

Edge-grouped Communication Mechanism-based Game Formation Control for Unmanned Surface Vehicles
-
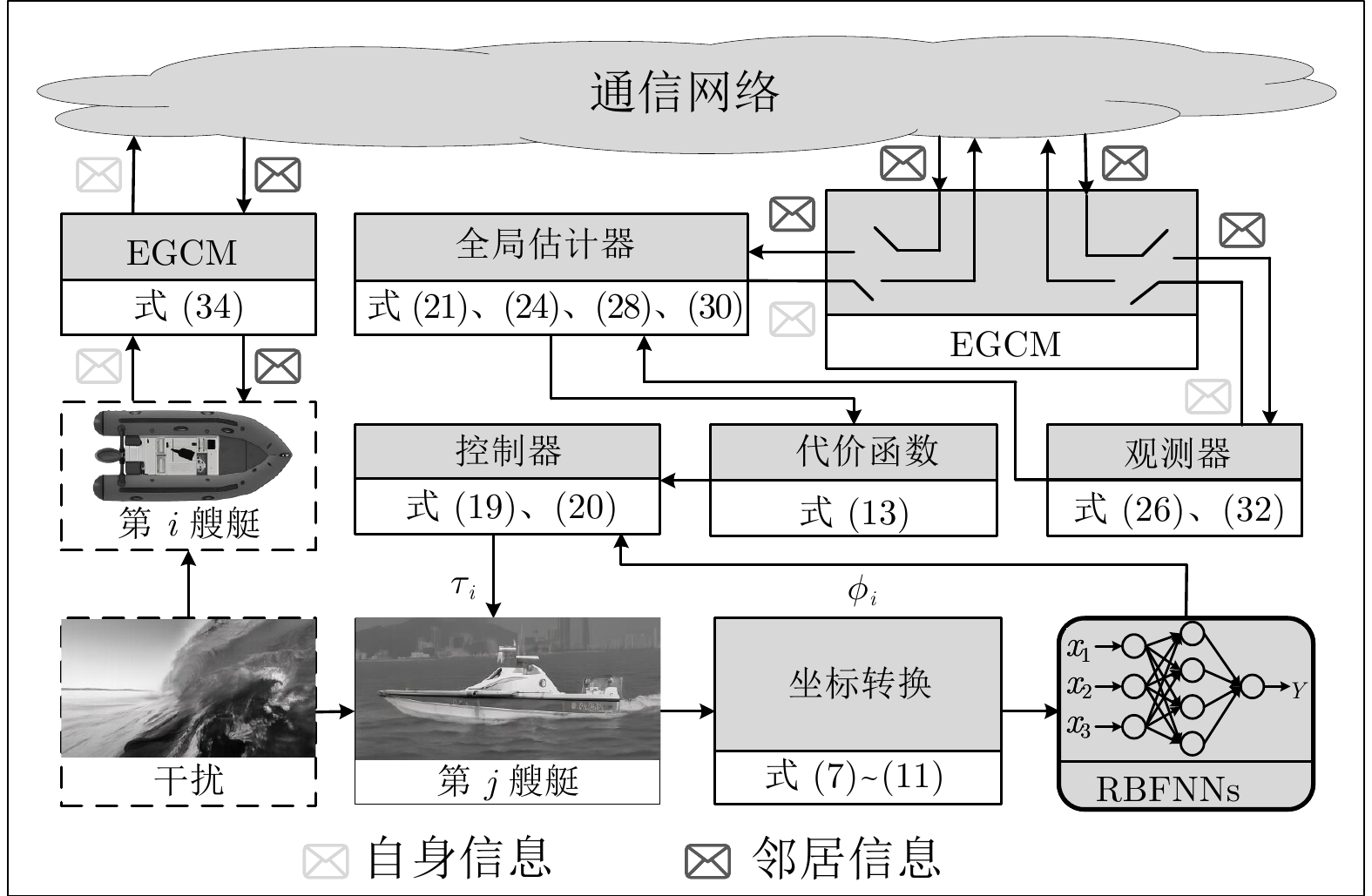
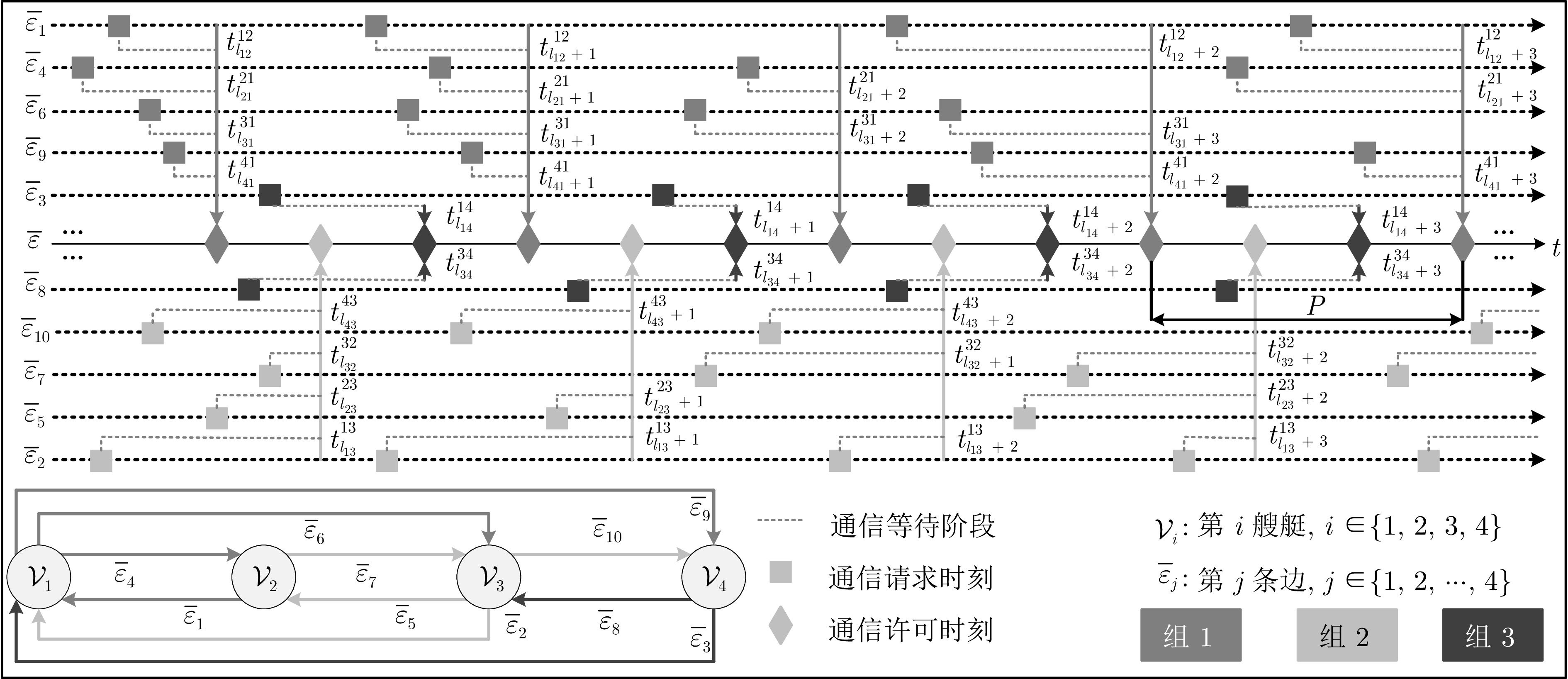
摘要: 针对大规模网络化无人艇集群面临的通信资源受限、成员收益最大化问题, 提出一种基于边分组通信机制的博弈编队控制方案. 首先, 构造具有时变纳什均衡点的代价函数, 使编队成员能够通过动态博弈过程最大化自身收益, 并逐步形成期望的编队构型; 同时, 为每个成员设计分布式状态估计器, 以降低博弈过程对全局信息的依赖. 其次, 考虑大规模集群系统多边并发通信易导致信道拥塞、延迟、丢包等问题, 边分组通信机制将通信边划分成组, 并由各组自主生成相互交错的通信时间序列, 使各边通信错峰进行, 在各自的通信时刻避免竞争. 最后, 通过理论分析与数值仿真验证了所提控制方案的有效性与优越性.Abstract: To address the problems of limited communication resources and individual payoff maximization in large-scale networked unmanned surface vehicles swarm, this paper proposes a game formation control scheme based on edge-grouped communication mechanism. First, cost functions with time-varying Nash equilibrium points are constructed, enabling formation members to maximize their individual payoffs through a dynamic game process while gradually forming the desired formation configuration; Meanwhile, a distributed state estimator is designed for each member to reduce the game process's dependence on global information. Second, concurrent communications over multiple edges in large-scale swarm systems may lead to channel congestion, delays, and packet loss. In this context, an edge-grouped communication mechanism is introduced, where communication edges are divided into groups, and each group autonomously generates mutually interleaved communication time sequences, allowing communications to be scheduled in a time-staggered manner and thus avoiding contention at their respective communication instants. Finally, the effectiveness and superiority of the proposed control scheme are validated through theoretical analysis and numerical simulations.
-
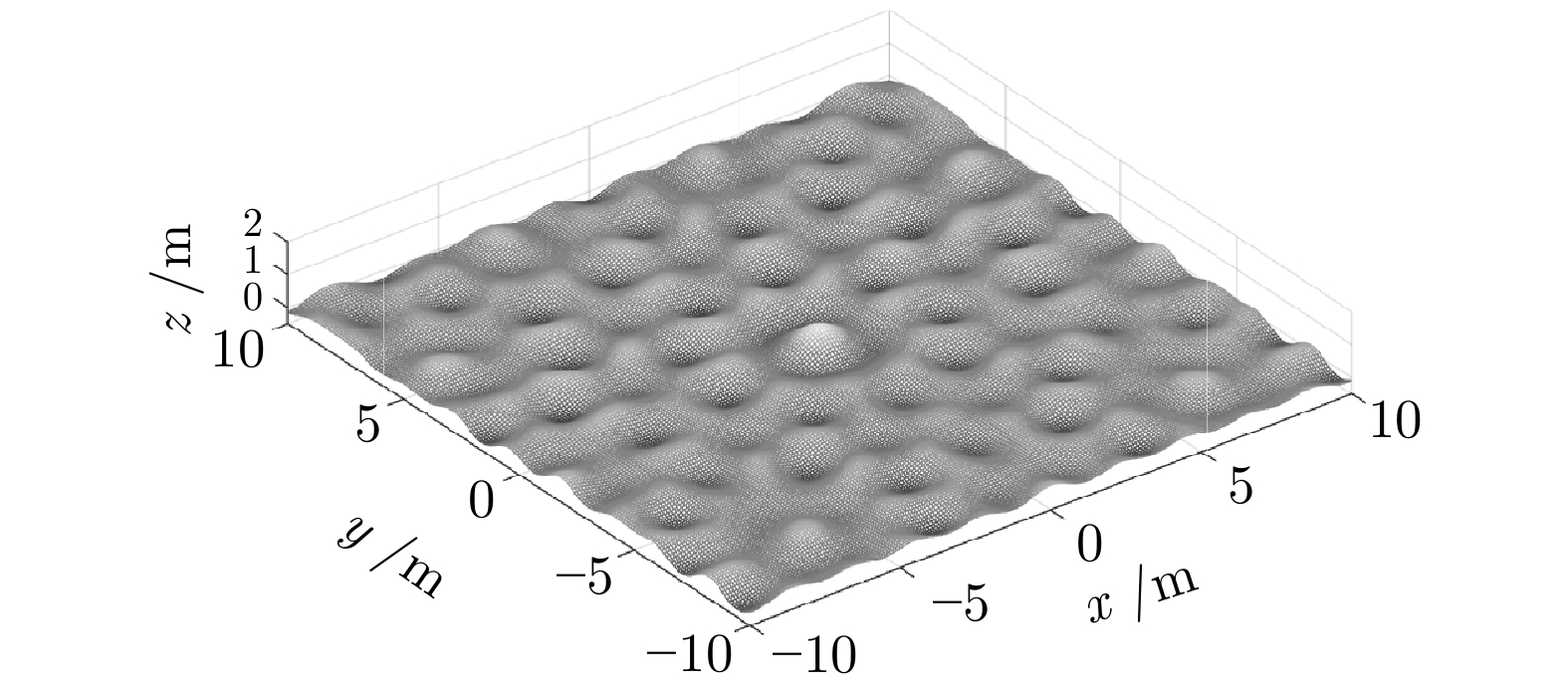
图 4 平均振幅为0.15 m的模拟浪面
Fig. 4 The simulated wave surface with an average amplitude of 0.15 m
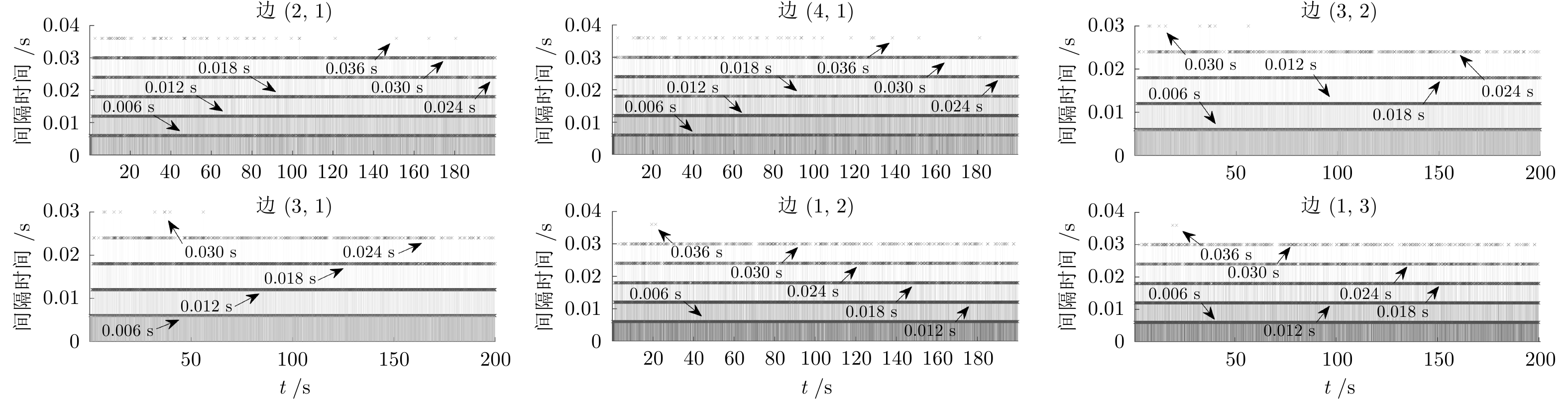
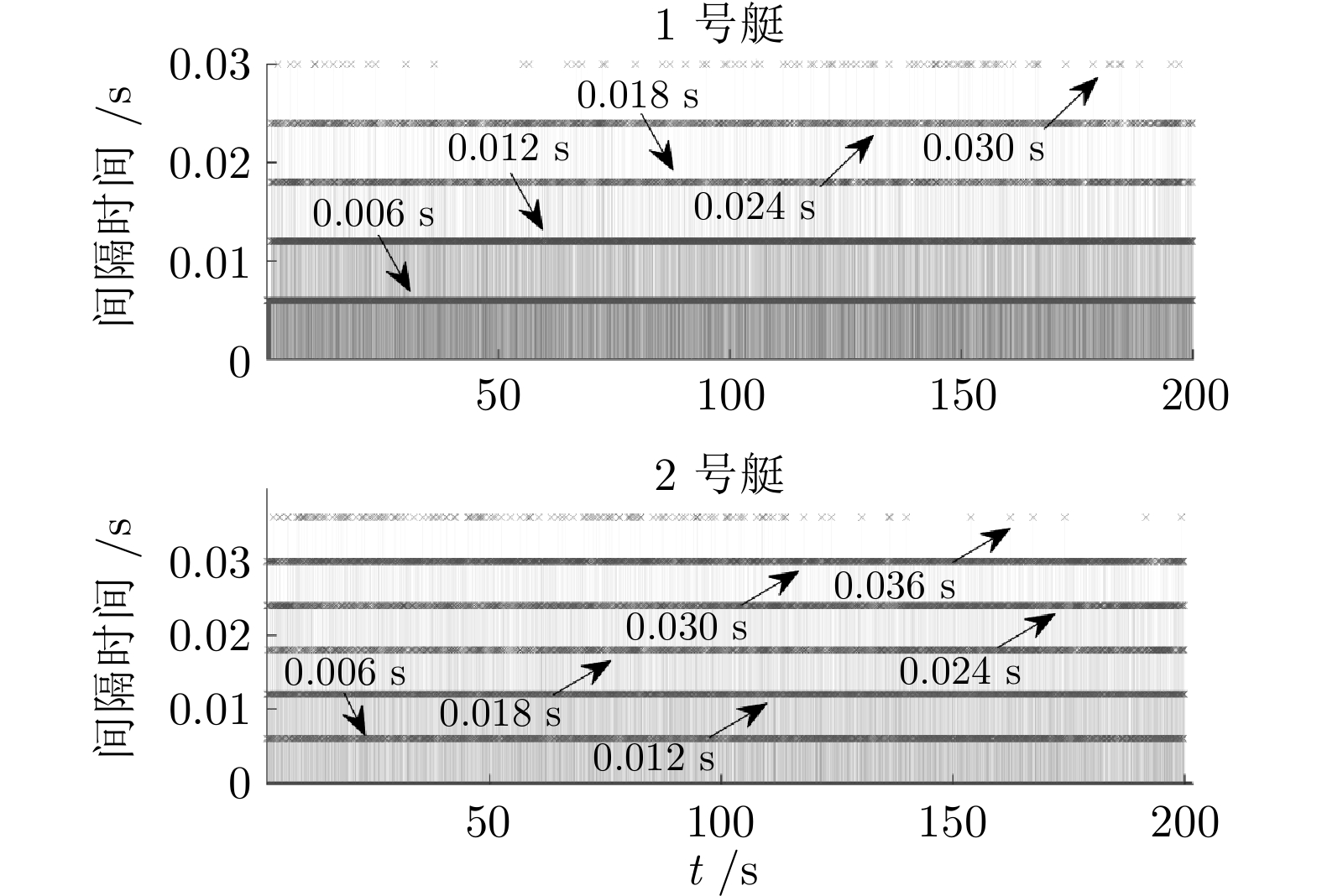
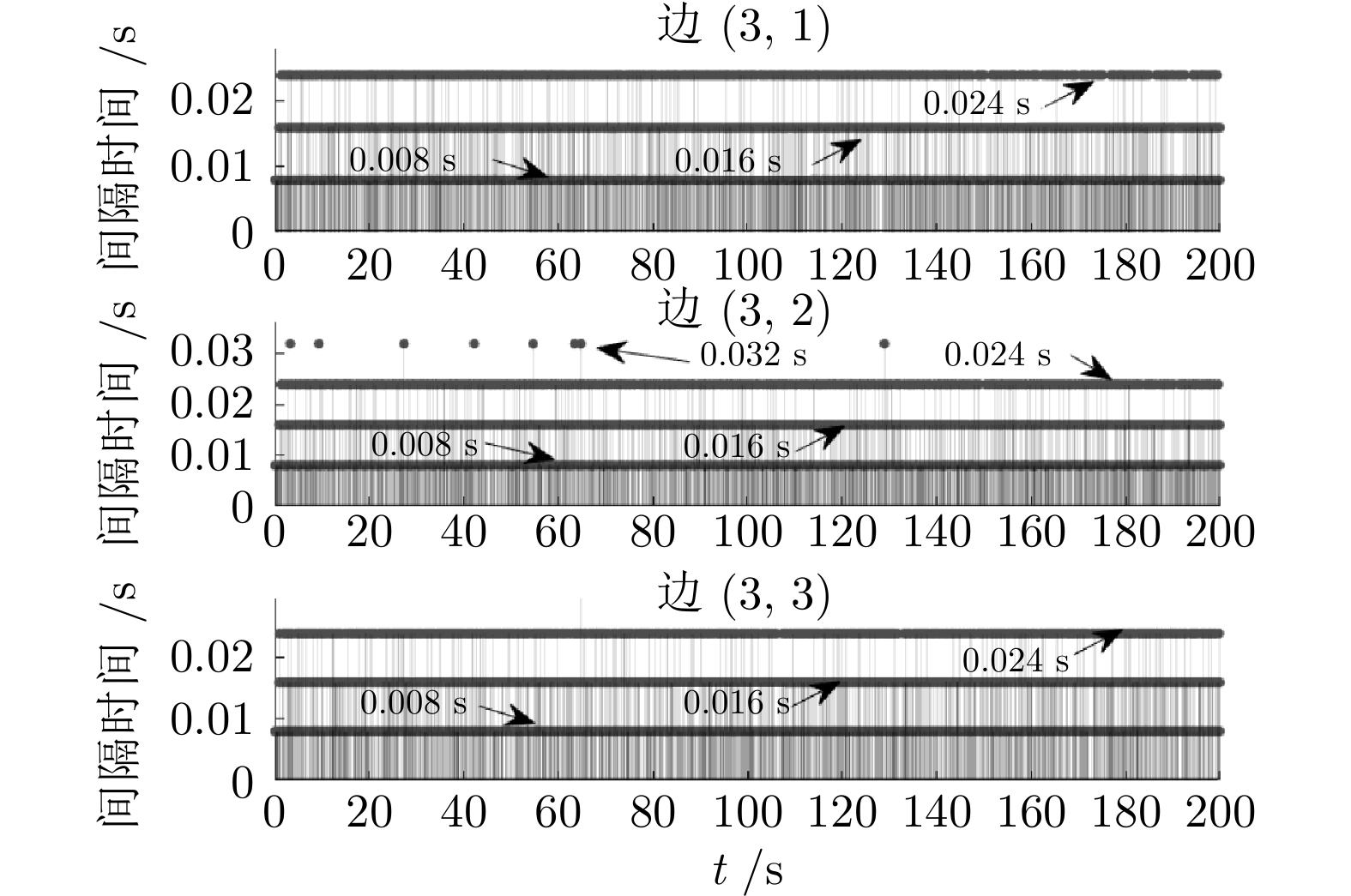
图 12 边(2, 1)、(3, 1)、(4, 1)、(1, 2)、(3, 2)、(1, 3)的通信间隔
Fig. 12 Communication intervals of edges (2, 1)、(3, 1)、(4, 1)、(1, 2)、(3, 2)、(1, 3)
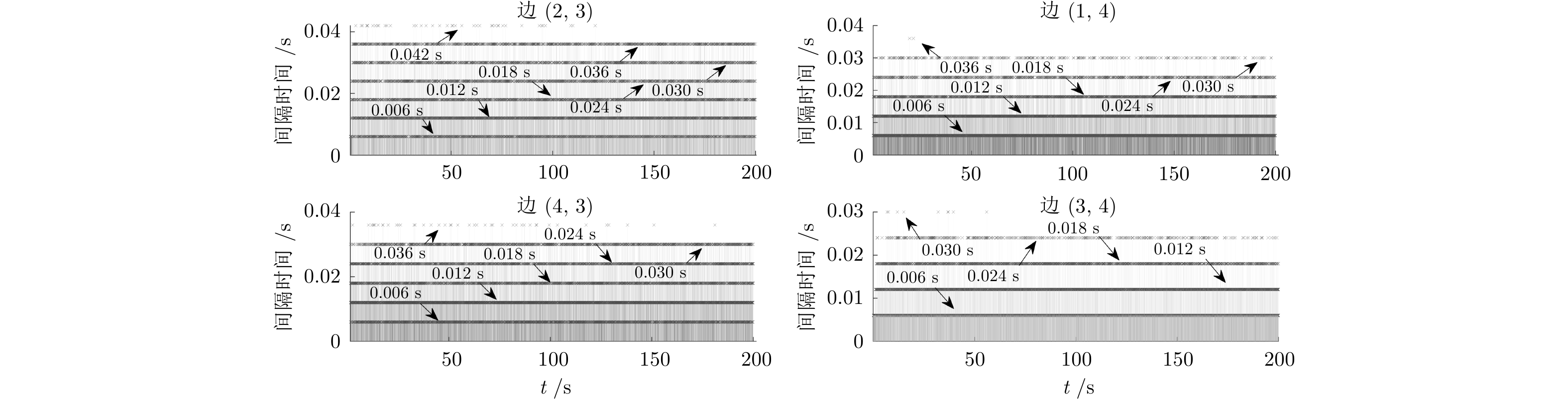
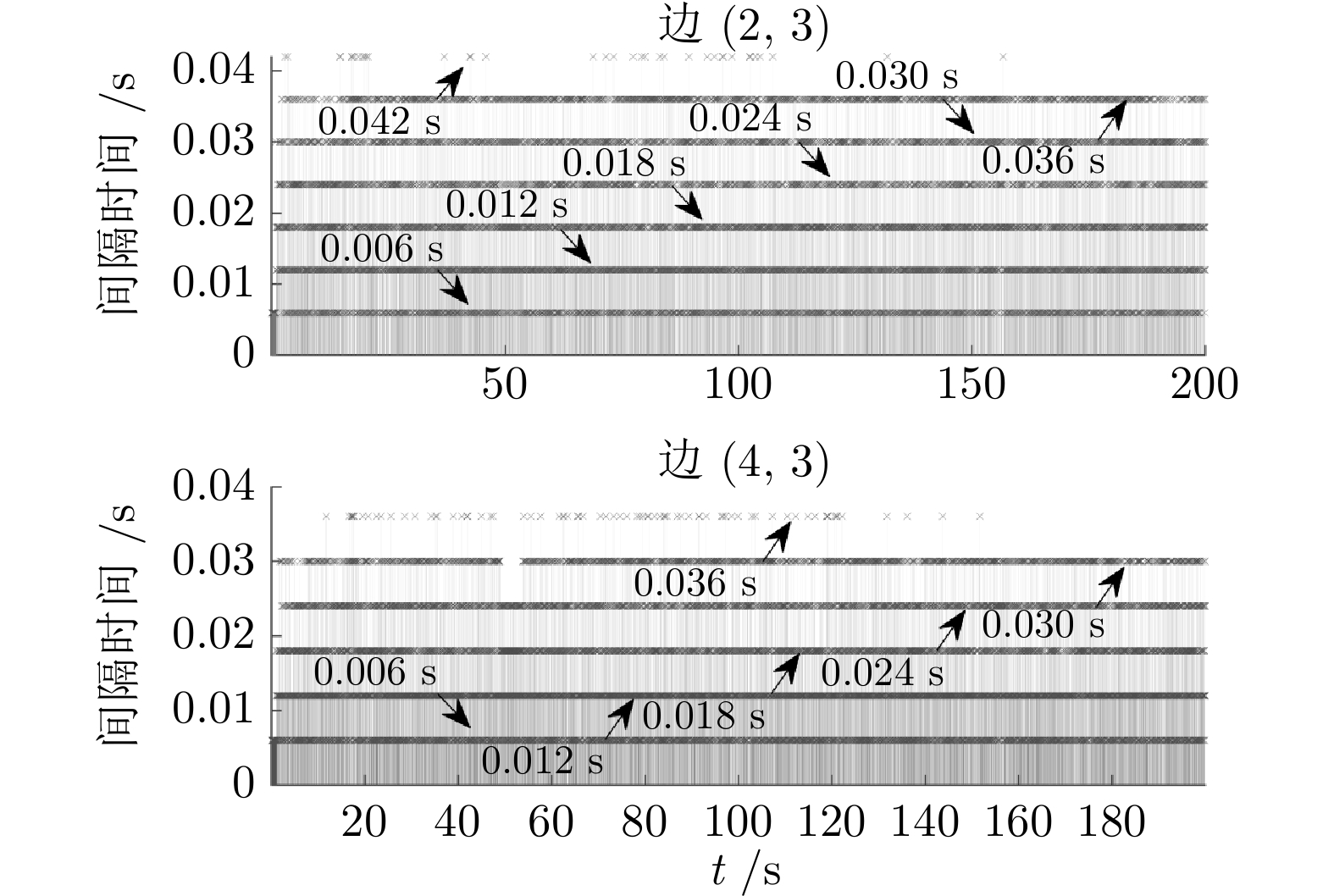
图 13 边(2, 3)、(4, 3)、(1, 4)、(3, 4)的通信间隔
Fig. 13 Communication intervals of edges (2, 3)、(4, 3)、(1, 4)、(3, 4)
表 1 本文方法与其他相关方法对比
Table 1 Comparison between the proposed method and other related methods
状态 通信方式 优点 局限性 相关文献 静态编队 连续通信 信息交互充分, 便于实现纳什均衡搜索与协同控制 通信负担较大, 难以适应受限带宽条件, 不适用于真实海洋环境 [19−24] 动态编队 连续通信 及时跟踪时变编队参考, 控制精度高 依赖高频持续交互, 易造成通信延迟、丢包等情况 [25−28] 动态编队 周期性
事件触发降低节点计算与通信负担, 并可避免Zeno现象 统一检测周期易引发同步广播与信道竞争 [32] 动态编队 交错周期
事件触发降低节点计算与通信负担, 并可缓解同步
触发导致的竞争问题多智能体系统规模增大时可扩展性受限 [33−34] 动态编队 动态
事件触发触发条件自适应性较强, 有助于进一步节约通信资源 以节点或局部簇为对象, 对并发通信交互
协调考虑不足[35−36] 动态编队 边分组
通信机制降低节点计算与通信负担, 并从通信边层面实现
错峰交互, 减少信道竞争、提升可扩展性需要进行通信边分组与时序设计 本文  下载: 导出CSV
下载: 导出CSV
表 2 核心符号说明
Table 2 Explanation of core symbols
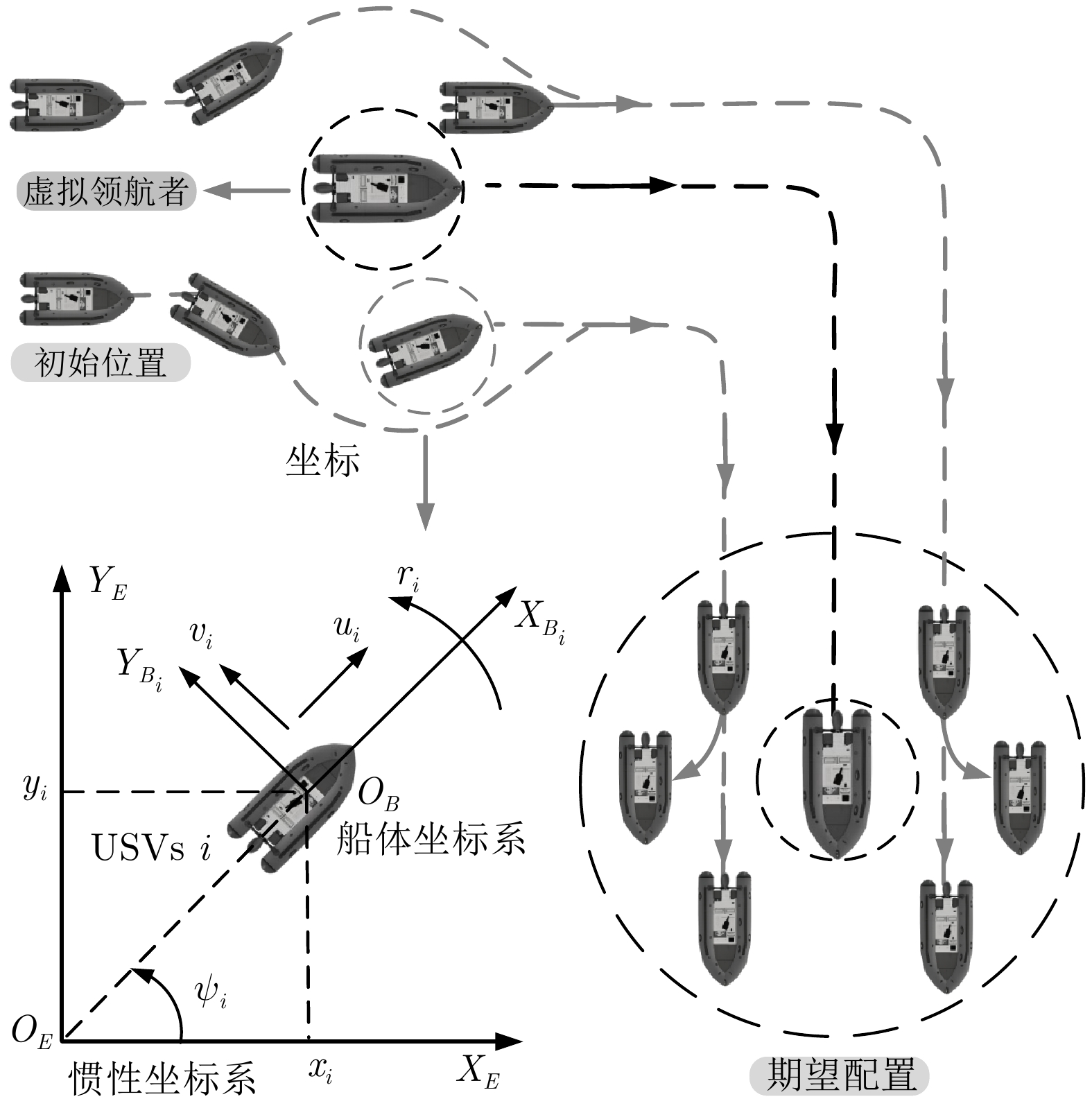
符号 含义 无人艇参数 $ x_i $、$ y_i $ 第$ i $艘艇在地固坐标系中的质心位置 $ \psi_i $ 第$ i $艘艇的艏向角 $ u_i $、$ v_i $、$ r_i $ 第$ i $艘艇的纵荡、横荡和艏摇速度 $ m_{u,\; i} $、$ m_{v,\; i} $、$ m_{r,\; i} $ 第$ i $艘艇在对应方向上的惯性质量 $ \tau_{u,\; i} $、$ \tau_{r,\; i} $ 第$ i $艘艇的控制输入 $ d_{u,\; i} $、$ d_{v,\; i} $、$ d_{r,\; i} $ 第$ i $艘艇所受外部扰动 $ {{\boldsymbol{\eta}}_{\boldsymbol{i}}} $ 第$ i $艘艇坐标变换后的位置向量 $ {{\boldsymbol{\tau}}_{\boldsymbol{i}}} $ 第$ i $艘艇控制输入向量 算法与控制参数 $ \hat{k}_i $、$ k_{0i}\sim k_{8i} $ 各类控制增益, 均为正常数 $ \bar{k} $ 控制增益, 正常数 $ \alpha_i $ 双曲正切函数参数, 满足$ \alpha_i \gg 1 $ $ \xi_i $ 与未知项上界相关的常数 $ \hat{\xi}_i $ $ \xi_i $的估计值 $ \tilde{\xi}_i $ $ \xi_i $的估计误差, $ \tilde{\xi}_i=\xi_i-\hat{\xi}_i $ $ \kappa_1 $、$ \kappa_2 $、$ \kappa_3 $、$ K_4 $、$ K_9 $、$ \sigma $ 通信机制相关正常数, $ \sigma \in [0,\; 1) $ $ P $ 通信检测周期 $ \bar{N} $ 通信边总分组数量 博弈与编队参数 $ J_i $ 第$ i $艘艇的代价函数 $ {{\boldsymbol{\eta}}^{\bf{*}}} $ $ {{\boldsymbol{\eta}}} $对应的纳什均衡点 $ {{\boldsymbol{p}}_{\bf{0}}} $ 编队期望轨迹向量 $ {{\boldsymbol{\delta}}_{\boldsymbol{i}}} $ 第$ i $艘艇相对参考轨迹的位置偏移向量 $ \Delta $ 编队跟踪误差允许的小正常数 通信相关参数 $ {\hat{{\boldsymbol{\eta}}}_{\boldsymbol{i}}} $ 第$ i $艘艇位置$ {{\boldsymbol{\eta}}_{\boldsymbol{i}}} $的估计值 $ {\hat{{\boldsymbol{v}}}_{\boldsymbol{i}}} $ 第$ i $艘艇对期望速度$ {\dot{{\boldsymbol{\eta}}}_{\bf{0}}} $的估计值 $ {\bar{{\boldsymbol{\eta}}}_{\boldsymbol{i}}} $ 第$ i $艘艇的参考状态向量 $ {\hat{{\boldsymbol{\delta}}}_{{\boldsymbol{ij}}}} $ 第$ i $艘艇对第$ j $艘艇耦合误差的估计值 $ t_{l_{ik}}^{ik} $ 第$ k $艘艇向第$ i $艘艇进行通信的时刻 $ {{\boldsymbol{e}}_{{\bf{1}}{{ik}}}}\sim {{\boldsymbol{e}}_{{\bf{8}}{{ik}}}} $ 各类测量或观测误差向量 $ \gamma_i $ 通信指示变量, $ \gamma_i \in \{0,\; 1\} $ 图论相关参数 $ \mathcal{V} $ 图的节点集, 即无人艇集合 $ \mathcal{E} $ 图的边集, 即艇间通信链路集合 $ \mathcal{A} $ 图的邻接矩阵 $ \mathcal{L} $ 图的拉普拉斯矩阵 $ \boldsymbol{A}_i $ 控制输入系数矩阵 $ \Lambda $、$ \beta $ 图论相关对角矩阵 仿真验证相关参数 $ B_{ij} $ 信道竞争率 $ l $ 径向基函数神经网络节点数量 $ b_i $、$ {{\boldsymbol{\mu}}_{i}} $ 径向基函数神经网络高斯函数参数
下载: 导出CSV
表 3 参数选择
Table 3 Parameter selections
种类 参数值$ (i\in {\cal{V}},\; (k,\; i)\in {\cal{E}}) $ 控制增益 $ {{\hat{k}}_{i}}=\bar{k}=10 $, $ {{k}_{0i}}={{k}_{1i}}=1 $, $ {{k}_{2i}}=0.5 $,
$ {{k}_{3i}}={{k}_{4i}}={{k}_{5i}}={{k}_{6i}}={{k}_{7i}}={{k}_{8i}}=25 $, $ {{K}_{9}}=0.01 $,
$ {{\hat{\xi }}_{i}}(0)=3 $, $ \alpha =100 $, $ {{l}_{0}}=0.001 $通讯管理 $ {{\kappa }_{1}}=0.0001 $, $ {{\kappa }_{2}}=0.001 $, $ {{\kappa }_{3}}=1 $, $ \sigma =0.9 $, $ \bar{N}=3 $,
$ P=0.006 $, $ {{\chi }_{ik}}(0)=100 $RBFNNs $ l=20 $, $ {{b}_{i}}=0.6 $, $ {{\boldsymbol{\mu}}_{i}}\in [-2,\; 6]\times [-2,\; 6]\times [-2,\; 2] $
下载: 导出CSV
表 4 两种机制下的通信总数
Table 4 Total number of communications under two mechanisms
边 (2, 1) (3, 1) (4, 1) (1, 2) (3, 2) (1, 3) (2, 3) (4, 3) (1, 4) (3, 4) 总计 EGCM 15 365 17 656 14 282 18 557 17 656 18 557 13 837 14 282 18 557 17 656 166 405 NBPETCM 15 895 17 963 16 359 20 335 17 963 20 335 15 895 16 359 20 335 17 963 179 402
下载: 导出CSV
表 5 参数选择
Table 5 Parameter selection
种类 参数值$ (i\in {\cal{V}},\; (k,\; i)\in {\cal{E}}) $ 控制增益 $ {{\hat{k}}_{i}}=\bar{k}=10 $, $ {{k}_{0i}}={{k}_{1i}}=1 $, $ {{k}_{2i}}=0.5 $, $ {{k}_{3i}}={{k}_{4i}}={{k}_{5i}}={{k}_{6i}}={{k}_{7i}}={{k}_{8i}}=25 $, $ {{K}_{9}}=0.01 $, $ {{\hat{\xi }}_{i}}(0)=3 $, $ \alpha =100 $, $ {{l}_{0}}=0.001 $ 通讯管理 $ {{\kappa }_{1}}=0.0001 $, $ {{\kappa }_{2}}=0.001 $, $ {{\kappa }_{3}}=1 $, $ \sigma =1 $, $ \bar{N}=3 $, $ P=0.008 $, $ {{\chi }_{ik}}(0)=1000 $ RBFNNs $ l=20 $, $ {{b}_{i}}=0.6 $, $ {{\boldsymbol{\mu}}_{i}}\in [-2,\; 6]\times [-2,\; 6]\times [-2,\; 2] $
下载: 导出CSV
-
[1] Huang B, Ren X Q, Zhou B, Zhang Z, Zhou X T, Miao J M. An intermittent anti-competition communication mechanism based formation maneuvers for the internet of unmanned surface vehicles. IEEE Internet of Things Journal, 2024, 12(3): 3234−3247 doi: 10.1109/jiot.2024.3478784 [2] 温广辉, 余星火, 黄廷文, 周艳. 模型参数不确定下多无人艇系统固定时间二分编队跟踪控制. 自动化学报, 2025, 51(3): 669−677Wen Guang-Hui, Yu Xing-Huo, Huang Ting-Wen, Zhou Yan. Fixed-time bipartite formation tracking control for multi-USV systems with uncertain model parameters. Acta Automatica Sinica, 2025, 51(3): 669−677 [3] 祝贵兵, 吴晨, 马勇. 虚假数据注入式攻击下无人水面船舶自适应神经输出反馈轨迹跟踪控制. 自动化学报, 2024, 50(7): 1472−1484 doi: 10.16383/j.aas.c220984Zhu Gui-Bing, Wu Chen, Ma Yong. Adaptive neural output feedback trajectory tracking control for USVs under false-data-injection attacks. Acta Automatica Sinica, 2024, 50(7): 1472−1484 doi: 10.16383/j.aas.c220984 [4] Zhou D J, Wang Z J, Schwager M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures. IEEE Transactions on Robotics, 2018, 34(4): 916−923 doi: 10.1109/TRO.2018.2857477 [5] Wen J B, Yang J C, Li Y, He J Y, Li Z J, Song H B. Behavior-based formation control digital twin for multi-aug in edge computing. IEEE Transactions on Network Science and Engineering, 2022, 10(5): 2791−2801 doi: 10.1109/tnse.2022.3198818 [6] Huang B, Peng H, Zhang C X, Ahn C K. Distributed optimal coordinated control for unmanned surface vehicles with interleaved periodic event-based mechanism. IEEE Transactions on Vehicular Technology, 2024, 73(12): 18073−18086 doi: 10.1109/TVT.2024.3432736 [7] Wu K F, Hu J Y, Li Z H, Ding Z T, Arvin F. Distributed collision-free bearing coordination of multi-uav systems with actuator faults and time delays. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(9): 11768−11781 doi: 10.1109/TITS.2024.3364356 [8] 彭周华, 吴文涛, 王丹, 刘陆. 多无人艇集群协同控制研究进展与未来趋势. 中国舰船研究, 2021, 16(1): 51−64 doi: 10.19693/j.issn.1673-3185.01923Peng Zhou-Hua, Wu Wen-Tao, Wang Dan, Liu Lu. Coordinated control of multiple unmanned surface vehicles: Recent advances and future trends. Chinese Journal of Ship Research, 2021, 16(1): 51−64 doi: 10.19693/j.issn.1673-3185.01923 [9] Kang Y H, Luo D L, Xin B, Cheng J, Yang T W, Zhou S L. Robust leaderless time-varying formation control for nonlinear unmanned aerial vehicle swarm system with communication delays. IEEE Transactions on Cybernetics, 2022, 53(9): 5692−5705 doi: 10.1109/tcyb.2022.3165007 [10] 高胜男, 彭周华, 王丹, 李铁山. 模型不确定下无人艇协同目标跟踪控制. 控制理论与应用, 2023, 40(12): 2198−2208 doi: 10.7641/CTA.2023.30229Gao Sheng-Nan, Peng Zhou-Hua, Wang Dan, Li Tie-Shan. Cooperative target tracking by multiple unmanned surface vehicles subject to model uncertainties. Journal Control Theory & Applications, 2023, 40(12): 2198−2208 doi: 10.7641/CTA.2023.30229 [11] Jiang X L, Xia G H. Event-triggered practical formation control of leaderless unmanned surface vehicles with environmental disturbances. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, 71(3): 1326−1330 [12] 王昊, 王丹, 彭周华, 孙刚. 多自主船协同路径跟踪的自适应动态面控制. 控制理论与应用, 2013, 30(5): 637−643Wang Hao, Wang Dan, Peng Zhou-Hua, Sun Gang. Adaptive dynamic surface control for cooperative path following of multiple autonomous surface vessels. Journal Control Theory & Applications, 2013, 30(5): 637−643 [13] Chen R S, Yang Z Y. A cooperative merging strategy for connected and automated vehicles based on game theory with transferable utility. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19213−19223 doi: 10.1109/TITS.2022.3161535 [14] Yu R R, Zhao X, Lu S, Chen Y H, Li C M. Intelligent game-theoretic approach for resilient robust control design of cyber-physical systems: Application to intelligent transportation systems. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(11): 16072−16083 doi: 10.1109/TITS.2024.3407721 [15] Yang Y, Li X. Towards a snowdrift game optimization to vertex cover of networks. IEEE Transactions on Cybernetics, 2013, 43(3): 948−956 doi: 10.1109/TSMCB.2012.2218805 [16] Deng Z H. Distributed algorithm design for aggregative games of Euler-Lagrange systems and its application to smart grids. IEEE Transactions on Cybernetics, 2021, 52(8): 8315−8325 doi: 10.1109/tcyb.2021.3049462 [17] Ye M J, Hu G Q. Game design and analysis for price-based demand response: An aggregate game approach. IEEE Transactions on Cybernetics, 2016, 47(3): 720−730 doi: 10.1109/tcyb.2016.2524452 [18] Chen Z, Nian X H, Meng Q. Noncooperative formation control in the presence of malicious agents: A game-based strategy. IEEE Transactions on Industrial Informatics, 2023, 20(3): 4972−4981 [19] Deng Z H. Game-based formation control of high-order multi-agent systems. IEEE Transactions on Network Science and Engineering, 2022, 10(1): 140−151 doi: 10.1109/tnse.2022.3205659 [20] Ye M J, Hu G Q. Distributed Nash equilibrium seeking by a consensus-based approach. IEEE Transactions on Automatic Control, 2017, 62(9): 4811−4818 doi: 10.1109/TAC.2017.2688452 [21] Pan W, Xu X L, Lu Y, Zhang W D. Distributed Nash equilibrium learning for average aggregative games: Harnessing smoothness to accelerate the algorithm. IEEE Systems Journal, 2023, 17(3): 4855−4865 doi: 10.1109/JSYST.2023.3264791 [22] Ye M J. Distributed robust seeking of Nash equilibrium for networked games: An extended state observer-based approach. IEEE Transactions on Cybernetics, 2020, 52(3): 1527−1538 doi: 10.1109/tcyb.2020.2989755 [23] Xiong F, Zheng H, Ruan L, Wang H, Tang L J, Dong X, et al. Energy-saving data aggregation for multi-uav system. IEEE Transactions on Vehicular Technology, 2020, 69(8): 9002−9016 doi: 10.1109/TVT.2020.2999374 [24] Deng Z H, Luo J, Liu Y Y, Yu W Y. Distributed formation control algorithms for QUAVs based on aggregative games. IEEE Systems Journal, 2023, 17(3): 4419−4429 doi: 10.1109/JSYST.2023.3268160 [25] Park B S, Yoo S J. Connectivity-maintaining and collision-avoiding performance function approach for robust leader–follower formation control of multiple uncertain underactuated surface vessels. Automatica, 2021, 127: Article No. 109501 doi: 10.1016/j.automatica.2021.109501 [26] Wang Y Y, Liu X, Wu Z T, Dang C Y. Distributed prescribed-time formation control for underactuated surface vehicles with input saturation: Theory and experiment. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(11): 18611−18623 doi: 10.1109/TITS.2024.3436882 [27] 吴文涛, 古楠, 彭周华, 刘陆, 王丹. 多领航者导引无人船集群的分布式时变队形控制. 中国舰船研究, 2020, 15(1): 21−30Wu Wen-Tao, Gu Nan, Peng Zhou-Hua, Liu Lu, Wang Dan. Distributed time-varying formation control for unmanned surface vehicles guided by multiple leaders. Chinese Journal of Ship Research, 2020, 15(1): 21−30 [28] 闫敬, 关新平. 海上无人系统跨域集群发展现状及其关键技术. 自动化学报, 2025, 51(4): 744−761Yan Jing, Guan Xin-Ping. Development status and key techniques for cross-domain swarm of maritime unmanned systems. Acta Automatica Sinica, 2025, 51(4): 744−761 [29] 王浩亮, 柴亚星, 王丹, 刘陆, 王安青, 彭周华. 基于事件触发机制的多自主水下航行器协同路径跟踪控制. 自动化学报, 2024, 50(5): 1024−1034Wang Hao-Liang, Chai Ya-Xing, Wang Dan, Liu Lu, Wang An-Qing, Peng Zhou-Hua. Event-triggered cooperative path following of multiple autonomous underwater vehicles. Acta Automatica Sinica, 2024, 50(5): 1024−1034 [30] 胡鑫, 巩庆涛, 祝贵兵, 韩国杰, 王媛. 基于事件触发机制的船舶补给同步抗干扰控制. 中国舰船研究, 2024, 19(5): 87−94Hu Xin, Gong Qing-Tao, Zhu Gui-Bing, Han Guo-Jie, Wang Yuan. Event-triggered synchronization anti-disturbance control method for ship replenishment. Chinese Journal of Ship Research, 2024, 19(5): 87−94 [31] 先程鑫, 赵宇, 温广辉. 随机事件触发通讯下多航天器系统分布式编队跟踪控制. 指挥与控制学报, 2025, 11(3): 361−370Xian Cheng-Xin, Zhao Yu, Wen Guang-Hui. Distributed formation tracking control of multi-spacecraft systems under stochastic event-triggered communication mechanism. Journal of Command and Control, 2025, 11(3): 361−370 [32] Wang S B, Wen S P, Shi K B, Zhou X J, Huang T W. Approximate optimal control for nonlinear systems with periodic event-triggered mechanism. IEEE Transactions on Neural Networks and Learning Systems, 2021, 34(6): 2722−2731 [33] Ren X Q, Huang B, Zhou B, Peng H, Zhang Z. Game theory-based formation control for networked unmanned surface vessels with weighted switching topology and dynamically assigned data sampling period. Nonlinear Dynamics, 2025, 113: 19845 doi: 10.1007/s11071-025-11177-1 [34] Zhang Z, Huang B, Zhou B, Miao J M. An anti-congestion interaction mechanism based leaderless formation control for unmanned surface vehicles with communication interruptions. IEEE Transactions on Vehicular Technology, 2024, 73(11): 16964−16976 doi: 10.1109/TVT.2024.3423478 [35] Li J X, Zhou B. Huang B, Huang W Q. Distributed event-driven optimal control for networked unmanned surface vehicles with long transmission delays: A memory-based estimation and communication assignment approach. IEEE Internet of Things Journal, 2026, 13(3): 4247−4260 doi: 10.1109/JIOT.2025.3632907 [36] Zhang Y C, Miao J M, Huang B. Dual-layer dynamic event-triggered formation maneuver control for underactuated autonomous underwater vehicles via edge vector-based method. Ocean Engineering, 2025, 330: Article No. 121200 doi: 10.1016/j.oceaneng.2025.121200 [37] Dai S L, He S D, Wang M, Yuan C Z. Adaptive neural control of underactuated surface vessels with prescribed performance guarantees. IEEE Transactions on Neural Networks and Learning Systems, 2018, 30(12): 3686−3698 [38] Wen G H, Fu J J, Wang B W, Wang X D, Shen H. Robust formation tracking of ASVs with nonconservative collision avoidance: A control barrier function-based approach. IEEE Transactions on Industrial Electronics, 2026, 73(6): 9174−9186 doi: 10.1109/TIE.2025.3649849 [39] Lu Y, Wen C Y, Shen T L, Zhang W D. Bearing-based adaptive neural formation scaling control for autonomous surface vehicles with uncertainties and input saturation. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32(10): 4653−4664 doi: 10.1109/tnnls.2020.3025807 [40] Ran G T, Liu J, Li C J, Chen L M, Li D Y. Event-based finite-time consensus control of second-order delayed multi-agent systems. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 68(1): 276−280 doi: 10.1109/ccdc.2018.8407122 [41] Do K D, Jiang Z P, Pan J. Robust adaptive path following of underactuated ships. Automatica, 2004, 40(6): 929−944 doi: 10.1016/j.automatica.2004.01.021 -

 下载:
下载:

计量
- 文章访问数: 201
- HTML全文浏览量: 71
- 被引次数: 0
