

-
摘要: 根据研究重点的不同, 从群目标跟踪的建模和滤波算法方面展开综述, 主要包括:量测处理、扩展外形建模、内部关系建模、群分裂/合并建模以及滤波算法等.最后, 基于群目标跟踪现有研究进展和未来可能面临的挑战, 对群目标跟踪领域需要重点研究和关注的方向作了展望.Abstract: On the basis of the research focuses of group target tracking, an overview is presented, which includes modeling and filtering. Special attention is paid to the following areas: measurement processing, modeling of extension shape, modeling inter relationships, modeling of group splitting/combination, and filters for group target tracking based on the aforementioned models. Finally, based on the research progress and the challenges that maybe faced in the future, an outlook is made over the key issues that need to be focused on in the field of group target tracking.
-
Key words:
- Group target /
- random finite set /
- random matrix /
- evolving networks model /
- group refined tracking /
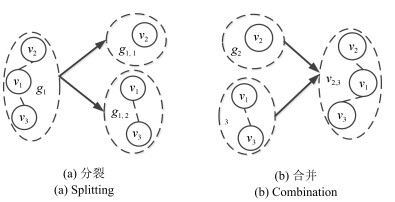
- group splitting/combination
1) 本文责任编委 朱纪洪 -
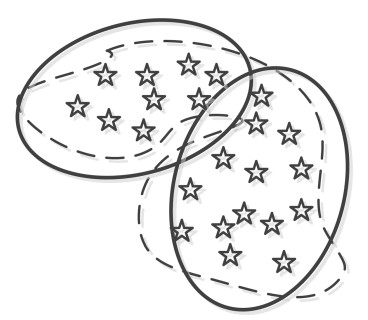
图 3 多椭圆建模任意外形群目标示意图
Fig. 3 Modeling arbitrary shape group targets with multiple ellipse center
表 2 常见群扩展外形的主要建模方法及特点
Table 2 Main modeling methods and features of common group extensions
扩展外形 建模方法 特点 椭圆外形 RM方法[14, 44, 55-57] 波方程简单, 预设先验参数少、鲁棒性强, 适用于线性系统 RHM方法[43-44] 精度高, 比RM方法计算复杂 矩形外形 矩形参数法[11] 波方程简单, 预设先验参数少、鲁棒性强, 适用于线性系统 区间箱方法[46] 密集杂波条件下效果较好; 只描述了量测外形而没有估计目标外形 星凸外形 星凸RHM方法[20, 58] 比简单外形建模方法具有更高的跟踪精度和更强的鲁棒性, 可描述更复杂的群外形; 估计半径可能为负 GP方法[49, 59] 半径函数具有描述后验分布的能力; 不需要进行频域转换; 能保持不可观测部分的不确定性; 能够估计目标方向; 估计半径可能为负 任意外形 水平集RHM方法[40] 能够在信息不确定条件下对时变外形进行高精度跟踪; 初始化困难; 需要正则化以满足鲁棒性要求; 需要处理强噪声造成的估计偏差 多椭圆方法[12-13, 16, 52] 利用多个简单外形描述复杂外形, 具有较高的灵活性, 算法复杂度随着子目标数目的增加而增加  下载: 导出CSV
下载: 导出CSV
表 3 常见群内部关系模型及特点
Table 3 Common group internal relationship models and their characteristics
下载: 导出CSV
-
[1] Beard M, Reuter S, Granström K, Vo B T, Vo B N, Scheel A. Multiple extended target tracking with labeled random finite sets. IEEE Transactions on Signal Processing, 2016, 64(7): 1638-1653 doi: 10.1109/TSP.2015.2505683 [2] 耿文东, 王元钦, 董正宏.群目标跟踪.北京:国防工业出版社, 2014.Geng Wen-Dong, Wang Yuan-Qin, Dong Zheng-Hong. Group-Targets Tracking. Beijing: National Defense Industry Press, 2014. [3] Mihaylova L, Carmi A Y, Septier F, Gning A, Pang S K, Godsill S. Overview of Bayesian sequential Monte Carlo methods for group and extended object tracking. Digital Signal Processing, 2014, 25: 1-16 doi: 10.1016/j.dsp.2013.11.006 [4] Waxman M J. A bibliography of cluster (Group) tracking. In: Proceedings of the SPIE 5428, Signal and Data Processing of Small Targets. Florida, USA: SPIE, 2004. 551- 560 [5] Drummond O E, Blackman S S, Pretrisor G C. Tracking clusters and extended objects with multiple sensors. In: Proceedings of the SPIE 1305, Signal and Data Processing of Small Targets. Florida, USA: SPIE, 1990. 362-375 [6] 李振兴.群目标跟踪关键技术研究[博士学位论文], 空军工程大学, 中国, 2014.Li Zhen-Xing. Research on the Key Technologies of Group Target Tracking [Ph. D. dissertation], Air Force Engineering University, China, 2014. [7] 王海鹏, 董云龙, 熊伟, 潘新龙, 贾舒宜.多传感器编队目标跟踪技术.北京:电子工业出版社, 2016.Wang Hai-Peng, Dong Yun-Long, Xiong Wei, Pan Xin-Long, Jia Shu-Yi. Multi-Sensor Formation Targets Tracking Method. Beijing: Electronic Industry Press, 2016. [8] Taenzer E. Tracking multiple targets simultaneously with a phased array radar. IEEE Transactions on Aerospace and Electronic Systems, 1980, AES-16(5): 604-614 doi: 10.1109/TAES.1980.308926 [9] Baum M, Faion F, Hanebeck U D. Modeling the target extent with multiplicative noise. In: Proceedings of the 15th International Conference on Information Fusion. Singapore, Singapore: IEEE, 2012. 2406-2412 [10] Koch J W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042- 1059 doi: 10.1109/TAES.2008.4655362 [11] Granström K, Reuter S, Meissner D, Scheel A. A multiple model PHD approach to tracking of cars under an assumed rectangular shape. In: Proceedings of the 17th International Conference on Information Fusion (Fusion). Salamanca, Spain: IEEE, 2014. 1-8 [12] Lan J, Li X R. Tracking of extended object or target group using random matrix, Part Ⅱ: irregular object. In: Proceedings of the 15th International Conference on Information Fusion. Singapore, Singapore: IEEE, 2012. 2185- 2192 [13] Lan J, Li X R. Tracking of maneuvering non-ellipsoidal extended object or target group using random matrix. IEEE Transactions on Signal Processing, 2014, 62(9): 2450- 2463 doi: 10.1109/TSP.2014.2309561 [14] Lan J, Li X R. Tracking of extended object or target group using random matrix, Part Ⅰ: new model and approach. In: Proceedings of the 15th International Conference on Information Fusion. Singapore, Singapore: IEEE, 2012. 2177-2184 [15] Granstrom K, Baum M, Reuter S. Extended object tracking: introduction, overview and applications. Journal of Advances in Information Fusion, 2017, 12(2): 139-174 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ026837439/ [16] Hu Q, Ji H B, Zhang Y Q. Tracking of maneuvering non-ellipsoidal extended target with varying number of sub-objects. Mechanical Systems and Signal Processing, 2018, 99: 262-284 doi: 10.1016/j.ymssp.2017.06.013 [17] Granström K, Lundquist C, Orguner U. A Gaussian mixture PHD filter for extended target tracking. In: Proceedings of the 13th International Conference on Information Fusion. Edinburgh, UK: IEEE, 2010. 1-8 [18] Granström K, Lundquist C, Orguner U. Extended target tracking using a Gaussian-mixture PHD filter. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3268-3286 doi: 10.1109/TAES.2012.6324703 [19] 张永权.随机有限集扩展目标跟踪算法研究[博士学位论文], 西安电子科技大学, 中国, 2014.Zhang Yong-Quan. Research on Algorithms of Extended Target Tracking Based on Random Finite Set [Ph. D. dissertation], Xidian University, China, 2014. [20] Li P, Ge H W, Yang J L. Adaptive measurement partitioning algorithm for a Gaussian inverse Wishart PHD filter that tracks closely spaced extended targets. Radioengineering, 2017, 26(2): 573-580 doi: 10.13164/re.2017.0573 [21] 王聪, 王海鹏, 何友.基于坐标映射距离差分的快速群分割算法.系统工程与电子技术, 2016, 38(8): 1716-1722 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201608002Wang Cong, Wang Hai-Peng, He You. Fast algorithm of group segmentation based on coordinates transformations and distance differentiations. Systems Engineering and Electronics, 2016, 38(8): 1716-1722 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201608002 [22] Granström K, Orguner U. A PHD filter for tracking multiple extended targets using random matrices. IEEE Transactions on Signal Processing, 2012, 60(11): 5657-5671 doi: 10.1109/TSP.2012.2212888 [23] Yang J L, Li P, Yang L, Ge H W. An improved ET-GM-PHD filter for multiple closely-spaced extended target tracking. International Journal of Control, Automation and Systems, 2017, 15(1): 468-472 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=59912f6d99eec7b18579787a001e6356 [24] Zhang Y Q, Ji H B. A novel fast partitioning algorithm for extended target tracking using a Gaussian mixture PHD filter. Signal Processing, 2013, 93(11): 2975-2985 doi: 10.1016/j.sigpro.2013.04.006 [25] Zhang Y Q, Ji H B. Clustering Gaussian mixture reduction algorithm based on fuzzy adaptive resonance theory for extended target tracking. IET Radar, Sonar and Navigation, 2014, 8(5): 536-546 doi: 10.1049/iet-rsn.2013.0254 [26] Zhang Y Q, Ji H B. Gaussian mixture reduction based on fuzzy ART for extended target tracking. Signal Processing, 2014, 97: 232-241 doi: 10.1016/j.sigpro.2013.11.004 [27] Zhang Y Q, Ji H B. A robust and fast partitioning algorithm for extended target tracking using a Gaussian inverse Wishart PHD filter. Knowledge-Based Systems, 2016, 95: 125-141 doi: 10.1016/j.knosys.2015.12.008 [28] 冯新喜, 蒲磊, 孔云波, 王雪.基于随机有限集理论的多扩展目标跟踪技术综述.空军工程大学学报(自然科学版), 2016, 17(3): 93-99 doi: 10.3969/j.issn.1009-3516.2016.03.018Feng Xin-Xi, Pu Lei, Kong Yun-Bo, Wang Xue. A survey of multiple extended targets tracking techniques based on FISST. Journal of Air Force Engineering University (Natural Science Edition), 2016, 17(3): 93-99 doi: 10.3969/j.issn.1009-3516.2016.03.018 [29] Shen X L, Song Z Y, Fan H Q, Fu Q. Generalised distance partitioning for multiple-detection tracking filter based on random finite set. IET Radar, Sonar and Navigation, 2018, 12(2): 260-267 doi: 10.1049/iet-rsn.2017.0201 [30] Granström K, Lundquist C. On the use of multiple measurement models for extended target tracking. In: Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013. 1534-1541 [31] Granström K, Orguner U. On spawning and combination of extended/group targets modeled with random matrices. IEEE Transactions on Signal Processing, 2013, 61(3): 678 -692 doi: 10.1109/TSP.2012.2230171 [32] Petrov N, Mihaylova L, Gning A, Angelova D. A novel sequential Monte Carlo approach for extended object tracking based on border parameterisation. In: Proceedings of the 14th International Conference on Information Fusion, Chicago, Illinois, USA: IEEE, 2011. 306-313 [33] Schuster M, Reuter J, Wanielik G. Probabilistic data association for tracking extended targets under clutter using random matrices. In: Proceedings of the 18th International Conference on Information Fusion. Washington, USA: IEEE, 2015. 961-968 [34] Zhu H Y, Han C Z, Li C. An extended target tracking method with random finite set observations. In: Proceedings of the 14th International Conference on Information Fusion. Chicago, USA: IEEE, 2011. 1-6 [35] Baum M, Noack B, Hanebeck U D. Extended object and group tracking with elliptic random hypersurface models. In: Proceedings of the 13th International Conference on Information Fusion. Edinburgh, UK: IEEE, 2010. 1-8 [36] Granström K, Lundquist C, Orguner U. Tracking rectangular and elliptical extended targets using laser measurements. In: Proceedings of the 14th International Conference on Information Fusion. Chicago, USA: IEEE, 2011. 1 -8 [37] Petrov N, Gning A, Mihaylova L, Angelova D. Box particle filtering for extended object tracking. In: Proceedings of the 15th International Conference on Information Fusion. Singapore, Singapore: IEEE, 2012. 82-89 [38] 严超.箱粒子滤波在扩展目标跟踪中的应用[硕士学位论文], 西安电子科技大学, 中国, 2014.Yan Chao. Box Particle Filter's Application to Extended Target Tracking [Master thesis], Xidian University, China, 2014. [39] Baum M, Feldmann M, Franken D, Hanebeck U D, Koch W. Extended object and group tracking: a comparison of random matrices and random hypersurface models. In: Proceedings of the 5th IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF). Leipzig, Germany: IEEE, 2010. 904-906 [40] Baum M, Hanebeck U D. Shape tracking of extended objects and group targets with star-convex RHMs. In: Proceedings of the 14th International Conference on Information Fusion. Chicago, USA: IEEE, 2011. 1-8 [41] Baum M, Hanebeck U D. Extended object tracking with random hypersurface models. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 149-159 doi: 10.1109/TAES.2013.120107 [42] Hirscher T, Scheel A, Reuter S, Dietmayer K. Multiple extended object tracking using Gaussian processes. In: Proceedings of the 19th International Conference on Information Fusion (Fusion). Heidelberg, Germany: IEEE, 2016. 868-875 [43] Zea A, Faion F, Baum M, Hanebeck U D. Level-set random hypersurface models for tracking nonconvex extended objects. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(6): 2990-3007 doi: 10.1109/TAES.2016.130704 [44] Feldmann M, Franken D. Advances on tracking of extended objects and group targets using random matrices. In: Proceedings of the 12th International Conference on Information Fusion. Seattle, USA: IEEE, 2009. 1029-1036 [45] Feldmann M, Franken D, Koch W. Tracking of extended objects and group targets using random matrices. IEEE Transactions on Signal Processing, 2011, 59(4): 1409- 1420 doi: 10.1109/TSP.2010.2101064 [46] Baum M, Hanebeck U D. Random hypersurface models for extended object tracking. In: Proceedings of the 2009 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT). Ajman, United Arab Emirates: IEEE, 2009. 178-183 [47] 李翠芸, 林锦鹏, 姬红兵.一种基于椭圆RHM的扩展目标Gamma高斯混合CPHD滤波器.控制与决策, 2015, 30(9): 1551-1558 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201509003Li Cui-Yun, Lin Jin-Peng, Ji Hong-Bing. A Gamma Gaussian-mixture CPHD filter based on ellipse random hypersurface models for extended targets. Control and Decision, 2015, 30(9): 1551-1558 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201509003 [48] Wahlström N, Özkan E. Extended target tracking using Gaussian processes. IEEE Transactions on Signal Processing, 2015, 63(16): 4165-4178 doi: 10.1109/TSP.2015.2424194 [49] Aftab W, De Freitas A, Arvaneh M, Mihaylova L. A Gaussian process approach for extended object tracking with random shapes and for dealing with intractable likelihoods. In: Proceedings of the 22nd International Conference on Digital Signal Processing (DSP). London, UK: IEEE, 2017. 1-6 [50] Zea A, Faion F, Baum M, Hanebeck U D. Level-set random hypersurface models for tracking non-convex extended objects. In: Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013. 1760 -1767 [51] Granström K, Willett P, Bar-Shalom Y. An extended target tracking model with multiple random matrices and unified kinematics. In: Proceedings of the 18th International Conference on Information Fusion. Washington, USA: IEEE, 2015. 1007-1014 [52] Lan J, Li X R. Joint tracking and classification of non-ellipsoidal extended object using random matrix. In: Proceedings of the 17th International Conference on Information Fusion. Salamanca, Spain: IEEE, 2014. 1-8 [53] Cao X M, Lan J, Li X R. Extension-deformation approach to extended object tracking. In: Proceedings of the 19th International Conference on Information Fusion. Heidelberg, Germany: IEEE, 2016. 1185-1192 [54] Cao X M, Lan J, Li X R. Extended object tracking using control-points-based extension deformation. In: Proceedings of the 20th International Conference on Information Fusion. Xi'an, China: IEEE, 2017. 1-8 [55] Cao W, Lan J, Li X R. Extended object tracking and classification using radar and ESM sensor data. IEEE Signal Processing Letters, 2018, 25(1): 90-94 doi: 10.1016/j.sigpro.2017.10.026 [56] Hu Q, Ji H B, Zhang Y Q. A standard PHD filter for joint tracking and classification of maneuvering extended targets using random matrix. Signal Processing, 2018, 144: 352-363 doi: 10.1016/j.sigpro.2017.10.026 [57] Vivone G, Granström K, Braca P, Willett P. Multiple sensor measurement updates for the extended target tracking random matrix model. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(5): 2544-2558 doi: 10.1109/TAES.2017.2704166 [58] Yao G, Dani A. Image moment-based random hypersurface model for extended object tracking. In: Proceedings of the 20th International Conference on Information Fusion. Xi'an, China: IEEE, 2017. 1-7 [59] Michaelis M, Berthold P, Meissner D, Wuensche H J. Heterogeneous multi-sensor fusion for extended objects in automotive scenarios using Gaussian processes and a GMPHD-filter. In: Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF). Bonn, Germany: IEEE, 2017. 1-6 [60] Pang S K, Li J, Godsill S J. Models and algorithms for detection and tracking of coordinated groups. In: Proceedings of the 2008 IEEE Aerospace Conference. Big Sky, USA: IEEE, 2008. 1-17 [61] Khan Z, Balch T, Dellaert F. MCMC-based particle filtering for tracking a variable number of interacting targets. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(11): 1805-1819 doi: 10.1109/TPAMI.2005.223 [62] Tchango A F, Thomas V, Buffet O, Dutech A, Flacher F. Tracking multiple interacting targets using a joint probabilistic data association filter. In: Proceedings of the 17th International Conference on Information Fusion. Salamanca, Spain: IEEE, 2014. 1-8 [63] Pang S K, Li J, Godsill S J. Detection and tracking of coordinated groups. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 472-502 doi: 10.1109/TAES.2011.5705687 [64] Gning A, Mihaylova L, Maskell S, Pang S K, Godsill S. Group object structure and state estimation with evolving networks and Monte Carlo methods. IEEE Transactions on Signal Processing, 2011, 59(4): 1383-1396 doi: 10.1109/TSP.2010.2103062 [65] Georgieva P, Mihaylova L, Jain L C. Advances in Intelligent Signal Processing and Data Mining. Berlin, Heidelberg: Springer, 2013. 7-53 [66] Chen X J, Qin Z, An L, Bhanu B. Multiperson tracking by online learned grouping model with nonlinear motion context. IEEE Transactions on Circuits and Systems for Video Technology, 2016, 26(12): 2226-2239 doi: 10.1109/TCSVT.2015.2511480 [67] Qin Z, Shelton C R. Social grouping for multi-target tracking and head pose estimation in video. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(10): 2082-2095 doi: 10.1109/TPAMI.2015.2505292 [68] Bazzani L, Zanotto M, Cristani M, Murino V. Joint individual-group modeling for tracking. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(4): 746-759 doi: 10.1109/TPAMI.2014.2353641 [69] Ur-Rehman A, Naqvi S M, Mihaylova L, Chambers J A. Multi-target tracking and occlusion handling with learned variational Bayesian clusters and a social force model. IEEE Transactions on Signal Processing, 2016, 64(5): 1320-1335 doi: 10.1109/TSP.2015.2504340 [70] Gao S, Chen X G, Ye Q X, Xing J L, Kuijper A, Ji X Y. A graphical social topology model for multi-object tracking [Online], available: https: //arxiv.org/abs/1702.04040, September 29, 2017 [71] Liu W F, Wen C L. The structure-labeled group target estimation with random finite set observation. In: Proceedings of the 2014 International Conference on Control, Automation and Information Sciences (ICCAIS 2014). Gwangju, South Korea: IEEE, 2014. 1-8 [72] Mahler R P S. Statistical Multisource-Multitarget Information Fusion. Norwood: Artech House, Inc, 2007. [73] Feng P M, Wang W W, Dlay S, Naqvi S M, Chambers J. Social force model-based MCMC-OCSVM particle PHD filter for multiple human tracking. IEEE Transactions on Multimedia, 2017, 19(4): 725-739 doi: 10.1109/TMM.2016.2638206 [74] Mazzon R, Cavallaro A. Multi-camera tracking using a multi-goal social force model. Neurocomputing, 2013, 100: 41-50 doi: 10.1016/j.neucom.2011.09.038 [75] Geng W D, Wang Y Q, Dong Z H. Group-Target Tracking. Singapore: Springer, 2017. 115-142 [76] Lian F, Han C Z, Liu W F, Yan X X, Zhou H Y. Sequential Monte Carlo implementation and state extraction of the group probability hypothesis density filter for partly unresolvable group targets-tracking problem. IET Radar, Sonar and Navigation, 2010, 4(5): 685-702 doi: 10.1049/iet-rsn.2009.0109 [77] 汪云, 胡国平, 甘林海.基于多模型GGIW-CPHD滤波的群目标跟踪算法.华中科技大学学报(自然科学版), 2017, 45(2): 89 -94 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201702017Wang Yun, Hu Guo-Ping, Gan Lin-Hai. Group targets tracking algorithm using a multiple models Gaussian inverse Wishart CPHD filter. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(2): 89-94 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201702017 [78] Gan L H, Wang G. Tracking maneuvering group target with extension predicted and best model augmentation method adapted. Mathematical Problems in Engineering, 2017, 2017: Article No. 5752870 [79] Lan J, Li X R. Extended object or group target tracking using random matrix with nonlinear measurements. In: Proceedings of the 19th International Conference on Information Fusion. Heidelberg, Germany: IEEE, 2016. 901-908 [80] Lei B T, Li C Y, Ji H B. Nonlinear maneuvering non-ellipsoidal extended object tracking using random matrix. In: Proceedings of the 20th International Conference on Information Fusion. Xi'an, China: IEEE, 2017. 1-6 [81] Özkan E, Wahlström N, Godsill S J. Rao-Blackwellised particle filter for star-convex extended target tracking models. In: Proceedings of the 19th International Conference on Information Fusion. Heidelberg, Germany: IEEE, 2016. 1193-1199 [82] Simon D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches. New York: Wiley-Interscience, 2006. [83] Baum M. Simultaneous Tracking and Shape Estimation of Extended Objects [Ph. D. dissertation], Karlsruhe Institute of Technology, Karlsruhe, Germany, 2013. [84] Steinbring J, Baum M, Zea A, Faion F, Hanebeck U D. A closed-form likelihood for particle filters to track extended objects with star-convex RHMs. In: Proceedings of the 2015 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI). San Diego, USA: IEEE, 2015. 25-30 [85] de Freitas A, Mihaylova L, Gning A, Angelova D, Kadirkamanathan V. Autonomous crowds tracking with box particle filtering and convolution particle filtering. Automatica, 2016, 69: 380-394 doi: 10.1016/j.automatica.2016.03.009 [86] Zhang Y Q, Ji H B, Gao X B, Hu Q. An ellipse extended target CBMeMBer filter using gamma and box-particle implementation. Signal Processing, 2018, 149: 88-102 doi: 10.1016/j.sigpro.2018.03.002 [87] Zhang Y Q, Ji H B, Hu Q. A fast ellipse extended target PHD filter using box-particle implementation. Mechanical Systems and Signal Processing, 2018, 99: 57-72 doi: 10.1016/j.ymssp.2017.05.044 [88] Zhu H Y, Ma T T, Chen S, Jiang W. A random matrix based method for tracking multiple extended targets. In: Proceedings of the 17th International Conference on Information Fusion. Salamanca, Spain: IEEE, 2014. 1-8 [89] Streit R. JPDA intensity filter for tracking multiple extended objects in clutter. In: Proceedings of the 19th International Conference on Information Fusion. Heidelberg, Germany: IEEE, 2016. 1477-1484 [90] Wieneke M, Koch W. A PMHT approach for extended objects and object groups. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 2349-2370 doi: 10.1109/TAES.2012.6237596 [91] Zhang Y Q, Ji H B, Hu Q. A box-particle implementation of standard PHD filter for extended target tracking. Information Fusion, 2017, 34: 55-69 doi: 10.1016/j.inffus.2016.06.007 [92] Li P, Ge H W, Yang J L, Zhang Y Q. Shape selection partitioning algorithm for Gaussian inverse Wishart probability hypothesis density filter for extended target tracking. IET Signal Processing, 2017, 10(9): 1041-1051 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6b5a1efda6eddfb1faf399e30e6513ef [93] Lundquist C, Granström K, Orguner U. An extended target CPHD filter and a Gamma Gaussian inverse Wishart implementation. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 472-483 doi: 10.1109/JSTSP.2013.2245632 [94] Li C Y, Wang R, Hu Y H, Wang J B. Cardinalised probability hypothesis density tracking algorithm for extended objects with glint noise. IET Science, Measurement and Technology, 2016, 10(5): 528-536 doi: 10.1049/iet-smt.2016.0004 [95] Jiang T Y, Liu M Q, Fan Z, Zhang S L. On multiple-model extended target multi-Bernoulli filters. Digital Signal Processing, 2016, 59: 76-85 doi: 10.1016/j.dsp.2016.08.002 [96] Zong P, Barbary M. Improved multi-Bernoulli filter for extended stealth targets tracking based on sub-random matrices. IEEE Sensors Journal, 2016, 16(5): 1428-1447 doi: 10.1109/JSEN.2015.2499268 [97] Ma D D, Lian F, Liu J. Sequential Monte Carlo implementation of cardinality balanced multi-target multi-Bernoulli filter for extended target tracking. IET Radar, Sonar and Navigation, 2016, 10(2): 272-277 doi: 10.1049/iet-rsn.2015.0081 [98] Li M, Lin Z P, An W, Zhou Y Y. Box-particle labeled multi-Bernoulli filter for multiple extended target tracking. Radioengineering, 2016, 25(3): 527-535 doi: 10.13164/re.2016.0527 [99] Li W L, Jia Y M, Du J P, Yu F S. Gaussian mixture PHD filter for multiple maneuvering extended targets tracking. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, USA: IEEE, 2014. 2410-2415 [100] 欧阳成, 陈晓旭, 华云.改进的最适高斯近似概率假设密度滤波.雷达学报, 2013, 2(2): 239-246 http://d.old.wanfangdata.com.cn/Periodical/ldxb201302015Ouyang Cheng, Chen Xiao-Xu, Hua Yun. Improved best-fitting Gaussian approximation PHD filter. Journal of Radars, 2013, 2(2): 239-246 http://d.old.wanfangdata.com.cn/Periodical/ldxb201302015 [101] 韩玉兰, 朱洪艳, 韩崇昭, 王静.多扩展目标的高斯混合概率假设密度滤波器.西安交通大学学报, 2014, 48(4): 95-101 http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb201404017Han Yu-Lan, Zhu Hong-Yan, Han Chong-Zhao, Wang Jing. Gaussian-mixture probability hypothesis density filter for multiple extended targets. Journal of Xi'an Jiaotong University, 2014, 48(4): 95-101 http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb201404017 [102] Wang Y, Hu G P, Zhou H. Group targets tracking using multiple models GGIW-CPHD based on best-fitting Gaussian approximation and strong tracking filter. Journal of Sensors, 2016, 2016: Article No. 7294907 [103] Wang Y, Hu G P, Li Z X. Tracking of group targets using multiple models GGIW-PHD algorithm based on best-fitting Gaussian approximation and strong tracking filter. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232(2): 331-343 doi: 10.1177/0954410016684359 [104] 宋骊平, 严超, 姬红兵, 梁萌.基于箱粒子的多扩展目标PHD滤波.控制与决策, 2015, 30(10): 1759-1765 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201510004Song Li-Ping, Yan Chao, Ji Hong-Bing, Liang Meng. PHD filter for tracking multiple extended targets using box particle. Control and Decision, 2015, 30(10): 1759-1765 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201510004 [105] 汪云.群目标跟踪关键技术研究[博士学位论文], 空军工程大学, 中国, 2017.Wang Yun. Research on the Group Target Tracking Algorithm [Ph. D. dissertation], Air Force Engineering University, China, 2017. [106] Ristic B, Sherrah J. Bernoulli filter for joint detection and tracking of an extended object in clutter. IET Radar, Sonar and Navigation, 2013, 7(1): 26-35 doi: 10.1049/iet-rsn.2012.0069 [107] 李鹏涛.基于箱粒子滤波的MeMBer扩展目标跟踪算法研究[硕士学位论文], 西安电子科技大学, 中国, 2016.Li Peng-Tao. Research on MeMBer Extended Target Tracking Based on Box Particle Filter [Master thesis], Xidian University, China, 2016. [108] Lau R A, Williams J L. Tracking a coordinated group using expectation maximisation. In: Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing. Melbourne, Australia: IEEE, 2013. 282-287 [109] 朱志宇.粒子滤波算法及其应用.北京:科学出版社, 2010.Zhu Zhi-Yu. Particle Filter and Its Application. Beijing: Science Press, 2010. [110] 杨小军, 潘泉, 王睿, 张洪才.粒子滤波进展与展望.控制理论与应用, 2006, 23(2): 261-267 doi: 10.3969/j.issn.1000-8152.2006.02.019Yang Xiao-Jun, Pan Quan, Wang Rui, Zhang Hong-Cai. Development and prospect of particle filtering. Control Theory and Applications, 2006, 23(2): 261-267 doi: 10.3969/j.issn.1000-8152.2006.02.019 [111] Carmi A Y, Mihaylova L, Septier F, Pang S K, Gurfil P, Godsill S J. Inferring leadership from group dynamics using Markov chain Monte Carlo methods. Modeling, Simulation and Visual Analysis of Crowds. New York: Springer, 2013. 325-346 [112] Carmi A Y, Mihaylova L, Septier F. Subgradient-based Markov chain Monte Carlo particle methods for discrete-time nonlinear filtering. Signal Processing, 2016, 120: 532 -536 doi: 10.1016/j.sigpro.2015.10.015 [113] 李振兴, 刘进忙, 李松, 白东颖, 倪鹏.基于箱式粒子滤波的群目标跟踪算法.自动化学报, 2015, 41(4): 785-798 doi: 10.16383/j.aas.2015.c140222Li Zhen-Xing, Liu Jin-Mang, Li Song, Bai Dong-Ying, Ni Peng. Group targets tracking algorithm based on box particle filter. Acta Automatica Sinica, 2015, 41(4): 785-798 doi: 10.16383/j.aas.2015.c140222 [114] 李振兴, 刘进忙, 李超, 白东颖, 郭相科.联合模糊聚类和拟蒙特卡罗重采样的群目标跟踪算法.控制理论与应用, 2014, 31(11): 1597-1603 doi: 10.7641/CTA.2014.40362Li Zhen-Xing, Liu Jin-Mang, Li Chao, Bai Dong-Ying, Guo Xiang-Ke. Group targets tracking algorithm by combination of fuzzy clustering and Quasi-Monte Carlo resampling method. Control Theory and Applications, 2014, 31(11): 1597-1603 doi: 10.7641/CTA.2014.40362 [115] 朱书军, 刘伟峰, 崔海龙.基于广义标签多伯努利滤波的可分辨群目标跟踪算法.自动化学报, 2017, 43(12): 2178-2189 doi: 10.16383/j.aas.2017.c160334Zhu Shu-Jun, Liu Wei-Feng, Cui Hai-Long. Multiple resolvable groups tracking using the GLMB filter. Acta Automatica Sinica, 2017, 43(12): 2178-2189 doi: 10.16383/j.aas.2017.c160334 -

 下载:
下载:

图(7) / 表(4)
计量
- 文章访问数: 7079
- HTML全文浏览量: 2365
- PDF下载量: 992
- 被引次数: 0
