

-
摘要: 针对复杂环境下单传感器多目标跟踪方法效果不佳的问题,基于FISST(Finite set statistics)跟踪理论提出一种多传感器高斯混合PHD(Probability hypothesis density)多目标跟踪方法.首先,分析了FISST下多传感器PHD的形式化滤波器,在此基础上构建一种反馈式多传感器PHD融合跟踪框架;进一步利用高斯混合技术提出多传感器PHD跟踪方法;最后,通过解决多传感器后验PHD粒子匹配与融合问题提出三种算法.仿真实验表明,与常规高斯混合PHD跟踪算法相比,本文所提算法能够有效提高目标跟踪精度和鲁棒性.Abstract: As the performance of single sensor multi-target tracking method will degenerate under complicated environment, a multi-sensor Gaussian mixture PHD multi-target tracker is proposed in terms of FISST theory. First, the formalized PHD filter is analyzed with FISST. Then, a multi-sensor posterior PHD feedback fusion framework is constructed. Further, Gaussian mixture technique is employed to build a multi-sensor PHD tracking method. At last, three applicable algorithms are proposed by solving particle matching and fusion problem. Simulation results show that, compared to some common Gaussian mixture PHD algorithms, the proposed algorithms are more accurate and robust.1) 本文责任编委 王伟
-
表 1 三种反馈式多传感器PHD融合跟踪算法表
Table 1 Three multi-sensor PHD feedback fusion tracking algorithms
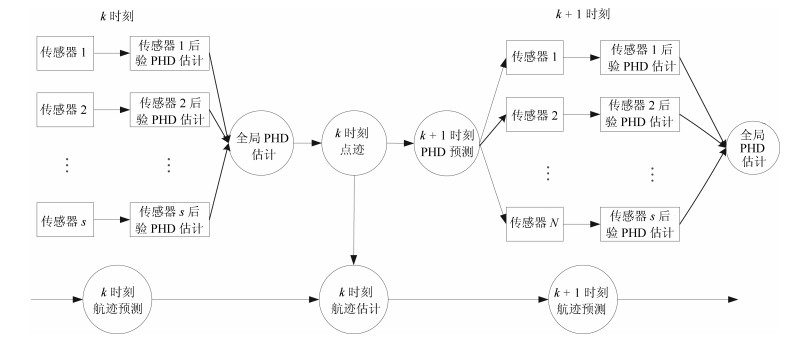
算法 乘积融合算法(Feedback multi-sensor PHD product fusion tracker, FMPF-PHDT) 最大值融合算法(Feedback multi-sensor PHD max fusion tracker, FMMF-PHDT) 几何均值融合算法(Feedback multi-sensor PHD geometrical mean fusion tracker, FMGF-PHDT) 步骤1.融合中心利用方程(15) 取得k-1时刻全局后验PHD粒子集; 步骤2.利用方程(16) 和(17) 得到k时刻全局预测PHD粒子集; 步骤3.利用方程(18) 将融合中心的全局预测PHD粒子集反馈共享至各个分布式的传感器; 步骤4.各分布式传感器利用方程(19)~(21) 得到k时刻更新的后验PHD粒子集; 步骤5.利用方程(23)~(26) 对各传感器的PHD粒子集进行匹配处理; 步骤6. 对于FMPF-PHDT算法:利用方程(27)~(31) 融合匹配粒子 对于FMMF-PHDT算法:利用方程(29)~(32) 融合匹配粒子 对于FMGF-PHDT算法:利用方程(29)~(31), (33) 融合匹配粒子 步骤7.对匹配融合后的后验PHD粒子集进行聚类、合并、修剪和重要性重采样处理[14]从而获得k时刻的全局后验PHD粒子集合; 步骤8.在k时刻全局后验PHD粒子集合的基础上利用航迹关联技术[1]取得被跟踪目标的航迹估计  下载: 导出CSV
下载: 导出CSV
表 2 4个目标跟踪场景的检测概率与杂波强度设定
Table 2 Detection rate and clutter density settings in four tracking scenarios
实验场景 检测概率 杂波强度 场景一 0.95 10 场景二 0.95 50 场景三 0.65 10 场景四 0.65 50
下载: 导出CSV
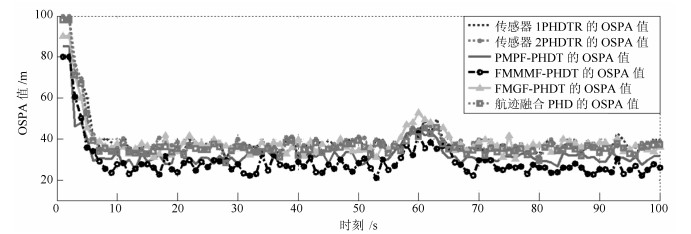
表 3 场景一算法OSPA均值和均方根值比较
Table 3 Mean and RMS comparison of OSPA in Scenario one
单传感器PHD均值 航迹融合PHD FMPF-PHDT FMMF-PHDT FMGF-PHDT OSPA平均值 38.02 36.43 31.25 27.30 38.02 OSPA均方根 3.06 3.33 4.65 3.56 3.34
下载: 导出CSV
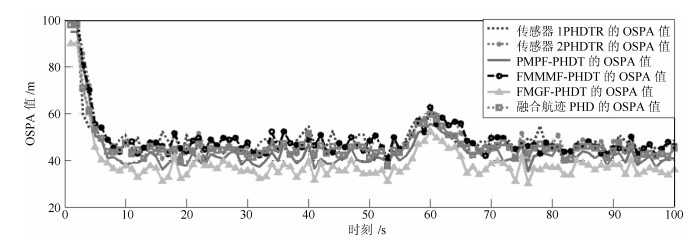
表 4 场景二算法OSPA均值和均方根值比较
Table 4 Mean and RMS comparison of OSPA in Scenario two
单传感器PHD均值 航迹融合PHD FMPF-PHDT FMMF-PHDT FMGF-PHDT OSPA平均值 48.04 46.32 41.23 49.07 37.59 OSPA均方根 5.45 5.41 4.43 6.22 4.32
下载: 导出CSV
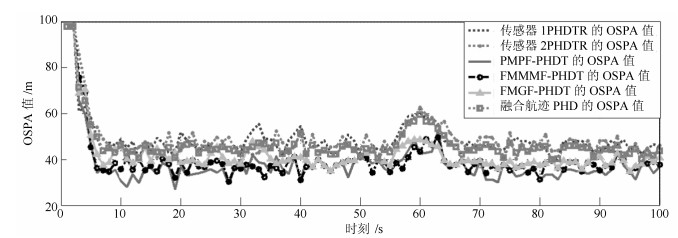
表 5 场景三算法OSPA均值和均方根值比较
Table 5 Mean and RMS comparison of OSPA in Scenario three
单传感器PHD均值 航迹融合PHD FMPF-PHDT FMMF-PHDT FMGF-PHDT OSPA平均值 49.09 48.02 37.59 41.05 42.14 OSPA均方根 4.47 4.49 5.58 3.89 5.75
下载: 导出CSV
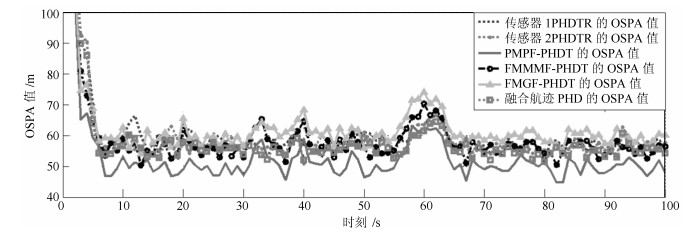
表 6 场景四算法OSPA均值和均方根值比较
Table 6 Mean and RMS comparison of OSPA in Scenario four
单传感器PHD均值 航迹融合PHD FMPF-PHDT FMMF-PHDT FMGF-PHDT OSPA平均值 59.18 57.76 52.52 55.83 58.55 OSPA均方根 3.24 3.42 5.64 6.65 3.44
下载: 导出CSV
-
[1] 权太范.目标跟踪新理论与技术.北京:国防工业出版社, 2009.Quan Tai-Fan. Target Tracking: Advanced Theory and Techniques. Beijing: National Defence Industry Press, 2009. [2] 韩崇昭, 朱洪艳, 段战胜.多源信息融合.第2版.北京:清华大学出版社, 2010.Han Chong-Zhao, Zhu Hong-Yan, Duan Zhan-Sheng. Multi-sources Information Fusion (2nd Edition). Beijing: Tsinghua University Press, 2010. [3] Bar-Shalom Y. Multitarget-multisensor Tracking: Applications and Advances. Volume Ⅲ. Norwood: Artech Print on Demand, 2000. [4] Magnant C, Giremus A, Grivel E, Ratton L, Joseph B. Multi-target tracking using a PHD-based joint tracking and classification algorithm. In: Proceedings of the 2016 IEEE Radar Conference (RadarConf). Philadelphia, PA, USA: IEEE, 2016. 1-6 [5] Choi M E, Seo S W. Robust multitarget tracking scheme based on Gaussian mixture probability hypothesis density filter. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4217-4229 doi: 10.1109/TVT.2015.2479363 [6] Bar-Shalom Y, Tse E. Tracking in a cluttered environment with probabilistic data association. Automatica, 1975, 11(5): 451-460 doi: 10.1016/0005-1098(75)90021-7 [7] Fortmann T, Bar-Shalom Y, Scheffe M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE Journal of Oceanic Engineering, 1983, 8(3): 173-184 doi: 10.1109/JOE.1983.1145560 [8] Blackman S S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1): 5-18 doi: 10.1109/MAES.2004.1263228 [9] Cham T J, Rehg J M. A multiple hypothesis approach to figure tracking. In: Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Fort Collins, CO, USA: IEEE, 1999. [10] Mahler R. The multisensor PHD filter: Ⅱ. Erroneous solution via Poisson magic. In: Proceedings of SPIE 7336, Signal Processing, Sensor Fusion, and Target Recognition XVⅢ. Orlando, Florida, USA: SPIE, 2009. [11] Tian Y X, Gao K, Liu Y, Han L. A novel track-before-detect algorithm based on optimal nonlinear filtering for detecting and tracking infrared dim target. In: Proceedings of SPIE 9622, 2015 International Conference on Optical Instruments and Technology: Optoelectronic Imaging and Processing Technology. Beijing, China: SPIE, 2015. [12] Vasuhi S, Vaidehi V. Target tracking using Interactive Multiple Model for Wireless Sensor Network. Information Fusion, 2016, 27: 41-43 doi: 10.1016/j.inffus.2015.05.004 [13] Li W L, Jia Y M, Du J P, Yu F S. Gaussian mixture PHD filter for multi-sensor multi-target tracking with registration errors. Signal Processing, 2013, 93(1): 86-99 doi: 10.1016/j.sigpro.2012.06.030 [14] Mahler R P S. Statistical Multisource-Multitarget Information Fusion. Boston: Artech House, 2007. [15] Mahler R. Random set theory for target tracking and identification. Multisensor Data Fusion. Boca Raton, FL: CRC Press, 2001. [16] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178 doi: 10.1109/TAES.2003.1261119 [17] 杨峰, 王永齐, 梁彦, 潘泉.基于概率假设密度滤波方法的多目标跟踪技术综述.自动化学报, 2013, 39(11): 1944-1956 http://www.aas.net.cn/CN/abstract/abstract18233.shtmlYang Feng, Wang Yong-Qi, Liang Yan, Pan Quan. A survey of PHD filter based multi-target tracking. Acta Automatica Sinica, 2013, 39(11): 1944-1956 http://www.aas.net.cn/CN/abstract/abstract18233.shtml [18] Vo B T, Vo B N, Cantoni A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Transactions on Signal Processing, 2007, 55(7): 3553-3567 doi: 10.1109/TSP.2007.894241 [19] Jones B A, Gehly S, Axelrad P. Measurement-based birth model for a space object cardinalized probability hypothesis density filter. In: Proceedings of the 2014 AIAA/AAS Astrodynamics Specialist Conference. San Diego, CA, USA: AIAA, 2014. [20] 欧阳成, 姬红兵, 郭志强.改进的多模型粒子PHD和CPHD滤波算法.自动化学报, 2012, 38(3): 341-348 http://www.aas.net.cn/CN/abstract/abstract17638.shtmlOuyang Cheng, Ji Hong-Bing, Guo Zhi-Qiang. Improved multiple model particle PHD and CPHD filters. Acta Automatica Sinica, 2012, 38(3): 341-348 http://www.aas.net.cn/CN/abstract/abstract17638.shtml [21] 陈辉, 韩崇昭. CBMeMBer滤波器序贯蒙特卡罗实现新方法的研究.自动化学报, 2016, 42(1): 26-36 http://www.aas.net.cn/CN/abstract/abstract18793.shtmlChen Hui, Han Chong-Zhao. A new sequential Monte Carlo implementation of cardinality balanced multi-target multi-Bernoulli filter. Acta Automatica Sinica, 2016, 42(1): 26-36 http://www.aas.net.cn/CN/abstract/abstract18793.shtml [22] Papi F, Vo B N, Vo B T. Generalized labeled multi-Bernoulli approximation of multi-object densities. IEEE Transactions on Signal Processing, 2015, 63(20): 5487-5497 doi: 10.1109/TSP.2015.2454478 [23] Vo B N, Singh S, Boucet A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245 doi: 10.1109/TAES.2005.1561884 [24] Delande E, Duflos E, Vanheeghe P, Heurguier D. Multi-sensor PHD: construction and implementation by space partitioning. In: Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Prague, Czech Republic: IEEE, 2011. 3632-3635 [25] 吴卫华, 江晶, 冯讯, 刘重阳, 秦星.基于随机有限集的多目标跟踪算法综述.电光与控制, 2016, 23(3): 1-6 http://cdmd.cnki.com.cn/Article/CDMD-10248-1012034711.htmWu Wei-Hua, Jiang Jing, Feng Xun, Liu Chong-Yang, Qin Xing. Multi-target tracking algorithms based on random finite set: a survey. Electronics Optics & Control, 2016, 23(3): 1-6 http://cdmd.cnki.com.cn/Article/CDMD-10248-1012034711.htm [26] Zhang Q, Song T L. Improved bearings-only multi-target tracking with GM-PHD filtering. Sensors, 2016, 16(9): 1469 doi: 10.3390/s16091469 -

 下载:
下载:

计量
- 文章访问数: 2945
- HTML全文浏览量: 691
- PDF下载量: 943
- 被引次数: 0
