

-
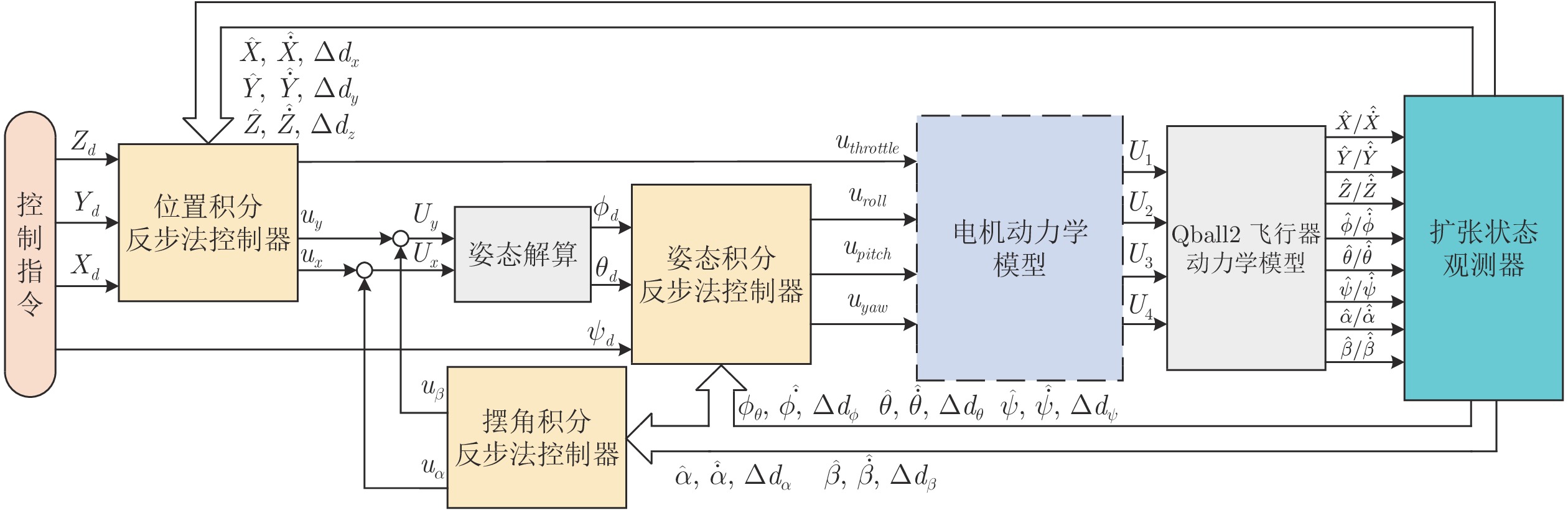
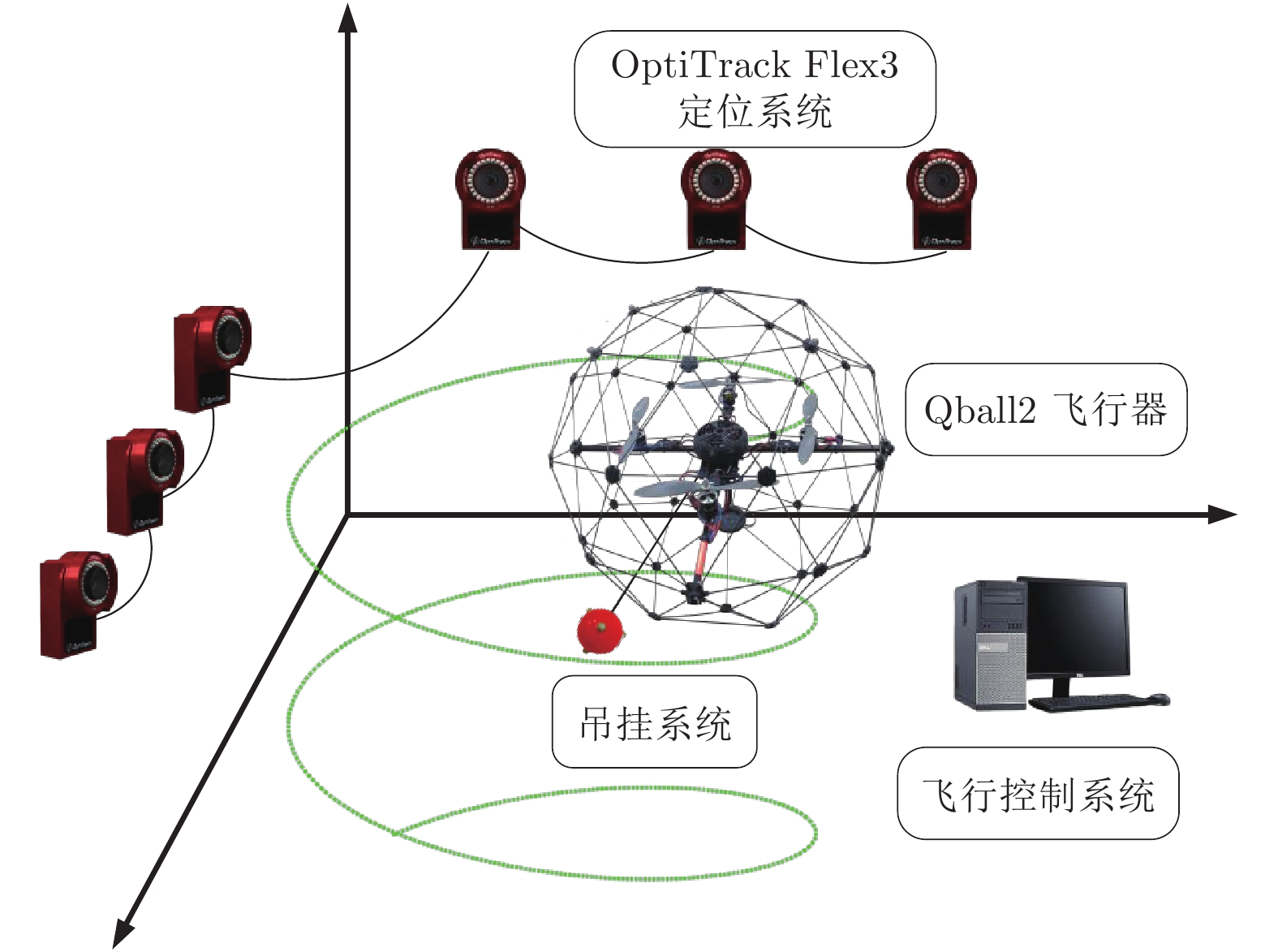
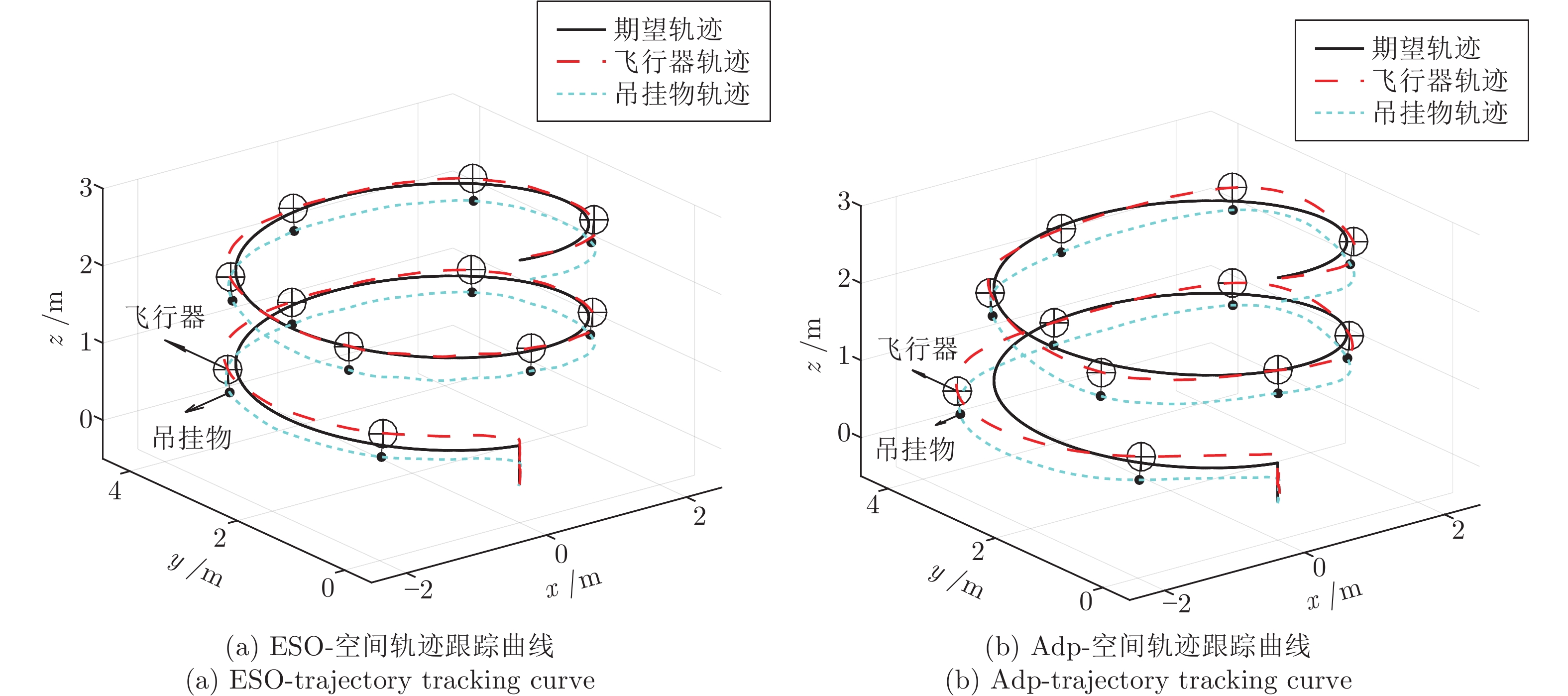
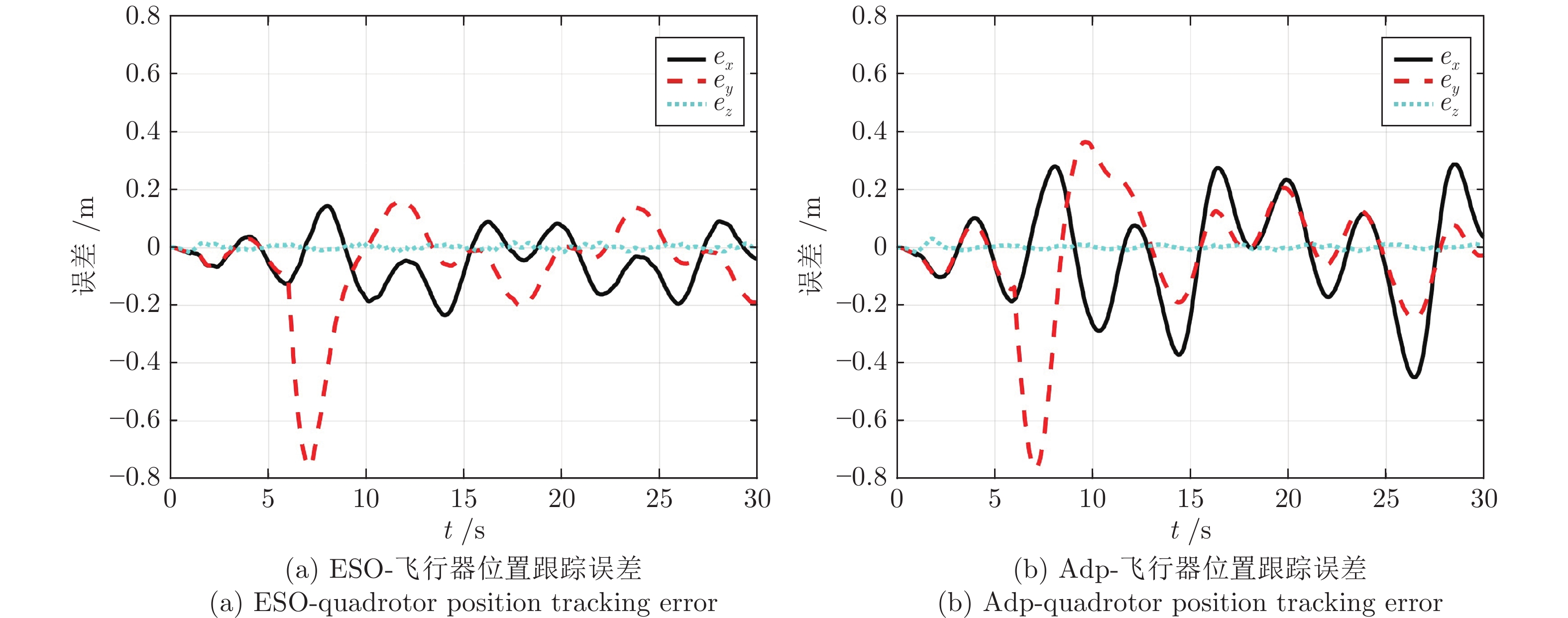
摘要: 针对一类四旋翼飞行器吊挂飞行系统的负载摆动抑制和轨迹跟踪精确控制的问题, 考虑系统存在未知外界扰动和模型动态不确定的情况, 提出一种基于扩张状态观测器(Extended state observer, ESO)的吊挂负载摆动抑制的非线性轨迹跟踪控制方法. 将四旋翼吊挂飞行系统分解为姿态、位置和负载摆动控制三个动态子系统, 分别设计非线性控制器实现欠驱动约束下的解耦控制; 设计一种扩张状态观测器, 用以估计和补偿四旋翼与吊挂负载耦合飞行的未知外界扰动与模型动态不确定性, 并验证了闭环系统的稳定性, 跟踪误差及吊挂负载摆动所有信号的一致最终有界. 最后, 利用Quanser公司的Qball2飞行器进行三维空间螺旋轨迹的跟踪控制, 仿真结果验证了未知干扰下基于扩张状态观测器的四旋翼吊挂飞行非线性控制的有效性和优越性, 实现了四旋翼吊挂系统轨迹跟踪的精确控制和飞行过程中负载摆动的快速抑制.Abstract: In order to solve the problem of load swing suppression and precise control of trajectory tracking for a class of quadrotors, considering the unknown external disturbance and model dynamic uncertainty, a nonlinear trajectory tracking control method based on extended state observer (ESO) is proposed. In this paper, the quadrotor suspension flight system is divided into three dynamic subsystems: Attitude, position and swing angle of the suspending load. Nonlinear controllers are designed to realize decoupling control under drive constraints. An extended state observer is designed to estimate and compensate the unknown external disturbance and model dynamic uncertainty in coupled flight of quadrotor and suspended load, so as to ensure the stability of the closed-loop system, tracking error and all signals in suspension system are uniformly ultimately bounded. Finally, Quanser's Qball2 aircraft is used to track the spiral trajectory in three-dimensional space. The simulation results show the effectiveness and superiority of the proposed control method, and realize the precise control of the trajectory tracking of the quadrotor suspension system and the rapid suppression of the load swing during the flight.
-
Key words:
- Quadrotor /
- suspension flight /
- integral back-stepping /
- extended state observer (ESO)
-
表 1 模型参数
Table 1 Model parameters
参数 大小 $M$ 1.80 kg $l$ 0.20 m ${I_x}$ 0.03 kg·m2 ${I_y}$ 0.03 kg·m2 ${I_z}$ 0.04 kg·m2 ${K_t}$ 8.80 N ${K_y}$ 0.40 N $m$ 0.20 kg $L$ 0.30 m  下载: 导出CSV
下载: 导出CSV
表 2 ESO参数设置
Table 2 Parameters of ESO
参数 $i=X,Y,Z$ $i=\phi ,\theta ,\psi$ $i=\alpha ,\beta$ ${\kappa _{1i}}$ 55 100 100 ${\kappa _{2i}}$ 550 1000 1000 ${\kappa _{3i}}$ 5500 10000 10000
下载: 导出CSV
-
[1] Romero J G, Rodríguez-Cortés H. Asymptotic stability for a transformed nonlinear UAV model with a suspended load via energy shaping. European Journal of Control, 2020, 52: 87-96. doi: 10.1016/j.ejcon.2019.09.002 [2] Ren Yong, Chen Mou. Anti-swing control for a suspension cable system of a helicopter with cable swing constraint and unknown dead-zone. Neurocomputing, 2019, 356: 257-267. doi: 10.1016/j.neucom.2019.04.056 [3] 曹龙, 曹义华, 李春华. 直升机-吊挂耦合系统平衡特性和稳定性分析. 北京航空航天大学学报, 2014, 40(09): 1219-1224.Cao Long, Cao Yi-Hua, Li Chun-Hua. Analysis of the balance characteristics and stability of the helicopter-hanging interchange system. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(09): 1219-1224. [4] Thanapalan K. Nonlinear controller design for a helicopter with an external slung load system. Systems Science & Control Engineering, 2017, 5(1): 97-107. [5] 何荣荣, 陈谋, 吴庆宪, 刘楠. 无人直升机吊挂系统滑模反步减摆控制. 航空兵器, 2020, 27(05): 100-106.He Rong-Rong, Chen Mou, Wu Qing-Xian, Liu Nan. Sliding mode anti-step sway control of unmanned helicopter suspension system. Aviation Ordnance, 2020, 27(05): 100-106. [6] Cao Yi-Hua, Nie Wen-Song, Wang Zhao-Rui, Wan Shao-Feng. Dynamic modeling of helicopter-slung load system under the flexible sling hypothesis. Aerospace Science and Technology, 2020, 99: 105770. doi: 10.1016/j.ast.2020.105770 [7] 黄刚, 李军华. 基于AC-DSDE进化算法多UAVs协同目标分配. 自动化学报, 2021, 47(01): 173-184.Huang Gang, Li Jun-Hua. Multi UAVs Cooperative Target Assignment Based on ac-dsde evolutionary algorithm. Acta Automatica Sinica, 2021, 47(01): 173-184. [8] 甄子洋. 舰载无人机自主着舰回收制导与控制研究进展. 自动化学报, 2019, 45(04): 669-681.Zhen Zi-Yang. Research progress of guidance and control for autonomous landing and recovery of Shipborne UAV. Acta Automatica Sinica, 2019, 45(04): 669-681. [9] Sanalitro D, Savino H J, Tognon M, et al. Full-pose Manipulation Control of a Cable-suspended load with Multiple UAVs under Uncertainties. IEEE Robotics and Automation Letters, 2020, 5(2): 2185-2191. doi: 10.1109/LRA.2020.2969930 [10] Guerrero-Sánchez M E, Lozano R, Castillo P, et al. Nonlinear control strategies for a UAV carrying a load with swing attenuation. Applied Mathematical Modelling, 2021, 91: 709-722. doi: 10.1016/j.apm.2020.09.027 [11] Qian L H, Liu H H T. Dynamics and control of a quadrotor with a cable suspended payload. In: Proceedings of the 30th IEEE Canadian Conference on Electrical and Computer Engineering. Windsor, Canada: IEEE, 2017. 1−4 [12] Ailon A, Arogeti S. On set-point control of a quadrotor-type helicopter with a suspended load. In: Proceedings of the 2nd International Conference on Control, Automation and Robotics. Hong Kong, China: IEEE, 2016. 194−199 [13] Yi K, Gu F, Yang L Y, He Y Q, Han J D. Sliding mode control for a quadrotor slung load system. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: IEEE, 2017. 3967− 3703 [14] 王诗章, 鲜斌, 杨森. 无人机吊挂飞行系统的减摆控制设计. 自动化学报, 2018, 44 (10): 1771-1780.Wang Shi-Zhang, Xian Bin, Yang Sen. Design of sway control for UAV suspension flight system. Acta Automatica Sinica, 2018, 44(10): 1771-1780. [15] Cruz P J, Oishi M, Fierro R. Lift of a cable-suspended load by a quadrotor: A hybrid system approach. In: Proceedings of the IEEE American Control Conference. Chicago, USA: IEEE, 2015. 1887−1892 [16] Cruz P J, Fierro R. Cable-suspended load lifting by a quadrotor UAV: hybrid model, trajectory generation, and control. Autonomous Robots, 2017, 41(8): 1629-1643. doi: 10.1007/s10514-017-9632-2 [17] Emanuele L. de Angelis, Fabrizio Giulietti, Goele Pipeleers. Two-time-scale control of a multirotor aircraft for suspended load transportation. Aerospace Science and Technology, 2019, 84: 193-203. doi: 10.1016/j.ast.2018.10.012 [18] 梁晓, 胡欲立. 四旋翼吊挂运输系统动态反馈线性化轨迹控制. 自动化学报, 2020, 46(09): 1993-2002.Liang Xiao, Hu Yu-Li. Dynamic feedback linearization trajectory control of four-rotor suspension transportation system. Acta Automatica Sinica, 2020, 46(09): 1993-2002. [19] Liang X, Fang Y, Sun N, et al. Nonlinear hierarchical control for unmanned quadrotor transportation systems. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3395-3405. doi: 10.1109/TIE.2017.2752139 [20] Feng Y, Rabbath C A, Rakheja S, Su C. Adaptive controller design for generic quadrotor aircraft platform subject to slung load. In: Proceedings of the 28th Canadian Conference on Electrical and Computer Engineering. Halifax, Canada: IEEE, 2015. 1135−1139 [21] David, Cabecinhas, et al. A trajectory tracking control law for a quadrotor with slung load. Automatica, 2019, 106: 384-389. doi: 10.1016/j.automatica.2019.04.030 [22] Yu G, Cabecinhas D, Cunha R, et al. Nonlinear Backstepping Control of a Quadrotor-Slung Load System. IEEE/ASME Transactions on Mechatronics, 2019, 24(5): 2304-2315. doi: 10.1109/TMECH.2019.2930211 [23] Vandanipour M, Khodabandeh M. Adaptive Fractional Order Sliding Mode Control for a Quadrotor with a Varying Load. Aerospace Science and Technology, 2019, 86: 737-747. doi: 10.1016/j.ast.2019.01.053 [24] Bin, Xian, Shizhang, et al. An Online Trajectory Planning Approach for a Quadrotor UAV With a Slung Payload. IEEE Transactions on Industrial Electronics, 2019, 67(8): 6669-6678. [25] Antonelli G, Cataldi E, Arrichiello F, et al. Adaptive Trajectory Tracking for Quadrotor MAVs in Presence of Parameter Uncertainties and External Disturbances. IEEE Transactions on Control Systems Technology, 2017, 26(1): 248-254. [26] Cabecinhas D, Cunha R, Silvestre C. A nonlinear quadrotor trajectory tracking controller with disturbance rejection. Control Engineering Practice, 2014, 26: 1-10. doi: 10.1016/j.conengprac.2013.12.017 [27] 范云生, 曹亚博, 赵永生. 四旋翼飞行器轨迹跟踪控制器的设计与验证. 仪器仪表学报, 2017, 38(3): 741-749. doi: 10.3969/j.issn.0254-3087.2017.03.029Fan Yun-Sheng, Cao Ya-Bo, Zhao Yong-Sheng. Design and verification of a quadrotor trajectory tracking controller. Chinese Journal of Scientific Instrument, 2017, 38(3): 741-749. doi: 10.3969/j.issn.0254-3087.2017.03.029 [28] FAN Y SH, CAO Y B, GUO Ch, et al. Fuzzy Self-adaptive Proportional Integration Differential Control for Attitude Stabilization of Quadrotor UAV. Journal of Donghua University(English Edition), 2016, 33(5): 768-773. [29] Fan Y S, Cao Y B, Zhao Y S. Sliding mode control for nonlinear trajectory tracking of a quadrotor. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: IEEE, 2017. 6676−6680 [30] 范云生, 何智平, 曹健, 王国峰. 四旋翼飞行器非线性轨迹跟踪控制. 仪器仪表学报, 2019, 40(10): 247-256.Fan Yun-Sheng, He Zhi-Ping, Cao Jian, Wang Guo-Feng. Nonlinear trajectory tracking control of quadrotor aircraft. Chinese Journal of Scientific Instrument, 2019, 40(10): 247-256. [31] Chen X Y, Zhao Y S, Fan Y S. Adaptive integral back-stepping control for a quadrotor with suspended flight. In: Proceedings of the 5th International Conference on Automation, Control and Robotics Engineering. Dalian, China: IEEE, 2020. 226−234 [32] Kotaru P, Wu G, Sreenath K. Dynamics and control of a quadrotor with a payload suspended through an elastic cable. In: Proceedings of the American Control Conference. Seattle, USA: IEEE, 2017. 3906−3913 -

 下载:
下载:




图(18) / 表(2)
计量
- 文章访问数: 2399
- HTML全文浏览量: 1216
- PDF下载量: 432
- 被引次数: 0
