

-
摘要: 提出了一种改进的高斯近似(Gaussian approximate, GA)滤波方法, 推导了它的一般解和特殊解, 并证明了现有的高斯近似滤波方法是所提出的方法的一种特例.在提出的方法中, 不需要基于高斯假设重复地产生求积点, 而是直接地更新求积点.与现有的高斯近似滤波方法相比, 提出的方法利用了量测求积点修正状态求积点, 从而可以更好地捕获状态一步预测密度和状态后验密度的非高斯信息和高阶矩信息.此外, 提出的方法不仅适用于确定的系统模型而且还适用于随机的系统模型.单变量非平稳增长模型、垂直落体模型、再入飞行器目标跟踪的仿真验证了提出的高斯近似滤波方法的有效性和与现有方法相比的优越性.Abstract: In this paper, an improved Gaussian approximate (GA) filtering method is proposed. Its general solution and special solution are derived, and the existing GA filtering method is proved to be its special case of the proposed method. In the proposed method, the quadrature points are no longer generated repeatedly based on Gaussian assumption, but updated directly. As compared with the existing GA filtering method, the proposed method can better capture the non-Gaussian information and high-order moment information of the one-step predicted density and posterior density of state, since the measurement quadrature points in the proposed method are used to correct the state quadrature points. Moreover, the proposed method is suitable for not only deterministic process model but also random process model. The efficiency and superiority of the proposed method are illustrated by simulations of univariate non-stationary growth model, vertically falling body model, and target tracking of re-entry vehicle.
-
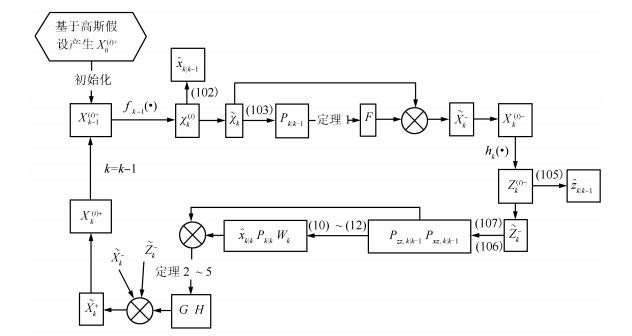
图 1 提出的改进高斯近似滤波算法的流程图
Fig. 1 Diagram of the proposed improved Gaussian approximate filtering algorithm
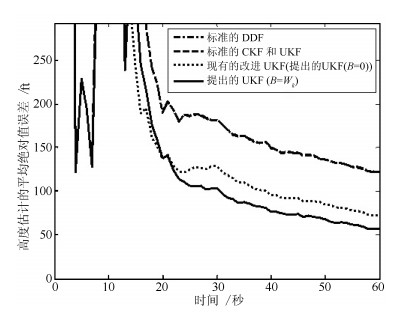
图 4 不同滤波方法的高度估计平均绝对值误差
Fig. 4 Averaged absolute error of the altitude of different filtering methods
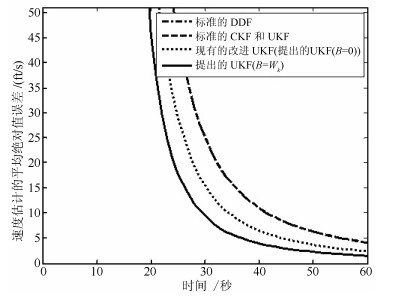
图 5 不同滤波方法的速度估计平均绝对值误差
Fig. 5 Averaged absolute error of the velocity of different filtering methods
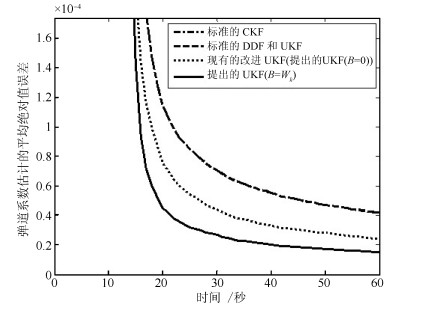
图 6 不同滤波方法的弹道系数估计平均绝对值误差
Fig. 6 Averaged absolute error of the ballistic coefficient of different filtering methods
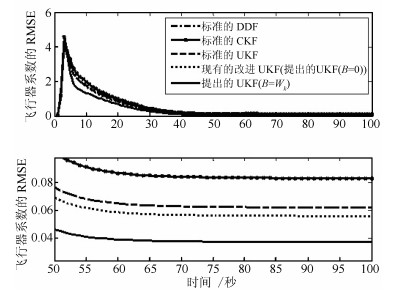
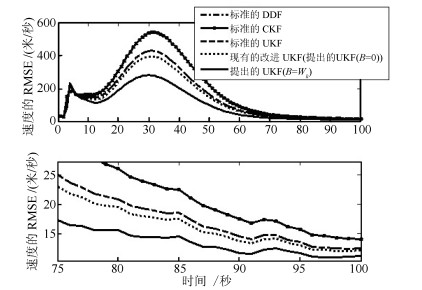
图 9 不同滤波方法的飞行器系数RMSE
Fig. 9 RMSEs of the vehicle coefficient of different filtering methods
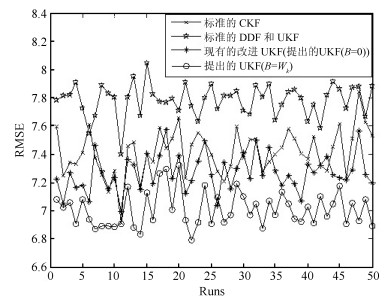
表 1 不同滤波方法的平均RMSE
Table 1 The averaged RMSEs of different filtering methods
滤波器 标准的CKF 标准的DDF2和UKF (n=1时等价) 现有的改进UKF 提出的UKF 平均RMSE 7.417 7.787 7.271 7.009  下载: 导出CSV
下载: 导出CSV
表 2 不同滤波方法的单步运行时间
Table 2 The run time of different filtering methods at single step
滤波器 标准的CKF 标准的DDF2和UKF (n=1时等价) 现有的改进UKF 提出的UKF 单步运行时间(秒) 0.21 × 10-3 0.22 × 10-3 0.28 × 10-3 0.32 × 10-3
下载: 导出CSV
表 3 不同滤波方法在最后30秒内的平均绝对值误差的均值
Table 3 The means of averaged absolute errors of different filtering methods over the last 30 s
滤波器 高度估计的平均绝对值
误差的均值(ft)速度估计的平均绝对值
误差的均值(ft/s)弹道系数估计的平均
绝对值误差的均值标准的DDF2 143.701 9.636 5.174 ×10-5 标准的CKF和UKF(n=3时等价) 144.003 9.659 5.182 ×10-5 现有的改进UKF 92.060 5.723 3.087 ×10-5 提出的UKF 73.210 3.499 1.886 ×10-5
下载: 导出CSV
表 4 不同滤波方法的单步运行时间
Table 4 The run time of different filtering methods at single step
滤波器 标准的DDF2 标准的CKF和UKF (n=3时等价) 现有的改进UKF 提出的UKF 单步运行时间(秒) 0.28 × 10-3 0.25 × 10-3 0.35 × 10-3 0.50 × 10-3
下载: 导出CSV
表 5 不同滤波方法在最后25秒内的平均RMSE
Table 5 The averaged RMSEs of different filtering methods over the last 25 s
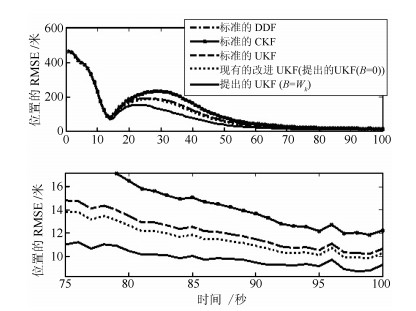
滤波器 位置的平均RMSE(m) 速度的平均RMSE(m/s) 飞行器系数的平均RMSE 标准的DDF2 12.142 17.023 6.212 × 10-2 标准的CKF 14.577 20.747 8.323 × 10-2 标准的UKF 12.143 17.025 6.213 × 10-2 现有的改进UKF 11.505 16.026 5.601 × 10-2 提出的UKF 9.844 13.332 3.726 × 10-2
下载: 导出CSV
表 6 不同滤波方法的单步运行时间
Table 6 The run time of different filtering methods at single step
滤波器 标准的DDF2 标准的CKF 标准的UKF 现有的改进UKF 提出的UKF 单步运行时间(秒) 1.08 × 10-3 0.97 × 10-3 1.02 × 10-3 1.16 × 10-3 1.20 × 10-3
下载: 导出CSV
-
[1] 张勇刚, 黄玉龙, 赵琳.一种带多步随机延迟量测高斯滤波器的一般框架解.自动化学报, 2015, 41(1):122-135 http://www.aas.net.cn/CN/Y2015/V41/I1/122Zhang Yong-Gang, Huang Yu-Long, Zhao Lin. A general framework solution to Gaussian filter with multiple-step randomly-delayed measurements. Acta Automatica Sinica, 2015, 41(1):122-135 http://www.aas.net.cn/CN/Y2015/V41/I1/122 [2] 张勇刚, 黄玉龙, 李宁, 赵琳.带一步随机延迟量测非线性序列贝叶斯估计的条件后验克拉美罗下界.自动化学报, 2015, 41(3):559-574 doi: 10.16383/j.aas.2015.c140391Zhang Yong-Gang, Huang Yu-Long, Li Ning, Zhao Lin. Conditional posterior Cramér-Rao lower bound for nonlinear sequential Bayesian estimation with one-step randomly delayed measurements. Acta Automatica Sinica, 2015, 41(3):559-574 doi: 10.16383/j.aas.2015.c140391 [3] Lei M, van Wyk B J, Qi Y. Online estimation of the approximate posterior Cramer-Rao lower bound for discrete-time nonlinear filtering. IEEE Transactions on Aerospace and Electronic systems, 2011, 47(1):37-57 doi: 10.1109/TAES.2011.5705658 [4] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1269 doi: 10.1109/TAC.2009.2019800 [5] Gordon N J, Salmond D J, Smith A F M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proceedings F:Radar and Signal Processing, 1993, 140(2):107-113 doi: 10.1049/ip-f-2.1993.0015 [6] Guo D, Wang X D. Quasi-Monte Carlo filtering in nonlinear dynamic systems. IEEE Transactions on Signal Processing, 2006, 54(6):2087-2098 doi: 10.1109/TSP.2006.873585 [7] Wang X X, Liang Y, Pan Q, Zhao C H. Gaussian filter for nonlinear systems with one-step randomly delayed measurements. Automatica, 2013, 49(4):976-986 doi: 10.1016/j.automatica.2013.01.012 [8] Arasaratnam I, Haykin S, Elliott R J. Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature. Proceedings of the IEEE, 2007, 95(5):953-977 doi: 10.1109/JPROC.2007.894705 [9] Julier S J, Uhlman J K, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Transactions on Automatic Control, 2000, 45(3):477-482 doi: 10.1109/9.847726 [10] Julier S J, Uhlman J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3):401-422 doi: 10.1109/JPROC.2003.823141 [11] Wu Y X, Hu D W, Wu M P, Hu X P. A numerical-integration perspective on Gaussian filters. IEEE Transactions on Signal Processing, 2006, 54(8):2910-2921 doi: 10.1109/TSP.2006.875389 [12] Norgaard M, Poulsen N K, Ravn O. New developments in state estimation for nonlinear systems. Automatica, 2000, 36(11):1627-1638 doi: 10.1016/S0005-1098(00)00089-3 [13] Ito K, Xiong K Q. Gaussian filters for nonlinear filtering problems. IEEE Transactions on Automatic Control, 2000, 45(5):910-927 doi: 10.1109/9.855552 [14] Jia B, Xin M, Cheng Y. High-degree cubature Kalman filter. Automatica, 2013, 49(2):510-518 doi: 10.1016/j.automatica.2012.11.014 [15] Jia B, Xin M, Cheng Y. Sparse-grid quadrature nonlinear filtering. Automatica, 2012, 48(2):327-341 doi: 10.1016/j.automatica.2011.08.057 [16] Duník J, Straka O, Šimandl M. Stochastic integration filter. IEEE Transactions on Automatic Control, 2013, 58(6):1561-1566 doi: 10.1109/TAC.2013.2258494 [17] Zhang X C. A novel cubature Kalman filter for nonlinear state estimation. In:Proceedings of the 2013 IEEE 52nd Annual Conference on Decision and Control. Firenze:IEEE, 2013. 7797-7802 [18] Zhang Y G, Huang Y L, Li N, Zhao L. Embedded cubature Kalman filter with adaptive setting of free parameter. Signal Processing, 2015, 114:112-116 doi: 10.1016/j.sigpro.2015.02.022 [19] Wang S Y, Feng J C, Tse C K. Spherical simplex-radial cubature Kalman filter. IEEE Signal Processing Letters, 2014, 21(1):43-46 doi: 10.1109/LSP.2013.2290381 [20] 张勇刚, 黄玉龙, 武哲民, 李宁.一种高阶无迹卡尔曼滤波方法.自动化学报, 2014, 40(5):838-848 http://www.aas.net.cn/CN/Y2014/V40/I5/838Zhang Yong-Gang, Huang Yu-Long, Wu Zhe-Min, Li Ning. A high order unscented Kalman filtering method. Acta Automatica Sinica, 2014, 40(5):838-848 http://www.aas.net.cn/CN/Y2014/V40/I5/838 [21] Chang L B, Hu B Q, Li A, Qin F J. Transformed unscented Kalman filter. IEEE Transactions on Automatic Control, 2013, 58(1):252-257 doi: 10.1109/TAC.2012.2204830 [22] Zhang Y G, Huang Y L, Li N, Zhao L. Interpolatory cubature Kalman filters. IET Control Theory and Applications, 2015, 9(11):1731-1739 doi: 10.1049/iet-cta.2014.0873 [23] Tian Y, Cheng Y. Novel measurement update method for quadrature-based Gaussian filters. In:Proceedings of the 2013 AIAA Guidance, Navigation, and Control Conference. Boston:AIAA, 2013. 1-15 [24] van der Merwe R. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models[Ph., D. dissertation], Oregon Health & Science University, Portland, OR, USA, 2004 [25] Cheng Y, Tian Y, Crassidis J L. Extension of the sparse grid quadrature filter. In:Proceedings of the 17th International Conference on Information Fusion (FUSION). Salamanca:IEEE, 2014. 1-7 [26] Golub G H, Van Loan C F. Matrix Computations (Fourth edition). Baltimore, Maryland:The Johns Hopkins University Press, 2013. [27] 黄玉龙, 张勇刚, 李宁, 赵琳.一种带有色量测噪声的非线性系统辨识方法.自动化学报, 2015, 41(11):1877-1892 http://www.aas.net.cn/CN/Y2015/V41/I11/1877Huang Yu-Long, Zhang Yong-Gang, Li Ning, Zhao Lin. An identification method for nonlinear systems with colored measurement noise. Acta Automatica Sinica, 2015, 41(11):1877-1892 http://www.aas.net.cn/CN/Y2015/V41/I11/1877 [28] Šimandl M, Duník J. Derivative-free estimation methods:new results and performance analysis. Automatica, 2009, 45(7):1749-1757 [29] Lee J H. Nonlinear estimation and multiple sensor fusion using unscented information filtering. IEEE Signal Processing Letters, 2008, 15:861-864 doi: 10.1109/LSP.2008.2005447 -

 下载:
下载:

计量
- 文章访问数: 4252
- HTML全文浏览量: 397
- PDF下载量: 1335
- 被引次数: 0
