

Nonlinear Kalman Filter Based on Gaussian-generalized-hyperbolic Mixing Distribution
-
摘要: 本文研究带非平稳厚尾非高斯量测噪声的非线性系统状态估计问题. 考虑到广义双曲分布包含多种常见厚尾分布特例, 且其混合分布为共轭的广义逆高斯分布, 选用广义双曲分布建模厚尾噪声; 进而引入伯努利变量构建高斯–广义双曲混合分布来建模非平稳厚尾噪声, 并利用该分布的高斯分层结构得到系统的概率模型. 随后采用变分贝叶斯方法实现对系统状态以及噪声参数的后验估计, 得到针对此类噪声系统的卡尔曼滤波 (Kalman filter, KF) 框架, 现有的几种鲁棒滤波算法均是本文算法的特例. 机器人跟踪仿真实验表明, 所提算法与同类算法相比具有更好的估计精度和数值稳定性, 且对于初始参数具有较好的鲁棒性.Abstract: In this paper, we consider the state estimation problem of nonlinear systems with non-stationary heavy-tailed non-Gaussian noise. Considering that many often encountered heavy-tailed noises are the special cases of generalized hyperbolic distribution, and its mixing distribution is the conjugate generalized inverse Gaussian distribution, we adopt the generalized hyperbolic distribution to model the heavy-tailed noise. After that, we employ the Bernoulli variable to construct the Gaussian-generalized-hyperbolic mixing distribution to model the non-stationary heavy-tailed noise, and then the probability model of the target system is constructed based on the hierarchical Gaussian structure of this distribution. The Kalman filter (KF) framework for systems with this type of noises is achieved by applying the variational Bayes method to estimate the posteriori distribution of system states and the parameters of the noise, and several existing robust filtering algorithms are the special cases of the proposed algorithm. Simulation results of robot tracking experiments demonstrate that the proposed algorithm has better estimation accuracy and numerical stability than the existing ones, and is robust to its initial parameters.
-
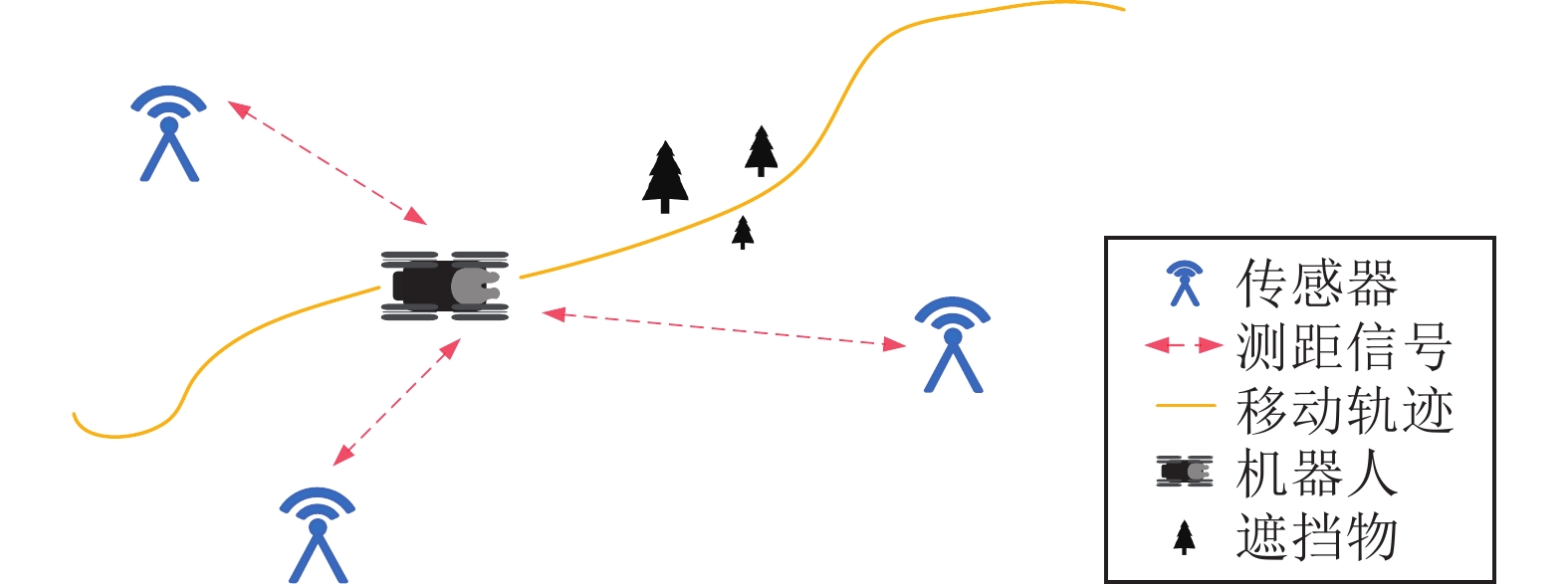
图 2 基于传感器网络的机器人跟踪示意图
Fig. 2 The illustration of tracking a robot with the sensor network
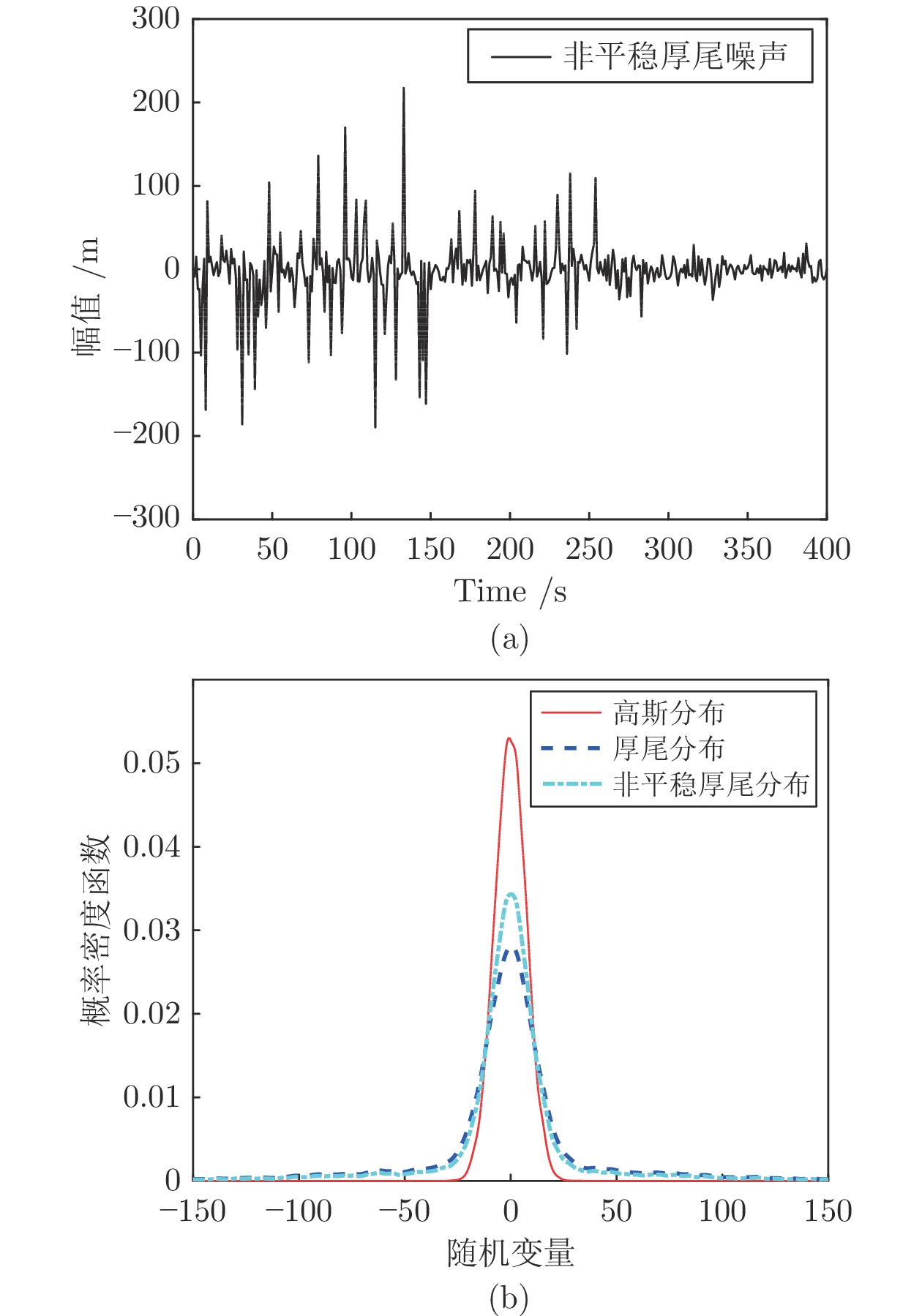
图 3 仿真中产生一维噪声的幅值以及概率密度函数
Fig. 3 The amplitude and probability density functions of the one-dimensional noise used in the simulation
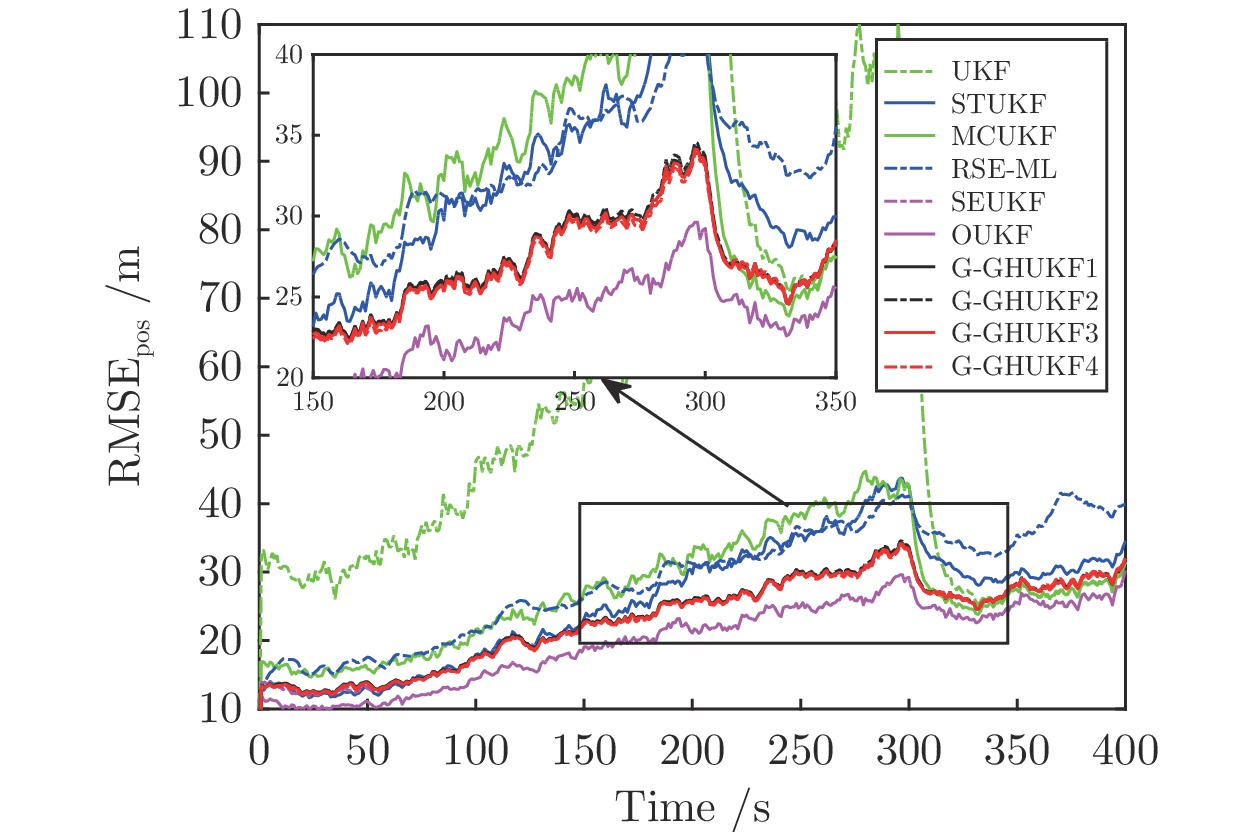
图 4 本文所提算法与同类方法的
${{\rm{RMSE}}}_{\rm pos}$ Fig. 4 The
${{\rm{RMSE}}}_{\rm pos}$ of the proposed algorithms and related ones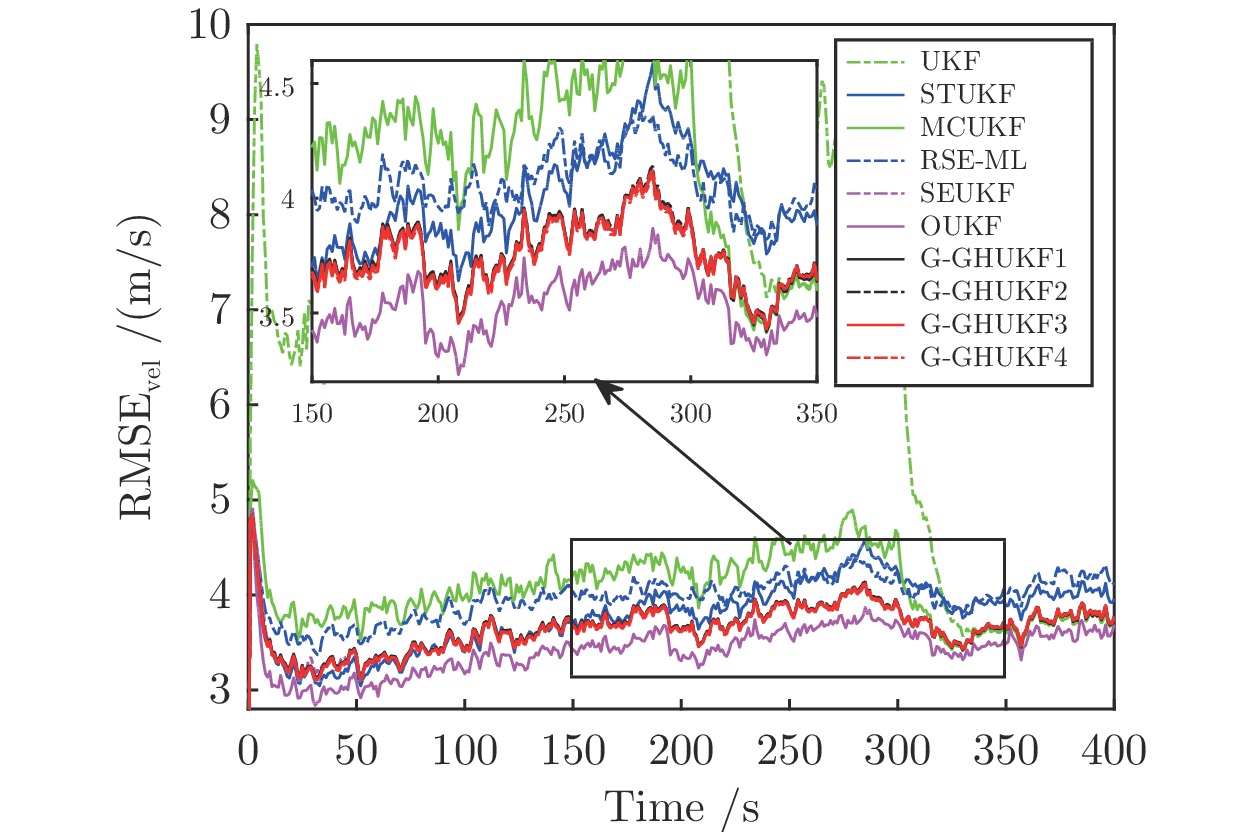
图 5 本文所提算法与同类方法的
${{\rm{RMSE}}}_{\rm vel}$ Fig. 5 The
${{\rm{RMSE}}}_{\rm vel}$ of the proposed algorithms and related ones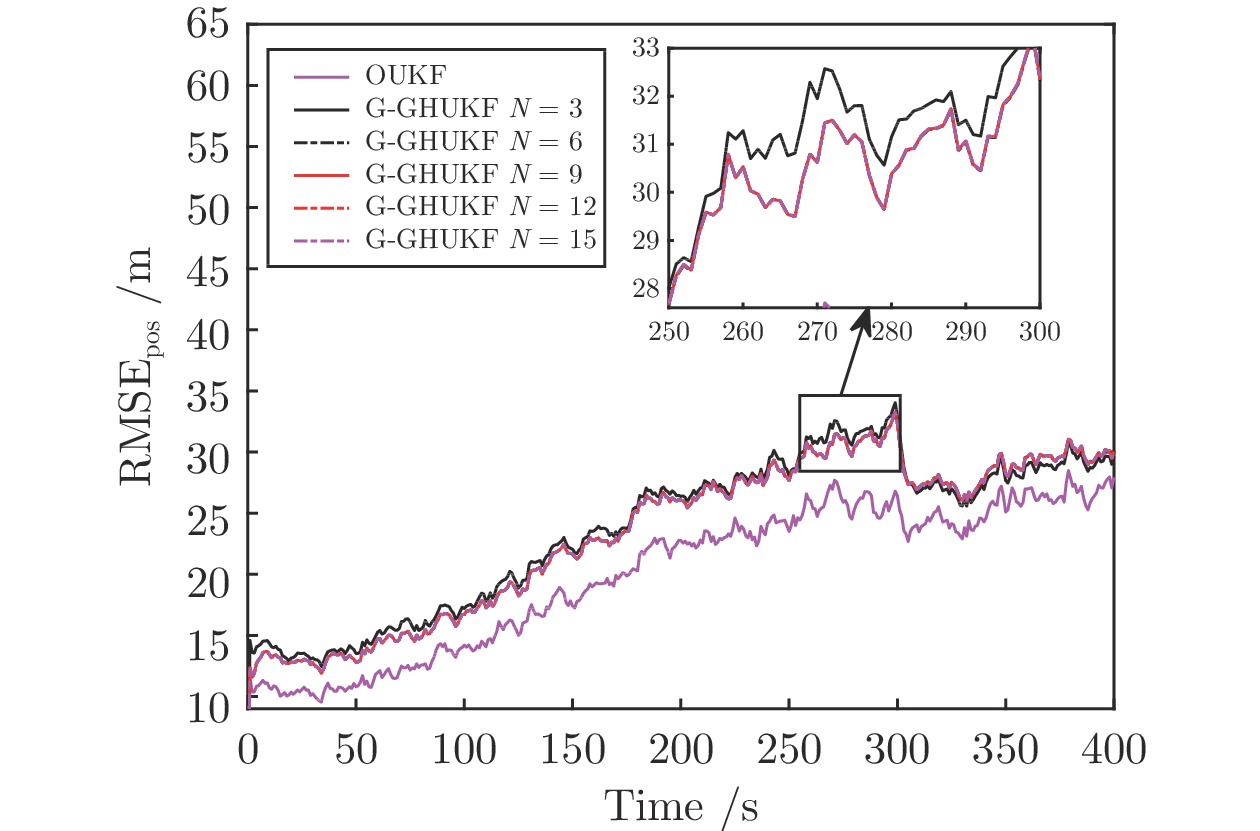
图 6 本文算法在迭代次数
$ N$ 不同时的$ {{\rm{RMSE}}}_{\rm pos}$ Fig. 6 The
$ {{\rm{RMSE}}}_{ \rm pos}$ of the proposed algorithms with different iteration number$ N$ 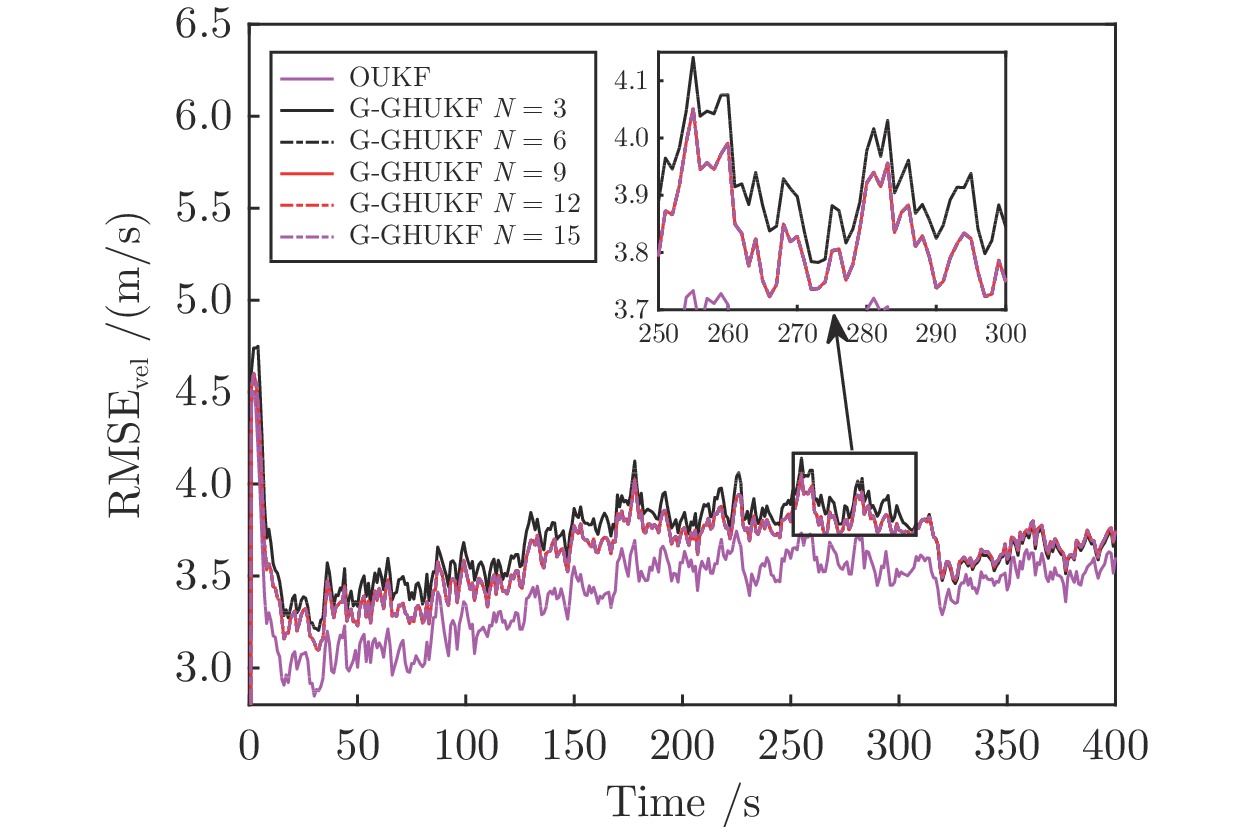
图 7 本文算法在迭代次数
$N$ 不同时的$ {{\rm{RMSE}}}_{\rm vel}$ Fig. 7 The
$ {{\rm{RMSE}}}_{\rm vel}$ of the proposed algorithms with different iteration number$N$ 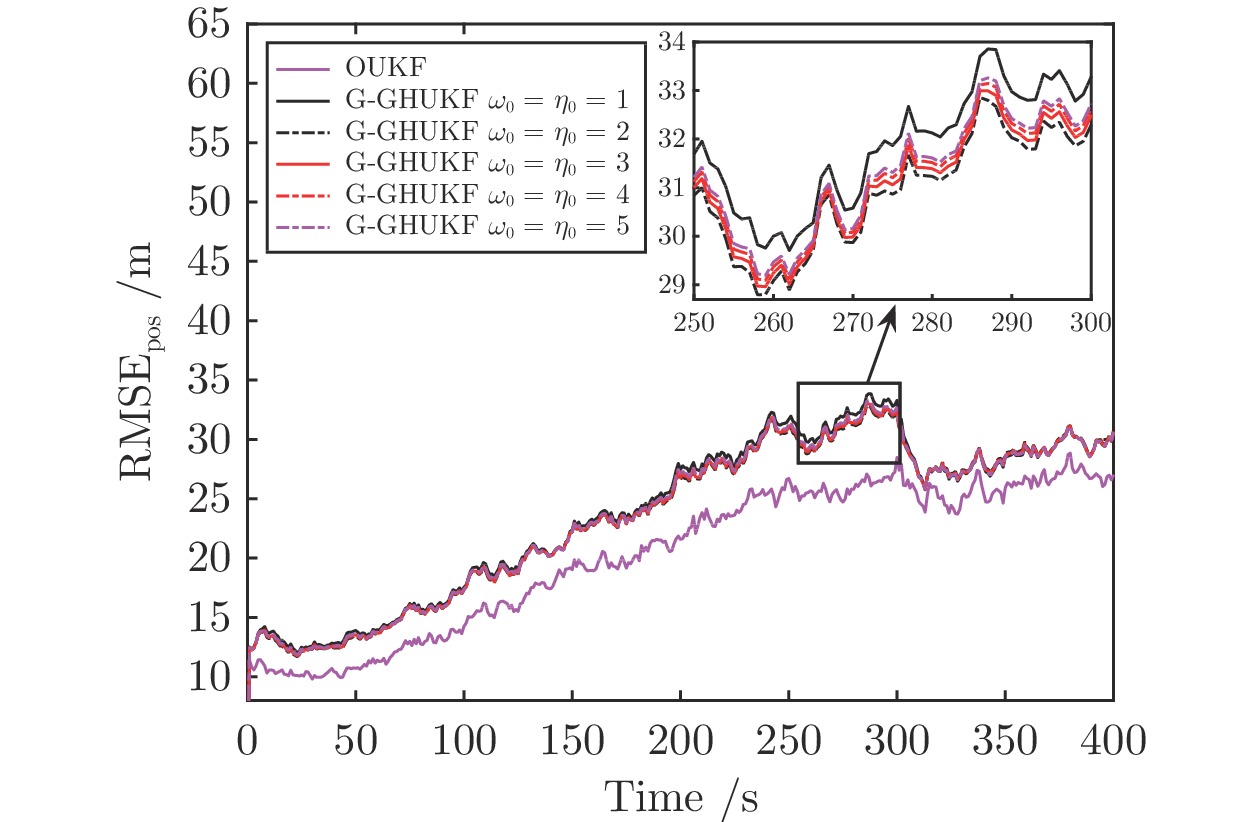
图 8 本文算法在
$\omega_0$ 和$\eta_0$ 不同时的${{\rm{RMSE}}}_{\rm {pos}}$ Fig. 8 The
${{\rm{RMSE}}}_{\rm {pos}}$ of the proposed algorithms with different$\omega_0$ and$\eta_0$ 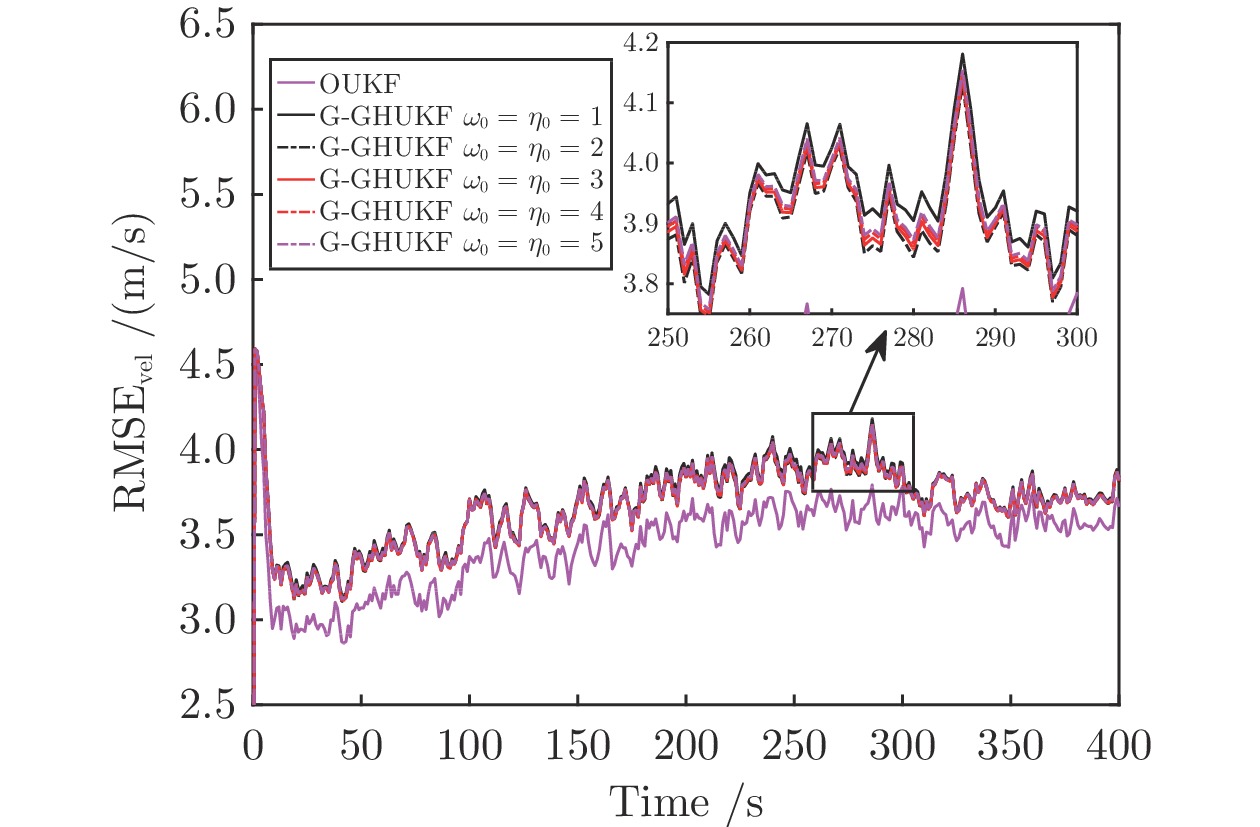
图 9 本文算法在
$\omega_0$ 和$\eta_0$ 不同时的$ {{\rm{RMSE}}}_{\rm vel}$ Fig. 9 The
$ {{\rm{RMSE}}}_{\rm vel}$ of the proposed algorithms with different$\omega_0$ and$\eta_0$ 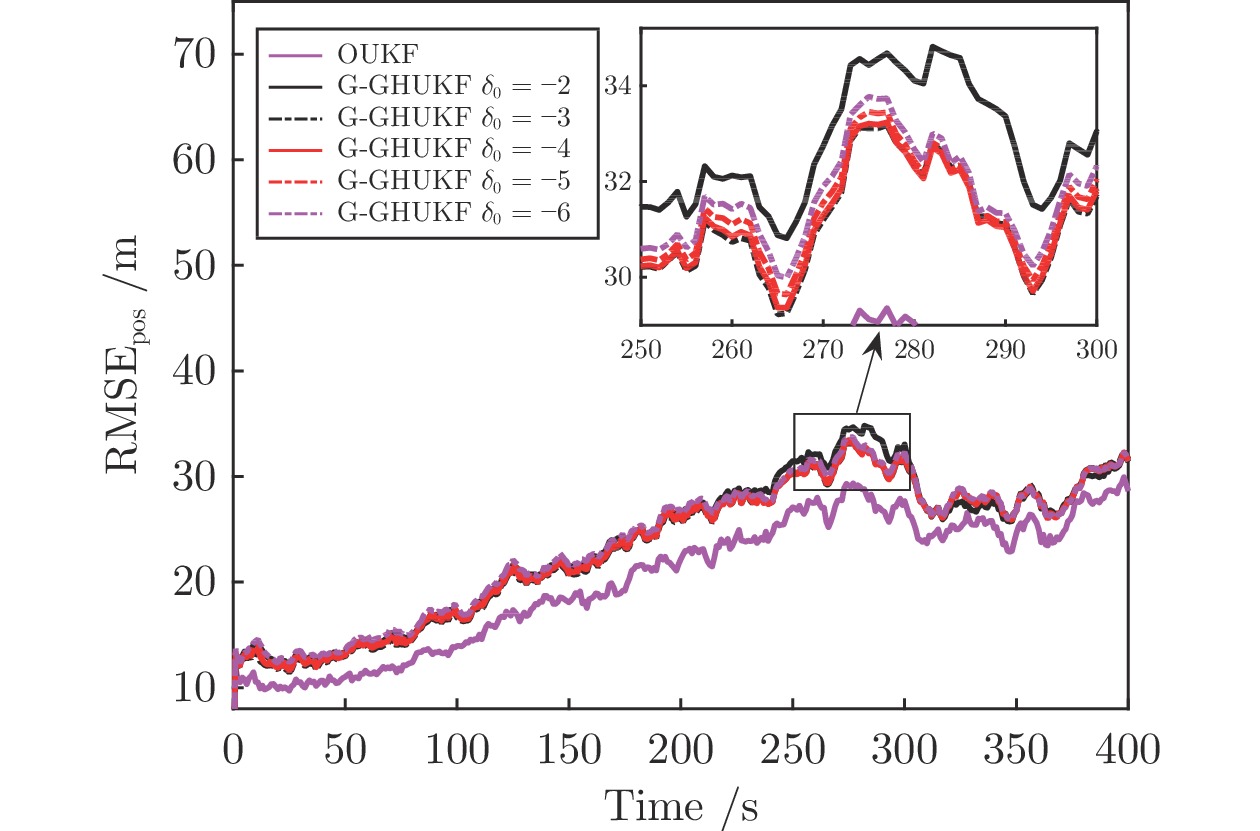
图 10 本文算法在
$\delta_0$ 不同时的$ {{\rm{RMSE}}}_{\rm pos}$ Fig. 10 The
$ {{\rm{RMSE}}}_{\rm pos}$ of the proposed algorithms with different$\delta_0$ 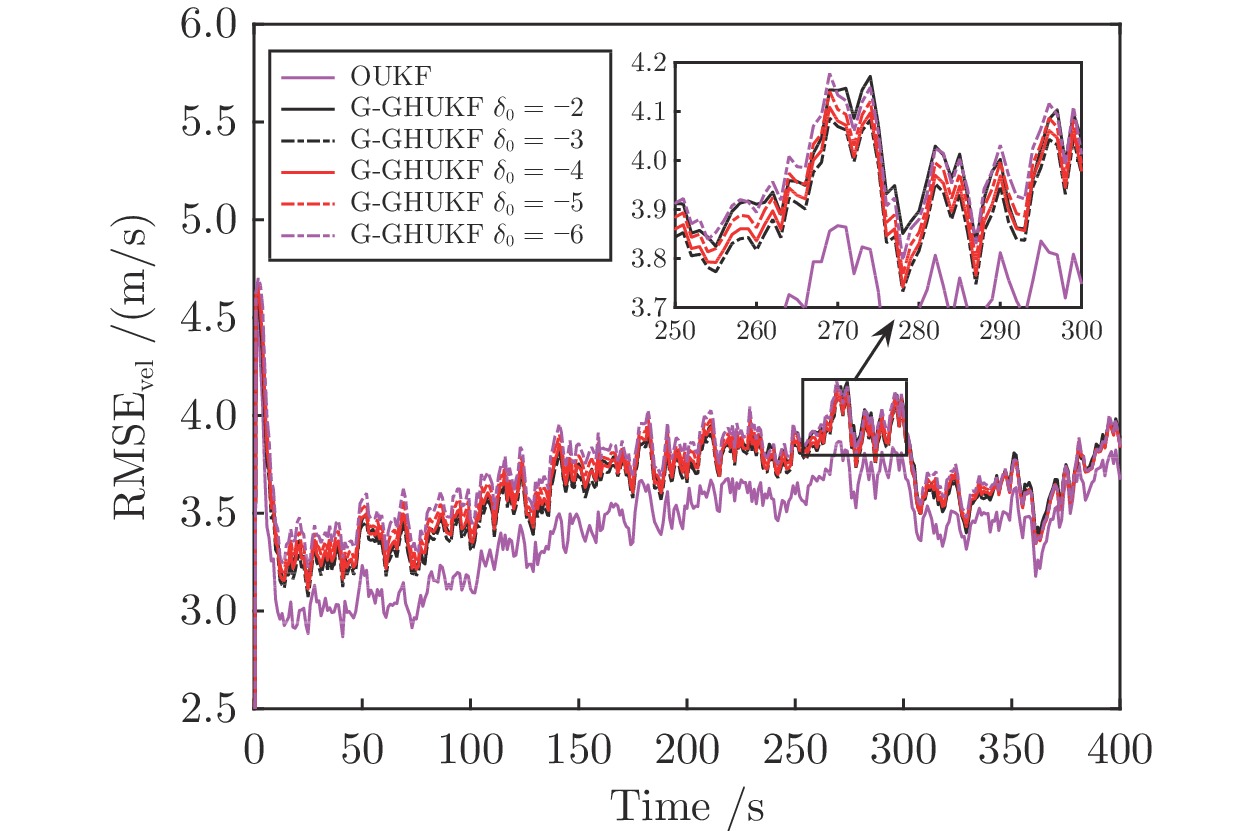
图 11 本文算法在
$\delta_0$ 不同时的$ {{\rm{RMSE}}}_{\rm vel}$ Fig. 11 The
${{\rm{RMSE}}}_{\rm vel}$ of the proposed algorithms with different$\delta_0$ 表 1 广义双曲分布的几种特殊分布
Table 1 Several special cases of generalized hyperbolic distribution
分布名称 关键参数 高斯分布 $\delta\rightarrow+\infty$或者$\delta\rightarrow-\infty$ 正态逆高斯分布 $\delta=-0.5$ 双曲分布 $\delta=1$ K 分布 $\omega=0$ 广义双曲学生 t 分布 $\eta=0$  下载: 导出CSV
下载: 导出CSV
表 2 不同算法总运行时间
Table 2 The total simulation time of different algorithms
算法名称 仿真时间 (s) UKF 15.28 STUKF 139.66 MCUKF 22.51 RSE-ML 151.75 SEUKF 146.92 OUKF 14.67 G-GHUKF1 167.36 G-GHUKF2 165.32 G-GHUKF3 166.65 G-GHUKF4 145.77
下载: 导出CSV
-
[1] 潘泉, 胡玉梅, 兰华, 孙帅, 王增福, 杨峰. 信息融合理论研究进展: 基于变分贝叶斯的联合优化. 自动化学报, 2019, 45(7): 1207-1223Pan Quan, Hu Yu-Mei, Lan Hua, Sun Shuai, Wang Zeng-Fu, Yang Feng. Information fusion progress: Joint optimization based on variational Bayesian theory. Acta Automatica Sinica, 2019, 45(7): 1207-1223 [2] 罗小元, 潘雪扬, 王新宇, 关新平. 基于自适应 Kalman 滤波的智能电网假数据注入攻击检测. 自动化学报, 2022, 48(12): 2960−2971Luo Xiao-Yuan, Pan Xue-Yang, Wang Xin-Yu, Guan Xin-Ping. Detection of false data injection attack in smart grid via adaptive Kalman filtering. Acta Automatica Sinica, 2022, 48(12): 2960−2971 [3] Wang G Q, Wang X D, Zhang Y G. Variational Bayesian IMM-filter for JMSs with unknown noise covariances. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(2): 1652-1661 doi: 10.1109/TAES.2019.2929975 [4] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269 doi: 10.1109/TAC.2009.2019800 [5] Dang L J, Chen B D, Wang S Y, Ma W T, Ren P J. Robust power system state estimation with minimum error entropy unscented Kalman filter. IEEE Transactions on Instrumentation and Measurement, 2020, 69(11): 8797-8808 doi: 10.1109/TIM.2020.2999757 [6] 葛泉波, 王贺彬, 杨秦敏, 张兴国, 刘华平. 基于改进高斯混合模型的机器人运动状态估计. 自动化学报, 2022, 48(8): 1972-1983Ge Quan-Bo, Wang He-Bin, Yang Qin-Min, Zhang Xing-Guo, Liu Hua-Ping. Estimation of robot motion state based on improved Gaussian mixture model. Acta Automatica Sinica, 2022, 48(8): 1972-1983 [7] Huang Y L, Zhang Y G, Xu B, Wu Z M, Chambers J A. A new outlier-robust student's t based Gaussian approximate filter for cooperative localization. IEEE-ASME Transactions on Mechatronics, 2017, 22(5): 2380-2386 doi: 10.1109/TMECH.2017.2744651 [8] Bai M M, Huang Y L, Zhang Y G, Chen F. A novel heavy-tailed mixture distribution based robust Kalman filter for cooperative localization. IEEE Transactions on Industrial Informatics, 2021, 17(5): 3671-3681 doi: 10.1109/TII.2020.3015001 [9] 朱兵, 李星, 刘强, 李作虎. 鲁棒Kalman滤波及其在水下组合导航中的应用. 导航定位与授时, 2021, 8(1): 96-103 doi: 10.19306/j.cnki.2095-8110.2021.01.010Zhu Bing, Li Xing, Liu Qiang, Li Zuo-Hu. Robust Kalman filter and its application in underwater intergrated navigation. Navigation Positioning and Timing, 2021, 8(1): 96-103 doi: 10.19306/j.cnki.2095-8110.2021.01.010 [10] Huang Y L, Zhang Y G, Shi P, Wu Z M, Qian J H, Chambers J A. Robust Kalman filters based on Gaussian scale mixture distributions with application to target tracking. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(10): 2082-2096 doi: 10.1109/TSMC.2017.2778269 [11] 王国庆, 杨春雨, 马磊. 基于多变量 Laplace 分布的非线性系统分布式鲁棒状态估计. 电子学报, 2022, 50(11): 2610−2618Wang Guo-Qing, Yang Chun-Yu, Ma Lei. Distributed robust state estimation for nonlinear systems based on multivariate Laplace distribution. Acta Electronica Sinica, 2022, 50(11): 2610−2618 [12] Chen B D, Liu X, Zhao H Q, Principe J C. Maximum correntropy Kalman filter. Automatica, 2017, 76: 70-77 doi: 10.1016/j.automatica.2016.10.004 [13] Chen B D, Dang L J, Gu Y T, Zheng N N, Principe J C. Minimum error entropy Kalman filter. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(9): 5819-5829 doi: 10.1109/TSMC.2019.2957269 [14] Huang Y L, Zhang Y G, Zhao Y X, Shi P, Chambers J A. A novel outlier-robust Kalman filtering framework based on statistical similarity measure. IEEE Transactions on Automatic Control, 2021, 66(6): 2677-2692 doi: 10.1109/TAC.2020.3011443 [15] Bai M M, Huang Y L, Zhang Y G, Chambers J A. Statistical similarity measure-based adaptive outlier-robust state estimator with applications. IEEE Transactions on Automatic Control, 2022, 67(8): 4354-4361 doi: 10.1109/TAC.2022.3176837 [16] Wang G Q, Zhang Y G, Wang X D. Maximum correntropy Rauch-Tung-Striebel smoother for nonlinear and non-Gaussian systems. IEEE Transactions on Automatic Control, 2021, 66(3): 1270-1277 doi: 10.1109/TAC.2020.2997315 [17] Wang G Q, Zhang Y G, Wang X D. Iterated maximum correntropy unscented Kalman filters for non-Gaussian systems. Signal Processing, 2019, 163: 87-94 doi: 10.1016/j.sigpro.2019.05.015 [18] Wang G Q, Li N, Zhang Y G. Maximum correntropy unscented Kalman and information filters for non-Gaussian measurement noise. Journal of the Franklin Institute, 2017, 354(18): 8659-8677 doi: 10.1016/j.jfranklin.2017.10.023 [19] Wang G Q, Li N, Zhang Y G. Distributed maximum correntropy linear and nonlinear filters for systems with non-Gaussian noises. Signal Processing, 2021, 182: Article No. 107937 doi: 10.1016/j.sigpro.2020.107937 [20] 王健, 鲁金瑞, 郑栋, 李璇, 张涛. 水下复杂环境下基于 SINS/USBL/DVL 多源信息融合的组合导航算法. 导航定位与授时, 2022, 9(1): 76-84Wang Jian, Lu Jin-Rui, Zheng Dong, Li Xuan, Zhang Tao. Integrated navigation algorithm based on SINS/USBL/DVL multi-souce information fusion in underwater complex environment. Navigation Positioning and Timing, 2022, 9(1): 76-84 [21] Huang Y L, Zhang Y G, Li N, Wu Z M, Chambers J A. A novel robust student's t-based Kalman filter. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1545-1554 doi: 10.1109/TAES.2017.2651684 [22] Huang Y L, Zhang Y G, Li N, Chambers J A. A robust Gaussian approximate filter for nonlinear systems with heavy tailed measurement noises. In: Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Shanghai, China: IEEE, 2016. 4209−4213 [23] Wang G Q, Yang C Y, Ma X P. A novel robust nonlinear Kalman filter based on multivariate Laplace distribution. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(7): 2705-2709 doi: 10.1109/TCSII.2021.3052351 [24] Xue C, Huang Y L, Zhu F C, Zhang Y G, Chambers J A. An outlier-robust Kalman filter with adaptive selection of elliptically contoured distributions. IEEE Transactions on Signal Processing, 2022, 70: 994-1009 doi: 10.1109/TSP.2022.3151199 [25] Wang G Q, Yang C Y, Ma L, Dai W. Centralized and distributed robust state estimation over sensor networks using elliptical distribution. IEEE Internet of Things Journal, 2022, 9(21): 21825−21837 [26] Huang Y L, Zhang Y G, Zhao Y, Chambers J A. A novel robust Gaussian-student's t mixture distribution based Kalman filter. IEEE Transactions on Signal Processing, 2019, 67(13): 3606-3620 doi: 10.1109/TSP.2019.2916755 [27] Zhu H, Zhang G R, Li Y F, Leung H. A novel robust Kalman filter with unknown non-stationary heavy-tailed noise. Automatica, 2021, 127: Article No. 109511 doi: 10.1016/j.automatica.2021.109511 [28] Bai M M, Huang Y L, Chen B D, Zhang Y G. A movel robust Kalman filtering framework based on normal-skew mixture distribution. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(11): 6789−6805 [29] Nakabayashi A, Ueno G. Nonlinear filtering method using a switching error model for outlier-contaminated observations. IEEE Transactions on Automatic Control, 2020, 65(7): 3150-3156 doi: 10.1109/TAC.2019.2947649 [30] Breymann W, Lüthi D. ghyp: A package on generalized hyperbolic distributions [Online], available: https://cran.microsoft.com/snapshot/2015-09-28/web/packages/ghyp/vignettes/Generalized_Hyperbolic_Distribution.pdf, May 16, 2022 [31] Babacan S D, Nakajima S. Do M N. Bayesian group-sparse modeling and variational inference. IEEE Transactions on Signal Processing, 2014, 62(11): 2906-2921 doi: 10.1109/TSP.2014.2319775 [32] Zhang Y, Chu J, Chan S, Chan B. The generalised hyperbolic distribution and its subclass in the analysis of a new era of cryptocurrencies: Ethereum and its financial risk. Physica A: Statistical Mechanics and its Applications, 2019, 526: Article No. 120900. doi: 10.1016/j.physa.2019.04.136 [33] Särkkä S, Hartikainen J. Non-linear noise adaptive Kalman filtering via variational Bayes. In: Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing (MLSP). Southampton, UK: IEEE, 2013. 1−6 [34] Yang X S, Zhang W A, Yu L, Yang F W. Sequential Gaussian approximation filter for target tracking with nonsynchronous measurements. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 407-418 doi: 10.1109/TAES.2018.2852398 -

 下载:
下载:

































计量
- 文章访问数: 1209
- HTML全文浏览量: 908
- PDF下载量: 306
- 被引次数: 0
