

Reliability-based Robust Optimization Design Based on Specular Reflection Algorithm
-
摘要: 本文通过模拟镜子反射光线的能力,提出了一种全新的全局优化方法-镜面反射算法(Specular Reflection Algorithm).镜面反射算法不仅具有全局收敛、计算效率高,适合求解高维、多峰的复杂函数等优点,而且算法的自适应能力强,能够根据不同的优化对象,自适应调整参数,以达到最好的优化效果.本文利用4个典型的优化问题验证该算法的计算能力,并同经典的粒子群算法、果蝇算法和模拟退火算法比较.最后,以桥式起重机桥架结构为研究对象,将镜面反射算法和稳健可靠性设计方法相结合对其进行优化设计,证明了镜面反射算法具有很高的工程研究价值,而且可以预见算法能够广泛的同生产实际结合,创造更大的价值.Abstract: In this paper, a novel global optimization method-specular reflection algorithm (SRA) is proposed, which simulates the unique optical property of mirror-reflection function. Combining the computing features of the SRA with traditional mathematical theories, the global convergence ability of the SRA is verified. The reasonable value of the SRA's control parameter is analysed, so that the best control parameter which is suitable for current optimization problems can be acquired. Four numerical examples are researched using the SRA and other 4 classical intelligent optimization methods, such as particle swarm optimization, Kalman swarm optimization, etc. Simulation results of numerical examples demonstrated the effectiveness and superiority of the SRA, especially its suitability for solving high dimensional, multi-peak complex functions. Finally the structure of general bridge crane is investigated and designed by SRA for robust reliability optimization design. The results illustrate that the SRA is reasonable, accurate and can be treated as an effective analysis technique in reliability-based robust optimization design. It can be predicted that the SRA can be widely used in engineering for creating more value.
-
Key words:
- Engineering /
- mirror /
- robust reliability optimization /
- specular reflection algorithm (SRA)
-
Table Ⅰ JUDGEMENT OF $\xi$
Value of $\xi$ N =2 N =10 N=20 N=50 N = 100 Optimal solution (10-6) Iteration times Optimal solution (10-6) Iteration times Optimal solution (10-6) Optimal solution (103) Optimal solution (10-6) Optimal solution (103) Optimal solution (10-6) Optimal solution (104) 0.4 4.7776 402.70 7.1895 1103 7.2883 2.0369 8.9324 6.1015 9.5844 1.4945 0.5 3.3845 341.04 6.4267 940.12 7.3111 1.8001 8.4771 5.3149 9.6383 1.2586 0.6 3.9884 737.76 5.4844 936.46 7.2327 1.6802 9.0155 4.8292 9.3691 1.1344 0.7 3.5625 515.18 6.9587 810.24 7.2858 1.5971 8.5419 4.4544 9.5971 1.0679 0.8 4.2770 509.46 6.7379 747.90 7.5046 1.4992 8.8811 4.2697 9.3384 1.0741 0.9 4.0589 259.08 6.3850 732.90 7.4304 1.4562 8.3421 4.2036 9.4009 1.0976 1.0 4.9287 193.26 5.9257 694.18 6.8977 1.3677 8.3414 4.3603 9.5947 1.1404 1.1 4.6702 142.60 6.1496 674.28 8.0852 1.2946 9.4538 4.2854 9.4944 1.1889 1.2 4.6250 142.42 5.8875 626.54 7.7654 1.3608 8.6969 4.4775 9.6771 1.2434 1.3 5.1501 139.08 6.5208 654.72 7.2172 1.4050 8.9588 4.5342 9.5792 1.3215 1.4 5.4409 131.02 5.6072 695.40 6.9556 1.4699 8.9053 4.6930 9.6898 1.3675 1.5 4.7099 103.72 5.7050 675.02 7.6612 1.4740 9.0472 4.8329 9.5134 1.4173 1.6 4.7625 93.82 5.8038 713.20 6.4546 1470 8.9756 4.8634 9.7748 1.4768 1.7 4.9327 91.94 4.9871 783.90 5.8034 1.6036 9.1825 5.0851 9.6612 1.4985 1.8 5.9076 87.32 5.4104 856.30 7.1143 1.6917 8.7372 5.3202 9.4446 1.5536 1.9 4.9402 82.44 5.5724 832.12 6.4092 1.8641 8.7754 5.5962 9.6617 1.6423 2.0 4.7168 89.08 4.8307 998.300 5.7508 2.0544 8.1780 6.3700 9.4975 2.5117  下载: 导出CSV
下载: 导出CSV
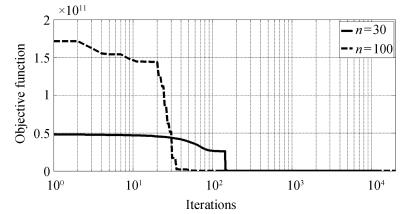
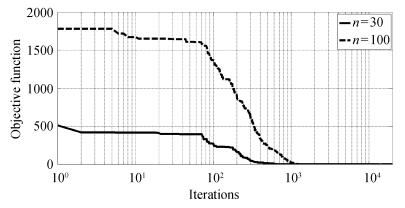
Table Ⅱ NUMERICAL CALCULATION FUNCTION
Name Expression Interval of convergence Global extreme Dimension Sphere $f_1 = \sum\limits_{i = 1}^n {x_i^2 }$ $x_i\in [-50,50]$ 0 (0, 0, $\ldots$ , 0) $n$ = 30 100 Griewank $f_2 = 1 + \sum\limits_{i = 1}^n {\left( {\frac{x_i^2 }{4000}} \right) -\prod\limits_{i = 1}^n {\cos \left( {\frac{x_i }{\sqrt i }} \right)} }$ $x_i\in [-600,600]$ 0 (0, 0, $\ldots$ , 0) $n$ = 30 100 Rosenbrock $f_3 = \sum\limits_{i = 1}^{n - 1} {[100(x_{i + 1}-x_i^2 )^2 + (x_i-1)^2]}$ $x_i\in [-100,100]$ 0 (1, 1, $\ldots$ , 1) $n$ = 30 100 Restrigin $f_4 = \sum\limits_{i = 1}^n {[10 + x_i^2-10\cos (2\pi x_i )]}$ $x_i\in [-5.0, 5.0]$ 0 (0, 0, $\ldots$ , 0) $n$ = 30 100
下载: 导出CSV
Table Ⅲ CALCULATION RESULTS OF TEST FUNCTION
Name PSO
(n = 30) [10]Kalman swarm
(n = 30) [10]Chaos ant colony optimization
(n = 30)[10]Chaos PSO
(n = 30) [10]New chaos PSO
(n = 30) [10]SRA
(n = 30)SRA
(n = 100)Sphere 3.7004×102 4.723 3.815×10-1 2.4736×10-3 2.0729×10-9 1.1080×10-24 2.3160×10-12 Griewank 2.61×107 3.28×103 23.414 6.8481×10-2 9.9051×10-11 4.6629×10-15 2.7978×10-14 Rosenbrock 13.865 9.96×10-1 4.669×10-1 1.0404×10-2 2.9068×10-4 9.8730×10-7 6.1173×10-5 Restrigin 1.0655×102 53.293 22.6361 9.5258×10-1 4.3741×10-4 3.9373×10-21 8.7727×10-7
下载: 导出CSV
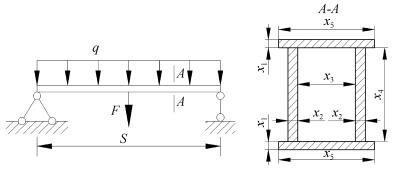
Table Ⅳ CALCULATION RESULTS
Design method Design variables (mm) Objective function (mm2) Reliability Sensitivity of reliability/(10-3) x1 x2 x3 x4 x5 A Rv $\frac{\partial R_v}{\partial S}$ $\frac{\partial R_v}{\partial F}$ $\frac{\partial R_v}{\partial E}$ $\frac{\partial R_v}{\partial \rho}$ SRA Optimization 6 6 205 635 257 10 704 0.5071 14.3985 0.0017 9.15×10-9 0.0011 Reliability Optimization 6 6 258 632 310 11 304 0.9968 13.0816 0.0015 8.77×10-9 0.0010 Robust Reliability Optimization 6 6 324 595 376 11 652 0.9813 12.6270 0.0015 9.23×10-9 0.0010 PSO Optimization 10 6 185 567 619 11 544 0.5314 13.0714 0.0015 9.8×10-9 0.0010 Reliability Optimization 7 7 222 605 276 12 334 0.9806 12.9119 0.0015 9.73×10-9 0.0011 Robust Reliability Optimization 9 6 302 534 354 12 780 0.9810 11.5262 0.0013 1.01×10-8 0.0010 FOA Optimization 9 6 190 581 633 11 328 0.5132 13.3500 0.0016 9.64×10-9 0.0010 Reliability Optimization 6 6 491 532 543 13 068 0.9802 11.3697 0.0013 1.01×10-8 9.95×10-4 Robust Reliability Optimization 8 11 237 536 299 16 576 1.0 11.6479 0.0013 1.27×10-9 0.0013 Note: The index of reliability R0 = 0.98 is deflned.
下载: 导出CSV
-
[1] W. T. Pan, "A new fruit fly optimization algorithm: Taking the financial distress model as an example, " Knowl. Based Syst. , vol. 26, pp. 69-74, Feb. 2012. http://www.sciencedirect.com/science/article/pii/S0950705111001365 [2] H. Cheng and C. Z. Liu, "Mixed fruit fly optimization algorithm based on chaotic mapping, " Comput. Eng. , vol. 39, no. 5, pp. 218-221, May 2013. http://en.cnki.com.cn/Article_en/CJFDTOTAL-JSJC201305050.htm [3] T. Li, C. F. Wang, W. B. Wang, and W. L. Su, "A global optimization bionics algorithm for solving integer programming-Plant growth simulation algorithm, " Syst. Eng. Theory Pract. , vol. 25, no. 1, pp. 76-85, Jan. 2005. http://en.cnki.com.cn/Article_en/CJFDTotal-XTLL200501012.htm [4] D. Karaboga and B. Basturk, "On the performance of artificial bee colony (ABC) algorithm, " Appl. Soft Comput. , vol. 8, no. 1, pp. 687-697, Jan. 2008. http://www.sciencedirect.com/science/article/pii/S1568494607000531 [5] X. J. Bi and Y. J. Wang, "A modified artificial bee colony algorithm and its application, " J. Harbin Eng. Univ. , vol. 33, no. 1, pp. 117-123, Jan. 2012. http://en.cnki.com.cn/Article_en/CJFDTOTAL-HEBG201201023.htm [6] J. H. Holland, Adaptation in Natural and Artificial Systems. Ann Arbor, MI:University of Michigan Press, 1975. [7] M. Franchini, "Use of a genetic algorithm combined with a local search method for the automatic calibration of conceptual rainfall-runoff models, " Hydrol. Sci. J. , vol. 41, no. 1, pp. 21-39, Feb. 1996. [8] C. Y. Liu, C. Q. Yan, J. J. Wang, and Z. H. Liu, "Particle swarm genetic algorithm and its application, " Nucl. Power Eng. , vol. 33, no. 4, pp. 29-33, Aug. 2012. http://en.cnki.com.cn/Article_en/CJFDTOTAL-HDLG201204009.htm [9] L. B. Zhang, C. G. Zhou, M. Ma, and X. H. Liu, "Solutions of multi-objective optimization problems based on particle swarm optimization, " J. Comput. Res. Dev. , vol. 41, no. 7, pp. 1286-1291, Jul. 2004. http://en.cnki.com.cn/Article_en/CJFDTotal-JFYZ200407034.htm [10] X. B. Xu, K. F. Zheng, D. Li, M. Ma, and Y. X. Yang, "New chaos-particle swarm optimization algorithm, " J. Commun. , vol. 33, no. 1, pp. 24-30, 37, Jan. 2012. http://en.cnki.com.cn/Article_en/CJFDTOTAL-TXXB201201005.htm [11] H. Modares, A. Alfi, and M. B. Naghibi Sistani, "Parameter estimation of bilinear systems based on an adaptive particle swarm optimization, " Eng. Appl. Artif. Intell. , vol. 23, no. 7, pp. 1105-1111, Oct. 2010. http://www.sciencedirect.com/science/article/pii/S0952197610001089 [12] S. Kirkpatrick, C. D. Gelatt Jr, and M. P. Vecchi, "Optimization by simulated annealing, " Science, vol. 220, no. 4598, 671-680, May 1983. [13] K. Abdi, M. Fathian, and E. Safari, "A novel algorithm based on hybridization of artificial immune system and simulated annealing for clustering problem, " Int. J. Adv. Manuf. Technol. , vol. 60, no. 5-8, pp. 723-732, May 2012. doi: 10.1007/s00170-011-3632-8 [14] R. Storn and K. Price, "Differential evolution-A simple and efficient heuristic for global optimization over continuous spaces, " J. Global Optim. , vol. 11, no. 4, pp. 341-359, Dec. 1997. [15] B. V. Babu and M. M. L. Jehan, "Differential evolution for multi-objective optimization, " in Proc. The 2003 Congress on Evolutionary Computation, Canberra, ACT, Australia, vol. 4, pp. 2696-2703, Dec. 2003. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1299429 [16] Z. X. Liu and H. Liang, "Parameter setting and experimental analysis of the random number in particle swarm optimization algorithm, " Control Theory Appl. , vol. 27, no. 11, pp. 1489-1496, Nov. 2010. http://en.cnki.com.cn/Article_en/CJFDTOTAL-KZLY201011009.htm [17] C. K. Dimou and V. K. Koumousis, "Reliability-based optimal design of truss structures using particle swarm optimization, " J. Comput. Civil Eng. , vol. 23, no. 2, pp. 100-109, Mar. 2009. [18] D. A. McAdams and W. Li, "A novel method to design and optimize flat-foldable origami structures through a genetic algorithm, " J. Comput. Inform. Sci. Eng. , vol. 14, no. 3, Article ID: 031008, Jun. 2014. [19] Z. Z. Lv, S. F. Song, H. S. Li, and X. K. Yuan, Structure and Mechanism Reliability Analysis and Reliability Sensitivity Analysis. Beijing, China:Science Press, 2009. [20] H. X. Guo, "Current status of research on robust design and development of research on fuzzy robust design, " J. Mach. Design, vol. 22, no. 2, pp. 1-5, Feb. 2005. http://en.cnki.com.cn/Article_en/CJFDTOTAL-JXSJ200502000.htm [21] Y. M. Zhang, R. Y. Liu, and F. H. Yu, "Multi-objective reliability based on robust optimization design for vehicle front-axles, " Mach. Design and Res. , vol. 22, no. 4, pp. 82-84, 106, Aug. 2006. http://en.cnki.com.cn/article_en/cjfdtotal-jsyy200604021.htm -

 下载:
下载:

图(8) / 表(4)
计量
- 文章访问数: 2191
- HTML全文浏览量: 281
- PDF下载量: 537
- 被引次数: 0
