

-
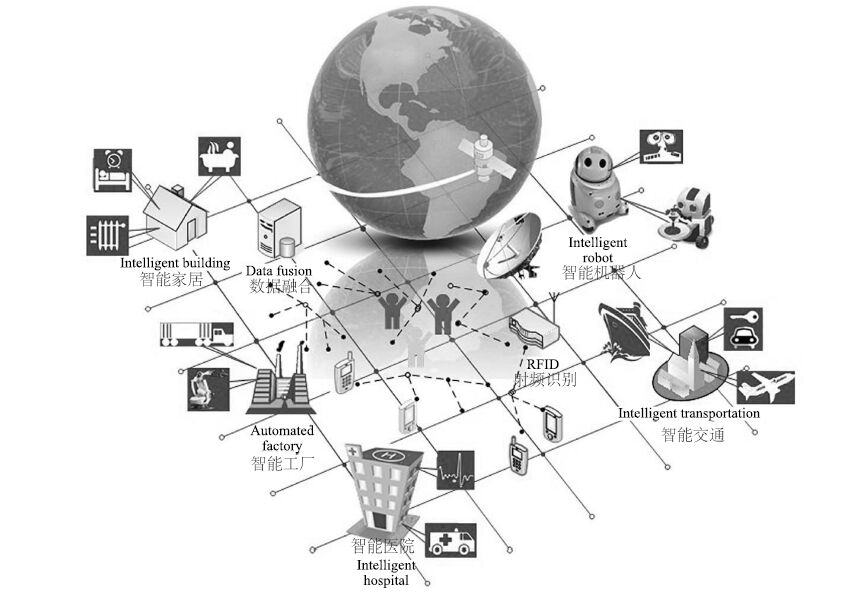
摘要: 本文提出的云控制系统(Cloud control systems, CCSs)是对之前的网络化控制系统(Networked control systems, NCSs)的进一步扩展.目前,物联网(Internet of things, IOT)已经成功应用于实际中,网络化控制技术在其中发挥了关键作用.与此同时,云计算的迅速发展为大数据存储与处理、控制器设计和控制系统性能优化提供了一个完美的平台.可以预见,虽然当前云控制技术的研究和应用还存在许多挑战,但在不久的将来,云控制系统的深入研究将对控制理论的发展和各种实际应用起到积极推动作用.Abstract: This paper proposes the concept of cloud control systems(CCSs), which is an extension of networked control systems(NCSs). Internet of things(IOT) has been applied successfully in practice and the technology of NCSs has played a key role in IOT. At the same time, cloud computing is developing rapidly, which provides a perfect platform for big data storage and processing, controller design and performance optimization. Though there are still lots of challenges to be solved, the research on cloud control systems will give new contributions to both the control theory and applications in the near future.
-
Key words:
- Cloud control systems /
- networked control systems /
- cloud computing /
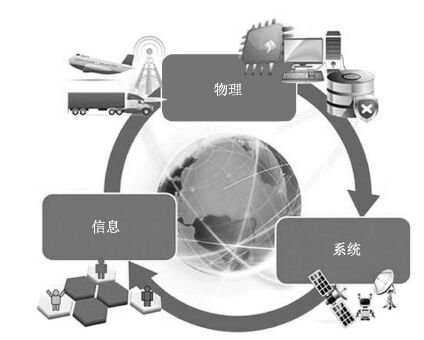
- cyber-physical systems /
- big data
-
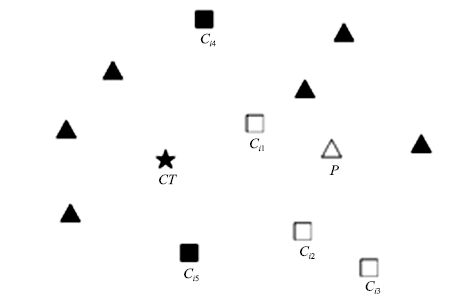
表 1 愿意节点列表
Table 1 The list of willing nodes
Node IP Address Superiority Ranking Ci1 Addi1 Si1 1 Ci2 Addi2 Si2 2 Ci3 Addi3 Si3 3 Ci4 Addi4 Si4 4 $\vdots $ $\vdots $ $\vdots $ $\vdots $ CT AddCT SCT kCT  下载: 导出CSV
下载: 导出CSV
-
[1] Xia Y Q. From networked control systems to cloud control systems. In:Proceedings of the 31th Chinese Control Conference. Hefei, China:IEEE, 2012. 5878-5883 [2] Xia Y Q. Cloud control systems. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2):134-142 doi: 10.1109/JAS.2015.7081652 [3] Xia Y Q, Fu M Y, Shi P. Analysis and Synthesis of Dynamical Systems with Time-delays. Berlin Heidelberg:Springer, 2009. [4] Xia Y Q, Fu M Y, Liu G P. Analysis and Synthesis of Networked Control Systems. Berlin Heidelberg:Springer, 2011. [5] Xia Y Q, Gao Y L, Yan L P, Fu M Y. Recent progress in networked control systems——a survey. International Journal of Automation and Computing, 2015, 12(4):343-367 doi: 10.1007/s11633-015-0894-x [6] Wang F Y, Liu D R. Networked Control Systems:Theory and Applications. London:Springer, 2008. [7] Liu K, Fridman E, Hetel L. Stability and L2-gain analysis of networked control systems under Round-Robin scheduling:a time-delay approach. Systems and Control Letters, 2012, 61(5):666-675 doi: 10.1016/j.sysconle.2012.03.002 [8] Liu K, Fridman E, Johansson K H. Dynamic quantization of uncertain linear networked control systems. Automatica, 2015, 59:248-255 doi: 10.1016/j.automatica.2015.06.041 [9] Park H S, Kim Y H, Kim D S, Kwon W H. A scheduling method for network-based control systems. IEEE Transactions on Control Systems Technology, 2002, 10(3):318-330 doi: 10.1109/87.998012 [10] Zhivoglyadov P V, Middleton R H. Networked control design for linear systems. Automatica, 2003, 39(4):743-750 doi: 10.1016/S0005-1098(02)00306-0 [11] Yue D, Han Q L, Peng C. State feedback controller design of networked control systems. IEEE Transactions on Circuits and Systems II:Express Briefs, 2004, 51(11):640-644 doi: 10.1109/TCSII.2004.836043 [12] Liu K, Fridman E. Wirtinger's inequality and Lyapunov-based sampled-data stabilization. Automatica, 2012, 48(1):102-108 doi: 10.1016/j.automatica.2011.09.029 [13] Liu K, Fridman E. Networked-based stabilization via discontinuous Lyapunov functionals. International Journal of Robust and Nonlinear Control, 2012, 22(4):420-436 doi: 10.1002/rnc.v22.4 [14] Gao H J, Chen T W. A new approach to quantized feedback control systems. Automatica, 2008, 44(2):534-542 doi: 10.1016/j.automatica.2007.06.015 [15] Gao H J, Chen T W. Network-based H∞ output tracking control. IEEE Transactions on Automatic Control, 2008, 53(3):655-667 doi: 10.1109/TAC.2008.919850 [16] Liu K, Fridman E, Johansson K H. Networked control with stochastic scheduling. IEEE Transactions on Automatic Control, 2015, 60(11):3071-3076 doi: 10.1109/TAC.2015.2414812 [17] Liu K, Fridman E. Discrete-time network-based control under scheduling and actuator constraints. International Journal of Robust and Nonlinear Control, 2015, 25(12):1816-1830 doi: 10.1002/rnc.v25.12 [18] Liu K, Fridman E, Hetel L. Networked control systems in the presence of scheduling protocols and communication delays. SIAM Journal on Control and Optimization, 2015, 53(4):1768-1788 doi: 10.1137/140980570 [19] Kehoe B, Patil S, Abbeel P, Goldberg K. A survey of research on cloud robotics and automation. IEEE Transactions on Automation Science and Engineering, 2015, 12(2):398-409 doi: 10.1109/TASE.2014.2376492 [20] Ericson K, Pallickara S, Anderson C W. Analyzing electroencephalograms using cloud computing techniques. In:Proceedings of the 2nd International Conference on Cloud Computing Technology and Science(CloudCom). Indianapolis, IN, USA:IEEE, 2010:185-192 [21] Xia Y Q, Liu G P, Fu M Y, Rees D. Predictive control of networked systems with random delay and data dropout. IET Control Theory and Applications, 2008, 3(11):1476-1486 [22] Xia Y Q, Xie W, Liu B, Wang X Y. Data-driven predictive control for networked control systems. Information Sciences, 2013, 235:45-54 doi: 10.1016/j.ins.2012.01.047 [23] Olfati-Saber R, Fax J A, Murray R M. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95(1):215-233 doi: 10.1109/JPROC.2006.887293 [24] Yan G P, Wang L, Xie G M, Wu B. Consensus of multi-agent systems based on sampled-data control. International Journal of Control, 2009, 82(12):2193-2205 doi: 10.1080/00207170902948035 [25] Ren W, Beard R W. Distributed Consensus in Multi-vehicle Cooperative Control. London:Springer, 2008. [26] Meng D, Jia Y. Finite-time consensus for multi-agent systems via terminal feedback iterative learning. IET Control Theory and Applications, 2011, 5(8):2098-2110 https://www.researchgate.net/publication/260586905_Finite-time_consensus_for_multi-agent_systems_via_terminal_feedback_iterative_learning [27] Ren W, Beard R W, Atkins E M. A survey of consensus problems in multi-agent coordination. In:Proceedings of the 2005 American Control Conference. Portland, OR, USA:IEEE, 2005. 1859-1864 [28] Park D J, Delima P, Toussaint G J, York G. Cooperative control of UAVs for localization of intermittently emitting mobile targets. IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics, 2009, 39(4):959-970 doi: 10.1109/TSMCB.2008.2010865 [29] Xiao F, Wang L, Chen J, Gao Y P. Finite-time formation control for multi-agent systems. Automatica, 2011, 45(11):2605-2611 http://or.nsfc.gov.cn/handle/00001903-5/340678 [30] Xia Y Q, Fu M Y. Compound Control Methodology for Flight Vehicles. Berlin, Heidelberg:Springer, 2013. [31] Wang F Y. Agent-based control for networked traffic management systems. IEEE Intelligent Systems, 2005, 20(5):92-96 doi: 10.1109/MIS.2005.80 [32] Li Z J, Chen C, Wang K. Cloud computing for agent-based urban transportation systems. IEEE Intelligent Systems, 2011, 26(1):73-79 doi: 10.1109/MIS.2011.10 [33] Wang F Y. Parallel control and management for intelligent transportation systems:concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):630-638 doi: 10.1109/TITS.2010.2060218 [34] Bradley J M, Atkins E M. Toward continuous state-space regulation of coupled cyber-physical systems. Proceedings of the IEEE, 2012, 100(1):60-74 doi: 10.1109/JPROC.2011.2161239 [35] Joslyn C, Rocha L M. Towards semiotic agent-based models of socio-technical organizations. In:Proceedings of the 2000 AI, Simulation and Planning in High Autonomy Systems Conference. Tucson, Arizona, USA, 2000. 70-79 [36] Kwapieńn J, Drożzdżz S. Physical approach to complex systems. Physics Report, 2012, 515(3-4):115-226 doi: 10.1016/j.physrep.2012.01.007 [37] Willems J C. In control, almost from the beginning until the day after tomorrow. European Journal of Control, 2007, 13(1):71-81 doi: 10.3166/ejc.13.71-81 [38] Hill D J. Advances in stability theory for complex systems and networks. In:Proceedings of the 27th Chinese Control Conference. Kunming, China:IEEE, 2008. 13-17 [39] Desoer C A. Feedback Systems:Input-Output Properties. New York:Academic Press, 1975. [40] Wang X F, Chen G R. Synchronization in scale-free dynamical networks:robustness and fragility. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications, 2002, 49(1):54-62 doi: 10.1109/81.974874 [41] Wu C W. Synchronization in Complex Networks of Nonlinear Dynamical Systems. New Jersey:World Scientific, 2007. [42] The Economist. Cloud computing:clash of the clouds[Online], available:http://www.economist.com/node/14637206,November3,2009 [43] Galen G. What cloud computing really means[Online], available:http://www.infoworld.com/d/cloud-computing/what-cloud-computing-really-means-031, June6,2009 [44] Gartner says cloud computing will be as influential as e-business[Online], available:http://www.gartner.com/newsroom/id/707508, August 22, 2010 [45] Cloud computing[Online], available:http://en.wikipedia.org/wiki/Cloud_computing, November 27, 2011 [46] Cloud computing[Online], available:http://www.cloud-computingdefined.com/, July 17, 2010 [47] Segaran T, Hammerbacher J. Beautiful Data:the Stories Behind Elegant Data Solutions. Sebastopol:O'Reilly, 2009. [48] White T. Hadoop:the Definitive Guide(2nd edited). Sebastopol:O'Reilly, 2012. -

 下载:
下载:



图(12) / 表(1)
计量
- 文章访问数: 3868
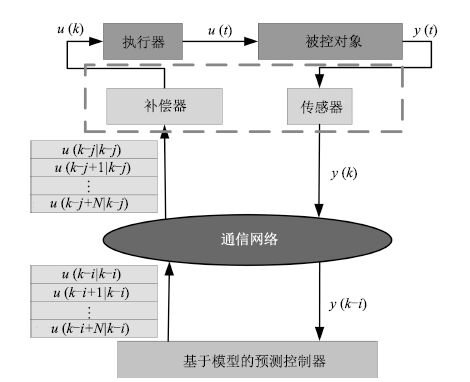
- HTML全文浏览量: 967
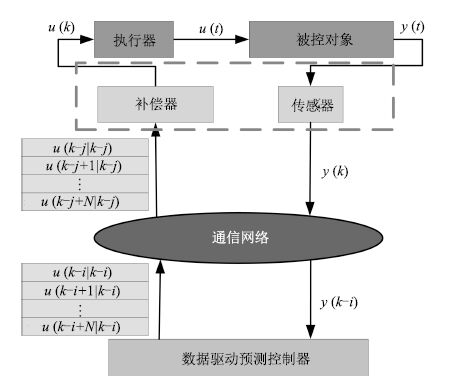
- PDF下载量: 3245
- 被引次数: 0
