

Multi-maneuvering Acoustic Targets Tracking Algorithm Based on Virtual Extension of Single Acoustic Vector Sensor
-
摘要: 为解决单声矢量传声器(Acoustic vector sensor, AVS)可跟踪声目标数目少、跟踪性能差的问题, 提出了基于AVS虚拟扩展的多机动声目标跟踪算法. 首先, 引入高阶累积量预处理过程并建立高阶似然函数, 不仅能够抑制高斯噪声、提高估计精度, 还可通过AVS的虚拟扩展增加可跟踪目标数目. 然后, 在边缘化
$\delta$ 广义标签多伯努利(Marginalized$\delta$ -generalized label multi-bernoulli, M$\delta$ -GLMB)滤波框架下, 提出了基于累积量的增广运动模型状态的M$\delta$ -GLMB (Cumulants-based augumented motion model state M$\delta$ -GLMB, Cum-AMMS-GLMB)算法. 算法引入多种运动模型, 并将表征不同模型的索引标号作为目标状态的增广参数, 通过各模型间的加权混合获取优于单一运动模型的跟踪性能. 除此之外, 算法的序贯蒙特卡洛(Sequential Monte Carlo, SMC)实现过程中, 依据高阶预处理获得的归一化空间谱拟合检测概率函数, 抑制了杂波向可用粒子扩展, 进一步增强了高似然区域的粒子. 最后, 推导了AVS目标跟踪的后验克拉美罗下界(Posterior cram$\acute{e}$ r-rao lower bound, PCRLB), 并通过仿真实验验证了算法的量测噪声抑制能力和声目标跟踪性能.-
关键词:
- 声矢量传声器 /
- 高阶累积量 /
- 虚拟扩展 /
- 广义标签多伯努利滤波 /
- 多目标跟踪
Abstract: To solve the problem of poor performance and fewer trackable targets in the multi-targets tracking of acoustic vector sensor (AVS) in multi-target tracking, a multi-maneuvering acoustic targets tracking algorithm based on virtual extension of single AVS is proposed. First, the higher-order cumulants processing method is introduced to establish a higher-order likelihood function, which can not only improve the estimation accuracy by suppressing the Gaussian noise, but also increase the number of estimable targets by virtually extending the AVS. Then, under the marginalized$\delta$ -generalized label multi-bernoulli (M$\delta$ -GLMB) framework, a cumulants-based augmented motion model state M$\delta$ -GLMB (Cum-AMMS-GLMB) algorithm is proposed. The algorithm introduces multiple models, and uses the model index labels that distinguish different motion models as an augmented parameter for the target state, and obtains a better tracking performance than a single motion model through weighted mixing of the updated states of each model. In addition, in the sequential Monte Carlo (SMC) implementation of the algorithm, the detection probability function is fitted based on the normalized spatial spectrum obtained by higher-order cumulants preprocessing can suppress the diffusion of clutter to the available particles, and further enhance the particles in the high-likelihood region. Finally, the posterior cram$\acute{e}$ r-rao lower bound (PCRLB) for targets tracking of single AVS is derived, and the performance of measurement noise suppression and acoustic targets tracking is verified by simulation experiments. -
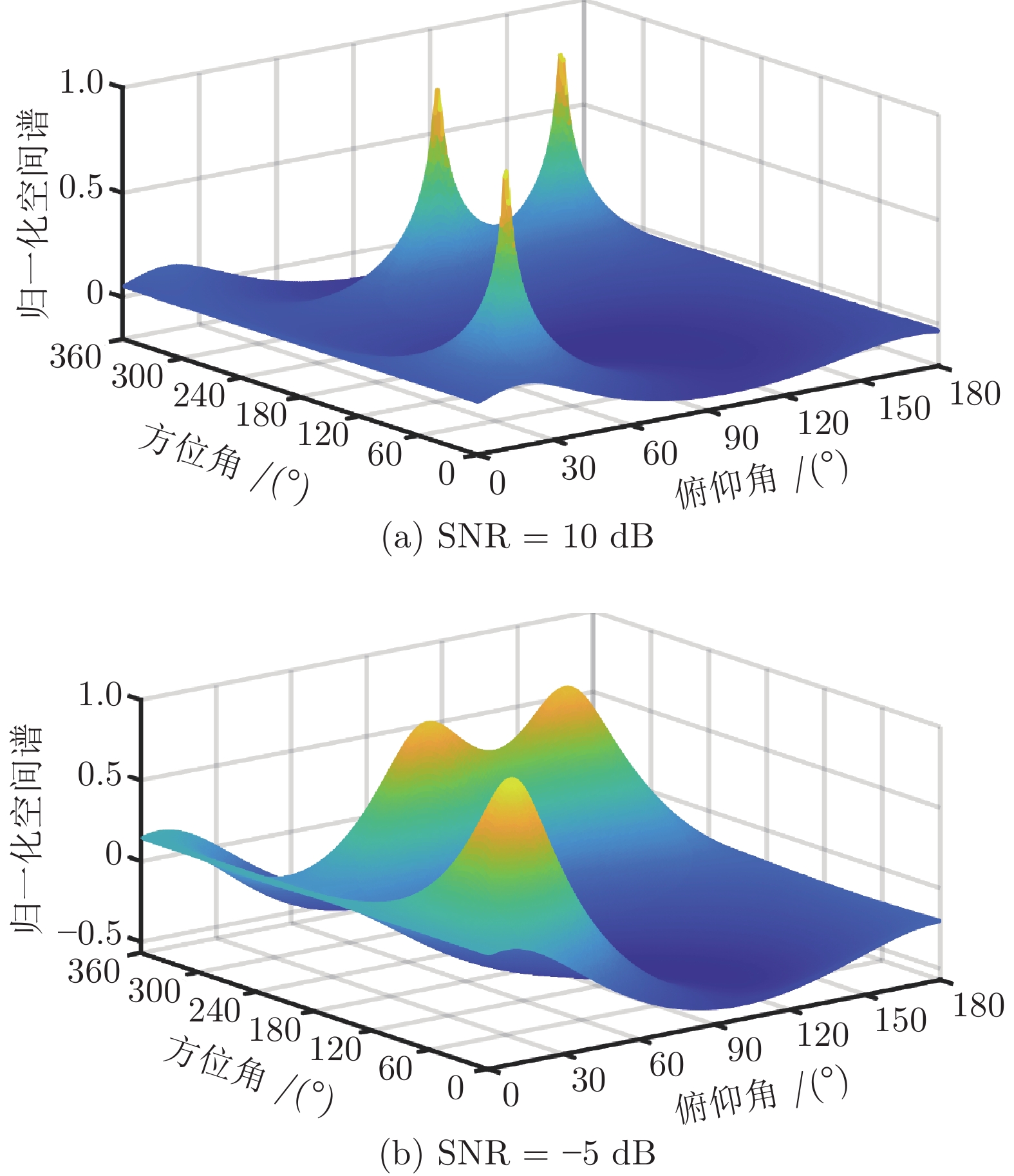
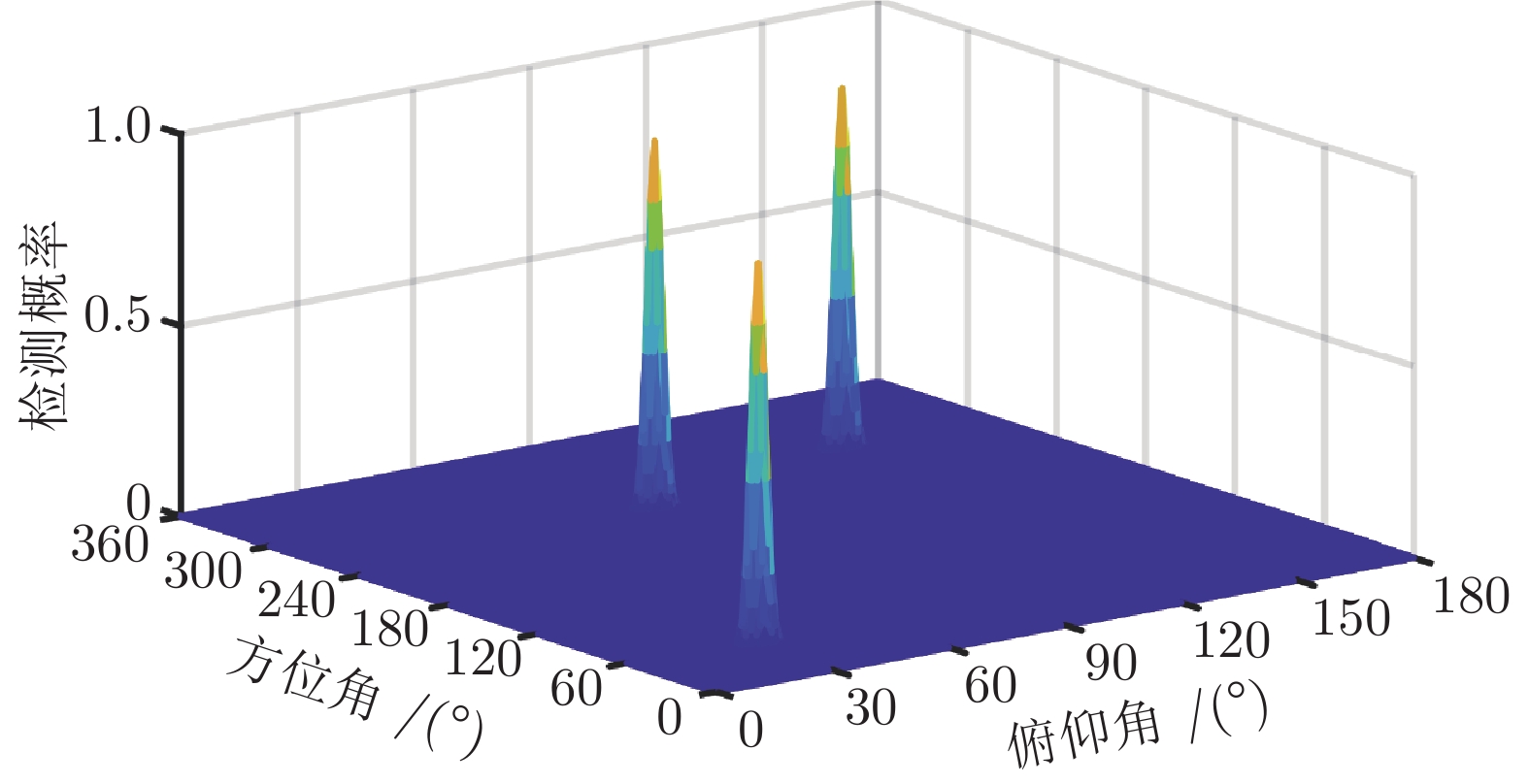
图 1 不同信噪比下的归一化高阶似然函数示例
Fig. 1 Example of normalized higher-order spatial spectrum under different SNR
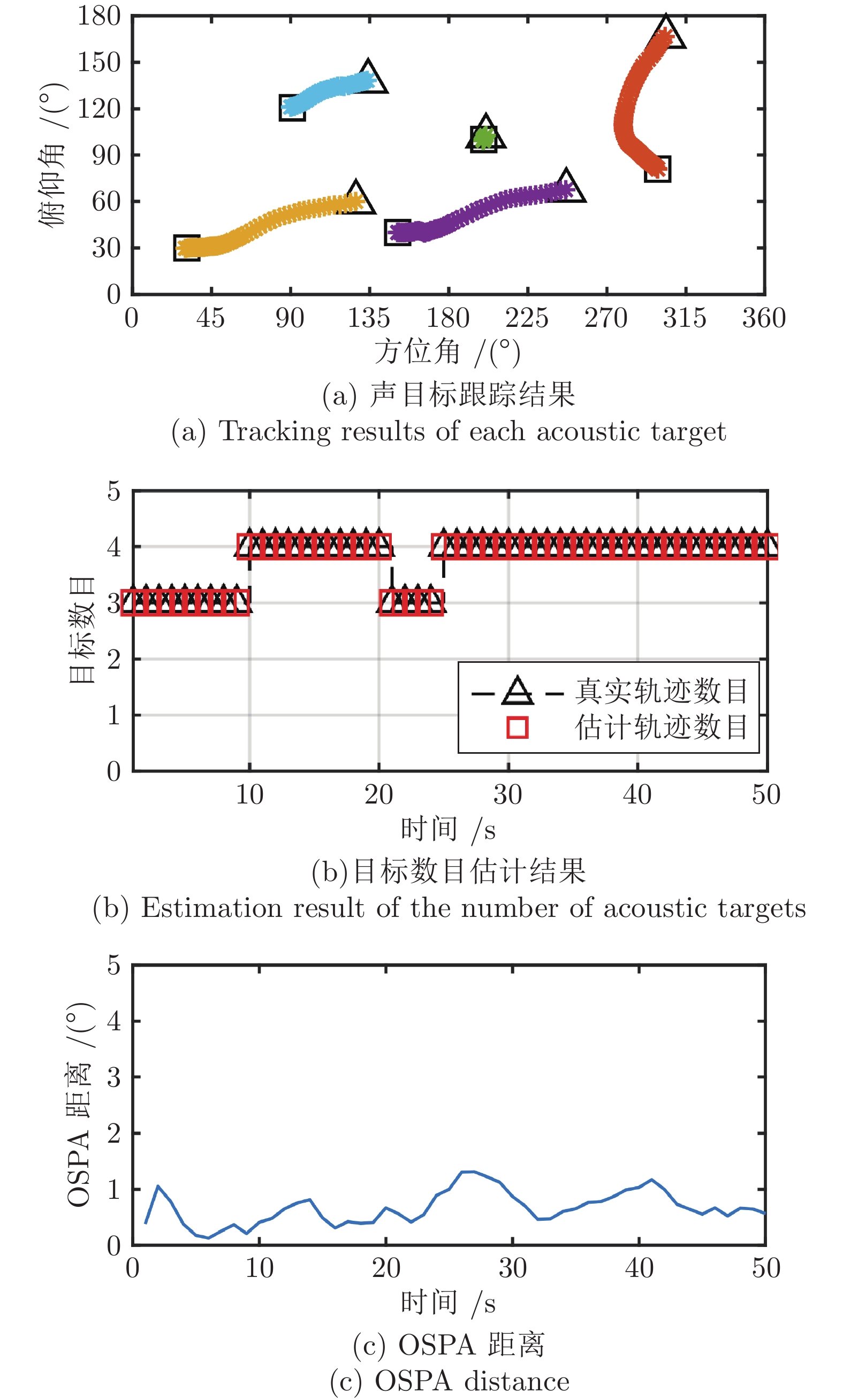
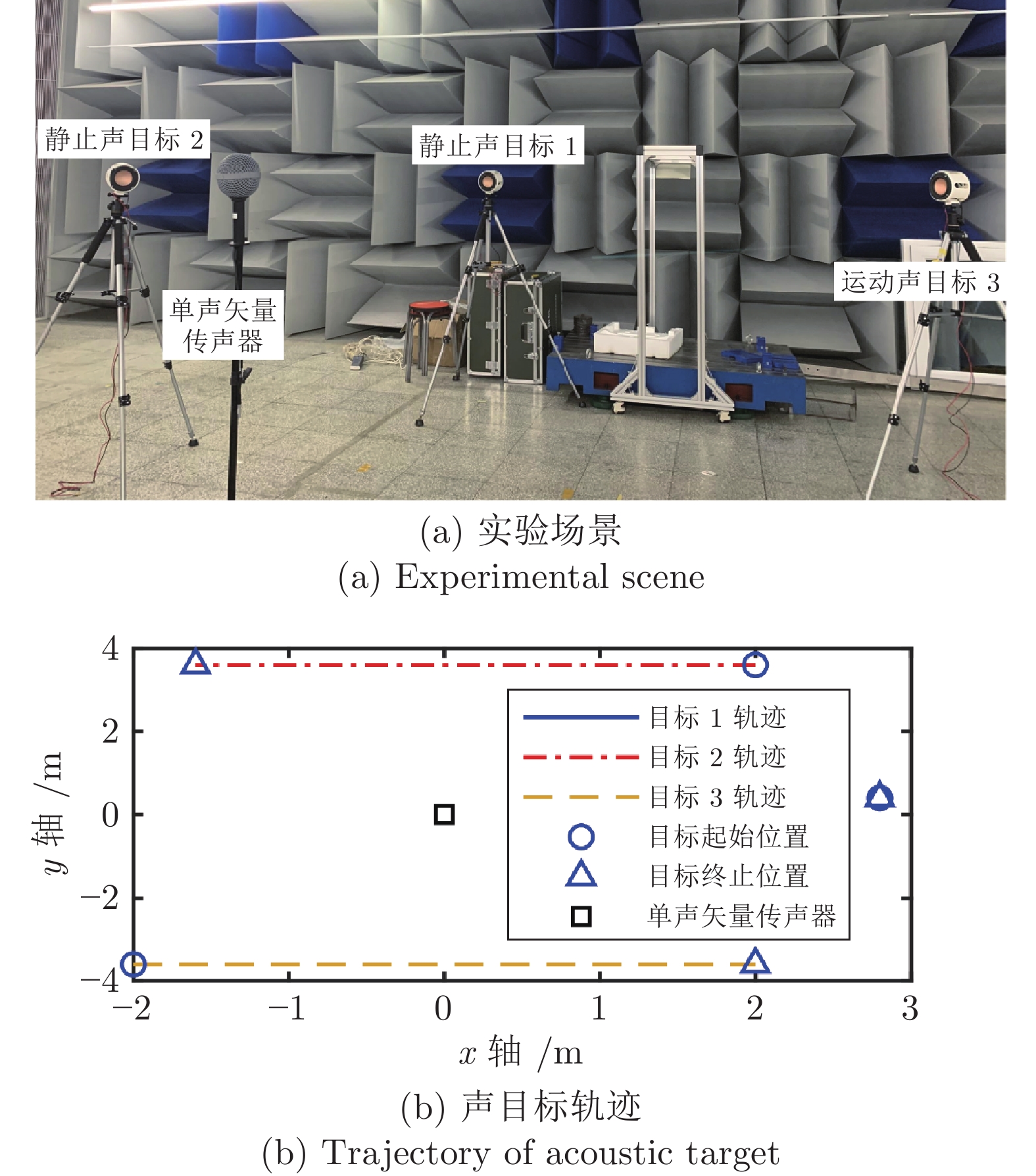
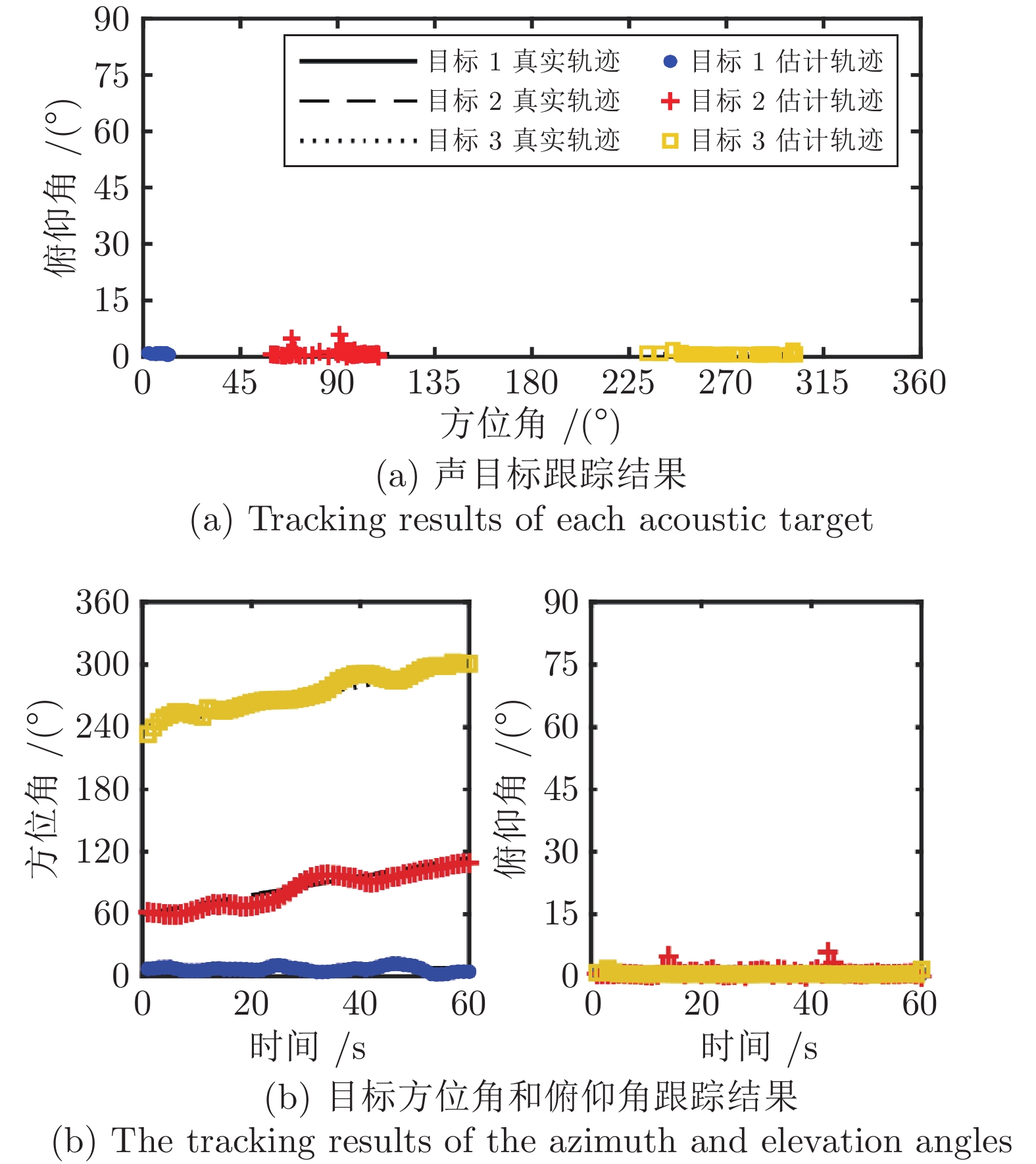
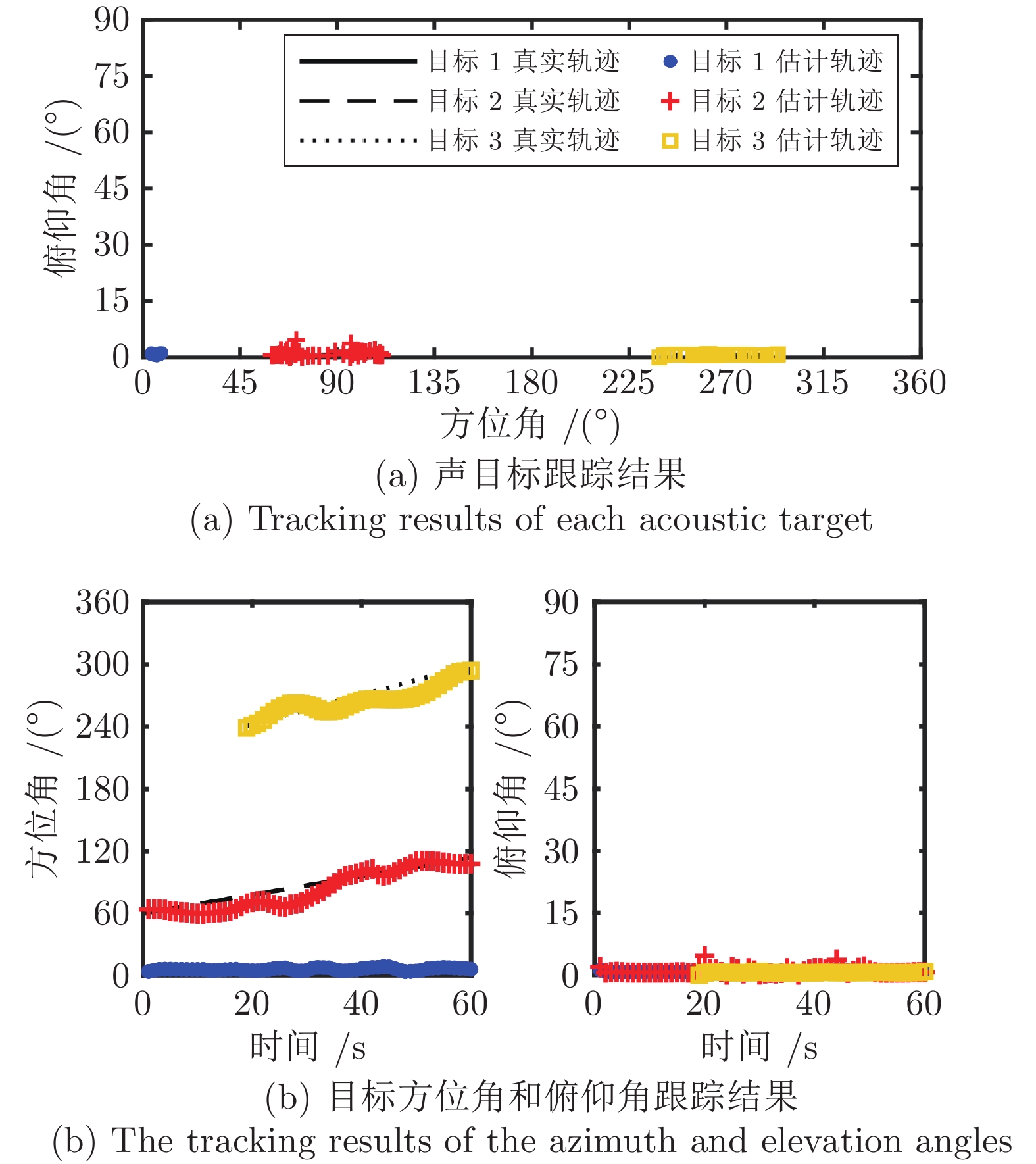
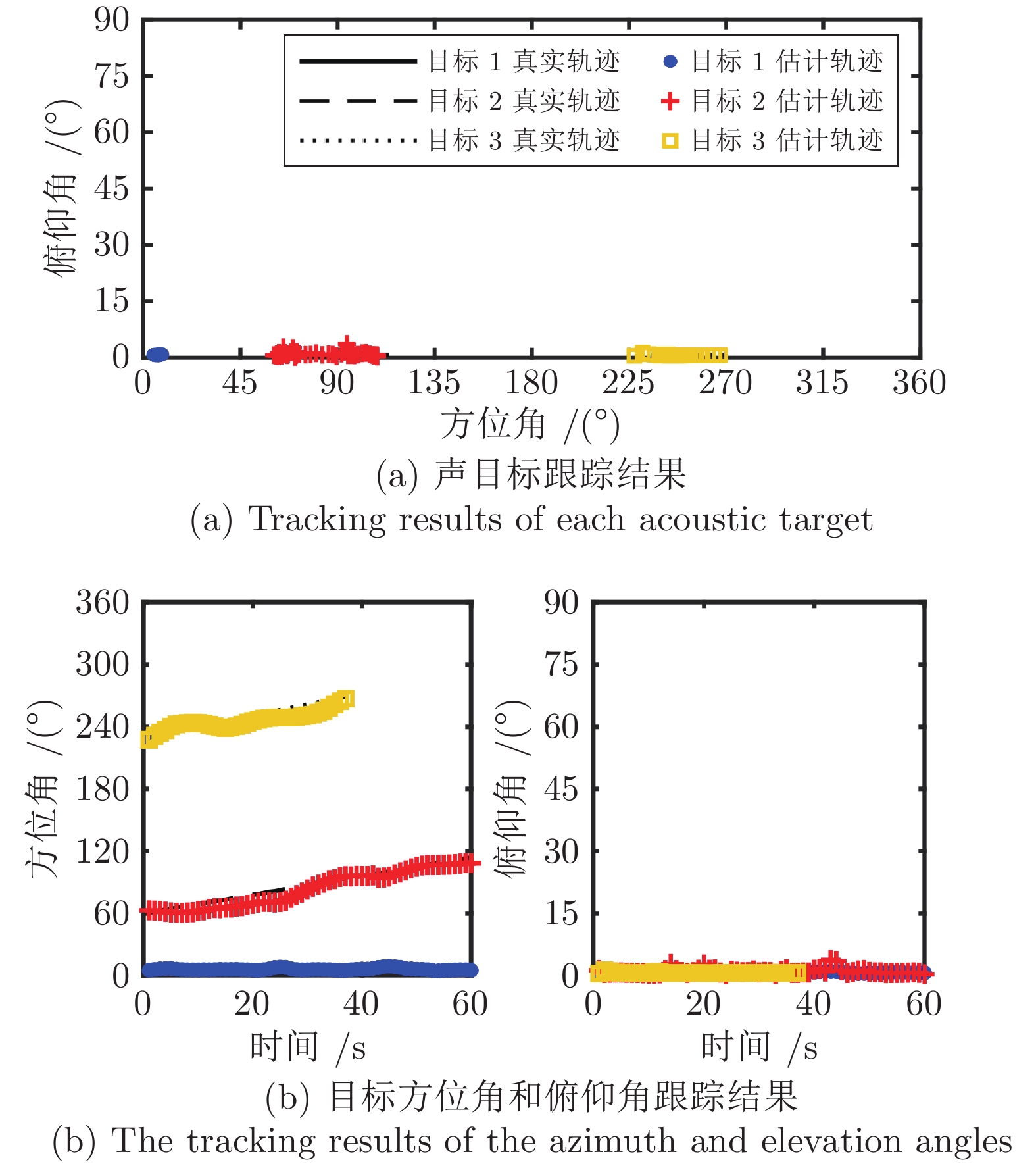
图 3 Cum-AMMS-GLMB算法的多声目标跟踪结果
Fig. 3 Multiple acoustic target tracking results of Cum-AMMS-GLMB algorithm
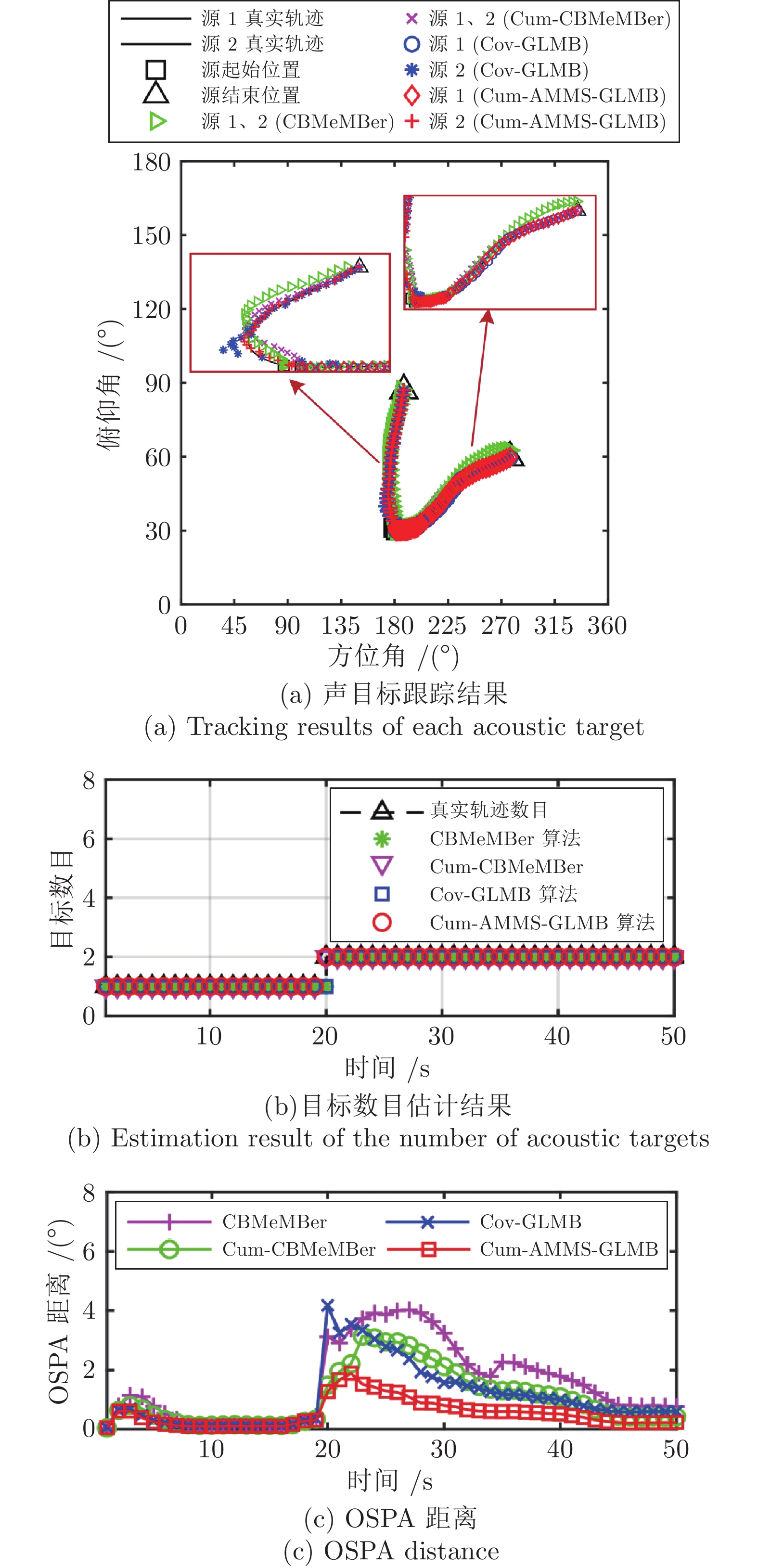
图 4 双声目标情况下不同算法的估计结果
Fig. 4 The estimation results of different algorithms in the case of two acoustic targets
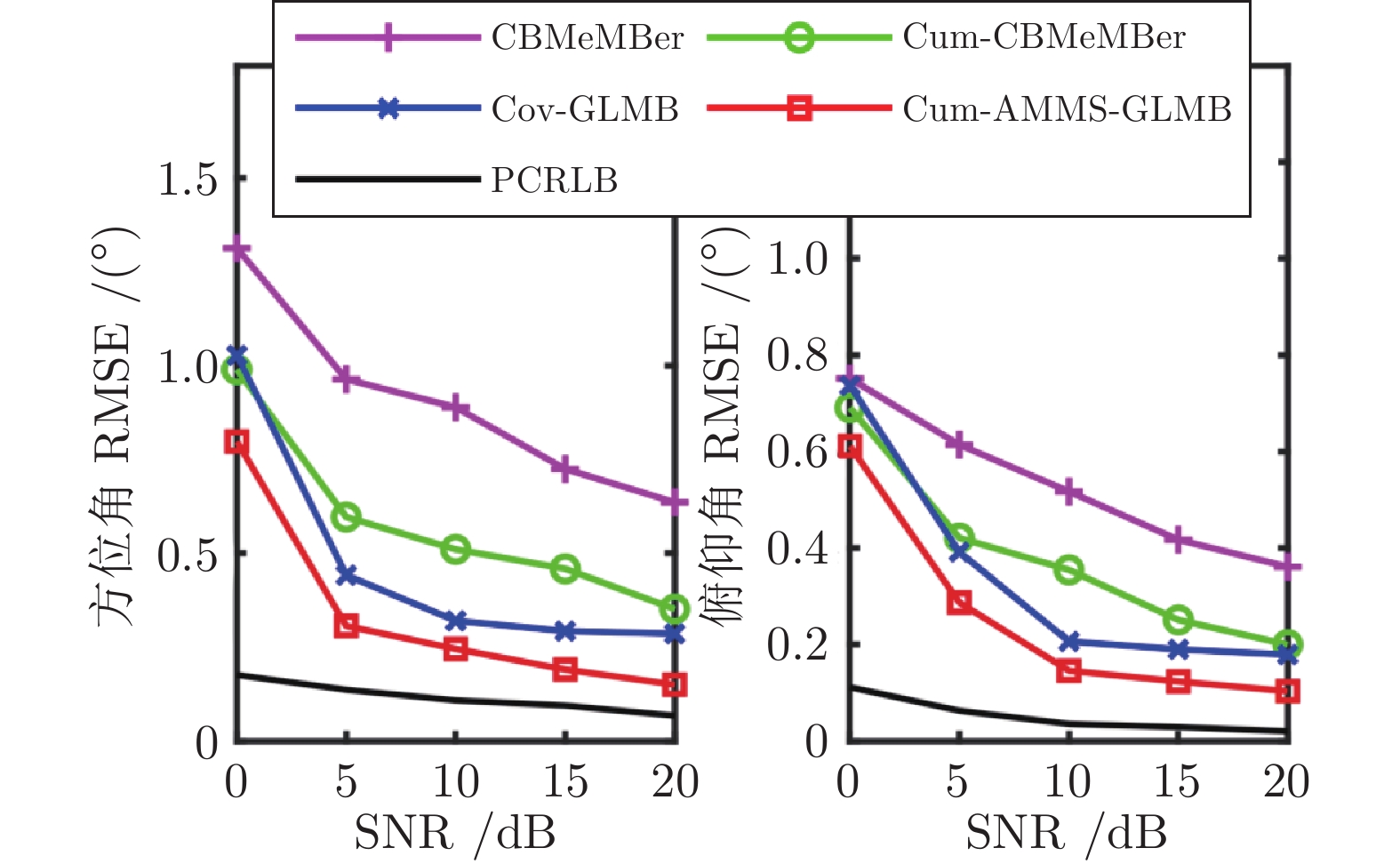
图 5 不同信噪比下PCRLB和各算法的RMSE估计结果
Fig. 5 PCRLB and RMSE estimation results of each algorithm under different SNR
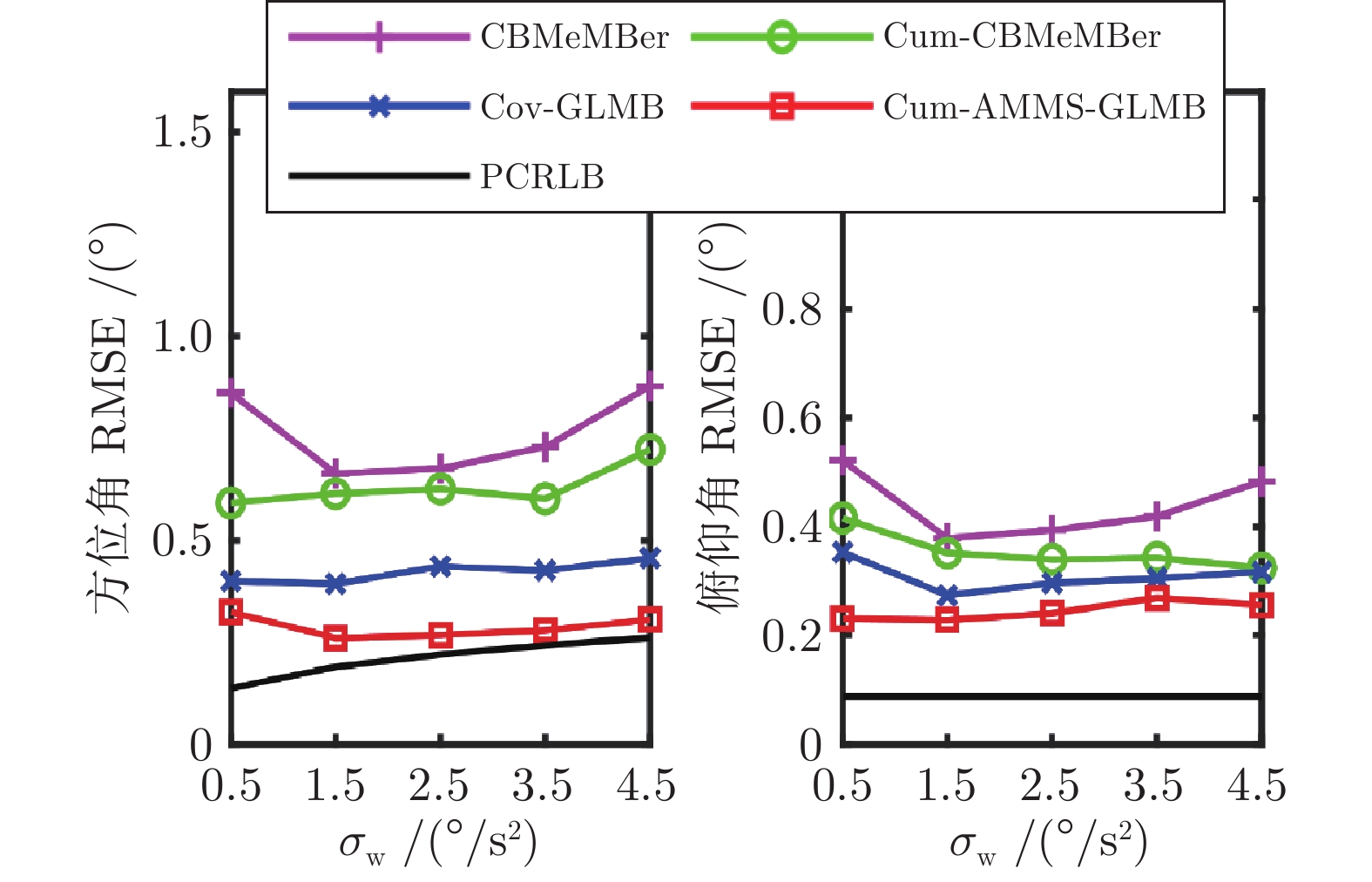
图 6 不同
$\sigma_w$ 下PCRLB和各算法的RMSE估计结果Fig. 6 PCRLB and RMSE estimation results of each algorithm under different
$\sigma_w$ 表 1 各时间段对应的运动模型
Table 1 Movement model corresponding to each time period
时间 1~15 s 16~30 s 31~40 s 41~50 s 运动模型 CV模型 CA模型
$0.1^\circ/{\rm s}^2$CT模型
$ \omega=-2\pi/180$CV模型  下载: 导出CSV
下载: 导出CSV
表 2 声目标的运动状态和幸存时间
Table 2 Motion state and survival time of acoustic targets
声目标 初始状态 存在时间 目标1 $\mathrm{DOA}:\ \{30^\circ,30^\circ\}$, 速度$:\ \{1^\circ/{\rm s},0.05^\circ/{\rm s}\}$ 1~50 s 目标2 $\mathrm{DOA}:\ \{300^\circ,80^\circ\}$, 速度$:\ \{-1^\circ/{\rm s},1^\circ/{\rm s}\}$ 1~50 s 目标3 $\mathrm{DOA}:\ \{200^\circ,100^\circ\}$, 速度$:\ \{0^\circ/{\rm s},0.1^\circ/{\rm s}\}$ 10~20 s 目标4 $\mathrm{DOA}:\ \{150^\circ,40^\circ\}$, 速度$:\ \{1^\circ/{\rm s},0^\circ/{\rm s}\}$ 1~50 s 目标5 $\mathrm{DOA}:\ \{90^\circ,80^\circ\}$, 速度$:\ \{1^\circ/{\rm s},0.5^\circ/{\rm s}\}$ 25~50 s
下载: 导出CSV
-
[1] Leslie C B, Kendall J M, Jones J L. Hydrophone for measuring particle velocity. The Journal of the Acoustical Society of America, 1956, 28(4): 711-715 doi: 10.1121/1.1908455 [2] Nehorai A, Paldi E. Acoustic vector-sensor array processing. IEEE Transactions on Signal Processing, 1994, 42(9): 2481-2491 doi: 10.1109/78.317869 [3] Bereketli A, Guldogan M B, Kolcak T, Gudu T, Avsar A L. Experimental results for direction of arrival estimation with a single acoustic vector sensor in shallow water. Journal of Sensors, 2015, 2015: Article No. 401353 [4] Zhang W D, Guan L G. Zhang G J, Xue C Y. Zhang K R, Wang J P. Research of DOA estimation based on single MEMS vector hydrophone. Sensors, 2009, 9(9): 6823-6831 doi: 10.3390/s90906823 [5] Levin D, Habets E A P, Gannot S. Maximum likelihood estimation of direction of arrival using an acoustic vector-sensor. The Journal of the Acoustical Society of America, 2012, 131(2): 1240-1248 doi: 10.1121/1.3676699 [6] Hawkes M, Nehorai A. Acoustic vector-sensor beamforming and Capon direction estimation. IEEE Transactions on Signal Processing, 1998, 46(9): 2291-2304 doi: 10.1109/78.709509 [7] Wong K T, Zoltowski M D. Root-MUSIC-based azimuth-elevation angle-of-arrival estimation with uniformly spaced but arbitrarily oriented velocity hydrophones. IEEE Transactions on Signal Processing, 1999, 47(12): 3250-3260 doi: 10.1109/78.806070 [8] Miron S, Bihan N L, Mars J I. Quaternion-MUSIC for vector-sensor array processing. IEEE Transactions on Signal Processing, 2006, 54(4): 1218-1229 doi: 10.1109/TSP.2006.870630 [9] Tichavsky P, Wong K T, Zoltowski M D. Near-field/far-field azimuth and elevation angle estimation using a single vector hydrophone. IEEE Transactions on Signal Processing, 2001, 49(11): 2498-2510 doi: 10.1109/78.960397 [10] Wong K T, Zoltowski M D. Extended-aperture underwater acoustic multisource azimuth/elevation direction-finding using uniformly but sparsely spaced vector hydrophones. IEEE Journal of Oceanic Engineering, 1997, 22(4): 659-672 doi: 10.1109/48.650832 [11] Zhang J, Xu X Y, Chen Z F, Bao M, Zhang X P, Yang J H. High-resolution DOA estimation algorithm for a single acoustic vector sensor at low SNR. IEEE Transactions on Signal Processing, 2020, 68: 6142-6158 doi: 10.1109/TSP.2020.3021237 [12] Mahler R P S. Statistical Multisource-multitarget Information Fusion. Boston: Artech House, 2007. [13] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178 doi: 10.1109/TAES.2003.1261119 [14] Vo B N, Ma W K. The Gaussian mixture probability hypothesis density filter. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104 doi: 10.1109/TSP.2006.881190 [15] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245 doi: 10.1109/TAES.2005.1561884 [16] Mahler R. PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543 doi: 10.1109/TAES.2007.4441756 [17] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423 doi: 10.1109/TSP.2008.2007924 [18] Ristic B, Vo B T, Vo B N, Farina A. A tutorial on Bernoulli filters: Theory, implementation and applications. IEEE Transactions on Signal Processing, 2013, 61(13): 3406-3430 doi: 10.1109/TSP.2013.2257765 [19] Wong S, Vo B T, Papi F. Bernoulli forward-backward smoothing for track-before-detect. IEEE Signal Processing Letters, 2014, 21(6): 727-731 doi: 10.1109/LSP.2014.2310137 [20] Vo B T, See C M, Ma N, Ng W T. Multi-sensor joint detection and tracking with the Bernoulli filter. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1385-1402 doi: 10.1109/TAES.2012.6178069 [21] Vo B N, Vo B T, Phung D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Transactions on Signal Processing, 2014, 62(24): 6554-6567 doi: 10.1109/TSP.2014.2364014 [22] Vo B N, Vo B T. Labeled random finite sets and multi-object conjugate priors. IEEE Transactions on Signal Processing, 2013, 61(13): 3460-3475 doi: 10.1109/TSP.2013.2259822 [23] Reuter S, Vo B T, Vo B N, Dietmayer K. The labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2014, 62(12): 3246-3260 doi: 10.1109/TSP.2014.2323064 [24] 陈辉, 邓东明, 韩崇昭. 基于区间箱粒子多伯努利滤波器的传感器控制策略. 自动化学报, 2021, 47(6): 1428-1443 doi: 10.16383/j.aas.c180541Chen Hui, Deng Dong-Ming, Han Chong-Zhao. Sensor control based on interval box-particle multi-Bernoulli filter. Acta Automatica Sinica, 2021, 47(6): 1428-1443 doi: 10.16383/j.aas.c180541 [25] 侯利明, 连峰, 谭顺成, 徐从安. 闪烁噪声统计特性未知情况下的鲁棒广义标签多伯努利滤波器. 电子学报, 2021, 49(7): 1346-1353 doi: 10.12263/DZXB.20200960Hou Li-Ming, Lian Feng, Tan Shun-Cheng, Xu Cong-An. Robust generalized labeled multi-Bernoulli filter for multi-target tracking with unknown statistical characteristics of glint noise. Acta Electronica Sinica, 2021, 49(7): 1346-1353 doi: 10.12263/DZXB.20200960 [26] Zhao J, Gui R Z, Dong X D, Wu S Y. Time-varying DOA tracking algorithm based on generalized labeled multi-Bernoulli. IEEE Access, 2021, 9: 5943-5950 doi: 10.1109/ACCESS.2020.3048952 [27] Sathyan T, Chin T J, Arulampalam S, Suter D. A multiple hypothesis tracker for multitarget tracking with multiple simultaneous measurements. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 448-460 doi: 10.1109/JSTSP.2013.2258322 [28] Habtemariam B, Tharmarasa R, Thayaparan T, Mallick M, Kirubarajan T. A multiple-detection joint probabilistic data association filter. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 461-471 doi: 10.1109/JSTSP.2013.2256772 [29] Zhong X H, Premkumar A B, Madhukumar A S, Tong L C. Multi-modality likelihood based particle filtering for 2-D direction of arrival tracking using a single acoustic vector sensor. In: Proceedings of IEEE International Conference on Multimedia and Expo. Barcelona, Spain: IEEE, 2011. 1−6 [30] Zhong X H, Premkumar A B. Particle filtering approaches for multiple acoustic source detection and 2-D direction of arrival estimation using a single acoustic vector sensor. IEEE Transactions on Signal Processing, 2012, 60(9): 4719-4733 doi: 10.1109/TSP.2012.2199987 [31] Zhong X H, Hari V N, Premkumar A B, Madhukumar A S. Particle filtering with enhanced likelihood model for underwater acoustic source DOA tracking. In: Proceedings of the OCEANS IEEE-Spain. Santander, Spain: IEEE, 2011. 1−6 [32] Zhong X H, Premkumar A B, Madhukumar A S. Particle filtering and posterior cramér-rao bound for 2-D direction of arrival tracking using an acoustic vector sensor. IEEE Sensors Journal, 2012, 12(2): 363-377 doi: 10.1109/JSEN.2011.2168204 [33] Gunes A, Guldogan M B. Multi-target bearing tracking with a single acoustic vector sensor based on multi-Bernoulli filter. In: Proceedings of the OCEANS Genova. Genova, Italy: IEEE, 2015. 1−5 [34] Dong X D, Zhang X F, Zhao J, Sun M, Wu Q H. Multi-maneuvering sources DOA tracking with improved interactive multi-model multi-Bernoulli filter for acoustic vector sensor (AVS) array. IEEE Transactions on Vehicular Technology, 2021, 70(8): 7825-7838 doi: 10.1109/TVT.2021.3093063 [35] Fantacci C, Papi F. Scalable multisensor multitarget tracking using the marginalized δ-GLMB density. IEEE Signal Processing Letters, 2016, 23(6): 863-867 doi: 10.1109/LSP.2016.2557078 [36] Fantacci C, Vo B T, Papi F, Vo B N. The marginalized δ-GLMB filter. arXiv preprint arXiv: 1501.00926, 2015. [37] Wu S Y, Dong X D, Zhao J, Sun X Y, Cai R H. A fast implementation of interactive-model generalized labeled multi-Bernoulli filter for interval measurements. Signal Processing, 2019, 164: 345-353 doi: 10.1016/j.sigpro.2019.05.028 [38] Yi W, Jiang M, Hoseinnezhad R. The multiple model Vo–Vo filter. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(2): 1045-1054 doi: 10.1109/TAES.2017.2667300 [39] Mazor E, Averbuch A, Bar-Shalom Y, Dayan J. Interacting multiple model methods in target tracking: A survey. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1): 103-123 doi: 10.1109/7.640267 [40] 李昊润, 卜凡康, 周剑雄. 修正的马尔科夫转移矩阵自适应IMM算法. 火力与指挥控制, 2021, 46(9): 118-124, 132 doi: 10.3969/j.issn.1002-0640.2021.09.021Li Hao-Run, Bu Fan-Kang, Zhou Jian-Xiong. Improved adaptive Markov matrix IMM algorithm. Fire Control & Command Control, 2021, 46(9): 118-124, 132 doi: 10.3969/j.issn.1002-0640.2021.09.021 [41] Agarwal A, Kumar A, Agrawal M, Fauziya F. Higher order statistics based direction of arrival estimation with single acoustic vector sensor in the under-determined case. In: Proceedings of the OCEANS MTS/IEEE Monterey. Monterey, USA: IEEE, 2016. 1−9 [42] Bao M, Zheng C S, Li X D, Yang J, Tian J. Acoustical vehicle detection based on bispectral entropy. IEEE Signal Processing Letters, 2009, 16(5): 378-381 doi: 10.1109/LSP.2009.2016014 [43] Mendel J M. Tutorial on higher-order statistics (spectra) in signal processing and system theory: Theoretical results and some applications. Proceedings of the IEEE, 1991, 79(3): 278-305 doi: 10.1109/5.75086 [44] Nikias C L, Mendel J M. Signal processing with higher-order spectra. IEEE Signal Processing Magazine, 1993, 10(3): 10-37 doi: 10.1109/79.221324 [45] Hoang H G, Vo B T, Vo B N. A fast implementation of the generalized labeled multi-Bernoulli filter with joint prediction and update. In: Proceedings of the 18th International Conference on Information Fusion (Fusion). Washington, USA: IEEE, 2015. 999−1006 [46] Vo B N, Vo B T, Hoang H G. An efficient implementation of the generalized labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2017, 65(8): 1975-1987 doi: 10.1109/TSP.2016.2641392 [47] Tichavsky P, Muravchik C H, Nehorai A. Posterior Cramer-Rao bounds for discrete-time nonlinear filtering. IEEE Transactions on Signal Processing, 1998, 46(5): 1386-1396 doi: 10.1109/78.668800 [48] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457 doi: 10.1109/TSP.2008.920469 [49] Kuhn H W. The Hungarian method for the assignment problem. Naval Research Logistics Quarterly, 1955, 2(1-2): 83-97 doi: 10.1002/nav.3800020109 -





 下载:
下载:



计量
- 文章访问数: 1240
- HTML全文浏览量: 202
- PDF下载量: 146
- 被引次数: 0
