2025年 第51卷 第8期
2025, 51(8): 1715-1738.
doi: 10.16383/j.aas.c240668
cstr: 32138.14.j.aas.c240668
摘要:
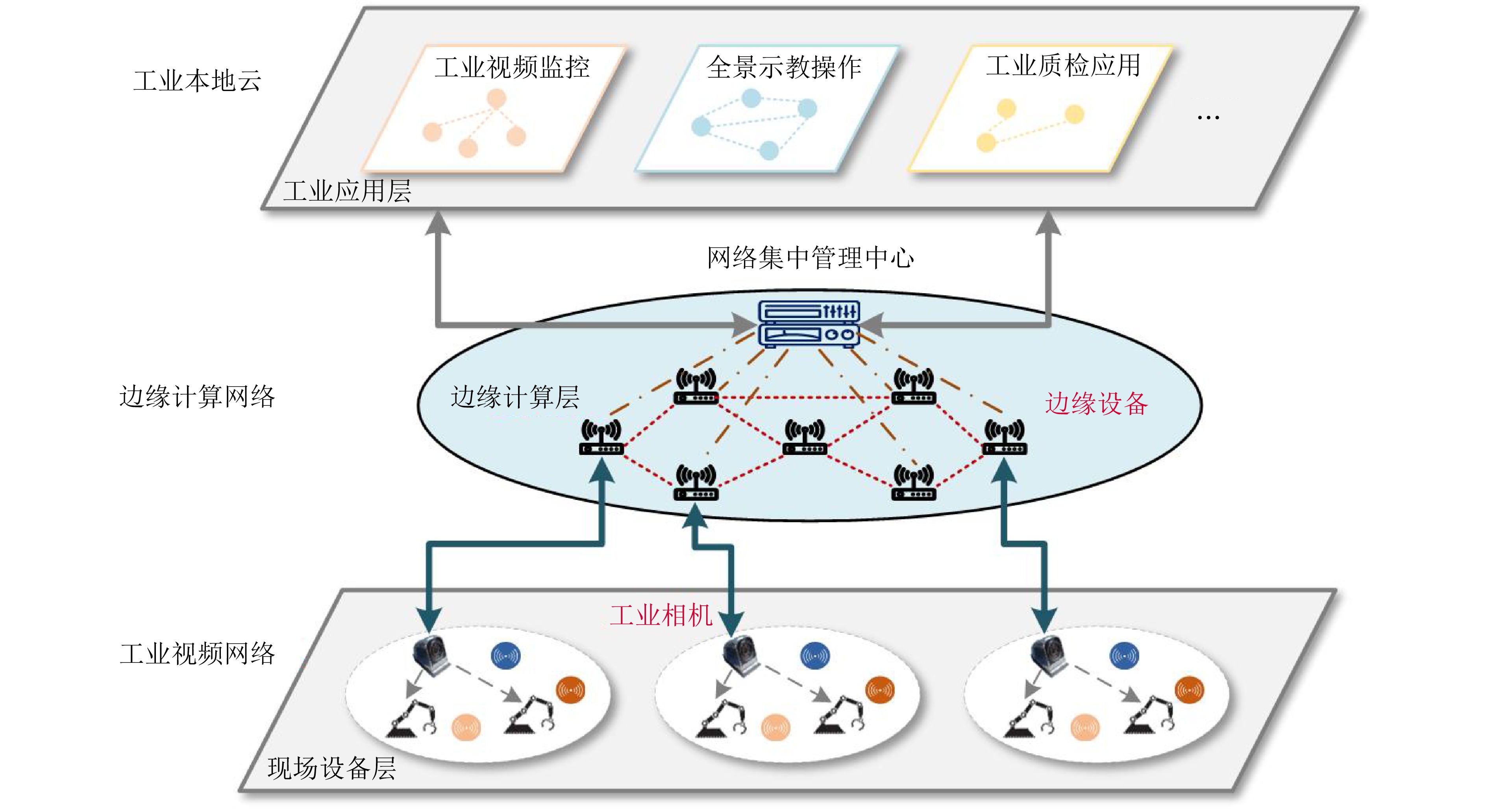
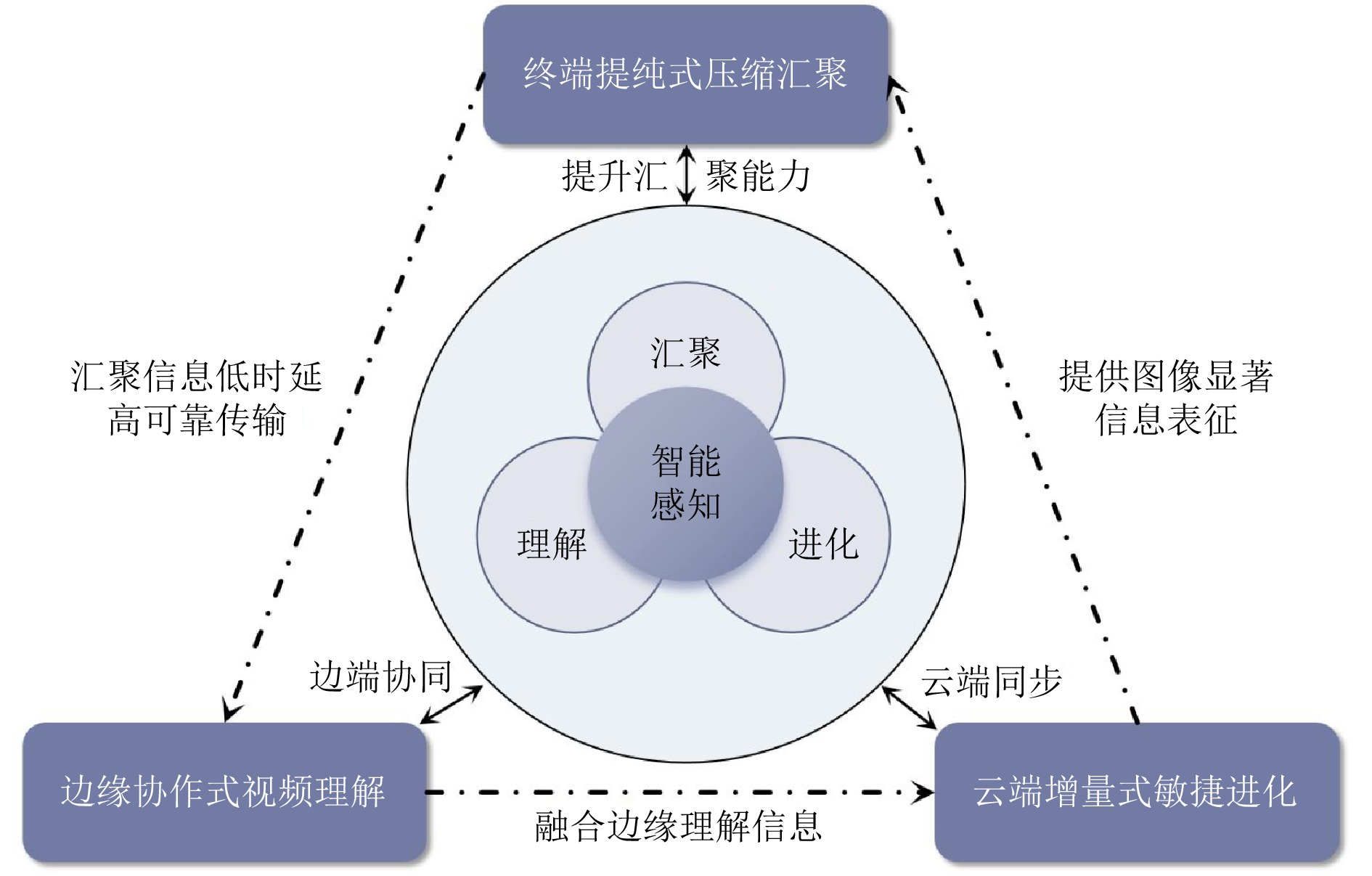
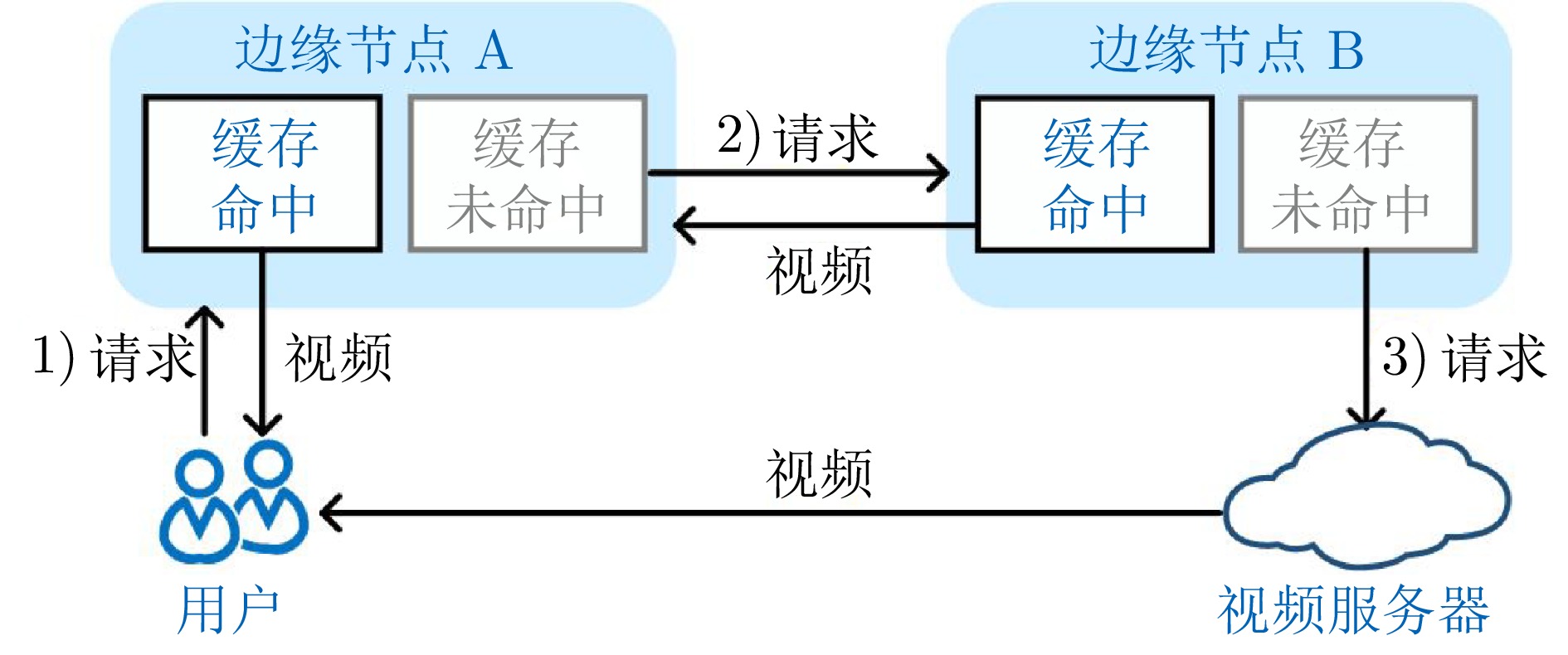
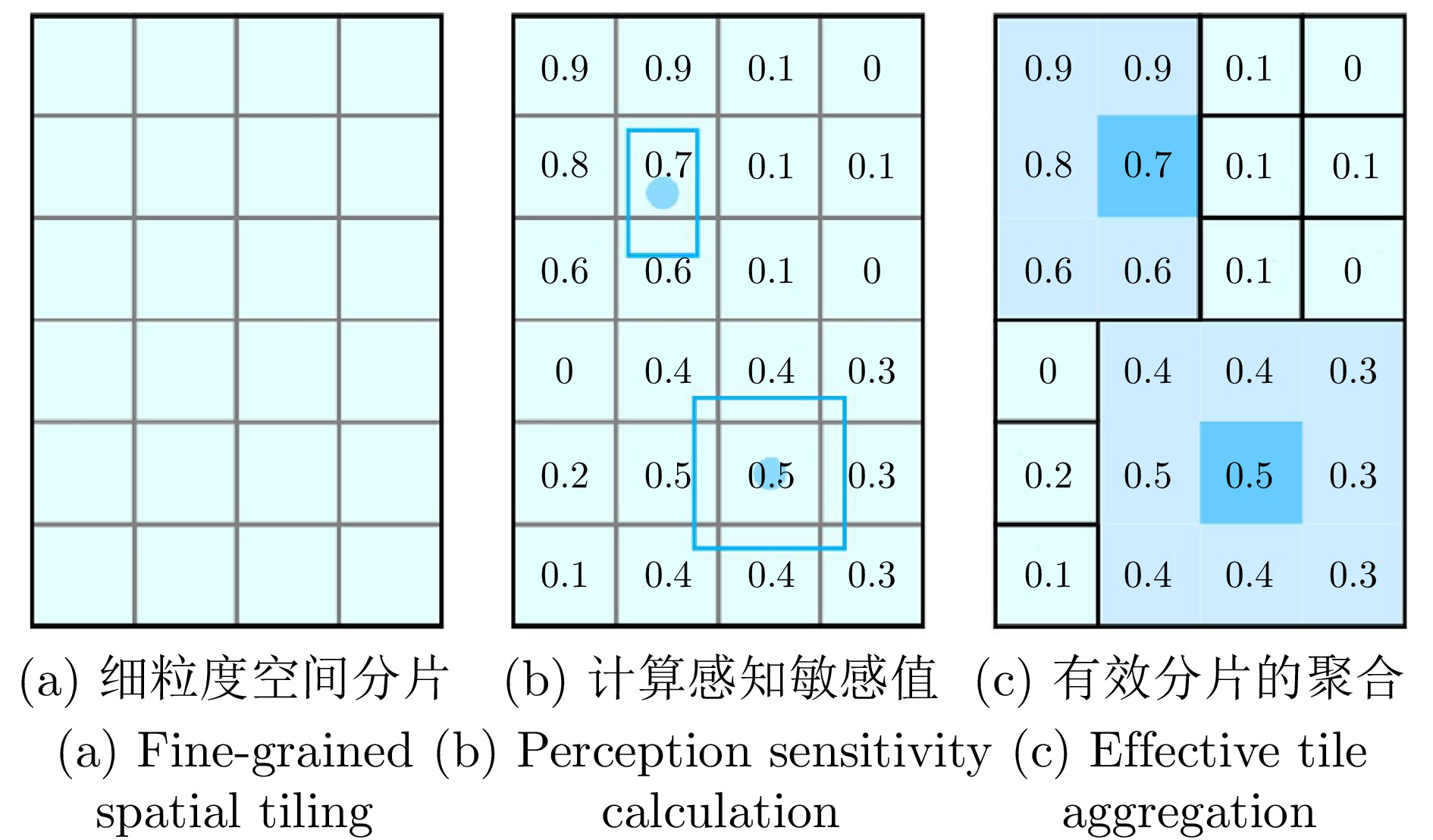
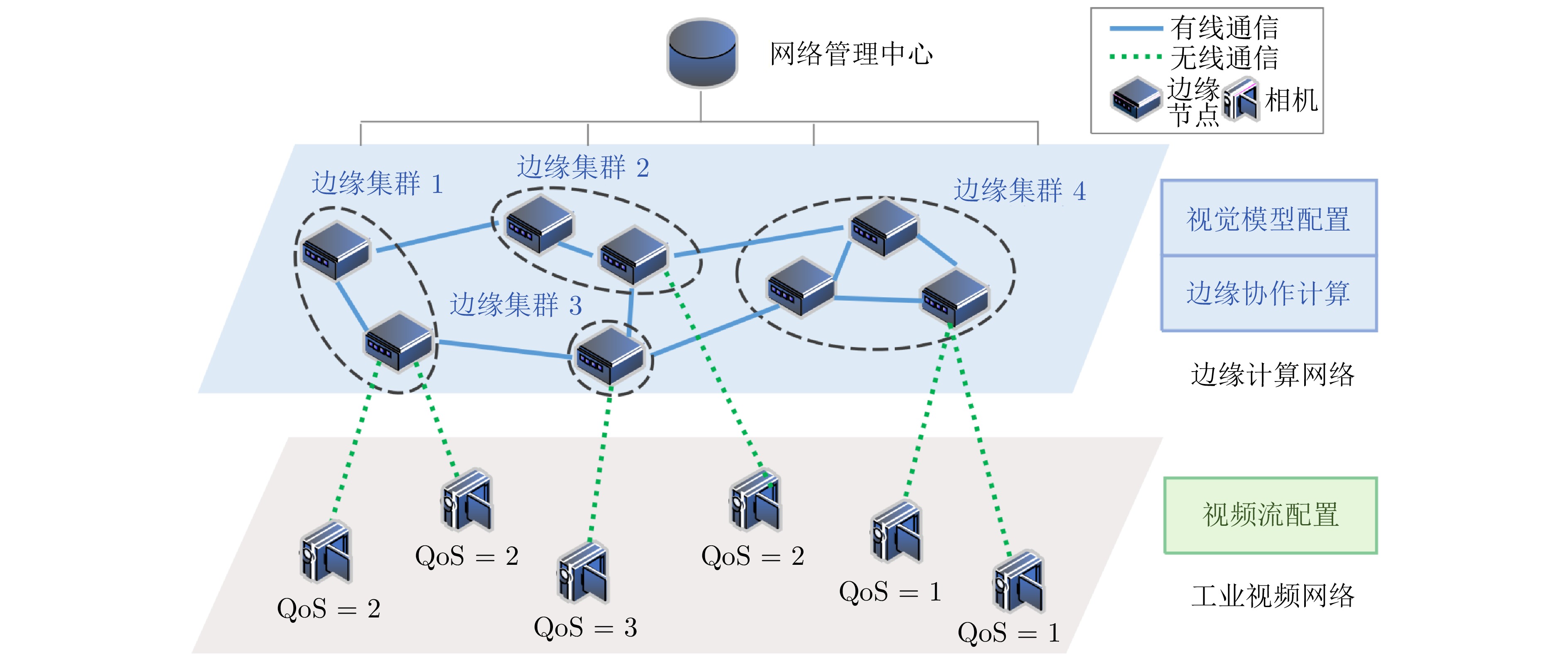
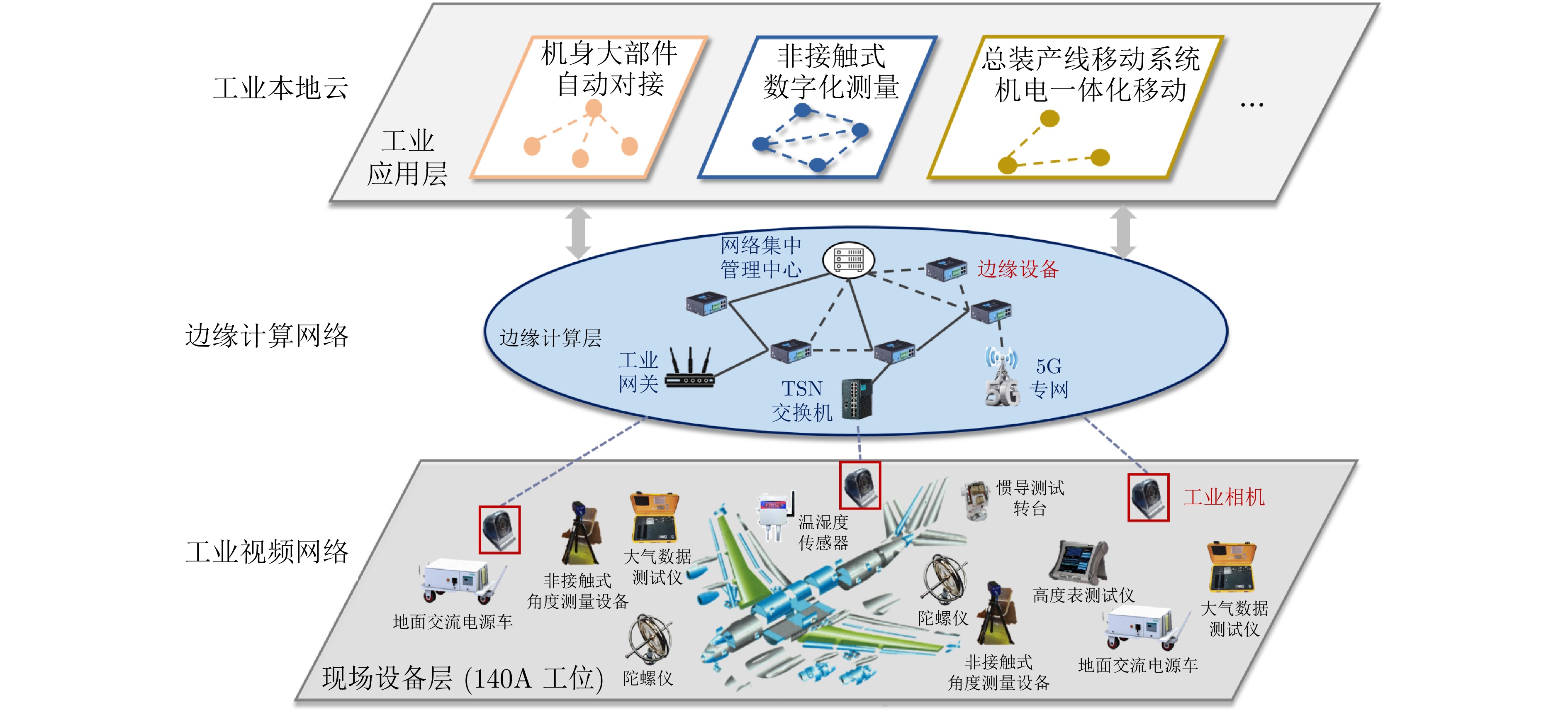
工业视频网络是由工业网络系统现场层的视觉感知终端组成的网络, 是实现工业网络系统泛在感知的重要基石. 通过支持边缘计算层和现场设备层之间的交互和物联, 工业视频网络将独立的视觉传感器单元无线连接、边缘处理, 以实现空间分散下的协作监控和精确感知. 它具有感知维度高, 网络动态性强, 感知与传输、计算、存储紧密耦合等突出特性. 如何在计算、网络、存储资源受限环境下实现终端压缩提纯、边缘协作处理、云端敏捷分析, 是这类系统研究的新挑战. 本文首先简述工业视频网络的定义和主要特征; 其次分析工业视频网络智能感知面临的挑战和关键问题; 然后综述基于边缘计算的工业视频网络智能感知关键技术的研究进展; 最后对工业视频网络智能感知的未来研究方向和潜在应用前景进行总结和展望.
工业视频网络是由工业网络系统现场层的视觉感知终端组成的网络, 是实现工业网络系统泛在感知的重要基石. 通过支持边缘计算层和现场设备层之间的交互和物联, 工业视频网络将独立的视觉传感器单元无线连接、边缘处理, 以实现空间分散下的协作监控和精确感知. 它具有感知维度高, 网络动态性强, 感知与传输、计算、存储紧密耦合等突出特性. 如何在计算、网络、存储资源受限环境下实现终端压缩提纯、边缘协作处理、云端敏捷分析, 是这类系统研究的新挑战. 本文首先简述工业视频网络的定义和主要特征; 其次分析工业视频网络智能感知面临的挑战和关键问题; 然后综述基于边缘计算的工业视频网络智能感知关键技术的研究进展; 最后对工业视频网络智能感知的未来研究方向和潜在应用前景进行总结和展望.
2025, 51(8): 1739-1759.
doi: 10.16383/j.aas.c240660
cstr: 32138.14.j.aas.c240660
摘要:
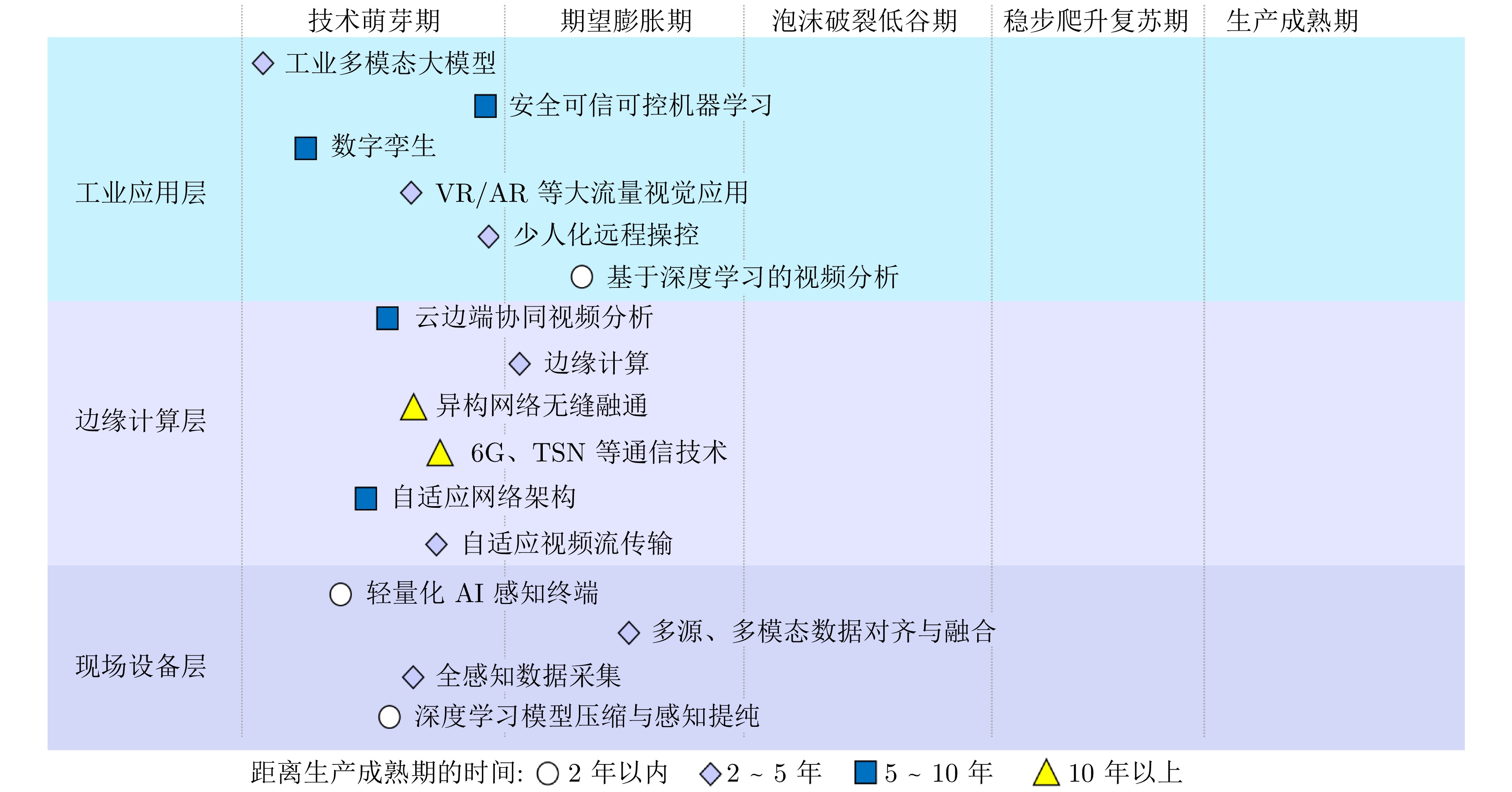
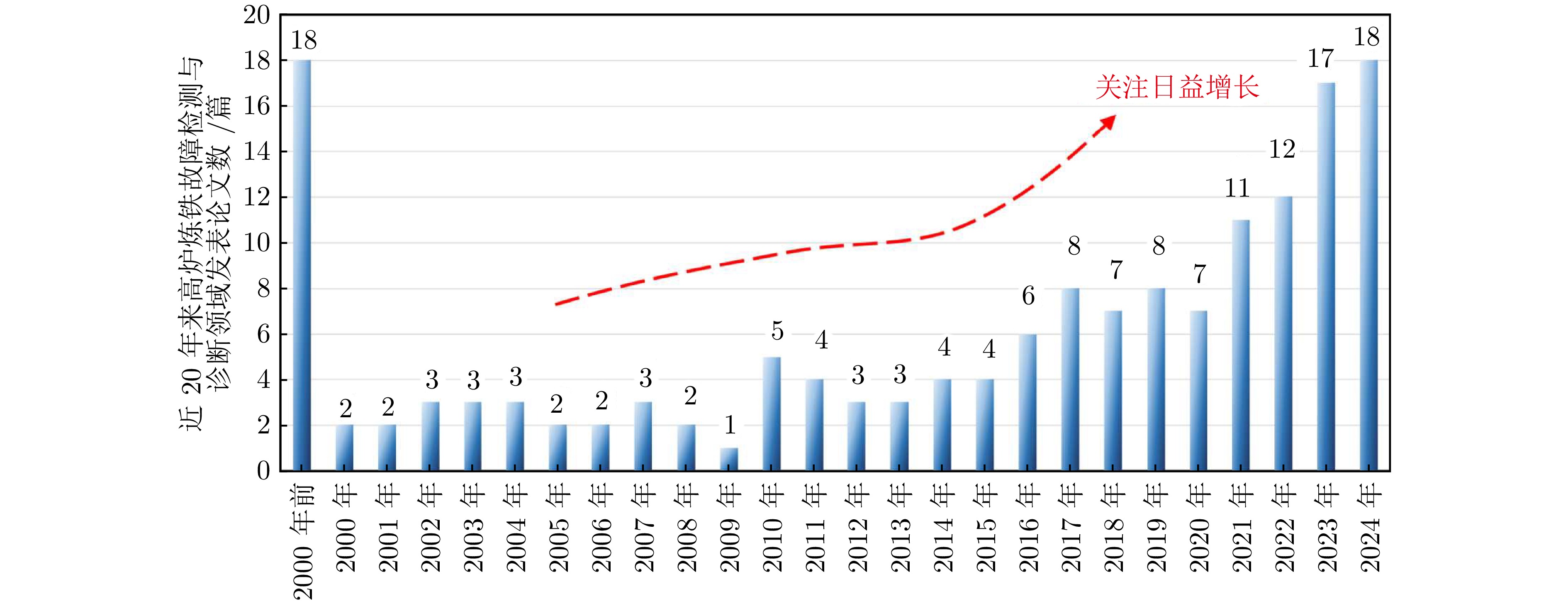
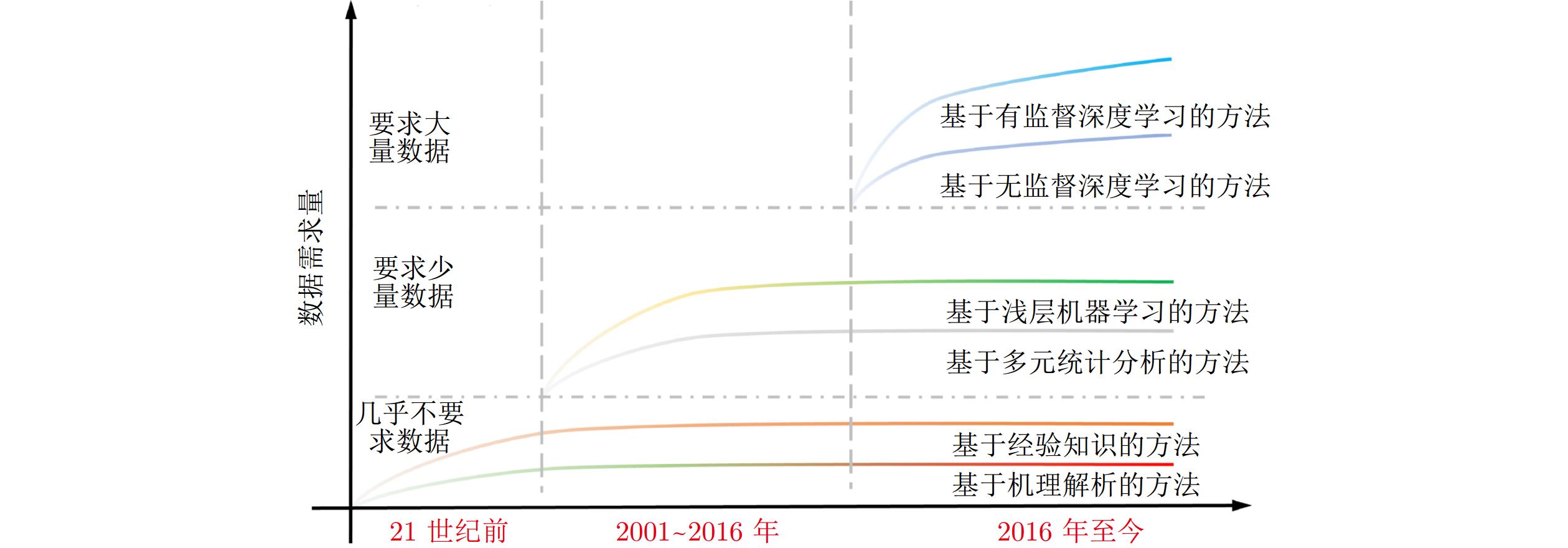
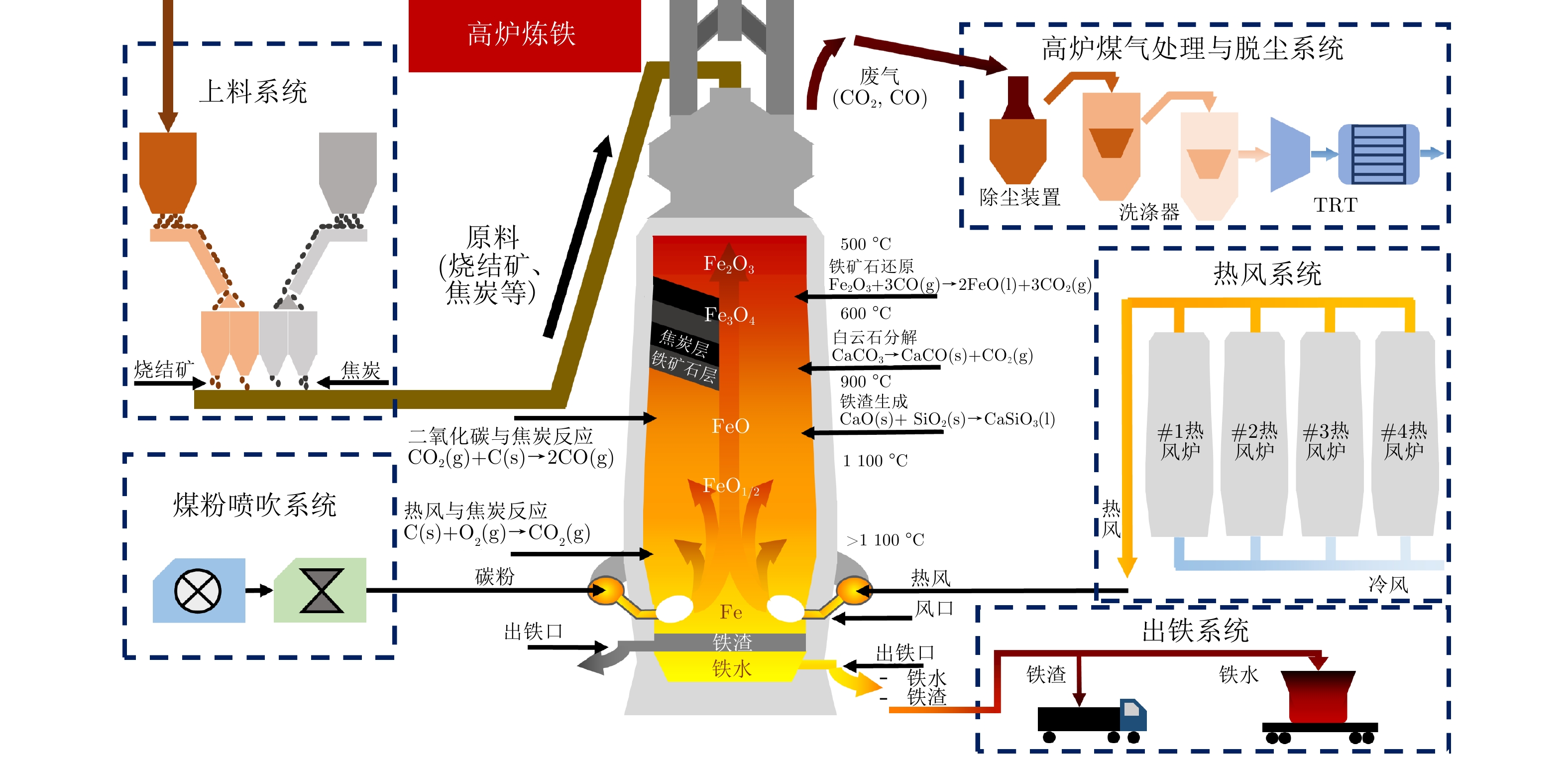
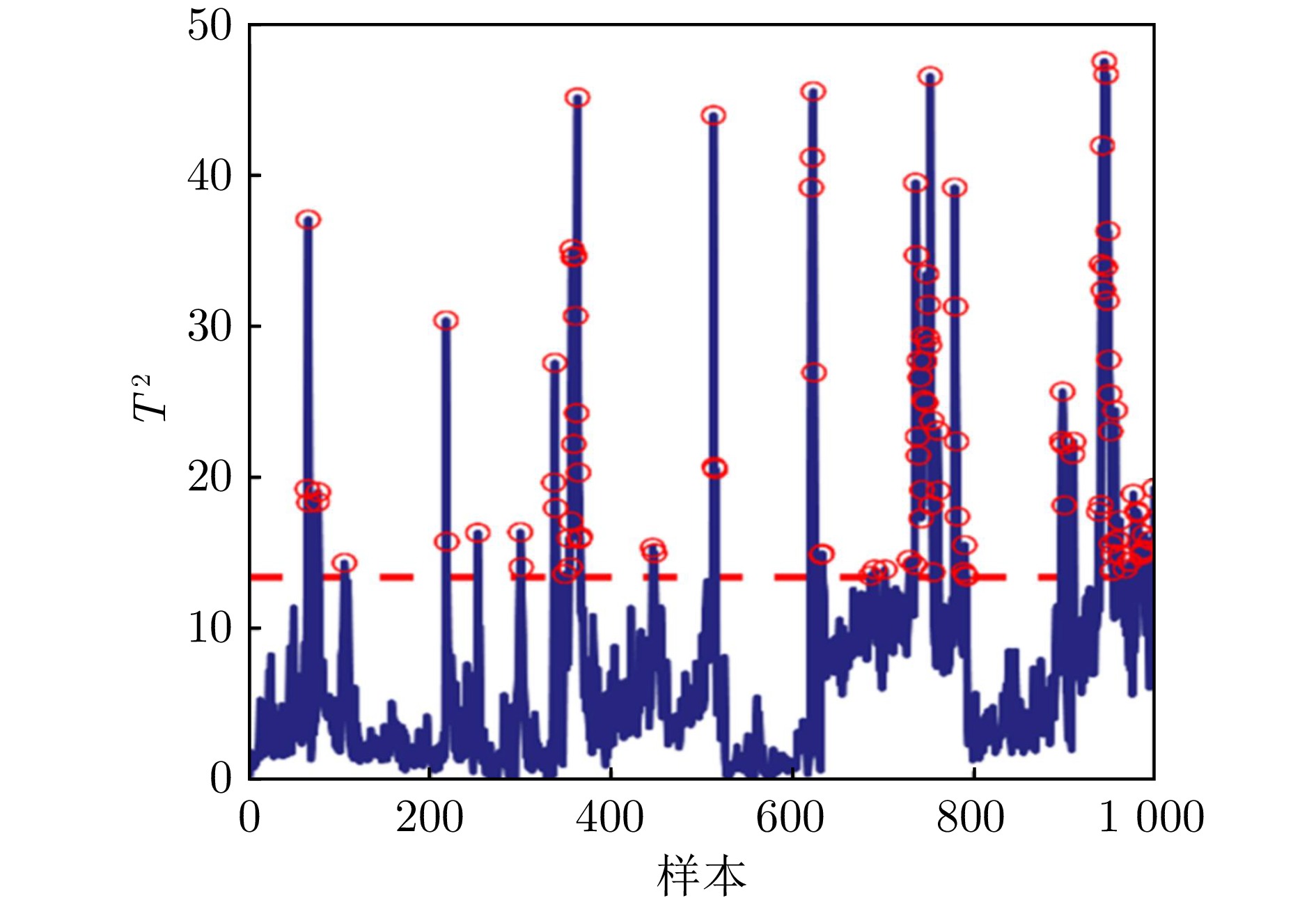
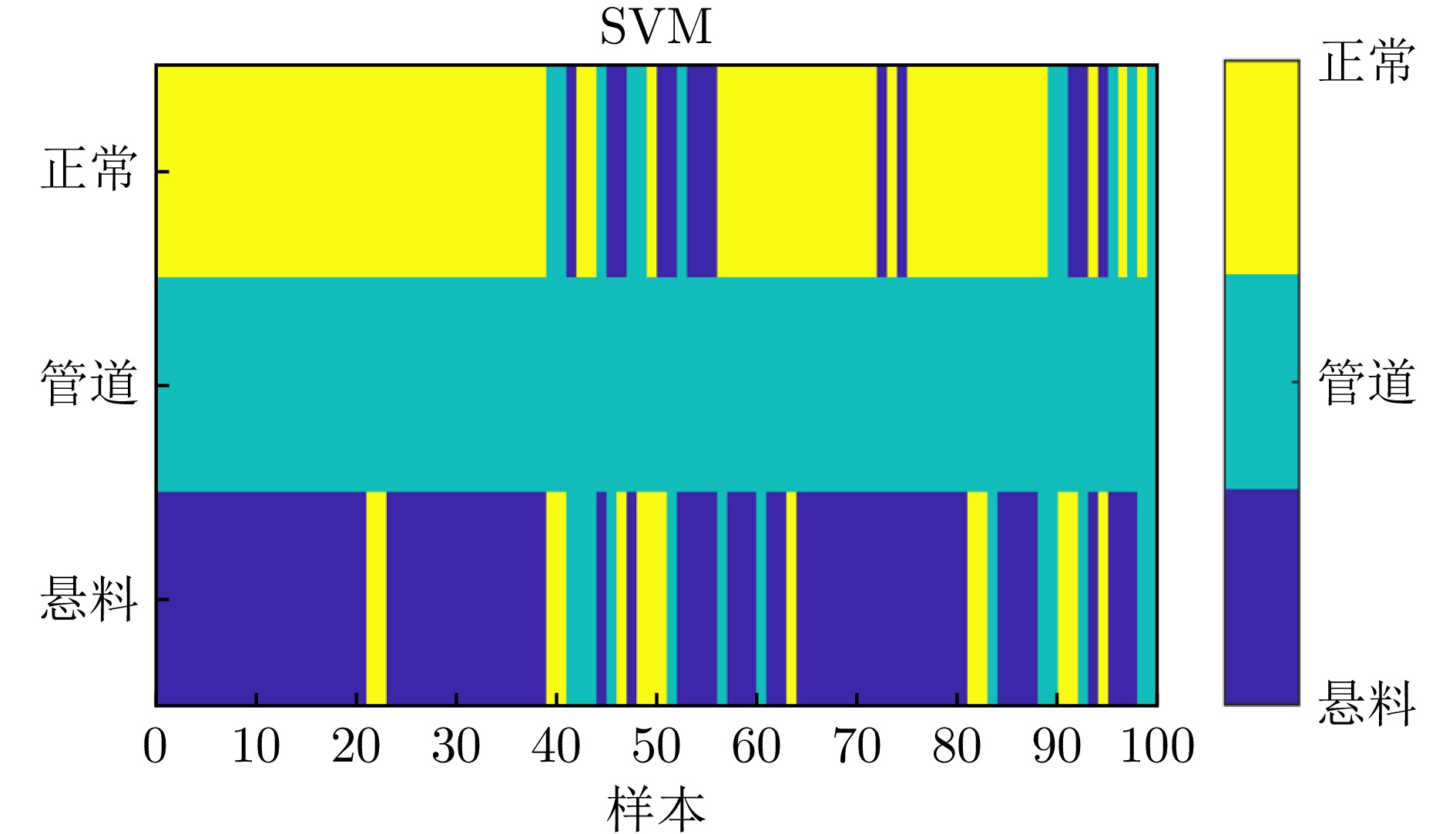
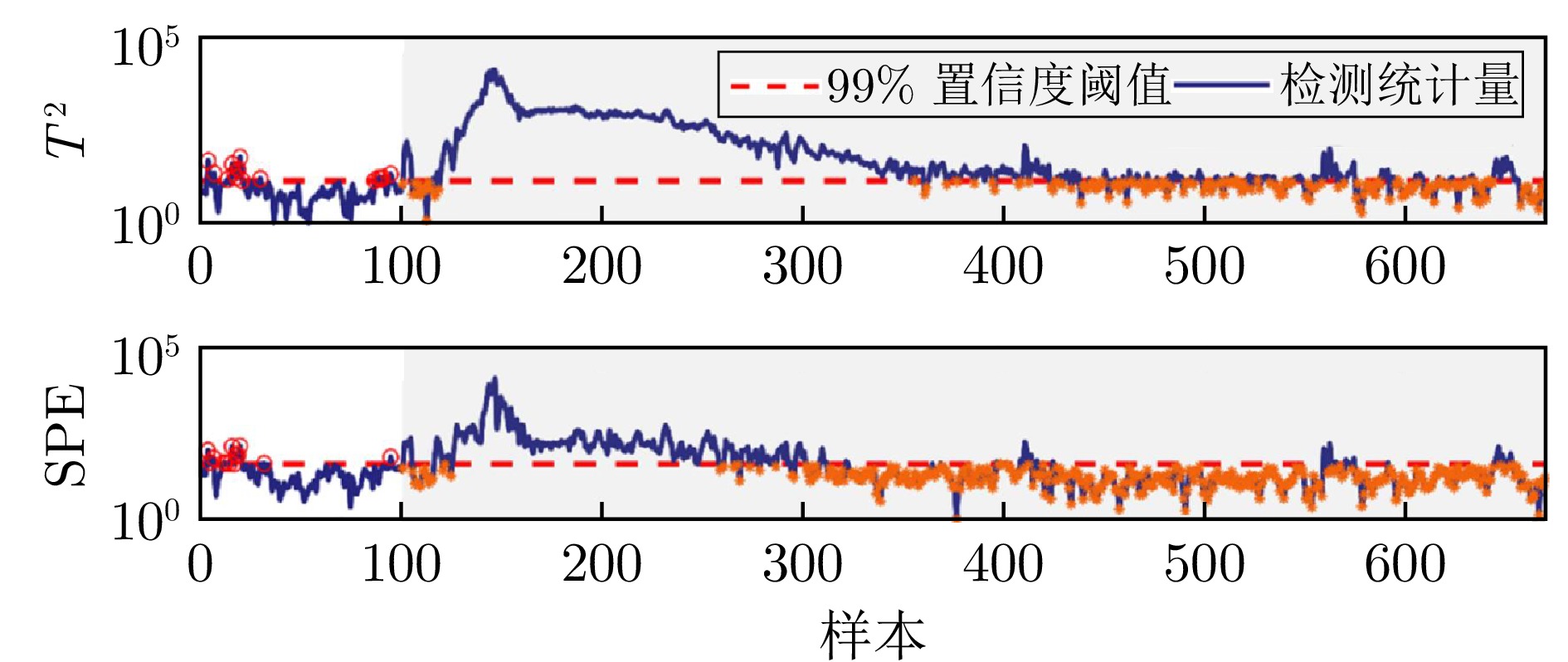
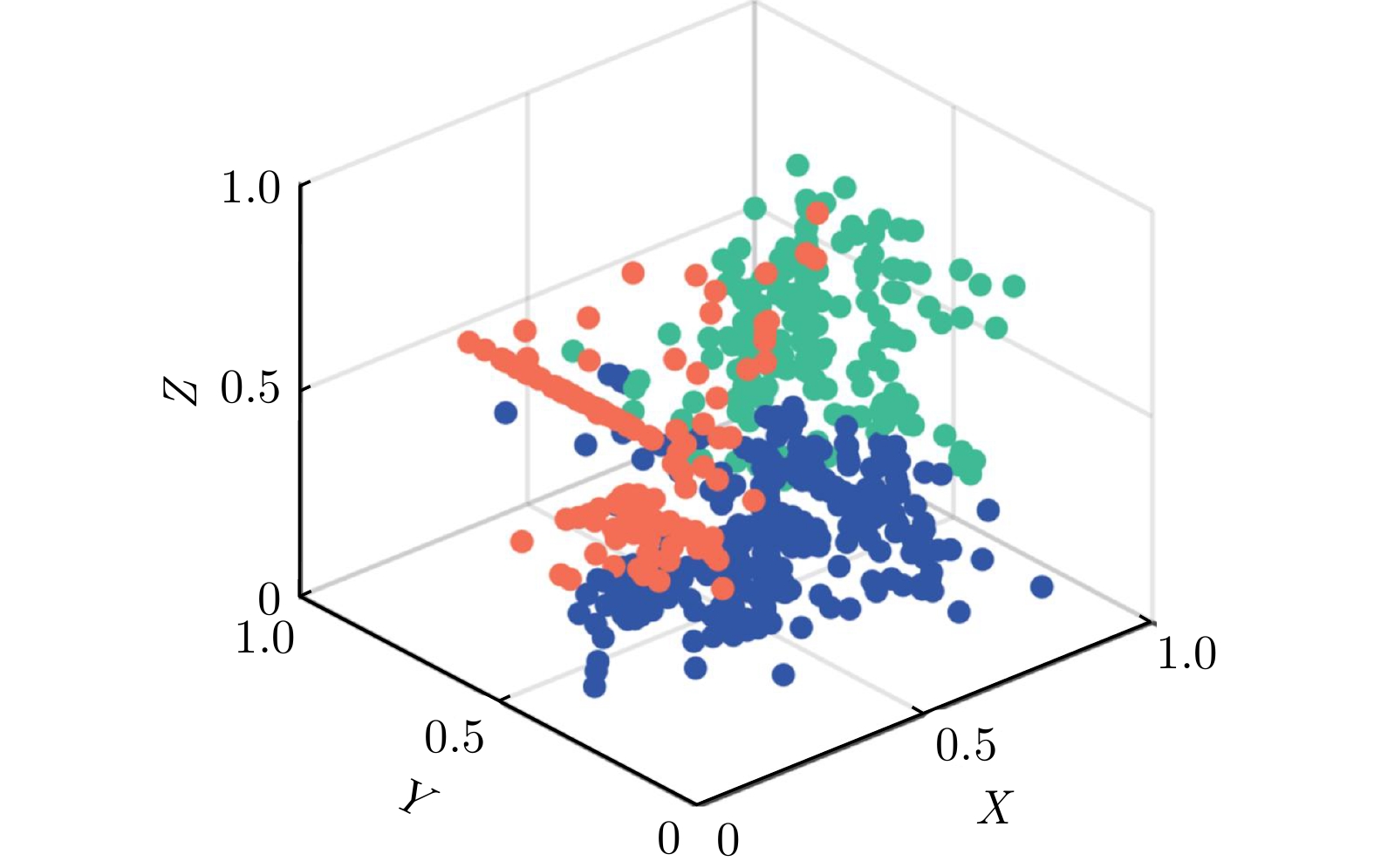
高炉炼铁过程是钢铁冶炼制造中能耗最大、成本最高、排放最多的核心环节, 其能耗、成本约占钢铁流程的70%, 而碳排放占总排放的近80%, 其平稳生产决定着整个钢铁制造流程的生产水平. 为此, 高效的高炉炼铁过程故障检测与诊断, 是保障钢铁制造流程生产的有效手段, 也是近年业界与学界的研究热点. 立足于该领域的未来发展需求, 首先, 总结国内外研究现状, 着重于近20年来数据驱动方法在高炉炼铁过程的故障检测与诊断; 其次, 按照数据量需求, 阐述并分析不同技术方法的基本思想、优势与不足, 并分类概述最新技术进展; 最后, 提出未来发展趋势, 以期对高炉炼铁过程故障检测与诊断的持续发展提供参考.
高炉炼铁过程是钢铁冶炼制造中能耗最大、成本最高、排放最多的核心环节, 其能耗、成本约占钢铁流程的70%, 而碳排放占总排放的近80%, 其平稳生产决定着整个钢铁制造流程的生产水平. 为此, 高效的高炉炼铁过程故障检测与诊断, 是保障钢铁制造流程生产的有效手段, 也是近年业界与学界的研究热点. 立足于该领域的未来发展需求, 首先, 总结国内外研究现状, 着重于近20年来数据驱动方法在高炉炼铁过程的故障检测与诊断; 其次, 按照数据量需求, 阐述并分析不同技术方法的基本思想、优势与不足, 并分类概述最新技术进展; 最后, 提出未来发展趋势, 以期对高炉炼铁过程故障检测与诊断的持续发展提供参考.
2025, 51(8): 1760-1776.
doi: 10.16383/j.aas.c240572
cstr: 32138.14.j.aas.c240572
摘要:
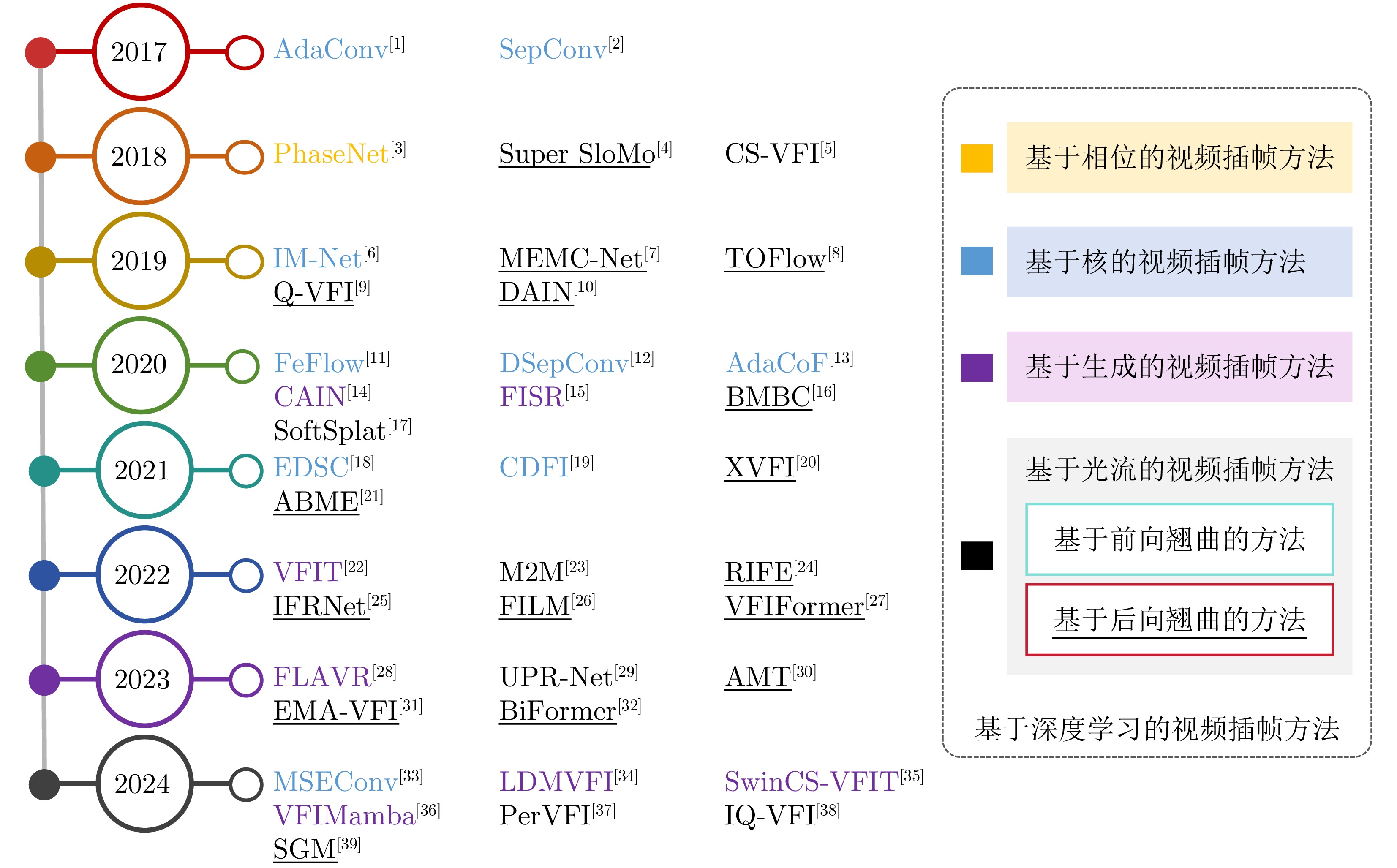
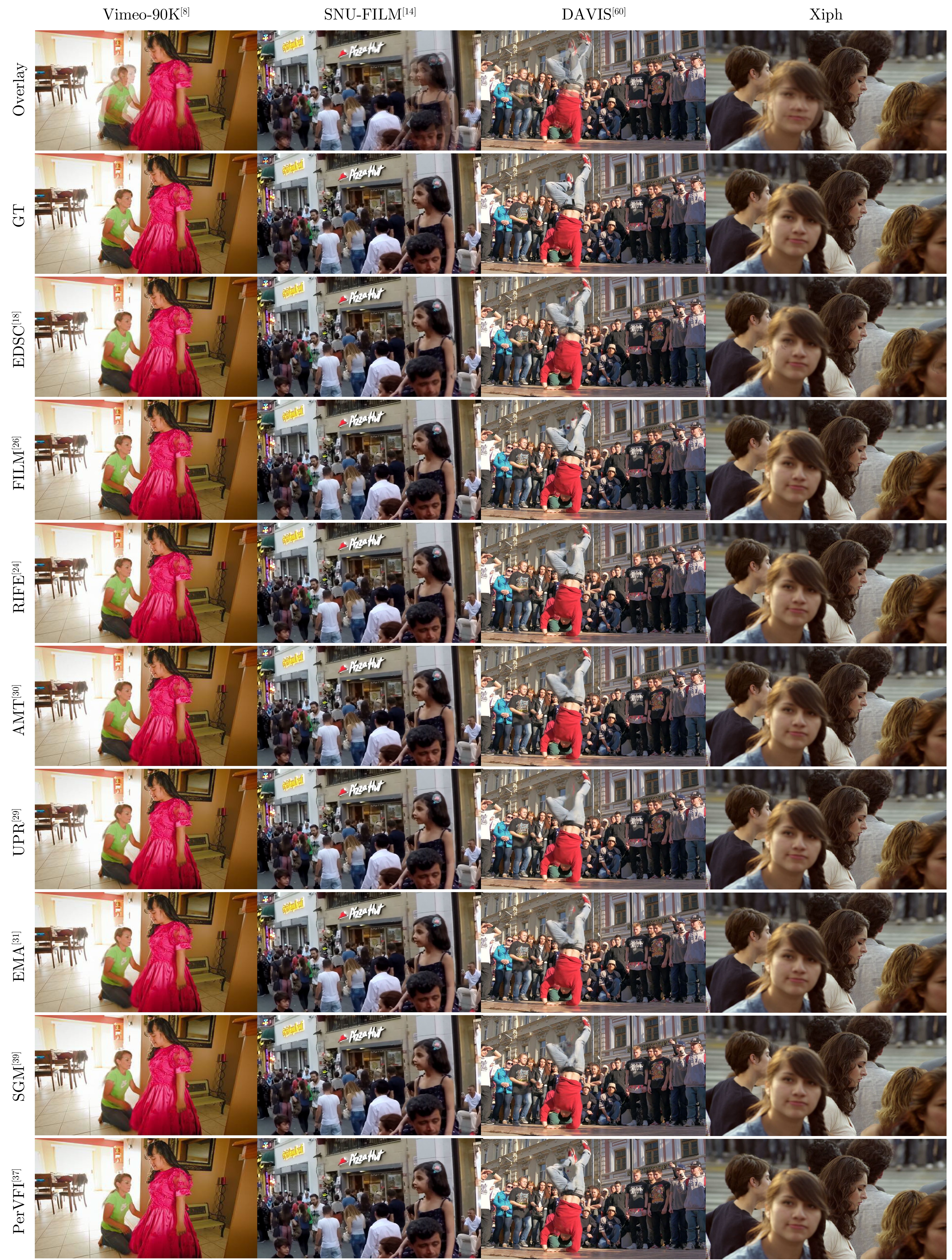
视频插帧技术是视频处理领域的研究热点问题. 它通过生成中间帧来提高视频的帧率, 从而使视频播放更加流畅, 在老视频修复、电影后期制作和慢动作生成等领域发挥着重要的作用. 随着深度学习技术的迅猛发展, 基于深度学习的视频插帧技术已经成为主流. 本文全面综述现有的基于深度学习的视频插帧工作, 并且深入分析这些方法的优点与不足. 随后, 详细介绍视频插帧领域的常用数据集, 这些数据集为视频插帧相关研究和算法训练提供重要支撑. 最后, 对当前视频插帧研究中仍然存在的挑战进行深入思考, 并且从多个角度展望未来的研究方向, 旨在为该领域后续的发展提供参考.
视频插帧技术是视频处理领域的研究热点问题. 它通过生成中间帧来提高视频的帧率, 从而使视频播放更加流畅, 在老视频修复、电影后期制作和慢动作生成等领域发挥着重要的作用. 随着深度学习技术的迅猛发展, 基于深度学习的视频插帧技术已经成为主流. 本文全面综述现有的基于深度学习的视频插帧工作, 并且深入分析这些方法的优点与不足. 随后, 详细介绍视频插帧领域的常用数据集, 这些数据集为视频插帧相关研究和算法训练提供重要支撑. 最后, 对当前视频插帧研究中仍然存在的挑战进行深入思考, 并且从多个角度展望未来的研究方向, 旨在为该领域后续的发展提供参考.
2025, 51(8): 1777-1787.
doi: 10.16383/j.aas.c250047
cstr: 32138.14.j.aas.c250047
摘要:
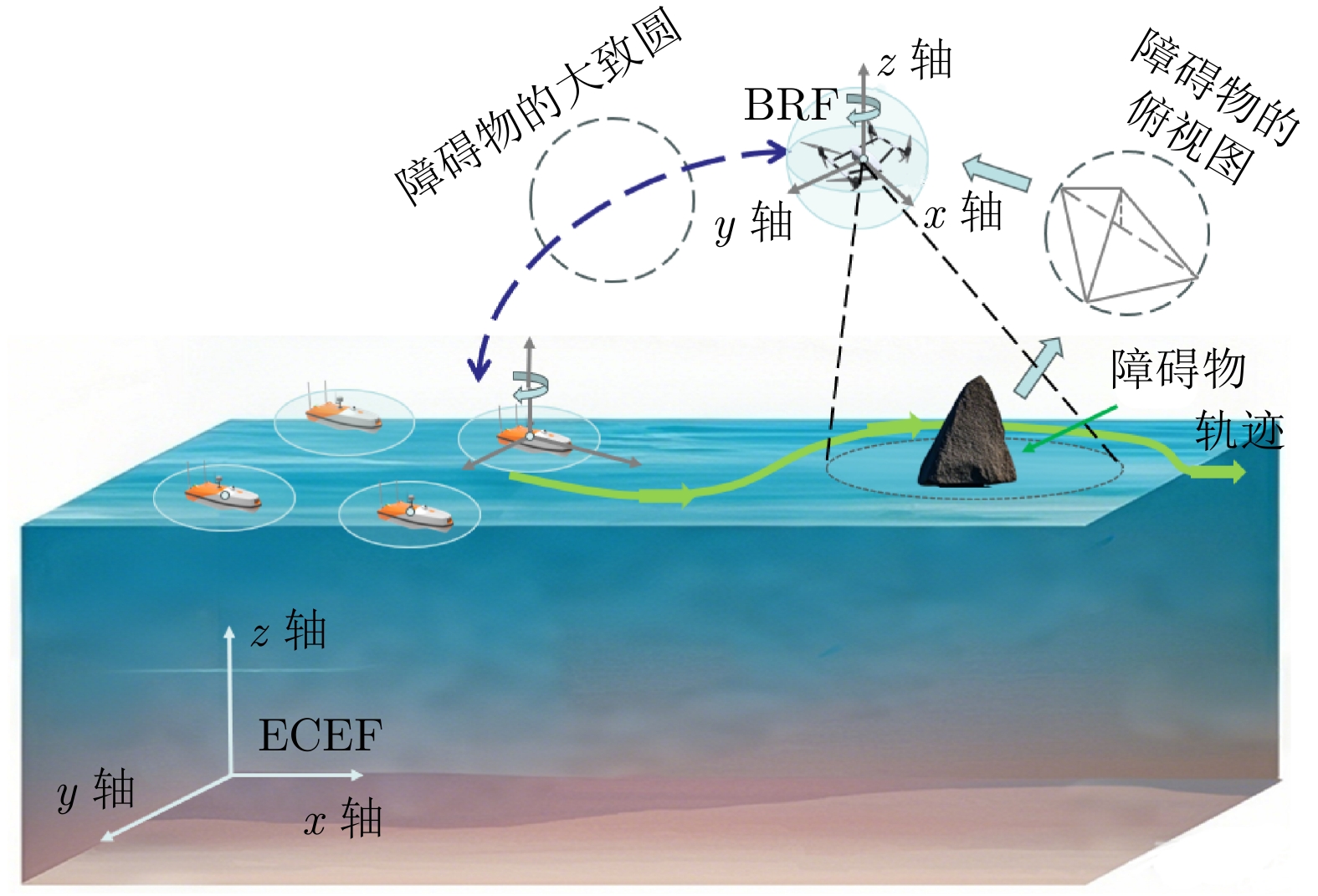
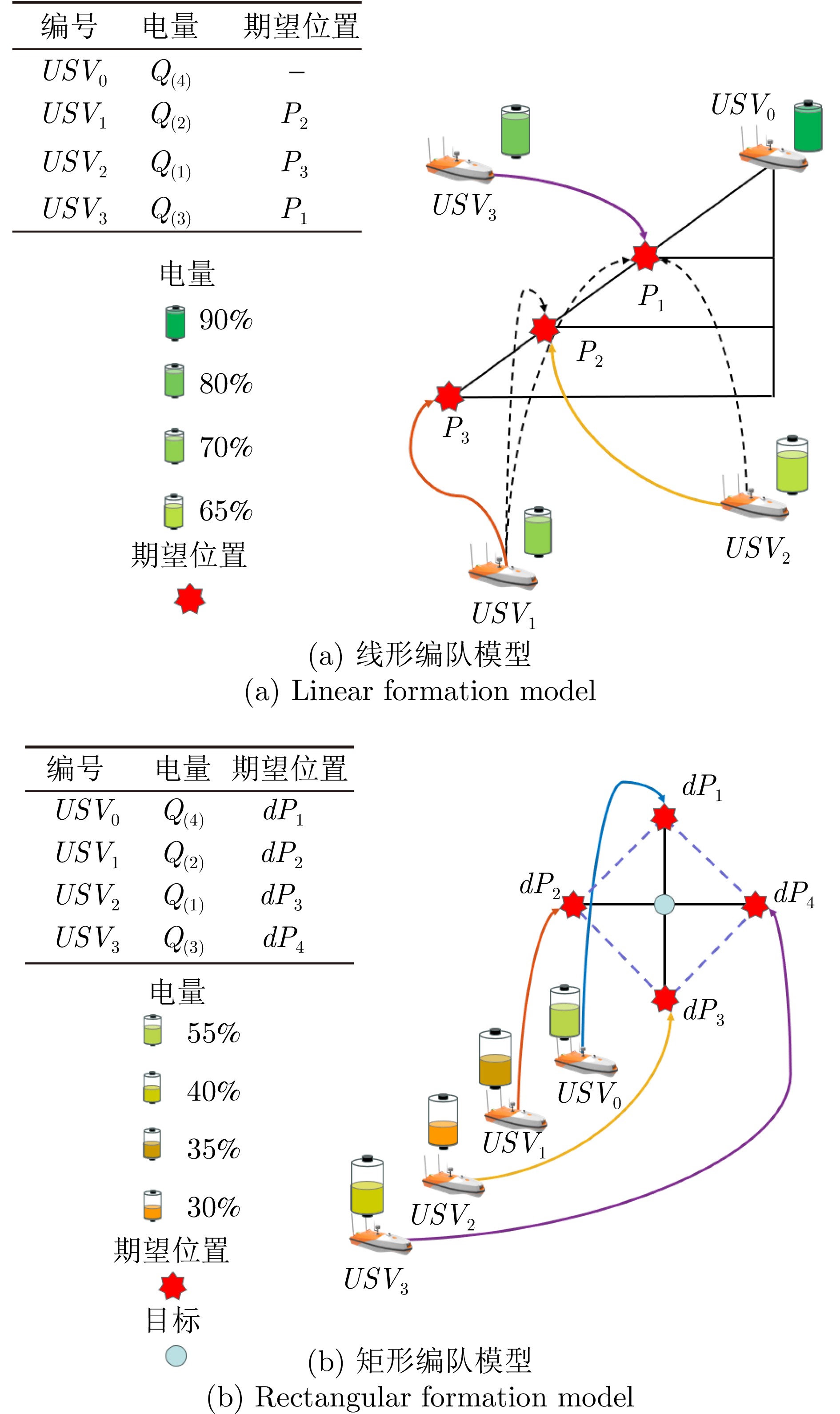
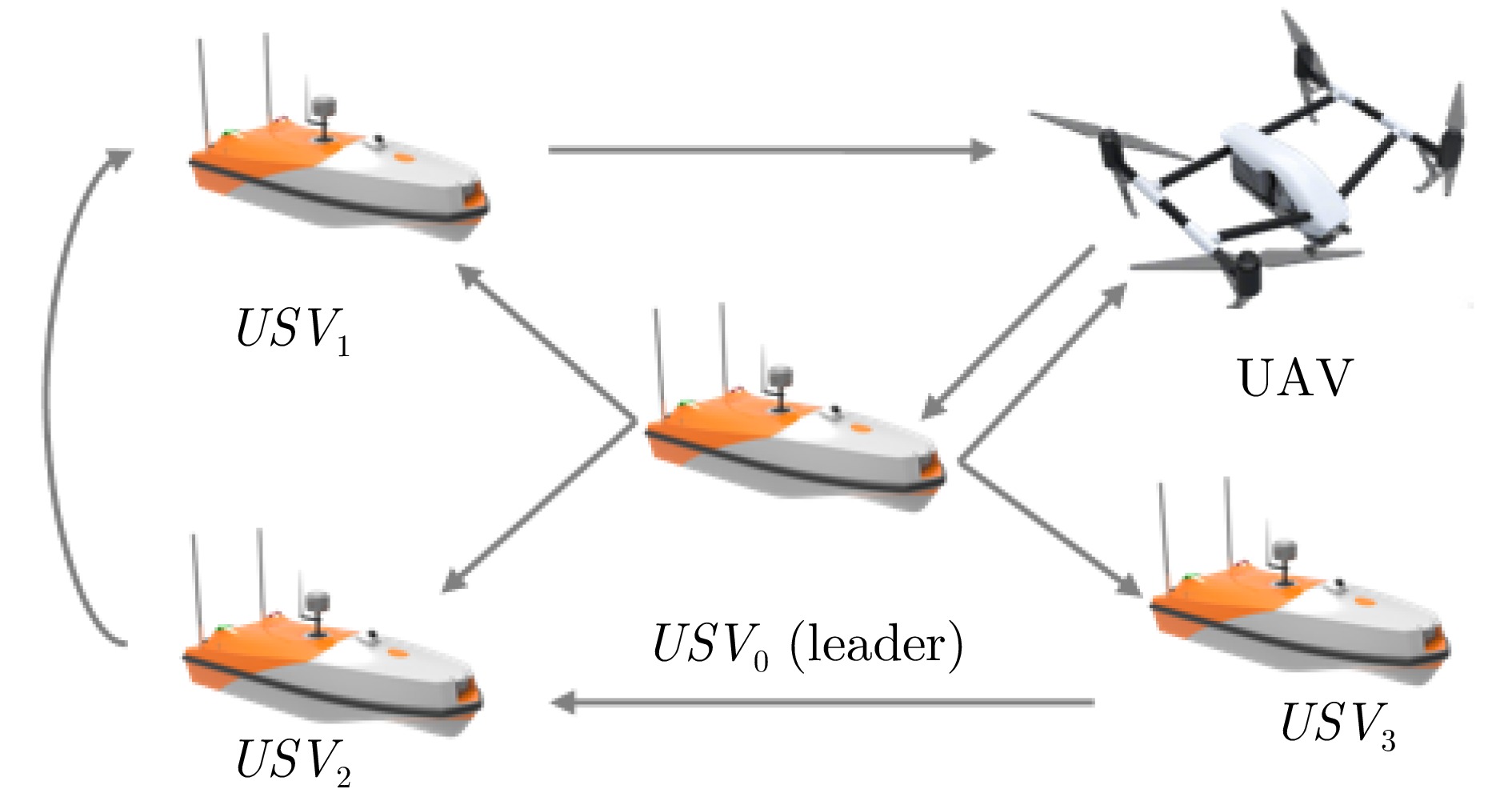
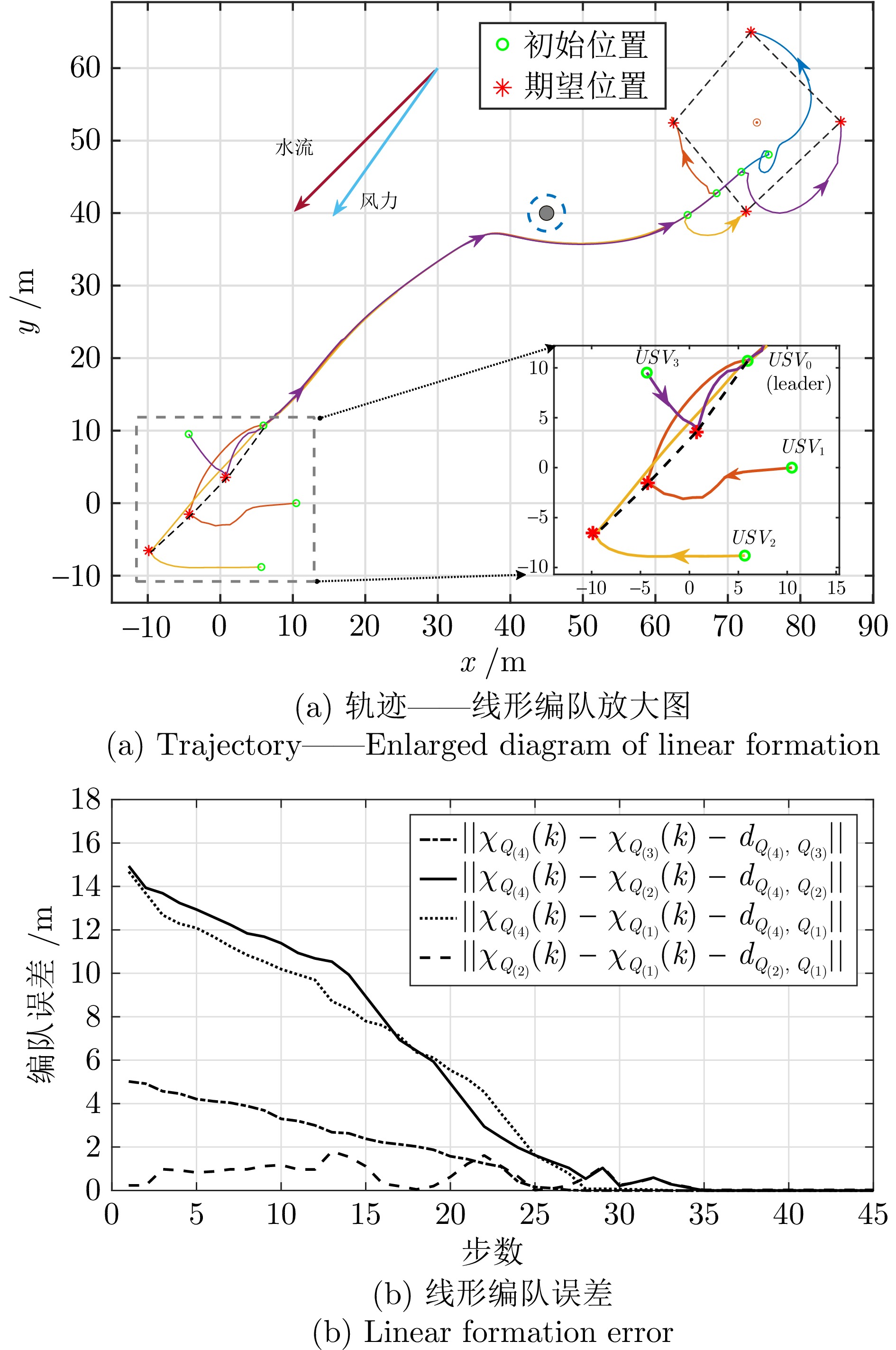
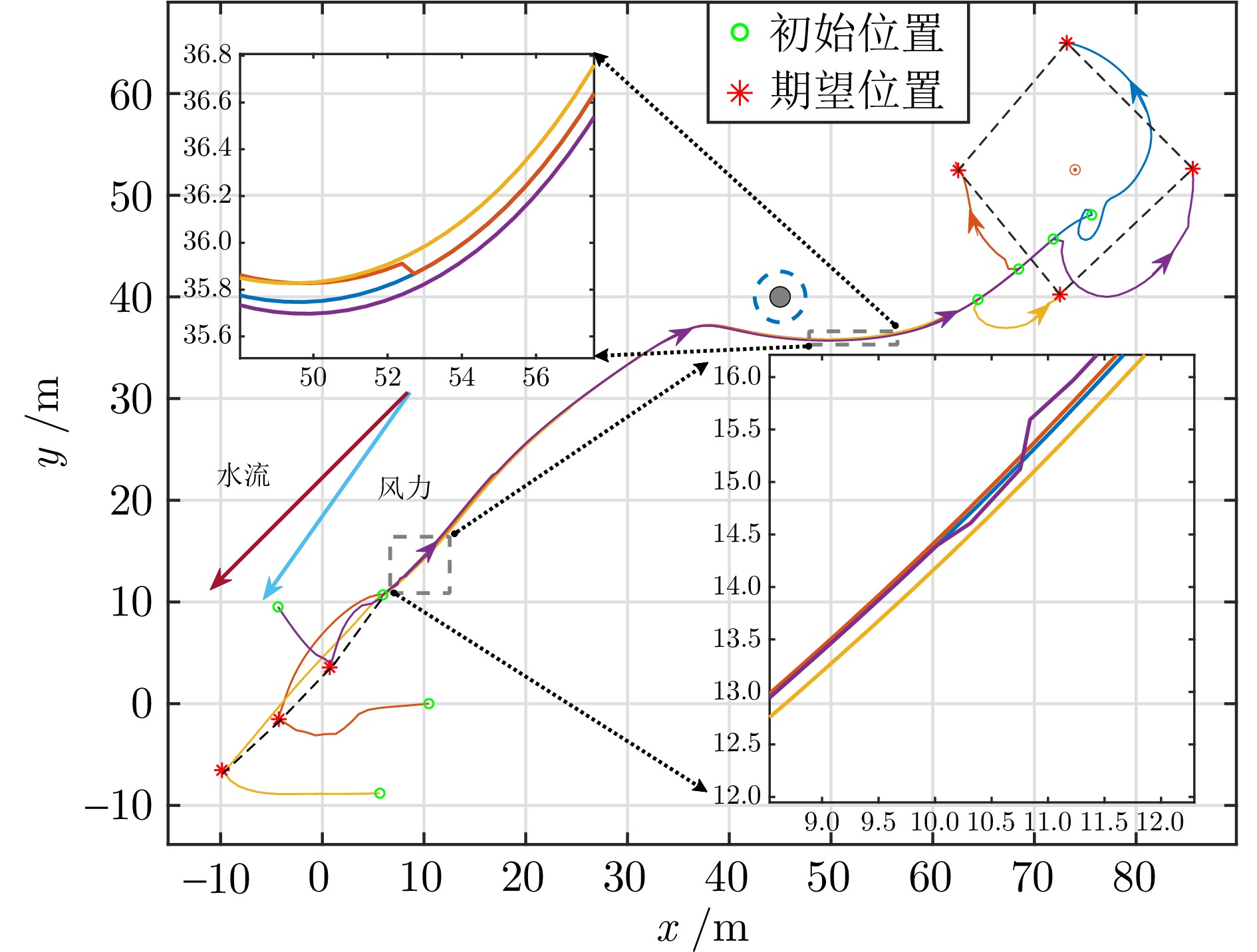
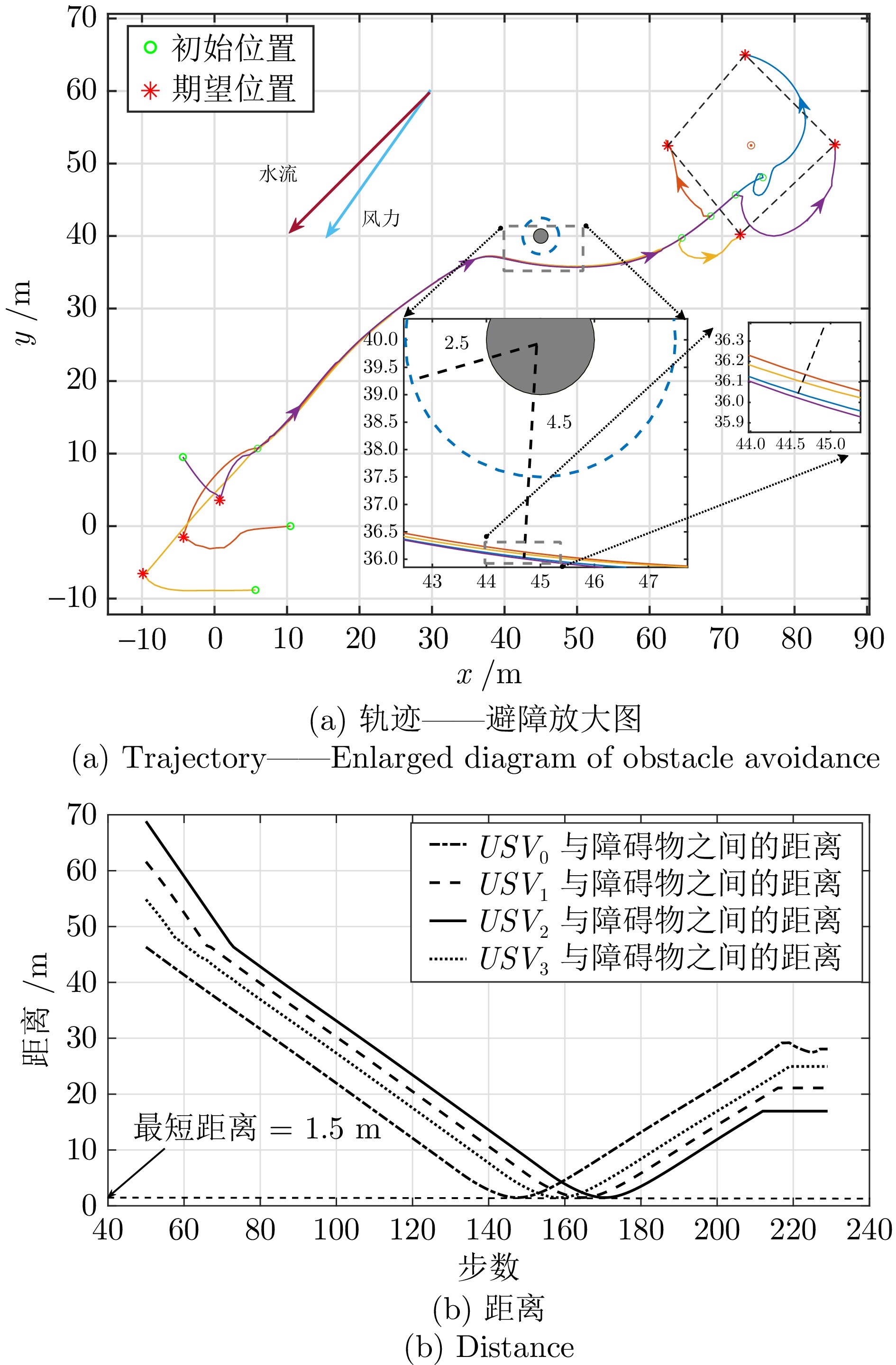
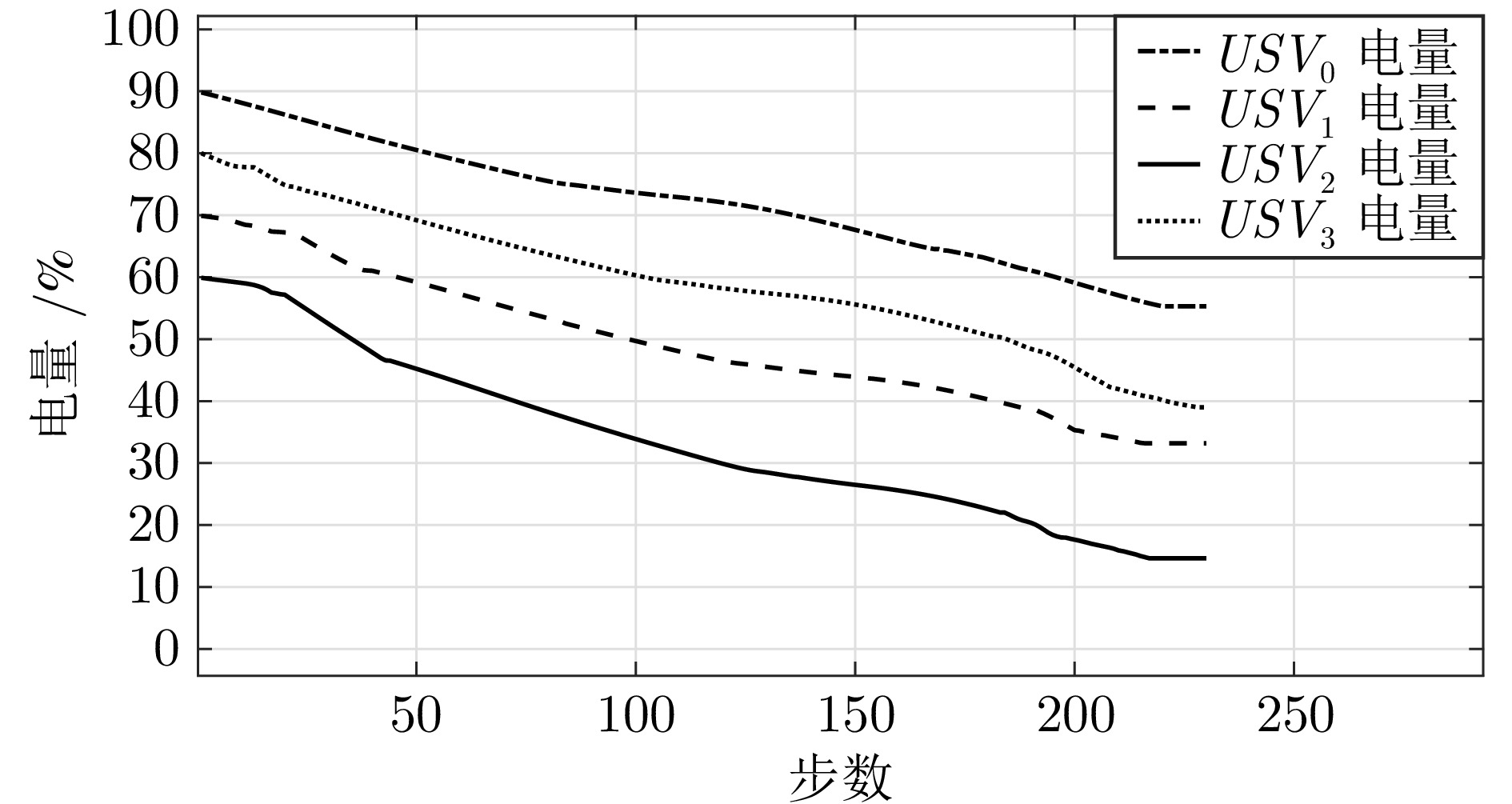
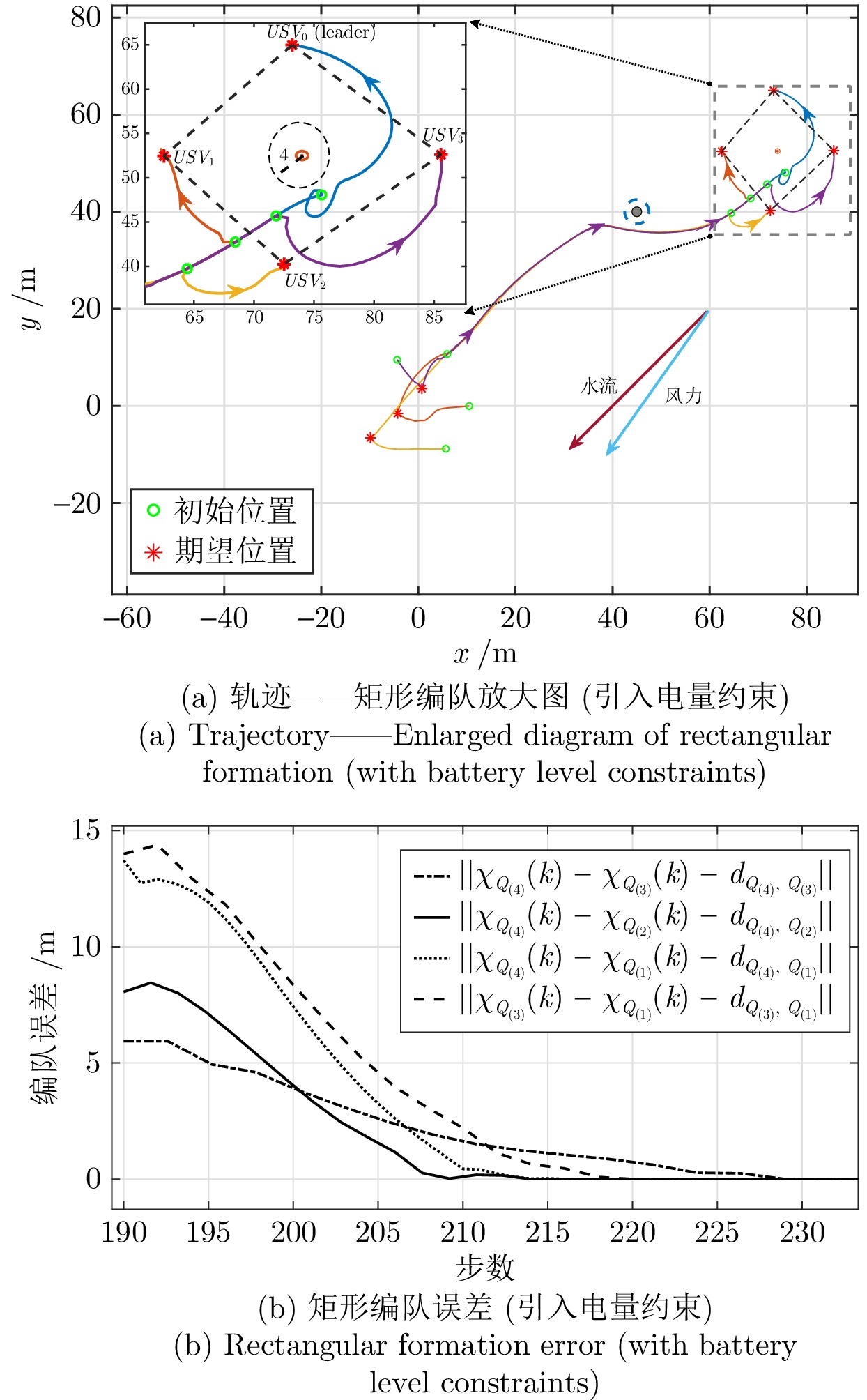
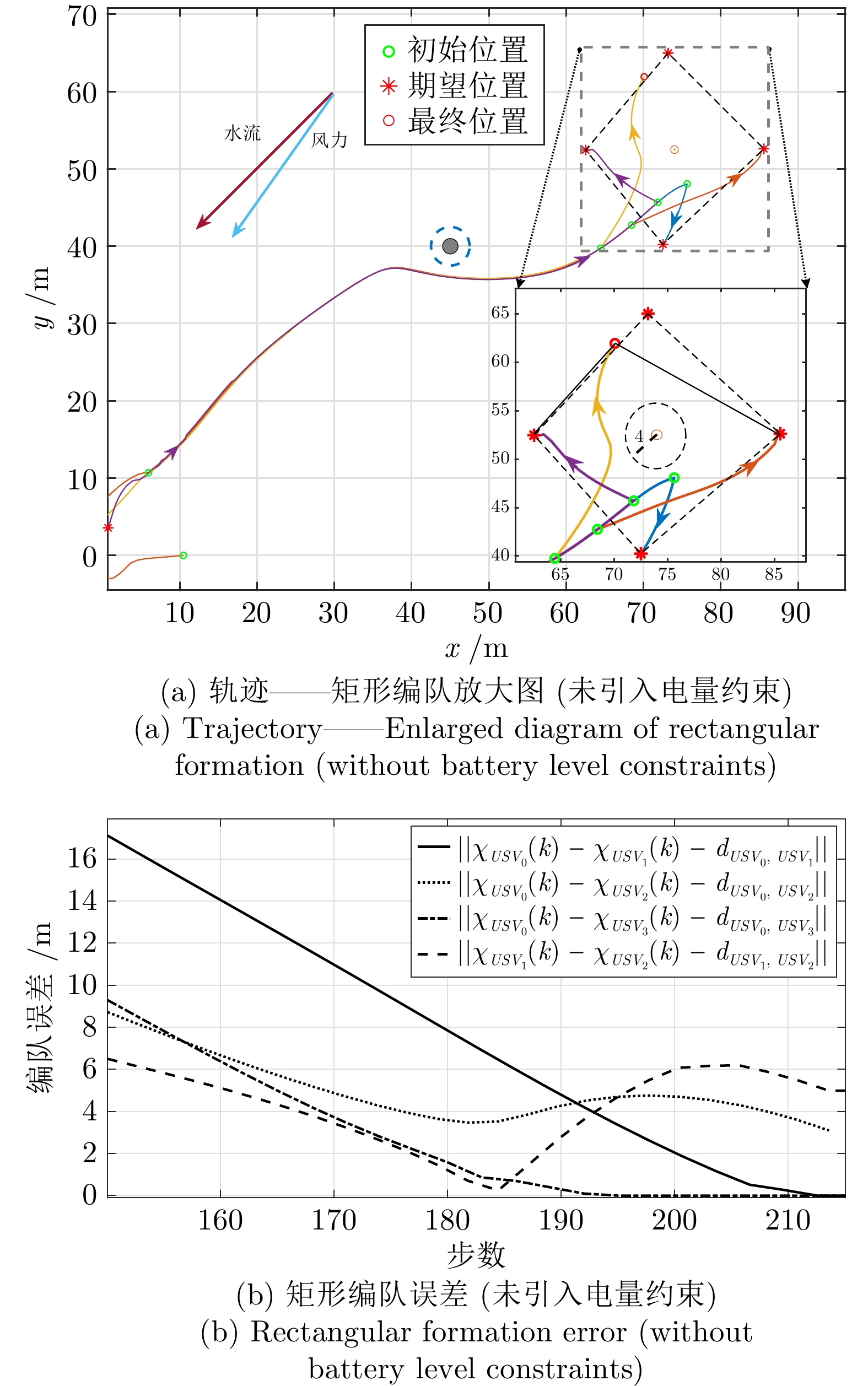
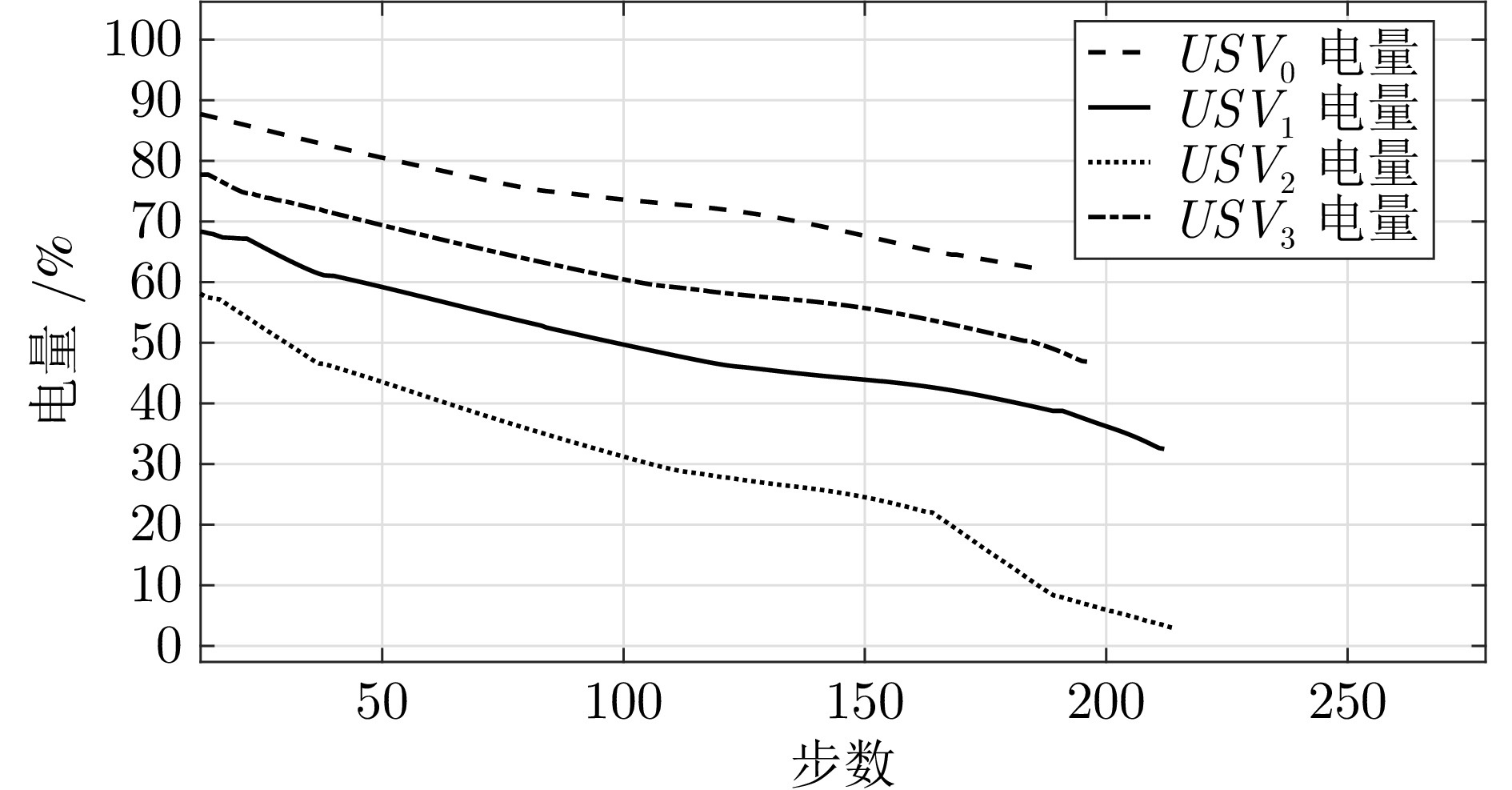
研究无人水面舰艇−无人机(USVs-UAV)系统中基于电量状态的编队控制、避障与轨迹跟踪问题, 提出一种分布式模型预测控制方法以实现多无人载具协同. 第一, 基于USV电量设计编队模型, 实时调整编队构型. 第二, 设计空海协同避障机制, 利用UAV空中高度优势构建障碍物监测网络, 实时更新水面障碍物信息至USV群. 第三, 优化控制框架将编队控制、避障与轨迹跟踪问题统一转化为带约束的优化问题, 通过求解最优控制输入实现多无人载具协同.
研究无人水面舰艇−无人机(USVs-UAV)系统中基于电量状态的编队控制、避障与轨迹跟踪问题, 提出一种分布式模型预测控制方法以实现多无人载具协同. 第一, 基于USV电量设计编队模型, 实时调整编队构型. 第二, 设计空海协同避障机制, 利用UAV空中高度优势构建障碍物监测网络, 实时更新水面障碍物信息至USV群. 第三, 优化控制框架将编队控制、避障与轨迹跟踪问题统一转化为带约束的优化问题, 通过求解最优控制输入实现多无人载具协同.
2025, 51(8): 1788-1799.
doi: 10.16383/j.aas.c250034
cstr: 32138.14.j.aas.c250034
摘要:
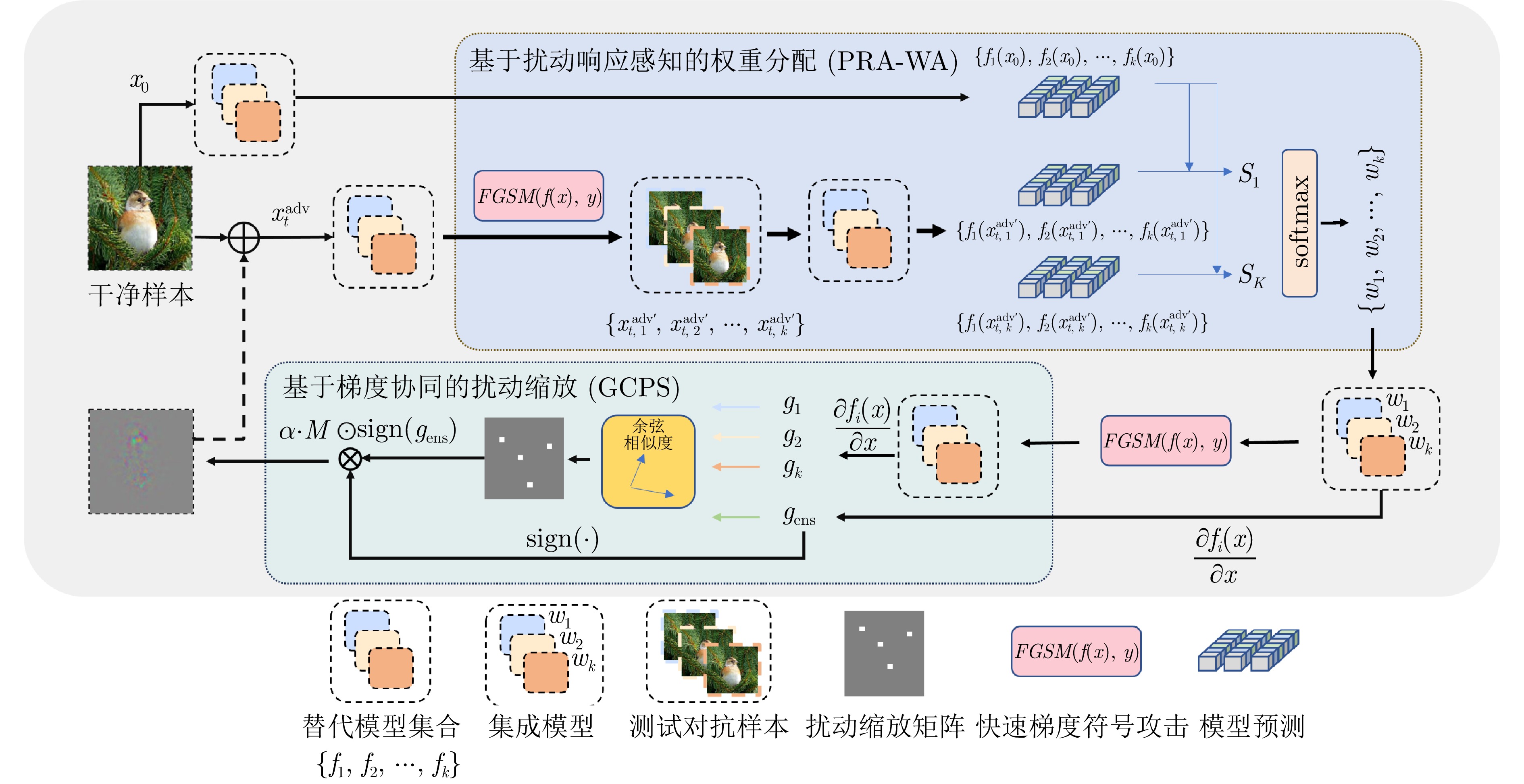
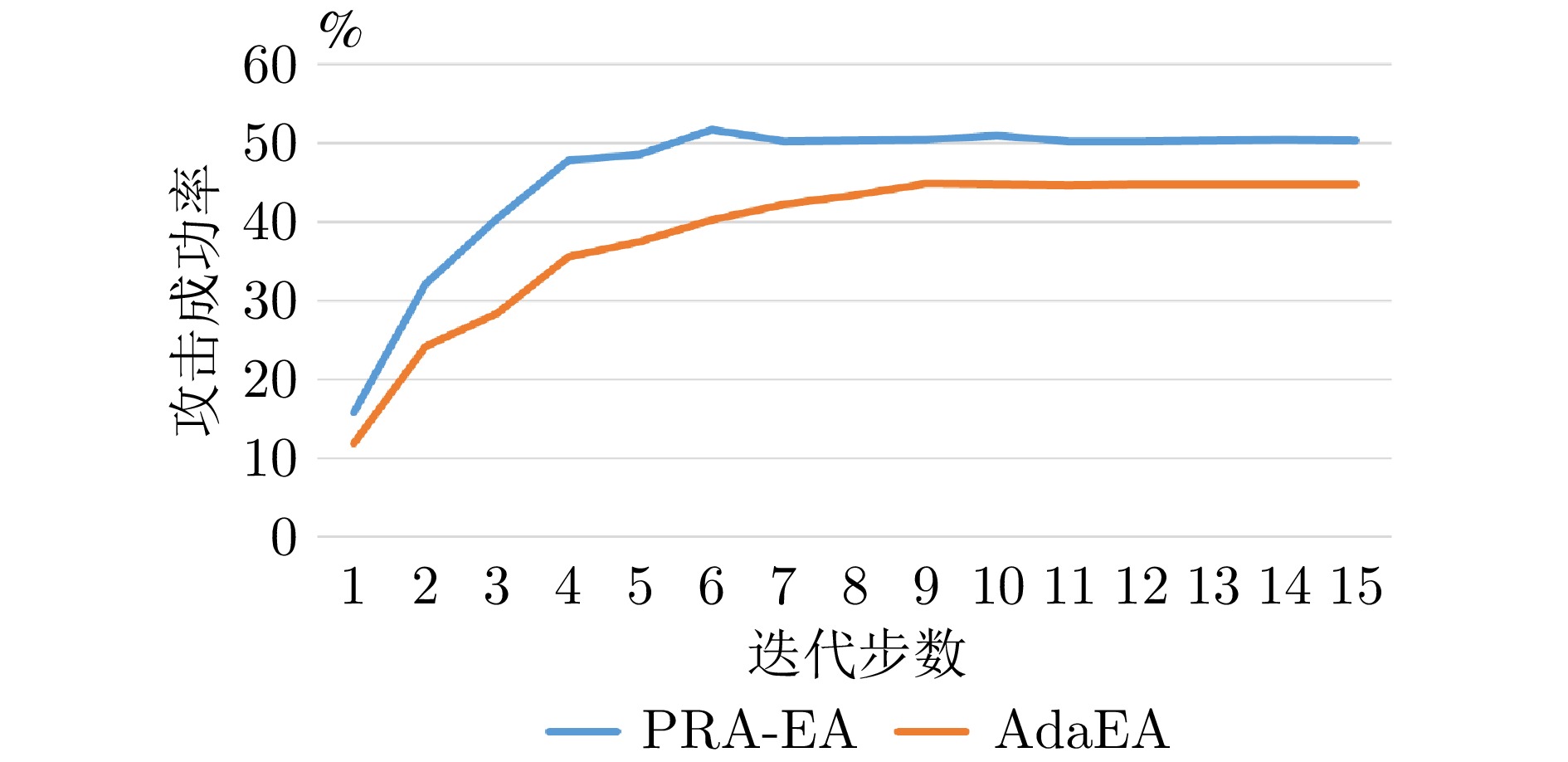
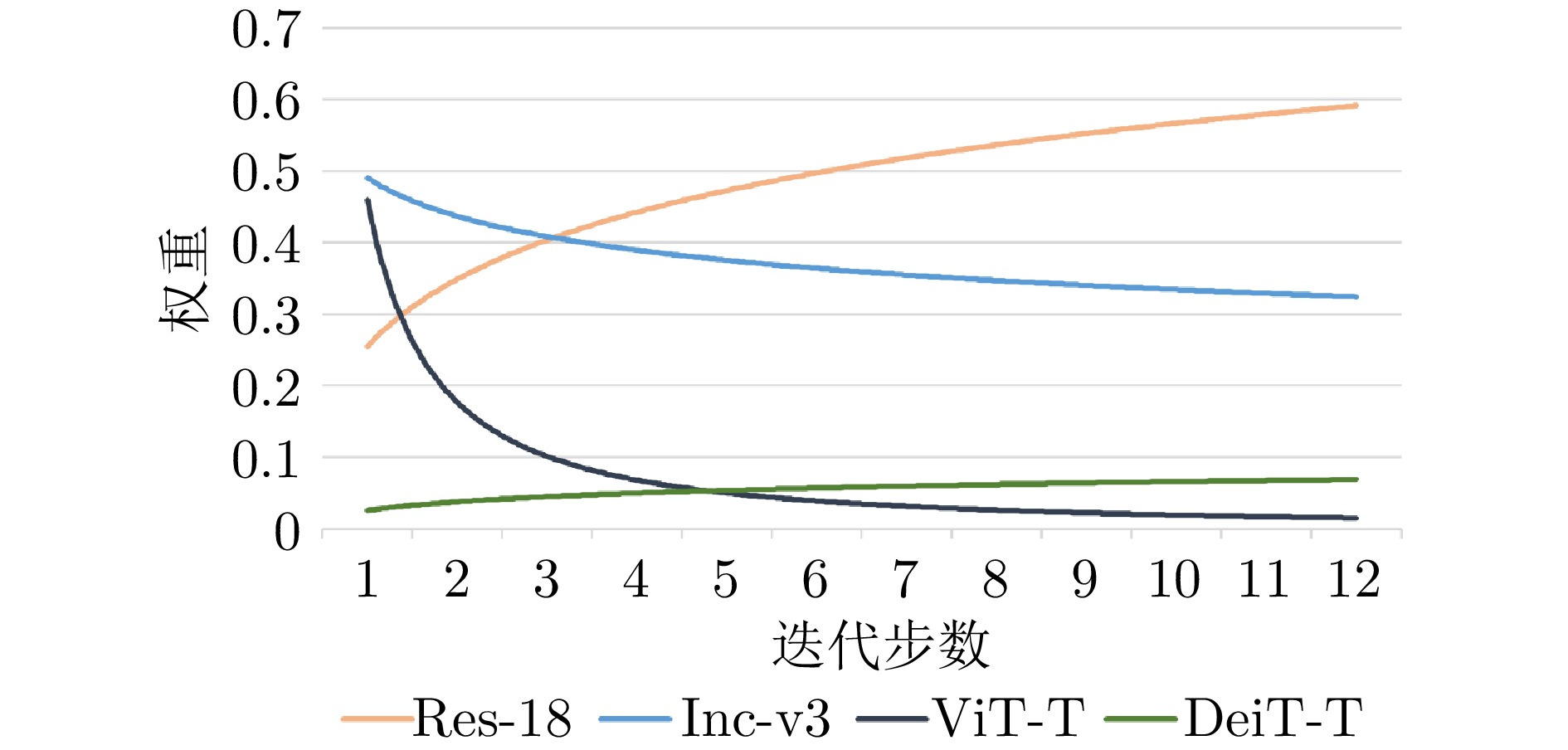
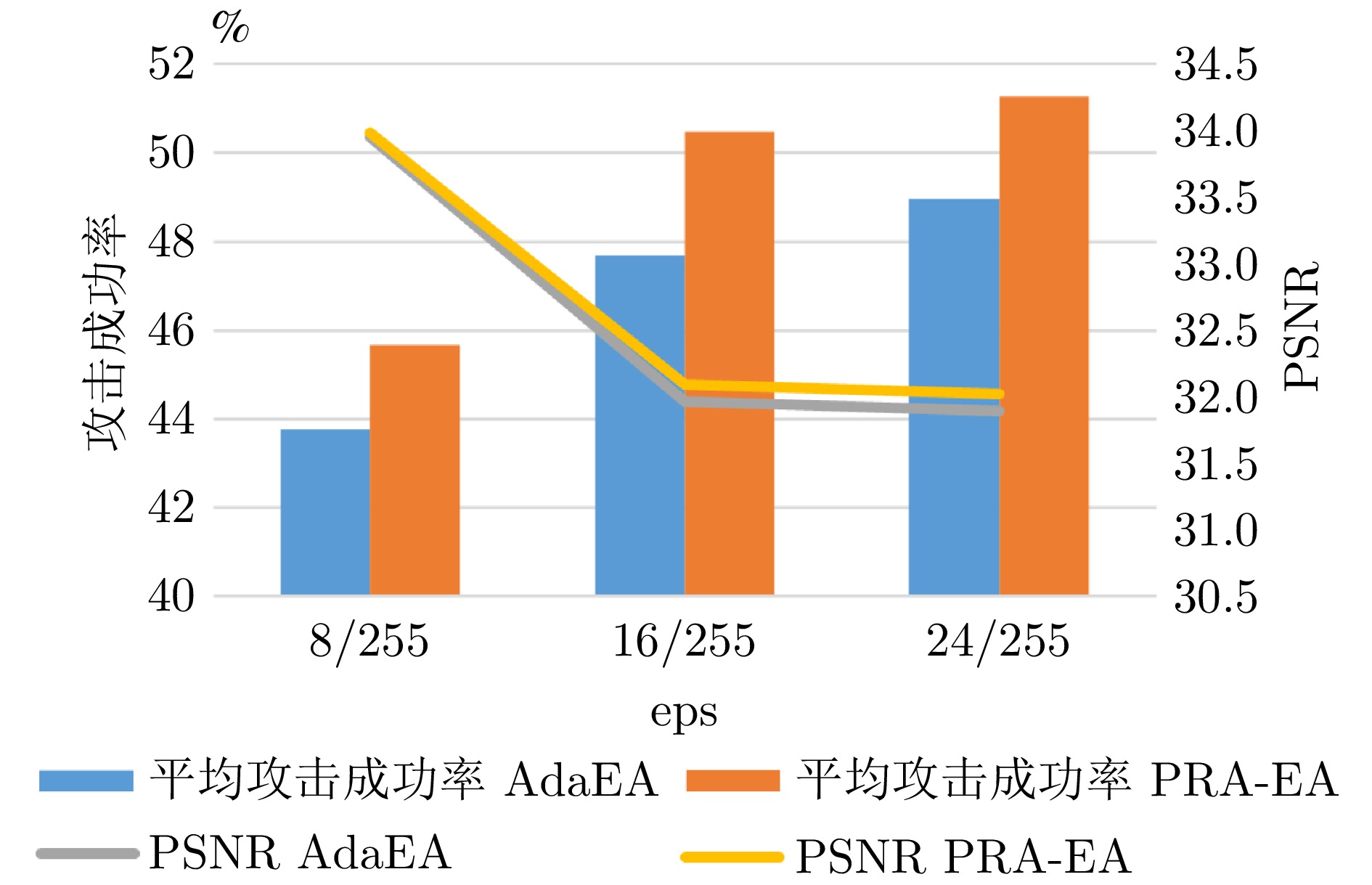
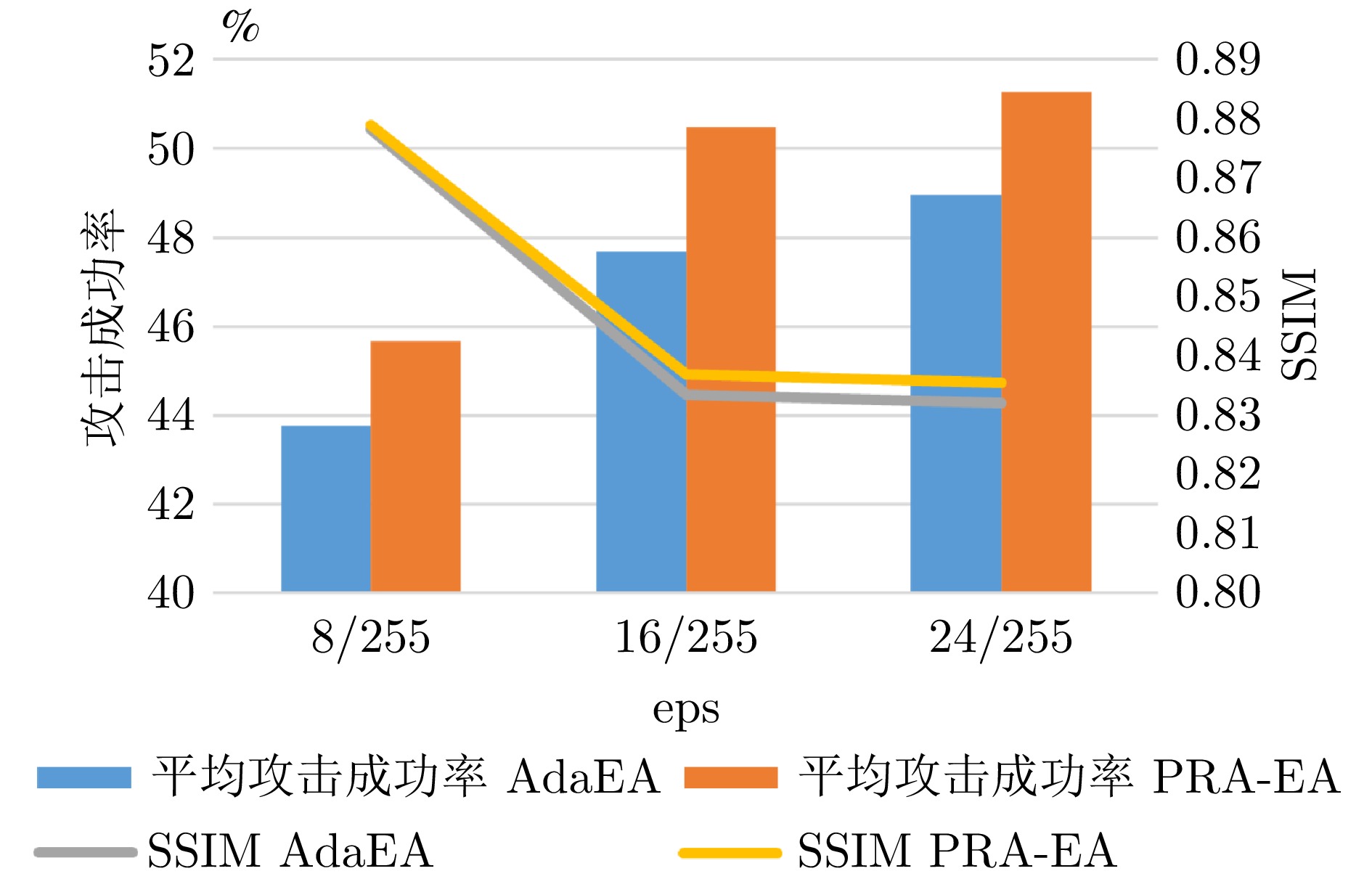
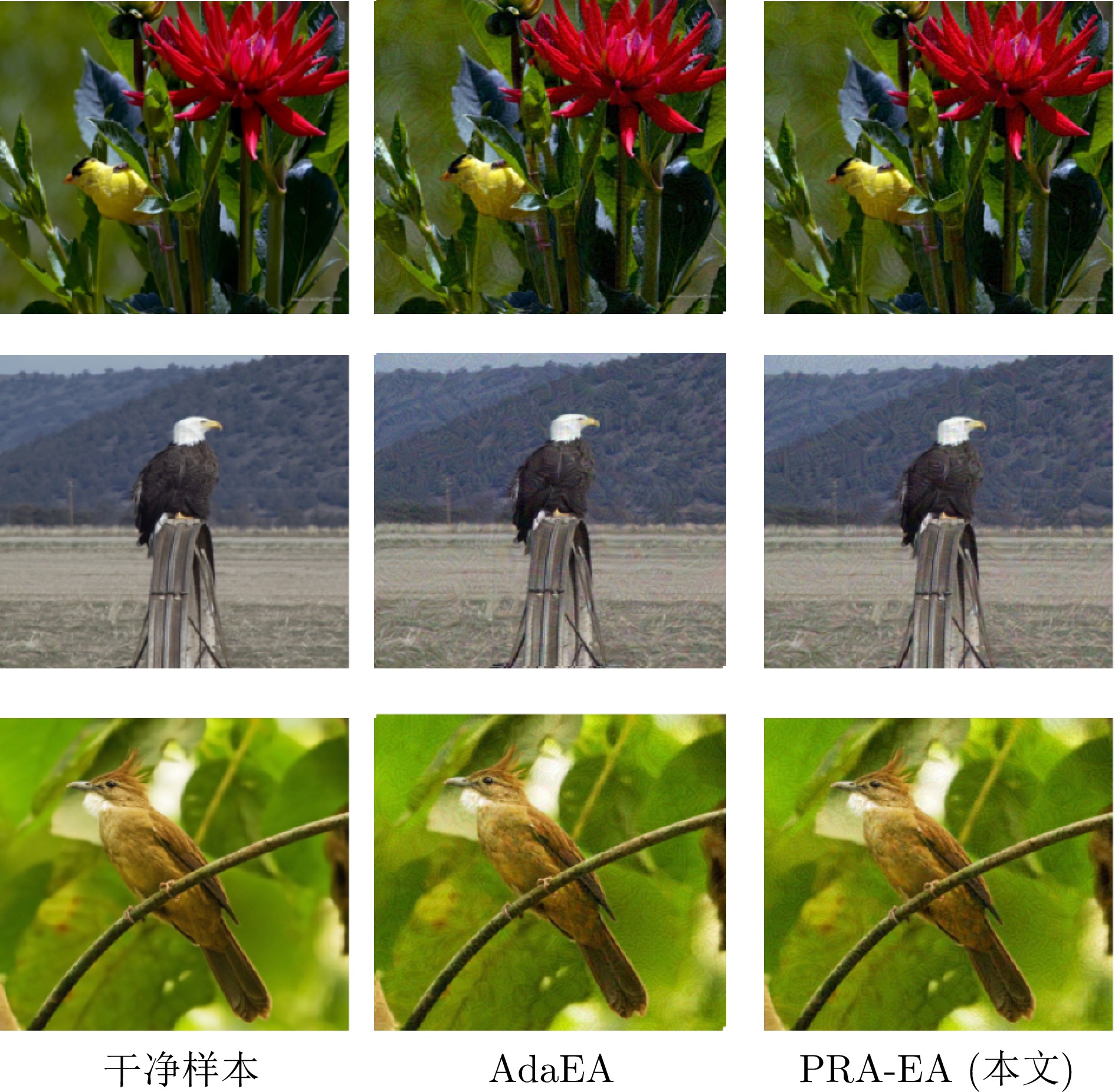
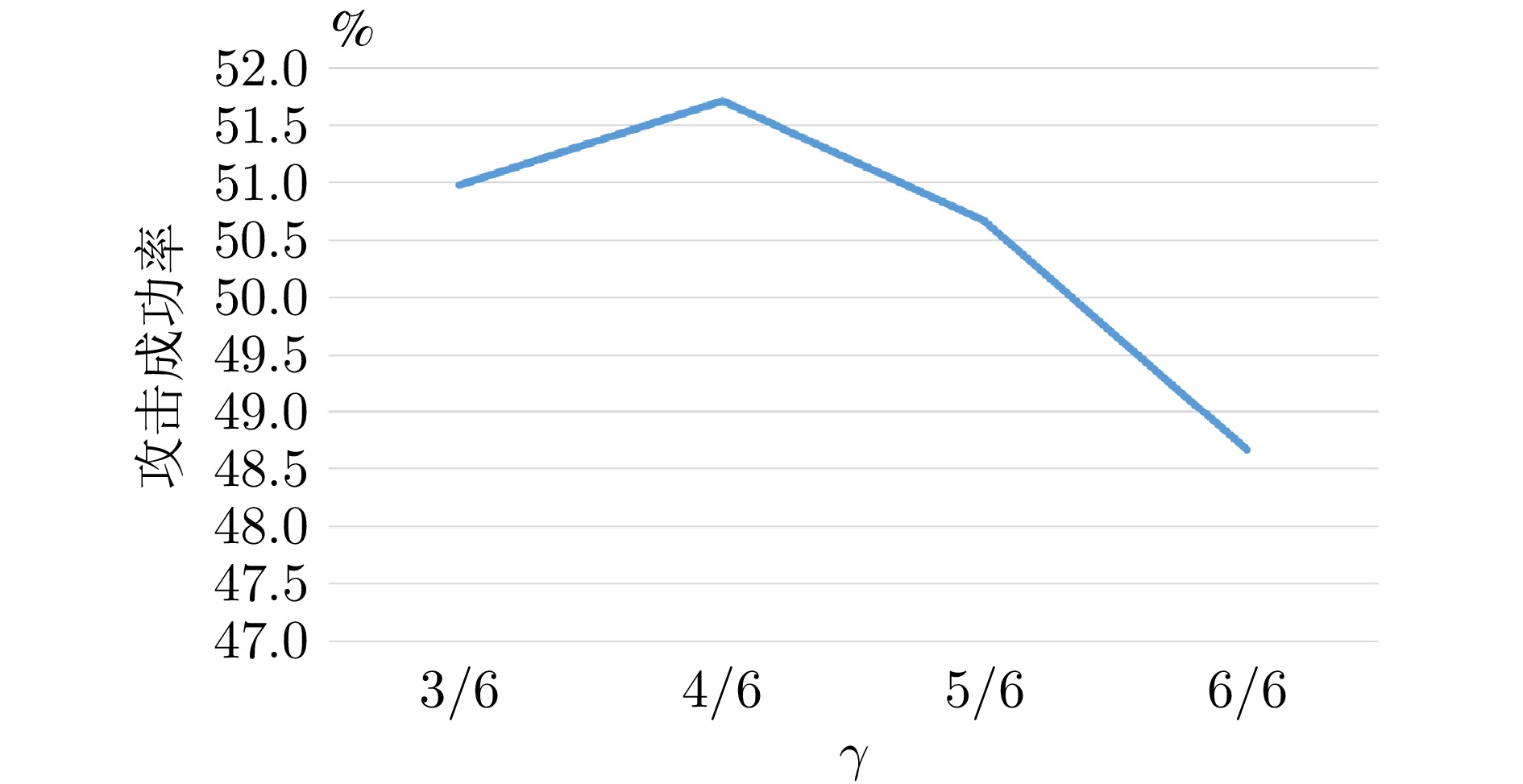
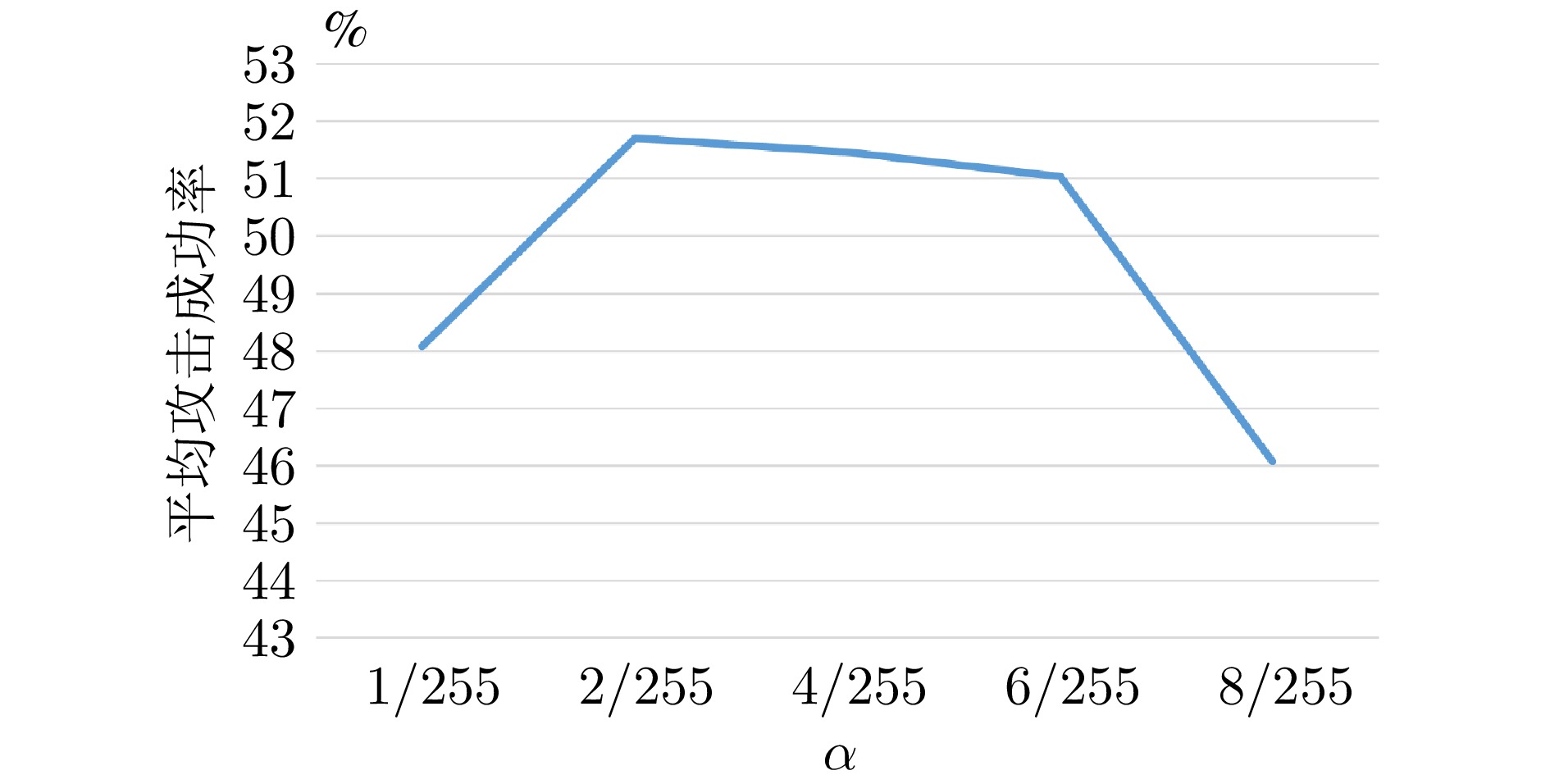
模型集成对抗攻击通过整合多个替代模型的梯度信息, 能够显著增强对抗样本的跨模型迁移能力, 是当前黑盒攻击中最具潜力的策略之一. 然而, 现有集成方法在动态加权过程中通常依赖扰动引起的预测误差作为权重依据, 未能有效区分扰动作用与模型自身固有误差. 由此可能高估低质量模型对扰动优化的贡献, 干扰攻击方向, 进而削弱对抗样本的实际迁移效果. 鉴于此, 提出基于扰动响应的自适应集成黑盒对抗攻击算法. 首先, 提出扰动响应感知的权重分配策略, 通过引入KL散度与集成相似度指标来衡量扰动对模型输出的真实影响, 避免低质量模型对集成过程的干扰; 其次, 提出梯度协同扰动缩放策略, 结合像素级梯度一致性度量, 动态调整扰动幅度, 缓解集成过程中的局部过拟合现象, 增强对抗样本在多模型间的泛化能力; 最后, 在多个黑盒攻击任务中进行综合评估, 实验结果表明所提出的基于扰动响应的自适应集成黑盒对抗攻击算法在迁移性能、攻击成功率与扰动效率方面均显著优于现有方法.
模型集成对抗攻击通过整合多个替代模型的梯度信息, 能够显著增强对抗样本的跨模型迁移能力, 是当前黑盒攻击中最具潜力的策略之一. 然而, 现有集成方法在动态加权过程中通常依赖扰动引起的预测误差作为权重依据, 未能有效区分扰动作用与模型自身固有误差. 由此可能高估低质量模型对扰动优化的贡献, 干扰攻击方向, 进而削弱对抗样本的实际迁移效果. 鉴于此, 提出基于扰动响应的自适应集成黑盒对抗攻击算法. 首先, 提出扰动响应感知的权重分配策略, 通过引入KL散度与集成相似度指标来衡量扰动对模型输出的真实影响, 避免低质量模型对集成过程的干扰; 其次, 提出梯度协同扰动缩放策略, 结合像素级梯度一致性度量, 动态调整扰动幅度, 缓解集成过程中的局部过拟合现象, 增强对抗样本在多模型间的泛化能力; 最后, 在多个黑盒攻击任务中进行综合评估, 实验结果表明所提出的基于扰动响应的自适应集成黑盒对抗攻击算法在迁移性能、攻击成功率与扰动效率方面均显著优于现有方法.
2025, 51(8): 1800-1810.
doi: 10.16383/j.aas.c240462
cstr: 32138.14.j.aas.c240462
摘要:
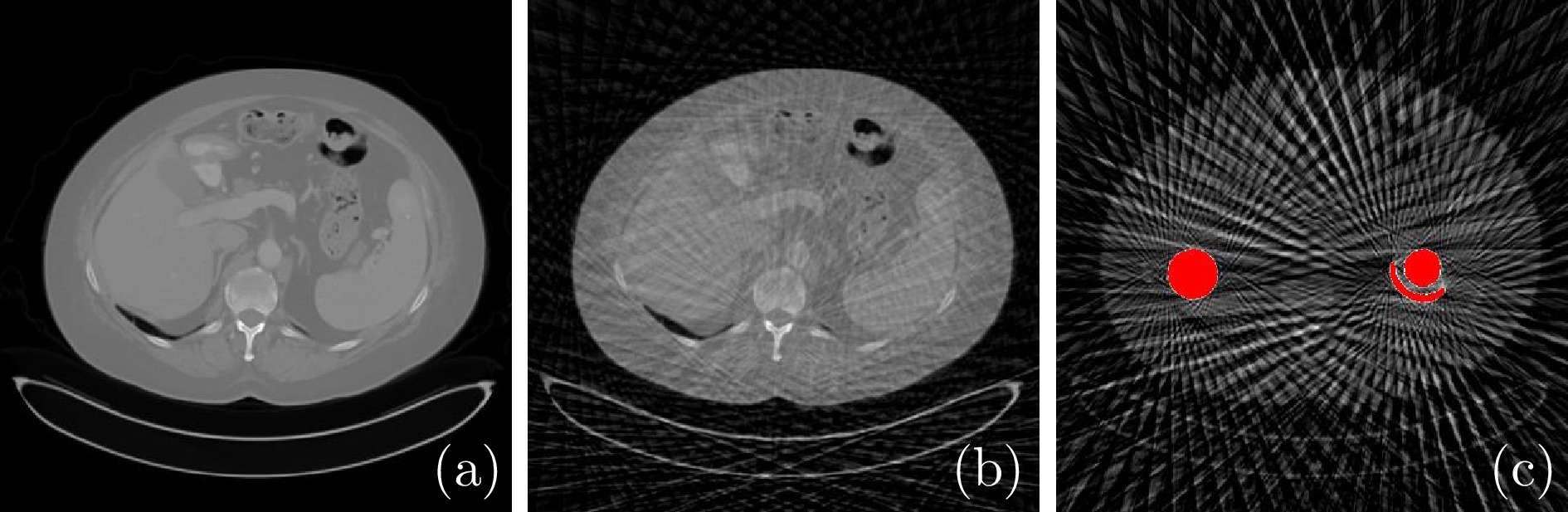
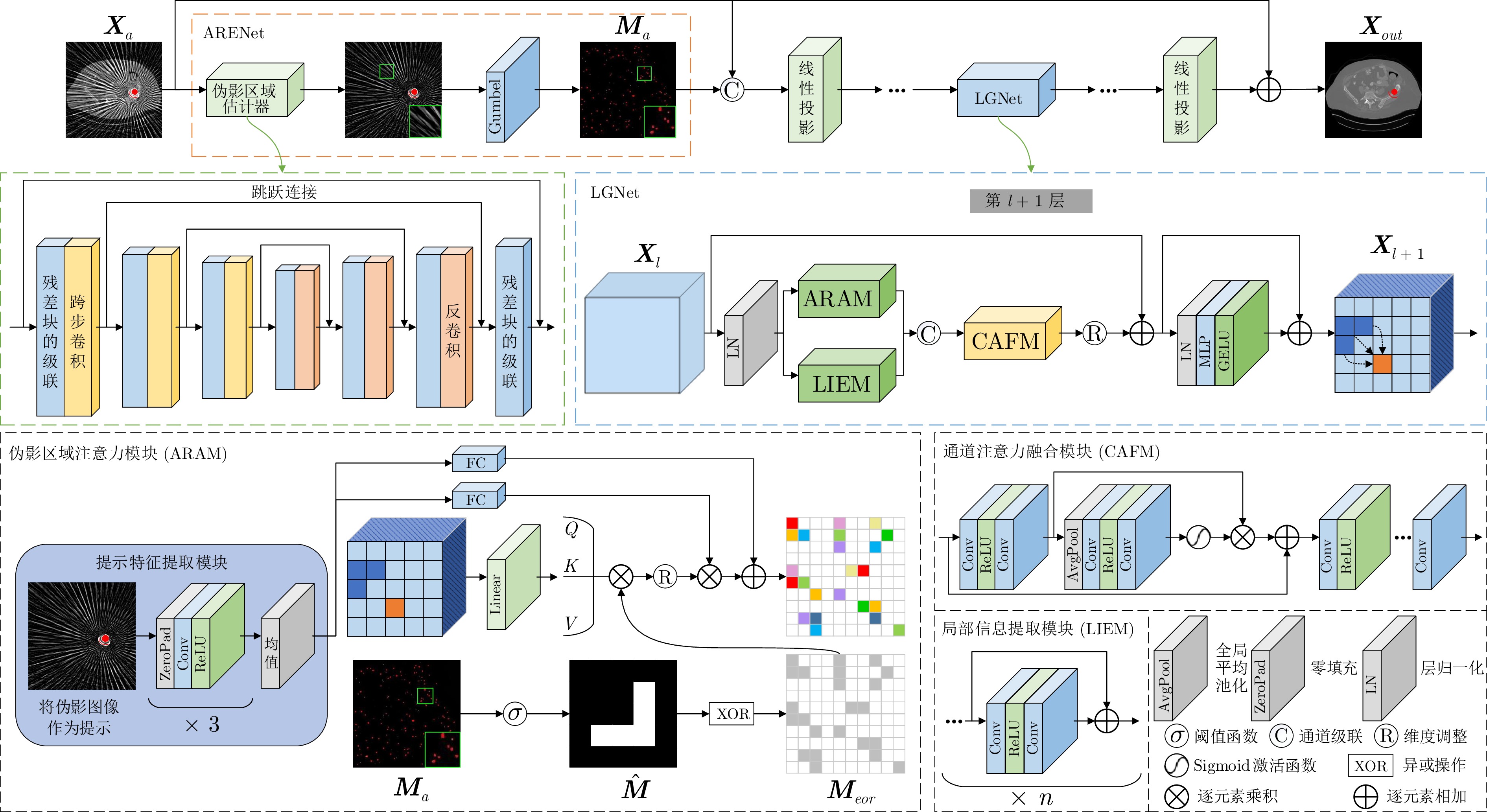
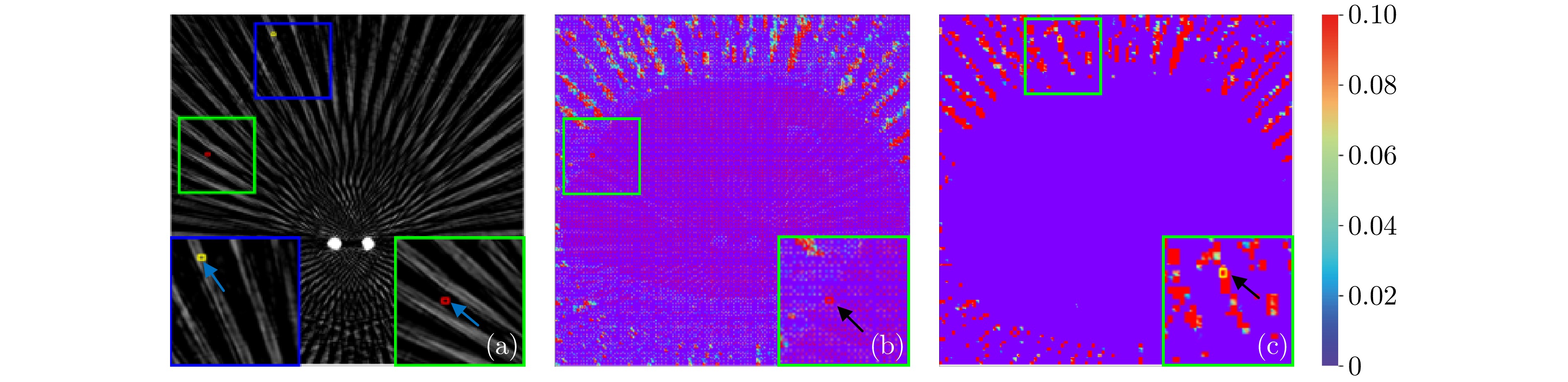
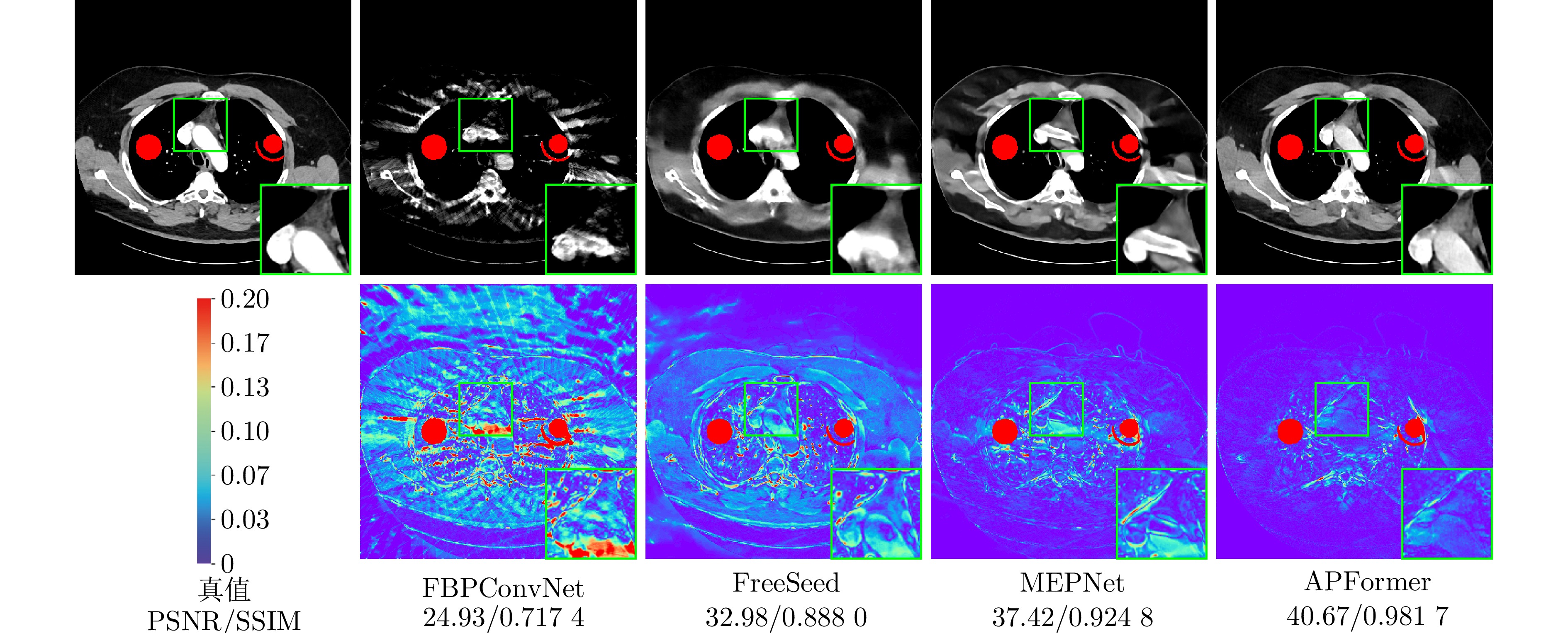
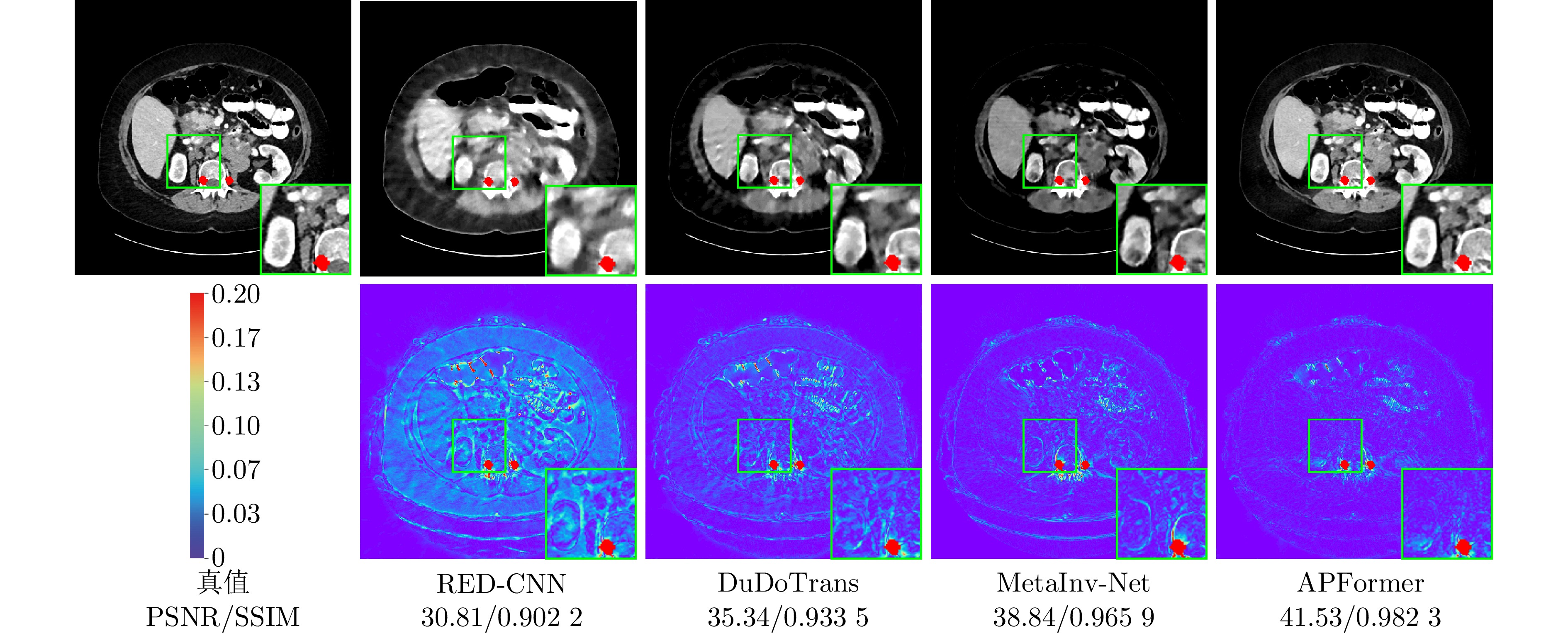
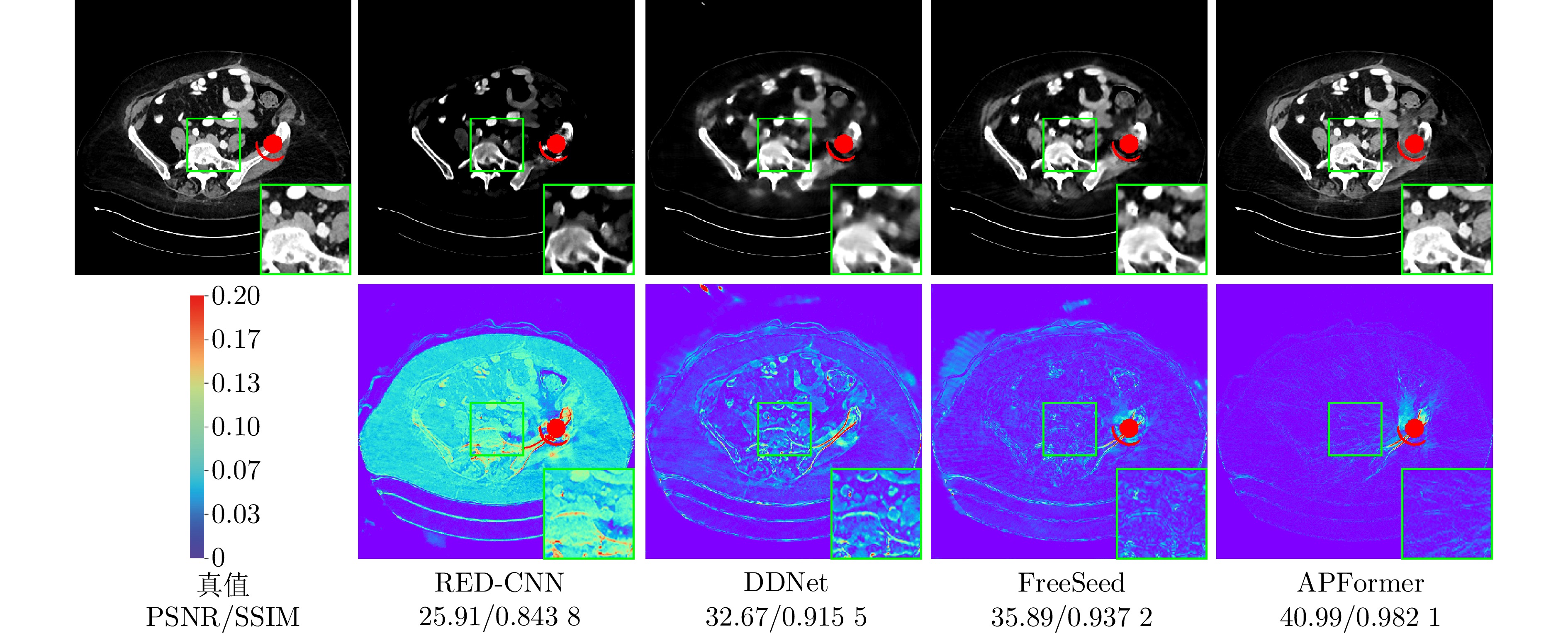
联合稀疏角度CT重建和金属伪影校正任务旨在通过受金属迹污染的少视角投影数据重建高质量的CT图像. 现有稀疏角度CT重建方法和金属伪影校正方法通常依赖于CT图像或投影数据, 但其存在临床投影数据难以获取和校正精度差的问题. 为解决这些问题, 提出一种基于伪影提示Transformer的图像域方法, 仅利用受伪影影响的CT图像即可同时实现稀疏角度CT重建和金属伪影校正. 该方法将伪影区域作为提示, 并将提示特征融入Transformer提取的特征中, 提出伪影提示Transformer架构. 该架构能够通过伪影区域特征提示, 利用伪影区域和非伪影区域之间的全局上下文相关性提升伪影校正精度. 针对多种伪影校正问题, 在包含伪影的CT图像上构建伪影区域估计网络来估计伪影区域, 并设计由局部信息提取模块、伪影区域注意力模块和通道注意力融合模块构成的局部−全局信息交互网络来融合局部与全局信息. 实验结果表明, 该方法能够同时进行高精度CT重建并有效去除金属伪影.
联合稀疏角度CT重建和金属伪影校正任务旨在通过受金属迹污染的少视角投影数据重建高质量的CT图像. 现有稀疏角度CT重建方法和金属伪影校正方法通常依赖于CT图像或投影数据, 但其存在临床投影数据难以获取和校正精度差的问题. 为解决这些问题, 提出一种基于伪影提示Transformer的图像域方法, 仅利用受伪影影响的CT图像即可同时实现稀疏角度CT重建和金属伪影校正. 该方法将伪影区域作为提示, 并将提示特征融入Transformer提取的特征中, 提出伪影提示Transformer架构. 该架构能够通过伪影区域特征提示, 利用伪影区域和非伪影区域之间的全局上下文相关性提升伪影校正精度. 针对多种伪影校正问题, 在包含伪影的CT图像上构建伪影区域估计网络来估计伪影区域, 并设计由局部信息提取模块、伪影区域注意力模块和通道注意力融合模块构成的局部−全局信息交互网络来融合局部与全局信息. 实验结果表明, 该方法能够同时进行高精度CT重建并有效去除金属伪影.
2025, 51(8): 1811-1828.
doi: 10.16383/j.aas.c250070
cstr: 32138.14.j.aas.c250070
摘要:
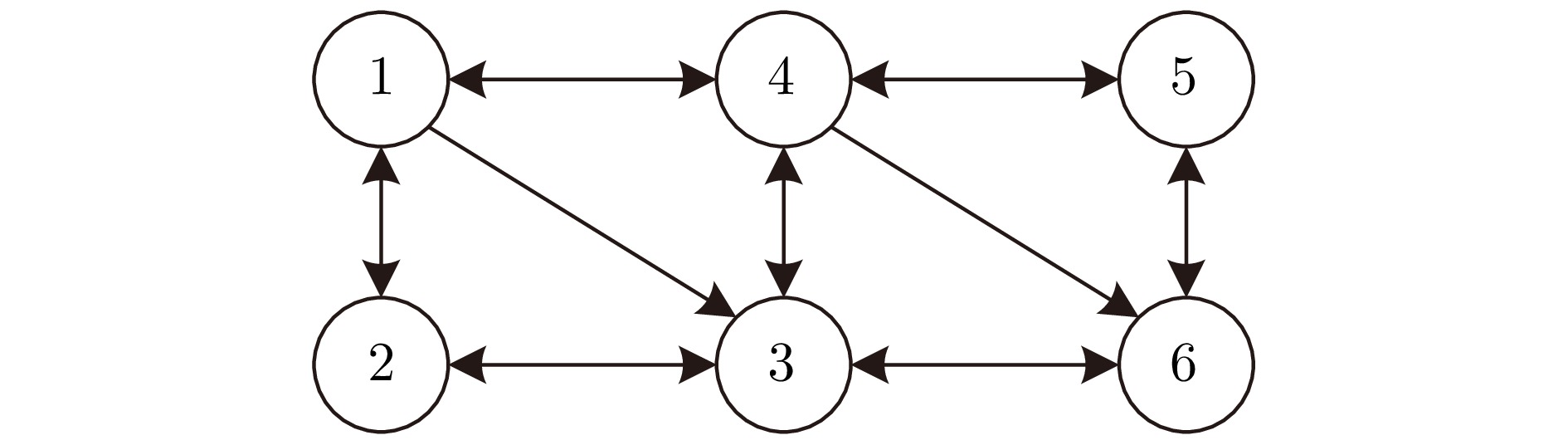
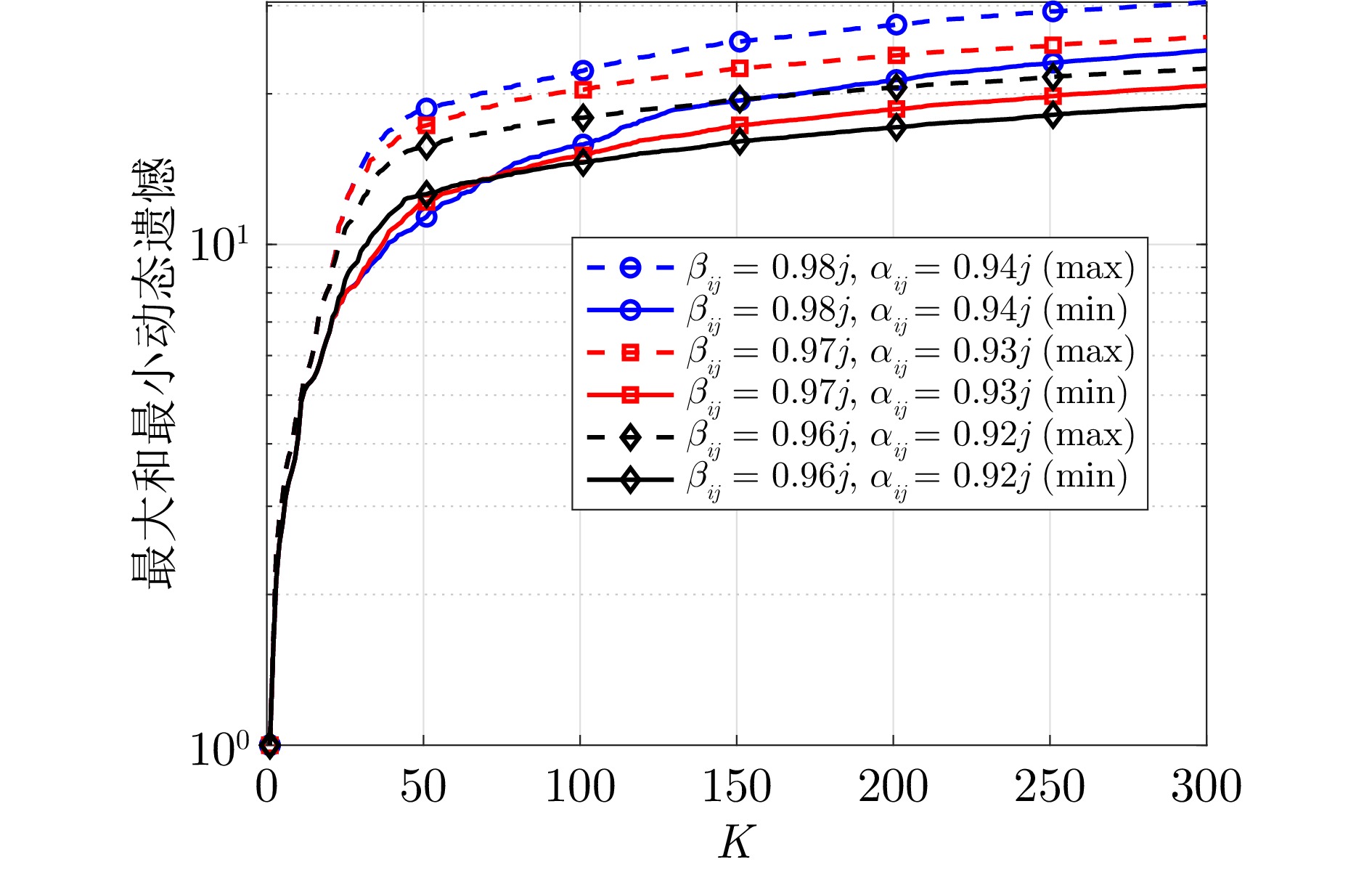
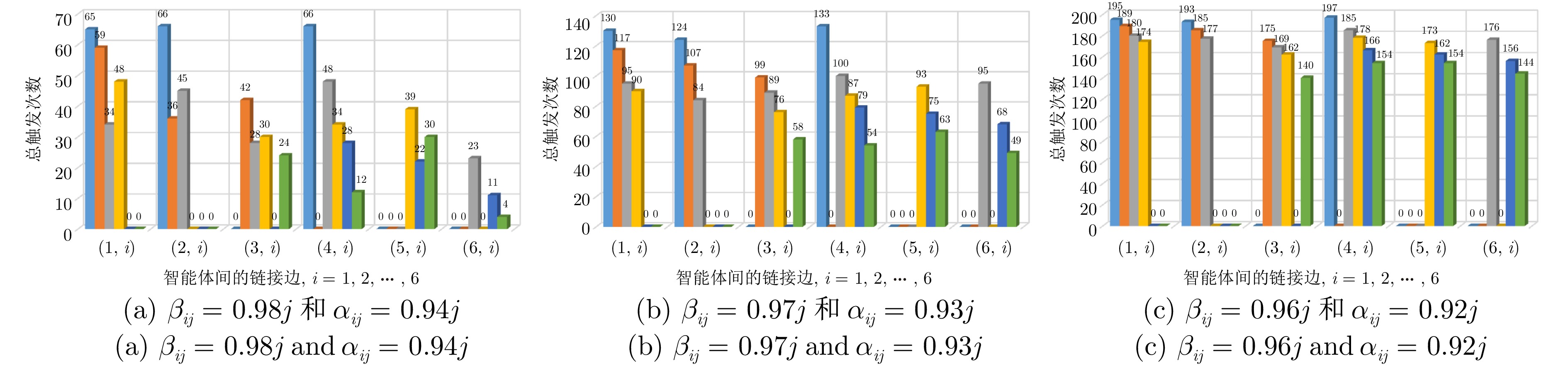
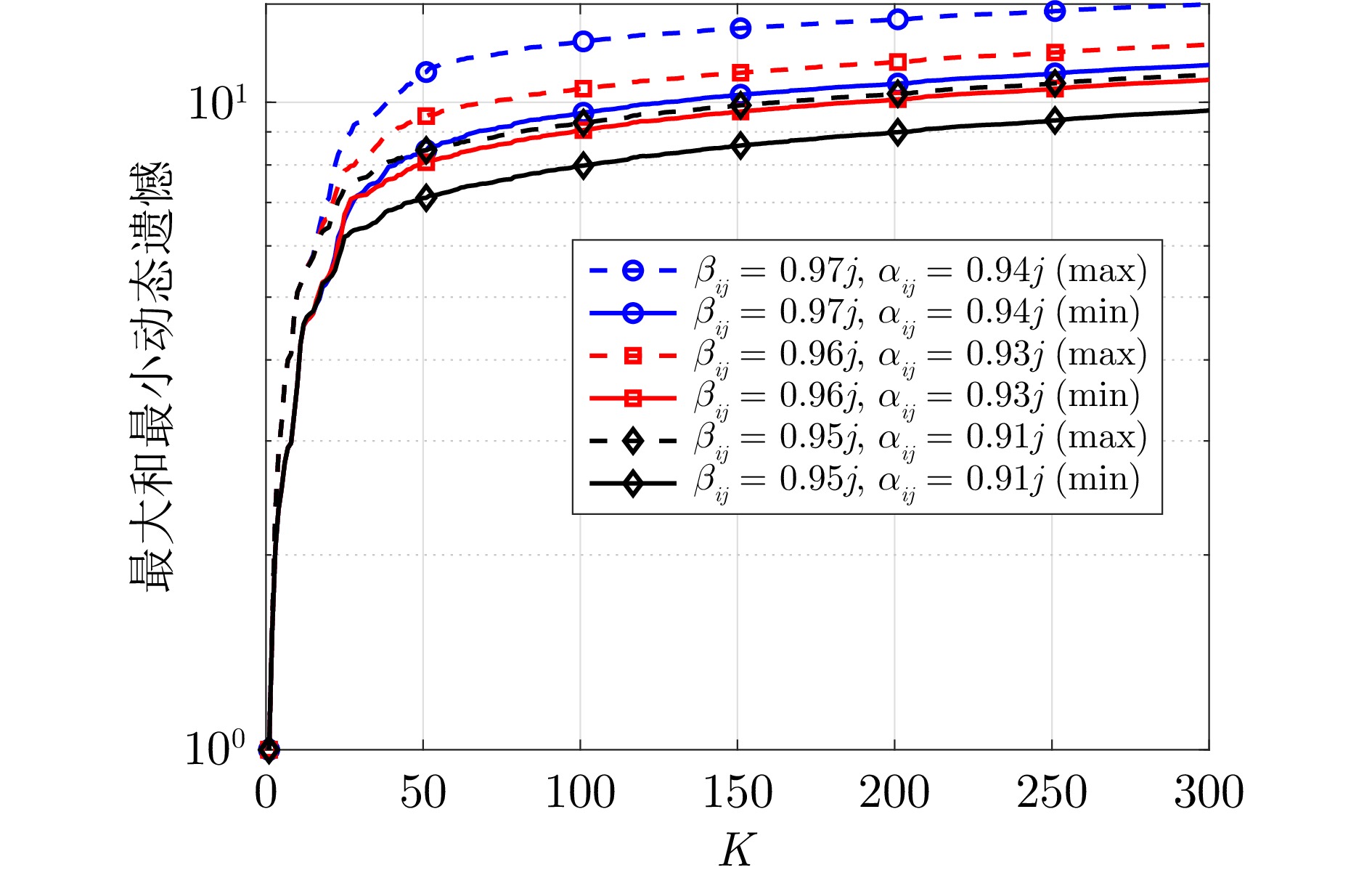
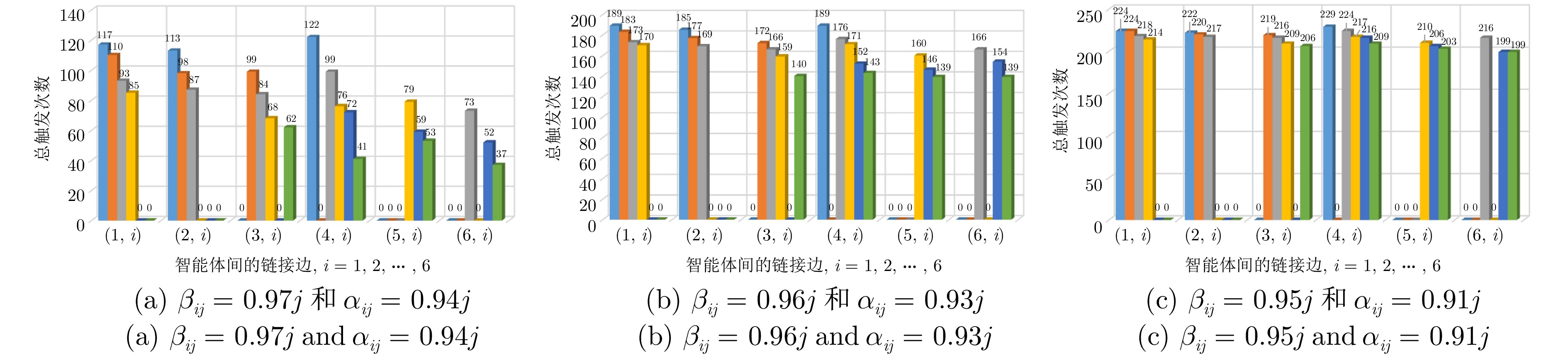
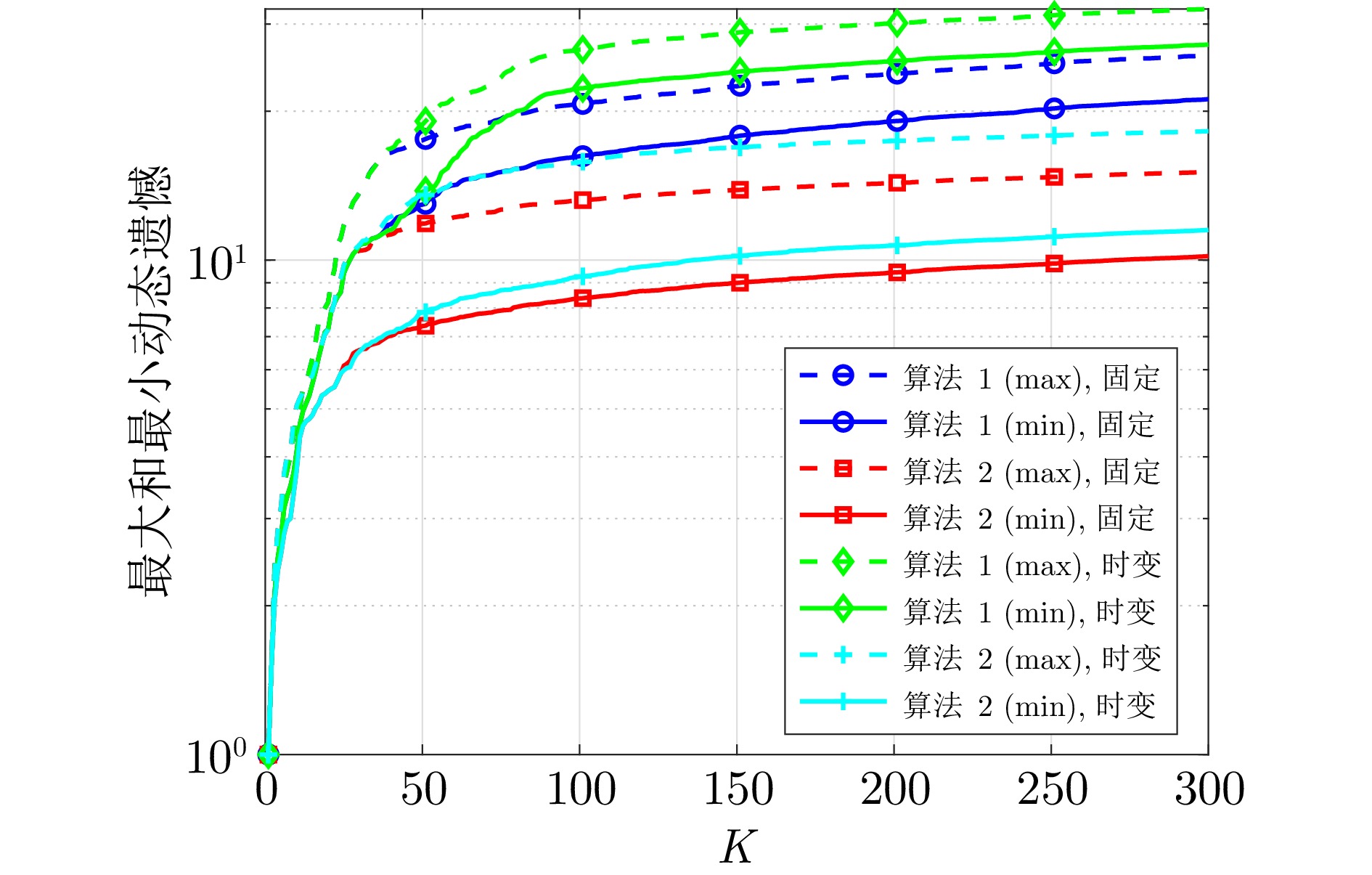
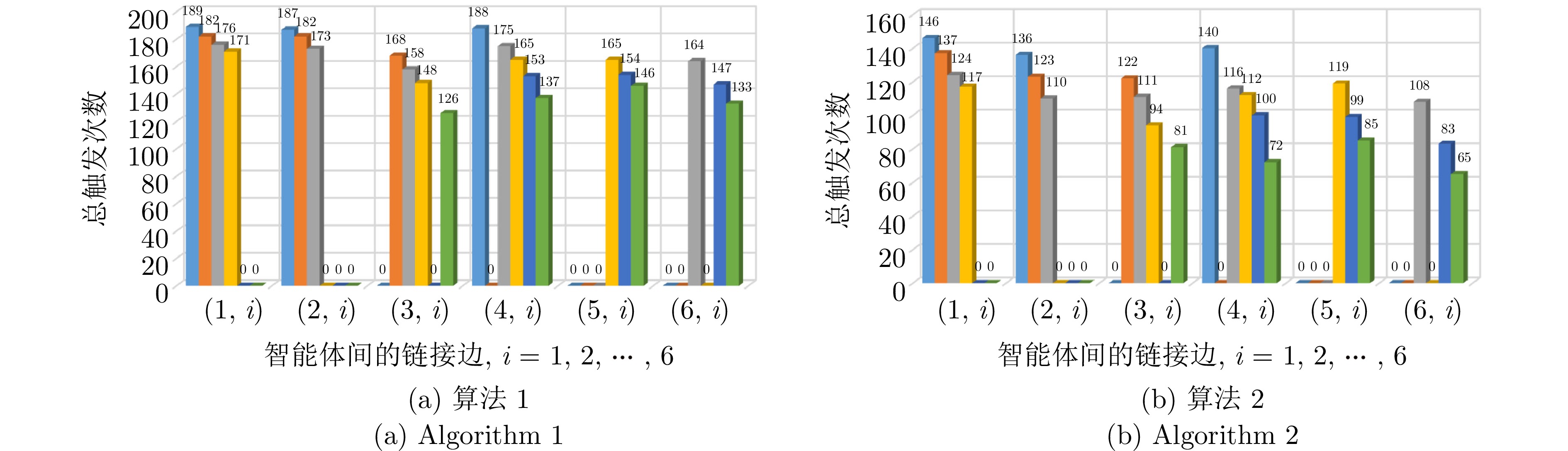
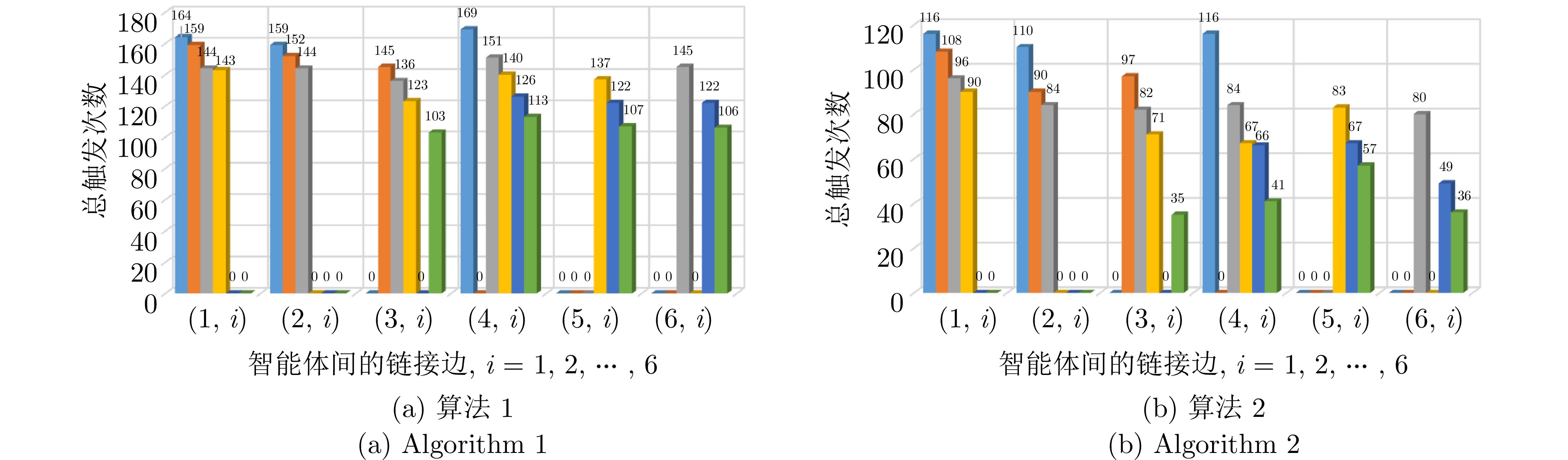
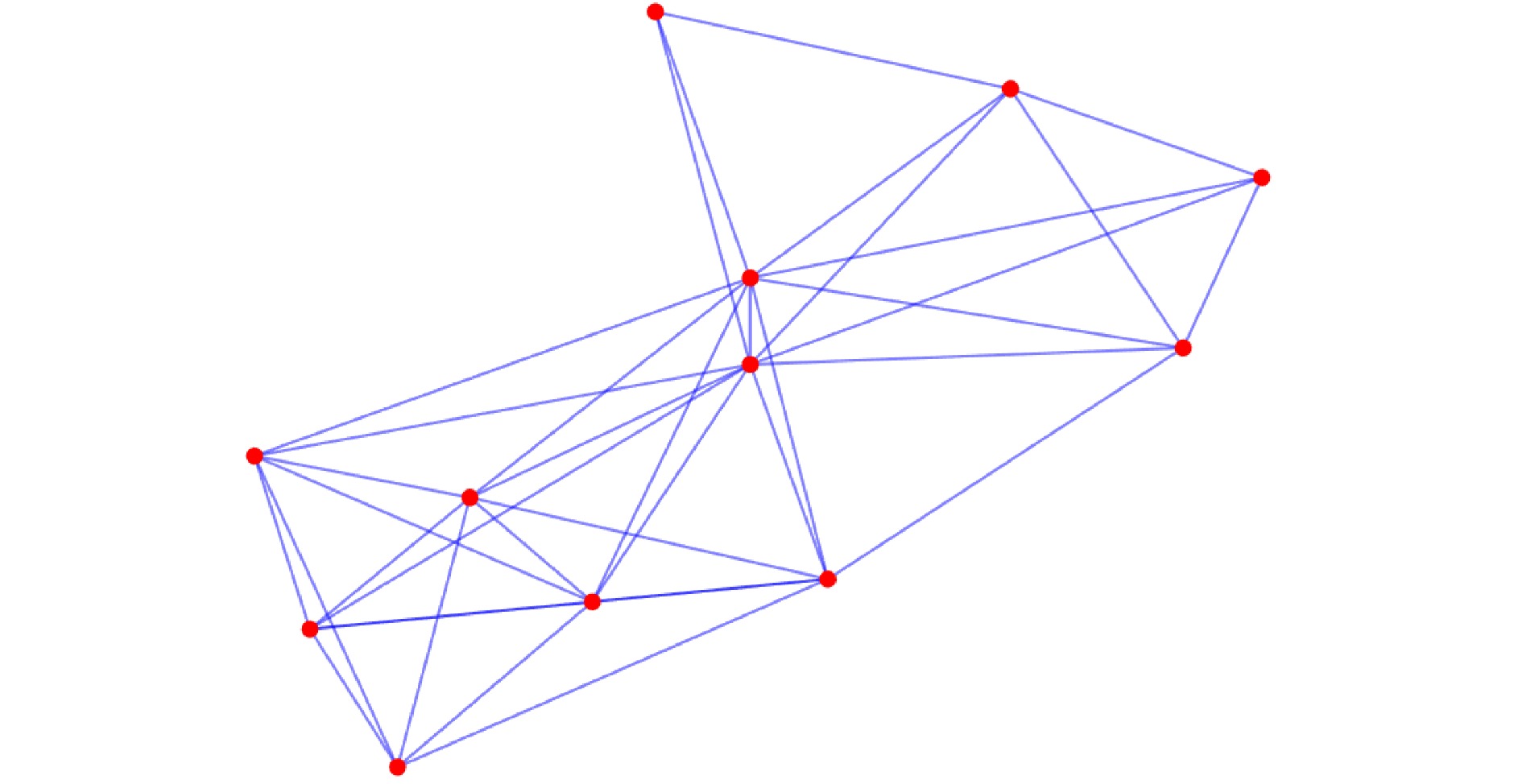
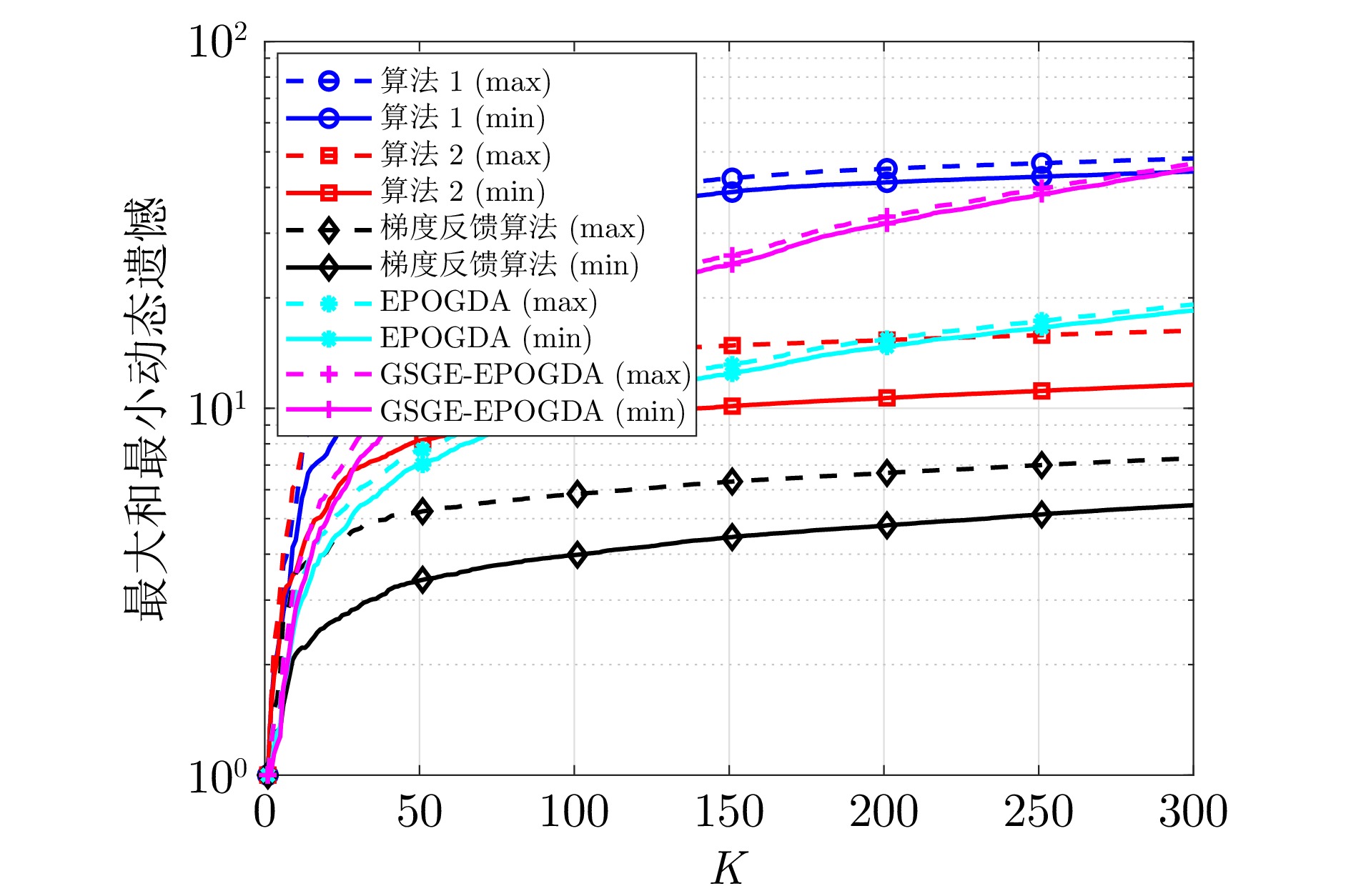
研究带宽受限的非平衡有向多智能体网络环境下的在线分布式复合Bandit优化问题. 该问题中每个智能体的局部目标函数具有复合结构: 其一为梯度信息不可获取的时变损失函数, 其二为具有特定结构的正则化项. 为应对网络带宽的受限, 设计具有控制因子的边缘动态事件触发通信协议, 以降低通信开销. 同时, 针对局部损失函数梯度信息难以获取的挑战, 分别引入单点和两点梯度估计方法, 以支撑损失函数梯度信息的获取. 基于此, 结合近端算子, 分别设计仅要求加权邻接矩阵满足行随机性质的在线分布式复合单点和两点Bandit优化算法, 并使用动态遗憾指标分析两种算法的收敛性. 结果表明, 在合理的假设和参数设定下, 两种算法在期望意义下分别可获得\begin{document}${\cal{O}}({K^\frac{3}{4}}(1+{{\cal{P}}_K}))$\end{document} \begin{document}${\cal{O}}({K^\frac{1}{2}}(1+{{\cal{P}}_K}))$\end{document} \begin{document}$K$\end{document} \begin{document}${\cal{P}}_K$\end{document} \begin{document}${\cal{P}}_K$\end{document} \begin{document}${\cal{O}}({K^\frac{3}{4}}\sqrt{1+{{\cal{P}}_K}})$\end{document} \begin{document}${\cal{O}}({K^\frac{1}{2}}\sqrt{1+{{\cal{P}}_K}})$\end{document}
研究带宽受限的非平衡有向多智能体网络环境下的在线分布式复合Bandit优化问题. 该问题中每个智能体的局部目标函数具有复合结构: 其一为梯度信息不可获取的时变损失函数, 其二为具有特定结构的正则化项. 为应对网络带宽的受限, 设计具有控制因子的边缘动态事件触发通信协议, 以降低通信开销. 同时, 针对局部损失函数梯度信息难以获取的挑战, 分别引入单点和两点梯度估计方法, 以支撑损失函数梯度信息的获取. 基于此, 结合近端算子, 分别设计仅要求加权邻接矩阵满足行随机性质的在线分布式复合单点和两点Bandit优化算法, 并使用动态遗憾指标分析两种算法的收敛性. 结果表明, 在合理的假设和参数设定下, 两种算法在期望意义下分别可获得
2025, 51(8): 1829-1841.
doi: 10.16383/j.aas.c240810
cstr: 32138.14.j.aas.c240810
摘要:
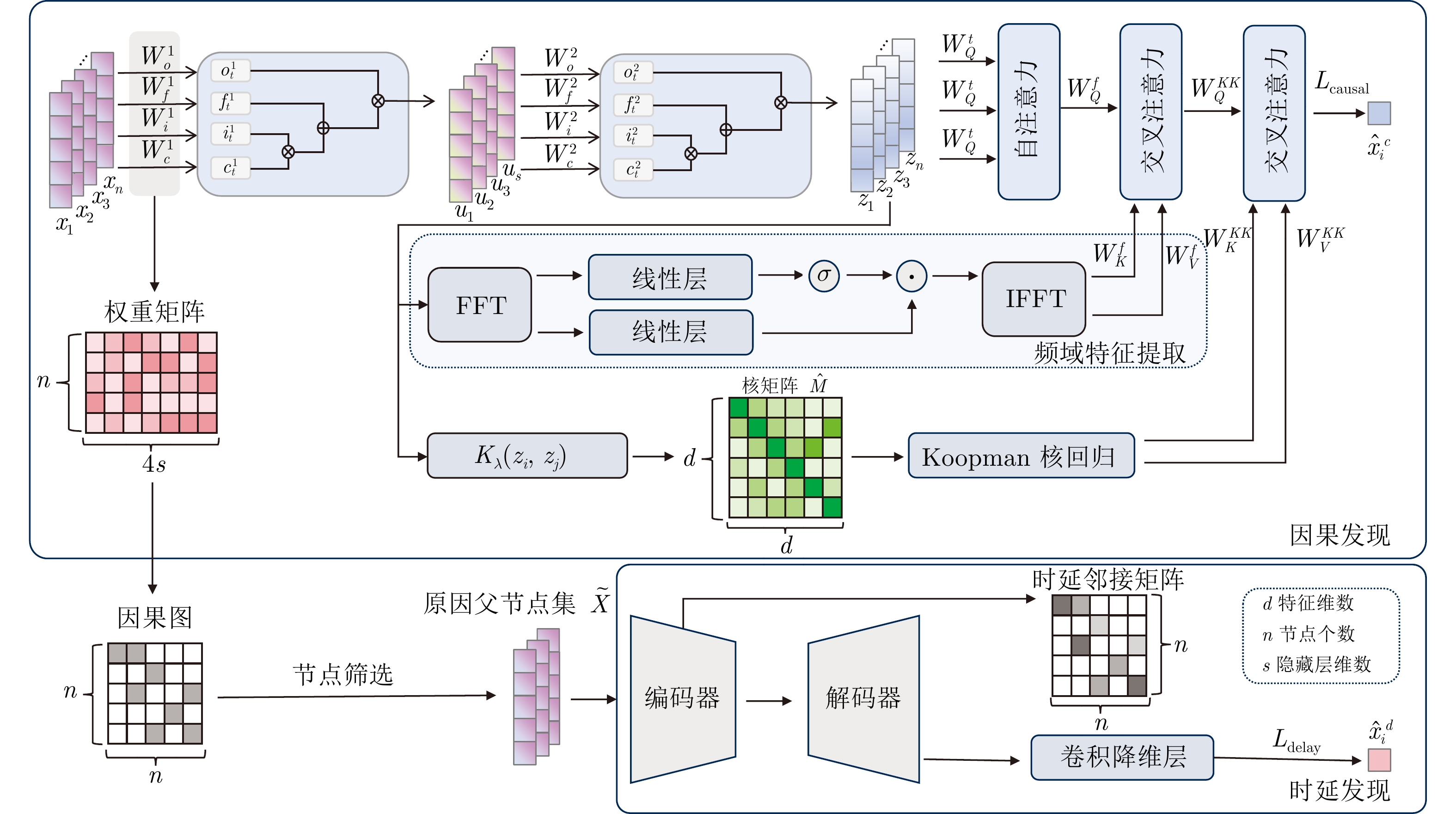
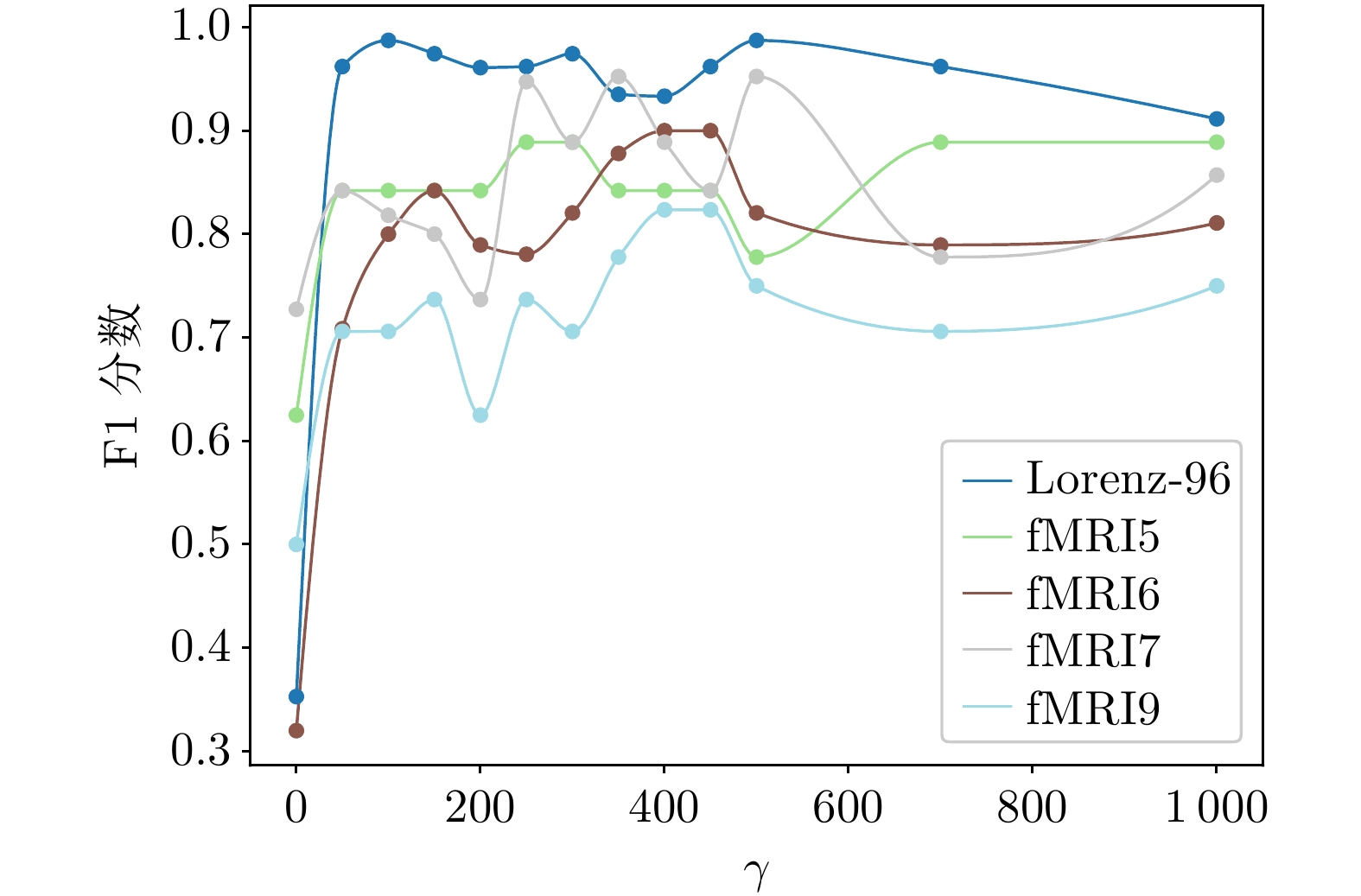
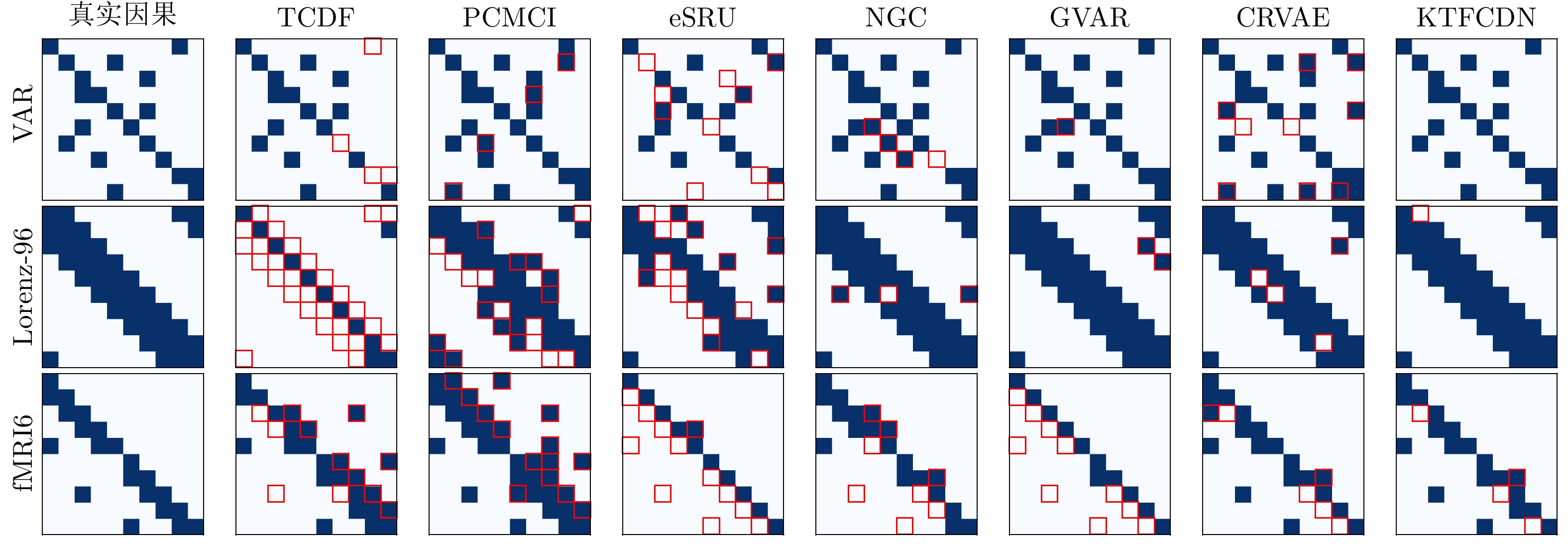
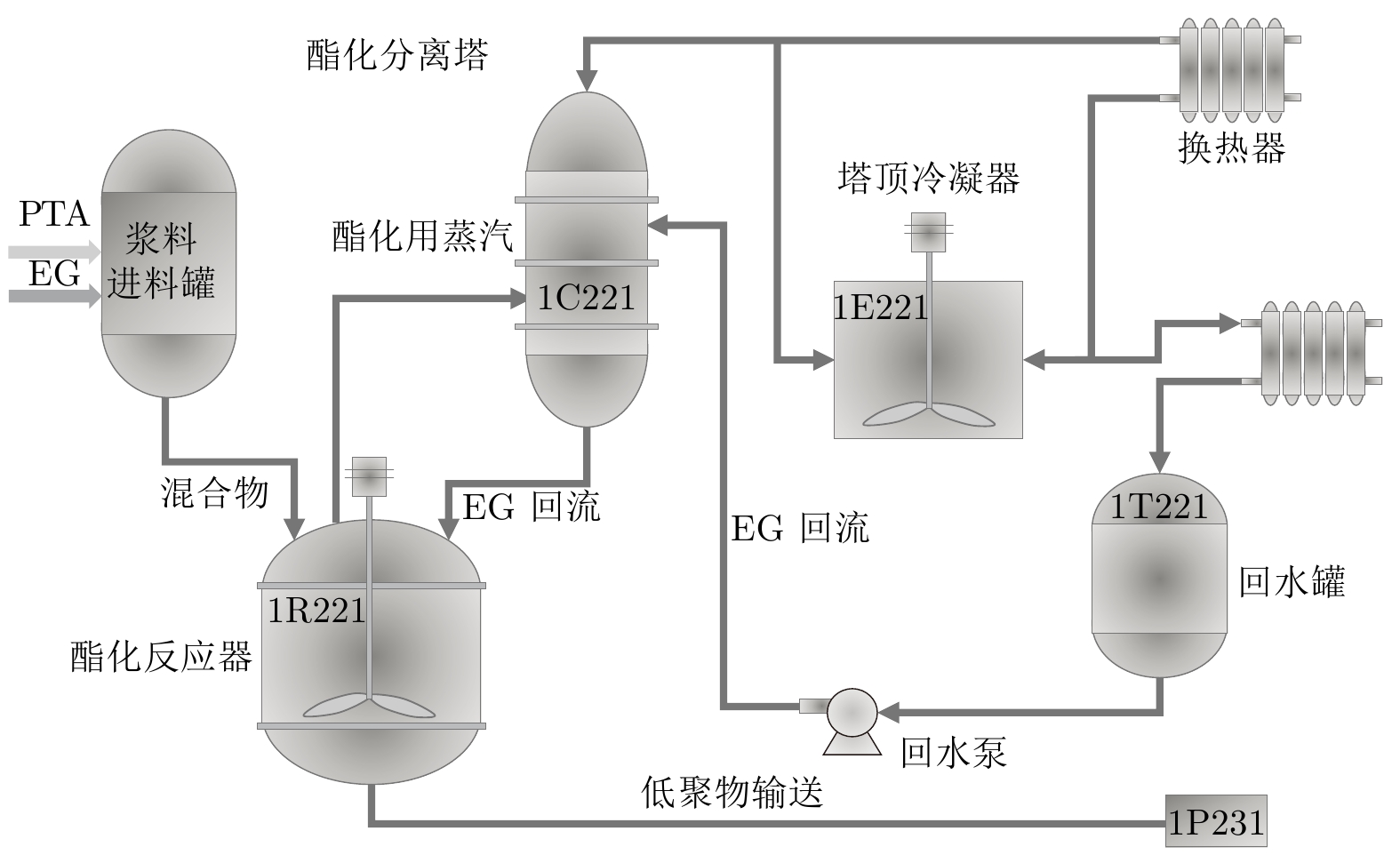
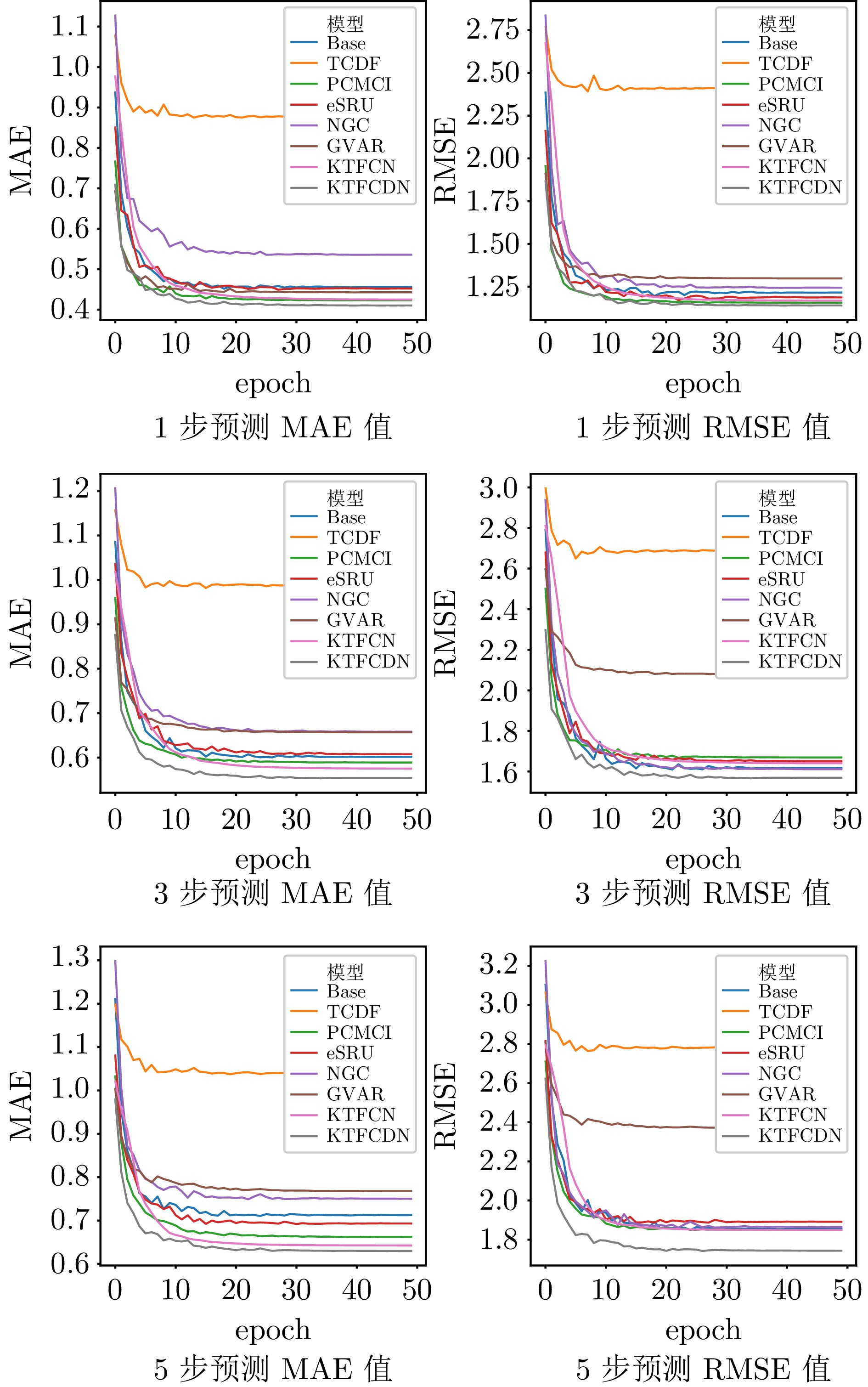
因果推理在复杂工业系统中对产能分析和产出优化具有重要意义. 然而, 现有方法难以有效处理这种高度非线性和时延的复杂因果关系. 为此, 提出一种基于Koopman特征核的时频因果与时延推理网络, 用于复杂工业过程的因果分析与时延识别. 该方法结合Koopman特征变换与再生核理论设计核回归层, 在保留时间信息的基础上, 将数据映射到高维再生核希尔伯特空间以提取时不变的非线性关系. 同时, 通过证明非线性格兰杰因果关系在时频域上的一致性, 进而在时域上融入频域特征以提取时间维度的全局信息并捕获变量间的时延关系. 此外, 针对长时延问题, 设计基于状态空间模型的时延发现网络. 实验结果表明, 该方法在三个公共数据集上表现优异, 并在聚酯纤维酯化过程的实际应用中进一步验证了其有效性.
因果推理在复杂工业系统中对产能分析和产出优化具有重要意义. 然而, 现有方法难以有效处理这种高度非线性和时延的复杂因果关系. 为此, 提出一种基于Koopman特征核的时频因果与时延推理网络, 用于复杂工业过程的因果分析与时延识别. 该方法结合Koopman特征变换与再生核理论设计核回归层, 在保留时间信息的基础上, 将数据映射到高维再生核希尔伯特空间以提取时不变的非线性关系. 同时, 通过证明非线性格兰杰因果关系在时频域上的一致性, 进而在时域上融入频域特征以提取时间维度的全局信息并捕获变量间的时延关系. 此外, 针对长时延问题, 设计基于状态空间模型的时延发现网络. 实验结果表明, 该方法在三个公共数据集上表现优异, 并在聚酯纤维酯化过程的实际应用中进一步验证了其有效性.
2025, 51(8): 1842-1856.
doi: 10.16383/j.aas.c240784
cstr: 32138.14.j.aas.c240784
摘要:
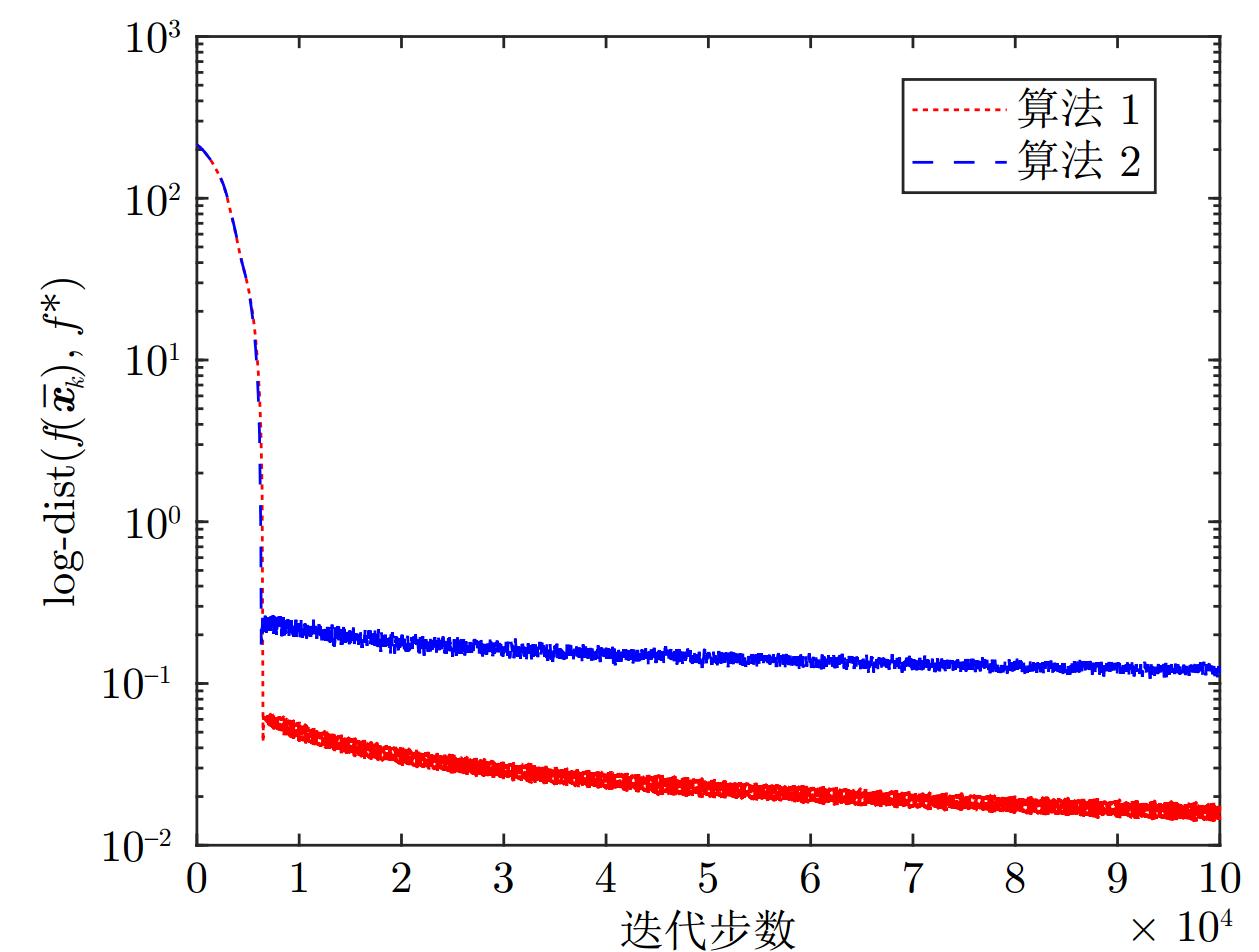
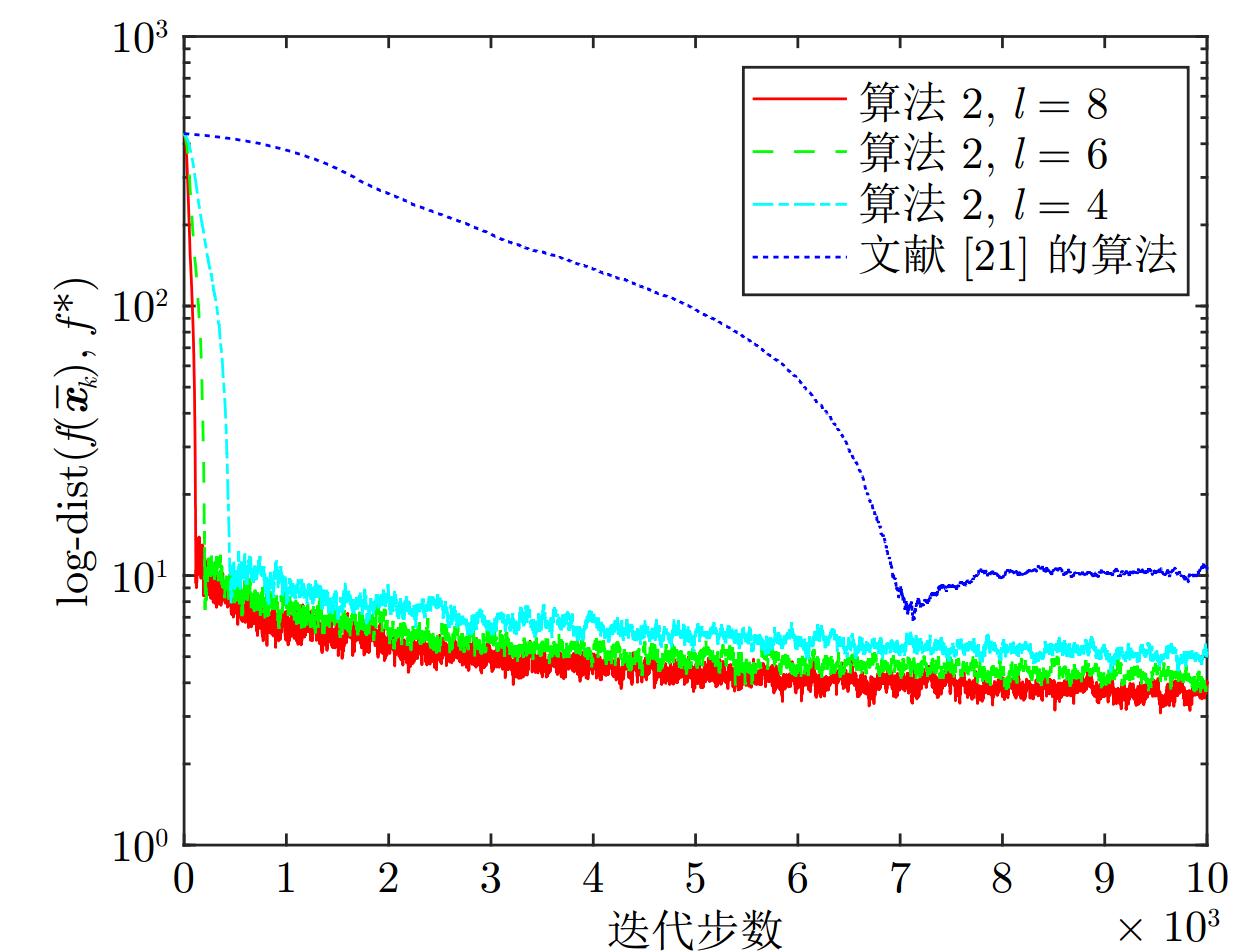
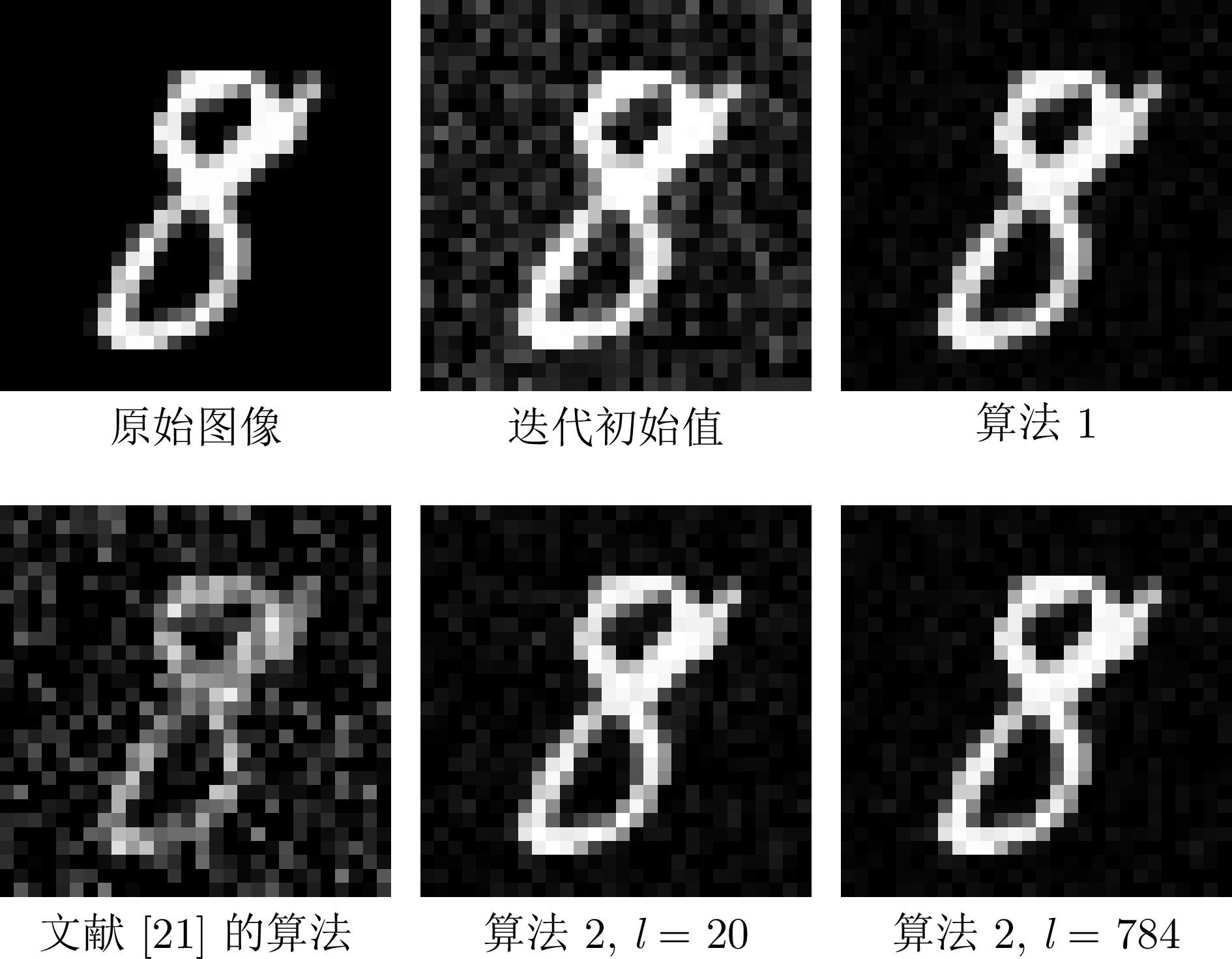
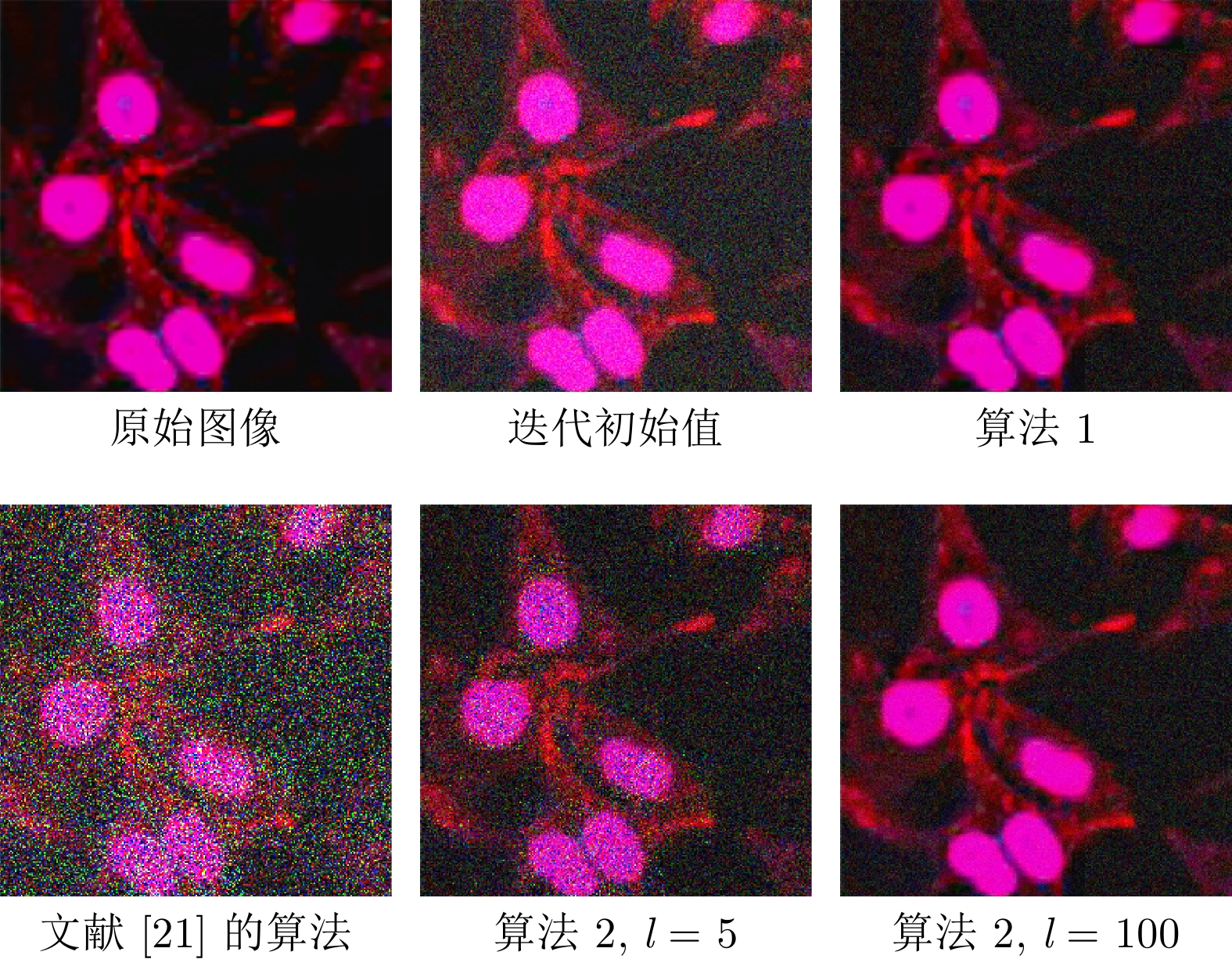
机器学习中的诸多非凸优化问题, 如鲁棒相位恢复、低秩矩阵补全以及稀疏字典学习等, 本质上可归结为弱凸优化问题. 然而, 弱凸优化问题固有的非凸特性使得此类问题的求解极具挑战. 此外, 由于系统复杂度和问题规模的增加以及相关参数的分布式存储需求, 传统的基于单个个体的集中式计算框架难以高效求解此类问题. 针对上述挑战, 设计一种分布式镜像下降算法, 并从Bregman-Moreau包络的角度分析其收敛性, 证明算法的收敛速度为\begin{document}$ \mathrm{O}(\ln K/\sqrt{K}) $\end{document} \begin{document}$K$\end{document}
机器学习中的诸多非凸优化问题, 如鲁棒相位恢复、低秩矩阵补全以及稀疏字典学习等, 本质上可归结为弱凸优化问题. 然而, 弱凸优化问题固有的非凸特性使得此类问题的求解极具挑战. 此外, 由于系统复杂度和问题规模的增加以及相关参数的分布式存储需求, 传统的基于单个个体的集中式计算框架难以高效求解此类问题. 针对上述挑战, 设计一种分布式镜像下降算法, 并从Bregman-Moreau包络的角度分析其收敛性, 证明算法的收敛速度为
2025, 51(8): 1857-1868.
doi: 10.16383/j.aas.c250064
cstr: 32138.14.j.aas.c250064
摘要:
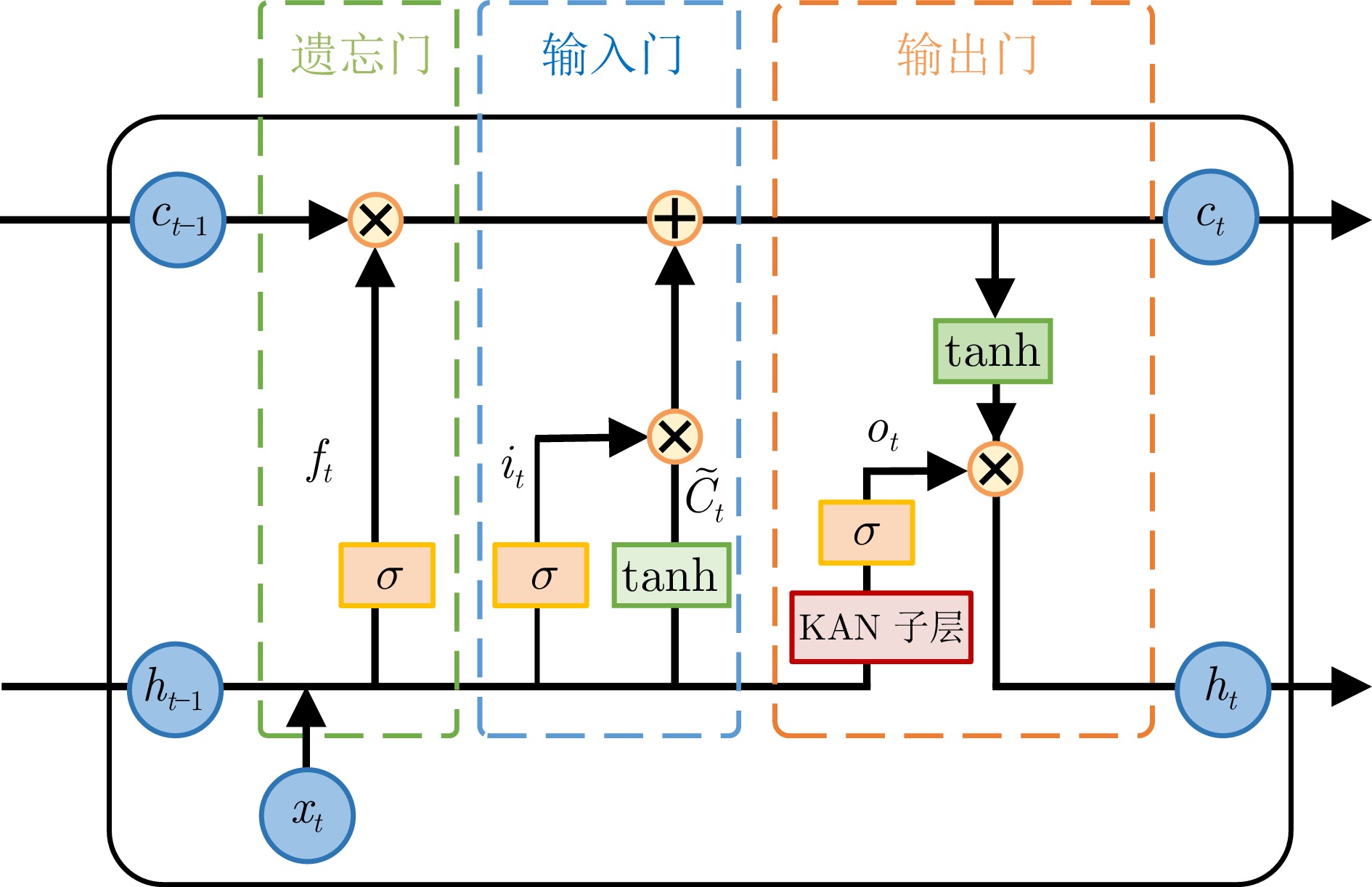
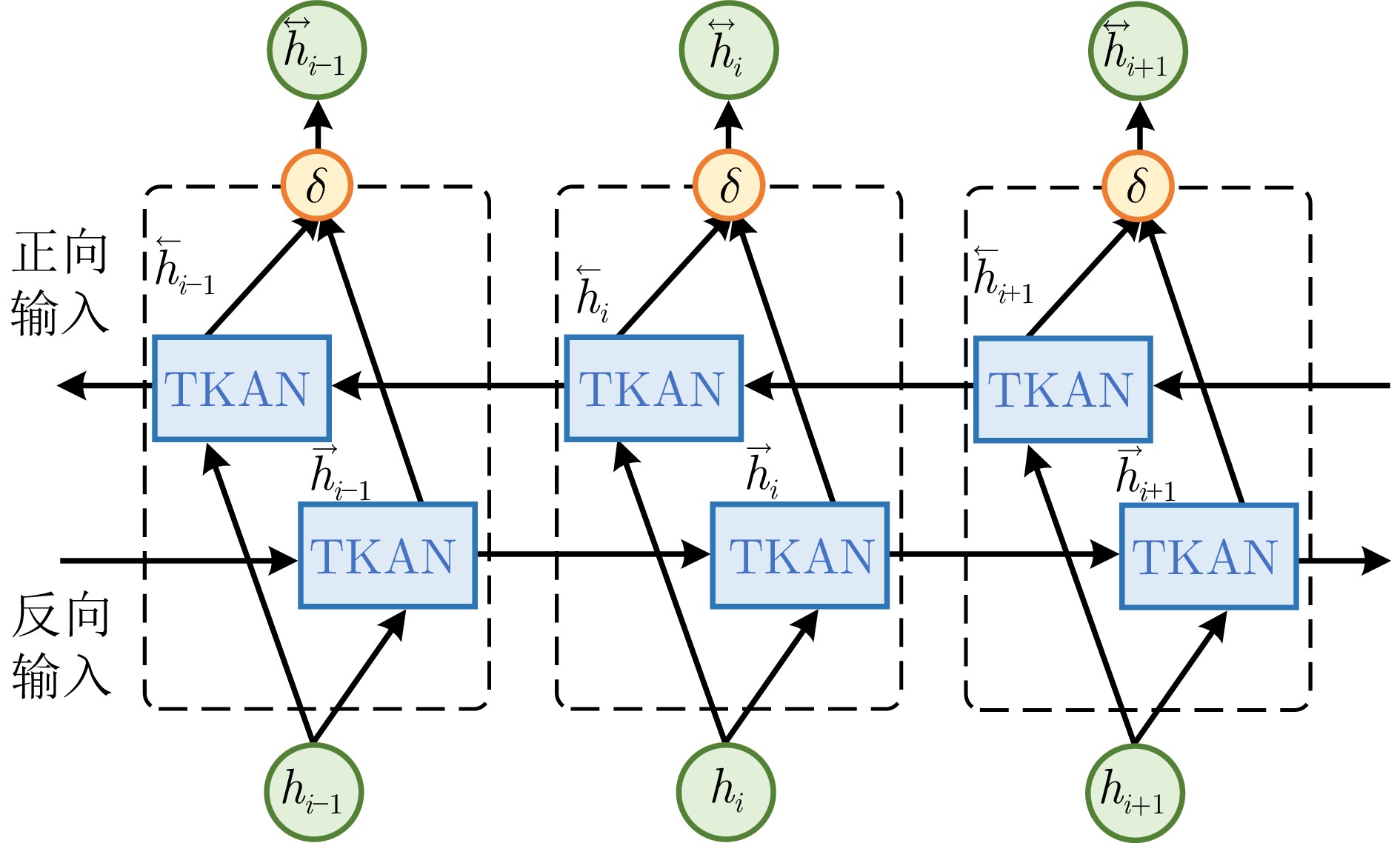
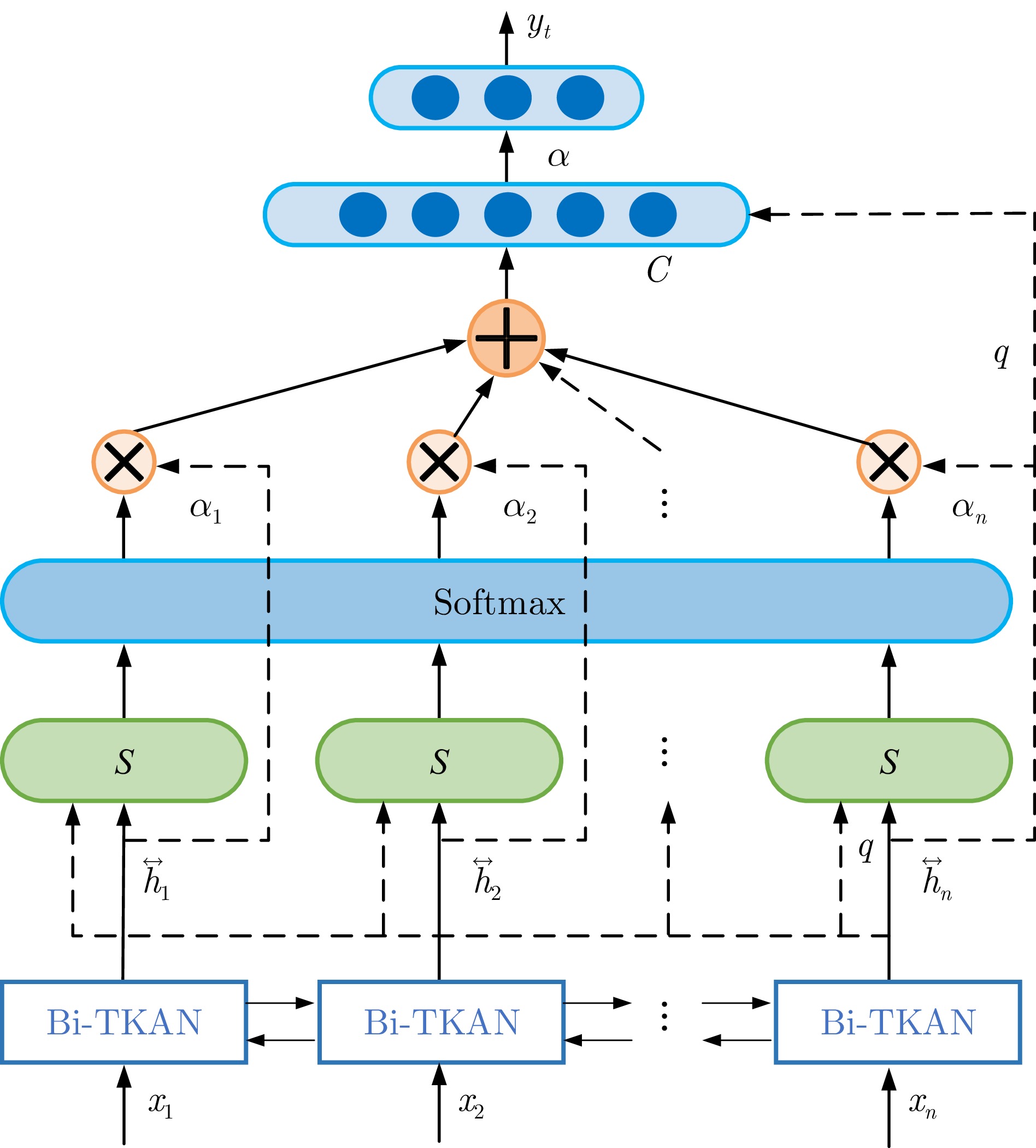
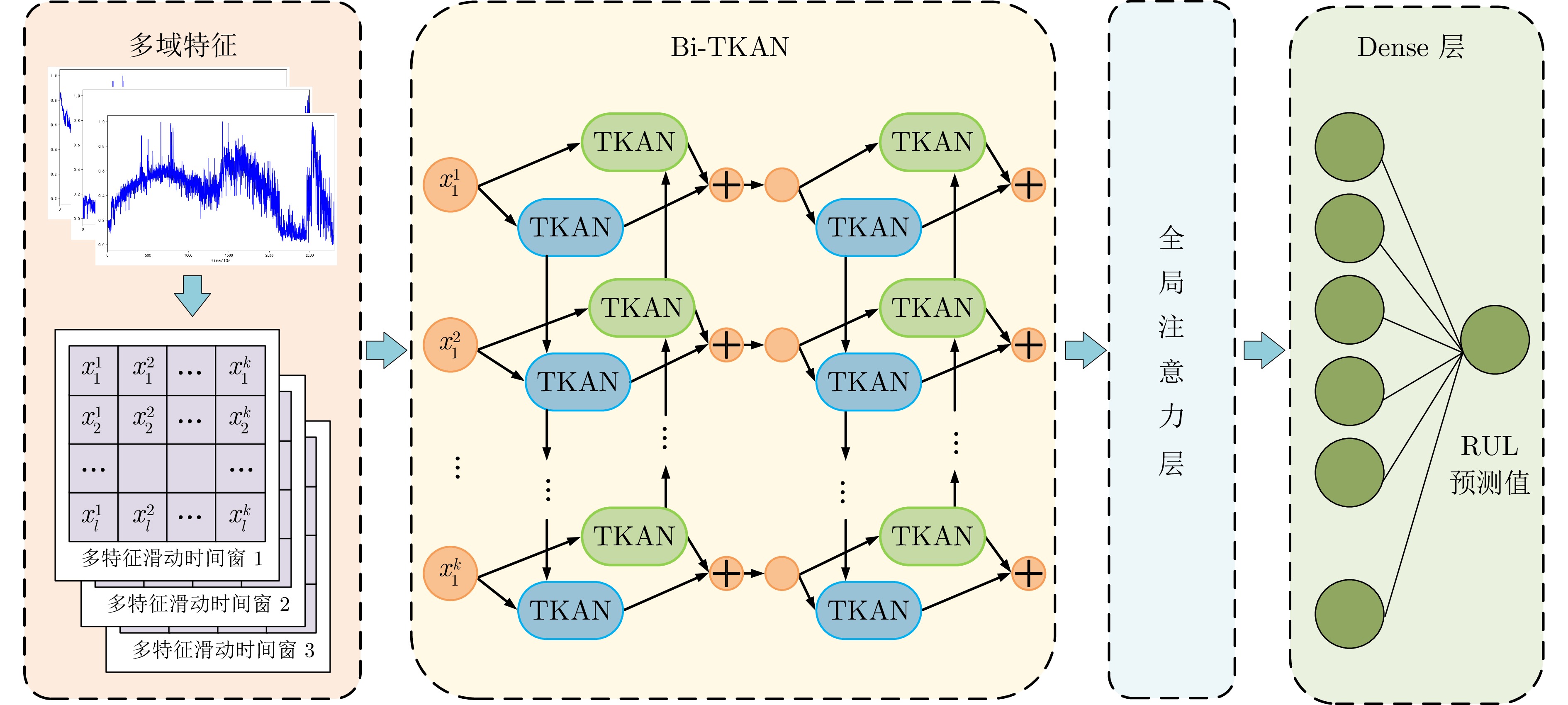
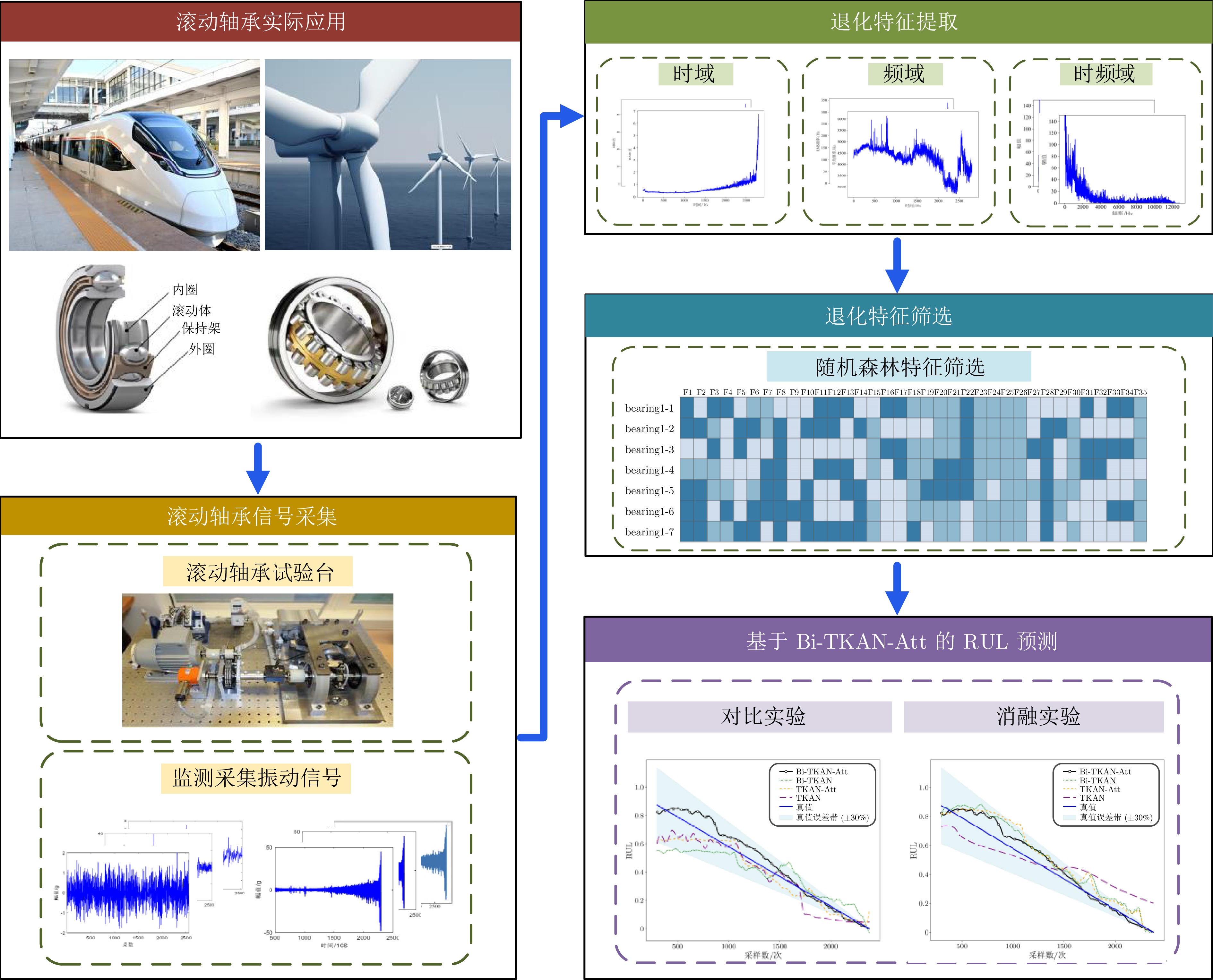
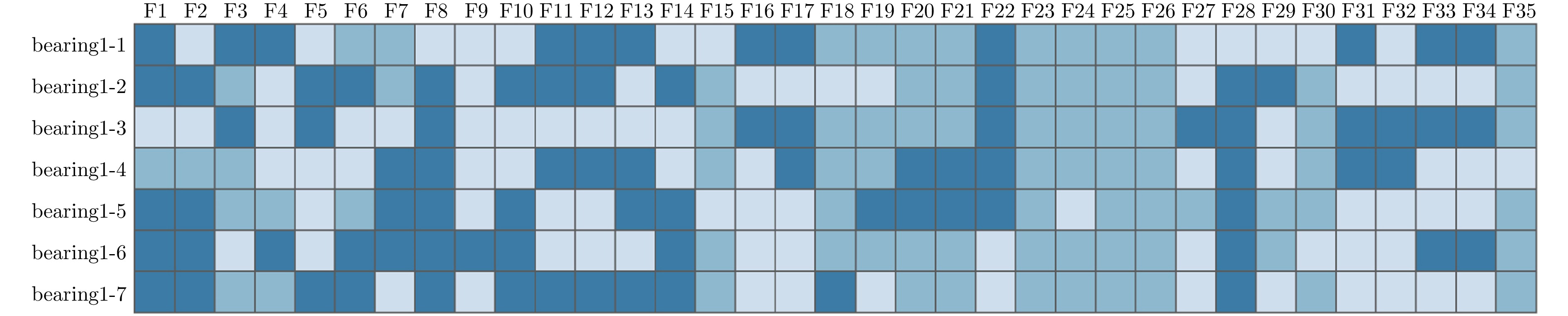
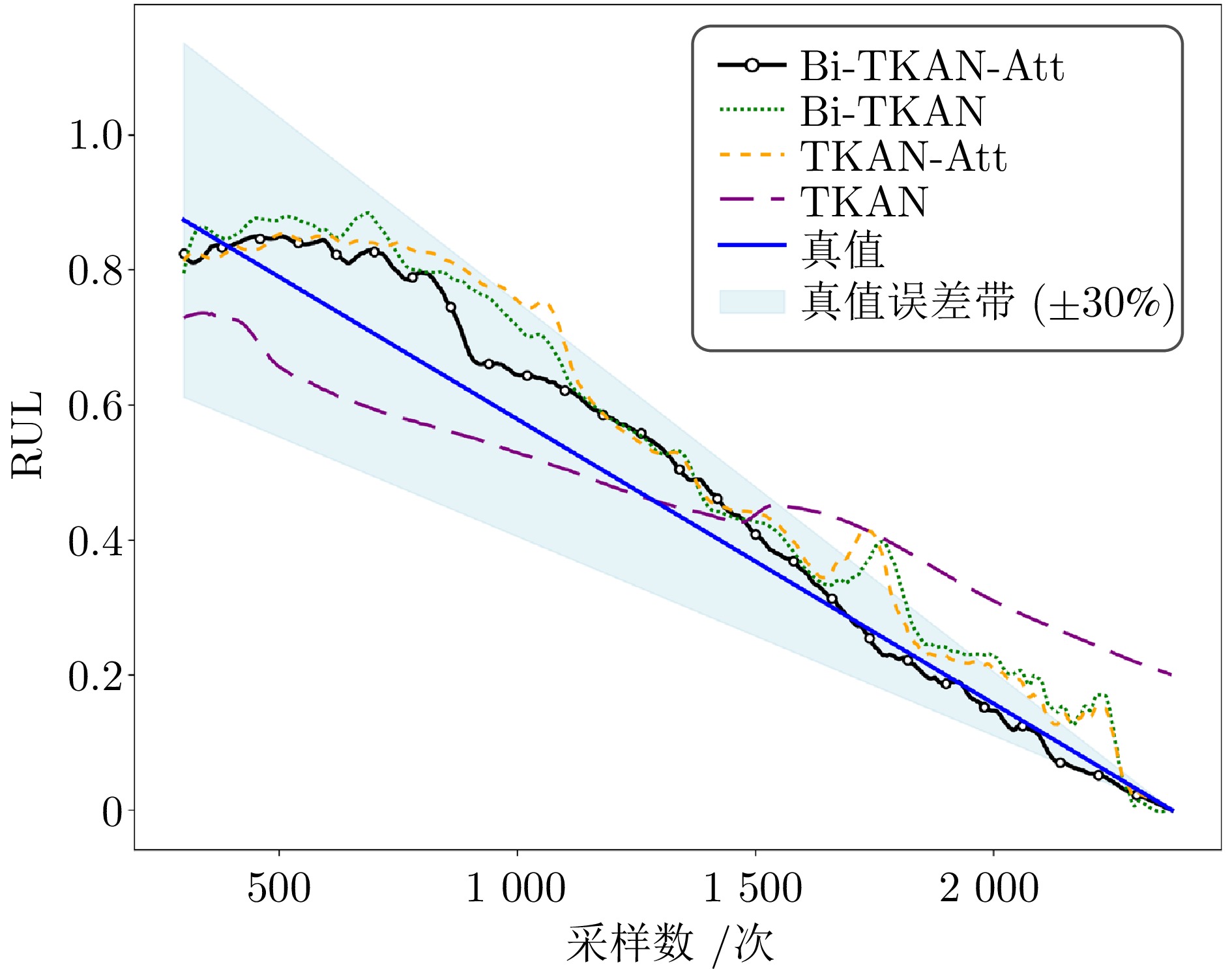
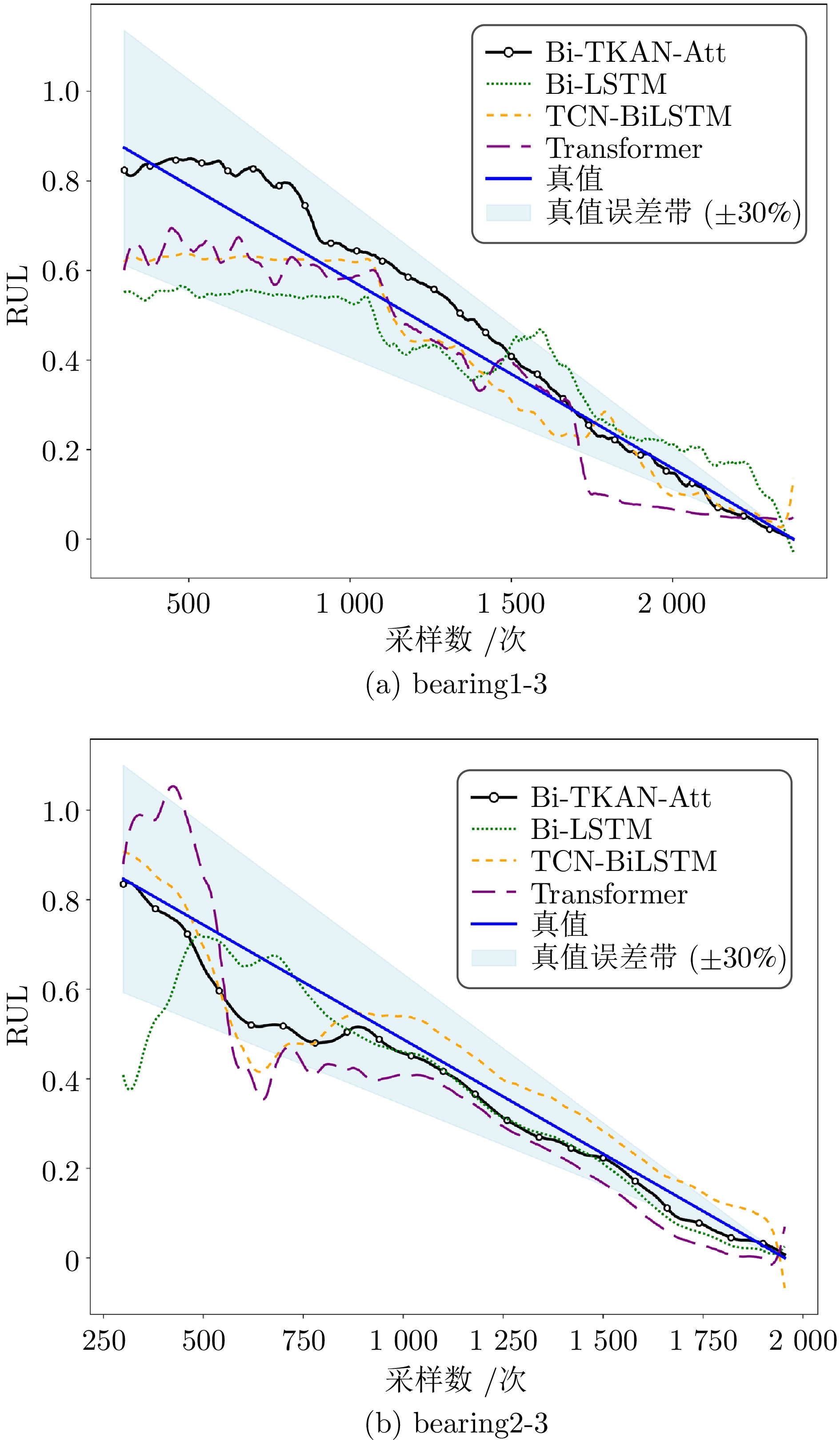
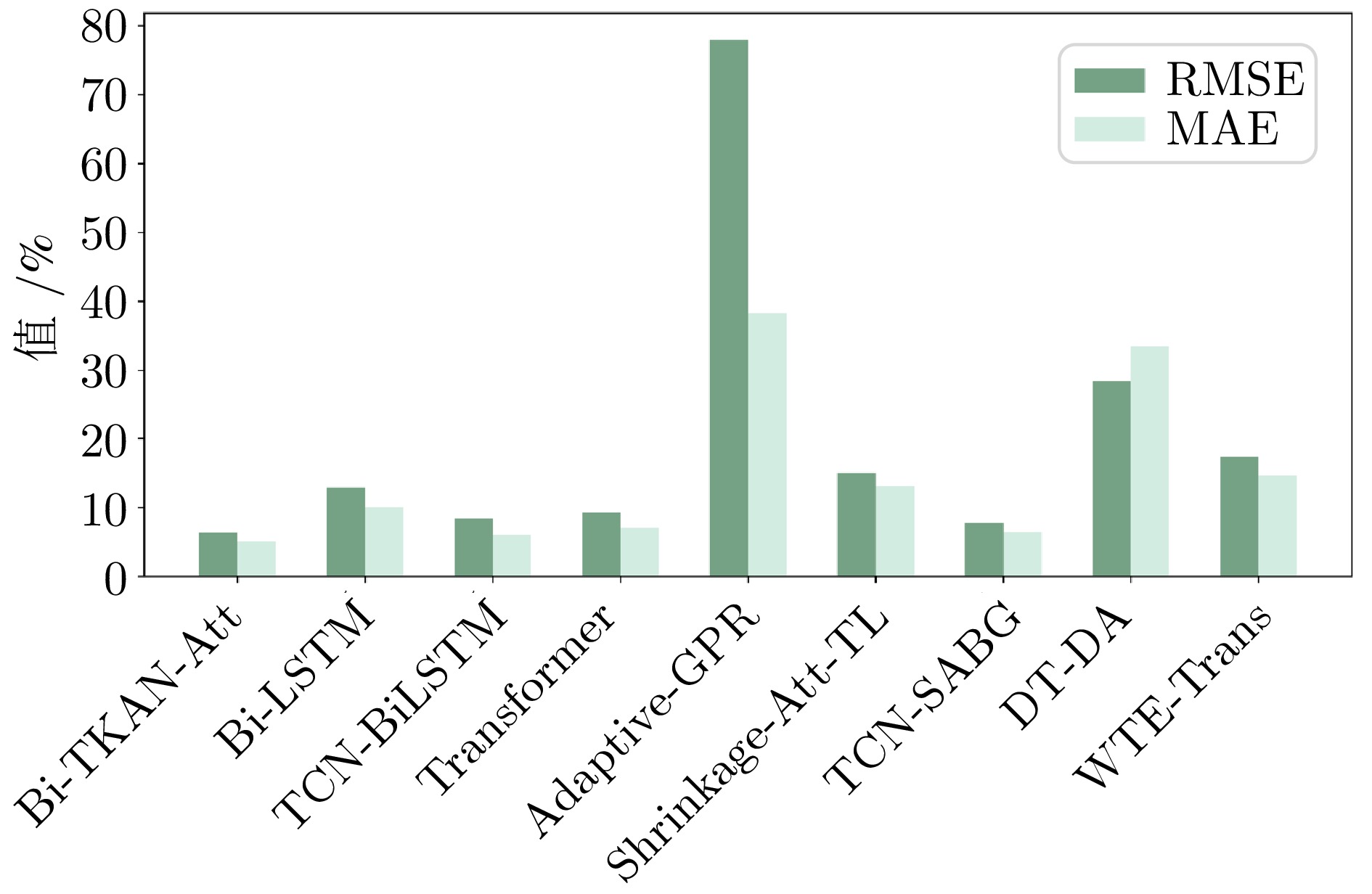
滚动轴承剩余使用寿命(RUL)的精准预测是确保设备或系统安全可靠运行的关键. 针对滚动轴承RUL预测中多维退化特征的长期依赖关系难以有效建模的问题, 提出一种双向时间序列建模与注意力机制融合的预测模型——双向时序科尔莫戈洛夫−阿诺尔德注意力网络(Bi-TKAN-Att). 该模型兼具了时序科尔莫戈洛夫−阿诺尔德网络的强时序建模能力和全局注意力机制的关键特征提取能力, 采用双向建模的方式捕捉前后向信息, 最终实现了具有长期依赖多维退化特征的滚动轴承RUL预测. 所提方法在滚动轴承数据集上进行实验验证, 结果表明Bi-TKAN-Att模型在捕获滚动轴承退化特性和提升RUL预测精度方面具有显著优势, 并通过消融实验证明了模型各组件的合理性和有效性, 为滚动轴承的寿命预测提供了全新可行的解决方案.
滚动轴承剩余使用寿命(RUL)的精准预测是确保设备或系统安全可靠运行的关键. 针对滚动轴承RUL预测中多维退化特征的长期依赖关系难以有效建模的问题, 提出一种双向时间序列建模与注意力机制融合的预测模型——双向时序科尔莫戈洛夫−阿诺尔德注意力网络(Bi-TKAN-Att). 该模型兼具了时序科尔莫戈洛夫−阿诺尔德网络的强时序建模能力和全局注意力机制的关键特征提取能力, 采用双向建模的方式捕捉前后向信息, 最终实现了具有长期依赖多维退化特征的滚动轴承RUL预测. 所提方法在滚动轴承数据集上进行实验验证, 结果表明Bi-TKAN-Att模型在捕获滚动轴承退化特性和提升RUL预测精度方面具有显著优势, 并通过消融实验证明了模型各组件的合理性和有效性, 为滚动轴承的寿命预测提供了全新可行的解决方案.
2025, 51(8): 1869-1882.
doi: 10.16383/j.aas.c240794
cstr: 32138.14.j.aas.c240794
摘要:
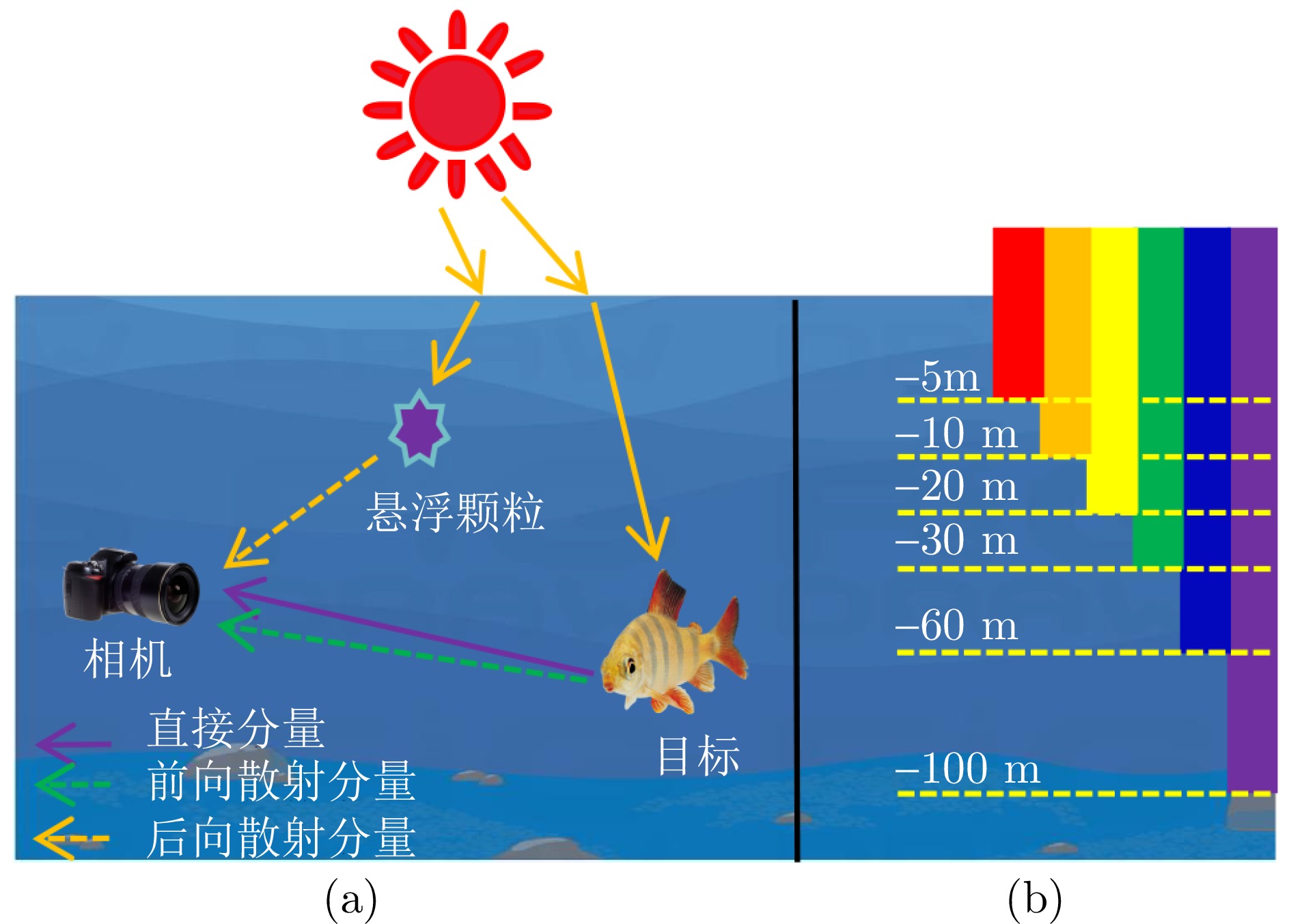
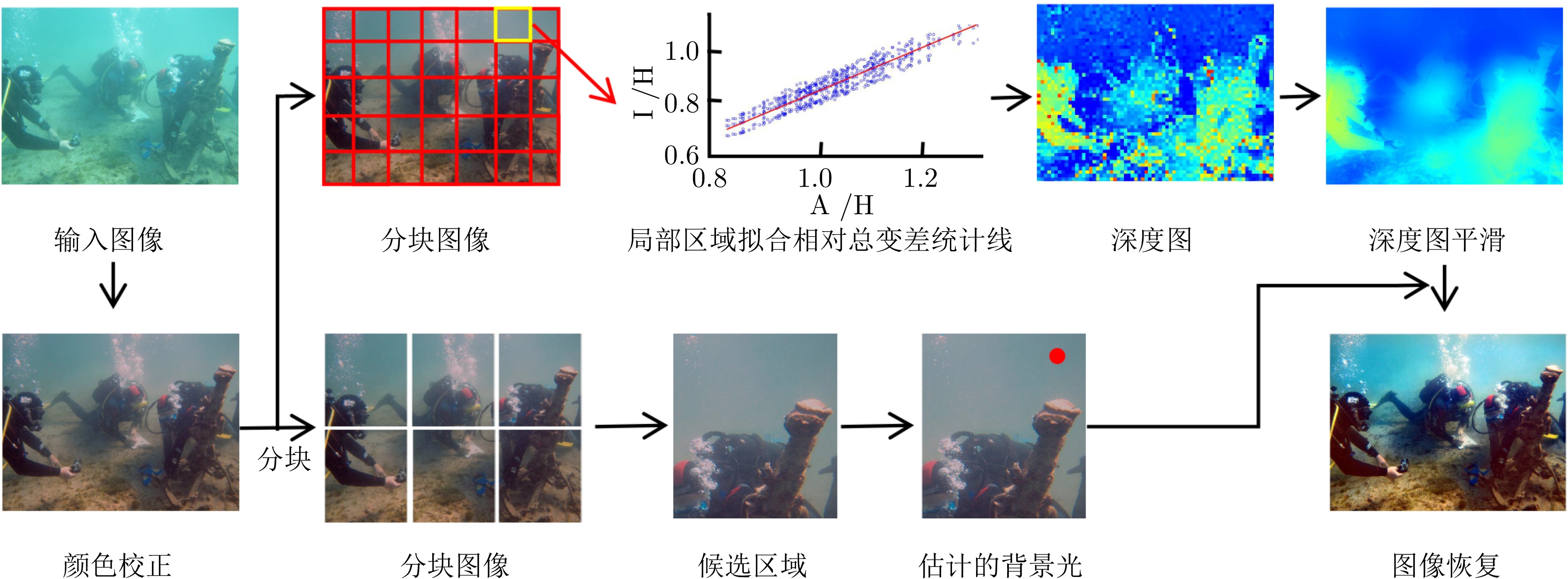
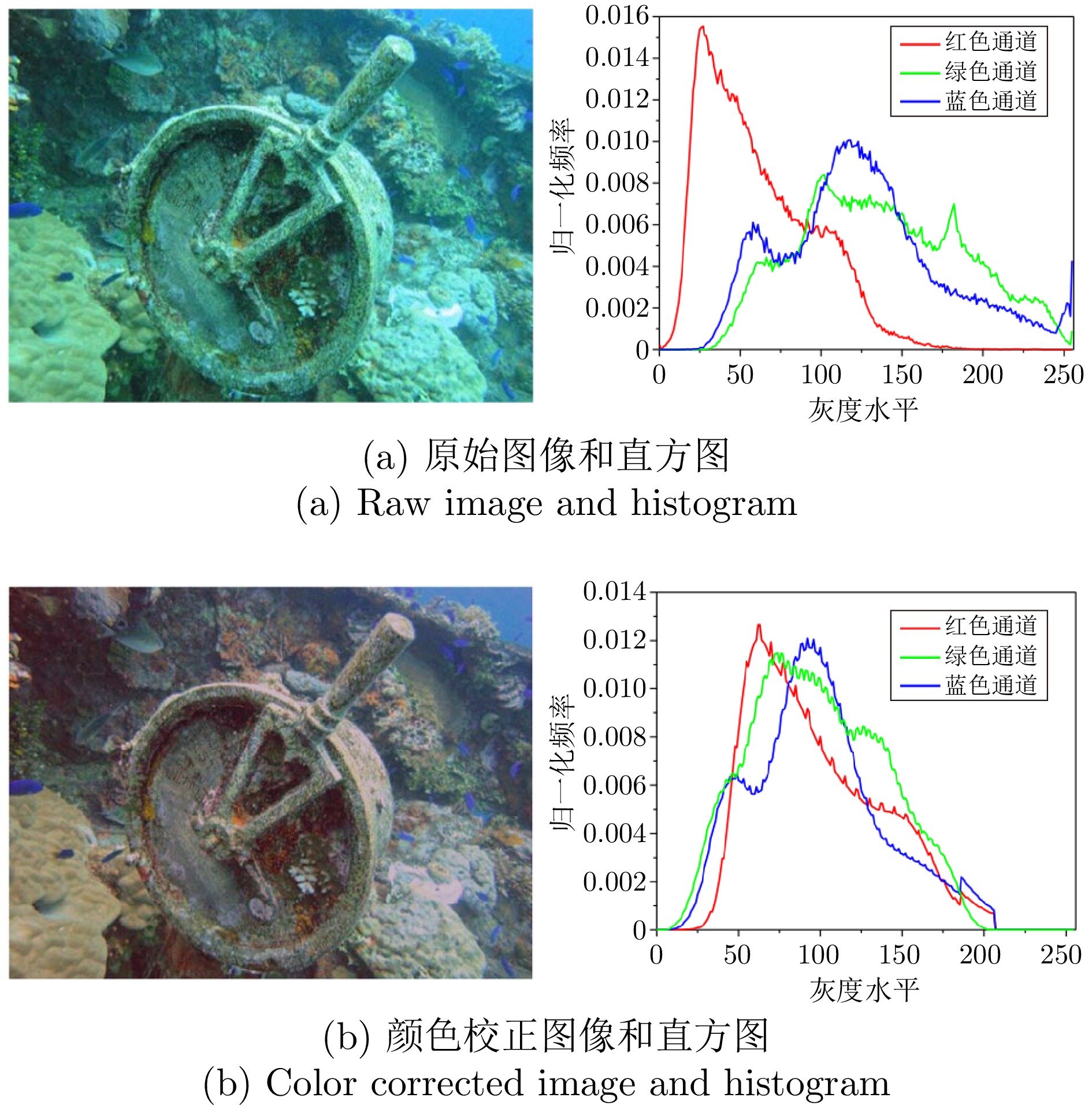
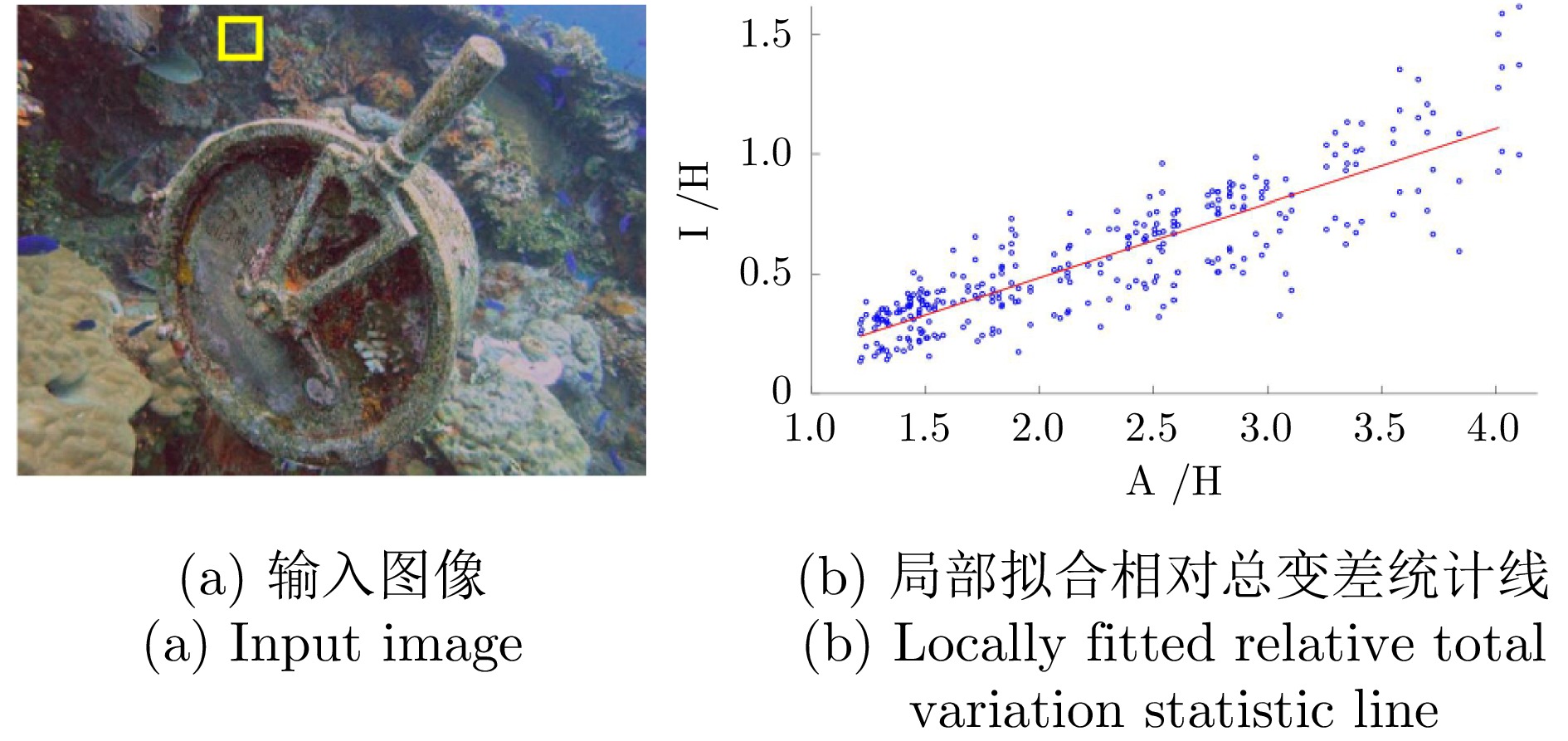
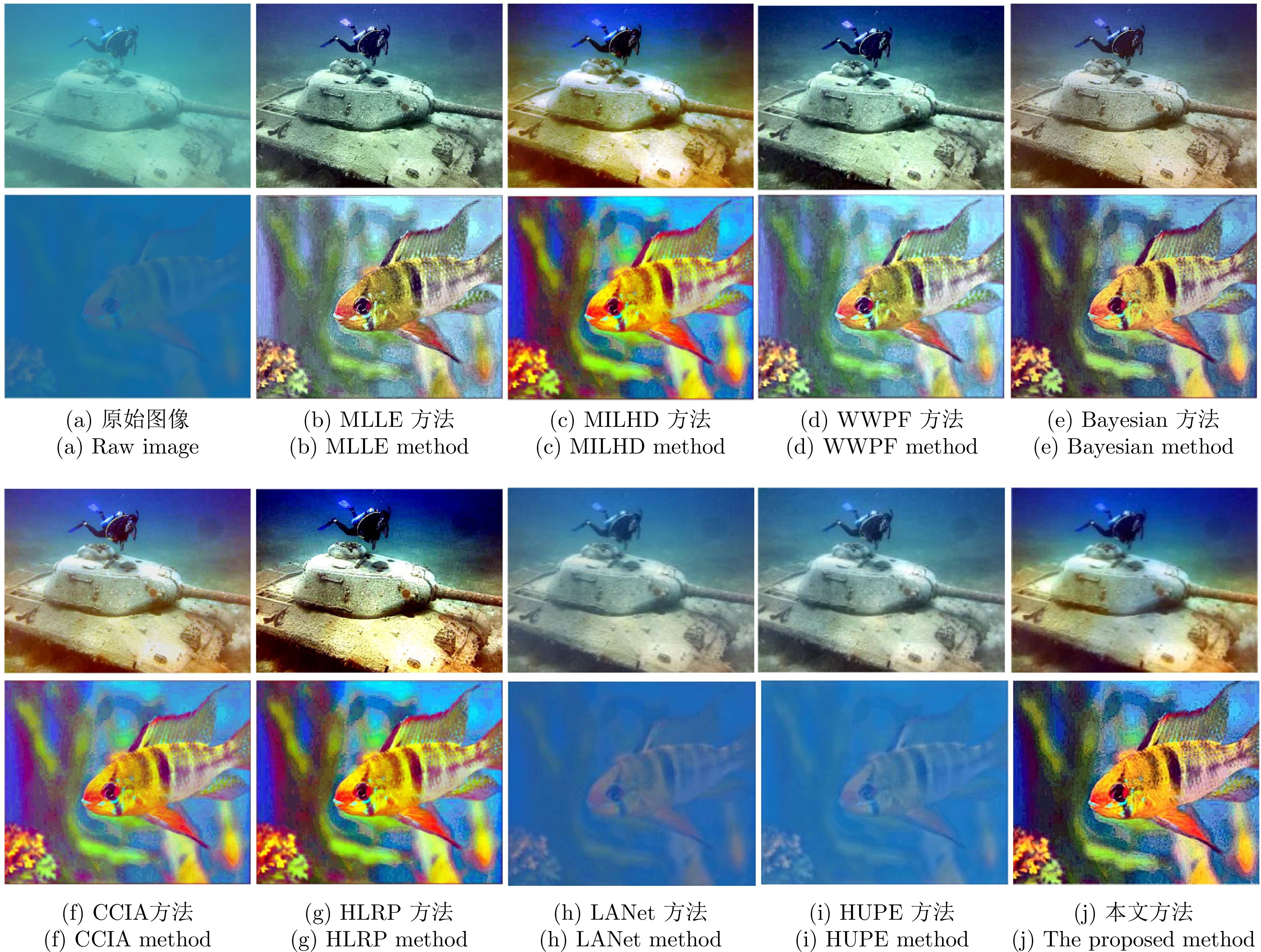
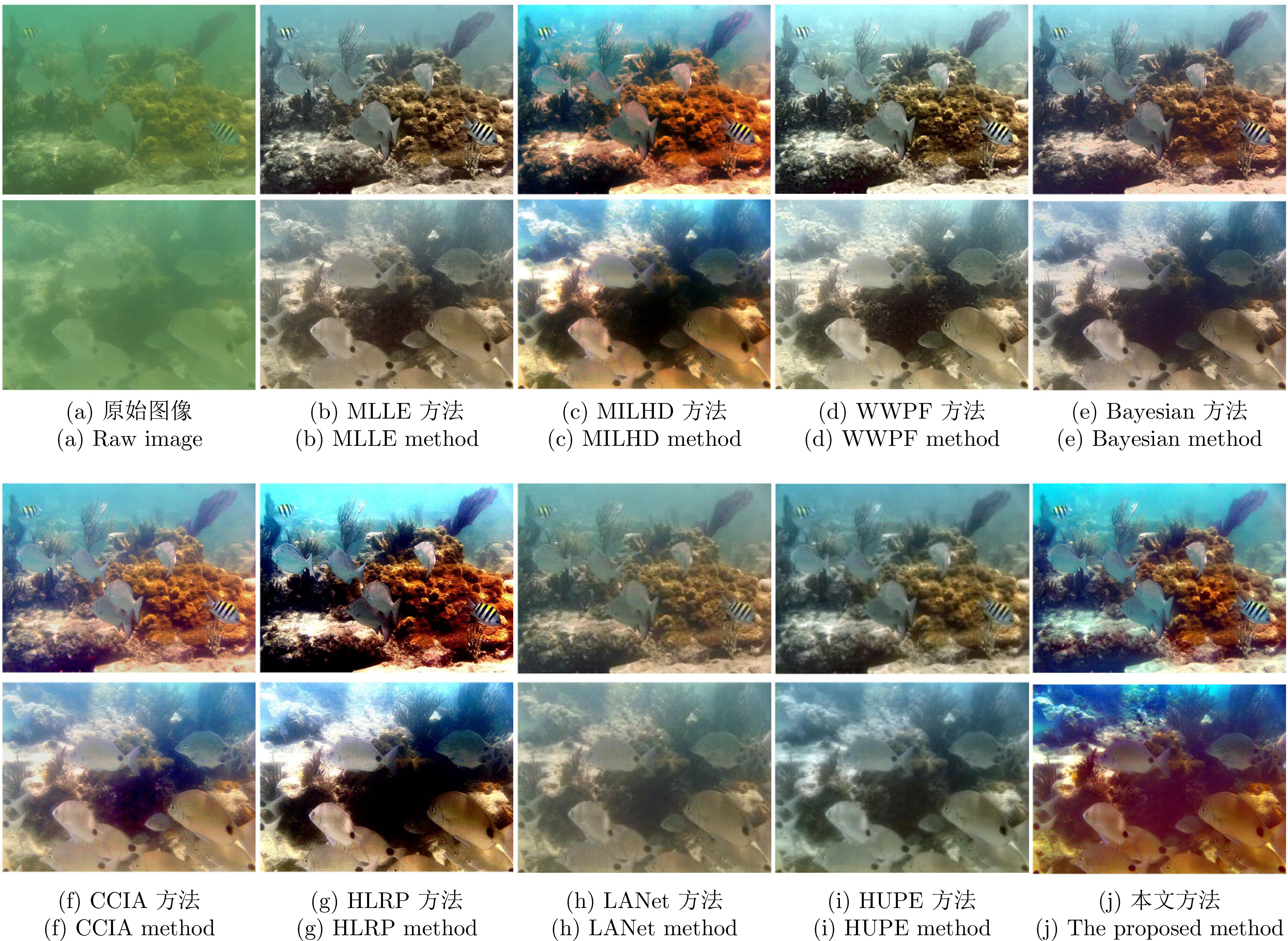
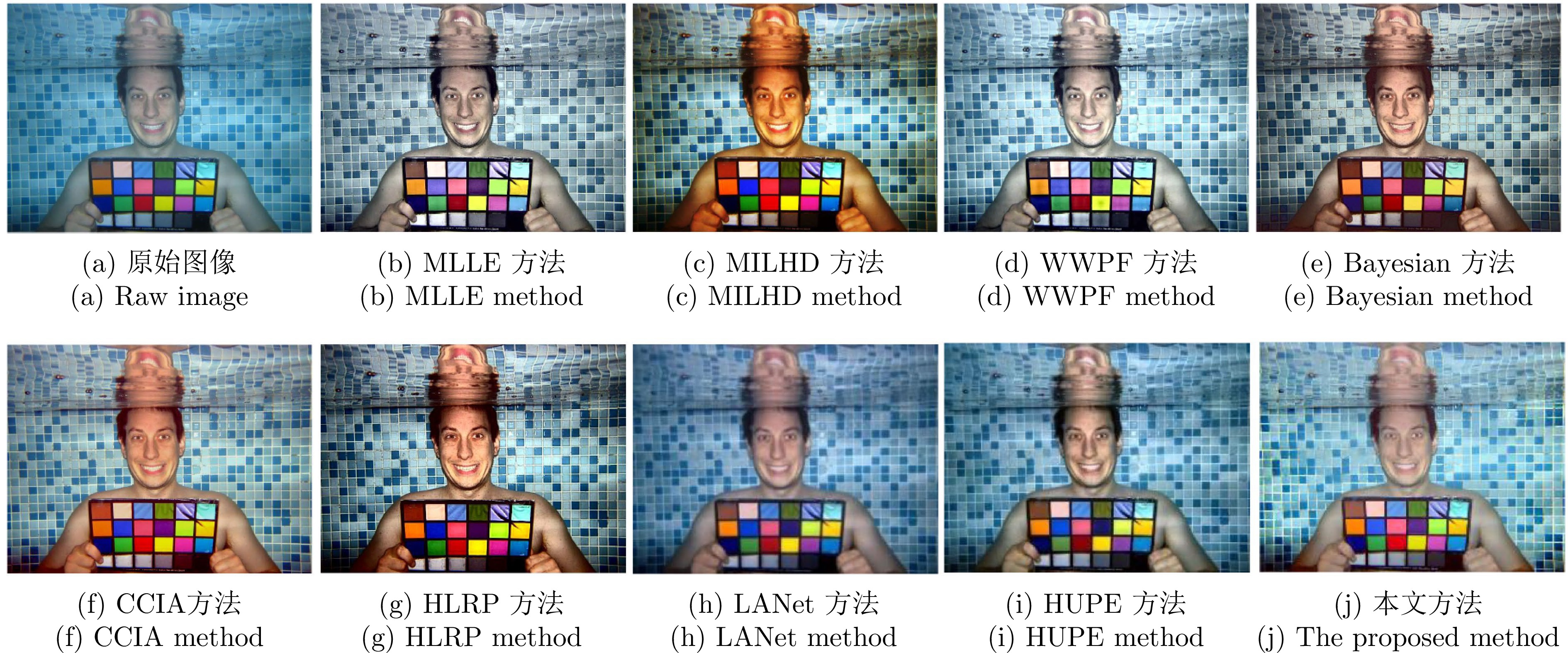
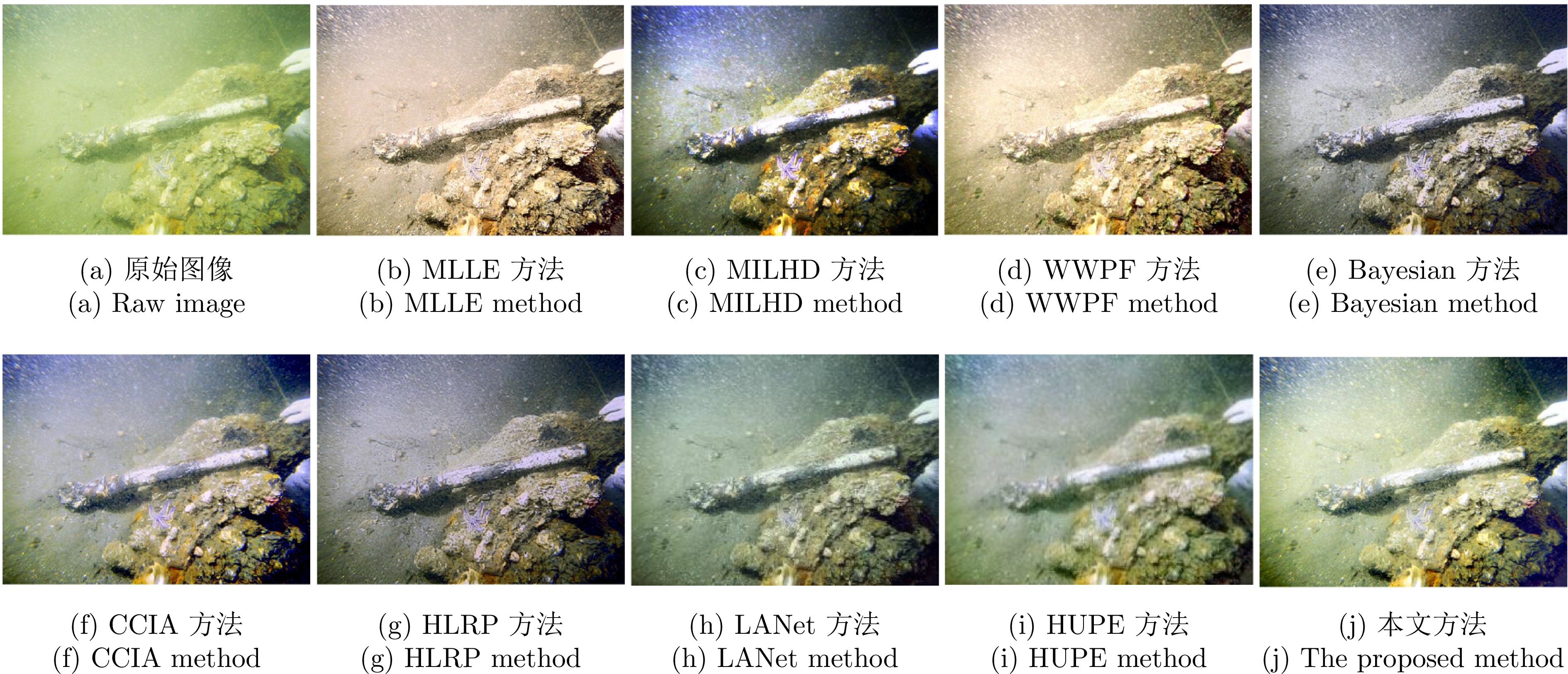
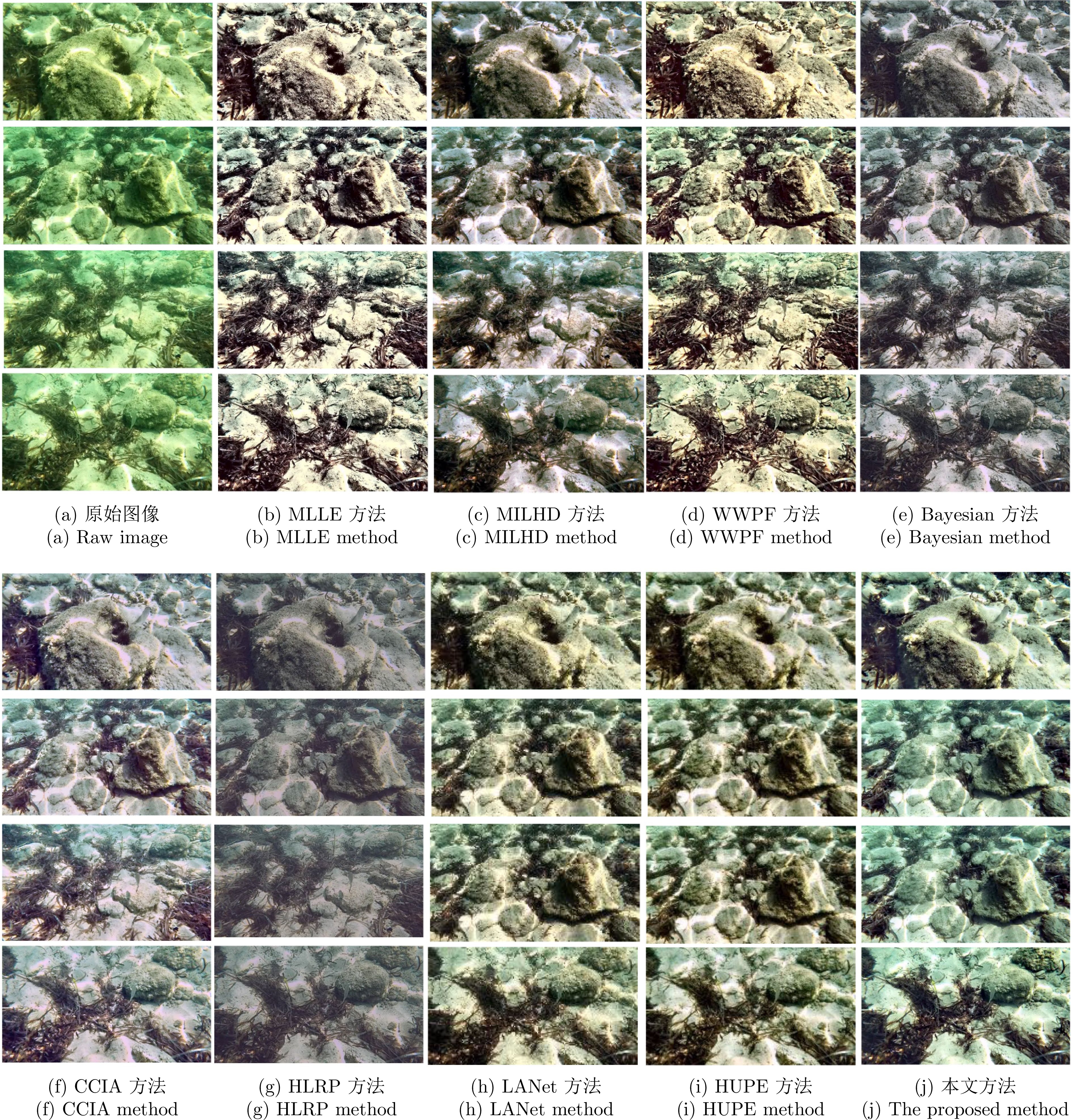
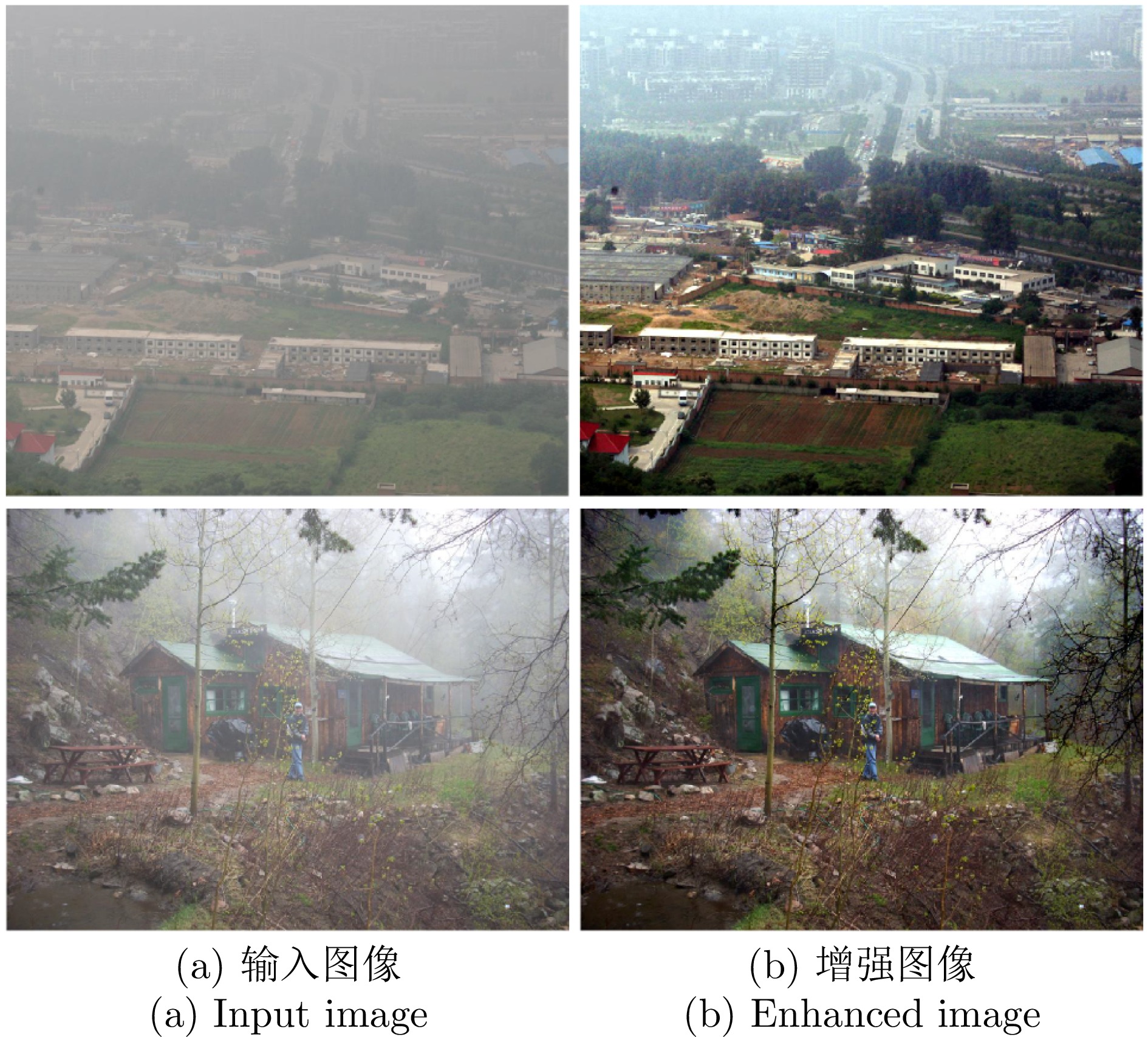
针对水下采集的图像存在模糊、低对比度和颜色失真等低质量问题, 提出一种基于相对总变差统计线的水下图像快速增强方法. 首先, 采用线性拉伸的方法来校正图像的颜色信息, 消除颜色偏差并恢复图像的自然度. 其次, 基于大气散射模型, 结合图像的纹理信息构建水下图像的相对总变差统计线模型, 利用该模型准确估计图像深度图. 此外, 提出一种基于图像分块细分的水下背景光估计方法, 得到鲁棒的全局背景光估计值. 最后, 在估计的背景光和深度图基础上得到符合人眼感官视觉的水下增强图像. 实验结果表明, 所提方法不仅在主客观图像质量评价上具有明显优势, 而且在计算效率上优于现有的先进方法.
针对水下采集的图像存在模糊、低对比度和颜色失真等低质量问题, 提出一种基于相对总变差统计线的水下图像快速增强方法. 首先, 采用线性拉伸的方法来校正图像的颜色信息, 消除颜色偏差并恢复图像的自然度. 其次, 基于大气散射模型, 结合图像的纹理信息构建水下图像的相对总变差统计线模型, 利用该模型准确估计图像深度图. 此外, 提出一种基于图像分块细分的水下背景光估计方法, 得到鲁棒的全局背景光估计值. 最后, 在估计的背景光和深度图基础上得到符合人眼感官视觉的水下增强图像. 实验结果表明, 所提方法不仅在主客观图像质量评价上具有明显优势, 而且在计算效率上优于现有的先进方法.