

Funnel Control for Uncertain Nonlinear Systems Under Soft and Hard Output Constraints: A Direct Modification Approach
-
摘要: 本文研究了一类同时存在软、硬输出约束的不确定非线性系统跟踪控制问题. 其中, 安全相关的输出约束被建模为不可违背的硬约束, 而期望的跟踪性能则通过可调节的软约束加以刻画. 针对软、硬约束可能发生冲突的情形, 引入一种光滑过渡函数, 并基于此构造凸组合算子对软约束边界进行直接修正, 从而保证其与硬约束的兼容性. 在此基础上, 将硬约束与修正后的软约束进行统一整合, 构造具有光滑边界的约束结构. 基于该约束结构并结合漏斗控制技术, 提出一种低复杂度鲁棒控制算法, 确保系统同时满足硬约束与修正后的软约束. 与现有基于辅助动态系统的软约束间接调整方法不同, 所提策略无需引入额外动态系统, 从而得到结构简洁、易于实现的静态控制器. 此外, 在软、硬约束冲突发生时, 该方法能够将软约束的违背量严格限制在硬约束所必需的最小违背量之上的预设容差范围内, 且在有限时间内实现约束解耦, 优先确保硬约束的严格满足. 仿真结果验证了该方法的有效性.Abstract: This paper investigates the tracking control problem for a class of uncertain nonlinear systems subject to simultaneous soft and hard output constraints. The safety-related output constraints are modeled as inviolable hard constraints, while the desired tracking performance is characterized by adjustable soft constraints. To address potential conflicts between soft and hard constraints, a smooth transition function is introduced, based on which convex combination operators are constructed to directly modify the soft constraint boundaries, thereby ensuring their compatibility with the hard constraints. On this basis, the hard constraints and the modified soft constraints are consolidated to construct a constraint structure with smooth boundaries. Based on this consolidated constraint structure and combined with funnel control techniques, a low-complexity robust control algorithm is proposed to ensure the simultaneous satisfaction of the hard constraints and the modified soft constraints. Unlike existing methods that rely on auxiliary dynamic systems to indirectly adjust soft constraints, the proposed strategy eliminates the need for extra dynamic systems, resulting in a structurally simple and easy-to-implement static controller. Furthermore, when conflicts occur, the proposed method strictly confines the violation of soft constraints within a prescribed tolerance above the minimum violation necessitated by the hard constraints, and achieves constraint decoupling within a finite time, thereby prioritizing the strict satisfaction of hard constraints. Simulation results verify the effectiveness of the proposed method.
-
Key words:
- nonlinear systems /
- uncertain systems /
- hard constraints /
- soft constraints /
- funnel control
-
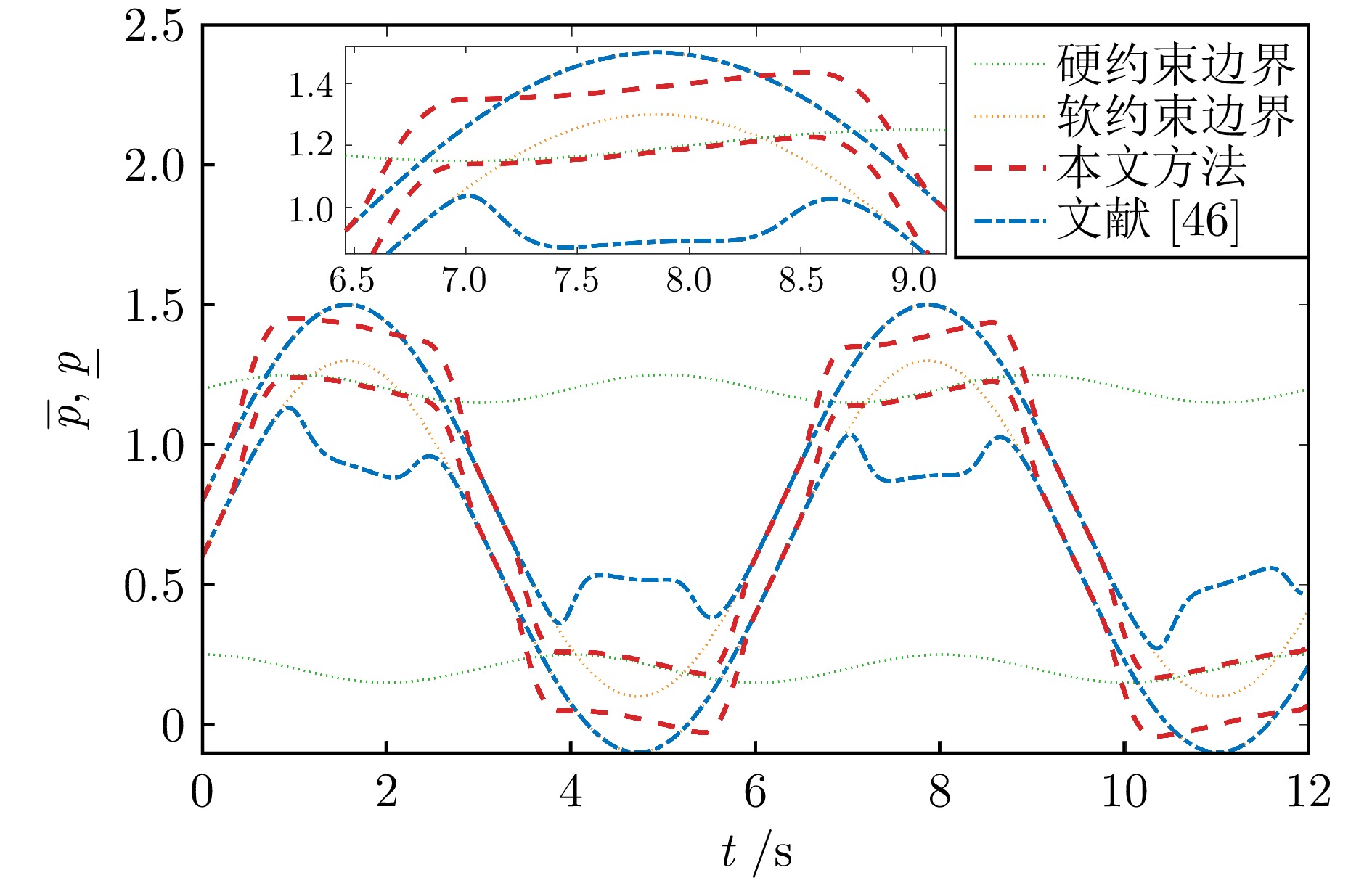
图 2 修正后的软约束边界$\overline{p}$和$\underline{p}$
Fig. 2 Modified soft constraint boundaries $\overline{p}$ and $\underline{p}$
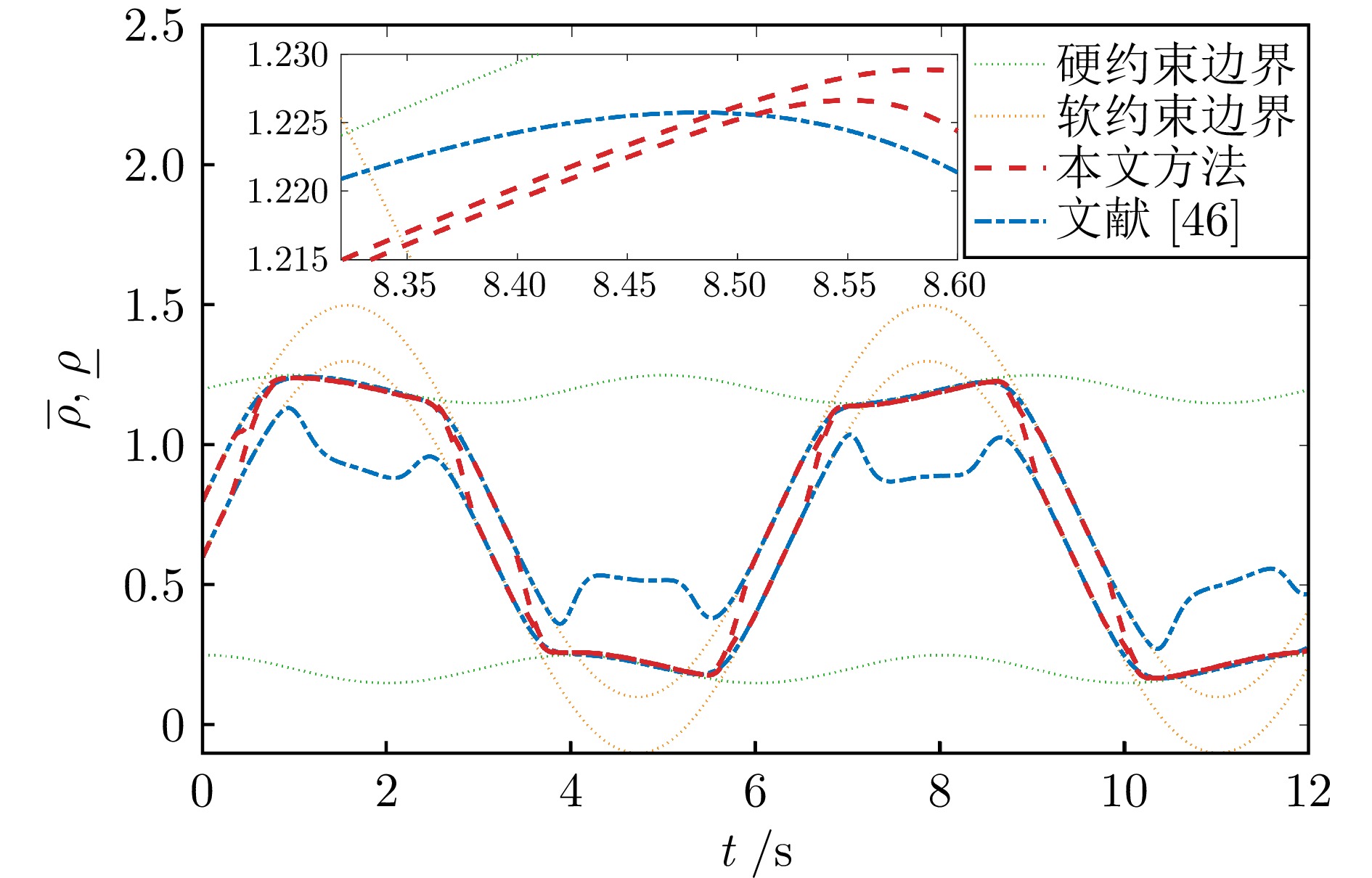
图 3 整合的光滑约束边界$\overline{\rho}$和$\underline{\rho}$
Fig. 3 Consolidated smooth constraint boundaries $\overline{\rho}$ and $\underline{\rho}$
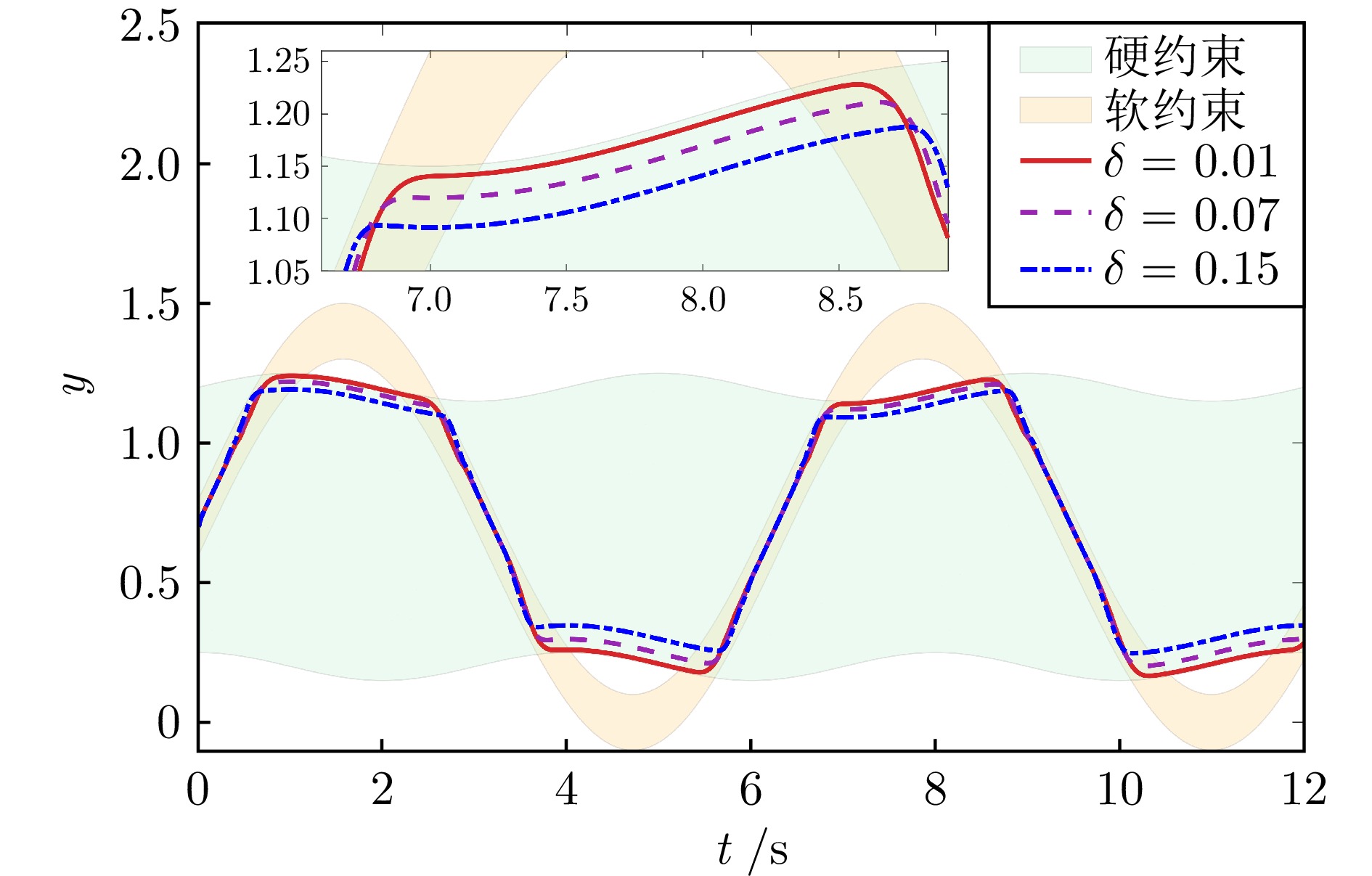
图 6 不同容差参数$\delta$下软约束违背量对比
Fig. 6 Comparison of soft-constraint violation under different tolerance parameters $\delta$
-
[1] Arabi E, Garg K, Panagou D. Safety-critical adaptive control with nonlinear reference model systems. In: Proceedings of the American Control Conference (ACC). Denver, CO, USA: IEEE, 2020. 1749-1754 [2] Yang H, Dong H, Zhao X. Safety-critical control allocation for obstacle avoidance of quadrotor aerial photography. IEEE Control Systems Letters, 2024, 8: 1973−1978 doi: 10.1109/LCSYS.2024.3427269 [3] Mao J, Yeom J, Nair S, Loianno G. From propeller damage estimation and adaptation to fault tolerant control: Enhancing quadrotor resilience. IEEE Robotics and Automation Letters, 2024, 9(5): 4297−4304 doi: 10.1109/LRA.2024.3380923 [4] Nguyen Q, Sreenath K. Robust safety-critical control for dynamic robotics. IEEE Transactions on Automatic Control, 2022, 67(3): 1073−1088 doi: 10.1109/TAC.2021.3059156 [5] He Z, Wu J, Zhang J, Zhang S, Shi Y, Liu H, et al. CDM-MPC: An integrated dynamic planning and control framework for bipedal robots jumping. IEEE Robotics and Automation Letters, 2024, 9(7): 6672−6679 doi: 10.1109/LRA.2024.3408487 [6] Han L, Chen X, Yu Z, Zhang W. A heuristic gait template planning and dynamic motion control for biped robots. Robotica, 2023, 41(2): 789−805 doi: 10.1017/S026357472200162X [7] Xiao W, Cassandras C G, Belta C A. Bridging the gap between optimal trajectory planning and safety-critical control with applications to autonomous vehicles. Automatica, 2021, 129: 109592 doi: 10.1016/j.automatica.2021.109592 [8] Cohen M H, Molnar T G, Ames A D. Safety-critical control for autonomous systems: Control barrier functions via reduced-order models. Annual Reviews in Control, 2024, 57: 100947 doi: 10.1016/j.arcontrol.2024.100947 [9] Alan A, Taylor A J, He C R, Ames A D, Orosz G. Control barrier functions and input-to-state safety with application to automated vehicles. IEEE Transactions on Control Systems Technology, 2023, 31(6): 2744−2759 doi: 10.1109/TCST.2023.3286090 [10] Ilchmann A, Ryan E P, Sangwin C J. Tracking with prescribed transient behaviour. ESAIM: Control, Optimisation and Calculus of Variations, 2002, 7: 471−493 doi: 10.1051/cocv:2002064 [11] Ilchmann A, Ryan E P, Townsend P. Tracking with prescribed transient behavior for nonlinear systems of known relative degree. SIAM Journal on Control and Optimization, 2007, 46(1): 210−230 doi: 10.1137/050641946 [12] Berger T, Ilchmann A, Ryan E P. Funnel control of nonlinear systems. Mathematics of Control, Signals, and Systems, 2021, 33(1): 151−194 doi: 10.1007/s00498-021-00277-z [13] Liu Y H, Su C Y, Li H. Adaptive output feedback funnel control of uncertain nonlinear systems with arbitrary relative degree. IEEE Transactions on Automatic Control, 2021, 66(6): 2854−2860 doi: 10.1109/TAC.2020.3012027 [14] Berger T, Ilchmann A, Ryan E P. Funnel control–-a survey. Annual Reviews in Control, 2025, 60: 101024 [15] Berger T. Input-constrained funnel control of nonlinear systems. IEEE Transactions on Automatic Control, 2024, 69(8): 5368−5382 doi: 10.1109/TAC.2024.3352362 [16] Bechlioulis C P, Rovithakis G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Transactions on Automatic Control, 2008, 53(9): 2090−2099 doi: 10.1109/TAC.2008.929402 [17] Bechlioulis C P, Rovithakis G A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica, 2014, 50(4): 1217−1226 doi: 10.1016/j.automatica.2014.02.020 [18] Bu X. Prescribed performance control approaches, applications and challenges: A comprehensive survey. Asian Journal of Control, 2023, 25(1): 241−261 doi: 10.1002/asjc.2765 [19] Chen G, Dong J. Approximate optimal adaptive prescribed performance control for uncertain nonlinear systems with feature information. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(4): 2298−2308 doi: 10.1109/TSMC.2023.3342854 [20] Zhang J X, Ding J, Chai T. Fault-tolerant prescribed performance control of wheeled mobile robots: A mixed-gain adaptation approach. IEEE Transactions on Automatic Control, 2024, 69(8): 5500−5507 doi: 10.1109/TAC.2024.3365726 [21] Glotfelter P, Cortés J, Egerstedt M. Nonsmooth barrier functions with applications to multi-robot systems. IEEE Control Systems Letters, 2017, 1(2): 310−315 doi: 10.1109/LCSYS.2017.2710943 [22] Molnar T G, Ames A D. Composing control barrier functions for complex safety specifications. IEEE Control Systems Letters, 2023, 7: 3615−3620 doi: 10.1109/LCSYS.2023.3339719 [23] Ames A D, Xu X, Grizzle J W, Tabuada P. Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control, 2016, 62(8): 3861−3876 doi: 10.1109/tac.2016.2638961 [24] Breeden J, Panagou D. Robust control barrier functions under high relative degree and input constraints for satellite trajectories. Automatica, 2023, 155: 111109 doi: 10.1016/j.automatica.2023.111109 [25] Jian Z, Yan Z, Lei X, Lu Z, Lan B, Wang X, et al. Dynamic control barrier function-based model predictive control to safety-critical obstacle avoidance of mobile robot. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, UK: IEEE, 2023. 3679-3685 [26] Hackl C M, Hopfe N, Ilchmann A, Mueller M, Trenn S. Funnel control for systems with relative degree two. SIAM Journal on Control and Optimization, 2013, 51(2): 965−995 doi: 10.1137/100799903 [27] Berger T. Fault-tolerant funnel control for uncertain linear systems. IEEE Transactions on Automatic Control, 2020, 66(9): 4349−4356 [28] Berger T, Lê H H, Reis T. Funnel control for nonlinear systems with known strict relative degree. Automatica, 2018, 87: 345−357 doi: 10.1016/j.automatica.2017.10.017 [29] Berger T, Breiten T, Puche M, Reis T. Funnel control for the monodomain equations with the FitzHugh-Nagumo model. Journal of Differential Equations, 2021, 286: 164−214 doi: 10.1016/j.jde.2021.03.012 [30] Hastir A, Winkin J J, Dochain D. Funnel control for a class of nonlinear infinite-dimensional systems. Automatica, 2023, 152: 110964 doi: 10.1016/j.automatica.2023.110964 [31] Berger T, Puche M, Schwenninger F L. Funnel control for a moving water tank. Automatica, 2022, 135: 109999 doi: 10.1016/j.automatica.2021.109999 [32] Long L, Wang F, Chen Z. Global event-triggered funnel control of switched nonlinear systems via switching multiple Lyapunov functions. IEEE Transactions on Cybernetics, 2024, 54(11): 6731−6741 doi: 10.1109/TCYB.2024.3399392 [33] Mishra P K, Jagtap P. Approximation-free control for unknown systems with performance and input constraints. IEEE Transactions on Automatic Control, 2025, 70(5): 3417−3424 doi: 10.1109/TAC.2024.3519275 [34] Bechlioulis C P, Rovithakis G A. Prescribed performance adaptive control for multi-input multi-output affine in the control nonlinear systems. IEEE Transactions on Automatic Control, 2010, 55(5): 1220−1226 doi: 10.1109/TAC.2010.2042508 [35] Theodorakopoulos A, Rovithakis G A. Low-complexity prescribed performance control of uncertain MIMO feedback linearizable systems. IEEE Transactions on Automatic Control, 2015, 61(7): 1946−1952 [36] Bikas L N, Rovithakis G A. Prescribed performance under input saturation for uncertain strict-feedback systems: A switching control approach. Automatica, 2024, 165: 111663 doi: 10.1016/j.automatica.2024.111663 [37] Bu X, Luo R, Lv M, Lei H. Adaptive fuzzy safety control of hypersonic flight vehicles pursuing adaptable prescribed behaviors: A sensing and adjustment mechanism. IEEE Transactions on Fuzzy Systems, 2024, 32(12): 7050−7062 doi: 10.1109/TFUZZ.2024.3476393 [38] Bu X, Wu X, Zhu F, Huang J, Ma Z, Zhang R. Novel prescribed performance neural control of a flexible air-breathing hypersonic vehicle with unknown initial errors. ISA Transactions, 2015, 59: 149−159 doi: 10.1016/j.isatra.2015.09.007 [39] Ma C, Dong D. Finite-time prescribed performance time-varying formation control for second-order multi-agent systems with non-strict feedback based on a neural network observer. IEEE/CAA Journal of Automatica Sinica, 2023, 11(4): 1039−1050 doi: 10.1109/jas.2023.123615 [40] Wu Y, Chen M, Li H, Chadli M. Event-triggered adaptive NN cooperative control of six-rotor UAVs with finite-time prescribed performance. IEEE Transactions on Automation Science and Engineering, 2024, 21(2): 1867−1877 doi: 10.1109/TASE.2023.3241182 [41] Bu X, Lv M, Liu Z. Intelligent safety flight control with variable prescribed performance. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(2): 2050−2060 doi: 10.1109/TAES.2023.3346804 [42] Bu X, Park J H, Lei H. Discrete-time neural control with flexible prescribed performance for constrained systems with fragility relaxation. IEEE Transactions on Automation Science and Engineering, 2024, 22: 2386−2394 [43] Xu X. Constrained control of input-output linearizable systems using control sharing barrier functions. Automatica, 2018, 87: 195−201 doi: 10.1016/j.automatica.2017.10.005 [44] Lindemann L, Dimarogonas D V. Control barrier functions for signal temporal logic tasks. IEEE Control Systems Letters, 2018, 3(1): 96−101 doi: 10.23919/ecc57647.2023.10178255 [45] Safari A, Hoagg J B. Time-varying soft-maximum control barrier functions for safety in an a priori unknown environment. In: Proceedings of the American Control Conference (ACC). Toronto, ON, Canada: IEEE, 2024. 3698-3703 [46] Mehdifar F, Bechlioulis C P, Dimarogonas D V. Funnel control under hard and soft output constraints. In: Proceedings of the IEEE Conference on Decision and Control (CDC). Cancún, Mexico: IEEE, 2022. 4473-4478 [47] Mehdifar F, Lindemann L, Bechlioulis C P, Dimarogonas D V. Low-complexity control for a class of uncertain MIMO nonlinear systems under generalized time-varying output constraints. IEEE Transactions on Automatic Control, 2025, 70(7): 4270−4285 doi: 10.1109/TAC.2024.3524276 [48] Bertsekas D P. Nondifferentiable optimization via approximation. In: Nondifferentiable Optimization. Berlin, Germany: Springer, 2009. 1-25 [49] Warner F W. Foundations of Differentiable Manifolds and Lie Groups. New York, NY, USA: Springer, 1983 [50] Logemann H, Ryan E P. Ordinary Differential Equations: Analysis, Qualitative Theory and Control. London, UK: Springer, 2014 [51] Khalil H K. Nonlinear Systems, 3rd Edition. Upper Saddle River, NJ, USA: Prentice-Hall, 2002 -

 下载:
下载:

计量
- 文章访问数: 188
- HTML全文浏览量: 85
- 被引次数: 0
