

Fault-tolerant Control for Multi-agent Systems Based on Binary-valued Communication Under Dual-terminal Switching Topologies
-
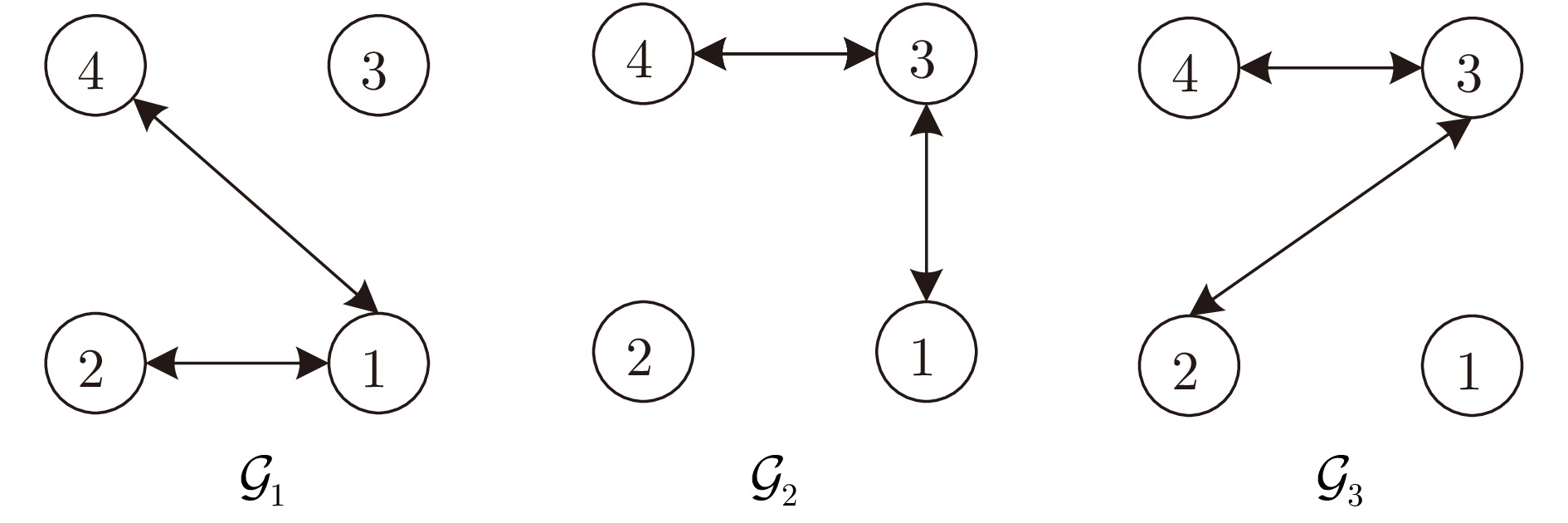
摘要: 针对一类双端切换拓扑下基于二值通信的多智能体系统, 研究其迭代学习容错均值一致性控制问题. 为了降低通信负担和提高数据传输的安全性, 假设每个智能体只能从其邻居处接收到二值信息, 建立一类双端切换拓扑结构以调控智能体之间的信息传递, 放宽通信拓扑在时间轴上需要完整生成树的限制. 在双迭代尺度框架下, 通过二值信息的估计过程和迭代学习控制技术的交替使用, 实现对智能体邻居状态的估计, 并完成均值一致性控制任务. 进一步地, 针对系统存在执行器故障的影响, 提出一种迭代学习容错均值一致性控制方案, 利用迭代学习实现对故障参数的迭代估计, 以保证系统在执行器故障影响下的性能. 基于非负的复合能量函数理论, 证明所得到的误差系统是有界的. 最后, 利用数值仿真算例验证所提方法的可行性与有效性.Abstract: For a class of multi-agent systems based on binary-valued communication under dual-terminal switching topologies, the iterative learning fault-tolerant averaging consensus control issue is studied. To reduce the communication burden and enhance the security of data transmission, it considers that each agent can only receive binary-valued information from its neighbors. A kind of dual-terminal switching topologies is established to regulate the information transfer among agents, relaxing the requirement for the communication topology to have a complete spanning tree over time. Under the two-iterative scale framework, based on alternating iterations of binary-valued information estimation and iterative learning control technology, the states of the agent′s neighbors are estimated, and the averaging consensus control task is accomplished. Furthermore, considering the actuator faults presented in the system, an iterative learning fault-tolerant averaging consensus control scheme is proposed, which makes use of iterative learning to realize the iterative estimation of fault parameters to ensure the performance of the system in the presence of actuator faults. Based on non-negative composite energy functions theory, it verifies that the corresponding error system is bounded. Finally, the feasibility and effectiveness of the proposed method are illustrated by numerical simulation examples.
-
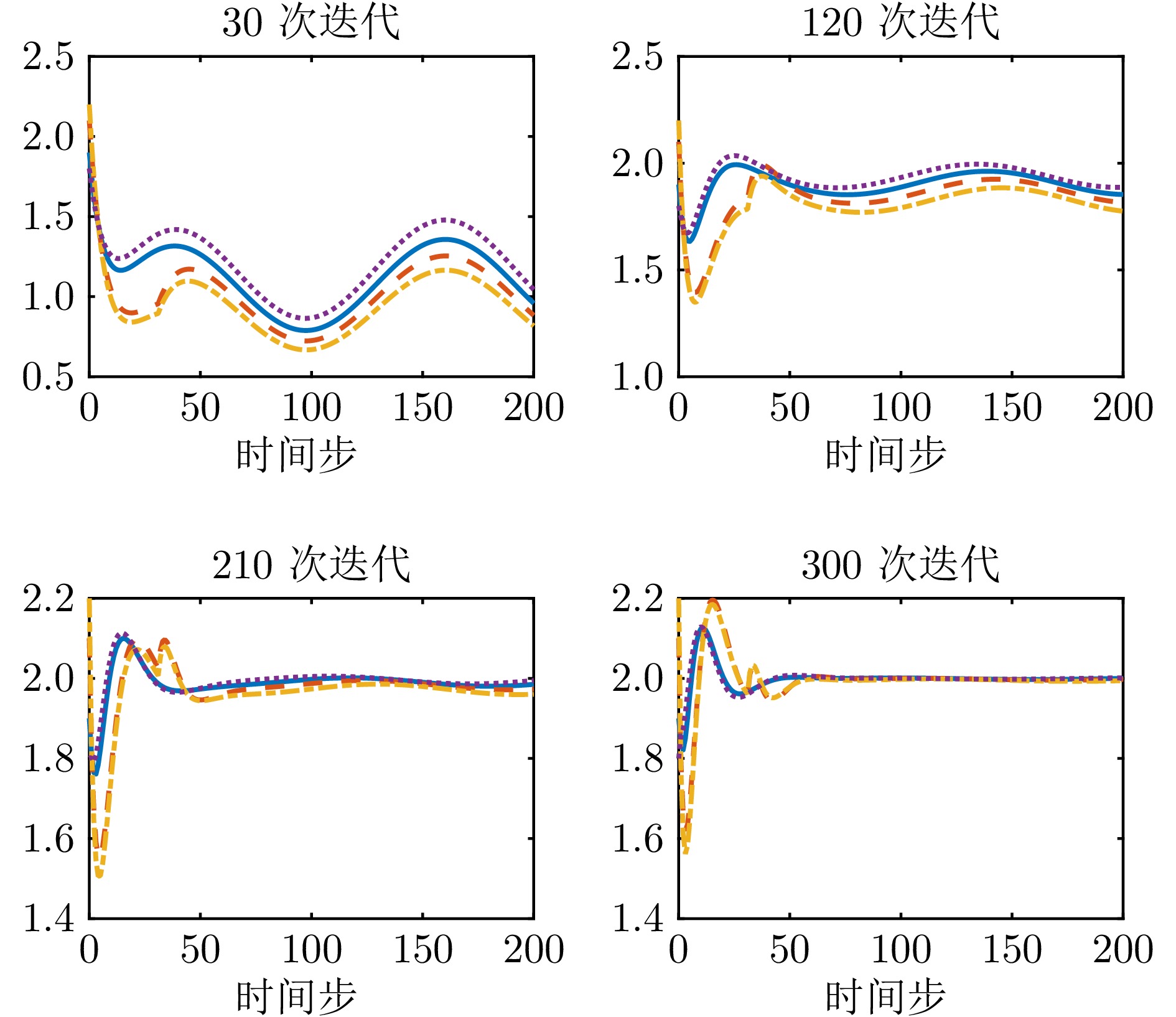
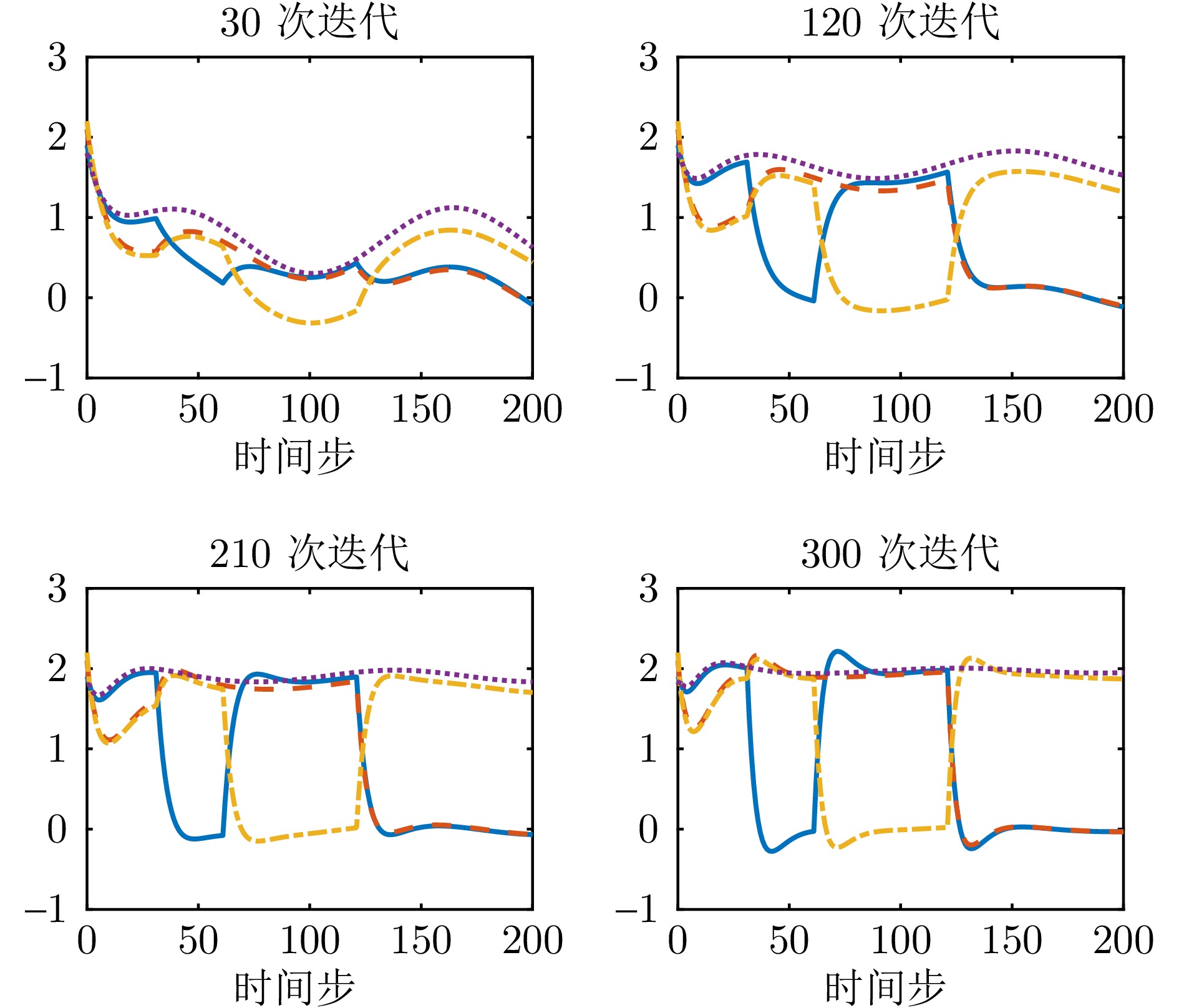
图 3 双端切换拓扑下第30、120、210和300次迭代智能体的状态响应
Fig. 3 States response of the agents on 30th,120th,210th and 300th iteration under dual-terminal switching topologies
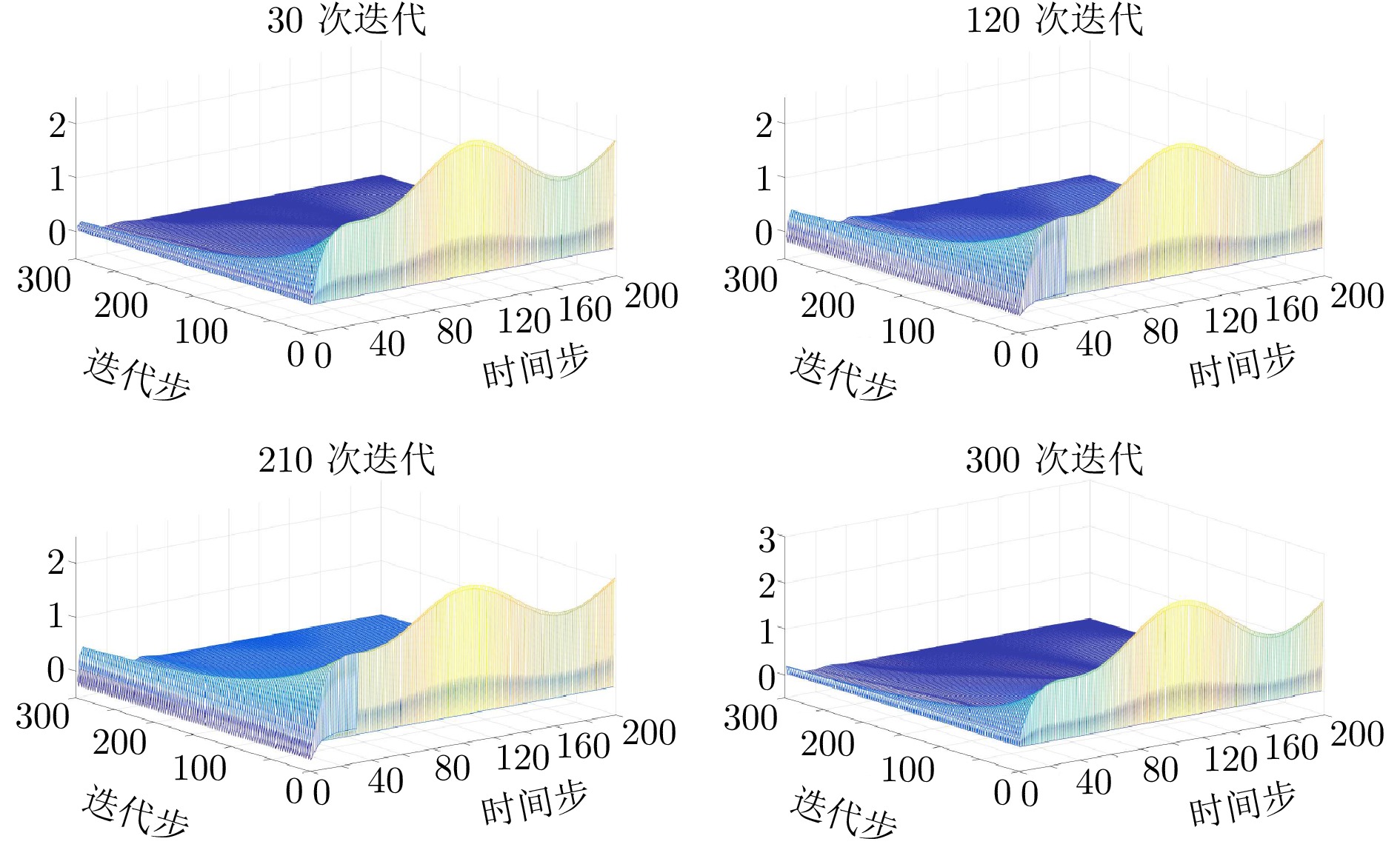
图 4 双端切换拓扑下智能体的均值一致性误差
Fig. 4 Averaging consensus errors of the agents under dual-terminal switching topologies
-
[1] He S D, and Wang M, and Dai S L, and Luo F. Leader-follower formation control of USVs with prescribed performance and collision avoidance. IEEE Transactions on Industrial Informatics, 2019, 15(1): 572−581 doi: 10.1109/TII.2018.2839739 [2] Li Y M, and Feng K L, and Li K W. Finite-time fuzzy adaptive dynamic event-triggered formation tracking control for USVs with actuator faults and multiple constraints. IEEE Transactions on Industrial Informatics, 2024, 20(4): 5285−5296 doi: 10.1109/TII.2023.3331101 [3] Olfati-Saber R, Fax J A, Murray R M. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95(1): 215−233 doi: 10.1109/JPROC.2006.887293 [4] Guo X Y, and Zhang H G, and Sun J Y, Zhou Y. Fixed-time fuzzy adaptive control of manipulator systems under multiple constraints: A modified dynamic surface control approach. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(4): 2522−2532 doi: 10.1109/TSMC.2022.3212988 [5] Ren H R, Cheng Z J, Qin J H, Lu R Q. Deception attacks on event-triggered distributed consensus estimation for nonlinear systems. Automatica, 2023, 154: 111100 doi: 10.1016/j.automatica.2023.111100 [6] Wu Y, Chen M, Chadli M, Li H Y. Dual-type-triggers-based cooperative adaptive critic control of swarm UAVs under FDI attacks. Automatica, 2024, 167: 111757 doi: 10.1016/j.automatica.2024.111757 [7] 应晨铎, 伍益明, 徐明, 郑宁, 何熊熊. 欺骗攻击下具备隐私保护的多智能体系统均值趋同控制. 自动化学报, 2023, 49(2): 425−436Ying C D, Wu Yi M, Xu M, Zheng N, He X X. Privacy-preserving average consensus control formulti-agent systems under deception attacks. Acta Automatica Sinica, 2023, 49(2): 425−436 [8] 杨彬, 周琪, 曹亮, 鲁仁全. 具有指定性能和全状态约束的多智能体系统事件触发控制. 自动化学报, 2019, 45(8): 1527−1535Yang B, Zhou Q, Cao L, Lu R Q. Event-triggered control for multi-agent systems with prescribed performance and full state constraints. Acta Automatica Sinica, 2019, 45(8): 1527−1535 [9] Li H Q, Liao X F, Huang T W, Zhu W. Event-triggering sampling based leader-following consensus in second-order multi-agent systems. IEEE Transactions on Automatic Control, 2015, 60(7): 1998−2003 doi: 10.1109/TAC.2014.2365073 [10] Li K, Hua C C, You X, Ahn C K. Leader-following consensus control for uncertain feedforward stochastic nonlinear multiagent systems. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(2): 1049−1057 doi: 10.1109/TNNLS.2021.3105109 [11] Yao D Y, Li H Y, Shi Y. Event-based average consensus of disturbed MASs via fully distributed sliding mode control. IEEE Transactions on Automatic Control, 2024, 69(3): 2015−2022 doi: 10.1109/TAC.2023.3317505 [12] Li X J, Bo S, Zhang X W, Qin Y, Yin X Y. Data-driven parallel koopman subsystem modeling and distributed moving horizon state estimation for large-scale nonlinear processes. AIChE Journal, 2024, 70(3): e18326 doi: 10.1002/aic.18326 [13] 范泉涌, 张乃宗, 唐勇, 许斌. 基于动态事件触发通信协议的多智能体系统自适应可靠控制. 自动化学报, 2024, 50(5): 924−936Fan Q Y, Zhang N Z, Tang Y, Xu B. Adaptive reliable control of multi-agent systems based on dynamic event-triggered communication protocol. Acta Automatica Sinica, 2024, 50(5): 924−936 [14] Mei J, Ren W, Song Y D. A unified framework for adaptive leaderless consensus of uncertain multiagent systems under directed graphs. IEEE Transactions on Automatic Control, 2021, 66(12): 6179−6186 doi: 10.1109/TAC.2021.3062594 [15] Ma D, Chen J Q, Lu R Q, Chen J, Chai T Y. Delay consensus margin of first-order multiagent systems with undirected graphs and pd protocols. IEEE Transactions on Automatic Control, 2021, 66(9): 4192−4198 doi: 10.1109/TAC.2020.3035556 [16] Psillakis H E. Consensus in networks of agents with unknown high-frequency gain signs and switching topology. IEEE Transactions on Automatic Control, 2017, 62(8): 3993−3998 doi: 10.1109/TAC.2016.2616645 [17] Wen G H, Zheng W X. On constructing multiple lyapunov functions for tracking control of multiple agents with switching topologies. IEEE Transactions on Automatic Control, 2019, 64(9): 3796−3803 doi: 10.1109/TAC.2018.2885079 [18] 孙梦薇, 任璐, 刘剑, 孙长银. 切换拓扑下动态事件触发多智能体系统固定时间一致性. 自动化学报, 2023, 49(6): 1295−1305Sun M W, Ren L, Liu J, Sun C Y. Dynamic event-triggered fixed-time consensus control of multi-agent systems under switching topologies. Acta Automatica Sinica, 2023, 49(6): 1295−1305 [19] Olfati-Saber R, Murray R M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 2004, 49(9): 1520−1533 doi: 10.1109/TAC.2004.834113 [20] Wang P J, Wen G H, Yu W W, Huang T W, Yu X H. Asymptotical consensus of mimo linear multiagent systems with a nonautonomous leader and directed switching topology: a continuous approach. IEEE Transactions on Control of Network Systems, 2023, 10(3): 1326−1337 doi: 10.1109/TCNS.2022.3226944 [21] Razaq, M A, Rehan M, Tufail M, Ahn C K. Multiple lyapunov functions approach for consensus of one-sided lipschitz multi-agents over switching topologies and input saturation. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2020, 67(12): 3267−3271 doi: 10.1109/TCSII.2020.2986009 [22] Frasca P, and Carli R, and Fagnani F, and Zampieri S. Average consensus on networks with quantized communication. International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal, 2009, 19(16): 1787−1816 [23] Liu S, and Li T, and Xie L H, and Fu M Y, and Zhang J-F. Continuous-time and sampled-data-based average consensus with logarithmic quantizers. Automatica, 2013, 49(11): 3329−3336 doi: 10.1016/j.automatica.2013.07.016 [24] Hu M, Wang T, Zhao Y L. Consensus of switched multi-agent systems with binary-valued communications. Science China Information Sciences, 2022, 65(6): 162207 doi: 10.1007/s11432-020-3052-0 [25] Ning Z P, Feng G, Yin X Y. Asynchronous quantized control of piecewise-affine systems. IEEE Transactions on Automatic Control, 2024, 69(1): 503−510 doi: 10.1109/TAC.2023.3266978 [26] Wang L Y, Zhang J F, Yin G G. System identification using binary sensors. IEEE Transactions on Automatic Control, 2003, 48(11): 1892−1907 doi: 10.1109/TAC.2003.819073 [27] Zhao Y L, Wang T, Bi W J. Consensus protocol for multiagent systems with undirected topologies and binary-valued communications. IEEE Transactions on Automatic Control, 2019, 64(1): 206−221 doi: 10.1109/TAC.2018.2814632 [28] Wang T, Zhang H, Zhao Y L. Consensus of multi-agent systems under binary-valued measurements and recursive projection algorithm. IEEE Transactions on Automatic Control, 2020, 65(6): 2678−2685 doi: 10.1109/TAC.2019.2942569 [29] Chen J N, Hua C C. Adaptive iterative learning fault-tolerant consensus control of multiagent systems under binary-valued communications. IEEE Transactions on Cybernetics, 2023, 53(11): 6751−6760 doi: 10.1109/TCYB.2021.3123697 [30] Li X J, Bo S, Qin Y, Yin X Y. Iterative distributed moving horizon estimation of linear systems with penalties on both system disturbances and noise. Chemical Engineering Research and Design, 2023, 194: 878−893 doi: 10.1016/j.cherd.2023.05.020 [31] Ahn H S, Chen Y Q, Moore K L. Iterative learning control: Brief survey and categorization. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2007, 37(6): 1099−1121 doi: 10.1109/TSMCC.2007.905759 [32] Yang S P, Xu J X, Li X F, Shen D. Iterative learning control for multiagent systems coordination. John Wiley & Sons, 2017. [33] Bu X H, Yu Q X, Hou Z S, and Qian W. Model free adaptive iterative learning consensus tracking control for a class of nonlinear multiagent systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(4): 677−686 doi: 10.1109/TSMC.2017.2734799 [34] Ren H R, Ma H, Li H Y, Wang Z Y. Adaptive fixed-time control of nonlinear MASs with actuator faults. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1252−1262 doi: 10.1109/JAS.2023.123558 [35] Li K, Ding S X, Zheng W X, Hua C C. Global distributed fault-tolerant consensus control of nonlinear delayed multiagent systems with hybrid faults. IEEE Transactions on Automatic Control, 2024, 69(3): 1967−1974 doi: 10.1109/TAC.2023.3303098 [36] Cai Y L, Zhang H G, Li W H, Mu Y F, He Q. Distributed bipartite adaptive event-triggered fault-tolerant consensus tracking for linear multiagent systems under actuator faults. IEEE Transactions on Cybernetics, 2022, 52(11): 11313−11324 doi: 10.1109/TCYB.2021.3069955 [37] Wang C L, Wen C Y, Guo L. Adaptive consensus control for nonlinear multiagent systems with unknown control directions and time-varying actuator faults. IEEE Transactions on Automatic Control, 2021, 66(9): 4222−4229 doi: 10.1109/TAC.2020.3034209 [38] Chen S, Ho D W C, Li L L, Liu M. Fault-tolerant consensus of multi-agent system with distributed adaptive protocol. IEEE Transactions on Cybernetics, 2015, 45(10): 2142−2155 doi: 10.1109/TCYB.2014.2366204 [39] Li H Y, Wu Y, Chen M. Adaptive fault-tolerant tracking control for discrete-time multiagent systems via reinforcement learning algorithm. IEEE Transactions on Cybernetics, 2021, 51(3): 1163−1174 doi: 10.1109/TCYB.2020.2982168 -

 下载:
下载:
计量
- 文章访问数: 18
- HTML全文浏览量: 18
- 被引次数: 0
