

-
摘要: 人类的视觉注意具有高度的选择性.模仿这些机制可以使得机器人对其周围环境建模更具高效、智能和鲁棒特性.本文采用视觉注意提出了一种移动机器人环境3D建模方法.该方法采用障碍物距离势函数的变化率作为显著度的度量函数,利用移动机器人提取到的场景中的特征点并结合快速均值漂移算法,实现了移动机器人周围环境中物体显著性检测,并以其为栅格先验模型,结合传感器模型、投影方法采用贝叶斯估计方法构建了环境的栅格模型.建立的模型在室内和室外环境进行了实验验证和性能评估.Abstract: Human visual attention is highly selective. The artificial vision system that imitates this mechanism increases the efficiency, intelligence, and robustness of mobile robots in environment modeling. This paper presents a 3-D modeling method based on visual attention for mobile robots. This method uses the distance-potential gradient as motion contrast and combines the visual features extracted from the scene with a mean shift segment algorithm to detect conspicuous objects in the surrounding environment. This method takes the saliency of objects as priori information, uses Bayes' theorem to fuse sensor modeling and grid priori modeling, and uses the projection method to create and update the 3-D environment modeling. The results of the experiments and performance evaluation illustrate the capabilities of our approach in generating accurate 3-D maps.
-
Key words:
- 3-D Mapping /
- grid model /
- mobile robots /
- visual attention
-

Fig. 1 The robot system used in our evaluations. (a) Mobile robot platform. (b) Binocular visual system and DM642 image processing card.
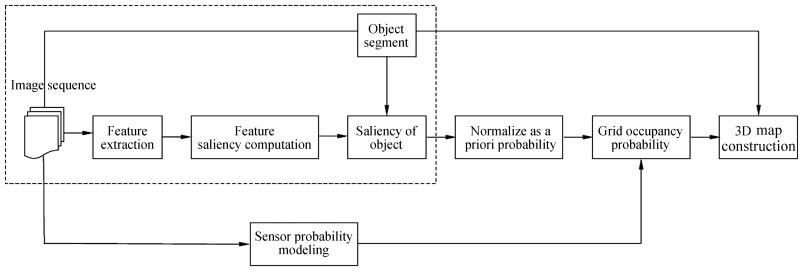
Fig. 2 Schematic overview of the method. The dash box is used for saliency modeling construction, and a 3-D map is generated by using the probability of occupancy.
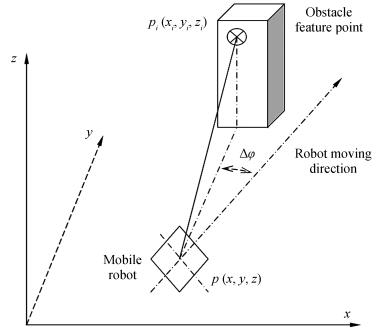
Fig. 3 The relation of $\Delta \varphi$ , $p$ ( $x$ , $y$ , $z$ ), and $p_i$ ( $x_i$ , $y_i$ , $z_i$ ), where $p$ ( $x$ , $y$ , $z$ ) is the center of the robot and $p_i$ ( $x_i$ , $y_i$ , $z_i$ ) is the feature point on the objects.
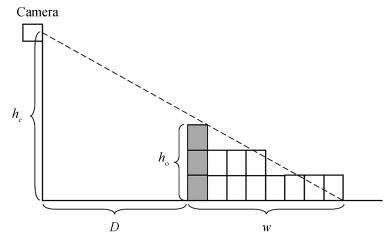
Fig. 4 Occupancy grid maps creation when objects produce visual occlusion. We use the projection method to calculate the objects occupancy width w.
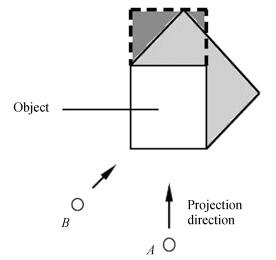
Fig. 5 Overhead view of occupancy grid updating. The updated results using (12) will be close to the size of objects when robot moves from $A$ to $B$ . The shadows are the occupancy fields of occlusion.

Fig. 6 An example of a saliency map. (a) Conspicuous objects. Parts 1 and 3 are of the same object; however, because of the differences in texture and distance, the object was segmented into two parts. (b) Indoor corridor and conspicuous SURF features.
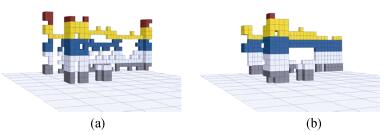
Fig. 7 A part of 3-D occupancy grid map. (a) The map is created using SURF features, and many grids show discontinuity. (b) The map is created by combining the conspicuous SURF features with the mean shift algorithm, and the discontinuity is reduced significantly.
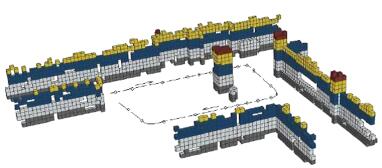
Fig. 8 Indoor corridor 3-D map with 1 dm $^3$ voxel size. The dash line and arrow are the trajectory and moving direction of mobile robot, respectively, and the small circles are the places used to evaluate the performance.
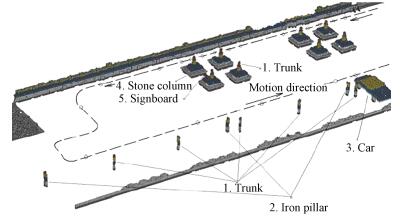
Fig. 9 Outdoor 3-D map with 1 dm3 voxel size, where the dashed line and arrow are the trajectory and moving direction of mobile robot, respectively, and the little circles are the places used to evaluate the performance.
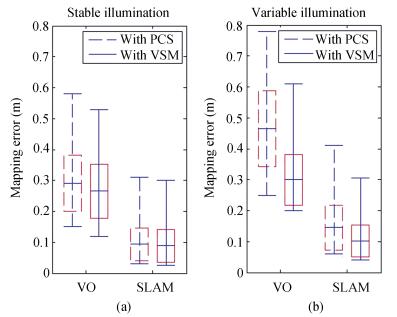
Fig. 12 Evaluation of mapping accuracy under (a) stable illumination and (b) varying illumination. The results are obtained with SURF and the mapping error increases under varying illumination, however, VSM slightly increases.
-
[1] T. K. Lee, S. H. Baek, Y. H. Choi, and S. Y. Oh, "Smooth coverage path planning and control of mobile robots based on high-resolution grid map representation, " Robot. Auton. Syst. , vol. 59, no. 10, pp. 801-812, Oct. 2011. http://www.researchgate.net/publication/220142222_Smooth_coverage_path_planning_and_control_of_mobile_robots_based_on_high-resolution_grid_map_representation [2] H. T. Cheng, H. P. Chen, and Y. Liu, "Topological indoor localization and navigation for autonomous mobile robot, " IEEE Trans. Automat. Sci. Eng. , vol. 12, no. 2, pp. 729-738, Apr. 2015. https://www.researchgate.net/publication/274573448_Topological_Indoor_Localization_and_Navigation_for_Autonomous_Mobile_Robot [3] I. J. Cox and J. J. Leonard, "Modeling a dynamic environment using a Bayesian multiple hypothesis approach, " Artif. Intell. , vol. 66, no. 2, pp. 311-344, Apr. 1994. https://www.researchgate.net/publication/223080507_Modeling_a_dynamic_environment_using_a_Bayesian_multiple_hypothesis_approach?ev=auth_pub [4] B. H. Guo and Z. H. Li, "Dynamic environment modeling of mobile robots based on visual saliency, " Control Theory Appl. , vol. 30, no. 7, pp. 821-827, Jul. 2013. http://en.cnki.com.cn/Article_en/CJFDTotal-KZLY201307006.htm [5] R. Sim and J. J. Little, "Autonomous vision-based exploration and mapping using hybrid maps and Rao-Blackwellised particle filters, " in Proc. 2006 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Beijing, China, 2006, pp. 2082-2089. https://www.researchgate.net/publication/224685128_Autonomous_vision-based_exploration_and_mapping_using_hybrid_maps_and_Rao-Blackwellised_particle_filters [6] Y. N. Wang, Y. M. Yang, X. F. Yuan, Y. Zuo, Y. L. Zhou, F. Yin, and L. Tan, "Autonomous mobile robot navigation system designed in dynamic environment based on transferable belief model, " Measurement, vol. 44, no. 8, pp. 1389-1405, Oct. 2011. http://www.researchgate.net/publication/251542234_Autonomous_mobile_robot_navigation_system_designed_in_dynamic_environment_based_on_transferable_belief_model [7] A. A. S. Souza, R. Maia, and L. M. G. Gonçalves, "3-D probabilistic occupancy grid to robotic mapping with stereo vision, " in Current Advancements in Stereo Vision, A. Bhatti, Ed. Croacia: INTECH, 2012, pp. 181-198. [8] D. Hähnel, W. Burgard, and S. Thrun, "Learning compact 3-D models of indoor and outdoor environments with a mobile robot, " Robot. Auton. Syst. , vol. 44, no. 1, pp. 15-27, Jul. 2003. [9] K. Pirker, M. Rüther, H. Bischof, and G. Schweighofer, "Fast and accurate environment modeling using three-dimensional occupancy grids, " in Proc. 2011 IEEE Int. Conf. Computer Vision Workshops, Barcelona, Spain, 2011, pp. 1134-1140. https://www.researchgate.net/publication/221430086_Fast_and_accurate_environment_modeling_using_three-dimensional_occupancy_grids [10] S. Kim and J. Kim, "Occupancy mapping and surface reconstruction using local gaussian processes with Kinect sensors, " IEEE Trans. Cybern. , vol. 43, no. 5, pp. 1335-1346, Oct. 2013. http://www.ncbi.nlm.nih.gov/pubmed/23893758 [11] Y. Zhuang, N. Jiang, H. S. Hu, and F. Yan, "3-D-laser-based scene measurement and place recognition for mobile robots in dynamic indoor environments, " IEEE Trans. Instrum. Meas. , vol. 62, no. 2, pp. 438-450, Feb. 2013. https://www.researchgate.net/publication/260492325_3-D-Laser-Based_Scene_Measurement_and_Place_Recognition_for_Mobile_Robots_in_Dynamic_Indoor_Environments [12] F. Endres, J. Hess, J. Sturm, D. Cremers, and W. Burgard, "3-D mapping with an RGB-D camera, " IEEE Trans. Robot. , vol. 30, no. 1, pp. 177-187, Feb. 2014. https://www.researchgate.net/publication/260520054_3-D_Mapping_With_an_RGB-D_Camera [13] L. Itti, C. Koch, and E. Niebur, "A model of saliency-based visual attention for rapid scene analysis, " IEEE Trans. Pattern Anal. Mach. Intell. , vol. 20, no. 11, pp. 1254-1259, Nov. 1998. http://www.researchgate.net/publication/3192913_A_model_of_saliency-based_visual_attention_for_rapid_scene_analysis [14] A. Kimura, R. Yonetani, and T. Hirayama, "Computational models of human visual attention and their implementations: A survey, " IEICE Trans. Inf. Syst. , vol. E96-D, no. 3, pp. 562-578, Mar. 2013. https://www.researchgate.net/publication/275603606_Computational_Models_of_Human_Visual_Attention_and_Their_Implementations_A_Survey [15] S. Frintrop, E. Rome, and H. I. Christensen, "Computational visual attention systems and their cognitive foundations: A survey, " ACM Trans. Appl. Percept. , vol. 7, no. 1, pp. Article ID: 6, Jan. 2010. https://www.researchgate.net/publication/220244956_Computational_visual_attention_systems_and_their_cognitive_foundations_A_survey?ev=prf_cit [16] S. Frintrop and P. Jensfelt, "Attentional landmarks and active gaze control for visual SLAM, " IEEE Trans. Robot. , vol. 24, no. 5, pp. 1054-1065, Oct. 2008. https://www.researchgate.net/publication/224332109_Attentional_Landmarks_and_Active_Gaze_Control_for_Visual_SLAM?ev=auth_pub [17] P. Newman and K. Ho, "SLAM-loop closing with visually salient features, " in Proc. 2005 IEEE Int. Conf. Robotics and Automation, Barcelona, Spain, 2005, pp. 635-642. https://www.researchgate.net/publication/4210014_SLAM-Loop_Closing_with_Visually_Salient_Features [18] N. Ouerhani, A. Bur, and H. Hügli, "Visual attention-based robot self-localization, " in Proc. 2005 European Conf. Mobile Robotics, Ancona, Italy, 2005, pp. 8-13. https://www.researchgate.net/publication/33682208_Visual_attention-based_robot_self-localization [19] E. Einhorn, C. Schröter, and H. M. Gross, "Attention-driven monocular scene reconstruction for obstacle detection, robot navigation and map building, " Robot. Auton. Syst. , vol. 59, no. 5, pp. 296-309, May 2011. https://www.researchgate.net/publication/228572034_Attention-driven_monocular_scene_reconstruction_for_obstacle_detection_robot_navigation_and_map_building [20] R. Roberts, D. N. Ta, J. Straub, K. Ok, and F. Dellaert, "Saliency detection and model-based tracking: A two part vision system for small robot navigation in forested environment, " in Proc. SPIE 8387, Unmanned Systems Technology XIV, Baltimore, Maryland, USA, vol. 8387, Atricle ID 83870S. https://www.researchgate.net/publication/258716451_Saliency_detection_and_model-based_tracking_a_two_part_vision_system_for_small_robot_navigation_in_forested_environment [21] H. Bay, T. Tuytelaars, and L. Van Gool, "SURF: Speeded up robust features, " in Proc. 9th European Conf. Computer Vision, Graz, Austria, 2006, pp. 404-417. https://www.researchgate.net/publication/221303886_SURF_Speeded_Up_Robust_Features [22] D. G. Lowe, "Distinctive image features from scale-invariant keypoints, " Int. J. Comput. Vis. , vol. 60, no. 2, pp. 91-110, Nov. 2004. [23] D. Comaniciu and P. Meer, "Mean shift: A robust approach toward feature space analysis, " IEEE Trans. Pattern Anal. Mach. Intell. , vol. 24, no. 5, pp. 603-619, May 2002. [24] R. Rocha, J. Dias, and A. Carvalho, "Cooperative multi-robot systems: A study of vision-based 3-D mapping using information theory, " Robot. Auton. Syst. , vol. 53, no. 3-4, pp. 282-311, Dec. 2005. https://www.researchgate.net/publication/4210106_Cooperative_Multi-Robot_Systems_A_study_of_Vision-based_3-D_Mapping_using_Information_Theory [25] S. Thrun, W. Burgard, and D. Fox, Probabilistic Robotics. New York, NY, USA:MIT Press, 2005. [26] A. Murarka, "Building safety maps using vision for safe local mobile robot navigation, " Ph. D. dissertation, Dept. CS, Univ. Texas, Austin, USA, 2009. https://www.researchgate.net/publication/50417504_Building_safety_maps_using_vision_for_safe_local_mobile_robot_navigation [27] S. Hrabar, "An evaluation of stereo and laser-based range sensing for rotorcraft unmanned aerial vehicle obstacle avoidance, " J. Field Robot. , vol. 29, no. 2, pp. 215-239, Mar. -Apr. 2012. https://www.researchgate.net/publication/261847674_An_evaluation_of_stereo_and_laser-based_range_sensing_for_rotorcraft_unmanned_aerial_vehicle_obstacle_avoidance -

 下载:
下载:

计量
- 文章访问数: 3169
- HTML全文浏览量: 339
- PDF下载量: 782
- 被引次数: 0
