

Performance-monitored Fault-tolerant Control for Cooperative Lane-changing of Connected Vehicular Platoons Under Multi-level Failures
-
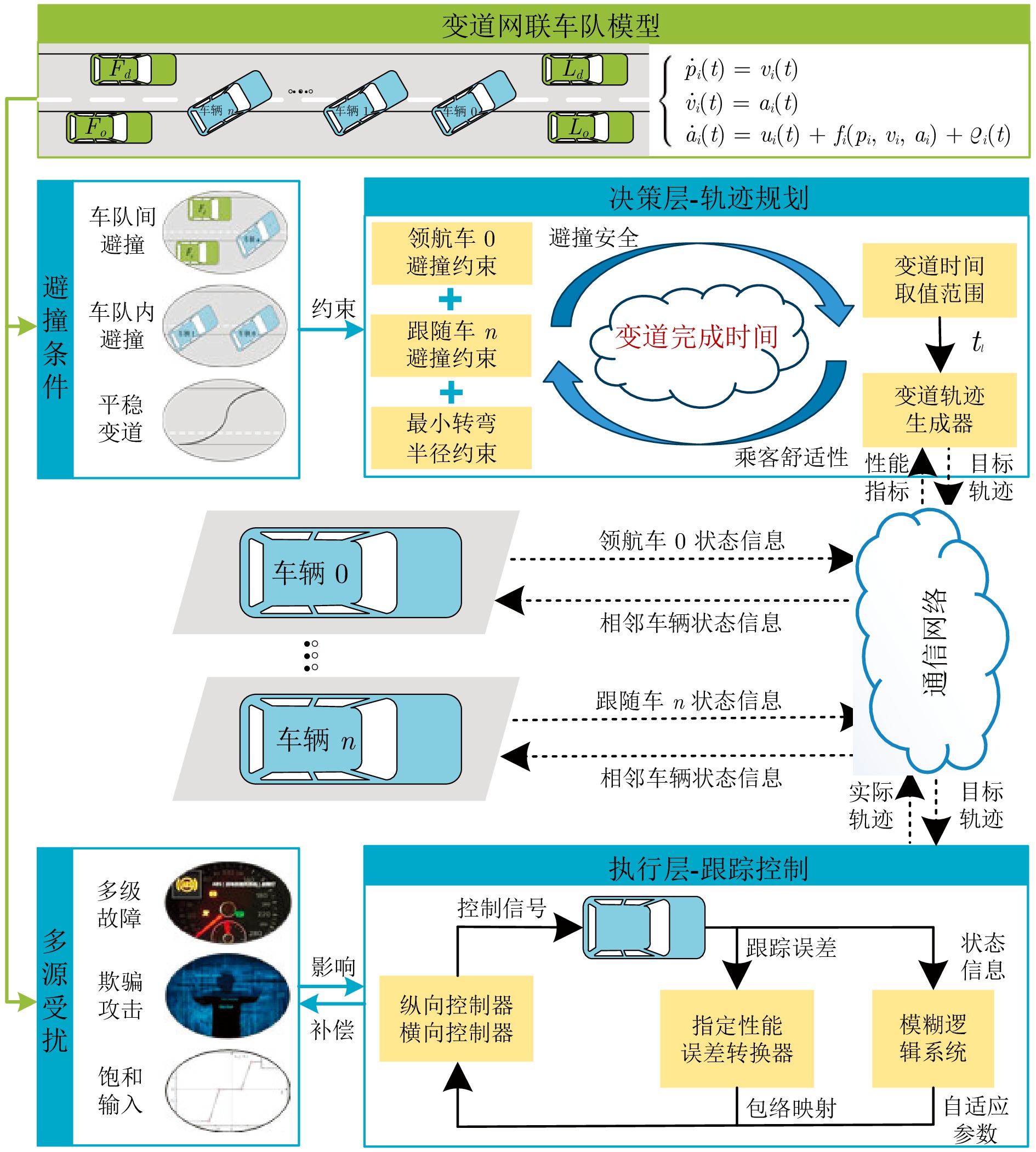
摘要: 针对由涵盖执行器部分至完全失效的多级故障所导致的网联车队决策?执行层协调失配问题, 提出一种融合跟踪精度与收敛速度监督的协同变道容错控制方法. 首先, 针对变道决策规划参数不当引发的快速性与平稳性冲突问题, 设计一种基于可变安全时窗的目标轨迹规划机制, 规避相邻车道动态障碍车碰撞风险, 实现变道过程快速响应与乘客舒适性的动态权衡. 其次, 针对多级故障、饱和输入与欺骗攻击耦合造成的执行层轨迹跟踪失控问题, 构建一种集成分布式扰动近似技术的性能监督容错跟踪控制策略, 确保队列跟踪精度与收敛速度在预设时间内恢复到指定范围内, 消除对故障因子非零的强假设条件. 接着, 针对多级故障过渡阶段安全时窗非光滑突变引发的决策−执行层协调失配问题, 提出一种基于性能过渡映射的自适应协同变道控制方法, 确保决策层与执行层动态双向交互调节, 保障车队一致跟踪目标轨迹并安全完成变道. 最后, 通过仿真实验验证了所提方法的有效性.Abstract: To address the problem of coordination mismatch between the decision-making and execution levels of connected vehicular platoons caused by multi-level failures ranging from partial to full actuator faults, a cooperative lane-changing fault-tolerant control method integrating supervision of tracking accuracy and convergence rate is proposed. Firstly, to address the conflict problem between rapidity and smoothness caused by improper lane-changing decision-making planning parameters, a target trajectory planning mechanism based on a variable safe time window is designed to mitigate collision risks posed by dynamic obstacle vehicles in adjacent lanes, thereby achieving dynamic trade-off between rapid response and passenger comfort during lane-changing process. Secondly, to address the loss problem of trajectory tracking control at the execution level due to the coupling of multi-level failures, saturation input, and deception attacks, a performance-monitored fault-tolerant tracking control strategy integrating distributed disturbance approximation technology is constructed to ensure that platoon tracking accuracy and convergence rate are restored into the specified range within the prescribed time while eliminating the strong assumption of non-zero fault factor. Then, to address the coordination mismatch problem between the decision-making and execution levels caused by the non-smooth change of safe time window during the transition phase of multi-level failures, an adaptive cooperative lane-changing control method based on a performance transition mapping is proposed to ensure dynamic bidirectional interaction and adjustment between the two levels, while guaranteeing that the vehicular platoon consistently tracks the target trajectory to complete lane-changing safely. Finally, the effectiveness of the proposed method is verified by simulation experiment.
-
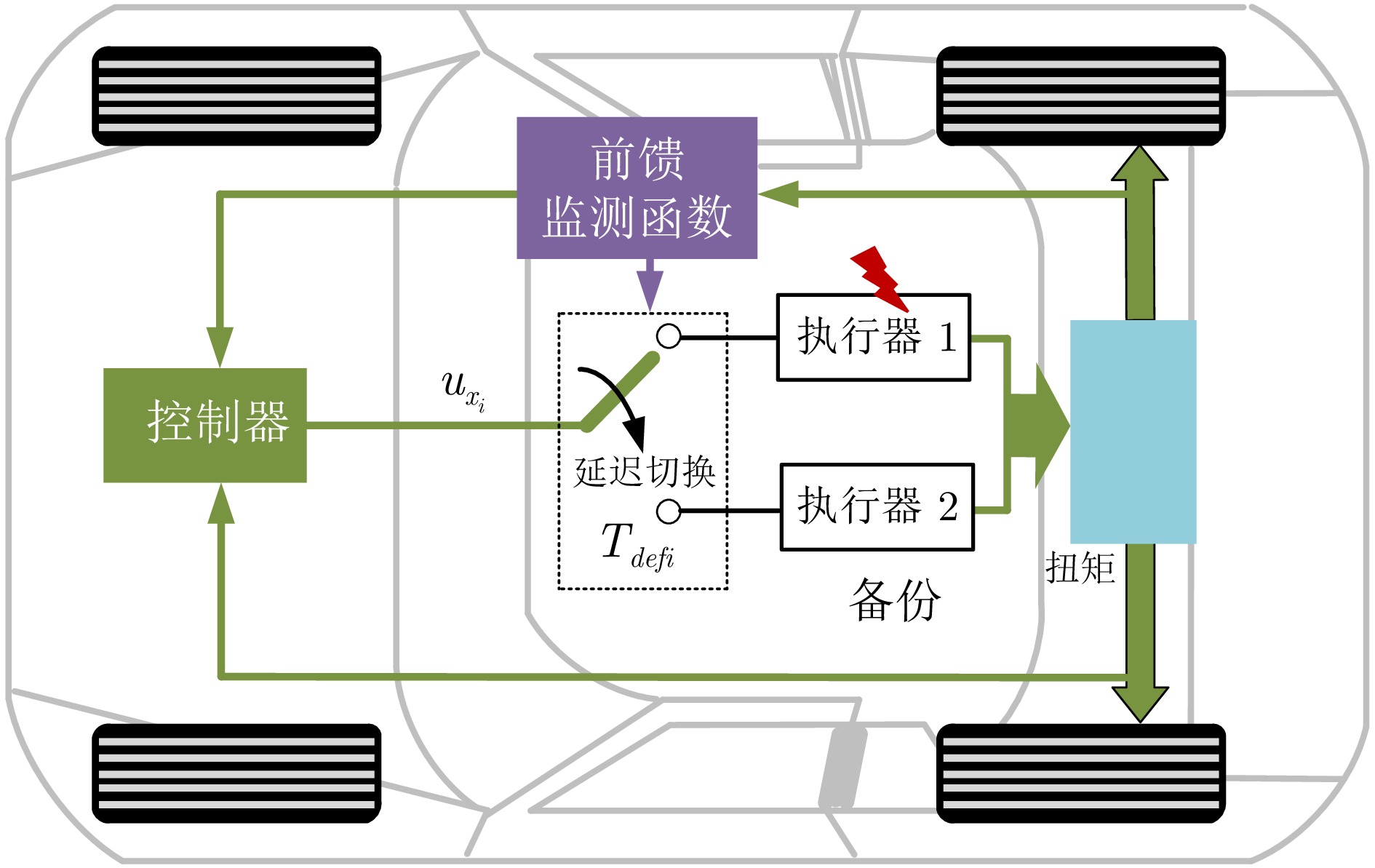
图 9 具有双冗余执行器的容错车辆结构
Fig. 9 Architecture of fault-tolerant vehicle with dual-redundant actuators
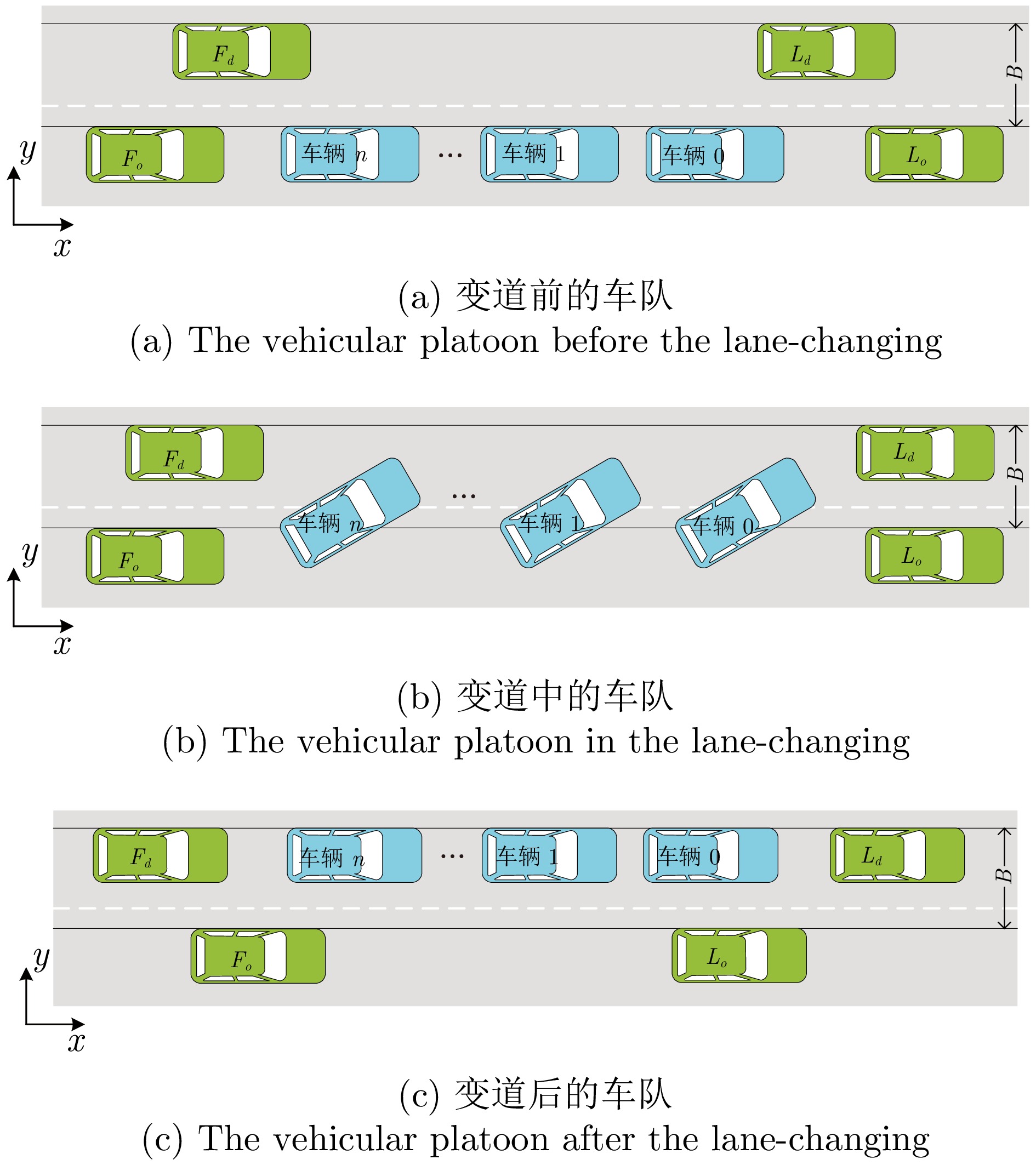
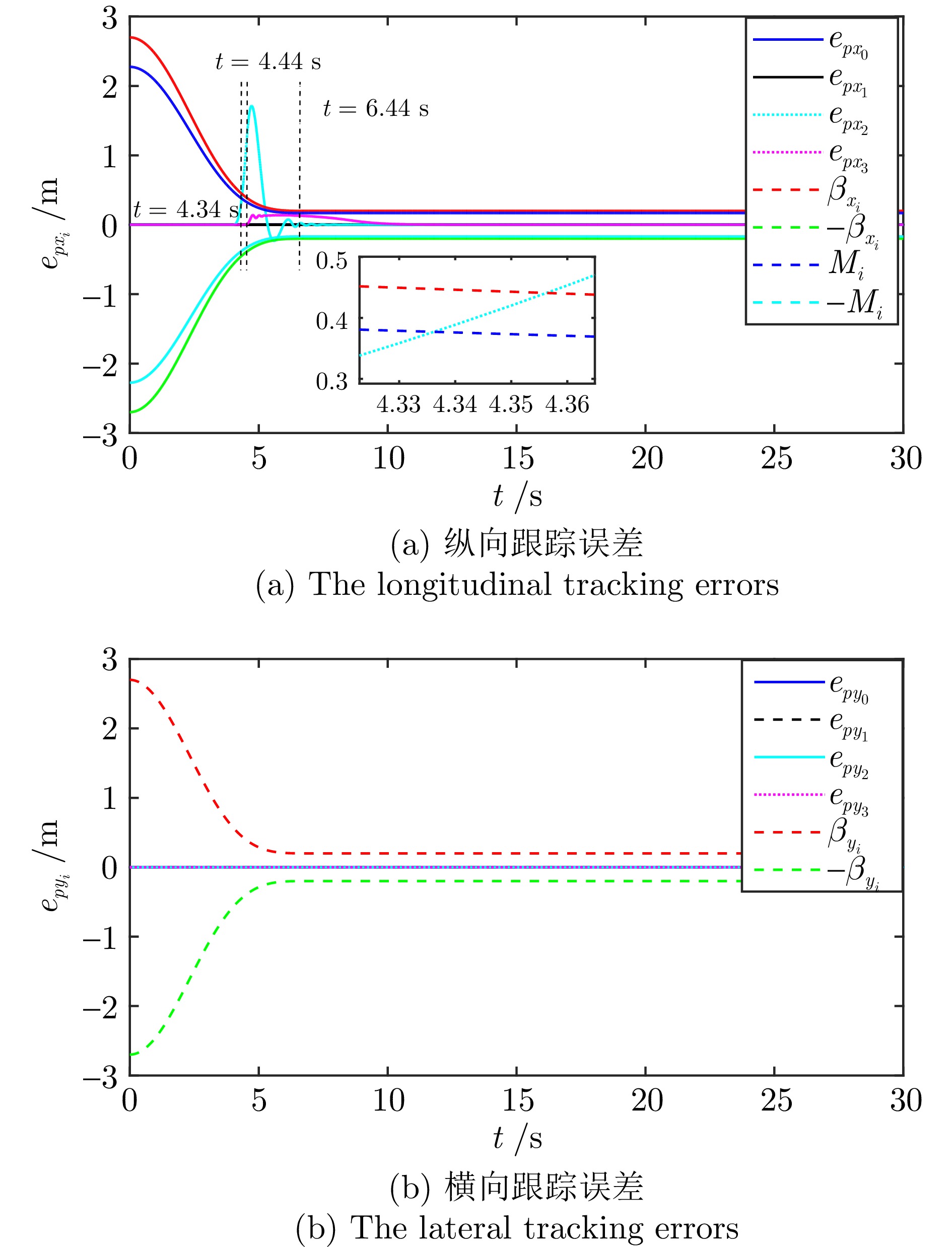
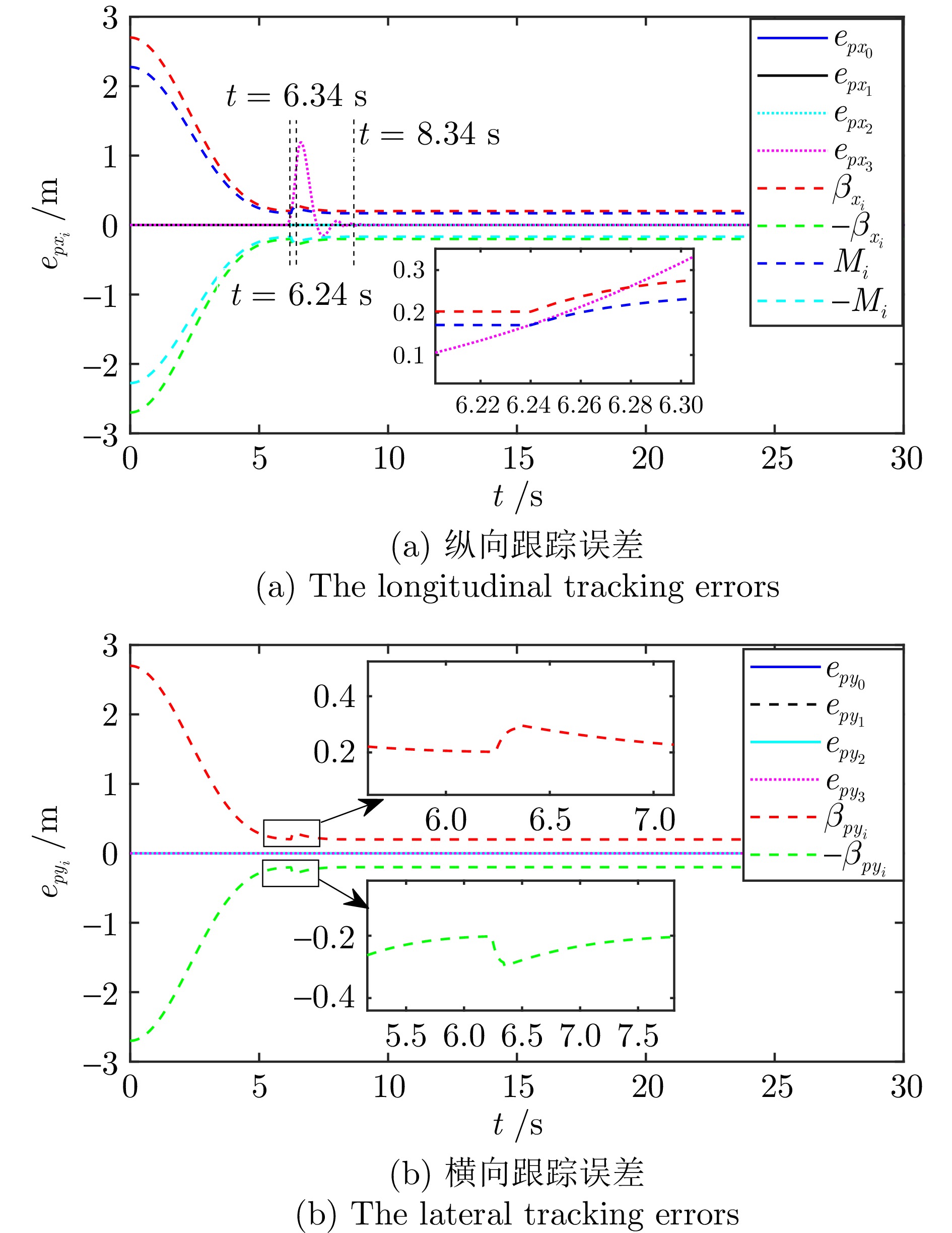
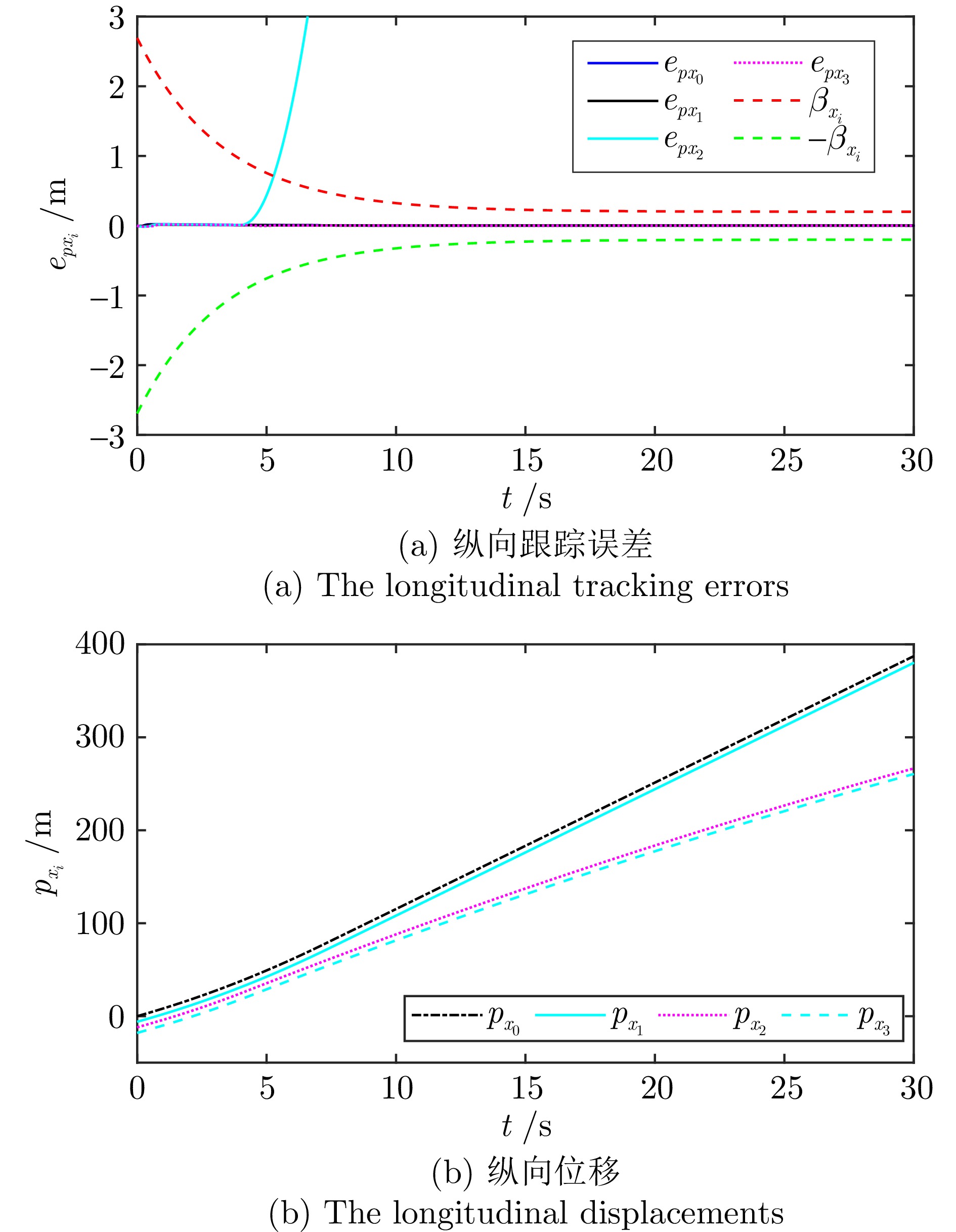
图 10 整个队列变道过程的纵向跟踪误差
Fig. 10 The longitudinal tracking error during the entire platoon lane-changing process
表 1 包络映射的一些示例
Table 1 Some examples of envelope mapping
类型 $ \Psi(\Phi_{pz_i}) $ $ \dfrac{\partial \Psi(\Phi_{pz_i})}{\partial\Phi_{pz_i}} $ $ \dfrac{\partial^2 \Psi(\Phi_{pz_i})}{\partial\Phi_{pz_i}^2} $ 1 $ {{\rm{ln}}}\left(\dfrac{1+\Phi_{pz_i}}{1-\Phi_{pz_i}}\right) $ $ \dfrac{2}{1-\Phi_{pz_i}^2} $ $ \dfrac{4\Phi_{pz_i}}{\left(1-\Phi_{pz_i}^2\right)^2} $ 2 $ {{\rm{tan}}}\left(\dfrac{\pi}{2}\Phi_{pz_i}\right) $ $ \dfrac{\pi\sec^2\left(\dfrac{\pi}{2}\Phi_{pz_i}\right)}{2} $ $ \dfrac{\pi^2{{\rm{sin}}}\left(\dfrac{\pi}{2}\varPhi_{pz_i}\right)}{2{{\rm{cos}}}^3\left(\dfrac{\pi}{2}\Phi_{pz_i}\right)} $ 3 $ \dfrac{2\Phi_{pz_i}}{\left(1+\Phi_{pz_i}\right)\left(1-\Phi_{pz_i}\right)} $ $ \dfrac{2+2\Phi_{pz_i}^2}{\left(1-\Phi_{pz_i}^2\right)^2} $ $ \dfrac{12\Phi_{pz_i}+4\Phi_{pz_i}^3}{\left(1-\Phi_{pz_i}^2\right)^3} $  下载: 导出CSV
下载: 导出CSV
-
[1] Wen G H, Wan Y, Zhou J L, Zheng D Z, Chen C L P. Distributed robust event-triggered platooning control of connected vehicles with uncertain dynamics: A neuro-adaptive approach. IEEE Transactions on Industrial Informatics, 2025, 21(3): 2570−2579 doi: 10.1109/TII.2024.3508842 [2] 王正武, 文强, 吴锯强. 单向通信下多队列车辆轨迹同步的DMPC控制器设计. 自动化学报, 2025, 51(9): 2085−2105 doi: 10.16383/j.aas.c240760Wang Zheng-Wu, Wen Qiang, Wu Ju-Qiang. DMPC controller design for trajectory synchronization of multi-platoon vehicles under unidirectional communication. Acta Automatica Sinica, 2025, 51(9): 2085−2105 doi: 10.16383/j.aas.c240760 [3] 宋秀兰, 李洋阳, 何德峰. 外部干扰和随机DoS攻击下的网联车安全 $H_{\infty}$队列控制. 自动化学报, 2024, 50(2): 348−355Song Xiu-Lan, Li Yang-Yang, He De-Feng. Secure $H_{\infty}$ platooning control for connected vehicles subject to external disturbance and random DoS attacks. Acta Automatica Sinica, 2024, 50(2): 348−355 [4] 高振宇, 孙振超, 郭戈. 考虑执行器非线性的固定时间全局预设性能车辆队列控制. 自动化学报, 2024, 50(2): 320−333Gao Zhen-Yu, Sun Zhen-Chao, Guo Ge. Fixed-time global prescribed performance control for vehicular platoons with actuator nonlinearities. Acta Automatica Sinica, 2024, 50(2): 320−333 [5] Deng C, Xu L, Yang T, Yue D, Chai T Y. Distributed cooperative optimization for nonlinear heterogeneous MASs under intermittent communication. IEEE Transactions on Automatic Control, 2024, 69(4): 2737−2744 doi: 10.1109/TAC.2023.3339435 [6] 杨凯, 唐小林, 钟桂川, 王明, 李国法, 胡晓松. 面向无信号灯十字路口场景的自动驾驶安全决策方法研究. 机械工程学报, 2024, 60(10): 147−159 doi: 10.3901/JME.2024.10.147Yang Kai, Tang Xiao-Lin, Zhong Gui-Chuan, Wang Ming, Li Guo-Fa, Hu Xiao-Song. Research on safe decision-making for autonomous driving at unsignalized intersections. Journal of Mechanical Engineering, 2024, 60(10): 147−159 doi: 10.3901/JME.2024.10.147 [7] Che W W, Zhang L L, Deng C, Wu Z G. Hierarchical lane-changing control for vehicle platoons in prescribed performance. Automatica, 2025, 171: Article No. 111972 doi: 10.1016/j.automatica.2024.111972 [8] Duan X T, Sun C, Tian D X, Zhou J S, Cao D P. Cooperative lane-change motion planning for connected and automated vehicle platoons in multi-lane scenarios. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 7073−7091 doi: 10.1109/TITS.2023.3253479 [9] Yang S W, Xu Y W, Wang P, Li D W. An efficient rolling-horizon approach for cooperative multi-lane platoon formation with undefined configurations. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(12): 21608−21621 doi: 10.1109/TITS.2024.3469634 [10] 唐小林, 张焜埸, 陈止戈, 杨剑英, 杨为. 融合交互预测信息的自动驾驶安全规划方法研究. 机械工程学报, 2026, 62(4): 249−262Tang Xiao-Lin, Zhang Kun-Yi, Chen Zhi-Ge, Yang Jian-Ying, Yang Wei. Research on autonomous driving safety planning method integrating interactive prediction information. Journal of Mechanical Engineering, 2026, 62(4): 249−262 [11] Jin S, Luo L, Zhu Q H, Liu A L. Vehicle platoon formation control method under mixed traffic scenarios with complex road conditions of variable curvature. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(10): 16947−16962 doi: 10.1109/TITS.2025.3578825 [12] Xu W D, Guo X G, Wang J L, Che W W, Wu Z G. Nonlinear disturbance observer-based fault-tolerant sliding-mode control for 2-D plane vehicular platoon with UTVFD and ANAS. IEEE Transactions on Cybernetics, 2024, 54(4): 2050−2061 doi: 10.1109/TCYB.2022.3222496 [13] Chen S G, Chen Y, Pan C W, Ali I, Pan J T, He W. Distributed adaptive platoon secure control on unmanned vehicles system for lane change under compound attacks. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(11): 12637−12647 doi: 10.1109/TITS.2023.3291559 [14] Chen X Y, Hu S W, Yang T, Xie X P, Qiu J L. Event-triggered bipartite consensus of multiagent systems with input saturation and DoS attacks over weighted directed networks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(7): 4054−4065 doi: 10.1109/TSMC.2024.3377213 [15] Zhang L L, Che W W, Xu S X, Deng C. Prescribed performance tracking control for 2-D plane vehicle platoons with actuator faults and saturations. IEEE Transactions on Vehicular Technology, 2023, 72(11): 14040−14050 [16] Zhang L L, Che W W, Deng C, Wu Z G. Data-driven prescribed performance lane-changing control for vehicle platoons. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(10): 16710−16723 doi: 10.1109/TITS.2025.3575815 [17] Cao Y, Wang X J, Ma Y J, Cao J F, Song Y D. Performance-based fault-tolerant control uniformly accommodating multiple levels of actuation failures. IEEE Transactions on Automatic Control, 2024, 69(11): 8018−8025 doi: 10.1109/TAC.2024.3405816 [18] Wang L, Bian Y G, Cao D P, Qin H M, Hu M J. Hierarchical safe control of heterogeneous connected vehicle systems using adaptive fault-tolerant control. IEEE Transactions on Vehicular Technology, 2024, 73(10): 14313−14325 doi: 10.1109/TVT.2024.3400971 [19] Liu C, Xia Z W, Patton R J. Distributed fault-tolerant consensus control of vehicle platoon systems with DoS attacks. IEEE Transactions on Vehicular Technology, 2024, 73(10): 14438−14449 doi: 10.1109/TVT.2024.3406608 [20] Gao Z Y, Zhang Y, Guo G. Finite-time fault-tolerant prescribed performance control of connected vehicles with actuator saturation. IEEE Transactions on Vehicular Technology, 2023, 72(2): 1438−1448 doi: 10.1109/TVT.2022.3209802 [21] Yang Y D, Shen Q K. Predetermined performance fault-tolerant control for vehicle platoon against measurement drifts and multiple input constraints. IEEE Transactions on Industrial Electronics, 2025, 72(3): 3008−3016 doi: 10.1109/TIE.2024.3436632 [22] Liu J L, Dong J X. Hierarchical prescribed-time platoon control for heterogeneous vehicles with actuator faults and system uncertainties. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(5): 6965−6976 doi: 10.1109/TITS.2025.3526788 [23] Han J H, Zhang J Z, He C K, Lv C, Li C, Hou X H, et al. Adaptive distributed finite-time fault-tolerant controller for cooperative braking of the vehicle platoon. IET Intelligent Transport Systems, 2021, 15(12): 1562−1581 doi: 10.1049/itr2.12122 [24] Sun W W, Ding L S, Lv X Y, Wu Y. State-triggered fault-tolerant control strategy for performance recovery in nonlinear interconnected systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2026, 56(2): 1423−1435 doi: 10.1109/TSMC.2025.3646608 [25] Ji W, Lv D Y, Luo S H, Sun Y G. Multiple models-based fault tolerant control of levitation module of maglev vehicles against partial actuator failures. IEEE Transactions on Vehicular Technology, 2025, 74(2): 2231−2240 doi: 10.1109/TVT.2024.3399235 [26] Han J H, Zhang J Z, He C K, Lv C, Li C, Ji Y, et al. Prescribed-time performance recovery fault tolerant control of platoon with nominal constraints guarantee. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(3): 3501−3513 doi: 10.1109/TITS.2022.3232818 [27] Gao H, Wang J L, Liu X L, Xia Y Q. Fuzzy fixed-time event-triggered consensus control for uncertain nonlinear multi-agent systems with memory-based learning. IEEE Transactions on Fuzzy Systems, 2024, 32(6): 3682−3692 doi: 10.1109/TFUZZ.2024.3370254 [28] Gao Z Y, Zhang Y, Guo G. Finite-time fault-tolerant prescribed performance control of connected vehicles with actuator saturation. IEEE Transactions on Vehicular Technology, 2023, 72(2): 1438−1448 doi: 10.1109/TVT.2022.3209802 -

 下载:
下载:

计量
- 文章访问数: 142
- HTML全文浏览量: 63
- 被引次数: 0
