

Active Interaction Exercise Control of Exoskeleton Upper Limb Rehabilitation Robot Using Model-free Adaptive Methods
-
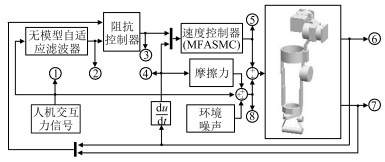
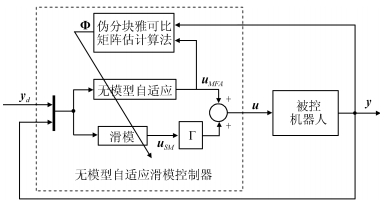
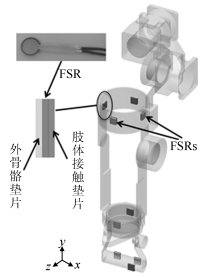
摘要: 设计了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.在机器人与人体上肢接触面安装力传感器采集人机交互力矩信息作为量化的主动运动意图,设计了一种无模型自适应滤波算法使交互力矩变得平滑而连贯;以人机交互力矩为输入,综合考虑机器人末端点与参考轨迹的相对位置和补偿力的信息,设计了人机交互阻抗控制器,用于调节各关节的给定目标速度;设计了将无模型自适应与离散滑模趋近律相结合的速度控制器完成机器人各关节对目标速度的跟踪.仿真结果表明,该控制方法可以实现外骨骼式上肢康复机器人辅助患者完成主动交互训练的功能.通过调节人机交互阻抗控制器的相应参数,机器人可以按照患者的运动意图完成不同的主动交互训练任务,并在运动出现偏差时予以矫正.控制器在设计实现过程中不要求复杂准确的动力学建模和参数识别,并有一定的抗干扰性和通用性.Abstract: This paper proposes an active interaction exercise control method for the exoskeleton upper limb rehabilitation robot based on model-free adaptive algorithm. Force sensors are mounted on the contact surface of the robot and the human upper limb to collect human-robot interaction torque information which is used to quantize active movement intention. A model-free adaptive filtering algorithm is designed to make the interaction torque smooth and continuous. A human-robot interaction impedance controller is designed for adjusting the given target velocity of each joint, according to the input of interaction torque and considering the relative position of the robot end-point to the reference trajectory and the compensation force information. By combining the model-free adaptive algorithm and the sliding mode exponential reaching law, a speed controller for all the joints of the robot is developed to implement the target speed tracking. Simulation results show that this control method can achieve the function of the exoskeleton for upper limb rehabilitation, which is to assist patients to complete the active interaction training exercise. By adjusting the corresponding parameters of the human-robot interaction impedance controller, the robot can perform different tasks of the active interaction training exercise in the light of patients' active movement intention, and give correction in motion deviation. In the designing and implementing the controller, complicated and accurate dynamic modeling and parameter identification are not required, and the control method has a certain degree of immunity and versatility.
-
Key words:
- Model free adaptive /
- rehabilitation robot /
- active interaction /
- force sensor /
- impedance control
1) 本文责任编委 程龙 -
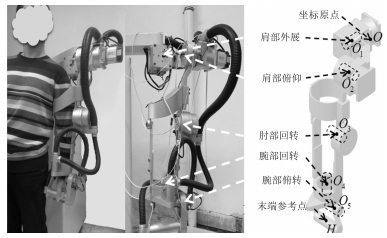
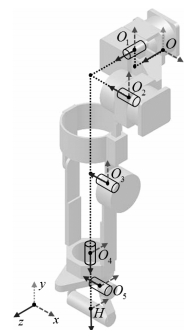
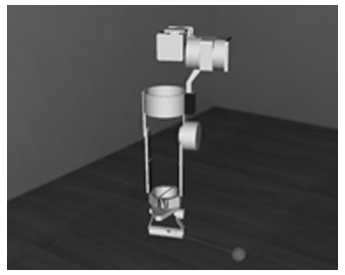
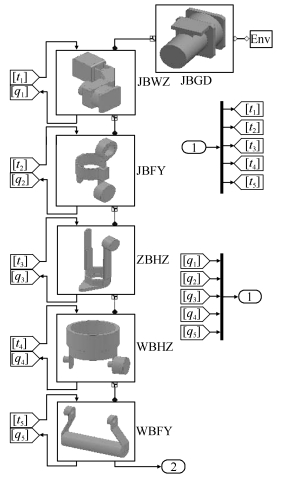
图 1 五自由度外骨骼式上肢康复机器人
Fig. 1 Five degree-of-freedom exoskeleton upper limb rehabilitation robot
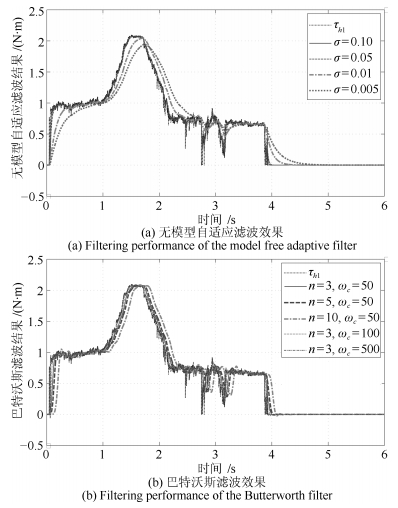
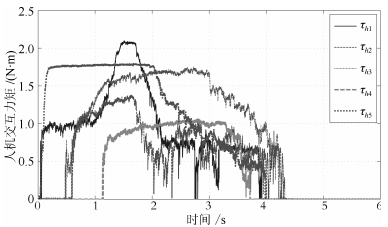
图 6 交互力矩信号$\tau_{h1}$滤波效果比较
Fig. 6 Filtering performance comparison of interaction torque $\tau_{h1}$
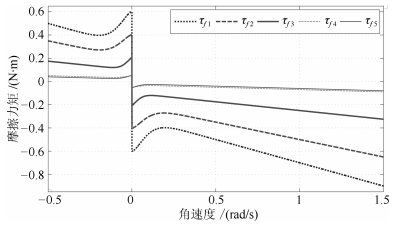
图 9 摩擦力矩与角速度的关系
Fig. 9 The relationship between joint friction torques and angular velocity
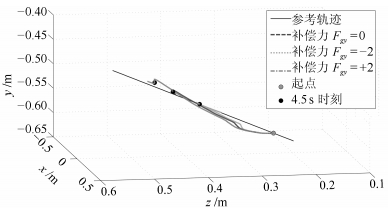
图 11 补偿力$F_{gy}$对主动训练末端轨迹的影响
Fig. 11 The impact of compensation force $ F_ {gy} $ to the end trajectory of active training
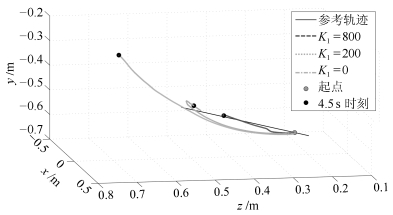
图 12 刚度系数$K_1$对主动训练末端轨迹的影响
Fig. 12 The impact of stiffness coefficient $ K_1 $ to the end trajectory of active training
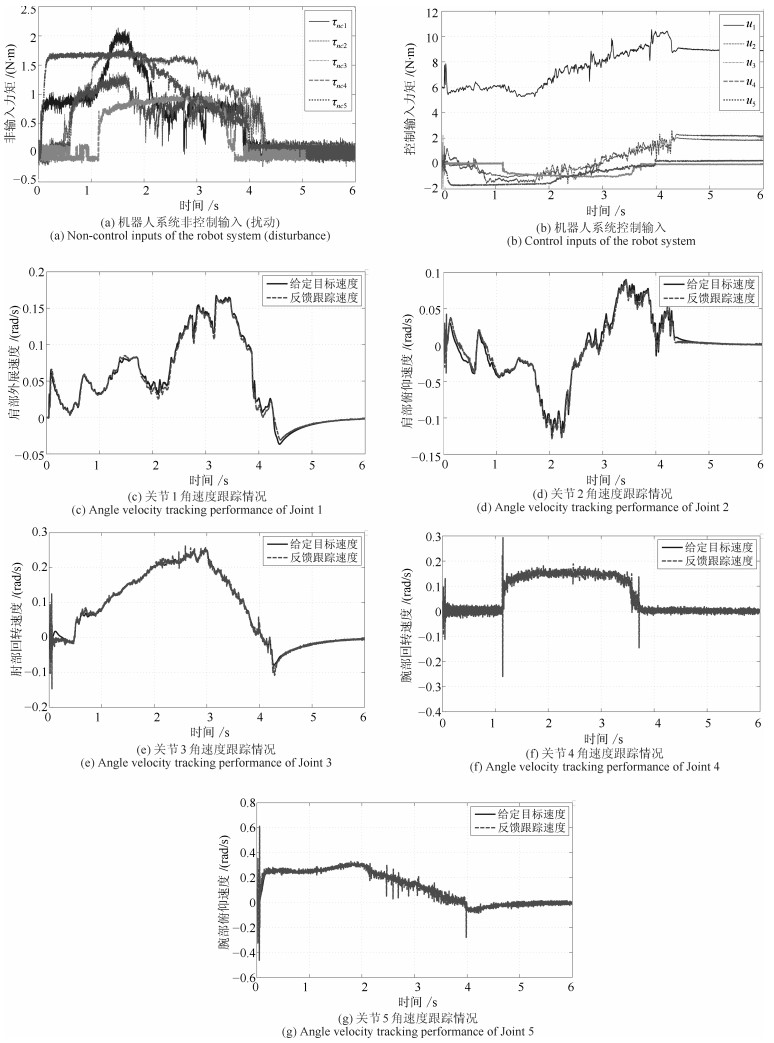
图 13 五自由度主动交互训练仿真中主要变量的状态变化
Fig. 13 Control results of five degree-of-freedom active interaction training exercise
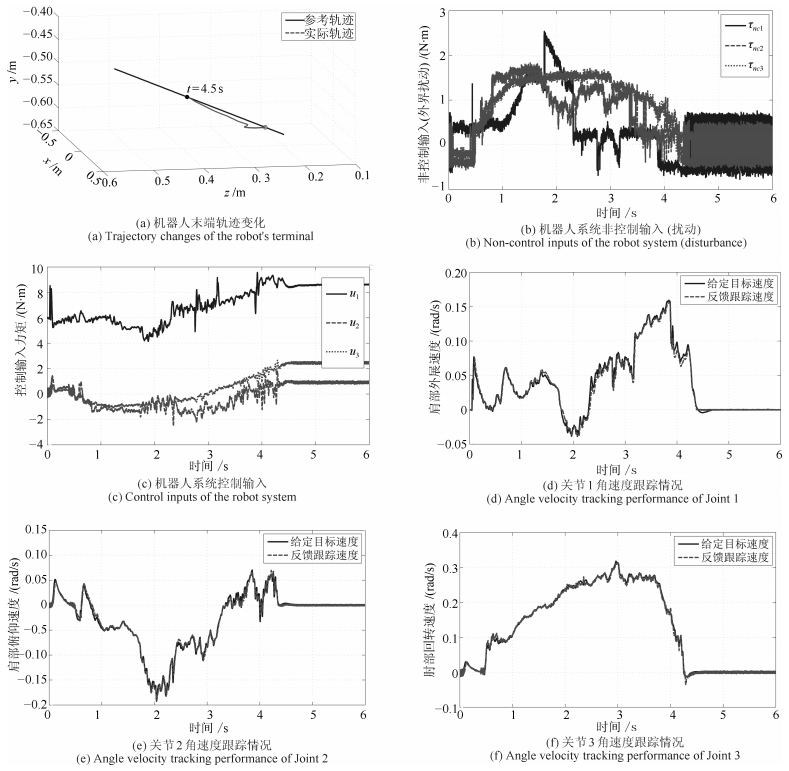
图 14 三自由度主动交互训练仿真中主要变量的状态变化
Fig. 14 Control results of three degree-of-freedom active interaction training exercises
表 1 外骨骼机器人运动学分析D-H参数表
Table 1 D-H kinematics parameters of the robot
i θi(°) di(m) ai(m) αi(°) 0 90 0.0925 0.047 0 1 q1 0.1425 0 -90 - 0 -0.1240 0 0 2 q2 0.0682 -0.277 0 3 q3 0.0558 -0.220 0 - 90 0 0 -90 4 q4 0.079 0 90 - 90 -0.0330 0 0 5 q5 0.033 0 -90 H 90 0.08 0 0  下载: 导出CSV
下载: 导出CSV
-
[1] Norouzi-Gheidari N, Archambault P S, Fung J. Effects of robot-assisted therapy on stroke rehabilitation in upper limbs:systematic review and meta-analysis of the literature. Journal of Rehabilitation Research and Development, 2012, 49(4):479-496 doi: 10.1682/JRRD.2010.10.0210 [2] Connell L A, Mcmahon N E, Harris J E, Watkins C L, Eng J J. A formative evaluation of the implementation of an upper limb stroke rehabilitation intervention in clinical practice:a qualitative interview study. Implementation Science, 2014, 9:90, DOI: 10.1186/s13012-014-0090-3 [3] 何雯, 王凯.脑卒中后上肢功能康复研究进展.中国康复理论与实践, 2014, 20(4):334-339 http://www.cnki.com.cn/Article/CJFDTOTAL-ZKLS201404010.htmHe Wen, Wang Kai. Advance in rehabilitation of upper limb function in hemiplegic patients after stroke (review). Chinese Journal of Rehabilitation Theory and Practice, 2014, 20(4):334-339 http://www.cnki.com.cn/Article/CJFDTOTAL-ZKLS201404010.htm [4] 夏彬, 吴睿, 刘合玉.上肢康复机器人对偏瘫患者上肢运动功能治疗的临床研究.中国实用神经疾病杂志, 2014, 17(9):104-106 http://www.cnki.com.cn/Article/CJFDTOTAL-HNSJ201409062.htmXia Bin, Wu Rui, Liu He-Yu. Clinical research on upper limb rehabilitation robot for upper limb movement function in patients with hemiplegia therapy. Chinese Journal of Practical Nervous Diseases, 2014, 17(9):104-106 http://www.cnki.com.cn/Article/CJFDTOTAL-HNSJ201409062.htm [5] Frisoli A, Procopio C, Chisari C, Creatini I, Bonfiglio L, Bergamasco M, Rossi B, Carboncini M C. Positive effects of robotic exoskeleton training of upper limb reaching movements after stroke. Journal of NeuroEngineering and Rehabilitation, 2012, 9:36, DOI: 10.1186/1743-0003-9-36 [6] Ren Y P, Kang S H, Park H S, Wu Y N, Zhang L Q. Developing a multi-joint upper limb exoskeleton robot for diagnosis, therapy, and outcome evaluation in neurorehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(3):490-499 doi: 10.1109/TNSRE.2012.2225073 [7] Lo H S, Sheng Q X. Exoskeleton robots for upper-limb rehabilitation:state of the art and future prospects. Medical Engineering and Physics, 2012, 34(3):261-268 doi: 10.1016/j.medengphy.2011.10.004 [8] 杨启志, 曹电锋, 赵金海.上肢康复机器人研究现状的分析.机器人, 2013, 35(5):630-640 doi: 10.3724/SP.J.1218.2013.00630Yang Qi-Zhi, Cao Dian-Feng, Zhao Jin-Hai. Analysis on state of the art of upper limb rehabilitation robots. Robot, 2013, 35(5):630-640 doi: 10.3724/SP.J.1218.2013.00630 [9] Frisoli A, Sotgiu E, Procopio C, Bergamasco M, Rossi B, Chisari C. Design and implementation of a training strategy in chronic stroke with an arm robotic exoskeleton. In:Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics (ICORR). Zurich, Switzerland:IEEE, 2011. 1-8 [10] Lee G D, Wang W W, Lee K W, Lin S Y, Fu L C, Lai J S, Chen W S, Luh J J. Arm exoskeleton rehabilitation robot with assistive system for patient after stroke. In:Proceedings of the 12th IEEE International Conference on Control, Automation and Systems (ICCAS). Jeju Island, Korea:IEEE, 2012. 1943-1948 [11] Hu J, Hou Z G, Zhang F, Chen Y X, Li P F. Training strategies for a lower limb rehabilitation robot based on impedance control. In:Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). San Diego, CA, USA:IEEE, 2012. 6032-6035 [12] 彭亮, 侯增广, 王卫群.康复机器人的同步主动交互控制与实现.自动化学报, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtmlPeng Liang, Hou Zeng-Guang, Wang Wei-Qun. Synchronous active interaction control and its implementation for a rehabilitation robot. Acta Automatica Sinica, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtml [13] Cao J H, Xie S Q, Das R, Zhu G L. Control strategies for effective robot assisted gait rehabilitation:the state of art and future prospects. Medical Engineering and Physics, 2014, 36(12):1555-1566 doi: 10.1016/j.medengphy.2014.08.005 [14] Zhang Z, Sup F. Activity recognition of the torso based on surface electromyography for exoskeleton control. Biomedical Signal Processing and Control, 2014, 10:281-288 doi: 10.1016/j.bspc.2013.10.002 [15] Li Z J, Huang Z C, He W, Su C Y. Adaptive impedance control for an upper limb robotic exoskeleton using biological signals. IEEE Transactions on Industrial Electronics, DOI:10.1109/TIE.2016.2538741 [16] Khan A M, Yun D W, Ali M A, Zuhaib K M, Yuan C, Iqbal J, Han J, Shin K, Han C. Passivity based adaptive control for upper extremity assist exoskeleton. International Journal of Control, Automation and Systems, 2016, 14(1):291-300 doi: 10.1007/s12555-014-0250-x [17] 丁其川, 熊安斌, 赵新刚, 韩建达.基于表面肌电的运动意图识别方法研究及应用综述.自动化学报, 2016, 42(1):13-25 http://www.aas.net.cn/CN/abstract/abstract18792.shtmlDing Qi-Chuan, Xiong An-Bin, Zhao Xin-Gang, Han Jian-Da. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 2016, 42(1):13-25 http://www.aas.net.cn/CN/abstract/abstract18792.shtml [18] Rahman M H, Ochoa-Luna C, Rahman M J, Saad M, Archambault P. Force-position control of a robotic exoskeleton to provide upper extremity movement assistance. International Journal of Modelling, Identification and Control, 2014, 21(4):390-400 doi: 10.1504/IJMIC.2014.062026 [19] Lee H D, Lee B K, Kim W S, Hanb J S, Shinc K S, Han C S. Human-robot cooperation control based on a dynamic model of an upper limb exoskeleton for human power amplification. Mechatronics, 2014, 24(2):168-176 doi: 10.1016/j.mechatronics.2014.01.007 [20] Chen S H, Lien W M, Wang W W, Lee G D, Hsu L C, Lee K W, Lin S Y, Lin C H, Fu L C, Lai J S, Luh J J, Chen W S. Assistive control system for upper limb rehabilitation robot. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(11):1199-1209 doi: 10.1109/TNSRE.2016.2532478 [21] Wang W Q, Hou Z G, Tong L, Chen Y X, Peng L, Tan M. Dynamics modeling and identification of the human-robot interface based on a lower limb rehabilitation robot. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China:IEEE, 2014. 6012-6017 [22] Wang X F, Li X, Wang J H. Modeling and identification of the human-exoskeleton interaction dynamics for upper limb rehabilitation. In:Proceedings of the 2015 Chinese Intelligent Automation Conference. Berlin Heidelberg, Germarny:Springer, 2015, 338:51-60 [23] Anam K, Al-Jumaily A A. Active exoskeleton control systems:state of the art. Procedia Engineering, 2012, 41:988-994 doi: 10.1016/j.proeng.2012.07.273 [24] Rahman M H, Saad M, Kenné J P, Archambault P S. Control of an exoskeleton robot arm with sliding mode exponential reaching law. International Journal of Control Automation and Systems, 2013, 11(1):92-104 doi: 10.1007/s12555-011-0135-1 [25] Li Z J, Su C Y, Li G L, Su H. Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs. IEEE Transactions on Fuzzy Systems, 2015, 23(3):555-566 doi: 10.1109/TFUZZ.2014.2317511 [26] Li Z J, Wang B C, Sun F C, Yang C G, Xie Q, Zhang W D. sEMG-based joint force control for an upper-limb power-assist exoskeleton robot. IEEE Journal of Biomedical and Health Informatics, 2014, 18(3):1043-1050 doi: 10.1109/JBHI.2013.2286455 [27] 侯忠生, 许建新.数据驱动控制理论及方法的回顾和展望.自动化学报, 2009, 35(6):650-667 doi: 10.3724/SP.J.1004.2009.00650Hou Zhong-Sheng, Xu Jian-Xin. On data-driven control theory:the state of the art and perspective. Acta Automatica Sinica, 2009, 35(6):650-667 doi: 10.3724/SP.J.1004.2009.00650 [28] Hou Z S, Jin S T. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Transactions on Neural Networks, 2011, 22(12):2173-2188 doi: 10.1109/TNN.2011.2176141 [29] Li Q L, Wang D Y, Du Z J, Sun L N. A novel rehabilitation system for upper limbs. In:Proceedings of the 27th Annual Conference of the Engineering in Medicine and Biology. Shanghai, China:IEEE, 2006. 6840-6843 [30] Huang J, Huo W G, Xu W X, Mohammed S, Amirat Y. Control of upper-limb power-assist exoskeleton using a human-robot interface based on motion intention recognition. IEEE Transactions on Automation Science and Engineering, 2015, 12:1257-1270 doi: 10.1109/TASE.2015.2466634 [31] Craig J J[著], 贠超[译].机器人学导论.第3版.北京:机械工业出版社, 2006.Craig J J[Author], Yun Chao[Translator]. Introduction to Robotics:Mechanics and Control (Third edition). Beijing:China Machine Press, 2006. [32] Niku S B[著], 孙富春, 朱纪洪, 刘国栋[译].机器人学导论-分析、控制及应用.第2版.北京:电子工业出版社, 2013.Niku S B[Author], Sun Fu-Chun, Zhu Ji-Hong, Liu Guo-Dong[Translator]. Introduction to Robotics:Analysis, Control, Applications (Second edition). Beijing:Electronic Industry Press, 2013. [33] 吴文祥.多自由度串联机器人关节摩擦分析与低速高精度运动控制[博士学位论文], 浙江大学, 中国, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10335-1014173276.htmWu Wen-Xiang. Joint Friction Analysis and Low-Speed High-Precision Motion Control of Multi-DOF Serial Robot[Ph.D. dissertation], Zhejiang University, China, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10335-1014173276.htm [34] 刘金琨.机器人控制系统的设计与MATLAB仿真.北京:清华大学出版社, 2008.Liu Jin-Kun. Design and MATLAB Simulation of Robot Control System. Beijing:Tsinghua University Press, 2008. [35] 胡盛斌.非线性多关节机器人系统滑模控制.北京:国防工业出版社, 2015.Hu Sheng-Bin. Sliding Mode Control for Nonlinear Multi Joint Robot System. Beijing:National Defence of Industry Press, 2015. [36] Matkowski J. Uniformly bounded composition operators between general Lipschitz function normed spaces. Topological Methods in Nonlinear Analysis, 2011, 38(2):395-405 https://www.researchgate.net/publication/265979151_Uniformly_bounded_composition_operators_between_general_Lipschitz_function_normed_spaces [37] Ekramian M, Sheikholeslam F, Hosseinnia S, Yazdanpanah M J. Adaptive state observer for Lipschitz nonlinear systems. Systems and Control Letters, 2013, 62(4):319-323 doi: 10.1016/j.sysconle.2013.01.002 [38] Hou Z S, Jin S T. Model Free Adaptive Control:Theory and Applications. Florida, USA:Chemical Rubber Company Press, 2013. [39] Wang X F, Li X, Wang J H, Fang X K, Zhu X F. Data-driven model-free adaptive sliding mode control for the multi degree-of-freedom robotic exoskeleton. Information Sciences, 2016, 327:246-257 doi: 10.1016/j.ins.2015.08.025 [40] Sarpturk S, Istefanopulos Y, Kaynak O. On the stability of discrete-time sliding mode control systems. IEEE Transactions on Automatic Control, 1987, 32(10):930-932 doi: 10.1109/TAC.1987.1104468 [41] Gao W B, Wang Y F, Homaifa A. Discrete-time variable structure control systems. IEEE Transactions on Industrial Electronics, 1995, 42(2):117-122 doi: 10.1109/41.370376 [42] Culmer P R, Jackson A E, Makower S, Richardson R, Cozens J A, Levesley M C, Bhakta B B. A control strategy for upper limb robotic rehabilitation with a dual robot system. IEEE/ASME Transactions on Mechatronics, 2010, 15(4):575-585 doi: 10.1109/TMECH.2009.2030796 [43] Hou Z S, Jin S T. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Transactions on Control Systems Technology, 2011, 19(6):1549-1558 doi: 10.1109/TCST.2010.2093136 [44] 李钟慎.基于MATLAB设计巴特沃斯低通滤波器.信息技术, 2003, 27(3):49-50, 52 http://www.cnki.com.cn/Article/CJFDTOTAL-HDZJ200303017.htmLi Zhong-Shen. The design of butterworth lowpass filter based on MATLAB. Information Technology, 2003, 27(3):49-50, 52 http://www.cnki.com.cn/Article/CJFDTOTAL-HDZJ200303017.htm [45] Mello R G T, Oliveira L F, Nadal J. Digital Butterworth filter for subtracting noise from low magnitude surface electromyogram. Computer Methods and Programs in Biomedicine, 2007, 87(1):28-35 doi: 10.1016/j.cmpb.2007.04.004 [46] Burke J W, McNeill M, Charles D, Morrow P, Crosbie J, McDonough S. Serious games for upper limb rehabilitation following stroke. In:Proceedings of the 2009 Conference in Games and Virtual Worlds for Serious Applications. Coventry, UK:IEEE, 2009. 103-110 -

 下载:
下载:

计量
- 文章访问数: 4089
- HTML全文浏览量: 557
- PDF下载量: 1751
- 被引次数: 0
