

Abnormal Condition Diagnosis Through Deep Learning of Image Sequences for Fused Magnesium Furnaces
-
摘要: 超高温电熔镁炉(Fused magnesium furnace,FMF)生产炉况监测困难,易发生欠烧异常工况,不仅造成产品质量下降,也直接危害生产安全与人员安全.现有的人工巡检方式实时性差,容易发生漏报和误报,甚至导致铁制炉壳烧透、烧漏.针对该问题,本文采用视频信号,利用电熔镁炉欠烧工况的时空特征,即在炉壳表面出现的局部不规则高亮区域的空间特征,以及该高亮区域随时间呈现出亮度增强、面积变大的时序特征,提出一种基于卷积循环神经网络(Convolutional recurrent neural network,CRNN)的电熔镁炉异常工况诊断新方法.该方法包括图像序列一致性变换和时序残差图像提取预处理、基于卷积神经网络(Convolutional neural network,CNN)的空间特征提取、基于循环神经网络(Recurrent neural network,RNN)的时序特征提取、基于加权中值滤波的工况自动标记.最后采用实际的电熔镁炉炉壳的视频信号,进行了所提方法与现有的两种深度学习网络模型的实验比较研究,结果说明了所提方法的优越性.Abstract: Ultra-high temperature smelting process of fused magnesium furnace (FMF) is difficult to monitor and prone to the semi-molten abnormal condition, which exerts severe influences not only on product quality but also on security of production and workers. Traditionally, the practioners have to reach out for inspection by watching the furnace shell. This is difficult in real-time and can cause missed alarms, wrong alarms, even lead to melting through the iron shell of the furnace. To solve this problem, the paper uses the information from in-situ video and takes advantage of the spatial-temporal features of the semi-molten abnormal condition, namely, the spatial feature appearing as irregular highlighted regions on the local furnace shell and the temporal feature appearing as increasing brightness and increasing areas of those regions. Based on the spatial-temporal features, this paper proposes a novel convolutional recurrent neural network (CRNN)-based method for the abnormal condition diagnosis of FMF. The method is composed of three modules:a preprocessing of the original video, a convolutional neural network (CNN)-based spatial feature extraction and a recurrent neural network (RNN)-based temporal feature extraction and a weighted median filter-based automatic labeling algorithm. By applying videos from the furnace shell of a real FMF, the proposed method is tested and compared with other two deep learning-based baseline approaches, and the results demonstrate the superiority of the proposed method.1) 本文责任编委 徐德
-
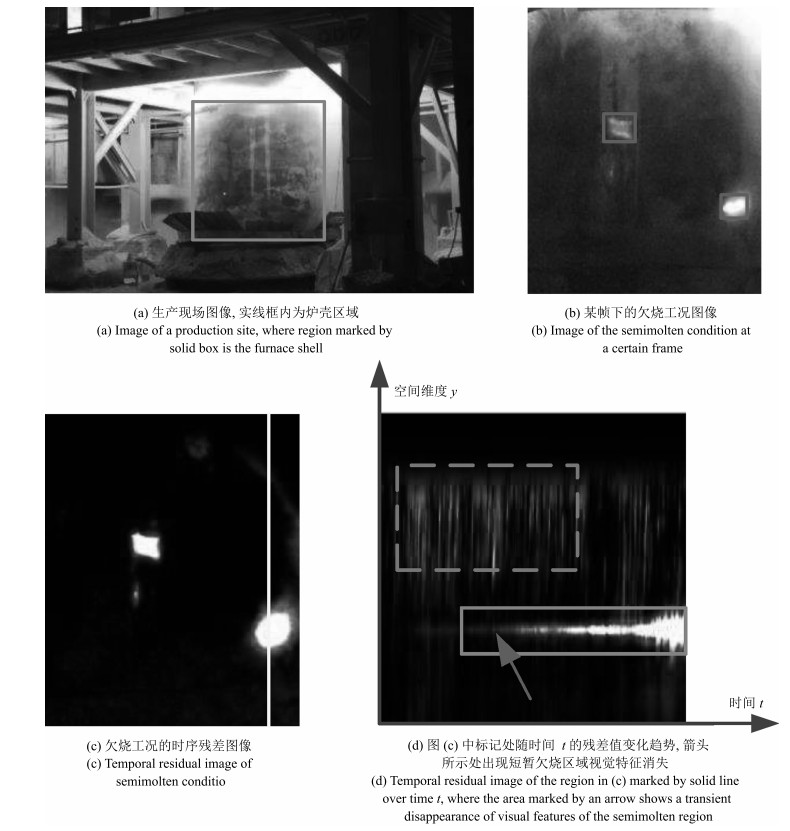
图 1 电熔镁炉欠烧工况视觉特征分析
Fig. 1 Analysis of visual features of semimolten condition for an FMF
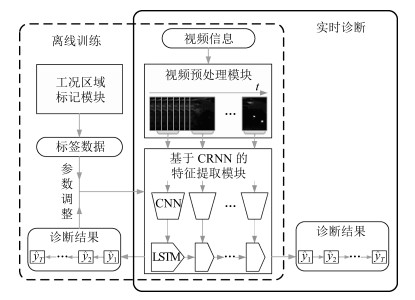
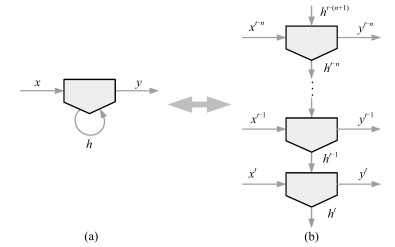
图 2 基于CRNN的电熔镁炉欠烧工况诊断策略结构图
Fig. 2 Framework of the proposed semimolten condition diagnosis based on CRNN for FMF
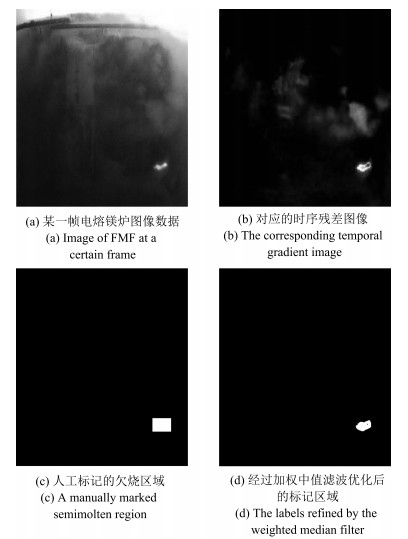
图 6 基于加权中值滤波的训练集标签生成
Fig. 6 Generation of training labels based on weighted median filter
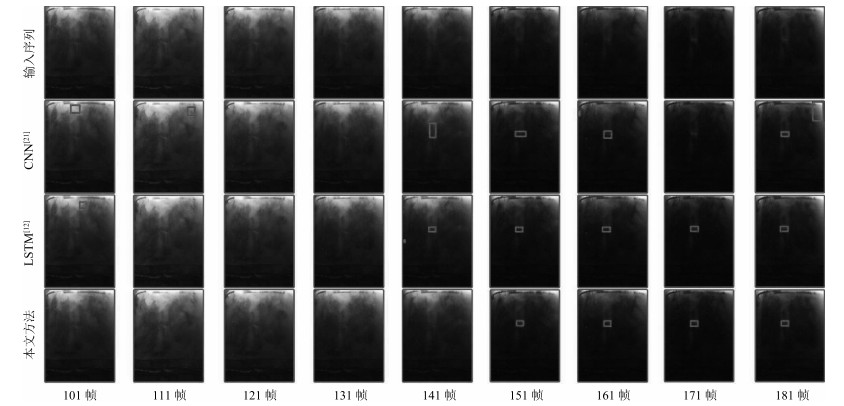
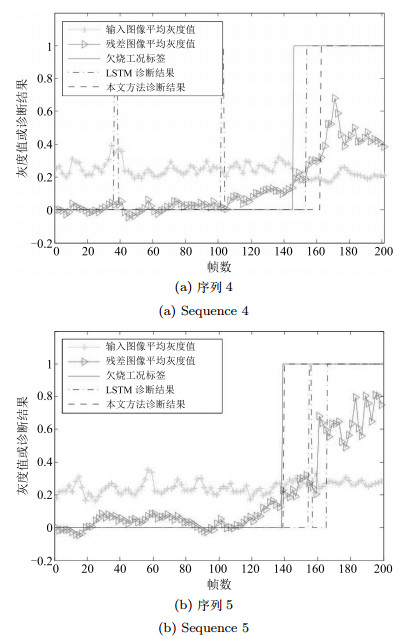
图 9 电熔镁炉欠烧工况诊断结果可视化
Fig. 9 Visualization of diagnosis result of semimolten condition for FMF
表 1 电熔镁炉欠烧工况的诊断率(%)
Table 1 Diagnosis rates of semimolten condition for FMF (%)
 下载: 导出CSV
下载: 导出CSV
表 2 预处理对诊断率的影响(%)
Table 2 Influences of two preprocessing procedures on diagnosis rates (%)
漏诊断率 误诊断率 总诊断率 无预处理 11.47 7.23 81.30 无预处理1 10.22 6.73 83.04 无预处理2 7.48 2.74 89.77 本文方法 4.99 0.00 95.01
下载: 导出CSV
-
[1] Fuchs A, Kaifer E, Himmel H J. Synthesis and characterization of the new tetrameric magnesium imide compound[(thf)MgNSiPh3]4. European Journal of Inorganic Chemistry, 2008, 2008(1):41-43 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1002/ejic.200701155 [2] Zhang X, Xue D F, Xu D L, Feng X Q, Wang J Y. Growth of large MgO single crystals by an arc-fusion method. Journal of Crystal Growth, 2005, 280(1-2):234-238 doi: 10.1016/j.jcrysgro.2005.03.061 [3] Zhang X, Xue D F, Wang J Y, Feng X Q. Improved growth technology of large MgO single crystals. Journal of Crystal Growth, 2006, 292(2):505-509 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9bc5b58b1b7edea7a578dc82744b899f [4] Wu Z W, Wu Y J, Chai T Y, Sun J. Data-driven abnormal condition identification and self-healing control system for fused magnesium furnace. IEEE Transactions on Industrial Electronics, 2015, 62(3):1703-1715 doi: 10.1109/TIE.2014.2349479 [5] Chai T Y, Wu Z W, Wang H. A CPS based optimal operational control system for fused magnesium furnace. IFAC-PapersOnLine, 2017, 50(1):14992-14999 doi: 10.1016/j.ifacol.2017.08.2566 [6] Maninis K K, Pont-Tuset J, Arbelaez P, van Gool L. Convolutional oriented boundaries:from image segmentation to high-level tasks. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(4):819-833 doi: 10.1109/TPAMI.2017.2700300 [7] 孙旭, 李晓光, 李嘉锋, 卓力.基于深度学习的图像超分辨率复原研究进展.自动化学报, 2017, 43(5):697-709 http://www.aas.net.cn/CN/abstract/abstract19048.shtmlSun Xu, Li Xiao-Guang, Li Jia-Feng, Zhuo Li. Review on deep learning based image super-resolution restoration algorithms. Acta Automatica Sinica, 2017, 43(5):697-709 http://www.aas.net.cn/CN/abstract/abstract19048.shtml [8] 胡长胜, 詹曙, 吴从中.基于深度特征学习的图像超分辨率重建.自动化学报, 2017, 43(5):814-821 http://www.aas.net.cn/CN/abstract/abstract19059.shtmlHu Chang-Sheng, Zhan Shu, Wu Cong-Zhong. Image super-resolution based on deep learning features. Acta Automatica Sinica, 2017, 43(5):814-821 http://www.aas.net.cn/CN/abstract/abstract19059.shtml [9] 孙晓, 潘汀, 任福继.基于ROI-KNN卷积神经网络的面部表情识别.自动化学报, 2016, 42(6):883-891 http://www.aas.net.cn/CN/abstract/abstract18879.shtmlSun Xiao, Pan Ting, Ren Fu-Ji. Facial expression recognition using ROI-KNN deep convolutional neural networks. Acta Automatica Sinica, 2016, 42(6):883-891 http://www.aas.net.cn/CN/abstract/abstract18879.shtml [10] Huang C, Li Y N, Loy C C, Tang X O. Learning deep representation for imbalanced classification. In: Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV, USA: IEEE, 2016.5375-5384 [11] 卢绍文, 王克栋, 吴志伟, 李鹏琦, 郭章.基于深度卷积网络的电熔镁炉欠烧工况在线识别.控制与决策, 2017, 23(9):1-8 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201907026Lu Shao-Wen, Wang Ke-Dong, Wu Zhi-Wei, Li Peng-Qi, Guo Zhang. Online detection of semi-molten of fused magnesium furnace based on deep convolutional neural network. Control and Decision, 2017, 23(9):1-8 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201907026 [12] Graves A, Jaitly N. Towards end-to-end speech recognition with recurrent neural networks. In: Proceedings of the 31st International Conference on Machine Learning. Beijing, China: JMLR.org, 2014. Ⅱ-1764-Ⅱ-1772 [13] Sutskever I, Vinyals O, Le Q V. Sequence to sequence learning with neural networks. In: Proceedings of the 27th International Conference on Neural Information Processing Systems. Montreal, Canada: MIT Press, 2014.3104-3112 [14] Donahue J, Hendricks L A, Rohrbach M, Venugopalan S, Guadarrama S, Saenko K, et al. Long-term recurrent convolutional networks for visual recognition and description. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(4):677-691 doi: 10.1109/TPAMI.2016.2599174 [15] Srivastava N, Mansimov E, Salakhutdinov R. Unsupervised learning of video representations using LSTMs. In: Proceedings of the 32nd International Conference on Machine Learning. Lille, France: JMLR.org, 2015.843-852 [16] Graves A. Generating sequences with recurrent neural networks. arXiv preprint arXiv: 1308.0850, 2013. [17] Reinhard E, Adhikhmin M, Gooch B, Shirley P. Color transfer between images. IEEE Computer Graphics and Applications, 2001, 21(5):34-41 http://d.old.wanfangdata.com.cn/Periodical/jsjfzsjytxxxb200609009 [18] Bengio Y, Simard P, Frasconi P. Learning long-term dependencies with gradient descent is difficult. IEEE Transactions on Neural Networks, 1994, 5(2):157-166 doi: 10.1109/72.279181 [19] Hochreiter S, Schmidhuber J. Long short-term memory. Neural Computation, 1997, 9(8):1735-1780 doi: 10.1162/neco.1997.9.8.1735 [20] Hendricks L A, Venugopalan S, Rohrbach M, Mooney R, Saenko K, Darrell T. Deep compositional captioning: describing novel object categories without paired training data. In: Proceedings of the 29th IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016.1-10 [21] Zhao R, Ouyang W L, Li H S, Wang X G. Saliency detection by multi-context deep learning. In: Proceedings of the 28th IEEE Conference on Computer Vision and Pattern Recognition. Boston, USA: IEEE, 2015.1265-1274 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=7298731 [22] Abadi M, Agarwal A, Barham P, Brevdo E, Chen Z F, Citro C, et al. TensorFlow: large-scale machine learning on heterogeneous distributed systems. arXiv preprint arXiv: 1603.04467, 2016. [23] Kingma D P, Ba J. Adam: a method for stochastic optimization. arXiv: 1412.6980, 2014. [24] Varol G, Laptev I, Schmid C. Long-term temporal convolutions for action recognition. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(6):1510-1517 doi: 10.1109/TPAMI.2017.2712608 [25] Lotter W, Kreiman G, Cox D. Deep predictive coding networks for video prediction and unsupervised learning. arXiv preprint arXiv: 1605.08104, 2016. [26] Zhao C H, Gao F R. Critical-to-fault-degradation variable analysis and direction extraction for online fault prognostic. IEEE Transactions on Control Systems Technology, 2017, 25(3):842-854 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e6c78829e2f13c2931fe7469231efda8 -

 下载:
下载:

计量
- 文章访问数: 2978
- HTML全文浏览量: 750
- PDF下载量: 341
- 被引次数: 0
