

Secure H∞ Platooning Control for Connected Vehicles Subject to External Disturbance and Random DoS Attacks
-
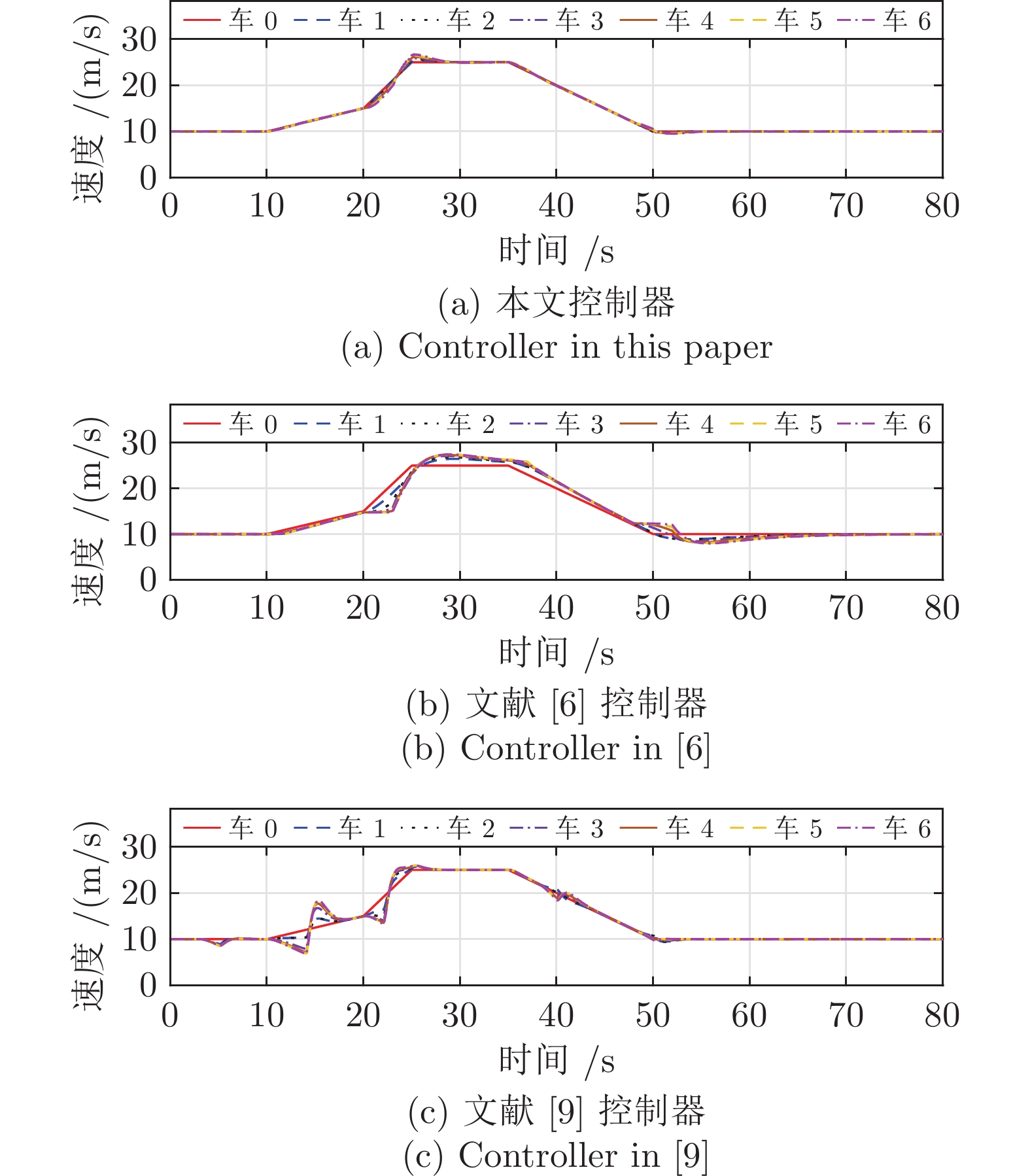
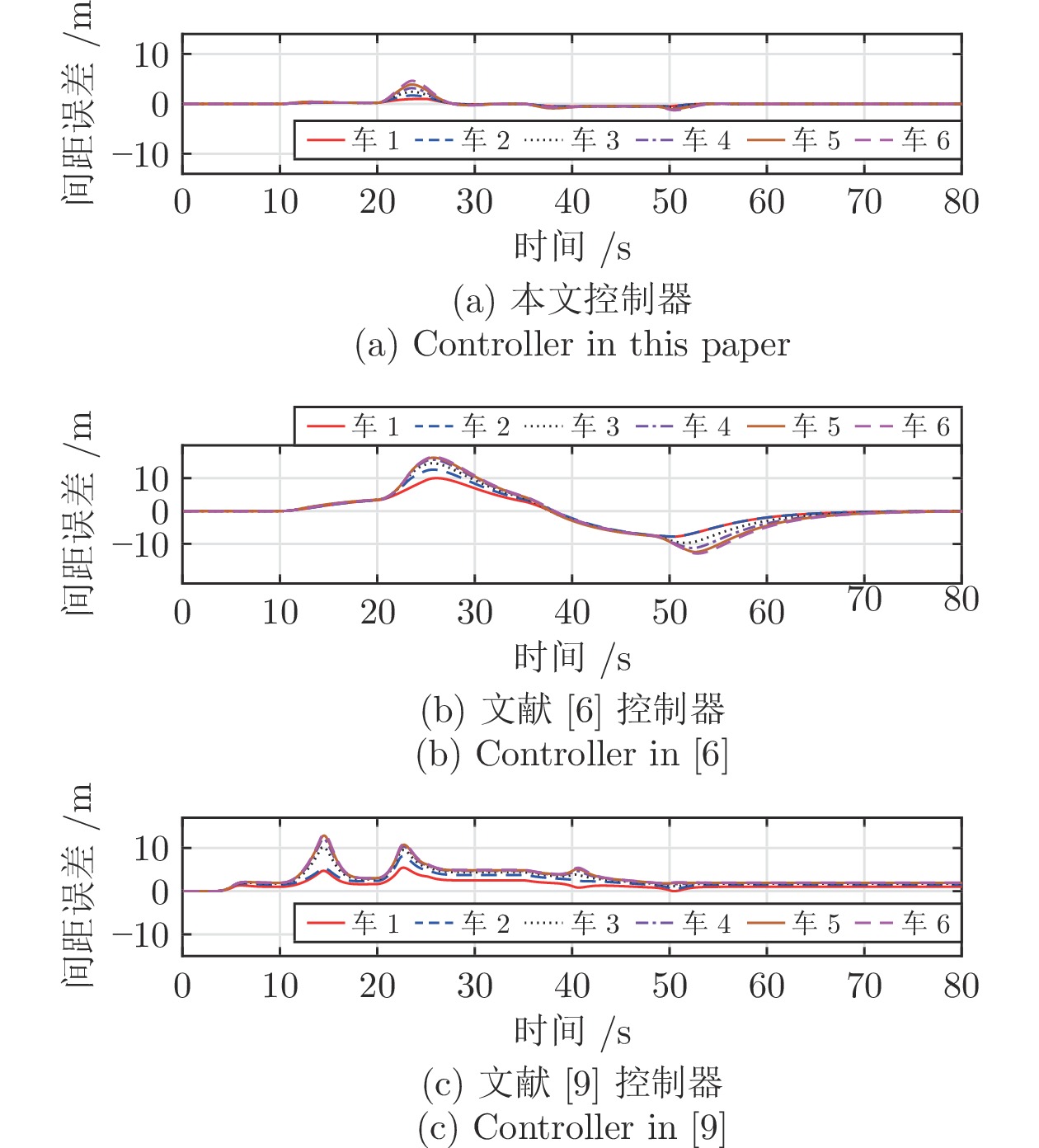
摘要: 针对网联车队列系统易受到干扰和拒绝服务(Denial of service, DoS)攻击问题, 提出一种外部干扰和随机DoS攻击作用下的网联车安全H∞ 队列控制方法. 首先, 采用马尔科夫随机过程, 将网联车随机DoS攻击特性建模为一个随机通信拓扑切换模型, 据此设计网联车安全队列控制协议. 然后, 采用线性矩阵不等式(Linear matrix inequality, LMI)技术计算安全队列控制器参数, 并应用Lyapunov-Krasovskii稳定性理论, 建立在外部扰动和随机DoS攻击下队列系统稳定性充分条件. 在此基础上, 分析得到该队列闭环系统的弦稳定性充分条件. 最后, 通过7辆车组成的队列系统对比仿真实验, 验证该方法的优越性.Abstract: In response to the vulnerability of connected vehicle platoon systems to disturbances and denial of service (DoS) attacks, a secure H∞ platooning control approach is proposed for connected vehicles subject to external disturbances and random DoS attacks. Utilizing Markov random processes, the characteristics of random DoS attacks on connected vehicles are modeled as a stochastic communication topology switching model, based on which a protocol for secure platooning control is designed. Next, the parameters of the secure queue controller are computed using linear matrix inequality (LMI) techniques, and the Lyapunov-Krasovskii stability theory is applied to establish sufficient conditions for stability of the platoon system under the external disturbances and random DoS attacks. On this basis, the sufficient conditions for the string stability of the closed-loop system of the platoon are obtained. Finally, the superiority of the results presented in this paper is verified through comparative simulation experiments on a platoon system composed of seven vehicles.
-
Key words:
- Connected automated vehicles /
- platooning control /
- secure control /
- random DoS attacks /
- stability
-
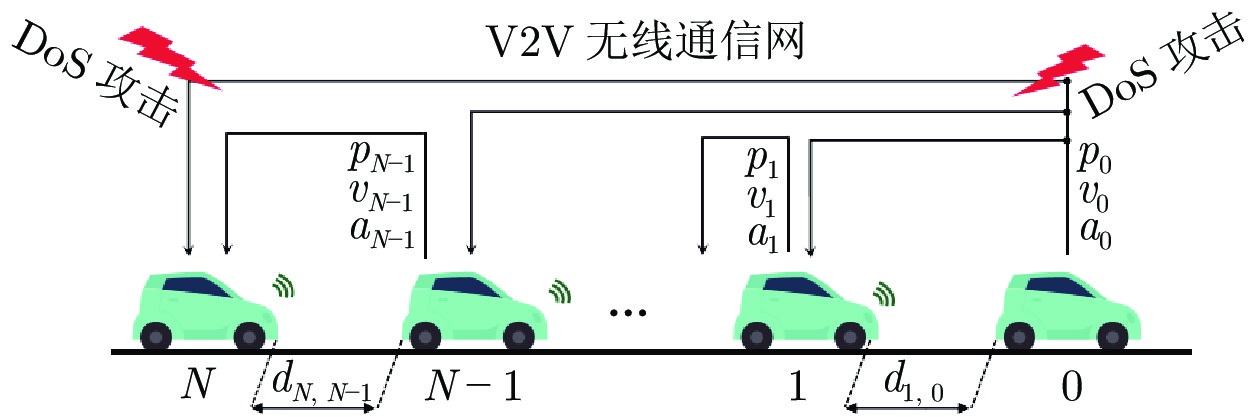
图 1 DoS攻击下的网联车队列示意图
Fig. 1 A schematic of a connected vehicle platoon subject to DoS attacks
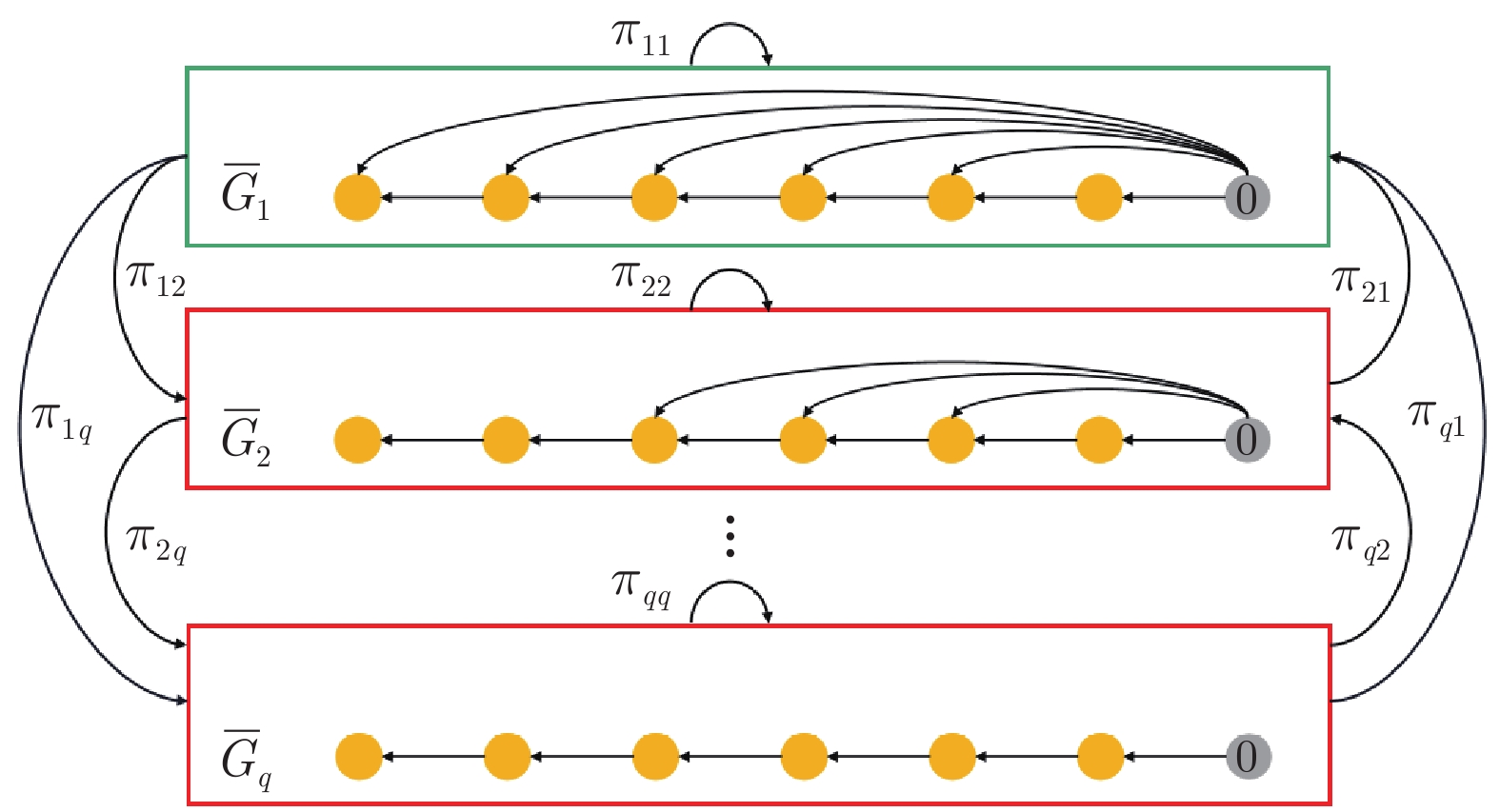
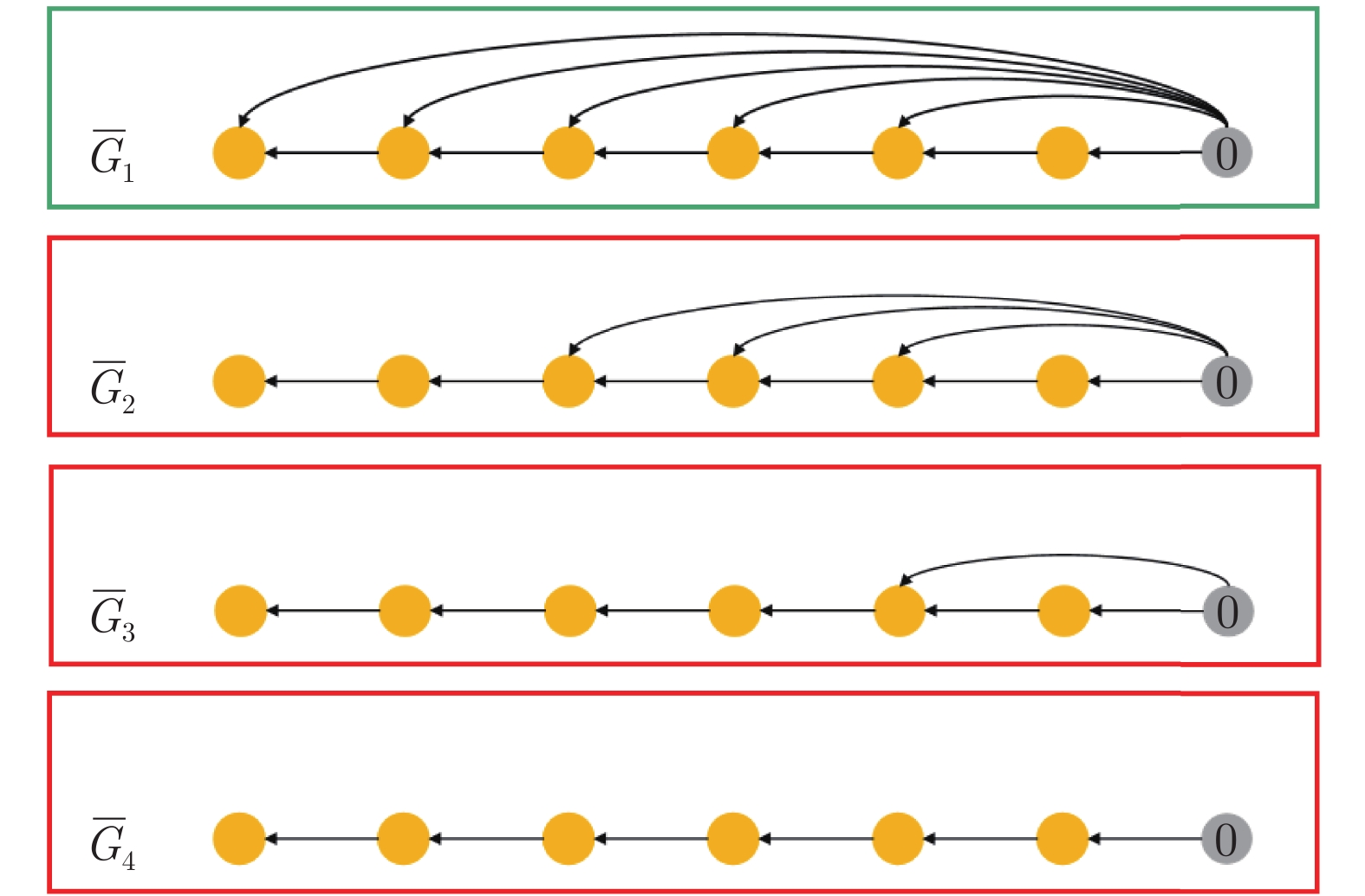
图 2 DoS攻击造成的拓扑切换示意图
Fig. 2 A schematic of topologies switching suffered from DoS attacks
表 1 仿真参数
Table 1 The parameters of simulation
参数 数值 参数 数值 $d_{des} \;({\rm{m} })$ 5.00 $k_{p}$ 1.7391 $l \;({\rm{s} })$ 1.00 $k_{v}$ 3.3422 $\tau_{i}\;({\rm{s}})$ 0.54 $k_{a}$ 2.8996 $\gamma$ 1.50 c 1.5200  下载: 导出CSV
下载: 导出CSV
-
[1] 朱永薪, 李永福, 朱浩, 于树友. 通信延时环境下基于观测器的智能网联车辆队列分层协同纵向控制. 自动化学报, 2023, 49(8): 1785-1798 doi: 10.16383/j.aas.c210311Zhu Yong-Xin, Li Yong-Fu, Zhu Hao, Yu Shu-You. Observer-based longitudinal control for connected and automated vehicles platoon subject to communication delay. Acta Automatica Sinica, 2023, 49(8): 1785-1798 doi: 10.16383/j.aas.c210311 [2] 陈滏媛, 董振江, 董建阔, 徐敏杰. 车联网安全防护技术综述. 电信科学, 2023, 39(3): 1-15 doi: 10.11959/j.issn.1000-0801.2023046Chen Fu-Yuan, Dong Zhen-Jiang, Dong Jian-Kuo, Xu Min-Jie. A review of security protection technology for internet of vehicles. Telecommunications Science, 2023, 39(3): 1-15 doi: 10.11959/j.issn.1000-0801.2023046 [3] 杨飞生, 汪璟, 潘泉, 康沛沛. 网络攻击下信息物理融合电力系统的弹性事件触发控制. 自动化学报, 2019, 45(1): 110-119 doi: 10.16383/j.aas.c180388Yang Fei-Sheng, Wang Jing, Pan Quan, Kang Pei-Pei. Resilient event-triggered control of grid cyber-physical systems against cyber Attack. Acta Automatica Sinica, 2019, 45(1): 110-119 doi: 10.16383/j.aas.c180388 [4] Petit J, Shladover SE. Potential cyberattacks on automated vehicles. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 546-556 [5] Xiao S Y, Ge X H, Han Q L, Zhang Y J. Secure distributed adaptive platooning control of automated vehicles over vehicular ad-hoc networks under denial-of-service attacks. IEEE Transactions on Cybernetics, 2022, 52(11): 12003-12015 doi: 10.1109/TCYB.2021.3074318 [6] Zhang D, Shen Y P, Zhou S Q, Dong X W, Yu L. Distributed secure platoon control of connected vehicles subject to DoS attack: theory and application. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(11): 7269-7278 doi: 10.1109/TSMC.2020.2968606 [7] Chen J C, Zhang H, Yin G D. Distributed dynamic event-triggered secure model predictive control of vehicle platoon against DoS attacks. IEEE Transactions on Vehicular Technology, 2023, 72(3): 2863-2877 doi: 10.1109/TVT.2022.3215966 [8] Zhao H, Li W D, Li Z C. Resilient event-triggered control for vehicular networked systems under markovian jump DoS jamming attacks. IEEE Transactions on Vehicular Technology, 2023, 72(4): 4182-4195 doi: 10.1109/TVT.2022.3197192 [9] Zhao Y, Liu Z C, Wong W S. Resilient platoon control of vehicular cyber physical systems under DoS attacks and multiple disturbances. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10945-10956 doi: 10.1109/TITS.2021.3097356 [10] Liu Y H. Secure control of networked switched systems with random DoS attacks via event-triggered approach. In: Proceedings of the 40th Chinese Control Conference. Shanghai, China: 2021. 1399−1404 [11] Sun Y G, Wang L. Consensus of multi-agent systems in directed networks with nonuniform time-varying delays. IEEE Transactions on Automatic Control, 2009, 54(7): 1607-1613 doi: 10.1109/TAC.2009.2017963 [12] Ploeg J, P.Shukla D, Wouw N, Nijmeijer H. Controller synthesis for string stability of vehicle platoons. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 854-865 doi: 10.1109/TITS.2013.2291493 [13] Zhou J S, Tian D X, Sheng Z G, Duan X T, Qu G X, Zhao D Z, et al. Robust min-max model predictive vehicle platooning with causal disturbance feedback. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 15878-15897 doi: 10.1109/TITS.2022.3146149 [14] Liu Y G, Gao H L, Xu B G, Liu G Y, Cheng H. Autonomous coordinated control of a platoon of vehicles with multiple disturbances. IET Control Theory Appl, 2014, 8(18): 2325-2335 doi: 10.1049/iet-cta.2014.0172 [15] Kwon J W, Chwa D. Adaptive bidirectional platoon control using a coupled sliding mode control method. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5): 2040-2048 doi: 10.1109/TITS.2014.2308535 [16] Wang P W, Deng H, Zhang J, Wang L, Zhang M F, Li Y F. Model predictive control for connected vehicle platoon under switching communication topology. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7817-7830 doi: 10.1109/TITS.2021.3073012 [17] Huang C, Coskun S, Wang J, Mei P, Shi Q. Robust H∞ dynamic output-feedback control for CACC with ROSSs subject to RODAs. IEEE Transactions on Vehicular Technology, 2022, 71(1): 137-147 doi: 10.1109/TVT.2021.3128635 [18] Ge X H, Han Q L, Wu Q, Zhang X M. Resilient and safe platooning control of connected automated vehicles against intermittent Denial-of-Service attacks. IEEE/ CAA Journal of Automatica Sinica, 2023, 10(5): 1234-1251 doi: 10.1109/JAS.2022.105845 [19] Petrillo A, Pescapé A, Santini S. A secure adaptive control for cooperative driving of autonomous conn-ected vehicles in the presence of heterogeneous co-mmunication delays and cyberattacks. IEEE Transac-tions on Cybernetics, 2021, 51(3): 1134-1149 doi: 10.1109/TCYB.2019.2962601 [20] Li Z Y, Zhou B, Lam J. Lyapunov-Krasovskii functionals for predictor feedback control of linear systems with multiple input delays. In: Proceedings of the 33rd Chinese Control Conference. Nanjing, China: 2014. 6136−6141 [21] Wen S X, Guo G. Sampled-Data Control for Connected vehicles with markovian switching topologies and communication delay. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(7): 2930-2942 doi: 10.1109/TITS.2019.2921781 -

 下载:
下载:

图(6) / 表(2)
计量
- 文章访问数: 1063
- HTML全文浏览量: 715
- PDF下载量: 367
- 被引次数: 0
