

-
摘要: 扑翼飞行器(Flapping-wing air vehicle,FAV)即通过模拟昆虫以及鸟类飞行方式而制造的仿生机器人.与常见的固定翼和旋翼飞行器相比,具有效率高、质量轻、机动性强、耗能低等显著优点,是飞行器发展的重要方向.关于扑翼机的研究始于上世纪后期,现如今从理论探索到机体开发都有了可喜的成果.本文首先介绍了世界领先的几款扑翼飞行器的特点,接着简述了扑翼飞行器在动力学、能源、控制等方面的发展现状,并对未来的研究方向做出了展望.Abstract: The flapping-wing air vehicle (FAV) is a sort of bionic-robot, which simulates insect and bird flight. Comparing with fixed and rotary-wing aircraft, FAV is characterized by efficiency, low mass, high flexibility and energy conservation, and is a major trend of the aircraft development. The study of FAV can date from the end of 20th century. And now, great achievements have been made both in the theoretical research and modeling. This overview introduces the characters of the leading FAVs in the world, followed by an overlook and outlook of the aerodynamics, energy-supply and control problem for FAVs.
-
Key words:
- Flapping-wing air vehicle (FAV) /
- aerodynamics /
- fight control /
- flexible structure /
- vibration control
1) 本文责任编委 朱纪洪 -

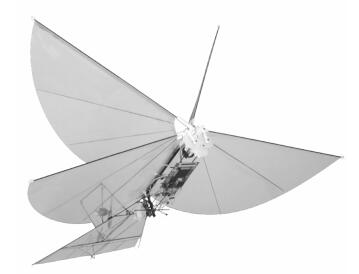
图 13 南航仿鸟扑翼飞行器
Fig. 13 Bird-like FAV of Nanjing University of Aeronautics and Astronautics
表 1 扑翼机参数
Table 1 The parameters of FAV
名称 制作单位 质量(g) 翼展(cm) 推动频率(Hz) 飞行速度(m/s) 续航时间(s) Nano Hummingbird 航空环境公司 17.5 15.8 27.5 6.7 660 Phoenix 麻省理工学院 200 − 2.4 4 − Insect-scale 哈佛大学 0.08 3 120 0.3 20 SmartBird Festo 400 200 − − − Bat Bot UIUC 60 40 8 − − Ornithopter 亚利桑那大学 260 74 18 10 420 Microbat 加州理工大学 12.5 15.24 − 5 42 DelFly Delft 16 2.8 18 15 900 H2bird UC Berkeley 13 26.5 − 1.2 600 EPFL的扑翼机 EPFL 30 86 − 2.5 1 800 马里兰大学扑翼机 马里兰大学 425 107 5 8.3 150 ASN-211 西北工业大学 220 60 − 10 −  下载: 导出CSV
下载: 导出CSV
表 2 扑翼机控制方法优缺点比较
Table 2 The advantages and disadvantages of FAV control
控制分类 控制方法 优缺点 无模型主动控制 主动(被动)位置反馈[58] 优点: 1) 自适应性; 2) 有效抑制振动同时又不降低系统的稳定性.
缺点: 1) 频率不能时变; 2) 难以应对多种系统模型; 3) 形成高阶控制器.线性速度反馈[59] 优点:保证了闭环系统的无条件稳定性.
缺点: 1) 要求微分器实现; 2) 增加了全频段的控制难度.PID[60] 优点: 1) 结构简单; 2) 性能可靠; 3) 应用广泛.
缺点: 1) 不具有自适应性; 2) 不能应用于可调变化中.分数阶控制[61] 优点: 1) 对不同负载具有鲁棒性; 2) 可消除扰动的影响.
缺点:只能应用于常系数线性系统.奇摄动控制[62] 优点:能把复杂系统高阶项分成简单的低阶子系统.
缺点: 1) 当考虑高阶项时增加项的解将变得非常复杂;
2) 模型的不确定性将会反映在缓慢变化的动态性能中.无模型的被动控制 被动定理[63] 优点:简单且对于动态性能的变化具有鲁棒性.
缺点: 1) 动作控制反应慢; 2) 不够高效; 3) 对关节摩擦敏感.无模型主被动组合控制 内外环[64] 优点: 1) 暂态收敛速度快; 2) 具有准确的稳态跟踪率;
3) 可以消除一些扰动的影响; 4) 简化控制动作;
缺点:传感器和变送器增多.无模型自适应/智能控制 滑膜控制[65] 优点: 1) 可用于处理模型未知或者不确定系统;
2) 有效保持了系统的稳定性和一致性; 3) 降低阶次.
缺点:可能导致无模型系统的振动、能量损失、设备损坏.自适应控制[66] 优点:可以应对系统变负载和位置扰动.
缺点:自适应因子独立于过程, 需要额外调节.神经网络控制[67] 优点: 1) 能在系统动态性能未知的情况下很快建立控制器;
2) 有效应对数学描述错误的系统.
缺点: 1) 训练样本和离线学习很耗时且结算量庞大;
2) 训练样本少会导致系统性能差.模糊控制[68] 优点: 1) 不需要准确的物理模型或真实的物理系统; 2) 易于设计和应用;
3) 可以由非专门人员实现和执行; 4) 通过调节参数可以有效处理非线性.
缺点: 1) 对于没有经验的人, 很难选择合适的参数;
2) 如果系统的参数变化很大且没有规律, 那么控制效果将很差.基于模型的控制器设计 前馈控制[69] 优点:不需要传感器.
缺点: 1) 不适用于有扰、不确定和负载变化的系统; 2) 不能忽略非线性.系统优化[70] 优点:易于设计和操作.
缺点: 1) 对于非线性控制问题缺乏解析解; 2) 是个无限时间问题.边界控制[71] 优点: 1) 轨迹跟踪效果好; 2) 有效应对系统的扰动和振动.
缺点:难以处理参数不确定系统.预测控制[72] 优点: 1) 可以解决非最小相位系统的时延问题;
2) 有效处理反馈时延和非线性系统的约束问题;
3) 不用把系统分解成子系统却又良好的鲁棒性.
缺点:不能产生快速稳定的响应.
下载: 导出CSV
-
[1] Keennon M, Klingebiel K, Won H, Andriukov A. Development of the Nano hummingbird: a tailless flapping wing micro air vehicle. In: Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Reston, VA, USA: AIAA, 2012. 1-24 [2] Jackowski Z J. Design and Construction of an Autonomous Ornithopter [Ph.D. dissertation], Massachusetts Institute of Technology, USA, 2009. [3] Ma K Y, Chirarattananon P, Fuller S B, Wood R J. Controlled flight of a biologically inspired, insect-scale robot. Science, 2013, 340(6132): 603-607 doi: 10.1126/science.1231806 [4] Mackenzie D. A flapping of wings. Science, 2012, 335(6075): 1430-1433 doi: 10.1126/science.335.6075.1430 [5] Paranjape A A, Chung S J, Kim J. Novel dihedral-based control of flapping-wing aircraft with application to perching. IEEE Transactions on Robotics, 2013, 29(5): 1071-1084 doi: 10.1109/TRO.2013.2268947 [6] Krashanitsa R Y, Silin D, Shkarayev S V, Abate G. Flight dynamics of a flapping-wing air vehicle. International Journal of Micro Air Vehicles, 2009, 1(1): 35-49 doi: 10.1260/1756-8293.1.1.35 [7] Park J H, Yoon K J, Park H C. Development of bio-mimetic composite wing structures and experimental study on flapping characteristics. In: Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics. Sanya, China: IEEE, 2007. 25-30 [8] Pornsin-sirirak T N, Tai Y C, Nassef H, Ho C M. Titanium-alloy MEMS wing technology for a micro aerial vehicle application. Sensors and Actuators A: Physical, 2001, 89(1-2): 95-103 doi: 10.1016/S0924-4247(00)00527-6 [9] De Croon G C H E, Persin M, Remes B D W, Ruijsink R, De Wagter C. The DelFly. Netherlands: Springer, 2016. [10] Phan H V, Truong Q T, Park H C. Implementation of initial passive stability in insect-mimicking flapping-wing micro air vehicle. International Journal of Intelligent Unmanned Systems, 2015, 3(1): 18-38 doi: 10.1108/IJIUS-12-2014-0010 [11] Rose C, Fearing R S. Comparison of ornithopter wind tunnel force measurements with free flight. In: Proceeding of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014. 1816-1821 [12] Zufferey J C, Klaptocz A, Beyeler A, Nicoud J D, Floreano D. A 10-gram vision-based flying robot. Advanced Robotics, 2007, 21(14): 1671-1684 doi: 10.1163/156855307782227417 [13] Harmon R, Grauer J, Hubbard J E Jr, Conroy J, Humbert S J, Siaraman J, Roget B. Experimental determination of ornithopter membrane wing shapes used for simple aerodynamic modeling. In: Proceedings of the 26th AIAA Applied Aerodynamics Conference. Hawaii, USA: AIAA, 2008. DOI: 10.2514/6.2008-6237 [14] 昂海松, 曾锐, 段文博, 史志伟.柔性扑翼微型飞行器升力和推力机理的风洞试验和飞行试验.航空动力学报, 2007, 22(11): 1838-1845 doi: 10.3969/j.issn.1000-8055.2007.11.010Ang Hai-Song, Zeng Rui, Duan Wen-Bo, Shi Zhi-Wei. Aerodynamic experimental investigation for mechanism of lift and thrust of flexible flapping-wing MAV. Journal of Aerospace Power, 2007, 22(11): 1838-1845 doi: 10.3969/j.issn.1000-8055.2007.11.010 [15] 侯宇, 方宗德, 刘岚, 傅卫平.仿生微扑翼飞行器机构动态分析与工程设计方法.航空学报, 2005, 26(2): 173-178 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200502009.htmHou Yu, Fang Zong-De, Liu Lan, Fu Wei-Ping. Dynamic analysis and engineering design of biomimetic flapping-wing micro air vehicles. Acta Aeronautica et Astronautica Sinica, 2005, 26(2): 173-178 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200502009.htm [16] Mao S, Gang D. Lift and power requirements of hovering insect flight. Acta Mechanica Sinica, 2003, 19(5): 458-469 doi: 10.1007/BF02484580 [17] Shen C, Sun M. Power requirements of vertical flight in the dronefly. Journal of Bionic Engineering, 2015, 12(2): 227-237 doi: 10.1016/S1672-6529(14)60115-3 [18] Karásek M, Preumont A. Simulation of flight control of a hummingbird like robot near hover. In: Proceedings of the 18th International Conference on Engineering Mechanics. Svratka, Czech Republic, 2012. 607-619 [19] 唐志共, 许晓斌, 杨彦广, 李绪国, 戴金雯, 吕治国, 贺伟.高超声速风洞气动力试验技术进展.航空学报, 2015, 36(1): 86-97 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201501007.htmTang Zhi-Gong, Xu Xiao-Bin, Yang Yan-Guang, Li Xu-Guo, Dai Jin-Wen, Lv Zhi-Guo, He Wei. Research progress on hypersonic wind tunnel aerodynamic testing techniques. Acta Aeronautica et Astronautica Sinica, 2015, 36(1): 86-97 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201501007.htm [20] Weis-Fogh T. Flapping flight and power in birds and insects, conventional and novel mechanisms. Swimming and Flying in Nature. New York, US: Springer, 1975. 729-762 http://www.tobst.cn/yckj/CN/abstract/abstract12018.shtml [21] Sohn M H, Chang J W. Flow visualization and aerodynamic load calculation of three types of clap-fling motions in a Weis-Fogh mechanism. Aerospace Science and Technology, 2007, 11(2-3): 119-129 doi: 10.1016/j.ast.2006.10.003 [22] 于冰, 于雷, 刘廷波, 赵永美, 颜景平.关于仿生飞行器仿昆飞行机理的研究状况.中国制造业信息化, 2006, 35(7): 70-75 http://www.cnki.com.cn/Article/CJFDTOTAL-JXZZ200607019.htmYu Bing, Yu Lei, Liu Ting-Bo, Zhao Yong-Mei, Yan Jing-Ping. The study status in flying mechanism of the bionic insect equipment. Manufacturing Information Engineering of China, 2006, 35(7): 70-75 http://www.cnki.com.cn/Article/CJFDTOTAL-JXZZ200607019.htm [23] Van Den Berg C, Ellington C P. The vortex wake of a 'hovering' model hawkmoth. Philosophical Transactions of the Royal Society B: Biological Sciences, 1997, 352(1351): 317-328 doi: 10.1098/rstb.1997.0023 [24] Dickinson M H, Lehmann F O, Sane S P. Wing rotation and the aerodynamic basis of insect flight. Science, 1999, 284(5422): 1954-1960 doi: 10.1126/science.284.5422.1954 [25] Dickinson M. Solving the mystery of insect flight. Scientific American, 2001, 284(6): 48-57 doi: 10.1038/scientificamerican0601-48 [26] Von Karman T. Aerodynamics: Selected Topics in the Light of Their Historical Development. Courier Corporation, 2004. http://www.worldcat.org/isbn/0486434850%20 [27] Jones K D, Dohring C M, Platzer M F. Wake structures behind plunging airfoils: a comparison of numerical and experimental results. In: Proceedings of the 34th Aerospace Sciences Meeting and Exhibit. Reno, NV, USA: AIAA, 1996. DOI: 10.2514/6.1996-78 [28] Xiao T, Li Z, Deng S, Ang H, Zhou X. Numerical study on the flow characteristics of micro air vehicle wings at low Reynolds numbers. International Journal of Micro Air Vehicles, 2016, 8(1): 29-40 doi: 10.1177/1756829316638204 [29] 曾锐, 昂海松.仿鸟复合振动的扑翼气动分析.南京航空航天大学学报, 2003, 35(1): 6-12 http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK200301001.htmZeng Rui, Ang Hai-Song. Aerodynamic computation of flapping-wing simulating birds wings. Journal of Nanjing Universinty of Aeronautics and Astronautics, 2003, 35(1): 6-12 http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK200301001.htm [30] 曾锐, 昂海松, 梅源, 季健.扑翼柔性及其对气动特性的影响.计算力学学报, 2005, 22(6): 750-754 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJG200506020.htmZeng Rui, Ang Hai-Song, Mei Yuan, Ji Jian. Flexibility of flapping wing and its effect on aerodynamic characteristic. Chinese Journal of Computational Mechanics, 2005, 22(6): 750-754 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJG200506020.htm [31] 陈茂伟, 孙茂.蜂蝇快速起飞过程的实验观测及力学分析.航空学报, 2014, 35(12): 3222-3231 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201412005.htmChen Mao-Wei, Sun Mao. Experimental measurement and force analysis of a fast takeoff in dronefly. Acta Aeronautica et Astronautica Sinica, 2014, 35(12): 3222-3231 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201412005.htm [32] He W, Zhang S. Control design for nonlinear flexible wings of a robotic aircraft. IEEE Transactions on Control Systems Technology, 2017, 25(1): 351-357 doi: 10.1109/TCST.2016.2536708 [33] Jones K D, Duggan S J, Platzer M F. Flapping-wing propulsion for a micro air vehicle. In: Proceedings of the 39th Aerospace Sciences Meeting and Exhibit. Reno, NV, USA: AIAA, 2001. DOI: 10.2514/6.2001-126 [34] Verma N, Shoeb A, Bohorquez J, Dawson J. A micro-power EEG acquisition SoC with integrated feature extraction processor for a chronic seizure detection system. IEEE Journal of Solid-State Circuits, 2010, 45(4): 804-816 doi: 10.1109/JSSC.2010.2042245 [35] Bruno J C, Ortega-López V, Coronas A. Integration of absorption cooling systems into micro gas turbine trigeneration systems using biogas: case study of a sewage treatment plant. Applied Energy, 2009, 86(6): 837-847 doi: 10.1016/j.apenergy.2008.08.007 [36] Mehra A, Zhang X, Ayon A A, Waitz I A, Schmidt M A, Spadaccini C M. A six-wafer combustion system for a silicon micro gas turbine engine. Journal of Microelectromechanical Systems, 2000, 9(4): 517-527 doi: 10.1109/84.896774 [37] Violi A, Yan S, Eddings E G, Sarofim A F, Granata S, Faravelli T, Ranzi E. Experimental formulation and kinetic model for JP-8 surrogate mixtures. Combustion Science and Technology, 2002, 174(11-12): 399-417 doi: 10.1080/00102200215080 [38] London A P, Ayón A A, Epstein A H, Spearing S M, Harrison T, Peles Y, Kerrebrock J L. Microfabrication of a high pressure bipropellant rocket engine. Sensors and Actuators A: Physical, 2001, 92(1-3): 351-357 doi: 10.1016/S0924-4247(01)00571-4 [39] Fu K, Knobloch A J, Martinez F C, Walther D C, Fernandez-Pello C, Pisano A P, Liepmann D. Design and experimental results of smal-scale rotary engines. In: Proceedings of the 2001 ASME International Mechanical Engineering Congress and Exposition. New York, USA: ASME, 2001. 3439-3445 [40] 张仕民, 郭志平, 夏必忠, 段广洪.微型/便携式发电系统原动机-微型/小型内燃机的研究.小型内燃机与摩托车, 2004, 33(4): 4-8 http://www.cnki.com.cn/Article/CJFDTOTAL-XXNR200404001.htmZhang Shi-Min, Guo Zhi-Ping, Xia Bi-Zhong, Duan Guang-Hong. Study on the primary movers of micro/man-portable power generation system-micro/mini internal combustion engines. Small Internal Combustion Engine and Motorcycle, 2004, 33(4): 4-8 http://www.cnki.com.cn/Article/CJFDTOTAL-XXNR200404001.htm [41] Grasmeyer J M, Keennon M T. Development of the black widow micro air vehicle. In: Proceedings of the 39th AIAA Aerospace Sciences Meeting and Exhibit. Reston, VA, USA: AIAA, 2001. DOI: 10.2514/6.2001-127 [42] Keennon M T, Grasmeyer J M. Development of the black widow and microbat MAVs and a vision of the future of MAV design. In: Proceedings of AIAA/ICAS International Air and Space Symposium and Exposition: The Next 100 Years. Reston, VA, USA: AIAA, 2003. DOI: 10.2514/6.2003-2901 [43] Prior S D, Shen S T, White A S, Odedra S, Karamanoglu M, Erbil M A, Foran T. Development of a novel platform for greater situational awareness in the urban military terrain. Engineering Psychology and Cognitive Ergonomics. Berlin Heidelberg, Germany: Springer, 2009. 120-125 [44] Baughman R H. Conducting polymer artificial muscles. Synthetic Metals, 1996, 78(3): 339-353 doi: 10.1016/0379-6779(96)80158-5 [45] 陶宝祺.智能材料结构.北京:国防工业出版社, 1997.Tao Bao-Qi. Intelligent Material Structures. Beijing: National Defence Industry Press, 1997. [46] Michelson R C. Entomopter and Method for Using Same, U.S. Patent 6082671, July 2000. [47] 王永寿.激光推进微型无人机及其系统最优化.飞航导弹, 2005, (7): 24-29 http://www.cnki.com.cn/Article/CJFDTOTAL-FHDD200507005.htmWang Yong-Shou. Laser propulsion micro UAV and system optimization. Winged Missiles Journal, 2005, (7): 24-29 http://www.cnki.com.cn/Article/CJFDTOTAL-FHDD200507005.htm [48] 王广宇, 洪延姬, 叶继飞. 激光微推进研究进展. 中国宇航学会固体火箭推进24届年会论文集. 烟台, 中国: 中国宇航学会, 2007. 367-372Wang Guang-Yu, Hong Yan-Ji, Ye Ji-Fei. The investigation process of laser propolsion. In: Proceeedings of the 24th Annual Meeting of Chinese Academy of aerospace solid rocket propulsion. Yantai, China: Chinese Society of Astronautics, 2007. 367-372 [49] Kantrowitz A. Propulsion to orbit by ground based lasers. Astronaut, 1972, 10: 74-76 doi: 10.1007/978-0-387-30453-3_17 [50] Phipps C R, Luke J R. Micro laser plasma thrusters for small satellites. In: Proceedings of the SPIE 4065, High-Power Laser Ablation Ⅲ. Santa Fe, NM, USA: SPIE, 2000. 801-809 [51] Phipps C R, Luke J, Helgeson W. Laser space propulsion overview. In: Proceedings of the SPIE 6346, XVI International Symposium on Gas Flow, Chemical Lasers, and High-Power Lasers. Santa Fe, NM, USA: SPIE, 2007. 660602 [52] 段洪君, 史小平.微型飞行器建模与控制.北京:科学出版社, 2012.Duan Hong-Jun, Shi Xiao-Ping. Modeling and Control of Micro Air Vehicle. Beijing: Science Press, 2012. [53] Chirarattananon P, Ma K Y, Wood R J. Adaptive control of a millimeter-scale flapping-wing robot. Bioinspiration & Biomimetics, 2014, 9(2): Article No. 025004 https://www.researchgate.net/publication/262527690_Adaptive_control_of_a_millimeter-scale_flapping-wing_robot [54] Soleymani T, Saghafi F. Fuzzy trajectory tracking control of an autonomous air vehicle. In: Proceedings of the 2nd International Conference on Mechanical and Electronics Engineering. Kyoto, Japan: IEEE, 2010. 347-352 [55] Cheng B, Deng X Y. A neural adaptive controller in flapping flight. Journal of Robotics and Mechatronics, 2012, 24(4): 602-611 doi: 10.20965/jrm.issn.1883-8049 [56] 段洪君. 微型飞行器飞行姿态控制方法研究[博士学位论文], 哈尔滨工业大学, 中国, 2007Duan Hong-Jun. Flight Attitude Control of MAV [Ph.D. dissertation], Harbin Institute of Technology, China, 2007 [57] Lin C M, Chen T Y. Self-organizing CMAC control for a class of MIMO uncertain nonlinear systems. IEEE Transactions on Neural Networks, 2009, 20(9): 1377-1384 doi: 10.1109/TNN.2009.2013852 [58] Ahmed B, Pota H R. Dynamic compensation for control of a rotary wing UAV using positive position feedback. Journal of Intelligent & Robotic Systems, 2011, 61(1-4): 43-56 doi: 10.1007%2Fs10846-010-9487-7.pdf [59] Shen S J, Michael N, Kumar V. Autonomous multi-floor indoor navigation with a computationally constrained MAV. In: Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011. 20-25 [60] Groen M, Bruggeman B, Remes B, Ruijsink B, van Oudheusden B, Bijl H. Improving flight performance of the flapping wing MAV DelFly Ⅱ. In: Proceedings of the 2010 International Micro Air Vehicle Conference and Competition. Braunschweig, Germany, 2010. 3439-3445 [61] Torvik P J, Bagley R L. On the appearance of the fractional derivative in the behavior of real materials. Journal of Applied Mechanics, 1984, 51(2): 294-298 doi: 10.1115/1.3167615 [62] James E C. Lifting-line theory for an unsteady wing as a singular perturbation problem. Journal of Fluid Mechanics, 1975, 70(4): 753-771 doi: 10.1017/S0022112075002339 [63] Liu L Y, Yuan K. Noncollocated passivity-based PD control of a single-link flexible manipulator. Robotica, 2003, 21(2): 117-135 https://www.researchgate.net/publication/220103965_Noncollocated_passivity-based_PD_control_of_a_single-link_flexible_manipulator [64] 盖文东, 王宏伦, 李大伟.鸭式旋翼/机翼无人机飞行动力学建模与分析.空气动力学学报, 2012, 30(2): 244-249 http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX201202019.htmGai Wen-Dong, Wang Hong-Lun, Li Da-Wei. Flight dynamic modeling and analysis for the canard rotor/wing UAV. Acta Aerodynamica Sinica, 2012, 30(2): 244-249 http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX201202019.htm [65] 蒲明, 吴庆宪, 姜长生, 佃松宜, 王宇飞.非匹配不确定高阶非线性系统递阶Terminal滑模控制.自动化学报, 2012, 38(11): 1777-1793 http://www.aas.net.cn/CN/abstract/abstract17784.shtmlPu Ming, Wu Qing-Xian, Jiang Chang-Sheng, Dian Song-Yi, Wang Yu-Fei. Recursive Terminal sliding mode control for higher-order nonlinear system with mismatched uncertainties. Acta Automatica Sinica, 2012, 38(11): 1777-1793 http://www.aas.net.cn/CN/abstract/abstract17784.shtml [66] 张维存, 刘冀伟, 胡广大.鲁棒多模型自适应控制系统的稳定性.自动化学报, 2015, 41(1): 113-121 http://www.aas.net.cn/CN/abstract/abstract18589.shtmlZhang Wei-Cun, Liu Ji-Wei, Hu Guang-Da. Stability analysis of robust multiple model adaptive control systems. Acta Automatica Sinica, 2015, 41(1): 113-121 http://www.aas.net.cn/CN/abstract/abstract18589.shtml [67] Chao H Y, Cao Y C, Chen Y Q. Autopilots for small fixed-wing unmanned air vehicles: a survey. In: Proceeding of the 2007 IEEE International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2007. 3144-3149 [68] Brotherton T, Grabill P, Wroblewski D, Friend R, Sotomayer B, Berry J. A testbed for data fusion for engine diagnostics and prognostics. In: Proceeding of the 2002 IEEE Aerospace Conference Proceedings. Big Sky, MT, USA: IEEE, 2002, 6: 3029-3042 [69] Ucun L, Salášek J. HOSIDF-based feedforward friction compensation in low-velocity motion control systems. Mechatronics, 2014, 24(2): 118-127 doi: 10.1016/j.mechatronics.2013.12.005 [70] Ariyur K B, Krstic M. Real-time Optimization by Extremum-Seeking Control. Hoboken, NJ: John Wiley and Sons, 2003. [71] He W, Lv T, Chen Y N, He X Y, Sun C Y. Modeling and vibration control of flexible wings with output constraint. In: Proceeding of the 12th World Congress on Intelligent Control and Automation. Guilin, China: IEEE, 2016. 292-297 [72] Saska M, Vonásek V, Krajník T, Přeučil L. Coordination and navigation of heterogeneous MAV-UGV formations localized by a 'hawk-eye'-like approach under a model predictive control scheme. International Journal of Robotics Research, 2014, 33(10): 1393-1412 doi: 10.1177/0278364914530482 [73] Liu Z L. Reinforcement adaptive fuzzy control of wing rock phenomena. IEE Proceedings -Control Theory and Applications, 2005, 152(6): 615-620 doi: 10.1049/ip-cta:20045072 [74] 刘暾, 常亚武, 杨大明.柔性空间飞行器的振动抑止控制.航天控制, 1992, (2): 25-33 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ199202003.htmLiu Tun, Chang Ya-Wu, Yang Da-Ming. The vibration suppression control of flexible spacecraft. Aerospace Control, 1992, (2): 25-33 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ199202003.htm [75] 段丽玮, 汤忠梁, 吴志华.飞行器垂直尾翼H∞鲁棒振动主动控制.振动、测试与诊断, 2011, 31(1): 119-123 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zdcs201101030&dbname=CJFD&dbcode=CJFQDuan Li-Wei, Tang Zhong-Liang, Wu Zhi-Hua. Active vibration suppression of vertical tail using H∞ robust control theory. Journal of Vibration, Measurement & Diagnosis, 2011, 31(1): 119-123 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zdcs201101030&dbname=CJFD&dbcode=CJFQ [76] Bialy B J, Chakraborty I, Cekic S C, Dixon W E. Adaptive boundary control of store induced oscillations in a flexible aircraft wing. Automatica, 2016, 70: 230-238 doi: 10.1016/j.automatica.2016.04.004 [77] Paranjape A A, Guan J Y, Chung S J, Krstic M. PDE boundary control for flexible articulated wings on a robotic aircraft. IEEE Transactions on Robotics, 2013, 29(3): 625-640 doi: 10.1109/TRO.2013.2240711 [78] Mozaffari-Jovin S, Firouz-Abadi R D, Roshanian J. Flutter of wings involving a locally distributed flexible control surface. Journal of Sound and Vibration, 2015, 357: 377-408 doi: 10.1016/j.jsv.2015.03.044 [79] 樊琼剑, 杨忠, 方挺, 沈春林.多无人机协同编队飞行控制的研究现状.航空学报, 2009, 30(4): 683-691 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201703001.htmFan Qiong-Jian, Yang Zhong, Fang Ting, Shen Chun-Lin. Research status of coordinated formation flight control for multi-UAVs. Acta Aeronautica et Astronautica Sinica, 2009, 30(4): 683-691 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201703001.htm [80] 刘小雄, 章卫国, 李广文, 李爱军.无人机自主编队飞行控制的技术问题.电光与控制, 2006, 13(6): 28-31 http://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ200606006.htmLiu Xiao-Xiong, Zhang Wei-Guo, Li Guang-Wen, Li Ai-Jun. Discussion on autonomous formation flight control technique of UAV. Electronics Optics & Control, 2006, 13(6): 28-31 http://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ200606006.htm [81] 董晓光, 曹喜滨, 张锦绣, 施梨.卫星编队飞行的鲁棒自适应控制方法.自动化学报, 2013, 39(2): 132-141 http://www.aas.net.cn/CN/abstract/abstract17823.shtmlDong Xiao-Guang, Cao Xi-Bin, Zhang Jin-Xiu, Shi Li. A robust adaptive control law for satellite formation flying. Acta Automatica Sinica, 2013, 39(2): 132-141 http://www.aas.net.cn/CN/abstract/abstract17823.shtml [82] Gu Y, Seanor B, Campa G, Napolitano M R, Rowe L, Gururajan S, Wan S. Design and flight testing evaluation of formation control laws. IEEE Transactions on Control Systems Technology, 2006, 14(6): 1105-1112 doi: 10.1109/TCST.2006.880203 [83] 李磊, 李小民, 杨森.基于单位四元数的四旋翼编队反演控制方法.计算机测量与控制, 2016, 24(2): 64-67 http://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201602019.htmLi Lei, Li Xiao-Min, Yang Sen. Formation control of quadrotors with unit quaternions based via backstepping method. Computer Measurement & Control, 2016, 24(2): 64-67 http://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201602019.htm [84] Dong X W, Yu B C, Shi Z Y, Zhong Y S. Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Transactions on Control Systems Technology, 2015, 23(1): 340-348 doi: 10.1109/TCST.2014.2314460 -

 下载:
下载:






图(16) / 表(2)
计量
- 文章访问数: 6153
- HTML全文浏览量: 3118
- PDF下载量: 2498
- 被引次数: 0
