

Un-modeled Dynamics Increment Compensation Driven Nonlinear PID Control and Its Application
-
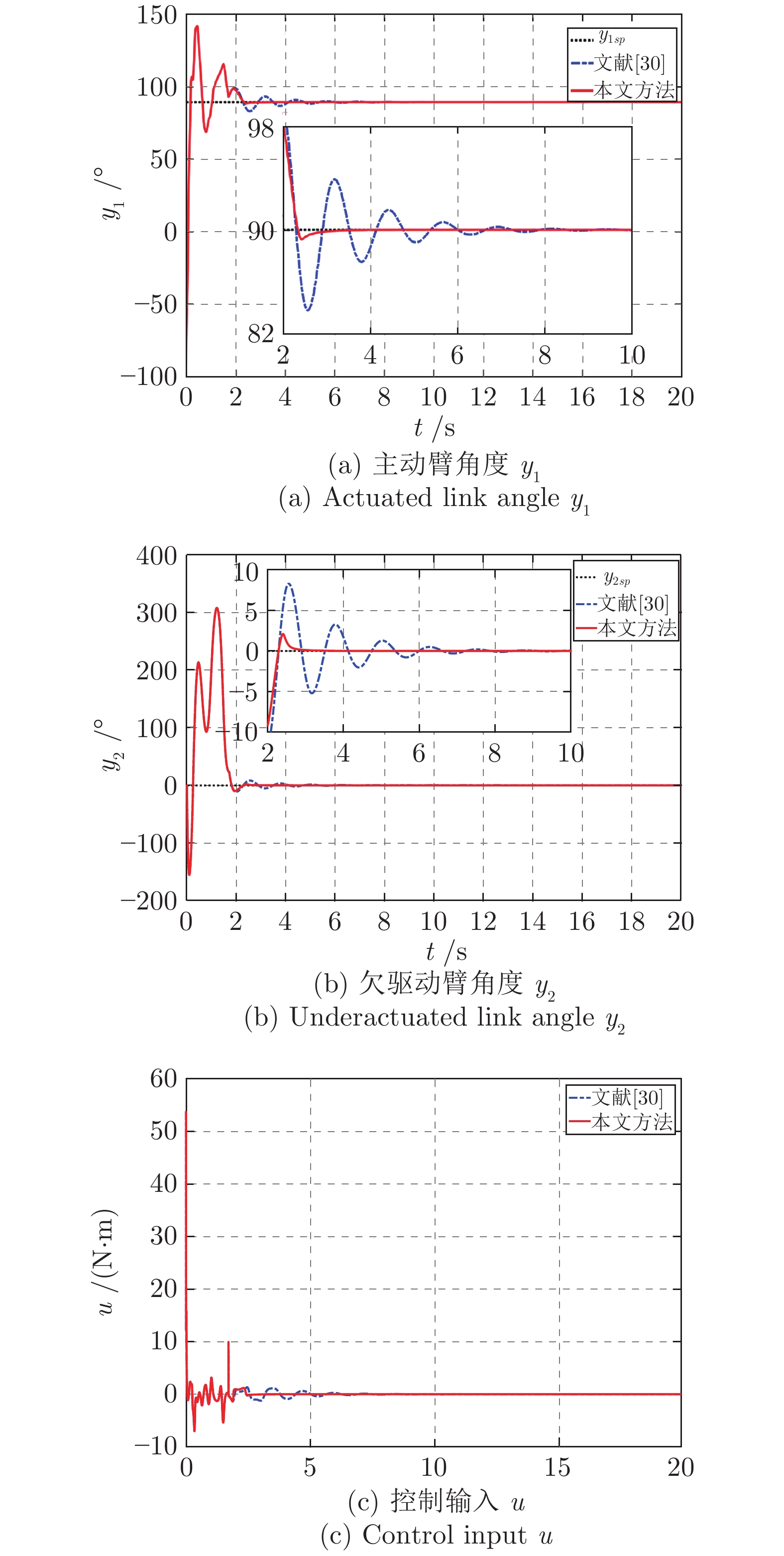
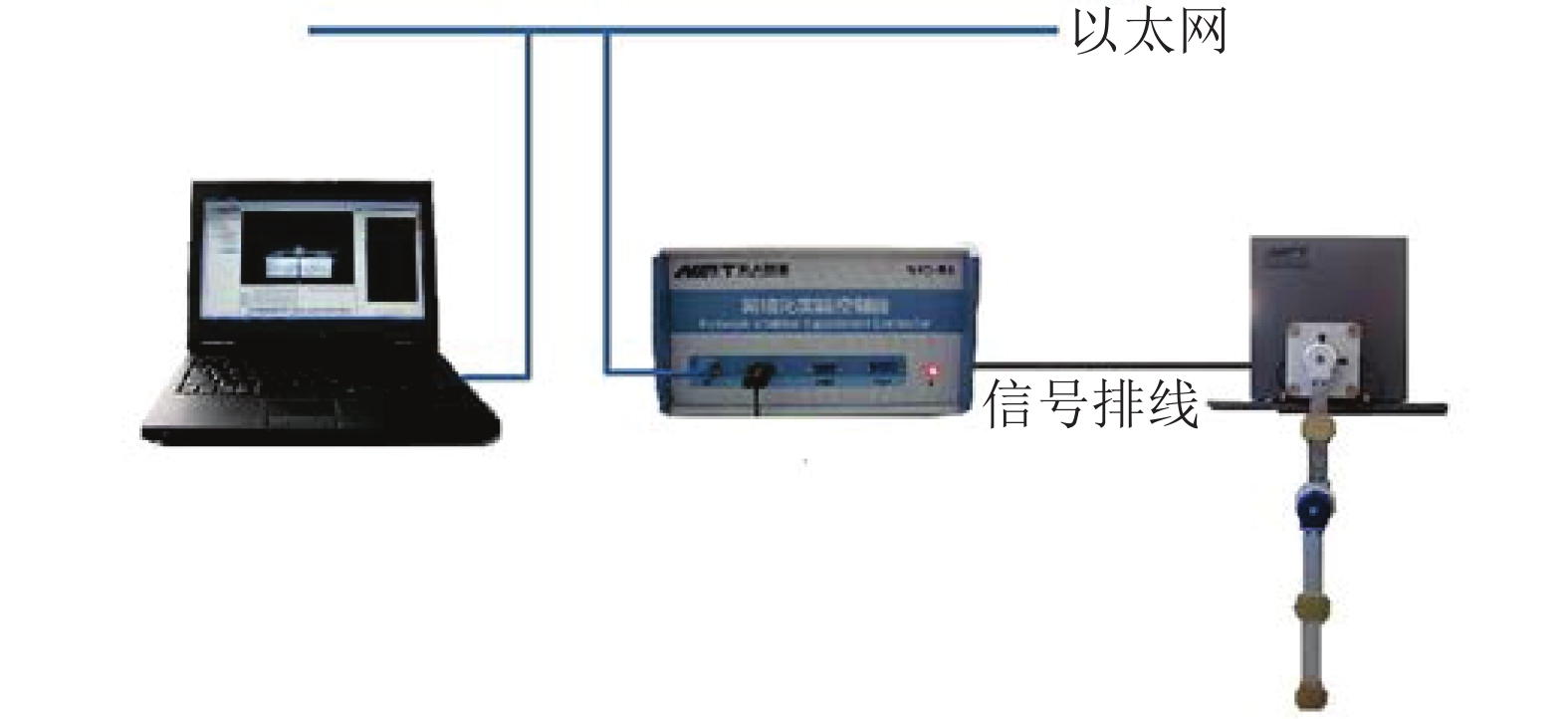
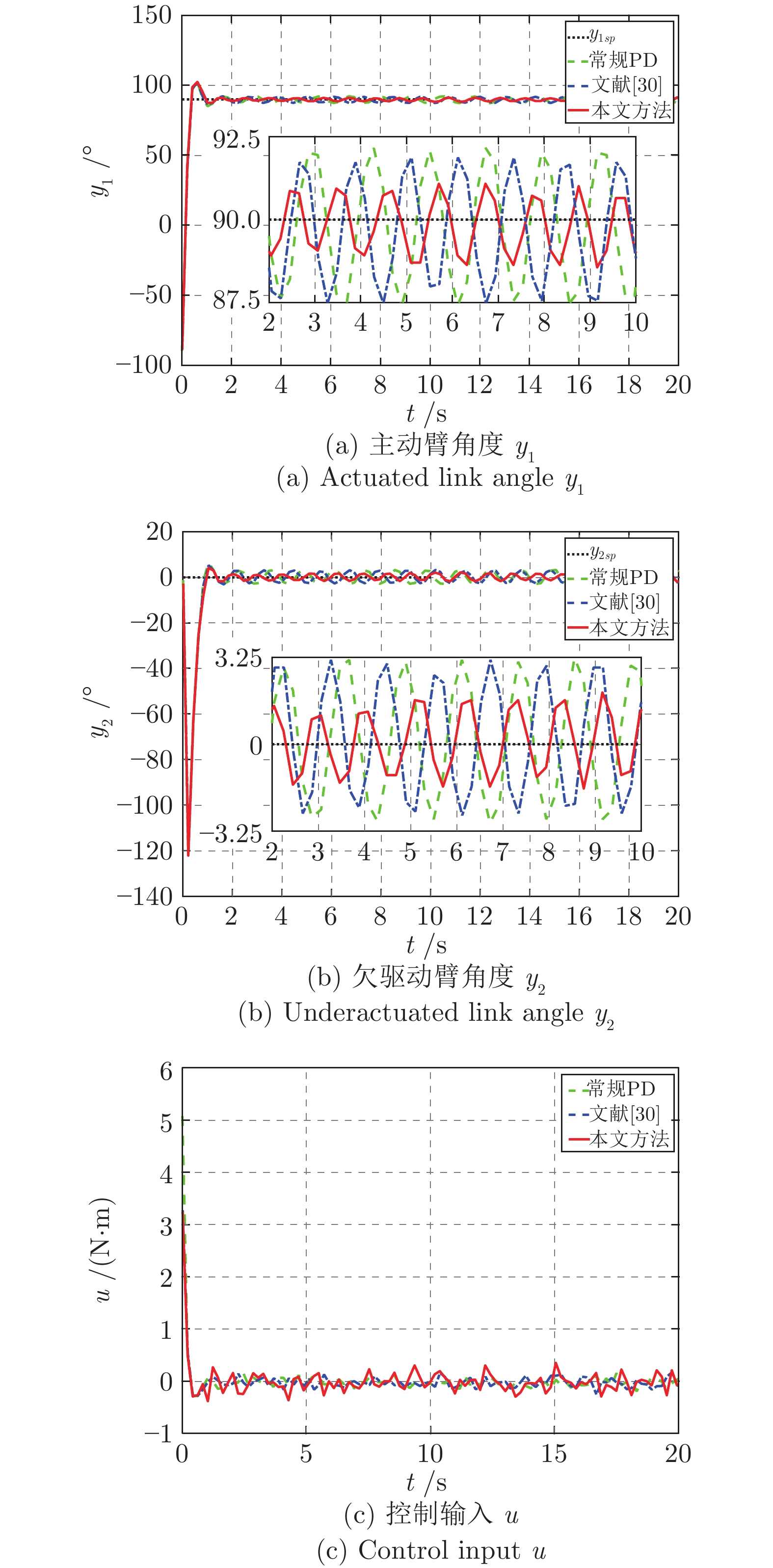
摘要: 针对一类具有强非线性、机理不清且动态特性随不同运行条件而变化的复杂过程, 将基于数据的建模技术与基于模型的控制策略相结合, 提出了未建模动态及其未知增量补偿驱动的非线性PID控制方法. 所提的算法将一步超前最优控制策略应用于PID控制器的参数设计, 并结合非线性补偿技术进行综合设计, 从理论上给出了PID控制器参数以及非线性补偿器设计的一般原则和方法, 为解决传统PID控制器参数难于整定的问题提供了方法和途径. 在此基础上, 分析了闭环系统的稳定性和收敛性. 最后, 将所提的控制算法进行数值仿真实验以及Pendubot系统平衡控制的对比实验, 实验结果表明, 在Pendubot的精确摩擦力模型未知的情况下, 所提算法能有效地消除系统未知时变不确定性的影响, 并尽可能地减少Pendubot摆角的波动, 将摆角控制在规定的目标值范围内.Abstract: For a class of complex industrial process whose structure is unclear and the dynamic characteristics changing strongly with different operating conditions, unmodeled dynamics driven nonlinear PID control method is proposed in this paper, the algorithm combined the data modelling technologies and control strategy based on process model and is applied to the Pendubot balance control system. One step ahead of the optimal control strategy is used to design the parameters of the PID controller, which combined with the nonlinear compensation technology for integrated design. The general principle and method of choosing PID controller parameters and nonlinear compensator design are given theoretically, which provides ways and means to solve the problem that the traditional PID controller parameters are difficult to design. Then, the stability and convergence of the closed-loop system are analyzed. Finally, through the numerical simulation and the comparative experiment on Pendubot balance control system, the results show that the proposed algorithm can effectively eliminate the influence of the unknown time-varying uncertainty of the system when the accurate friction model of Pendubot is unknown, and reduce Pendubot angular fluctuations as far as possible, the swing angle is controlled within the specified target value range.
-
Key words:
- Data driven /
- increment of unmodeled dynamics /
- PID controller /
- stability /
- Pendubot
-
-
[1] 赵大勇, 柴天佑. 再磨过程泵池液位区间与给矿压力模糊切换控制. 自动化学报, 2013, 39(5): 556−564Zhao Da-Yong, Chai Tian-You. Fuzzy switching control for sump level interval and hydrocyclone pressure in regrinding process. Acta Automatica Sinica, 2013, 39(5): 556−564 [2] 贾瑶, 张立岩, 柴天佑. 矿浆中和过程中基于模型预估模糊自适应控制. 东北大学学报, 2014, 35(5): 617−621 doi: 10.3969/j.issn.1005-3026.2014.05.003Jia Yao, Zhang Li-Yan, Chai Tian-You. Based on fuzzy adaptive control of model predictive in slurry neutralization process. Journal of Northeastern University Natural Science, 2014, 35(5): 617−621 doi: 10.3969/j.issn.1005-3026.2014.05.003 [3] Zhang Y J, Jia Y, Chai T Y, Wang D H, Dai W, Fu J. Data-driven PID controller and its application to pulp neutralization process. IEEE Transactions on Control Systems Technology, 2018, 26(3): 828−841 doi: 10.1109/TCST.2017.2695981 [4] Xia D Y, Chai T Y, Wang L Y. Fuzzy neural-network friction compensation-based singularity avoidance energy swing-up to nonequilibrium unstable position control of Pendubot. IEEE Transactions on Control Systems Technology, 2014, 22(2): 690−705 doi: 10.1109/TCST.2013.2255290 [5] 魏萃, 柴天佑, 贾瑶, 王良勇. 补偿信号法驱动的Pendubot自适应平衡控制. 自动化学报, 2019, 45(6): 1146−1156Wei Cui, Chai Tian-You, Jia Yao, Wang Liang-Yong. Compensation signal driven adaptive balance control of the Pendubot. Acta Automatica Sinica, 2019, 45(6): 1146−1156 [6] Chen L, Narendra K S. Nonlinear adaptive control using neural networks and multiple models. Automatica, 2001, 37(8): 1245−1255 doi: 10.1016/S0005-1098(01)00072-3 [7] Fu Y, Chai T Y. Nonlinear multivariable adaptive control using multiple models and neural networks. Automatica, 2007, 43(8): 1101−1110 [8] 柴天佑, 张亚军. 基于未建模动态补偿的非线性自适应切换控制方法. 自动化学报, 2010, 37(7): 773−786Chai Tian-You, Zhang Ya-Jun. Nonlinear adaptive switching control method based on un-modeled dynamics compensation. Acta Automatica Sinica, 2010, 37(7): 773−786 [9] Wang Y G, Chai T Y, Fu J, Zhang Y J, Fu Y. Adaptive decoupling switching control based on generalized predictive control. IET Control Theory and Application, 2012, 12(6): 1−12 [10] Wang Y G, Chai T Y, Fu J, Sun J, Wang H. Adaptive decoupling switching control of the forced-circulation evaporation system using neural networks. IEEE Transactions on Control Systems Technology, 2013, 21(3): 964−974 doi: 10.1109/TCST.2012.2193883 [11] Hou Z S, Jin S T. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Transactions on Neural Networks, 2011, 22(12): 2173−2188 doi: 10.1109/TNN.2011.2176141 [12] Zhu Y M, Hou Z S. Data-driven MFAC for a class of discrete-time nonlinear systems with RBFNN. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(5): 1013−1020 [13] Dai W, Chai T Y, Yang S X. Data-driven optimization control for safety operation of hematite grinding process. IEEE Transactions on Industrial Electronics, 2015, 62(5): 2930−2941 doi: 10.1109/TIE.2014.2362093 [14] Chi R H, Liu Y, Hou Z S, Jin S T. Data-driven terminal iterative learning control with high-order learning law for a class of non-linear discrete-time multiple-input–multiple output systems. IET Control Theory and Applications, 2015, 9(7): 1075−1082 [15] Chai T Y, Zhang Y J, Wang H, Su C Y, Sun J. Data-based virtual un-modeled dynamics driven multivariable nonlinear adaptive switching control. IEEE Transactions on Neural Networks, 2011, 22(12): 2154−2171 doi: 10.1109/TNN.2011.2167685 [16] Spong M W, Block D J. The Pendubot: A mechatronic system for control research and education. In: Proceedings of the 34th IEEE Conference on Decision and Control.New Orleans, LA, USA: IEEE, 1995. 555−556 [17] Zhang M J, Tzyh-Jong T. Hybrid control of the Pendubot. IEEE/ASME Transactions on Mechatronics, 2002, 7(1): 79−86 doi: 10.1109/3516.990890 [18] Xin X, Liu Y N. Reduced-order stable controllers for two- link underactuated planar robots. Automatica, 2013, 49(7): 2176−2183 doi: 10.1016/j.automatica.2013.03.027 [19] Sanchez E N, Flores V. Real-time fuzzy PI+PD control for an underactuated robot. In: Proceedings of the 2002 IEEE Internatinal Symposium on Intelligent Control. Vancouver, BC, Canada: IEEE, 2002. 137−141 [20] 侯俊, 王良勇, 柴天佑, 方正. 基于T-S模糊的欠驱动机械臂的平衡控制. 控制工程, 2012, 19(1): 5−8, 85 doi: 10.3969/j.issn.1671-7848.2012.01.002Hou Jun, Wang Liang-Yong, Chai Tian-You, Fang Zheng. Balance control of underactuated manipulator using T-S fuzzy scheme. Control Engineering of China, 2012, 19(1): 5−8, 85 doi: 10.3969/j.issn.1671-7848.2012.01.002 [21] Wang W, Yi J Q, Zhao D B, Liu X J. Adaptive sliding mode controller for an underactuated manipulator. In: Proceedings of the 2004 International Conference on Machine Learning and Cybernetics. Shanghai, China: IEEE, 2004. 882−887 [22] Spall J C, Cristion J A. Model-free control of nonlinear stochastic systems with discrete-time measurements. IEEE Transactions on Automatic Control, 1998, 43(9): 1198−1210 doi: 10.1109/9.718605 [23] Hjalmarsson H, Gevers M, Gunnarsson S, Lequin O. Iterative feedback tuning: Theory and applications. IEEE Control Systems Magazine, 1998, 18(4): 26−41 doi: 10.1109/37.710876 [24] Agnoloni T, Mosca E. Controller falsification based on multiple models. International Journal of Adaptive Control and Signal Processing, 2003, 17(2): 163−177 doi: 10.1002/acs.745 [25] Safonov M G, Tsao T C. The unfalsified control concept and learning. IEEE Transactions on Automatic Control, 1997, 42(6): 843−847 doi: 10.1109/9.587340 [26] Campi M C, Lecchini A, Savaresi S M. Virtual reference feedback tuning: A direct method for the design of feedback controllers. Automatica, 2002, 38(8): 1337−1346 doi: 10.1016/S0005-1098(02)00032-8 [27] Markovsky I, Rapisarda P. Data-driven simulation and control. International Journal of Control, 2008, 81(12): 1946−1959 doi: 10.1080/00207170801942170 [28] Jang J S R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Transactions on System, Man, Cybernetics, 1993, 23(3): 665−685 doi: 10.1109/21.256541 [29] Zhang Y J, Chai T Y, Wang D H. An alternating identification algorithm for a class of nonlinear dynamical systems. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(7): 1606−1617 doi: 10.1109/TNNLS.2016.2547968 [30] Eom M, Chwa D. Robust swing-up and balancing control using a nonlinear disturbance observer for the Pendubot system with dynamic friction. IEEE Transactions on Robotics, 2015, 31(2): 331−343 doi: 10.1109/TRO.2015.2402512 [31] Sun N, Fang Y C, Chen H, Lu B, Fu Y M. Slew/Translation positioning and swing suppression for 4-DOF tower cranes with parametric uncertainties: Design and hardware experimentation. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6407−6418 [32] 王永富, 柴天佑. 一种补偿动态摩擦的自适应模糊控制方法. 中国电机工程学报, 2005, 25(2): 139−143Wang Yong-Fu, Chai Tian-You. Adaptive fuzzy control method for dynamic friction compensation. Proceedings of the CSEE, 2005, 25(2): 139−143 -

 下载:
下载:

图(3) / 表(2)
计量
- 文章访问数: 2114
- HTML全文浏览量: 477
- PDF下载量: 386
- 被引次数: 0
