

Dynamics Modeling and Oscillation Control of a Biomimetic Fish-tail Robot Based on a Three-element Model
-
摘要: 随着水下机器人技术的发展, 基于气动驱动的仿生鱼尾机器人因其高灵活性和低噪声特性受到广泛关注. 然而, 气动驱动器固有的非线性迟滞效应与柔顺特性为鱼尾的精确动力学建模与摆动控制带来挑战. 为此, 针对气动仿生鱼尾机器人建立包含弹簧、质量与阻尼的三元动力学模型, 并通过实验数据实现参数辨识, 有效描述该机器人的复杂非线性动力学行为. 进而提出一种前馈−反馈复合控制方法, 基于所建立的模型生成前馈输入以提升响应速度, 结合PID反馈抑制建模误差与外部扰动, 同时基于Lyapunov理论证明系统的渐近稳定性. 实验结果表明, 在定频正弦、变幅变频及随机轨迹等多种工况下, 该方法相较传统PID控制, 具有更高的跟踪精度与动态适应能力, 同时, 反馈补偿与参数辨识也被证明对提升跟踪性能具有关键作用. 水下实验进一步验证了所提方法对辨识误差、未建模动态及外部扰动的适应能力.Abstract: With the development of underwater robotics, pneumatic-driven biomimetic fish-tail robots have attracted widespread attention due to their high flexibility and low noise characteristics. However, the inherent nonlinear hysteresis and compliant properties of pneumatic actuators pose significant challenges for accurate dynamic modeling and precise oscillation control of the fish-tail. To address these problems, a three-element dynamic model incorporating spring, mass, and damping is established for the pneumatic biomimetic fish-tail robot, and model parameters are identified using experimental data, effectively characterizing the complex nonlinear dynamic behavior of the robot. Furthermore, a feedforward-feedback composite control method is proposed, in which the feedforward input is generated based on the established model to enhance the system's response speed, while PID feedback is used to suppress modeling errors and external disturbances. The asymptotic stability of the closed-loop system is rigorously proven by using the Lyapunov theory. Experimental results demonstrate that, under various operating conditions including constant-frequency sine waves, variable-amplitude-variable-frequency signals, and random trajectories, the proposed method demonstrates higher tracking accuracy and dynamic adaptability compared to conventional PID control. Meanwhile, feedback compensation and parameter identification are also critical for improving tracking performance. Underwater experiments further validate the adaptability of the proposed method to parameter identification errors, unmodeled dynamics, and external disturbances.
-
Key words:
- biomimetic robots /
- pneumatic actuators /
- hysteresis effects /
- oscillation control /
- three-element model
-
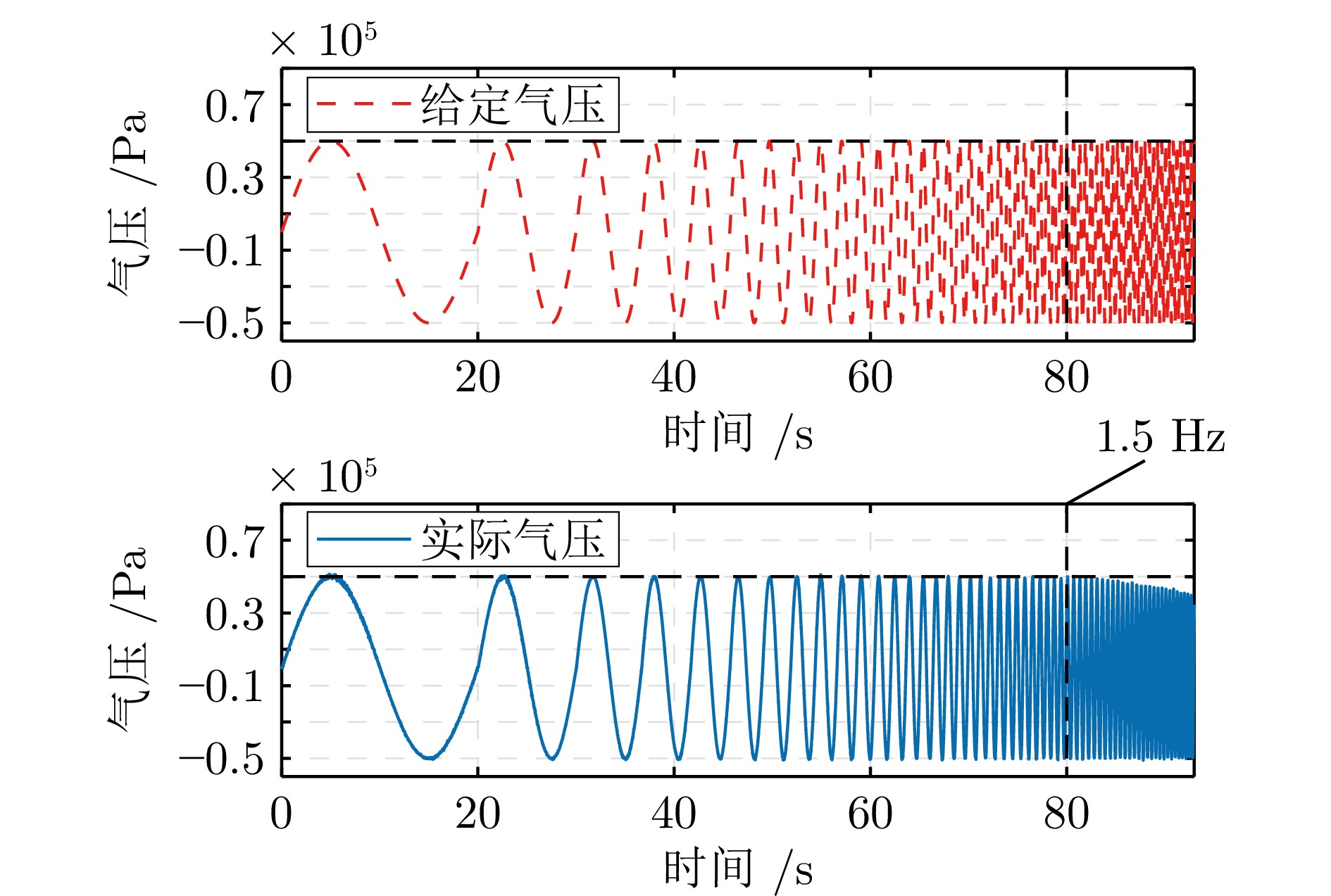
图 5 比例压力调节阀扫频特性测试
Fig. 5 Sweep frequency characteristic test of proportional pressure regulating valve
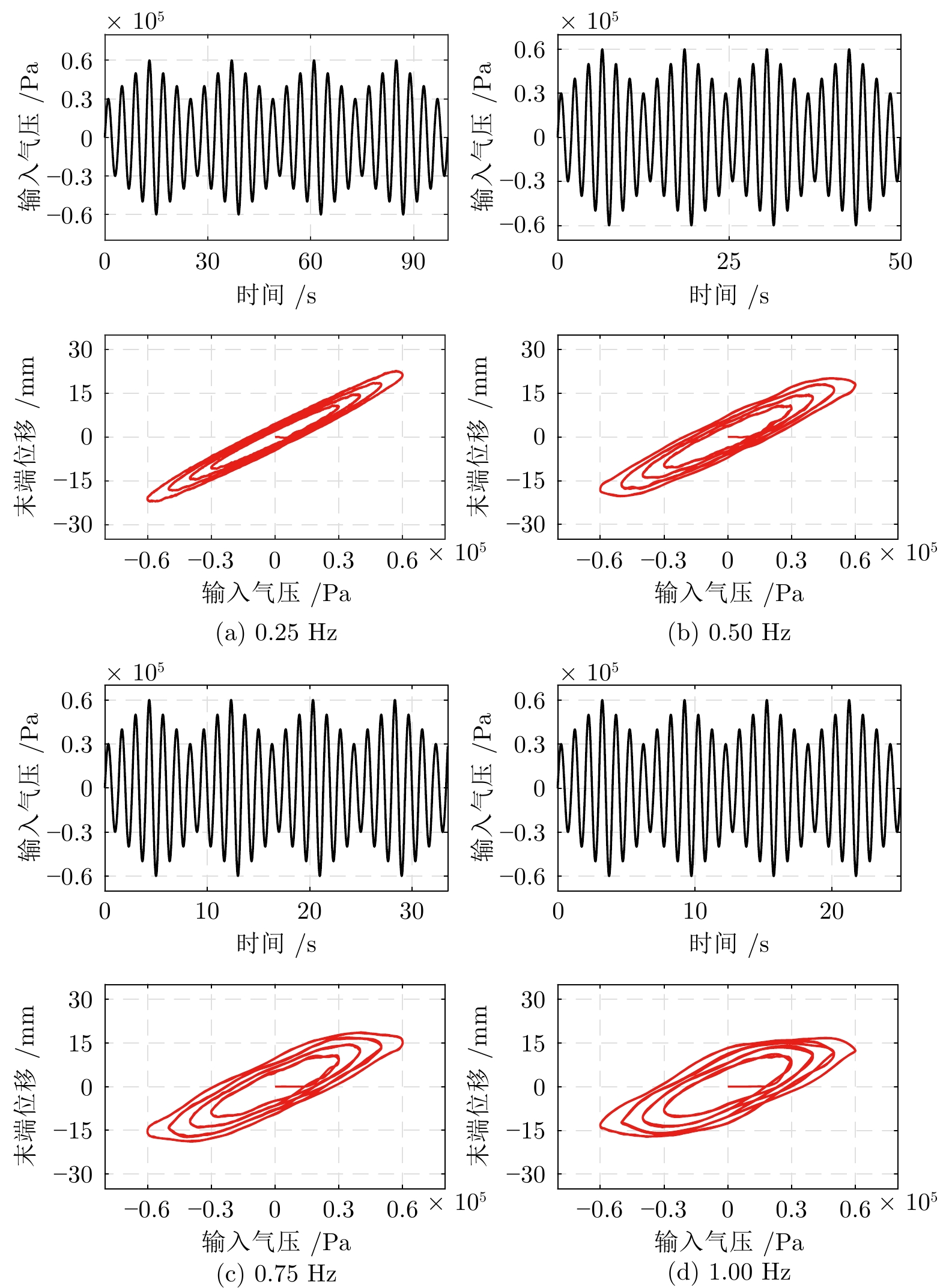
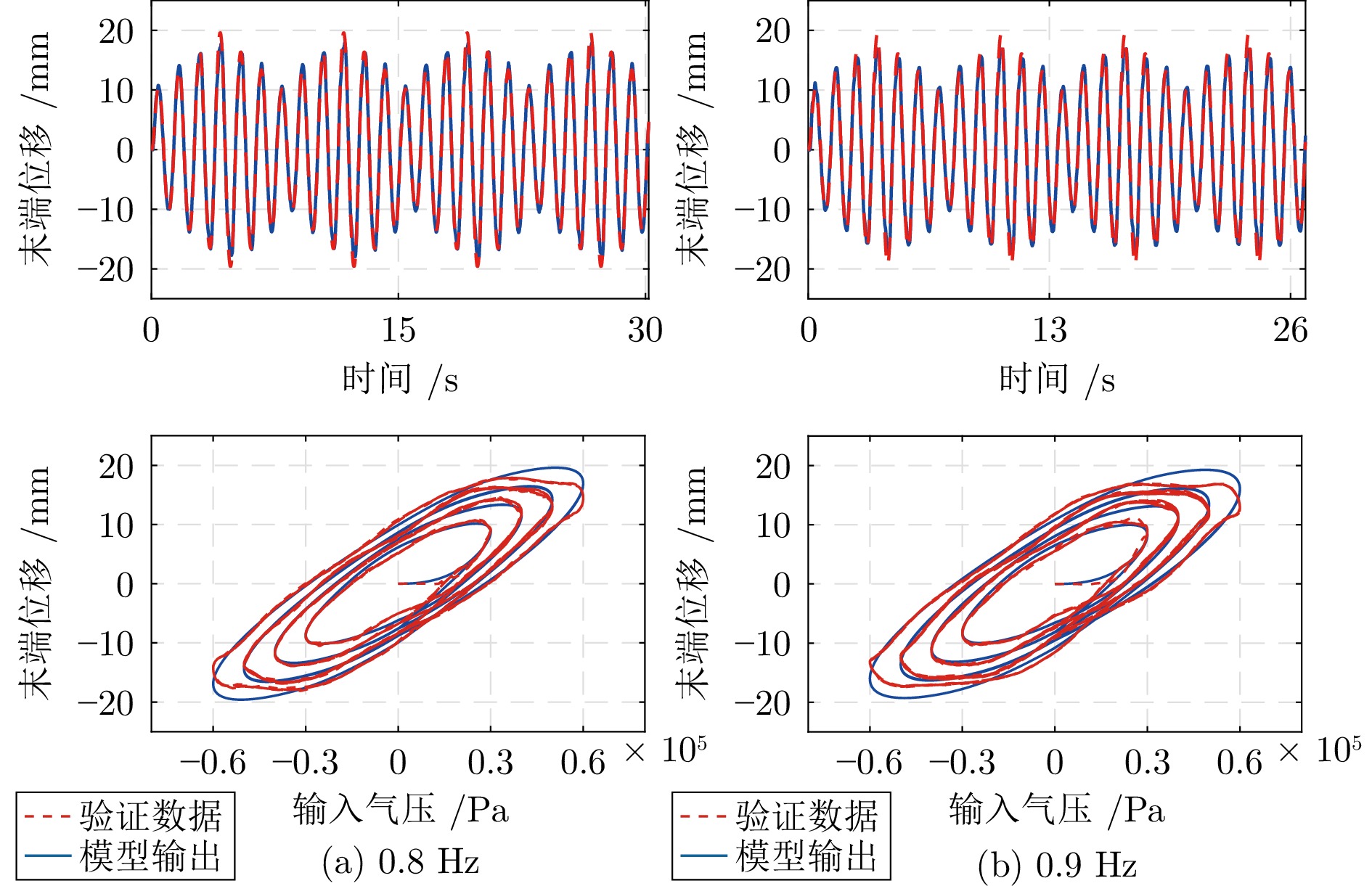
图 6 仿生鱼尾机器人开环控制实验数据
Fig. 6 Open-loop control experimental data for the biomimetic fish-tail robot
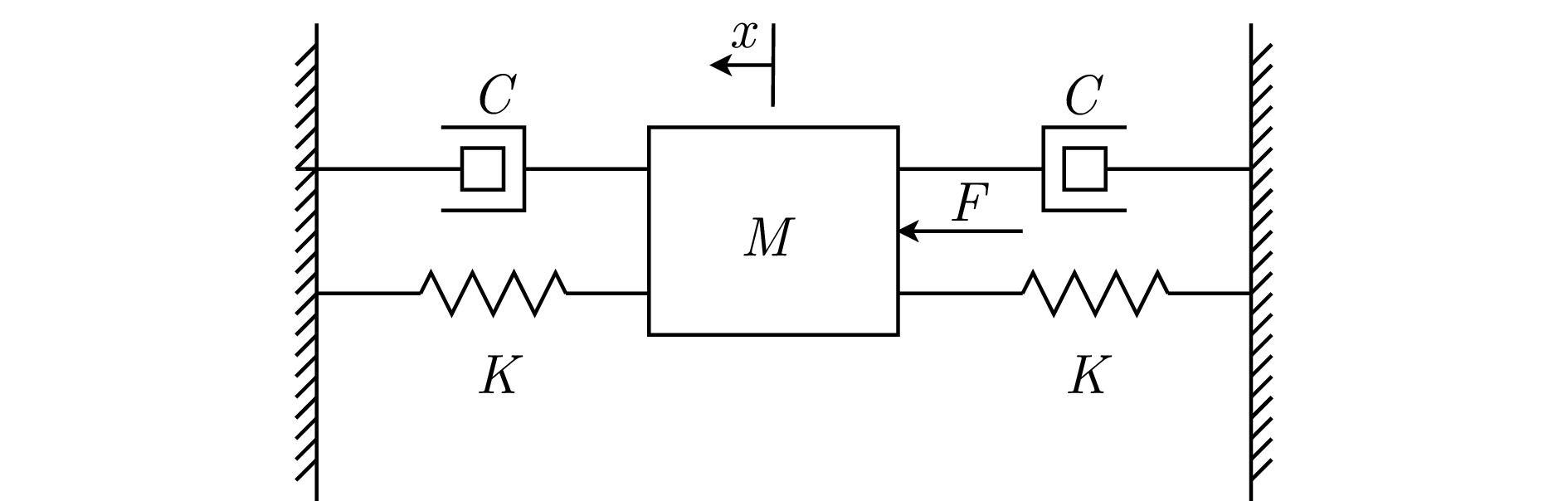
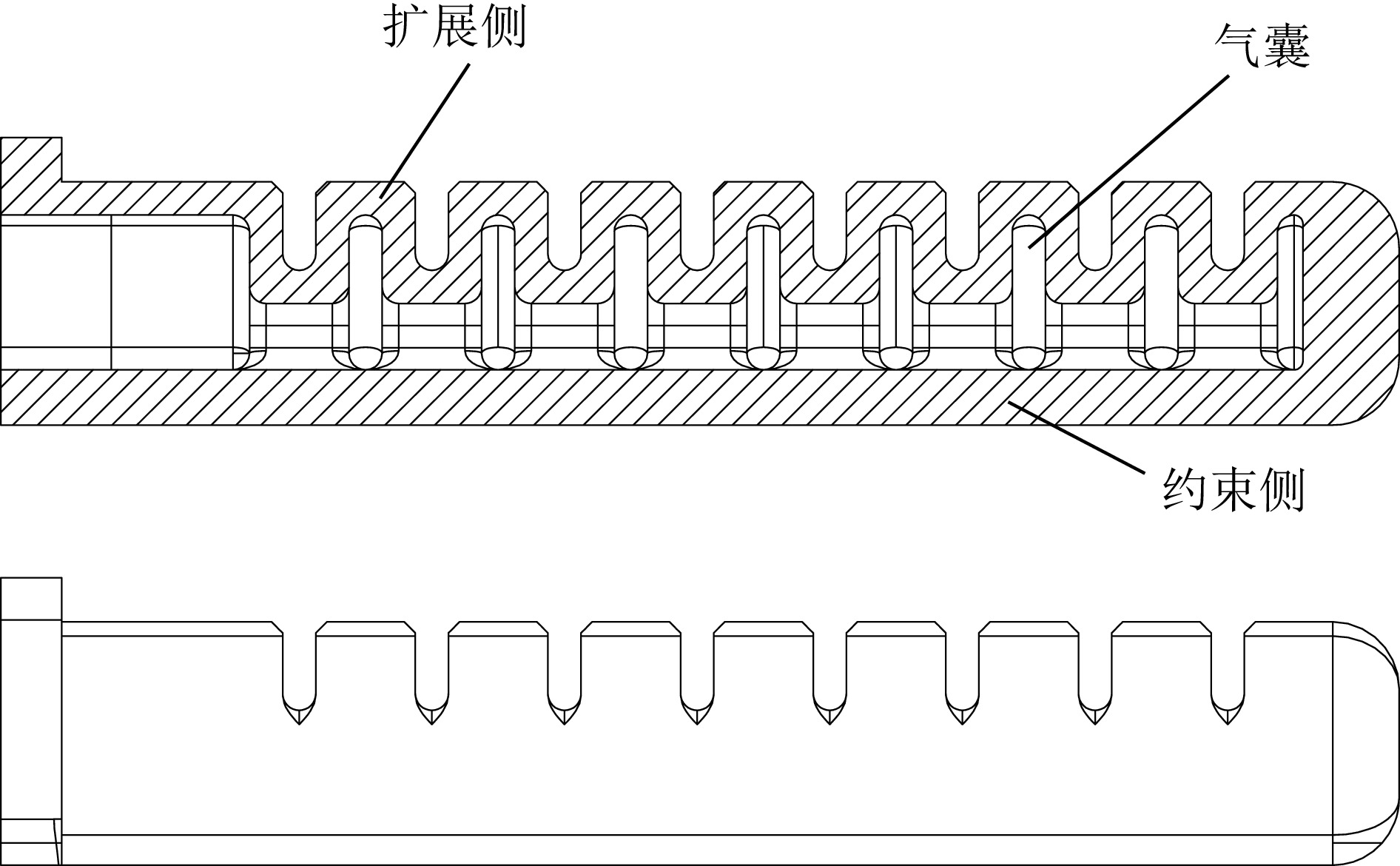
图 7 仿生鱼尾机器人的三元模型结构
Fig. 7 Three-element model structure of the biomimetic fish-tail robot
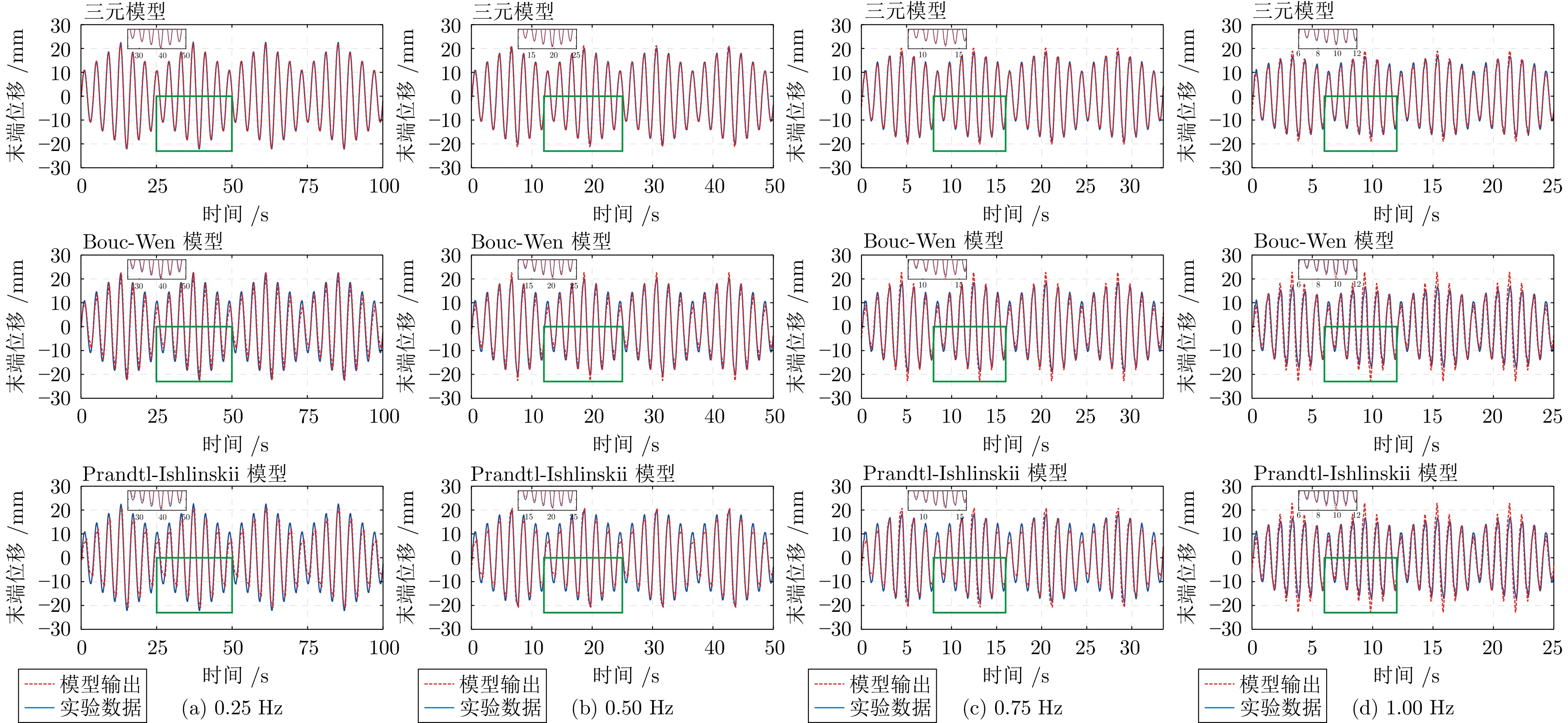
图 8 三种模型输出与实验数据的拟合对比
Fig. 8 Comparison of the fitting for three model outputs with experimental data
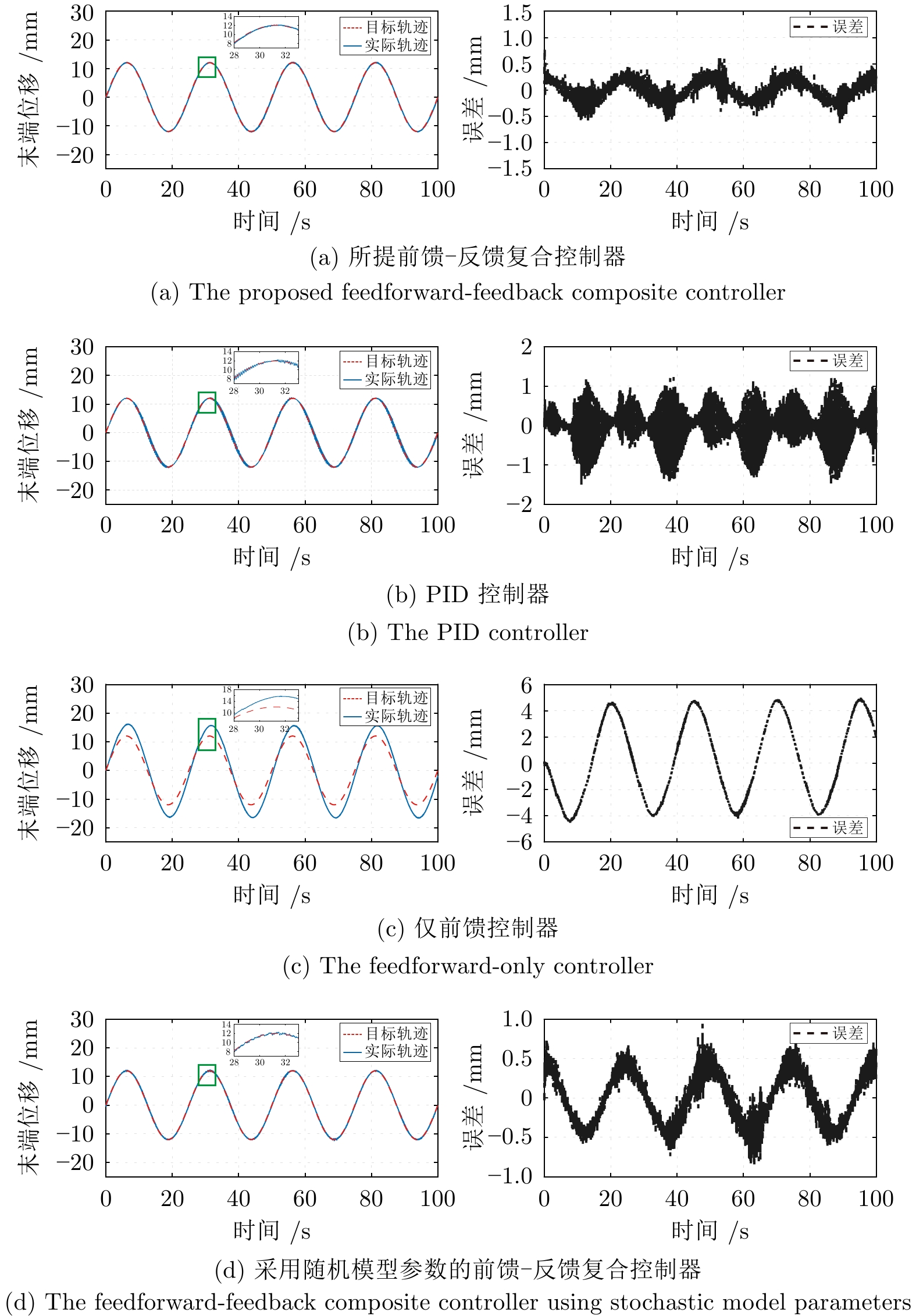
图 10 正弦波轨迹跟踪控制的实验结果
Fig. 10 Experimental results of sine wave trajectory tracking control
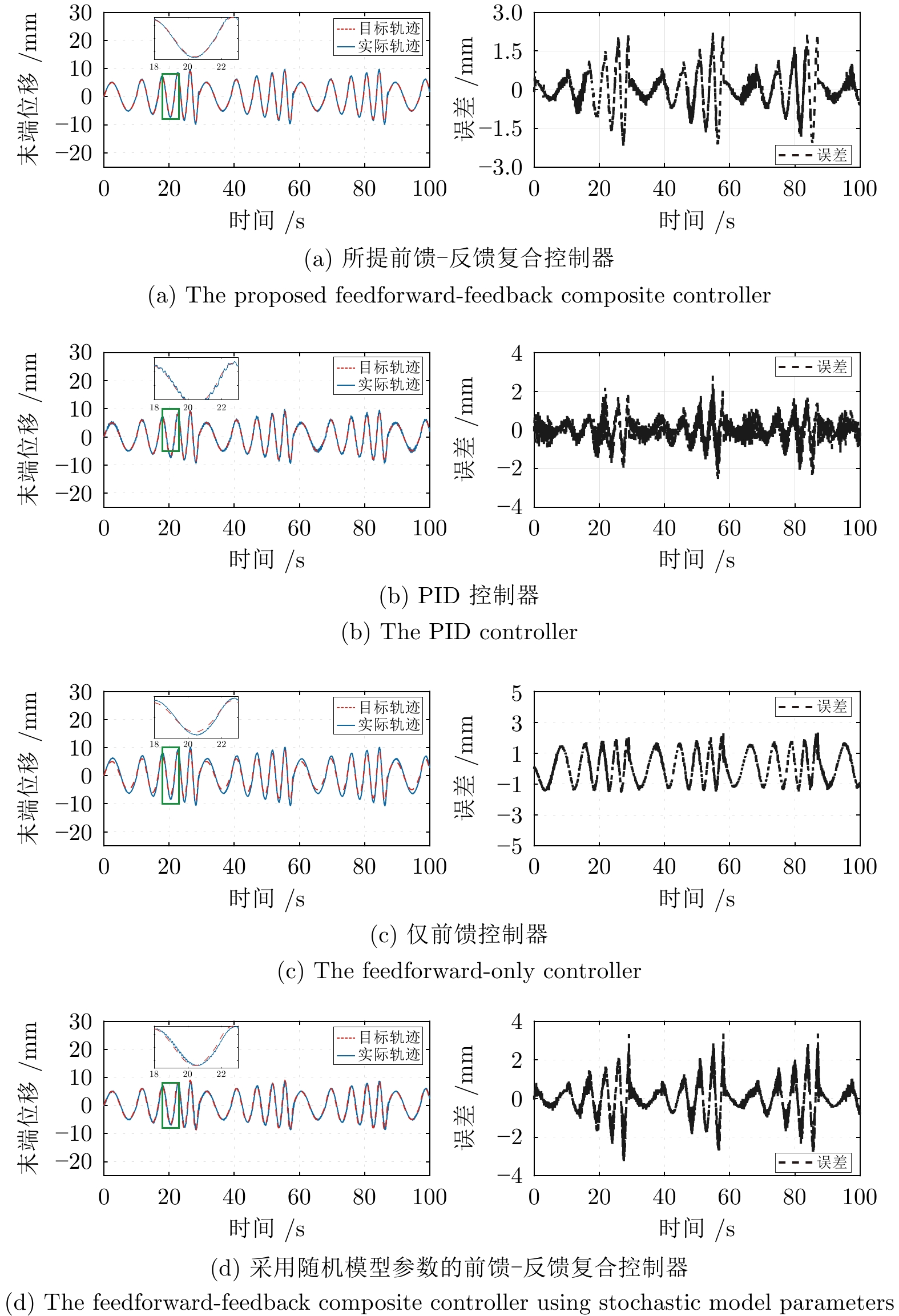
图 11 变幅变频波轨迹跟踪控制的实验结果
Fig. 11 Experimental results of variable amplitude and frequency wave trajectory tracking control
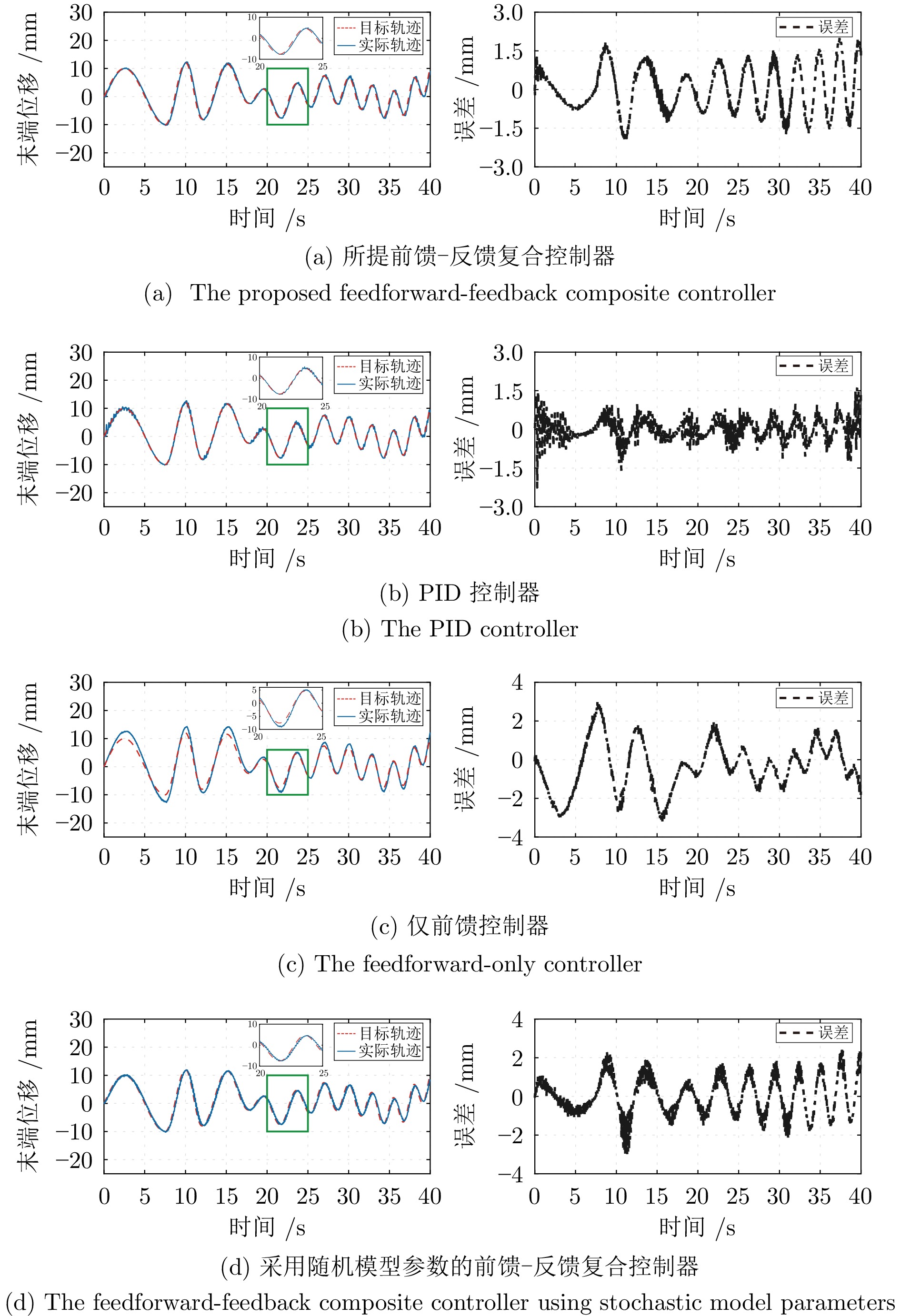
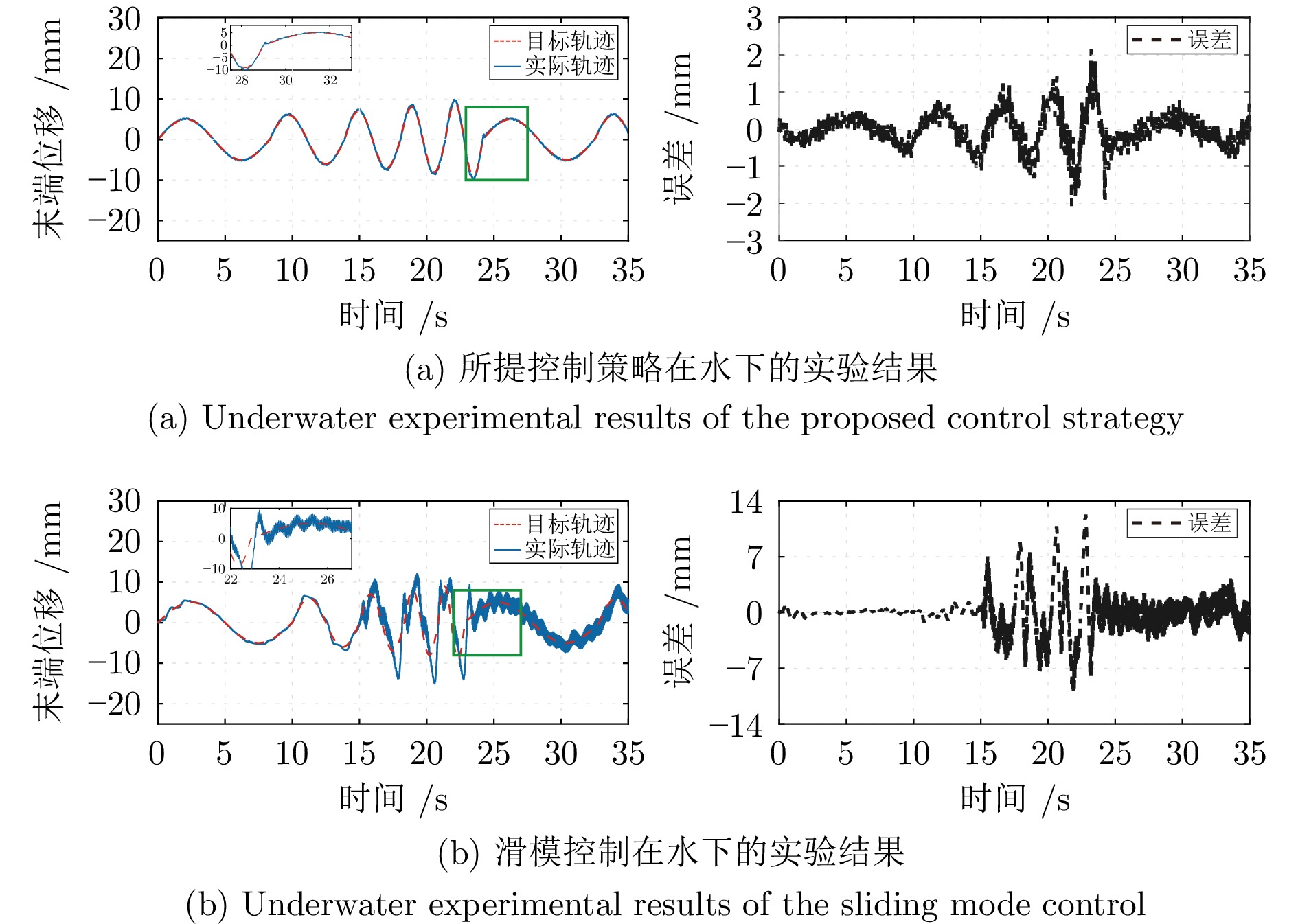
图 12 随机波轨迹跟踪控制的实验结果
Fig. 12 Experimental results of random wave trajectory tracking control
表 1 参数辨识结果
Table 1 Parameter identification results
参数 辨识结果 单位 $ M $ 0.0076 kg $ C $ 0.4597 N·s/m $ K $ 3.9949 N/m $ F_1 $ 14.7114 N/MPa  下载: 导出CSV
下载: 导出CSV
表 2 不同模型的拟合效果对比(%)
Table 2 Comparison of fitting effects among different models (%)
方法 $ e_{\rm rmsp} $ $ e_{\rm mp} $ 三元模型 1.16 16.85 Bouc-Wen模型 5.34 16.87 Prandtl-Ishlinskii模型 5.97 18.93
下载: 导出CSV
-
[1] Wang W J. The protection and development of marine resources under the perspective of the sustainable development concept. Marine Economics and Management, 2024, 7(2): 181−191 doi: 10.1108/MAEM-09-2024-0016 [2] 徐玉如, 肖坤. 智能海洋机器人技术进展. 自动化学报, 2007, 33(5): 518−521Xu Yu-Ru, Xiao Kun. Technology development of autonomous ocean vehicle. Acta Automatica Sinica, 2007, 33(5): 518−521 [3] Wang J, Wu Z X, Dong H J, Tan M, Yu J Z. Development and control of underwater gliding robots: A review. IEEE/CAA Journal of Automatica Sinica, 2022, 9(9): 1543−1560 doi: 10.1109/JAS.2022.105671 [4] 文永鹏, 颜波, 余桐, 方鹏高. 水下机器人在海上风电桩基巡检中的应用现状与发展趋势. 海洋技术学报, 2025, 44(5): 89−97 doi: 10.3969/j.issn.1003-2029.2025.05.010Wen Yong-Peng, Yan Bo, Yu Tong, Fang Peng-Gao. Underwater robots in offshore wind turbine pile inspection: Status and future trends. Journal of Ocean Technology, 2025, 44(5): 89−97 doi: 10.3969/j.issn.1003-2029.2025.05.010 [5] 朱铱镤, 杜秀娟. 水下环境监测系统综述与展望. 计算机工程与应用, 2023, 59(10): 65−74Zhu Yi-Pu, Du Xiu-Juan. Review and prospect of underwater environmental monitoring system. Computer Engineering and Applications, 2023, 59(10): 65−74 [6] Jiao P C, Ye X H, Zhang C J, Li W T, Wang H P. Vision-based real-time marine and offshore structural health monitoring system using underwater robots. Computer-Aided Civil and Infrastructure Engineering, 2024, 39(2): 281−299 doi: 10.1111/mice.12993 [7] Wang X R, Wang Q L, Su Y X, Ouyang Y C, Sun C Y. Adaptive sensor-fault tolerant control of unmanned underwater vehicles with input saturation. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 907−918 doi: 10.1109/JAS.2023.123837 [8] Li J Y, Ma L, Chen D Y, Qi Y P, Bai T C, Pan G. Comparative study of hydrodynamic performance of submerged water jet propeller and conventional propeller under multiple operating conditions. Machines, 2025, 13(2): Article No. 147 doi: 10.3390/machines13020147 [9] Raghebi M, Keshtan M N, Jafarian M M, Bagheri M R. Numerical study and acoustic analysis of propeller and hull surface vessel in self-propulsion mode. Ships and Offshore Structures, 2022, 17(11): 2488−2497 doi: 10.1080/17445302.2021.2004801 [10] 王久斌, 贺威, 孟亭亭, 邹尧, 付强. 基于高仿生形态布局的仿鸽扑翼飞行机器人系统设计. 自动化学报, 2024, 50(2): 308−319Wang Jiu-Bin, He Wei, Meng Ting-Ting, Zou Yao, Fu Qiang. System design of dove-like flapping-wing flying robot based on highly bionic morphological layout. Acta Automatica Sinica, 2024, 50(2): 308−319 [11] 冯育凯, 吴正兴, 谭民. 基于MARL-MHSA架构的水下仿生机器人协同围捕策略: 数据驱动建模与分布式策略优化. 自动化学报, 2025, 51(10): 2269−2282Feng Yu-Kai, Wu Zheng-Xing, Tan Min. Cooperative pursuit policy for bionic underwater robot based on MARL-MHSA architecture: Data-driven modeling and distributed strategy optimization. Acta Automatica Sinica, 2025, 51(10): 2269−2282 [12] Wang Y M, Gao T Y, Pang S X, Xu J J, Tao X T, Yang J Q, et al. Optimal design and development of a fast steering robot inspired by scallops. Frontiers in Bioengineering and Biotechnology, 2024, 11: Article No. 1297727 doi: 10.3389/fbioe.2023.1297727 [13] Li H, Wang G Z, Li L J, Wei M Y, Li Y B, Sun W, et al. Design of the swimming system of a bionic jellyfish robot for seabed exploration. Applied Ocean Research, 2023, 134: Article No. 103498 doi: 10.1016/j.apor.2023.103498 [14] Zhang Y, Wang N, Zhao W C, Peng L H, Luo J. Development and performance analysis of pneumatic variable stiffness imitation dolphin tail actuator. Journal of Bionic Engineering, 2024, 21(5): 2271−2290 doi: 10.1007/s42235-024-00574-8 [15] Li G R, Chen X P, Zhou F H, Liang Y M, Xiao Y H, Cao X N, et al. Self-powered soft robot in the Mariana Trench. Nature, 2021, 591(7848): 66−71 doi: 10.1038/s41586-020-03153-z [16] 乔增, 王神龙, 李凯, 林俊杰, 胡锦杰, 黎卓羿, 等. 气动双稳态装置驱动的仿喷水推进乌贼结构软体机器人. 机器人, 2023, 45(3): 287−301 doi: 10.13973/j.cnki.robot.220062Qiao Zeng, Wang Shen-Long, Li Kai, Lin Jun-Jie, Hu Jin-Jie, Li Zhuo-Yi, et al. Water-jet propelled squid-inspired soft robot driven by pneumatic bistable device. Robot, 2023, 45(3): 287−301 doi: 10.13973/j.cnki.robot.220062 [17] 马睿宸, 白雪剑, 王宇, 王睿, 王硕. 基于强化学习的波动鳍推进水下作业机器人悬停控制. 控制理论与应用, 2022, 39(11): 2092−2099Ma Rui-Chen, Bai Xue-Jian, Wang Yu, Wang Rui, Wang Shuo. Hovering control of an underwater vehicle-manipulator system propelled by undulatory fins via reinforcement learning. Control Theory & Applications, 2022, 39(11): 2092−2099 [18] 刘长红, 吴博淳, 黄锦山, 苏杰锋, 温嘉文, 陈思霖. 基于曲柄摇杆机构的仿生海扁虫水下机器人. 机械设计, 2024, 41(S1): 27−31Liu Chang-Hong, Wu Bo-Chun, Huang Jin-Shan, Su Jie-Feng, Wen Jia-Wen, Chen Si-Lin. Bionic flatworm underwater robot based on crank androcker mechanism. Journal of Machine Design, 2024, 41(S1): 27−31 [19] Lyu B, Xiao H, Meng Q X, Wu J D, Wang Y W, She J H, et al. Humanoid finger with rigid-flexible-soft structure. Nature Communications, 2025, 16(1): Article No. 9905 doi: 10.1038/s41467-025-65367-x [20] de Pascali C, Naselli G A, Palagi S, Scharff R B N, Mazzolai B. 3D-printed biomimetic artificial muscles using soft actuators that contract and elongate. Science Robotics, 2022, 7(68): Article No. eabn4155 doi: 10.1126/scirobotics.abn4155 [21] Shi X T, Zou J, Yan P N, Wan R T, Lu B Y, Gu G Y, et al. Semiseparated biphasic bicontinuous dielectric elastomer for high-performance artificial muscle. Science, 2025, 390(6777): 1044−1049 doi: 10.1126/science.adr3521 [22] Zhu C H, Zhou C, Zou Q Q, Wang X F, Deng L W, Wang J, et al. A variable stiffness fishlike propeller with compressible flexible bionic spine. Ocean Engineering, 2025, 316: Article No. 119780 doi: 10.1016/j.oceaneng.2024.119780 [23] Xia Q C, Li H, Song N, Wu Z L, Wang X, Sun X, et al. Research on flexible collapsible fluid-driven bionic robotic fish. Ocean Engineering, 2023, 276: Article No. 114203 doi: 10.1016/j.oceaneng.2023.114203 [24] Liu S J, Liu C B, Liang Y H, Ren L Q, Ren L. Design and control of an untethered robotic tuna based on a hydraulic soft actuator. IEEE/ASME Transactions on Mechatronics, 2025, 30(1): 623−633 doi: 10.1109/TMECH.2024.3401111 [25] Santina C D, Duriez C, Rus D. Model-based control of soft robots: A survey of the state of the art and open challenges. IEEE Control Systems, 2023, 43(3): 30−65 doi: 10.1109/MCS.2023.3253419 [26] Liu Z J, Liu J K, He W. Robust adaptive fault tolerant control for a linear cascaded ODE-beam system. Automatica, 2018, 98: 42−50 doi: 10.1016/j.automatica.2018.09.021 [27] Zhao S Y, Meng Q X, Lai X Z, Woo J, She J H, Fukushima E F, et al. Modeling and trajectory tracking control of continuum robot with magnetic spacer disks and soft drives. IEEE Transactions on Automation Science and Engineering, 2025, 22: 22468−22483 doi: 10.1109/TASE.2025.3620829 [28] Zhang Y, Wang Y W, Wu J D, Su C Y. Feedforward-cascaded adaptive generalized predictive control of dielectric elastomer transducer. IEEE Robotics and Automation Letters, 2024, 9(3): 2885−2892 doi: 10.1109/LRA.2024.3360812 [29] Meng Q X, Zhu M L, Lai X Z, Wang Y W, Wu M. Iterative-learning-based motion planning and position control of a single-link flexible manipulator with vibration sensor hysteresis. IEEE/ASME Transactions on Mechatronics, 2024, 29(6): 4560−4571 doi: 10.1109/TMECH.2024.3377995 [30] Zhang Y, Huang P, Zhang P, Wang Y W. Modeling and tracking control for dielectric elastomer actuator with sliding mode feedback controller. In: Proceedings of the 7th International Conference on Control Science and Systems Engineering (ICCSSE). Qingdao, China: IEEE, 2021. 185−194 -

 下载:
下载:

计量
- 文章访问数: 196
- HTML全文浏览量: 58
- PDF下载量: 39
- 被引次数: 0
