

A Co-evolutionary Teaching-learning-based Optimization Algorithm for Constrained Optimization Problems
-
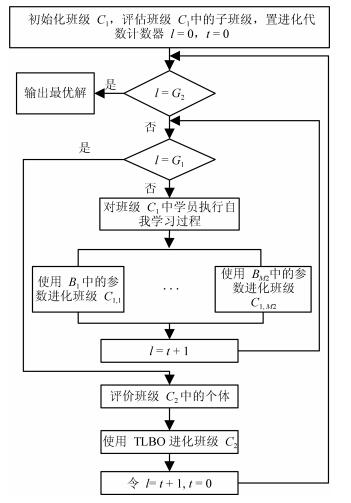
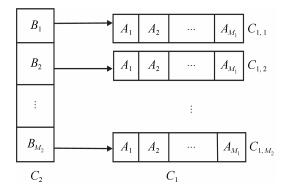
摘要: 对约束优化问题,为了避免罚因子和等式约束转化为不等式约束时引入的约束容忍度参数所带来的不便,本文在基本教与学优化(Teaching-learning-based optimization,TLBO)算法中加入了自我学习过程并提出了一种求解约束优化问题的协同进化教与学优化算法,使得罚因子和约束容忍度随种群的进化动态调整.对7个常见测试函数的数值实验验证了算法求解带有等式和不等式约束优化问题的有效性.Abstract: In order to avoid the inconvenience of penalty factors and the tolerance amount during transforming equality constraints into inequality constraints, the self-learning process is combined with teaching-learning-based algorithm, and a co-evolutionary teaching-learning-based algorithm is thus proposed, which makes the penalty factors and tolerance amounts dynamically adjust along with the population evolution. Numerical experiments on seven common test functions verify the effectiveness of the algorithm to solve optimization problems with equality and inequality constraints.1) 本文责任编委 王占山
-
表 1 不同方法求得问题1最优解的比较
Table 1 Comparison of the best solution for Example 1 found by different methods
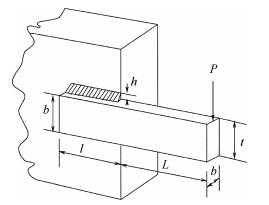
变量 TLBO[12] CDE[18] UABC[24] ITLBO[25] CTLBO $x_1(h)$ 0.205730 0.203137 0.205730 0.205730 0.205730 $x_2(l)$ 3.470489 3.542998 3.470489 3.470489 3.470489 $x_3(t)$ 9.036624 9.033498 9.036624 9.036624 9.036626 $x_4(b)$ 0.205730 0.206179 0.205730 0.205730 0.205730 $g_1(x)$ -0.000001 -44.578568 -0.000028 -0.000000 -0.000002 $g_2(x)$ -0.000001 -44.663534 -0.000025 -0.000000 -0.009189 $g_3(x)$ -0.000000 -0.003042 -0.000000 -0.000000 -0.000000 $g_4(x)$ -3.432984 -3.423726 -3.432984 -3.432984 -3.432984 $g_5(x)$ -0.080730 -0.078137 -0.080730 -0.080730 -0.080730 $g_6(x)$ -0.235540 -0.235557 -0.235540 -0.235540 -0.235540 $g_7(x)$ -0.000000 -38.028268 -0.000050 -0.000000 -0.000004 $f(x)$ 1.724852 1.733462 1.724852 1.724852 1.724852  下载: 导出CSV
下载: 导出CSV
表 3 不同方法求得问题2最优解的比较
Table 3 Comparison of the best solution for Example 2 found by different methods
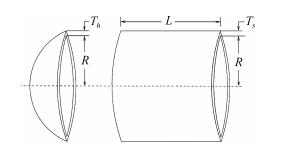
变量 TLBO[12] CDE[18] UABC[24] ITLBO[25] CTLBO $x_1(T_s)$ 0.8125 0.812500 0.8125 0.8125 0.81250 $x_2(T_h)$ 0.4375 0.437500 0.4375 0.4375 0.437500 $x_3(R)$ 42.098446 42.09841 42.098446 42.098446 42.098400 $x_4(L)$ 176.636596 176.63769 176.636596 176.636596 176.636596 $g_1(x)$ -0.000000 -6.677E-7 -0.000000 -0.000000 -0.000000 $g_2(x)$ -0.035881 -0.035881 -0.035881 -0.035881 -0.035880 $g_3(x)$ -0.000000 -3.6831 -0.000000 -0.000000 -7.0E-10 $g_4(x)$ -63.363404 -63.3623 -63.363404 -63.363404 -63.363404 $f(x)$ 6 059.714335 6 059.7340 6 059.714335 6 059.714335 6 059.714335
下载: 导出CSV
表 4 不同方法求得问题2结果统计表
Table 4 Statistical results of different methods for Example 2
方法 最优解 均值 最差解 标准差 TLBO[12] 6 059.714335 6 059.714335 6 059.714335 1.85E-12 CDE[18] 6 059.7340 6 085.2303 6 371.0455 4.3E+02 UABC[24] 6 059.714335 6 192.116211 NA 2.04E+02 ITLBO[25] 6 059.714335 6 059.714335 6 059.714335 1.85E-12 COMDE[26] 6 059.714335 6 059.714335 6 059.714335 3.62E-10 CTLBO 6 059.714335 6 059.714335 6 059.714335 0.00E-00
下载: 导出CSV
表 5 不同方法求得问题3最优解的比较
Table 5 Comparison of the best solution for Example 3 found by different methods
变量 TLBO[12] ETLBO[13] FETLBO[15] UABC[24] ITLBO[25] CTLBO $x_1(d)$ 0.051506 0.051565 0.051691 0.051691 0.051698 0.051664 $x_2(D)$ 0.35327 0.353713 0.356758 0.356769 0.356723 0.356112 $x_3(P)$ 11.555900 11.468954 11.286578 11.285988 11.288662 11.313513 $g_1(x)$ -0.000388 -0.001029 0.000953 -0.000000 -0.000000 -1.50E-08 $g_2(x)$ -0.000020 -0.000062 -0.000014 -0.000000 -0.000000 -5.60E-08 $g_3(x)$ -4.042961 -4.047205 -4.053903 -4.053886 -4.053796 -4.057519 $g_4(x)$ -0.730778 -0.729815 -0.727701 -0.727694 -0.727725 -0.728149 $f(x)$ 0.012671 0.0126674 0.0126652 0.012665 0.012665 0.0126547
下载: 导出CSV
表 6 不同方法求得问题3结果统计表
Table 6 Statistical results of different methods for Example 3
方法 最优解 均值 最差解 标准差 TLBO[12] 0.0126717 0.0127407 0.0127977 2.88E-05 ETLBO[13] 0.0126674 NA NA NA FETLBO[15] 0.0126652 NA NA NA CDE[18] 0.0126702 0.012703 0.012790 2.7E-05 UABC[24] 0.012665 0.012683 NA 3.31E-05 ITLBO[25] 0.0126652 0.0126662 0.0126735 2.12E-06 CTLBO 0.0126547 0.01265493 0.01265693 5.50E-07
下载: 导出CSV
表 7 不同方法求得问题$g05, g06, g11$ 和$g13$ 最优解的比较
Table 7 Comparison of the best solution for example $g05, g06, g11$ and $g13$ found by different methods
函数/最优值 统计项 方法 TLBO[12] ETLBO[13] HTS[27] Jaya[28] CTLBO $g05$ /5 126.498 最好解 5 126.486 5 126.484 5 126.486 5 126.486 5 126.517 均值 5 126.6184 5 168.7149 5 126.6831 5 126.635 5 126.605 最差解 5 127.714 5 261.826 5 126.5152 5 126.5061 5 126.759 $g06/-$ 6 961.814 最好解 -6 961.814 -6 961.814 -6 961.814 -6 961.814 -6 961.814 均值 -6 961.814 -6 961.814 -6 961.814 -6 961.814 -6 961.814 最差解 -6 961.814 -6 961.814 -6 961.814 -6 961.814 -6 961.814 $g11$ /0.750 最好解 0.7499 0.750 0.7499 0.7499 0.750 均值 0.7499 0.750 0.7499 0.7499 0.750 最差解 0.7499 0.750 0.7499 0.7499 0.750 $g13$ /0.0539498 最好解 0.44015 0.13314 0.37319 0.003625 0.053991 均值 0.69055 0.83851 0.79751 0.003631 0.058190 最差解 0.95605 0.99979 0.66948 0.003627 0.069077
下载: 导出CSV
-
[1] 陈宝林.最优化理论与算法.北京:清华大学出版社, 1989.Chen Bao-Lin. Optimization Theory and Algorithm. Beijing:Tsinghua University Press, 1989. [2] Das S, Mullick S S, Suganthan P N. Recent advances in differential evolution-An updated survey. Swarm & Evolutionary Computation, 2016, 27:1-30 [3] Duan H B, Li P, Yu Y X. A predator-prey particle swarm optimization approach to multiple UCAV air combat modeled by dynamic game theory. IEEE/CAA Journal of Automatica Sinica, 2015, 2 (1):11-18 doi: 10.1109/JAS.2015.7032901 [4] 潘峰, 陈杰, 甘明刚, 蔡涛, 涂序彦.粒子群优化算法模型分析.自动化学报, 2006, 32 (3):368-377 http://www.aas.net.cn/CN/abstract/abstract15822.shtmlPan Feng, Chen Jie, Gan Ming-Gang, Cai Tao, Tu Xu-Yan. Model analysis of particle swarm optimizer. Acta Automatica Sinica, 2006, 32 (3):368-377 http://www.aas.net.cn/CN/abstract/abstract15822.shtml [5] 金欣磊, 马龙华, 吴铁军, 钱积新.基于随机过程的PSO收敛性分析.自动化学报, 2007, 33(12):1263-1268 http://www.aas.net.cn/CN/abstract/abstract13374.shtmlJin Xin-Lei, Ma Long-Hua, Wu Tie-Jun, Qian Ji-Xin. Convergence analysis of the particle swarm optimization based on stochastic processes. Acta Automatica Sinica, 2007, 33(12):1263-1268 http://www.aas.net.cn/CN/abstract/abstract13374.shtml [6] Long Q, Wu C Z. A hybrid method combining genetic algorithm and Hooke-Jeeves method for constrained global optimization. Journal of Industrial & Management Optimization, 2017, 10 (4):1279-1296 [7] Prakasam A, Savarimuthu N. Metaheuristic algorithms and probabilistic behaviour:a comprehensive analysis of Ant Colony Optimization and its variants. Artificial Intelligence Review, 2016, 45(1):97-130 [8] Ma L B, Zhu Y L, Zhang D Y, Niu B. A hybrid approach to artificial bee colony algorithm. Neural Computing and Applications, 2016, 27 (2):387-409 doi: 10.1007/s00521-015-1851-x [9] Coello C A C, Carlos A. Constraint-handling Techniques Used with Evolutionary Algorithms. In: Proceedings of the 10th Annual Conference Companion on Genetic and Evolutionary Computation. Atlanta, GA, USA: ACM, 2010. 2445-2466 [10] Wu G H, Pedrycz W, Suganthan P N, Mallipeddi P. A variable reduction strategy for evolutionary algorithms handling equality constraints. Applied Soft Computing, 2015, 37:774-786 doi: 10.1016/j.asoc.2015.09.007 [11] Rao R V, Savsani V J, Vakharia D P. Teaching-learning-based optimization:a novel method for constrained mechanical design optimization problems. Computer-Aided Design, 2011, 43 (3):303-315 doi: 10.1016/j.cad.2010.12.015 [12] Venkata Rao R. Teaching-learning-based optimization and its engineering applications. Teaching Learning Based Optimization Algorithm: and Its Engineering Applications. Berlin, Heidelberg: Springer Publishing Company, 2015. [13] Venkata Rao R, Patel V. An elitist teaching-learning-based optimization algorithm for solving complex constrained optimization problems. International Journal of Industrial Engineering Computations, 2012, 3 (4):535-560 doi: 10.5267/j.ijiec [14] Patel V K. Teaching Learning Based Optimization Algorithm. Berlin, Heidelberg:Springer International Publishing, 2016. [15] 于坤杰, 王昕, 王振雷.基于反馈的精英教学优化算法.自动化学报, 2014, 40 (9):1976-1983 http://www.aas.net.cn/CN/abstract/abstract18468.shtmlYu Kun-Jie, Wang Xin, Wang Zhen-Lei. Elitist teaching-learning-based optimization algorithm based on feedback. Acta Automatica Sinica, 2014, 40(9):1976-1983 http://www.aas.net.cn/CN/abstract/abstract18468.shtml [16] Coello C A C. Use of a self-adaptive penalty approach for engineering optimization problems. Computers in Industry, 2000, 41 (2):113-127 doi: 10.1016/S0166-3615(99)00046-9 [17] He Q, Wang L. An effective co-evolutionary particle swarm optimization for constrained engineering design problems. Engineering Applications of Artificial Intelligence, 2007, 20 (1):89-99 doi: 10.1016/j.engappai.2006.03.003 [18] Huang F Z, Wang L, He Q. An effective co-evolutionary differential evolution for constrained optimization. Applied Mathematics & Computation, 2007, 186 (1):340-356 [19] Richardson J T, Palmer M R, Liepins G E, Hilliard M. Some guidelines for genetic algorithms with penalty functions. In: Proceedings of the 3rd International Conference on Genetic Algorithms. George Mason University, USA: Morgan Kaufmann Publishers Inc., 1989. 191-197 [20] Runarsson T P, Yao X. Stochastic ranking for constrained evolutionary optimization. IEEE Transactions on Evolutionary Computation, 2000, 4 (3):284-294 doi: 10.1109/4235.873238 [21] Kannan B K, Kramer S N. An augmented lagrange multiplier based method for mixed integer discrete continuous optimization and its applications to mechanical design. Journal of Mechanical Design, 1994, 116 (2):405-411 doi: 10.1115/1.2919393 [22] Arora J S. Introduction to Optimal Design New York:McGraw-Hill, 1989. 413-432 [23] Belegundu A D, Arora J S. A study of mathematical programming methods for structural optimization. Part Ⅰ:theory. International Journal for Numerical Methods in Engineering, 1985, 21 (9):1583-1599 doi: 10.1002/(ISSN)1097-0207 [24] Brajevic I, Tuba M. An upgraded artificial bee colony (ABC) algorithm for constrained optimization problems. Journal of Intelligent Manufacturing, 2013, 24 (4):729-740 doi: 10.1007/s10845-011-0621-6 [25] Yu K J, Wang X, Wang Z L. An improved teaching-learning-based optimization algorithm for numerical and engineering optimization problems. Journal of Intelligent Manufacturing, 2016, 27 (4):831-843 doi: 10.1007/s10845-014-0918-3 [26] Mohamed A W, Sabry H Z. Constrained optimization based on modified differential evolution algorithm. Information Sciences, 2012, 194:171-208 doi: 10.1016/j.ins.2012.01.008 [27] Patel V K, Savsani V J. Heat transfer search (HTS):a novel optimization algorithm. Information Sciences, 2015, 324:217-246 doi: 10.1016/j.ins.2015.06.044 [28] Venkata R R. Jaya:a simple and new optimization algorithm for solving constrained and unconstrained optimization problems. International Journal of Industrial Engineering Computations, 2016, 7 (1):19-34 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ02338361/ -

 下载:
下载:


计量
- 文章访问数: 2348
- HTML全文浏览量: 335
- PDF下载量: 561
- 被引次数: 0
