

Architecture of Marine Environmental Parallel Monitoring System Based on the Lanhai Information Network
-
摘要: 针对目前海洋环境监测体系顶层设计不足、各监测手段间统一调度与管理缺乏、监视数据关联分析缺失等问题, 提出了基于蓝海信息网络的海洋环境平行监测系统架构; 详细描述了海洋环境监测人工系统的构建方法, 以及计算实验方案; 最后, 构建完备的海洋环境监测平行系统, 通过平行执行为海洋环境监测的高效、智能管理与运营提供保障, 对减少海洋环境监测基础设施冗余建设、降低人力与物理成本、提高运营能力, 实现海洋环境监测的可持续发展必将产生深远的影响.Abstract: The architecture of marine environmental parallel system based on the Lanhai information network is proposed by using the artificial environmental systems, computational experiments, and parallel execution (ACP) method, in view of the problems of insufficient top-level design of the marine environmental monitoring system, the lack of unified scheduling and management among various monitoring means and the inefficiency of the correlation analysis of monitoring data. The system modeling method and computational experiments system are described in detail. A complete marine monitoring and control system is constructed to ensure the efficient and intelligent management and operation of the marine environmental monitoring, which will have a far-reaching impact on reducing the redundant construction of the marine environmental monitoring infrastructure, reducing the human and physical costs, improving the operational power and achieving the sustainable development of the marine environment monitoring.
-
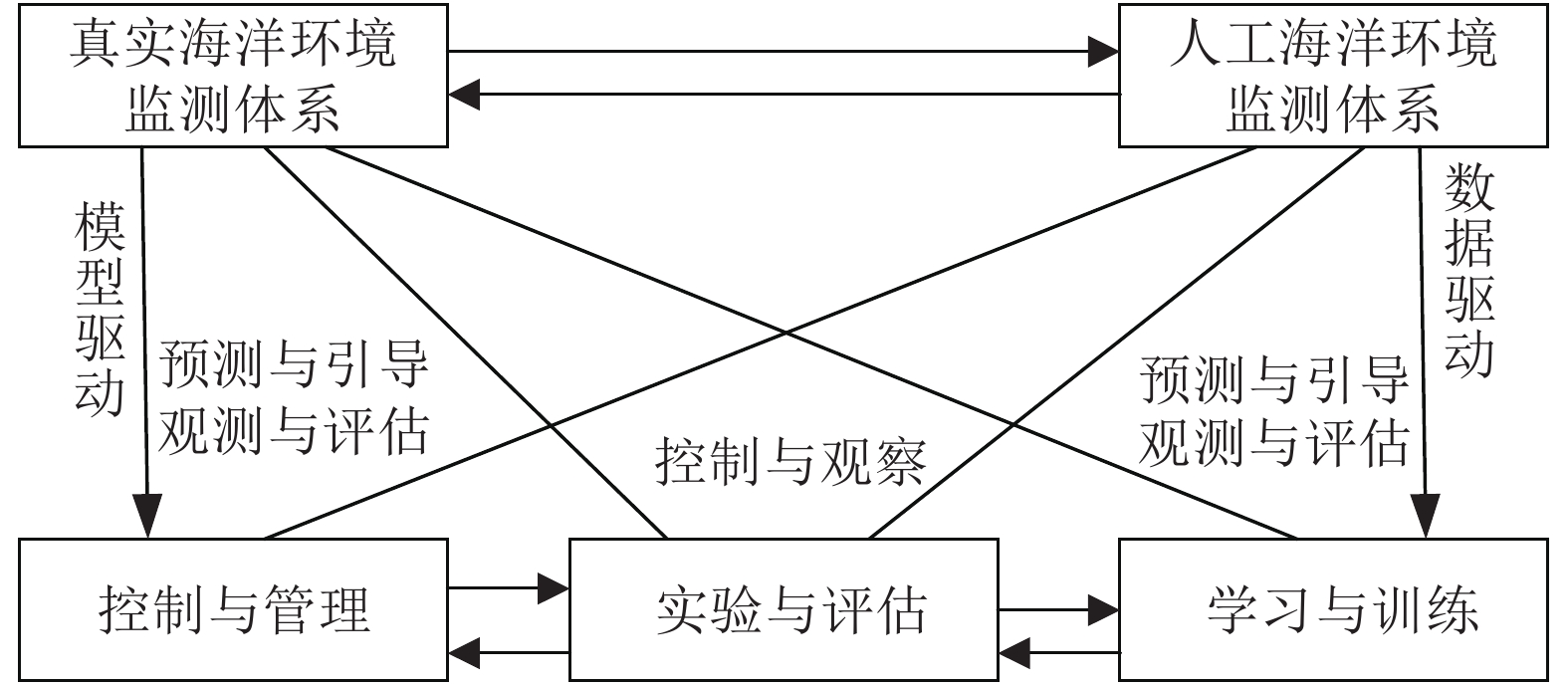
图 1 海洋环境平行监测体系框架
Fig. 1 The framework of marine environmental parallel monitoring system
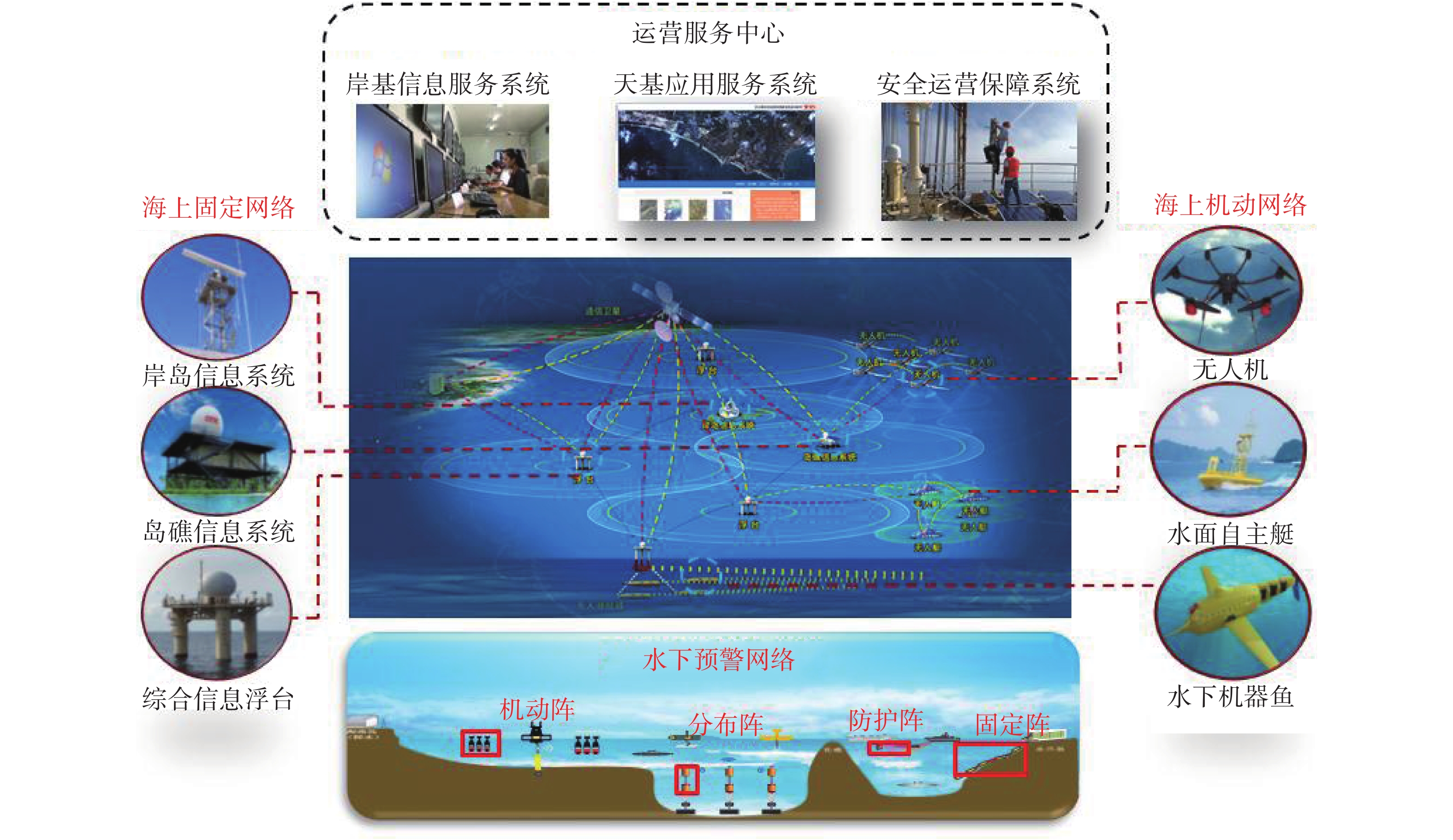
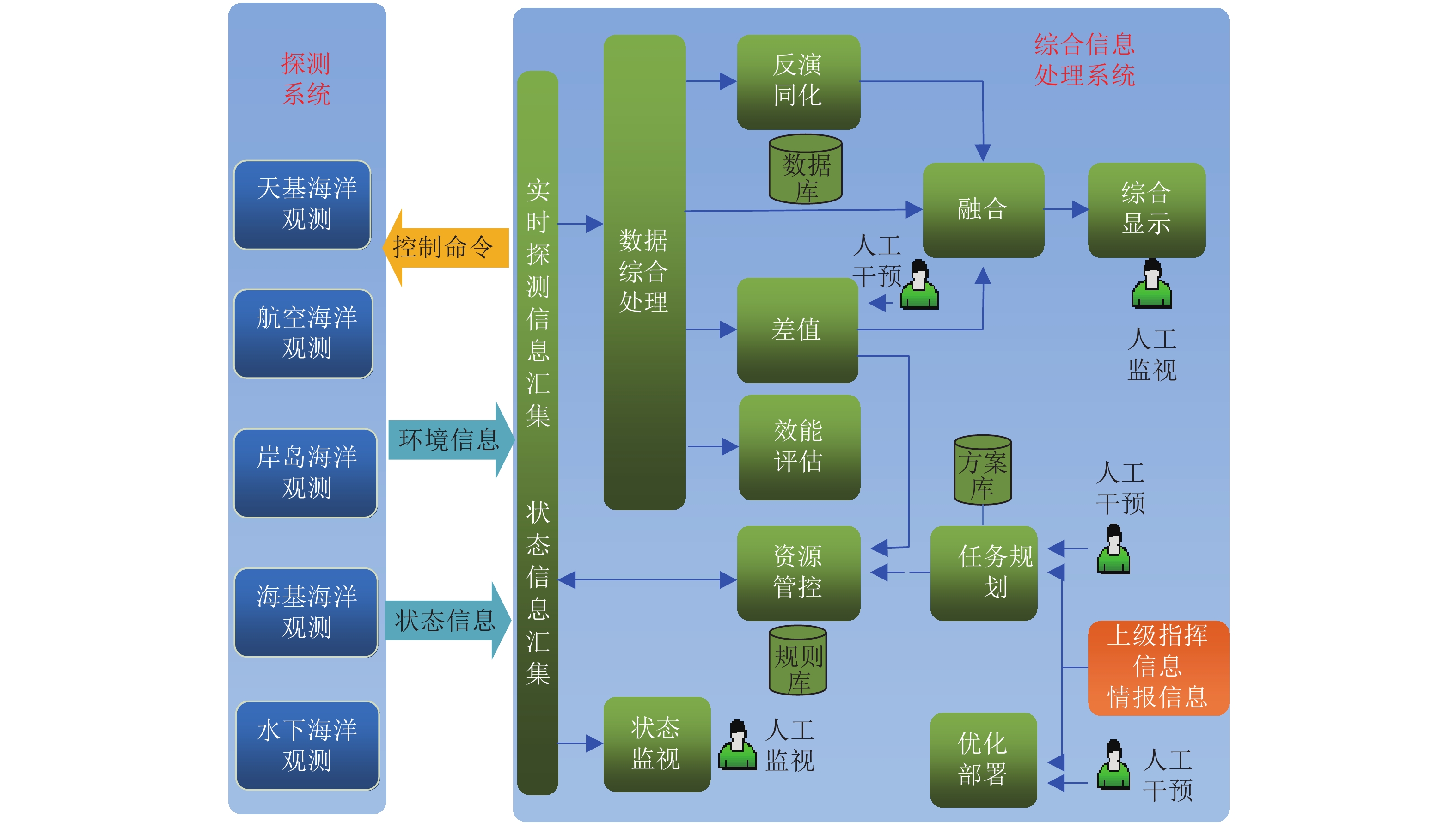
图 2 海洋环境平行监测体系框架
Fig. 2 The architecture of marine environmental parallel monitoring system
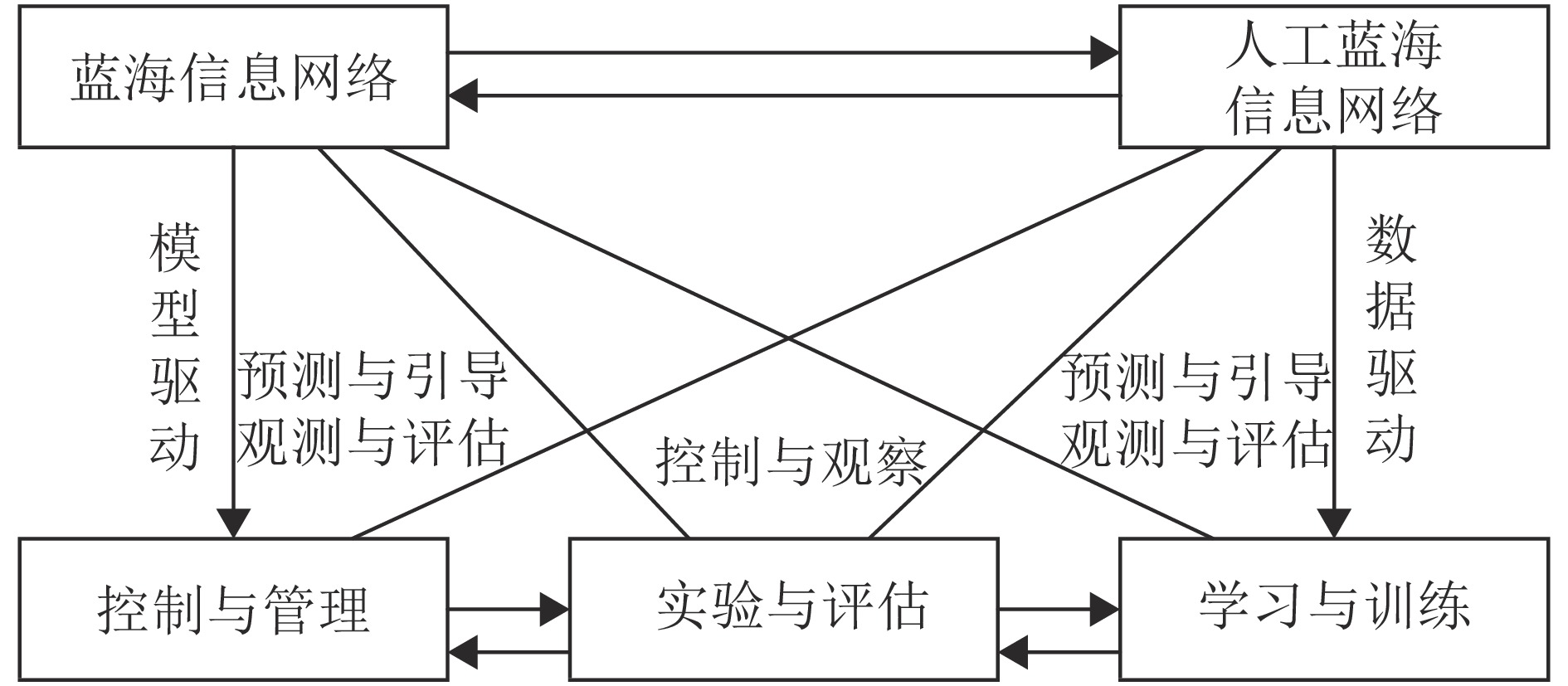
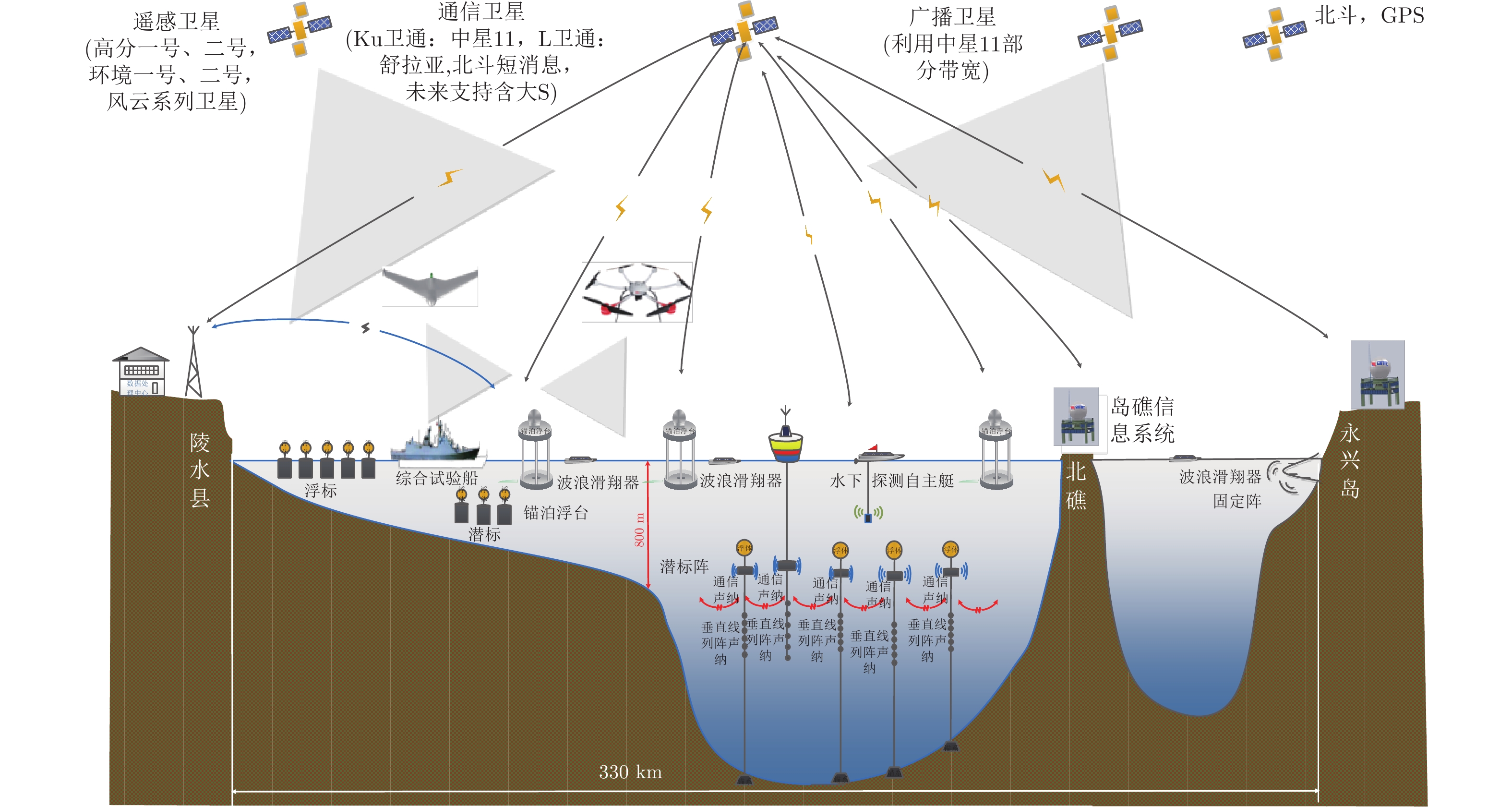
图 4 基于蓝海信息网络的海洋环境平行监测体系框架
Fig. 4 Framework of parallel monitoring system for marine environment based on the Lanhai information network
表 1 海洋环境监测传感器
Table 1 Marine environmental monitoring sensor
观测参数 传感器 温深盐仪CTD 可连续测量 温度 抛投式温深仪XBT 抛弃式, 不可回收, 测量范围 450 m以浅 抛弃式XCTD 抛弃式, 不可回收 温深盐仪CTD 可连续测量 盐度 抛投式温深盐仪XBT 抛弃式, 不可回收, 测量范围 450 m以浅 抛弃式XCTD 抛弃式, 不可回收 声学多普勒海流计ADCP 工作深度 $50\sim 6\;000 $ m海流 电磁海流计 倾斜影响大 声学多普勒海流计(单点式) 可连续测量 声学测波仪 放置于海底, 通过回波信号测量波高 海浪(波向、波高) 雷达测波 海杂波反演海面波高 波浪浮标 可连续测量 漂流浮标 需要浮体具有较好的随波性 潮汐/潮位(水位) 声学水位计/超声波验潮计 可连续测量 压力式验潮仪 可连续测量 GPS验潮 可连续测量 重力 旋转型重力仪 按照设定频率采样 直线型重力仪 按照设定频率采样 磁力 铯光泵磁力仪 对铁磁性物质很敏感, 搭载平台必须为无磁性或弱磁性 回声测深仪 可连续测量 海底地形(水深) 多波束测深 能一次给出与航线相垂直的平面内的几十个甚至上百个深度  下载: 导出CSV
下载: 导出CSV
-
[1] 康寿岭. 注重海洋仪器设备的发展提高海洋监测技术水平. 海洋技术, 1996, 15(2): 1−5Kang Shou-Ling. Giving more attention to the development of oceanographic instrument, and equipment, increasing the ocean monitoring technology level. Ocean Technology, 1996, 15(2): 1−5 [2] 袁新, 王卫平. 船型海洋资料浮标布放作业的组织与实施. 气象水文海洋仪器, 2002, 2(2): 40−44 doi: 10.3969/j.issn.1006-009X.2002.02.009Yuan Xin, Wang Wei-Ping. The arrangement of boat-shaped oceanic date buoy's deployment. Meteorological, Hydrological and Marine Instruments, 2002, 2(2): 40−44 doi: 10.3969/j.issn.1006-009X.2002.02.009 [3] 谢波涛, 雷方辉, 王俊勤. 平台基海洋环境立体监测系统的研制及应用. 海洋技术, 2013, 32(1): 16−20Xie Bo-Tao, Lei Fang-Hui, Wang Jun-Qin. Development and application of the platform-based marine environment monitoring system. Ocean Technology, 2013, 32(1): 16−20 [4] 王飞跃. 平行系统方法与复杂系统的管理和控制. 控制与决策, 2004, 19(5): 485−489 doi: 10.3321/j.issn:1001-0920.2004.05.002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5): 485−489 doi: 10.3321/j.issn:1001-0920.2004.05.002 [5] 王飞跃. 关于复杂系统研究的计算理论与方法. 中国基础科学, 2004, 41(6): 3−10 doi: 10.3969/j.issn.1009-2412.2004.06.001Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 41(6): 3−10 doi: 10.3969/j.issn.1009-2412.2004.06.001 [6] 王飞跃. 人工社会、计算实验、平行系统—关于复杂社会经济系统计算研究的讨论. 复杂系统与复杂性科学, 2004, 1(4): 25−35 doi: 10.3969/j.issn.1672-3813.2004.04.002Wang Fei-Yue. Artificial society, computational experiments, parallel systems: A discussion on computational research of complex socioeconomic systems. Complex Systems and Complexity Science, 2004, 1(4): 25−35 doi: 10.3969/j.issn.1672-3813.2004.04.002 [7] Wang F-Y. “Parallel control and management for intelligent transportation systems: Concepts, architectures, and applications”. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 630−638 doi: 10.1109/TITS.2010.2060218 [8] 吕宜生, 欧彦, 汤淑明, 朱凤华, 赵红霞. 基于人工交通系统的路网交通运行状况评估的计算实验. 吉林大学学报(工学版), 2009, 39(S2): 87−90Lv Yi-Sheng, Ou Yan, Tang Shu-Ming, Zhu Feng-Hua, Zhao Hong-Xia. Computation experiment of evaluating road network traffic condition based artificial transportation systems. Journal of Jilin University (Engineering and Technology Edition), 2009, 39(S2): 87−90 [9] 王飞跃. 平行控制: 数据驱动的计算控制方法. 自动化学报, 2013, 39(4): 293−302Wang Fei-Yue. Parallel control: A method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293−302 [10] Wang F-Y, Yang L Q, Cheng X, Han S S, Yang J. Network softwarization and parallel networks: Beyond software-defined networks. IEEE Network, 2016, 30(4): 60−65 doi: 10.1109/MNET.2016.7513865 [11] 王飞跃, 杨柳青, 胡晓娅, 程翔, 韩双双, 杨坚. 平行网络与网络软件化: 一种新颖的网络架构. 中国科学: 信息科学, 2017, 47: 811−831 doi: 10.1360/N112016-00047Wang Fei-Yue, Yang Liu-Qing, Hu Xiao-Ya, Cheng Xiang, Han Shuang-Shuang, Yang Jian. Parallel networks and network softwarization: A novel network architecture. Scientia Sinica Informationis, 2017, 47: 811−831 doi: 10.1360/N112016-00047 [12] 王飞跃, 张俊. 智联网: 概念、问题和平台. 自动化学报, 2017, 43(12): 2061−2070Wang Fei-Yue, Zhang Jun. Internet of minds: The concept, issues and platforms. Acta Automatica Sinica, 2017, 43(12): 2061−2070 [13] 王飞跃, 戴汝为, 张嗣瀛, 陈国良, 汤淑明, 杨东援, 杨晓光, 李平. 关于城市交通、物流、生态综合发展的复杂系统研究方法. 复杂系统与复杂性科学, 2004, (2): 60−69 doi: 10.3969/j.issn.1672-3813.2004.02.009Wang Fei-Yue, Dai Ru-Wei, Zhang Si-Ying, Chen Guo-Liang, Tang Shu-Ming, Yang Dong-Yuan, Yang Xiao-Guang, Li Ping. Research on complex systems for urban transportation, logistics and ecological development. Complex Systems and Complexity Science, 2004, (2): 60−69 doi: 10.3969/j.issn.1672-3813.2004.02.009 [14] Kang M Z, Wang F-Y. From parallel plants to smart plants: Intelligent control and management for plant growth. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2): 161−166 doi: 10.1109/JAS.2017.7510487 [15] Wang F-Y, Wong P K. Intelligent systems and technology for integrative and predictive medicine: An ACP approach. ACM Transactions on Intelligent Systems and Technology, 2013, 4(2): Article No. 32 [16] 王飞跃. 智能系统加速提升医疗保健水平, [Online], available: http://news.sciencenet.cn/htmlnews/2014/6/297592.shtm December 2, 2018Wang F-Y. Intelligent systems accelerate the improvement of health care [Online], available: http://news.sciencenet.cn/htmlnews/2014/6/297592.shtm December 2, 2018 [17] 苏振东, 杨瑞平, 王飞跃. 海洋环境平行监测体系架构及应用. 指挥与控制学报, 2018, 4(1): 32−36 doi: 10.3969/j.issn.2096-0204.2018.01.0032Su Zhen-Dong, Yang Rui-Ping, Wang Fei-Yue. Parallel marine environment monitoring systems: Architecture and application. Journal of Command and Control, 2018, 4(1): 32−36 doi: 10.3969/j.issn.2096-0204.2018.01.0032 [18] 袁勇, 王飞跃. 平行区块链: 概念、方法与内涵解析. 自动化学报, 2017, 43(10): 1703−1712Yuan Yong, Wang Fei-Yue. Parallel block chain: Concept, methods and issues. Acta Automatica Sinica, 2017, 43(10): 1703−1712 [19] 袁勇, 王飞跃. 区块链技术发展现状与展望. 自动化学报, 2016, 42(4): 481−494Yuan Yong, Wang Fei-Yue. Blockchain: The state of the art and future trends. Acta Automatica Sinica, 2016, 42(4): 481−494 [20] 王飞跃. 关于复杂系统的建模、分析、控制和管理. 复杂系统与复杂性科学, 2006, 3(2): 27−34Wang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2): 27−34 [21] 熊刚, 王飞跃, 侯家琛, 董西松, 张家麟, 付满昌. 提高核电站安全可靠性的平行系统方法. 系统工程理论与实践, 2012, 32(5): 1018−1026 doi: 10.3969/j.issn.1000-6788.2012.05.014Xiong Gang, Wang Fei-Yue, Hou Jia-Chen, Dong Xi-Song, Zhang Jia-Lin, Fu Man-Chang. To improve safety and reliability of nuclear power plant with parallel system method. Systems Engineering — Theory and Practice, 2012, 32(5): 1018−1026 doi: 10.3969/j.issn.1000-6788.2012.05.014 [22] 宁滨, 王飞跃, 董海荣, 李润梅, 文丁, 李莉. 基于ACP方法的城市轨道交通平行系统体系研究. 交通运输系统工程与信息, 2010, 10(6): 22−28 doi: 10.3969/j.issn.1009-6744.2010.06.003Ning Bin, Wang Fei-Yue, Dong Hai-Rong, Li Run-Mei, Wen Ding, Li Li. Parallel systems for urban rail transportation based on ACP approach. Journal of Transportation Systems Engineering and Information Technology, 2010, 10(6): 22−28 doi: 10.3969/j.issn.1009-6744.2010.06.003 [23] Lui F, Zhao F J, Deng Y K, Yu W D, Chen Y Q, Ai J Q. Determination of ocean wave propagation direction based on azimuth scanning mode. IEEE Geoscience and Remote Sensing Letters, 2011, 8(6): 1155−1159 [24] Liu F, Zhao F J, Deng Y K, Yu W D, Ai J Q, Wang Y. Ship detection and speed estimation based on azimuth scanning mode of SAR. IET Radar, Sonar and Navigation, 2011, PP(27): 655−661 [25] 赵凤军, 刘凡, 邓云凯, 禹卫东, 冯锦. 一种基于灰度互相关法的扫描模式下的风场反演算法. 电子与信息学报, 2011, 33(7): 1667−1670Zhao Feng-Jun, Liu Fan, Deng Yun-Kai, Yu Wei-Dong, Feng Jin. A new wind vector algorithm in scanning mode based on gray cross-correlation. Journal of Electronics and Information Technology, 2011, 33(7): 1667−1670 [26] Chen C S, Beardsley R C, Cowles G. An unstructured grid, finite-volume coastal ocean model (FVCOM) system. Oceanograwhy, 2006, 19(1): 78−89 -

 下载:
下载:


计量
- 文章访问数: 7470
- HTML全文浏览量: 3000
- PDF下载量: 624
- 被引次数: 0
