

-
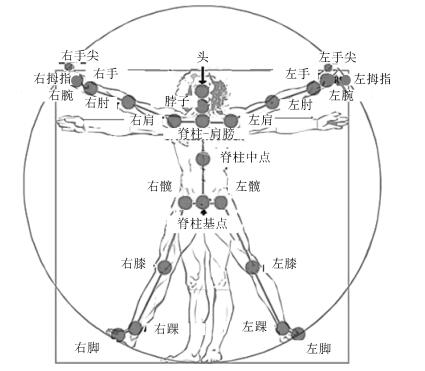
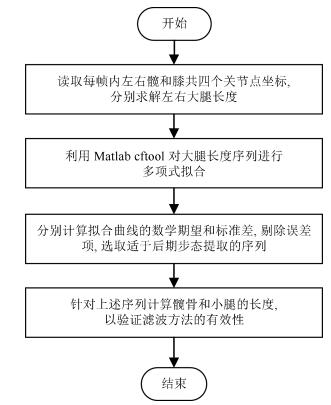
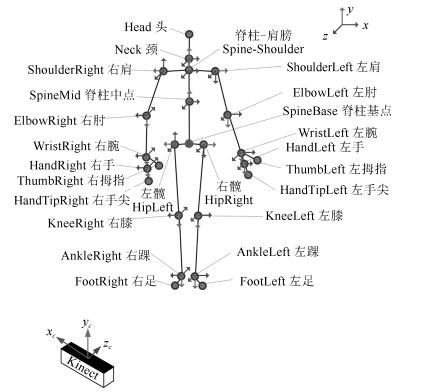
摘要: 针对学步期幼儿的行走步态信息采集困难这一问题展开研究,提出一种基于Kinect的自然步态提取方法.通过Kinect直接获取人体的骨骼信息来采集不同月龄幼儿行走的关节数据,并利用关节位置平滑和骨骼长度曲线拟合实现对骨骼数据的滤波和截取;通过拟合幼儿行走的足端轨迹来提取不同月龄的步态时空参数,基于下肢的逆运动学解算来获得各关节角变化,并由此总结出学步期幼儿独立行走时的步态特征变化规律.Abstract: To solve the acquisition difficulty of toddler's walking gait, a Kinect-based natural gait extraction approach is proposed. The human body's skeletal information is acquired directly by Kinect to collect the joints data of toddlers of different months. The joint position smoothing and bone length curve fitting are utilized to realize filtering and acquisition of bone data. The temporal-spatial gait parameters of toddlers of different months are extracted by fitting the foot trajectory of the walking toddler. By means of the inverse kinematics of the lower limb, the changes of joint angles are obtained and the gait variation characteristics of the walking toddler are deduced.
-
Key words:
- Kinect /
- toddler /
- gait extraction /
- data filtering
1) 本文责任编委 周志华 -
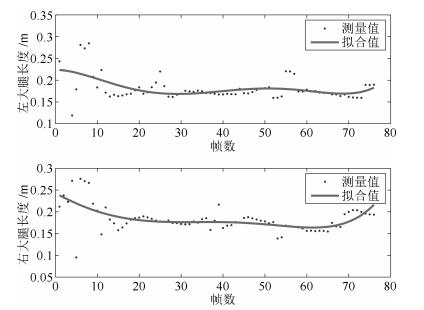
图 4 幼儿25月龄的左右大腿长度的测量值与拟合曲线
Fig. 4 The measuring curve and fitting curve of left & right thigh length during 25 months old
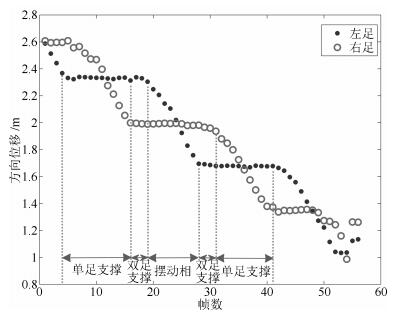
图 6 Kinect坐标系下$z$方向的足端轨迹
Fig. 6 Foot trajectory of $z$ axis in Kinect coordinate system
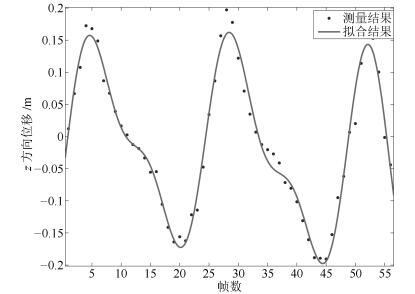
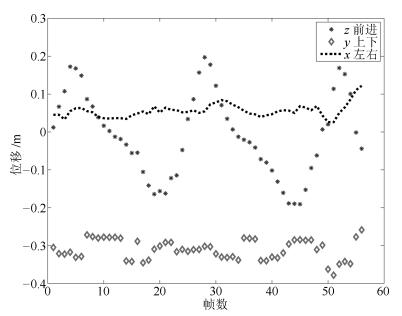
图 10 SpineBase坐标系下$z$方向足端轨迹的拟合曲线
Fig. 10 Fitting curve of foot trajectory in $z$ axis in SpineBase coordinate system
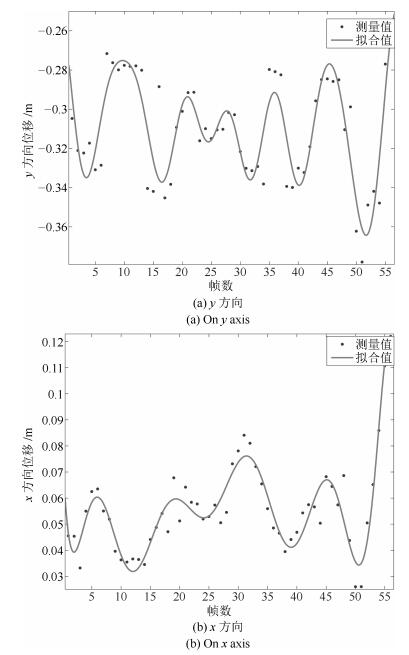
图 11 SpineBase坐标系下$y$和$x$方向足端轨迹的拟合曲线
Fig. 11 Fitting curves of foot trajectory in $y$ and $z$ axes in SpineBase coordinate system
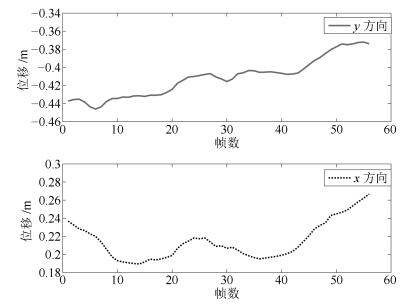
图 12 Kinect坐标系下脊柱基点的运动轨迹
Fig. 12 Moving trajectory of SpineBase in Kinect coordinate system
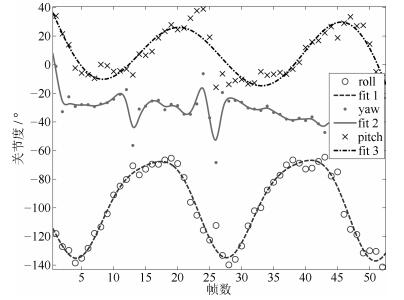
图 13 SpineBase坐标系下踝关节角变化及拟合曲线
Fig. 13 Variation of ankle joint angles and corresponding fitting curves in SpineBase coordinate system
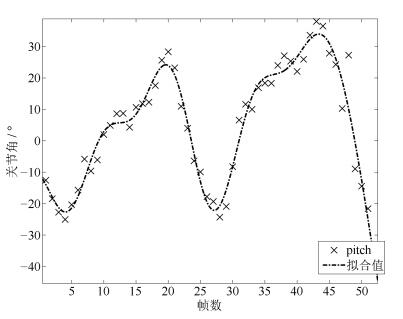
图 14 SpineBase坐标系下膝关节角变化及拟合曲线
Fig. 14 Variation of knee joint angle and corresponding fitting curve in SpineBase coordinate system
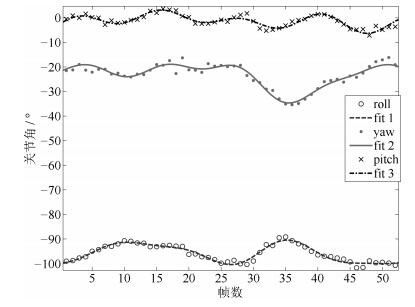
图 15 SpineBase坐标系下髋关节角变化及拟合曲线
Fig. 15 Variation of hip joint angles and corresponding fitting curves in SpineBase coordinate system
表 1 滤波后17 $\sim$ 31月龄各下肢骨骼的长度值(m)
Table 1 The filtered skeletal lengths of lower limb during 17 $\sim$ 31 months (m)
月龄 大腿 小腿 17 0.16 0.12 18 0.16 0.13 19 0.16 0.13 20 0.16 0.14 21 0.17 0.15 22 0.17 0.16 23 0.17 0.17 24 0.18 0.17 25 0.18 0.17 27 0.18 0.18 29 0.19 0.18 31 0.19 0.19  下载: 导出CSV
下载: 导出CSV
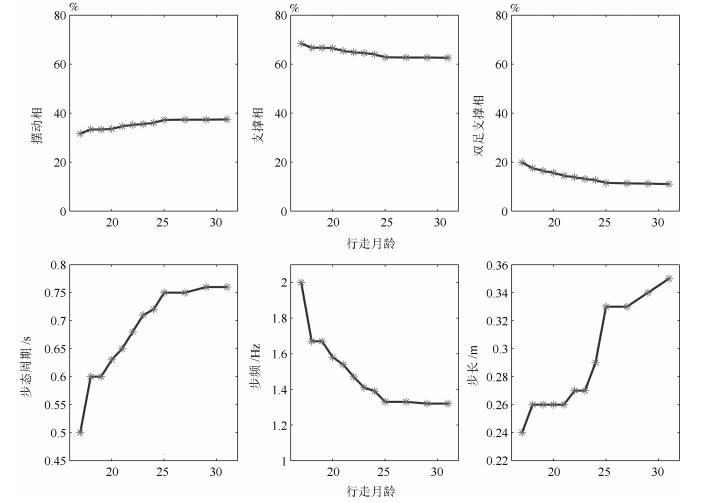
表 2 17 $\sim$ 31月龄幼儿行走的步态时空参数
Table 2 The temporal-spatial gait parameters of toddler during 17 $\sim$ 31 months
月龄 支撑相(%) 双足支撑相(%) 单足支撑相(%) 摆动相(%) 步态周期(s) 步频(Hz) 步长(m) 17 68.4 19.8 48.6 31.6 0.5 2 0.24 18 66.7 17.5 49.2 33.3 0.6 1.67 0.26 19 66.7 16.4 50.3 33.3 0.6 1.67 0.26 20 66.5 15.6 50.9 33.5 0.63 1.58 0.26 21 65.4 14.4 51 34.6 0.65 1.54 0.26 22 64.8 13.8 51 35.2 0.68 1.47 0.27 23 64.5 13.1 51.4 35.5 0.71 1.41 0.27 24 64 12.6 51.4 36 0.72 1.39 0.29 25 62.8 11.5 51.3 37.2 0.75 1.33 0.33 27 62.7 11.3 51.4 37.3 0.75 1.33 0.33 29 62.7 11.2 51.5 37.3 0.76 1.32 0.34 31 62.6 11 51.6 37.4 0.76 1.32 0.35
下载: 导出CSV
表 3 17 $\sim$ 31月龄幼儿行走时下肢各关节角变化($^\circ$)
Table 3 The joint angle variations of lower limb of toddler during 17 $\sim$ 31 months ($^\circ$)
关节角月龄 俯仰角 髋关节横滚角 航向角 膝关节横滚角 俯仰角 踝关节横滚角 航向角 17 $-$12 $\sim$ 3 $-$103 $\sim -$88 $-$39 $\sim -$28 $-$26 $\sim$ 53 $-$32 $\sim$ 23 $-$150 $\sim -$75 $-$47 $\sim -$17 18 $-$10 $\sim$ 2 $-$101 $\sim -$86 $-$28 $\sim -$15 $-$23 $\sim$ 46 $-$23 $\sim$ 19 $-$145 $\sim -$90 $-$50 $\sim -$15 19 $-$8 $\sim$ 5 $-$100 $\sim -$85 $-$39 $\sim -$21 $-$25 $\sim$ 45 $-$11 $\sim$ 25 $-$123 $\sim -$62 $-$50 $\sim -$24 20 $-$8 $\sim$ 4 $-$98 $\sim -$84 $-$46 $\sim -$38 $-$21 $\sim$ 46 $-$10 $\sim$ 27 $-$128 $\sim -$82 $-$57 $\sim -$32 21 $-$7 $\sim$ 5 $-$97 $\sim -$84 $-$33 $\sim -$21 $-$22 $\sim$ 45 $-$12 $\sim$ 24 $-$127 $\sim -$69 $-$40 $\sim -$20 22 $-$5 $\sim$ 6 $-$100 $\sim -$87 $-$22 $\sim -$9 $-$24 $\sim$ 37 $-$18 $\sim$ 16 $-$125 $\sim -$58 $-$37 $\sim -$18 23 $-$5 $\sim$ 5 $-$100 $\sim -$90 $-$35 $\sim -$20 $-$15 $\sim$ 40 $-$20 $\sim$ 12 $-$140 $\sim -$75 $-$42 $\sim -$22 24 $-$4 $\sim$ 6 $-$100 $\sim -$90 $-$45 $\sim -$25 $-$16 $\sim$ 38 $-$10 $\sim$ 18 $-$120 $\sim -$64 $-$34 $\sim -$17 25 $-$6 $\sim$ 3 $-$100 $\sim -$90 $-$35 $\sim -$21 $-$22 $\sim$ 25 $-$12 $\sim$ 14 $-$135 $\sim -$70 $-$30 $\sim -$20 27 $-$4 $\sim$ 5 $-$100 $\sim -$91 $-$37 $\sim -$23 $-$18 $\sim$ 26 $-$14 $\sim$ 11 $-$137 $\sim -$78 $-$37 $\sim -$10 29 $-$5 $\sim$ 3 $-$99 $\sim -$89 $-$33 $\sim -$20 $-$15 $\sim$ 26 $-$13 $\sim$ 12 $-$134 $\sim -$52 $-$48 $\sim -$20 31 $-$4 $\sim$ 4 $-$97 $\sim -$88 $-$24 $\sim -$10 $-$13 $\sim$ 25 $-$12 $\sim$ 12 $-$135 $\sim -$76 $-$25 $\sim -$5
下载: 导出CSV
-
[1] 李凯, 元文学, 孟昭莉.儿童步态的研究进展.体育科学, 2009, 29(10):72-75 doi: 10.3969/j.issn.1000-677X.2009.10.013Li Kai, Yuan Wen-Xue, Meng Zhao-Li. Research advancement of children's gait. China Sport Science, 2009, 29(10):72-75 doi: 10.3969/j.issn.1000-677X.2009.10.013 [2] 夏泽洋, 陈垦, 刘莉, 熊璟.面向仿人机器人自然步态规划的人体步行实验分析.机器人, 2008, 30(1):41-46 http://www.cqvip.com/QK/90986X/200801/26291193.htmlXia Ze-Yang, Chen Ken, Liu Li, Xiong Jing. Experimental analysis on human locomotion for natural gait planning of humanoid robots. Robots, 2008, 30(1):41-46 http://www.cqvip.com/QK/90986X/200801/26291193.html [3] 孙广彬, 王宏, 陆志国, 王福旺, 史添玮, 王琳.仿人足底肌电特征的机器人行走规划.自动化学报, 2015, 41(5):874-884 doi: 10.16383/j.aas.2015.c140632Sun Guang-Bin, Wang Hong, Lu Zhi-Guo, Wang Fu-Wang, Shi Tian-Wei, Wang Lin. Humanoid walking planning based on EMG from human foot-bottom. Acta Automatica Sinica, 2015, 41(5):874-884 doi: 10.16383/j.aas.2015.c140632 [4] 田彦涛, 孙中波, 李宏扬, 王静.动态双足机器人的控制与优化研究进展.自动化学报, 2016, 42(8):1142-1157 http://www.aas.net.cn/CN/Y2016/V42/I8/1142Tian Yan-Tao, Sun Zhong-Bo, Li Hong-Yang, Wang Jing. A review of optimal and control strategies for dynamic walking bipedal robots. Acta Automatica Sinica, 2016, 42(8):1142-1157 http://www.aas.net.cn/CN/Y2016/V42/I8/1142 [5] 赵晓军, 黄强, 彭朝琴, 张利格, 李科杰.基于人体运动的仿人型机器人动作的运动学匹配.机器人, 2005, 27(4):357-361 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr200504015Zhao Xiao-Jun, Huang Qiang, Peng Zhao-Qin, Zhang Li-Ge, Li Ke-Jie. Kinematics mapping of humanoid motion based on human motion. Robot, 2005, 27(4):357-361 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr200504015 [6] Kanako M, Mitsuharu M, Shin'ichiro N, Fumio K, Kensuke H, Kenji K, Shuuji K. Robot motion remix based on motion capture data-towards human-like locomotion of humanoid robots. In: Proceedings of the 9th IEEE-RAS International Conference on Humanoids. Paris, France: IEEE, 2009. 596-603 [7] Armstrong N, Welsman J R, Chia M Y H. Short term power output in relation to growth and maturation. British Journal of Sports Medicine, 2001, 35(2):118-124 doi: 10.1136/bjsm.35.2.118 [8] Van Praagh E, Doré E. Short-term muscle power during growth and maturation. Sports Medicine, 2002, 32(11):701-728 doi: 10.2165/00007256-200232110-00003 [9] Cioni G, Duchini F, Milianti B, Paolicelli P B, Sicola E, Boldrini A, et al. Differences and variations in the patterns of early independent walking. Early Hum Development, 1993, 35(3):193-205 doi: 10.1016/0378-3782(93)90106-5 [10] Whittle M W. Clinical gait analysis:a review. Human Movement Science, 1996, 15(3):369-387 doi: 10.1016/0167-9457(96)00006-1 [11] Yaguramaki N, Kimura T. Acquirement of stability and mobility in infant gait. Gait & Posture, 2002, 16(1):69-77 [12] Sutherland D H, Olshen R, Cooper L, Woo S L. The development of mature gait. The Journal of Bone & Joint Surgery, 1980, 62(3):336-353 [13] 王新, 关欣. 1-6岁健康儿童行走步态特征分析.北京体育大学学报, 2012, 35(7):66-69 http://www.cqvip.com/QK/96907A/201207/43098576.htmlWang Xin, Guan Xin. The gait kinematics analysis for healthy infant aged from one to six. Journal of Beijing Sport University, 2012, 35(7):66-69 http://www.cqvip.com/QK/96907A/201207/43098576.html [14] 张晓栋, 肖丹丹.肥胖儿童与正常儿童行走步态特征的运动学分析.北京体育大学学报, 2008, 31(12):1651-1654 http://www.cnki.com.cn/Article/CJFDTotal-SYTB201404018.htmZhang Xiao-Dong, Xiao Dan-Dan. A kinematic analysis of over weight children and normal weight children's walk movement characteristics. Journal of Beijing Sport University, 2008, 31(12):1651-1654 http://www.cnki.com.cn/Article/CJFDTotal-SYTB201404018.htm [15] 闫松华, 谢楠, 刘志成.肥胖儿童平地自然行走时的步态研究.中国运动医学杂志, 2007, 26(3):286-290 http://med.wanfangdata.com.cn/Paper/Detail/PeriodicalPaper_zgydyxzz200703007Yan Song-Hua, Xie Nan, Liu Zhi-Cheng. Biomechanical study on gait of obese children. Chinese Journal of Sports Medicine, 2007, 26(3):286-290 http://med.wanfangdata.com.cn/Paper/Detail/PeriodicalPaper_zgydyxzz200703007 [16] Winter D A, Greenlaw R K, Hobson D A. Television-computer analysis of kinematics of human gait. Computers and Biomedical Research, 1972, 5(5):498-504 doi: 10.1016/0010-4809(72)90056-0 [17] Hallemans A, Clercq D D, Aerts P. Changes in 3D joint dynamics during the first 5 months after the onset of independent walking:a longitudinal follow-up study. Gait & Posture, 2006, 24(3):270-279 [18] Sun B Q, Liu X G, Wu X T, Wang H Y. Human gait modeling and gait analysis based on Kinect. In: Proceedings of the 2014 IEEE International Conference on Robotics & Automation (ICRA). Hong Kong, China: IEEE, 2014. 3173-3178 [19] Amandine D, Francois C. A gait analysis method based on a depth camera for fall prevention. In: Proceedings of the 36th Annual International Conference on Engineering in Medicine and Biology Society (EMBC). Chicago, USA: IEEE, 2014. 4515-4518 [20] Suttipong K, Pornchai M, Bunthit W, Sasipa S. Automatic multiple Kinect cameras setting for simple walking posture analysis. In: Proceedings of the 2013 International Conference on Computer Science and Engineering (ICSEC). Bangkok, Thailand: IEEE, 2013. 245-249 [21] 余涛. Kinect应用开发实战:用最自然的方式与机器对话.北京:机械工业出版社, 2012. 26-30Yu Tao. Kinect Application Development Combat:the Most Natural Way to Dialogue with the Machine. Beijing:Machinery Industry Press, 2012. 26-30 [22] The Microsoft Kinect. JointType enumeration[Online], available: https://msdn.microsoft.com/en-us/library/microsoft.kinect.jointtype.aspx, May 4, 2017. [23] Pete D. Avateering with kinect v2-joint orientations[Online], available: http://peted.azure-websites.net/avateering-with-kinect-v2-joint-orientations/, May 6, 2017. [24] McGhee R B. Some finite state aspects of legged locomotion. Mathematical Biosciences, 1968, 2(1-2):67-84 doi: 10.1016/0025-5564(68)90007-2 [25] 孟健. 复杂地形环境四足机器人运动控制方法研究与实现[博士学位论文], 山东大学, 中国, 2015.Meng Jian. Research and Implementation on Motion Control Method of Quadruped Robot on Complex Terrain and Environment[Ph. D. dissertation], Shandong University, China, 2015. [26] Craig J J. Introduction to Robotics:Mechanical and Control (Third Edition). New Jersey:Pearsone Education, 2005. 51-55 [27] Wang C, Zhang J P, Wang L, Pu J, Yuan X R. Human identification using temporal information preserving gait template. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(11):2164-2176 doi: 10.1109/TPAMI.2011.260 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 1768
- HTML全文浏览量: 251
- PDF下载量: 716
- 被引次数: 0
