

Analysis and System Design of Multi-convex Hull Stabilization Domain for Double-layered Model Predictive Control System
-
摘要: 针对双层模型预测控制(Model predictive control,MPC)中出现的由于系统状态在动态控制(Dynamic control,DC)过程中超出约束集,导致下层优化不可行的问题,本文在综合控制方法的基础上提出一种新的动态控制策略,引入多包镇定域(Multi-convex hull stabilization domain,MHSD)的概念.通过离线计算多包镇定域,并根据系统每一时刻的实测状态值,在线决定(Dynamic control)层的镇定域以及相应的控制时域,结合变约束思想,保证动态控制过程递归可行,从而有效控制在大范围内变化的系统状态.另外,本文通过设计非线性反馈控制器,扩大了终端不变集和多包镇定域的范围,提高了DC层对稳态目标值的跟踪效果.本文的控制算法可以使得DC层在目标跟踪过程中保证递归可行性,并最大程度地实现无静差跟踪.仿真算例验证了本文算法对稳定系统和不稳定系统都有效.Abstract: In order to solve the feasibility problem in double-layered model predictive control (MPC) caused by some states in dynamic control (DC) that violate the constraints, this paper proposes a new control strategy based on the overall control solution and introduces a new definition multi-convex hull stabilization domain (MHSD). This strategy designs the MHSD off line and then chooses a proper stabilization range online according to the real-time system state. The control horizon of the DC layer can be calculated at the same time. What is more, this paper enlarges the invariant sets and the stabilization domain through designing a nonlinear feedback controller so that the system states varying in a wide range can be controlled and the tracking effect is significantly improved. By using the above algorithm, the control process is recursively feasible and the optimal targets can be tracked precisely. The effectiveness of this method is verified in both stable and unstable systems through two examples.1) 本文责任编委 谢永芳
-

图 3 控制时刻$k$从31到60对应的纸机系统控制过程
Fig. 3 Control process of the paper system with the control moment $k$ from 31 to 60
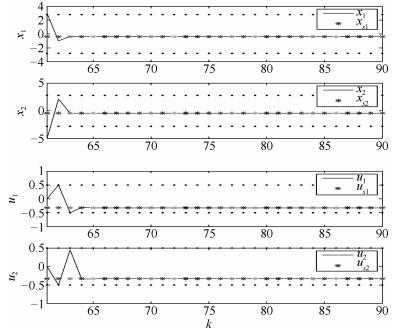
图 4 控制时刻$k$从61到90对应的纸机系统控制过程
Fig. 4 Control process of the paper system with the control moment $k$ from 61 to 90
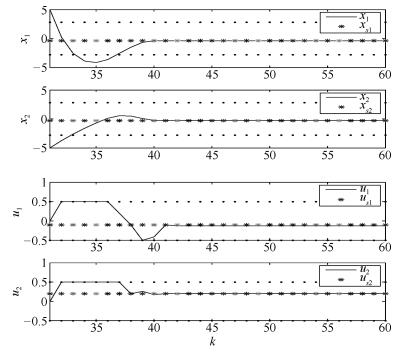
图 5 控制时刻$k$从31到60对应的双积分系统控制过程
Fig. 5 Control process of the double-integrator system with the control moment $k$ from 31 to 60
表 1 本文符号及其含义
Table 1 The meanings of the notations in this paper
符号 含义 $x^*$ $x$的最优值 ${\bf R}^n$ $n$维欧氏空间 $k$ 离散采样间隔 $x$ 系统状态, $x \in {\bf R}^{n_x}$ $u$ 系统输入, $u \in {\bf R}^{n_u}$ $x_s(u_s)$ 稳态状态(输入) $x_t(u_t)$ 期望稳态状态(输入) $\bar{x}(\bar{u})$ 状态(输入)上界 $I_n $ $n$维单位矩阵 $Q_s, R_s$ 适维权重矩阵 $N_i$ 第$i$个镇定域所对应的控制时域 ${\| x\|}_{Q_s}^2$ $x^{\rm T}$$Q_s$$x$ $x(k+i|k)$ $k$时刻对未来状态的预测值 $u(k+i|k) $ $k$时刻对未来输入的预测值  下载: 导出CSV
下载: 导出CSV
表 2 纸机系统的稳态目标计算结果
Table 2 The results of the SSTC in the AS DPS system
$k$ $u_{s, 1}$ $u_{s, 2}$ $x_{s, 1}$ $x_{s, 2}$ $1\sim90$ -0.39 -0.41 -0.32 -0.33
下载: 导出CSV
表 3 双积分器系统的稳态目标计算结果
Table 3 The results of SSTC in the double-integrator system
k $u_t$ $x_t$ $u_s$ $x_s$ $1\sim30$ (0, 0) (2, -2) (0, 0) (2, 0.5) $31\sim60$ (0, 0) (0, -2) (-0.1, 0.2) (-0.38, 0.2998) $61\sim90$ (0, 0) (0, 0) (0, 0) (0, 0)
下载: 导出CSV
-
[1] 席裕庚, 李德伟.预测控制定性综合理论的基本思想和研究现状.自动化学报, 2008, 34 (10):1225-1234 http://www.aas.net.cn/CN/abstract/abstract17992.shtmlXi Yu-Geng, Li De-Wei. Fundamental philosophy and status of qualitative synthesis of model predictive control. Acta Automatica Sinica, 2008, 34 (10):1225-1234 http://www.aas.net.cn/CN/abstract/abstract17992.shtml [2] 席裕庚, 李德伟, 林姝.模型预测控制-现状与挑战.自动化学报, 2013, 39 (3):222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtmlXi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control-status and challenges. Acta Automatica Sinica, 2013, 39 (3):222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtml [3] 席裕庚.预测控制.第2版.北京:国防工业出版社, 2013. 15-67Xi Yu-Geng. Predictive Control (Second Edition). Beijing:National Defense Industry Press, 2013. 15-67 [4] Sildir H, Arkun Y, Cakal B, Gokce D, Kuzu E. Plant-wide hierarchical optimization and control of an industrial hydrocracking process. Journal of Process Control, 2013, 23 (9):1229-1240 doi: 10.1016/j.jprocont.2013.07.007 [5] Darby M L, Nikolaou M, Jones J, Nicholson D. RTO:an overview and assessment of current practice. Journal of Process Control, 2011, 21 (6):874-884 doi: 10.1016/j.jprocont.2011.03.009 [6] Scattolini R. Architectures for distributed and hierarchical model predictive control-a review. Journal of Process Control, 2009, 19 (5):723-731 doi: 10.1016/j.jprocont.2009.02.003 [7] 李世卿, 丁宝苍.基于动态矩阵控制的双层结构预测控制的整体解决方案.自动化学报, 2015, 41 (11):1857-1866 http://www.aas.net.cn/CN/abstract/abstract18761.shtmlLi Shi-Qing, Ding Bao-Cang. An overall solution to double-layered model predictive control based on dynamic matrix control. Acta Automatica Sinica, 2015, 41 (11):1857-1866 http://www.aas.net.cn/CN/abstract/abstract18761.shtml [8] 李世卿, 丁宝苍, 孙耀.双层预测控制中基于操作变量增量的多优先级稳态目标计算.控制理论与应用, 2015, 32 (2):239-245 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201502014Li Shi-Qing, Ding Bao-Cang, Sun Yao. Multi-priority rank steady-state target calculation in double-layered model predictive control by optimizing increments of manipulated variables. Control Theory & Applications, 2015, 32 (2):239-245 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201502014 [9] Mayne D Q, Rawlings J B, Rao C V, Scokaert P O M. Constrained model predictive control:stability and optimality. Automatica, 2000, 36 (6):789-814 doi: 10.1016/S0005-1098(99)00214-9 [10] Gutman P O, Cwikel M. An algorithm to find maximal state constraint sets for discrete-time linear dynamical systems with bounded controls and states. IEEE Transactions on Automatic Control, 1987, 32 (3):251-254 doi: 10.1109/TAC.1987.1104567 [11] Gilbert E G, Tan K T. Linear systems with state and control constraints:the theory and application of maximal output admissible sets. IEEE Transactions on Automatic Control, 1991, 36 (9):1008-1020 doi: 10.1109/9.83532 [12] 潘红光, 高海南, 孙耀, 张英, 丁宝苍.基于多优先级稳态优化的双层结构预测控制算法及软件实现.自动化学报, 2014, 40 (3):405-414 http://www.aas.net.cn/CN/abstract/abstract18305.shtmlPan Hong-Guang, Gao Hai-Nan, Sun Yao, Zhang Ying, Ding Bao-Cang. The algorithm and software implementation for double-layered model predictive control based on multi-priority rank steady-state optimization. Acta Automatica Sinica, 2014, 40 (3):405-414 http://www.aas.net.cn/CN/abstract/abstract18305.shtml [13] Blanchini F. Set invariance in control. Automatica, 1999, 35 (11):1747-1767 doi: 10.1016/S0005-1098(99)00113-2 [14] Li Z J, Tan W, Nian S C, Liu J Z. A stabilizing model predictive control for linear systems with input saturation. In: Proceedings of the 2006 International Conference on Machine Learning and Cybernetics. Dalian, China: IEEE, 2006. 671-675 [15] Li Z J, Liu J Z, Tan W. Multi-model H_∞ loop shaping controller for nonlinear system based on gap metric. In: Proceedings of the ICARCV 8th Control, Automation, Robotics and Vision Conference. Kunming, China: IEEE, 2004, 3: 1940-1944 [16] Kosut R. Design of linear systems with saturating linear control and bounded states. IEEE Transactions on Automatic Control, 1983, 28 (1):121-124 doi: 10.1109/TAC.1983.1103127 [17] 李志军. 约束模型预测控制的稳定性与鲁棒性研究[博士学位论文], 华北电力大学(北京), 中国, 2005.Li Zhi-Jun. Research on Stability and Robustness of Constrained Model Predictive Control[Ph. D. dissertation], North China Electric Power University (Beijing), China, 2005. [18] Limon D, Alvarado I, Alamo T, Camacho E F. MPC for tracking piecewise constant references for constrained linear systems. Automatica, 2008, 44 (9):2382-2387 doi: 10.1016/j.automatica.2008.01.023 [19] Chen H, Allgöwer F. A quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability. Automatica, 1998, 34 (10):1205-1217 doi: 10.1016/S0005-1098(98)00073-9 [20] 曹永岩, 毛维杰, 孙优贤, 冯旭.现代控制理论的工程应用.杭州:浙江大学出版社, 2000.Cao Yong-Yan, Mao Wei-Jie, Sun You-Xian, Feng Xu. Engineering Application of Modern Control Theory. Hangzhou:Zhejiang University Press, 2000. [21] Pluymers B, Rossiter J A, Suykens J A K, Moor B D. The efficient computation of polyhedral invariant sets for linear systems with polytopic uncertainty. In: Proceedings of the 2005 American Control Conference. Portland, OR, USA: IEEE, 2005, 2: 804-809 -

 下载:
下载:

计量
- 文章访问数: 2400
- HTML全文浏览量: 352
- PDF下载量: 890
- 被引次数: 0
