

Research on Path Tracking Control Under Limit Conditions Based on Tire State Stiffness Prediction
-
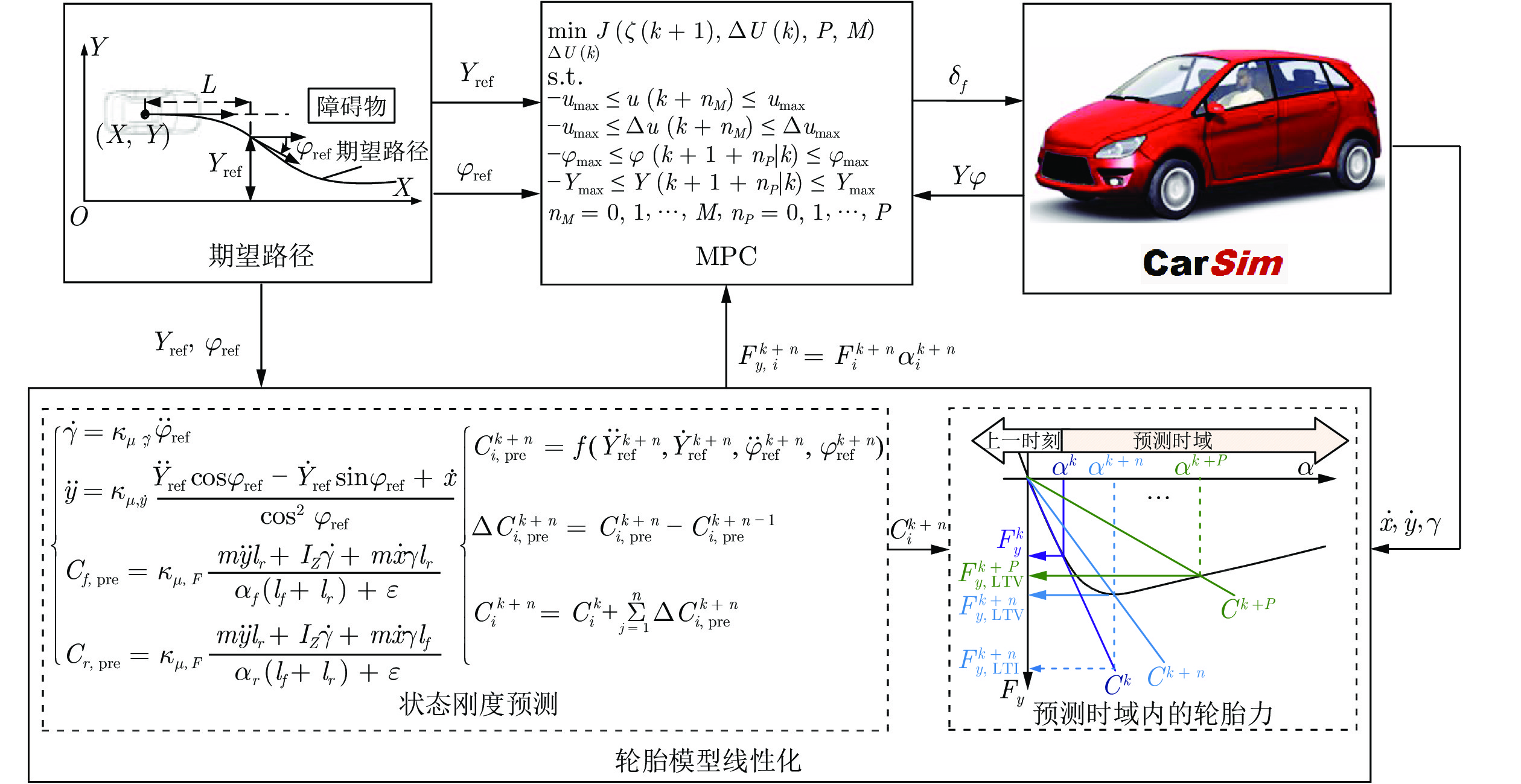
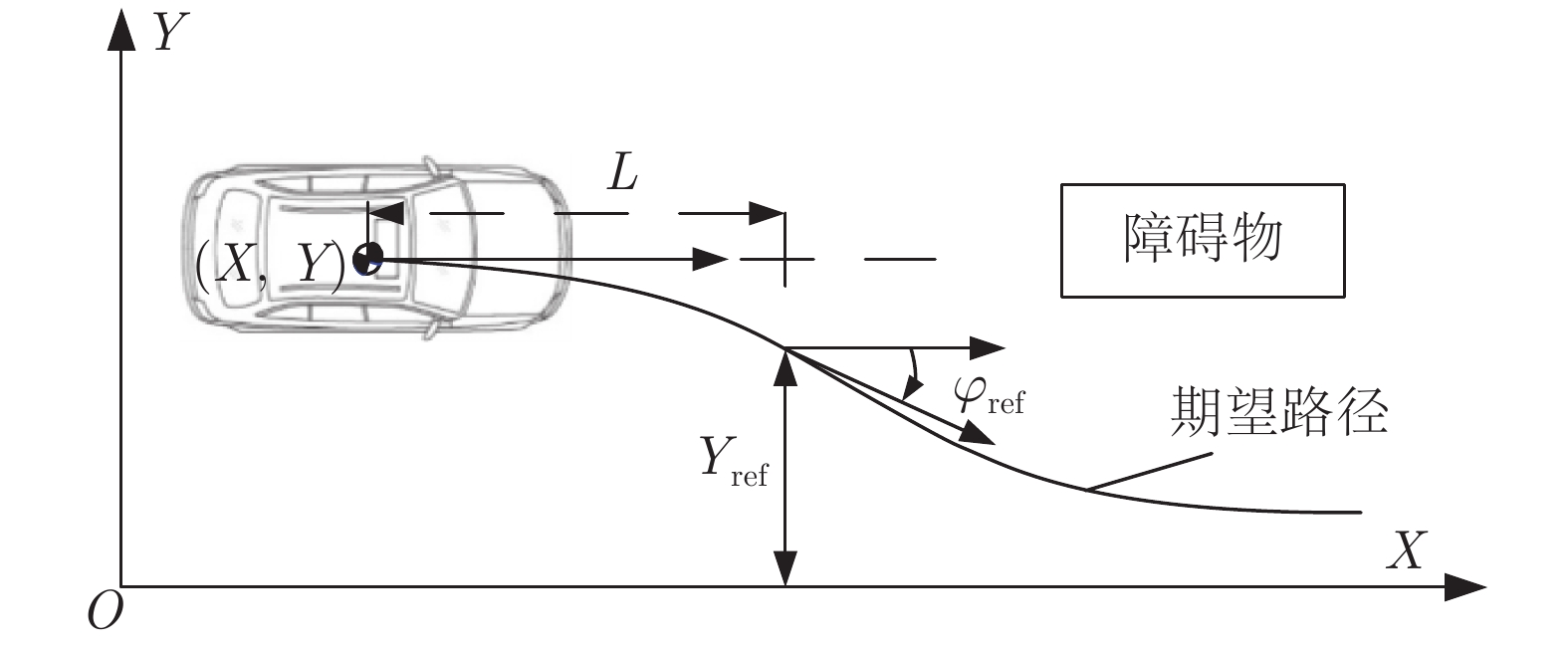
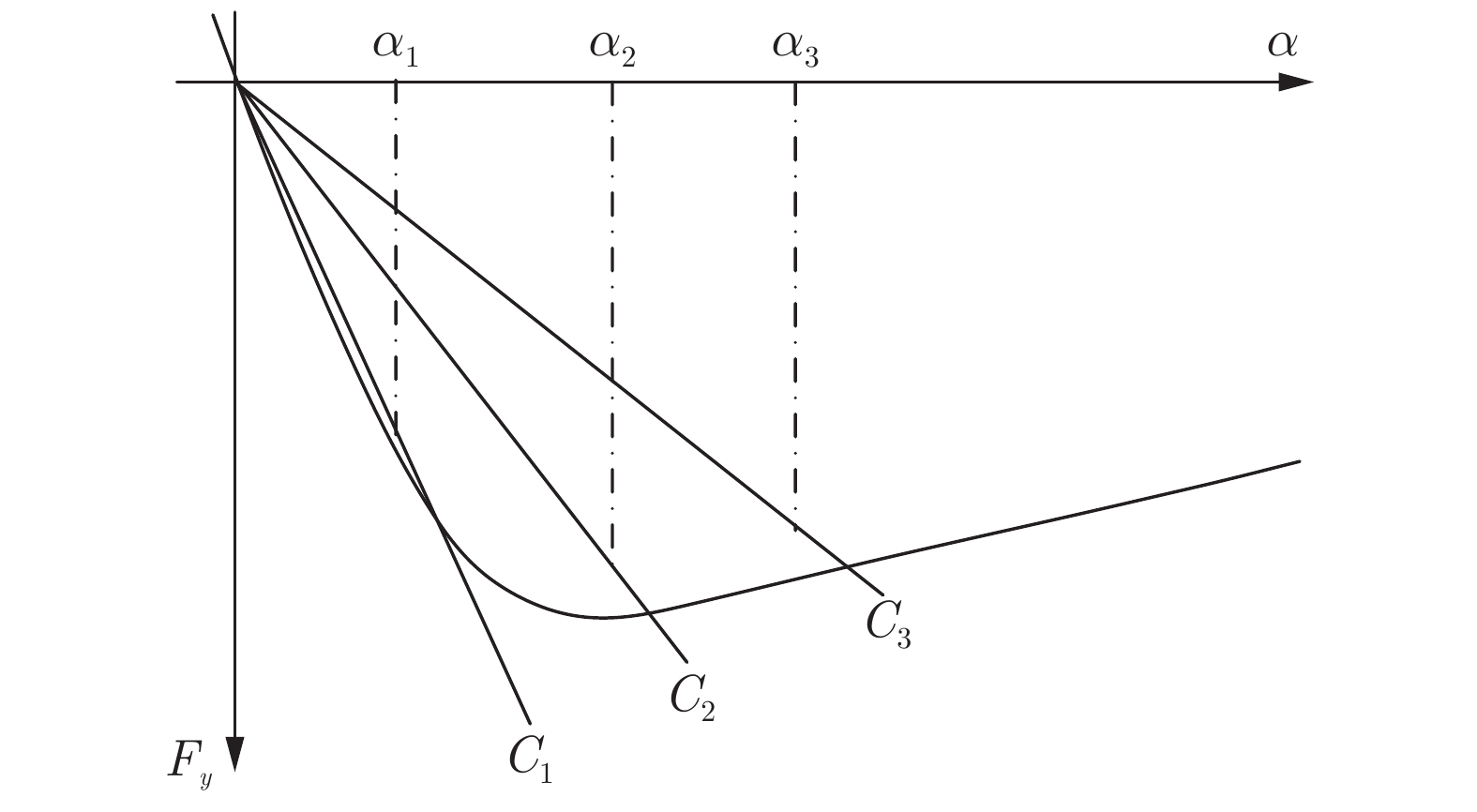
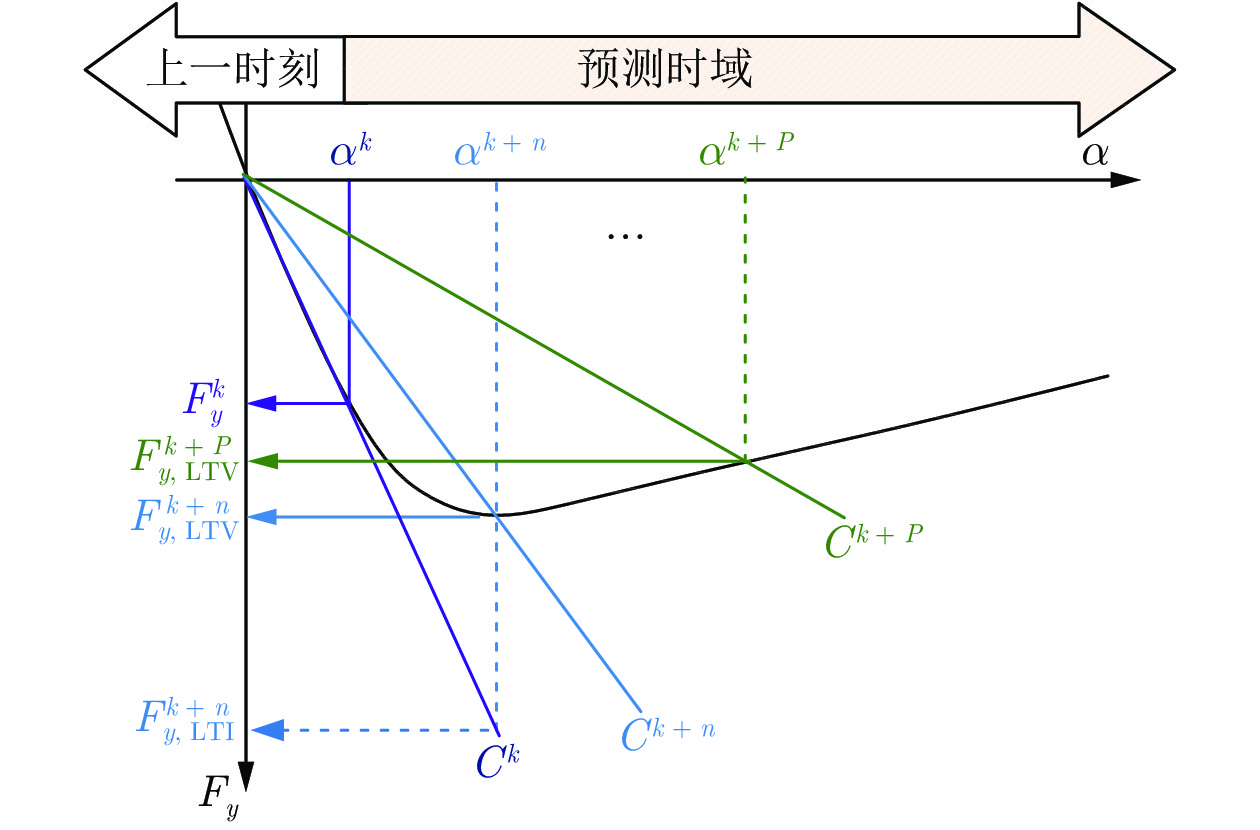
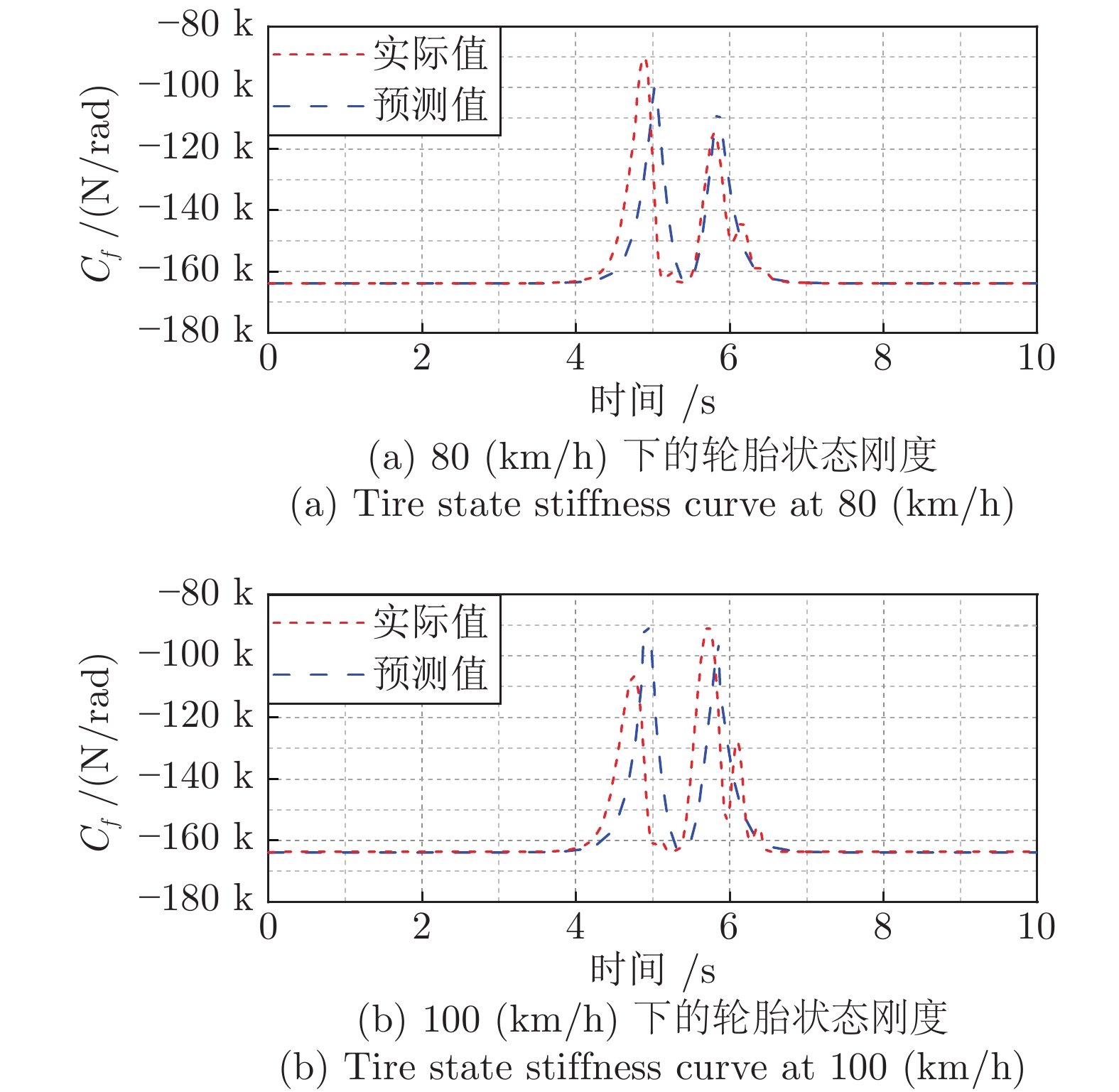
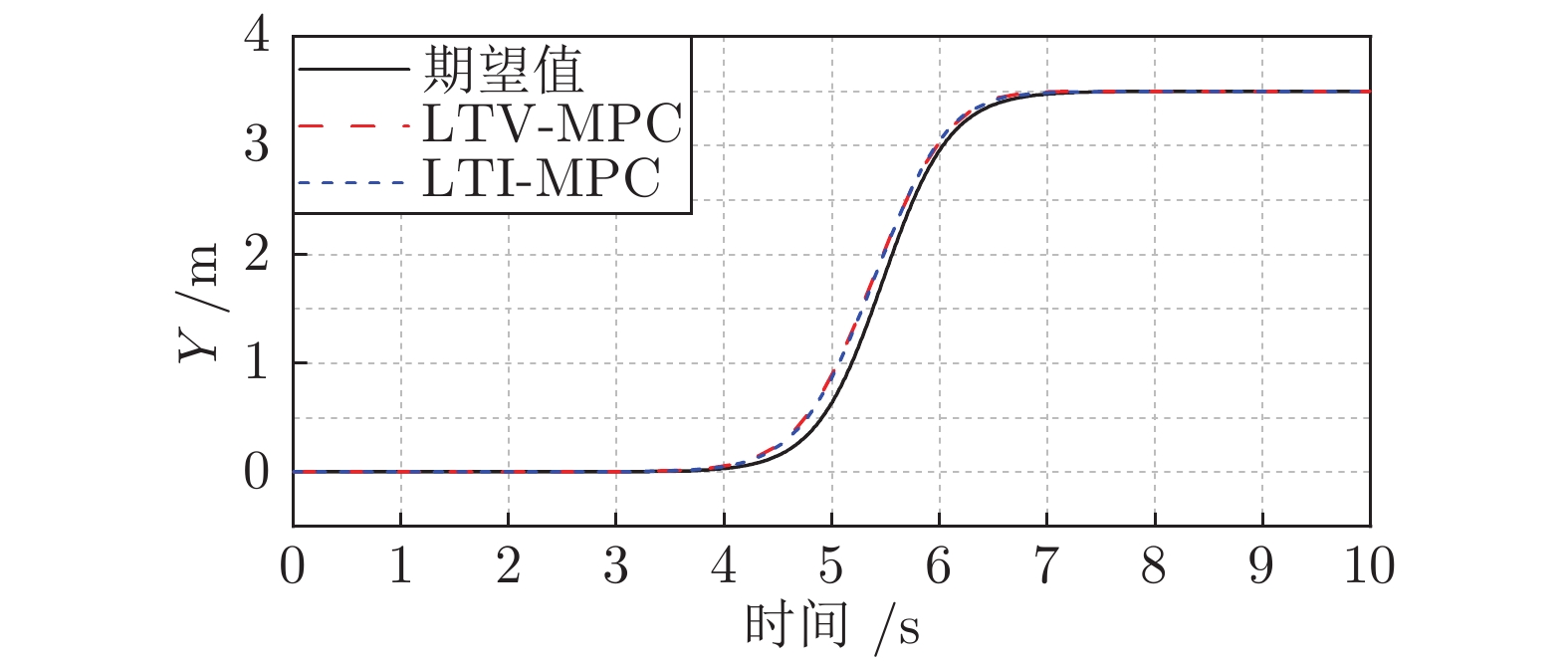
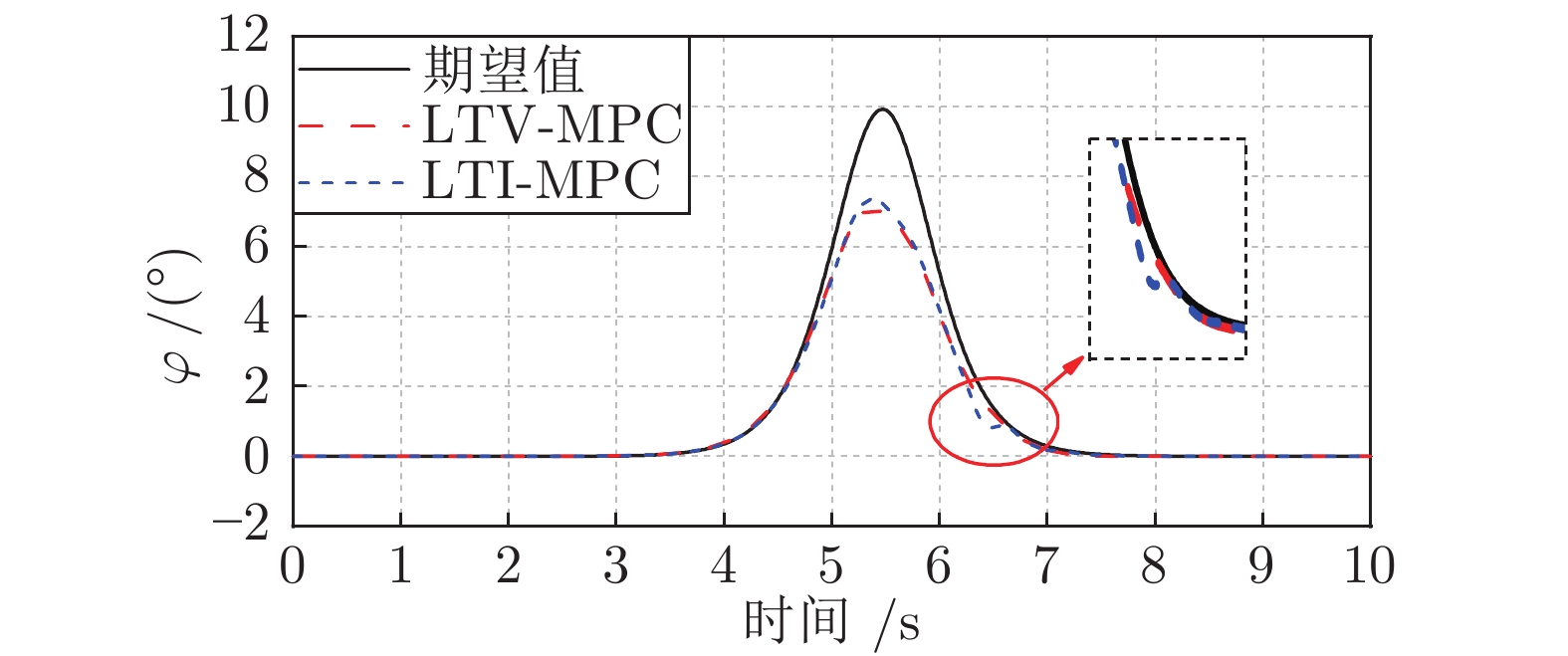
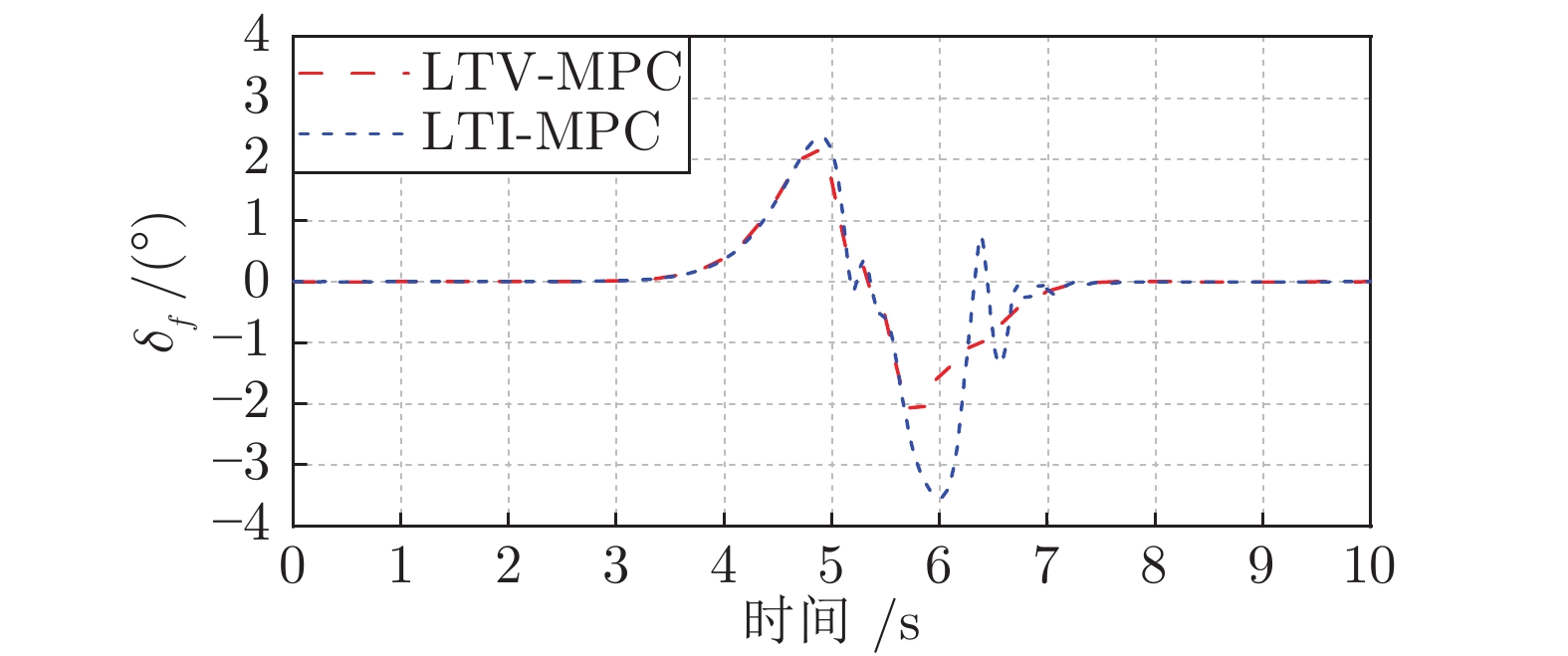
摘要: 为解决高速极限工况下自动驾驶车辆紧急避撞时传统路径跟踪控制方法因轮胎力表达不精确导致的路径跟踪失败问题, 提出一种基于轮胎状态刚度预测的模型预测路径跟踪控制方法. 首先, 基于非线性UniTire轮胎模型求解的轮胎状态刚度对非线性轮胎力进行线性化处理. 其次, 基于期望路径信息提出状态刚度预测方法, 实现预测时域内轮胎力的预测和线性化. 最后, MATLAB和CarSim联合仿真实验表明: 所提出的方法能够明显改善高速极限工况下的避撞控制效果.Abstract: To solve the problem of path tracking failure caused by the imprecise expression of tire force in conventional path tracking control system during the emergency collision avoidance of autonomous vehicles under high-speed limit condition, a model predictive path tracking control method based on tire state stiffness prediction is proposed. Firstly, the nonlinear tire force is linearized based on the tire state stiffness calculated by the nonlinear UniTire tire model. Secondly, based on the reference path information, the state stiffness prediction method is proposed to predict and linearize the tire force in the predicted horizon. Finally, MATLAB and CarSim joint simulation experiments show that the proposed method can improve the collision avoidance control effect under high-speed limit conditions obviously.
-
表 1 车辆参数
Table 1 Vehicle parameters
参数 符号 值 质心到前轴的距离 lf 1.04 m 质心到后轴的距离 lr 1.56 m 整车质量 m 1 240 kg 横摆转动惯量 Iz 2 031.4 kgm2  下载: 导出CSV
下载: 导出CSV
表 2 控制器参数
Table 2 MPC controller parameters
参数 LTI-MPC LTV-MPC Ts 0.01 0.01 P 40 40 M 1 1 ${Y_{\max }}$(°) 5 5 ${\varphi _{\max }}$(°) 15 15 ${\delta _f}_{\max }$(°) 10 10 ${\Delta{\delta_f}_{\max }}$(°) 0.17 0.17 ${\tau _{\varphi ,80}}$ 550 550 ${\tau _{y ,80}}$ 260 260 ${\tau _{u ,80}}$ 1 900 1 900 ${\tau _{\varphi ,100}}$ 550 550 ${\tau _{y ,100}}$ 260 260 ${\tau _{u ,100}}$ 3 500 3 500
下载: 导出CSV
-
[1] Shen C, Guo H Y, Liu F, Chen H. MPC-based path tracking controller design for autonomous ground vehicles. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: CCC, 2017. 9584−9586 [2] 陈虹, 申忱, 郭洪艳, 刘俊. 面向动态避障的智能汽车滚动时域路径规划. 中国公路学报, 2019, 32(01): 162-172. doi: 10.3969/j.issn.1001-7372.2019.01.018Chen Hong, Shen Chen, Guo Hong-Yan, Liu Jun. Moving horizon Path Planning for Intelligent vehicle Considering Dynamic Obstacle Avoidance. China Journal of Highway and Transport, 2019, 32(01): 162-172. doi: 10.3969/j.issn.1001-7372.2019.01.018 [3] 熊璐, 付志强, 柏满飞, 章仁燮. 无人驾驶车辆的底层动力学控制研究. 汽车技术, 2017, (11): 5-10.Xiong Lu, Fu Zhi-Qiang, Bai Man-Fei, Zhang Ren-Xie. Research on the Bottom Dynamic Control for Unmanned Ground Vehicle. Automobile Technology, 2017, (11): 5-10. [4] 周东昇, 李伟, 刘玉龙, 丁伟. 基于滚动时域的线性二次型路径跟踪研究. 汽车技术, 2017, (10): 54-57. doi: 10.3969/j.issn.1000-3703.2017.10.011Zhou Dong-Sheng, Li Wei, Liu Yu-Long, Ding Wei. Research on Linear Quadratic Path Tracking Based on Receding Horizon. Automobile Technology, 2017, (10): 54-57. doi: 10.3969/j.issn.1000-3703.2017.10.011 [5] Mashadi B, Ahmadizadeh P, Majidi M, Mahmoodi-Kaleybar M. Integrated robust controller for vehicle path following. Multibody System Dynamics, 2015, 33(2): 207-228. doi: 10.1007/s11044-014-9409-8 [6] 阮久宏, 李贻斌, 杨福广, 荣学文. 无人驾驶高速 4WID-4WIS 车辆路径跟踪单点预瞄控制. 重庆大学学报, 2011, 34(10): 21-26.Ruan Jiu-Hong, Li Yi-Bin, Yang Fu-Guang, Rong Xue-Wen. Single-point preview control for unmanned high-speed 4WID-4WIS vehicle path tracking. Journal of Chongqing University(Natural Science Edition), 2011, 34(10): 21-26. [7] Wang R J, Yin G D, Jin X J. Robust adaptive sliding mode control for nonlinear four-wheel steering autonomous vehicles path tracking systems. In: Proceedings of the 2016 Power Electronics and Motion Control Conference. Hefei, China: IEEE, 2016. 2999−3006 [8] Falcone P, Tufo M, Borrelli F, Asgari J, Tseng H E. A linear time varying model predictive control approach to the integrated vehicle dynamics control problem in autonomous systems. In: Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, USA: IEEE, 2008. 2980−2985 [9] 冀杰, 唐志荣, 吴明阳, 方京城. 面向车道变换的路径规划及模型预测轨迹跟踪. 中国公路学报, 2018, 31(04): 172-179. doi: 10.3969/j.issn.1001-7372.2018.04.021JI Jie, Tang Zhi-Rong, Wu Ming-Yang, Fang Jing-Cheng. Path Planning and Tracking for Lane Changing Based on Model predictive Control. China Journal of Highway and Transport, 2018, 31(04): 172-179. doi: 10.3969/j.issn.1001-7372.2018.04.021 [10] Li S S, Wang G D, Zhang B C, Yu Z X, Cui G J. Vehicle stability control based on model predictive control considering the changing trend of tire force over the prediction horizon. IEEE Access, 2018, 7: 6877-6888 [11] 陈杰, 李亮, 宋健. 基于 LTV-MPC 的车辆稳定性控制研究. 汽车工程, 2016, 38(3): 308-316. doi: 10.3969/j.issn.1000-680X.2016.03.008Chen Jie, Li Liang, Song Jian. A Study on Vehicle Stability Control Based on LTV-MPC. Automotive Engineering, 2016, 38(3): 308-316. doi: 10.3969/j.issn.1000-680X.2016.03.008 [12] Borrelli F, Falcone P, Keviczky T, Asgari J, Hrovat D. MPC-based approach to active steering for autonomous vehicle systems. International Journal of Vehicle Autonomous Systems, 2005, 3: 265-291. doi: 10.1504/IJVAS.2005.008237 [13] Falcone P, Borrelli F, Tseng H E, Asgari J, Hrovat D. Linear time-varying model predictive control and its application to active steering systems: stability analysis and experimental validation. International Journal of Robust & Nonlinear Control, 2010, 18(8): 862-875. [14] 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制. 北京: 北京理工大学出版社, 2014.Gong Jian-Wei, Jiang Yan, Xu Wei. Model Predictive Control of Self-driving Vehicles. Beijing: Beijing Institute of Technology Press, 2014. [15] 杭鹏, 陈辛波, 张榜, 史鹏飞, 唐廷举. 四轮独立转向独立驱动电动车主动避障路径规划与跟踪控制. 汽车工程, 2019, 41(2): 170-176.Hang Peng, Chen Xin-Bo, Zhang Bang, Shi Peng-Fei, Tang Ting-Ju. Path Planning and Tracking Control for Collision Avoidance of a 4 Wis-4 WId Electric vehicle. Automotive Engineering, 2019, 41(2): 170-176. [16] 徐杨, 陆丽萍, 褚端峰, 黄子超. 无人车辆轨迹规划与跟踪控制的统一建模方法. 自动化学报, 2019, 45(4): 799-807Xu Yang, Lu Li-Ping, Chu Duan-Feng, Huang Zi-Chao. Unified modeling of trajectory planning and tracking for unmanned vehicle. Acta Automatica Sinica, 2019, 45(4): 799-807 [17] Choi M, Choi S B. MPC for vehicle lateral stability via differential braking and active front steering considering practical aspects. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2016, (230), 459–469. [18] Beal C E, Gerdes J C. Model Predictive Control for Vehicle Stabilization at the Limits of Handling. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1258-1269. doi: 10.1109/TCST.2012.2200826 [19] Brown M, Funke J, Erlien S, Gerdes J C. Safe driving envelopes for path tracking in autonomous vehicles. Control Engineering Practice, 2017, (61): 307-316. [20] Funke J, Brown M, Erlien S M, Gerdes J C. Collision Avoidance and Stabilization for Autonomous Vehicles in Emergency Scenarios. IEEE Transactions on Control Systems Technology, 2017, 25(4): 1204-1216. doi: 10.1109/TCST.2016.2599783 [21] 郭孔辉. UniTire统一轮胎模型. 机械工程学报, 2016, (12): 90-99.Guo Kong-Hui. UniTire: Unified Tire Model. Journal of Mechanical Engineering, 2016, (12): 90-99. [22] 许男. 复合工况下轮胎稳态模型研究 [博士学位论文], 吉林大学, 中国, 2012.Xu Nan. Study on the Steady State Tire Model under Combined Conditions [Ph.D. dissertation], Jilin University, China, 2012. [23] 郭孔辉. 汽车轮胎动力学. 北京: 科学出版社, 2018.Guo Kong-Hui. Dynamics of Automobile Tyres. Beijing: Science Press, 2018. [24] 袁伟, 蒋拯民, 郭应时. 制动与转向协调动作的车辆避撞控制研究. 中国公路学报, 2019, 32(01): 173-181. doi: 10.3969/j.issn.1001-7372.2019.01.019Yuan Wei, Jiang Zheng-Min, Guo Ying-Shi. Research on vehicle Active Collision A voidance System based on the Coordinated Actions of Braking and Steering. China Journal of Highway and Transport, 2019, 32(01): 173-181. doi: 10.3969/j.issn.1001-7372.2019.01.019 [25] Ackermann C, Bechtloff J, Isermann R. Collision avoidance with combined braking and steering. 2015, 199−213 [26] 陈虹. 模型预测控制. 北京: 科学出版社, 2013.Chen Hong. Model Predictive Control. Beijing: Science Press, 2013. -

 下载:
下载:

图(18) / 表(2)
计量
- 文章访问数: 742
- HTML全文浏览量: 846
- PDF下载量: 188
- 被引次数: 0
