

-
摘要: 针对结构固定认知模型中存在的学习浪费与计算浪费问题, 在具有内发动机机制的感知行动认知模型基础上, 根据操作条件反射学习特性, 借鉴潜在动作原理, 建立起一种具有发育机制的感知行动认知模型D-SSCM (Development-sensorimotor cognitive model), 具体为一个14元组, 包含离散学习时间集、内部可感知离散状态集、可输出动作集、有效输出动作空间集、潜在动作关系集、可输出动作空间探索率集及发育算法等.针对模型发育过程, 分别设计了模型结构扩展式发育方法和算法以及缩减式发育方法和算法, 定义了模型的发育式学习过程.使用两轮机器人自平衡任务对设计的学习模型进行验证, 实验结果表明, 发育机制下的感知行动认知模型D-SSCM具有更快的学习速度及更稳定的学习效果.Abstract: Aiming at the problems of learning waste and computing waste that exist in the cognitive models with fixed structure, and according to the operate conditioning learning characteristics as well as drawing on the affordance theory, a new kind of sensorimotor cognitive model named D-SSCM with the developmental mechanism is established based on the sensorimotor cognitive model with the mechanism of intrinsic motivation. D-SSCM is a fourteen tuple in specific, including discrete learning time set, internal sensible discrete state set, optional motion set, effective output motion space set, affordance relationship set, optional motion space exploration rate set, developmental algorithm and etc. In view of D-SSCM's developmental learning, extended developmental method and algorithm as well as reduced developmental method and algorithm are designed. Model's developmental learning process is defined. Using two-wheeled robot self-balancing task to test this designed model, results show that D-SSCM is with faster learning speed and more stable learning effect.
-
Key words:
- Development /
- operant conditioning /
- affordance /
- sensorimotor cognitive /
- two-wheeled robot
1) 本文责任编委 张俊 -
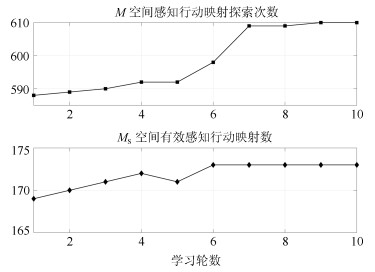
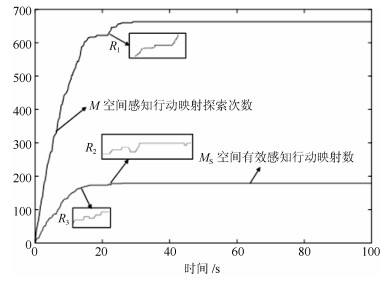
图 12 10轮学习中的$n_M$及$n_{M_\text{s}}$数
Fig. 12 $n_M$ and $n_{M_\text{s}}$ in 10 learning rounds
表 1 D-SSCM状态划分
Table 1 D-SSCM state division
$\varphi\, (^{\circ})$ $\dot{\varphi}\, (^{\circ}/s)$ $(-\infty, -17.5)$ $(-\infty, -100)$ $[-17.5, -12.5)$ $[-100, -50)$ $[-12.5, -7.5)$ $[-50, -20)$ $[-7.5, -2.5)$ $[-20, -5)$ $[-2.5, -0.5)$ $[-5, -2)$ $[-0.5, 0)$ $[-2, 0)$ $[0, 0.5)$ $[0, 2)$ $[0.5, 2.5)$ $[2, 5)$ $[2.5, 7.5)$ $[5, 20)$ $[7.5, 12.5)$ $[20, 50)$ $[12.5, 17.5)$ $[50, 100)$ $[17.5, +\infty)$ $[100, +\infty)$  下载: 导出CSV
下载: 导出CSV
表 2 10轮学习中的$n_M$及$n_{M_{\rm s}}$数
Table 2 $n_M$ and $n_{M_{\rm s}}$ in 10 learning rounds
学习轮数 1 2 3 4 5 6 7 8 9 10 $M$空间感知行动映射探索次数 588 589 590 592 592 598 609 609 610 610 $M_{\rm s}$空间有效感知行动映射数 169 170 171 172 171 173 173 173 173 173
下载: 导出CSV
-
[1] Tang H J, Yan R, Tan K C. Cognitive navigation by neuro-inspired localization, mapping and episodic memory. IEEE Transactions on Cognitive and Developmental Systems, 2018, 10(3): 751-761 doi: 10.1109/TCDS.2017.2776965 [2] Piaget J. The Origins of Intelligence in Children. New York: International Universities Press, 1952 [3] Alexandrov A V, Lippi V, Mergner T, Frolov A A, Hettich G, Husek D. Human-inspired eigenmovement concept provides coupling-free sensorimotor control in humanoid robot. Frontiers in Neurorobotics, 2017, 11: 22 doi: 10.3389/fnbot.2017.00022 [4] Mirus F, Axenie C, Stewart T C, Conradt J. Neuromorphic sensorimotor adaptation for robotic mobile manipulation: From sensing to behaviour. Cognitive Systems Research, 2018, 50: 52-66 doi: 10.1016/j.cogsys.2018.03.006 [5] Martius G, Fiedler K, Herrmann J M. Structure from behavior in autonomous agents. In: Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France: IEEE, 2008. 858-862 [6] Ren H G, Liu C, Shi T. A computational model of cognitive development for the motor skill learning from curiosity. Biologically Inspired Cognitive Architectures, 2018, 25: 101-106 doi: 10.1016/j.bica.2018.05.001 [7] Vallverdú J, Talanov M, Distefano S, Mazzara M, Tchitchigin A, Nurgaliev I. A cognitive architecture for the implementation of emotions in computing systems. Biologically Inspired Cognitive Architectures, 2016, 15: 34-40 doi: 10.1016/j.bica.2015.11.002 [8] Bing Z S, Meschede C, R$\ddot{o}$hrbein F, Huang K, Knoll A C. A survey of robotics control based on learning-inspired spiking neural networks. Frontiers in Neurorobotics, 2018, 12: 35 doi: 10.3389/fnbot.2018.00035 [9] Cai J X, Hong L, Cheng L N, Yu R H. Skinner operant conditioning model and robot bionic self-learning control. Technical Gazette, 2016, 23(1): 65-75 [10] Cyr A, Boukadoum M, Thériault F. Operant conditioning: a minimal components requirement in artificial spiking neurons designed for bio-inspired robot's controller. Frontiers in neurorobotics, 2014, 8: 21 [11] Itoh K, Miwa H, Matsumoto M, et al. Behavior model of humanoid robots based on operant conditioning. In: Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots. Tsukuba, Japan: IEEE, 2005. 220-225 [12] Mannella F, Santucci V G, Somogyi E, Jacquey L, O'Regan K J, Baldassarre G. Know your body through intrinsic goals. Frontiers in Neurorobotics, 2018, 12: 30 doi: 10.3389/fnbot.2018.00030 [13] Baranes A, Oudeyer P Y. Intrinsically motivated goal exploration for active motor Learning in robots: a case study. In: Proceedings of IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems. Taipei, China: IEEE, 2010. 1766-1773 [14] Baranes A, Oudeyer P Y. Active learning of inverse models with intrinsically motivated goal exploration in robots. Robotics and Autonomous Systems, 2013, 61(1): 49-73 doi: 10.1016/j.robot.2012.05.008 [15] Castellanos S, Rodríguez L F, Gastro L A, Gutierrez-Garcia J O. A computational model of emotion assessment influenced by cognition in autonomous agents. Biologically Inspired Cognitive Architectures, 2018, 25: 26-36 doi: 10.1016/j.bica.2018.07.007 [16] Weng J. Artificial intelligence: autonomous mental development by robots and animals. Science, 2001, 291(5504): 599-600 doi: 10.1126/science.291.5504.599 [17] Weng J. A model for auto-programming for general purposes. arXiv preprint arXiv: 1810.05764, 2018. [18] 张晓平, 阮晓钢, 肖尧, 朱晓庆.两轮机器人具有内发动机机制的感知运动系统的建立.自动化学报, 2016, 42(8): 1175-1184 doi: 10.16383/j.aas.2016.c150598Zhang Xiao-Ping, Ruan Xiao-Gang, Xiao Yao, Zhu Xiao-Qing. Establishment of a two-wheeled robot's sensorimotor system with mechanism of intrinsic motivation. Acta Automatica Sinica, 2016, 42(8): 1175-1184 doi: 10.16383/j.aas.2016.c150598 [19] Gibson J J. The Ecological Approach to Visual Perception. Houghton Mifflin, 1979 [20] Hsiao S W, Hsu C F, Lee Y T. An online affordance evaluation model for product design. Design Studies, 2012, 33(2): 126-159 doi: 10.1016/j.destud.2011.06.003 [21] EU Project MACS[Online], available: http://www.macs-eu.org/, July 1, 2018 [22] Af Net 2.0: The Affordance Network[Online], available: http://affordances.info/workshops, September 3, 2018 [23] Yi C, Min H, Luo R, et al. A novel formalization for robot cognition based on affordance model. In: Proceedings of the 2000 IEEE International Conference on Robotics and Biomimetics. Guangzhou, China: IEEE, 2000. 145-146 [24] Min H, Yi C, Luo R, et al. Affordance learning based on subtask's optimal strategy. International Journal of Advanced Robotic Systems, 2015, 12: 8 doi: 10.5772/59993 [25] Min H, Yi C, Luo R, et al. Goal-directed affordance prediction at the subtask level. Industrial Robot, 2016, 43(1): 48-57 doi: 10.1108/IR-05-2015-0084 [26] Turvey M T. Affordances and prospective control: An outline of the ontology. Ecological Psychology, 1992, 4(3): 173-187 doi: 10.1207/s15326969eco0403_3 [27] Stoffregen T A. Affordances as properties of the animal-environment system. Ecological Psychology, 2003, 15(2): 115-134 doi: 10.1207/S15326969ECO1502_2 [28] Chemero A. An outline of a theory of affordances. Ecological Psychology, 2003, 15(2): 181-195 doi: 10.1207/S15326969ECO1502_5 [29] Steedman M. Plans, affordances, and combinatory grammar. Linguistics and Philosophy, 2002, 25(5/6): 723-753 doi: 10.1023/A:1020820000972 [30] 易长安, 闵华清, 罗荣华.基于子任务的机器人潜在动作预测.华中科技大学学报(自然科学版), 2015, s1: 412-415 https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2015S1098.htmYi Chang-An, Min Hua-Qing, Luo Rong-Hua. Robot's affordance prediction based on the subtask. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2015, s1: 412-415 https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2015S1098.htm [31] 沈孝文.分层强化学习与潜在动作模型的研究与应用[博士学位论文], 华南理工大学, 中国, 2014Shen Xiao-Wen. The Research and Application of Hierarchical Reinforcement Learning and Affordance Model[Ph. D. dissertation], South China University of Technology, China, 2014 [32] Sahin E, Cakmak M, Doǧar M R, Uǧur E, Ücoluk G. To afford or not to afford: A new formalization of affordances toward affordance-based robot control. Adaptive Behavior, 2007, 15(4): 447-472 doi: 10.1177/1059712307084689 -

 下载:
下载:

图(12) / 表(2)
计量
- 文章访问数: 1435
- HTML全文浏览量: 300
- PDF下载量: 187
- 被引次数: 0
