

-
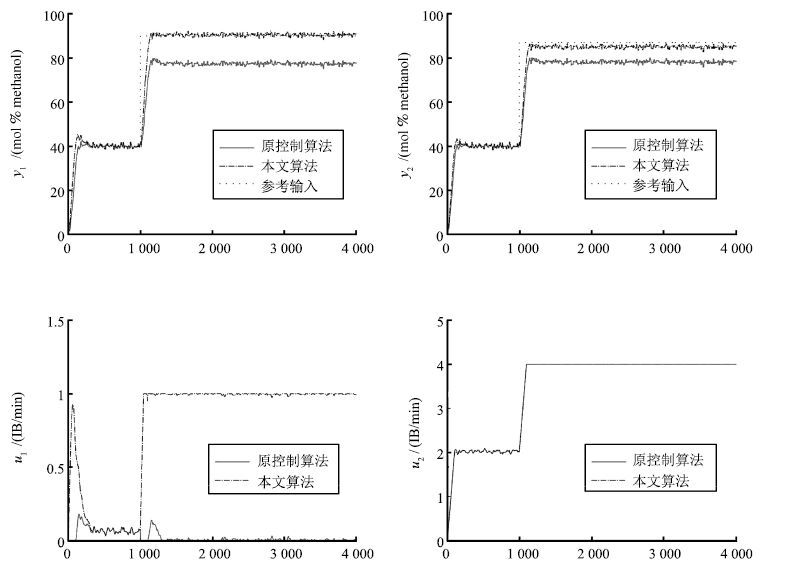
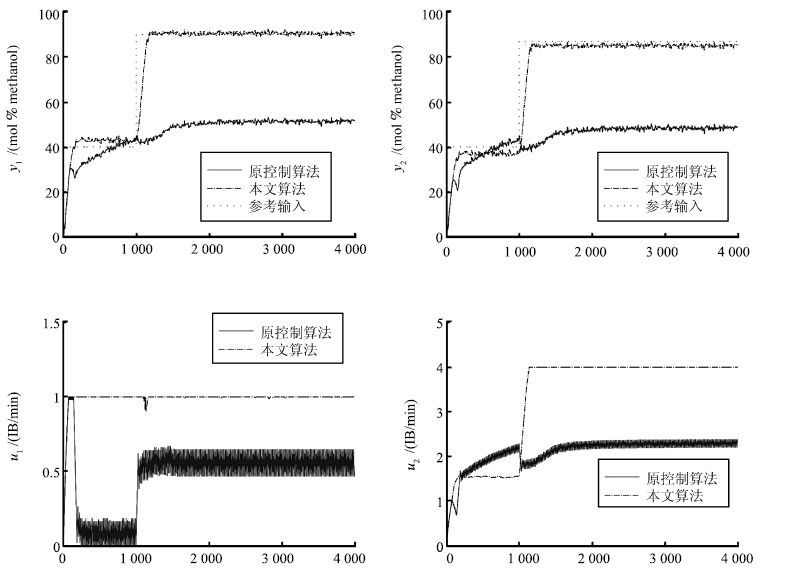
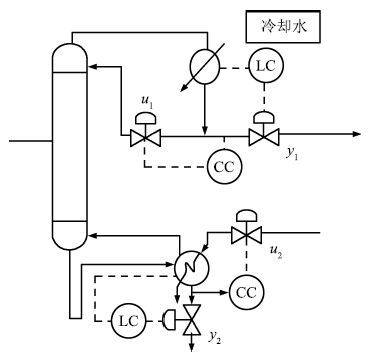
摘要: 无模型自适应控制(Model free adaptive control,MFAC)是一种数据驱动的控制方法,具有计算简单、鲁棒性强、无需建模等优点.目前无模型自适应控制方法普遍未考虑可能出现的执行器饱和问题.本文针对这一问题,对执行器执行能力存在上限的情况设计了改进算法.该算法通过对控制输入准则函数引入约束条件,使用Hildreth方法进行数值求解,具有编程简单、计算量小的优点.在此基础上分析并证明了闭环稳定性.最后以蒸馏塔模型为控制对象,通过对比仿真实验验证了算法的有效性.Abstract: Model free adaptive control (MFAC) is a data-driven based control approach. The advantages of this method lie in low computational complexity, strong robustness and no-need of modeling during its design progress. However, actuator saturation is a problem which is not yet considered in all of the existing MFAC methods. In this paper, a novel improved MFAC method is proposed to deal with the constrains of actuator. Hildreth method is used to solve control output by introducing constraint condition for the critical function of control input, which simplifies the programming progress and reduces the computing load. After that, the stability of the closed-loop system is proved through rigorous analysis. At the end, taking Wood/Berry distillation as the plant, a series of comparative simulation is conducted and the result shows a better performance by using the proposed controller than traditional MFAC methods when actuator saturation exists.
-
Key words:
- Model free adaptive control (MFAC) /
- actuator saturation /
- robustness /
- data-driven
-
[1] 韩京清. 控制理论——模型论还是控制论. 系统科学与数学, 1989, 9(4):328-335 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS198904005.htmHan Jing-Qing. Control theory, is it a model analysis approach or a direct control approach? Journal of Systems Science and Mathematical Sciences, 1989, 9(4):328-335 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS198904005.htm [2] Wu H X, Hu J, Xie Y C. Characteristic model-based all-coefficient adaptive control method and its applications. IEEE Transactions on Systems, Man, and Cybernetics, Part C, 2007, 37(2):213-221 doi: 10.1109/TSMCC.2006.887004 [3] 侯忠生. 再论无模型自适应控制. 系统科学与数学, 2014, 34(10):1182-1191 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201410005.htmHou Zhong-Sheng. Highlight and perspective on model free adaptive control. Journal of Systems Science and Mathematical Sciences, 2014, 34(10):1182-1191 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201410005.htm [4] 侯忠生. 无模型自适应控制的现状与展望. 控制理论与应用, 2006, 23(4):586-592 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200604018.htmHou Zhong-Sheng. On model-free adaptive control:the state of the art and perspective. Control Theory and Applications, 2006, 23(4):586-592 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200604018.htm [5] 侯忠生, 金尚泰. 无模型自适应控制:理论与应用. 北京:科学出版社, 2013.9-11, 46-48, 92-100Hou Zhong-Sheng, Jin Shang-Tai. Model-free Adaptive Control:Theory and Application. Beijing Science Press, 2013.9-11, 46-48, 92-100% [6] Guardabassi G O, Savaresi S M. Virtual reference direct design method:an off-line approach to data-based control system design. IEEE Transactions on Automatic Control, 2000, 45(5):954-959 doi: 10.1109/9.855559 [7] Spall J C. Multivariate stochastic approximation using a simultaneous perturbation gradient approximation. IEEE Transactions on Automatic Control, 1992, 37(3):332-341 doi: 10.1109/9.119632 [8] 侯忠生. 非线性系统参数辨识、自适应控制和无模型学习自适应控制[博士学位论文], 东北大学, 中国, 1994.Hou Zhong-Sheng. Parameter Identification of Nonlinear System, Adaptive Control and Model-free Adaptive Control[Ph.D. dissertation], Northeastern University, China, 1994. [9] Hou Z S, Jin S T. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Transactions on Control Systems Technology, 2011, 19(6):1549-1558 doi: 10.1109/TCST.2010.2093136 [10] Jin S T, Hou Z S, Chi R H. A novel higher-order model-free adaptive control for a class of discrete-time SISO nonlinear systems. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(4):044503 doi: 10.1115/1.4023764 [11] Hou Z S, Zhu Y M. Controller-dynamic-linearization-based model free adaptive control for discrete-time nonlinear systems. IEEE Transactions on Industrial Informatics, 2013, 9(4):2301-2309 doi: 10.1109/TII.2013.2257806 [12] Xu D Z, Jiang B, Shi P. A novel model-free adaptive control design for multivariable industrial processes. IEEE Transactions on Industrial Electronics, 2014, 61(11):6391-6398 doi: 10.1109/TIE.2014.2308161 [13] Hu T S, Lin Z L. Control systems with actuator saturation. Control Engineering. New York:Birkhäuser Basel, 2001.1-15 [14] Hou Z S, Wang Z. From model-based control to data-driven control:survey, classification and perspective. Information Sciences, 2013, 235:3-35 doi: 10.1016/j.ins.2012.07.014 [15] Wang L P. Model Predictive Control System Design and Implementation Using Matlab. Berlin:Springer, 2009.110-114 [16] Wood R K, Berry M W. Terminal composition control of a binary distillation column. Chemical Engineering Science, 1973, 28(9):1707-1717 doi: 10.1016/0009-2509(73)80025-9 -

 下载:
下载:

图(3)
计量
- 文章访问数: 2831
- HTML全文浏览量: 379
- PDF下载量: 1803
- 被引次数: 0
