

Design of a Fractional-order Finite-time Controller for High-speed Train With Uncertain Model and Actuator Failures
-
摘要:
针对具有输入非线性, 不确定的气动阻力, 未知的车间力, 外部扰动以及未知的执行器故障等特征的高速列车非线性系统, 结合分数阶稳定性原理以及有限时间控制理论, 本文设计了一种分数阶有限时间控制器以实现高速列车更快速且更高精度的跟踪控制. 该控制器能够直接补偿高速列车的不确定性和非线性以及执行器故障而不需任何“试错”过程, 且稳定时间可由控制参数的不同选择来调整. 仿真研究验证了所设计控制器的有效性和优越性.
-
关键词:
- 分数阶有限时间控制器 /
- 高速列车 /
- 不确定性 /
- 执行器故障 /
- 非线性
Abstract:This paper focuses on the position/velocity tracking control problem of high speed train (HST) with considering some uncertain and nonlinear characteristics such as input nonlinearity, aerodynamic resistance, in-train force, external disturbance and unknown actuator failures. Aiming at the system characteristics of HST, a fractional-order finite-time controller is designed on the basis of the principle of fractional stability and finite-time control theory to achieve higher tracking accuracy in finite time. It should be pointed out that the designed controller is able to deal with uncertainties and nonlinearities as well as actuator failures without any “trail and error” process, and the settling time can be adjustable by different selection of control parameters. The feasibility and effectiveness of the designed controller is verified by Lyapunov theoretical analysis and numerical simulation studies. Furthermore, compared with traditional PID controller, the designed fractional-order finite-time controller is superior.
-
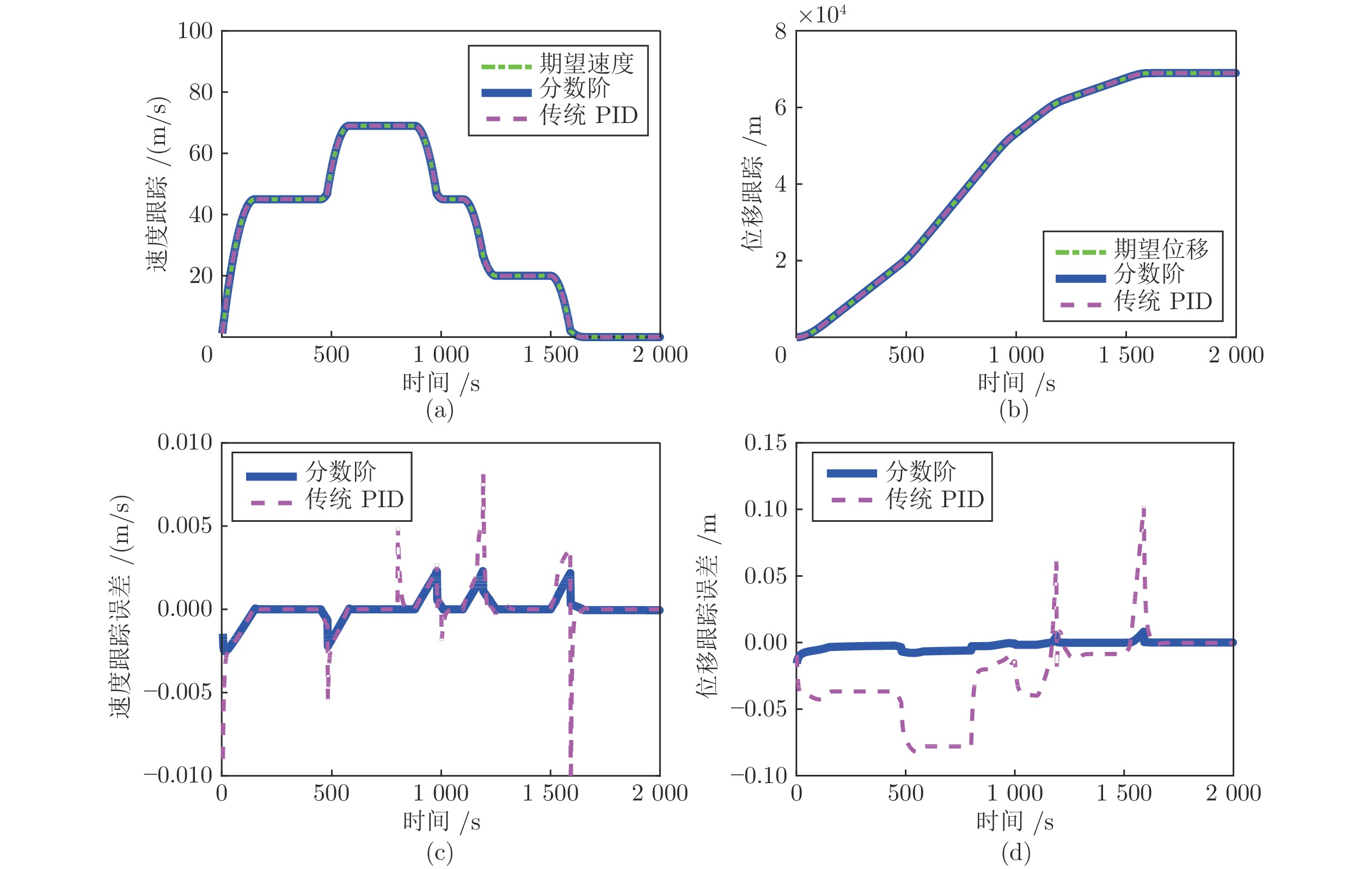
图 1 基于分数阶与传统PID控制器的跟踪过程和误差
Fig. 1 The tracking process and errors of the fractional-order or PID controller
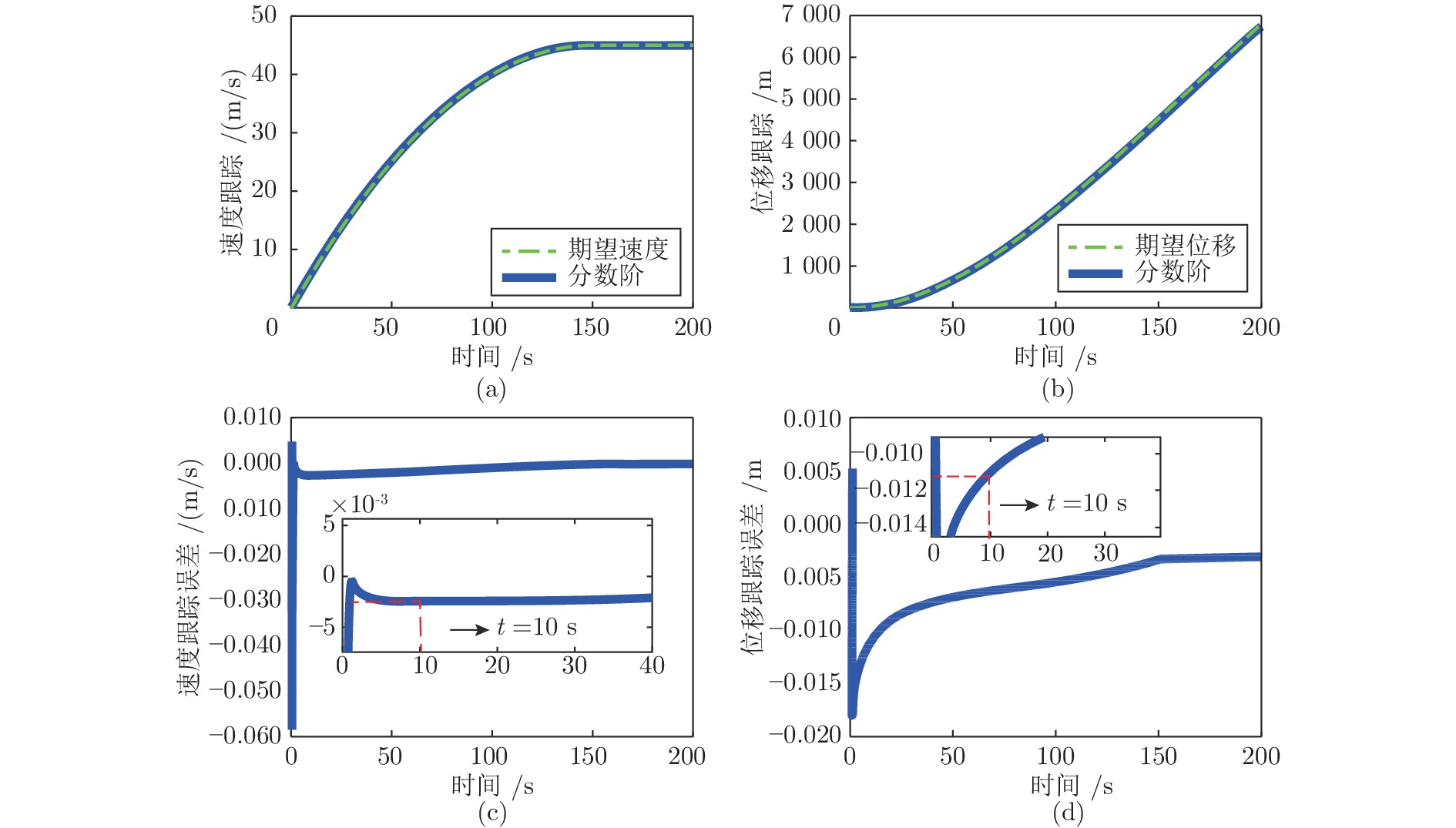
图 2 分数阶控制器在
$ t\in(0,200) $ 的跟踪过程和误差Fig. 2 The tracking process and errors of the designed controller in
$ t\in(0,200) $ 表 1 列车相关参数
Table 1 Parameters of the vehicles
变量 参数含义 仿真值 $\varrho_i$ 第$i$节车厢的旋转质量系数 $\varrho_i\in[0.08,0.11]$ $m_i$ 第$i$节车厢的总体质量 $m_i = (50+\Delta m_i)\quad\Delta m_i\in[-6,13]$ $a_{0i},a_{1i},a_{2i}$ 第$i$节车厢的阻力系数 $a_{0i}\in[50,85],\quad a_{1i}\in[30,100],\quad a_{2i} = [0.1,6.5]$ $\Lambda$ 牵引/制动分配矩阵 $\Lambda ={\rm{ diag} }\{0.5, 0.3, 0.5, 0.3, 0.6, 0.4, 0.6, 0.4\}$ $r$ 分数阶阶次 $0<r = r_1/r_2<1$且$r_2$为奇数 $h$ 执行器健康参数 $h2$, $h5$, $h6$  下载: 导出CSV
下载: 导出CSV
-
[1] Lin X, Dong H R, Yao X M, Chai B G. Adaptive active faulttolerant controller design for high-speed trains subject to unknown actuator faults. Vehile System Dynamic, 2018, 56(11): 1717−1733 doi: 10.1080/00423114.2018.1430836 [2] Song Q, Song Y D. Data-based fault-tolerant control of high-speed trains with traction/braking notch nonlinearities and actuator failures. IEEE Transactions on Neural Networks, 2011, 22(12): 2250−2261 doi: 10.1109/TNN.2011.2175451 [3] Tang H Y, Wang Q Y, Feng X Y. Robust stochastic control for high-speed trains with nonlinearity, parametric uncertainty, and multiple time-varying delays. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(4): 1027−1037 doi: 10.1109/TITS.2018.2812000 [4] Mao Z H, Tao G, Jiang B, Yan X G. Adaptive actuator compensation of position tracking for high-speed trains with disturbances. IEEE Transactions Vehicular Technology, 2018, 67(7): 5706−5717 [5] Hu Q L, Shao X D. Smooth finite-time faulttolerant attitude tracking control for rigid spacecraft. Aerospace Science and Technology, 2016, 55(2016): 144−157 [6] Amato F, Ambrosino R, Ariola M, Cosentino C, De Tommasi G. Finite-Time Stability and Control. London: Springer Verlag, 2014. 1−9 [7] Cheng P, Gao Z F, Qian M S, Lin J X, Active fault tolerant control design for uav using nonsingular fast terminal sliding mode approach. In: Proceedings of the 30th Chinese Control and Decision Conference. Shenyang, China: IEEE, 2018. 292−297 [8] Boukattaya M, Mezghani N, Damak T. Adaptive nonsingular fast terminal slidingmode control for the tracking problem of uncertain dynamical systems. ISA Transactions, 2018, 77(2018): 1−19 [9] Chen Y Q, Ionescu C. Special issue: Applied fractional calculus in modelling, analysis and design of control systems. International Journal of Control, 2017, 90(6): 1155−1156 doi: 10.1080/00207179.2017.1315242 [10] Chen Y Q, Petras I, Xue D Y. Fractional order control—A tutorial. In: Proceedings of the 2009 American Control Conference. St. Louis, USA: IEEE, 2009. 1397−1411 [11] Podlubny I. Geometric and physical interpretation of fractional integration and fractional differentiation. Fractional Calculus and Applied Analysis, 2001, 5(4): 230−237 [12] Al-Saggaf U M, Mehedi I M, Mansouri R. Rotary flexible joint control by fractional order controllers. International Journal of Control Automation and Systems, 2017, 15(59): 1−9 [13] Angel L, Viola J. Fractional order PID for tracking control of a parallel robotic manipulator type delta. ISA Transactions, 2018, 79(2018): 172−188 [14] Wang B, Ding J L, Wu F J, Zhu D L. Robust finite-time control of fractional-order nonlinear systems via frequency distributed model. Nonlinear Dynamics, 2016, 85(4): 2133−2142 doi: 10.1007/s11071-016-2819-9 [15] Liang J X, Wu B W, Wang Y E, Niu B, Xie X J. Input-output finite-time stability of fractional-order positive switched systems. Circuits, Systems, and Signal Processing, 2019, 38(4): 1619−1638 doi: 10.1007/s00034-018-0942-1 [16] Li D Y, Li P, Cai W C, Ma X P, Liu B, Dong H H. Neural adaptive fault tolerant control for high speed trains considering actuation notches and antiskid constraints. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(5): 1706−1718 [17] Yu S H, Yu X H, Shirinzadeh B, Man Z H. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica, 2005, 41(11): 1957−1964 doi: 10.1016/j.automatica.2005.07.001 [18] Zhao Y G, Wang Y Z, Liu Z B. Finite time stability analysis for nonlinear fractional order differential systems. In: Proceedings of the 32nd Chinese Control Conference. Xi′an, China: IEEE, 2013. 487−492 [19] Yang H J, Liu J K. An adaptive RBF neural network control method for a class of nonlinear systems. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 457−462 doi: 10.1109/JAS.2017.7510820 -

 下载:
下载:



计量
- 文章访问数: 1206
- HTML全文浏览量: 435
- PDF下载量: 196
- 被引次数: 0
