

A Comparative Study on Algorithms of Robust and Stochastic MPC for Uncertain Systems
-
摘要: 近几十年来,不确定系统模型预测控制的理论和应用得到了飞速发展.本文简要地回顾了不确定系统中鲁棒模型预测控制和随机模型预测控制的发展历史,总结了它们的相关应用,并较为细致地分析了线性不确定系统模型预测控制的各种主要算法.通过总结各种算法的通用模型、运作方式、问题规模,以及它们保证递归可行性、稳定性的方法,分析了部分算法可行域间的关系,揭示了各种算法的主要特点、适用场合和未来可发展方向,并通过仿真实例直观地分析了各种算法的性能和可靠性.Abstract: In recent years, the development of model predictive control (MPC) of uncertain systems has been remarkable. This paper briefly reviews the development of robust MPC and stochastic MPC, summarizes their applications, and expounds and discusses the main algorithms of linear uncertain systems in these two fields. By summarizing their general models, the ways they work, computational complexities, and the ideas they use to ensure recursive feasibility and stability, we reveal the relationship of feasible sets among some of them and unravel the main features of these algorithms and their application situations. Finally, we demonstrate the performance of all the algorithms through certain simulation cases and give some indication on the future development of these two fields.
-
Key words:
- Uncertain system /
- robust MPC /
- stochastic MPC /
- stability /
- feasibility
-
表 1 算法主要参数
Table 1 Main parameters of algorithms
说明 问题规模 变量数目:指最终OCP决策变量的数量, 包括所有的松弛变量.
约束数目:是指最终OCP的约束数目.
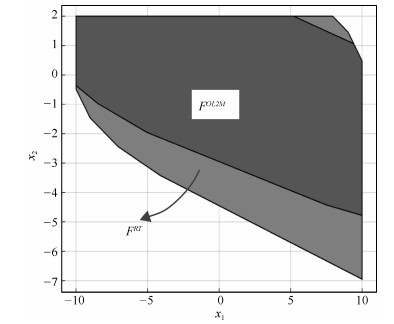
平均CPU时间:指每一次求解最终OCP所花费的平均时间.本质属性 可行域范围:假设OCP $^M$ 的所有决策变量为 $\Theta^M(x_k)$ , 其中 $x_k$ 是算法 $M$ 下的初始状态, OCP $^M$ 的可行域可定义为: ${F}^{M}=\{x| \exists \Theta^M(x)$ 使得OCP $^M$ 有可行解  下载: 导出CSV
下载: 导出CSV
表 2 Min-max算法的问题规模
Table 2 Problem scale of algorithms
算法 变量数目 约束数目 OL2M $Nm+Nr+1 $ $1LMI+Nn_{hx}+Nn_{hu}+n_S $ OL2M* $Nm+Nr+1 $ $ (q^{ N}-1)(1L+Nn_{hx}+n_S)+Nn_{hu} $ FF2M $Nm+Nr+1 $ $1LMI+N n_{hx}+Nn_{hu}+(2Nr+1)n_S $ FF2M* $Nm+Nr+1 $ $ (q^{N}-1)(N n_{hx}+Nn_{hu}+(2Nr+1)n_S+1) $ DF2M $N(N-1)/2+N m+N^2(n_{hx}+n_{hu})r+N r+1$ $1LMI+N n_{hx}+2N^2(n_{hx}+n_{hu})r+N n_{hu}+(2Nr+1)n_S $ DF2M* $N(N-1)/2+N m+N^2(n_{hx}+n_{hu})r+N r+1$ $ (q^{ N}-1)(N n_{hx}+2N^2(n_{hx}+n_{hu})r+N n_{hu}+(2Nr+1)n_S+1) $ DME2M* $ (q^{ N}-1)m/(q-1)+1$ $q^{ N}(1+ Nn_{hx} +N n_{hu} +n_S)$
下载: 导出CSV
表 3 PT RMPC的Tube和参数化
Table 3 Tubes and parameterization of PT RMPC
输入Tube 状态Tube 参数化 $\left.\begin{array}{*{20}ll} \mathfrak{U}_k=\{{U}_k, {U}_{k+1},\cdots,{U}_{k+N-1}\}\\ \text{其中}\\ {U}_{k+j}=\bigoplus_{i=0}^{j} {U}_{k+j}^{i}, \forall j\in \textbf{N}_{[0,N-1]}\\ {U}_{k+j}^{i=0}=\{u_{k+j}^{i=0} \in \textbf{R}^m\}, \forall j\in \textbf{N}_{[0,N-1]}\\ {U}_{k+j}^{i}=co\{u_{k+j}^{i,l} \in \textbf{R}^m,\forall l \in \textbf{N}_{[1,q]},\\ \forall i\in \textbf{N}_{[1,j]},\forall j\in \textbf{N}_{[1,N-1]}\} \end{array}\right.$ $\left.\begin{array}{*{20}ll} \mathfrak{X}_k=\{{X}_k, {X}_{k+1},\cdots,{X}_{k+N-1}\}\\ \text{其中}\\ {X}_{k+j}=\bigoplus_{i=0}^{j} {X}_{k+j}^{i}, \forall j\in \textbf{N}_{[0,N]}\\ {X}_{k+j}^{i=0}=\{x_{k+j}^{i=0} \in \textbf{R}^n, \forall j\in \textbf{N}_{[0,N]}\}\\ {X}_{k+j}^{i}=co\{x_{k+j}^{i,l} \in \textbf{R}^n,l \in \textbf{N}_{[1,q]},\\ \forall i\in \textbf{N}_{[1,j-1]}, \forall j\in \textbf{N}_{[2,N]}\}\\ {X}_{k+j}^{i=j}=G{W}=co\{x_{k+j}^{i=j,l}=G\widetilde{w}_l,\\ \forall l\in \textbf{N}_{[1,q]}, \forall j\in \textbf{N}_{[1,N]}\}\end{array}\right.$ $\left.\begin{array}{*{20}ll} x_{k+j}=\sum_{i=0}^jx_{k+j}^i\\ \text{其中,}\forall i\in \textbf{N}_{[1,j]}, \forall j\in \textbf{N}_{[1,N]}\\ x_{k+j}^i=\sum_{l=1}^{q}\lambda^l_{k+j}x_{k+j}^{i,l}\\ \text{ 且 } \sum_{l=1}^{q}\lambda^l_{k+j}=1\\ u_{k+j}=\sum_{i=0}^ju_{k+j}^i\\ \text{其中 }~\forall i\in \textbf{N}_{[1,j]}, \forall j\in \textbf{N}_{[1,N-1]}\\ u_{k+j}^i=\sum_{l=1}^{q}\lambda^l_{k+j}u_{k+j}^{i,l},\\ \lambda^l_{k+j} \text{ 同 }~ x_{k+j}^i \end{array}\right.$
下载: 导出CSV
表 4 基于Tube的RMPC算法的问题规模
Table 4 Problem scale tube-based RMPC
算法 变量数目 约束数目 RT $Nm+n$ $Nn_{hx}+Nn_{hu}+n_f+n_{sr}$ HT $Nm+ n +1$ $N(n_{hx}+n_{hu}+1)+n_f+n_{sr} $ PT $ (N-1)^2/2(mq+n_{hx}+n_{hu} )+ $ $N(N+1)/2+3N+Nn_s+N(N-1)(3(1+q)q/2+2)/2+ $ $ N(n+n_{h}+1)+N^2$ $n_{hx}+n_{hu}+N(1+q)qn_s/2+n_s$
下载: 导出CSV
表 5 RMPC算法对比
Table 5 Comparison of RMPC algorithms
算法 变量数目 约束数目 平均CPU时间(s) MPC $5 $ $30 $ 0.2884 OL2M $16 $ $1LMI+35$ 0.3884 OL2M* $16 $ $25585 $ 49.4144 FF2M $16 $ $1LMI+135$ 1.1977 FF2M* $16 $ $139128 $ 267.5556 DF2M $326$ $1LMI+735 $ 1.9504 DF2M* $326$ $752928 $ 1444.8 DME2M* $ 342$ 36864 88.9460 RT $ 7$ $81$ 0.3247 HT 8 $86$ 0.3329 PT 140 636 0.7974
下载: 导出CSV
表 7 RMPC和SMPC应用
Table 7 Applications of RMPC and SMPC algorithms
随机模型预测控制 鲁棒模型预测控制 无人汽车 驾驶转向控制[75] (DE)车辆导航[76] (ST)变道辅助[77] (SG)
巡航控制[78] (SG)车道保持与避障[79] (ST) [80] (DE)
自动驾驶控制[81] (SG)驾驶员行为建模[82] (DE)轨迹跟踪[83] (TB)传动动力系统控制[84] (MM)
车道保持与避障[85] (TB)智能家居 房屋气候控制[86] (SG)房屋遮阳镜片控制[87] (DE)
房屋能量控制[88] (SG)暖通空调系统建模与能量控制[89] (SG)温度控制[90] (MM)变风量空调系统控制[91] (MM) 电子电路 网络直流电机控制系统[92] (DE) 永磁同步电机驱动器[93] (TB)电子电路[94] (MM)热力电路[95] (MM) 飞行器 能源管理系统[96] (DE) 起落架系统振动抑制[97] (MM)
无人直升机轨迹跟踪控制[98] (MM)无人机飞行控制[99] (MM)
高超声速飞行器飞行控制[100] (MM)机器人 机器人导航与避障[101] (DE) 轨迹跟踪[102] (TB) 医疗 常压等离子射流控制[74] (ST)急救车辆调度[103] (SG) 药房库存管理[104](DE) 静脉麻醉控制[105] (MM) 过程工业 过程控制(四罐过程)[106] (DE) 浮选过程控制[107] (MM)热交换网控制[108] (MM)
连续搅拌反应釜[109] (MM)燃煤电站锅炉燃烧系统[110] (MM)
蒸馏塔控制[111] (MM)热轧带钢自动厚度控制[112] (MM)电网 微电网能量管理系统[113] (DE)微电网操控[114] (SG)
能源储存与生产的优化调度[115] (SG)电力调度[116] (SG)能源局域网优化调度[117] (SG)可再生能源微电网控制[118] (MM) 风力发电 风力涡轮机机械疲劳抑制[119] (DE)电池储能系统控制[120] (DE)风力发电系统控制[121] (DE) 风力涡轮机阻尼控制[122] (MM)风力涡轮机控制[123] (MM) 水资源 饮用水网络[124] (DE)水资源管理与利用[125] (DE) 城市交通 铁路货运车规模与分配控制[126](DE)能源管理[127] (SG) 城市道路交通网控制[128] (MM)地铁列车调度[129] (MM) 金融 动态套期保值和期权定价[130] (SG)欧式期权动态对冲[131] (SG) 其他 多层供应链管理[132] (SG)智能热网中的能量平衡[133](SG)云副本放置技术[134] (DE) 内燃机的热量管理[135] (MM)基于图像的视觉伺服控制[136] (MM)
下载: 导出CSV
-
[1] Kassmann D E, Badgwell T A, Hawkins R B. Robust steady-state target calculation for model predictive control. AIChE Journal, 2000, 46(5): 1007-1024 doi: 10.1002/(ISSN)1547-5905 [2] Qin S J, Badgwell T A. A survey of industrial model predictive control technology. Control Engineering Practice, 2003, 11(7): 733-764 doi: 10.1016/S0967-0661(02)00186-7 [3] Hrovat D, Di Cairano S, Tseng H E, Kolmanovsky I V. The development of model predictive control in automotive industry: a survey. In: Proceedings of the 2012 IEEE International Conference on Control Applications (CCA). Dubrovnik, Croatia: IEEE, 2012. 295-302 [4] 席裕庚, 李德伟, 林姝.模型预测控制--现状与挑战.自动化学报, 2013, 39(3): 222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtmlXi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control-status and challenges. Acta Automatica Sinica, 2013, 39(3): 222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtml [5] Mesbah A. Stochastic model predictive control: an overview and perspectives for future research. IEEE Control Systems, 2016, 36{6: 30-44 doi: 10.1109/MCS.2016.2602087 [6] Wang Y J, Rawlings J B. A new robust model predictive control method I: theory and computation. Journal of Process Control, 2004, 14(3): 231-247 doi: 10.1016/S0959-1524(02)00133-6 [7] Mayne D Q. Model predictive control: recent developments and future promise. Automatica, 2014, 50(12): 2967-2986 doi: 10.1016/j.automatica.2014.10.128 [8] Campo P J, Morari M. Robust model predictive control. In: Proceedings of the 1987 American Control Conference. Minneapolis, MN, USA: IEEE, 1987. 1021-1026 [9] Allwright J C, Papavasiliou G C. On linear programming and robust model-predictive control using impulse-responses. Systems & Control Letters, 1992, 18(2): 159-164 https://www.researchgate.net/publication/222725809_On_Linear_Programming_and_Robust_Model-Predictive_Control_Using_Impulse-Responses [10] Zheng Z Q, Morari M. Robust stability of constrained model predictive control. In: Proceedings of the 1993 American Control Conference. San Francisco, California, USA: IEEE, 1993. 379-383 [11] Lee J H, Yu Z H. Worst-case formulations of model predictive control for systems with bounded parameters. Automatica, 1997, 33(5): 763-781 doi: 10.1016/S0005-1098(96)00255-5 [12] Scokaert P O M, Mayne D Q. Min-max feedback model predictive control for constrained linear systems. IEEE Transactions on Automatic Control, 1998, 43(8): 1136-1142 doi: 10.1109/9.704989 [13] Blanchini F. Control synthesis for discrete time systems with control and state bounds in the presence of disturbances. Journal of Optimization Theory and Applications, 1990, 65(1): 29-40 doi: 10.1007/BF00941157 [14] Gossner J R, Kouvaritakis B, Rossiter J A. Stable generalized predictive control with constraints and bounded disturbances. Automatica, 1997, 33(4): 551-568 doi: 10.1016/S0005-1098(96)00214-2 [15] Lee Y I, Kouvaritakis B. Constrained receding horizon predictive control for systems with disturbances. International Journal of Control, 1999, 72(11): 1027-1032 doi: 10.1080/002071799220579 [16] Raković S V, Kerrigan E C, Kouramas K I, Mayne D Q. Invariant Approximations of Robustly Positively Invariant Sets for Constrained Linear Discrete-Time Systems Subject to Bounded Disturbances, Technical Report CUED/F-INFENG/TR.473, Department of Engineering, University of Cambridge, Cambridge, UK, 2004. [17] Limon D, Alvarado I, Alamo T, Camacho E F. Robust tube-based MPC for tracking of constrained linear systems with additive disturbances. Journal of Process Control, 2010, 20(3): 248-260 doi: 10.1016/j.jprocont.2009.11.007 [18] Cannon M, Kouvaritakis B, Rakovic S V, Cheng Q F. Stochastic tubes in model predictive control with probabilistic constraints. IEEE Transactions on Automatic Control, 2011, 56(1): 194-200 doi: 10.1109/TAC.2010.2086553 [19] Raković S V, Kouvaritakis B, Findeisen R, Cannon M. Homothetic tube model predictive control. Automatica, 2012, 48(8): 1631-1638 doi: 10.1016/j.automatica.2012.05.003 [20] Raković S V, Kouvaritakis B, Cannon M, Panos C, Findeisen R. Parameterized tube model predictive control. IEEE Transactions on Automatic Control, 2012, 57(11): 2746-2761 doi: 10.1109/TAC.2012.2191174 [21] Muñoz-Carpintero D, Kouvaritakis B, Cannon M. Striped parameterized tube model predictive control. In: Proceedings of the 19th IFAC World Congress. Cape Town, South Africa: IFAC, 2014. 11998-12003 [22] Farina M, Giulioni L, Magni L, Scattolini R. A probabilistic approach to model predictive control. In: Proceedings of the 52nd Annual Conference on Decision and Control (CDC). Florence, Italy: IEEE, 2013. 7734-7739 [23] Farina M, Giulioni L, Magni L, Scattolini R. An approach to output-feedback MPC of stochastic linear discrete-time systems. Automatica, 2015, 55: 140-149 doi: 10.1016/j.automatica.2015.02.039 [24] Hokayem P, Chatterjee D, Lygeros J. On stochastic receding horizon control with bounded control inputs. In: Proceedings of the 48th IEEE Conference on Decision and Control, Held Jointly with the 28th Chinese Control Conference. Shanghai, China: IEEE, 2009. 6359-6364 [25] Hokayem P, Chatterjee D, Ramponi F, Chaloulos G, Lygeros J. Stable stochastic receding horizon control of linear systems with bounded control inputs. In: Proceedings of the 19th International Symposium on Mathematical Theory of Networks and Systems. Budapest, Hungary: MTNS, 2010. 31-36 [26] Primbs J A, Sung C H. Stochastic receding horizon control of constrained linear systems with state and control multiplicative noise. IEEE Transactions on Automatic Control, 2009, 54(2): 221-230 doi: 10.1109/TAC.2008.2010886 [27] Hokayem P, Cinquemani E, Chatterjee D, Ramponi F, Lygeros J. Stochastic receding horizon control with output feedback and bounded controls. Automatica, 2012, 48(1): 77-88 doi: 10.1016/j.automatica.2011.09.048 [28] Lucia S, Zometa P, Kögel M, Findeisen R. Efficient stochastic model predictive control based on polynomial chaos expansions for embedded applications. In: Proceedings of the 54th Annual Conference on Decision and Control (CDC). Osaka, Japan: IEEE, 2015. 3006-3012 [29] Kouvaritakis B, Cannon M, Raković S V, Cheng Q F. Explicit use of probabilistic distributions in linear predictive control. Automatica, 2010, 46(10): 1719-1724 doi: 10.1016/j.automatica.2010.06.034 [30] Kothare M V, Balakrishnan V, Morari M. Robust constrained model predictive control using linear matrix inequalities. Automatica, 1996, 32(10): 1361-1379 doi: 10.1016/0005-1098(96)00063-5 [31] Kouvaritakis B, Cannon M. Model Predictive Control: Classical, Robust and Stochastic. Switzerland: Springer, 2015. [32] Mayne D. Robust and stochastic model predictive control: are we going in the right direction? Annual Reviews in Control, 2016, 41: 184-192 doi: 10.1016/j.arcontrol.2016.04.006 [33] Bemporad A, Morari M. Robust model predictive control: a survey, Robustness in Identification and Control. London: Springer, 1999. 207-226 [34] Löfberg J. Approximations of closed-loop minimax MPC. In: Proceedings of the 42nd IEEE Conference on Decision and Control. Maui, HI, USA: IEEE, 2003, 2: 1438-1442 [35] Alamo T, Ramirez D R, de La Peña D M, Camacho E F. Min-max MPC using a tractable QP problem. Automatica, 2007, 43(4): 693-700 doi: 10.1016/j.automatica.2006.10.006 [36] Gao Y, Chong K T. The explicit constrained min-max model predictive control of a discrete-time linear system with uncertain disturbances. IEEE Transactions on Automatic Control, 2012, 57(9): 2373-2378 doi: 10.1109/TAC.2012.2186090 [37] de la Peña D M, Ramírez D R, Camacho E F, Alamo T. Explicit solution of min-max MPC with additive uncertainties and quadratic criterion. Systems & control letters, 2006, 55(4): 266-274 https://www.researchgate.net/publication/257012284_Explicit_solution_of_min-max_MPC_with_additive_uncertainties_and_quadratic_criterion [38] Bertsekas D P. Nonlinear Programming (Second edition). Belmont, Massachusetts: Athena Scientific, 1999 [39] Löfberg J. Minimax Approaches to Robust Model Predictive Control [Ph.D. dissertation], Linköping University, Sweden, 2003. [40] 王振英. 不确定扰动情形下离散系统约束鲁棒模型预测控制[硕士学位论文], 哈尔滨理工大学, 中国, 2005.Wang Zhen-Ying. Constrained Robust Model Predictive Control of Discrete with Uncertaint Disturbance Case [Master dissertation], Harbin University of Science and Technology, China, 2005. [41] Bemporad A. Reducing conservativeness in predictive control of constrained systems with disturbances. In: Proceedings of the 37th IEEE Conference on Decision and Control. Tampa, FL, USA: IEEE, 1998, 2: 1384-1389 [42] Goulart P J, Kerrigan E C, Maciejowski J M. Optimization over state feedback policies for robust control with constraints. Automatica, 2006, 42(4): 523-533 doi: 10.1016/j.automatica.2005.08.023 [43] Langson W, Chryssochoos I, Raković S V, Mayne D Q. Robust model predictive control using tubes. Automatica, 2004, 40(1): 125-133 doi: 10.1016/j.automatica.2003.08.009 [44] Gautam A, Chu Y C, Soh Y C. Optimized dynamic policy for receding horizon control of linear time-varying systems with bounded disturbances. IEEE Transactions on Automatic Control, 2012, 57(4): 973-988 doi: 10.1109/TAC.2011.2170109 [45] Muñoz-Carpintero D, Cannon M, Kouvaritakis B. Robust MPC strategy with optimized polytopic dynamics for linear systems with additive and multiplicative uncertainty. Systems & Control Letters, 2015, 81: 34-41 https://www.researchgate.net/publication/271549753_Recursively_feasible_Robust_MPC_for_linear_systems_with_additive_and_multiplicative_uncertainty_using_optimized_polytopic_dynamics [46] Blanchini F. Survey paper: set invariance in control. Automatica, 1999, 35(11): 1747-1767 doi: 10.1016/S0005-1098(99)00113-2 [47] Herceg M, Kvasnica M, Jones C N, Morari M. Multi-parametric toolbox 3.0. In: Proceedings of the 2013 European Control Conference (ECC). Zurich, Switzerland: IEEE, 2013. 502-510 [48] Mayne D Q, Rawlings J B, Rao C V, Scokaert P O M. Constrained model predictive control: stability and optimality. Automatica, 2000, 36(6): 789-814 doi: 10.1016/S0005-1098(99)00214-9 [49] Goodwin G C, Kong H, Mirzaeva G, Seron M M. Robust model predictive control: reflections and opportunities. Journal of Control and Decision, 2014, 1(2): 115-148 doi: 10.1080/23307706.2014.913837 [50] Zheng P Y, Li D W, Xi Y G, Zhang J. Improved model prediction and RMPC design for LPV systems with bounded parameter changes. Automatica, 2013, 49(12): 3695-3699 doi: 10.1016/j.automatica.2013.09.024 [51] 平续斌, 丁宝苍, 韩崇昭.动态输出反馈鲁棒模型预测控制.自动化学报, 2012, 38(1): 31-37 http://www.aas.net.cn/CN/abstract/abstract17542.shtmlPing Xu-Bin, Ding Bao-Cang, Han Chong-Zhao. Dynamic output feedback robust model predictive control. Acta Automatica Sinica, 2012, 38(1): 31-37 http://www.aas.net.cn/CN/abstract/abstract17542.shtml [52] Cuzzola F A, Geromel J C, Morari M. An improved approach for constrained robust model predictive control. Automatica, 2002, 38(7): 1183-1189 doi: 10.1016/S0005-1098(02)00012-2 [53] Kouvaritakis B, Rossiter J A, Schuurmans J. Efficient robust predictive control. IEEE Transactions on Automatic Control, 2000, 45(8): 1545-1549 doi: 10.1109/9.871769 [54] Mayne D Q, Langson W. Robustifying model predictive control of constrained linear systems. Electronics Letters, 2001, 37(23): 1422-1423 doi: 10.1049/el:20010951 [55] Mayne D Q, Seron M M, Raković S V. Robust model predictive control of constrained linear systems with bounded disturbances. Automatica, 2005, 41(2): 219-224 doi: 10.1016/j.automatica.2004.08.019 [56] Raković S V, Kouvaritakis B, Findeisen R, Cannon M. Simple homothetic tube model predictive control. In: Proceedings of the 19th International Symposium on Mathematical Theory of Networks and Systems-MTNS. Budapest, Hungary: MTNS, 2010. 1411-1418 [57] Kolmanovsky I, Gilbert E G. Theory and computation of disturbance invariant sets for discrete-time linear systems. Mathematical Problems in Engineering, 1998, 4(4): 317-367 doi: 10.1155/S1024123X98000866 [58] Calafiore G, Campi M C. Uncertain convex programs: randomized solutions and confidence levels. Mathematical Programming, 2005, 102(1): 25-46 doi: 10.1007/s10107-003-0499-y [59] Campi M C, Garatti S, Prandini M. The scenario approach for systems and control design. Annual Reviews in Control, 2009, 33(2): 149-157 doi: 10.1016/j.arcontrol.2009.07.001 [60] Schildbach G, Fagiano L, Frei C, Morari M. The scenario approach for stochastic model predictive control with bounds on closed-loop constraint violations. Automatica, 2014, 50(12): 3009-3018 doi: 10.1016/j.automatica.2014.10.035 [61] Cannon M, Cheng Q F, Kouvaritakis B, Raković S V. Stochastic tube MPC with state estimation. Automatica, 2012, 48(3): 536-541 doi: 10.1016/j.automatica.2011.08.058 [62] Schwarm A T, Nikolaou M. Chance-constrained model predictive control. AIChE Journal, 1999, 45(8): 1743-1752 doi: 10.1002/(ISSN)1547-5905 [63] Magni L, Pala D, Scattolini R. Stochastic model predictive control of constrained linear systems with additive uncertainty. In: Proceedings of the 2009 European Control Conference (ECC). Budapest, Hungary: IEEE, 2009. 2235-2240 [64] Farina M, Scattolini R. Model predictive control of linear systems with multiplicative unbounded uncertainty and chance constraints. Automatica, 2016, 70: 258-265 doi: 10.1016/j.automatica.2016.04.008 [65] Farina M, Giulioni L, Scattolini R. Stochastic linear model predictive control with chance constraints——a review. Journal of Process Control, 2016, 44: 53-67 doi: 10.1016/j.jprocont.2016.03.005 [66] Batina I. Model Predictive Control for Stochastic Systems By Randomized Algorithms [Ph.D. dissertation], Technische Universiteit Eindhoven, Netherlands, 2004. [67] Blackmore L, Ono M, Bektassov A, Williams B C. A probabilistic particle-control approximation of chance-constrained stochastic predictive control. IEEE Transactions on Robotics, 2010, 26(3): 502-517 doi: 10.1109/TRO.2010.2044948 [68] Campi M C, Garatti S. The exact feasibility of randomized solutions of uncertain convex programs. SIAM Journal on Optimization, 2008, 19(3): 1211-1230 doi: 10.1137/07069821X [69] Campi M C, Garatti S. A sampling-and-discarding approach to chance-constrained optimization: feasibility and optimality. Journal of Optimization Theory and Applications, 2011, 148(2): 257-280 doi: 10.1007/s10957-010-9754-6 [70] Calafiore G C, Campi M C. The scenario approach to robust control design. IEEE Transactions on Automatic Control, 2006, 51(5): 742-753 doi: 10.1109/TAC.2006.875041 [71] Calafiore G C. Random convex programs. SIAM Journal on Optimization, 2010, 20(6): 3427-3464 doi: 10.1137/090773490 [72] Alamo T, Tempo R, Luque A, Ramirez D R. Randomized methods for design of uncertain systems: sample complexity and sequential algorithms. Automatica, 2015, 52: 160-172 doi: 10.1016/j.automatica.2014.11.004 [73] Cannon M, Kouvaritakis B, Wu X J. Probabilistic constrained MPC for multiplicative and additive stochastic uncertainty. IEEE Transactions on Automatic Control, 2009, 54(7): 1626-1632 doi: 10.1109/TAC.2009.2017970 [74] Gidon D, Graves D B, Mesbah A. Model predictive control of thermal effects of an atmospheric pressure plasma jet for biomedical applications. In: Proceedings of the 2016 American Control Conference (ACC). Boston, MA, USA: IEEE, 2016. 4889-4894 [75] 王秋, 曲婷, 陈虹.基于随机模型预测控制的自主车辆转向控制.信息与控制, 2015, 44(4): 499-506 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201504021.htmWang Qiu, Qu Ting, Chen Hong. Steering control of autonomous vehicles based on stochastic model predictive control. Information and Control, 2015, 44(4): 499-506 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201504021.htm [76] Carvalho A, Gao Y Q, Lefevre S, Borrelli F. Stochastic predictive control of autonomous vehicles in uncertain environments. In: Proceedings of the 12th International Symposium on Advanced Vehicle Control. Tuat, Japan: AVEC, 2014. [77] Schildbach G, Borrelli F. Scenario model predictive control for lane change assistance on highways. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (Ⅳ). Seoul, Korea: IEEE, 2015. 611-616 [78] Moser D, Waschl H, Kirchsteiger H, Schmied R, del Re L. Cooperative adaptive cruise control applying stochastic linear model predictive control strategies. In: Proceedings of the 2015 European Control Conference (ECC). Linz, Austria: IEEE, 2015. 3383-3388 [79] Liu C C, Carvalho A, Schildbach G, Hedrick J K. Stochastic predictive control for lane keeping assistance systems using a linear time-varying model. In: Proceedings of the 2015 American Control Conference (ACC). Chicago, IL, USA: ACC, 2015. 3355-3360 [80] Gray A, Gao Y Q, Lin T, Hedrick J K, Borrelli F. Stochastic predictive control for semi-autonomous vehicles with an uncertain driver model. In: Proceedings of the 16th International IEEE Annual Conference on Intelligent Transportation Systems-(ITSC). The Hague, the Netherlands: IEEE, 2013. 2329-2334 [81] Carvalho A, Lefévre S, Schildbach G, Kong J, Borrelli F. Automated driving: the role of forecasts and uncertainty-a control perspective. European Journal of Control, 2015, 24: 14-32 doi: 10.1016/j.ejcon.2015.04.007 [82] 曲婷. 基于随机模型预测控制的驾驶员行为建模[博士学位论文], 吉林大学, 中国, 2015.Qu Ting. Driver Behavior Modeling Based on Stochastic Model Predictive Control [Ph.D. dissertation], Jilin University, China, 2015. [83] Kayacan E, Ramon H, Saeys W. Robust trajectory tracking error model-based predictive control for unmanned ground vehicles. IEEE/ASME Transactions on Mechatronics, 2016, 21(2): 806-814 doi: 10.1109/TMECH.2015.2492984 [84] Zhu X Y, Zhang H, Cao D P, Fang Z D. Robust control of integrated motor-transmission powertrain system over controller area network for automotive applications. Mechanical Systems and Signal Processing, 2015, 58-59: 15-28 http://d.scholar.cnki.net/detail/SJESTEMP_U/SJES14123100018385 [85] Gao Y Q, Gray A, Tseng H E, Borrelli F. A tube-based robust nonlinear predictive control approach to semiautonomous ground vehicles. Vehicle System Dynamics, 2014, 52(6): 802-823 doi: 10.1080/00423114.2014.902537 [86] Zhang X J, Grammatico S, Schildbach G, Goulart P, Lygeros J. On the sample size of randomized MPC for chance-constrained systems with application to building climate control. In: Proceedings of the 2014 European Control Conference (ECC). Strasbourg, France: IEEE, 2014. 478-483 [87] Yao J. Determining the energy performance of manually controlled solar shades: a stochastic model based co-simulation analysis. Applied Energy, 2014, 127: 64-80 doi: 10.1016/j.apenergy.2014.04.046 [88] Tanner R A, Henze G P. Stochastic control optimization for a mixed mode building considering occupant window opening behaviour. Journal of Building Performance Simulation, 2014, 7(6): 427-444 doi: 10.1080/19401493.2013.863384 [89] Ma Y D, Matuško J, Borrelli F. Stochastic model predictive control for building HVAC systems: complexity and conservatism. IEEE Transactions on Control Systems Technology, 2015, 23(1): 101-116 doi: 10.1109/TCST.2014.2313736 [90] Xu X H, Wang S W, Huang G S. Robust MPC for temperature control of air-conditioning systems concerning on constraints and multitype uncertainties. Building Services Engineering Research and Technology, 2010, 31(1): 39-55 doi: 10.1177/0143624409352420 [91] 杨世忠, 任庆昌.鲁棒模型预测控制在变风量空调系统中的应用.计算机工程与应用, 2013, 49(6): 8-11, 104 http://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201306004.htmYang Shi-Zhong, Ren Qing-Chang. Robust model predictive control for variable air volume air conditioning system. Computer Engineering and Applications, 2013, 49(6): 8-11, 104 http://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201306004.htm [92] Ren M F, Zhang J H, Jiang M, Yu M, Xu J L. Minimum (h, Φ) entropy control for non-Gaussian stochastic networked control systems and its application to a networked dc motor control system. IEEE Transactions on Control Systems Technology, 2015, 23(1): 406-411 doi: 10.1109/TCST.2014.2324978 [93] Preindl M. Robust control invariant sets and Lyapunov-based mpc for ipm synchronous motor drives. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3925-3933 doi: 10.1109/TIE.2016.2527722 [94] Zhao X D, Zhang L X, Shi P, Karimi H R. Robust control of continuous-time systems with state-dependent uncertainties and its application to electronic circuits. IEEE Transactions on Industrial Electronics, 2014, 61(8): 4161-4170 doi: 10.1109/TIE.2013.2286568 [95] Rhouma A, Bouani F. Robust model predictive control of uncertain fractional systems: a thermal application. IET Control Theory & Applications, 2014, 8(17): 1986-1994 https://www.researchgate.net/publication/270579793_Robust_model_predictive_control_of_uncertain_fractional_systems_A_thermal_application [96] Shahsavari B, Maasoumy M, Sangiovanni-Vincentelli A, Horowitz R. Stochastic model predictive control design for load management system of aircraft electrical power distribution. In: Proceedings of the 2015 American Control Conference (ACC). Chicago, IL, USA: IEEE, 2015. 3649-3655 [97] Hajiloo A, Xie W F. The stochastic robust model predictive control of shimmy vibration in aircraft landing gears. Asian Journal of Control, 2015, 17(2): 476-485 doi: 10.1002/asjc.v17.2 [98] Marantos P, Bechlioulis C P, Kyriakopoulos K J. Robust trajectory tracking control for small-scale unmanned helicopters with model uncertainties. IEEE Transactions on Control Systems Technology, 2017, doi: 10.1109/TCST.2016.2642160 [99] Alexis K, Papachristos C, Siegwart R, Tzes A. Robust model predictive flight control of unmanned rotorcrafts. Journal of Intelligent & Robotic Systems, 2016, 81(3-4): 443-469 https://www.researchgate.net/publication/279232323_Robust_Model_Predictive_Flight_Control_of_Unmanned_Rotorcrafts [100] 张少康. 基于LPV模型的高超声速飞行器鲁棒预测控制方法研究[硕士学位论文], 天津大学, 中国, 2014.Zhang Shao-Kang. Research on Robust Model Predictive Control Based on LPV Model for Hypersonic Vehicles [Master dissertation], Tianjin University, China, 2014. [101] Blackmore L, Ono M, Williams B C. Chance-constrained optimal path planning with obstacles. IEEE Transactions on Robotics, 2011, 27(6): 1080-1094 doi: 10.1109/TRO.2011.2161160 [102] González R, Fiacchini M, Guzmán J L, Á lamo T, Rodríguez F. Robust tube-based predictive control for mobile robots in off-road conditions. Robotics and Autonomous Systems, 2011, 59(10): 711-726 doi: 10.1016/j.robot.2011.05.006 [103] Goodwin G C, Medioli A M. Scenario-based, closed-loop model predictive control with application to emergency vehicle scheduling. International Journal of Control, 2013, 86(8): 1338-1348 doi: 10.1080/00207179.2013.788215 [104] Jurado I, Maestre J M, Velarde P, Ocampo-Martinez C, Fern{andez I, Tejera B I, del Prado J R. Stock management in hospital pharmacy using chance-constrained model predictive control. Computers in Biology and Medicine, 2016, 72: 248-255 doi: 10.1016/j.compbiomed.2015.11.011 [105] Chang H, Krieger A, Astolfi A, Pistikopoulos E N. Robust multi-parametric model predictive control for LPV systems with application to anaesthesia. Journal of Process Control, 2014, 24(10): 1538-1547 doi: 10.1016/j.jprocont.2014.07.005 [106] Jurado I, Millán P, Quevedo D, Rubio F R. Stochastic MPC with applications to process control. International Journal of Control, 2015, 88(4): 792-800 doi: 10.1080/00207179.2014.975845 [107] Tang Y, Peng C, Yin S, Qiu J B, Gao H J, Kaynak O. Robust model predictive control under saturations and packet dropouts with application to networked flotation processes. IEEE Transactions on Automation Science and Engineering, 2014, 11(4): 1056-1064 doi: 10.1109/TASE.2013.2283304 [108] Bakošová M, Oravec J. Robust model predictive control for heat exchanger network. Applied Thermal Engineering, 2014, 73(1): 924-930 doi: 10.1016/j.applthermaleng.2014.08.023 [109] Ghaffari V, Naghavi S V, Safavi A A. Robust model predictive control of a class of uncertain nonlinear systems with application to typical CSTR problems. Journal of Process Control, 2013, 23(4): 493-499 doi: 10.1016/j.jprocont.2013.01.009 [110] 刘正峰, 王景成, 史元浩, 张浪文. 燃煤电站锅炉燃烧系统的鲁棒分布式模型预测控制. 见: 第25届中国过程控制会议. 大连, 中国: 中国自动化学会过程控制专业委员会, 2014. 6Liu Zheng-Feng, Wang Jing-Cheng, Shi Yuan-Hao, Zhang Lang-Wen. Robust distributed model prediction control for coal-fired power plant boiler combustion system. In: Proceedings of the 25th Chinese Process Control Conference. Dalian, China, 2014. 6 [111] Yorgashov Yu A. Robust model predictive control of industrial reactive distillation column. Journal of Shenyang University of Chemical Technology, 2009, 23(1): 92-96 http://en.cnki.com.cn/Article_en/CJFDTOTAL-SYHY200901022.htm [112] 杨斌虎, 杨卫东, 曲蕾.热轧带钢自动厚度控制鲁棒预测模型与控制策略.控制理论与应用, 2011, 28(6): 799-804 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201106007.htmYang Bin-Hu, Yang Wei-Dong, Qu Lei. Robust predictive-model-control strategy for automatic gauge control in hot strip finishing milling. Control Theory & Applications, 2011, 28(6): 799-804 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201106007.htm [113] Cominesi S R, Farina M, Giulioni L, Picasso B, Scattolini R. Two-layer predictive control of a micro-grid including stochastic energy sources. In: Proceedings of the 2015 American Control Conference (ACC). Chicago, IL, USA: IEEE, 2015. 918-923 [114] Hans C A, Sopasakis P, Bemporad A, Raisch J, Reincke-Collon C. Scenario-based model predictive operation control of islanded microgrids. In: Proceedings of the 54th Annual Conference on Decision and Control (CDC). Osaka, Japan: IEEE, 2015. 3272-3277 [115] Zhu D H, Hug G. Decomposed stochastic model predictive control for optimal dispatch of storage and generation. IEEE Transactions on Smart Grid, 2014, 5(4): 2044-2053 doi: 10.1109/TSG.2014.2321762 [116] Patrinos P, Trimboli S, Bemporad A. Stochastic MPC for real-time market-based optimal power dispatch. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC). Orlando, FL, USA: IEEE, 2011. 7111-7116 [117] 张彦, 张涛, 刘亚杰, 郭波.基于随机模型预测控制的能源局域网优化调度研究.中国电机工程学报, 2016, 36(13): 3451-3462 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201613007.htmZhang Yan, Zhang Tao, Liu Ya-Jie, Guo Bo. Stochastic model predictive control for energy management optimization of an energy local network. Proceedings of the CSEE, 2016, 36(13): 3451-3462 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201613007.htm [118] Velarde P, Maestre J M, Ocampo-Martinez C, Bordons C. Application of robust model predictive control to a renewable hydrogen-based microgrid. In: Proceedings of the 15th European Control Conference (ECC). Aalborg, Denmark: ECC, 2016. 1209-1214 [119] Riverso S, Mancini S, Sarzo F, Ferrari-Trecate G. Model predictive controllers for reduction of mechanical fatigue in wind farms. IEEE Transactions on Control Systems Technology, 2017, 25(2): 535-549 doi: 10.1109/TCST.2016.2572170 [120] Kou P, Gao F, Guan X H. Stochastic predictive control of battery energy storage for wind farm dispatching: using probabilistic wind power forecasts. Renewable Energy, 2015, 80: 286-300 doi: 10.1016/j.renene.2015.02.001 [121] 胡婧. 随机模型预测控制在风力发电系统的应用[硕士学位论文], 华北电力大学, 中国, 2015.Hu Jing. Research on application of stochastic model predictive control in wind power generation systems [Master dissertation], North China Electric Power University, China, 2015. [122] Evans M A, Cannon M, Kouvaritakis B. Robust MPC tower damping for variable speed wind turbines. IEEE Transactions on Control Systems Technology, 2015, 23(1): 290-296 doi: 10.1109/TCST.2014.2310513 [123] Mirzaei M, Poulsen N K, Niemann H H. Robust model predictive control of a wind turbine. In: Proceedings of the 2012 American Control Conference (ACC). Montréal, Canada: IEEE, 2012. 4393-4398 [124] Grosso J M, Ocampo-Martínez C, Puig V, Joseph B. Chance-constrained model predictive control for drinking water networks. Journal of Process Control, 2014, 24(5): 504-516 doi: 10.1016/j.jprocont.2014.01.010 [125] 黄翀胤, 罗灿, 赵勇, 韩守东.随机预测控制模型及其在水资源可持续中的应用.水电能源科学, 2011, 29(12): 16-20 doi: 10.3969/j.issn.1000-7709.2011.12.005Huang Chong-Yin, Luo Can, Zhao Yong, Han Shou-Dong. Application of stochastic predictive control model to sustainable utilization of water resources. Water Resources and Power, 2011, 29(12): 16-20 doi: 10.3969/j.issn.1000-7709.2011.12.005 [126] Milenković M S, Bojović N J, Švadlenka L, Melichar V. A stochastic model predictive control to heterogeneous rail freight car fleet sizing problem. Transportation Research Part E: Logistics and Transportation Review, 2015, 82: 162-198 doi: 10.1016/j.tre.2015.07.009 [127] Di Cairano S, Bernardini D, Bemporad A, Kolmanovsky I V. Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management. IEEE Transactions on Control Systems Technology, 2014, 22(3): 1018-1031 doi: 10.1109/TCST.2013.2272179 [128] Tettamanti T, Luspay T, Kulcsár B, Péni T, Varga I. Robust control for urban road traffic networks. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 385-398 doi: 10.1109/TITS.2013.2281666 [129] Li S K, De Schutter B, Yang L X, Gao Z Y. Robust model predictive control for train regulation in underground railway transportation. IEEE Transactions on Control Systems Technology, 2016, 24(3): 1075-1083 doi: 10.1109/TCST.2015.2480839 [130] Bemporad A, Bellucci L, Gabbriellini T. Dynamic option hedging via stochastic model predictive control based on scenario simulation. Quantitative Finance, 2014, 14(10): 1739-1751 doi: 10.1080/14697688.2011.649780 [131] 张卫国, 杜谦.基于随机模型预测控制的欧式期权动态对冲研究.华南理工大学学报(社会科学版), 2016, 18(4): 1-9 http://www.cnki.com.cn/Article/CJFDTOTAL-HNLS201604002.htmZhang Wei-Guo, Du Qian. Dynamic hedging european option based on stochastic model predictive controldynamic hedging European option based on stochastic model predictive control. Journal of South China University of Technology (Social Science Edition), 2016, 18(4): 1-9 http://www.cnki.com.cn/Article/CJFDTOTAL-HNLS201604002.htm [132] Schildbach G, Morari M. Scenario-based model predictive control for multi-echelon supply chain management. European Journal of Operational Research, 2016, 252(2): 540-549 doi: 10.1016/j.ejor.2016.01.051 [133] Rostampour V, Keviczky T. Robust randomized model predictive control for energy balance in smart thermal grids. In: Proceedings of the 2016 European Control Conference (ECC). Aalborg, Denmark: IEEE, 2016. 1201-1208 [134] Ghanbari H, Litoiu M, Pawluk P, Barna C. Replica placement in cloud through simple stochastic model predictive control. In: Proceedings of the 2014 IEEE 7th International Conference on Cloud Computing (CLOUD). Anchorage, AK, USA: IEEE, 2014. 80-87 [135] Pizzonia F, Castiglione T, Bova S. A Robust Model Predictive Control for efficient thermal management of internal combustion engines. Applied Energy, 2016, 169: 555-566 doi: 10.1016/j.apenergy.2016.02.063 [136] Hajiloo A, Keshmiri M, Xie W F, Wang T T. Robust online model predictive control for a constrained image-based visual servoing. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2242-2250 https://www.researchgate.net/profile/Amir_Hajiloo/publication/287965502_Robust_On-Line_Model_Predictive_Control_for_a_Constrained_Image_Based_Visual_Servoing/links/56e1926608aec09a8bc08154.pdf [137] Carrasco D S, Goodwin G C. Feedforward model predictive control. Annual Reviews in Control, 2011, 35(2): 199-206 doi: 10.1016/j.arcontrol.2011.10.007 [138] Paulson J A, Mesbah A, Streif S, Findeisen R, Braatz R D. Fast stochastic model predictive control of high-dimensional systems. In: Proceedings of the 53rd Conference on Decision and Control. Los Angeles, California, USA: IEEE, 2014. 2802-2809 [139] Terejanu G, Singla P, Singh T, Scott P D. Approximate interval method for epistemic uncertainty propagation using polynomial chaos and evidence theory. In: Proceedings of the 2010 American Control Conference. Baltimore, MD, USA: IEEE, 2010. 349-354 [140] Bayer F A, Müller M A, Allgöwer F. Tube-based robust economic model predictive control. Journal of Process Control, 2014, 24(8): 1237-1246 doi: 10.1016/j.jprocont.2014.06.006 [141] Hovgaard T G, Larsen L F S, Jorgensen J B. Robust economic MPC for a power management scenario with uncertainties. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC). Orlando, FL, USA: IEEE, 2011. 1515-1520 [142] Bayer F A, Lorenzen M, Müller M A, Allgöwer F. Robust economic model predictive control using stochastic information. Automatica, 2016, 74: 151-161 doi: 10.1016/j.automatica.2016.08.008 [143] Feller C, Ebenbauer C. A stabilizing iteration scheme for model predictive control based on relaxed barrier functions. Automatica, 2017, 80: 328-339 doi: 10.1016/j.automatica.2017.02.001 -

 下载:
下载:

计量
- 文章访问数: 5864
- HTML全文浏览量: 981
- PDF下载量: 2042
- 被引次数: 0
