

Attitude Consensus Control of UAV Swarm Based on Adaptive Multi-scale Super-twisting Algorithm
-
摘要: 四旋翼无人机(Unmanned aerial vehicle, UAV)系统姿态角和角速度分别为运行在不同时间尺度上的慢、快动态. 由于输入扰动的上界难以精确估计, 本文提出一种基于自适应多尺度超螺旋(Super-twisting, STW)滑模算法的无人机集群一致性控制策略. 首先, 建立无人机集群系统的姿态角模型, 并通过奇异摄动理论将其化为两时间尺度形式. 基于系统的快慢特性, 本文设计两时间尺度的超螺旋滑模算法, 并采用自适应增益处理无人机集群系统的未知边界非线性. 此外, 还提出一种改进型自适应多尺度超螺旋滑模算法, 进一步减少系统的一致性收敛时间, 实现无人机集群姿态角有限时间内同步. 最后通过仿真分析, 验证两种自适应多尺度超螺旋算法的正确性和有效性.Abstract: In a UAV (unmanned aerial vehicle) system, the attitude angle and angular velocity of the UAV are, respectively, the slow and fast dynamics operating in different time scales. Due to the difficulty in the estimation of the bound of disturbance, this paper proposes a control method for UAV swarm, based on the adaptive multi-scale STW (super-twisting) sliding mode algorithm. First, the attitude model of the UAV swarm system is established, which is transformed into a two-time-scale model via singular perturbation theory. On this basis, this paper designs a two-time-scale STW sliding mode algorithm with adaptive gains to deal with the perturbations and unknows. Furthermore, by adding a few linear iterms, a modified adaptive STW control algorithm is also provided, which further reduces the convergence time and achieves the synchronization of the attitudes in finite time. Finally, the effectiveness of two different adaptive multi-scale STW algorithms are verified through simulations.
-
Key words:
- Singular perturbation /
- STW /
- multi-scale /
- attitude coordination /
- quadrotors
-
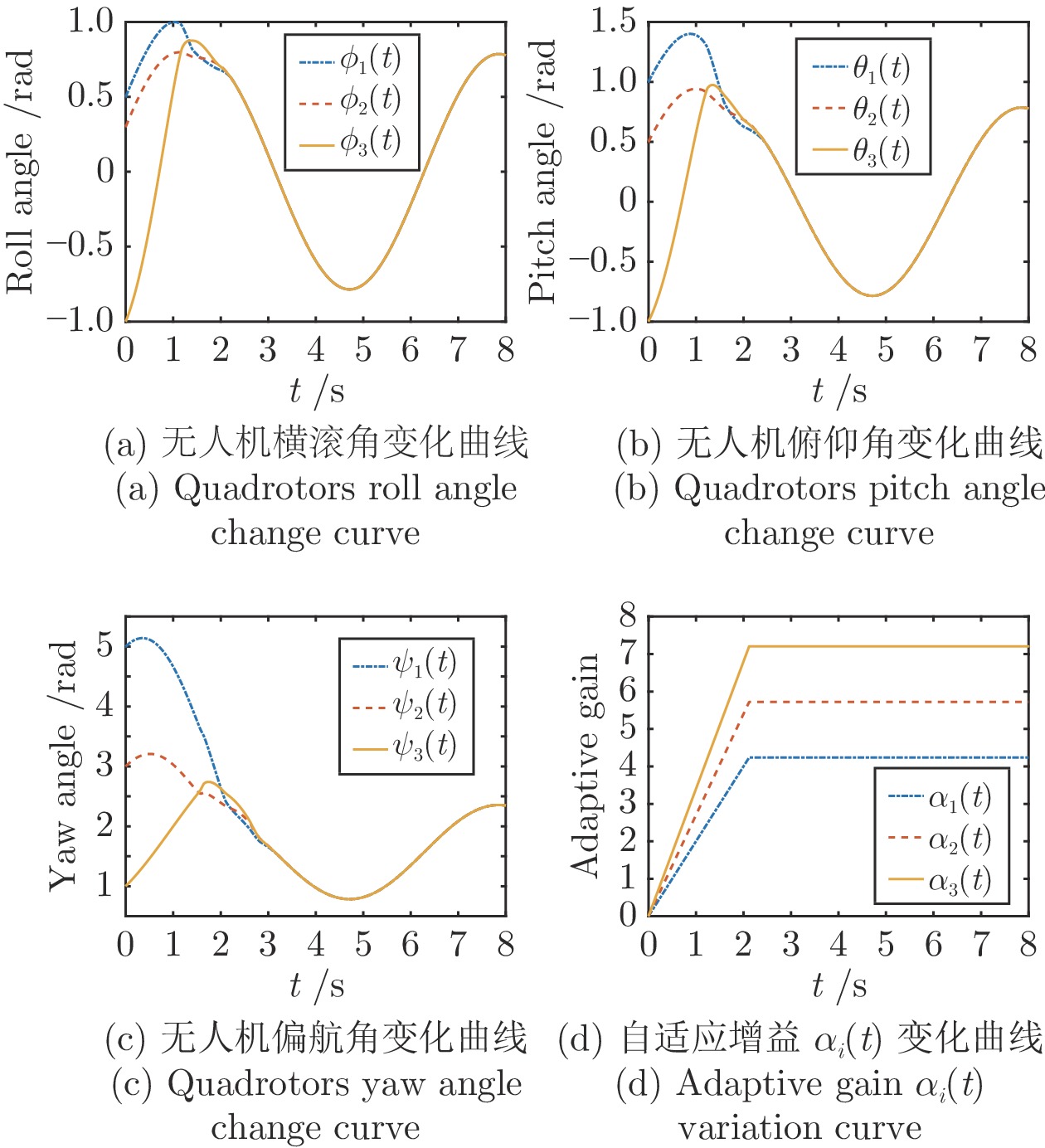
图 2 自适应多尺度STW算法控制下的无人机姿态历时曲线
Fig. 2 Trajectories of attitudes under the adaptive multi-scale STW controller
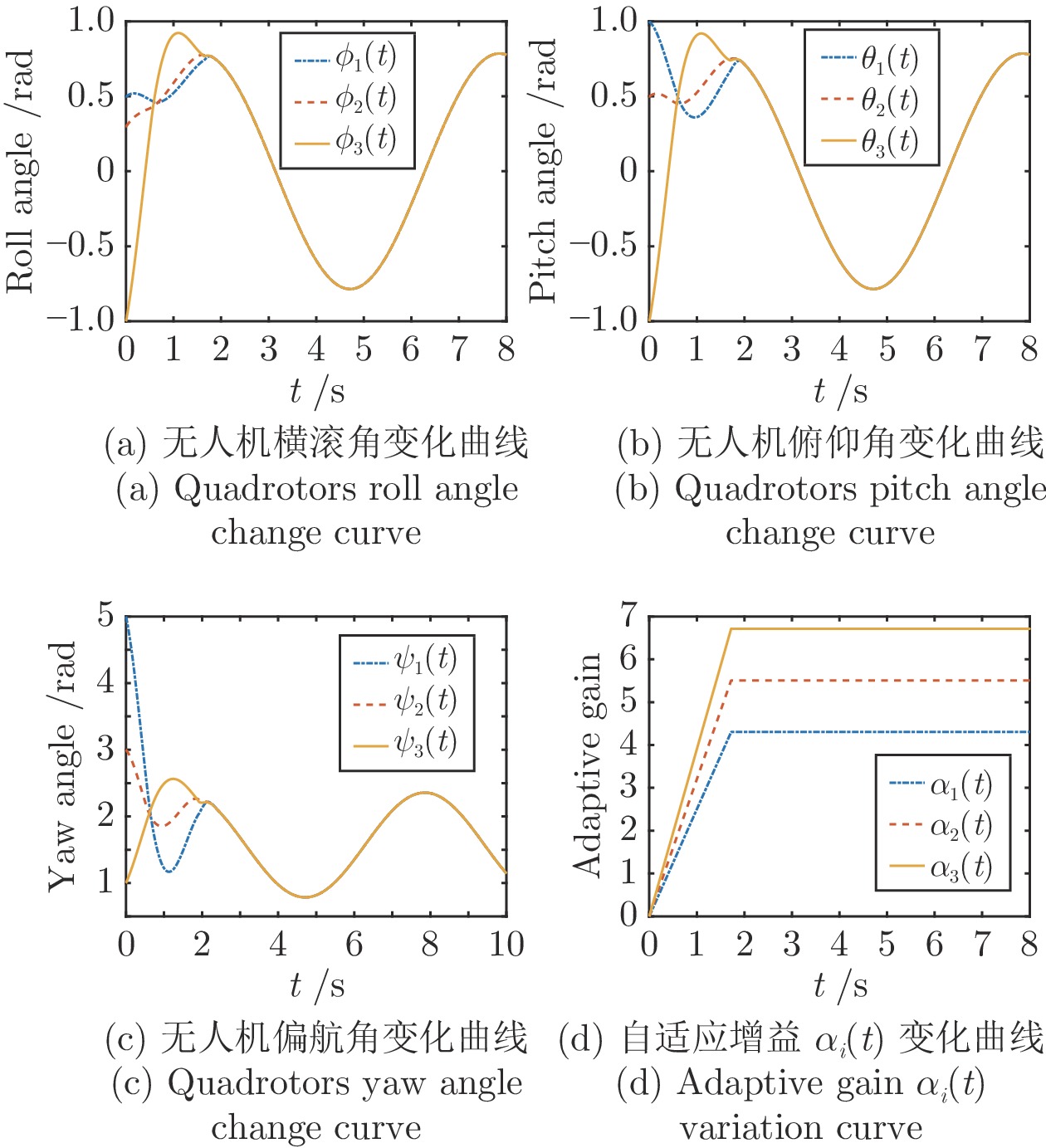
图 3 改进型自适应多尺度STW算法控制下的无人机姿态历时曲线
Fig. 3 Trajectories of attitudes under the modified adaptive multi-scale STW controller
-
[1] Xu J, Fridman E, Fridman L, Niu Y G. Static sliding mode control of systems with arbitrary relative degree by using artificial delays. IEEE Transactions on Automatic Control, 2020, 65(12): 5464-5471 doi: 10.1109/TAC.2020.2973598 [2] 许璟, 蔡晨晓, 李勇奇, 邹云. 小型四旋翼无人机双闭环轨迹跟踪与控制. 控制理论与应用, 2015, 32(10): 1335-1342Xu Jing, Cai Chen-Xiao, Li Yong-Qi, Zhou Yun. Dual-loop path tracking and control for quad-rotor miniature unmanned aerial vehicles. Control Theory & Applications, 2015, 32(10): 1335-1342 [3] 周小程, 严建钢, 谢宇鹏, 翟鸿君. 多无人机对地攻击任务分配算法. 海军航空工程学院学报, 2012, 27(3): 308-312Zhou Xiao-Cheng, Yan Jian-Gang, Xie Yu-Peng, Zhai Hong-Jun. Task distributed algorithmic for multi-UAV based on auction mechanism. Journal of Naval Aeronautical and Astronautical University, 2012, 27(3): 308-312 [4] 常一哲, 李战武, 杨海燕, 罗卫平, 徐安. 未来中远距协同空战多目标攻击决策研究. 火力与指挥控制, 2015, 40(6): 36-40Chang Yi-Zhe, Li Zhan-Wu, Yang Hai-Yan, Luo Wei-Ping, Xu An. A decision-making for multiple target attack based on characteristic of future long-range cooperative air combat.Fire Control & Command Control, 2015, 40(6): 36-40 [5] Luo C, Yu L J, Ren P. A vision-aided approach to perching a bioinspired unmanned aerial vehicle.IEEE Transactions on Industrial Electronics, 2018, 65(5): 3976-3984 doi: 10.1109/TIE.2017.2764849 [6] De Castro A I, Torres-Sanchez J T, Pena, J M, Csillik O, Lopez-Granados F. An automatic random forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sensing, 2018, 10(2): 285 [7] Kim B O, Yun K H, Chang T S, Bahk J J, Kim S P. A preliminary study on UAV photogrammetry for the hyanho coast near the military reservation zone, eastern coast of Korea. Ocean and Polar Research, 2017, 39(2): 159-168 doi: 10.4217/OPR.2017.39.2.159 [8] 王宁, 王永. 基于模糊不确定观测器的四旋翼飞行器自适应动态面轨迹跟踪控制. 自动化学报, 2018, 44(4): 685-695Wang Ning, Wang Yong. Fuzzy uncertainty observer based adaptive dynamic surface control for trajectory tracking of a quadrotor. Acta Automatica Sinica, 2018, 44(4): 685-695 [9] Vallejo D, Castro-Schez J J, Glez-Morcillo C, et al. Multi-agent architecture for information retrieval and intelligent monitoring by UAVs in known environments affected by catastrophes. Engineering Applications of Artificial Intelligence, 2020, 87: 103243 doi: 10.1016/j.engappai.2019.103243 [10] 谢海军, 梁湛民, 王健. 无人机编队表演控制系统设计与实现. 电子设计工程, 2021, 29(17): 75-79Xie Hai-jun, Liang Zhan-min, Wang Jiang. Design and implementation of control system of UAV formation performance. Electronic Design Engineering, 2021, 29(17): 75-79 [11] 杨明月, 寿莹鑫, 唐勇, 刘畅, 许斌. 多四旋翼无人机编队保持与避碰控制. 航空学报: 2022, 43: 1-11 doi: 10.7527/j.issn.1000-6893.2022.7.hkxb202207001Yang Ming-yue, Shou Ying-xin, Tang Yong, Liu Chang, Xu Bin. Multi-Quadrotor UAVs formation maintaining and collision avoidance control. Acta Aeronautica et Astronautica Sinica, 2022, 43: 1-11 doi: 10.7527/j.issn.1000-6893.2022.7.hkxb202207001 [12] Mao X, Zhang H, Wang Y. Flocking of quad-rotor UAVs with fuzzy control. ISA transactions, 2018, 74: 185-193 doi: 10.1016/j.isatra.2018.01.024 [13] 刘明威, 高兵兵, 王鹏飞, 刘亚南, 李怡萌, 李沛琦. 基于神经网络自适应PID的无人机编队避障飞行控制研究. 无人系统技术, 2022, 5(2): 22-32Liu Ming-wei, Gao Bing-bing, Wang Peng-fei, Liu Ya-nan, Li Yi-meng, Li Pei-qi. Research on UAV formation obstacle avoidance flight based on neural network adaptive PID control. Unmanned Systems Technology, 2022, 5(2): 22-32 [14] 李习康, 许璟, 牛玉刚. 带记忆比例-积分-时滞输出滑模控制器设计. 控制理论与应用, 2022, 3: 1-9Li Xi-kang, Xu Jing, NIU Yu-gang. Memory Proportional-Integral-Retarded output sliding mode controller design. Control Theory & Applications, 2022, 3: 1-9 [15] 田栢苓, 李品品, 鲁瀚辰, 宗群. 复杂环境下多无人机轨迹姿态协同控制. 航空学报, 2020, 41: 36-43Tian Bo-lin, Li Pin-pin, Lu Hao-chen, Zong Qun. Trajectory and attitude coordinated control of multiple unmanned aerial vehicles in complex environments. Acta Aeronautica et Astronautica Sinica, 2020, 41: 36-43 [16] Yu Z Q, Liu Z X, Zhang Y M, Qu Y H, Su C Y. Decentralized fault-tolerant cooperative control of multiple UAVs with prescribed attitude synchronization tracking performance under directed communication topology. Frontiers of Information Technology & Electronic Engineering, 2019, 20(5): 685-701 [17] 奚文龙, 唐文秀, 许李尚, 刘方悦. 基于一阶低通滤波器滑模反步法的直流电机位置控制. 重庆邮电大学学报(自然科学版), 2017, 29(4): 550-556Xi Wen-long, Tang Wen-xiu, Xu Li-shang, Liu Fang-yue. Position control of DC-motor based on one-order low pass filter backstepping sliding mode method. Chongqing University of Posts and Telecommunications, 2017, 29(4): 550-556 [18] Liu Z, Lou X, Jia J. Event-triggered dynamic output-feedback control for a class of Lipschitz nonlinear systems. Frontiers of Information Technology & Electronic Engineering, 2022, 23(11): 1684-1699 [19] 陈再发, 刘彦呈. 基于超螺旋滑模变结构永磁同步电机的控制. 电机与控制应用, 2017, 44(6): 19-23Chen Zai-fa, Liu Yan-ceng. Control of Permanent Magnet Synchronous Motor Based on Super Spiral Sliding Model Variable Structure.Motor and Control Applications, 2017, 44(6): 19-23 [20] 任彦, 王义敏, 牛志强, 肖永健. 高阶终端滑模控制在稳定平台中的应用. 控制工程, 2021, 28(3): 553-558Ren Yan, Wang Yi-ming, Niu Zhi-qiang, Xiao Yong-jiang. Application of High-order Terminal Sliding Mode Control in Stable Platform. Control Engineering, 2021, 28(3): 553-558 [21] Derafa L, Benallegue A, Fridman L. Super twisting control algorithm for the attitude tracking of a four rotors UAV. Journal of the Franklin Institute, 2012, 349(2): 685-699 doi: 10.1016/j.jfranklin.2011.10.011 [22] Naidu D. Singular perturbations and time scales in control theory and applications: an overview. Dynamics of Continuous Discrete and Impulsive Systems Series B, 2002, 9: 233-278. doi: 10.3934/dcds.2003.9.233 [23] Li F, Zheng W X, Xu S, et al. A novel ϵ-dependent Lyapunov function and its application to singularly perturbed systems. Automatica, 2021, 133: 109749 doi: 10.1016/j.automatica.2021.109749 [24] 何守元. 正定矩阵的性质及判定方法. 数理化解题研究, 2020, 24: 18-19He Shou-yuan. Properties and judgment methods of positive definite matrix. Journal of Mathematical and chemical problem solving, 2020, 24: 18-19 [25] Malamud S M. A converse to the Jensen inequality, its matrix extensions and inequalities for minors and eigenvalues. Linear Algebra and Its Applications, 2001, 22(1): 19-41 [26] Shtessel Y B, Moreno J A, Plestan F. Super-twisting adaptive sliding mode control: A Lyapunov design. In: Proceedings of the 49th Conference on Decision and Control. Petersburg, Russia: IEEE, 2010. 5109−5113 [27] Wang G, Li Z, Miao X, et al. Fault detection of discrete-time delay Markovian jump systems with delay term modes partially available. Journal of the Franklin Institute, 2019, 356(5): 3045-3071 doi: 10.1016/j.jfranklin.2018.10.037 [28] 胡晓莉, 乔龙坤. 柯西不等式的改进及其应用. 江汉大学学报, 2021, 49(6): 29-33Hu Xiao-li, Qiao Long-kun. Improvement of Cauchy's Inequality and its Application. Journal of Jianghan University, 2021, 49(6): 29-33 [29] Munoz F, Estrada M B, González-Hernández I, Salazar S, Lozano R. Super twisting vs modified super twisting algorithm for altitude control of an unmanned aircraft system. In: Proceedings of the 12th International Conference on Electrical Engineering, Computing Science and Automatic Control. Tu Delft, Netherlands: IEEE, 2015. 1−6 [30] 金琬丽, 于志永, 蒋海军. 事件触发脉冲控制下二阶多智能体系统的领导跟随一致性. 兰州理工大学学报, 2022, 48(5): 153Jin Wan-li, Yu Zhi-yong, Jiang Hai-jun. Leader-following consensus of second-order multi-agent systems via event-triggered impulsive control. Journal of Lanzhou University of Technology, 2022, 48(5): 153 -

 下载:
下载:

图(3) / 表(1)
计量
- 文章访问数: 2288
- HTML全文浏览量: 1006
- PDF下载量: 473
- 被引次数: 0
