

Research on Jumping Method of Two Wheeled-leg Robot Based on Whole-body Torque Control
-
摘要: 双腿轮机器人由于内在不稳定性以及强耦合非线性特性, 其运动控制尤其是高动态运动控制非常困难. 为此, 提出基于最优力分配的全身力矩控制框架, 可同时实现双腿轮机器人的自平衡与躯干位姿控制; 为提高双腿轮机器人在高速运动时跨越垂直障碍物的能力, 提出应对垂直障碍的跳跃动作规划方法, 并基于全身力矩控制框架进行控制与实现; 通过分析简化的轮式倒立摆模型, 得到腾空时飞轮转动对俯仰姿态的动力学影响, 实现腾空阶段俯仰姿态的调整. 设置连续跳跃仿真实验与有无飞轮调整的俯仰姿态对比实验, 其仿真结果证明所提方法的有效性与鲁棒性.Abstract: The motion control, especially high dynamic motion control of a two wheeled-leg robot is difficult because of its inherent instability and strong coupling nonlinear characteristics. In this paper, a whole-body torque control framework based on optimal force distribution is proposed, which can realize the self-balancing and torso posture control of the two wheeled-leg robot simultaneously. A jumping movement planning method is proposed to improve the ability of the two wheeled-leg robot to step over vertical obstacles during high-speed movement based on the whole-body torque control method. By analyzing the simplified wheeled inverted pendulum model, the dynamic effect of the fly wheel rotation on the pitch attitude during flight is obtained, and the pitch attitude adjustment during the flight phase is realized. A continuous jump simulation experiment and a comparison experiment of pitch attitude with or without fly wheel adjustment are set up. The simulation results demonstrate the effectiveness and robustness of the proposed method.
-
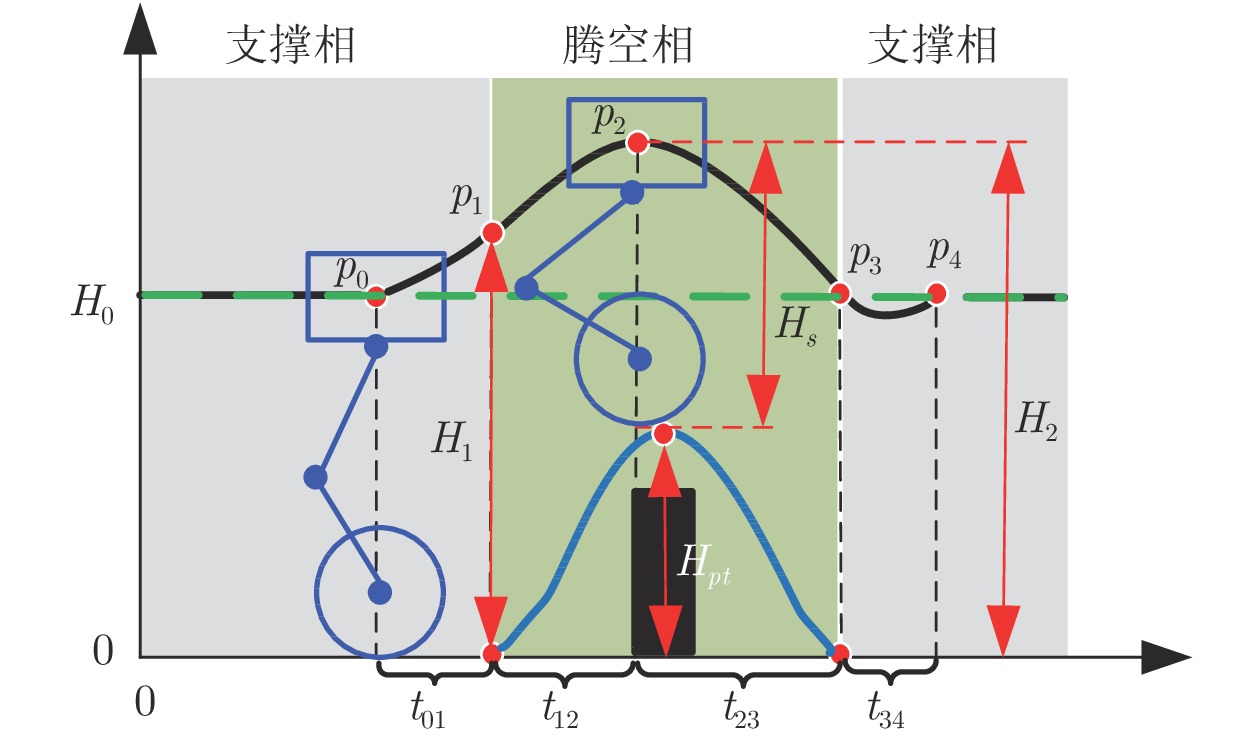
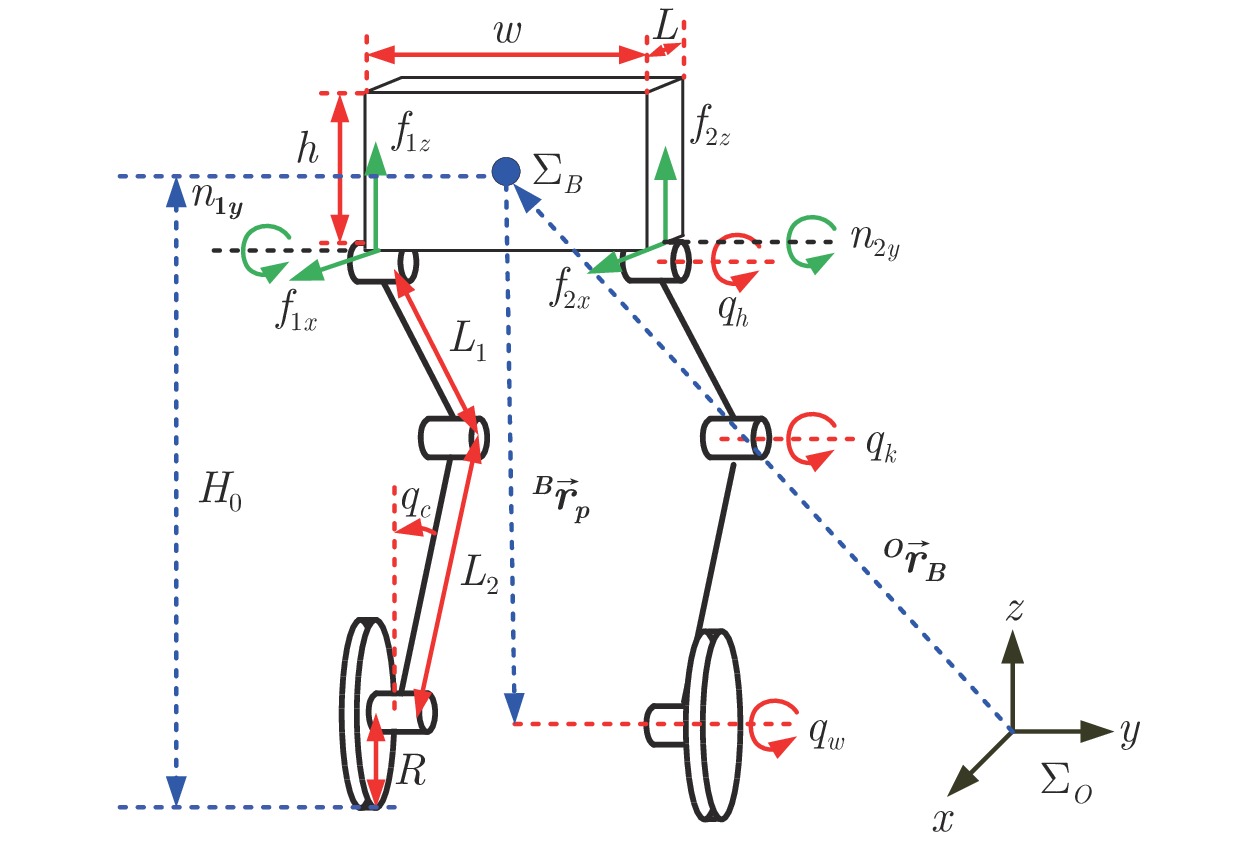
图 2 躯干与足端矢状面轨迹示意图
Fig. 2 The trajectory schematic of the torso and feet in the sagittal plane
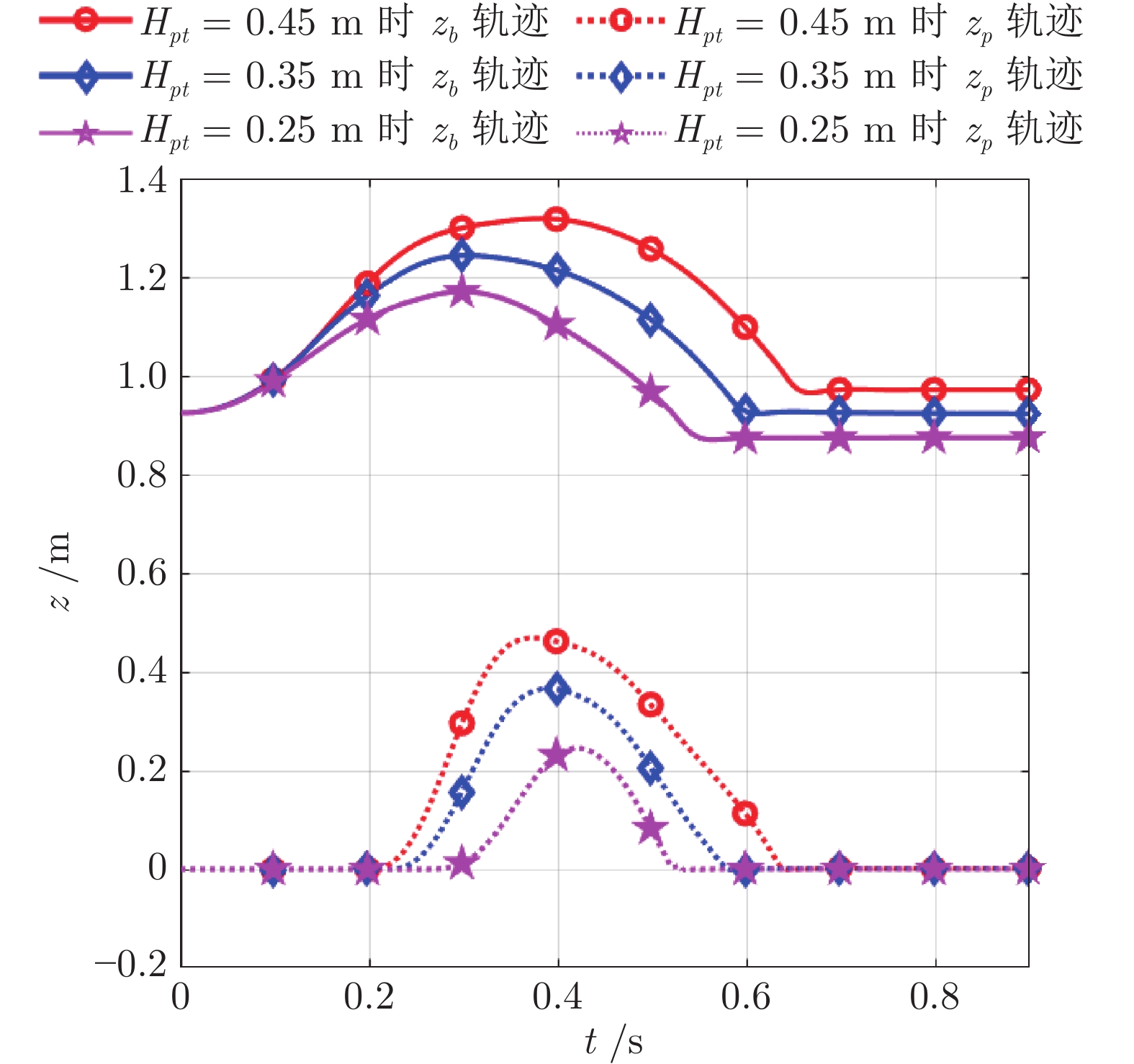
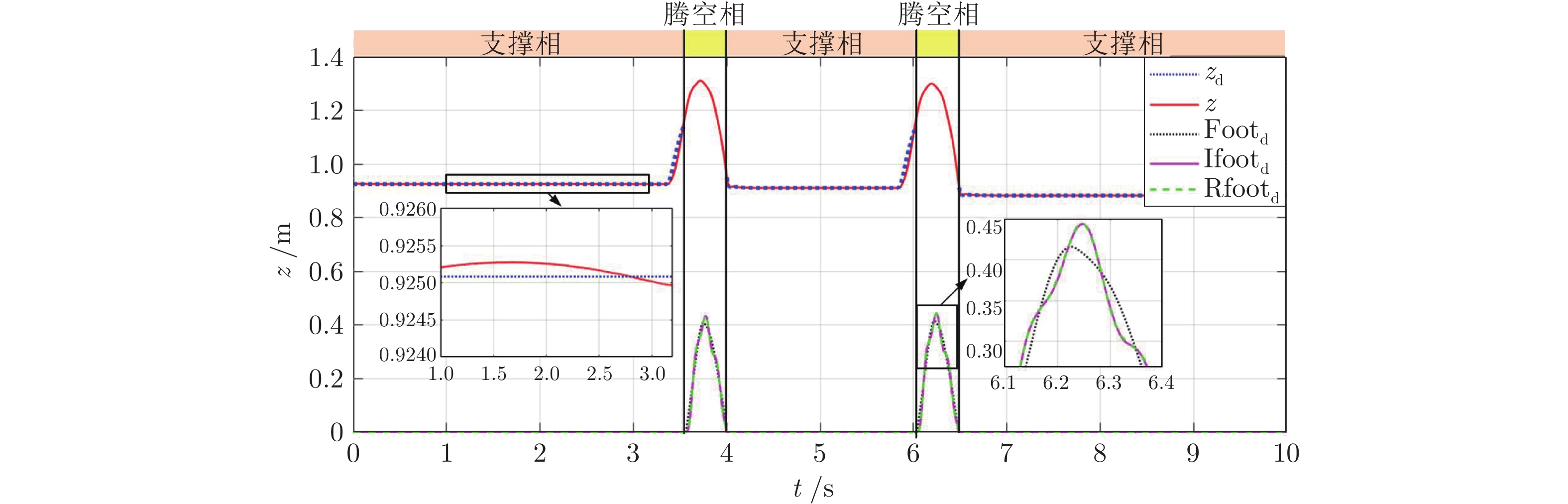
图 4 不同离地高度下躯干与足端纵向位置曲线
Fig. 4 Longitudinal position curves of the torso and feet at different ground clearance
表 1 跳跃参数设置
Table 1 Parameters of the jump motion
参数 参数含义 H0 正常行走时躯干站立高度在${\Sigma _O}$中的表示 H1 腾空瞬间躯干站立高度在${\Sigma _O}$中的表示 Hpt 足端最大离地距离在${\Sigma _O}$中的表示 Hs 足端最大收缩量在${\Sigma _B}$中的表示  下载: 导出CSV
下载: 导出CSV
-
[1] 高志伟, 代学武, 郑志达. 基于运动控制和频域分析的移动机器人能耗最优轨迹规划. 自动化学报, 2020, 46(5): 934-945 doi: 10.16383/j.aas.c180399Gao Zhi-Wei, Dai Xue-Wu, Zheng Zhi-Da. Optimal energy consumption trajectory planning for mobile robot based on motion control and frequency domain analysis. Acta Automatica Sinica, 2020, 46(5): 934-945 doi: 10.16383/j.aas.c180399 [2] Bjelonic M, Bellicoso C D, De Viragh Y, Sako D, Tresoldi F D, Jenelten F, et al. Keep Rollin’—whole-body motion control and planning for wheeled quadrupedal robots. IEEE Robotics and Automation Letters, 2019, 4(2): 2116-2123 doi: 10.1109/LRA.2019.2899750 [3] Dynamics B. Introducing handle [Online], available: https://youtu.be/-7xvqQeoA8c, February 28, 2017 [4] Klemm V, Morra A, Salzmann C, Tschopp F, Bodie K, Gulich L, et al. Ascento: A two-wheeled jumping robot. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 7515−7521 [5] Klemm V, Morra A, Gulich L, Mannhart D, Rohr D, Kamel M, et al. LQR-assisted whole-body control of a wheeled bipedal robot with kinematic loops. IEEE Robotics and Automation Letters, 2020, 5(2): 3745-3752 doi: 10.1109/LRA.2020.2979625 [6] Handle[Online], available: https://baijiahao.baidu.com/s?id=1629321730842384760 &wfr=spider&for=pc, March 29, 2019 [7] Wang H F, Zheng Y F, Jun Y, Oh P. DRC-Hubo walking on rough terrains. In: Proceedings of the IEEE International Conference on Technologies for Practical Robot Applications (TePRA). Woburn, USA: IEEE, 2014. 1−6 [8] Zhang S, Gao J Y, Duan X G, Li H, Yu Z G, Chen X C, et al. Trot pattern generation for quadruped robot based on the ZMP stability margin. In: Proceedings of the ICME International Conference on Complex Medical Engineering. Beijing, China: IEEE, 2013. 608−613 [9] Zhao D, Revzen S. Multi-legged steering and slipping with low DoF hexapod robots. Bioinspiration and Biomimetics, 2020, 15(4): Article No. 045001 [10] Vukobratović M, Borovac B. Zero-moment point — thirty five years of its life. International Journal of Humanoid Robotics, 2004, 1(1): 157-173 doi: 10.1142/S0219843604000083 [11] Messuri D, Klein C. Automatic body regulation for maintaining stability of a legged vehicle during rough-terrain locomotion. IEEE Journal on Robotics and Automation, 1985, 1(3): 132-141 doi: 10.1109/JRA.1985.1087012 [12] Hirose S, Tsukagoshi H, Yoneda K. Normalized energy stability margin and its contour of walking vehicles on rough terrain. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Seoul, South Korea: IEEE, 2001. 181−186 [13] Liu L X, Guo R W, Ji J C, Miao Z H, Zhou J. Practical consensus tracking control of multiple nonholonomic wheeled mobile robots in polar coordinates. International Journal of Robust and Nonlinear Control, 2020, 30(10): 3831-3847 doi: 10.1002/rnc.4967 [14] Xin Y X, Rong X W, Li Y B, Li B, Chai H. Movements and balance control of a wheel-leg robot based on uncertainty and disturbance estimation method. IEEE Access, 2019, 7: 133265-133273 doi: 10.1109/ACCESS.2019.2940487 [15] Abeygunawardhana P K W, Murakami T. Vibration suppression of two-wheel mobile manipulator using resonance-ratio-control-based null-space control. IEEE Transactions on Industrial Electronics, 2010, 57(12): 4137-4146 doi: 10.1109/TIE.2010.2044115 [16] Shihabudheen K V, George N, Chinmaya K A, Thankachan J. Stability control and trajectory tracking of two wheeled mobile manipulator. In: Proceedings of the Annual IEEE India Conference (INDICON). New Delhi, India: IEEE, 2015. 1−6 [17] Xin S Y, You Y W, Zhou C X, Fang C, Tsagarakis N. A torque-controlled humanoid robot riding on a two-wheeled mobile platform. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 1435−1442 [18] Yue M, An C, Sun J Z. An efficient model predictive control for trajectory tracking of wheeled inverted pendulum vehicles with various physical constraints. International Journal of Control, Automation and Systems, 2018, 16(1): 265-274 doi: 10.1007/s12555-016-0393-z [19] Park J, Haan J, Park F C. Convex optimization algorithms for active balancing of humanoid robots. IEEE Transactions on Robotics, 2007, 23(4): 817-822 doi: 10.1109/TRO.2007.900639 [20] Rocchi A, Hoffman E M, Caldwell D G, Tsagarakis N G. OpenSoT: A whole-body control library for the compliant humanoid robot COMAN. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Seattle, USA: IEEE, 2015. 6248−6253 [21] Neunert M, Stauble M, Giftthaler M, Bellicoso C D, Carius J, Gehring C, et al. Whole-body nonlinear model predictive control through contacts for quadrupeds. IEEE Robotics and Automation Letters, 2018, 3(3): 1458-1465 doi: 10.1109/LRA.2018.2800124 [22] Chen T, Sun X B, Xu Z, Li Y B, Rong X W, Zhou L L. A trot and flying trot control method for quadruped robot based on optimal foot force distribution. Journal of Bionic Engineering, 2019, 16(4): 621-632 doi: 10.1007/s42235-019-0050-3 [23] Kim D, Di Carlo J, Katz B, Bledt G, Kim S. Highly dynamic quadruped locomotion via whole-body impulse control and model predictive control. arXiv preprint arXiv: 1909.06586v1, 2019. [24] Dynamics B. Parkour atlas [Online], available: https://youtu.be/LikxFZZO2sk, October 12, 2018 [25] Xin Y X, Chai H, Li Y B, Rong X W, Li B, Li Y Y. Speed and acceleration control for a two wheel-leg robot based on distributed dynamic model and whole-body control. IEEE Access, 2019, 7: 180630-180639 doi: 10.1109/ACCESS.2019.2959333 [26] HEBI Robotics. IGOR: Wheeled, self-balancing robotic kit from HEBI robotics [Online], available: https://youtu.be/icLyS4RWYjg, September 12, 2019 -

 下载:
下载:

图(12) / 表(1)
计量
- 文章访问数: 2705
- HTML全文浏览量: 1649
- PDF下载量: 424
- 被引次数: 0
