

Recent Progress and Challenges of Robotic Lower-limb Prostheses for Human-robot Integration
-
摘要: 智能动力下肢假肢在残疾人生活中起着越来越重要的作用.解决人-智能假肢-环境融合中的关键科学问题是实现假肢穿戴者安全、流畅运动的必要条件.本文针对此问题,综述了面向人机融合的智能动力下肢假肢研究,包括智能动力下肢假肢的仿生结构和控制方法、人体运动意图识别、复杂环境下的人-智能假肢融合、以及用于下肢假肢的感知替代和反馈,深入探讨了智能动力下肢假肢人机融合研究中所面临的挑战和问题,最后,本文对该领域的未来发展方向进行了展望和总结.Abstract: Robotic lower-limb prosthesis plays an increasingly important role in amputees' daily activities. One of the key programs in this research area is the human-prosthesis-environment interaction, and its solution is a crucial step towards reliable and smooth motions of the amputee wearing a robotic prosthesis in practical applications. In this paper, we overview the state-of-the-art of the robotic lower-limb prosthesis in the context of human-prosthesis-environment interaction. The overview includes bio-inspired mechanical structure design, control strategy, human intenting recognition, human-prosthesis interaction in complex environments, and sensory substitution for human-in-loop control. At last, existing challenges and future directions are discussed.1) 本文责任编委 王卫群
-
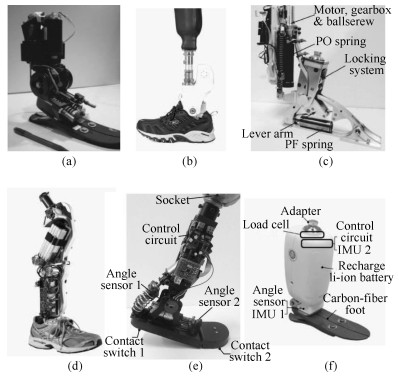
图 1 智能动力下肢假肢((a) MIT智能动力小腿假肢[2]; (b)智能动力小腿假肢Odyssey[21]; (c)储能小腿假肢AMP-foot 2.0[5]; (d)含膝、踝关节的智能动力大腿假肢[24]; (e)含踝、趾关节的智能动力假肢PANTOE[6]; (f)智能动力小腿假肢PKU-RoboTPro[7])
Fig. 1 Robotic lower-limb prostheses ((a) MIT powered ankle-foot prosthesis[2]; (b) Odyssey[21]; (c) AMP-foot 2.0[5]; (d) Vanderbilt powered lower-limb prosthesis[24]; (e) PANTOE[6]; (f) PKU-RoboTPro[7])
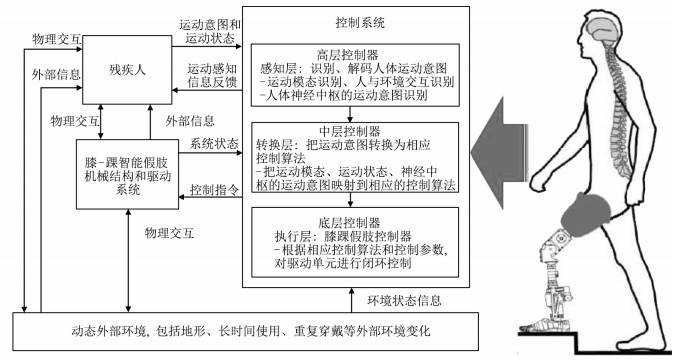
图 2 智能动力下肢假肢的分层控制策略
Fig. 2 Hierarchical control strategy of robotic lower-limb prostheses
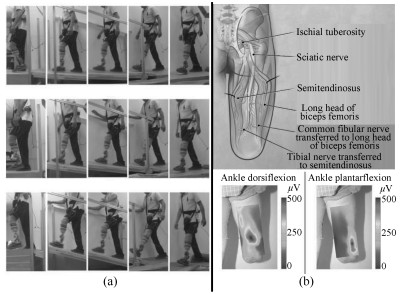
图 3 基于sEMG运动意图识别研究((a)残疾人穿戴智能动力小腿假肢, 通过sEMG主动控制在不同角度的斜坡上行走[34]; (b)大腿肌肉重定向手术示意图(上), 重定向手术后通过收缩大腿肌肉来反映踝关节的跖屈和背屈[37])
Fig. 3 Human intent recognition based on sEMG signals ((a) sEMG-based volitional control of robotic transtibial prosthesis, and the amputee walks on ramps with different angles[34]; (b) Target muscle reinnervation (TMR)(upper half), sEMG signals of ankle dorsiflexion and ankle plantarflexion through TMR muscles (bottom half)[37])
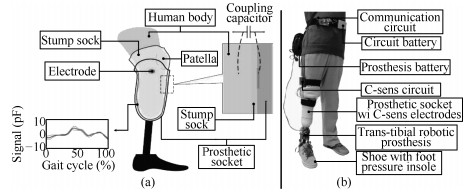
图 4 基于非接触式电容传感的运动意图识别((a)非接触式电容传感在小腿假肢上测量原理示意图; (b)基于非接触式电容传感的运动意图识别研究,与小腿智能动力假肢穿戴示意图)
Fig. 4 Lower-limb motion intent recognition based on noncontact capacitive sensing ((a) The sensing principle of noncontact capacitive sensing on transtibial prosthesis; (b) A study on noncontact capacitive sensing based locomotion transition recognition with robotic prosthesis, and its placement on human body)
-
[1] 中国残疾人联合会.第二次全国残疾人抽样调查主要数据公报. 2006. http://www.cnki.com.cn/Article/CJFDTotal-CJRZ200612003.htm [2] Au S K, Weber J, Herr H. Powered ankle-foot prosthesis improves walking metabolic economy. IEEE Transactions on Robotics, 2009, 25(1):51-66 doi: 10.1109/TRO.2008.2008747 [3] Sup F, Varol H, Mitchell J, Withrow T J, Goldfarb M. Preliminary evaluations of a self-contained anthropomorphic transfemoral prosthesis. IEEE/ASME Transactions on Mechatronics, 2009, 14(6):667-676 doi: 10.1109/TMECH.2009.2032688 [4] Hitt J, Sugar T, Holgate M, Bellmann R, Hollander K. Robotic transtibial prosthesis with biomechanical energy regeneration. Industrial Robot:An International Journal, 2009, 36(5):441-447 doi: 10.1108/01439910910980169 [5] Cherelle P, Grosu V, Matthys A, Vanderborght B, Lefeber D. Design and validation of the ankle mimicking prosthetic (AMP) foot 2.0. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(1):138-148 doi: 10.1109/TNSRE.2013.2282416 [6] Zhu J Y, Wang Q N, Wang L. On the design of a powered transtibial prosthesis with stiffness adaptable ankle and toe joints. IEEE Transactions on Industrial Electronics, 2014, 61(9):4797-4807 doi: 10.1109/TIE.2013.2293691 [7] Wang Q N, Yuan K B, Zhu J Y, Wang L. Walk the walk:a lightweight active transtibial prosthesis. IEEE Robotics and Automation Magazine, 2015, 22(4):80-89 doi: 10.1109/MRA.2015.2408791 [8] Huang H, Kuiken T A, Lipschutz R D. A strategy for identifying locomotion modes using surface electromyography. IEEE Transactions on Biomedical Engineering, 2009, 56(1):65-73 doi: 10.1109/TBME.2008.2003293 [9] Huang H, Zhang F, Hargrove L J, Dou Z, Rogers D R, Englehart K B. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Transactions on Biomedical Engineering, 2011, 58(10):2867-2875 doi: 10.1109/TBME.2011.2161671 [10] Hargrove L J, Simon A M, Lipschutz R, Finucane S B, Kuiken T A. Non-weight-bearing neural control of a powered transfemoral prosthesis. Journal of NeuroEngineering and Rehabilitation, 2013, 10:62, DOI: 10.1186/1743-0003-10-62 [11] Young A J, Simon A M, Hargrove L J. A training method for locomotion mode prediction using powered lower limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3):671-677 doi: 10.1109/TNSRE.2013.2285101 [12] Zheng E H, Wang L, Wei K L, Wang Q N. A noncontact capacitive sensing system for recognizing locomotion modes of transtibial amputees. IEEE Transactions on Biomedical Engineering, 2014, 61(12):2911-2920 doi: 10.1109/TBME.2014.2334316 [13] Zheng E H, Wang Q N. Noncontact capacitive sensing based locomotion transition recognition for amputees with robotic transtibial prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, DOI: 10.1109/TNSRE.2016.2529581 [14] Yuan K B, Wang Q N, Wang L. Fuzzy-logic-based terrain identification with multisensor fusion for transtibial amputees. IEEE/ASME Transactions on Mechatronics, 2015, 20(2):618-630 doi: 10.1109/TMECH.2014.2309708 [15] Chen B J, Feng Y G, Wang Q N. Combining vibrotactile feedback with volitional myoelectric control for robotic transtibial prostheses. Frontiers in Neurorobotics, 2016, 10:1-14 [16] Klute G K, Czerniecki J, Hannaford B. Development of powered prosthetic lower limb. In:Proceedings of the 1st National Meeting, Veterans Affairs Rehabilitation Research and Development Service. Washington D.C., USA, 1998. [17] Versluys R, Lenaerts G, Desomer A, Pareit O, Vanderborght B, Van der Perre G, Peeraer L, Lefeber D. A biomechatronical transtibial prosthesis powered by pleated pneumatic artificial muscles. International Journal of Modelling, Identification and Control, 2008, 4(4):394-405 doi: 10.1504/IJMIC.2008.021479 [18] Robinson J L, Smidt G L, Arora J S. Accelerographic, temporal, and distance gait factors in below-knee amputees. Physical Therapy, 1977, 57(8):898-904 https://www.researchgate.net/publication/22278098_Accelerographic_temporal_and_distance_gait_Factors_in_below-knee_amputees [19] Au S K, Herr H. Powered ankle-foot prosthesis. IEEE Robotics and Automation Magazine, 2008, 15(3):52-59 doi: 10.1109/MRA.2008.927697 [20] Au S K, Berniker M, Herr H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Networks, 2008, 21(4):654-666 doi: 10.1016/j.neunet.2008.03.006 [21] Hitt J K, Sugar T G, Holgate M A, Bellman R D. An active foot-ankle prosthesis with biomechanical energy regeneration. Journal of Medical Devices, 2010, 4(1):011003, DOI: 10.1115/1.4001139 [22] Bellman R D, Holgate M A, Sugar T G. SPARKY 3:design of an active robotic ankle prosthesis with two actuated degrees of freedom using regenerative kinetics. In:Proceedings of the 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Scottsdale, AZ:IEEE, 2008. 511-516 [23] Holgate M A, Hitt J K, Bellman R D, Sugar T G, Hollander K W. The SPARKY (spring ankle with regenerative kinetics) project:choosing a DC motor based actuation method. In:Proceedings of the 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Scottsdale, AZ:IEEE, 2008. 163-168 [24] Goldfarb M, Lawson B E, Shultz A H. Realizing the promise of robotic leg prostheses. Science Translational Medicine, 2013, 5(210):210ps15, DOI: 10.1126/scitranslmed.3007312 [25] Lawson B E, Mitchell J, Truex D, Shultz A, Ledoux E, Goldfarb M. A robotic leg prosthesis:design, control, and implementation. IEEE Robotics and Automation Magazine, 2014, 21(4):70-81 doi: 10.1109/MRA.2014.2360303 [26] Sup F, Bohara A, Goldfarb M. Design and control of a powered transfemoral prosthesis. The International Journal of Robotics Research, 2008, 27(2):263-273 doi: 10.1177/0278364907084588 [27] Varol H A, Sup F, Goldfarb M. Multiclass real-time intent recognition of a powered lower limb prosthesis. IEEE Transactions on Biomedical Engineering, 2010, 57(3):542-551 doi: 10.1109/TBME.2009.2034734 [28] Eilenberg M F, Geyer H, Herr H. Control of a powered ankle-foot prosthesis based on a neuromuscular model. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(2):164-173 doi: 10.1109/TNSRE.2009.2039620 [29] Huang H, Zhang F, Sun Y L, He H B. Design of a robust EMG sensing interface for pattern classification. Journal of Neural Engineering, 2010, 7(5):056005, DOI: 10.1088/1741-2560/7/5/056005 [30] Zhang F, Liu M, Huang H. Effects of locomotion mode recognition errors on volitional control of powered above-knee prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23(1):64-72 doi: 10.1109/TNSRE.2014.2327230 [31] Miller J D, Beazer M S, Hahn M E. Myoelectric walking mode classification for transtibial amputees. IEEE Transactions on Biomedical Engineering, 2013, 60(10):2745-2750 doi: 10.1109/TBME.2013.2264466 [32] Jin D W, Yang J K, Zhang R H, Wang R C, Zhang J C. Terrain identification for prosthetic knees based on electromyographic signal features. Tsinghua Science and Technology, 2006, 11:74-79 doi: 10.1016/S1007-0214(06)70157-2 [33] Kannape O A, Herr H M. Volitional control of ankle plantar flexion in a powered transtibial prosthesis during stair-ambulation. In:Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). Chicago, IL:IEEE, 2014. 1662-1665 [34] Chen B J, Wang Q N, Wang L. Adaptive slope walking with a robotic transtibial prosthesis based on volitional EMG control. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2146-2157 doi: 10.1109/TMECH.2014.2365877 [35] Hoover C D, Fulk G D, Fit K B. Stair ascent with a powered transfemoral prosthesis under direct myoelectric control. IEEE/ASME Transactions on Mechatronics, 2013, 18(3):1191-1200 doi: 10.1109/TMECH.2012.2200498 [36] Farmer S, Silver-Thorn B, Voglewede P, Beardsley S A. Within-socket myoelectric prediction of continuous ankle kinematics for control of a powered transtibial prosthesis. Journal of Neural Engineering, 2014, 11(5):056027, DOI: 10.1088/1741-2560/11/5/056027 [37] Hargrove L J, Simon A M, Young A J, Lipschutz R D, Finucane S B, Smith D G, Kuiken T A. Robotic leg control with EMG decoding in an amputee with nerve transfers. New England Journal of Medicine, 2013, 369(13):1237-1242 doi: 10.1056/NEJMoa1300126 [38] Jiménez-Fabián R, Verlinden O. Review of control algorithms for robotic ankle systems in lower-limb orthoses, prostheses, and exoskeletons. Medical Engineering & Physics, 2012, 34(4):397-408 https://www.researchgate.net/publication/51896474_Review_of_control_algorithms_for_robotic_ankle_systems_in_lower-limb_orthoses_prostheses_and_exoskeletons [39] Tucker M R, Olivier J, Pagel A, Bleuler H, Bouri M, Lambercy O, del R Millán J, Riener R, Vallery H, Gassert R. Control strategies for active lower extremity prosthetics and orthotics:a review. Journal of NeuroEngineering and Rehabilitation, 2015, 12:1, DOI: 10.1186/1743-0003-12-1 [40] Young A J, Simon A M, Fey N P, Hargrove L J. Intent recognition in a powered lower limb prosthesis using time history information. Annals of Biomedical Engineering, 2014, 42(3):631-641 doi: 10.1007/s10439-013-0909-0 [41] Tkach D C, Hargrove L J. Neuromechanical sensor fusion yields highest accuracies in predicting ambulation mode transitions for trans-tibial amputees. In:Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine, Biology Society (EMBC). Osaka:IEEE, 2013. 3074-3077 [42] Young A J, Hargrove L J, Kuiken T A. The effects of electrode size and orientation on the sensitivity of myoelectric pattern recognition systems to electrode shift. IEEE Transactions on Biomedical Engineering, 2011, 58(9):2537-2544 doi: 10.1109/TBME.2011.2159216 [43] Sensinger J W, Lock B A, Kuiken T A. Adaptive pattern recognition of myoelectric signals:exploration of conceptual framework ad practical algorithms. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2009, 17(3):270-278 doi: 10.1109/TNSRE.2009.2023282 [44] Taborri J, Palermo E, Rossi S, Cappa P. Gait partitioning methods:a systematic review. Sensors, 2016, 16(1):66-85 doi: 10.3390/s16010066 [45] Wang X G, Wang Q N, Zheng E H, Wei K L, Wang L. A wearable plantar pressure measurement system:design specifications and first experiments with an amputee. Intelligent Autonomous Systems 12. Berlin Heidelberg:Springer, 2013. 273-281 [46] Chen B J, Wang X G, Huang Y, Wei K L, Wang Q N. A foot-wearable interface for locomotion mode recognition based on discrete contact force distribution. Mechatronics, 2015, 32:12-21 doi: 10.1016/j.mechatronics.2015.09.002 [47] Zheng E H, Chen B J, Wei K L, Wang Q N. Lower limb wearable capacitive sensing and its applications to recognizing human gaits. Sensors, 2013, 13(10):13334-13355 doi: 10.3390/s131013334 [48] Chen B J, Zheng E H, Fan X D, Liang T, Wang Q N, Wei K L, Wang L. Locomotion mode classification using a wearable capacitive sensing system. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(5):744-755 doi: 10.1109/TNSRE.2013.2262952 [49] Pons J L. Wearable Robots:Biomechatronic Exoskeletons. Hoboken:John Wiley & Sons, 2008. [50] Liu M, Wang D, Huang H H. Development of an environment-aware locomotion mode recognition system for powered lower limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(4):434-443 doi: 10.1109/TNSRE.2015.2420539 [51] Krausz N E, Lenzi T, Hargrove L J. Depth sensing for improved control of lower limb prostheses. IEEE Transactions on Biomedical Engineering, 2015, 62(11):2576-2587 doi: 10.1109/TBME.2015.2448457 [52] Young A J, Hargrove L J. A classification method for user-independent intent recognition for transfemoral amputees using powered lower limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(2):217-225 doi: 10.1109/TNSRE.2015.2412461 [53] Wen Y, Si J, Gao X, Huang S, Huang H. A new powered lower limb prosthesis control framework based on adaptive dynamic programming. IEEE Transactions on Neural Networks and Learning Systems, 2016, DOI: 10.1109/TNNLS.2016.2584559 [54] Fridman G Y, Blair H T, Blaisdell A P, Judy J W. Perceived intensity of somatosensory cortical electrical stimulation. Experimental Brain Research, 2010, 203(3):499-515 doi: 10.1007/s00221-010-2254-y [55] Semprini M, Bennicelli L, Vato A. A parametric study of intracortical microstimulation in behaving rats for the development of artificial sensory channels. In:Proceedings of 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). San Diego, CA:IEEE, 2012. 799-802 https://www.researchgate.net/publication/235387016_A_parametric_study_of_intracortical_microstimulation_in_behaving_rats_for_the_development_of_artificial_sensory_channels [56] Romo R, Hernández A, Zainos A, Salinas E. Somatosensory discrimination based on cortical microstimulation. Nature, 1998, 392(6674):387-390 doi: 10.1038/32891 [57] Fitzsimmons N A, Drake W, Hanson T L, Lebedev M A, Nicolelis M A L. Primate reaching cued by multichannel spatiotemporal cortical microstimulation. Journal of Neuroscience, 2007, 27(21):5593-5602 doi: 10.1523/JNEUROSCI.5297-06.2007 [58] O'Doherty J E, Lebedev M A, Ifft P J, Zhuang K Z, Shokur S, Bleuler H, Nicolelis M A L. Active tactile exploration using a brain-machine-brain interface. Nature, 2011, 479(7372):228-231 doi: 10.1038/nature10489 [59] Tabot G A, Dammann J F, Berg J A, Tenore F V, Boback J L, Vogelstein R J, Bensmaia S J. Restoring the sense of touch with a prosthetic hand through a brain interface. Proceedings of the National Academy of Sciences of the United States of America, 2013, 110(45):18279-18284 doi: 10.1073/pnas.1221113110 [60] Berg J A, Dammann J F, Tenore F V, Tabot G A, Boback J L, Manfredi L R, Peterson M L, Katyal K D, Johannes M S, Makhlin A, Wilcox R, Franklin R K, Vogelstein R J, Hatsopoulos N G, Bensmaia S J. Behavioral demonstration of a somatosensory neuroprosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(3):500-507 doi: 10.1109/TNSRE.2013.2244616 [61] Zaaimi B, Ruiz-Torres R, Solla S A, Miller L E. Multi-electrode stimulation in somatosensory cortex increases probability of detection. Journal of Neural Engineering, 2013, 10(5):056013, DOI: 10.1088/1741-2560/10/5/056013 [62] Horch K, Meek S, Taylor T G, Hutchinson D T. Object discrimination with an artificial hand using electrical stimulation of peripheral tactile and proprioceptive pathways with intrafascicular electrodes. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2011, 19(5):483-489 doi: 10.1109/TNSRE.2011.2162635 [63] Raspopovic S, Capogrosso M, Petrini F M, Bonizzato M, Rigosa J, Di Pino G, Carpaneto J, Controzzi M, Boretius T, Fernandez E, Granata G, Oddo C M, Citi L, Ciancio A L, Cipriani C, Carrozza M C, Jensen W, Guglielmelli E, Stieglitz T, Rossini P M, Micera S. Restoring natural sensory feedback in real-time bidirectional hand prostheses. Science Translational Medicine, 2014, 6(222):222ra19, DOI: 10.1126/scitranslmed.3006820 [64] Tan D W, Schiefer M A, Keith M W, Anderson J R, Tyler J, Tyler D J. A neural interface provides long-term stable natural touch perception. Science Translational Medicine, 2014, 6(257):257ra138, DOI: 10.1126/scitranslmed.3008669 [65] Yoo P B, Durand D M. Selective recording of the canine hypoglossal nerve using a multicontact flat interface nerve electrode. IEEE Transactions on Biomedical Engineering, 2005, 52(8):1461-1469 doi: 10.1109/TBME.2005.851482 [66] Schiefer M A, Freeberg M, Pinault G J C, Anderson J, Hoyen H, Tyler D J, Triolo R J. Selective activation of the human tibial and common peroneal nerves with a flat interface nerve electrode. Journal of Neural Engineering, 2013, 10(5):056006, DOI: 10.1088/1741-2560/10/5/056006 [67] Naples G G, Mortimer J T, Scheiner A, Sweeney J D. A spiral nerve cuff electrode for peripheral nerve stimulation. IEEE Transactions on Biomedical Engineering, 1988, 35(11):905-916 doi: 10.1109/10.8670 [68] Fisher L E, Tyler D J, Anderson J S, Triolo R J. Chronic stability and selectivity of four-contact spiral nerve-cuff electrodes in stimulating the human femoral nerve. Journal of Neural Engineering, 2009, 6(4):046010, DOI: 10.1088/1741-2560/6/4/046010 [69] Kuiken T A, Marasco P D, Lock B A, Harden R N, Dewald J P A. Redirection of cutaneous sensation from the hand to the chest skin of human amputees with targeted reinnervation. Proceedings of the National Academy of Sciences of the United States of America, 2007, 104(50):20061-20066 doi: 10.1073/pnas.0706525104 [70] Kuiken T A, Miller L A, Lipschutz R D, Lock B A, Stubblefield K, Marasco P D, Zhou P, Dumanian G A. Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation:a case study. The Lancet, 2007, 369(9559):371-380 doi: 10.1016/S0140-6736(07)60193-7 [71] Sensinger J W, Schultz A E, Kuiken T A. Examination of force discrimination in human upper limb amputees with reinnervated limb sensation following peripheral nerve transfer. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2009, 17(5):438-444 doi: 10.1109/TNSRE.2009.2032640 [72] Zambarbieri D, Schmid M, Magnaghi M, Vermi G, Macellari V, Fadda A. Biofeedback techniques for rehabilitation of the lower limb prosthetic subject. In:Proceedings of the 1998 Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON). Lemesos:MEDICON, 1998. 1-5 [73] Bamberg S J M, Carson R J, Stoddard G, Dyer P S, Webster J B. The lower extremity ambulation feedback system for analysis of gait asymmetries:preliminary design and validation results. Journal of Prosthetics and Orthotics, 2010, 22(1):31-36 doi: 10.1097/JPO.0b013e3181ccc065 [74] Yang L, Dyer P S, Carson R J, Webster J B, Foreman K B, Bamberg S J M. Utilization of a lower extremity ambulatory feedback system to reduce gait asymmetry in transtibial amputation gait. Gait & Posture, 2012, 36(3):631-634 https://www.researchgate.net/publication/225045669_Utilization_of_a_lower_extremity_ambulatory_feedback_system_to_reduce_gait_asymmetry_in_transtibial_amputation_gait?_sg=XEYI93zldK_DKLMKj_7taHESvJlbXdR4J8iRl1y8OUi9_thl8yuIV6Imizb8-zrd_oYcE1ff4FoirwXXs7SEYQ [75] Gonzalez J, Soma H, Sekine M, Yu W. Psycho-physiological assessment of a prosthetic hand sensory feedback system based on an auditory display:a preliminary study. Journal of NeuroEngineering and Rehabilitation, 2012, 9:33, DOI: 10.1186/1743-0003-9-33 [76] Witteveen H J B, Droog E A, Rietman J S, Veltink P H. Vibro-and electrotactile user feedback on hand opening for myoelectric forearm prostheses. IEEE Transactions on Biomedical Engineering, 2012, 59(8):2219-2226 doi: 10.1109/TBME.2012.2200678 [77] Sabolich J A, Ortega G M. Sense of feel for lower-limb amputees:a phase-one study. Journal of Prosthetics and Orthotics, 1994, 6(2):36-41 doi: 10.1097/00008526-199400620-00003 [78] Buma D G, Buitenweg J R, Veltink P H. Intermittent stimulation delays adaptation to electrocutaneous sensory feedback. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(3):435-441 doi: 10.1109/TNSRE.2007.903942 [79] Cipriani C, Zaccone F, Micera S, Carrozza M C. On the shared control of an EMG-controlled prosthetic hand:analysis of user-prosthesis interaction. IEEE Transactions on Robotics, 2008, 24(1):170-184 doi: 10.1109/TRO.2007.910708 [80] Cipriani C, D'Alonzo M, Carrozza M C. A miniature vibrotactile sensory substitution device for multifingered hand prosthetics. IEEE Transactions on Biomedical Engineering, 2012, 59(2):400-408 doi: 10.1109/TBME.2011.2173342 [81] Stepp C E, An Q, Matsuoka Y. Repeated training with augmentative vibrotactile feedback increases object manipulation performance. PLoS One, 2012, 7(2):e32743, DOI: 10.1371/journal.pone.0032743 [82] Wall III C, Kentala E. Control of sway using vibrotactile feedback of body tilt in patients with moderate and severe postural control deficits. Journal of Vestibular Research, 2005, 15(5-6):313-325 https://www.researchgate.net/publication/7166713_Control_of_sway_using_vibrotactile_feedback_of_body_tilt_in_patients_with_moderate_and_severe_postural_control_deficits [83] Alahakone A U, Senanayake S M N A. A real-time system with assistive feedback for postural control in rehabilitation. IEEE/ASME Transactions on Mechatronics, 2010, 15(2):226-233 doi: 10.1109/TMECH.2010.2041030 [84] Gopalai A A, Senanayake S M N A. A wearable real-time intelligent posture corrective system using vibrotactile feedback. IEEE/ASME Transactions on Mechatronics, 2011, 16(5):827-834 doi: 10.1109/TMECH.2011.2161486 [85] Fan R E, Culjat M O, King C H, Franco M L, Boryk R, Bisley J W, Dutson E, Grundfest W S. A haptic feedback system for lower-limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2008, 16(3):270-277 doi: 10.1109/TNSRE.2008.920075 [86] Rusaw D, Hagberg K, Nolan L, Ramstrand N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss? The Journal of Rehabilitation Research and Development, 2012, 49(8):1239-1254 http://gup.ub.gu.se/publication/175150-can-vibratory-feedback-be-used-to-improve-postural-stability-in-persons-with-transtibial-limb-loss [87] Crea S, Cipriani C, Donati M, Carrozza M C, Vitiello N. Providing time-discrete gait information by wearable feedback apparatus for lower-limb amputees:usability and functional validation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23(2):250-257 doi: 10.1109/TNSRE.2014.2365548 [88] Chew A W. A Vibrotactile Display Design for the Feedback of External Prosthesis Sensory Information to the Amputee Wearer[Ph.D. dissertation], Massachusetts Institute of Technology, USA, 2006 [89] Kaczmarek K A, Webster J G, Bach-y-Rita P, Tompkins W J. Electrotactile and vibrotactile displays for sensory substitution systems. IEEE Transactions on Biomedical Engineering, 1991, 38(1):1-16 doi: 10.1109/10.68204 -

 下载:
下载:

计量
- 文章访问数: 3896
- HTML全文浏览量: 1229
- PDF下载量: 1656
- 被引次数: 0
