

A Review on Researches and Applications of sEMG-based Motion Intent Recognition Methods
-
摘要: 表面肌电信号 (Surface electromyography, sEMG) 是人体自身的资源, 蕴含着关联人体运动的丰富信息, 用它作为交互媒介以构建人机交互 (Human-robot interaction, HRI) 系统有天然的优势.通过肌电信号实现人机自然交互的关键是由肌电信号识别出人体运动意图, 通常包括离散动作模态分类、关节连续运动量估计及关节刚度/阻抗估计等三方面内容.本文详细归纳基于表面肌电的运动识别方法研究成果, 总结当前研究的特点; 随后, 介绍基于表面肌电的运动识别技术的应用现状, 并探讨制约其推广的主要问题; 最后, 展望该技术的未来发展.Abstract: Surface electromyography (sEMG) signals are human's own resources, which contain a wealth of information associated with one's movement. Thus, there is a natural advantage in utilizing sEMG signals as interface media to construct human-robot interaction (HRI) systems. The key to realize a natural HRI with sEMG is recognizing human's motion intention from sEMG signals, which usually involves three aspects, i.e., classifying discrete motion modes, estimating continuous movements of joints, and estimating stiffness or impedance of joints. This paper fully collects the researches on methods of sEMG-based motion recognition, and summarizes the features of current studies. Afterwards, this paper introduces the application status of sEMG-based motion recognition technology, and discusses the key issues constraining its marketing applications. Finally, future development of the technology is presented.
-
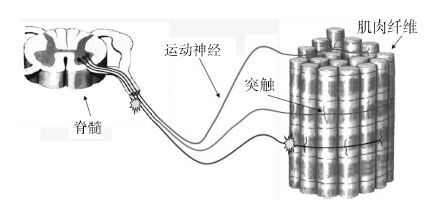
图 1 运动单元 (每条运动神经对应一个运动单元)
Fig. 1 Motor units (One motor nerve is corresponding to one motor unit.)
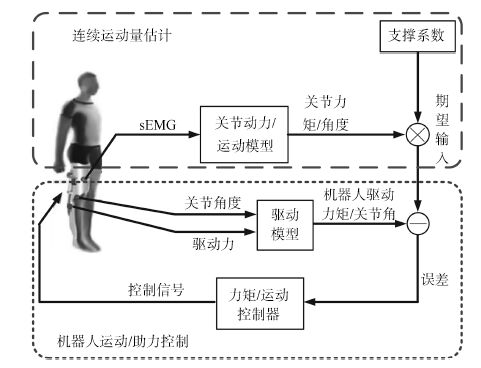
图 6 基于sEMG的连续运动估计及机器人控制
Fig. 6 sEMG-based continuous-movement estimation and robot control

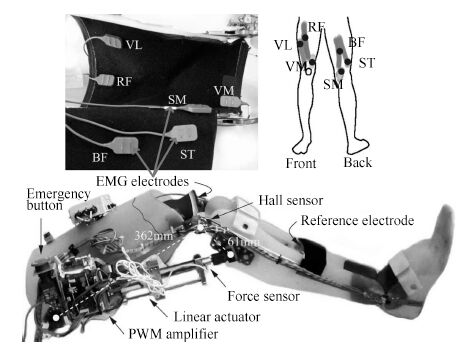
图 10 7-DOF上肢外骨骼康复机器人EXO-UL3
Fig. 10 The 7-DOF upper-limb exoskeleton rehabilitation robot EXO-UL3
表 1 离散动作分类研究1
Table 1 Researches on discrete-motion classification1
文献 sEMG特征 降维
分类算法sEMG
通道数动作 残疾人
测试?平均分类
精度 (%)小结 [13] WPT LDA+MLP 4 9种手/腕
部动作否 97.4 LDA投影特征能提高动作识
别精度, 用于假手在线控制[23] TD, STFT,
WT, WPTPCA+LDA 4 6种上
肢动作否 $>96$ WPT等时频域特征
能提高动作分类精度[24] DFT幅值,
ARCKNN 2 5种手指
按压动作否 $>93$ 利用GA算法可自主选择
与动作最相关sEMG特征[25] MAV, SSC,
ARCANFIS 4 6种手/腕
部动作否 92 设计一种多步强化分类
器, 其性能优于ANN、
贝叶斯分类器等[26] TD, ARC,
RMSGMM 4 6种上
肢动作否 $>95$ 设计并优化GMM, 其分
类效果优于LDA、MLP[27] RMS, ARC SVM 4 5种手部
姿势否 73 基于双线性变换, 提出一种
与个体无关的动作分类方法[28] RMS, ARC HMM 4 6种上
肢动作否 94.6 设计并优化HMM, 其动
作分类效果优于MLP[29] MAV, ZC,
SSC, WLMCLPBoot 6 7种上肢动
作/姿势否 92, 80 利用Boosting随机森林分
类器降低未训练数据的干扰[30] RMS, ZC,
SSC, WLLDA+ANN 8 8种手/腕
部动作是 59~92 提出一种可以检测并修正
动作错误分类的后处理算法[31] MAV, ZC,
WL, SSCLDA 12 10种手/腕
部动作是 84.4 针对单侧截肢患者, 评估利
用其健侧与截肢侧肌肉的
sEMG进行肌电控制的效果[32] 归一化
sEMG值LLGMN 5 6种手/腕
部动作否 82.6~97.7 利用任务上下文信息进
行动作分类, 完成机械
臂辅助进餐实验验证[33] MAV, ZC,
WL, SSC条件并联
分类算法6, 8 4~12种
手/腕单一/
联合运动是 93.4, 89.1 设计条件并联分类器, 分
类多自由度联合运动模态[34] RMS,
log (RMS)模糊C-均值 2 5~9种
上肢动作是 79.9, 92.7 设计一种用户自主选择动
作类的实时肌电分类方法[35] TD, ARC,
RMSLDA, KNN 57(高密
度电极)6种手部
抓取动作是 $>97$ 针对颈脊髓损伤患者, 由
其瘫痪肢体肌肉sEMG
识别出运动意图1表 1中涉及的sEMG特征:时域特征 (Time domain feature, TD)、短时傅里叶变换 (Short-time Fourier transform, STFT)、小波变换 (Wavelet transform, WT)、小波包变换 (Wavelet packet transform, WPT)、离散傅里叶变换 (Discrete Fourier transform, DFT)、自回归模型系数 (Autoregressive model coefficients, ARC)、均方根 (Root mean square, RMS)、平均绝对值 (Mean absolute value, MAV)、零穿越次数 (Number of zero-crossings, ZC)、波长 (Wave length, WL)、斜率符号变化次数 (Slope sign changes, SSC); 特征投影算法:主元分析 (Principal components analysis, PCA)、遗传算法 (Genetic algorithm, GA); 分类模型: $K$ 近邻 ( $K$ -nearest neighbor, KNN)、线性判别分析 (Linear discriminant analysis, LDA)、隐马尔可夫模型 (Hidden Markov model, HMM)、高斯混合模型 (Gaussian mixture model, GMM)、多层感知器 (Multi layer perceptron, MLP)、人工神经网络 (Artificial neural network, ANN)、支持向量机 (Support vector machine, SVM)、对数线性高斯混合网络 (Log-linearized Gaussian mixture network, LLGMN)、自适应神经模糊交互系统 (Adaptive neuro-fuzzy inference system, ANFIS)、线性规划Boosting算法 (Linear programming boosting algorithm, MCLPBoot).  下载: 导出CSV
下载: 导出CSV
表 2 关节连续运动估计研究2
Table 2 Researches on estimation of joints' continuous-movements2
文献 模型 连续运动量 sEMG
通道数残疾人
测试?小结 [43] 基于Hill模型的
前向神经肌骨模型关节力矩、角
速度、角度等10 否 建立包括肌肉活跃度、肌肉收缩、
肌骨几何、关节动力/运动学等子
模型的神经肌骨动力模型[45] 改进的Hill
肌肉力模型上肢肘/腕
关节力矩28 否 改进Hill肌肉力模型, 利用
遗传算法辨识参数, 构建
肌电控制上肢康复系统[46] 简化的Hill
肌肉力模型下肢膝关
节力矩6 否 简化Hill肌肉力模型, 设计
分步标定法辨识参数, 构建
肌电控制下肢外骨骼系统[47] 神经肌骨动
力学模型下肢髋/膝
关节力矩16 否 建立"多肌肉-多肌骨"的一般化
运动模型, 实现多关节力矩估计[48] 基于Hill模型
的状态空间模型肘关节角
度、角速度1 否 提取sEMG特征作为量测输出,
建立估计关节运动的状态空间模型[49] DRNN 下肢关节角
度、角速度等6 否 设计全连接自适应DRNN
网络, 估计关节连续运动量[50] BPNN 下肢踝/膝/髋
关节角度7 是 预测健康者与脊髓损伤患者的
下肢关节运动, 实现下肢康复
设备的自主肌电控制[51] NMF, LR, ANN 腕关节角度 16 是 比较3种不同模型预测关
节角度离线与在线性能[52-53] 线性状态
空间模型上肢关节角度及
手部运动位置9 否 建立状态空间方程, 描述肌肉活跃
度与关节运动量映射关系, 并引入
补偿疲劳干扰的模型自适应机制[54] 高阶多项
式模型肘关节
屈/伸角度2 否 利用高阶多项式插值方法建
立sEMG特征与规则化肘关
节角度的映射模型2表 2中涉及的算法:反向传播神经网络 (Back propagation neural network, BPNN)、动态递归神经网络 (Dynamic recurrent neural network, DRNN)、非负矩阵分解 (Non-negative matrix factorization, NMF)、线性回归 (Linear regression, LR), 其他同表 1.
下载: 导出CSV
-
[1] Goodrich M A, Schultz A C. Human-robot interaction:a survey. Foundations and Trends in Human-Computer Interaction, 2007, 1(3):203-275 doi: 10.1561/1100000005 [2] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [3] Nam Y, Koo B, Cichocki A, Choi S. GOM-face:GKP, EOG, and EMG-based multimodal interface with application to humanoid robot control. IEEE Transactions on Biomedical Engineering, 2014, 61(2):453-462 doi: 10.1109/TBME.2013.2280900 [4] Artemiadis P. EMG-based robot control interfaces:past, present and future. Advances in Robotics & Automation, 2012, 1(2):1-3 [5] Ngeo J G, Tamei T, Shibata T. Continuous and simultaneous estimation of finger kinematics using inputs from an EMG-to-muscle activation model. Journal of NeuroEngineering and Rehabilitation, 2014, 11:122 doi: 10.1186/1743-0003-11-122 [6] 佟丽娜, 侯增广, 彭亮, 王卫群, 陈翼雄, 谭民.基于多路sEMG时序分析的人体运动模式识别方法.自动化学报, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtmlTong Li-Na, Hou Zeng-Guang, Peng Liang, Wang Wei-Qun, Chen Yi-Xiong, Tan Min. Multi-channel sEMG time series analysis based human motion recognition method. Acta Automatica Sinica, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtml [7] Chowdhury R H, Reaz M B I, Ali M A B, Bakar A A A, Chellappan K, Chang T G. Surface electromyography signal processing and classification techniques. Sensors, 2013, 13(9):12431-12466 doi: 10.3390/s130912431 [8] Ahsan M R, Ibrahimy M I, Khalifa O O. EMG signal classification for human computer interaction:a review. European Journal of Scientific Research, 2009, 33(3):480-501 http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.468.4287&rep=rep1&type=pdf [9] 丁其川, 赵新刚, 韩建达.基于肌电信号的上肢多关节连续运动估计.机器人, 2014, 36(4):469-476 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201404012.htmDing Qi-Chuan, Zhao Xin-Gang, Han Jian-Da. EMG-based estimation for multi-joint continuous movement of human upper limb. Robot, 2014, 36(4):469-476 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201404012.htm [10] Ison M, Artemiadis P. Multi-directional impedance control with electromyography for compliant human-robot interaction. In:Proceedings of the 2015 International Conference on Rehabilitation Robotics (ICORR). Singapore:IEEE, 2015. 416-421 [11] Farina D, Merletti R, Enoka R M. The extraction of neural strategies from the surface EMG. Journal of Applied Physiology, 2004, 96(4):1486-1495 doi: 10.1152/japplphysiol.01070.2003 [12] De Luca C J. Imaging the Behavior of Motor Units by Decomposition of the EMG Signal. Boston, MA, USA:Delsys Inc., 2008. [13] Chu J U, Moon I, Lee Y J, Kim S K, Mun M S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Transactions on Mechatronics, 2007, 12(3):282-290 doi: 10.1109/TMECH.2007.897262 [14] Scheme E J, Englehart K B, Hudgins B S. Selective classification for improved robustness of myoelectric control under nonideal conditions. IEEE Transactions on Biomedical Engineering, 2011, 58(6):1698-1705 doi: 10.1109/TBME.2011.2113182 [15] Jamal M Z. Signal acquisition using surface EMG and circuit design considerations for robotic prosthesis. Computational Intelligence in Electromyography Analysis--A Perspective on Current Applications and Future Challenges. Rijeka:INTECH Open Access Publisher, 2012. [16] Li Z J, Wang B C, Sun F C, Yang C G, Xie Q, Zhang W D. sEMG-based joint force control for an upper-limb power-assist exoskeleton robot. IEEE Journal of Biomedical and Health Informatics, 2014, 18(3):1043-1050 doi: 10.1109/JBHI.2013.2286455 [17] Pons J L. Wearable Robots:Biomechatronic Exoskeletons. West Sussex:John Wiley & Sons Ltd, 2008. 87-122 [18] Gopura R A R C, Bandara D S V, Gunasekara J M P, Jayawardane T S S. Recent trends in EMG-based control methods for assistive robots. Electrodiagnosis in New Frontiers of Clinical Research, 2013:237-268 https://www.researchgate.net/publication/236981286_Recent_Trends_in_EMG-Based_Control_Methods_for_Assistive_Robots [19] Gijsberts A, Atzori M, Castellini C, Muller H, Caputo B. Movement error rate for evaluation of machine learning methods for sEMG-based hand movement classification. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(4):735-744 doi: 10.1109/TNSRE.2014.2303394 [20] Castellini C, Arquer A, Artigas J. sEMG-based estimation of human stiffness:towards impedance-controlled rehabilitation. In:Proceedings of the 5th International Conference on Biomedical Robotics and Biomechatronics. Sao Paulo, Brazil:IEEE, 2014. 604-609 [21] Zhang D H, Zhao X G, Han J D, Zhao Y W. A comparative study on PCA and LDA based EMG pattern recognition for anthropomorphic robotic hand. In:Proceedings of the 2014 International Conference on Robotics and Automation (ICRA). Hong Kong, China:IEEE, 2014. 4850-4855 [22] 李阳, 田彦涛, 陈万忠.基于FFT盲辨识的肌电信号建模及模式识别.自动化学报, 2012, 38(1):128-134 doi: 10.3724/SP.J.1004.2012.00128Li Yang, Tian Yan-Tao, Chen Wan-Zhong. Modeling and classifying of sEMG based on FFT blind identification. Acta Automatica Sinica, 2012, 38(1):128-134 doi: 10.3724/SP.J.1004.2012.00128 [23] Englehart K, Hudgins B, Parker P A. A wavelet-based continuous classification scheme for multifunction myoelectric control. IEEE Transactions on Biomedical Engineering, 2001, 48(3):302-311 doi: 10.1109/10.914793 [24] Peleg D, Braiman E, Yom-Tov E, Inbar G F. Classification of finger activation for use in a robotic prosthesis arm. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2002, 10(4):290-293 doi: 10.1109/TNSRE.2002.806831 [25] Khezri M, Jahed M. A neuro-fuzzy inference system for sEMG-based identification of hand motion commands. IEEE Transactions on Industrial Electronics, 2011, 58(5):1952-1960 doi: 10.1109/TIE.2010.2053334 [26] Huang Y, Englehart K B, Hudgins B, Chan A D C. A Gaussian mixture model based classification scheme for myoelectric control of powered upper limb prostheses. IEEE Transactions on Biomedical Engineering, 2005, 52(11):1801-1811 doi: 10.1109/TBME.2005.856295 [27] Matsubara T, Morimoto J. Bilinear modeling of EMG signals to extract user-independent features for multiuser myoelectric interface. IEEE Transactions on Biomedical Engineering, 2013, 60(8):2205-2213 doi: 10.1109/TBME.2013.2250502 [28] Chan A D C, Englehart K B. Continuous myoelectric control for powered prostheses using hidden Markov models. IEEE Transactions on Biomedical Engineering, 2005, 52(1):121-124 doi: 10.1109/TBME.2004.836492 [29] Li Z, Wang B, Yang C, Xie Q. Boosting-based EMG patterns classification scheme for robustness enhancement. IEEE Journal of Biomedical and Health Informatics, 2013, 17(3):545-552 doi: 10.1109/JBHI.2013.2256920 [30] Amsüss S, Goebel P M, Jiang N, Graimann B, Paredes L, Farina D. Self-correcting pattern recognition system of surface EMG signals for upper limb prosthesis control. IEEE Transactions on Biomedical Engineering, 2014, 61(4):1167-1176 doi: 10.1109/TBME.2013.2296274 [31] Li G L, Schultz A E, Kuiken T A. Quantifying pattern recognition-based myoelectric control of multifunctional transradial prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(2):185-192 doi: 10.1109/TNSRE.2009.2039619 [32] Nan B, Okamoto M, Tsuji T. A hybrid motion classification approach for EMG-based human-robot interfaces using Bayesian and neural networks. IEEE Transactions on Robotics, 2009, 25(3):502-511 doi: 10.1109/TRO.2009.2019782 [33] Young A J, Smith L H, Rouse E J, Hargrove L J. Classification of simultaneous movements using surface EMG pattern recognition. IEEE Transactions on Biomedical Engineering, 2013, 60(5):1250-1258 doi: 10.1109/TBME.2012.2232293 [34] Momen K, Krishnan S, Chau T. Real-time classification of forearm electromyographic signals corresponding to user-selected intentional movements for multifunction prosthesis control. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(4):535-542 doi: 10.1109/TNSRE.2007.908376 [35] Liu J, Zhou P. A novel myoelectric pattern recognition strategy for hand function restoration after incomplete cervical spinal cord injury. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(1):96-103 doi: 10.1109/TNSRE.2012.2218832 [36] Kiguchi K, Tanaka T, Fukuda T. Neuro-fuzzy control of a robotic exoskeleton with EMG signals. IEEE Transactions on Fuzzy Systems, 2004, 12(4):481-490 doi: 10.1109/TFUZZ.2004.832525 [37] Gopura R A R C, Kiguchi K, Li Y. SUEFUL-7:a 7DOF upper-limb exoskeleton robot with muscle-model-oriented EMG-based control. In:Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis, USA:IEEE, 2009. 1126-1131 [38] Ngeo J, Tamei T, Shibata T, Orlando M F F, Behera L, Saxena A. Control of an optimal finger exoskeleton based on continuous joint angle estimation from EMG signals. In:Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). Osaka, Japan:IEEE, 2013. 338-341 [39] Kwon S, Kim Y, Kim J. Movement stability analysis of surface electromyography-based elbow power assistance. IEEE Transactions on Biomedical Engineering, 2014, 61(4):1134-1142 doi: 10.1109/TBME.2013.2295381 [40] Duc D M, Kazuhiko T, Takanori M. EMG-moment model of human arm for rehabilitation robot system. In:Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision. Hanoi, Vietnam:IEEE, 2008. 190-195 [41] Aung Y M, Al-Jumaily A. Estimation of upper limb joint angle using surface EMG signal. International Journal of Advanced Robotic Systems, 2013, 10(369):1-8 http://www.wenkuxiazai.com/doc/5bed974baaea998fcc220e9f.html [42] Hayashibe M, Guiraud D, Poignet P. EMG-to-force estimation with full-scale physiology based muscle model. In:Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis, USA:IEEE, 2009. 1621-1626 [43] Buchanan T S, Lloyd D G, Manal K, Besier T F. Neuromusculoskeletal modeling:estimation of muscle forces and joint moments and movements from measurements of neural command. Journal of Applied Biomechanics, 2004, 20(4):367-395 doi: 10.1123/jab.20.4.367 [44] Fleischer C. Controlling Exoskeletons with EMG Signals and a Biomechanical Body Model[Ph.D. dissertation], Technische University Berlin, Germany, 2007. [45] Cavallaro E E, Rosen J, Perry J C, Burns S. Real-time myoprocessors for a neural controlled powered exoskeleton arm. IEEE Transactions on Biomedical Engineering, 2006, 53(11):2387-2396 doi: 10.1109/TBME.2006.880883 [46] Fleischer C, Hommel G. A human-exoskeleton interface utilizing electromyography. IEEE Transactions on Robotics, 2008, 24(4):872-882 doi: 10.1109/TRO.2008.926860 [47] Sartori M, Reggiani M, Farina D, Lloyd D G. EMG-driven forward-dynamic estimation of muscle force and joint moment about multiple degrees of freedom in the human lower extremity. PLoS One, 2012, 7(12):e52618 doi: 10.1371/journal.pone.0052618 [48] Han J D, Ding Q C, Xiong A B, Zhao X G. A state-space EMG model for the estimation of continuous joint movements. IEEE Transactions on Industrial Electronics, 2015, 62(7):4267-4275 doi: 10.1109/TIE.2014.2387337 [49] Cheron G, Leurs F, Bengoetxea A, Draye J P, Destrée M, B Dan. A dynamic recurrent neural network for multiple muscles electromyographic mapping to elevation angles of the lower limb in human locomotion. Journal of Neuroscience Methods, 2003, 129(2):95-104 doi: 10.1016/S0165-0270(03)00167-5 [50] Zhang F, Li P F, Hou Z G, Lu Z, Chen Y X, Li Q L, Tan M. sEMG-based continuous estimation of joint angles of human legs by using BP neural networks. Neurocomputing, 2012, 78(1):139-148 doi: 10.1016/j.neucom.2011.05.033 [51] Jiang N, Vujaklija I, Rehbaum H, Graimann B, Farina D. Is accurate mapping of EMG signals on kinematics needed for precise online myoelectric control? IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3):549-558 doi: 10.1109/TNSRE.2013.2287383 [52] Artemiadis P K, Kyriakopoulos K J. EMG-based control of a robot arm using low-dimensional embeddings. IEEE Transactions on Robotics, 2010, 26(2):393-398 doi: 10.1109/TRO.2009.2039378 [53] Artemiadis P K, Kyriakopoulos K J. An EMG-based robot control scheme robust to time-varying EMG signal features. IEEE Transactions on Information Technology in Biomedicine, 2010, 14(3):582-588 doi: 10.1109/TITB.2010.2040832 [54] Yu H J, Lee A Y, Choi Y. Human elbow joint angle estimation using electromyogram signal processing. IET Signal Processing, 2011, 5(8):767-775 doi: 10.1049/iet-spr.2009.0203 [55] Ahmed M R. Compliance Control of Robot Manipulator for Safe Physical Human Robot Interaction[Ph.D. dissertation], Orebro University, Sweden, 2011. [56] Tsuji T, Kaneko M. Estimation and modeling of human hand impedance during isometric muscle contraction. Proceedings of the ASME Dynamics Systems and Control Division, 1996, 58:575-582 [57] Shin D, Kim J, Koike Y. A myokinetic arm model for estimating joint torque and stiffness from EMG signals during maintained posture. Journal of Neurophysiology, 2009, 101(1):387-401 https://www.researchgate.net/publication/23469434_A_Myokinetic_Arm_Model_for_Estimating_Joint_Torque_and_Stiffness_From_EMG_Signals_During_Maintained_Posture [58] Kim H K, Kang B, Kim B, Park S. Estimation of multijoint stiffness using electromyogram and artificial neural network. IEEE Transactions on Systems, Man, Cybernetics--Part A:Systems and Humans, 2009, 39(5):972-980 doi: 10.1109/TSMCA.2009.2025021 [59] Ajoudani A, Tsagarakis N, Bicchi A. Tele-impedance:teleoperation with impedance regulation using a body-machine interface. International Journal of Robotics Research, 2012, 31(13):1642-1656 doi: 10.1177/0278364912464668 [60] Liang P D, Yang C G, Wang N, Li Z J, Li R F, Burdet E. Implementation and test of human-operated and human-like adaptive impedance controls on Baxter robot. Advances in Autonomous Robotics Systems. Switzerland:Springer International Publishing, 2014. 109-119 [61] Pons J L, Rocon E, Ceres R, Reynaerts D, Saro B, Levin S, Van Moorleghem W. The MANUS-HAND dextrous robotics upper limb prosthesis:mechanical and manipulation aspects. Autonomous Robots, 2004, 16(2):143-163 doi: 10.1023/B:AURO.0000016862.38337.f1 [62] Pons J L, Ceres R, Rocon E, Levin S, Markovitz I, Saro B, Reynaerts D, Van Moorleghem W, Bueno L. Virtual reality training and EMG control of the MANUS hand prosthesis. Robotica, 2005, 23(3):311-317 doi: 10.1017/S026357470400133X [63] Butterfass J, Grebenstein M, Liu H, Hirzinger G. DLR-Hand II:next generation of a dextrous robot hand. In:Proceedings of 2001 International Conference on Robotics and Automation. Seoul, Korea:IEEE, 2001. 109-114 [64] Butterfass J, Fischer M, Grebenstein M, Haidacher S, Hirzinger G. Design and experiences with the DLR hand II. In:Proceedings of the 2004 World Automation Congress. Seville, Spain:IEEE, 2004. 105-110 [65] 杨大鹏, 赵京东, 姜力, 刘宏.三自由度仿人型假手及其肌电控制策略.哈尔滨工程大学学报, 2009, 30(7):804-810 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200907014.htmYang Da-Peng, Zhao Jing-Dong, Jiang Li, Liu Hong. A 3-DOF anthropomorphic prosthetic hand and its EMG control method. Journal of Harbin Engineering University, 2009, 30(7):804-810 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200907014.htm [66] He P, Jin M H, Yang L, Wei R, Liu Y W, Cai H G, Liu H, Seitz N, Butterfass J, Hirzinger G. High performance DSP/FPGA controller for implementation for HIT/DLR dexterous robot hand. In:Proceedings of 2004 International Conference on Robotics and Automation. New Orleans, USA:IEEE, 2004, 4:3397-3402 [67] Gaiser I N, Pylatiuk C, Schulz S, Kargov A, Oberle R, Werner T. The FLUIDHAND III:a multifunctional prosthetic hand. Journal of Prosthetics and Orthotics, 2009, 21(2):91-96 doi: 10.1097/JPO.0b013e3181a1ca54 [68] Antfolk C, Cipriani C, Controzzi M, Carrozza M C, Lundborg G, Rosen B. Using EMG for real-time prediction of joint angles to control a prosthetic hand equipped with a sensory feedback system. Journal of Medical and Biological Engineering, 2010, 30(6):399-406 doi: 10.5405/jmbe.767 [69] Otr O V D N, Reinders-Messelink H A, Bongers R M, Bouwsema H, Van Der Sluis C K. The i-LIMB hand and the DMC plus hand compared:a case report. Prosthetics and Orthotics International, 2010, 34(2):216-220 doi: 10.3109/03093641003767207 [70] Connolly C. Prosthetic hands from touch bionics. Industrial Robot:An International Journal, 2008, 35(4):290-293 doi: 10.1108/01439910810876364 [71] Perry J C. Design and development of a 7 degree-of-freedom powered exoskeleton for the upper limb[Ph.D. dissertation], University of Washington, USA, 2006. [72] Hayashi T, Kawamoto H, Sankai Y. Control method of robot suit HAL working as operator's muscle using biological and dynamical information. In:Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Alera, Canada:IEEE, 2005. 3063-3068 [73] Sankai Y. HAL:hybrid assistive limb based on cybernics. Robotics Research:Springer Tracts in Advanced Robotics. Berlin Heidelberg:Springer, 2011, 66:25-34 [74] Lee S, Sankai Y. Power assist control for walking aid with HAL-3 based on EMG and impedance adjustment around knee joint. In:Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems. Lausanne, Switzerland:IEEE, 2002, 2:1499-1504 [75] Kiguchi K, Hayashi Y. An EMG-based control for an upper-limb power-assist exoskeleton robot. IEEE Transactions on Systems, Man, Cybernetics--Part B:Cybernetics, 2012, 42(4):1064-1071 doi: 10.1109/TSMCB.2012.2185843 [76] Saponas T S, Tan D S, Morris D, Balakrishnan R, Turner J, Landay J A. Enabling always-available input with muscle-computer interfaces. In:Proceedings of the 22nd Annual Symposium on User Interface Software and Technology. New York, USA:ACM, 2009. 167-176 [77] Saponas T S, Tan D S, Morris D, Turner J, Landay J A. Making muscle-computer interfaces more practical. In:Proceedings of the 2010 SIGCHI Conference on Human Factors in Computing Systems. New York, USA:ACM, 2010. 851-854 [78] Han J D, Xiong A B, Zhao X G, Ding Q C, Chen Y G, Liu G J. sEMG based quantitative assessment of acupuncture on Bell's palsy:an experimental study. Science China Information Sciences, 2015, 58(8):1-15 http://www.cnki.com.cn/Article/CJFDTotal-JFXG201508009.htm [79] Lee S W, Wilson K M, Lock B A, Kamper D G. Subject-specific myoelectric pattern classification of functional hand movements for stroke survivors. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2011, 19(5):558-566 doi: 10.1109/TNSRE.2010.2079334 [80] Kuiken T A, Li G L, Lock B A, Lipschutz R D, Miller L A, Stubblefield K A, Englehart K B. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA, 2009, 301(6):619-628 doi: 10.1001/jama.2009.116 [81] Mesa I, Rubio A, Tubia I, De No J, Diaz J. Channel and feature selection for a surface electromyographic pattern recognition task. Expert Systems with Applications, 2014, 41(11):5190-5200 doi: 10.1016/j.eswa.2014.03.014 [82] 丁其川, 赵新刚, 韩建达.基于肌电信号容错分类的手部动作识别.机器人, 2015, 37(1):9-16 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501002.htmDing Qi-Chuan, Zhao Xin-Gang, Han Jian-Da. Recognizing hand motions based on fault-tolerant classification with EMG signals. Robot, 2015, 37(1):9-16 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501002.htm [83] De Luca C J, Chang S S, Roy S H, Kline J C, Nawab S H. Decomposition of surface EMG signals from cyclic dynamic contractions. Journal of Neurophysiology, 2015, 113(6):1941-1951 doi: 10.1152/jn.00555.2014 -

 下载:
下载:



计量
- 文章访问数: 6094
- HTML全文浏览量: 2000
- PDF下载量: 2596
- 被引次数: 0
