

-
摘要: 欠驱动双足机器人在行走中为保持自身的平衡, 双脚需要不间断运动. 但在仅有特定立足点的离散地形上很难实现调整后的落脚点, 从而导致欠驱动双足机器人在复杂环境中的适应能力下降. 提出了基于虚拟约束(Virtual constraint, VC)的变步长调节与控制方法, 根据欠驱动双足机器人当前状态与参考落脚点设计了非时变尺度缩放因子, 能够实时重构适应当前环境的步态轨迹; 同时构建了全身动力学模型, 采用反馈线性化的模型预测控制 (Model predictive control, MPC) 滚动优化产生力矩控制量, 实现准确的轨迹跟踪控制. 最终进行了欠驱动双足机器人的随机离散地形稳定行走的仿真实验, 验证了所提方法的有效性与鲁棒性.Abstract: To keep the balance of the underactuated biped robot during walking, its feet need to move continuously. However, it is difficult to achieve the adjusted foothold on the discrete terrain with only a specific foothold, which decreases the adaptability of underactuated biped robots in complex environments. This paper proposes a variable step-size adjustment and control method based on virtual constraints (VC). Time-invariant scaling factors are designed according to the underactuated biped robot's current state and reference point, which can reconstruct the gait trajectory by adapting to the current environment in real-time. Meanwhile, the whole body dynamics model is constructed. The torque control is generated by rolling optimization using model predictive control (MPC) with feedback linearization to achieve accurate trajectory tracking control. Finally, an underactuated biped robot walking stably on random discrete terrain is simulated to verify the effectiveness and robustness of the proposed method.
-

图 6 机器人平地固定步长行走仿真截图
Fig. 6 Simulation screenshot of robot walking with fixed step length on flat ground
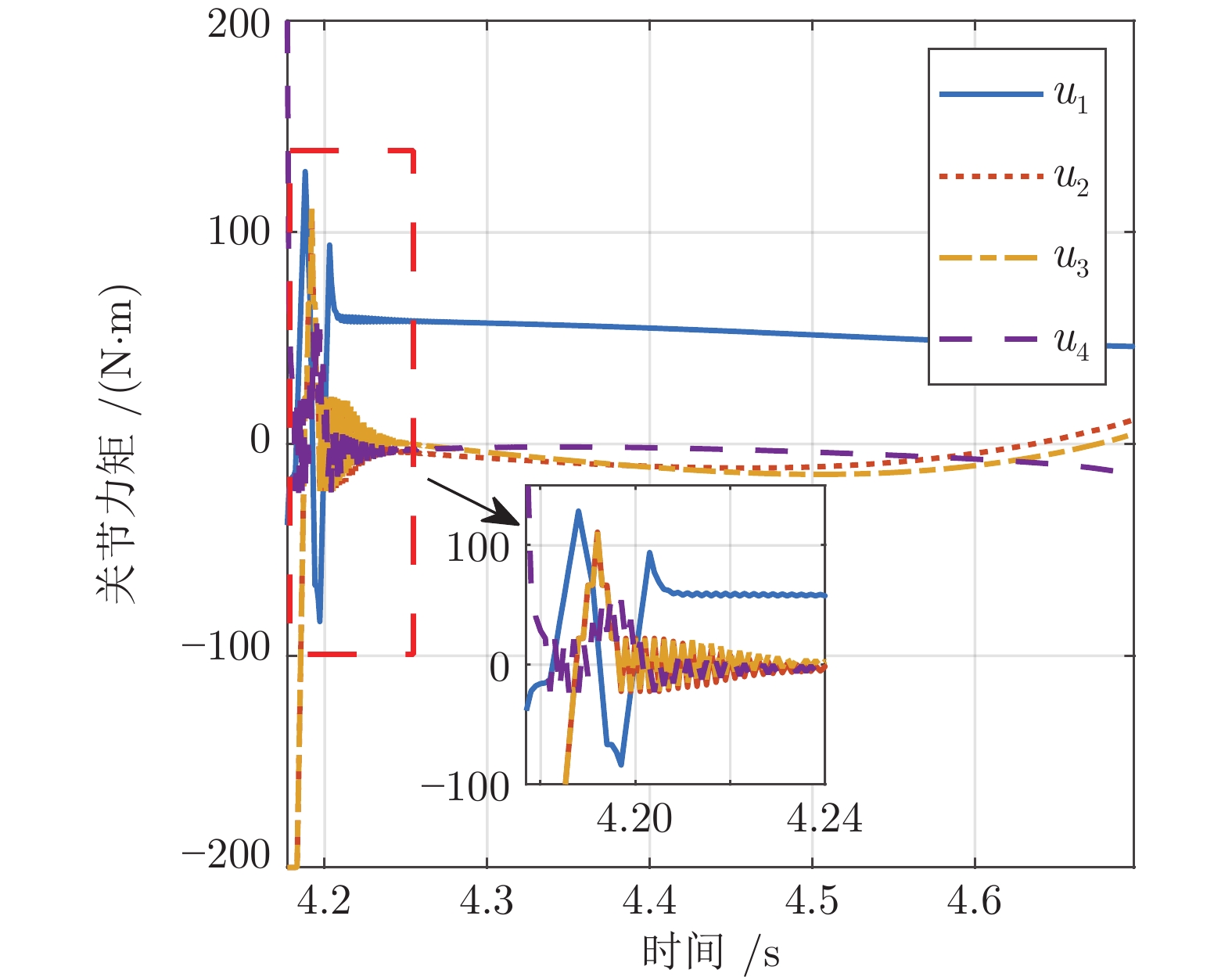
图 8 机器人单脚支撑期的关节驱动力矩
Fig. 8 Joint driving torque of robot during one leg support period
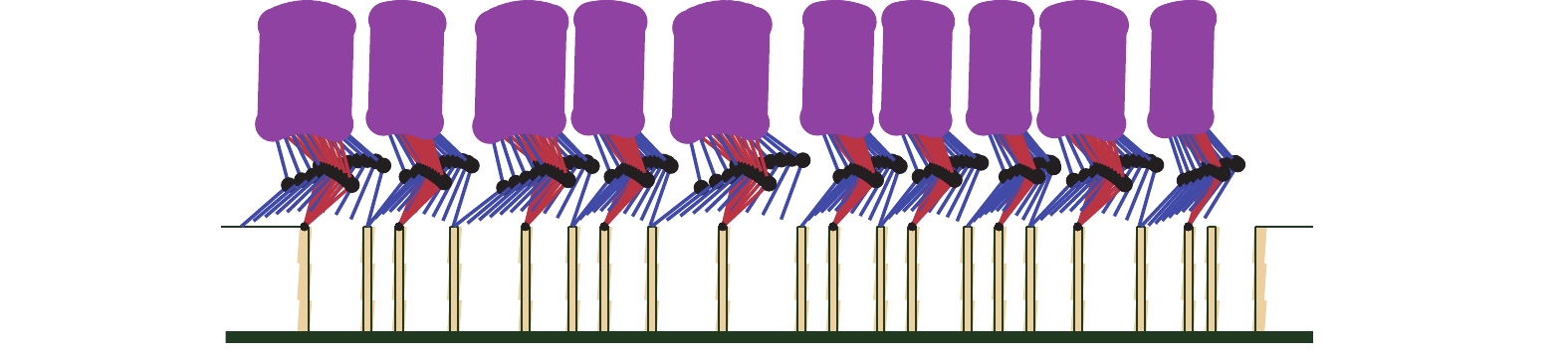
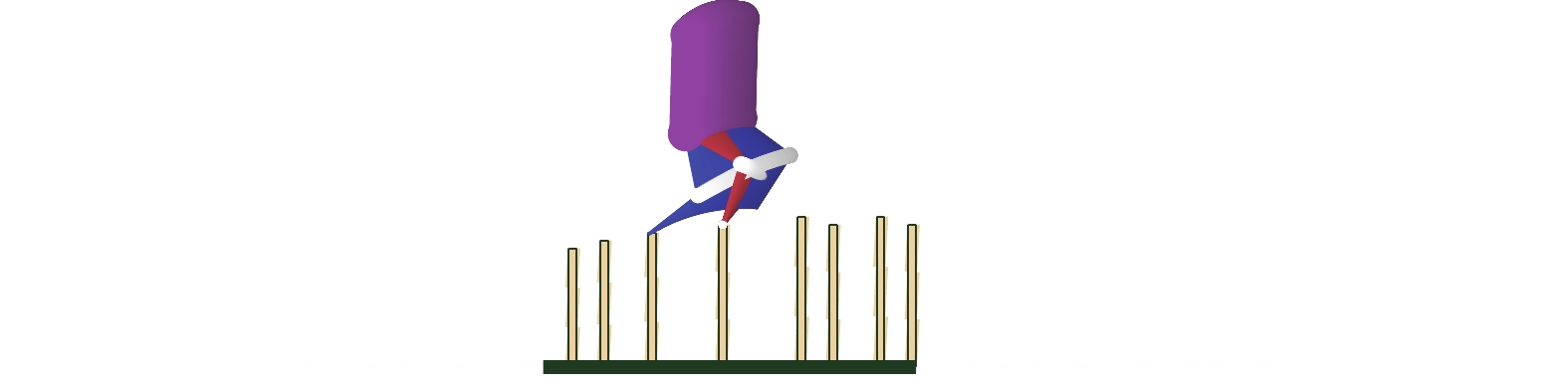
图 10 机器人变步长离散地形行走仿真截图
Fig. 10 Simulation screenshot of robot walking on discrete terrain with variable step-size
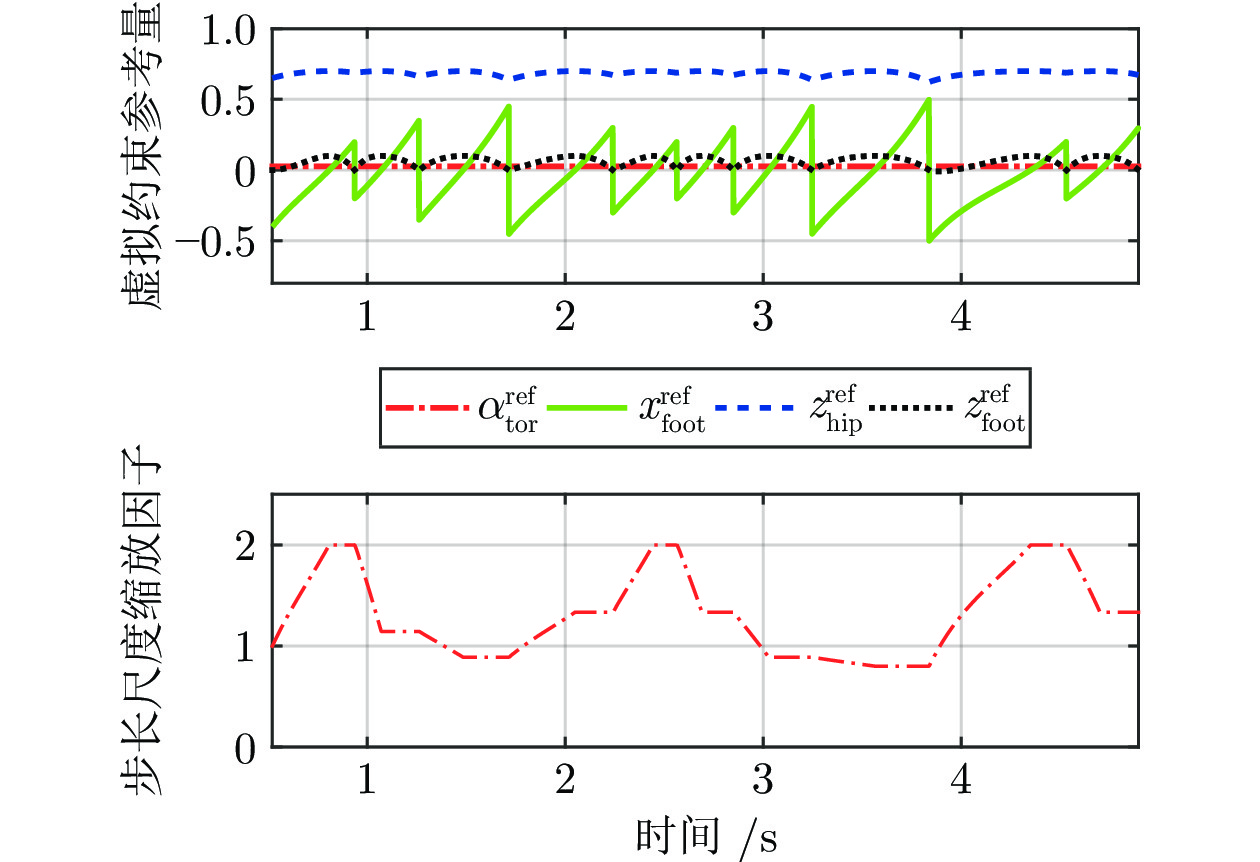
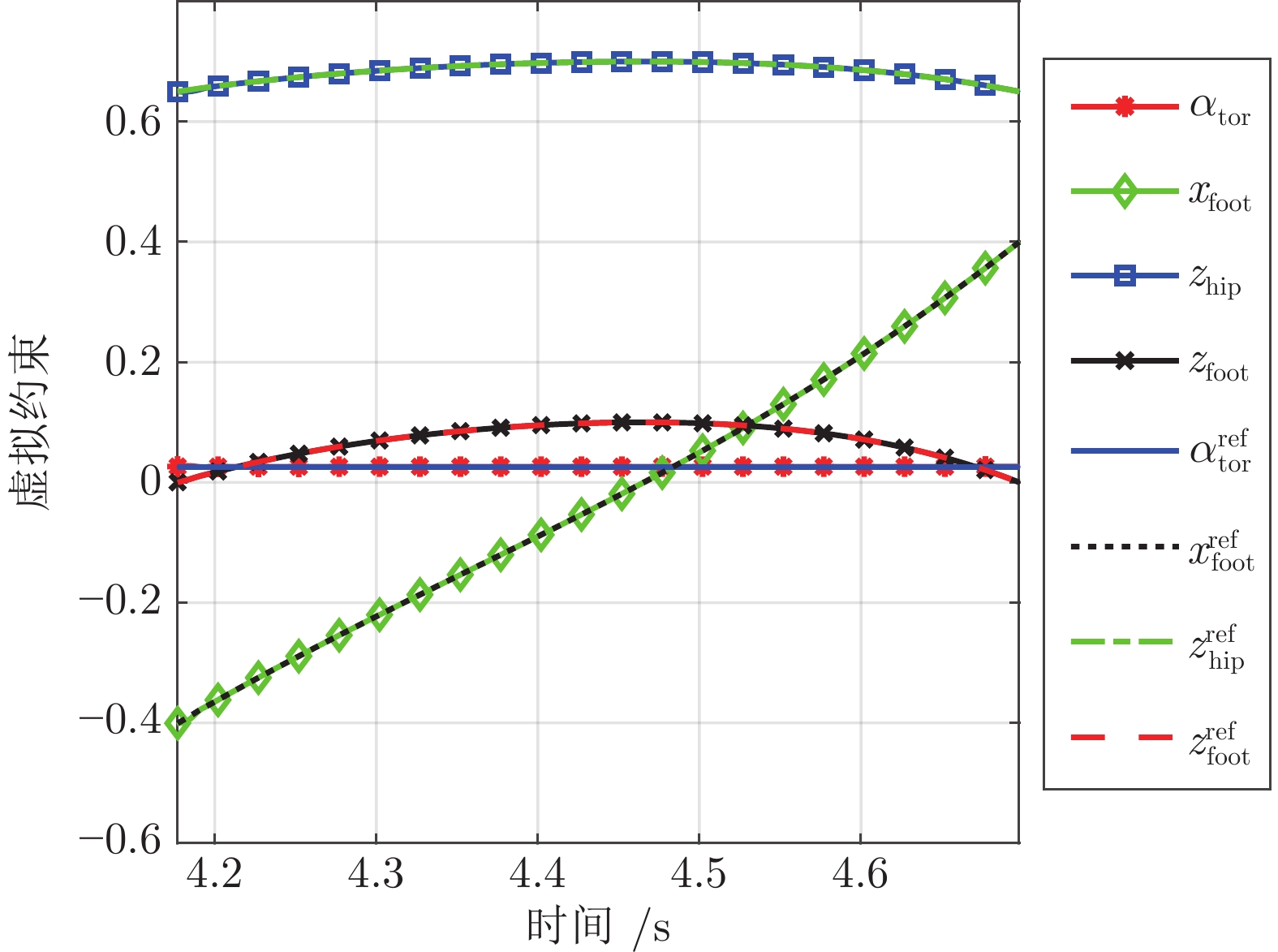
图 11 离散平地变步长运动中的尺度因子与VC轨迹变化
Fig. 11 Scale factor and VC trajectory variation in discrete flat variable step-size motion
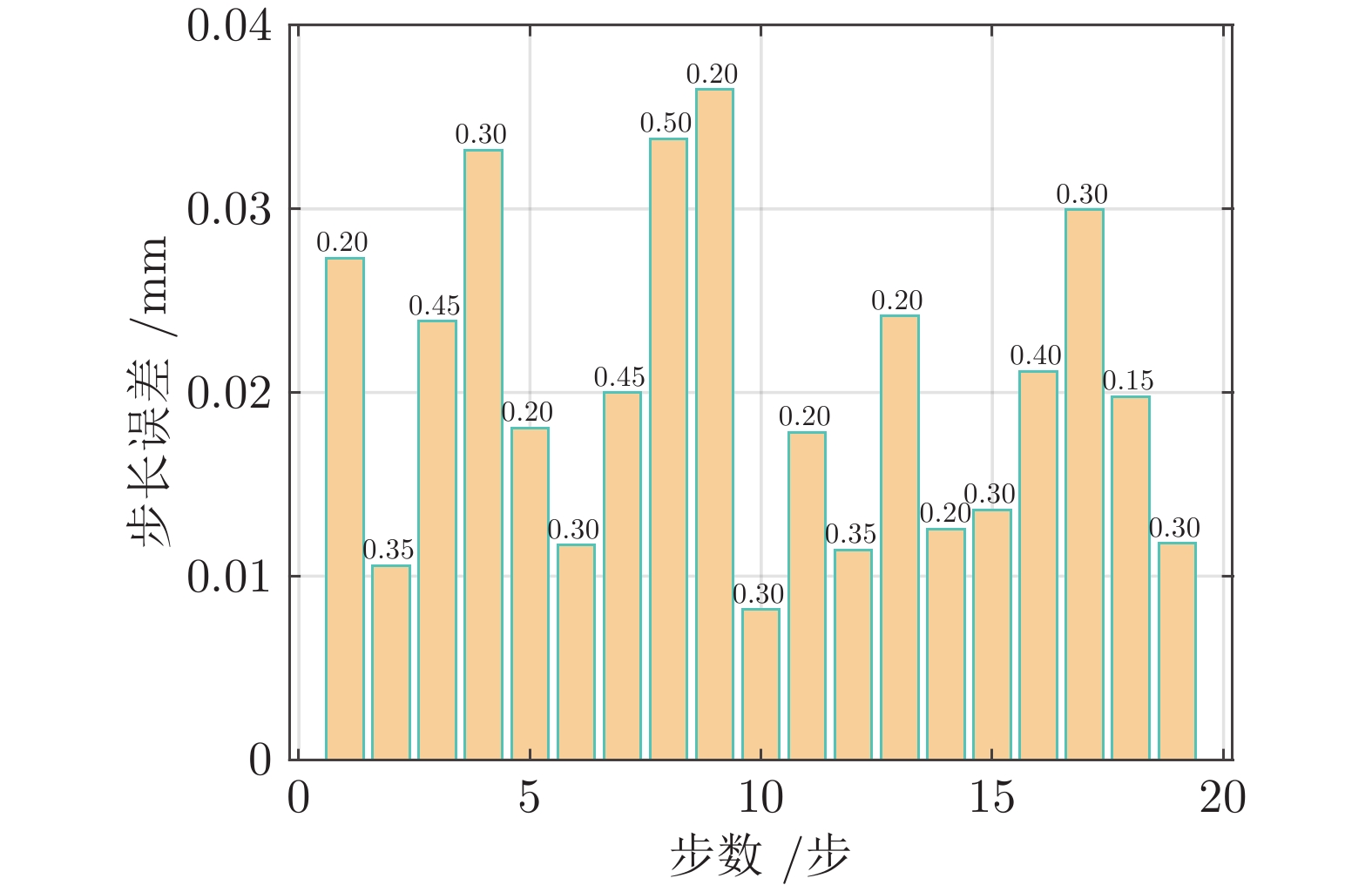
图 12 离散平地变步长行走的步长误差
Fig. 12 Step error of discrete variable step-size walking on flat ground
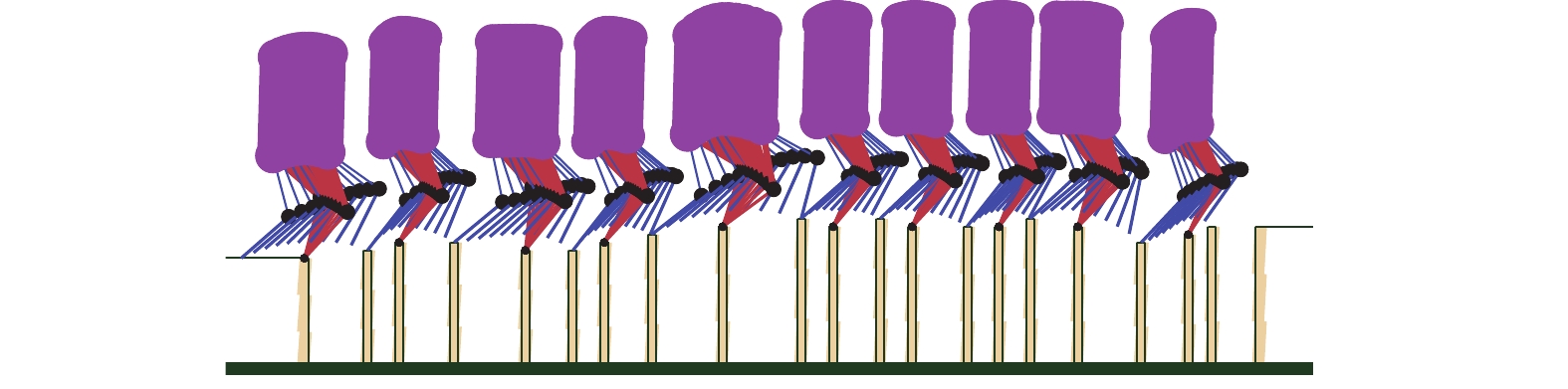
图 13 随机离散变步长变高度行走的仿真截图
Fig. 13 Simulation screenshot of random discrete variable step-size and variable height walking
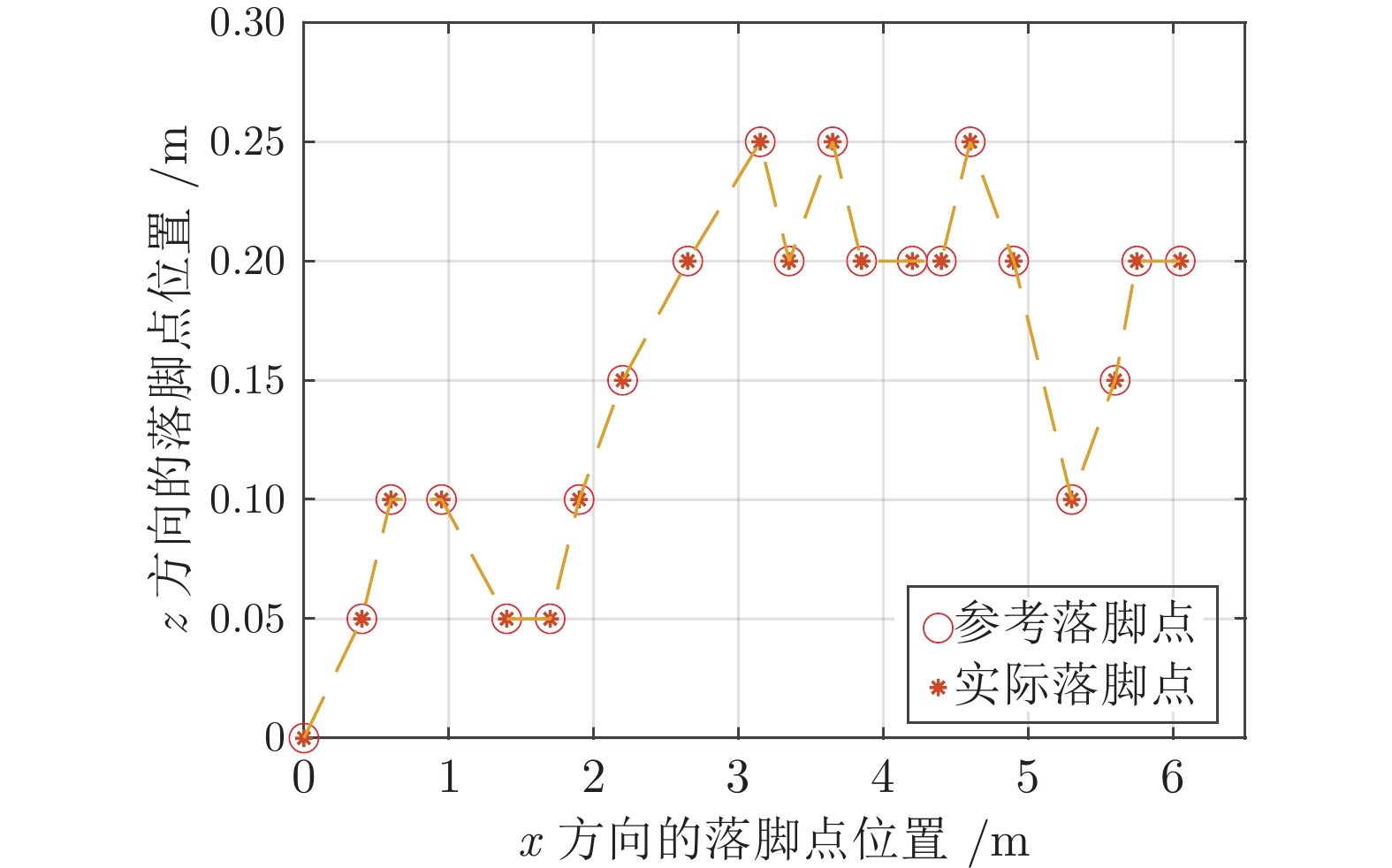
图 14 空间中参考落脚点与实际落脚点的示意图
Fig. 14 Schematic diagram of reference foothold and actual foothold in space
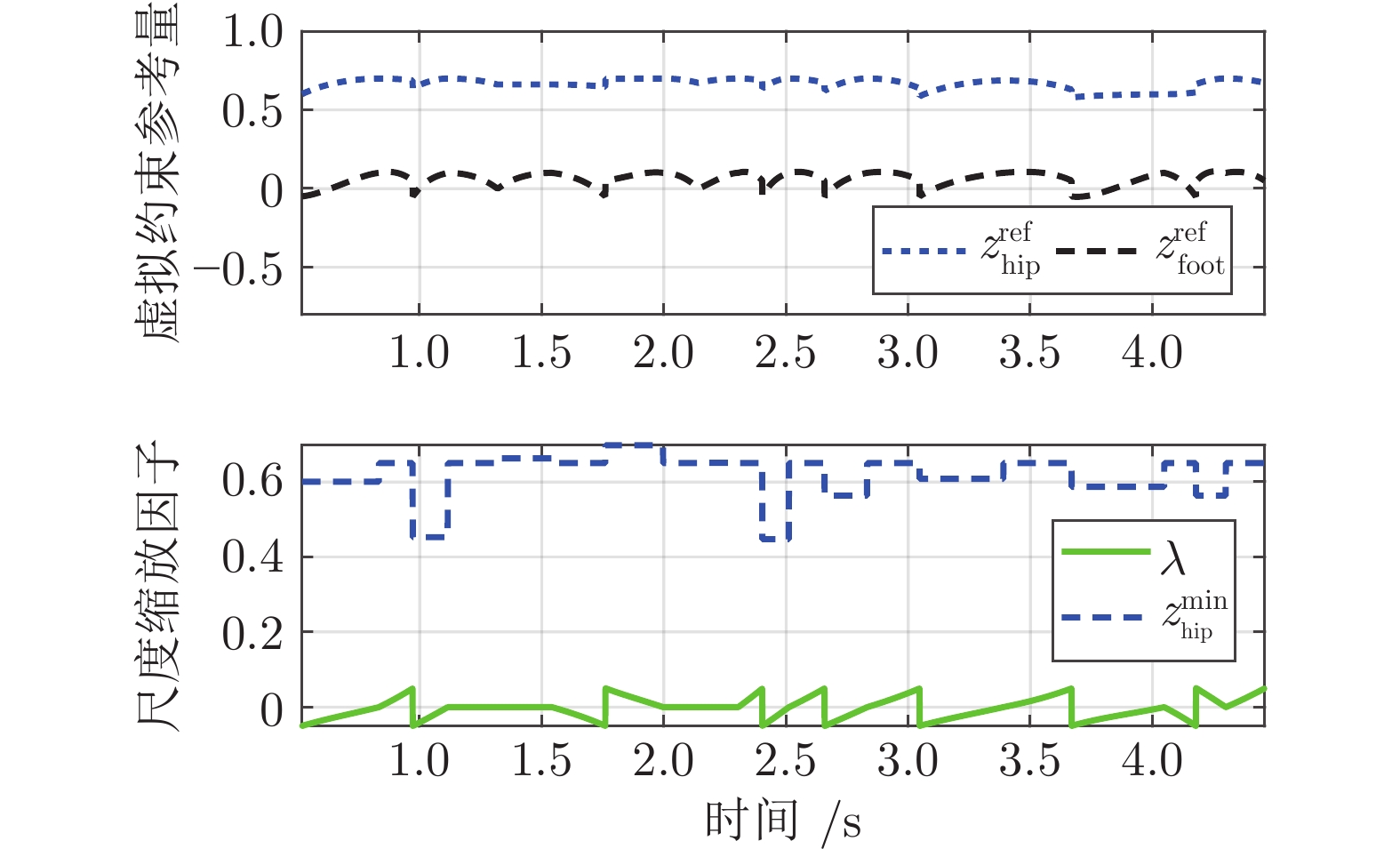
图 15 随机离散地形运行中的尺度缩放因子和VC参考轨迹
Fig. 15 Scaling factor and VC reference trajectory in random discrete terrain
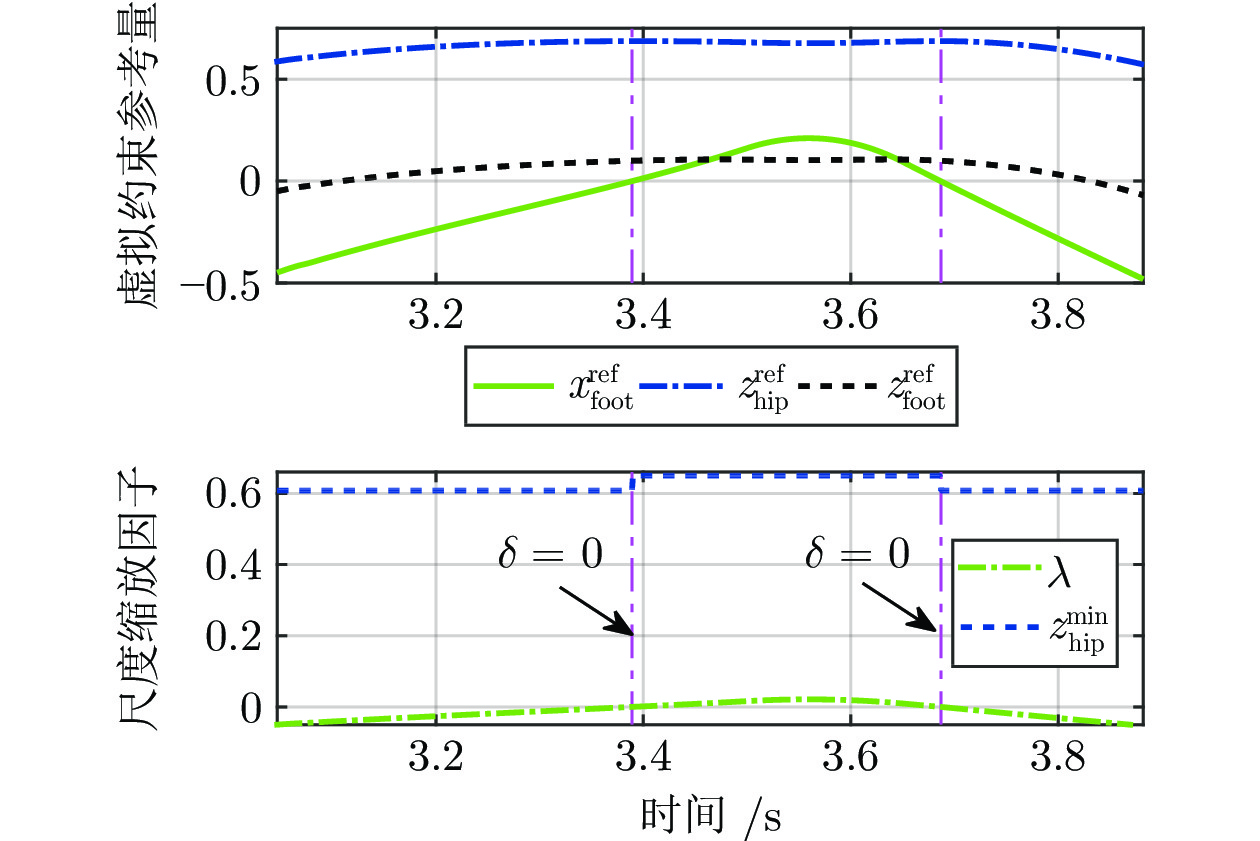
图 17 机器人行走受扰动后的尺度因子变化情况
Fig. 17 The change of scale factor after the robot is disturbed in walking
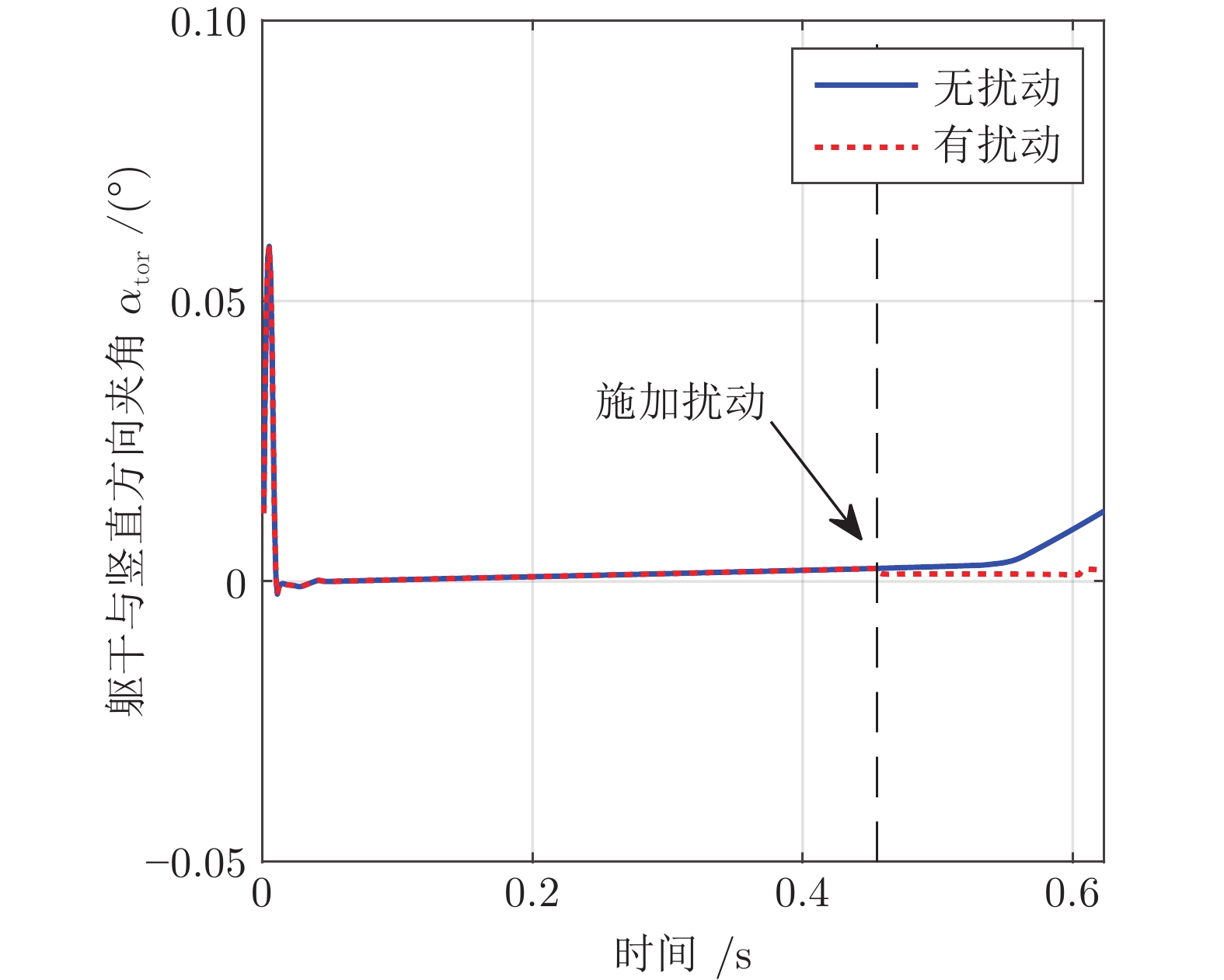
图 18 机器人行走中有无扰动下躯干姿态变化
Fig. 18 The posture change of the trunk with or without disturbance during robot walking
表 1 仿真参数设置
Table 1 Parameters setting in simulation
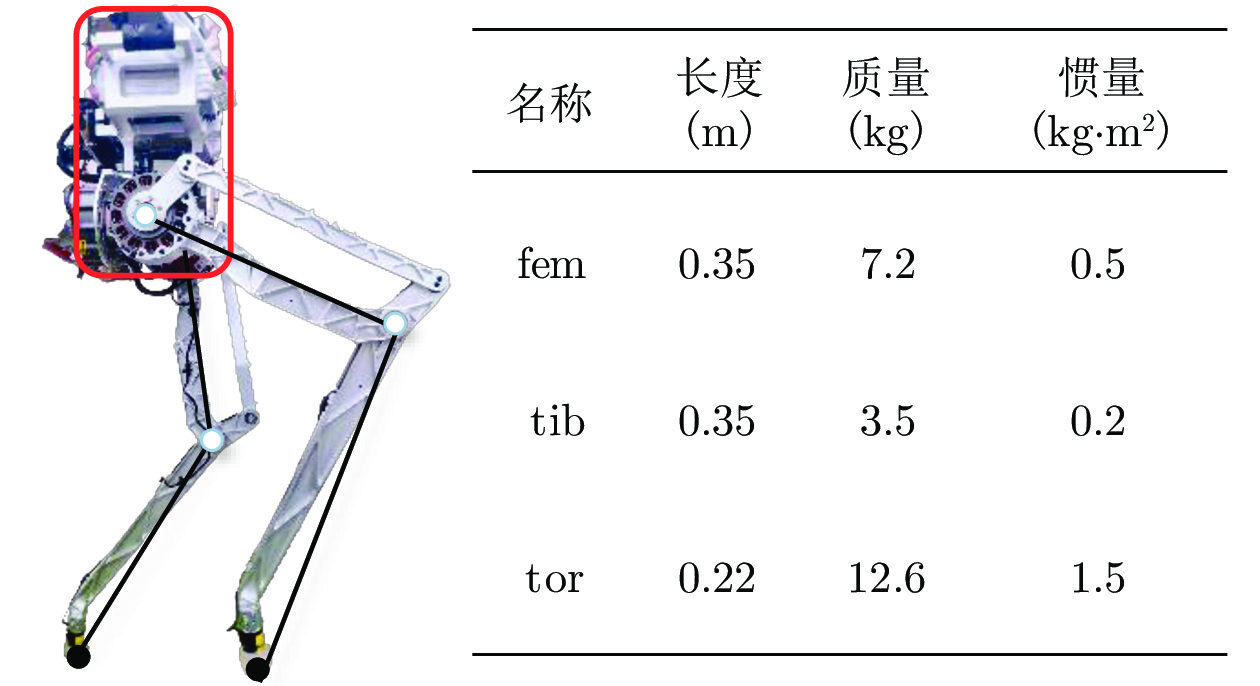
参数 取值 单位 上身目标角度$\alpha _{\text{tor}}^{\text{ref}}$ 0 rad 固定步长${L_{\text{step}}}$ 0.4 m 最大抬腿量${}^{\max }z_{\text{foot}}^{\text{ref}}$ 0.1 m 调节量$\sigma $ 0.1 m 髋关节最大高度$Z_{\text{hip}}^{\max }$ 0.7 m 髋关节最小高度$Z_{\text{hip}}^{\min }$ 0.6 m 控制周期为$\Delta T$ 0.001 s 预测步长$NP$ 5 步 状态权重系数 0.1 − 控制权重系数 0.001 − 驱动力矩边界值${u_{\min }}$ −200 N·m 驱动力矩边界值${u_{\max }}$ 200 N·m  下载: 导出CSV
下载: 导出CSV
-
[1] 田彦涛, 孙中波, 李宏扬, 王静. 动态双足机器人的控制与优化研究进展. 自动化学报, 2016, 42(8): 1142-1157Tian Yan-Tao, Sun Zhong-Bo, Li Hong-Yang, Wang Jing. A review of optimal and control strategies for dynamic walking bipedal robots. Acta Automatica Sinica, 2016, 42(8): 1142-1157 [2] 吴晓光, 刘绍维, 杨磊, 邓文强, 贾哲恒. 基于深度强化学习的双足机器人斜坡步态控制方法. 自动化学报, 2021, 47(8): 1976-1987Wu Xiao-Guang, Liu Sao-Wei, Yang Lei, Deng Wen-Qiang, Jia Zhe-Heng. A gait control method for biped robot on slope based on deep reinforcement learning. Acta Automatica Sinica, 2021, 47(8): 1976-1987 [3] Gong Y, Hartley R, Da X, Hereid A, Harib O, Huang J K, et al. Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway. In: Proceedings of the 2019 IEEE International Conference on American Control Conference. Philadelphia, PA, USA: IEEE, 2019. 4559−4566 [4] Zhu Y, Li C, Jin H, Sun L. Classifying motion intention of step length and synchronous walking speed by functional near-infrared spectroscopy. Cyborg and Bionic Systems, 2021, 2021(1): 1-11 [5] Yao C, Liu C, Xia L, Liu M, Chen Q. Humanoid adaptive locomotion control through a bioinspired CPG-based controller. Robotica, 2022, 40(3): 762-779 doi: 10.1017/S0263574721000795 [6] Li Q, Meng F, Yu Z, Chen X, Huang Q. Dynamic torso compliance control for standing and walking balance of position-controlled humanoid robots. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 679-688 doi: 10.1109/TMECH.2021.3061825 [7] Liu C, Zhang T, Zhang C, Liu M, Chen Q. Foot placement compensator design for humanoid walking based on discrete control Lyapunov function. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 39(8): 936-956 [8] 辛亚先, 李贻斌, 柴汇, 荣学文, 李彬. 基于全身力矩控制的双腿轮机器人跳跃方法研究. 自动化学报, DOI: 10.16383/j.aas.c200486Xin Ya-Xian, Li Yi-Bing, Chai Hui, Rong Xue-Wen, Li Bin. Research on jumping method of two wheeled-leg robot based on whole-body torque control. Acta Automatica Sinica, DOI: 10.16383/j.aas.c200486 [9] Kim D, Jorgensen S J, Lee J, Ahn J, Luo J, Sentis L. Dynamic locomotion for passive-ankle biped robots and humanoids using whole-body locomotion control. The International Journal of Robotics Research, 2020, 39(8): 936-956 doi: 10.1177/0278364920918014 [10] Luo J, Su Y, Ruan L, Zhao Y, Kim D, Sentis L, et al. Robust bipedal locomotion based on a hierarchical control structure. Robotica, 2019, 37(10): 1750-1767 doi: 10.1017/S0263574719000237 [11] Daneshmand E, Khadiv M, Grimminger F, Righetti L. Variable horizon mpc with swing foot dynamics for bipedal walking control. IEEE Robotics and Automation Letters, 2021, 6(2): 2349-2356 doi: 10.1109/LRA.2021.3061381 [12] Westervelt E R, Grizzle J W, Chevallereau C, Choi J H, Morris B. Feedback Control of Dynamic Bipedal Robot Locomotion. Boca Raton: CRC Press, 2018. 55−58 [13] Griffin B, Grizzle J. Nonholonomic virtual constraints and gait optimization for robust walking control. The International Journal of Robotics Research, 2017, 36(8): 895-922 doi: 10.1177/0278364917708249 [14] Hubicki C, Grimes J, Jones M, Renjewski D, Sprowitz A, Abate A, et al. Atrias: Design and validation of a tether-free 3d-capable spring-mass bipedal robot. The International Journal of Robotics Research, 2016, 35(12): 1497-1521 doi: 10.1177/0278364916648388 [15] Matthew P J, Cousineau E A, Ames A D. Model predictive control of underactuated bipedal robotic walking. In: Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, Washington, USA: IEEE, 2015. 5121−5126 [16] Guo Y, Zhang M, Dong H, Zhao M. Fast online planning for bipedal locomotion via centroidal model predictive gait synthesis. IEEE Robotics and Automation Letters, 2021, 6(4), 6450-6457 doi: 10.1109/LRA.2021.3092268 [17] Negri G H, Rosa L K, Cavalca M S, Celiberto J, Figueiredo E B. Nonlinear predictive control applied to a biped walker with adjustable step length using a passive walking-based reference generator. Optimal Control Applications and Methods, 2020, 41(3): 729-747 doi: 10.1002/oca.2570 [18] 姚渊, 姚道金, 肖晓晖, 王杨. 面向非连续性地面的双足欠驱动步行稳定控制. 机器人, 2017, 39(5): 742-750 doi: 10.13973/j.cnki.robot.2017.0742Yao Yuan, Yao Dao-Jin, Xiao Xiao-Hui, Wang Yang. Stable control of underactuated biped walking on discontinuous ground. Robot, 2017, 39(5): 742-750 doi: 10.13973/j.cnki.robot.2017.0742 [19] Yao D, Wu Y, He J, Zhou J, Xiao X. Feedforward control for underactuated bipedal walking on compliant continuous steps with varying height. Transactions of the Institute of Measurement and Control, 2020, 42(13): 2410-2422 doi: 10.1177/0142331220911827 [20] Da X, Harib O, Hartley R, Griffin B, Grizzle J W. From 2D design of underactuated bipedal gaits to 3D implementation: Walking with speed tracking. IEEE Access, 2016, 4(1): 3469-3478 [21] Grizzle J W, Abba G, Plestan F. Asymptotically stable walking for biped robots: Analysis via systems with impulse effects. IEEE Transactions on Automatic Control, 2001, 46(1): 51-64 doi: 10.1109/9.898695 [22] Yang T, Westervelt E R, Serrani A, Schmiedeler J P. A framework for the control of stable aperiodic walking in underactuated planar bipeds. Autonomous Robots, 2009, 27(3): 277-290 doi: 10.1007/s10514-009-9126-y [23] Nguyen Q, Agrawal A, Martin W, Geyer H, Sreenath K. Dynamic bipedal locomotion over stochastic discrete terrain. The International Journal of Robotics Research, 2018, 37(13): 1537-1553 [24] Xiong X, Ames A D. Dynamic and versatile humanoid walking via embedding 3d actuated slip model with hybrid lip based stepping. IEEE Robotics and Automation Letters, 2020, 5(4): 6286-6293 doi: 10.1109/LRA.2020.3013924 [25] Zhu X S, Wang L, Yu Z G, Chen X C, Han L Q. Motion control for underactuated robots adaptable to uneven terrain by decomposing body balance and velocity tracking. In: Proceedings of the 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM). Chongqing, China: IEEE, 2021. 729−734 [26] Han L Q, Chen X C, Yu Z G, Zhu X S, Kenji H, Huang Q. Trajectory-free dynamic locomotion using key trend states for biped robots with point feet. Science China Information Sciences, DOI: 10.1007/s11432-021-3450-5 [27] Yuno T, Ohtsuka T. Lie derivative inclusion for a class of polynomial state feedback controls. Transactions of the Institute of Systems, Control and Information Engineers, 2014, 27(11): 423-433 doi: 10.5687/iscie.27.423 -

 下载:
下载:

计量
- 文章访问数: 1512
- HTML全文浏览量: 957
- PDF下载量: 372
- 被引次数: 0
