

A Modeling and Tracking Algorithm of Finite Mixture Models for Multiple Extended Target Based on the GLMB Filter and Gibbs Sampler
-
摘要: 本文针对杂波条件下多扩展目标的状态估计, 目标个数估计, 扩展目标形状估计问题, 提出了一种基于标签随机有限集(Labelled random finite sets, L-RFS)框架下多扩展目标跟踪学习算法, 该学习算法主要包括两方面:多扩展目标动态建模和多扩展目标的跟踪估计.首先, 结合广义标签多伯努利滤波器(Generalized labelled multi-Bernoulli, GLMB)建立了扩展目标的量测有限混合模型(Finite mixture models, FMM), 利用Gibbs采样和贝叶斯信息准则(Bayesian information criterion, BIC)准则推导出有限混合模型的参数来对多扩展目标形状进行学习, 然后采用等效量测方法来替代扩展目标产生的量测, 对扩展目标形状采用椭圆逼近建模, 实现扩展目标形状与状态的估计.仿真实验表明本文所给的方法能够有效跟踪多扩展目标, 并且在目标个数估计方面优于CBMeMBer算法.此外, 与标签多伯努利滤波(LMB)计算比较表明: GLMB和LMB算法滤波估计精度接近, 二者精度高于CBMeMBer算法.Abstract: In this paper, a new multiple extended target tracking learning algorithm based on labelled random finite sets (L-RFS) framework is proposed to estimate the number, shape and state of extended targets under clutter conditions. The algorithm mainly includes two aspects: multi-extended target dynamic modeling and multi-extended target tracking estimates. Firstly, a finite mixture model (FMM) of extended target is established under the generalized labelled multi-Bernoulli (GLMB) filter. Learning the parameters of finite mixture model by Gibbs sampling and Bayesian information criterion (BIC), and then equivalent point target measurements are used in place of the actual extended target measurements. Finally, the proposed ellipse approximation model is used to realize the estimation of the extended target shape. The simulation results show that the proposed algorithm can effectively track the multiple extended targets and it is superior to CBMeMBer algorithm in the estimation of the number of extended targets. In addition, comparison with LMB filter shows that: The filtering accuracy of the GLMB and LMB algorithms are close to each other, and the accuracy of both algorithms is higher than CBMeMBer algorithm.
-
Key words:
- Multiple extended target /
- finite mixture models (FMM) /
- labeled random finite sets (L-RFS) /
- Generalized labelled multi-Bernoulli (GLMB) filter /
- Gibbs sampling /
- Bayesian information criterion (BIC)
1) 本文责任编委 许斌 -

图 1 扩展目标("四角星"表示量测)
Fig. 1 The concept map of extended target (the four-pointed star denotes the measurement)
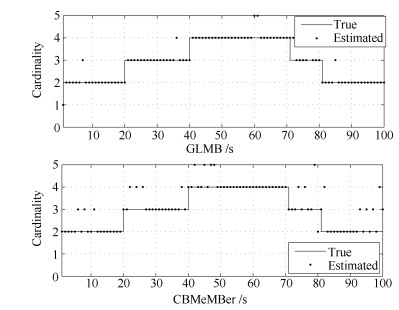
图 6 多扩展目标个数估计对比
Fig. 6 The cardinality estimates comparison for multiple extended targets
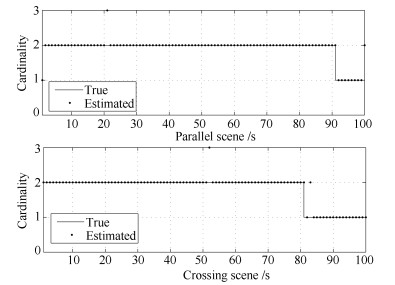
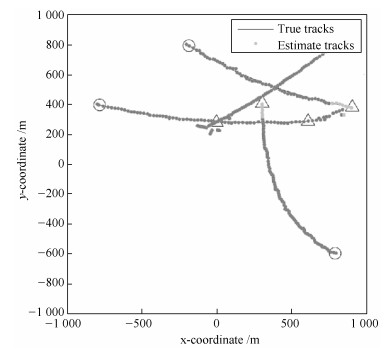
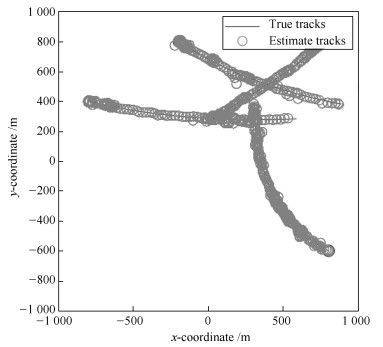
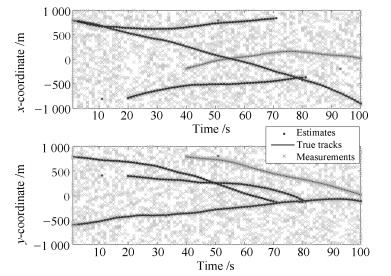
图 12 平行运动和交叉运动场景下的扩展目标个数估计
Fig. 12 Estimated number of extended targets in cross-motion and parallel motion scenarios
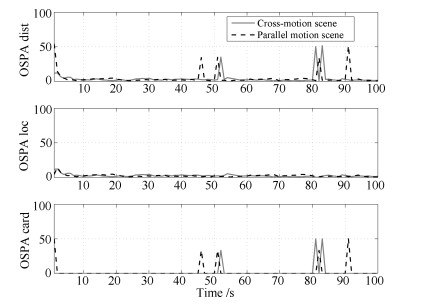
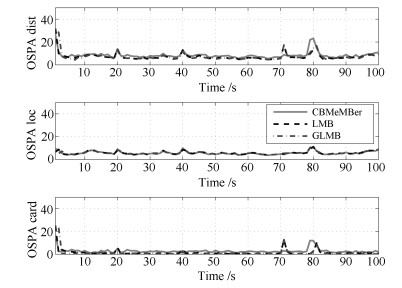
图 13 交叉运动和平行运动场景OSPA距离(100 MCs)
Fig. 13 OSPA distance of cross-motion and parallel motion scenes (100 MCs)
表 1 算法性能分析
Table 1 Performance analysis of algorithms
线性 线性 时间(秒/步) 1.37 0.05 目标个数估计准确率 97.8 % 84.6 %  下载: 导出CSV
下载: 导出CSV
-
[1] Granstrom K, Lundquist C, Orguner U. Tracking rectangular and elliptical extended targets using laser measurements. In: Proceedings of the 14th International Conference on Information Fuison. Chicago, USA: IEEE, 2011. 1-8 [2] Granstrom K, Baum M. Extended Object Tracking: Introduction, Overview and Applications. Journal of Advances in Information Fusion, 2017, 12(2): 139-174 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ026837439/ [3] Bar-Shalom Y, Tse E. Tracking in a cluttered environment with probabilistic data association. IEEE Transactions on Automatic Control, 1975, 11(9): 451-460 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_8dc15d816a6401c947831944afbe18b1 [4] Bar-Shalom Y. Tracking methods in a multi-target environment. IEEE Transactions on Automatic Control, 1978, 23(6): 678-626 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_ab65a2e64f2283b6646724fc1a43c872 [5] Fortmann T, Bar-Shalom Y, Scheffe M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE Journal of Oceanic Engineering, 1983, 8(3): 173-184 doi: 10.1109/JOE.1983.1145560 [6] Reid D. An algorithm for tracking multiple targets. IEEE Transactions on Automatic Control, 1979, 24(6): 843-854 doi: 10.1109/TAC.1979.1102177 [7] Blackman S. Multiple hypothesis tracking for multitarget tracking. IEEE Transactions on Aerospace and Electronic Systems, 2004, 11(9): 5-18 [8] Koch W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042-1059 doi: 10.1109/TAES.2008.4655362 [9] Feldmann M, Franken D, Koch W. Tracking of extended objects and group targets using random matrices. IEEE Transactions on Signal Processing, 2011, 59(4): 1409-1420 doi: 10.1109/TSP.2010.2101064 [10] Baum M, Hanebeck U D. Random hypersurface models for extended object tracking. In: Proceedings of the 9th IEEE International Symposium on Signal Processing and Information Technology. Ajman, United Arab Emirates: IEEE, 2009. 178-183 [11] Gilholm K, Salmond D. Spatial distribution model for tracking extended objects. IEEE Proceedings Radar, Sonar and Navigation, 2005, 152(5): 364-371 doi: 10.1049/ip-rsn:20045114 [12] Gilholm K, Godsill S, Maskell S, Salmond D. Poisson models for extended target and group tracking. In: Proceedings of Signal and Data Processing of Small Targets. San Diego, USA: SPIE, 2005. 230-241 [13] Mahler R. PHD filters for nonstandard targets, I: extended targets. In: Proceedings of the 12th International Conference on Information Fusion. Seattle, USA: IEEE, 2009. 915-921 [14] Granstrom K, Lundquist C, Orguner U. A Gaussian mixture PHD filter for extended target tracking. In: Proceedings of the 13th International Conference on Information Fusion, Edinburgh, UK: IEEE, 2010. 1-8 [15] Orguner U, Lundquist C, Granstrom K. Extended target tracking with a cardinalized probability hypothesis density filter. In: Proceedings of the 14th International Conference on Information Fusion. Chicago, USA: IEEE, 2011. 65-72 [16] Vo B T, Vo B N. Labeled random finite sets and multi-object conjugate priors. IEEE Transactions on Signal Processing, 2013, 61(13): 3460-3475 doi: 10.1109/TSP.2013.2259822 [17] Beard M, Reuter S, Granstrom K, Vo B T, Vo B N and Scheel A. Multiple extended target tracking with labeled random finite sets. IEEE Transactions on Signal Processing, 2016, 64(7): 1638-1653 doi: 10.1109/TSP.2015.2505683 [18] 连峰, 马冬冬, 元向辉, 陈文, 韩崇昭.扩展目标CBMeMBer滤波器及其高斯混合实现.控制与决策, 2015, 30(04): 611-616 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201504006Lian Feng, Ma Dong-Dong, Yuan Xiang-Hui, Chen Wen, Han Chong-Zhao. CBMeMBer filter for extended targets and its Gaussian mixture implementations. Control and Decision, 2015, 30(04): 611-616 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201504006 [19] Baum M, Hanebeck U D. Shape tracking of extended objects and group targets with star-convex RHMs. In: Proceedings of the 14th International Conference on Information Fusion. Chicago, USA: IEEE, 2011. 1-8 [20] Aranstrom K, Orguner U. A PHD filter for tracking multiple extended targets using random matrices. IEEE Transactions on Signal Processing, 2012, 60(11): 5657-5671 doi: 10.1109/TSP.2012.2212888 [21] Baum M, Hanebeck U D. Random Hypersurface Models for Extended Object Tracking. IEEE International Symposium on Signal Processing and Information Technology. Ajman, United Arabn Emirates: IEEE, 2009. 178-183 [22] 李鹏, 杨金龙, 葛洪伟.基于高斯曲面特征矩阵的扩展目标形状估计.光电子激光, 2014, 25(9): 1803-1811 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdzjg201409027Li Peng, Yang Jin-Long, Ge Hong-Wei. Shape estimation of exteded targets based on Gaussian surface feature matrix. Journal of Opto-electronics Laser, 2014, 25(9): 1803-1811 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdzjg201409027 [23] Sun L, Lan J, Lix R. Extended target tracking using star-convex model with non-linear inequality constraints. In: Proceedings of the 31th Chinese Control Conference, Hefei, China: IEEE, 2012. 3869-3874 [24] Vo B N, Vo B T, Hoang H G. An efficient implementation of the generalized labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2017, 65(8): 1975-1987 doi: 10.1109/TSP.2016.2641392 [25] Vo B N, Vo B T. An implementation of the multi-sensor generalized labeled multi-Bernoulli filter via Gibbs sampling. In: Proceedings of the 20th International Conference on Information Fusion, Xi$'$an, China, 2017. 1-8 [26] 李翠芸, 王荣, 姬红兵.基于变分贝叶斯势均衡多目标多伯努利滤波的多扩展目标跟踪算法.控制理论与应用, 2015, 32(02): 187-195 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201502007Li Cui-Yun, Wang Yong, Ji Hong-Bing. Multiple extended-target tracking based on variational Bayesian cardinality-balanced multi-target multi-Bernoulli. Control Theory & Applications, 2015, 32(02): 187-195 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201502007 [27] 刘伟峰, 柴中, 文成林.基于随机采样的多量测目标跟踪算法.自动化学报, 2013, 39(02): 168-178 doi: 10.3724/SP.J.1004.2013.00168Liu Wei-Feng, Chai Zhong, Wen Cheng-Lin. Multi-measurement target tracking by using random sampling approach. Acta Automatica Sinica, 2013, 39(2): 168-178 doi: 10.3724/SP.J.1004.2013.00168 [28] 朱书军, 刘伟峰, 崔海龙.基于广义标签多伯努利滤波的可分辨群目标跟踪算法.自动化学报, 2017, 43(12): 2178-2189 doi: 10.16383/j.aas.2017.c160334Zhu Shu-Jun, Liu Wei-Feng, Cui Hai-Long. Multiple resolvable groups tracking by using GLMB filter. Acta Automatica Sinica, 2017, 43(12): 2178-2189 doi: 10.16383/j.aas.2017.c160334 [29] Chen Y M, Liu W F, Wang X D. Multiple extended target tracking based on GLMB filter and gibbs sampler. In: Proceedings of the 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), Chiang Mai, Thailand, 2017. 26-31 [30] Mahler R P S. Statistical multisource-multitarget information fusion. Boston: Artech House, USA, 2007. [31] Mahler R. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace, Electronic Systems, 2003, 39(4): 1152-1178 doi: 10.1109/TAES.2003.1261119 [32] Mc Lachlan G, Peel D. Finite mixture models. New York, John Wiley Sons, 2000. [33] Vo B N, Vo B T, Phung D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Transactions on Signal Processing, 2014, 62(24): 6554-6567 doi: 10.1109/TSP.2014.2364014 [34] Diebolt J, Robert P. Estimation of finite mixture distributions through Bayesian sampling. Journal of the Royal Statistical Society 1994, 56(2): 363-375 [35] Vo B N, Vo B T, Phung D. Labeled random finite sets and the bayes multi-target tracking filter. IEEE Transactions on Signal Processing, 2014, 62(24): 6554-6567 doi: 10.1109/TSP.2014.2364014 [36] Geman S, Geman D. Stochastic relaxation, Gibbs distributions, and the Bayesian restoration of image. IEEE Transaction on Pattern Analysis and Machine Intelligence, 1984, 6(4): 721-741 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1080/02664769300000058 [37] Liu W F, Cui H L, Wen C L. A time-varying clutter intensity estimation algorithm by using gibbs sampler and BIC. In: Proceedings of the 19th International Conference on Information Fuison. Germany, IEEE, 2016. 1546-1553 [38] Vo B T, Vo B N, and Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transaction on Signal Processing, 57(2): 409-423 doi: 10.1109/TSP.2008.2007924 [39] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457 doi: 10.1109/TSP.2008.920469 -

计量
- 文章访问数: 1786
- HTML全文浏览量: 84
- PDF下载量: 165
- 被引次数: 0
