

Weighted Measurement Fusion Unscented Kalman Filter Using Gauss-Hermite Approximation for Nonlinear Systems
-
摘要: 对非线性多传感器系统,基于Gauss-Hermite逼近方法和加权最小二乘法,提出了一种具有普适性的非线性加权观测融合算法.该算法可将一个高维观测压缩为一个低维观测.在此基础上,结合无迹Kalman滤波器(Unscented Kalman filter,UKF),提出了非线性加权观测融合无迹Kalman滤波器(WMF(Weighted measurement fusion)-UKF).与集中式融合UKF(CMF(Centralized measurement fusion)-UKF)相比,该算法计算负担小且具有逼近的估计精度.特别是在传感器数量较大时,该算法在计算量上的优势更加明显.仿真例子验证了算法的有效性.
-
关键词:
- 非线性系统 /
- 加权观测融合 /
- Gauss-Hermite逼近 /
- 无迹Kalman滤波器
Abstract: A universal nonlinear weighted measurement fusion algorithm is proposed using the Gauss-Hermite approximation method and the weighted least squares method for multi-sensor nonlinear systems. A high-dimensional measurement is compressed to a low dimensional measurement by this algorithm. Combined with the unscented Kalman filter (UKF), a nonlinear weighted measurement fusion UKF (WMF-UKF) is proposed based on the algorithm. Compared with the centralized measurement fusion UKF (CMF-UKF), the proposed algorithm has a reduced computational cost and approximate estimation accuracy. Its advantage in computation is obvious when the number of sensors is large. A simulation example illustrates the effectiveness of the algorithm.1) 本文责任编委 李鸿一 -
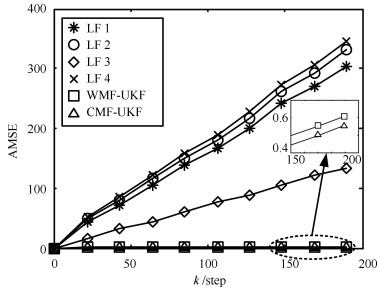
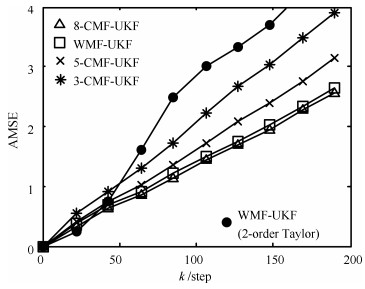
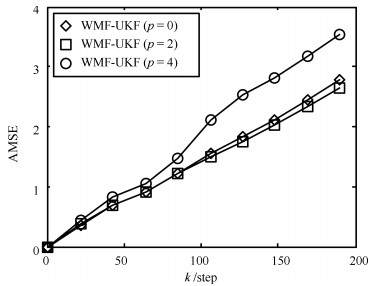
图 2 局部UKF, WMF-UKF以及CMF-UKF的AMSE曲线
Fig. 2 AMSE curves of local UKF, WMF-UKF and CMF-UKF
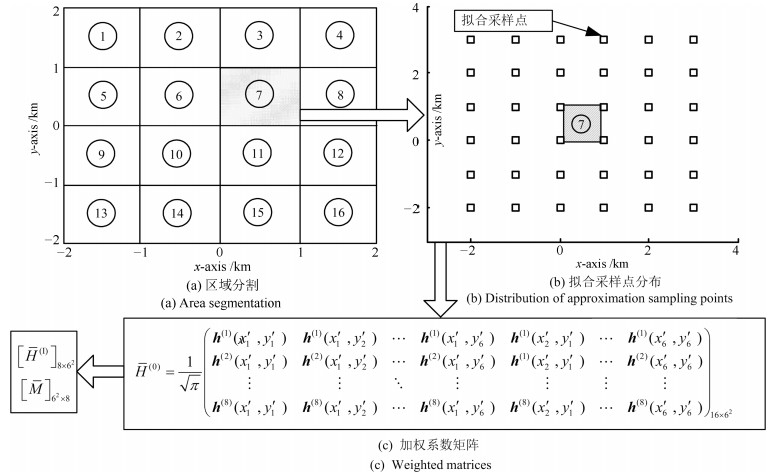
图 3 加权系数矩阵$\overline{M}$和$\overline{H}^{(\rm{I})}$的计算
Fig. 3 Calculation of the weighted matrices $\overline{M}$ and $\overline{H}^{(\rm{I})}$
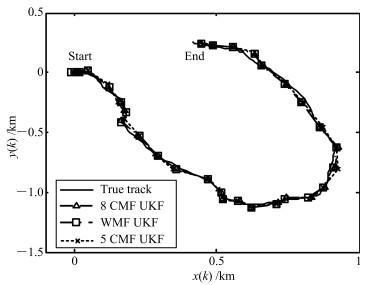
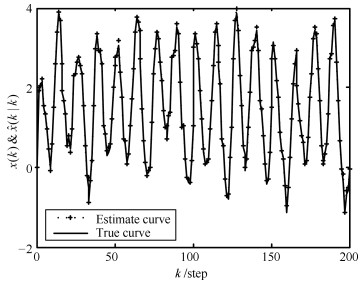
图 4 真实轨迹和WMF-UKF, 8-CMF-UKF和5-CMF-UKF的估计曲线
Fig. 4 True and estimated tracks using WMF-UKF, 8-CMF-UKF and 5-CMF-UKF
-
[1] 韩崇昭, 朱洪艳.多传感信息融合与自动化.自动化学报, 2002, 28(S1):117-124 http://www.aas.net.cn/CN/abstract/abstract14371.shtmlHan Chong-Zhao, Zhu Hong-Yan. Multiple-sensor information fusion and automation. Acta Automatica Sinica, 2002, 28(S1):117-124 http://www.aas.net.cn/CN/abstract/abstract14371.shtml [2] 潘泉, 于昕, 程咏梅, 张洪才.信息融合理论的基本方法与进展.自动化学报, 2003, 29(4):599-615 http://www.aas.net.cn/CN/abstract/abstract13929.shtmlPan Quan, Yu Xin, Cheng Yong-Mei, Zhang Hong-Cai. Essential methods and progress of information fusion theory. Acta Automatica Sinica, 2003, 29(4):599-615 http://www.aas.net.cn/CN/abstract/abstract13929.shtml [3] Sun S L, Deng Z L. Multi-sensor optimal information fusion Kalman filter. Automatica, 2004, 40(6):1017-1023 doi: 10.1016/j.automatica.2004.01.014 [4] 邓自立, 郝钢.自校正多传感器观测融合Kalman估值器及其收敛性分析.控制理论与应用, 2008, 25(5):845-852 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200805009Deng Zi-Li, Hao Gang. Self-tuning multisensor measurement fusion Kalman estimator and its convergence analysis. Control Theory & Applications, 2008, 25(5):845-852 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200805009 [5] Ran C J, Deng Z L. Self-tuning weighted measurement fusion Kalman filtering algorithm. Computational Statistics & Data Analysis, 2012, 56(6):2112-2128 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0226056500/ [6] Li X R, Jilkov V P. A survey of maneuvering target tracking:approximation techniques for nonlinear filtering. In:Proceedings of the 2004 SPIE Conference on Signal and Data Processing of Small Targets. Orlando, USA:SPIE, 2004. 537-550 [7] Bar-Shalom Y, Li X R. Multitarget-Multisensor Tracking:Principles and Techniques. Storrs:YBS Publishing, 1995. 87-99 [8] Sun S L. Multi-sensor information fusion white noise filter weighted by scalars based on Kalman predictor. Automatica, 2004, 40(8):1447-1453 doi: 10.1016/j.automatica.2004.03.012 [9] Sun S L. Distributed optimal component fusion weighted by scalars for fixed-lag Kalman smoother. Automatica, 2005, 41(12):2153-2159 doi: 10.1016/j.automatica.2005.06.014 [10] Gan Q Q, Harris C J. Comparison of two measurement fusion methods for Kalman-filter-based multisensor data fusion. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(1):273-279 doi: 10.1109/7.913685 [11] Julier S J, Uhlmann J K. A new extension of the Kalman filter to nonlinear systems. In:Proceedings of the 11th International Symposium on Aerospace/Defence Sensing, Simulation and Controls. Orlando, USA:IEEE, 1997. 182-193 [12] Julier S J, Uhlmann J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3):401-422 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs-e200801002 [13] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1269 doi: 10.1109/TAC.2009.2019800 [14] Ge Q B, Shao T, Yang Q M, Shen X F, Wen C L. Multisensor nonlinear fusion methods based on adaptive ensemble fifth-degree iterated cubature information filter for biomechatronics. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 46(7):912-925 doi: 10.1109/TSMC.2016.2523911 [15] Arulampalam M S, Maskell S, Gordon N, Clapp T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Transactions on Signal Processing, 2002, 50(2):174-188 doi: 10.1109/78.978374 [16] Lan J, Li X R. Nonlinear estimation by LMMSE-based estimation with optimized uncorrelated augmentation. IEEE Transactions on Signal Processing, 2015, 63(16):4270-4283 doi: 10.1109/TSP.2015.2437834 [17] Assa A, Janabi-Sharifi F. A Kalman filter-based framework for enhanced sensor fusion. IEEE Sensors Journal, 2015, 15(6):3281-3292 doi: 10.1109/JSEN.2014.2388153 [18] Straka O, Duník J, Šimandl M. Truncation nonlinear filters for state estimation with nonlinear inequality constraints. Automatica, 2012, 48(2):273-286 doi: 10.1016/j.automatica.2011.11.002 [19] Ge Q B, Xu D X, Wen C L. Cubature information filters with correlated noises and their applications in decentralized fusion. Signal Processing, 2014, 94:434-444 doi: 10.1016/j.sigpro.2013.06.015 [20] Hlinka O, Sluciak O, Hlawatsch F, Djuric P M, Rupp M. Likelihood consensus and its application to distributed particle filtering. IEEE Transactions on Signal Processing, 2012, 60(8):4334-4349 doi: 10.1109/TSP.2012.2196697 [21] 葛泉波, 李文斌, 孙若愚, 徐姿.基于EKF的集中式融合估计研究.自动化学报, 2013, 39(6):816-825 http://www.aas.net.cn/CN/abstract/abstract18107.shtmlGe Quan-Bo, Li Wen-Bin, Sun Ruo-Yu, Xu Zi. Centralized fusion algorithms based on EKF for multisensor non-linear systems. Acta Automatica Sinica, 2013, 39(6):816-825 http://www.aas.net.cn/CN/abstract/abstract18107.shtml [22] Jia B, Xin M, Cheng Y. High-degree cubature Kalman filter. Automatica, 2013, 49(2):510-518 doi: 10.1016/j.automatica.2012.11.014 [23] Khaleghi B, Khamis A, Karray F O, Razavi S N. Multisensor data fusion:a review of the state-of-the-art. Information Fusion, 2013, 14:28-44 doi: 10.1016/j.inffus.2011.08.001 [24] 郝钢, 叶秀芬, 陈亭.加权观测融合非线性无迹卡尔曼滤波算法.控制理论与应用, 2011, 28(6):753-758 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201106001Hao Gang, Ye Xiu-Fen, Chen Ting. Weighted measurement fusion algorithm for nonlinear unscented Kalman filter. Control Theory & Applications, 2011, 28(6):753-758 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201106001 [25] Hao G, Sun S L, Li Y. Nonlinear weighted measurement fusion unscented Kalman filter with asymptotic optimality. Information Sciences, 2015, 299:85-98 doi: 10.1016/j.ins.2014.12.013 [26] Pomorski K. Gauss-Hermite approximation formula. Computer Physics Communications, 2006, 174(3):181-186 doi: 10.1016/j.cpc.2005.09.009 [27] Strutinsky V M. "Shells" in deformed nuclei. Nuclear Physics A, 1968, 122(1):1-33 doi: 10.1016-0375-9474(68)90699-4/ [28] Strutinsky V M. Shell effects in nuclear masses and deformation energies. Nuclear Physics A, 1967, 95(2):420-442 doi: 10.1016/0375-9474(67)90510-6 [29] Oussalah M, Messaoudi Z, Ouldali A. Track-to-track measurement fusion architectures and correlation analysis. Journal of Universal Computer Science, 2010, 16(1):37-61 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000002511857 [30] Santhanam B, Santhanam T S. On discrete Gauss-Hermite functions and eigenvectors of the discrete Fourier transform. Signal Processing, 2008, 88(11):2738-2746 doi: 10.1016/j.sigpro.2008.05.016 [31] Ge Q B, Shao T, Chen S D, Wen C L. Carrier tracking estimation analysis by using the extended strong tracking filtering. IEEE Transactions on Industrial Electronics, 2017, 64(2):1415-1424 doi: 10.1109/TIE.2016.2610403 [32] Du D J, Chen R, Fei M R, Li K. A novel networked online recursive identification method for multivariable systems with incomplete measurement information. IEEE Transactions on Signal and Information Processing over Networks, 2017, 3(4):744-759 doi: 10.1109/TSIPN.2017.2662621 [33] 杜大军, 商立立, 漆波, 费敏锐.一种不完全信息下递推辨识方法及收敛性分析.自动化学报, 2015, 41(8):1502-1515 http://www.aas.net.cn/CN/abstract/abstract18724.shtmlDu Da-Jun, Shang Li-Li, Qi Bo, Fei Min-Rui. Convergence analysis of an online recursive identification method with uncomplete communication constraints. Acta Automatica Sinica, 2015, 41(8):1502-1515 http://www.aas.net.cn/CN/abstract/abstract18724.shtml [34] 王小旭, 赵琳, 夏全喜, 曹伟, 李亮.噪声相关条件下Unscented卡尔曼滤波器设计.控制理论与应用, 2010, 27(10):1362-1368 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201010011Wang Xiao-Xu, Zhao Lin, Xia Quan-Xi, Cao Wei, Li Liang. Design of unscented Kalman filter with correlative noises. Control Theory & Applications, 2010, 27(10):1362-1368 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201010011 [35] 王小旭, 赵琳, 潘泉, 夏全喜, 洪伟.基于最小均方误差估计的噪声相关UKF设计.控制与决策, 2010, 25(9):1393-1398 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201009023Wang Xiao-Xu, Zhao Lin, Pan Quan, Xia Quan-Xi, Hong Wei. Design of UKF with correlative noises based on minimum mean square error estimation. Control and Decision, 2010, 25(9):1393-1398 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201009023 [36] Fang D L, Ran X M. A distributed sensor management algorithm based on auction. Procedia Computer Science, 2017, 107:618-623 doi: 10.1016/j.procs.2017.03.165 [37] 张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析.哈尔滨工业大学学报, 2013, 45(12):111-115 http://d.old.wanfangdata.com.cn/Periodical/hebgydxxb201312020Zhang Zhao-You, Hao Yan-Ling, Wu Xu. Complexity analysis of three deterministic sampling nonlinear filtering algorithms. Journal of Harbin Institute of Technology, 2013, 45(12):111-115 http://d.old.wanfangdata.com.cn/Periodical/hebgydxxb201312020 [38] Kitagawa G. Non-Gaussian state space modeling of time series. In:Proceedings of the 26th Conference on Decision and Control. Los Angeles, USA:IEEE, 1987. 1700-1705 [39] Cheng P, Yang Y, Oelmann B. Stator-free RPM sensor using accelerometers-a statistical performance simulation by Monte Carlo method. IEEE Sensors Journal, 2011, 11(12):3368-3376 doi: 10.1109/JSEN.2011.2159108 -

 下载:
下载:

图(6)
计量
- 文章访问数: 2270
- HTML全文浏览量: 396
- PDF下载量: 550
- 被引次数: 0
