

Multi-strategy Fusion Seagull Optimization Algorithm for Multi-UAV Cooperative Task Allocation
-
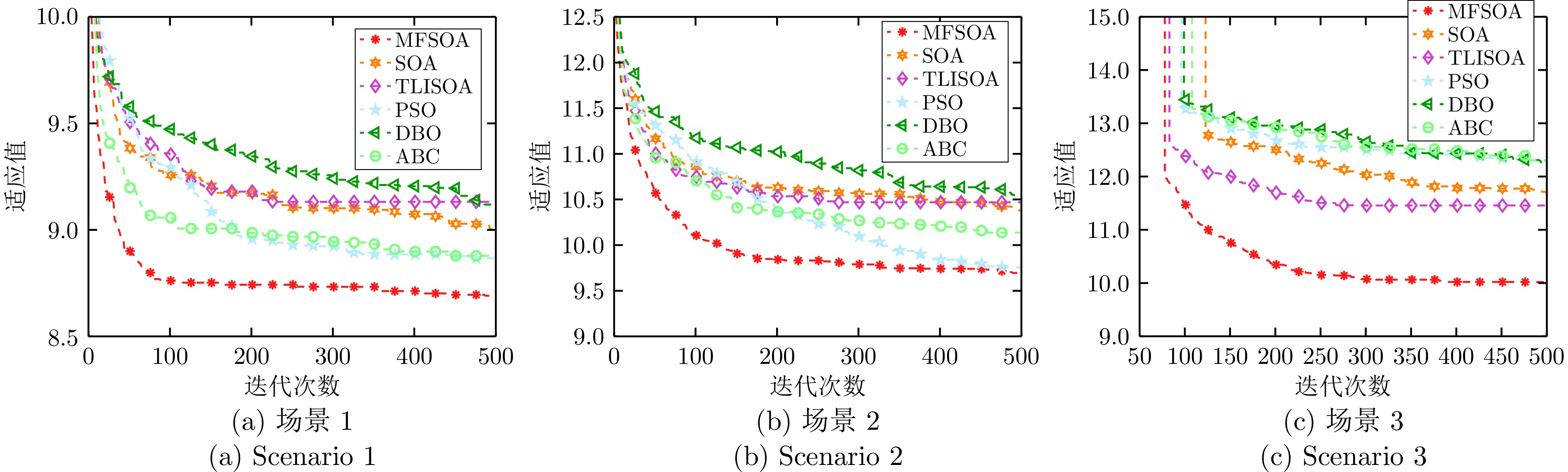
摘要: 针对多无人机在多重约束下的协同任务分配问题, 提出一种面向多无人机协同任务分配的多策略融合海鸥优化算法(MFSOA). 该算法由时间代价、能耗代价、负载均衡、任务时序及多约束条件构建多无人机协同任务分配目标优化模型. 为提升算法寻优效率, 采用Tent混沌映射增强种群多样性, 结合精英进化策略优化迭代过程中的种群质量; 通过设计多方向自适应迁徙策略增强算法全局寻优能力, 避免算法陷入局部最优; 构建基于精英个体的攻击策略平衡算法的全局探索与局部开发能力, 提升算法的寻优稳定性. 实验结果表明, MFSOA在多场景下均表现出优异的综合性能, 其寻优能力相较对比算法提升约3%~13%, 验证了该算法求解多无人机协同任务分配问题的有效性与可靠性.Abstract: To address the cooperative task allocation problem of multi-UAV under multiple constraints, this paper proposes a multi-strategy fusion seagull optimization algorithm (MFSOA) for multi-UAV cooperative task allocation. The algorithm constructs an objective optimization model for multi-UAV cooperative task allocation considering time cost, energy consumption cost, load balancing, task sequencing, and multiple constraint conditions. To improve the optimization efficiency of the algorithm, Tent chaotic mapping is employed to enhance population diversity, combined with an elite evolutionary strategy to optimize population quality during iteration; A multi-directional adaptive migration strategy is designed to strengthen the global optimization capability and prevent the algorithm from falling into local optima; And an elite individual-based attack strategy is developed to balance global exploration and local exploitation of the algorithm, thereby enhancing the optimization stability of the algorithm. Experimental results demonstrate that MFSOA exhibits excellent comprehensive performance across multiple scenarios, with its optimization capability improving by approximately 3% to 13% compared with comparison algorithms, validating its effectiveness and reliability in solving the multi-UAV cooperative task allocation problem.
-
表 1 参数说明
Table 1 Parameter description
对象类型 参数 说明 无人机$U$ $N$ 无人机数量 $P_{U_i}=(x_{U_i},\;y_{U_i})$ 起始位置坐标 $V_{U_i}$ 飞行速度 ${FT}_{max,\;U_i}$ 最大飞行时间 ${TN}_{max,\;U_i}$ 最大任务数量 任务$T$ $M$ 任务数量 ${P}_{T_j} = (x_{T_j},\; y_{T_j})$ 任务位置坐标 $t_{T_j}$ 任务执行时间 ${PL}_j$ 任务优先级  下载: 导出CSV
下载: 导出CSV
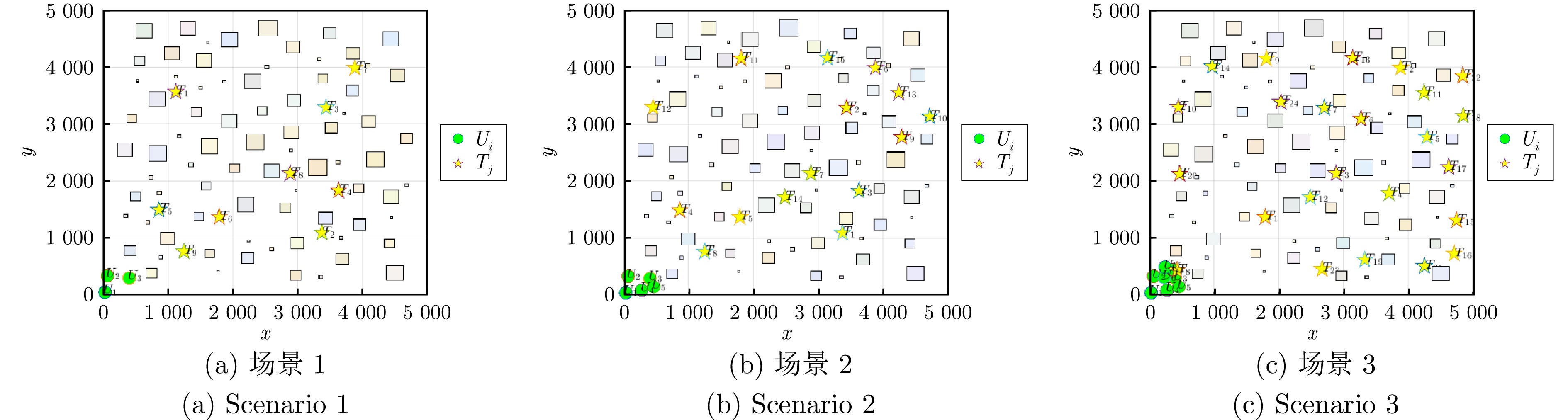
表 2 各实验场景设置
Table 2 Settings of each experimental scenario
场景 无人机数量 任务点数量 场景1 3 12 场景2 5 15 场景3 8 24
下载: 导出CSV
表 3 各UAV性能设置
Table 3 Performance settings of each UAV
$U_i$ $P_{U_i}$ $V_{U_i}(\mathrm{km/h})$ $FT_{{max},\;U_i}({\rm{h}})$ $TN_{{max},\;U_i}$ 1 (23.41) 68.72 1.81 3 2 (61.331) 49.68 2.16 5 3 (398.293) 64.73 1.59 5 4 (271.87) 64.55 1.48 5 5 (454.145) 41.08 1.30 2 6 (225.311) 67.75 2.21 4 7 (362.446) 62.32 1.28 5 8 (240.489) 40.54 2.01 3
下载: 导出CSV
表 4 各算法主要参数设置
Table 4 Main parameter settings of each algorithm
算法 参数 参数值 MFSOA $f_c$ 2 $u$ 1 $P_{ne}$ 0.35 SOA $f_c$ 2 $v$ 1 $u$ 1 TLISOA $f_c$ 2 $u$ 1 DBO $k$ 0.15 $b$ 0.3 $s$ 2 PSO $\omega_{{\rm{max}}}$ 0.9 $\omega_{{\rm{min}}}$ 0.3 $c_1$ 2 $c_2$ 2
下载: 导出CSV
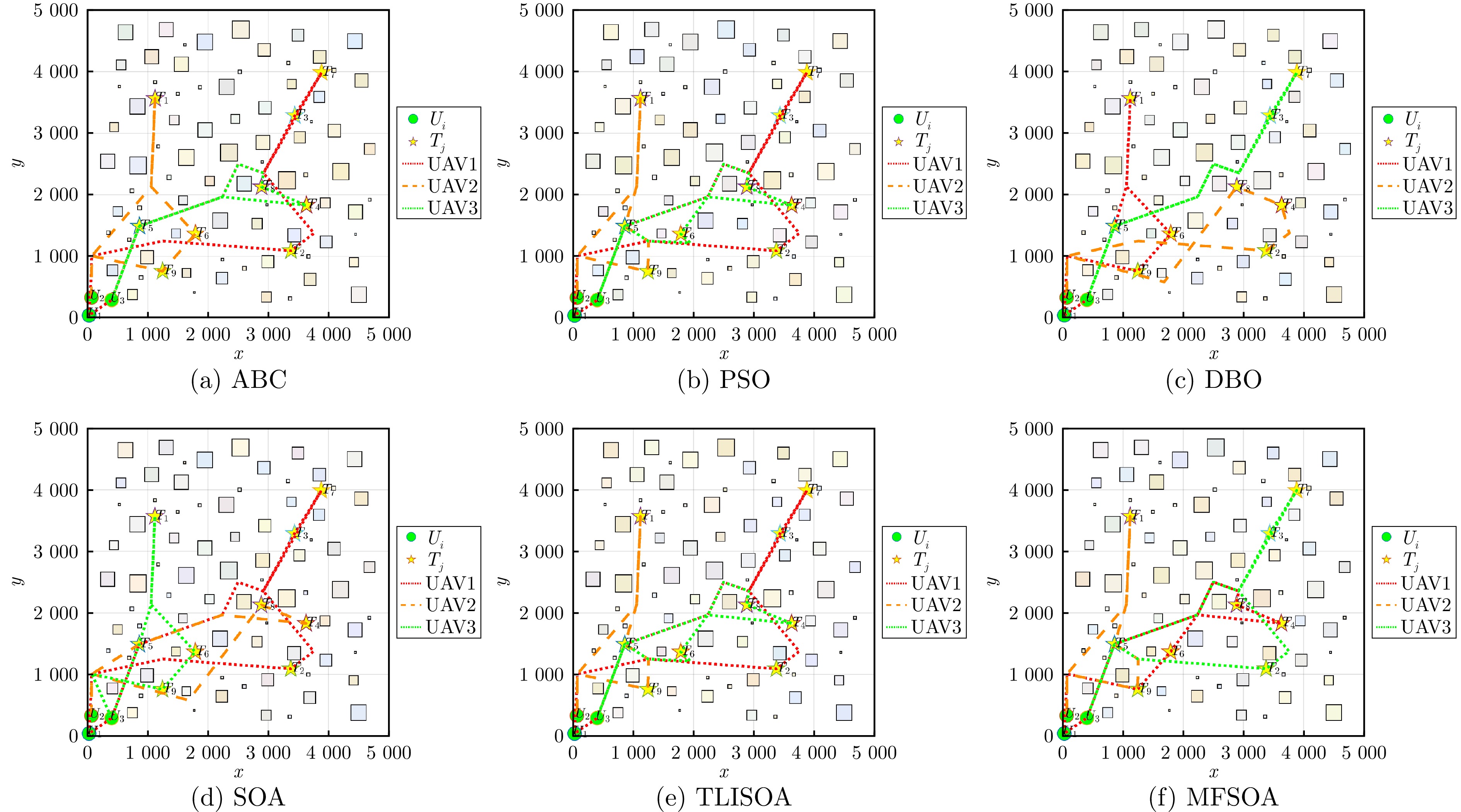
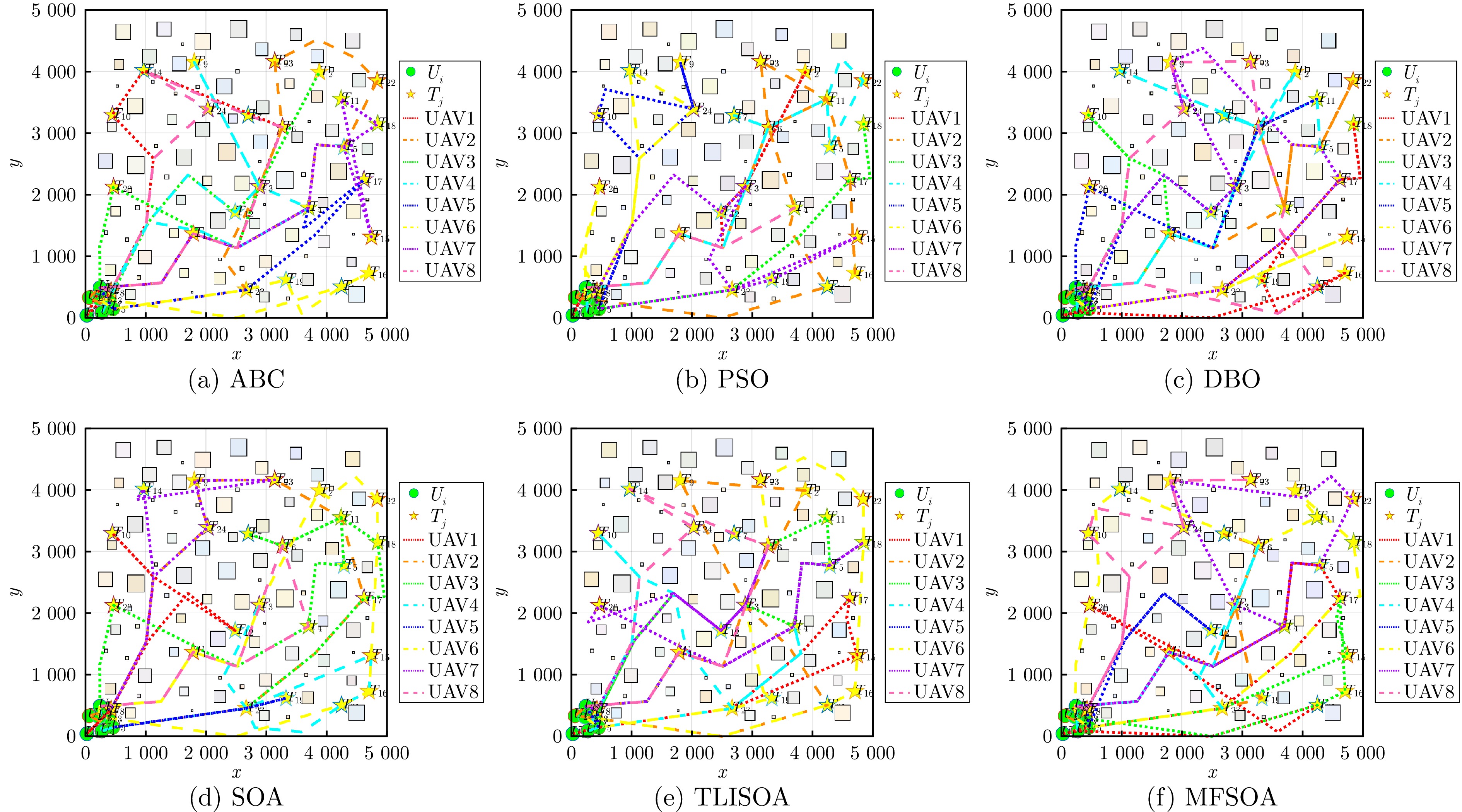
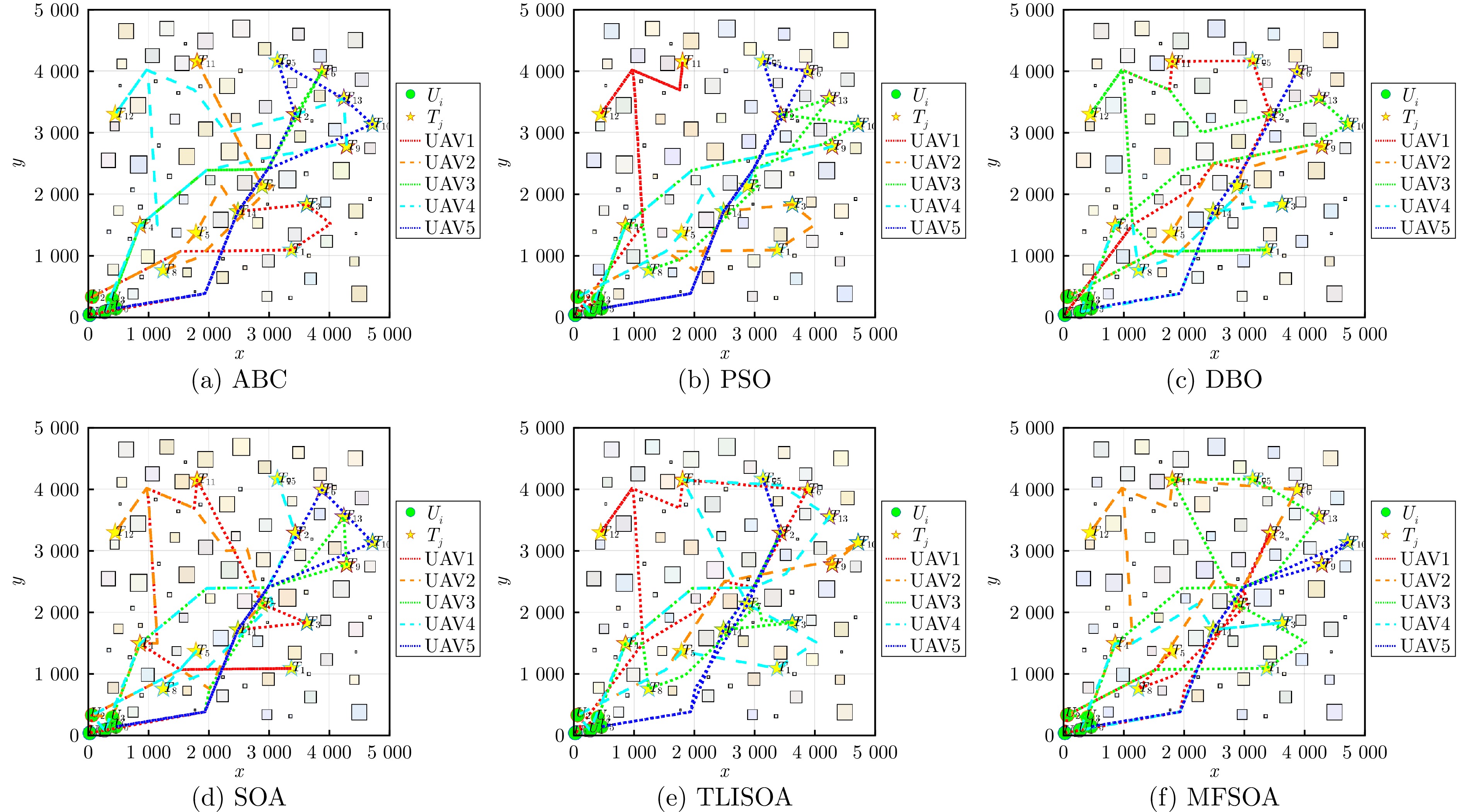
表 5 各算法任务分配方案
Table 5 Task allocation schemes for each algorithm
算法 场景1 场景2 场景3 ABC $ U_1:T_2\rightarrow T_7\rightarrow T_3 $
$ U_2:T_1\rightarrow T_6\rightarrow T_9 $
$ U_3:T_5\rightarrow T_4\rightarrow T_8 $$U_1:T_1\rightarrow T_3\rightarrow T_{14}$
$U_2:T_5\rightarrow T_{11}\rightarrow T_7\rightarrow T_8$
$U_3:T_4\rightarrow T_6\rightarrow T_2$
$U_4:T_{12}\rightarrow T_{13}\rightarrow T_9$
$U_5:T_{15}\rightarrow T_{10}$$U_1:T_{10}\rightarrow T_6\rightarrow T_3$
$U_2:T_{22}\rightarrow T_{13}\rightarrow T_{23}$
$U_3:T_2\rightarrow T_{20}$
$U_4:T_8\rightarrow T_4\rightarrow T_9\rightarrow T_{12}$
$U_5:T_1\rightarrow T_{17}$
$U_6:T_{19}\rightarrow T_{21}\rightarrow T_{16}$
$U_7:T_{18}\rightarrow T_{11}\rightarrow T_{15}\rightarrow T_5$
$U_8:T_{24}\rightarrow T_{14}\rightarrow T_7$PSO $ U_1:T_2\rightarrow T_7\rightarrow T_3 $
$ U_2:T_1\rightarrow T_5\rightarrow T_9 $
$ U_3:T_6\rightarrow T_4\rightarrow T_8 $$U_1:T_4\rightarrow T_{12}\rightarrow T_{11}$
$U_2:T_1\rightarrow T_3\rightarrow T_{14}$
$U_3:T_8\rightarrow T_{13}\rightarrow T_2\rightarrow T_{10}$
$U_4:T_5\rightarrow T_7\rightarrow T_9$
$U_5:T_6\rightarrow T_{15}$$U_1:T_{12}\rightarrow T_2$
$U_2:T_{21}\rightarrow T_{13}\rightarrow T_{16}\rightarrow T_{11}$
$U_3:T_{18}\rightarrow T_{17}$
$U_4:T_7\rightarrow T_{22}\rightarrow T_5\rightarrow T_6$
$U_5:T_{10}\rightarrow T_9$
$U_6:T_{20}\rightarrow T_8\rightarrow T_{14}\rightarrow T_{24}$
$U_7:T_{15}\rightarrow T_{19}\rightarrow T_{23}\rightarrow T_3$
$U_8:T_4\rightarrow T_1$DBO $ U_1:T_1\rightarrow T_6\rightarrow T_9 $
$ U_2:T_2\rightarrow T_4\rightarrow T_8 $
$ U_3:T_5\rightarrow T_7\rightarrow T_3 $$U_1:T_{11}\rightarrow T_{15}\rightarrow T_2$
$U_2:T_5\rightarrow T_9\rightarrow T_7$
$U_3:T_1\rightarrow T_{12}\rightarrow T_{13}\rightarrow T_{10}$
$U_4:T_4\rightarrow T_8\rightarrow T_3$
$U_5:T_6\rightarrow T_{14}$$U_1:T_{18}\rightarrow T_{19}\rightarrow T_{16}$
$U_2:T_{22}\rightarrow T_4\rightarrow T_6\rightarrow T_3$
$U_3:T_1\rightarrow T_{10}\rightarrow T_8$
$U_4:T_2\rightarrow T_{14}\rightarrow T_5\rightarrow T_7$
$U_5:T_{20}\rightarrow T_{11}$
$U_6:T_{15}\rightarrow T_{23}$
$U_7:T_{17}\rightarrow T_{24}\rightarrow T_9\rightarrow T_{12}$
$U_8:T_{13}\rightarrow T_{21}$SOA $ U_1:T_2\rightarrow T_7\rightarrow T_3 $
$ U_2:T_5\rightarrow T_4\rightarrow T_8 $
$ U_3:T_1\rightarrow T_6\rightarrow T_9 $$U_1:T_1\rightarrow T_4\rightarrow T_{11}\rightarrow T_3$
$U_2:T_{12}\rightarrow T_{14}$
$U_3:T_{13}\rightarrow T_9\rightarrow T_7$
$U_4:T_5\rightarrow T_8\rightarrow T_{15}\rightarrow T_2$
$U_5:T_6\rightarrow T_{10}$$U_1:T_{10}\rightarrow T_{12}\rightarrow T_8$
$U_2:T_{24}\rightarrow T_9\rightarrow T_{11}\rightarrow T_{17}$
$U_3:T_{18}\rightarrow T_7\rightarrow T_5\rightarrow T_{20}$
$U_4:T_{15}\rightarrow T_{21}\rightarrow T_{23}\rightarrow T_3$
$U_5:T_{19}$
$U_6:T_1\rightarrow T_2\rightarrow T_{22}\rightarrow T_{16}$
$U_7:T_{13}\rightarrow T_{14}$
$U_8:T_4\rightarrow T_6$TLISOA $ U_1:T_2\rightarrow T_7\rightarrow T_3 $
$ U_2:T_1\rightarrow T_5\rightarrow T_9 $
$ U_3:T_6\rightarrow T_4\rightarrow T_8 $$U_1:T_4\rightarrow T_{12}\rightarrow T_6$
$U_2:T_9\rightarrow T_{10}$
$U_3:T_8\rightarrow T_3\rightarrow T_{14}\rightarrow T_2$
$U_4:T_5\rightarrow T_1\rightarrow T_{11}\rightarrow T_{13}$
$U_5:T_{15}\rightarrow T_7$$U_1:T_{17}\rightarrow T_{15}$
$U_2:T_2\rightarrow T_9\rightarrow T_{21}$
$U_3:T_{11}\rightarrow T_5\rightarrow T_3$
$U_4:T_4\rightarrow T_{23}\rightarrow T_{10}$
$U_5:T_1\rightarrow T_8$
$U_6:T_{19}\rightarrow T_{13}\rightarrow T_{22}\rightarrow T_{16}$
$U_7:T_{18}\rightarrow T_{20}\rightarrow T_{12}\rightarrow T_6$
$U_8:T_7\rightarrow T_{14}\rightarrow T_{24}$MFSOA $ U_1:T_6\rightarrow T_4\rightarrow T_8 $
$ U_2:T_1\rightarrow T_5\rightarrow T_9 $
$ U_3:T_2\rightarrow T_7\rightarrow T_3 $$U_1:T_5\rightarrow T_8\rightarrow T_2\rightarrow T_7$
$U_2:T_{12}\rightarrow T_6$
$U_3:T_1\rightarrow T_{11}\rightarrow T_{15}\rightarrow T_{13}$
$U_4:T_4\rightarrow T_3\rightarrow T_{14}$
$U_5:T_9\rightarrow T_{10}$$U_1:T_{21}\rightarrow T_{20}\rightarrow T_5$
$U_2:T_{19}\rightarrow T_3\rightarrow T_7$
$U_3:T_{15}\rightarrow T_{17}\rightarrow T_{16} $
$U_4:T_1\rightarrow T_{23}\rightarrow T_6$
$U_5:T_8\rightarrow T_{12}$
$U_6:T_{18}\rightarrow T_2\rightarrow T_{11}\rightarrow T_{14}$
$U_7:T_{22}\rightarrow T_{24}\rightarrow T_4 $
$U_8:T_{10}\rightarrow T_9\rightarrow T_{13}$
下载: 导出CSV
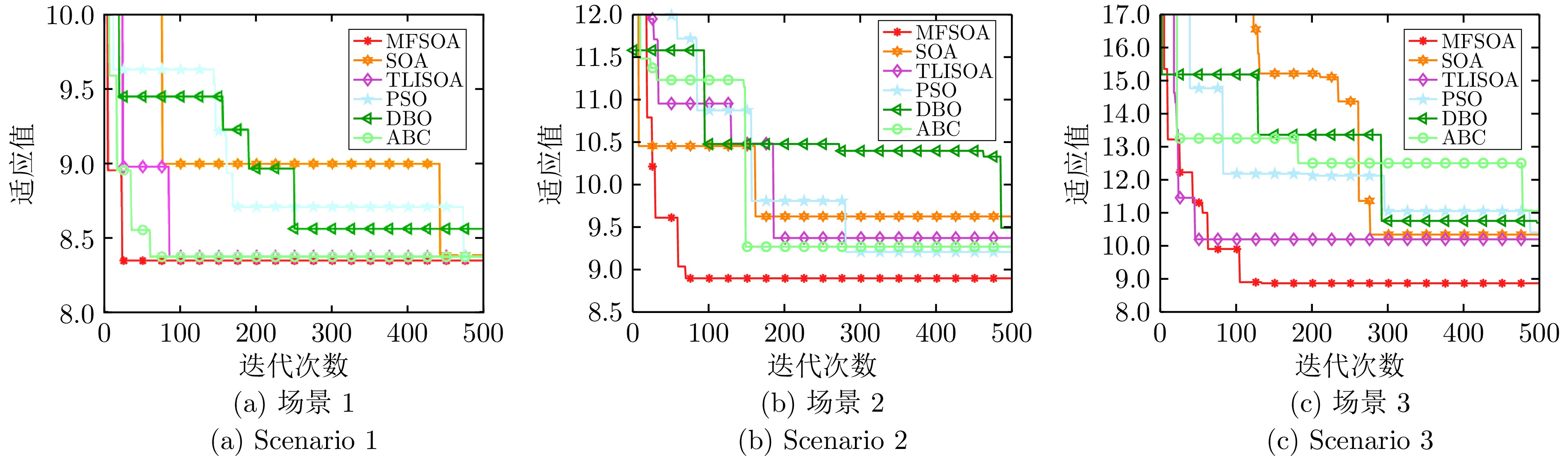
表 6 各算法性能对比
Table 6 Performance comparison for each algorithm
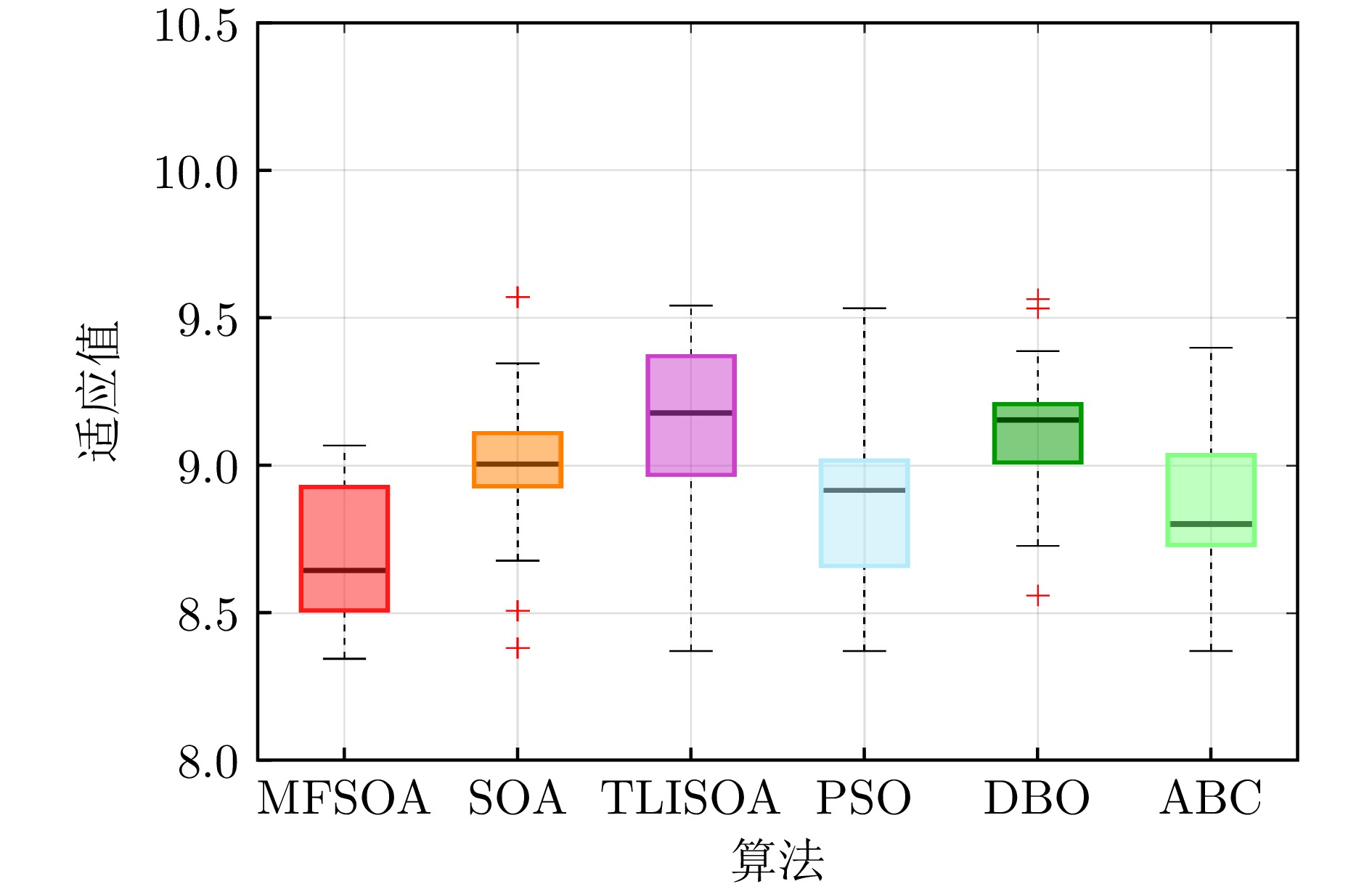
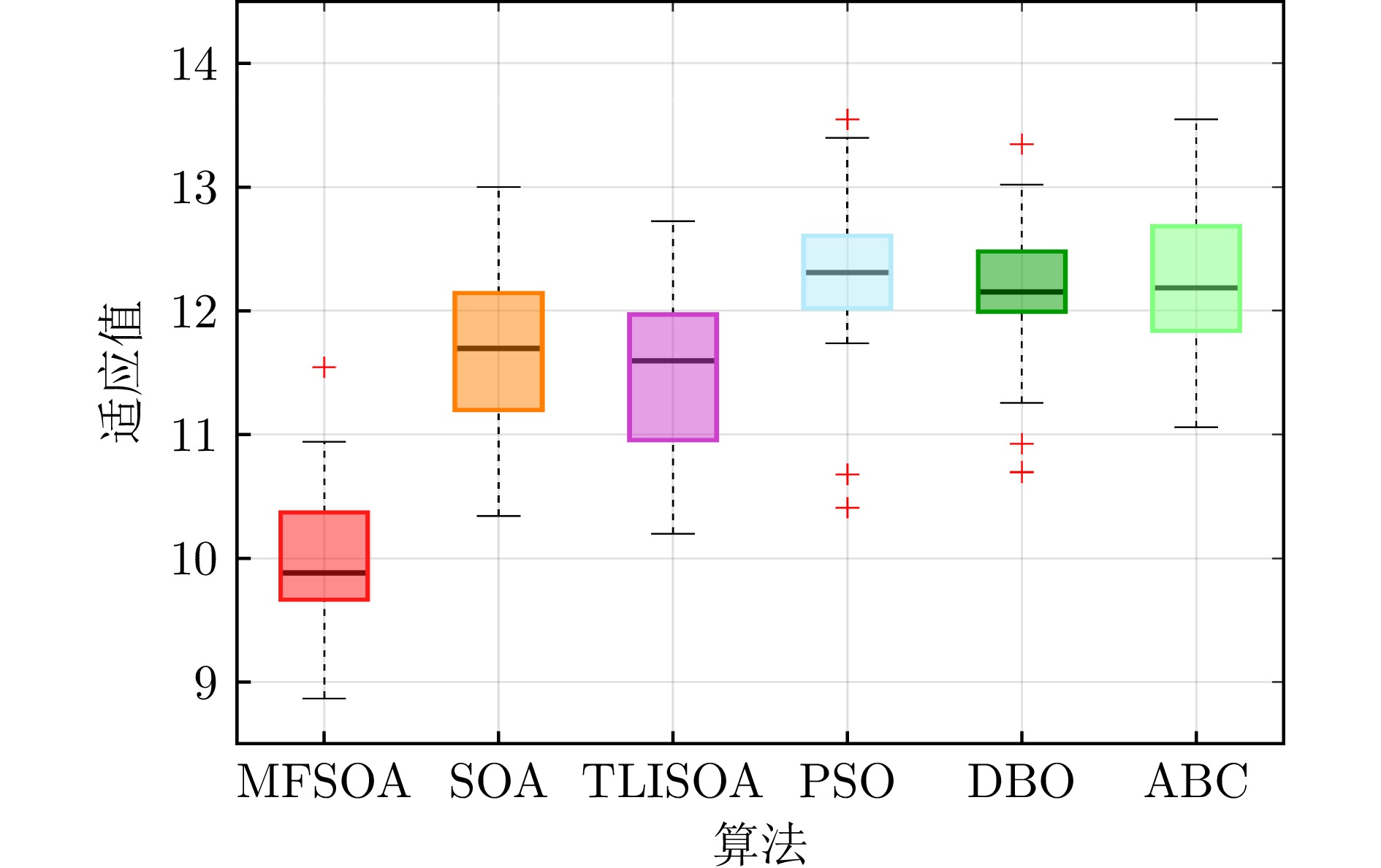
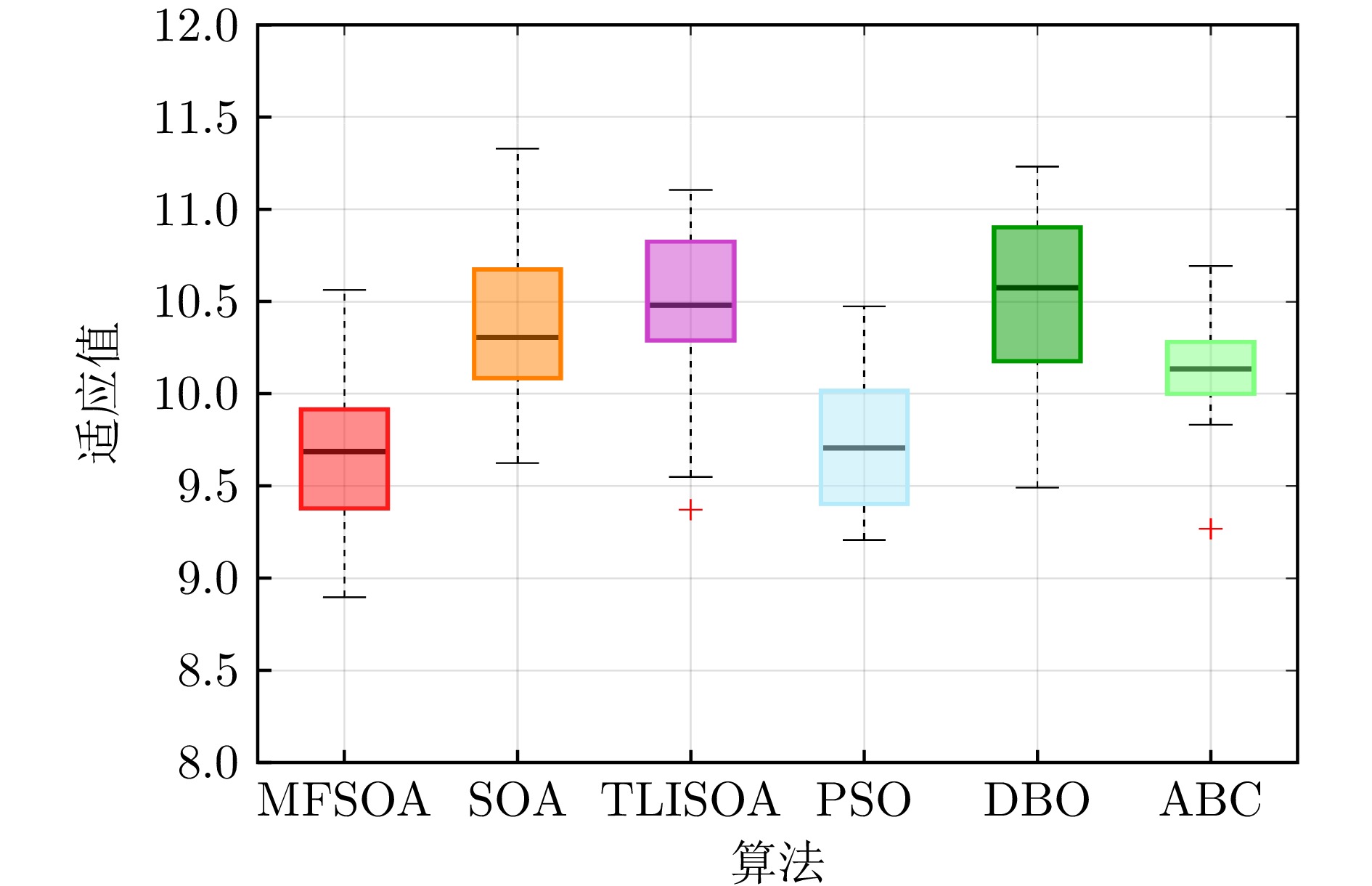
场景 算法 Best Worst Avg Std P-Value 显著性 场景1 MFSOA 8.3452 9.0674 8.6911 0.2463 _______ _______ SOA 8.3816 9.5707 8.9984 0.2561 1.07664E-05 $\mathrm{++}$ TLISOA 8.3709 9.5418 9.1318 0.2861 3.91382E-07 $\mathrm{++}$ PSO 8.3709 9.5327 8.8664 0.2744 0.028069678 $\mathrm{++}$ DBO 8.5597 9.5637 9.1149 0.2158 4.83916E-08 $\mathrm{++}$ ABC 8.3711 9.3997 8.8781 0.2460 0.022309836 $\mathrm{++}$ 场景2 MFSOA 8.8965 10.5623 9.6955 0.4119 _______ _______ SOA 9.6248 11.3297 10.3809 0.4504 8.84109E-07 $\mathrm{++}$ TLISOA 9.3718 11.1058 10.4698 0.4320 2.57212E-07 $\mathrm{++}$ PSO 9.2072 10.4756 9.7538 0.3782 0.706171488 ≈ DBO 9.4911 11.2327 10.5466 0.3966 1.20233E-08 $\mathrm{++}$ ABC 9.2683 10.6935 10.1362 0.2712 2.13273E-05 $\mathrm{++}$ 场景3 MFSOA 8.8685 11.5420 10.0170 0.5490 _______ _______ SOA 10.3406 13.0019 11.6999 0.6859 3.82016E-10 $\mathrm{++}$ TLISOA 10.1968 12.7229 11.4576 0.6565 1.41098E-09 $\mathrm{++}$ PSO 10.4081 13.5471 12.2842 0.6693 7.38908E-11 $\mathrm{++}$ DBO 10.6991 13.3464 12.1833 0.6072 6.06576E-11 $\mathrm{++}$ ABC 11.0582 13.5474 12.3074 0.6576 4.50432E-11 $\mathrm{++}$
下载: 导出CSV
-
[1] Jia Z, Xiao B, Qian H. Improved mixed discrete particle swarms based multi-task assignment for UAVs[C]//2023 IEEE 12th Data Driven Control and Learning Systems Conference (DDCLS). IEEE, 2023: 442-448. [2] 江碧涛, 温广辉, 周佳玲, 郑德智. 智能无人集群系统跨域协同技术研究现状与展望. 中国工程科学, 2024, 26(01): 117−126 doi: 10.15302/J-SSCAE-2024.01.015Jiang Bi-Tao, Wen Guang-Hui, Zhou Jia-Ling, Zheng De-Zhi. Cross-Domain Cooperative Technology of Intelligent Unmanned Swarm Systems: Current Status and Prospects. Strategic Study of CAE, 2024, 26(01): 117−126 doi: 10.15302/J-SSCAE-2024.01.015 [3] 姜斌, 马亚杰, 薛舒心. 无人飞行器集群自主控制: 基于联盟形成博弈的任务分配. 自动化学报, 2025, 51(05): 942−959 doi: 10.16383/j.aas.c240593Jiang Bin, MA Ya-Jie, Xue Shu-Xin. Autonomous Control of Unmanned Aerial Vehicle Swarms: Task Allocation Based on Coalition Formation Game. Acta Automatica Sinica, 2025, 51(05): 942−959 doi: 10.16383/j.aas.c240593 [4] Ye F, Chen J, Tian Y, et al. Cooperative task assignment of a heterogeneous multi-UAV system using an adaptive genetic algorithm. Electronics, 2020, 9(4): 687 doi: 10.3390/electronics9040687 [5] 薛雅丽, 李寒雁, 欧阳权, 崔闪, 洪君. 战场环境下遗传黏菌算法的多机协同任务分配. 浙江大学学报(工学版), 2024, 58(08): 1748−1756 doi: 10.3785/j.issn.1008-973X.2024.08.021Xue Ya-Li, Li Han-Yan, OuYang Quan, Cui Shan, Hong Jun. Multi-UAVs collaborative task allocation based on genetic slime mould algorithm in battlefield environment. Journal of Zhejiang University(Engineering Science), 2024, 58(08): 1748−1756 doi: 10.3785/j.issn.1008-973X.2024.08.021 [6] 鞠锴, 冒泽慧, 姜斌, 马亚杰. 基于势博弈的异构多智能体系统任务分配和重分配. 自动化学报, 2022, 48(10): 2416−2428 doi: 10.16383/j.aas.c220003Ju Kai, Mao Ze-Hui, Jiang Bin, Ma Ya-Jie. Task Allocation and Reallocation for Heterogeneous Multiagent Systems Based on Potential Game. Acta Automatica Sinica, 2022, 48(10): 2416−2428 doi: 10.16383/j.aas.c220003 [7] 王峰, 黄子路, 韩孟臣, 邢立宁, 王凌. 基于KnCMPSO算法的异构无人机协同多任务分配. 自动化学报, 2023, 49(02): 399−414 doi: 10.16383/j.aas.c210696Wang Feng, Huang Zi-Lu, Han Meng-Chen, Xing Li-Ning, Wang ling. A Knee Point Based Coevolution Multi-objective Particle Swarm Optimization Algorithm for Heterogeneous UAV Cooperative Multi-task Allocation. Acta Automatica Sinica, 2023, 49(02): 399−414 doi: 10.16383/j.aas.c210696 [8] Yang W Z, Xin Y. Multi-UAV task assignment based on quantum genetic algorithm[C]//Journal of Physics: Conference Series. IOP Publishing, 2021, 1824(1): 012010. [9] Qin B, Zhang D, Tang S, et al. Distributed grouping cooperative dynamic task assignment method of UAV swarm. Applied Sciences, 2022, 12(6): 2865 doi: 10.3390/app12062865 [10] 温广辉, 周佳玲, 吕跃祖, 刘照辉, 吕金虎. 多导弹协同作战中的分布式协调控制问题. 指挥与控制学报, 2021, 7(02): 137−145Wen Guang-Hui, Zhou Jia-Ling, Lv Yue-Zu, Liu Zhao-Hui, Lv Jin-Hu. Distributed Coordination Control in Multi-missile Cooperative Tasks. Journal of Command and Control, 2021, 7(02): 137−145 [11] 饶凌风, 耿娜, 张勇, 郭广颂, 肖磊. 不确定环境下无人机任务分配的种群交互式粒子群算法[J/OL]. 电子学报, 1-13[2025-12-05].Rao Ling-Feng, Geng Na, Zhang Yong, Guo Guang-Song, Xiao Lei. Population Interactive Particle Swarm Optimization Algorithm for UAV Task Allocation in Uncertain Environments[J/OL]. Acta Electronica Sinica, 1-13[2025-12-05]. [12] Zhang J, Jiahao X. Cooperative task assignment of multi-UAV system. Chinese Journal of Aeronautics, 2020, 33(11): 2825−2827 doi: 10.1016/j.cja.2020.02.009 [13] Wen G, Yu W, Chen M Z Q, et al. Pinning a complex network to follow a target system with predesigned control inputs. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 50(6): 2293−2304 [14] Yu X, Gao X, Wang L, et al. Cooperative multi-UAV task assignment in cross-regional joint operations considering ammunition inventory. Drones, 2022, 6(3): 77 doi: 10.3390/drones6030077 [15] Seenu N, RM K C, Ramya M M, et al. Review on state-of-the-art dynamic task allocation strategies for multiple-robot systems. Industrial Robot: the international journal of robotics research and application, 2020, 47(6): 929−942 doi: 10.1108/IR-04-2020-0073 [16] 王巍, 解慧, 魏忠诚, 赵继军, 彭力. 不确定需求下无人机任务分配的两阶段鲁棒优化方法. 电子学报, 2024, 52(10): 3552−3561 doi: 10.12263/DZXB.20240444Wang Wei, Xie Hui, Wei Zhong-Cheng, Zhao Ji-Jun, Peng Li. Two-Stage Robust Optimization Method for UAV Task Assignment Under Uncertain Demand. Acta Electronica Sinica, 2024, 52(10): 3552−3561 doi: 10.12263/DZXB.20240444 [17] Lippi M, Marino A. A mixed-integer linear programming formulation for human multi-robot task allocation[C]//2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN). IEEE, 2021: 1017-1023. [18] Li J, Yang X, Yang Y, et al. Cooperative mapping task assignment of heterogeneous multi-UAV using an improved genetic algorithm. Knowledge-Based Systems, 2024, 296: 111830 doi: 10.1016/j.knosys.2024.111830 [19] Yan F, Chu J, Hu J, et al. Cooperative task allocation with simultaneous arrival and resource constraint for multi-UAV using a genetic algorithm. Expert Systems with Applications, 2024, 245: 123023 doi: 10.1016/j.eswa.2023.123023 [20] Sun B, Zeng Y, Zhu D. Dynamic task allocation in multi autonomous underwater vehicle confrontational games with multi-objective evaluation model and particle swarm optimization algorithm. Applied Soft Computing, 2024, 153: 111295 doi: 10.1016/j.asoc.2024.111295 [21] Xue J, Shen B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. The journal of Supercomputing, 2023, 79(7): 7305−7336 doi: 10.1007/s11227-022-04959-6 [22] Kaya E, Gorkemli B, Akay B, et al. A review on the studies employing artificial bee colony algorithm to solve combinatorial optimization problems. Engineering Applications of Artificial Intelligence, 2022, 115: 105311 doi: 10.1016/j.engappai.2022.105311 [23] 胡晟荣, 王强, 钱玥, 杜雄梓, 郑文天等. 面向城市环境的多无人机协同打击任务分配与路径规划算法[J/OL]. 兵工学报, 1-19[2025-12-05].Hu Sheng-Rong, Wang Qiang, Qian Yue, Du Xiong-Zi, Zheng Wen-Tian. Multi-UAV Cooperative Strike Task Assignment and Path Planning Algorithm for Urban Environments[J/QL]. Acta Armamentarii, 1-19[2025-12-05]. [24] Wang Z, Zhang J. A task allocation algorithm for a swarm of unmanned aerial vehicles based on bionic wolf pack method. Knowledge-Based Systems, 2022, 250: 109072 doi: 10.1016/j.knosys.2022.109072 [25] Wei Z, Zhao X. Multi-UAVs cooperative reconnaissance task allocation under heterogeneous target values. IEEE Access, 2022, 10: 70955−70963 doi: 10.1109/ACCESS.2022.3188859 [26] Xiao P, Xie F, Ni H, et al. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning. Journal of System Simulation, 2024, 36(5): 1141−1151 doi: 10.1109/gncc42960.2018.9018868 [27] Kurdi H, AlDaood M F, Al-Megren S, et al. Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour. Applied Soft Computing, 2019, 83: 105643 doi: 10.1016/j.asoc.2019.105643 [28] 王昱, 马春荣, 赵明月. 基于混合策略多目标粒子群的异构无人机协同多任务分配. 浙江大学学报(工学版), 2025, 59(04): 821−831Wang Yu, Ma Chun-Rong, Zhao Ming-Yue. Collaborative multi-task assignment of heterogeneous UAVs based on hybrid strategies based multi-objective particle swarm. Journal of Zhejiang University(Engineering Science), 2025, 59(04): 821−831 [29] 王俊杰, 闫东宇, 郝永平, 徐九龙. 大规模任务场景下无人机协同任务分配方法[J/OL]. 兵工学报, 1-16[2025-12-05].Wang Jun-Jie, Yan Dong-Yu, Hao Yong-Ping, Xu Jiu-Long. A Cooperative Task Allocation Method for Multi-UAV in Large-Scale Scenarios[J/QL]. Acta Armamentarii, 1-16[2025-12-05]. [30] Dhiman G, Kumar V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowledge-based systems, 2019, 165: 169−196 doi: 10.1016/j.knosys.2018.11.024 [31] Zhou Z, Liu H, Dai Y, et al. A tent-Lévy-based Seagull optimization algorithm for the multi-UAV collaborative task allocation problem. Applied Sciences, 2024, 14(13): 5398 doi: 10.3390/app14135398 [32] Chen J, Chen X, Fu Z. Improvement of the seagull optimization algorithm and its application in path planning[C]//Journal of Physics: Conference Series. IOP Publishing, 2022, 2216(1): 012076. [33] Jia H, Xing Z, Song W. A new hybrid seagull optimization algorithm for feature selection. IEEE access, 2019, 7: 49614−49631 doi: 10.1109/ACCESS.2019.2909945 [34] Hou P, Liu J, Ni F, et al. Hybrid strategies based seagull optimization algorithm for solving engineering design problems. International Journal of Computational Intelligence Systems, 2024, 17(1): 62 doi: 10.1007/s44196-024-00439-2 [35] Pathak V K, Gangwar S, Dikshit M K. A Comprehensive Survey on Seagull Optimization Algorithm and Its Variants: VK Pathak et al. Archives of Computational Methods in Engineering, 2025, 32(6): 3651−3685 doi: 10.1007/s11831-025-10249-0 -


 下载:
下载:

计量
- 文章访问数: 393
- HTML全文浏览量: 276
- 被引次数: 0
