

Vehicle-road Collaborative Perception Technology and Development Trend for Intelligent Connected Vehicles
-
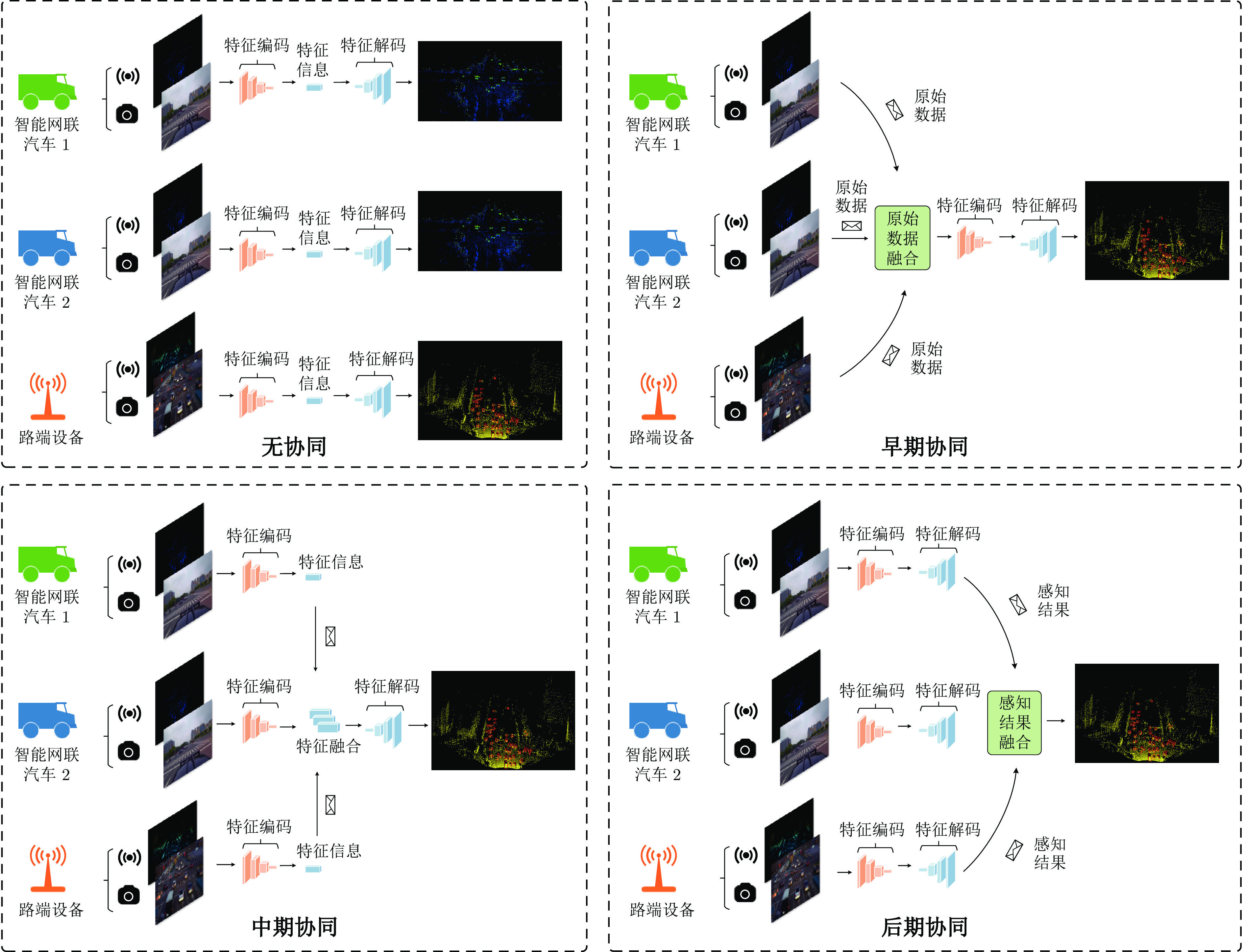
摘要: 随着感知技术的不断发展以及智能交通基础设施的完善, 智能网联汽车应用在自动驾驶领域的地位逐渐提升. 自动驾驶感知从单车智能向车路协同迈进, 近年来涌现出一批新的协同感知技术与方法. 本文旨在全面阐述面向智能网联汽车的车路协同感知技术, 并总结相关可利用数据及该方向的发展趋势. 首先对智能网联汽车的协同感知策略进行划分, 并总结了不同感知策略具备的优势与不足; 其次, 对智能网联汽车协同感知的关键技术进行阐述, 包括车路协同感知过程中的感知技术与通信技术; 然后对车路协同感知方法进行归纳, 总结了近年来解决协同感知中感知融合(Perception fusion, PF)、感知信息选择与压缩(Perception selection and compression, SC)等问题的相关研究; 最后对车路协同感知的大规模数据集进行整理, 并对智能网联汽车协同感知的发展趋势进行分析.Abstract: With the continuous development of perception technology and the improvement of intelligent transportation infrastructure, the status of intelligent connected vehicle applications in the field of autonomous driving has been gradually improved. Autonomous driving perception has progressed from single-vehicle intelligence to vehicle-road collaboration, and several new collaborative perception technologies and methods have emerged in recent years. The purpose of this paper is to comprehensively describe the vehicle-road collaborative perception technology for intelligent connected vehicles, and summarize the relevant available data and the development trend in this direction. Firstly, the collaborative perception strategies for intelligent connected vehicles are divided, and the advantages and shortcomings of different perception strategies are summarized; Secondly, the key technologies of collaborative perception for intelligent connected vehicles are elaborated, including the perception technology and communication technology in the process of vehicle-road collaborative perception; Then the vehicle-road collaborative perception methods are summarized, and the research related to solving the problems of perception fusion (PF), perception selection and compression (SC) in collaborative perception in recent years are summarized; Finally, the large-scale dataset of vehicle-road collaborative perception is organized, and the development trend of collaborative perception of intelligent connected vehicles is analyzed.
-
表 1 不同协同策略传输性能分析
Table 1 Analysis on transmission performance of different collaborative strategies
策略 指标 带宽 (传输速率) 需求 精度/AP@50 算力评估 早期协同 20 Mbps ~ 60 Mbps[19, 28] 60.8%[14] FPS 2.63 ~ 3.45[19] GPU Nvidia Quadro M4000 MACs 31.45 G[14] on V2Xset 中期协同 10 Mbps ~ 20 Mbps[20] V2VNet[22] 57.8%[14] FPS 17.54 ~ 35.71[16] V2X-ViT[16] 58.3%[14] GPU Tesla V100 Where2comm[29] 59.1%[14] MACs 60 ~ 200 G[14] on V2Xset 后期协同 3 Mbps ~ 5 Mbps[15] 56.8%[14] FPS 2.56 ~ 3.23[20] GPU GeForce GTX 1080 TiMACs 31.34 G[14] on V2Xset  下载: 导出CSV
下载: 导出CSV
表 3 车路协同感知方法汇总表
Table 3 Summary table of vehicle-road collaboration perception methods
方法 年份 感知/
通信方法类型 方法特点 协同对象 图像/点云/
融合任务 PF SC SP Cooper[17] 2019 感知 √ 稀疏点云检测 V2V 点云 检测 Who2com[85] 2020 通信 √ 低带宽需求, 无监督学习 — — 通信任务 When2com[86] 2020 通信 √ 动态减少带宽需求, 无监督学习 — — 通信任务 FRLCP[87] 2022 通信 √ 低带宽需求, 强化学习 — — 感知信息选择 MMW-RCSF[49] 2022 通信 √ 传感器融合, 时空同步 — — 标定任务 FPV-RCNN[24] 2022 感知 √ 损失优化, 基于关键点 V2V 传感器融合 检测 Coopernaut[59] 2022 感知 √ 端到端框架 V2V 点云 控制决策 CoBEVT[41] 2022 感知 √ 注意力机制 V2V 图像 BEV分割 V2XP-ASG[81] 2023 感知 √ 场景生成, 对抗攻击 V2X 点云 检测 V2X-ViT[16] 2022 感知 √ 位姿误差, 注意力机制, 自适应信息融合, 多尺度 V2X 点云 检测 MMVR[52] 2022 感知 √ 多尺度, 图神经网络, 注意力机制 V2X 传感器融合 检测 DAIR-V2X[15] 2022 感知 √ 时间补偿延迟融合, 时间异步鲁棒性 V2X 点云
图像检测 CO^3[35] 2023 感知 √ 无监督学习 V2X 点云 检测 RCP-MSF[53] 2022 感知 √ 鲁棒性增强, 低成本点云处理 V2X 传感器融合 检测 3D-Harmonic-Loss[88] 2023 感知 损失函数优化, 点云稀疏检测 V2X 点云 检测 Where2comm[29] 2022 通信 √ 图神经网络, 低带宽需求, 特征压缩 — 点云、图像 检测 PCP6G[89] 2022 通信 √ 新的数据传输类型, 特征压缩 — 点云 检测 H2-FED[90] 2022 通信 √ 连接中断鲁棒性, 隐私保护计算, 联邦学习 V2X — 通信任务 CoPEM[91] 2022 通信 √ 感知错误建模 V2X — — CAP-V2V[92] 2022 通信 √ 多车协同路径规划 V2V 点云 路径规划 ERCP[58] 2023 通信 √ 位姿误差鲁棒性, 基于迭代最近点, 基于最佳传输 V2V — — PCG-SF[93] 2022 通信 √ 参数化协方差, 定位误差鲁棒性, 传感器融合 — — 定位任务 VIMI[43] 2023 感知 √ √ 多尺度, 注意力机制, 特征压缩 V2I 图像 检测 FFNet[37] 2023 感知 √ 特征流预测, 延迟, 自监督学习 V2I 点云 检测 VICOD[50] 2022 感知 √ 低延迟感知, 减少通信成本 V2I 传感器融合 检测 LCCP[57] 2023 感知 √ 注意力机制, 不确定性感知, 有损通信下感知 V2V 点云 检测 UMC[94] 2023 感知 √ √ 多尺度, 图神经网络, 新的协同感知评价指标 V2X 点云 检测 DeepAccident[95] 2024 感知 Transformer 架构, 端到端框架 V2X 图像 事故预测 CoCa3D[42] 2023 感知 √ 仅相机协作 V2X 图像 检测 GevBEV[96] 2023 感知 √ 不确定性感知, 空间高斯 — 点云 BEV分割 CCPAV[66] 2023 通信 √ 新的评分函数, 基站拥塞网络的优化方法 V2X — 感知信息选择 SDVN-V2X[97] 2023 通信 路侧设备中心化 V2X — 通信任务 Among Us[80] 2023 通信 √ 对抗攻击抵御 — 点云 检测
下载: 导出CSV
表 4 车路协同感知数据集汇总表
Table 4 Summary of vehicle-road collaboration perception datasets
数据集 年份 制作单位 场景 传感器 支持任务 数据量 DAIR-V2X[15] 2022 清华大学人工智能产业研究院、百度公司、清华大学计算机科学与技术系和中国科学院大学 城市道路、高速公路(包含多种天气场景)、十字路口 相机、雷达 检测、跟踪 71 254帧 V2X-Sim[104] 2022 纽约大学AI4CE实验室 & 上海交通大学MediaBrain团队 交叉路口 相机、雷达 检测、跟踪、分割 47 200帧 CoopInfo[19] 2022 英国华威大学华威制造集团智能汽车小组 T 型路口 相机 检测 20 000帧 CODD[32] 2022 英国华威大学华威制造集团智能汽车小组 路口场景、环岛场景 雷达 检测、跟踪 5 000帧 IPS300+[101] 2022 清华大学 & 北京万集科技 交叉路口 相机、雷达 检测、跟踪 14 198帧 OPV2V[23] 2022 加州大学洛杉矶分校移动实验室 T 型路口、交叉路口 相机、雷达 检测、跟踪、分割 11 464帧 V2XSet[16] 2022 加州大学洛杉矶分校 & 德克萨斯大学奥斯汀分校 & 谷歌研究院 & 加州大学默塞德分校 十字路口、街区中段和入口坡道 雷达 检测 11 447帧 DOLPHINS[105] 2022 清华大学电子工程系 & 北京交通大学电子信息工程学院 十字路口、丁字路口、陡坡道、高速公路入口匝道和山路(包含多种天气场景) 相机、雷达 检测、跟踪 42 376帧 V2X-Seq[103] 2023 清华大学智能产业研究院 & 百度公司 城市道路、十字路口 相机、雷达 跟踪、轨迹预测 225 000帧 V2V4Real[102] 2023 加州大学洛杉矶分校 高速公路、城市道路 相机、雷达 检测、跟踪、域自适应 60 000帧
下载: 导出CSV
-
[1] 李克强, 戴一凡, 李升波, 边明远. 智能网联汽车(ICV)技术的发展现状及趋势. 汽车安全与节能学报, 2017, 8(1): 1−14Li Ke-Qiang, Dai Yi-Fan, Li Sheng-Bo, Bian Ming-Yuan. State-of-the-art and technical trends of intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2017, 8(1): 1−14 [2] Feng D, Haase-Schütz C, Rosenbaum L, Hertlein H, Gläser C, Timm F, et al. Deep multi-modal object detection and semantic segmentation for autonomous driving: Datasets, methods, and challenges. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1341−1360 doi: 10.1109/TITS.2020.2972974 [3] Yoshihara Y, Morales Y, Akai N, Takeuchi E, Ninomiya Y. Autonomous predictive driving for blind intersections. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 3452−3459 [4] Zhang C, Steinhauser F, Hinz G, Knoll A. Traffic mirror-aware POMDP behavior planning for autonomous urban driving. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Aachen, Germany: IEEE, 2022. 323−330 [5] Wang K, Zhou T Q, Li X C, Ren F. Performance and challenges of 3D object detection methods in complex scenes for autonomous driving. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1699−1716 doi: 10.1109/TIV.2022.3213796 [6] Pilz C, Ulbel A, Steinbauer-Wagner G. The components of cooperative perception——A proposal for future works. In: Proceedings of the IEEE International Intelligent Transportation Systems Conference (ITSC). Indianapolis, USA: IEEE, 2021. 7−14 [7] Bai Z W, Wu G Y, Barth M J, Liu Y K, Sisbot E A, Oguchi K, et al. A survey and framework of cooperative perception: From heterogeneous singleton to hierarchical cooperation. arXiv preprint arXiv: 2208.10590, 2022. [8] Cui G Z, Zhang W L, Xiao Y Q, Yao L, Fang Z P. Cooperative perception technology of autonomous driving in the internet of vehicles environment: A review. Sensors, 2022, 22 (15): Article No. 5535 [9] Ren S L, Chen S H, Zhang W J. Collaborative perception for autonomous driving: Current status and future trend. In: Proceedings of the 5th Chinese Conference on Swarm Intelligence and Cooperative Control. Shenzhen, China: Springer, 2022. 682−692 [10] Sun P P, Sun C H, Wang R M, Zhao X M. Object detection based on roadside LiDAR for cooperative driving automation: A review. Sensors, 2022, 22 (23): Article No. 9316 [11] Yu G Z, Li H, Wang Y P, Chen P, Zhou B. A review on cooperative perception and control supported infrastructure-vehicle system. Green Energy and Intelligent Transportation, 2022, 1 (3): Article No. 100023 [12] Han Y S, Zhang H, Li H F, Jin Y, Lang C Y, Li Y D. Collaborative perception in autonomous driving: Methods, datasets, and challenges. IEEE Intelligent Transportation Systems Magazine, 2023, 15(6): 131−151 doi: 10.1109/MITS.2023.3298534 [13] 丁飞, 张楠, 李升波, 边有钢, 童恩, 李克强. 智能网联车路云协同系统架构与关键技术研究综述. 自动化学报, 2022, 48(12): 2863−2885Ding Fei, Zhang Nan, Li Sheng-Bo, Bian You-Gang, Tong En, Li Ke-Qiang. A survey of architecture and key technologies of intelligent connected vehicle-road-cloud cooperation system. Acta Automatica Sinica, 2022, 48(12): 2863−2885 [14] Liu S, Gao C, Chen Y, Peng X Y, Kong X H, Wang K, et al. Towards vehicle-to-everything autonomous driving: A survey on collaborative perception. arXiv preprint arXiv: 2308.16714, 2023. [15] Yu H B, Luo Y Z, Shu M, Huo Y Y, Yang Z B, Shi Y F, et al. DAIR-V2X: A large-scale dataset for vehicle-infrastructure cooperative 3D object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA: IEEE, 2022. 21329−21338 [16] Xu R S, Xiang H, Tu Z Z, Xia X, Yang M H, Ma J Q. V2X-ViT: Vehicle-to-everything cooperative perception with vision transformer. In: Proceedings of the 17th European Conference on Computer Vision. Tel Aviv, Israel: Springer, 2022. 107−124 [17] Chen Q, Tang S H, Yang Q, Fu S. Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds. In: Proceedings of the IEEE 39th International Conference on Distributed Computing Systems (ICDCS). Dallas, USA: IEEE, 2019. 514−524 [18] Ye E, Spiegel P, Althoff M. Cooperative raw sensor data fusion for ground truth generation in autonomous driving. In: Proceedings of the IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020. 1−7 [19] Arnold E, Dianati M, de Temple R, Fallah S. Cooperative perception for 3D object detection in driving scenarios using infrastructure sensors. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(3): 1852−1864 doi: 10.1109/TITS.2020.3028424 [20] Chen Q, Ma X, Tang S H, Guo J D, Yang Q, Fu S. F-cooper: Feature based cooperative perception for autonomous vehicle edge computing system using 3D point clouds. In: Proceedings of the 4th ACM/IEEE Symposium on Edge Computing. Arlington, Virginia: ACM, 2019. 88−100 [21] Wei S G, Du Y, Chai L G. Interactive perception-based multiple object tracking via CVIS and AV. IEEE Access, 2019, 7: 121907−121921 doi: 10.1109/ACCESS.2019.2937950 [22] Wang T H, Manivasagam S, Liang M, Yang B, Zeng W Y, Urtasun R. V2VNet: Vehicle-to-vehicle communication for joint perception and prediction. In: Proceedings of the 16th European Conference on Computer Vision. Glasgow, UK: Springer, 2020. 605−621 [23] Xu R S, Xiang H, Xia X, Han X, Li J L, Ma J Q. OPV2V: An open benchmark dataset and fusion pipeline for perception with vehicle-to-vehicle communication. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. 2583−2589 [24] Yuan Y S, Cheng H, Sester M. Keypoints-based deep feature fusion for cooperative vehicle detection of autonomous driving. IEEE Robotics and Automation Letters, 2022, 7(2): 3054−3061 doi: 10.1109/LRA.2022.3143299 [25] Kim Y, Hwang S, Bahk S. A study on the feature-level perception sharing of autonomous vehicles. In: Proceedings of the IEEE VTS Asia Pacific Wireless Communications Symposium (APWCS). Seoul, Korea: IEEE, 2022. 109−111 [26] Xu R S, Li J L, Dong X Y, Yu H K, Ma J Q. Bridging the domain gap for multi-agent perception. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. 6035−6042 [27] Allig C, Wanielik G. Alignment of perception information for cooperative perception. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019. 1849−1854 [28] Shi S Y, Cui J H, Jiang Z H, Yan Z Y, Xing G L, Niu J W, et al. VIPS: Real-time perception fusion for infrastructure-assisted autonomous driving. In: Proceedings of the 28th Annual International Conference on Mobile Computing and Networking. Sydney, Australia: ACM, 2022. 133−146 [29] Hu Y, Fang S H, Lei Z X, Zhong Y Q, Chen S H. Where2comm: Communication-efficient collaborative perception via spatial confidence maps. In: Proceedings of the 36th Annual Conference on Neural Information Processing Systems. New Orleans, USA: Curran Associates, Inc., 2022. 4874−4886 [30] Creß C, Bing Z S, Knoll A C. Intelligent transportation systems using roadside infrastructure: A literature survey. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 6309−6327Creß C, Bing Z S, Knoll A C. Intelligent transportation systems using roadside infrastructure: A literature survey. IEEE Transactions on Intelligent Transportation Systems, 2024, 25 (7): 6309−6327 [31] Qiao D H, Zulkernine F. Adaptive feature fusion for cooperative perception using LiDAR point clouds. In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV). Waikoloa, USA: IEEE, 2023. 1186−1195 [32] Arnold E, Mozaffari S, Dianati M. Fast and robust registration of partially overlapping point clouds. IEEE Robotics and Automation Letters, 2022, 7(2): 1502−1509 doi: 10.1109/LRA.2021.3137888 [33] Gu B, Liu J X, Xiong H Y, Li T T, Pan Y L. ECPC-ICP: A 6D vehicle pose estimation method by fusing the roadside lidar point cloud and road feature. Sensors, 2021, 21 (10): Article No. 3489 [34] Bai Z W, Wu G Y, Barth M J, Liu Y K, Sisbot E A, Oguchi K. PillarGrid: Deep learning-based cooperative perception for 3D object detection from onboard-roadside LiDAR. In: Proceedings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). Macao, China: IEEE, 2022. 1743−1749 [35] Chen R J, Mu Y, Xu R S, Shao W Q, Jiang C H, Xu H, et al. CO^3: Cooperative unsupervised 3D representation learning for autonomous driving. In: Proceedings of the Eleventh International Conference on Learning Representations. Kigali, Rwanda: ICLR, 2023. [36] Wang J Y, Zeng Y, Gong Y. Collaborative 3D object detection for automatic vehicle systems via learnable communications. arXiv preprint arXiv: 2205.11849, 2022. [37] Yu H B, Tang Y J, Xie E Z, Mao J L, Yuan J R, Luo P, et al. Vehicle-infrastructure cooperative 3D object detection via feature flow prediction. arXiv preprint arXiv: 2303.10552, 2023. [38] Shi H B, Hou D Z, Li X Y. Center-aware 3D object detection with attention mechanism based on roadside LiDAR. Sustainability, 2023, 15 (3): Article No. 2628 [39] Hussain M, Ali N, Hong J E. Vision beyond the field-of-view: A collaborative perception system to improve safety of intelligent cyber-physical systems. Sensors, 2022, 22 (17): Article No. 6610 [40] Marez D, Nans L, Borden S. Bandwidth constrained cooperative object detection in images. In: Proceedings of the SPIE 12276, Artificial Intelligence and Machine Learning in Defense Applications IV. Berlin, Germany: SPIE, 2022. 128−140 [41] Xu R S, Tu Z Z, Xiang H, Shao W, Zhou B L, Ma J Q. CoBEVT: Cooperative bird's eye view semantic segmentation with sparse transformers. In: Proceedings of the 6th Conference on Robot Learning. Auckland, New Zealand: CoRL, 2022. 989−1000 [42] Hu Y, Lu Y F, Xu R S, Xie W D, Chen S H, Wang Y F. Collaboration helps camera overtake LiDAR in 3D detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023. 9243−9252 [43] Wang Z, Fan S Q, Huo X L, Xu T D, Wang Y, Liu J J, et al VIMI: Vehicle-infrastructure multi-view intermediate fusion for camera-based 3D object detection. arXiv preprint arXiv: 2303.10975, 2023. [44] Fan S Q, Wang Z, Huo X L, Wang Y, Liu J J. Calibration-free BEV representation for infrastructure perception. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. 9008−9013 [45] Cui Y D, Chen R, Chu W B, Chen L, Tian D X, Li Y, et al. Deep learning for image and point cloud fusion in autonomous driving: A review. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 722−739 doi: 10.1109/TITS.2020.3023541 [46] 张新钰, 邹镇洪, 李志伟, 刘华平, 李骏. 面向自动驾驶目标检测的深度多模态融合技术. 智能系统学报, 2020, 15(4): 758−771Zhang Xin-Yu, Zou Zhen-Hong, Li Zhi-Wei, Liu Hua-Ping, Li Jun. Deep multi-modal fusion in object detection for autonomous driving. CAAI Transactions on Intelligent Systems, 2020, 15(4): 758−771 [47] Rossi V, Testolina P, Giordani M, Zorzi M. On the role of sensor fusion for object detection in future vehicular networks. In: Proceedings of the Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit). Porto, Portugal: IEEE, 2021. 247−252 [48] Wang L, Zhang X Y, Song Z Y, Bi J F, Zhang G X, Wei H Y, et al. Multi-modal 3D object detection in autonomous driving: A survey and taxonomy. IEEE Transactions on Intelligent Vehicles, 2023, 8(7): 3781−3798 doi: 10.1109/TIV.2023.3264658 [49] Du Y C, Qin B H, Zhao C, Zhu Y F, Cao J, Ji Y X. A novel spatio-temporal synchronization method of roadside asynchronous MMW radar-camera for sensor fusion. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 22278−22289 doi: 10.1109/TITS.2021.3119079 [50] Yu H, Zhao Y S, Zou Y, Li Q, Yu H Y, Ren Y L. Multistage fusion approach of LiDAR and camera for vehicle-infrastructure cooperative object detection. In: Proceedings of the 5th World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM). Ma'anshan, China: IEEE, 2022. 811−816 [51] Zha Y Y, Shangguan W. Beyond-line-of-sight perception enhancement via information interaction in connected autonomous driving environment. In: Proceedings of the China Automation Congress (CAC). Xiamen, China: IEEE, 2022. 1809−1814 [52] Zhang H, Luo G Y, Cao Y Z H, Jin Y, Li Y D. Multi-modal virtual-real fusion based transformer for collaborative perception. In: Proceedings of the IEEE 13th International Symposium on Parallel Architectures, Algorithms and Programming (PAAP). Beijing, China: IEEE, 2022. 1−6 [53] Zheng S W, Xie C, Yu S H, Ye M, Huang R Y, Li W H. A robust strategy for roadside cooperative perception based on multi-sensor fusion. In: Proceedings of the International Conference on Sensing, Measurement & Data Analytics in the Era of Artificial Intelligence (ICSMD). Harbin, China: IEEE, 2022. 1−6 [54] Singh P K, Nandi S K, Nandi S. A tutorial survey on vehicular communication state of the art, and future research directions. Vehicular Communications, 2019, 18 : Article No. 100164 [55] Zeadally S, Guerrero J, Contreras J. A tutorial survey on vehicle-to-vehicle communications. Telecommunication Systems, 2020, 73(3): 469−489 doi: 10.1007/s11235-019-00639-8 [56] 路莹. 基于5G通信技术的智能网联汽车系统设计. 农机使用与维修, 2023(8): 27−29Lu Ying. Intelligent networked vehicle system design based on 5G communication technology. Agricultural Machinery Using & Maintenance, 2023(8): 27−29 [57] Li J L, Xu R S, Liu X Y, Ma J, Chi Z C, Ma J Q, et al. Learning for vehicle-to-vehicle cooperative perception under lossy communication. IEEE Transactions on Intelligent Vehicles, 2023, 8(4): 2650−2660 doi: 10.1109/TIV.2023.3260040 [58] Song Z Y, Wen F X, Zhang H L, Li J. A cooperative perception system robust to localization errors. In: Proceedings of 2023 IEEE Intelligent Vehicles Symposium. Anchorage, Alaska, USA: IEEE, 2023. 1−6 [59] Cui J X, Qiu H, Chen D, Stone P, Zhu Y K. Coopernaut: End-to-end driving with cooperative perception for networked vehicles. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA: IEEE, 2022. 17231−17241 [60] Bai Z W, Wu G Y, Qi X W, Liu Y K, Oguchi K, Barth M J. Infrastructure-based object detection and tracking for cooperative driving automation: A survey. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Aachen, Germany: IEEE, 2022. 1366−1373 [61] Wang Y H, Sun W, Liu C X, Cui Z Y, Zhu M X, Pu Z Y. Cooperative perception of roadside unit and onboard equipment with edge artificial intelligence for driving assistance [Online], available: https://rosap.ntl.bts.gov/view/dot/60635, September 14, 2023 [62] Mo Y H, Zhang P L, Chen Z J, Ran B. A method of vehicle-infrastructure cooperative perception based vehicle state information fusion using improved Kalman filter. Multimedia Tools and Applications, 2022, 81(4): 4603−4620 doi: 10.1007/s11042-020-10488-2 [63] 朱永薪, 李永福, 朱浩, 于树友. 通信延时环境下基于观测器的智能网联车辆队列分层协同纵向控制. 自动化学报, 2023, 49(8): 1785−1798Zhu Yong-Xin, Li Yong-Fu, Zhu Hao, Yu Shu-You. Observer-based longitudinal control for connected and automated vehicles platoon subject to communication delay. Acta Automatica Sinica, 2023, 49(8): 1785−1798 [64] Bai Z W, Wu G Y, Barth M J, Liu Y K, Sisbot E A, Oguchi K. Cooperverse: A mobile-edge-cloud framework for universal cooperative perception with mixed connectivity and automation. arXiv preprint arXiv: 2302.03128, 2023. [65] Morgan Y L. Notes on DSRC & WAVE standards suite: Its architecture, design, and characteristics. IEEE Communications Surveys & Tutorials, 2010, 12(4): 504−518 [66] Hakim B, Sorour S, Hefeida M S, Alasmary W S, Almotairi K H. CCPAV: Centralized cooperative perception for autonomous vehicles using CV2X. Ad Hoc Networks, 2023, 142 : Article No. 103101 [67] Zaman M, Saifuddin M, Razzaghpour M, Fallah Y P. Performance analysis of V2I zone activation and scalability for C-V2X transactional services. In: Proceedings of the IEEE 96th Vehicular Technology Conference (VTC2022-Fall). London, United Kingdom: IEEE, 2022. 1−5 [68] Huang Z L, Chen S K, Pian Y Z, Sheng Z H, Ahn S, Noyce D A. CV2X-LOCA: Roadside unit-enabled cooperative localization framework for autonomous vehicles. arXiv preprint arXiv:2304.00676, 2023. [69] 吕品, 许嘉, 李陶深, 徐文彪. 面向自动驾驶的边缘计算技术研究综述. 通信学报, 2021, 42(3): 190−208Lv Pin, Xu Jia, Li Tao-Shen, Xu Wen-Biao. Survey on edge computing technology for autonomous driving. Journal on Communications, 2021, 42(3): 190−208 [70] Lee S, Jung Y, Park Y, Kim S. Design of V2X-based vehicular contents centric networks for autonomous driving. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 13526−13537 doi: 10.1109/TITS.2021.3125358 [71] Lu Y F, Li Q H, Liu B A, Dianati M, Feng C, Chen S H, et al. Robust collaborative 3D object detection in presence of pose errors. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. 4812−4818 [72] Luo G Y, Zhang H, Yuan Q, Li J L. Complementarity-enhanced and redundancy-minimized collaboration network for multi-agent perception. In: Proceedings of the 30th ACM International Conference on Multimedia. Lisboa, Portugal: Association for Computing Machinery, 2022. 3578−3586 [73] Wang J, Luo G Y, Yuan Q, Li J L. F-transformer: Point cloud fusion transformer for cooperative 3D object detection. In: Proceedings of the 31st International Conference on Artificial Neural Networks. Bristol, UK: Springer, 2022. 171−182 [74] Wang J D, Wang Z D, Yu B, Tang J, Song S L, Liu C, et al. Data fusion in infrastructure-augmented autonomous driving system: Why? Where? And how? IEEE Internet of Things Journal, 2023, 10 (18): 15857−15871 [75] Yang D, Yang K, Wang Y, Liu J, Xu Z, Yin R, et al. How2comm: Communication-efficient and collaboration-pragmatic multi-agent perception. In: Proceedings of the 2023 Conference on Neural Information Processing Systems. New Orleans, USA: Curran Associates, Inc., 2023. 25151–25164 [76] Thornton S, Flowers B, Dey S. Multi-source feature fusion for object detection association in connected vehicle environments. IEEE Access, 2022, 10: 131841−131854 doi: 10.1109/ACCESS.2022.3228735 [77] Miller A, Rim K, Chopra P, Kelkar P, Likhachev M. Cooperative perception and localization for cooperative driving. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. 1256−1262 [78] Lei Z X, Ren S L, Hu Y, Zhang W J, Chen S H. Latency-aware collaborative perception. In: Proceedings of the 17th European Conference on Computer Vision. Tel Aviv, Israel: Springer, 2022. 316−332 [79] Wang K, Wang Y, Liu B J, Chen J L. Quantification of uncertainty and its applications to complex domain for autonomous vehicles perception system. IEEE Transactions on Instrumentation and Measurement, 2023, 72 : Article No. 5010217 [80] Li Y M, Fang Q, Bai J M, Chen S H, Xu J F, Feng C. Among us: Adversarially robust collaborative perception by consensus. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023. 186−195 [81] Xiang H, Xu R S, Xia X, Zheng Z L, Zhou B L, Ma J Q. V2XP-ASG: Generating adversarial scenes for vehicle-to-everything perception. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. 3584−3591 [82] Wang S, Li C Y, Ng D W, Eldar Y C, Poor H V, Hao Q, et al. Federated deep learning meets autonomous vehicle perception: Design and verification. IEEE Network, 2023, 37(3): 16−25 doi: 10.1109/MNET.104.2100403 [83] Ahmed M, Raza S, Mirza M A, Aziz A, Khan M A, Khan W U, et al. A survey on vehicular task offloading: Classification, issues, and challenges. Journal of King Saud University-Computer and Information Sciences, 2022, 34(7): 4135−4162 doi: 10.1016/j.jksuci.2022.05.016 [84] Qayyum A, Usama M, Qadir J, Al-Fuqaha A. Securing connected & autonomous vehicles: Challenges posed by adversarial machine learning and the way forward. IEEE Communications Surveys & Tutorials, 2020, 22(2): 998−1026 [85] Liu Y C, Tian J J, Ma C Y, Glaser N, Kuo C W, Kira Z. Who2com: Collaborative perception via learnable handshake communication. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. 6876−6883 [86] Liu Y C, Tian J J, Glaser N, Kira Z. When2com: Multi-agent perception via communication graph grouping. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 4105−4114 [87] Abdel-Aziz M K, Perfecto C, Samarakoon S, Bennis M, Saad W. Vehicular cooperative perception through action branching and federated reinforcement learning. IEEE Transactions on Communications, 2022, 70(2): 891−903 doi: 10.1109/TCOMM.2021.3126650 [88] Zhang H L, Mekala M S, Yang D F, Isaacs J, Nain Z, Park J H, et al. 3D harmonic loss: Towards task-consistent and time-friendly 3D object detection on edge for V2X orchestration. IEEE Transactions on Vehicular Technology, 2023, 72(12): 15268−15279 doi: 10.1109/TVT.2023.3291650 [89] Wang J, Guo X Y, Wang H D, Jiang P, Chen T Y, Sun Z M. Pillar-based cooperative perception from point clouds for 6g-enabled cooperative autonomous vehicles. Wireless Communications and Mobile Computing, 2022, 2022 : Article No. 3646272 [90] Song R, Zhou L G, Lakshminarasimhan V, Festag A, Knoll A. Federated learning framework coping with hierarchical heterogeneity in cooperative ITS. In: Proceedings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). Macao, China: IEEE, 2022. 3502−3508 [91] Piazzoni A, Cherian J, Vijay R, Chau L P, Dauwels J. CoPEM: Cooperative perception error models for autonomous driving. In: Proceedings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). Macao, China: IEEE, 2022. 3934−3939 [92] Zhang S Y, Wang S, Yu S, Yu J J Q, Wen M W. Collision avoidance predictive motion planning based on integrated perception and V2V communication. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9640−9653 doi: 10.1109/TITS.2022.3173674 [93] Andert E, Shrivastava A. Accurate cooperative sensor fusion by parameterized covariance generation for sensing and localization pipelines in CAVs. In: Proceedings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). Macao, China: IEEE, 2022. 3595−3602 [94] Wang T H, Chen G, Chen K, Liu Z F, Zhang B, Knoll A, et al. UMC: A unified bandwidth-efficient and multi-resolution based collaborative perception framework. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023. 8153−8162 [95] Wang T Q, Kim S, Ji W X, Xie E Z, Ge C J, Chen J S, et al. DeepAccident: A motion and accident prediction benchmark for V2X autonomous driving. In: Proceedings of the 38th AAAI Conference on Artificial Intelligence. Vancouver, Canada: AAAI, 2024. 5599−5606 [96] Yuan Y S, Cheng H, Yang M Y, Sester M. Generating evidential BEV maps in continuous driving space. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 204: 27−41 doi: 10.1016/j.isprsjprs.2023.08.013 [97] Li Z D, Yu T, Suzuki T, Sakaguchi K. Building an SDVN framework for RSU-centric cooperative perception with heterogeneous V2X. In: Proceedings of the IEEE 20th Consumer Communications & Networking Conference (CCNC). Las Vegas, USA: IEEE, 2023. 1−7 [98] Tian Y L, Wang J G, Wang Y T, Zhao C, Yao F, Wang X. Federated vehicular transformers and their federations: Privacy-preserving computing and cooperation for autonomous driving. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 456−465 doi: 10.1109/TIV.2022.3197815 [99] Song R, Liu D, Chen D Z, Festag A, Trinitis C, Schulz M, et al. Federated learning via decentralized dataset distillation in resource-constrained edge environments. In: Proceedings of the International Joint Conference on Neural Networks (IJCNN). Gold Coast, Australia: IEEE, 2023. 1−10 [100] Song R, Xu R S, Festag A, Ma J Q, Knoll A. FedBEVT: Federated learning bird's eye view perception transformer in road traffic systems. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 958−969 doi: 10.1109/TIV.2023.3310674 [101] Wang H N, Zhang X Y, Li Z W, Li J, Wang K, Lei Z, et al. IPS300+: A challenging multi-modal data sets for intersection perception system. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. 2539−2545 [102] Xu R S, Xia X, Li J L, Li H Z, Zhang S, Tu Z Z, et al. V2V4Real: A real-world large-scale dataset for vehicle-to-vehicle cooperative perception. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023. 13712−13722 [103] Yu H B, Yang W X, Ruan H Z, Yang Z W, Tang Y J, Gao X, et al. V2X-seq: A large-scale sequential dataset for vehicle-infrastructure cooperative perception and forecasting. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023. 5486−5495 [104] Li Y M, Ma D K, An Z Y, Wang Z X, Zhong Y Q, Chen S H, et al. V2X-Sim: Multi-agent collaborative perception dataset and benchmark for autonomous driving. IEEE Robotics and Automation Letters, 2022, 7(4): 10914−10921 doi: 10.1109/LRA.2022.3192802 [105] Mao R Q, Guo J Y, Jia Y K, Sun Y X, Zhou S, Niu Z S. DOLPHINS: Dataset for collaborative perception enabled harmonious and interconnected self-driving. In: Proceedings of the 16th Asian Conference on Computer Vision. Macao, China: Springer, 2022. 495−511 [106] Azfar T, Li J L, Yu H K, Cheu R L, Lv Y S, Ke R M. Deep learning-based computer vision methods for complex traffic environments perception: A review. Data Science for Transportation, 2024, 6 (1): Article No. 1 [107] Cai X Y, Jiang W T, Xu R S, Zhao W Q, Ma J Q, Liu S, et al. Analyzing infrastructure LiDAR placement with realistic LiDAR simulation library. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. 5581−5587 -

 下载:
下载:

图(7) / 表(4)
计量
- 文章访问数: 4140
- HTML全文浏览量: 2221
- PDF下载量: 838
- 被引次数: 0
