

-
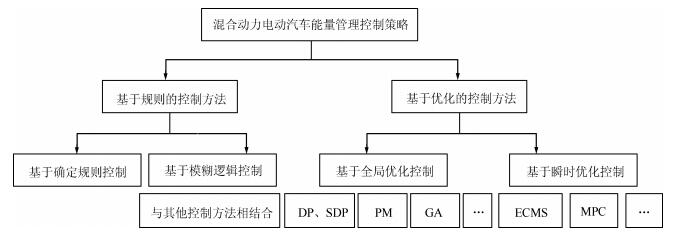
摘要: 能量管理对于提高混合动力电动汽车(Hybrid electric vehicles, HEVs)的燃油经济性、驾驶性能及减少排放具有至关重要的作用.本文对混合动力电动汽车能量管理问题的研究进展及现状进行了全面总结, 从不同角度对混合动力电动汽车的能量管理问题进行描述, 并对主要能量管理策略进行了分析和对比研究, 指出各种控制方法的优点及其存在的问题与不足, 最后对混合动力电动汽车能量管理策略研究的未来发展方向进行了展望.Abstract: Energy management is very important for improving fuel economy, driving performance and reducing emissions of hybrid electric vehicles (HEVs). We give an overview of the progress and the status quo of the energy management problem of HEVs. Various definitions of the energy management problem are introduced from different views. A variety of control methods are analyzed and compared with each other. Finally, some discussions about potential directions and challenges for future research on the energy management problem of hybrid electric vehicles are presented.
-
Key words:
- Hybrid electric vehicle (HEV) /
- energy management /
- optimization /
- control method
-
表 1 能量管理策略性能对比
Table 1 Performance comparison of various energy management strategies
性能 确定规则 模糊逻辑规则 全局优化 瞬时优化 优点 算法简单、易于实现 不依赖于模型的精确度, 具有较强的鲁棒性与适应性 具有理想的优化性能, 能够实现全局优化, 常用于其他算法的性能评估 通常不受循环工况的制约, 计算量少, 可用于实时控制, 能够实现瞬时能量最优 缺点 依赖于经验和静态数据, 不能适应工况变化和负载的动态变化, 无法保证最优控制 模糊规则的制定依赖于经验, 无法保证全局最优 通常都依赖于工况循环, 算法的计算量较大, 不利于实时控制, 因此具有一定的局限性 无法保证全局最优  下载: 导出CSV
下载: 导出CSV
-
[1] Chau K T, Chan C C. Emerging energy-efficient technologies for hybrid electric vehicles. Proceedings of the IEEE, 2007, 95(4):821-835 doi: 10.1109/JPROC.2006.890114 [2] Salmasi F R. Control strategies for hybrid electric vehicles:evolution, classification, comparison, and future trends. IEEE Transactions on Vehicular Technology, 2007, 56(5):2393-2404 doi: 10.1109/TVT.2007.899933 [3] 吴为理.插电式混合动力汽车动力耦合系统设计及应用研究[硕士学位论文], 华南理工大学, 中国, 2012Wu Wei-Li. Design and Application Study of Power Coupling System for Plug-In Hybrid Electric Vehicle[Master dissertation], South China University of Technology, China, 2012 [4] Ehsani M, Gao Y M, Emadi A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles:Fundamentals, Theory, and Design (2nd edition). New York:CRC Press, 2009. [5] Murphey Y L, Park J, Chen Z H, Kuang M L, Masrur M A, Phillips A M. Intelligent hybrid vehicle power control-Part I:machine learning of optimal vehicle power. IEEE Transactions on Vehicular Technology, 2012, 61(8):3519-3530 doi: 10.1109/TVT.2012.2206064 [6] Somayajula D, Meintz A, Ferdowsi M. Designing efficient hybrid electric vehicles. IEEE Vehicular Technology Magazine, 2009, 4(2):65-72 doi: 10.1109/MVT.2009.932546 [7] Anbaran S A, Idris N R N, Jannati M, Aziz M J, Alsofyani I. Rule-based supervisory control of split-parallel hybrid electric vehicle. In:Proceedings of the 2014 IEEE Conference on Energy Conversion. Johor Bahru:IEEE, 2014. 7-12 [8] Lin C C, Peng H, Grizzle J W, Kang J M. Power management strategy for a parallel hybrid electric truck. IEEE Transactions on Control Systems Technology, 2003, 11(6):839-849 doi: 10.1109/TCST.2003.815606 [9] Guo L L, Ren L N, Xiang Y, Gao B Z, Chen H. Performance analysis of a PHEV under optimal control strategy. In:Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference. Beijing, China:IEEE, 2013. 1-6 [10] Saeks R, Cox C J, Neidhoefer J, Mays P R, Murray J J. Adaptive control of a hybrid electric vehicle. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(4):213-234 doi: 10.1109/TITS.2002.804750 [11] Malikopoulos A A. Supervisory power management control algorithms for hybrid electric vehicles:a survey. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5):1869-1885 doi: 10.1109/TITS.2014.2309674 [12] Luo Y G, Chen T, Zhang S W, Li K Q. Intelligent hybrid electric vehicle ACC with coordinated control of tracking ability, fuel economy, and ride comfort. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4):2303-2308 doi: 10.1109/TITS.2014.2387356 [13] Sciarretta A, Back M, Guzzella L. Optimal control of parallel hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2004, 12(3):352-363 doi: 10.1109/TCST.2004.824312 [14] Musardo C, Rizzoni G, Guezennec Y, Staccia B. A-ECMS:an adaptive algorithm for hybrid electric vehicle energy management. European Journal of Control, 2005, 11(4-5):509-524 doi: 10.3166/ejc.11.509-524 [15] Pisu P, Rizzoni G. A comparative study of supervisory control strategies for hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2007, 15(3):506-518 doi: 10.1109/TCST.2007.894649 [16] Sezer V, Gokasan M, Bogosyan S. A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2011, 60(8):3557-3570 doi: 10.1109/TVT.2011.2166981 [17] Ebbesen S, Elbert P, Guzzella L. Battery state-of-health perceptive energy management for hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2012, 61(7):2893-2900 doi: 10.1109/TVT.2012.2203836 [18] Marano V, Tulpule P, Stockar S, Onori S, Rizzoni G. Comparative Study of Different Control Strategies for Plug-In Hybrid Electric Vehicles, SAE Technical Paper 2009-24-0071, Detroit, USA, 2009. [19] Zhao D Z, Stobart R, Dong G Y, Winward E. Real-time energy management for diesel heavy duty hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2015, 23(3):829-841 doi: 10.1109/TCST.2014.2343939 [20] Vahidi A, Stefanopoulou A, Peng H. Current management in a hybrid fuel cell power system:a model-predictive control approach. IEEE Transactions on Control Systems Technology, 2006, 14(6):1047-1057 doi: 10.1109/TCST.2006.880199 [21] Yan F J, Wang J M, Huang K S. Hybrid electric vehicle model predictive control torque-split strategy incorporating engine transient characteristics. IEEE Transactions on Vehicular Technology, 2012, 61(6):2458-2467 doi: 10.1109/TVT.2012.2197767 [22] Borhan H, Vahidi A, Phillips A M, Kuang M L, Kolmanovsky I V, Di Cairano S. MPC-based energy management of a power-split hybrid electric vehicle. IEEE Transactions on Control Systems Technology, 2012, 20(3):593-603 doi: 10.1109/TCST.2011.2134852 [23] Di Cairano S, Wei L, Kolmanovsky I V, Kuang M L, Phillips A M. Power smoothing energy management and its application to a series hybrid powertrain. IEEE Transactions on Control Systems Technology, 2013, 21(6):2091-2103 doi: 10.1109/TCST.2012.2218656 [24] Zeng X R, Wang J M. A parallel hybrid electric vehicle energy management strategy using stochastic model predictive control with road grade preview. IEEE Transactions on Control Systems Technology, 2015, 23(6):2416-2423 doi: 10.1109/TCST.2015.2409235 [25] Di Cairano S, Bernardini D, Bemporad A, Kolmanovsky I V. Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management. IEEE Transactions on Control Systems Technology, 2014, 22(3):1018-1031 doi: 10.1109/TCST.2013.2272179 [26] Delprat S, Lauber J, Guerra T M, Rimaux J. Control of a parallel hybrid powertrain:optimal control. IEEE Transactions on Vehicular Technology, 2004, 53(3):872-881 doi: 10.1109/TVT.2004.827161 [27] Won J S, Langari R, Ehsani M. An energy management and charge sustaining strategy for a parallel hybrid vehicle with CVT. IEEE Transactions on Control Systems Technology, 2005, 13(2):313-320 doi: 10.1109/TCST.2004.838569 [28] 夏超英, 张聪.混合动力系统能量管理策略的实时优化控制算法.自动化学报, 2015, 41(3):508-517 http://www.aas.net.cn/CN/abstract/abstract18629.shtmlXia Chao-Ying, Zhang Cong. Real-time optimization control algorithm of energy management strategy for hybrid electric vehicles. Acta Automatica Sinica, 2015, 41(3):508-517 http://www.aas.net.cn/CN/abstract/abstract18629.shtml [29] Vural B, Dusmez S, Uzunoglu M, Ugur E, Akin B. Fuel consumption comparison of different battery/ultracapacitor hybridization topologies for fuel-cell vehicles on a test bench. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(3):552-561 doi: 10.1109/JESTPE.2013.2297702 [30] Moghbeli H, Halvaei N A, Fallahi N. Fuzzy energy control strategy of through-to-road hybrid electric vehicle. In:Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics. Istanbul, Turkey:IEEE, 2014. 1660-1665 [31] Murphey Y L, Park J, Kiliaris L, Kuang M L, Masrur M A, Phillips A M, Wang Q. Intelligent hybrid vehicle power control-Part II:online intelligent energy management. IEEE Transactions on Vehicular Technology, 2013, 62(1):69-79 doi: 10.1109/TVT.2012.2217362 [32] 马向华, 叶银忠.并联式混合动力汽车驱动系统遗传模糊控制策略研究.见:第32届中国控制会议.西安, 中国:IEEE, 2013. 7575-7579Ma Xiang-Hua, Ye Yin-Zhong. Study on genetic-fuzzy control strategy for PHEV drive system. In:Proceedings of the 32nd Chinese Control Conference. Xi'an, China:IEEE, 2013. 7575-7579 [33] Sun H, Jiang J H, Wang X. Torque control strategy for a parallel hydraulic hybrid vehicle. Journal of Terramechanics, 2009, 46(6):259-265 doi: 10.1016/j.jterra.2009.08.004 [34] Bathaee S M T, Gastaj A H, Emami S R, Mohammadian M. A fuzzy-based supervisory robust control for parallel hybrid electric vehicles. In:Proceedings of the 2005 IEEE Conference Vehicle Power and Propulsion. Chicago, USA:IEEE, 2005. [35] Langari R, Won J S. Intelligent energy management agent for a parallel hybrid vehicle-Part I:system architecture and design of the driving situation identification process. IEEE Transactions on Vehicular Technology, 2005, 54(3):925-934 doi: 10.1109/TVT.2005.844685 [36] Won J S, Langari R. Intelligent energy management agent for a parallel hybrid vehicle-Part II:torque distribution, charge sustenance strategies, and performance results. IEEE Transactions on Vehicular Technology, 2005, 54(3):935-953 doi: 10.1109/TVT.2005.844683 [37] Mustafa R, Schulze M, Eilts P, Küçükay F. Intelligent Energy Management Strategy for a Parallel Hybrid Vehicle, SAE Technical Paper 2014-01-1909, Detroit, USA, 2014. [38] Wei Z, Xu J, Halim D. HEV energy management fuzzy logic control based on dynamic programming. In:Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference. Montreal, QC:IEEE, 2015. 1-5 [39] Wu J. Fuzzy energy management strategy for plug-in HEV based on driving cycle modeling. In:Proceedings of the 33rd Chinese Control Conference. Nanjing, China:IEEE, 2014. 4472-4476 [40] 张毅, 刘和平, 伍元彪.并联混合动力汽车模糊多目标控制策略.重庆大学学报, 2013, 36(2):75-84 http://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201302012.htmZhang Yi, Liu He-Ping, Wu Yuan-biao. Multi-objective control strategy for parallel HEV using fuzzy logic. Journal of Chongqing University, 2013, 36(2):75-84 http://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201302012.htm [41] Denis N, Dubois M R, Desrochers A. Fuzzy-based blended control for the energy management of a parallel plug-in hybrid electric vehicle. IET Intelligent Transport Systems, 2015, 9(1):30-37 doi: 10.1049/iet-its.2014.0075 [42] Taghavipoura A, Foumani M S, Boroushaki M. Implementation of an optimal control strategy for a hydraulic hybrid vehicle using CMAC and RBF networks. Scientia Iranica, 2012, 19(2):327-334 doi: 10.1016/j.scient.2012.02.019 [43] Sun C, Hu X S, Moura S J, Sun F C. Velocity predictors for predictive energy management in hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2015, 23(3):1197-1204 doi: 10.1109/TCST.2014.2359176 [44] Wagner J R, Dawson D M, Liu Z Y. Nonlinear air-to-fuel ratio and engine speed control for hybrid vehicles. IEEE Transactions on Vehicular Technology, 2003, 52(1):184-195 doi: 10.1109/TVT.2002.807156 [45] Fiengo G, Glielmo L, Vasca F. Control of auxiliary power unit for hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2007, 15(6):1122-1130 doi: 10.1109/TCST.2006.890301 [46] Zhang Y, Liu H P, Guo Q. Varying-domain optimal management strategy for parallel hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2014, 63(2):603-616 doi: 10.1109/TVT.2013.2276432 [47] Adhikari S, Halgamuge S K, Watson H C. An online power-balancing strategy for a parallel hybrid electric vehicle assisted by an integrated starter generator. IEEE Transactions on Vehicular Technology, 2010, 59(6):2689-2699 doi: 10.1109/TVT.2010.2051048 [48] Shabbir W, Evangelou S A. Real-time control strategy to maximize hybrid electric vehicle powertrain efficiency. Applied Energy, 2015, 135:512-522 [49] Lukic S M, Emadi A. Effects of drivetrain hybridization on fuel economy and dynamic performance of parallel hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2004, 53(2):385-389 doi: 10.1109/TVT.2004.823525 [50] Johnson V H, Wipke K B, Rausen D J. HEV Control Strategy for Real-Time Optimization of Fuel Economy and Emissions, SAE Technical Paper 2000-01-1543, Detroit, USA, 2000. [51] Larsson V, Johannesson M L, Egardt B, Karlsson S. Commuter route optimized energy management of hybrid electric vehicles. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(3):1145-1154 doi: 10.1109/TITS.2013.2294723 [52] Boehme T J, Frank B, Schori M, Jeinsch T. Multi-objective optimal powertrain design of parallel hybrid vehicles with respect to fuel consumption and driving performance. In:Proceedings of the 2014 European Control Conference. Strasbourg, France:IEEE, 2014. 1017-1023 [53] Ceraolo M, di Donato A, Franceschi G. A general approach to energy optimization of hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2008, 57(3):1433-1441 doi: 10.1109/TVT.2007.909268 [54] Kessels J T B A, Koot M W T, van den Bosch P P J, Kok D B. Online energy management for hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2008, 57(6):3428-3440 doi: 10.1109/TVT.2008.919988 [55] Koot M, Kessels J T B A, de Jager B, Heemels W P M H, van den Bosch P P J, Steinbuch M. Energy management strategies for vehicular electric power systems. IEEE Transactions on Vehicular Technology, 2005, 54(3):771-782 doi: 10.1109/TVT.2005.847211 [56] Kim N, Cha S, Peng H. Optimal control of hybrid electric vehicles based on Pontryagin's minimum principle. IEEE Transactions on Control Systems Technology, 2011, 19(5):1279-1287 doi: 10.1109/TCST.2010.2061232 [57] Tang L, Rizzoni G, Onori S. Energy management strategy for HEVs including battery life optimization. IEEE Transactions on Transportation Electrification, 2015, 1(3):211-222 doi: 10.1109/TTE.2015.2471180 [58] Cordiner S, Galeani S, Mecocci F, Mulone V, Zaccarian L. Torque Setpoint tracking for parallel hybrid electric vehicles using dynamic input allocation. IEEE Transactions on Control Systems Technology, 2014, 22(5):2007-2015 doi: 10.1109/TCST.2013.2293179 [59] 杨宏亮, 陈全世.混联式混合动力汽车控制策略研究综述.公路交通科技, 2002, 19(1):103-107 http://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200201027.htmYang Hong-Liang, Chen Quan-Shi. Views on the combined hybrid system operating strategies. Journal of Highway and Transportation Research and Development, 2002, 19(1):103-107 http://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200201027.htm [60] Sciarretta A, Guzzella L. Control of hybrid electric vehicles. IEEE Control Systems Magazine, 2007, 27(2):60-70 doi: 10.1109/MCS.2007.338280 [61] Panday A, Bansal H O. A review of optimal energy management strategies for hybrid electric vehicle. International Journal of Vehicular Technology, 2014, 2014:Article ID 160510 [62] Markel T, Wipke K. Modeling grid-connected hybrid electric vehicles using ADVISOR. In:Proceedings of the 16th Annual Battery Conference on Applications and Advances. Long Beach, CA:IEEE, 2001. 23-29 [63] Dextreit C, Kolmanovsky I V. Game theory controller for hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2014, 22(2):652-663 doi: 10.1109/TCST.2013.2254597 [64] 赵子亮, 刘东秦, 刘明辉, 李骏, 王庆年.并联混合动力汽车控制策略与仿真分析研究.机械工程学报, 2005, 41(12):13-18 doi: 10.3901/JME.2005.12.013Zhao Zi-Liang, Liu Dong-Qin, Liu Ming-Hui, Li Jun, Wang Qing-Nian. Study on control strategy and simulation for parallel hybrid electric vehicle. Chinese Journal of Mechanical Engineering, 2005, 41(12):13-18 doi: 10.3901/JME.2005.12.013 [65] 舒红, 刘文杰, 袁景敏, 高银平.混联型混合动力汽车能量管理策略优化.农业机械学报, 2009, 40(3):31-35 http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200903006.htmShu Hong, Liu Wen-Jie, Yuan Jing-Min, Gao Yin-Ping. Optimization of energy management strategy for a parallel-series HEV. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(3):31-35 http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200903006.htm [66] Kim J, Kim T, Min B, Hwang S, Kim H. Mode control strategy for a two-mode hybrid electric vehicle using electrically variable transmission (EVT) and fixed-gear mode. IEEE Transactions on Vehicular Technology, 2011, 60(3):793-803 doi: 10.1109/TVT.2011.2107564 [67] 童毅, 张俊智, 欧阳明高.混合动力汽车扭矩管理策略.清华大学学报(自然科学版), 2006, 43(8):1134-1137 http://www.cnki.com.cn/Article/CJFDTOTAL-QHXB200308033.htmTong Yi, Zhang Jun-Zhi, Ouyang Ming-Gao. Torque management strategy for hybrid electric vehicles. Journal of Tsinghua University (Science and Technology), 2003, 43(8):1134-1137 http://www.cnki.com.cn/Article/CJFDTOTAL-QHXB200308033.htm [68] Bellman R E. Dynamic Programming. Princeton, NJ, USA:Princeton University Press, 1957. [69] Brahma A, Guezennec Y, Rizzoni G. Optimal energy management in series hybrid electric vehicles. In:Proceedings of the 2000 American Control Conference. Chicago, USA:IEEE, 2000. 60-64 [70] Johannesson L, Egardt B S. Approximate dynamic programming applied to parallel hybrid powertrains. In:Proceedings of the 17th IFAC World Congress. Seoul, Korea:IFAC, 2008. 3374-3379 [71] Larsson V, Johannesson L, Egardt B. Analytic solutions to the dynamic programming subproblem in hybrid vehicle energy management. IEEE Transactions on Vehicular Technology, 2015, 64(4):1458-1467 doi: 10.1109/TVT.2014.2329864 [72] Larsson V, Johannesson L, Egardt B. Cubic spline approximations of the dynamic programming cost-to-go in HEV energy management problems. In:Proceedings of the 2014 European Control Conference. Strasbourg, France:IEEE, 2014. 1699-1704 [73] Ko J, Ko S, Son H, Yoo B, Cheon J, Kim H. Development of brake system and regenerative braking cooperative control algorithm for automatic-transmission-based hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2015, 64(2):431-440 doi: 10.1109/TVT.2014.2325056 [74] Lee H, Cha S W, Kim H, Kim S J. Energy Management Strategy of Hybrid Electric Vehicle Using Stochastic Dynamic Programming, SAE Technical Paper 2015-01-0019, Detroit, USA, 2015. [75] Pontryagin L S, Boltyanskii V G, Gamkrelidze R V, Mishchenko E F. The Mathematical Theory of Optimal Processes. New York:Interscience Publishers, 1962. [76] Xu K, Qiu B, Liu G B, Chen Q S. Energy management strategy design of plug-in hybrid electric bus based on Pontryagin's minimum principle. In:Proceedings of the 2014 IEEE Conference Expo Transportation Electrification Asia-Pacific. Beijing, China:IEEE, 2014. 1-6 [77] Tang L, Rizzoni G, Onori S. Optimal energy management of HEVs with consideration of battery aging. In:Proceedings of the 2014 IEEE Conference on Transportation Electrification Asia-Pacific. Beijing, China:IEEE, 2014. 1-6 [78] Yuan Z, Teng L, Sun F C, Peng H. Comparative study of dynamic programming and Pontryagin's minimum principle on energy management for a parallel hybrid electric vehicles. Energies, 2013, 6(4):2305-2318 doi: 10.3390/en6042305 [79] Liu T, Zou Y, Liu D X, Sun F C. Real-time control for a parallel hybrid electric vehicle based on Pontryagin's minimum principle. In:Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific. Beijing, China:IEEE, 2014. 1-5 [80] Ngo V, Hofman T, Steinbuch M, Serrarens A. Optimal control of the gearshift command for hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2012, 61(8):3531-3543 doi: 10.1109/TVT.2012.2207922 [81] Samanta C, Panigrahi S P, Panigrahi B K. Genetic-based bacteria foraging to optimise energy management of hybrid electric vehicles. IET Electrical Systems in Transportation, 2014, 4(3):53-61 doi: 10.1049/iet-est.2013.0013 [82] Fang L C, Qin S Y, Xu G, Li T L, Zhu K M. Simultaneous optimization for hybrid electric vehicle parameters based on multi-objective genetic algorithms. Energies, 2011, 4(12):532-544 doi: 10.3390/en4030532 [83] Das S, Biswas A, Dasgupta S, Abraham A. Bacterial foraging optimization algorithm:theoretical foundations, analysis, and applications. Foundations of Computational Intelligence. Berlin Heidelberg:Springer, 2009, 203:23-55 [84] 赵韩, 吴迪.基于随机模型预测控制的并联式混合动力汽车控制策略研究.汽车工程, 2014, 36(11):1289-1294 http://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201411001.htmZhao Han, Wu Di. A research on the control strategy of a parallel HEV based on stochastic model predictive control. Automotive Engineering, 2014, 36(11):1289-1294 http://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201411001.htm [85] Feng T H, Hu Y Q, Yang L. A neural network model to calculate the energy demand of the vehicle based on traffic features. In:Proceedings of the 17th International Symposium on Computational Intelligence and Design. Hangzhou, China:IEEE, 2014. 299-303 [86] Yaegashi T, Sasaki S, Abe T. Toyota hybrid system:its concept and technology. In:Proceedings of the 1998 FISITA World Automotive Congress. Paris, France, 1998. F98TP095 [87] Yamaguchi K, Maroto S, Kobayshi K, Kawamoto M, Miyaishi Y. Development of a New Hybrid System-Dual System, SAE Technical Paper 960231, Detroit, USA, 1996. [88] Panagiotidis M, Delarammatikas G, Assanis D. Development and Use of a Regenerative Braking Model for a Parallel Hybrid Electric Vehicle, SAE Technical Paper 2000-01-0995, Detroit, USA, 2000. [89] 杜常清.车用并联混合动力系统瞬态过程控制技术研究[博士学位论文], 武汉理工大学, 中国, 2009Du Chang-Qing. Transient Process Control Technology on Parallel Hybrid Electric Powertrain[Ph.D. dissertation], Wuhan University of Technology, China, 2009 [90] Gao Y M, Ehsani M, Miller J M. Hybrid electric vehicle:overview and state of the art. In:Proceedings of the 2005 IEEE International Symposium on Industrial Electronics. Dubrovnik, Croatia:IEEE, 2005. 307-316 [91] Meisel J. An Analytic Foundation for the Toyota Prius THS-II Powertrain with a Comparison to a Strong Parallel Hybrid-Electric Powertrain, SAE Technical Paper 2006-01-0666, Detroit, USA, 2006. [92] Bridges J, Wartnaby C E, Stannard D, Styles J, Ellims M. Frameworks for Power and Systems Management in Hybrid Vehicles:Challenges and Prospects, SAE Technical Paper 2006-21-0005, Detroit, USA, 2006. [93] Jurik T, Cela A, Hamouche R, Natowicz R, Reama A, Niculescu S I, Julien J. Energy optimal real-time navigation system. IEEE Intelligent Transportation Systems Magazine, 2014, 6(3):66-79 doi: 10.1109/MITS.2014.2324000 -

 下载:
下载:

图(1) / 表(1)
计量
- 文章访问数: 5894
- HTML全文浏览量: 1817
- PDF下载量: 2860
- 被引次数: 0
