

The Method for Gestures Recognition Based on Myo Rotation Shifts Estimation and Adaptive Correction
-
摘要: 在基于表面肌电信号(Surface electromyography, sEMG)的手势识别系统中, 针对Myo环形电极多次实验间旋转位置不同导致的识别精度降低问题, 提出了一种基于极坐标系的电极位置偏移估计与自适应校正的识别方法. 该方法首先建立相对于环形肌电传感器的极坐标系, 提出了极坐标系下活跃极角(Activation polar angle, APA), 用于估计实验中传感器相对于初始位置的横向旋转偏移角度; 进而建立基于偏移角度的线性变换模型, 在肌电信号特征空间内, 对电极偏移位置下的样本进行自适应校正. 在8 种常用手势识别应用中, 设计了两种实验范式: 利用传感器各通道数据循环平移模拟电极横向旋转偏移实验和肌电传感器在小臂肌肉上的真实旋转偏移实验. 结果均表明所提出方法的识别精度远高于未进行校正的模型识别精度. 因此, 所提出的电极偏移估计与自适应校正识别方法, 不仅有效提高了表面肌电交互系统识别的鲁棒性, 也降低了使用者在多次使用时训练成本与学习负担.Abstract: In the gestures recognition system based on surface electromyography (sEMG), an electrode shifts estimation and adaptive correction solution is proposed, to the problem of low recognition accuracies interfered by the Myo armband ring-electrode rotation shifts among experiments. The proposed method first estiblishes a polar coordinate system that is stationary relative to the ring sEMG acquisition system, and defines an activation polar angle (APA) that will be later used for measuring the electrode rotation shifts relative to its initial position. Based on the meansurement of electrode shifts, interfered sEMG samples are adaptively corrected by a linear transformation in feature space. In the sEMG-based recognition application of eight common gestures, two experimental paradigms are conducted, including a simulation rotation paradigm by right shifts of eight-channel sEMG signals and a real one by shifts of the ring acquisition system on the lower arm. Results of both experimental paradigms dimenstrate that the recognition accuracies of our proposed method are much higher than those of non-corrected models. In conclusion, the proposed electrode shifts estimation and adaptive correction method, improves the robustness of sEMG-based recognition system, and reduces the training time and learning burden for users.
-
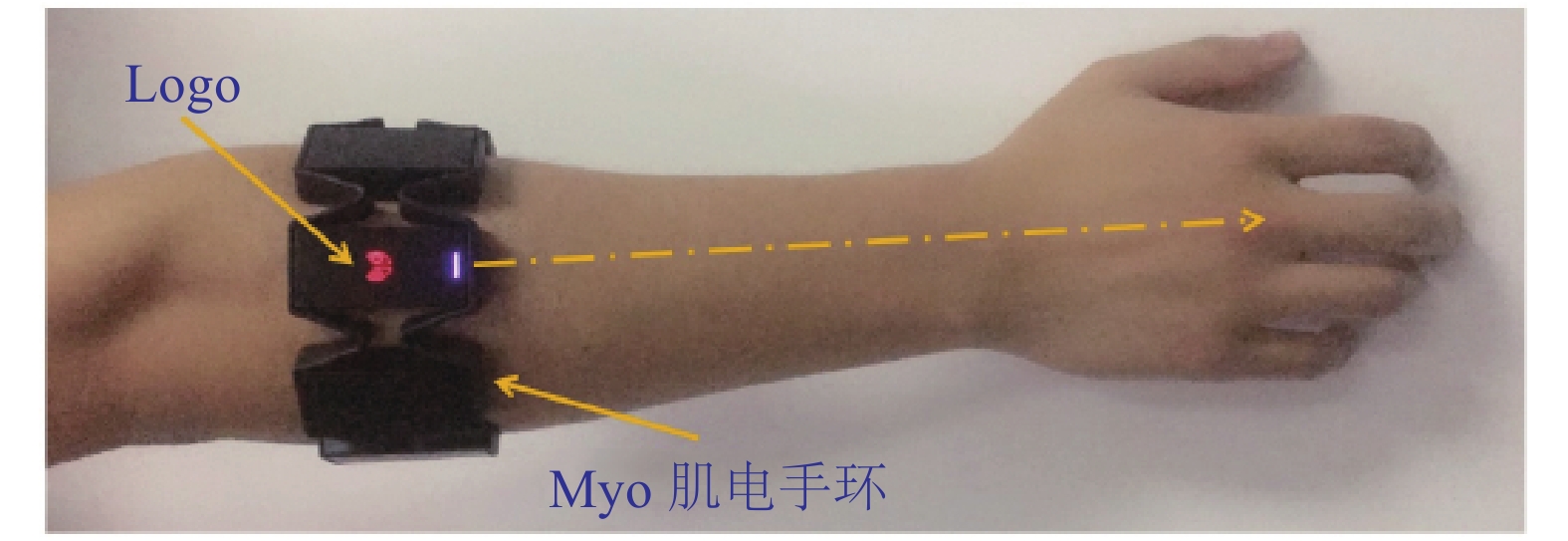
图 1 根据官方指导说明, 将Myo臂环固定在小臂处; 初始位置: 带有Logo指示灯的通道与中指对齐
Fig. 1 The Myo around the lower arm according to official guides. The position where the logo channel and the middle finger are on one line as the initial position
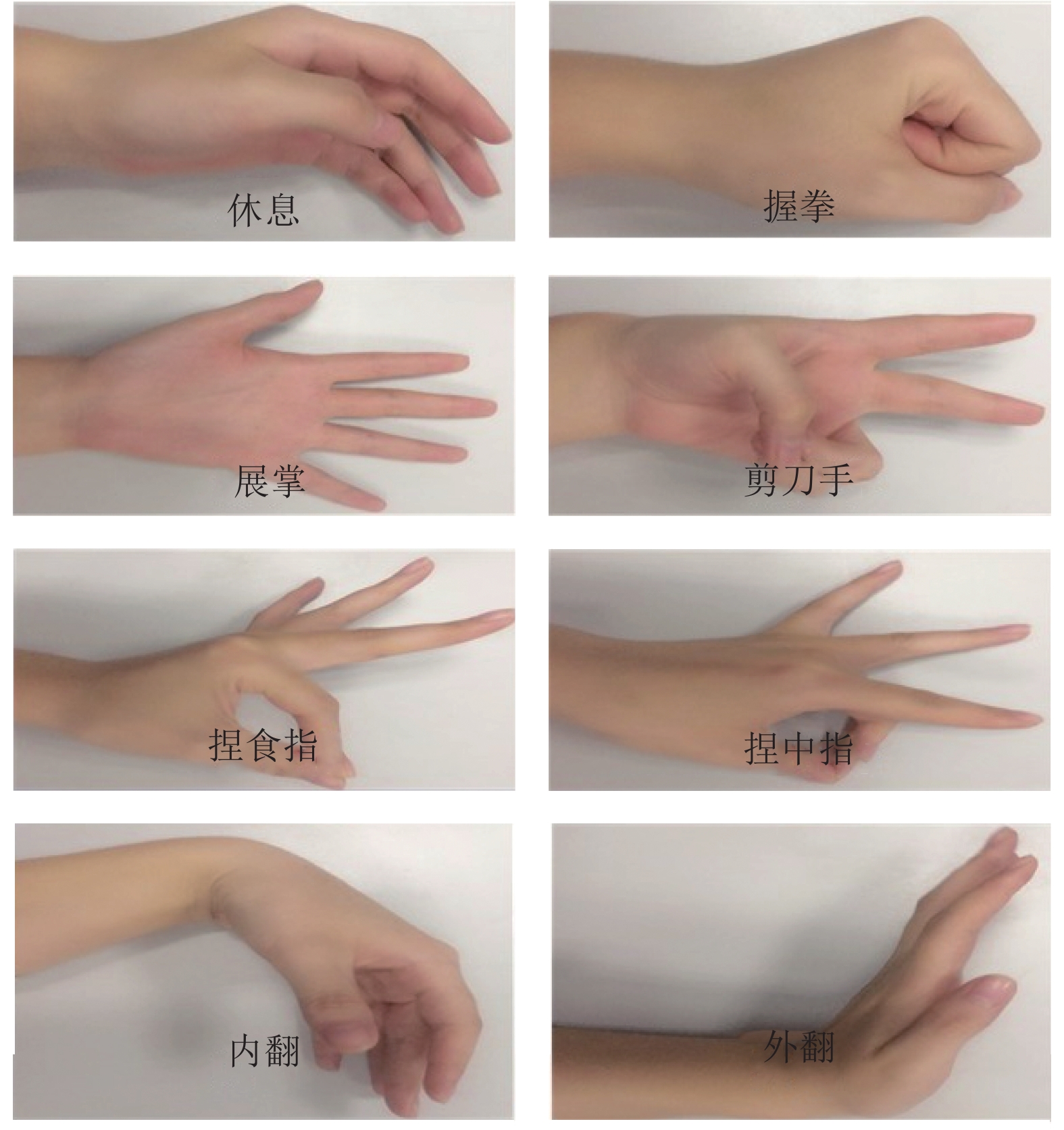
图 2 实验中8种常用手部动作: 休息、握拳、展掌、剪刀手、捏中指、捏食指、内翻、外翻
Fig. 2 Eight common gestures in the experiment: rest, grasp, open hand, peace sign, pinch thumb finger, pinch middle finger, carpal varus, carpal valgus
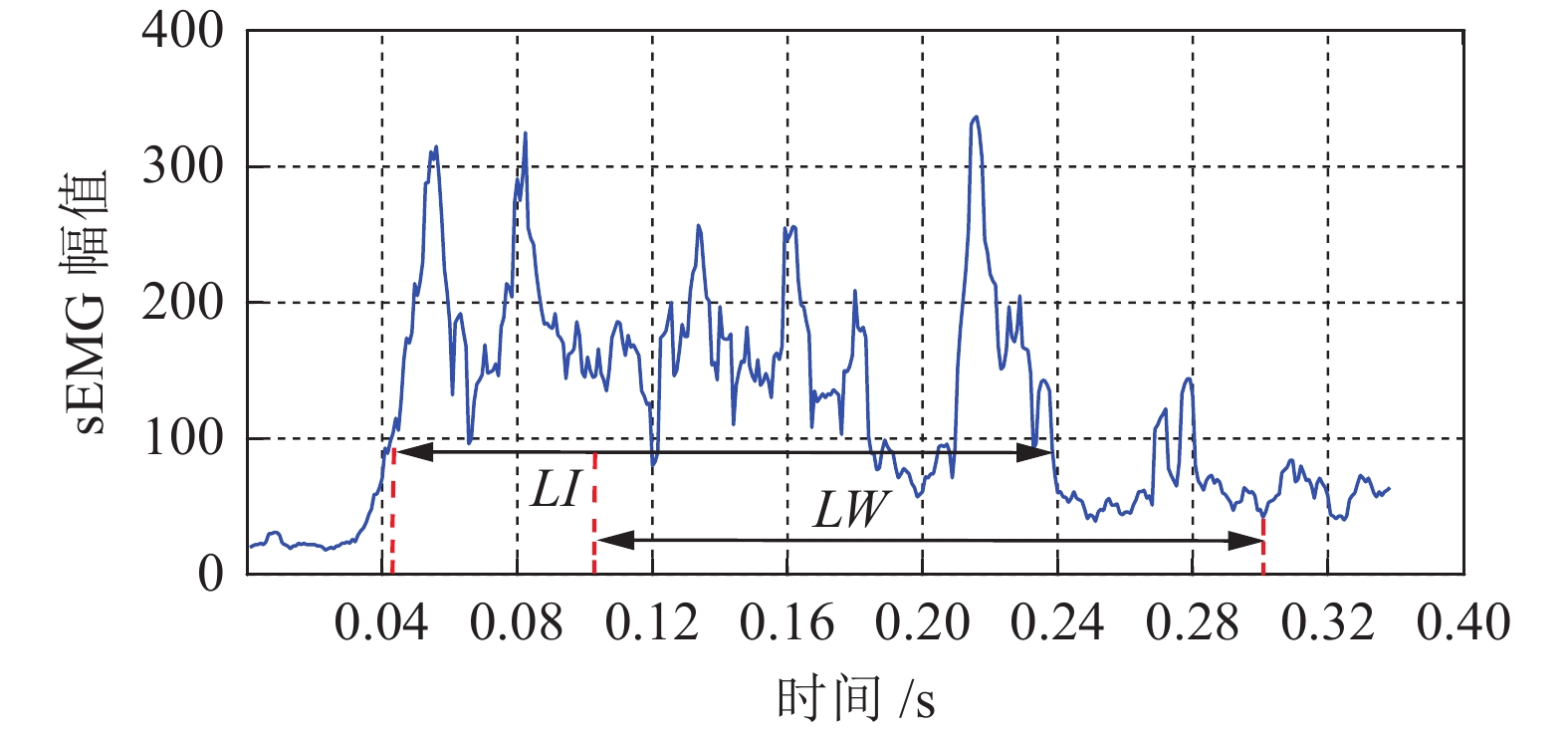
图 3 基于滑动窗的特征提取, 其中窗长为LW, 滑动为LI
Fig. 3 Feature extraction by a sliding window technique with incremental length (LI) and window length (LW)
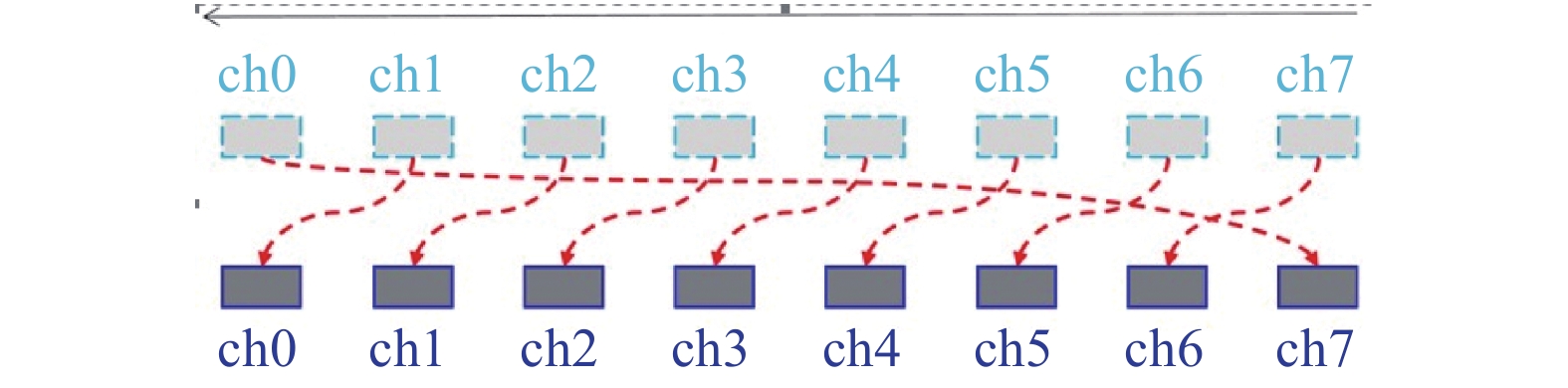
图 4 电极循环单位为1时, 由模拟法实验范式产生的电极偏移下表面肌电信号
Fig. 4 Electrode-shift sEMG by a simulation paradigm with a circulation step
$\tau= 1 $ 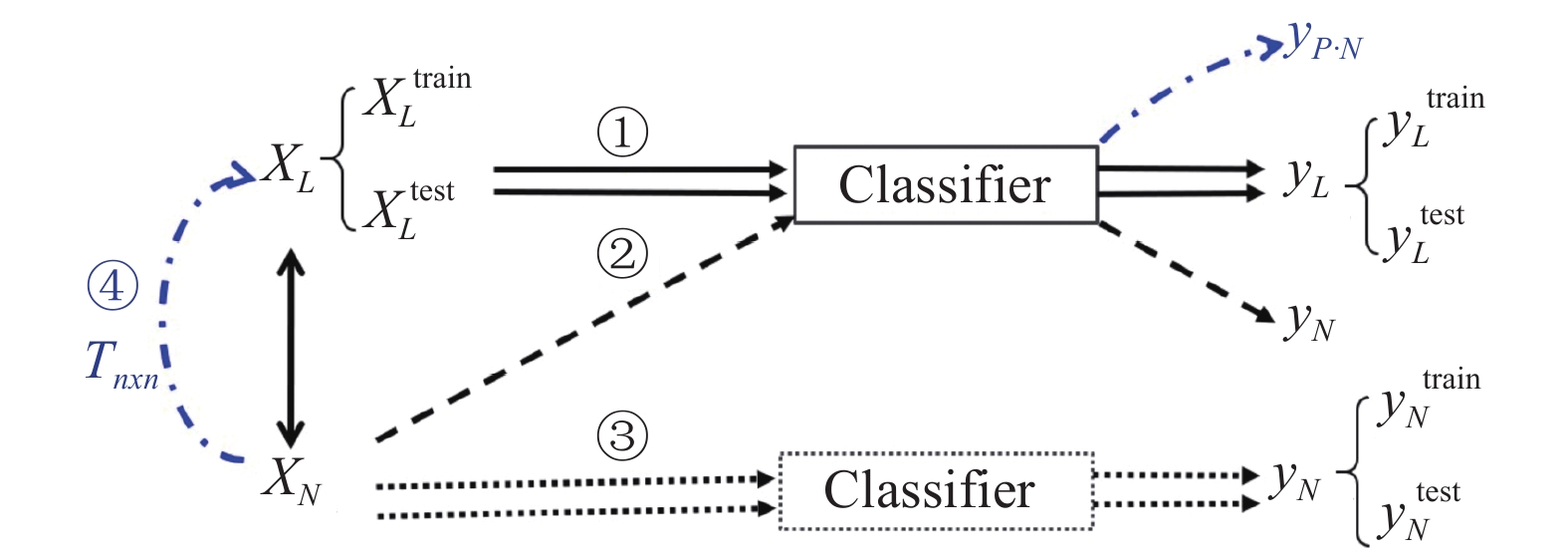
图 5 基于极坐标系的电极偏移估计与自适应校正的表面肌电手势识别方法与传统识别框架的对比.
所采集带标签的数据集$ X_L $, 分割成训练集$X_L^{\rm{train}}$ 与测试集$X_L^{\rm{test}}$; 电极偏移干扰新样本集$ X_N $, 按照原分类器得到的预测结果$ \hat{y}_N $; 或将新样本集$ X_N $训练独立的分类器, 得到训练集与测试集结果$y_N^{\rm{train}}$ 和$y_N^{\rm{test} }$ . 点划线表示路径, 首先估计电极偏移前后的偏移角度$ \delta\alpha $, 以此建立两者之间的关系$ T_{n\times n} $, 最终经原分类器得到预测结果$ y_{p\dot N} $
Fig. 5 The proposed electrode shifts estimation and adaptive correction method for sEMG-based gesture recognition and its traditional comparisons sEMG-based frameworks.
Here, the labeled datasets $ X_L $ were split into the training part ($X_L^{\rm{train}}$, $y_L^{\rm{train}}$) and the testing part ($X_L^{\rm{test}}$, $y_L^{\rm{test}}$). The dataset $ X_N $ was interfered by electrode shifts, whose classification results were $ \hat{y}_N $ by the pre-trained classifier. Or, $ X_N $ was used to train an individual classifier, resulting in $y_N^{\rm{train}}$ and $y_N^{\rm{test}}$. As the dot-dash line, the shift $ \Delta \alpha $ was first estimated, and then $ T_{n\times n} $ was established. Finally, $ y_{p\dot N} $ was the estimated results of the interfered by the pre-trained classifier
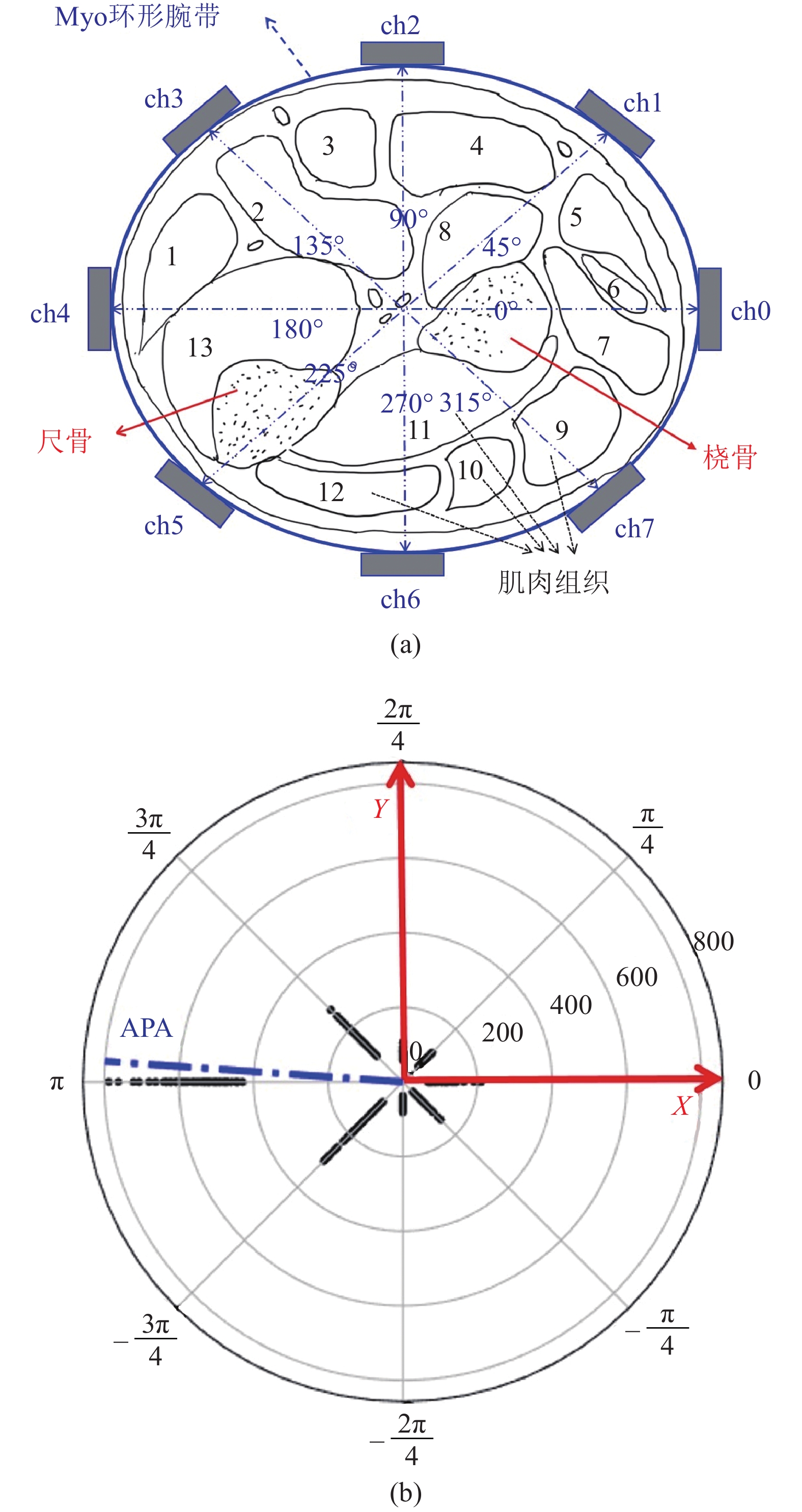
图 6 横截面图和散点图(a) 截面视角, 包括Myo臂环和小臂各肌肉与骨骼的截面分布; (b) 散点图: 不同通道上的样本点绘制在不同极角的极轴上, 点划线为所提出并定义的活跃极角
Fig. 6 The cross-section diagram and scatter diagram (a) the cross-section view of proposed polar coordinate with Myo armband and the lower arm's muscles and bones; (b) the scatter plot with every channel samples on different polar angle axis, and the proposed APA with dot-dash line
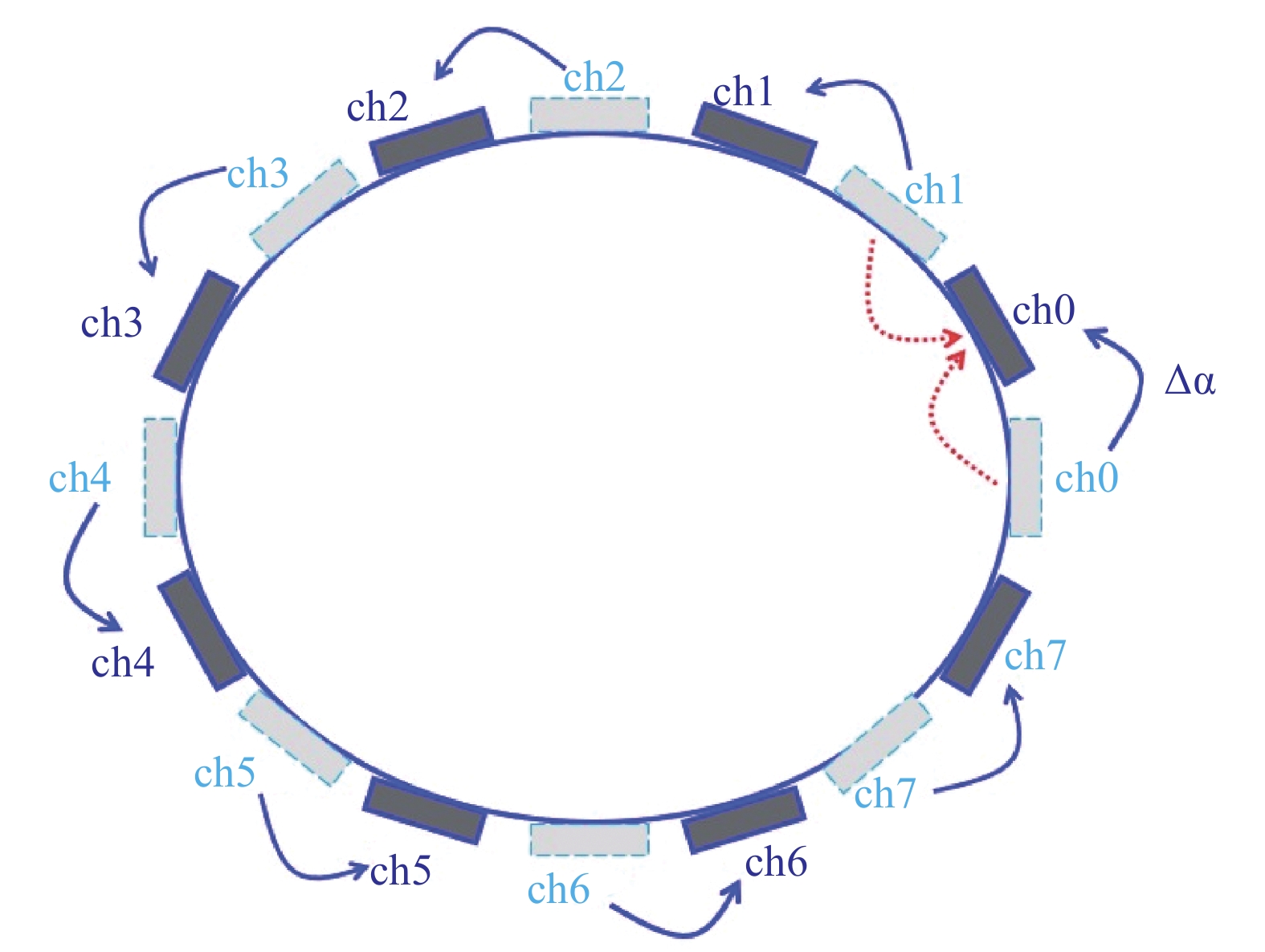
图 7 偏移范围
$ \Delta \alpha $ 为$ [{0^\circ}, {45^\circ }) $ 时, 所有通道电极相对于初始位置偏移情况Fig. 7 Every electrode shifts
$ \Delta \alpha $ in a counter-clockwise direction within the range of$ [{0^\circ}, {45^\circ }) $ 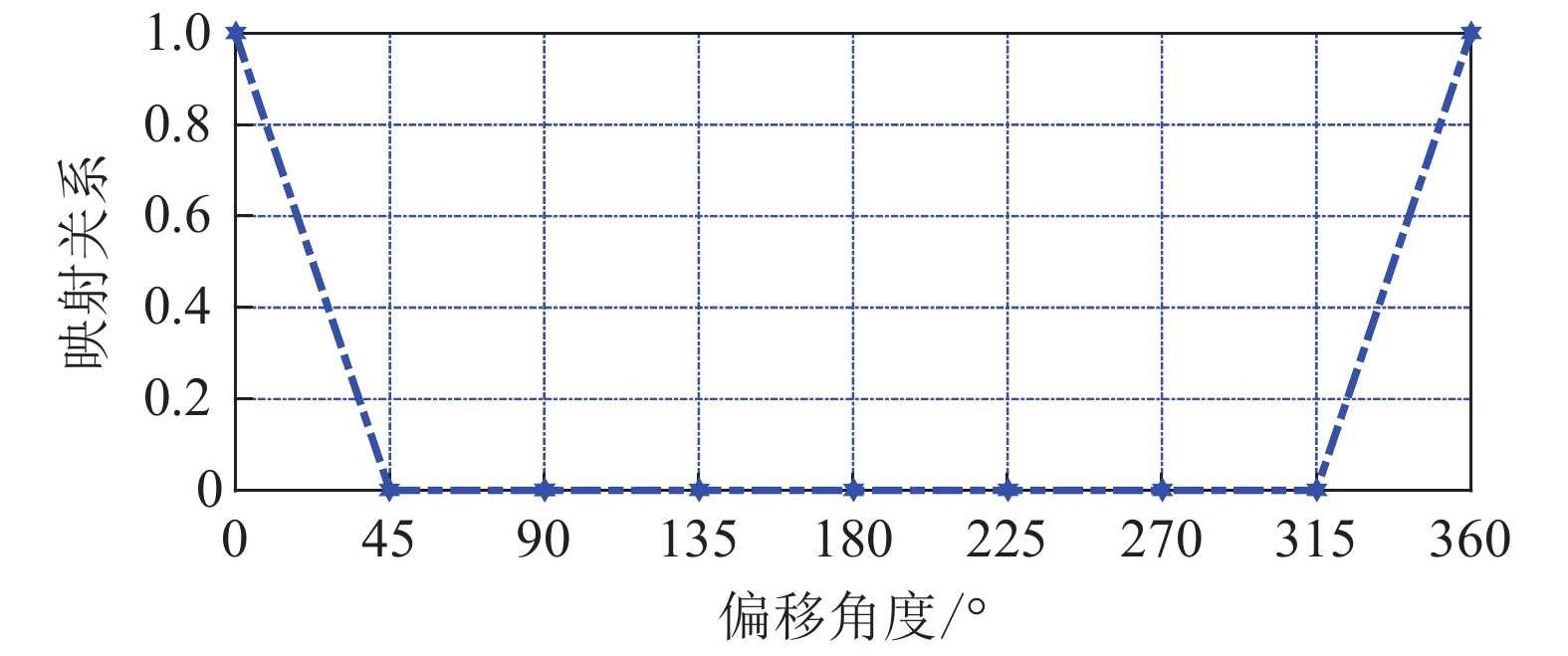
图 8 各电极通道MAV特征值映射变换与偏移角度间关系
Fig. 8 The mapping relationship between original one-channel MAV and shifted MAV on the shift angle
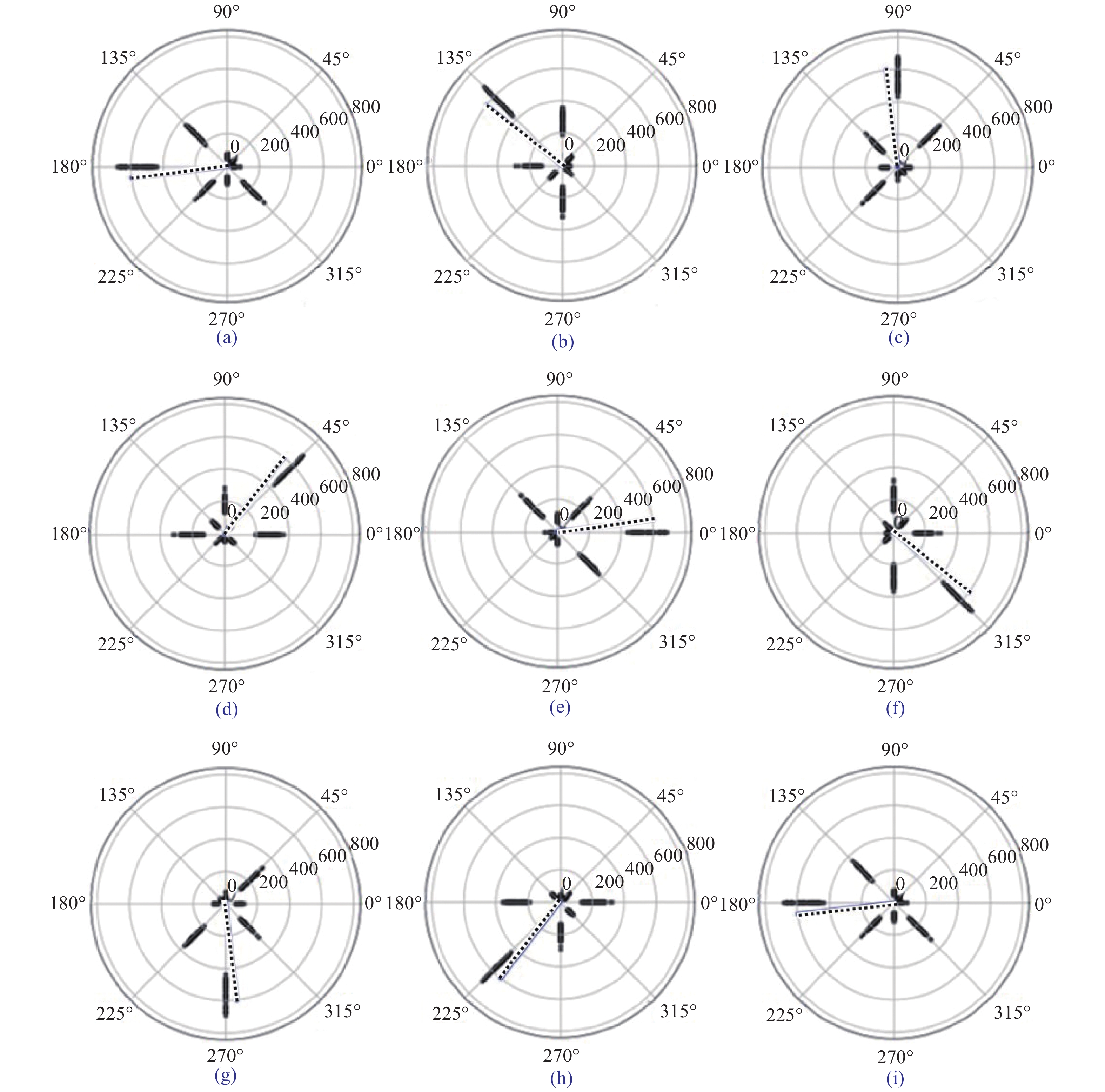
图 9 模拟电极偏移情况下, 极坐标内的肌电信号样本点的散点图与虚线所代表的活跃极角
Fig. 9 Scatter plots in the polar coordinate of sEMG samples from simulated electrode shifts and the proposed activation polar angle (APA) in dash line
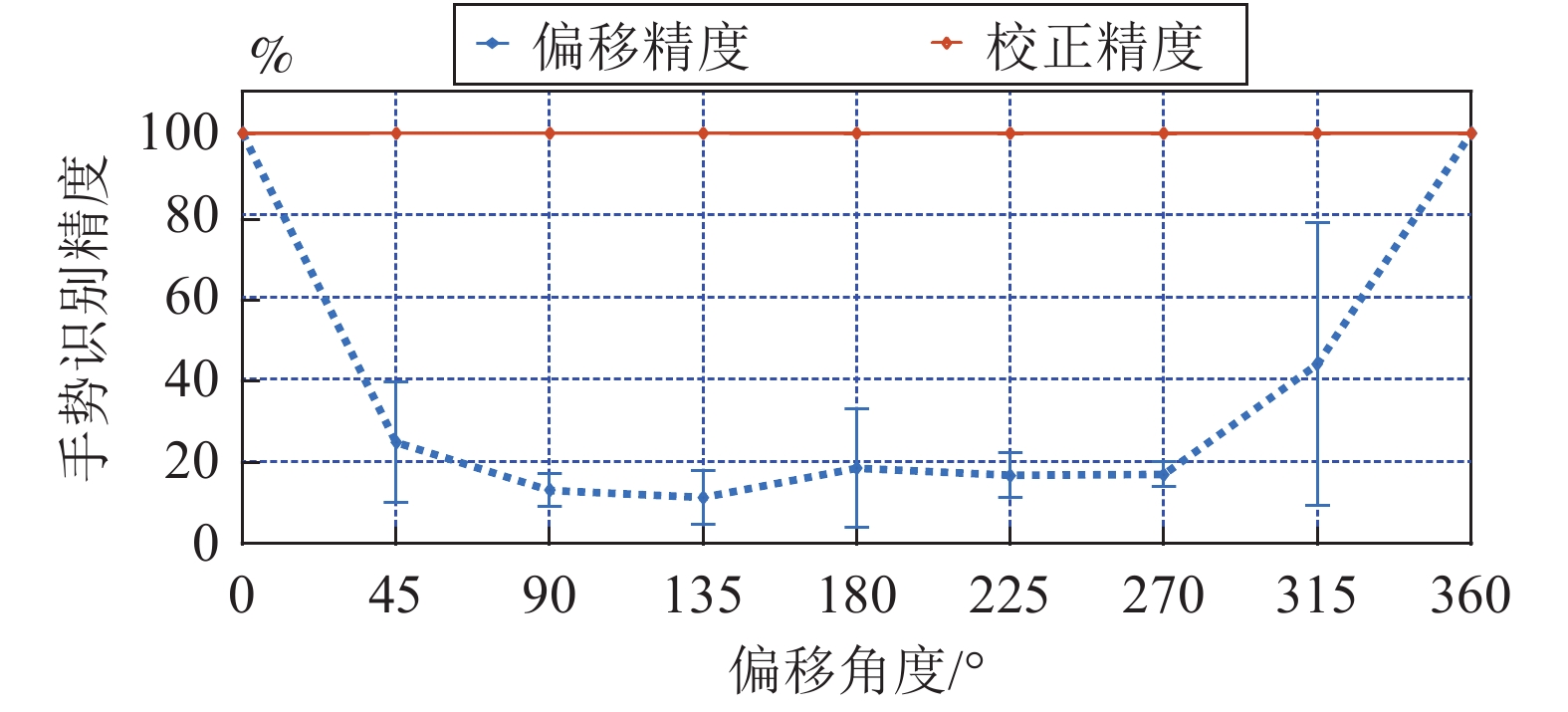
图 10 不同偏移程度下的手势识别精度对比: 偏移估计与自适应校正的精度(实线)和未处理电极偏移干扰下的精度(虚线)
Fig. 10 Gestures recognition comparison with different shifts: proposed shifts estimation and adaptively corrected accuracies (solid line) v.s. un-corrected accuracies (dotted line)
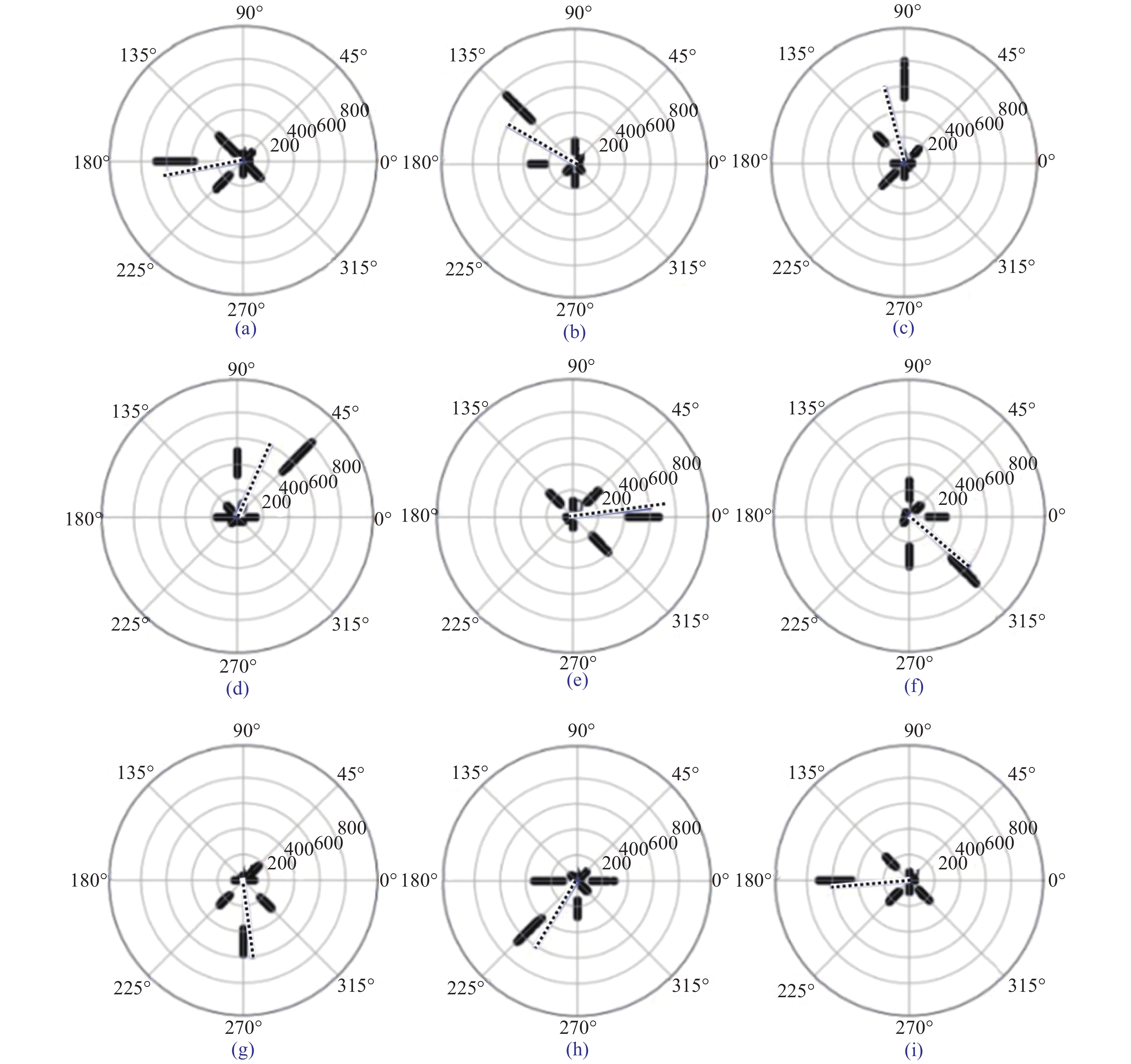
图 11 真实的电极−肌肉偏移情况下, 极坐标系内肌电信号样本点的散点图与虚线所代表的活跃极角
Fig. 11 Scatter plots in the polar coordinate of sEMG samples from real electrode shifts and the proposed activation polar angle (APA) in the dash line
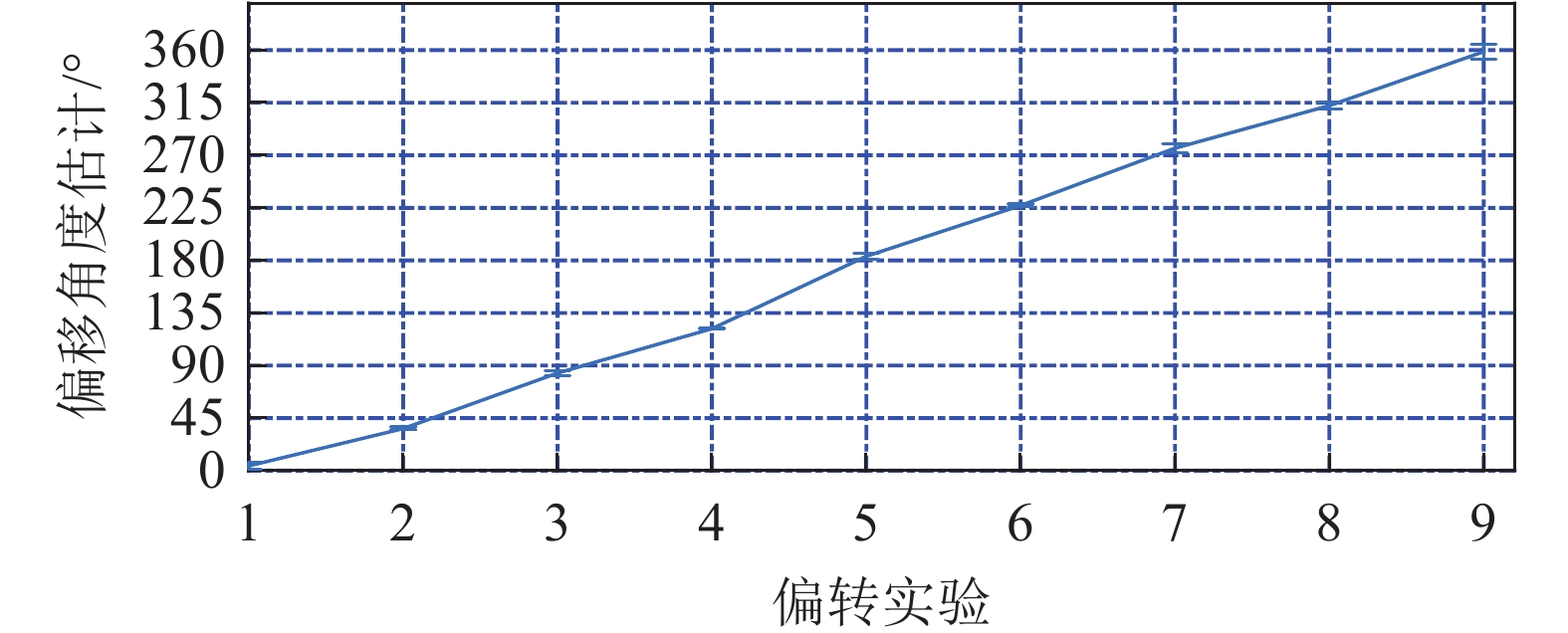
图 12 在9次电极−肌肉偏移过程中, 对活跃极角的偏移角度估计
Fig. 12 The estimations of activation polar angle for nine shifts in
$ [0^{\circ},\, 360^{\circ}) $ 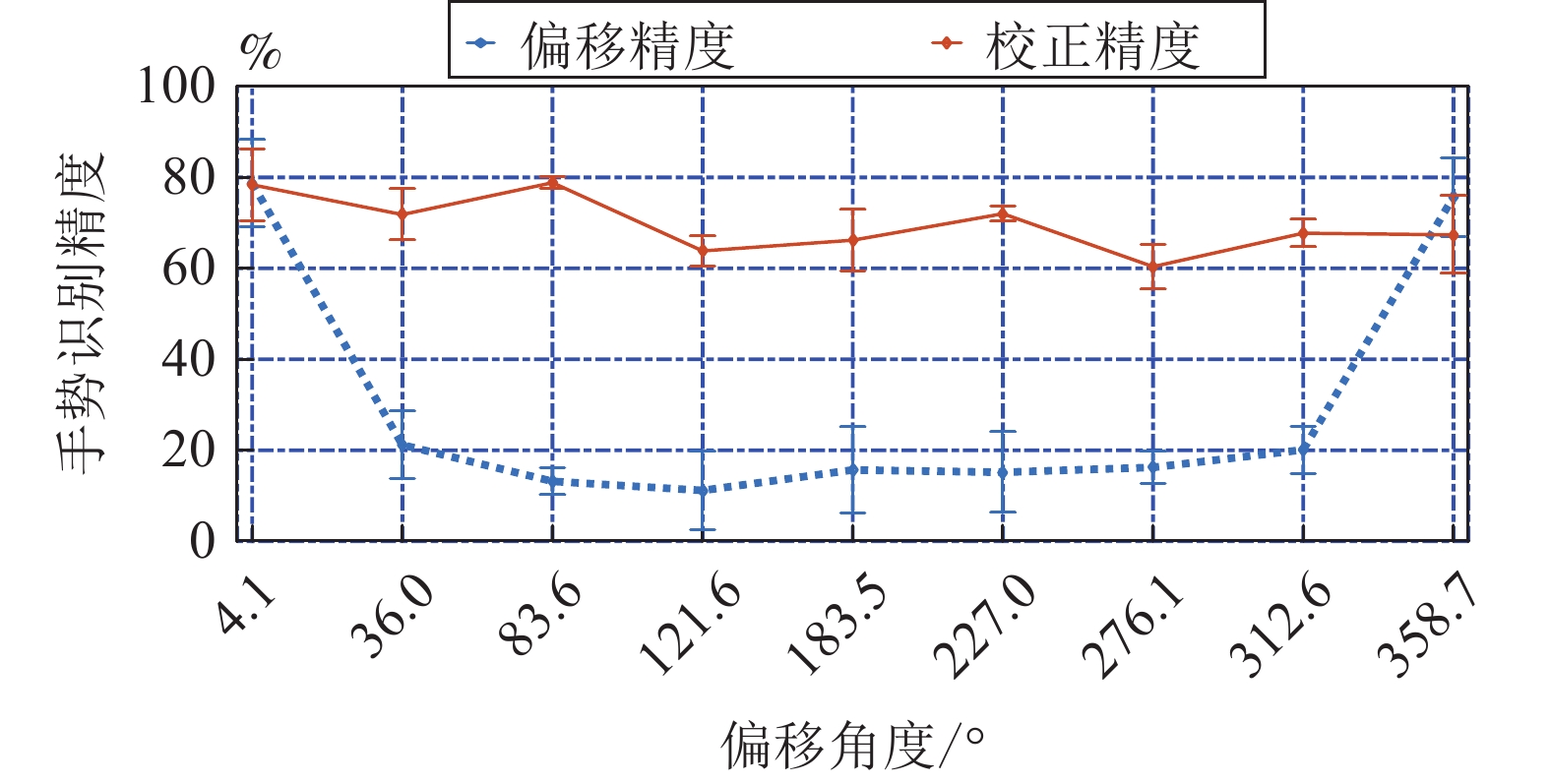
图 13 不同真实电极−肌肉偏移程度下的手势识别精度对比: 偏移估计与自适应校正的精度(实线)和未处理电极偏移干扰下的精度(虚线)
Fig. 13 Gesture recognition accuracy comparison with different electrode-muscle shifts: proposed shifts estimation and adaptively corrected accuracies (solid line) v.s. un-corrected accuracies (dotted line)
表 1 基于通道循环平移下的模拟电极偏移实验, 活跃极角估计, 与相对于初始位置旋转角度估计(°)
Table 1 The simulation experiments by circulations of each channel, the estimation of proposed activation polar angle – APA, and the estimation of shifts angle relative to the initial position (°)
偏转实验 $\tau$ 活跃极角 $\alpha$ 偏转角度 $\Delta\alpha$ 0 –173.15 — 1 141.85 45 2 96.85 90 3 51.85 135 4 6.85 180 5 –38.15 225 6 –83.15 270 7 –128.15 315 8 –173.15 360  下载: 导出CSV
下载: 导出CSV
表 2 基于电极旋转的真实电极偏移实验, 活跃极角估计, 与相对于初始位置旋转角度估计(°)
Table 2 The real experiments by electrode rotation, the estimation of proposed activation polar angle – APA, and the estimation of shifts angle relative to the initial position (°)
偏转实验 $\tau$ 活跃极角 $\alpha$ 偏转角度 $\Delta\alpha$ 0 –169.58 –3.57 1 150.09 36.76 2 104.74 82.11 3 64.97 121.88 4 6.29 180.57 5 −39.97 226.83 6 –83.01 269.87 7 –122.34 309.20 8 –175.31 2.17
下载: 导出CSV
表 3 每名实验参与者在不同位置或不同重复次数下的交叉验证平均识别结果(
$ \star $ 表示为女性受试者) (%)Table 3 Cross-validation based average accuracies for every subject in different shifted positions or repeated trials (
$ \star $ indicates women subjects) (%)被试者 校正前精度 校正后精度 1 38.21 $\pm$ 29.8886.56 $\pm$ 12.042 29.98 $\pm$ 25.6574.16 $\pm$ 26.813 24.54 $\pm$ 28.4890.06 $\pm$ 8.164 30.11 $\pm$ 26.5987.27 $\pm$ 9.515 $\star$ 36.95 $\pm$ 29.0575.27 $\pm$ 14.206 31.84 $\pm$ 33.5785.19 $\pm$ 9.507 25.91 $\pm$ 31.6678.24 $\pm$ 13.618 22.62 $\pm$ 29.2582.26 $\pm$ 11.819 26.72 $\pm$ 25.0964.16 $\pm$ 13.5010 25.27 $\pm$ 26.1273.92 $\pm$ 14.7211 21.96 $\pm$ 24.5261.84 $\pm$ 16.0112 $\star$ 25.00 $\pm$ 28.8681.53 $\pm$ 13.72均值 28.26 78.37 ( $p<0.001$ )
下载: 导出CSV
-
[1] 丁其川, 熊安斌, 赵新刚, 韩建达. 基于表面肌电的运动意图识别方法研究及应用综述. 自动化学报, 2016, 42(1): 13−25Ding Qi-Chuan, Xiong An-Bin, Zhao Xin-Gang, Han JianDa. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 2016, 42(1): 13−25 [2] 丁其川, 赵新刚, 韩建达. 基于肌电信号的上肢多关节连续运动估计. 机器人, 36(4): 469−476Ding Qi-Chuan, Zhao Xin-Gang, Han Jian-Da. EMG-based estimation for multi-joint continuous movement of human upper limb. Robot, 2014, 36(4): 469−476 [3] 侯增广, 赵新刚, 程龙, 王启宁, 王卫群. 康复机器人与智能辅助系统的研究进展. 自动化学报, 2016, 42(12): 1765−1779Hou Zeng-Guang, Zhao Xin-Gang, Cheng Long, Wang Qi-Ning, Wang Wei-Qun. Recent advances in rehabilitation robots and intelligent assistance systems. Acta Automatica Sinica, 2016, 42(12): 1765−1779 [4] Lu Z Y, Tong K Y, Shin H, Li S, Zhou P. Advanced myoelectric control for robotic hand-assisted training outcome from a stroke patient. Frontiers in Neurology, 2017, 8: 107 [5] Otr O V, Reinders-Messelink H A, Bongers R M, Bouwsema H, Van Der Sluis C K. The i-LIMB hand and the DMC plus hand compared a case report. Prosthetics and Orthotics International, 2010, 34(2): 216−220 doi: 10.3109/03093641003767207 [6] Chu J U, Moon I, Lee Y J, Kim S K, Mun M S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Transactions on Mechatronics, 2007, 12(3): 282−290 doi: 10.1109/TMECH.2007.897262 [7] Scheme E J, Englehart K B, Hudgins B S. Selective classification for improved robustness of myoelectric control under nonideal conditions. IEEE Transactions on Bio-medical Engineering, 2011, 58(6): 1698−1705 doi: 10.1109/TBME.2011.2113182 [8] 丁其川, 赵新刚, 李自由, 韩建达. 基于自更新混合分类模型的肌电运动识别方法. 自动化学报, 2019, 45(8): 1464−1474 doi: 10.16383/j.aas.2018.c170301Ding Qi-Chuan, Zhao Xin-Gang, Li Zi-You, Han Jian-Da. The EMG-motion recognition method based on self-update hybrid classification model. Acta Automatica Sinica, 2019, 45(8): 1464−1474 doi: 10.16383/j.aas.2018.c170301 [9] Tkach D, Huang H, Kuiken T A. Study of stability of time-domain features for electromyographic pattern recognition. Journal of NeuroEngineering and Rehabilitation, 2010, 7(1): 21 doi: 10.1186/1743-0003-7-21 [10] Scheme E, Englehart K. Training strategies for mitigating the effect of proportional controlon classification in pattern recognition based myoelectriccontrol. Journal of Prosthetics and Orthotics, 2013, 25(25): 76−83 [11] He J Y, Sheng X J, Zhu X Y, Jiang N. Electrode density affects the robustness of myoelectric pattern recognition system with and without electrode shift. IEEE Journal of Biomedical and Health Informatics, 2019, 23(1): 156−163 [12] Kristin Østlie, Lesjø I M, Franklin R J, Garfelt B, Magnus P. Prosthesis rejection in acquired major upper-limb amputees a population-based survey. Disability and Rehabilitation. Assistive technology, 2011, 7(4): 294−303 [13] Biddiss E A, Chau T T. Upper limb prosthesis use and abandonment a survey of the last 25 years. Prosthetics and Orthotics International, 2007, 31(3): 236−257 doi: 10.1080/03093640600994581 [14] Stango A, Negro F, Farina D. Spatial correlation of high density emg signals provides features robust to electrode number and shift in pattern recognition for myocontrol. IEEE Transactions on Neural Systems Rehabilitation Engineering, 2015, 23(2): 189−198 doi: 10.1109/TNSRE.2014.2366752 [15] Mohanaiah P, Sathyanarayana P, GuruKumar L. Image texture feature extraction using GLCM approach. International Journal of Scientific and Research Publications, 2013, 3(5): 1−5 [16] He J F, Zhu X Y. Combining improved gray-level co-occurrence matrix with high density grid for myoelectric control robustness to electrode shift. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25(9): 1539−1548 doi: 10.1109/TNSRE.2016.2644264 [17] Pan, L Z, Zhang D G, Jiang N, Sheng X J, Zhu, X. Y. Improving robustness against electrode shift of high density emg for myoelectric control through common spatial patterns. Journal of Neuroengineering Rehabilitation, 2015, 12(1): 1−16 doi: 10.1186/1743-0003-12-1 [18] Young A J, Hargrove L J, Kuiken T A. Improving myoelectric pattern recognition robustness to electrode shift by changing interelectrode distance and electrode configuration. IEEE Transactions on Bio-medical Engineering, 2012, 59(3): 645−652 doi: 10.1109/TBME.2011.2177662 [19] Rawat S, Vats S, Kumar P. Evaluating and exploring the MYO ARMBAND. In: Proceedings of the 2016 International Conference System Modeling and Advancement in Research Trends (SMART), Moradabad, India, 2016. 115−120 [20] Getting starting with Myo on Windows. Available from: https://support.getmyo.com [21] 王松. 运动解剖学. 武汉, 华中科技大学出版社, 2018, 113−117Wang Song. Sport Anatomy. Wuhan, Huazhong University of Science and Technology Press, 2018, 113−117 -

 下载:
下载:










































计量
- 文章访问数: 1756
- HTML全文浏览量: 516
- PDF下载量: 188
- 被引次数: 0
