

Applications of Evolutionary Computation in the Design Automation of Complex Mechatronic System: A Survey
-
摘要:
复杂机电系统设计自动化是知识自动化的一个重要分支, 在机器人系统设计、高档数控机床设计、智能装备系统设计等方面具有重要的研究意义和应用价值. 本文对进化计算在复杂机电系统设计自动化中的应用进行了综述. 首先, 介绍了几种常用进化计算方法及其优点; 其次, 对进化计算在电子系统、微机电系统和复杂机电系统三个领域的设计自动化进行了较为系统且全面的总结. 然后, 以一类典型的复杂机电系统—机器人系统的设计自动化为代表, 对进化计算在机器人系统设计自动化的研究发展进行了讨论. 最后, 针对进化计算在复杂机电系统设计自动化中存在的共性关键问题进行了讨论与展望.
Abstract:The design automation of complex mechatronic system is an important branch of knowledge automation, which has great theoretical significance and practical value in robot system, high-end computerized numerical control machine and intelligent equipment system design. This paper gives a review of applications of evolutionary algorithms in the design automation of complex mechatronic system. First, some basic algorithms in the field of evolutionary computation and their advantages are briefly introduced. Next, a comprehensive summary of applications of evolutionary algorithms in the design automation of electronic systems, micro-electro-mechanical systems, and complex mechatronic system are presented, respectively. Then, we select a typic complex mechatronic system, i.e., a robot system, to discuss the development of robot design automation with evolutionary algorithms. Finally, some common key issues of applications of evolutionary algorithms in the design automation of complex mechatronic system have been discussed and prospected.
-
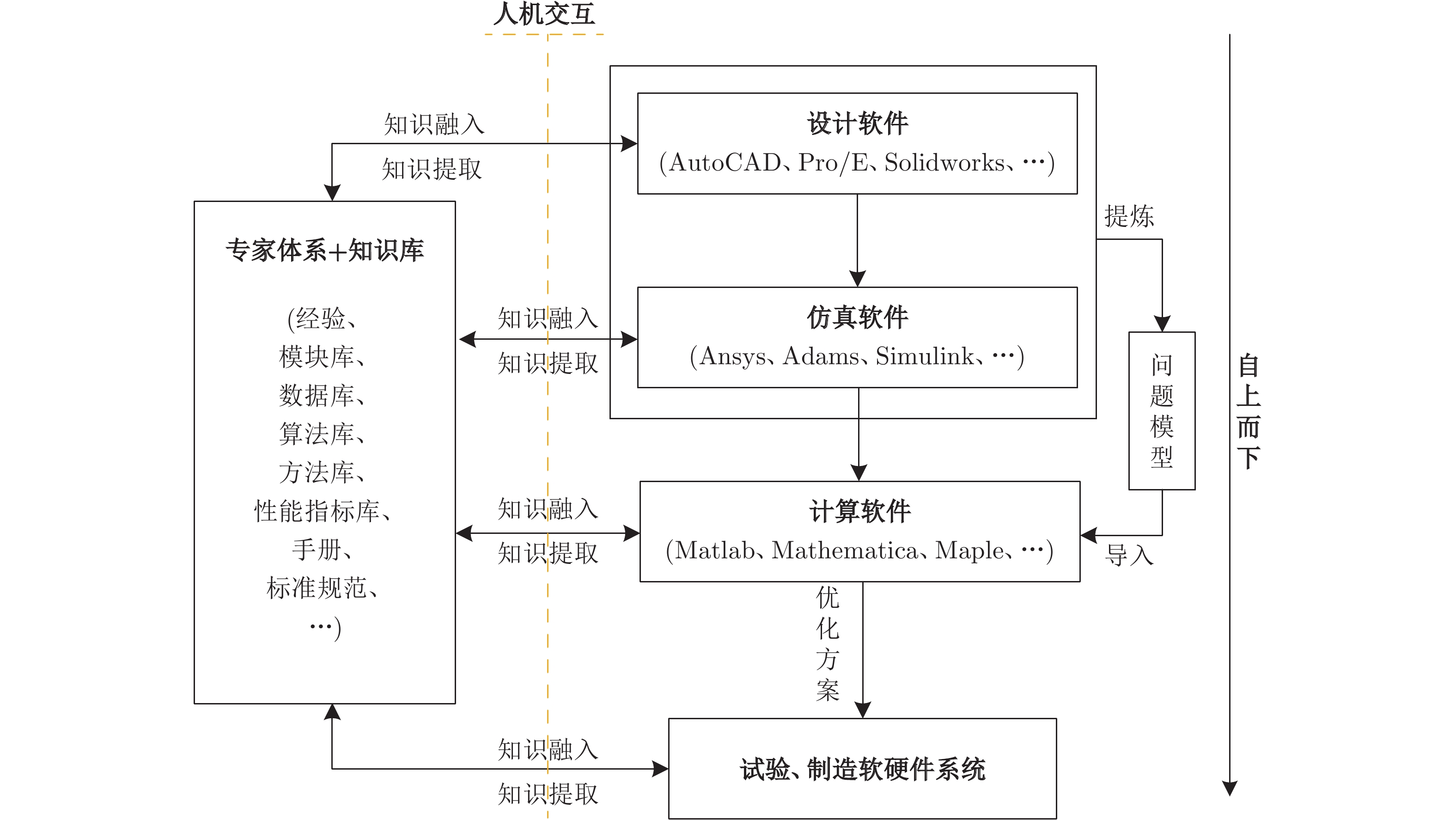
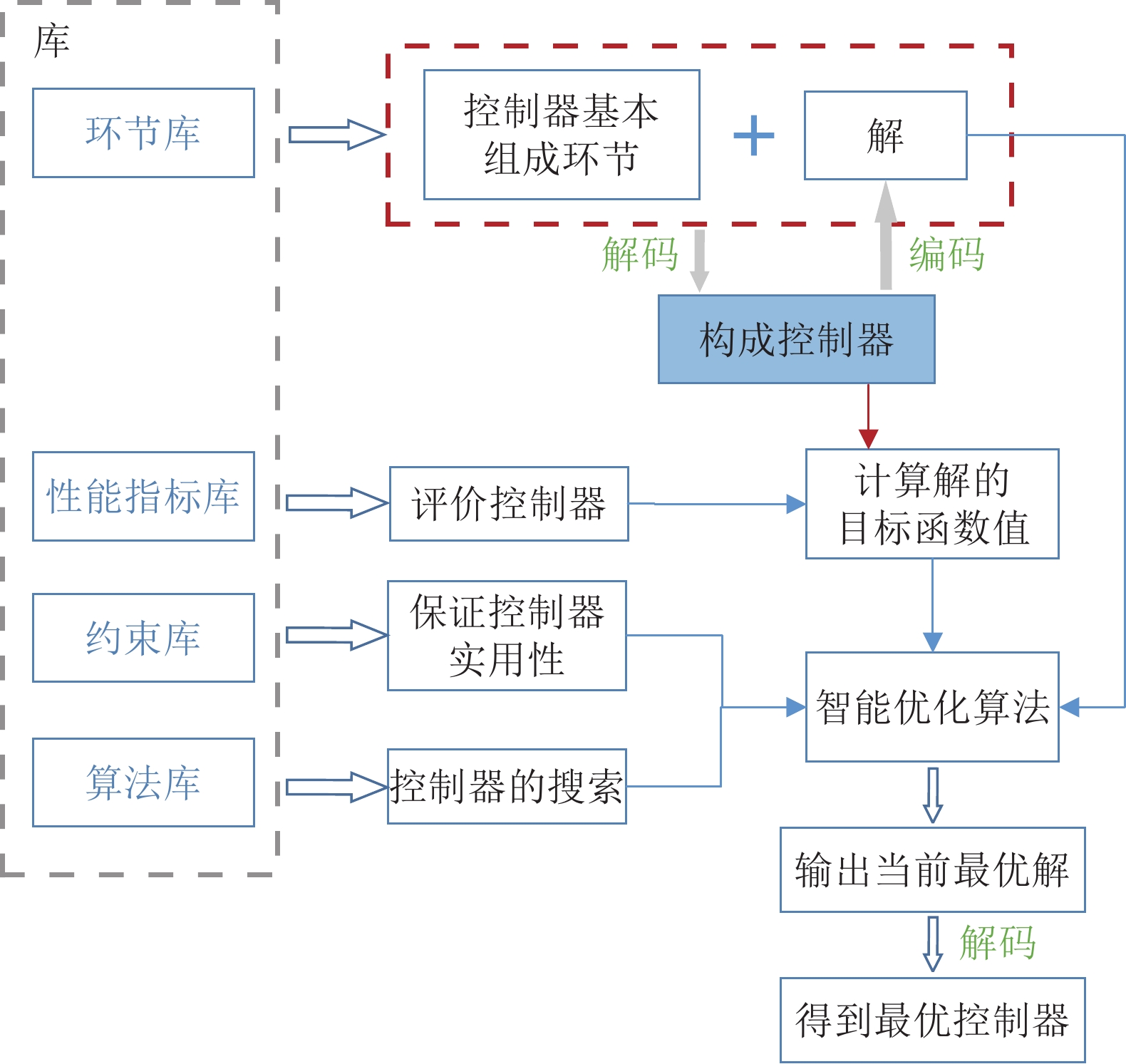
图 1 智能设计与制造平台中各部分间的关系图
Fig. 1 The relationship between the components of the intelligent design and manufacturing platform
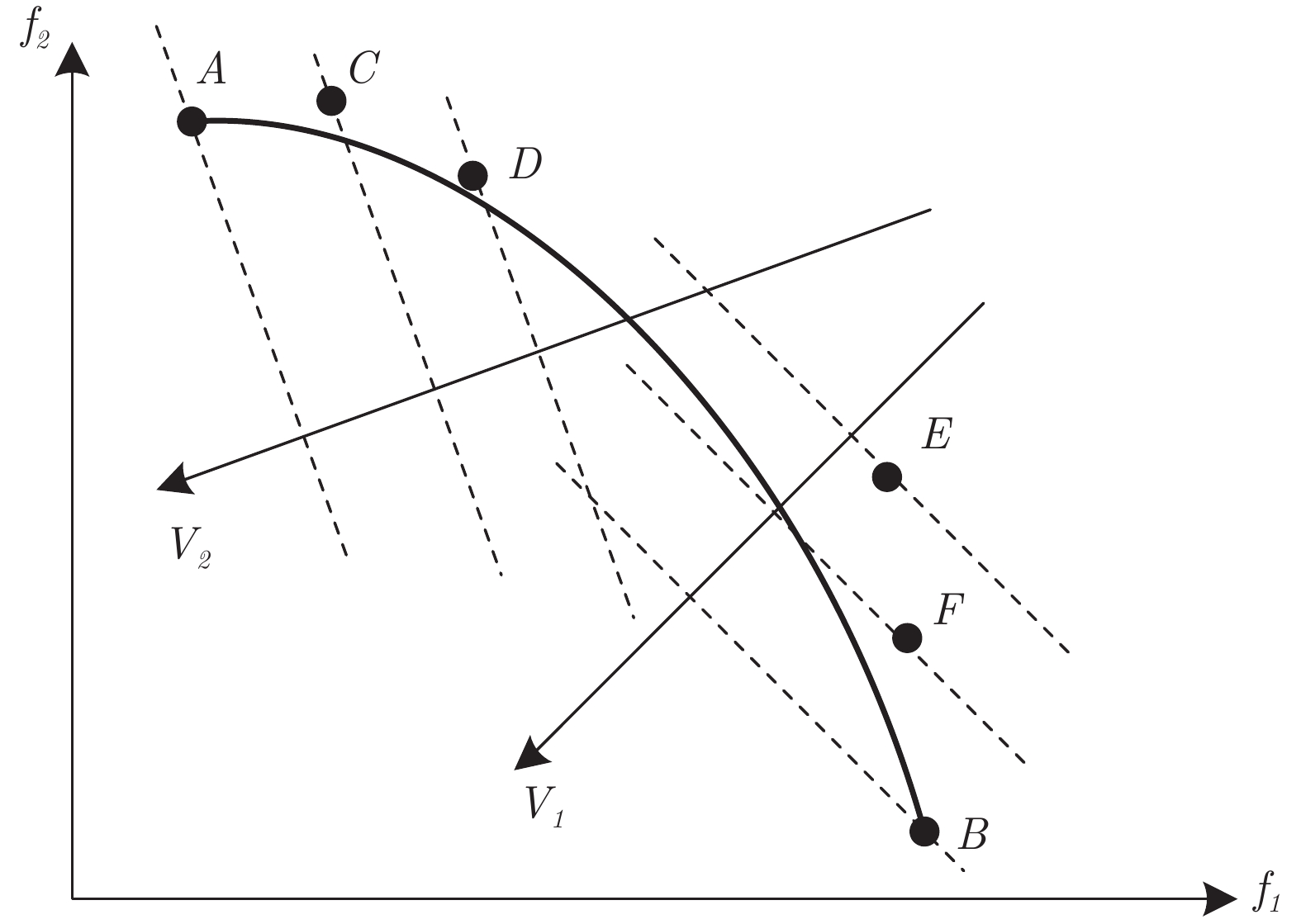
图 2 具有非凸Pareto前沿的优化问题的示意图
Fig. 2 A non-convex Pareto front of a multi-objective optimization problem
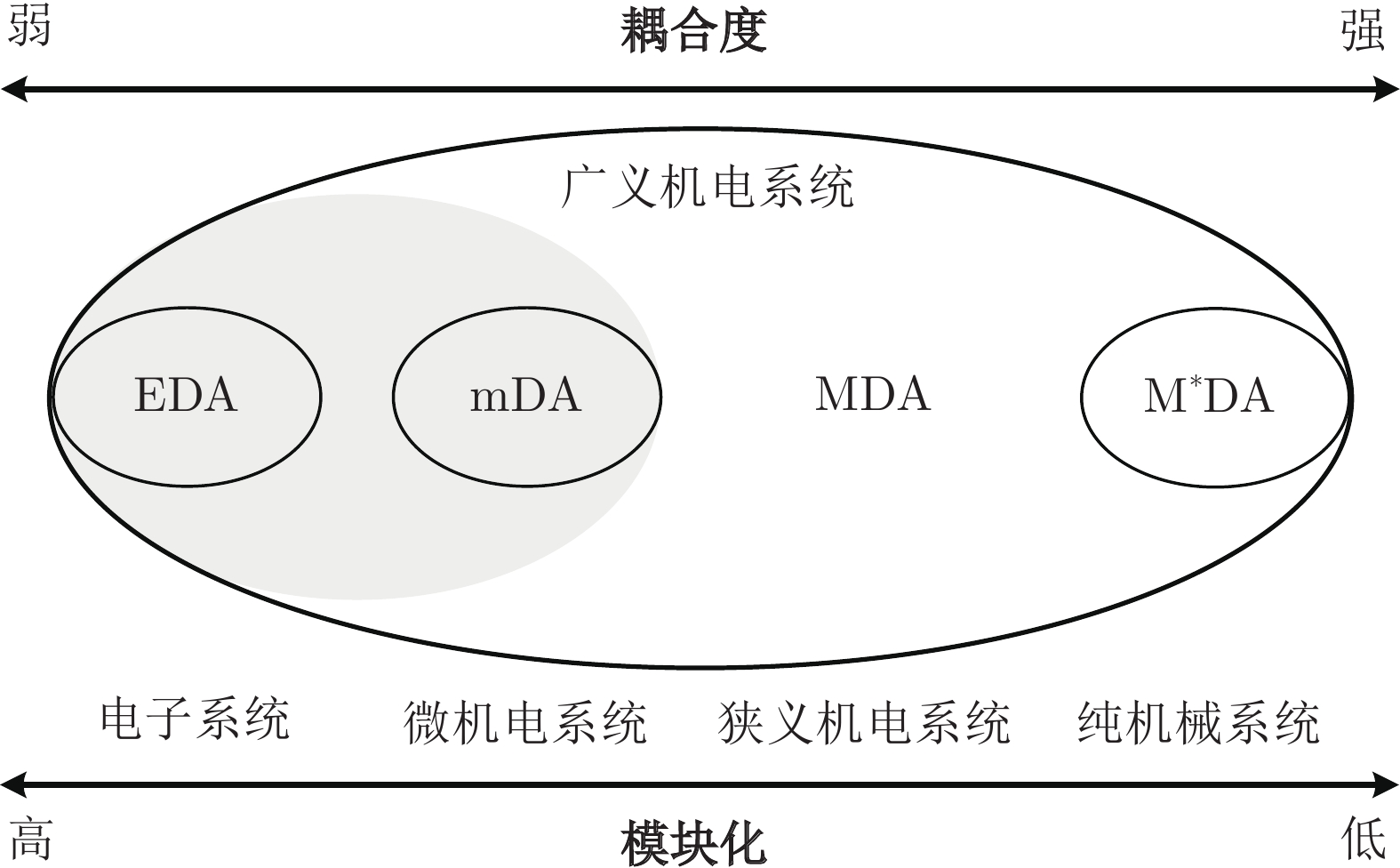
图 4 不同系统的设计自动化之间的关系
Fig. 4 The relationships of design automation of different systems
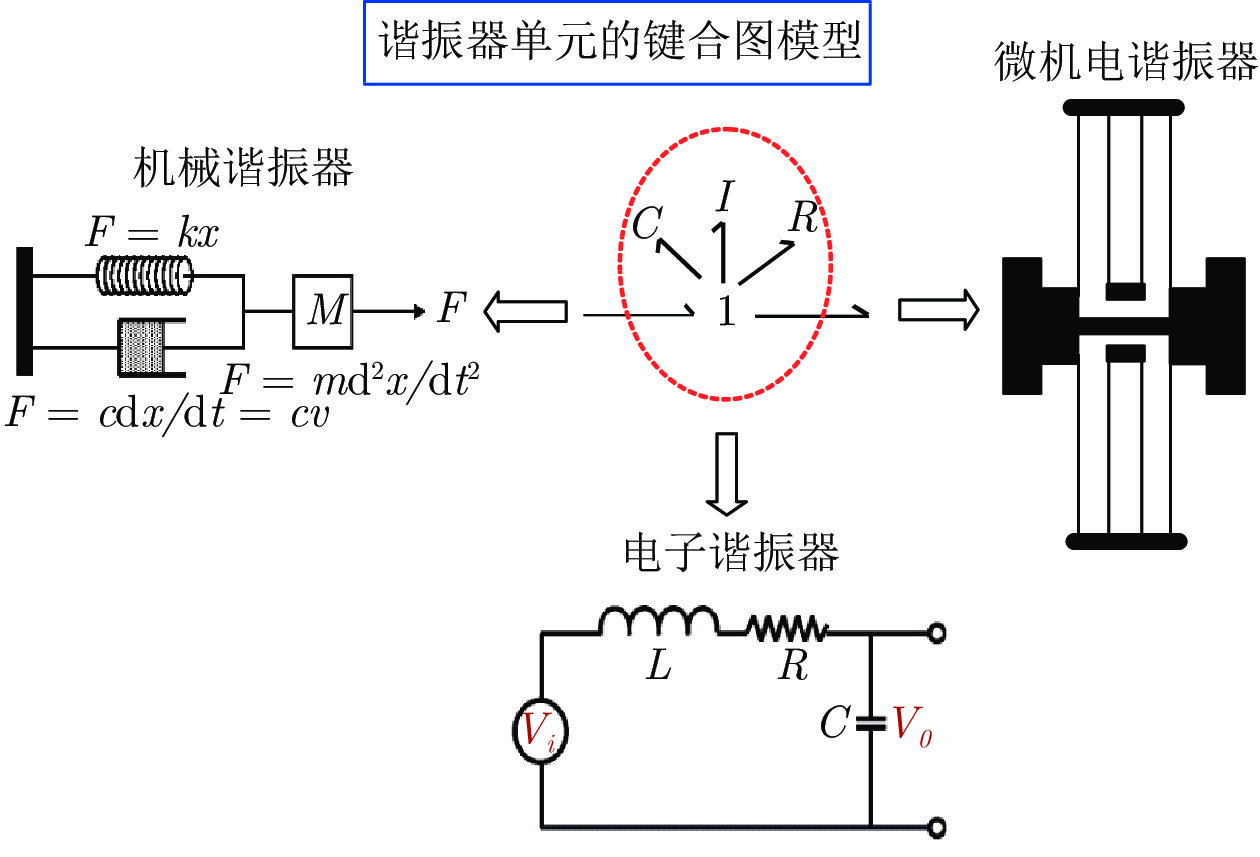
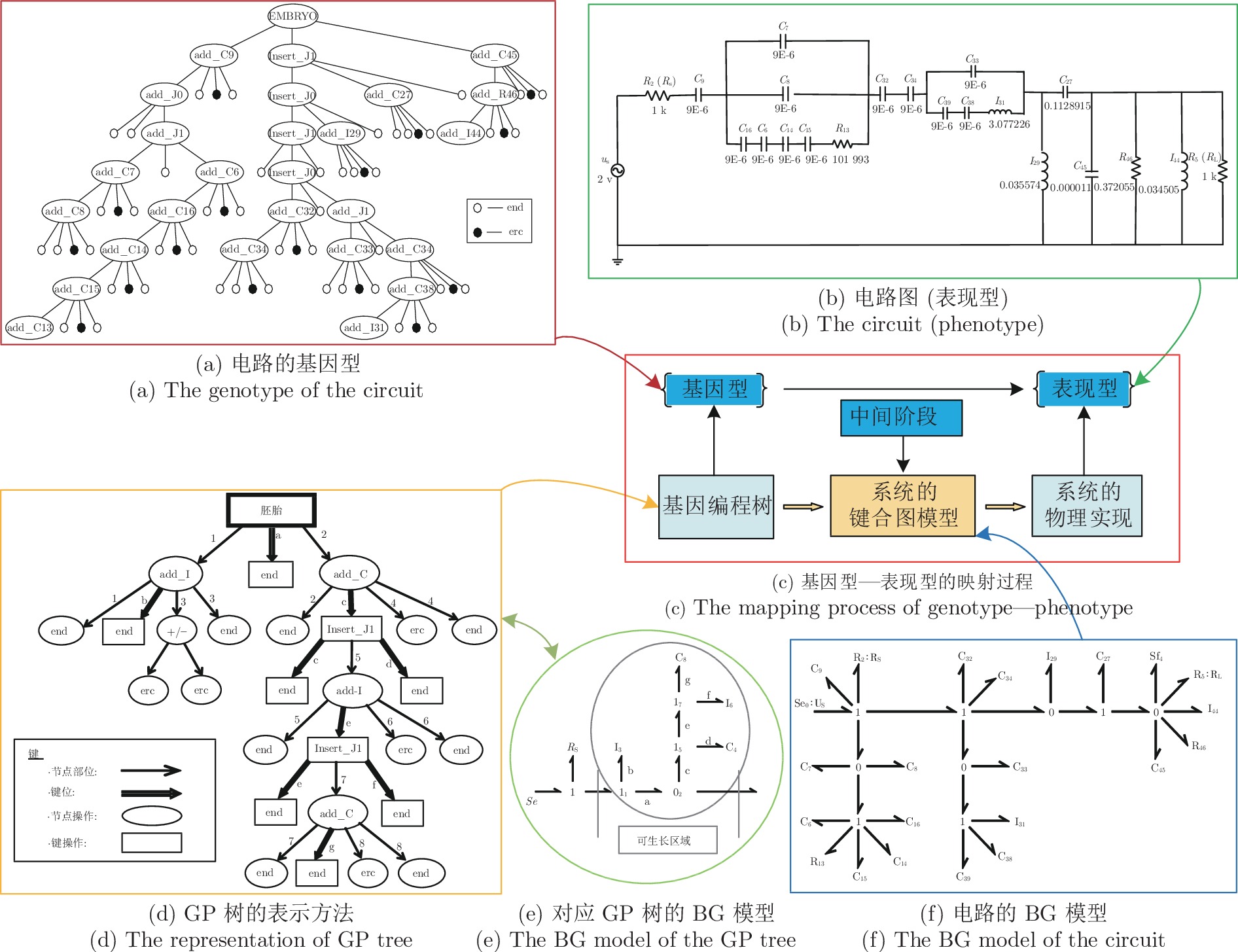
图 5 不同应用领域的谐振器键合图表示
Fig. 5 One bond graph represents resonators in different application domains
特性 设计方法 BG GA GP BG/GA BG/GP 多能域 √ √ √ 拓扑搜索 √ √ 进化过程 √ √ √ √ 自动综合 √ √ √ √ 最优化设计 √ √ √ √ 有效评估 √ √ √  下载: 导出CSV
下载: 导出CSV
表 2 机电系统设计自动化中设计方法的总结
Table 2 A survey of design methods for MDA
序号 设计方法 参考文献 1 非线性规划算法 Yin等[116] 2 遗传算法 Zhang等[40], 解光军等[44], Nabavi等[54-56], Li等[83], Yousfi等[89], 陈启鹏等[95] 3 进化策略算法 Kim[34], Mallick等[46] 4 文化基因算法 Arab等[86] 5 差分进化算法 Zheng等[47], Ak等[49], Rodíguez-Molina等[84], Ochoa等[88], Zheng等[96-97] 6 改进差分进化算法 Fan等[18], 展娇杨[107] 7 粒子群算法 Poddar等[38], Ye等[83], 王福斌等[93] 8 人工蜂群算法 Caraveo等[85], Zhang等[94] 9 基因编程 Koza等[16, 98-101], Vasicek等[36] 10 键合图+遗传算法 Tay等[78] 11 遗传算法+粒子群算法 Lapa等[103] 12 遗传算法+模拟退火算法 Shokouhifar等[37], Li等[90] 13 差分进化算法+粒子群算法 Moharam等[91] 14 键合图+基因编程 Dupuis等[43], Seo等[79], Fan等[60, 81-82], Wang等[20, 111] 15 遗传算法+基于梯度的局部优化算法 Zhang[66] 16 遗传算法+基因编程 Fan等[60], Bruijnen等[102] 17 混合键合图+基因编程 Dupuis等[43, 115] 18 多目标进化算法 Fan等[10], Wen等 [57], Farnsworth等[61], Jamwal等[117] 19 基于替代模型辅助的进化算法 Liu等[39, 63-64], Akinsolu等[52], Wang等[118]
下载: 导出CSV
-
[1] 国家制造强国建设战略咨询委员会. 《中国制造2025》重点领域技术创新绿皮书―技术路线图. 北京: 电子工业出版社, 2016.National Manufacturing Power Building Strategy Advisory Committee. Chinese Manufacturing 2025 Green Paper on Key Areas and Technological Innovation: Technology Roadmap. Beijing: Electronic Industry Press, 2016. [2] Coelingh E, de Vries T J A, van Amerongen J. Automated performance assessment of mechatronic motion systems during the conceptual design stage. In: Proceedings of the 3rd International Conference on Advanced Mechatronics. Okayama, Japan: Japan Society of Mechanical Engineering, 1998. 472−477 [3] 陶飞, 刘蔚然, 刘检华, 刘晓军, 刘强, 屈挺, 等. 数字孪生及其应用探索. 计算机集成制造系统, 2018, 24(1): 1−18Tao Fei, Liu Wei-Ran, Liu Jian-Hua, Liu Xiao-Jun, Liu Qing, Qu Ting, et al. Digital twin and its potential application exploration. Computer Integrated Manufacturing Systems, 2018, 24(1): 1−18 [4] 杨林瑶, 陈思远, 王晓, 张俊, 王成红. 数字孪生与平行系统: 发展现状、对比及展望. 自动化学报, 2019, 45(11): 2001−2031Yang Lin-Yao, Chen Si-Yuan, Wang Xiao, Zhang Jun, Wang Cheng-Hong. Digital twins and parallel systems: State of the art, comparisons and prospect. Acta Automatica Sinica, 2019, 45(11): 2001−2031 [5] Tao F, Sui F Y, Liu A, Qi Q L, Zhang M, Song B Y, et al. Digital twin-driven product design framework. International Journal of Production Research, 2019, 57(12): 3935−3953 doi: 10.1080/00207543.2018.1443229 [6] Zheng N N, Liu Z Y, Ren P J, Ma Y Q, Chen S T, Yu S Y, et al. Hybrid-augmented intelligence: Collaboration and cognition. Frontiers of Information Technology & Electronic Engineering, 2017, 18(2): 153−179 [7] Li L, Zheng N N, Wang F Y. On the crossroad of artificial intelligence: A revisit to Alan Turing and Norbert wiener. IEEE Transactions on Cybernetics, 2019, 49(10): 3618−3626 doi: 10.1109/TCYB.2018.2884315 [8] 桂卫华, 陈晓方, 阳春华, 谢永芳. 知识自动化及工业应用. 中国科学: 信息科学, 2016, 46(8): 1016−1034 doi: 10.1360/N112016-00065Gui Wei-Hua, Chen Xiao-Fang, Yang Chun-Hua, Xie Yong-Fang. Knowledge automation and its industrial application. Scientia Sinica: Informationis, 2016, 46(8): 1016−1034 doi: 10.1360/N112016-00065 [9] Zhang Q F, Zhou A M, Zhao S Z, Suganthan P N, Liu W D, Tiwari S. Multiobjective optimization test instances for the CEC 2009 special session and competition. University of Essex, Colchester, UK and Nanyang Technological University, Singapore, Technical Report, CES-487, 2008. [10] Fan Z, You Y G, Cai X Y, Zheng H D, Zhu G J, Li W J, et al. Analysis and multi-objective optimization of a kind of teaching manipulator. Swarm and Evolutionary Computation, 2019, 50: 100554 doi: 10.1016/j.swevo.2019.06.011 [11] 梁静, 刘睿, 瞿博阳, 岳彩通. 进化算法在大规模优化问题中的应用综述. 郑州大学学报(工学版), 2018, 39(3): 15−21Liang Jing, Liu Rui, Qu Bo-Yang, Yue Cai-Tong. A survey of evolutionary algorithms for large scale optimization problem. Journal of Zhengzhou University (Engineering Science), 2018, 39(3): 15−21 [12] 吴秀丽, 张志强. 求解柔性作业车间调度问题的细菌算法对比及改进. 郑州大学学报(工学版), 2018, 39(3): 34−39Wu Xiu-Li, Zhang Zhi-Qiang. The comparison and improvement of bacterial algorithms for flexible job scheduling problem. Journal of Zhengzhou University (Engineering Science), 2018, 39(3): 34−39 [13] 王大志, 刘士新, 郭希旺. 求解总拖期时间最小化流水车间调度问题的多智能体进化算法. 自动化学报, 2014, 40(3): 548−555Wang Da-Zhi, Liu Shi-Xin, Guo Xi-Wang. A multi-agent evolutionary algorithm for solving total tardiness permutation flow-shop scheduling problem. Acta Automatica Sinica, 2014, 40(3): 548−555 [14] 肖俊明, 周谦, 瞿博阳, 韦学辉. 多目标进化算法及其在电力环境经济调度中的应用综述. 郑州大学学报(工学版), 2016, 37(2): 1−9Xiao Jun-Ming, Zhou Qian, Qu Bo-Yang, Wei Xue-Hui. Multi-objective evolutionary algorithm and its application in electric power environment economic dispatch. Journal of Zhengzhou University (Engineering Science), 2016, 37(2): 1−9 [15] Gamarra C, Guerrero J M. Computational optimization techniques applied to microgrids planning: A review. Renewable and Sustainable Energy Reviews, 2015, 48: 413−424 doi: 10.1016/j.rser.2015.04.025 [16] Koza J R, Bennett F H, Andre D, Keane M A, Dunlap F. Automated synthesis of analog electrical circuits by means of genetic programming. IEEE Transactions on Evolutionary Computation, 1997, 1(2): 109−128 doi: 10.1109/4235.687879 [17] Laskar N M, Guha K, Chatterjee I, Chanda S, Baishnab K L, Paul P K. HWPSO: A new hybrid whale-particle swarm optimization algorithm and its application in electronic design optimization problems. Applied Intelligence, 2019, 49(1): 265−291 doi: 10.1007/s10489-018-1247-6 [18] Fan Z, Liu J C, Sorensen T, Wang P. Improved differential evolution based on stochastic ranking for robust layout synthesis of MEMS components. IEEE Transactions on Industrial Electronics, 2009, 56(4): 937−948 doi: 10.1109/TIE.2008.2006935 [19] Wu Z H, Xu Q S. Design and optimization of a new 3-DOF energy harvester with single piezoelectric stack. In: Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Hong Kong, China: IEEE, 2019. 424−429 [20] Wang J C, Fan Z, Terpenny J P, Goodman E D. Knowledge interaction with genetic programming in mechatronic systems design using bond graphs. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2005, 35(2): 172−182 doi: 10.1109/TSMCC.2004.841915 [21] Cheong K H, Koh J M. A hybrid genetic-Levenberg Marquardt algorithm for automated spectrometer design optimization. Ultramicroscopy, 2019, 202: 100−106 doi: 10.1016/j.ultramic.2019.03.004 [22] Wang X B, Yang Z X, Yan X A. Novel particle swarm optimization-based variational mode decomposition method for the fault diagnosis of complex rotating machinery. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 68−79 doi: 10.1109/TMECH.2017.2787686 [23] Peimankar A, Weddell S J, Jalal T, Lapthorn A C. Evolutionary multi-objective fault diagnosis of power transformers. Swarm and Evolutionary Computation, 2017, 36: 62−75 doi: 10.1016/j.swevo.2017.03.005 [24] 阎平凡, 张长水. 人工神经网络与模拟进化计算. 第2版. 北京: 清华大学出版社, 2005.Yan Ping-Fan, Zhang Chang-Shui. Artificial Neural Networks and Evolutionary Computing (Second edition). Beijing: Tsinghua University Press, 2005. [25] Fogel D B. The advantages of evolutionary computation. Biocomputing and Emergent Computation: Proceedings of BCEC97. Singapore: World Scientific, 1997. 1−11 [26] Mitchell M. An Introduction to Genetic Algorithms. Cambridge, Mass.: MIT Press, 1998. [27] Koza J R. Genetic Programming: On the Programming of Computers by Means of Natural Selection. Cambridge, Mass.: MIT Press, 1992. [28] Kinnear K E Jr. Advances in Genetic Programming. Cambridge, Mass.: MIT Press, 1994. [29] Beyer H G, Schwefel H P. Evolution strategies ― a comprehensive introduction. Natural Computing, 2002, 1(1): 3−52 doi: 10.1023/A:1015059928466 [30] Wang D S, Tan D P, Liu L. Particle swarm optimization algorithm: An overview. Soft Computing, 2018, 22(2): 387−408 doi: 10.1007/s00500-016-2474-6 [31] Storn R, Price K. Differential evolution ― a simple and efficient heuristic for global optimization over continuous spaces. Journal of Global Optimization, 1997, 11(4): 341−359 doi: 10.1023/A:1008202821328 [32] Dorigo M, Stutzle T. Ant colony optimization: Overview and recent advances. Handbook of Metaheuristics. Boston: Springer, 2019. 311−351 [33] Wang L T, Chang Y W, Cheng K T. Electronic Design Automation: Synthesis, Verification, and Test. San Francisco, CA, United States: Morgan Kaufmann, 2009. [34] Kim K J, Cho S B. Automated synthesis of multiple analog circuits using evolutionary computation for redundancy-based fault-tolerance. Applied Soft Computing, 2012, 12(4): 1309−1321 doi: 10.1016/j.asoc.2011.12.002 [35] Anjomshoa M, Mahani A, Sadeghifard S. A new automated design and optimization method of CMOS logic circuits based on modified imperialistic competitive algorithm. Applied Soft Computing, 2014, 21: 423−432 doi: 10.1016/j.asoc.2014.04.011 [36] Vasicek Z, Sekanina L. Evolutionary approach to approximate digital circuits design. IEEE Transactions on Evolutionary Computation, 2015, 19(3): 432−444 doi: 10.1109/TEVC.2014.2336175 [37] Shokouhifar M, Jalali A. An evolutionary-based methodology for symbolic simplification of analog circuits using genetic algorithm and simulated annealing. Expert Systems with Applications, 2015, 42(3): 1189−1201 doi: 10.1016/j.eswa.2014.09.030 [38] Poddar S, Narkhede P, Kumar V, Kumar A. PSO aided adaptive complementary filter for attitude estimation. Journal of Intelligent & Robotic Systems, 2017, 87(3-4): 531−543 [39] Liu B, Yang H, Lancaster M J. Global optimization of microwave filters based on a surrogate model-assisted evolutionary algorithm. IEEE Transactions on Microwave Theory and Techniques, 2017, 65(6): 1976−1985 doi: 10.1109/TMTT.2017.2661739 [40] Zhang J, Chung H S H, Lo W L, Hui S Y, Wu A K M. Implementation of a decoupled optimization technique for design of switching regulators using genetic algorithms. IEEE Transactions on Power Electronics, 2001, 16(6): 752−763 doi: 10.1109/63.974373 [41] Castejón F, Carmona E J. Automatic design of analog electronic circuits using grammatical evolution. Applied Soft Computing, 2018, 62: 1003−1018 doi: 10.1016/j.asoc.2017.09.036 [42] Rojec Z, Burmen A, Fajfar I. Analog circuit topology synthesis by means of evolutionary computation. Engineering Applications of Artificial Intelligence, 2019, 80: 48−65 doi: 10.1016/j.engappai.2019.01.012 [43] Dupuis J F, Fan Z, Goodman E D. Evolutionary design of both topologies and parameters of a hybrid dynamical system. IEEE Transactions on Evolutionary Computation, 2012, 16(3): 391−405 doi: 10.1109/TEVC.2011.2159724 [44] 解光军, 肖晗. 基于遗传算法的运算放大器建模与自动设计. 电子测量与仪器学报, 2009, 23(1): 91−95Xie Guang-Jun, Xiao Han. Modeling and auto-design of operational amplifier based on genetic algorithm. Journal of Electronic Measurement and Instrument, 2009, 23(1): 91−95 [45] 朱继祥, 李元香. 一种分解演化的电路自动设计方法. 计算机系统应用, 2010, 19(8): 52−56 doi: 10.3969/j.issn.1003-3254.2010.08.012Zhu Ji-Xiang, Li Yuan-Xiang. Automated circuit design methodology using decomposition evolution. Computer Systems & Applications, 2010, 19(8): 52−56 doi: 10.3969/j.issn.1003-3254.2010.08.012 [46] Mallick S, Kar R, Mandal D, Ghoshal S P. Optimal sizing of CMOS analog circuits using gravitational search algorithm with particle swarm optimization. International Journal of Machine Learning and Cybernetics, 2017, 8(1): 309−331 doi: 10.1007/s13042-014-0324-3 [47] Zheng L M, Zhang S X, Zheng S Y, Pan Y M. Differential evolution algorithm with two-step subpopulation strategy and its application in microwave circuit designs. IEEE Transactions on Industrial Informatics, 2016, 12(3): 911−923 doi: 10.1109/TII.2016.2535347 [48] Mattiussi C, Floreano D. Analog genetic encoding for the evolution of circuits and networks. IEEE Transactions on Evolutionary Computation, 2007, 11(5): 596−607 doi: 10.1109/TEVC.2006.886801 [49] Ak C, Yildiz A. A novel closed-form expression obtained by using differential evolution algorithm to calculate pull-in voltage of MEMS cantilever. Journal of Microelectromechanical Systems, 2018, 27(3): 392−397 doi: 10.1109/JMEMS.2018.2812924 [50] Rahmani M. MEMS gyroscope control using a novel compound robust control. ISA Transactions, 2018, 72: 37−43 doi: 10.1016/j.isatra.2017.11.009 [51] Zega V, Frangi A, Guercilena A, Gattere G. Analysis of frequency stability and thermoelastic effects for slotted tuning fork MEMS resonators. Sensors, 2018, 18(7): 2157 doi: 10.3390/s18072157 [52] Akinsolu M O, Liu B, Grout V, Lazaridis P I, Mognaschi M E, Barba P D. A parallel surrogate model assisted evolutionary algorithm for electromagnetic design optimization. IEEE Transactions on Emerging Topics in Computational Intelligence, 2019, 3(2): 93−105 doi: 10.1109/TETCI.2018.2864747 [53] Solouk M R, Shojaeefard M H, Dahmardeh M. Parametric topology optimization of a MEMS gyroscope for automotive applications. Mechanical Systems and Signal Processing, 2019, 128: 389−404 doi: 10.1016/j.ymssp.2019.03.049 [54] Nabavi S, Zhang L H. Design and optimization of piezoelectric MEMS vibration energy harvesters based on genetic algorithm. IEEE Sensors Journal, 2017, 17(22): 7372−7382 doi: 10.1109/JSEN.2017.2756921 [55] Nabavi S, Zhang L H. Frequency tuning and efficiency improvement of piezoelectric MEMS vibration energy harvesters. Journal of Microelectromechanical Systems, 2019, 28(1): 77−87 doi: 10.1109/JMEMS.2018.2878657 [56] Nabavi S, Zhang L H. Nonlinear multi-mode wideband piezoelectric MEMS vibration energy harvester. IEEE Sensors Journal, 2019, 19(13): 4837−4848 doi: 10.1109/JSEN.2019.2904025 [57] Wen S H, Xu Q S. Design of a novel piezoelectric energy harvester based on integrated multistage force amplification frame. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 1228−1237 doi: 10.1109/TMECH.2019.2906999 [58] Fedder G K, Jing Q. A hierarchical circuit-level design methodology for microelectromechanical systems. IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing, 1999, 46(10): 1309−1315 doi: 10.1109/82.799682 [59] Mukherjee T, Fedder G K. Hierarchical mixed-domain circuit simulation, synthesis and extraction methodology for MEMS. Journal of VLSI Signal Processing Systems for Signal, Image and Video Technology, 1999, 21(3): 233−249 doi: 10.1023/A:1008122921631 [60] Fan Z, Wang J C, Achiche S, Goodman E, Rosenberg R. Structured synthesis of MEMS using evolutionary approaches. Applied Soft Computing, 2008, 8(1): 579−589 doi: 10.1016/j.asoc.2007.04.001 [61] Farnsworth M, Tiwari A, Zhu M L. Multi-level and multi-objective design optimisation of a MEMS bandpass filter. Applied Soft Computing, 2017, 52: 642−656 doi: 10.1016/j.asoc.2016.10.007 [62] Di Barba P, Dughiero F, Mognaschi M E, Savini A, Wiak S. Biogeography-inspired multiobjective optimization and MEMS design. IEEE Transactions on Magnetics, 2016, 52(3): 7201504 [63] Liu B, Nikolaeva A. Efficient global optimization of MEMS based on surrogate model assisted evolutionary algorithm. In: Proceedings of the 2016 Design, Automation & Test in Europe Conference & Exhibition (DATE). Dresden, Germany: IEEE, 2016. 555−558 [64] Liu B, Grout V, Nikolaeva A. Efficient global optimization of actuator based on a surrogate model assisted hybrid algorithm. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5712−5721 doi: 10.1109/TIE.2017.2782203 [65] Kamalian R. Evolutionary Synthesis of MEMS [Ph. D. dissertation], University of California, USA, 2004 [66] Zhang Y. MEMS Design Synthesis Based on Hybrid Evolutionary Computation [Ph. D. dissertation], University of California, USA, 2006 [67] Wang P, Lu Q B, Fan Z. Evolutionary design optimization of MEMS: A review of its history and state-of-the-art. Cluster Computing, 2019, 22(4): 9105−9111 [68] Youcef-Toumi K. Modeling, design, and control integration: A necessary step in mechatronics. IEEE/ASME Transactions on Mechatronics, 1996, 1(1): 29−38 doi: 10.1109/3516.491407 [69] Chakrabarti A, Bligh T P. An approach to functional synthesis of solutions in mechanical conceptual design. Part I: Introduction and knowledge representation. Research in Engineering Design, 1994, 6(3): 127−141 doi: 10.1007/BF01607275 [70] Campbell M I. The A-Design Invention Machine: A Means of Automating and Investigating Conceptual Design [Ph. D. dissertation], Carnegie Mellon University, USA, 2000 [71] 钟掘. 复杂机电系统耦合设计理论与方法. 北京: 机械工业出版社, 2007.Zhong Jue. Coupling Design Theory and Method of Complex Electromechanical System. Beijing: China Machine Press, 2007. [72] Damic V, Montgomery J. Mechatronics by Bond Graphs: An Object-Oriented Approach to Modelling and Simulation (Second Edition). Berlin, Heidelberg: Springer, 2015. [73] Kumar P, Bensekrane I, Conrard B, Toguyeni A, Merzouki R. Functionability analysis of redundant mechatronic systems in bond graph framework. IEEE/ASME Transactions on Mechatronics, 2019, 24(6): 2465−2476 doi: 10.1109/TMECH.2019.2951945 [74] Zhang L J, Guo F, Li Y Q, Lu W J. Global dynamic modeling of electro-hydraulic 3-UPS/S parallel stabilized platform by bond graph. Chinese Journal of Mechanical Engineering, 2016, 29(6): 1176−1185 doi: 10.3901/CJME.2016.0623.078 [75] Lafarge B, Grondel S, Delebarre C, Cattan E. A validated simulation of energy harvesting with piezoelectric cantilever beams on a vehicle suspension using Bond Graph approach. Mechatronics, 2018, 53: 202−214 doi: 10.1016/j.mechatronics.2018.06.004 [76] Mohammadi V, Ghaemi S, Kharrati H. PSO tuned FLC for full autopilot control of quadrotor to tackle wind disturbance using bond graph approach. Applied Soft Computing, 2018, 65: 184−195 doi: 10.1016/j.asoc.2018.01.015 [77] 朱贵杰. 基于键合图方法的风力发电系统建模研究[硕士学位论文], 汕头大学, 中国, 2014Zhu Gui-Jie. Research on Modeling of Wind Power Generation System Based on Bond Graph Method [Master thesis], Shantou University, China, 2014 [78] Tay E H, Flowers W, Barrus J. Automated generation and analysis of dynamic system designs. Research in Engineering Design, 1998, 10(1): 15−29 doi: 10.1007/BF01580267 [79] Seo K, Fan Z, Hu J J, Goodman E D, Rosenberg R C. Toward a unified and automated design methodology for multi-domain dynamic systems using bond graphs and genetic programming. Mechatronics, 2003, 13(8-9): 851−885 doi: 10.1016/S0957-4158(03)00006-0 [80] Fan Z. Mechatronic Design Automation: Emerging Research and Recent Advances. Hauppauge, NY: Nova Science Publishers, 2010. [81] Fan Z, Seo K, Hu J J, Goodman E D, Rosenberg R C. A novel evolutionary engineering design approach for mixed-domain systems. Engineering Optimization, 2004, 36(2): 127−147 doi: 10.1080/03052150410001647957 [82] Fan Z, Wang J C, Goodman E. Exploring open-ended design space of mechatronic systems. International Journal of Advanced Robotic Systems, 2004, 1(4): 295−302 [83] Ye Y, Yin C B, Gong Y, Zhou J J. Position control of nonlinear hydraulic system using an improved PSO based PID controller. Mechanical Systems and Signal Processing, 2017, 83: 241−259 doi: 10.1016/j.ymssp.2016.06.010 [84] Rodiguez-Molina A, Villarreal-Cervantes M G, Aldape-Perez M. Adaptive control for the four-bar linkage mechanism based on differential evolution. In: Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC). Rio de Janeiro, Brazil: IEEE, 2018. 1−7 [85] Caraveo C, Valdez F, Castillo O. Optimization of fuzzy controller design using a new bee colony algorithm with fuzzy dynamic parameter adaptation. Applied Soft Computing, 2016, 43: 131−142 doi: 10.1016/j.asoc.2016.02.033 [86] Arab A, Alfi A. An adaptive gradient descent-based local search in memetic algorithm applied to optimal controller design. Information Sciences, 2015, 299: 117−142 doi: 10.1016/j.ins.2014.11.051 [87] Mehedi I M, Al-Saggaf U M, Mansouri R, Bettayeb M. Two degrees of freedom fractional controller design: Application to the ball and beam system. Measurement, 2019, 135: 13−22 doi: 10.1016/j.measurement.2018.11.021 [88] Ochoa P, Castillo O, Soria J. Optimization of fuzzy controller design using a differential evolution algorithm with dynamic parameter adaptation based on Type-1 and Interval Type-2 fuzzy systems. Soft Computing, 2020, 24(1): 193−214 doi: 10.1007/s00500-019-04156-3 [89] Yousfi L, Bouchemha A, Bechouat M, Boukrouche A. Vector control of induction machine using PI controller optimized by genetic algorithms. In: Proceedings of the 16th International Power Electronics and Motion Control Conference and Exposition. Antalya, Turkey: IEEE, 2014. 1272−1277 [90] Li L, Zhang Y H, Yang C, Jiao X H, Zhang L P, Song J. Hybrid genetic algorithm-based optimization of powertrain and control parameters of plug-in hybrid electric bus. Journal of the Franklin Institute, 2015, 352(3): 776−801 doi: 10.1016/j.jfranklin.2014.10.016 [91] Moharam A, El-Hosseini M A, Ali H A. Design of optimal PID controller using hybrid differential evolution and particle swarm optimization with an aging leader and challengers. Applied Soft Computing, 2016, 38: 727−737 doi: 10.1016/j.asoc.2015.10.041 [92] 徐国政, 宋爱国, 李会军. 基于进化模糊神经网络的上肢康复机器人自适应阻抗控制. 系统仿真学报, 2010, 22(8): 1880−1884, 1889Xu Guo-Zheng, Song Ai-Guo, Li Hui-Jun. Adaptive impedance control for upper-limb rehabilitation robot based on evolutionary fuzzy neural network. Journal of System Simulation, 2010, 22(8): 1880−1884, 1889 [93] 王福斌, 刘杰, 陈至坤, 焦春旺. 基于小生境粒子群优化的挖掘机器人自抗扰视觉伺服控制. 机械工程学报, 2012, 48(1): 32−38 doi: 10.3901/JME.2012.01.032Wang Fu-Bin, Liu Jie, Chen Zhi-Kun, Jiao Chun-Wang. Auto disturbances refection visual servoing control for excavator robot based on niching particle swarm optimization. Journal of Mechanical Engineering, 2012, 48(1): 32−38 doi: 10.3901/JME.2012.01.032 [94] 张冬丽, 唐英干, 关新平. 用改进的人工蜂群算法设计AVR系统最优分数阶PID控制器. 自动化学报, 2014, 40(5): 973−979 doi: 10.1016/S1874-1029(14)60010-0Zhang D L, Tang Y G, Guan X P. Optimum design of fractional order PID controller for an AVR system using an improved artificial bee colony algorithm. Acta Automatica Sinica, 2014, 40(5): 973−979 doi: 10.1016/S1874-1029(14)60010-0 [95] 陈启鹏, 李志华, 彭伟. 纯电动汽车车身稳定控制器多目标优化研究. 机电工程, 2018, 35(7): 728−734 doi: 10.3969/j.issn.1001-4551.2018.07.014Chen Qi-Peng, Li Zhi-Hua, Peng Wei. Multi objective optimization of stability controller for electric vehicle. Journal of Mechanical & Electrical Engineering, 2018, 35(7): 728−734 doi: 10.3969/j.issn.1001-4551.2018.07.014 [96] Zheng W J, Pi Y G. Study of the fractional order proportional integral controller for the permanent magnet synchronous motor based on the differential evolution algorithm. ISA Transactions, 2016, 63: 387−393 doi: 10.1016/j.isatra.2015.11.029 [97] Zheng W J, Luo Y, Wang X H, Pi Y G, Chen Y Q. Fractional order PIλDμ controller design for satisfying time and frequency domain specifications simultaneously. ISA Transactions, 2017, 68: 212−222 doi: 10.1016/j.isatra.2017.02.016 [98] Koza J R, Keane M A, Yu J, Mydlowec W, Bennett F H. Automatic synthesis of both the control law and parameters for a controller for a three-lag plant with five-second delay using genetic programming and simulation techniques. In: Proceedings of the 2000 American Control Conference. Chicago, USA: IEEE, 2000. 453−459 [99] Koza J R, Keane M A, Yu J, Bennett III F H, Mydlowec W. Automatic creation of human-competitive programs and controllers by means of genetic programming. Genetic Programming and Evolvable Machines, 2000, 1(1−2): 121−164 [100] Keane M A, Yu J, Koza J R. Automatic synthesis of both the topology and tuning of a common parameterized controller for two families of plants using genetic programming. In: Proceedings of the 2nd Annual Conference on Genetic and Evolutionary Computation. San Francisco, USA: Morgan Kaufmann Publishers, 2000. 496−504 [101] Keane M A, Koza J R, Streeter M J. Automatic synthesis using genetic programming of an improved general-purpose controller for industrially representative plants. In: Proceedings of the 2002 NASA/DoD Conference on Evolvable Hardware. Alexandria, USA: IEEE, 2002. 113−122 [102] Bruijnen D, Soute I, van de Molengraft R, Steinbuch M. Exploration of automatic controller synthesis for motion systems using genetic programming. IFAC Proceedings Volumes, 2004, 37(14): 229−234 doi: 10.1016/S1474-6670(17)31109-6 [103] Lapa K, Cpalka K. Flexible fuzzy PID controller (FFPIDC) and a nature-inspired method for its construction. IEEE Transactions on Industrial Informatics, 2018, 14(3): 1078−1088 doi: 10.1109/TII.2017.2771953 [104] Lapa K, Cpalka K, Paszkowski J. Hybrid multi-population based approach for controllers structure and parameters selection. In: Proceedings of the 18th International Conference on Artificial Intelligence and Soft Computing. Zakopane, Poland: Springer, 2019. 456−468 [105] Sun Z L, Xin B, Chen J. Optimal design of controllers based on libraries and differential evolution. In: Proceedings of the 2015 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. 5599−5604 [106] Zhan J Y, Xin B, Chen J. Evolutionary design of controllers with optimized structure and its application in a Maglev ball control system. In: Proceedings of the 36th Chinese Control Conference (CCC). Dalian, China: IEEE, 2017. 2545−2550 [107] 展娇杨. 结构可优化抗扰控制器的智能优化设计[硕士学位论文], 北京理工大学, 中国, 2019Zhan Jiao-Yang. The Intelligent Optimization Design of Disturbance Rejection Controllers with Optimized Structures [Master thesis], Beijing Institute of Technology, China, 2019 [108] Dotoli M, Fay A, Miskowicz M, Seatzu C. Advanced control in factory automation: A survey. International Journal of Production Research, 2017, 55(5): 1243−1259 doi: 10.1080/00207543.2016.1173259 [109] Potter M A, De Jong K A. Cooperative coevolution: An architecture for evolving coadapted subcomponents. Evolutionary Computation, 2000, 8(1): 1−29 doi: 10.1162/106365600568086 [110] Wiegand R P, Liles W C, De Jong K A. An empirical analysis of collaboration methods in cooperative coevolutionary algorithms. In: Proceedings of the 3rd Annual Conference on Genetic and Evolutionary Computation. San Francisco, USA: Morgan Kaufmann Publishers, 2001. 1235−1242 [111] Wang J C, Fan Z, Terpenny J P, Goodman E D. Cooperative body–brain coevolutionary synthesis of mechatronic systems. Artificial Intelligence for Engineering Design, Analysis and Manufacturing, 2008, 22(3): 219−234 doi: 10.1017/S0890060408000152 [112] Dupuis J F, Fan Z, Goodman E. Evolved finite state controller for hybrid system. In: Proceedings of the 1st ACM/SIGEVO Summit on Genetic and Evolutionary Computation. Shanghai, China: ACM, 2009. 105−111 [113] Dupuis J F, Fan Z. Evolved finite state controller for hybrid system in reduced search space. In: Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Singapore: IEEE, 2009. 833−838 [114] Dupuis J F, Fan Z. Comparing an evolved finite state controller for hybrid system to a lookahead design. In: Proceedings of the 2010 IEEE Congress on Evolutionary Computation. Barcelona, Spain: IEEE, 2010. 1−6 [115] Dupuis J F, Fan Z, Goodman E. Evolutionary design of discrete controllers for hybrid mechatronic systems. International Journal of Systems Science, 2015, 46(2): 303−316 doi: 10.1080/00207721.2013.783643 [116] Yin H B, Huang S S, He M C, Li J F. A unified design for lightweight robotic arms based on unified description of structure and drive trains. International Journal of Advanced Robotic Systems, 2017, 14(4): 1−14 [117] Jamwal P K, Hussain S, Xie S Q. Three-stage design analysis and multicriteria optimization of a parallel ankle rehabilitation robot using genetic algorithm. IEEE Transactions on Automation Science and Engineering, 2015, 12(4): 1433−1446 doi: 10.1109/TASE.2014.2331241 [118] Wang H D, Doherty J, Jin Y C. Hierarchical surrogate-assisted evolutionary multi-scenario airfoil shape optimization. In: Proceedings of the 2018 IEEE Congress on Evolutionary Computation. Rio de Janeiro, Brazil: IEEE, 2018. 1−8 [119] Tarkian M. Design Automation for Multidisciplinary Optimization: A High Level CAD Template Approach [Ph. D. dissertation], Linkoping University, Sweden, 2012 [120] Lipson H, Pollack J B. Automatic design and manufacture of robotic lifeforms. Nature, 2000, 406(6799): 974−978 doi: 10.1038/35023115 [121] Hiller J, Lipson H. Automatic design and manufacture of soft robots. IEEE Transactions on Robotics, 2012, 28(2): 457−466 doi: 10.1109/TRO.2011.2172702 [122] Xiao Y, Fan Z, Li W J, Chen S, Zhao L, Xie H H. A manipulator design optimization based on constrained multi-objective evolutionary algorithms. In: Proceedings of the 2016 International Conference on Industrial Informatics-Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII). Wuhan, China: IEEE, 2016. 199−205 [123] Xu G Y, Ding H F, Feng Z M. Optimal design of hydraulic excavator shovel attachment based on multiobjective evolutionary algorithm. IEEE/ASME Transactions on Mechatronics, 2019, 24(2): 808−819 doi: 10.1109/TMECH.2019.2903140 [124] Hsiao J C, Shivam K, Chou C L, Kam T Y. Shape design optimization of a robot arm using a surrogate-based evolutionary approach. Applied Sciences, 2020, 10(7): 2223 doi: 10.3390/app10072223 [125] Datta R, Deb K. Multi-objective design and analysis of robot gripper configurations using an evolutionary-classical approach. In: Proceedings of the 13th Annual Conference on Genetic and Evolutionary Computation. Dublin, Ireland: ACM, 2011. 1843-1850 [126] Datta R, Pradhan S, Bhattacharya B. Analysis and design optimization of a robotic gripper using multiobjective genetic algorithm. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(1): 16−26 doi: 10.1109/TSMC.2015.2437847 [127] Pettersson M, Olvander J. Drive train optimization for industrial robots. IEEE Transactions on Robotics, 2009, 25(6): 1419−1424 doi: 10.1109/TRO.2009.2028764 [128] Rezazadeh S, Hurst J W. On the optimal selection of motors and transmissions for electromechanical and robotic systems. In: Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 4605−4611 [129] West C, Montazeri A, Monk S D, Taylor C J. A genetic algorithm approach for parameter optimization of a 7DOF robotic manipulator. In: Proceedings of the 8th IFAC Conference on Manufacturing Modelling, Management and Control MIM 2016. Troyes, France: IFAC, 2016. 1261−1266 [130] Hassan A, Abomoharam M. Modeling and design optimization of a robot gripper mechanism. Robotics and Computer-Integrated Manufacturing, 2017, 46: 94−103 doi: 10.1016/j.rcim.2016.12.012 [131] Fan Z, Li W J, Cai X Y, Li H, Wei C M, Zhang Q F, et al. Push and pull search for solving constrained multi-objective optimization problems. Swarm and Evolutionary Computation, 2019, 44: 665−679 doi: 10.1016/j.swevo.2018.08.017 [132] Sharma R, Rana K P S, Kumar V. Performance analysis of fractional order fuzzy PID controllers applied to a robotic manipulator. Expert Systems with Applications, 2014, 41(9): 4274−4289 doi: 10.1016/j.eswa.2013.12.030 [133] Ali R S, Aldair A A, Almousawi A K. Design an optimal PID controller using artificial bee colony and genetic algorithm for autonomous mobile robot. International Journal of Computer Applications, 2014, 100(16): 8−16 doi: 10.5120/17607-8016 [134] Taherkhorsandi M, Mahmoodabadi M J, Talebipour M, Castillo-Villar K K. Pareto design of an adaptive robust hybrid of PID and sliding control for a biped robot via genetic algorithm optimization. Nonlinear Dynamics, 2015, 79(1): 251−263 doi: 10.1007/s11071-014-1661-1 [135] Son N N, Van Kien C, Anh H P H. A novel adaptive feed-forward-PID controller of a SCARA parallel robot using pneumatic artificial muscle actuator based on neural network and modified differential evolution algorithm. Robotics and Autonomous Systems, 2017, 96: 65−80 doi: 10.1016/j.robot.2017.06.012 [136] Hai X S, Wang Z L, Feng Q, Ren Y, Xu B H, Cui J J, et al. Mobile robot ADRC with an automatic parameter tuning mechanism via modified pigeon-inspired optimization. IEEE/ASME Transactions on Mechatronics, 2019, 24(6): 2616−2626 doi: 10.1109/TMECH.2019.2953239 [137] Florez C A C, Rosario J M, Amaya D. Control structure for a car-like robot using artificial neural networks and genetic algorithms. Neural Computing and Applications, 2020, 32(20): 15771−15784 doi: 10.1007/s00521-018-3514-1 [138] Delavari H, Lanusse P, Sabatier J. Fractional order controller design for a flexible link manipulator robot. Asian Journal of Control, 2013, 15(3): 783−795 doi: 10.1002/asjc.677 [139] Chin C S, Lin W P. Robust genetic algorithm and fuzzy inference mechanism embedded in a sliding-mode controller for an uncertain underwater robot. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 655−666 doi: 10.1109/TMECH.2018.2806389 [140] Feng H, Yin C B, Weng W W, Ma W, Zhou J J, Jia W H, et al. Robotic excavator trajectory control using an improved GA based PID controller. Mechanical Systems and Signal Processing, 2018, 105: 153−168 doi: 10.1016/j.ymssp.2017.12.014 [141] Tuvayanond W, Parnichkun M. Position control of a pneumatic surgical robot using PSO based 2-DOF H ∞ loop shaping structured controller. Mechatronics, 2017, 43: 40−55 doi: 10.1016/j.mechatronics.2017.03.001 [142] Cheney N, Bongard J, SunSpiral V, Lipson H. Scalable co-optimization of morphology and control in embodied machines. Journal of the Royal Society Interface, 2018, 15(143): 20170937 doi: 10.1098/rsif.2017.0937 [143] Endo K, Maeno T, Kitano H. Co-evolution of morphology and walking pattern of biped humanoid robot using evolutionary computation-evolutionary designing method and its evaluation. In: Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, USA: IEEE, 2003. 340−345 [144] Marbach D, Ijspeert A J. Co-evolution of configuration and control for homogenous modular robots. In: Proceedings of the 8th Conference on Intelligent Autonomous Systems (IAS8). Amsterdam, Holland: IOS Press, 2004. 712−719. [145] Villarreal-Cervantes M G, Cruz-Villar C A, Alvarez-Gallegos J. Synergetic structure-control design via a hybrid gradient-evolutionary algorithm. Optimization and Engineering, 2015, 16(3): 511−539 doi: 10.1007/s11081-014-9254-x [146] Valdez S I, Botello-Aceves S, Becerra H M, Hernandez E E. Comparison between a concurrent and a sequential optimization methodology for serial manipulators using metaheuristics. IEEE Transactions on Industrial Informatics, 2018, 14(7): 3155−3165 doi: 10.1109/TII.2018.2795103 [147] Prabhu S G R, Seals R C, Kyberd P J, Wetherall J C. A survey on evolutionary-aided design in robotics. Robotica, 2018, 36(12): 1804−1821 doi: 10.1017/S0263574718000747 [148] Deb K. Constrained multi-objective evolutionary algorithm. Evolutionary and Swarm Intelligence Algorithms. Cham: Springer, 2019. 85−118 [149] Yang Y K, Liu J C, Tan S B, Wang H H. A multi-objective differential evolutionary algorithm for constrained multi-objective optimization problems with low feasible ratio. Applied Soft Computing, 2019, 80: 42−56 doi: 10.1016/j.asoc.2019.02.041 [150] Han Z H, Liu F, Xu C Z, Zhang K S, Zhang Q F. Efficient multi-objective evolutionary algorithm for constrained global optimization of expensive functions. In: Proceedings of the 2019 IEEE Congress on Evolutionary Computation. Wellington, New Zealand: IEEE, 2019. 2026−2033 [151] Yu M Y, Li X, Liang J. A dynamic surrogate-assisted evolutionary algorithm framework for expensive structural optimization. Structural and Multidisciplinary Optimization, 2020, 61(2): 711−729 doi: 10.1007/s00158-019-02391-8 [152] Sun Y N, Yen G G, Yi Z. Evolving unsupervised deep neural networks for learning meaningful representations. IEEE Transactions on Evolutionary Computation, 2019, 23(1): 89−103 doi: 10.1109/TEVC.2018.2808689 [153] Miikkulainen R, Liang J, Meyerson E, Rawal A, Fink D, Francon O, et al. Evolving deep neural networks. Artificial Intelligence in the Age of Neural Networks and Brain Computing. Amsterdam: Elsevier, 2019. 293−312 [154] Ibrahim A O, Shamsuddin S M, Abraham A, Qasem S N. Adaptive memetic method of multi-objective genetic evolutionary algorithm for backpropagation neural network. Neural Computing and Applications, 2019, 31(9): 4945−4962 doi: 10.1007/s00521-018-03990-0 [155] Laredo D, Chen Z Y, Schutze O, Sun J Q. A neural network-evolutionary computational framework for remaining useful life estimation of mechanical systems. Neural Networks, 2019, 116: 178−187 doi: 10.1016/j.neunet.2019.04.016 [156] Barros R C, Basgalupp M P, de Carvalho A C P L F, Freitas A A. A survey of evolutionary algorithms for decision-tree induction. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2012, 42(3): 291−312 doi: 10.1109/TSMCC.2011.2157494 [157] Takenouchi H, Tokumaru M. Kansei retrieval agent model with fuzzy reasoning. International Journal of Fuzzy Systems, 2017, 19(6): 1803−1811 doi: 10.1007/s40815-017-0360-8 [158] Jia Y H, Chen W N, Yuan H Q, Gu T L, Zhang H X, Gao Y, et al. An intelligent cloud workflow scheduling system with time estimation and adaptive ant colony optimization. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(1): 634−649 doi: 10.1109/TSMC.2018.2881018 [159] Chen Z G, Zhan Z H, Lin Y, Gong J Y, Gu T L, Zhao F, et al. Multiobjective cloud workflow scheduling: A multiple populations ant colony system approach. IEEE Transactions on Cybernetics, 2019, 49(8): 2912−2926 doi: 10.1109/TCYB.2018.2832640 [160] Wang Y, Ru Z Y, Wang K Z, Huang P Q. Joint deployment and task scheduling optimization for large-scale mobile users in multi-UAV-enabled mobile edge computing. IEEE Transactions on Cybernetics, 2020, 50(9): 3984−3997 doi: 10.1109/TCYB.2019.2935466 [161] Wang Z J, Zhan Z H, Yu W J, Lin Y, Zhang J, Gu T L, et al. Dynamic group learning distributed particle swarm optimization for large-scale optimization and its application in cloud workflow scheduling. IEEE Transactions on Cybernetics, 2020, 50(6): 2715−2729 doi: 10.1109/TCYB.2019.2933499 [162] Larson P A, Blanas S, Diaconu C, Freedman C, Patel J M, Zwilling M. High-performance concurrency control mechanisms for main-memory databases. arXiv preprint arXiv: 1201.0228, 2011 [163] Ye X, Liu S H, Yin Y L, Jin Y C. User-oriented many-objective cloud workflow scheduling based on an improved knee point driven evolutionary algorithm. Knowledge-Based Systems, 2017, 135: 113−124 doi: 10.1016/j.knosys.2017.08.006 [164] Cheng R, Jin Y C, Olhofer M, Sendhoff B. A reference vector guided evolutionary algorithm for many-objective optimization. IEEE Transactions on Evolutionary Computation, 2016, 20(5): 773−791 doi: 10.1109/TEVC.2016.2519378 [165] Li K, Chen R Z, Fu G T, Yao X. Two-archive evolutionary algorithm for constrained multiobjective optimization. IEEE Transactions on Evolutionary Computation, 2019, 23(2): 303−315 doi: 10.1109/TEVC.2018.2855411 [166] Zhang Z X, He C, Ye J, Xu J B, Pan L Q. Switching ripple suppressor design of the grid-connected inverters: A perspective of many-objective optimization with constraints handling. Swarm and Evolutionary Computation, 2019, 44: 293−303 doi: 10.1016/j.swevo.2018.04.010 [167] Wang C, Xu R. An angle based evolutionary algorithm with infeasibility information for constrained many-objective optimization. Applied Soft Computing, 2020, 86: 105911 doi: 10.1016/j.asoc.2019.105911 [168] Shang C, Huang X L, You F Q. Data-driven robust optimization based on kernel learning. Computers & Chemical Engineering, 2017, 106: 464−479 [169] Bertsimas D, Gupta V, Kallus N. Data-driven robust optimization. Mathematical Programming, 2018, 167(2): 235−292 doi: 10.1007/s10107-017-1125-8 [170] Ning C, You F Q. Optimization under uncertainty in the era of big data and deep learning: When machine learning meets mathematical programming. Computers & Chemical Engineering, 2019, 125: 434−448 [171] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182−197 doi: 10.1109/4235.996017 [172] Zhang Q F, Li H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Transactions on Evolutionary Computation, 2007, 11(6): 712−731 doi: 10.1109/TEVC.2007.892759 [173] Liu H L, Gu F Q, Zhang Q F. Decomposition of a multiobjective optimization problem into a number of simple multiobjective subproblems. IEEE Transactions on Evolutionary Computation, 2014, 18(3): 450−455 doi: 10.1109/TEVC.2013.2281533 [174] Chen J, Li J, Xin B. DMOEA-εC: Decomposition-based multiobjective evolutionary algorithm with the ε-constraint framework. IEEE Transactions on Evolutionary Computation, 2017, 21(5): 714−730 [175] Cai X Y, Li Y X, Fan Z, Zhang Q F. An external archive guided multiobjective evolutionary algorithm based on decomposition for combinatorial optimization. IEEE Transactions on Evolutionary Computation, 2015, 19(4): 508−523 doi: 10.1109/TEVC.2014.2350995 [176] Cai X Y, Mei Z W, Fan Z, Zhang Q F. A constrained decomposition approach with grids for evolutionary multiobjective optimization. IEEE Transactions on Evolutionary Computation, 2018, 22(4): 564−577 doi: 10.1109/TEVC.2017.2744674 [177] 栗三一, 王延峰, 乔俊飞, 黄金花. 一种基于区域局部搜索的NSGA Ⅱ算法. 自动化学报, 2020, 46(12): 2617−2627Li San-Yi, Wang Yan-Feng, Qiao Jun-Fei, Huang Jin-Hua. A regional local search strategy for NSGA II algorithm. Acta Automatica Sinica, 2020, 46(12): 2617−2627 [178] Cai X Y, Yang Z X, Fan Z, Zhang Q F. Decomposition-based-sorting and angle-based-selection for evolutionary multiobjective and many-objective optimization. IEEE Transactions on Cybernetics, 2017, 47(9): 2824−2837 doi: 10.1109/TCYB.2016.2586191 [179] 陈美蓉, 郭一楠, 巩敦卫, 杨振. 一类新型动态多目标鲁棒进化优化方法. 自动化学报, 2017, 43(11): 2014−2032Chen Mei-Rong, Guo Yi-Nan, Gong Dun-Wei, Yang Zhen. A novel dynamic multi-objective robust evolutionary optimization method. Acta Automatica Sinica, 2017, 43(11): 2014−2032 [180] 丁进良, 杨翠娥, 陈立鹏, 柴天佑. 基于参考点预测的动态多目标优化算法. 自动化学报, 2017, 43(2): 313−320Ding Jin-Liang, Yang Cui-E, Chen Li-Peng, Chai Tian-You. Dynamic multi-objective optimization algorithm based on reference point prediction. Acta Automatica Sinica, 2017, 43(2): 313−320 [181] Deb K. An efficient constraint handling method for genetic algorithms. Computer Methods in Applied Mechanics and Engineering, 2000, 186(2-4): 311−338 doi: 10.1016/S0045-7825(99)00389-8 [182] Fan Z, Li W J, Cai X Y, Huang H, Fang Y, You Y G, et al. An improved epsilon constraint-handling method in MOEA/D for CMOPs with large infeasible regions. Soft Computing, 2019, 23(23): 12491−12510 doi: 10.1007/s00500-019-03794-x [183] Wang Y, Cai Z X, Zhou Y R, Zeng W. An adaptive tradeoff model for constrained evolutionary optimization. IEEE Transactions on Evolutionary Computation, 2008, 12(1): 80−92 doi: 10.1109/TEVC.2007.902851 [184] Fan Z, Fang Y, Li W J, Cai X Y, Wei C M, Goodman E. MOEA/D with angle-based constrained dominance principle for constrained multi-objective optimization problems. Applied Soft Computing, 2019, 74: 621−633 doi: 10.1016/j.asoc.2018.10.027 [185] Fan Z, Li W J, Cai X Y, Li H, Wei C M, Zhang Q F, et al. Difficulty adjustable and scalable constrained multiobjective test problem toolkit. Evolutionary Computation, 2020, 28(3): 339−378 doi: 10.1162/evco_a_00259 [186] Jin Y C. Surrogate-assisted evolutionary computation: Recent advances and future challenges. Swarm and Evolutionary Computation, 2011, 1(2): 61−70 doi: 10.1016/j.swevo.2011.05.001 [187] Liu B, Zhang Q F, Gielen G G E. A Gaussian process surrogate model assisted evolutionary algorithm for medium scale expensive optimization problems. IEEE Transactions on Evolutionary Computation, 2014, 18(2): 180−192 doi: 10.1109/TEVC.2013.2248012 [188] Awad N H, Ali M Z, Mallipeddi R, Suganthan P N. An improved differential evolution algorithm using efficient adapted surrogate model for numerical optimization. Information Sciences, 2018, 451-452: 326−347 doi: 10.1016/j.ins.2018.04.024 [189] Sun C L, Jin Y C, Cheng R, Ding J L, Zeng J C. Surrogate-assisted cooperative swarm optimization of high-dimensional expensive problems. IEEE Transactions on Evolutionary Computation, 2017, 21(4): 644−660 doi: 10.1109/TEVC.2017.2675628 [190] Bandaru S, Ng A H C, Deb K. Data mining methods for knowledge discovery in multi-objective optimization: Part A - Survey. Expert Systems with Applications, 2017, 70: 139−159 doi: 10.1016/j.eswa.2016.10.015 [191] Bandaru S, Ng A H C, Deb K. Data mining methods for knowledge discovery in multi-objective optimization: Part B - New developments and applications. Expert Systems with Applications, 2017, 70: 119−138 doi: 10.1016/j.eswa.2016.10.016 [192] Gupta A, Ong Y S, Feng L. Insights on transfer optimization: Because experience is the best teacher. IEEE Transactions on Emerging Topics in Computational Intelligence, 2018, 2(1): 51−64 doi: 10.1109/TETCI.2017.2769104 [193] Zhang J Y, Zhou A M, Zhang G X. A classification and Pareto domination based multiobjective evolutionary algorithm. In: Proceedings of the 2015 IEEE Congress on Evolutionary Computation. Sendai, Japan: IEEE, 2015. 2883−2890 [194] Zhang X Y, Tian Y, Cheng R, Jin Y C. A decision variable clustering-based evolutionary algorithm for large-scale many-objective optimization. IEEE Transactions on Evolutionary Computation, 2018, 22(1): 97−112 doi: 10.1109/TEVC.2016.2600642 [195] Wang H D, Jin Y C, Jansen J O. Data-driven surrogate-assisted multiobjective evolutionary optimization of a trauma system. IEEE Transactions on Evolutionary Computation, 2016, 20(6): 939−952 doi: 10.1109/TEVC.2016.2555315 [196] Lu Z C, Whalen I, Boddeti V, Dhebar Y, Deb K, Goodman E, et al. NSGA-Net: Neural architecture search using multi-objective genetic algorithm. In: Proceedings of the 2019 Genetic and Evolutionary Computation Conference. Prague, Czech: ACM, 2019. 419−427 [197] Suganuma M, Kobayashi M, Shirakawa S, Nagao T. Evolution of deep convolutional neural networks using Cartesian genetic programming. Evolutionary Computation, 2020, 28(1): 141−163 doi: 10.1162/evco_a_00253 [198] Bottou L. Stochastic gradient descent tricks. Neural Networks: Tricks of the Trade. Berlin: Springer-Verlag, 2012. 421−436 [199] Kingma D P, Ba J. Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980, 2017 [200] Liang J, Meyerson E, Miikkulainen R. Evolutionary architecture search for deep multitask networks. In: Proceedings of the 2018 Genetic and Evolutionary Computation Conference. Kyoto, Japan: ACM, 2018. 466−473 [201] Kelly S, Heywood M I. Emergent solutions to high-dimensional multitask reinforcement learning. Evolutionary Computation, 2018, 26(3): 347−380 doi: 10.1162/evco_a_00232 [202] Ma B, Lei G, Liu C C, Zhu J G, Guo Y G. Robust tolerance design optimization of a PM claw pole motor with soft magnetic composite cores. IEEE Transactions on Magnetics, 2018, 54(3): 8102404 -

 下载:
下载:

计量
- 文章访问数: 2576
- HTML全文浏览量: 1814
- PDF下载量: 475
- 被引次数: 0
