

-
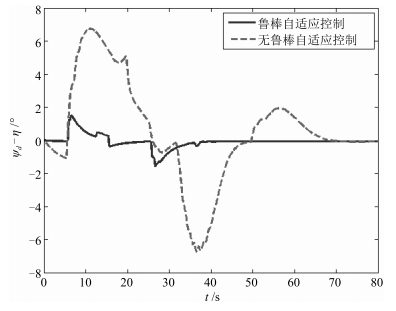
摘要: 针对空间绳系机器人(Tethered space robot,TSR)目标抓捕过程中的稳定控制问题,建立空间绳系机器人系统模型,根据阻抗控制原理,设计基于位置的阻抗控制方法;针对空间绳系机器人系统的模型不确定性问题,利用神经网络对不确定性进行估计补偿,设计鲁棒项对空间系绳干扰和神经网络估计误差的影响进行抑制,在此基础上设计空间绳系机器人目标抓捕鲁棒自适应稳定控制器,并进行稳定性证明.最后对设计的控制器进行仿真验证.作为对比,对无鲁棒项自适应的稳定控制器进行仿真.仿真结果表明,设计的基于阻抗控制的鲁棒自适应控制可以实现对空间绳系机器人目标抓捕过程中的稳定控制,与无鲁棒项自适应的稳定控制器仿真结果相比,本文采用的鲁棒自适应控制方法可以有效地对不确定性进行补偿,控制过程中超调量更小,收敛时间更短,并且控制精度更高.Abstract: Aimed at the problem of stabilization for a tethered space robot (TSR) capturing a target, a position-based impedance control is presented based on the model of a tethered space robot system. For the problem of model uncertainty of the tethered space robot system, an artificial neutral network (ANN) is used to estimate and compensate for the uncertainty, and a robust term is designed to repress the interference of tether and the effect of the estimation deviation by the ANN. Then a robust and adaptive controller for the TSR capturing a target is designed, and the stabilization of the controller is demonstrated. For the purpose of comparison, a simulation for an adaptive controller without the robust term is made, and the result shows that the controller designed in this paper can guarantee the stabilization during the TSR capturing a target. Compared to the adaptive controller without the robust term, the robust adaptive controller can compensate for the uncertainty effectively, with smaller overshoot, less convergence time, and higher control accuracy during the control process.1) 本文责任编委 孙富春
-
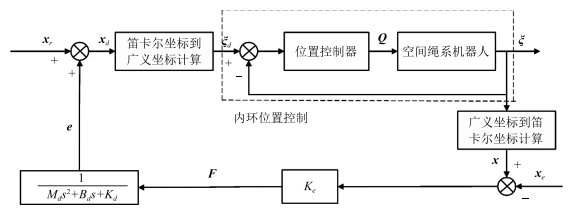
图 3 基于位置的空间绳系机器人阻抗控制
Fig. 3 Block diagram of the impedance controller based on position for the TSR
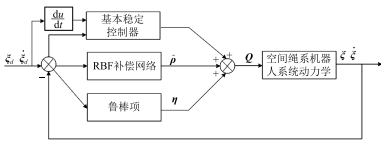
图 4 空间绳系机器人内环位置控制器框图
Fig. 4 Block diagram of the inner loop position controller for the TSR
-
[1] Huang P F, Wang D K, Meng Z J, Zhang F. Adaptive postcapture backstepping control for tumbling tethered space robot-target combination. Journal of Guidance, Control and Dynamics, 2016, 39(1):150-156 doi: 10.2514/1.G001309 [2] 黄攀峰, 孟中杰.空间绳系机器人技术.北京:中国宇航出版社, 2014. 91-139Huang Pan-Feng, Meng Zhong-Jie. Techniques in the Tethered Space Robot. Beijing:China Aerospace Press, 2014. 91-139 [3] Williams P. Deployment/retrieval optimization for flexible tethered satellite systems. Nonlinear Dynamics, 2008, 52(1-2):159-179 doi: 10.1007/s11071-007-9269-3 [4] Wen H, Zhu Z H, Jin D P, Hua H Y. Constrained tension control of a tethered space-tug system with only length measurement. Acta Astronautica, 2016, 119, 110-117 [5] Aslanov V S, Ledkov A S. Dynamics of towed large space debris taking into account atmospheric disturbance. Acta Mechanica, 2014, 225(9):2685-2697 doi: 10.1007/s00707-014-1094-4 [6] Chang I, Chung S J. Bio-inspired adaptive cooperative control of heterogeneous robotic networks. In:Proceedings of the 2009 AIAA Guidance, Navigation, and Control and Co-located Conferences. Chicago, USA:AIAA, 2009. 1-20 [7] Huang P F, Zhang F, Xu X D, Meng Z J, Liu Z X, Hu Y X. Coordinated coupling control of tethered space robot using releasing characteristics of space tether. Advances in Space Research, 2016, 57(7):1528-1542 doi: 10.1016/j.asr.2016.01.005 [8] 徐秀栋, 黄攀峰, 孟中杰.空间绳系机器人抓捕目标过程协同稳定控制.机器人, 2014, 36(1):100-110 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201401014.htmXu Xiu-Dong, Huang Pan-Feng, Meng Zhong-Jie. Coordinated stability control of tethered space robot for capturing the target. Robot, 2014, 36(1):100-110 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201401014.htm [9] Wang D K, Huang P F, Meng Z J. Coordinated stabilization of tumbling targets using tethered space manipulators. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3):2420-2432 doi: 10.1109/TAES.2015.140530 [10] 郭闻昊, 王天舒.空间机器人抓捕目标星碰撞前构型优化.宇航学报, 2015, 36(4):390-396 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201504005.htmGuo Wen-Hao, Wang Tian-Shu. Pre-impact configuration optimization for a space robot capturing target satellite. Journal of Astronautics, 2015, 36(4):390-396 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201504005.htm [11] 陈钢, 贾庆轩, 孙汉旭, 洪磊.空间机器人目标捕获过程中碰撞运动分析.机器人, 2010, 32(3):432-438 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201003022.htmChen Gang, Jia Qing-Xuan, Sun Han-Xu, Hong Lei. Analysis on impact motion of space robot in the object capturing process. Robot, 2010, 32(3):432-438 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201003022.htm [12] Wee L B, Walker M W. On the dynamics of contact between space robots and configuration control for impact minimization. IEEE Transactions on Robotics and Automation, 1993, 9(5):581-591 doi: 10.1109/70.258051 [13] 徐文福, 李成, 梁斌, 刘宇, 强文义.空间机器人捕获运动目标的协调规划与控制方法.自动化学报, 2009, 35(9):1216-1225 http://www.aas.net.cn/CN/abstract/abstract13569.shtmlXu Wen-Fu, Li Cheng, Liang Bin, Liu Yu, Qiang Wen-Yi. Coordinated planning and control method of space robot for capturing moving target. Acta Automatica Sinica, 2009, 35(9):1216-1225 http://www.aas.net.cn/CN/abstract/abstract13569.shtml [14] Aghili F. Pre-and post-grasping robot motion planning to capture and stabilize a tumbling/drifting free-floater with uncertain dynamics. In:Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany:IEEE, 2013. 5461-5468 [15] Yoshida K, Dimitrov D, Nakanishi H. On the capture of tumbling satellite by a space robot. In:Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China:IEEE, 2006. 4127-4132 [16] Xu W F, Liu Y, Xu Y S. The coordinated motion planning of a dual-arm space robot for target capturing. Robotica, 2012, 30(5):755-771 doi: 10.1017/S0263574711001007 [17] 徐文福, 孟得山, 徐超, 梁斌.自由漂浮空间机器人捕获目标的协调控制.机器人, 2013, 35(5):559-567 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201305007.htmXu Wen-Fu, Meng De-Shan, Xu Chao, Liang Bin. Coordinated control of a free-floating space robot for capturing a target. Robot, 2013, 35(5):559-567 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201305007.htm [18] Nakanishi H, Yoshida K. Impedance control for free-flying space robots-basic equations and applications. In:Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China:IEEE, 2006. 3137-3142 [19] Yoshida K, Nakanishi H, Ueno H, Inaba N, Nishimaki T, Oda M. Dynamics, control and impedance matching for robotic capture of a non-cooperative satellite. Advanced Robotics, 2004, 18(2):175-198 doi: 10.1163/156855304322758015 [20] 魏承, 赵阳, 田浩.空间机器人捕获漂浮目标的抓取控制.航空学报, 2010, 31(3):632-637 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201003036.htmWei Cheng, Zhao Yang, Tian Hao. Grasping control of space robot for capturing floating target. Acta Aeronautica Et Astronautica Sinica, 2010, 31(3):632-637 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201003036.htm [21] Leamy M J, Noor A K, Wasfy T M. Dynamic simulation of a tethered satellite system using finite elements and fuzzy sets. Computer Methods in Applied Mechanics and Engineering, 2001, 190(37-38):4847-4870 doi: 10.1016/S0045-7825(00)00352-2 [22] 吴玉香, 王聪.基于确定学习的机器人任务空间自适应神经网络控制.自动化学报, 2013, 39(6):806-815 http://www.aas.net.cn/CN/abstract/abstract18106.shtmlWu Yu-Xiang, Wang Cong. Deterministic learning based adaptive network control of robot in task space. Acta Automatica Sinica, 2013, 39(6):806-815 http://www.aas.net.cn/CN/abstract/abstract18106.shtml [23] Xu W K, Cai C X, Zou Y. Neural-network-based robot time-varying force control with uncertain manipulator-environment system. Transactions of the Institute of Measurement and Control, 2014, 36(8):999-1009 doi: 10.1177/0142331214528971 -

 下载:
下载:

图(9)
计量
- 文章访问数: 3625
- HTML全文浏览量: 539
- PDF下载量: 1207
- 被引次数: 0
