

Distributed Model Predictive Control for Battery Level-based Formation and Obstacle Avoidance in USVs-UAV System
-
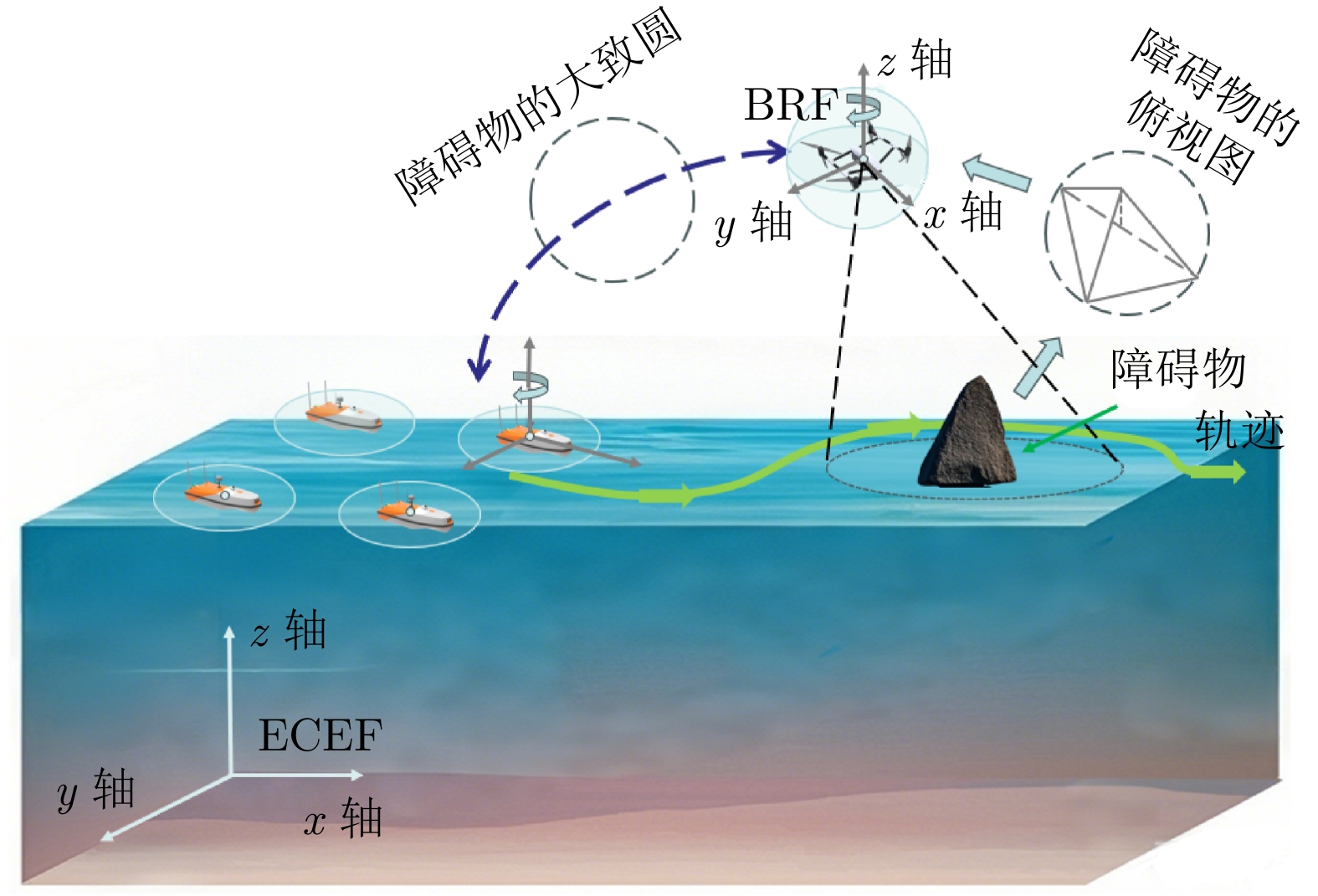
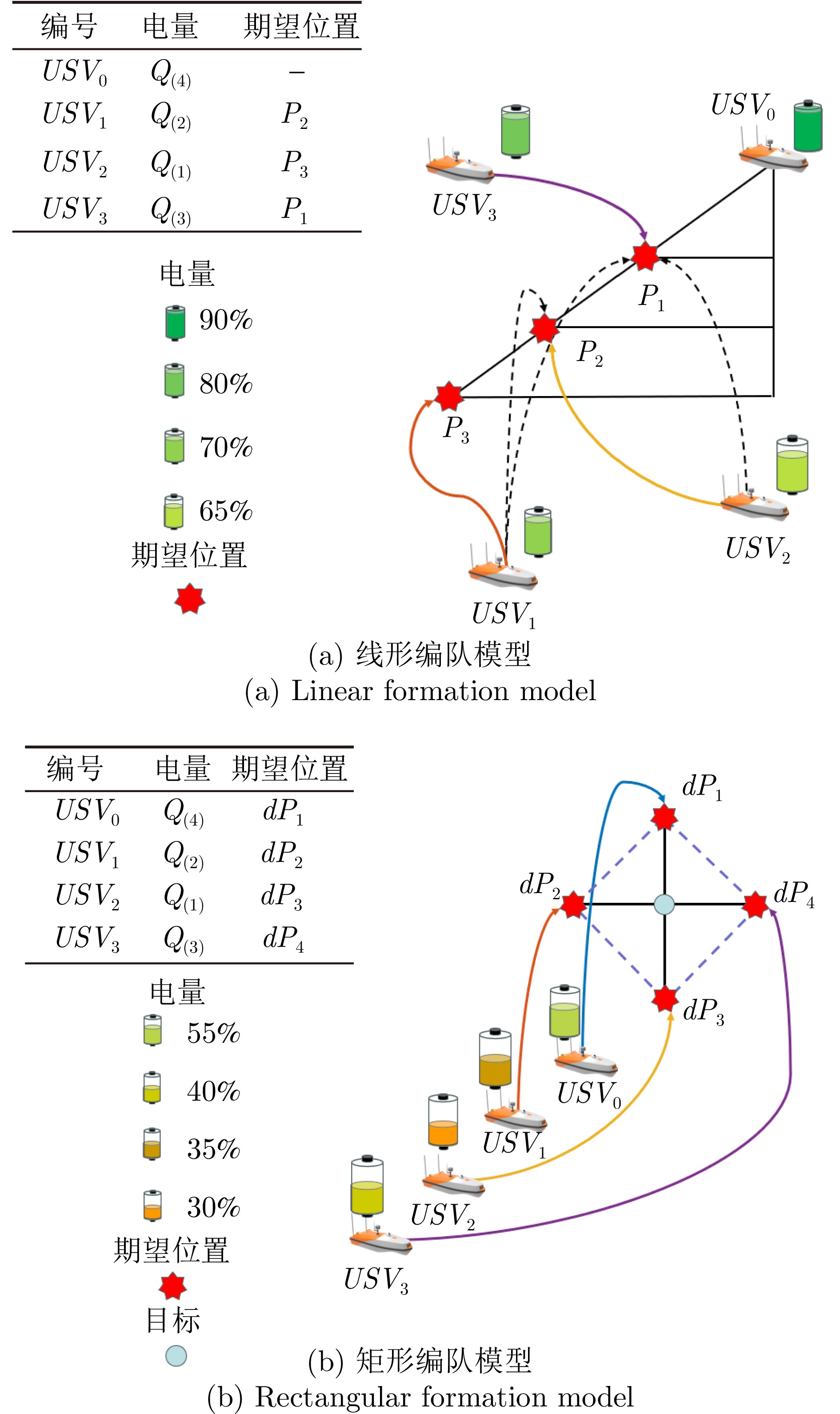
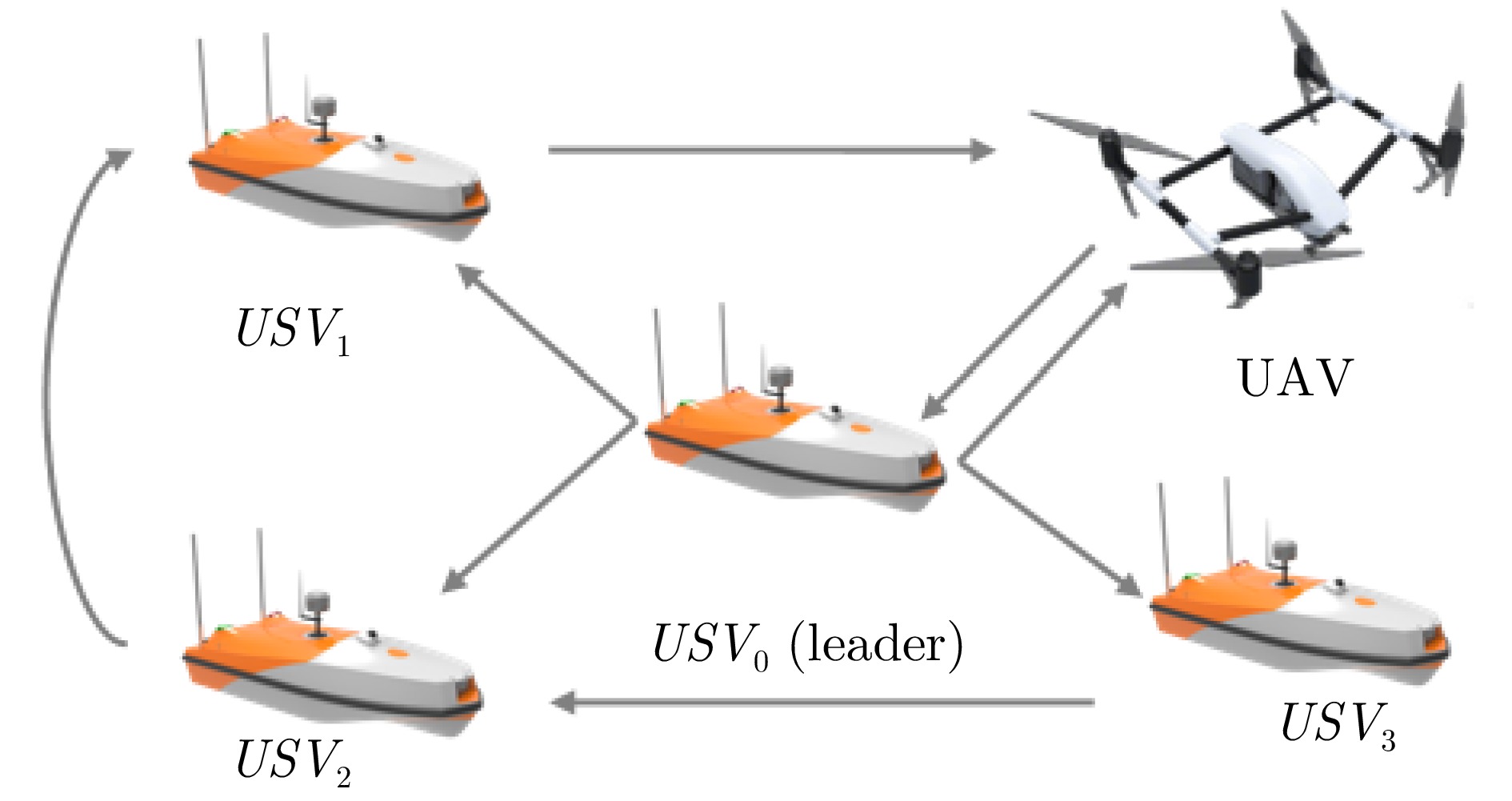
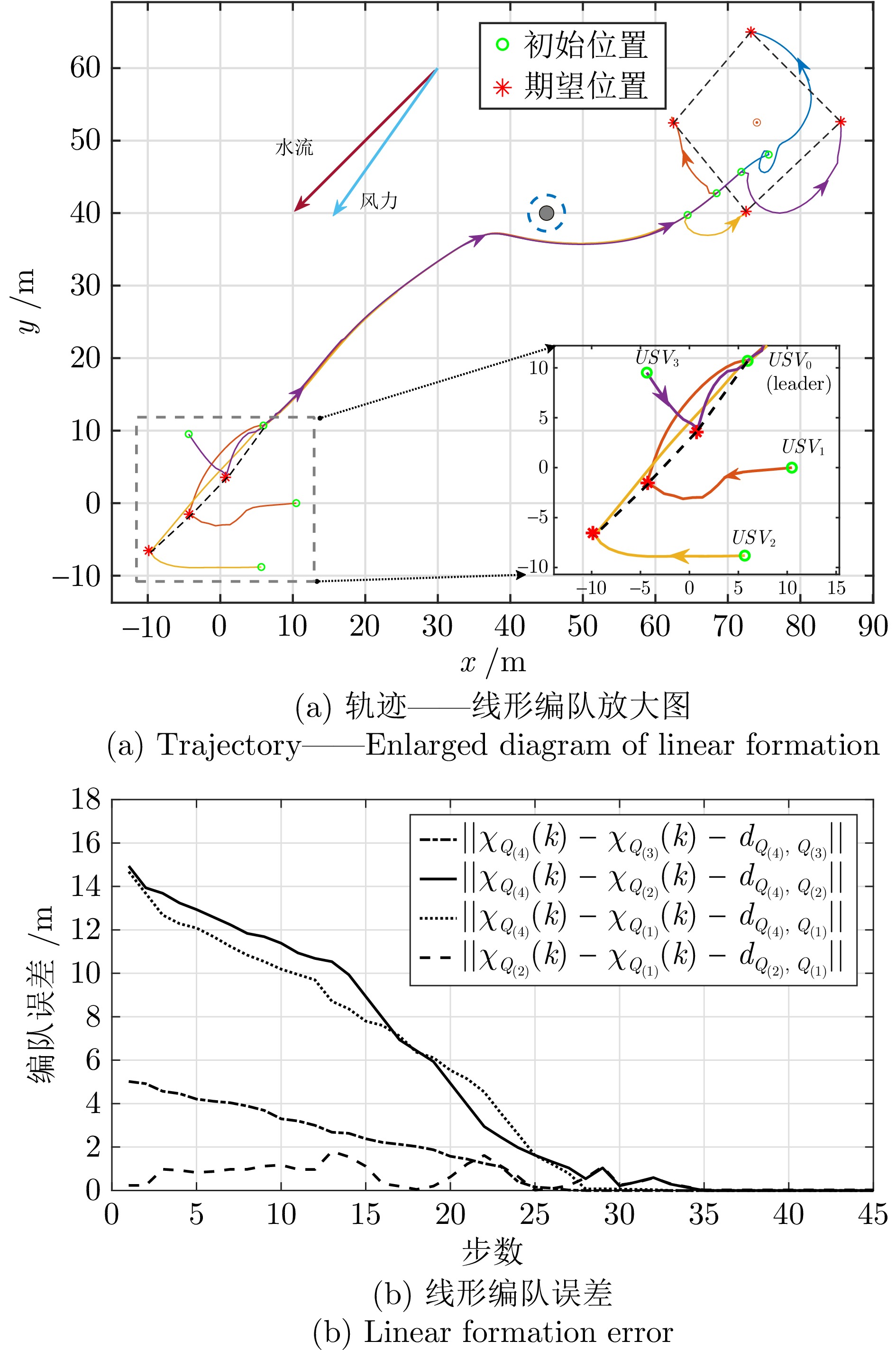
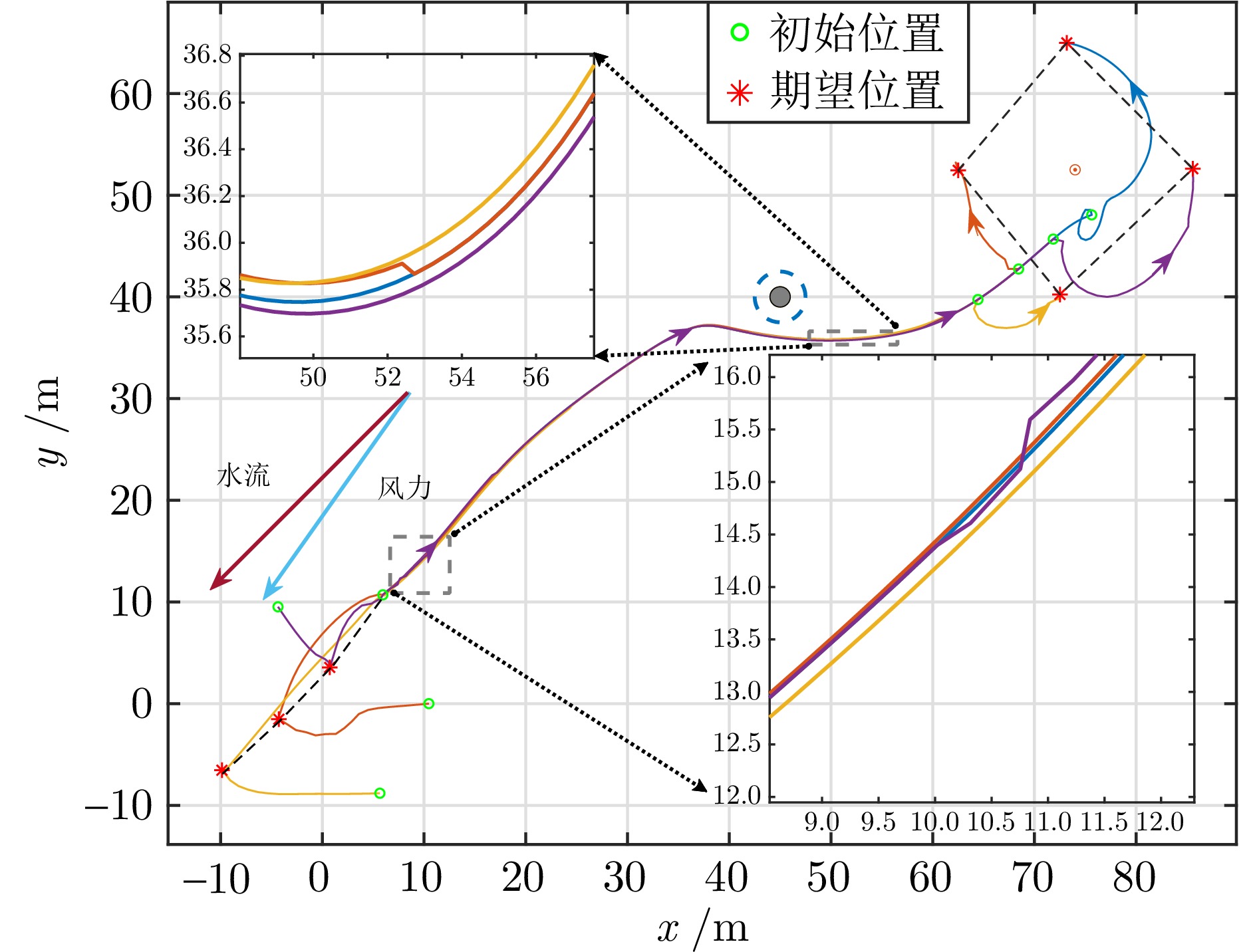
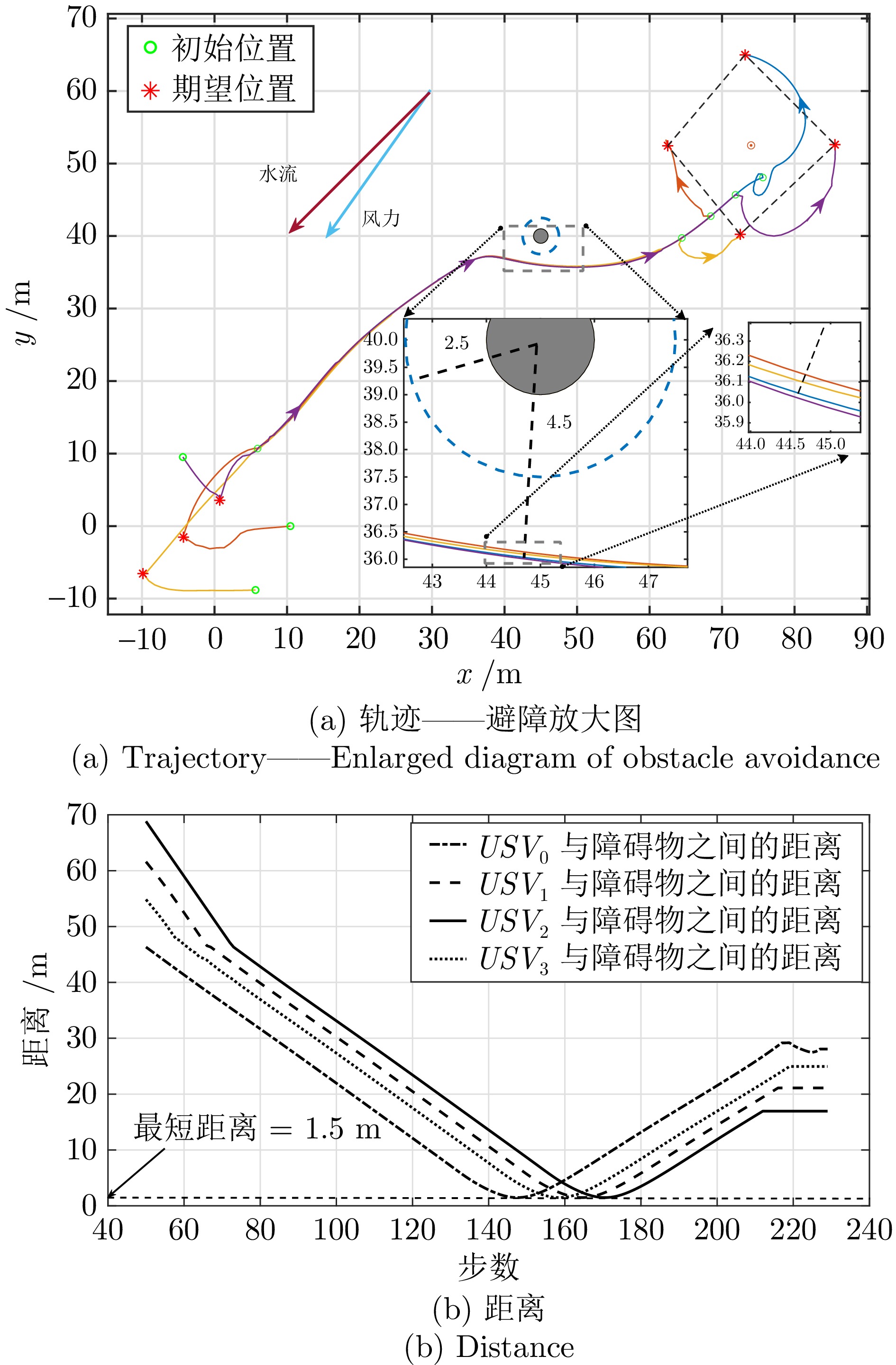
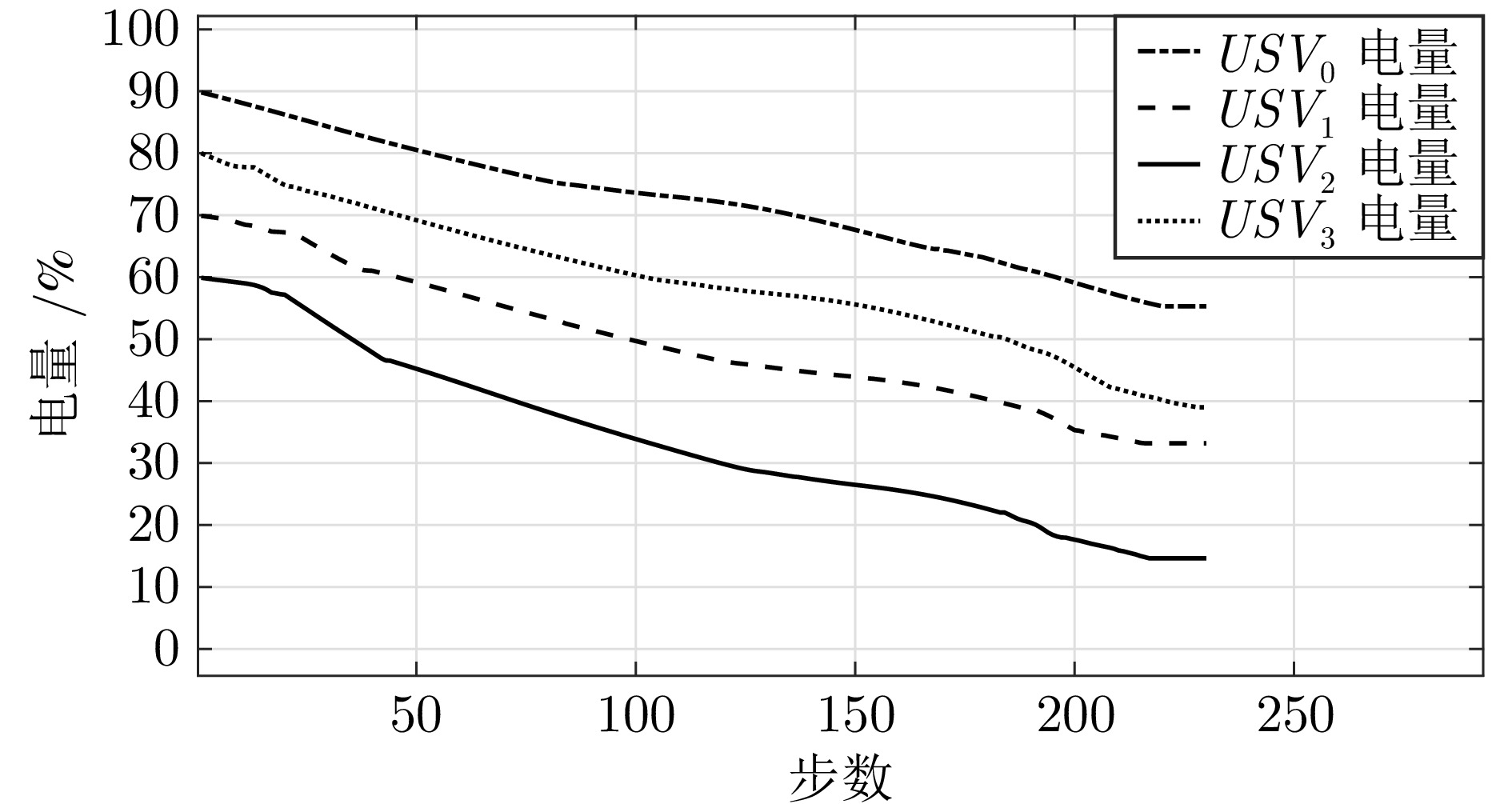
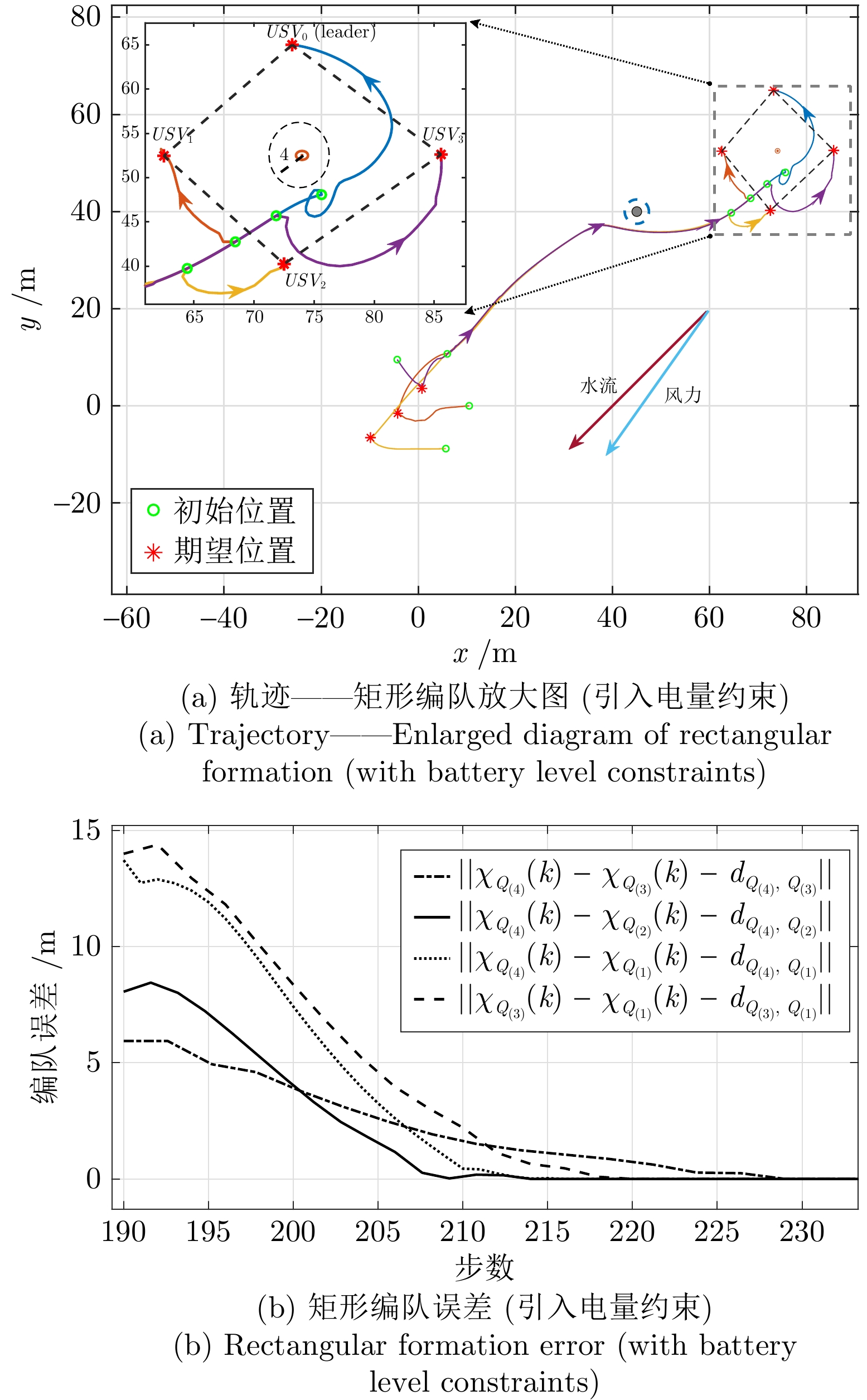
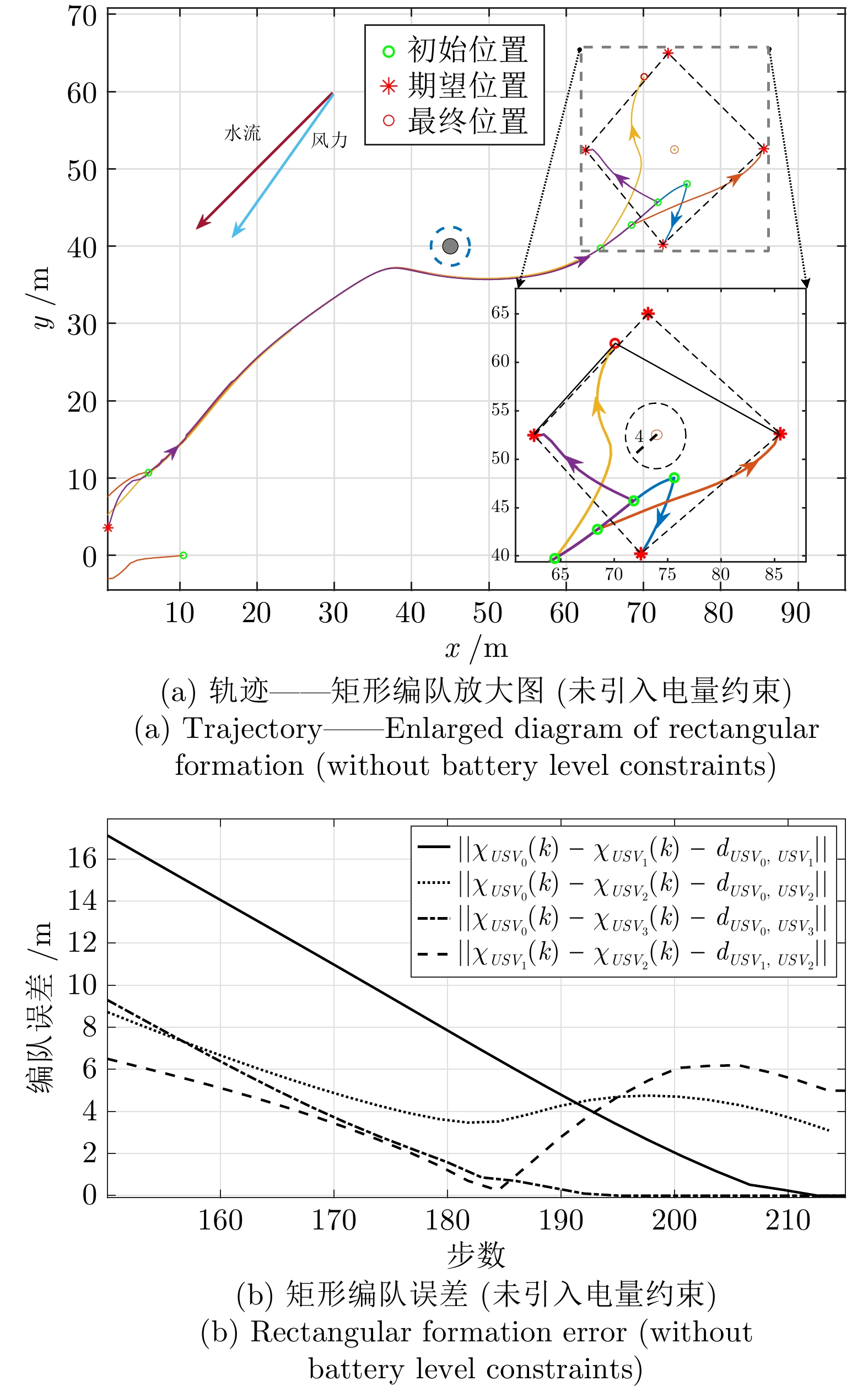
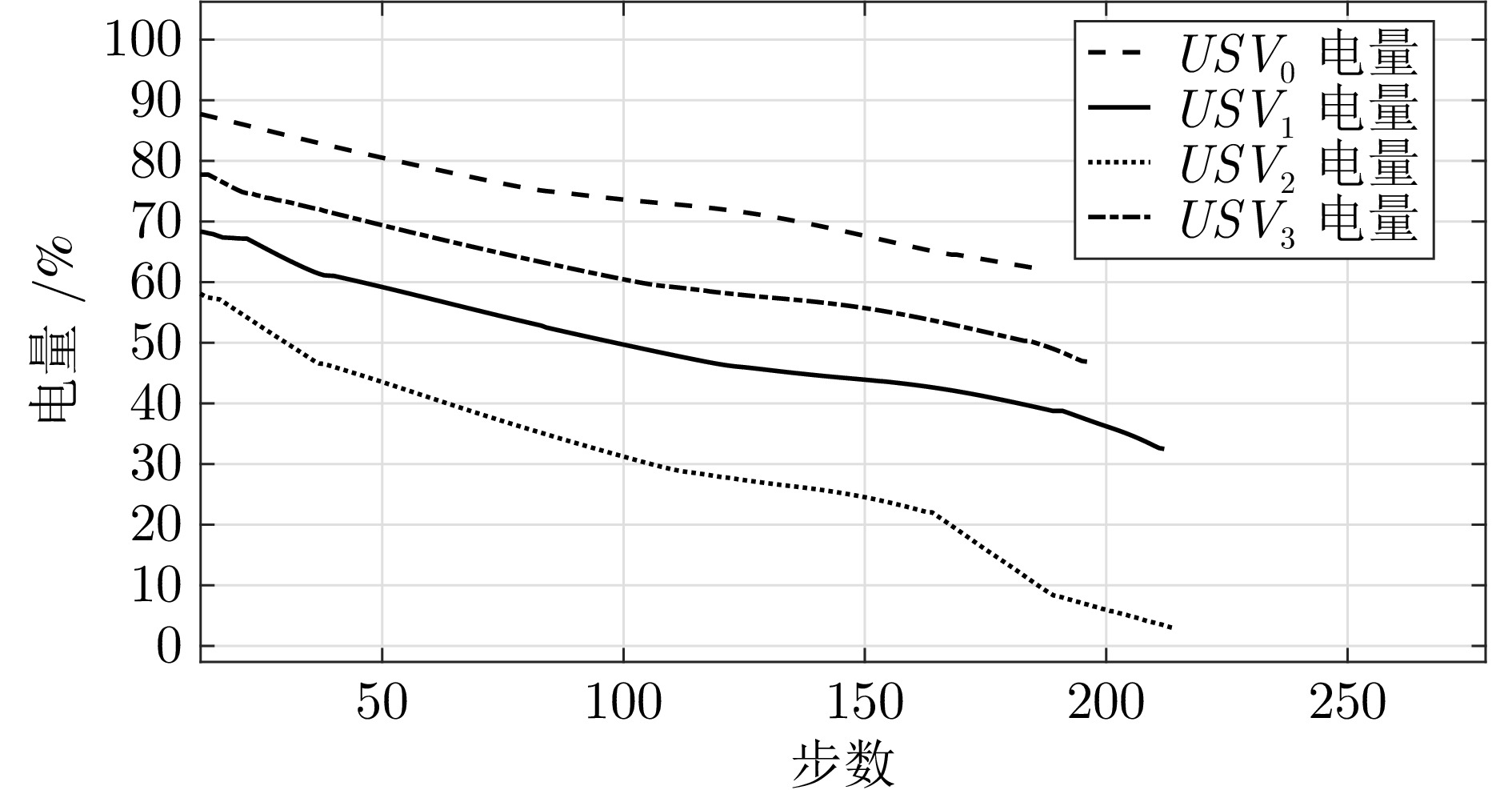
摘要: 研究无人水面舰艇−无人机(USVs-UAV)系统中基于电量状态的编队控制、避障与轨迹跟踪问题, 提出一种分布式模型预测控制方法以实现多无人载具协同. 第一, 基于USV电量设计编队模型, 实时调整编队构型. 第二, 设计空海协同避障机制, 利用UAV空中高度优势构建障碍物监测网络, 实时更新水面障碍物信息至USV群. 第三, 优化控制框架将编队控制、避障与轨迹跟踪问题统一转化为带约束的优化问题, 通过求解最优控制输入实现多无人载具协同.Abstract: The formation control, obstacle avoidance, and trajectory tracking problems in unmanned surface vehicles-unmanned aerial vehicle (USVs-UAV) system is studied, this paper proposes a distributed model predictive control method to achieve multi-unmanned vehicle collaboration. First, a formation model is designed based on the battery level of USV to enable real-time adjustment of formation configurations. Second, an air-sea collaboration obstacle avoidance mechanism is designed, leveraging the aerial altitude advantage of UAV to construct an obstacle monitoring network that continuously updates surface obstacle information to the USVs. Third, the optimized control framework integrates formation control, obstacle avoidance, and trajectory tracking by transforming these problems into a constrained optimization problem, achieving multi-unmanned vehicle collaboration through the solution of optimal control inputs.
-
表 1 UAV的参数
Table 1 Parameters of UAV
参数 值 $m_{a}$ $ 2.000\;\mathrm{kg} $ $ d $ $ 0.200\;\mathrm{N{\cdot} s/m} $ $ \alpha_{d} $ $ 0.010\;\mathrm{N{\cdot} s/m} $ $ I_{xx} $ $ 0.120\;\mathrm{kg{\cdot} m^{2}} $ $ I_{yy} $ $ 0.120\;\mathrm{kg{\cdot} m^{2}} $ $ I_{zz} $ $ 0.250\;\mathrm{kg{\cdot} m^{2}} $ $ k_{tx_{\alpha}} $ $ 0.010\;\mathrm{N{\cdot} s/m} $ $ k_{ty_{\alpha}} $ $ 0.010\;\mathrm{N{\cdot} s/m} $ $ k_{t\theta_{\alpha}} $ $ 0.001\;\mathrm{N{\cdot} s/m} $ $ k_{t\phi_{\alpha}} $ $ 0.001\;\mathrm{N{\cdot} s/m} $ $ k_{t\psi_{\alpha}} $ $ 0.001\;\mathrm{N{\cdot} s/m} $  下载: 导出CSV
下载: 导出CSV
表 2 USV的参数
Table 2 Parameters of USV
参数 值 $m$ $ 23.800\;\mathrm{kg} $ $ X_{\dot{u}} $ $ -2.000\;\mathrm{kg} $ $ Y_{\dot{v}} $ $ -10.000\;\mathrm{kg} $ $ N_{\dot{v}} $ $ 0\;\mathrm{kg {\cdot}t m} $ $ Y_{\dot{r}} $ $ 0\;\mathrm{kg {\cdot}t m} $ $ N_{\dot{r}} $ $ -1.000\;\mathrm{kg {\cdot}t m^{2}} $ $ x_{g} $ $0.046\;\mathrm{m}$ $ d_{11}(\nu_{s}) $ $ (12+2.5|u_{s}|)\;\mathrm{N{\cdot}t s/m} $ $ d_{23}(v_{s}) $ $ 0.200\;\mathrm{N{\cdot}t s/m} $ $ d_{22}(\nu_{s}) $ $ (17+4.5|v_{s}|)\;\mathrm{N{\cdot}t s/m} $ $ d_{32}(v_{s}) $ $ 0.500\;\mathrm{N{\cdot}t s/m} $ $ d_{33}(\nu_{s}) $ $ (0.5+0.1|r_{s}|\;)\mathrm{N{\cdot}t s/m} $
下载: 导出CSV
表 3 初始位置和电量
Table 3 Initial positions and initial battery levels
载具 电量 初始位置(m) $ USV_{0} $ $90\%\;(Q_{(4)})$ $ [6,\; 10.5,\; 0] $ $ USV_{1} $ $70\%\;(Q_{(2)})$ $ [10.5,\; 0,\; 0] $ $ USV_{2} $ $65\%\;(Q_{(1)})$ $ [5.5,\; -9,\; 0] $ $ USV_{3} $ $80\%\;(Q_{(3)})$ $ [-4.3,\; 9.5,\; 0] $
下载: 导出CSV
-
[1] 张卫东, 刘笑成, 韩鹏. 水上无人系统研究进展及其面临的挑战. 自动化学报, 2020, 46(5): 847−857Zhang Wei-Dong, Liu Xiao-Cheng, Han Peng. Progress and challenges of overwater unmanned systems. Acta Automatica Sinica, 2020, 46(5): 847−857 [2] 闫敬, 关新平. 海上无人系统跨域集群发展现状及其关键技术. 自动化学报, 2025, 51(4): 744−761Yan Jing, Guan Xin-Ping. Development status and key techniques for cross-domain swarm of maritime unmanned systems. Acta Automatica Sinica, 2025, 51(4): 744−761 [3] Cheng W, Zhang K, Jiang B. Continuous fixed-time fault-tolerant formation control for heterogeneous multiagent systems under fixed and switching topologies. IEEE Transactions on Vehicular Technology, 2023, 72(2): 1545−1558 doi: 10.1109/TVT.2022.3211609 [4] Xu X, Liu L, Feng G. Consensus of heterogeneous linear multiagent systems with communication time-delays. IEEE Transactions on Cybernetics, 2017, 47(8): 1820−1829 doi: 10.1109/TCYB.2017.2702635 [5] Meng M, Liu L, Feng G. Adaptive output regulation of heterogeneous multiagent systems under markovian switching topologies. IEEE Transactions on Cybernetics, 2018, 48(10): 2962−2971 doi: 10.1109/TCYB.2017.2753382 [6] Zuo S, Song Y, Lewis F, Davoudi A. Time-varying output formation containment of general linear homogeneous and heterogeneous multiagent systems. IEEE Transactions on Control of Network Systems, 2019, 6(2): 537−548 doi: 10.1109/TCNS.2018.2847039 [7] Huang D, Li H, Li X. Formation of generic UAVs-USVs system under distributed model predictive control scheme. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(12): 3123−3127 [8] Huang D, Li H, Li X. Adaptive neural formation control for underactuated unmanned surface vehicles with collision and connectivity constraints. Ocean Engineering, 2021, 226(15): Article No. 108834 [9] 高振宇, 郭戈. 基于扰动观测器的AUVs固定时间编队控制. 自动化学报, 2019, 45(6): 1094−1102Gao Zhen-Yu, Guo Ge. Fixed-time formation control of AUVs based on a disturbance observer. Acta Automatica Sinica, 2019, 45(6): 1094−1102 [10] Li Y, Wu D, Wang H, Lu J. Dynamic collision avoidance for maritime autonomous surface ships based on deep Q-network with velocity obstacle method. Ocean Engineering, 2025, 320: Article No. 120335 doi: 10.1016/j.oceaneng.2025.120335 [11] Xiong Z, Hu Z, Lei X. Multi-robot formation with obstacle avoidance: An improved velocity obstacle-based approach. In: Proceedings of the IEEE International Conference on Unmanned Systems (ICUS). Hefei, China: IEEE, 2000. 829−834 [12] 温广辉, 余星火, 黄廷文, 周艳. 模型参数不确定下多无人艇系统固定时间二分编队跟踪控制. 自动化学报, 2025, 51(3): 669−677Wen Guang-Hui, Yu Xing-Huo, Huang Ting-Wen, Zhou Yan. Fixed-time bipartite formation tracking control for multi-USV systems with uncertain model parameters. Acta Automatica Sinica, 2025, 51(3): 669−677 [13] Zhu Y, Li S, Guo G, Bai J, Yuan P. Formation control of UAV-USV based on distributed event-triggered adaptive MPC with virtual trajectory restriction. Ocean Engineering, 2024, 294: Article No. 116850 doi: 10.1016/j.oceaneng.2024.116850 [14] Dong Z, Liang Z, Liu D, Yu C, Li W. Dynamic formation optimisation for energy saving of a fleet of unmanned surface vehicles based on robust optimisation over time strategy. Ocean Engineering, 2024, 301(12): Article No. 117382 [15] Dong Z, Liang X, Guan X, Li W. Formation optimization of various spacing configurations for a fleet of unmanned surface vehicles based on a hydrodynamic energy-saving strategy. Ocean Engineering, 2022, 266: Article No. 112824 doi: 10.1016/j.oceaneng.2022.112824 [16] Skjetne R, Smogeli O, Fossen T I. Modeling, identification, and adaptive maneuvering of CyberShip II: A complete design with experiments. IFAC Proceedings Volumes, 2004, 37(10): 203−208 doi: 10.1016/S1474-6670(17)31732-9 [17] Roger S, Thor I, Petar V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica, 2024, 41(2): 289−298 [18] Li S, Zhu Y, Guo G, Yuan P, Bai J. A separation and rendezvous control method for the UAV-USV system based on distributed NMPC. IEEE Transactions on Intelligent Vehicles, DOI: 10.1109/TIV.2024.3395639 [19] Touzout W, Benmoussa Y, Benazzouz D, Moreac E, Diguet J. Unmanned surface vehicle energy consumption modelling under various realistic disturbances integrated into simulation environment. Ocean Engineering, 2021, 222: Article No. 108560 doi: 10.1016/j.oceaneng.2020.108560 -

计量
- 文章访问数: 4
- HTML全文浏览量: 2
- 被引次数: 0
