

-
摘要: 针对基于概率假设密度算法(Probability hypothesis density,PHD)的非线性多目标跟踪精度低、滤波发散等问题,提出了一种新的PHD算法——改进的均方根嵌入式容积粒子PHD算法(Advanced square-root imbedded cubature particle PHD,ASRICP-PHD).新的算法在初始化采样时将整个采样区域等概率划分为若干个区域,然后利用既定的准则从每个区域抽取粒子,并利用均方根嵌入式容积滤波方法对每个粒子进行滤波,来拟合重要密度函数,预测和更新多目标状态的PHD.仿真结果表明该算法能对多目标进行有效跟踪,相比拟随机采样法和伪随机采样,等概率采样的方法在多目标位置估计和数目估计上有更高的精度.
-
关键词:
- 多目标跟踪 /
- 概率假设密度 /
- 均方根嵌入式容积滤波 /
- 等概率采样
Abstract: Considering the low accuracy, filter divergence and other problems of nonlinear multi-target tracking based on probability hypothesis density (PHD), a new filter named advanced square-root imbedded cubature particle PHD (ASRICP-PHD) is proposed. ASRICP-PHD divides the whole particle sampling area into several parts of equal probability, then uses a special rule to obtain particles from each part, and matches the important density function with square-root imbedded cubature particle filter, and therefore predicts and updates PHD. Simulation shows that ASRICP-PHD is able to track multiple targets effectively. Moreover, compared with quasi random sampling, the method of particle sampling based on probability has higher accuracy in terms of multi-target positions and number's estimations.1) 本文责任编委 赖剑煌 -
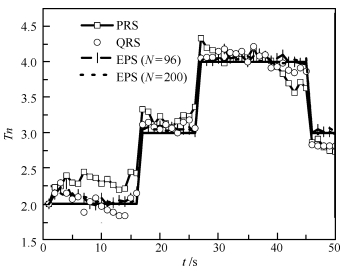
图 3 目标数目估计比较( $q = 0.1,{\lambda _k} = 5; {\rm CV}$ )
Fig. 3 Comparison of number estimation ( $q = 0.1,{\lambda _k} = 5; {\rm CV}$
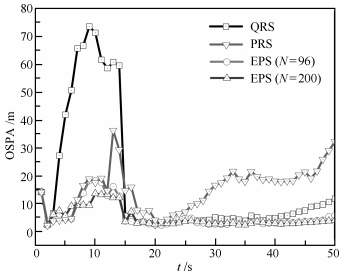
图 4 OSPA比较( $q = 0.1,{\lambda _k} = 5; {\rm CV}$ )
Fig. 4 Comparison of OSPA ( $q = 0.1,{\lambda _k} = 5; {\rm CV}$
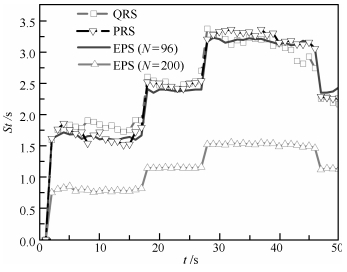
图 5 单步运行时间比较( $q = 0.1,{\lambda _k} = 5; {\rm CV}$ )
Fig. 5 Comparison of step time ( $q = 0.1,{\lambda _k} = 5; {\rm CV}$ )
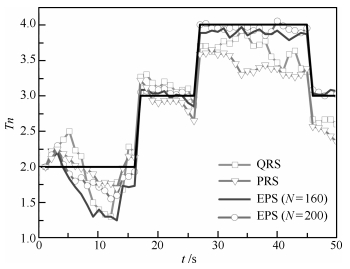
图 6 目标数目估计比较( $q = 1,{\lambda _k} = 5; {\rm CV}$ )
Fig. 6 Comparison of number estimation ( $q = 1,{\lambda _k} = 5; {\rm CV}$ )
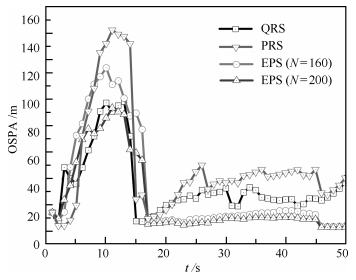
图 7 OSPA比较( $q = 1,{\lambda _k} = 5; {\rm CV}$ )
Fig. 7 Comparison of OSPA ( $q = 1,{\lambda _k} = 5; {\rm CV}$ )
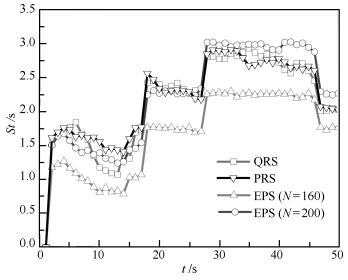
图 8 单步运行时间比较( $q = 1,{\lambda _k} = 5; {\rm CV}$ )
Fig. 8 Comparison of step time ( $q = 1,{\lambda _k} = 5; {\rm CV}$ )
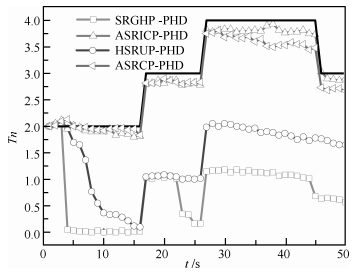
图 9 目标数目估计比较( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
Fig. 9 Comparison of number estimation ( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
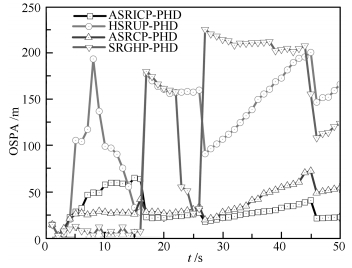
图 10 OSPA比较( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
Fig. 10 Comparison of OSPA ( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
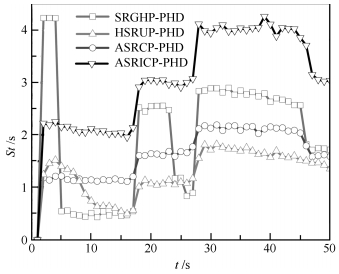
图 11 单步运行时间比较( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
Fig. 11 Comparison of step time ( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
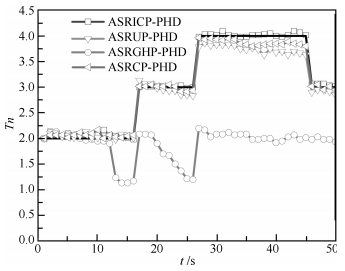
图 12 目标数目估计比较( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
Fig. 12 Comparison of number estimation ( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
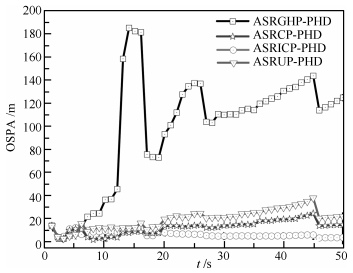
图 13 OSPA比较( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
Fig. 13 Comparison of OSPA ( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
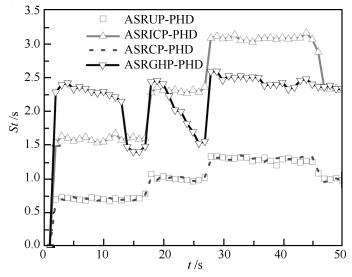
图 14 单步运行时间比较( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
Fig. 14 Comparison of step time ( $q = 3,{\lambda _k} = 10; {\rm CT}$ )
表 1 初始化目标运动参数
Table 1 Motion parameters initialization
目标 位置(m) 速度(m·s-1) t0 (s) tf (s) 1 (-250, 250) (5, -5) 1 45 2 (-250, -250) (5, 5) 1 50 3 (-160, 160) (7, -9) 17 50 4 (-160, -160) (9, 7) 27 50  下载: 导出CSV
下载: 导出CSV
表 2 $P_f$ 分析( $offset = 40\,{\rm {m}}; {\rm CV}$ )
Table 2 Analysis of $P_f$ ( $offset = 40\,{\rm {m}}; {\rm CV}$ )
采样手段 失败次数 仿真次数 Pf QRS 20 60 0.334 EPS (N=96) 8 60 0.134 EPS (N=200) 3 60 0.05 PRS 35 60 0.584
下载: 导出CSV
表 3 $P_f$ 分析( $offset = 100\,{\rm {m}}; {\rm CT}$ )
Table 3 Analysis of $P_f$ ( $offset = 100\,{\rm {m}}; {\rm CT}$ )
算法 失败次数 仿真次数 Pf ASRICP-PHD 17 60 0.28 ASRCP-PHD 32 60 0.502 HSRUP-PHD 50 60 0.83 SRGHP-PHD 55 60 0.916
下载: 导出CSV
-
[1] Li B, Pang F W. Improved probability hypothesis density filter for multitarget tracking. Nonlinear Dynamics, 2014, 76(1):367-376 doi: 10.1007/s11071-013-1131-1 [2] 占荣辉, 刘盛启, 欧建平, 张军.基于序贯蒙特卡罗概率假设密度滤波的多目标检测前跟踪改进算法.电子与信息学报, 2014, 36(11):2593-2599 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201411009.htmZhan Rong-Hui, Liu Sheng-Qi, Ou Jian-Ping, Zhang Jun. Improved multitarget track before detect algorithm using the sequential Monte Carlo probability hypothesis density filter. Journal of Electronics & Information Technology, 2014, 36(11):2593-2599 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201411009.htm [3] Xu L L, Ökten G. High-performance financial simulation using randomized quasi-Monte Carlo methods. Quantitative Finance, 2015, 15(8):1425-1436 doi: 10.1080/14697688.2015.1032549 [4] Guo D, Wang X D. Quasi-Monte Carlo filtering in nonlinear dynamic systems. IEEE Transactions on Signal Processing, 2006, 54(6):2087-2098 doi: 10.1109/TSP.2006.873585 [5] 杨金龙, 姬红兵, 刘进忙.高斯厄米特粒子PHD被动测角多目标跟踪算法.系统工程与电子技术, 2013, 35(3):457-462 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201303003.htmYang Jin-Long, Ji Hong-Bin, Liu Jin-Mang. Gauss-Hermite particle PHD filter for bearings-only multi-target tracking. Systems Engineering and Electronics, 2013, 35(3):457-462 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201303003.htm [6] 王华剑, 景占荣.基于容积原则的概率假设密度滤波算法.北京理工大学学报, 2014, 34(12):1304-1309 http://www.cnki.com.cn/Article/CJFDTOTAL-BJLG201412018.htmWang Hua-Jian, Jing Zhan-Rong. Probability hypothesis density filter based on cubature rule and its application to multi-target tracking. Transactions of Beijing Institute of Technology, 2014, 34(12):1304-1309 http://www.cnki.com.cn/Article/CJFDTOTAL-BJLG201412018.htm [7] 占荣辉, 张军.非线性滤波理论与目标跟踪应用.北京:国防工业出版社, 2013.Zhan Rong-Hui, Zhang Jun. Nonlinear Filtering Theory with Target Tracking Application. Beijing:National Defend Industry Press, 2013. [8] Zhang X C. Cubature information filters using high-degree and embedded cubature rules. Circuits, Systems, and Signal Processing, 2014, 33(6):1799-1818 doi: 10.1007/s00034-013-9730-0 [9] 连峰, 韩崇昭, 李晨.多模型GM-CBMeMBer滤波器及航迹形成.自动化学报, 2014, 40(2):336-347 http://www.aas.net.cn/CN/abstract/abstract18295.shtmlLian Feng, Han Chong-Zhao, Li Chen. Multiple-model GM-CBMeMBer filter and track continuity. Acta Automatica Sinica, 2014, 40(2):336-347 http://www.aas.net.cn/CN/abstract/abstract18295.shtml [10] 李翠芸, 江舟, 姬红兵, 曹潇男.基于拟蒙特卡罗的未知杂波GMP-PHD滤波器.控制与决策, 2014, 29(11):1997-2001 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201411015.htmLi Cui-Yun, Jiang Zhou, Ji Hong-Bin, Cao Xiao-Nan. GMP-PHD filter based on quasi-Monte Carlo in unknown clutter. Control and Decision, 2014, 29(11):1997-2001 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201411015.htm [11] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4):1152-1178 doi: 10.1109/TAES.2003.1261119 [12] Wang Y, Meng H D, Liu Y M, Wang X Q. Collaborative penalized Gaussian mixture PHD tracker for close target tracking. Signal Processing, 2014, 102:1-15 doi: 10.1016/j.sigpro.2014.01.034 [13] 张鑫春, 郭承军.均方根嵌入式容积卡尔曼滤波.控制理论与应用, 2013, 30(9):1116-1121 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201309007.htmZhang Xin-Chun, Guo Cheng-Jun. Square-root imbedded cubature Kalman filtering. Control Theory & Applications, 2013, 30(9):1116-1121 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201309007.htm [14] Wang X, Hickernell F J. Randomized Halton sequences. Mathematical and Computer Modelling, 2000, 32(7-8):887-899 doi: 10.1016/S0895-7177(00)00178-3 [15] Grewal M S, Andrew A P. Kalman Filtering:Theory and Practice Using MATLAB. Hoboken, N.J.:John Wiley & Sons, 2008. [16] 杨峰, 王永齐, 梁彦, 潘泉.基于概率假设密度滤波方法的多目标跟踪技术综述.自动化学报, 2013, 39(11):1944-1956 doi: 10.3724/SP.J.1004.2013.01944Yang Feng, Wang Yong-Qi, Liang Yan, Pan Quan. A survey of PHD filter based multi-target tracking. Acta Automatica Sinica, 2013, 39(11):1944-1956 doi: 10.3724/SP.J.1004.2013.01944 -

 下载:
下载:

计量
- 文章访问数: 3149
- HTML全文浏览量: 353
- PDF下载量: 774
- 被引次数: 0
