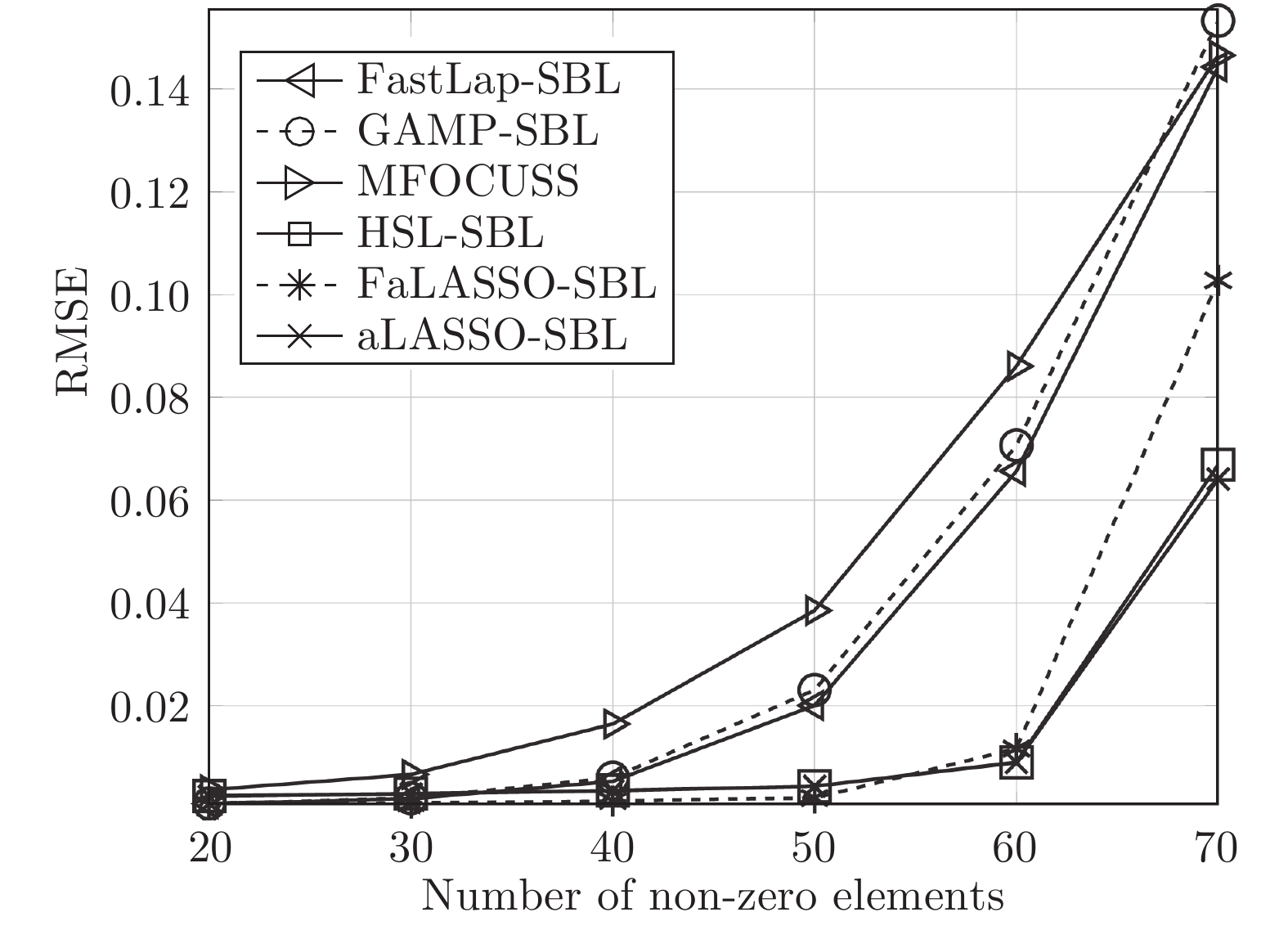
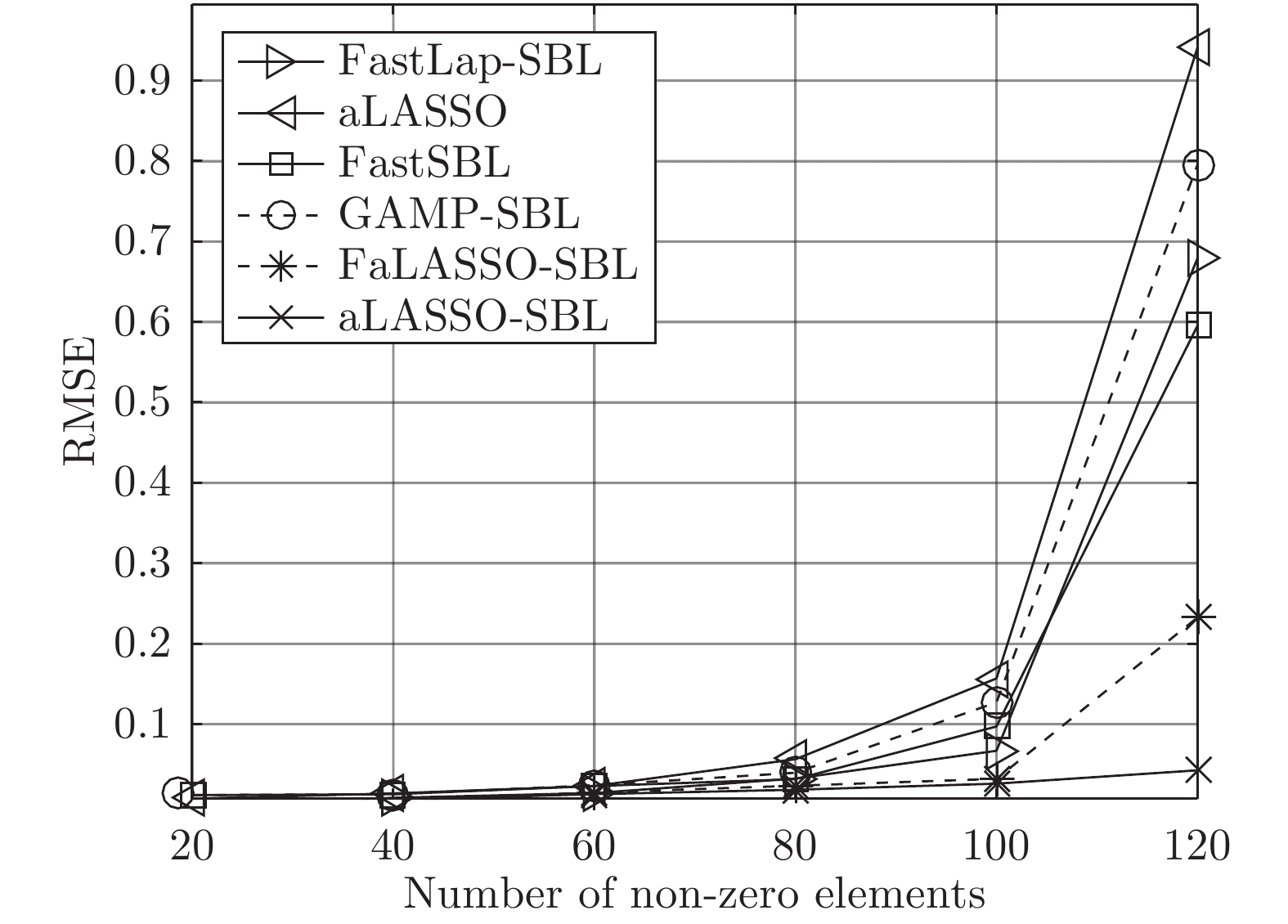
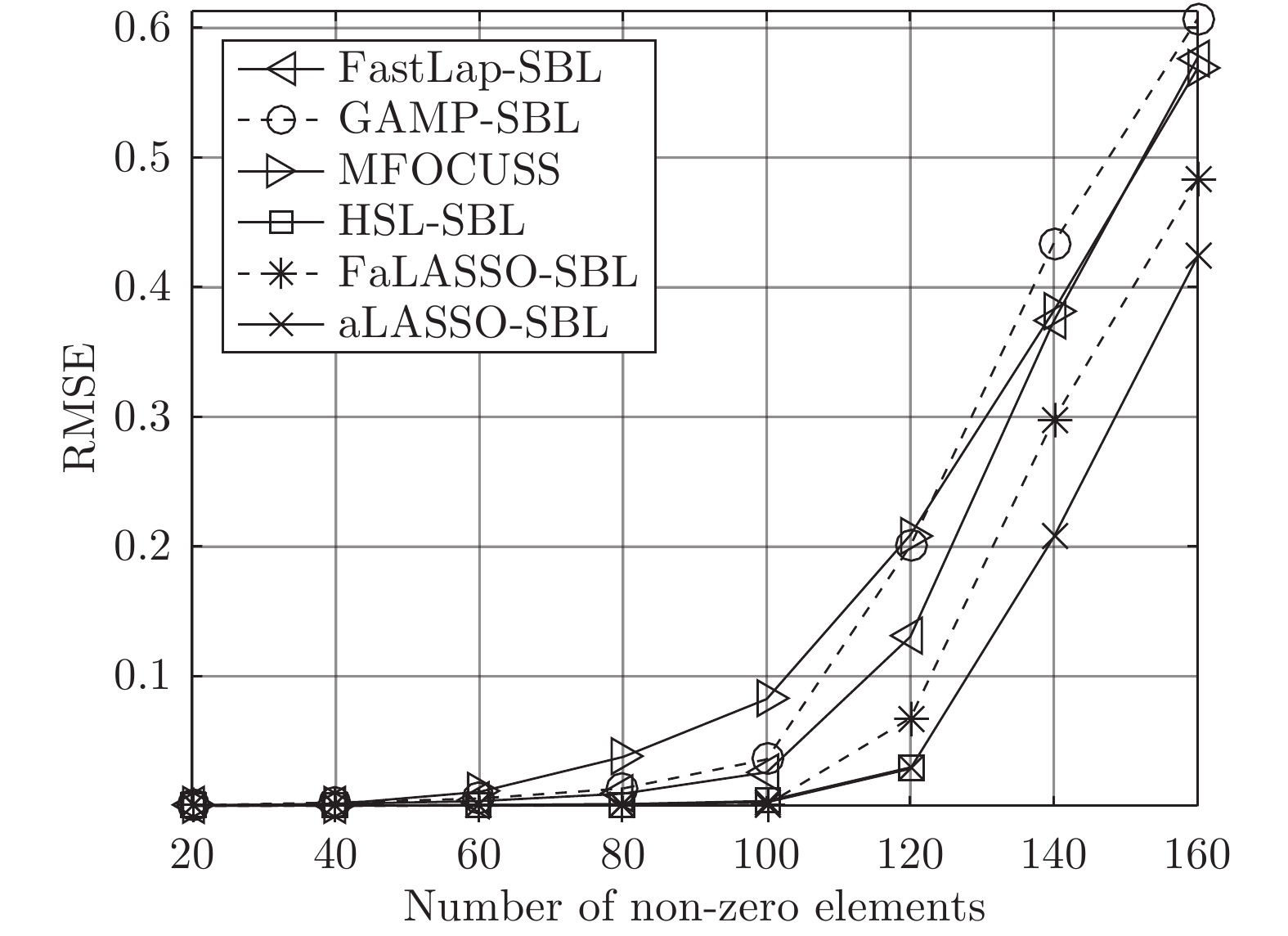
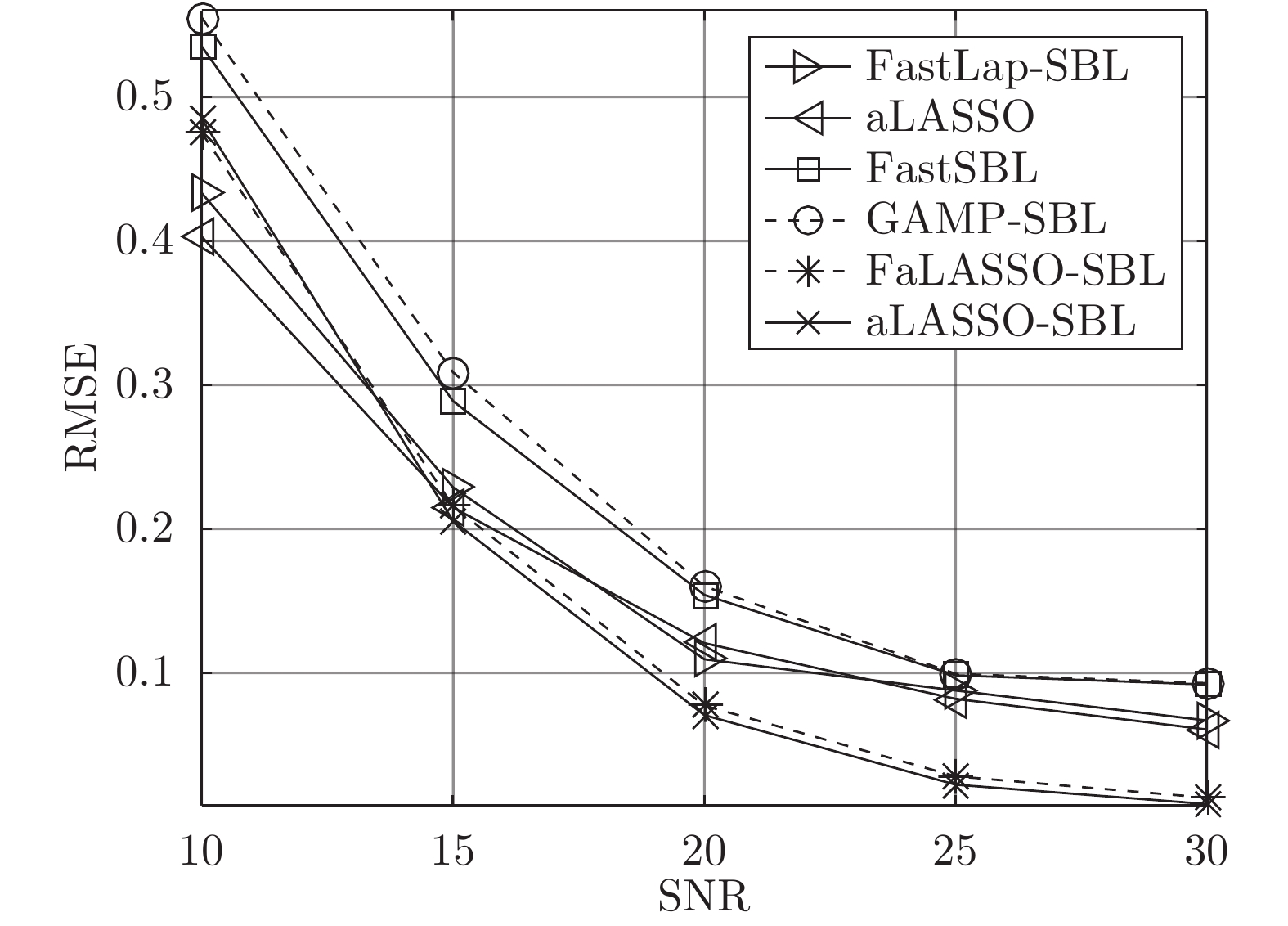
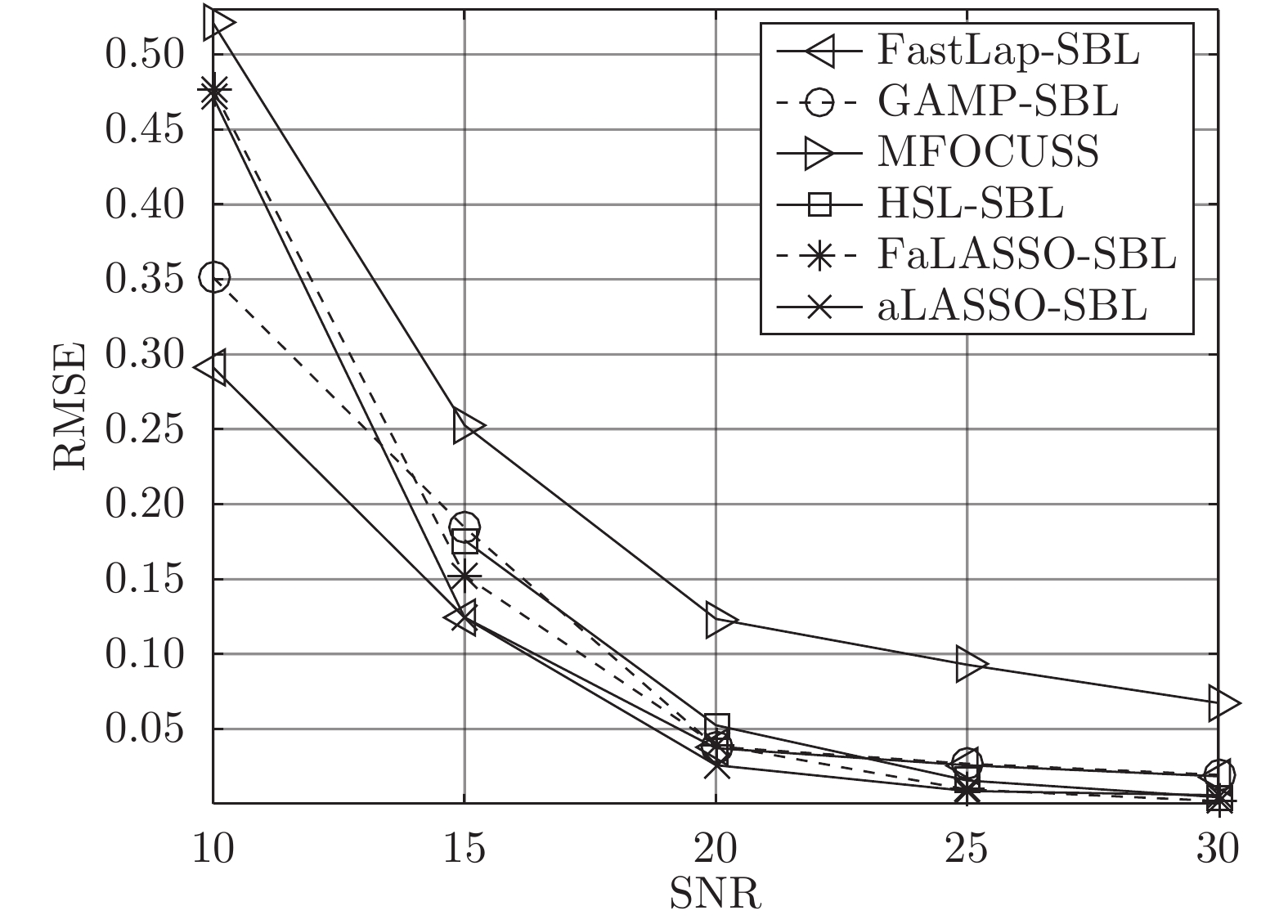
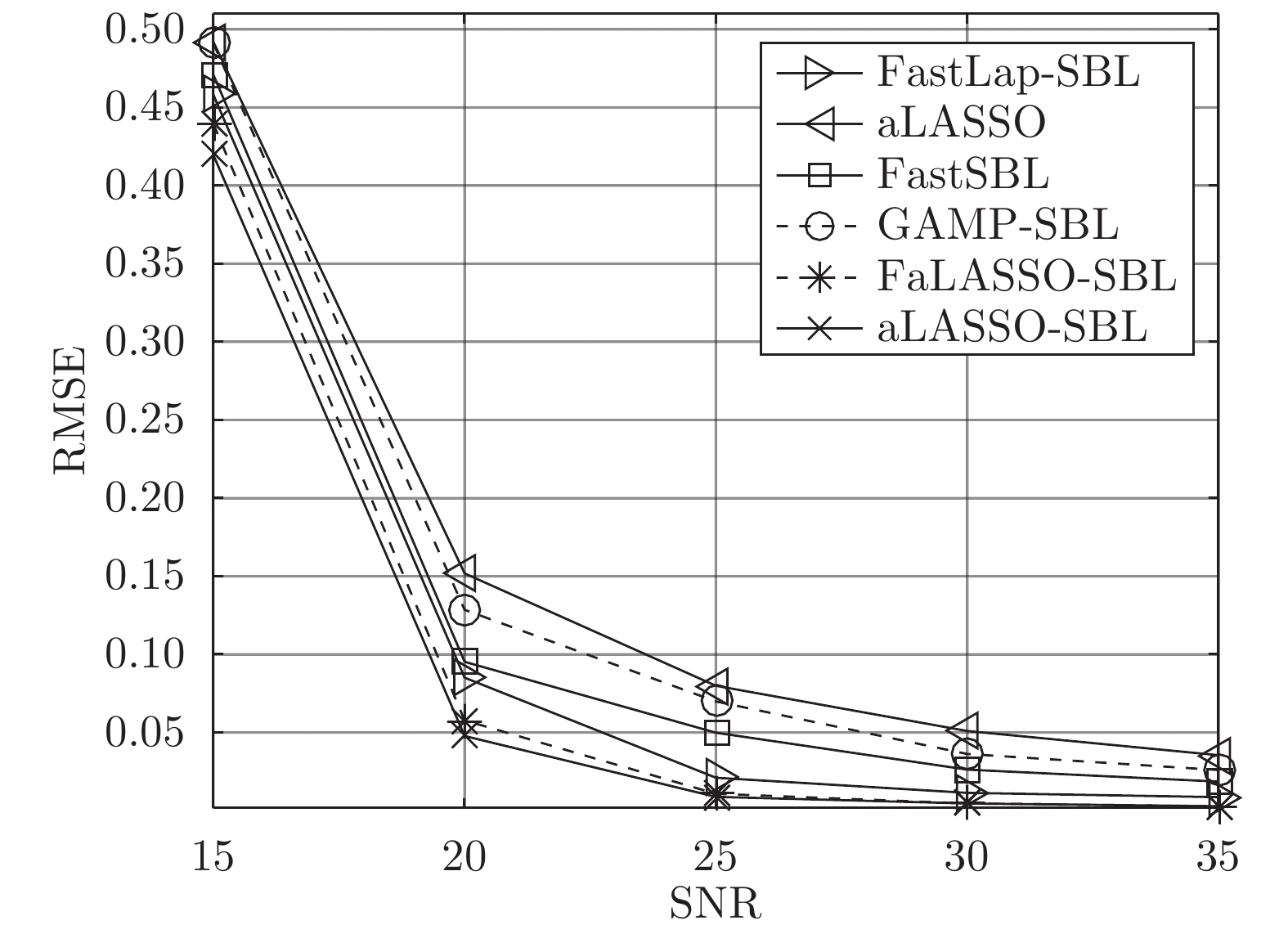
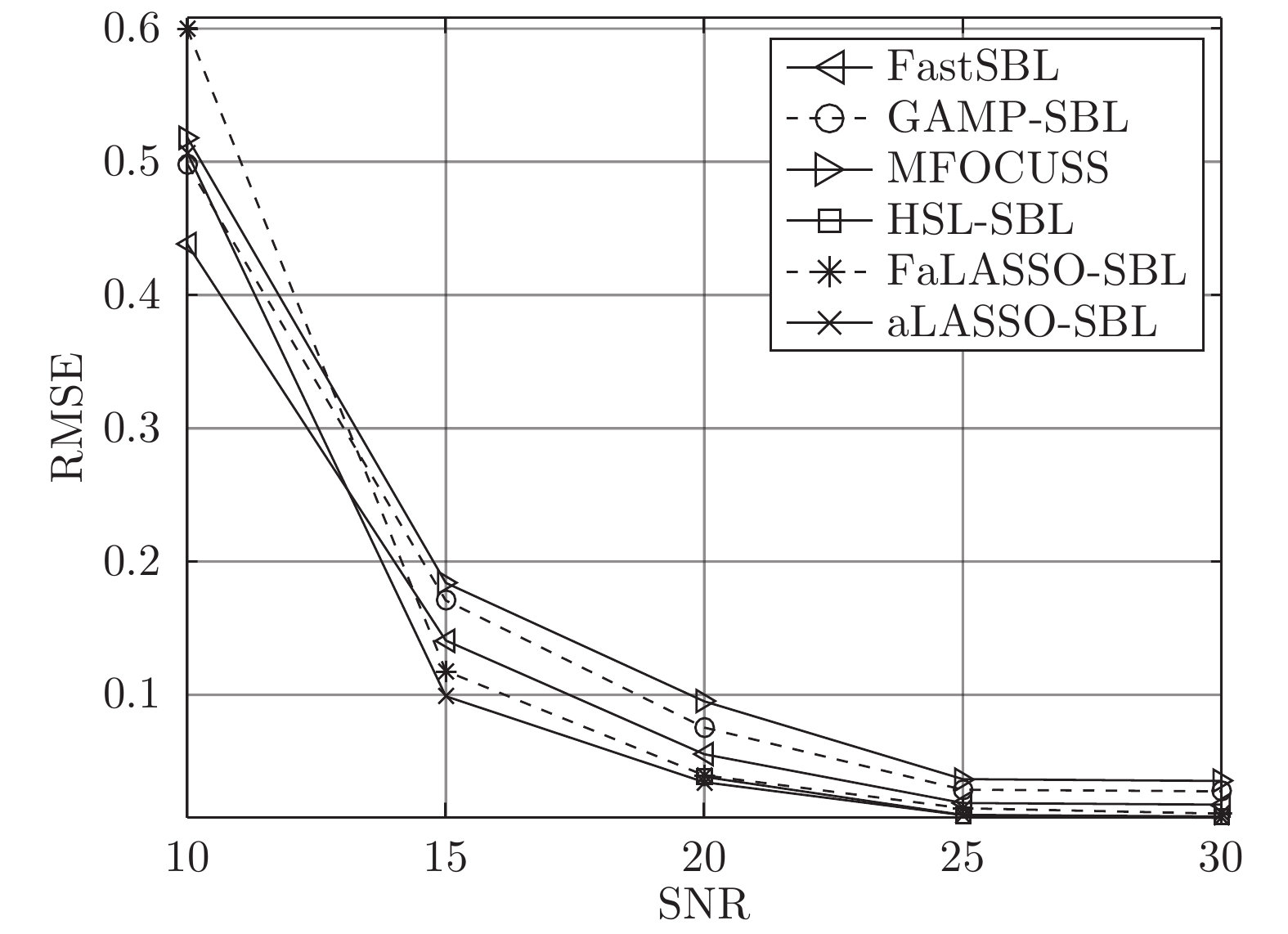
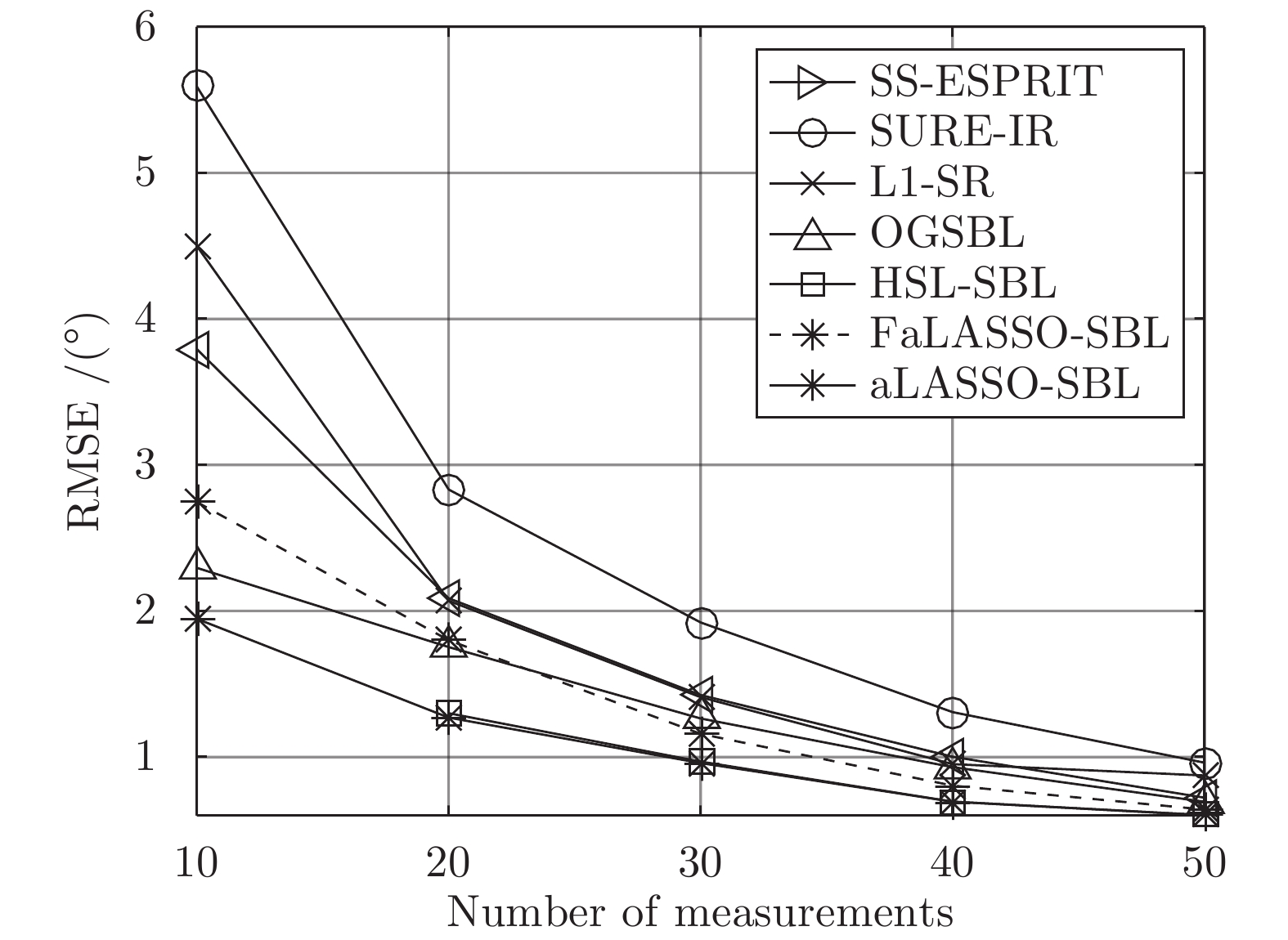
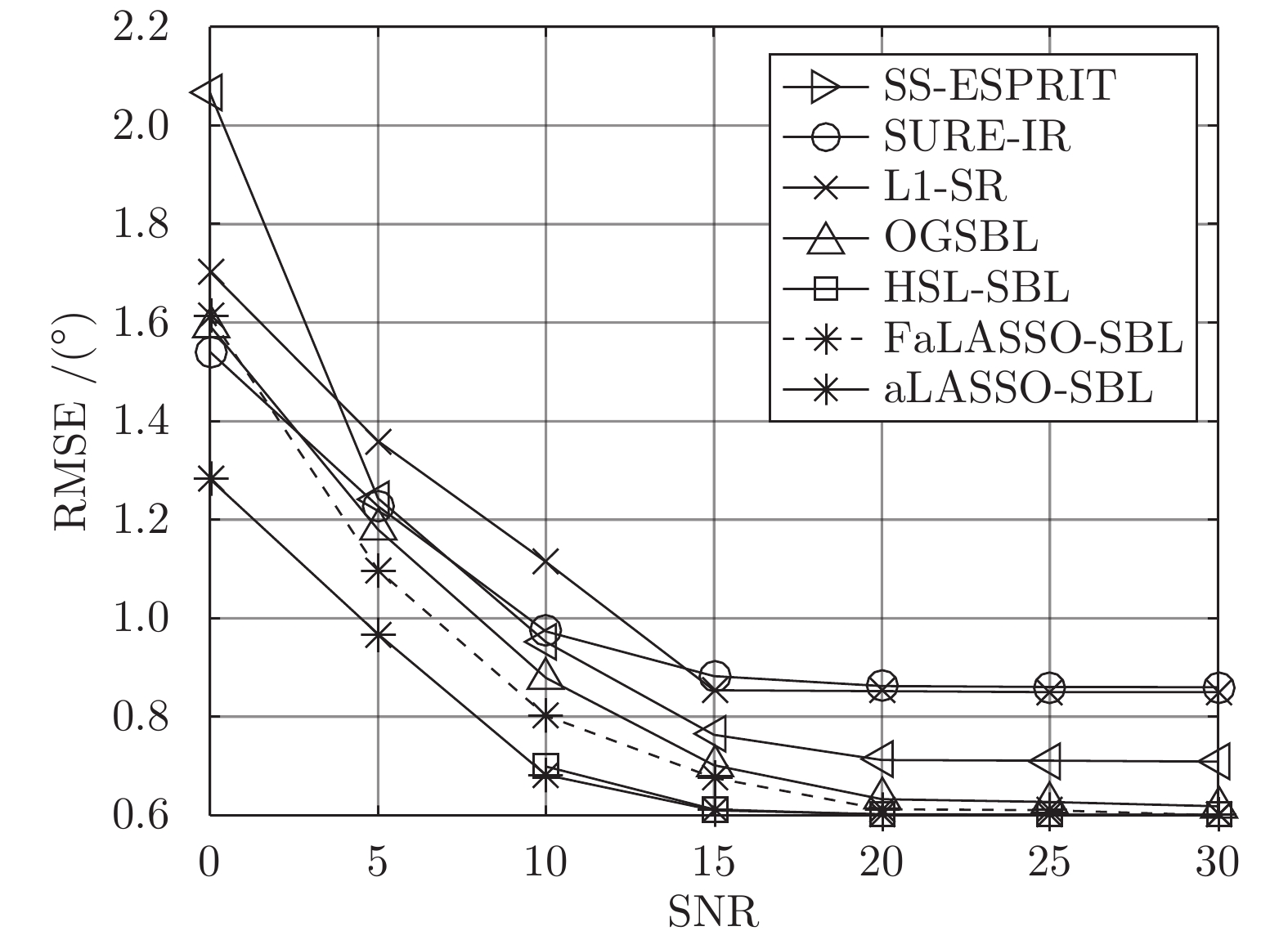
为了提高稀疏信号恢复的准确性, 开展了基于自适应套索算子(Least absolute shrinkage and selection operator, LASSO)先验的稀疏贝叶斯学习(Sparse Bayesian learning, SBL)算法研究. 1) 在稀疏贝叶斯模型构建阶段, 构造了一种新的多层贝叶斯框架, 赋予信号中元素独立的LASSO先验. 该先验比现有稀疏先验更有效地鼓励稀疏并且该模型中所有参数更新存在闭合解. 然后在该多层贝叶斯框架的基础上提出了一种基于自适应LASSO先验的SBL算法. 2) 为降低提出的算法的计算复杂度, 在贝叶斯推断阶段利用空间轮换变元方法对提出的算法进行改进, 避免了矩阵求逆运算, 使参数更新快速高效, 从而提出了一种基于自适应LASSO先验的快速SBL算法. 本文提出的算法的稀疏恢复性能通过实验进行了验证, 分别针对不同大小测量矩阵的稀疏信号恢复以及单快拍波达方向(Direction of arrival, DOA)估计开展了实验. 实验结果表明: 提出基于自适应LASSO先验的SBL算法比现有算法具有更高的稀疏恢复准确度; 提出的快速算法的准确度略低于提出的基于自适应LASSO先验的SBL算法, 但计算复杂度明显降低.
为了提高稀疏信号恢复的准确性, 开展了基于自适应套索算子(Least absolute shrinkage and selection operator, LASSO)先验的稀疏贝叶斯学习(Sparse Bayesian learning, SBL)算法研究. 1) 在稀疏贝叶斯模型构建阶段, 构造了一种新的多层贝叶斯框架, 赋予信号中元素独立的LASSO先验. 该先验比现有稀疏先验更有效地鼓励稀疏并且该模型中所有参数更新存在闭合解. 然后在该多层贝叶斯框架的基础上提出了一种基于自适应LASSO先验的SBL算法. 2) 为降低提出的算法的计算复杂度, 在贝叶斯推断阶段利用空间轮换变元方法对提出的算法进行改进, 避免了矩阵求逆运算, 使参数更新快速高效, 从而提出了一种基于自适应LASSO先验的快速SBL算法. 本文提出的算法的稀疏恢复性能通过实验进行了验证, 分别针对不同大小测量矩阵的稀疏信号恢复以及单快拍波达方向(Direction of arrival, DOA)估计开展了实验. 实验结果表明: 提出基于自适应LASSO先验的SBL算法比现有算法具有更高的稀疏恢复准确度; 提出的快速算法的准确度略低于提出的基于自适应LASSO先验的SBL算法, 但计算复杂度明显降低.
2022, 48(5): 1209-1219.
doi: 10.16383/j.aas.c200452
摘要:
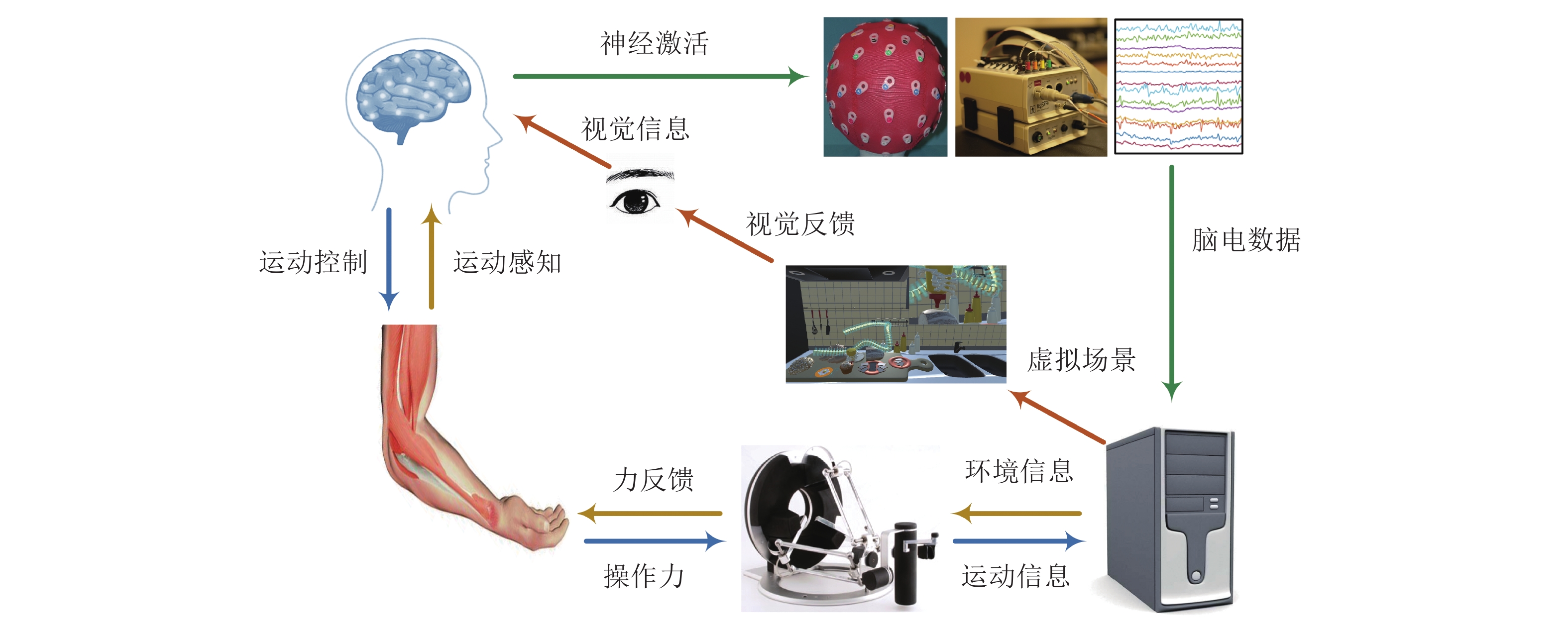
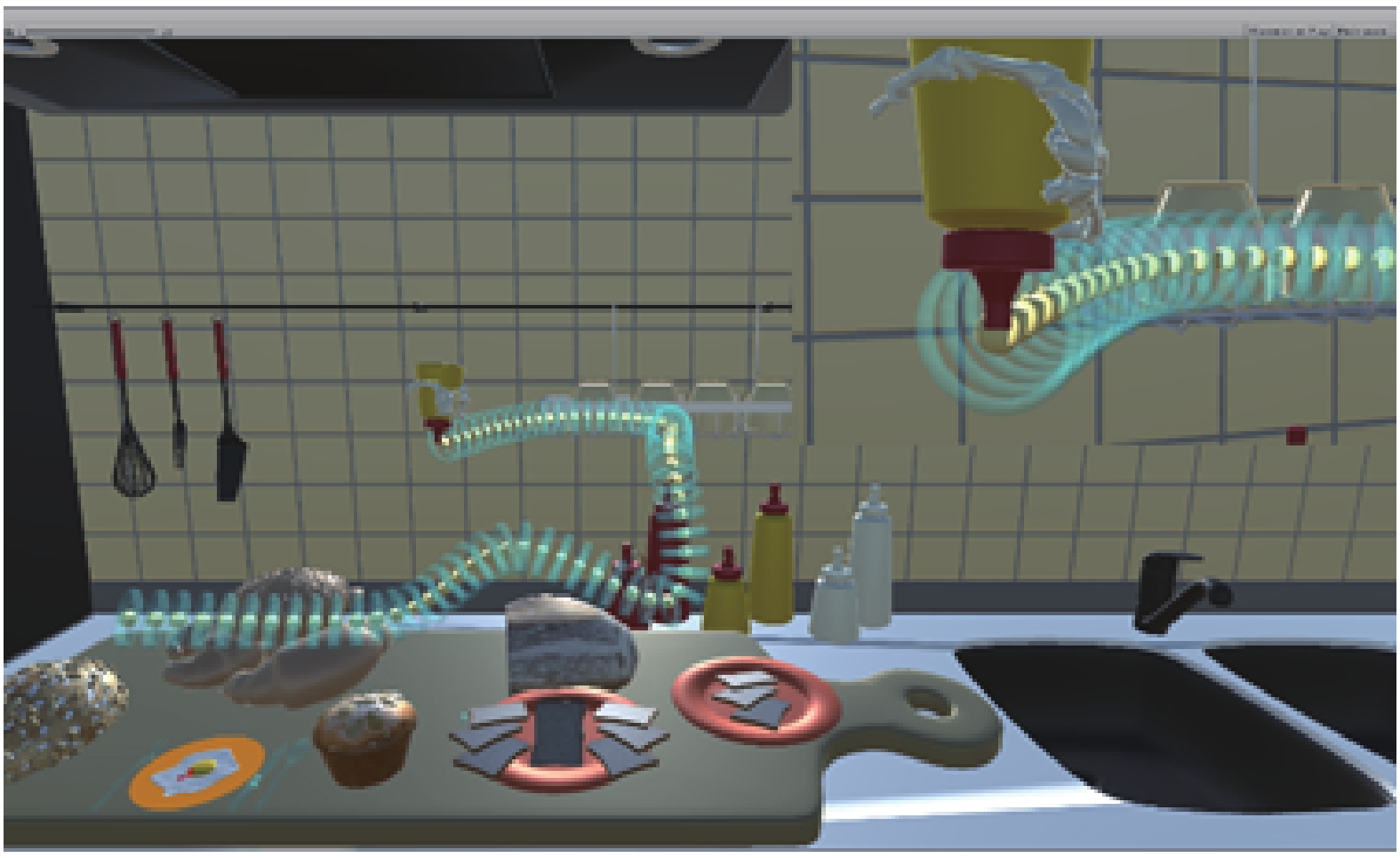
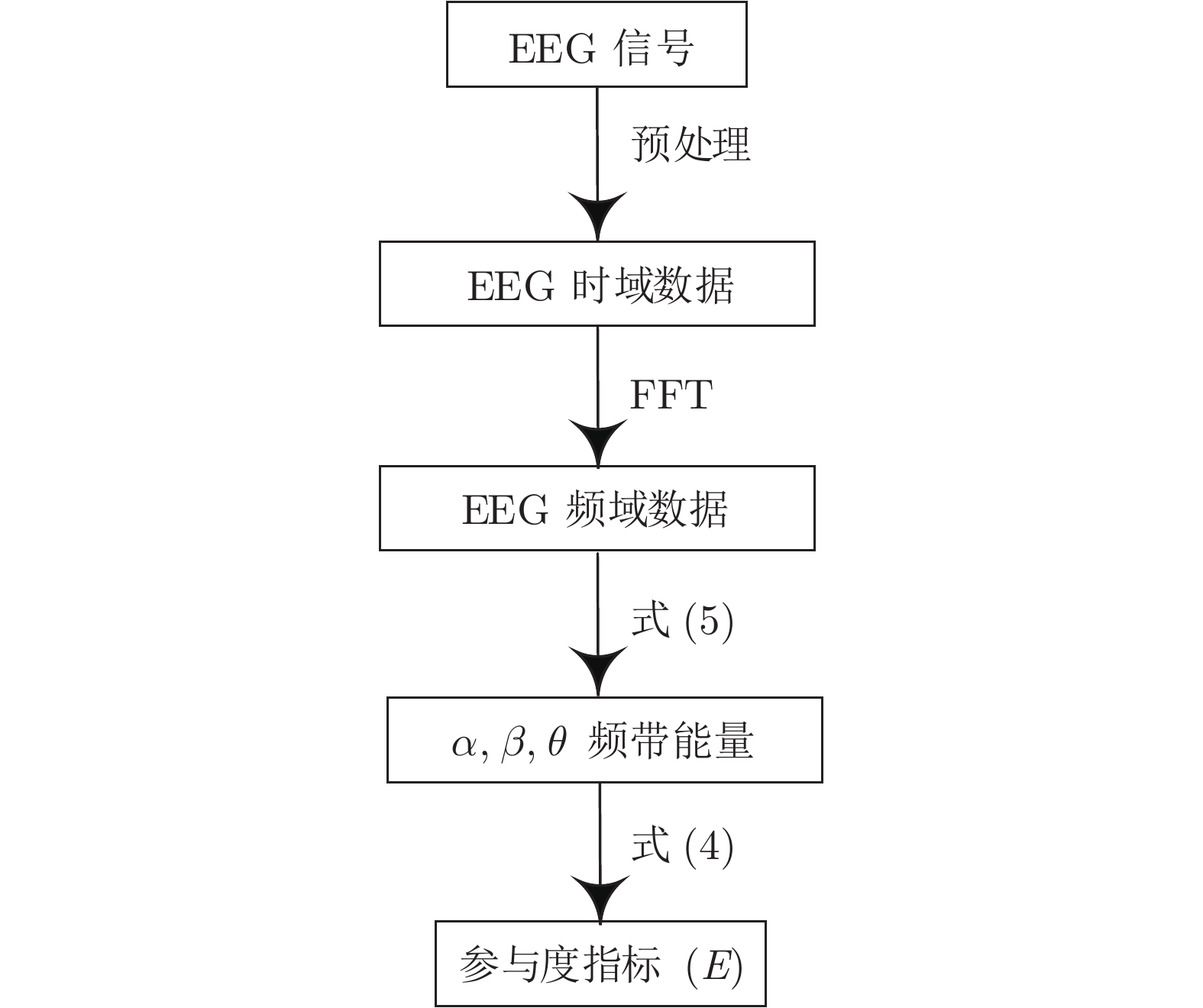
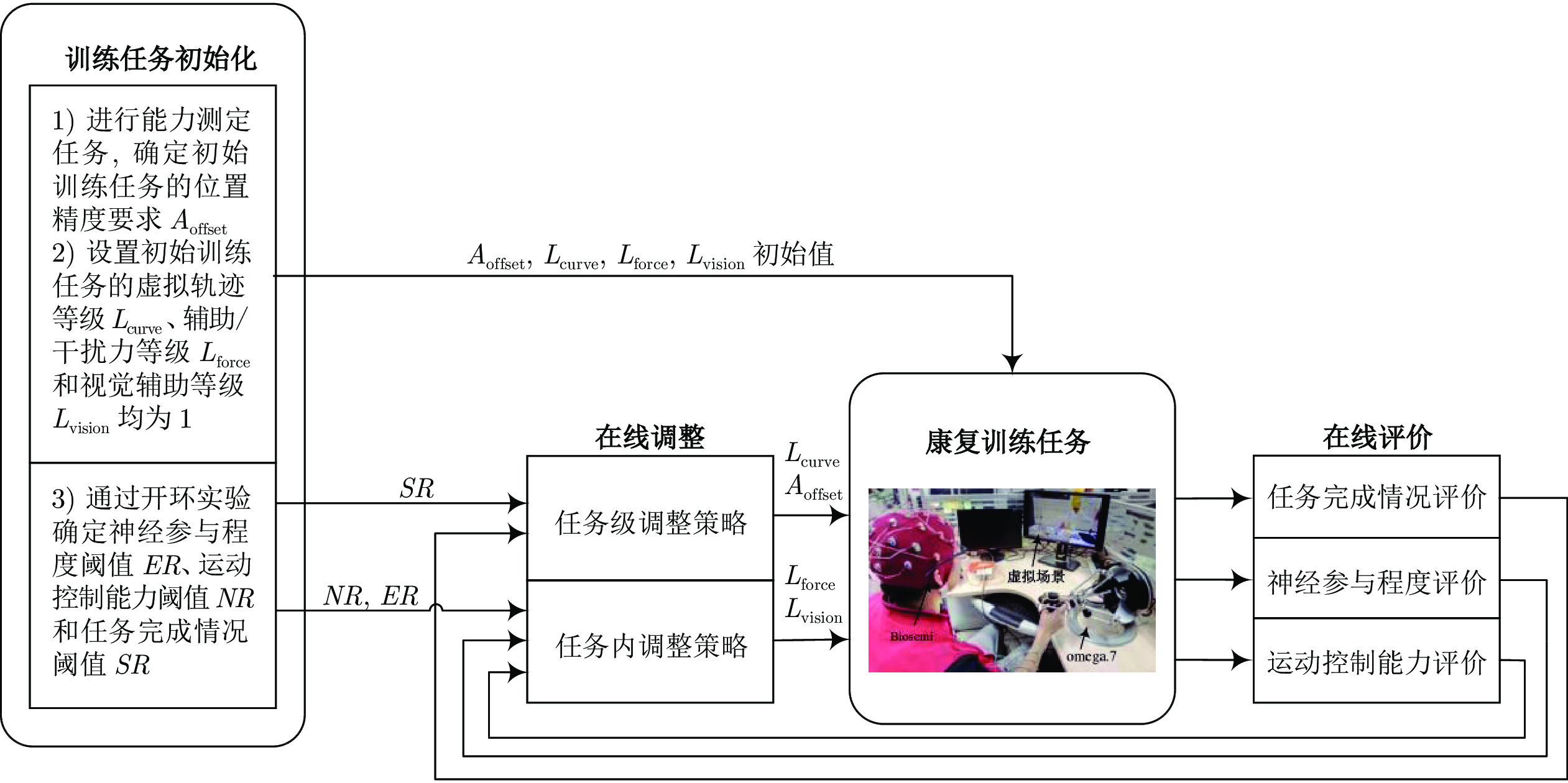
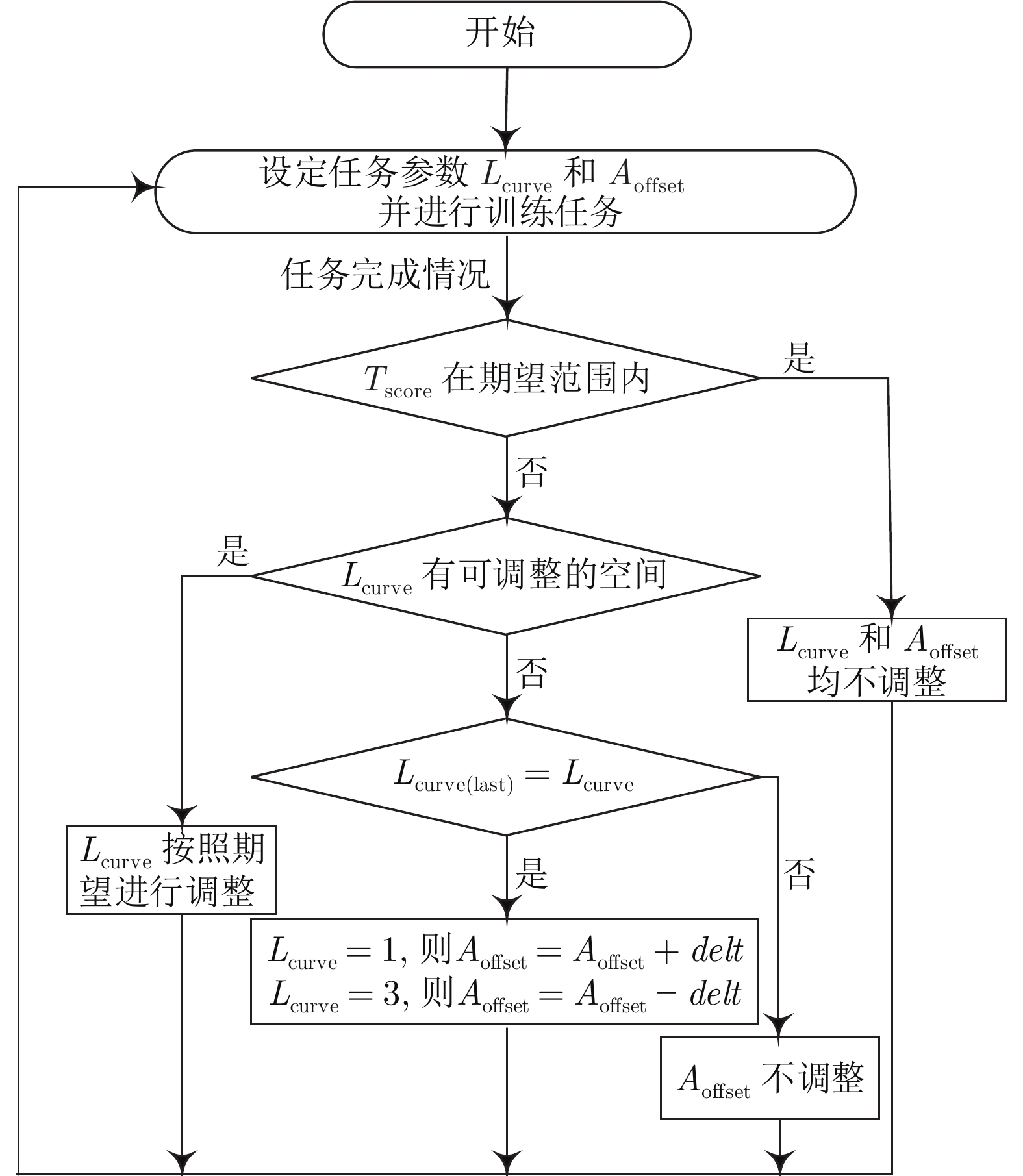
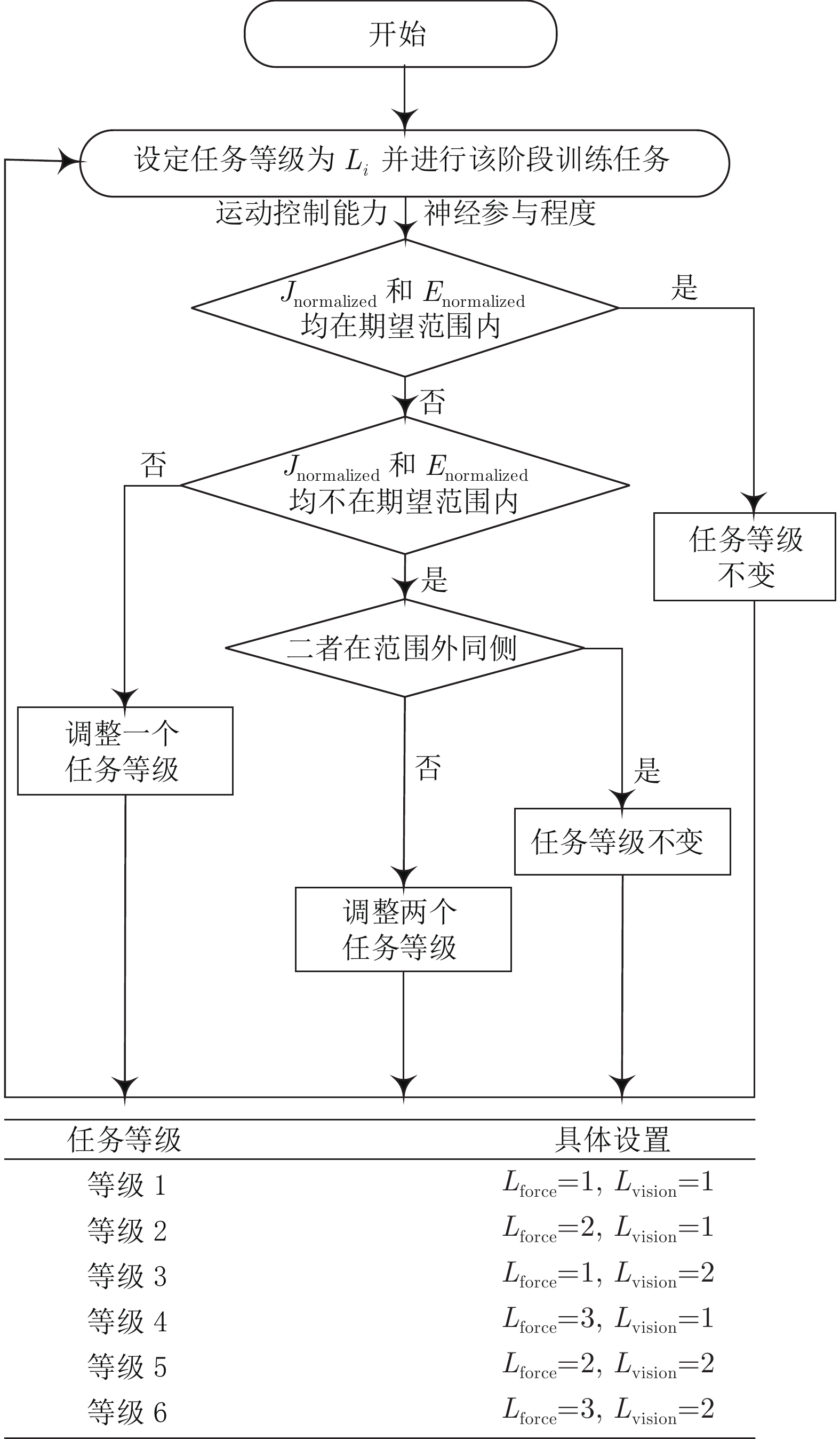
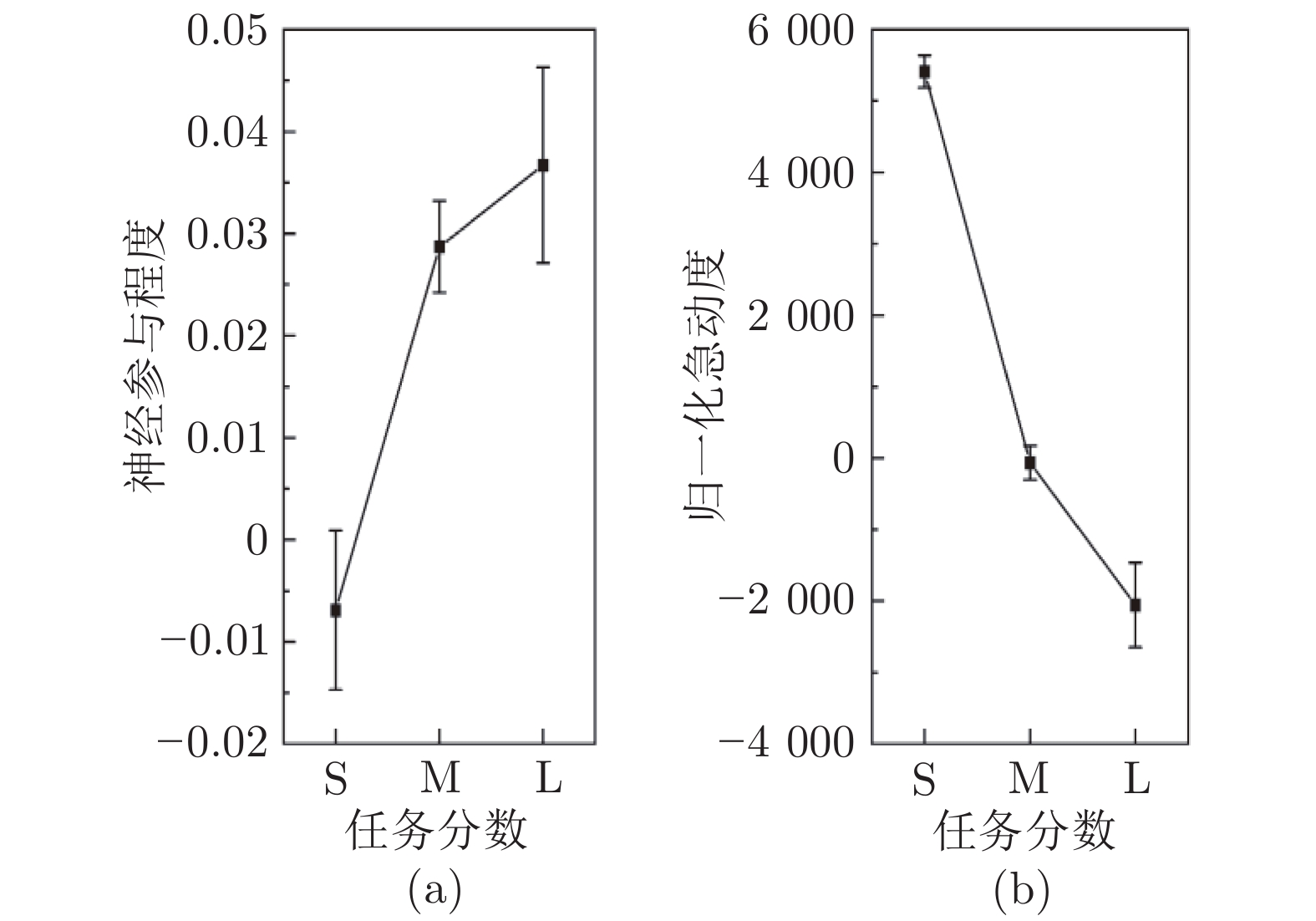
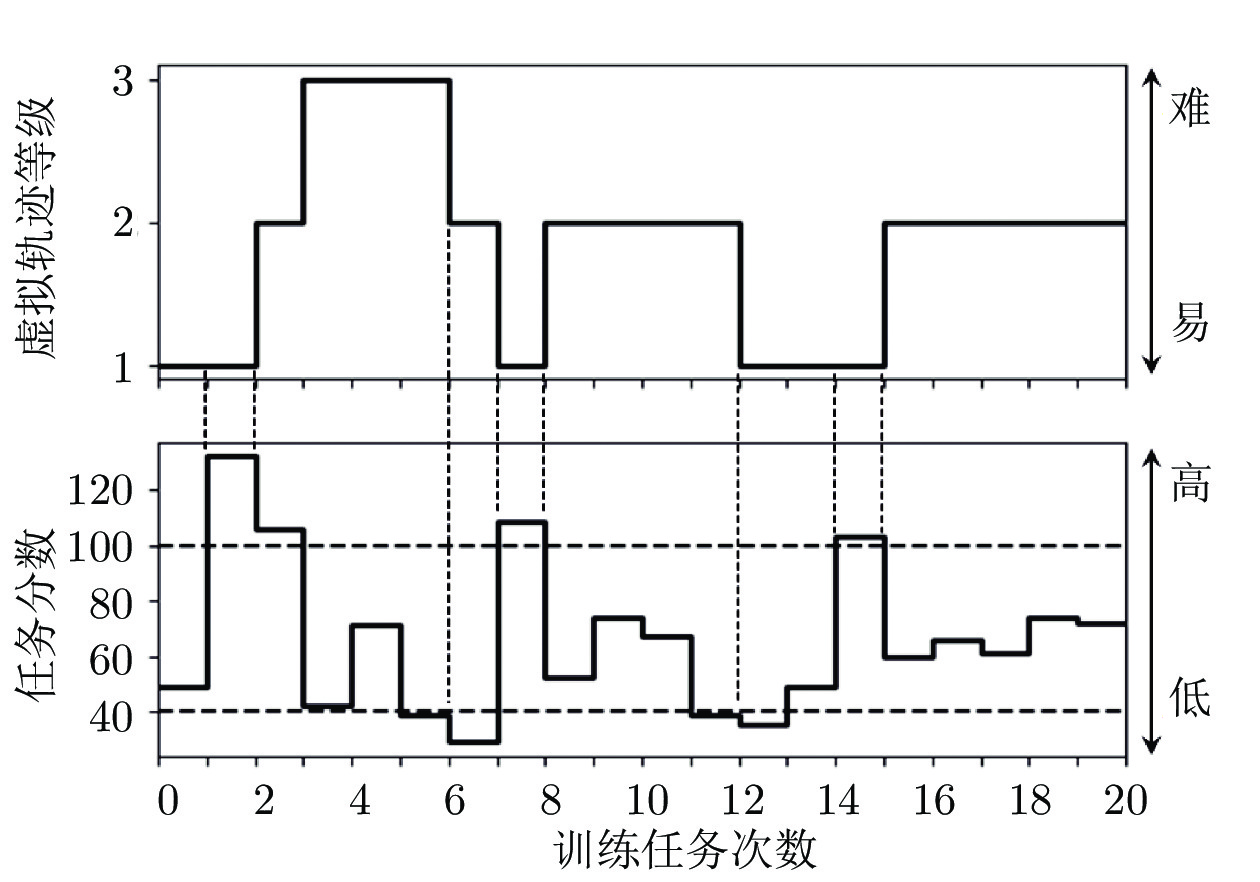
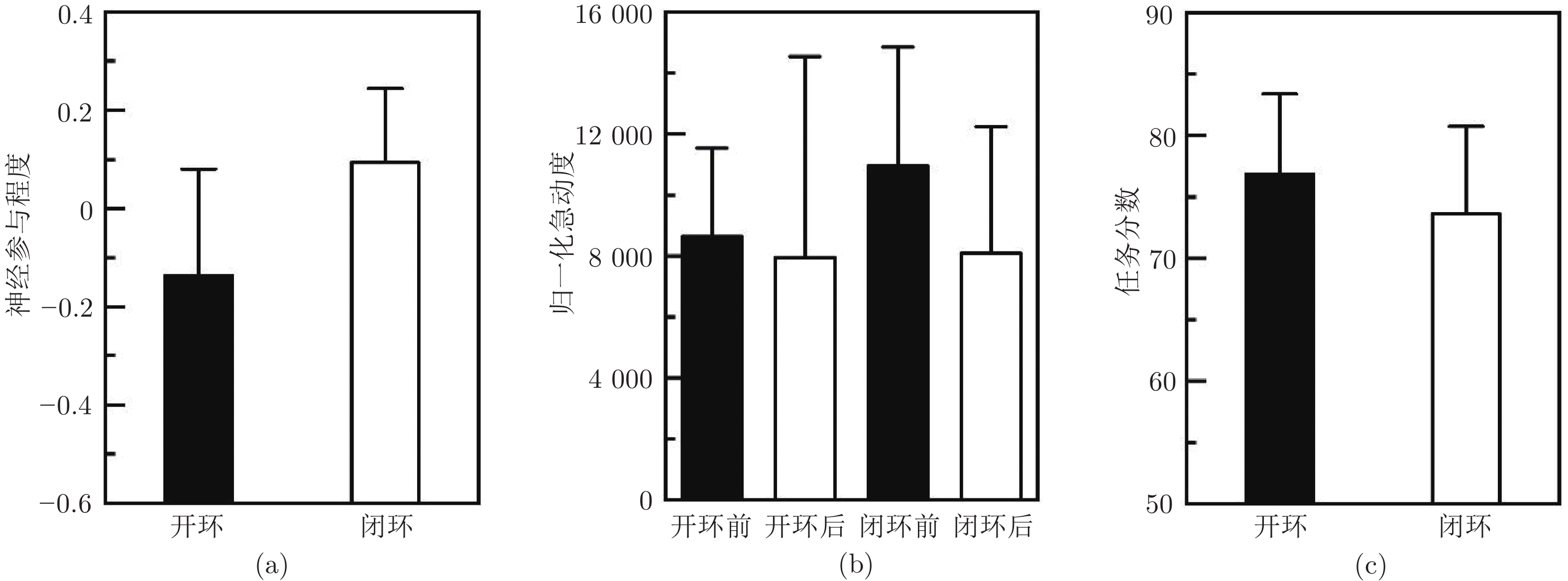
在神经康复训练中, 保持患者积极主动参与、提供适配其运动能力的训练难度, 对于取得良好的康复效果至关重要. 针对患者在长期康复训练过程中容易懈怠甚至出现惰性效应、运动能力有波动等挑战, 系统提出了一种脑肢融合的神经康复训练在线评价与调整方法. 首先, 从脑、肢体以及训练任务三个层面, 基于脑电(Electroencephalography, EEG)信号、肢体运动数据和任务评分, 建立了对患者神经参与程度、运动控制能力和任务完成情况的量化评价方法. 进而, 在任务操作难度、辅助或干扰力场以及视觉辅助等方面, 设计了康复训练任务内和任务间的在线调整方法. 通过一个针对手功能康复的灵巧操作任务, 实现了基于所提出的脑肢融合在线评价与调整方法的闭环神经康复训练. 开展实验, 招募16名受试者参加, 对比分析开环训练和闭环训练两种情况下的实验结果, 验证了所提出方法的可行性和有效性. 该工作可推广应用到脑功能障碍患者的运动康复训练, 进一步提高康复效果.
在神经康复训练中, 保持患者积极主动参与、提供适配其运动能力的训练难度, 对于取得良好的康复效果至关重要. 针对患者在长期康复训练过程中容易懈怠甚至出现惰性效应、运动能力有波动等挑战, 系统提出了一种脑肢融合的神经康复训练在线评价与调整方法. 首先, 从脑、肢体以及训练任务三个层面, 基于脑电(Electroencephalography, EEG)信号、肢体运动数据和任务评分, 建立了对患者神经参与程度、运动控制能力和任务完成情况的量化评价方法. 进而, 在任务操作难度、辅助或干扰力场以及视觉辅助等方面, 设计了康复训练任务内和任务间的在线调整方法. 通过一个针对手功能康复的灵巧操作任务, 实现了基于所提出的脑肢融合在线评价与调整方法的闭环神经康复训练. 开展实验, 招募16名受试者参加, 对比分析开环训练和闭环训练两种情况下的实验结果, 验证了所提出方法的可行性和有效性. 该工作可推广应用到脑功能障碍患者的运动康复训练, 进一步提高康复效果.


2022, 48(5): 1220-1233.
doi: 10.16383/j.aas.c200901
摘要:
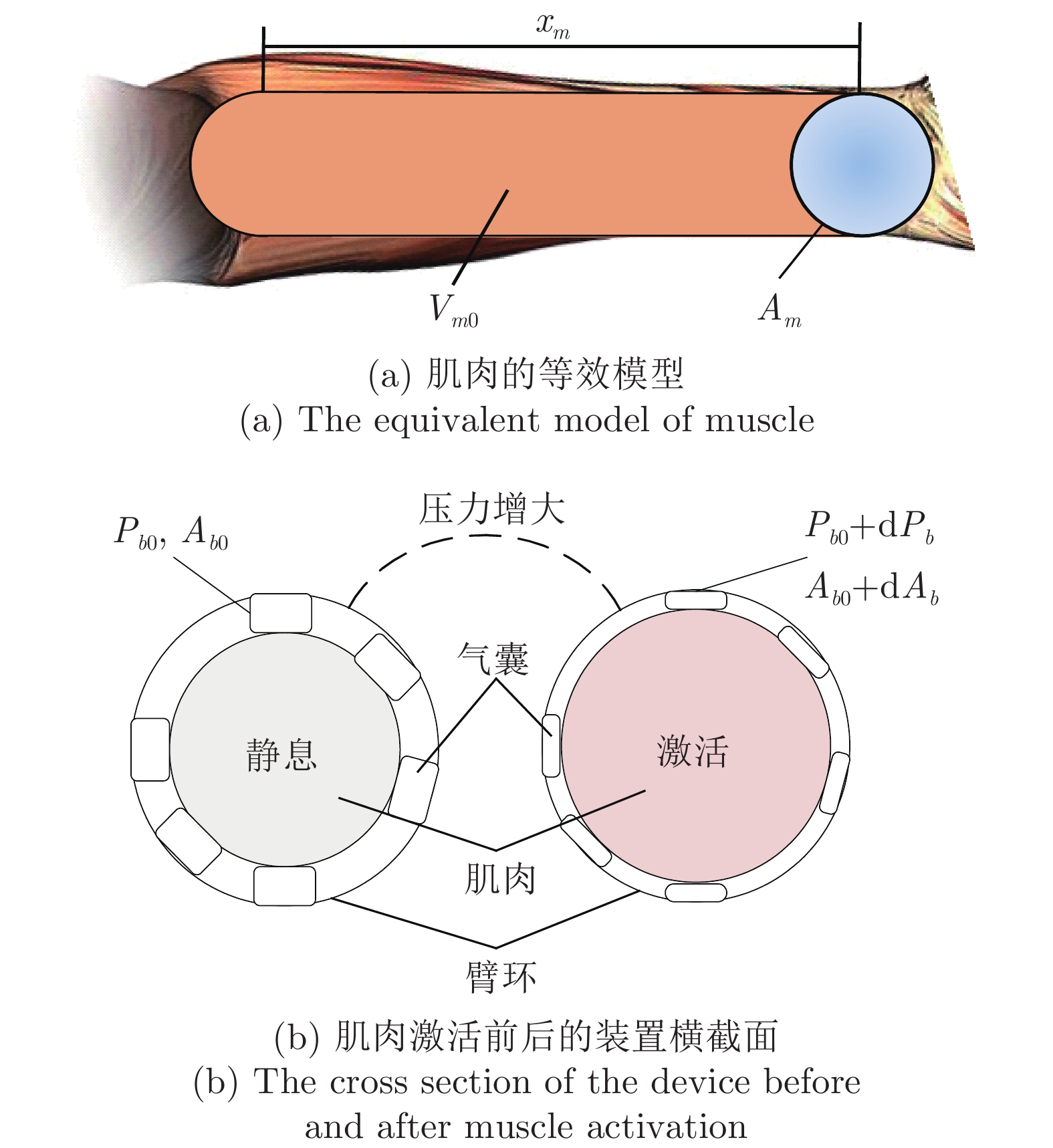
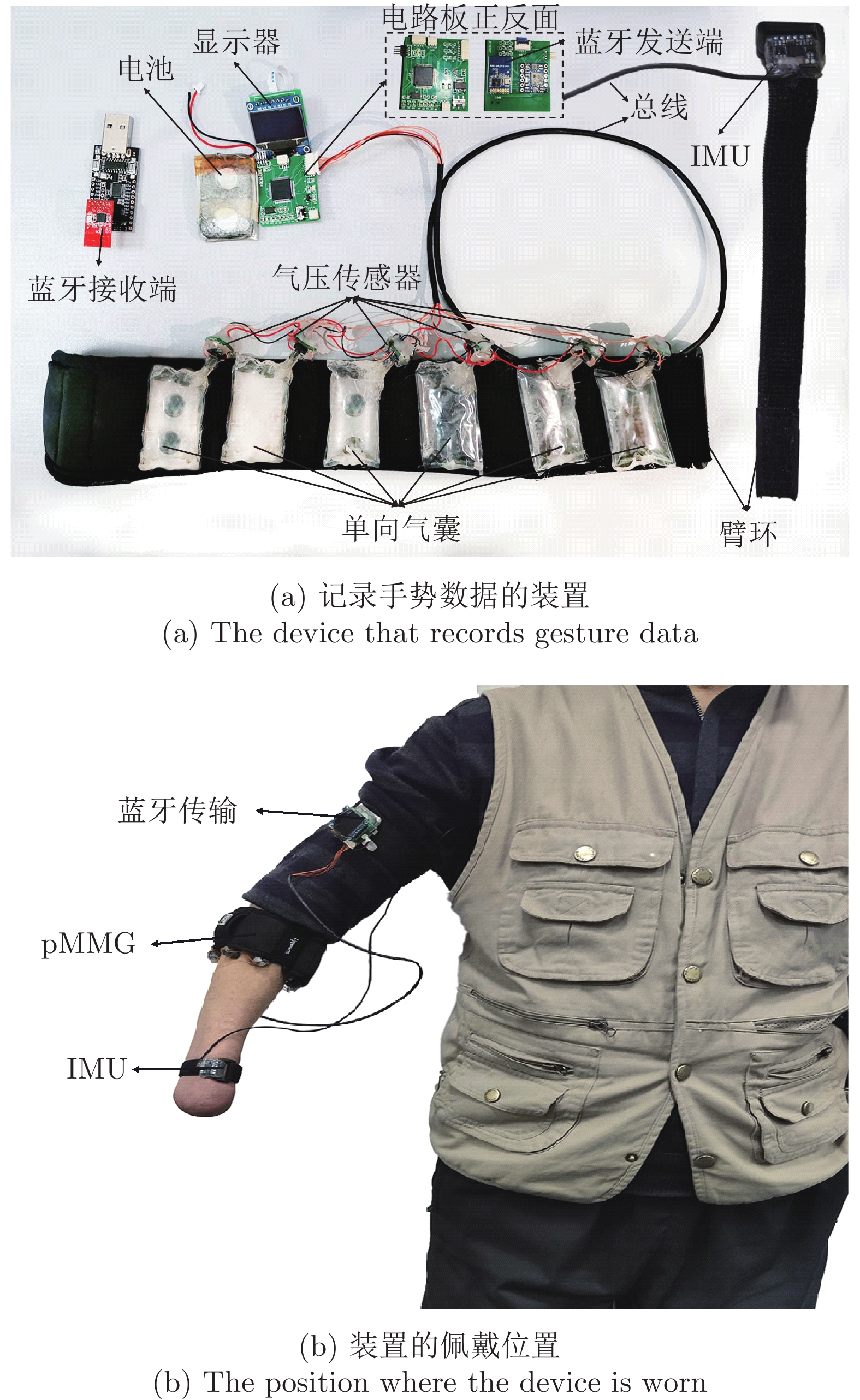
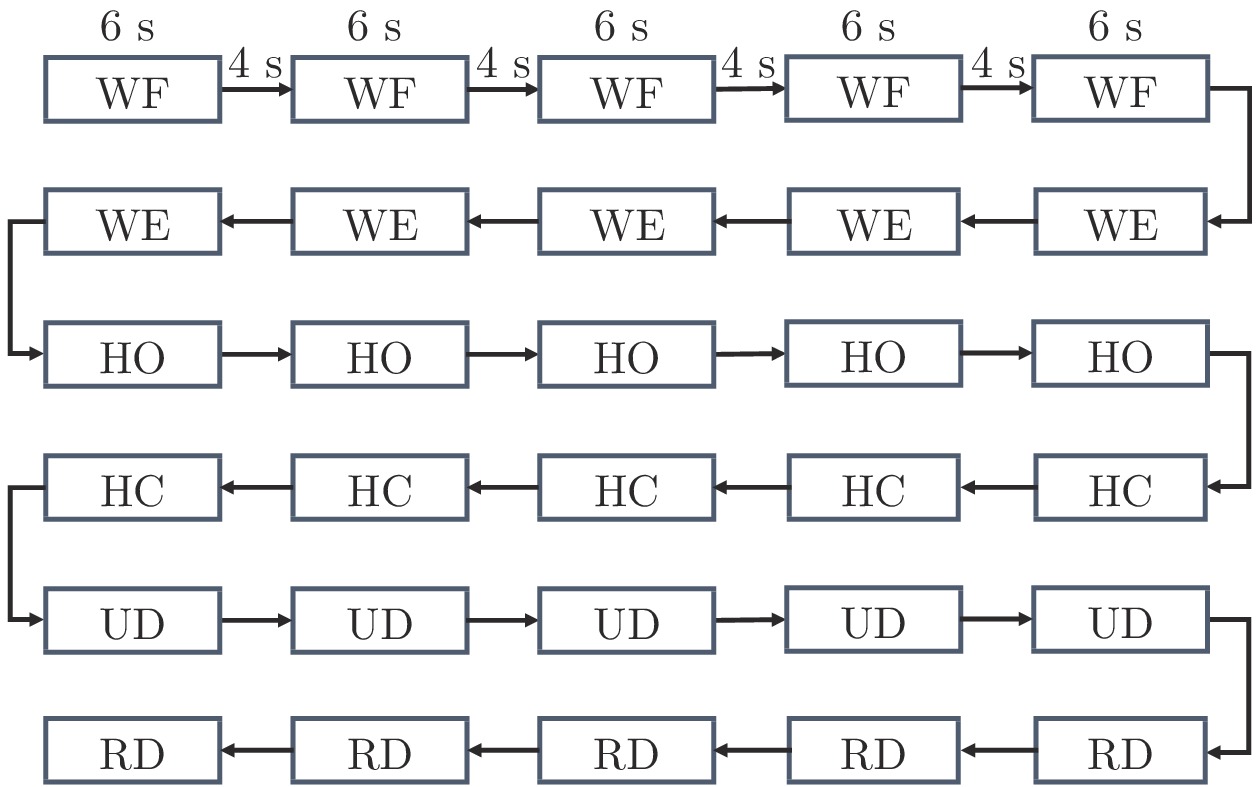
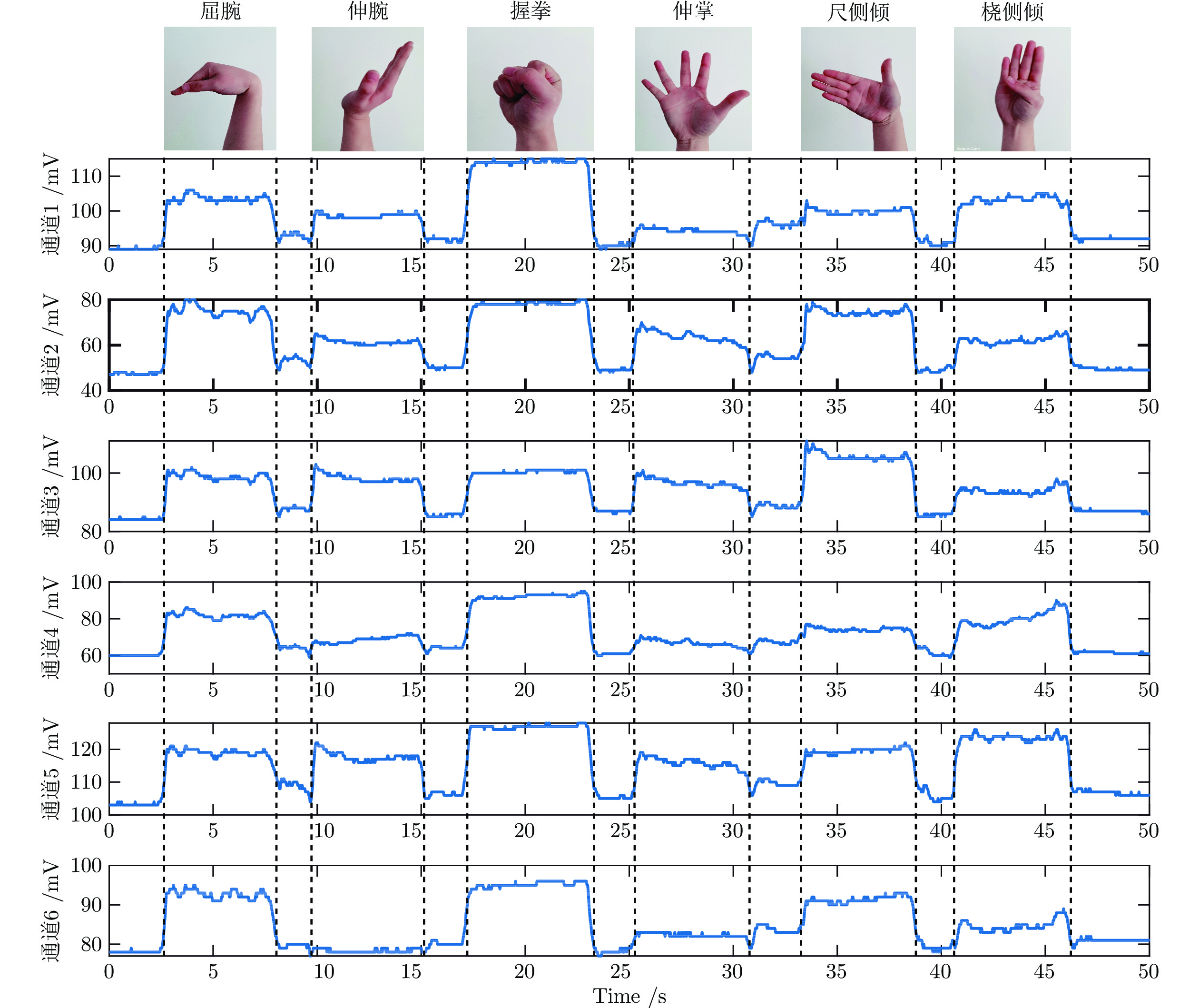
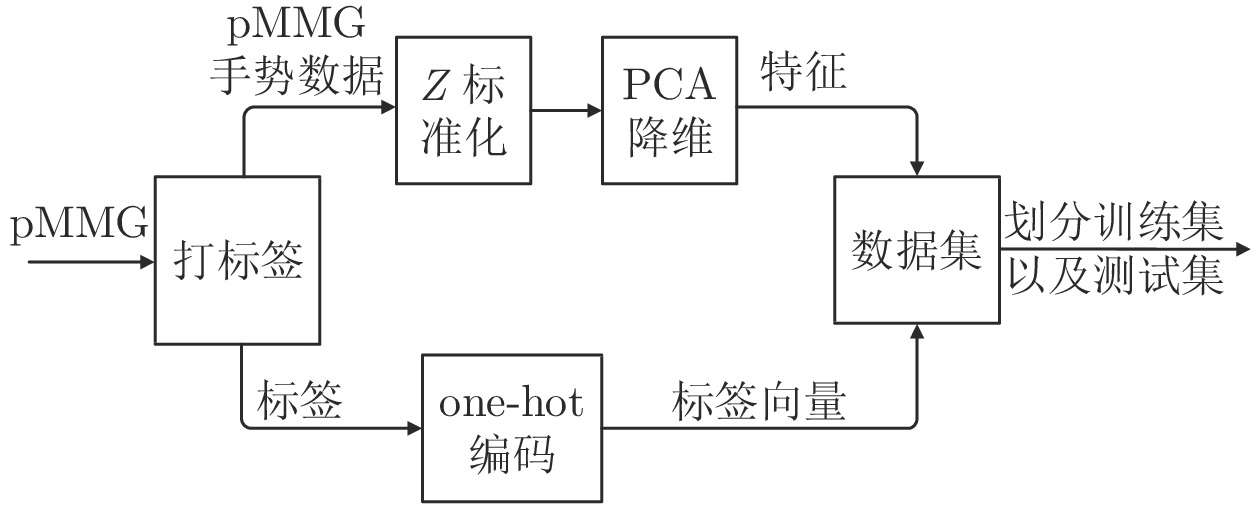
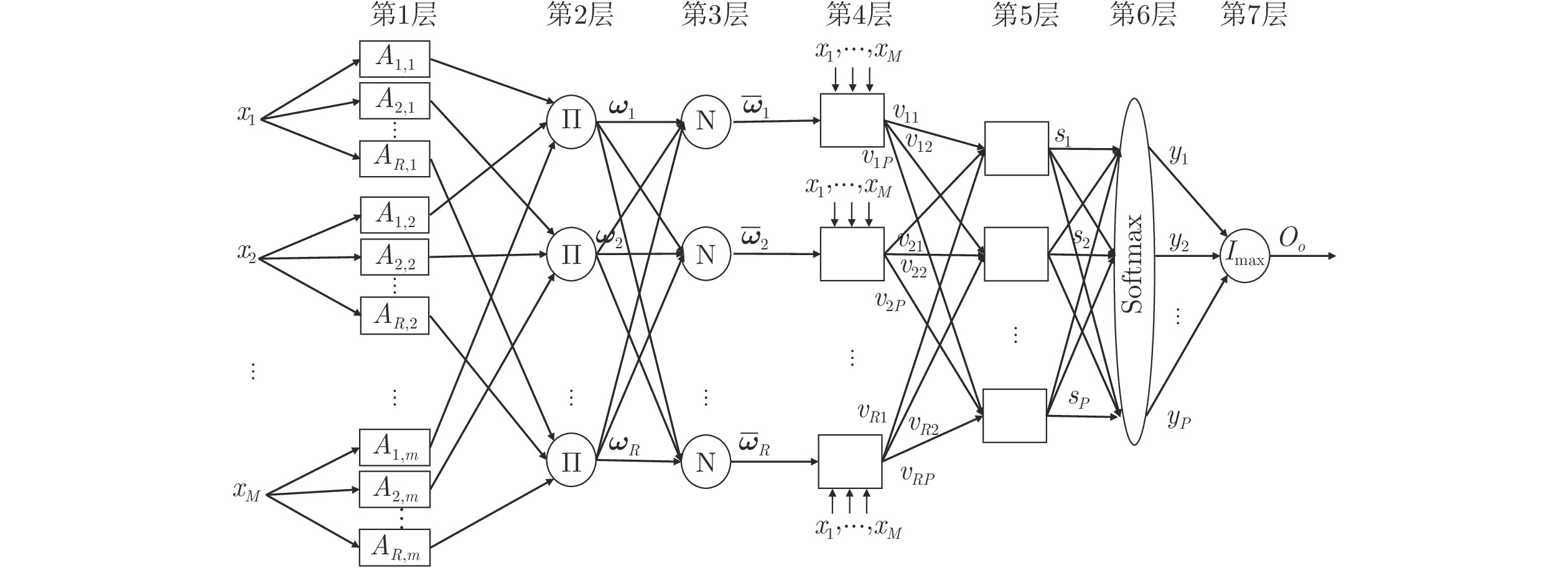
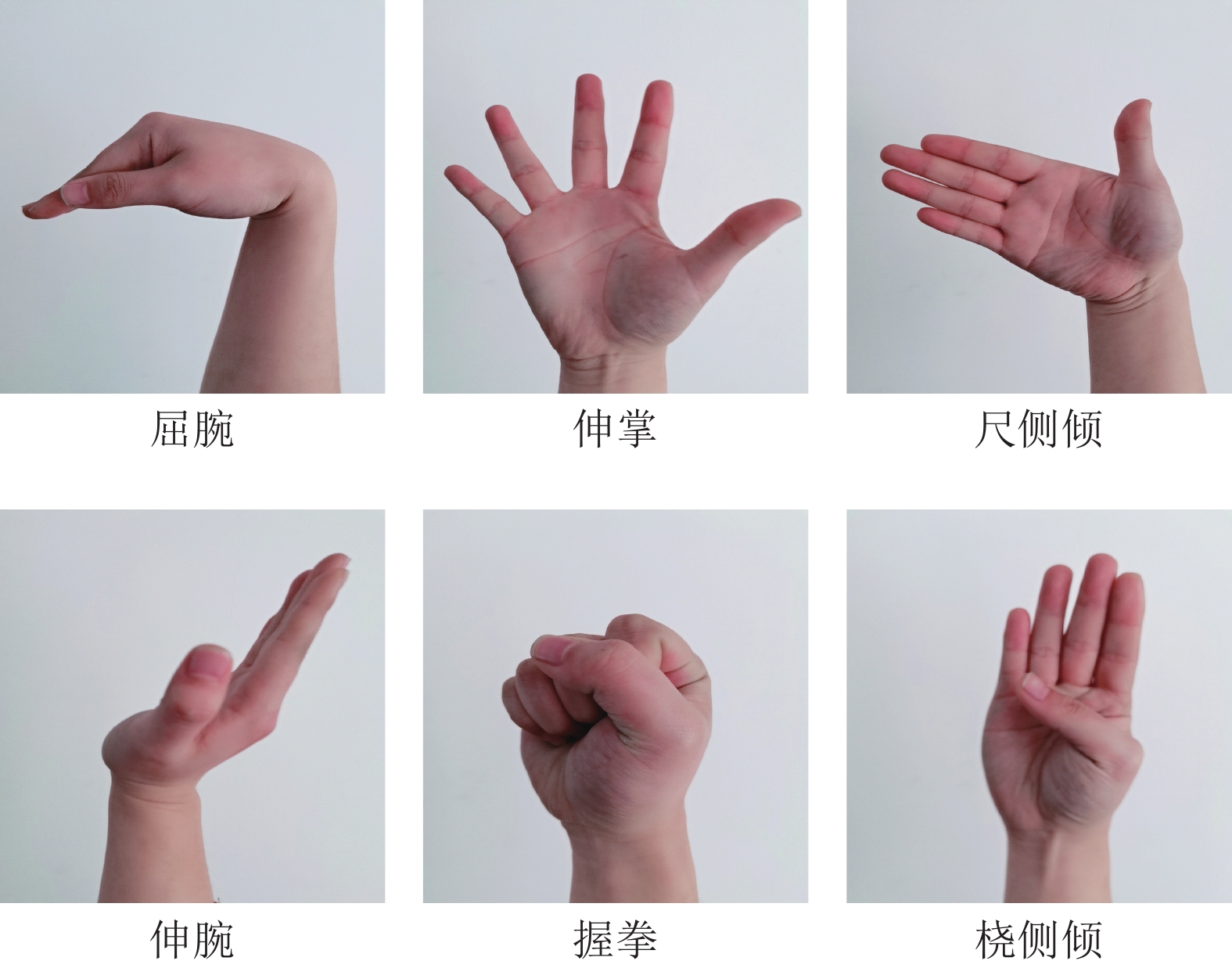
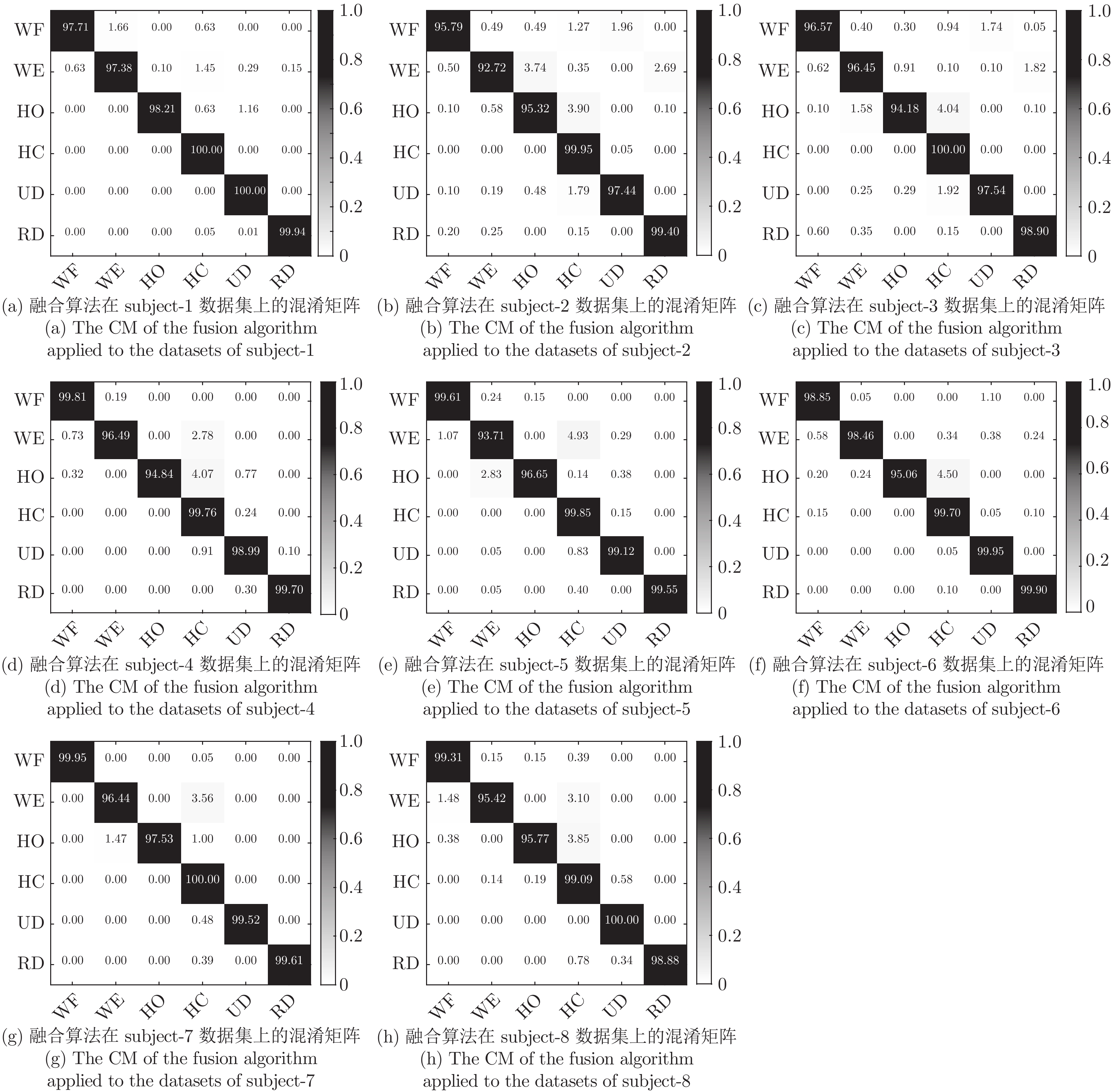
手势识别是人机交互领域的重要研究内容, 为截肢患者控制智能假肢手提供基础. 当前主流方法之一是利用表面肌电图(Electromyogram, EMG)识别手部运动意图, 但肌电信号存在信号弱和易受噪声、汗液、疲劳影响等缺点. 同时肌电图在识别准确率方面, 尤其是截肢患者手势识别方面仍然具有较大的提升空间. 针对这些问题, 设计了基于气压肌动图(Pressure-based mechanomyogram, pMMG)的穿戴式信号采集装置, 为手势识别提供了优质的信号源. 结合深度神经网络中全连接层结构、典型抽样和标准正则化技术, 提出了一种改进多类神经模糊推理系统(Improved multicalss neural fuzzy inference system, IMNFIS), 与传统自适应神经模糊推理系统(Adaptive neural fuzzy inference system, ANFIS)相比, 泛化能力得到显著提升. 招募了7名健康受试者和1名截肢受试者, 并用8种算法开展离线实验. 所提方法在残疾人手势识别实验中取得了97.25%的最高平均准确率, 在健康人手势识别实验中取得了98.18%的最高平均准确率. 与近年公开报道的多种手势识别研究相比, 所提方法的综合性能更优.
手势识别是人机交互领域的重要研究内容, 为截肢患者控制智能假肢手提供基础. 当前主流方法之一是利用表面肌电图(Electromyogram, EMG)识别手部运动意图, 但肌电信号存在信号弱和易受噪声、汗液、疲劳影响等缺点. 同时肌电图在识别准确率方面, 尤其是截肢患者手势识别方面仍然具有较大的提升空间. 针对这些问题, 设计了基于气压肌动图(Pressure-based mechanomyogram, pMMG)的穿戴式信号采集装置, 为手势识别提供了优质的信号源. 结合深度神经网络中全连接层结构、典型抽样和标准正则化技术, 提出了一种改进多类神经模糊推理系统(Improved multicalss neural fuzzy inference system, IMNFIS), 与传统自适应神经模糊推理系统(Adaptive neural fuzzy inference system, ANFIS)相比, 泛化能力得到显著提升. 招募了7名健康受试者和1名截肢受试者, 并用8种算法开展离线实验. 所提方法在残疾人手势识别实验中取得了97.25%的最高平均准确率, 在健康人手势识别实验中取得了98.18%的最高平均准确率. 与近年公开报道的多种手势识别研究相比, 所提方法的综合性能更优.
2022, 48(5): 1234-1245.
doi: 10.16383/j.aas.c200721
摘要:
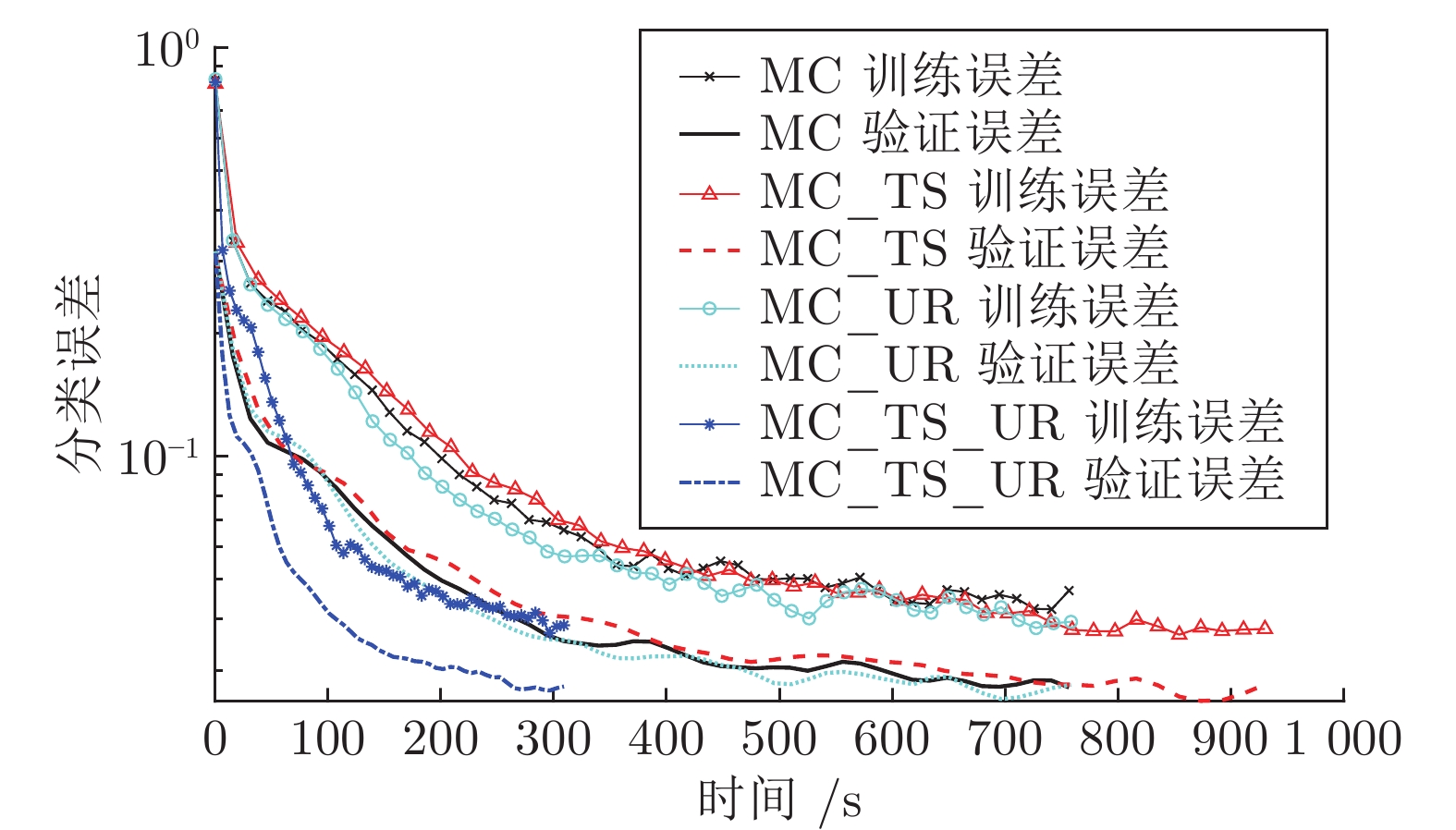
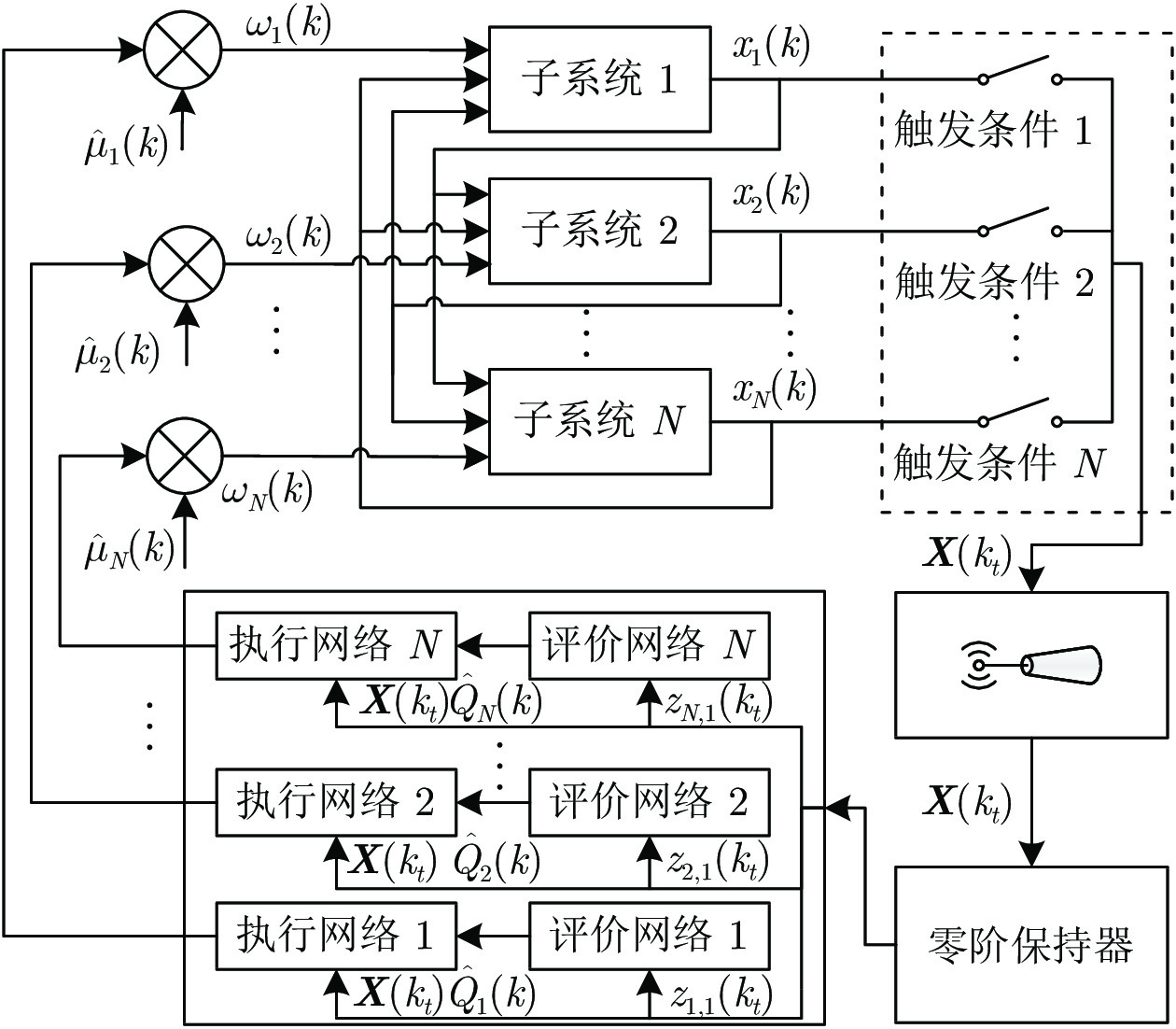
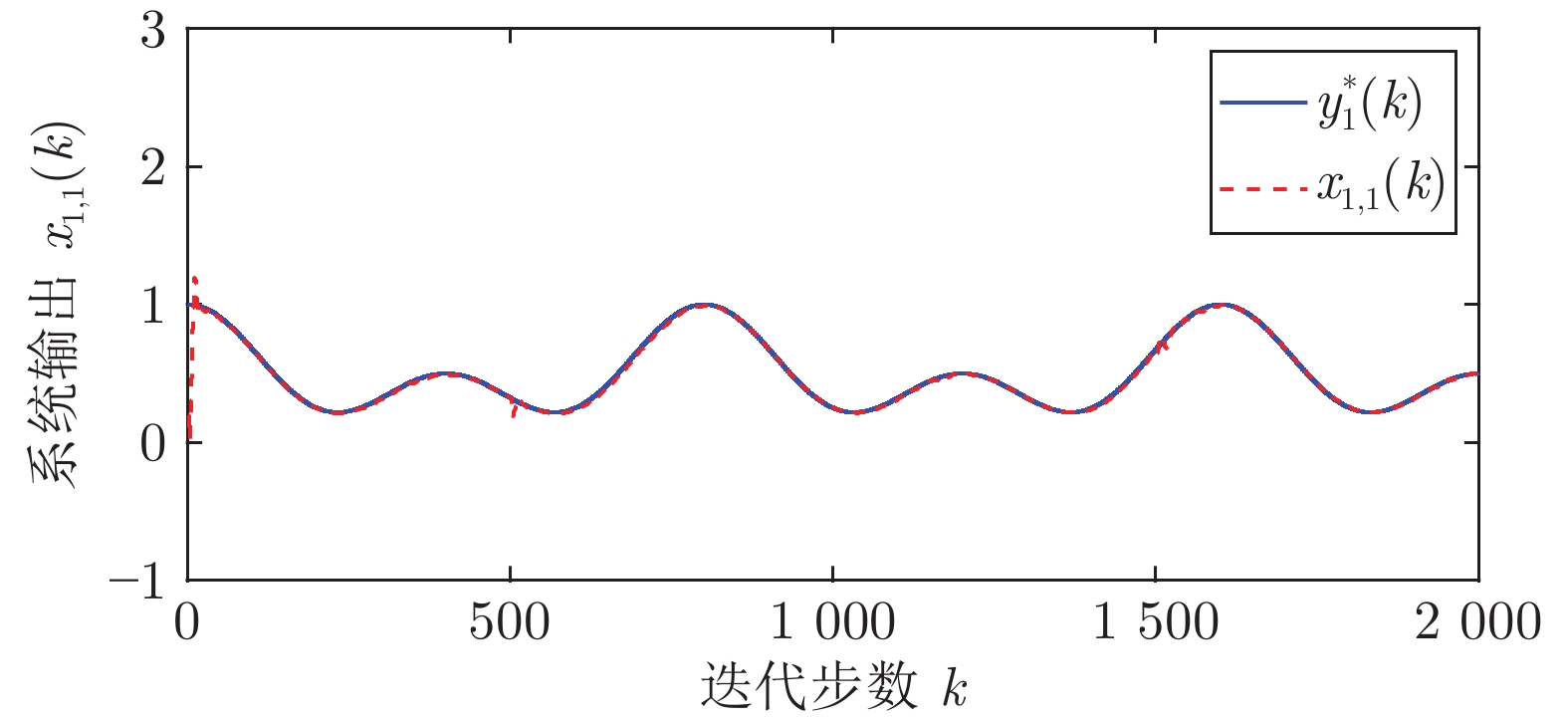
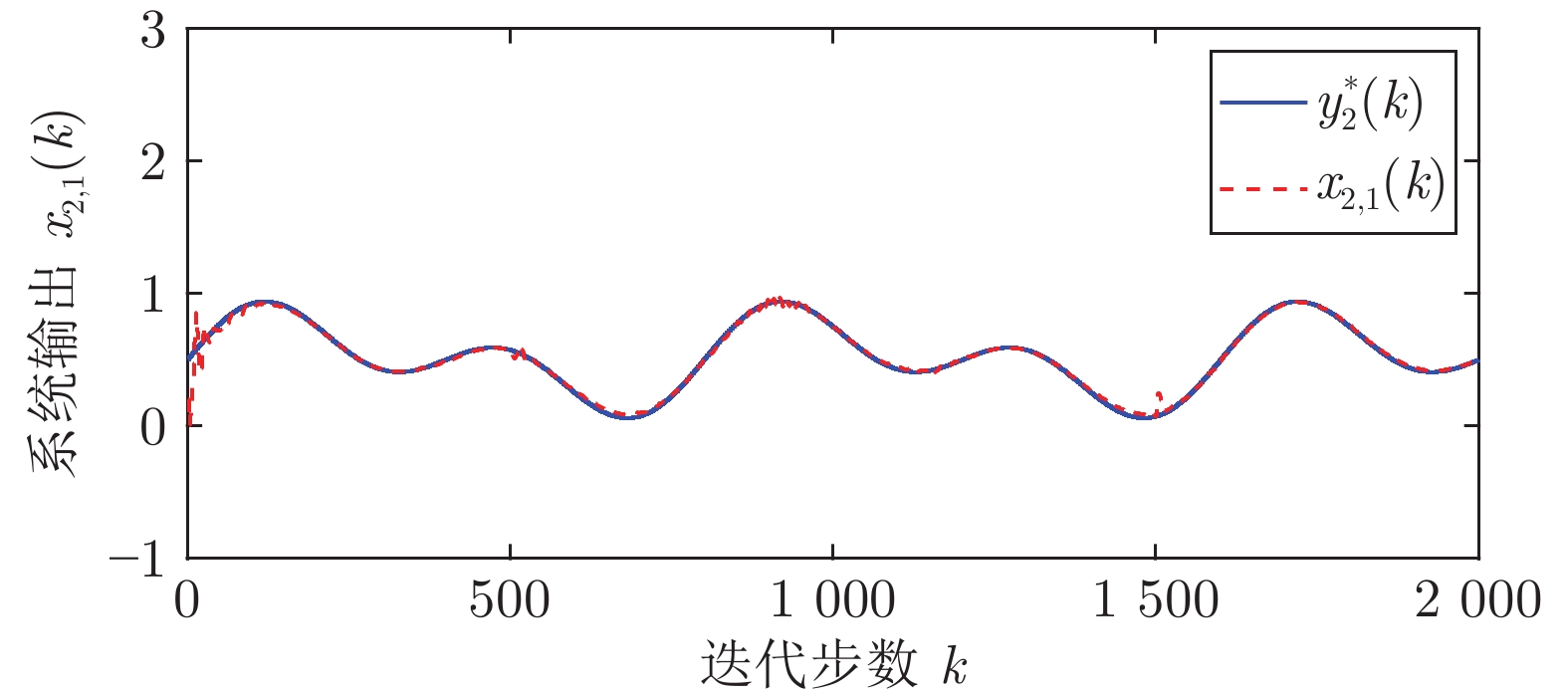
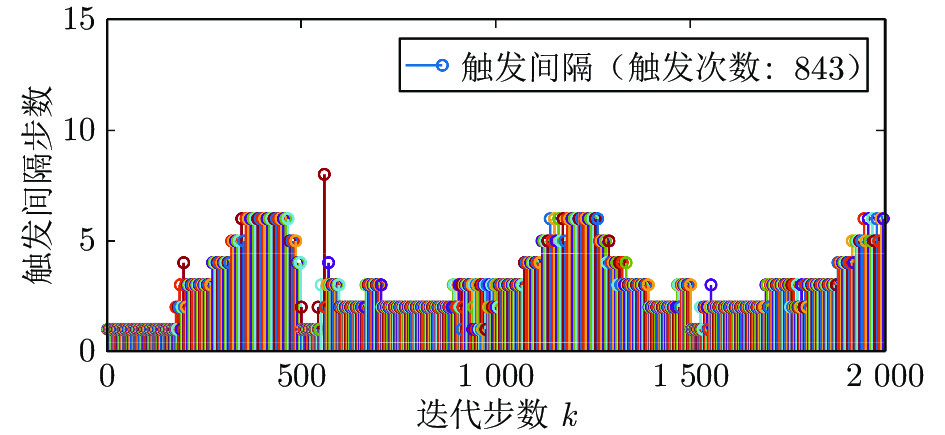
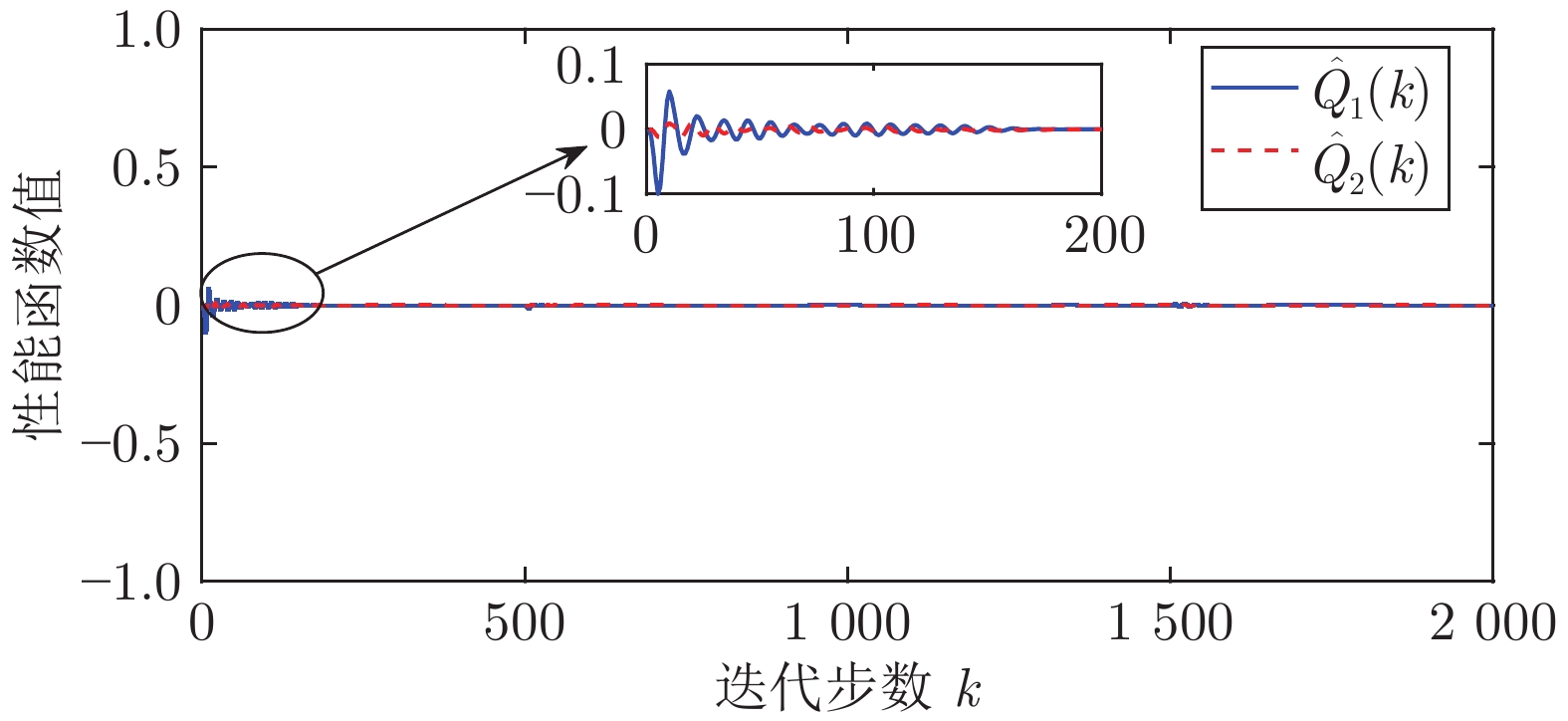
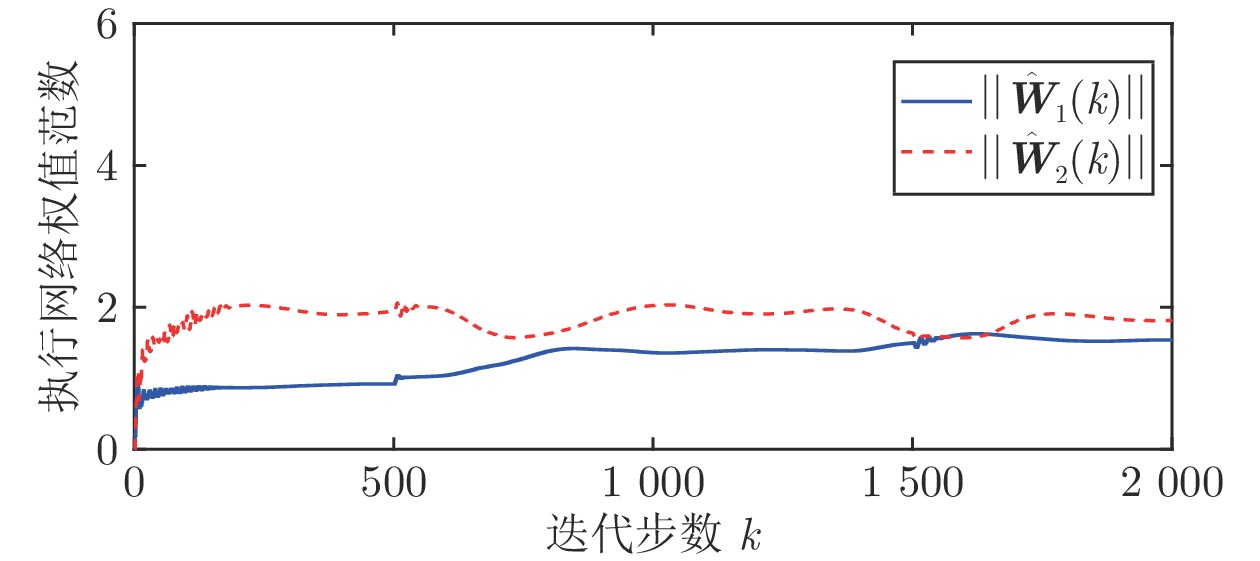
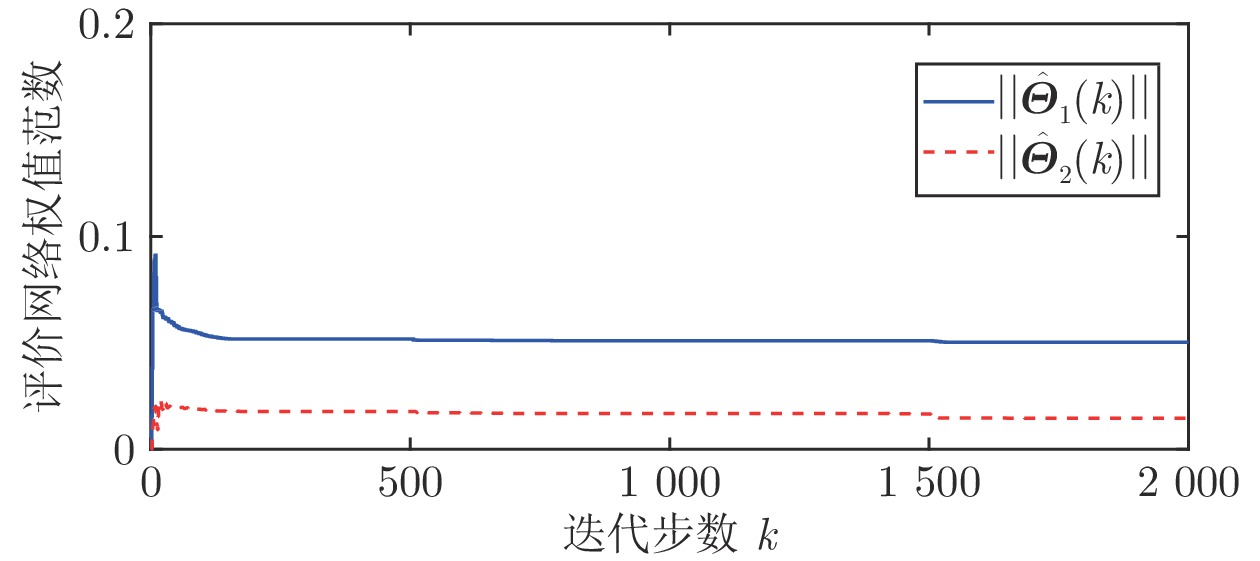
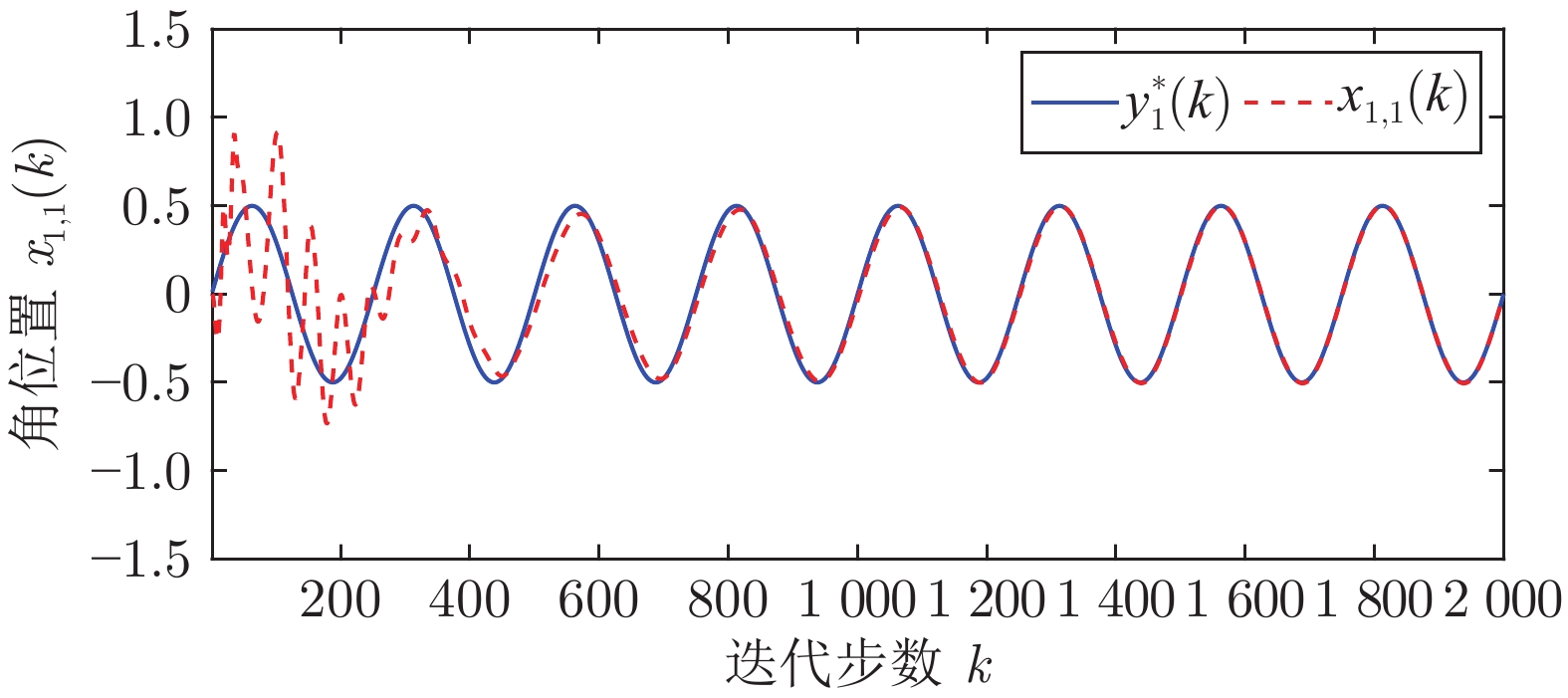
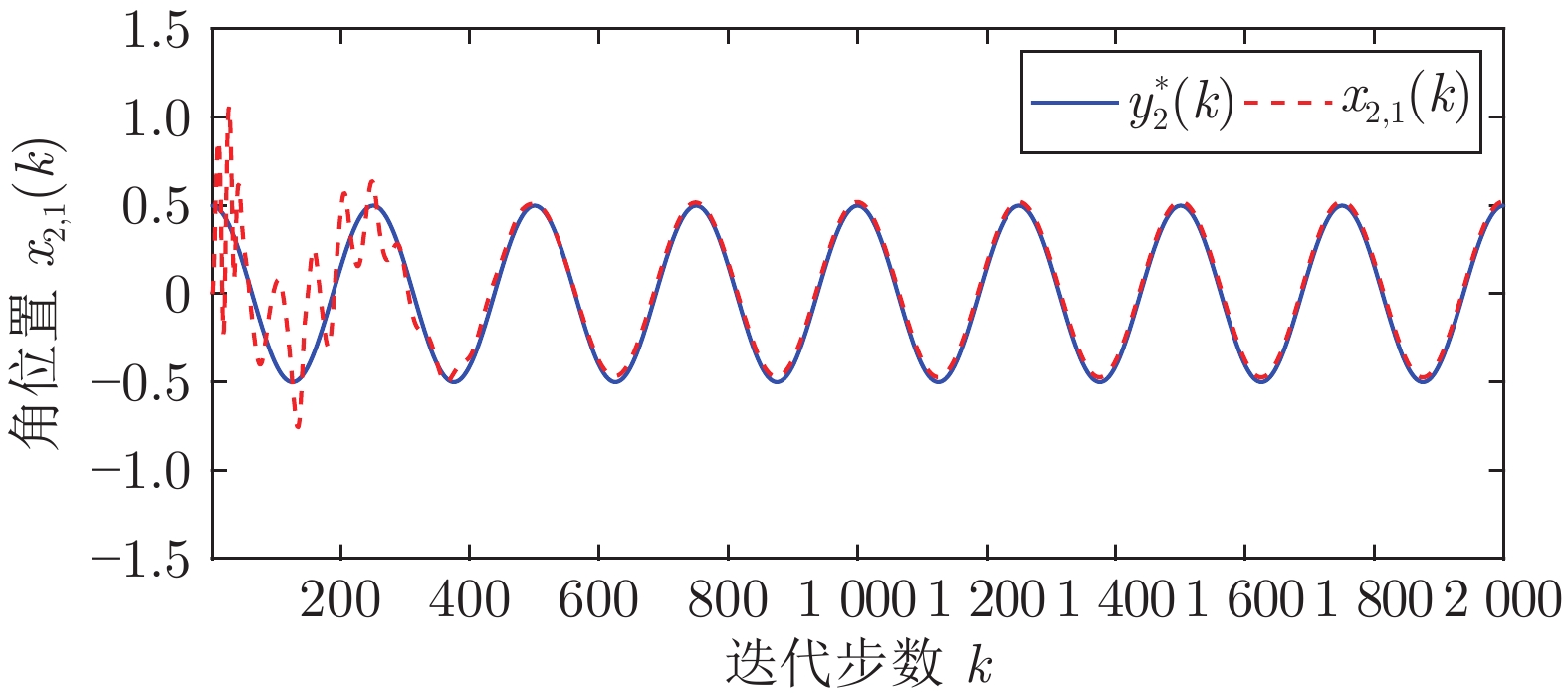
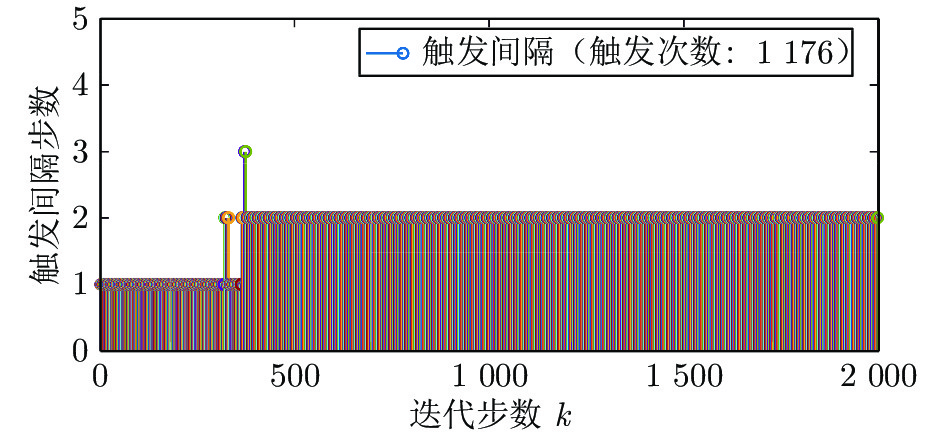
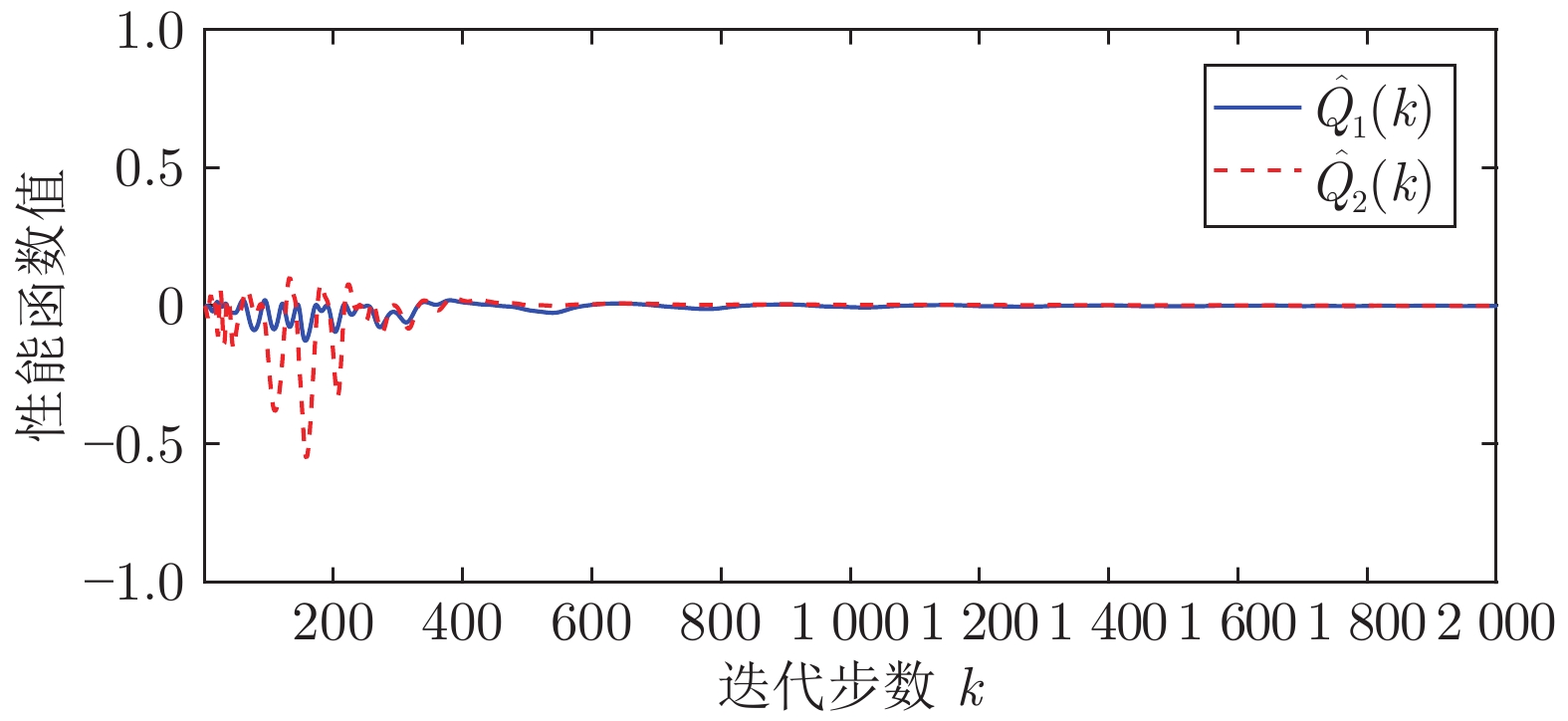
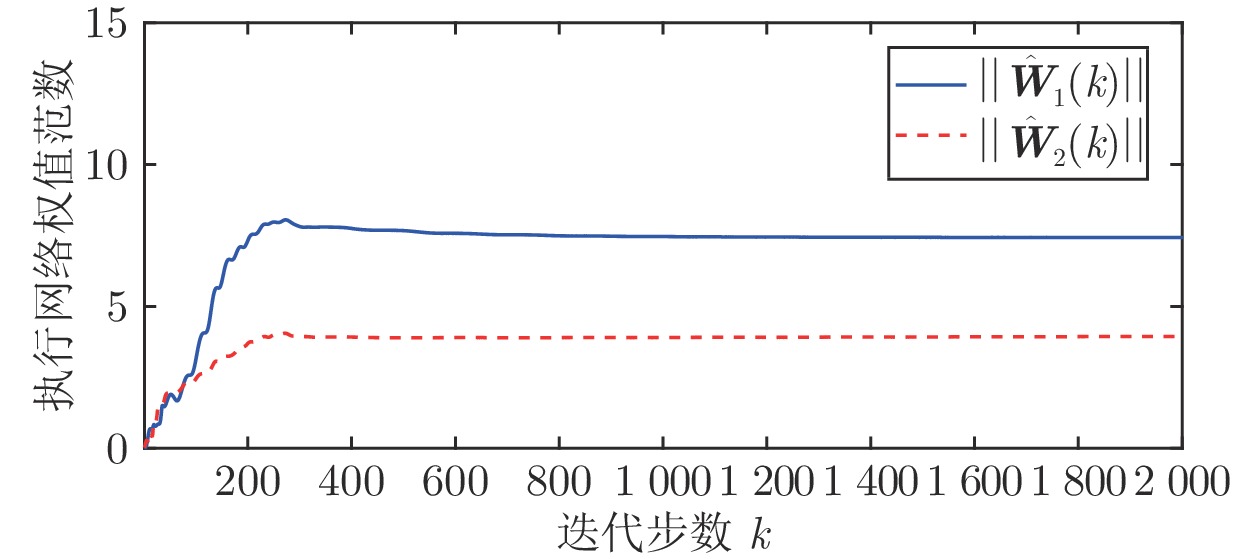
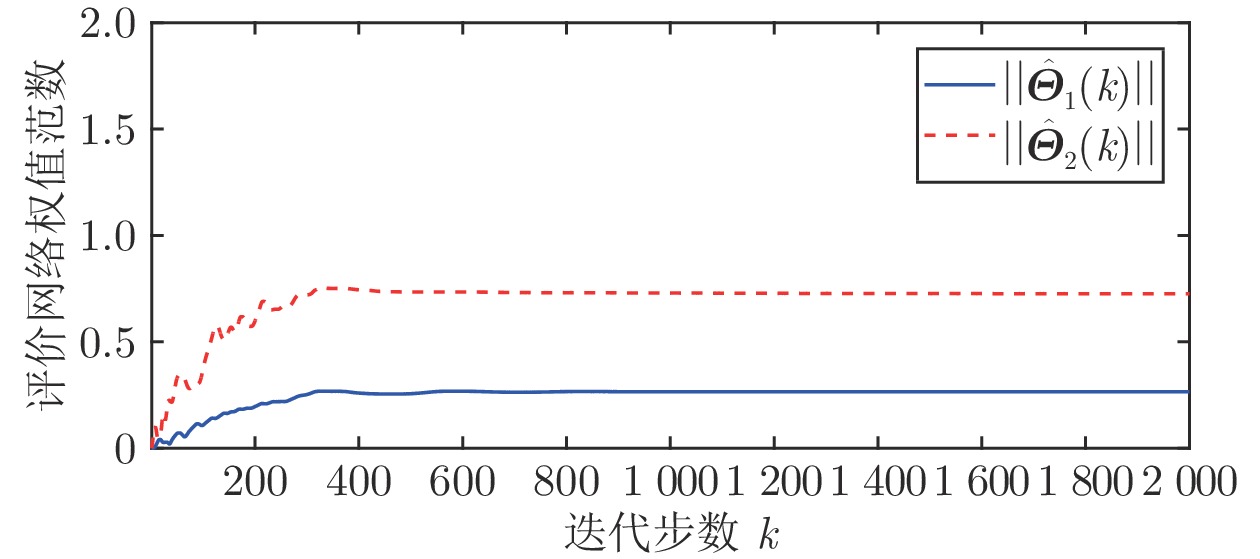
本文针对具有执行器故障的一类离散非线性多输入多输出(Multi-input multi-output, MIMO)系统, 提出了一种基于事件触发的自适应评判容错控制方案. 该控制方案包括评价和执行网络. 在评价网络里, 为了缓解现有的非光滑二值效用函数可能引起的执行网络跳变问题, 利用高斯函数构建了一个光滑的效用函数, 并采用评价网络近似最优性能指标函数. 在执行网络里, 通过变量替换将系统状态的将来信息转化成关于系统当前状态的函数, 并结合事件触发机制设计了最优跟踪控制器. 该控制器引入了动态补偿项, 不仅能够抑制执行器故障对系统性能的影响, 而且能够改善系统的控制性能. 稳定性分析表明所有信号最终一致有界且跟踪误差收敛于原点的有界小邻域内. 数值系统和实际系统的仿真结果验证了该方案的有效性.
本文针对具有执行器故障的一类离散非线性多输入多输出(Multi-input multi-output, MIMO)系统, 提出了一种基于事件触发的自适应评判容错控制方案. 该控制方案包括评价和执行网络. 在评价网络里, 为了缓解现有的非光滑二值效用函数可能引起的执行网络跳变问题, 利用高斯函数构建了一个光滑的效用函数, 并采用评价网络近似最优性能指标函数. 在执行网络里, 通过变量替换将系统状态的将来信息转化成关于系统当前状态的函数, 并结合事件触发机制设计了最优跟踪控制器. 该控制器引入了动态补偿项, 不仅能够抑制执行器故障对系统性能的影响, 而且能够改善系统的控制性能. 稳定性分析表明所有信号最终一致有界且跟踪误差收敛于原点的有界小邻域内. 数值系统和实际系统的仿真结果验证了该方案的有效性.
2022, 48(5): 1246-1258.
doi: 10.16383/j.aas.c210583
摘要:
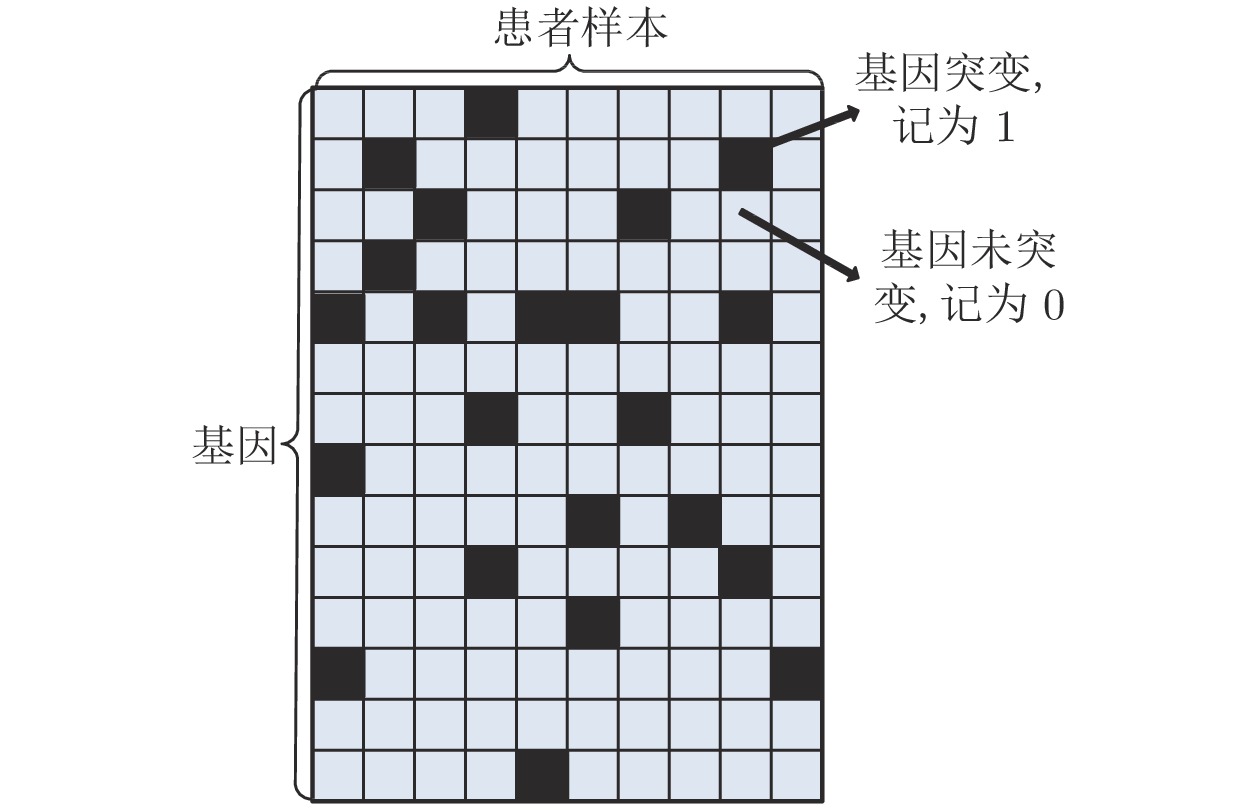
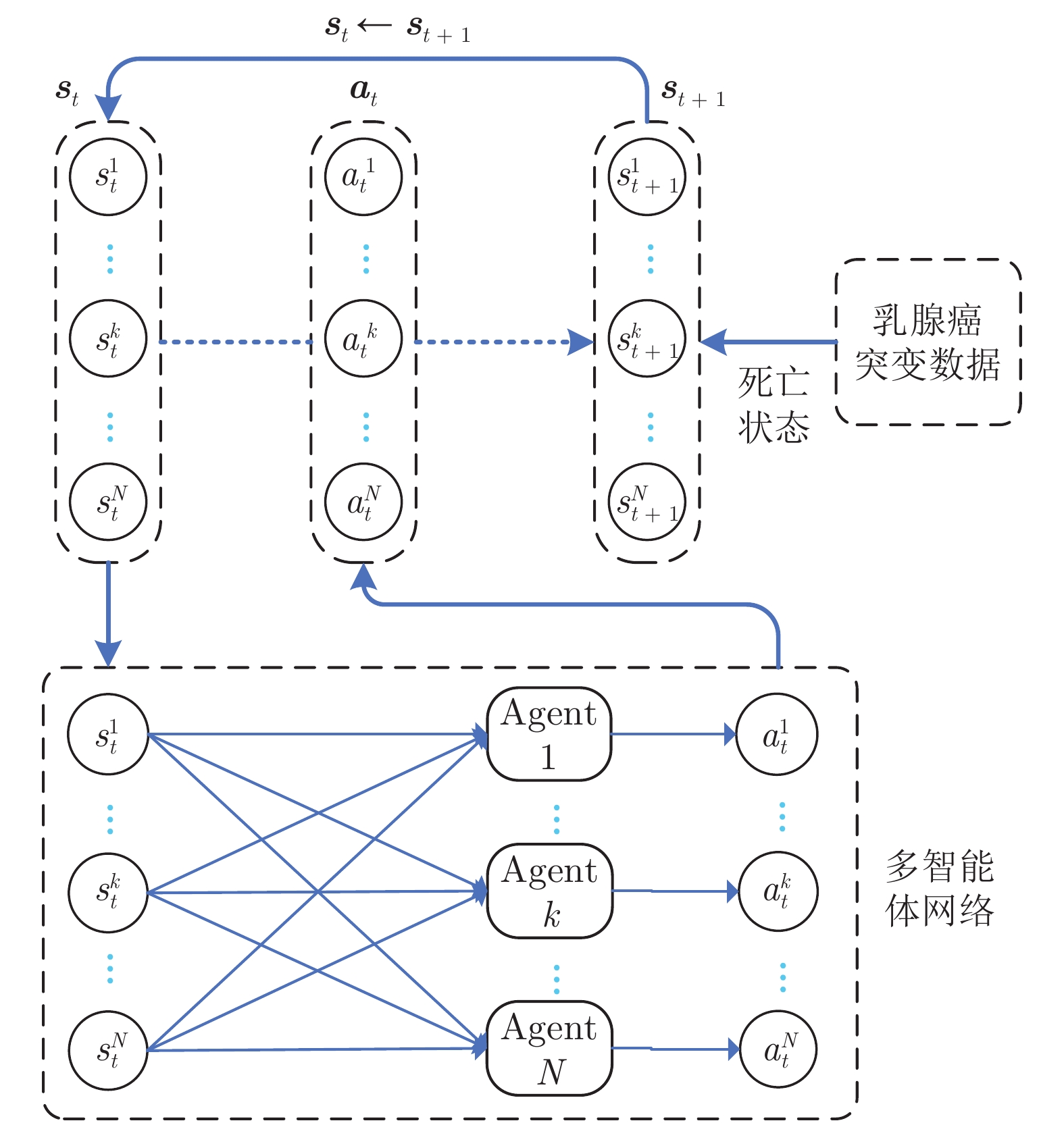
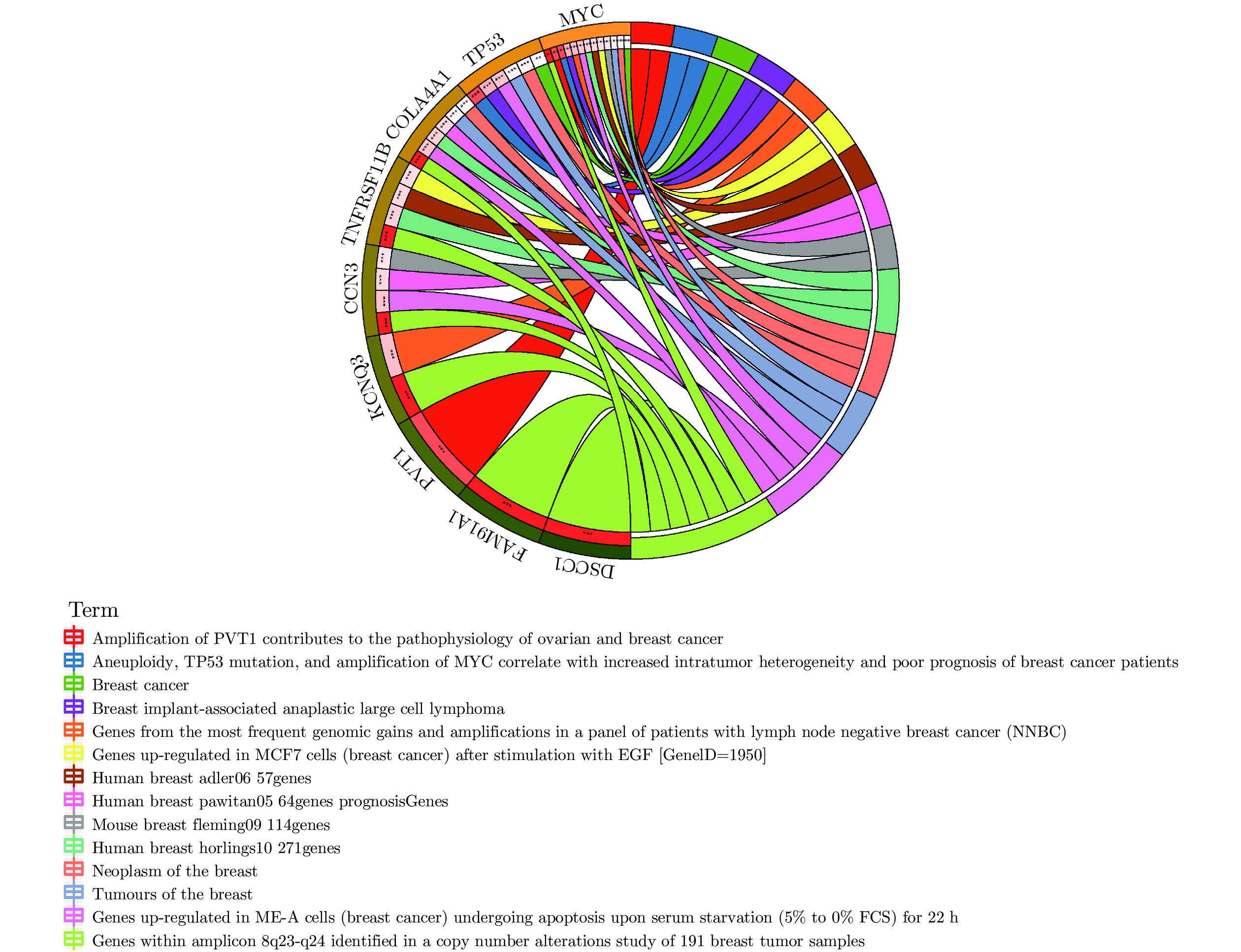
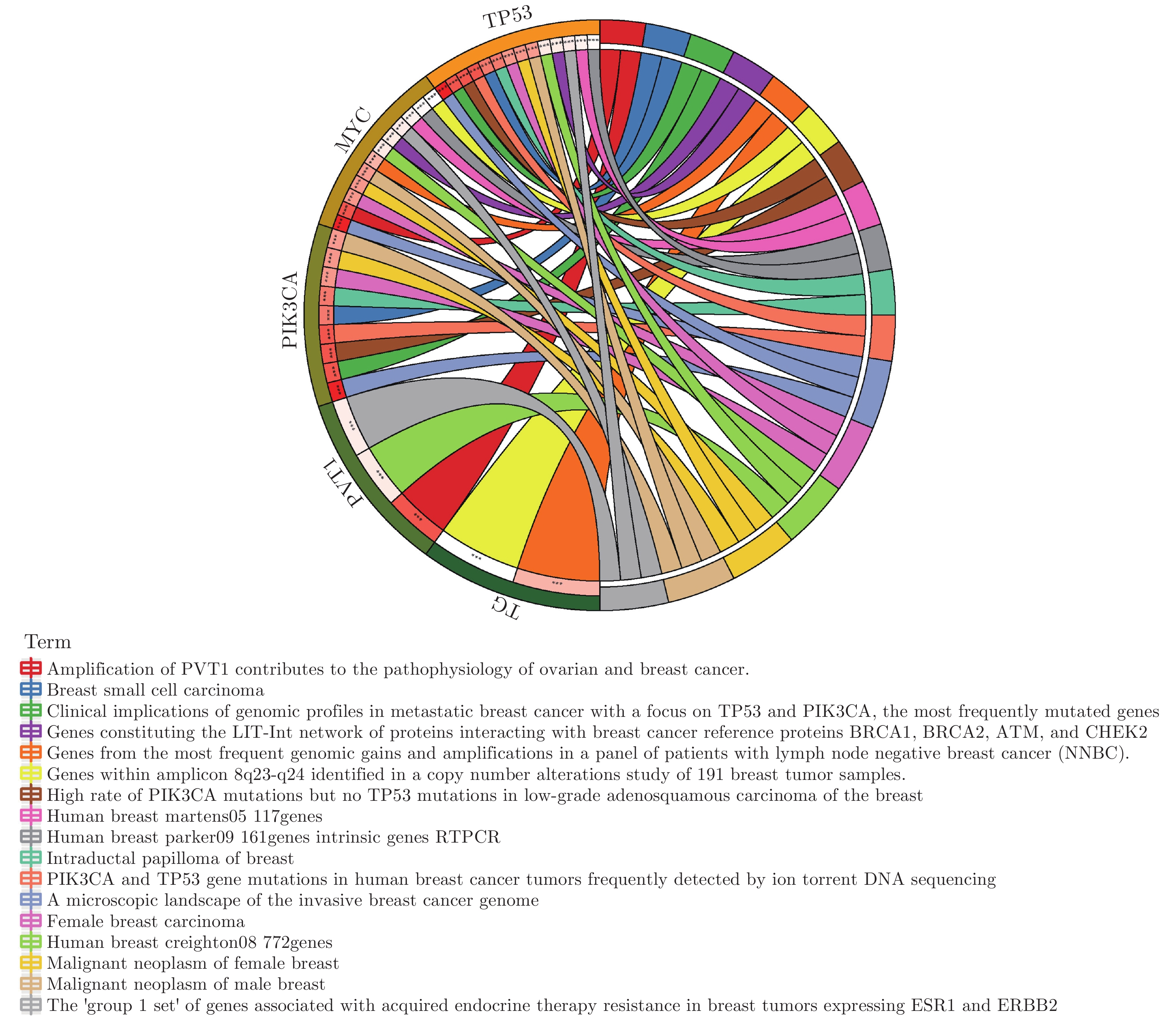
通过分析基因突变过程, 提出利用强化学习对癌症患者由正常状态至患病状态的过程进行推断, 发现导致患者死亡的关键基因突变. 首先, 将基因视为智能体, 基于乳腺癌突变数据设计多智能体强化学习环境; 其次, 为保证智能体探索到与专家策略相同的策略和满足更多智能体快速学习, 根据演示学习理论, 分别提出两种多智能体深度Q网络: 基于行为克隆的多智能体深度Q网络和基于预训练记忆的多智能体深度Q网络; 最后, 根据训练得到的多智能体深度Q网络进行基因排序, 实现致病基因预测. 实验结果表明, 提出的多智能体强化学习方法能够挖掘出与乳腺癌发生、发展过程密切相关的致病基因.
通过分析基因突变过程, 提出利用强化学习对癌症患者由正常状态至患病状态的过程进行推断, 发现导致患者死亡的关键基因突变. 首先, 将基因视为智能体, 基于乳腺癌突变数据设计多智能体强化学习环境; 其次, 为保证智能体探索到与专家策略相同的策略和满足更多智能体快速学习, 根据演示学习理论, 分别提出两种多智能体深度Q网络: 基于行为克隆的多智能体深度Q网络和基于预训练记忆的多智能体深度Q网络; 最后, 根据训练得到的多智能体深度Q网络进行基因排序, 实现致病基因预测. 实验结果表明, 提出的多智能体强化学习方法能够挖掘出与乳腺癌发生、发展过程密切相关的致病基因.
2022, 48(5): 1259-1272.
doi: 10.16383/j.aas.c200984
摘要:
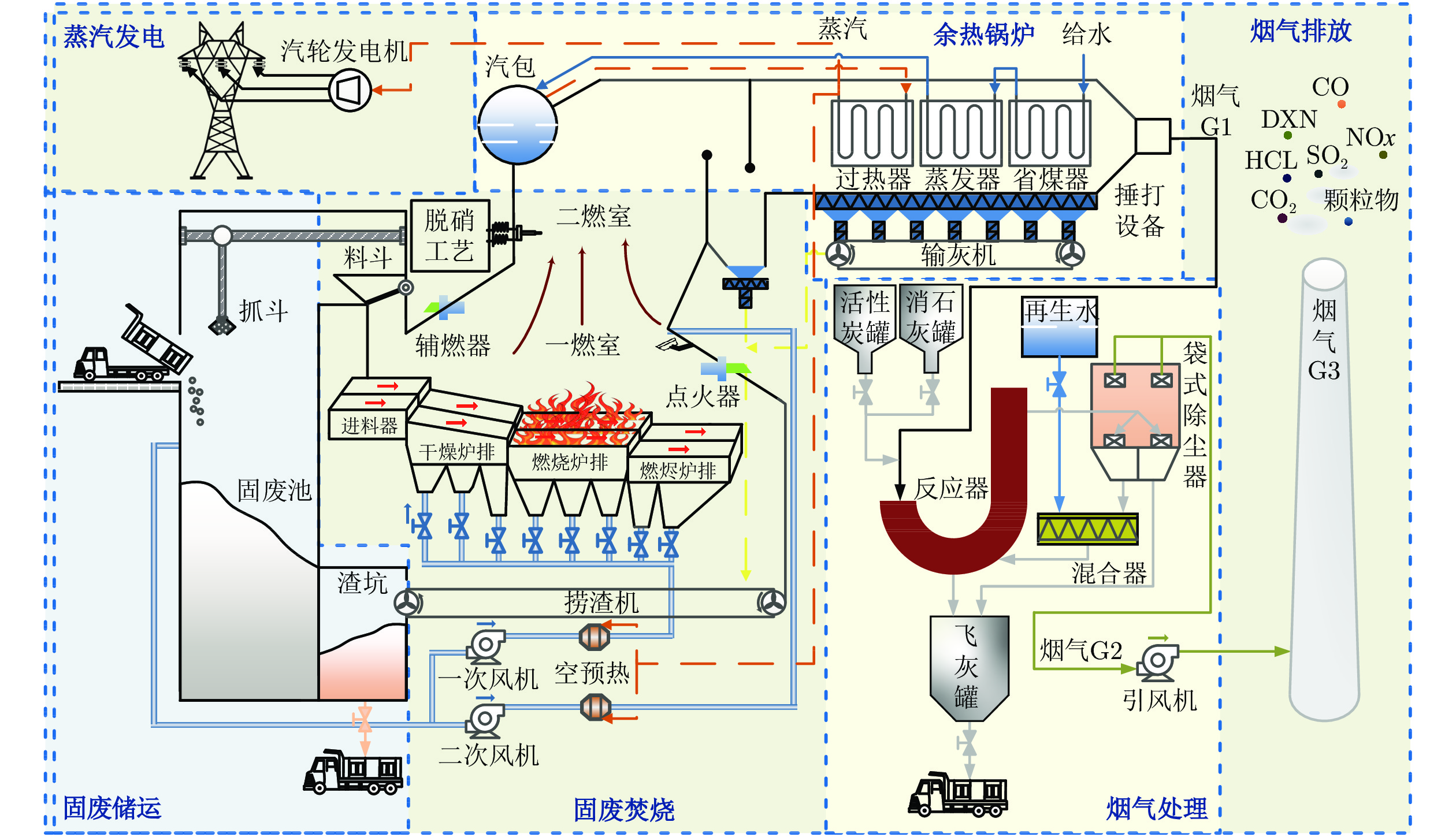
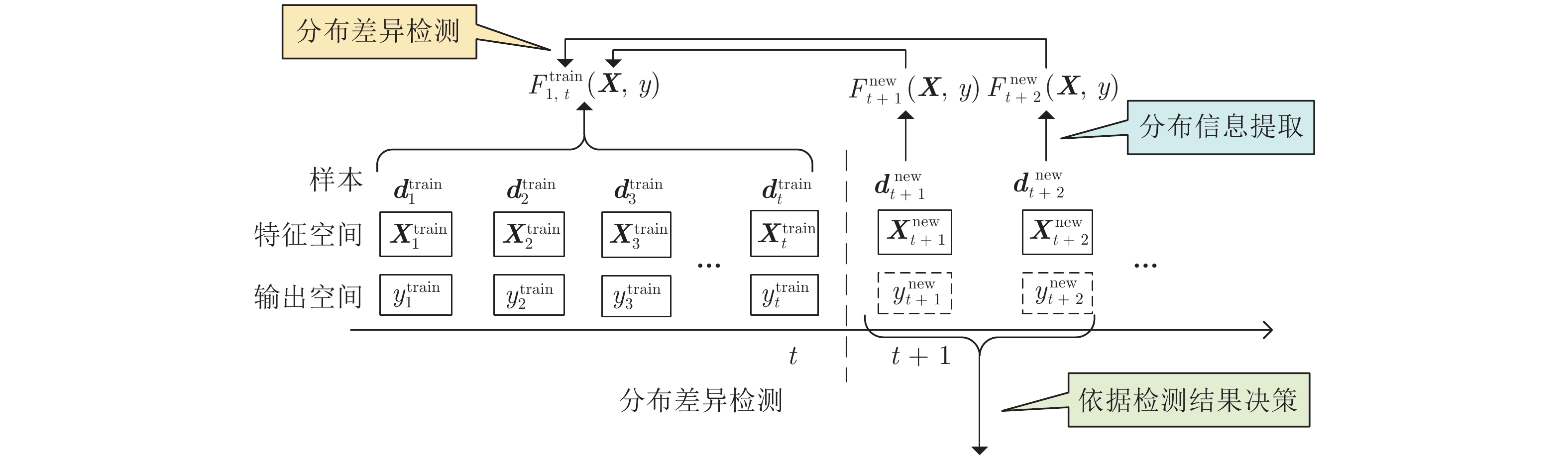
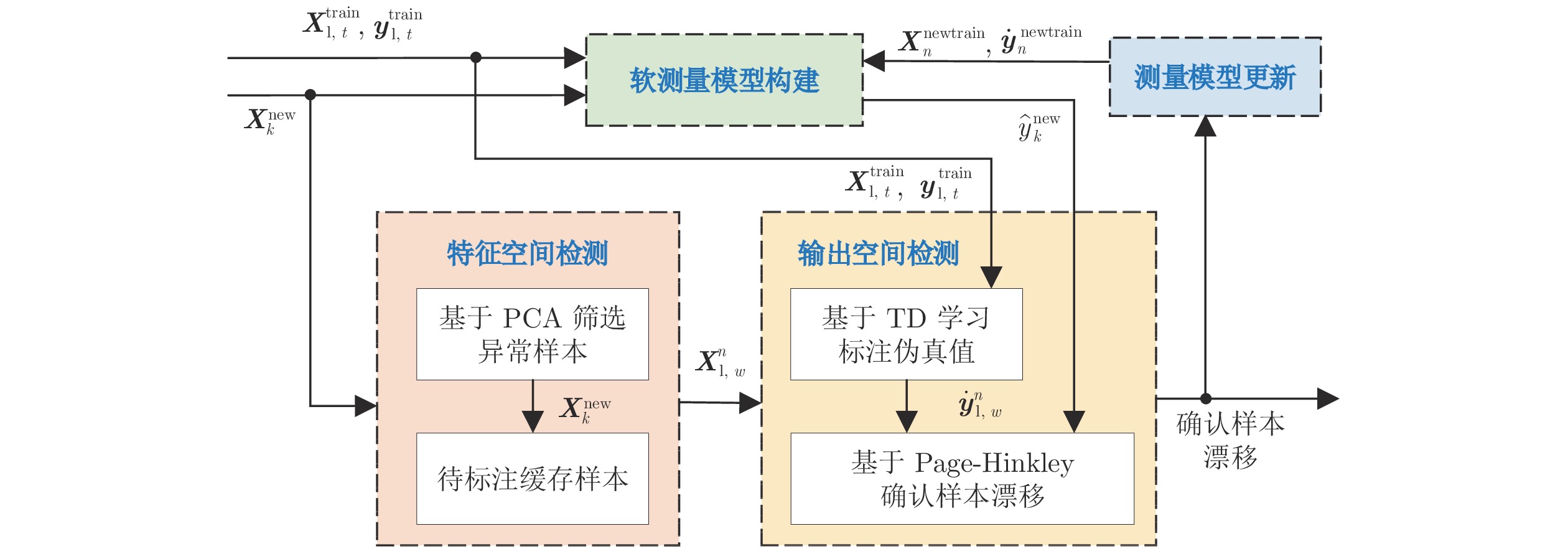
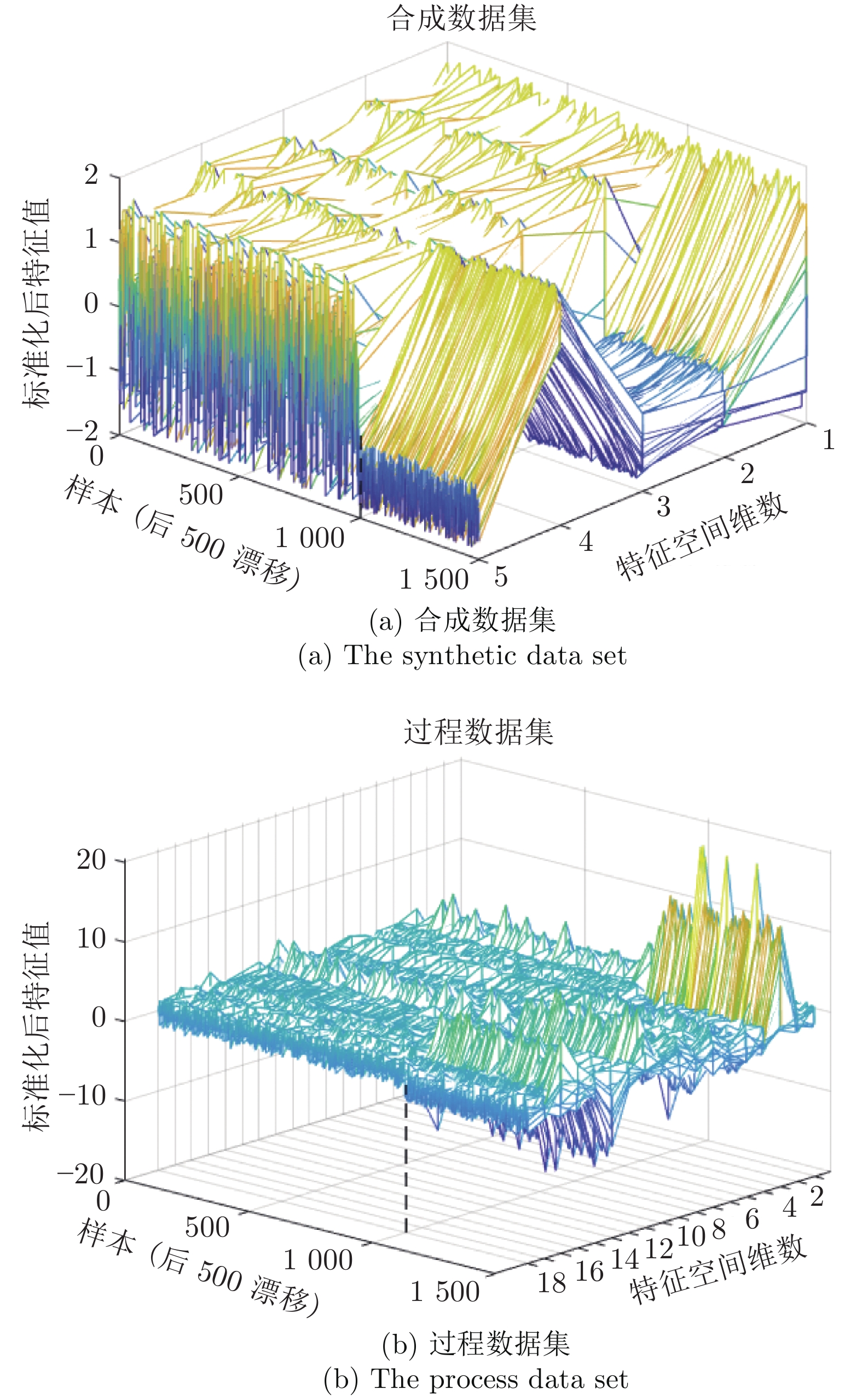
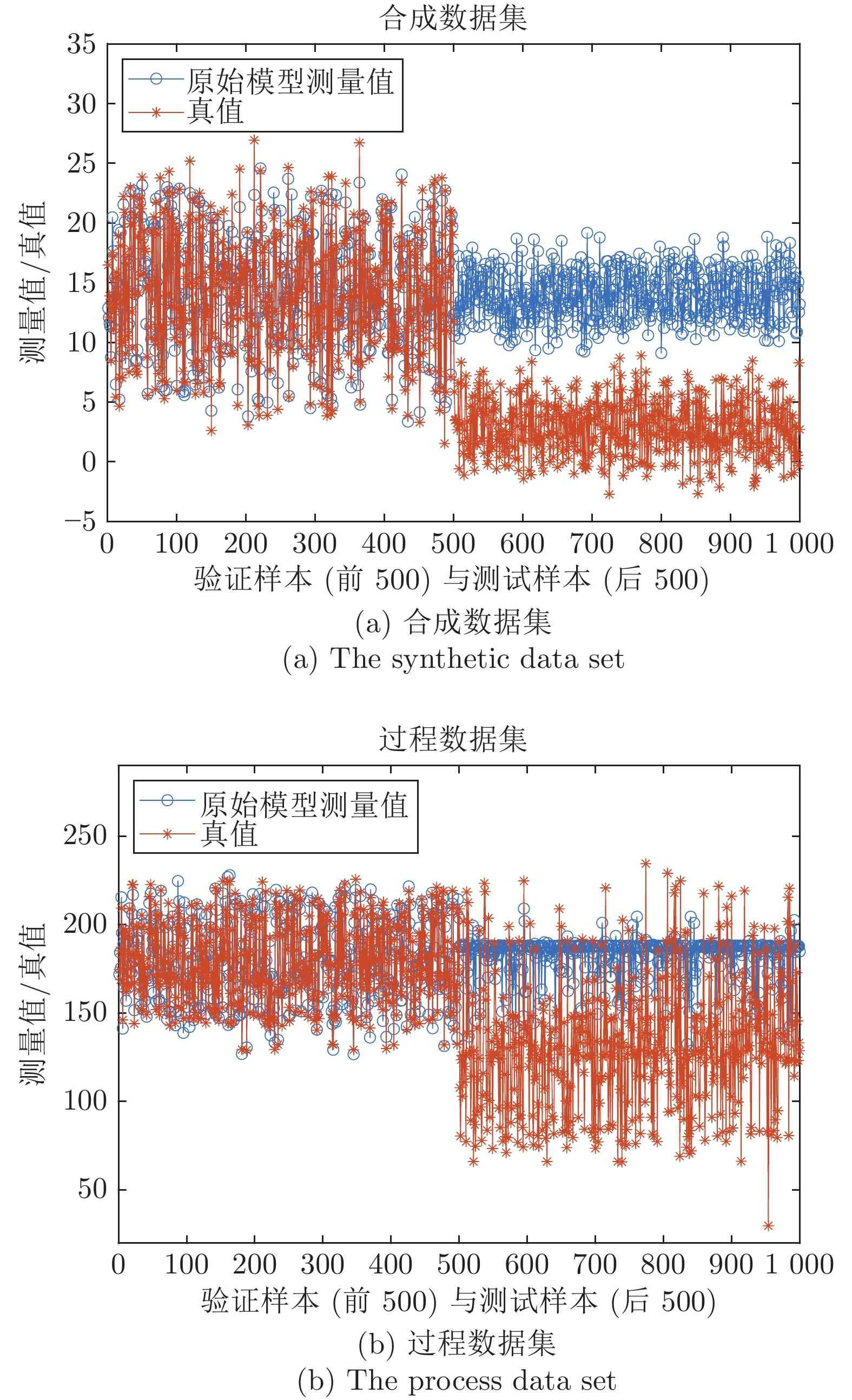
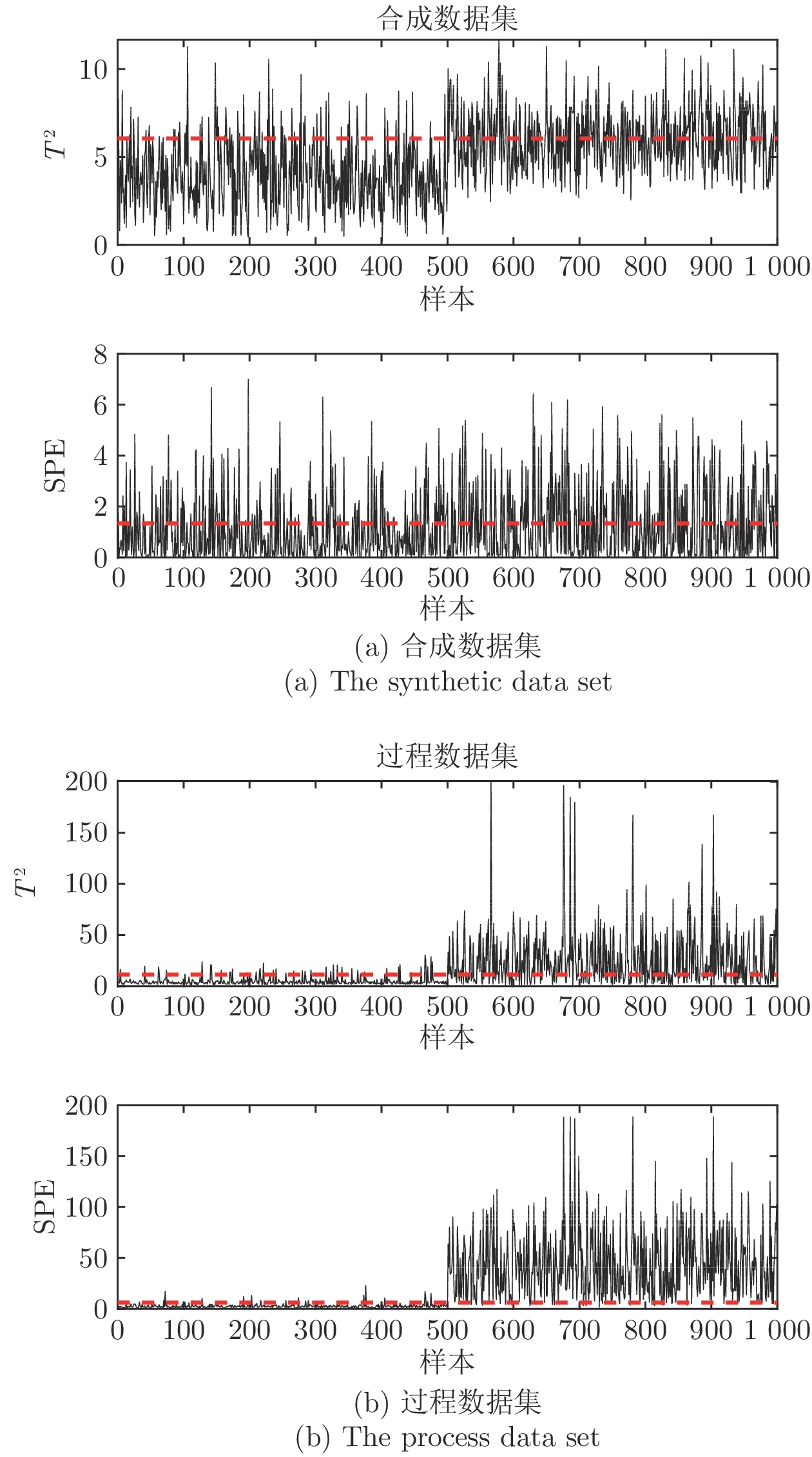
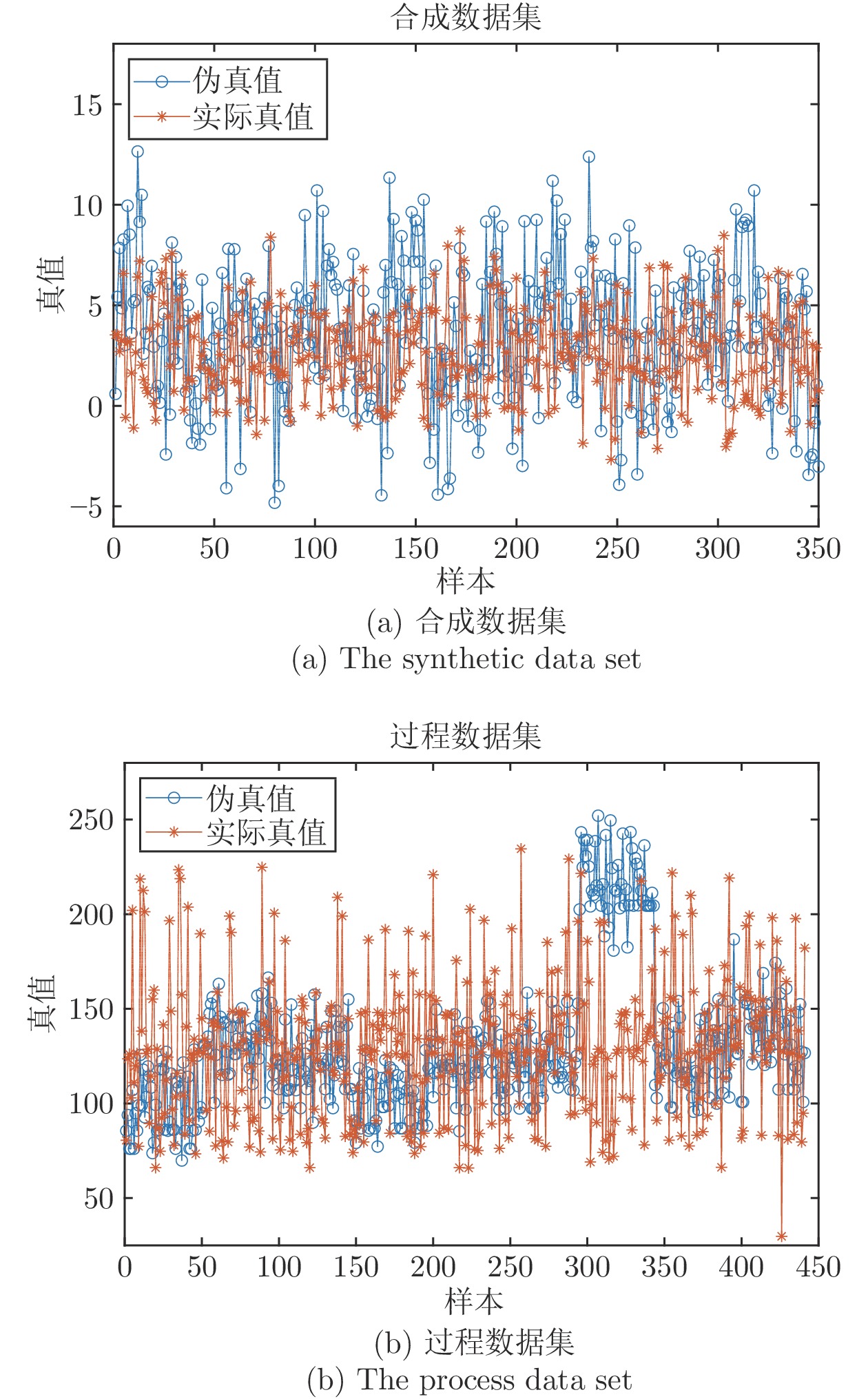
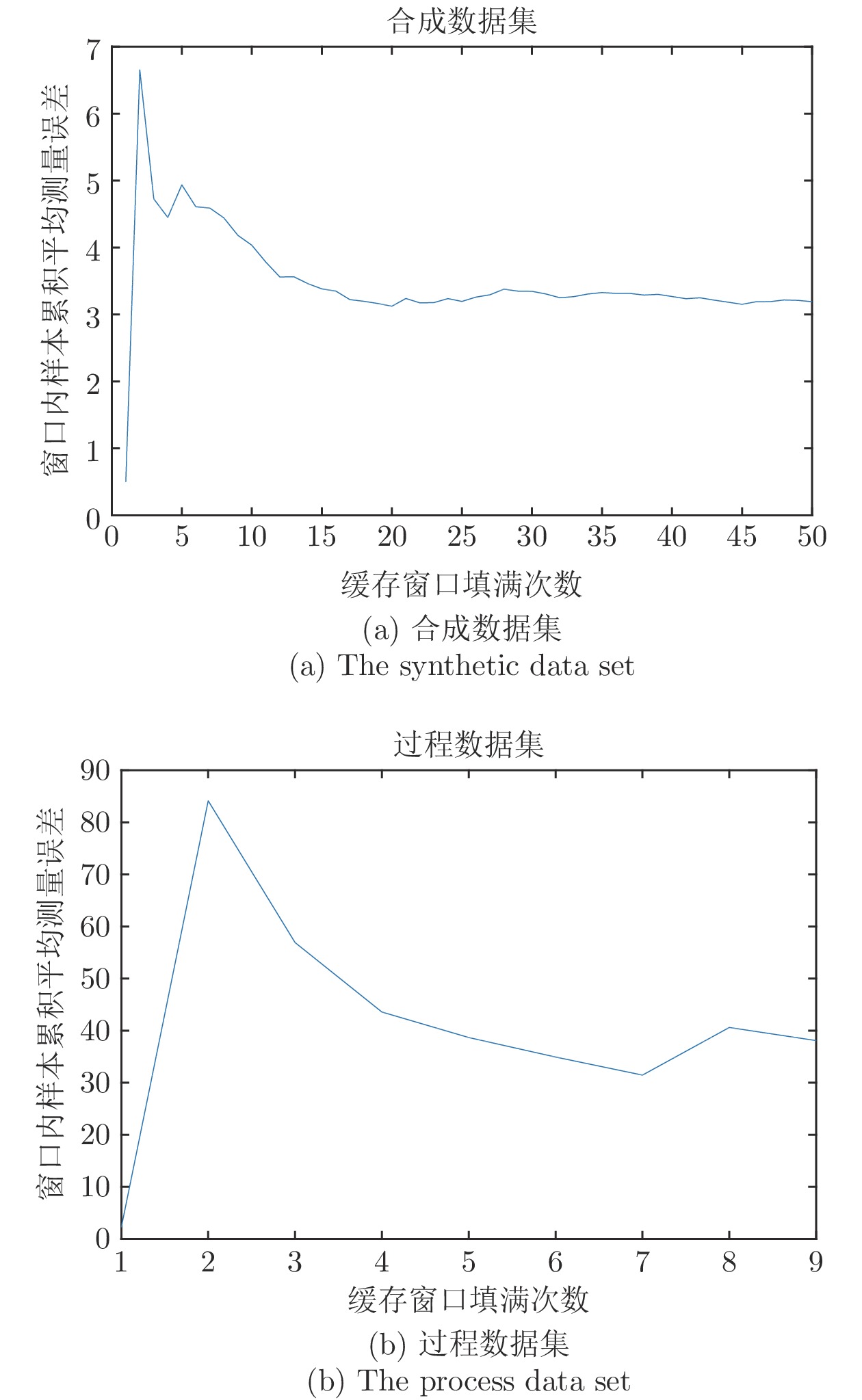
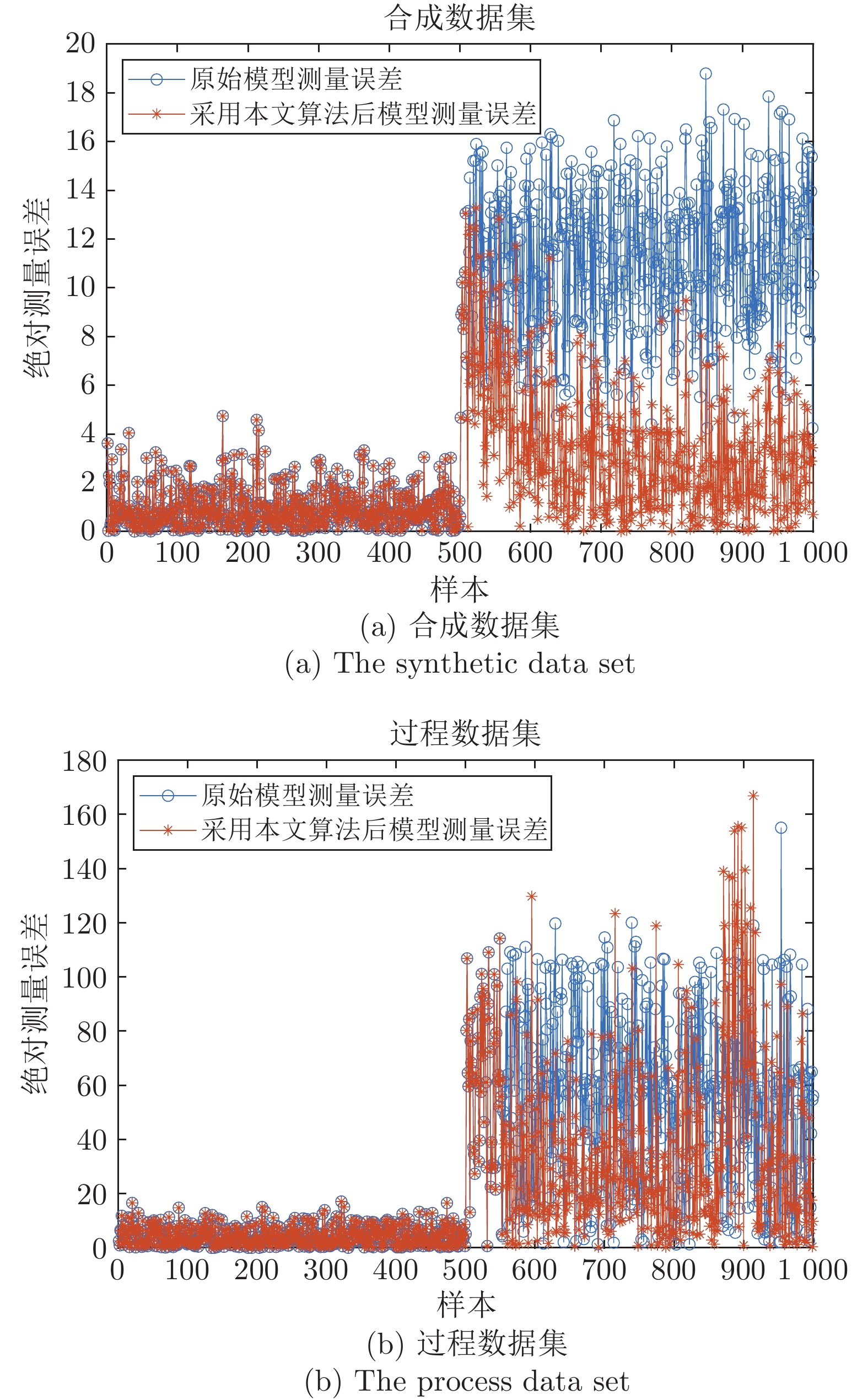
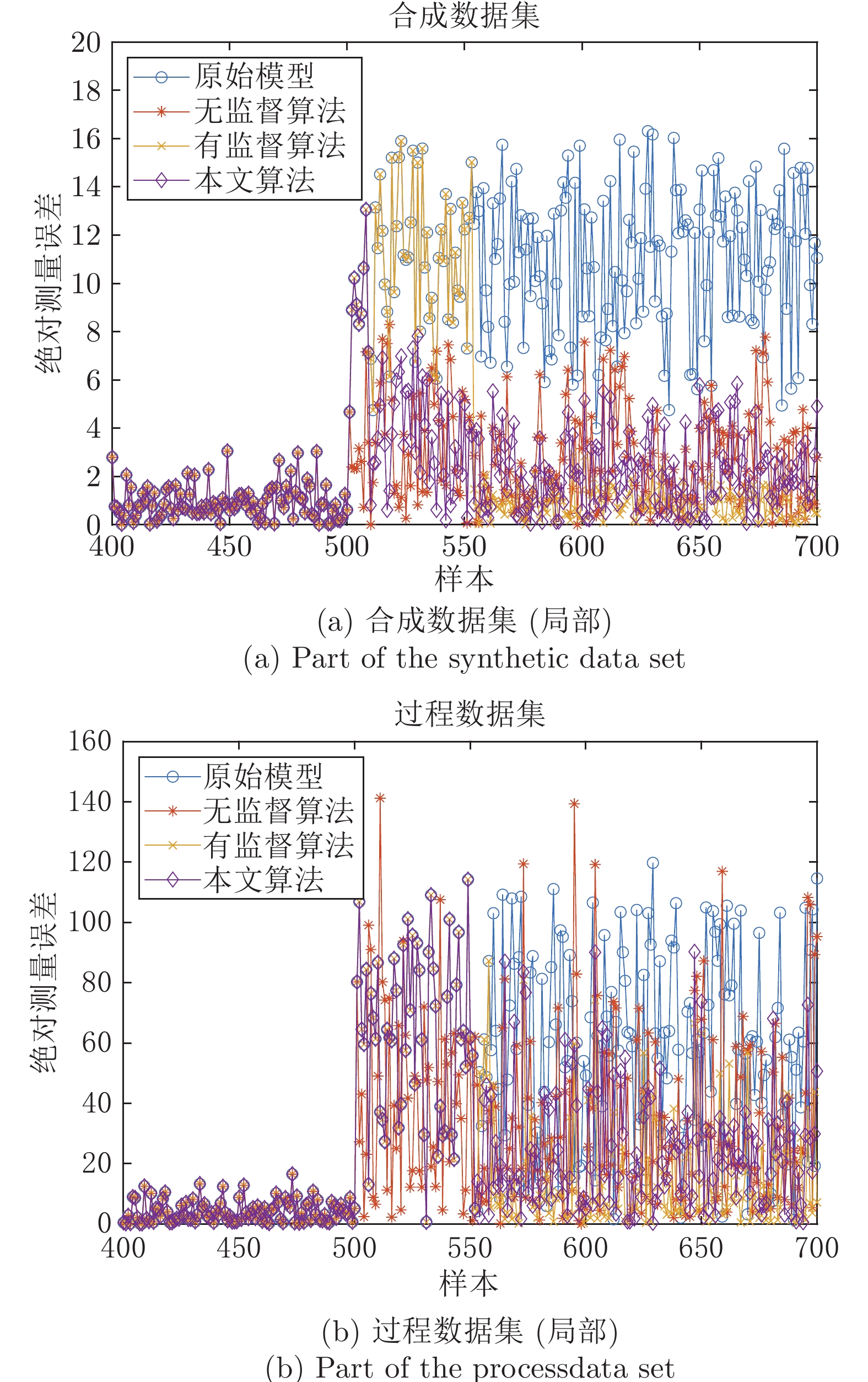
城市固废焚烧(Municipal solid waste incineration, MSWI)过程受垃圾成分波动、设备磨损与维修、季节交替变化等因素的影响而存在概念漂移现象, 这导致用于污染物排放浓度的建模数据具有时变性. 为此, 需要识别能够表征概念漂移的新样本对污染物测量模型进行更新, 但现有漂移检测方法难以有效应用于建模样本真值获取困难的工业过程. 针对上述问题, 提出一种联合样本输出与特征空间的半监督概念漂移检测方法. 首先, 采用基于主成分分析(Principal component analysis, PCA)的无监督机制识别特征空间内的概念漂移样本; 然后, 在样本输出空间采用基于时间差分(Temporal-difference, TD)学习的半监督机制对上述概念漂移样本进行伪真值标注后, 再用Page-Hinkley检测法确认能够表征概念漂移的样本; 最后, 采用上述步骤获得的新样本结合历史样本对模型进行更新. 基于合成和真实工业过程数据集的仿真结果表明所提方法具有优于已有方法的性能, 能够在加强模型漂移适应性的同时有效缩减样本标注成本.
城市固废焚烧(Municipal solid waste incineration, MSWI)过程受垃圾成分波动、设备磨损与维修、季节交替变化等因素的影响而存在概念漂移现象, 这导致用于污染物排放浓度的建模数据具有时变性. 为此, 需要识别能够表征概念漂移的新样本对污染物测量模型进行更新, 但现有漂移检测方法难以有效应用于建模样本真值获取困难的工业过程. 针对上述问题, 提出一种联合样本输出与特征空间的半监督概念漂移检测方法. 首先, 采用基于主成分分析(Principal component analysis, PCA)的无监督机制识别特征空间内的概念漂移样本; 然后, 在样本输出空间采用基于时间差分(Temporal-difference, TD)学习的半监督机制对上述概念漂移样本进行伪真值标注后, 再用Page-Hinkley检测法确认能够表征概念漂移的样本; 最后, 采用上述步骤获得的新样本结合历史样本对模型进行更新. 基于合成和真实工业过程数据集的仿真结果表明所提方法具有优于已有方法的性能, 能够在加强模型漂移适应性的同时有效缩减样本标注成本.
2022, 48(5): 1273-1284.
doi: 10.16383/j.aas.c200236
摘要:
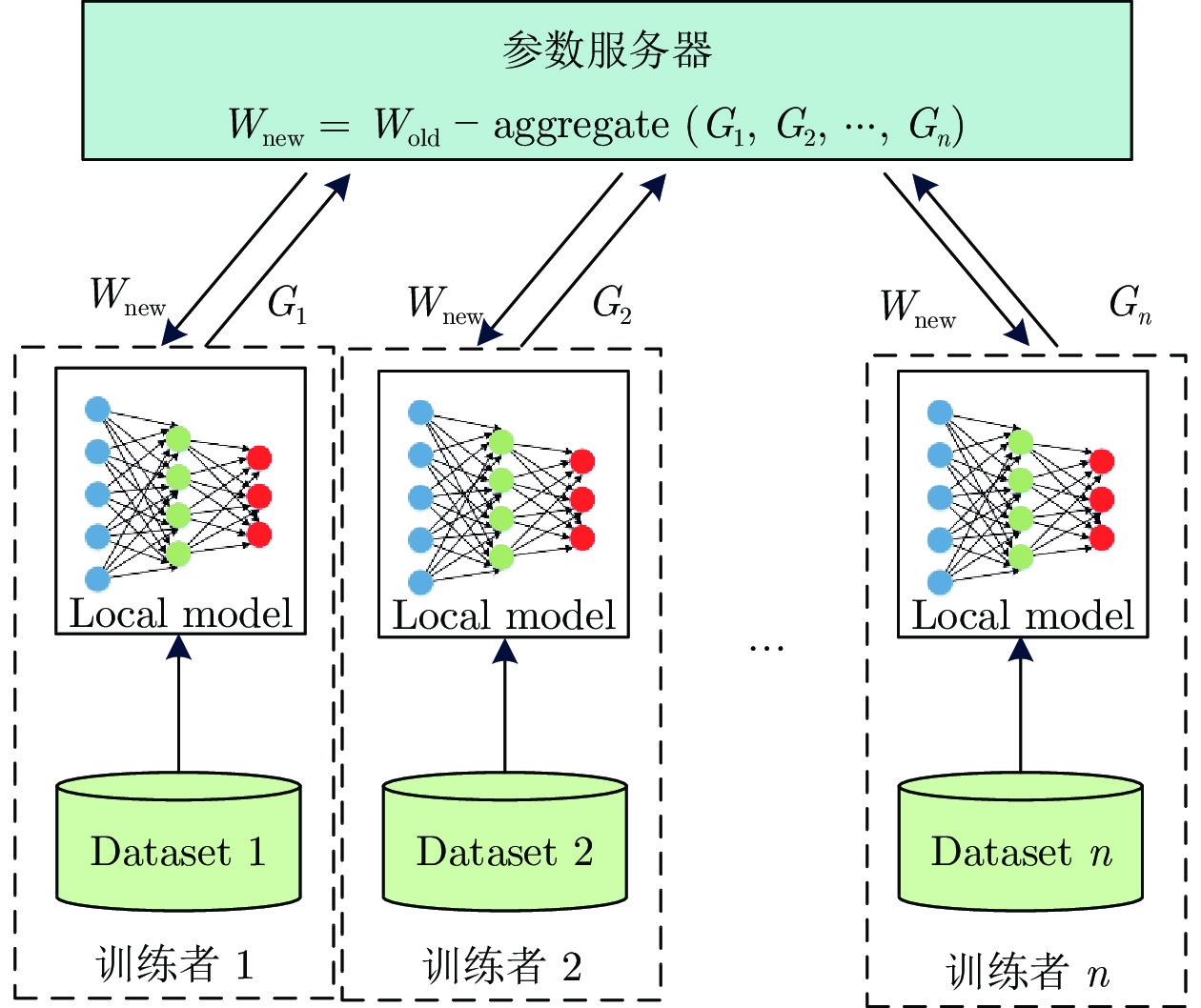
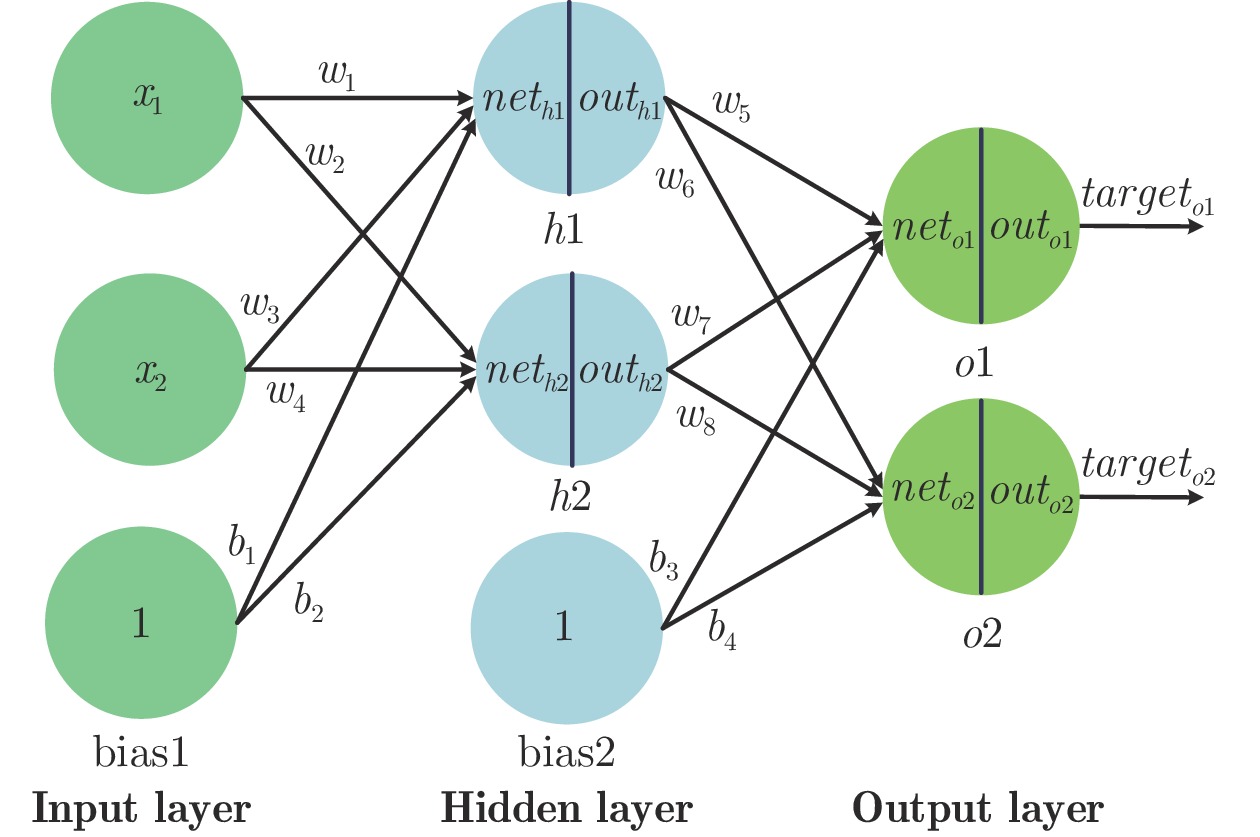
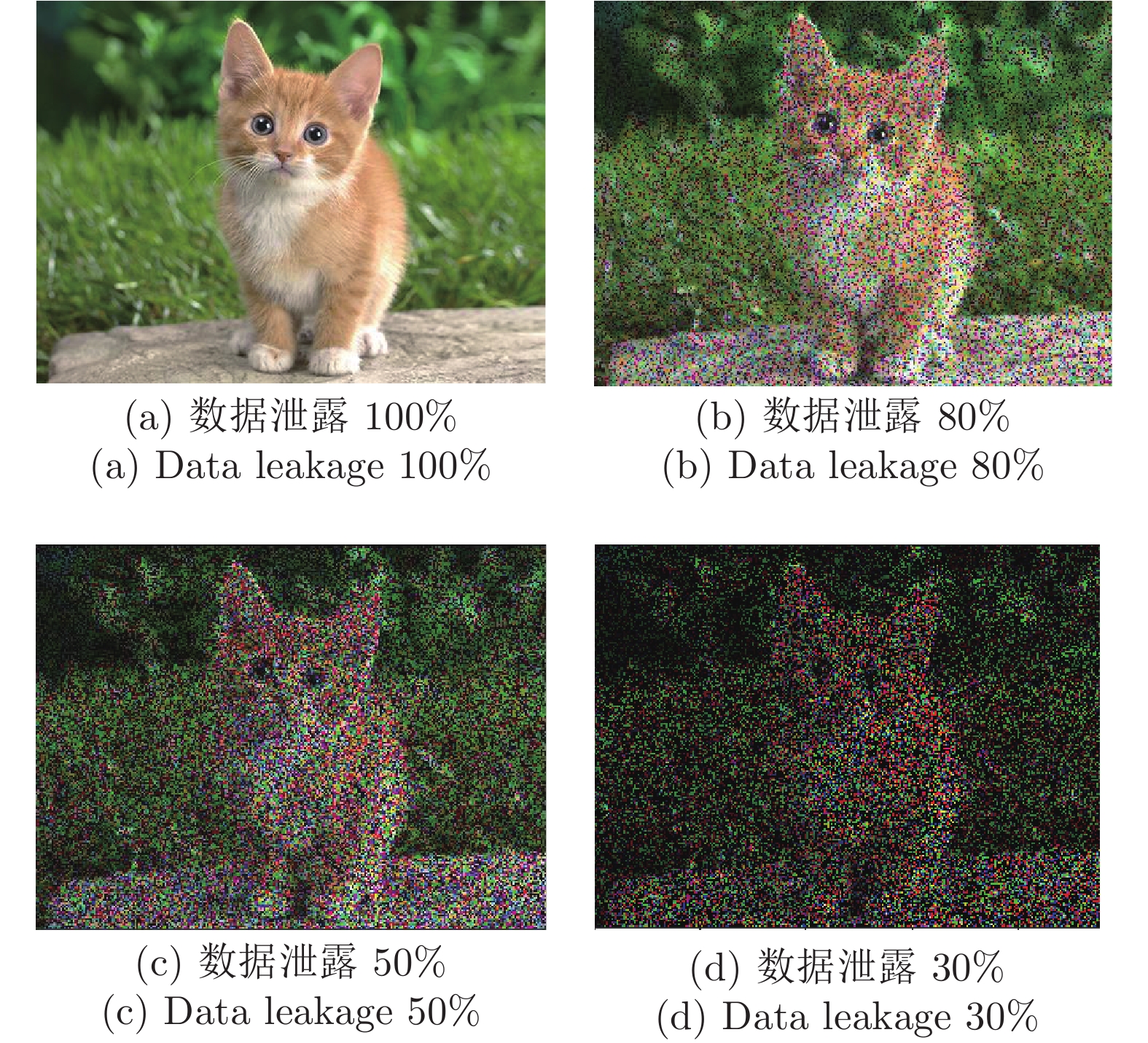
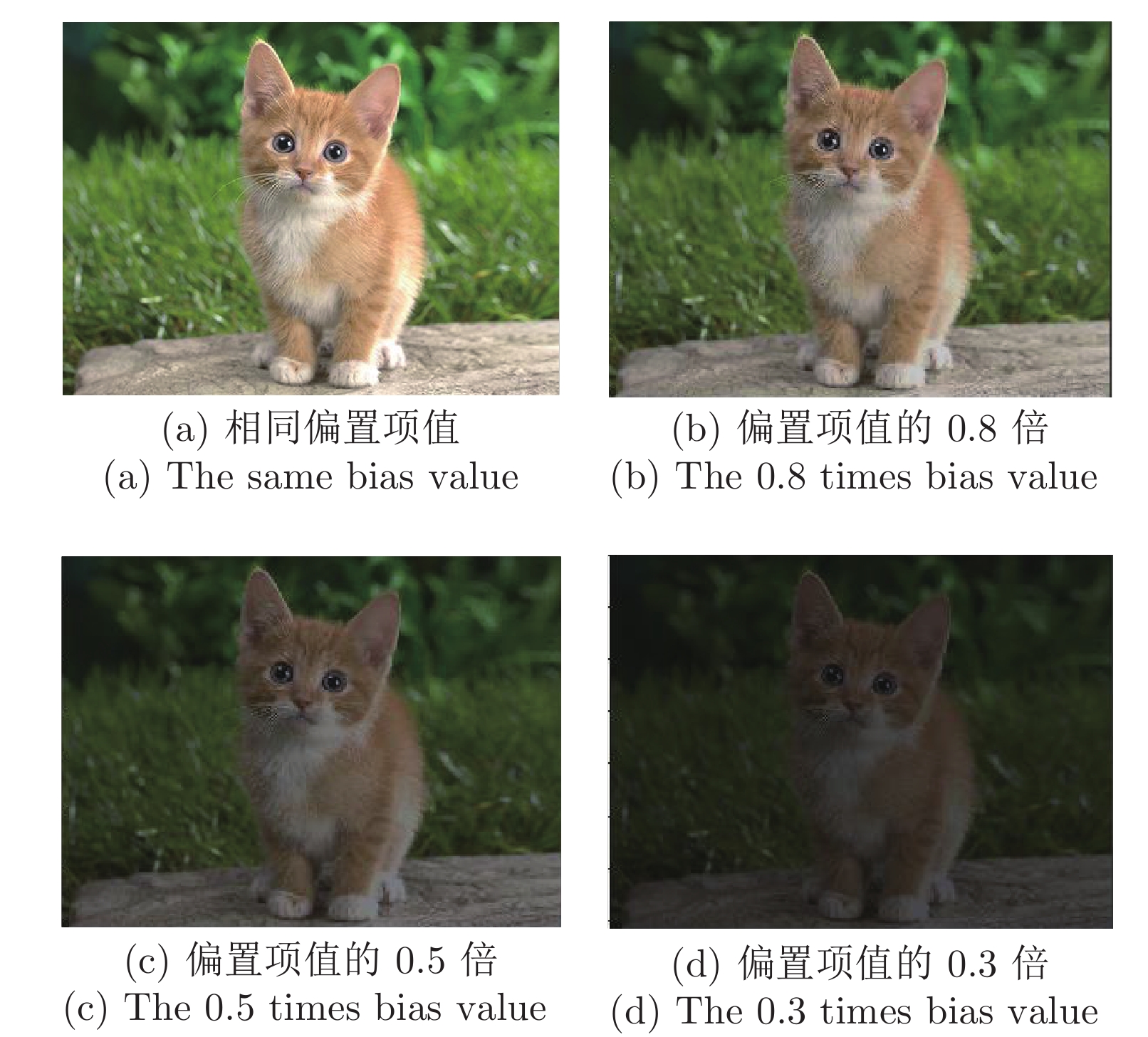
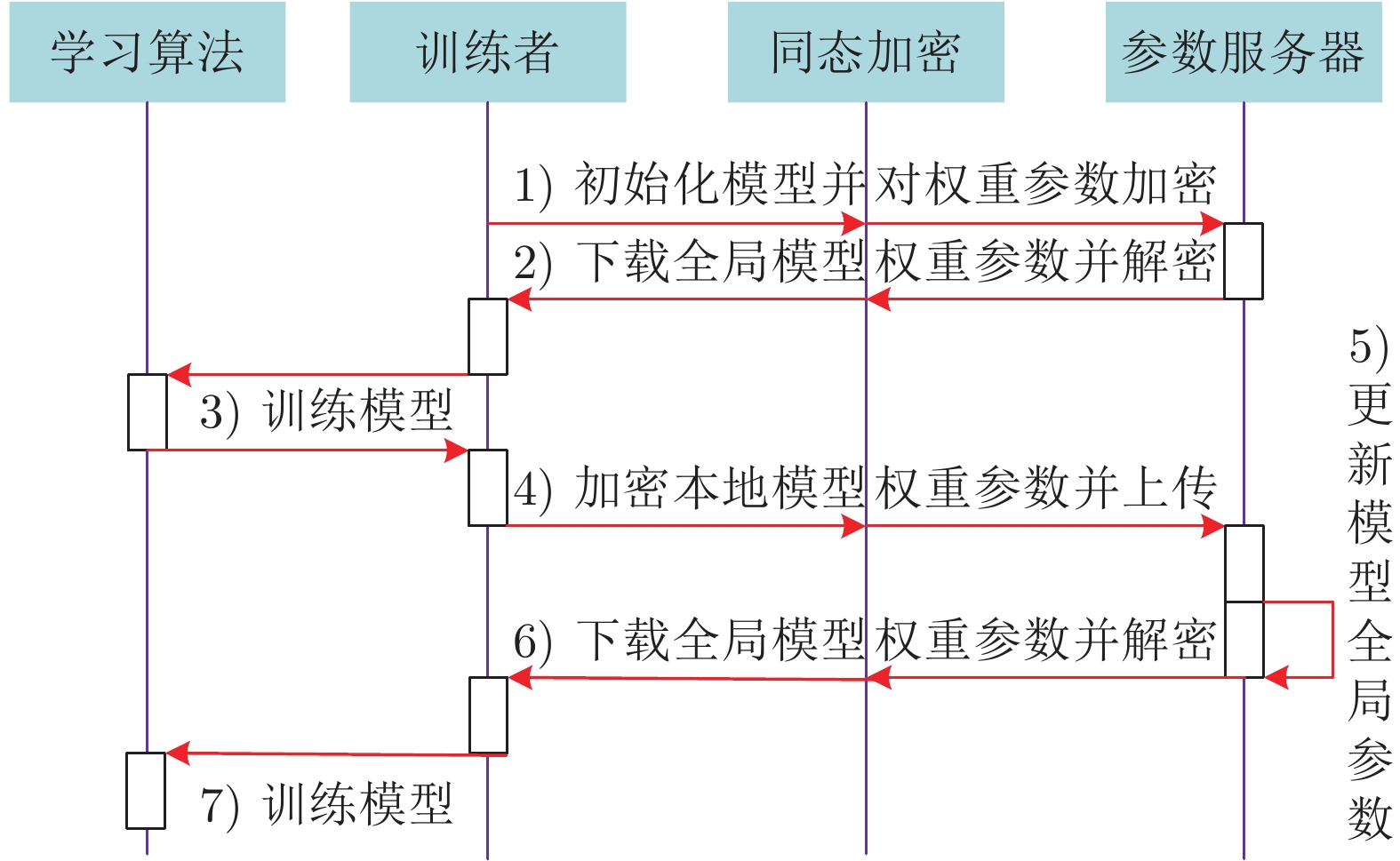
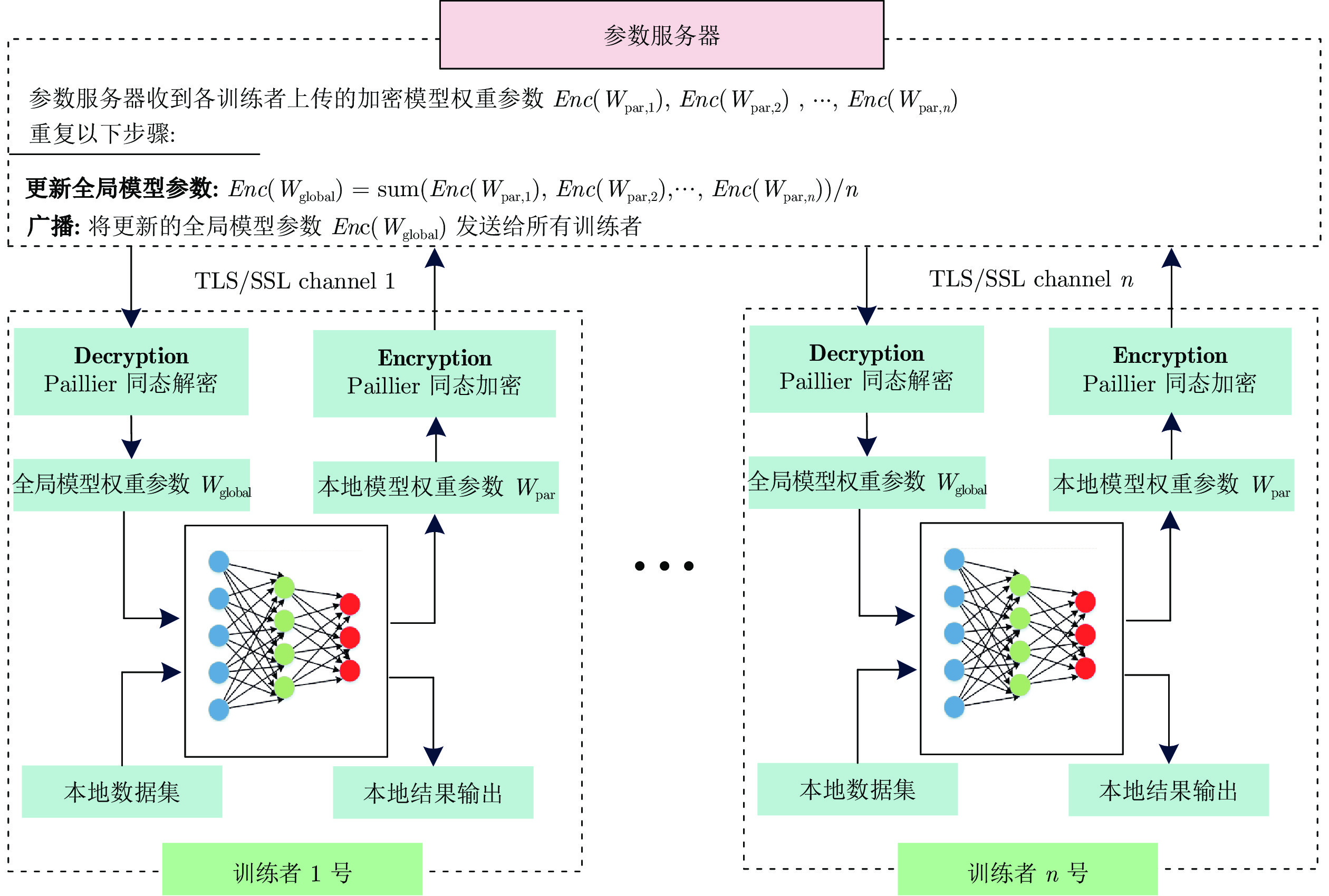
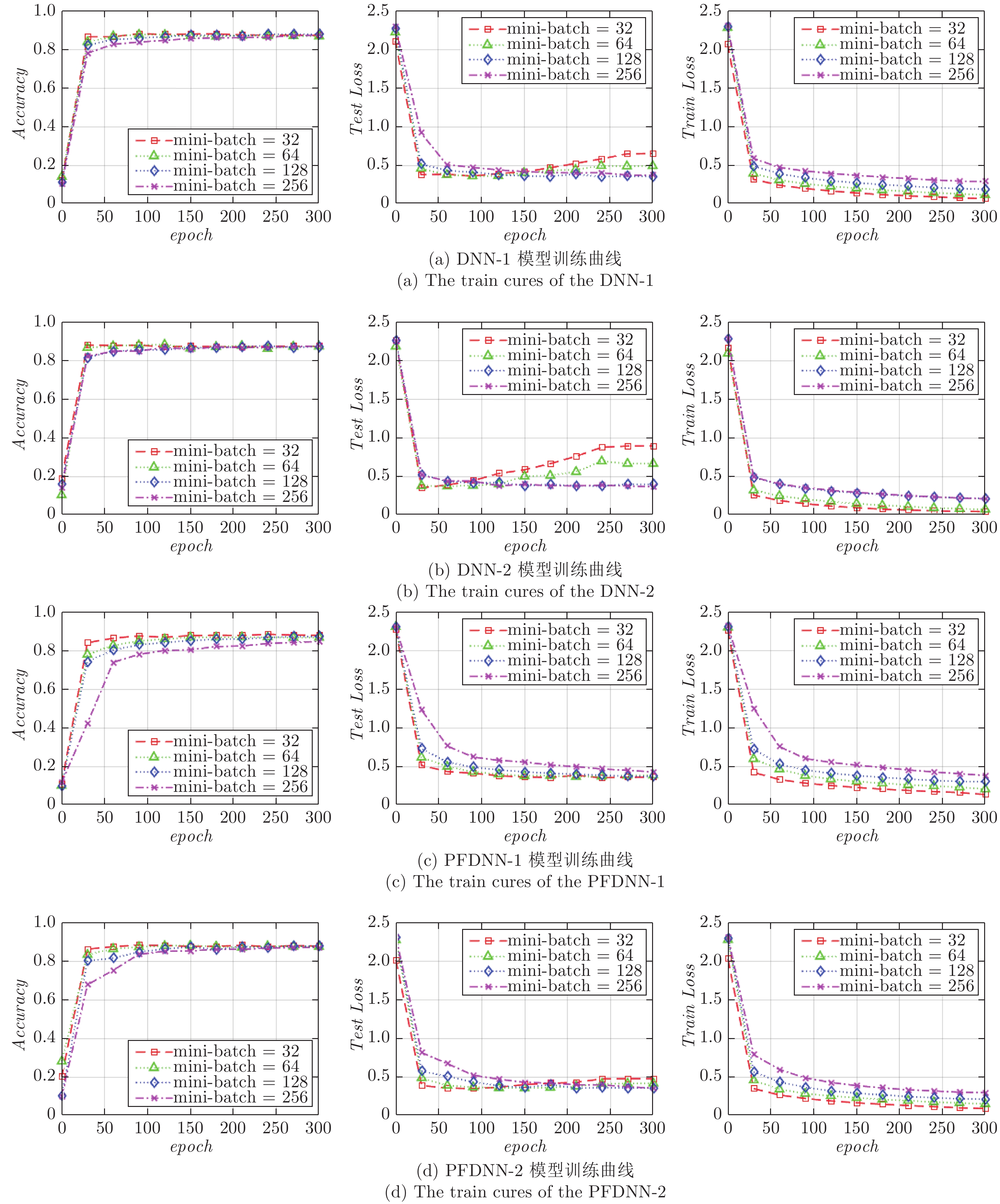
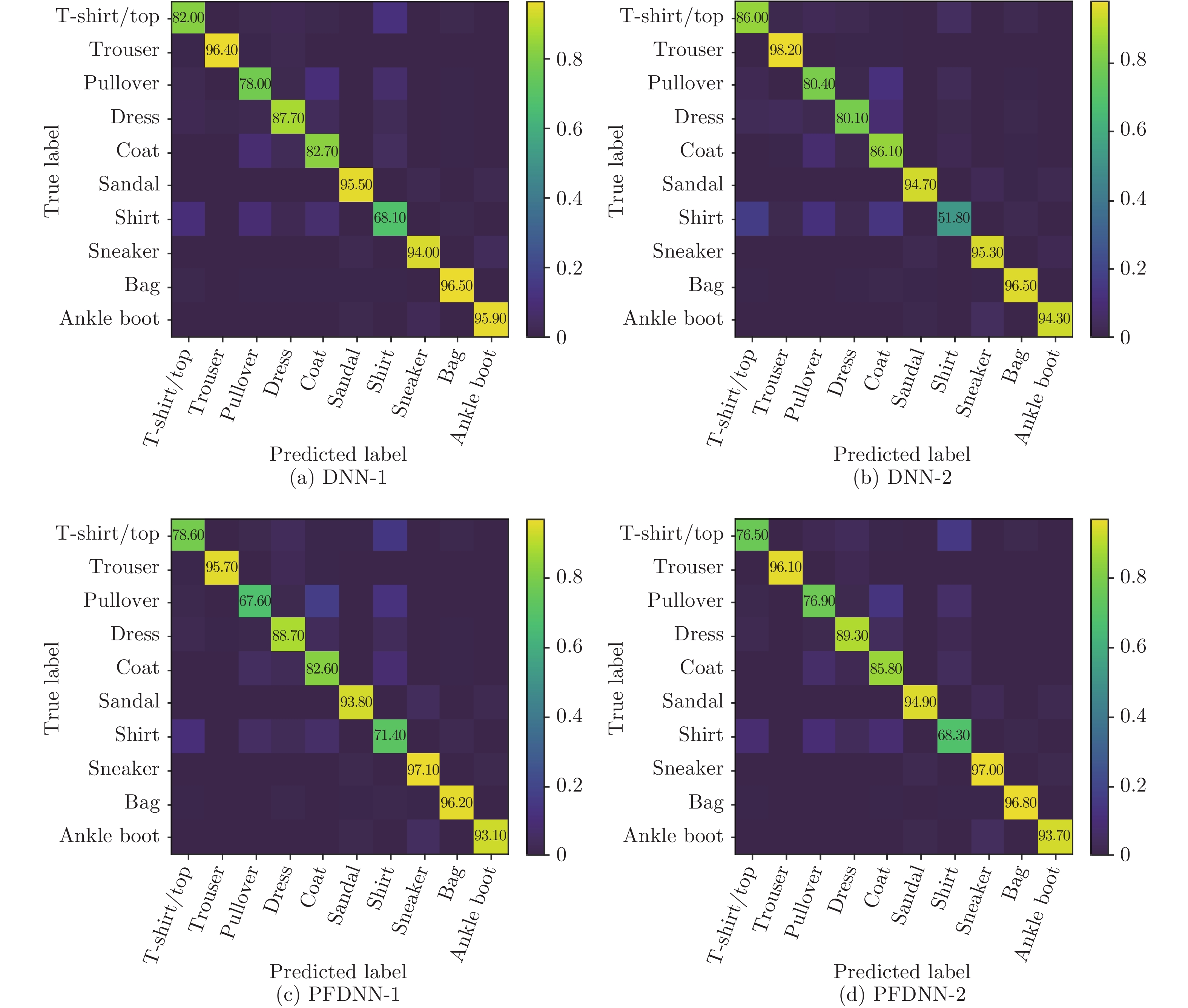
近些年, 人工智能技术已经在图像分类、目标检测、语义分割、智能控制以及故障诊断等领域得到广泛应用, 然而某些行业(例如医疗行业)由于数据隐私的原因, 多个研究机构或组织难以共享数据训练联邦学习模型. 因此, 将同态加密(Homomorphic encryption, HE)算法技术引入到联邦学习中, 提出一种支持数据隐私保护的联邦深度神经网络模型(Privacy-preserving federated deep neural network, PFDNN). 该模型通过对其权重参数的同态加密保证了数据的隐私性, 并极大地减少了训练过程中的加解密计算量. 通过理论分析与实验验证, 所提出的联邦深度神经网络模型具有较好的安全性, 并且能够保证较高的精度.
近些年, 人工智能技术已经在图像分类、目标检测、语义分割、智能控制以及故障诊断等领域得到广泛应用, 然而某些行业(例如医疗行业)由于数据隐私的原因, 多个研究机构或组织难以共享数据训练联邦学习模型. 因此, 将同态加密(Homomorphic encryption, HE)算法技术引入到联邦学习中, 提出一种支持数据隐私保护的联邦深度神经网络模型(Privacy-preserving federated deep neural network, PFDNN). 该模型通过对其权重参数的同态加密保证了数据的隐私性, 并极大地减少了训练过程中的加解密计算量. 通过理论分析与实验验证, 所提出的联邦深度神经网络模型具有较好的安全性, 并且能够保证较高的精度.
2022, 48(5): 1285-1291.
doi: 10.16383/j.aas.c200335
摘要:
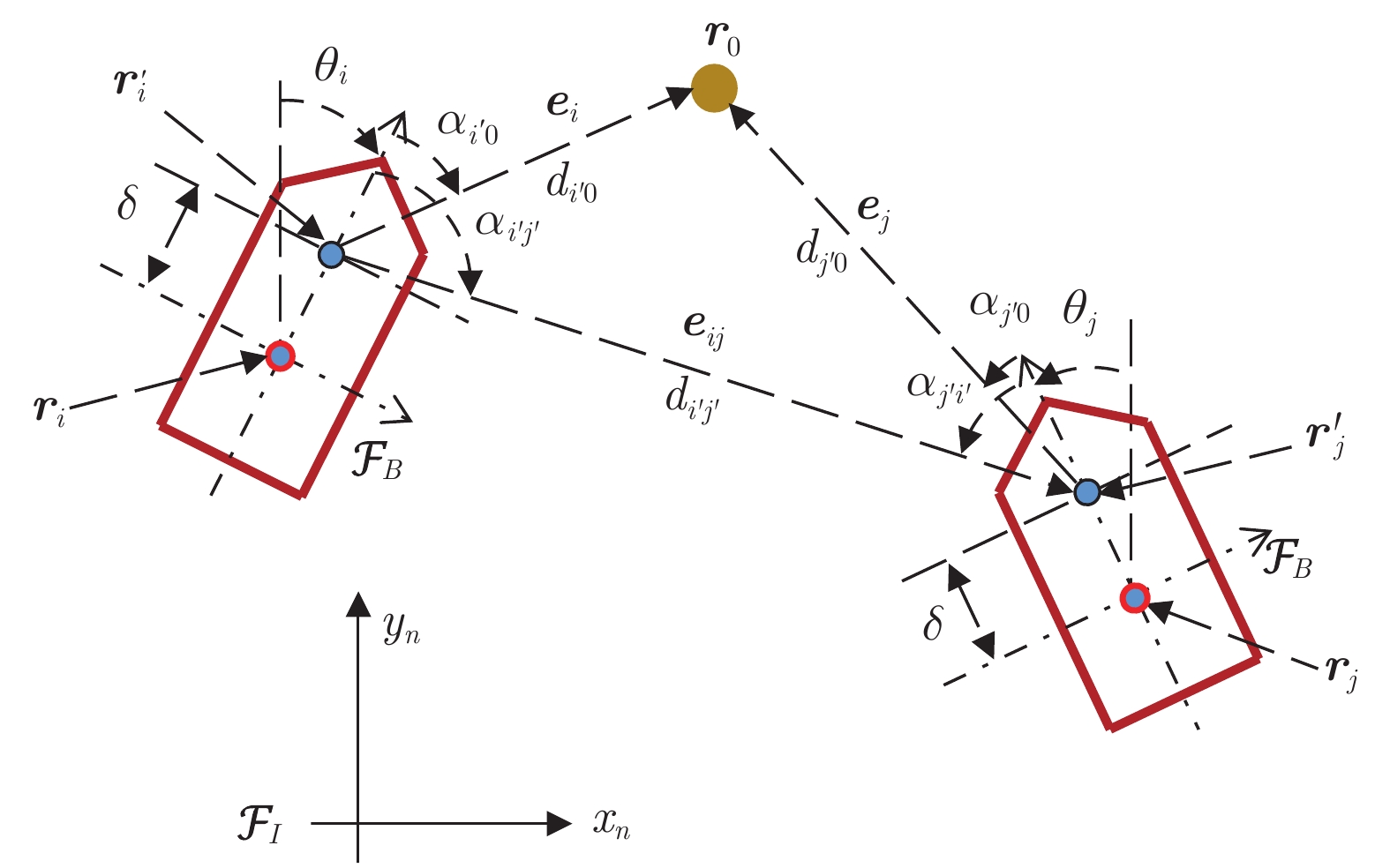
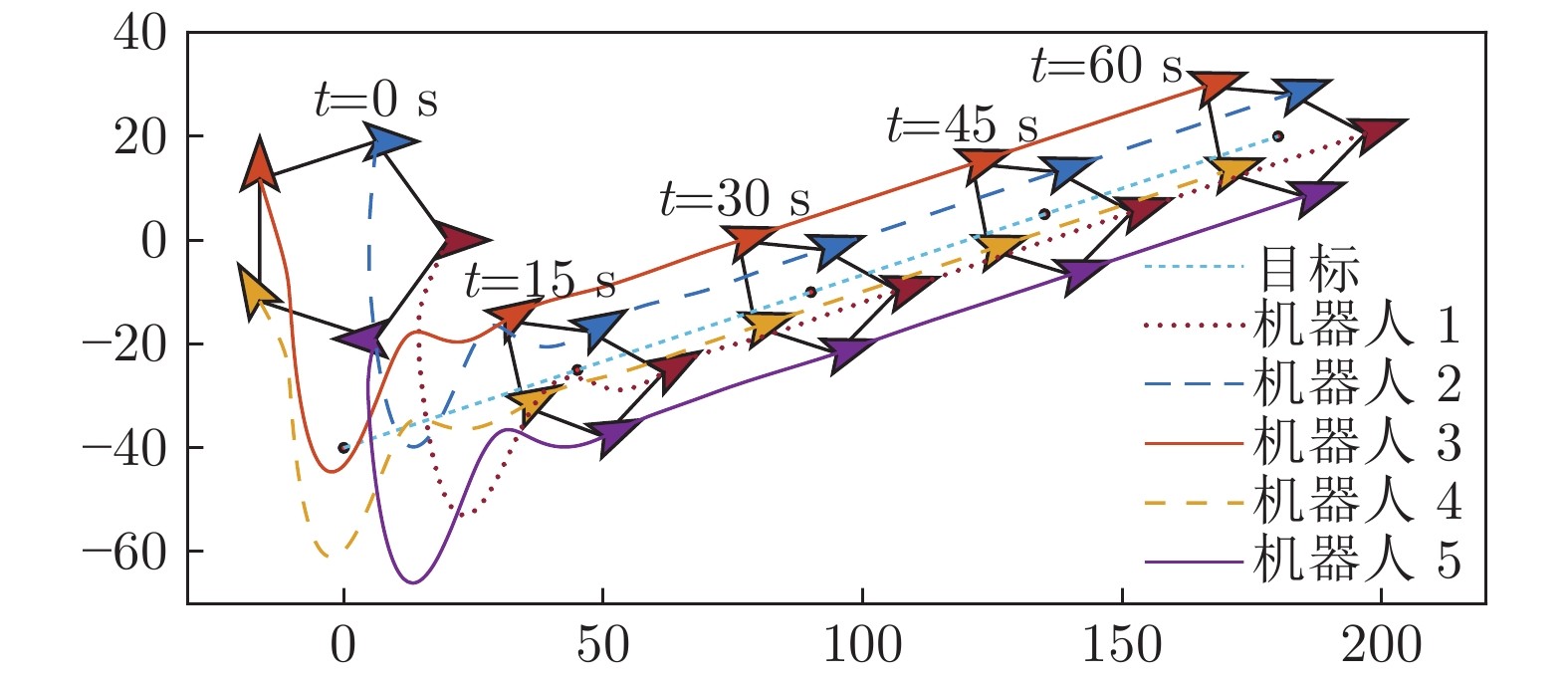
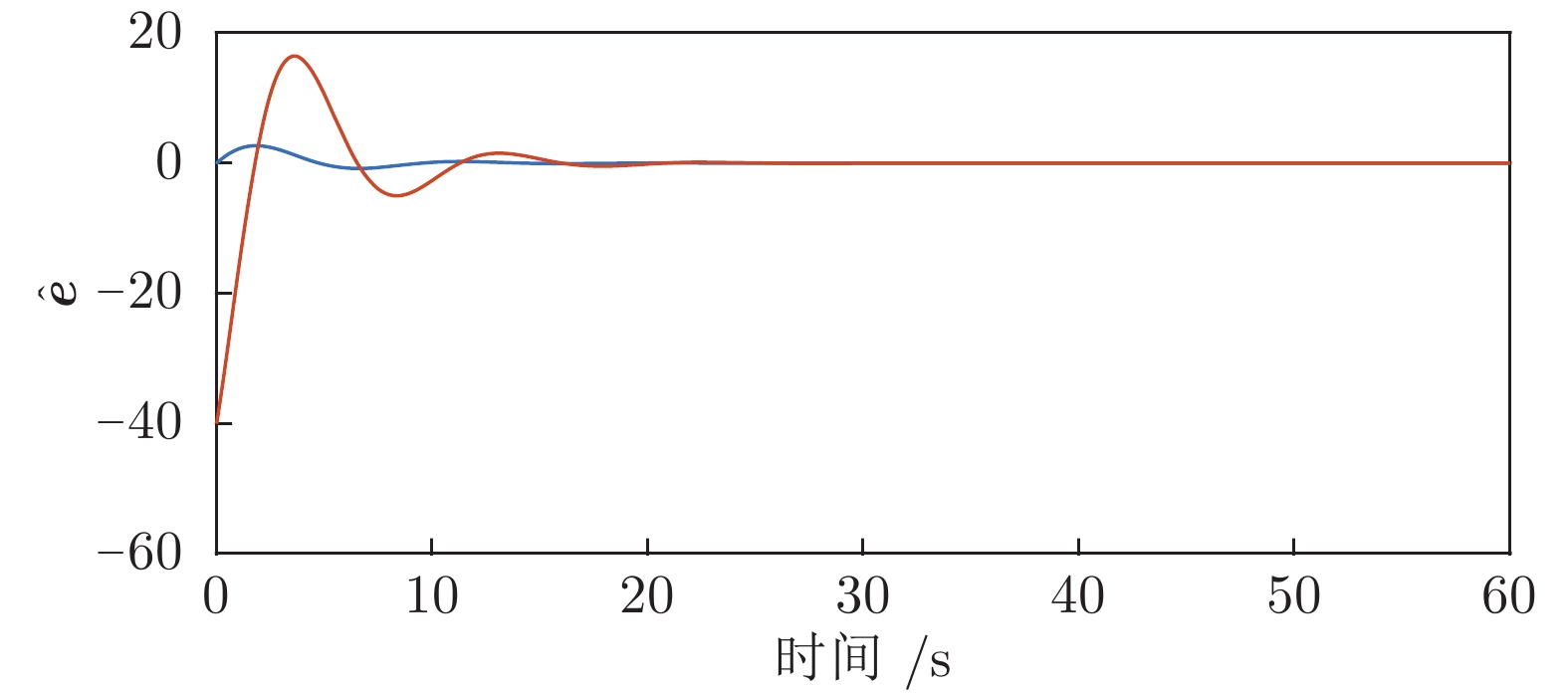
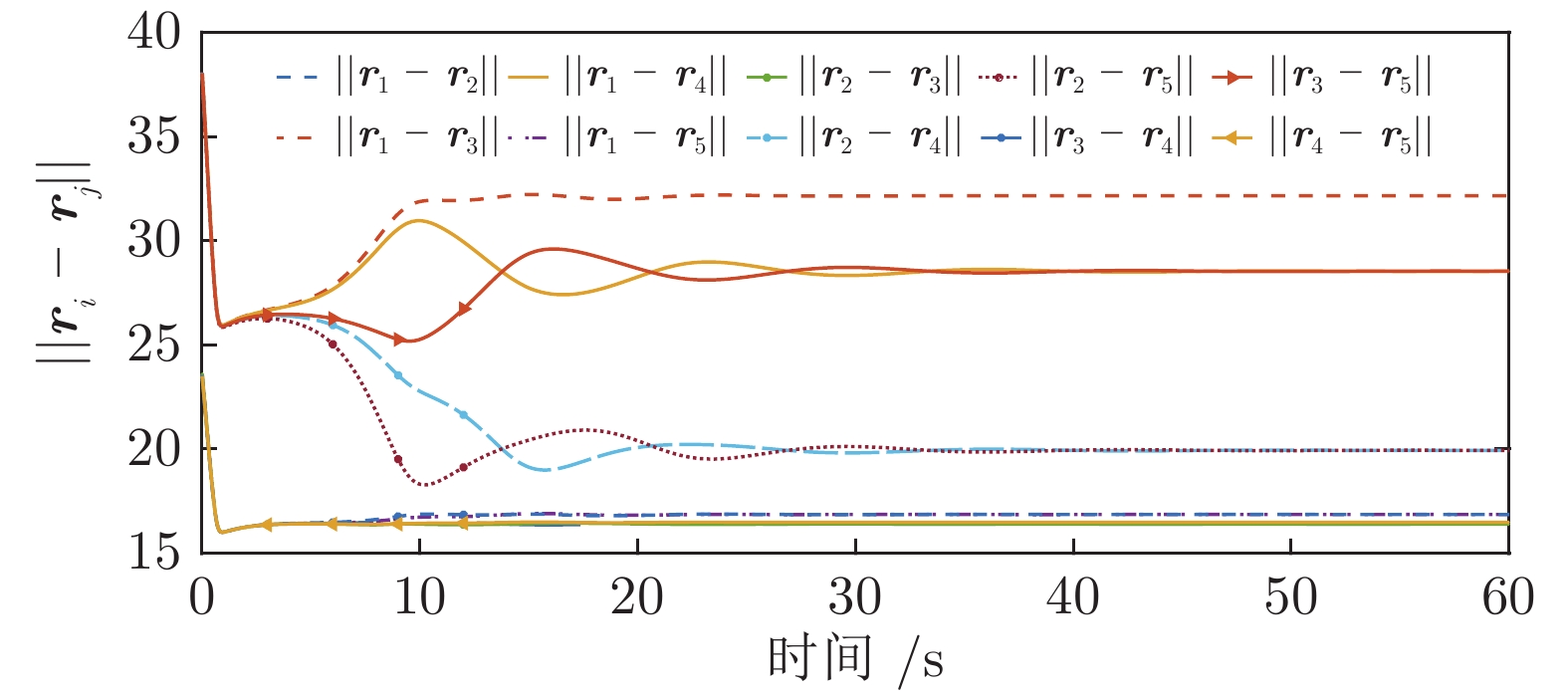
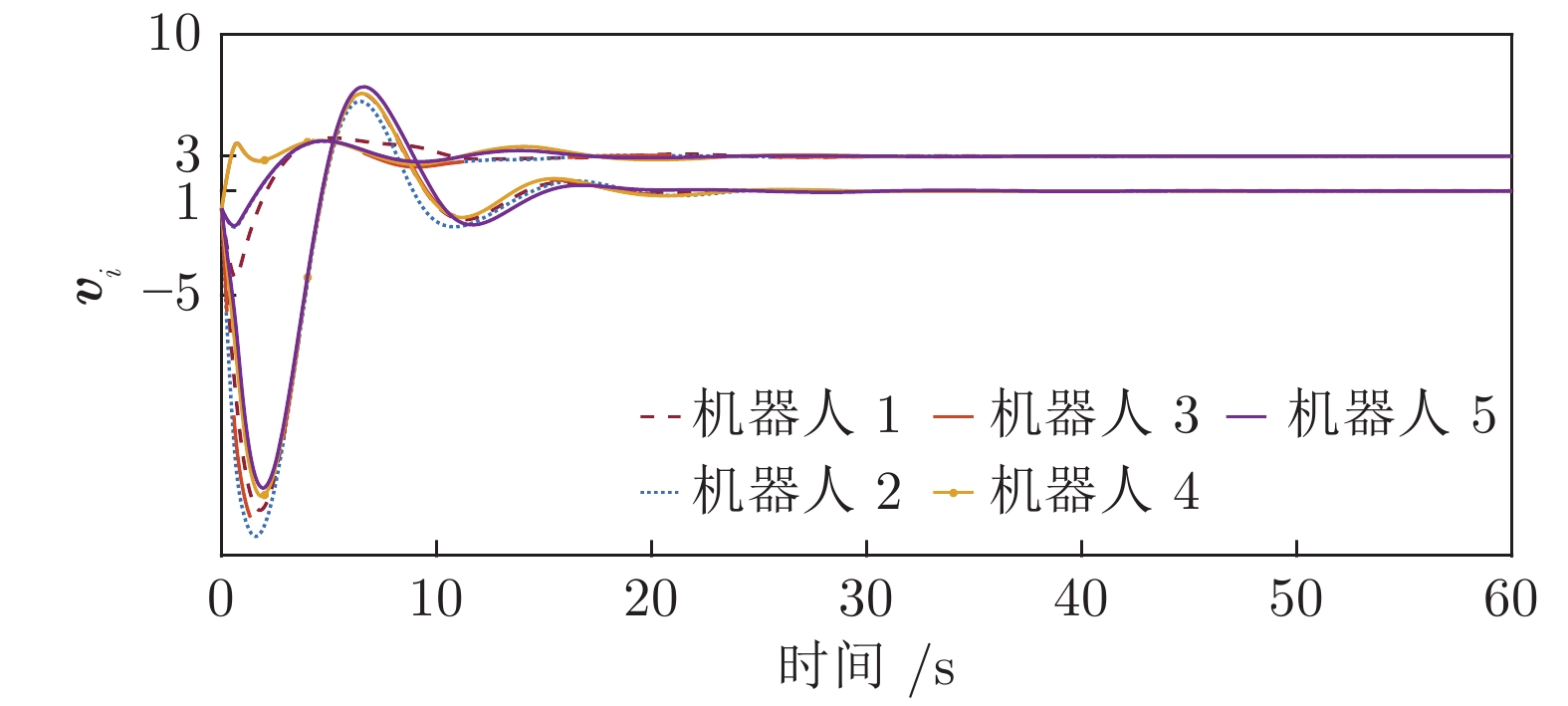
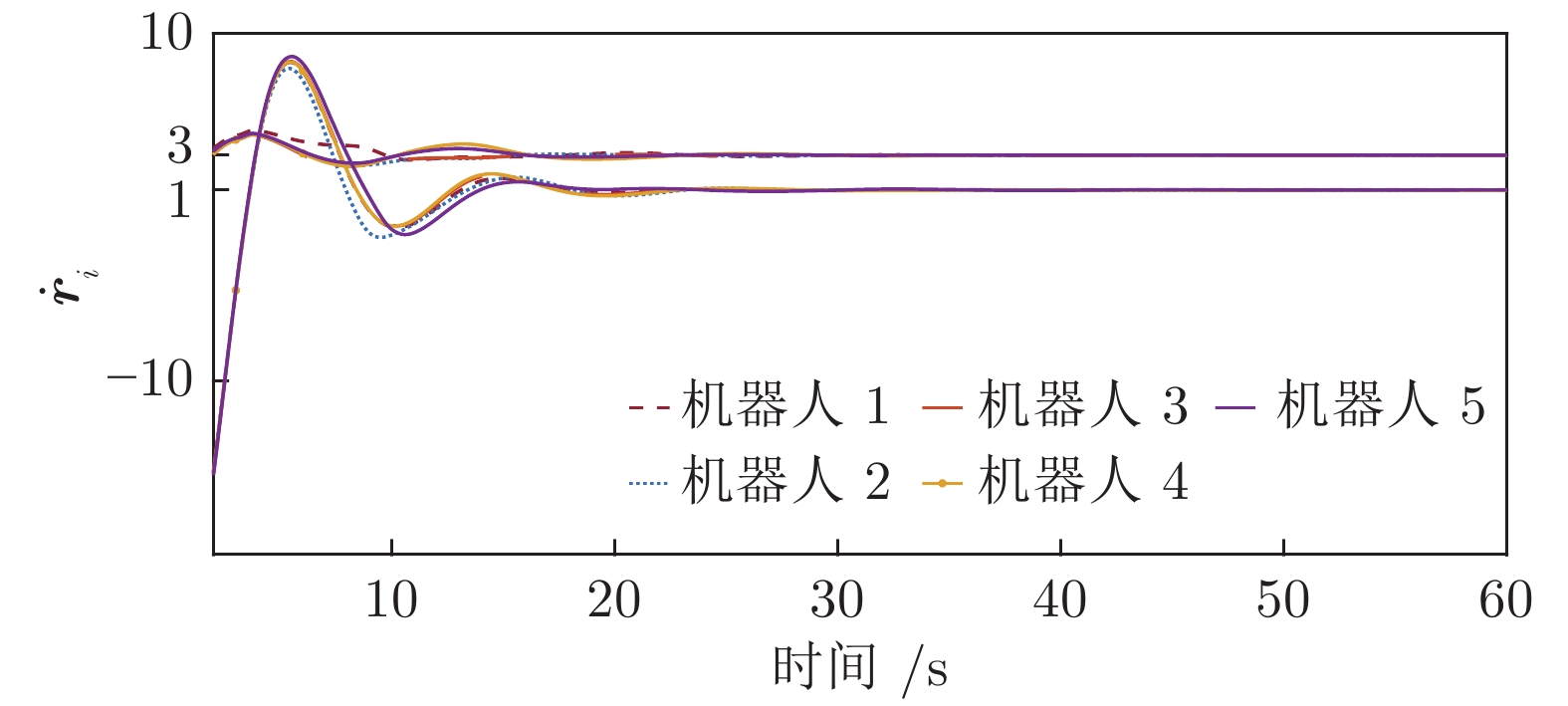
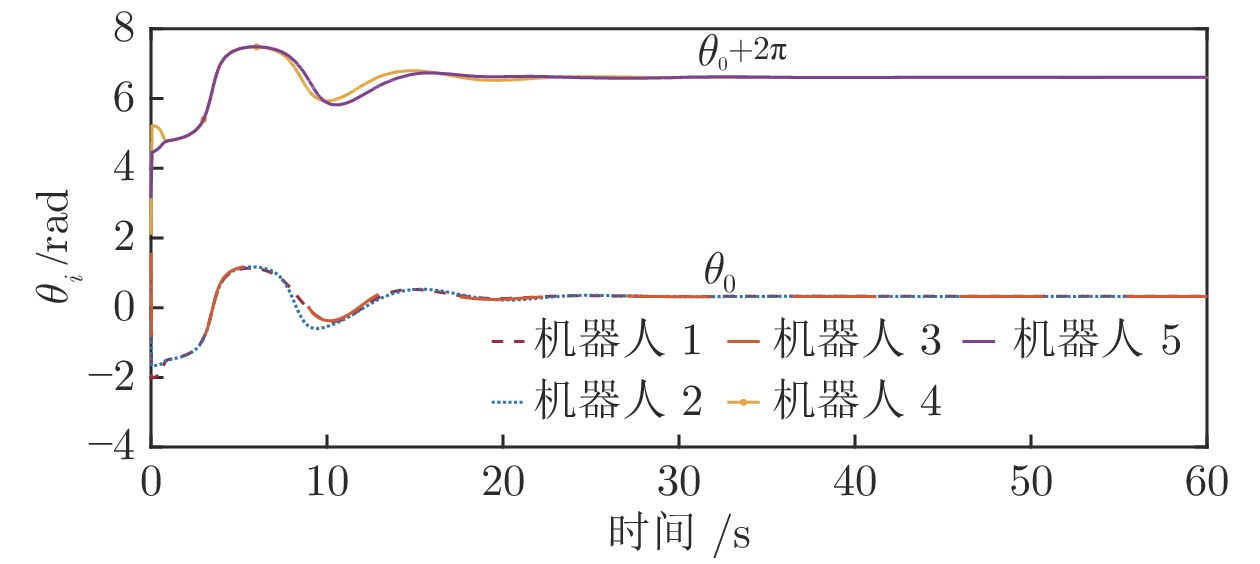
针对受非完整约束的多移动机器人系统的移动目标包围控制问题, 提出一种基于输出反馈线性化的局部协同控制方法. 利用机器人与邻居节点和目标的相对距离信息、角度信息以及机器人自身的方位角信息设计协同控制器. 该方法无需事先指定包围编队形状, 可实现对移动目标的速度估计, 且保证机器人之间的障碍规避. 严格的理论分析证明了移动目标指数收敛到多移动机器人构成的凸包内部. 最后, 仿真结果验证了所提控制方法的有效性.
针对受非完整约束的多移动机器人系统的移动目标包围控制问题, 提出一种基于输出反馈线性化的局部协同控制方法. 利用机器人与邻居节点和目标的相对距离信息、角度信息以及机器人自身的方位角信息设计协同控制器. 该方法无需事先指定包围编队形状, 可实现对移动目标的速度估计, 且保证机器人之间的障碍规避. 严格的理论分析证明了移动目标指数收敛到多移动机器人构成的凸包内部. 最后, 仿真结果验证了所提控制方法的有效性.
2022, 48(5): 1292-1306.
doi: 10.16383/j.aas.c200704
摘要:
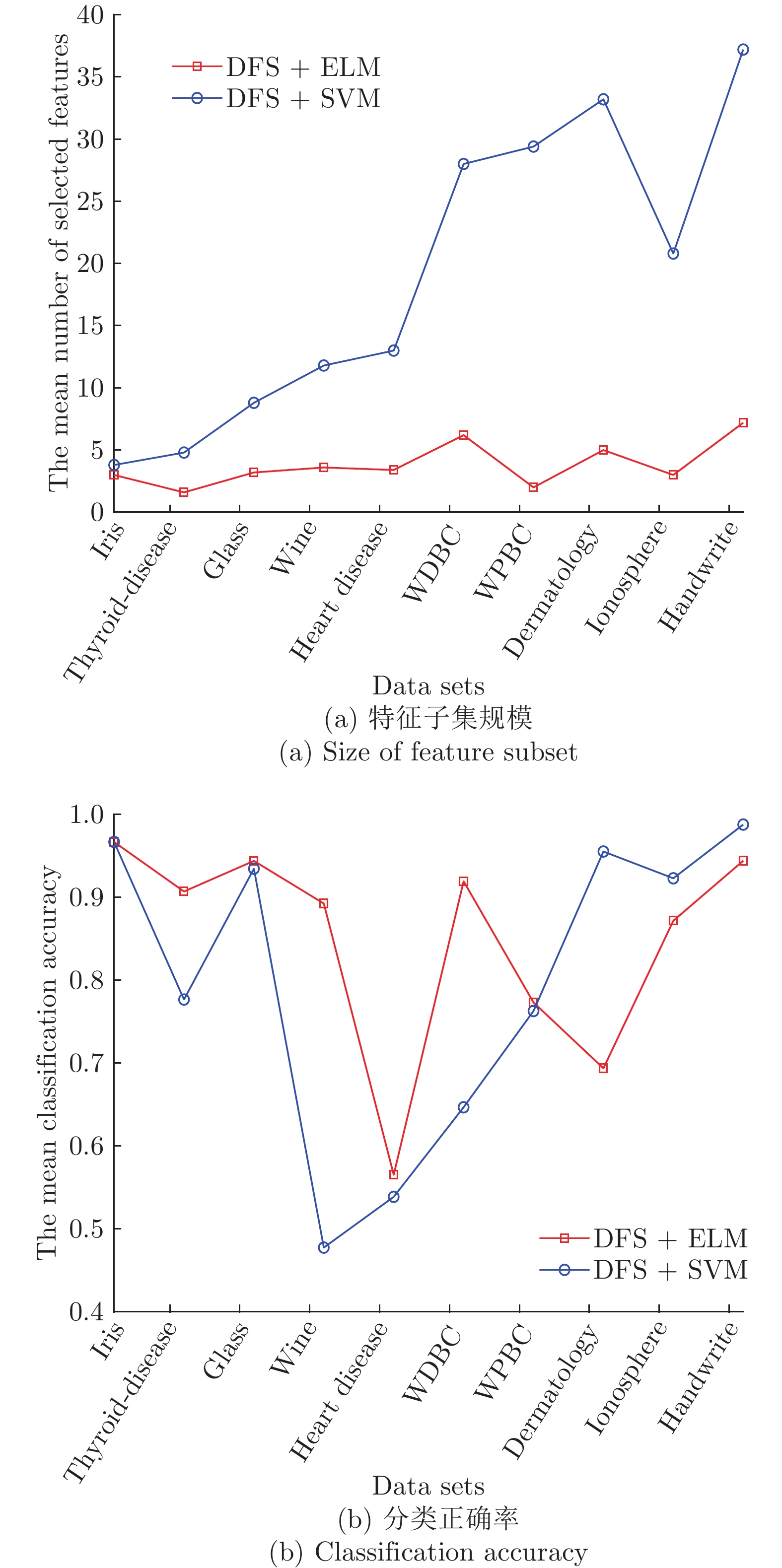
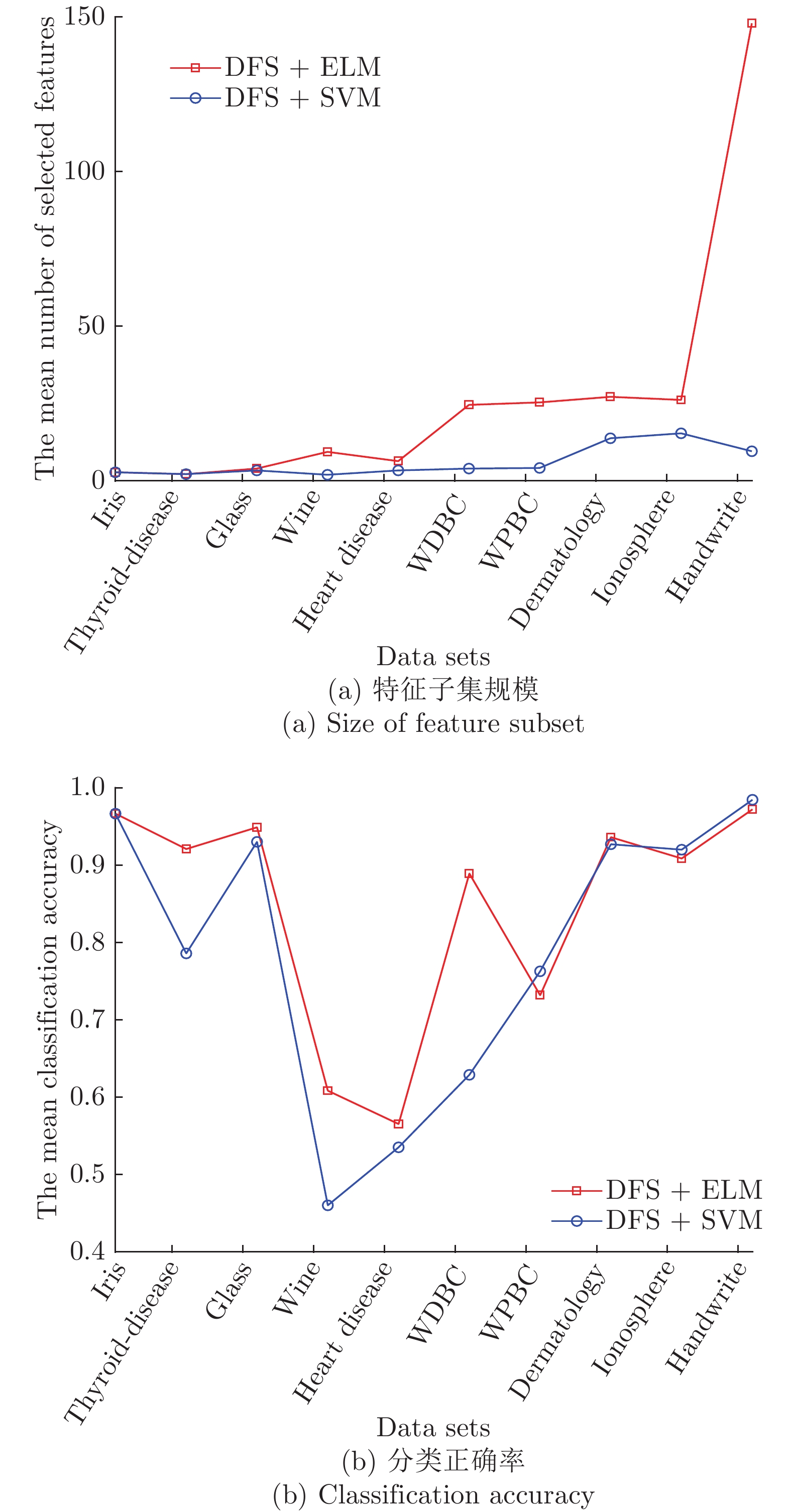
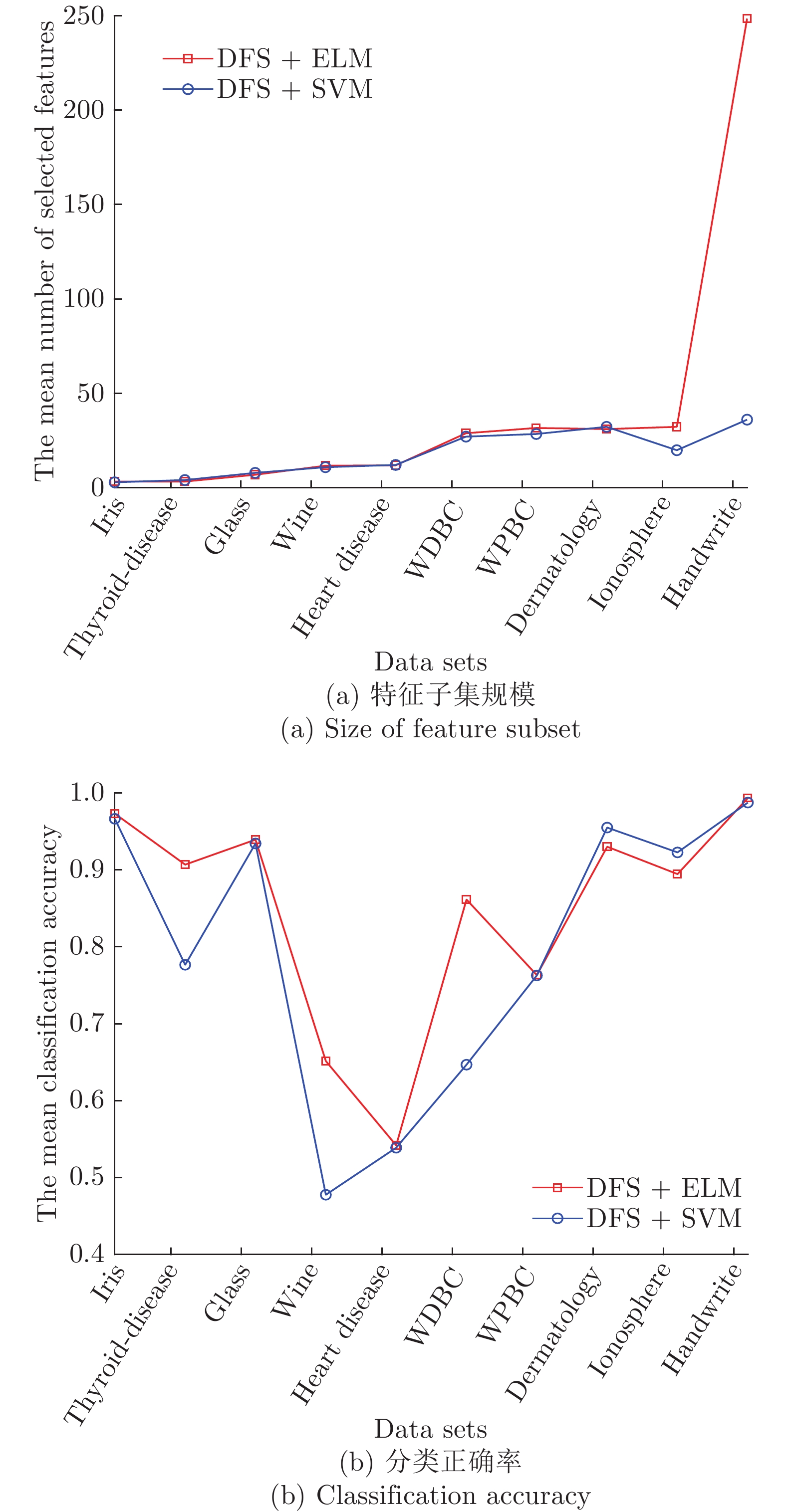
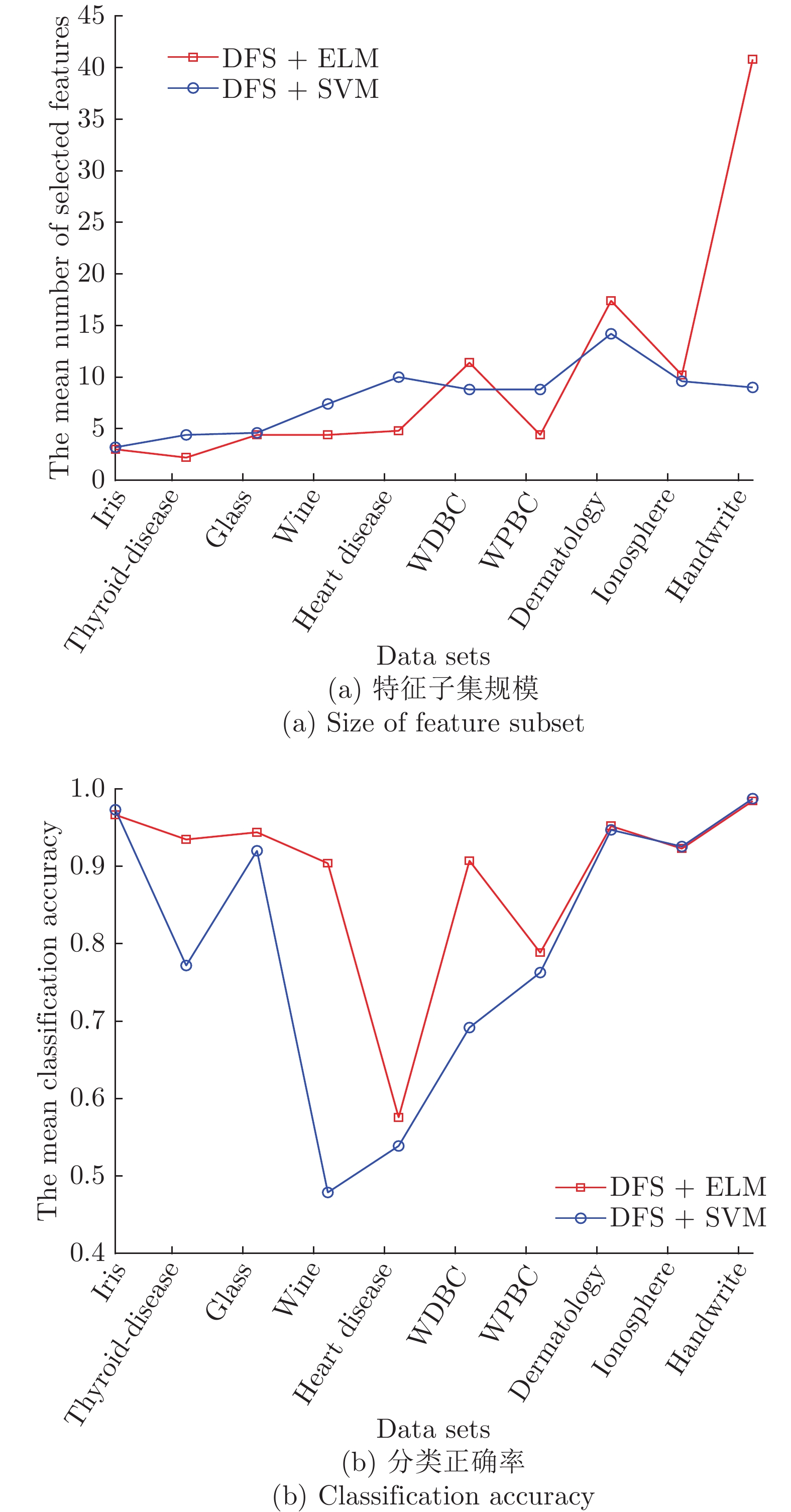
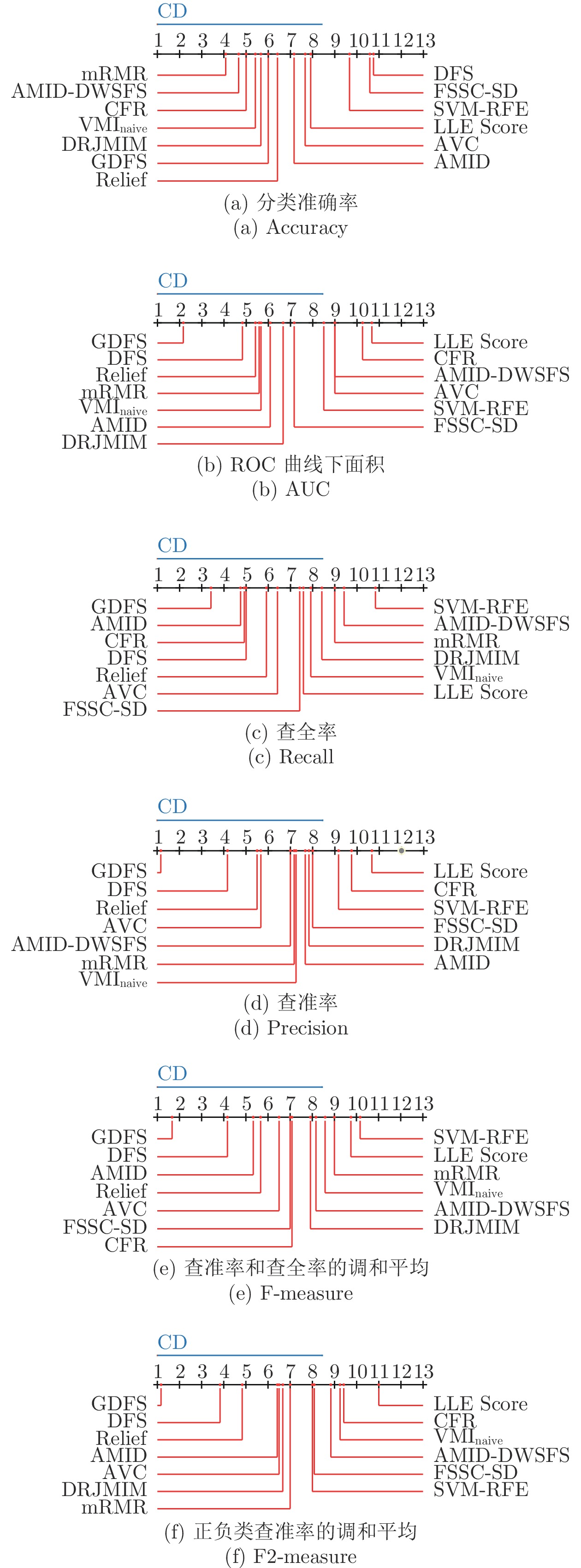
针对特征子集区分度准则(Discernibility of feature subsets, DFS)没有考虑特征测量量纲对特征子集区分能力影响的缺陷, 引入离散系数, 提出GDFS (Generalized discernibility of feature subsets)特征子集区分度准则. 结合顺序前向、顺序后向、顺序前向浮动和顺序后向浮动4种搜索策略, 以极限学习机为分类器, 得到4种混合特征选择算法. UCI数据集与基因数据集的实验测试, 以及与DFS、Relief、DRJMIM、mRMR、LLE Score、AVC、SVM-RFE、VMInaive、AMID、AMID-DWSFS、CFR和FSSC-SD的实验比较和统计重要度检测表明: 提出的GDFS优于DFS, 能选择到分类能力更好的特征子集.
针对特征子集区分度准则(Discernibility of feature subsets, DFS)没有考虑特征测量量纲对特征子集区分能力影响的缺陷, 引入离散系数, 提出GDFS (Generalized discernibility of feature subsets)特征子集区分度准则. 结合顺序前向、顺序后向、顺序前向浮动和顺序后向浮动4种搜索策略, 以极限学习机为分类器, 得到4种混合特征选择算法. UCI数据集与基因数据集的实验测试, 以及与DFS、Relief、DRJMIM、mRMR、LLE Score、AVC、SVM-RFE、VMInaive、AMID、AMID-DWSFS、CFR和FSSC-SD的实验比较和统计重要度检测表明: 提出的GDFS优于DFS, 能选择到分类能力更好的特征子集.
2022, 48(5): 1307-1317.
doi: 10.16383/j.aas.c190684
摘要:
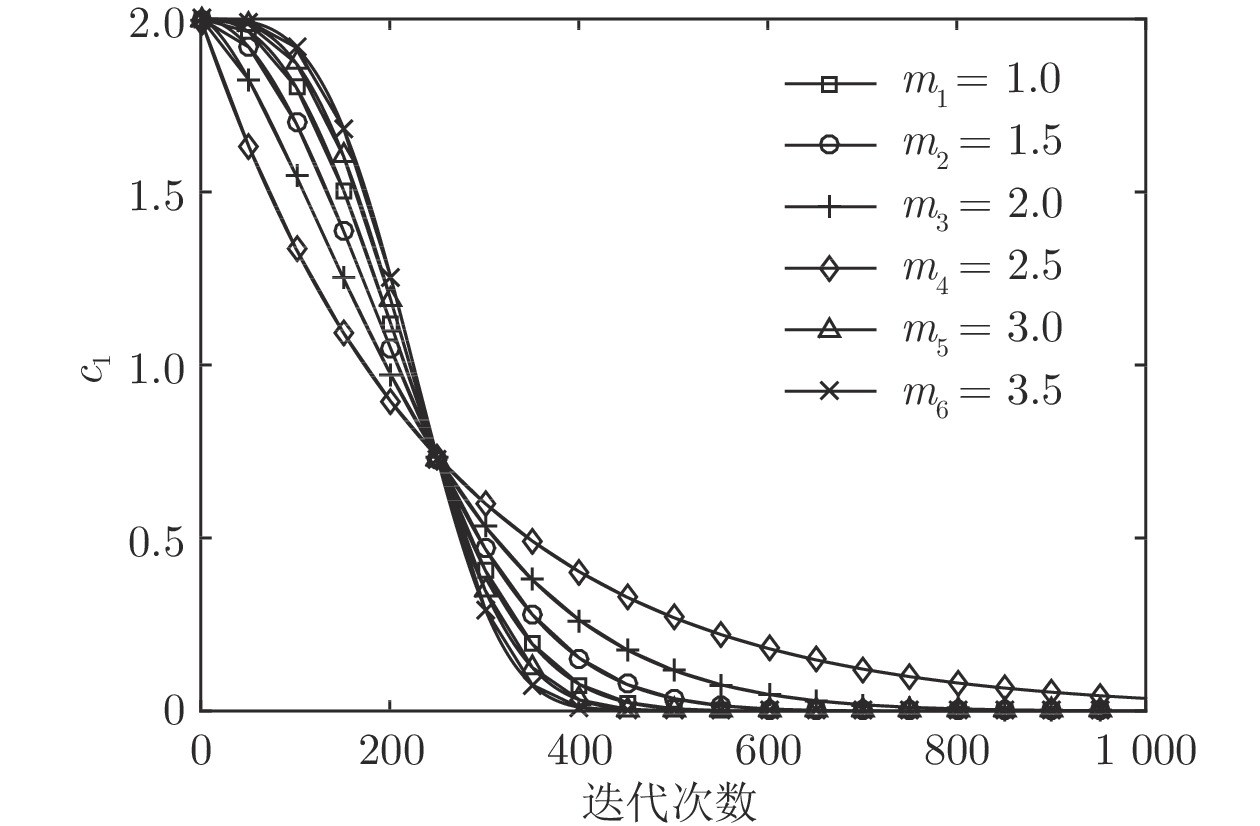
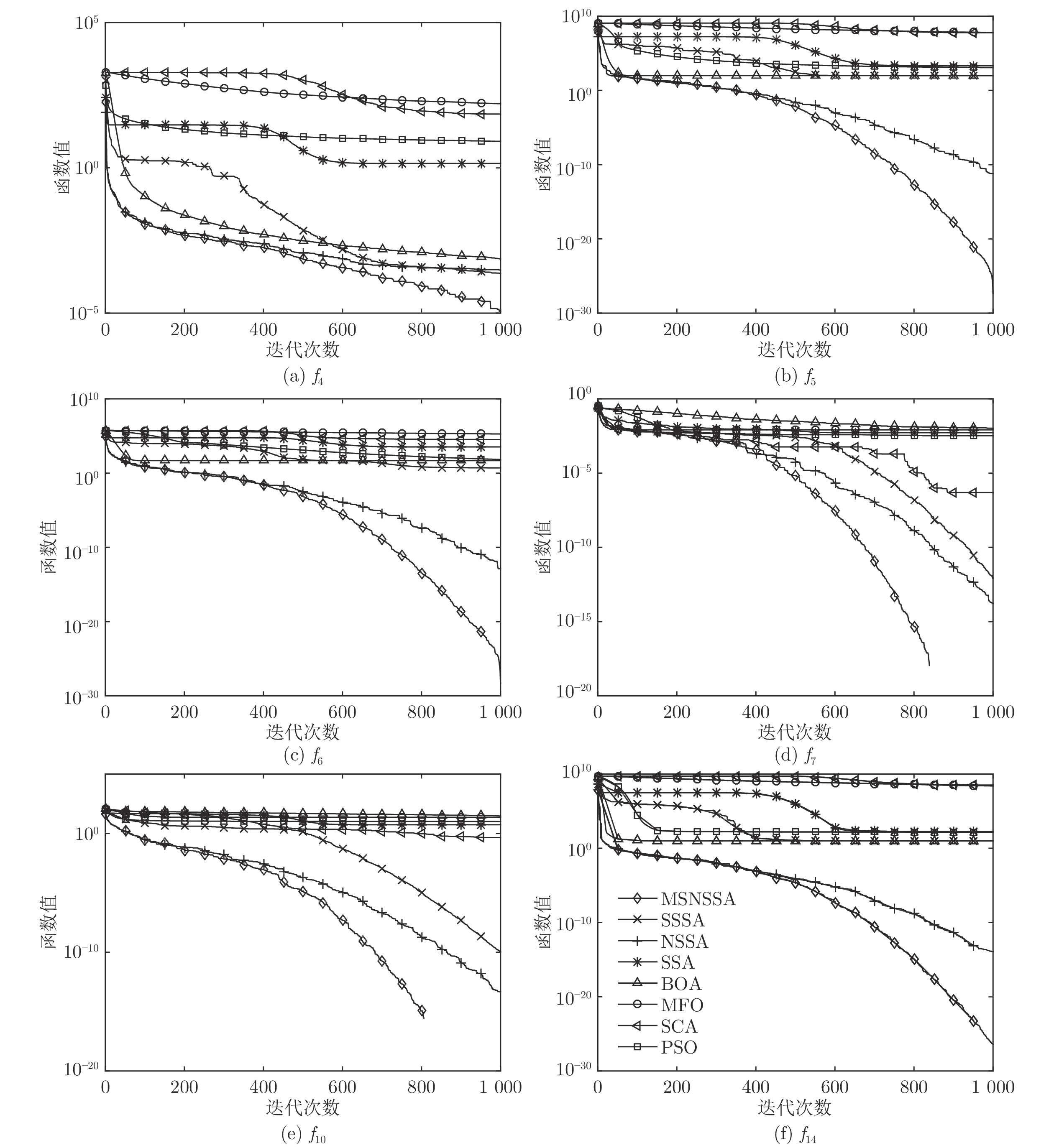
针对樽海鞘群算法求解精度不高和收敛速度慢等缺点, 提出一种多子群的共生非均匀高斯变异樽海鞘群算法. 根据不同适应度值将樽海鞘链群分为三个子种群, 各个子种群分别进行领导者位置更新、追随者共生策略和链尾者非均匀高斯变异等操作. 使用统计分析、收敛速度分析、Wilcoxon检验、经典基准函数和CEC 2014函数的标准差来评估改进樽海鞘群算法的效率. 结果表明, 改进算法具有更好的寻优精度和收敛速度. 尤其在求解高维和多峰测试函数上, 改进算法拥有更好性能.
针对樽海鞘群算法求解精度不高和收敛速度慢等缺点, 提出一种多子群的共生非均匀高斯变异樽海鞘群算法. 根据不同适应度值将樽海鞘链群分为三个子种群, 各个子种群分别进行领导者位置更新、追随者共生策略和链尾者非均匀高斯变异等操作. 使用统计分析、收敛速度分析、Wilcoxon检验、经典基准函数和CEC 2014函数的标准差来评估改进樽海鞘群算法的效率. 结果表明, 改进算法具有更好的寻优精度和收敛速度. 尤其在求解高维和多峰测试函数上, 改进算法拥有更好性能.
2022, 48(5): 1318-1326.
doi: 10.16383/j.aas.c200600
摘要:
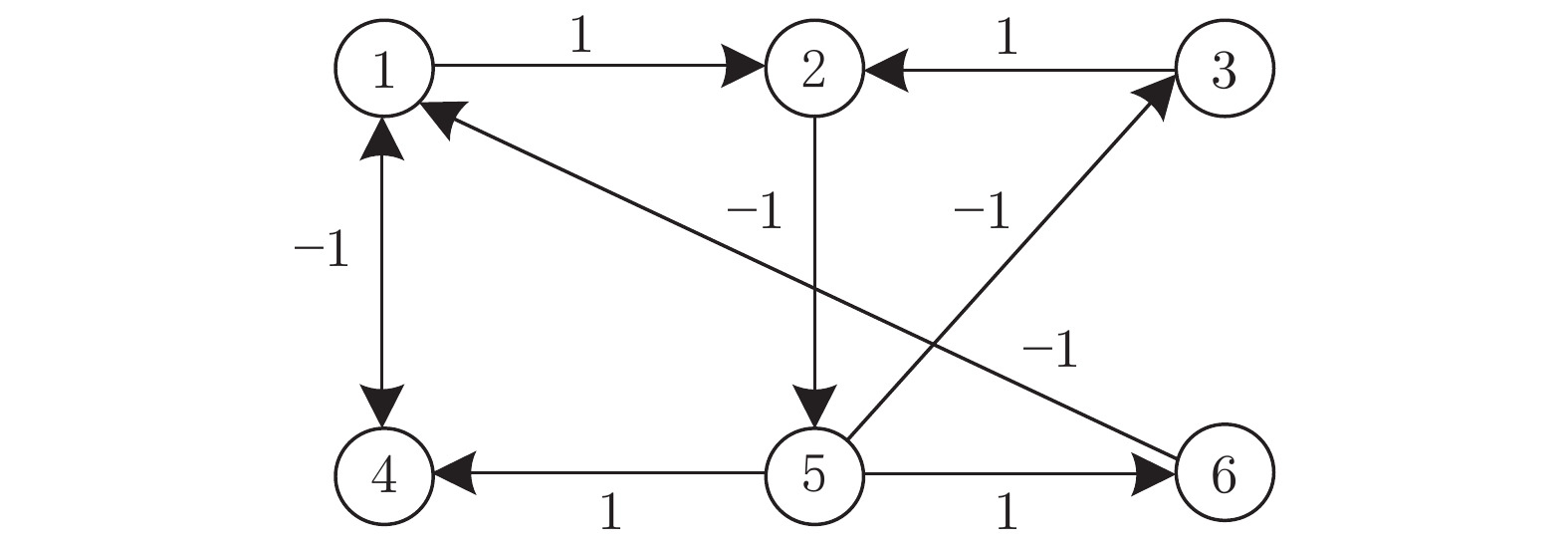
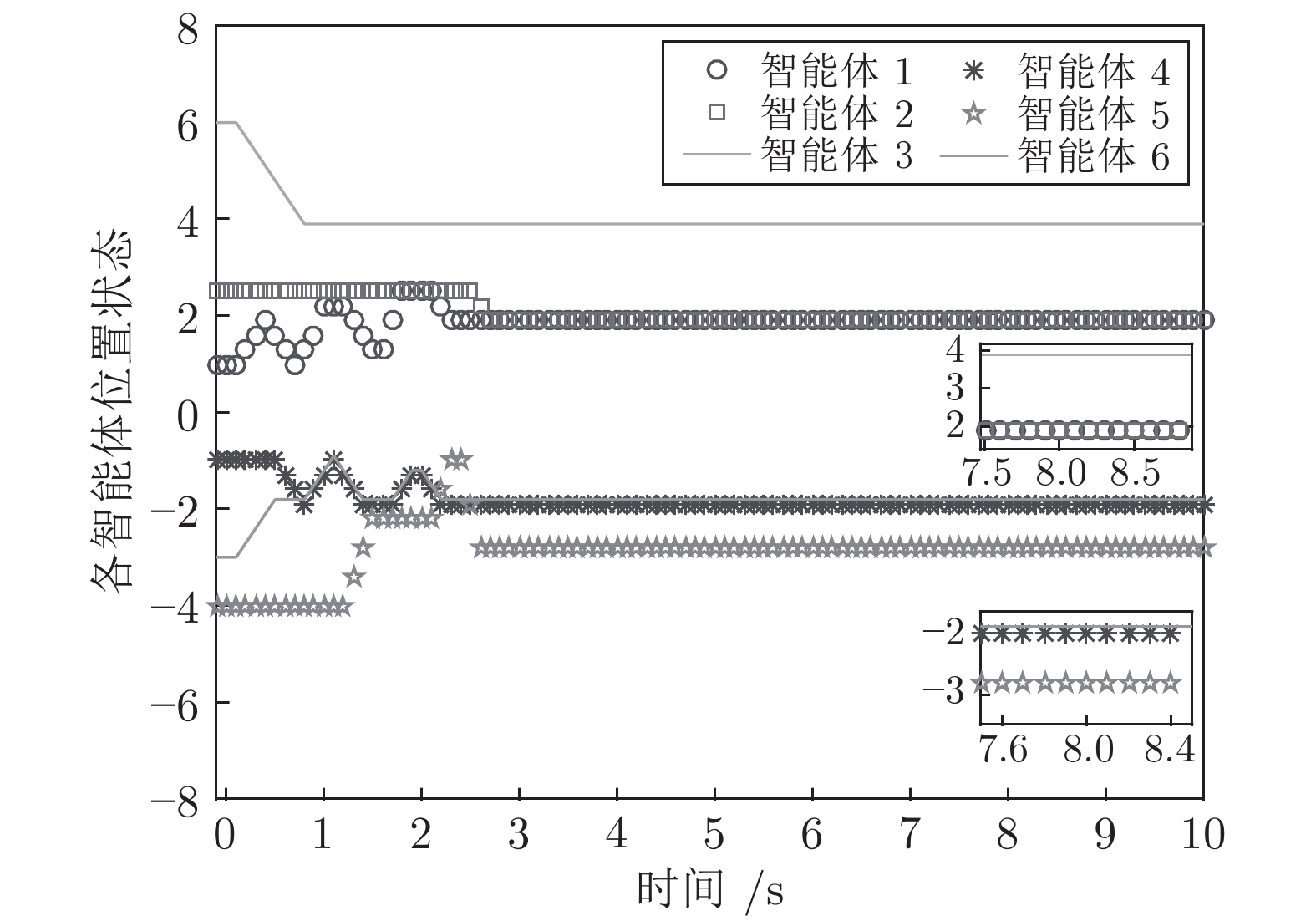
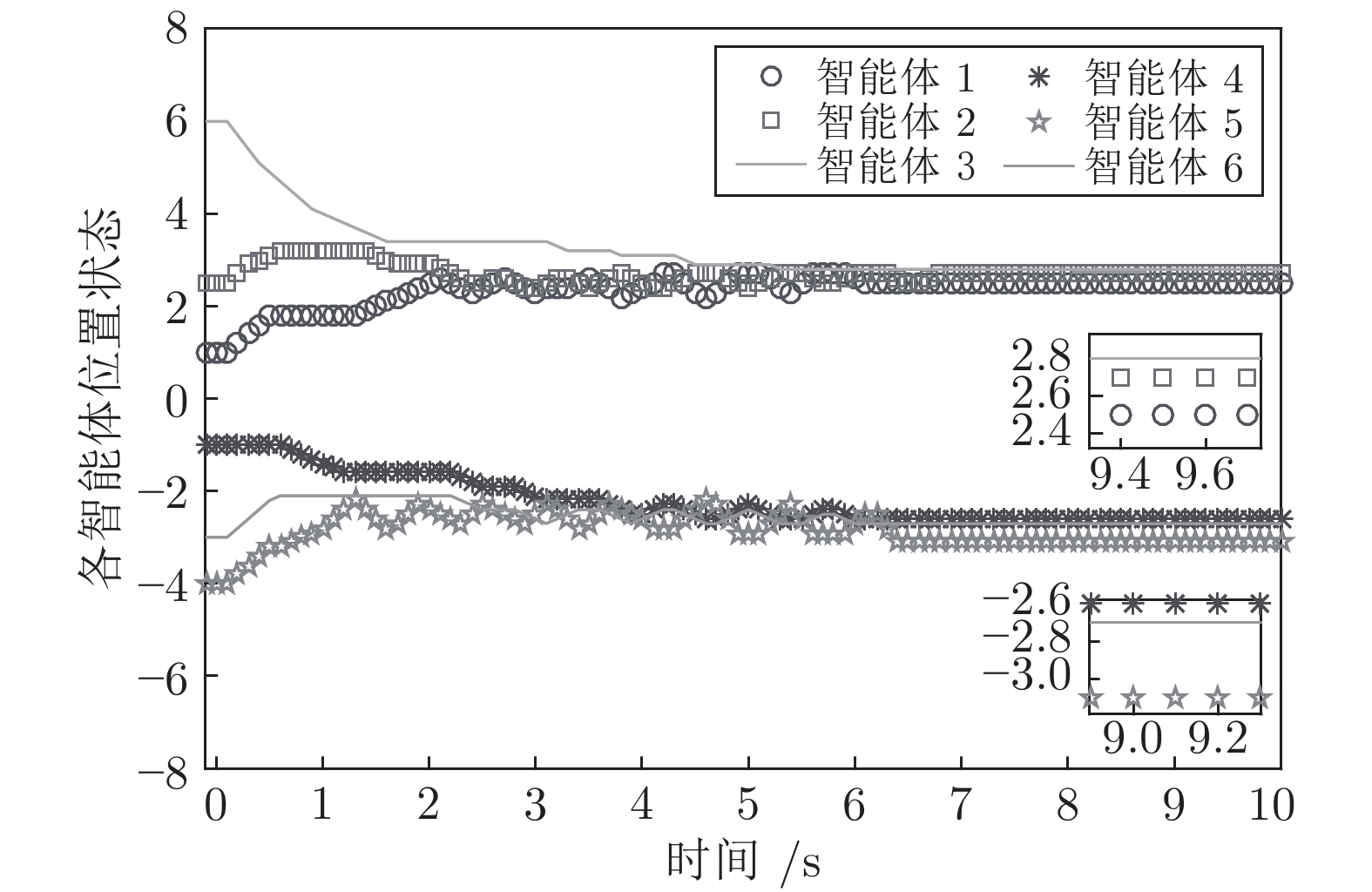
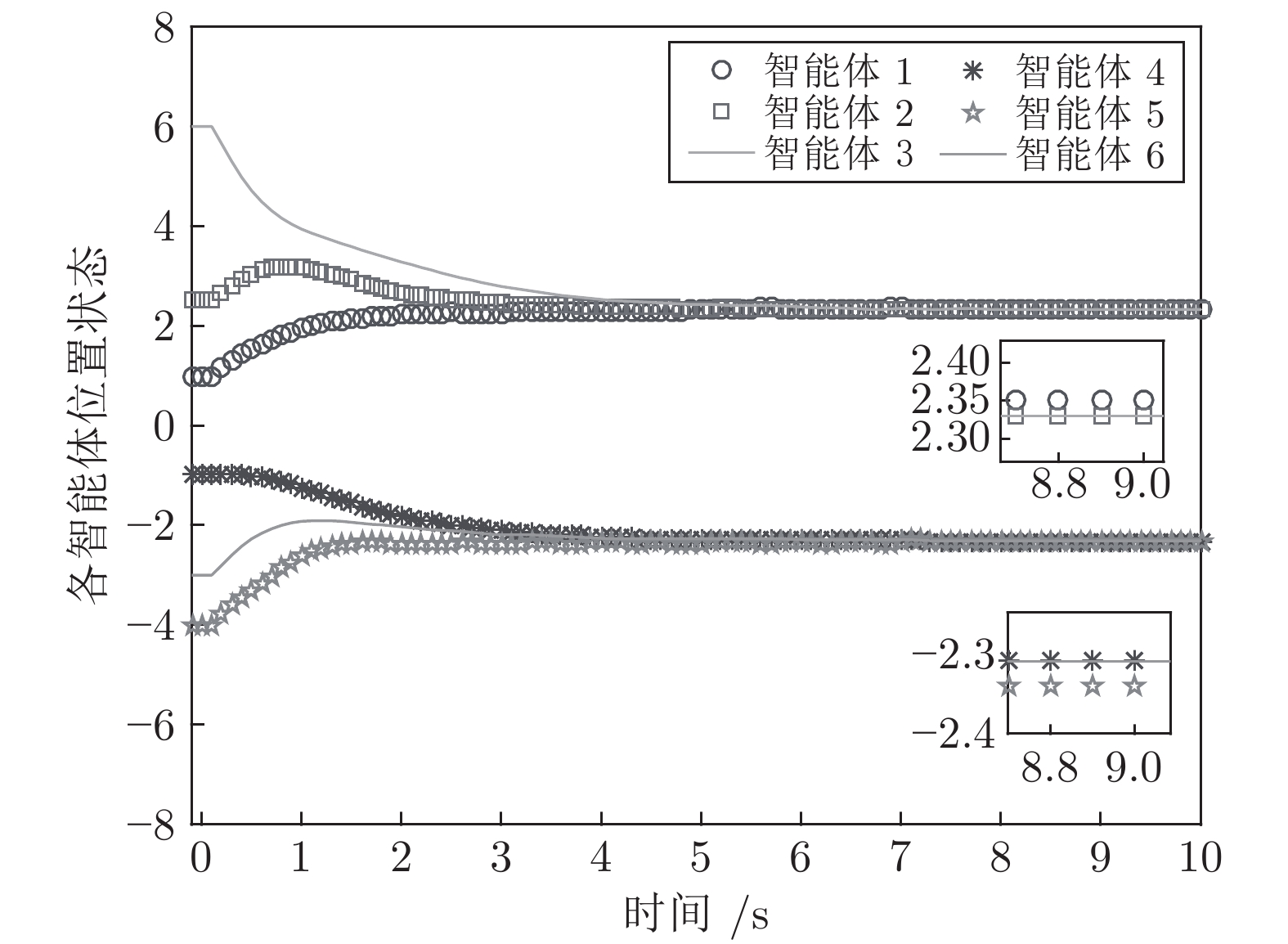
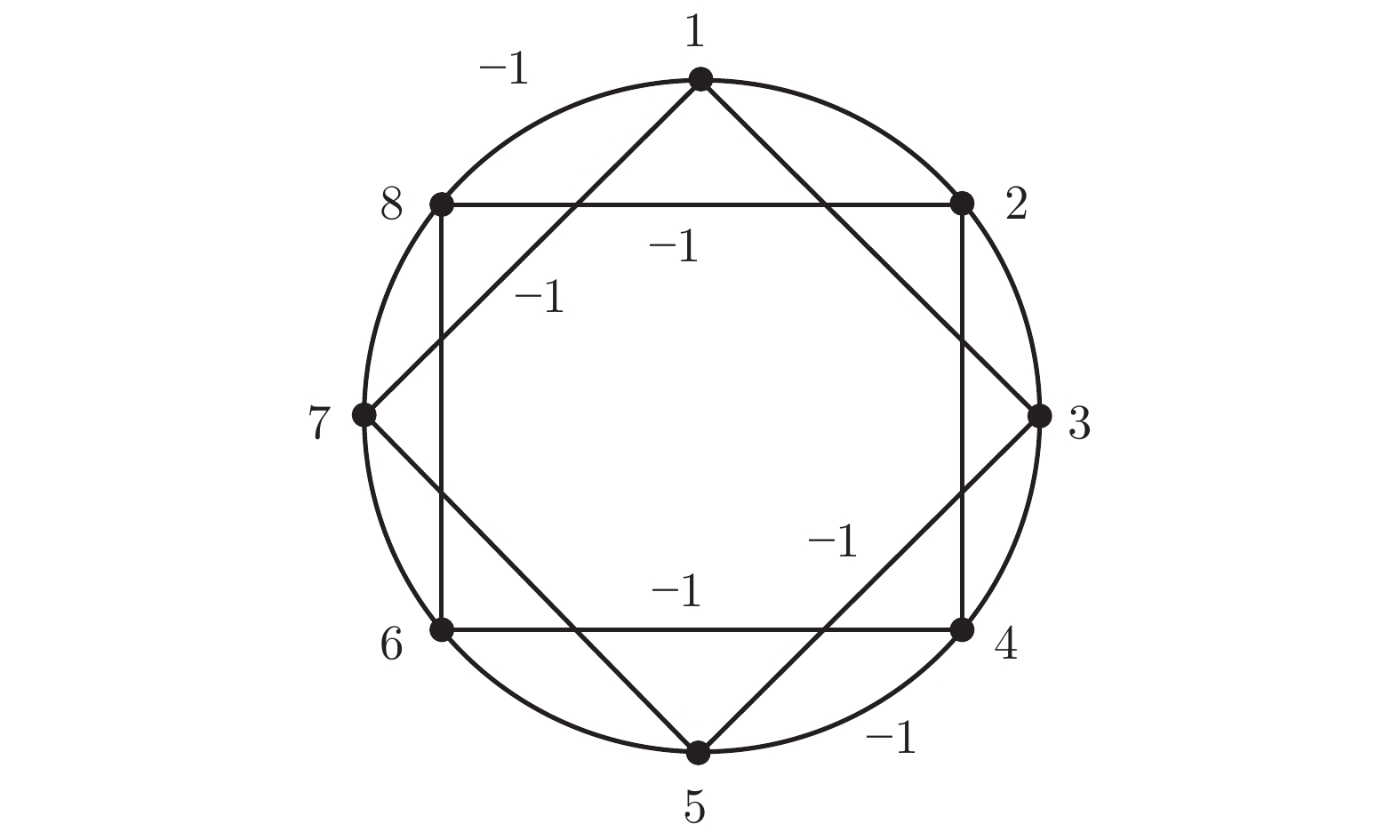
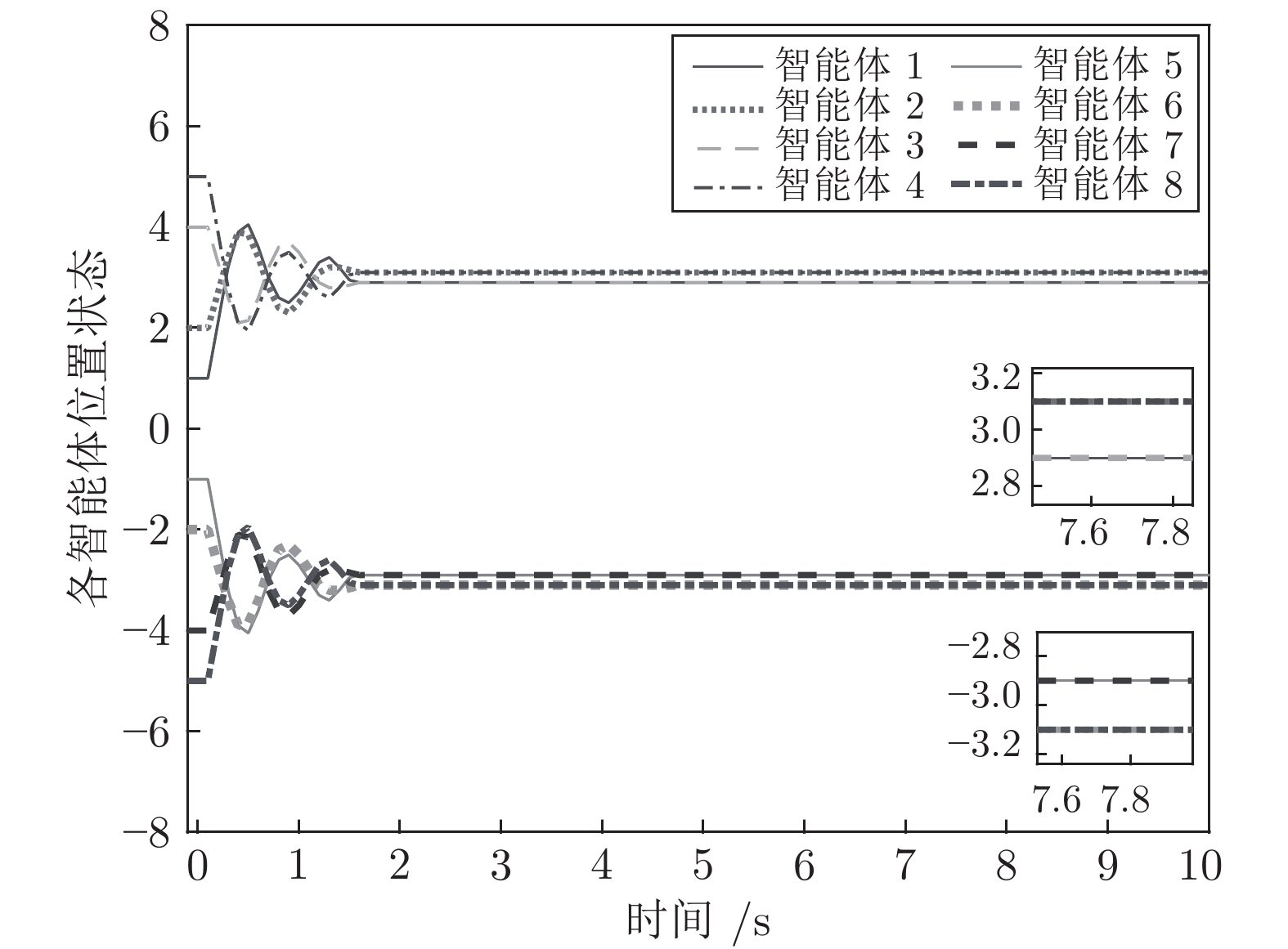
针对存在量化数据、通信时滞等通信约束以及带有竞争关系的多智能体系统, 研究其二分实用一致性问题, 提出了一种基于量化器的分布式控制协议. 该协议基于结构平衡拓扑假设, 通过规范变换将具有竞争关系系统转变为具有非负连接权重系统, 使二分实用一致性问题转变为一般实用一致性问题. 利用微分包含理论、菲利波夫解的框架、代数图论以及Lyapunov稳定性理论, 证明了在本文所提控制策略下, 具有竞争关系的多智能体系统能实现二分实用一致, 即智能体状态收敛至模相同但符号不同的可控区间, 并给出了误差收敛上界值. 仿真试验进一步验证了理论结果的有效性.
针对存在量化数据、通信时滞等通信约束以及带有竞争关系的多智能体系统, 研究其二分实用一致性问题, 提出了一种基于量化器的分布式控制协议. 该协议基于结构平衡拓扑假设, 通过规范变换将具有竞争关系系统转变为具有非负连接权重系统, 使二分实用一致性问题转变为一般实用一致性问题. 利用微分包含理论、菲利波夫解的框架、代数图论以及Lyapunov稳定性理论, 证明了在本文所提控制策略下, 具有竞争关系的多智能体系统能实现二分实用一致, 即智能体状态收敛至模相同但符号不同的可控区间, 并给出了误差收敛上界值. 仿真试验进一步验证了理论结果的有效性.
2022, 48(5): 1327-1342.
doi: 10.16383/j.aas.c200471
摘要:
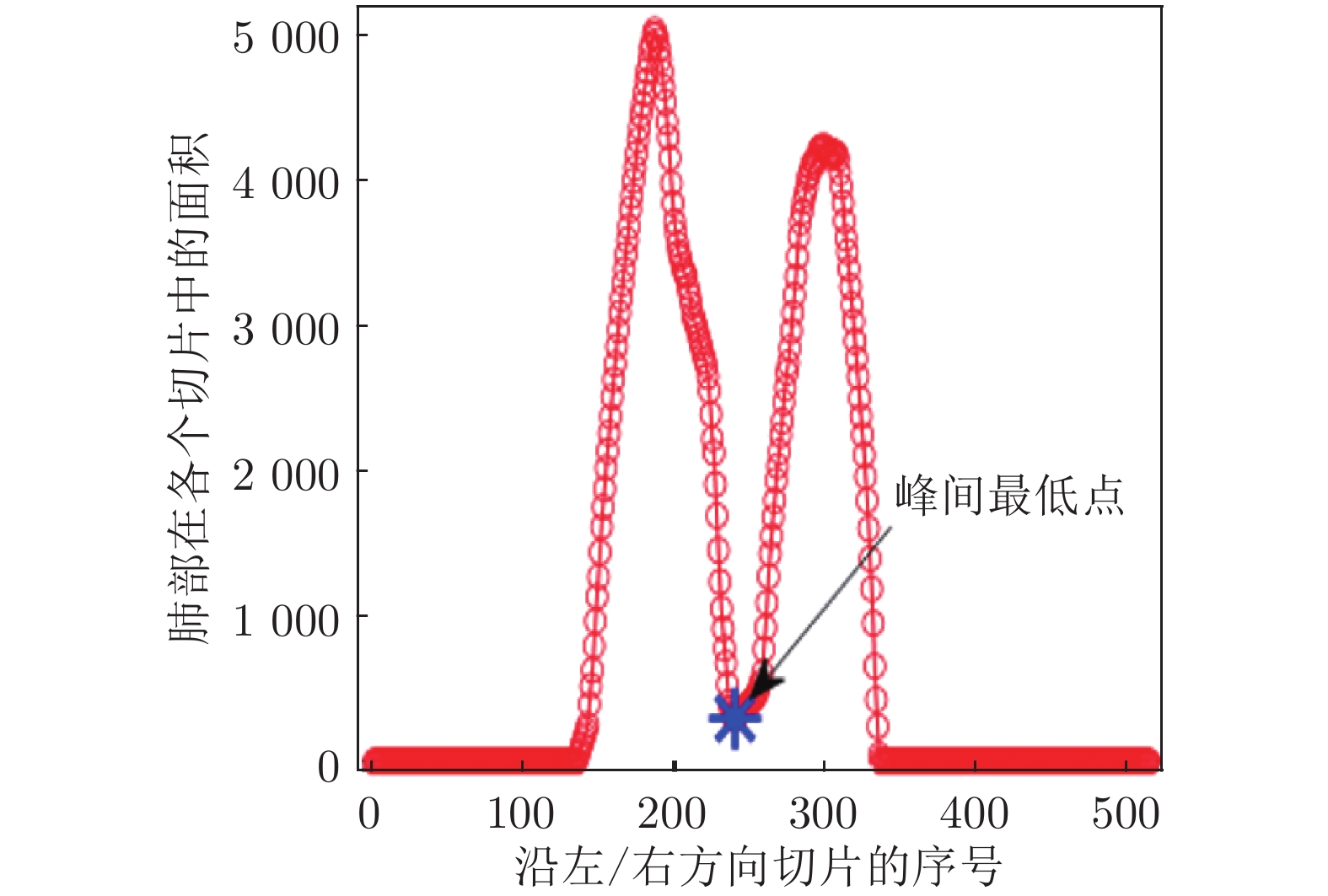
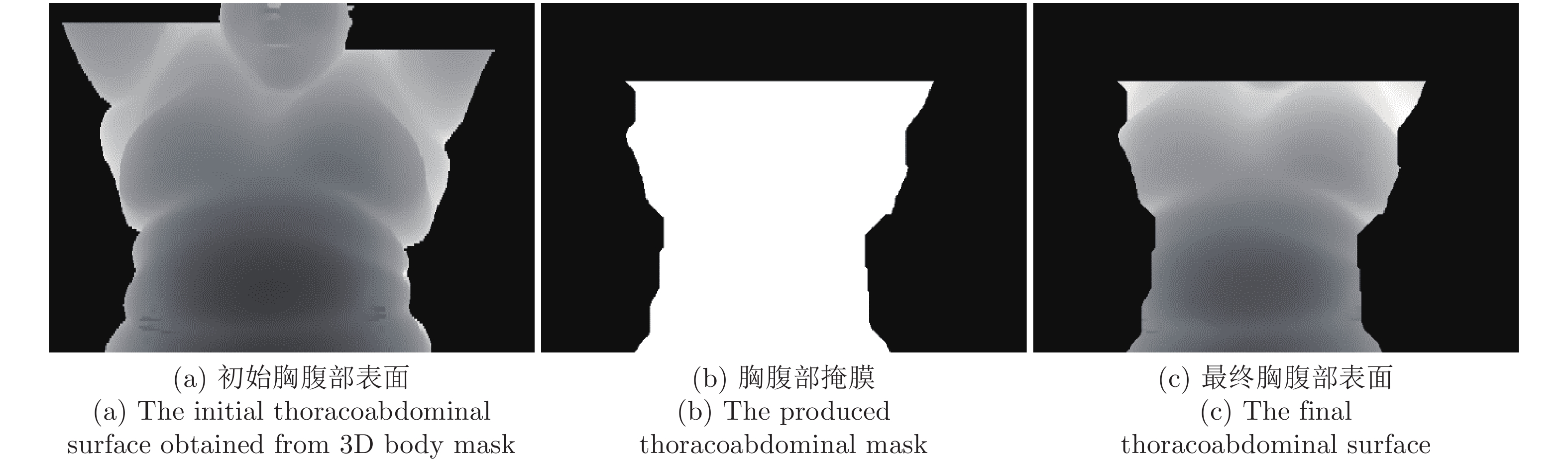
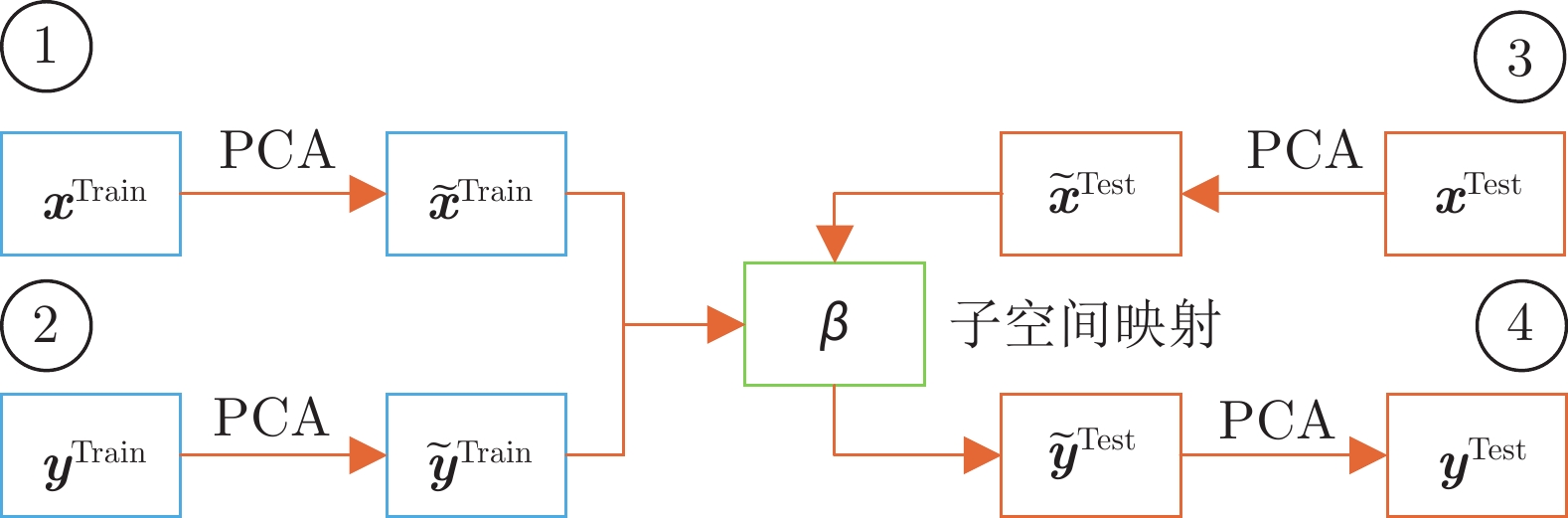
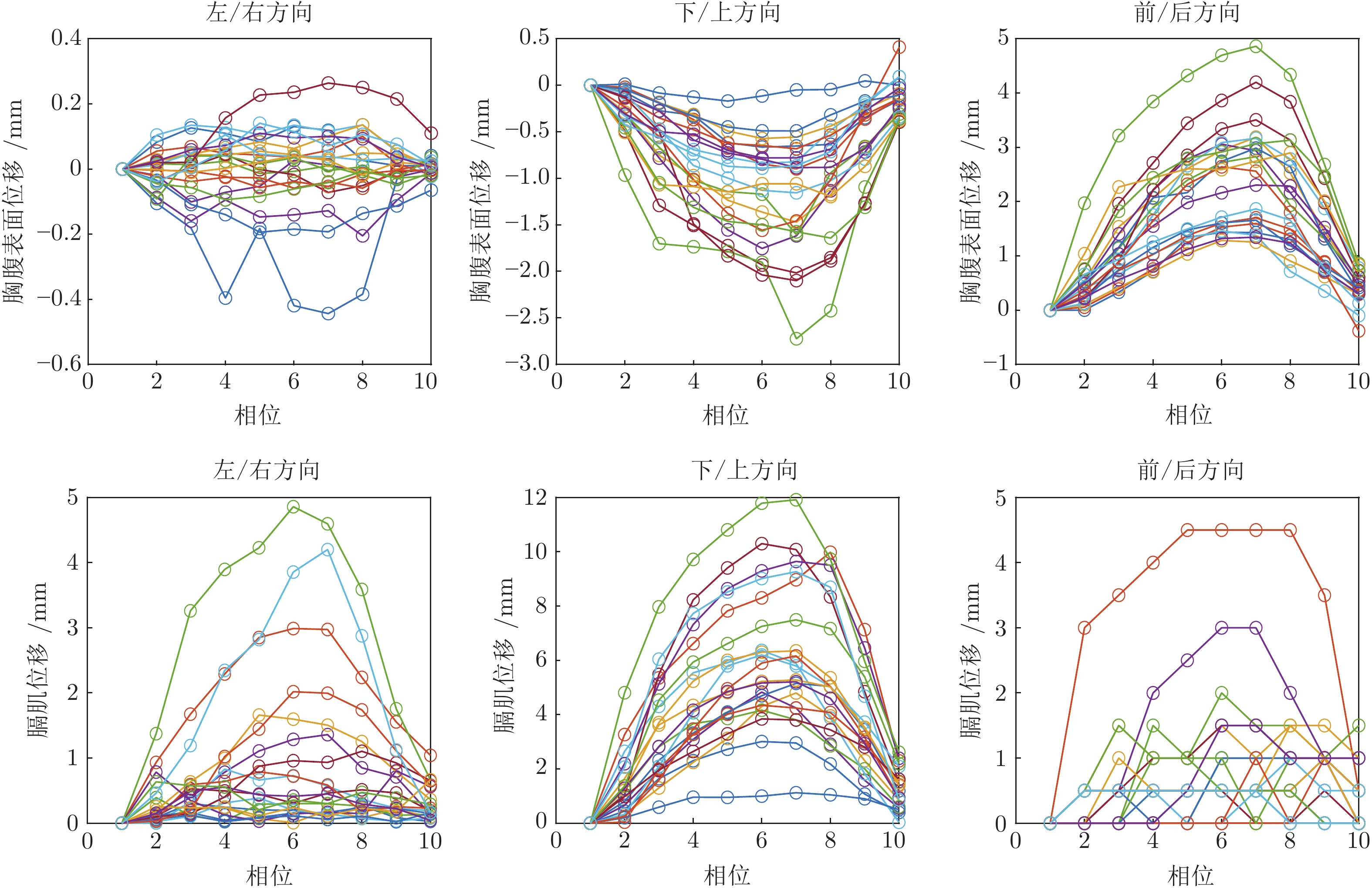
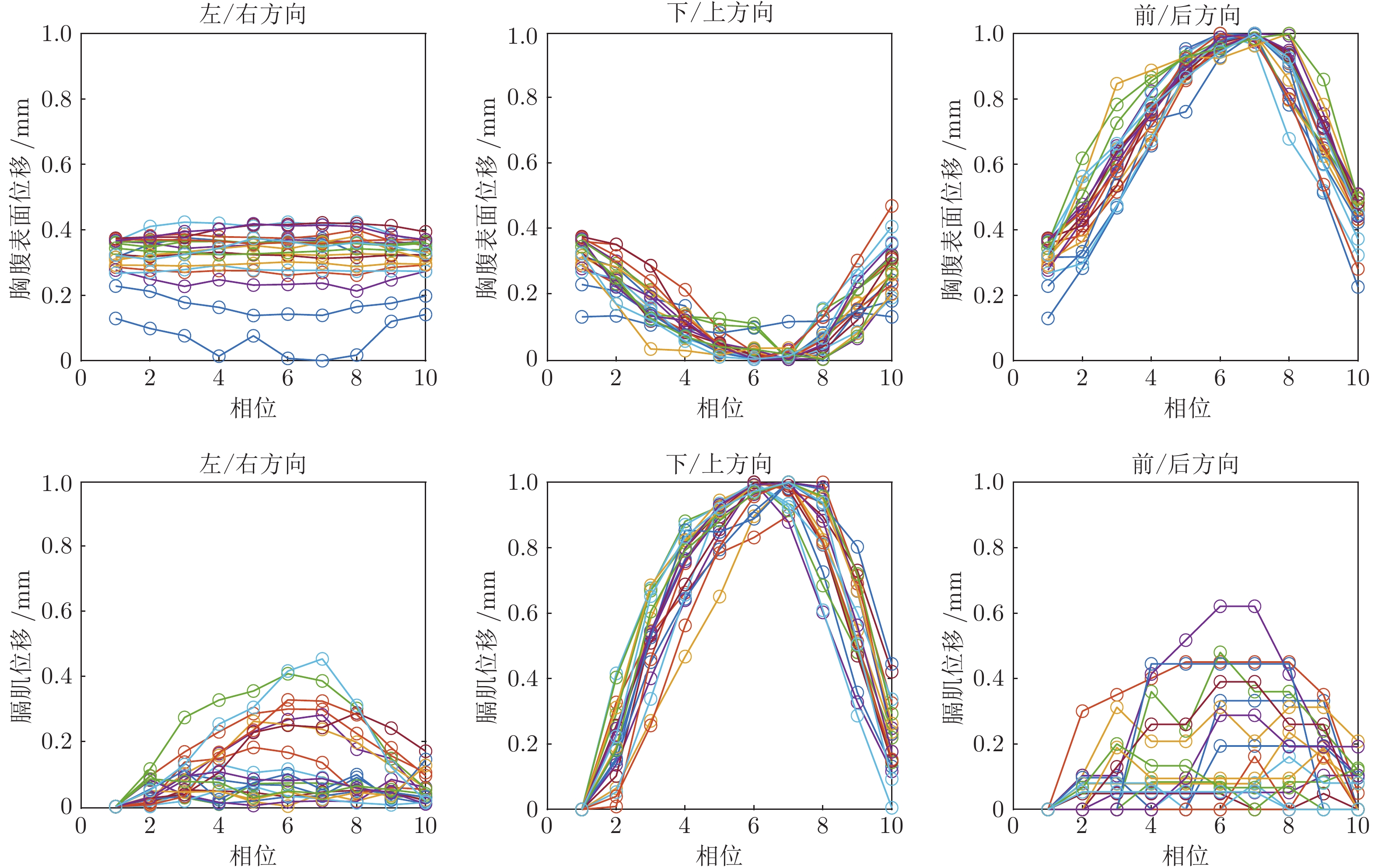
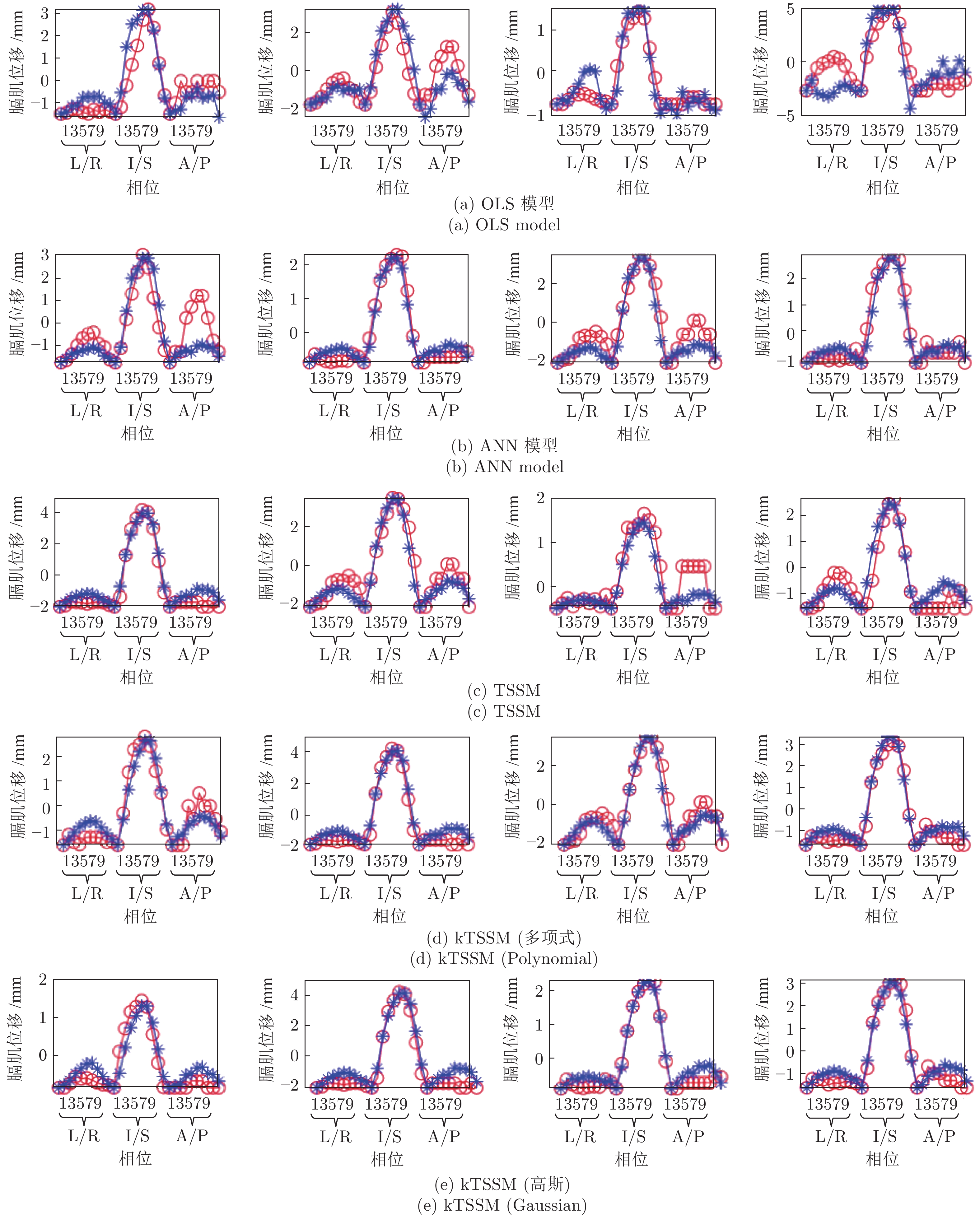
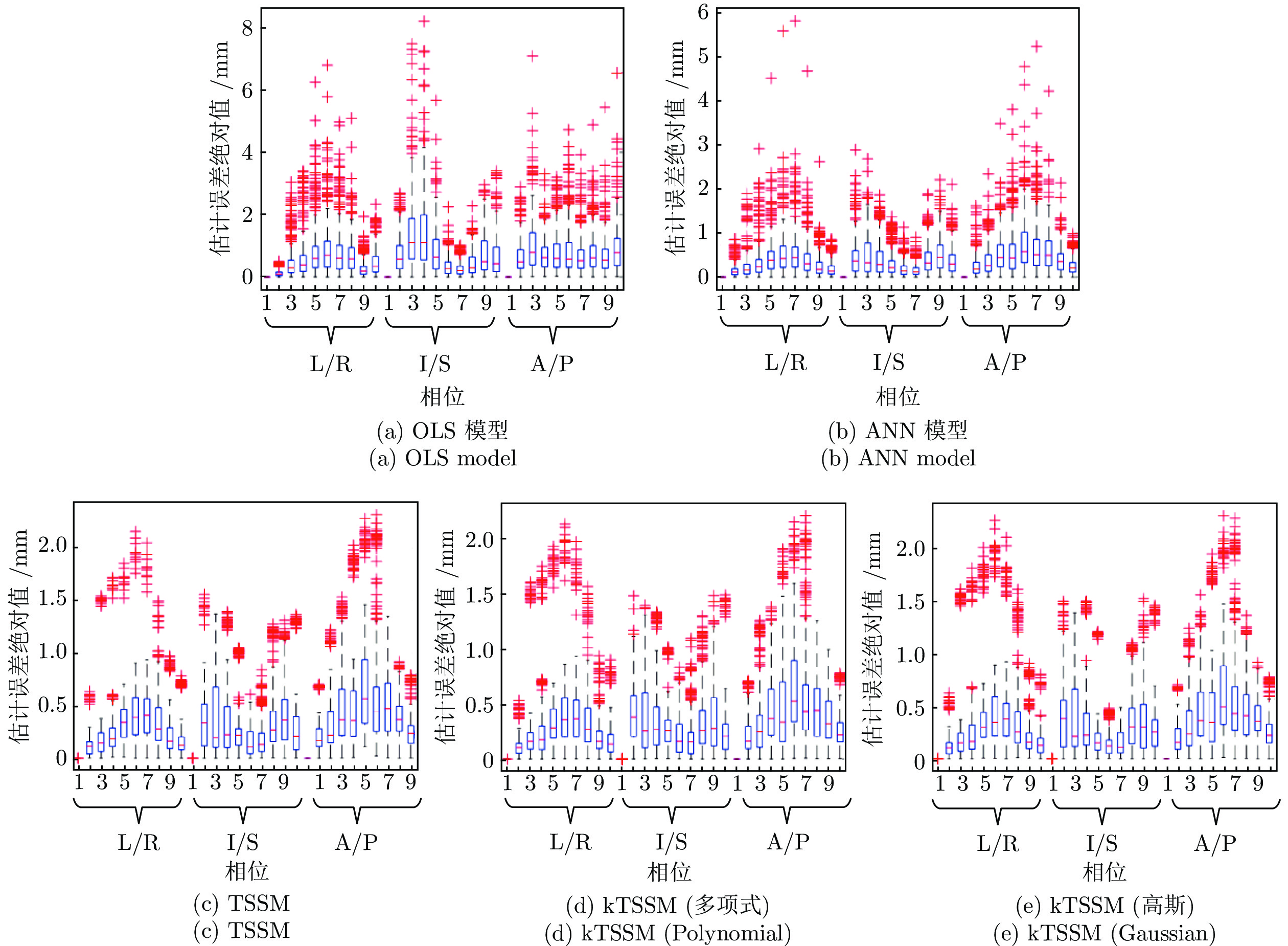
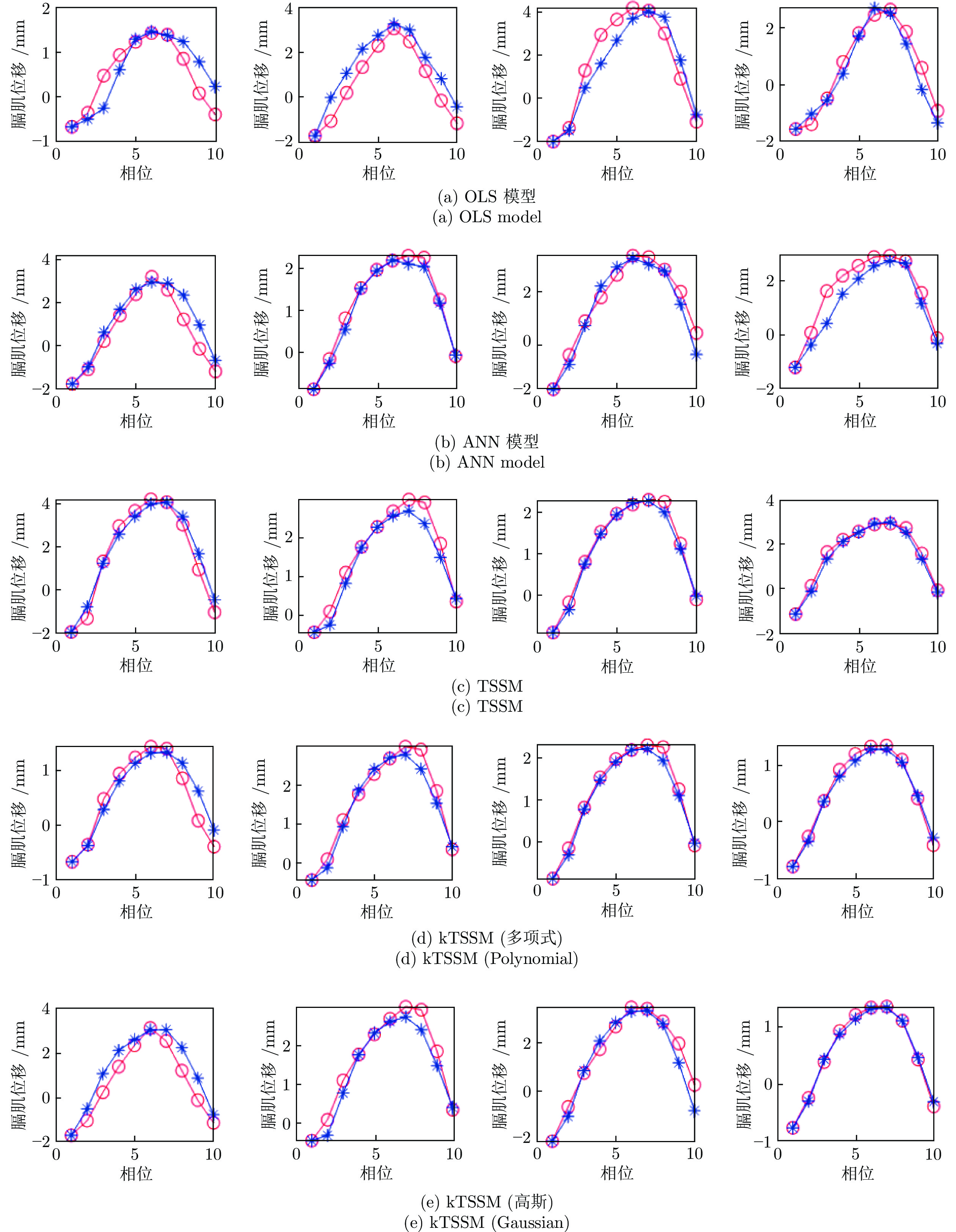
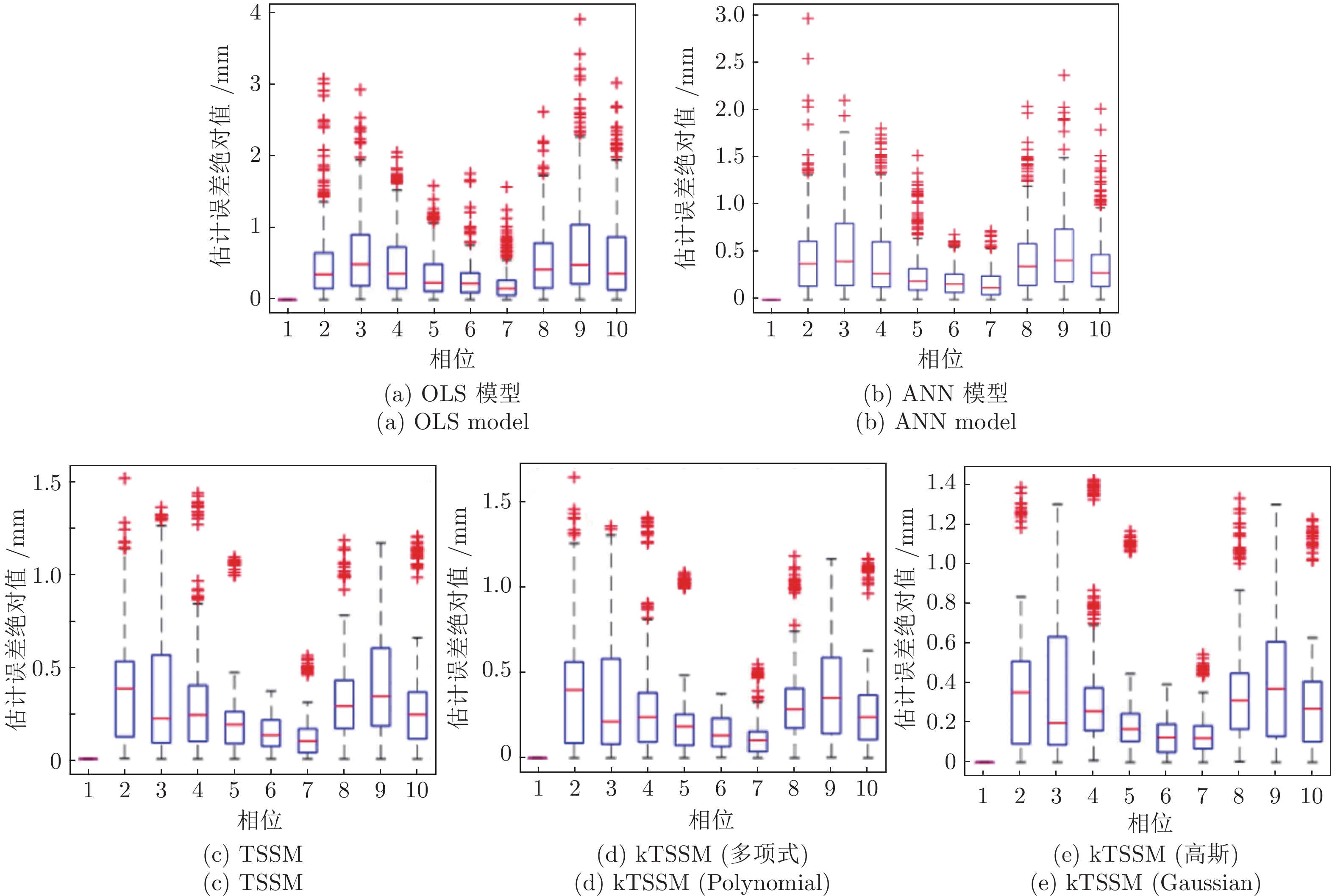
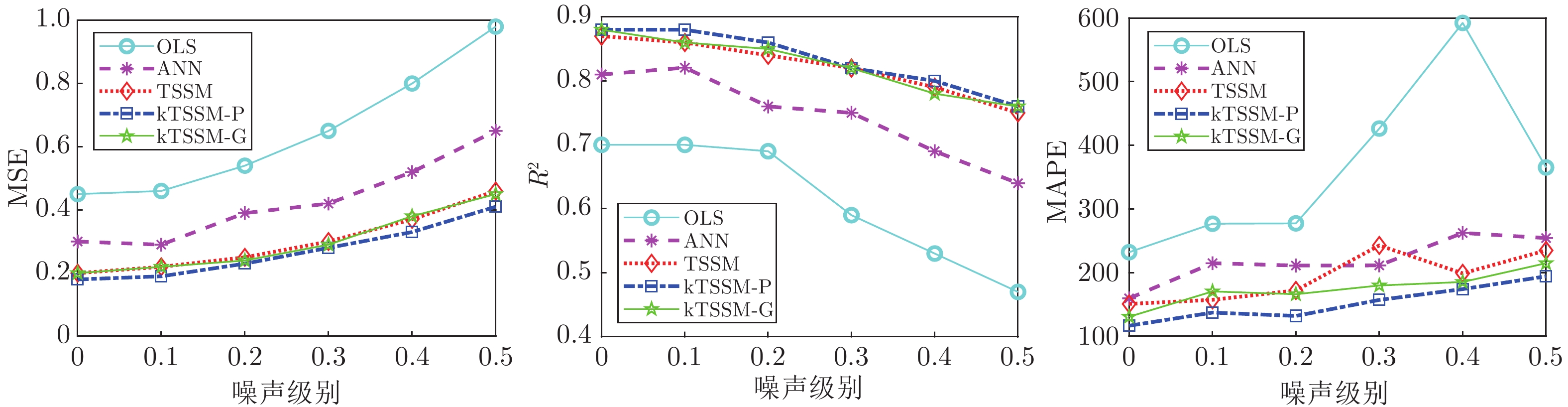
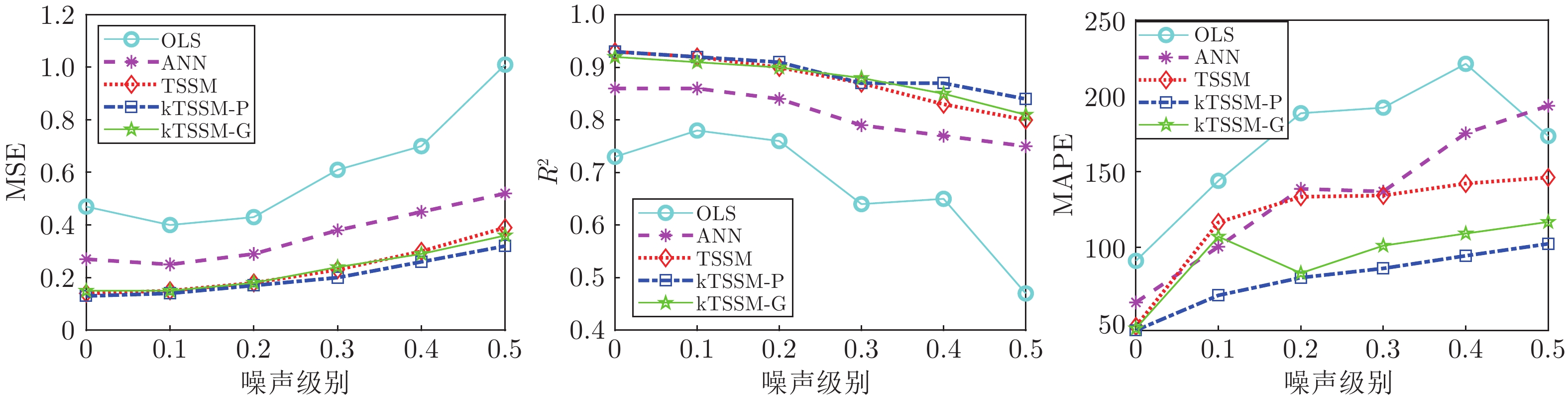
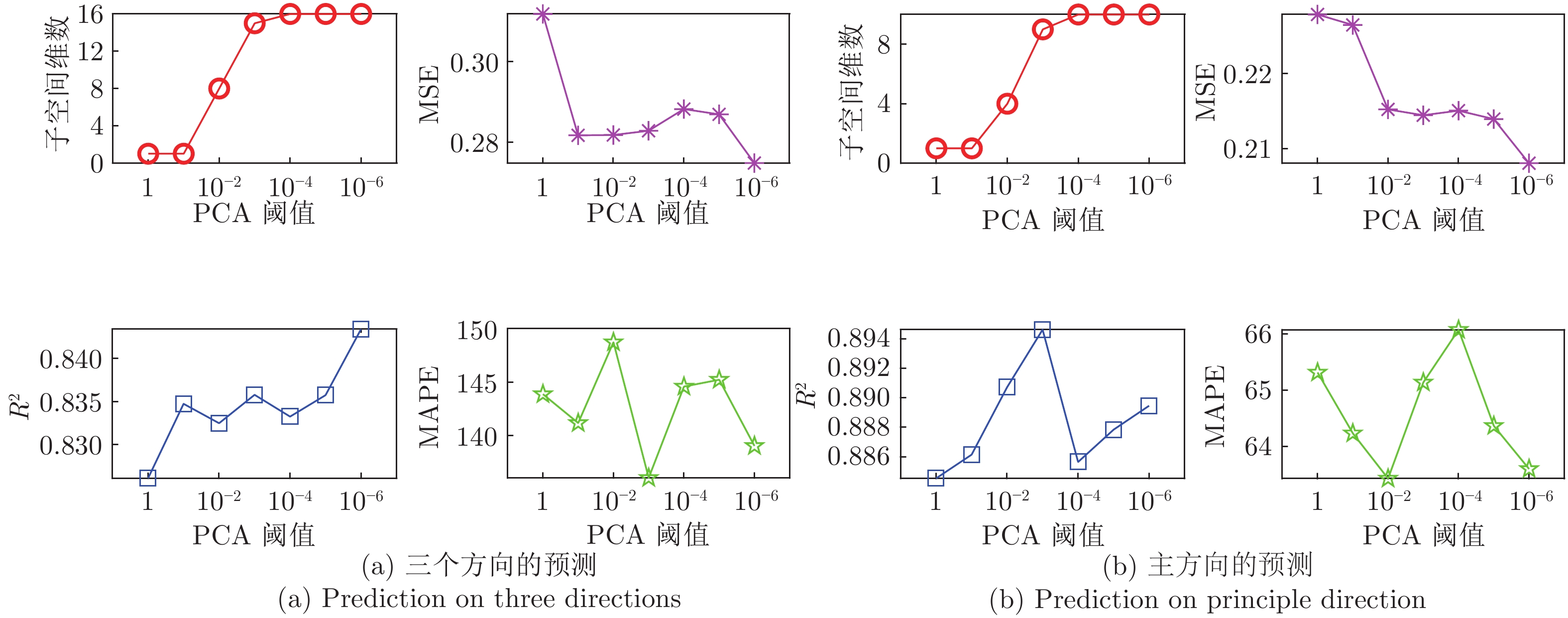
呼吸会引起体内器官和肿瘤的运动, 这会显著影响放射治疗的过程和效果. 人体内部膈肌和胸腹部外表面是当前两种与呼吸系统高度相关的结构, 本文对其进行系统研究, 提出了一种新的分步子空间映射(Two-step subspace mapping, TSSM)算法, 通过对体外胸腹部表面的测量, 来预测体内膈肌的运动. 首先采用三维图像分割技术对4D CT图像进行分割, 在不使用标记物的情况下, 准确测量体内膈肌和体外胸腹部表面的位移. 为了解决跨空间的预测问题, TSSM首先构造特征子空间, 并将膈肌数据和胸腹外表面数据分别映射到各自的子空间中, 以减少数据的相关性和冗余信息; 然后通过线性岭回归优化过程, 对两个子空间进行二次映射, 从而有效地捕获跨空间数据之间的相关性. 根据训练得到的相关模型, 通过体外胸腹部外表面的运动情况, 对体内膈肌的运动情况进行准确的预测. 为了研究数据之间的非线性关系, 进一步将TSSM推广到了基于核的TSSM (kTSSM)算法. 实验表明, 该方法可以根据腹腔外表面的运动情况, 准确地对体内膈肌位移进行预测, 优于经典的线性模型和ANN模型. 给出了优化算法的解析解, 其运算速度快, 将有助于提高放射治疗中门控技术和跟踪技术的效率和精度.
呼吸会引起体内器官和肿瘤的运动, 这会显著影响放射治疗的过程和效果. 人体内部膈肌和胸腹部外表面是当前两种与呼吸系统高度相关的结构, 本文对其进行系统研究, 提出了一种新的分步子空间映射(Two-step subspace mapping, TSSM)算法, 通过对体外胸腹部表面的测量, 来预测体内膈肌的运动. 首先采用三维图像分割技术对4D CT图像进行分割, 在不使用标记物的情况下, 准确测量体内膈肌和体外胸腹部表面的位移. 为了解决跨空间的预测问题, TSSM首先构造特征子空间, 并将膈肌数据和胸腹外表面数据分别映射到各自的子空间中, 以减少数据的相关性和冗余信息; 然后通过线性岭回归优化过程, 对两个子空间进行二次映射, 从而有效地捕获跨空间数据之间的相关性. 根据训练得到的相关模型, 通过体外胸腹部外表面的运动情况, 对体内膈肌的运动情况进行准确的预测. 为了研究数据之间的非线性关系, 进一步将TSSM推广到了基于核的TSSM (kTSSM)算法. 实验表明, 该方法可以根据腹腔外表面的运动情况, 准确地对体内膈肌位移进行预测, 优于经典的线性模型和ANN模型. 给出了优化算法的解析解, 其运算速度快, 将有助于提高放射治疗中门控技术和跟踪技术的效率和精度.


2022, 48(5): 1343-1352.
doi: 10.16383/j.aas.c200485
摘要:
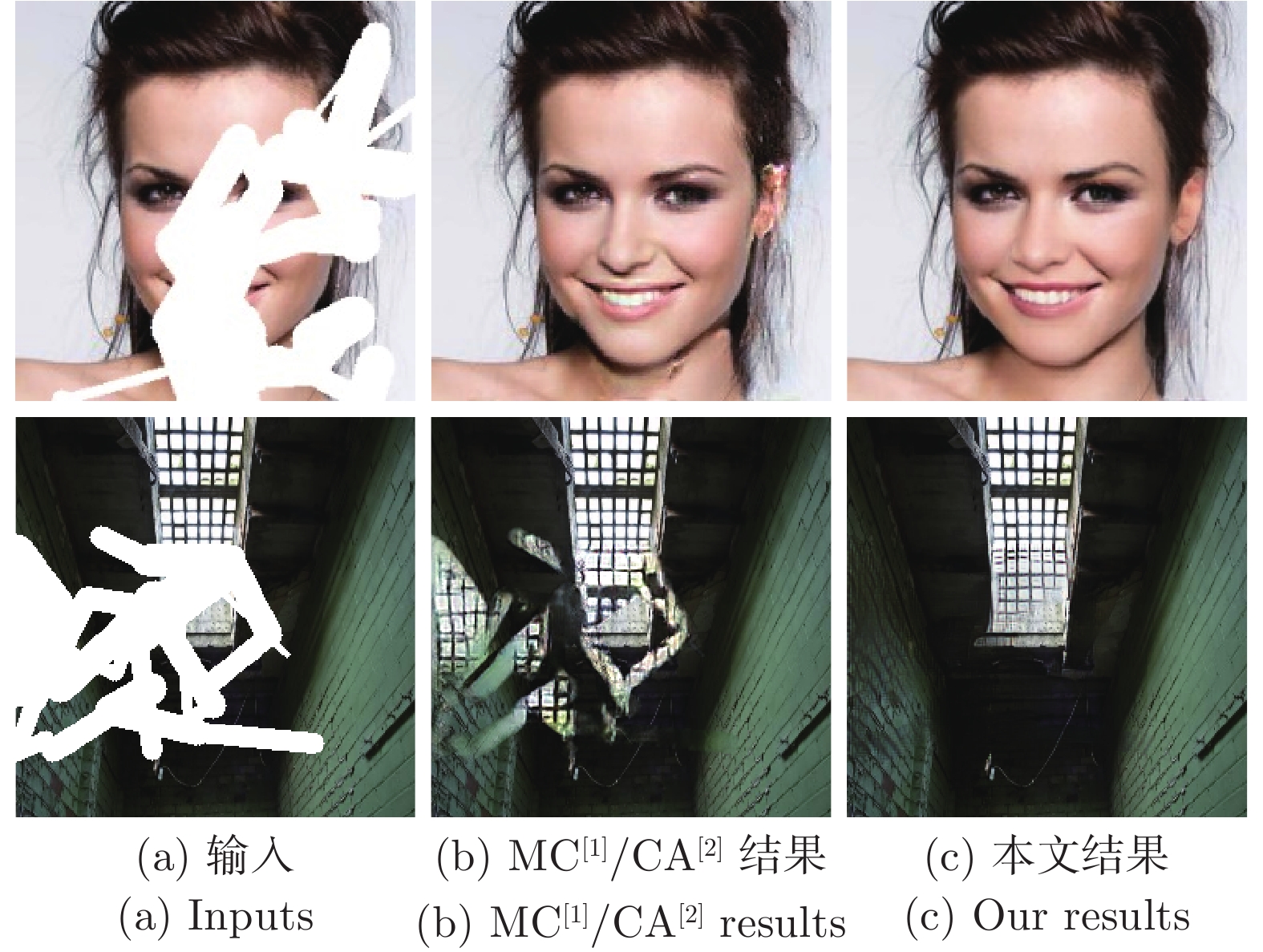
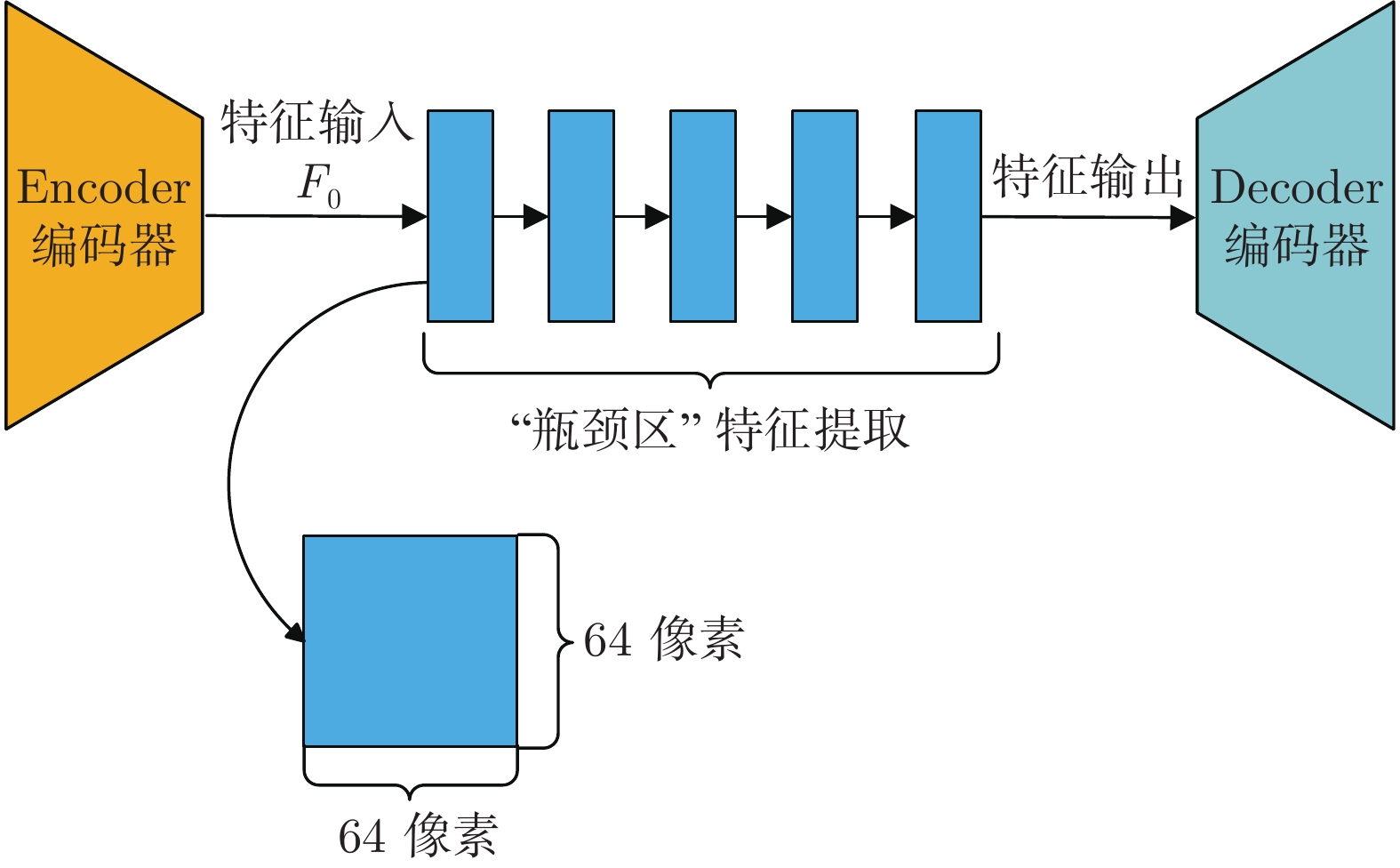
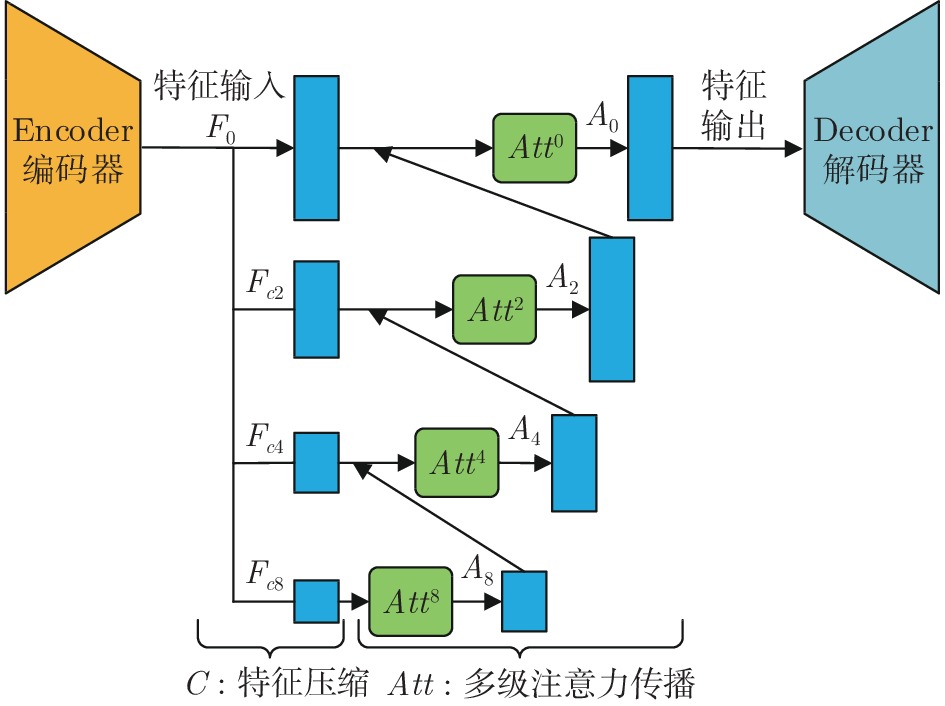
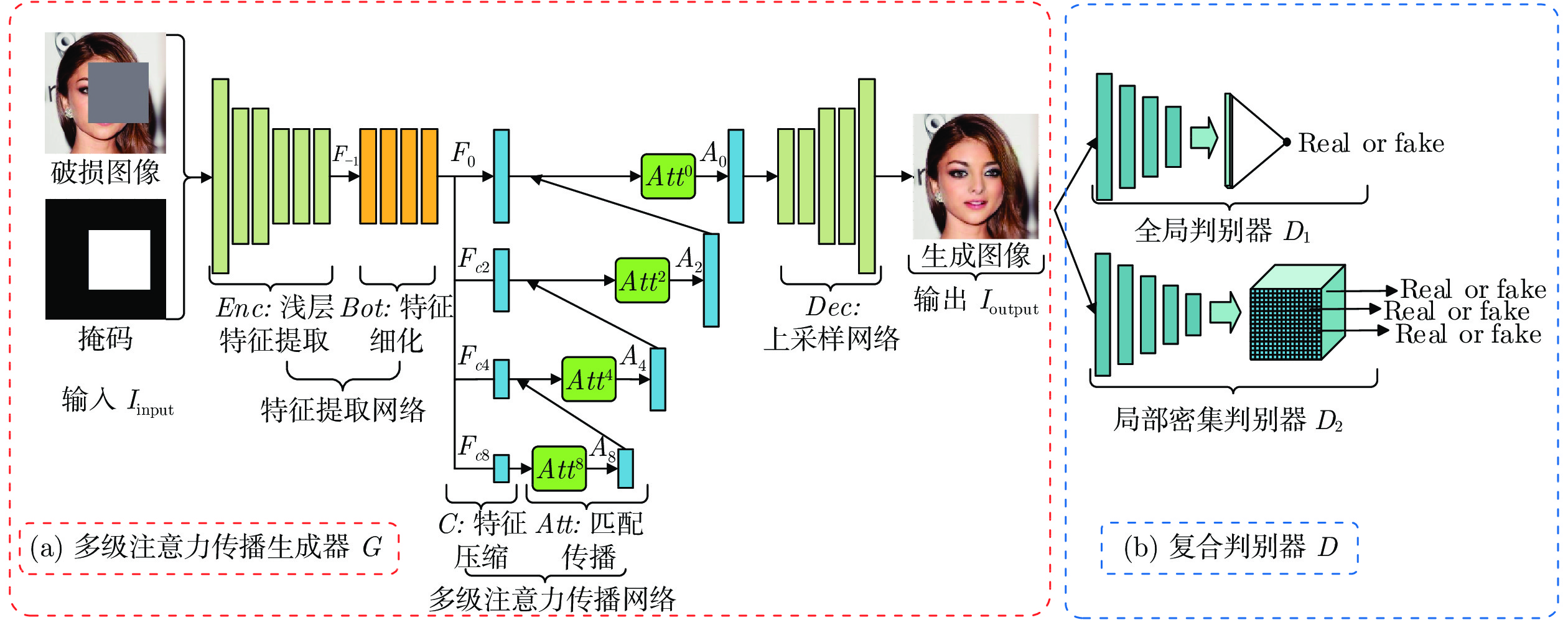
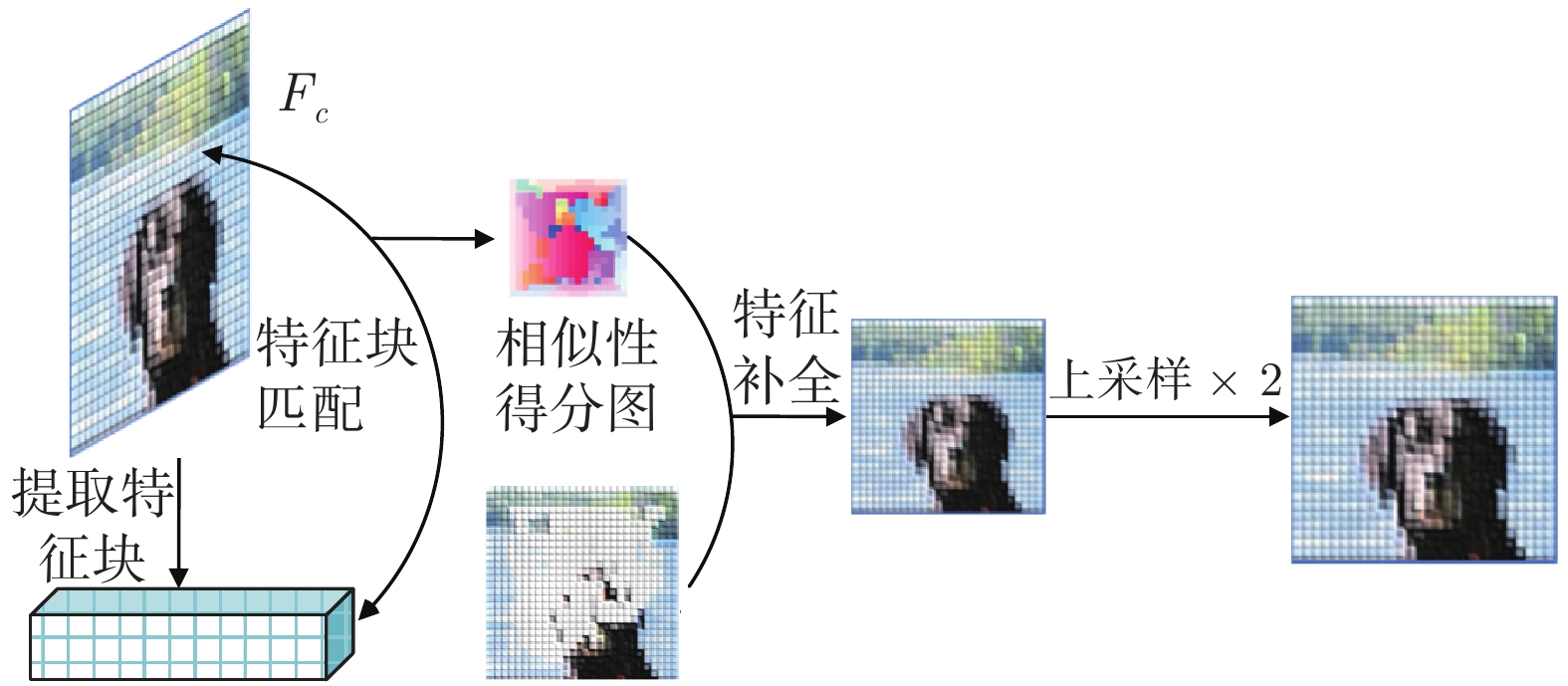
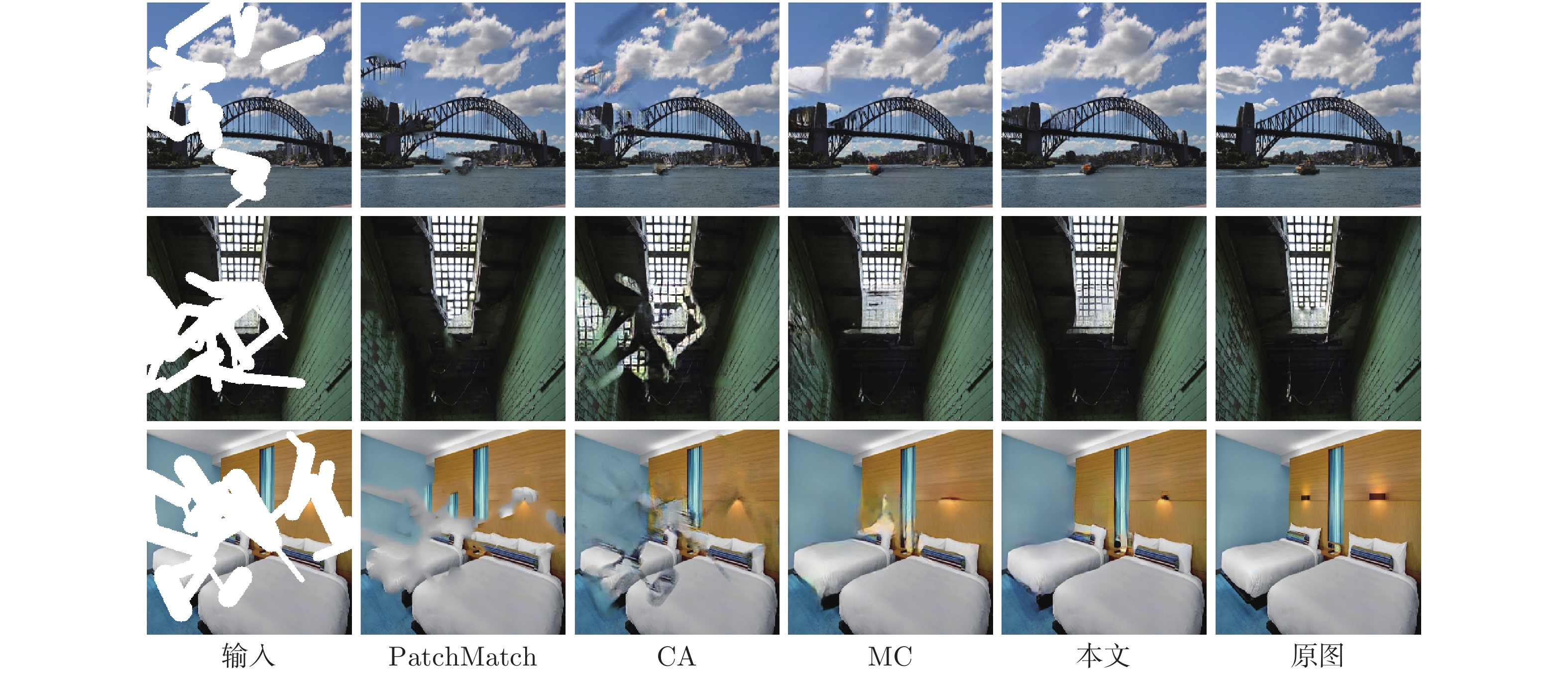
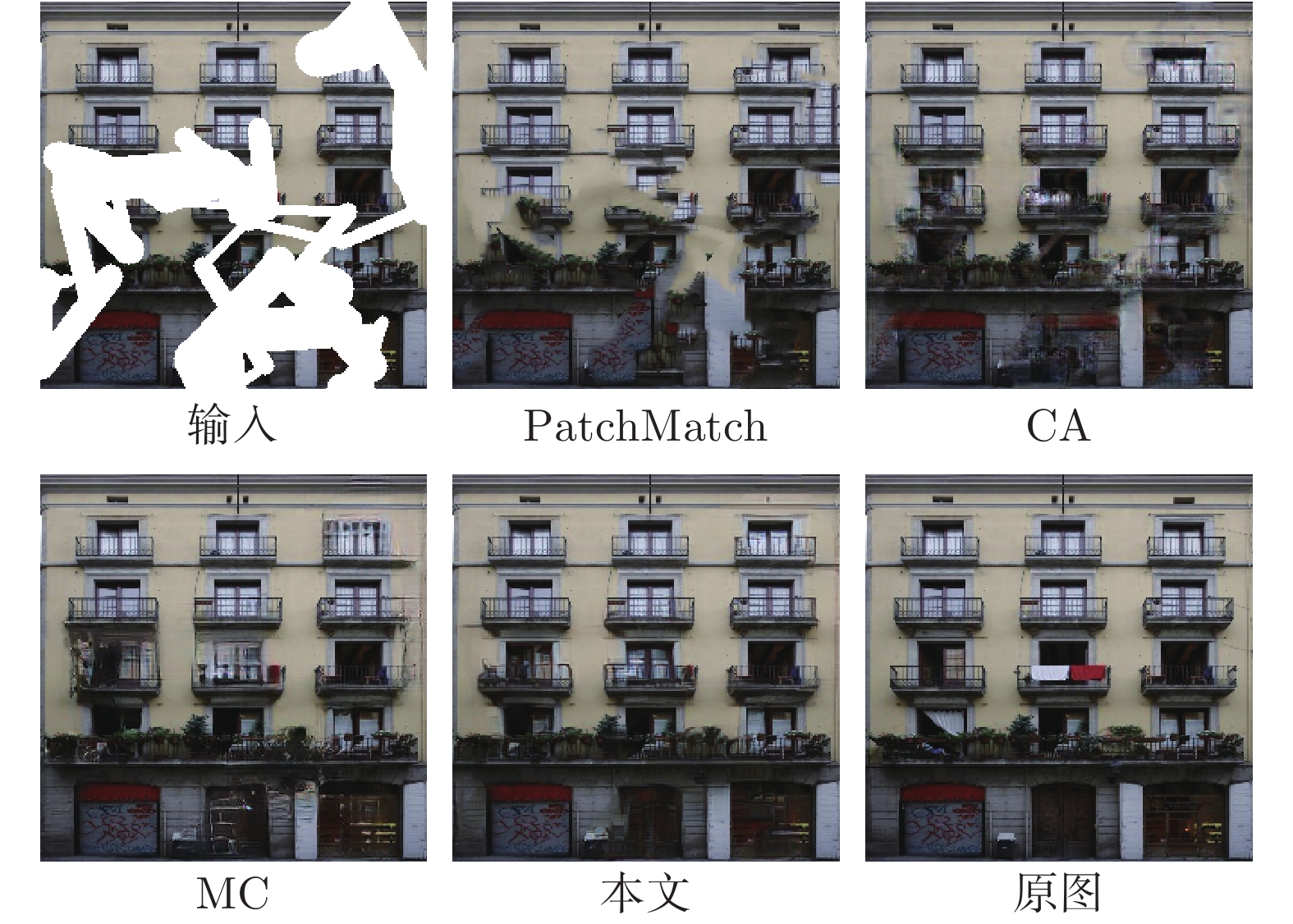
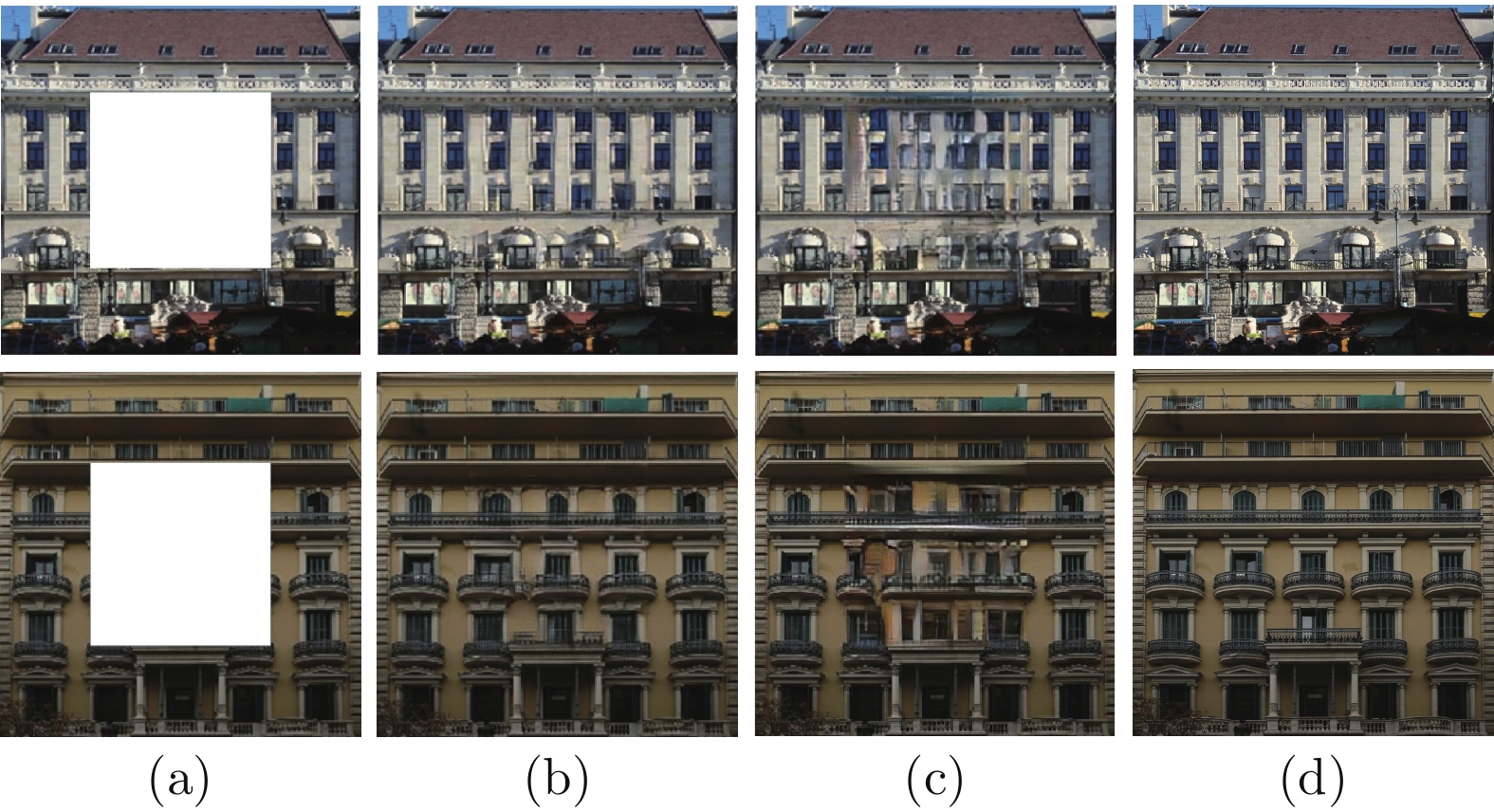
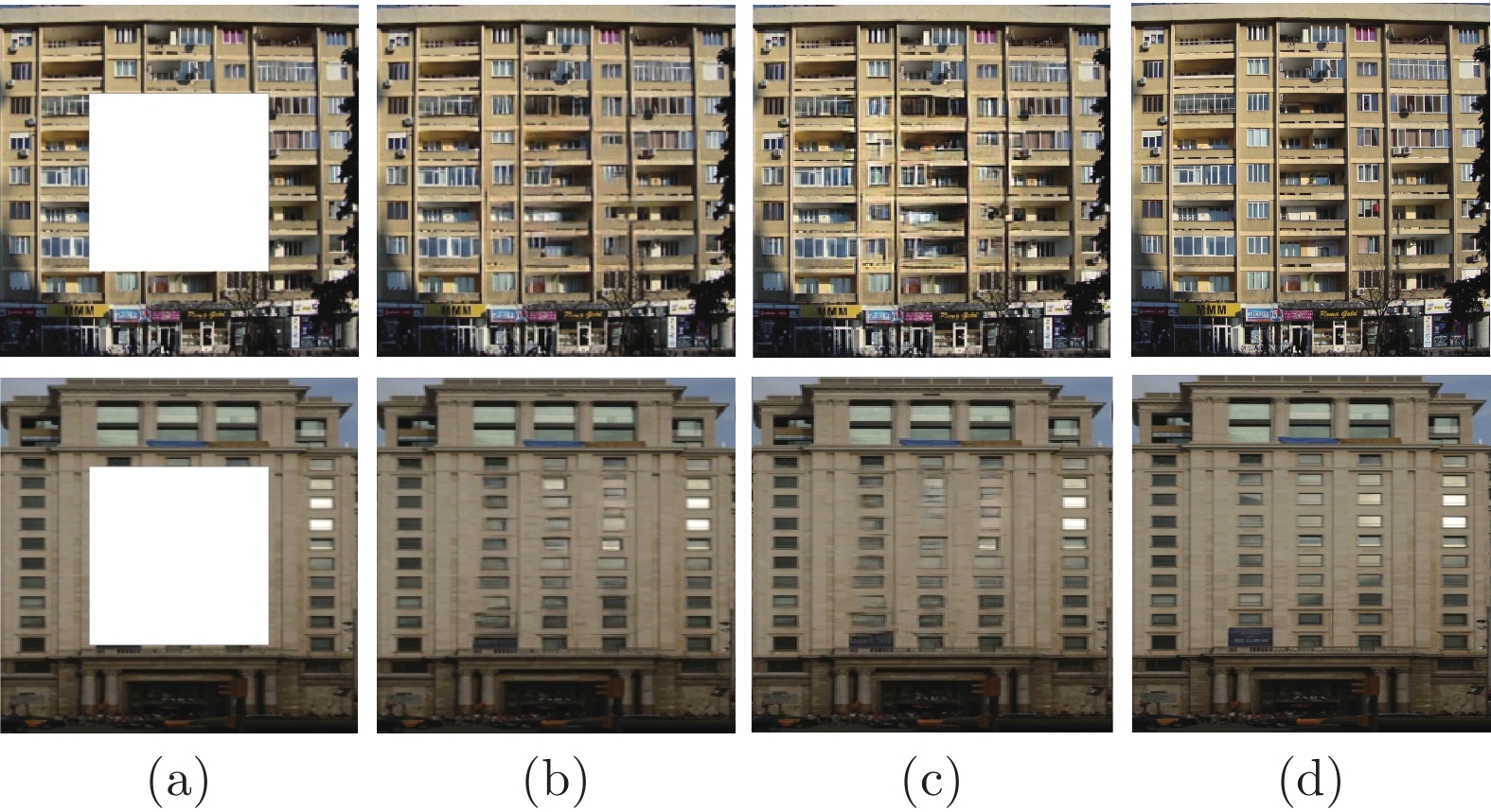
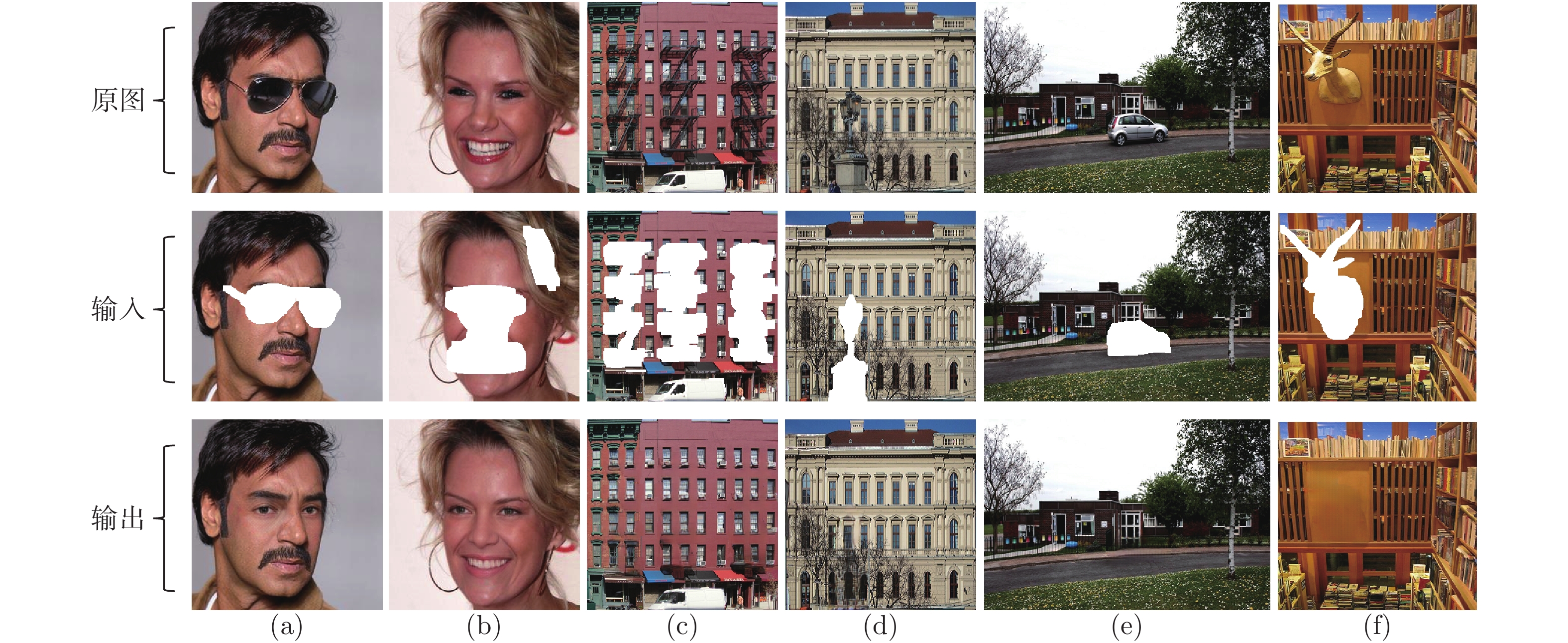
现有图像修复方案普遍存在着结构错乱和细节纹理模糊的问题, 这主要是因为在图像破损区域的重建过程中, 修复网络难以充分利用非破损区域内的信息来准确地推断破损区域内容. 为此, 本文提出了一种由多级注意力传播驱动的图像修复网络. 该网络通过将全分辨率图像中提取的高级特征压缩为多尺度紧凑特征, 进而依据尺度大小顺序驱动紧凑特征进行多级注意力特征传播, 以期达到包括结构和细节在内的高级特征在网络中充分传播的目标. 为进一步实现细粒度图像修复重建, 本文还同时提出了一种复合粒度判别器, 以期实现对图像修复过程进行全局语义约束与非特定局部密集约束. 大量实验表明, 本文提出的方法可以产生更高质量的修复结果.
现有图像修复方案普遍存在着结构错乱和细节纹理模糊的问题, 这主要是因为在图像破损区域的重建过程中, 修复网络难以充分利用非破损区域内的信息来准确地推断破损区域内容. 为此, 本文提出了一种由多级注意力传播驱动的图像修复网络. 该网络通过将全分辨率图像中提取的高级特征压缩为多尺度紧凑特征, 进而依据尺度大小顺序驱动紧凑特征进行多级注意力特征传播, 以期达到包括结构和细节在内的高级特征在网络中充分传播的目标. 为进一步实现细粒度图像修复重建, 本文还同时提出了一种复合粒度判别器, 以期实现对图像修复过程进行全局语义约束与非特定局部密集约束. 大量实验表明, 本文提出的方法可以产生更高质量的修复结果.

2022, 48(5): 1353-1369.
doi: 10.16383/j.aas.c190780
摘要:
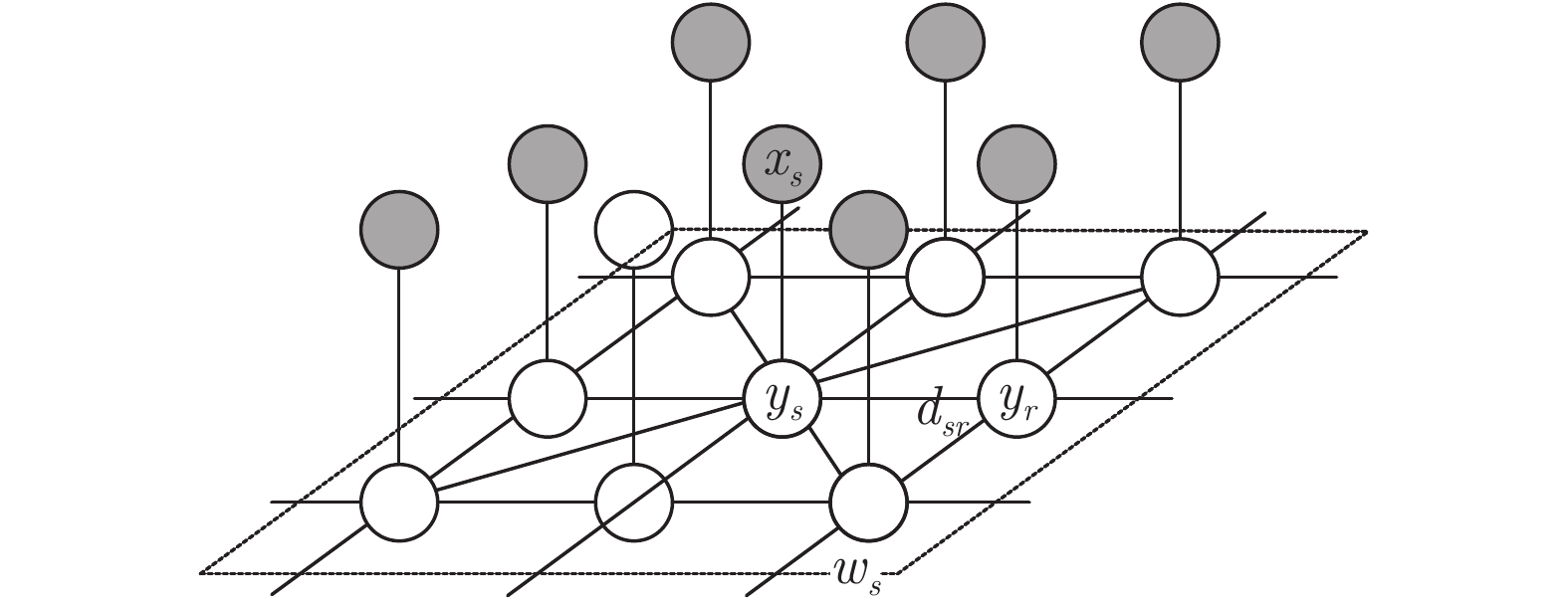
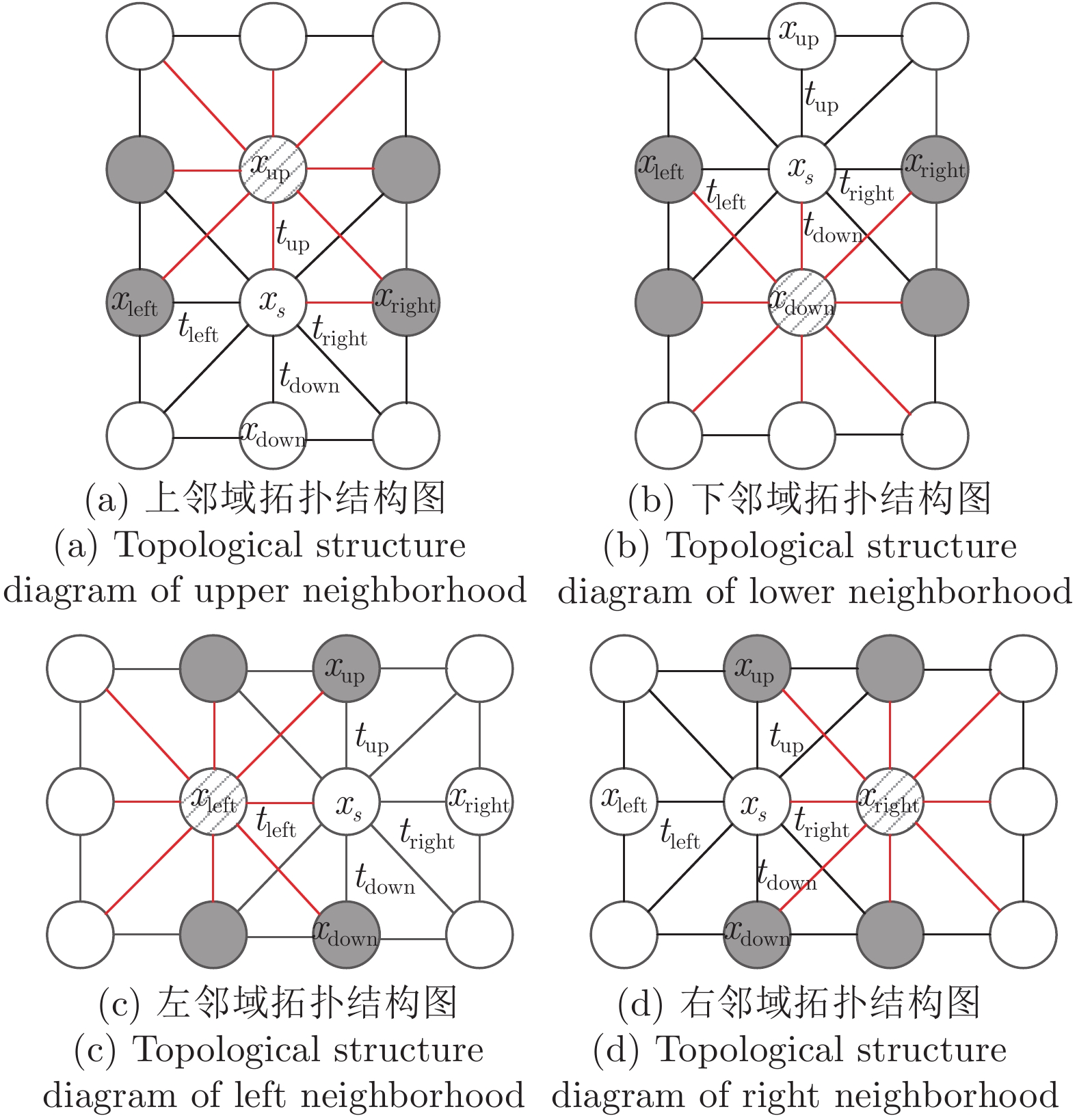
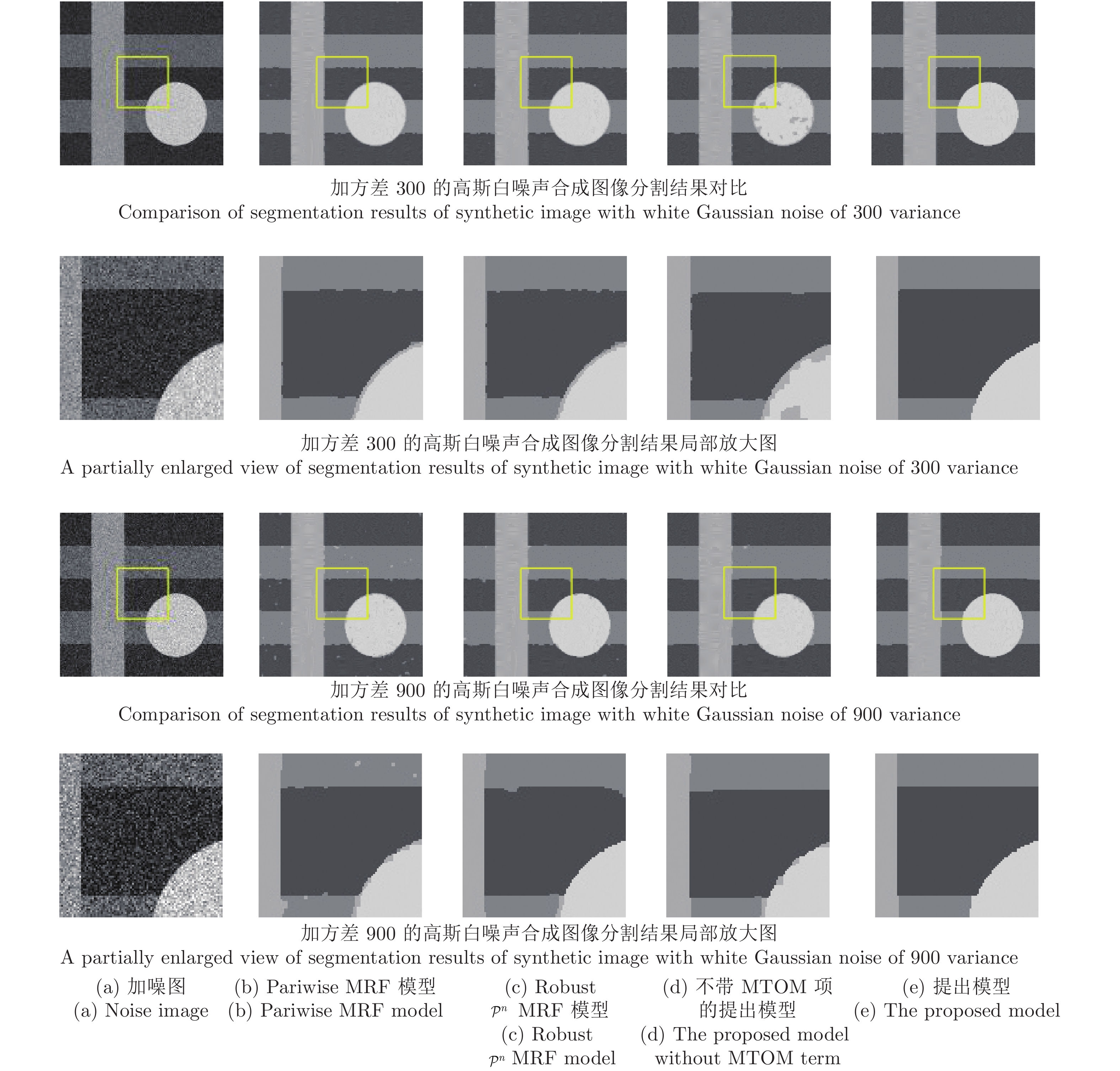
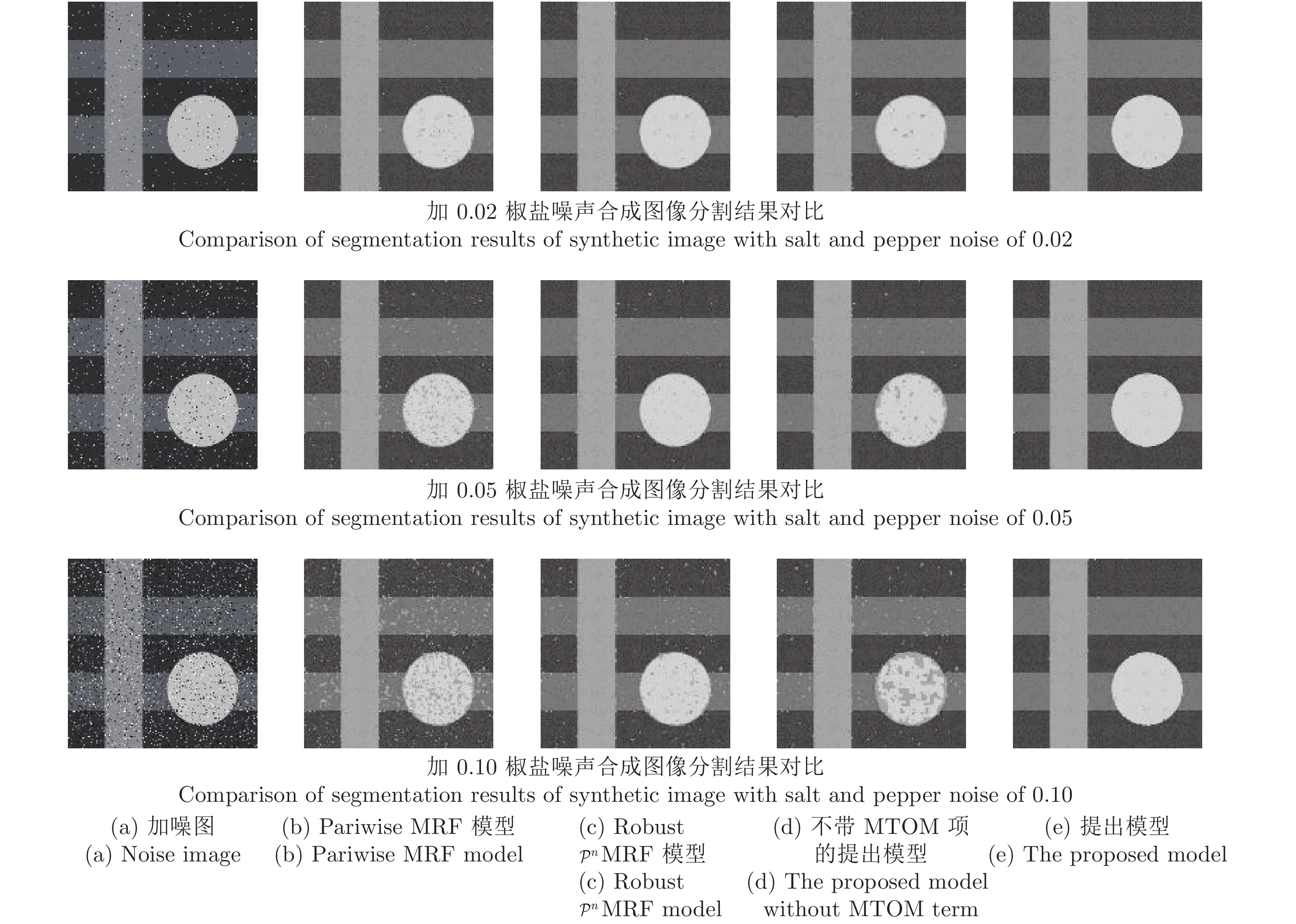
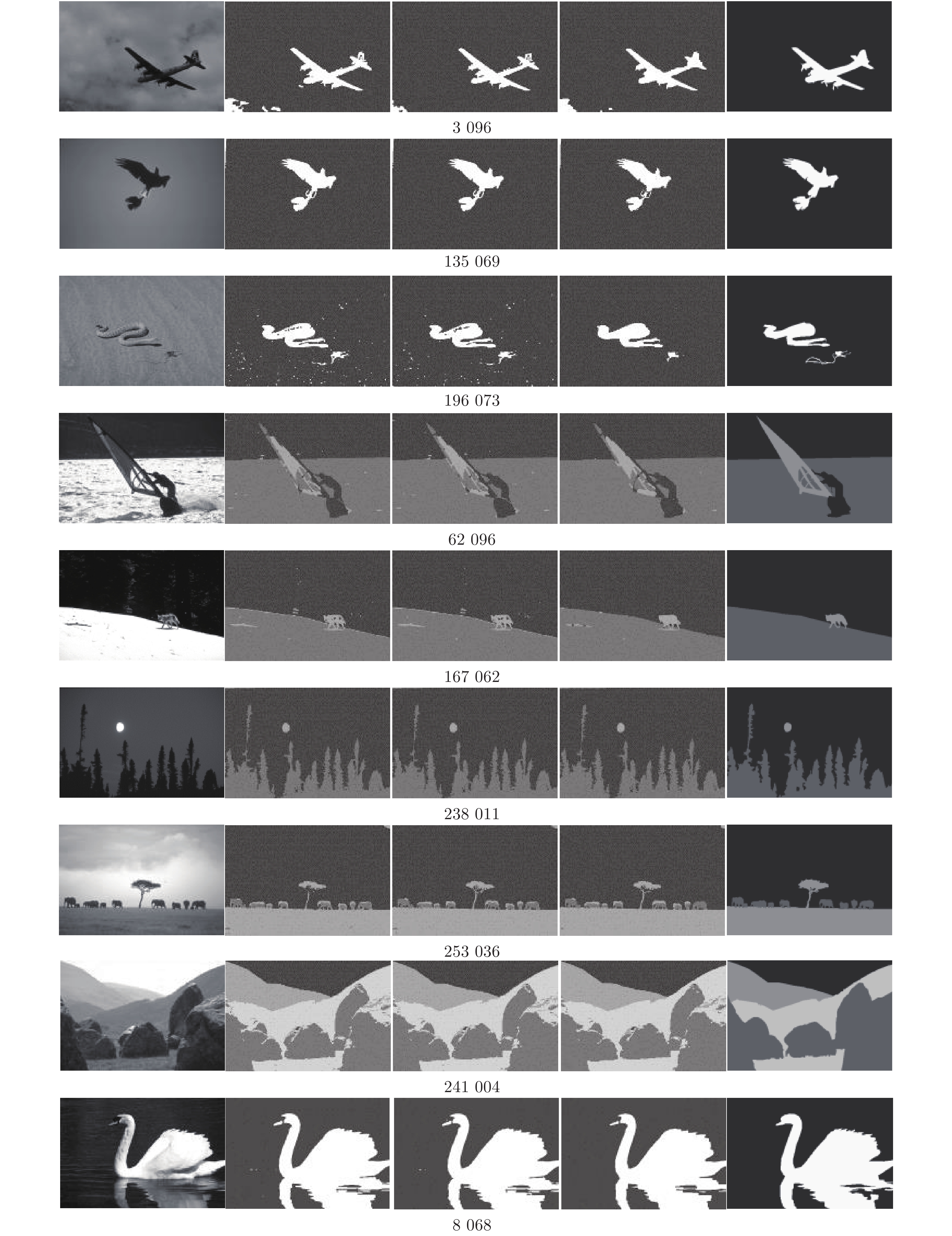
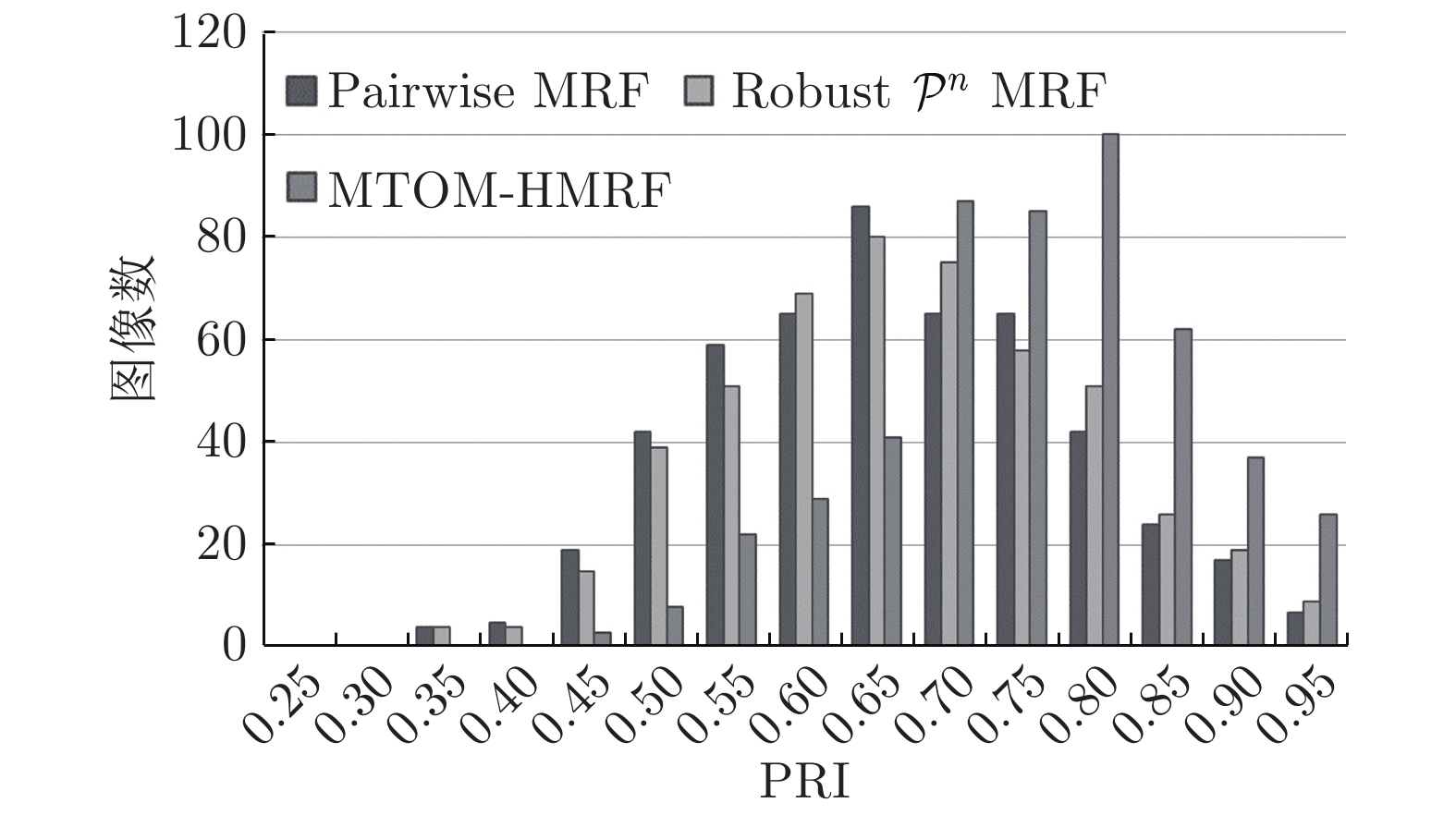
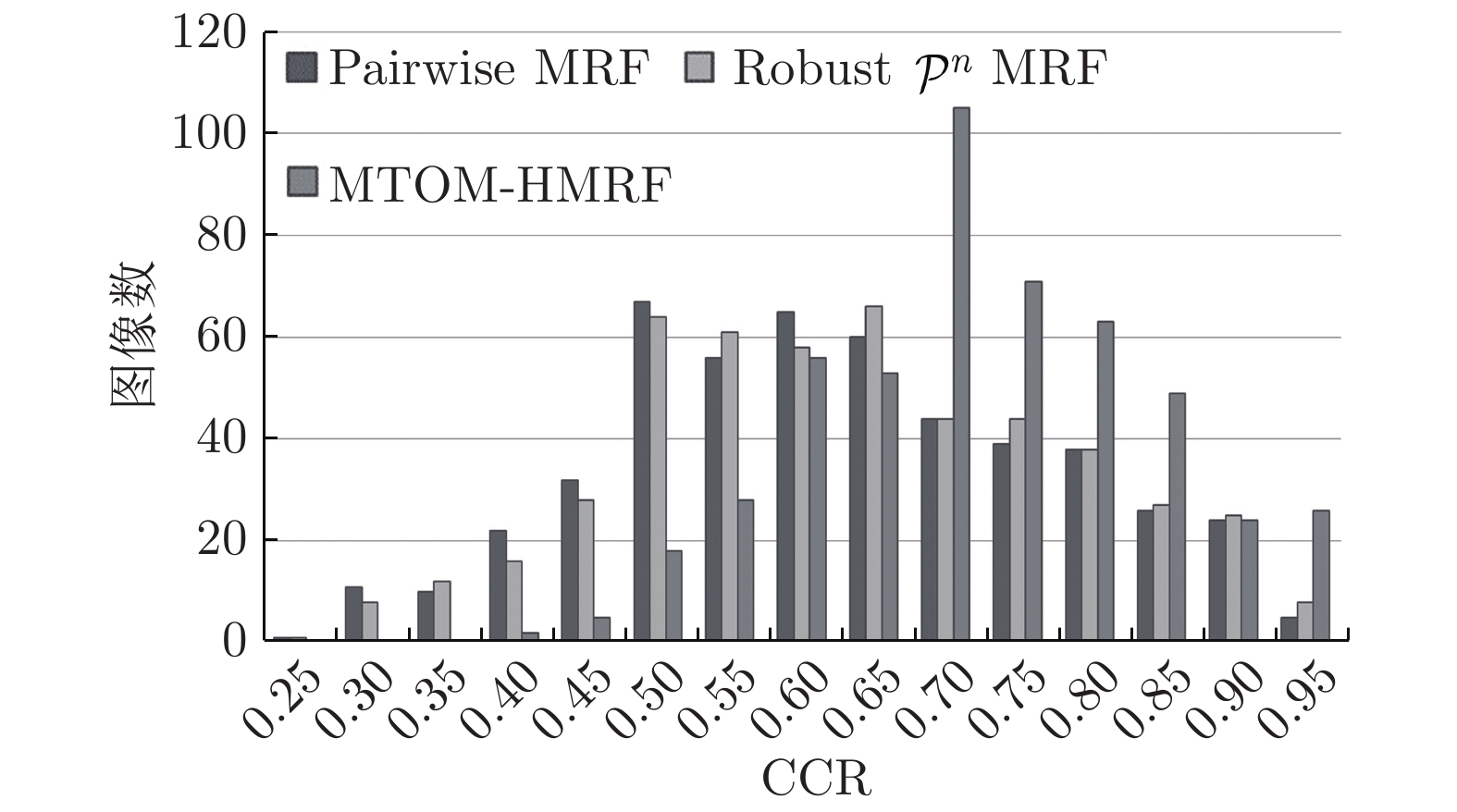
针对低阶马尔科夫随机场(Markov random field, MRF)模型难以有效表达自然图像中复杂的先验知识而造成误分割问题, 提出一种基于多节点拓扑重叠测度高阶MRF模型(Higher-order MRF model with multi-node topological overlap measure, MTOM-HMRF)的图像分割方法. 首先, 为描述图像局部区域内多像素蕴含的复杂空间拓扑结构信息, 利用多节点拓扑重叠测度建立图像局部区域的高阶先验模型; 其次, 利用较大的局部区域包含更多的标签节点信息能力, 基于Pairwise MRF模型建立基于局部区域的部分二阶Potts先验模型, 提高分割模型的抗噪能力; 再次, 为有效描述观察图像场与其标签场的似然特征分布, 研究利用局部区域内邻接像素的Hamming距离引入图像局部空间相关性, 建立局部空间一致性约束的高斯混合分布; 最后, 基于MRF框架建立用于图像分割的多节点拓扑重叠测度高阶MRF模型, 采用Gibbs采样算法对提出模型进行优化. 实验结果表明, 提出模型不仅能有效抵抗图像强噪声和复杂的纹理突变干扰, 鲁棒性更好, 而且具有更准确的图像分割结果.
针对低阶马尔科夫随机场(Markov random field, MRF)模型难以有效表达自然图像中复杂的先验知识而造成误分割问题, 提出一种基于多节点拓扑重叠测度高阶MRF模型(Higher-order MRF model with multi-node topological overlap measure, MTOM-HMRF)的图像分割方法. 首先, 为描述图像局部区域内多像素蕴含的复杂空间拓扑结构信息, 利用多节点拓扑重叠测度建立图像局部区域的高阶先验模型; 其次, 利用较大的局部区域包含更多的标签节点信息能力, 基于Pairwise MRF模型建立基于局部区域的部分二阶Potts先验模型, 提高分割模型的抗噪能力; 再次, 为有效描述观察图像场与其标签场的似然特征分布, 研究利用局部区域内邻接像素的Hamming距离引入图像局部空间相关性, 建立局部空间一致性约束的高斯混合分布; 最后, 基于MRF框架建立用于图像分割的多节点拓扑重叠测度高阶MRF模型, 采用Gibbs采样算法对提出模型进行优化. 实验结果表明, 提出模型不仅能有效抵抗图像强噪声和复杂的纹理突变干扰, 鲁棒性更好, 而且具有更准确的图像分割结果.
.jpg)
2022, 48(5): 1370-1384.
doi: 10.16383/j.aas.c200481
摘要:
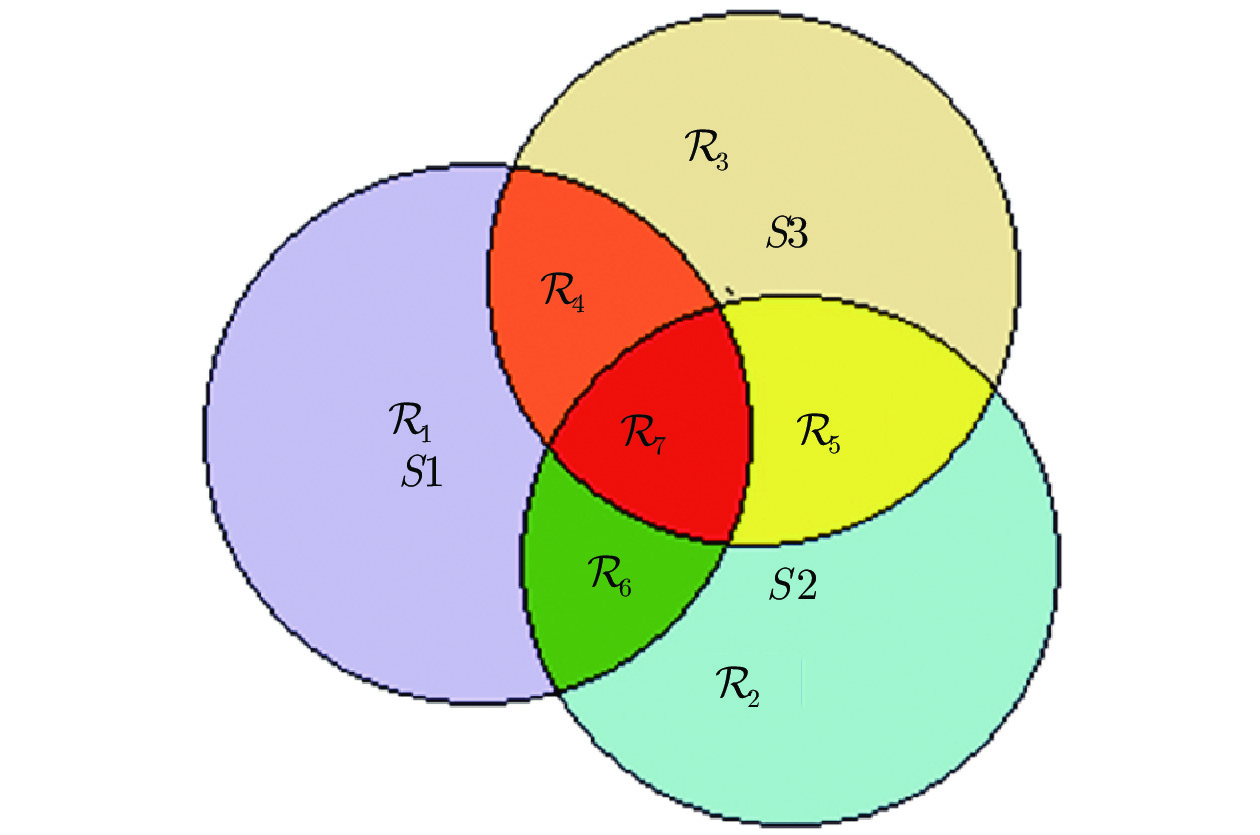
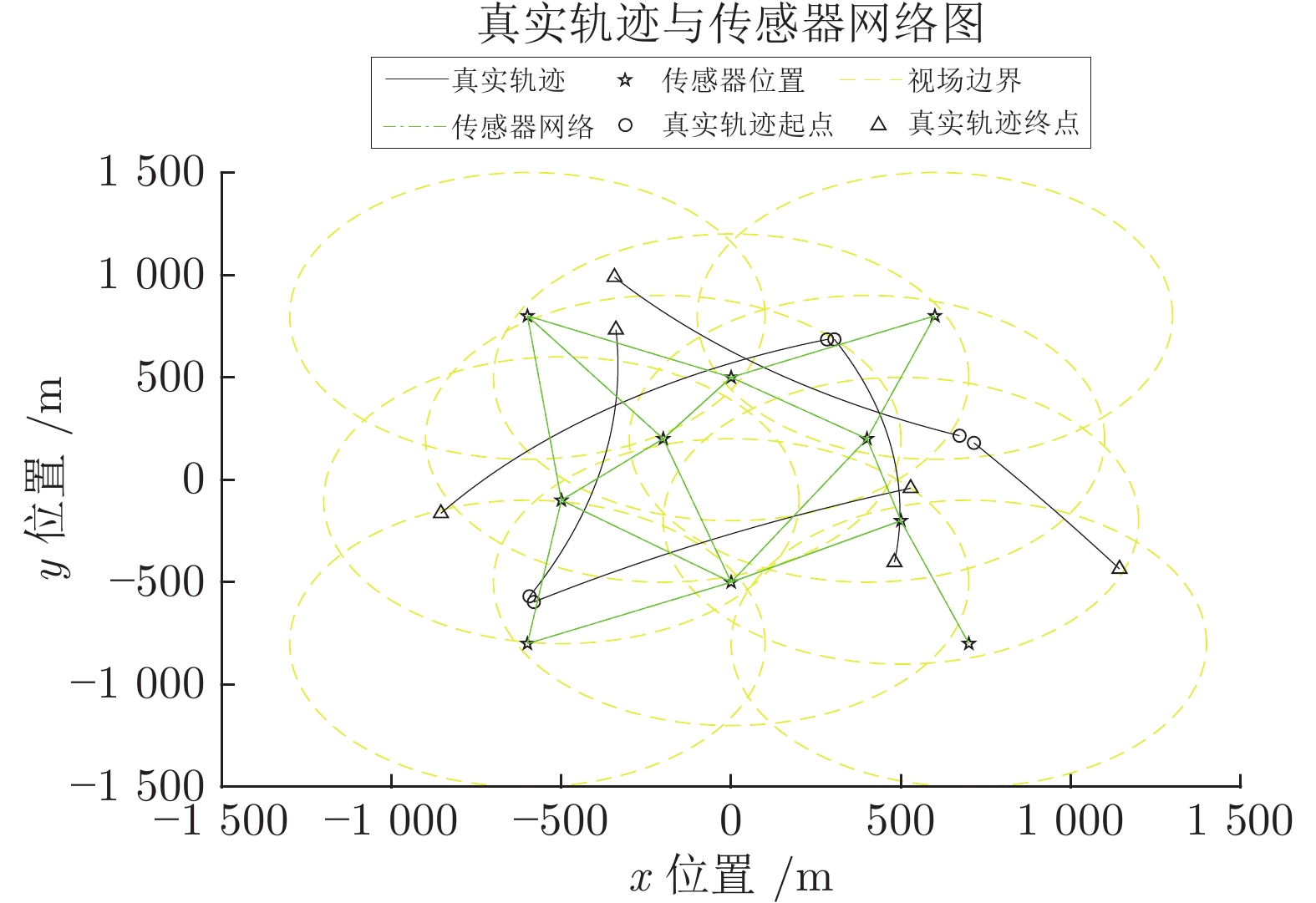
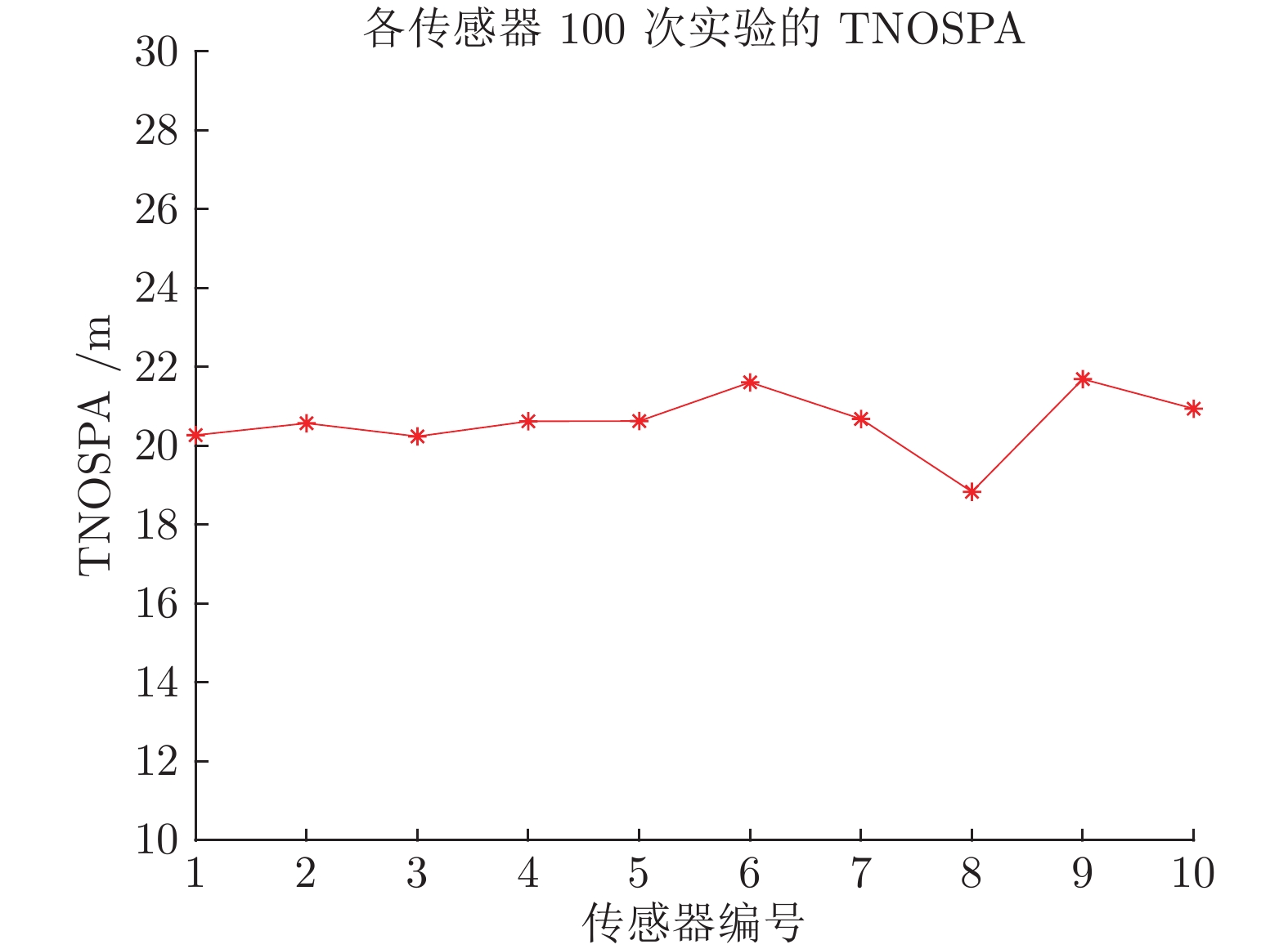
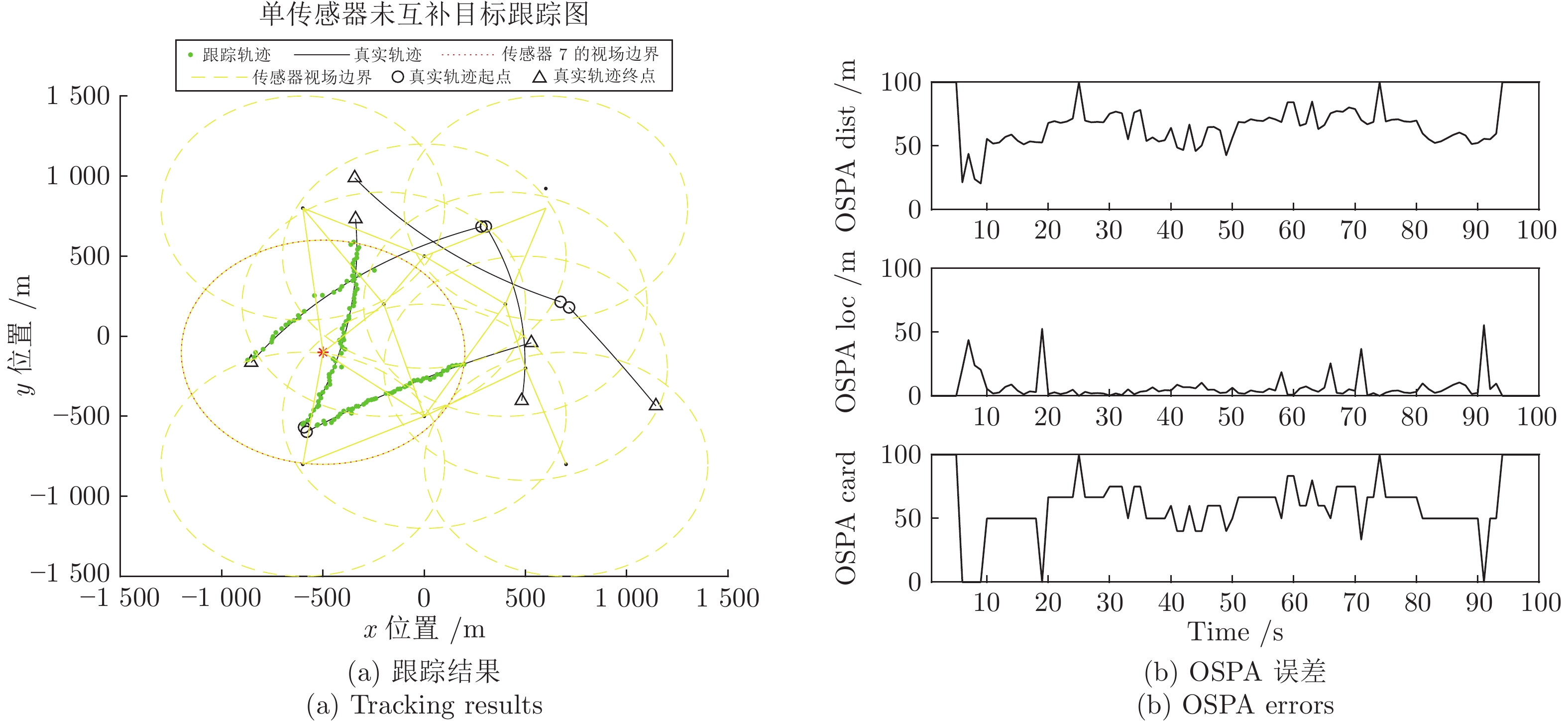
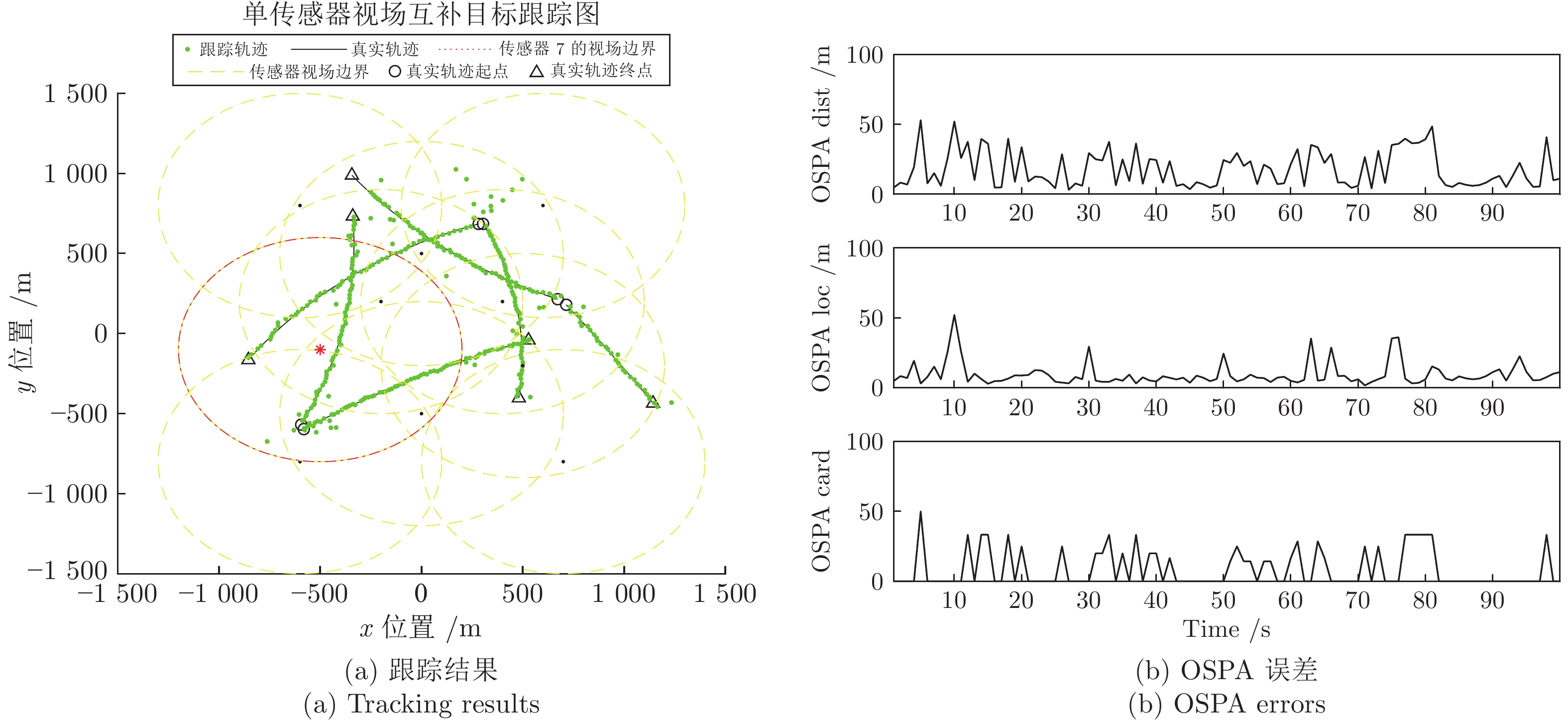
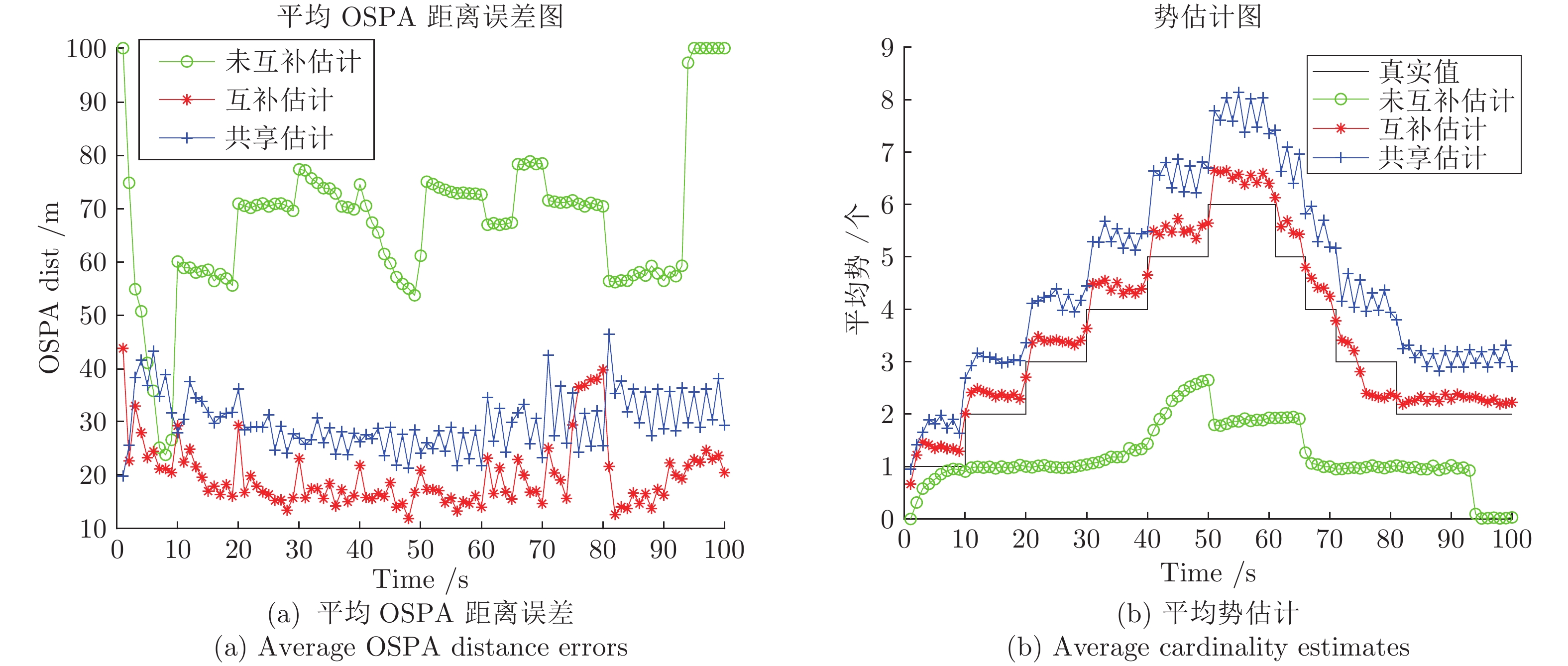
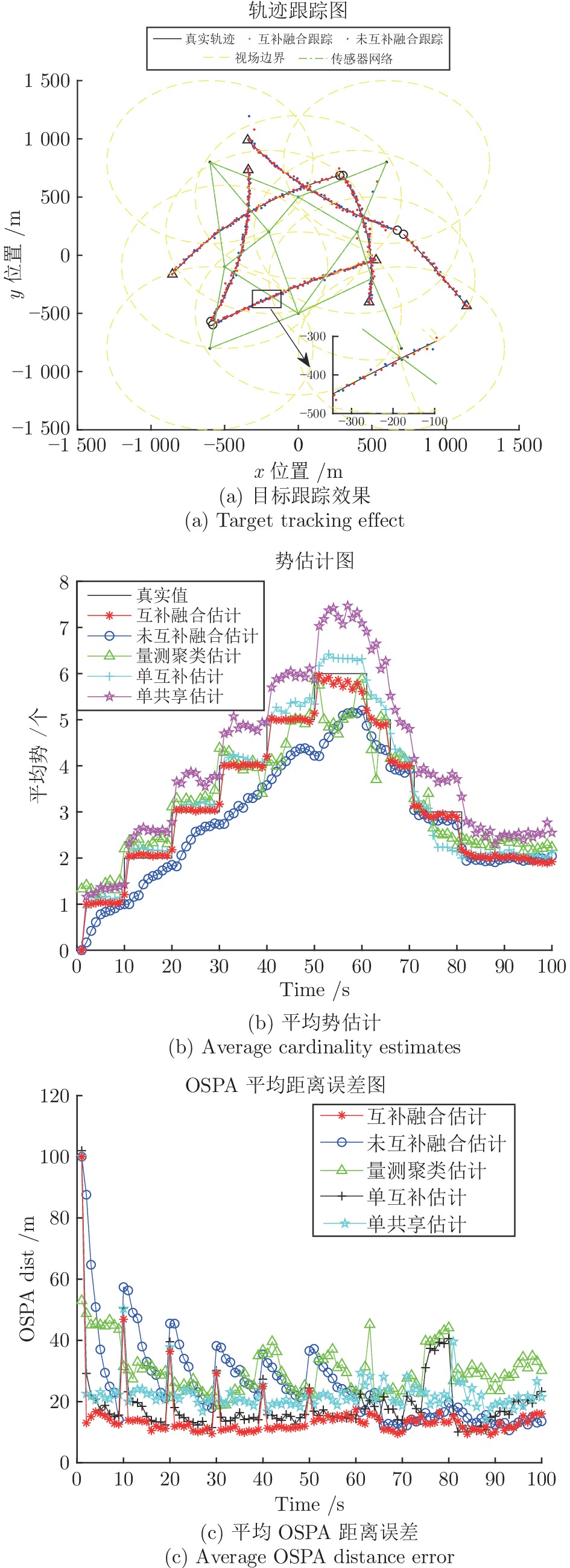
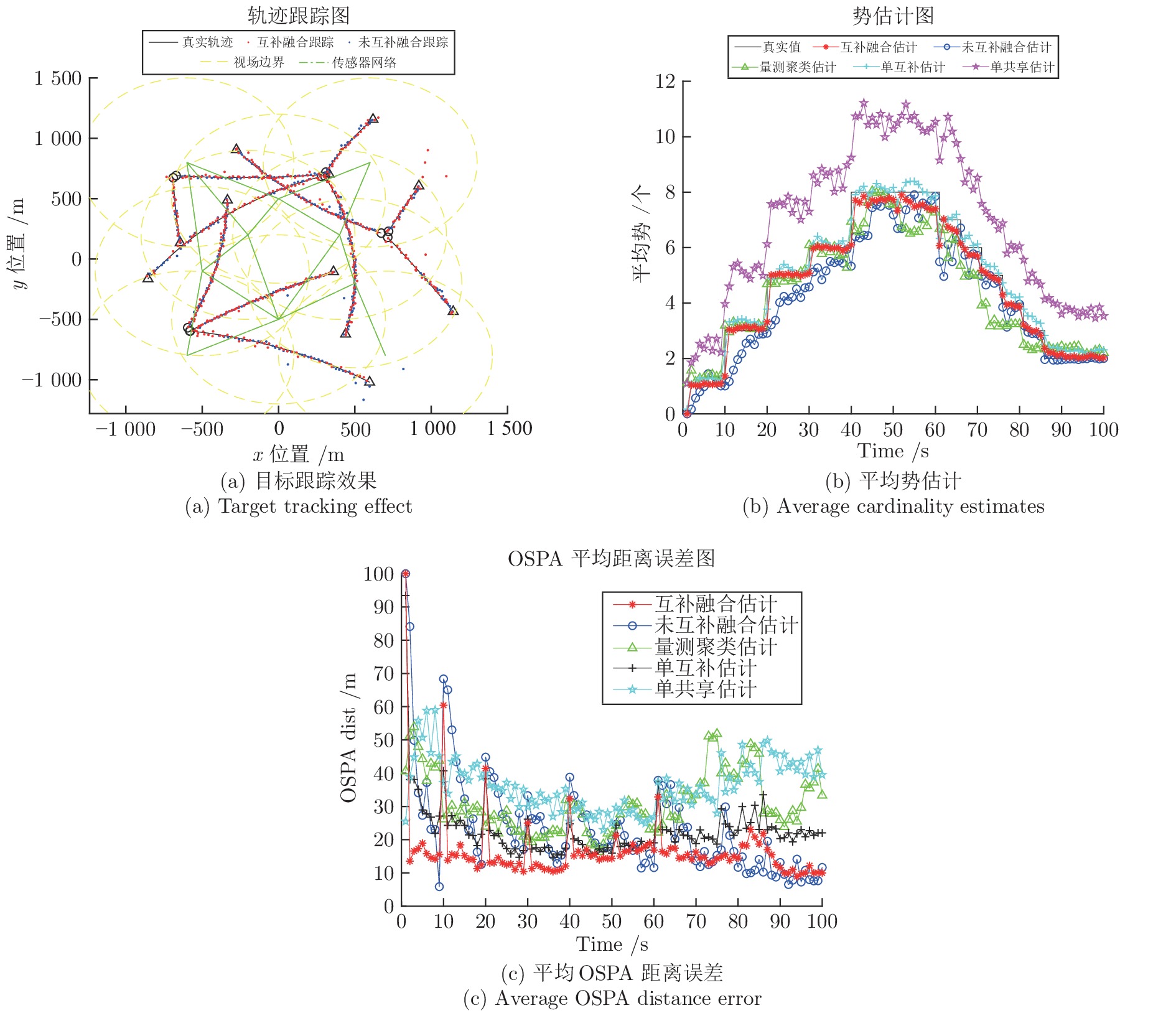
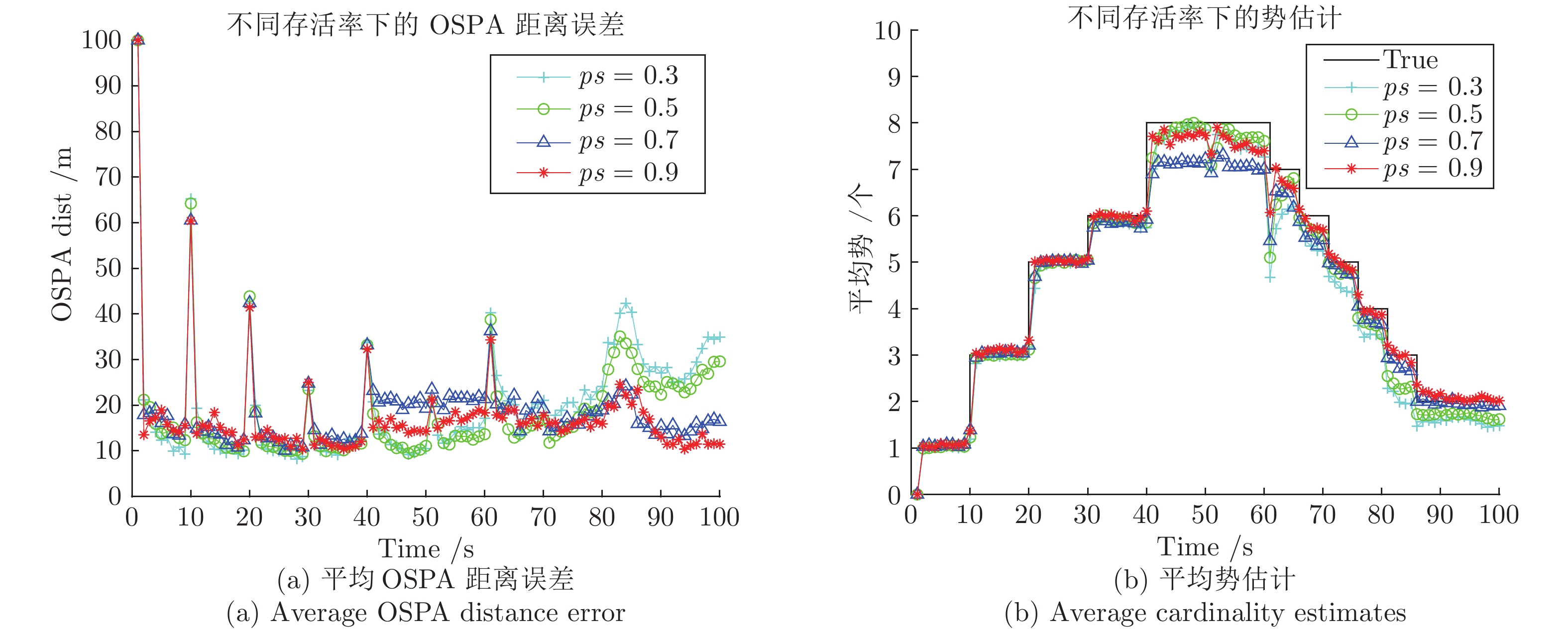
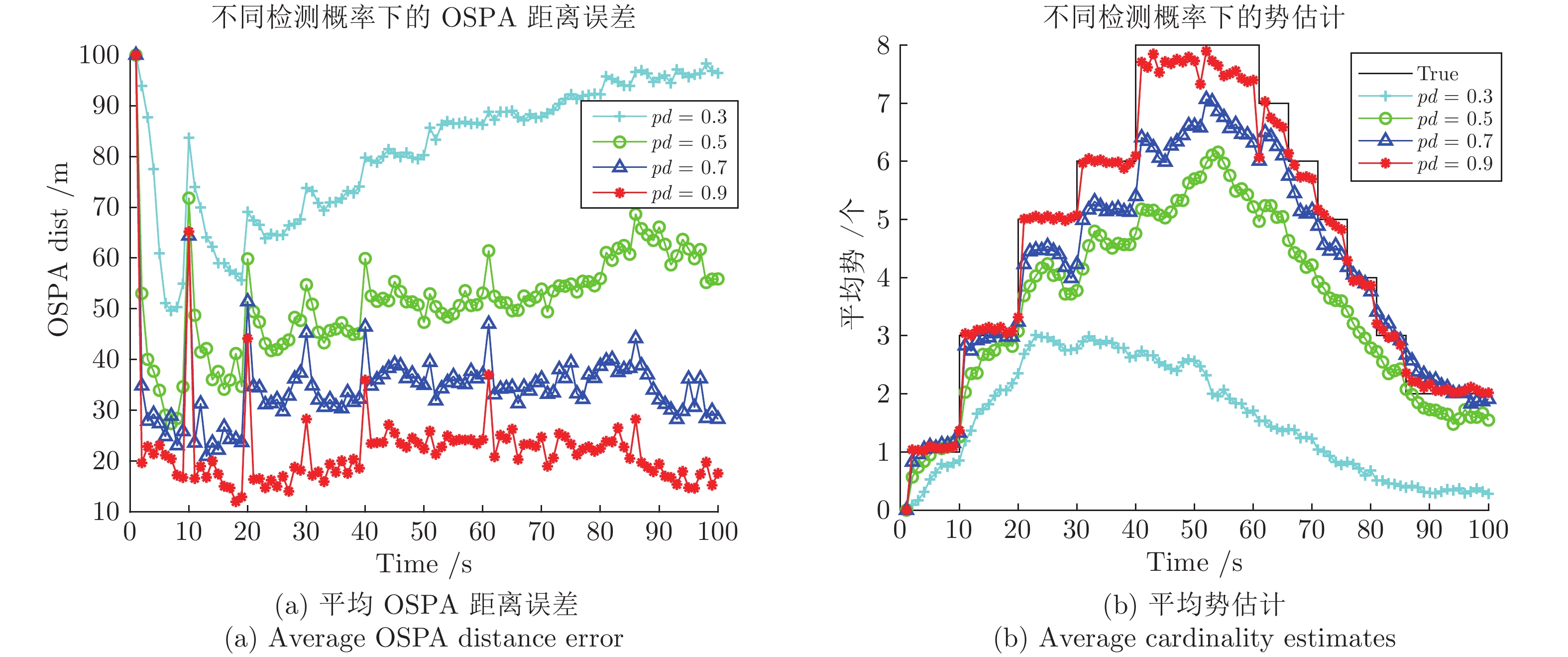
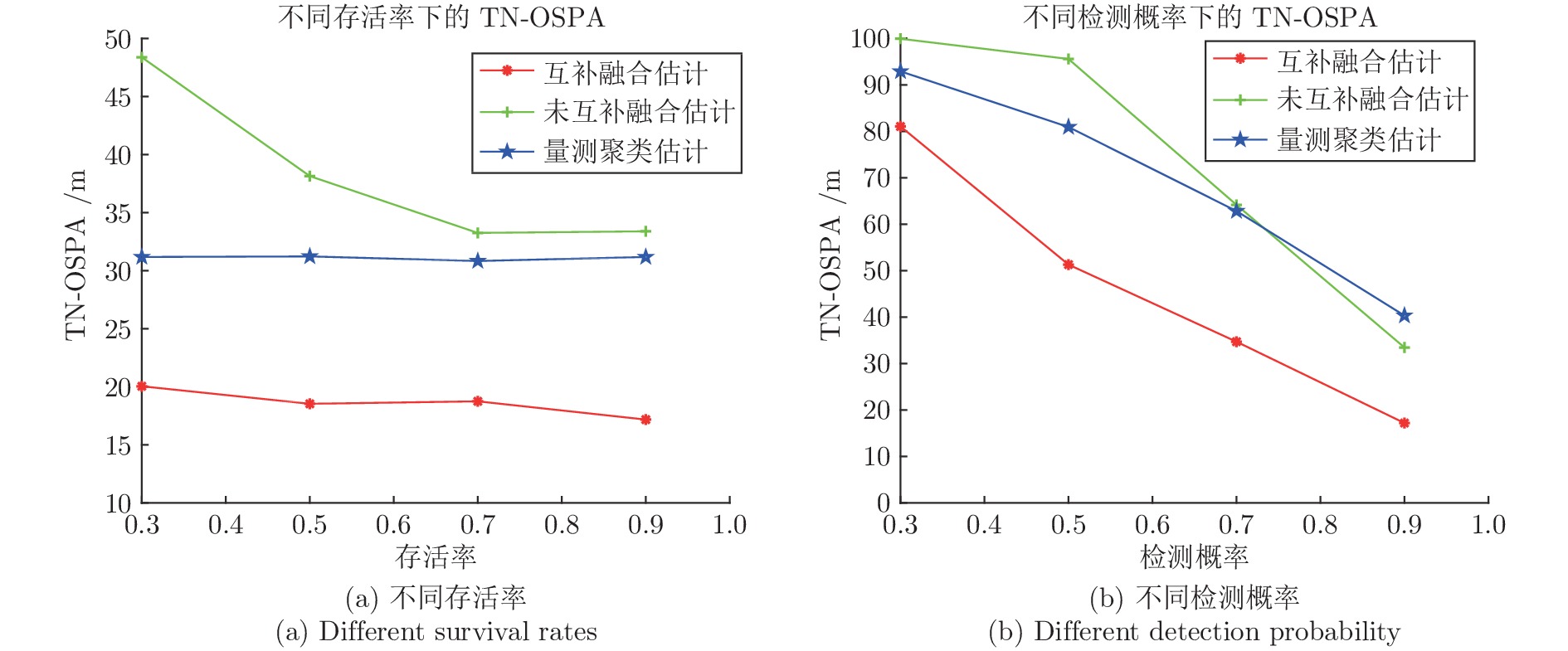
针对感知范围受限的分布式传感网多目标跟踪问题, 在多伯努利滤波跟踪理论基础上提出分布式视场互补多伯努利关联算术平均融合跟踪方法. 首先, 通过视场互补扩大传感器感知范围, 其中, 局部公共区域只互补一次以降低计算成本. 其次, 每个传感器分别运行局部多伯努利滤波器, 并将滤波后验结果与相邻传感器进行泛洪通信使得每个传感器获取多个相邻传感器的后验信息. 随后, 通过距离划分进行多伯努利关联, 将对应于同一目标的伯努利分量关联到同一个子集中, 并对每个关联子集进行算术平均融合完成融合状态估计. 仿真实验表明, 所提方法在有限感知范围的分布式传感器网络中能有效地进行多目标跟踪.
针对感知范围受限的分布式传感网多目标跟踪问题, 在多伯努利滤波跟踪理论基础上提出分布式视场互补多伯努利关联算术平均融合跟踪方法. 首先, 通过视场互补扩大传感器感知范围, 其中, 局部公共区域只互补一次以降低计算成本. 其次, 每个传感器分别运行局部多伯努利滤波器, 并将滤波后验结果与相邻传感器进行泛洪通信使得每个传感器获取多个相邻传感器的后验信息. 随后, 通过距离划分进行多伯努利关联, 将对应于同一目标的伯努利分量关联到同一个子集中, 并对每个关联子集进行算术平均融合完成融合状态估计. 仿真实验表明, 所提方法在有限感知范围的分布式传感器网络中能有效地进行多目标跟踪.